



 作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2023年 42卷 第9期
2023, 42(9): 1373-1380.
doi: 10.13433/j.cnki.1003-8728.20220112
 摘要
摘要 HTML
HTML PDF 523KB
PDF 523KB
摘要:
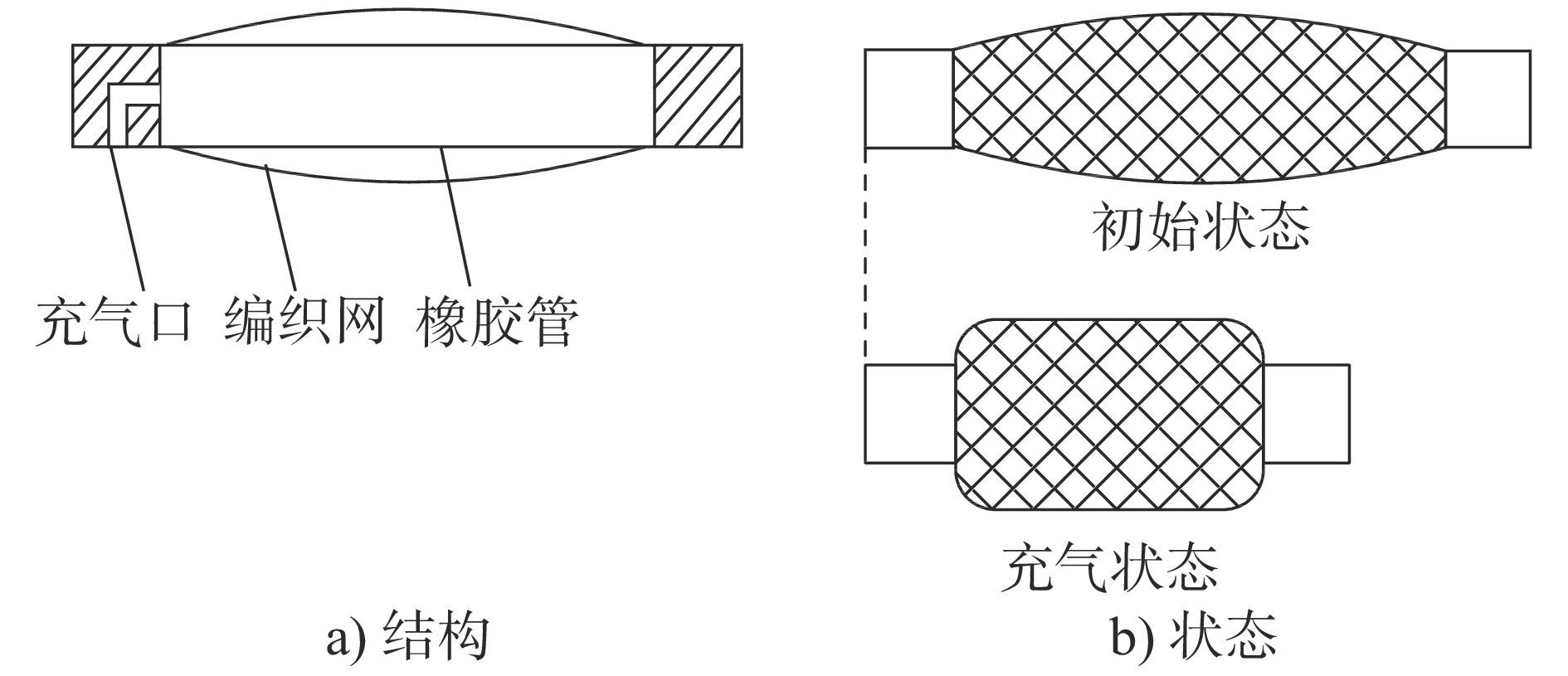
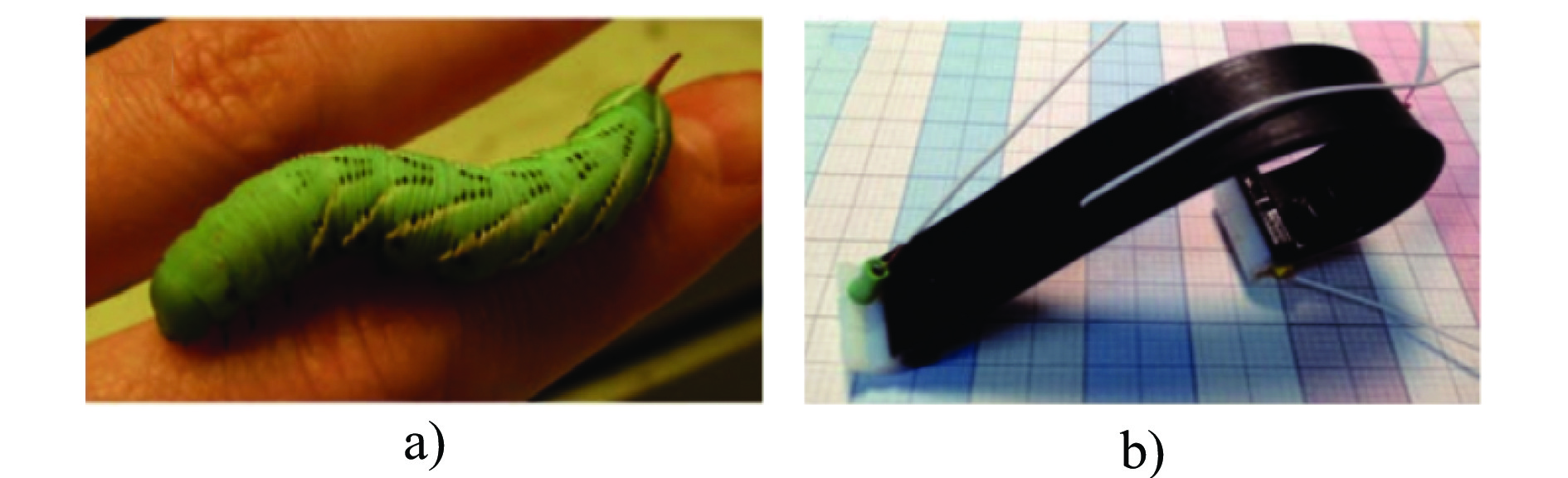
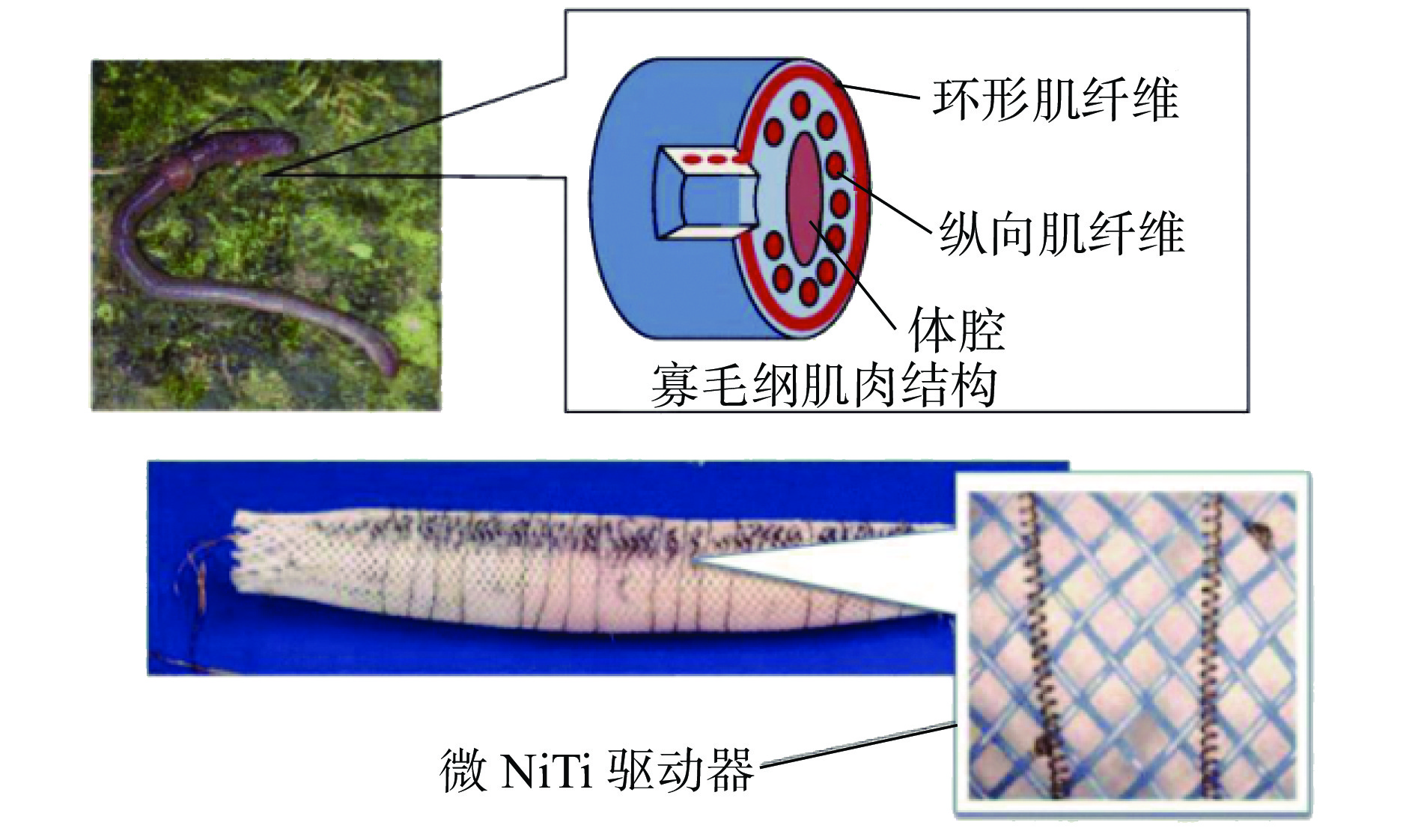
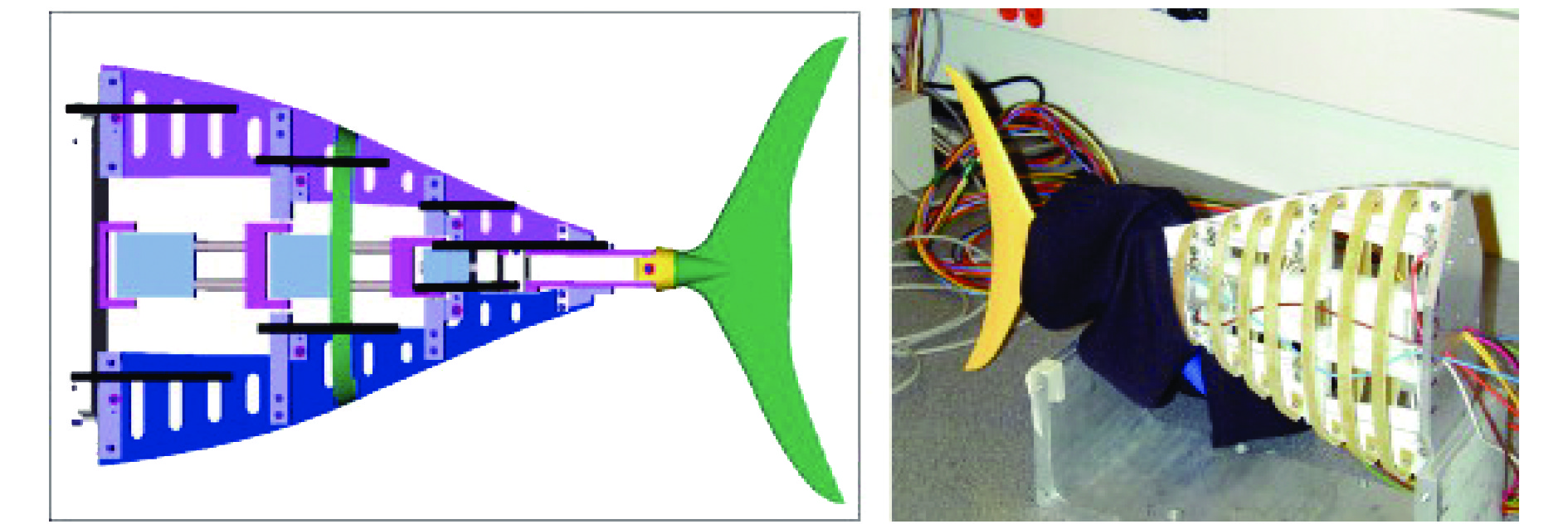
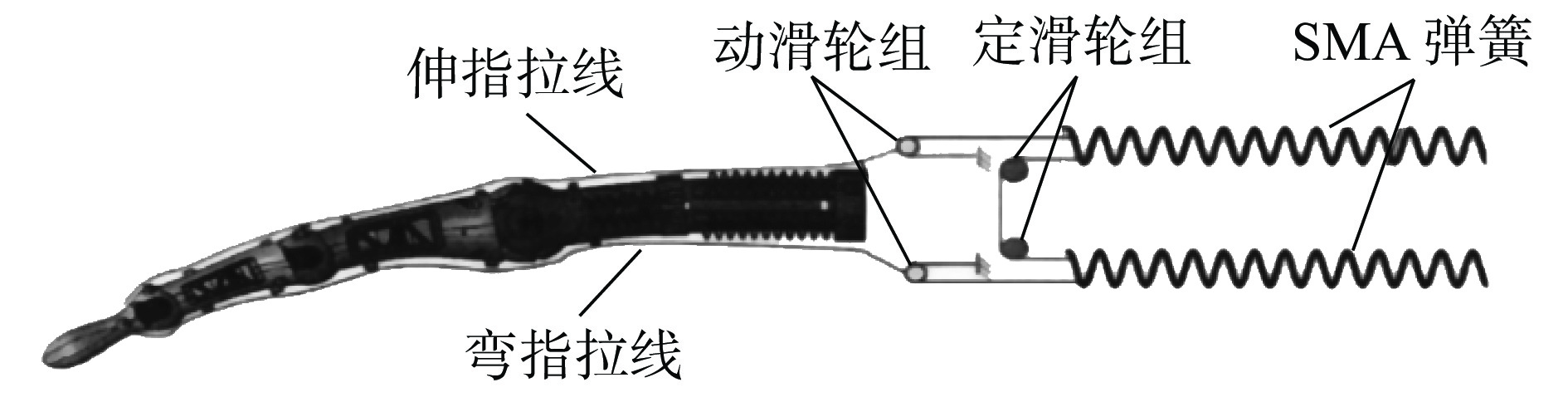
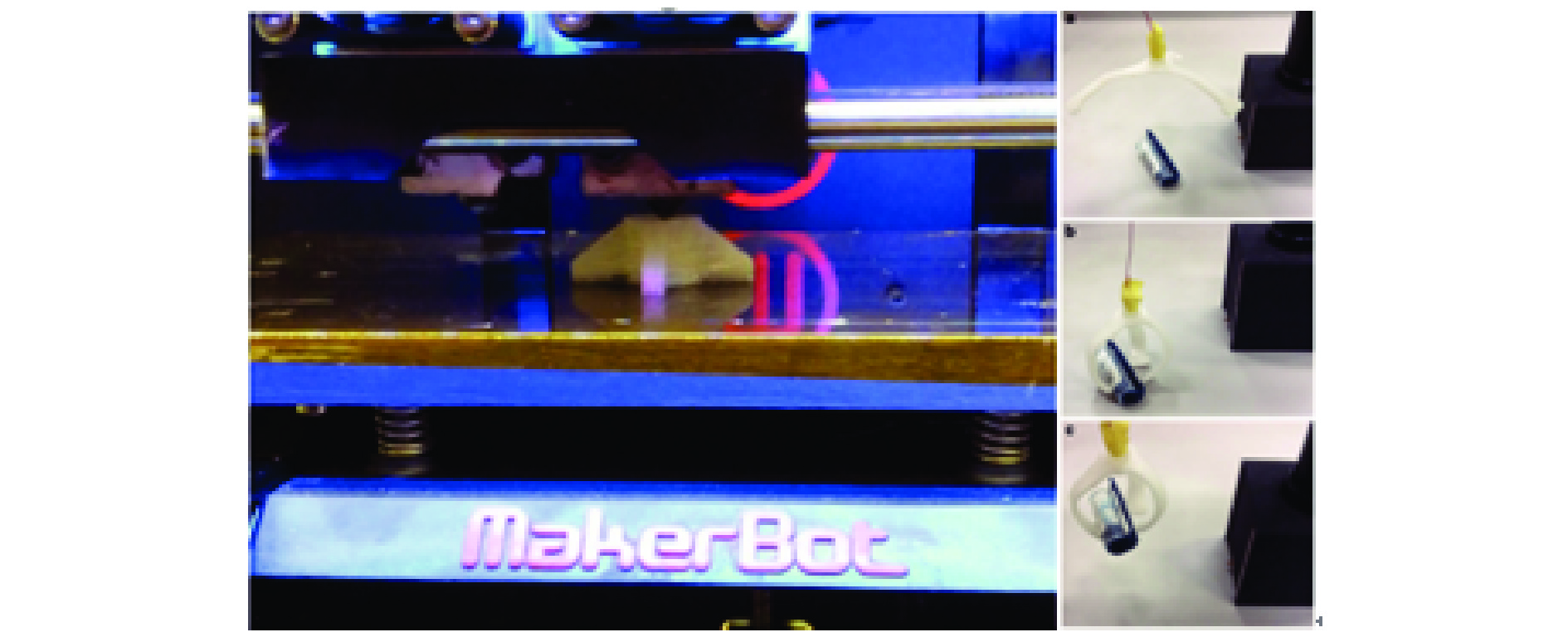
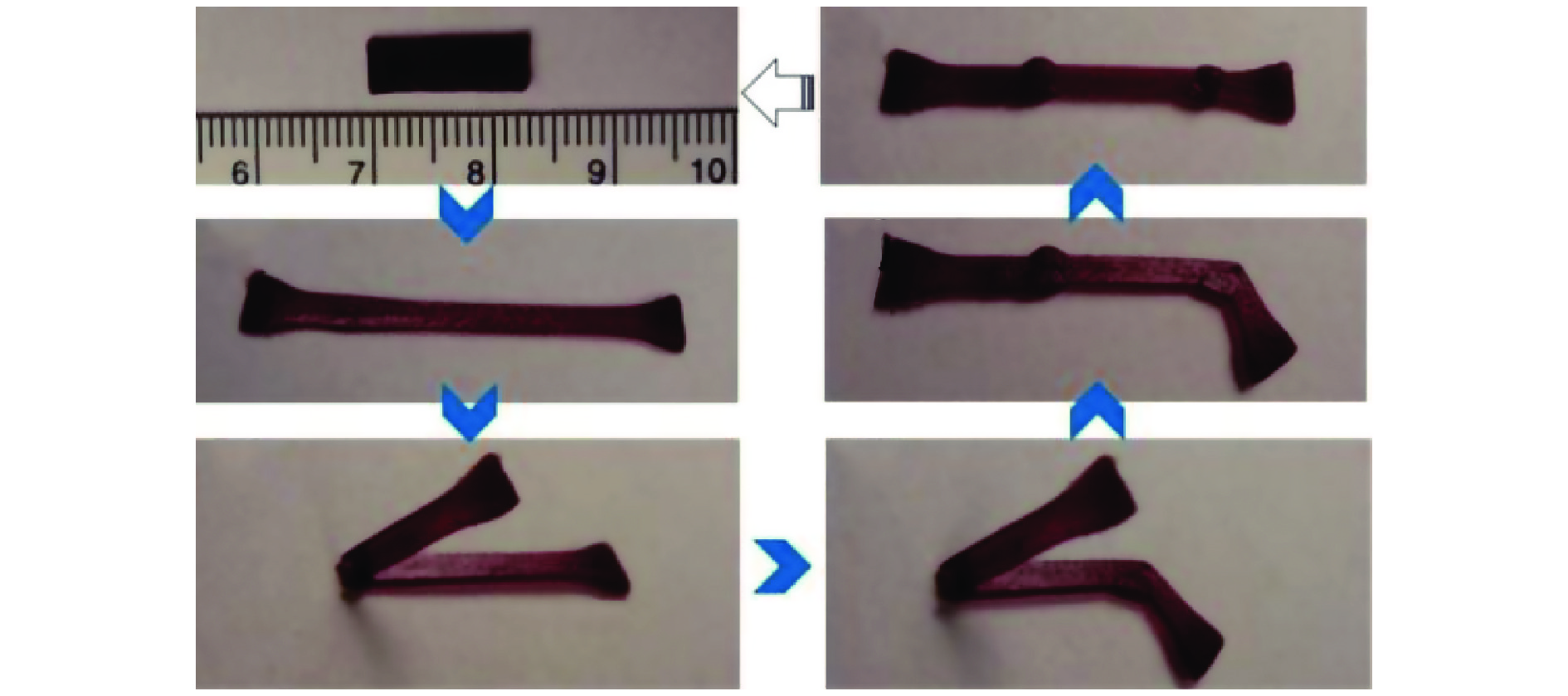
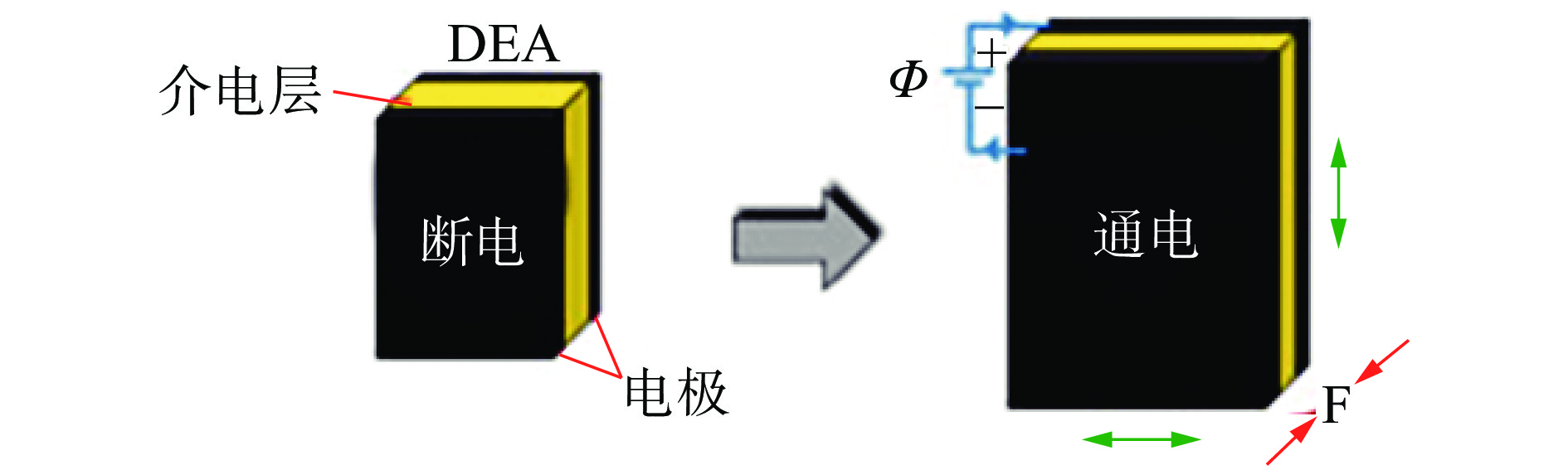
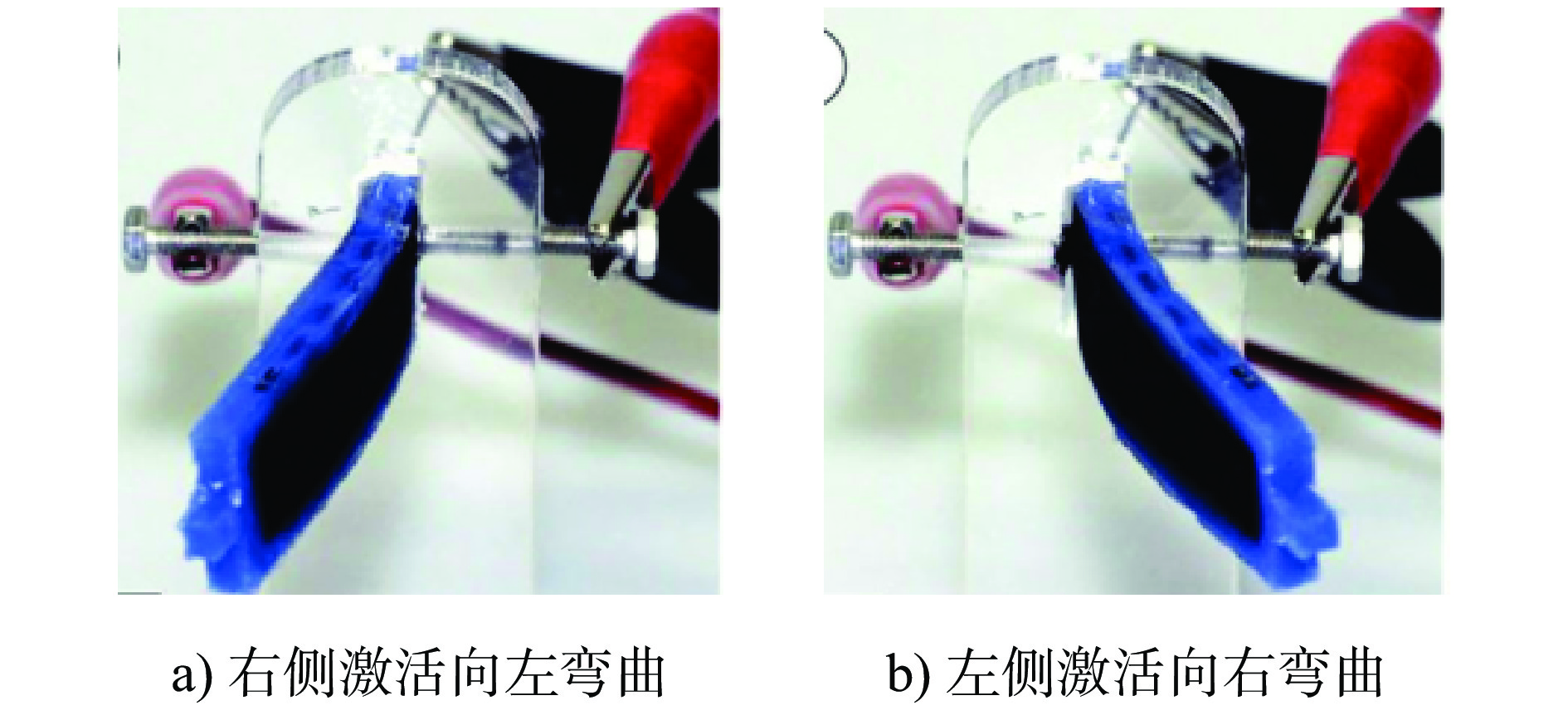
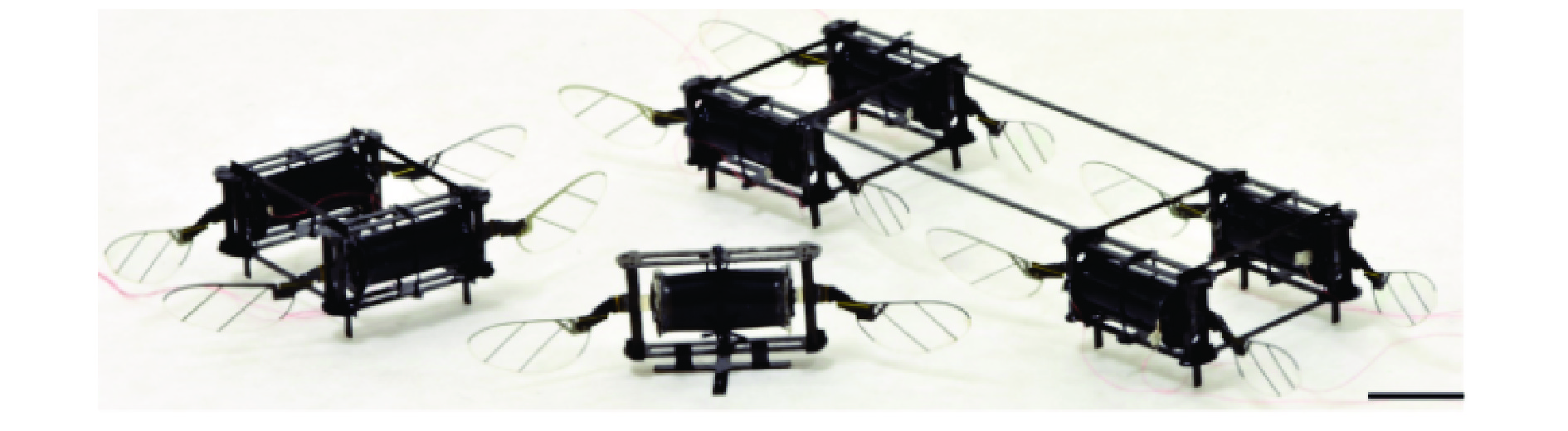
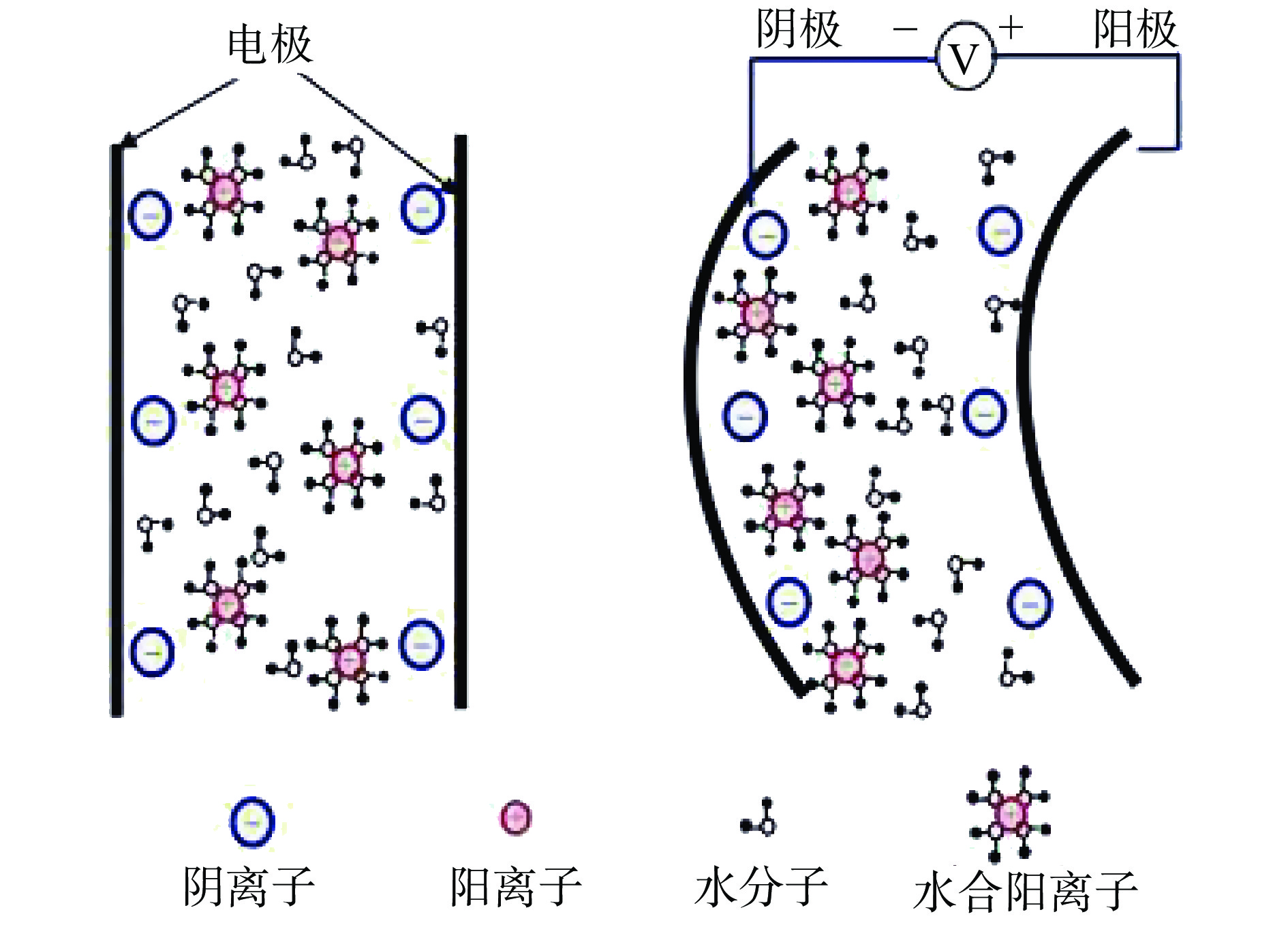
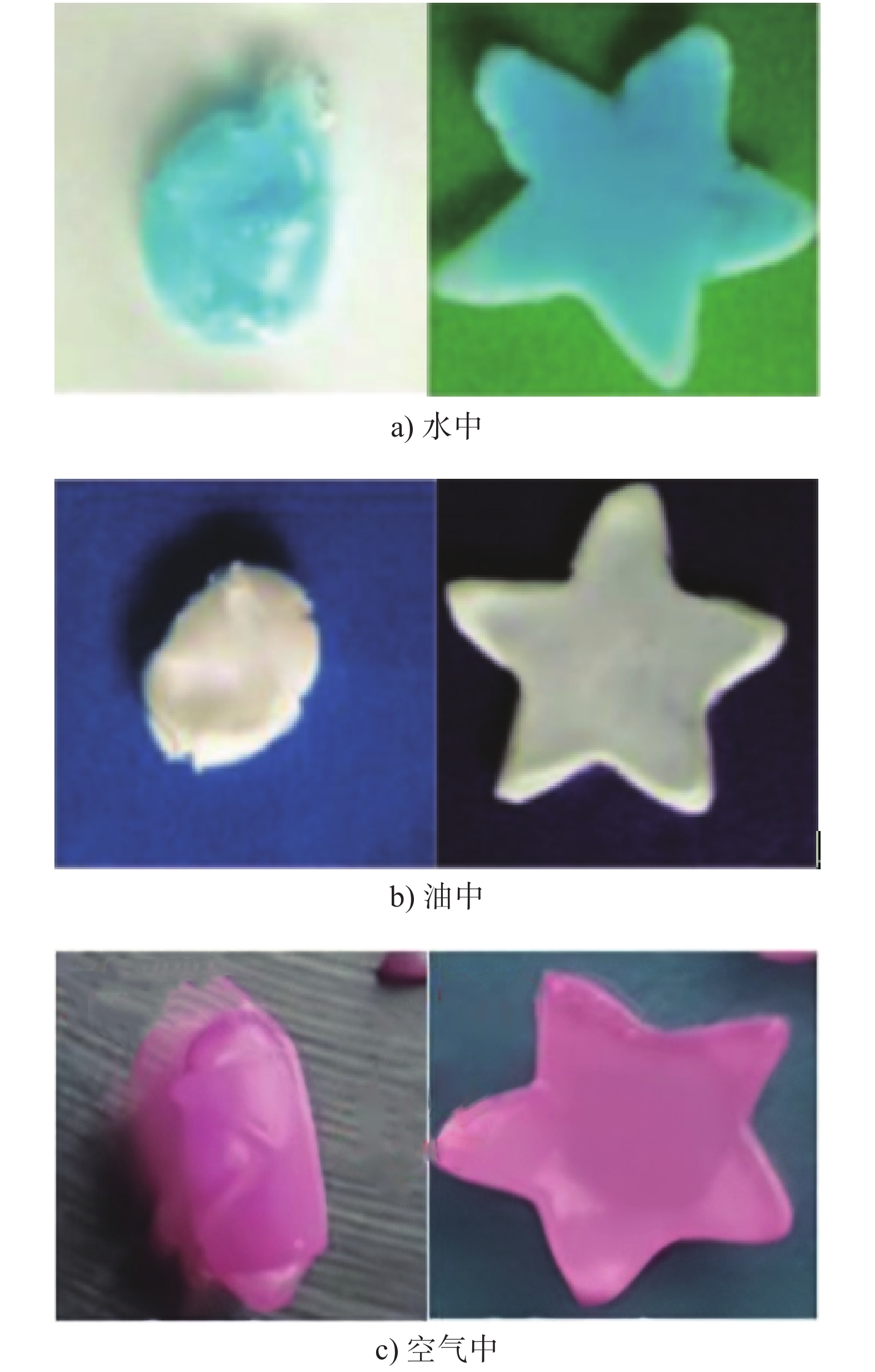
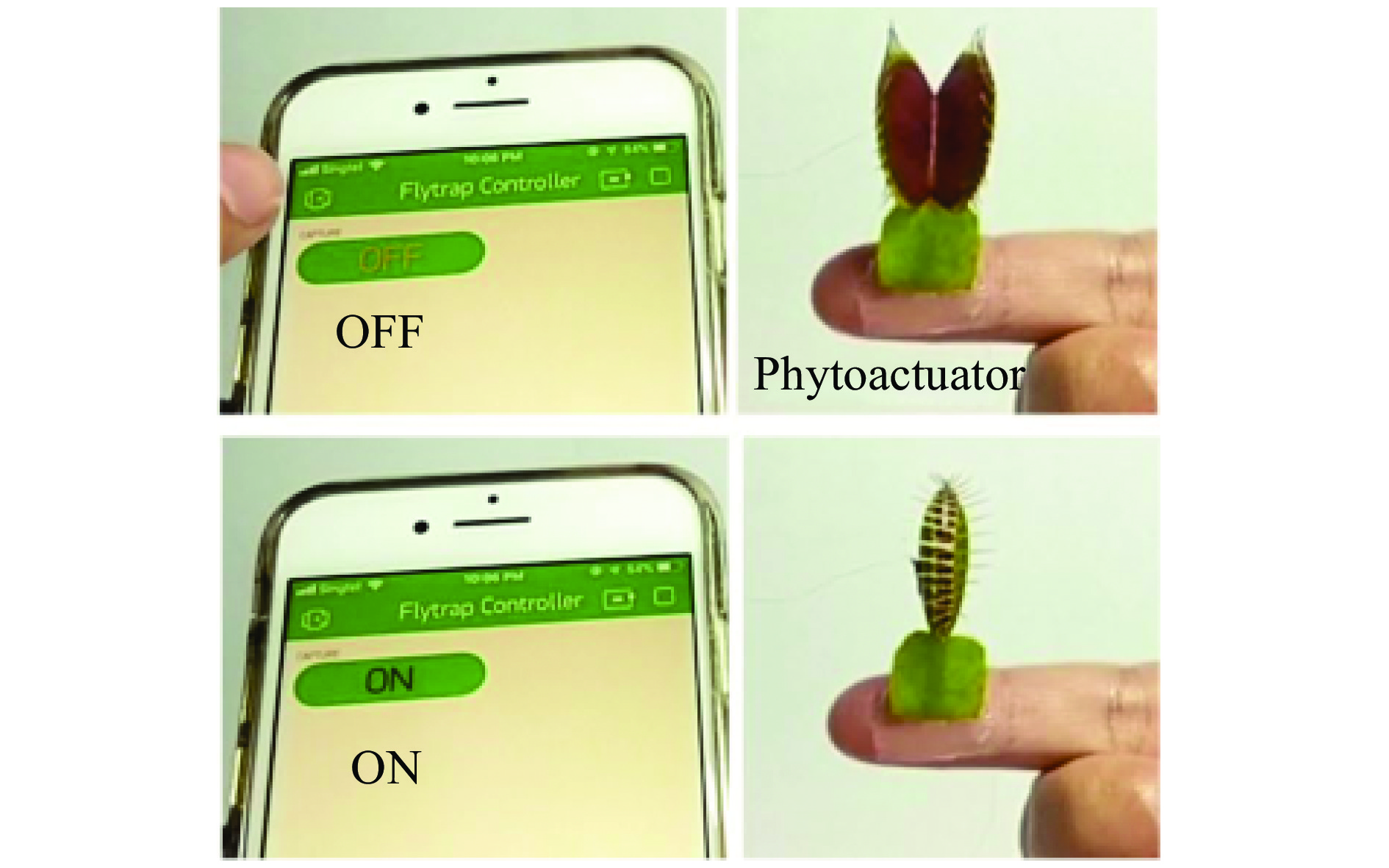
软体驱动器是智能和交互式软体机器人的核心部件,由于其高度的灵活性、良好的环境适应能力以及安全可交互等优势,被广泛应用于工业、农业、医学、救护和公告服务等领域。研究人员通过对生物的模仿制造出了各种类型的软体驱动器。围绕国内外近些年来软体驱动器的研究成果,介绍了国内外软体机器人中所采用的软体驱动器技术的基础研究发展现状;针对软体驱动器的基本特性对其进行了系统归纳分类,介绍了各类型软体驱动器的基本工作原理,介绍了各种软体驱动器各领域的的应用现状以及各种类型驱动器的优缺点和在实践应用中存在的问题;对软体驱动器未来的发展趋势进行展望。
软体驱动器是智能和交互式软体机器人的核心部件,由于其高度的灵活性、良好的环境适应能力以及安全可交互等优势,被广泛应用于工业、农业、医学、救护和公告服务等领域。研究人员通过对生物的模仿制造出了各种类型的软体驱动器。围绕国内外近些年来软体驱动器的研究成果,介绍了国内外软体机器人中所采用的软体驱动器技术的基础研究发展现状;针对软体驱动器的基本特性对其进行了系统归纳分类,介绍了各类型软体驱动器的基本工作原理,介绍了各种软体驱动器各领域的的应用现状以及各种类型驱动器的优缺点和在实践应用中存在的问题;对软体驱动器未来的发展趋势进行展望。

2023, 42(9): 1381-1391.
doi: 10.13433/j.cnki.1003-8728.20220092
摘要:
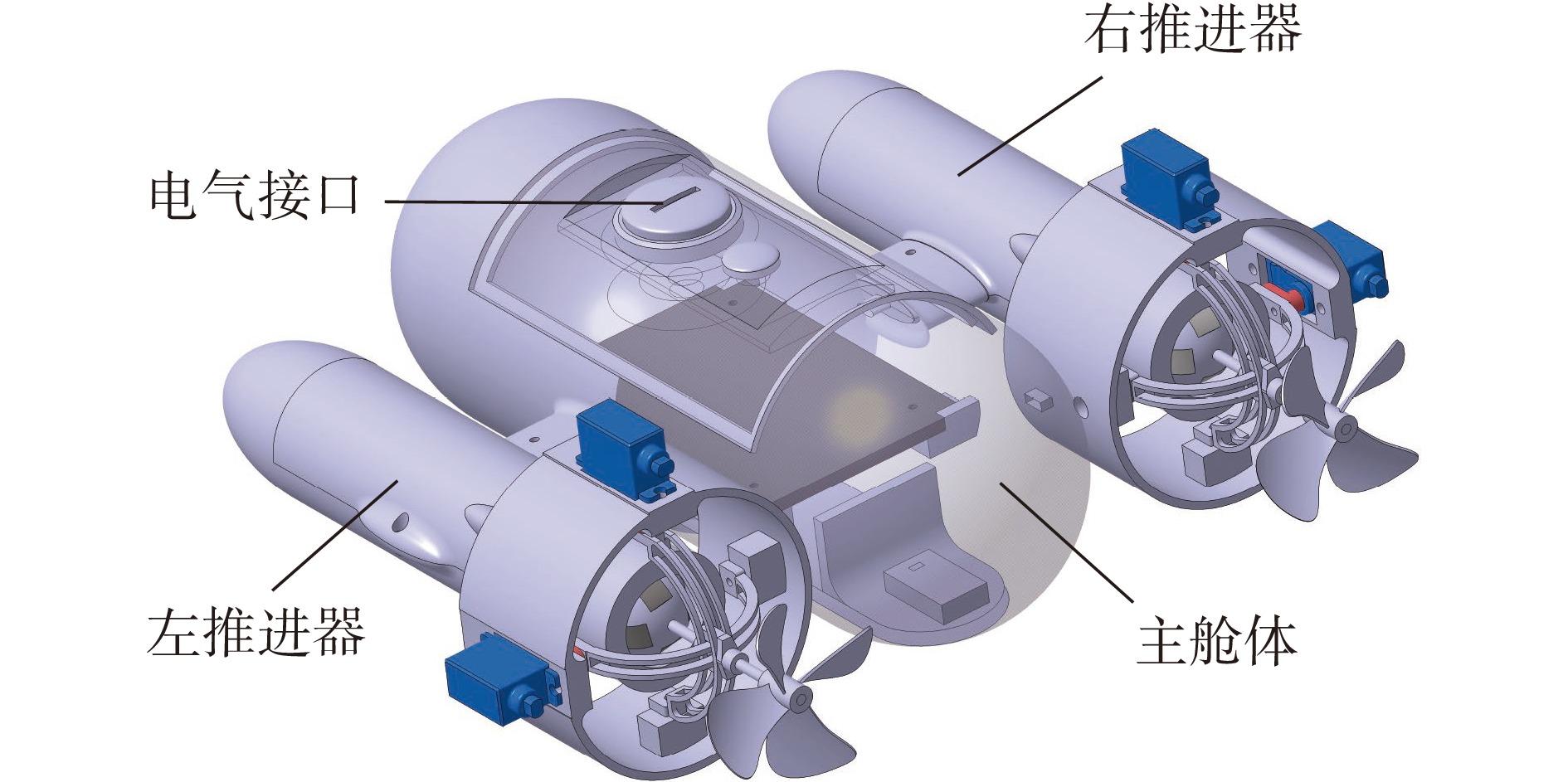
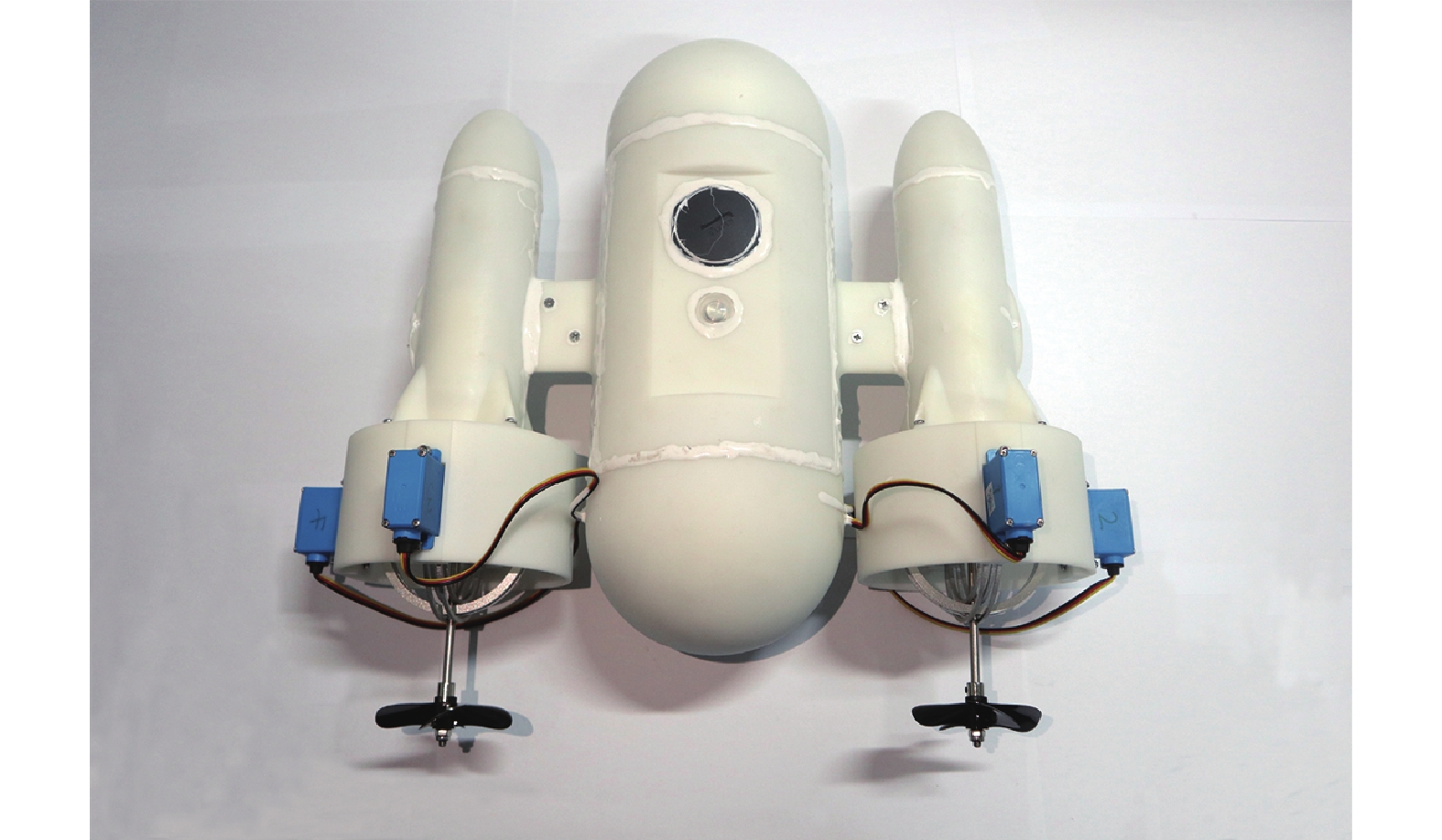
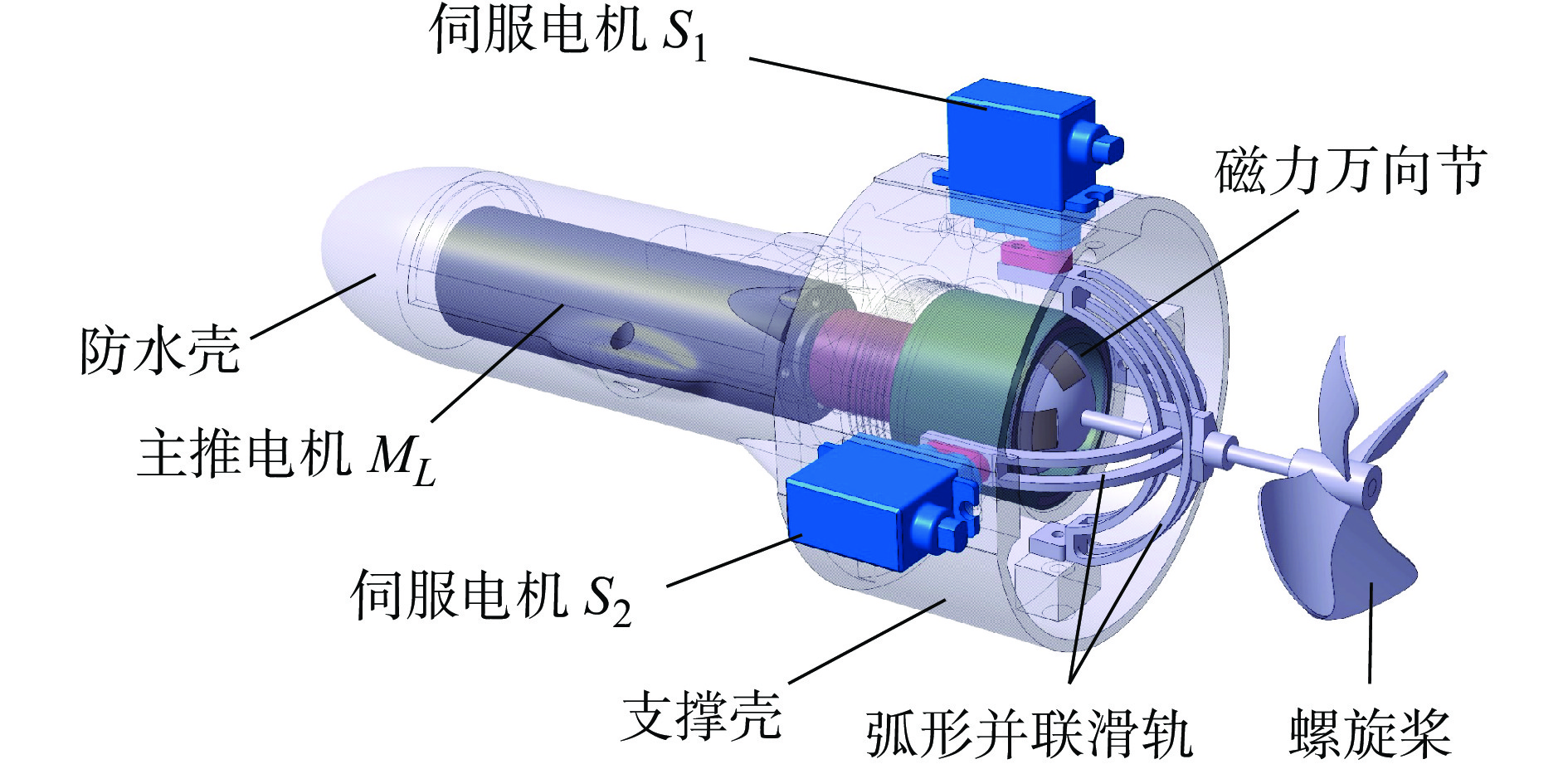
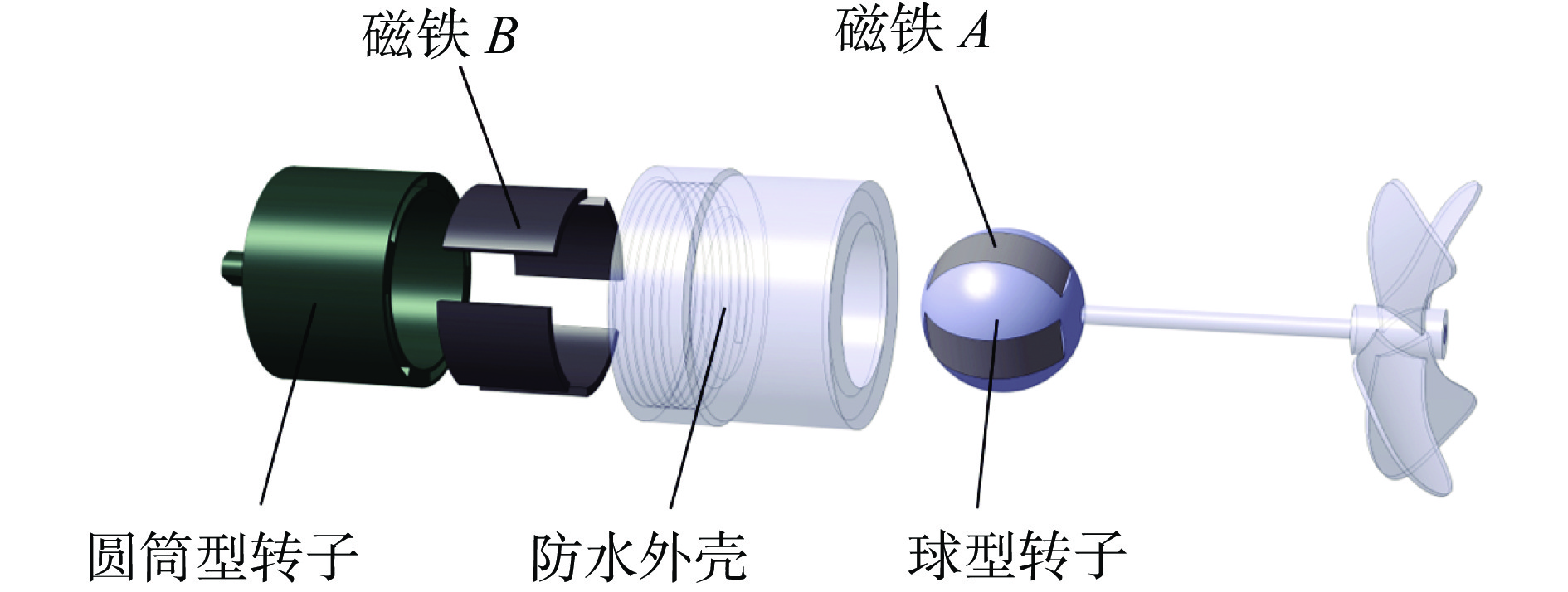
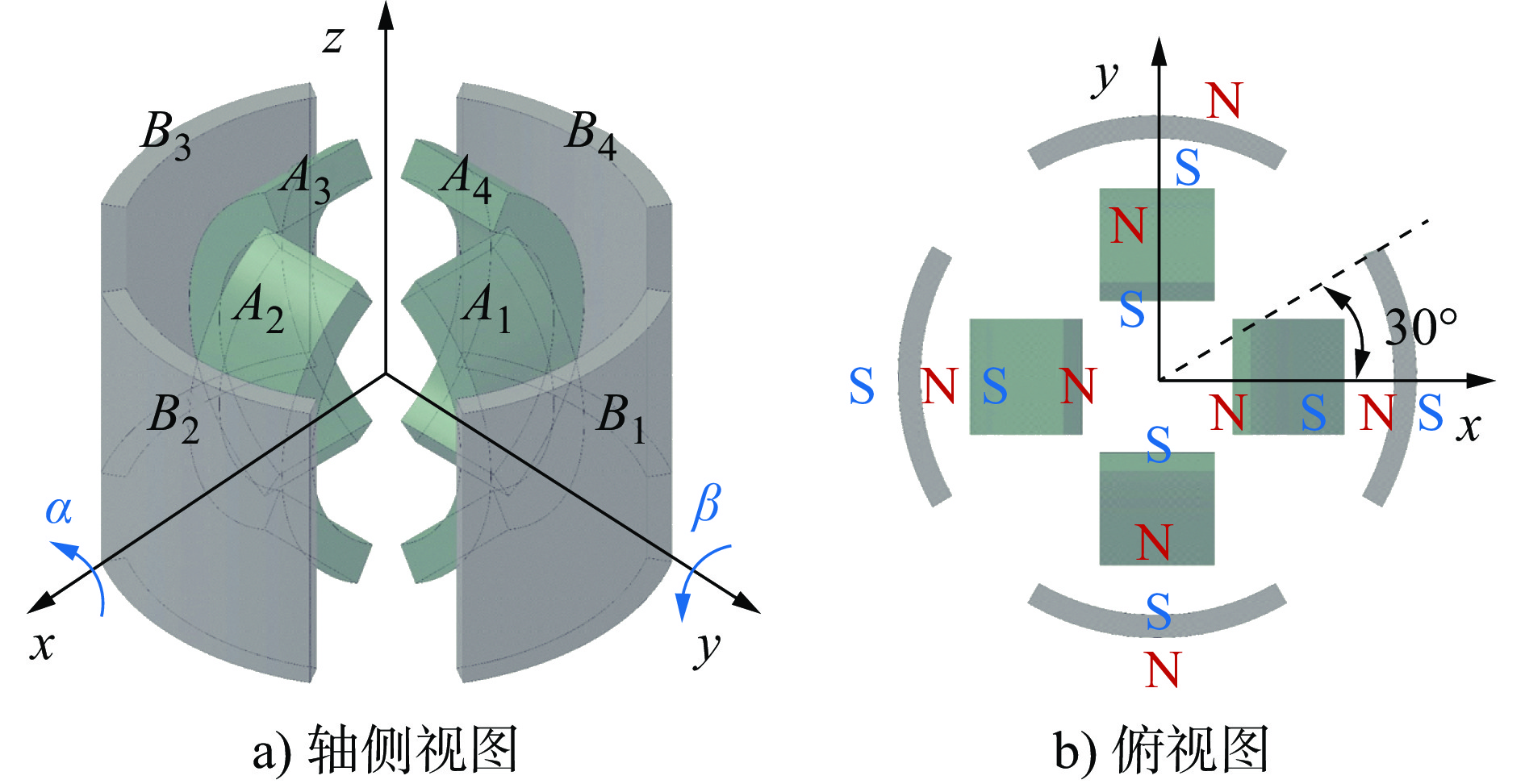
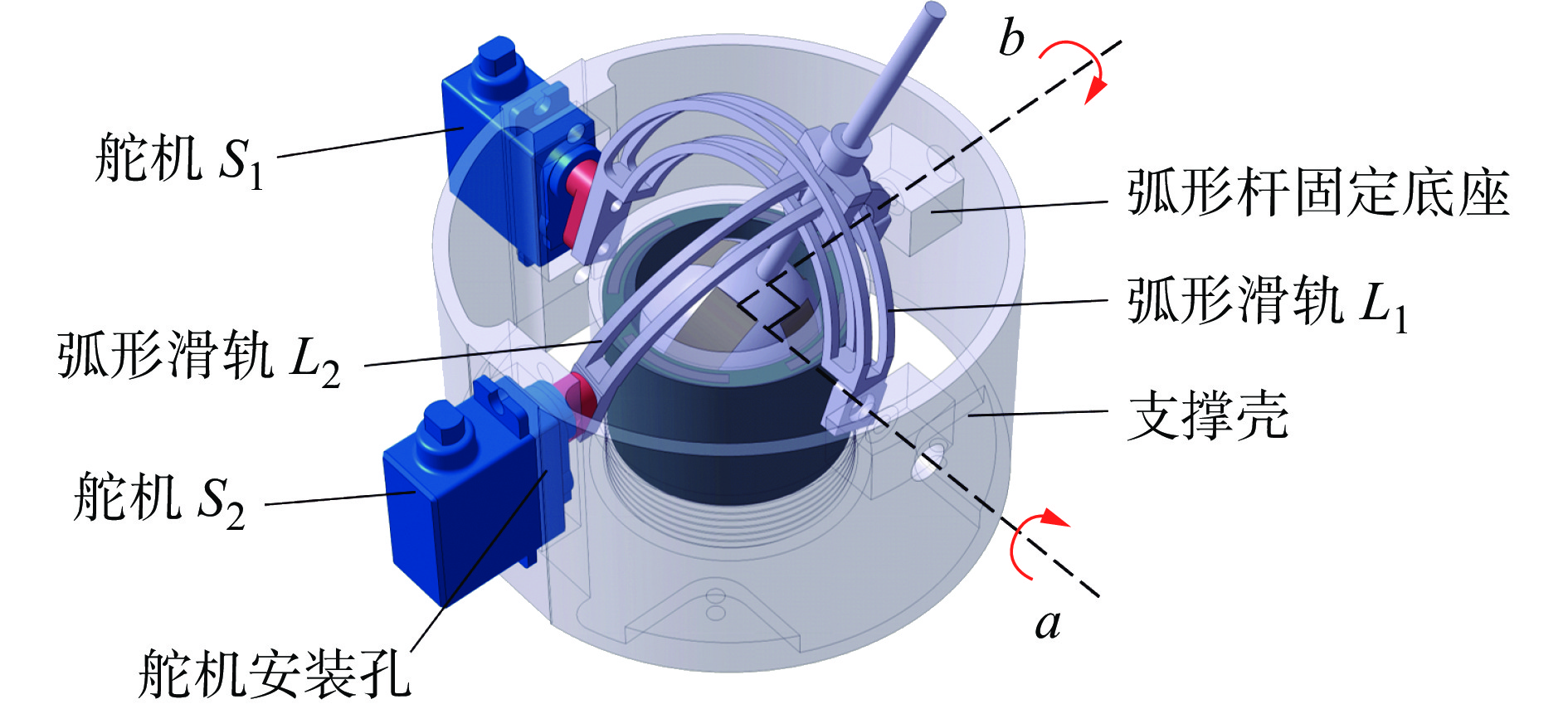
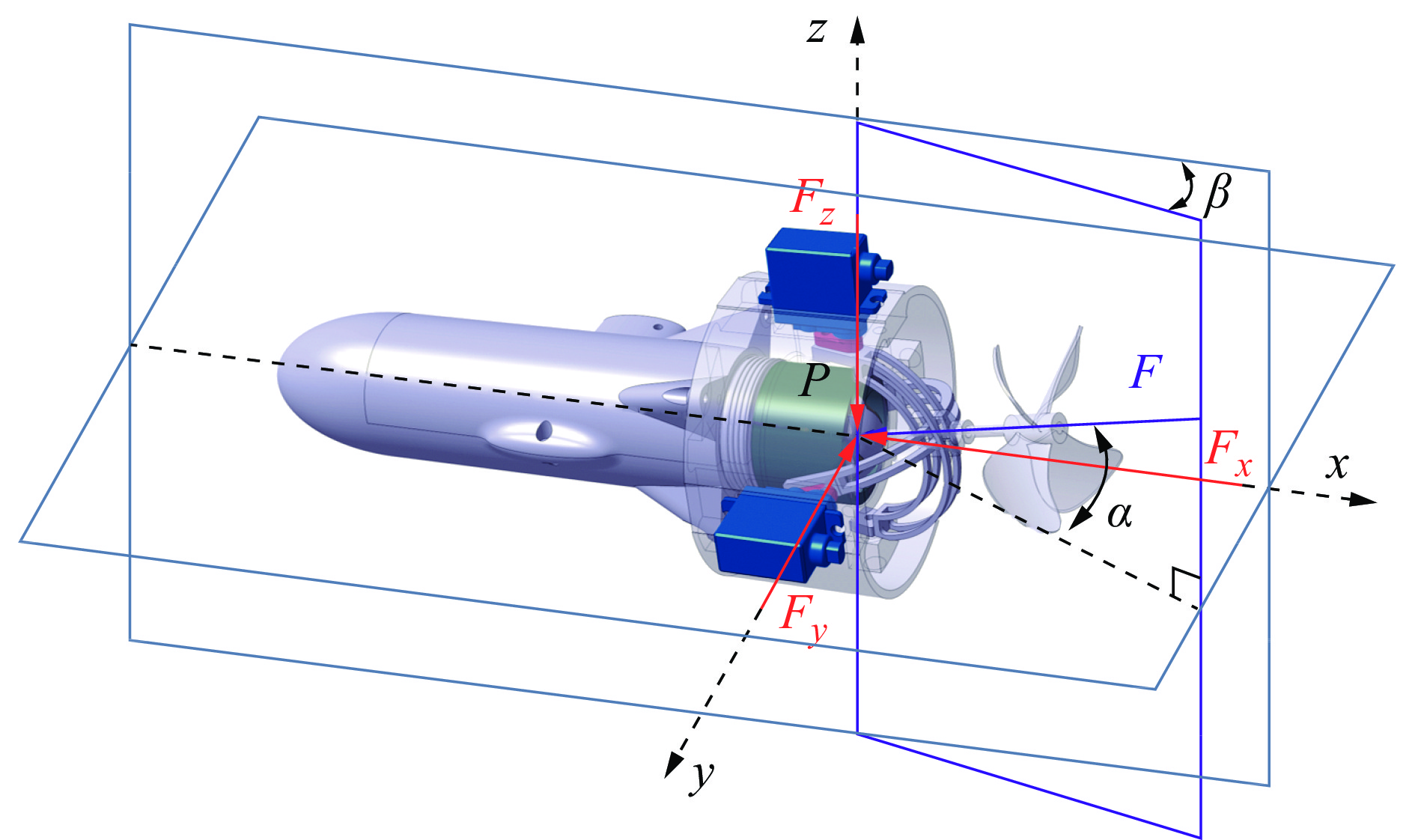
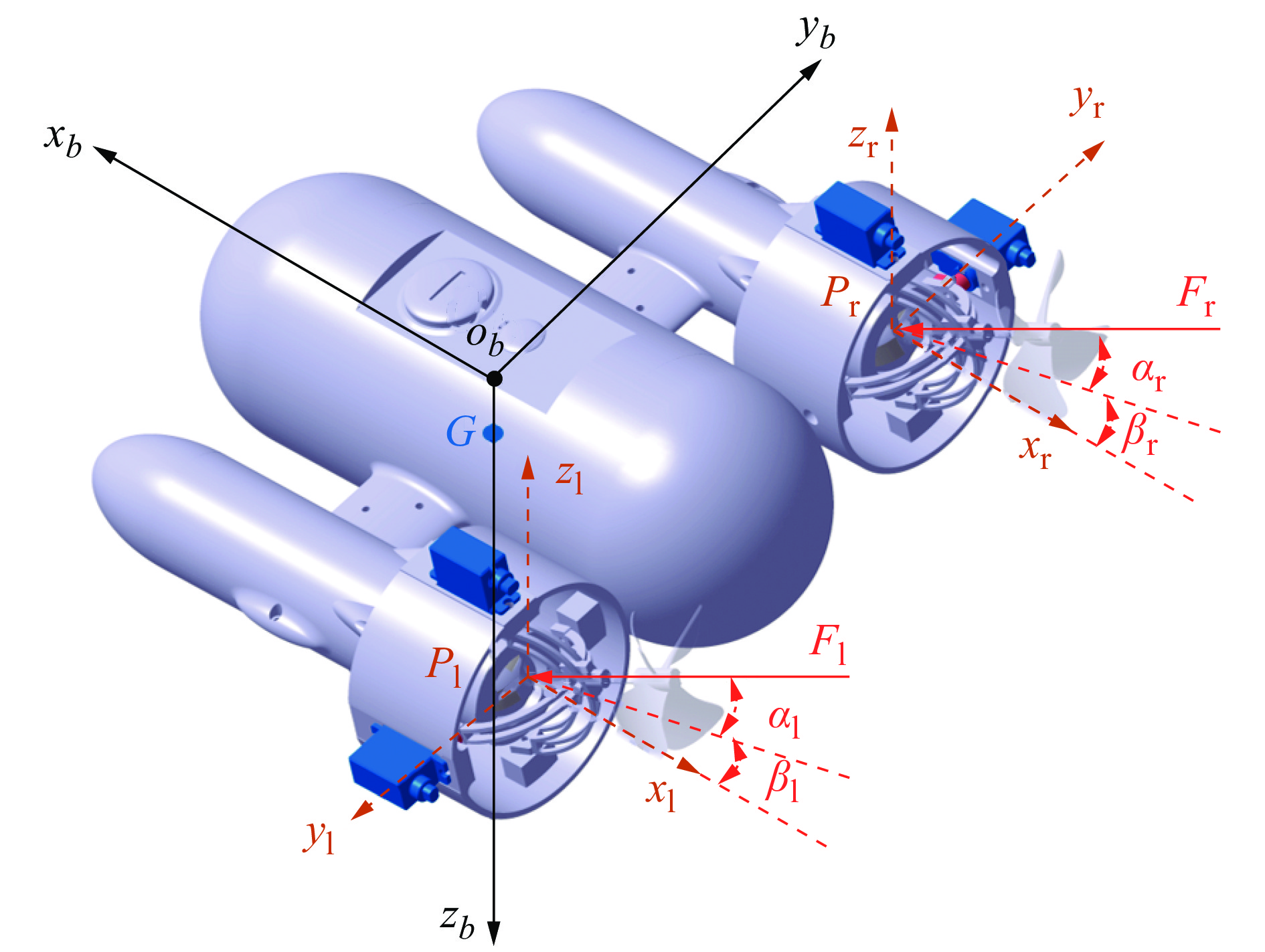
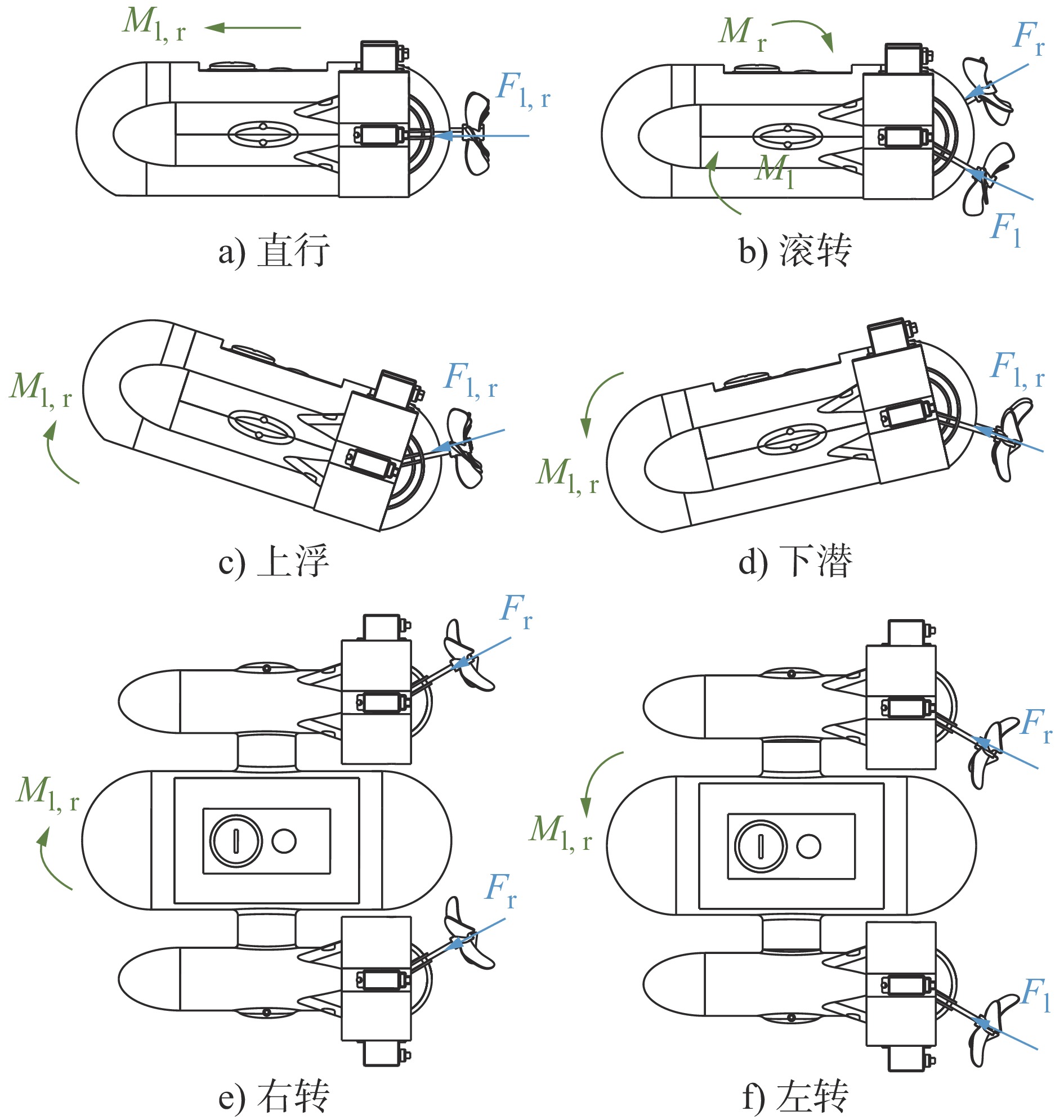
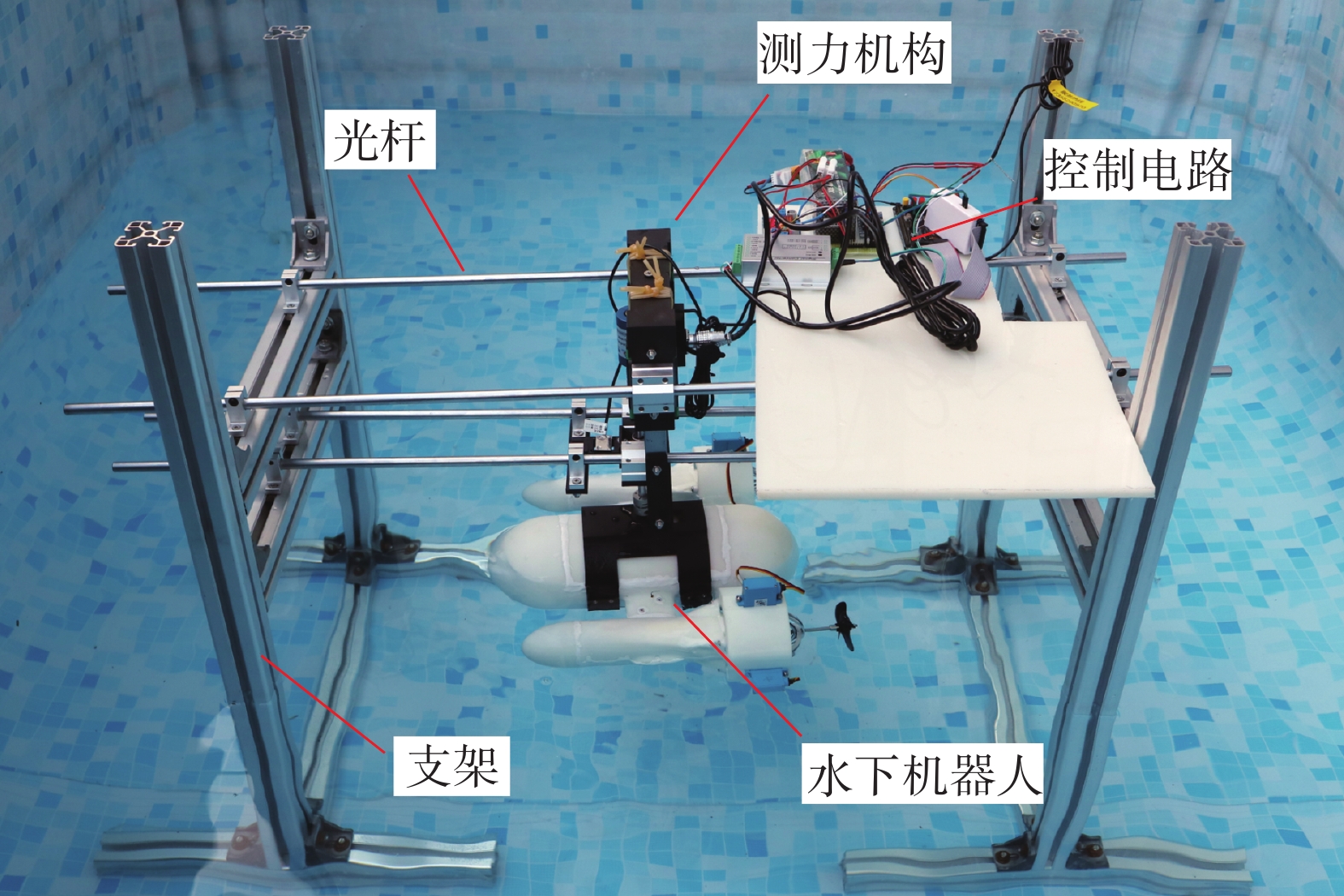
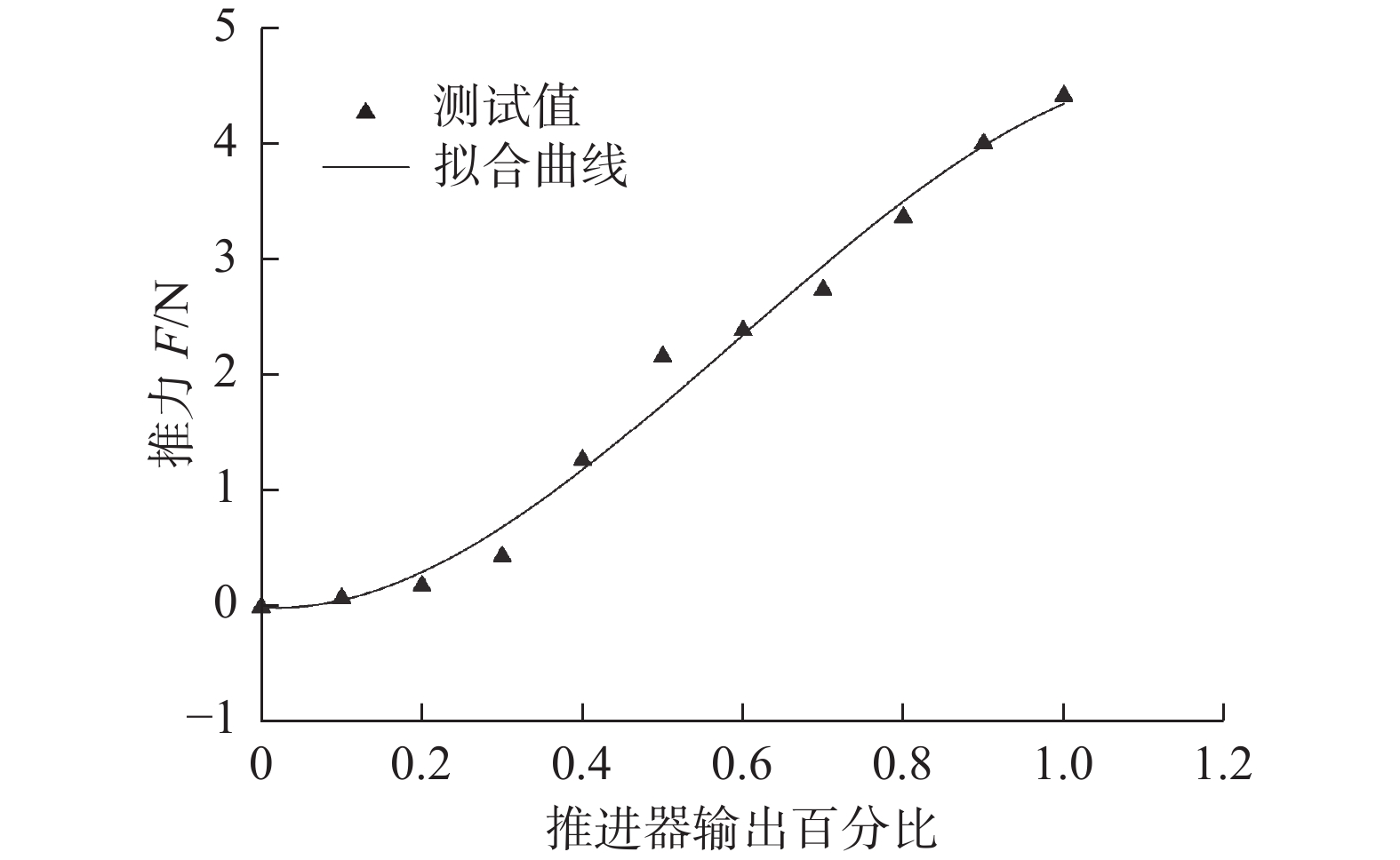
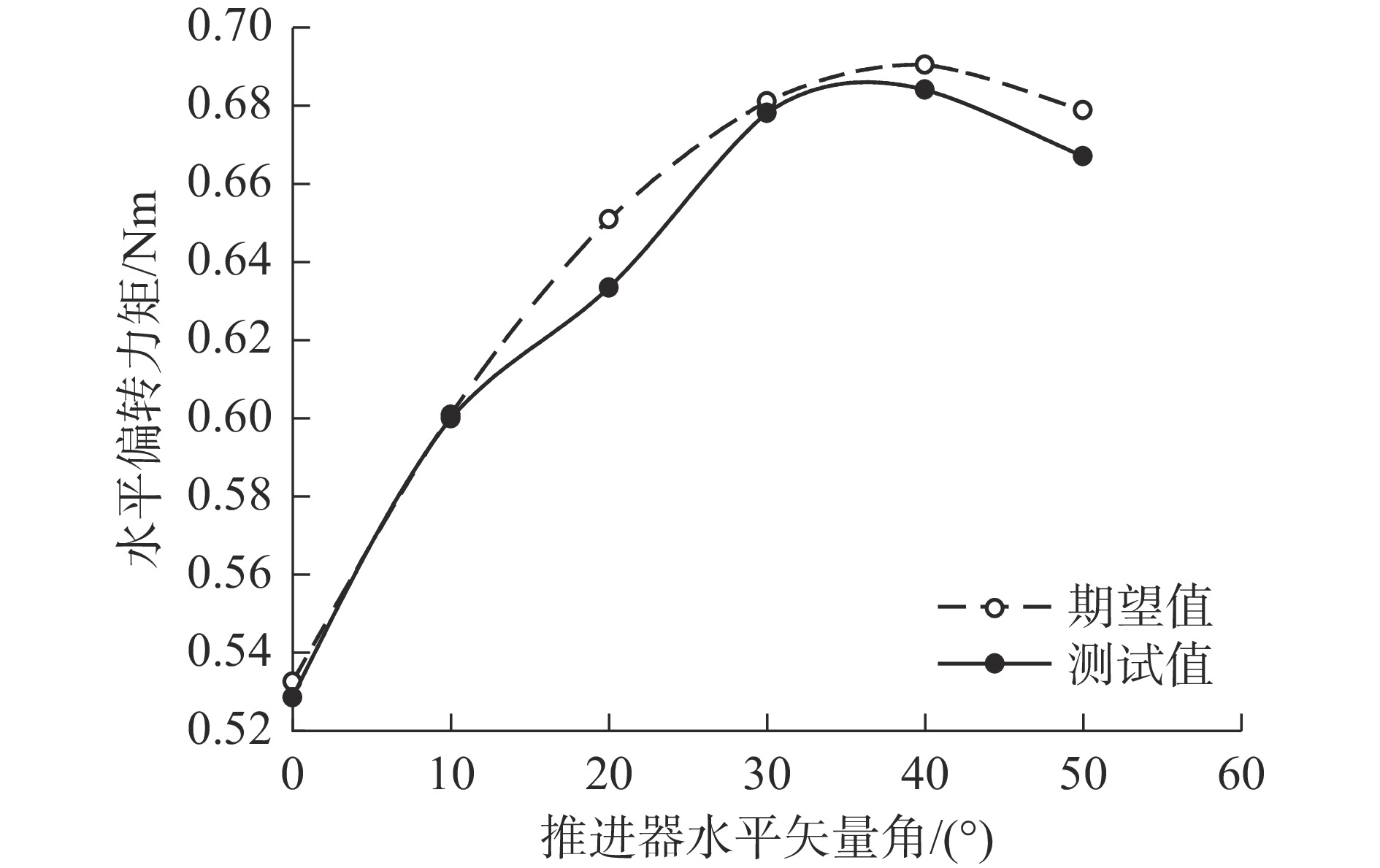
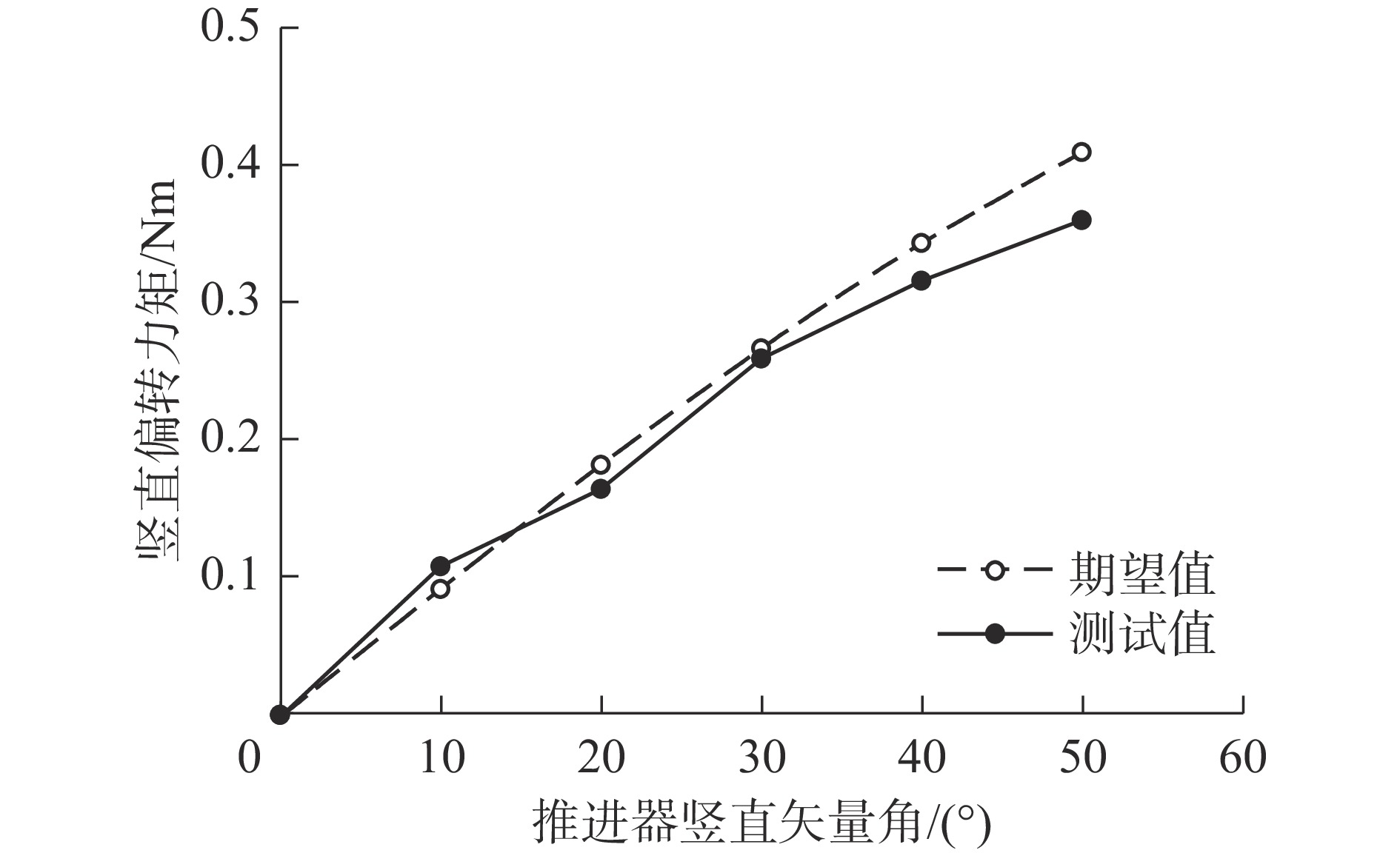
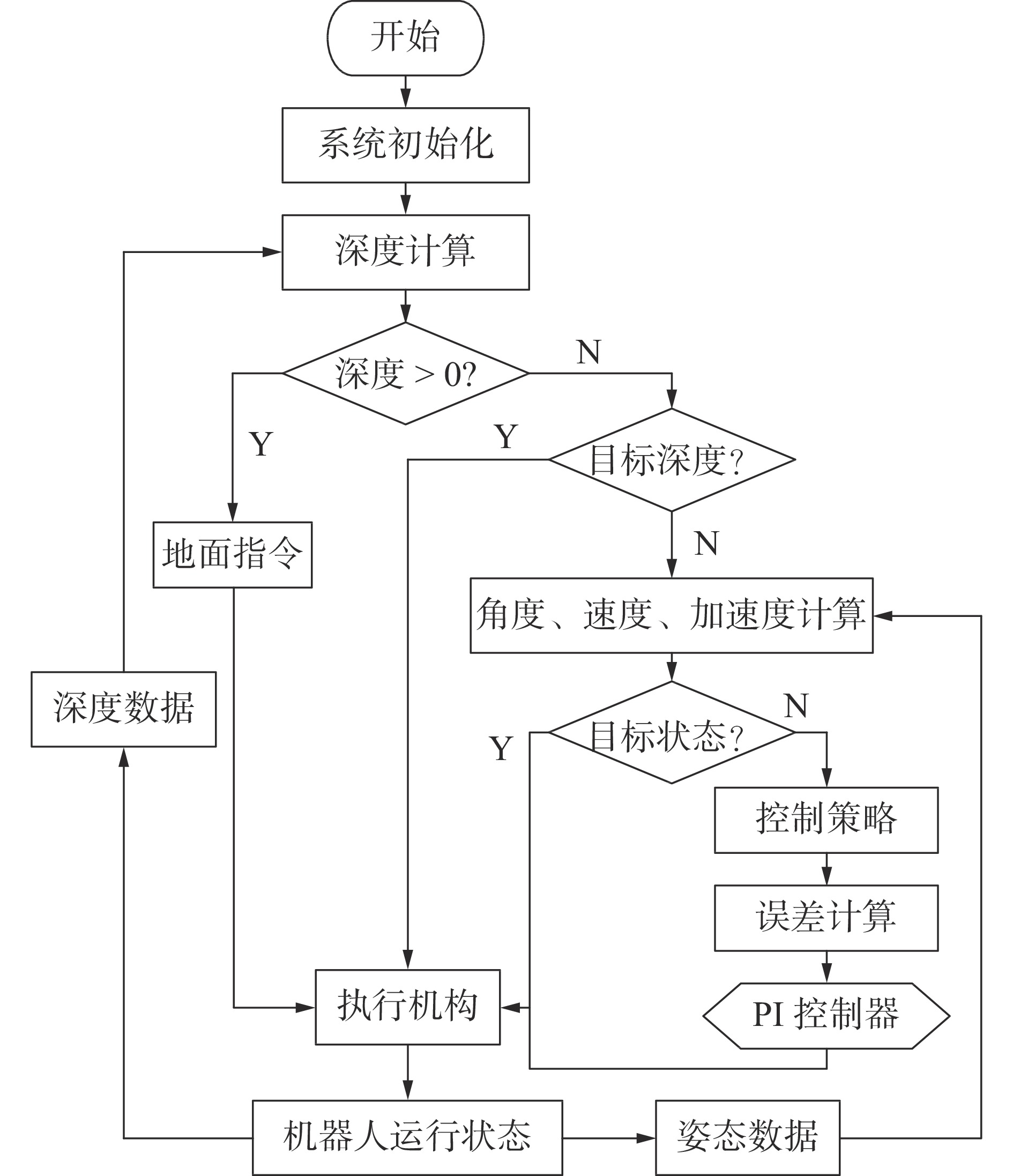
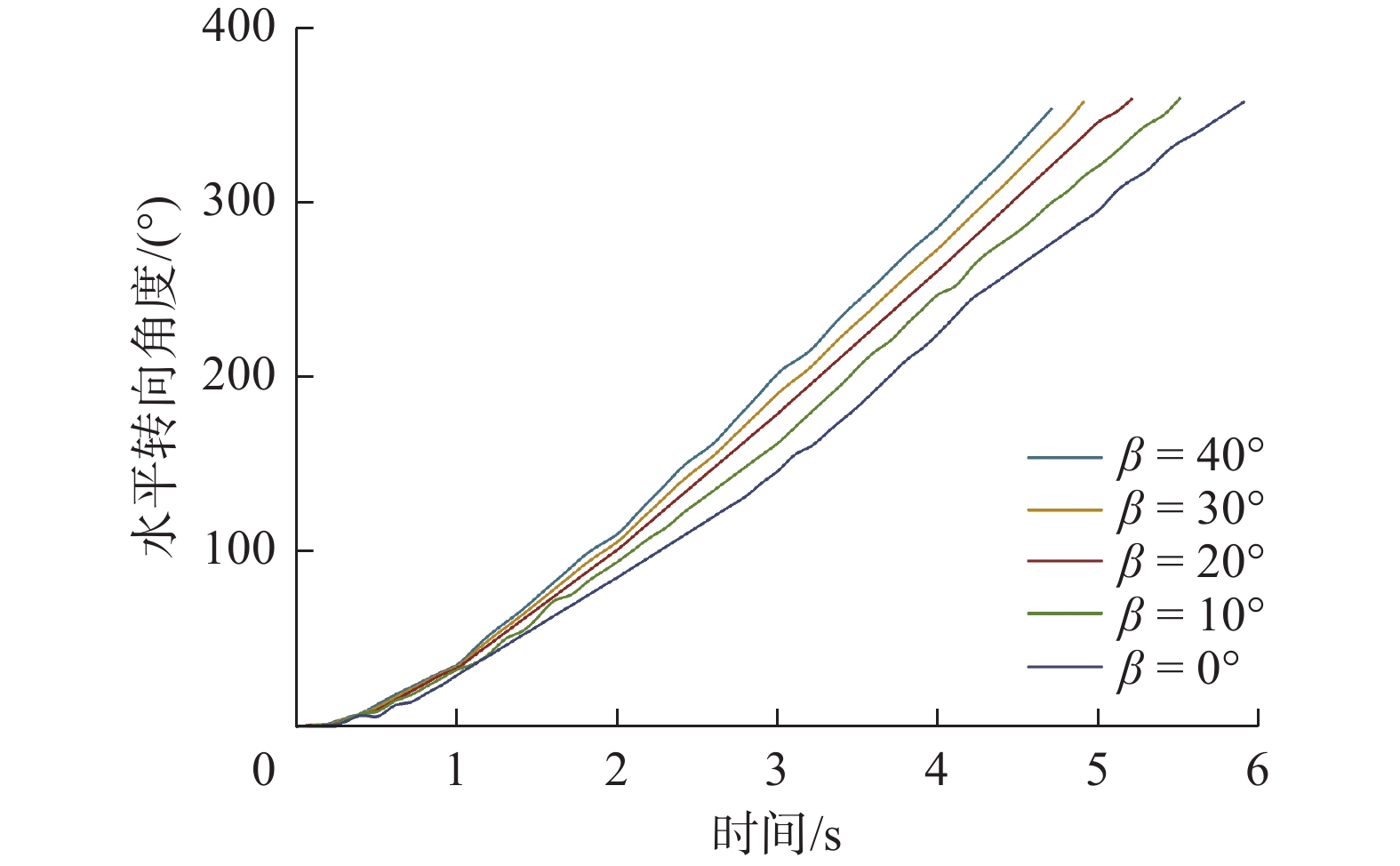
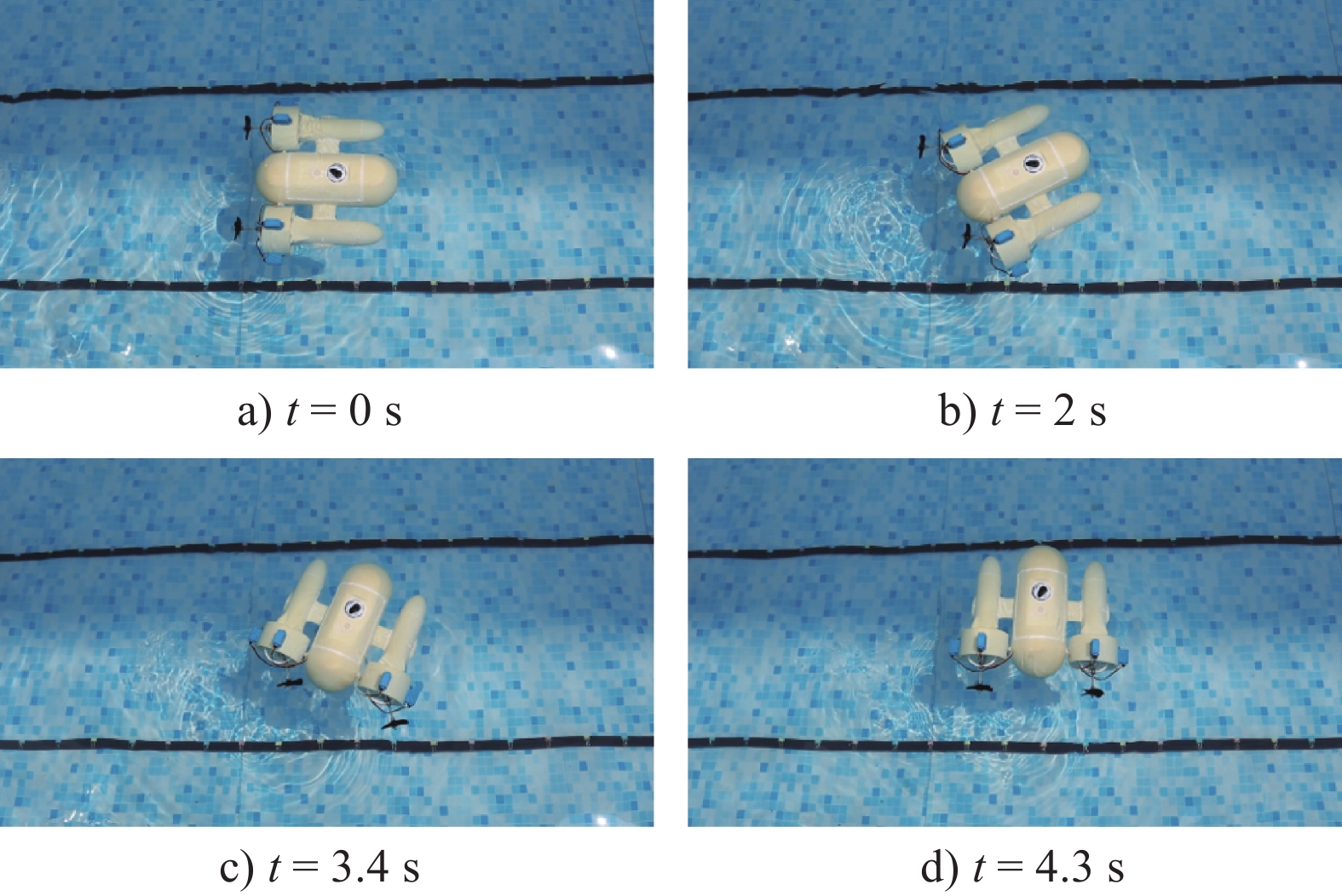
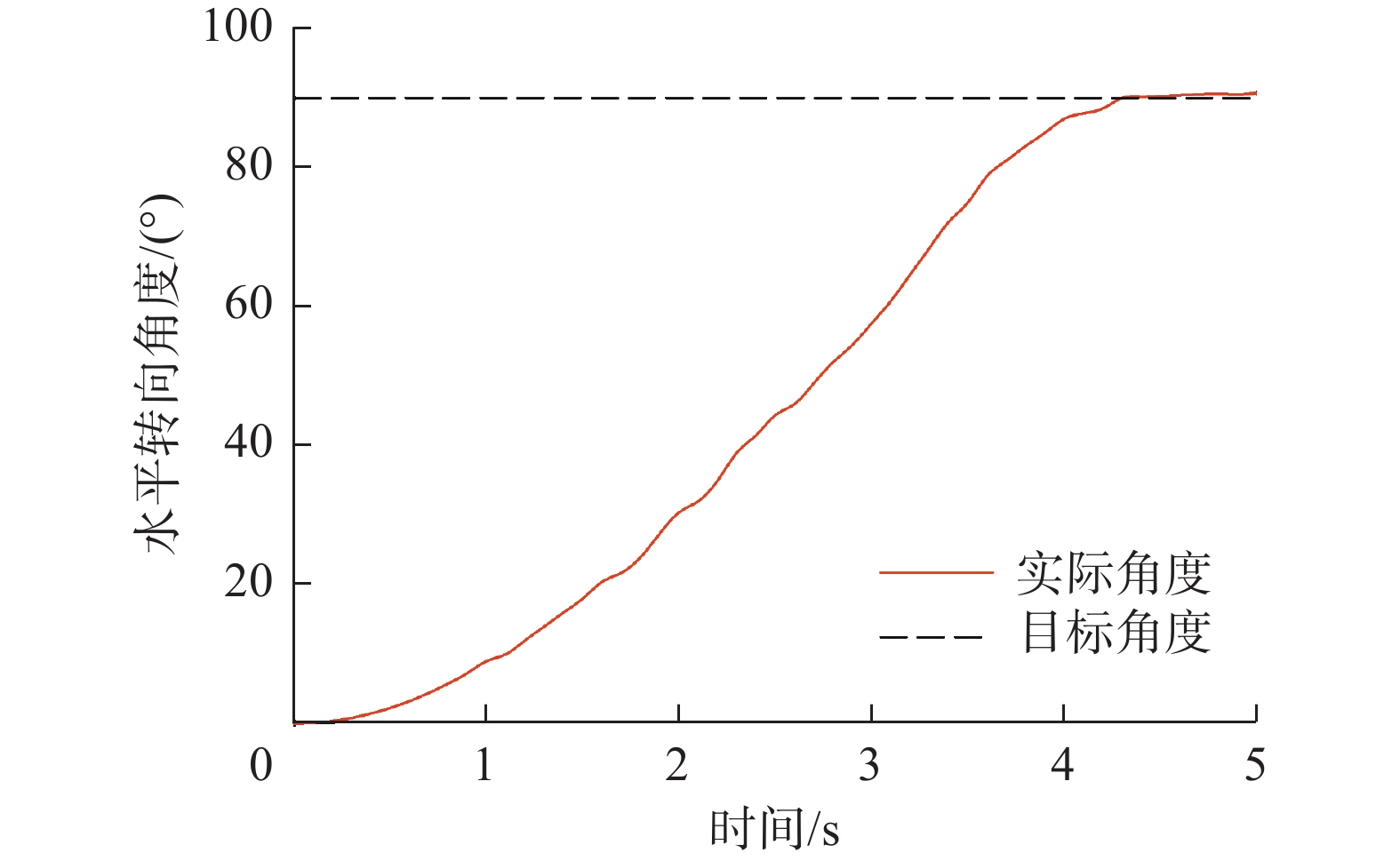
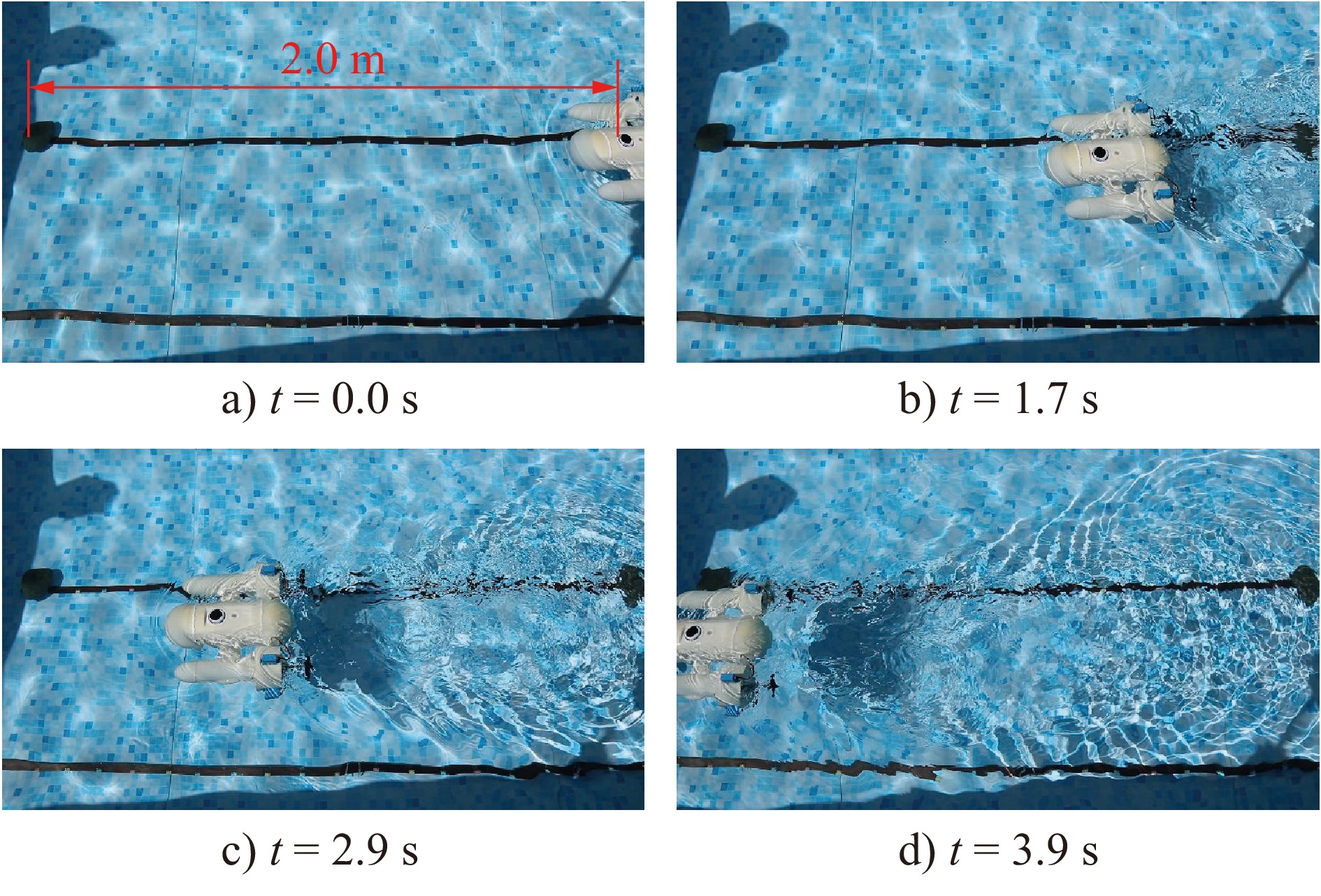
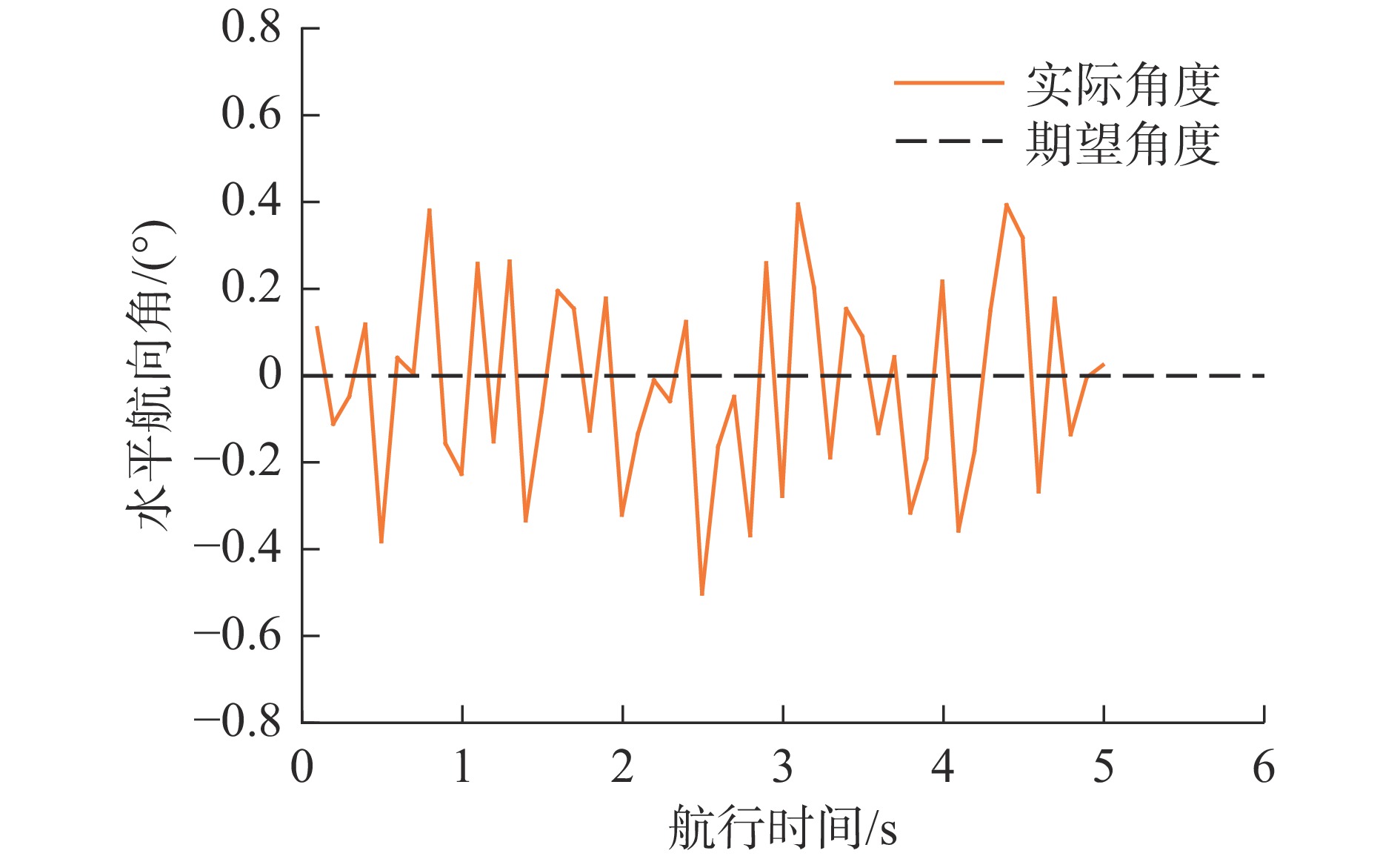
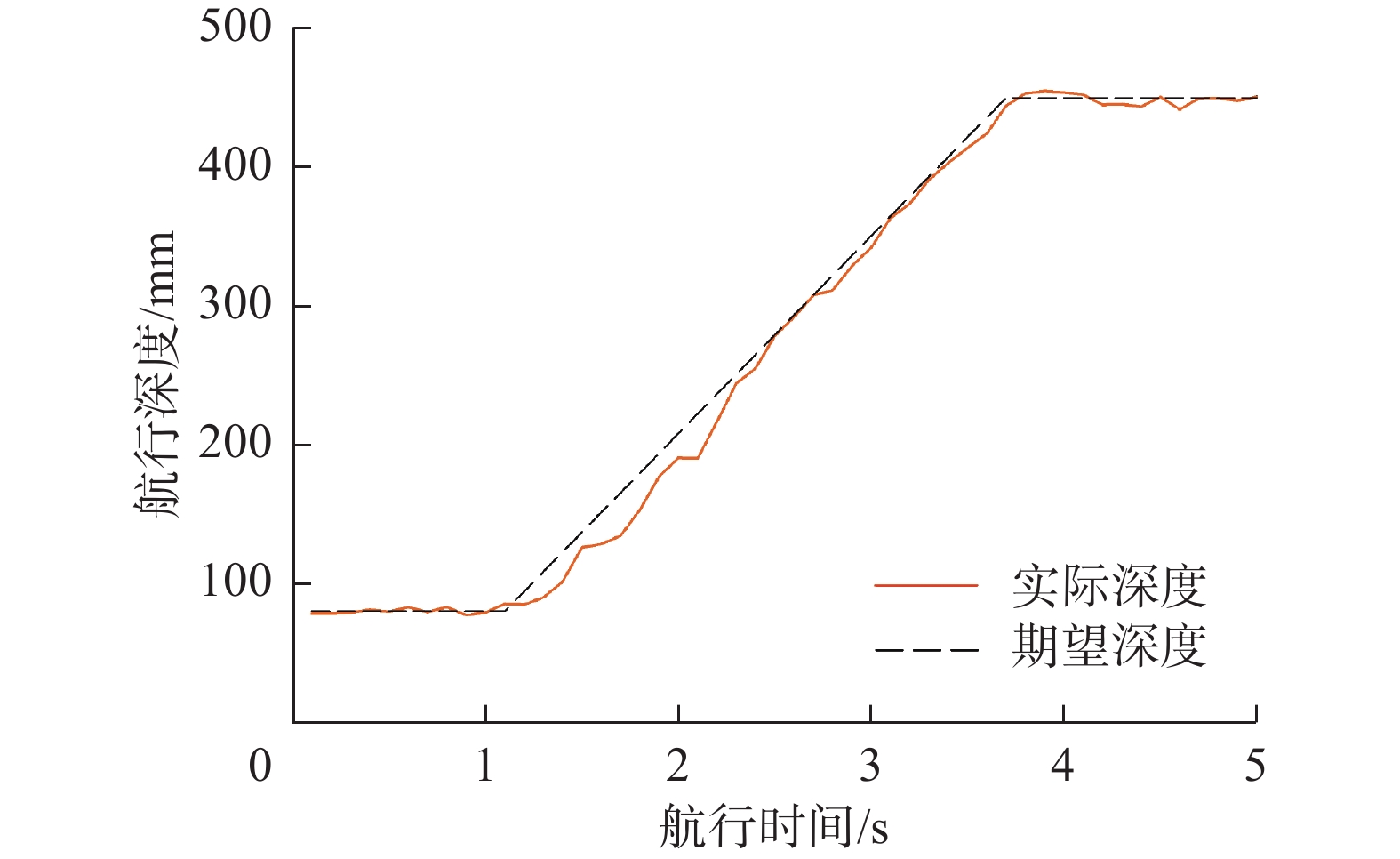
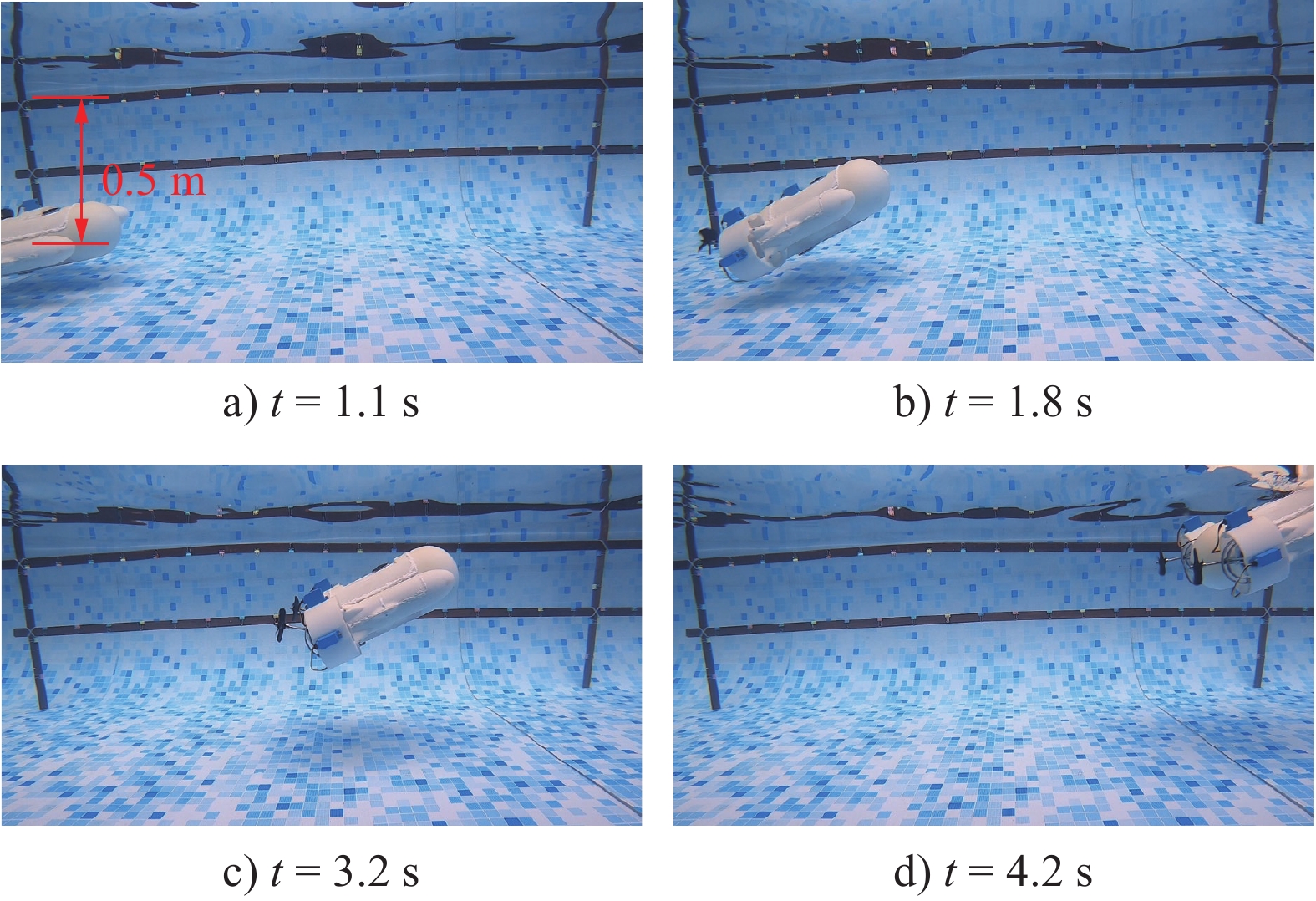
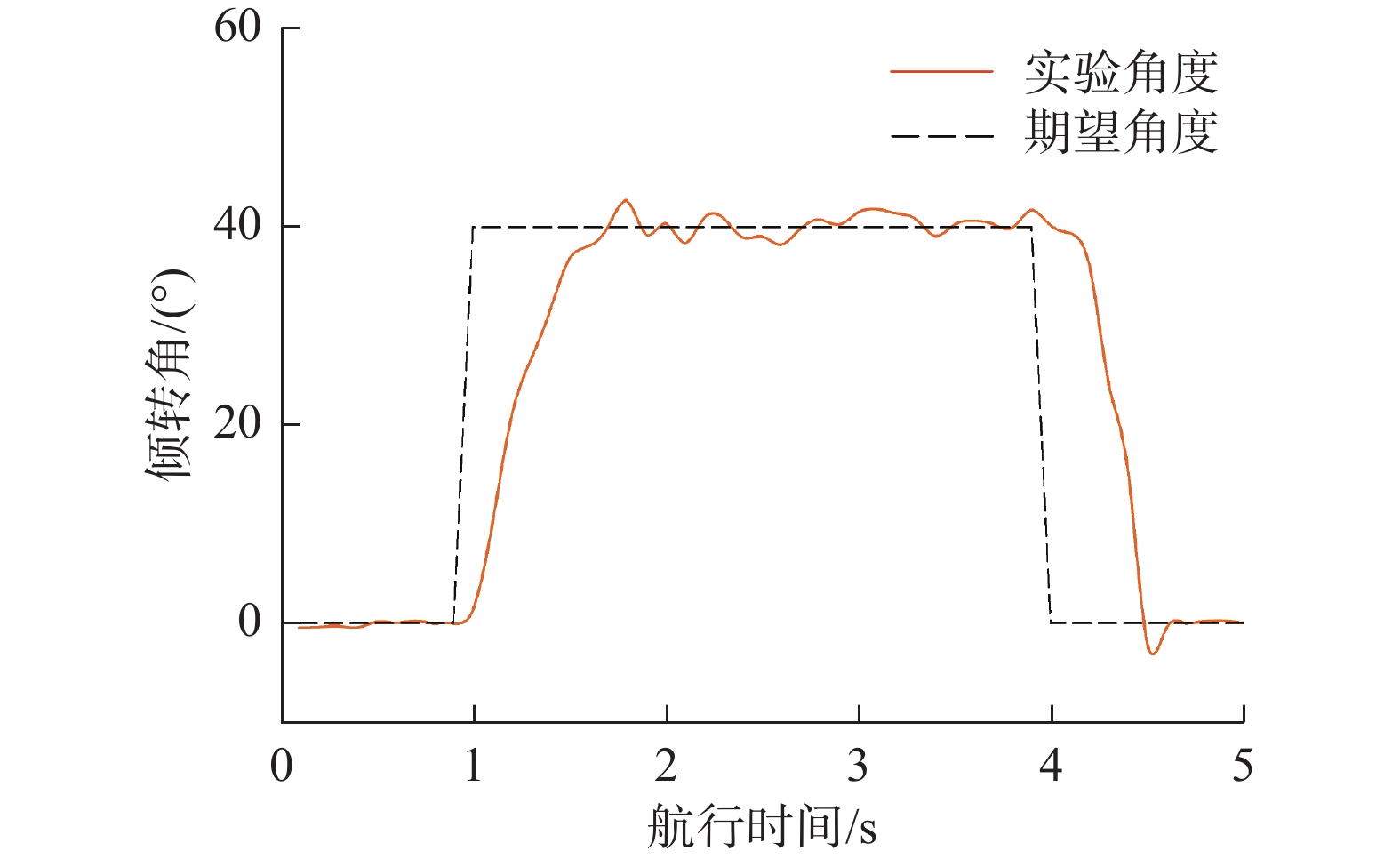
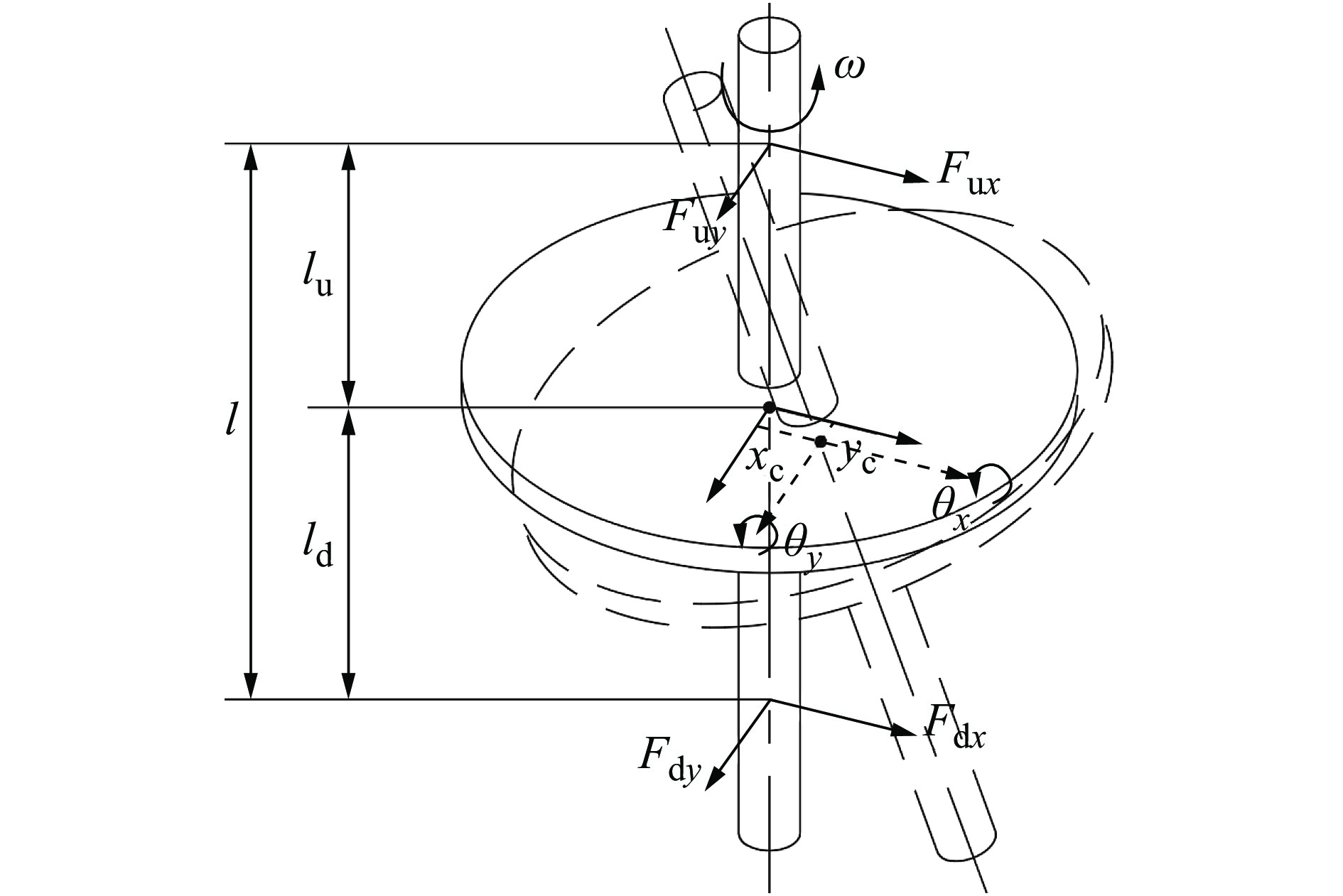
为了经济高效地实现矢量推进,提高水下机器人的机动性能,设计了一种新型矢量推进水下机器人。该机器人采用两个可重构磁耦合推进器作为推进系统的主动力单元,每个推进器都具备两个自由度的矢量重构能力,相较于传统水下机器人,拥有更高的可操纵性和灵活性。本文通过建立推进系统模型,完成了机器人的运动规划,并利用测力实验装置,对机器人的动力性能进行了评估。在此基础上,对机器人进行了前进、偏航、上浮、下潜等多自由度的运动控制实验。实验结果表明,该机器人能够高效地实现多个自由度的运动,新型可重构磁耦合推进器能够稳定的提供矢量推力,验证了该设计方案的可行性。
为了经济高效地实现矢量推进,提高水下机器人的机动性能,设计了一种新型矢量推进水下机器人。该机器人采用两个可重构磁耦合推进器作为推进系统的主动力单元,每个推进器都具备两个自由度的矢量重构能力,相较于传统水下机器人,拥有更高的可操纵性和灵活性。本文通过建立推进系统模型,完成了机器人的运动规划,并利用测力实验装置,对机器人的动力性能进行了评估。在此基础上,对机器人进行了前进、偏航、上浮、下潜等多自由度的运动控制实验。实验结果表明,该机器人能够高效地实现多个自由度的运动,新型可重构磁耦合推进器能够稳定的提供矢量推力,验证了该设计方案的可行性。



