




Self- adaptive Slip Angle Cascade Sliding Mode ObservationUnder Multiple Working Conditions
-
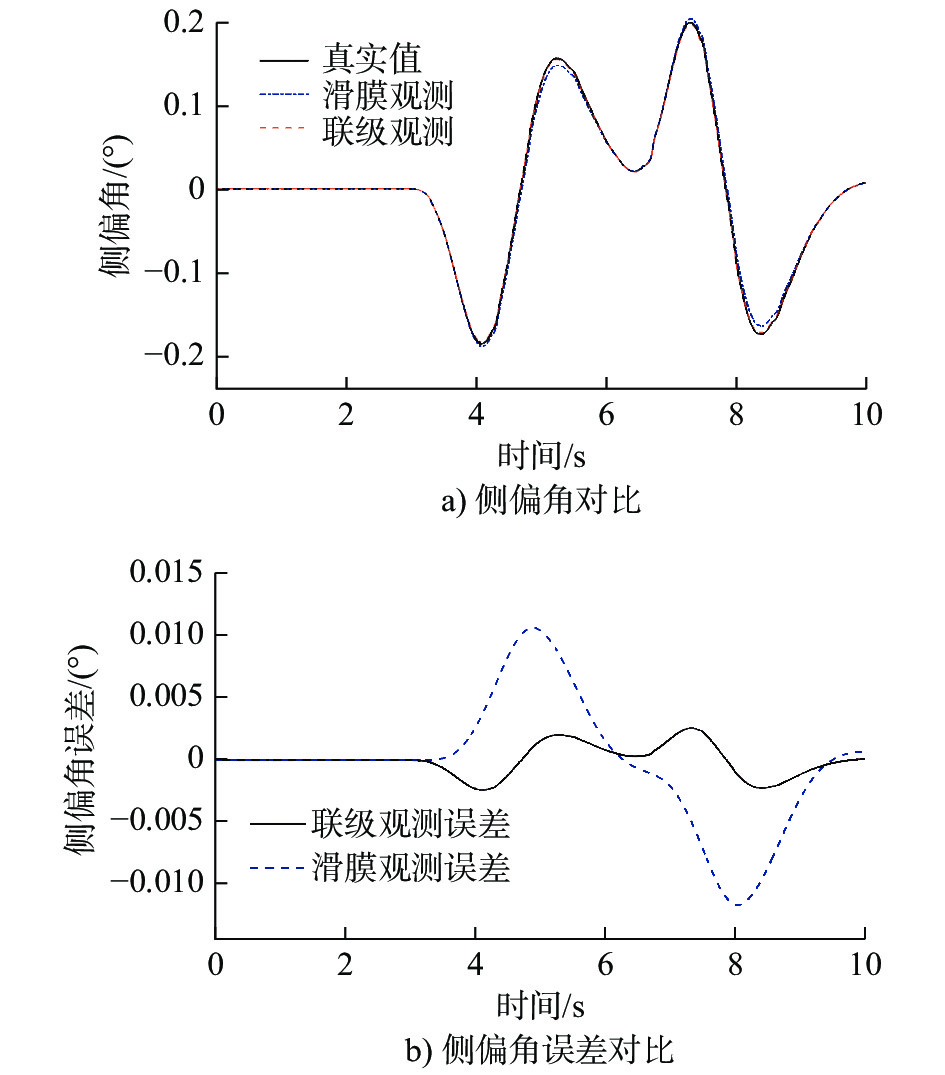
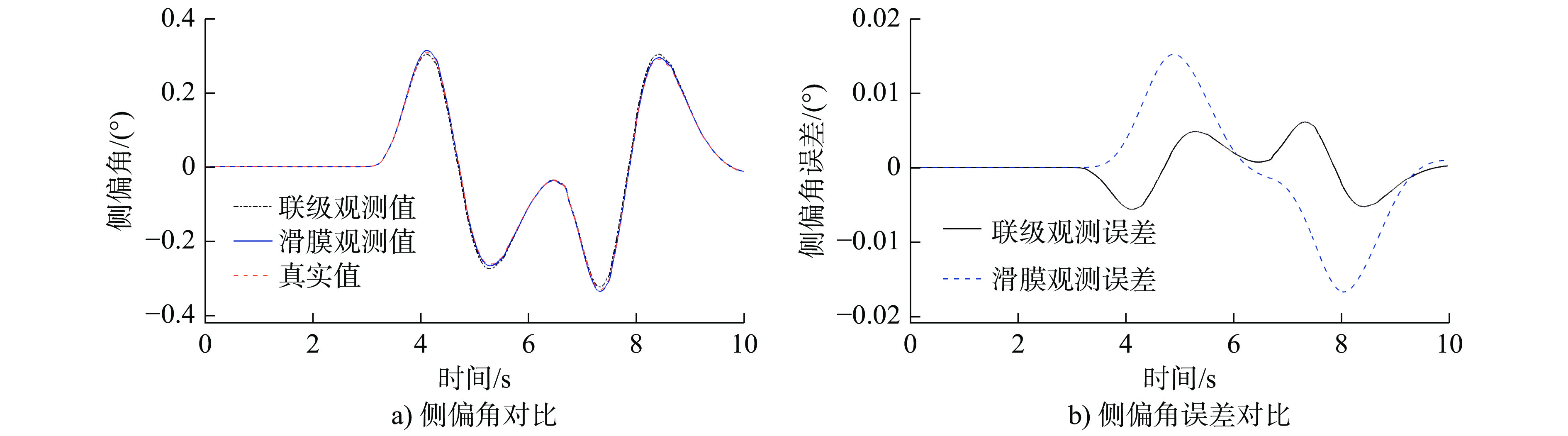
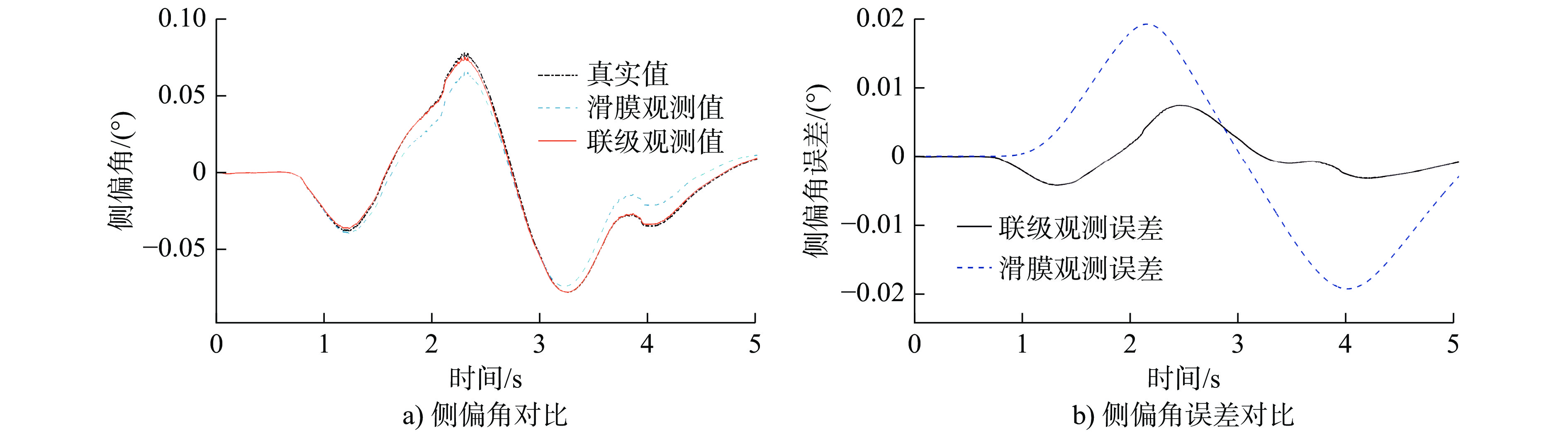
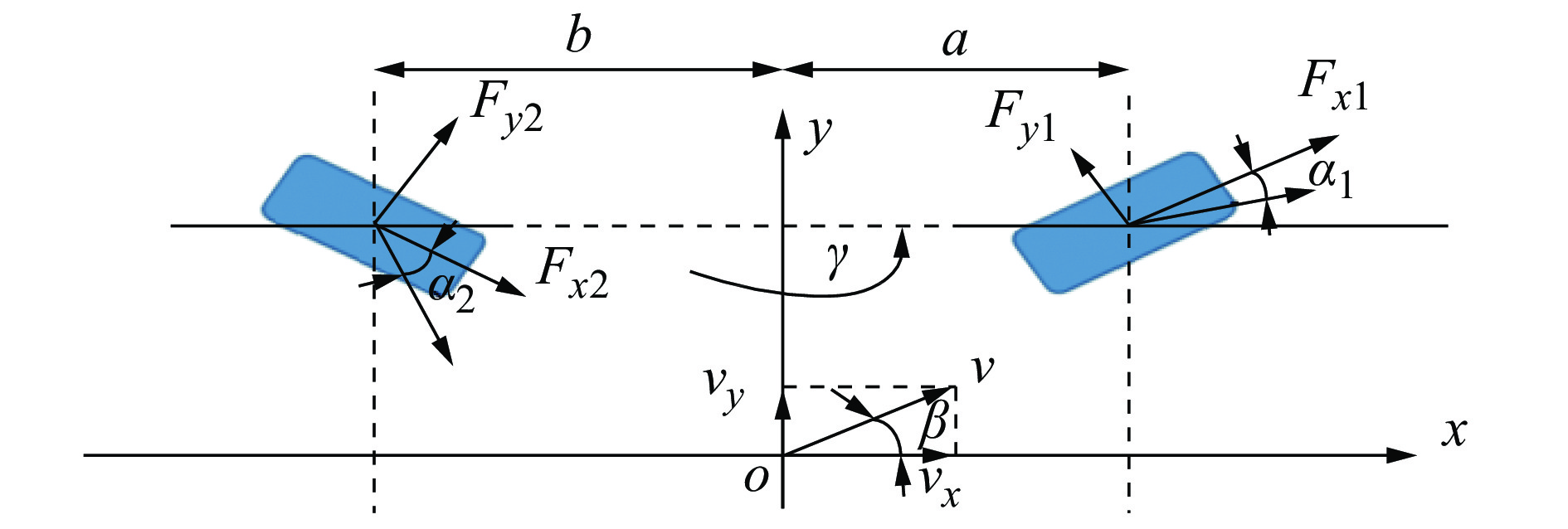
摘要: 轮胎侧偏特性是汽车动力学稳定性控制的基础,轮胎侧偏角是用来表征车辆侧向状态稳定性的重要参量。基于动力学模型的轮胎侧偏角观测方法,在复杂工况下因侧倾转向和变形转向的影响而精度变差,为此提出一种基于自适应双曲正切滑模观测器理论的新型联级观测算法。在车辆的二自由度模型基础上,利用CarSim与Simulink建立车辆联合仿真模型。针对双移线和紧急避障两种典型工况,对比分析了滑模观测算法和自适应双曲正切滑模联级观测算法的侧偏角误差值。结果表明:在不同工况下自适应滑模联级观测算法与滑模观测算法相比,观测误差最大可有效降低61.44%,充分体现算法具有更高的准确性与鲁棒性。Abstract: The tire slip characteristics are the basis of a vehicle's dynamics stability control, and the tire slip angle is an important parameter for characterizing the stability of the vehicle's lateral state. The tire slip angle observation method based on the dynamic model is not accurate due to the influence of roll steering and deformation steering under complex working conditions. Therefore, a new cascade observation algorithm based on the adaptive hyperbolic tangent sliding mode observation theory is proposed. Based on the two-degree-of-freedom model of the vehicle, its co-simulation model is established with the CarSim and Simulink software. The sliding mode observation algorithm and the adaptive hyperbolic tangent sliding mode connection are compared and analyzed under two typical working conditions of double shift lines and emergency obstacle avoidance. The results show that the adaptive sliding mode cascade observation algorithm can effectively reduce observation errors by about 61.44% compared with the sliding mode observation algorithm under different working conditions, fully revealing that the algorithm is more accurate and robust.