2023, 42(9): 1392-1401.
doi: 10.13433/j.cnki.1003-8728.20220114
摘要:
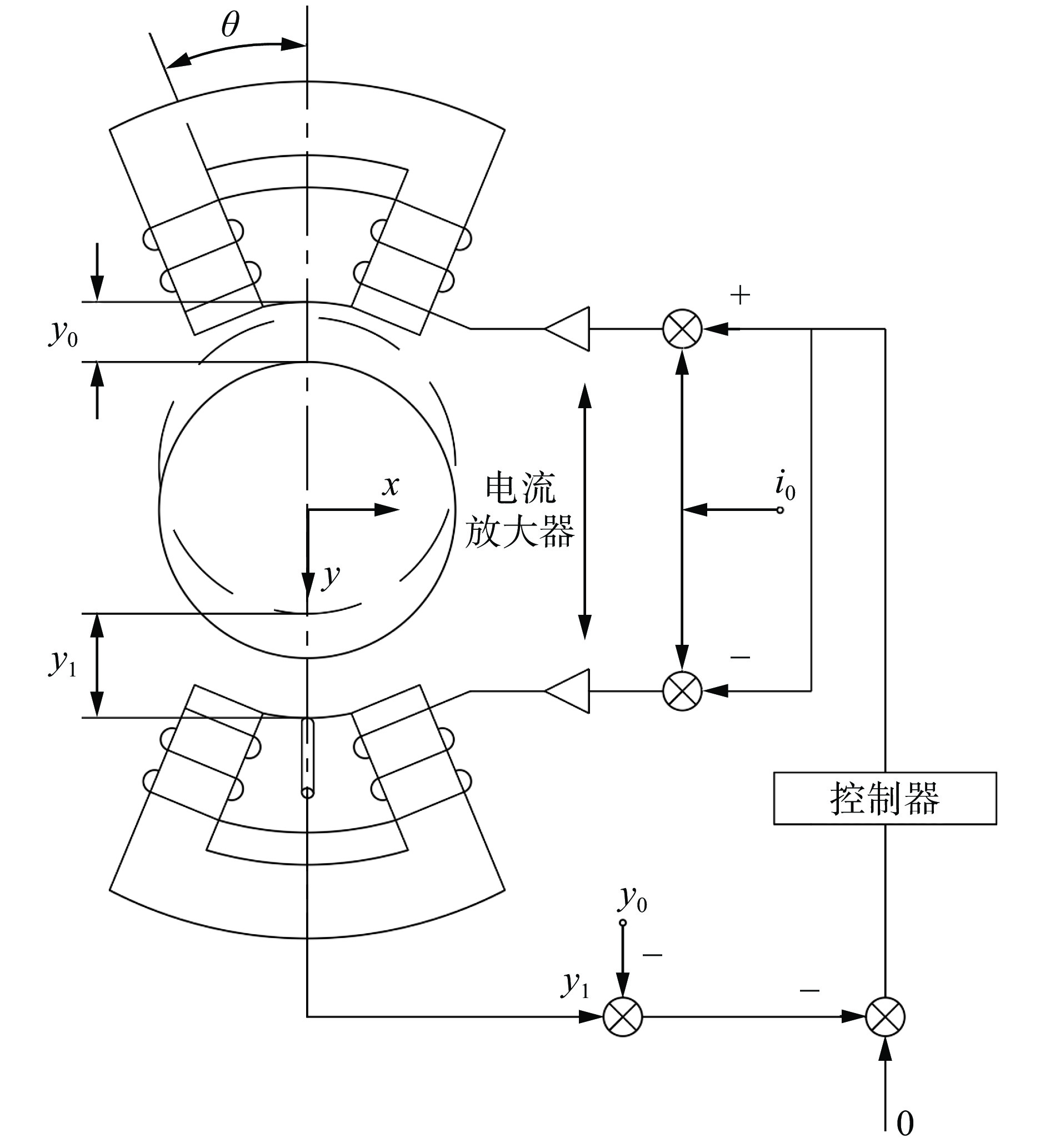
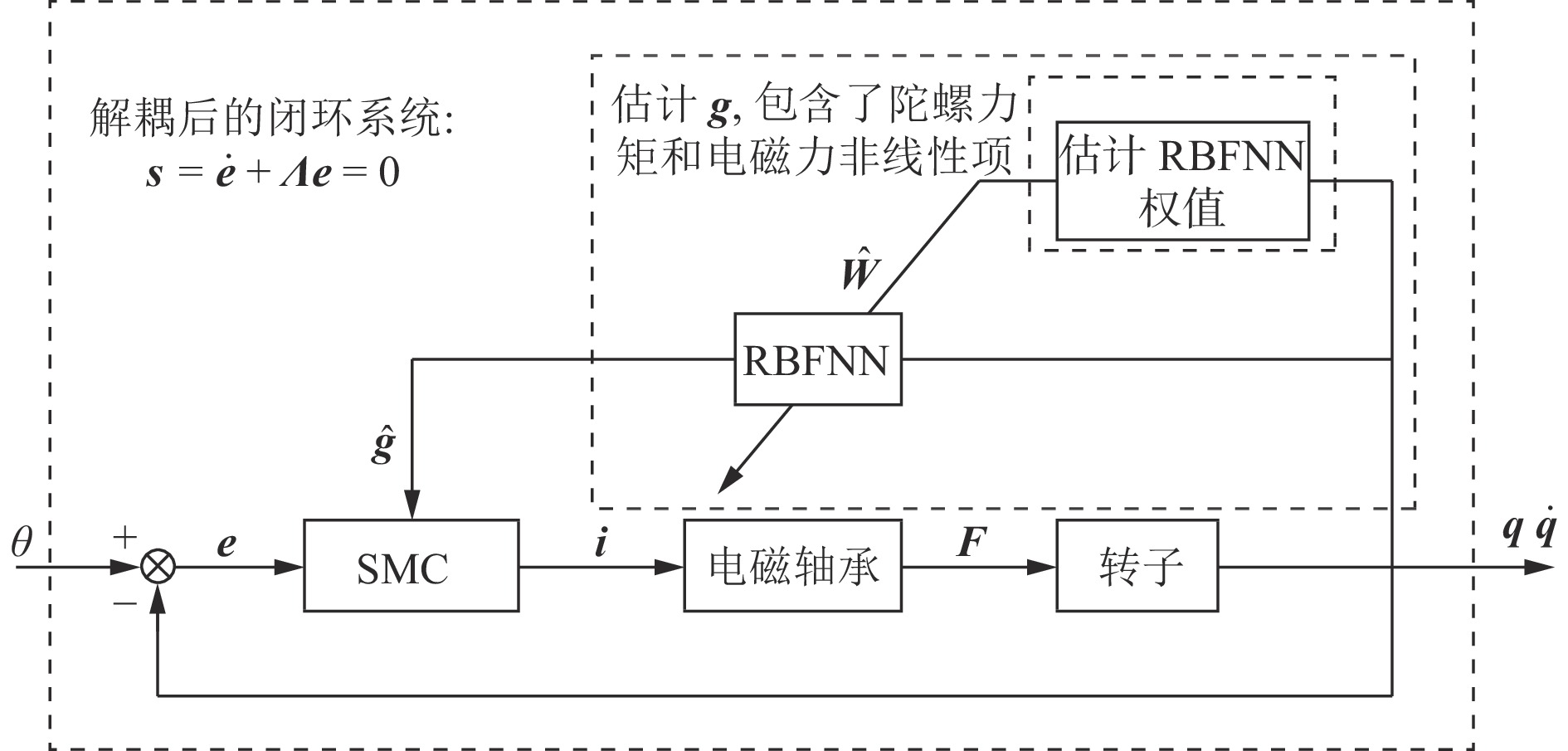
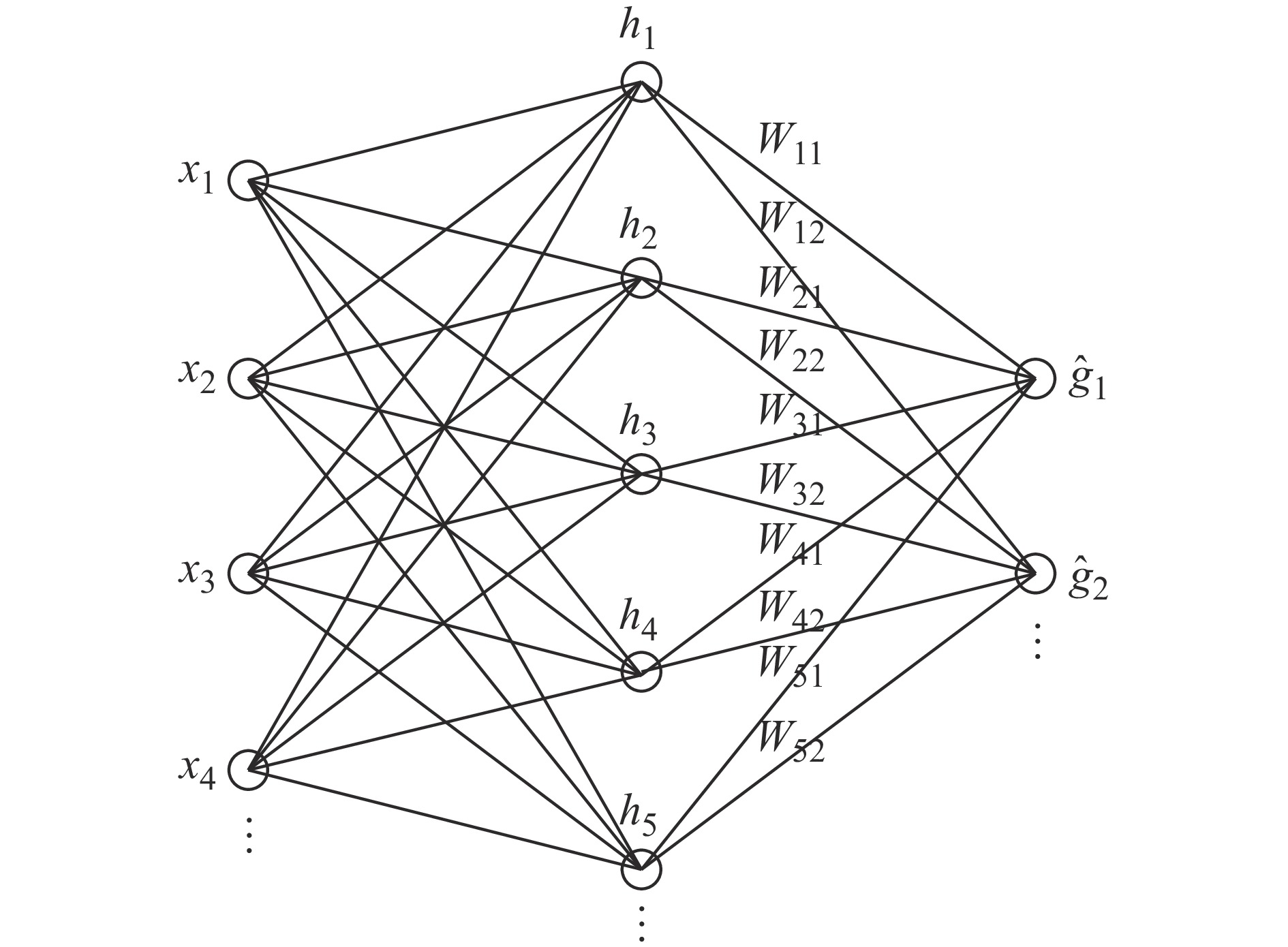
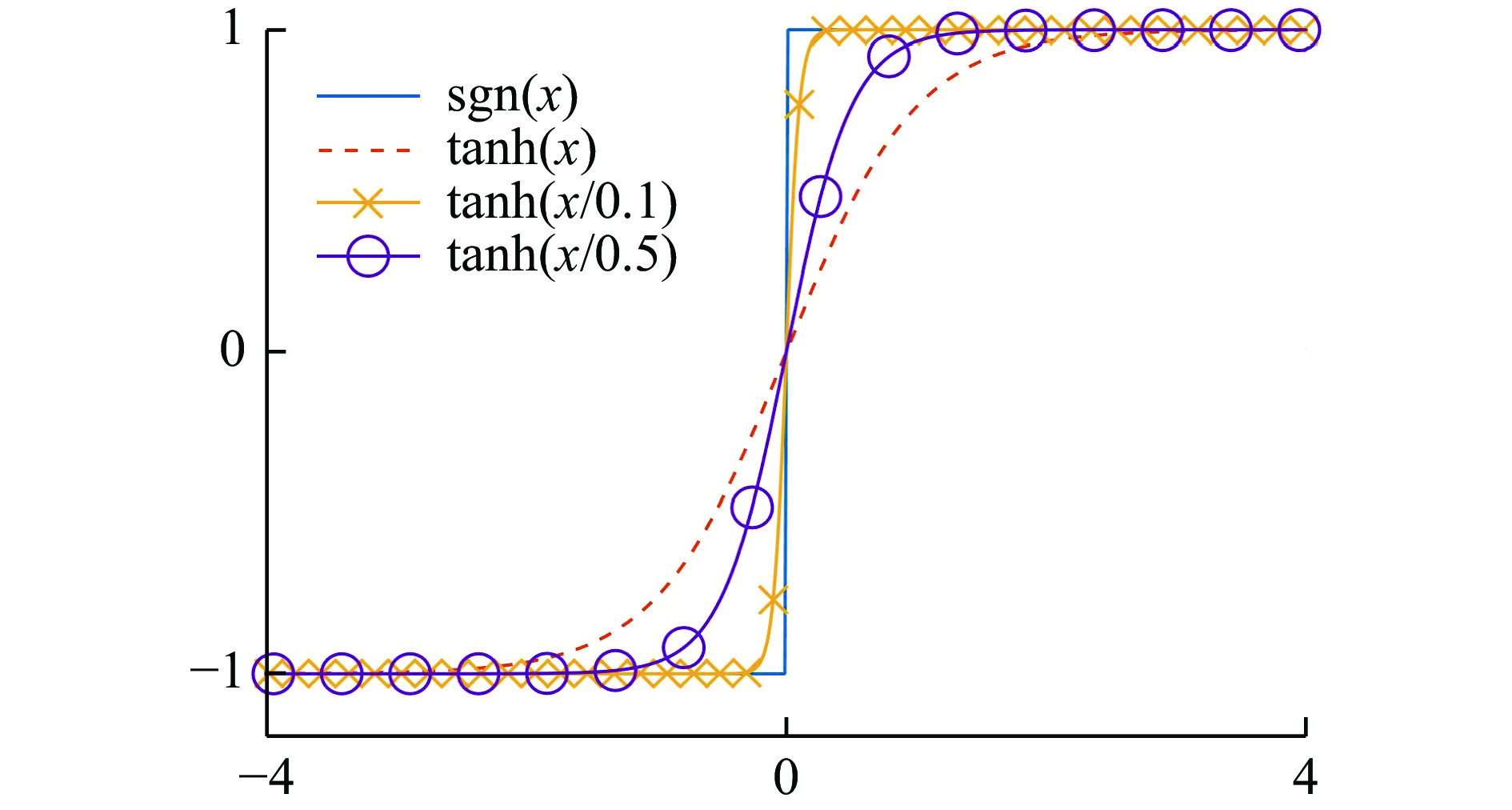
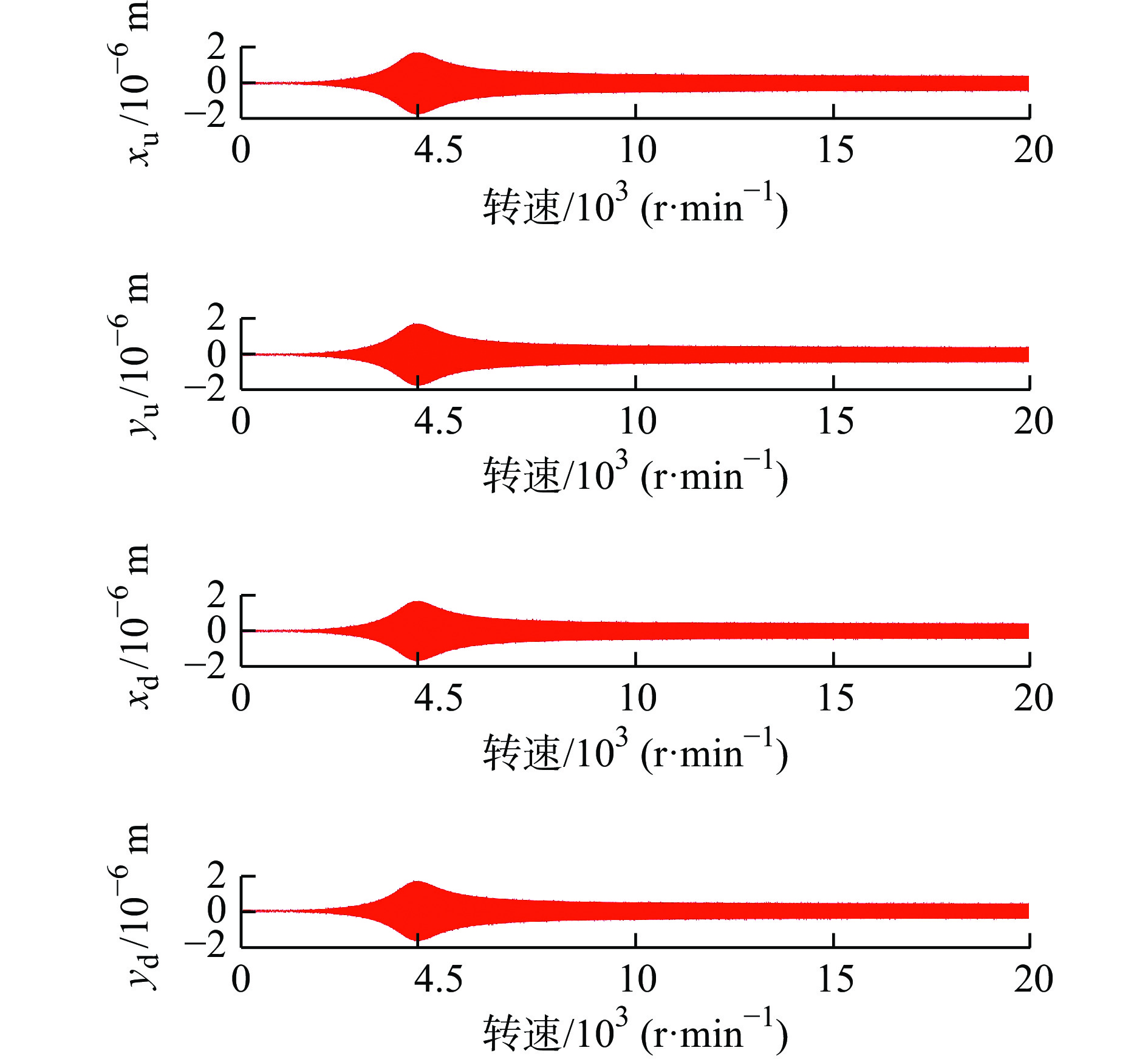
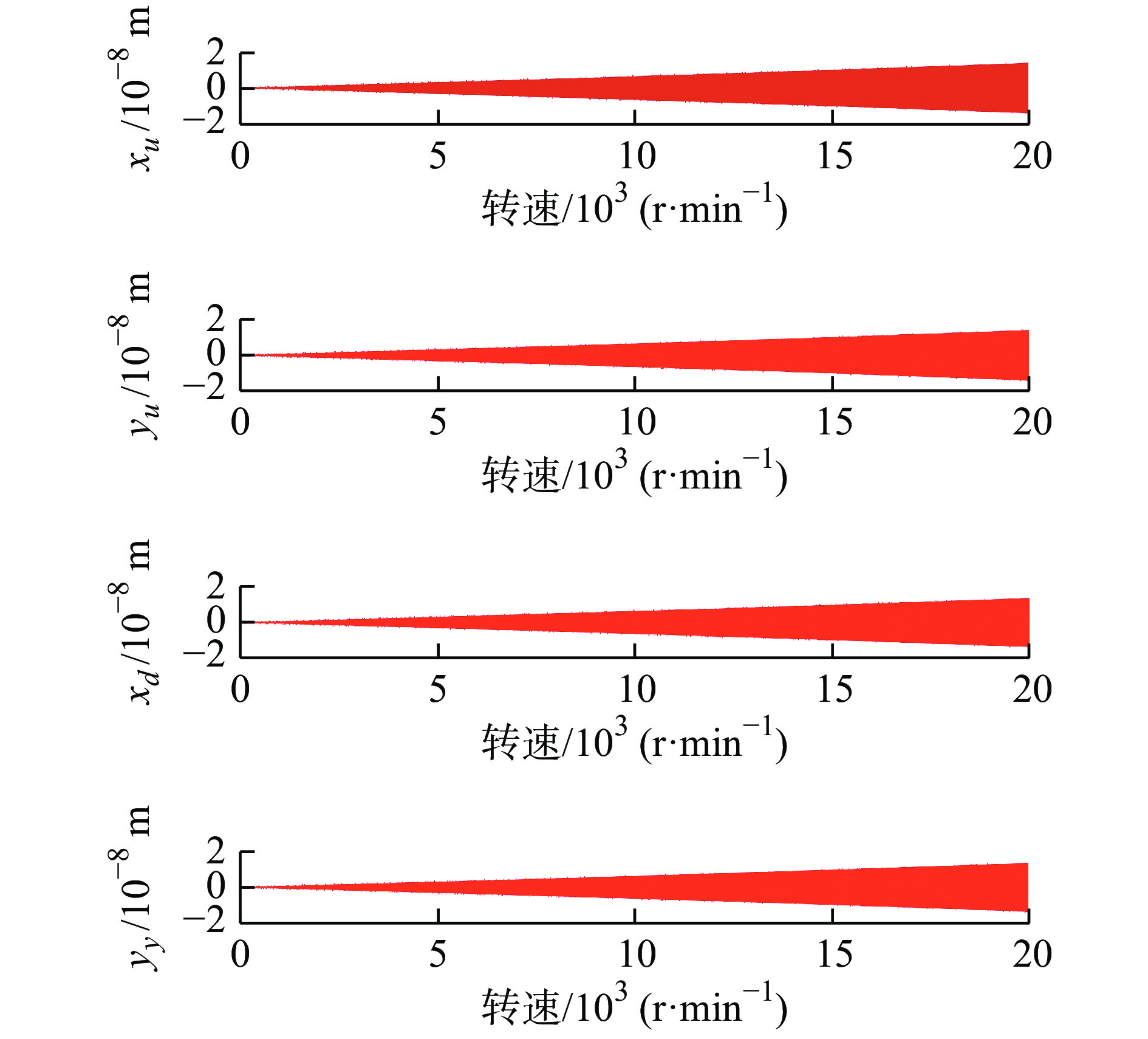
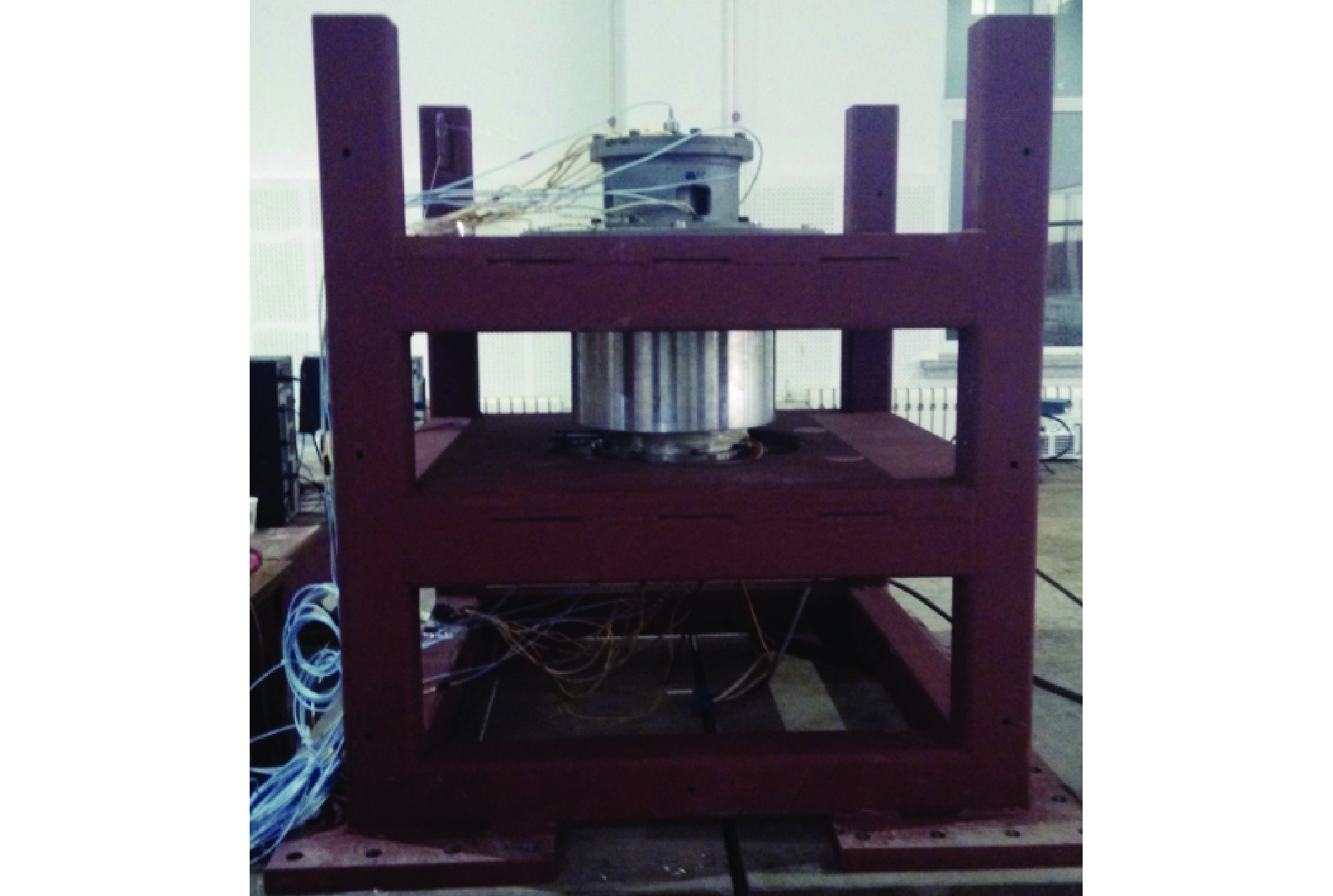
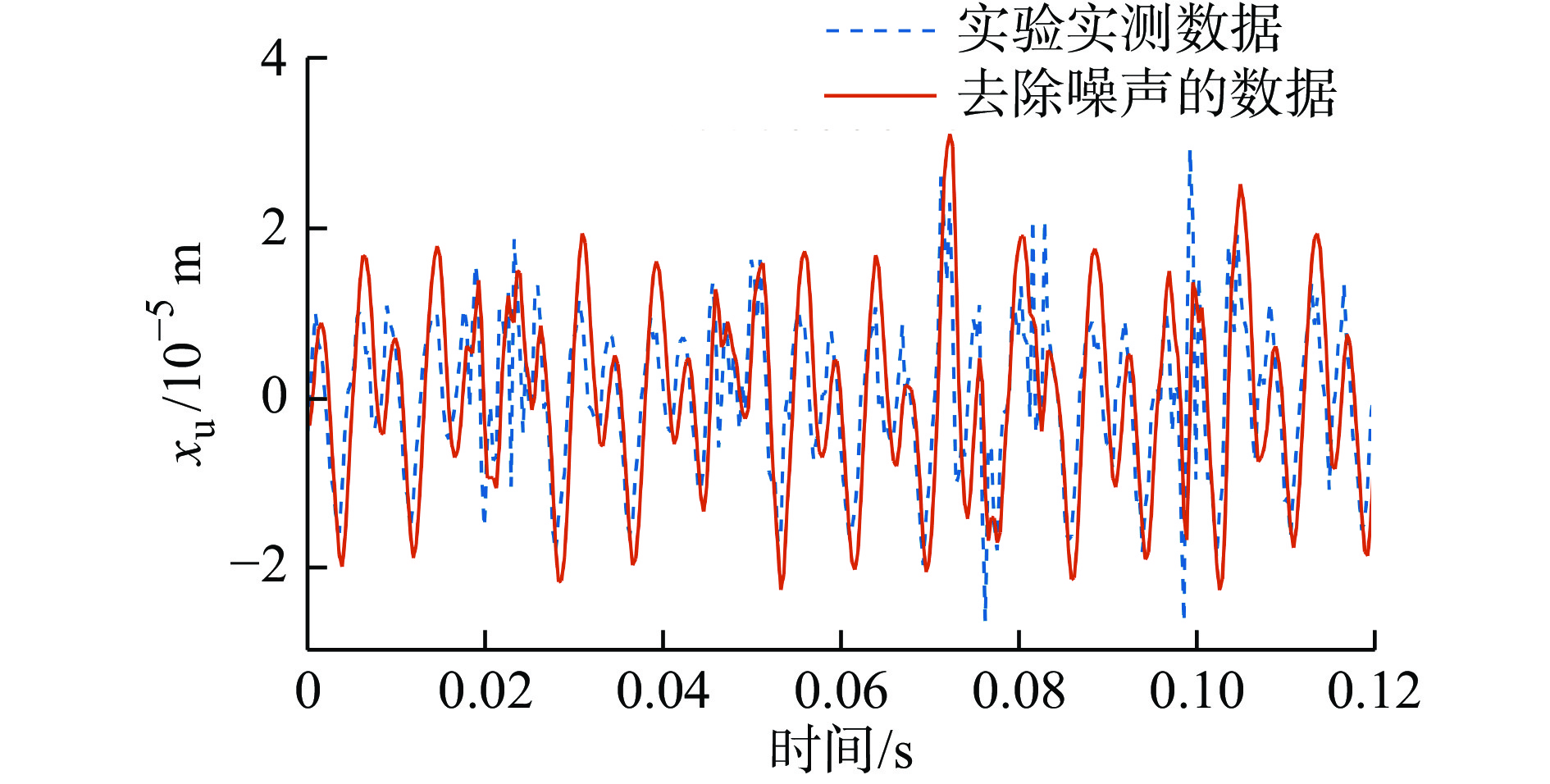
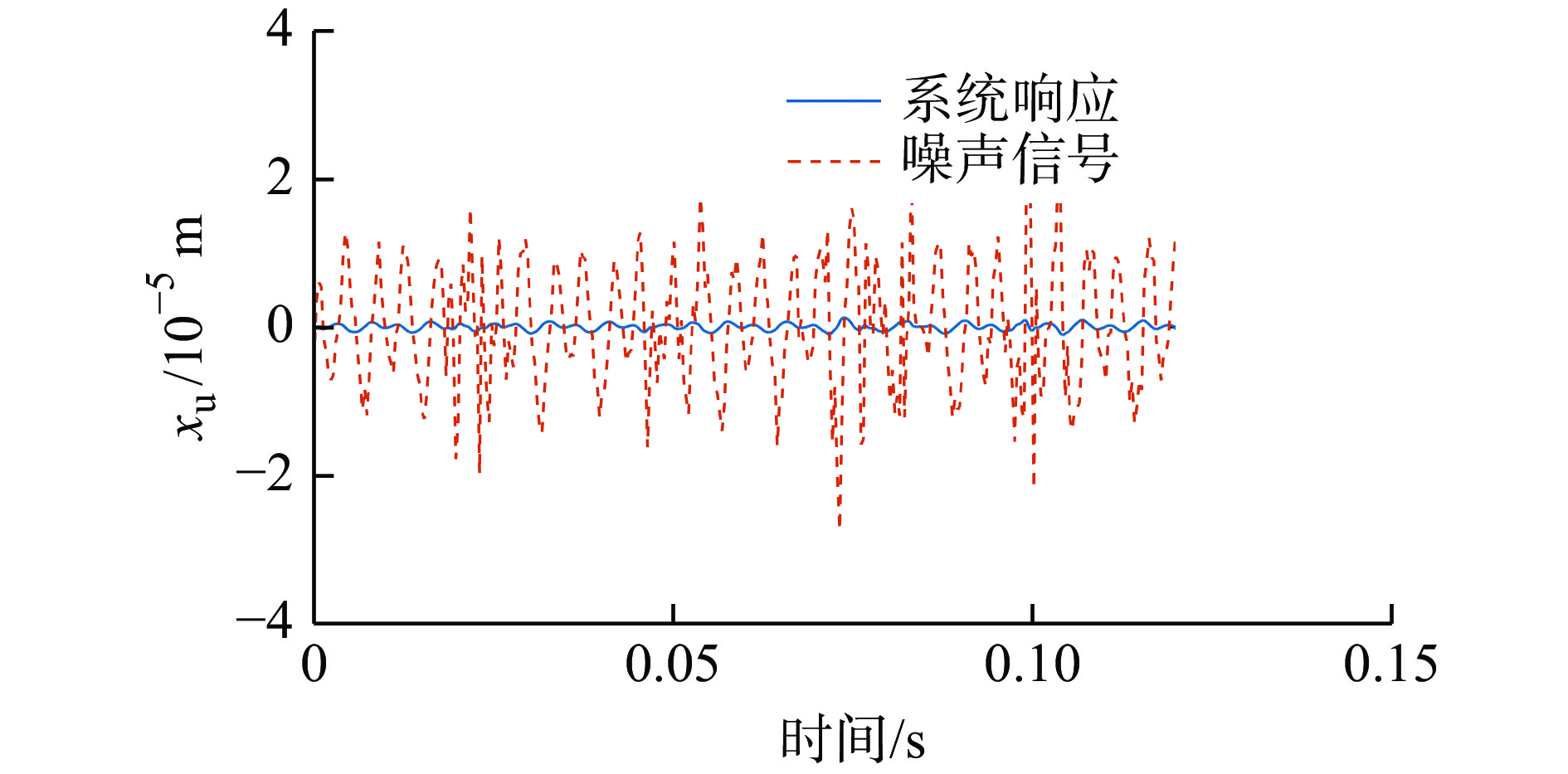
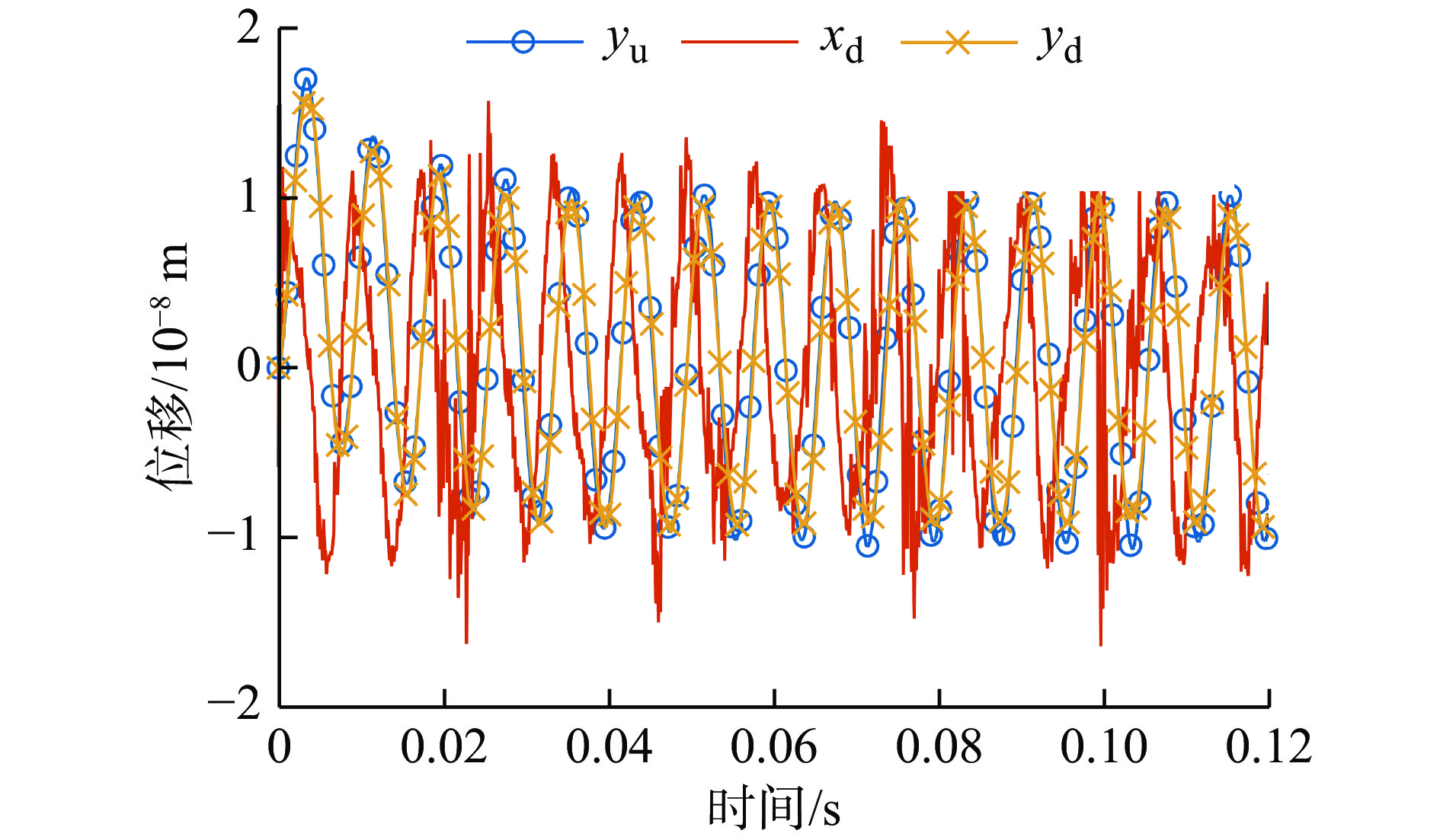
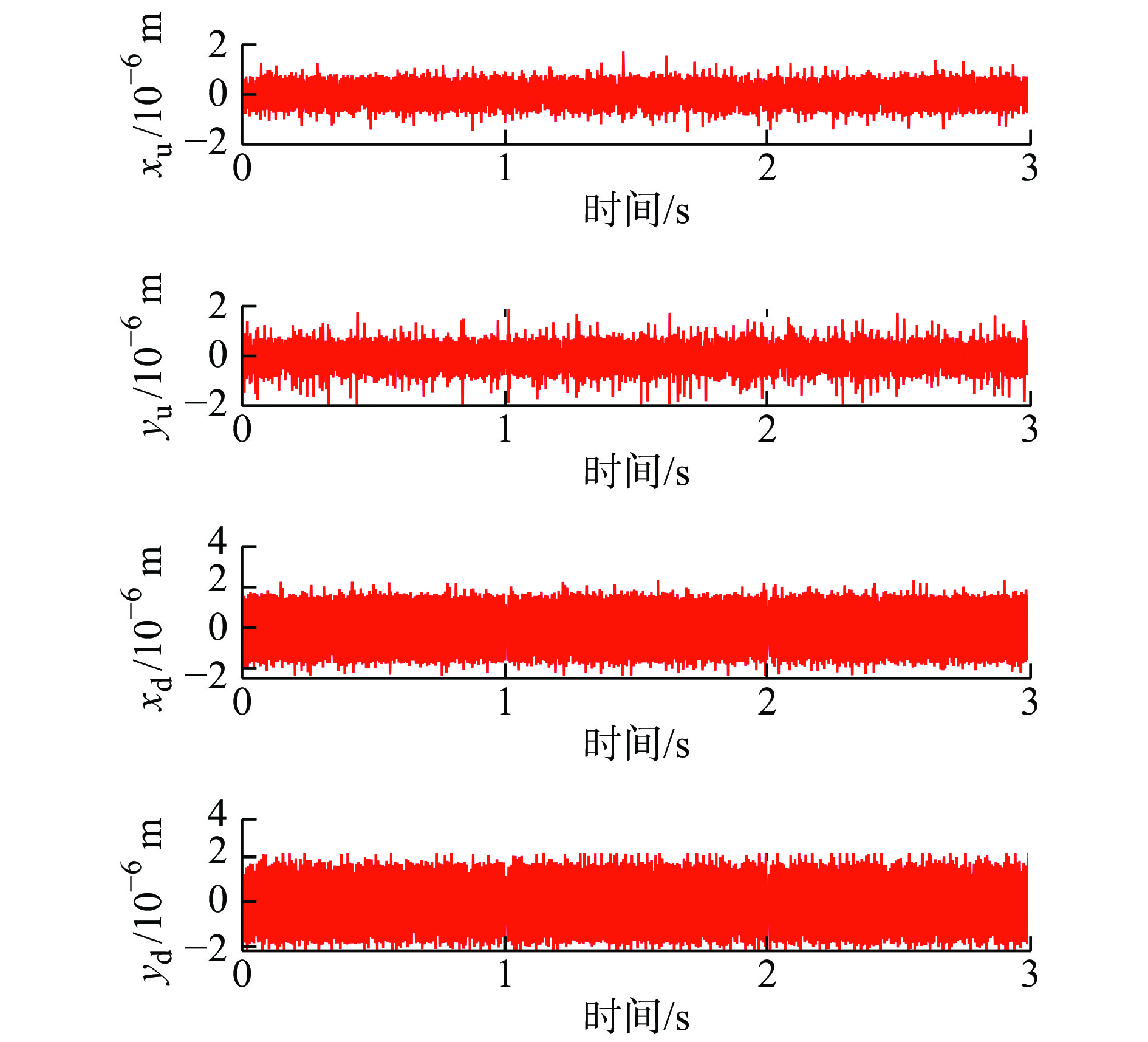
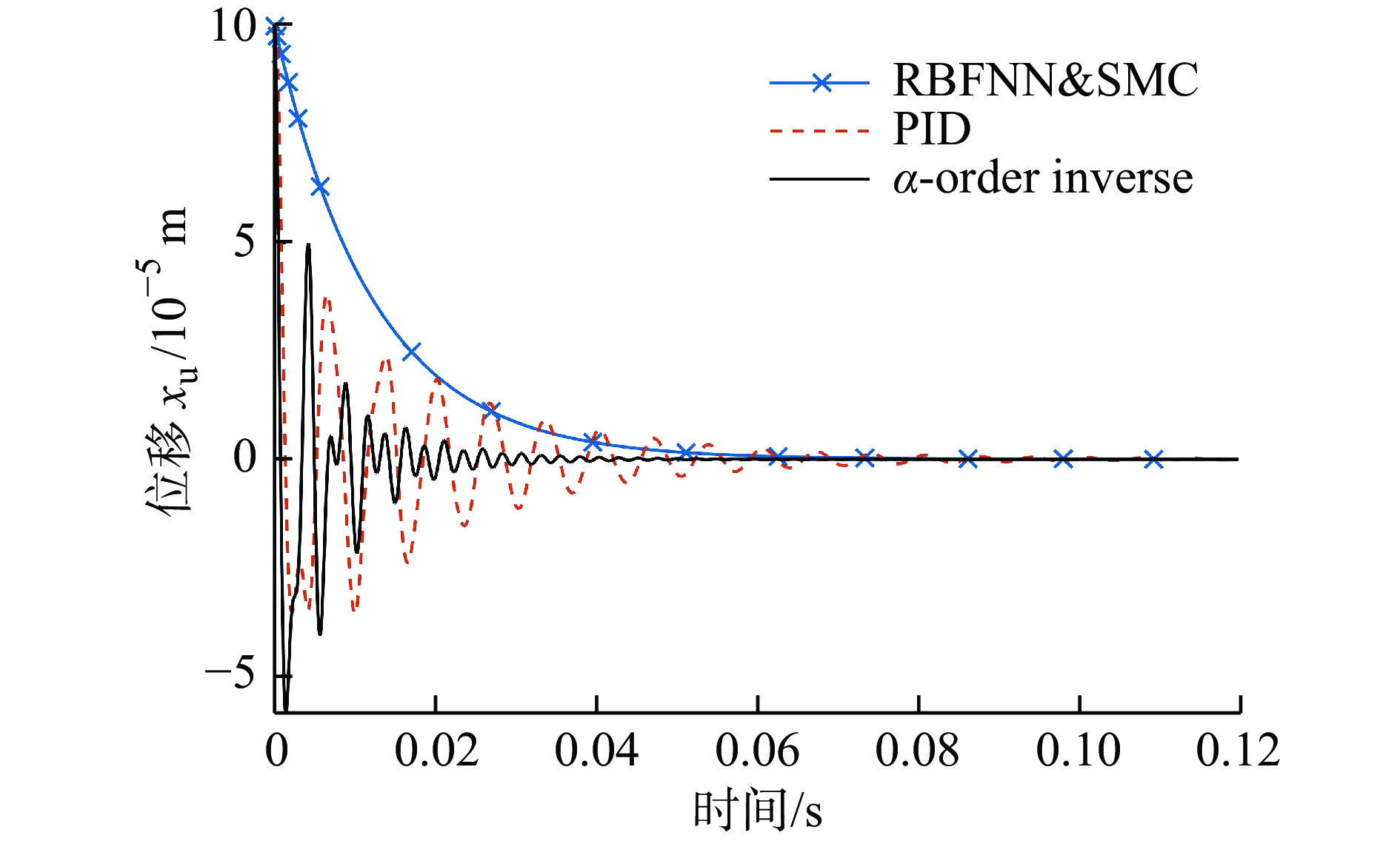
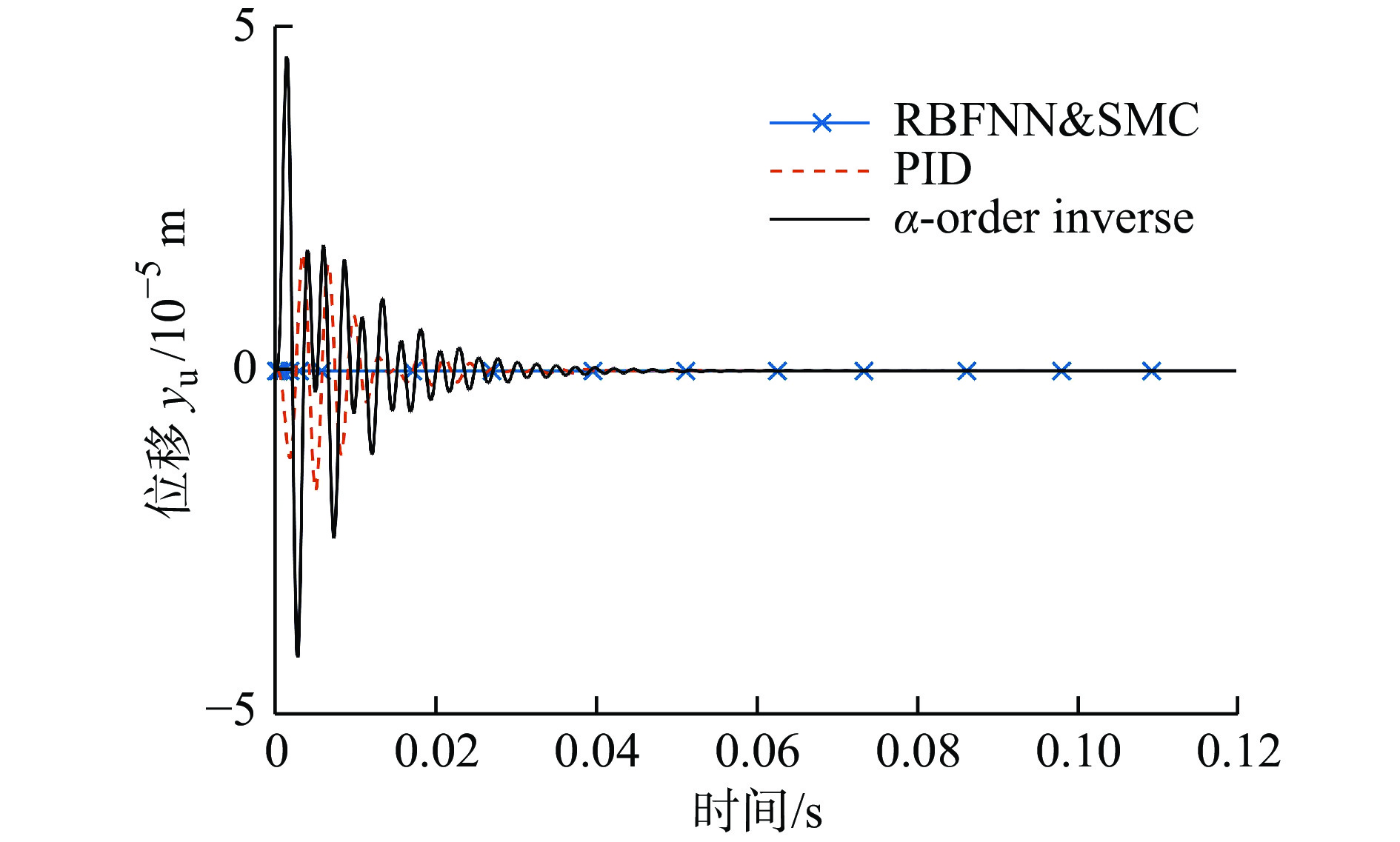
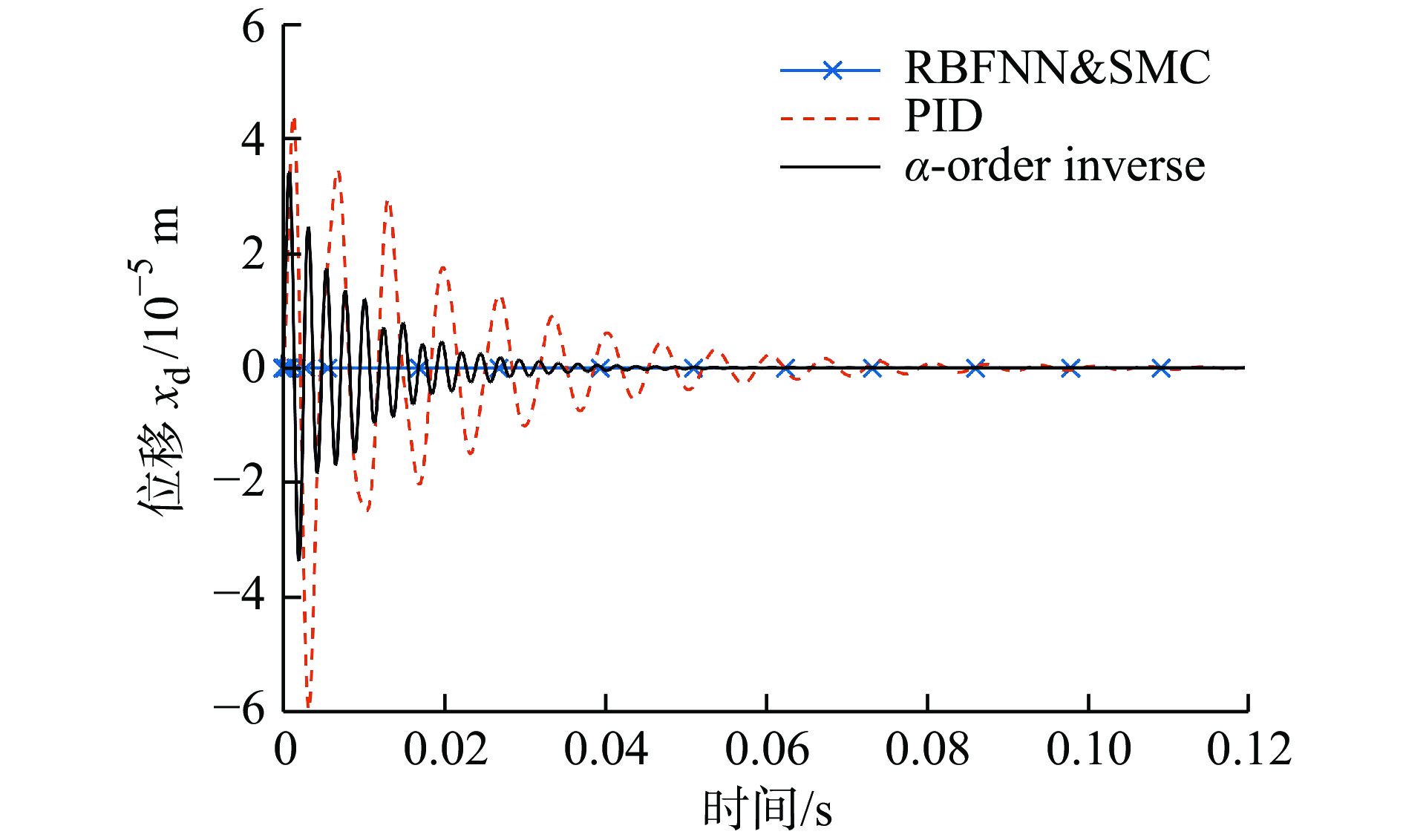
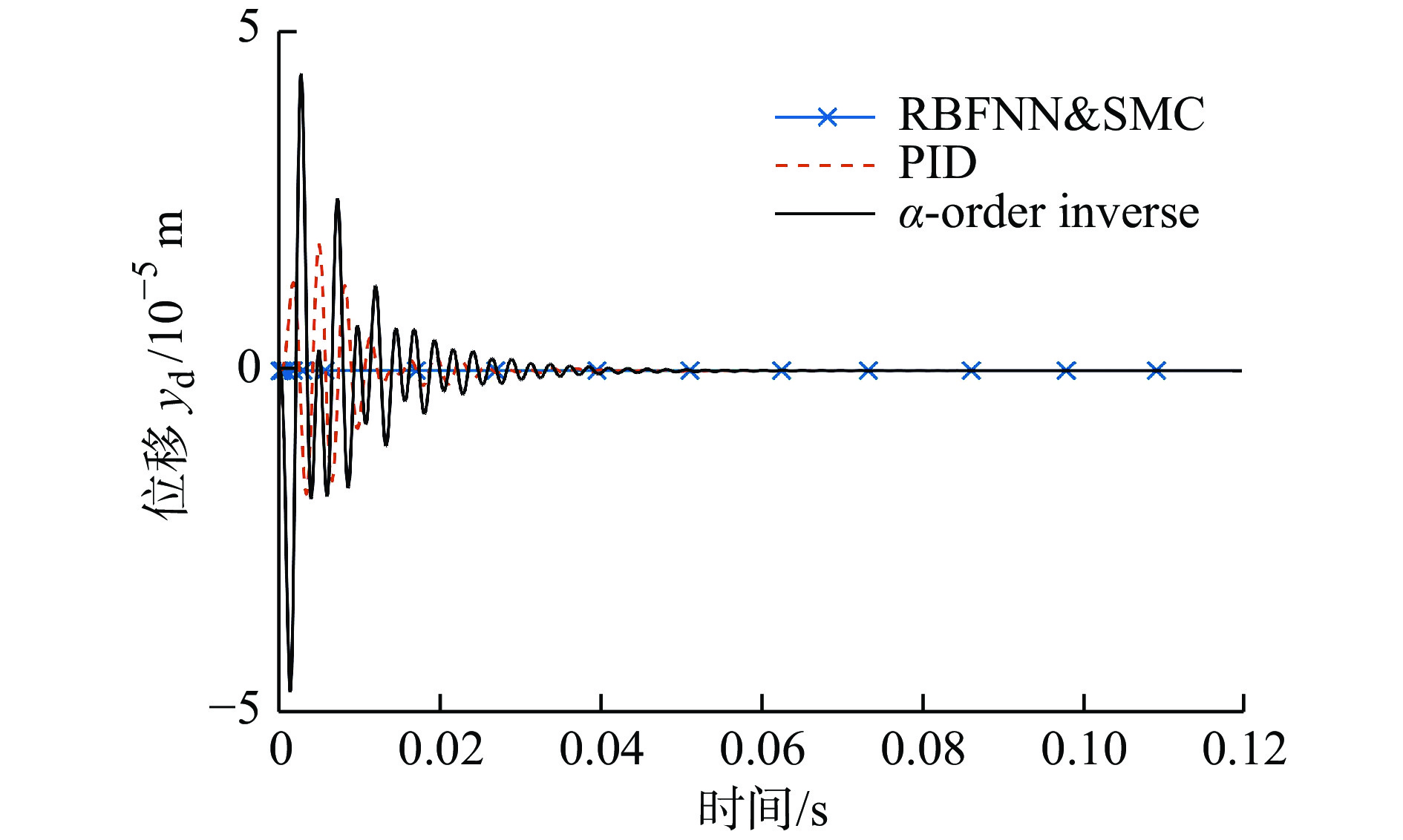
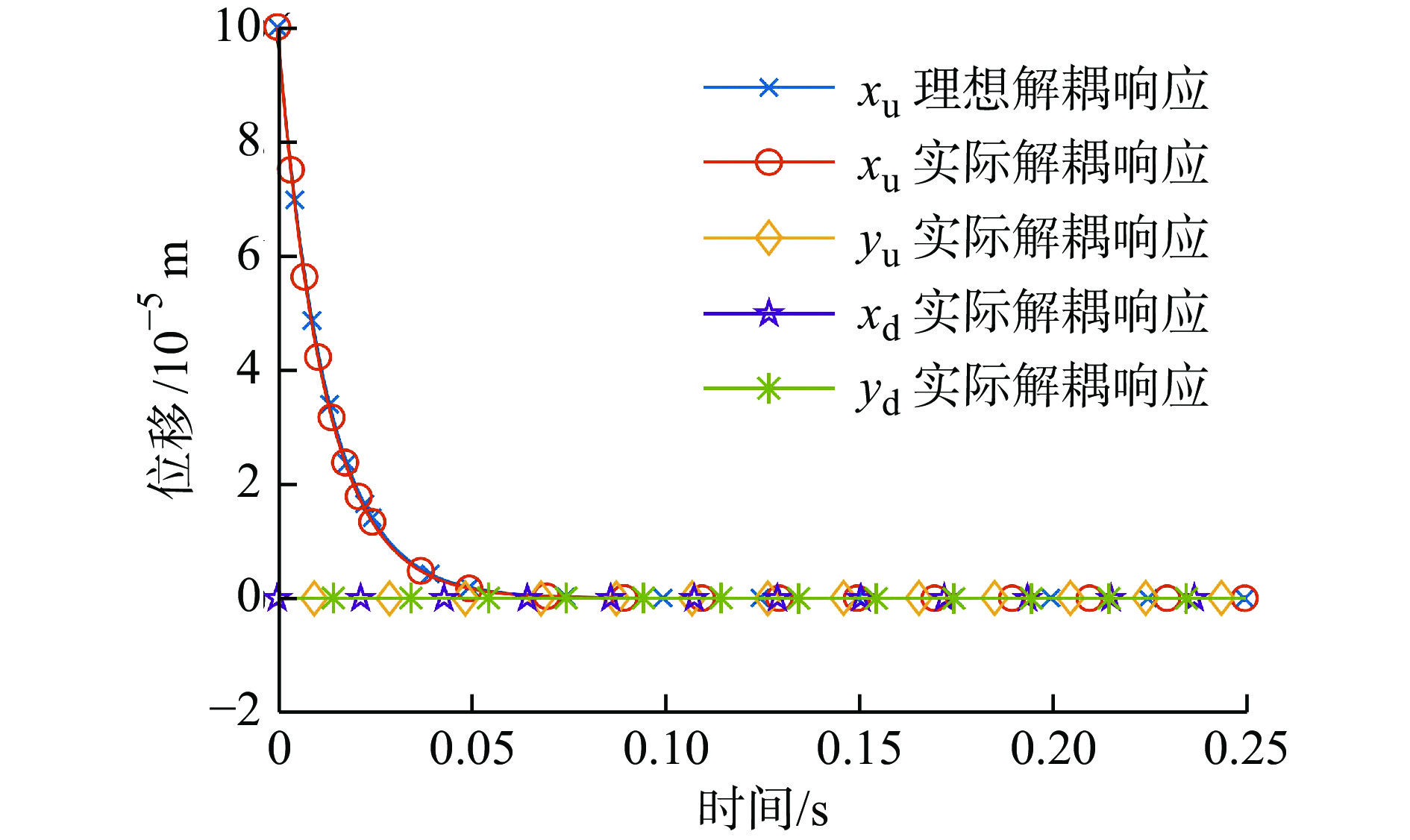
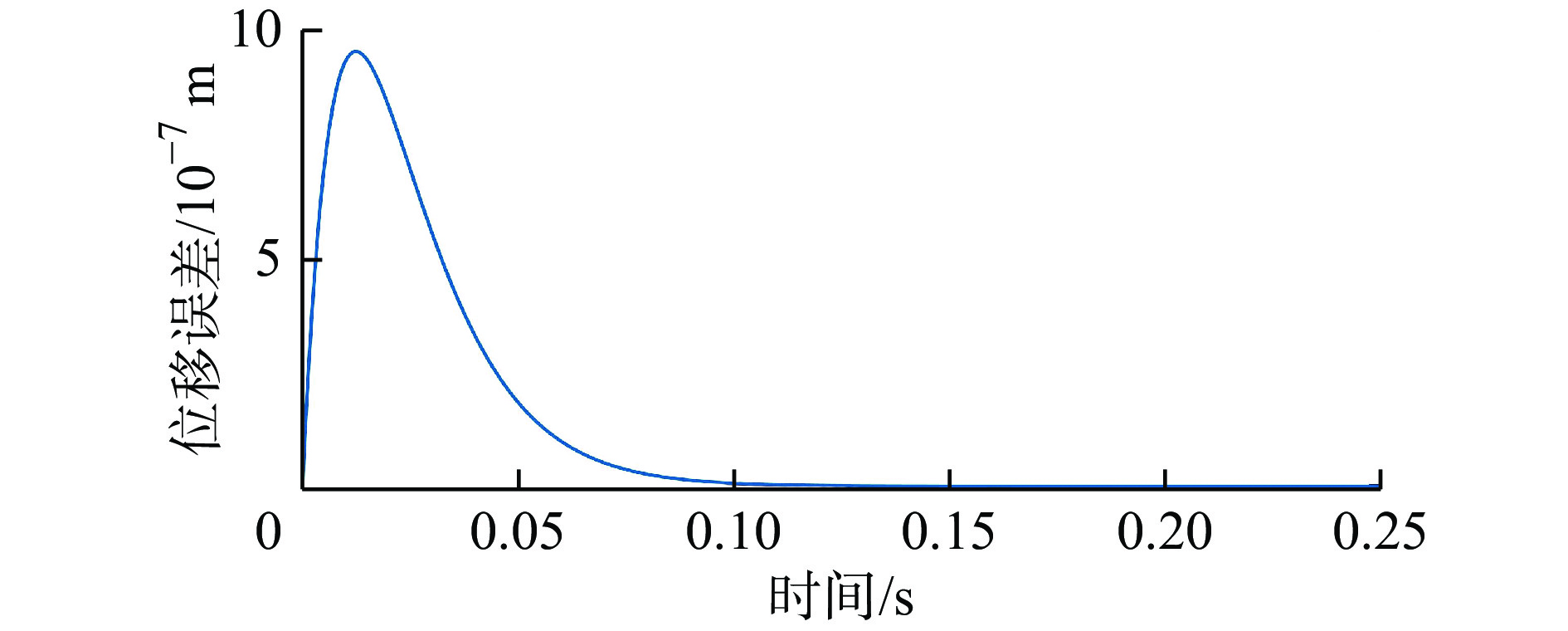
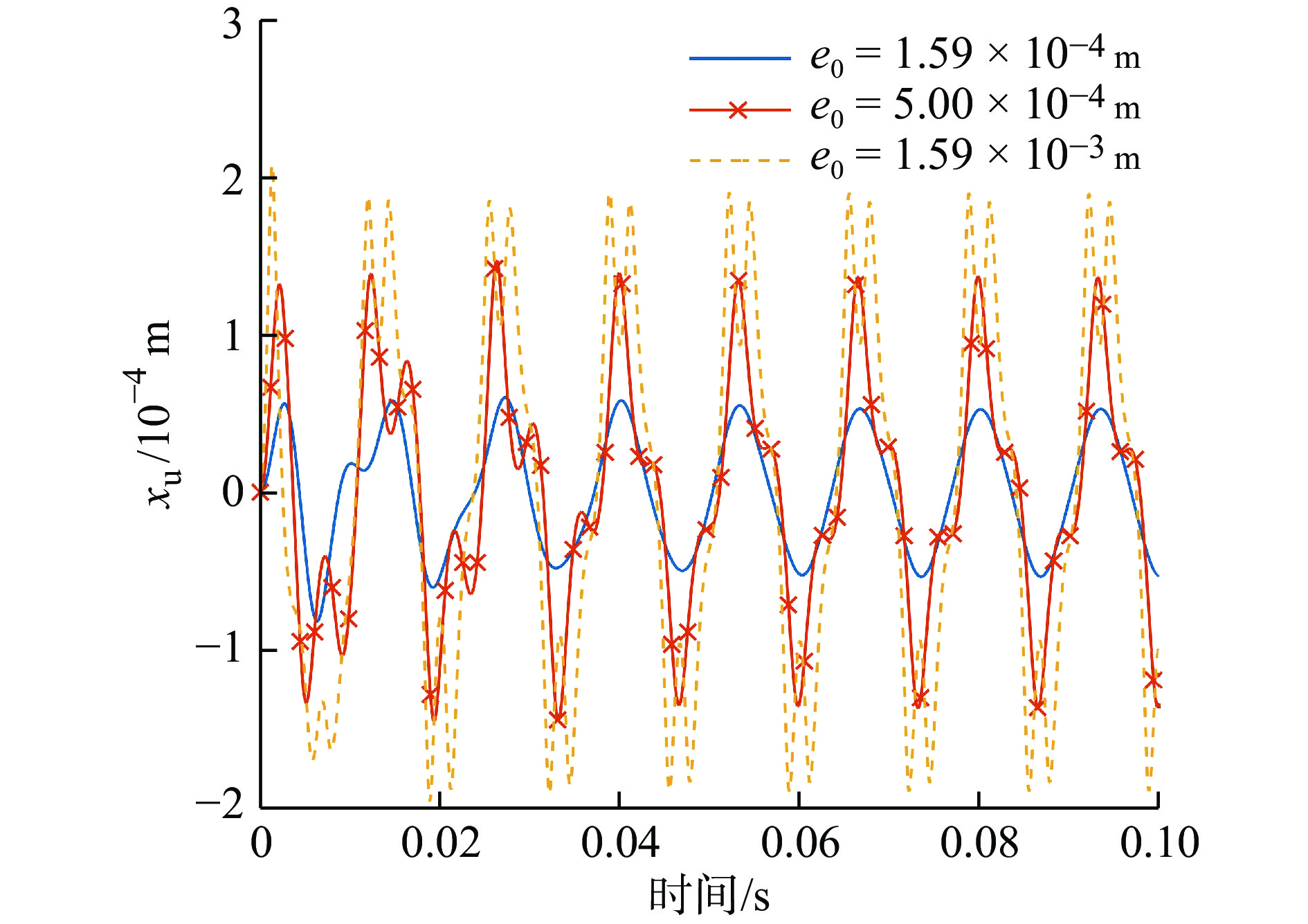
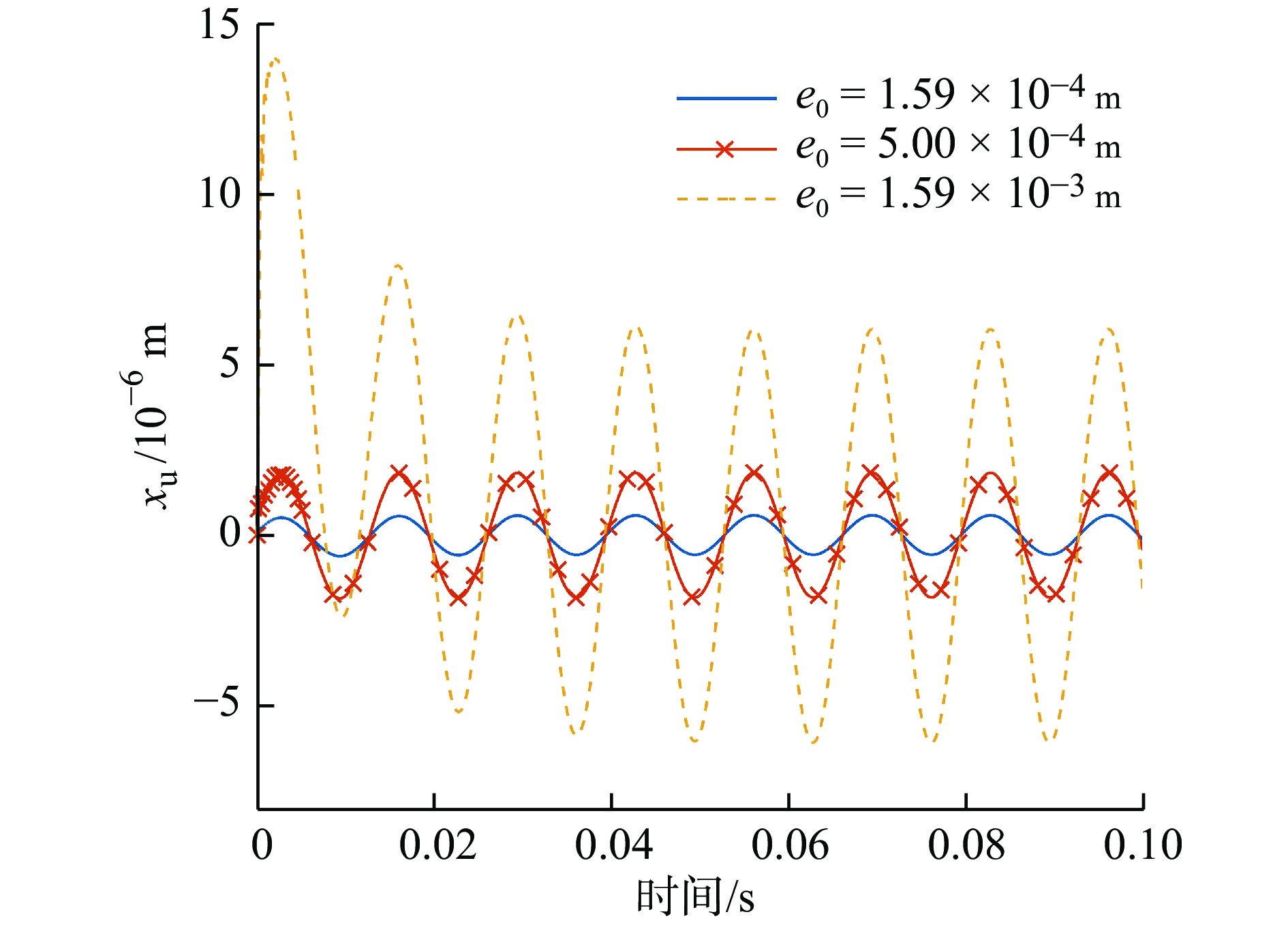
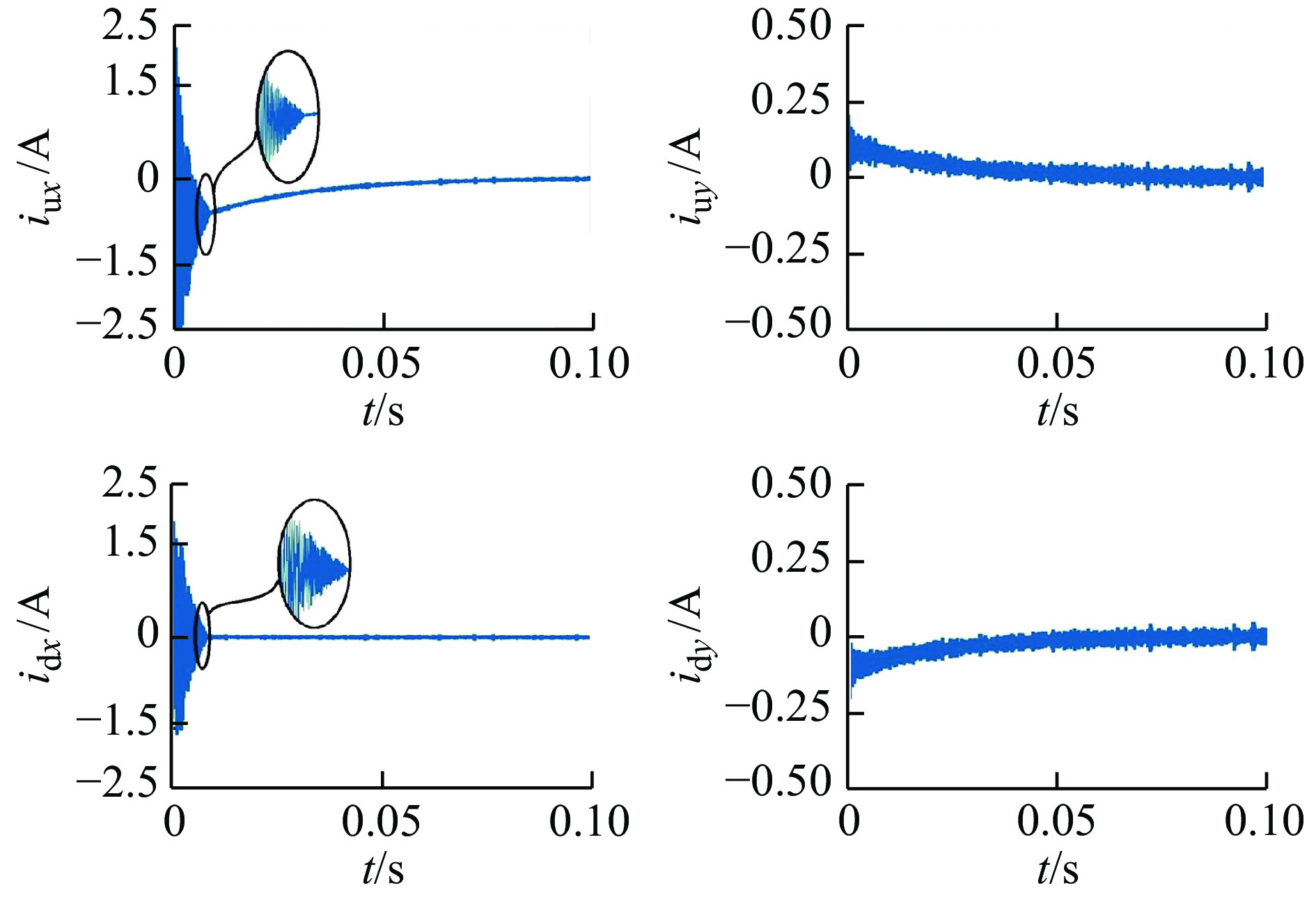
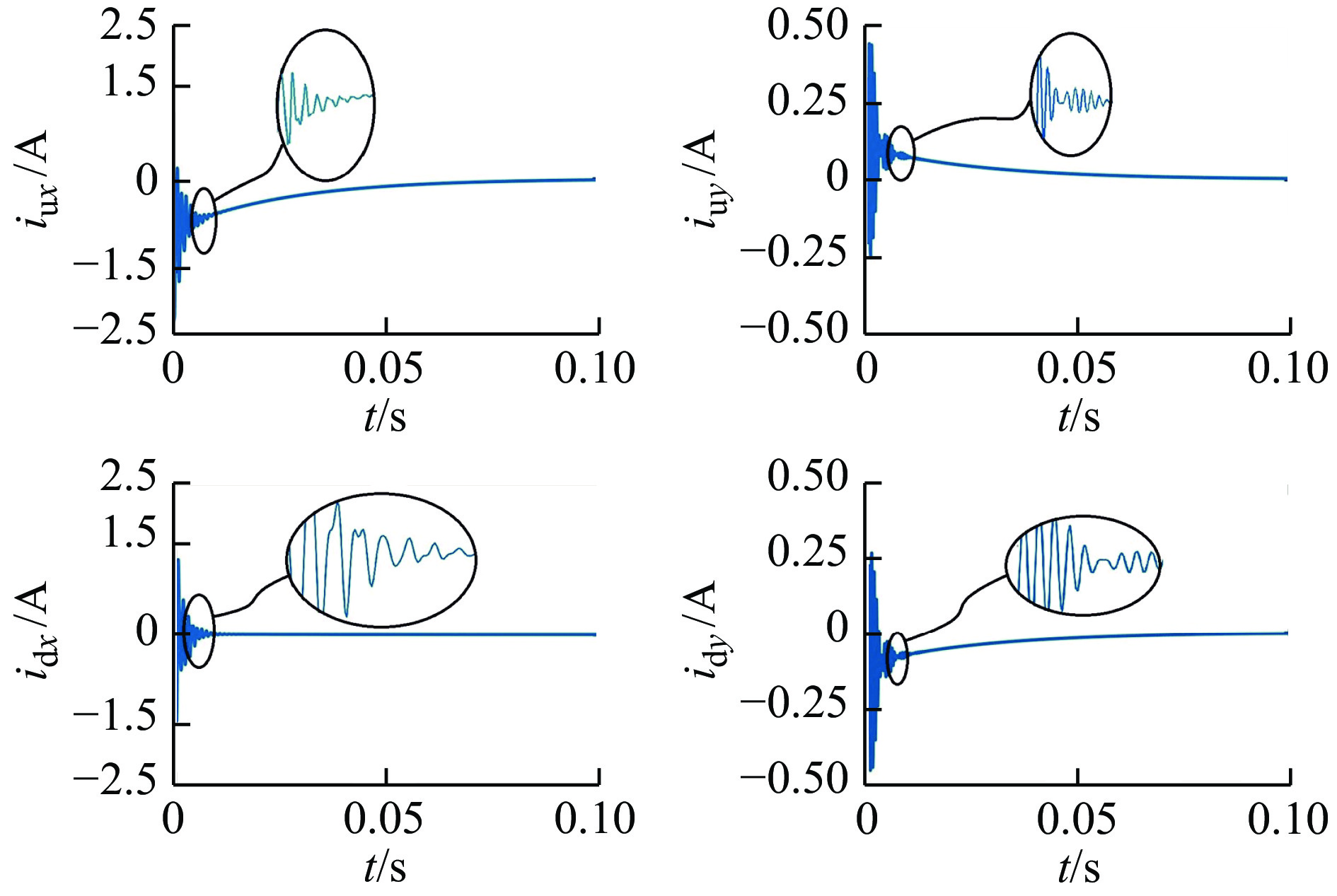
电磁轴承非线性力支承的飞轮转子各自由度之间产生的强耦合,影响轴承转子系统稳定性。为此建立了径向四自由度的非线性电磁力-刚性转子动力学模型。在此基础上,提出了一种自适应径向基神经网络和滑模控制结合的算法(Adaptive RBFNN&SMC)。基于RBFNN对非线性电磁力和陀螺效应进行整体补偿,应用双曲正切函数作为滑模鲁棒项,对滑模控制进行改进,改善了滑模算法的抖振、抑制了质量不平衡扰动和随机扰动。根据Lyapunov稳定性理论证明了系统的渐进稳定性。最后通过仿真将提出的算法与PID算法和\begin{document}$ \alpha $\end{document} ![]()
![]()
电磁轴承非线性力支承的飞轮转子各自由度之间产生的强耦合,影响轴承转子系统稳定性。为此建立了径向四自由度的非线性电磁力-刚性转子动力学模型。在此基础上,提出了一种自适应径向基神经网络和滑模控制结合的算法(Adaptive RBFNN&SMC)。基于RBFNN对非线性电磁力和陀螺效应进行整体补偿,应用双曲正切函数作为滑模鲁棒项,对滑模控制进行改进,改善了滑模算法的抖振、抑制了质量不平衡扰动和随机扰动。根据Lyapunov稳定性理论证明了系统的渐进稳定性。最后通过仿真将提出的算法与PID算法和
2023, 42(9): 1402-1408.
doi: 10.13433/j.cnki.1003-8728.20220113
摘要:
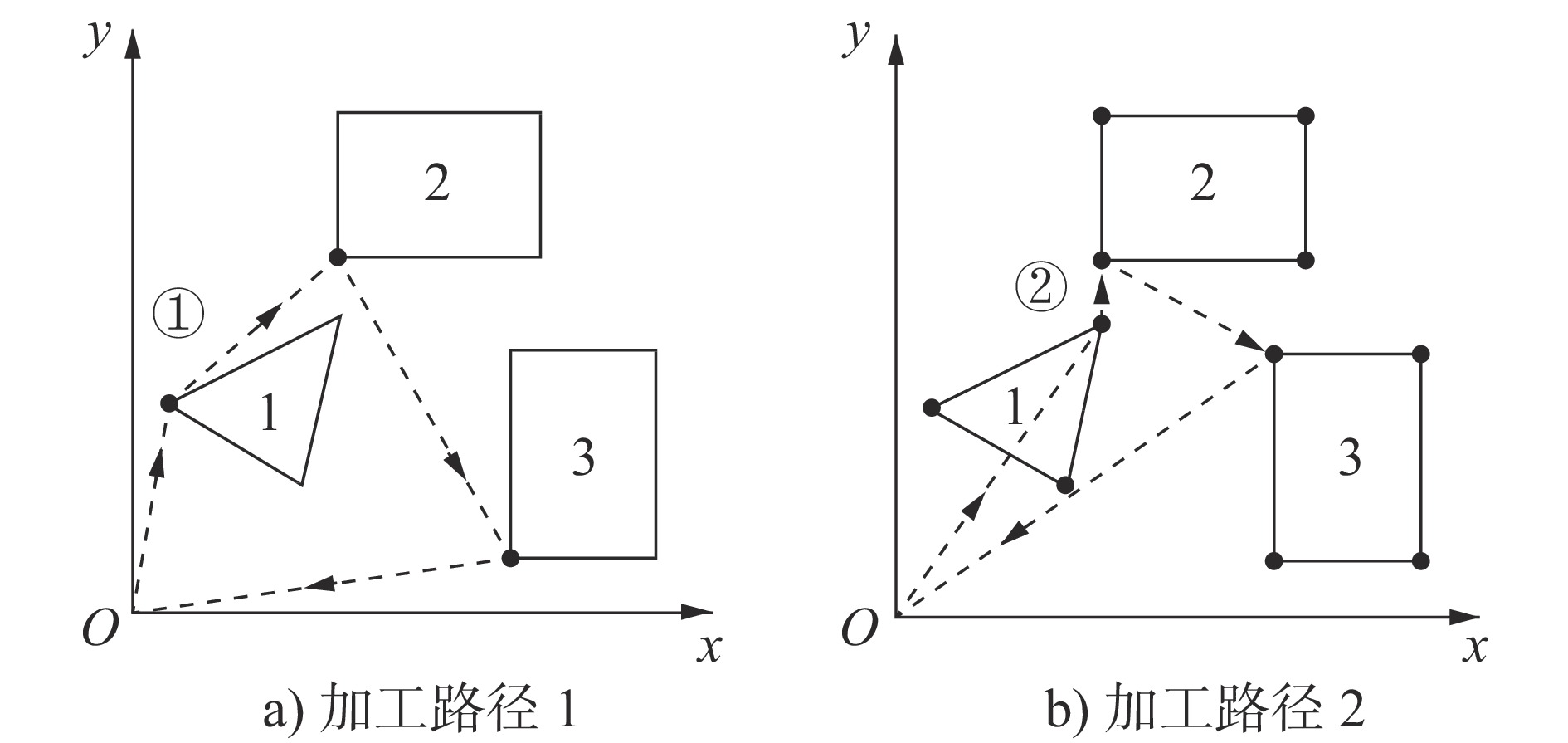
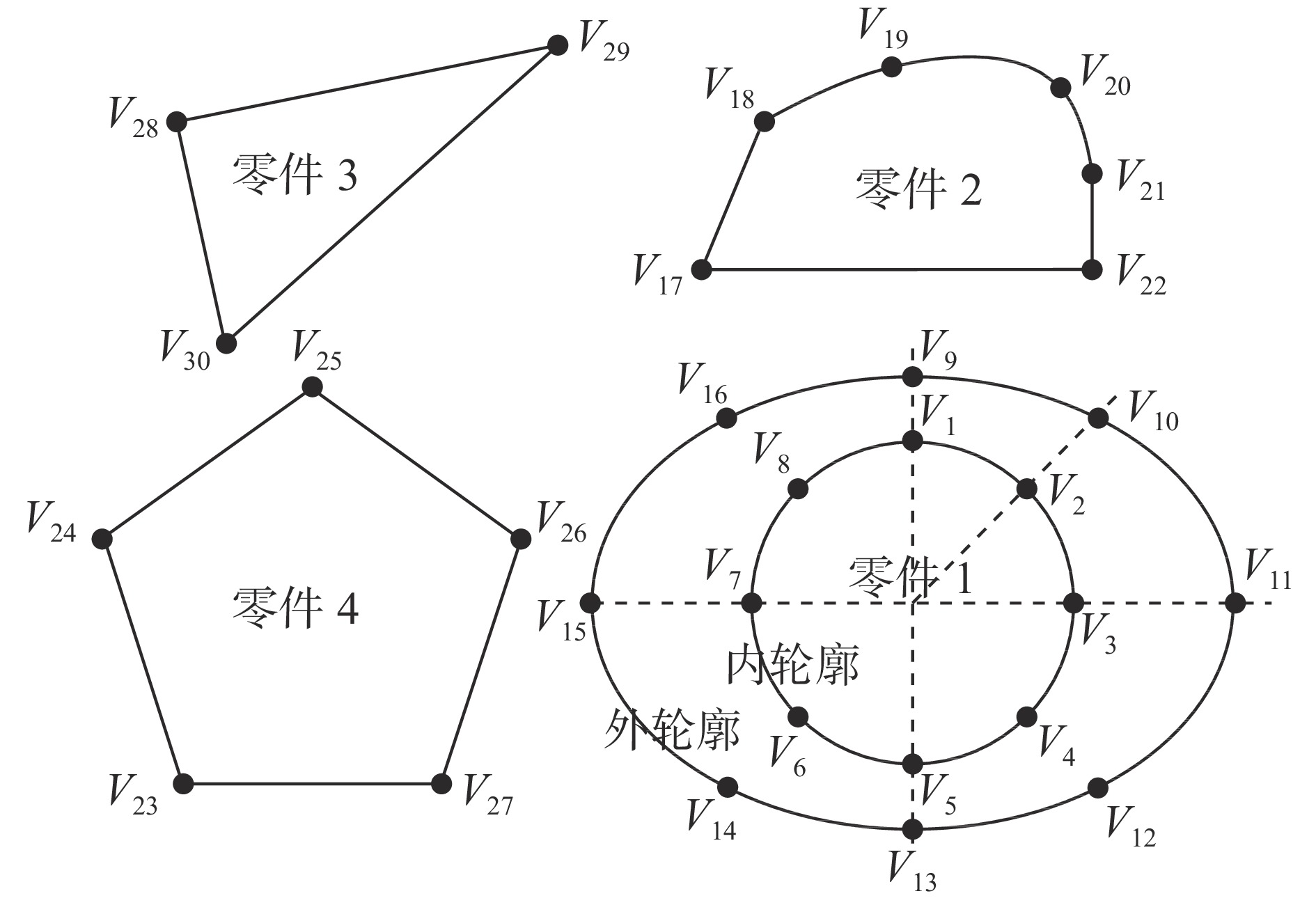
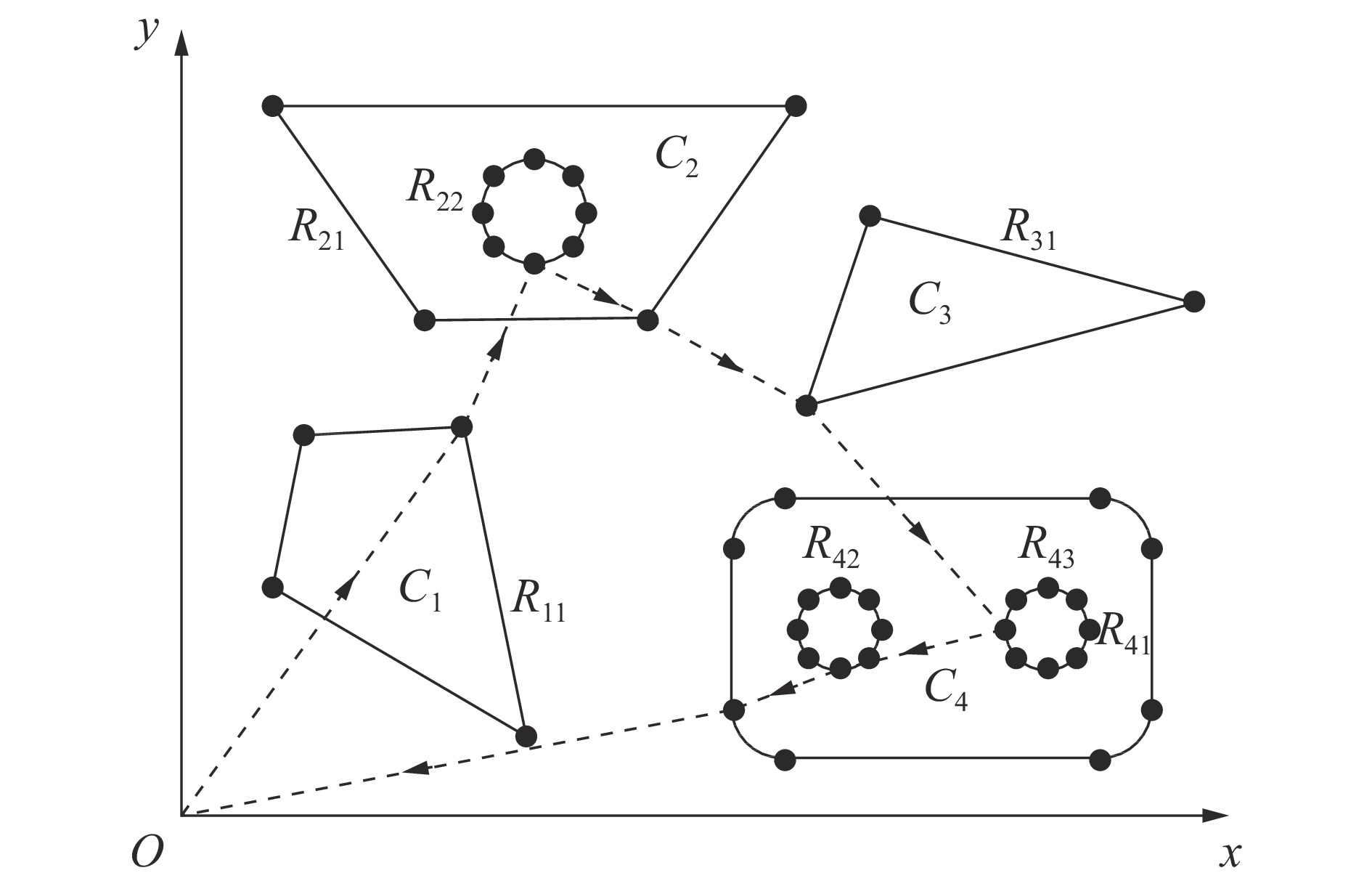
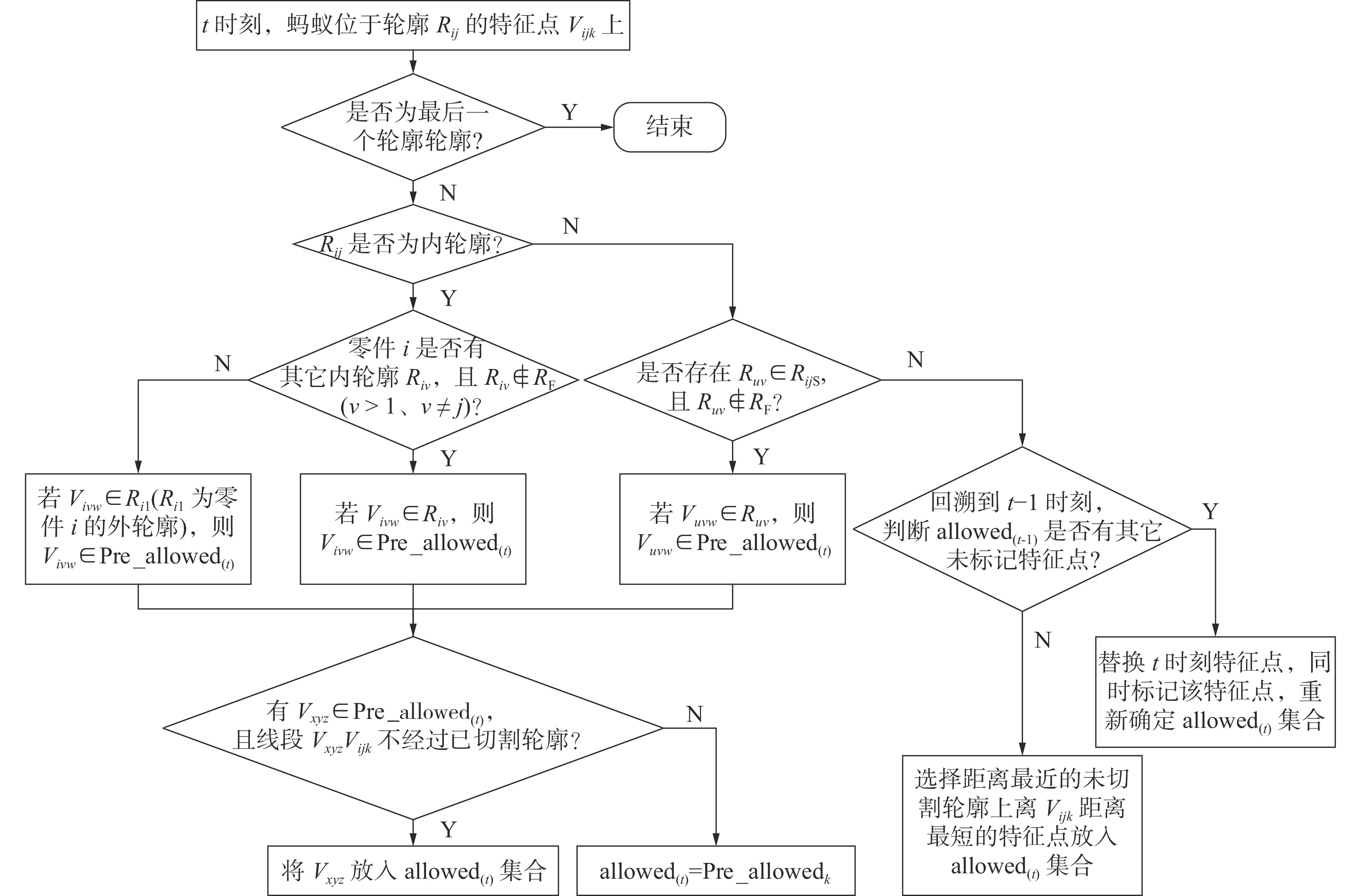
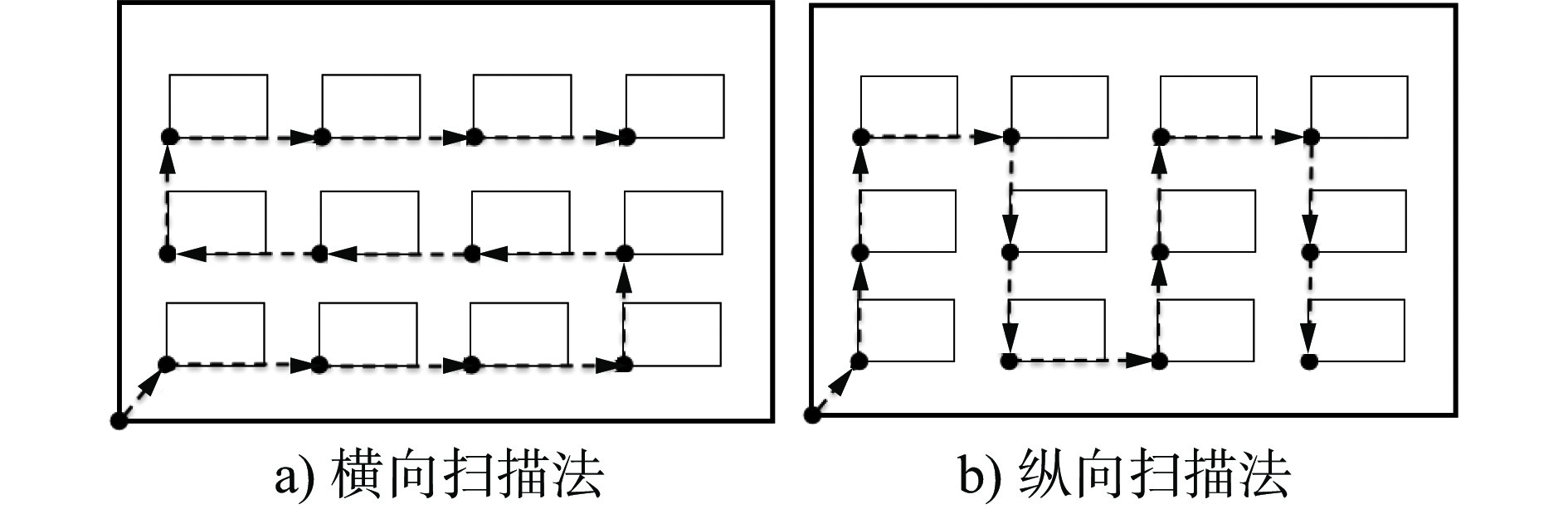
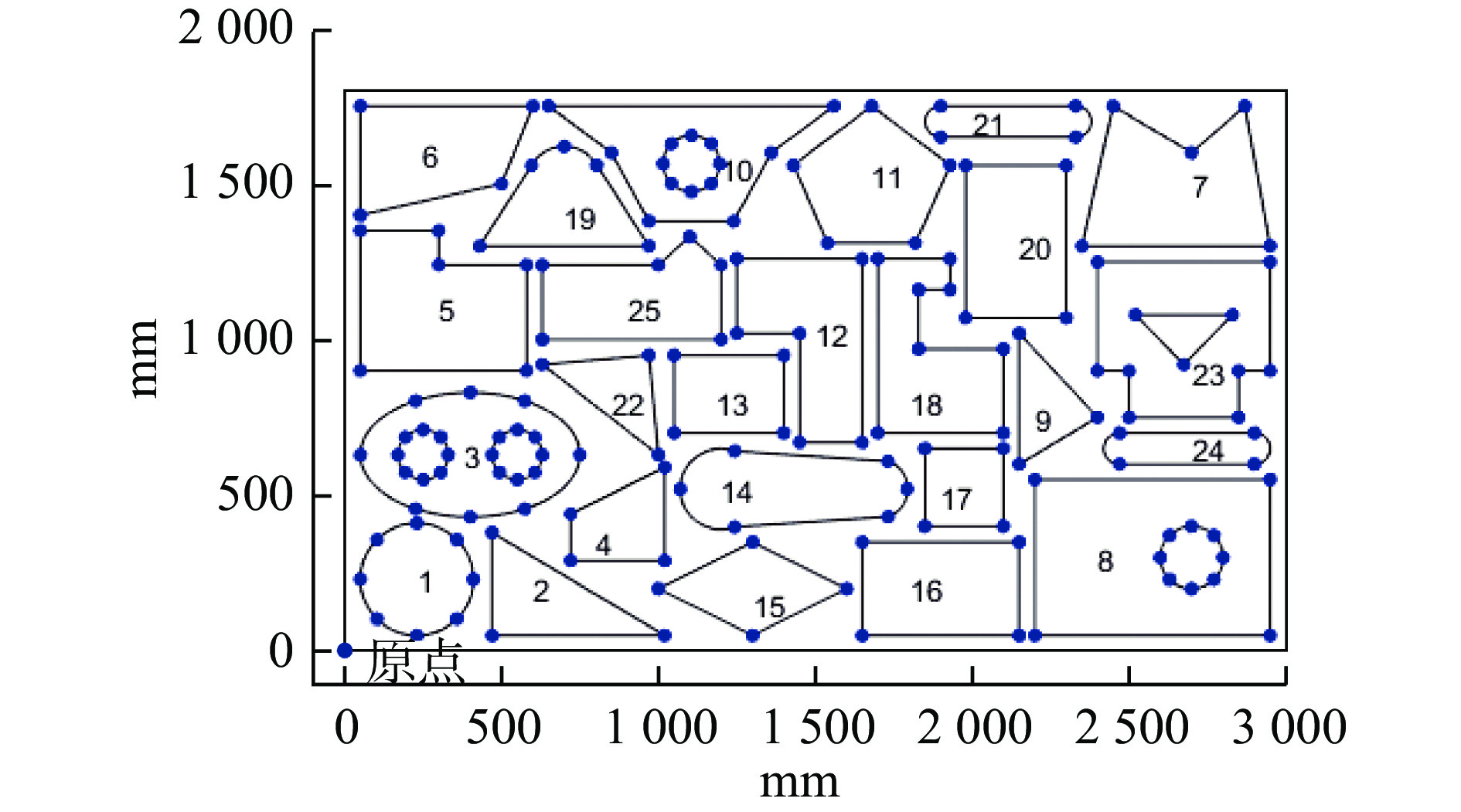
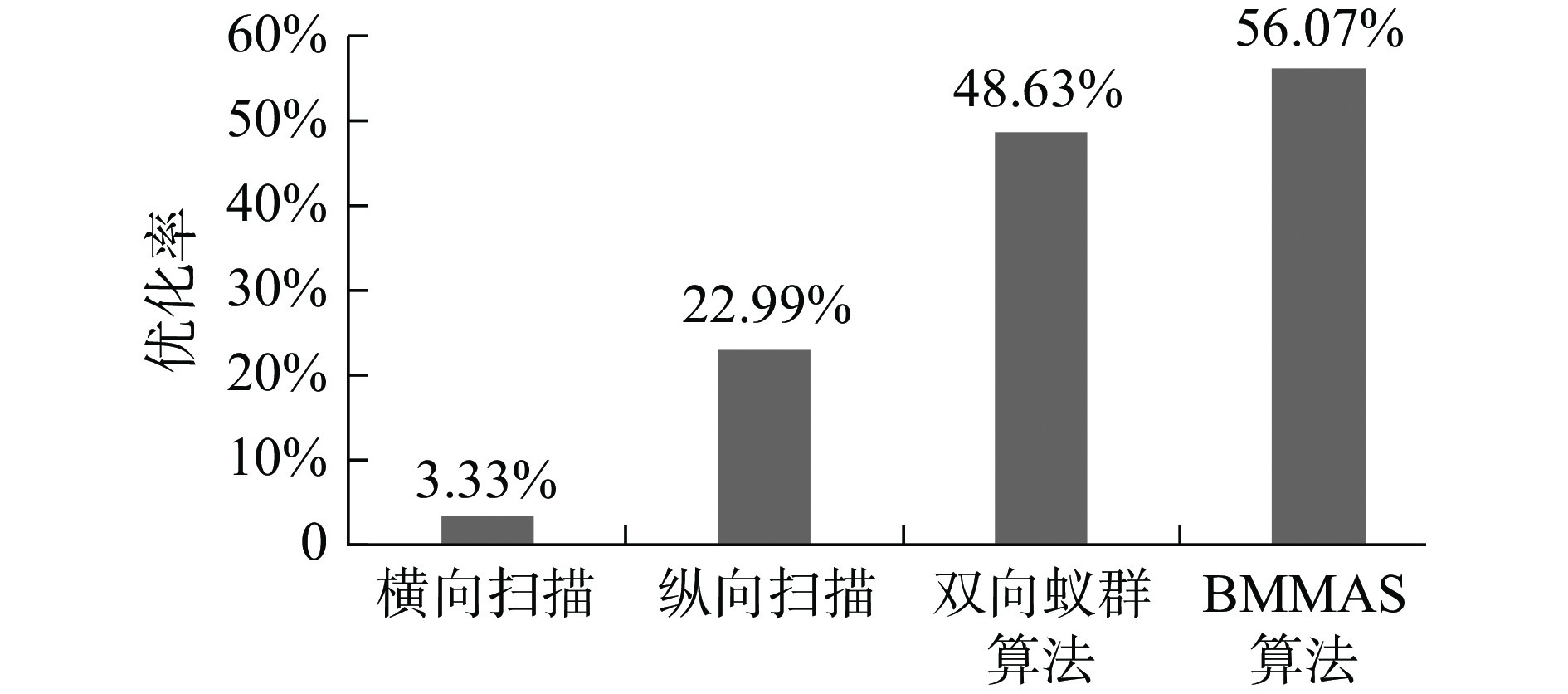
针对当前复杂图形加工中存在加工轨迹之间空行程多,导致加工过程耗时很长等缺陷,提出一种简单、易于实现的加工轨迹切换优化方法。分析了复杂图形加工轨迹切换控制方法,给出了缩短总空行程的优化思想。基于双向蚁群算法原理,推导了双向最大最小蚁群算法(Bidirectional max-min ant colony system,BMMAS),结合加工轨迹之间轨迹切换特点,对复杂图形加工工艺路径进行规划设计,给出了算法实现流程及加工工艺路径优化的实现要点。最后利用该方法对平面复杂图形进行了优化加工实验。实验结果表明,该加工方法计算简单,加工效率高,空行程路径长度较其它方法短,加工平稳。研究结果对相似复杂图形加工具有参考价值。
针对当前复杂图形加工中存在加工轨迹之间空行程多,导致加工过程耗时很长等缺陷,提出一种简单、易于实现的加工轨迹切换优化方法。分析了复杂图形加工轨迹切换控制方法,给出了缩短总空行程的优化思想。基于双向蚁群算法原理,推导了双向最大最小蚁群算法(Bidirectional max-min ant colony system,BMMAS),结合加工轨迹之间轨迹切换特点,对复杂图形加工工艺路径进行规划设计,给出了算法实现流程及加工工艺路径优化的实现要点。最后利用该方法对平面复杂图形进行了优化加工实验。实验结果表明,该加工方法计算简单,加工效率高,空行程路径长度较其它方法短,加工平稳。研究结果对相似复杂图形加工具有参考价值。