-
Key words:
- tire slip angle /
- cascade observation /
- adaptive control
-
表 1 车辆基本参数
Table 1. Basic vehicle parameters
参数 数值 车辆质心到前轴的距离a/m 1.25 车辆质心到后轴的距离b/m 1.74 整车质量m/kg 2780 转动惯量IZ/(kg·m2) 2287  下载: 导出CSV
下载: 导出CSV
表 2 双移线工况误差占比
Table 2. Error percentage for the double-shift-lineworking condition
速度/(m·s−1) 观测算法 前轮误差/% 后轮误差/% 15 滑模 7.27 6.97 自适应联级 2.79 2.53 30 滑模 8.75 7.67 自适应联级 3.22 3.03
下载: 导出CSV
表 3 紧急避障误差占比
Table 3. Error percentage for emergency obstacle avoidance
观测算法 前轮误差/% 后轮误差/% 滑模 11.27 10.97 自适应联级 4.82 4.23
下载: 导出CSV
-
[1] 王建涛. 前轮转向和四轮转向车辆侧向运动研究与对比分析[D]. 长春: 吉林大学, 2019WANG J T. The lateral movement research and comparative analysis between front wheel steering and four-wheel steering vehicle[D]. Changchun: Jilin University, 2019. (in Chinese) [2] 陈焕明, 郭孔辉. 基于航向角和位置偏差控制的驾驶员模型[J]. 农业机械学报, 2013, 44(10): 36-40. doi: 10.6041/j.issn.1000-1298.2013.10.006CHEN H M, GUO K H. Driver model based on heading angle and position deviation control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(10): 36-40. (in Chinese) doi: 10.6041/j.issn.1000-1298.2013.10.006 [3] 张小龙, 陈彬, 宋健, 等. 极限工况下汽车轮胎侧偏角测试方法研究[J]. 农业机械学报, 2014, 45(9): 31-36. doi: 10.6041/j.issn.1000-1298.2014.09.006ZHANG X L, CHEN B, SONG J, et al. Test method research on vehicle's tire side slip angle in extreme driving conditions[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(9): 31-36. (in Chinese) doi: 10.6041/j.issn.1000-1298.2014.09.006 [4] 李伟,郑柱,曹轩豪,等.车辆质心侧偏角估计及其稳定性控制研究[J/OL].重庆交通大学学报(自然科学版):1-7[2023-06-30]. http://kns.cnki.net/kcms/detail/50.1190.U.20210116.1350.002.html.LI W, ZHENG Z, CAO X H, et al. Research of vehicle sideslip angle estimation and stability control[J]. Journal of Chongqing Jiaotong University (Natural Science):1-7[2023-06-30]. http://kns.cnki.net/kcms/detail/50.1190.U.20210116.1350.002.html. (in Chinese) [5] 宋义彤, 舒红宇, 陈仙宝, 等. 分布式电动汽车状态与参数无迹卡尔曼滤波估计[J]. 机械工程学报, 2020, 56(16): 204-213. doi: 10.3901/JME.2020.16.204SONG Y T, SHU H Y, CHEN X B, et al. State and parameters estimation for distributed drive electric vehicle based on unscented Kalman filter[J]. Journal of Mechanical Engineering, 2020, 56(16): 204-213. (in Chinese) doi: 10.3901/JME.2020.16.204 [6] 余卓平, 许明煜, 张培志, 等. 基于视觉和车辆动力学的库位跟踪算法研究[J]. 汽车技术, 2019(2): 1-6. doi: 10.19620/j.cnki.1000-3703.20181211YU Z P, XU M Y, ZHANG P Z, et al. Research on parking slot tracking algorithm based on vision and vehicle dynamics[J]. Automobile Technology, 2019(2): 1-6. (in Chinese) doi: 10.19620/j.cnki.1000-3703.20181211 [7] 张小龙, 李亮, 李红志, 等. 基于改进RBF网的汽车侧偏角估计方法试验研究[J]. 