2023, 42(9): 1409-1415.
doi: 10.13433/j.cnki.1003-8728.20220111
摘要:
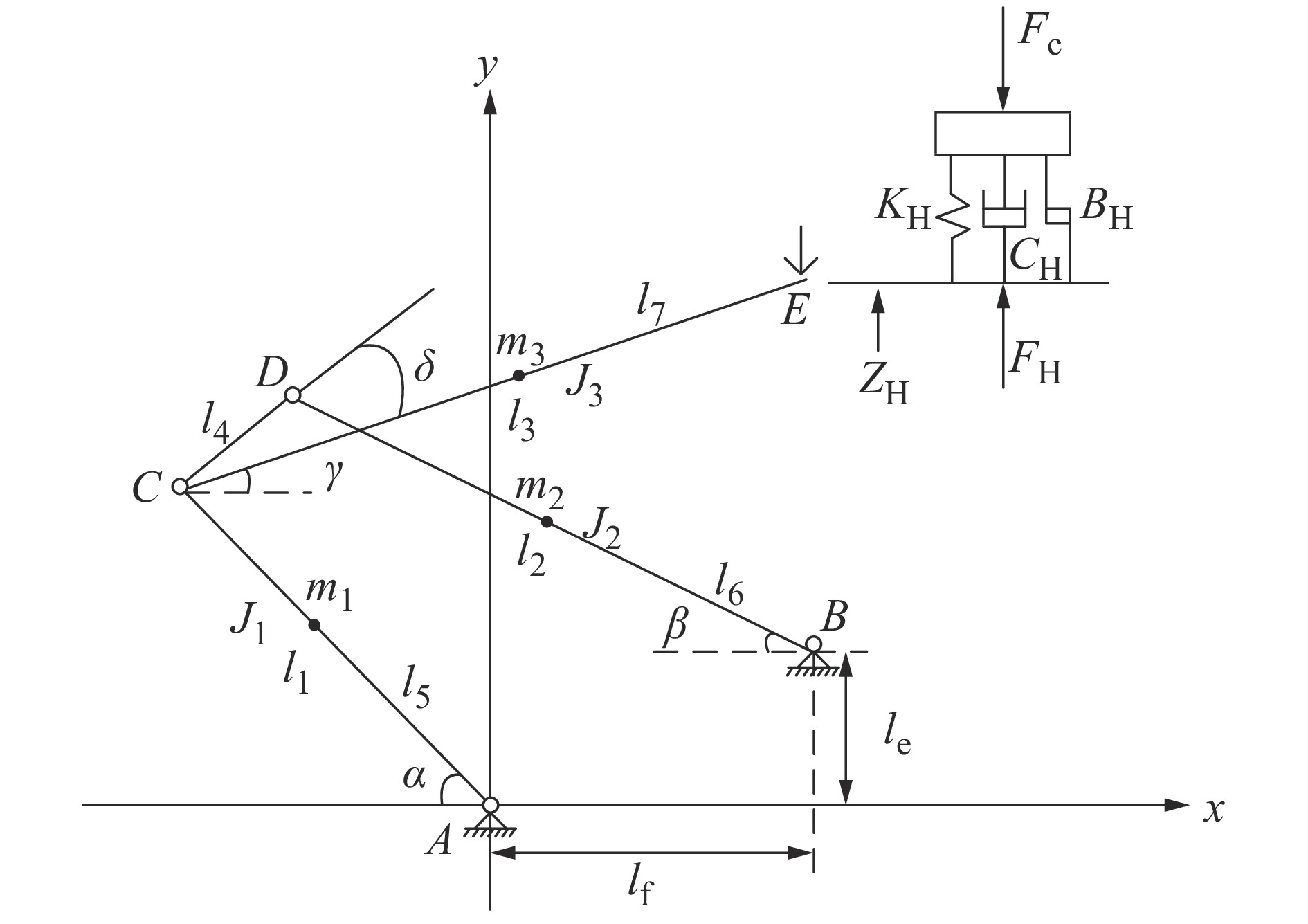
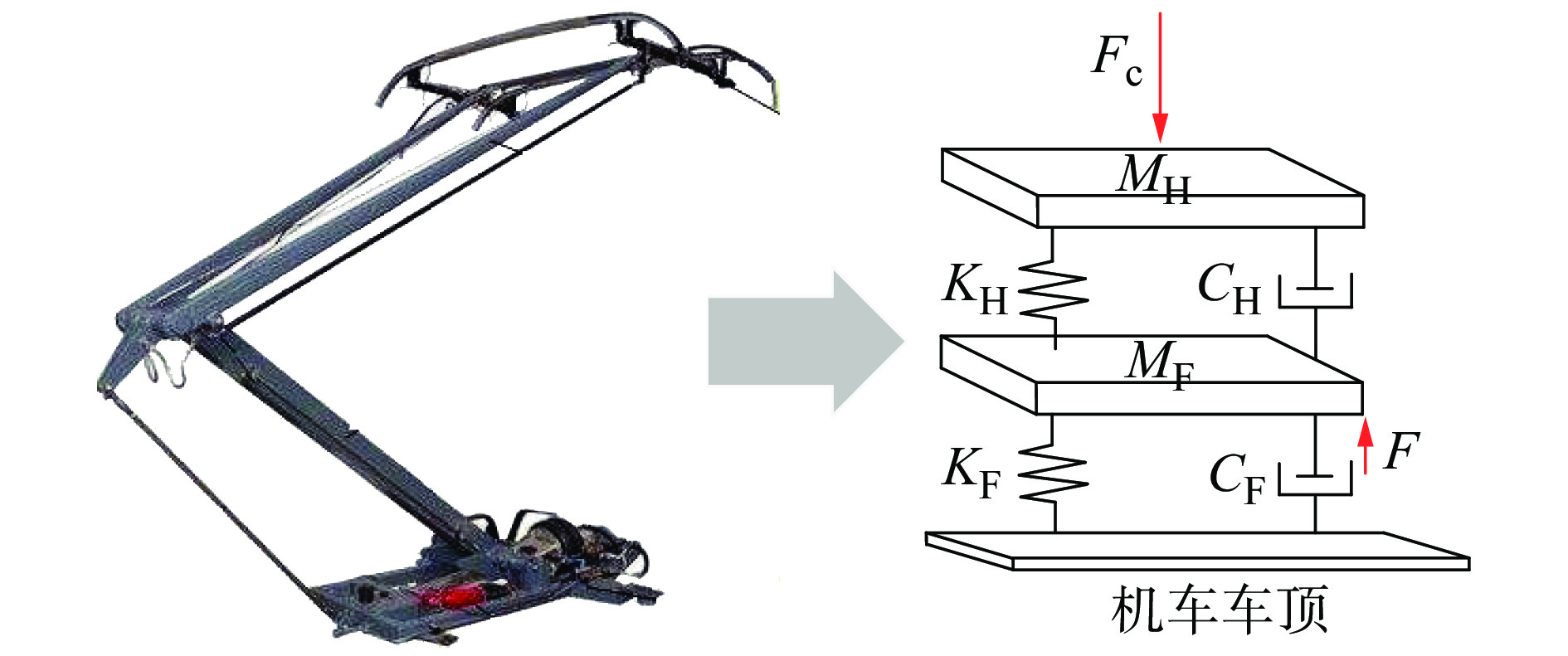
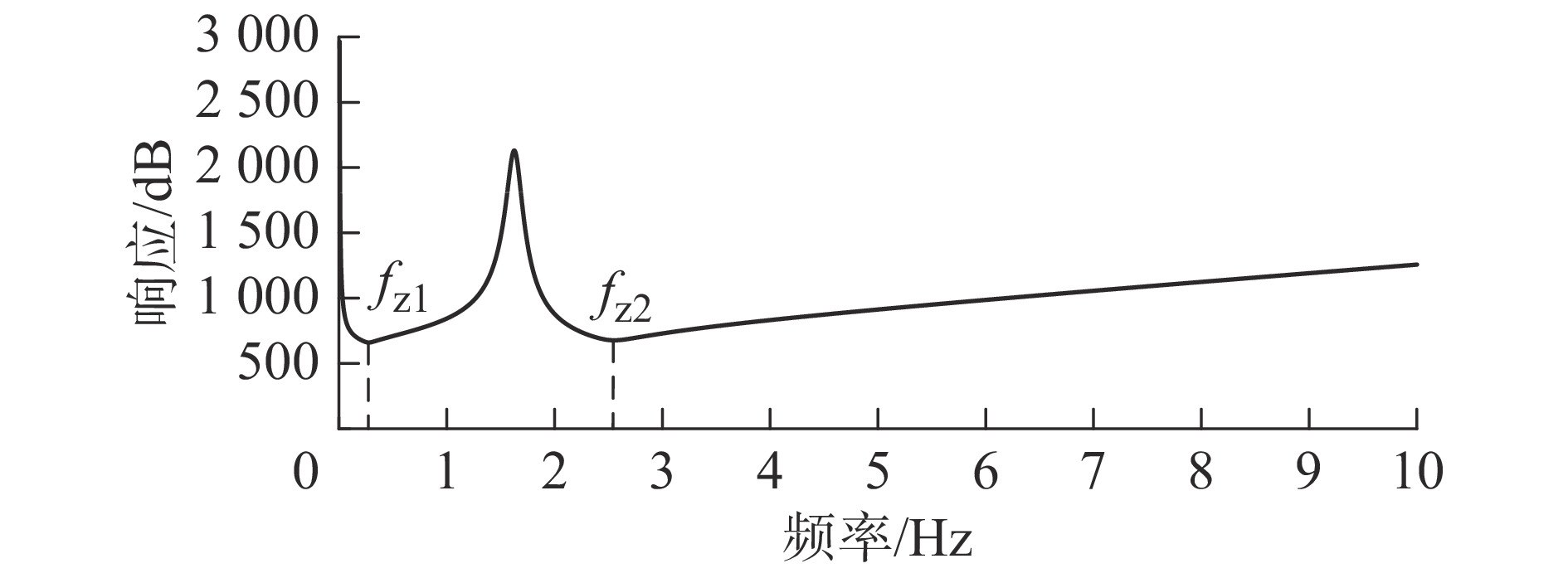
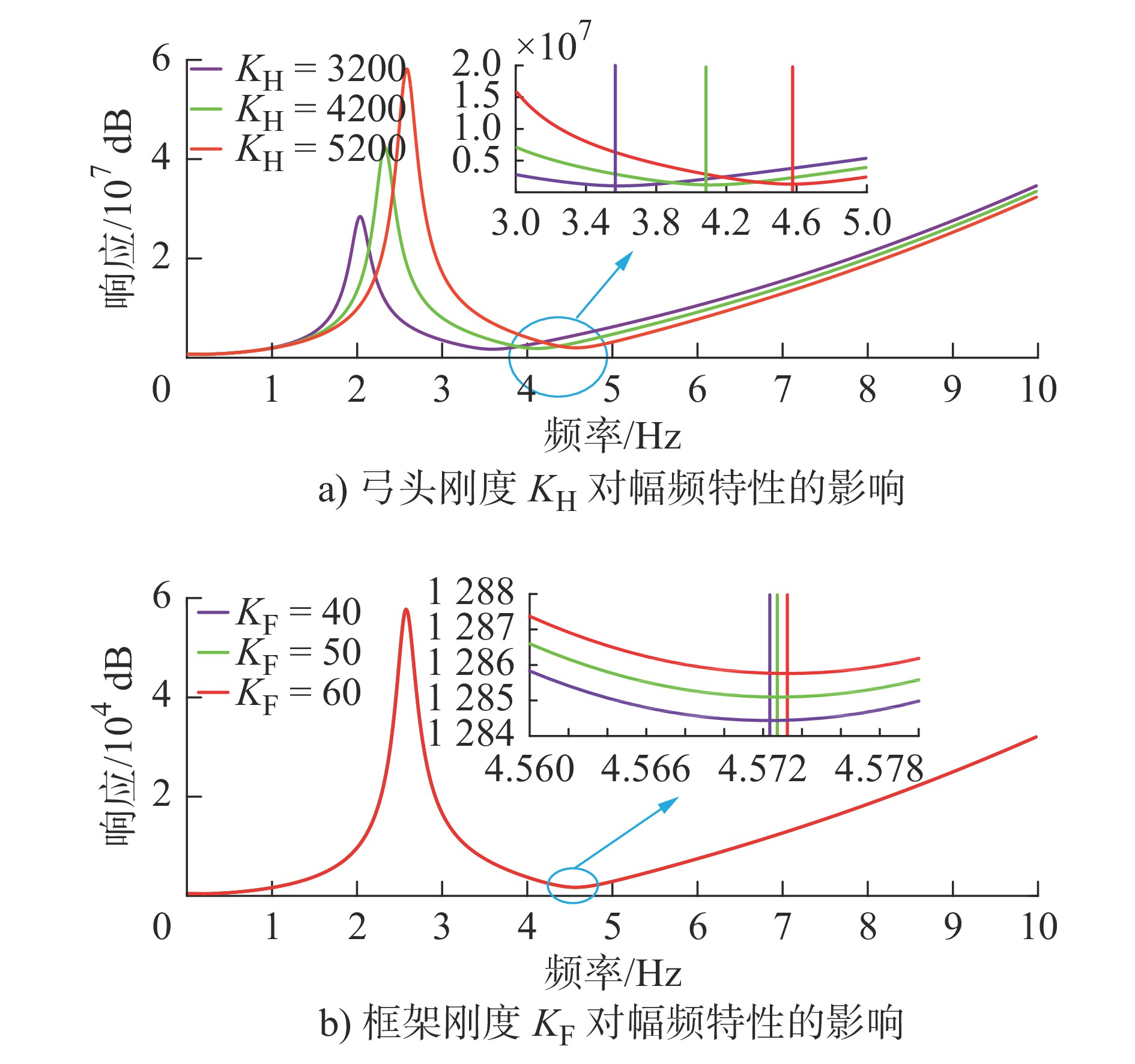
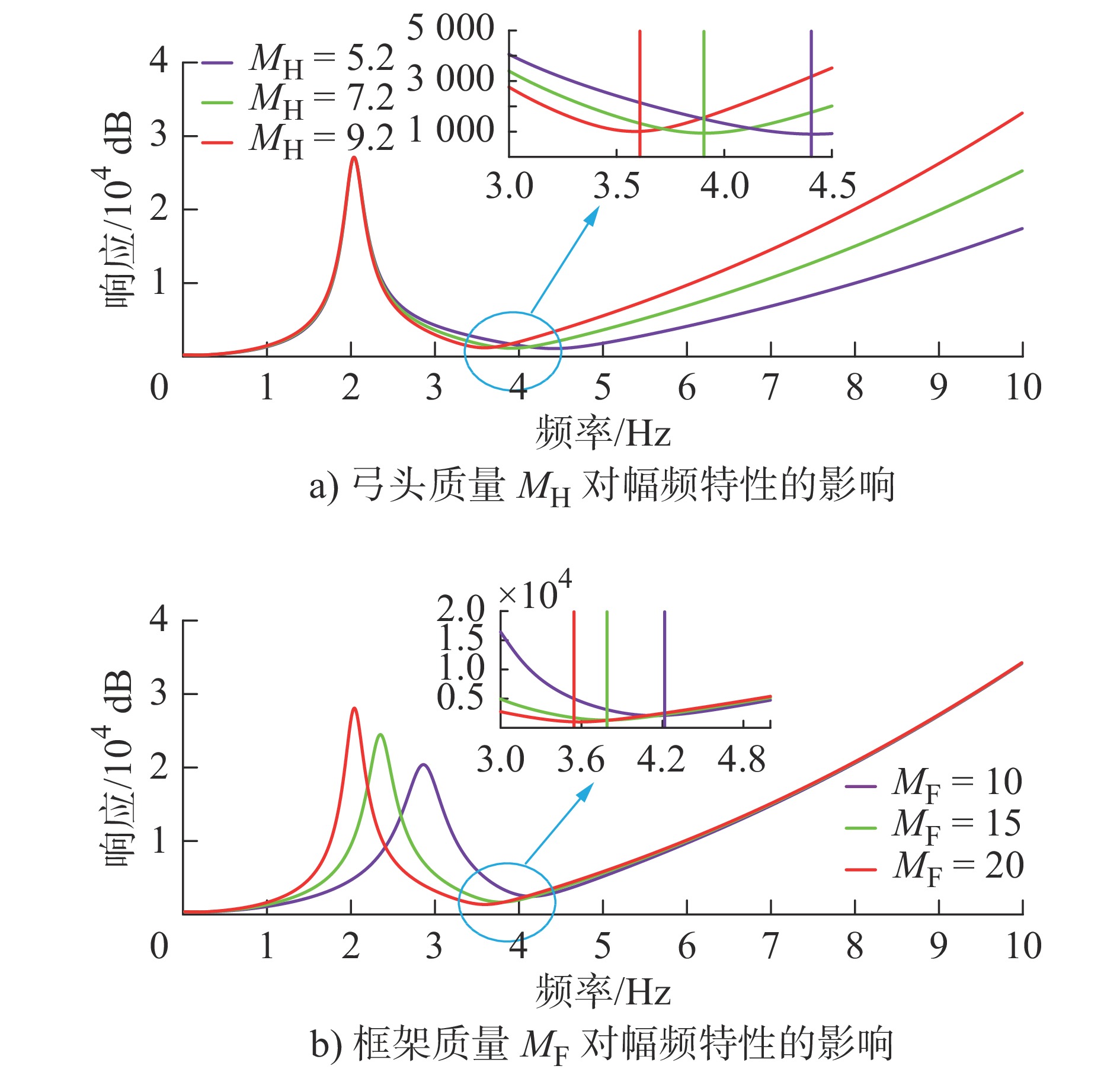
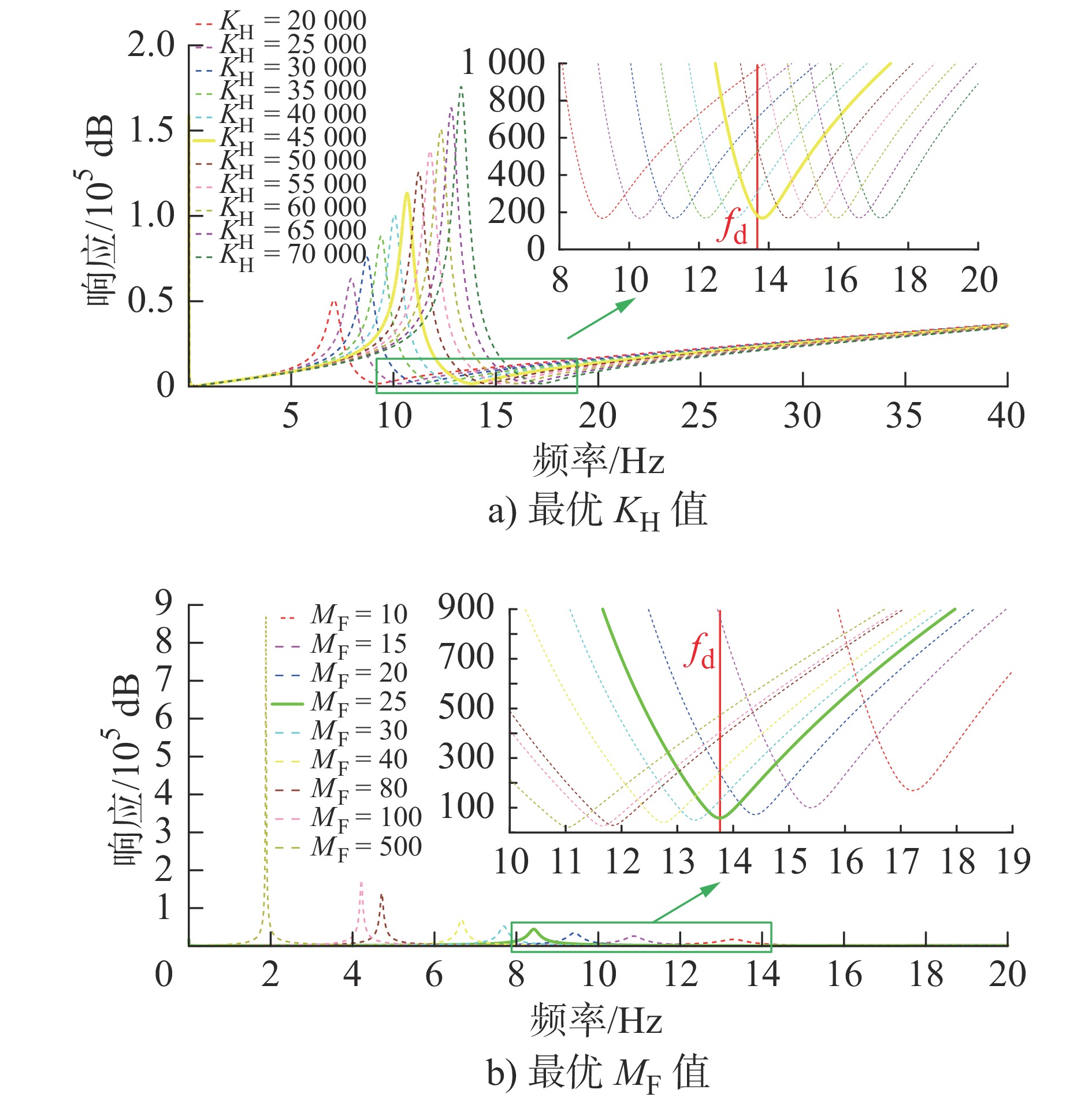
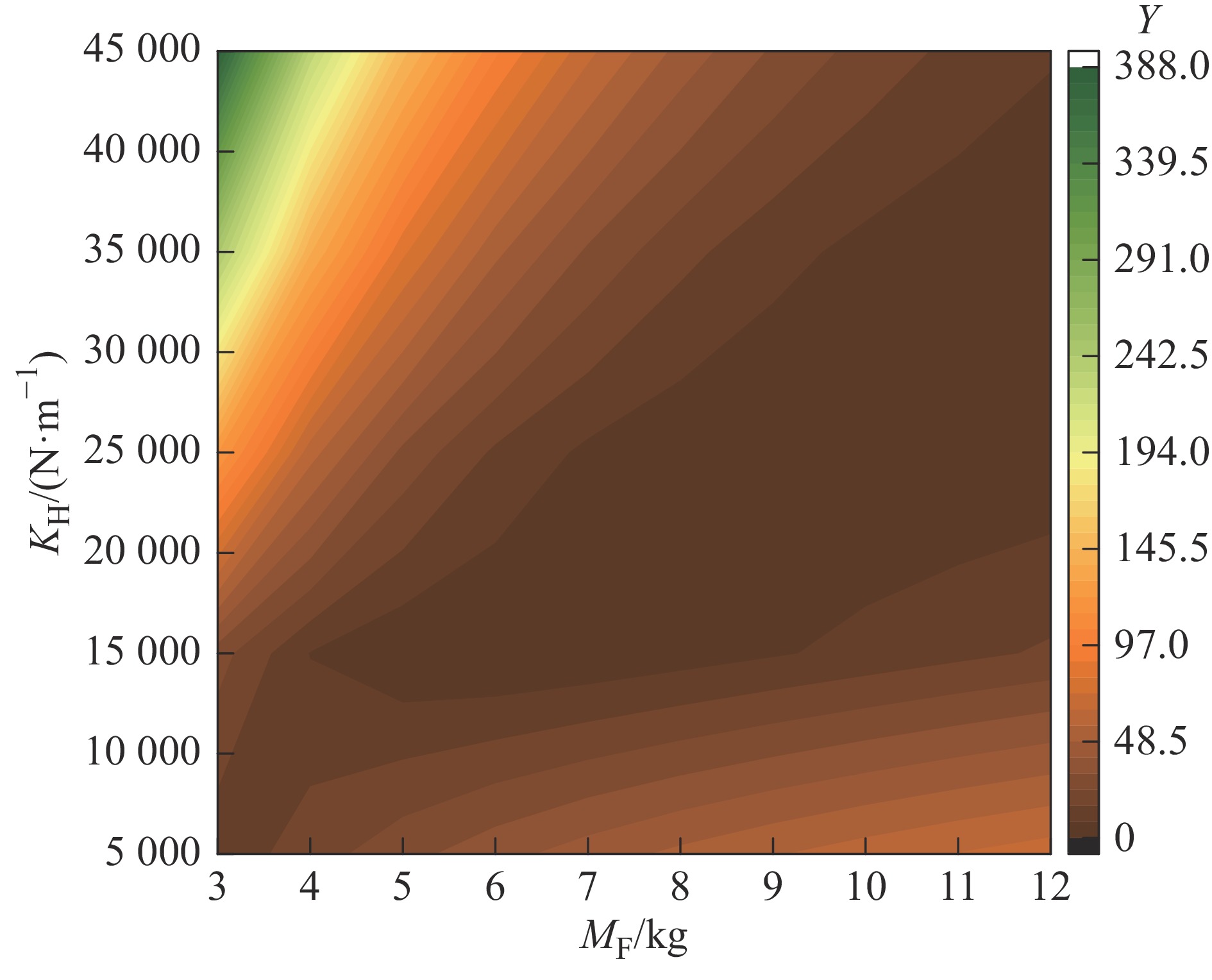
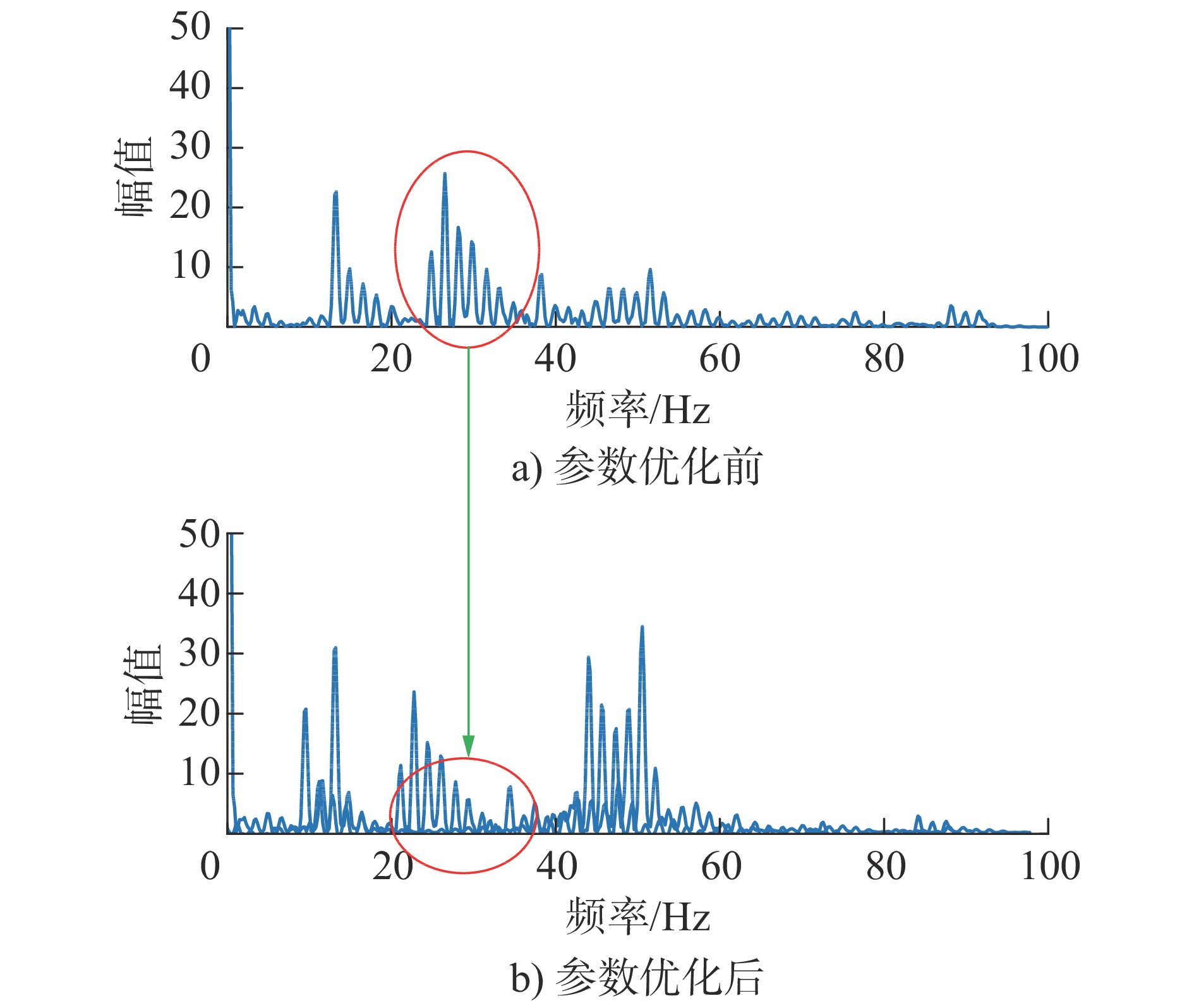
针对受电弓的非线性特性对受电弓-接触网系统(以下简称弓网系统)的性能造成的影响,基于拉普拉斯变换和数值方法,建立了一种多体受电弓-接触网耦合动力学模型。分析了多体受电弓参数对受电弓幅频特性的影响,根据分析结果,对接触压力波动的原因进行了分析,提出了一种减小接触压力波动的策略。将受电弓的非线性运动方程在平衡位置处进行高阶展开,得到等效模型。将受电弓不同参数对接触压力的影响进行对比,得出所有参数中弓头刚度和框架质量敏感度最高,并进行了单变量匹配和多变量匹配,对比得出多变量匹配效果更优。仿真结果表明参数优化后受电弓接触压力波动明显减小,受流质量明显提高。
针对受电弓的非线性特性对受电弓-接触网系统(以下简称弓网系统)的性能造成的影响,基于拉普拉斯变换和数值方法,建立了一种多体受电弓-接触网耦合动力学模型。分析了多体受电弓参数对受电弓幅频特性的影响,根据分析结果,对接触压力波动的原因进行了分析,提出了一种减小接触压力波动的策略。将受电弓的非线性运动方程在平衡位置处进行高阶展开,得到等效模型。将受电弓不同参数对接触压力的影响进行对比,得出所有参数中弓头刚度和框架质量敏感度最高,并进行了单变量匹配和多变量匹配,对比得出多变量匹配效果更优。仿真结果表明参数优化后受电弓接触压力波动明显减小,受流质量明显提高。
2023, 42(9): 1416-1422.
doi: 10.13433/j.cnki.1003-8728.20220101
摘要:
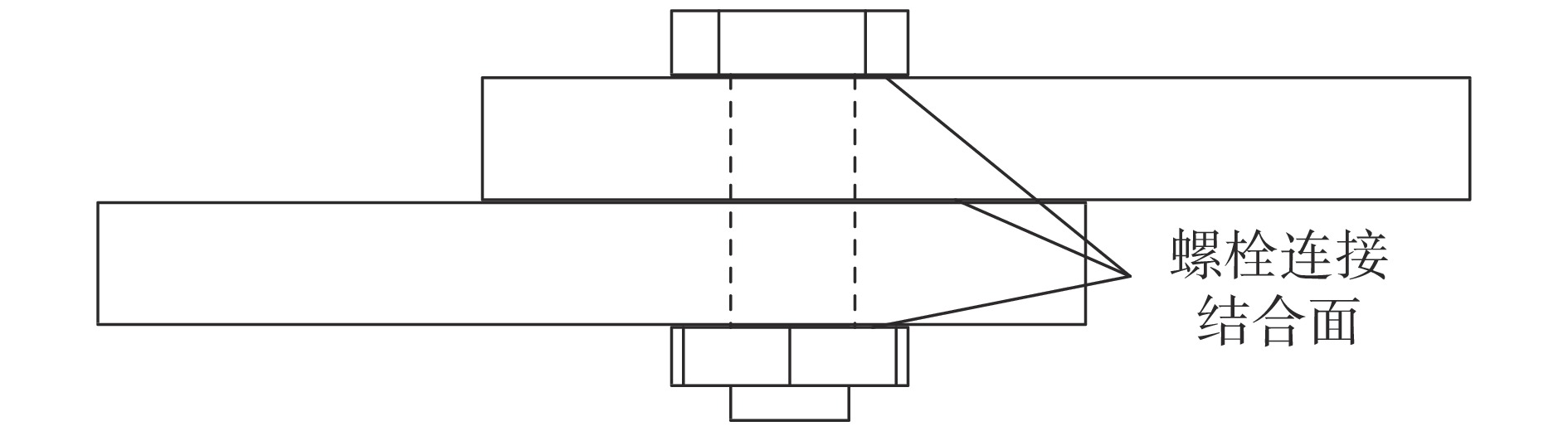
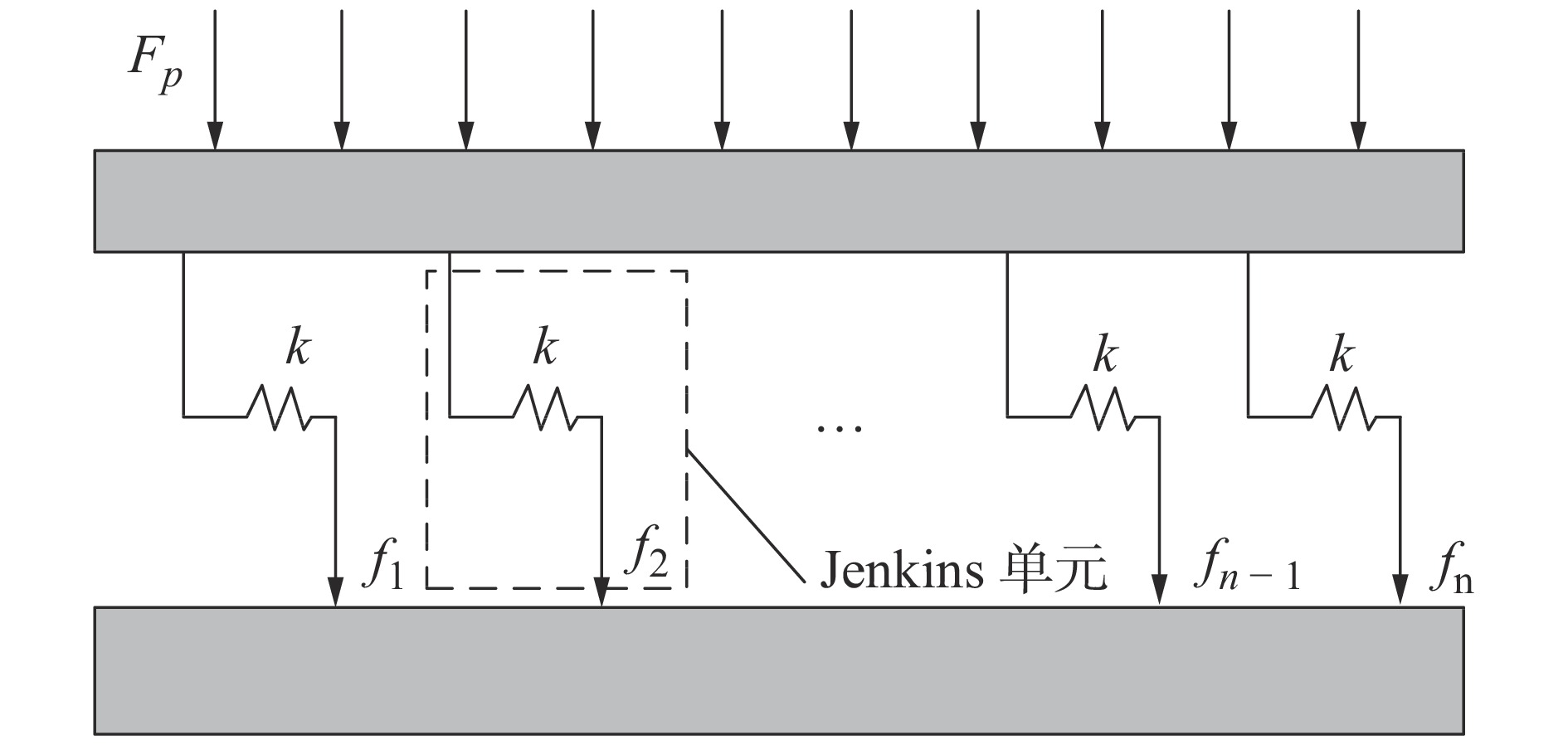
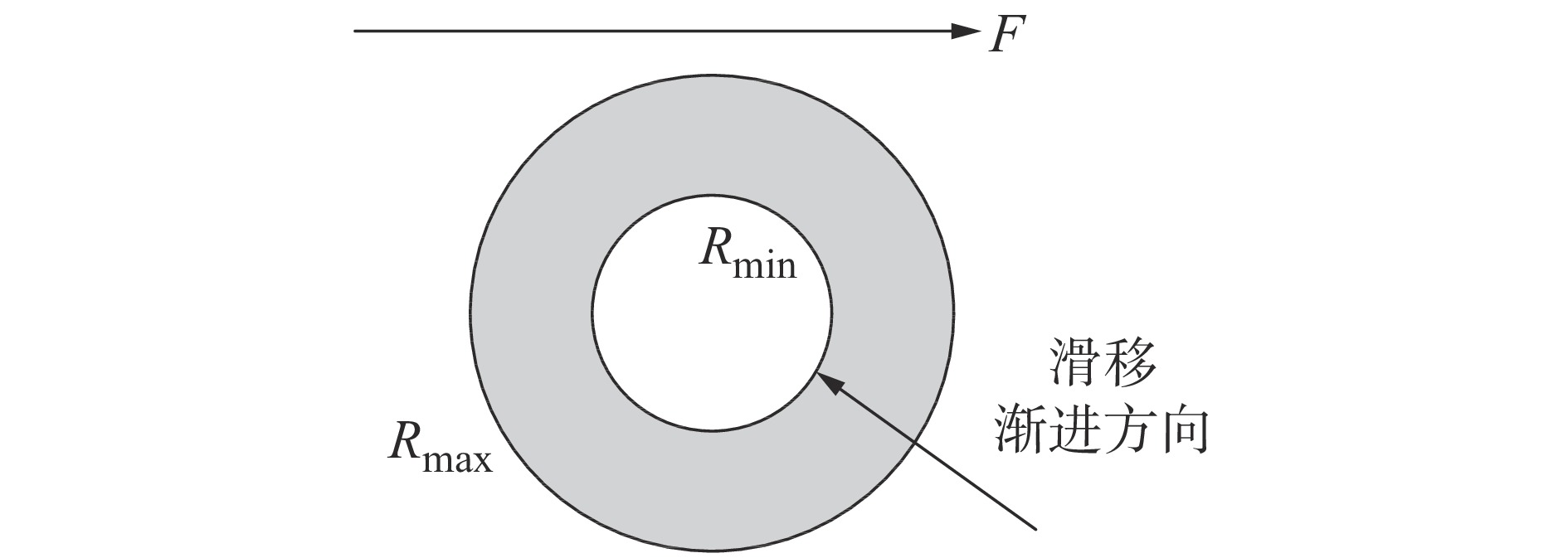
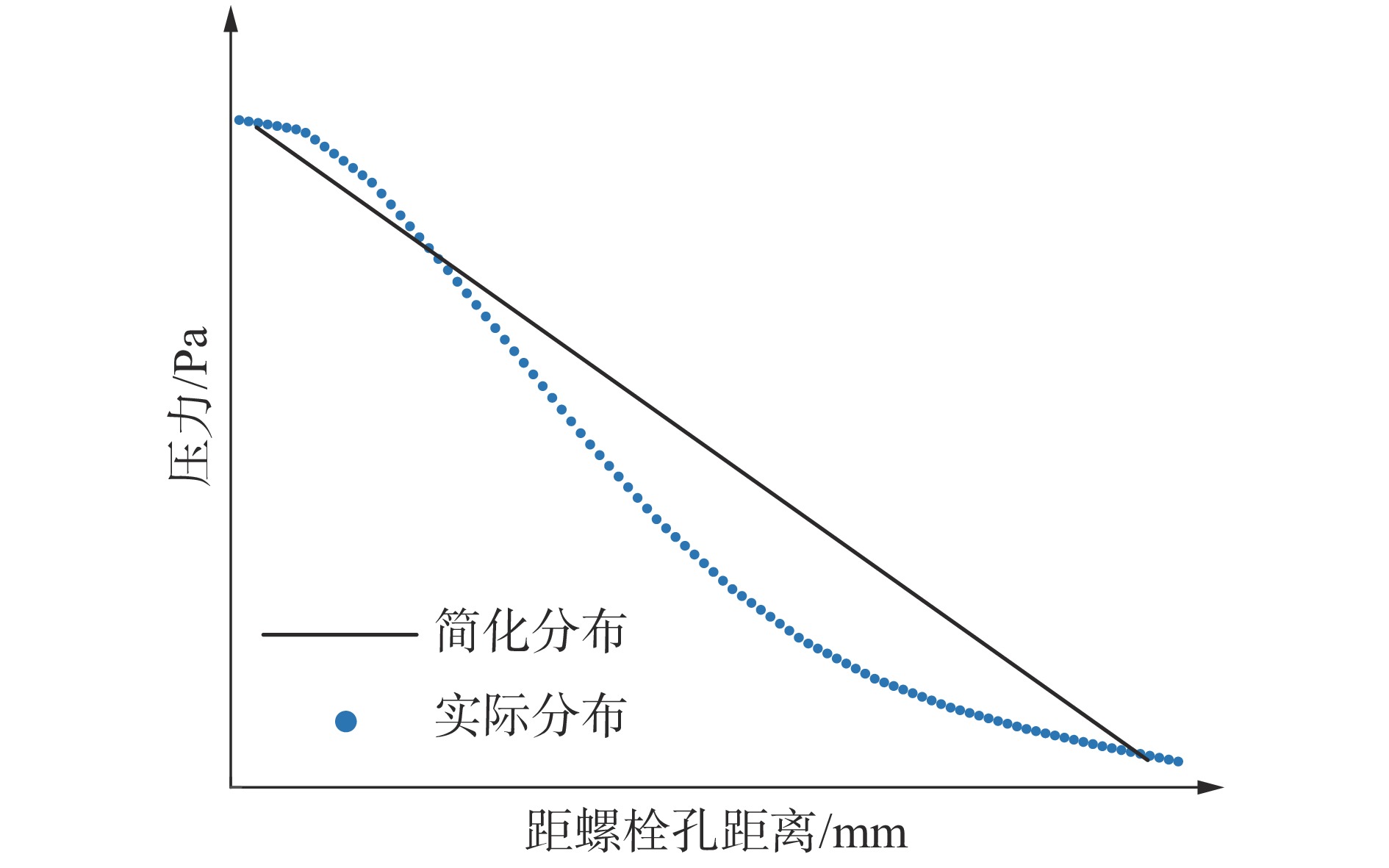
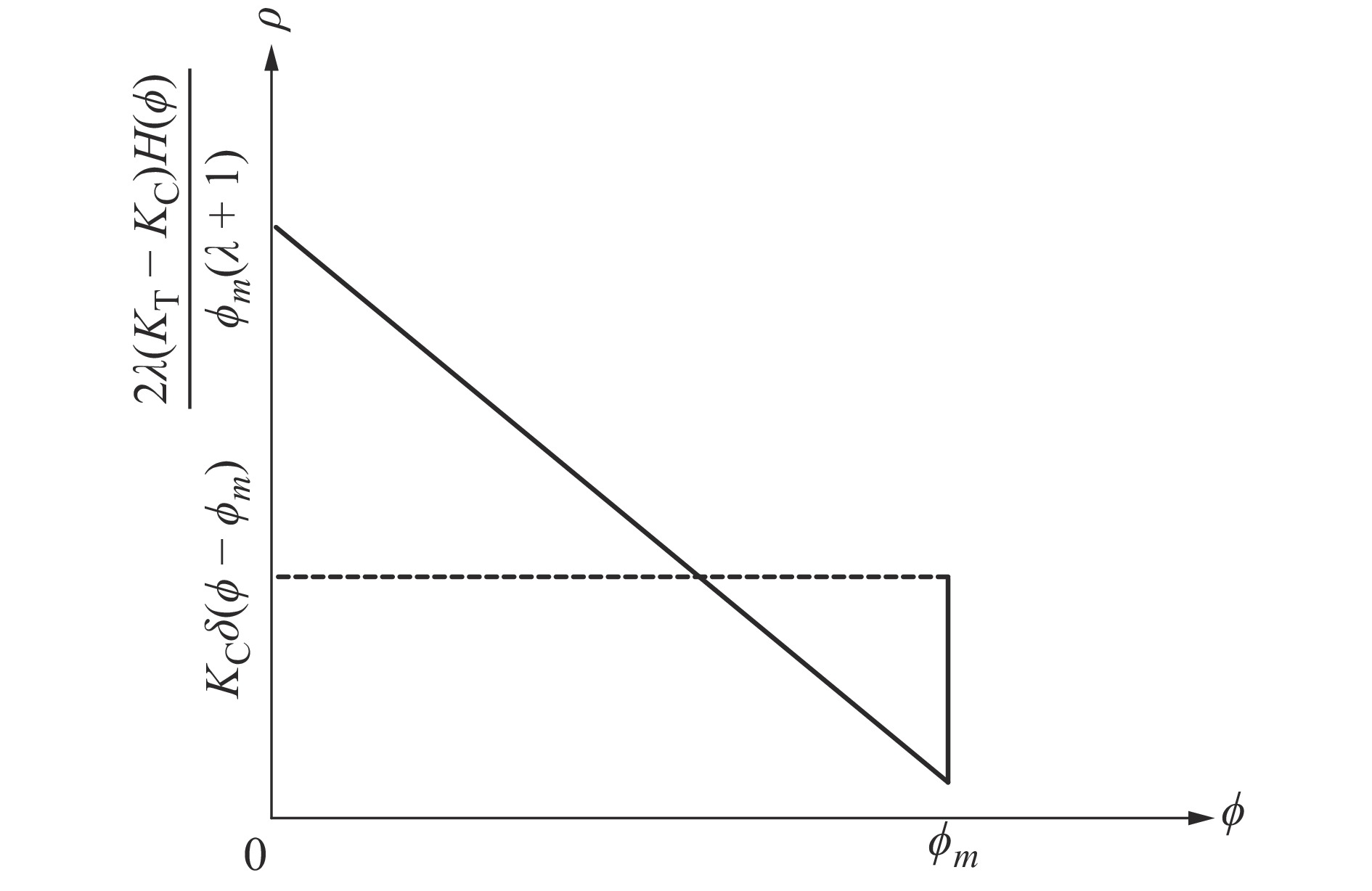
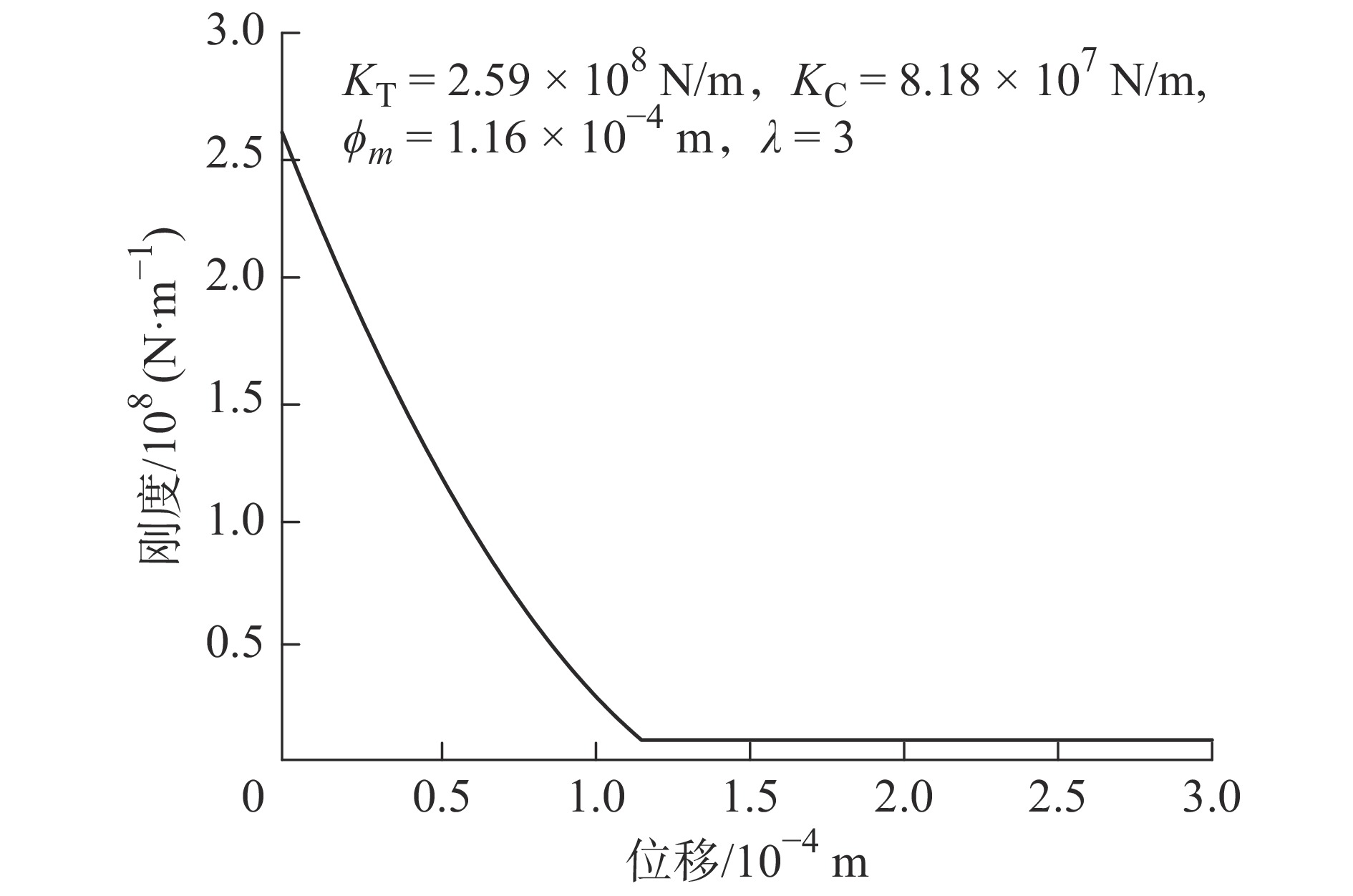
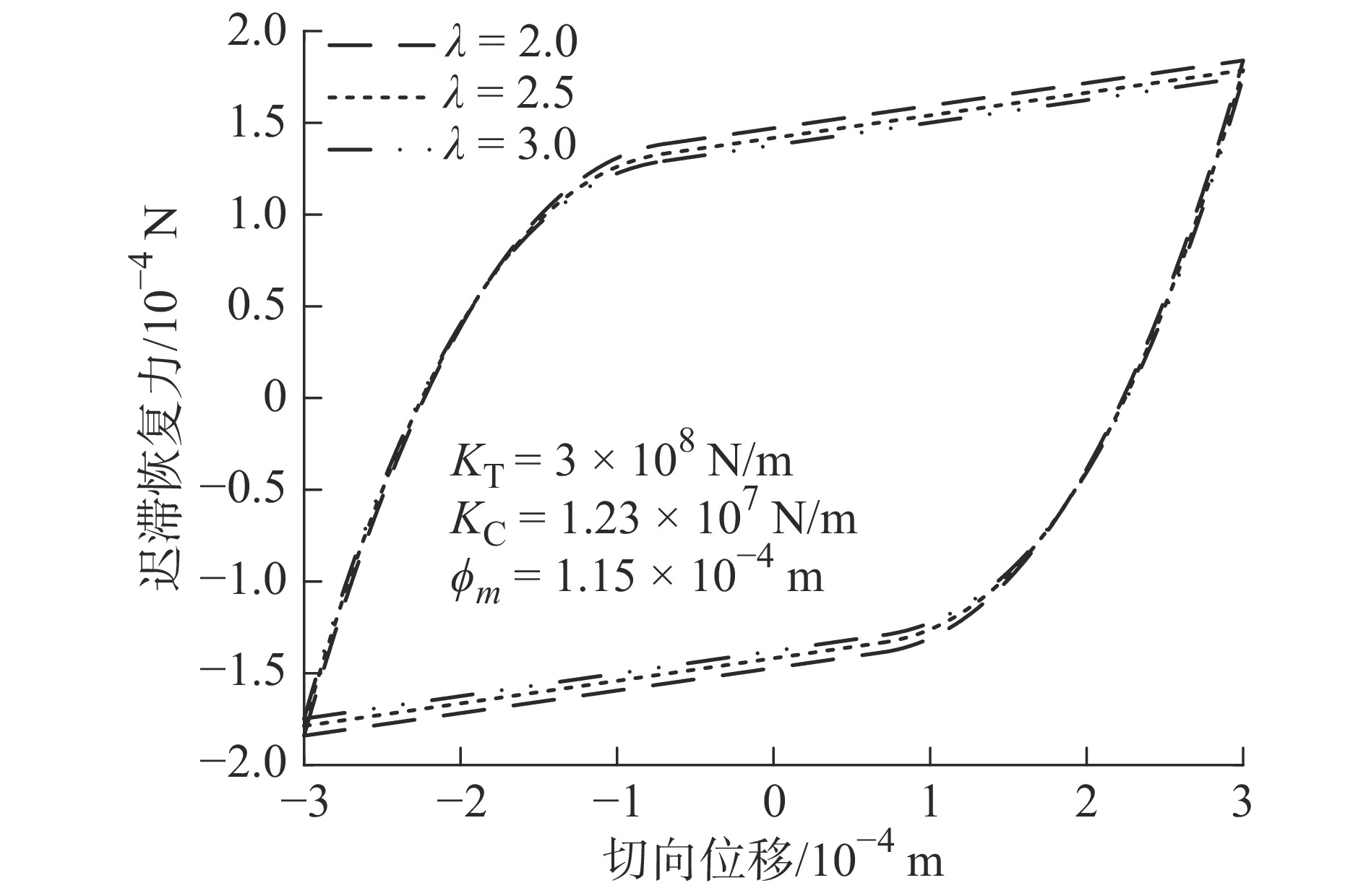
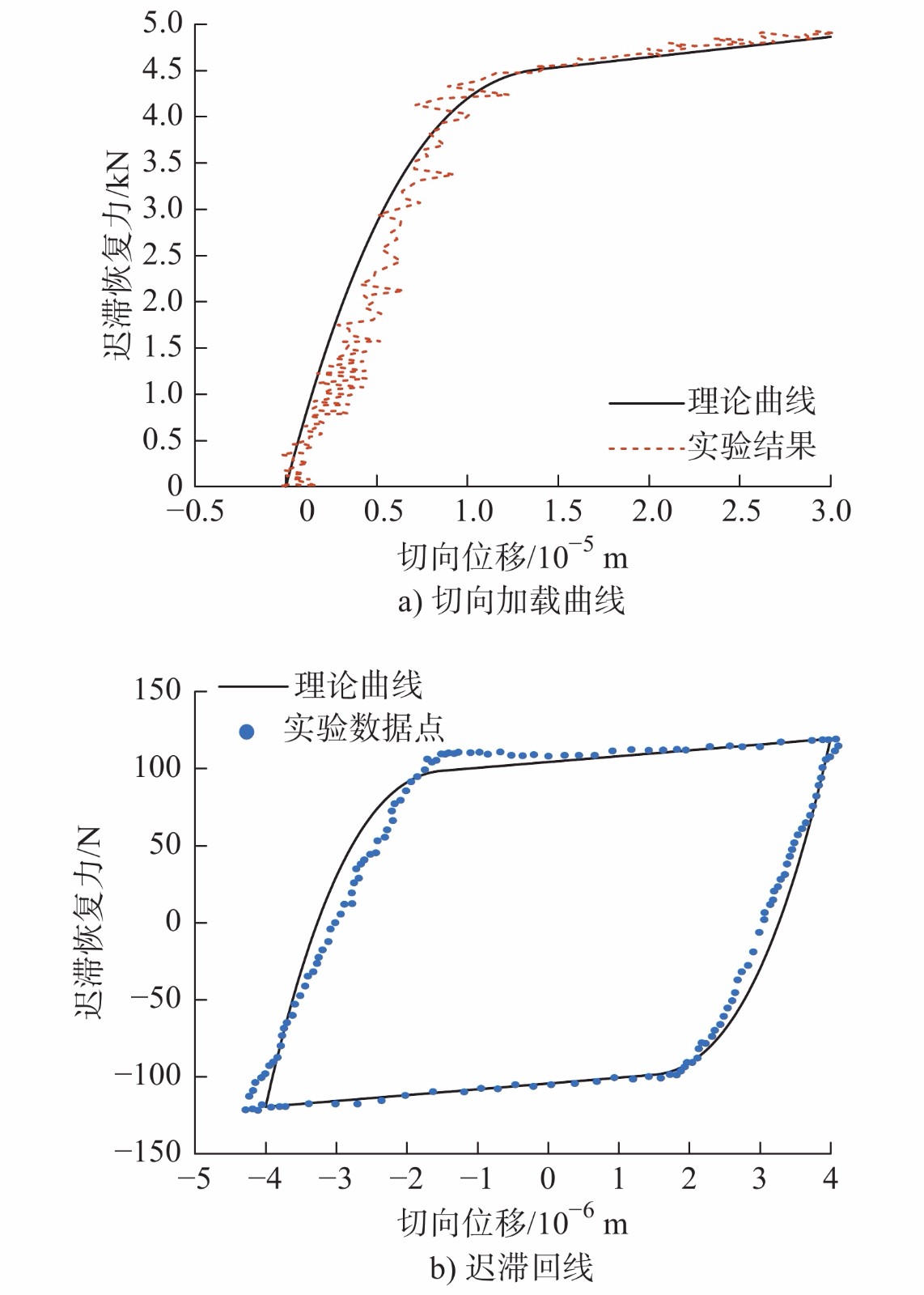
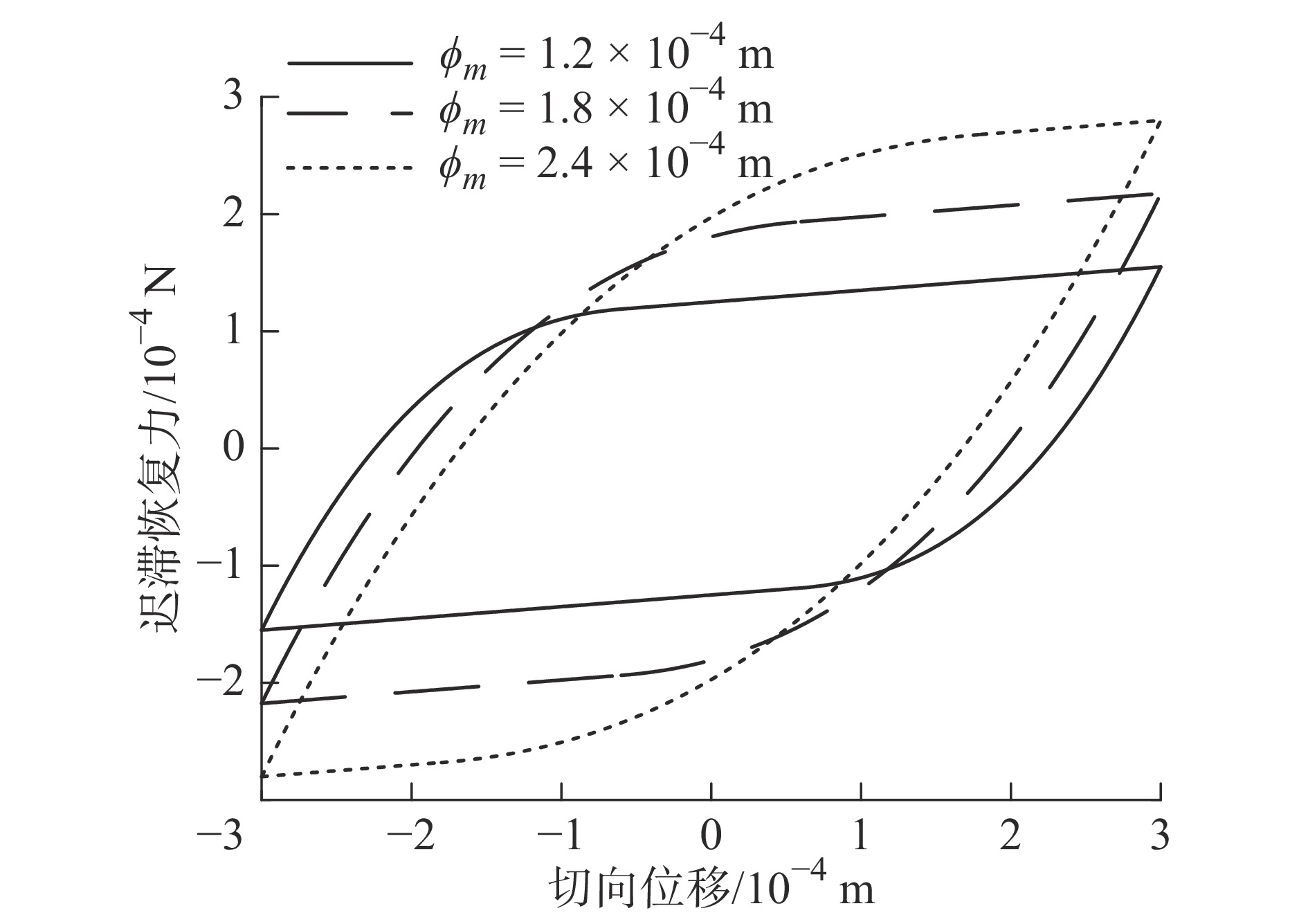
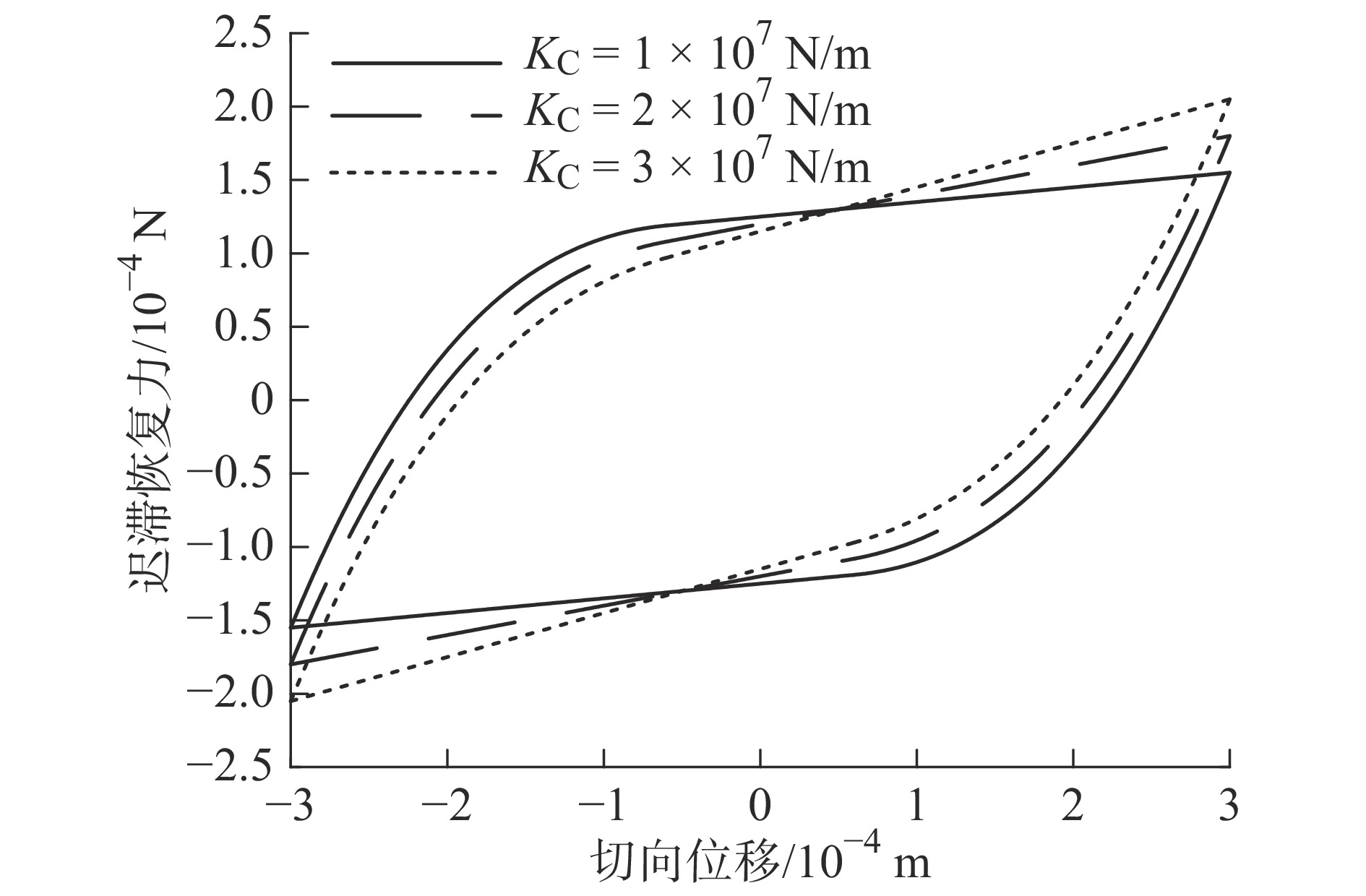
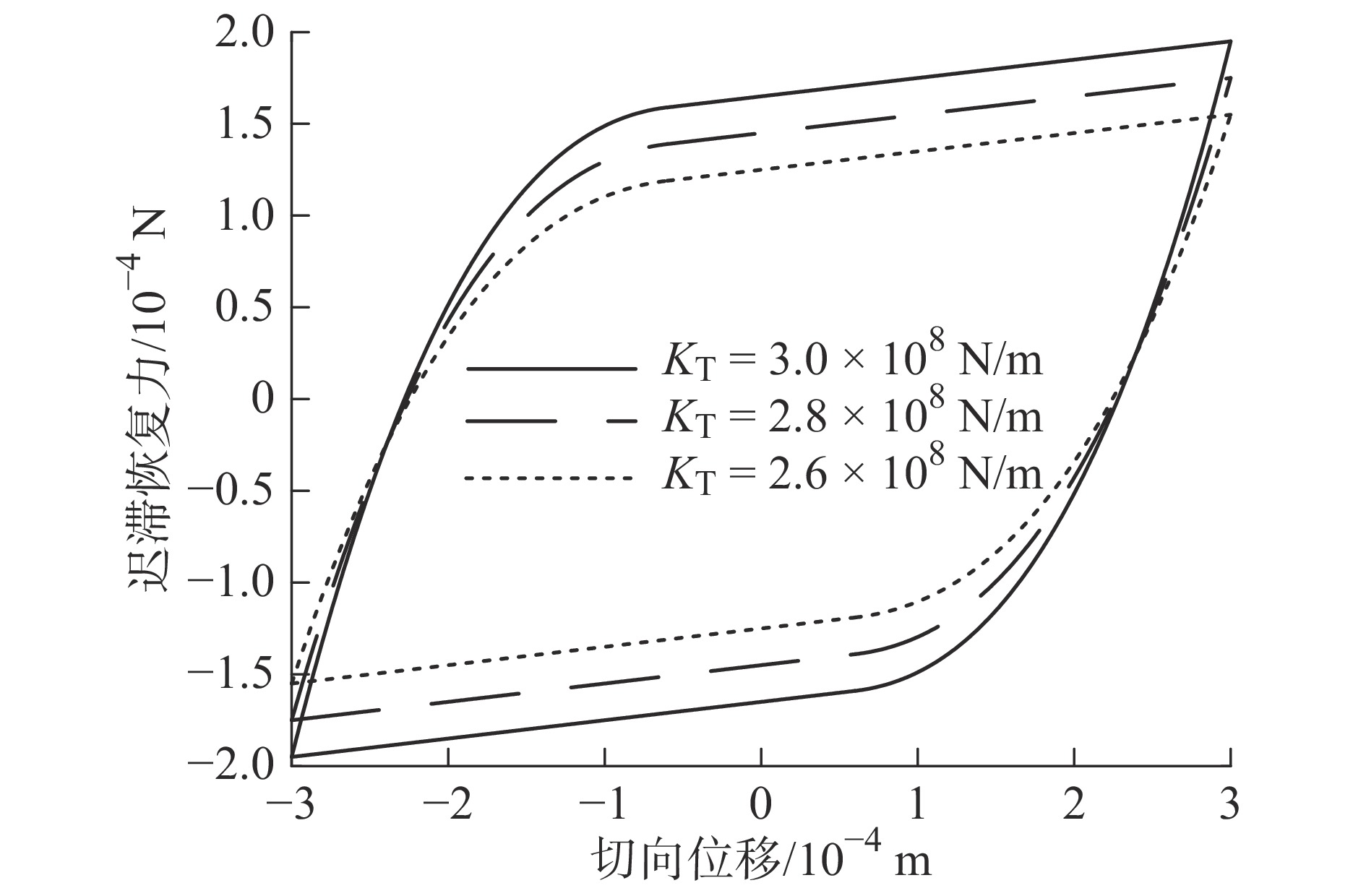
切向载荷作用下,螺栓接头界面随切向位移增大表现出明显的变阻尼和刚度软化特性。为有效表示接头界面的迟滞特性,旨在研究一种新的螺栓接头界面建模方法。基于Iwan模型,将预紧力产生在接头界面的正压力转换成切向力的均匀密度函数,建立螺栓接头界面的切向加载曲线与非线性迟滞回线理论模型。通过与原有的实验结果比较,验证了加载曲线与迟滞回线的正确性,并探讨了不同参数对迟滞回线的影响。结果表明,临界切向位移、初始刚度对迟滞回线的变化影响较为明显,残余刚度对迟滞行为影响主要体现在宏观滑移阶段。该模型可以有效地表达螺栓连接的复杂非线性特征,准确再现结合面的迟滞现象以及刚度软化现象。
切向载荷作用下,螺栓接头界面随切向位移增大表现出明显的变阻尼和刚度软化特性。为有效表示接头界面的迟滞特性,旨在研究一种新的螺栓接头界面建模方法。基于Iwan模型,将预紧力产生在接头界面的正压力转换成切向力的均匀密度函数,建立螺栓接头界面的切向加载曲线与非线性迟滞回线理论模型。通过与原有的实验结果比较,验证了加载曲线与迟滞回线的正确性,并探讨了不同参数对迟滞回线的影响。结果表明,临界切向位移、初始刚度对迟滞回线的变化影响较为明显,残余刚度对迟滞行为影响主要体现在宏观滑移阶段。该模型可以有效地表达螺栓连接的复杂非线性特征,准确再现结合面的迟滞现象以及刚度软化现象。
2023, 42(9): 1423-1429.
doi: 10.13433/j.cnki.1003-8728.20220231
摘要:
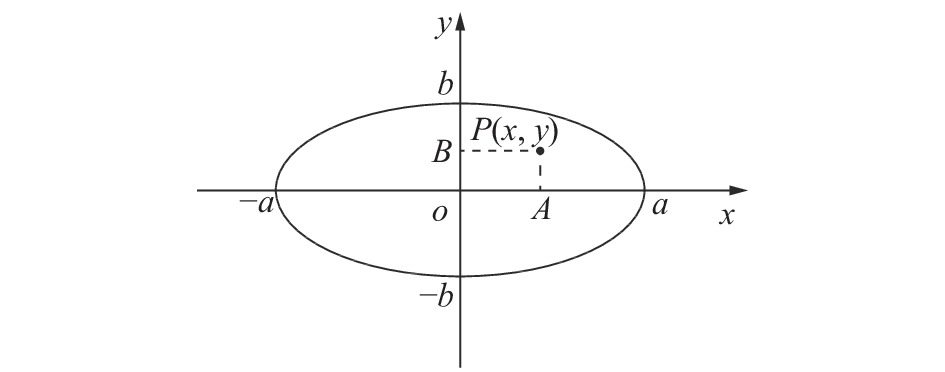
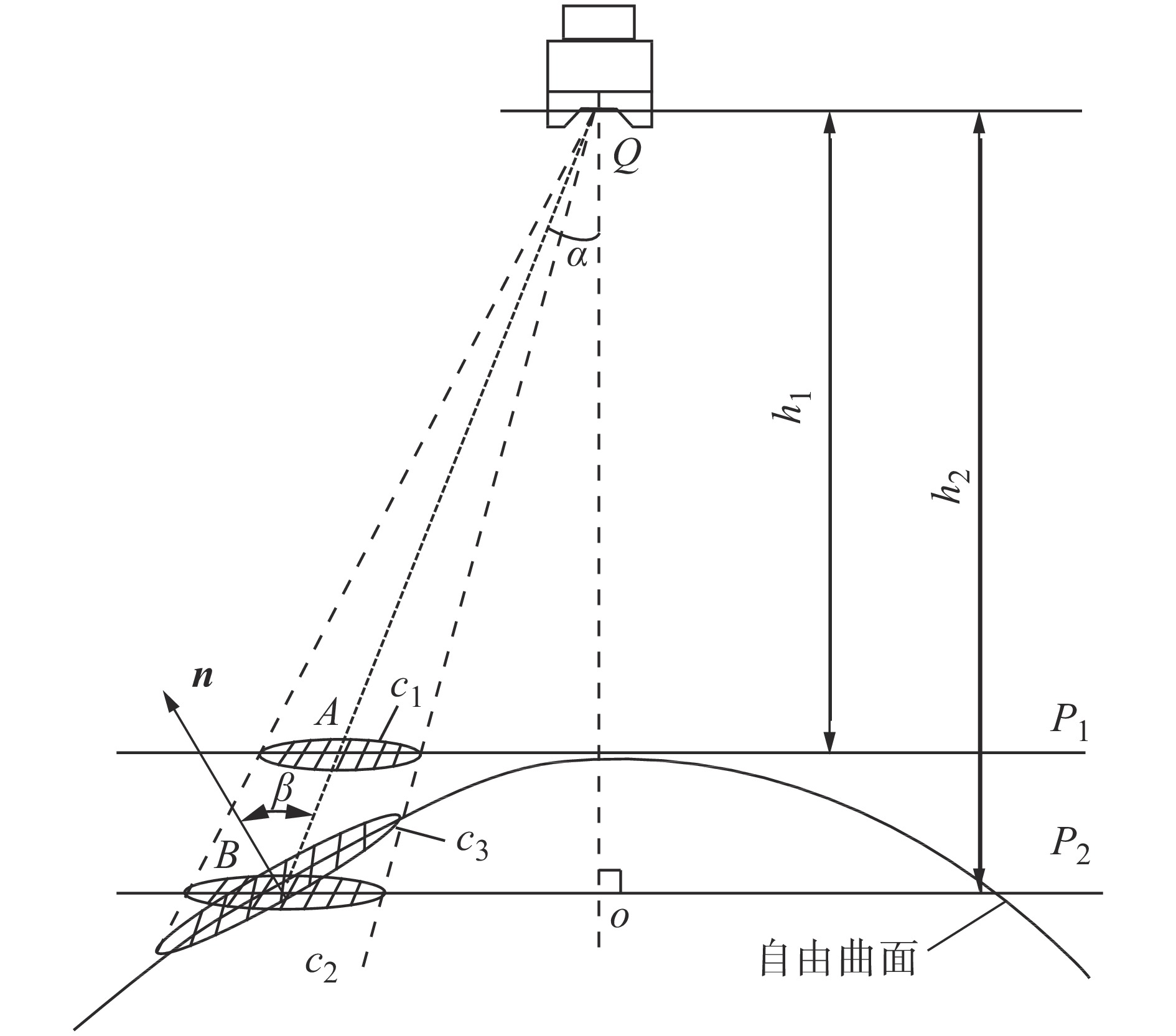
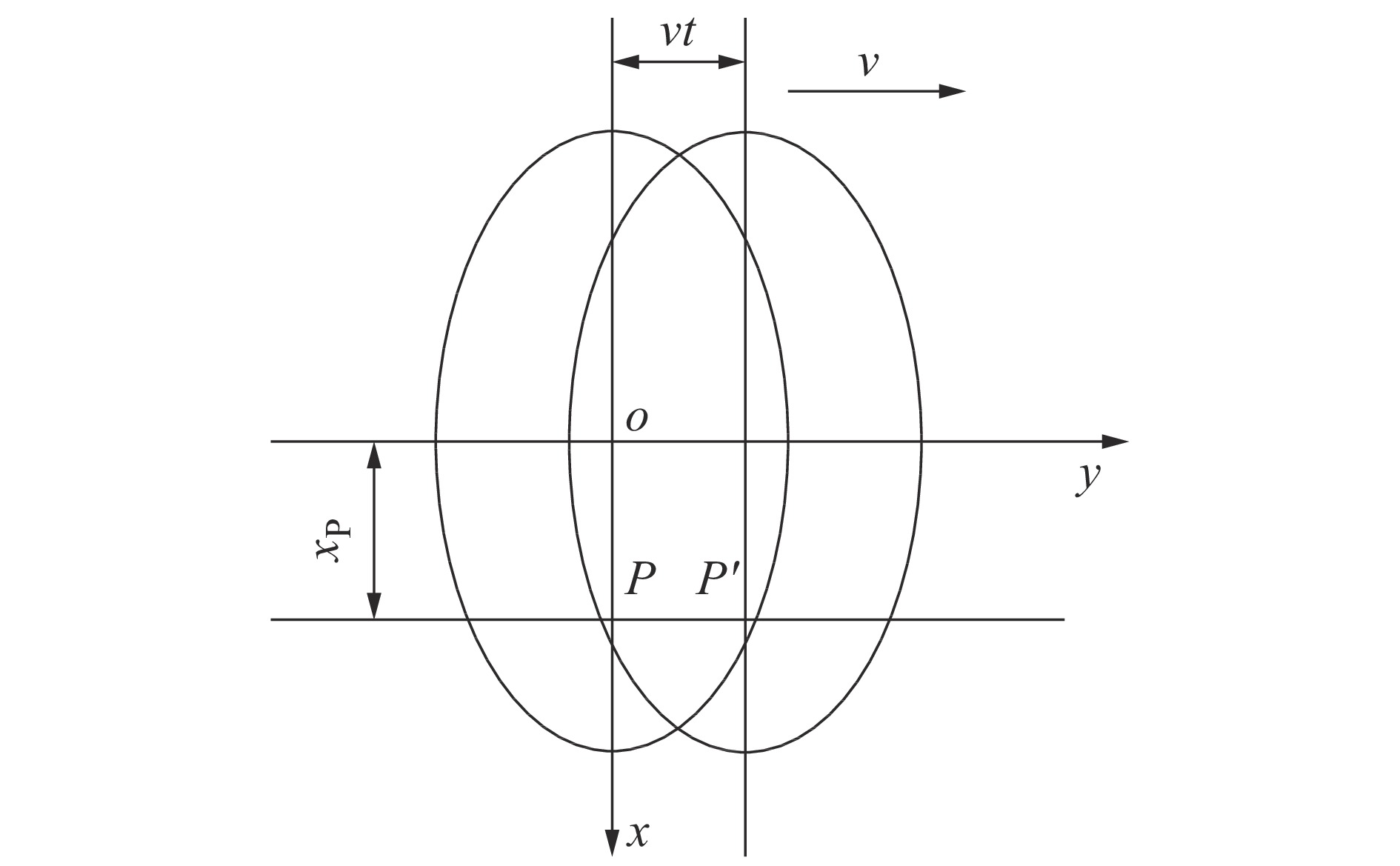
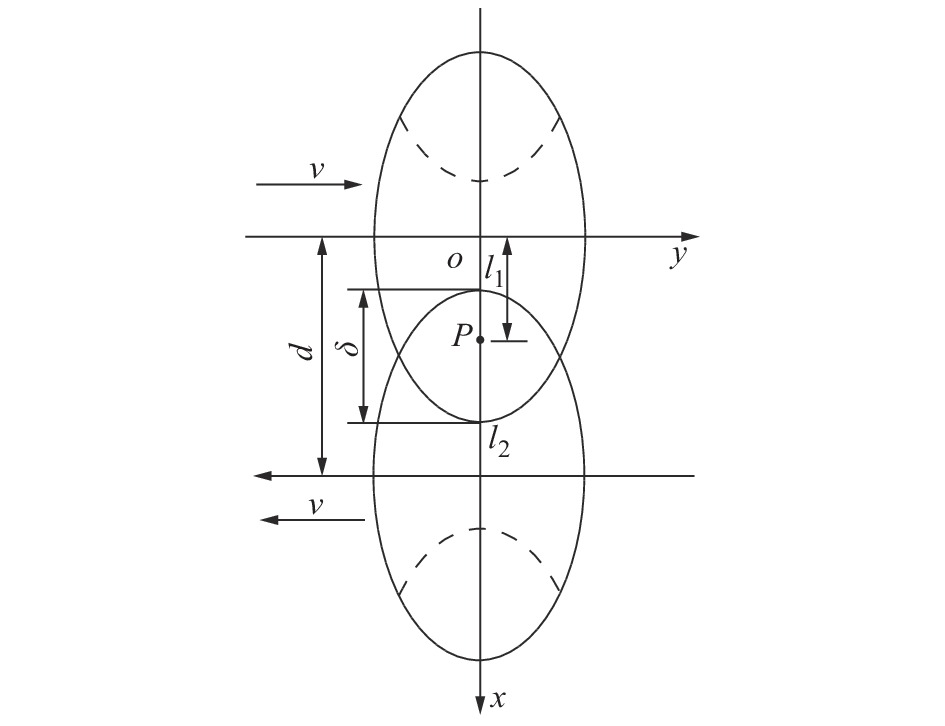
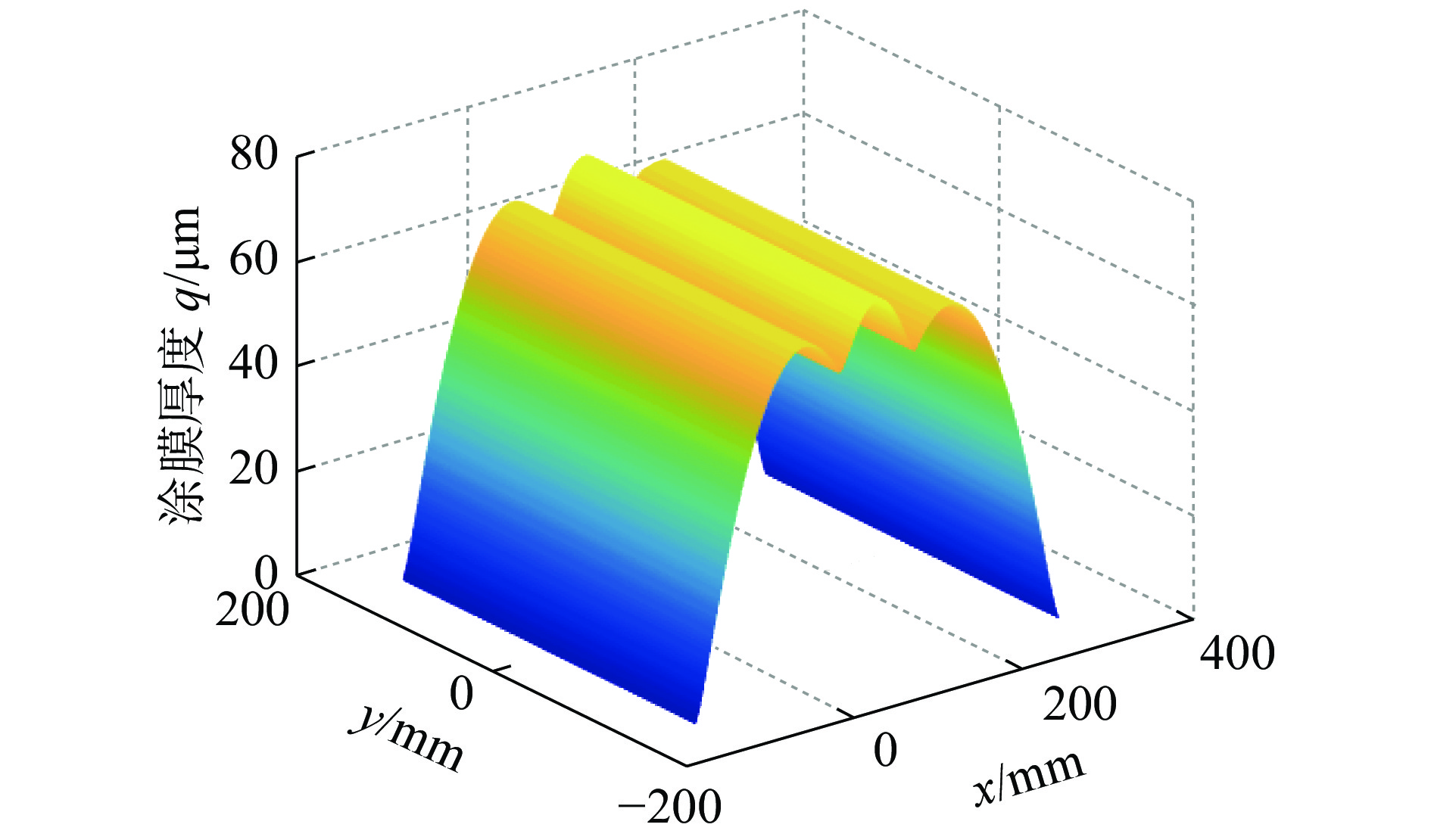
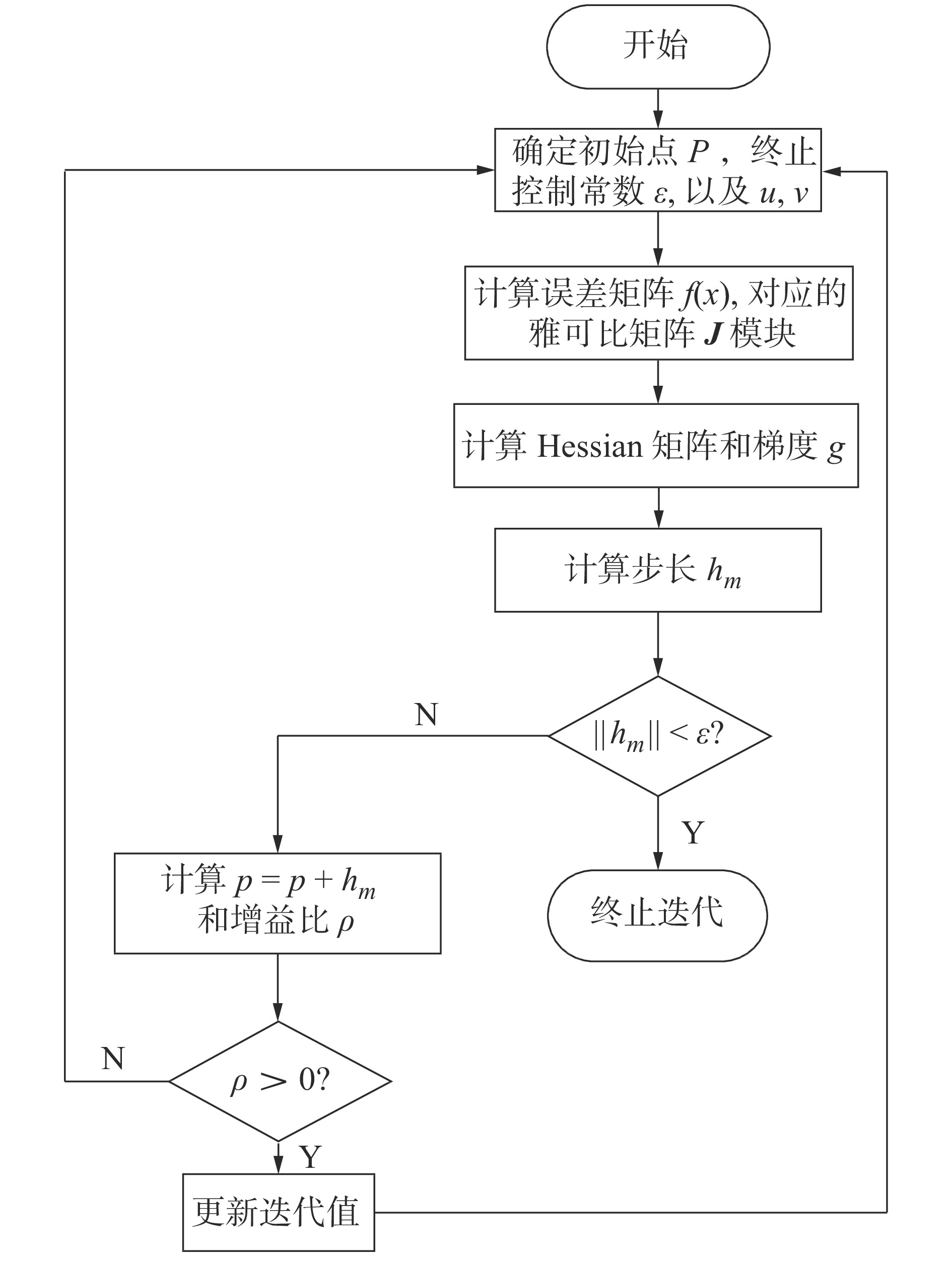
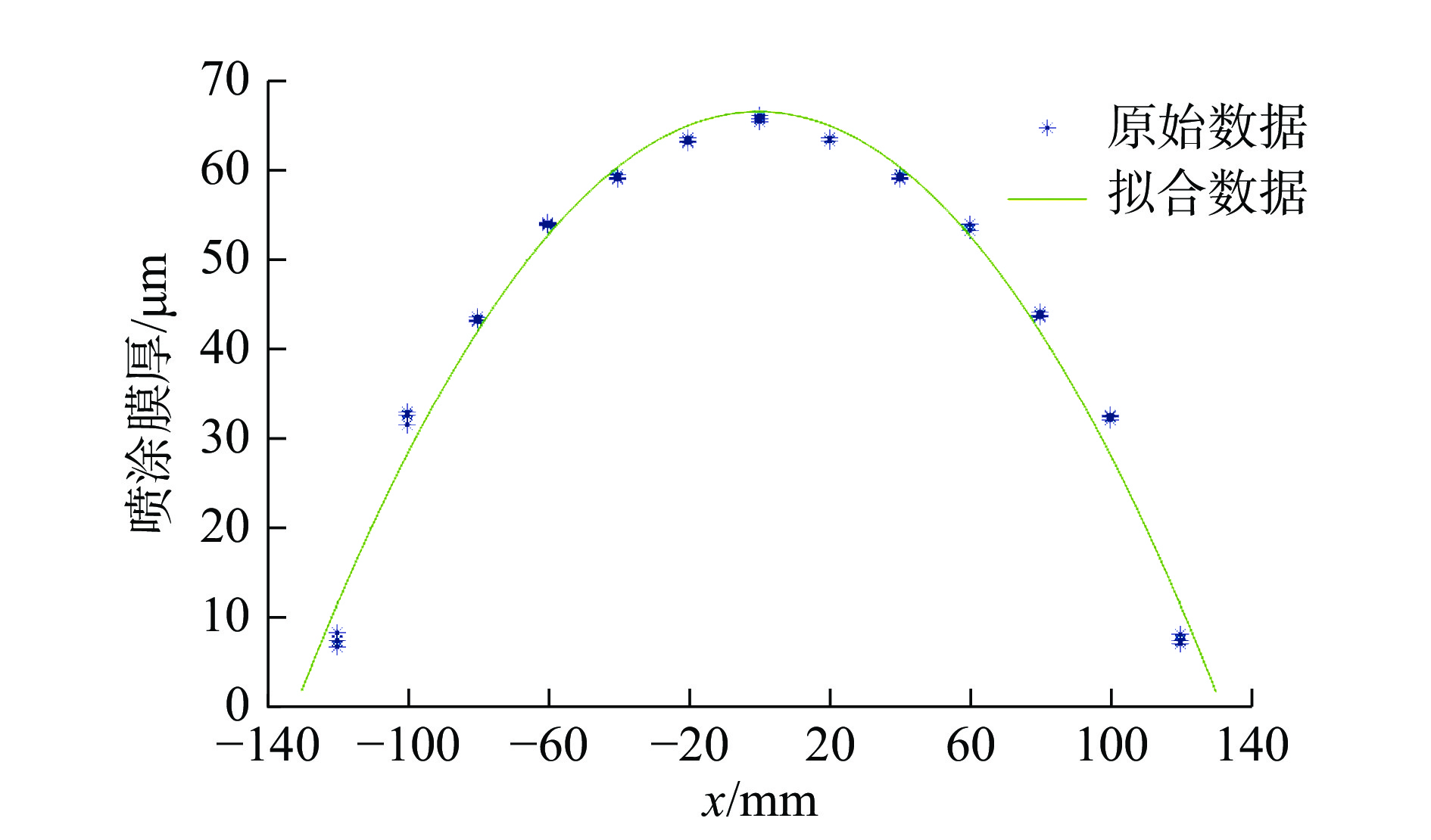
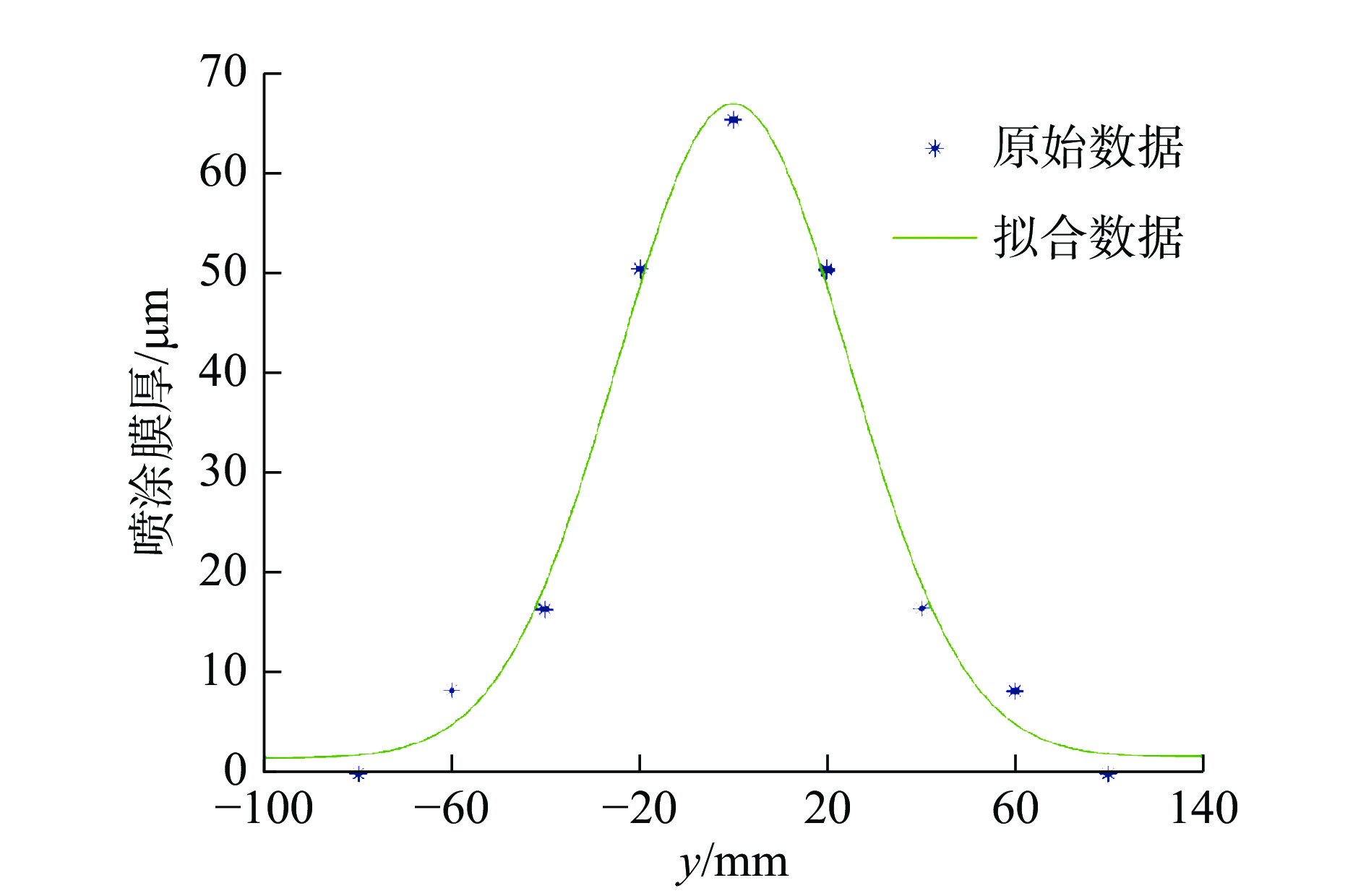
针对当前建立的机器人喷涂模型对复杂数据分析拟合能力较弱的问题,本文从喷涂漆膜沉积机理出发,深入研究并分析了机器人喷涂沉积厚度模型,以静态喷涂厚度建模方法为基础,提出了椭圆双高斯和模型,并使用单通道厚度建模方法和多通道厚度建模方法,研究了其动态涂层膜厚的分布规律。通过喷涂试验分析并求解了所建模型的参数,进而以此模型建立得到静态喷涂膜厚分布图。通过试验结果与理论数据之间的对比验证,进一步证实了该模型的有效性和实用性。
针对当前建立的机器人喷涂模型对复杂数据分析拟合能力较弱的问题,本文从喷涂漆膜沉积机理出发,深入研究并分析了机器人喷涂沉积厚度模型,以静态喷涂厚度建模方法为基础,提出了椭圆双高斯和模型,并使用单通道厚度建模方法和多通道厚度建模方法,研究了其动态涂层膜厚的分布规律。通过喷涂试验分析并求解了所建模型的参数,进而以此模型建立得到静态喷涂膜厚分布图。通过试验结果与理论数据之间的对比验证,进一步证实了该模型的有效性和实用性。


2023, 42(9): 1430-1435.
doi: 10.13433/j.cnki.1003-8728.20220071
摘要:
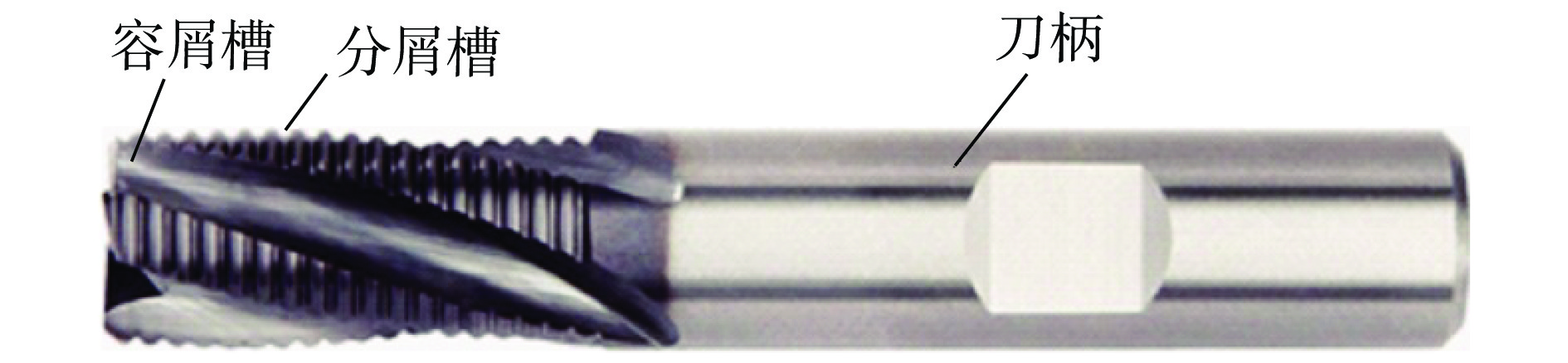
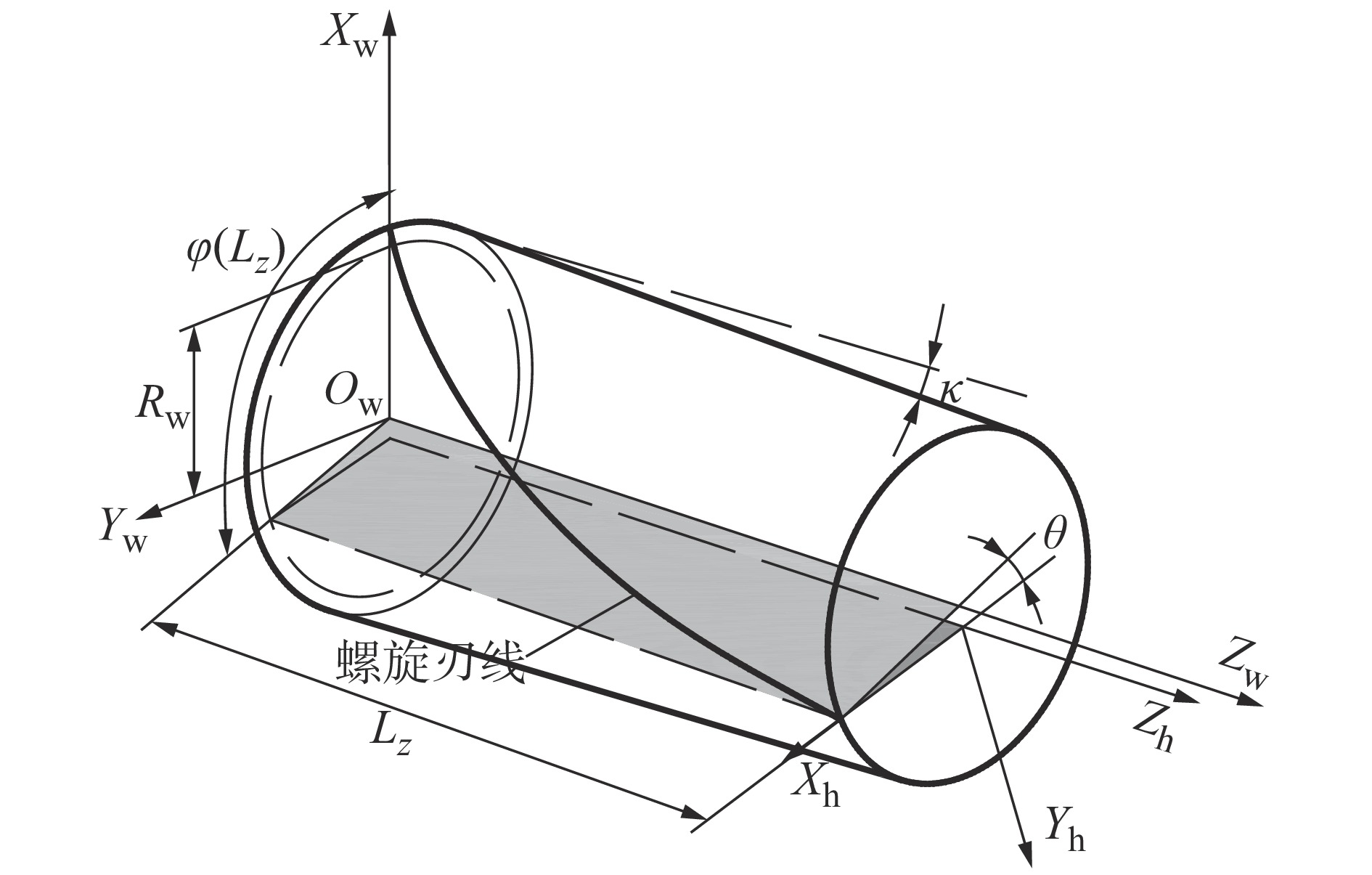
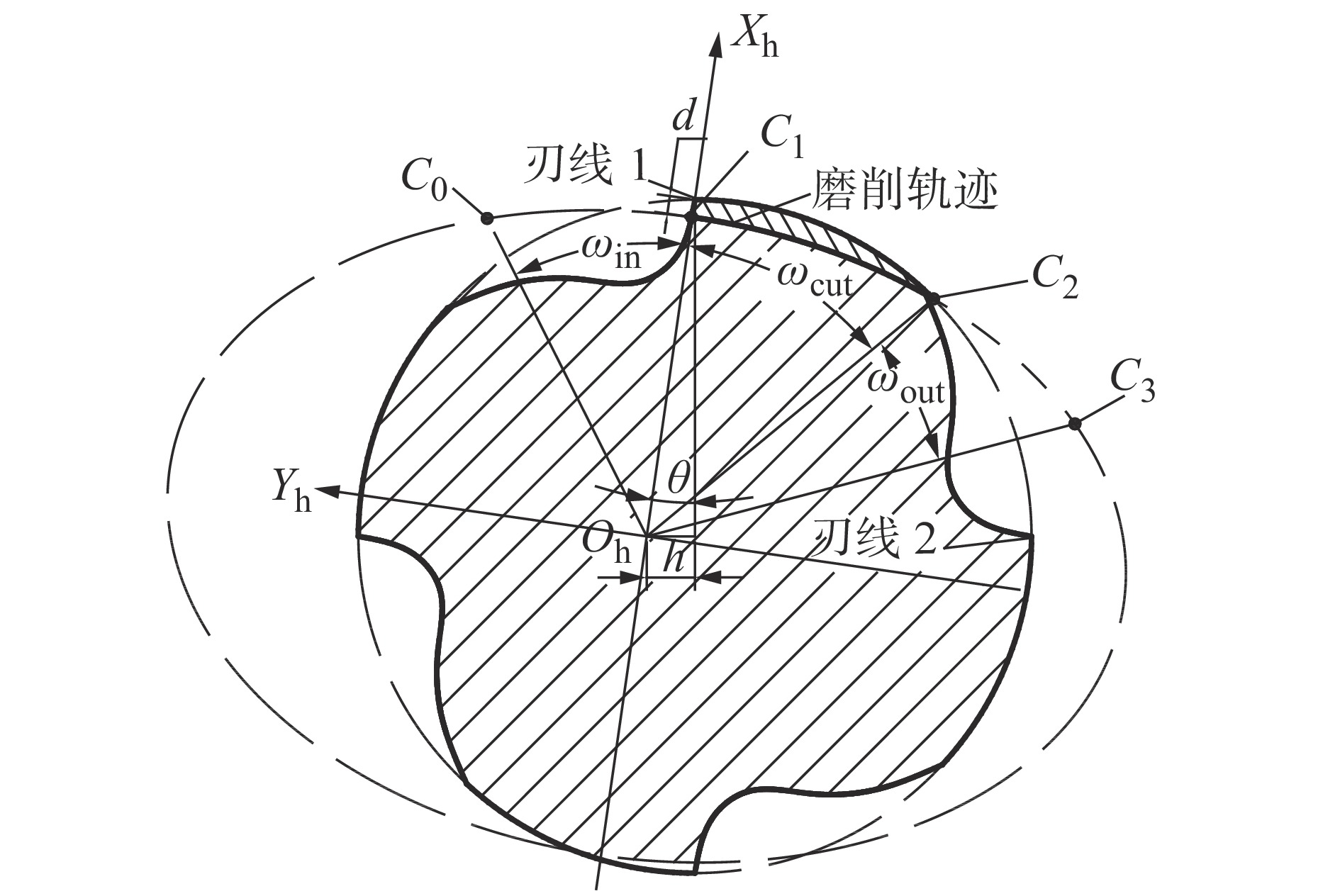
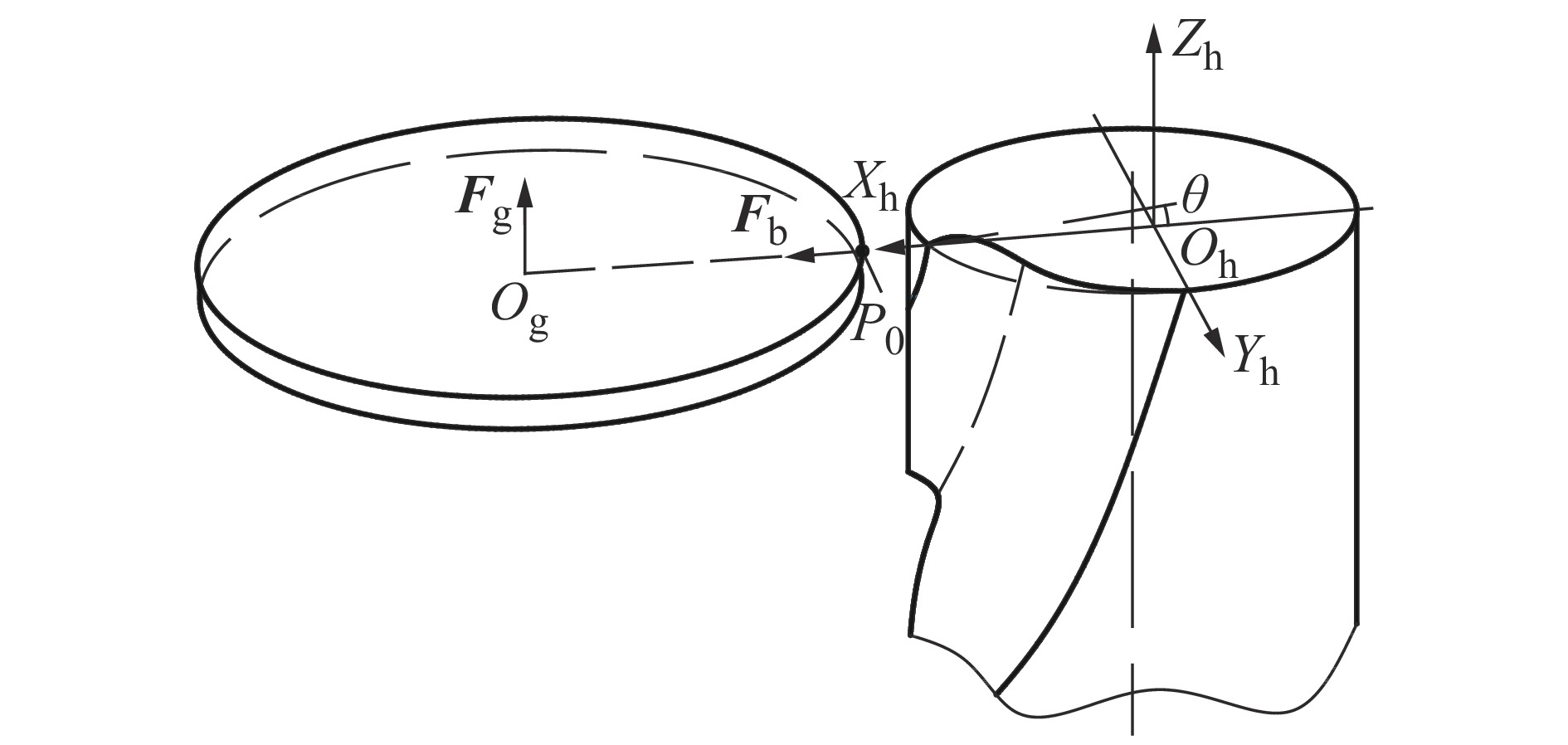
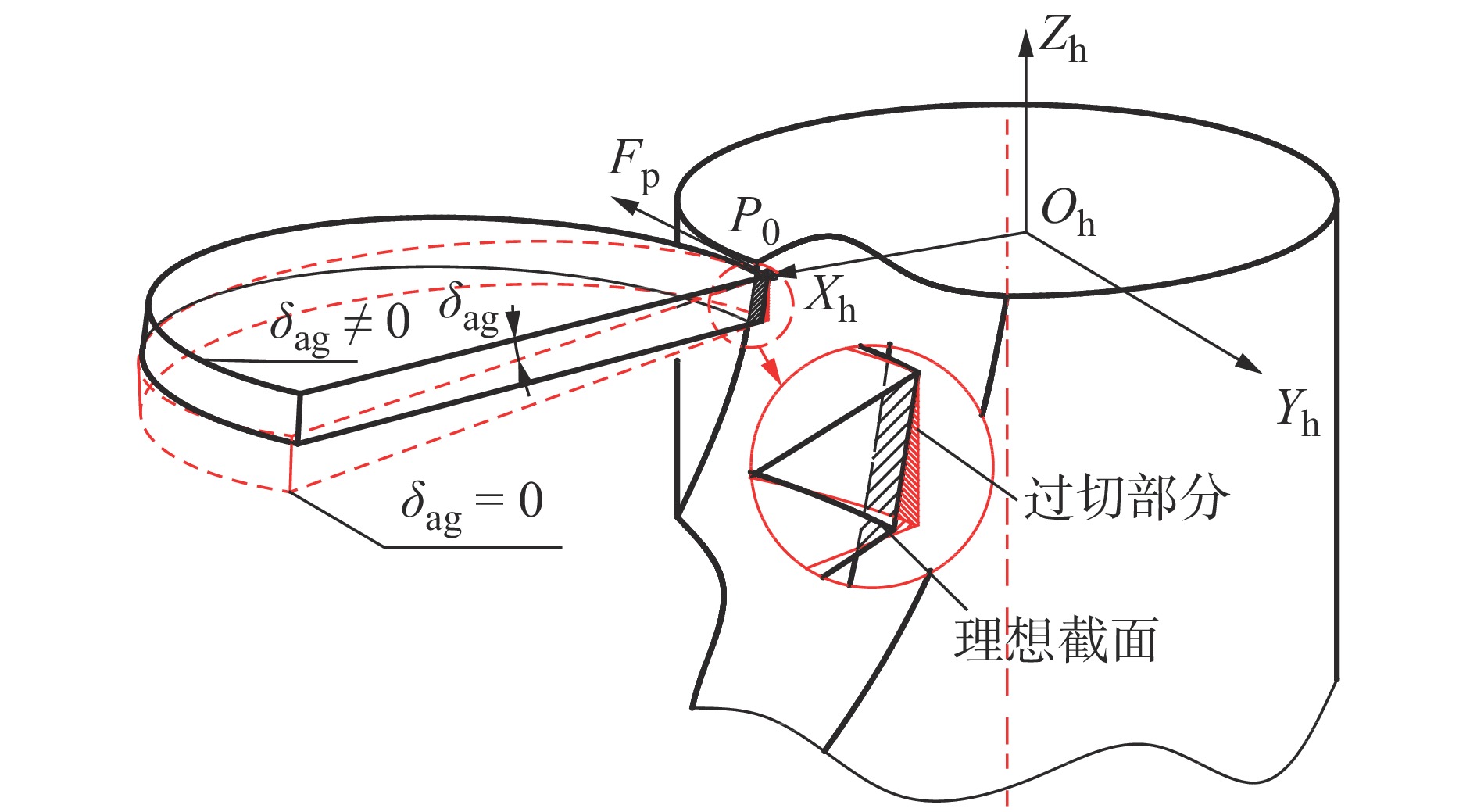
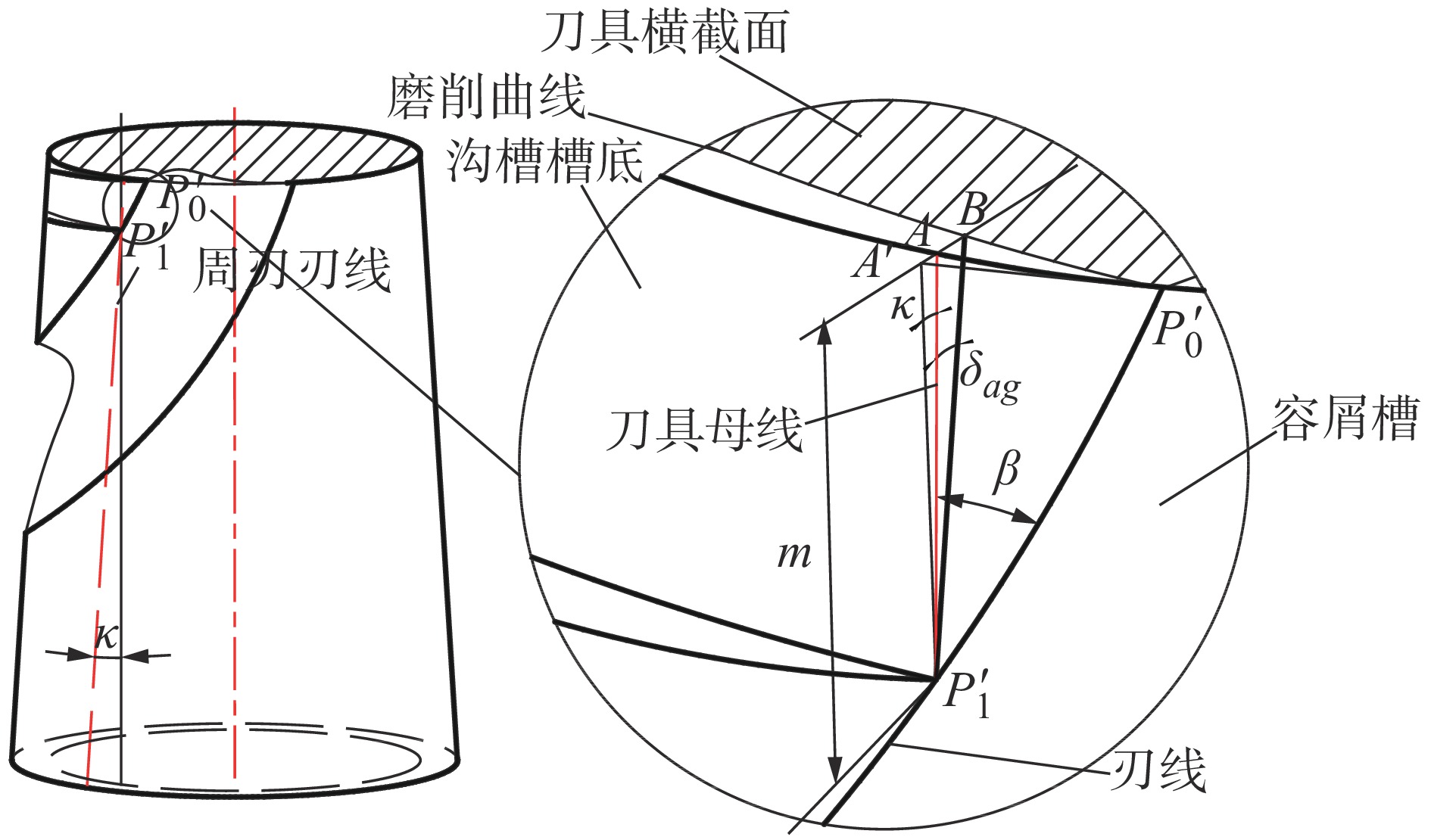
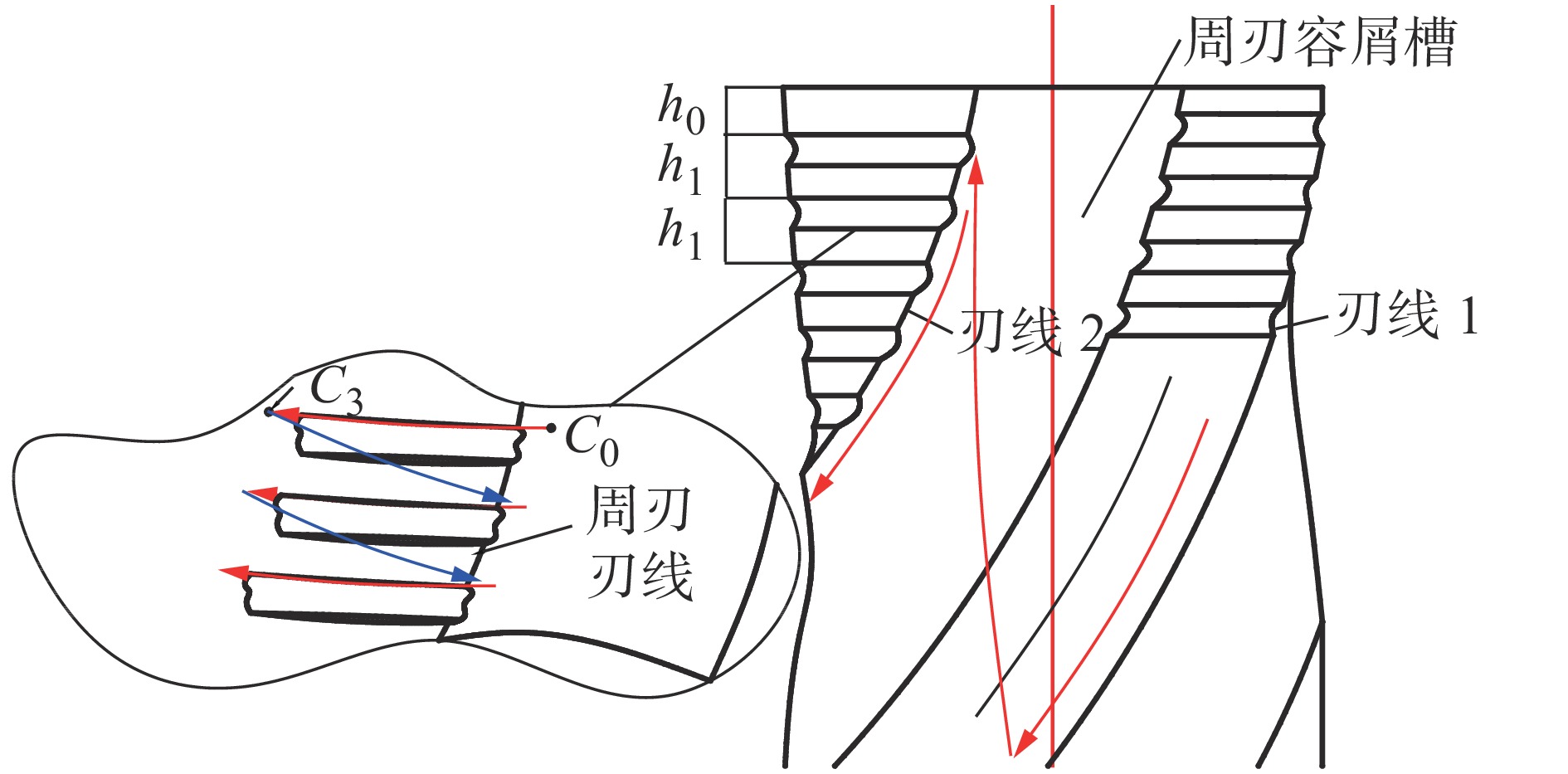
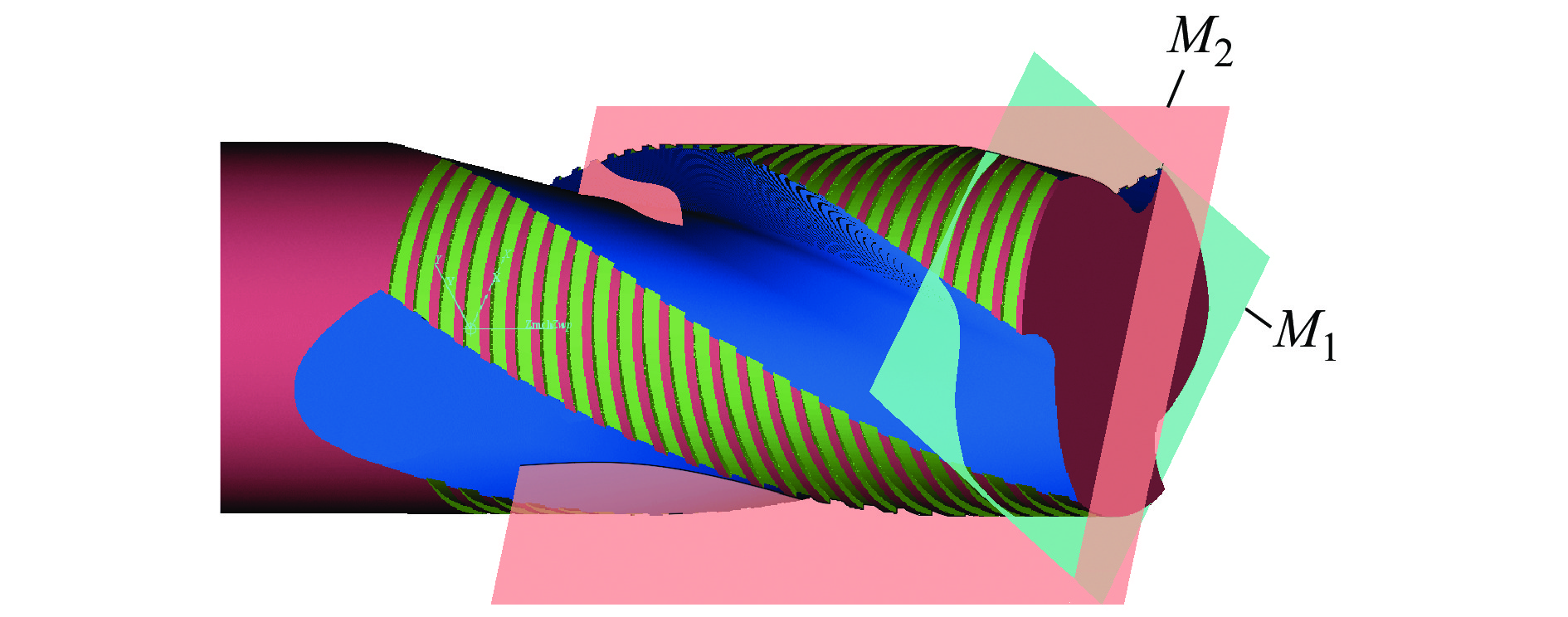
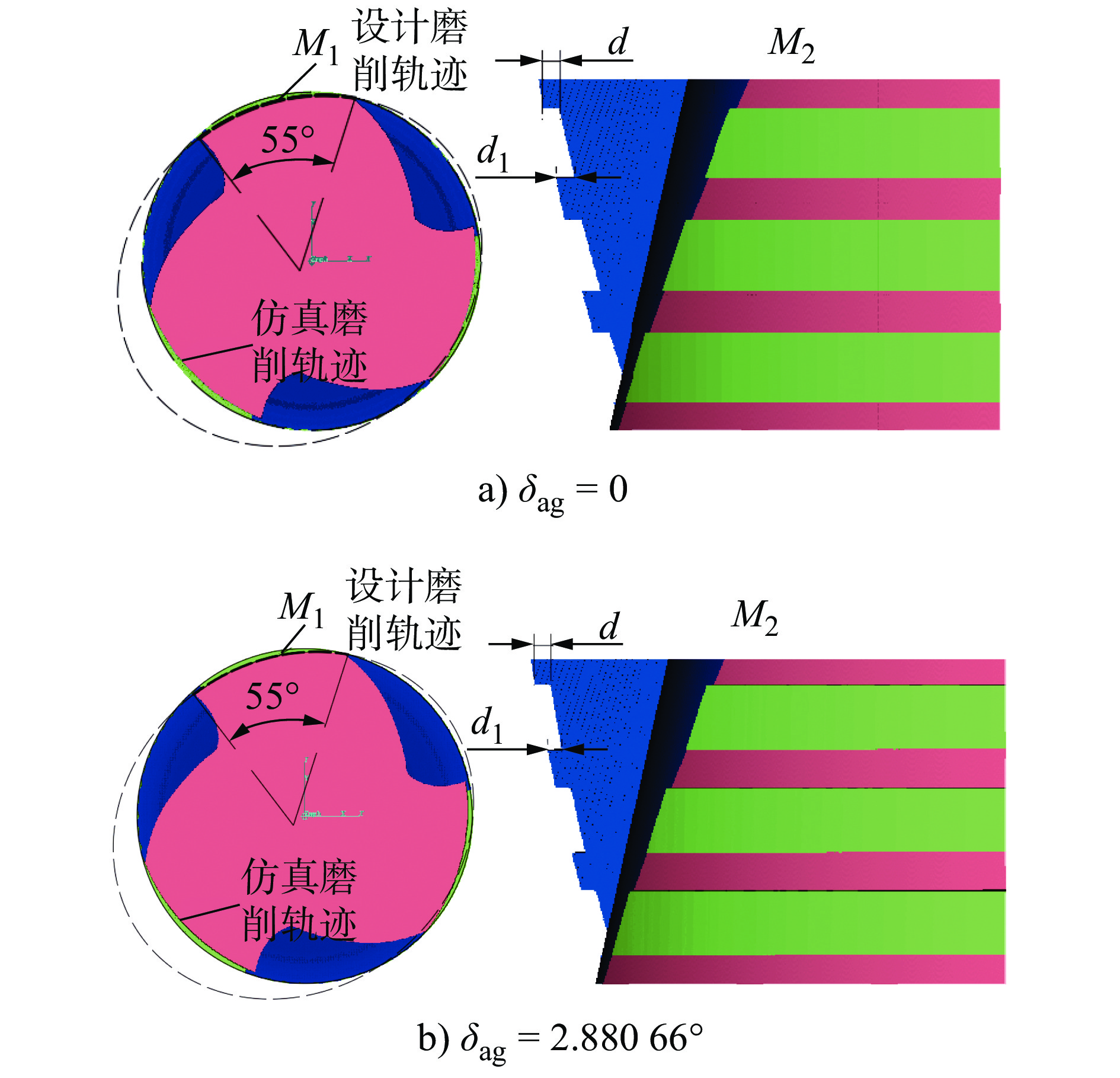
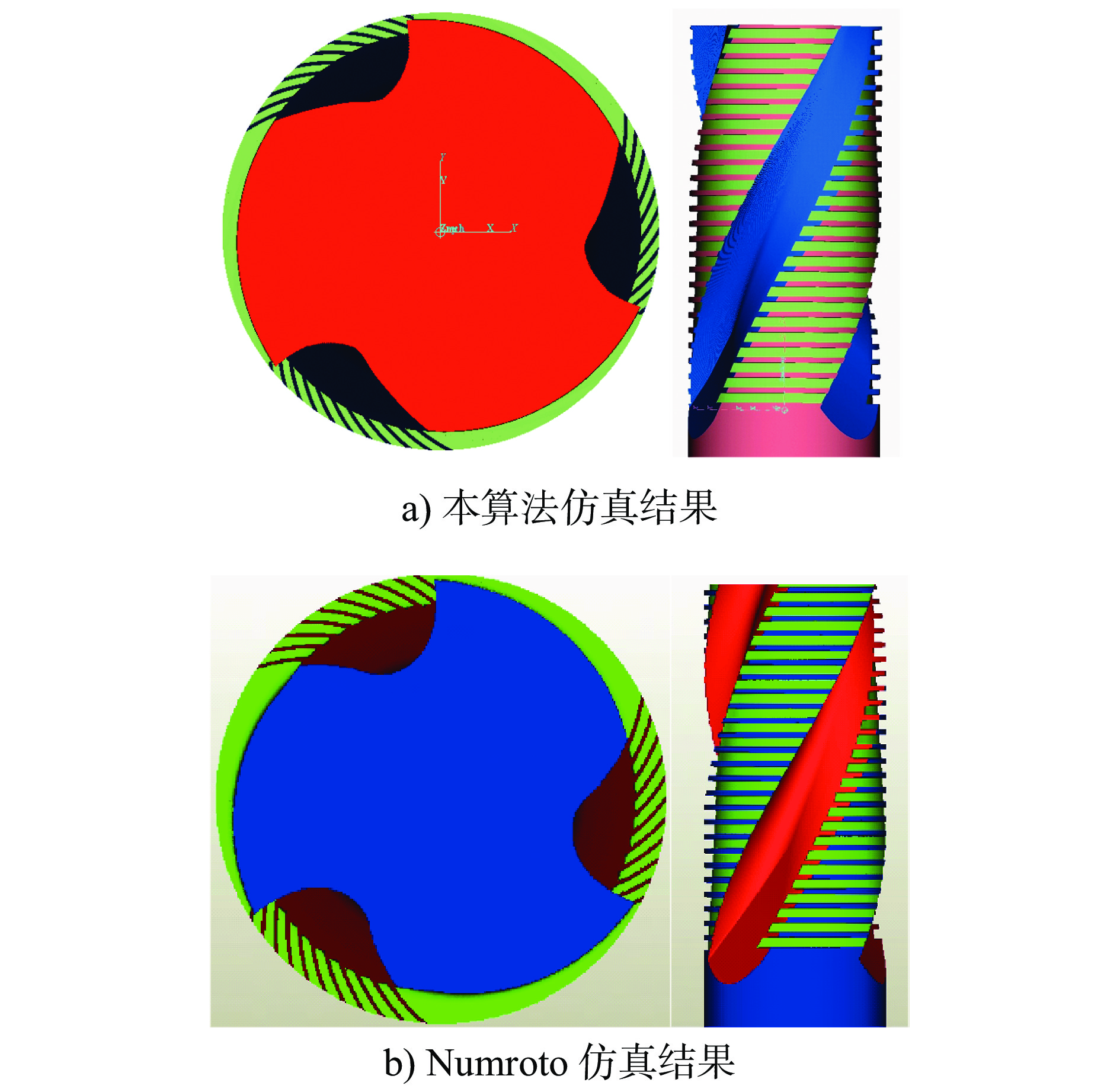
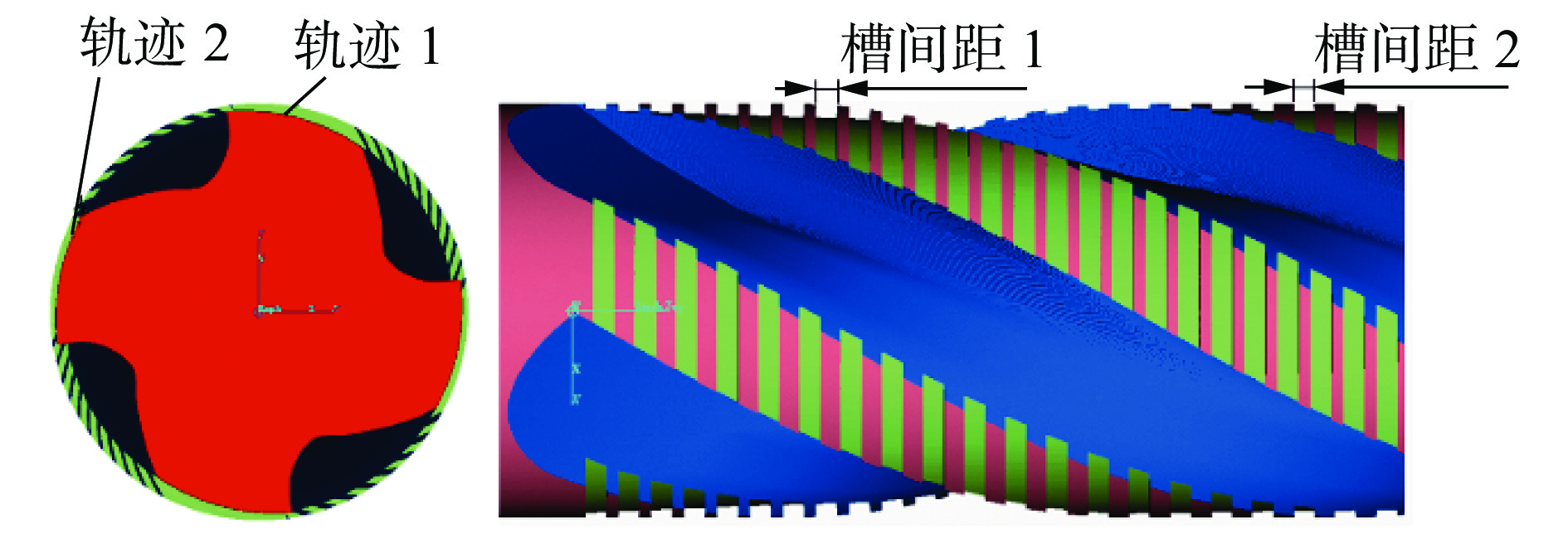
针对粗铣刀分屑槽形状的磨削工艺,对粗铣刀周齿分屑槽结构参数进行了定义,建立了加工坐标系及切深引导曲线方程;借助运动学理论,提出了砂轮磨削姿态和砂轮磨削轨迹的计算方法;在VC++环境开发了一套算法模块,并对其进行了仿真验证及与Numroto磨削软件的仿真结果对比。结果表明,该轨迹算法能够较好的实现预期效果,具有较好的刀具结构扩展性和加工精度。
针对粗铣刀分屑槽形状的磨削工艺,对粗铣刀周齿分屑槽结构参数进行了定义,建立了加工坐标系及切深引导曲线方程;借助运动学理论,提出了砂轮磨削姿态和砂轮磨削轨迹的计算方法;在VC++环境开发了一套算法模块,并对其进行了仿真验证及与Numroto磨削软件的仿真结果对比。结果表明,该轨迹算法能够较好的实现预期效果,具有较好的刀具结构扩展性和加工精度。
2023, 42(9): 1436-1444.
doi: 10.13433/j.cnki.1003-8728.20220078
摘要:
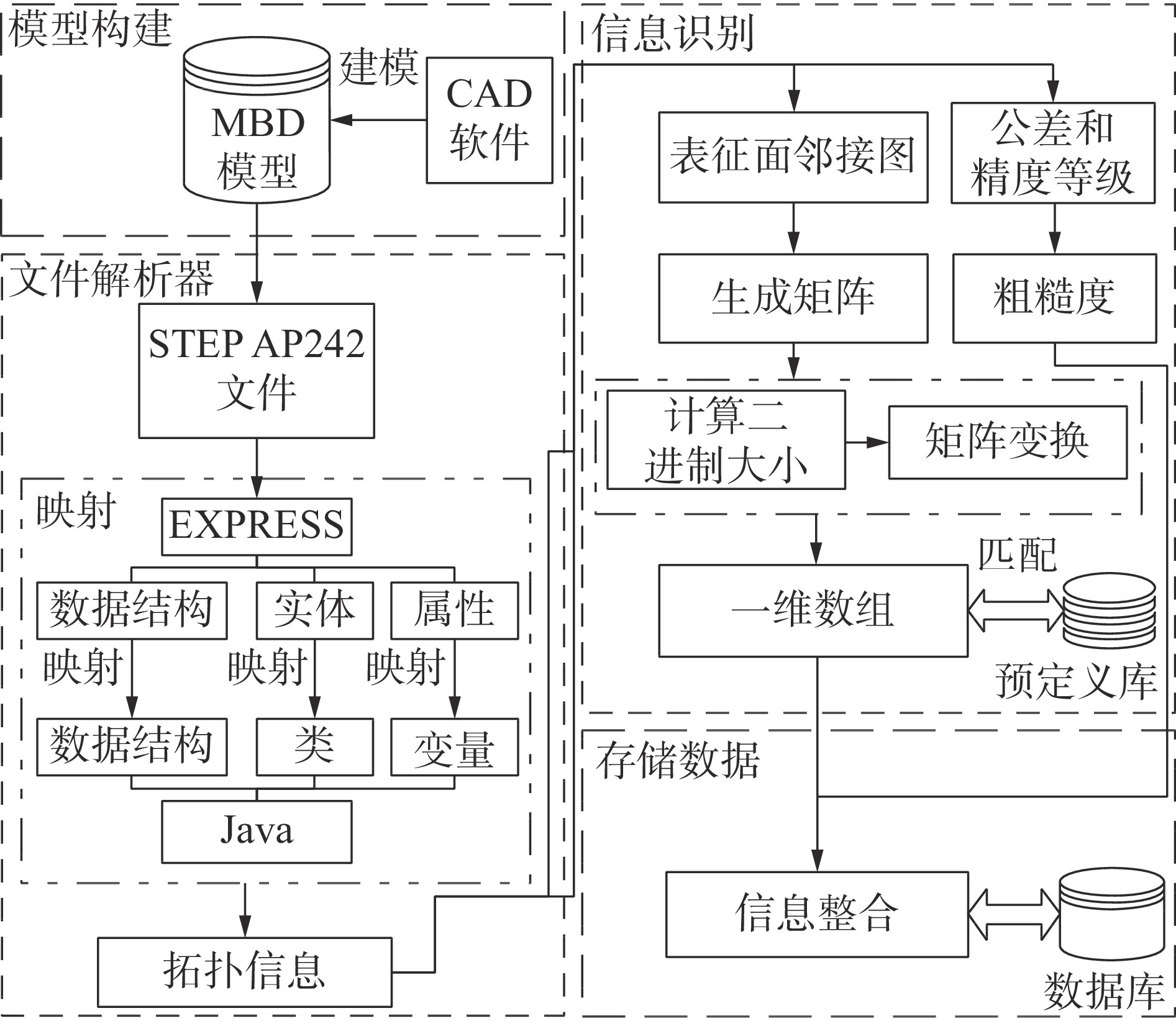
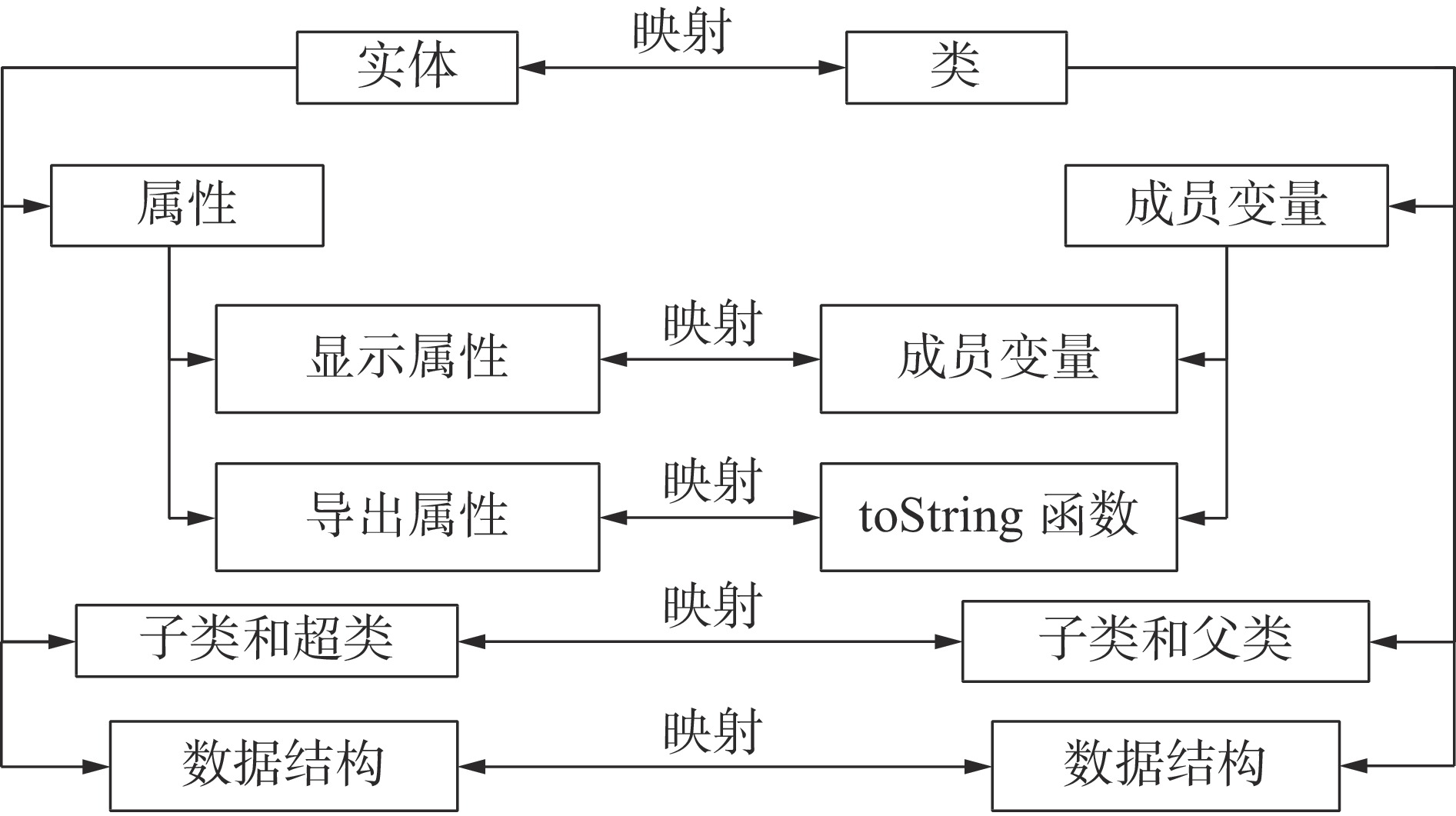
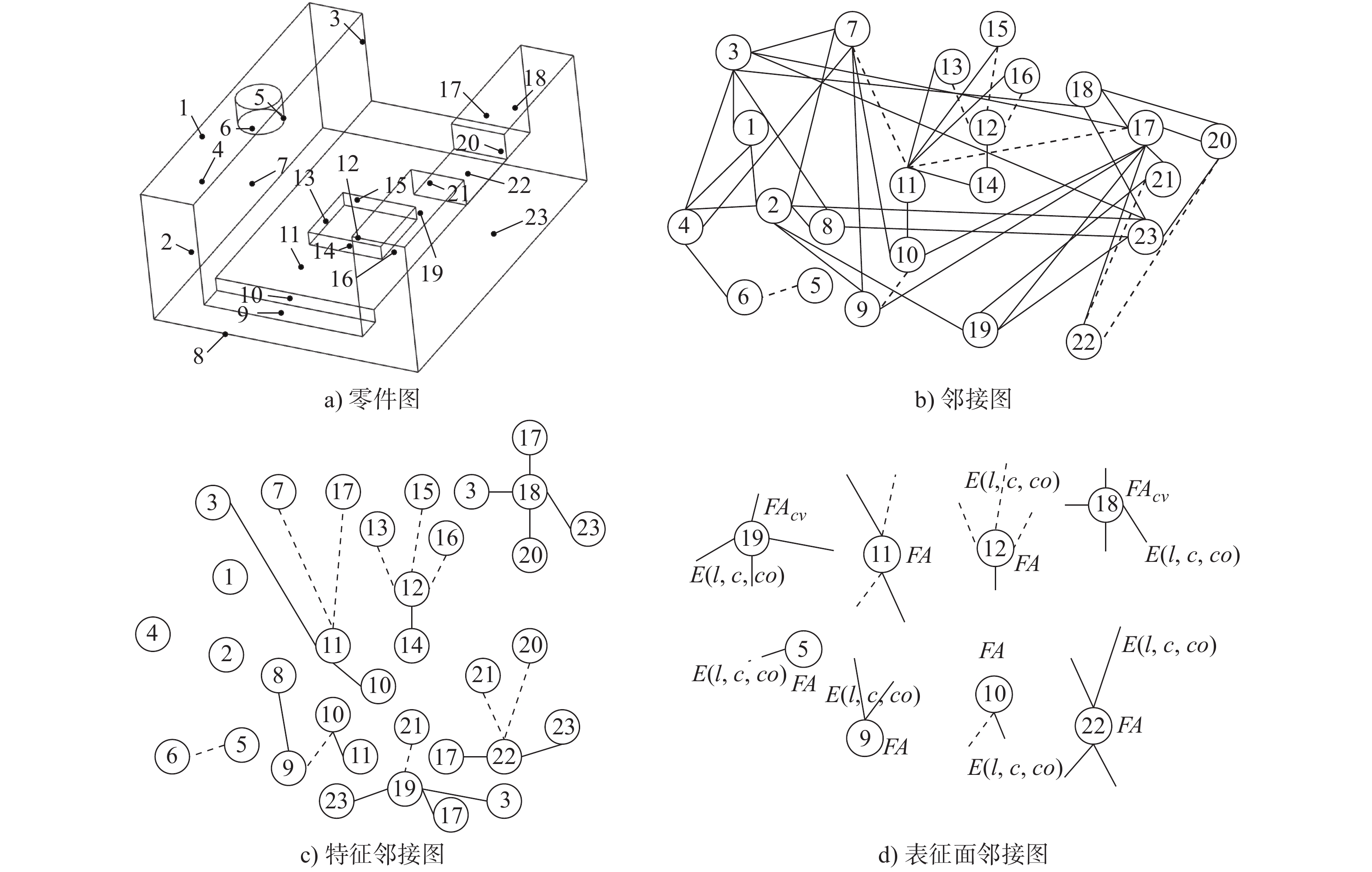
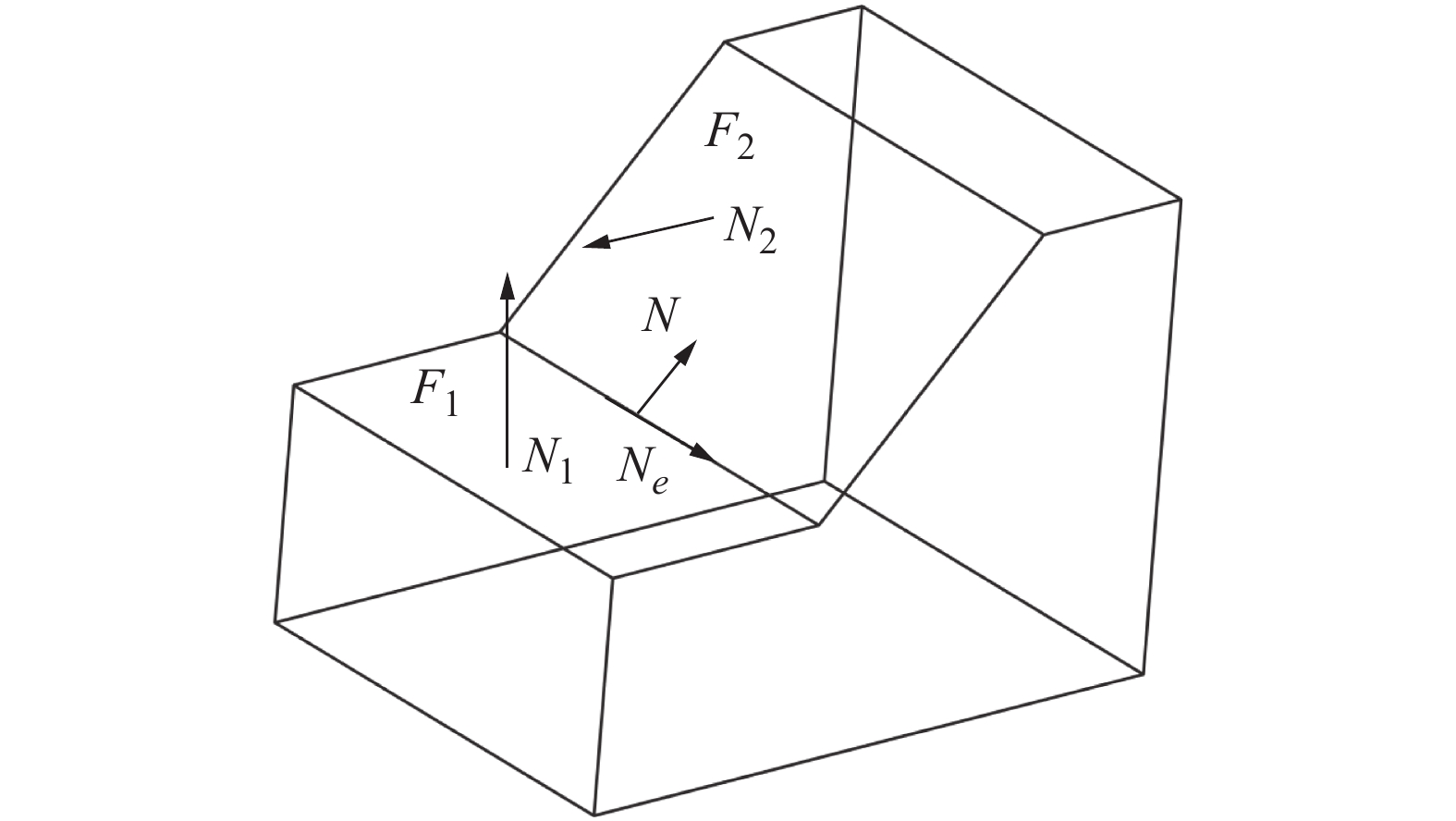
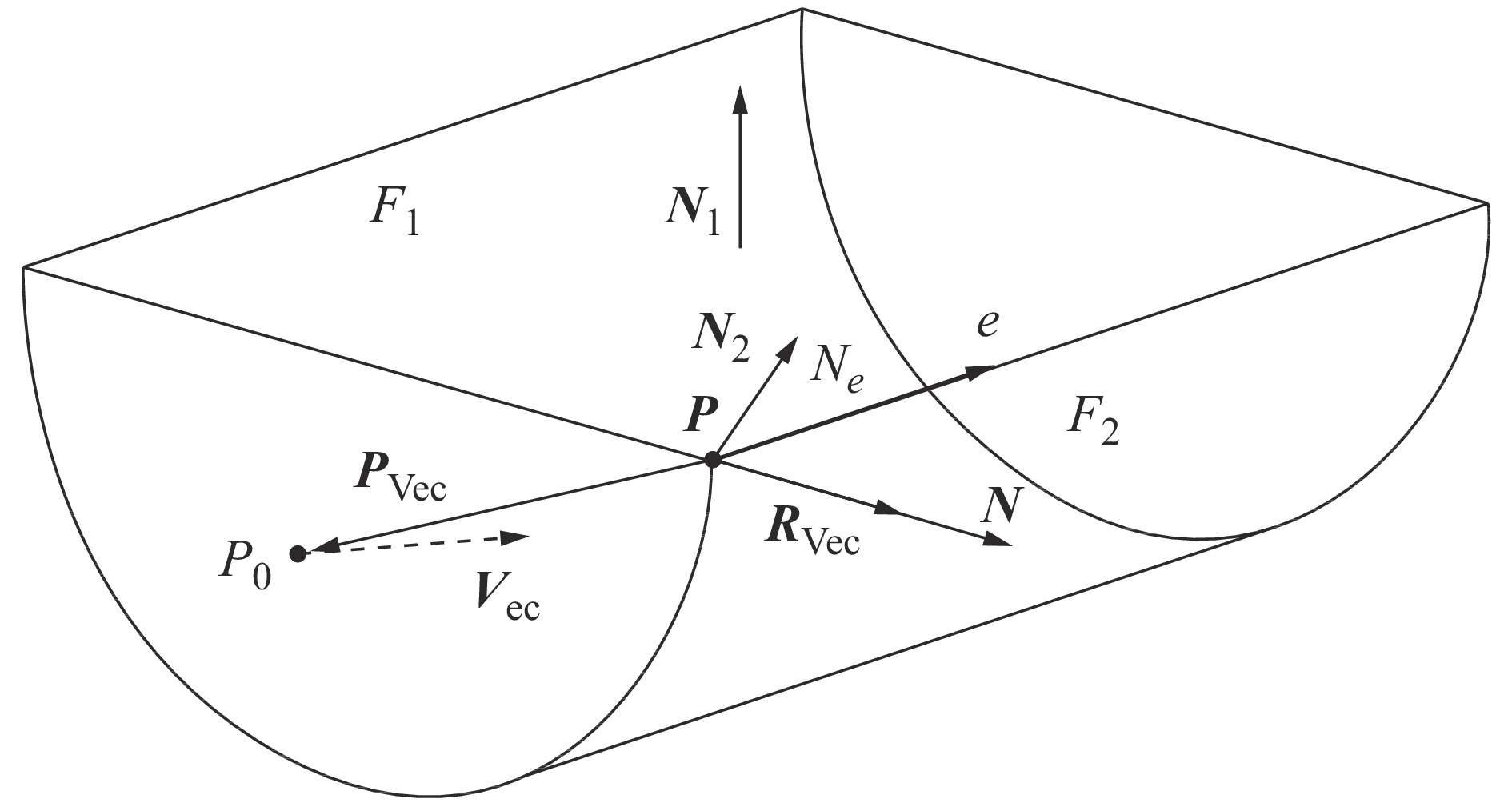
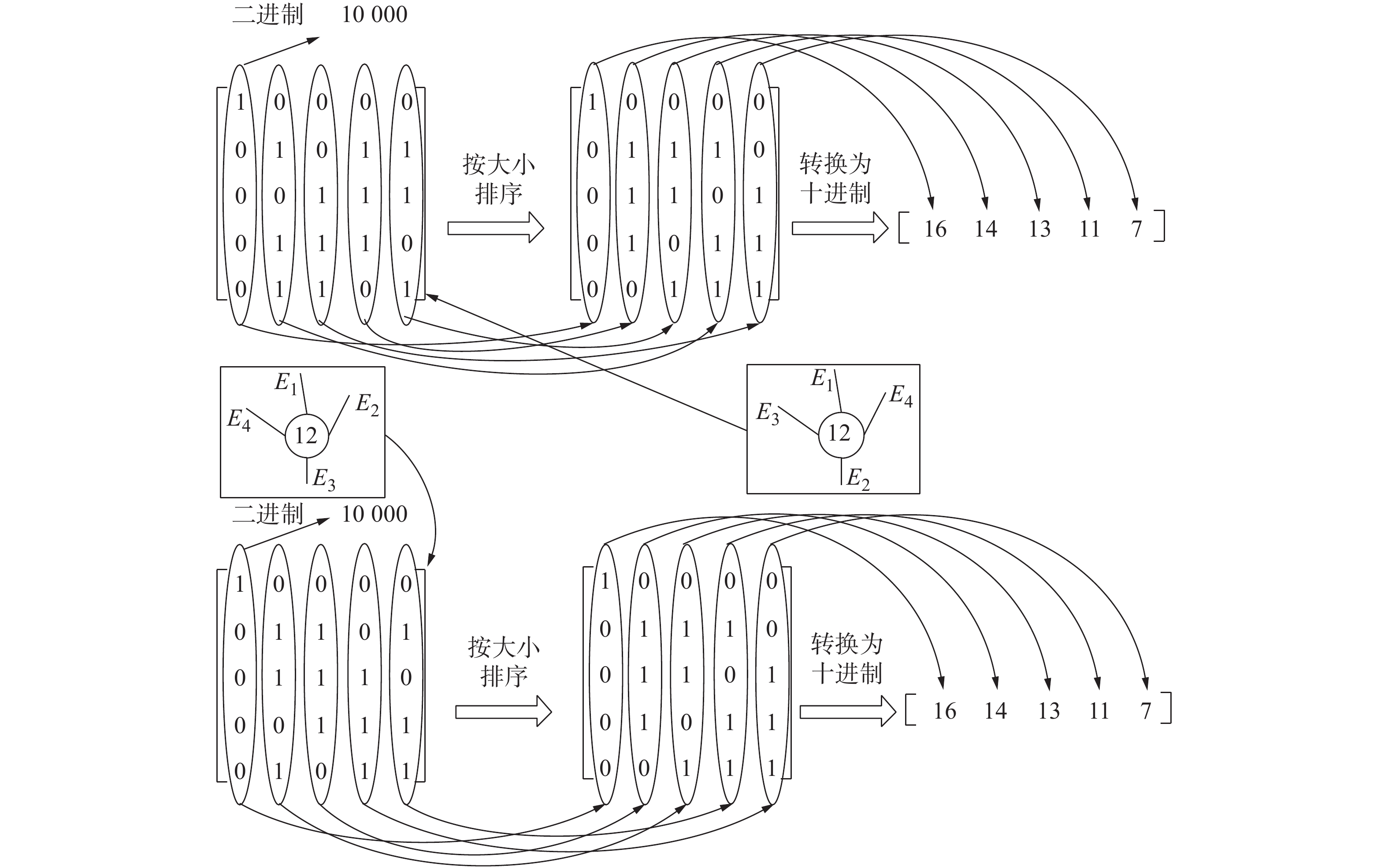
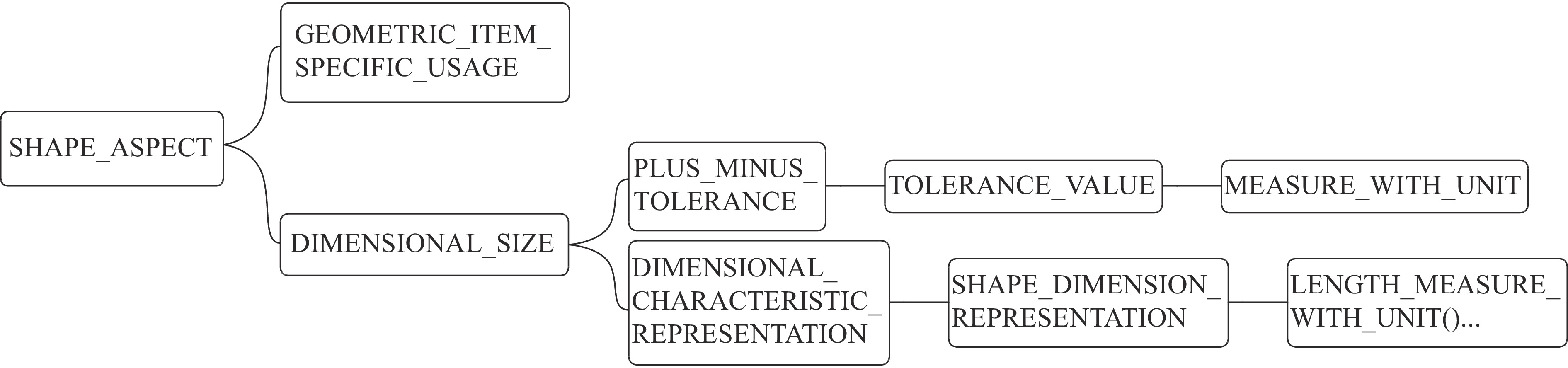
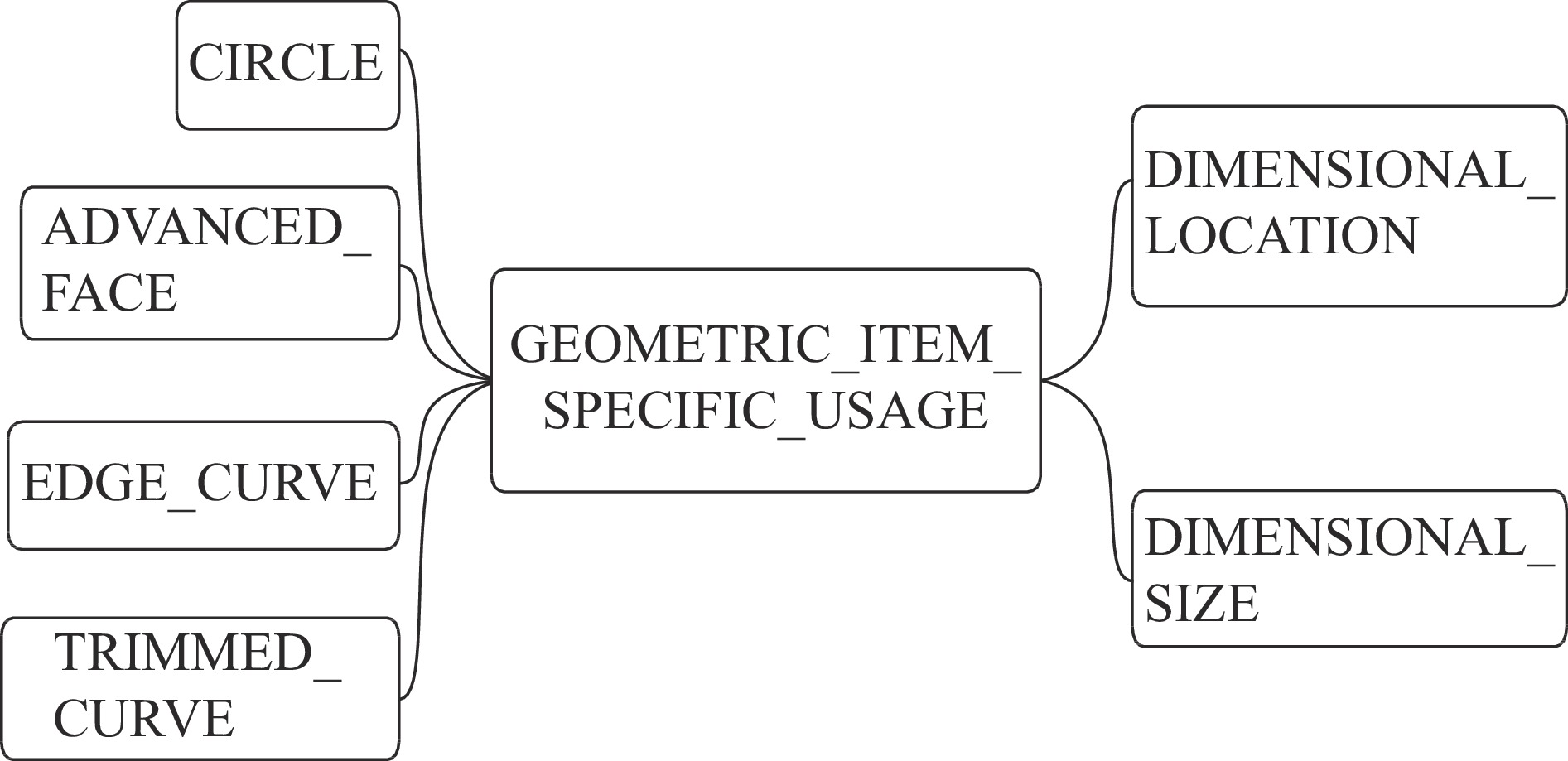
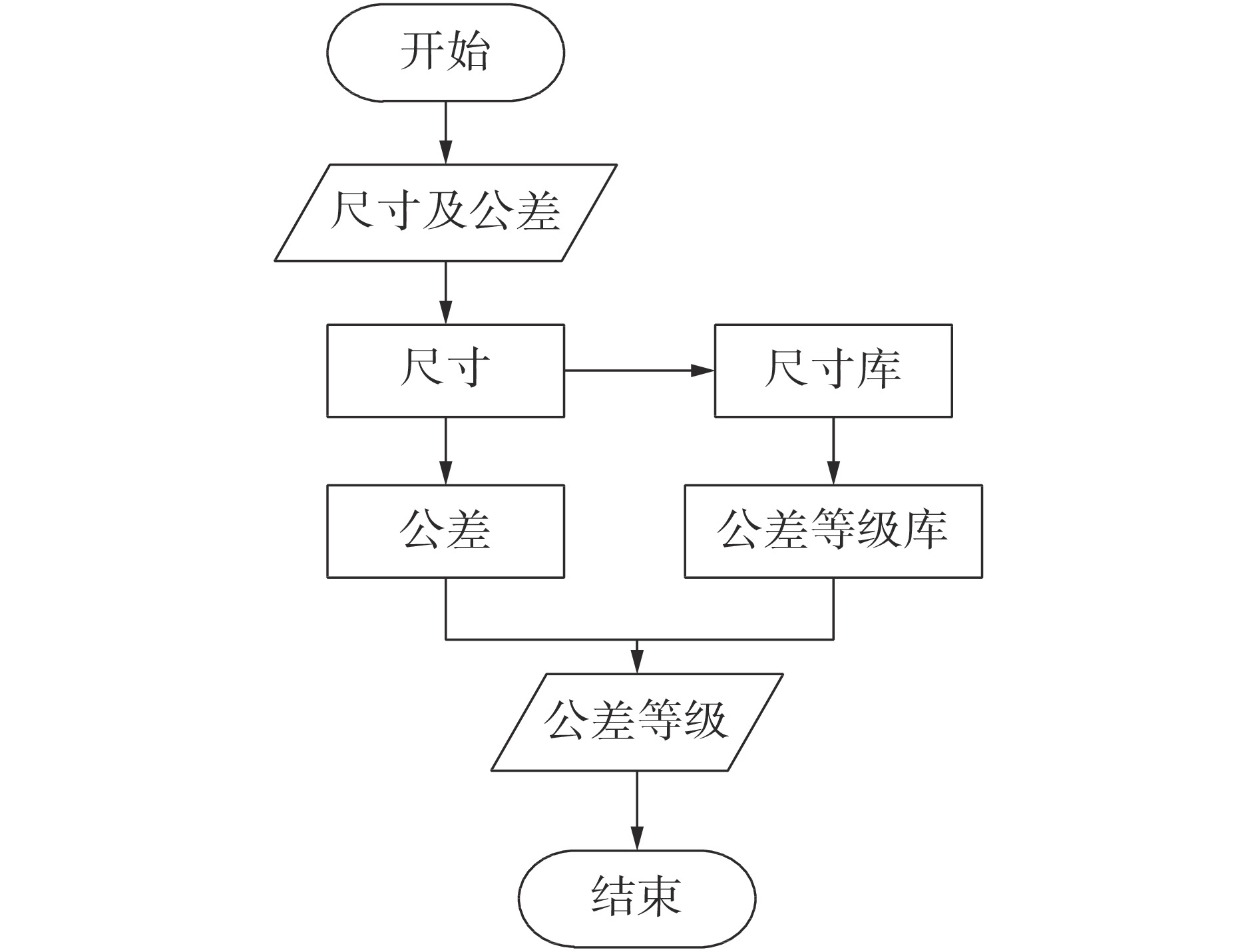
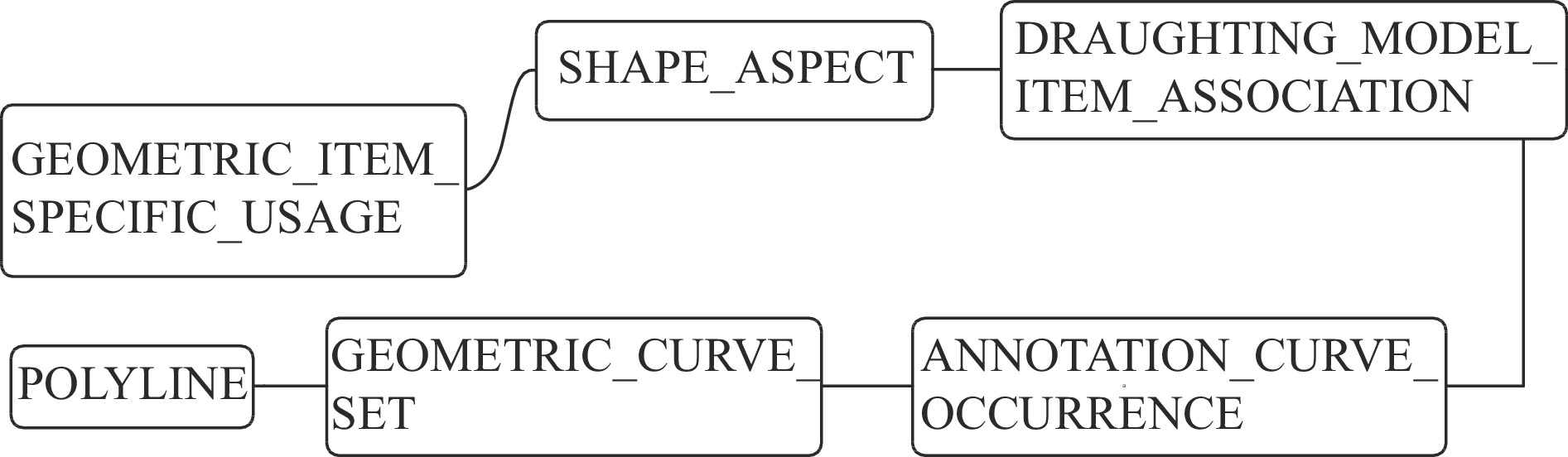
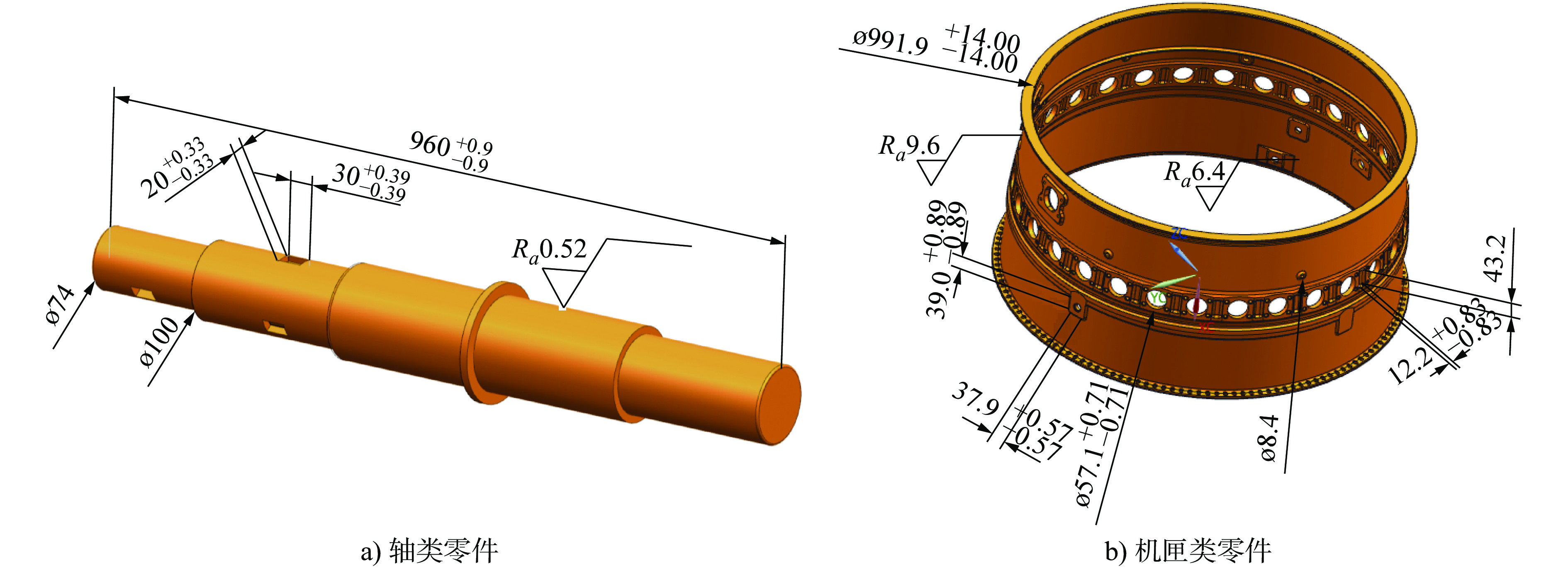
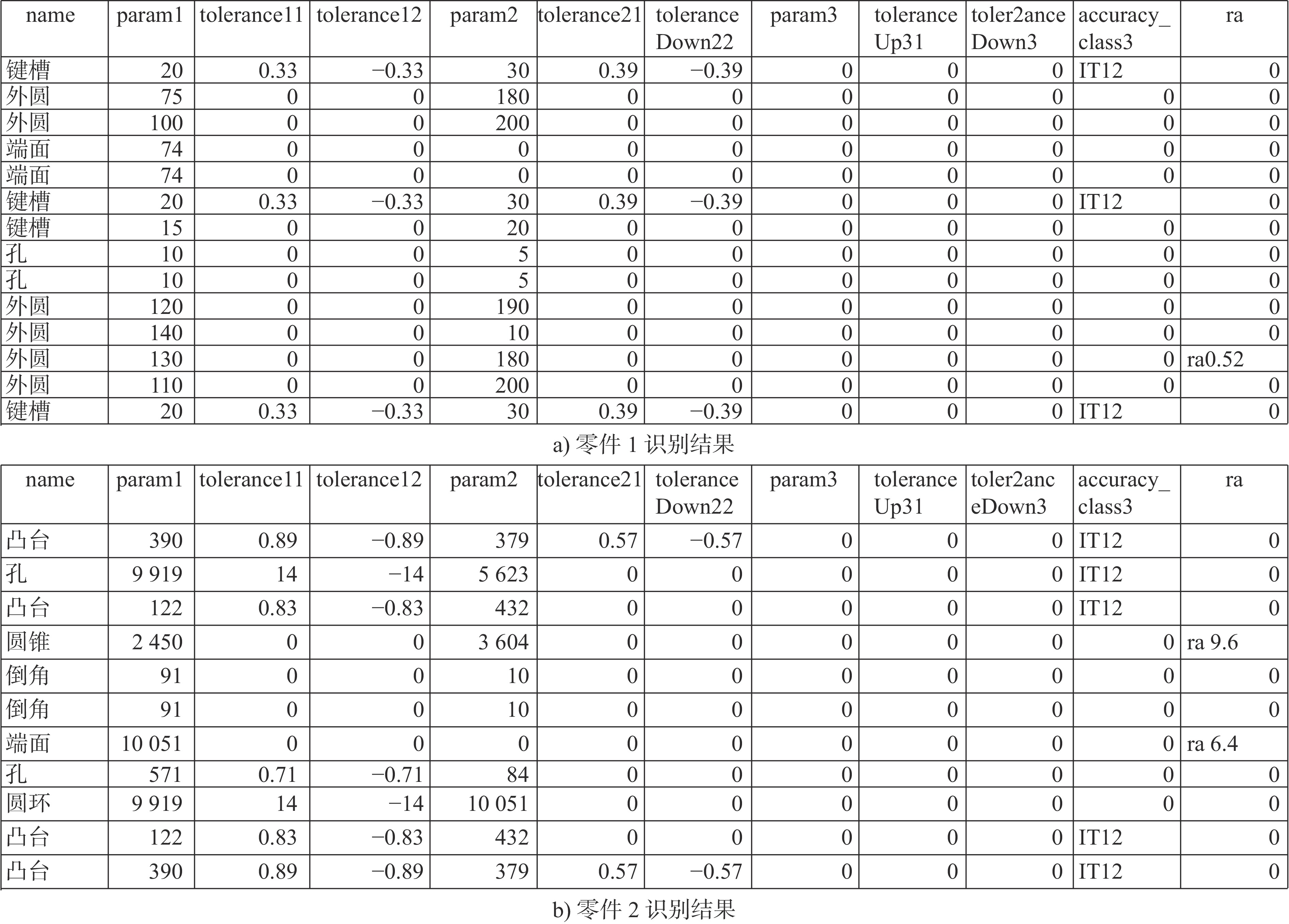
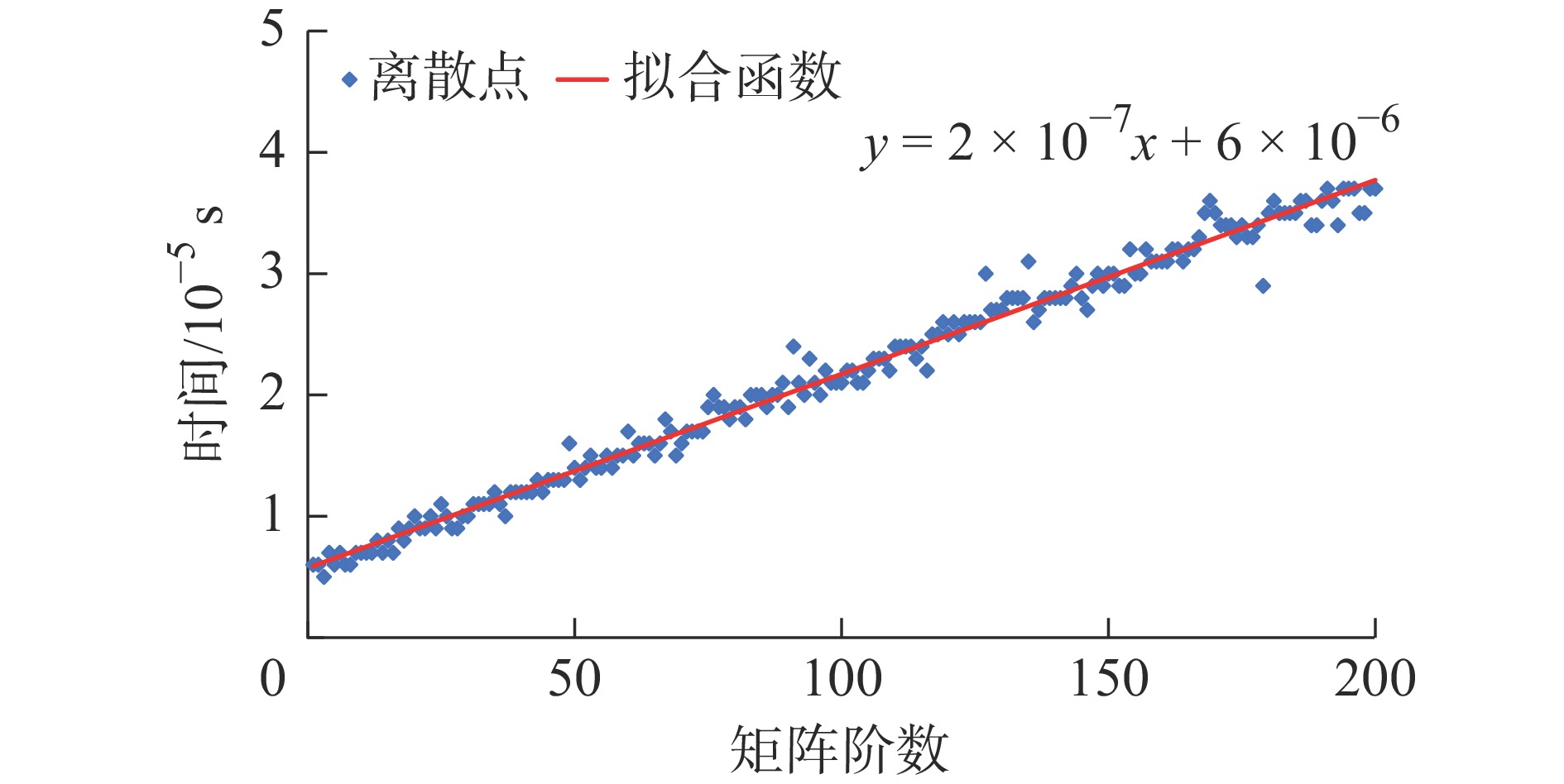
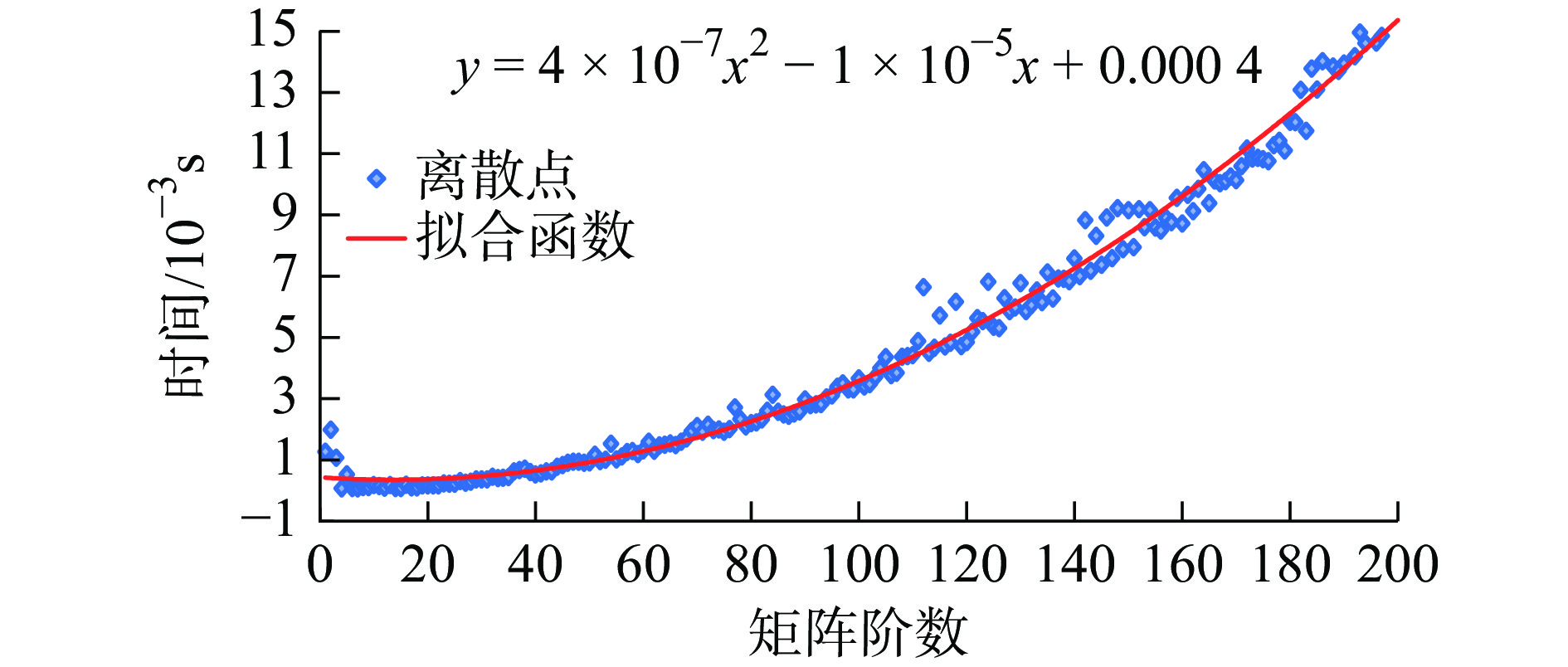
针对特征识别技术对产品制造信息识别的缺失以及匹配算法的复杂性问题,提出了一种基于MBD模型的特征信息自动识别算法。首先,通过EXPRESS和Java映射,构建STEP文件解析器解析MBD模型信息。其次,建立基于图和提示的几何特征识别算法,用表征面邻接图作为匹配算法的数据结构,以提示作为搜索与特征库进行匹配。然后,提出基于关系树的产品制造信息识别方法识别产品制造信息。最后,以轴和机匣作为测试对象,在Intellij IDEA平台中对所提方法进行了验证,分析了匹配算法时间复杂度。结果表明,该方法能够识别几何特征信息和产品制造信息,本匹配算法时间复杂度为O(n),优于时间复杂度为O(n2)的传统匹配算法。
针对特征识别技术对产品制造信息识别的缺失以及匹配算法的复杂性问题,提出了一种基于MBD模型的特征信息自动识别算法。首先,通过EXPRESS和Java映射,构建STEP文件解析器解析MBD模型信息。其次,建立基于图和提示的几何特征识别算法,用表征面邻接图作为匹配算法的数据结构,以提示作为搜索与特征库进行匹配。然后,提出基于关系树的产品制造信息识别方法识别产品制造信息。最后,以轴和机匣作为测试对象,在Intellij IDEA平台中对所提方法进行了验证,分析了匹配算法时间复杂度。结果表明,该方法能够识别几何特征信息和产品制造信息,本匹配算法时间复杂度为O(n),优于时间复杂度为O(n2)的传统匹配算法。

2023, 42(9): 1445-1454.
doi: 10.13433/j.cnki.1003-8728.20220095
摘要:
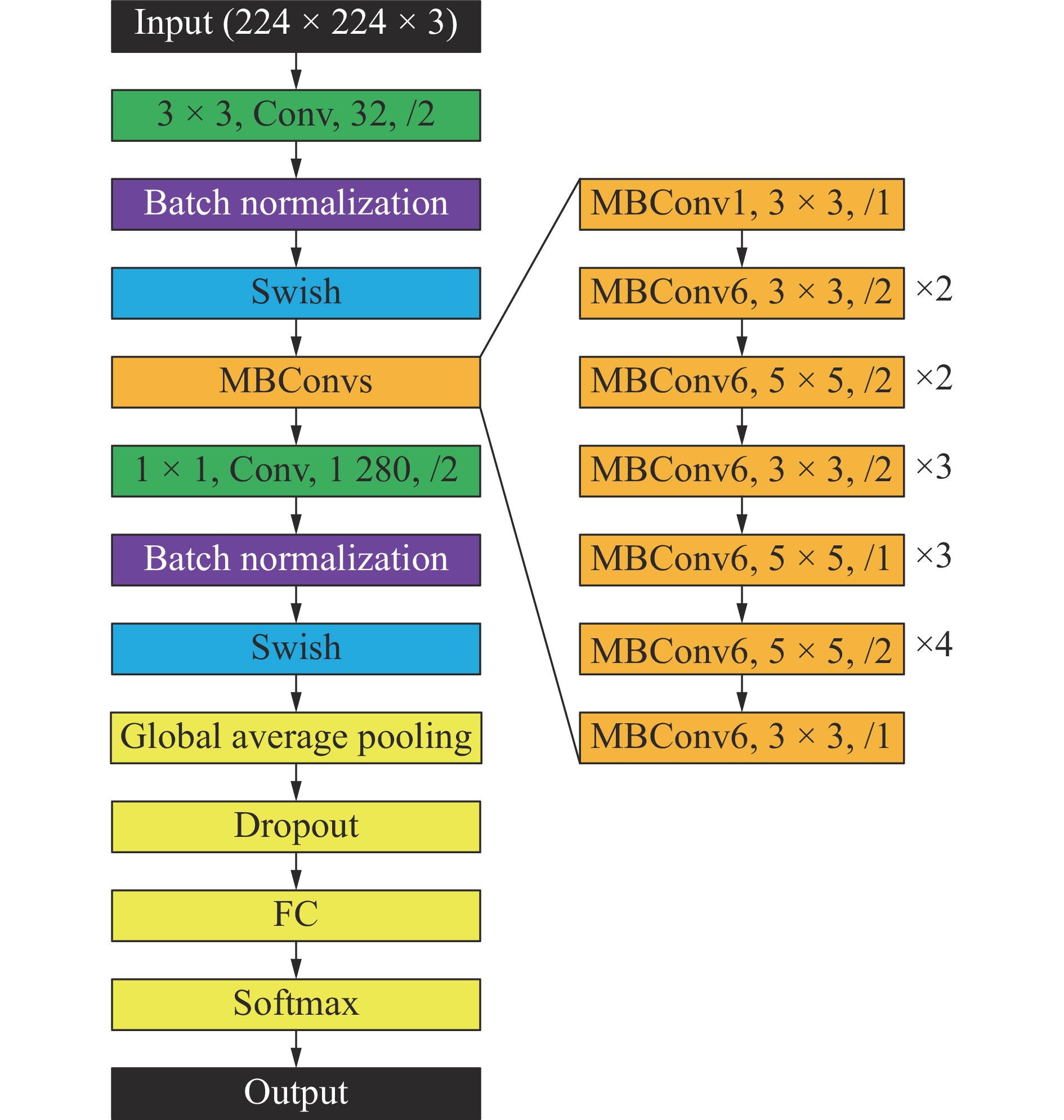
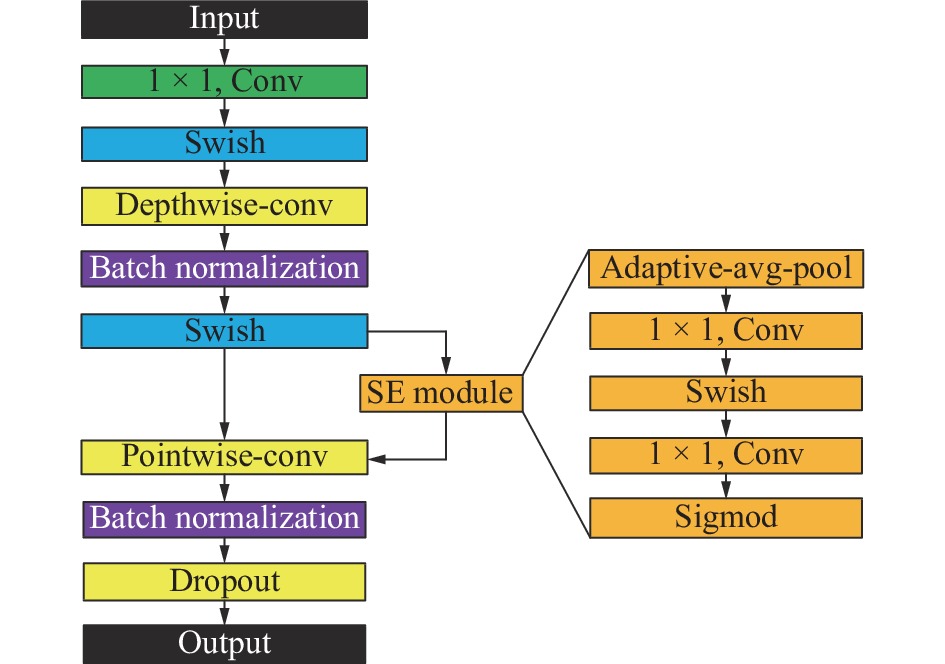
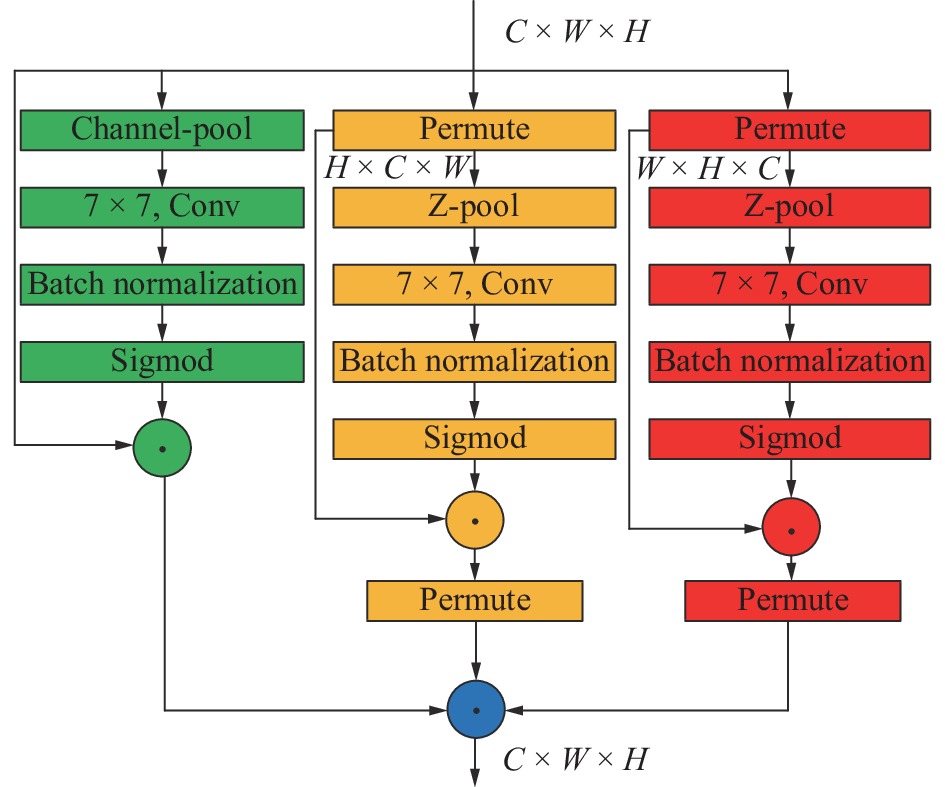
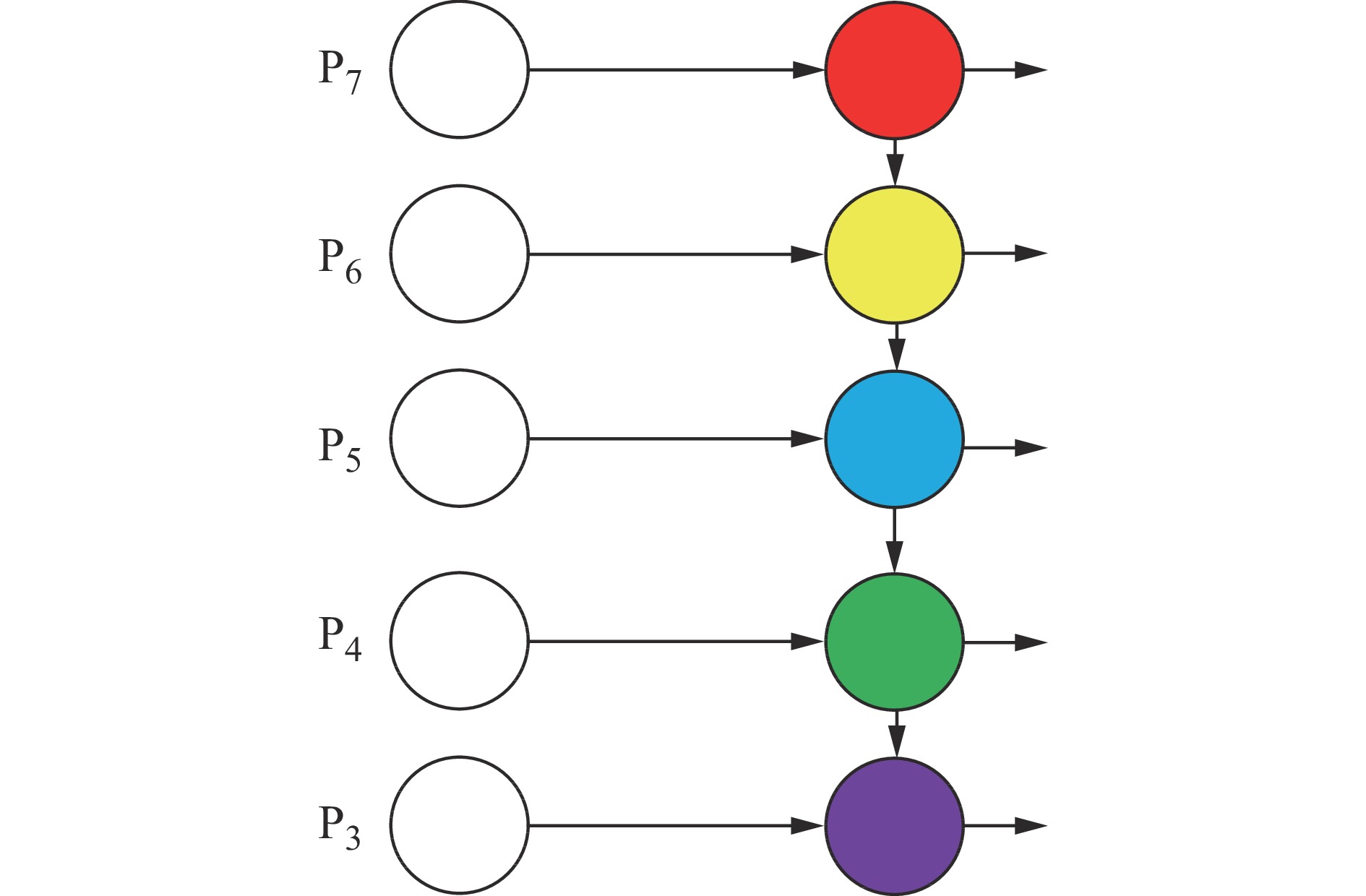
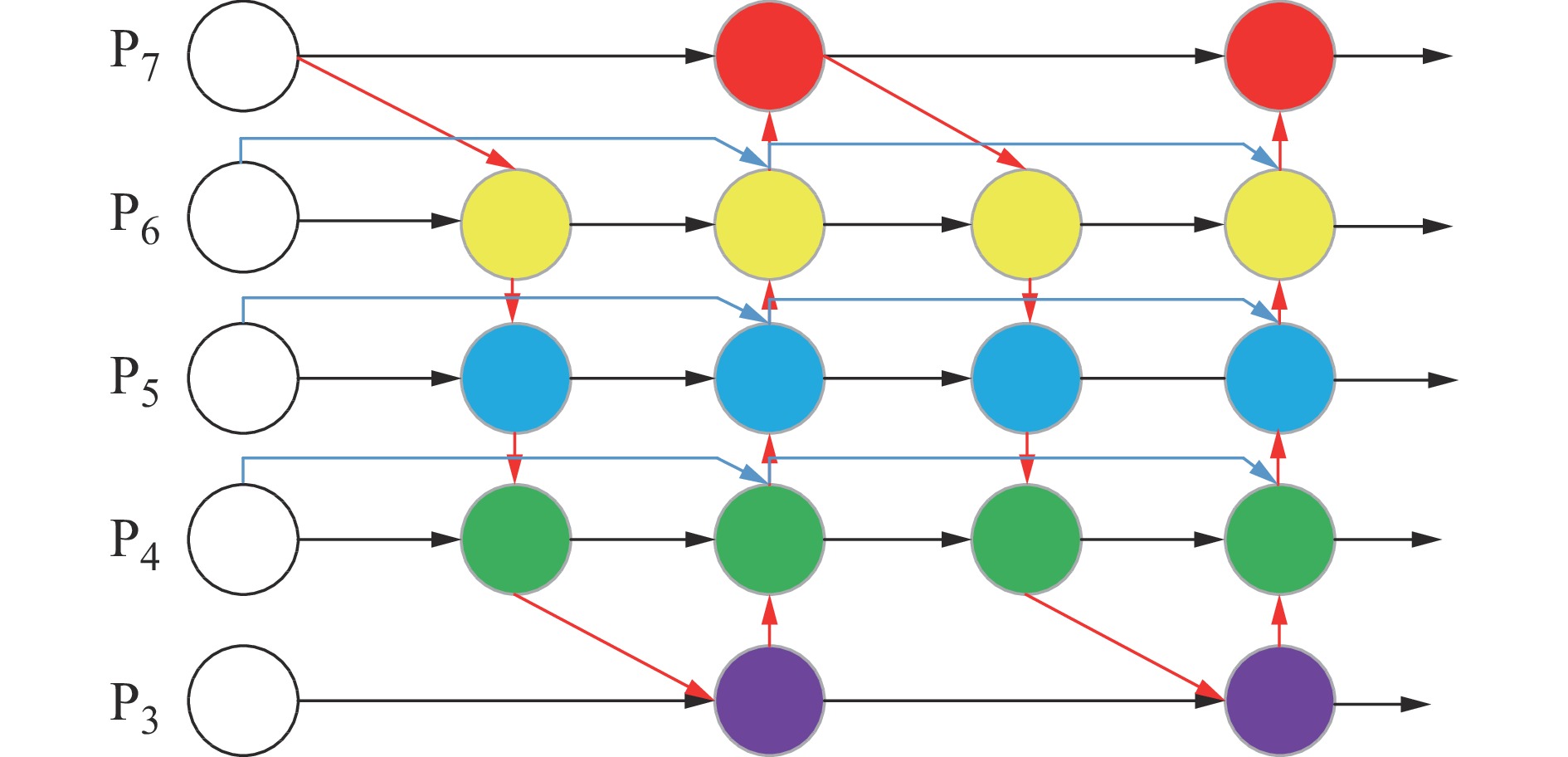
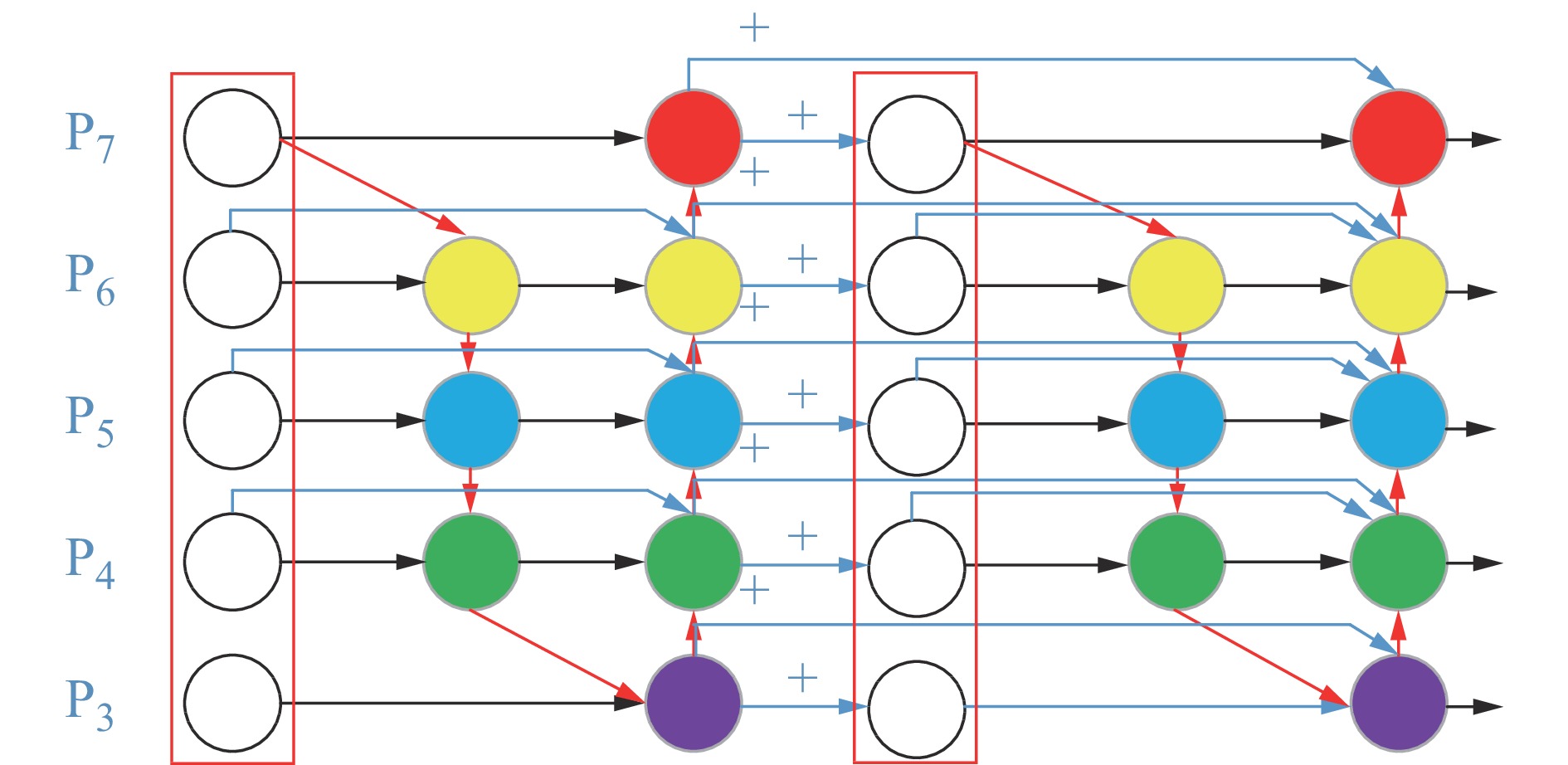
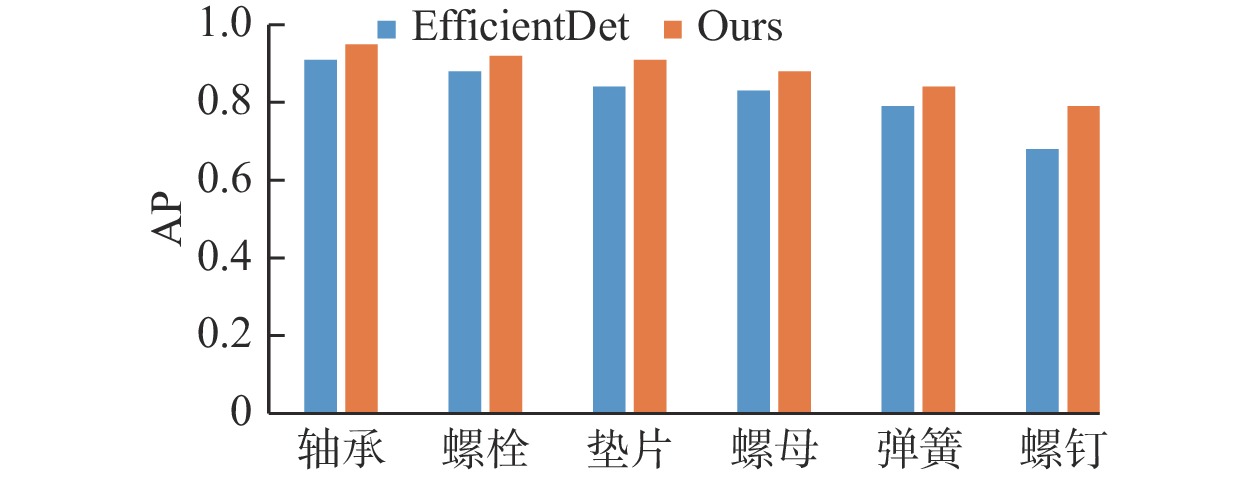
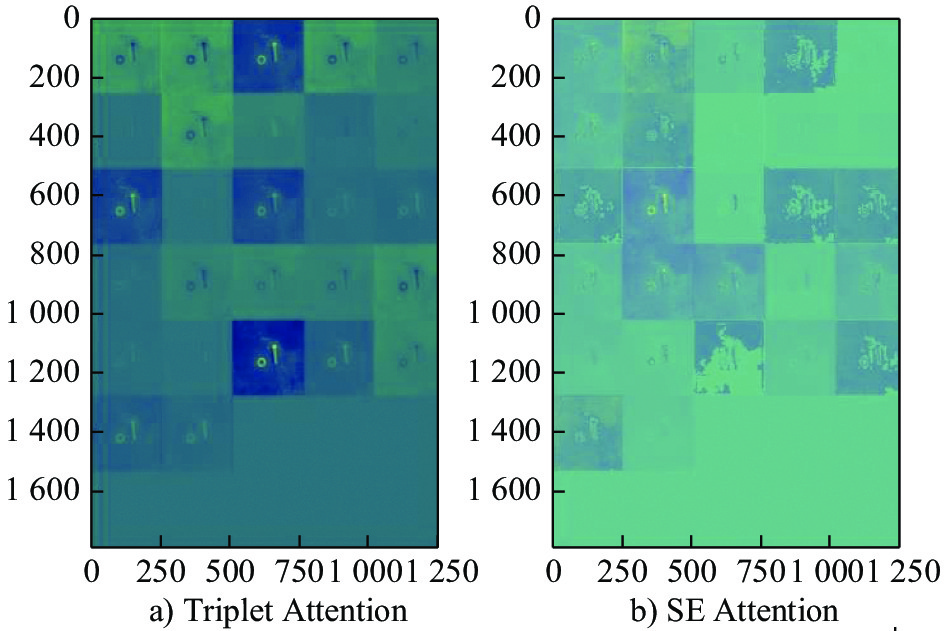
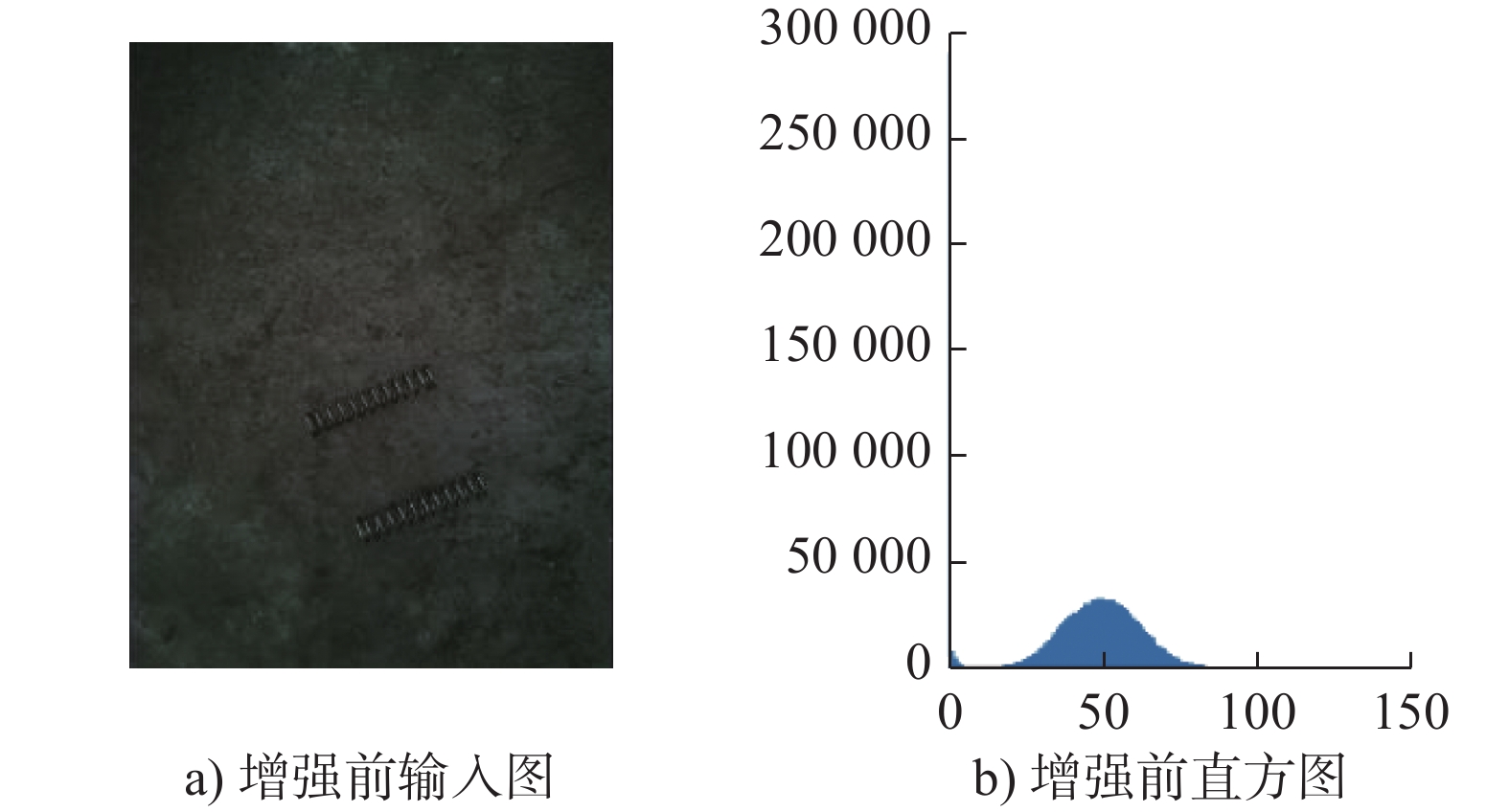
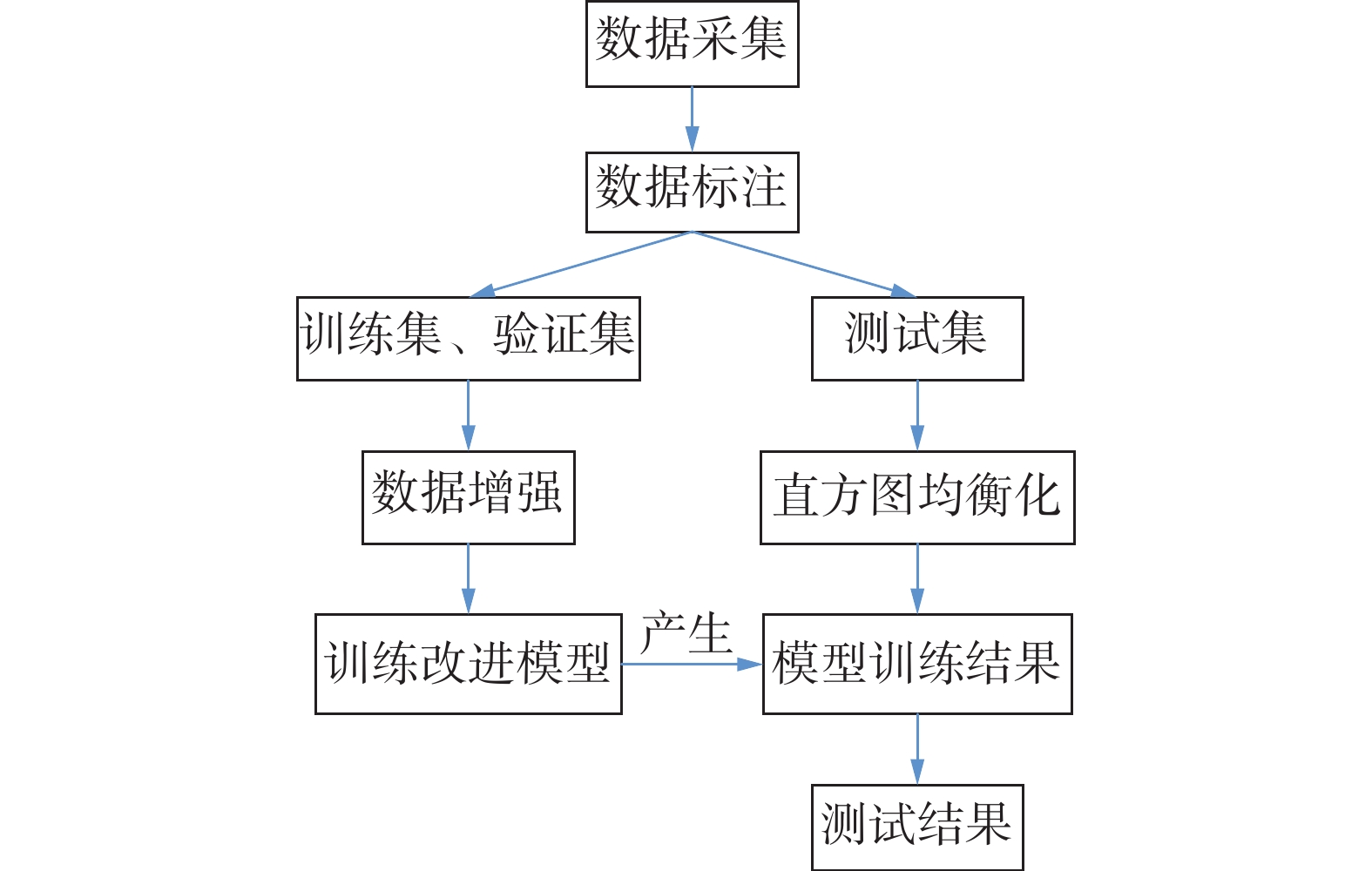
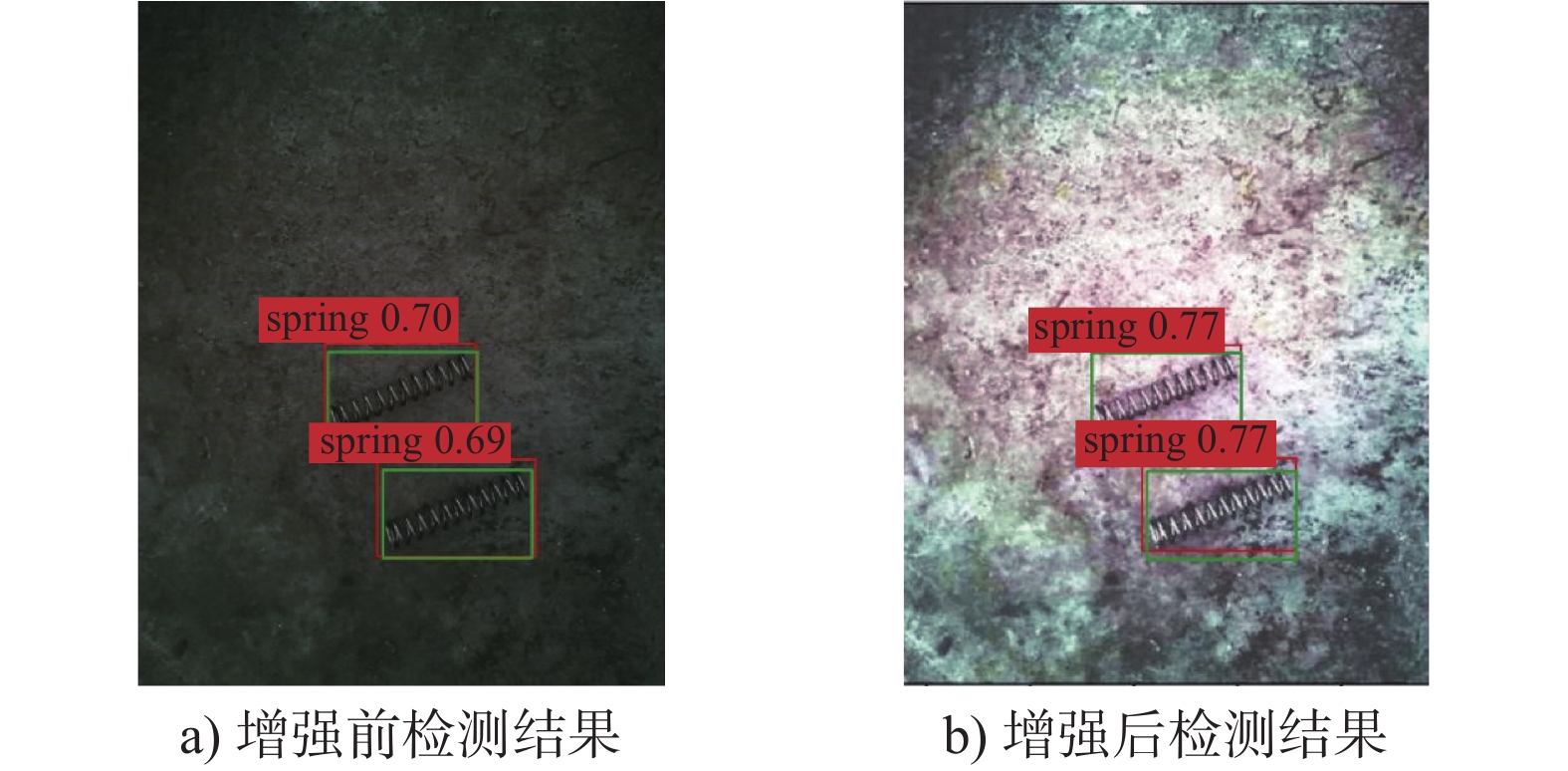
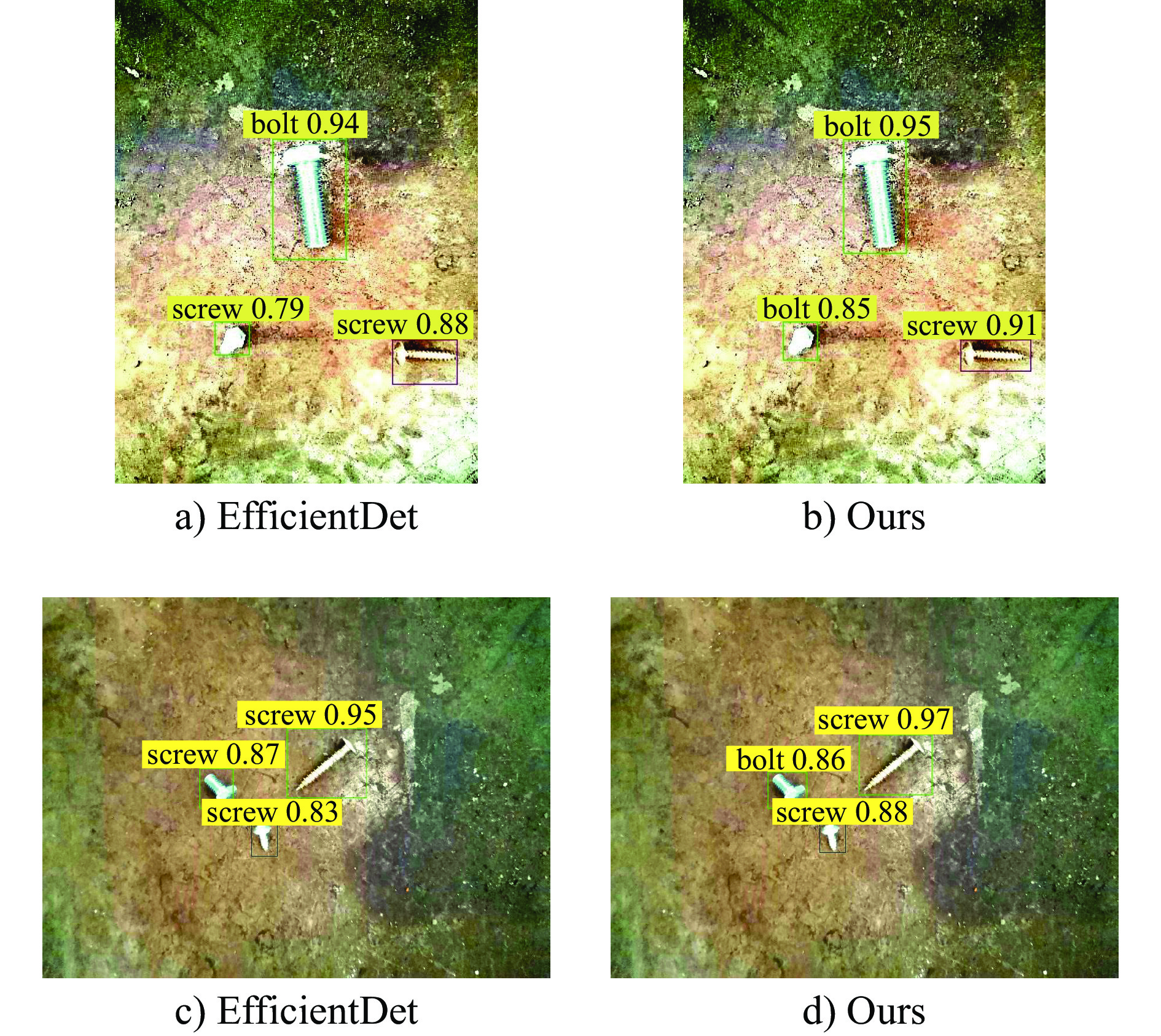
针对流水线加工作业环境下工业机器人对工件检测及定位率较低,速度慢等问题,提出基于改进的EfficientDet工件检测神经网络模型。采用EfficientNet作为主干特征提取网络,利用Triplet Attention注意力机制代替原始的SE Attention机制,同时借鉴循环特征融合思想,采用Recursive-BiFPN循环特征融合网络结构。针对正负样本不均等问题,采用generalized focal loss改进原始focal loss损失函数。考虑到机械加工特定生产环境,采用直方图均衡化思想对数据进行对比度提高。最后利用工业相机建立自制数据集并进行模型训练,在复杂工业生产情况下,改进后的EfficientDet在mAP上较原始网络提高6.1%,同时速度提高到72 帧/s。最后实验结果表明,该算法在生产环境下能快速准确地对工件进行定位检测,为实际生产需要提供新的解决思路
针对流水线加工作业环境下工业机器人对工件检测及定位率较低,速度慢等问题,提出基于改进的EfficientDet工件检测神经网络模型。采用EfficientNet作为主干特征提取网络,利用Triplet Attention注意力机制代替原始的SE Attention机制,同时借鉴循环特征融合思想,采用Recursive-BiFPN循环特征融合网络结构。针对正负样本不均等问题,采用generalized focal loss改进原始focal loss损失函数。考虑到机械加工特定生产环境,采用直方图均衡化思想对数据进行对比度提高。最后利用工业相机建立自制数据集并进行模型训练,在复杂工业生产情况下,改进后的EfficientDet在mAP上较原始网络提高6.1%,同时速度提高到72 帧/s。最后实验结果表明,该算法在生产环境下能快速准确地对工件进行定位检测,为实际生产需要提供新的解决思路





2023, 42(9): 1455-1466.
doi: 10.13433/j.cnki.1003-8728.20220100
摘要:
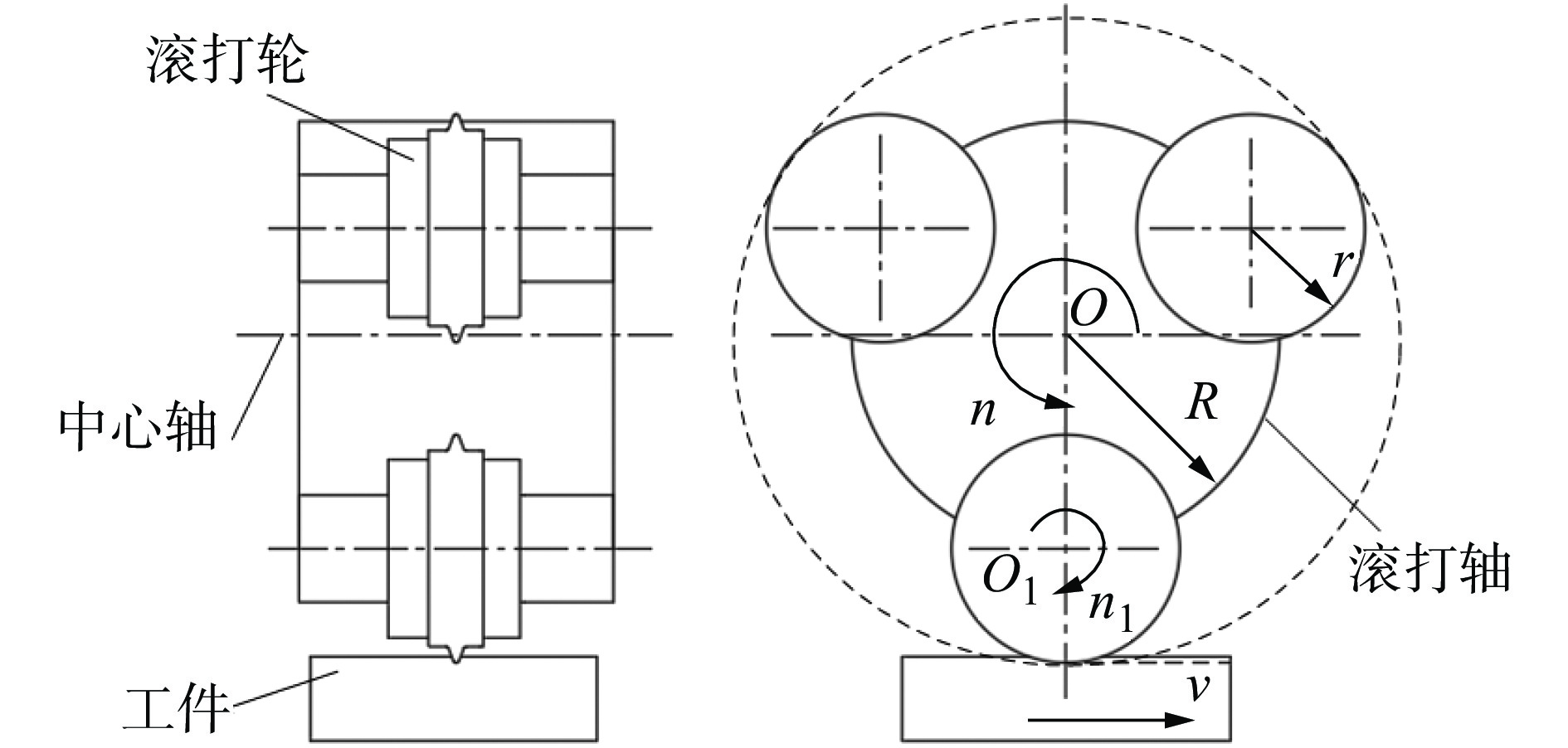
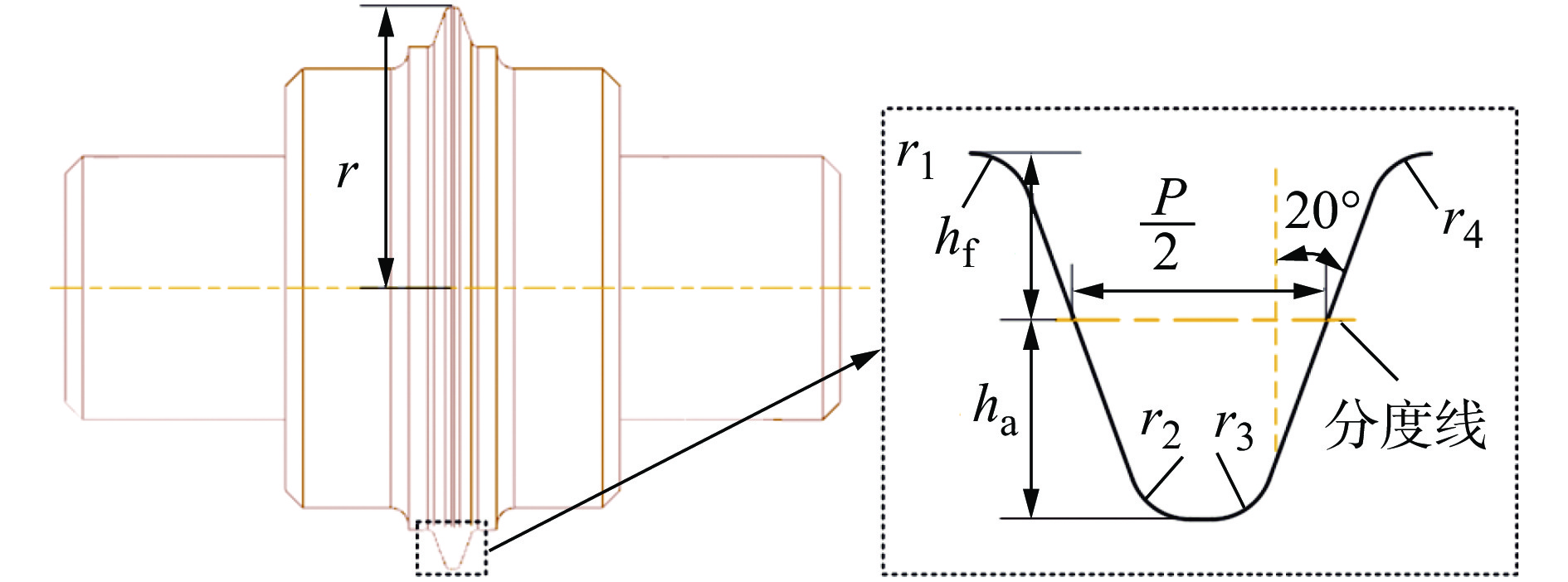
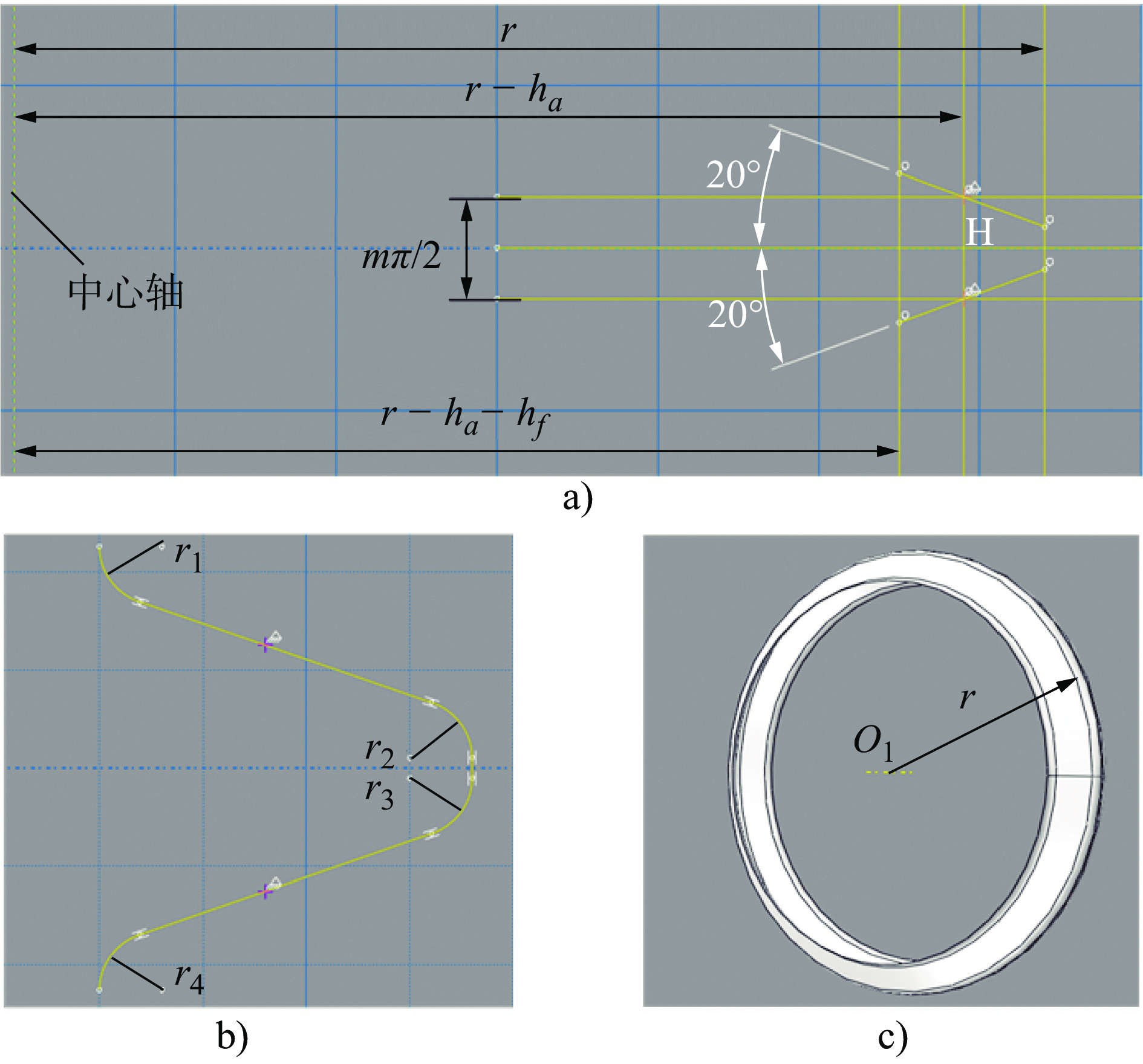
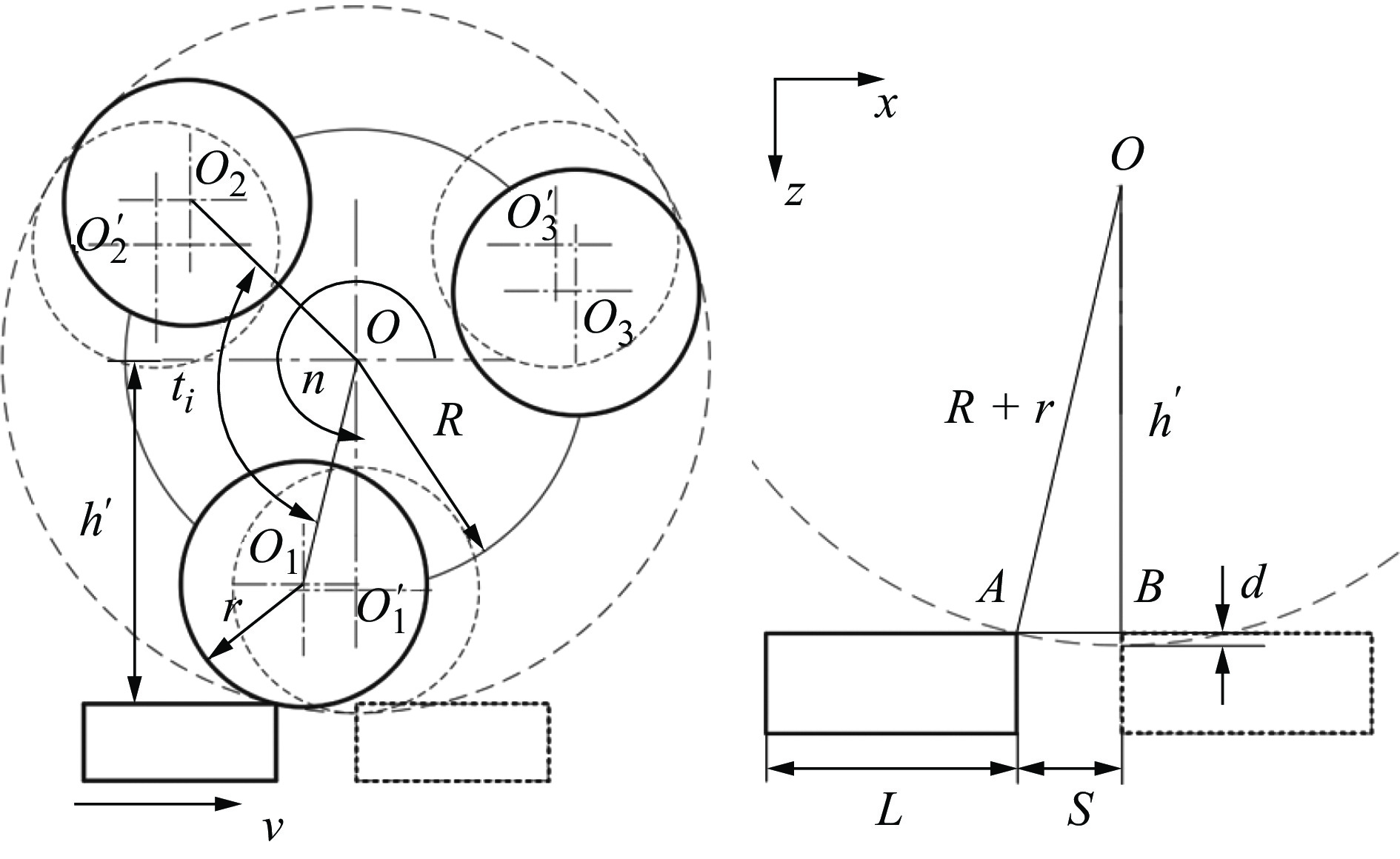
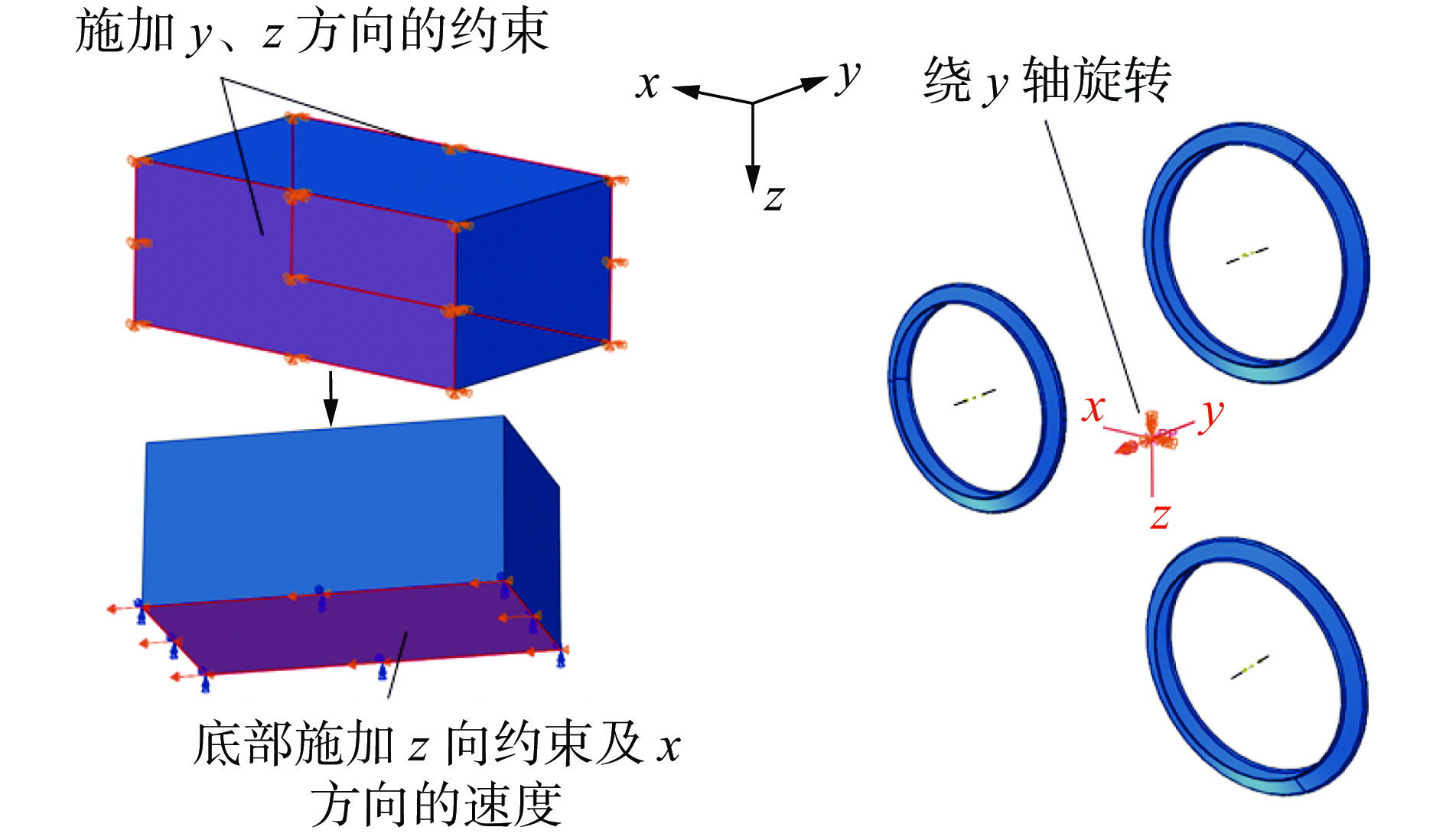
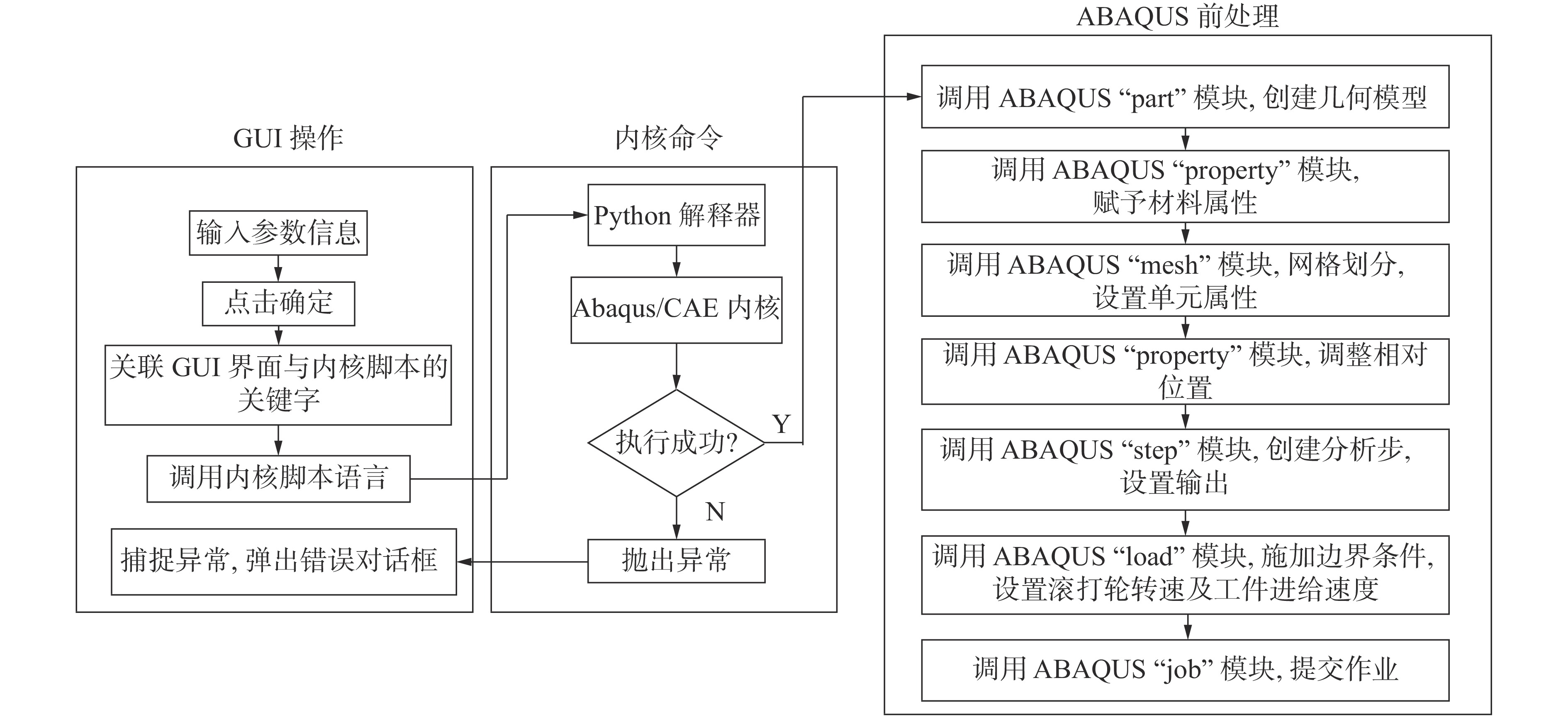
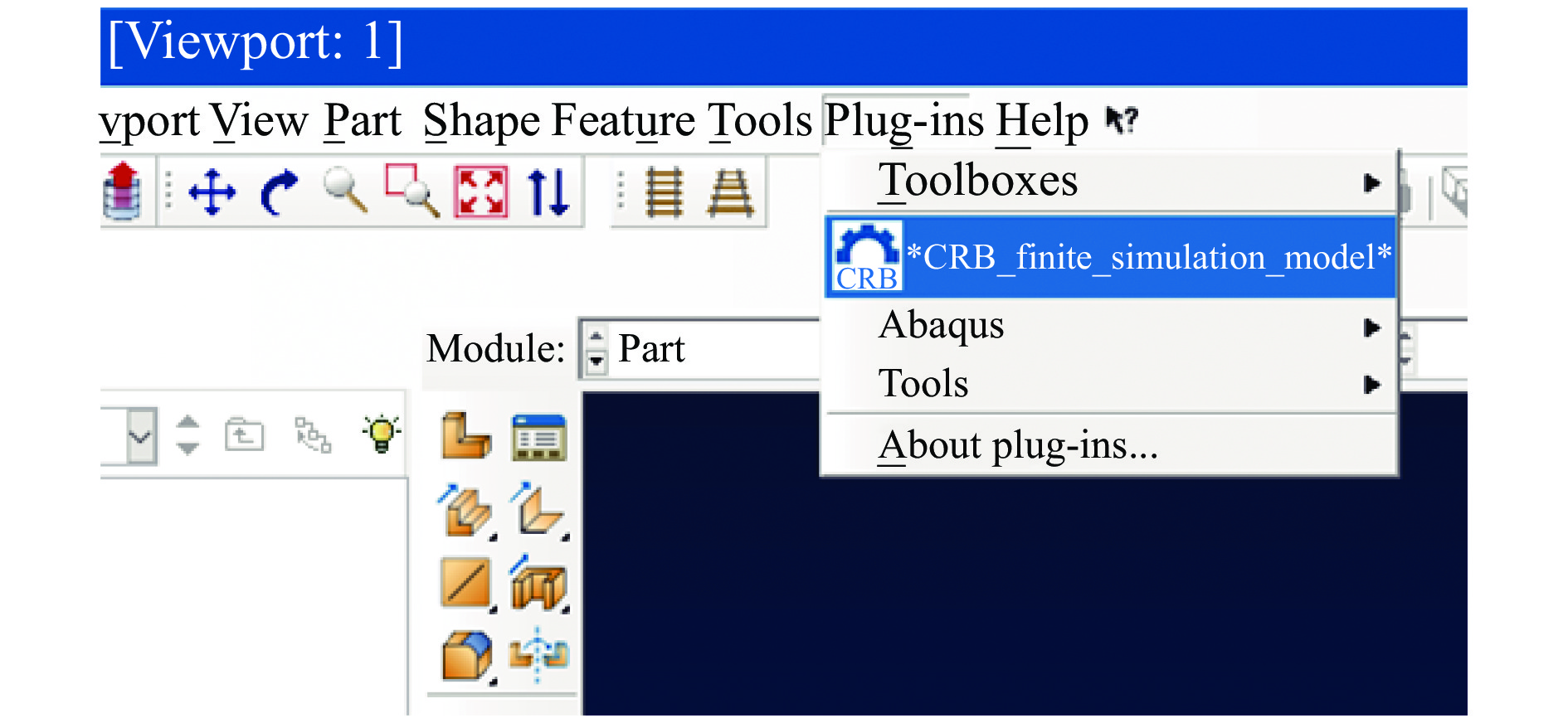
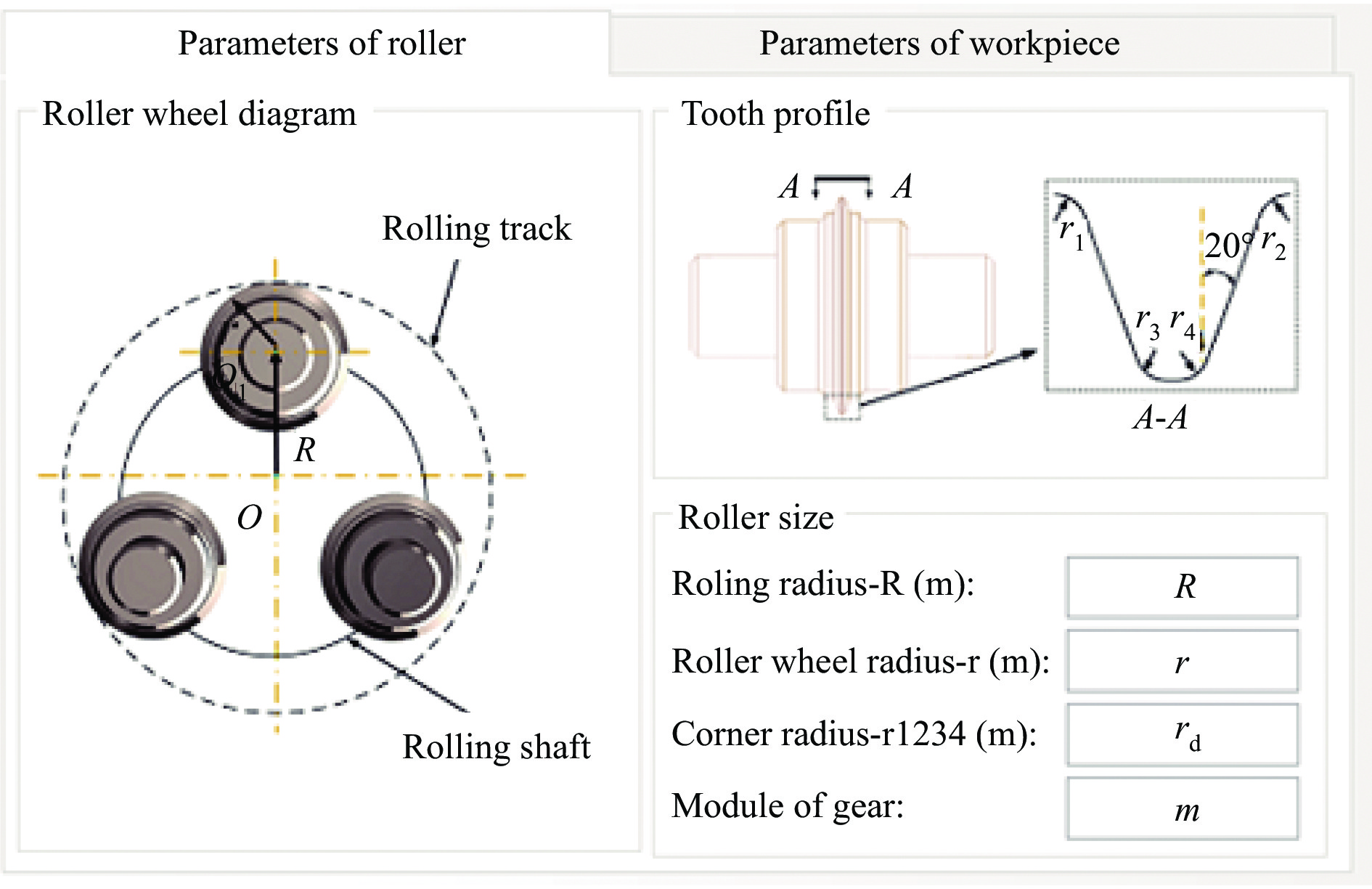
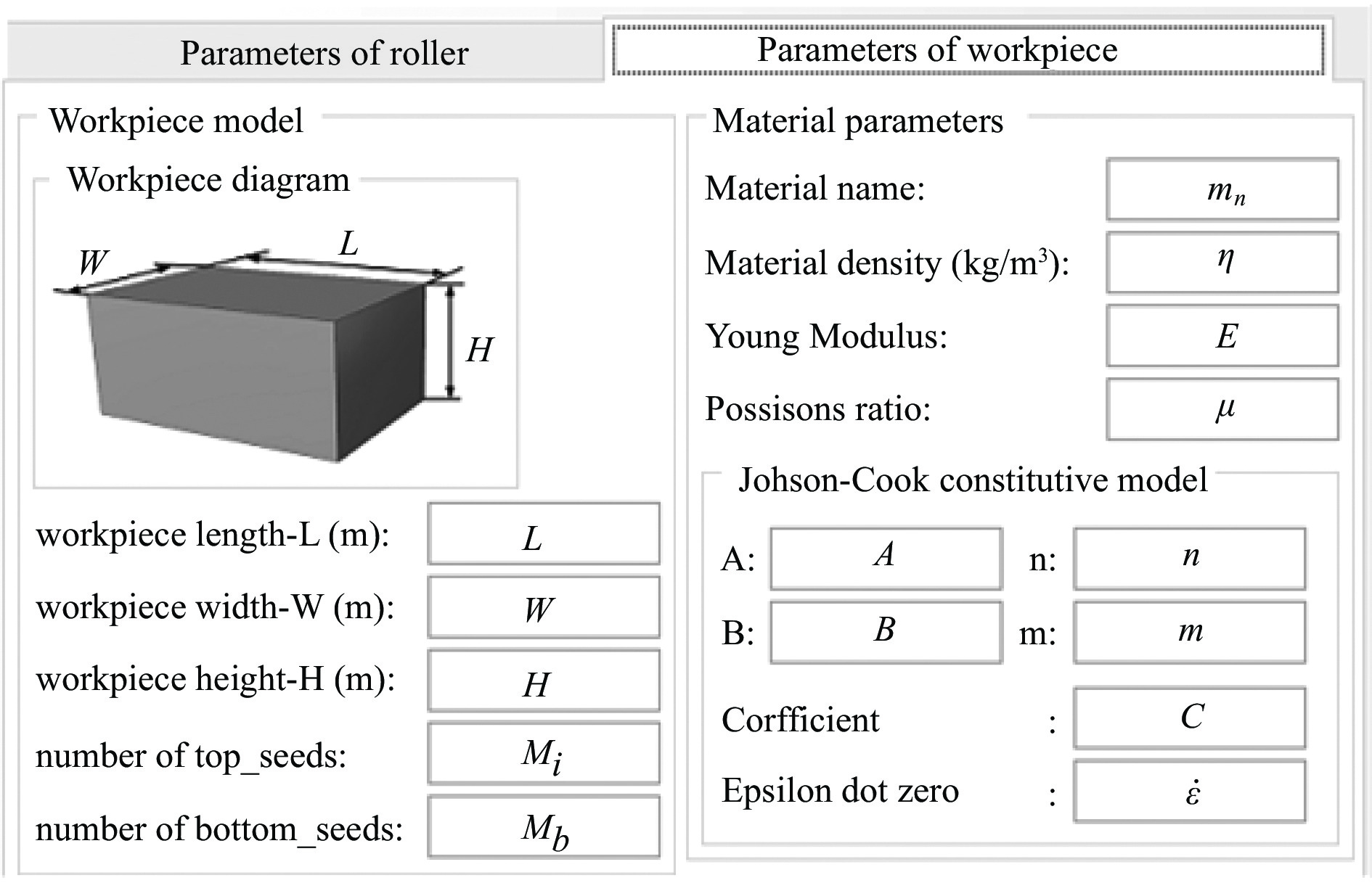
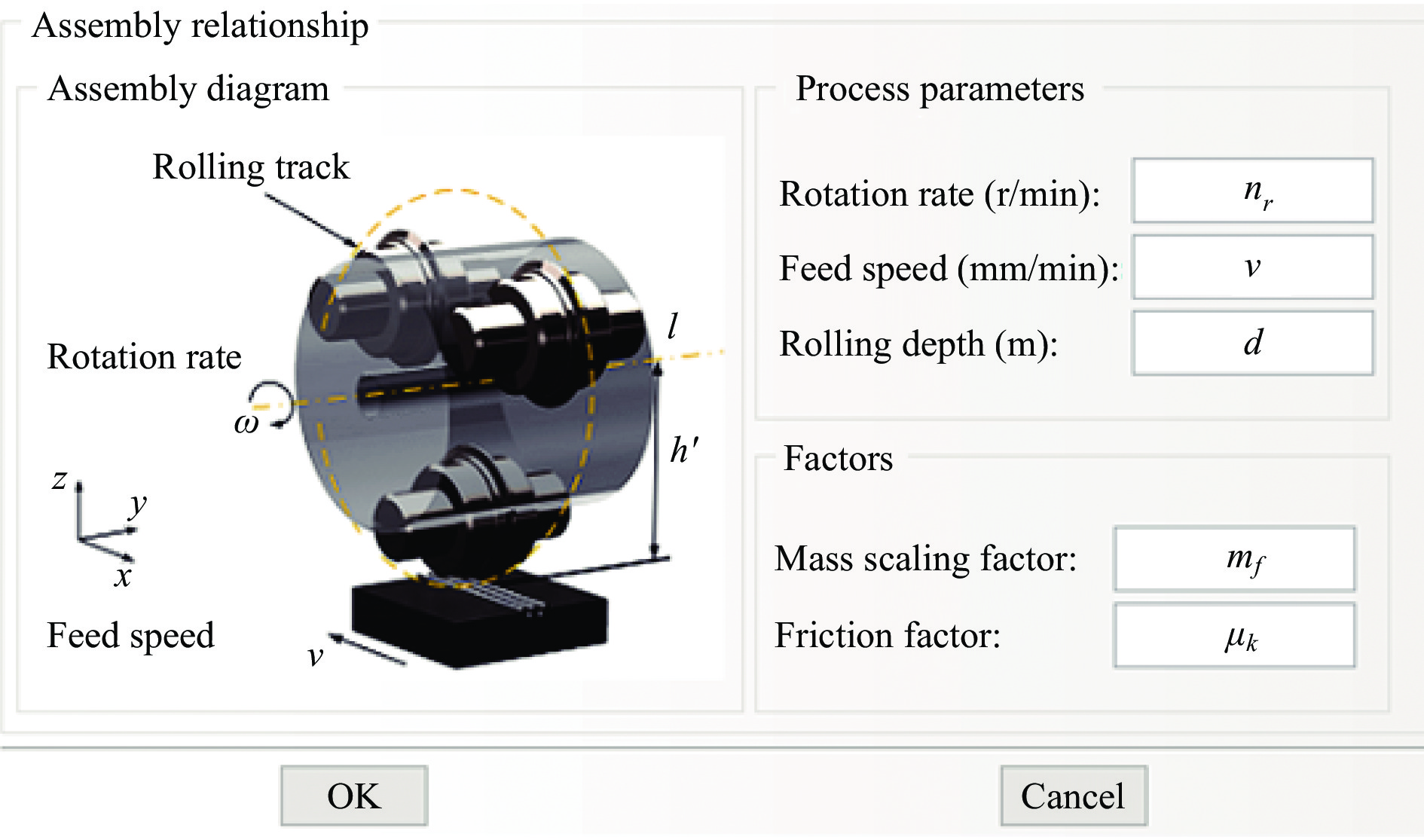
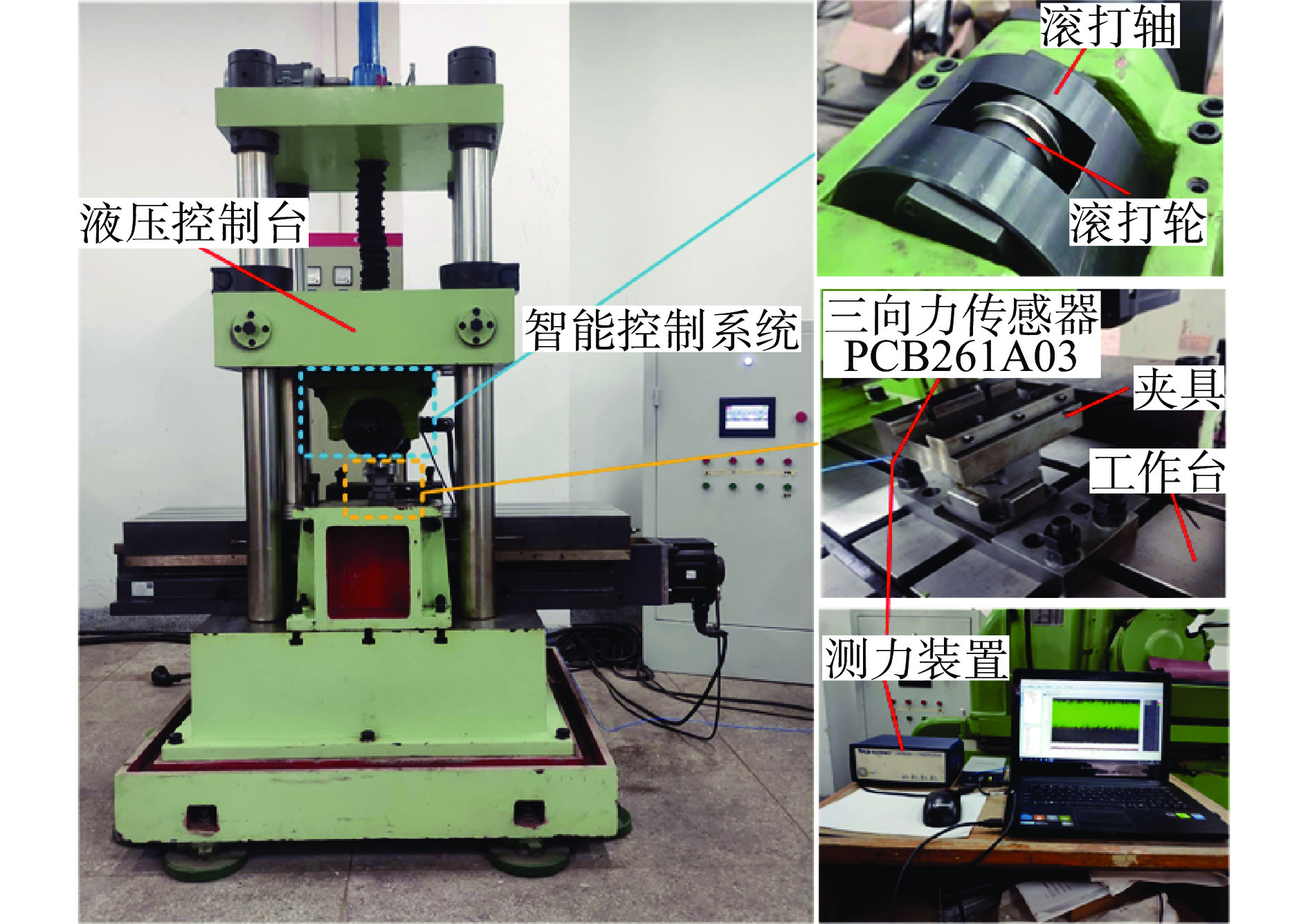
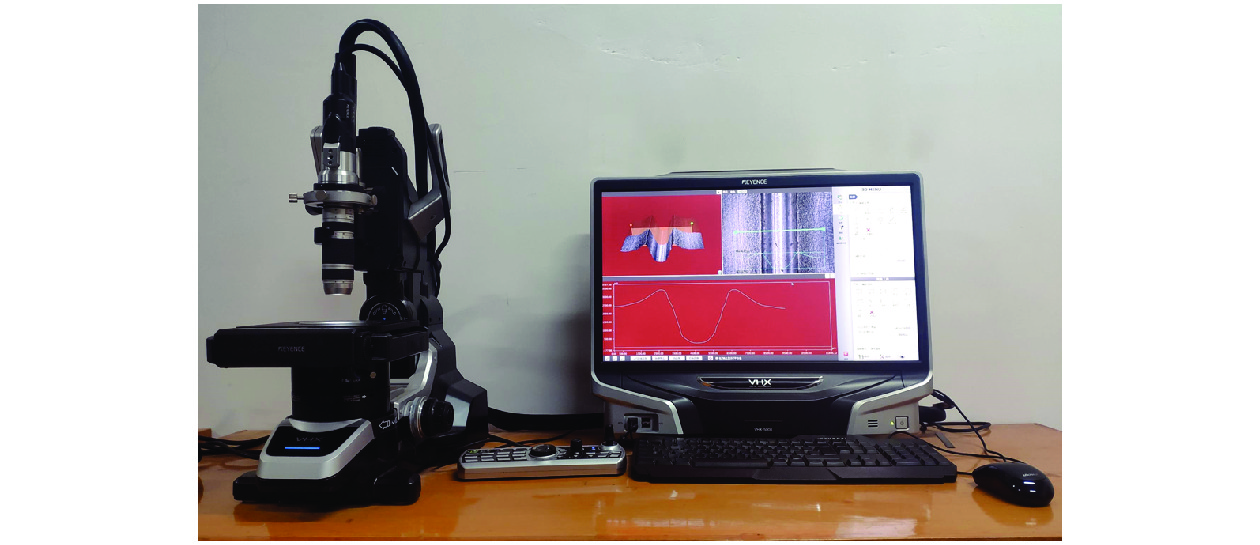
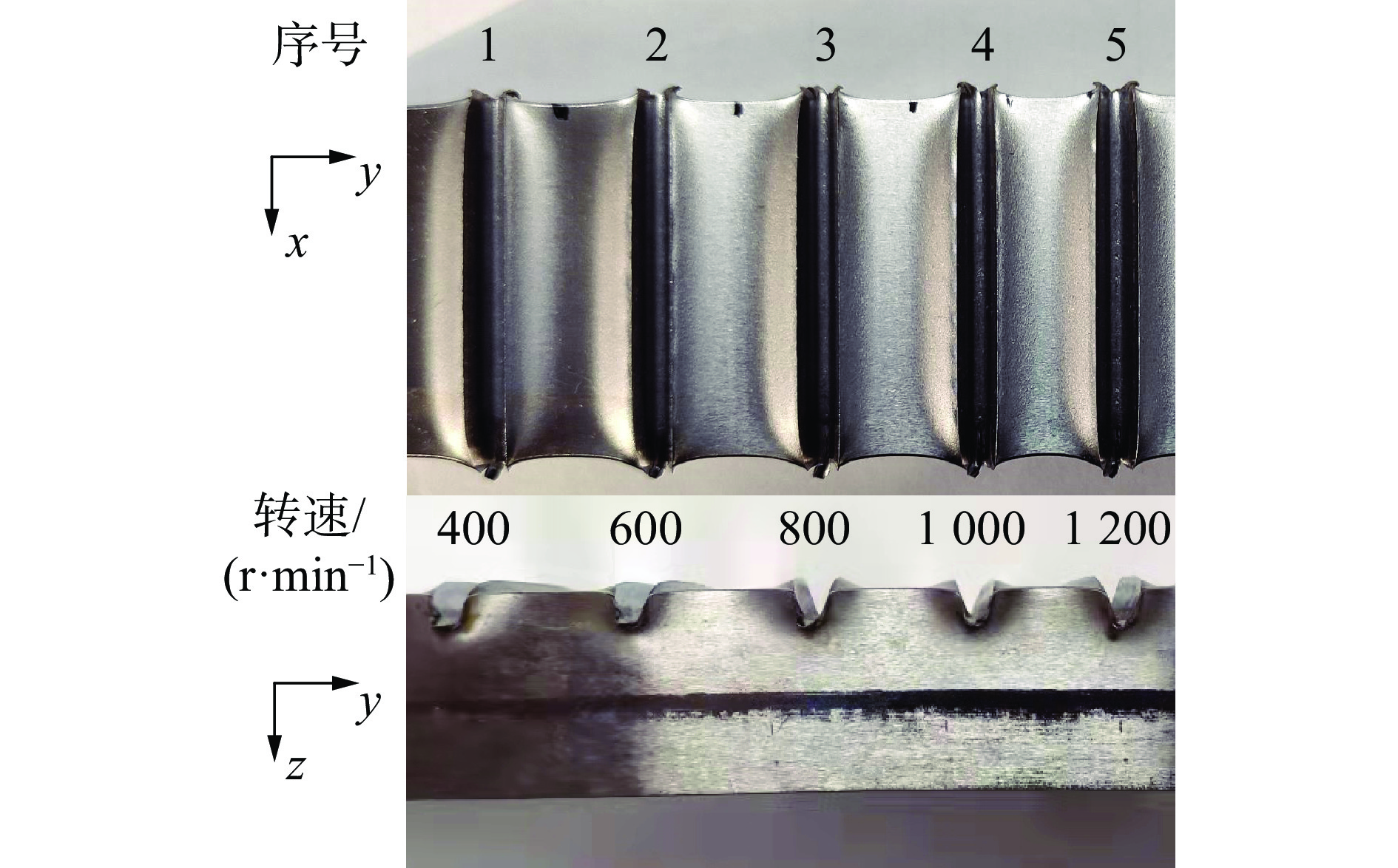
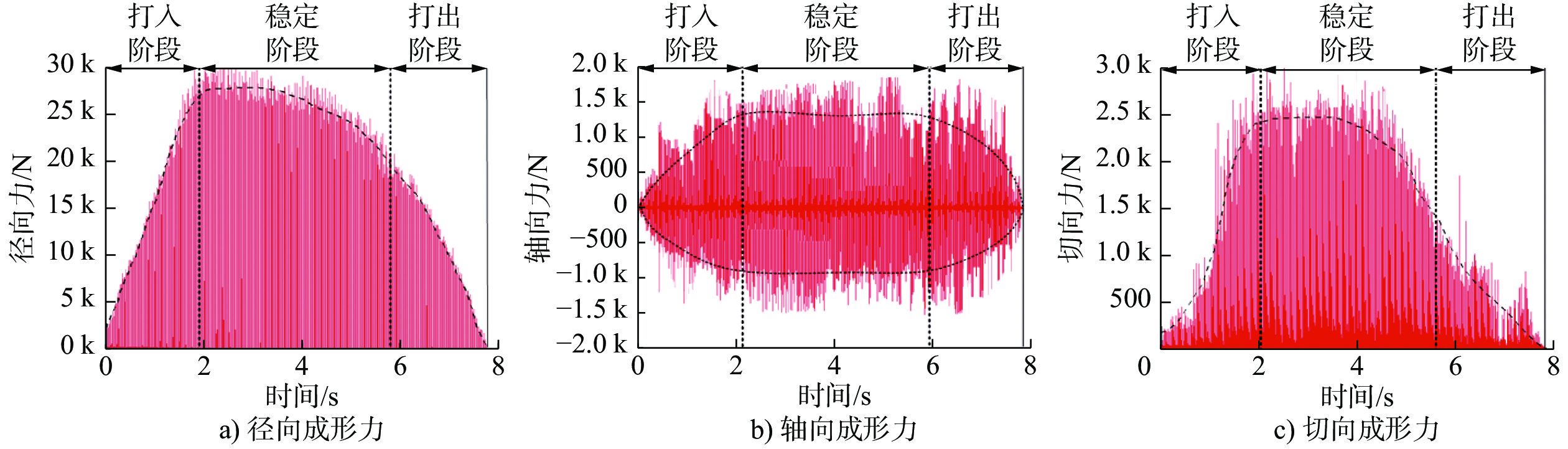
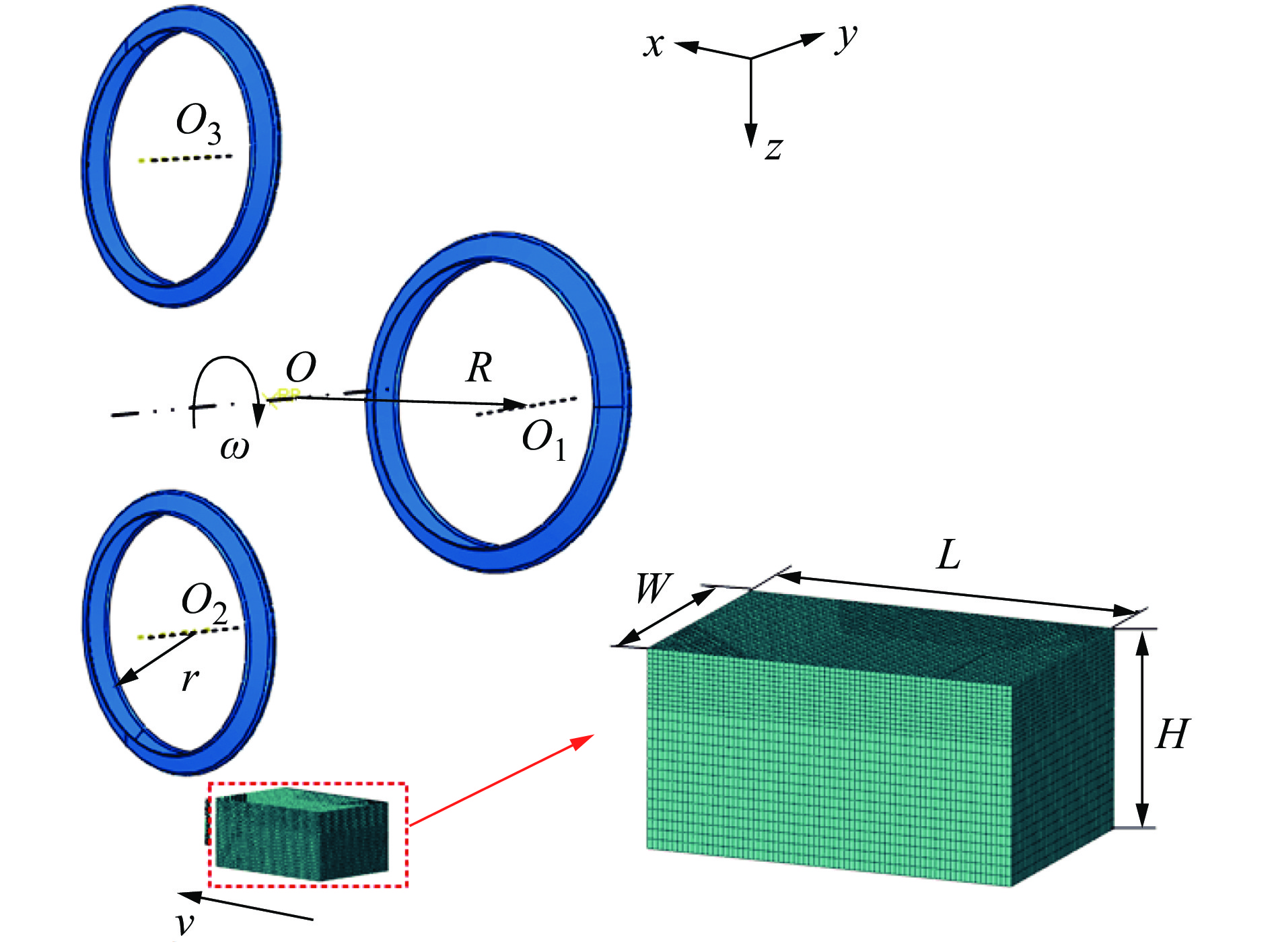
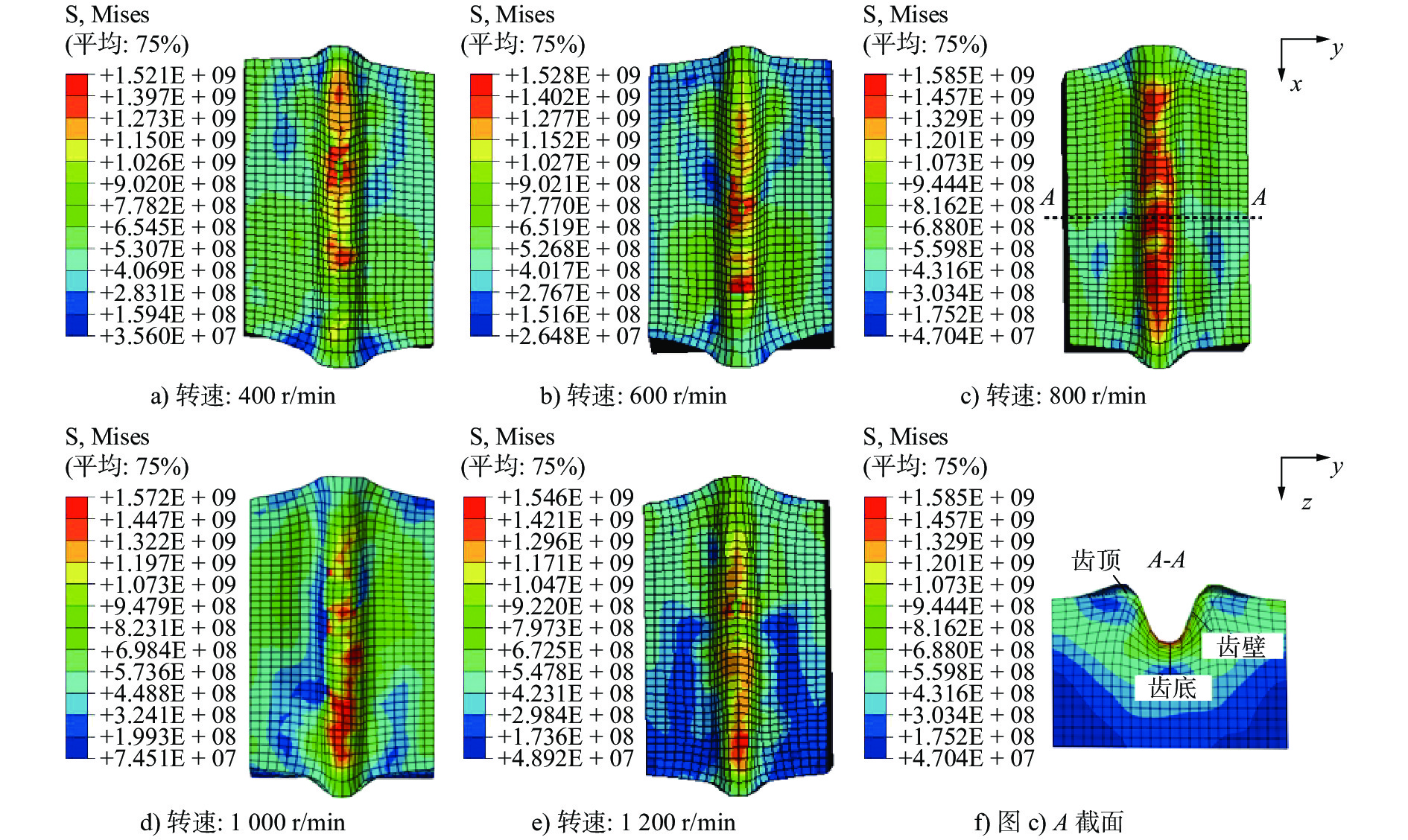
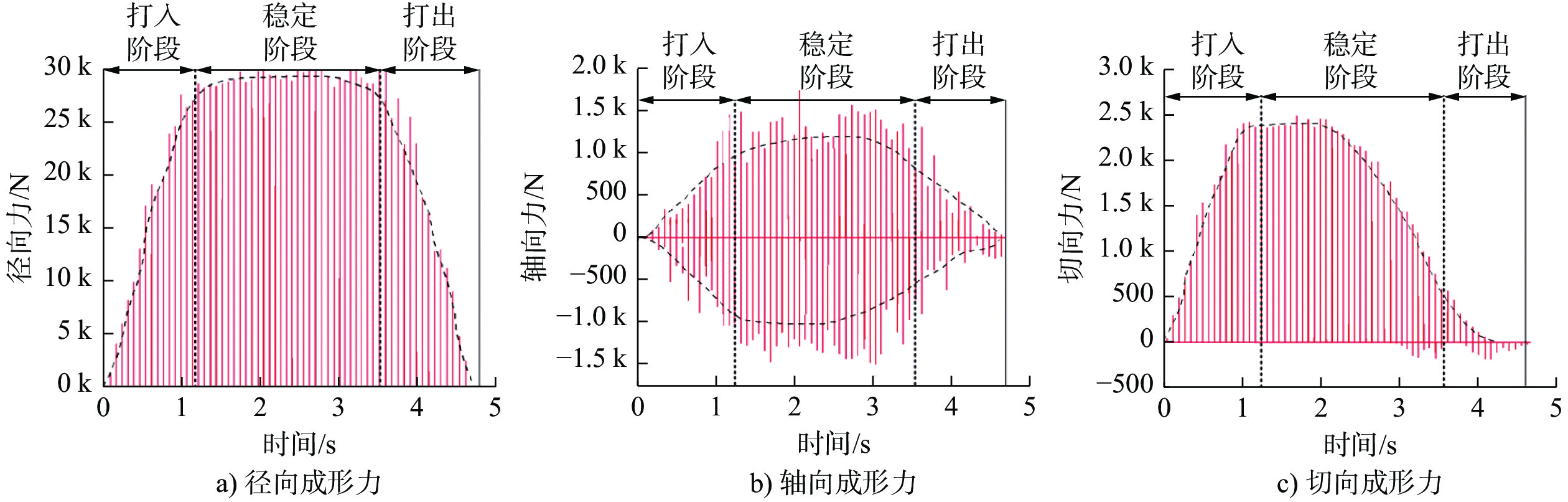
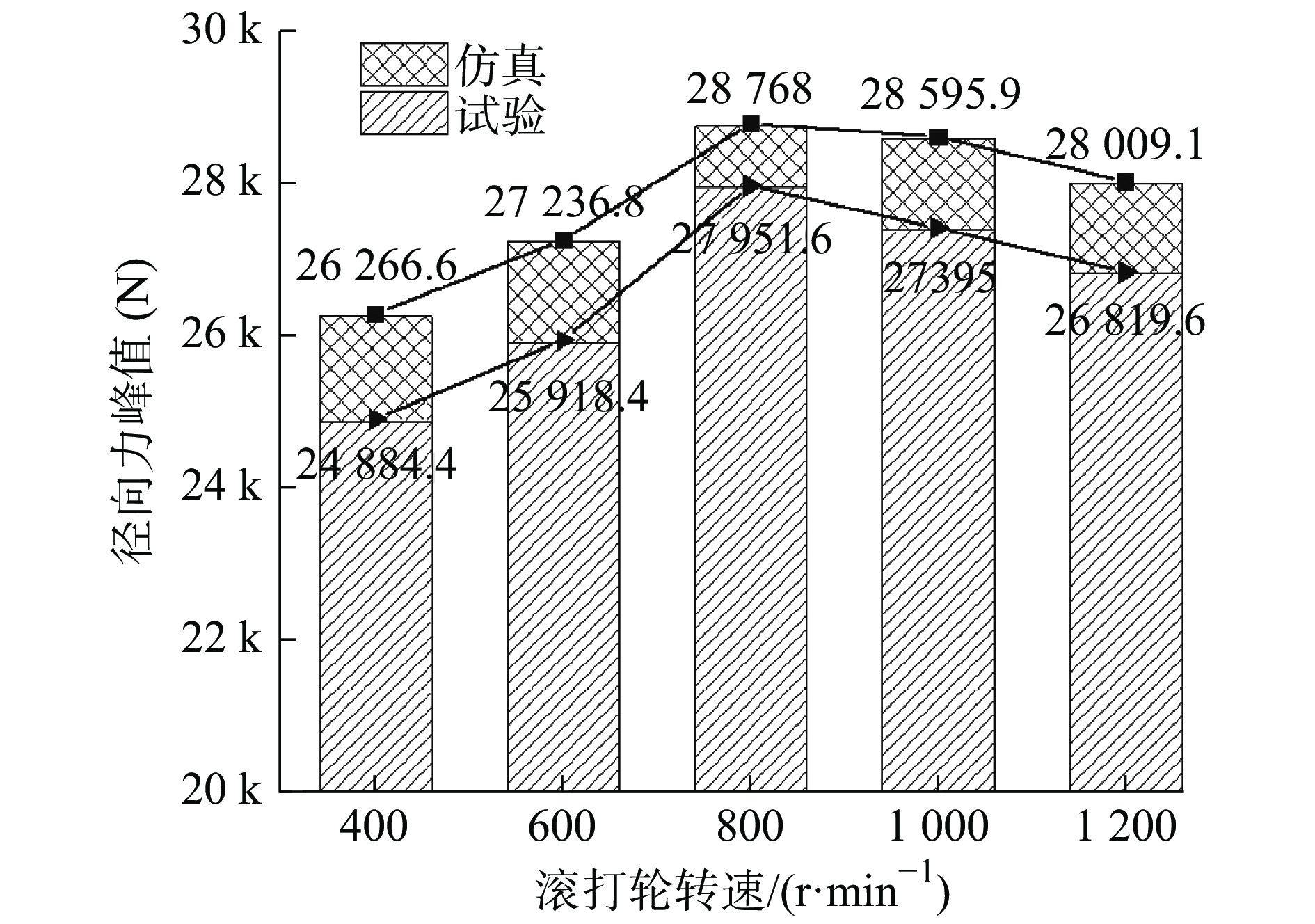
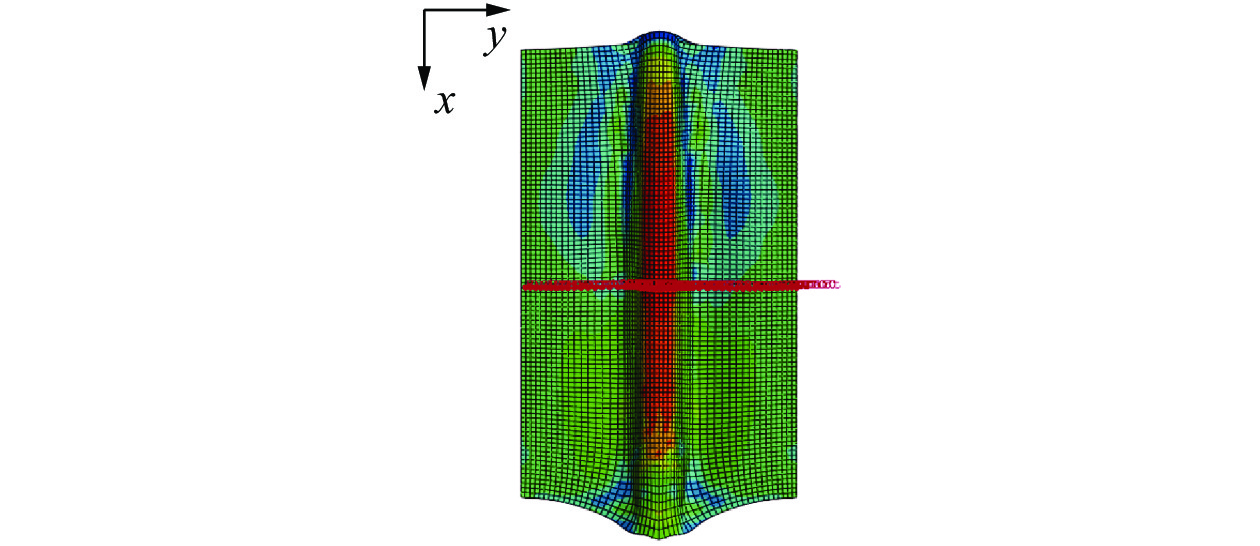
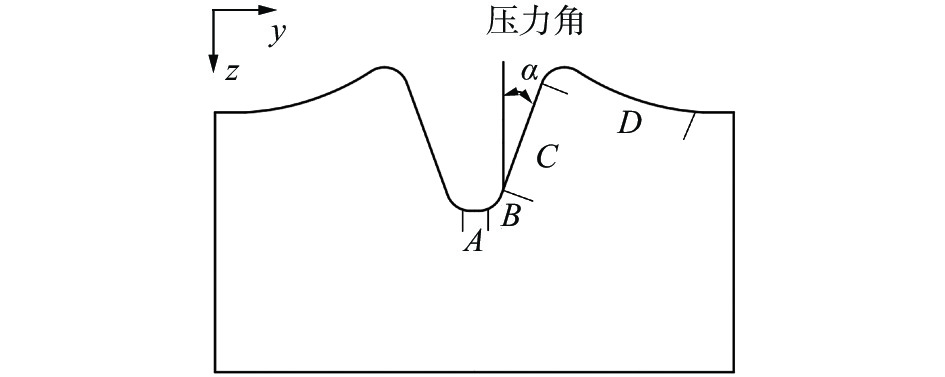
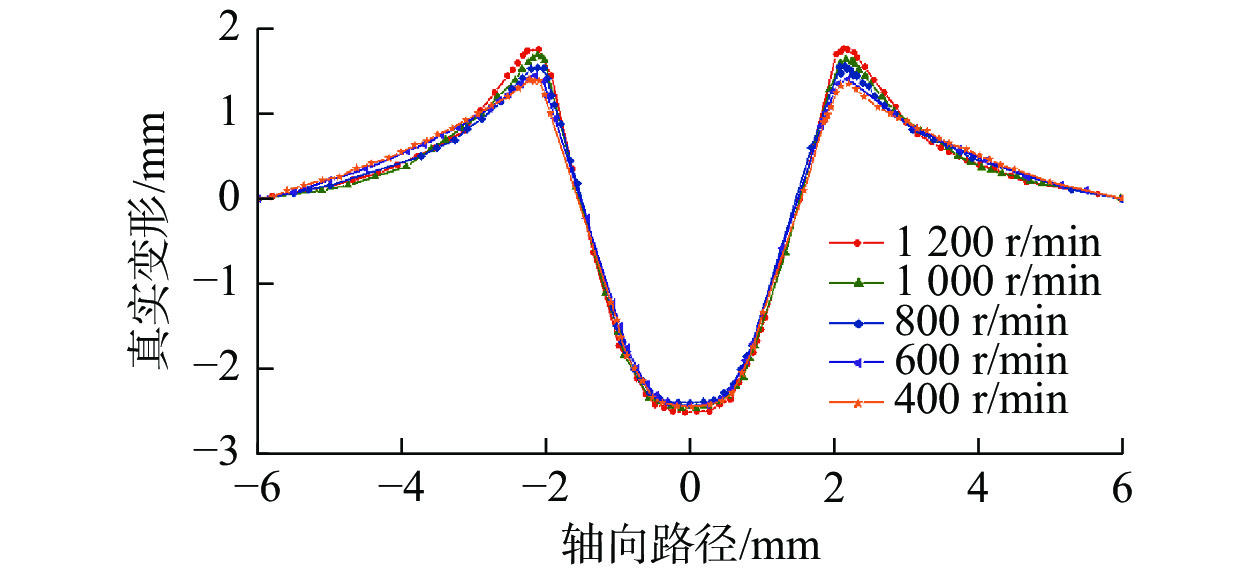
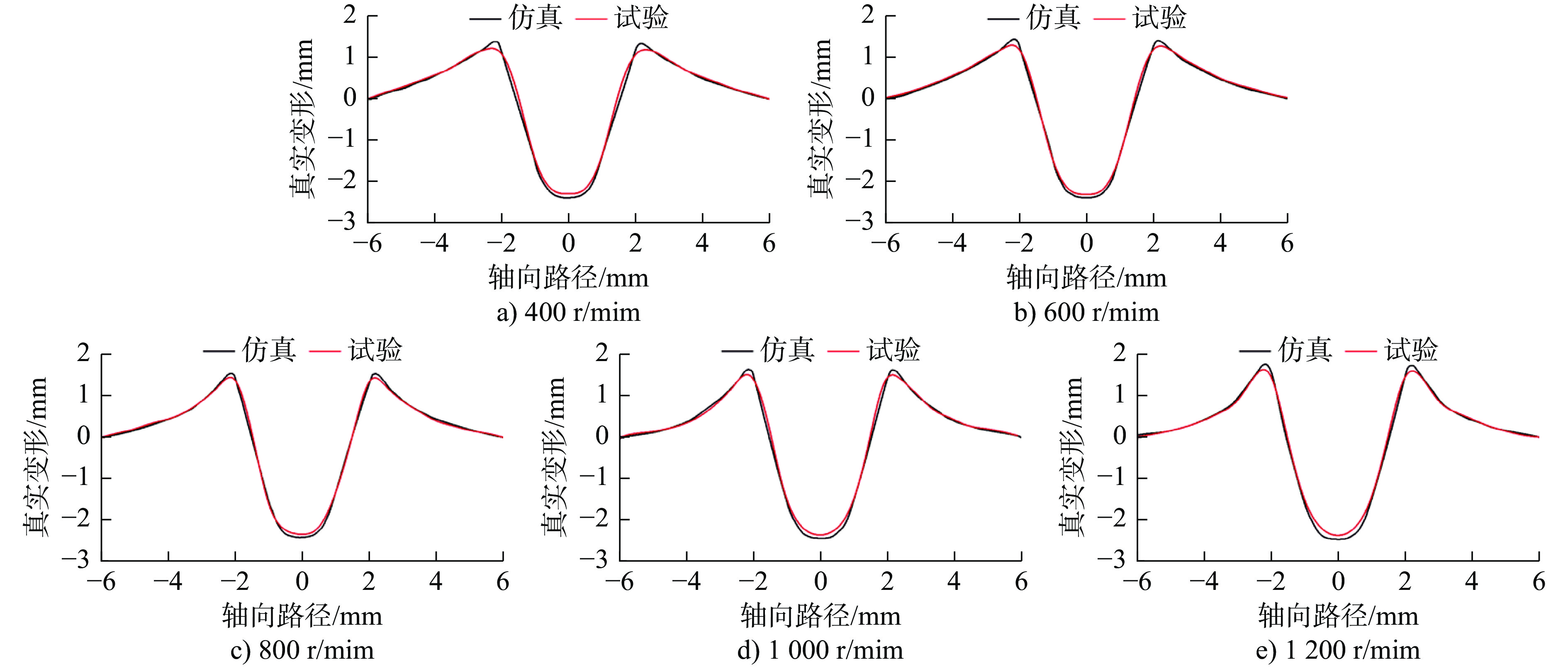
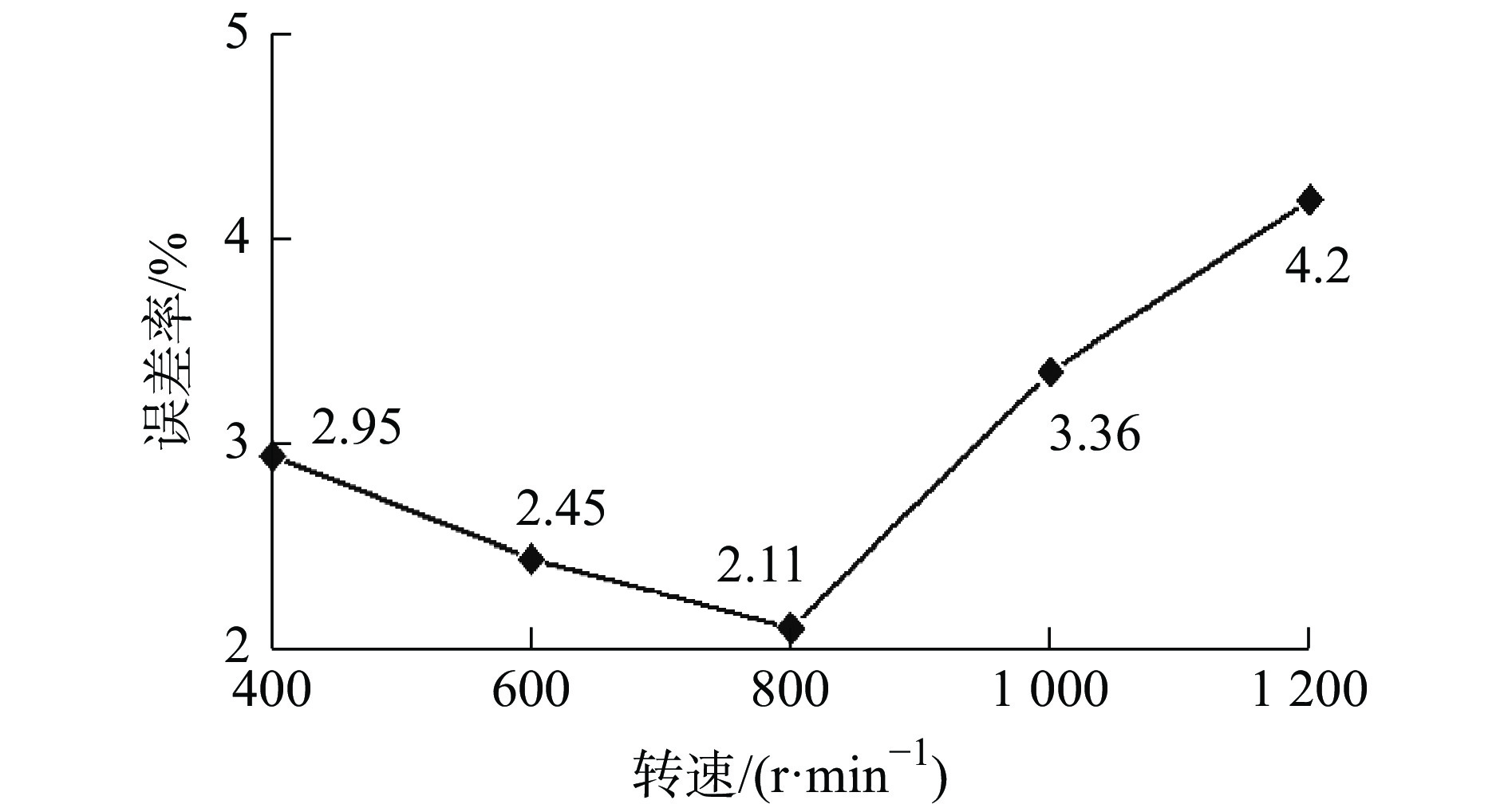
结合冷滚打成形工艺的特点,基于Python语言对有限元分析软件ABAQUS进行二次开发,建立了冷滚打成形有限元模型的参数化建模插件,利用该插件可以对滚打轮和工件的几何模型、复杂材料属性以及打入深度、公转速度、进给速度等工艺参数进行便捷更改,实现冷滚打有限元仿真模型的参数化建立,自动完成几何建模、网格划分、材料属性定义到提交作业等一系列前处理过程,最后使用该插件进行了仿真模拟,并进行了冷滚打试验研究,对不同转速下的仿真成形力和齿形轮廓与试验进行了对比分析。结果显示:仿真所得成形力和齿形轮廓与试验都有相同的变化趋势,并且误差都控制在6%以内,验证了利用该插件建立冷滚打有限元模型的可行性和有效性。
结合冷滚打成形工艺的特点,基于Python语言对有限元分析软件ABAQUS进行二次开发,建立了冷滚打成形有限元模型的参数化建模插件,利用该插件可以对滚打轮和工件的几何模型、复杂材料属性以及打入深度、公转速度、进给速度等工艺参数进行便捷更改,实现冷滚打有限元仿真模型的参数化建立,自动完成几何建模、网格划分、材料属性定义到提交作业等一系列前处理过程,最后使用该插件进行了仿真模拟,并进行了冷滚打试验研究,对不同转速下的仿真成形力和齿形轮廓与试验进行了对比分析。结果显示:仿真所得成形力和齿形轮廓与试验都有相同的变化趋势,并且误差都控制在6%以内,验证了利用该插件建立冷滚打有限元模型的可行性和有效性。