机械工程学报, 2010, 46(22): 105-110. doi: 10.3901/JME.2010.22.105ZHANG X L, LI L, LI H Z, et al. Experimental research on vehicle sideslip angle estimation based on improved RBF neural networks[J]. Journal of Mechanical Engineering, 2010, 46(22): 105-110. (in Chinese) doi: 10.3901/JME.2010.22.105 [8] 吕梦男, 孙涛, 李洁. 基于扩展卡尔曼滤波的车辆状态参数估计[J]. 农业装备与车辆工程, 2018, 56(5): 77-80. doi: 10.3969/j.issn.1673-3142.2018.05.018LYU M G, SUN T, LI J. Vehicle state parameter estimation based on extended Kalman filter[J]. Agricultural Equipment & Vehicle Engineering, 2018, 56(5): 77-80. (in Chinese) doi: 10.3969/j.issn.1673-3142.2018.05.018 [9] ZHANG X L, LI L, PAN D, et al. Experimental model and analytic solution for real-time observation of vehicle's additional steer angle[J]. Chinese Journal of Mechanical Engineering, 2014, 27(2): 340-347. doi: 10.3901/CJME.2014.02.340 [10] 张小龙, 李亮, 宋健, 等. 汽车稳定性控制系统性能试验与数据处理方法[J]. 农业机械学报, 2011, 42(5): 1-6.ZHANG X L, LI L, SONG J, et al. Performance test and data processing method for vehicle electronic stability control system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(5): 1-6. (in Chinese) [11] ZHONG B Q, DENG B, ZHAO H. Simulation model and method for active torsional vibration control of an HEV[J]. Applied Sciences, 2018, 9(1): 34. doi: 10.3390/app9010034 [12] 张征, 马晓军, 陈路明, 等. 基于无迹粒子滤波的车辆质心侧偏角估计方法[J]. 科学技术与工程, 2020, 20(12): 4735-4740. doi: 10.3969/j.issn.1671-1815.2020.12.018ZHANG Z, MA X J, CHEN L M, et al. Vehicle side-slip angle estimation based on unscented particle filter[J]. Science Technology and Engineering, 2020, 20(12): 4735-4740. (in Chinese) doi: 10.3969/j.issn.1671-1815.2020.12.018 [13] CHENG S, LI L, YAN B J, et al. Simultaneous estimation of tire side-slip angle and lateral tire force for vehicle lateral stability control[J]. Mechanical Systems and Signal Processing, 2019, 132: 168-182. doi: 10.1016/j.ymssp.2019.06.022 [14] 李亮, 贾钢, 宋健, 等. 汽车动力学稳定性控制研究进展[J]. 机械工程学报, 2013, 49(24): 95-107. doi: 10.3901/JME.2013.24.095LI L, JIA G, SONG J, et al. Progress on vehicle dynamics stability control system[J]. Journal of Mechanical Engineering, 2013, 49(24): 95-107. (in Chinese) doi: 10.3901/JME.2013.24.095 [15] 李静, 石求军, 洪良, 等. 基于车辆状态估计的商用车 ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555.LI J, SHI Q J, HONG L, et al. Commercial vehicle ESC neural network sliding mode control based on vehicle state estimation[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(5): 1545-1555. (in Chinese) [16] XU L, YAO B. Adaptive robust control of mechanical systems with non-linear dynamic friction compensation[J]. International Journal of Control, 2008, 81(2): 167-176. doi: 10.1080/00207170701390132 -




 点击查看大图
点击查看大图
图(8) / 表(3)
计量
- 文章访问数: 105
- HTML全文浏览量: 46
- PDF下载量: 10
- 被引次数: 0