2023, 42(9): 1467-1473.
doi: 10.13433/j.cnki.1003-8728.20220091
摘要:
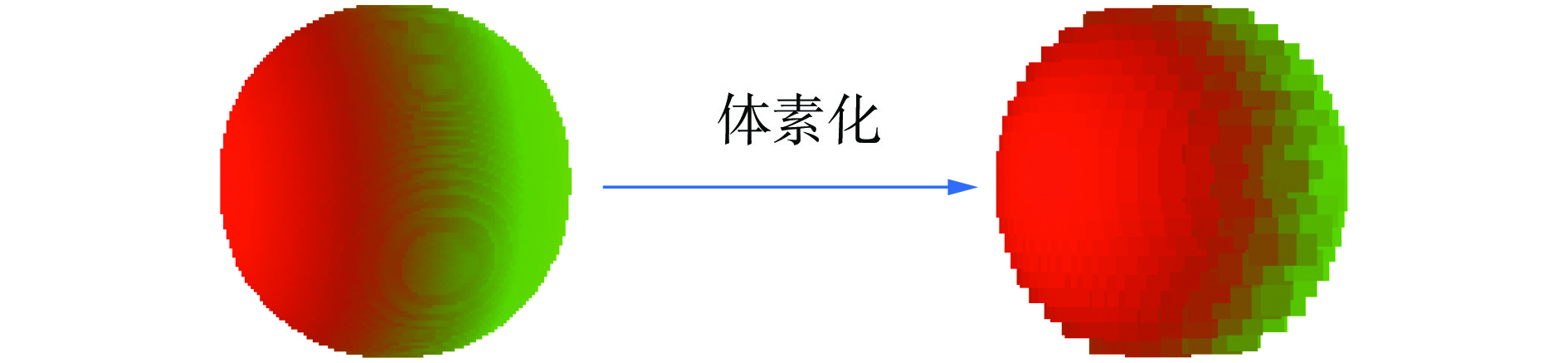
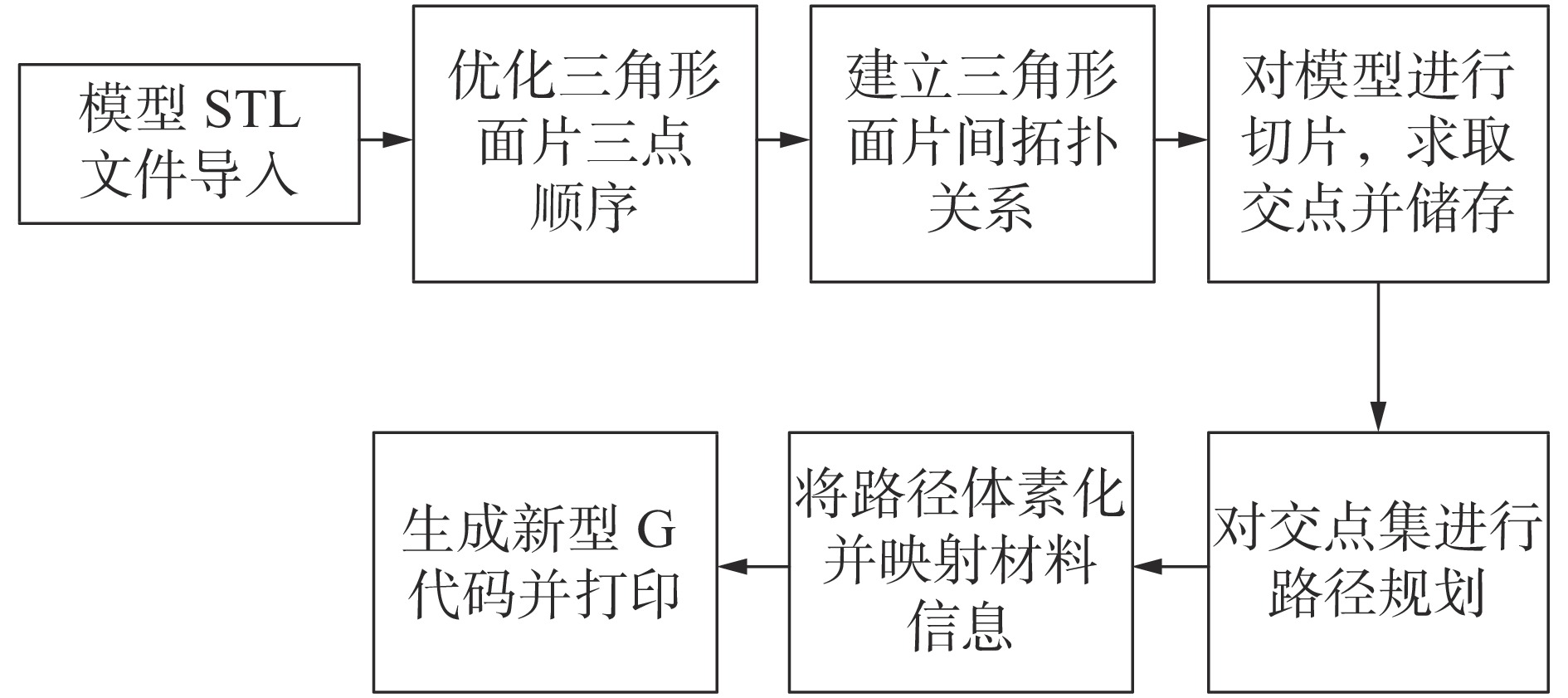
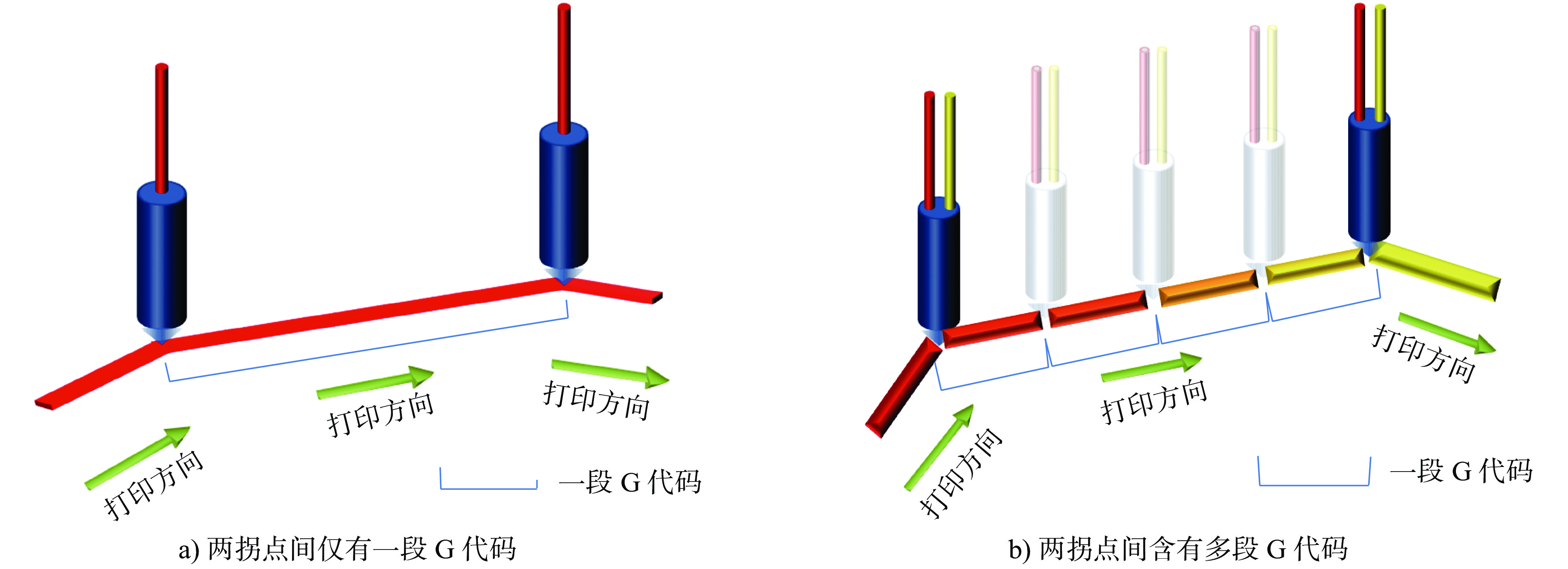
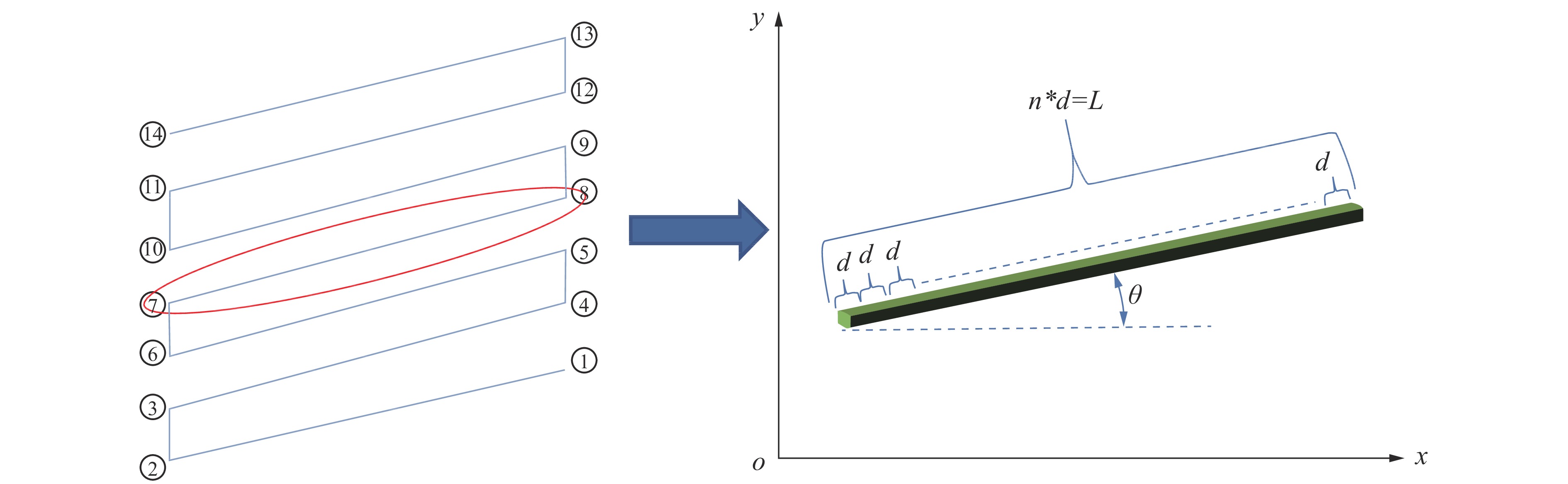
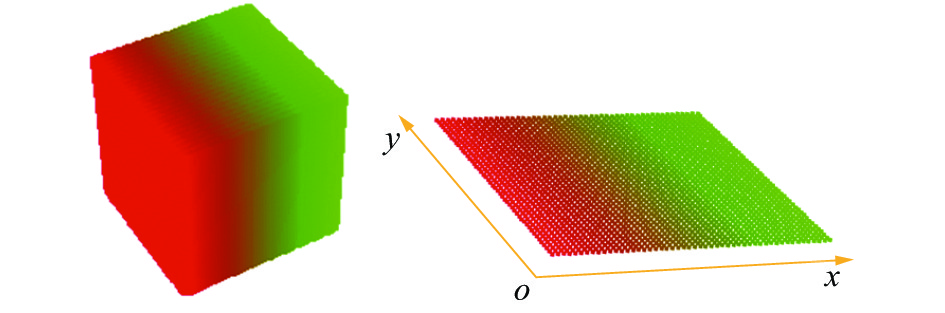
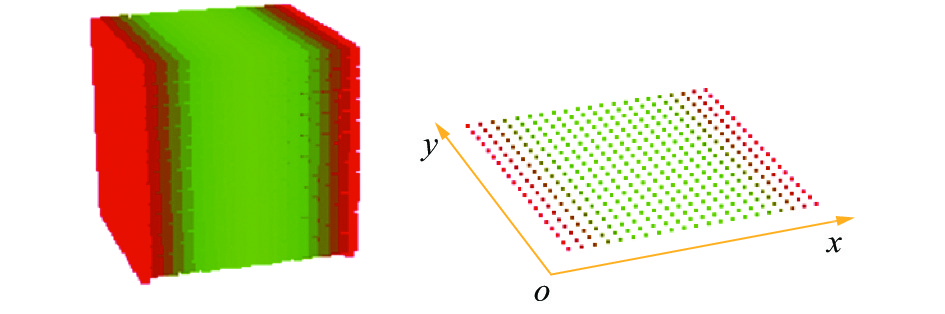
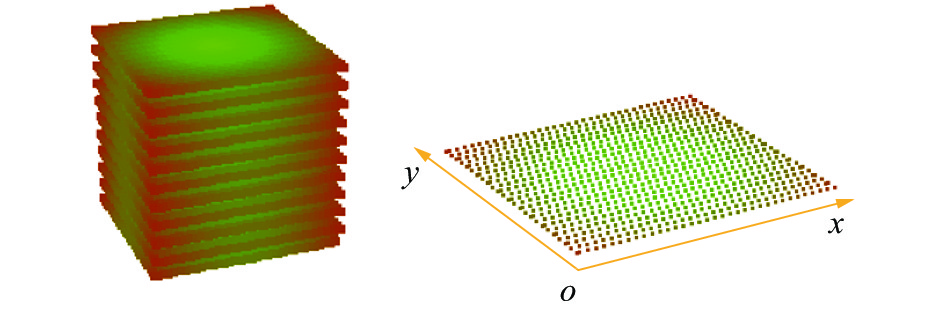
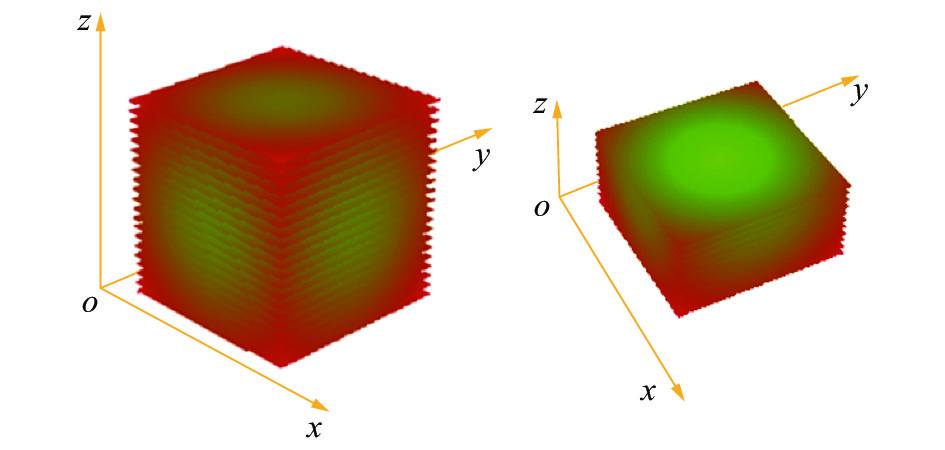
目前,功能梯度材料模型的构建方法尚未成熟,仍需要建立一种新的算法,将功能梯度材料的材料组分信息附加到路径规划中,以实现材料空间到几何空间的映射。以Visual Studio 2019为开发平台,利用OpenGL进行可视化分析;将打印路径体素化,对材料组分进行设计与计算,并映射至几何坐标中,构建出有连续梯度变化的目标模型;生成具有几何信息和材料信息的新型G代码,并用于功能梯度材料精准3D打印。结果表明:利用路径体素化的方法,可以精准控制材料模型的梯度变化。
目前,功能梯度材料模型的构建方法尚未成熟,仍需要建立一种新的算法,将功能梯度材料的材料组分信息附加到路径规划中,以实现材料空间到几何空间的映射。以Visual Studio 2019为开发平台,利用OpenGL进行可视化分析;将打印路径体素化,对材料组分进行设计与计算,并映射至几何坐标中,构建出有连续梯度变化的目标模型;生成具有几何信息和材料信息的新型G代码,并用于功能梯度材料精准3D打印。结果表明:利用路径体素化的方法,可以精准控制材料模型的梯度变化。
2023, 42(9): 1474-1481.
doi: 10.13433/j.cnki.1003-8728.20220093
摘要:
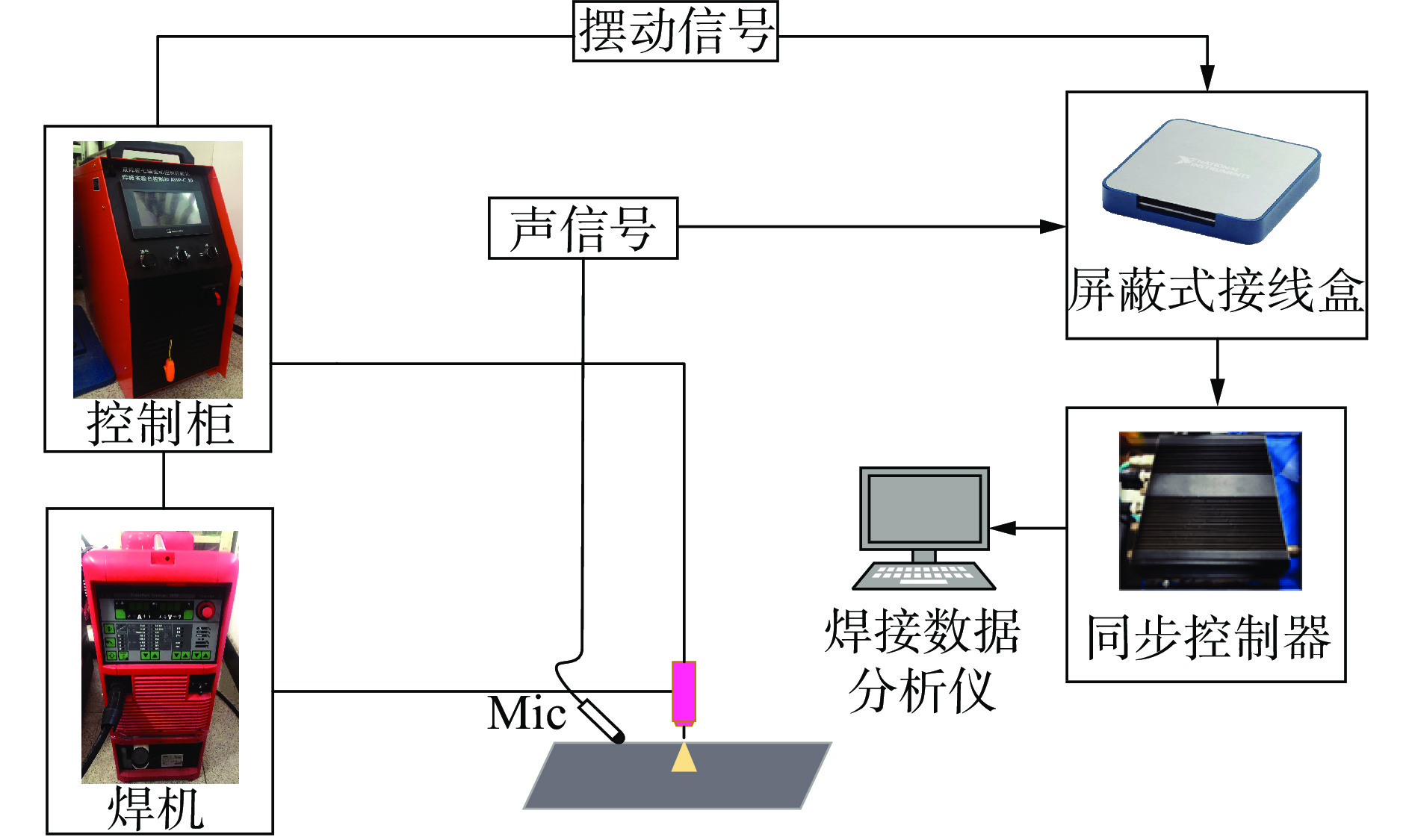
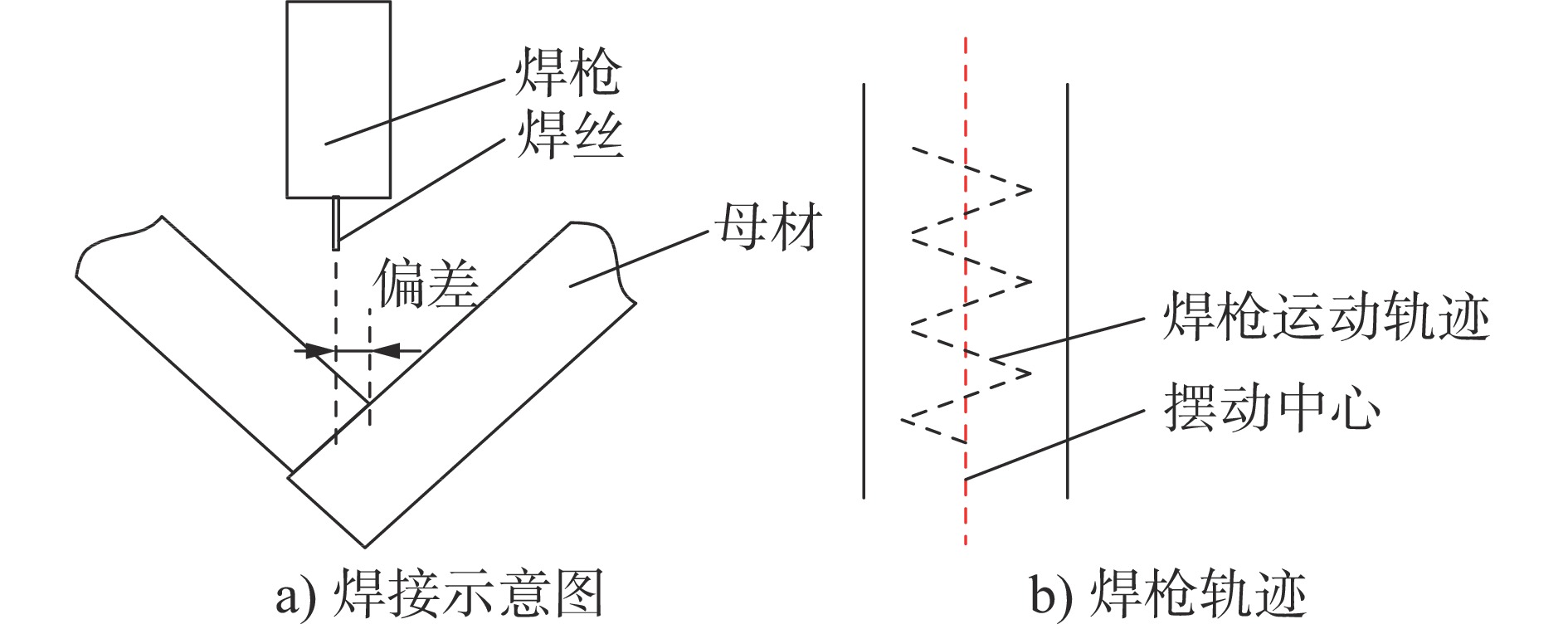
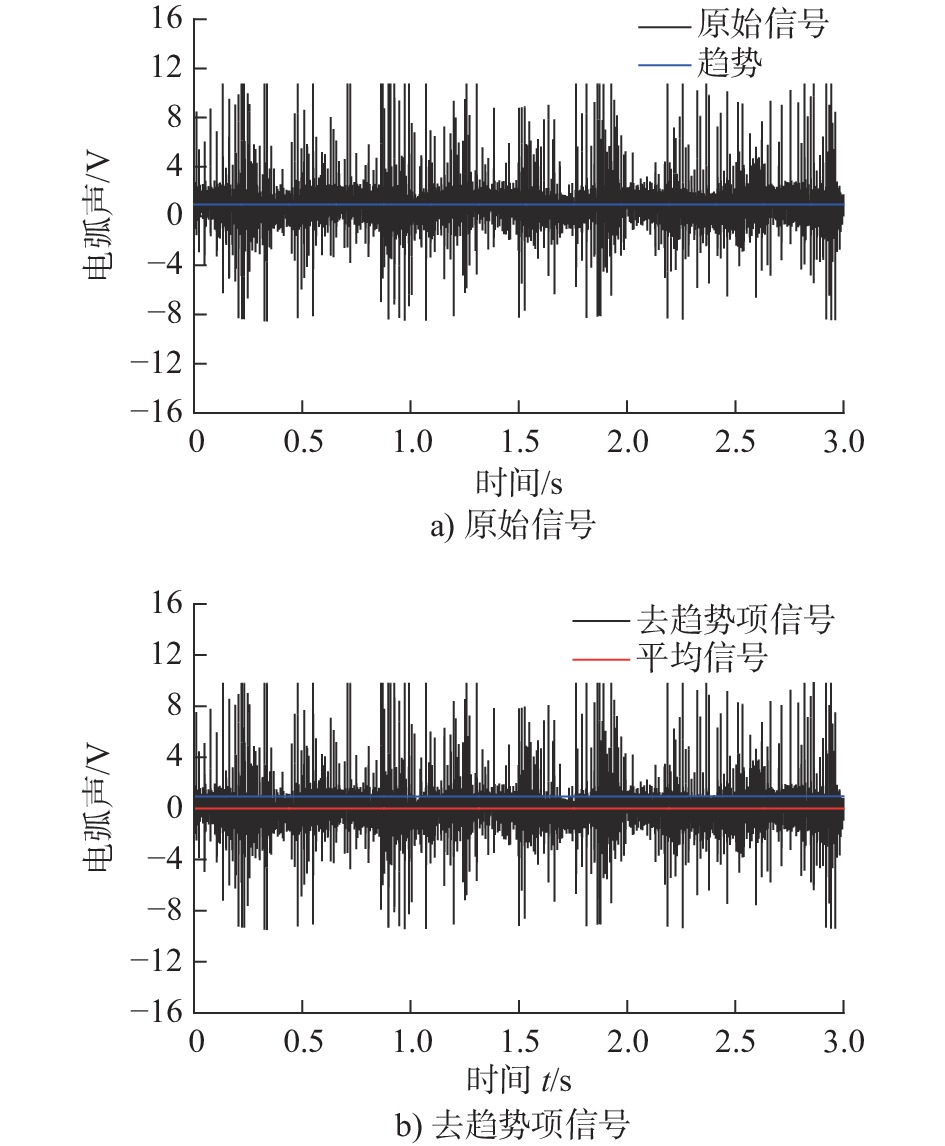
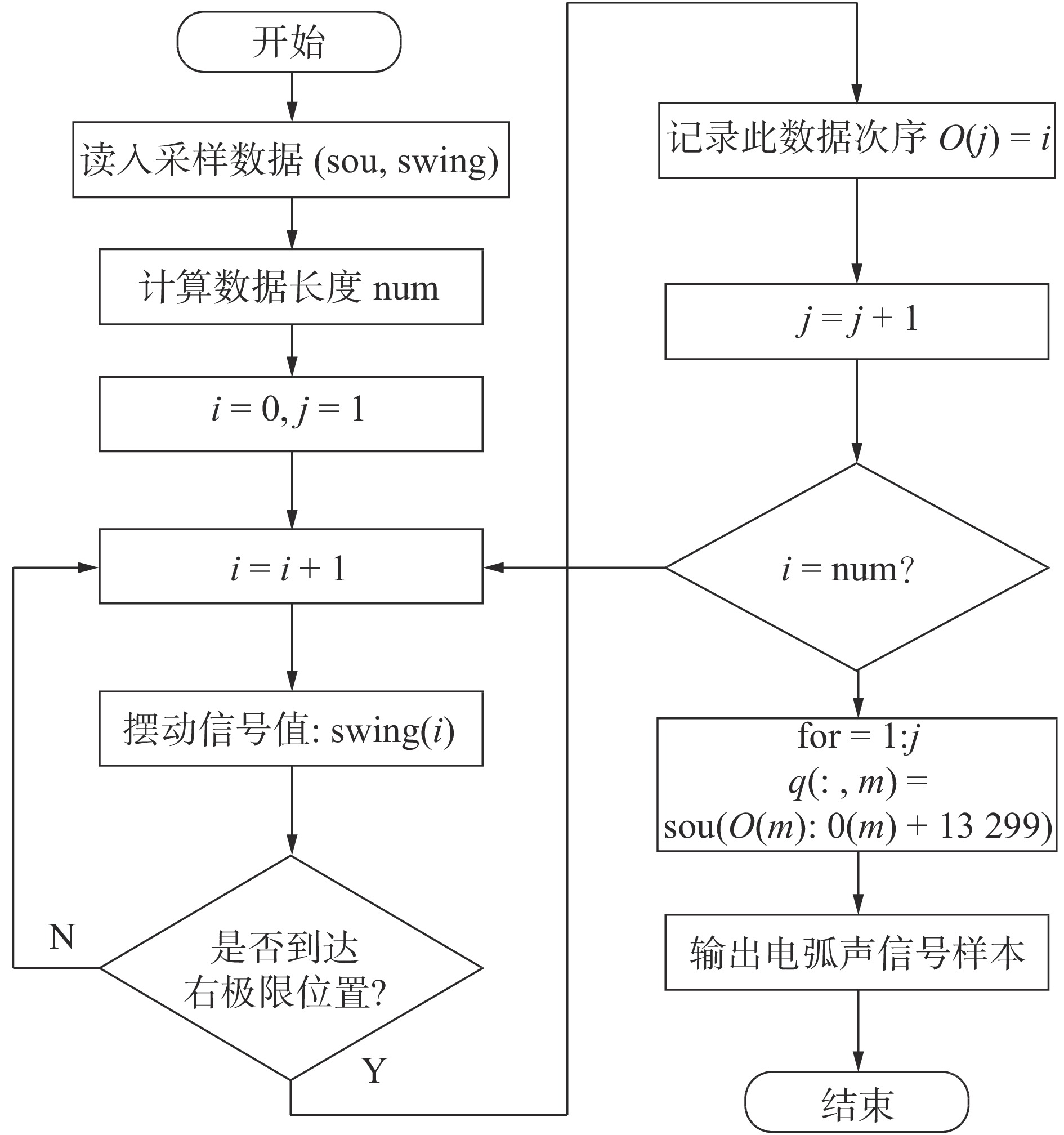
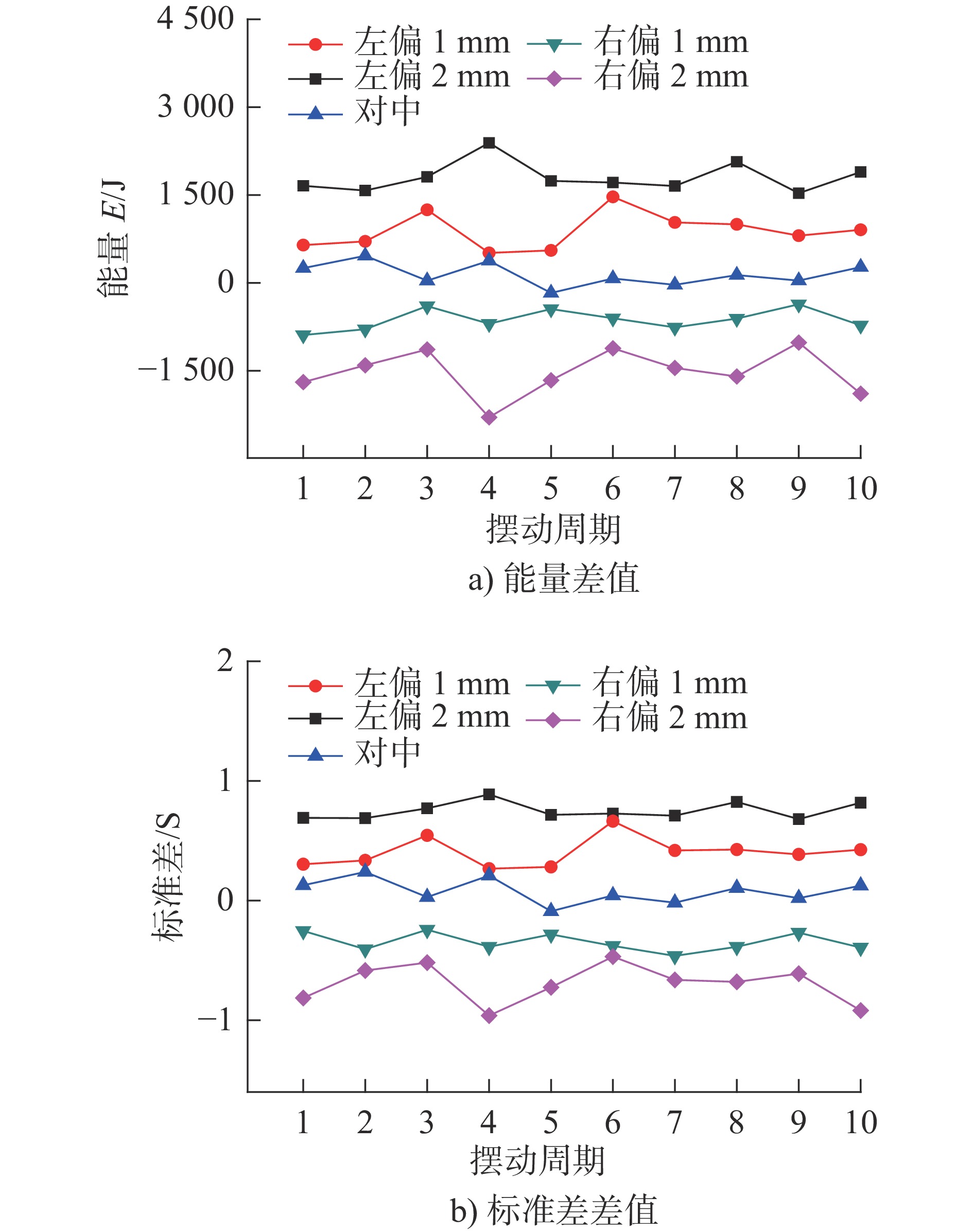
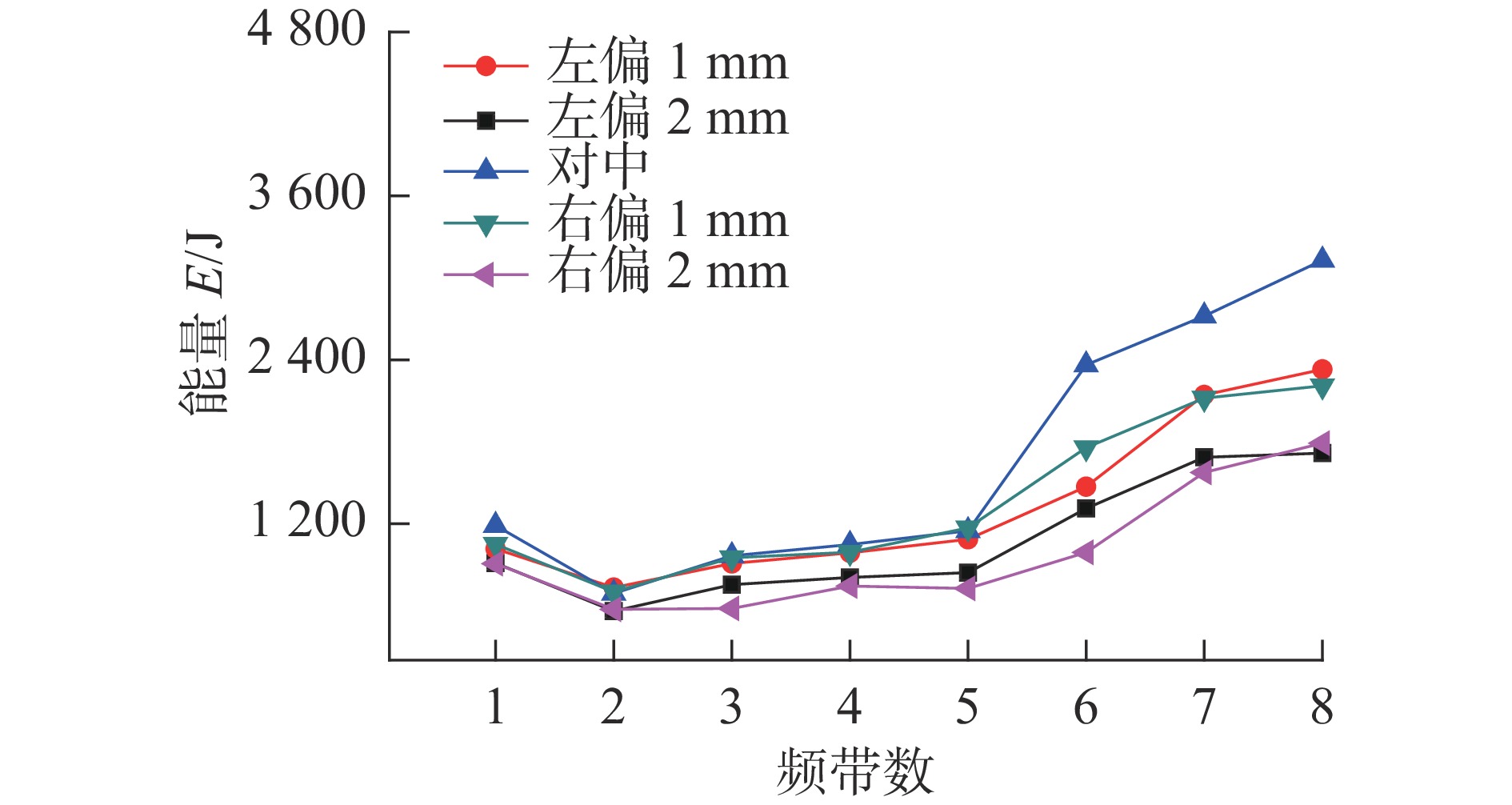
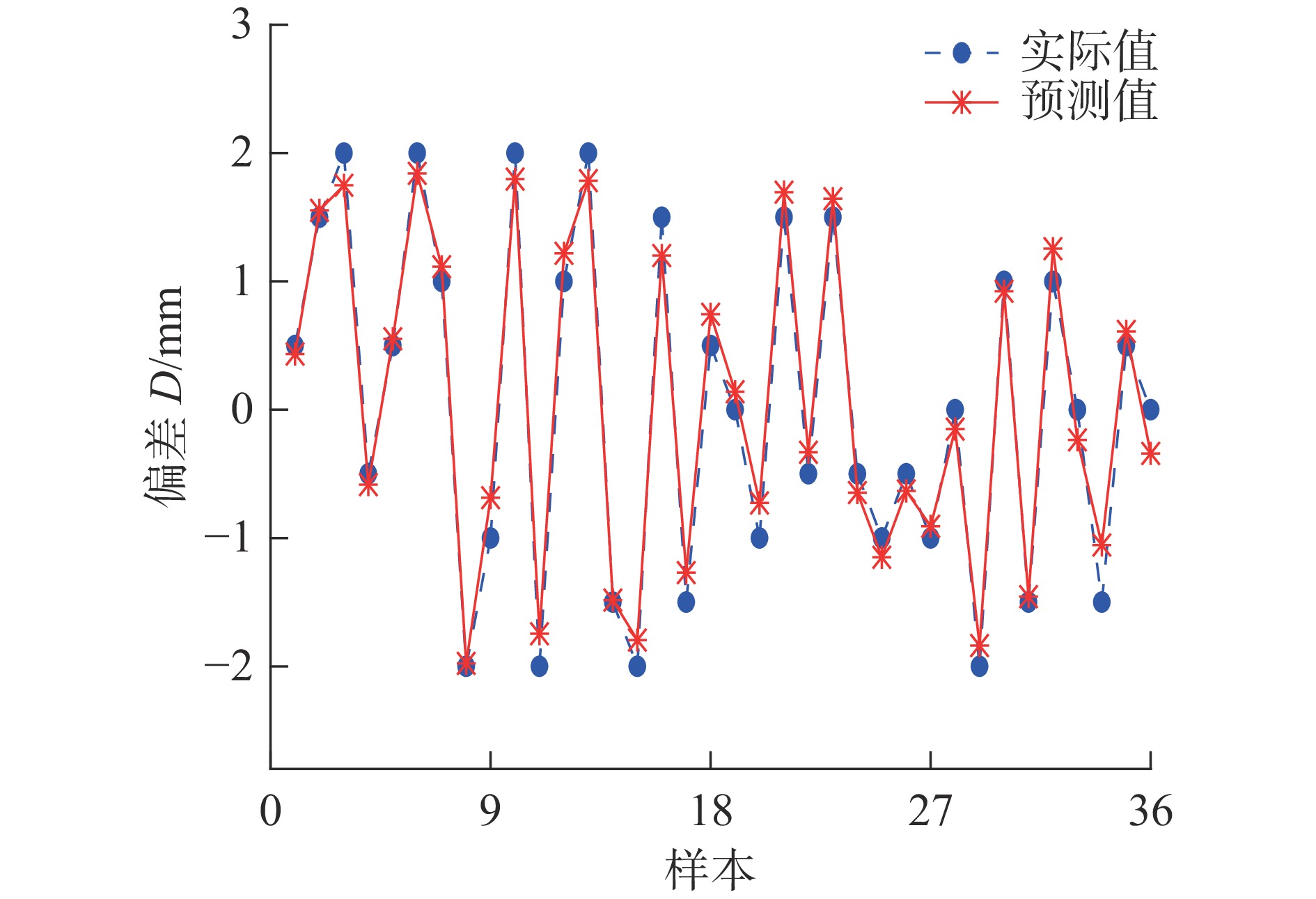
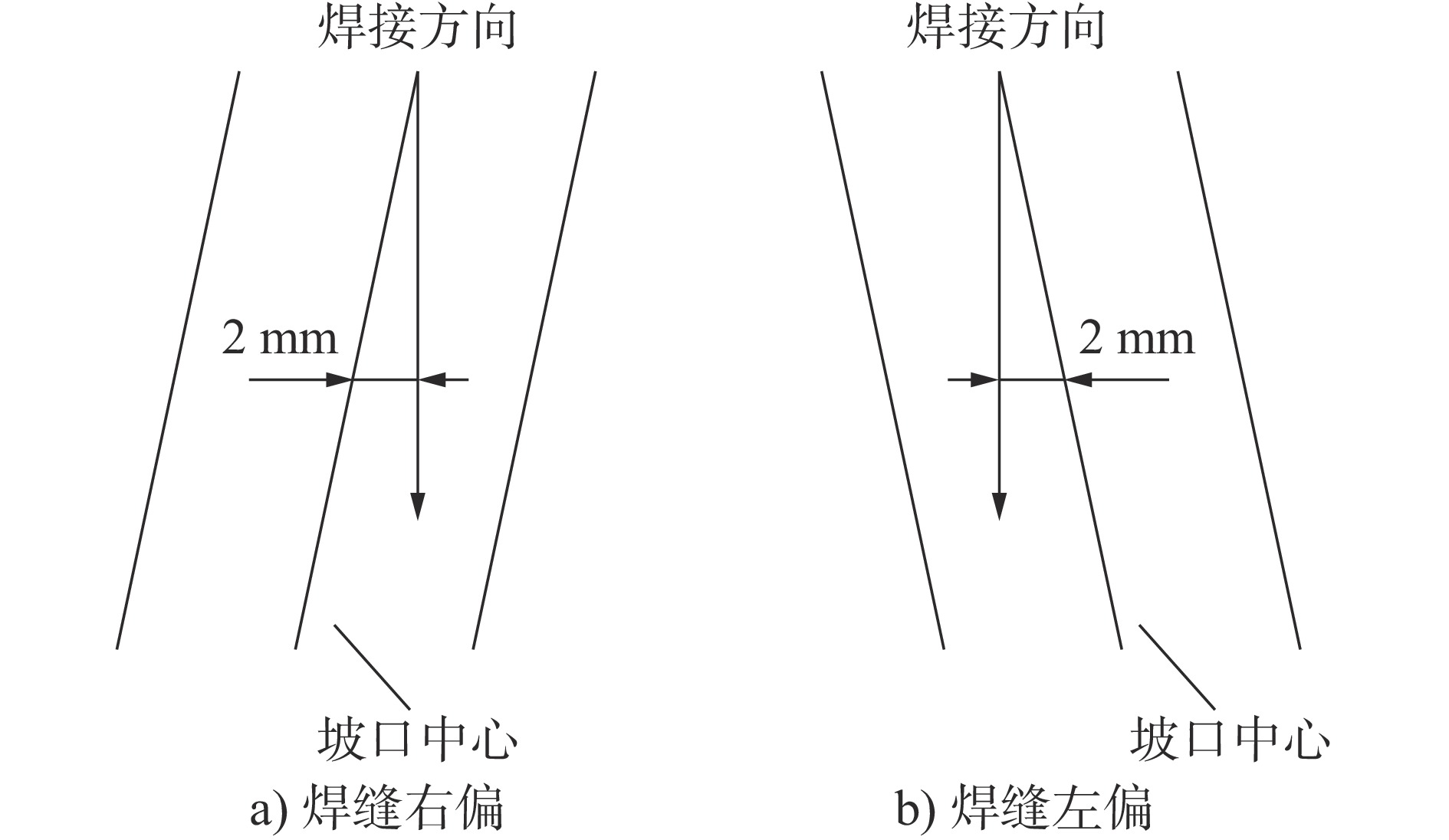
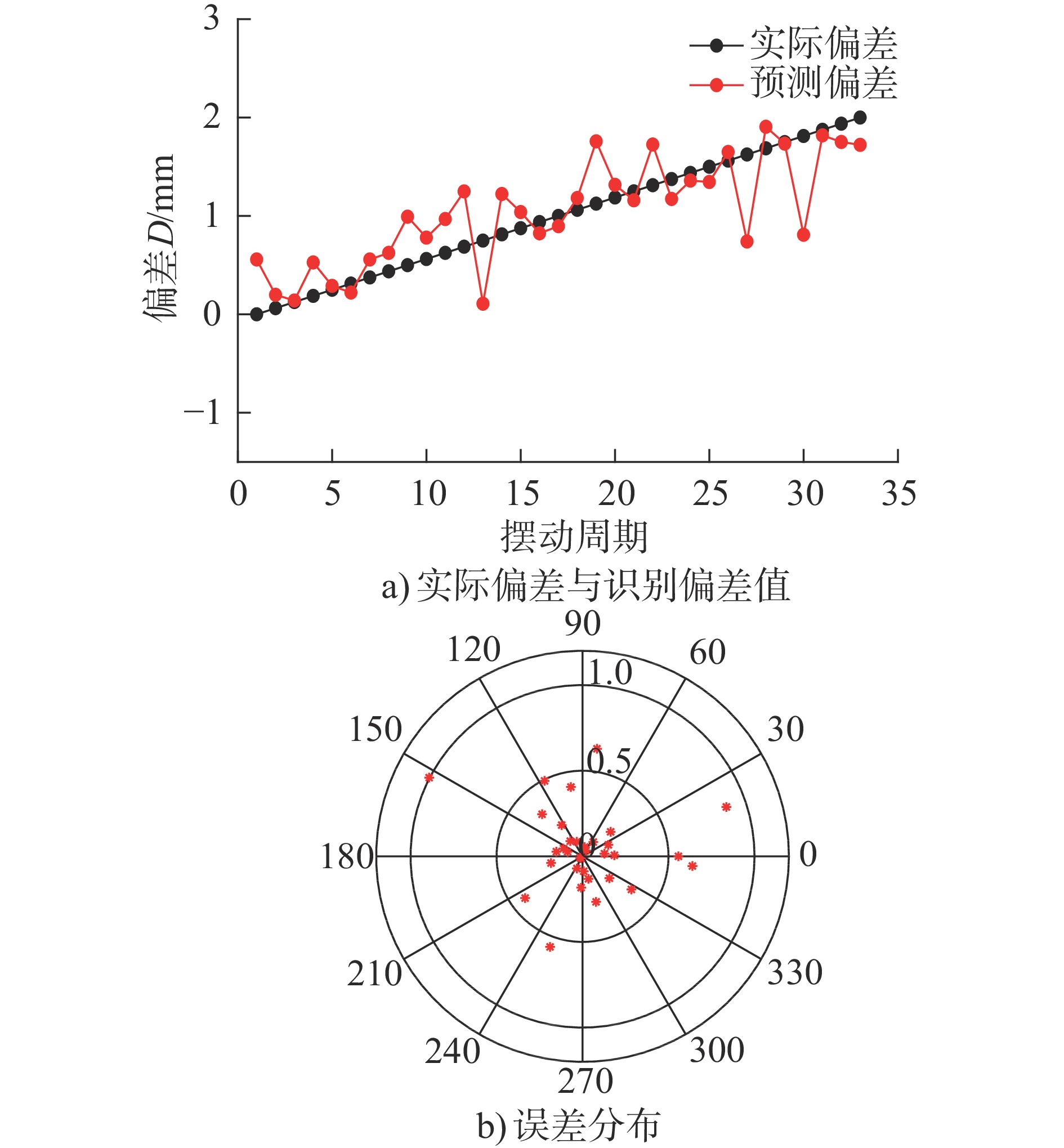
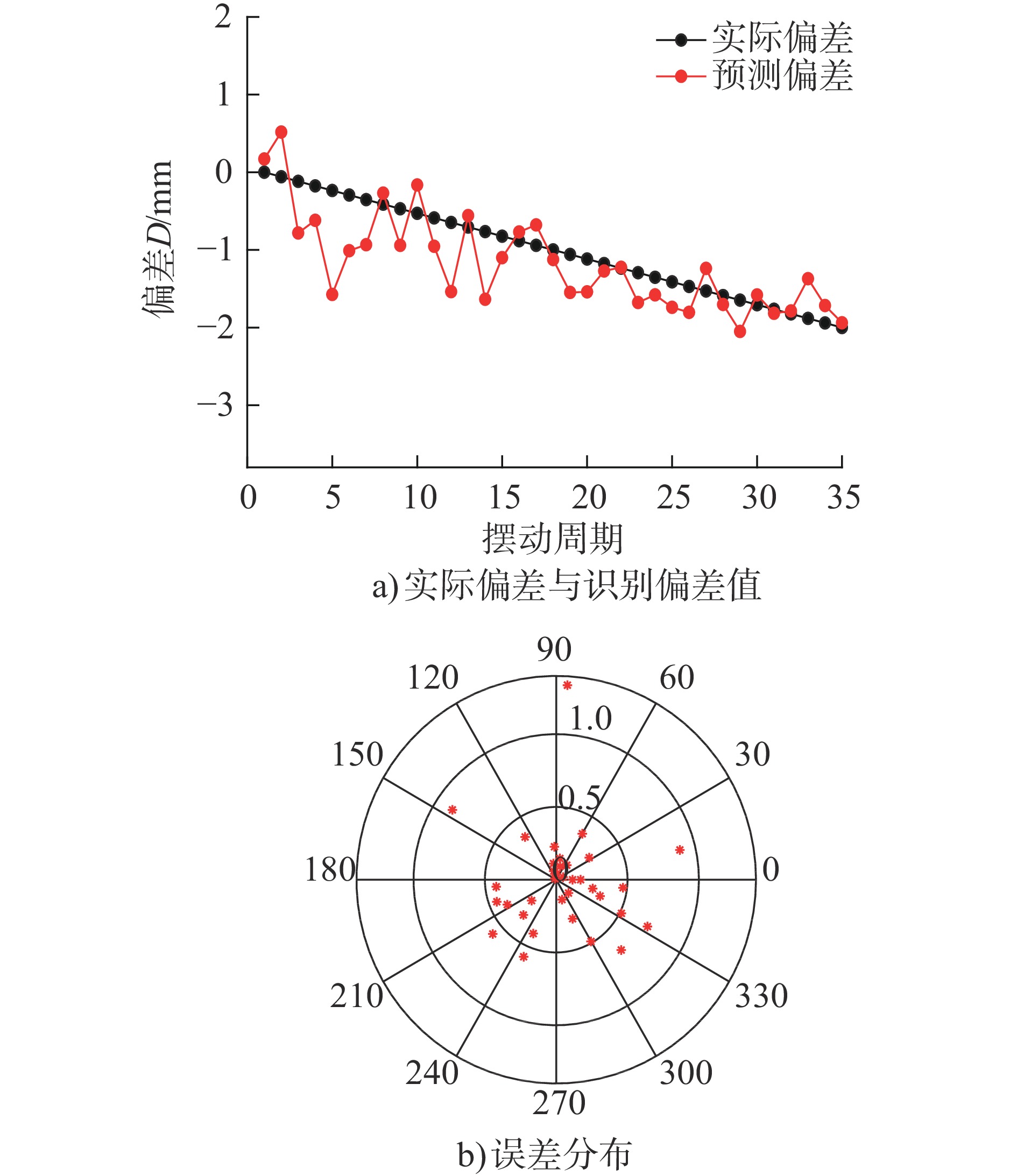
针对中厚板V型坡口GMAW(熔化极气体保护焊)焊缝偏差识别问题,提出一种新型基于电弧声信号的中厚板GMAW摆动焊焊缝偏差识别方法。在V型坡口摆动焊接中,发现当摆动中心与焊缝中心出现偏差,电弧声信号呈现明显非对称性。为此,针对电弧声信号的时域和频域特征开展了进一步研究,明确了与焊缝偏差信号存在密切关联的电弧声摆动极限位置能量差、标准差、小波包第7频带和第8频带能量等特征参量。构建基于上述4类参量的GS-SVR非线性回归方程,通过电弧声特征信号检测,可实现焊接过程中焊接偏差信息的在线识别,通过左右偏差试验表明该模型具有良好精度,可满足工程实际生产需要。
针对中厚板V型坡口GMAW(熔化极气体保护焊)焊缝偏差识别问题,提出一种新型基于电弧声信号的中厚板GMAW摆动焊焊缝偏差识别方法。在V型坡口摆动焊接中,发现当摆动中心与焊缝中心出现偏差,电弧声信号呈现明显非对称性。为此,针对电弧声信号的时域和频域特征开展了进一步研究,明确了与焊缝偏差信号存在密切关联的电弧声摆动极限位置能量差、标准差、小波包第7频带和第8频带能量等特征参量。构建基于上述4类参量的GS-SVR非线性回归方程,通过电弧声特征信号检测,可实现焊接过程中焊接偏差信息的在线识别,通过左右偏差试验表明该模型具有良好精度,可满足工程实际生产需要。


2023, 42(9): 1482-1489.
doi: 10.13433/j.cnki.1003-8728.20220043
摘要:
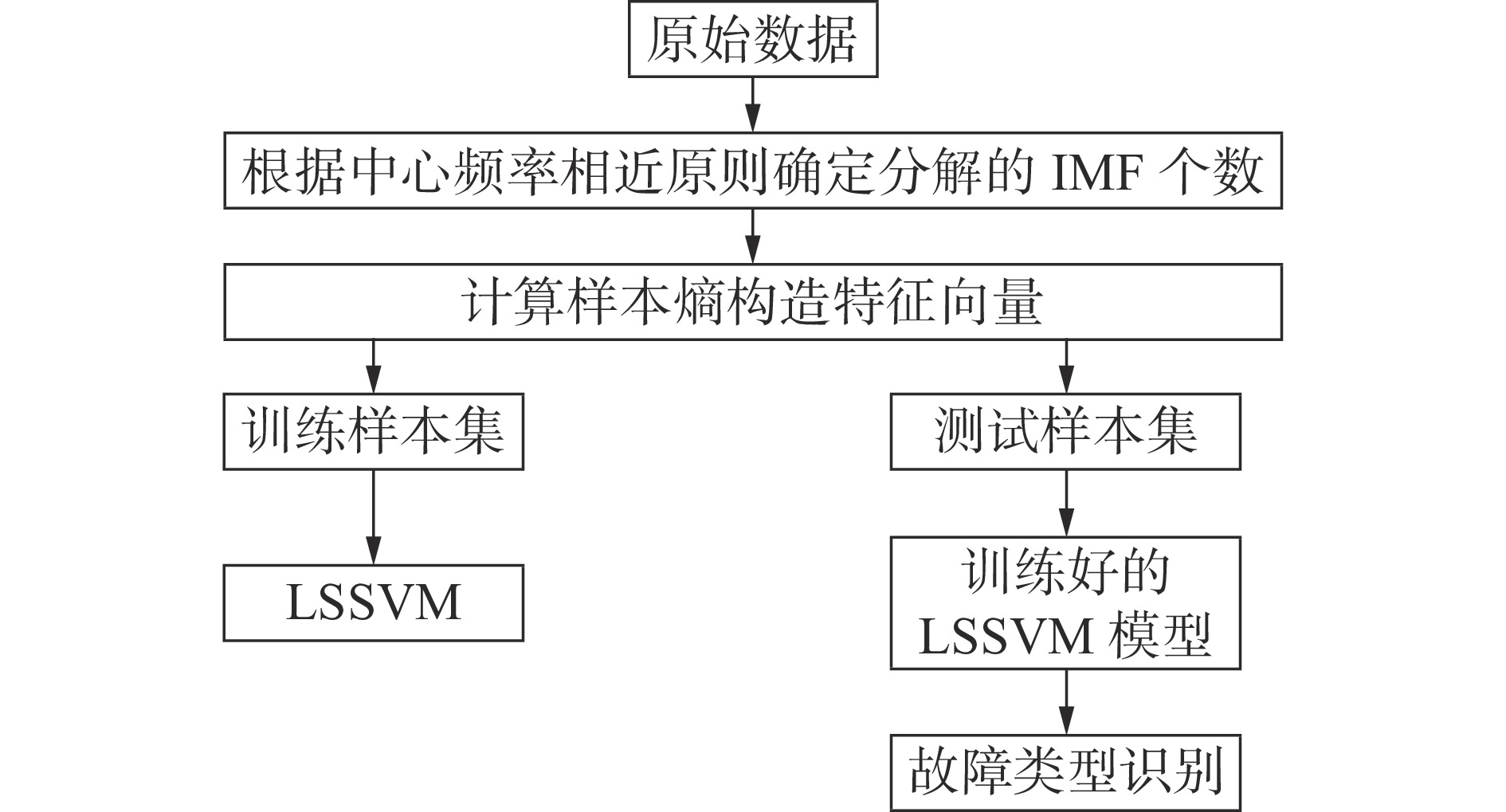
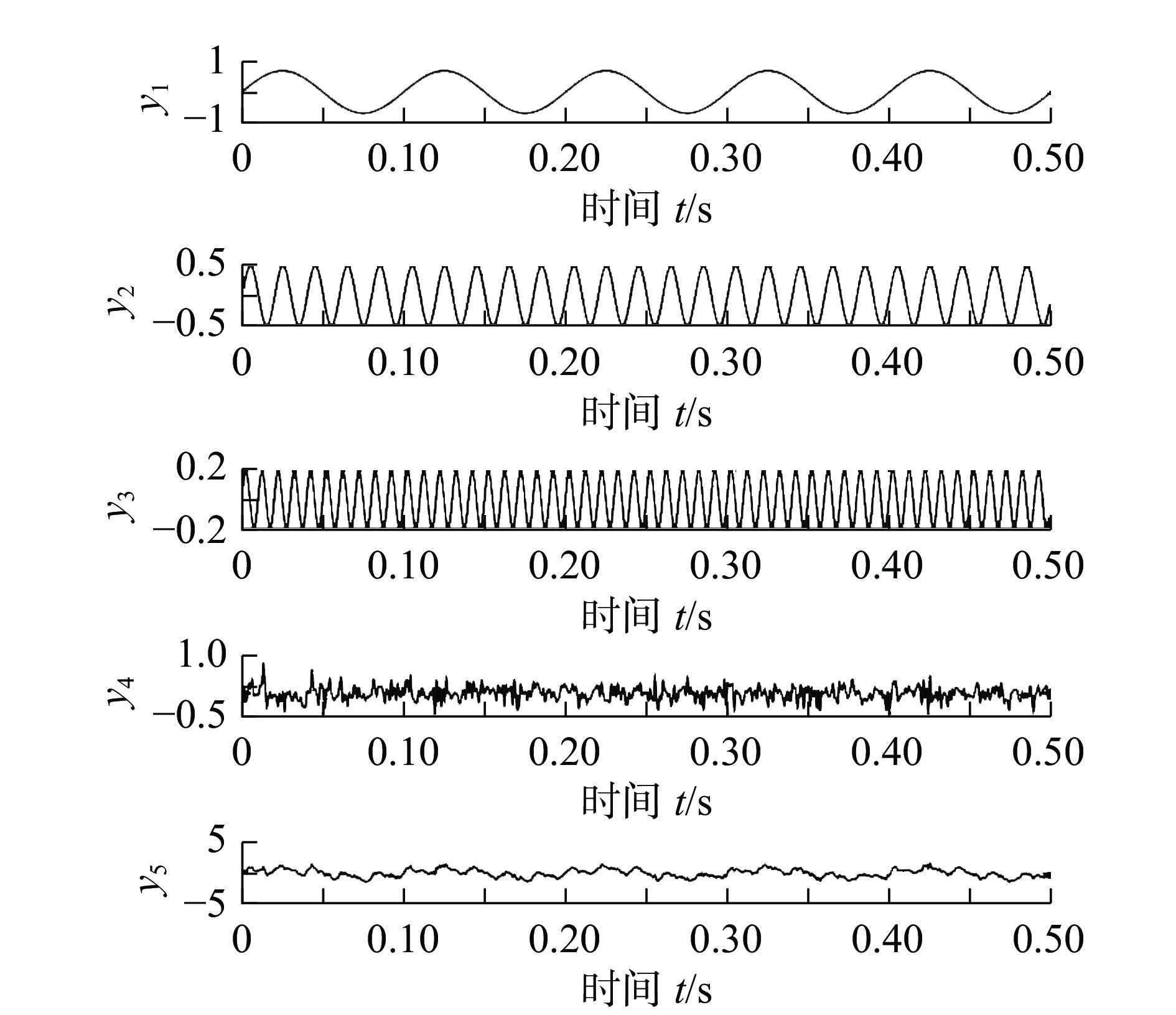
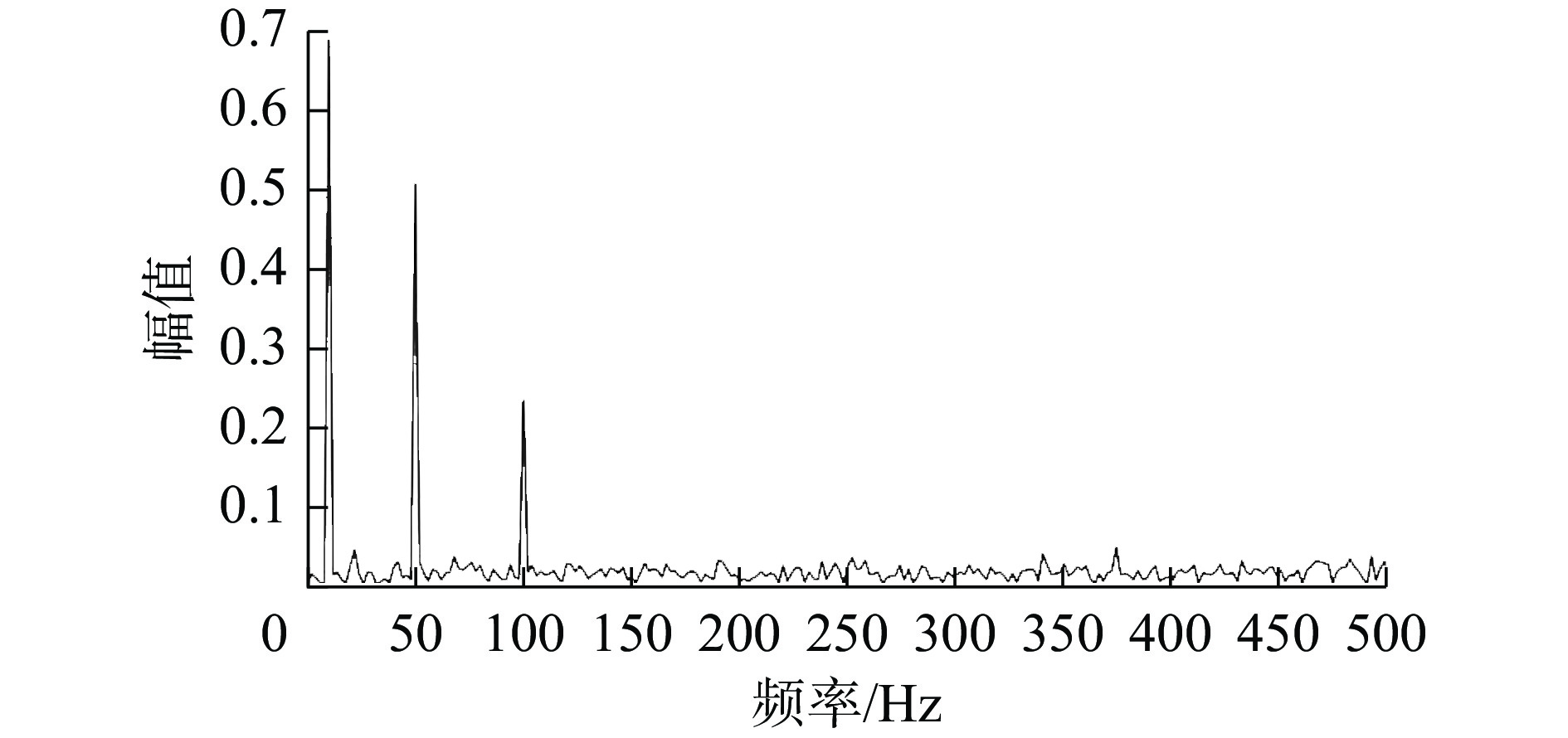
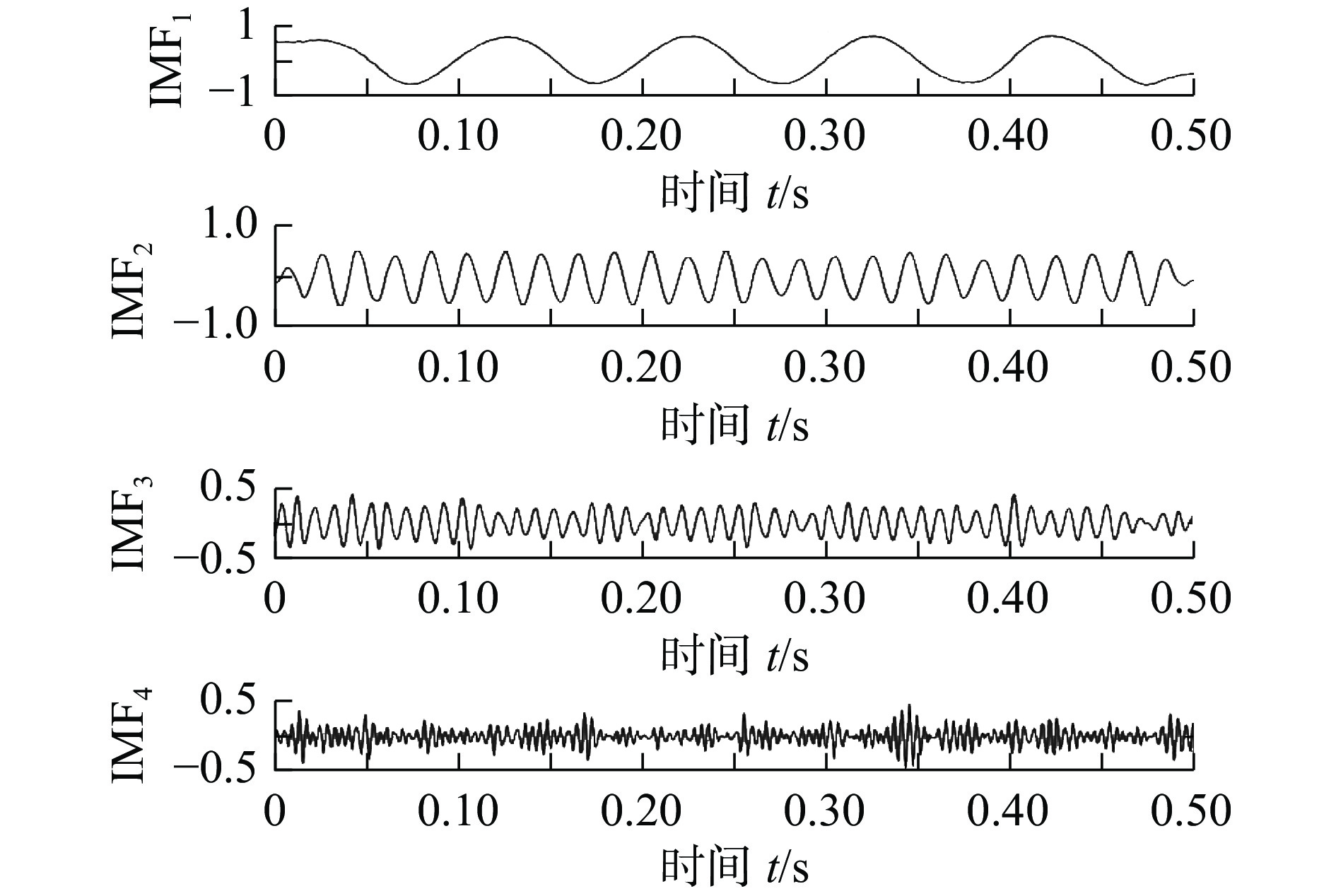
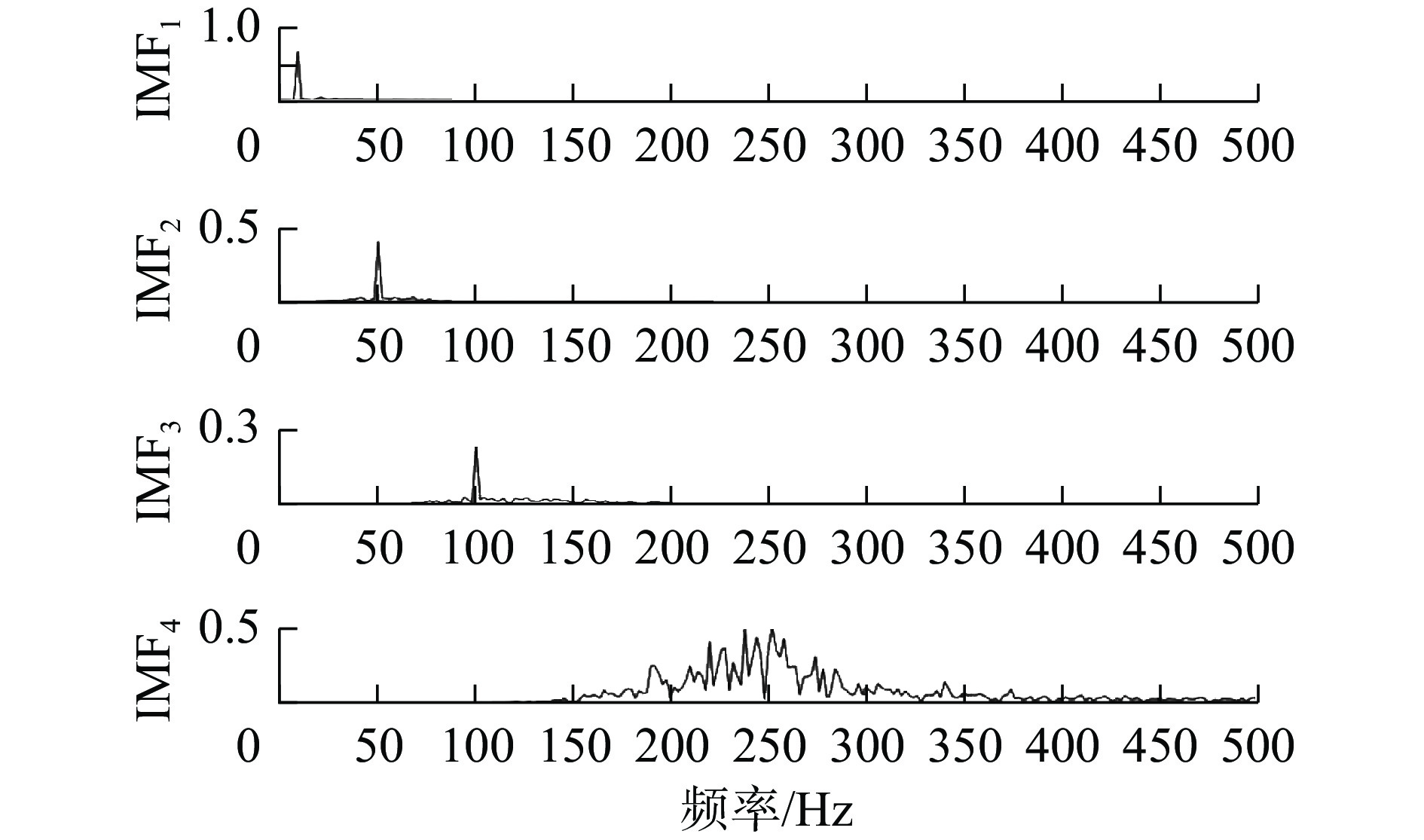
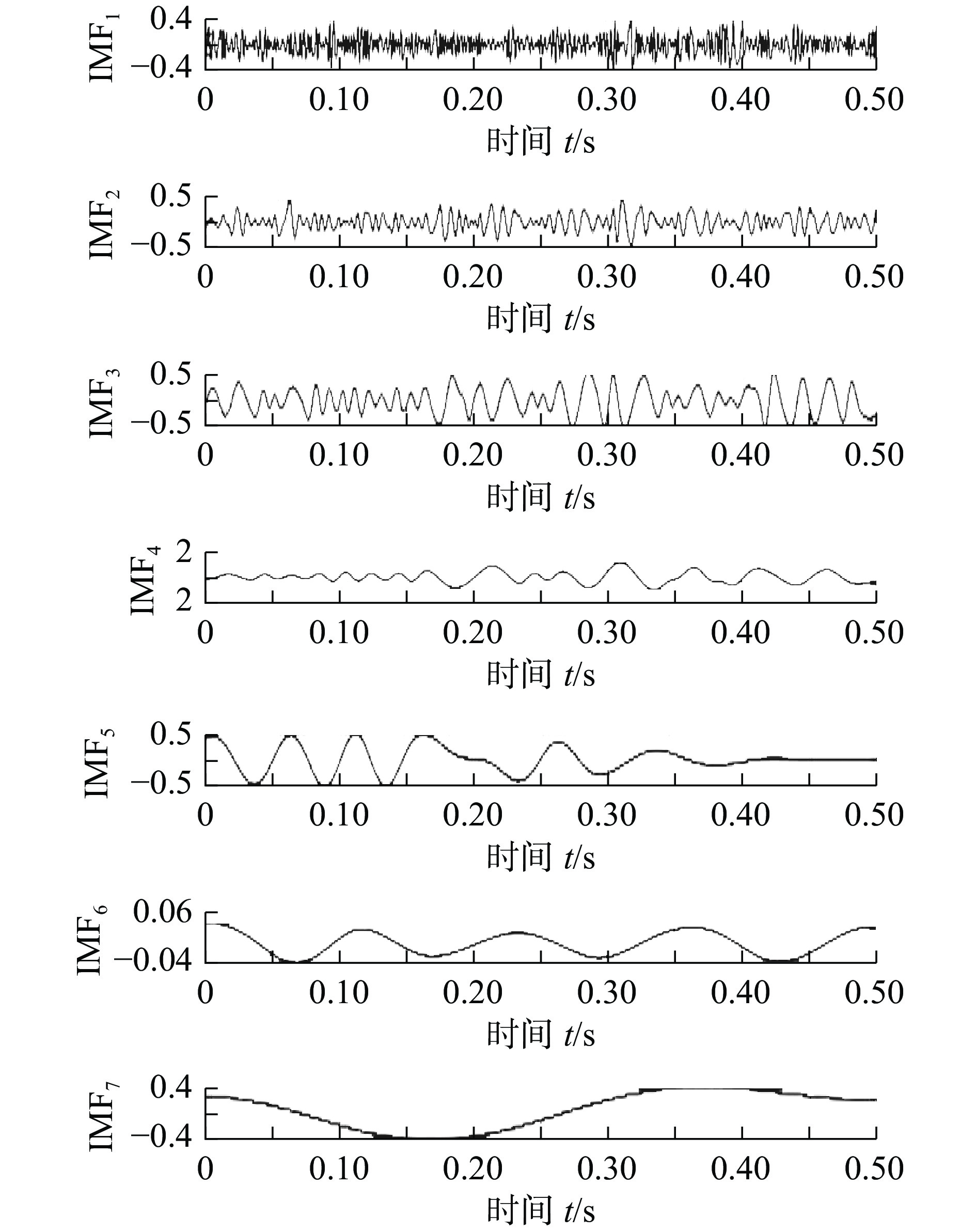
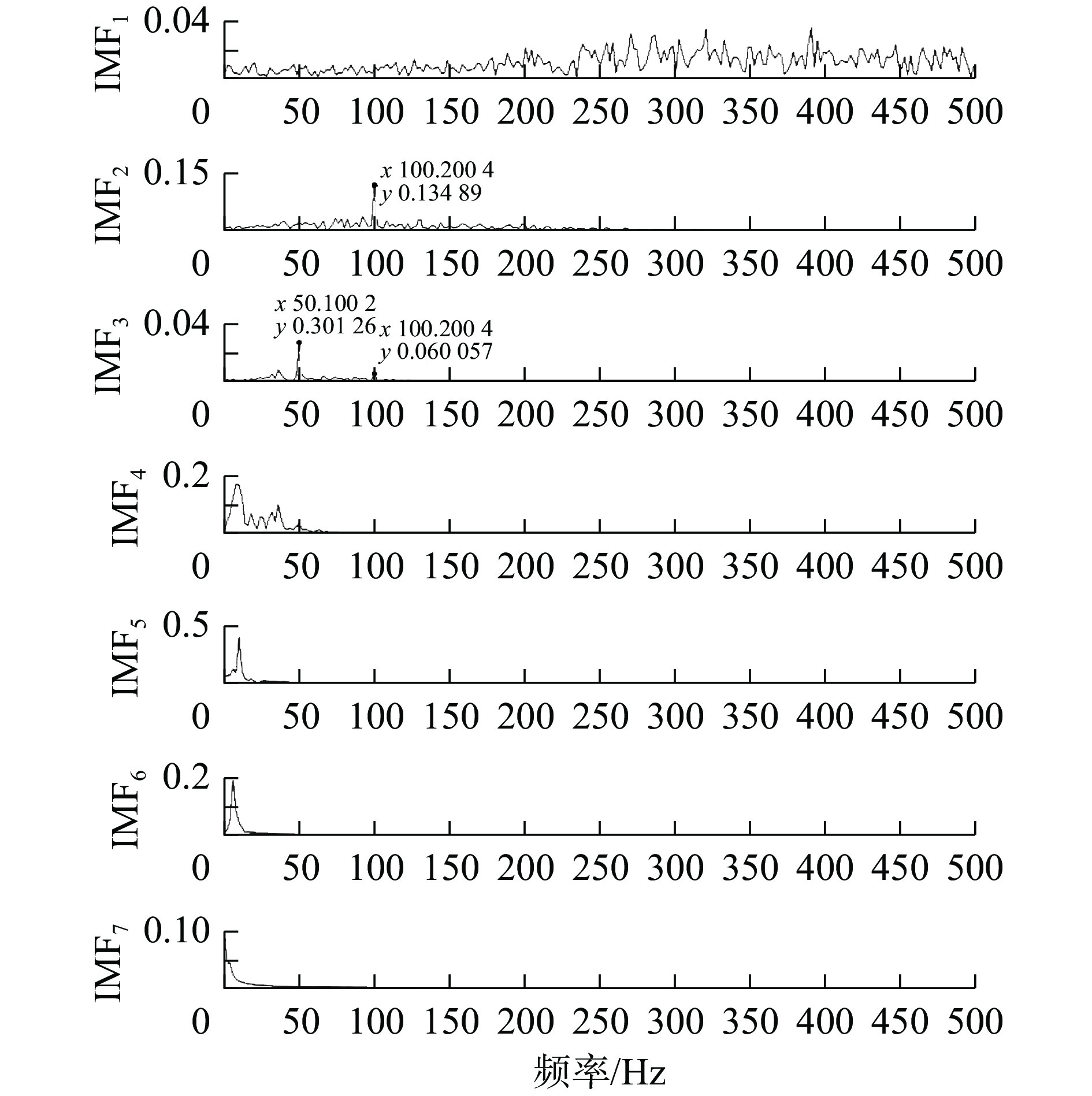
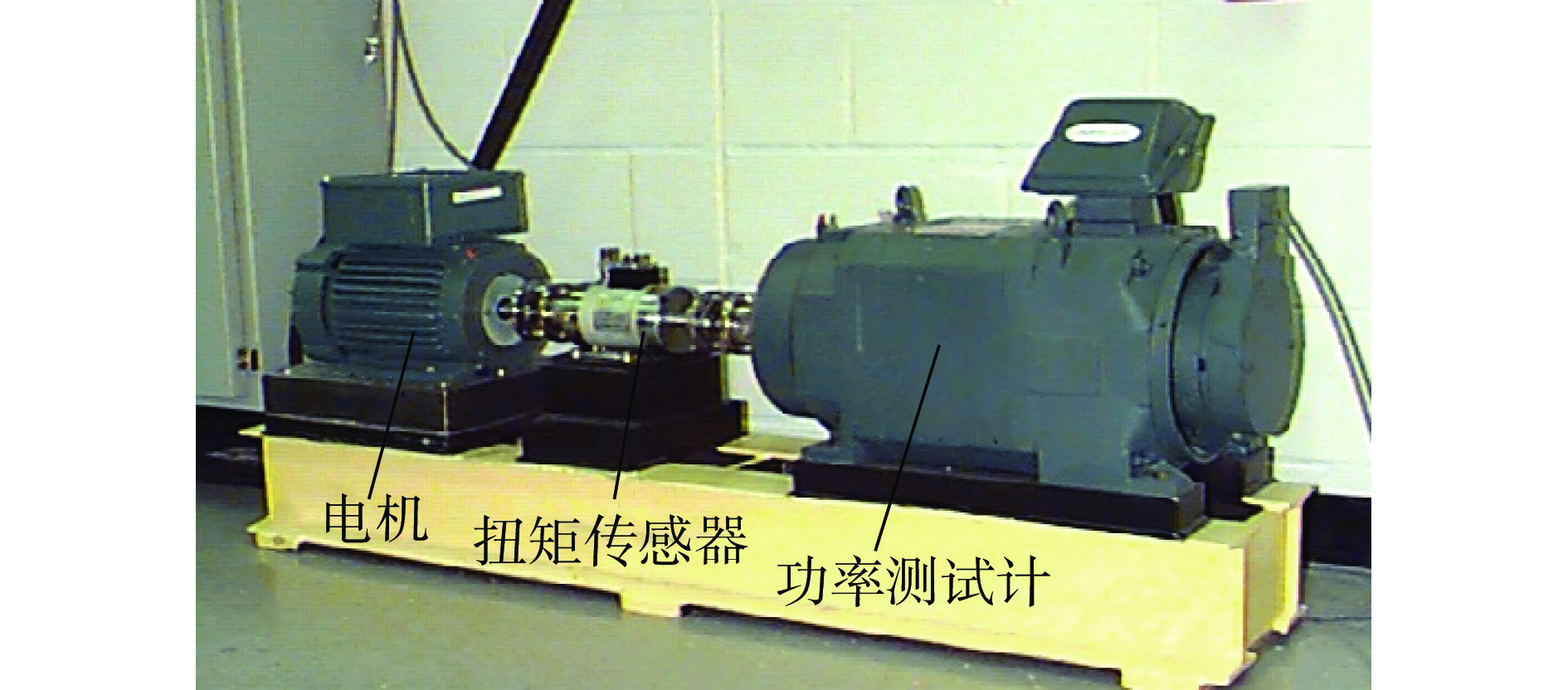
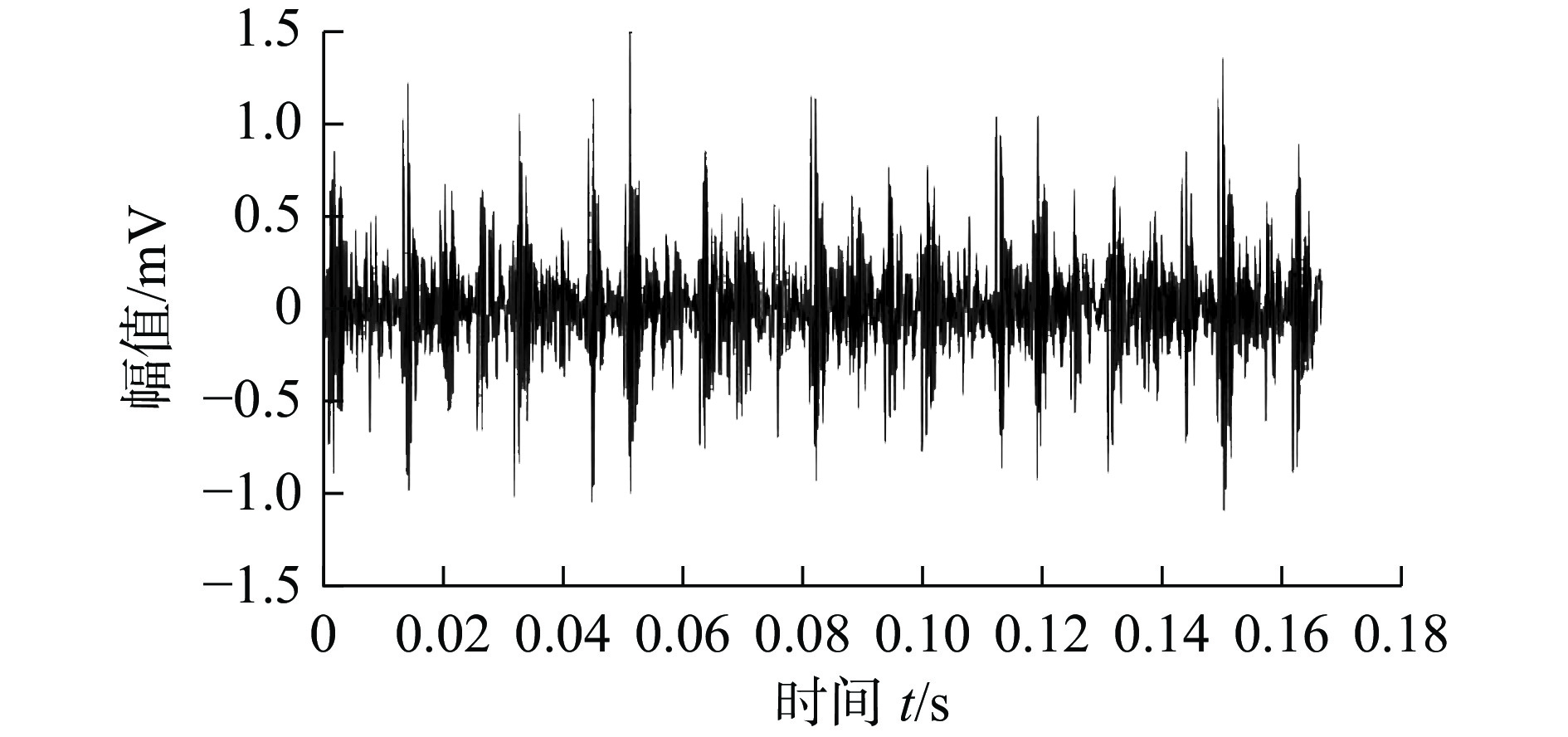
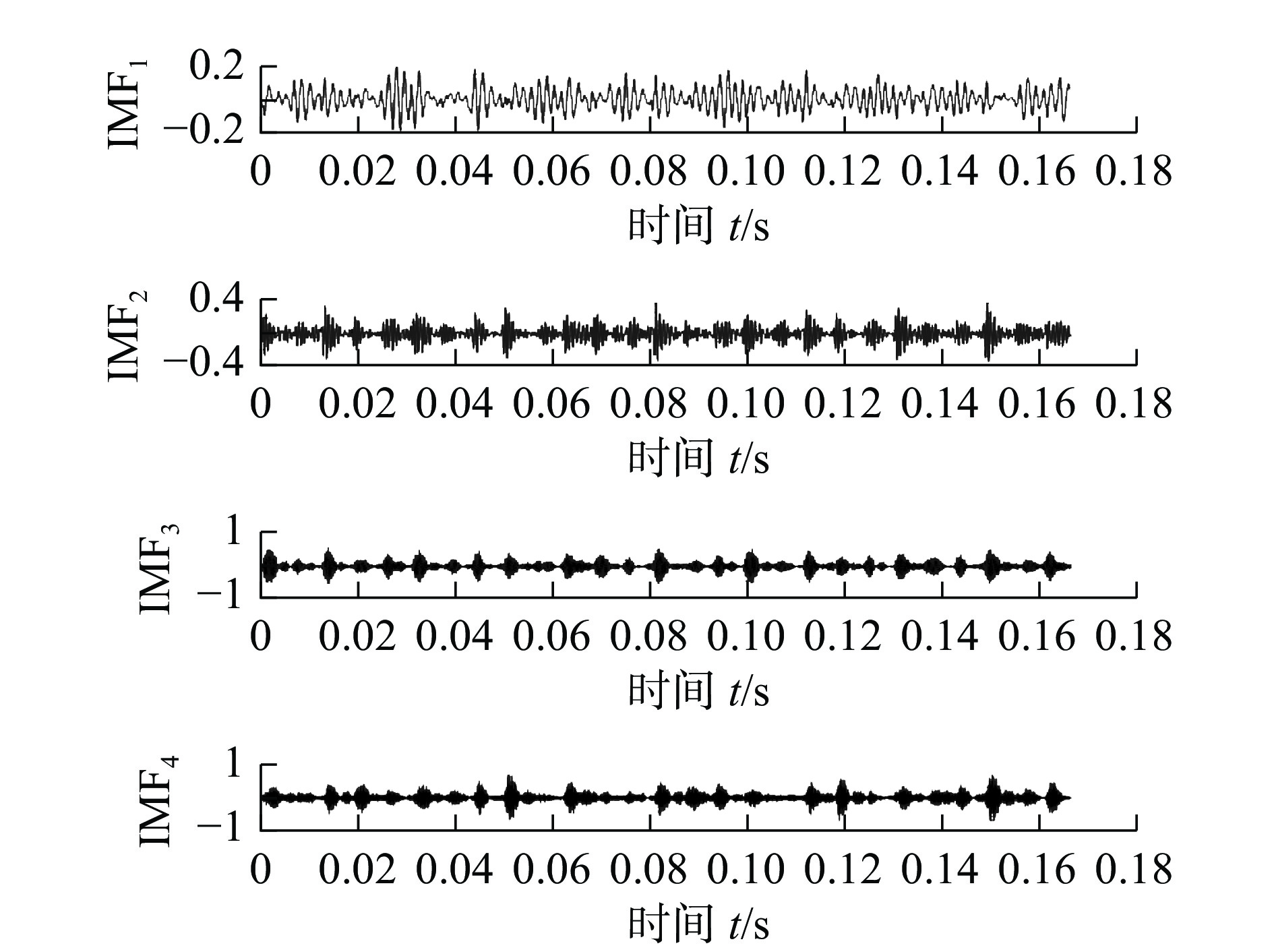
滚动轴承是工程设备中的关键部件,对滚动轴承进行故障识别方法研究有重要的意义。为了解决滚动轴承振动信号分析能力薄弱的问题,提出了一种基于变分模态分解(Variational modedecomposition,VMD)与最小二乘支持向量机(Least square support vector machine,LSSVM)的滚动轴承故障识别方法。以凯斯西储大学滚动轴承实验数据为研究对象,获取4类故障7种滚动轴承状态实验振动数据。进行VMD分解,得出最佳分解本征模态函数(Intrinsic mode function,IMF)个数4,然后计算4个IMF样本熵(Sample entropy,SE)得到相应特征量,输入LSSVM模型进行状态识别。实验表明,基于VMD-LSSVM的方法比EMD(Empirical mode decomposition)-HMM(HiddenMarkov model)和EMD-LSSVM方法有更高的识别率。
滚动轴承是工程设备中的关键部件,对滚动轴承进行故障识别方法研究有重要的意义。为了解决滚动轴承振动信号分析能力薄弱的问题,提出了一种基于变分模态分解(Variational modedecomposition,VMD)与最小二乘支持向量机(Least square support vector machine,LSSVM)的滚动轴承故障识别方法。以凯斯西储大学滚动轴承实验数据为研究对象,获取4类故障7种滚动轴承状态实验振动数据。进行VMD分解,得出最佳分解本征模态函数(Intrinsic mode function,IMF)个数4,然后计算4个IMF样本熵(Sample entropy,SE)得到相应特征量,输入LSSVM模型进行状态识别。实验表明,基于VMD-LSSVM的方法比EMD(Empirical mode decomposition)-HMM(HiddenMarkov model)和EMD-LSSVM方法有更高的识别率。

2023, 42(9): 1490-1501.
doi: 10.13433/j.cnki.1003-8728.20220097
摘要:
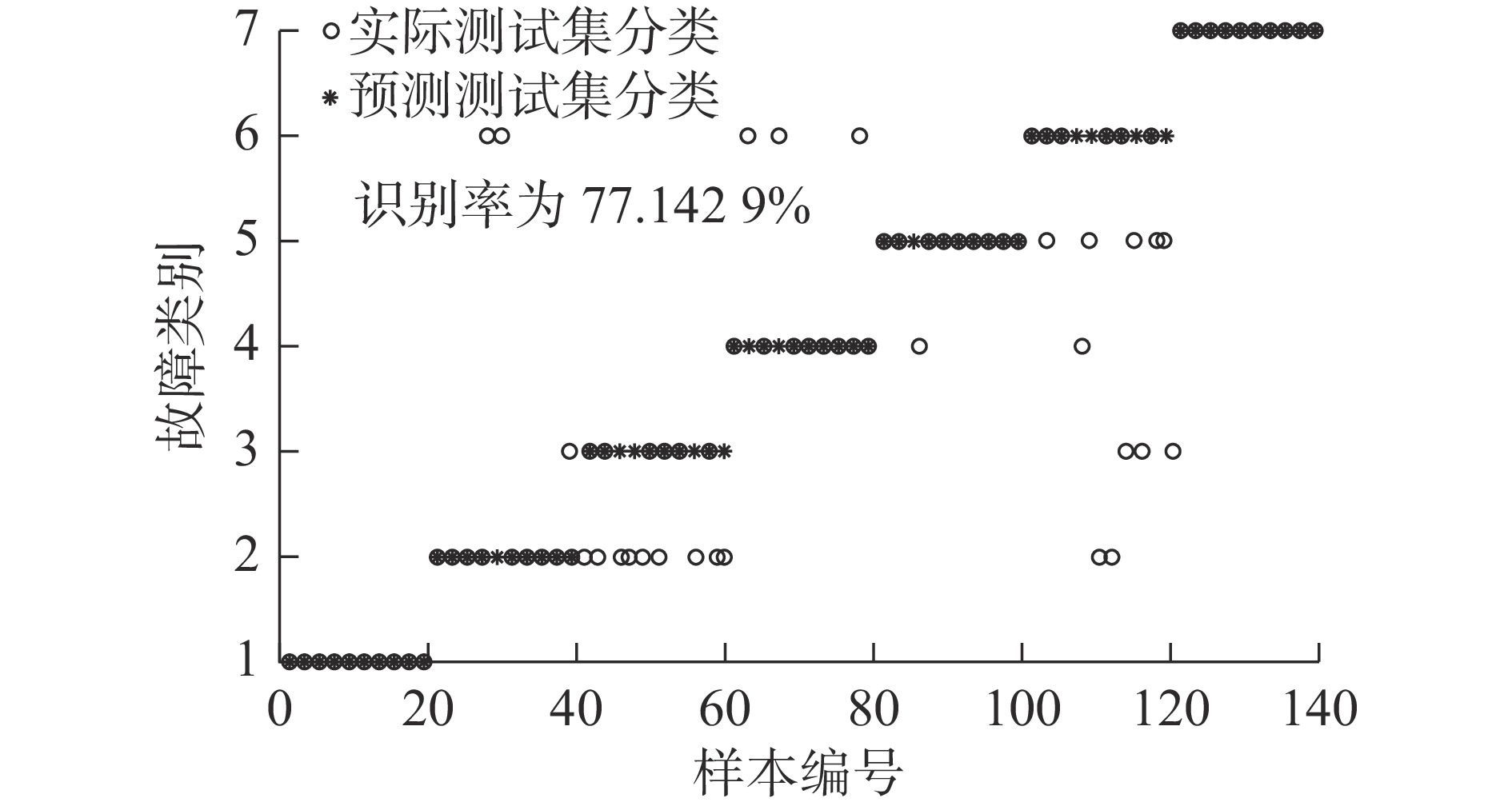
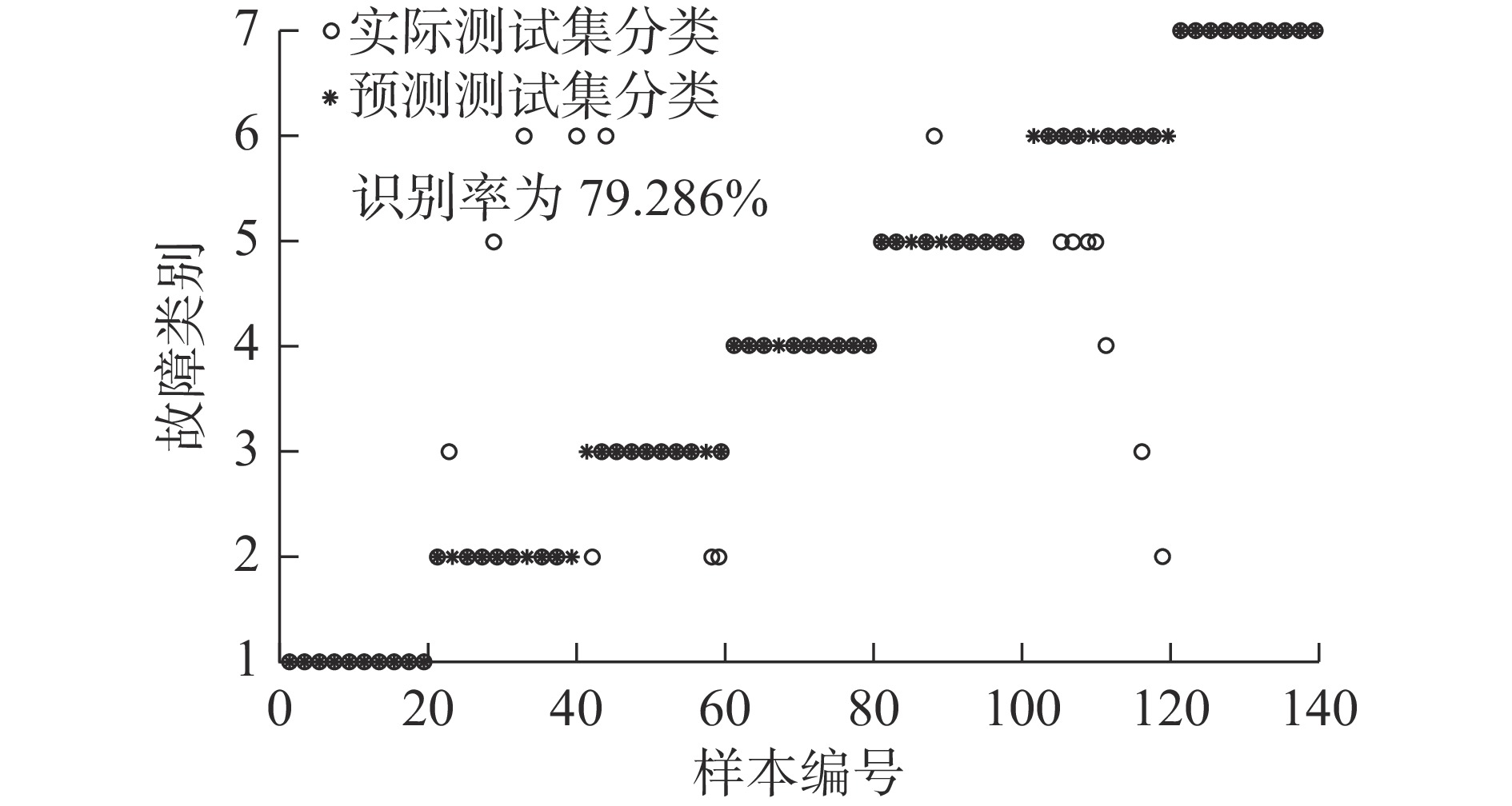
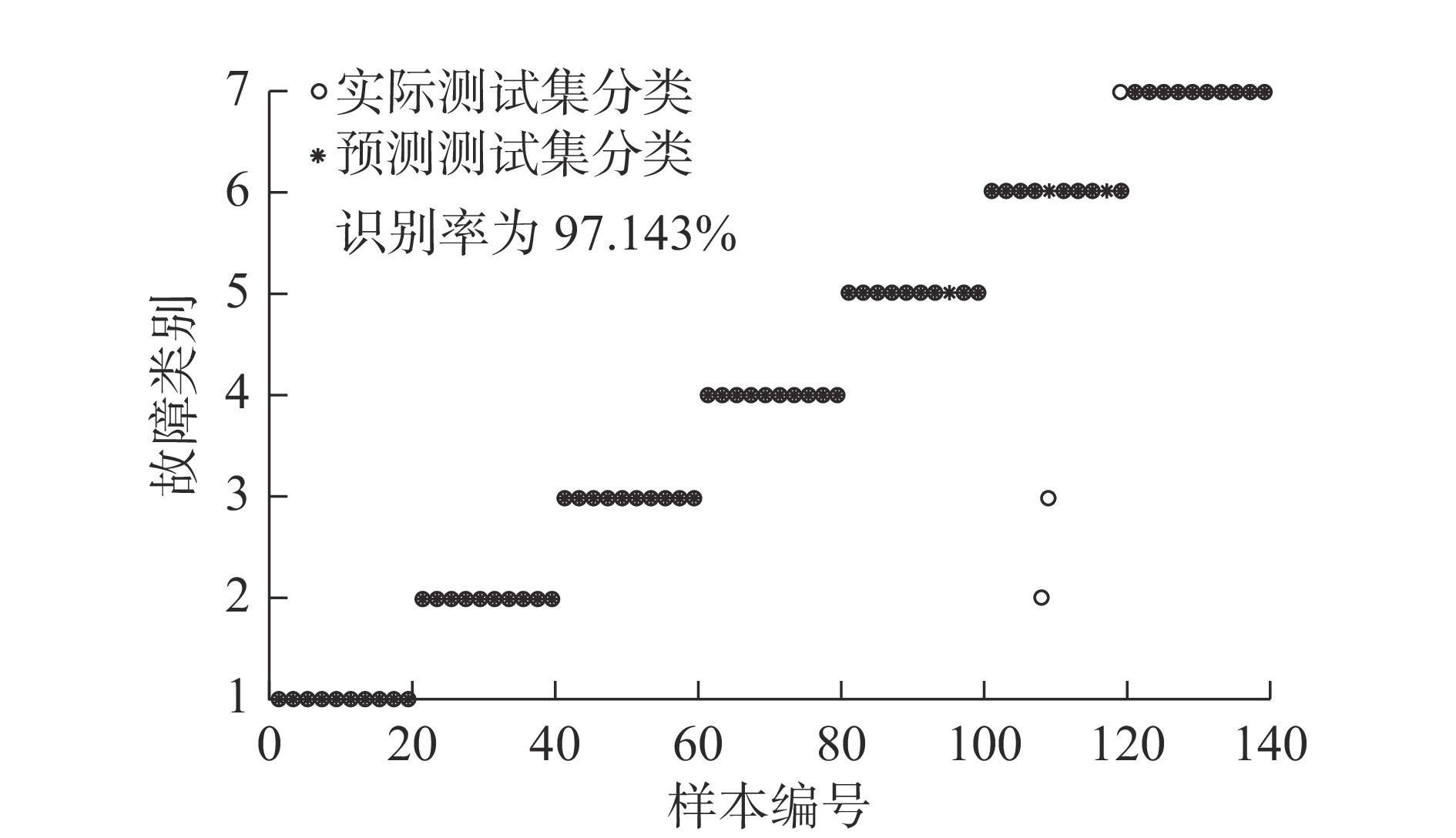
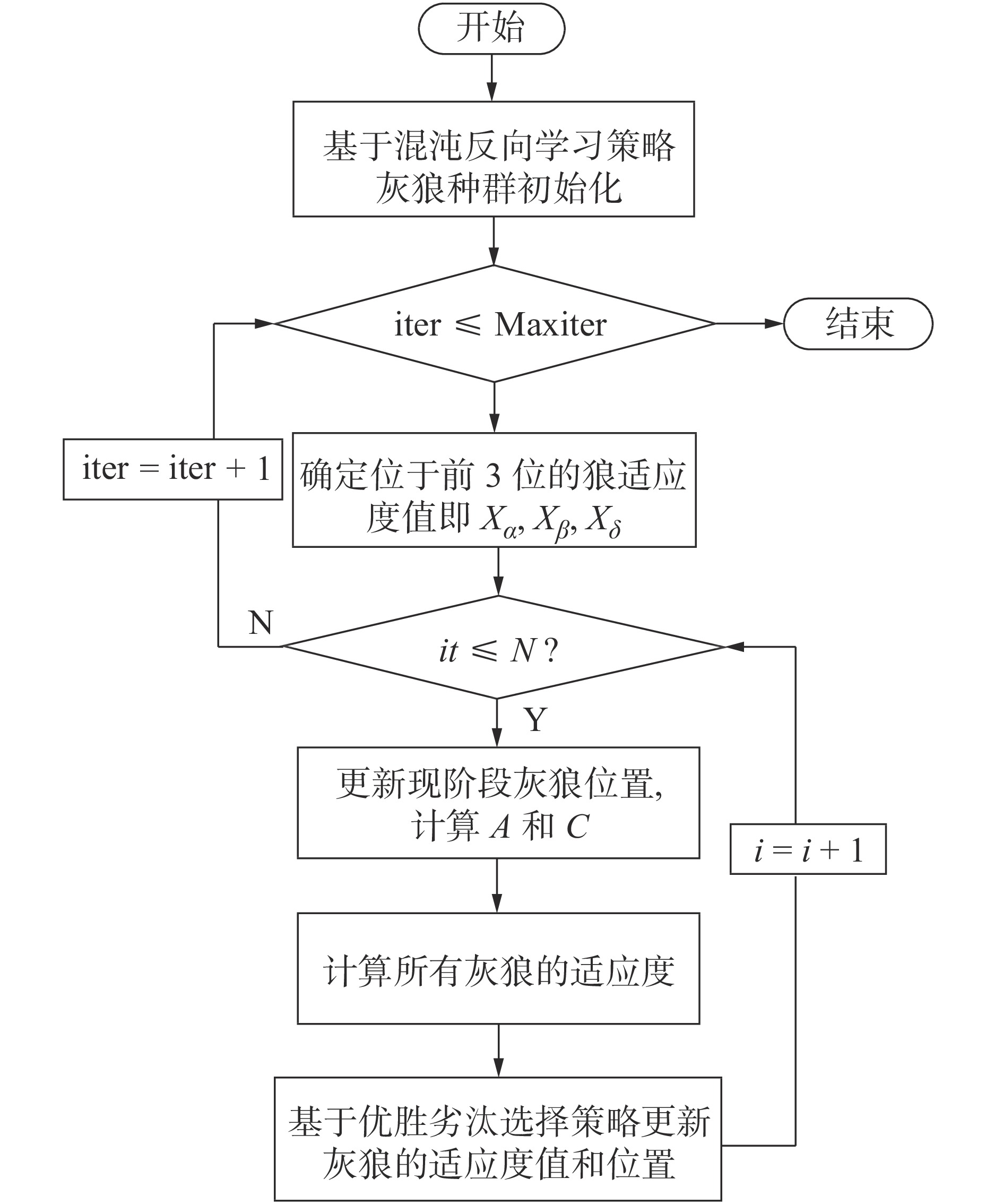
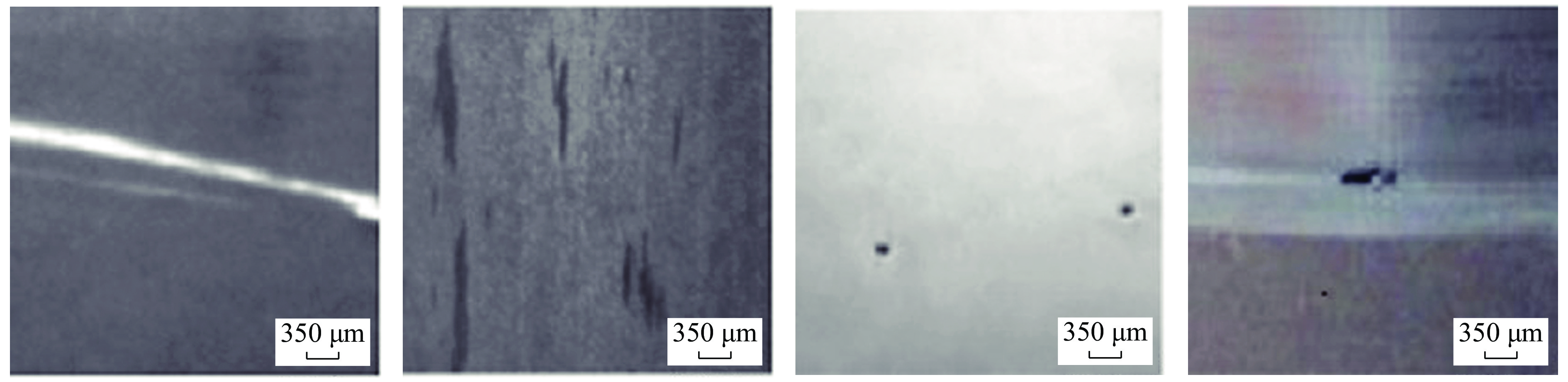
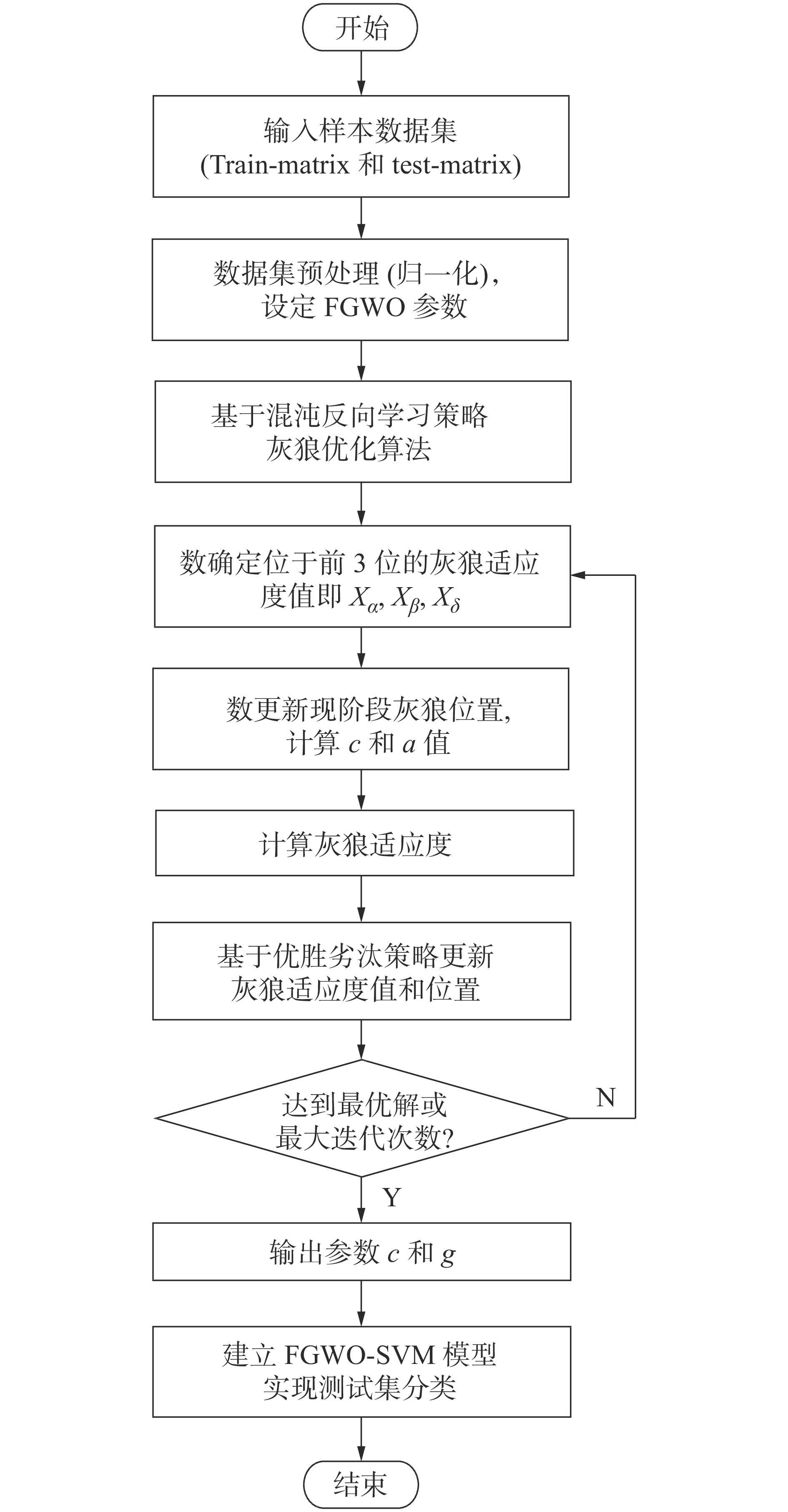
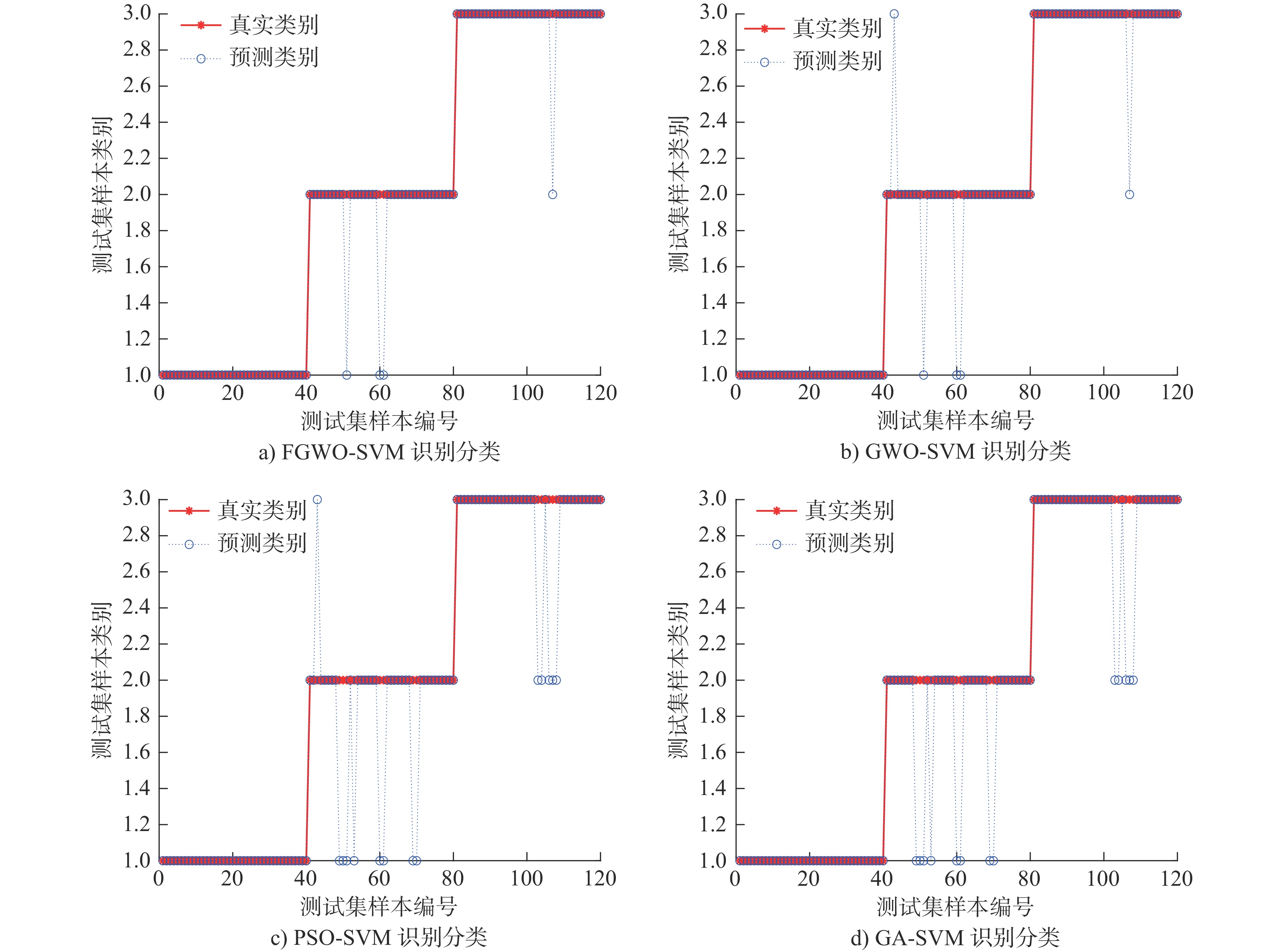
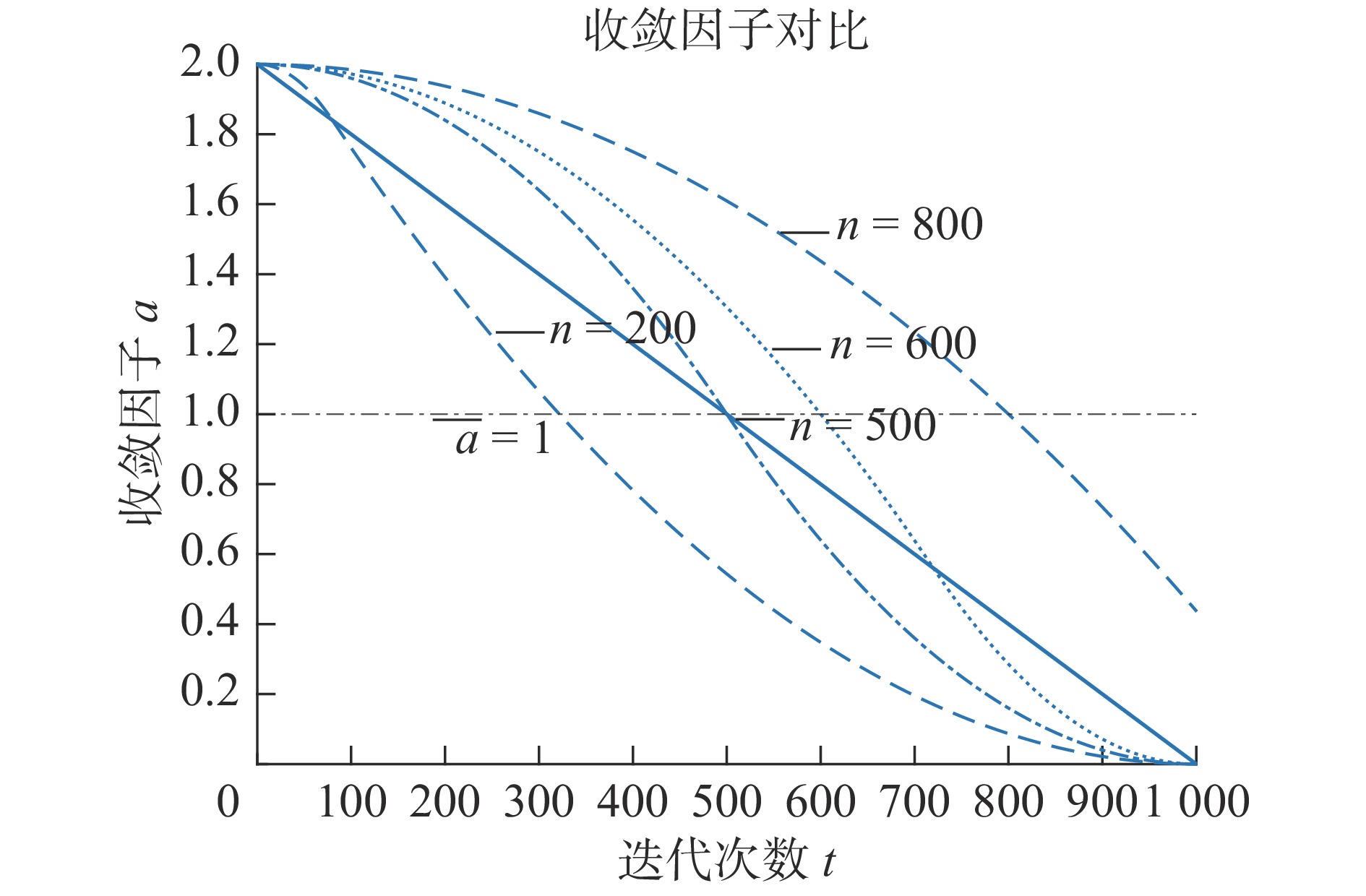
为有效地解决SVM核参数寻优问题,提出了一种基于Fuch混沌策略协同非线性收敛因子的灰狼优化算法(FGWO)。在算法的3个阶段分别引入Fuch混沌反向学习策略、动态非线性控制参数、双权重因子策略和胜劣汰选择策略,为平衡全局探索和局部开发性能提供了新机制,增强了算法的收敛速度和收敛精度;以FGWO为新策略,构建一种FGWO-SVM分类模型,实现铝铸件表面缺陷识别。为验证算法的性能,引入10个标准测试函数,采用本文FGWO与其他算法相比较。结果表明,FGWO可以有效地解决函数优化问题;将FGWO-SVM模型应用于缺陷识别问题上,该模型对缺陷类型的平均识别率为96.6%,优于其他分类器。
为有效地解决SVM核参数寻优问题,提出了一种基于Fuch混沌策略协同非线性收敛因子的灰狼优化算法(FGWO)。在算法的3个阶段分别引入Fuch混沌反向学习策略、动态非线性控制参数、双权重因子策略和胜劣汰选择策略,为平衡全局探索和局部开发性能提供了新机制,增强了算法的收敛速度和收敛精度;以FGWO为新策略,构建一种FGWO-SVM分类模型,实现铝铸件表面缺陷识别。为验证算法的性能,引入10个标准测试函数,采用本文FGWO与其他算法相比较。结果表明,FGWO可以有效地解决函数优化问题;将FGWO-SVM模型应用于缺陷识别问题上,该模型对缺陷类型的平均识别率为96.6%,优于其他分类器。

2023, 42(9): 1502-1507.
doi: 10.13433/j.cnki.1003-8728.20220109
摘要:
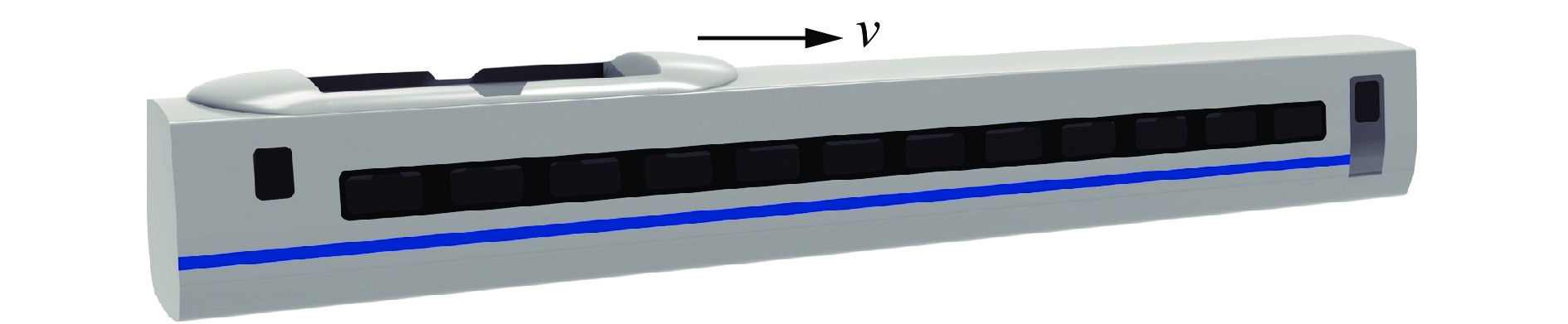
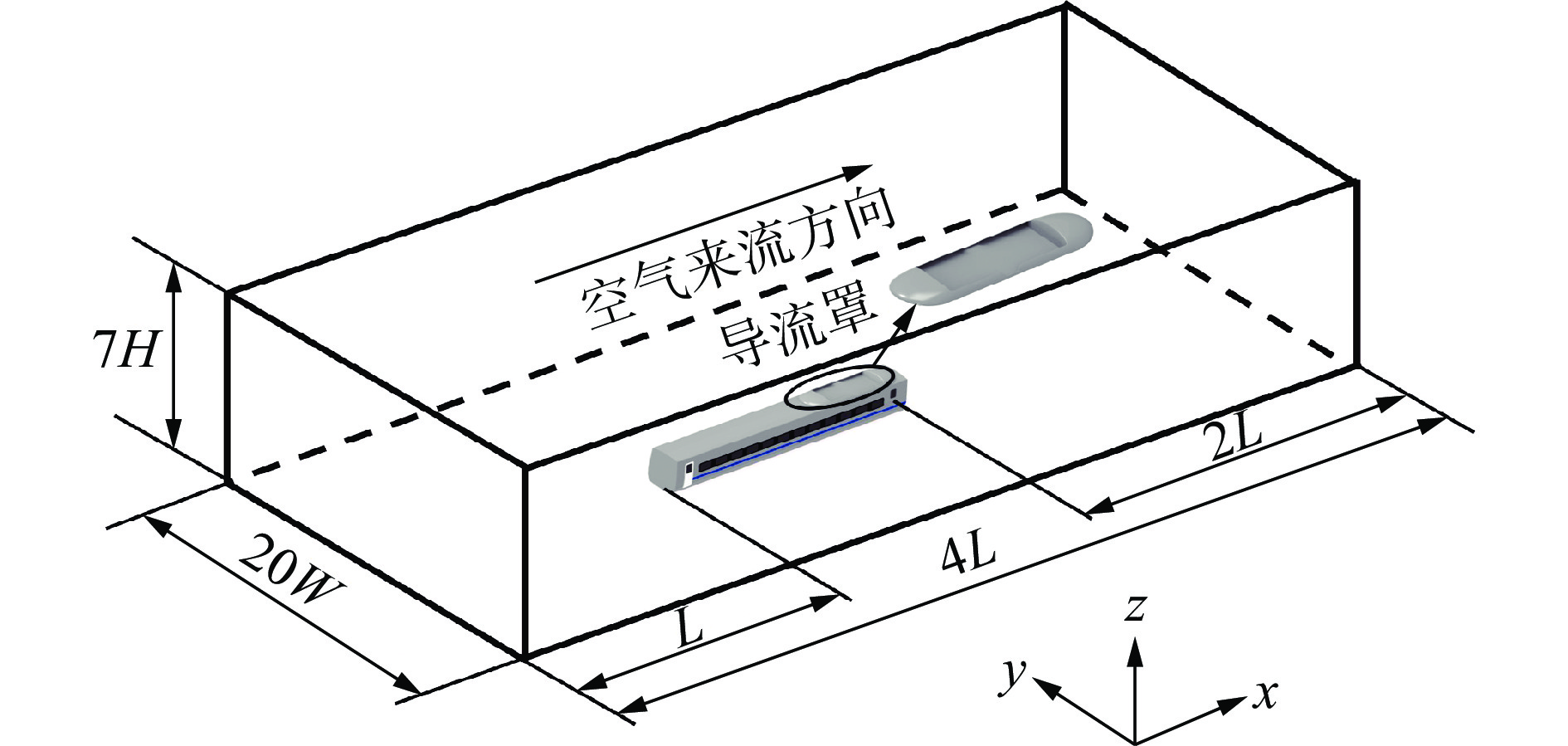
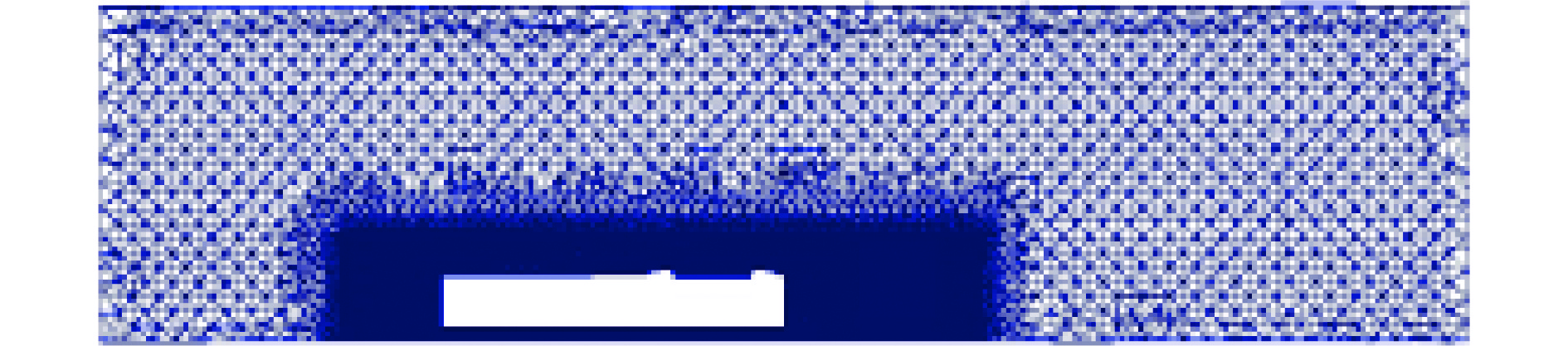
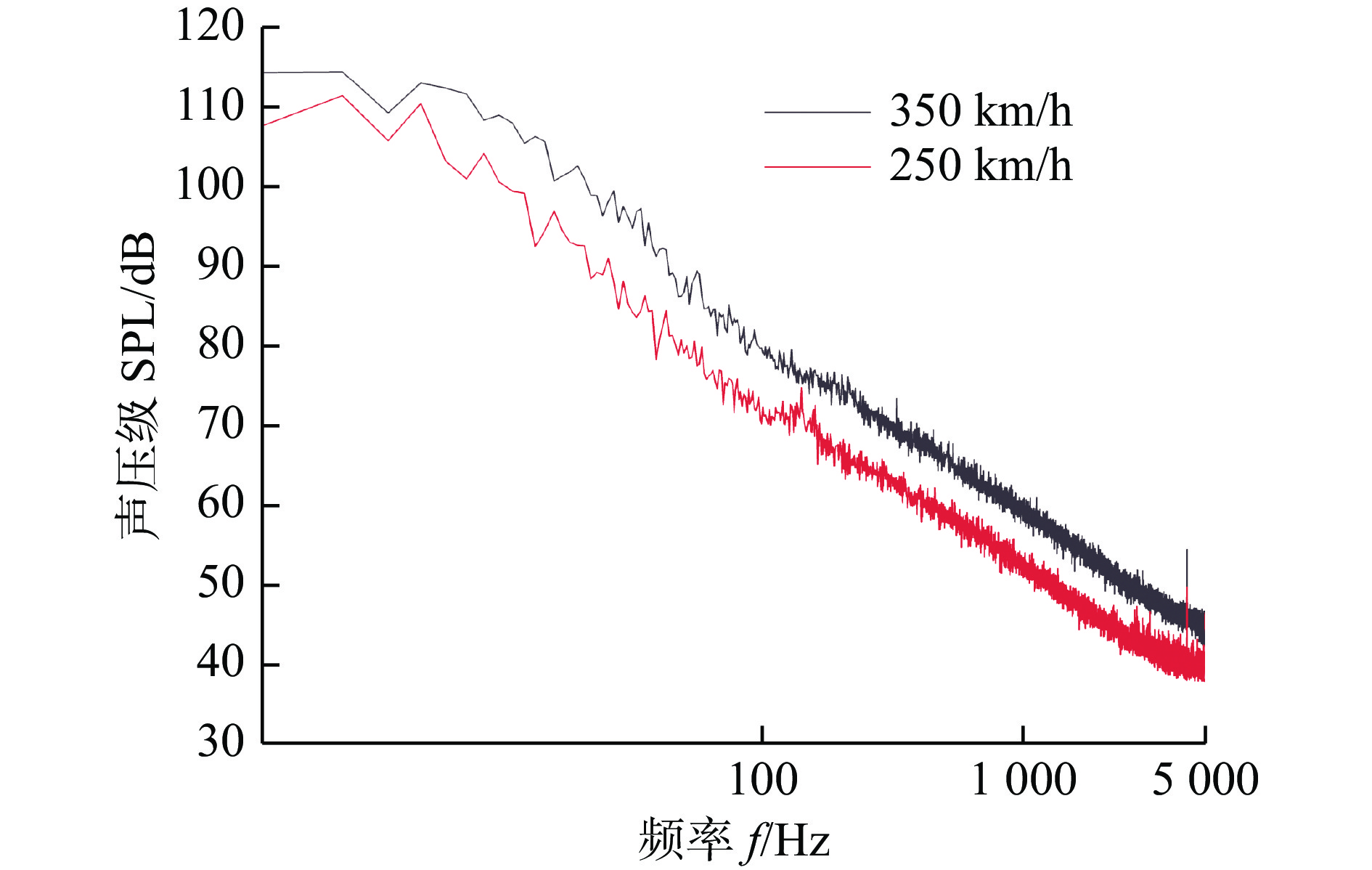
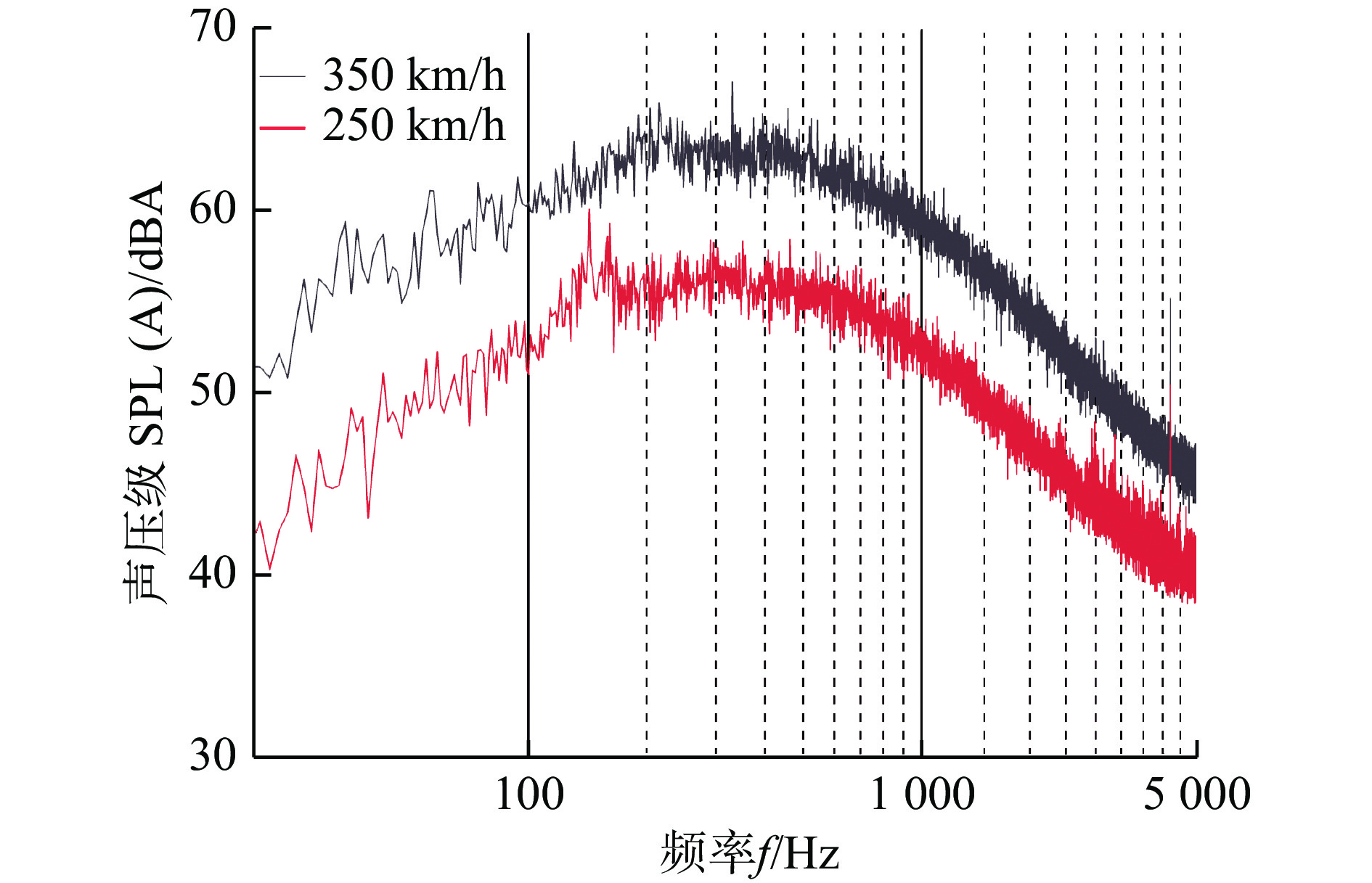
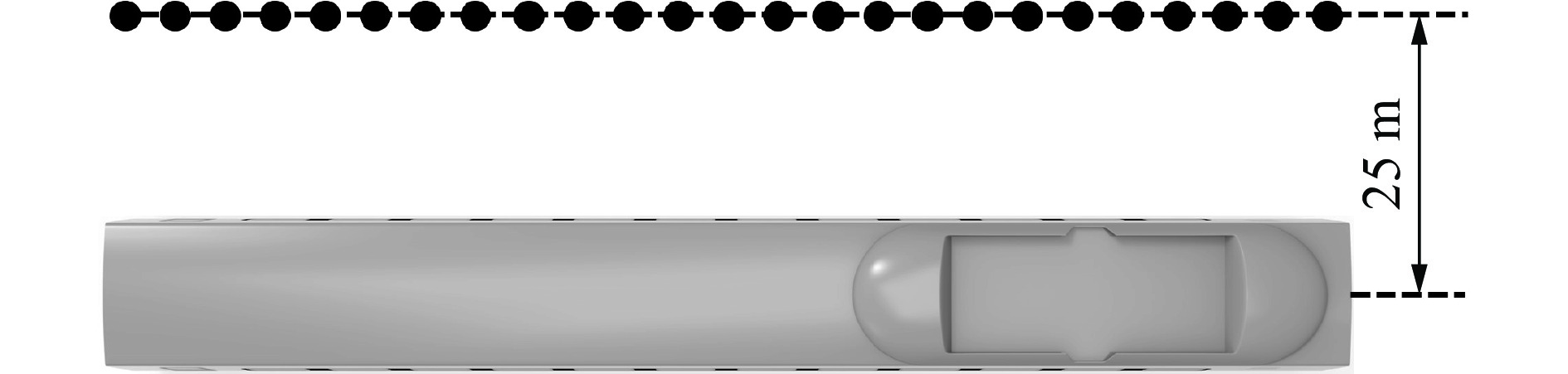
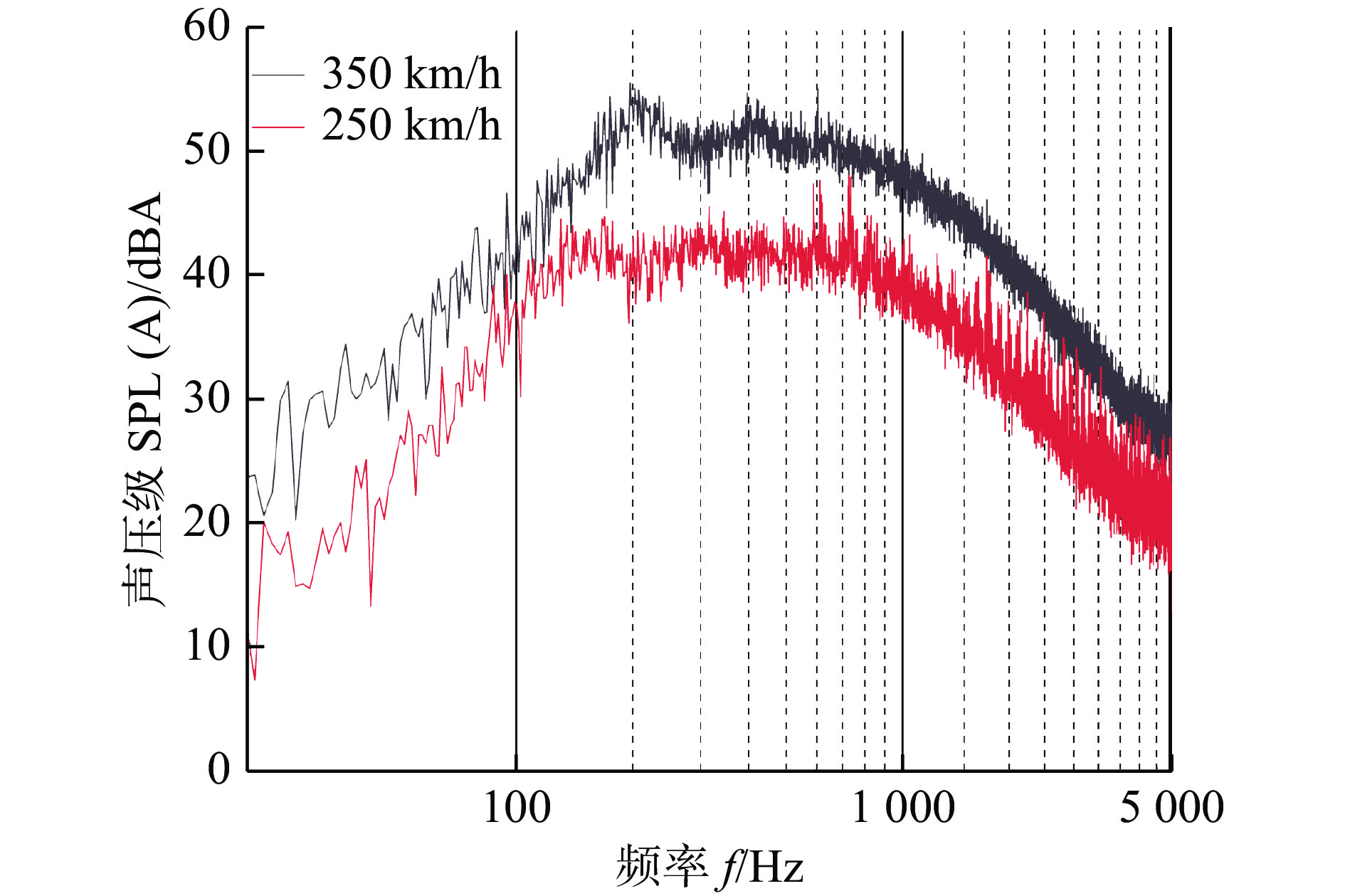
针对高速列车受电弓区域气动噪声问题,采用大涡模拟和FW-H声学模型重点对列车在250 km/h、350 km/h运行时受电弓导流罩气动噪声进行数值模拟,建立了车体+受电弓导流罩的计算模型,分析导流罩表面偶极子声源分布和气动噪声频谱特性。研究结果表明:350 km/h下导流罩表面气动噪声整体大于250 km/h;两种速度下导流罩表面偶极子声源分布规律在频域表现一致:在高频阶段声压级明显低于低频阶段,5 000 Hz下最大声压级仅为20 Hz下的40%;导流罩表面最大声压级都诱发于凹腔与后引导面的过渡处,20 Hz下分别可达136 dB、143 dB。此外,导流罩近场和远场气动噪声频谱曲线相似,均是一种宽频噪声,且能量主要集中在150 ~ 950 Hz,对后续更高速级列车受电弓导流罩降噪结构设计和隔声材料的选取有一定实际参考意义。
针对高速列车受电弓区域气动噪声问题,采用大涡模拟和FW-H声学模型重点对列车在250 km/h、350 km/h运行时受电弓导流罩气动噪声进行数值模拟,建立了车体+受电弓导流罩的计算模型,分析导流罩表面偶极子声源分布和气动噪声频谱特性。研究结果表明:350 km/h下导流罩表面气动噪声整体大于250 km/h;两种速度下导流罩表面偶极子声源分布规律在频域表现一致:在高频阶段声压级明显低于低频阶段,5 000 Hz下最大声压级仅为20 Hz下的40%;导流罩表面最大声压级都诱发于凹腔与后引导面的过渡处,20 Hz下分别可达136 dB、143 dB。此外,导流罩近场和远场气动噪声频谱曲线相似,均是一种宽频噪声,且能量主要集中在150 ~ 950 Hz,对后续更高速级列车受电弓导流罩降噪结构设计和隔声材料的选取有一定实际参考意义。


2023, 42(9): 1508-1515.
doi: 10.13433/j.cnki.1003-8728.20220115
摘要:
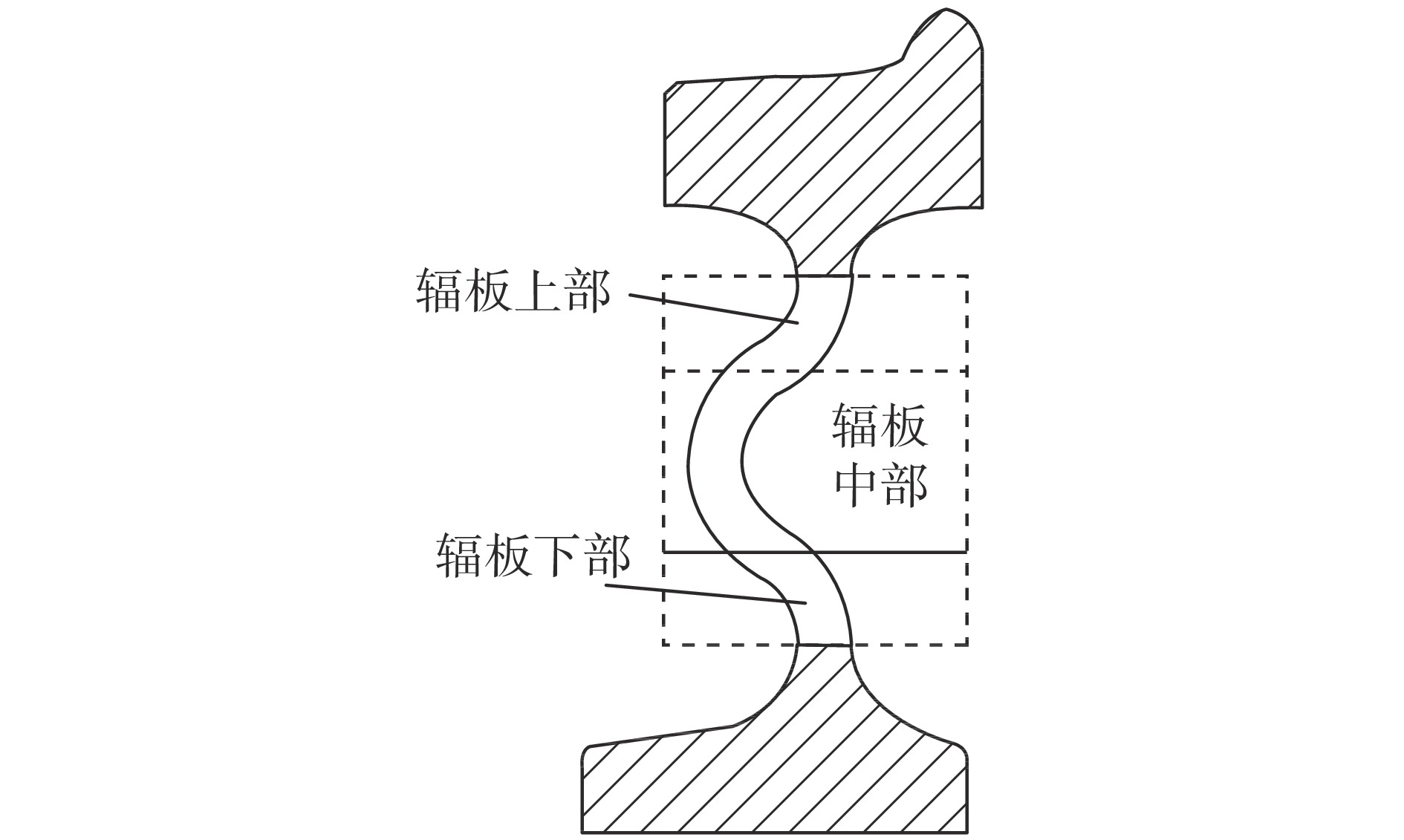
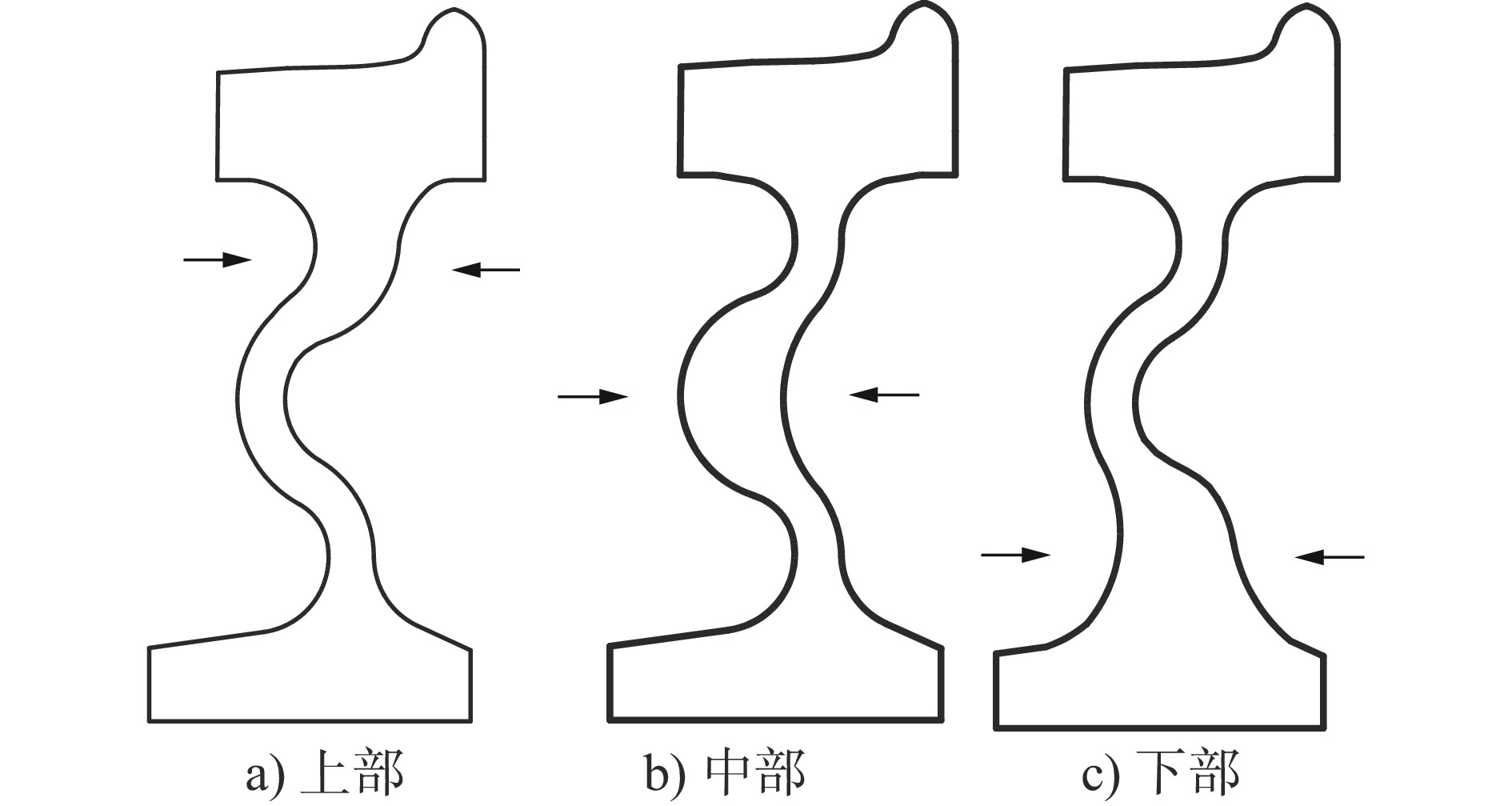
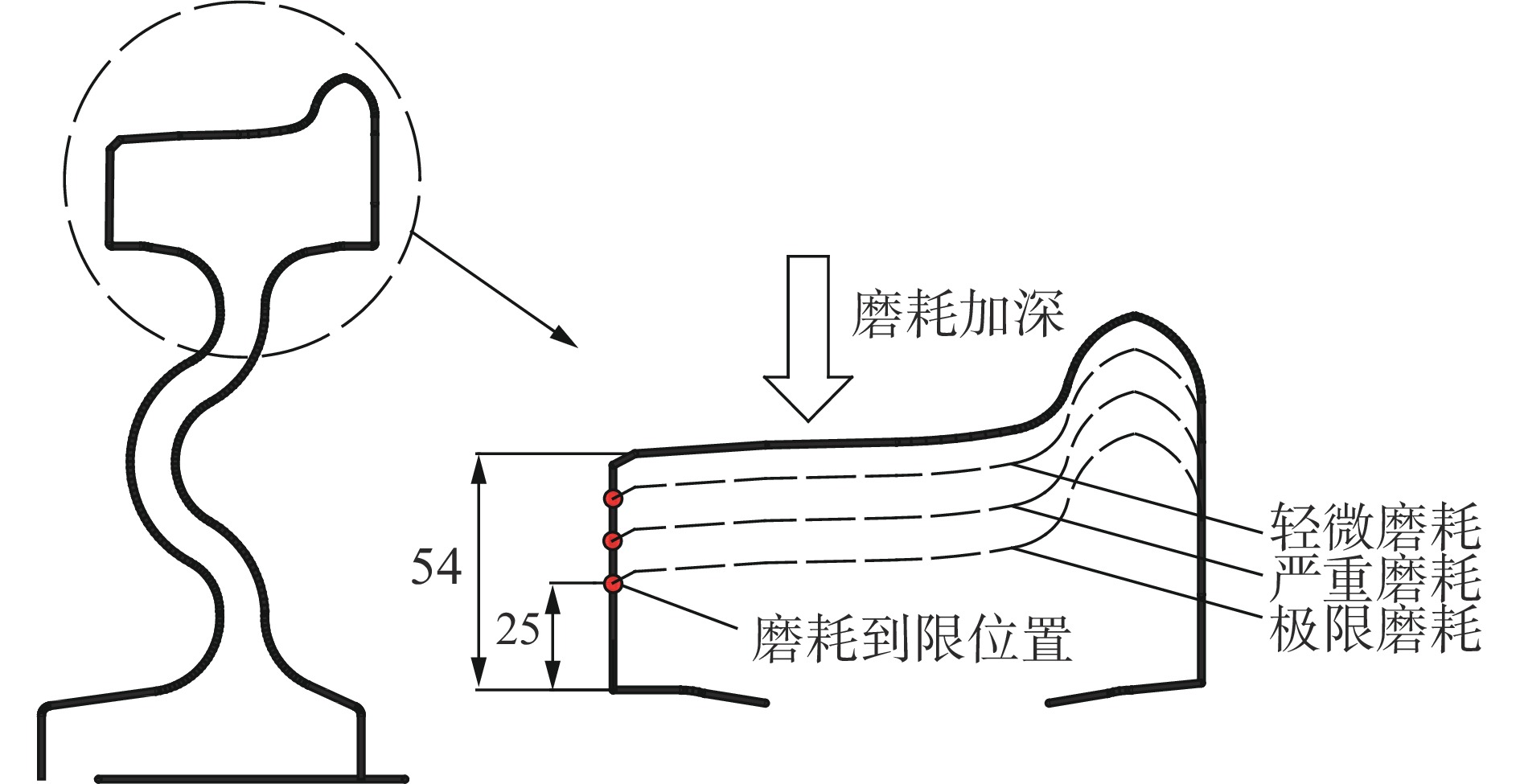
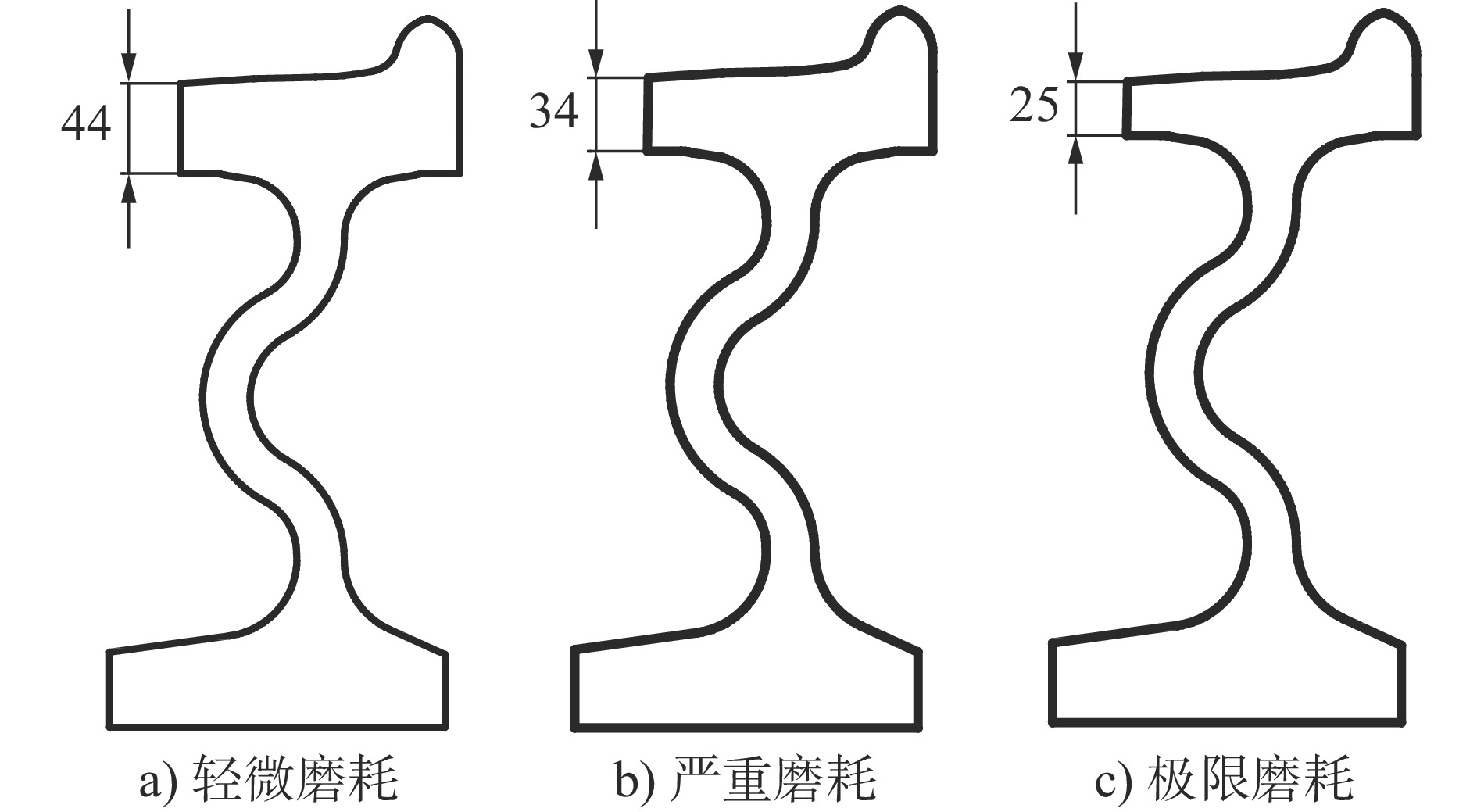
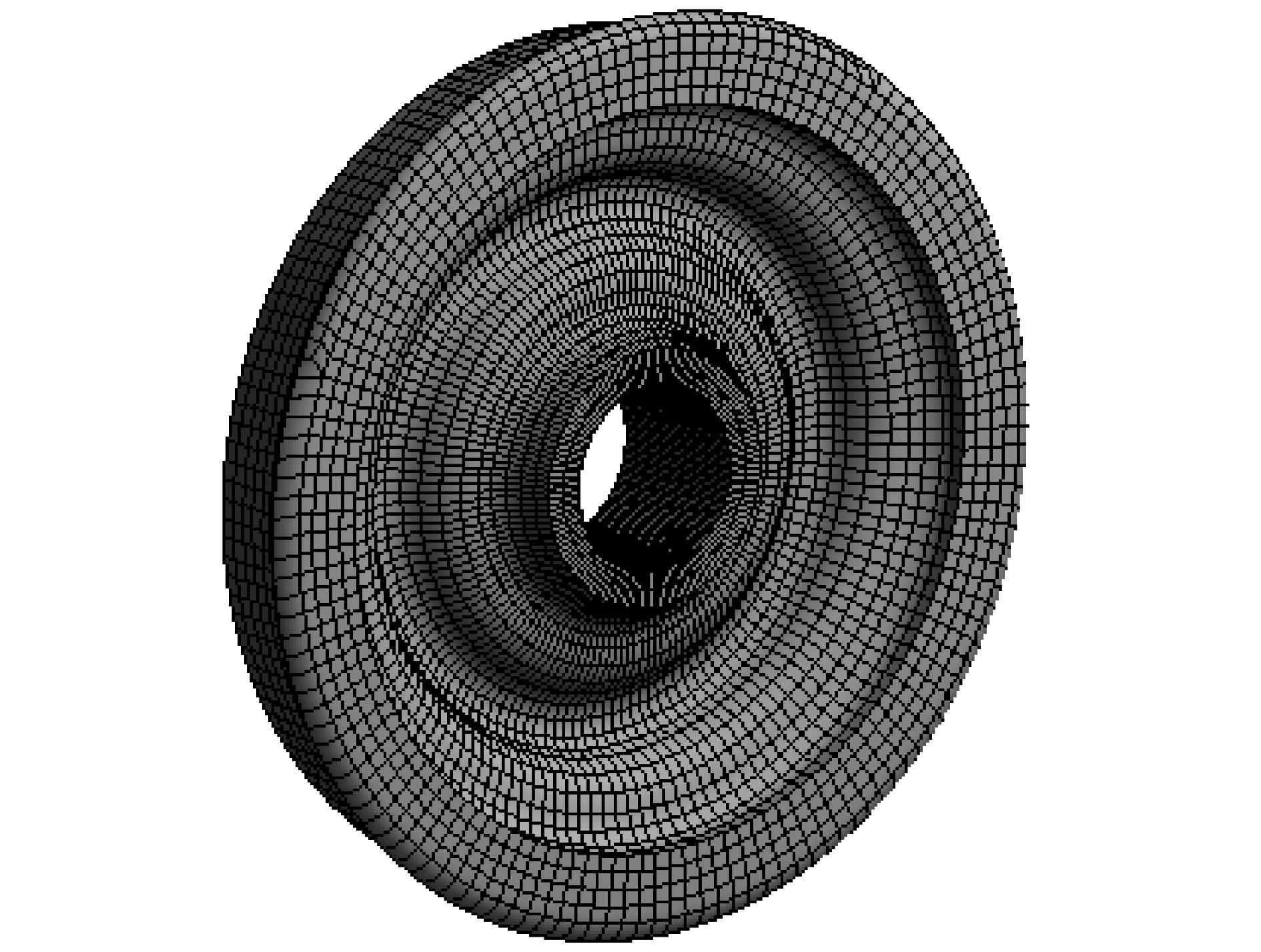
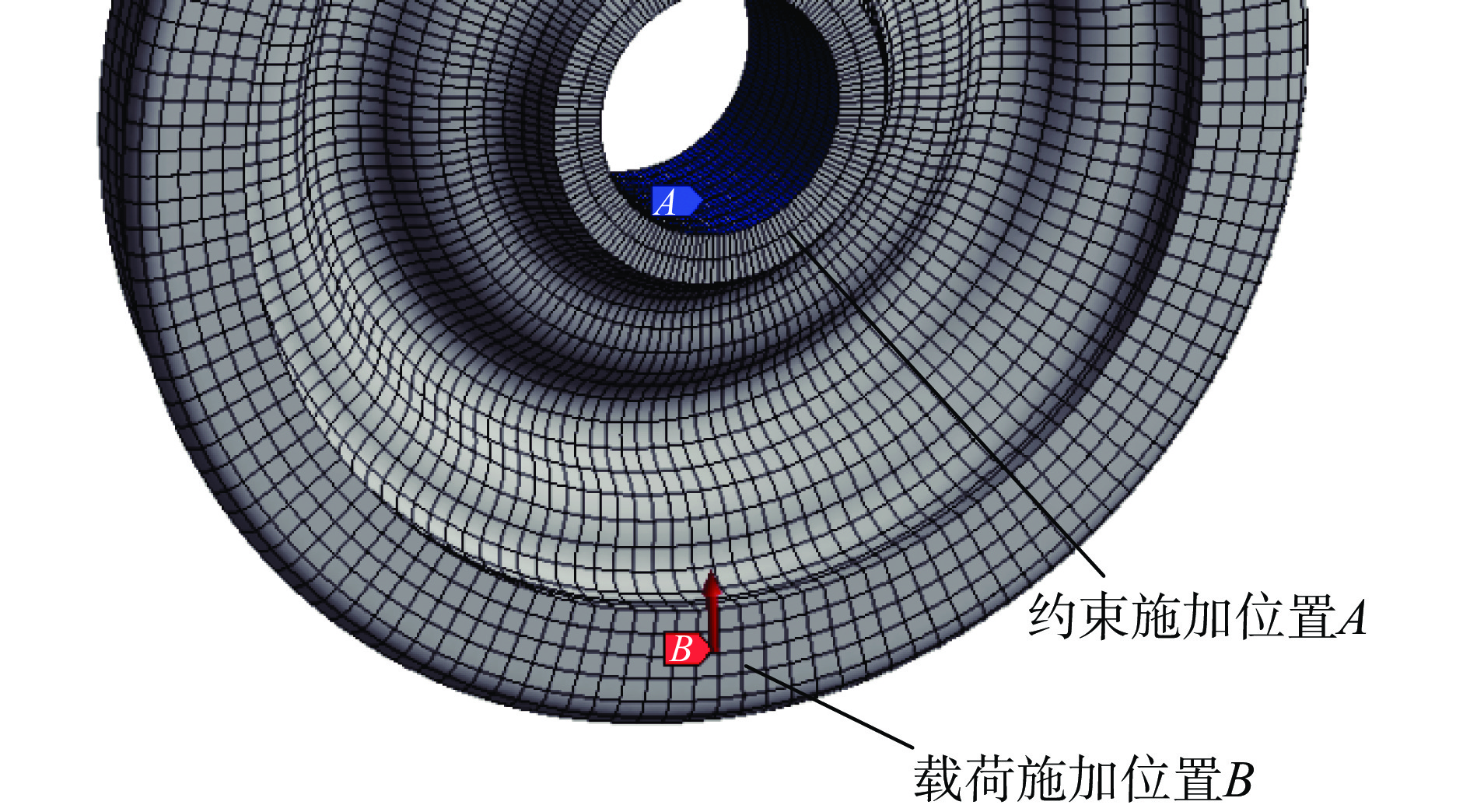
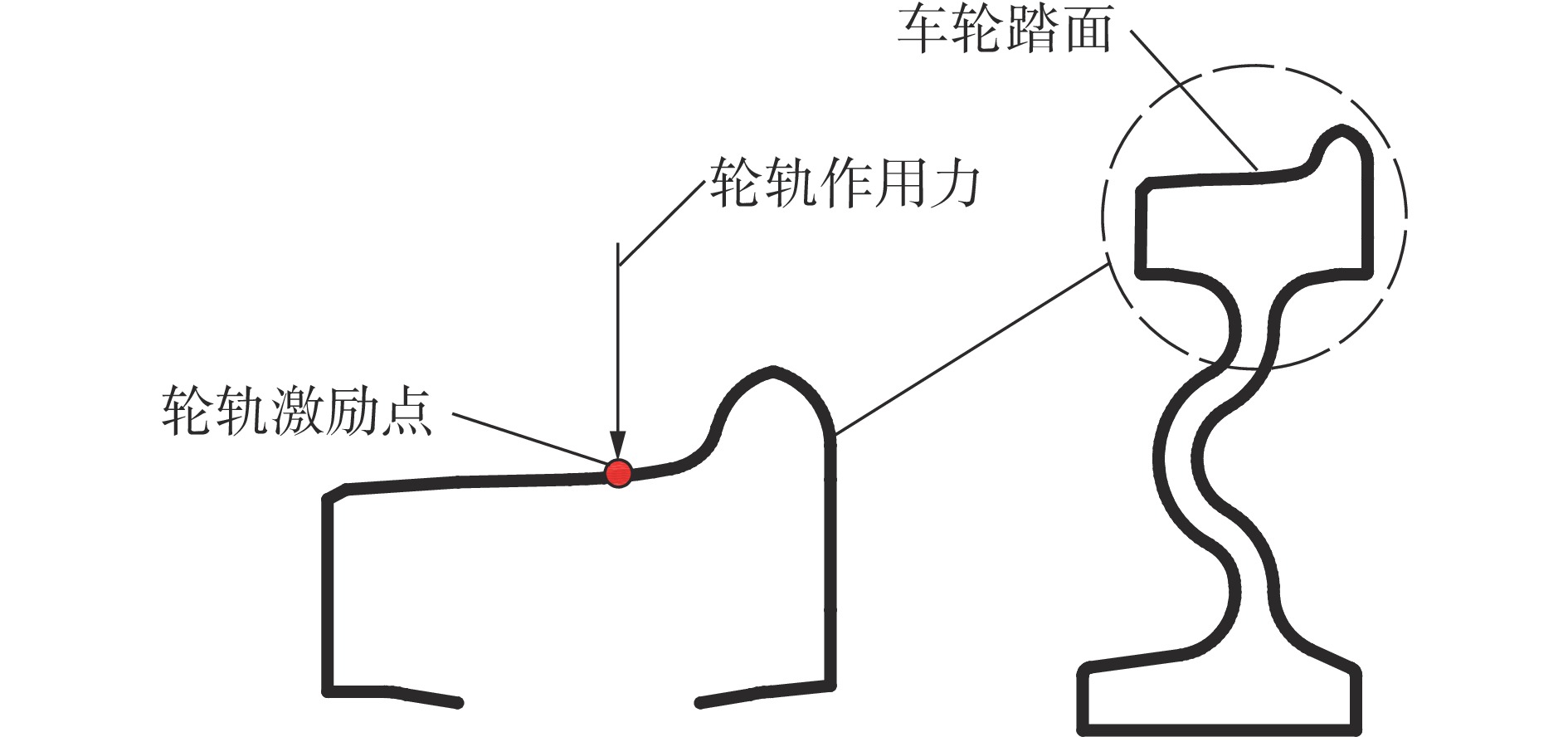
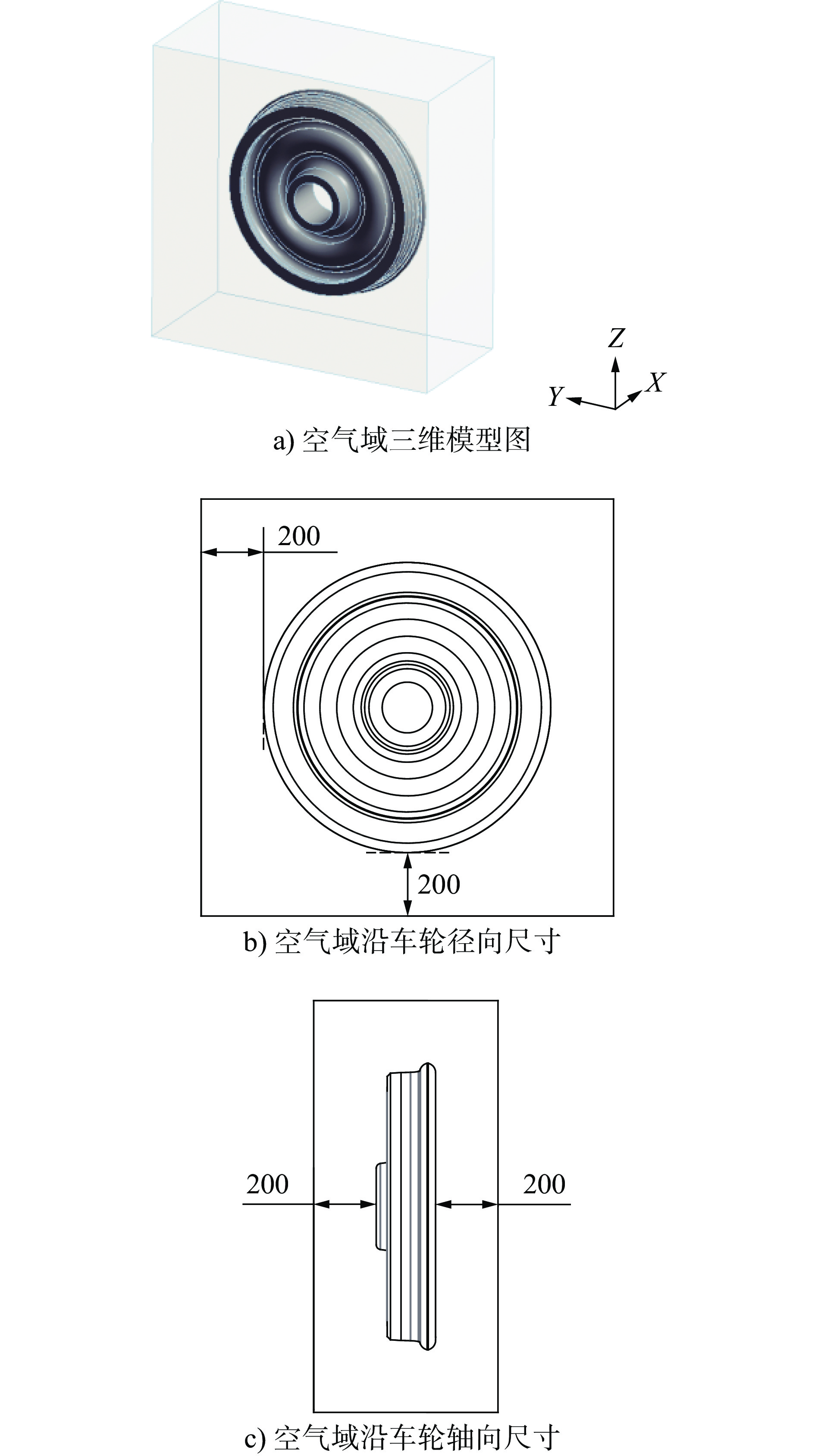
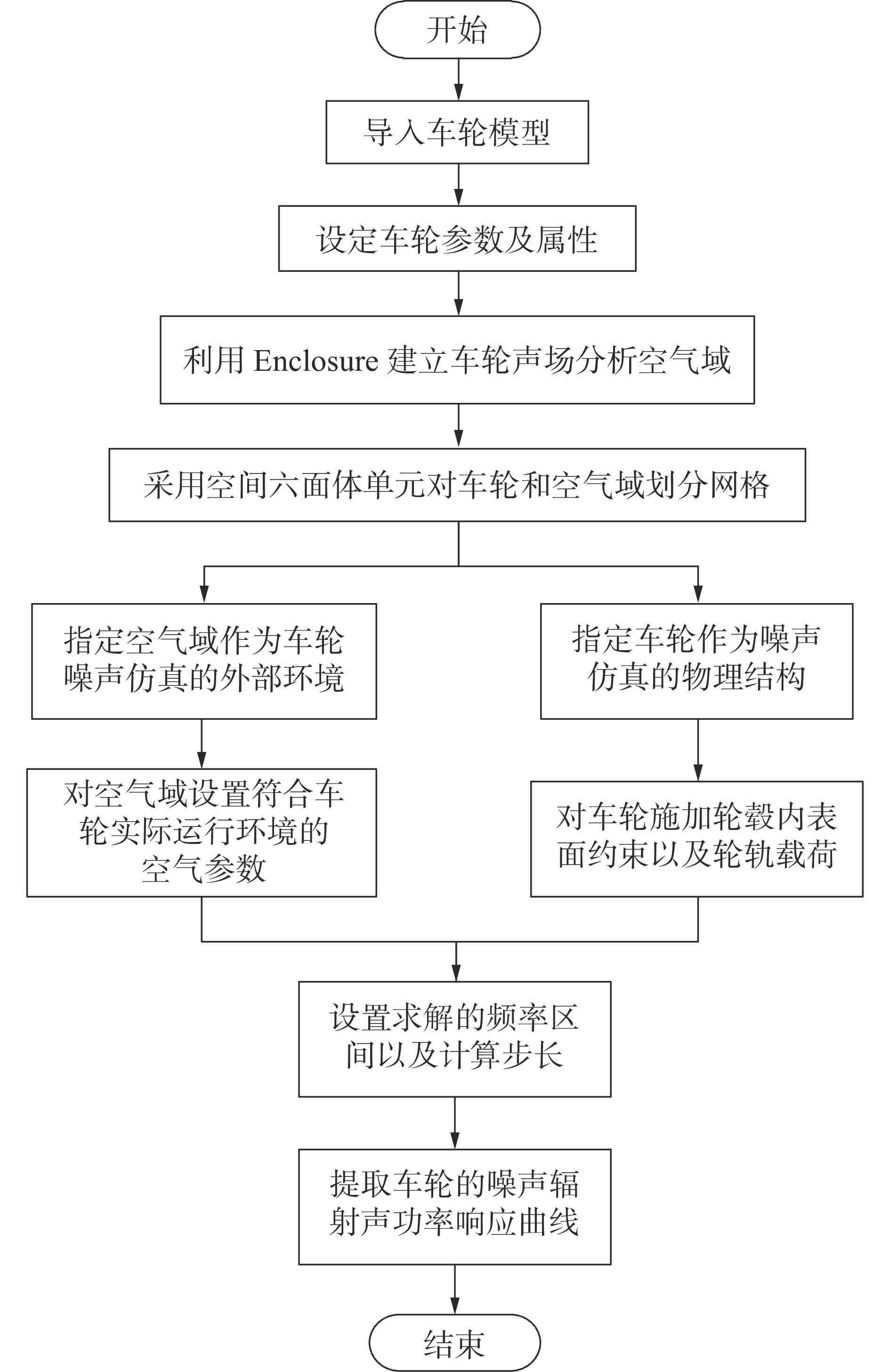
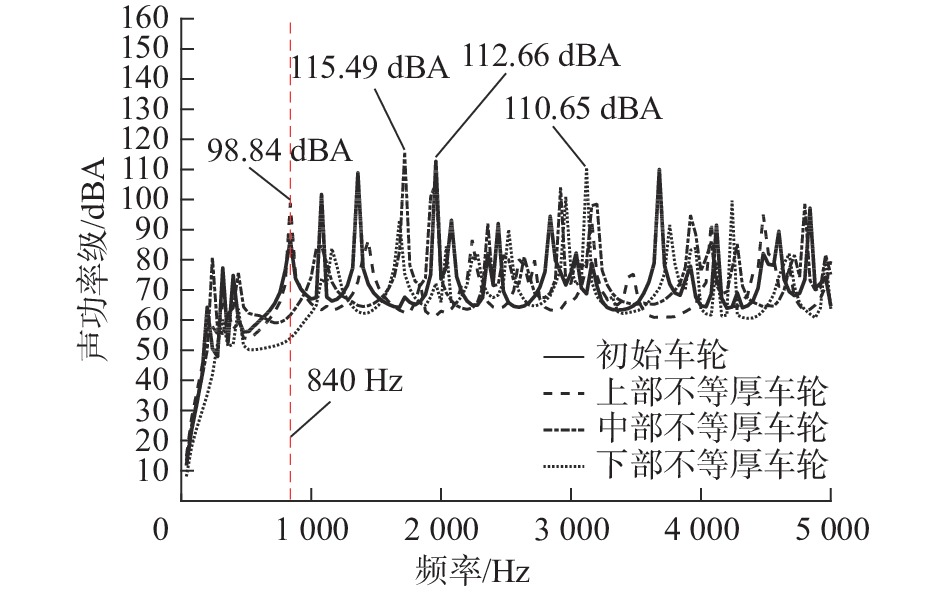
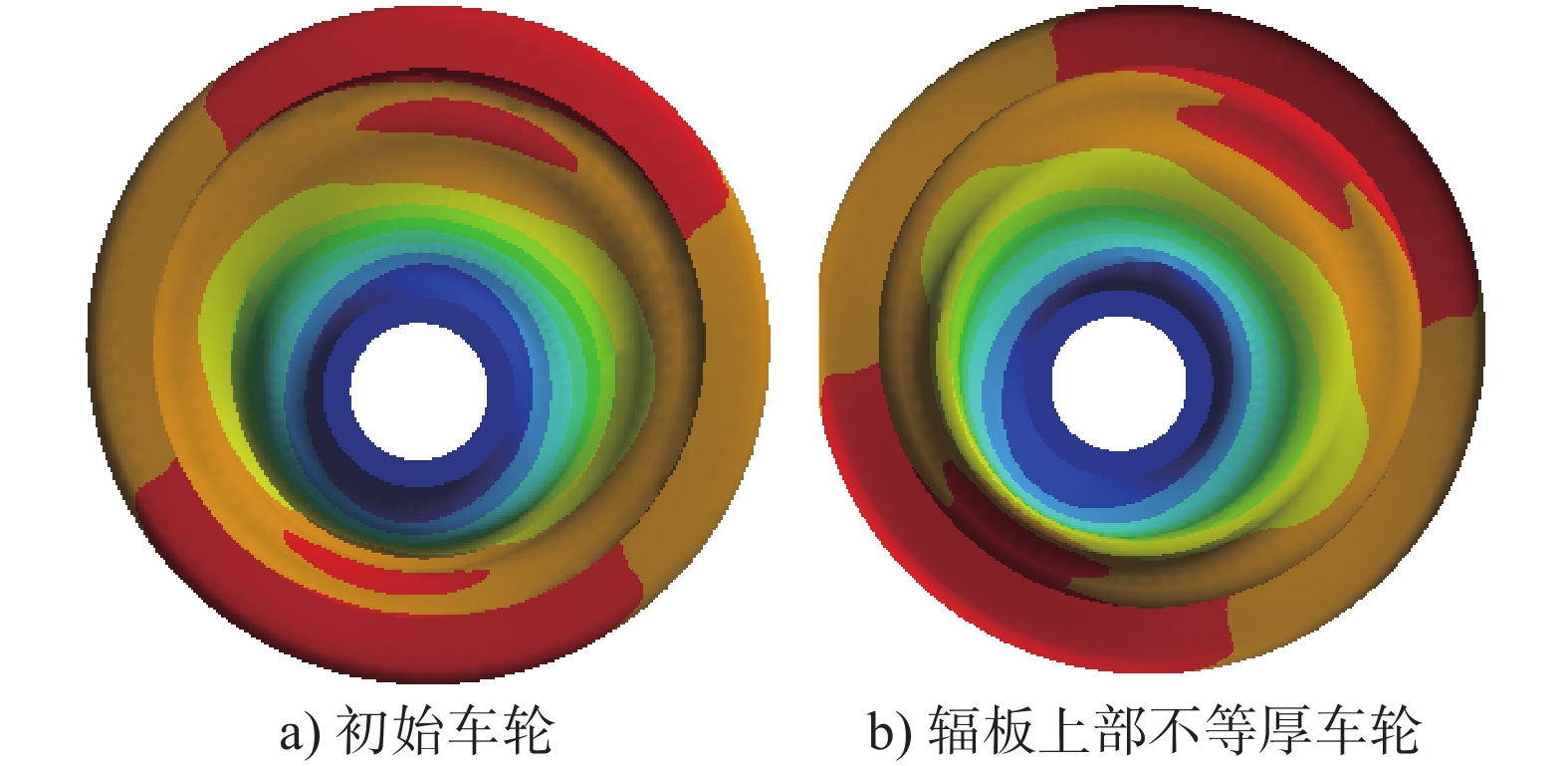
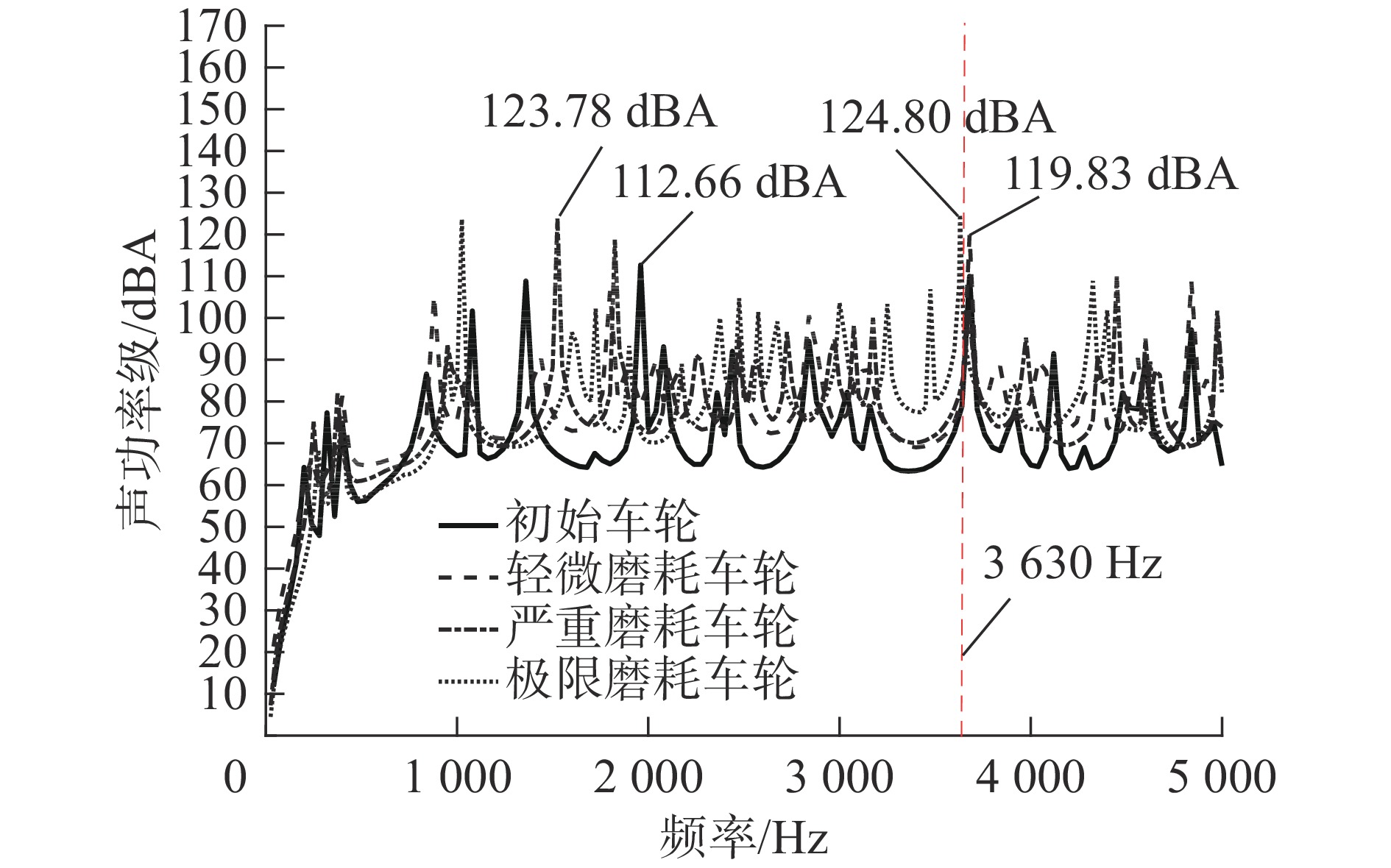
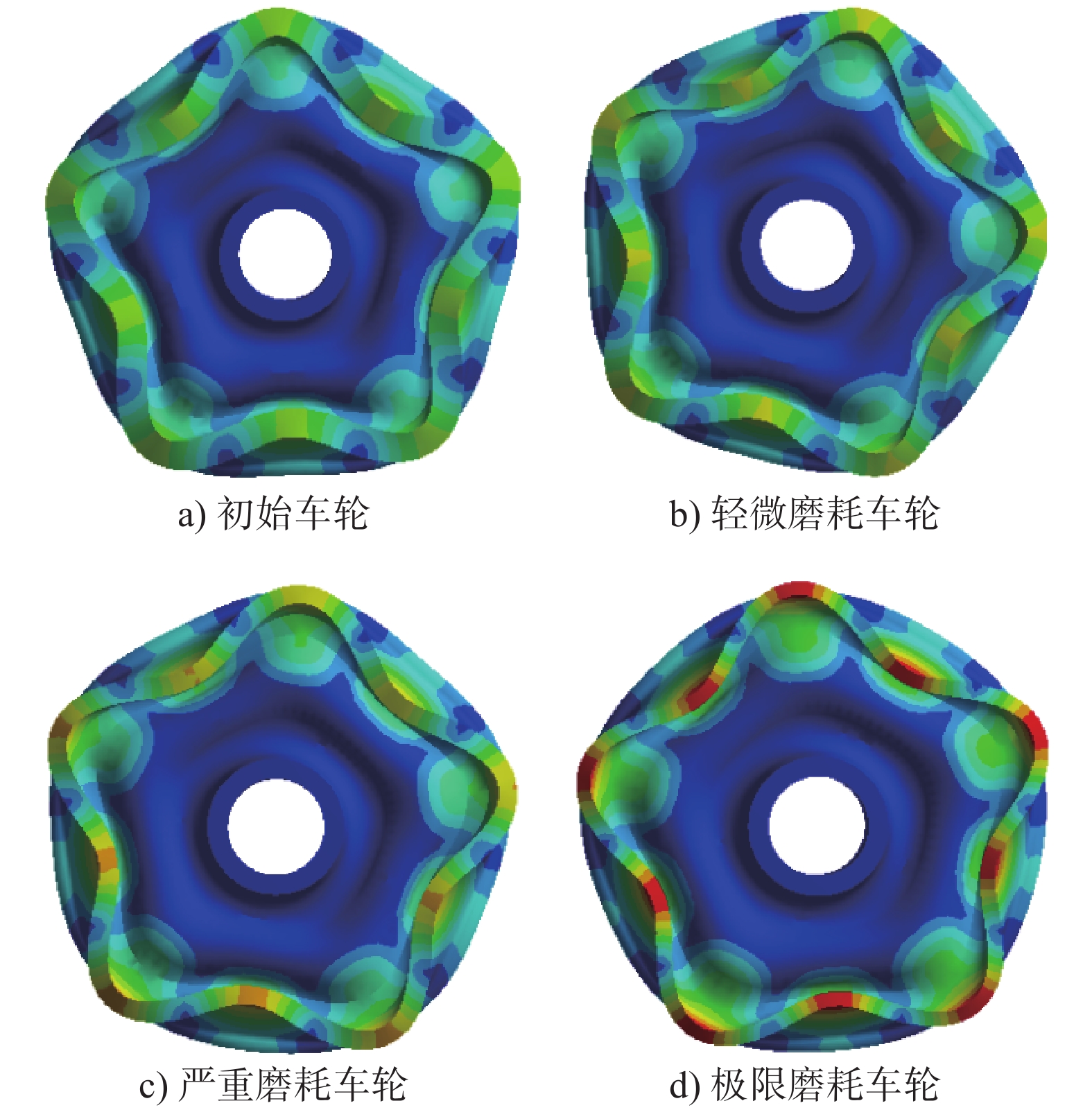
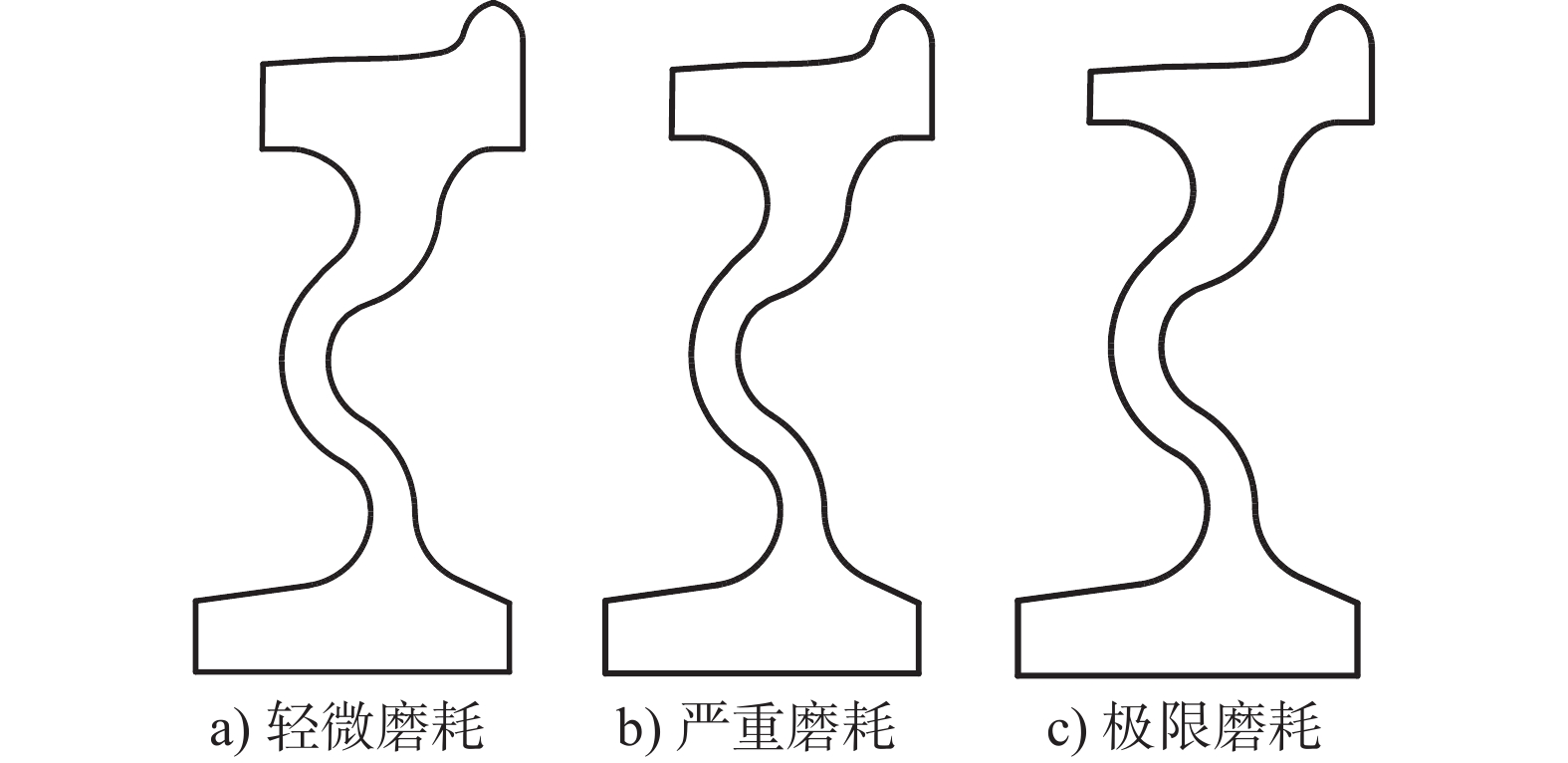
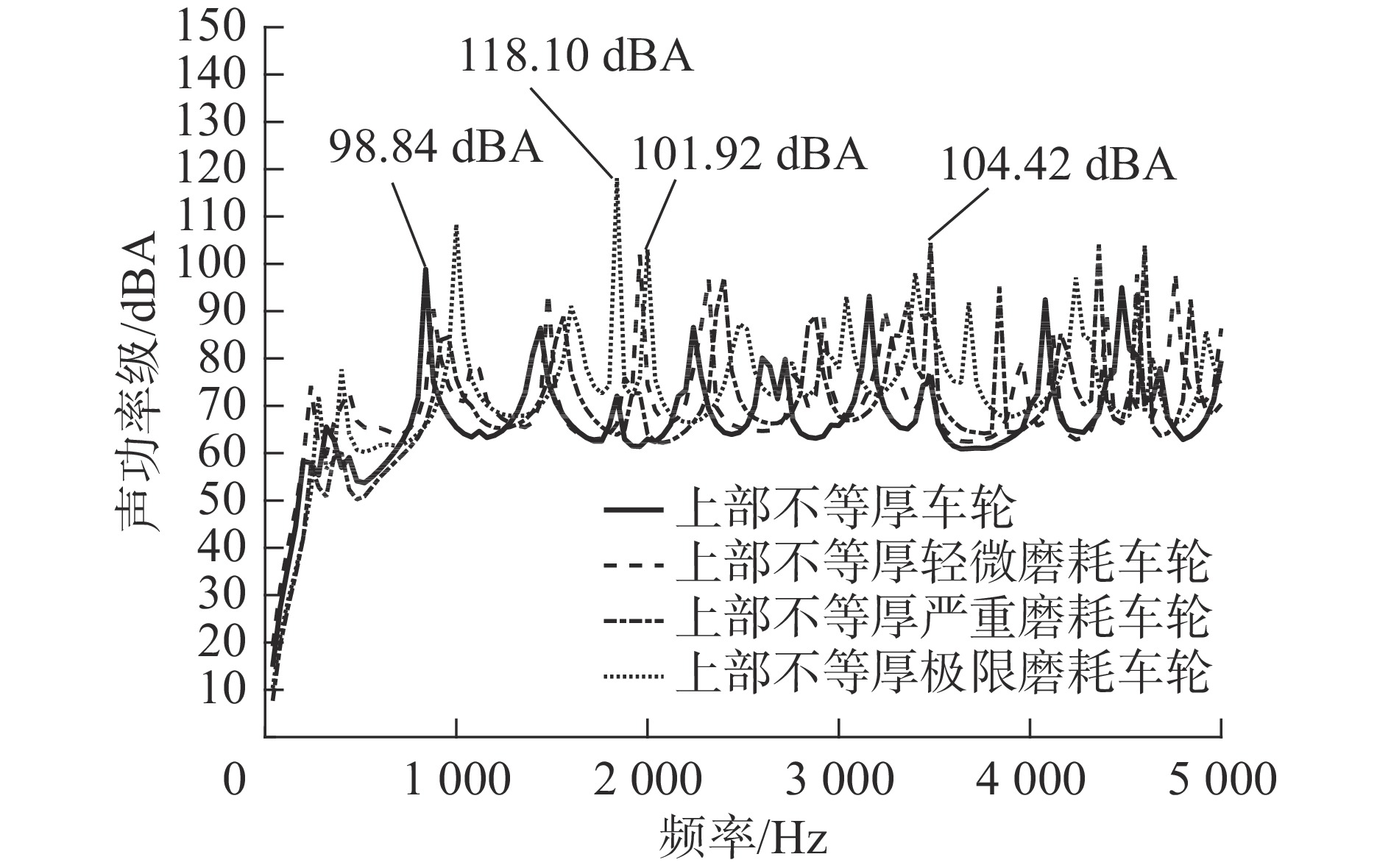
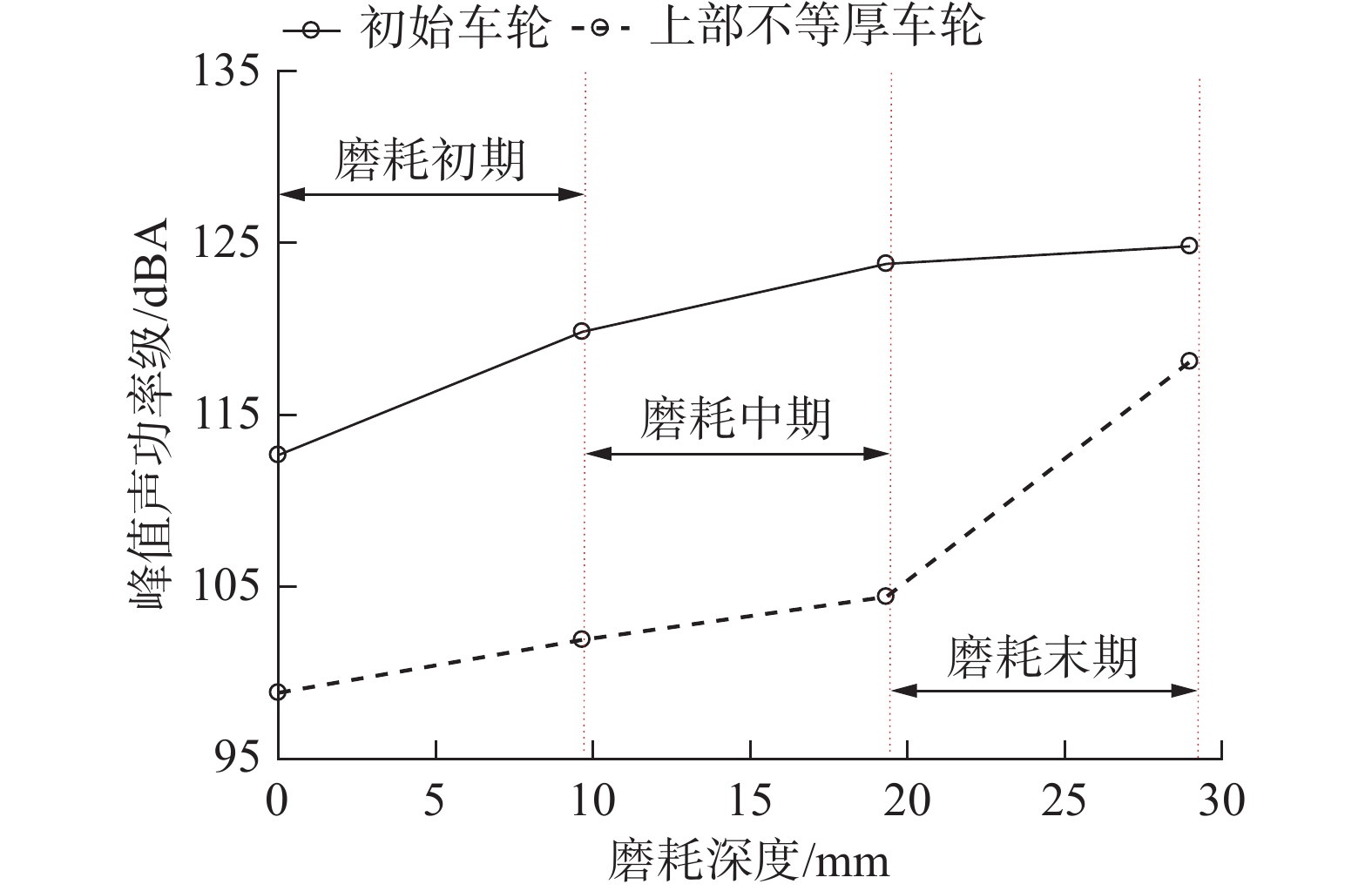
为了降低轨道车轮振动的声辐射,以双S型辐板车轮为研究对象,建立了反映磨耗及不等厚辐板的9种城市轨道车轮三维有限元模型,分别获得了车轮在各阶振动模态下的固有频率及结构振型,对比分析了不同车轮的声功率级响应曲线,从而得到车轮在不同磨耗条件及不等厚特征情况下的声辐射水平。研究结果表明:与初始现役车轮相比,辐板上部不等厚车轮在峰值声功率级上降低了13.82 dBA;随着踏面磨耗加深,车轮的噪声逐渐增大;辐板上部不等厚车轮在不同磨耗下的最大声功率级均小于初始现役车轮。
为了降低轨道车轮振动的声辐射,以双S型辐板车轮为研究对象,建立了反映磨耗及不等厚辐板的9种城市轨道车轮三维有限元模型,分别获得了车轮在各阶振动模态下的固有频率及结构振型,对比分析了不同车轮的声功率级响应曲线,从而得到车轮在不同磨耗条件及不等厚特征情况下的声辐射水平。研究结果表明:与初始现役车轮相比,辐板上部不等厚车轮在峰值声功率级上降低了13.82 dBA;随着踏面磨耗加深,车轮的噪声逐渐增大;辐板上部不等厚车轮在不同磨耗下的最大声功率级均小于初始现役车轮。
2023, 42(9): 1516-1526.
doi: 10.13433/j.cnki.1003-8728.20220098
摘要:
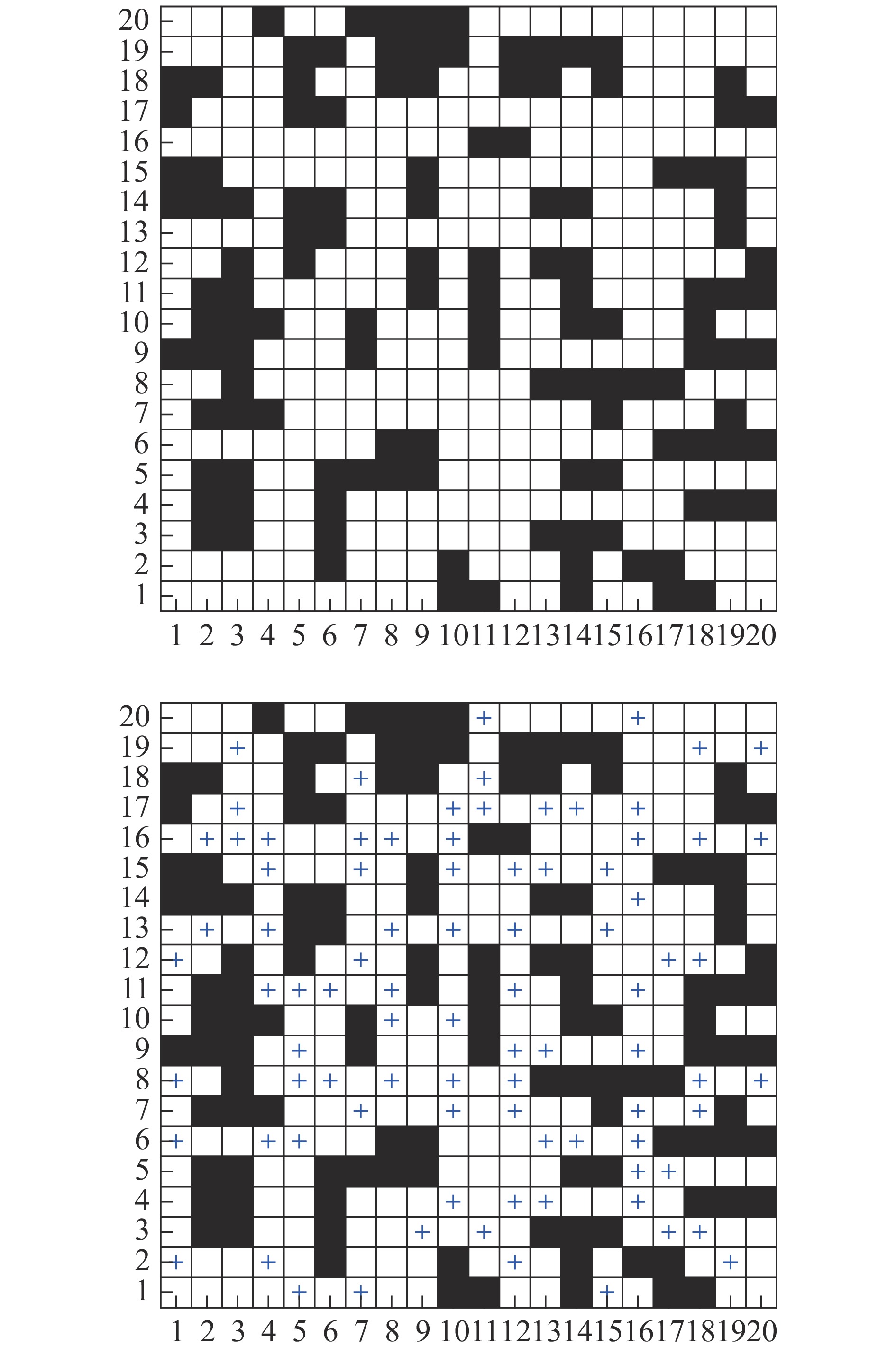
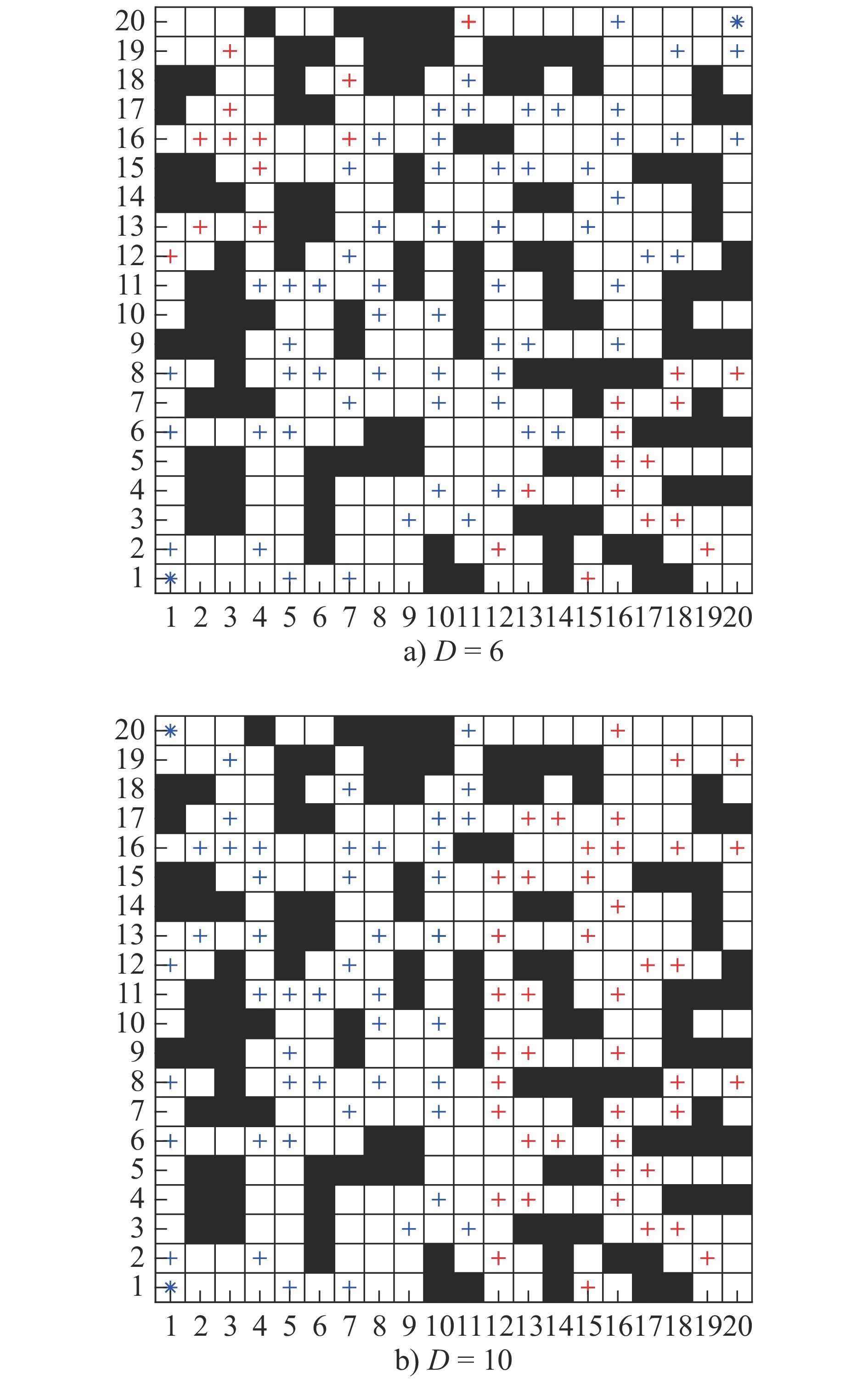
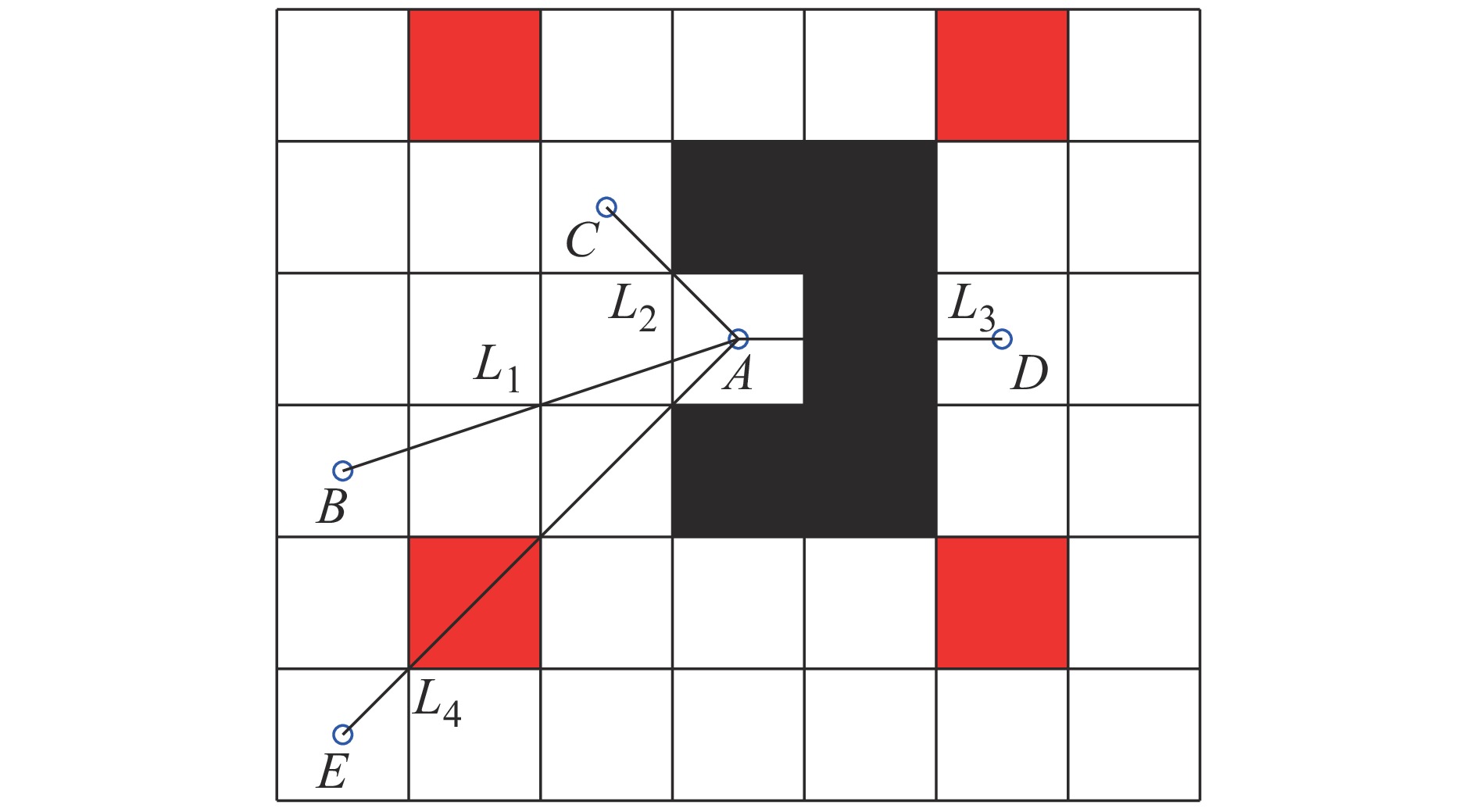
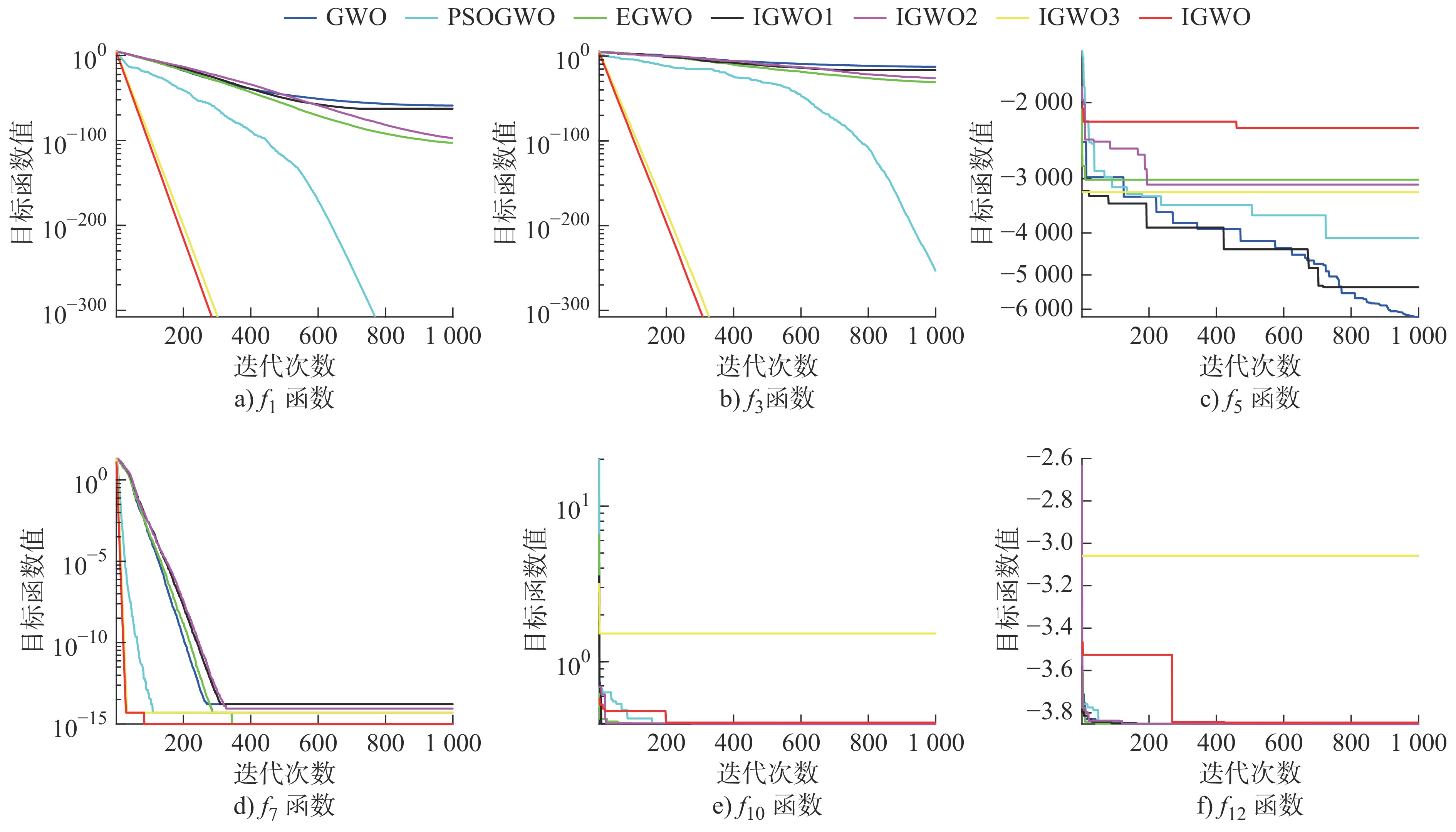
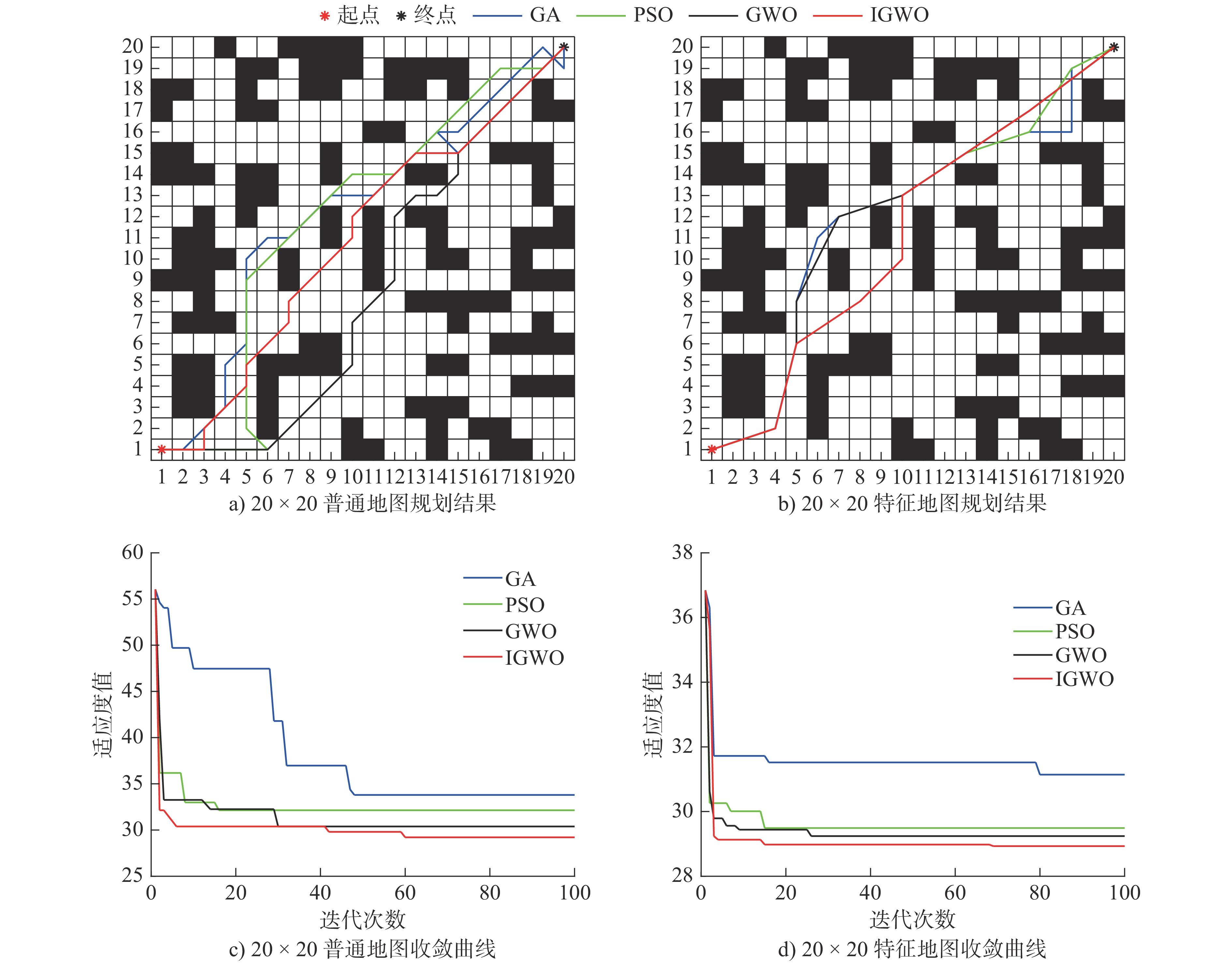
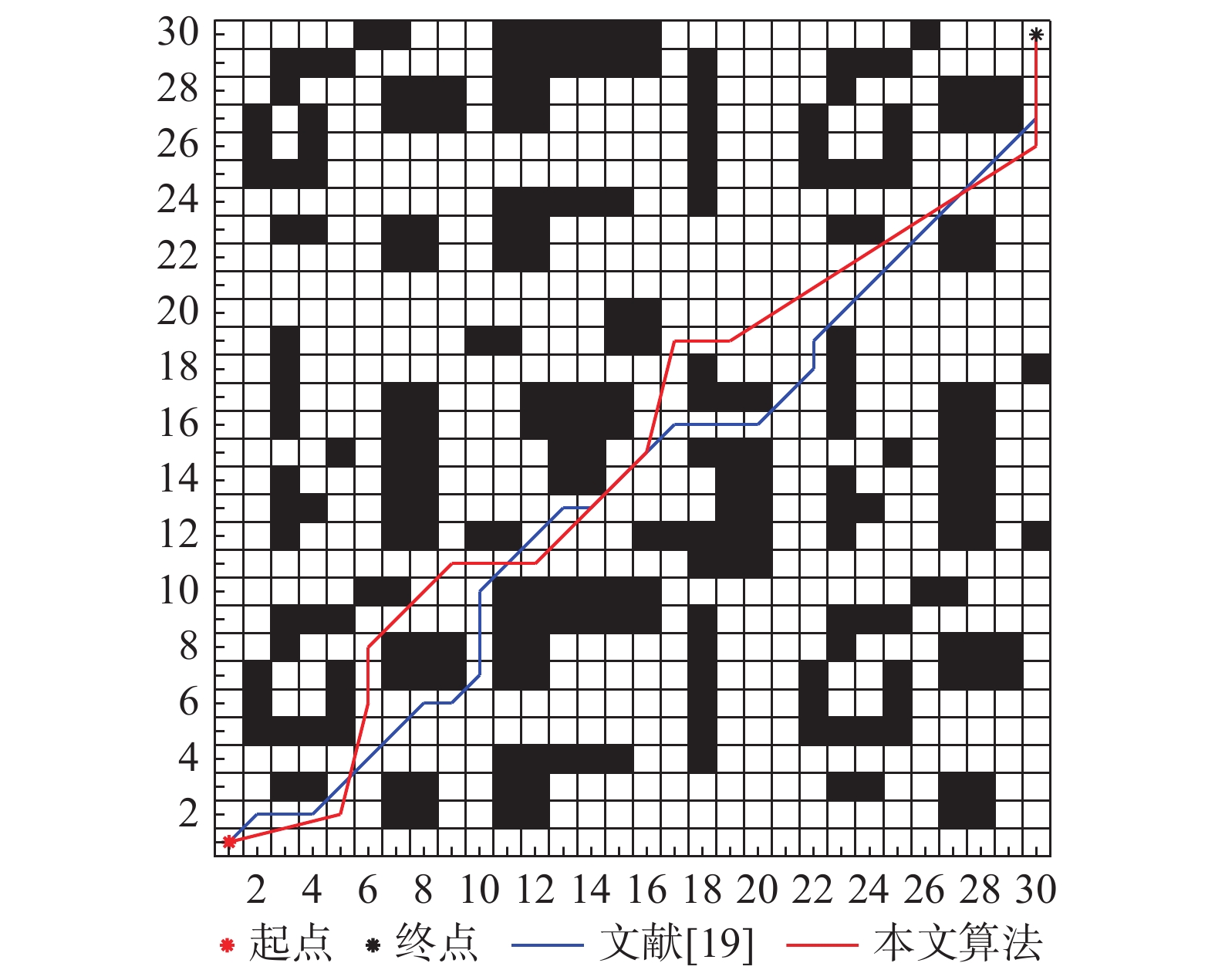
针对灰狼优化算法求解移动机器人路径规划易陷入局部最优且效率低的问题,本文提出一种改进灰狼优化算法在特征栅格地图上的路径规划方法。首先,对灰狼优化算法进行改进,引入根据具体要求调节算法的全局搜索和局部搜索的调节因子,并引入动态权重和游走策略以提高算法的收敛速度和避免局部最优的能力;其次,提出一种建立特征栅格地图的新方法,加快了特征栅格的确定;最后设置远距离特征栅格和可视步长,简化了邻接矩阵的建立。仿真实验结果表明,本文算法相比于其它算法在标准测试函数和路径规划问题中,都有更优的结果。在此基础上,通过建立特征栅格地图,有效地加快了改进算法在路径规划问题上的求解速度。
针对灰狼优化算法求解移动机器人路径规划易陷入局部最优且效率低的问题,本文提出一种改进灰狼优化算法在特征栅格地图上的路径规划方法。首先,对灰狼优化算法进行改进,引入根据具体要求调节算法的全局搜索和局部搜索的调节因子,并引入动态权重和游走策略以提高算法的收敛速度和避免局部最优的能力;其次,提出一种建立特征栅格地图的新方法,加快了特征栅格的确定;最后设置远距离特征栅格和可视步长,简化了邻接矩阵的建立。仿真实验结果表明,本文算法相比于其它算法在标准测试函数和路径规划问题中,都有更优的结果。在此基础上,通过建立特征栅格地图,有效地加快了改进算法在路径规划问题上的求解速度。

2023, 42(9): 1527-1532.
doi: 10.13433/j.cnki.1003-8728.20220089
摘要:
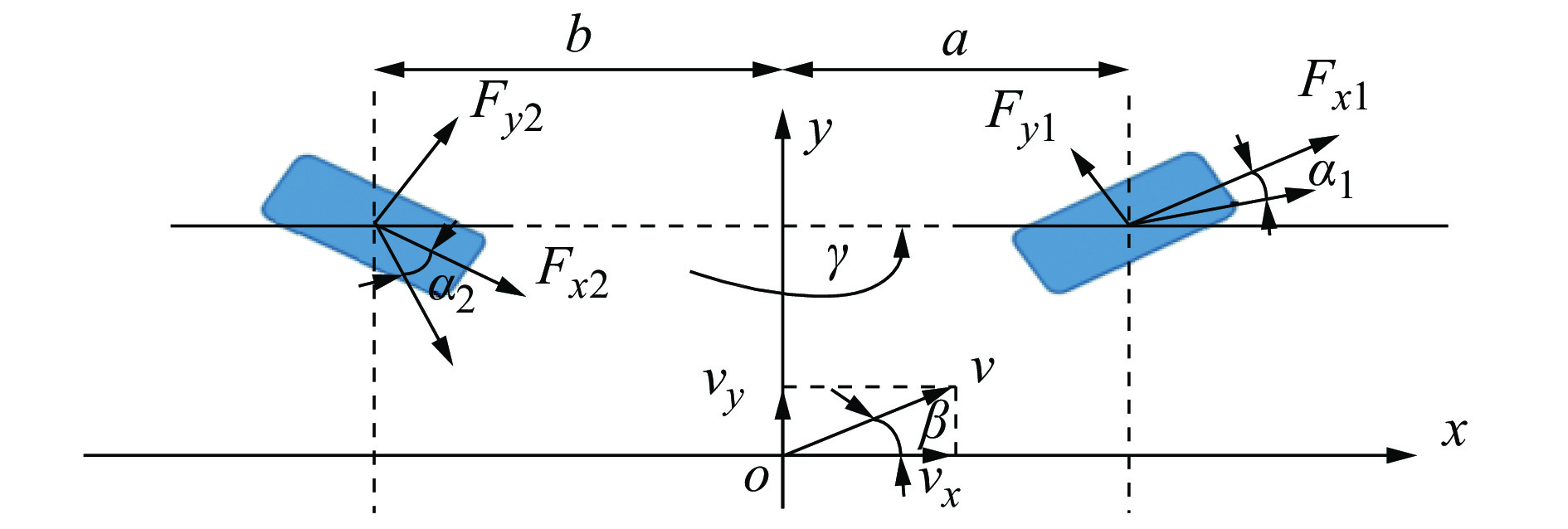
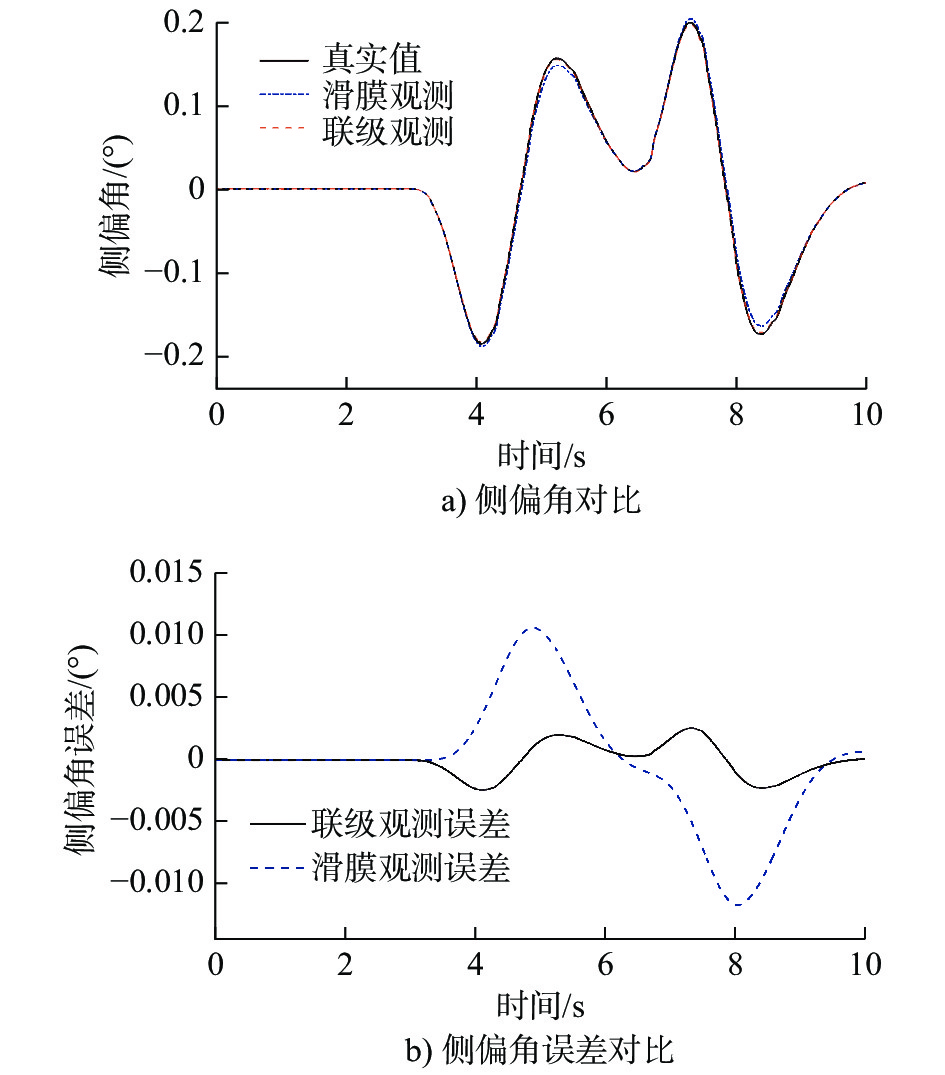
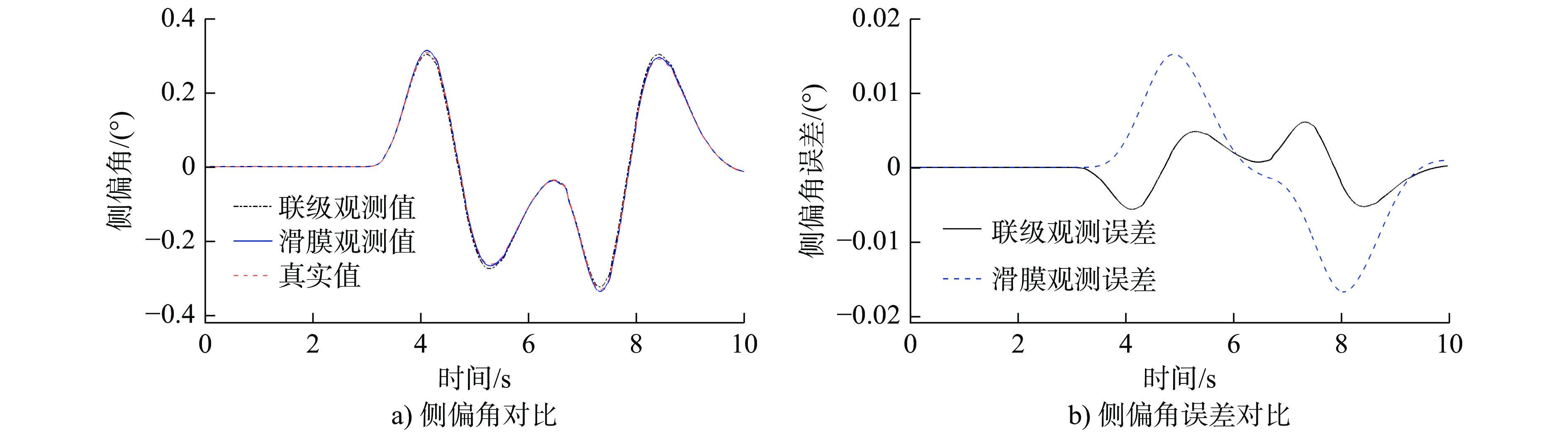
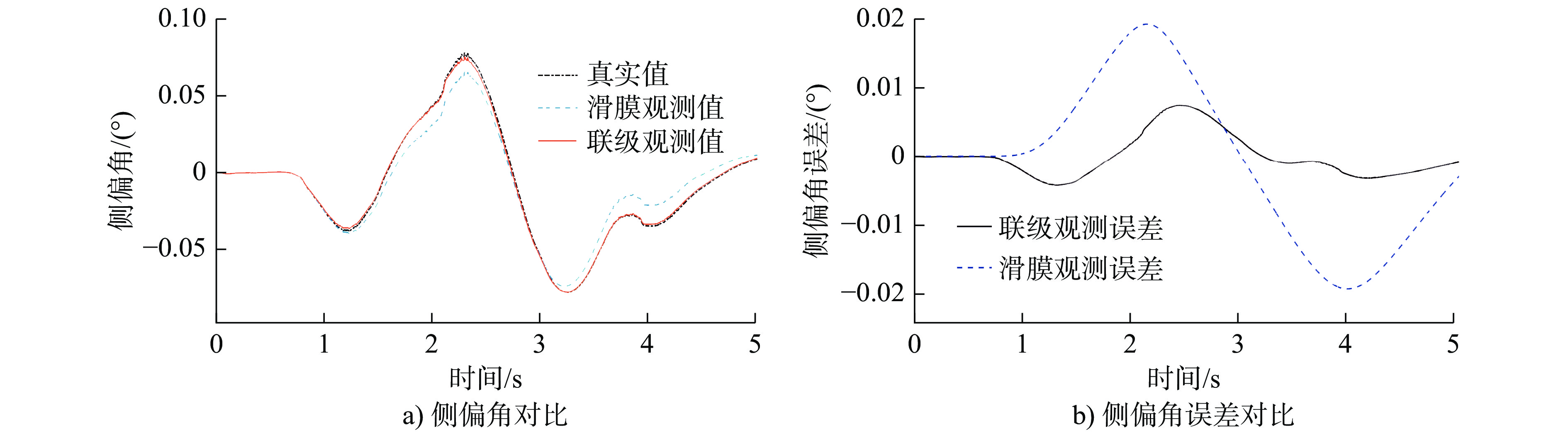
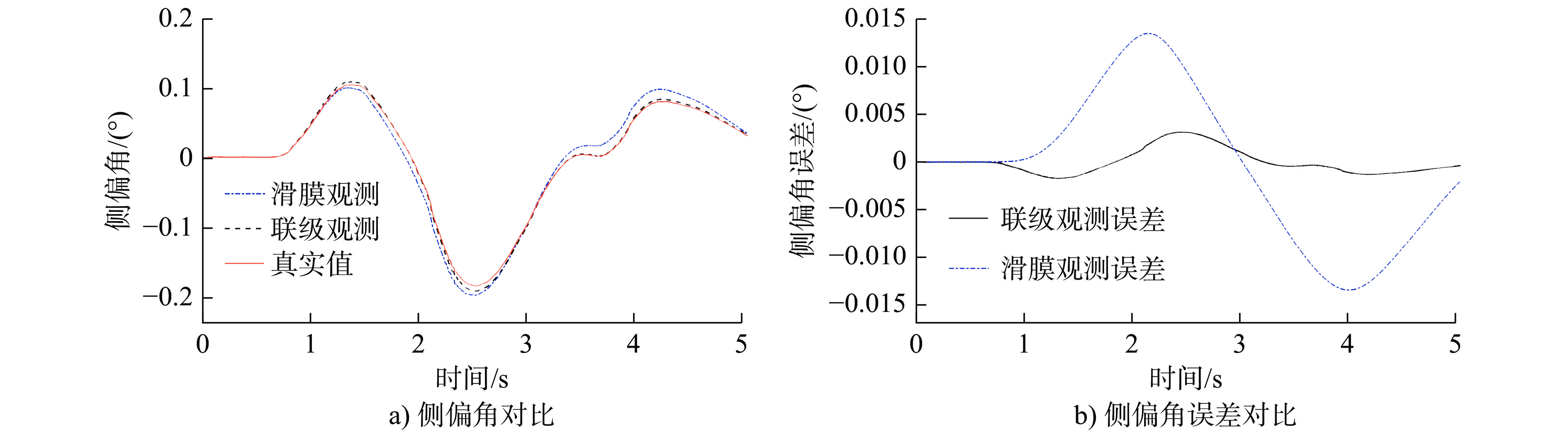
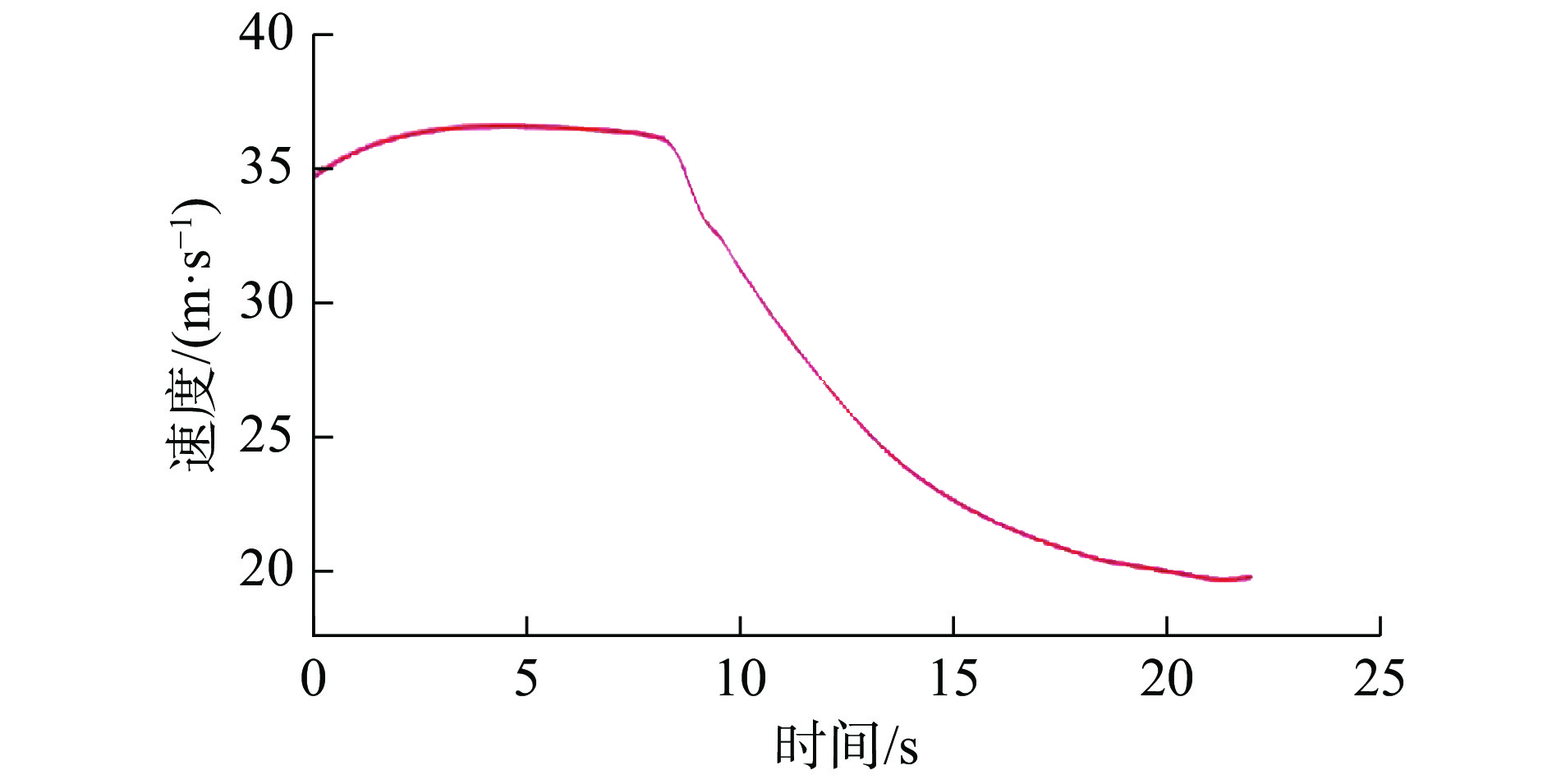
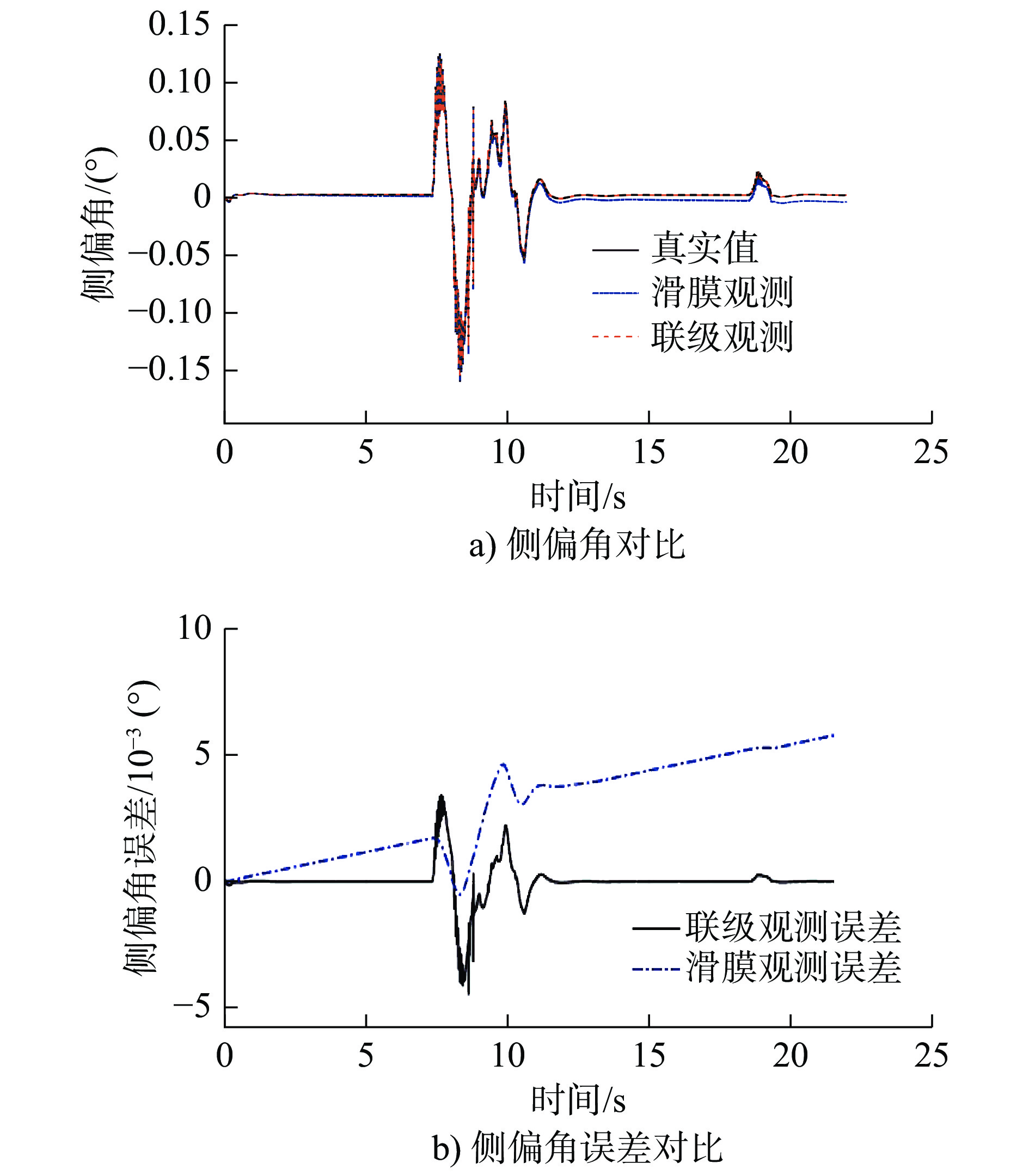
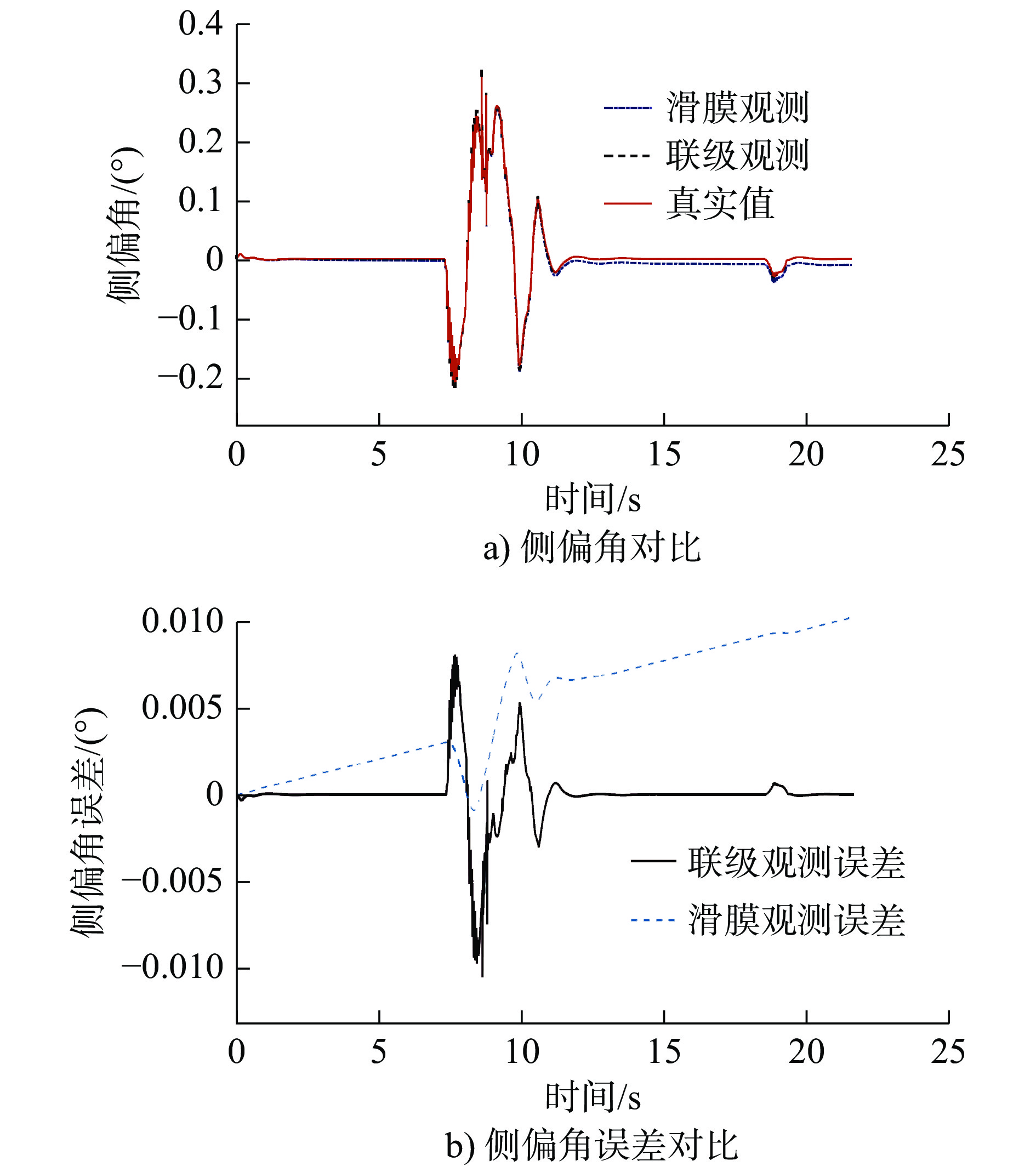
轮胎侧偏特性是汽车动力学稳定性控制的基础,轮胎侧偏角是用来表征车辆侧向状态稳定性的重要参量。基于动力学模型的轮胎侧偏角观测方法,在复杂工况下因侧倾转向和变形转向的影响而精度变差,为此提出一种基于自适应双曲正切滑模观测器理论的新型联级观测算法。在车辆的二自由度模型基础上,利用CarSim与Simulink建立车辆联合仿真模型。针对双移线和紧急避障两种典型工况,对比分析了滑模观测算法和自适应双曲正切滑模联级观测算法的侧偏角误差值。结果表明:在不同工况下自适应滑模联级观测算法与滑模观测算法相比,观测误差最大可有效降低61.44%,充分体现算法具有更高的准确性与鲁棒性。
轮胎侧偏特性是汽车动力学稳定性控制的基础,轮胎侧偏角是用来表征车辆侧向状态稳定性的重要参量。基于动力学模型的轮胎侧偏角观测方法,在复杂工况下因侧倾转向和变形转向的影响而精度变差,为此提出一种基于自适应双曲正切滑模观测器理论的新型联级观测算法。在车辆的二自由度模型基础上,利用CarSim与Simulink建立车辆联合仿真模型。针对双移线和紧急避障两种典型工况,对比分析了滑模观测算法和自适应双曲正切滑模联级观测算法的侧偏角误差值。结果表明:在不同工况下自适应滑模联级观测算法与滑模观测算法相比,观测误差最大可有效降低61.44%,充分体现算法具有更高的准确性与鲁棒性。
2023, 42(9): 1533-1541.
doi: 10.13433/j.cnki.1003-8728.20220088
摘要:
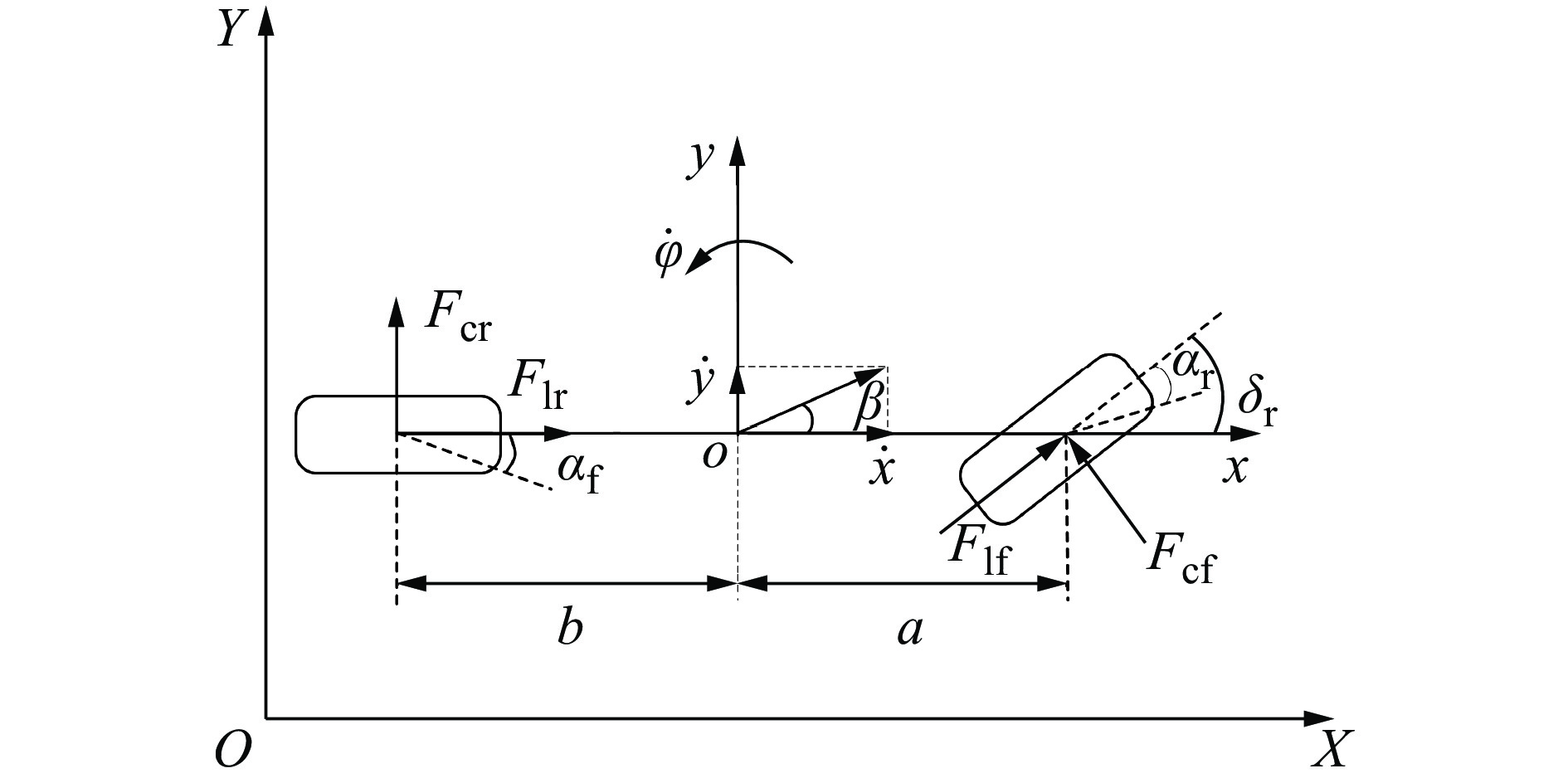
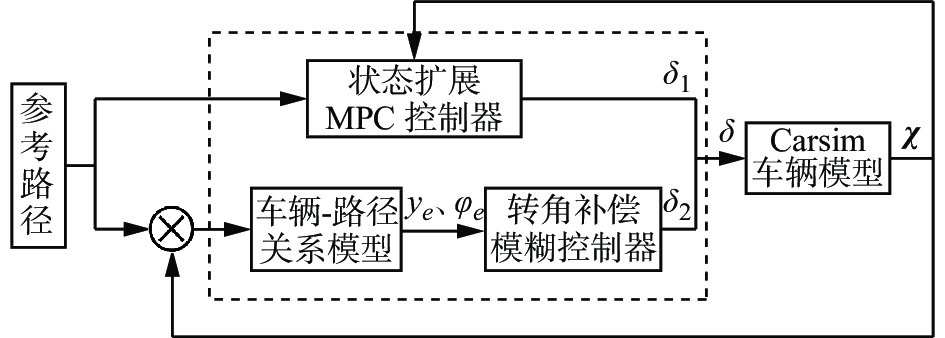
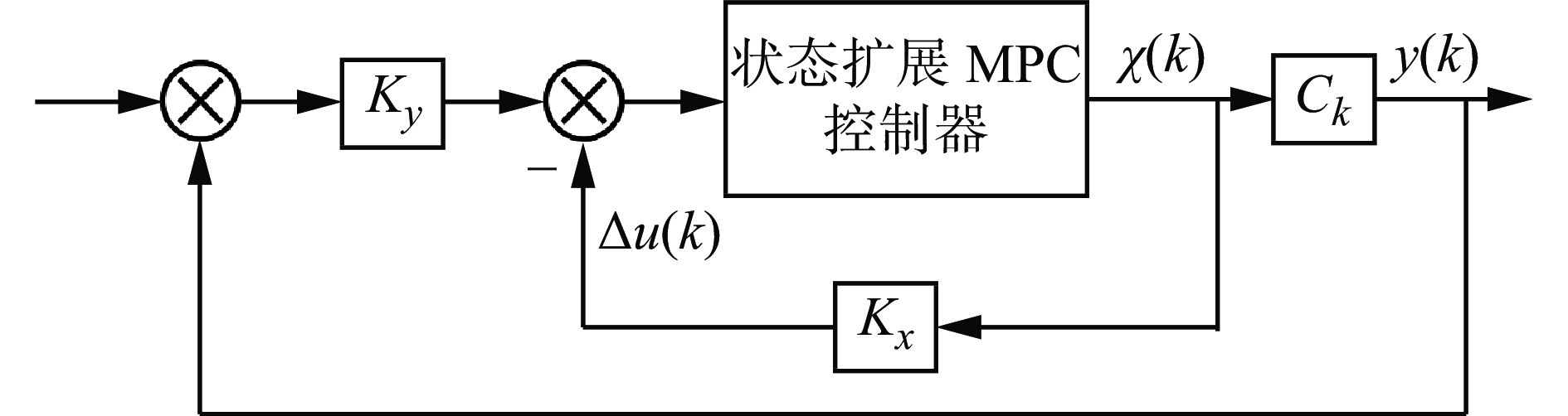
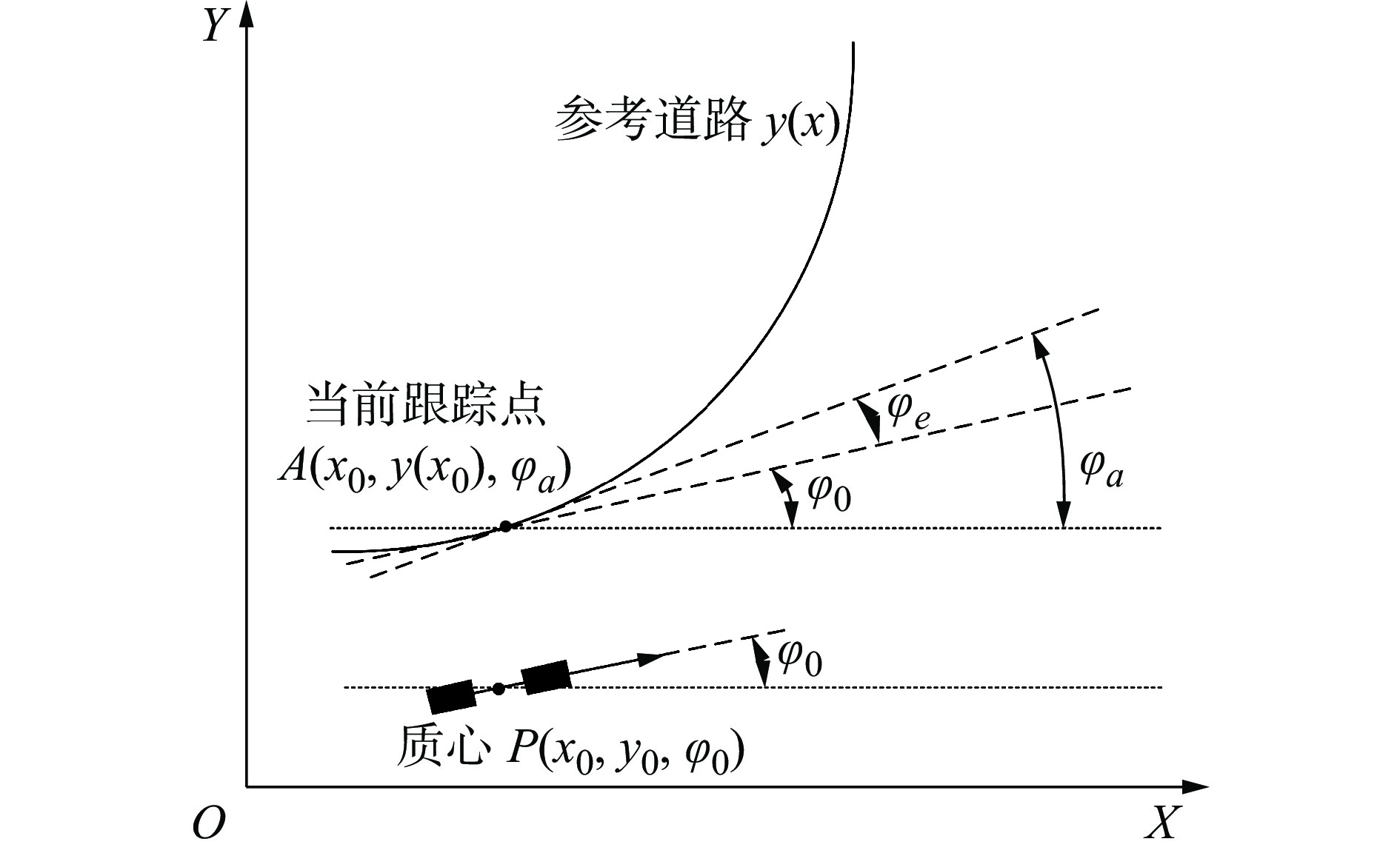
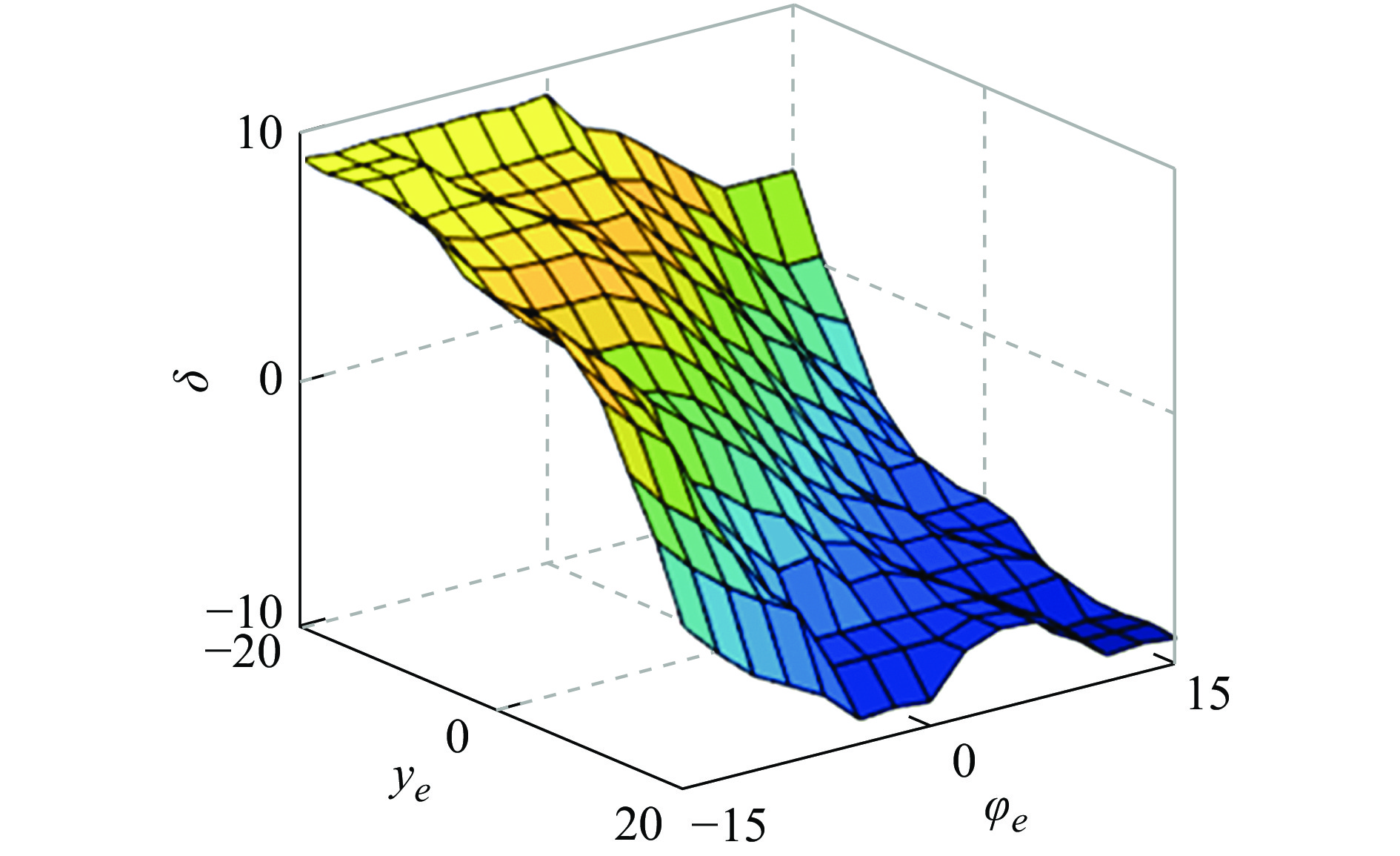
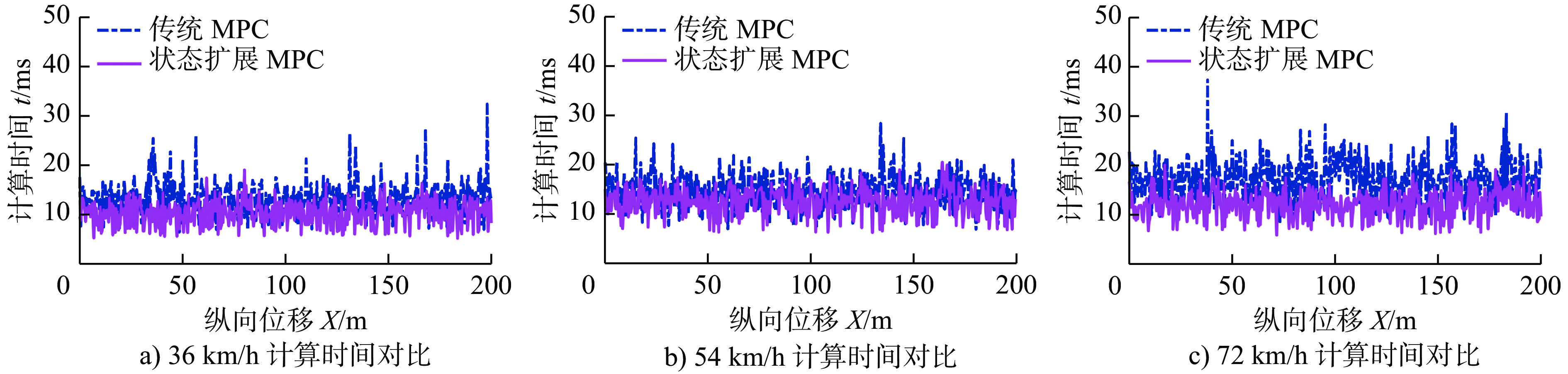
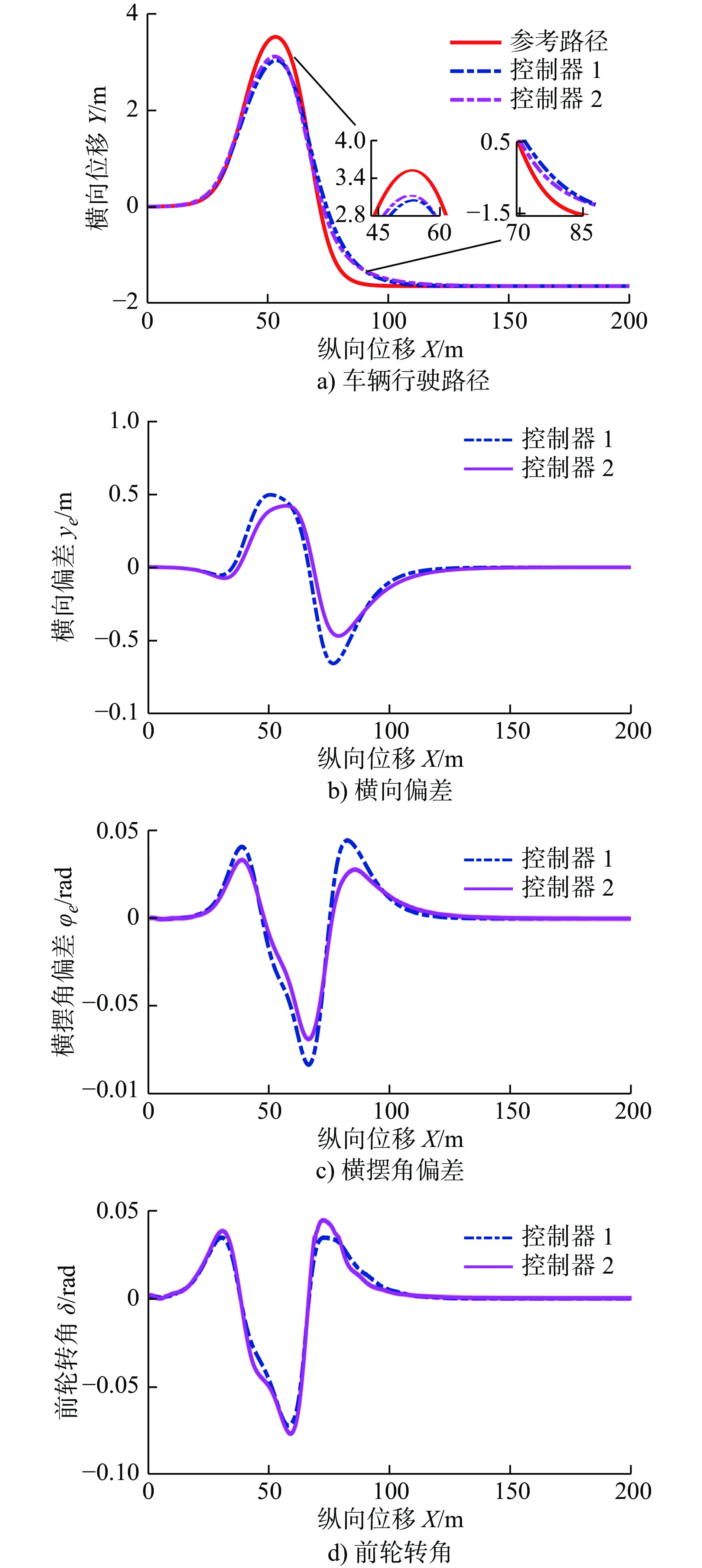
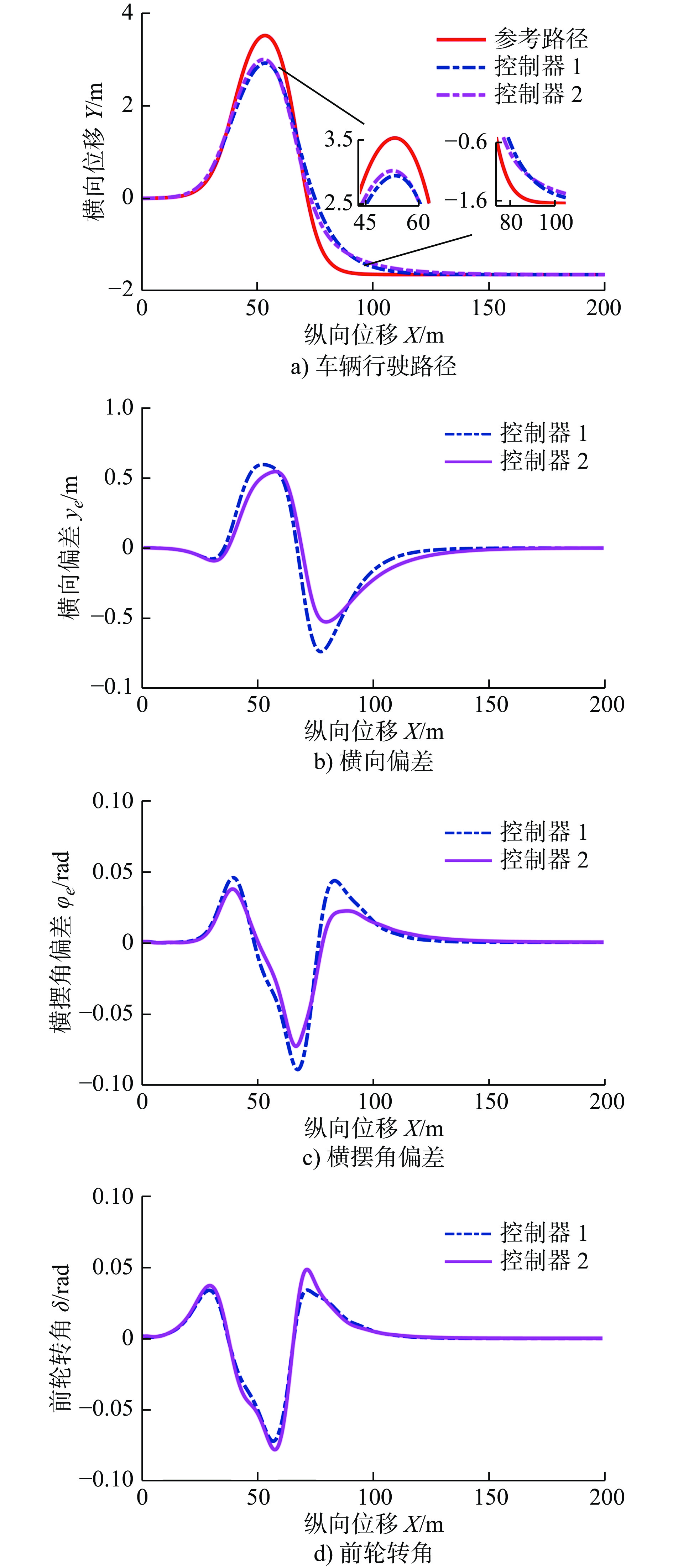
采用传统模型预测控制(MPC)的无人车难以同时保证路径跟踪精度和实时性,针对此问题,本文设计了一种采用状态扩展MPC与转角补偿的路径跟踪控制器。建立了车辆三自由度动力学模型,设计了基于状态扩展的双反馈MPC控制器,并根据车速调整控制器参数;建立了车辆-道路跟踪模型,根据车辆横向和航向偏差设计了转角补偿模糊控制器;利用MATLAB/Simulink和Carsim软件对所设计的路径跟踪控制器进行联合仿真分析。结果表明:相比采用传统MPC控制器的车辆,在中、低车速下,状态扩展MPC控制器的控制增量求解时间平均值降低14%以上,路径跟踪控制器跟踪道路的横向和航向偏差最大值分别降低23%和17%以上,具有较好的路径跟踪性能。
采用传统模型预测控制(MPC)的无人车难以同时保证路径跟踪精度和实时性,针对此问题,本文设计了一种采用状态扩展MPC与转角补偿的路径跟踪控制器。建立了车辆三自由度动力学模型,设计了基于状态扩展的双反馈MPC控制器,并根据车速调整控制器参数;建立了车辆-道路跟踪模型,根据车辆横向和航向偏差设计了转角补偿模糊控制器;利用MATLAB/Simulink和Carsim软件对所设计的路径跟踪控制器进行联合仿真分析。结果表明:相比采用传统MPC控制器的车辆,在中、低车速下,状态扩展MPC控制器的控制增量求解时间平均值降低14%以上,路径跟踪控制器跟踪道路的横向和航向偏差最大值分别降低23%和17%以上,具有较好的路径跟踪性能。

2023, 42(9): 1542-1550.
doi: 10.13433/j.cnki.1003-8728.20220090
摘要:
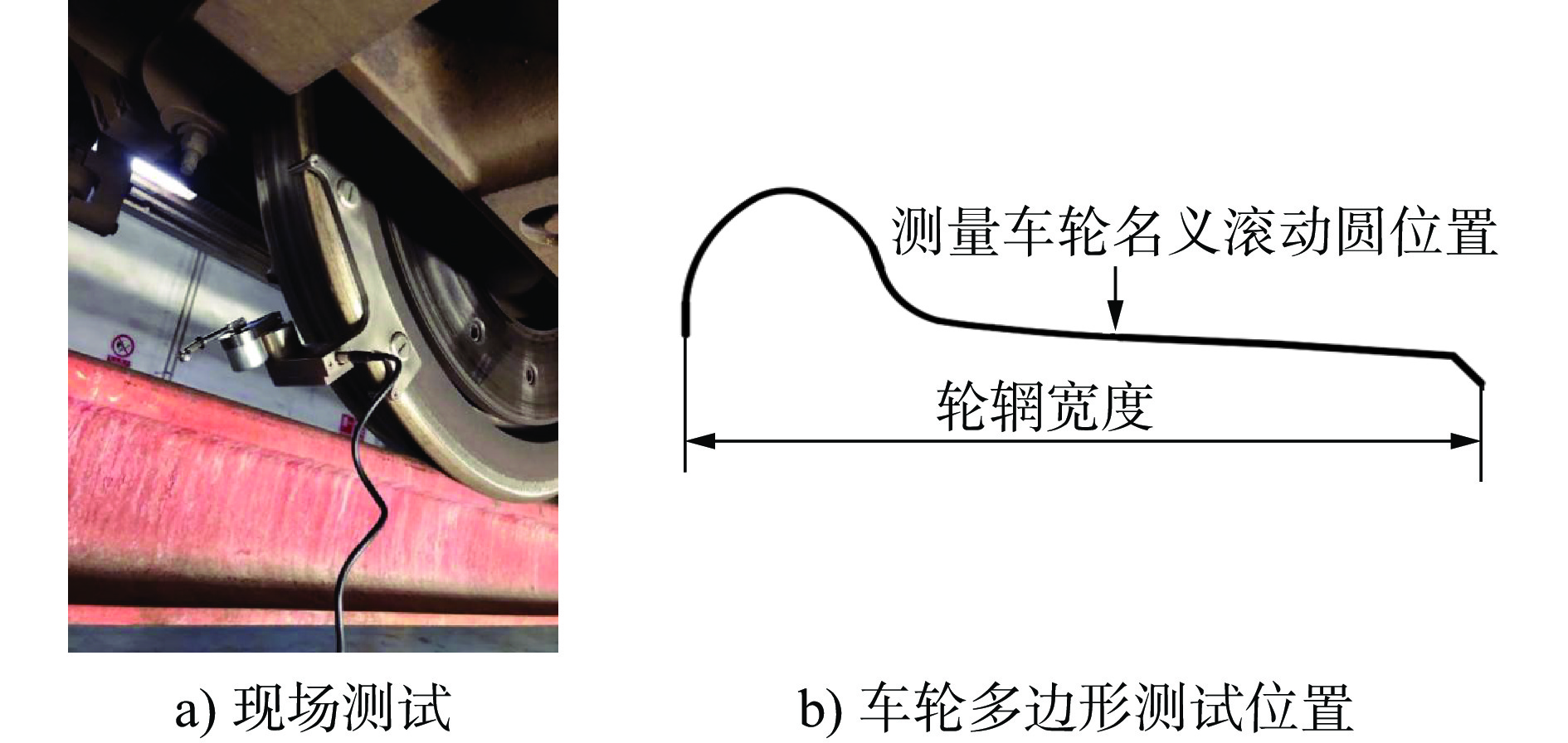
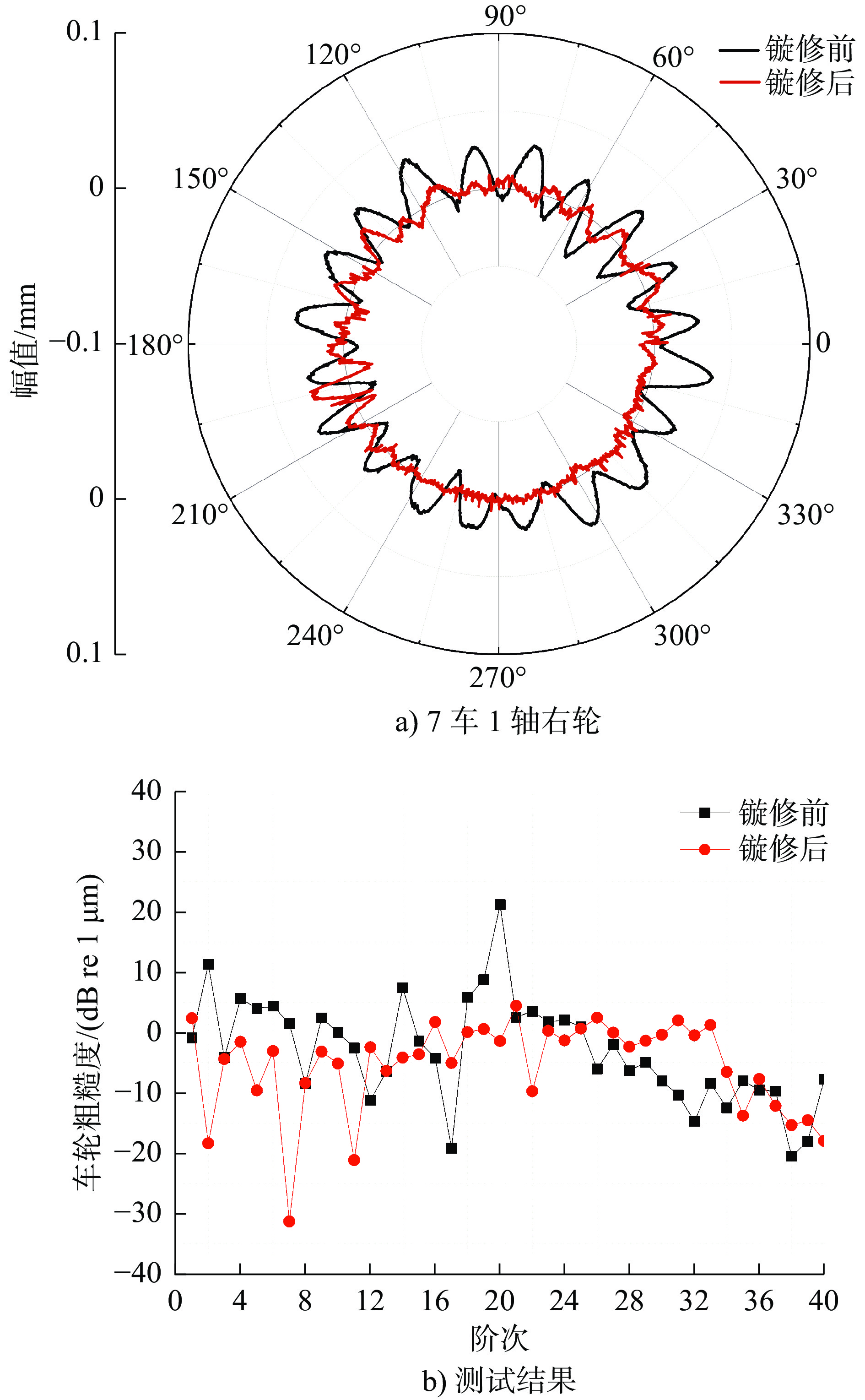
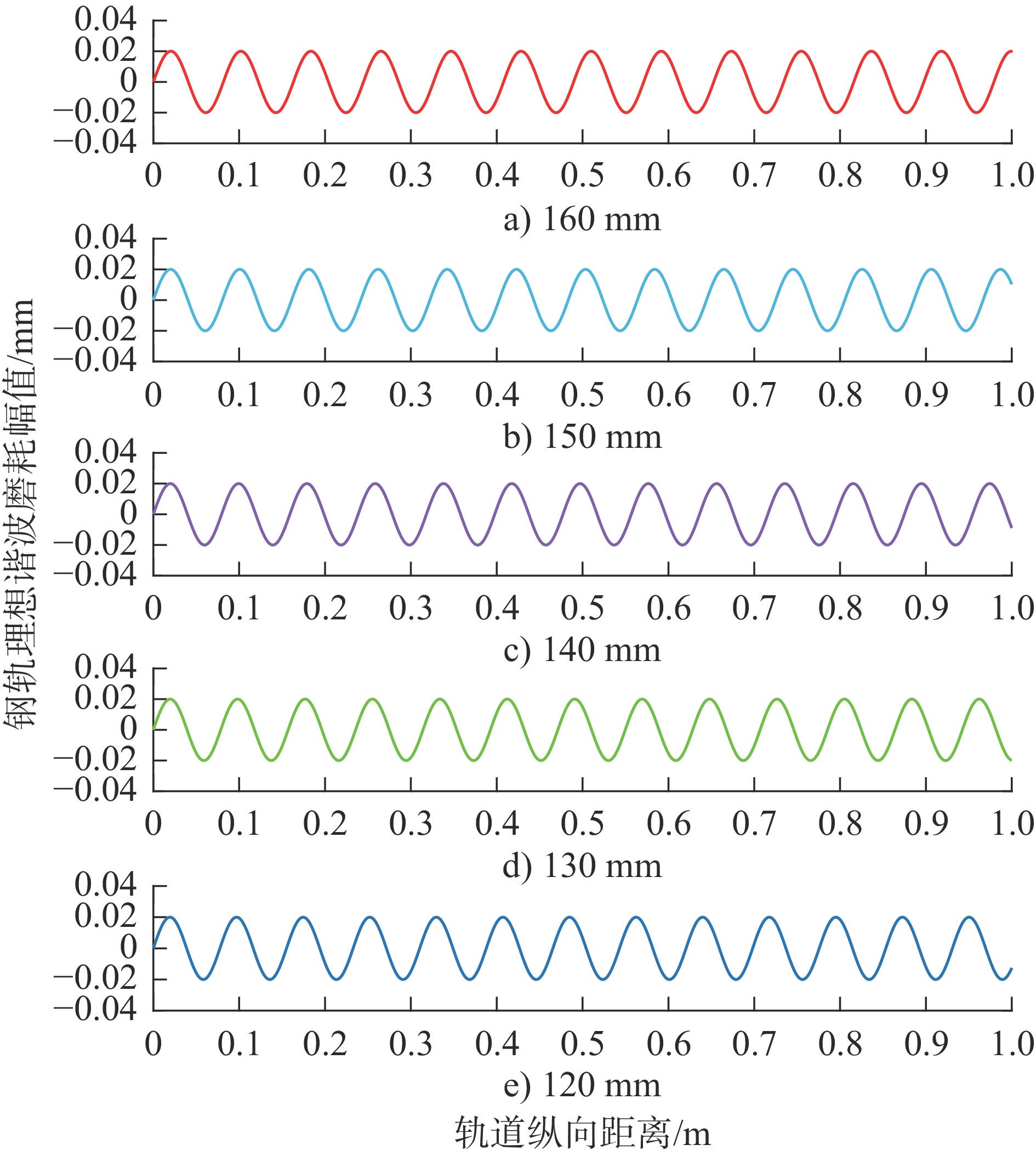
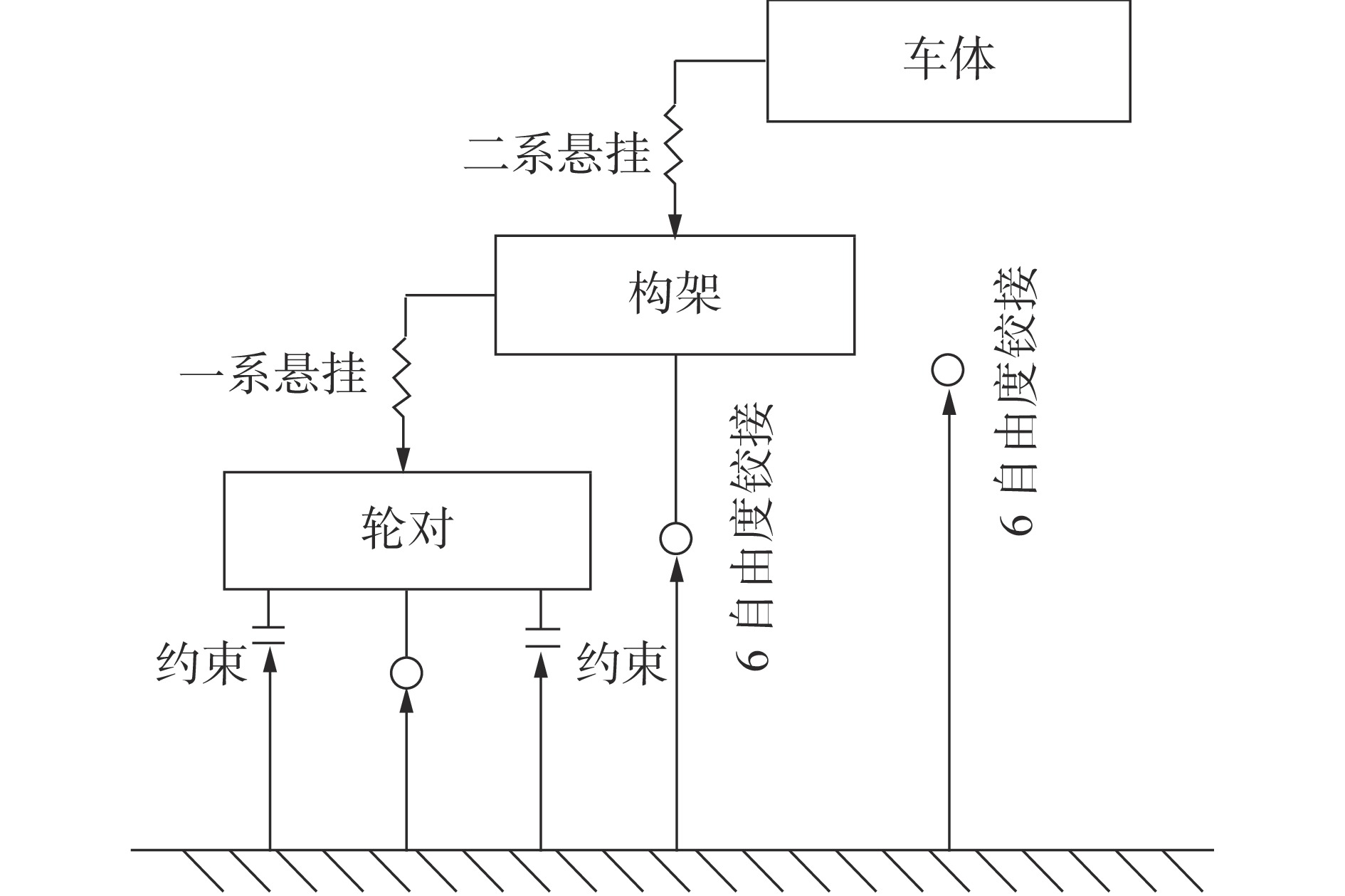
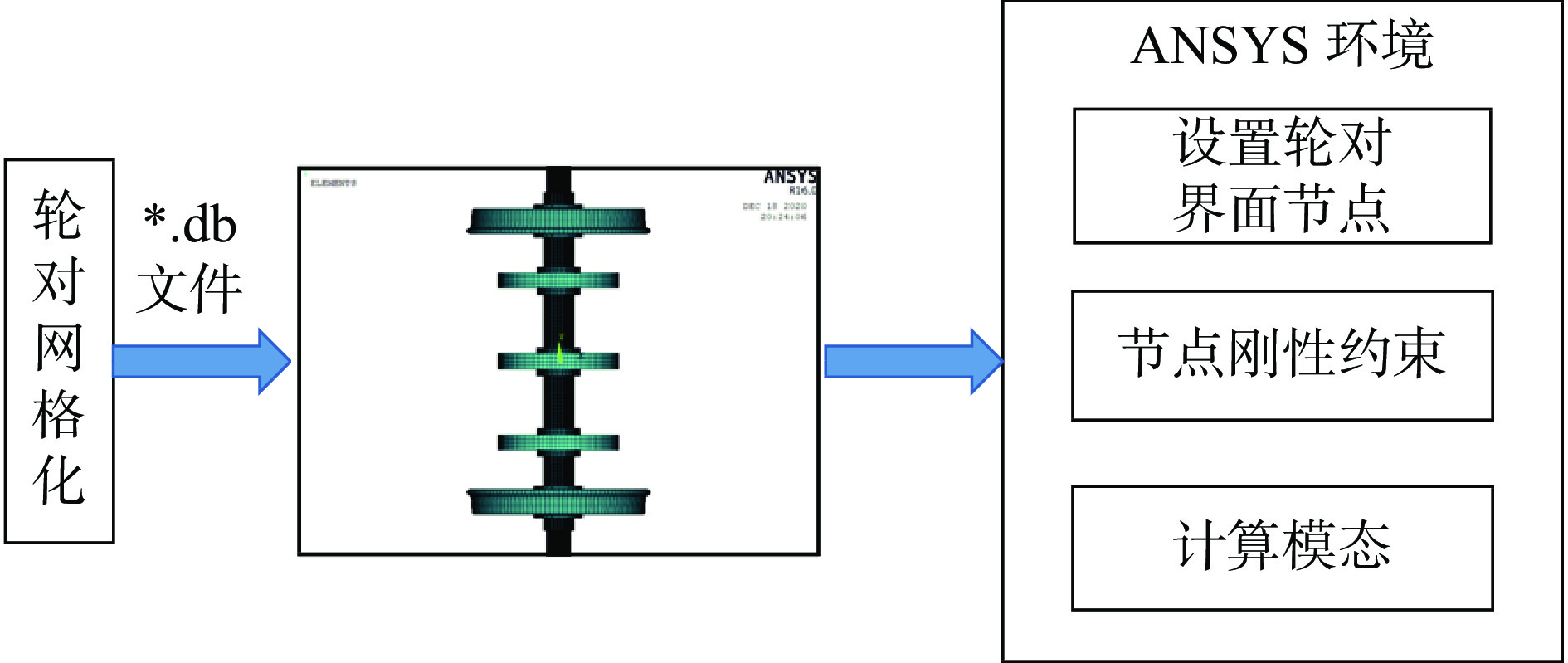
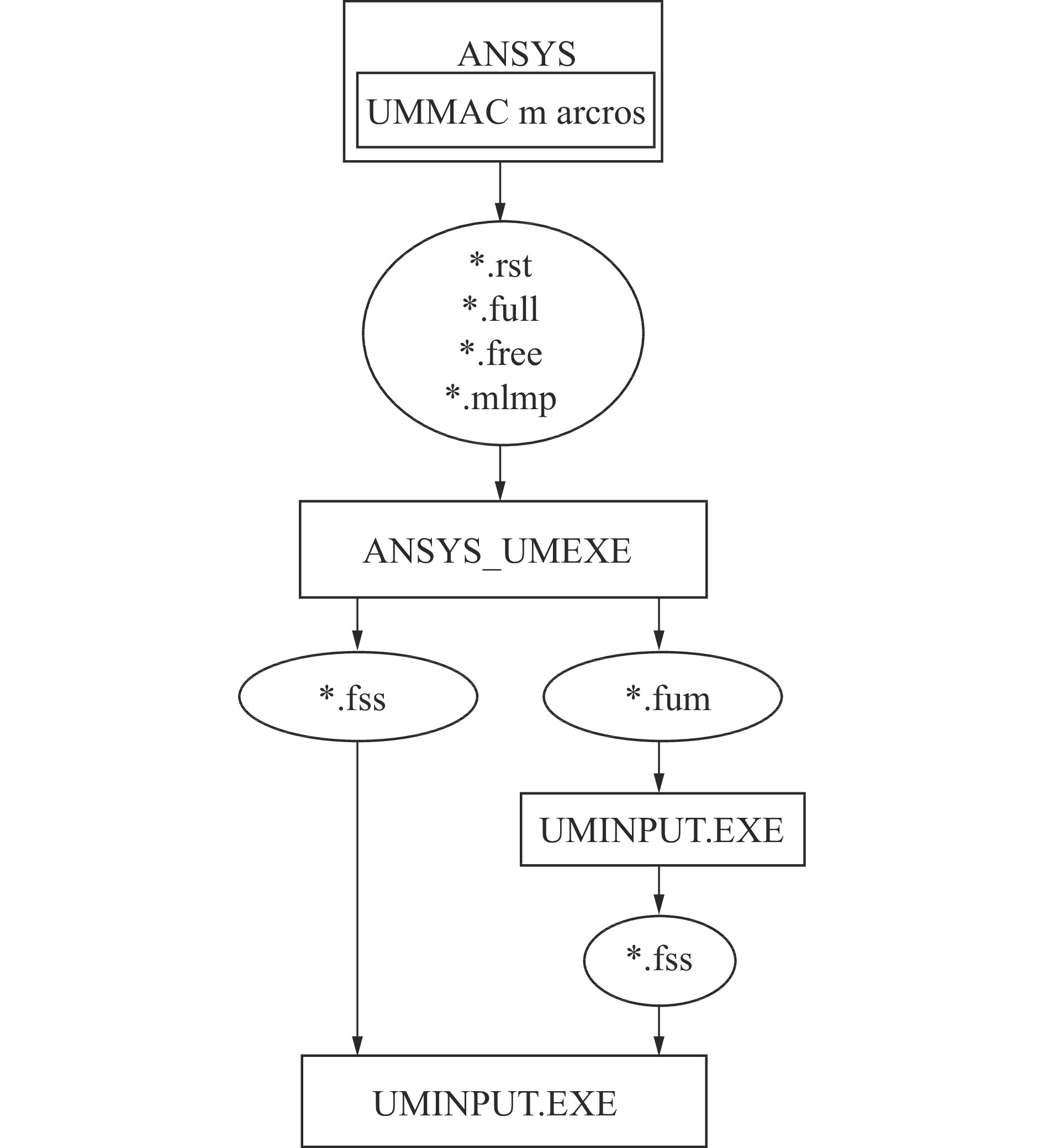
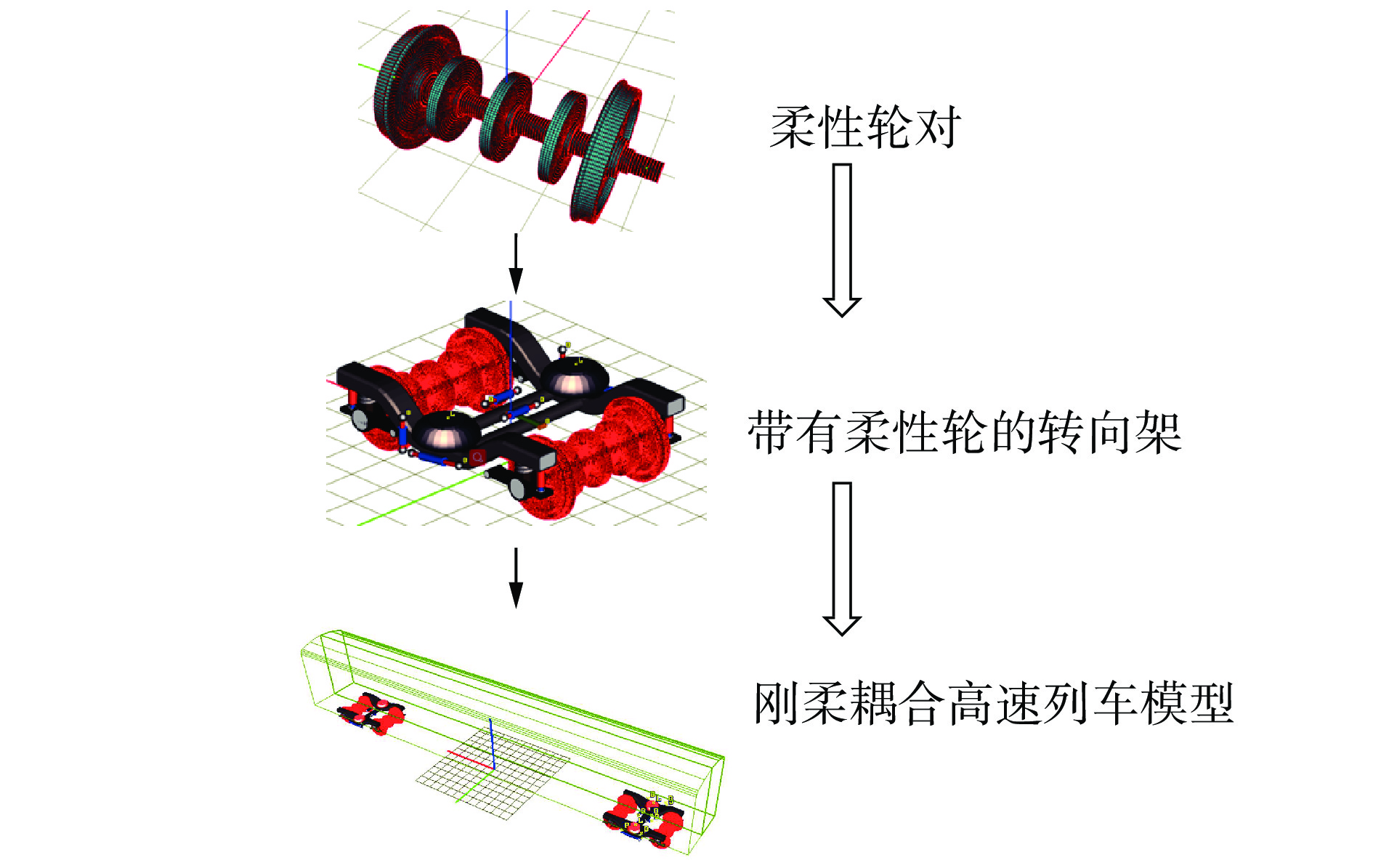
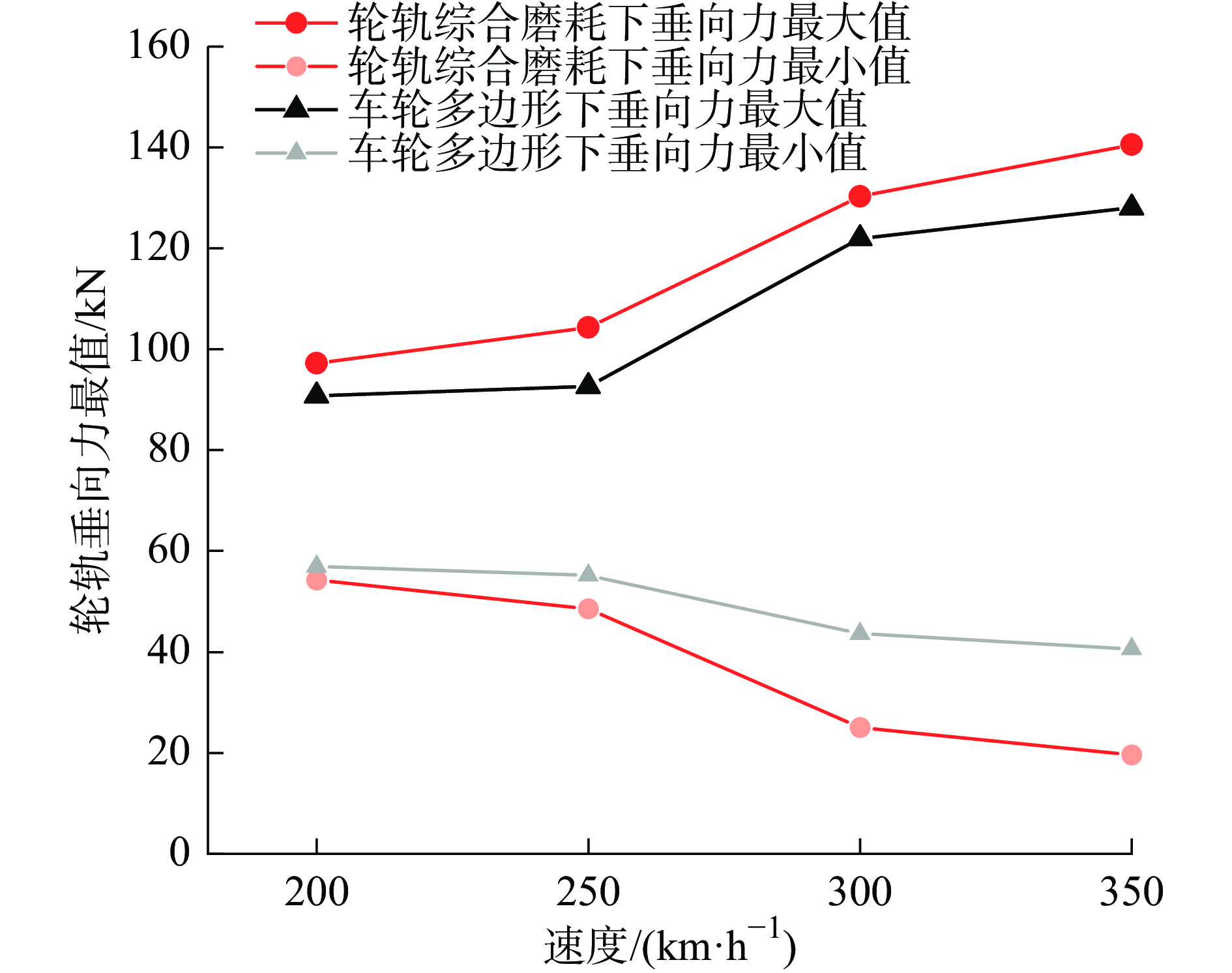
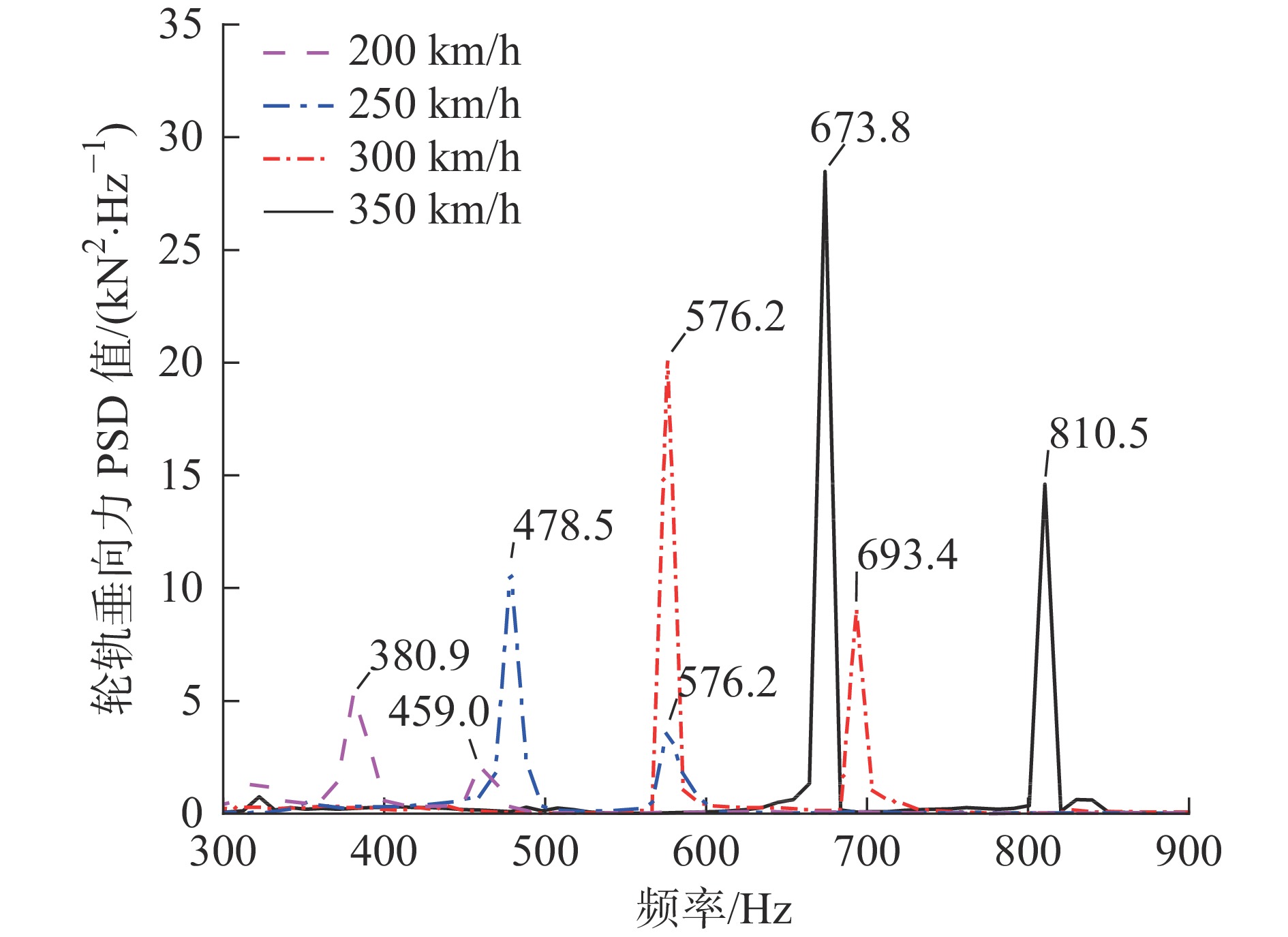
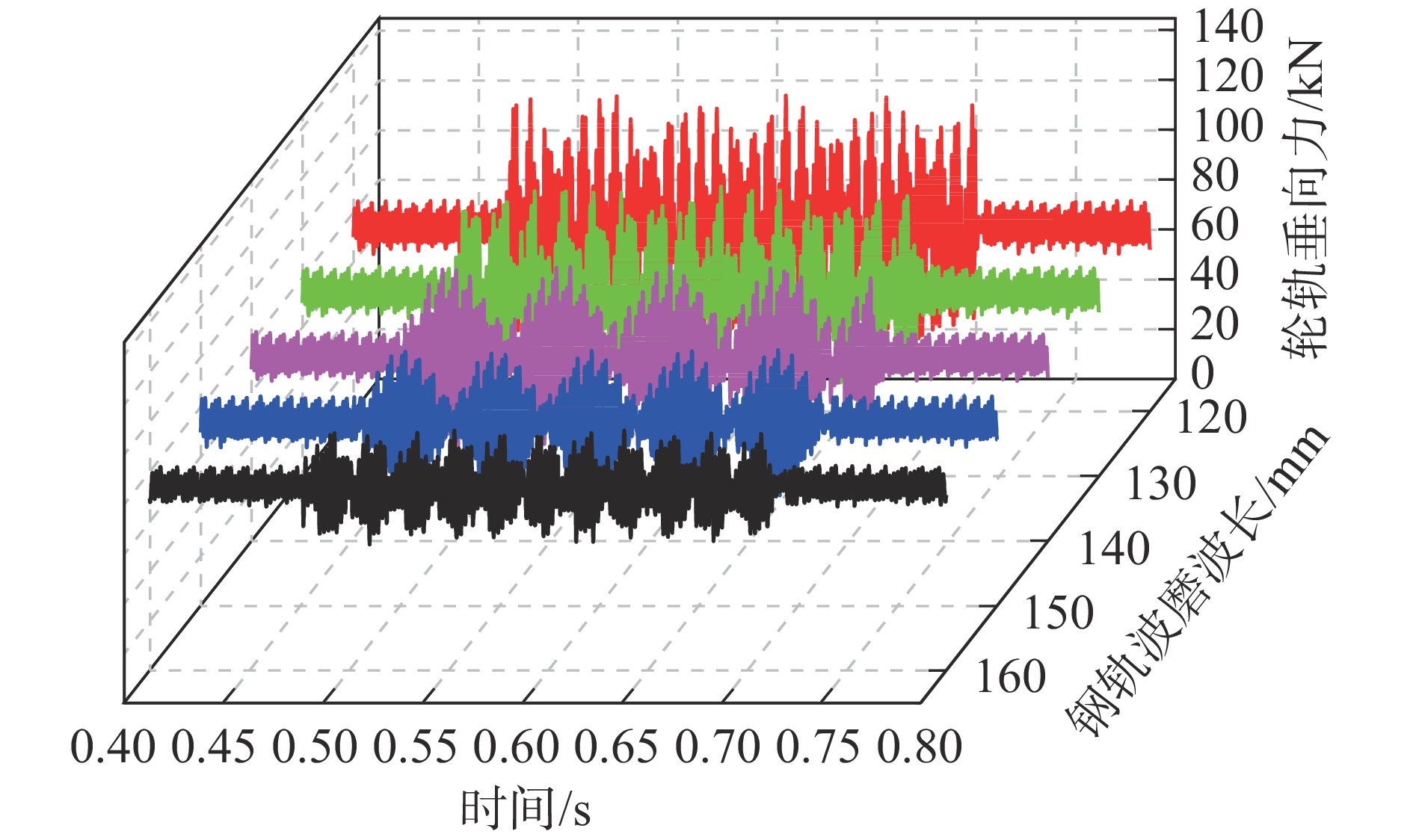
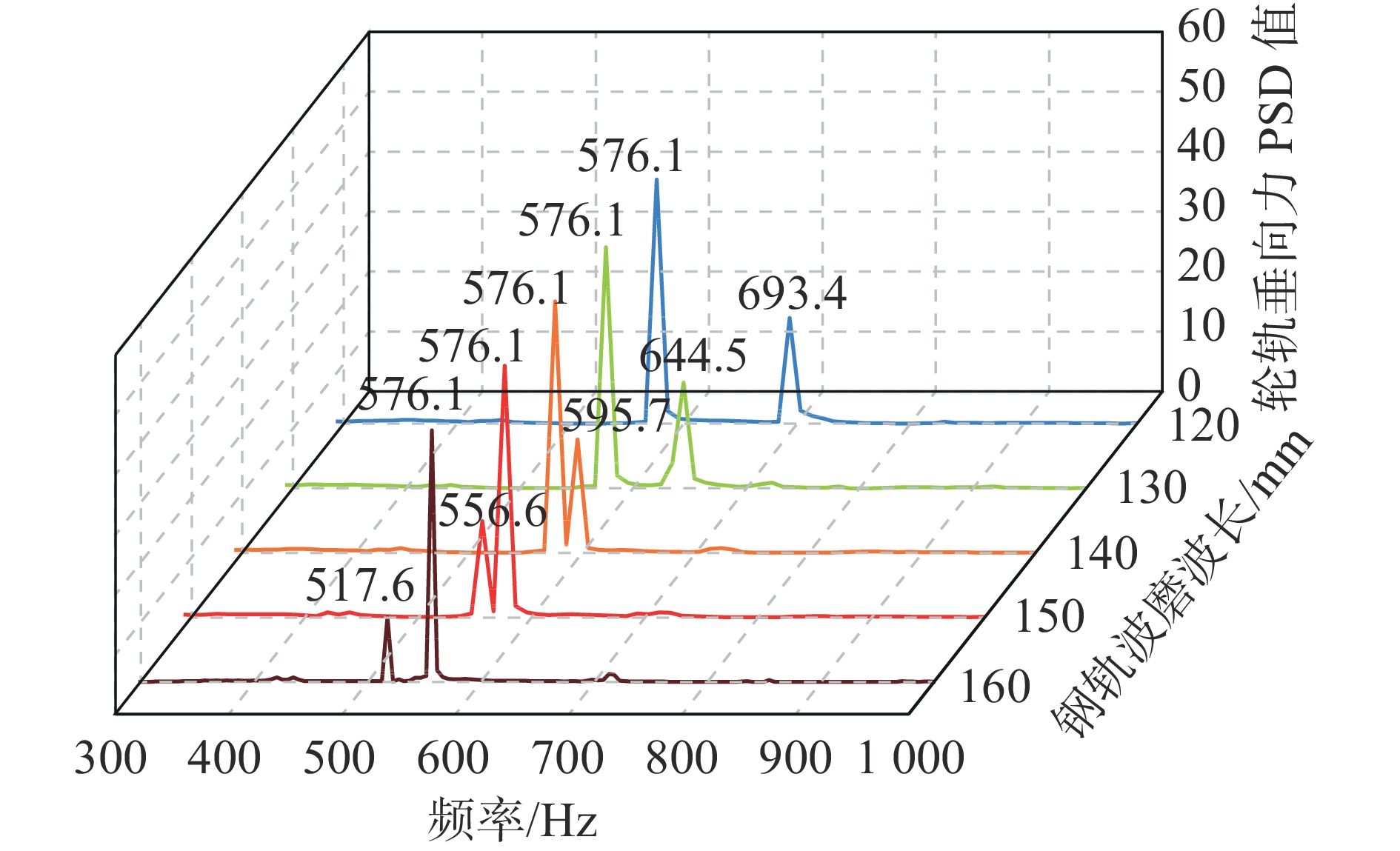
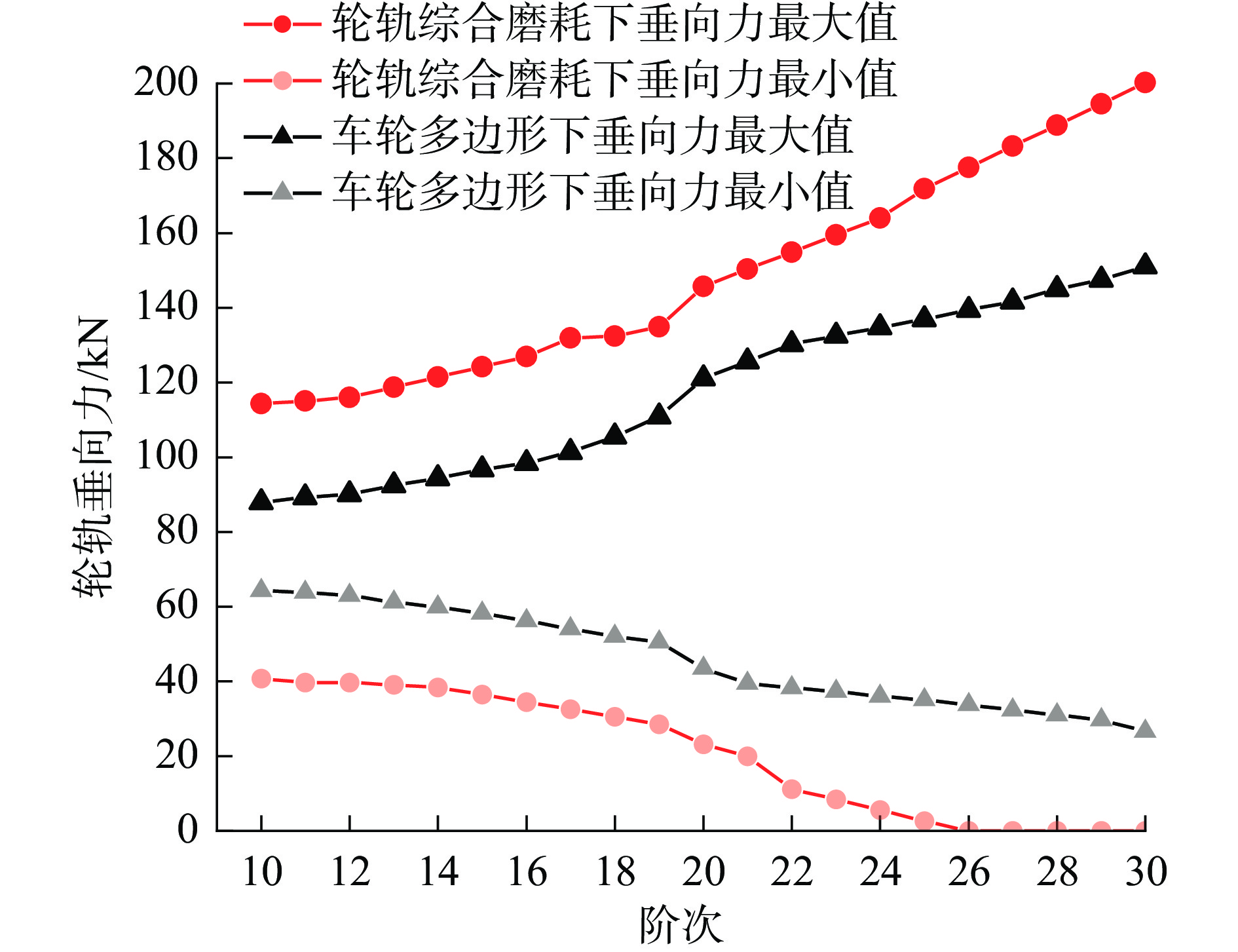
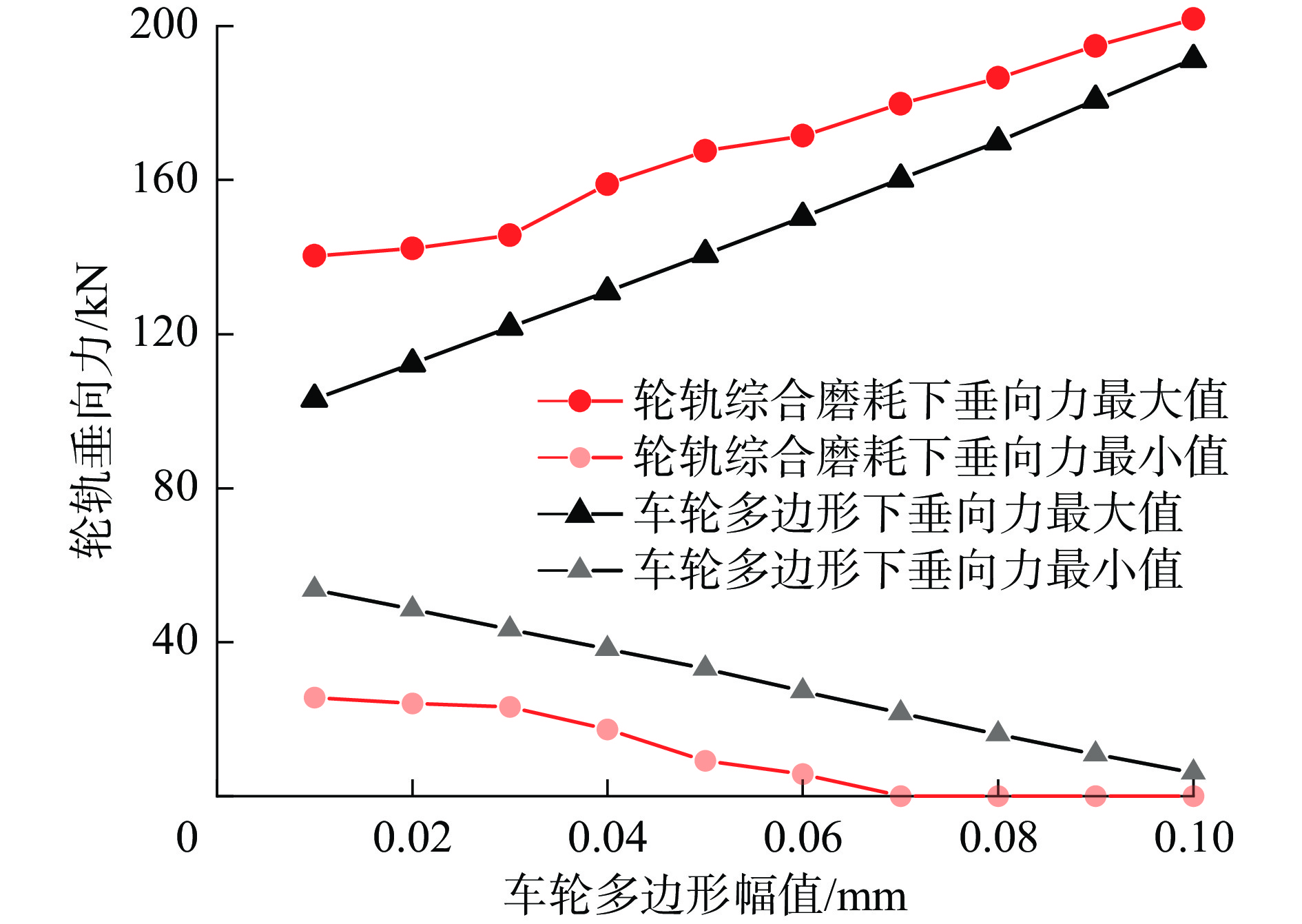
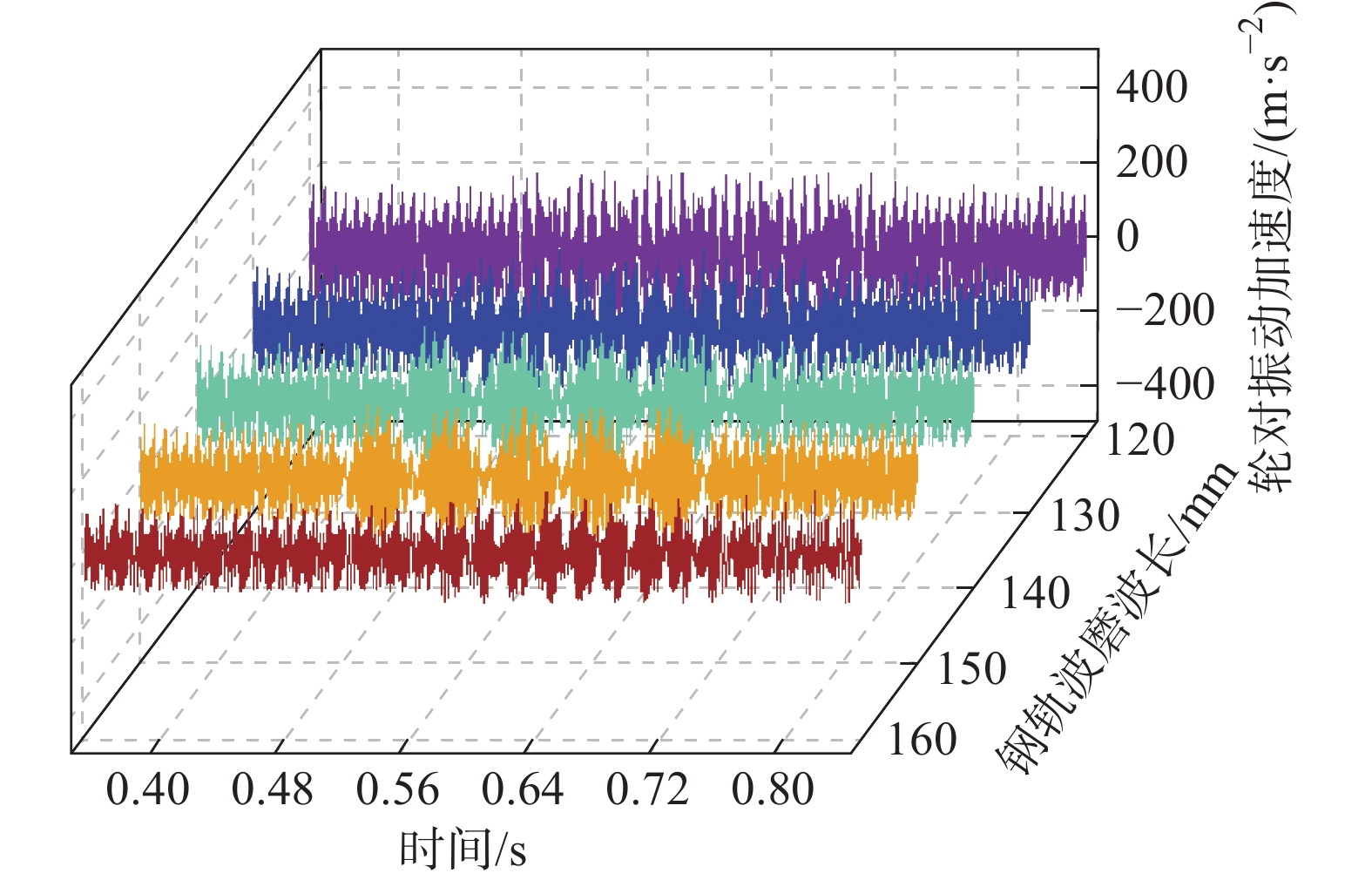
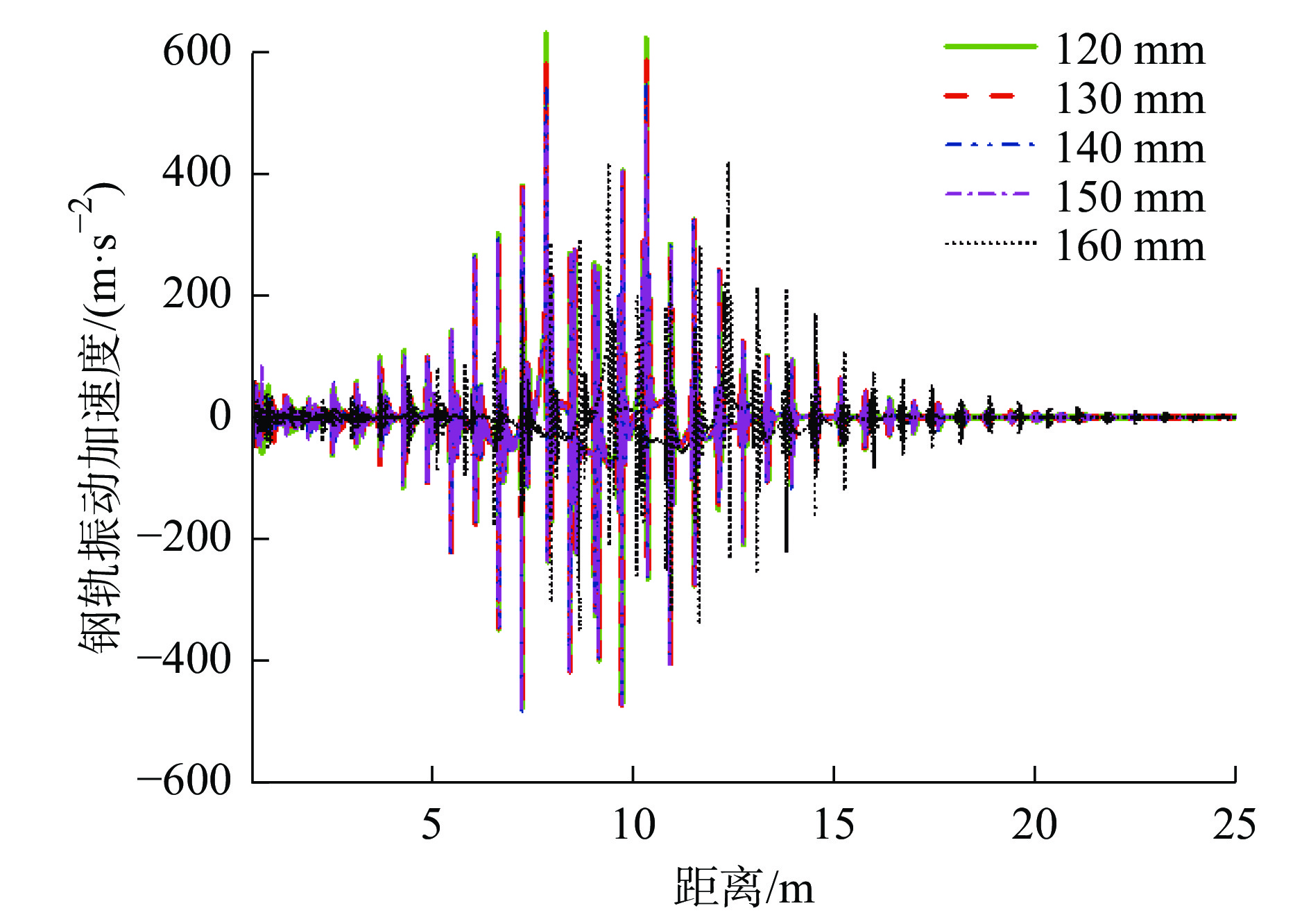
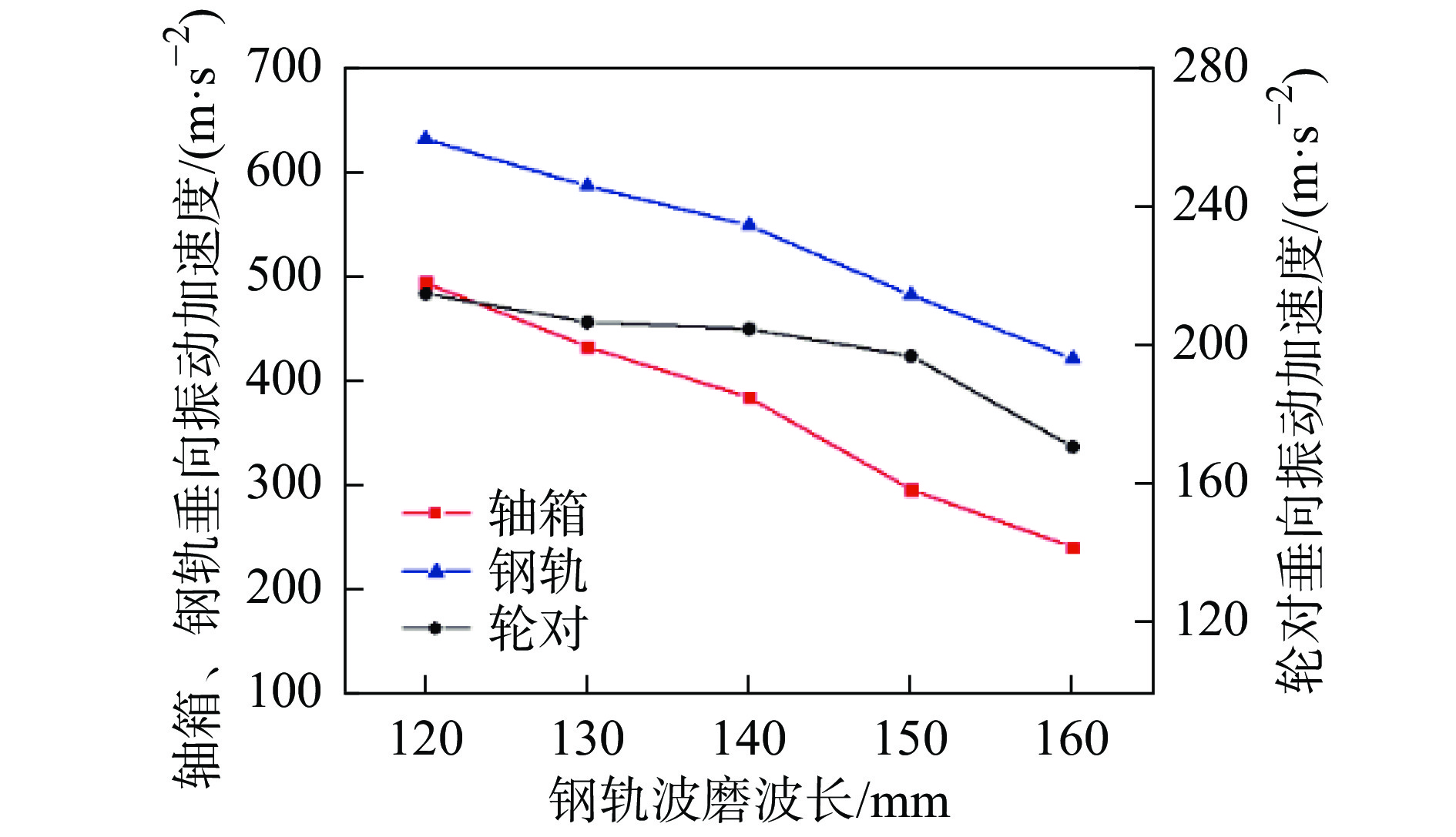
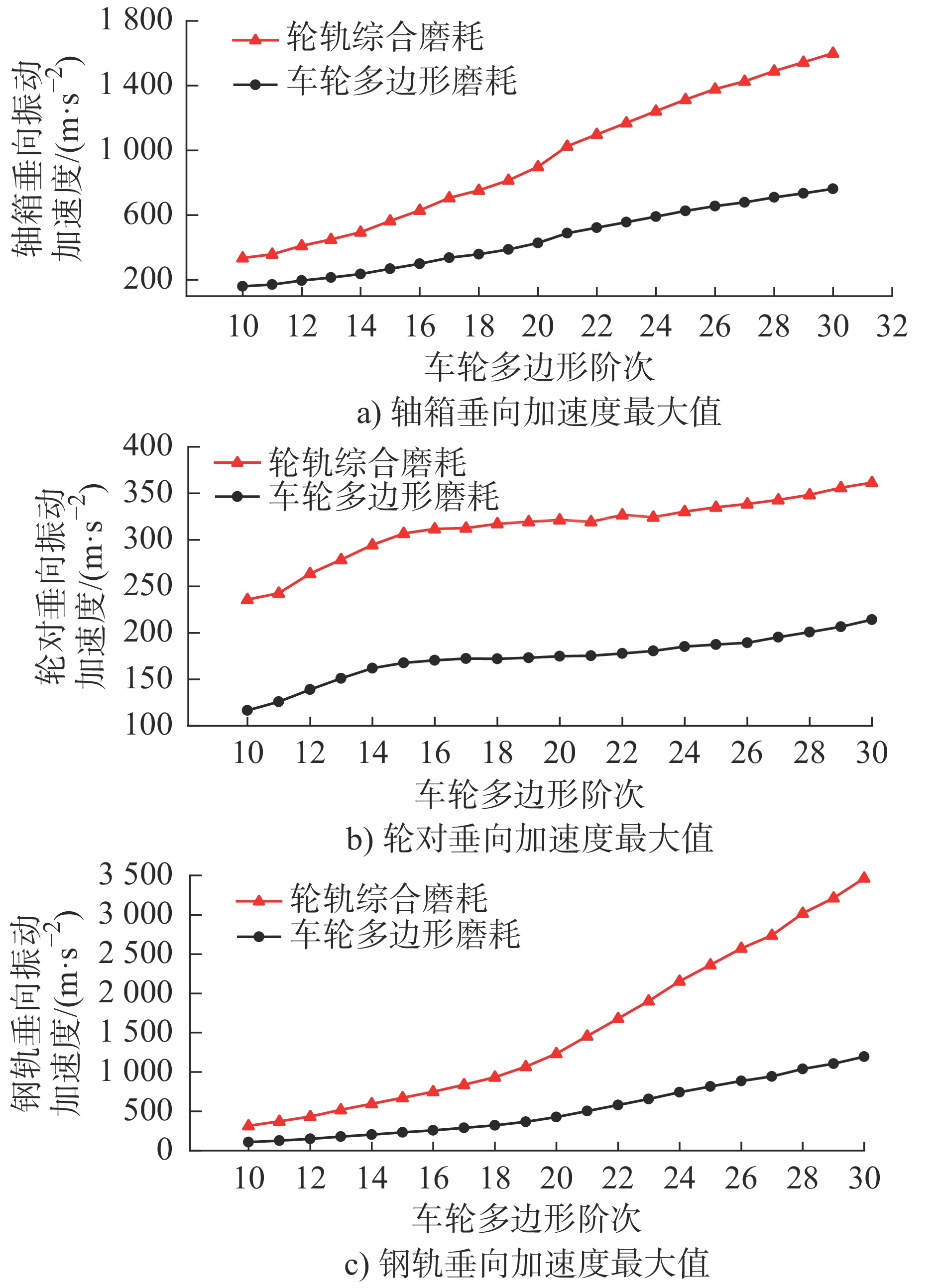
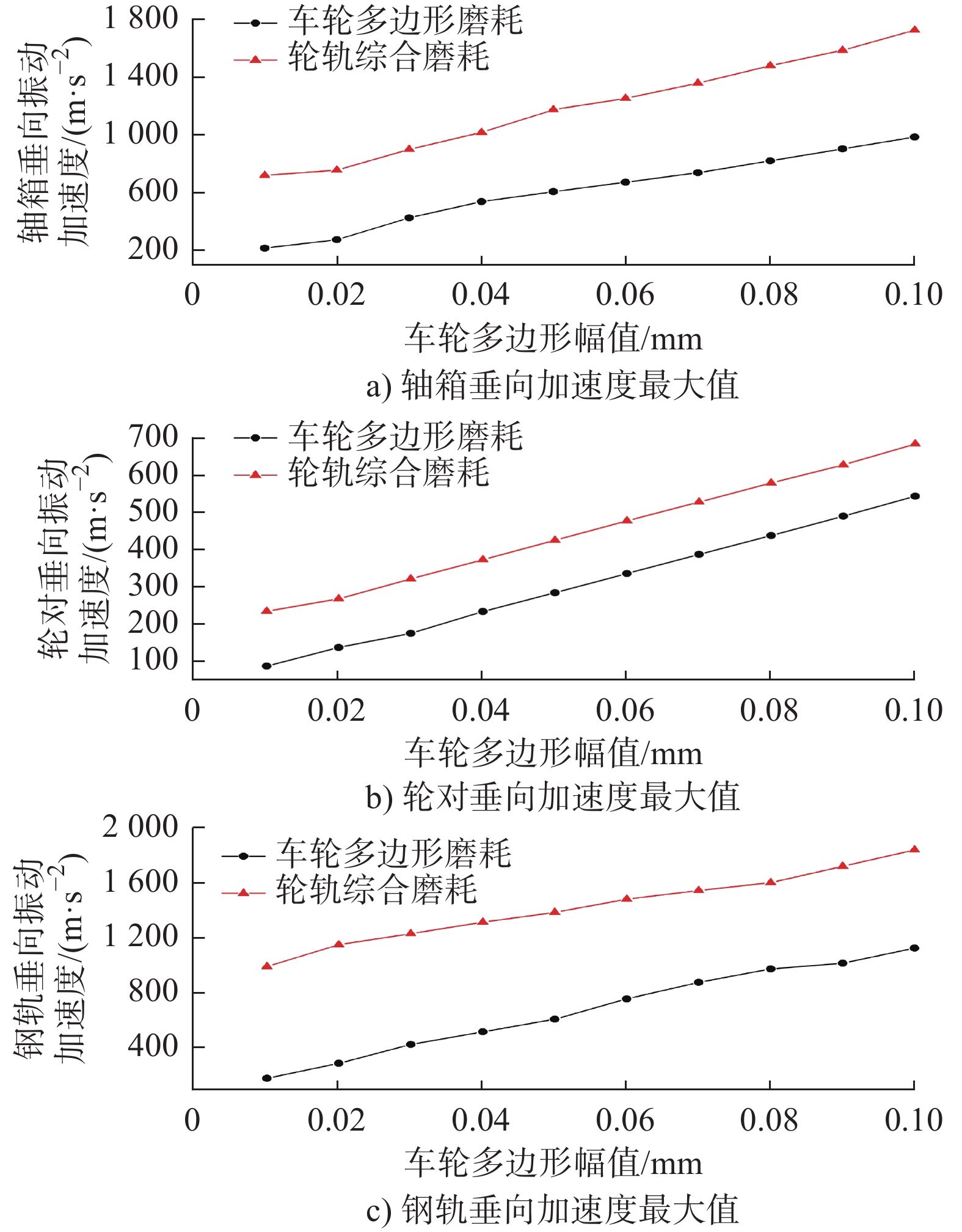
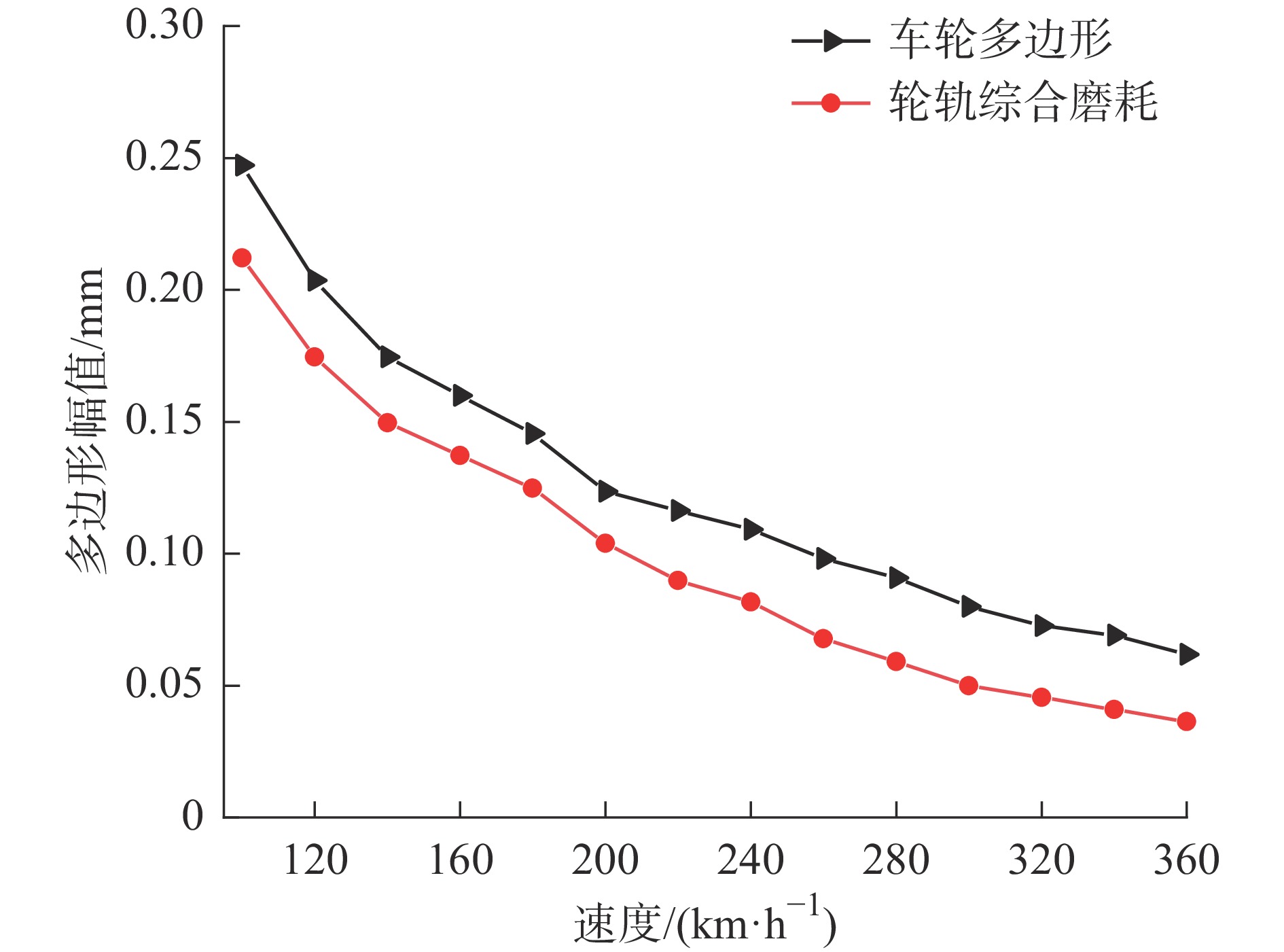
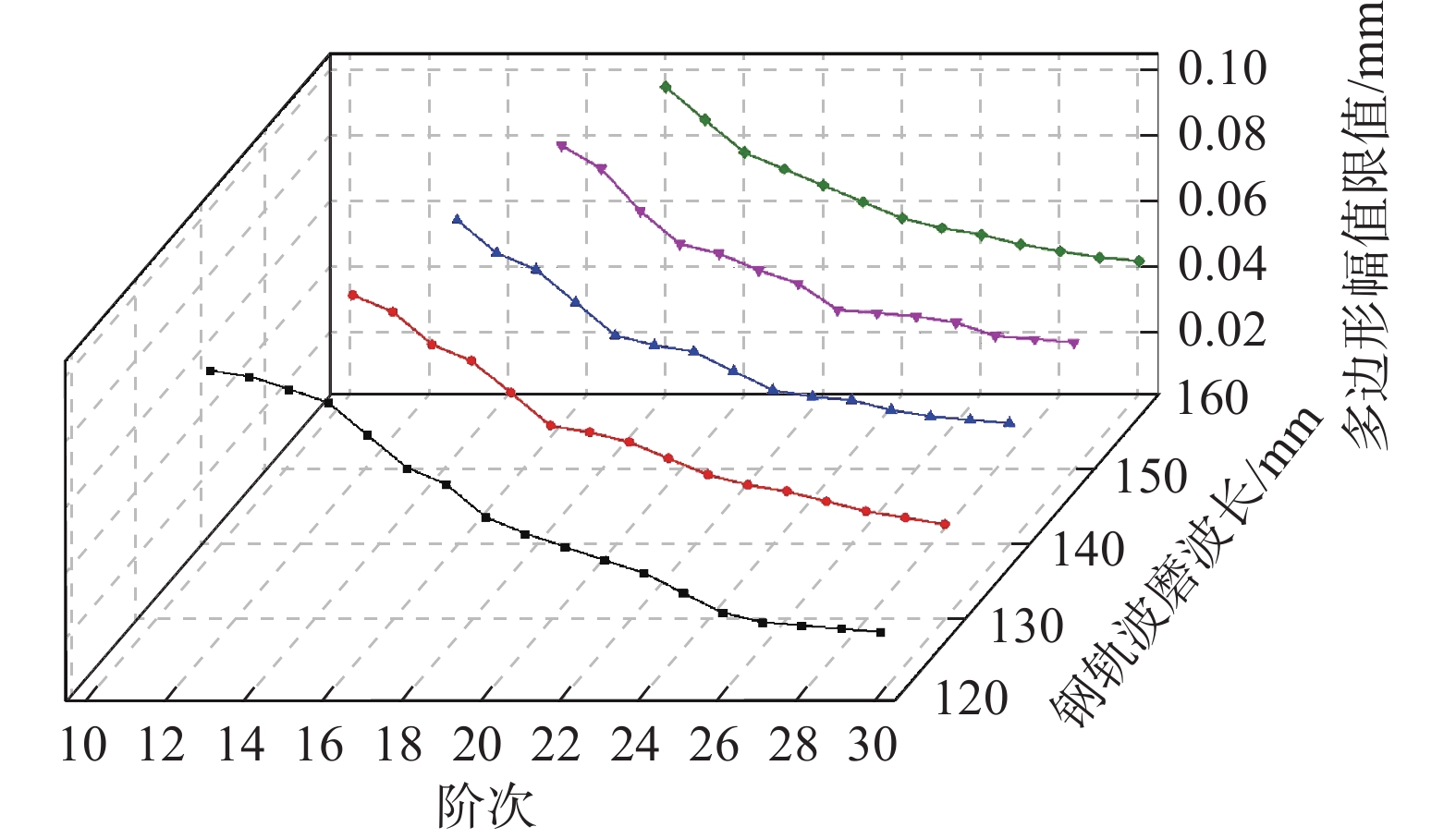
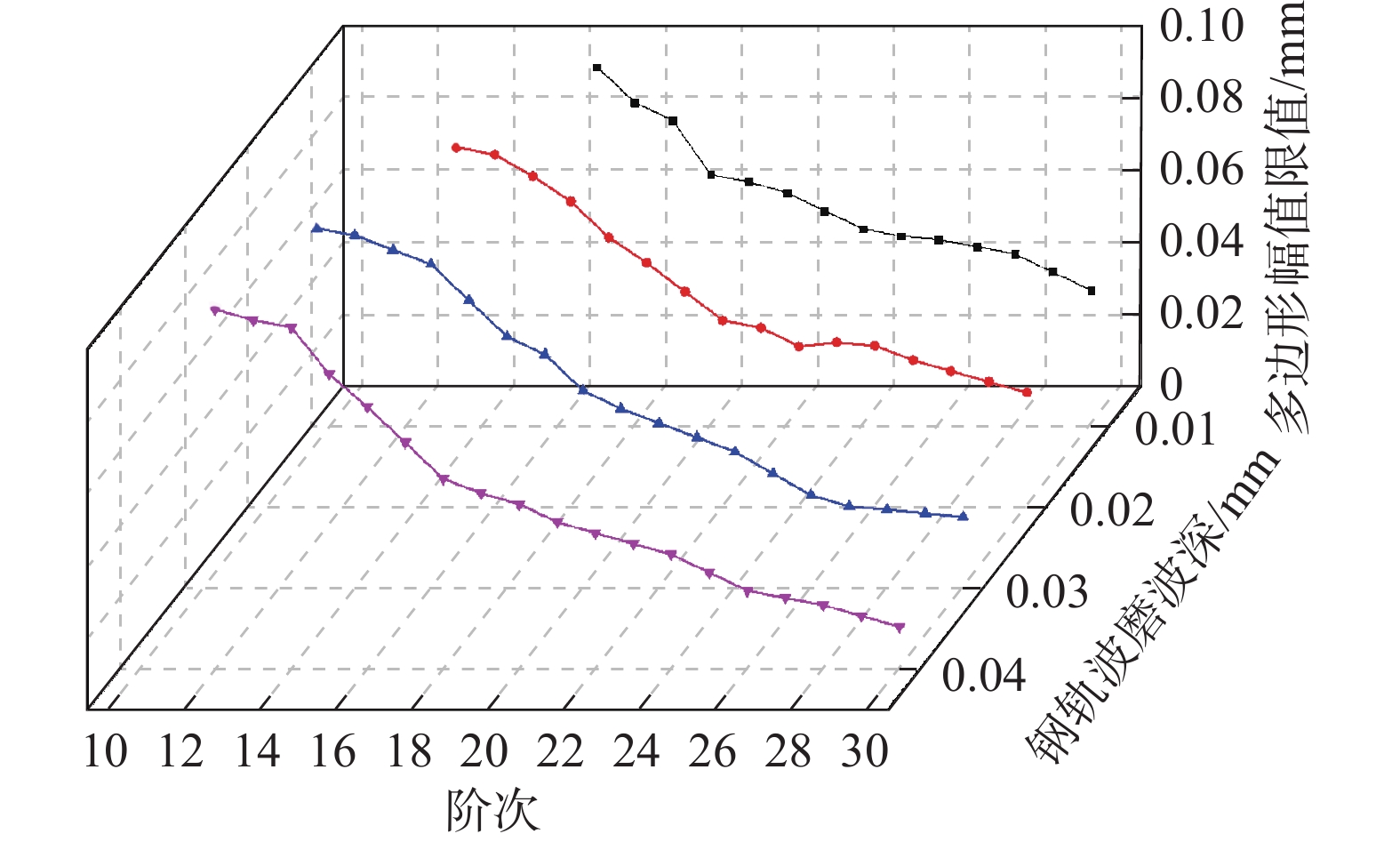
高速铁路长时间运营,经常发生车轮多边形磨耗,并伴随钢轨波磨,两种损伤形式对列车运行特性的综合影响有待深入研究。采用简谐函数法建立车轮多边形模型,设计余弦函数描述钢轨不平顺磨耗,建立列车刚柔耦合动力学模型,分析不同车轮多边形及钢轨波磨综合磨耗情况下,列车的动力学性能的影响,并提出轮轨综合磨耗的安全限值。结果表明:在轮轨综合磨耗激扰下对列车的动力学性能的影响更为剧烈;列车运行速度为300 km/h下,轮轨垂向力增长幅值最大达到30%,车轮与25阶振型模态产生共振;车轮多边形比钢轨波磨对垂向力的影响更大;不同多边形阶次、幅值下,轮轨综合磨耗工况对轴箱、轮对以及钢轨垂向振动加速度影响更大。车轮多边形安全限值更小,多边形幅值限值平均降低了25.9%,在轮轨综合磨耗作用下更易超出限值;当速度为300 km/h,提出了钢轨波磨和车轮多边形阶次在一定范围内的安全限值。
高速铁路长时间运营,经常发生车轮多边形磨耗,并伴随钢轨波磨,两种损伤形式对列车运行特性的综合影响有待深入研究。采用简谐函数法建立车轮多边形模型,设计余弦函数描述钢轨不平顺磨耗,建立列车刚柔耦合动力学模型,分析不同车轮多边形及钢轨波磨综合磨耗情况下,列车的动力学性能的影响,并提出轮轨综合磨耗的安全限值。结果表明:在轮轨综合磨耗激扰下对列车的动力学性能的影响更为剧烈;列车运行速度为300 km/h下,轮轨垂向力增长幅值最大达到30%,车轮与25阶振型模态产生共振;车轮多边形比钢轨波磨对垂向力的影响更大;不同多边形阶次、幅值下,轮轨综合磨耗工况对轴箱、轮对以及钢轨垂向振动加速度影响更大。车轮多边形安全限值更小,多边形幅值限值平均降低了25.9%,在轮轨综合磨耗作用下更易超出限值;当速度为300 km/h,提出了钢轨波磨和车轮多边形阶次在一定范围内的安全限值。

2023, 42(9): 1551-1558.
doi: 10.13433/j.cnki.1003-8728.20220096
摘要:
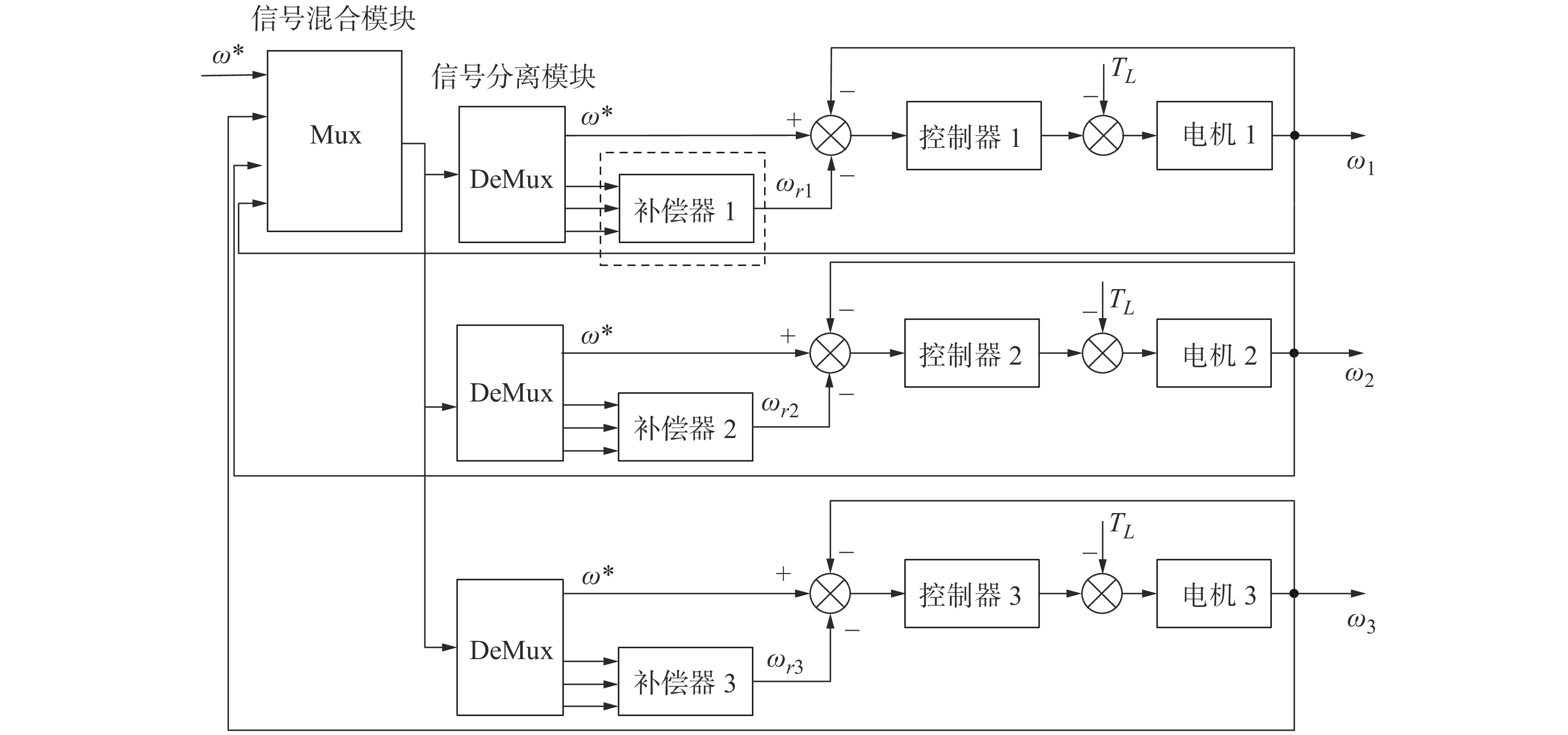
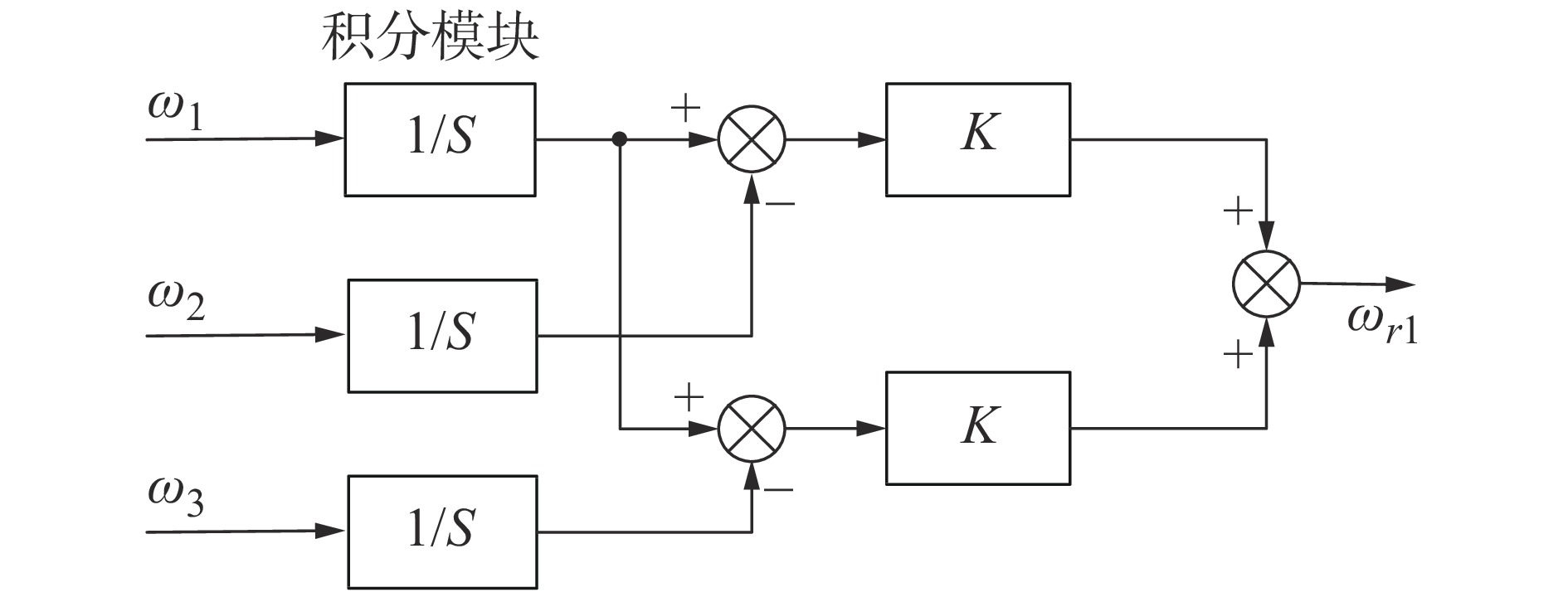
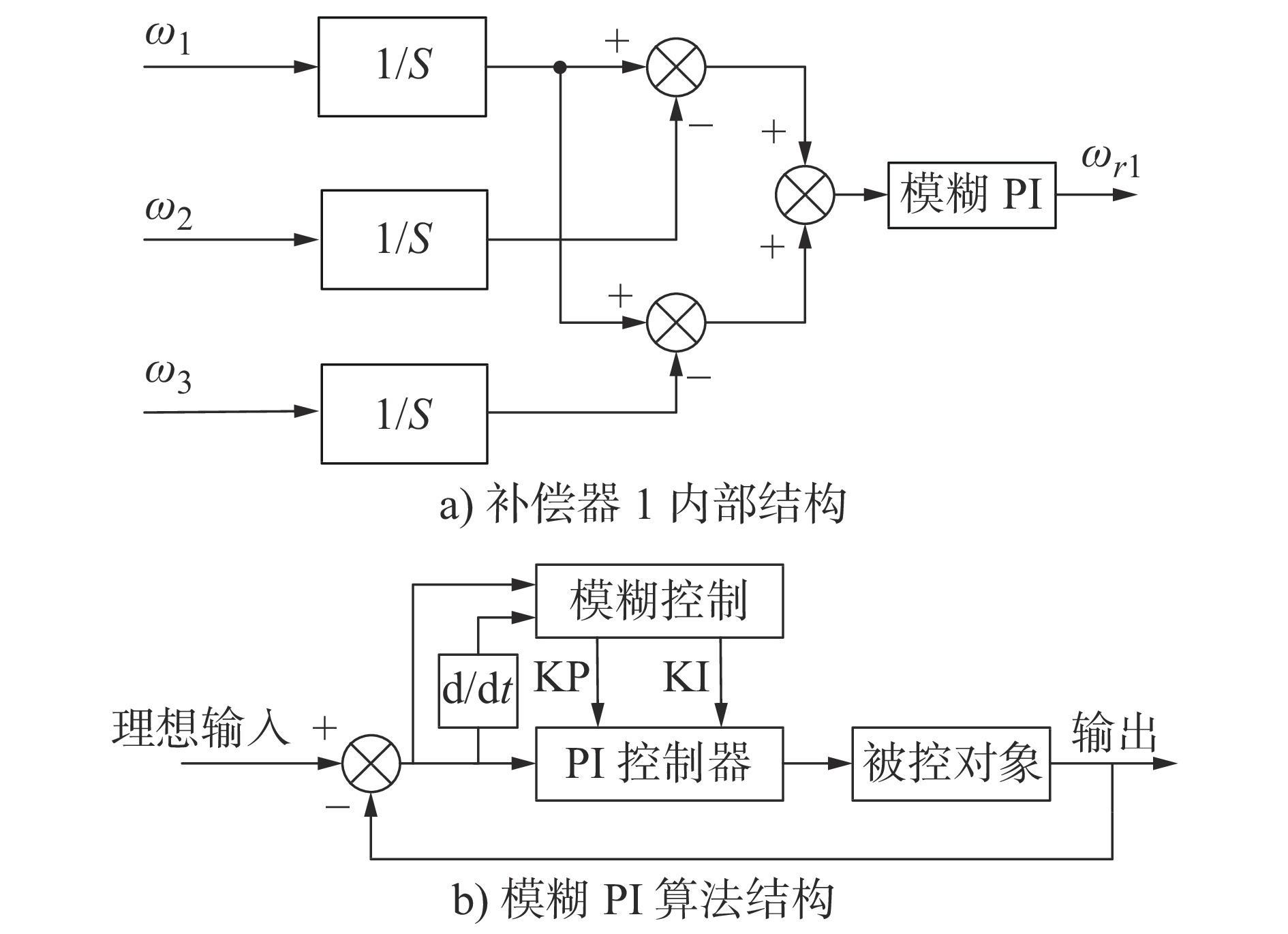
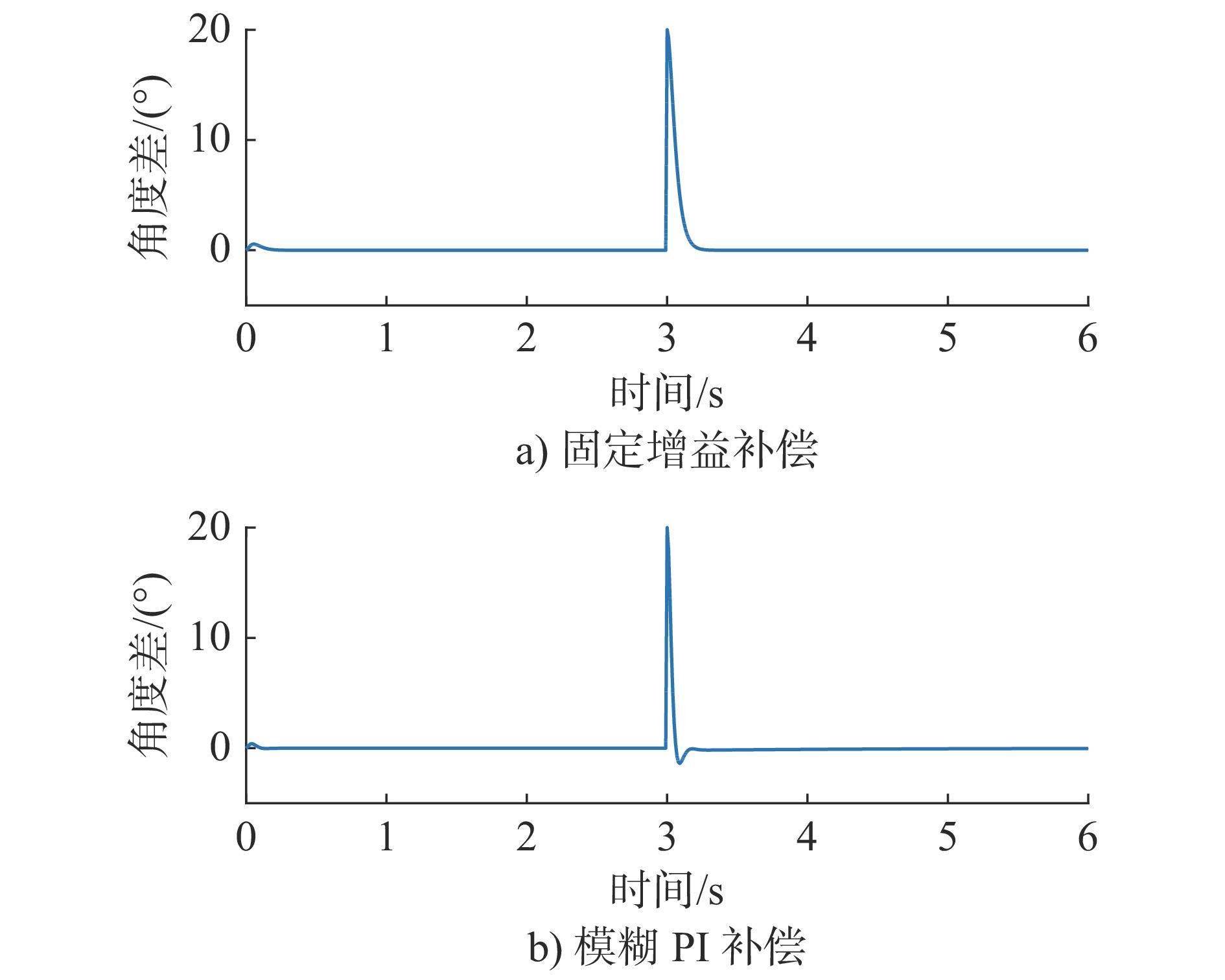
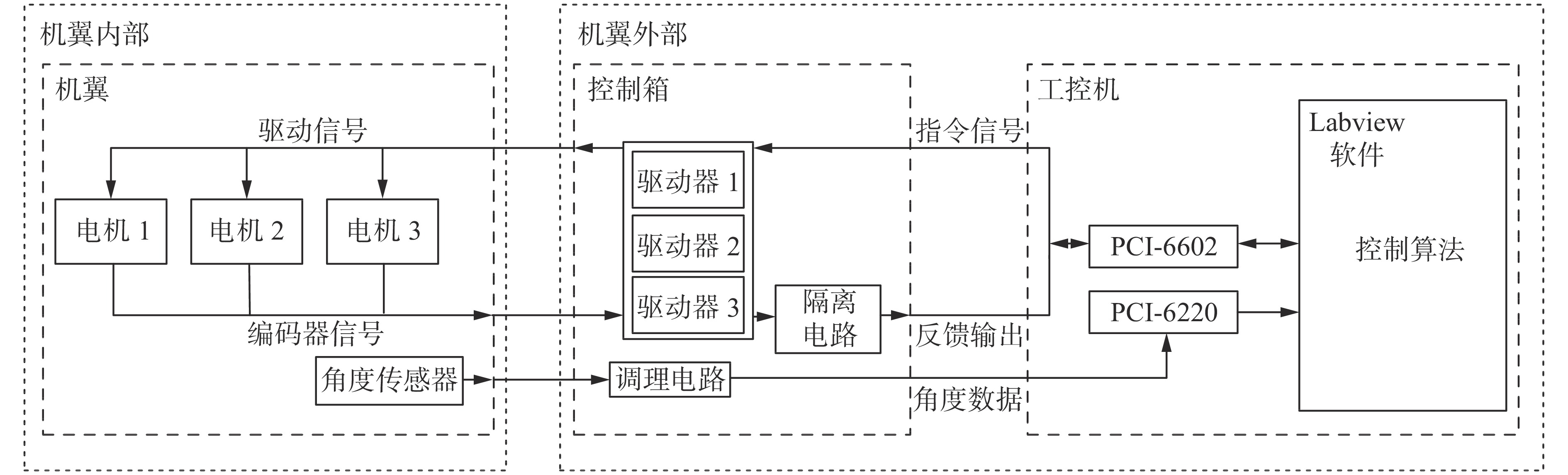
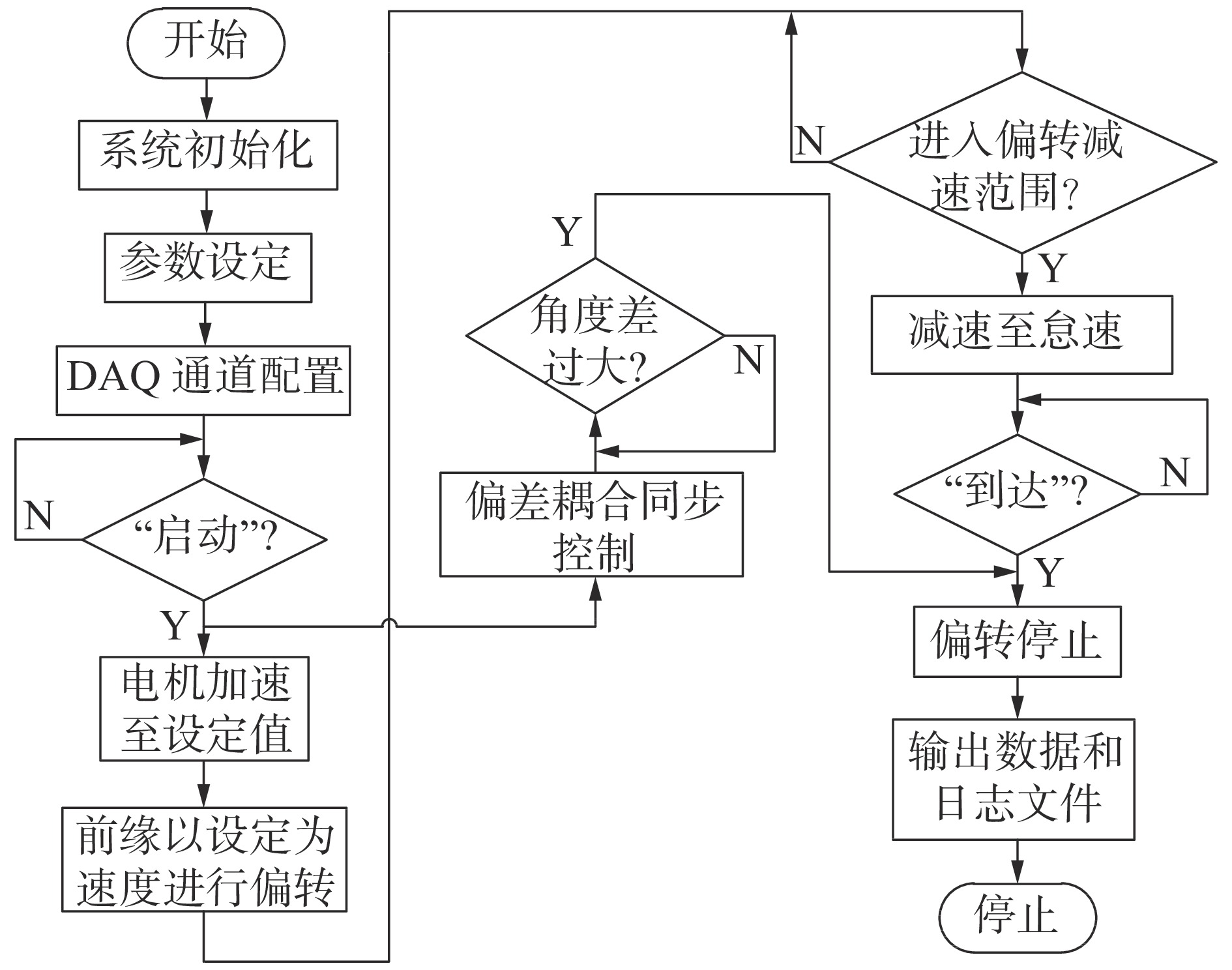
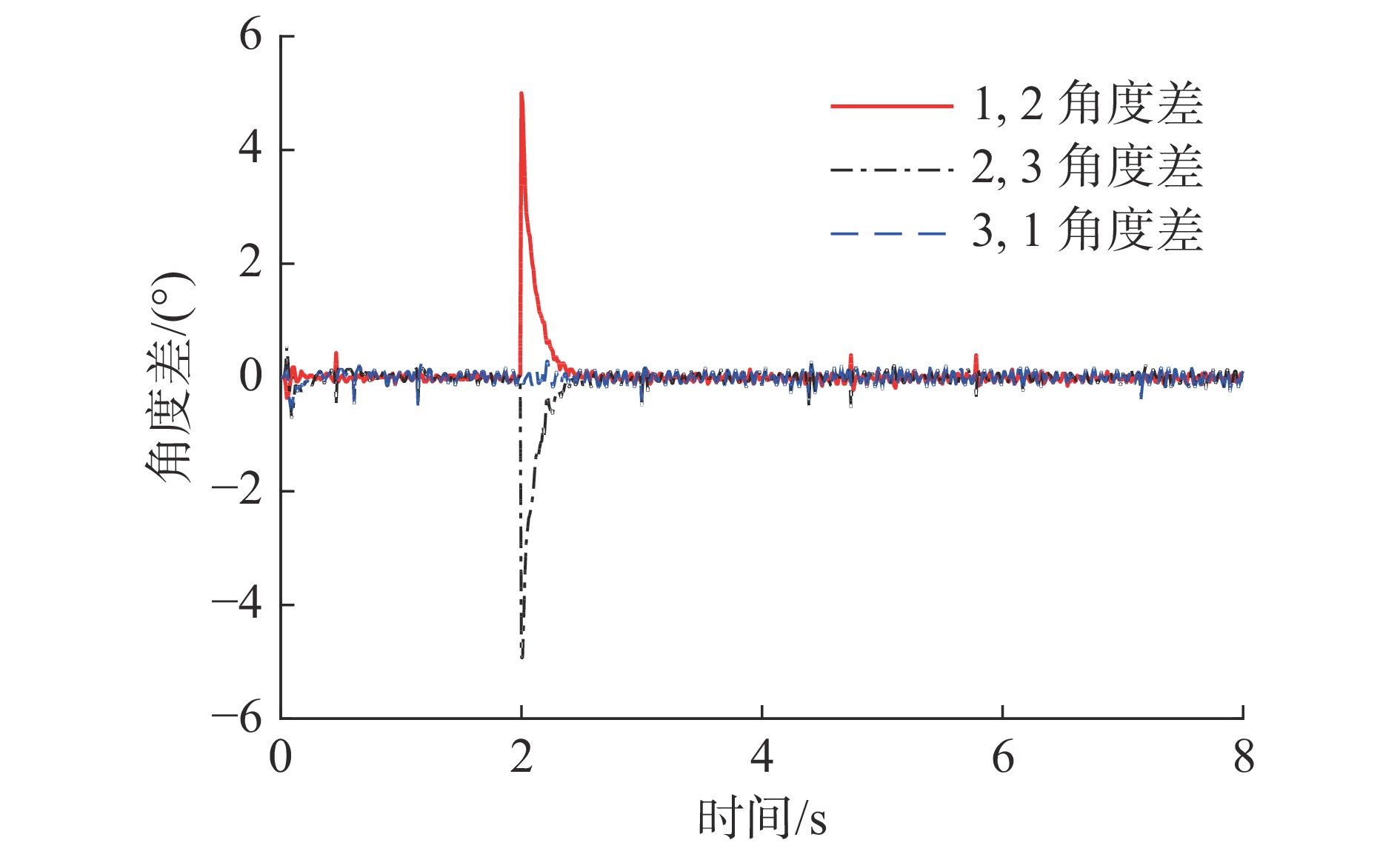
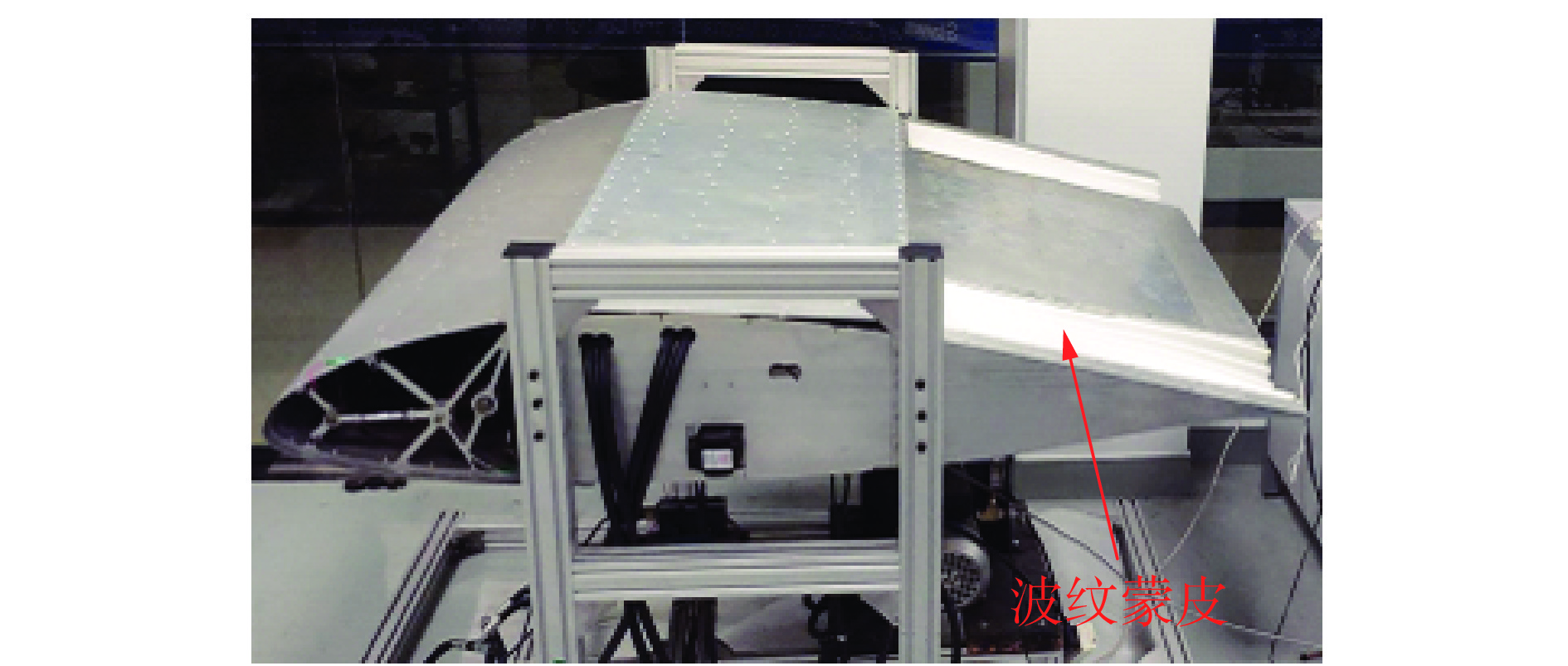
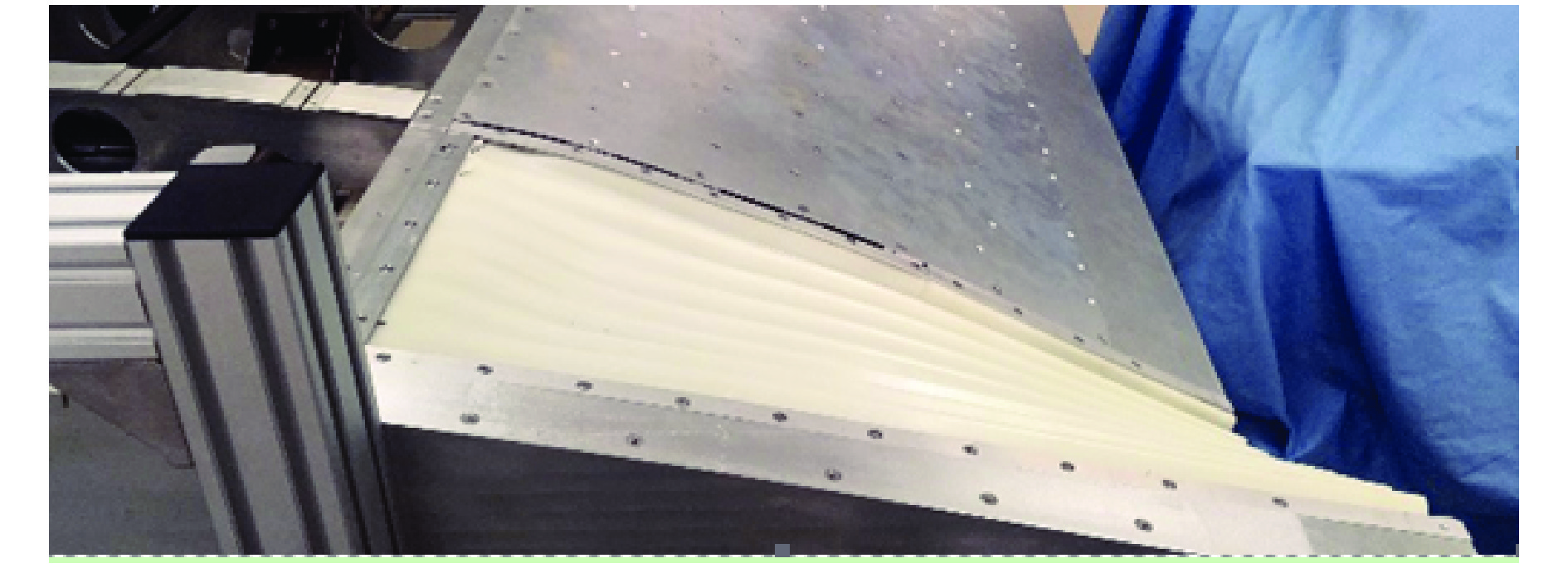
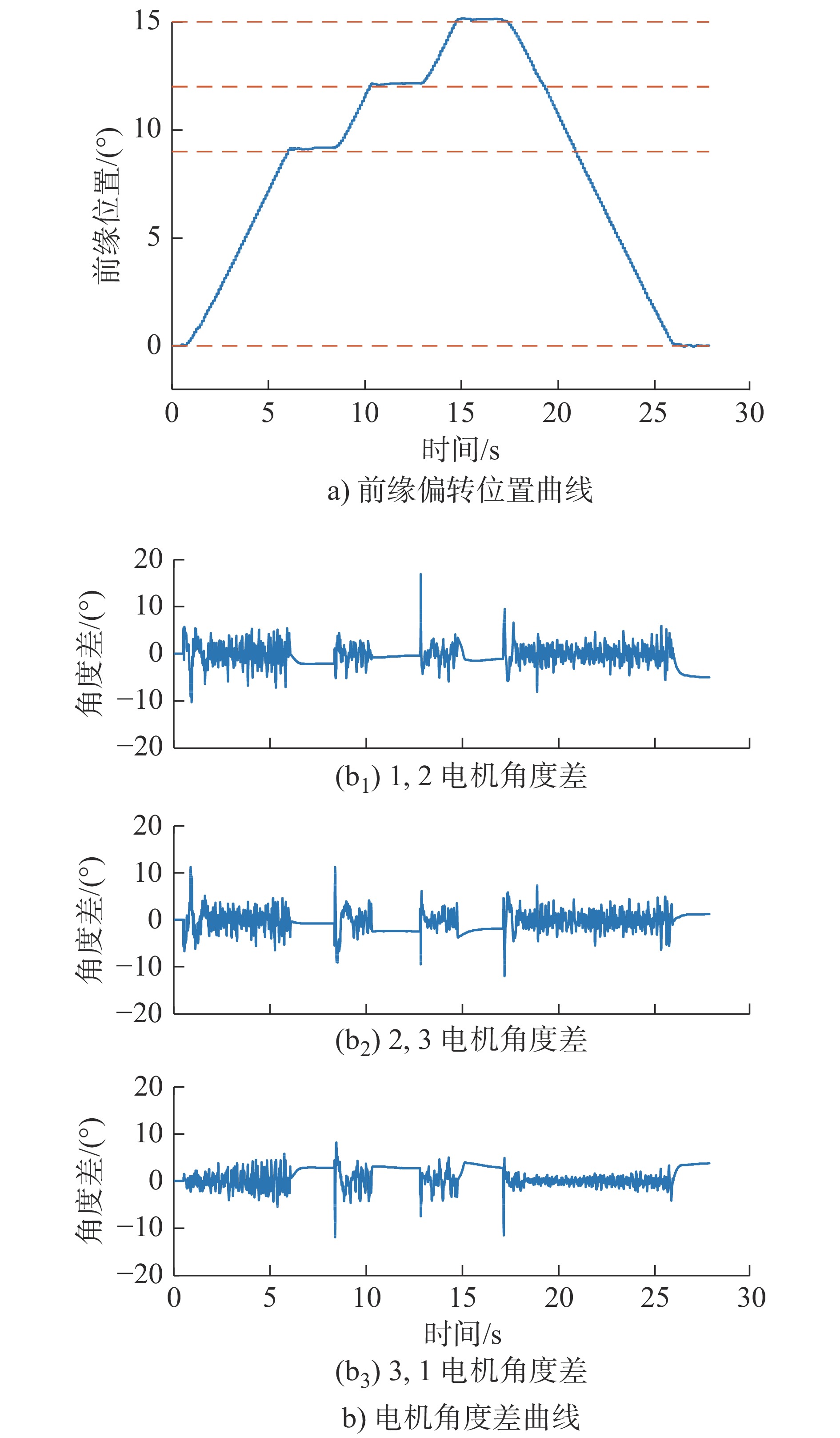
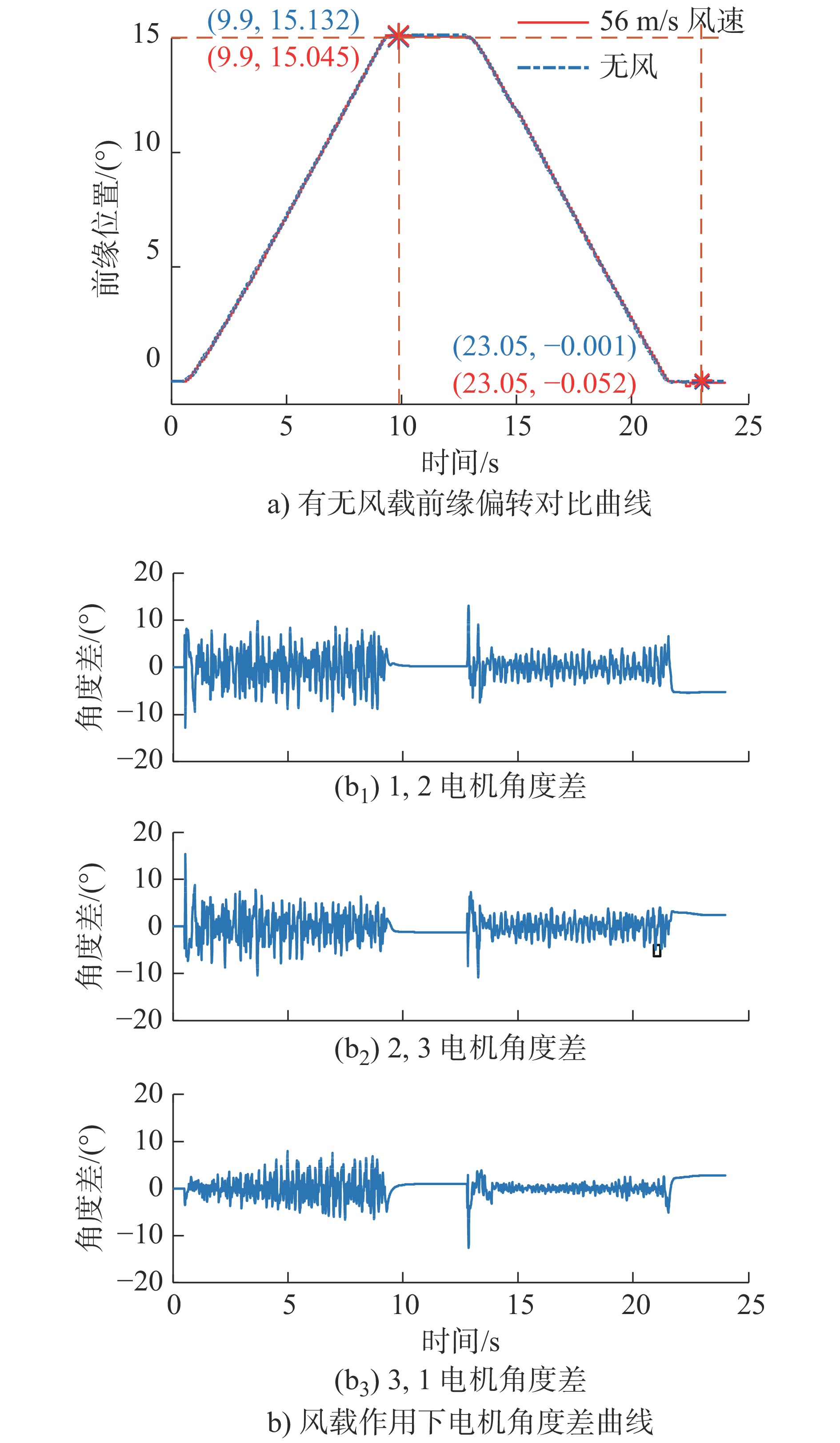
针对可变弯度柔性波纹蒙皮后缘模型结构,采用了多电机驱动技术,设计并制备了机翼模型、驱动及测控系统;采用改进的偏差耦合算法,实现了驱动系统中3台电机的角度同步控制;完成了系统软、硬件的设计,并对后缘结构模型驱动系统进行了空载、地面加载及风洞等多组实验研究,结果表明:测控系统可以实时控制电机间的角度偏差在允许的误差范围内,在有无载荷情况下驱动系统工作无显著差异;承受风洞载荷情况下,柔性后缘结构偏转速度可达1.7 °/s,超调量小于0.3°,电机启动阶段角度差小于20°,匀速运行阶段角度差小于10°。
针对可变弯度柔性波纹蒙皮后缘模型结构,采用了多电机驱动技术,设计并制备了机翼模型、驱动及测控系统;采用改进的偏差耦合算法,实现了驱动系统中3台电机的角度同步控制;完成了系统软、硬件的设计,并对后缘结构模型驱动系统进行了空载、地面加载及风洞等多组实验研究,结果表明:测控系统可以实时控制电机间的角度偏差在允许的误差范围内,在有无载荷情况下驱动系统工作无显著差异;承受风洞载荷情况下,柔性后缘结构偏转速度可达1.7 °/s,超调量小于0.3°,电机启动阶段角度差小于20°,匀速运行阶段角度差小于10°。

2023, 42(9): 1559-1566.
doi: 10.13433/j.cnki.1003-8728.20220094
摘要:
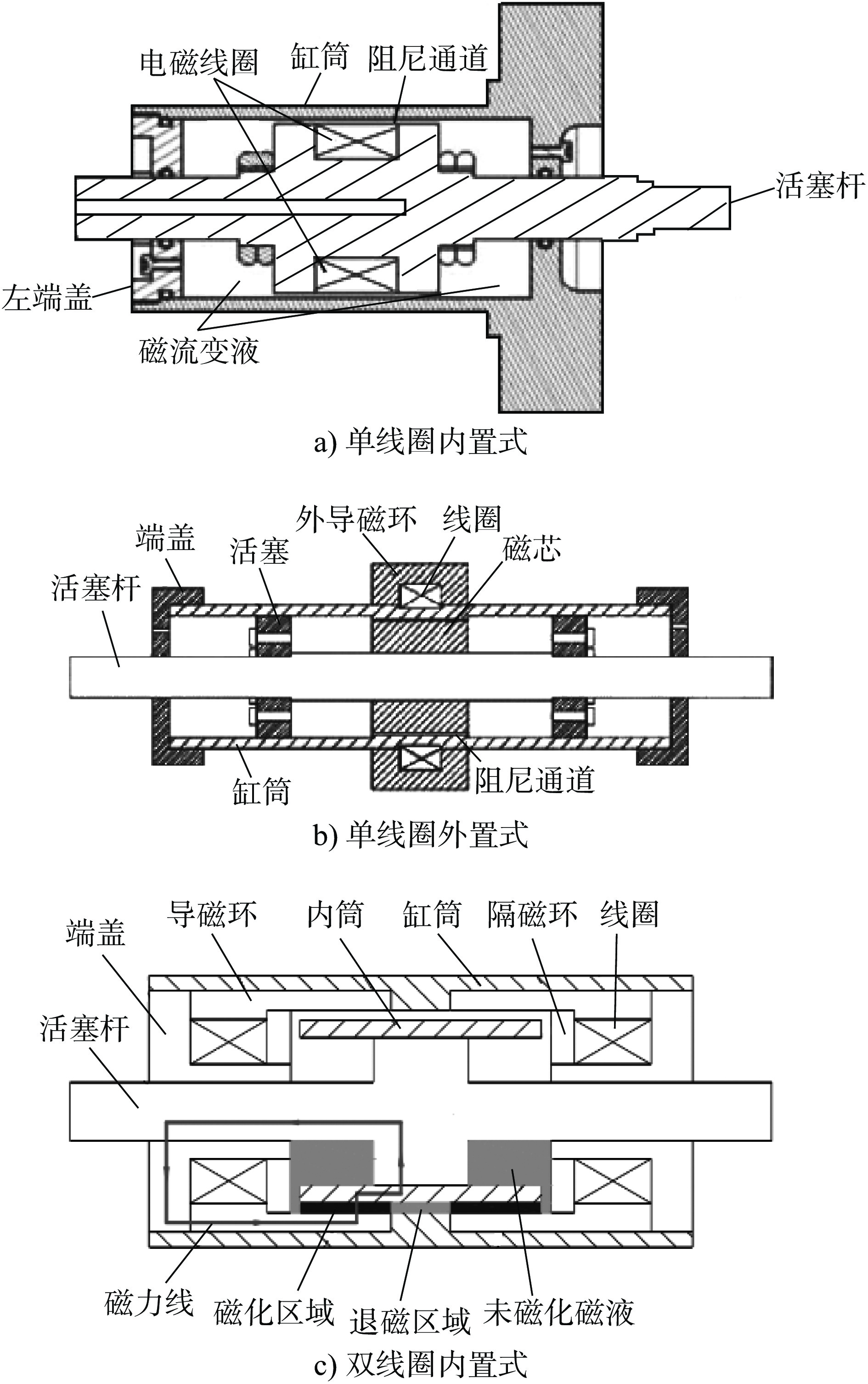
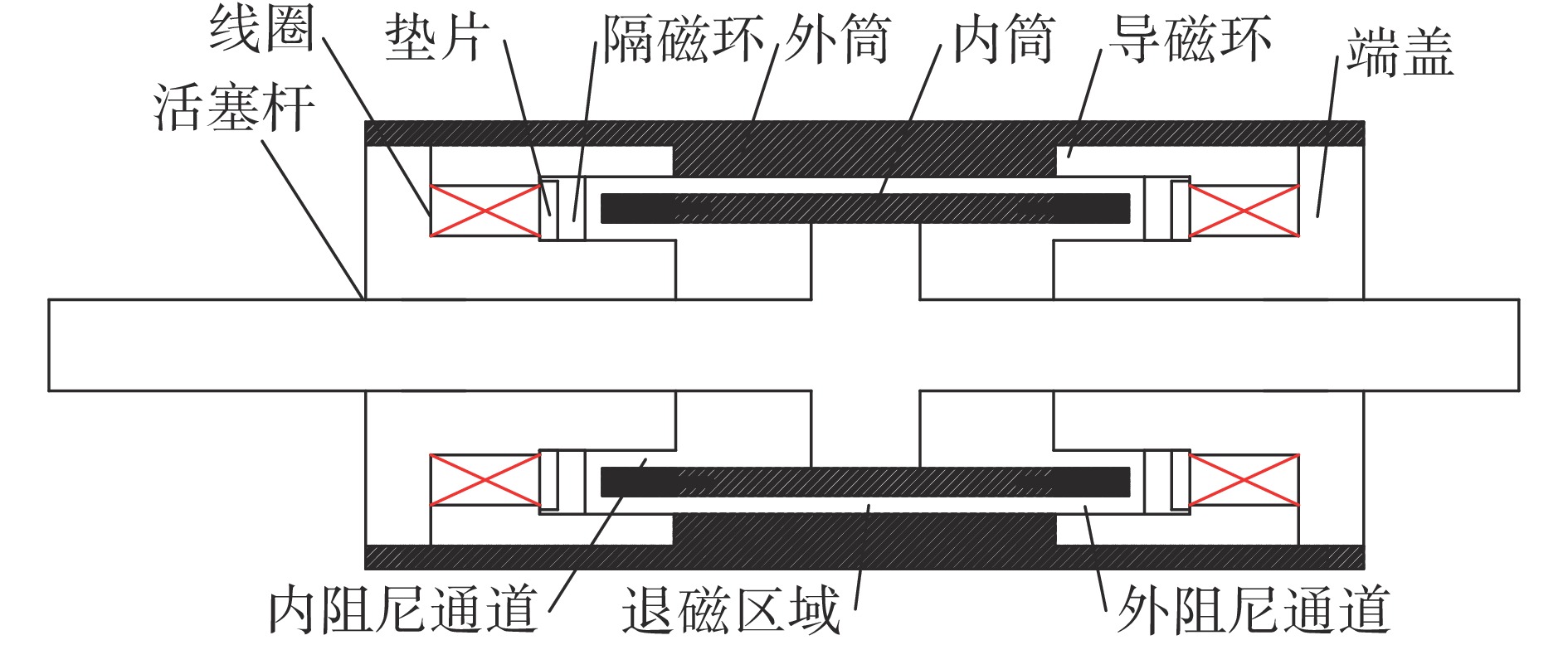
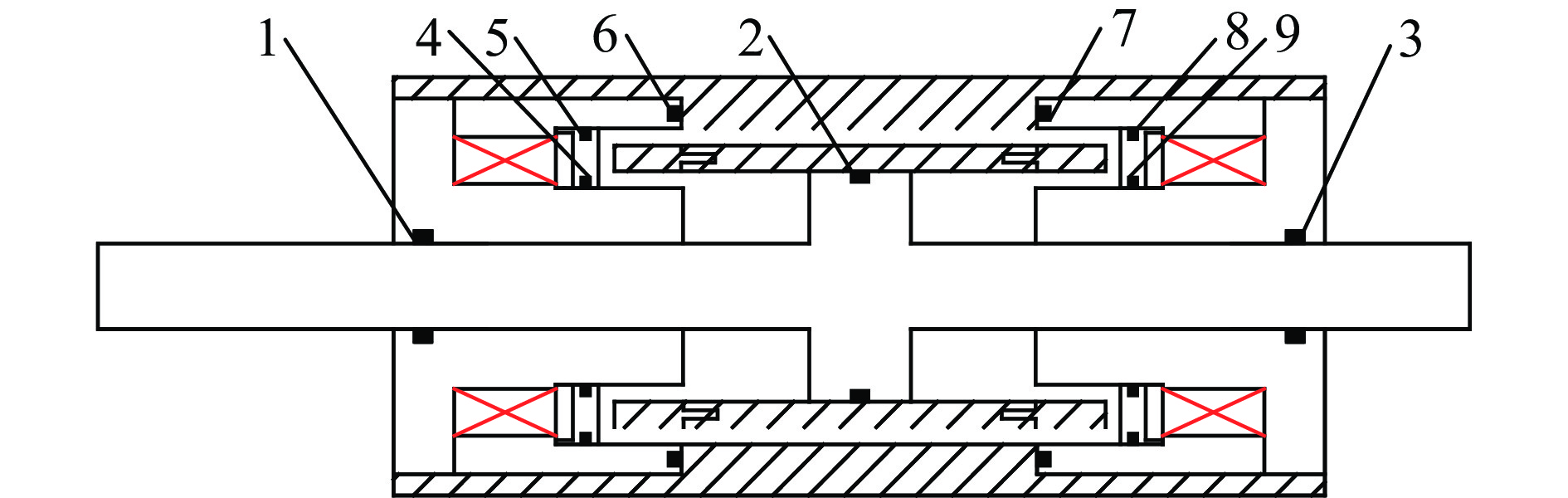
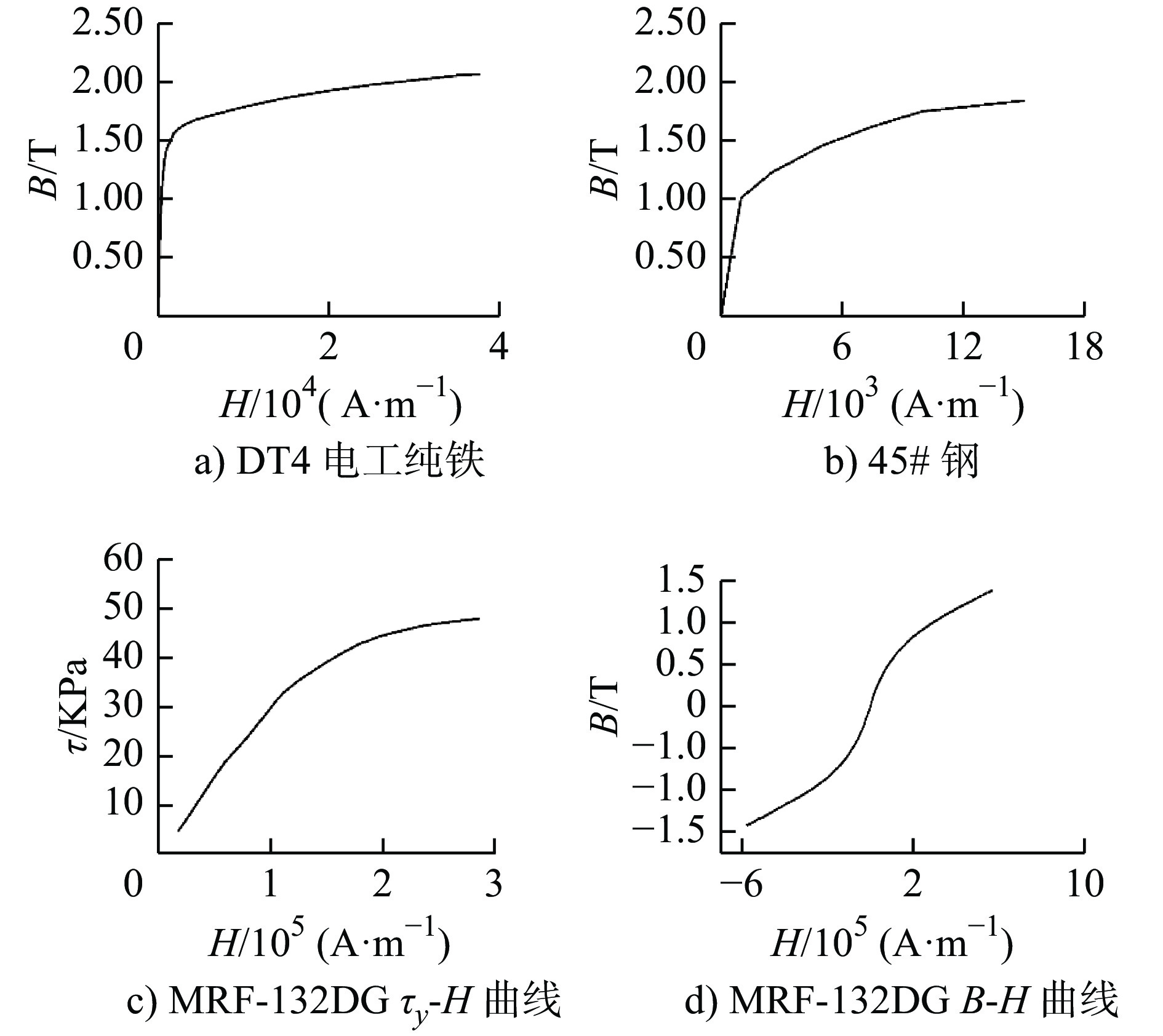
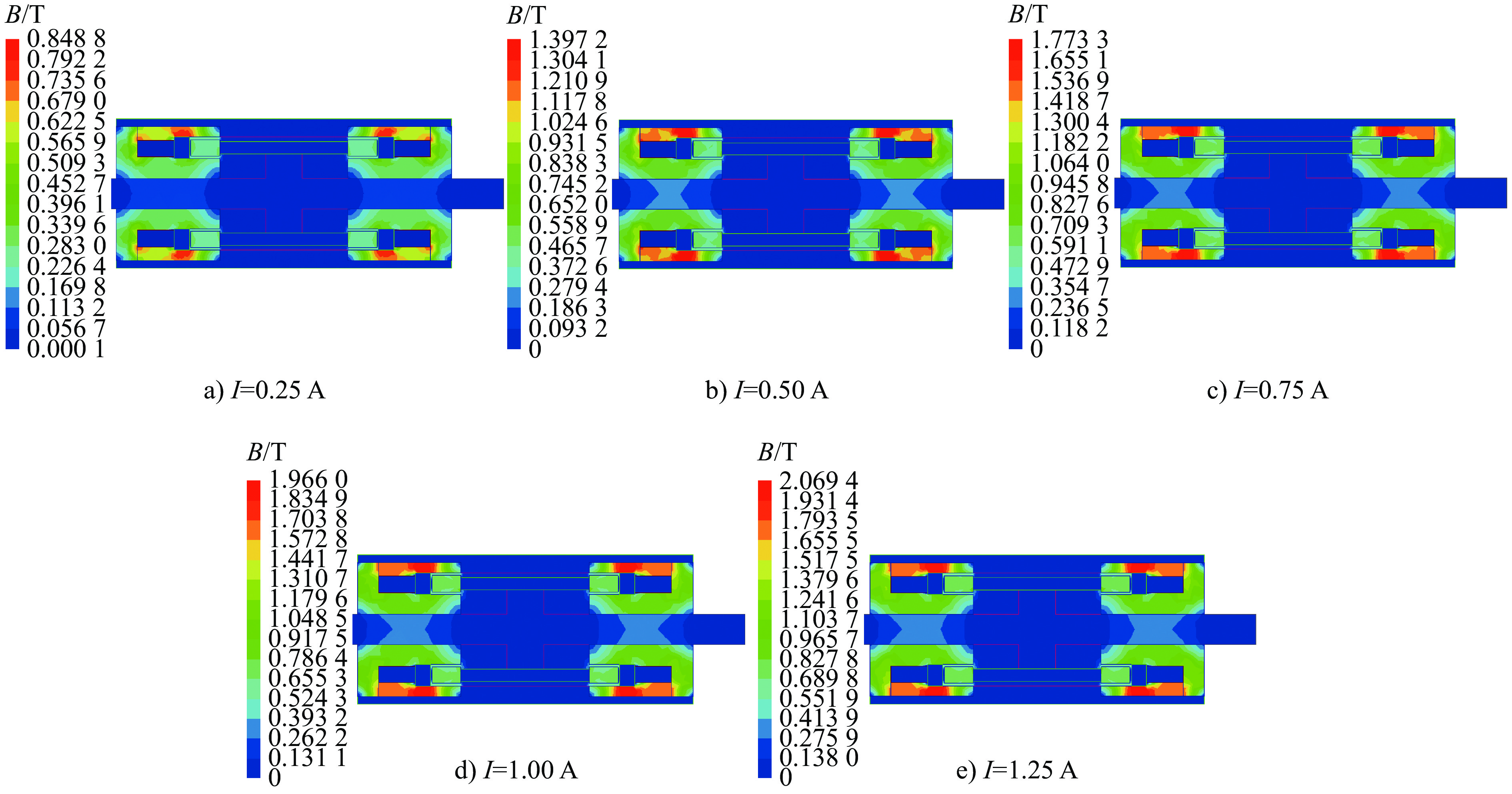
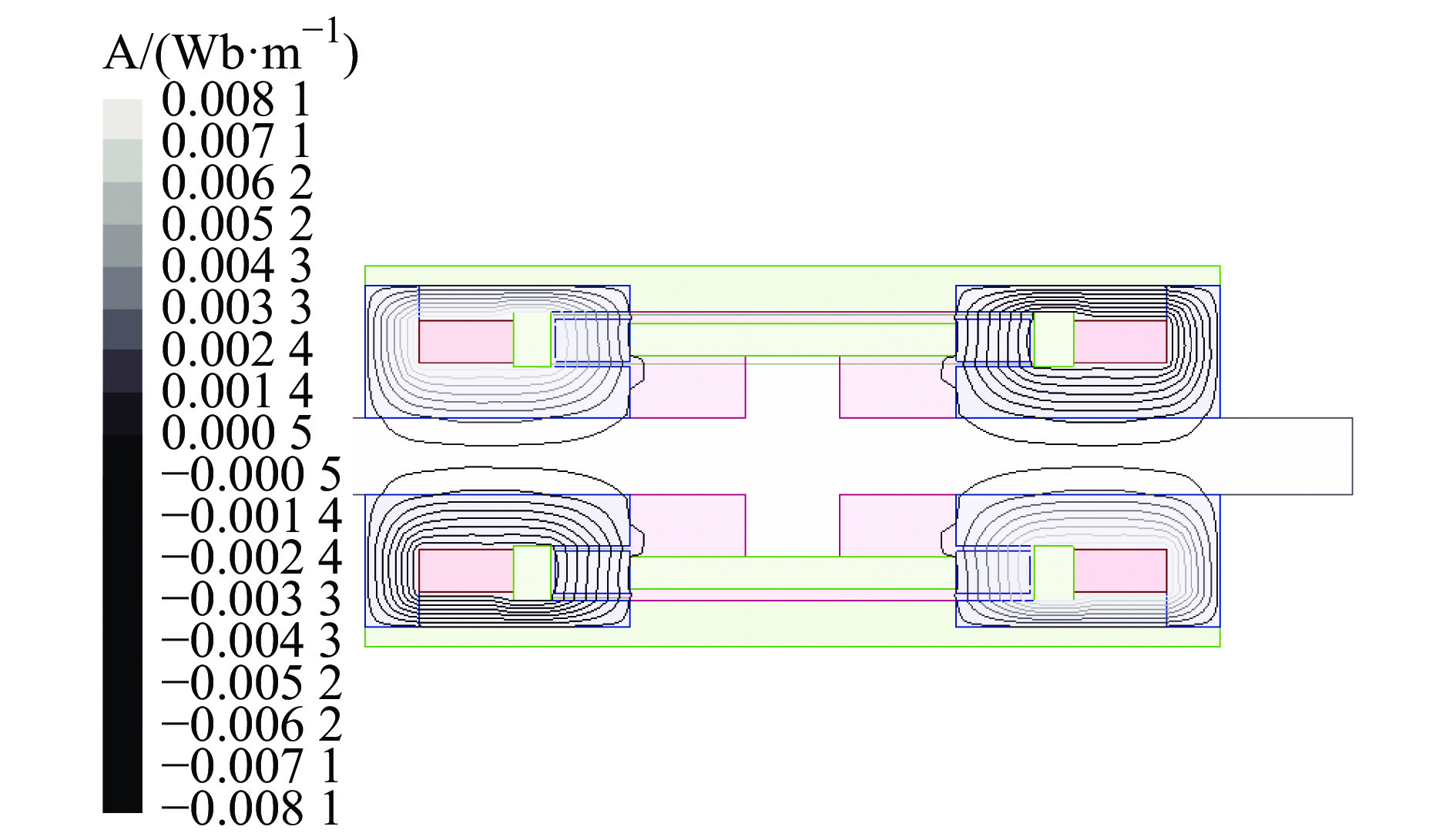
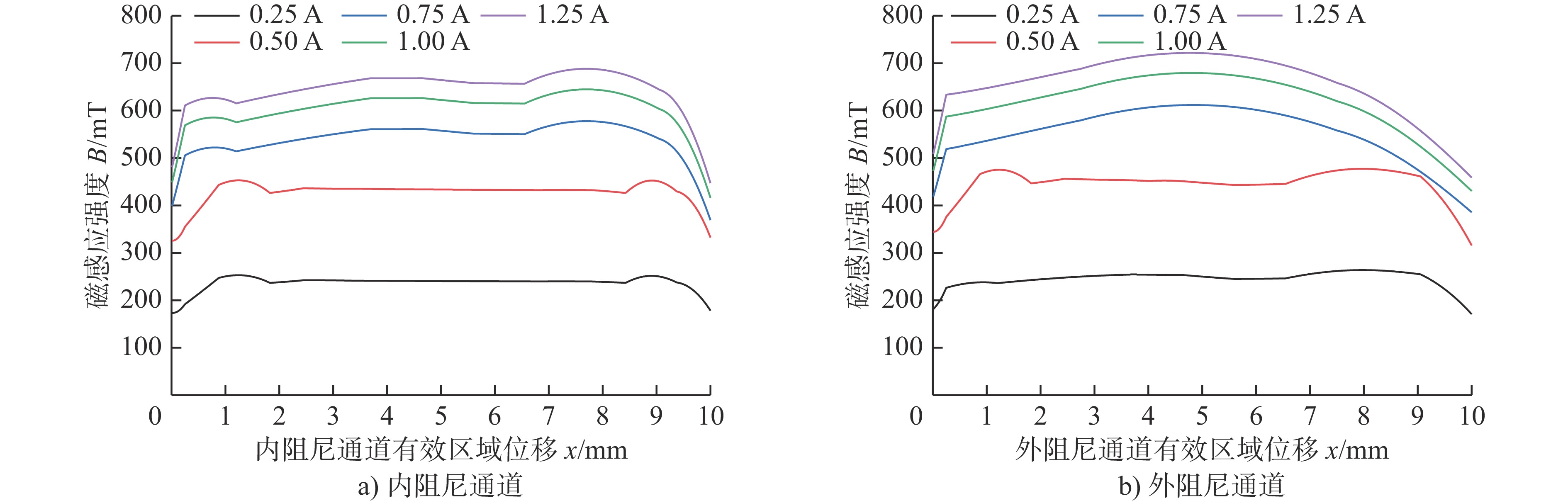
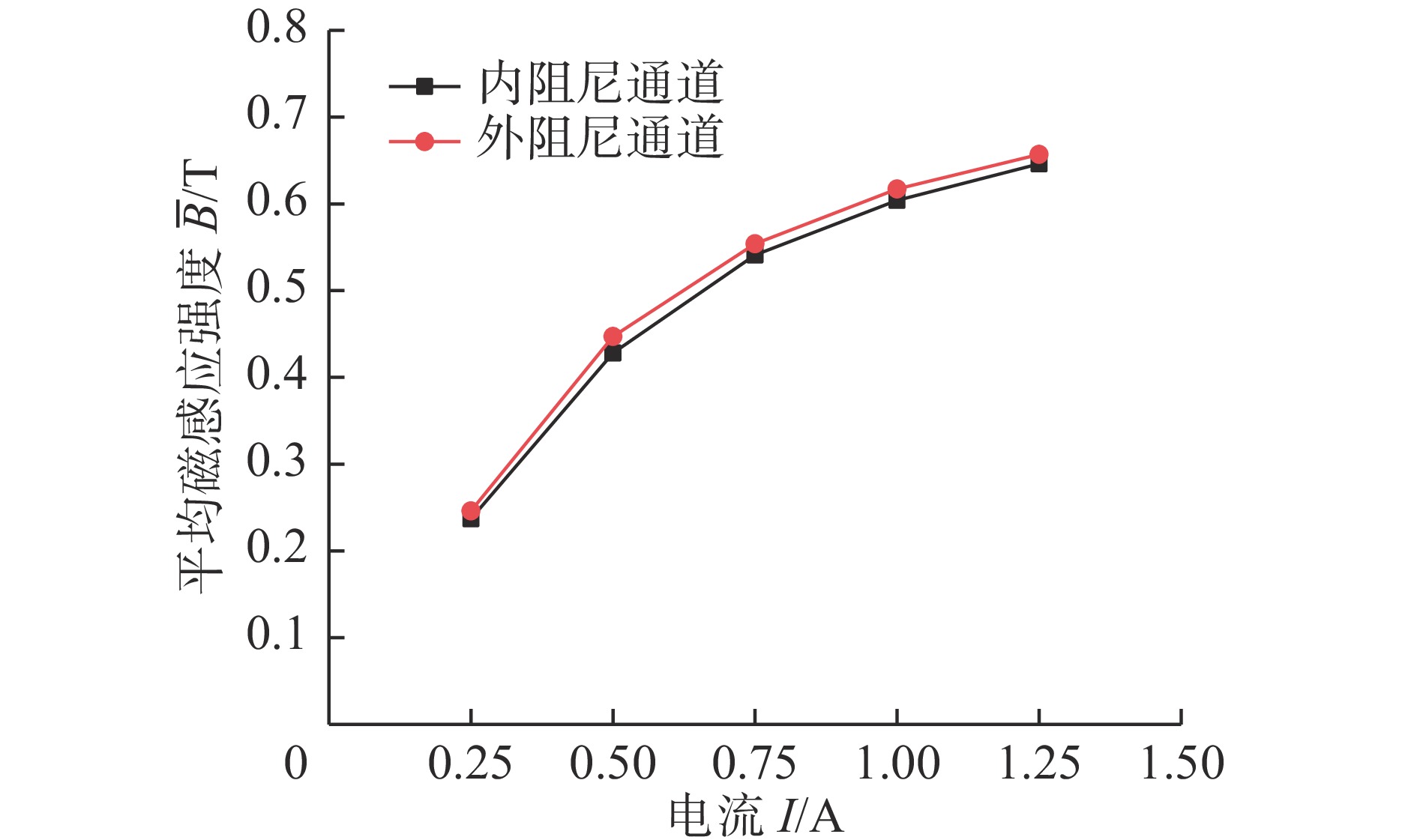
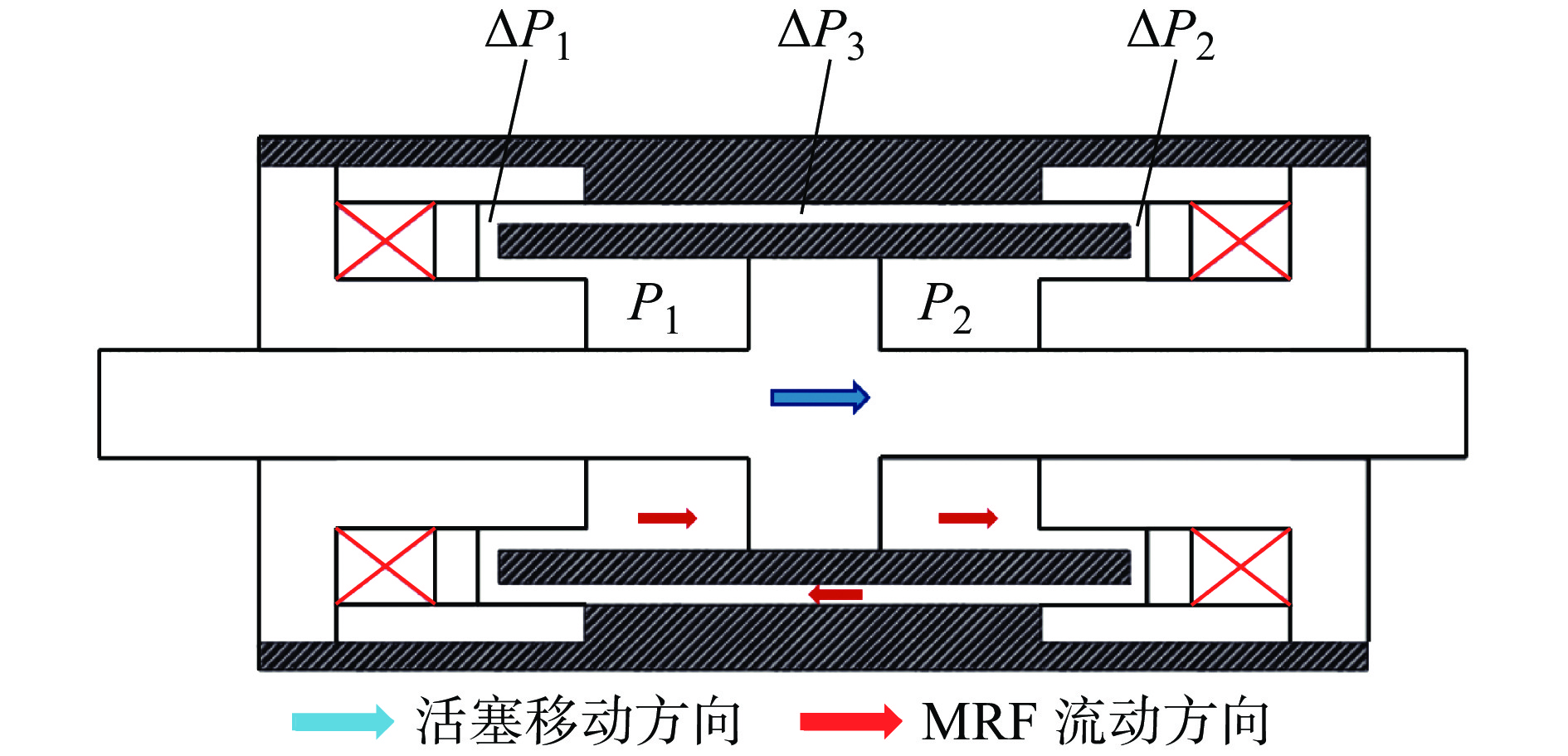
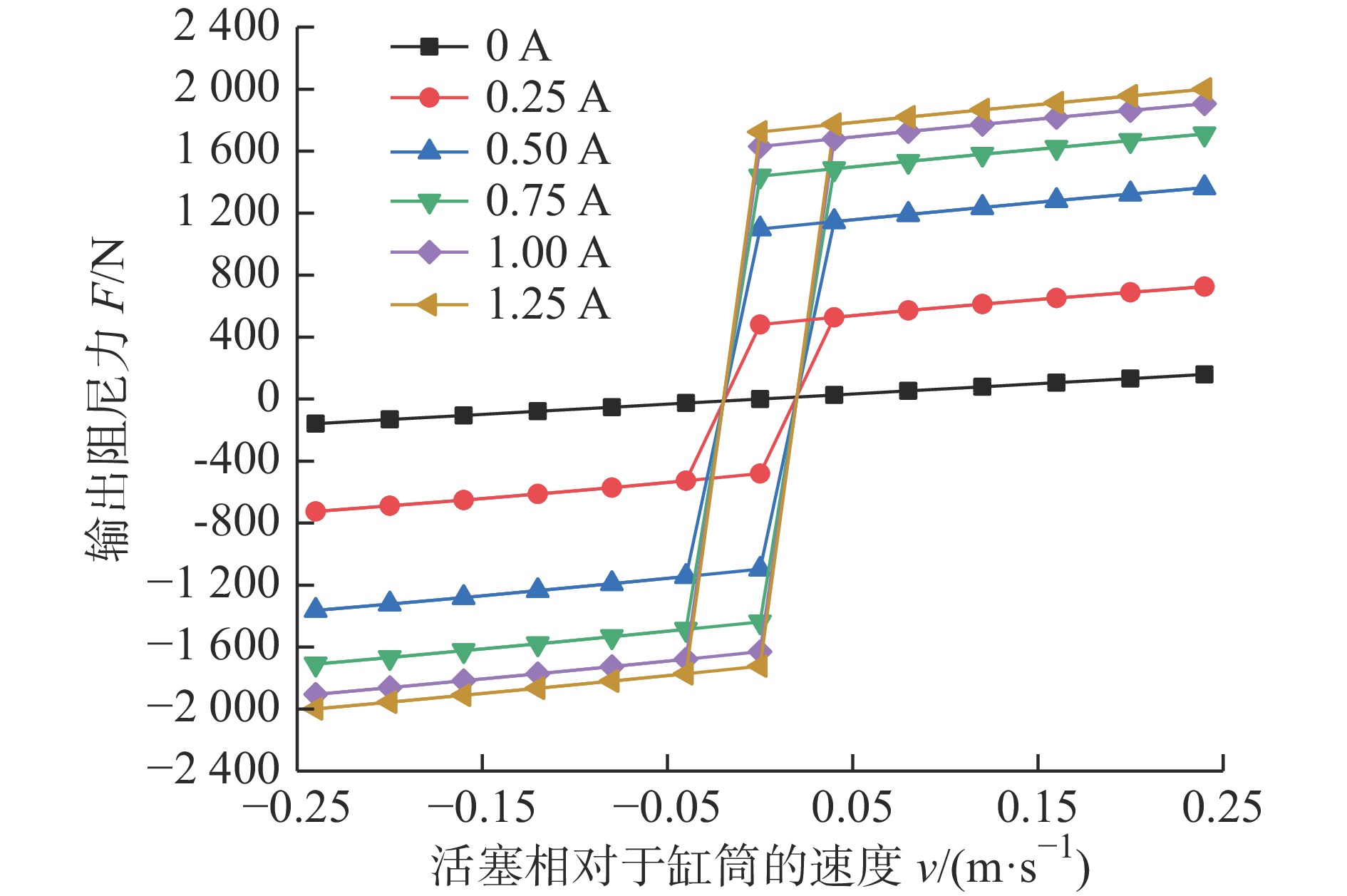
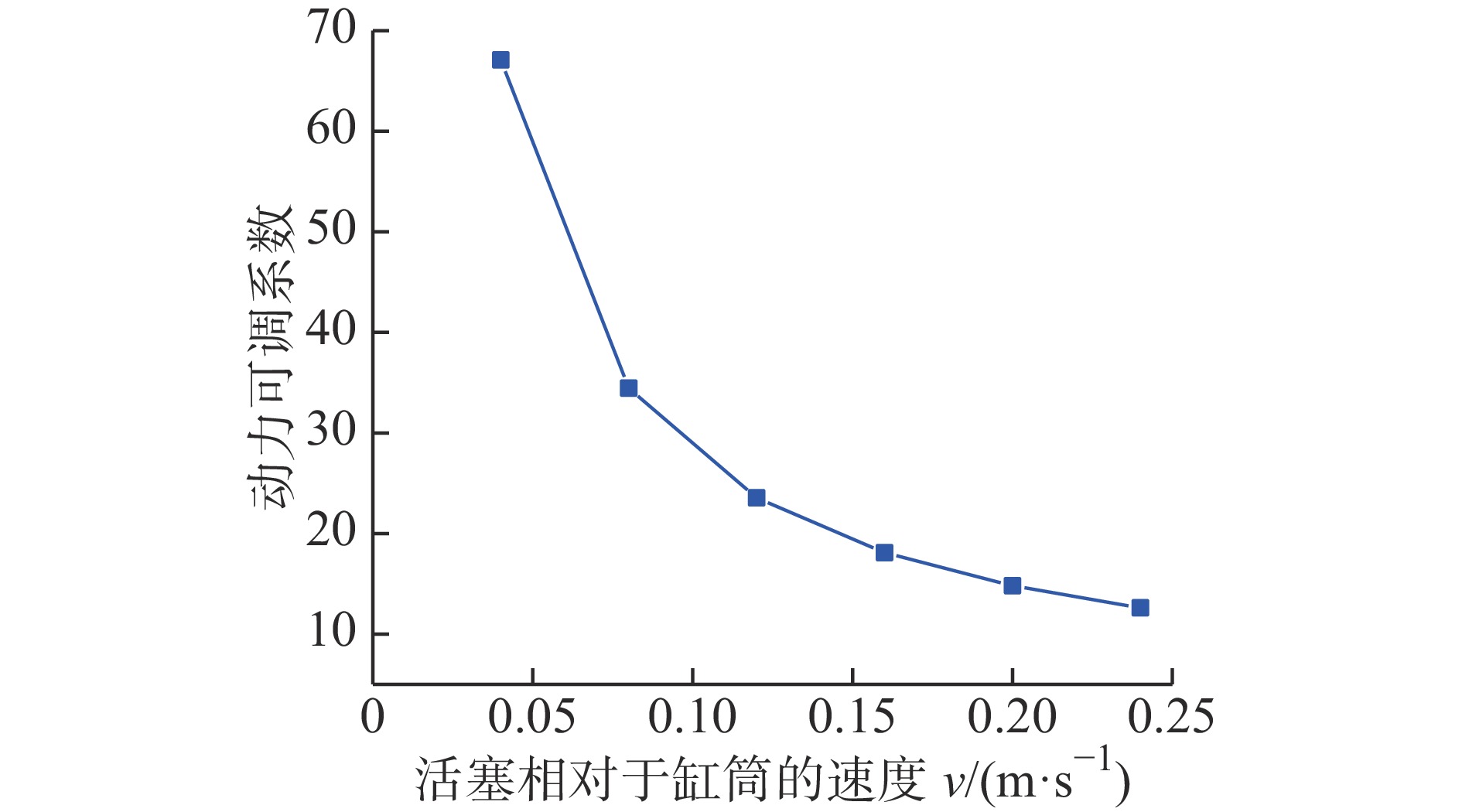
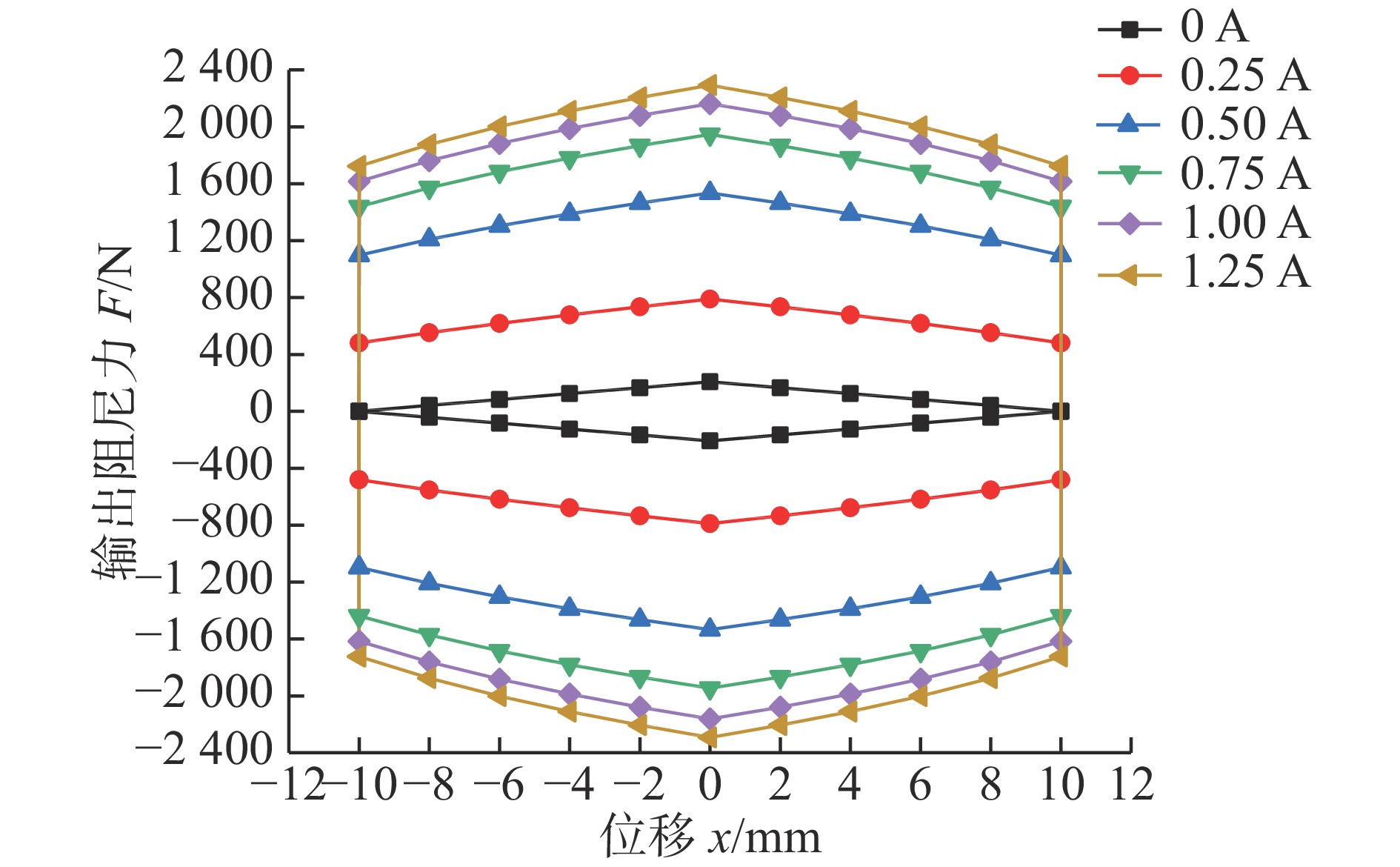
被动油液式减摆器对摆振激励的改变不能实时响应,传统磁流变(Magnetorheological,MR)减摆器存在引线复杂、不利于散热、输出阻尼力较低等方面的不足。针对上述问题,为了有效抑制飞机前轮摆振,提出一种新型压差式结构的双出杆活塞式MR减摆器,内置固定双线圈,内筒两端与磁芯和导磁环形成对称双阻尼通道;根据减摆需求完成结构设计,利用ANSYS/Emag 2020 R1对MR减摆器进行磁场仿真,仿真结果验证理论分析的合理性;最后进行力学性能分析。结果表明:设计的MR减摆器输出阻尼力满足减摆需求,动力可调系数较大,示功曲线近似于椭圆。所采用的研究思路对今后飞机起落架MR减摆器的研发具有一定指导意义。
被动油液式减摆器对摆振激励的改变不能实时响应,传统磁流变(Magnetorheological,MR)减摆器存在引线复杂、不利于散热、输出阻尼力较低等方面的不足。针对上述问题,为了有效抑制飞机前轮摆振,提出一种新型压差式结构的双出杆活塞式MR减摆器,内置固定双线圈,内筒两端与磁芯和导磁环形成对称双阻尼通道;根据减摆需求完成结构设计,利用ANSYS/Emag 2020 R1对MR减摆器进行磁场仿真,仿真结果验证理论分析的合理性;最后进行力学性能分析。结果表明:设计的MR减摆器输出阻尼力满足减摆需求,动力可调系数较大,示功曲线近似于椭圆。所采用的研究思路对今后飞机起落架MR减摆器的研发具有一定指导意义。
2023, 42(9): 1567-1573.
doi: 10.13433/j.cnki.1003-8728.20220116
摘要:
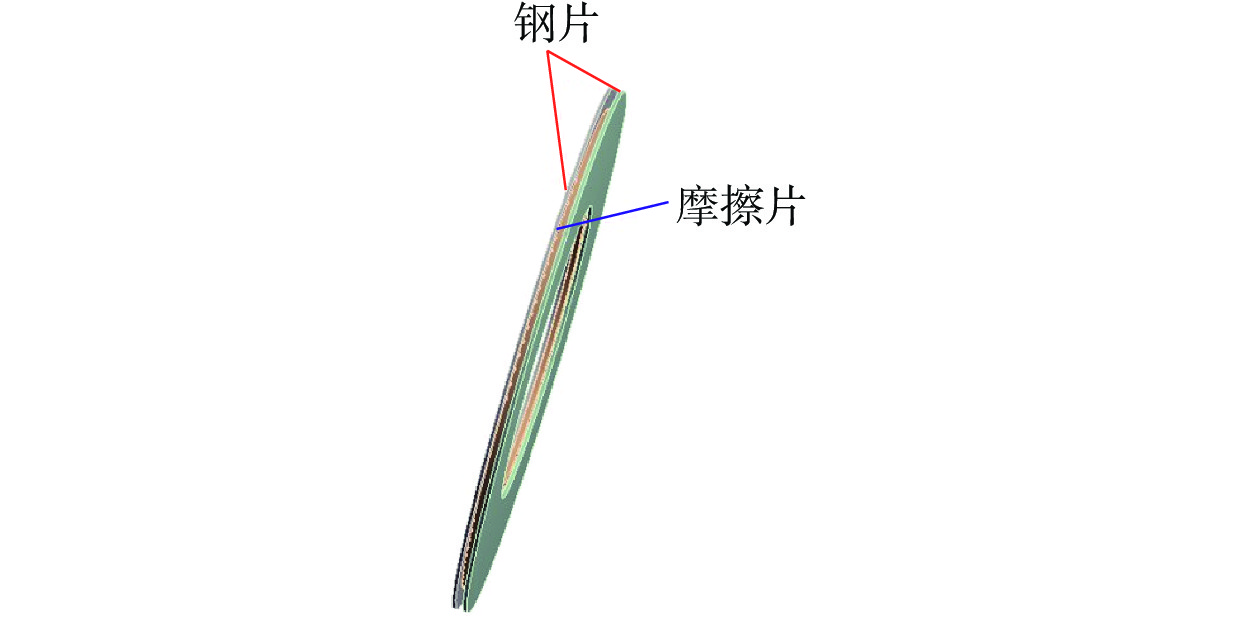
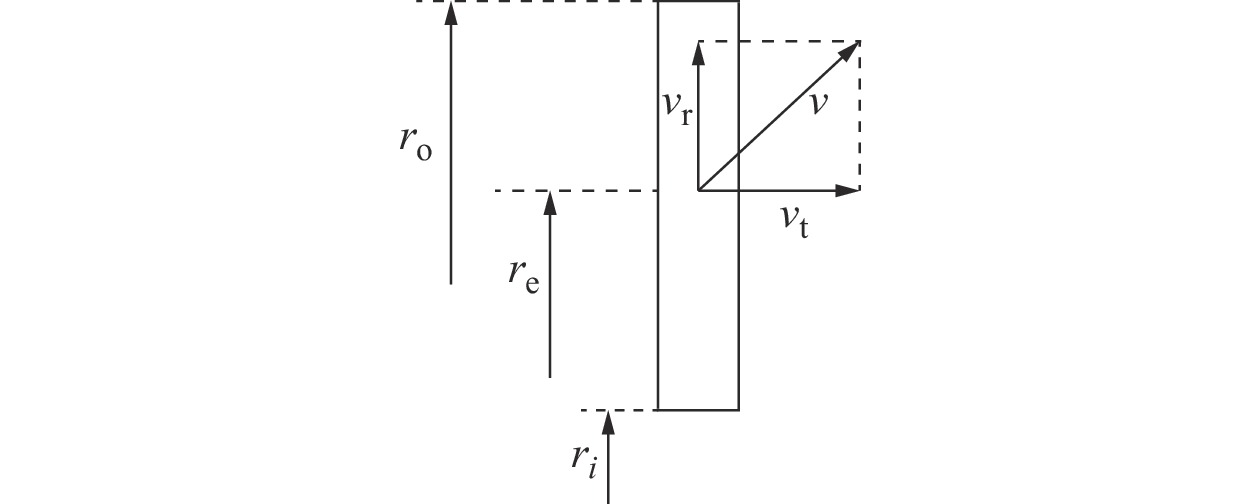
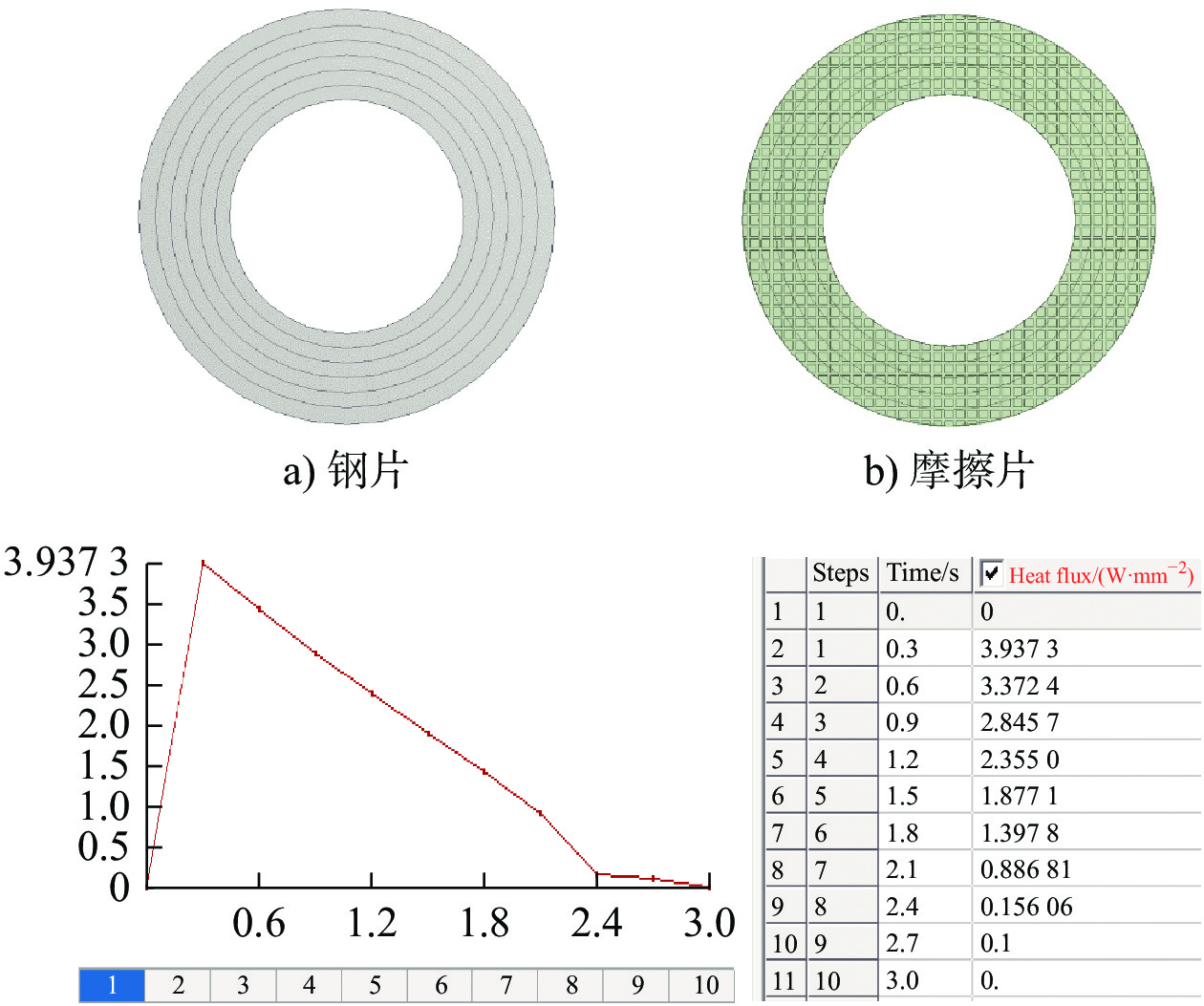
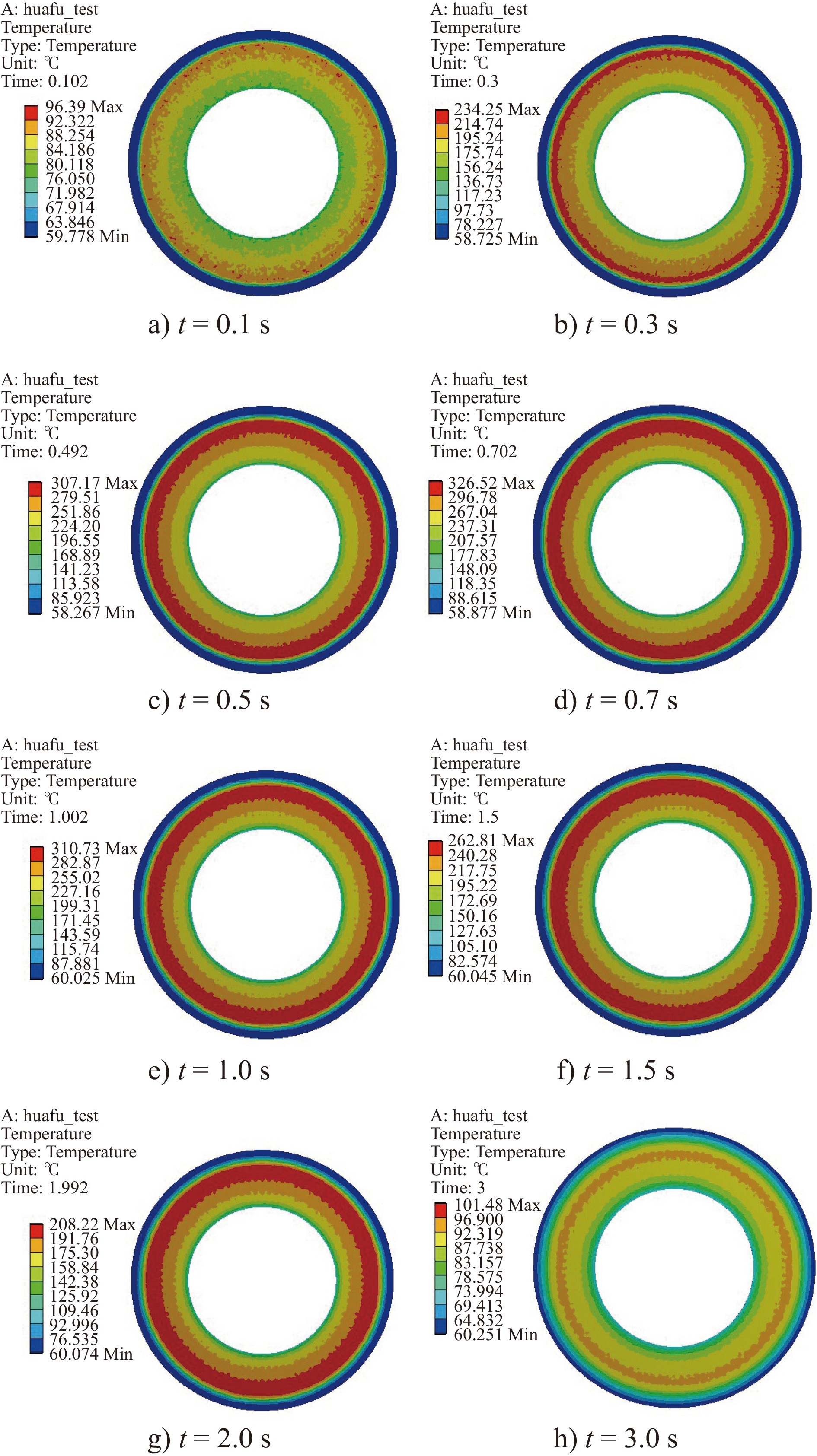
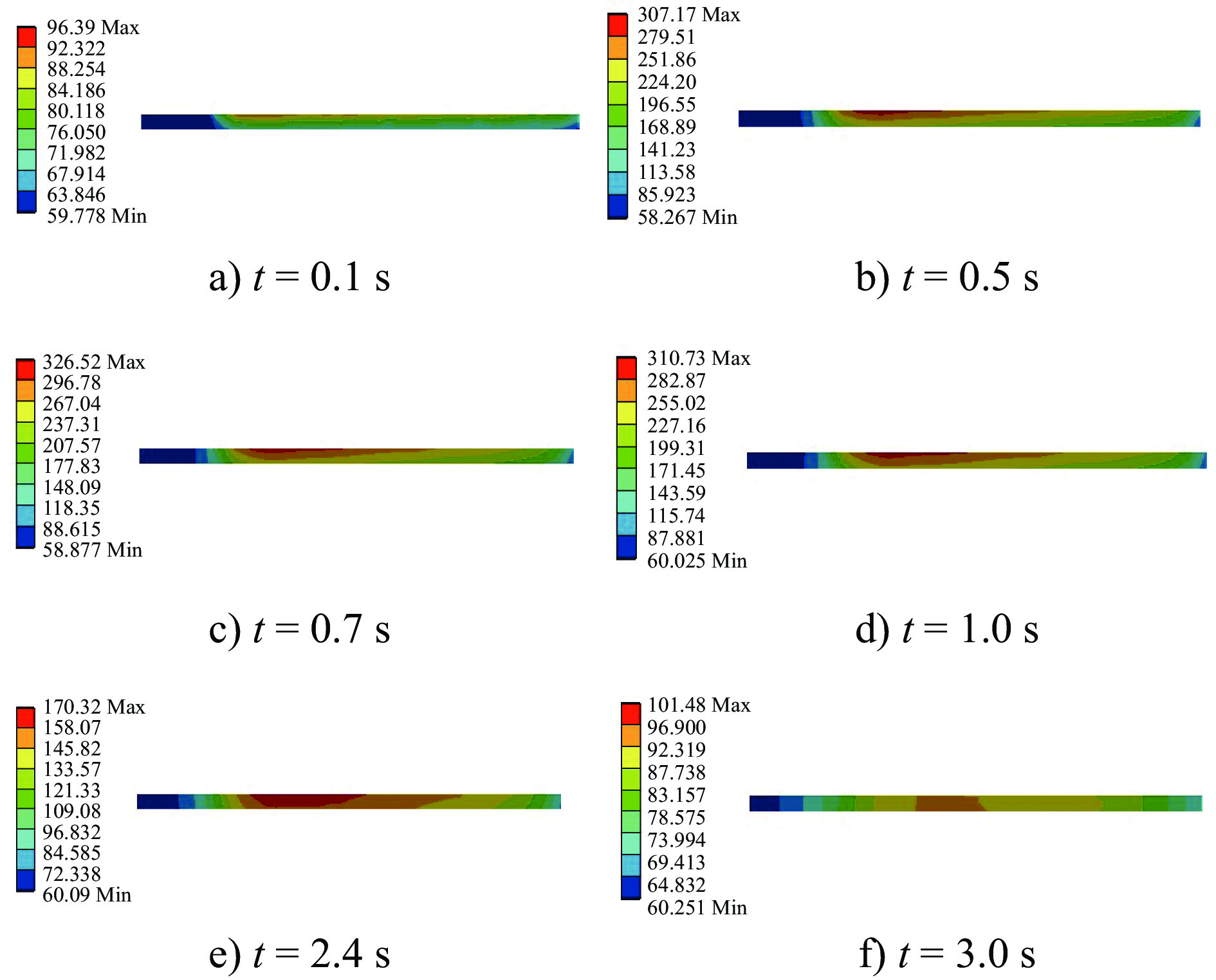
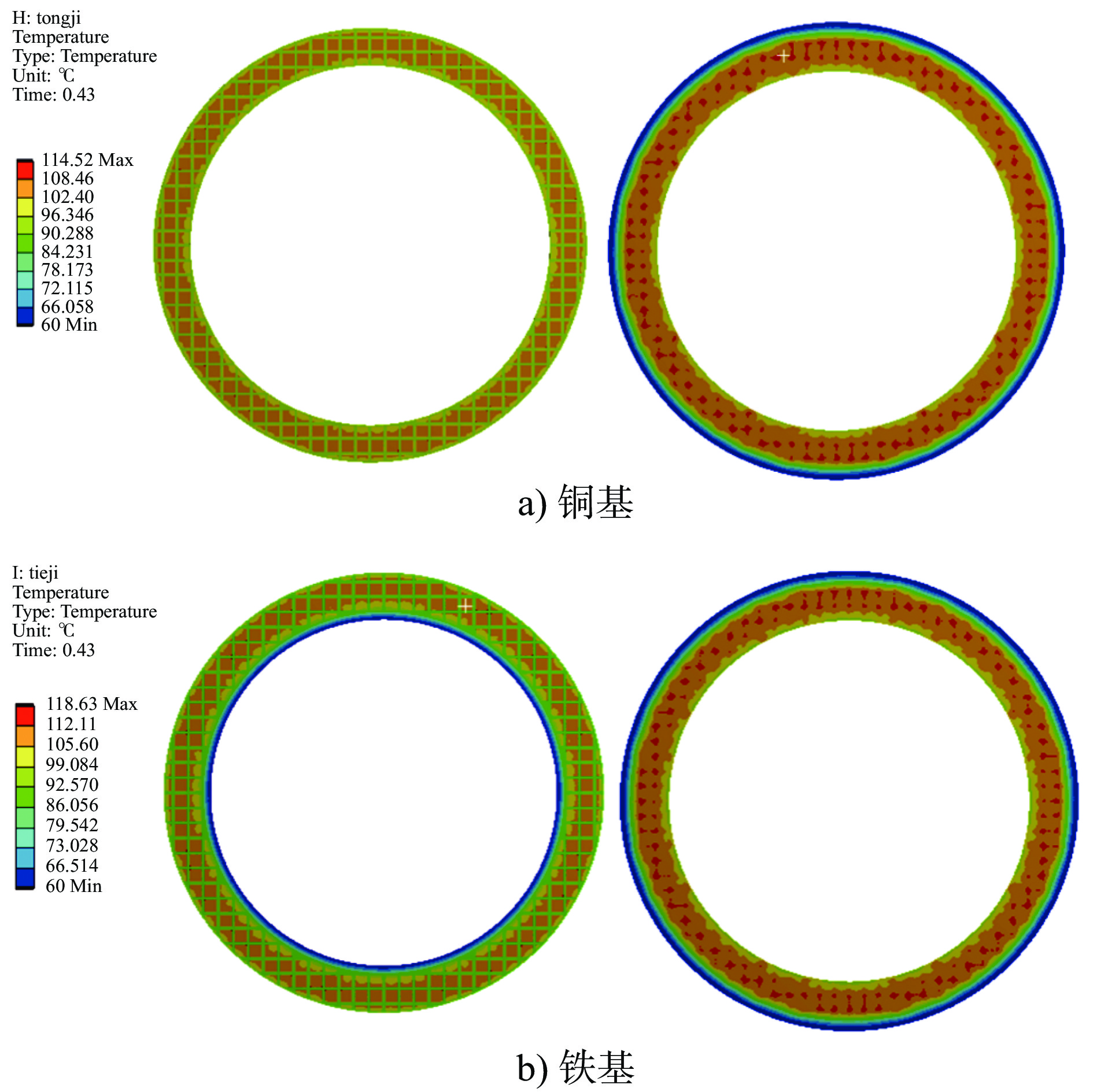
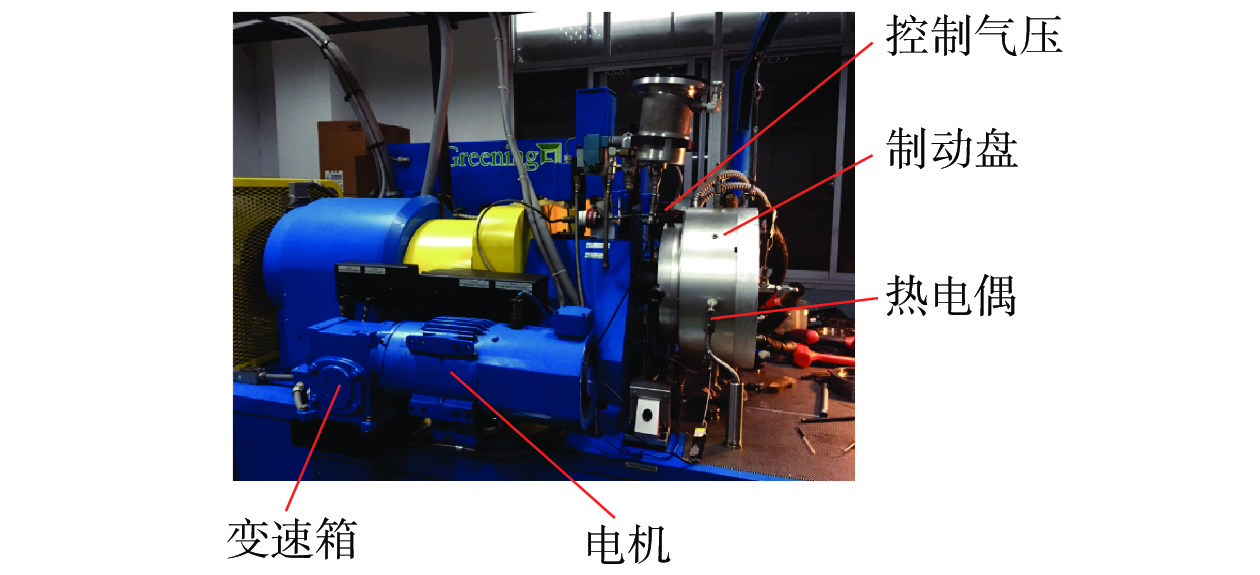
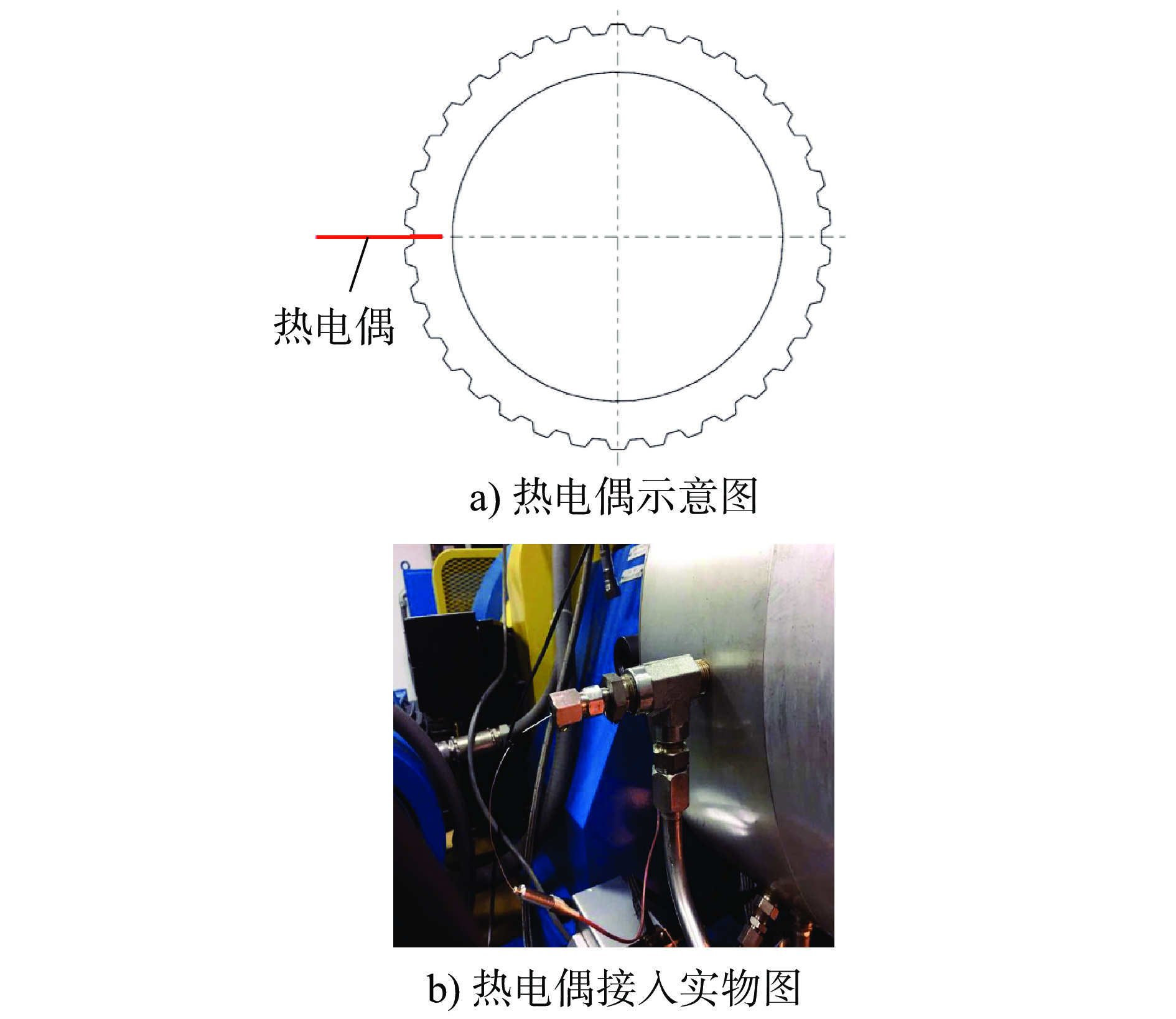
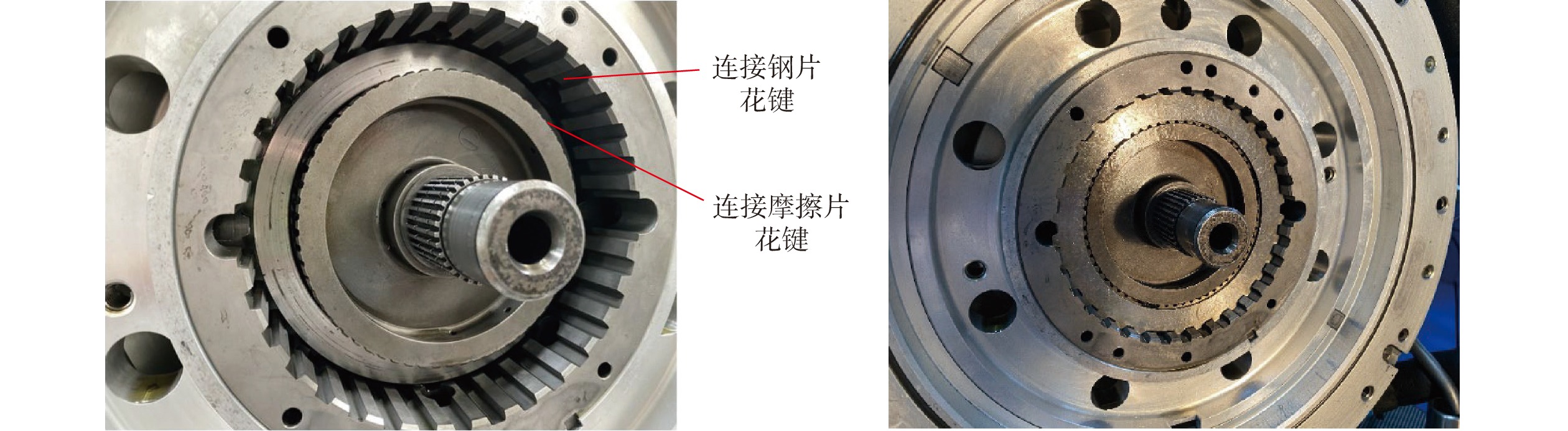
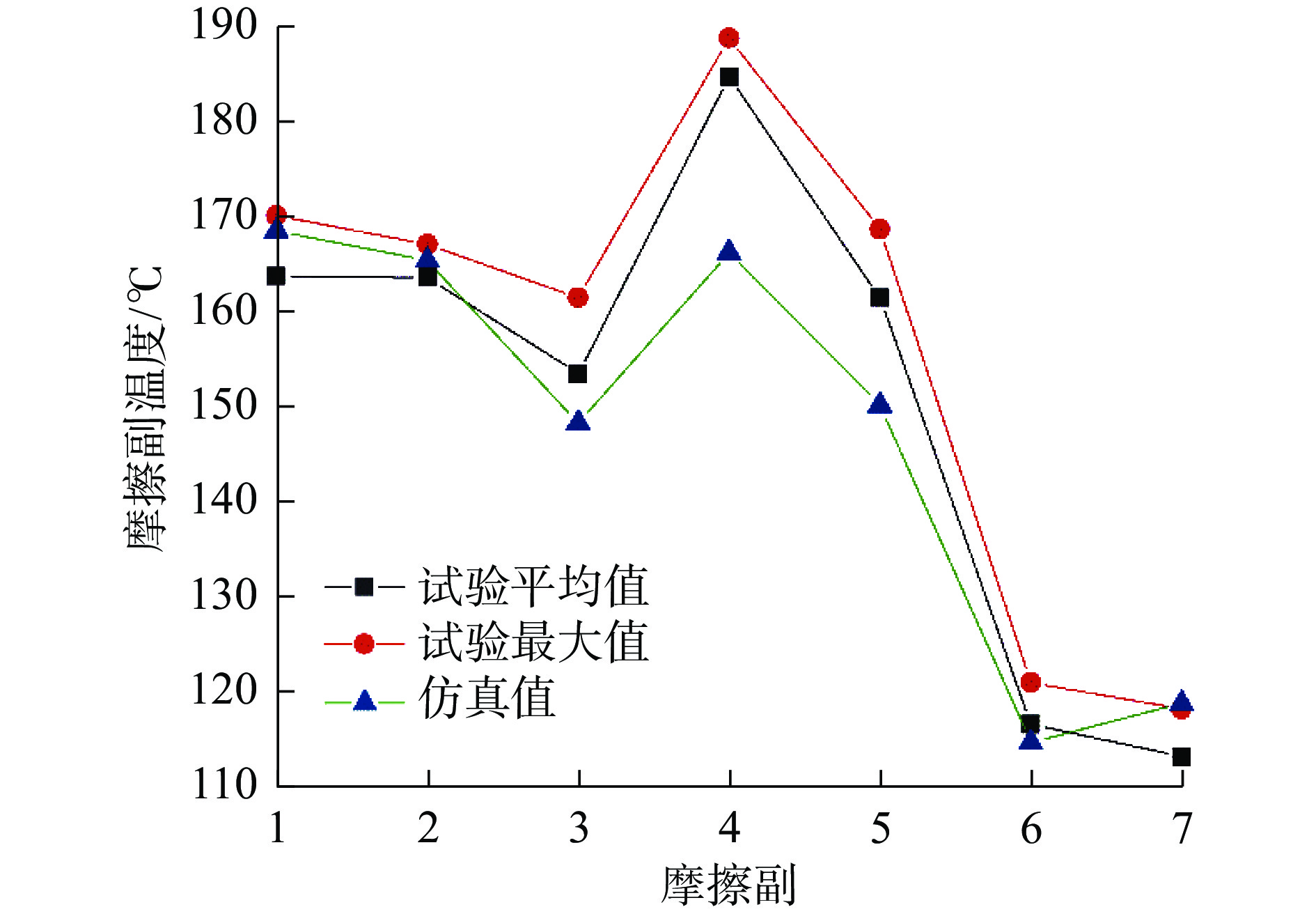
为了研究湿式多片离合器摩擦副的发热情况,选取其中一对摩擦副,建立了瞬态及稳态热分析有限元模型,将油槽类型转化为当量圆柱体并建立对流换热模型,计算了对流换热系数,并以此为边界条件,计算不同时间下摩擦片与对偶钢片沿径向和轴向的温度分布。同时,针对不同材料及槽型对摩擦副温度的影响进行分析,并采用SAE#2试验机,测试了不同材料及槽型的摩擦副温度,与理论分析进行了对比,温度变化趋势一致,误差较小。
为了研究湿式多片离合器摩擦副的发热情况,选取其中一对摩擦副,建立了瞬态及稳态热分析有限元模型,将油槽类型转化为当量圆柱体并建立对流换热模型,计算了对流换热系数,并以此为边界条件,计算不同时间下摩擦片与对偶钢片沿径向和轴向的温度分布。同时,针对不同材料及槽型对摩擦副温度的影响进行分析,并采用SAE#2试验机,测试了不同材料及槽型的摩擦副温度,与理论分析进行了对比,温度变化趋势一致,误差较小。




2023, 42(9): 1574-1574.
摘要:
