


Submission
 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial EntryOnline Production System

SearchAdvanced Search
Journal Search
Keyword Search
Notes to Authors
Links
 Email Alert
Email Alert RSS
RSS
Responsible Institution: Ministry of Industry and Information Technology of the People's Republic of China
Sponsor: Northwestern Polytechnical University
Indexed Database: Core Journal in Chinese Science Citation Database (CSCD) National Chinese Core Journals China Science and Technology Core Journals (Statistical Source Journals of Chinese Scientific and Technological Papers)
Contact: Tel: 029-88493054 E-mail: mst@nwpu.edu.cn
Articles in press have been peer-reviewed and accepted, which are not yet assigned to volumes /issues, but are citable by Digital Object Identifier (DOI).
Display Method:
, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190270
 PDF 1230KB
PDF 1230KB
Abstract:
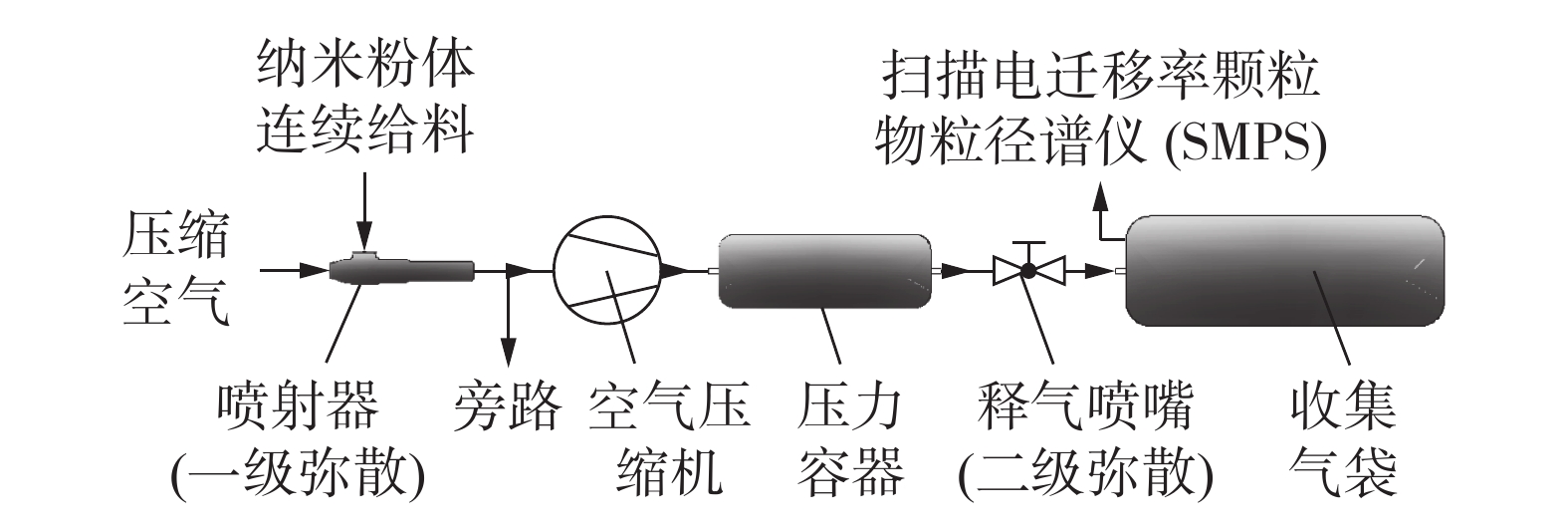
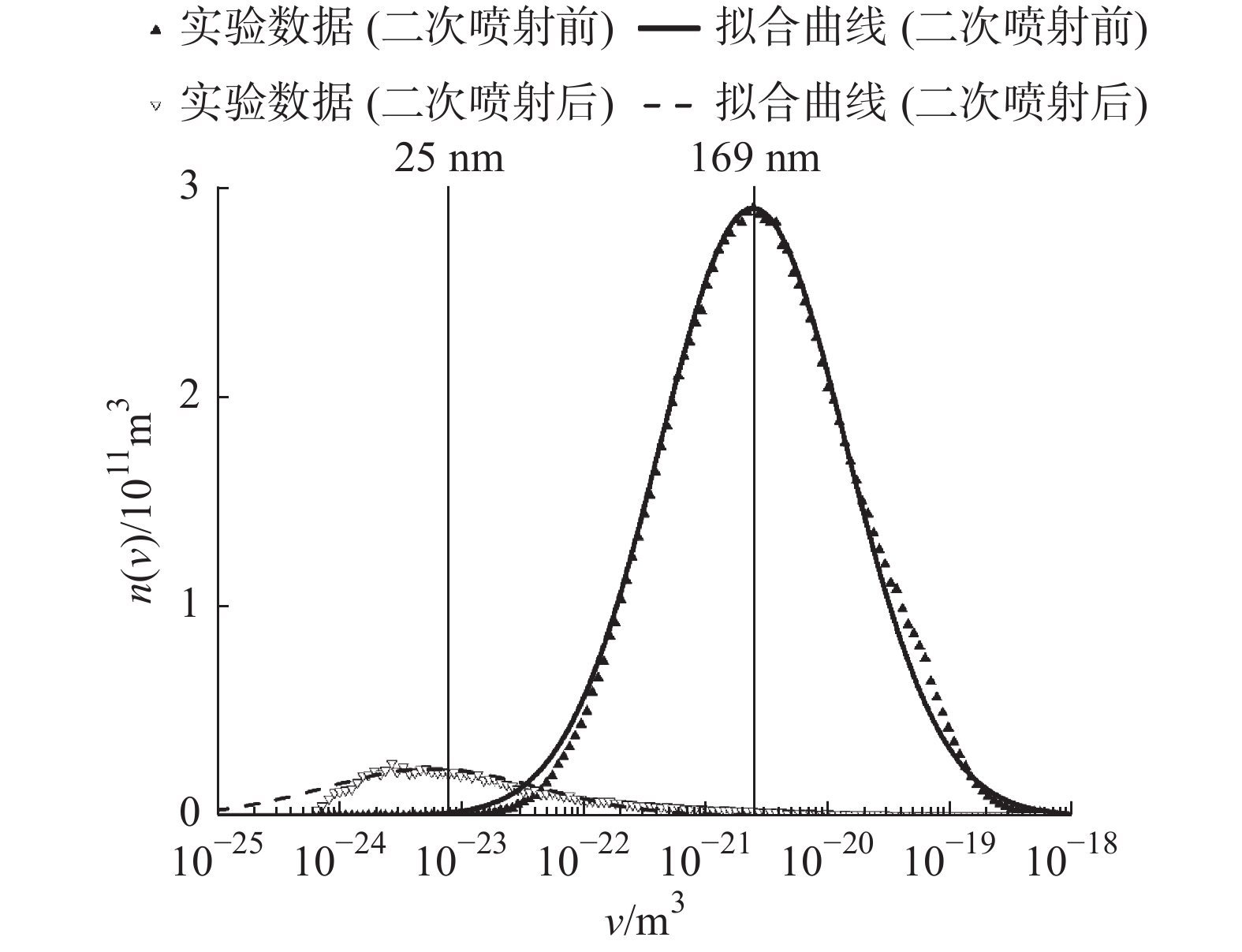
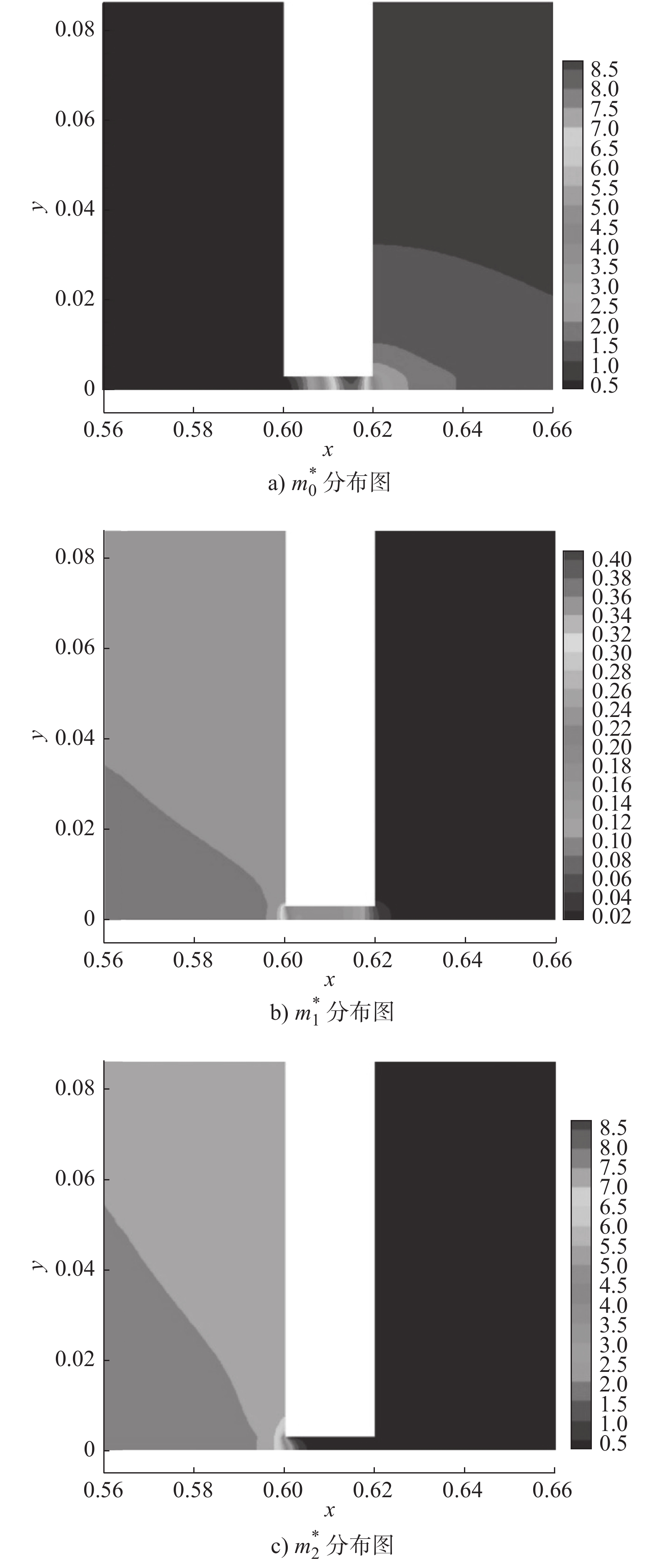
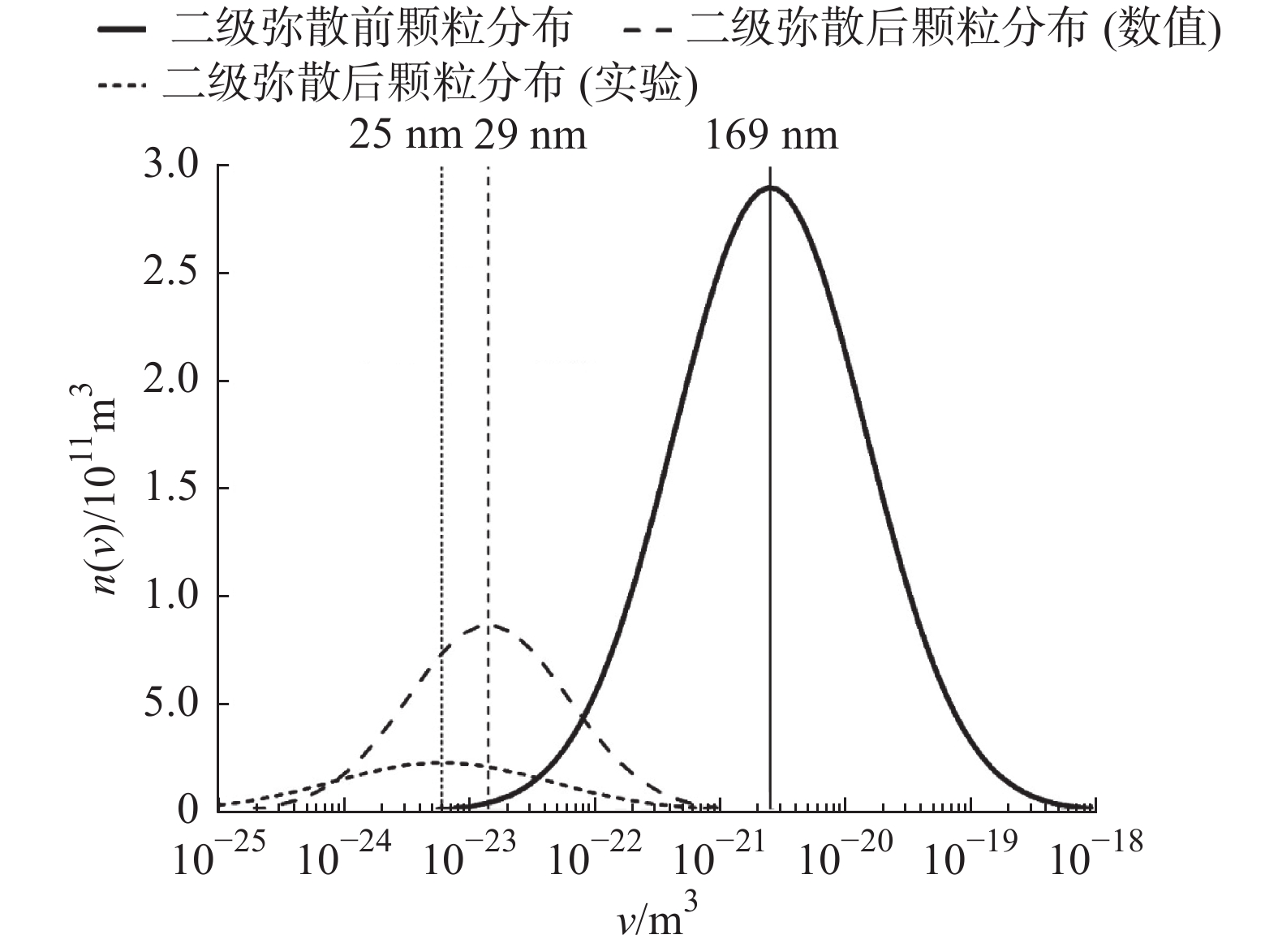
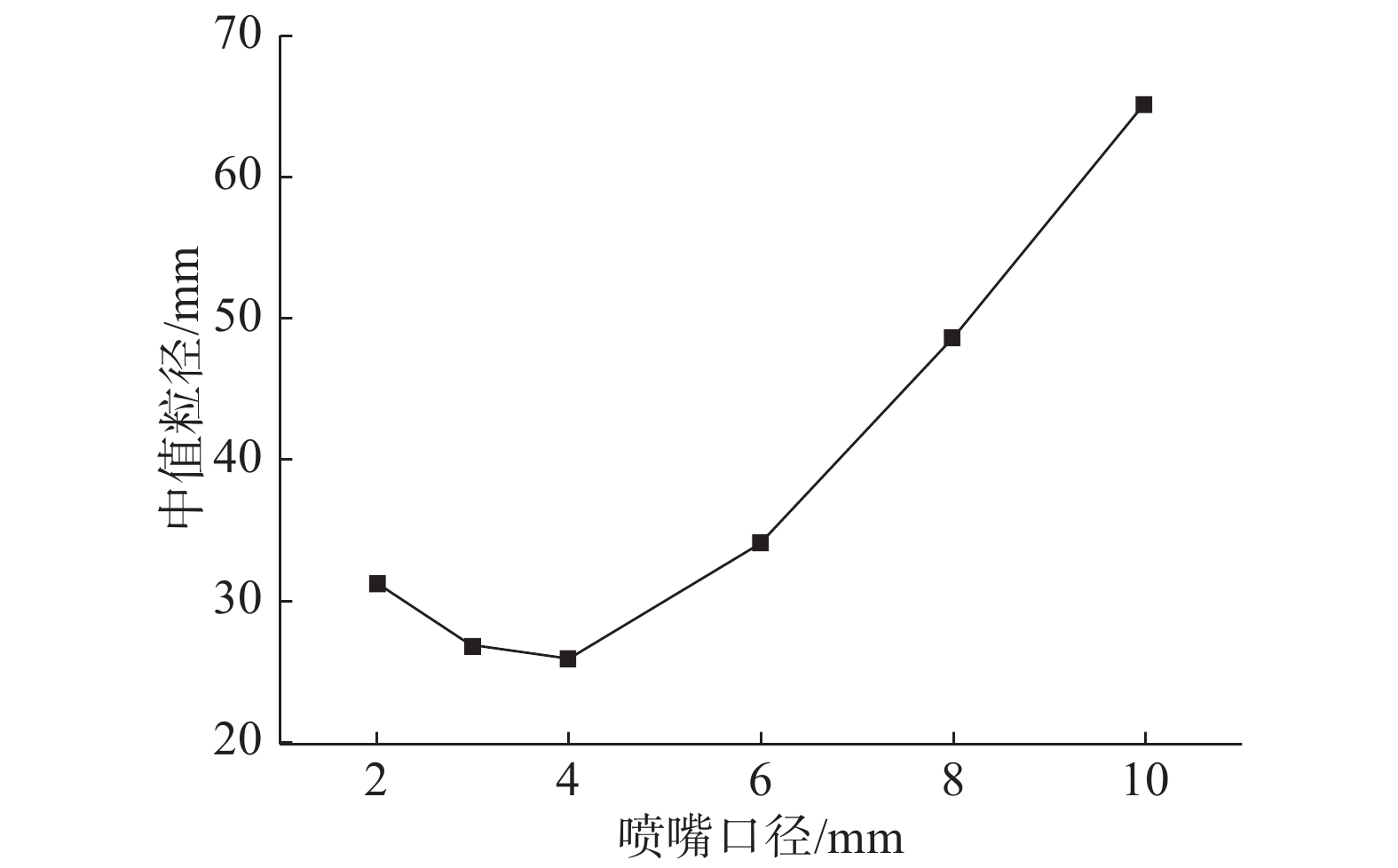
A continuous dispersing device for deagglomerating ultrafine particles is established. The experimental results show that nanoparticles can be dispersed to the primary particle size range via a continuous jet dispersion system. In order to investigate the mechanism and high-pressure dispersion characteristics of high pressure dispersion, the secondary jet dispersion of dry-powder nanoparticles was modeled and numerical simulated. The results show that numerical results of dynamic pressure profile agree with experiments. The particle number density decreases along the flow direction, and the experimental data is lower than the simulation results. The high pressure dispersing nozzle should not be too long to avoid re-agglomeration of the particles when passing through the nozzle. The aspect ratio of nozzle near 2.5 can produce the maximum shear rate at the jet outlet to obtain the best particle dispersion effect.
A continuous dispersing device for deagglomerating ultrafine particles is established. The experimental results show that nanoparticles can be dispersed to the primary particle size range via a continuous jet dispersion system. In order to investigate the mechanism and high-pressure dispersion characteristics of high pressure dispersion, the secondary jet dispersion of dry-powder nanoparticles was modeled and numerical simulated. The results show that numerical results of dynamic pressure profile agree with experiments. The particle number density decreases along the flow direction, and the experimental data is lower than the simulation results. The high pressure dispersing nozzle should not be too long to avoid re-agglomeration of the particles when passing through the nozzle. The aspect ratio of nozzle near 2.5 can produce the maximum shear rate at the jet outlet to obtain the best particle dispersion effect.


, Available online ,
doi: 10.13433/j.cnki.1003-8728.20200111
Abstract:
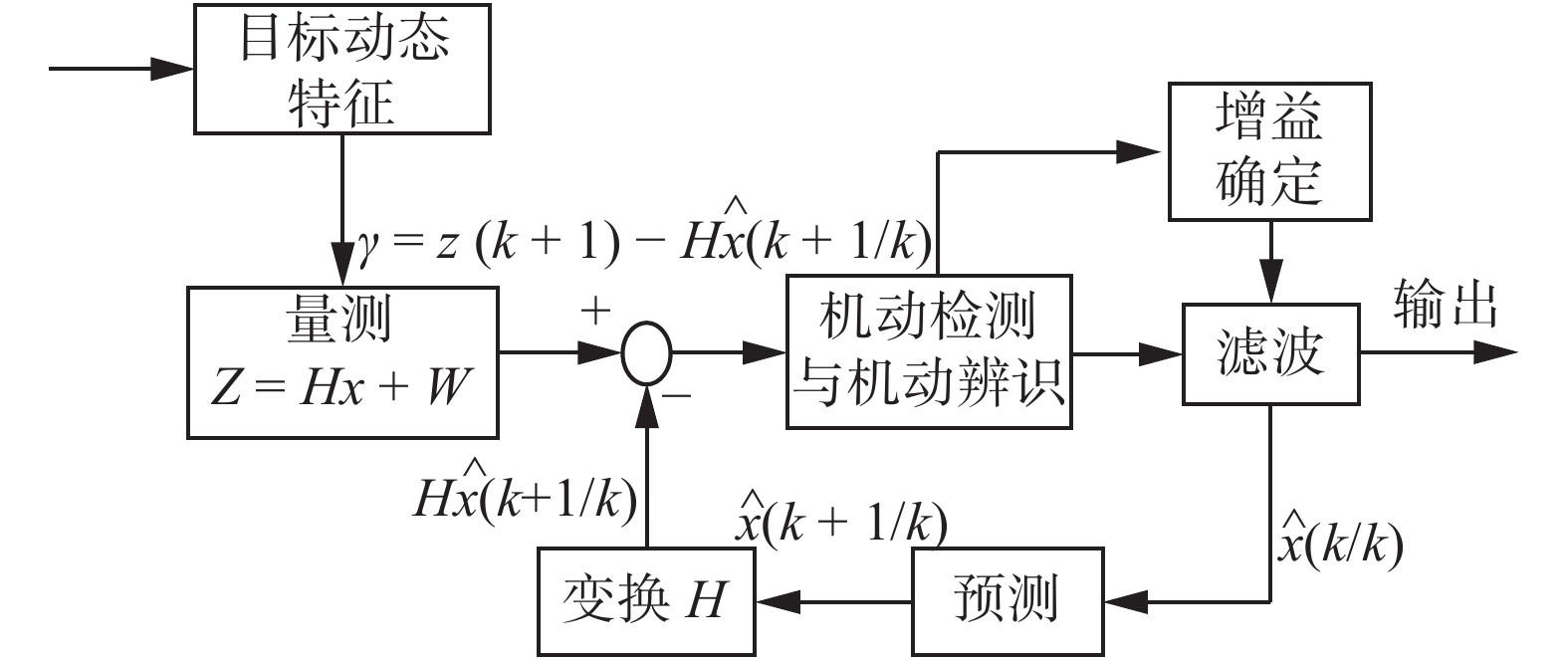
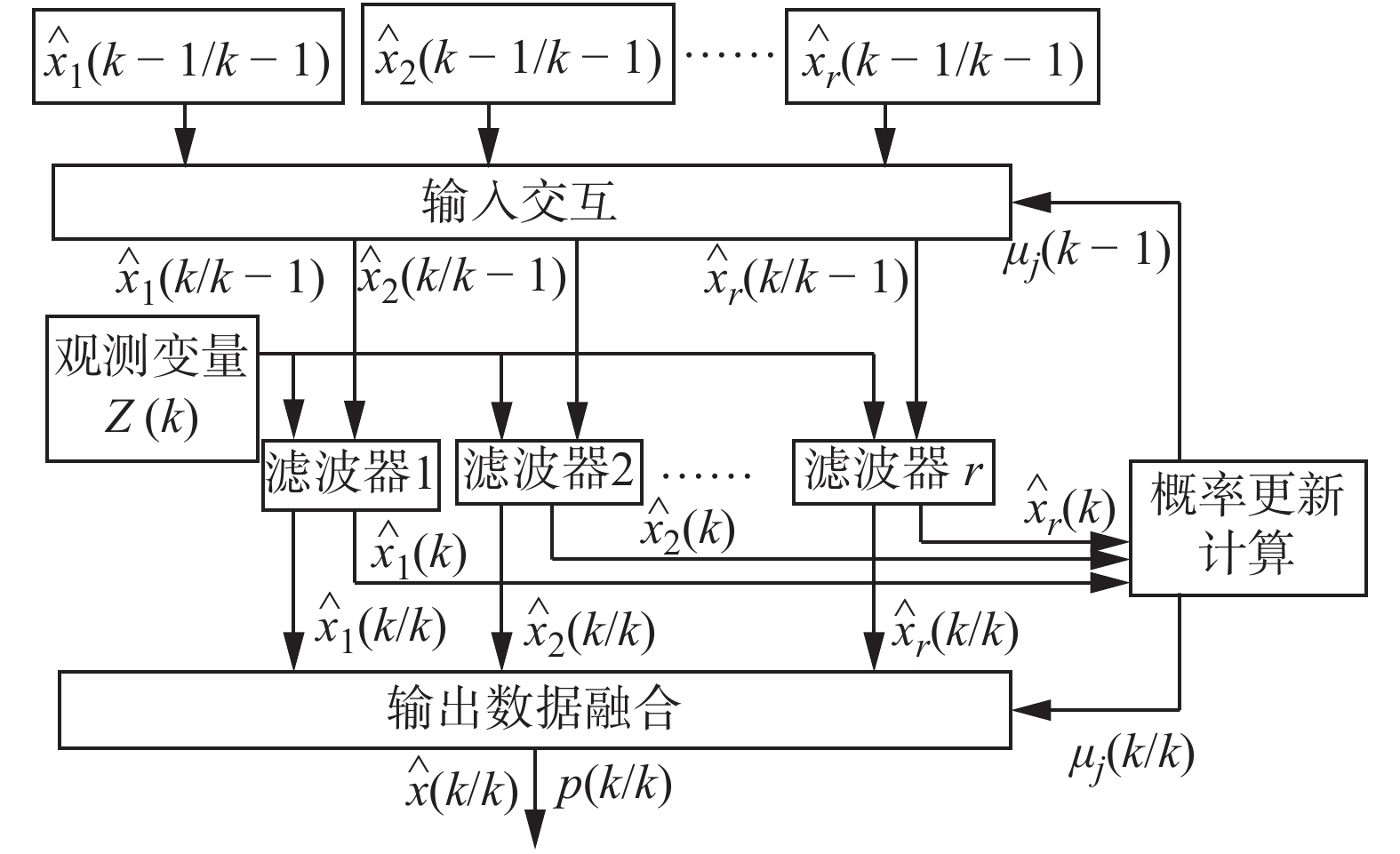
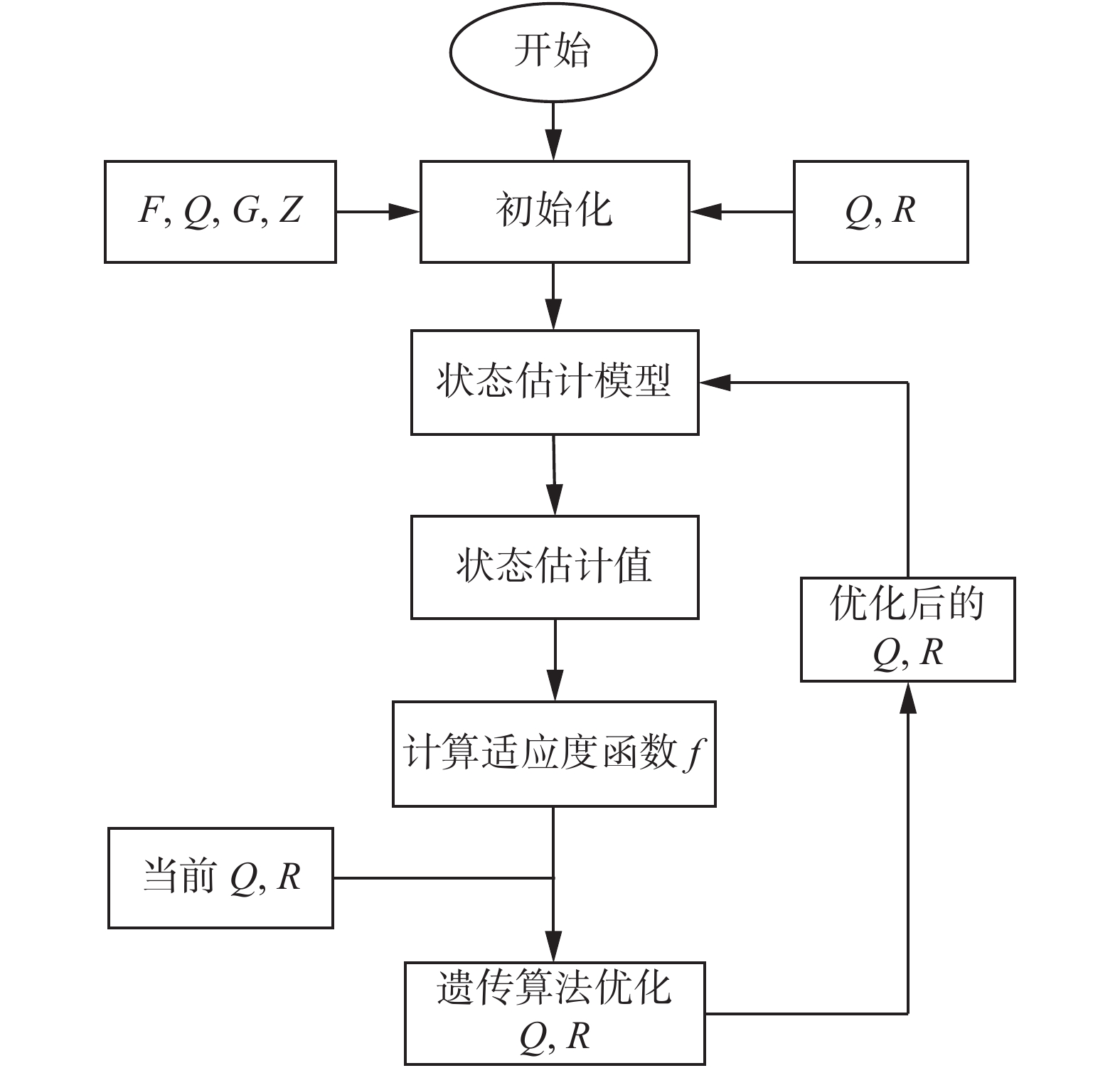
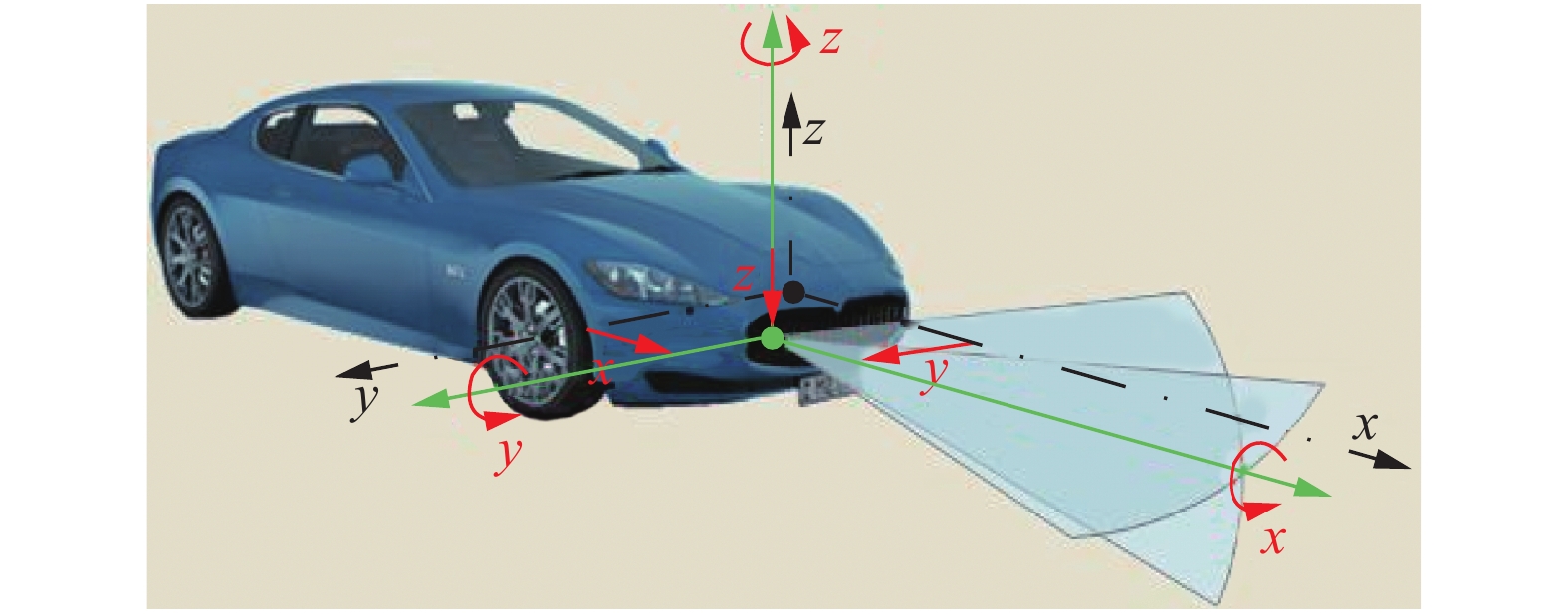
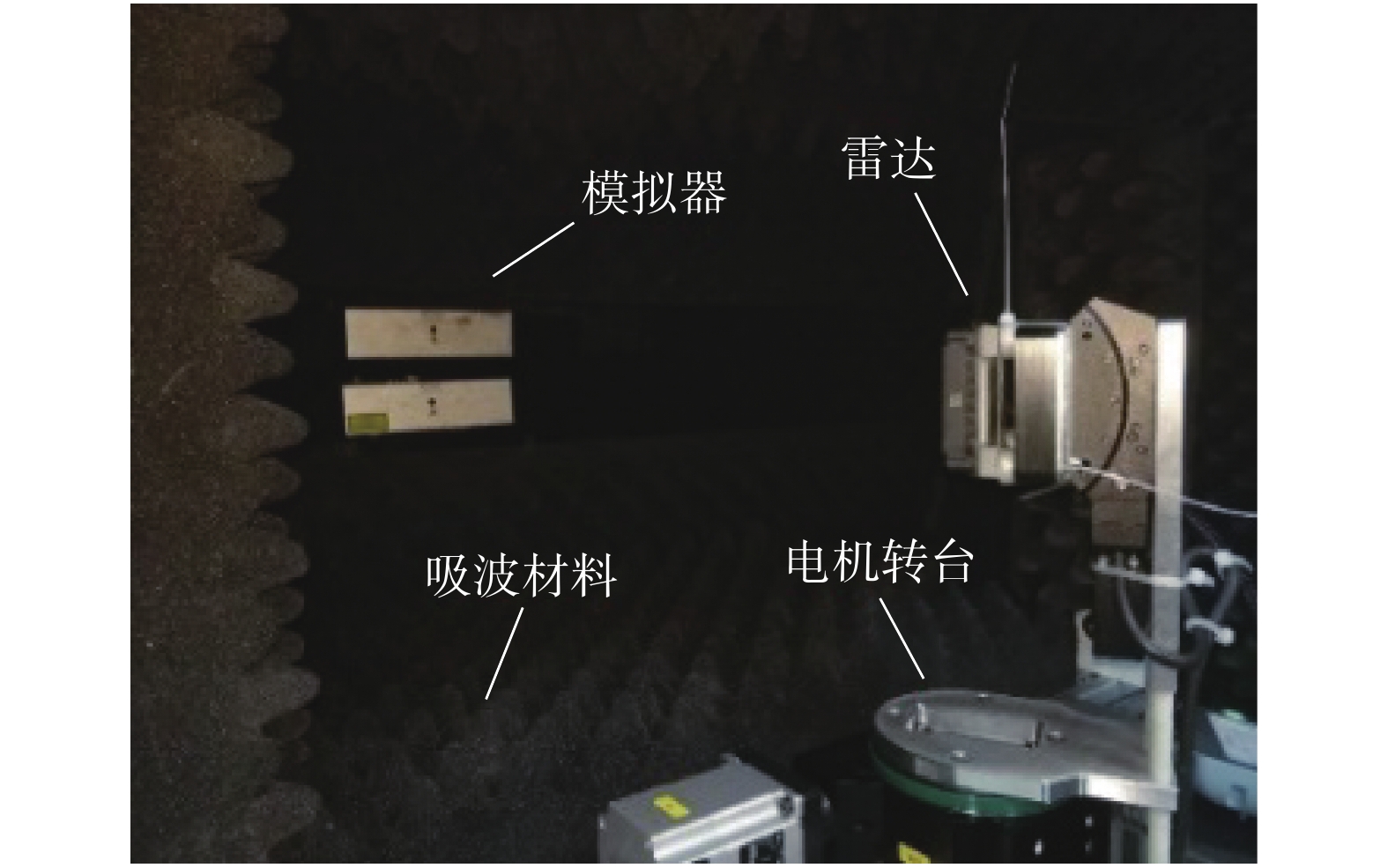
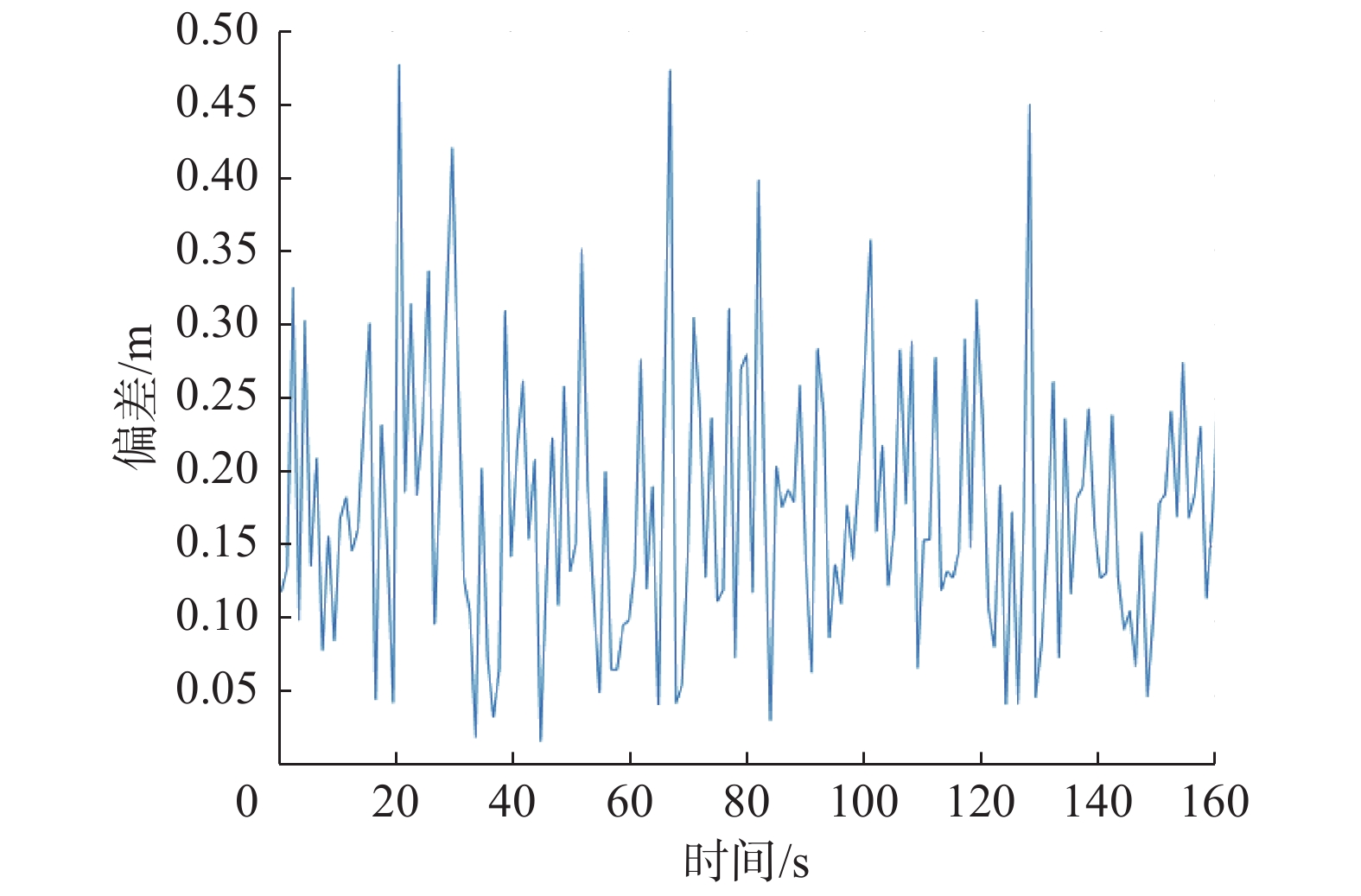
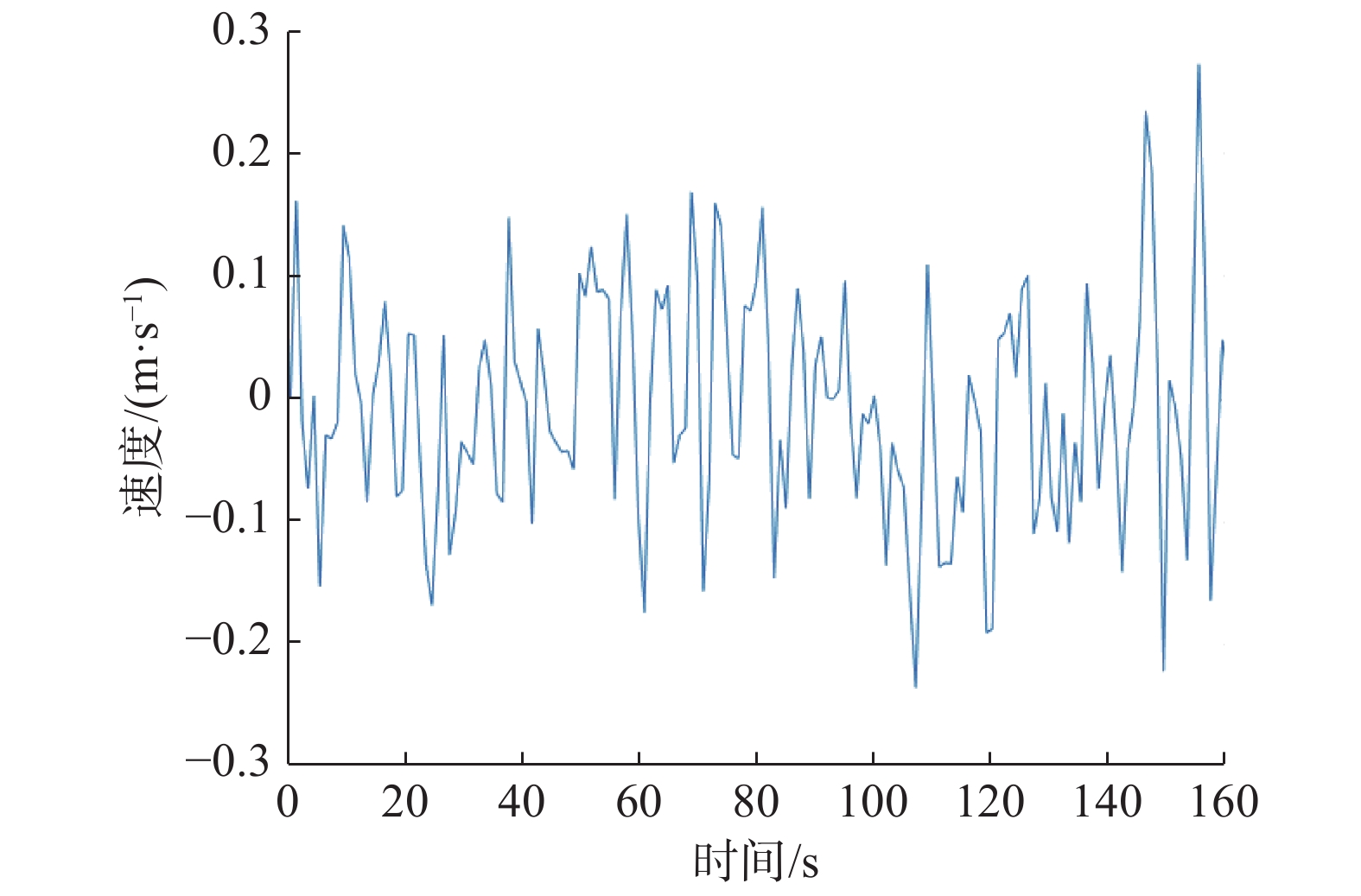
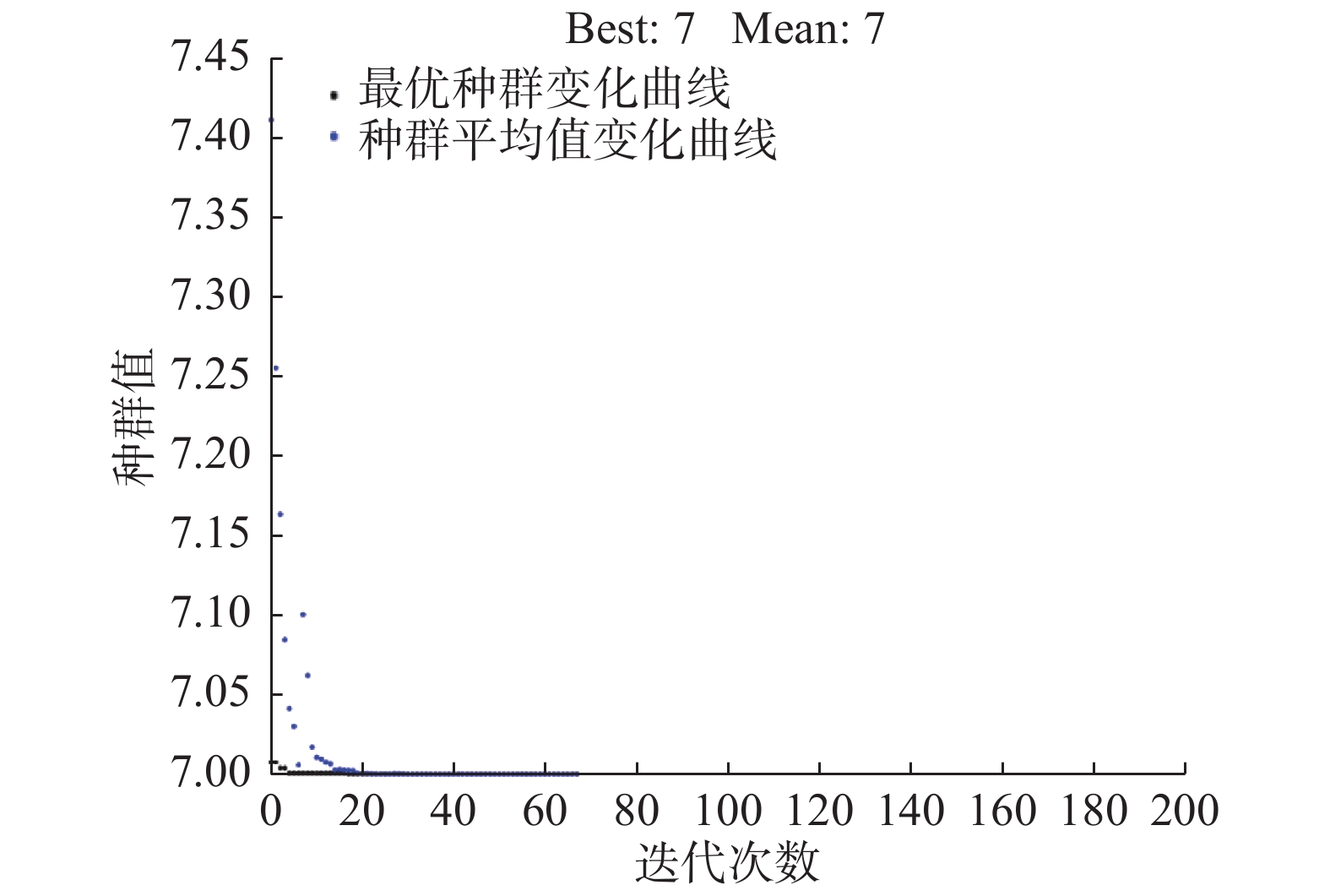
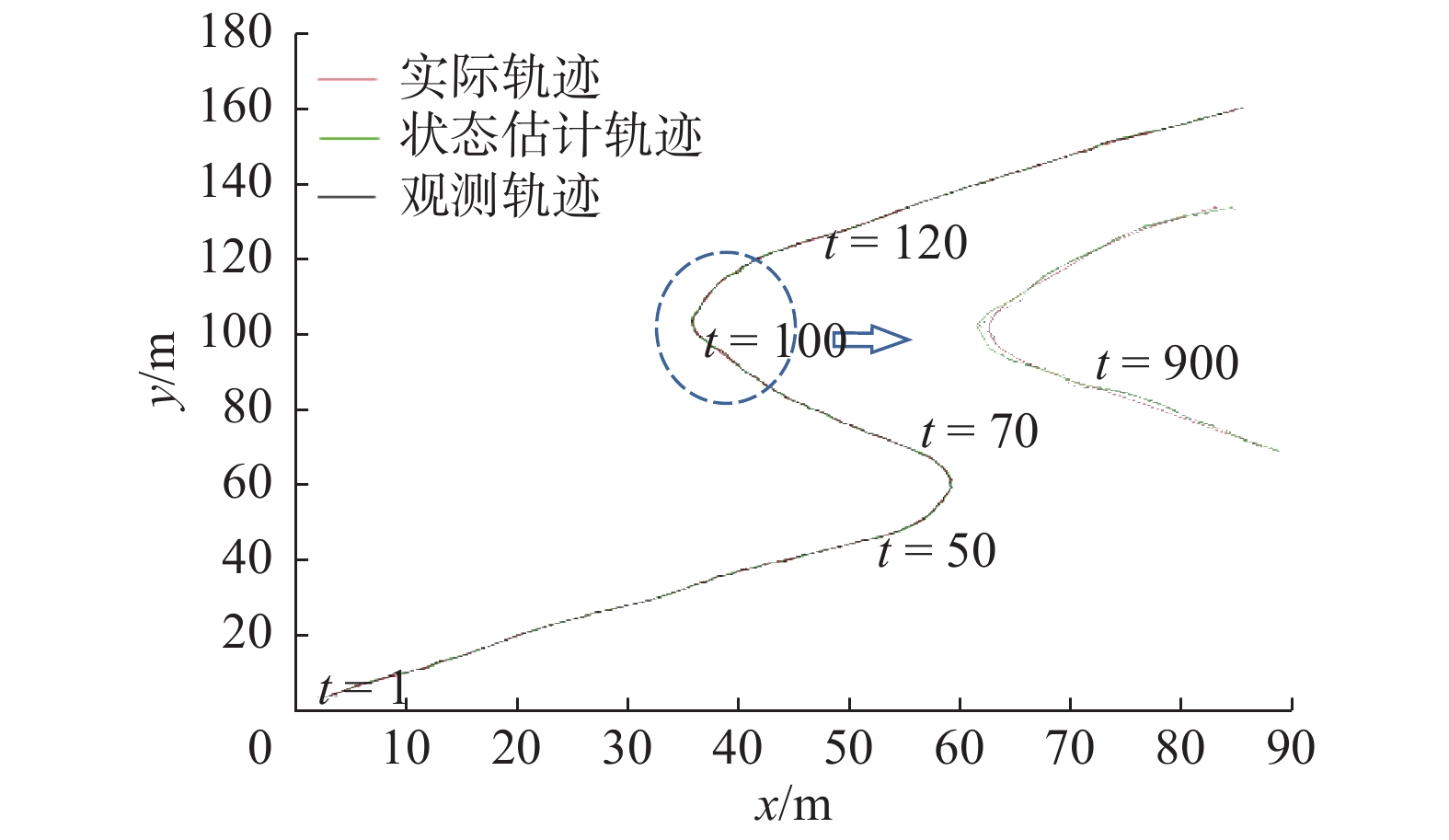
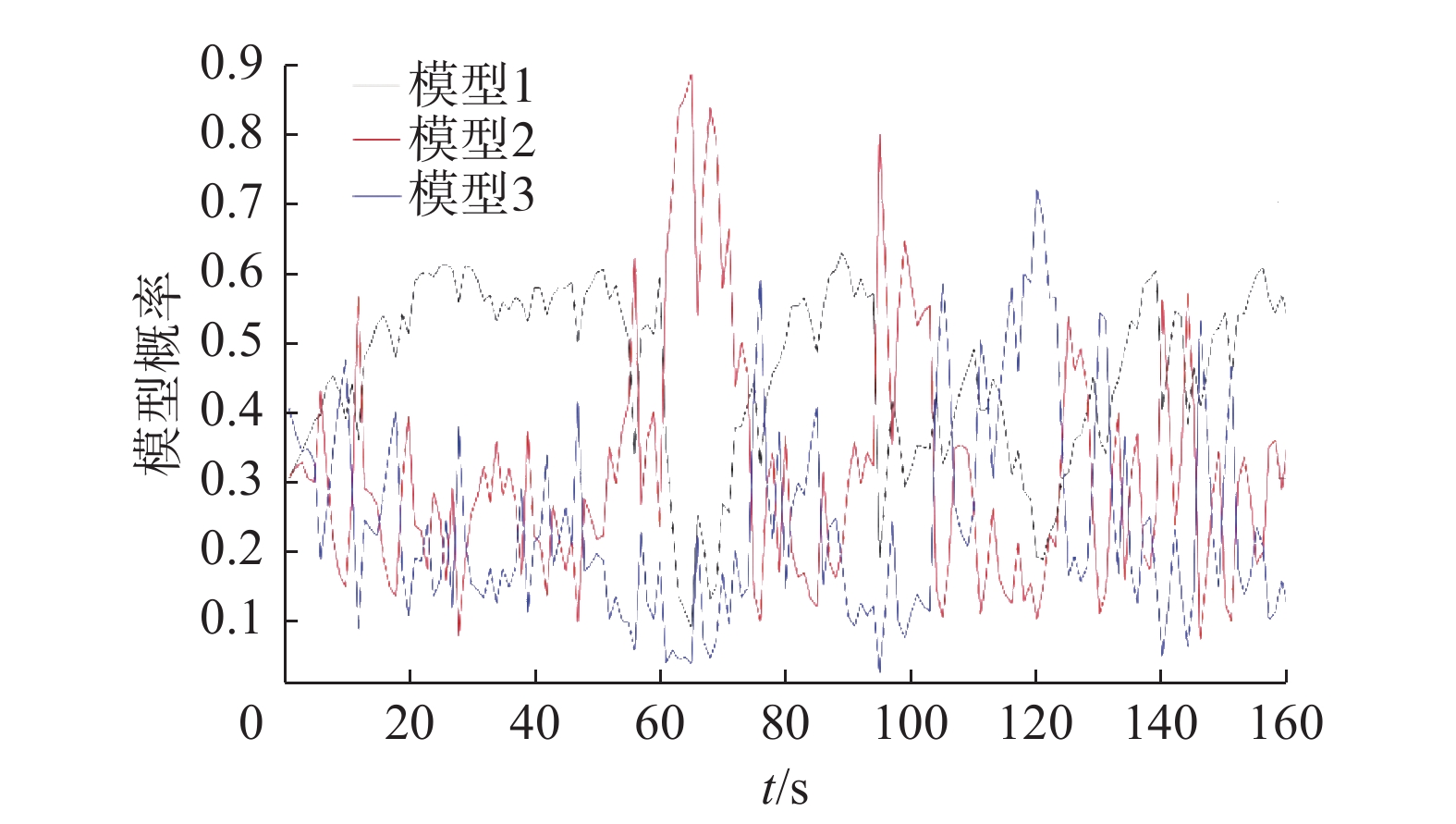
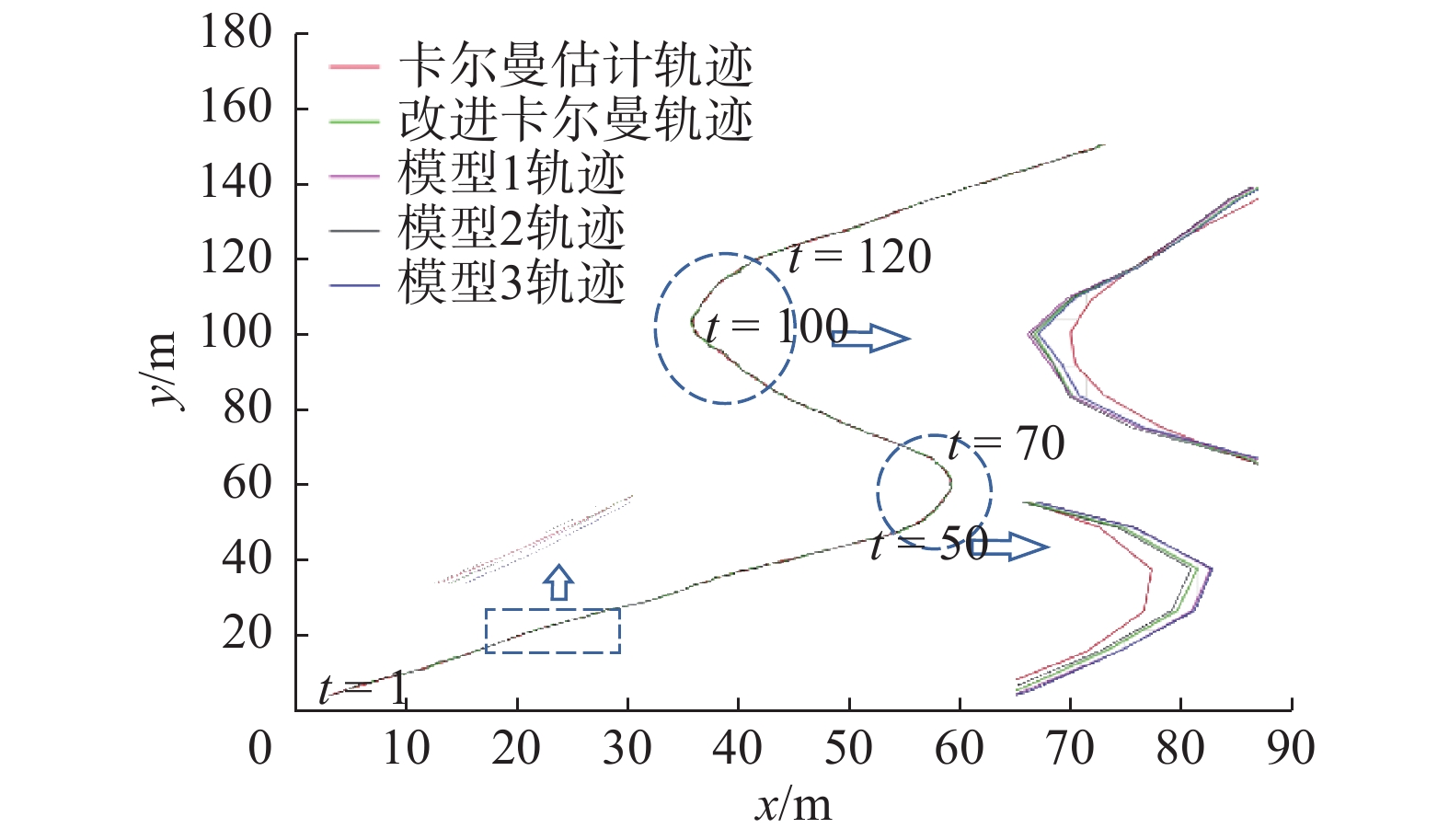
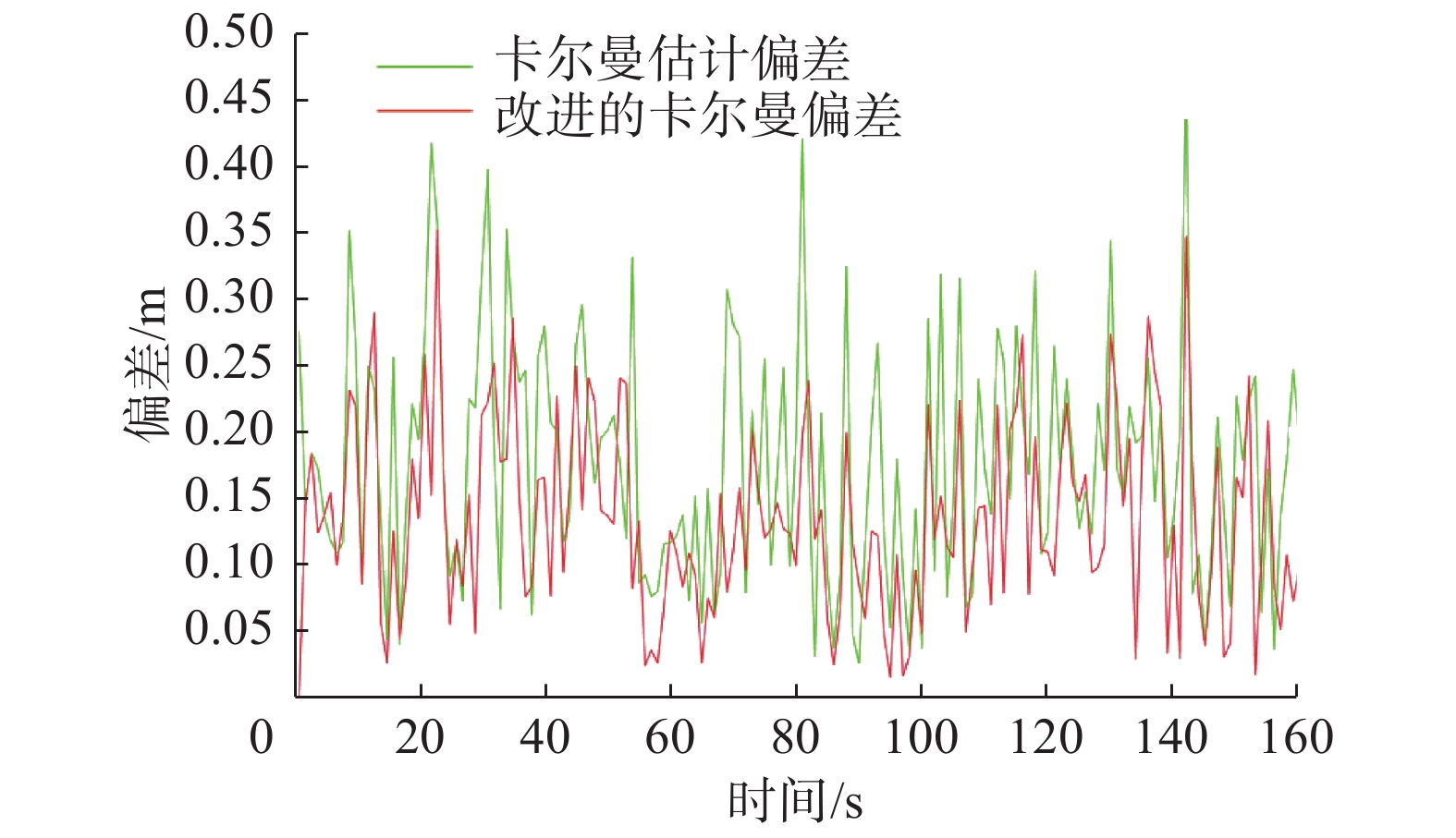
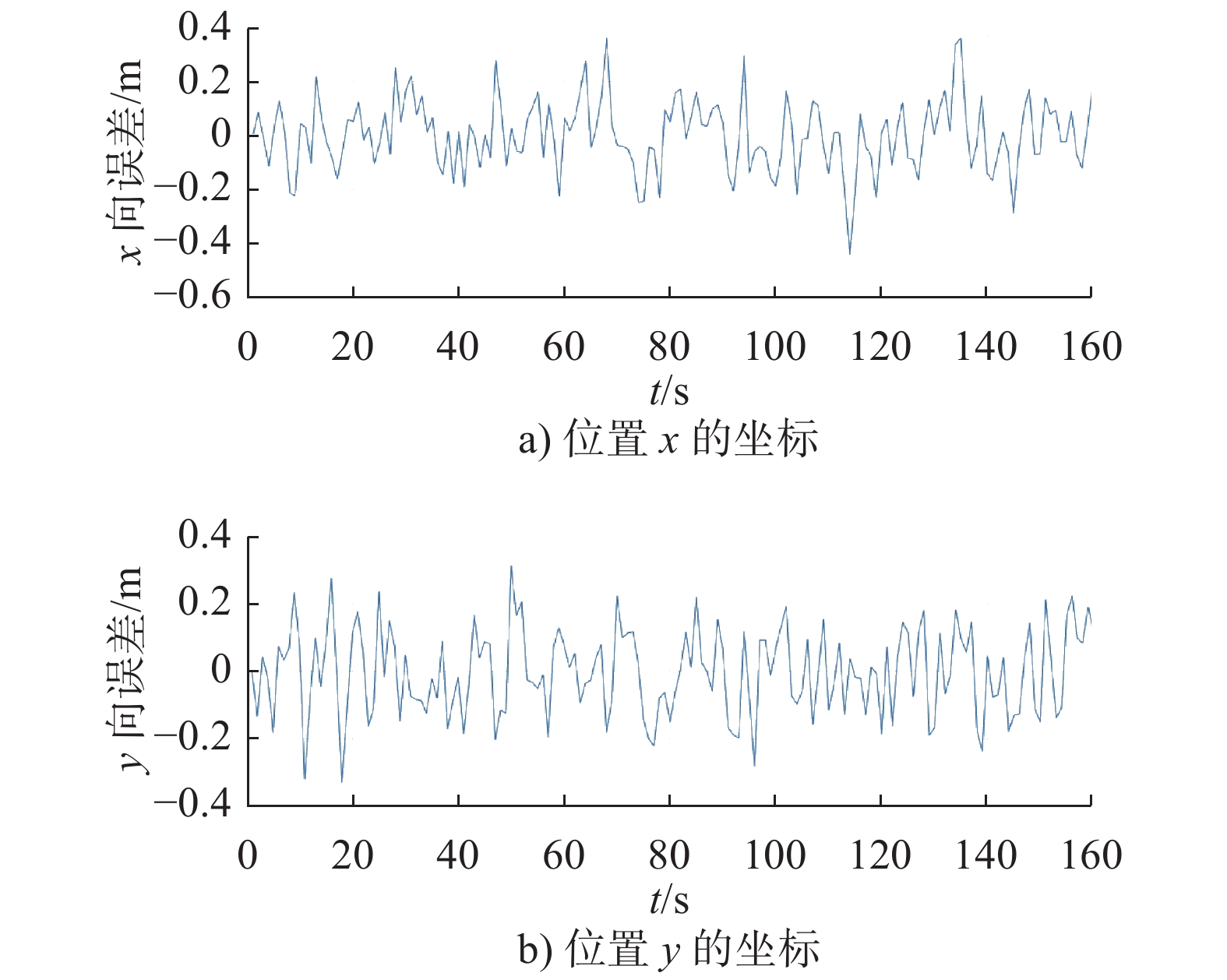
In order to reduce the influence of noise on millimeter wave radar data, an interactive Kalman filter algorithm is used to process the collected data and the optimal value of the data is obtained. The motion state equation of the target vehicle was constructed according to its motion trajectory, and the state matrix and observation matrix in different states were determined. Interactive multi-model filter was designed. The virtual traffic scene was built with dSPACE scene simulation software. The data acquisition of moving targets was realized with hardware-in-the-loop technology, and the radar data noise was analyzed and calculated. During the filtering process, the genetic algorithm was used to continuously optimize the process noise and measurement noise. The filtering performance of the algorithm was verified by the set target motion trajectory. The average error of the radar data obtained by the filtering algorithm was less than 0.1 m. The noise of the radar data was reduced, the positioning and tracking capabilities of the target vehicle were improved.
In order to reduce the influence of noise on millimeter wave radar data, an interactive Kalman filter algorithm is used to process the collected data and the optimal value of the data is obtained. The motion state equation of the target vehicle was constructed according to its motion trajectory, and the state matrix and observation matrix in different states were determined. Interactive multi-model filter was designed. The virtual traffic scene was built with dSPACE scene simulation software. The data acquisition of moving targets was realized with hardware-in-the-loop technology, and the radar data noise was analyzed and calculated. During the filtering process, the genetic algorithm was used to continuously optimize the process noise and measurement noise. The filtering performance of the algorithm was verified by the set target motion trajectory. The average error of the radar data obtained by the filtering algorithm was less than 0.1 m. The noise of the radar data was reduced, the positioning and tracking capabilities of the target vehicle were improved.



, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190260
Abstract:
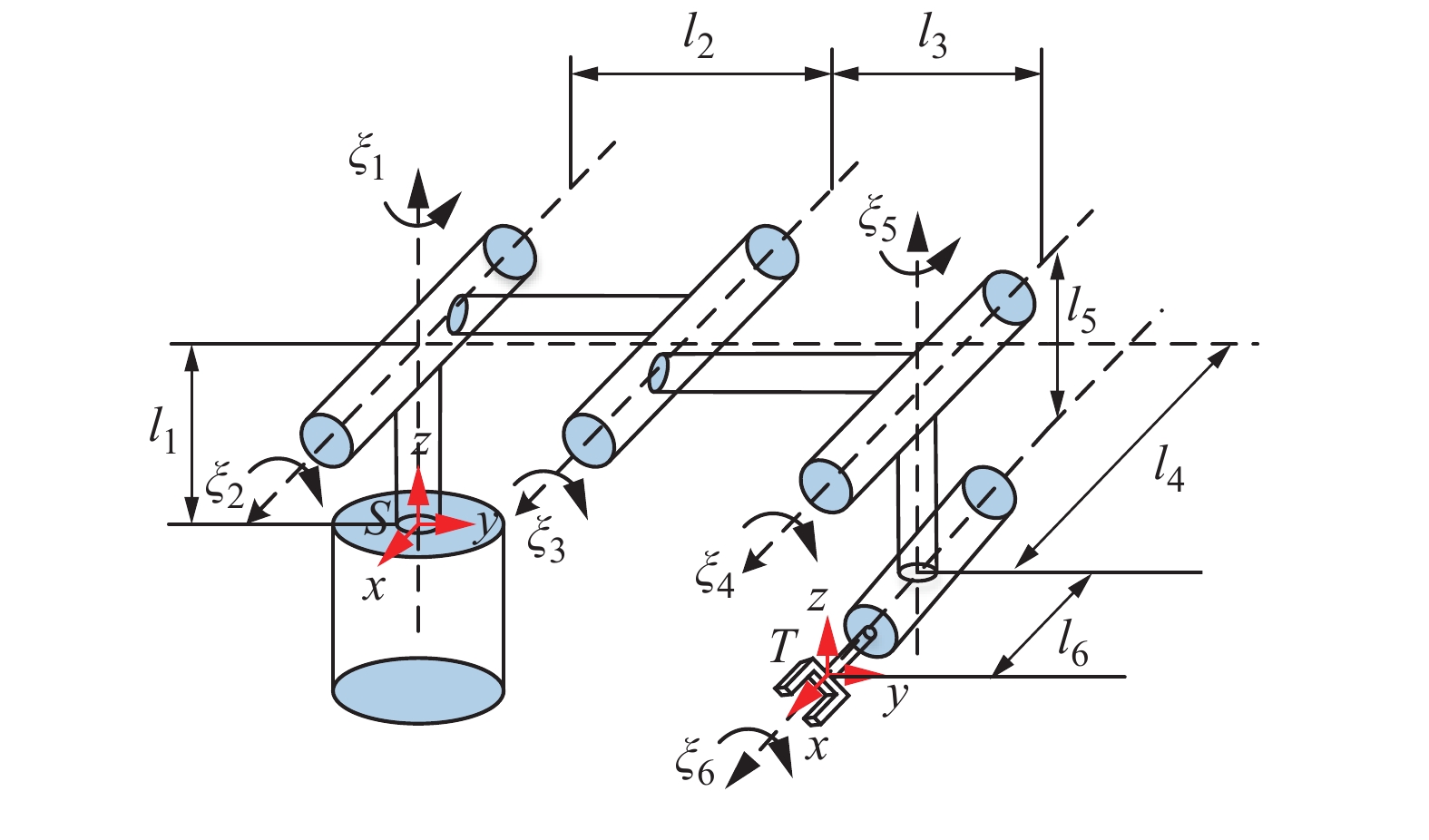
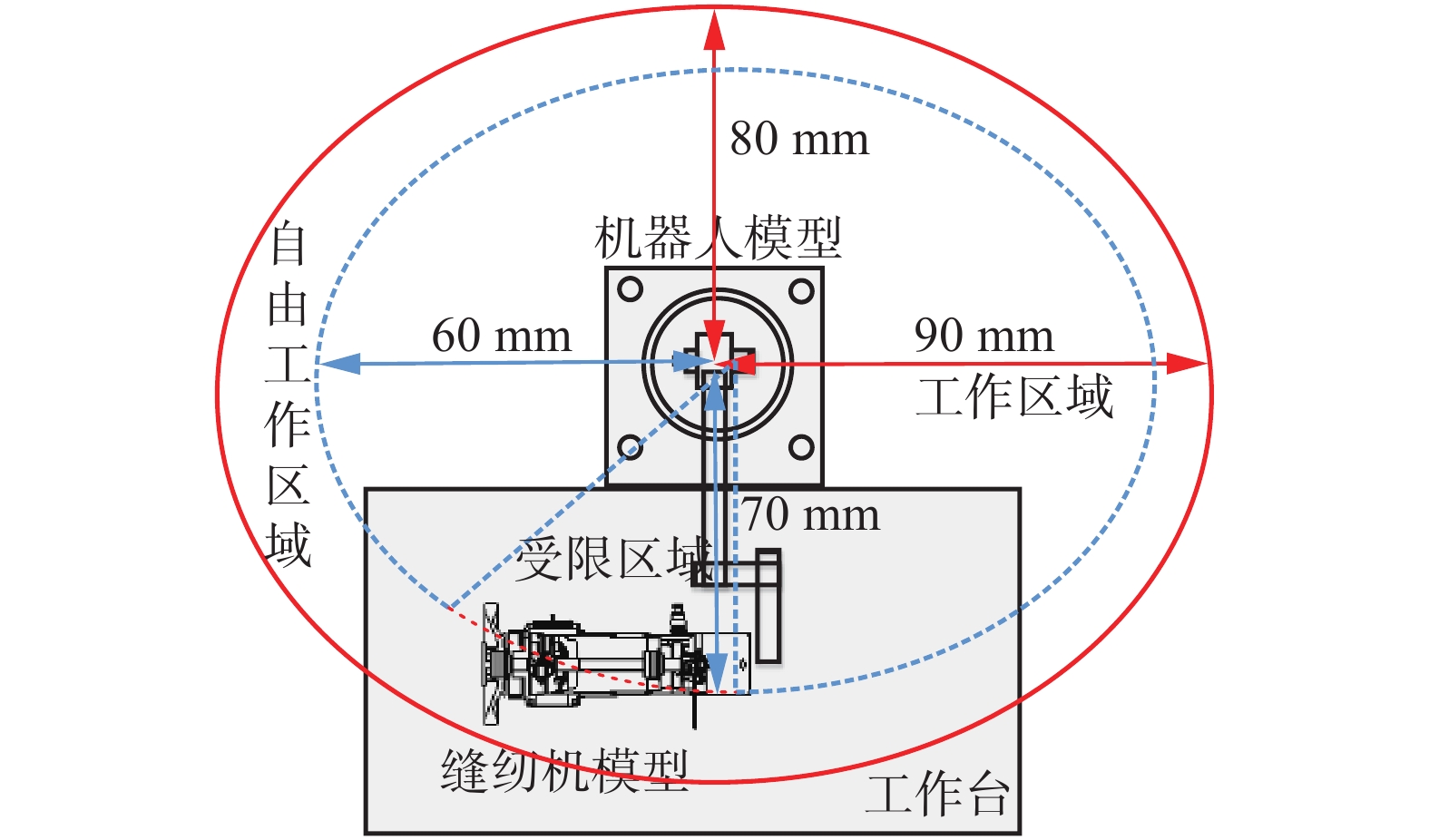
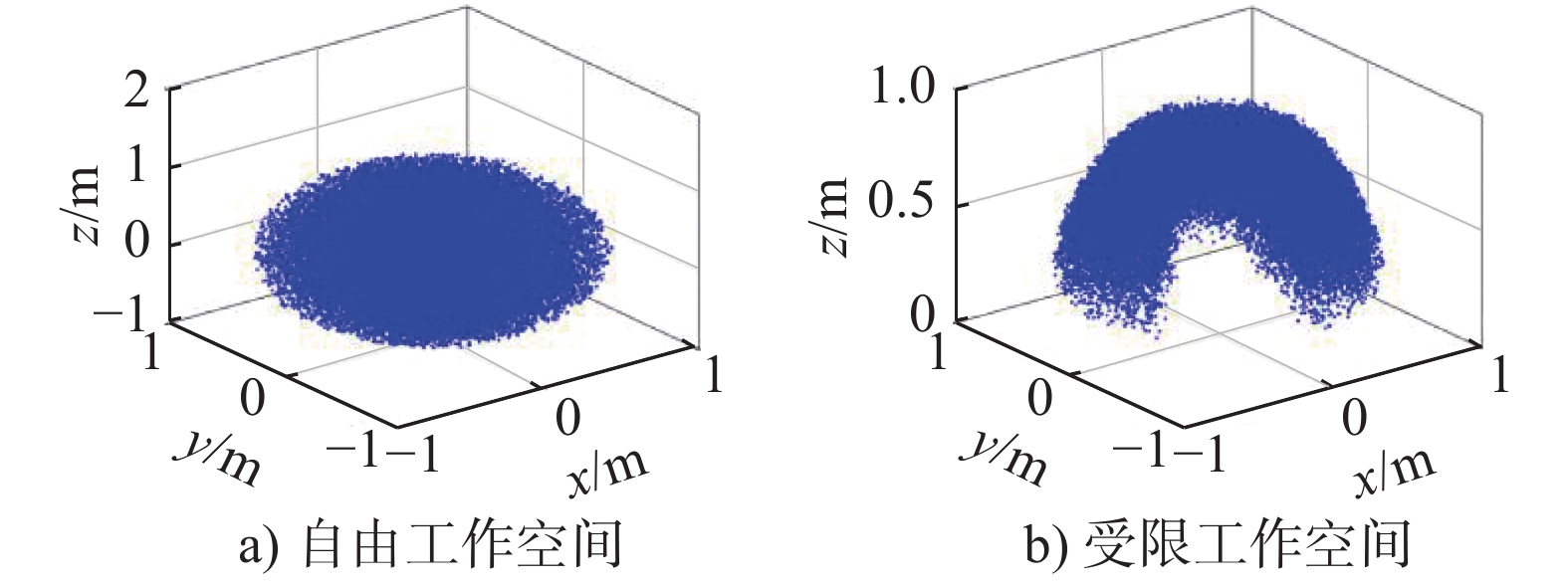
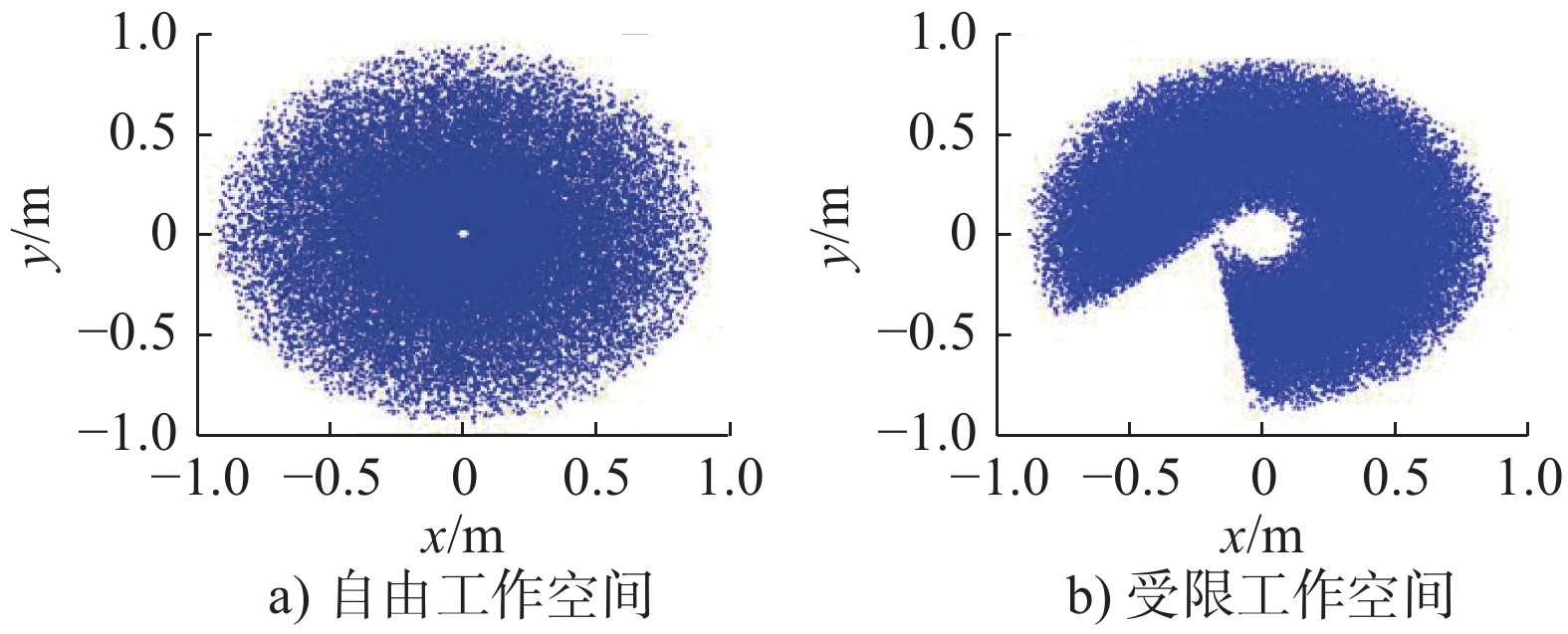
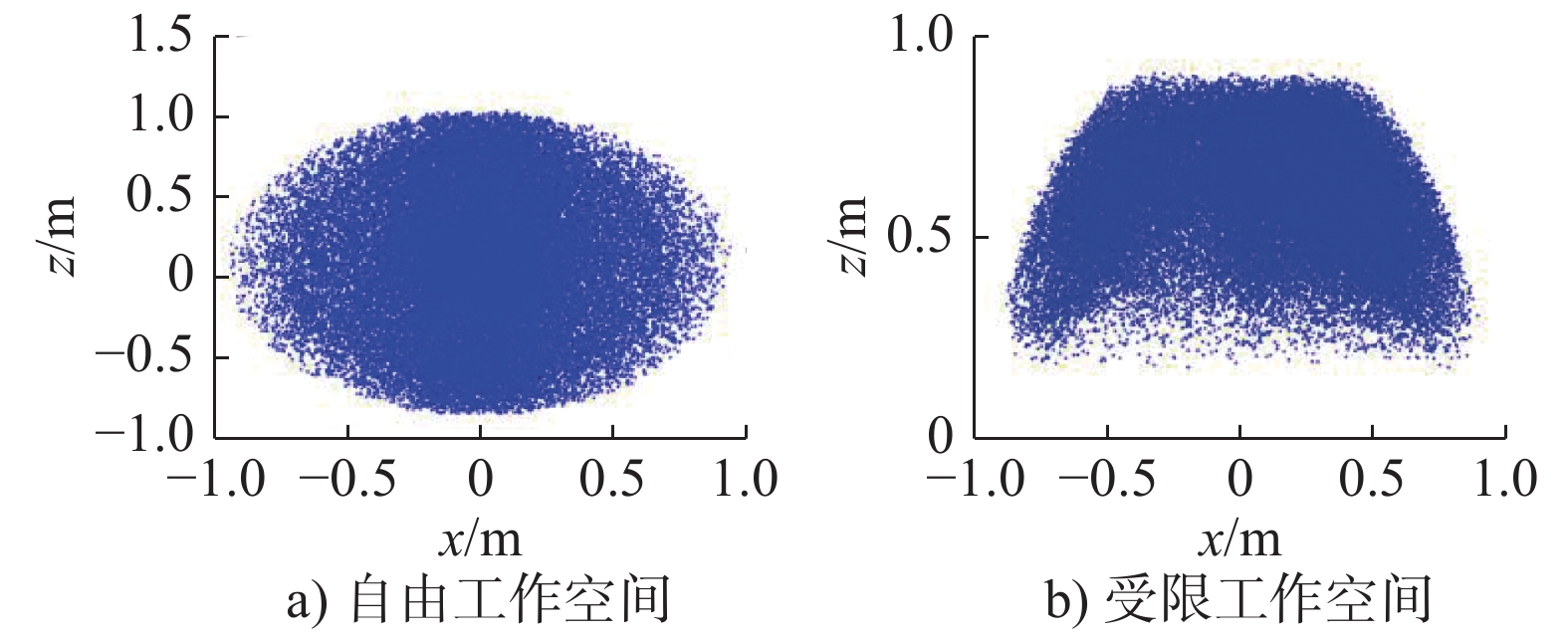
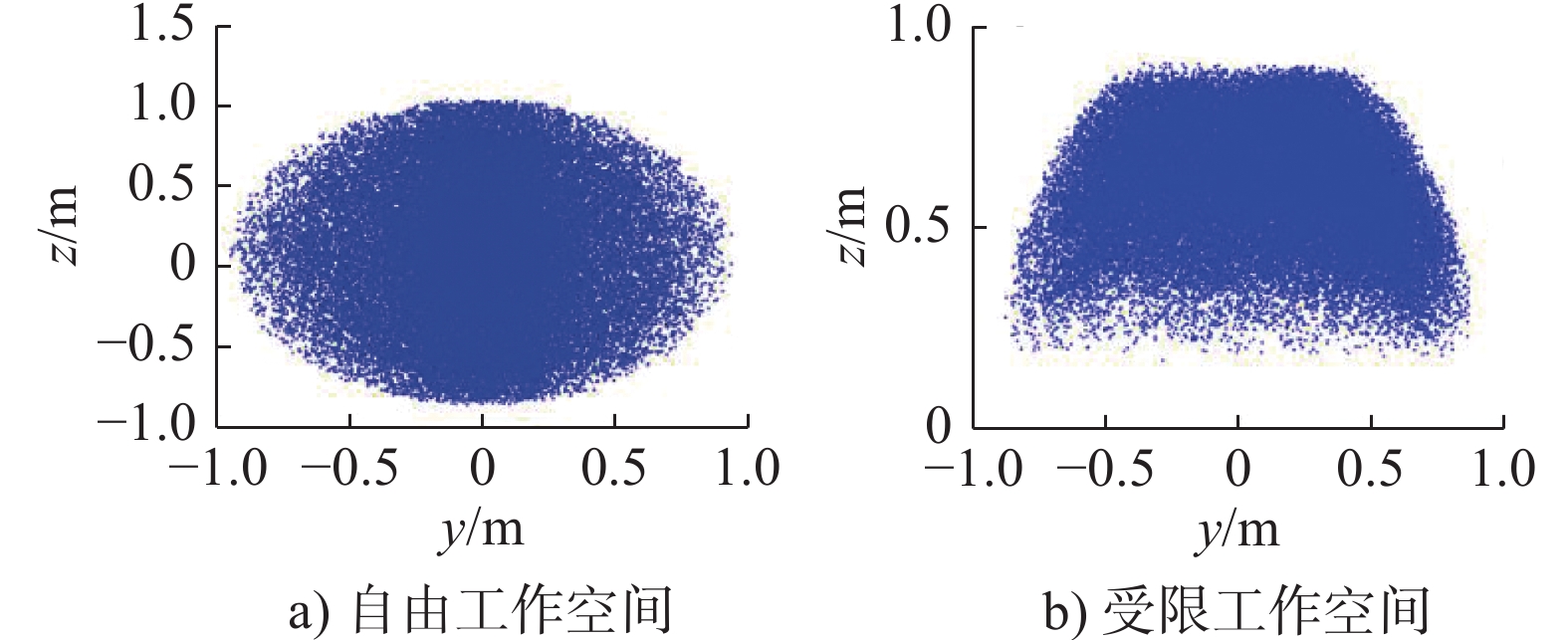
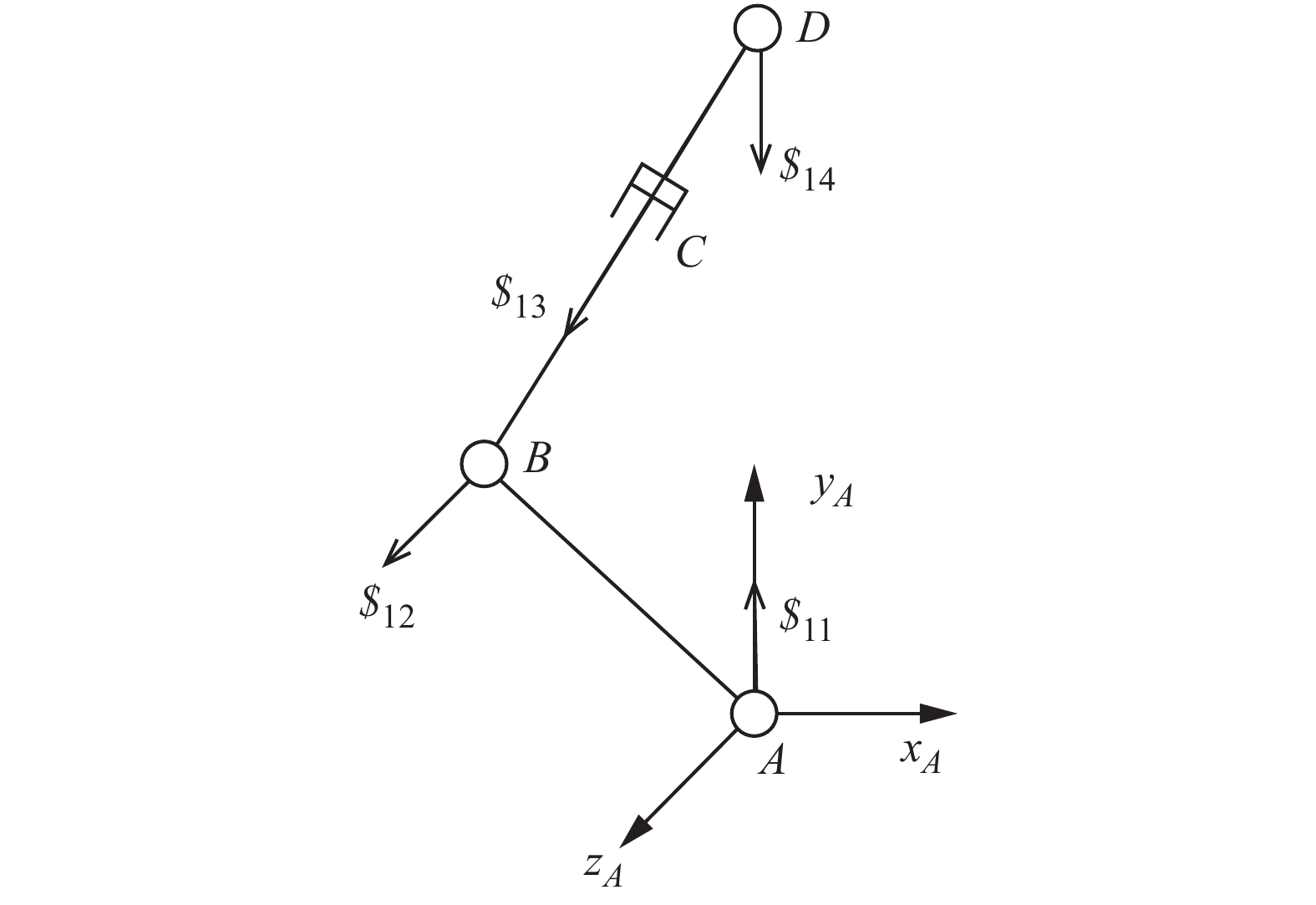
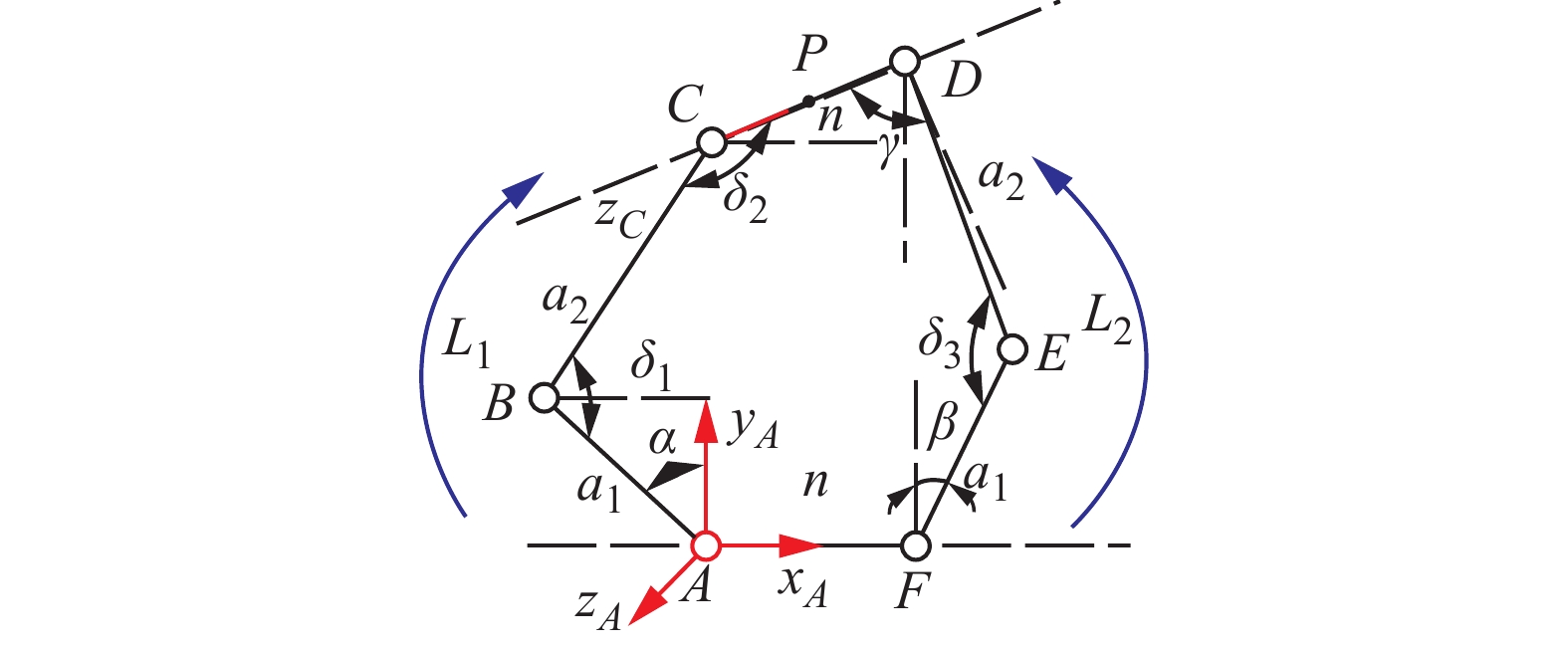
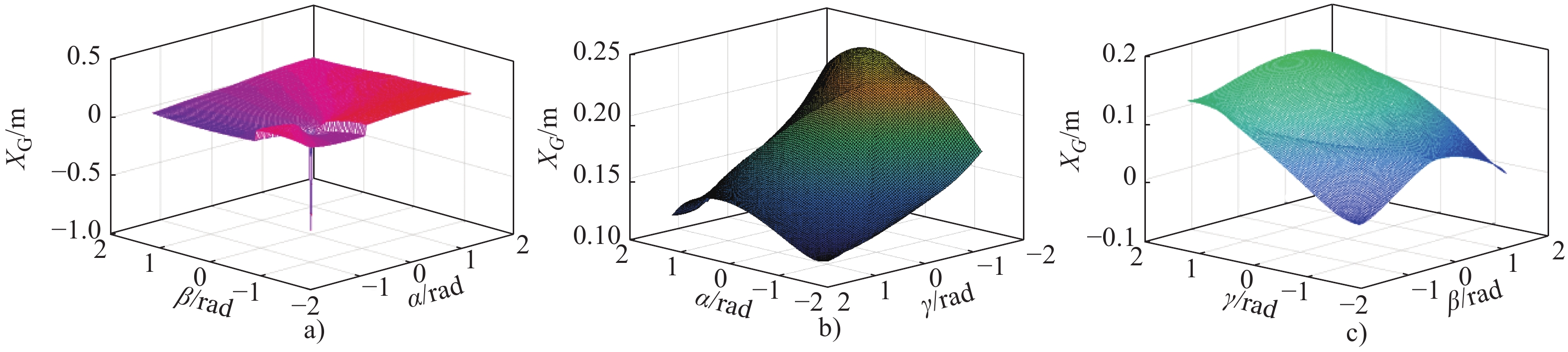
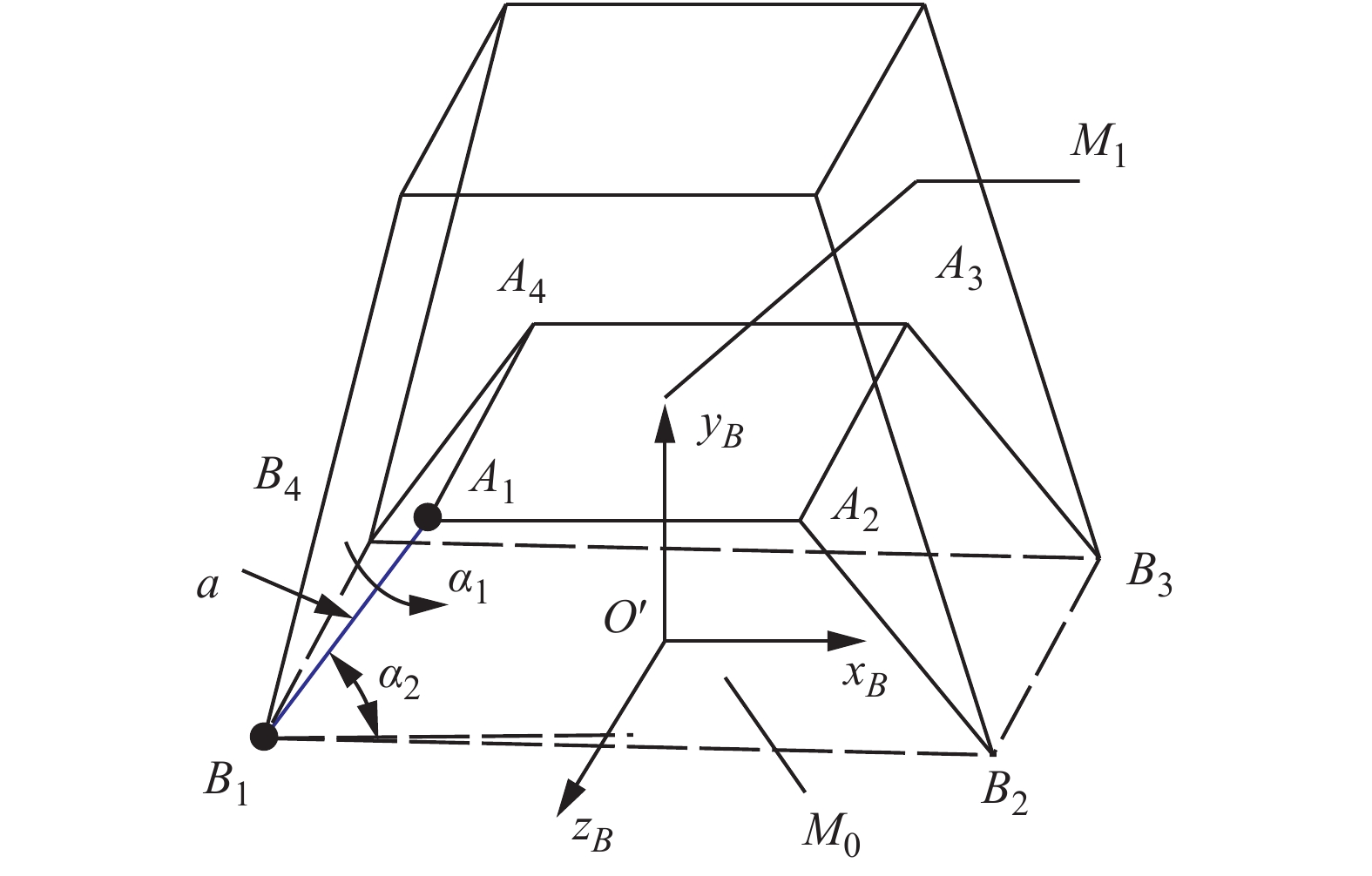
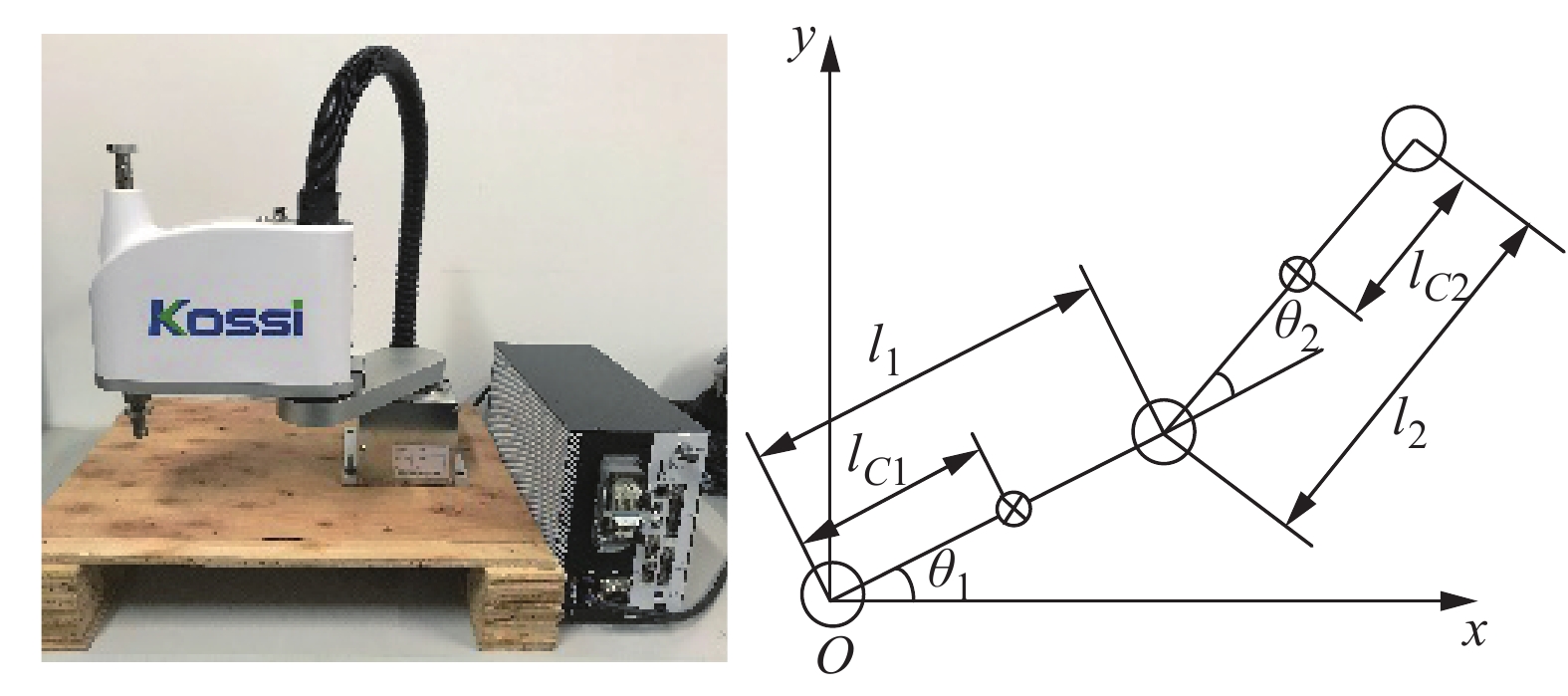
In order to determine the sewing robot′s workspace so as to meet its structural conditions and to improve the planning efficiency before its operation,its kinematics model is established with the screw theory.The correctness of the kinematic model is verified with the Adams software. The Monte Carlo method together with the control variable method is used to analyze the workspace that has regional restrictions and to determine the optimal range of rotation angles for each joint of the sewing robot in its actual working environment. The free and limited conditions of the cloud map of its workspace are simulated with the MATLAB. The simulation results show that the joint rotation angle range determined in this paper satisfies the actual workspace requirements of the sewing robot and provides a theoretical basis for the follow-up research of it.
In order to determine the sewing robot′s workspace so as to meet its structural conditions and to improve the planning efficiency before its operation,its kinematics model is established with the screw theory.The correctness of the kinematic model is verified with the Adams software. The Monte Carlo method together with the control variable method is used to analyze the workspace that has regional restrictions and to determine the optimal range of rotation angles for each joint of the sewing robot in its actual working environment. The free and limited conditions of the cloud map of its workspace are simulated with the MATLAB. The simulation results show that the joint rotation angle range determined in this paper satisfies the actual workspace requirements of the sewing robot and provides a theoretical basis for the follow-up research of it.

, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190255
Abstract:
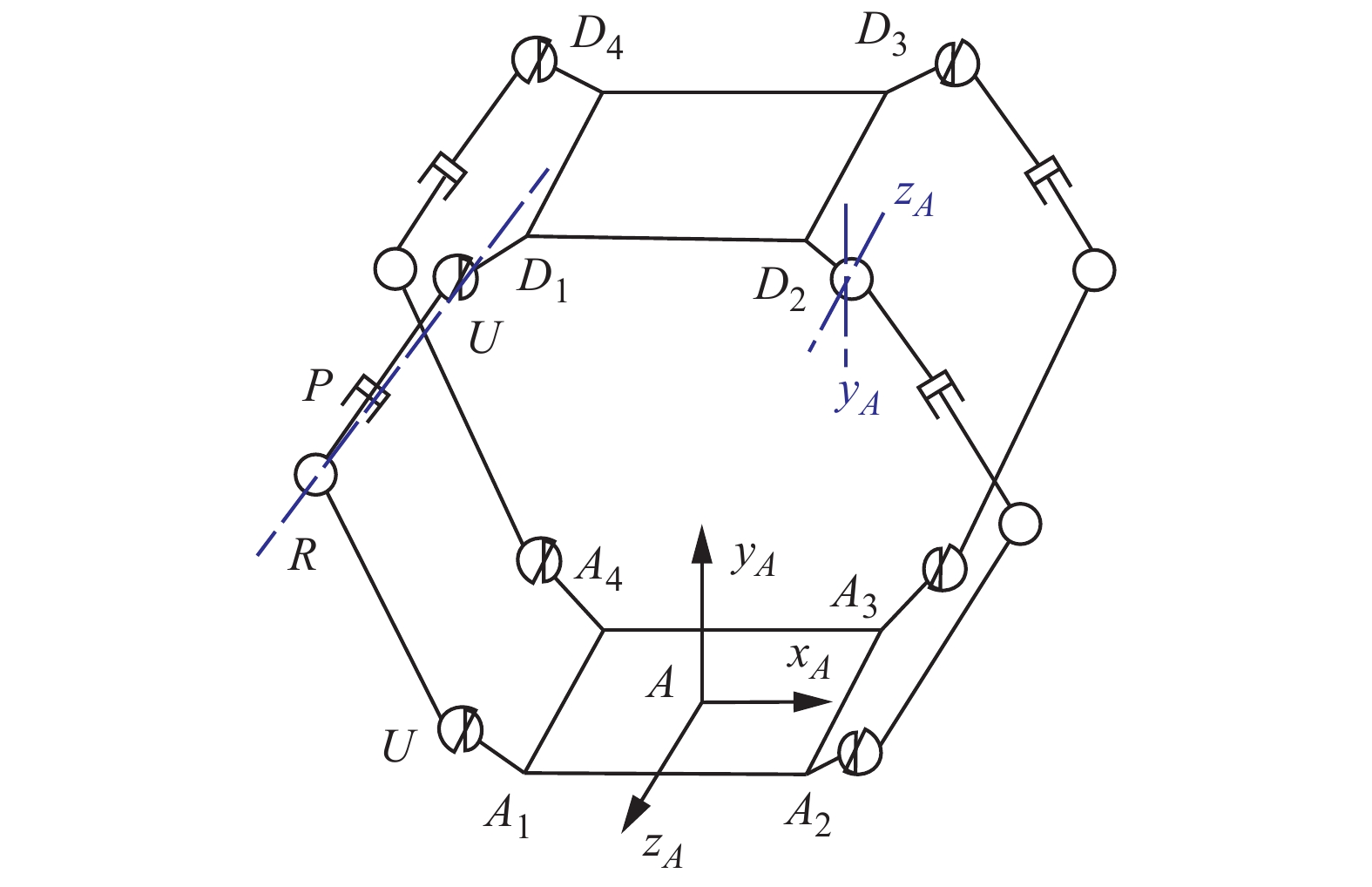
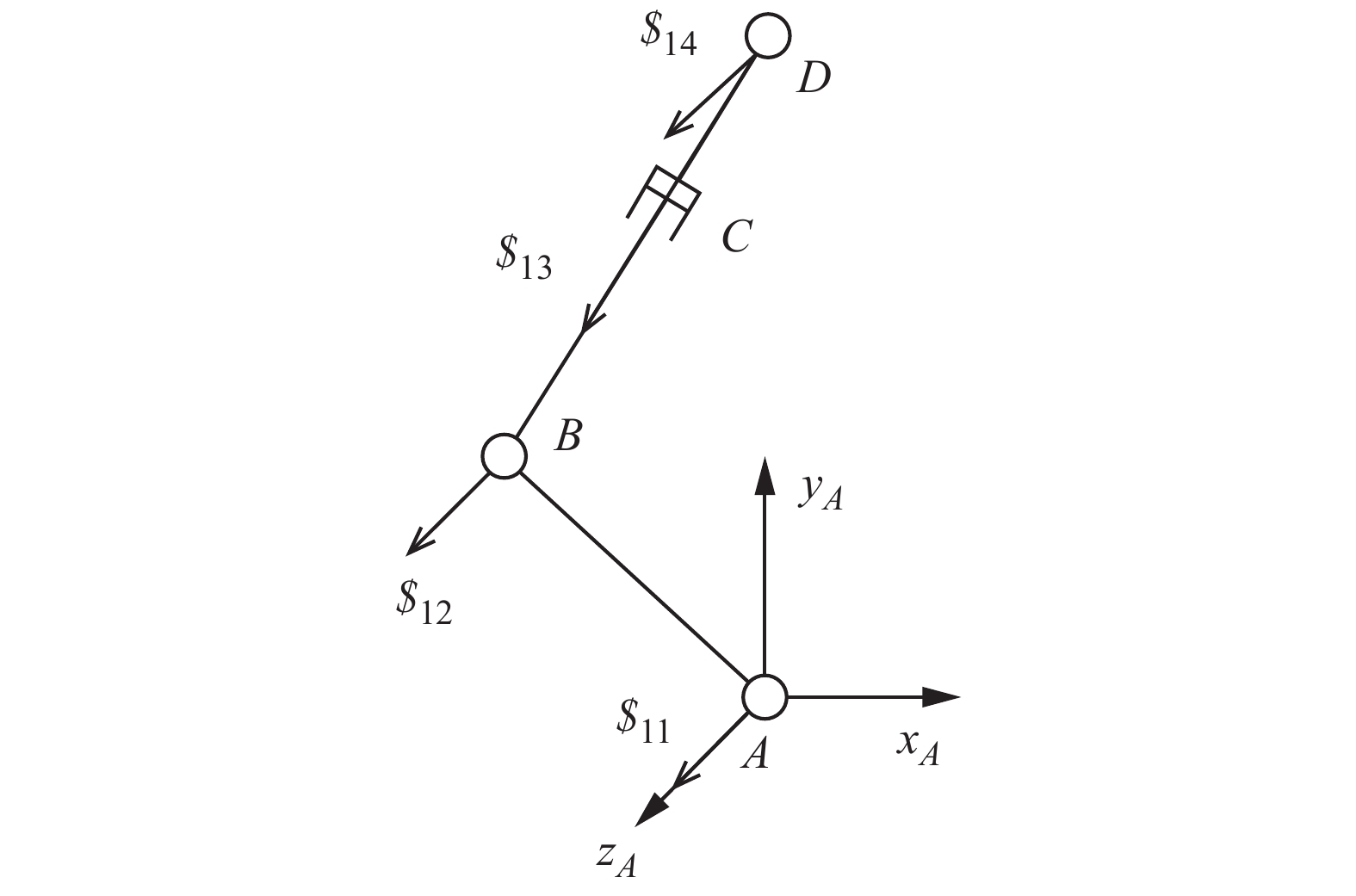
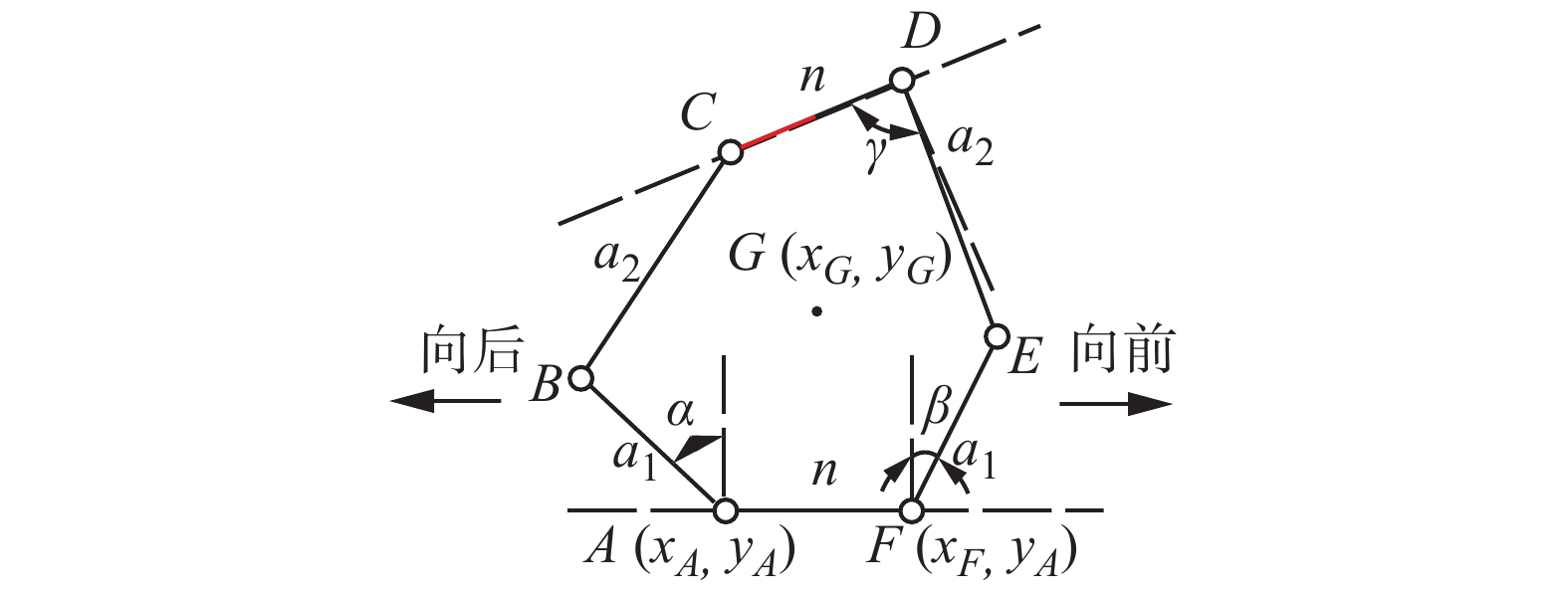
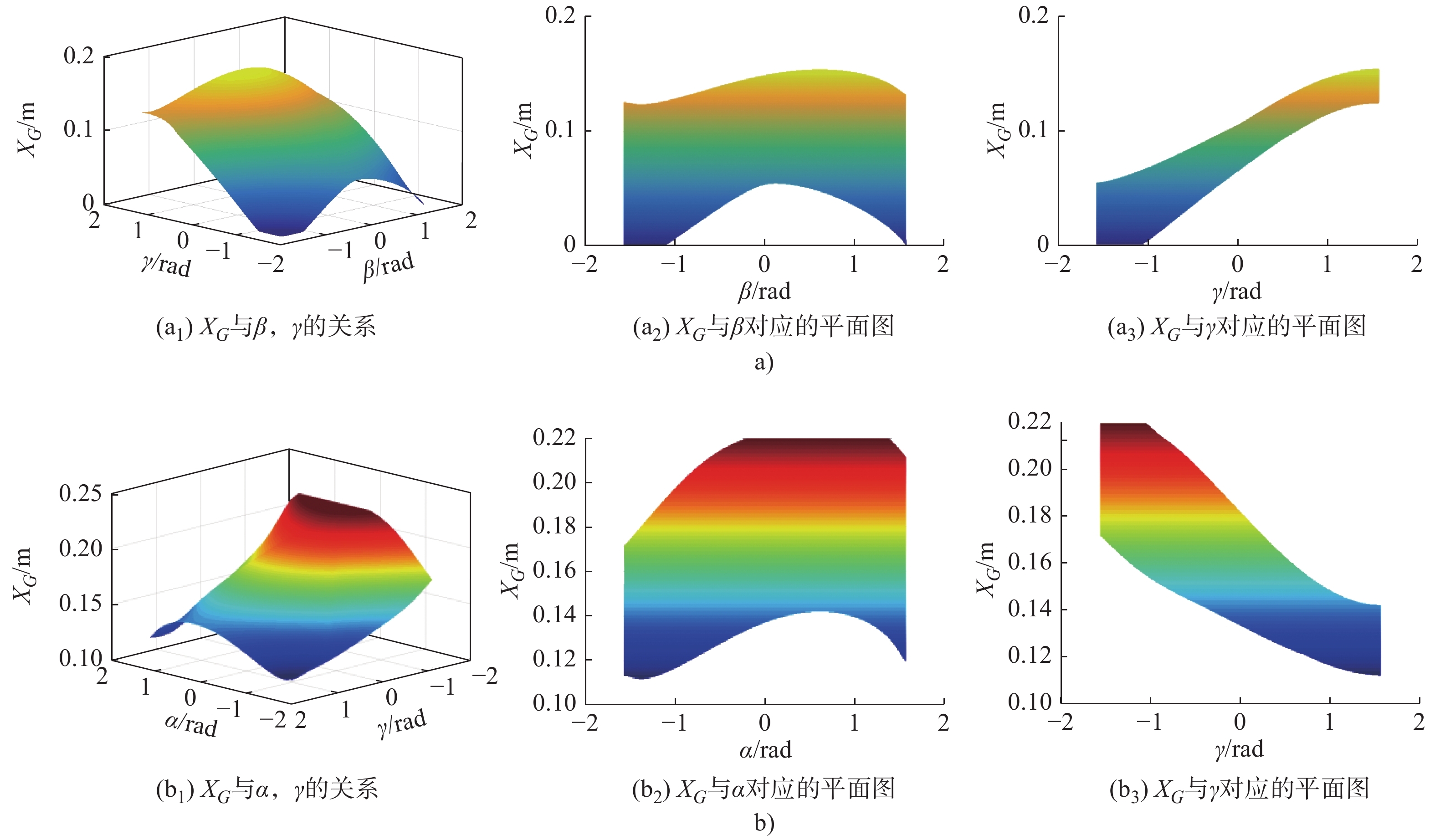
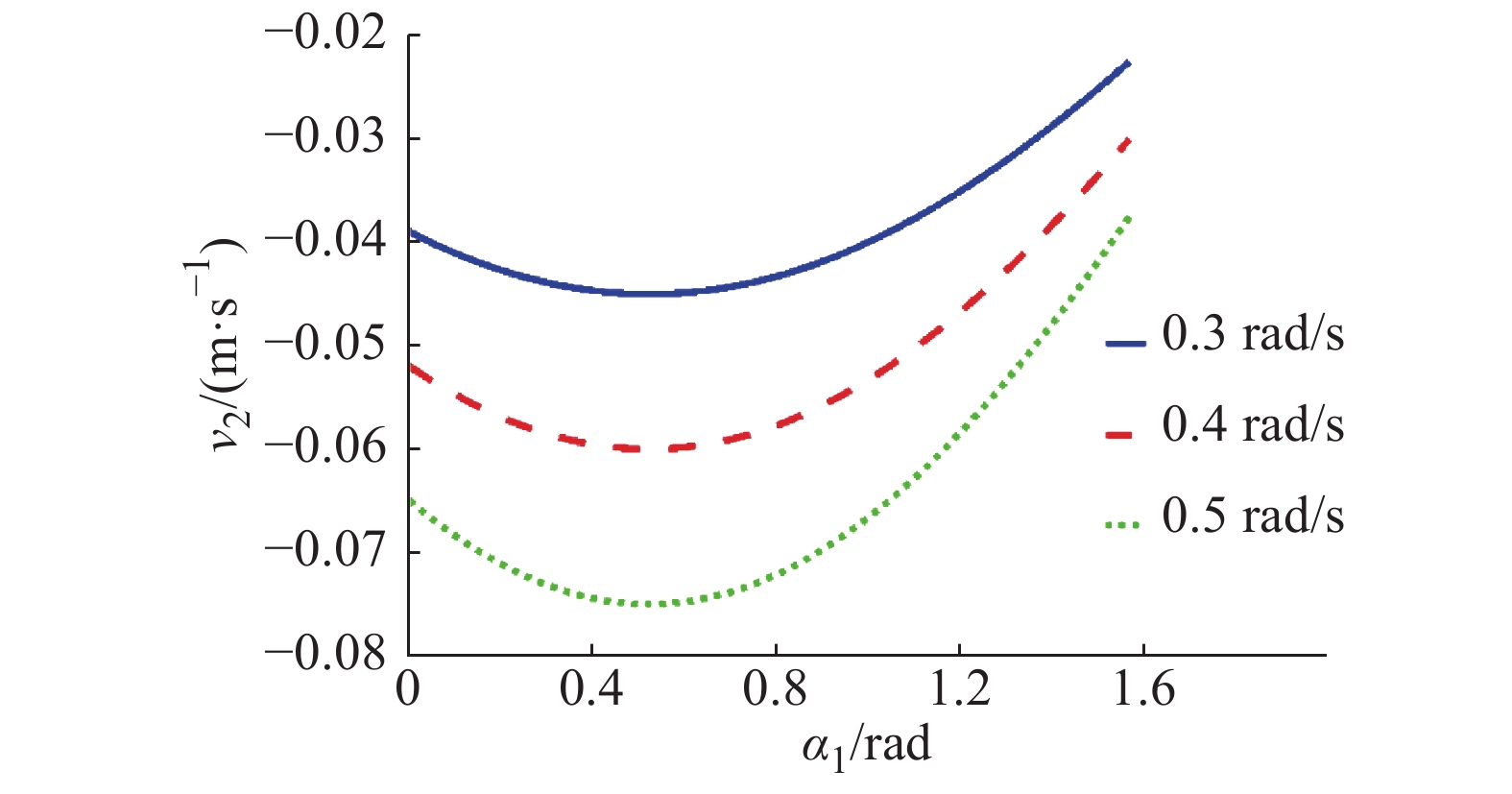
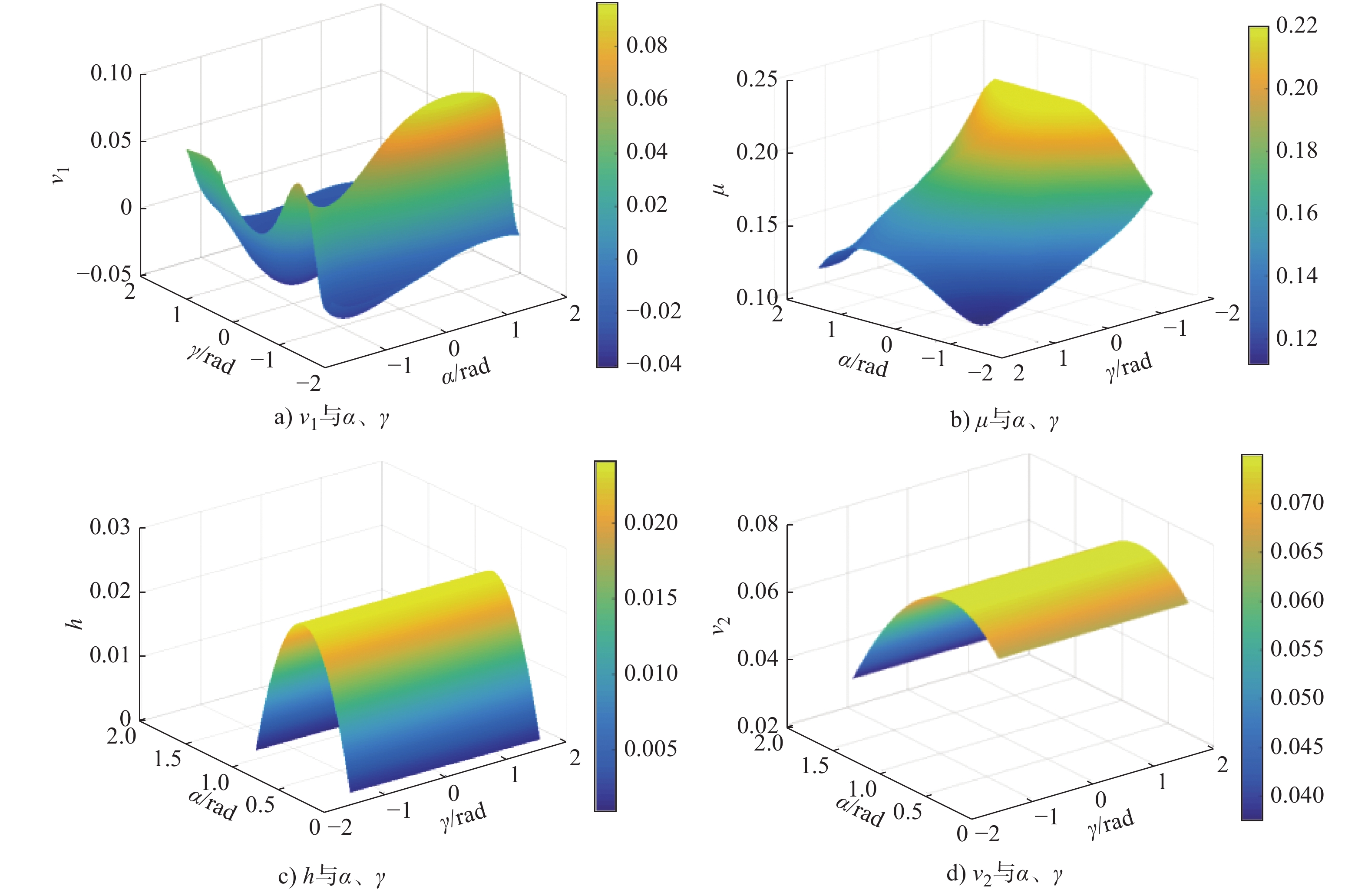
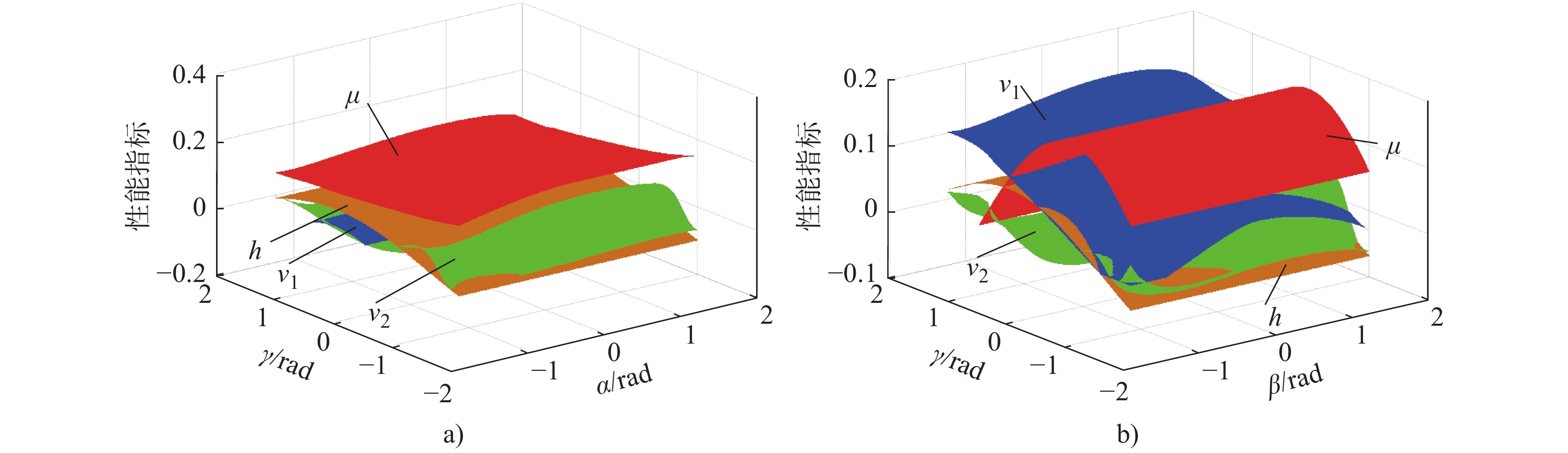
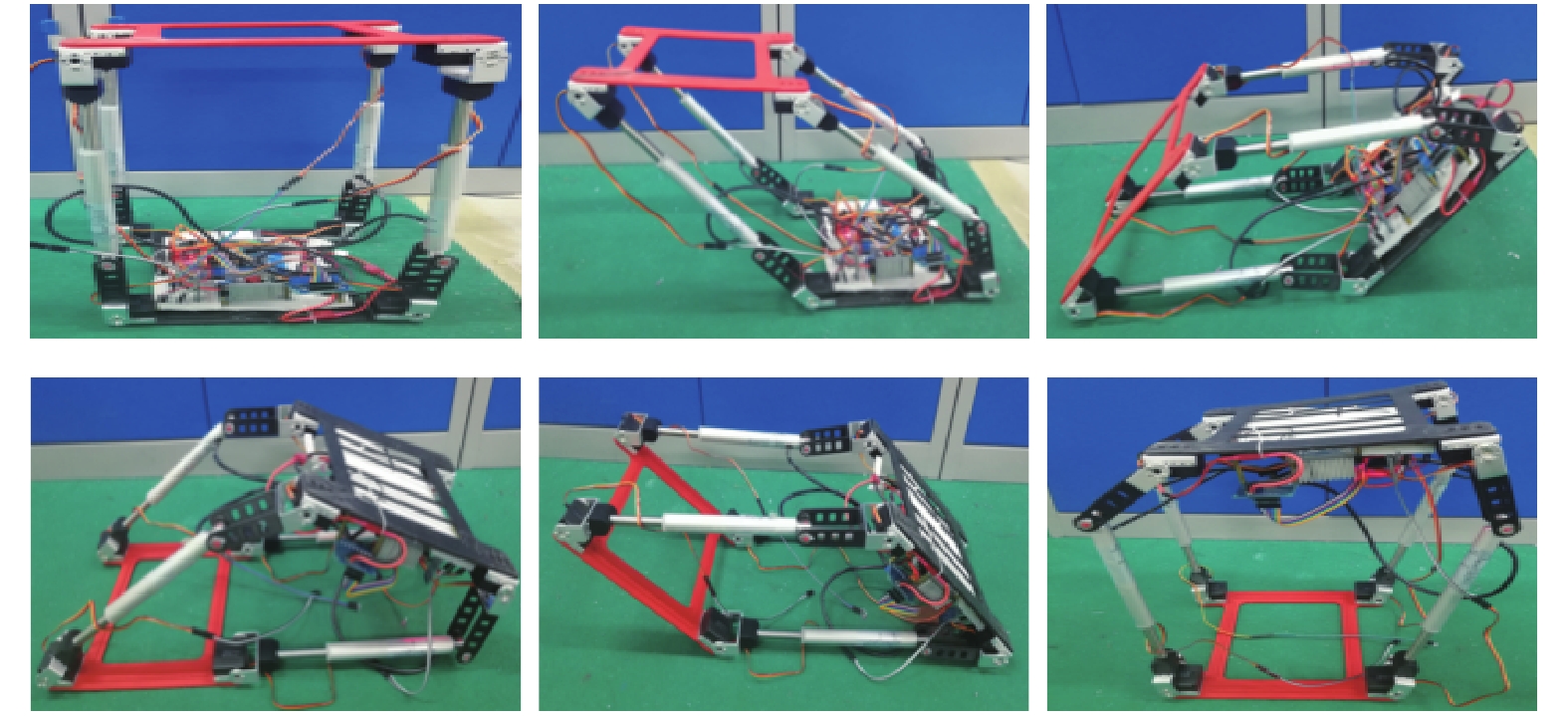
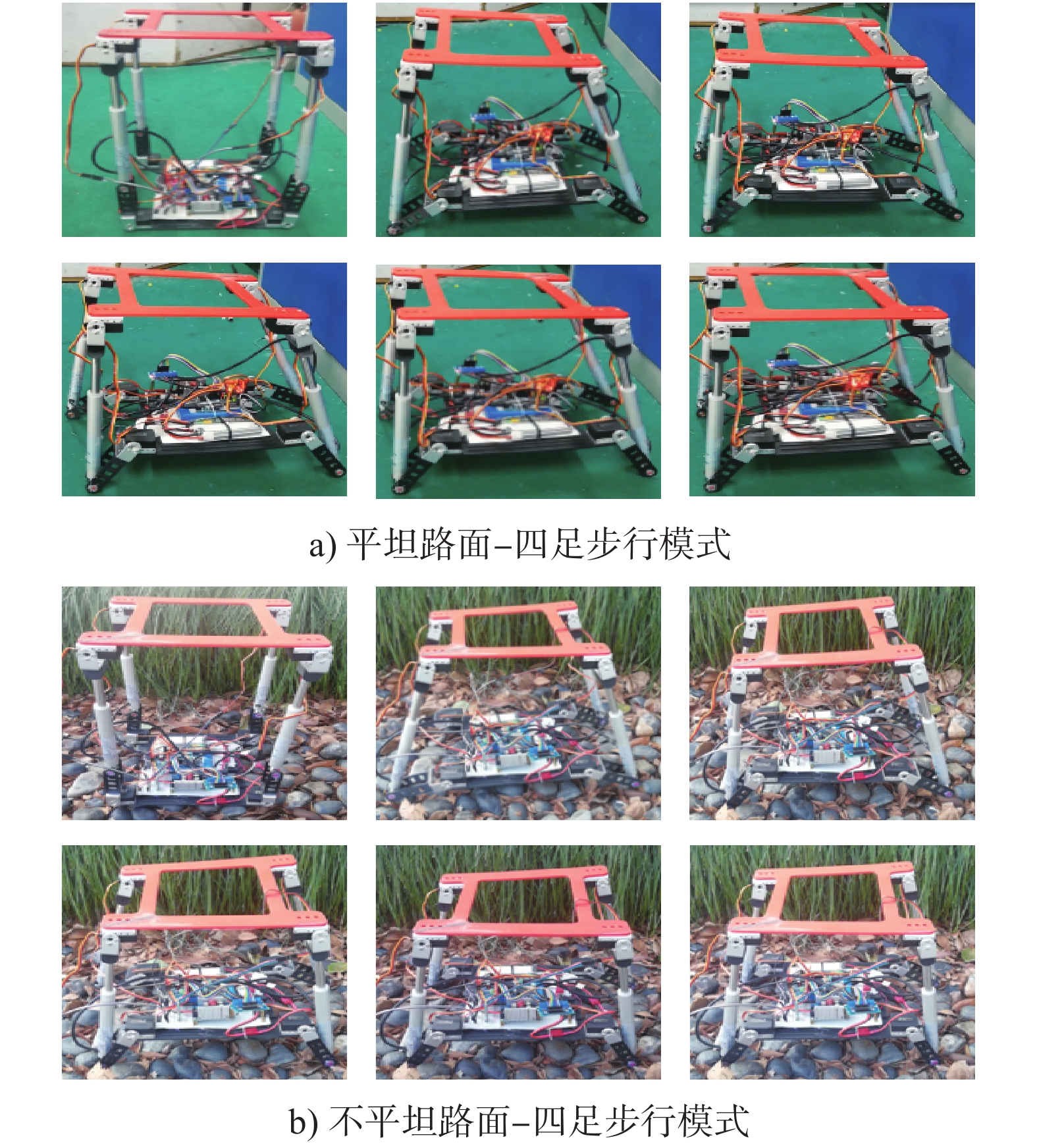
To adapt to the multi-terrain environment, a 4-URPU multiple locomotion modes mobile parallel mechanism is proposed, which integrates three motion modes of quadruped walking, creeping and rolling. The kinematic feasibility of the mechanism in each mode is analyzed by the screw theory. The position solution and velocity Jacobian matrix of the mechanism in each mode are solved, and a multi-objective optimization model is established to obtain a set of relative optimal solutions. The results show that the maximum speed performance index in walking process is lower than that in rolling process, and there are different optimal solutions for different working environments. Finally, a prototype test is carried out to verify the theoretical correctness and kinematic feasibility of the mechanism. The proposed mechanism can be applied to geographic environments with multiple topographic features such as nuclear power accidents, field and natural disasters, and has a certain application prospect.
To adapt to the multi-terrain environment, a 4-URPU multiple locomotion modes mobile parallel mechanism is proposed, which integrates three motion modes of quadruped walking, creeping and rolling. The kinematic feasibility of the mechanism in each mode is analyzed by the screw theory. The position solution and velocity Jacobian matrix of the mechanism in each mode are solved, and a multi-objective optimization model is established to obtain a set of relative optimal solutions. The results show that the maximum speed performance index in walking process is lower than that in rolling process, and there are different optimal solutions for different working environments. Finally, a prototype test is carried out to verify the theoretical correctness and kinematic feasibility of the mechanism. The proposed mechanism can be applied to geographic environments with multiple topographic features such as nuclear power accidents, field and natural disasters, and has a certain application prospect.



, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190227
Abstract:
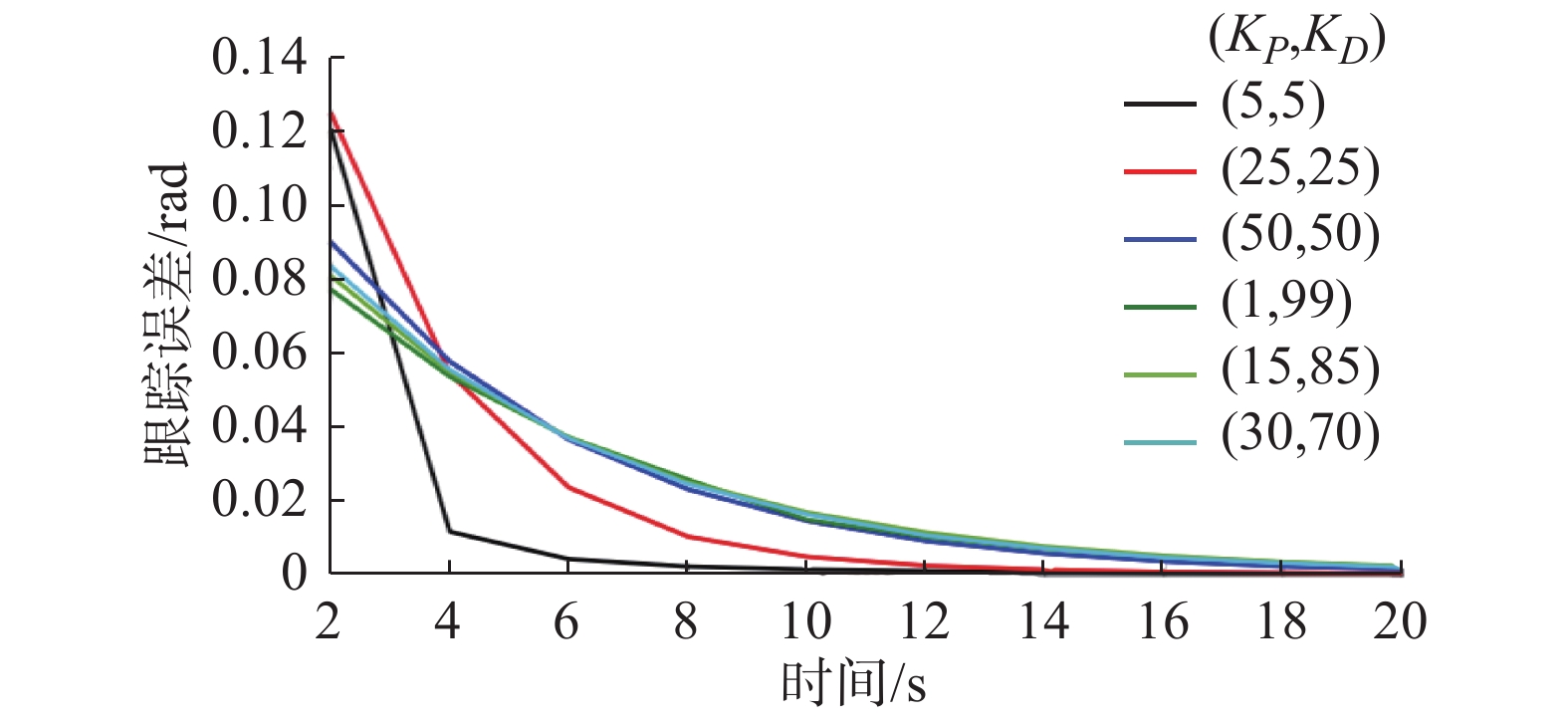
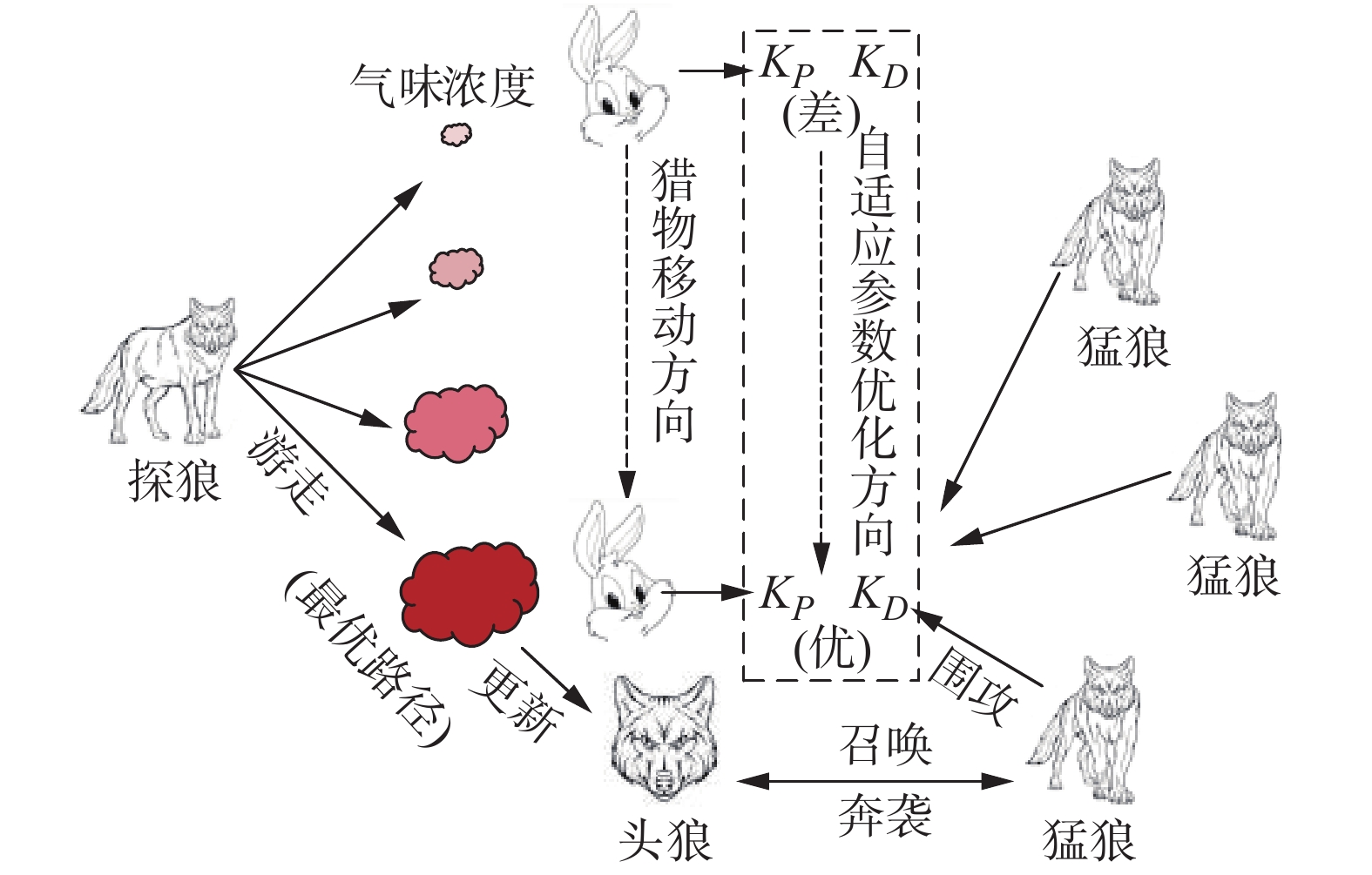
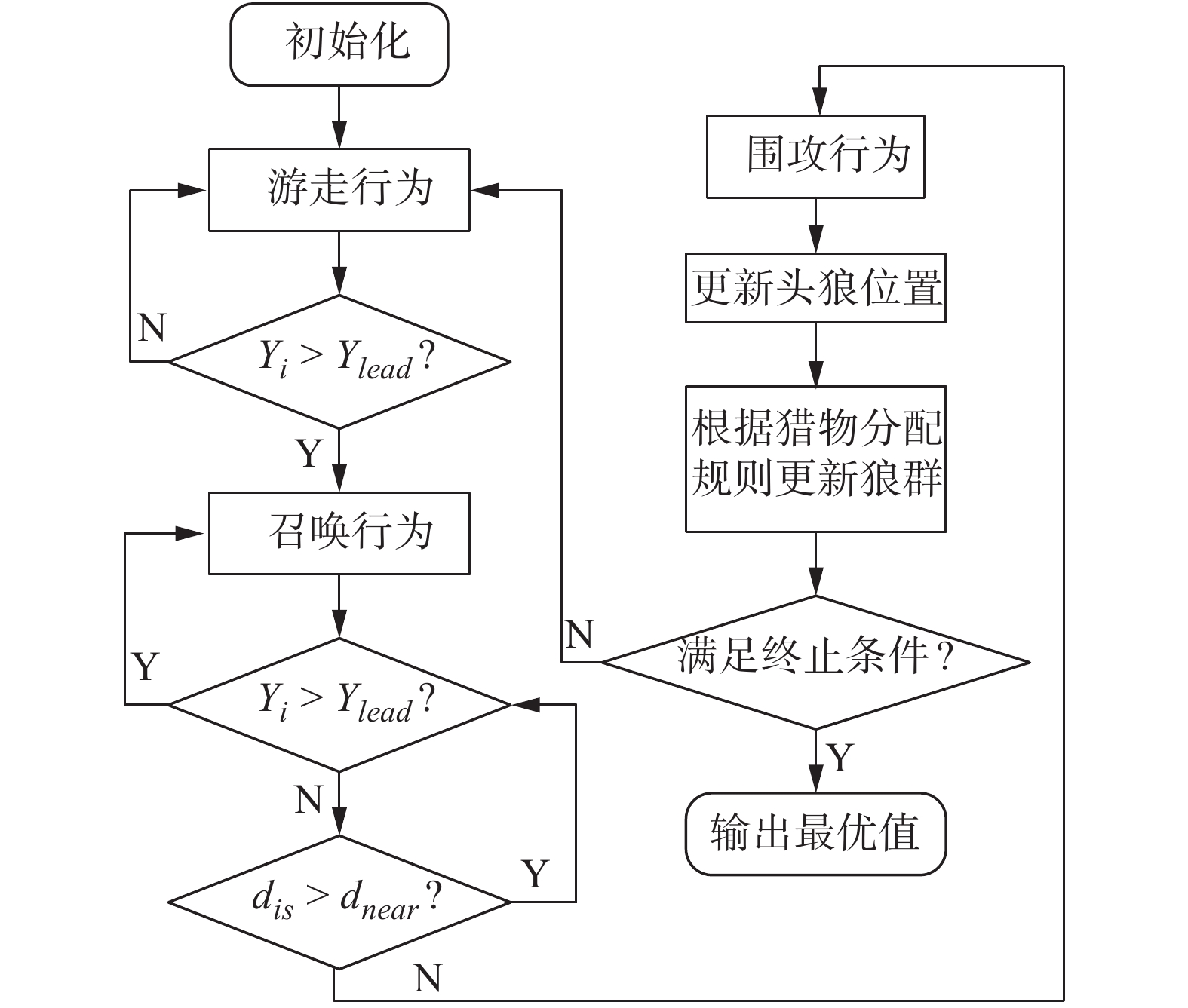
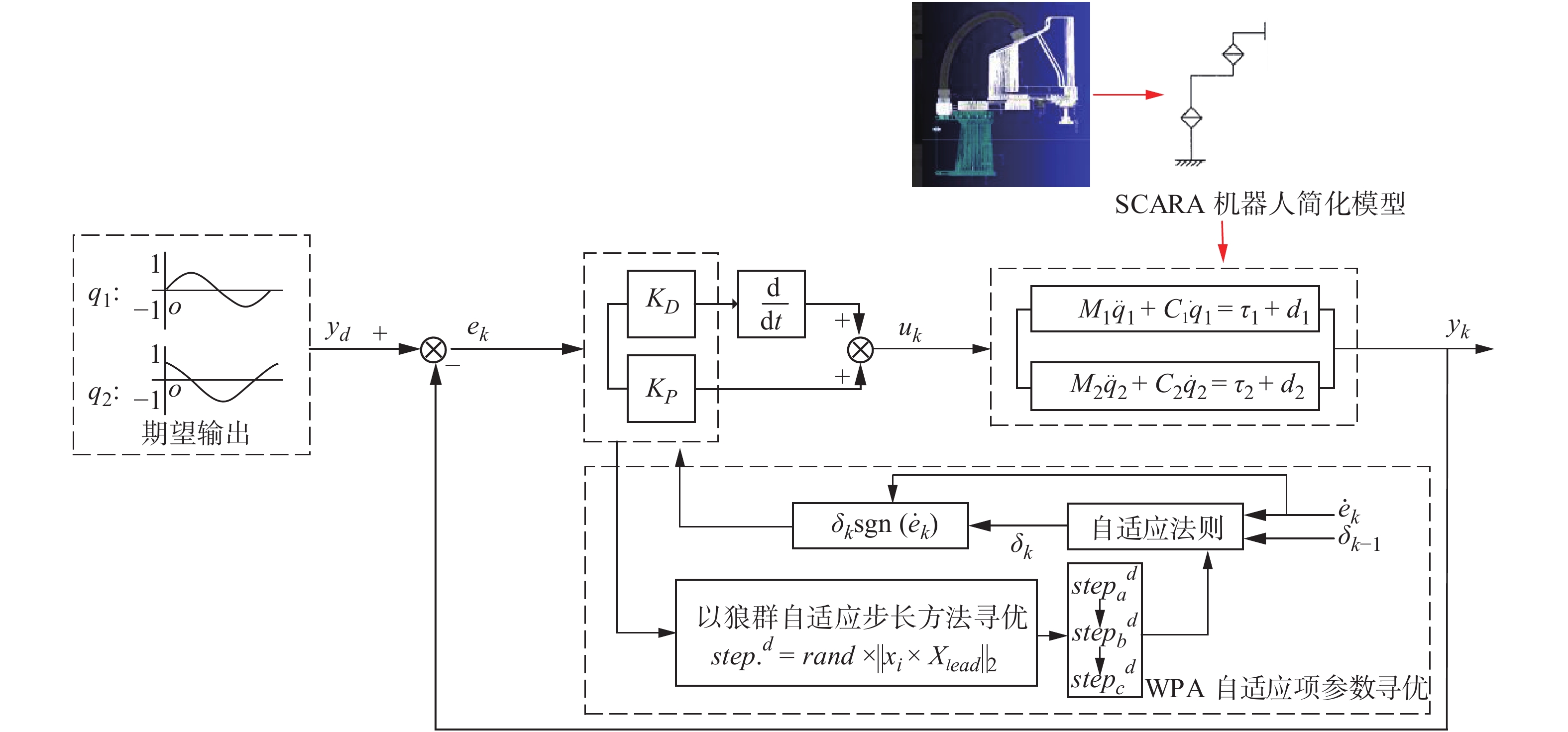
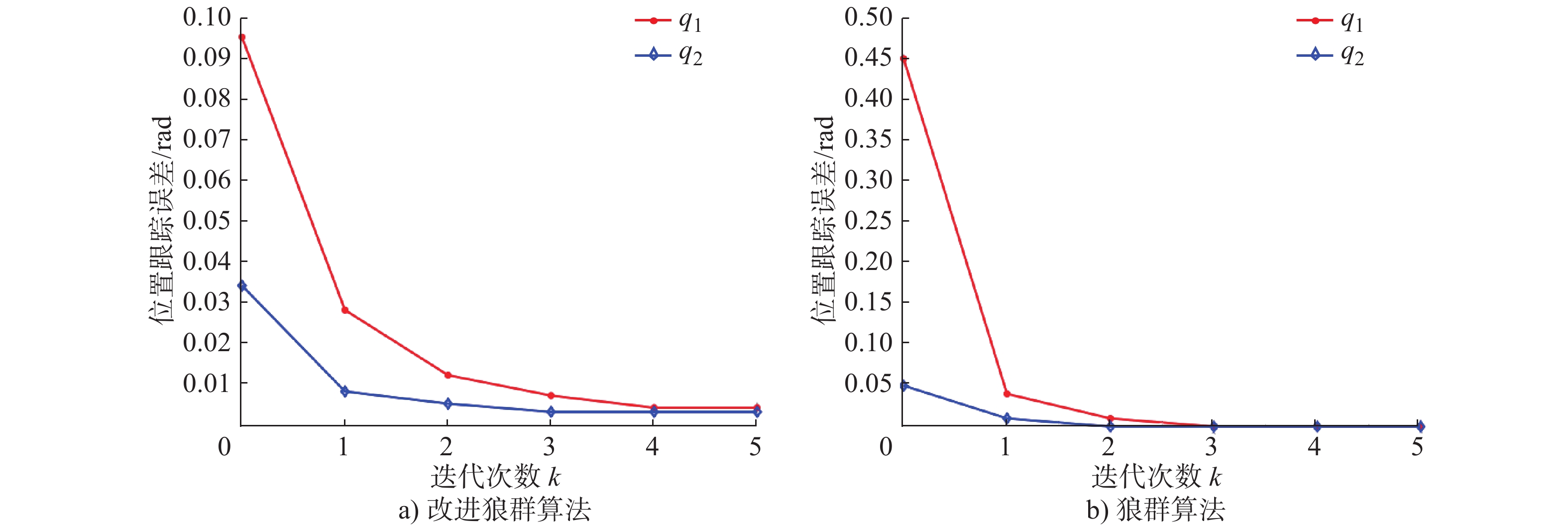
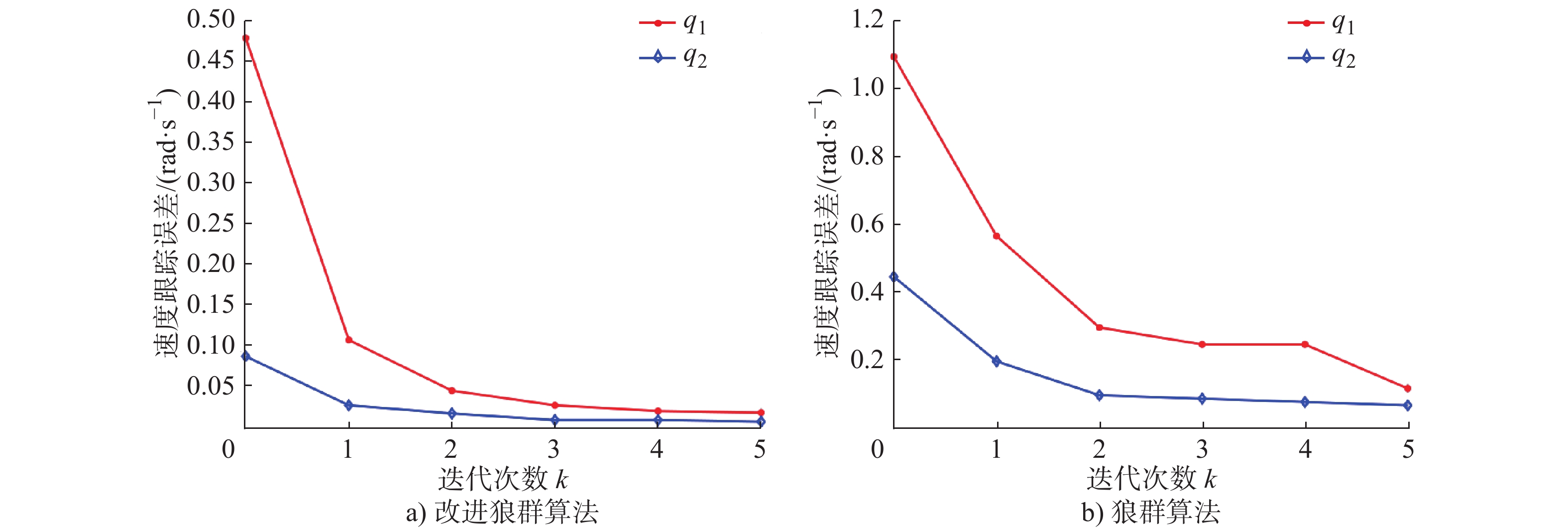
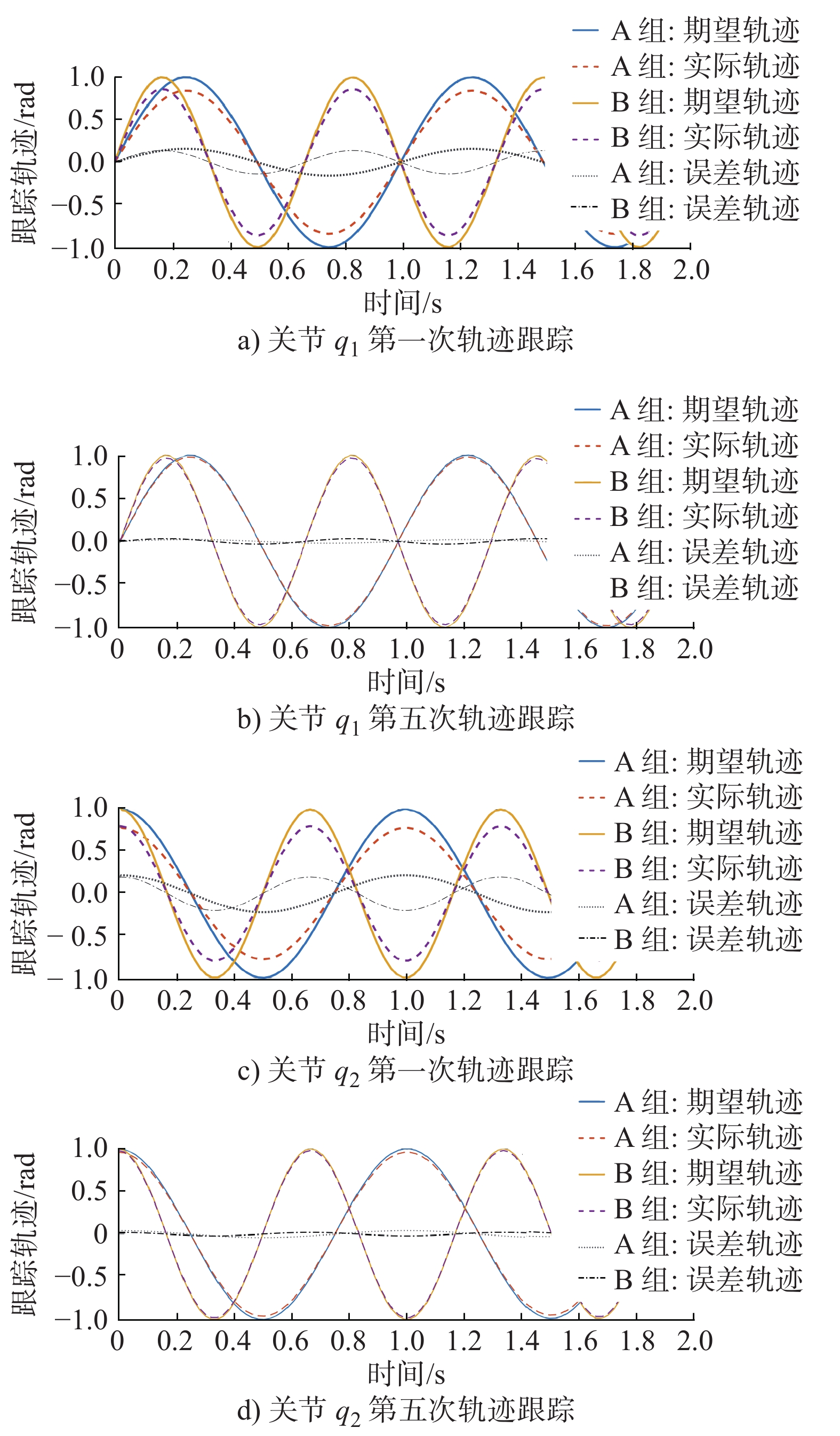
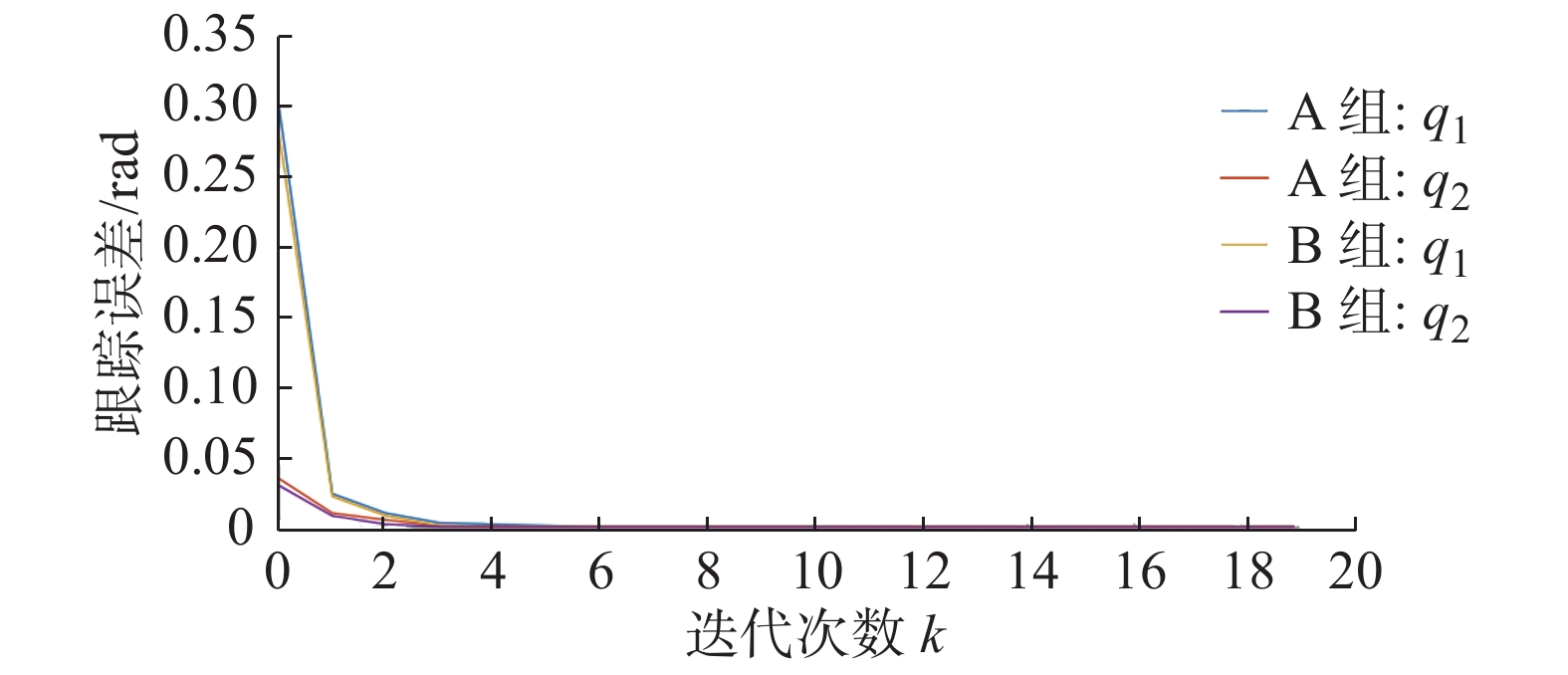
Aiming at reducing the position and speed tracking error of robot repetitive motion, an adaptive iterative learning control strategy based on wolf group algorithm is presented in this paper. According to the SCARA (Selective compliance assembly robot arm) manipulator drive equation, the iterative learning control law of the dynamic system is designed. The wolf group algorithm with adaptive step size is introduced to enable the wolf to dynamically adjust the moving step size according to the prey odor concentration, which improves the convergence speed and accuracy. When the strategy optimizes the parameters of the arm controller KP and KD, the result is effect for control and achieves effective tracking of the desired trajectory. The experimental results show that the adaptive control systems has good flexibility, high tracking accuracy for the system's desired trajectory, and effectively reduces the position and velocity tracking error of the double joint manipulator, which has strong feasibility and effectiveness.
Aiming at reducing the position and speed tracking error of robot repetitive motion, an adaptive iterative learning control strategy based on wolf group algorithm is presented in this paper. According to the SCARA (Selective compliance assembly robot arm) manipulator drive equation, the iterative learning control law of the dynamic system is designed. The wolf group algorithm with adaptive step size is introduced to enable the wolf to dynamically adjust the moving step size according to the prey odor concentration, which improves the convergence speed and accuracy. When the strategy optimizes the parameters of the arm controller KP and KD, the result is effect for control and achieves effective tracking of the desired trajectory. The experimental results show that the adaptive control systems has good flexibility, high tracking accuracy for the system's desired trajectory, and effectively reduces the position and velocity tracking error of the double joint manipulator, which has strong feasibility and effectiveness.


, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190254
Abstract:
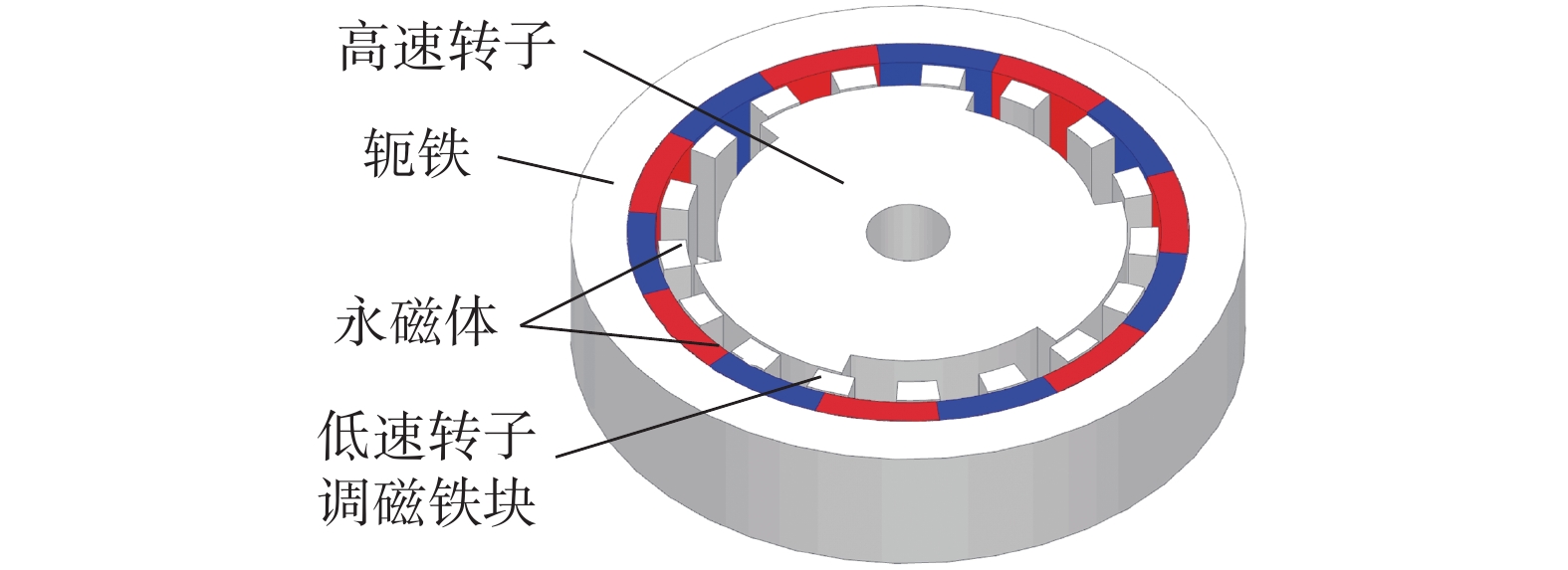
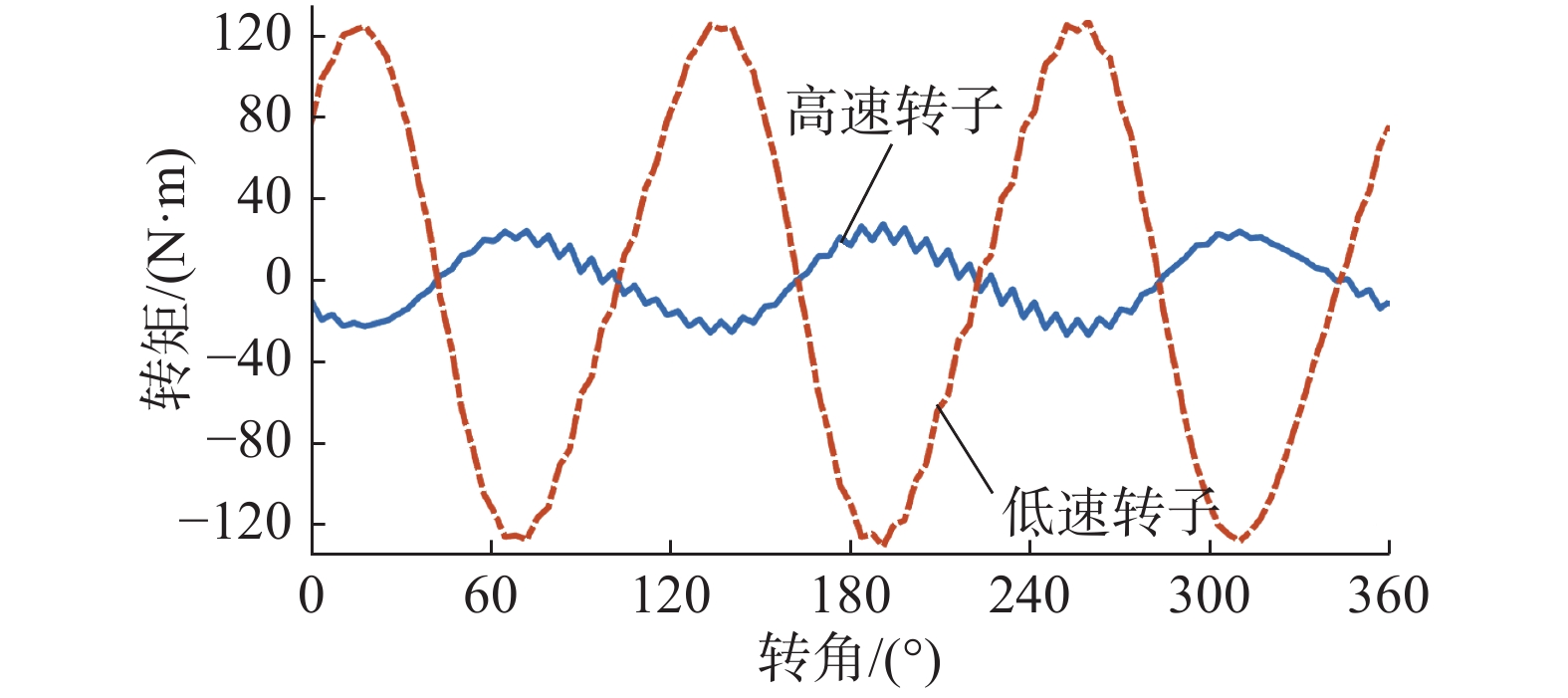
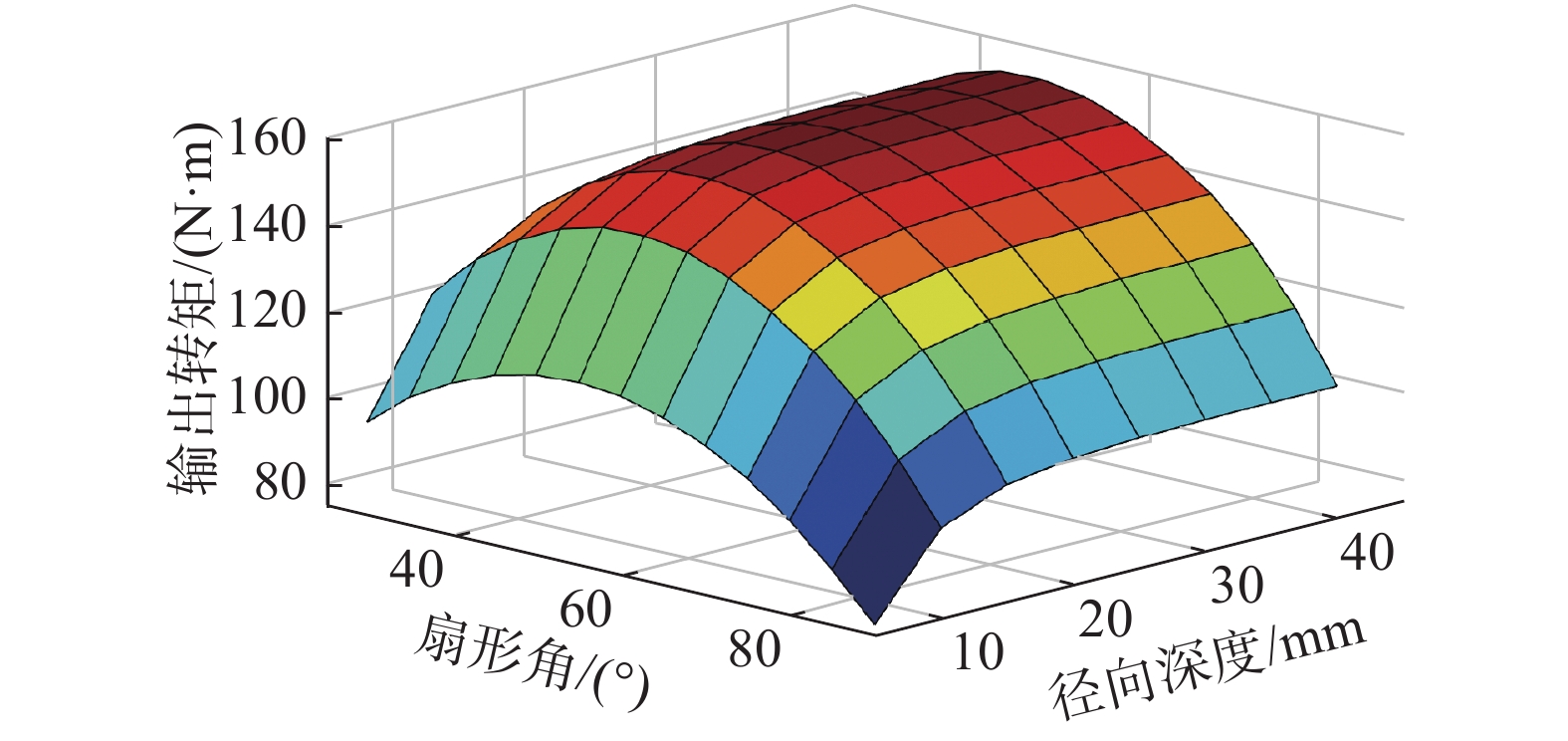
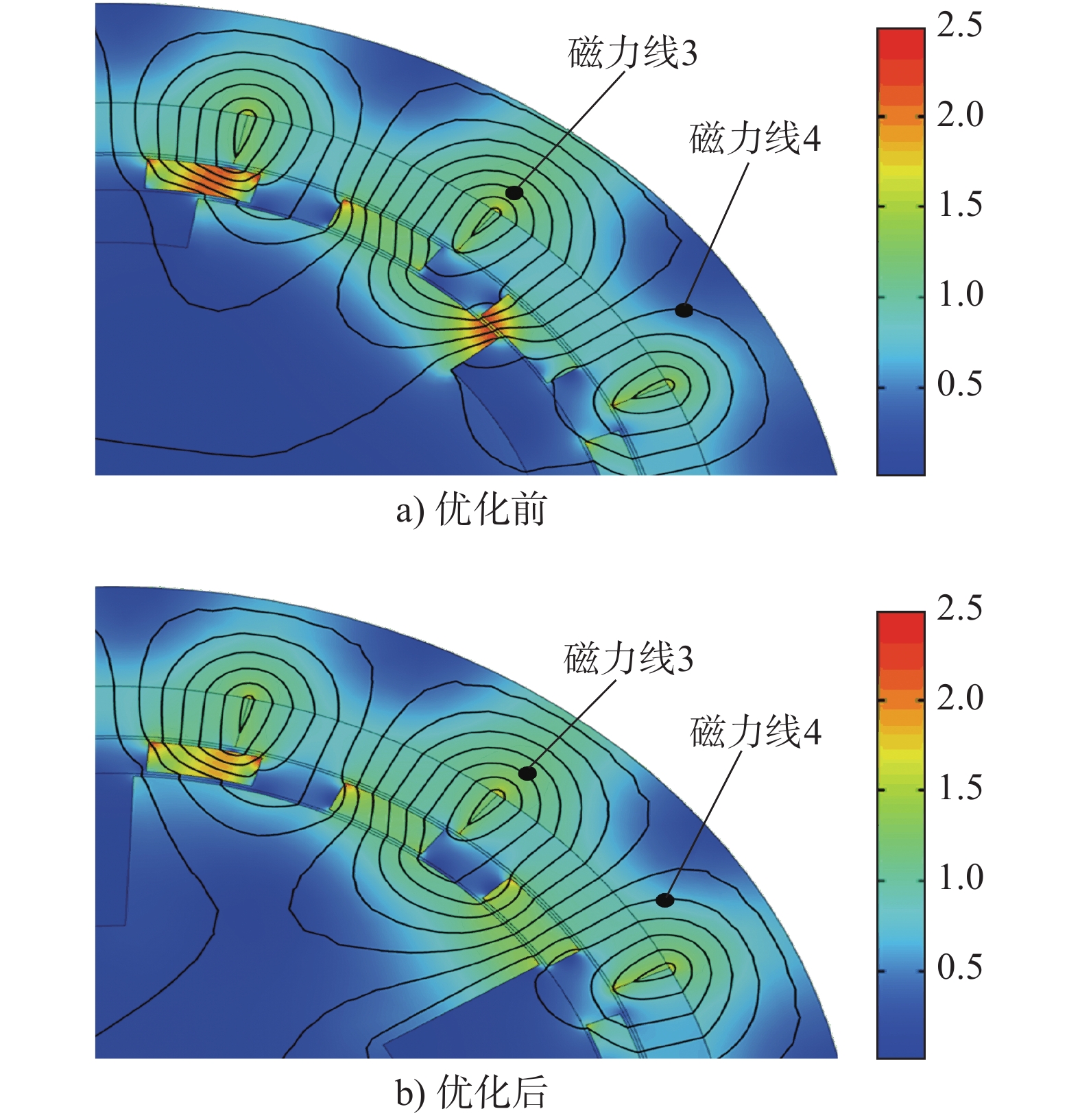
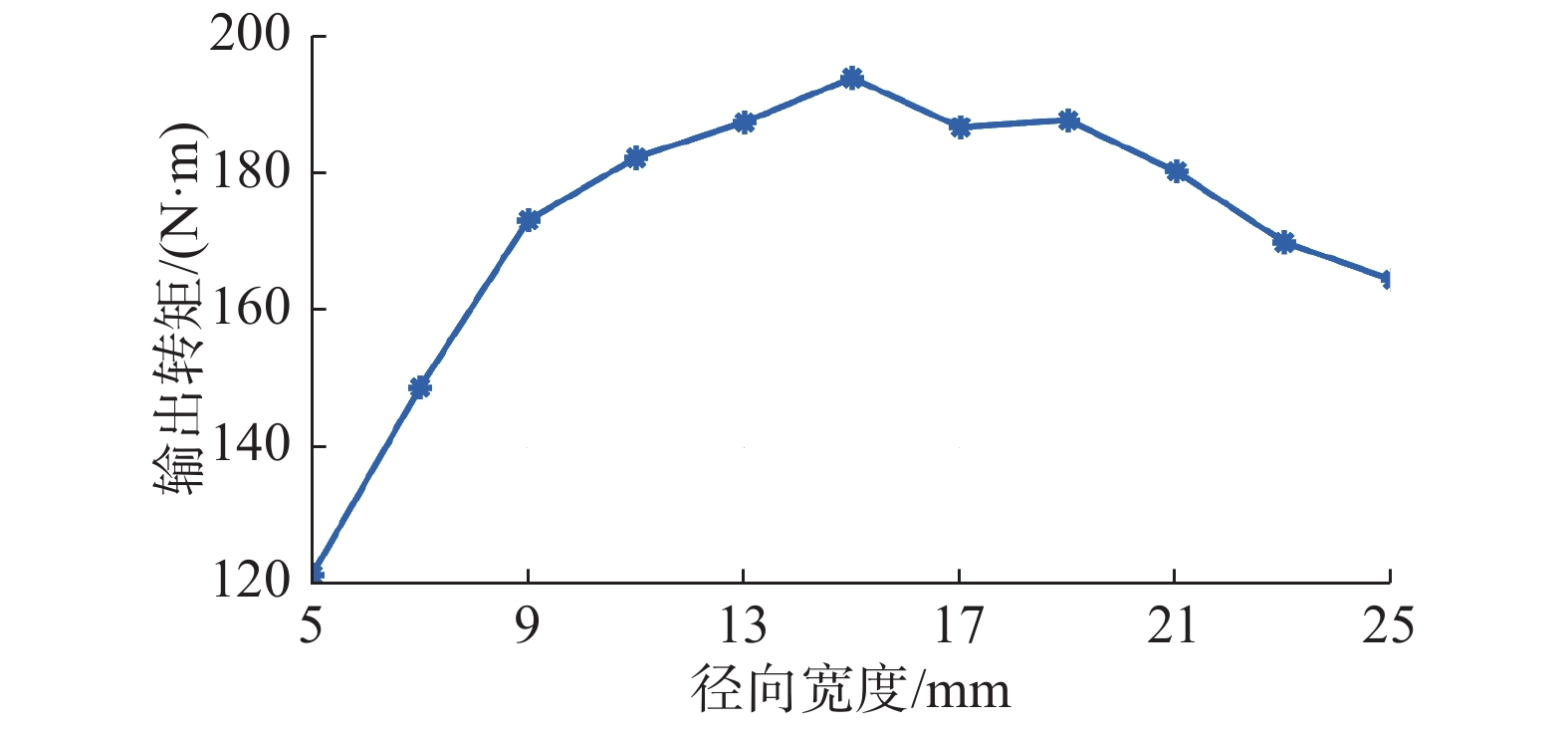
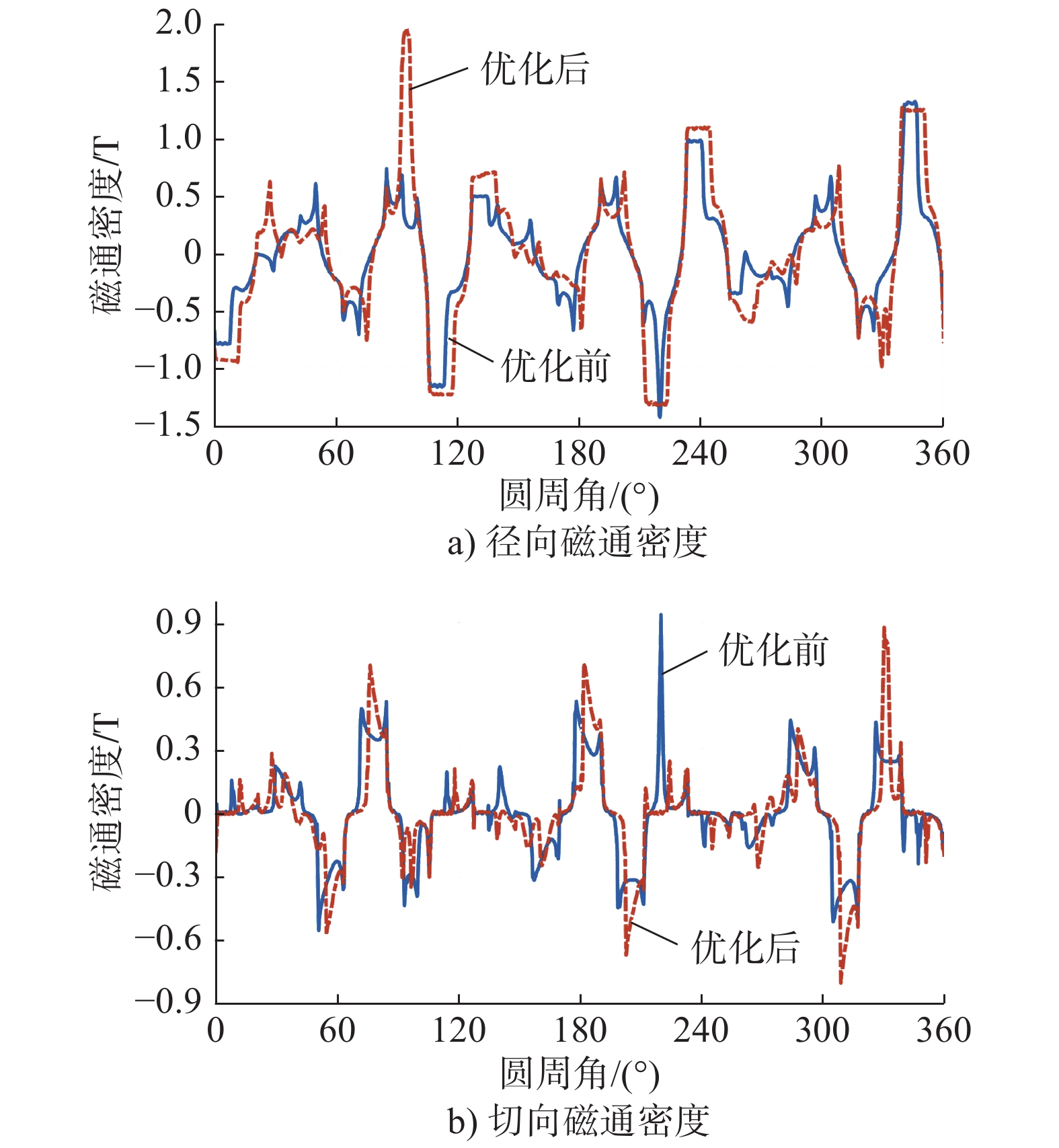
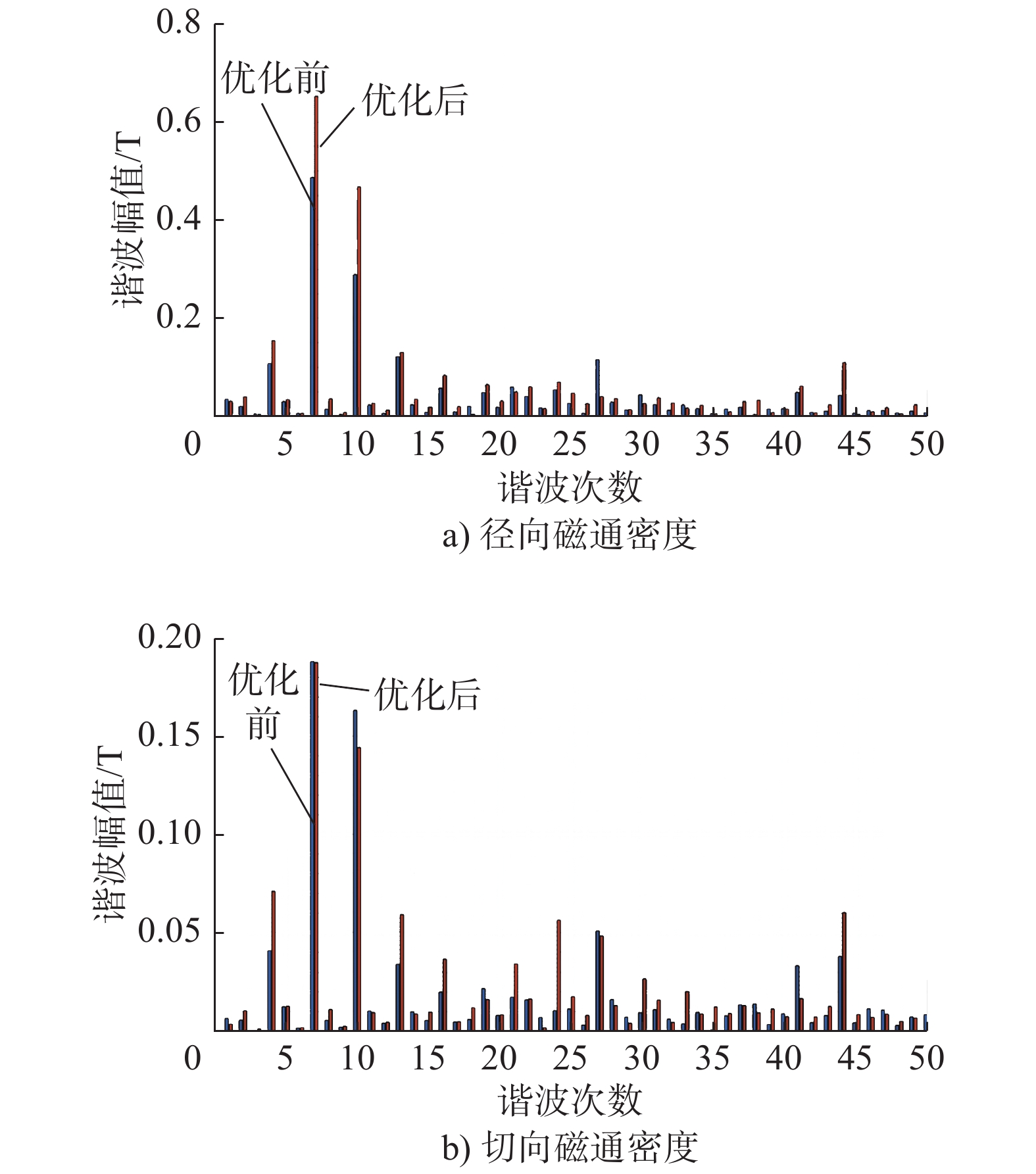
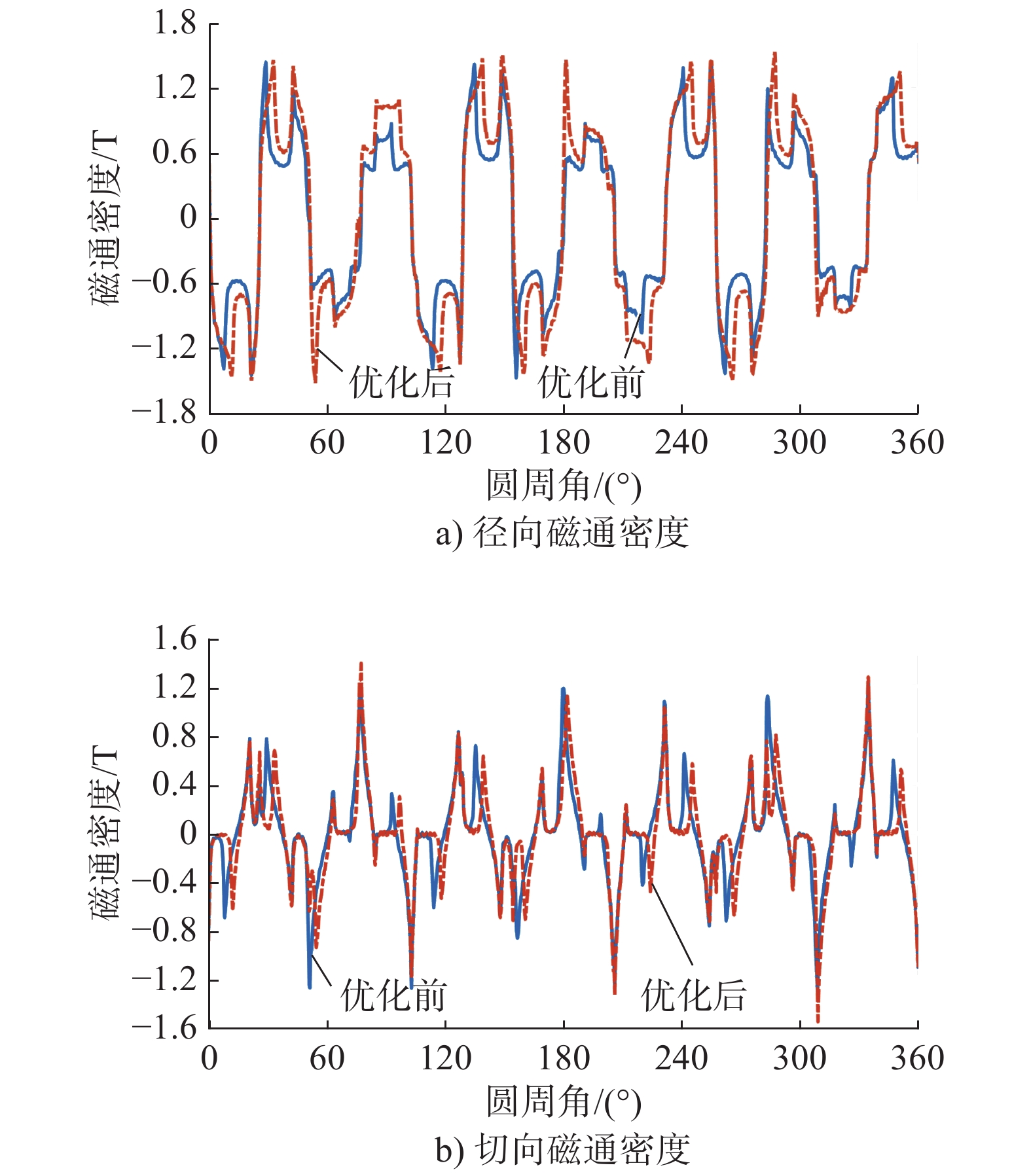
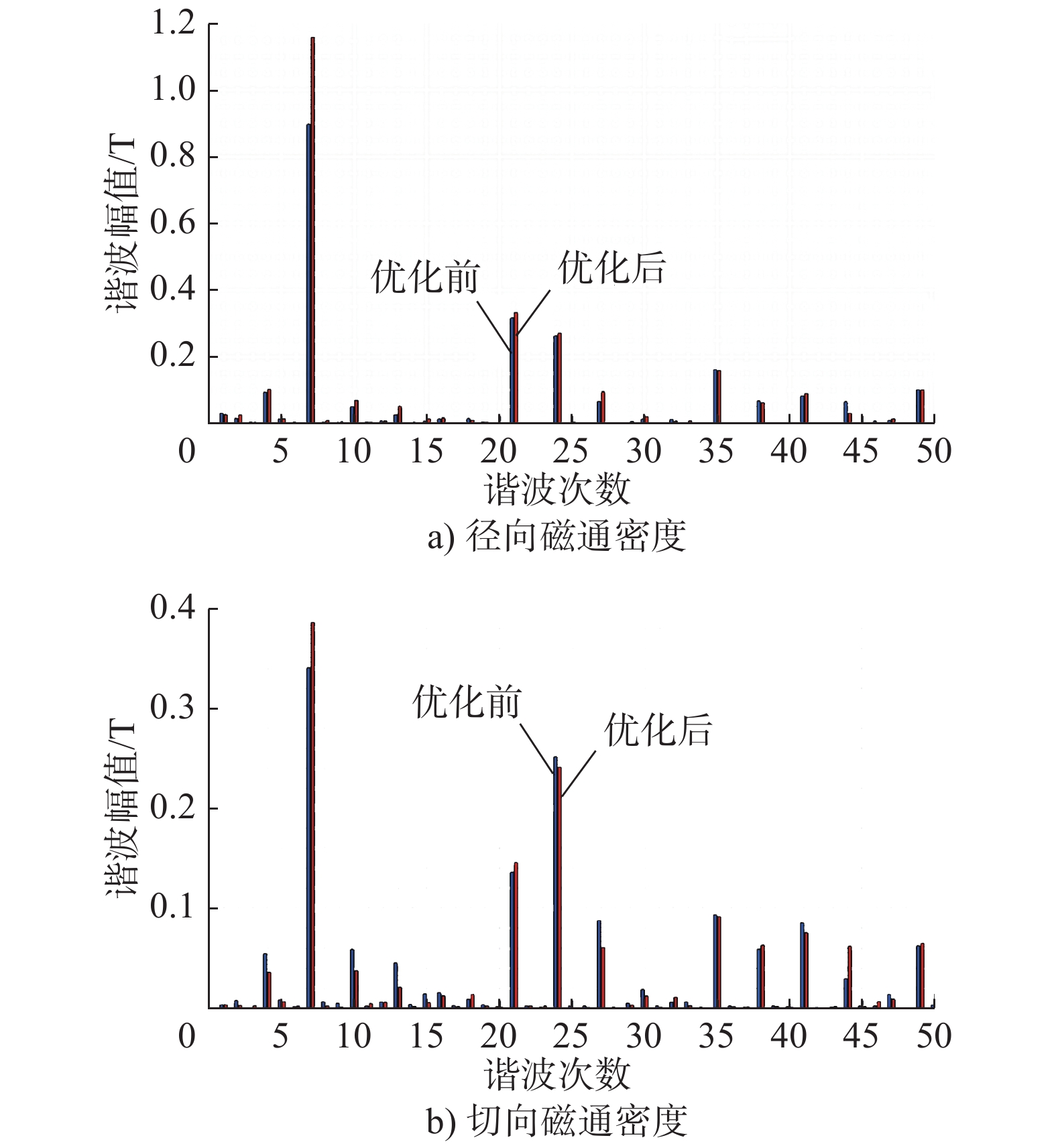
Aiming at the shortcoming that the permanent magnets would be broken in rotors when magnetic gear is working at high speed condition, a rotor-modulate magnetic gear without permanent magnet in rotors is proposed. According to the principle of magnetic field modulation, the relationship between input and output torque and air gap magnetic field is established. The torque transmission capacity is analyzed by 2D FEM. The parametric scanning is used to optimization analysis of different combinations of rotor size parameters to obtain the output torque, the reasons for the influence of rotor size parameters on the output torque are then explored. The simulation result shows that the output torque has a direct relationship with the size parameters of rotor. An optimal size will make the output torque reach the maximum value. After optimization, the output torque increases by 81.2%, and the low-speed rotor size has the greatest influence on the output torque. Finally, the harmonic analysis of the magnetic density in the air gap is carried out. The results show that the main harmonics change before and after the optimization are consistent with the torque variation, and the validity of the design and analysis of the rotor modulate magnetic gear is verified.
Aiming at the shortcoming that the permanent magnets would be broken in rotors when magnetic gear is working at high speed condition, a rotor-modulate magnetic gear without permanent magnet in rotors is proposed. According to the principle of magnetic field modulation, the relationship between input and output torque and air gap magnetic field is established. The torque transmission capacity is analyzed by 2D FEM. The parametric scanning is used to optimization analysis of different combinations of rotor size parameters to obtain the output torque, the reasons for the influence of rotor size parameters on the output torque are then explored. The simulation result shows that the output torque has a direct relationship with the size parameters of rotor. An optimal size will make the output torque reach the maximum value. After optimization, the output torque increases by 81.2%, and the low-speed rotor size has the greatest influence on the output torque. Finally, the harmonic analysis of the magnetic density in the air gap is carried out. The results show that the main harmonics change before and after the optimization are consistent with the torque variation, and the validity of the design and analysis of the rotor modulate magnetic gear is verified.




Display Method:
2024, 43(3): 373-379.
doi: 10.13433/j.cnki.1003-8728.20220213
 Abstract
Abstract FullText HTML
FullText HTML
Abstract:
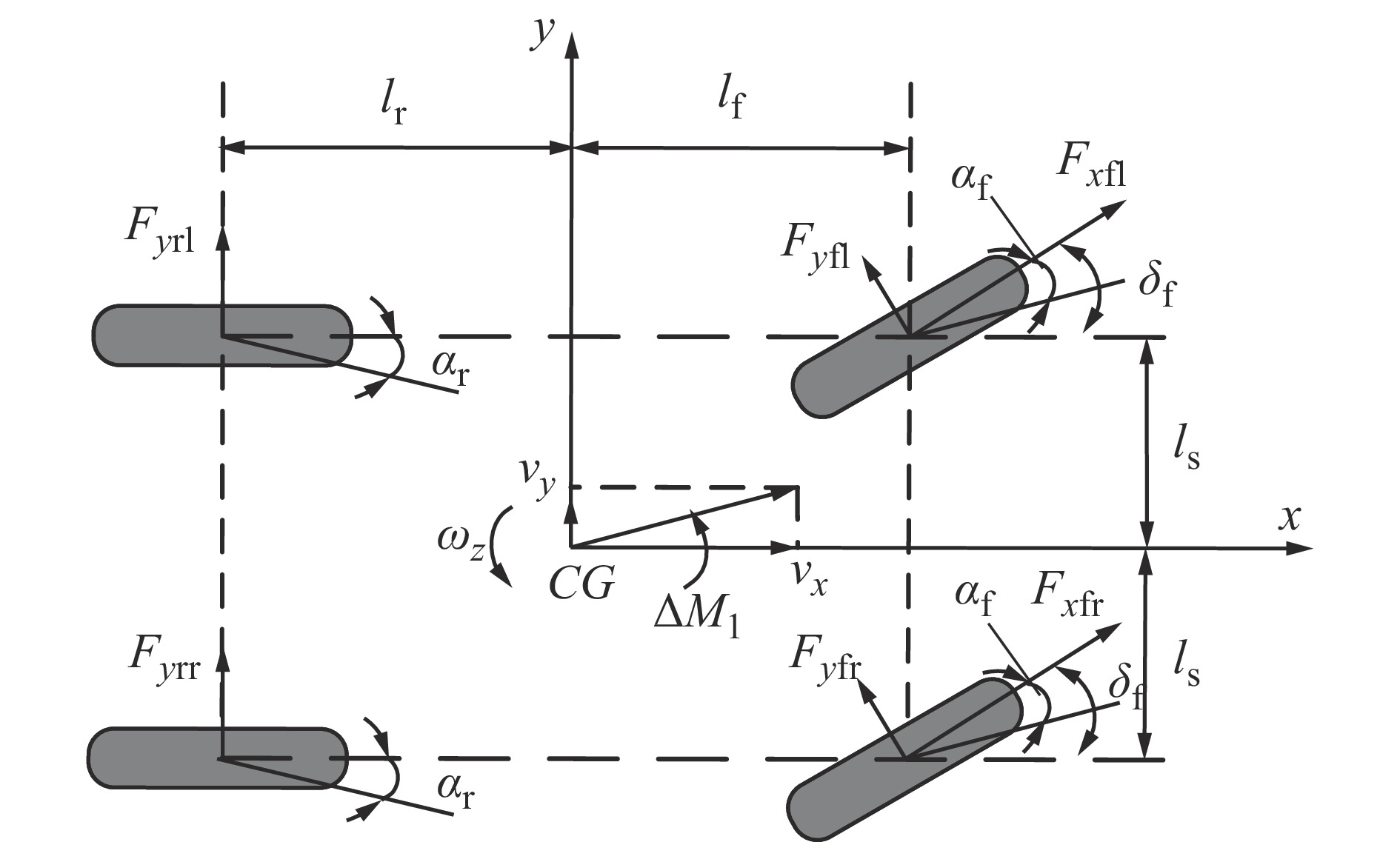
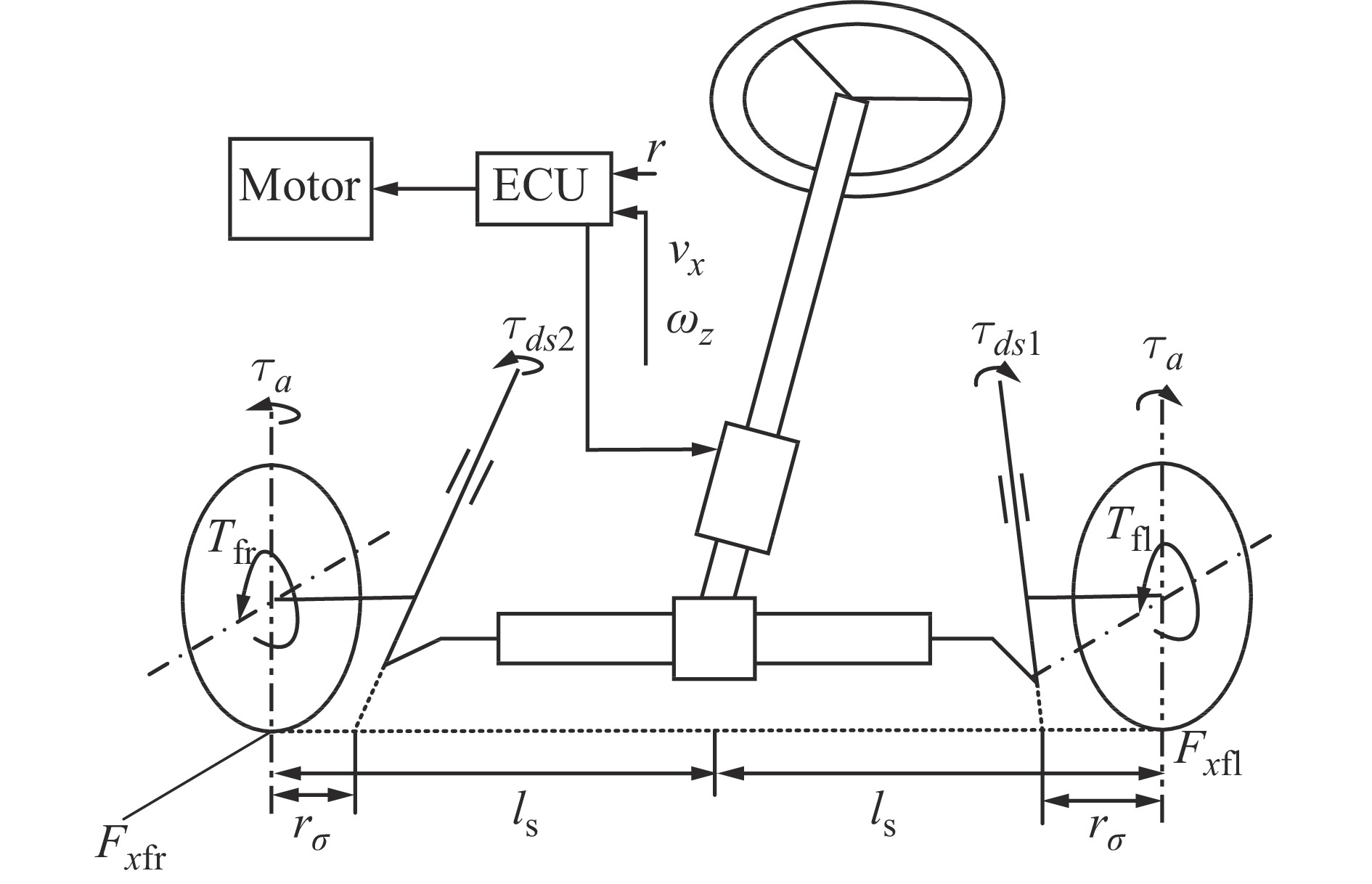
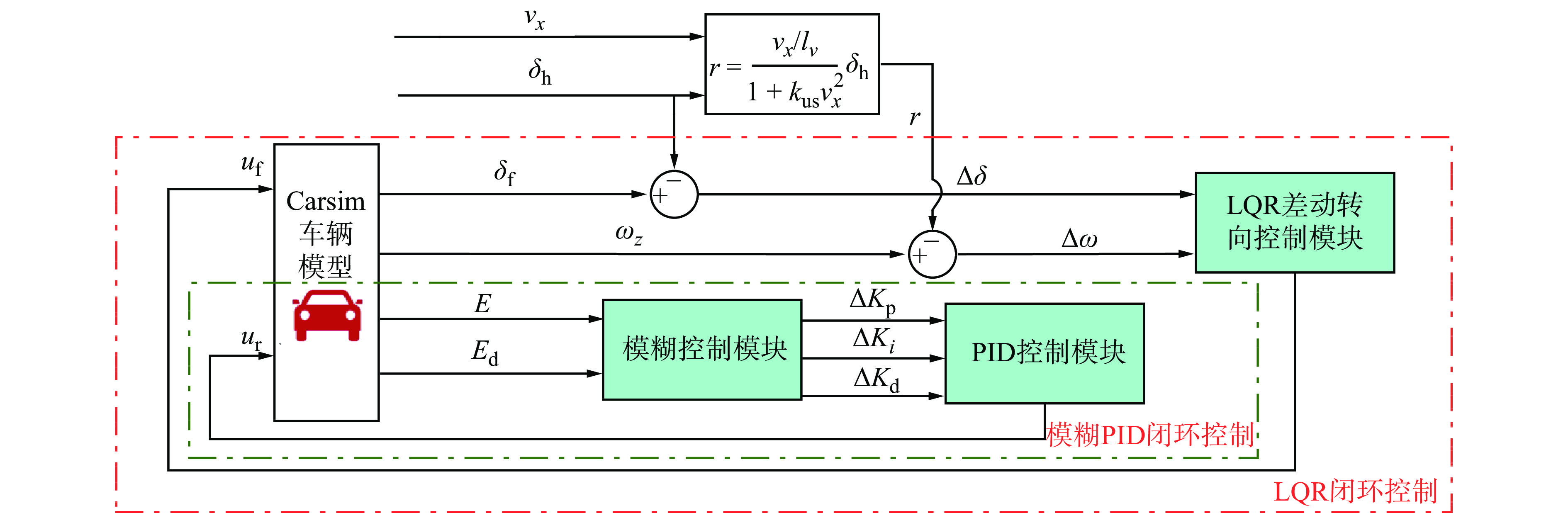
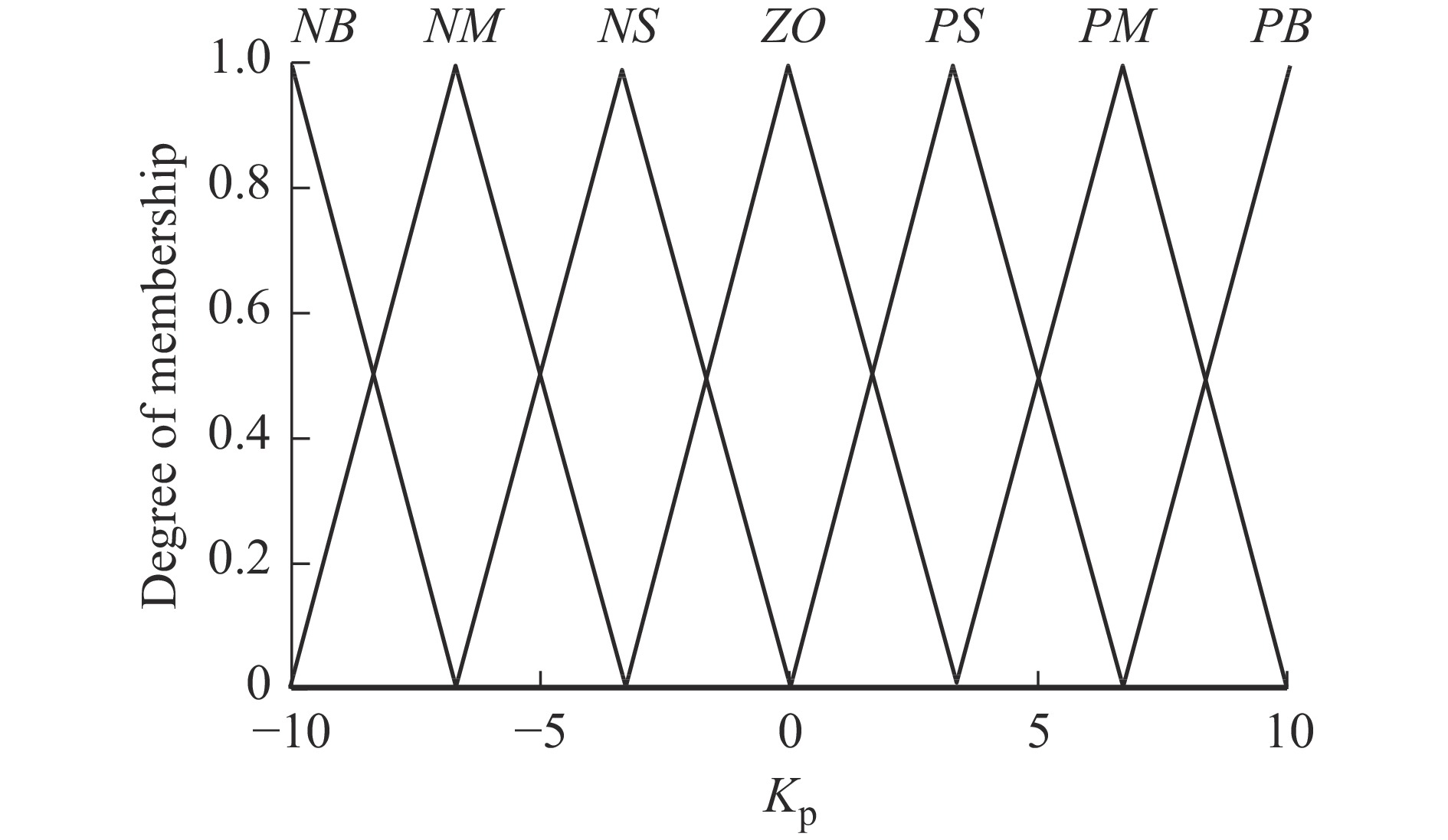
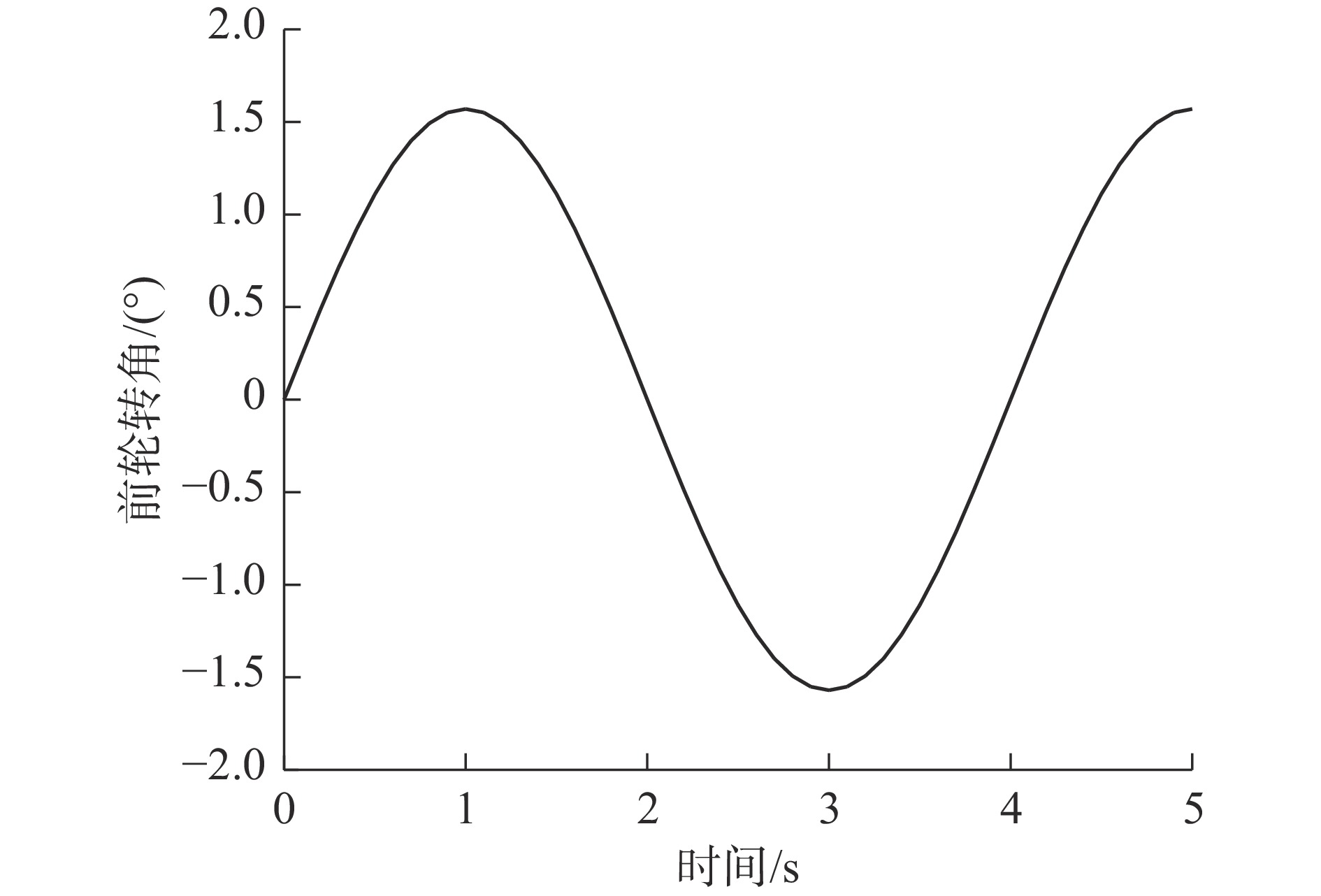
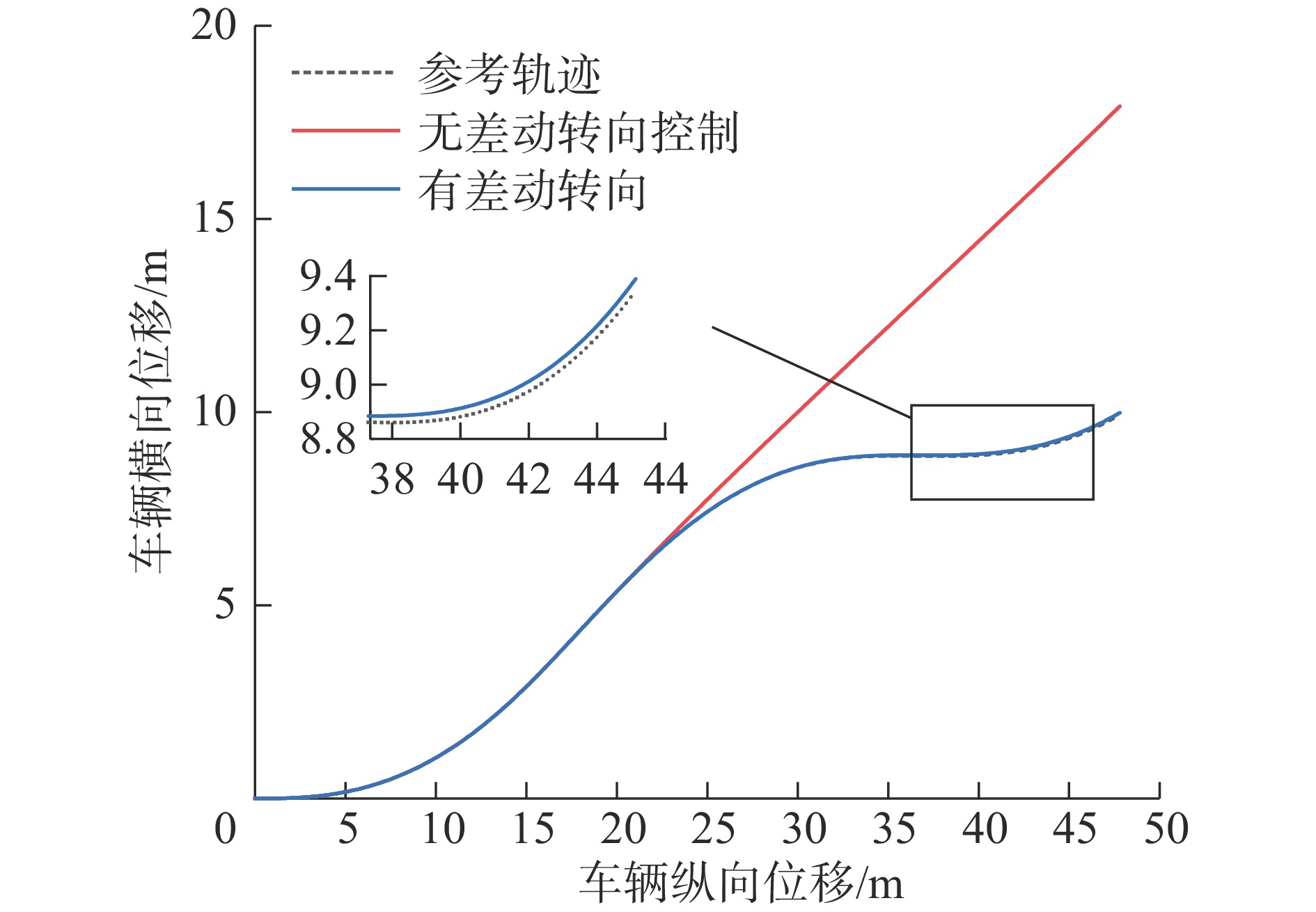
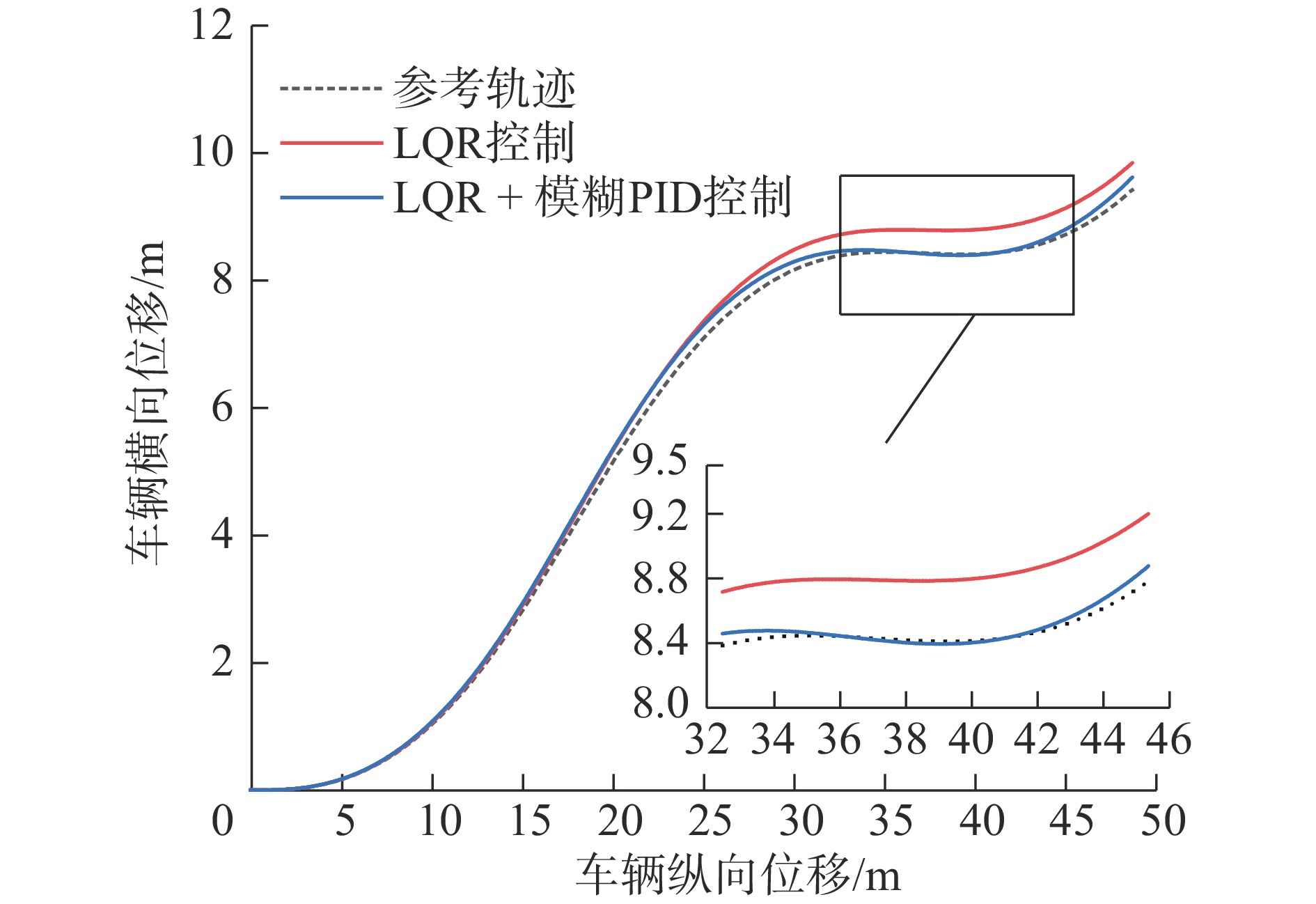
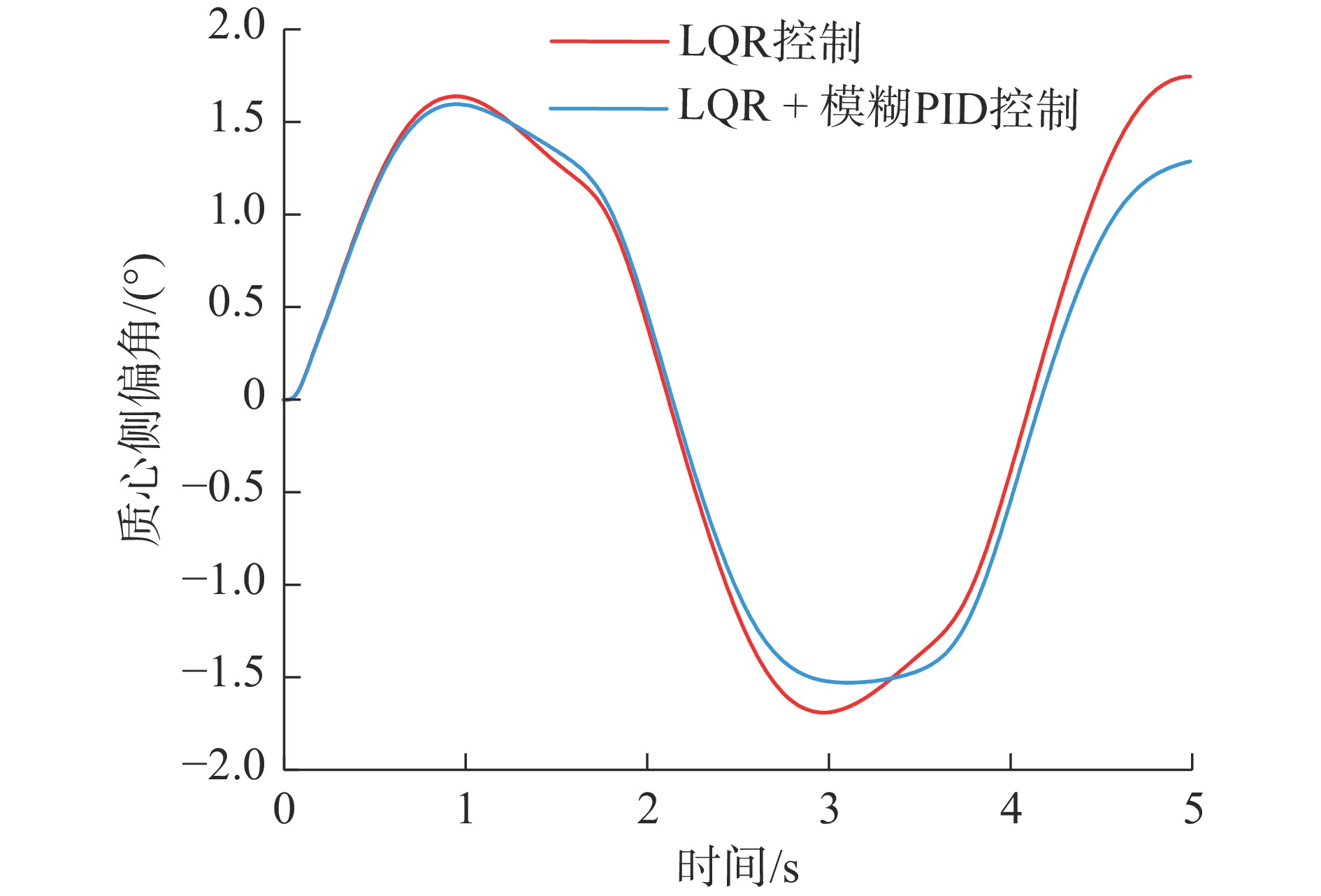
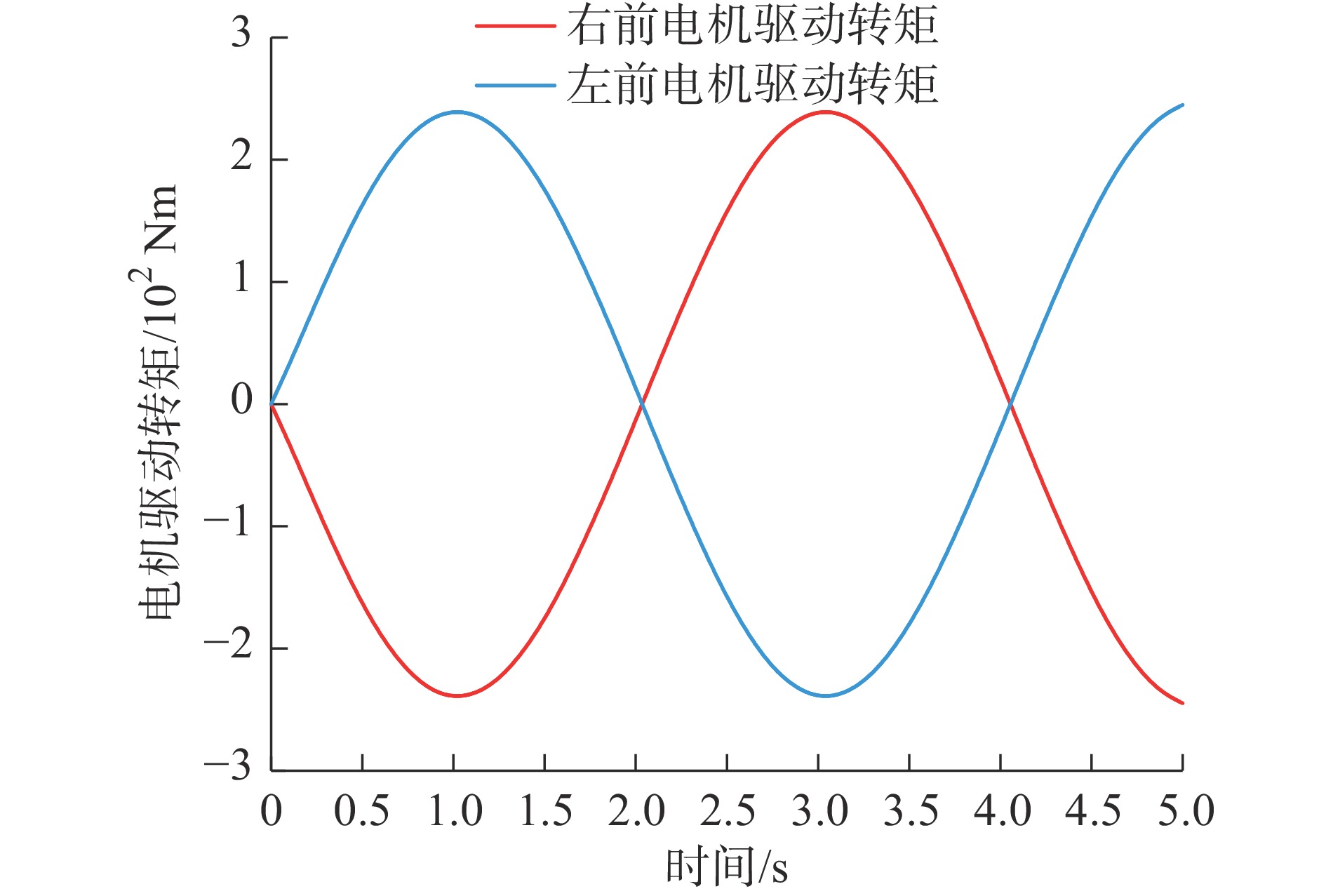
In order to reduce the negative impact of vehicle failure in the front wheel steering system and ensure the transient control performance of the steering system, an integrated control method combining differential steering control and lateral stability control is proposed to realize the steering control and lateral stability control of the vehicle with complete system failure by adjusting the left and right wheel hub motor torque to form the transverse swing torque. Firstly, the LQR (Linear quadratic regulator)-based differential steering controller is designed to track the reference front wheel rotation angle and the reference transverse swing angular velocity to ensure the vehicle trajectory tracking capability, and then the fuzzy PID-based lateral stability controller is designed to track the reference mass lateral deflection angle to ensure the vehicle transverse swing stability. The two controllers above constitute a double closed-loop control system, which finally converts the control quantity into transverse swing torque to realize vehicle control. The simulation results show that the differential steering system can achieve vehicle steering control under the failure of the front wheel steering system and effectively improve the vehicle transient control performance under the action of the lateral stability control system.
In order to reduce the negative impact of vehicle failure in the front wheel steering system and ensure the transient control performance of the steering system, an integrated control method combining differential steering control and lateral stability control is proposed to realize the steering control and lateral stability control of the vehicle with complete system failure by adjusting the left and right wheel hub motor torque to form the transverse swing torque. Firstly, the LQR (Linear quadratic regulator)-based differential steering controller is designed to track the reference front wheel rotation angle and the reference transverse swing angular velocity to ensure the vehicle trajectory tracking capability, and then the fuzzy PID-based lateral stability controller is designed to track the reference mass lateral deflection angle to ensure the vehicle transverse swing stability. The two controllers above constitute a double closed-loop control system, which finally converts the control quantity into transverse swing torque to realize vehicle control. The simulation results show that the differential steering system can achieve vehicle steering control under the failure of the front wheel steering system and effectively improve the vehicle transient control performance under the action of the lateral stability control system.

2024, 43(3): 380-393.
doi: 10.13433/j.cnki.1003-8728.20220268
Abstract:
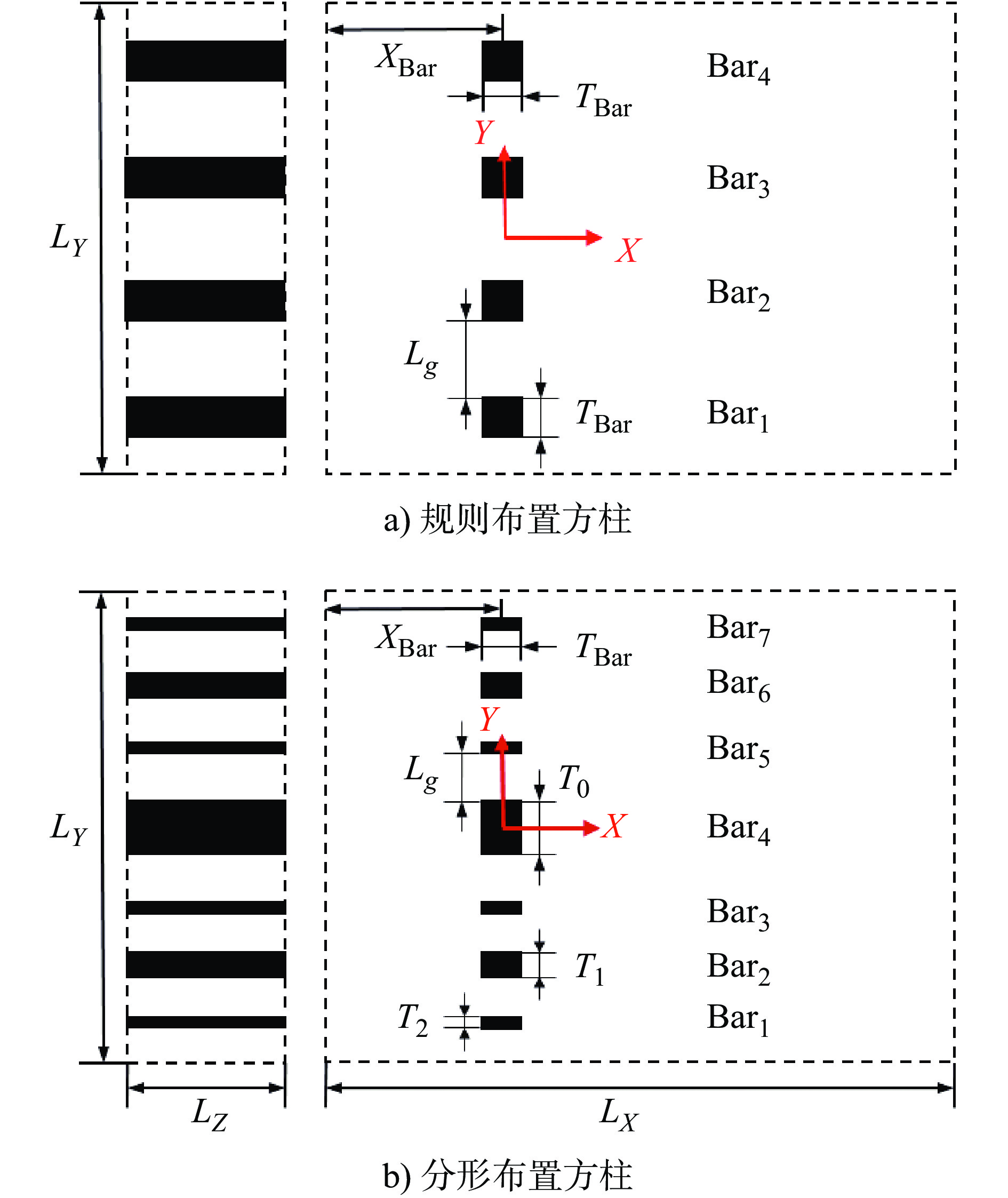
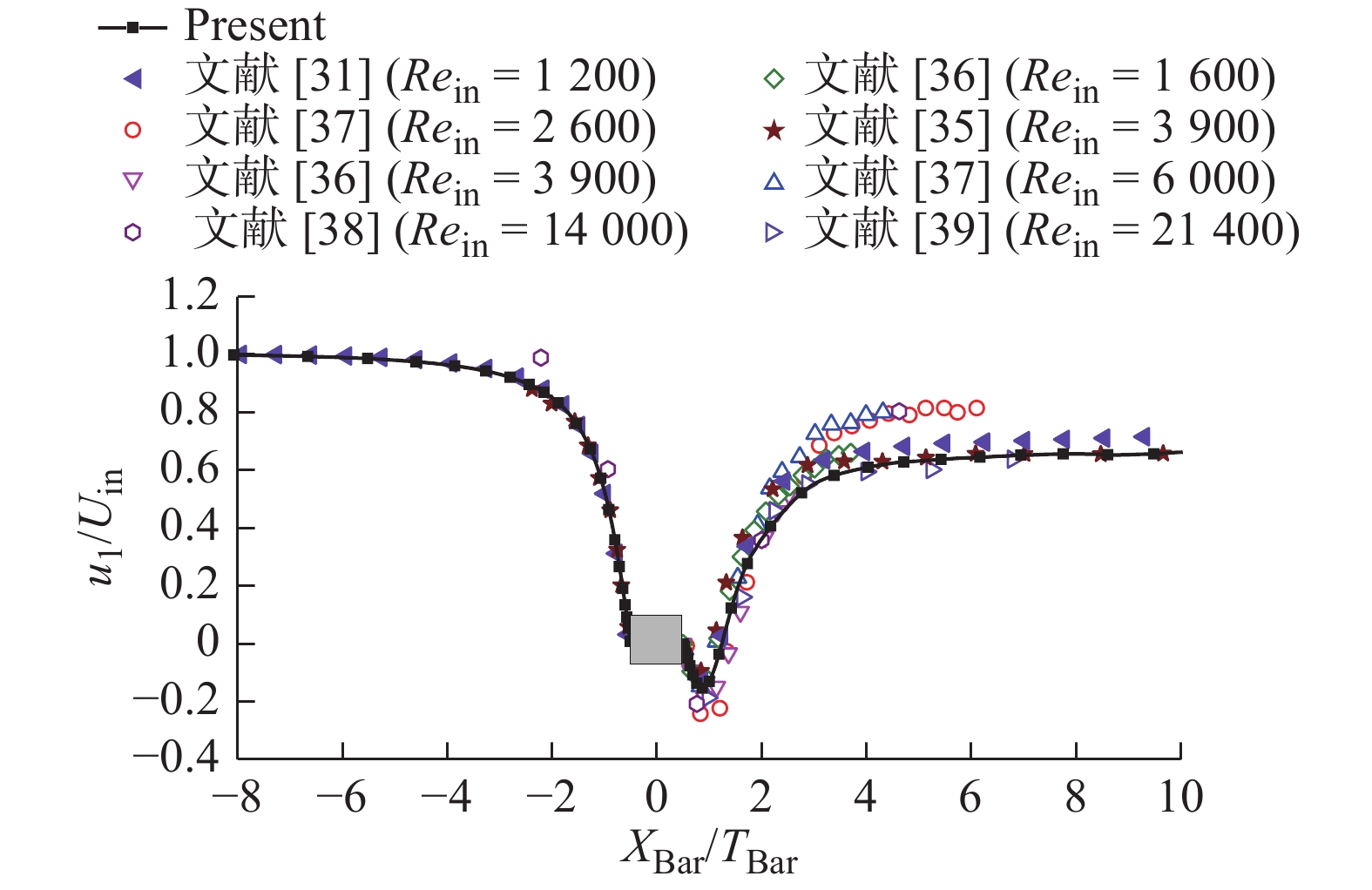
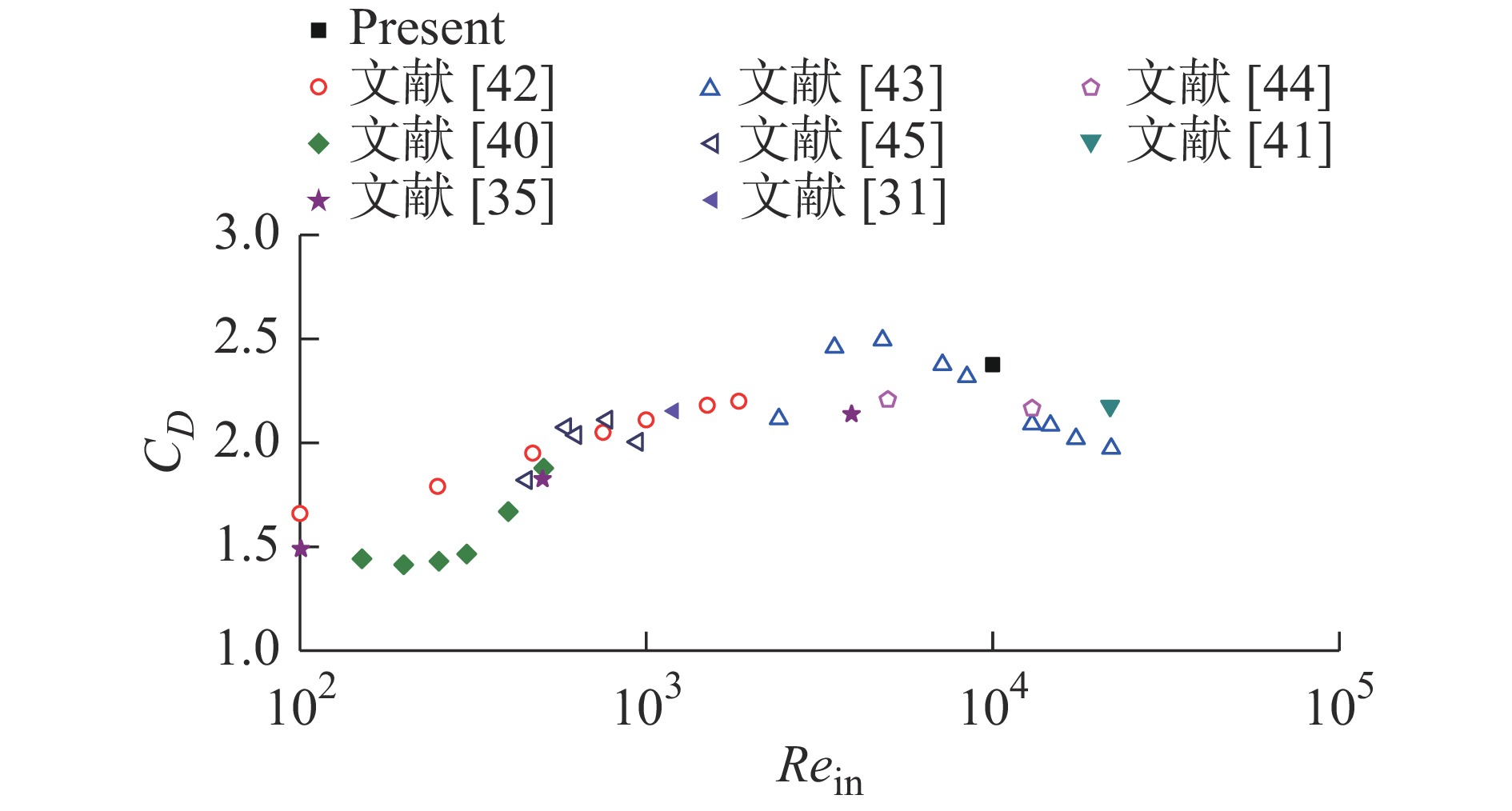
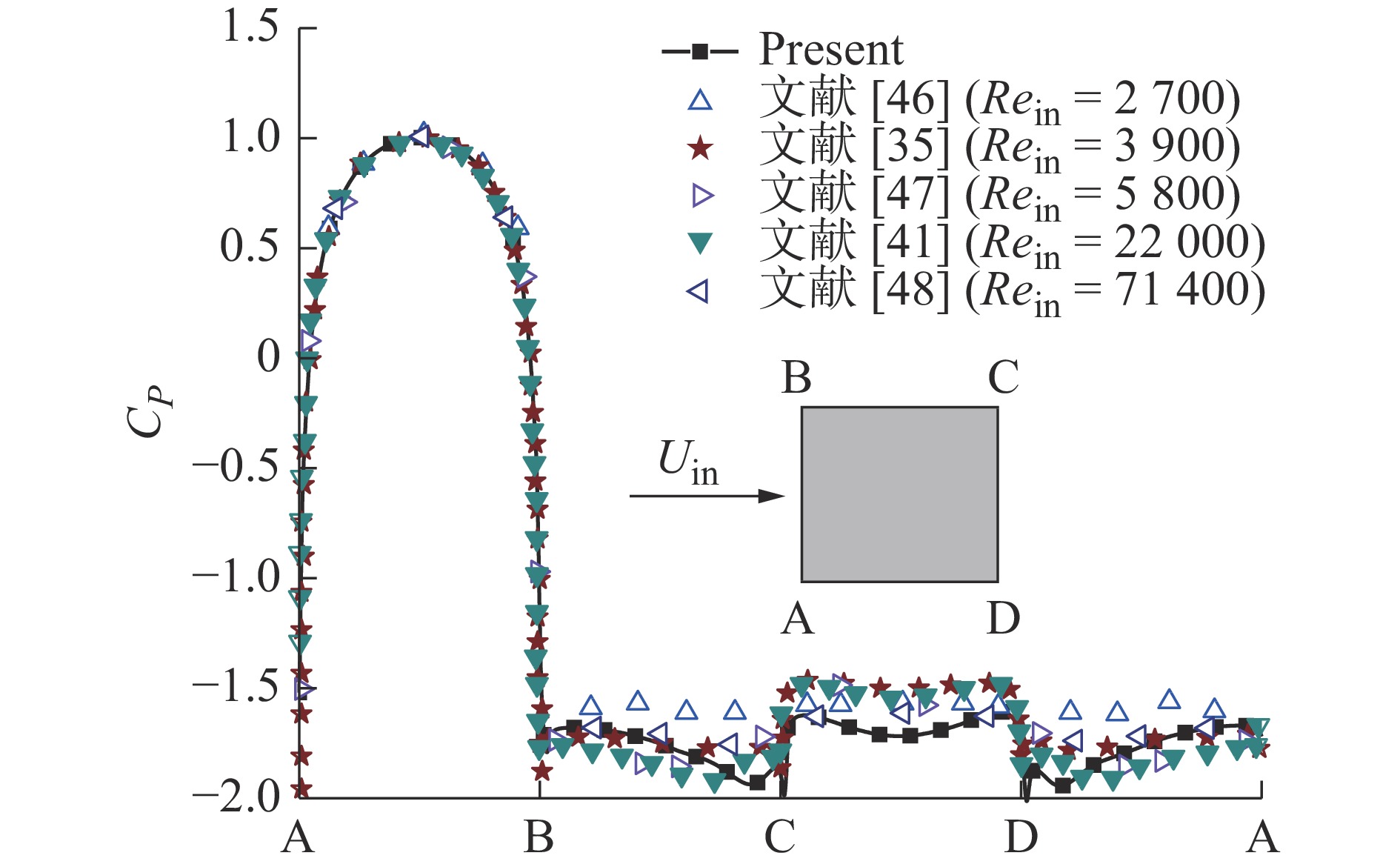
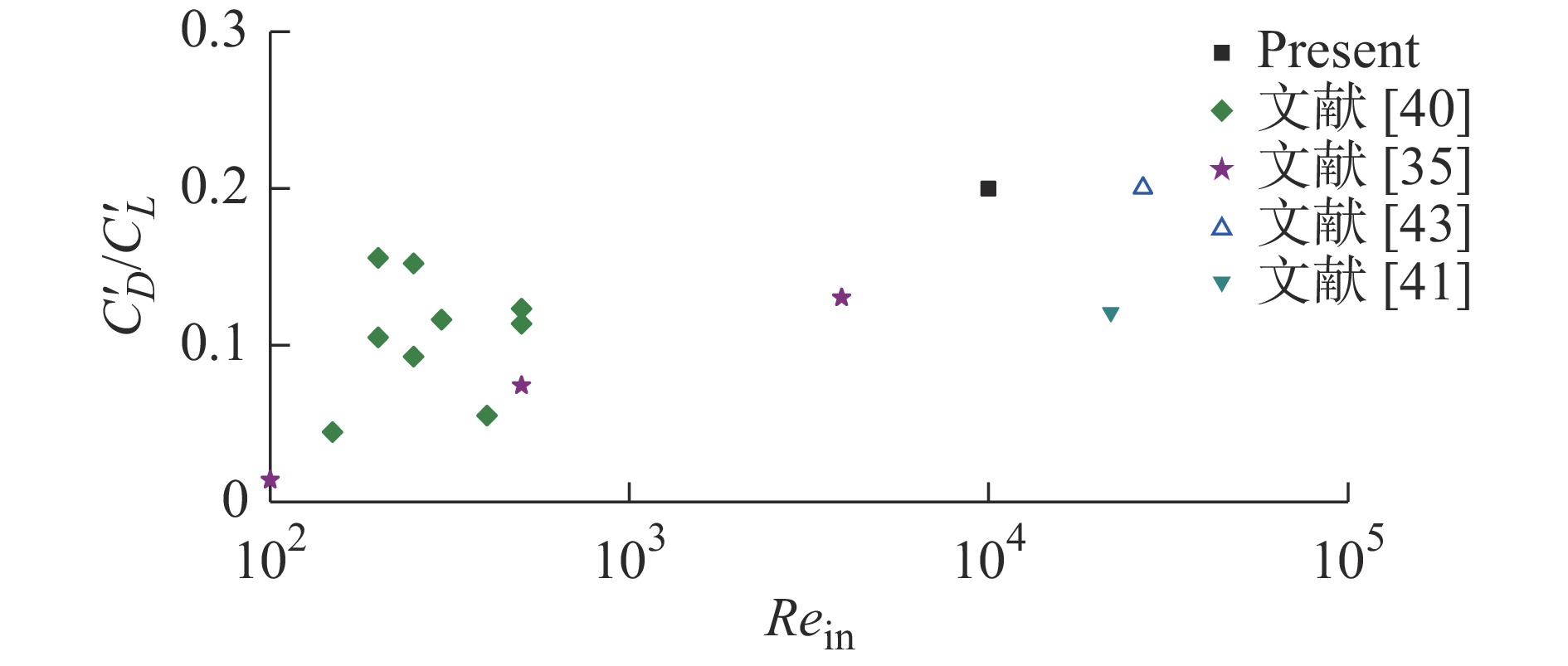
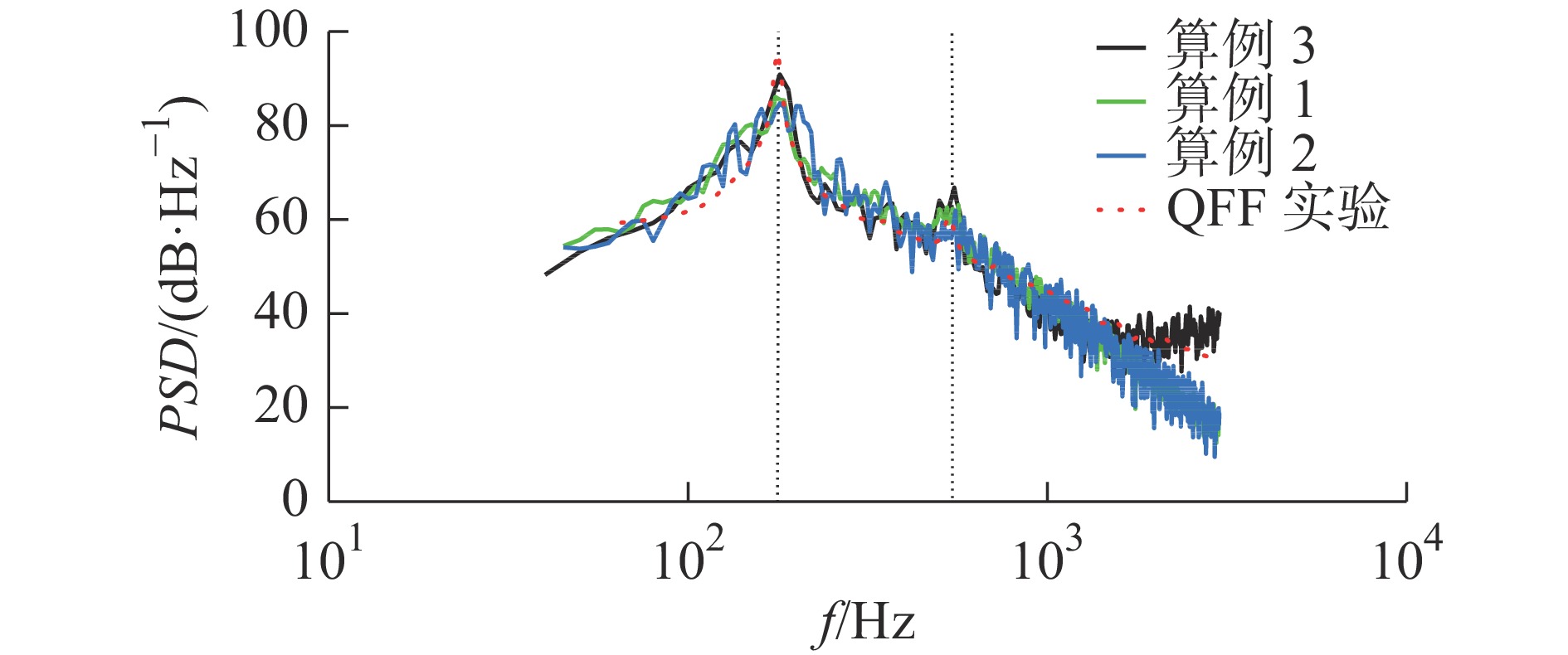
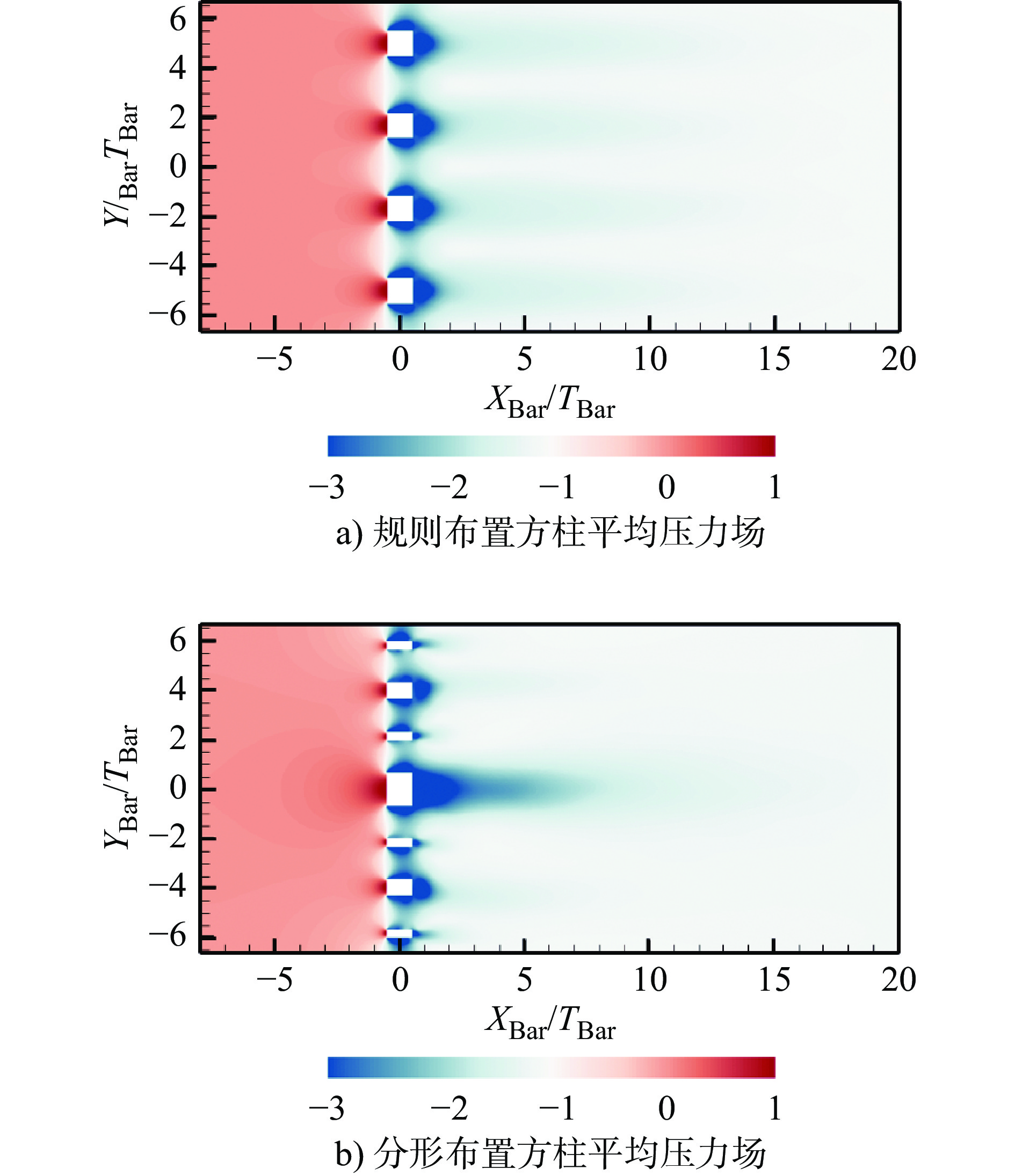
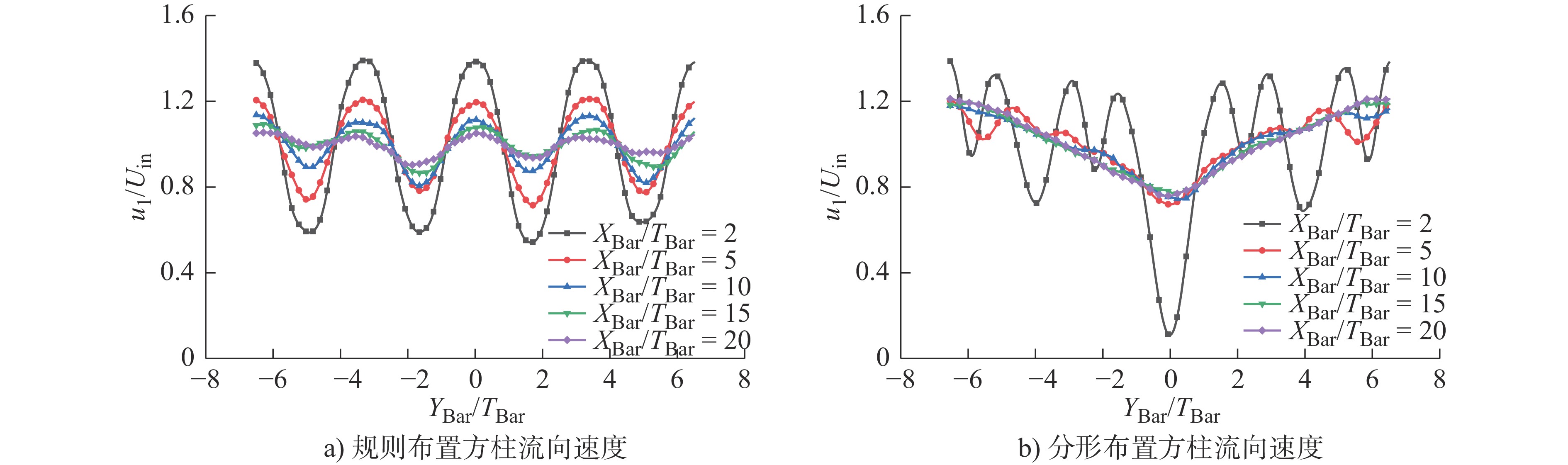
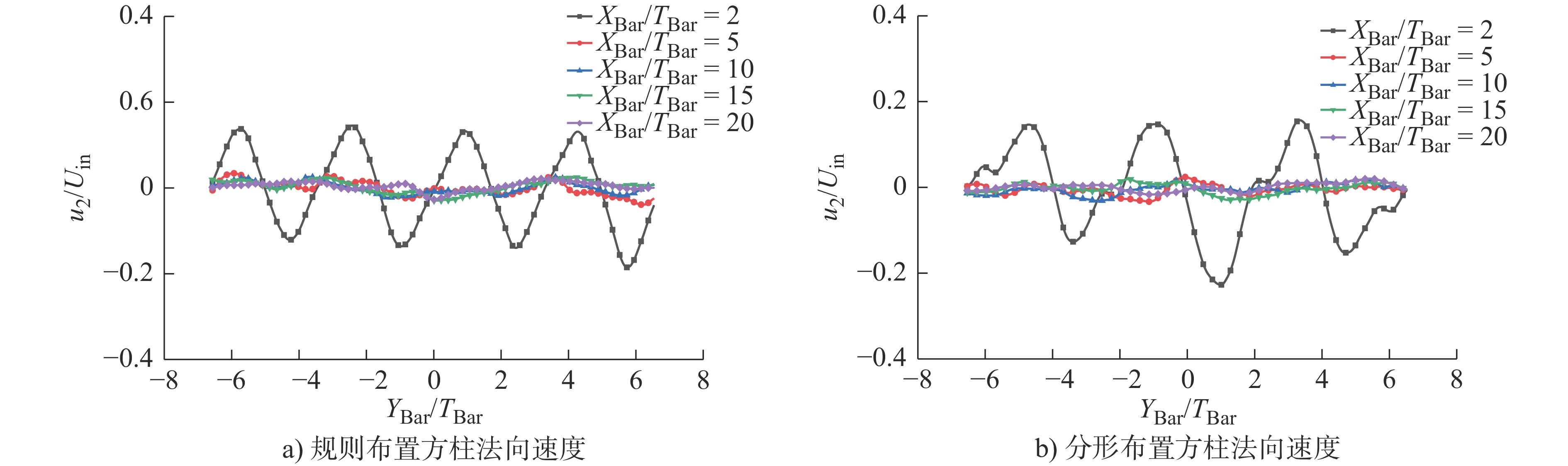
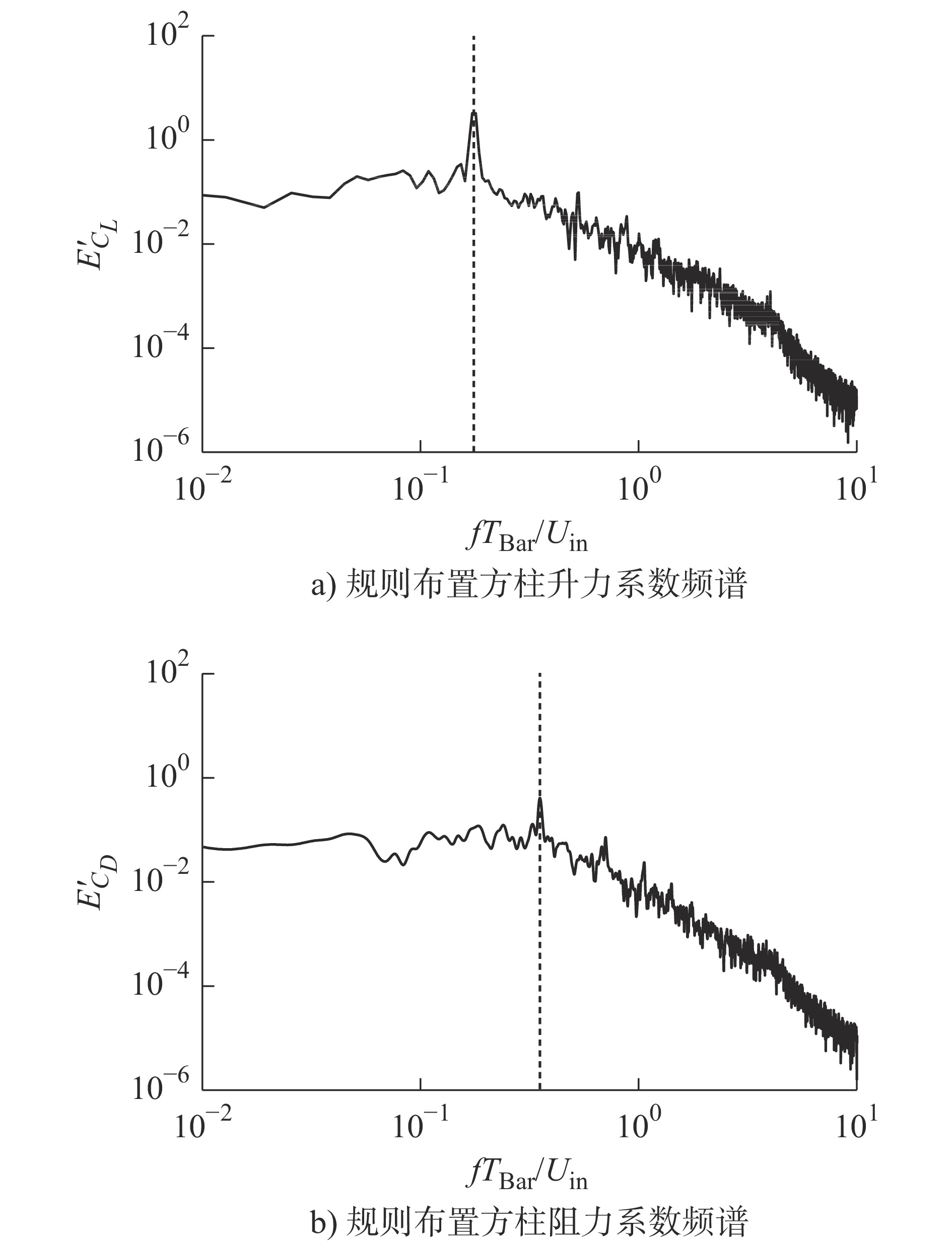
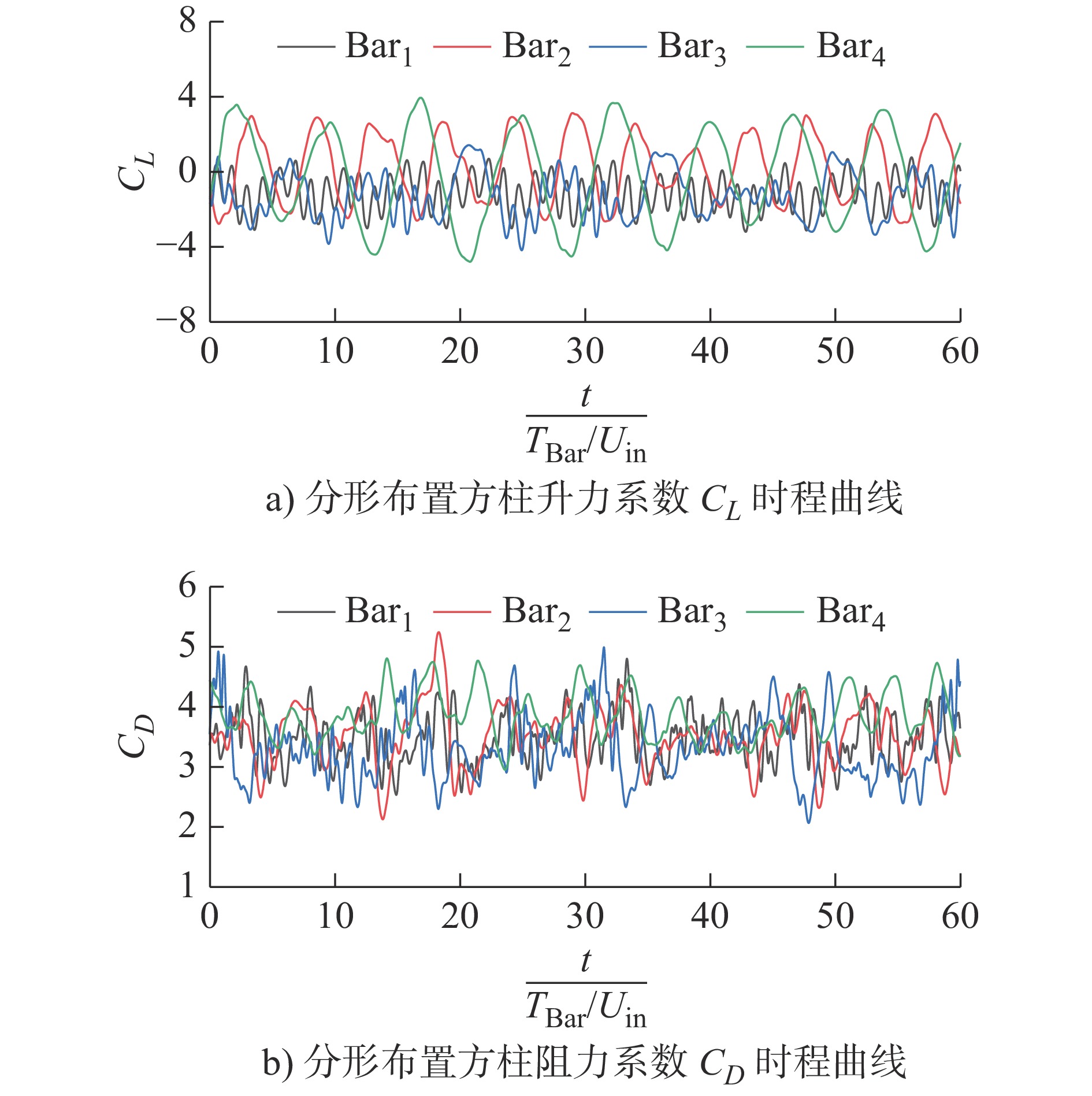
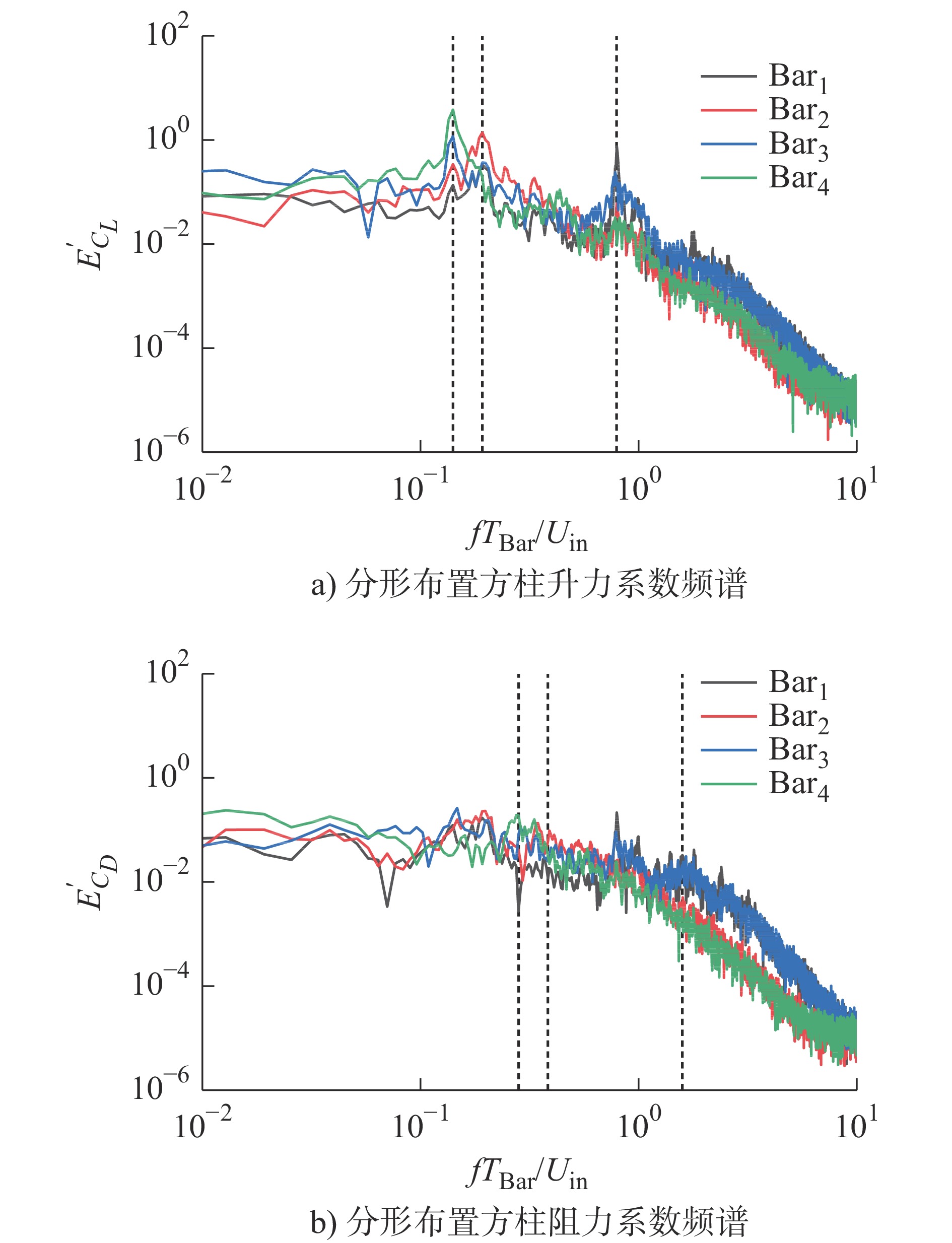
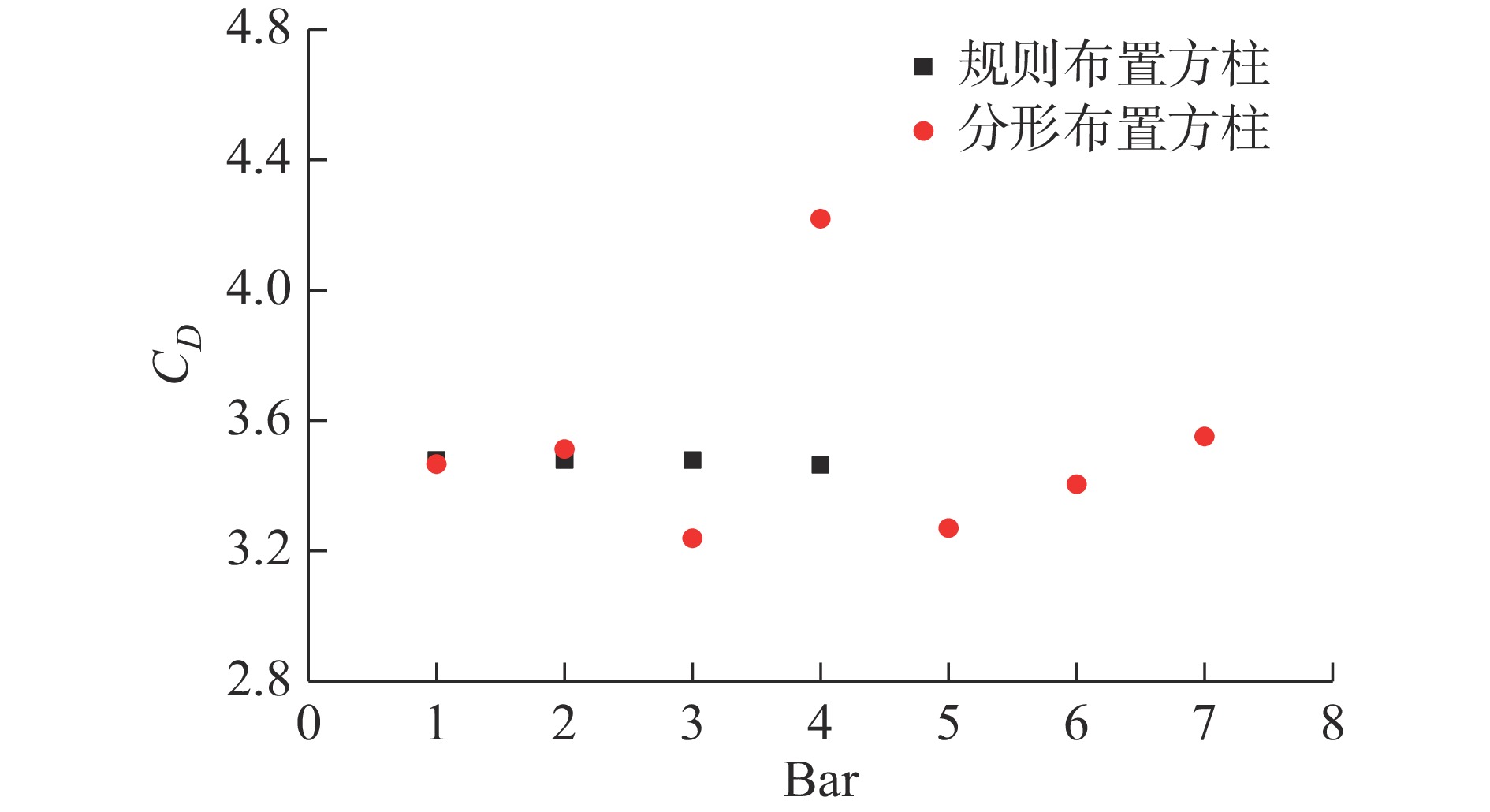
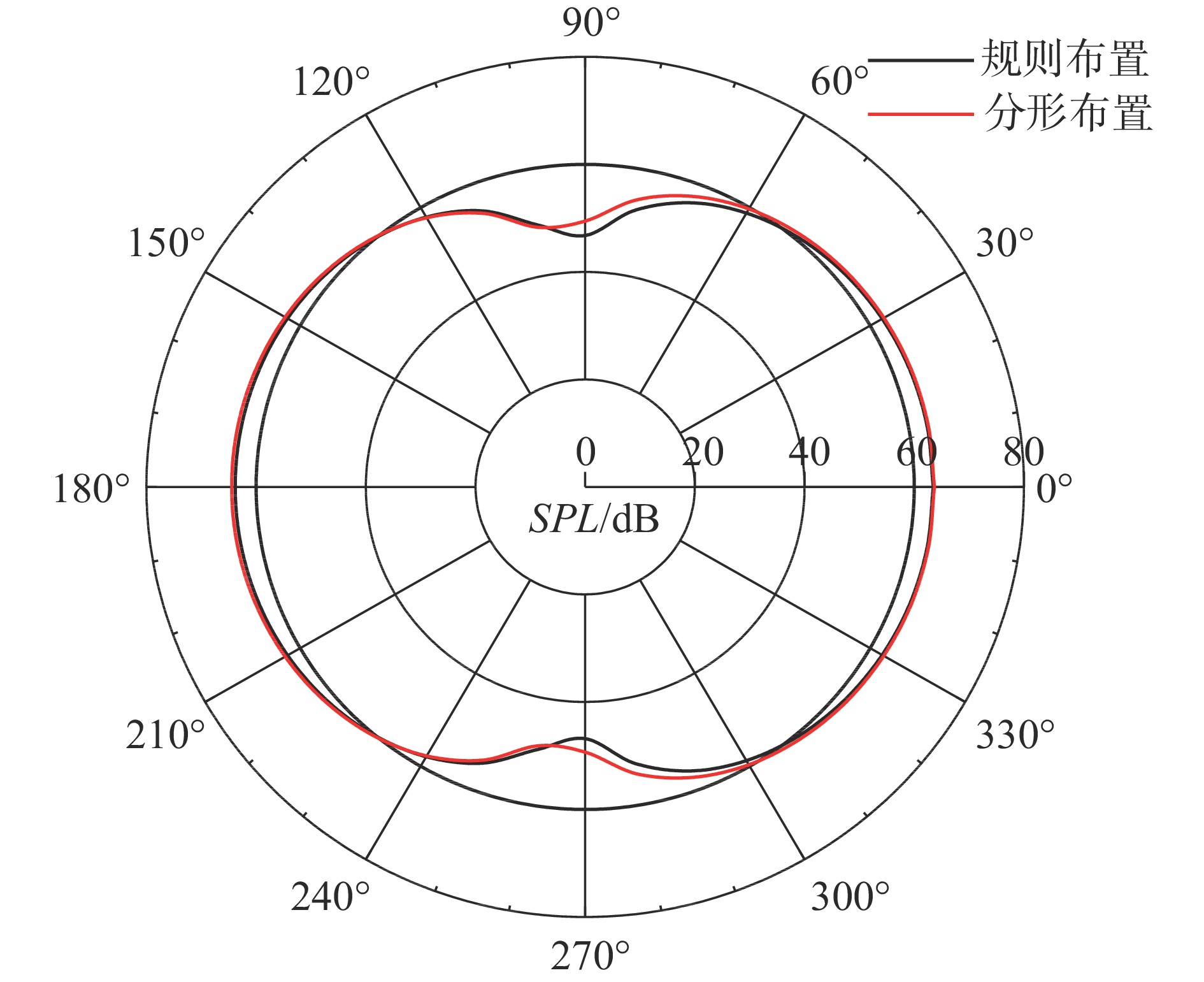
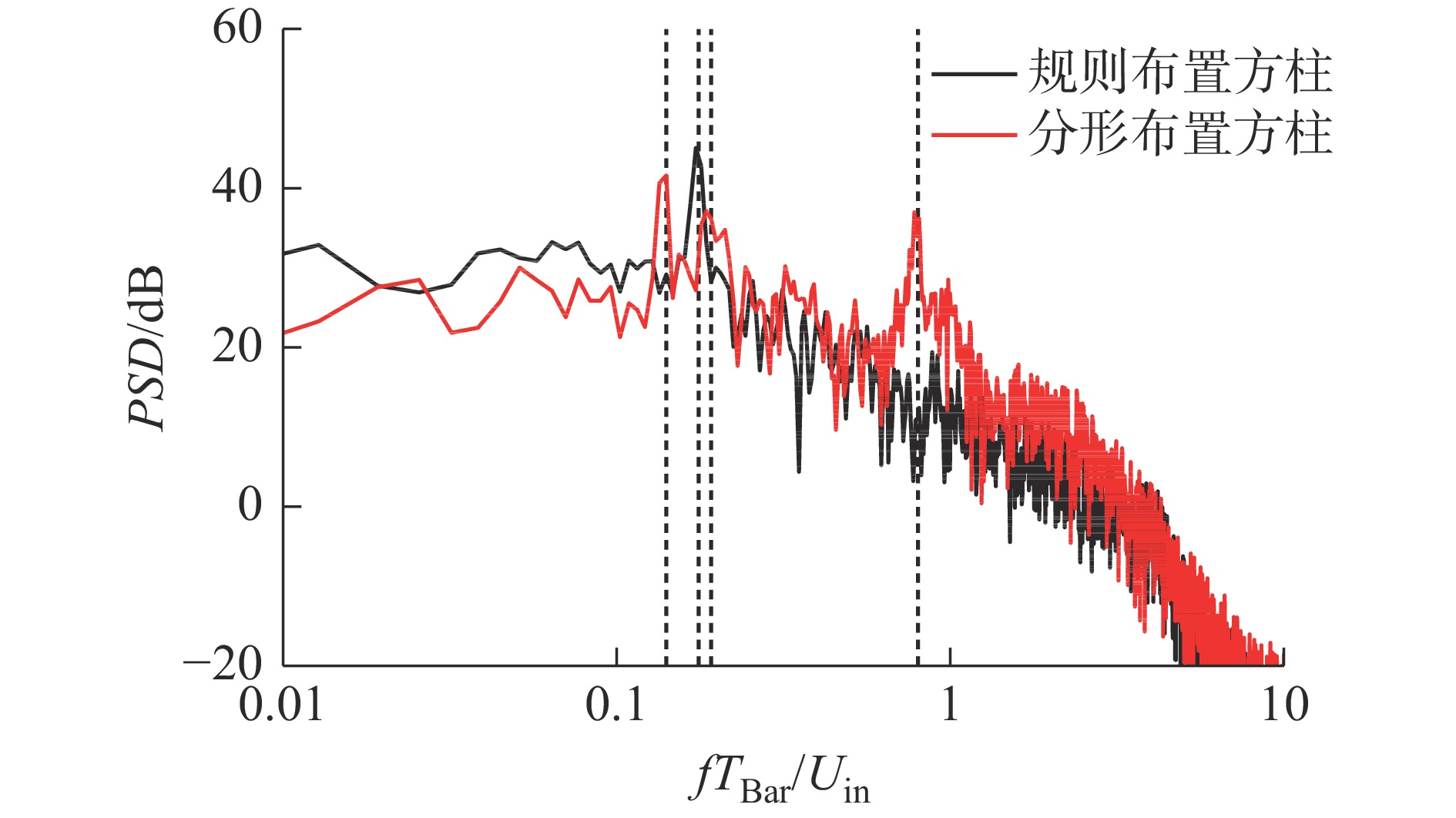
In this study, large eddy simulations with the usage of the K-FWH equation are performed to numerically simulate turbulent flows behind two different kind of cylinder arrays (regular and multiscale) with the same blocking ratio. The large eddy simulation methods used in this paper are verified by the previous single-cylinder flow experiments and numerical results. The results show that the numerical method used in this paper can better predict the turbulent characteristics of the flow around the cylinder. Numerical results show that at the Reynolds number of 104, the mean drag coefficient of square cylinders with regular arrangement is approximately equal to that of the square cylinders with multiscale arrangement. Vortex shedding behavior in the case of regular arrangement present an obvious phenomenon of "phase locking", while the vortex shedding in the case of multiscale arrangement is rather chaotic. The far-field distributions of the sound pressure level of the two flow fields are approximately the same. The induced noises in case with the regular array also exhibit similar "phase locking" behavior. In contrast, multiscale arrangement can modify the distribution the noise spectrum and transfer the power from the low-frequency region to the high-frequency region.
In this study, large eddy simulations with the usage of the K-FWH equation are performed to numerically simulate turbulent flows behind two different kind of cylinder arrays (regular and multiscale) with the same blocking ratio. The large eddy simulation methods used in this paper are verified by the previous single-cylinder flow experiments and numerical results. The results show that the numerical method used in this paper can better predict the turbulent characteristics of the flow around the cylinder. Numerical results show that at the Reynolds number of 104, the mean drag coefficient of square cylinders with regular arrangement is approximately equal to that of the square cylinders with multiscale arrangement. Vortex shedding behavior in the case of regular arrangement present an obvious phenomenon of "phase locking", while the vortex shedding in the case of multiscale arrangement is rather chaotic. The far-field distributions of the sound pressure level of the two flow fields are approximately the same. The induced noises in case with the regular array also exhibit similar "phase locking" behavior. In contrast, multiscale arrangement can modify the distribution the noise spectrum and transfer the power from the low-frequency region to the high-frequency region.









2024, 43(3): 394-401.
doi: 10.13433/j.cnki.1003-8728.20220286
Abstract:
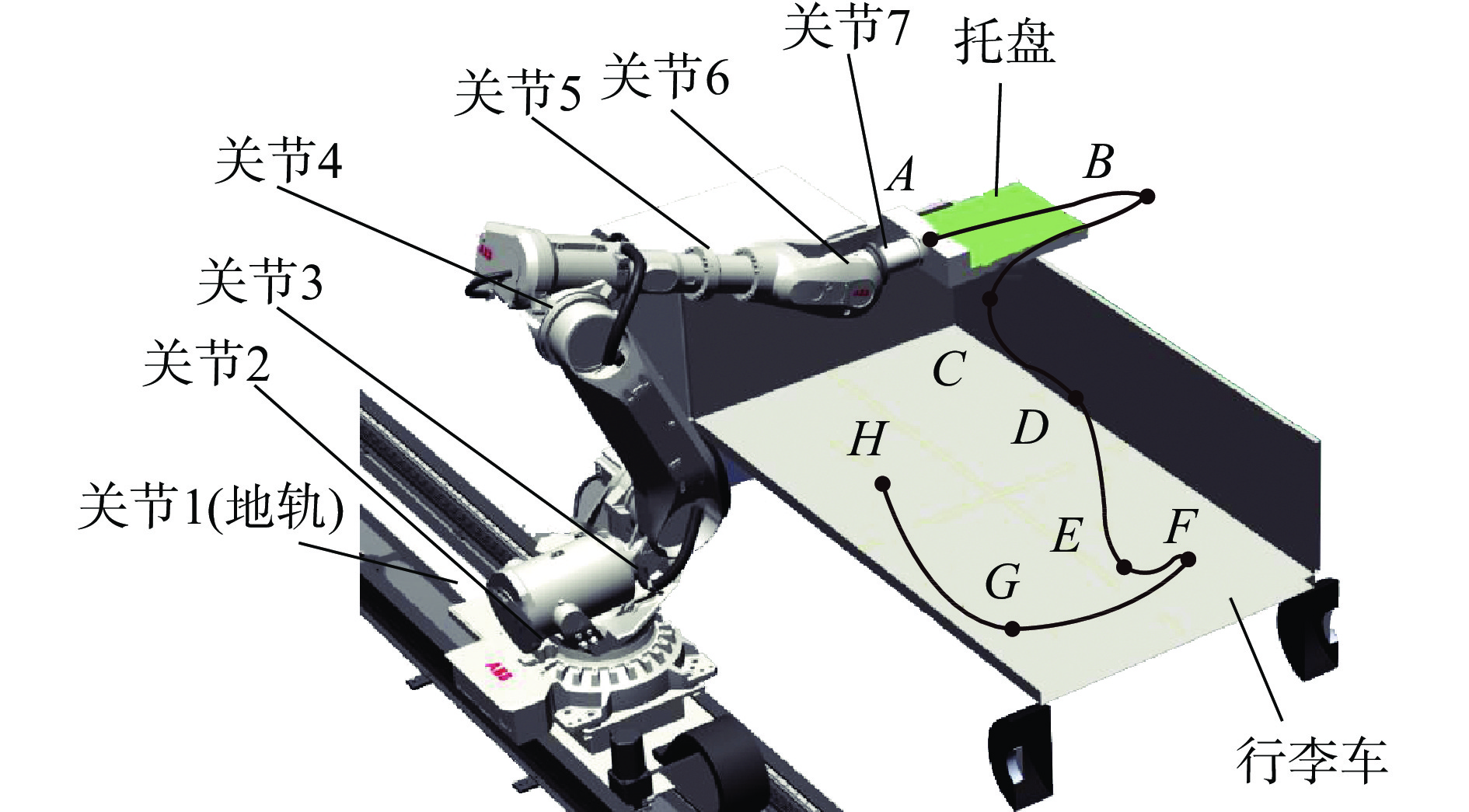
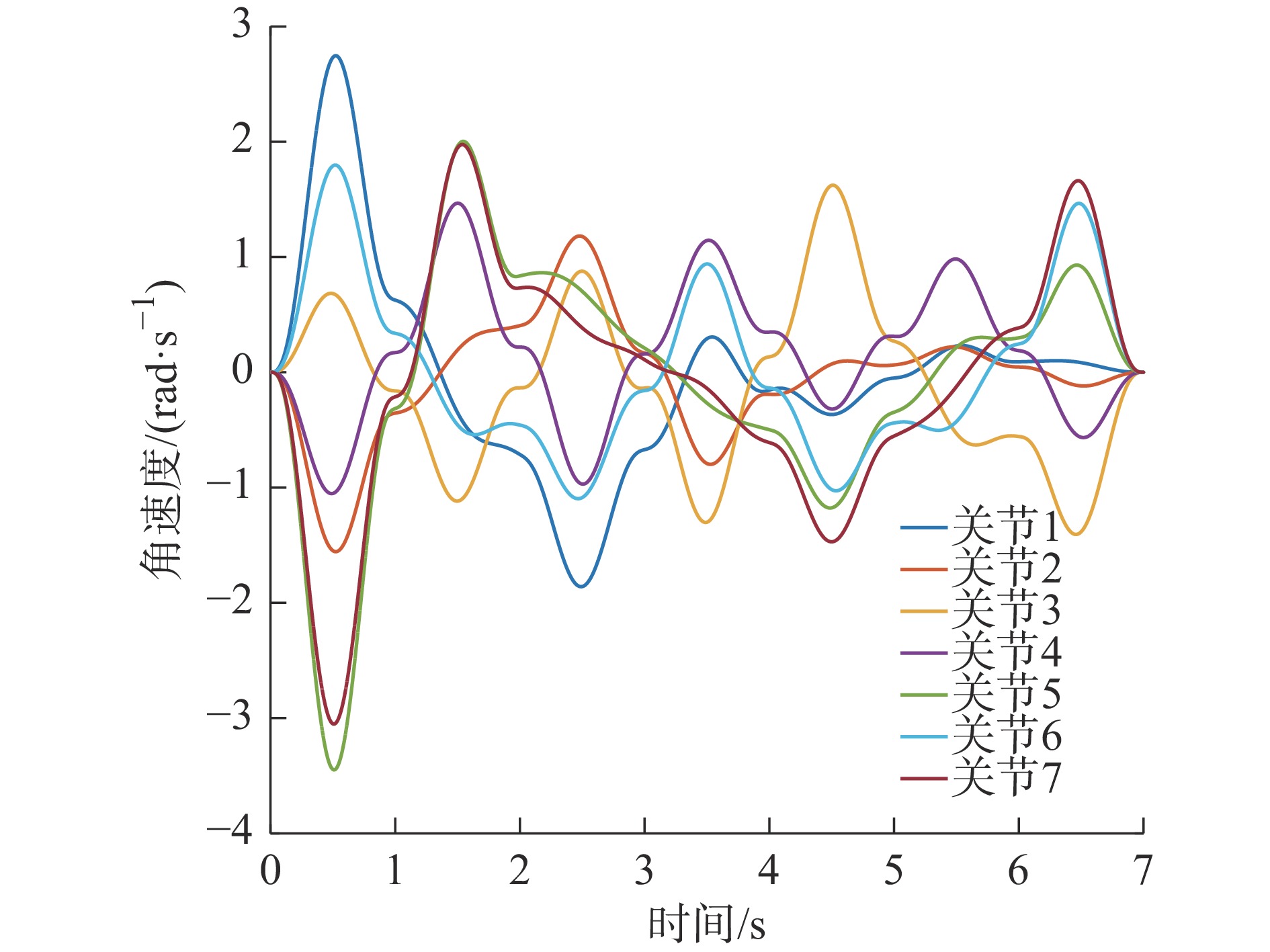
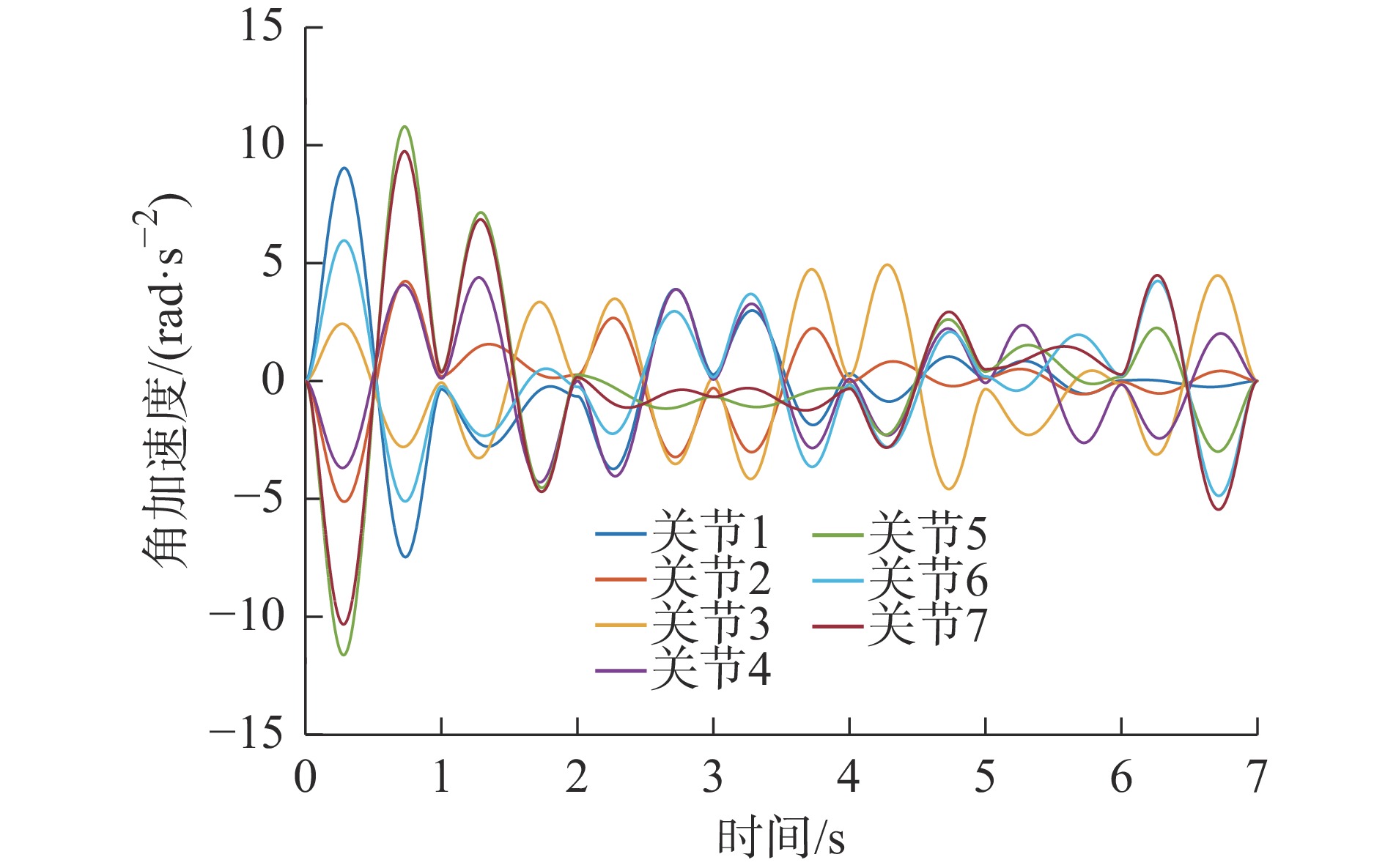
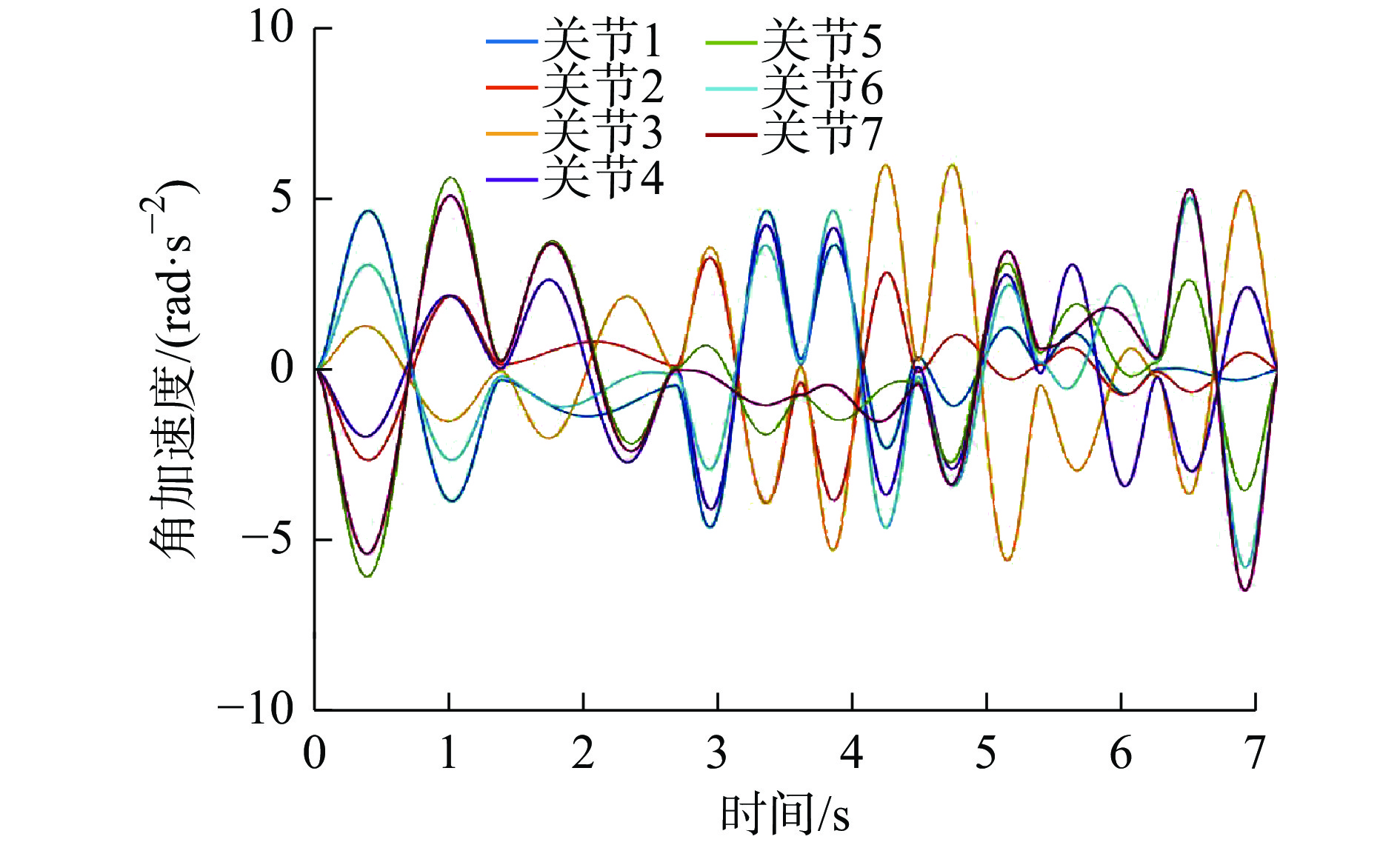
In order to improve the running stability of the pallet handling robot, an optimal trajectory planning method for robot acceleration based on the improved gray wolf algorithm is proposed. Aiming at the problems of local convergence and insufficient optimization performance of gray wolf algorithm, the Logistic-Tent chaotic map is introduced to optimize the initial population; the differential optimization algorithm is introduced to improve the global search ability; the elimination evolution mechanism is introduced to optimize the population structure and improve the optimization performance in all-round way. Compared with the standard gray wolf algorithm and the particle swarm algorithm, simulation results show that improved gray wolf algorithm has better convergence speed and algorithm accuracy in different types of test functions. In the application of the trajectory planning of the handling robot, after the optimization of the algorithm, the maximum joint angular acceleration of the robot is reduced by 44.11%, which greatly improves the running stability.
In order to improve the running stability of the pallet handling robot, an optimal trajectory planning method for robot acceleration based on the improved gray wolf algorithm is proposed. Aiming at the problems of local convergence and insufficient optimization performance of gray wolf algorithm, the Logistic-Tent chaotic map is introduced to optimize the initial population; the differential optimization algorithm is introduced to improve the global search ability; the elimination evolution mechanism is introduced to optimize the population structure and improve the optimization performance in all-round way. Compared with the standard gray wolf algorithm and the particle swarm algorithm, simulation results show that improved gray wolf algorithm has better convergence speed and algorithm accuracy in different types of test functions. In the application of the trajectory planning of the handling robot, after the optimization of the algorithm, the maximum joint angular acceleration of the robot is reduced by 44.11%, which greatly improves the running stability.


2024, 43(3): 402-408.
doi: 10.13433/j.cnki.1003-8728.20220290
Abstract:
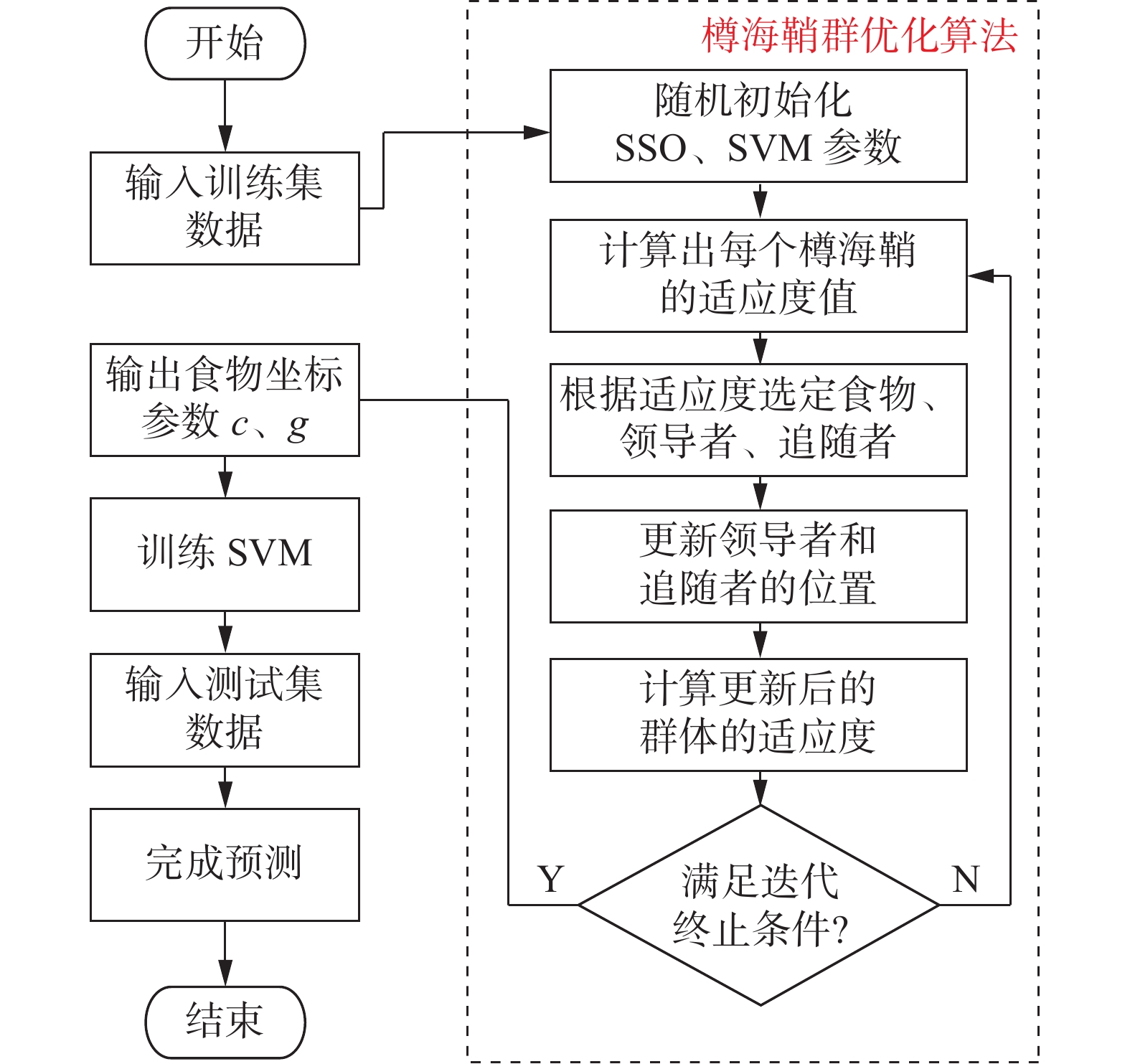
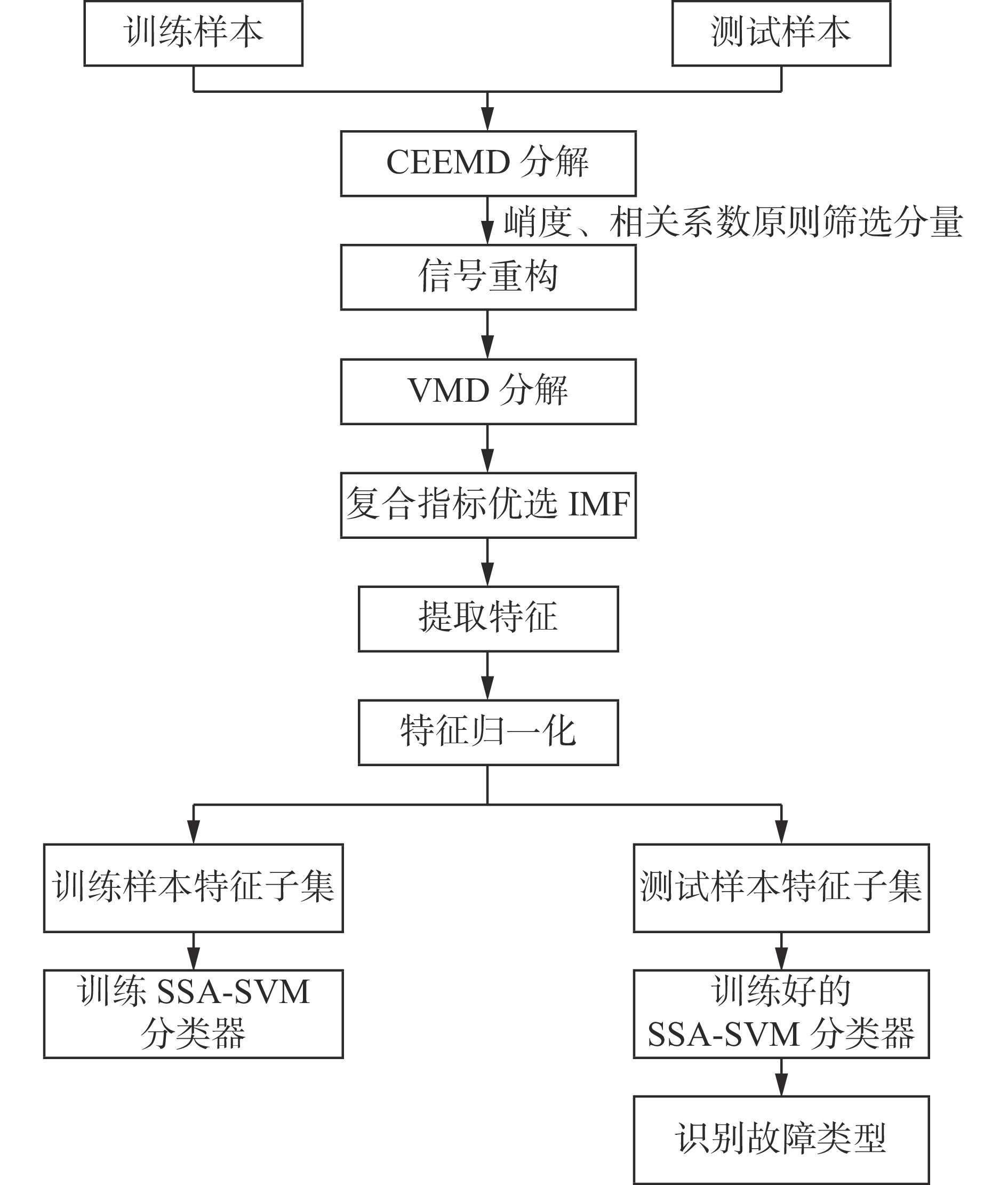
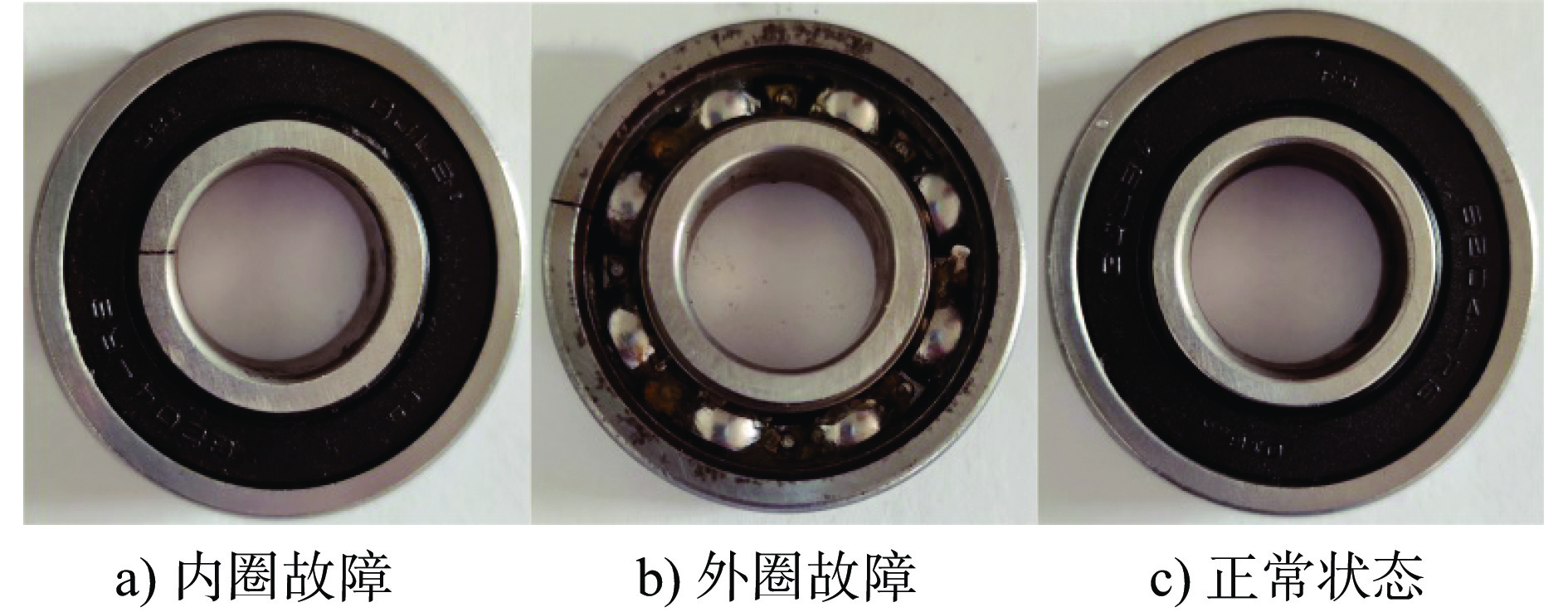
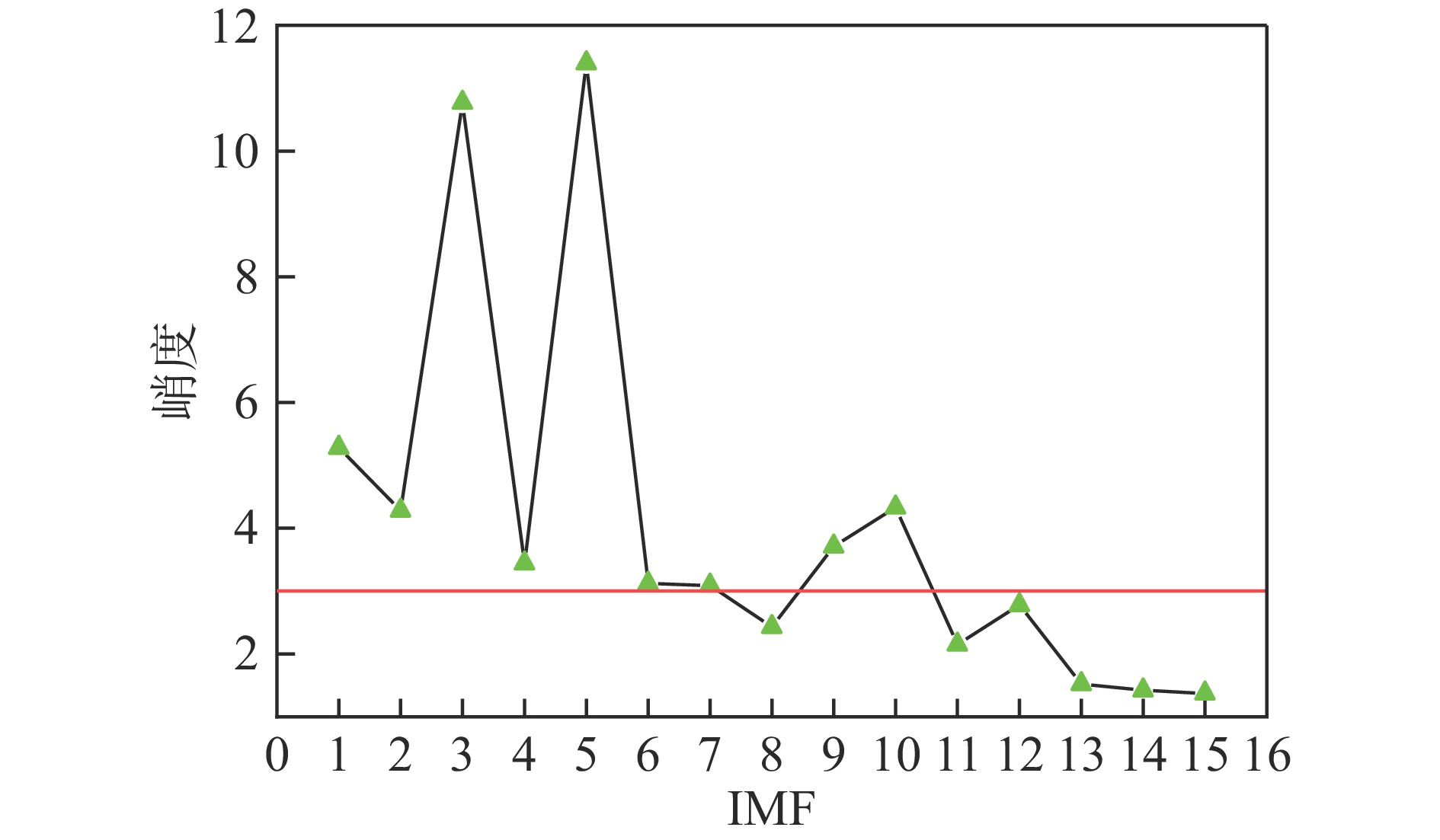
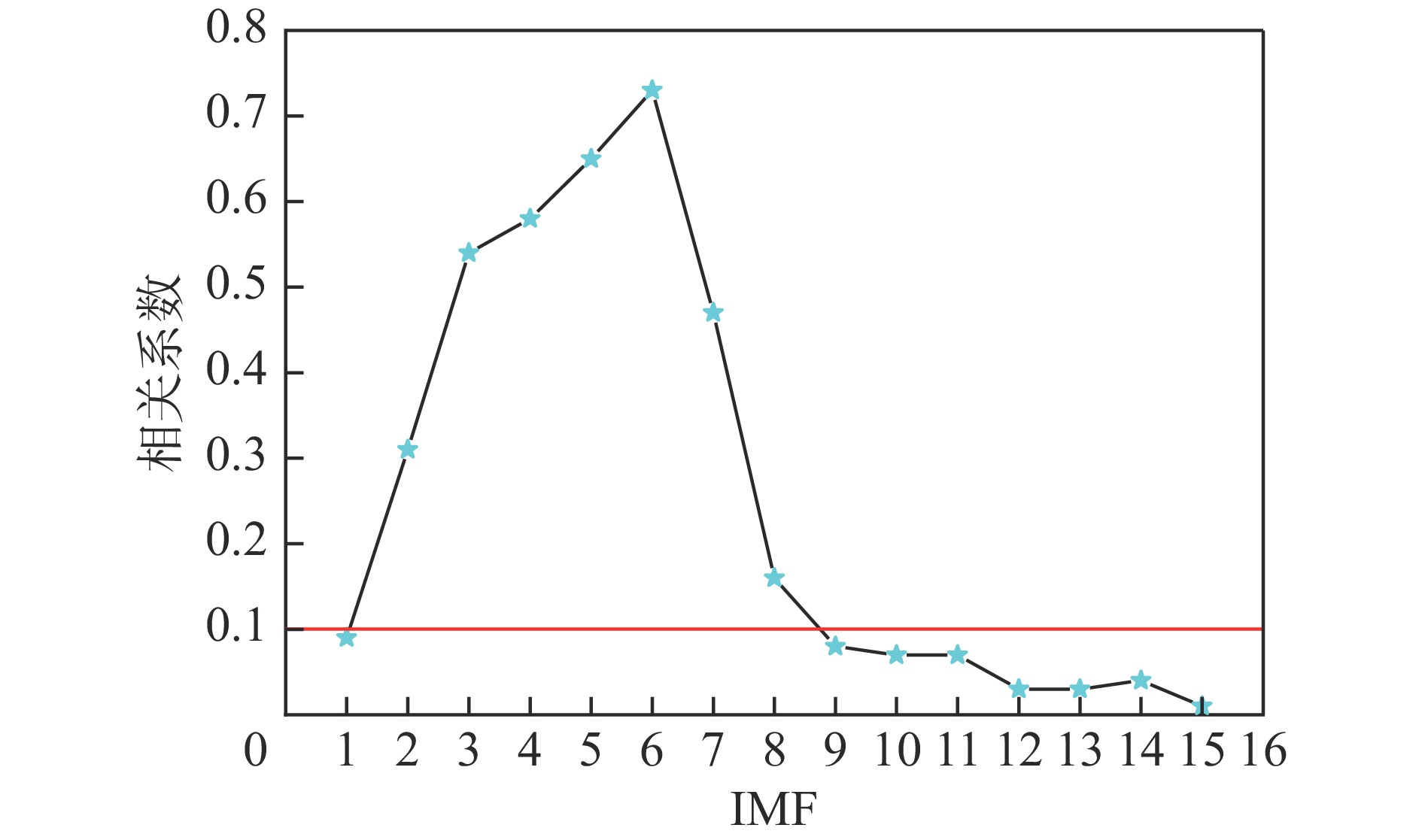
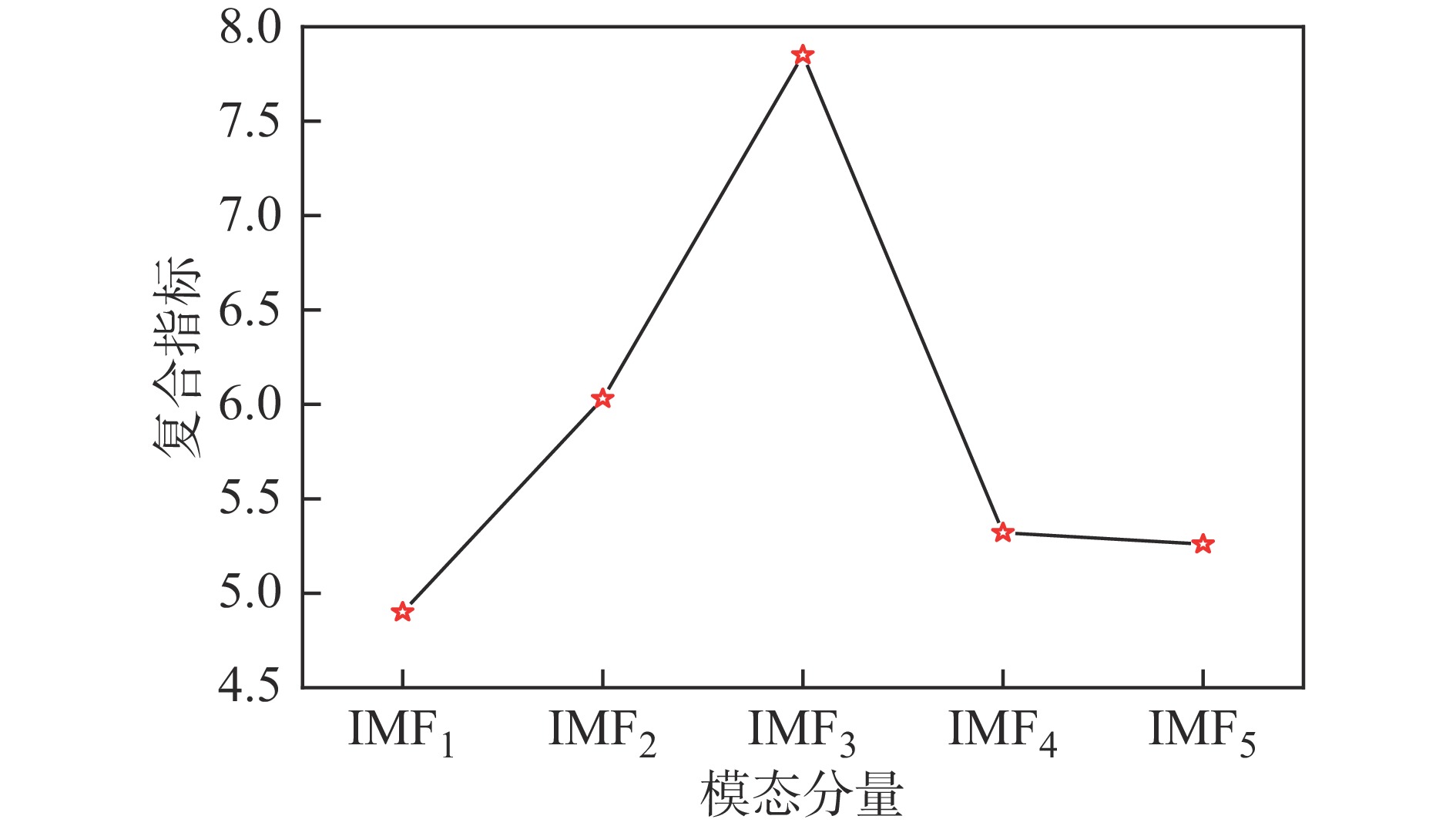
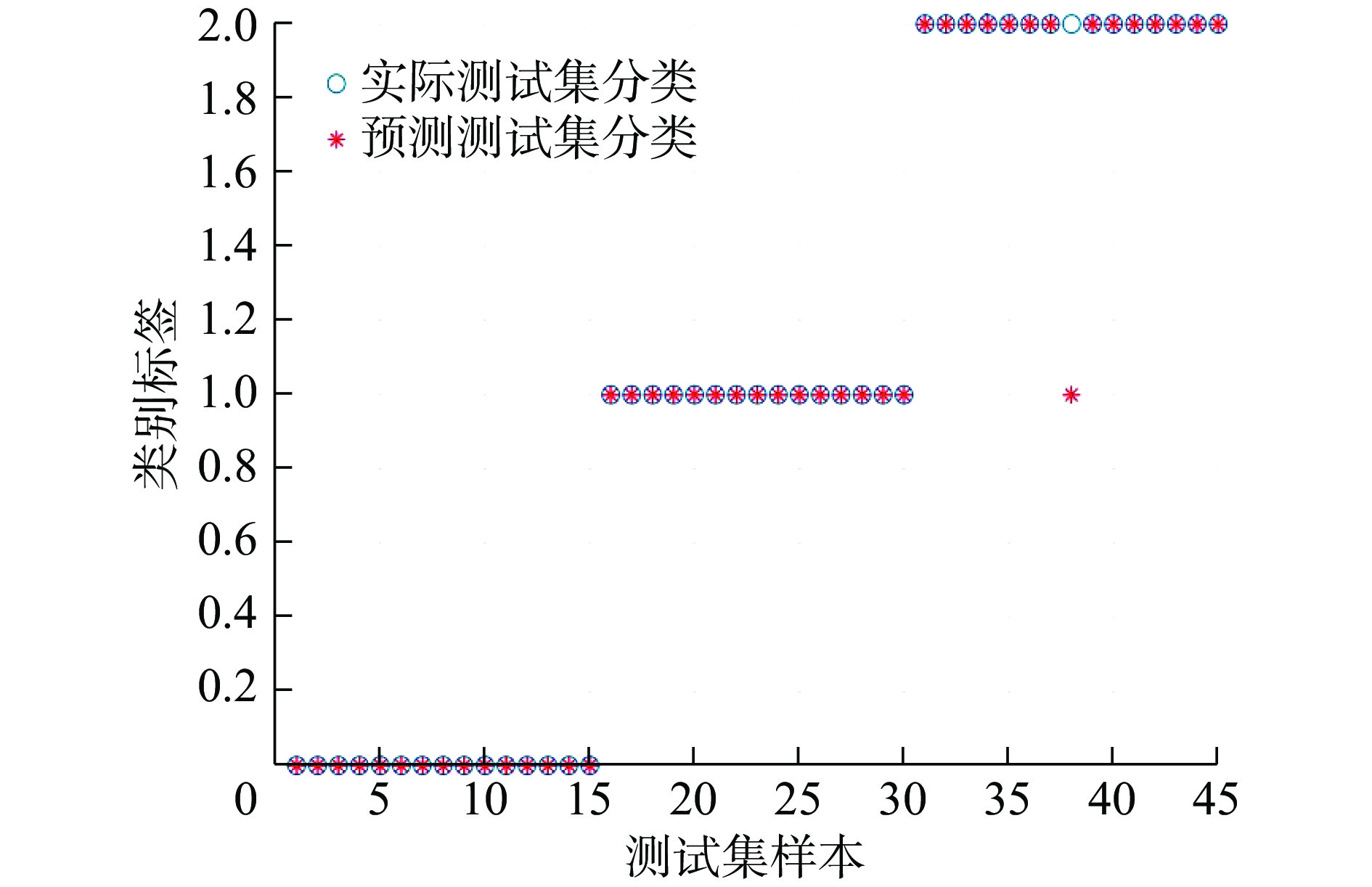
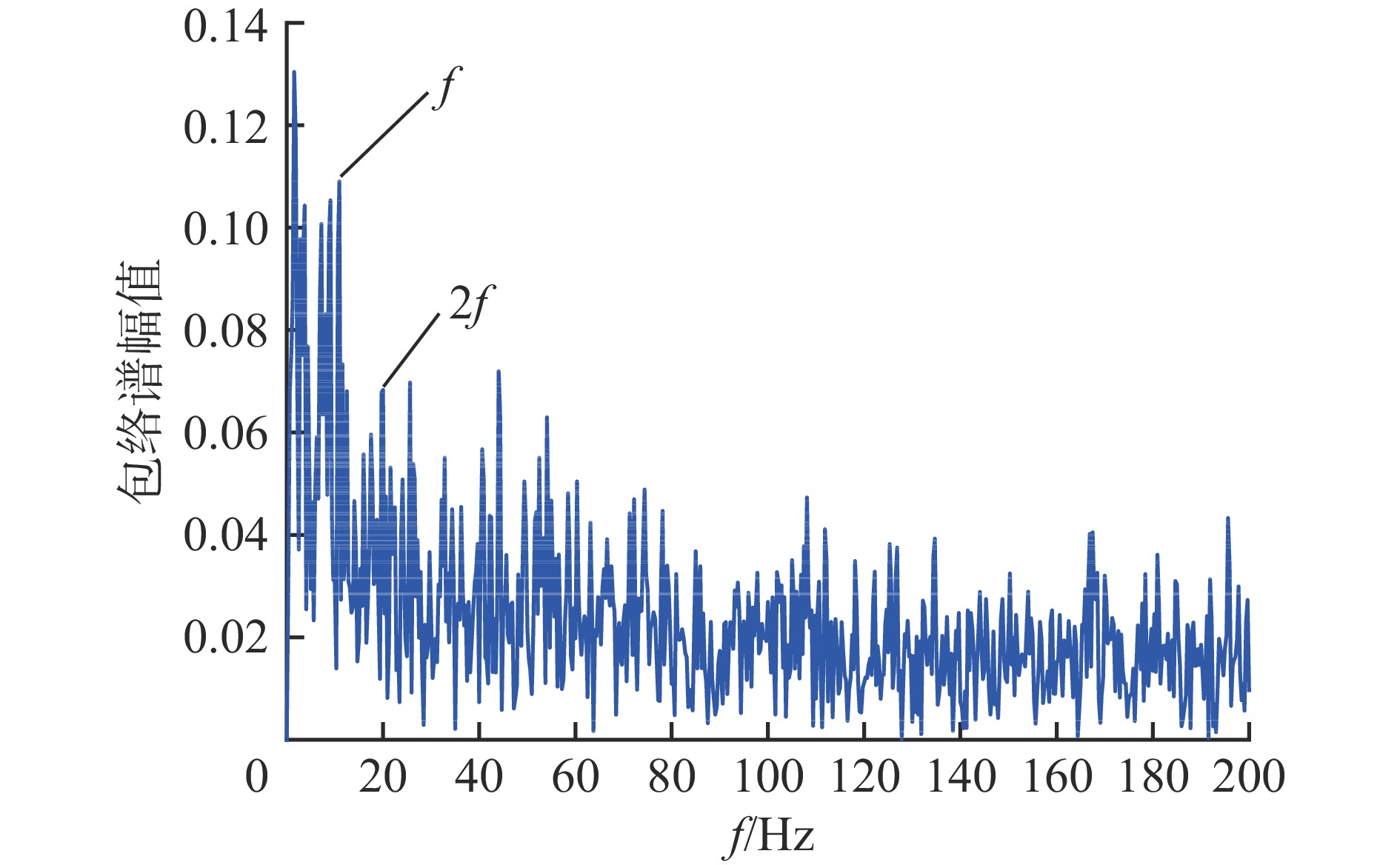
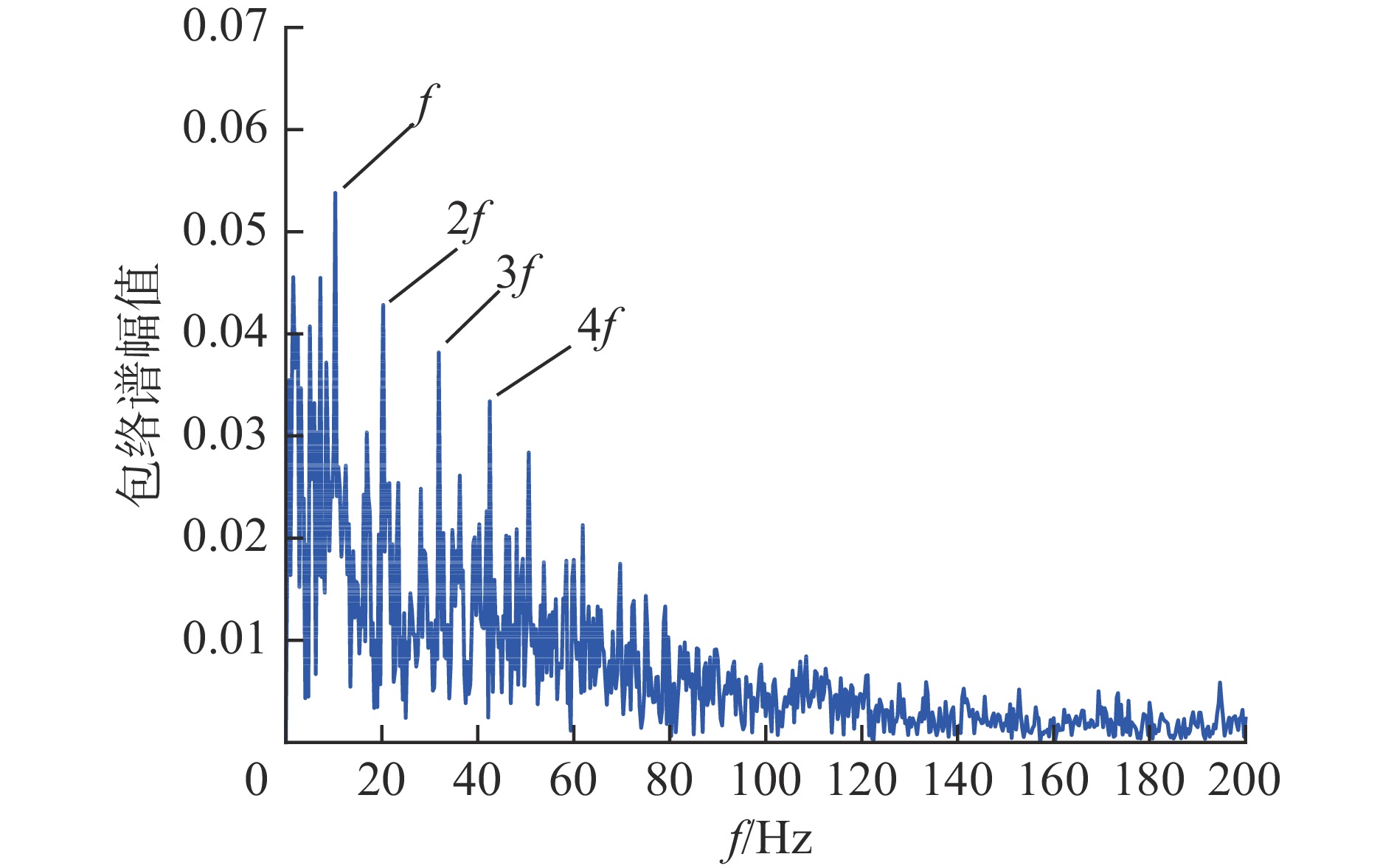
In order to solve the difficulty in extracting fault features of roller bearings under complex working environment, a noise reduction method was proposed based on the combination of complementary ensemble empirical mode decomposition (CEEMD) and variational modal decomposition (VMD). Firstly, the collected signals are decomposed by CEEMD, and the components are screened and reconstructed according to the correlation coefficient and kurtosis to generate new signals. Then, VMD was used to decompose the new signal, and the intrinsic mode functions (IMF) were optimized based on the composite index of the combination of envelope entropy and envelope spectrum kurtosis. Finally, the corresponding features were extracted and input into salp swarm optimized support vector machine (SSO-SVM) model to complete the fault diagnosis. The experimental results show that the diagnosis accuracy of normal bearing, bearing inner ring fault and bearing outer ring fault is up to 97.78%. Compared with the single noise reduction method, this method can effectively improve the signal noise ratio of fault signal, and the noise reduction effect is obvious.
In order to solve the difficulty in extracting fault features of roller bearings under complex working environment, a noise reduction method was proposed based on the combination of complementary ensemble empirical mode decomposition (CEEMD) and variational modal decomposition (VMD). Firstly, the collected signals are decomposed by CEEMD, and the components are screened and reconstructed according to the correlation coefficient and kurtosis to generate new signals. Then, VMD was used to decompose the new signal, and the intrinsic mode functions (IMF) were optimized based on the composite index of the combination of envelope entropy and envelope spectrum kurtosis. Finally, the corresponding features were extracted and input into salp swarm optimized support vector machine (SSO-SVM) model to complete the fault diagnosis. The experimental results show that the diagnosis accuracy of normal bearing, bearing inner ring fault and bearing outer ring fault is up to 97.78%. Compared with the single noise reduction method, this method can effectively improve the signal noise ratio of fault signal, and the noise reduction effect is obvious.




2024, 43(3): 409-415.
doi: 10.13433/j.cnki.1003-8728.20220266
Abstract:
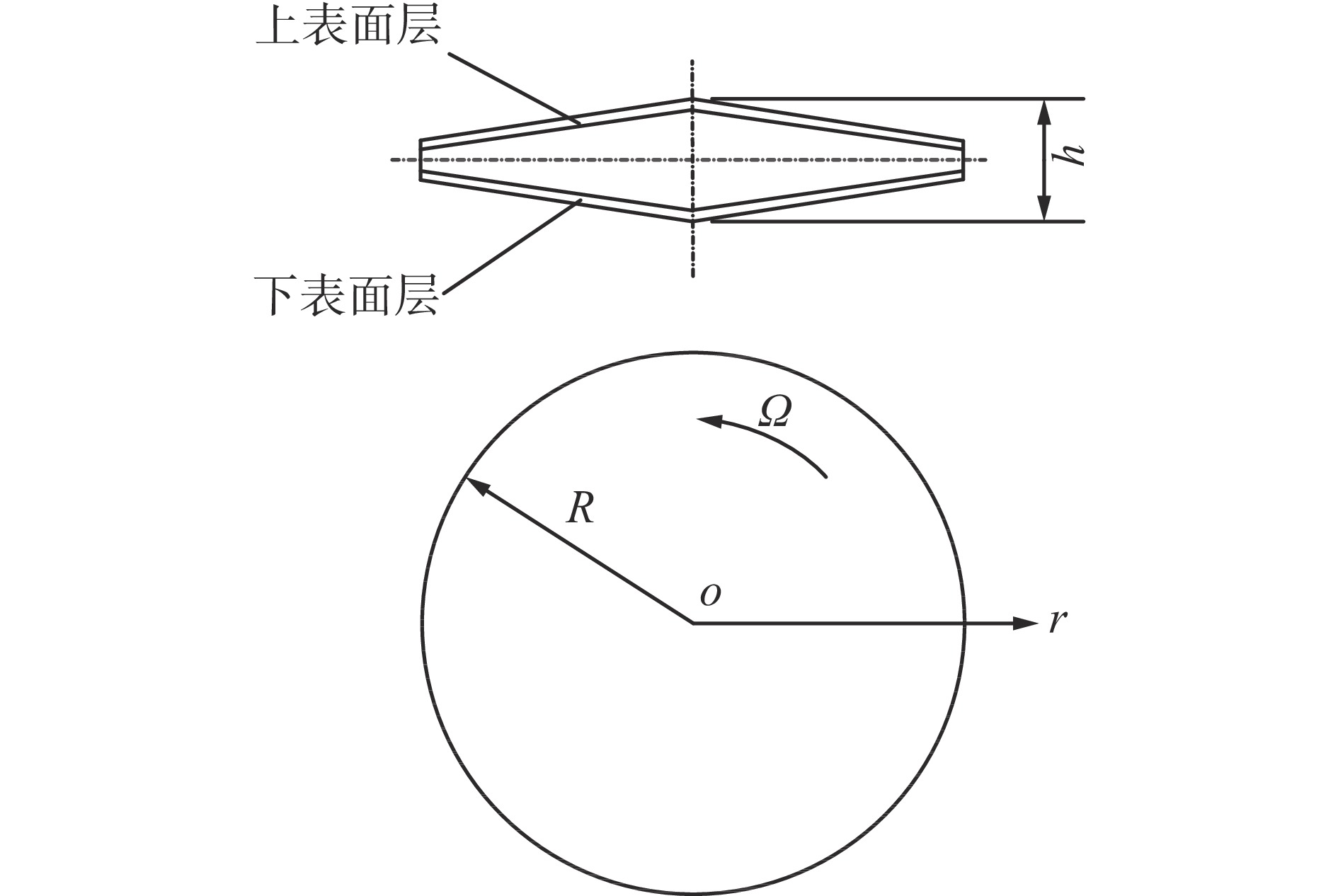
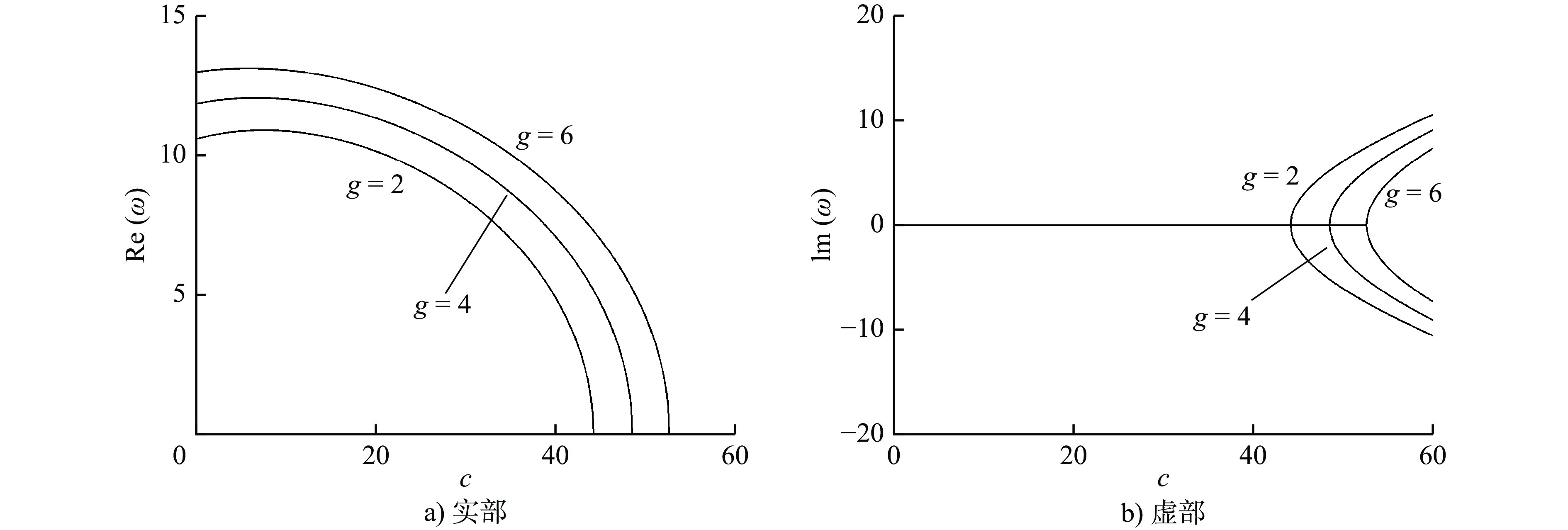
Based on the theory of the surface residual stress of nanomaterials and small deflection of elastic plate, the transverse vibration differential equation of rotating convex-concave circular nanoplate was established. The variation of dimensionless complex frequency of convex-concave circular nanoplate with dimensionless angular speed and surface residual stress under different conditions was obtained by using the differential quadrature method. The results show that the first-order divergence instability of rotating convex-concave circular nanoplate was observed in both clamped and simply supported conditions. When other parameters are constant, the critical instability angular speed of the clamped concave circular nanoplate is smaller than that of the convex circular nanoplate, and the critical instability angular speed of the simply supported concave circular nanoplate is greater than that of the convex circular nanoplate. The critical instability angular speed increases with the increasing of surface residual stress, and the critical surface residual stress increases with the increasing of dimensionless angular speed.
Based on the theory of the surface residual stress of nanomaterials and small deflection of elastic plate, the transverse vibration differential equation of rotating convex-concave circular nanoplate was established. The variation of dimensionless complex frequency of convex-concave circular nanoplate with dimensionless angular speed and surface residual stress under different conditions was obtained by using the differential quadrature method. The results show that the first-order divergence instability of rotating convex-concave circular nanoplate was observed in both clamped and simply supported conditions. When other parameters are constant, the critical instability angular speed of the clamped concave circular nanoplate is smaller than that of the convex circular nanoplate, and the critical instability angular speed of the simply supported concave circular nanoplate is greater than that of the convex circular nanoplate. The critical instability angular speed increases with the increasing of surface residual stress, and the critical surface residual stress increases with the increasing of dimensionless angular speed.


2024, 43(3): 416-422.
doi: 10.13433/j.cnki.1003-8728.20220219
Abstract:
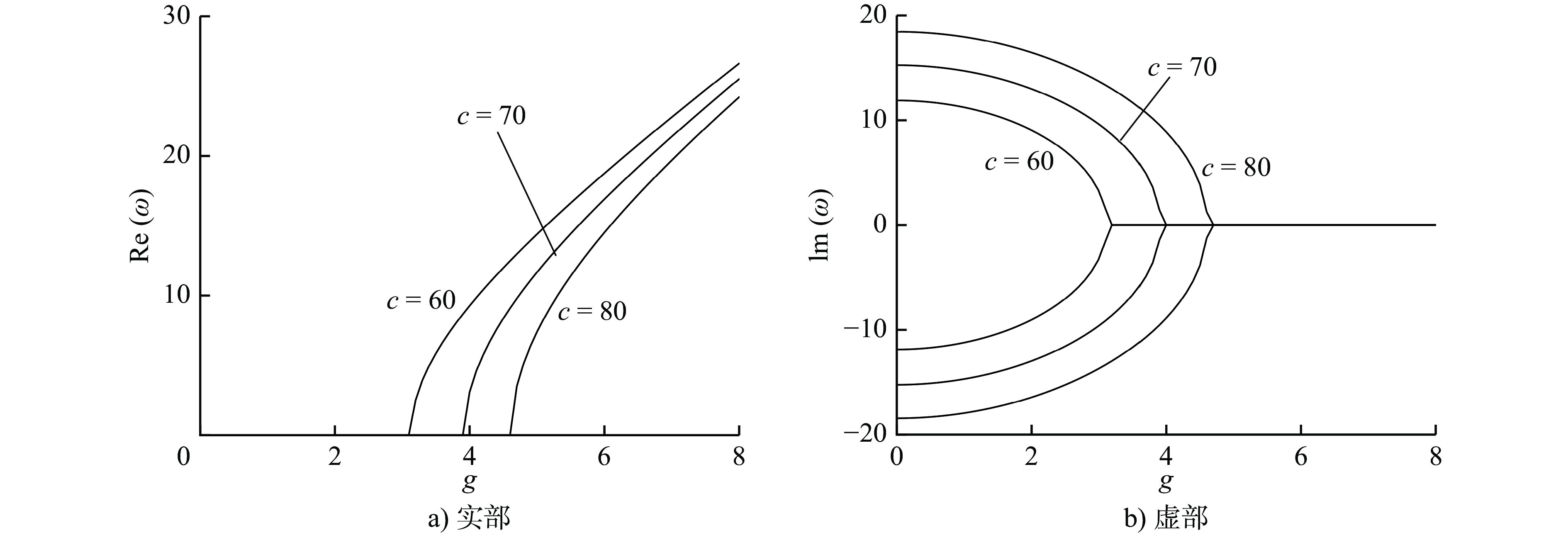
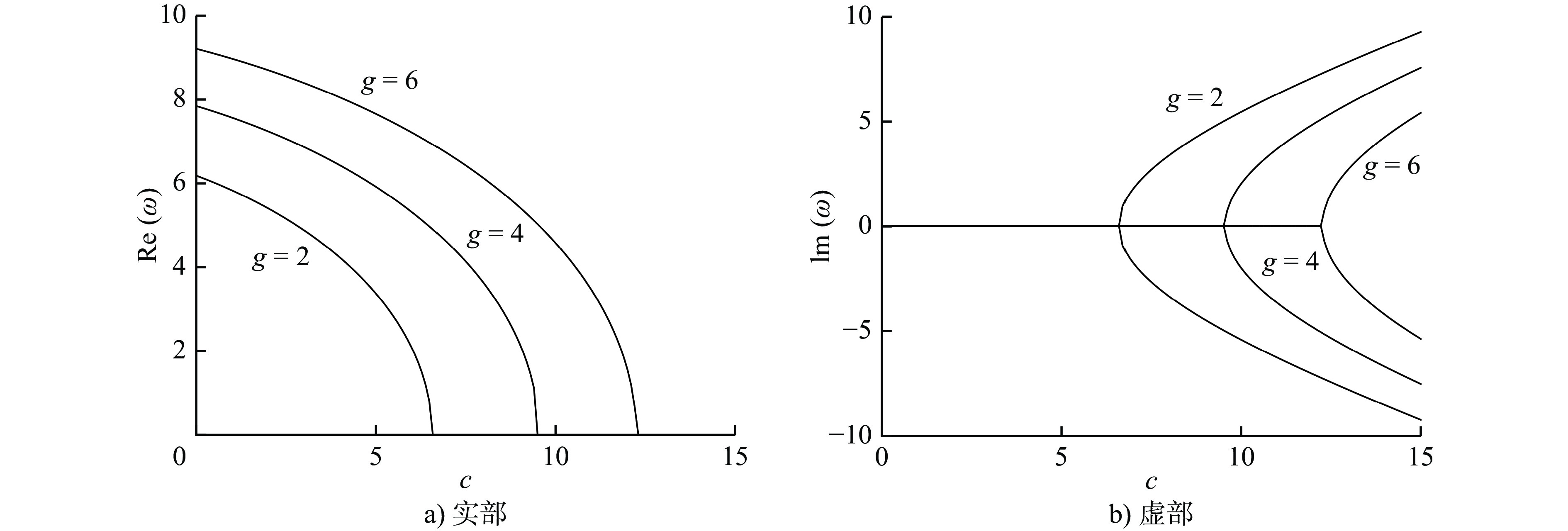
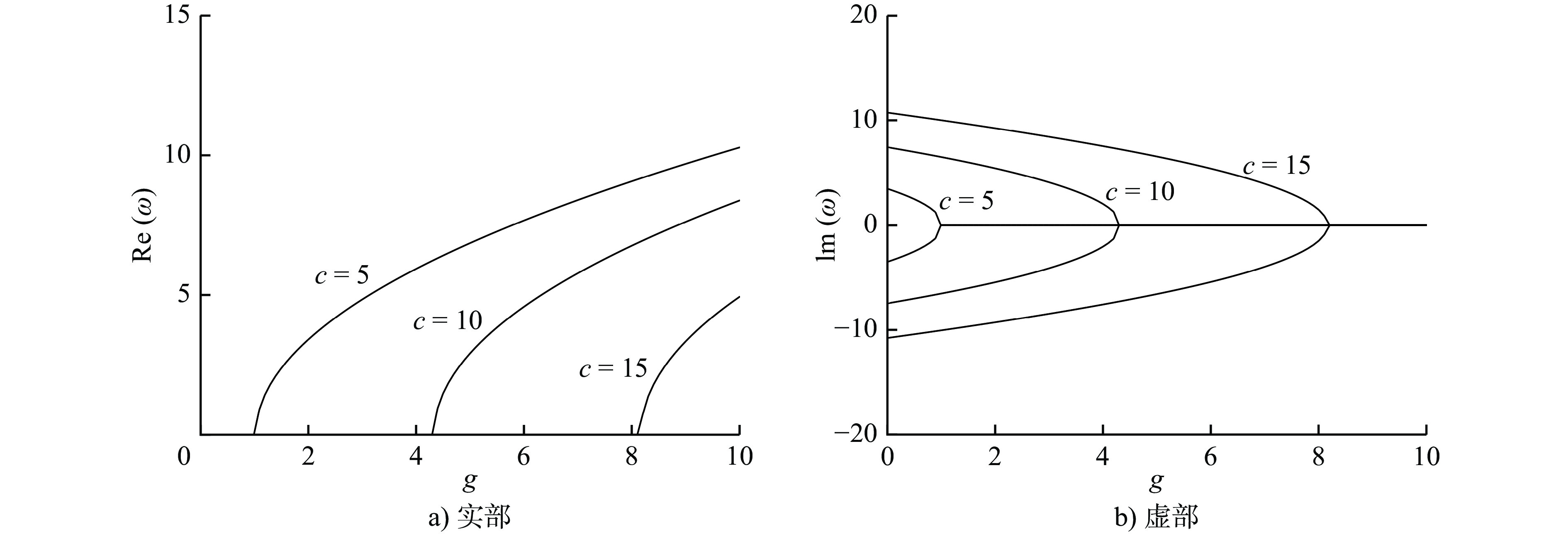
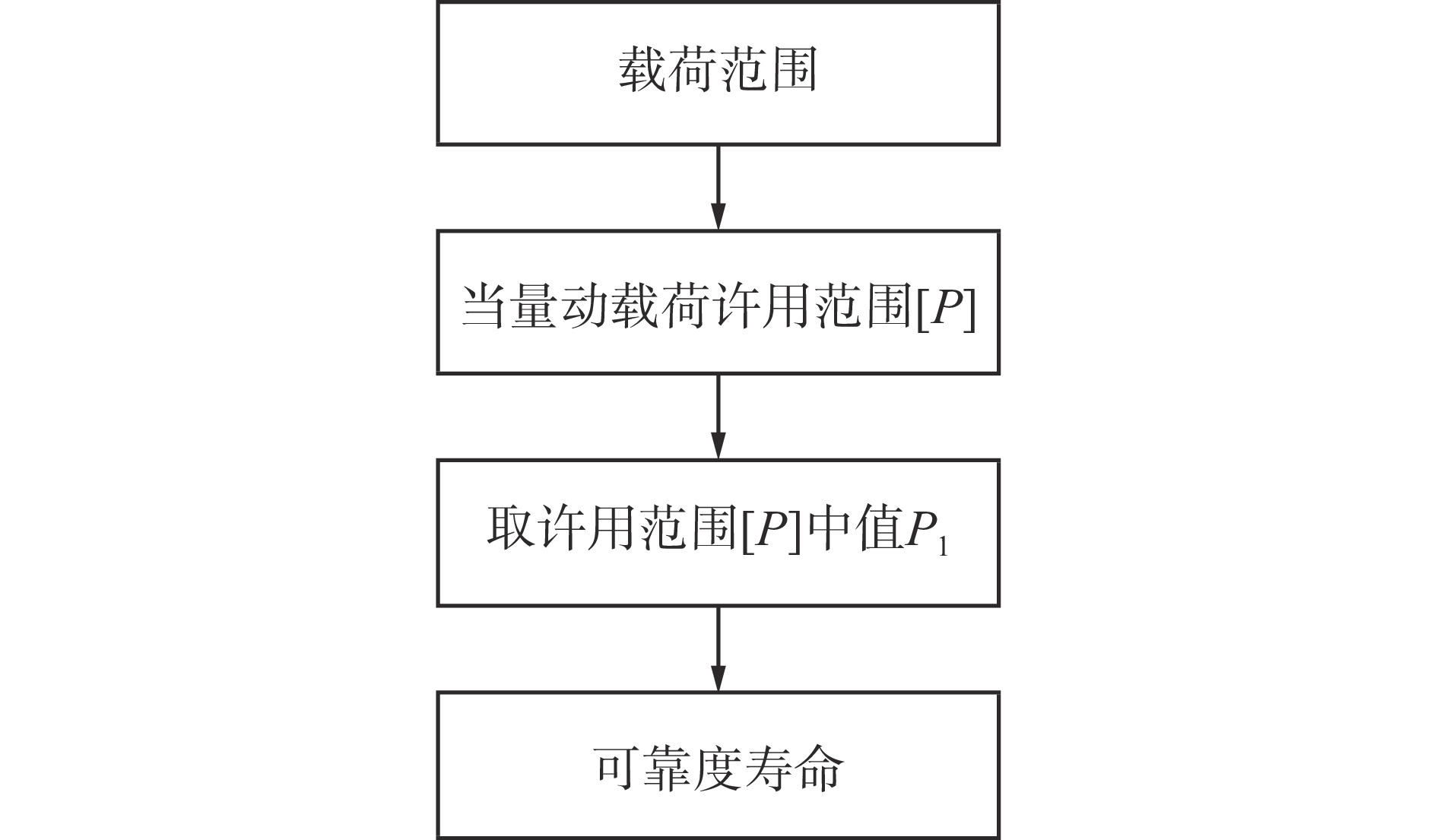
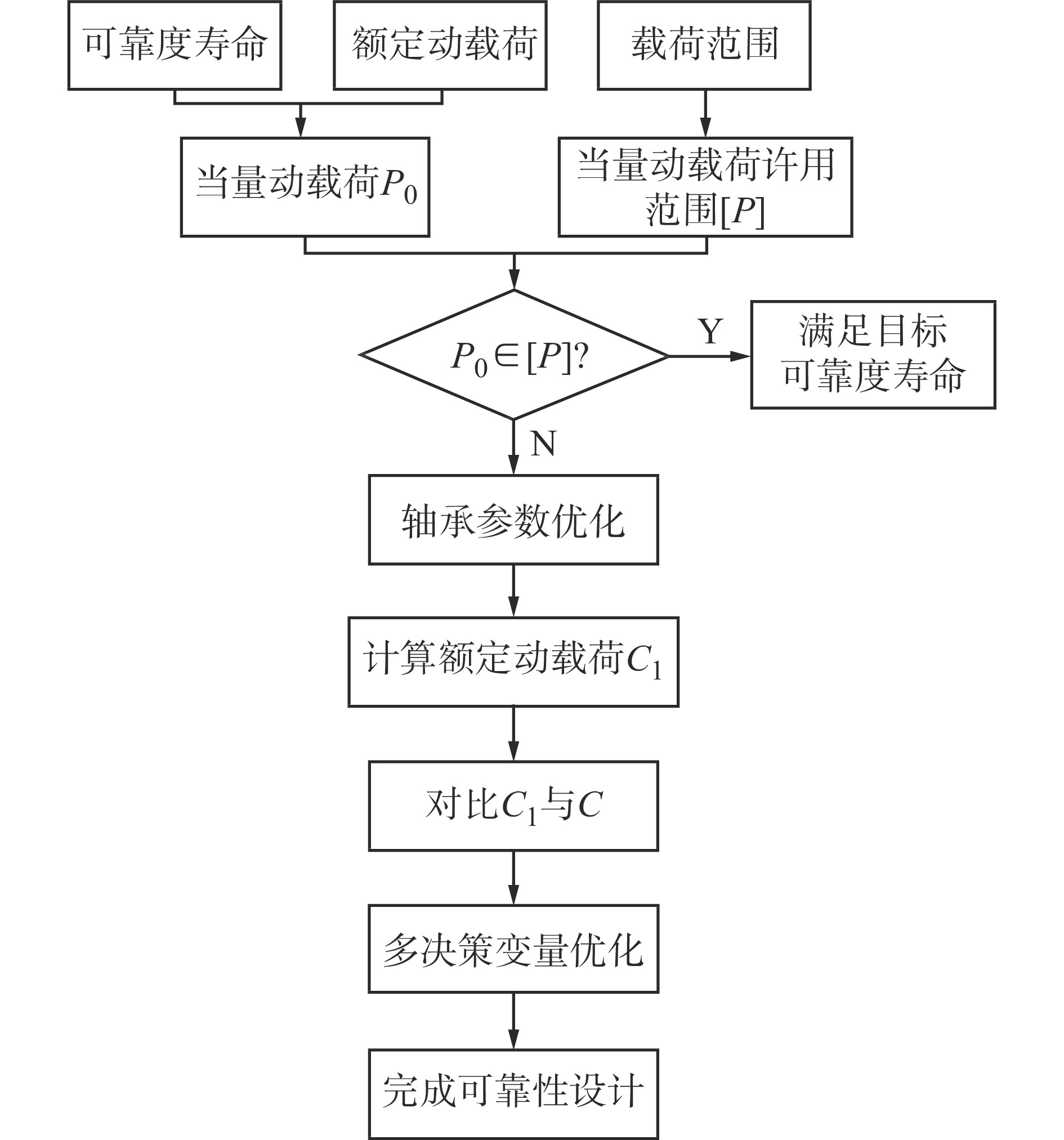
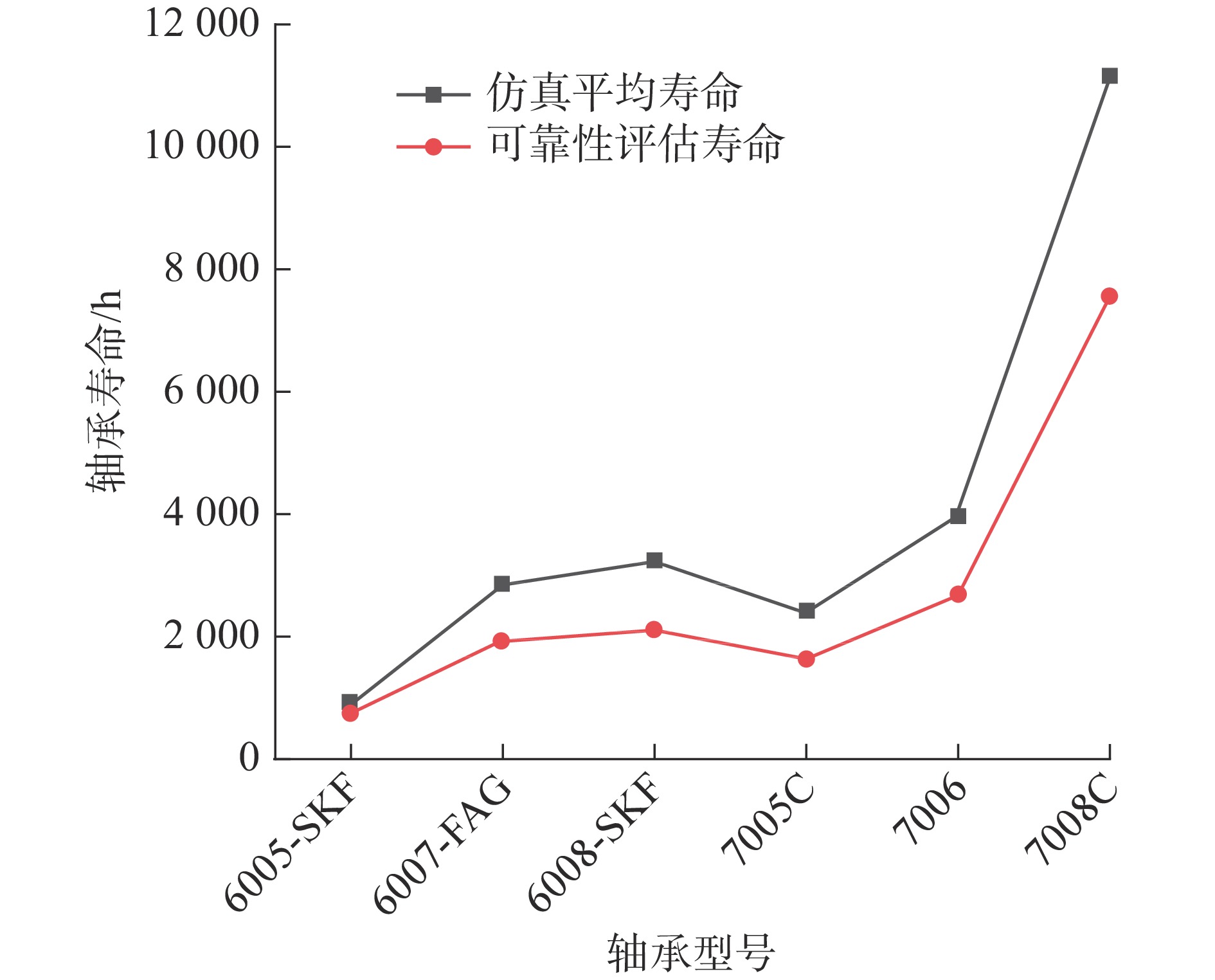
Aiming at the low reliability and lack of design basis of rolling bearings, a reliability evaluation and design method of rolling bearings under stress-strength interference model was proposed. Considering the random characteristics of the actual equivalent dynamic load and the specified equivalent dynamic load, and assuming that the two random variables subject to lognormal distribution, the reliability evaluation and design model for rolling bearings was established. Secondly, the simulation verification is carried out for the deep groove ball bearings and angular contact ball bearings under multiple models and conditions. The results show that the reliability evaluation and design method of rolling bearing proposed in this paper can make the optimized bearing meet the target reliability life under this working condition by analyzing the allowable range of equivalent dynamic load and combining with the bearing design formula, and achieve the reliability evaluation and design of rolling bearing accurately and effectively.
Aiming at the low reliability and lack of design basis of rolling bearings, a reliability evaluation and design method of rolling bearings under stress-strength interference model was proposed. Considering the random characteristics of the actual equivalent dynamic load and the specified equivalent dynamic load, and assuming that the two random variables subject to lognormal distribution, the reliability evaluation and design model for rolling bearings was established. Secondly, the simulation verification is carried out for the deep groove ball bearings and angular contact ball bearings under multiple models and conditions. The results show that the reliability evaluation and design method of rolling bearing proposed in this paper can make the optimized bearing meet the target reliability life under this working condition by analyzing the allowable range of equivalent dynamic load and combining with the bearing design formula, and achieve the reliability evaluation and design of rolling bearing accurately and effectively.
2024, 43(3): 423-429.
doi: 10.13433/j.cnki.1003-8728.20220271
Abstract:
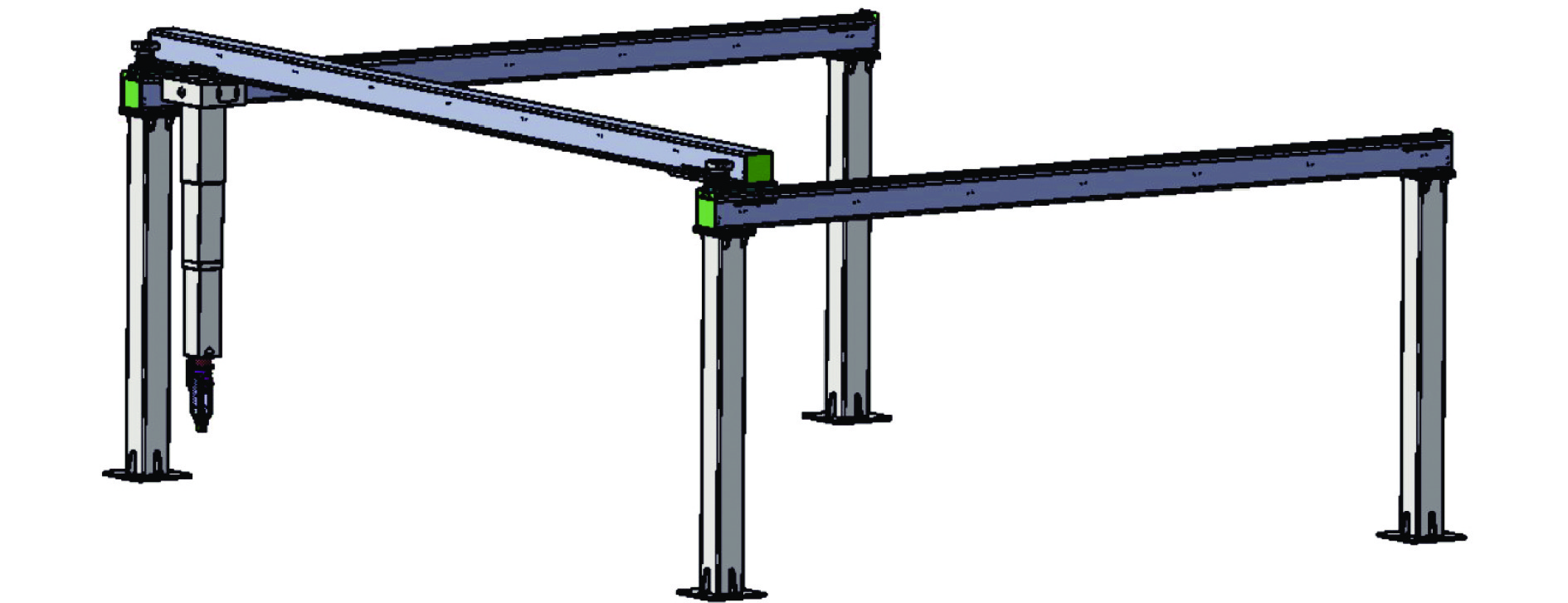
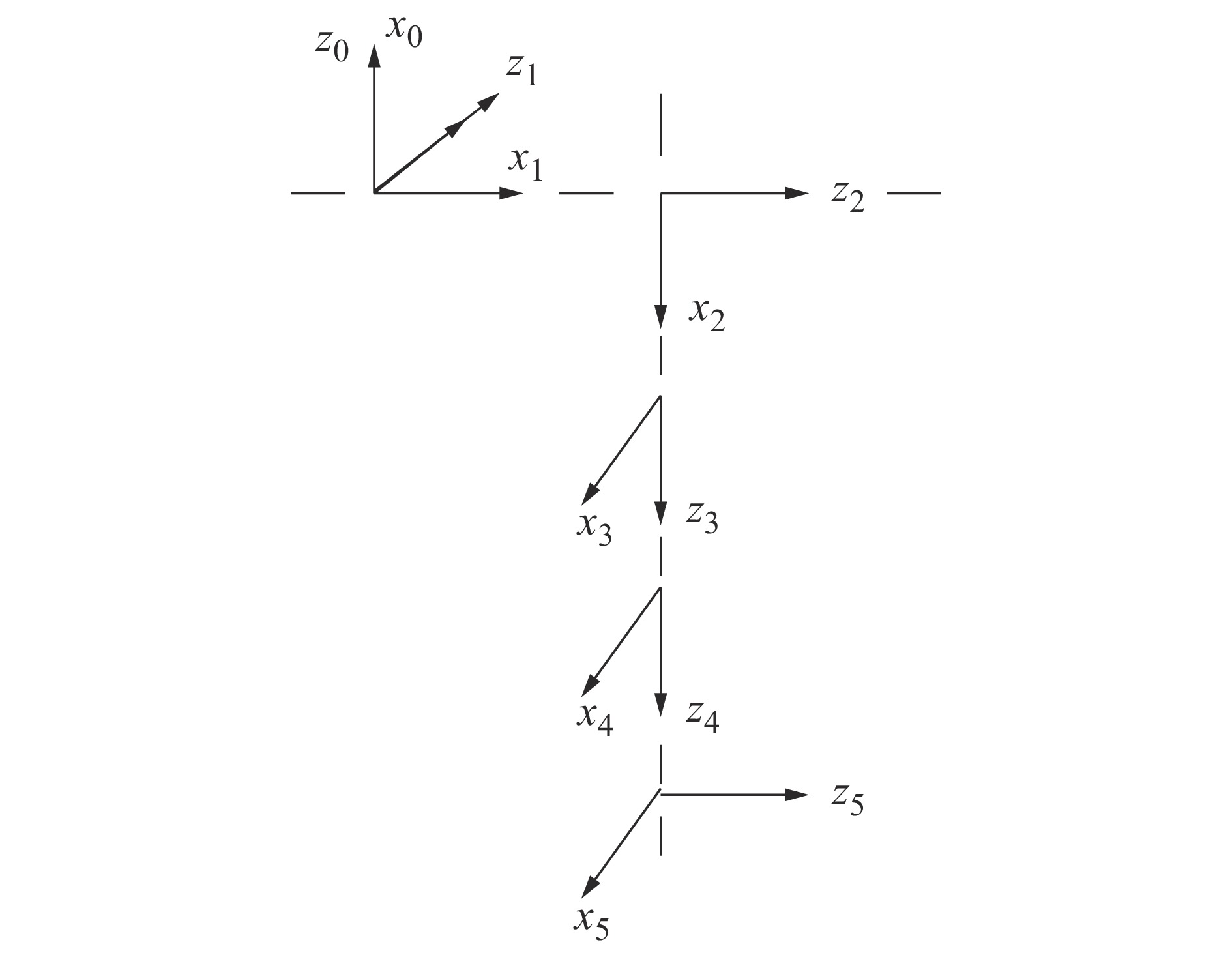
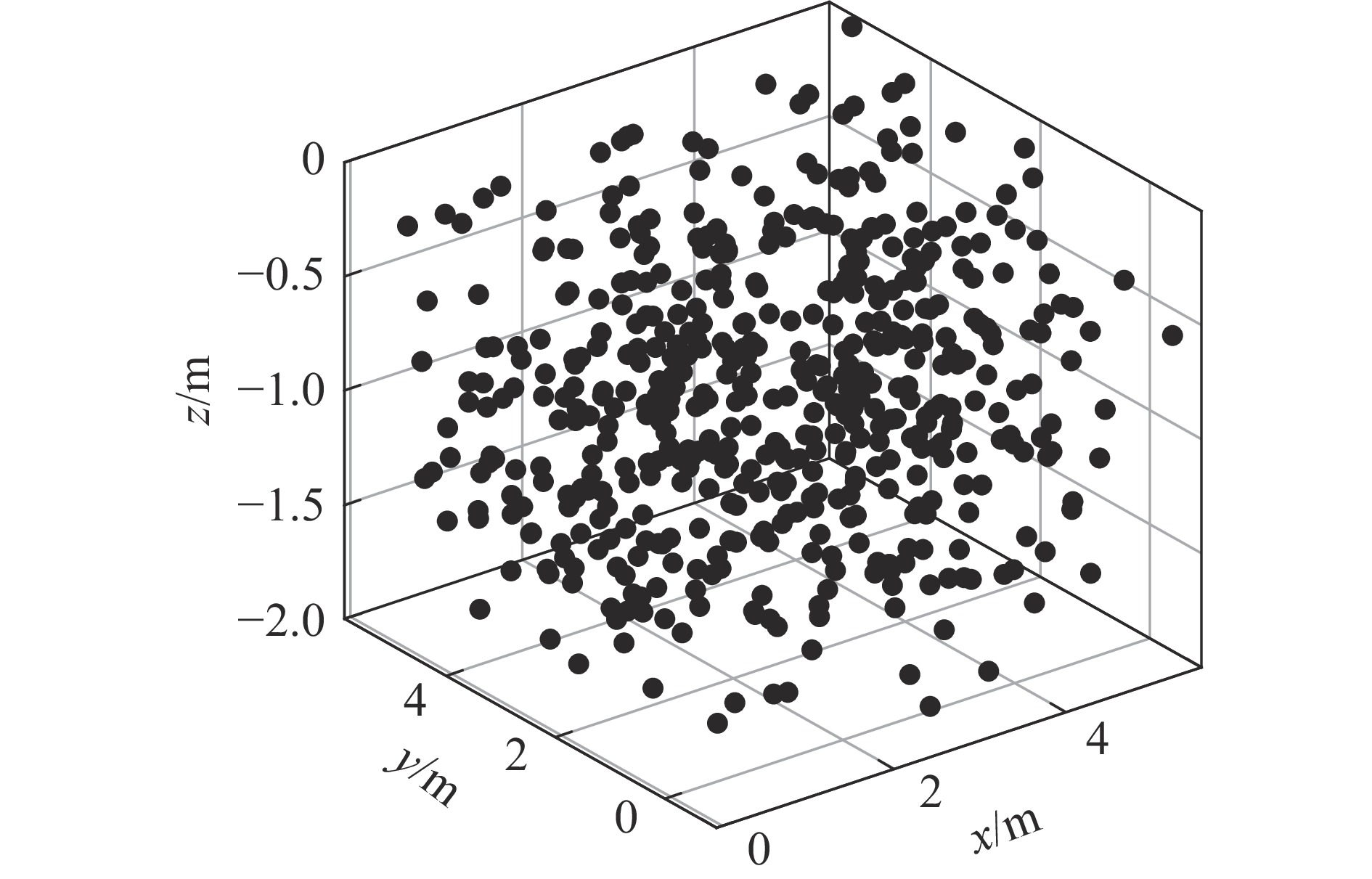
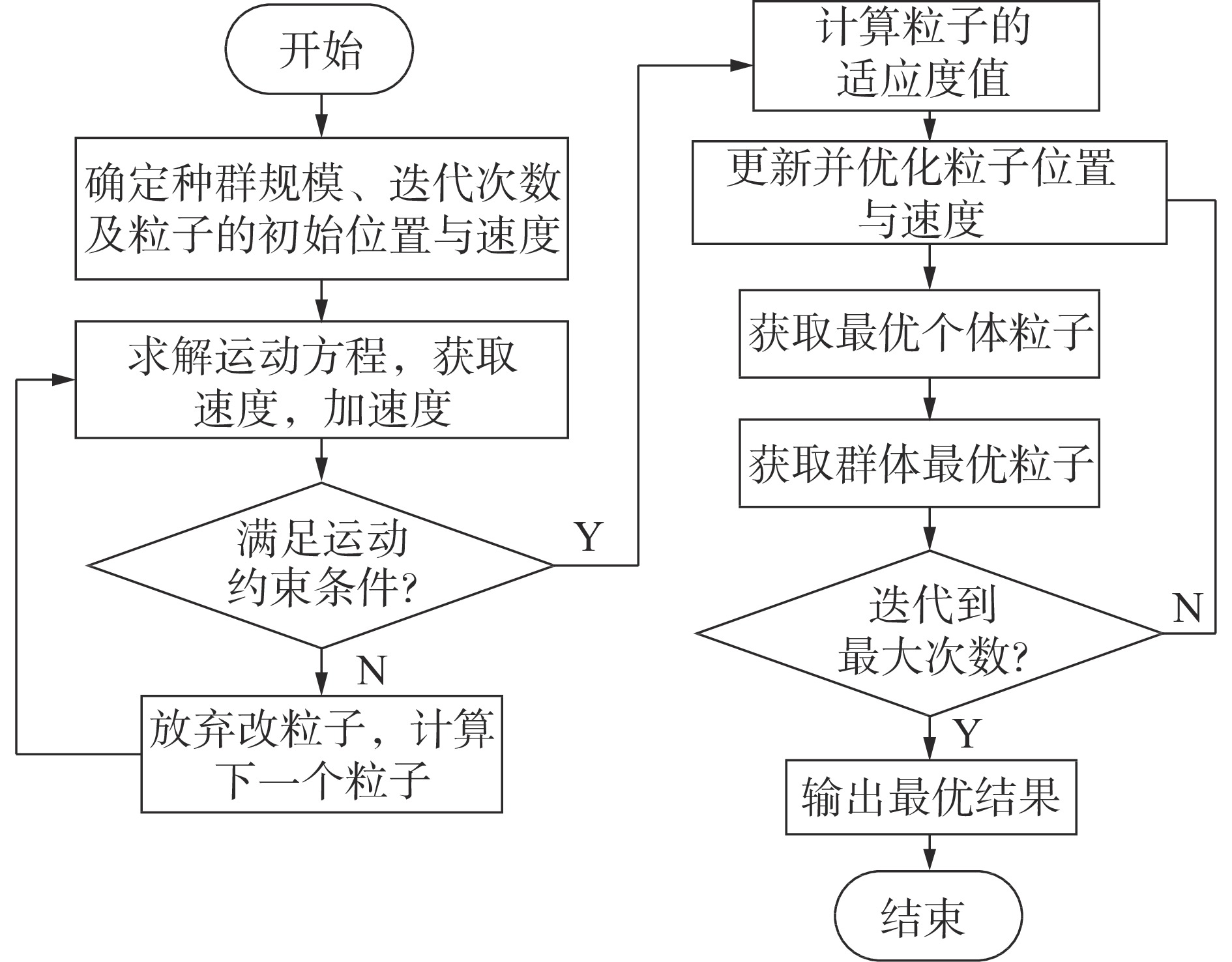
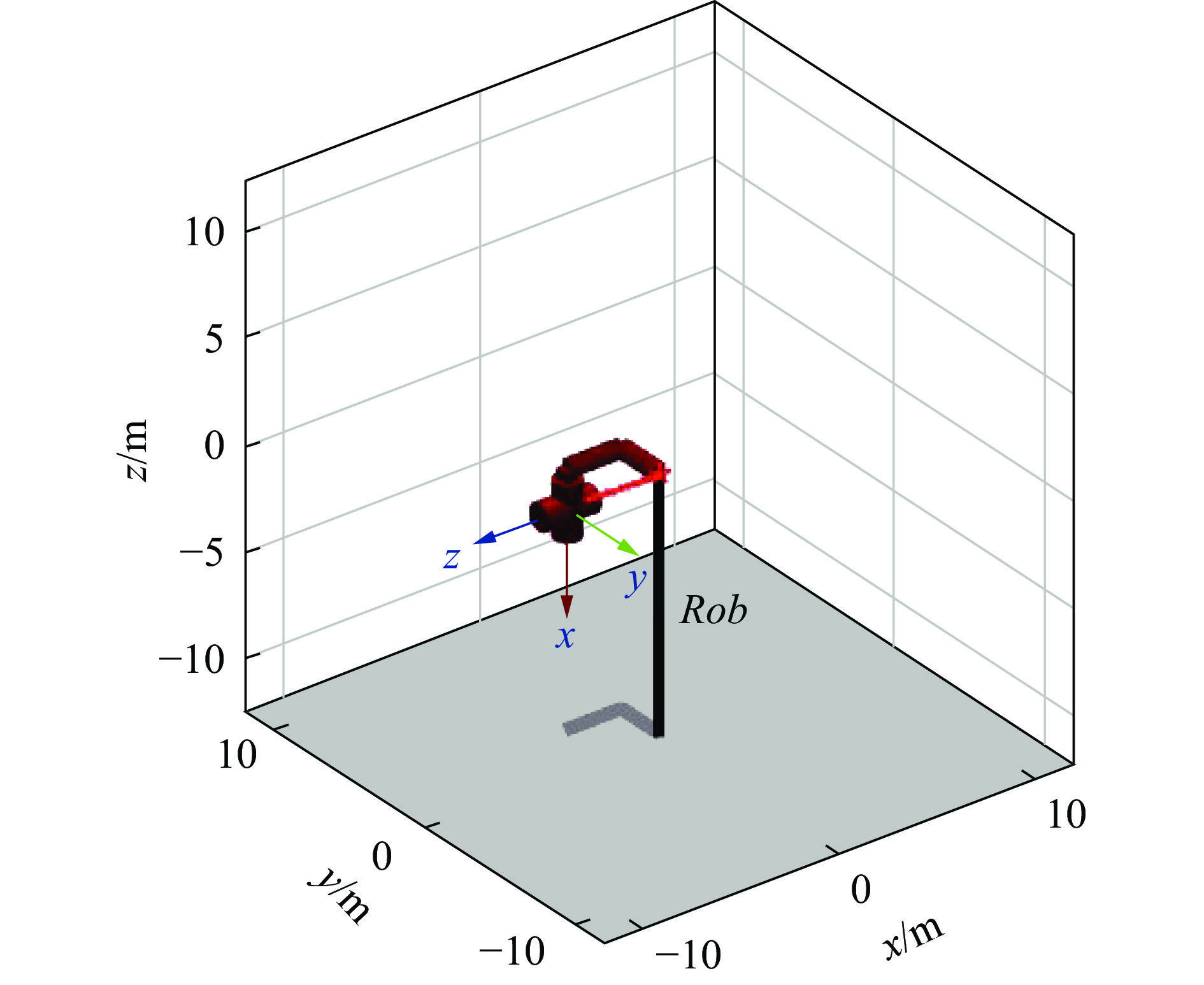
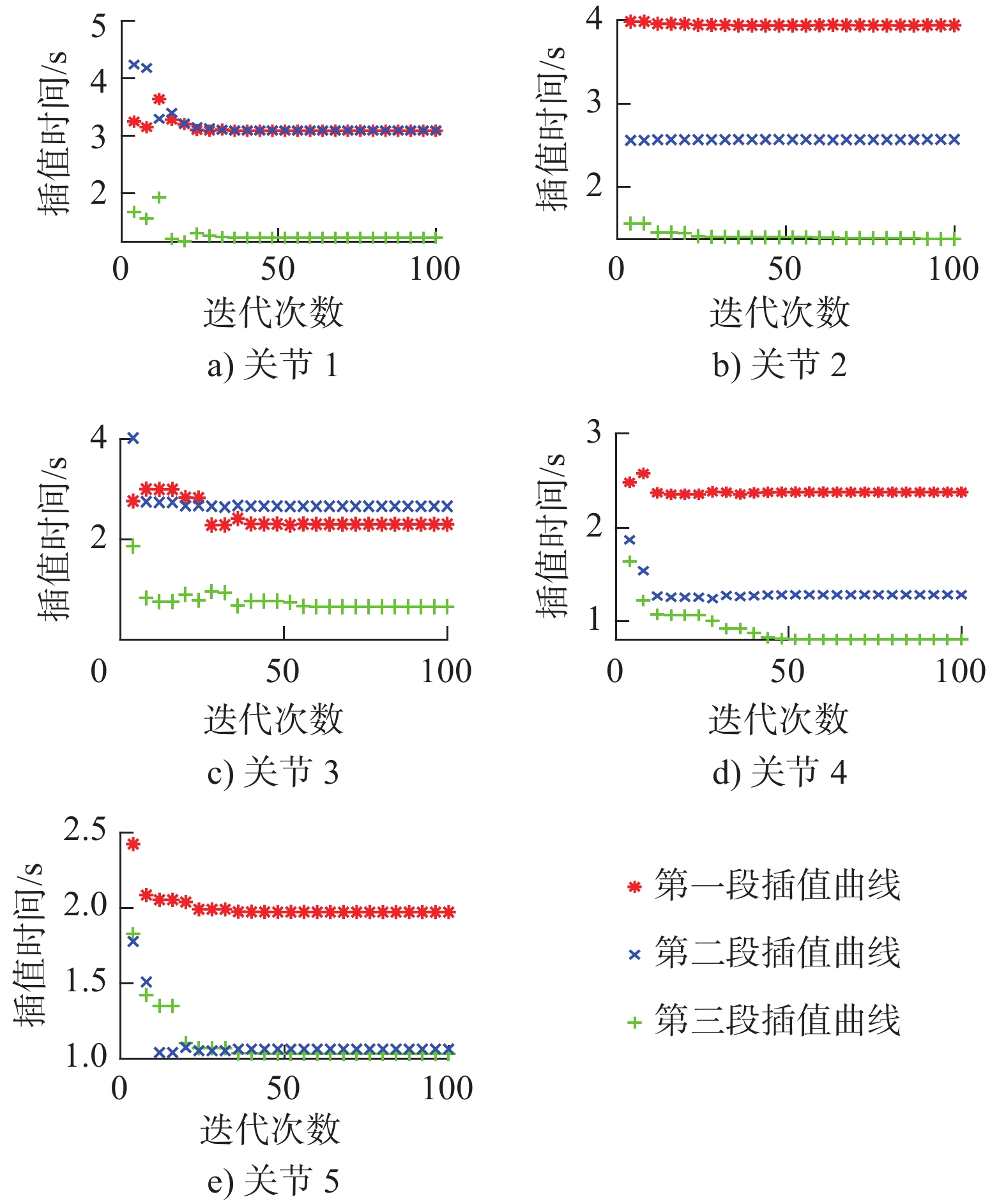
A particle swarm optimization (PSO) algorithm based on the nonlinear dynamic learning factor was proposed to solve the time optimization problem in the joint space trajectory planning of a truss charging manipulator. The workspace was obtained through kinematic analysis, and the 3-5-3 polynomial interpolation was introduced for the trajectory planning. The shortest motion time was sought through combining velocity constraints with acceleration constraints. The convergence speed of the improved PSO algorithm was compared with that of the basic PSO algorithm, and the variation of motion time of each joint before and after optimization was analyzed. The simulation results show that the convergence performance of the improved PSO algorithm is faster than that of the basic PSO algorithm and that the overall motion time is shortened by about 33%, confirming the feasibility of the improved PSO algorithm.
A particle swarm optimization (PSO) algorithm based on the nonlinear dynamic learning factor was proposed to solve the time optimization problem in the joint space trajectory planning of a truss charging manipulator. The workspace was obtained through kinematic analysis, and the 3-5-3 polynomial interpolation was introduced for the trajectory planning. The shortest motion time was sought through combining velocity constraints with acceleration constraints. The convergence speed of the improved PSO algorithm was compared with that of the basic PSO algorithm, and the variation of motion time of each joint before and after optimization was analyzed. The simulation results show that the convergence performance of the improved PSO algorithm is faster than that of the basic PSO algorithm and that the overall motion time is shortened by about 33%, confirming the feasibility of the improved PSO algorithm.



2024, 43(3): 430-437.
doi: 10.13433/j.cnki.1003-8728.20230391
Abstract:
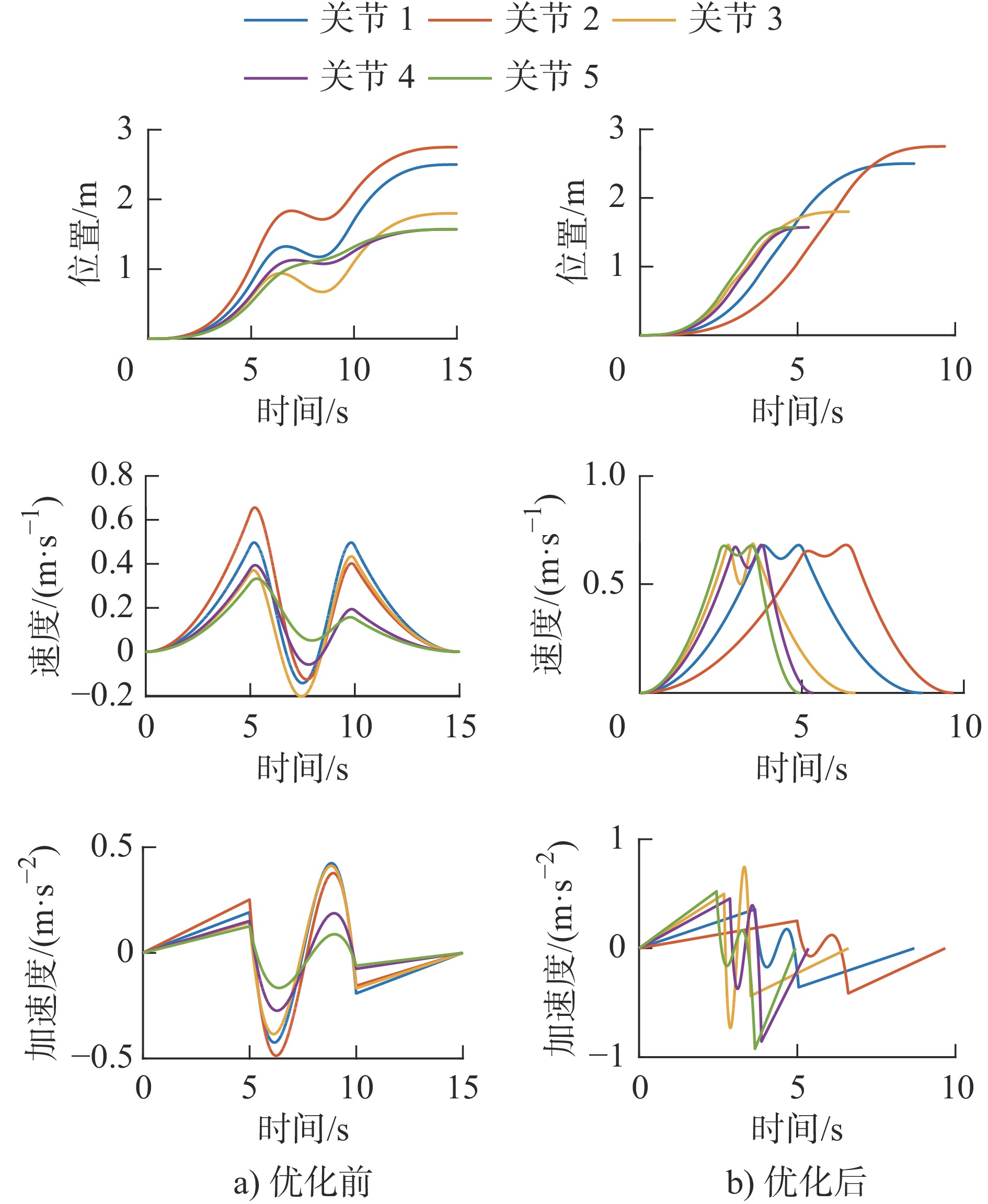
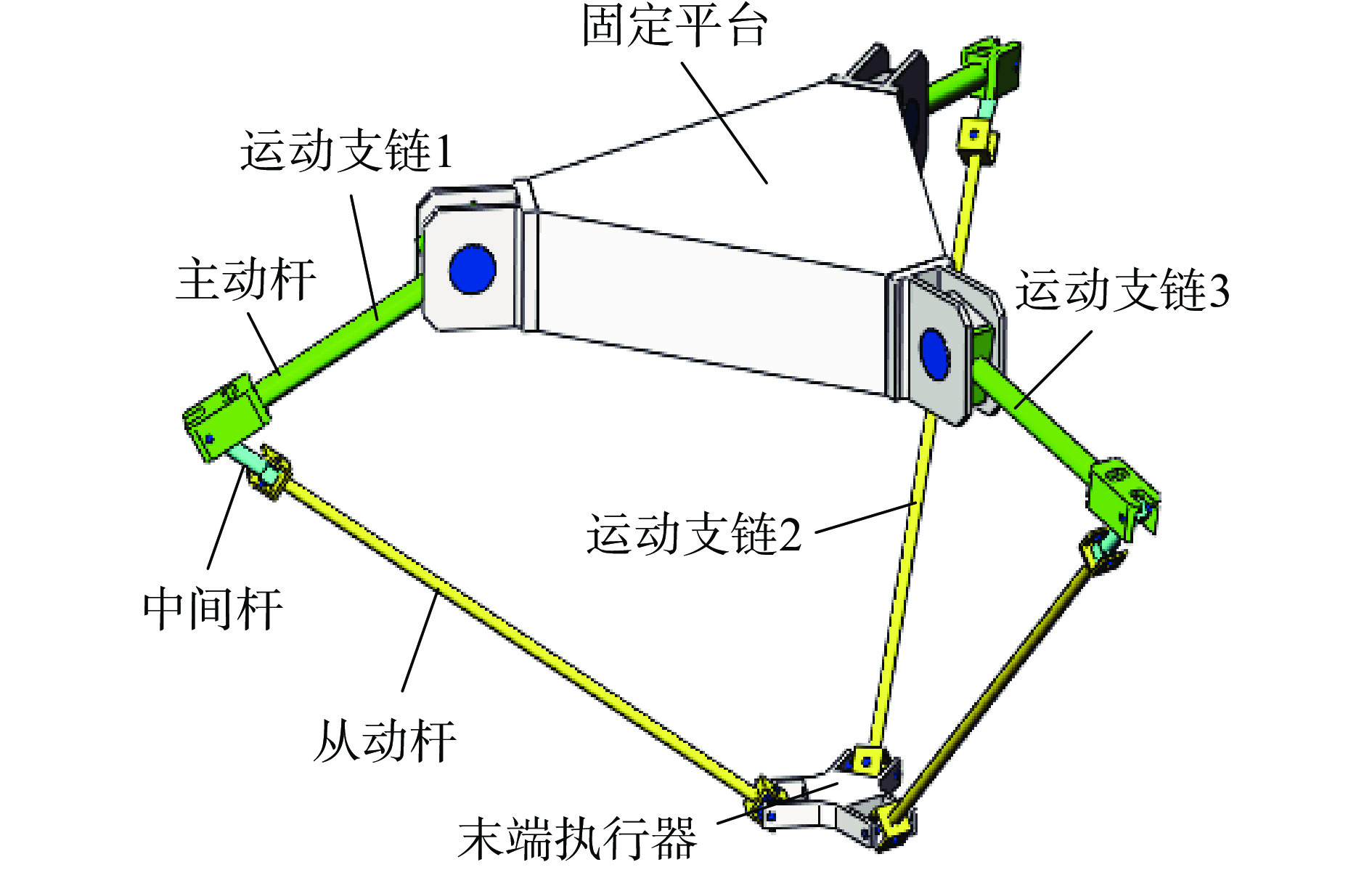
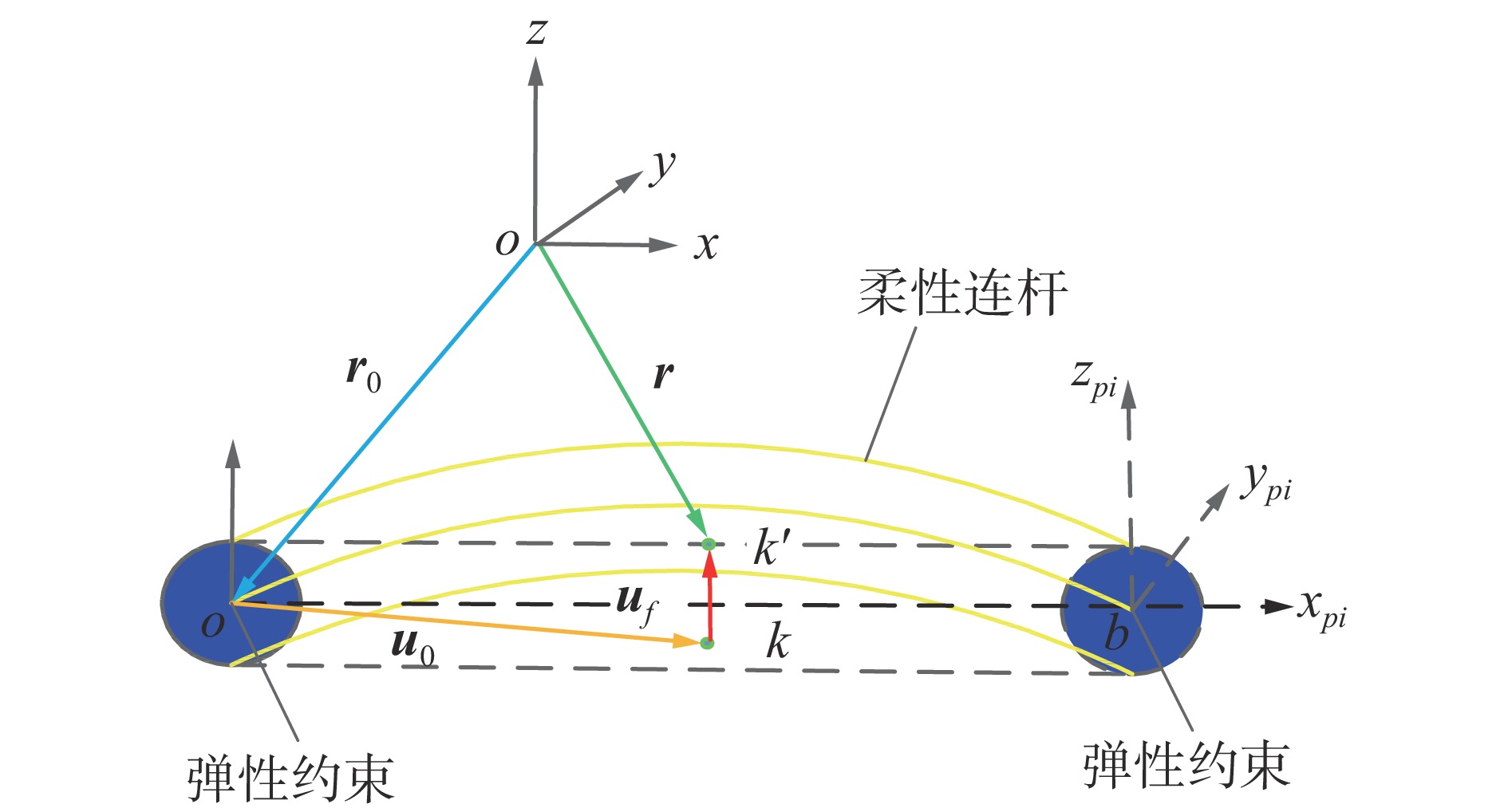
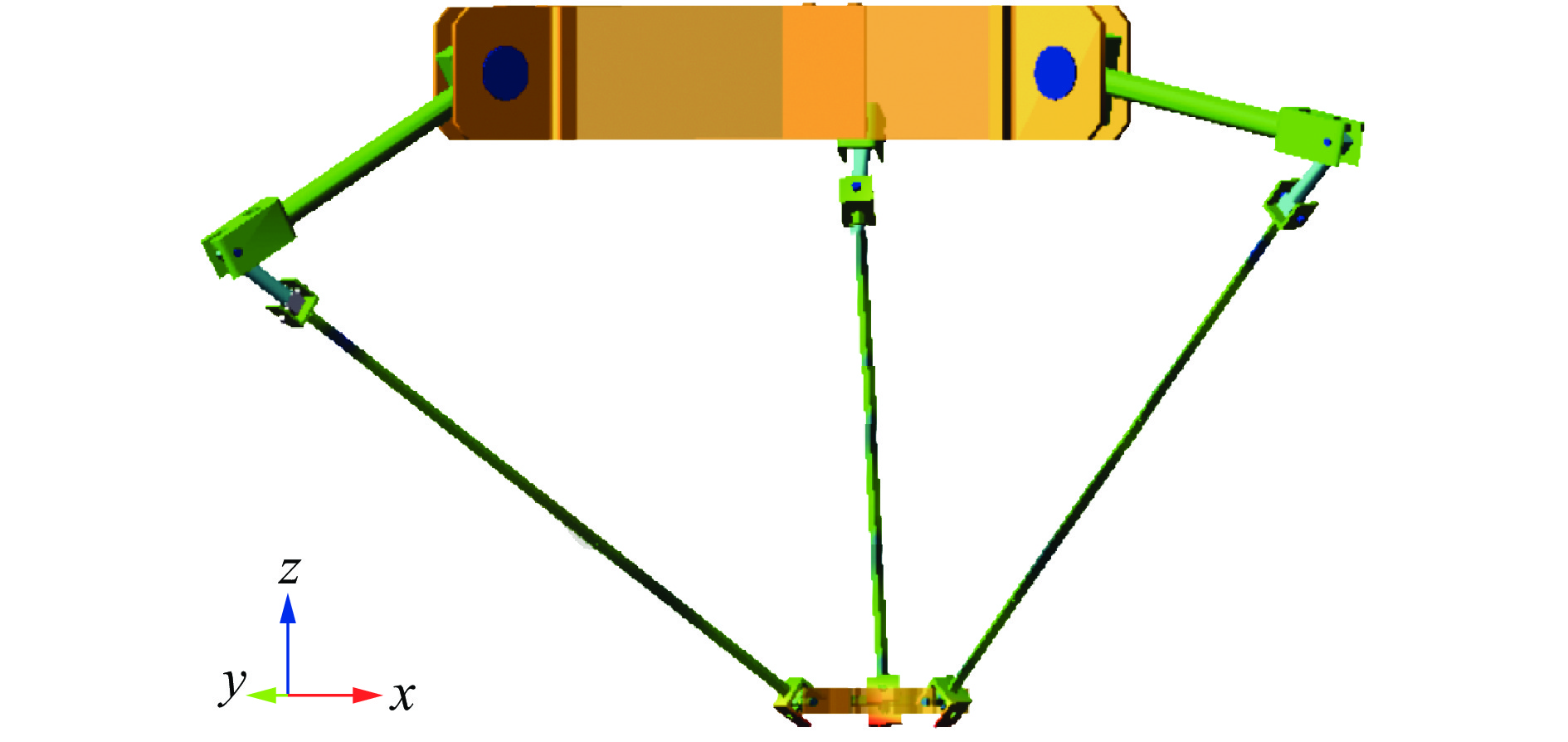
A dynamic modeling method for spatial robots with dual flexibility is proposed, taking spatial robots with flexible joints and links as the research object. Firstly, the flexible joint is simplified as a linear torsion spring with constant stiffness; Secondly, the displacement field vector of flexible spatial links containing higher-order modal information is described by combining the finite element method with the floating coordinate system method. Then, the flexible joints and spatial links are simplified as two flexible links with unidirectional elastic constraints and a simply supported beam, and the system constraint equation is established by combining the boundary conditions. Finally, a dynamic model of the end effector with small displacement changes is established based on the coordination matrix. The results indicate that the new method takes into account the elastic influence between the flexible joint and the flexible spatial link, resulting in a decrease in absolute deformation and an improvement trajectory accuracy of the end effector in a dual flexible deformation cancellation state. Among them, the deviation range in the z direction is 0 - 0.31 mm, the deviation range in the x direction is 0 - 2.68 mm, and the deviation in the y direction is 0 - 3.02 mm. Therefore, the proposed dynamic modeling method for dual flexible spatial robots is correct and can provide accurate models for system control and vibration analysis.
A dynamic modeling method for spatial robots with dual flexibility is proposed, taking spatial robots with flexible joints and links as the research object. Firstly, the flexible joint is simplified as a linear torsion spring with constant stiffness; Secondly, the displacement field vector of flexible spatial links containing higher-order modal information is described by combining the finite element method with the floating coordinate system method. Then, the flexible joints and spatial links are simplified as two flexible links with unidirectional elastic constraints and a simply supported beam, and the system constraint equation is established by combining the boundary conditions. Finally, a dynamic model of the end effector with small displacement changes is established based on the coordination matrix. The results indicate that the new method takes into account the elastic influence between the flexible joint and the flexible spatial link, resulting in a decrease in absolute deformation and an improvement trajectory accuracy of the end effector in a dual flexible deformation cancellation state. Among them, the deviation range in the z direction is 0 - 0.31 mm, the deviation range in the x direction is 0 - 2.68 mm, and the deviation in the y direction is 0 - 3.02 mm. Therefore, the proposed dynamic modeling method for dual flexible spatial robots is correct and can provide accurate models for system control and vibration analysis.






2024, 43(3): 438-445.
doi: 10.13433/j.cnki.1003-8728.20220274
Abstract:
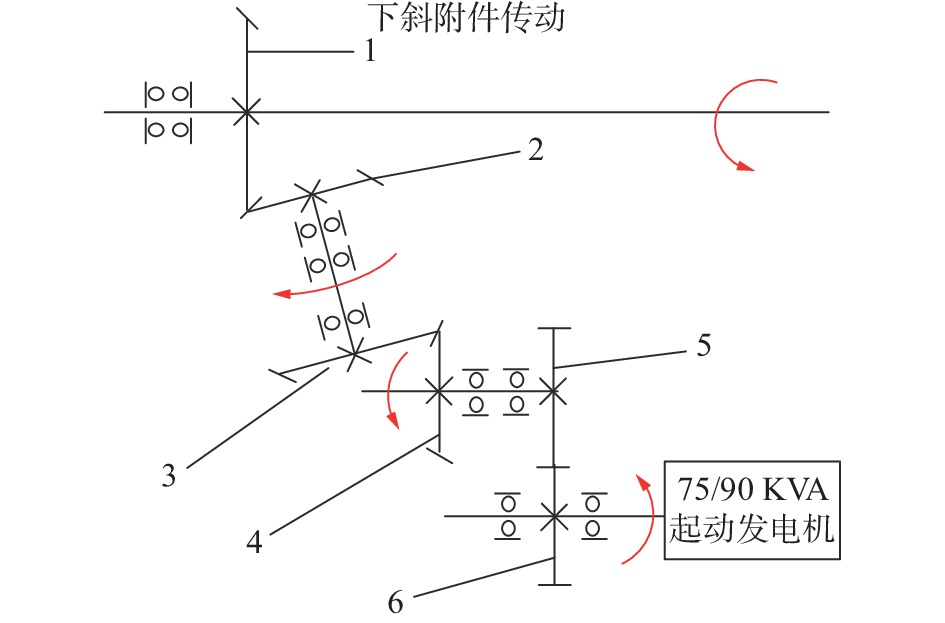
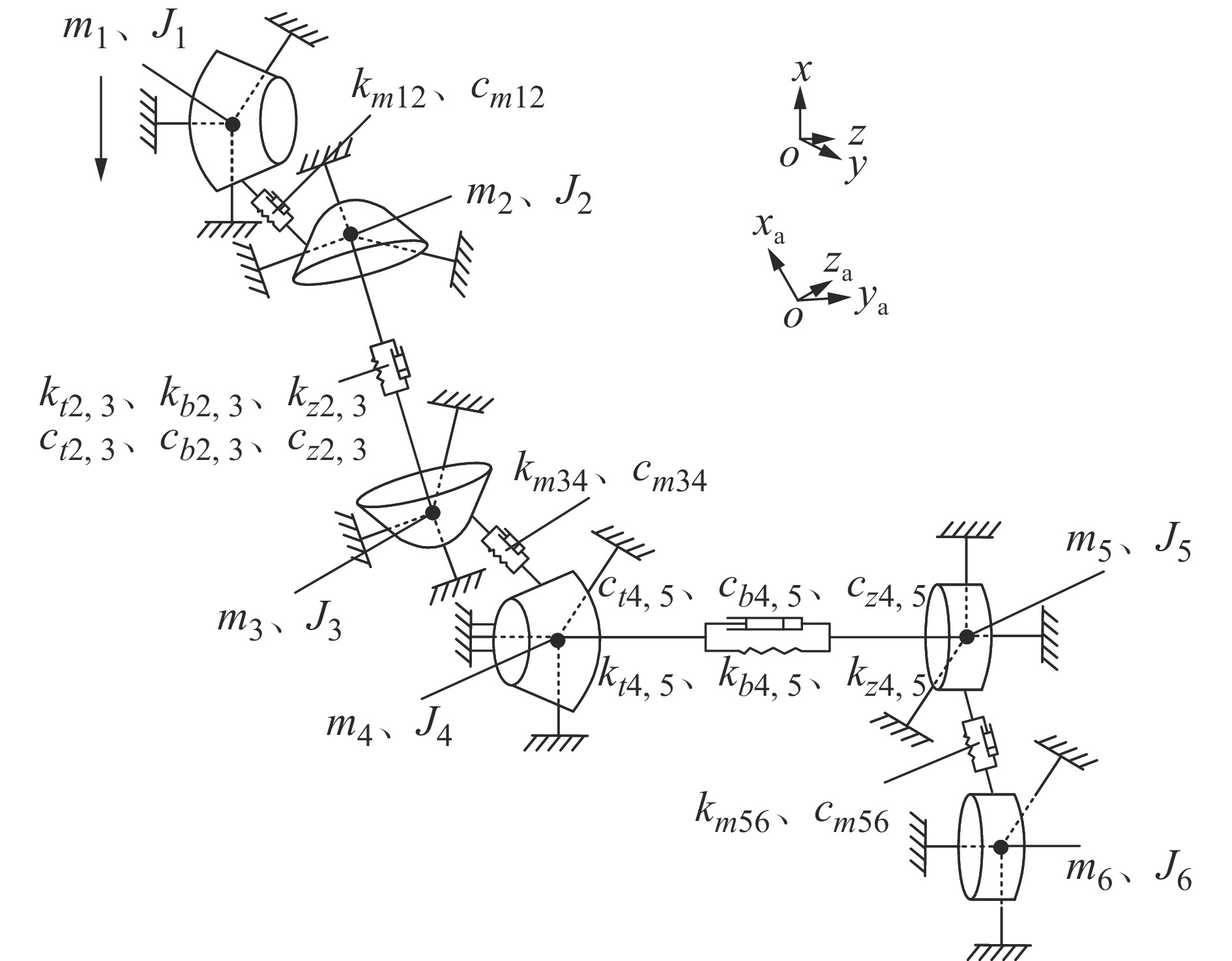
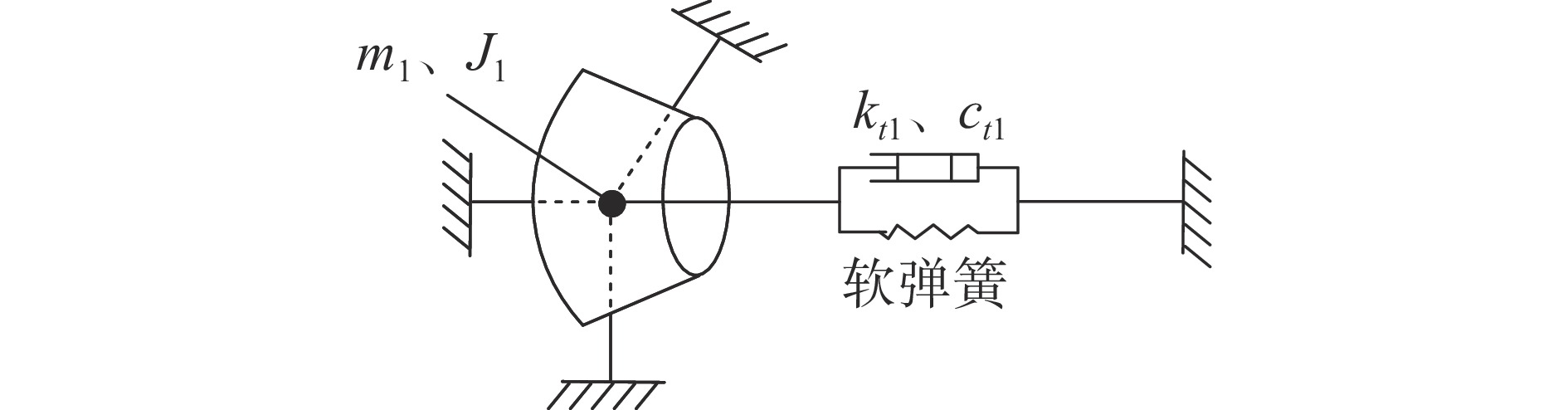
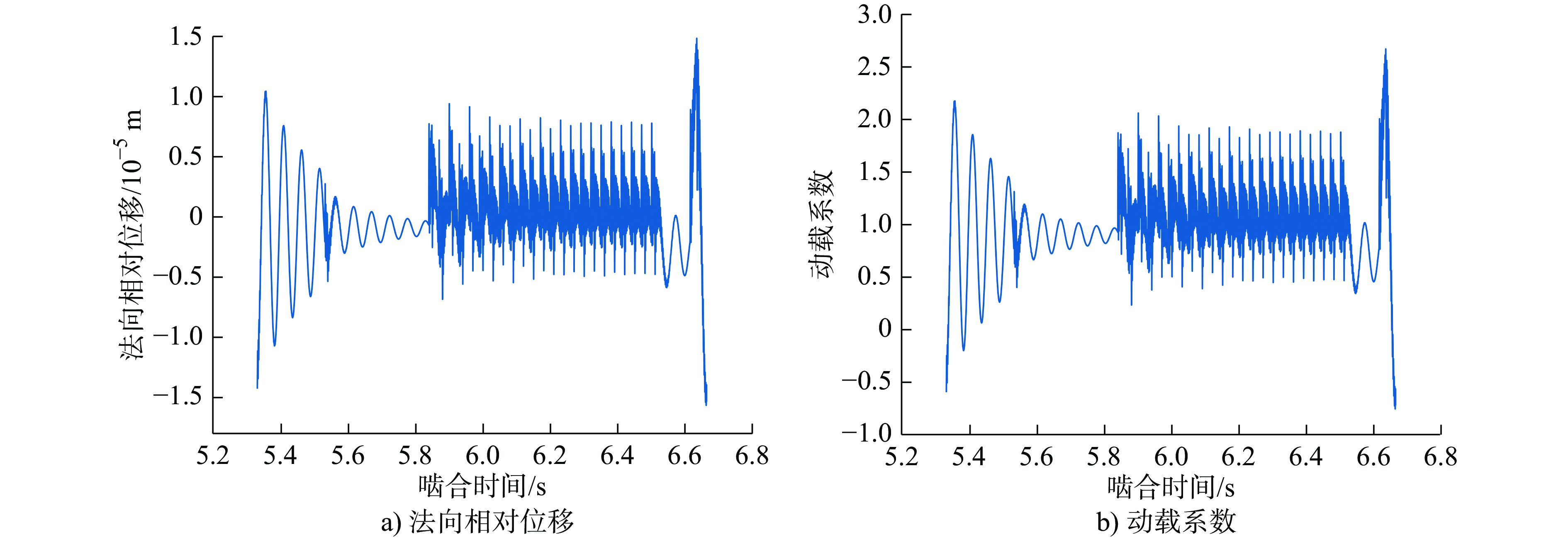
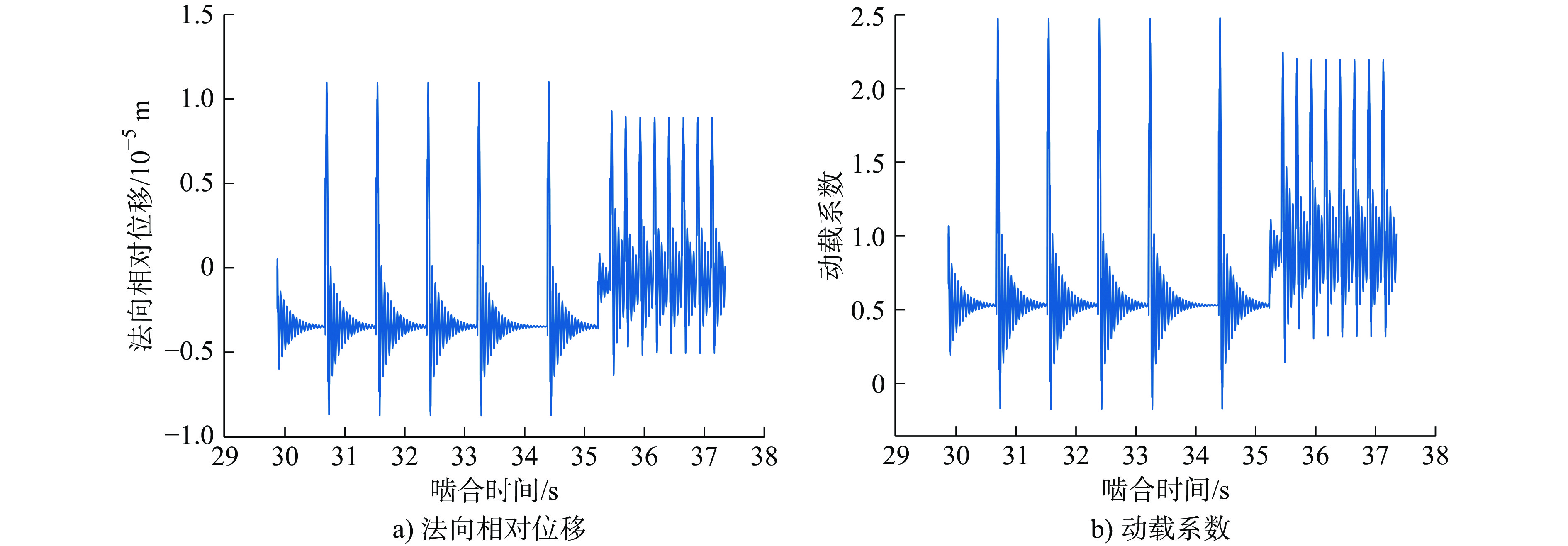
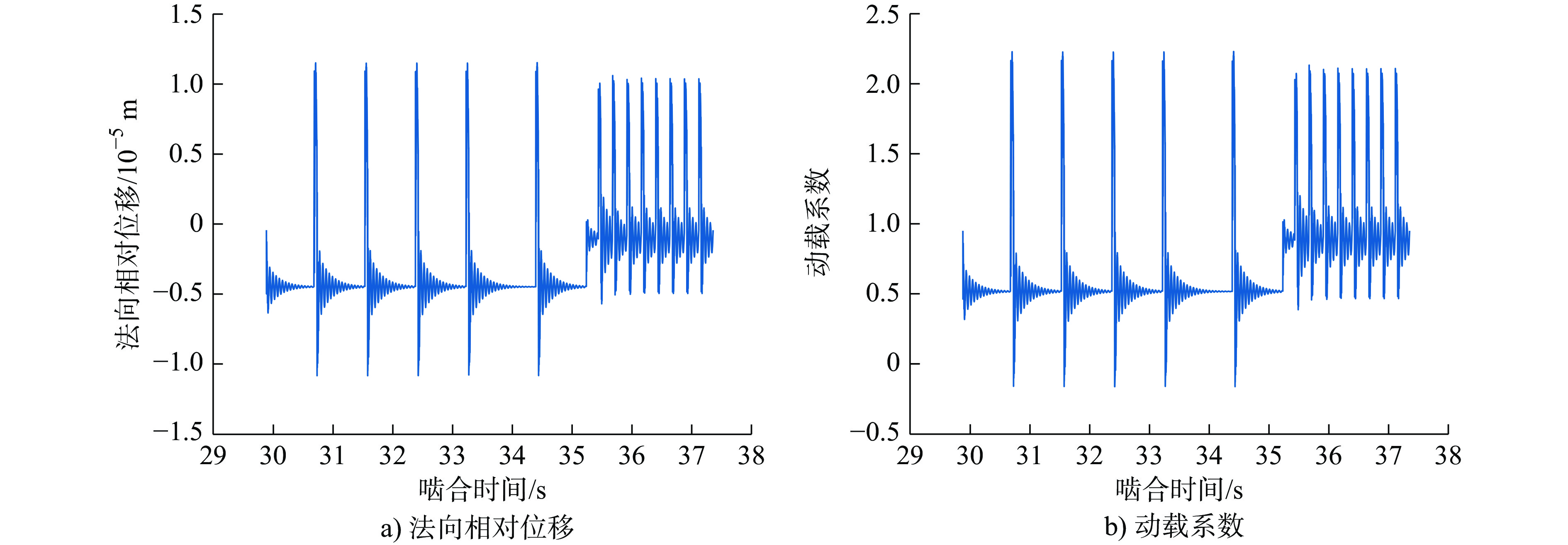
Considering the difficulty of dynamic modeling of accessory transmission system in a turboprop engine, based on the substructure global coupling matrix method, the dynamic model of the coupling system of main rotor and accessory transmission system is established by synthesizing and extending the dynamic model of coaxial multi-rotor coupling system and skew spiral bevel gear coupling multi-rotor subsystem, and the dynamic equations are derived. The variable order Adams-Bashforth-MoutlonPECE algorithm is used to solve the dynamic equation, and the dynamic responses of the system under different cyclic impact load spectra are obtained. The vibration characteristics of the aero-engine main rotor and accessory coupling system are studied. The results show that the shock excitation produced by the cyclic impact load spectrum has a great influence on the vibration characteristics of the system. Because the transmission torque of the third stage gear pair is larger, and the running stability of the helical gear pair is worse than that of the spiral bevel gear pair, the maximum normal relative displacement, the mean value of the maximum dynamic load coefficient and the root mean square of the maximum normal vibration acceleration of the helical gear pair under two kinds of alternating loads all occur on the helical transmission helical gear pair. The vibration of all gear pairs along the normal direction is periodic, and a load cycle contains multiple meshing periods at the same time.
Considering the difficulty of dynamic modeling of accessory transmission system in a turboprop engine, based on the substructure global coupling matrix method, the dynamic model of the coupling system of main rotor and accessory transmission system is established by synthesizing and extending the dynamic model of coaxial multi-rotor coupling system and skew spiral bevel gear coupling multi-rotor subsystem, and the dynamic equations are derived. The variable order Adams-Bashforth-MoutlonPECE algorithm is used to solve the dynamic equation, and the dynamic responses of the system under different cyclic impact load spectra are obtained. The vibration characteristics of the aero-engine main rotor and accessory coupling system are studied. The results show that the shock excitation produced by the cyclic impact load spectrum has a great influence on the vibration characteristics of the system. Because the transmission torque of the third stage gear pair is larger, and the running stability of the helical gear pair is worse than that of the spiral bevel gear pair, the maximum normal relative displacement, the mean value of the maximum dynamic load coefficient and the root mean square of the maximum normal vibration acceleration of the helical gear pair under two kinds of alternating loads all occur on the helical transmission helical gear pair. The vibration of all gear pairs along the normal direction is periodic, and a load cycle contains multiple meshing periods at the same time.




2024, 43(3): 446-456.
doi: 10.13433/j.cnki.1003-8728.20220169
Abstract:
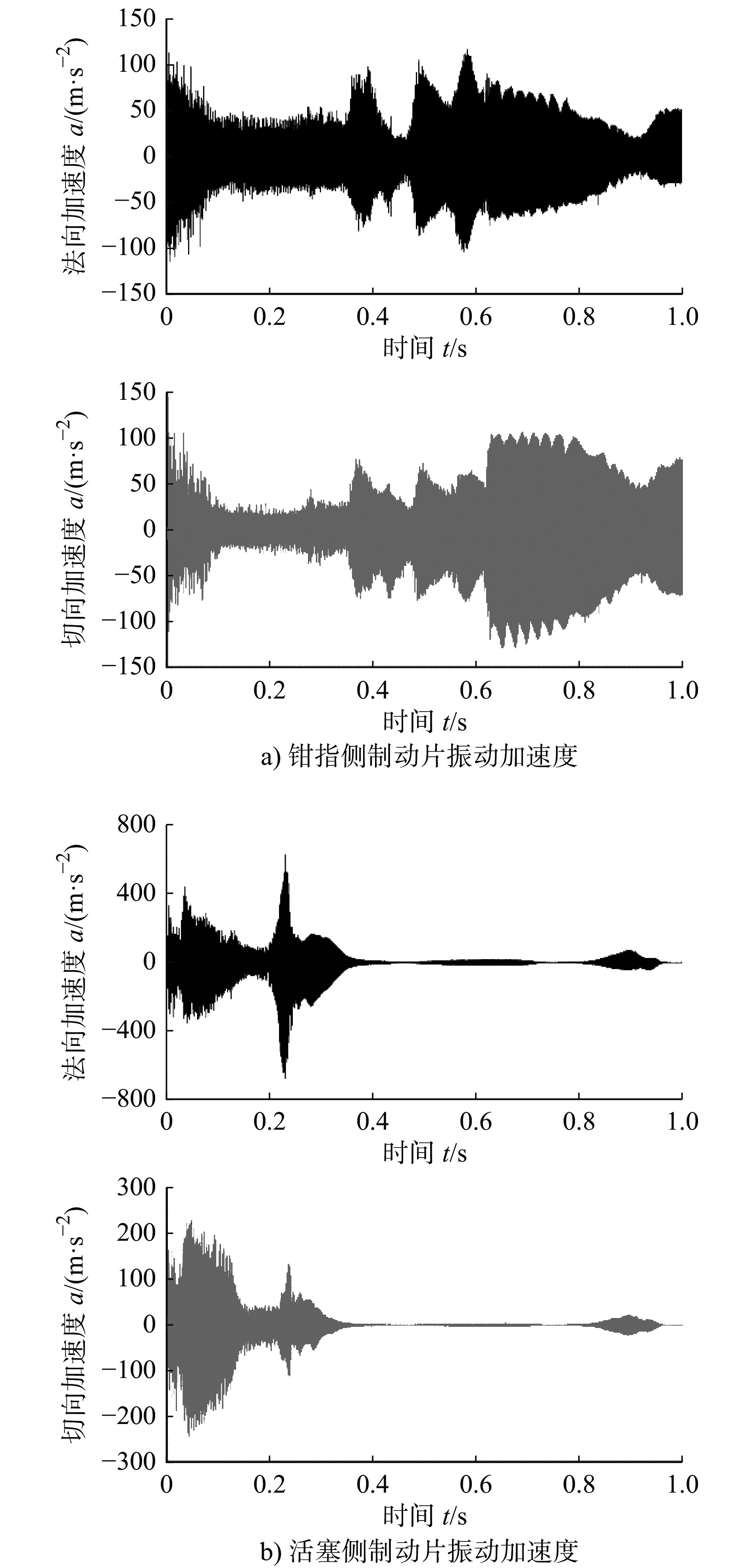
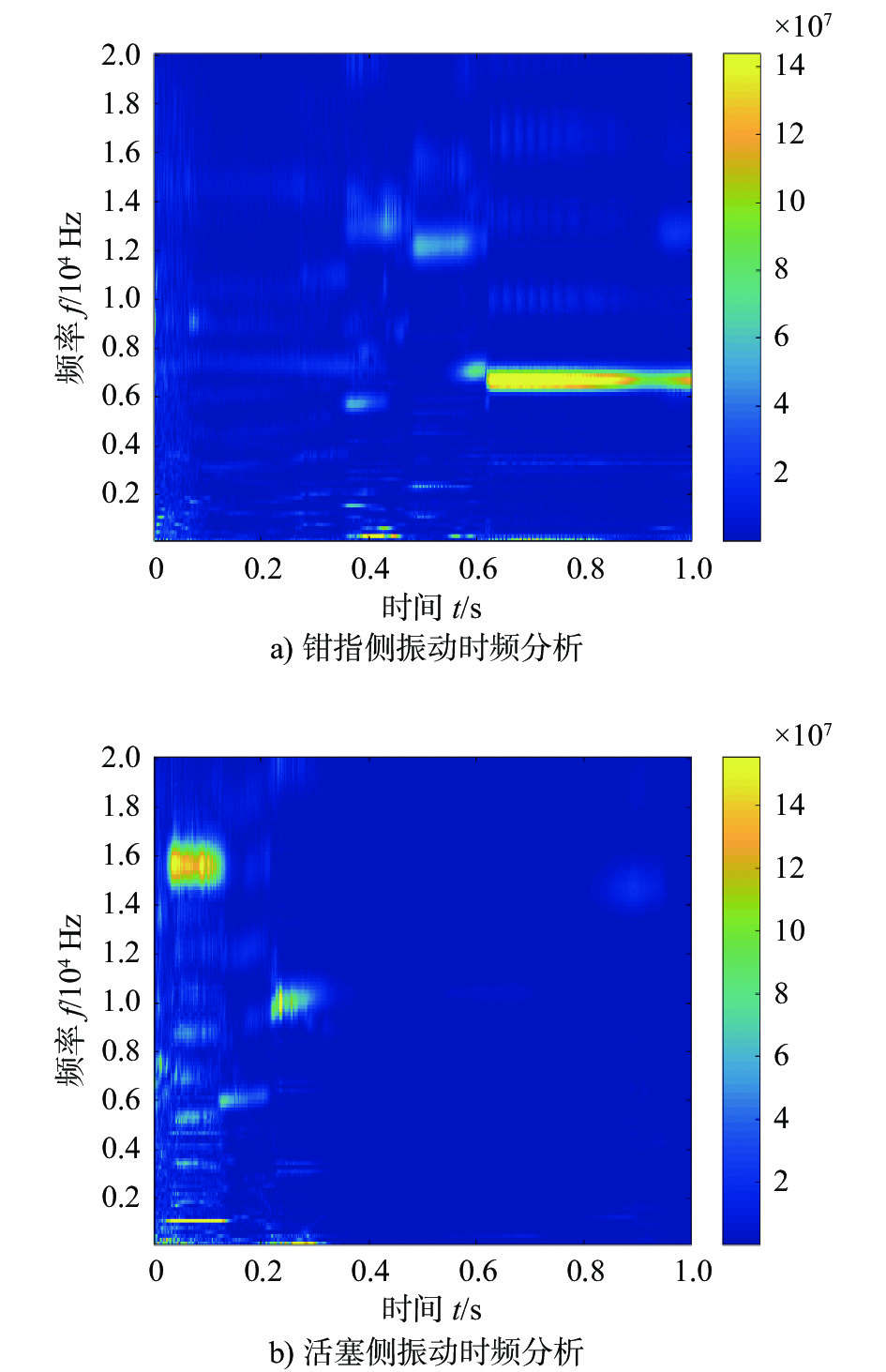
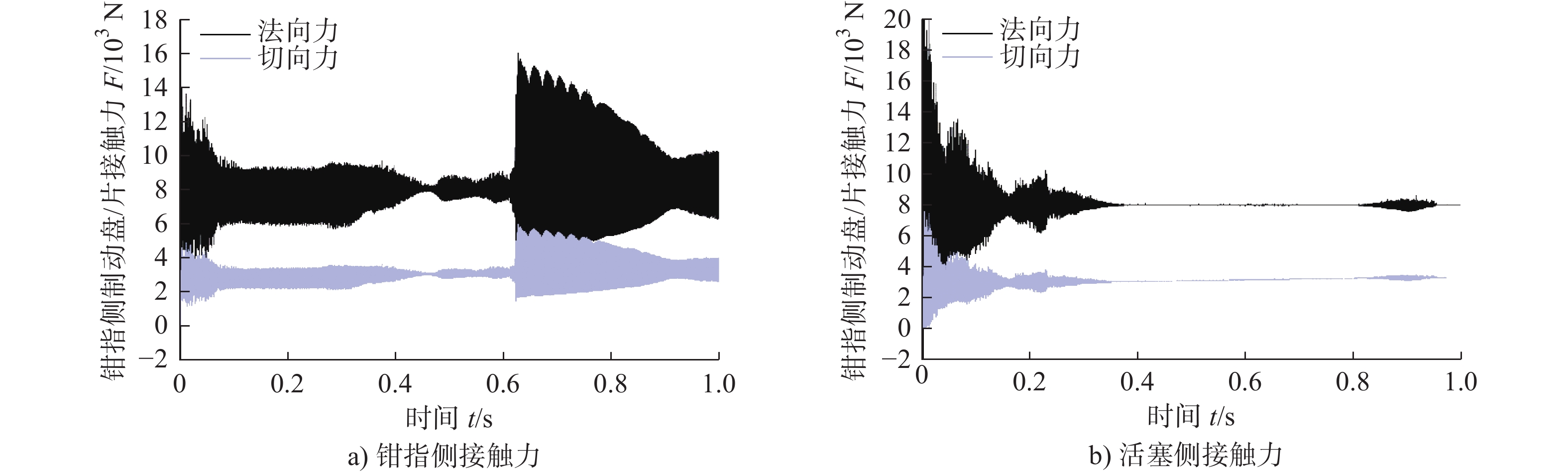
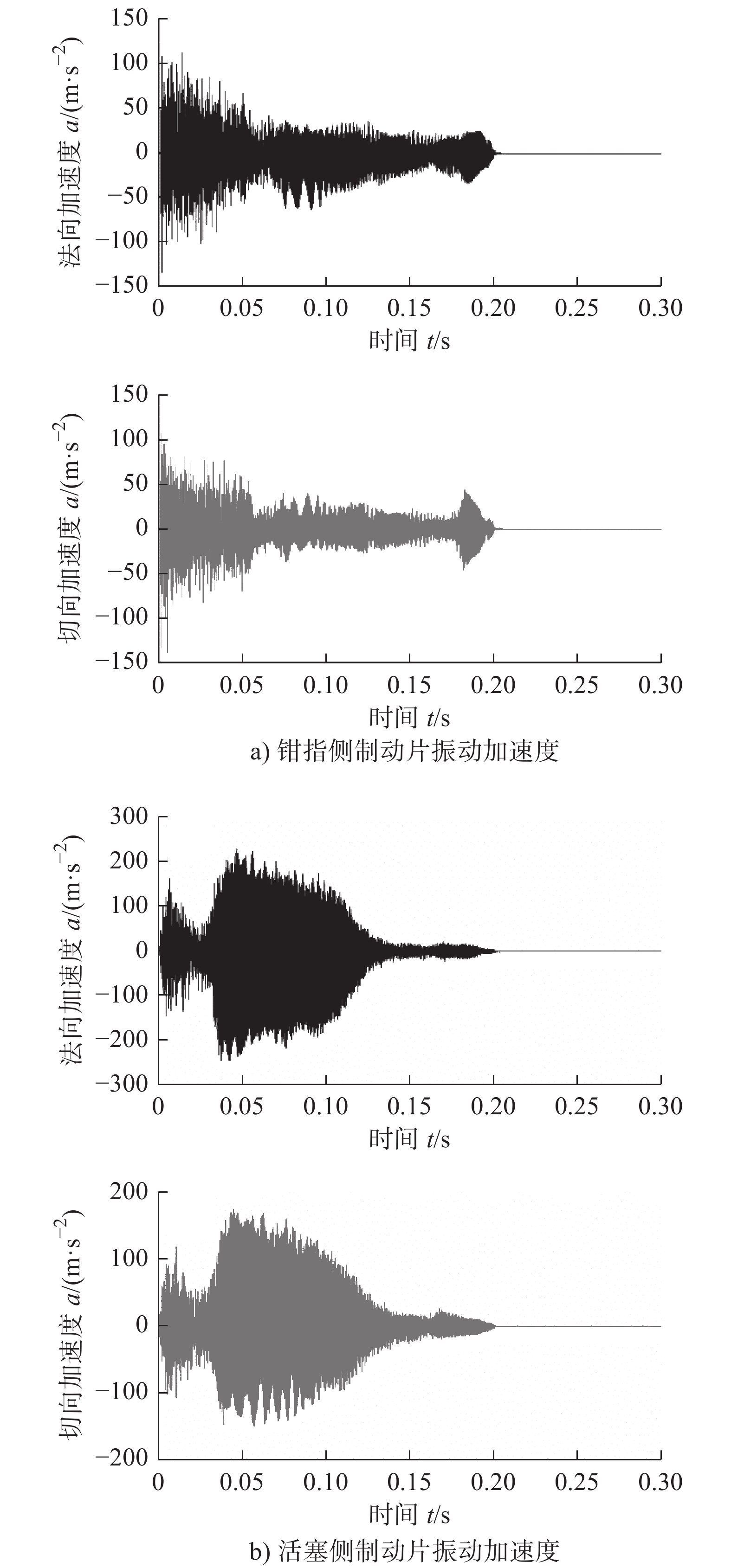
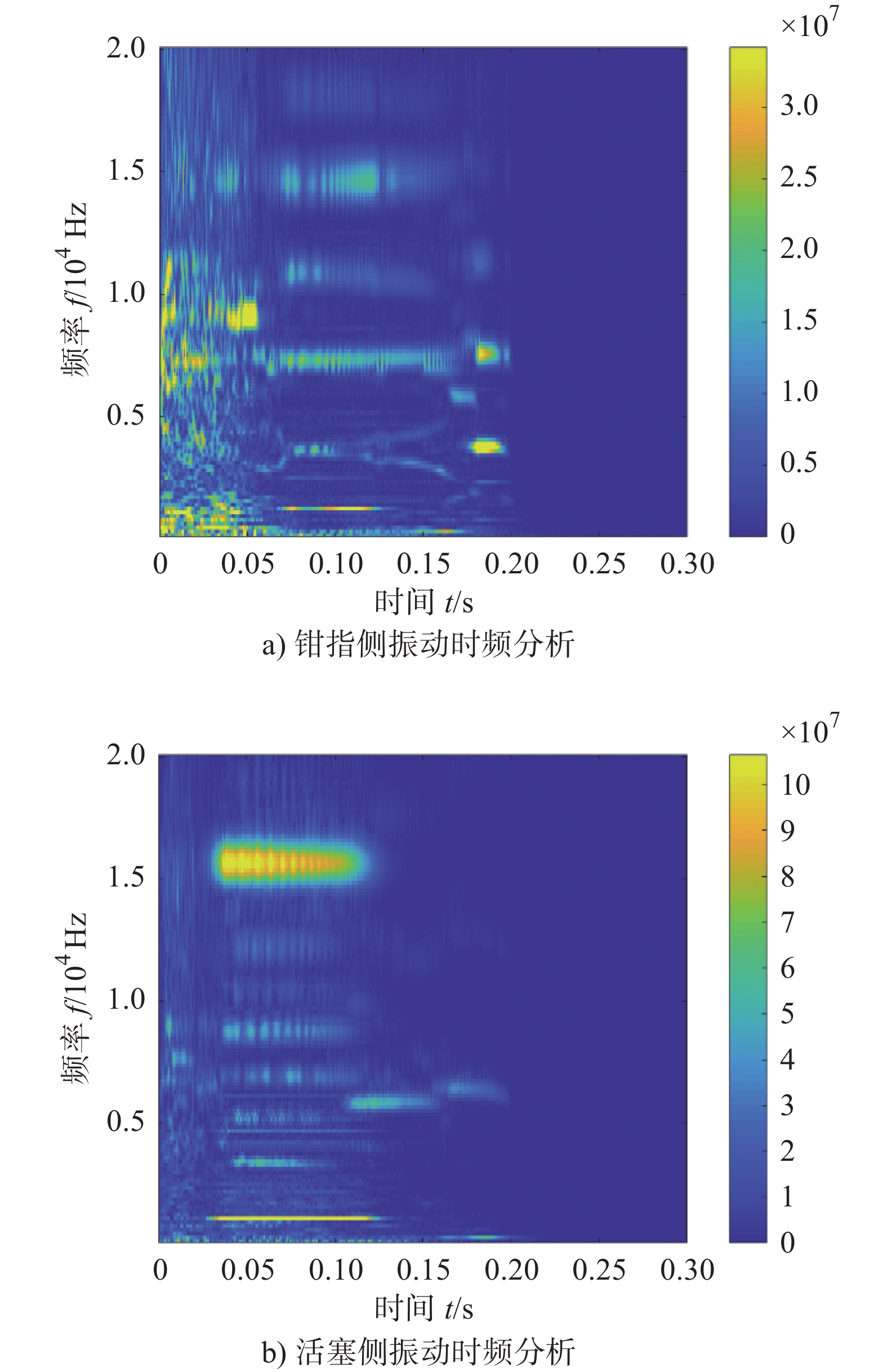
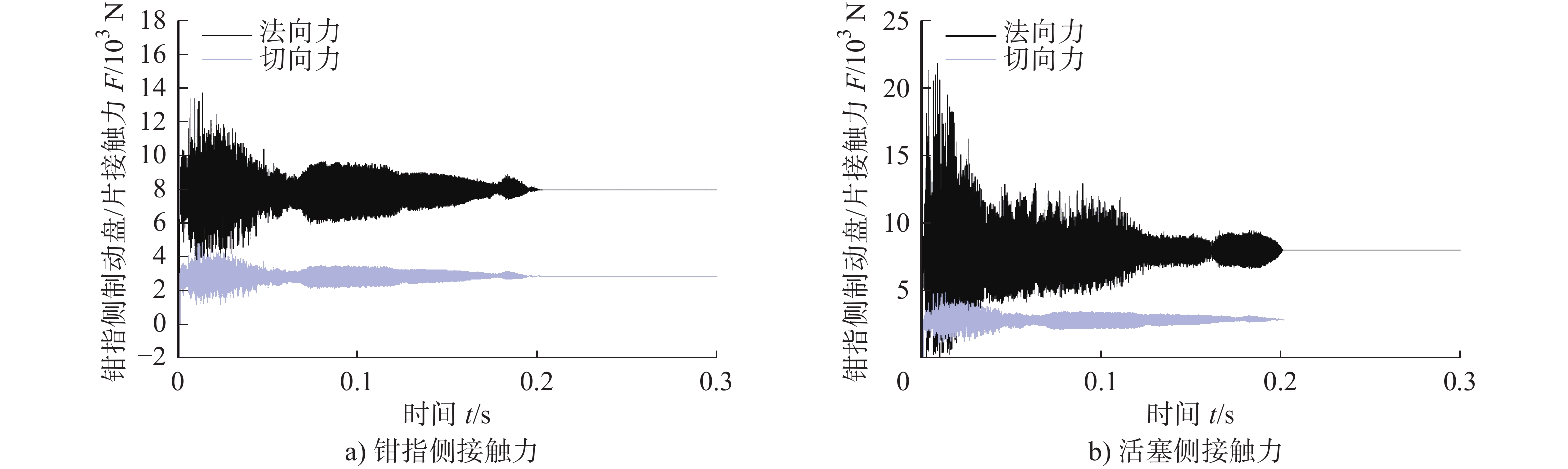
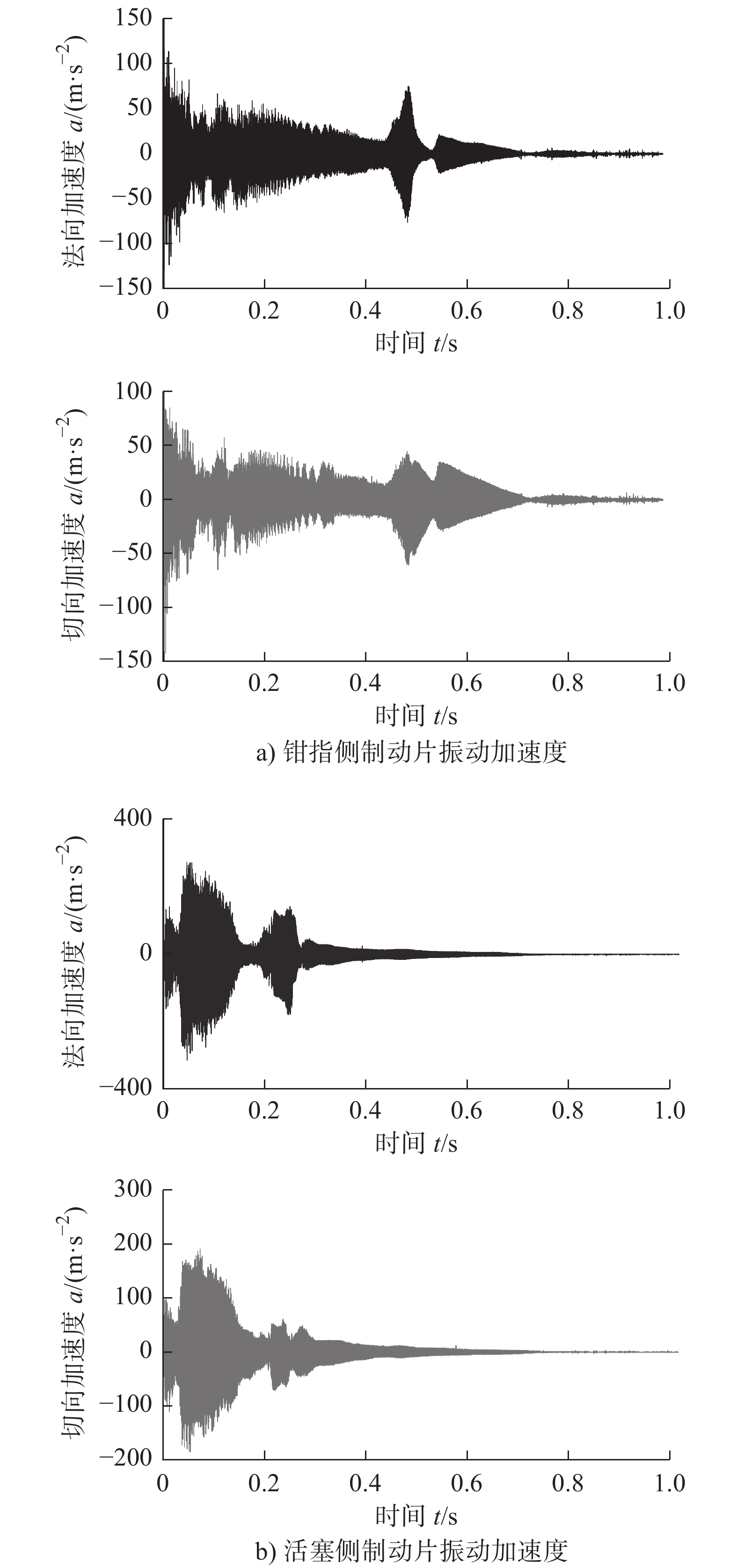
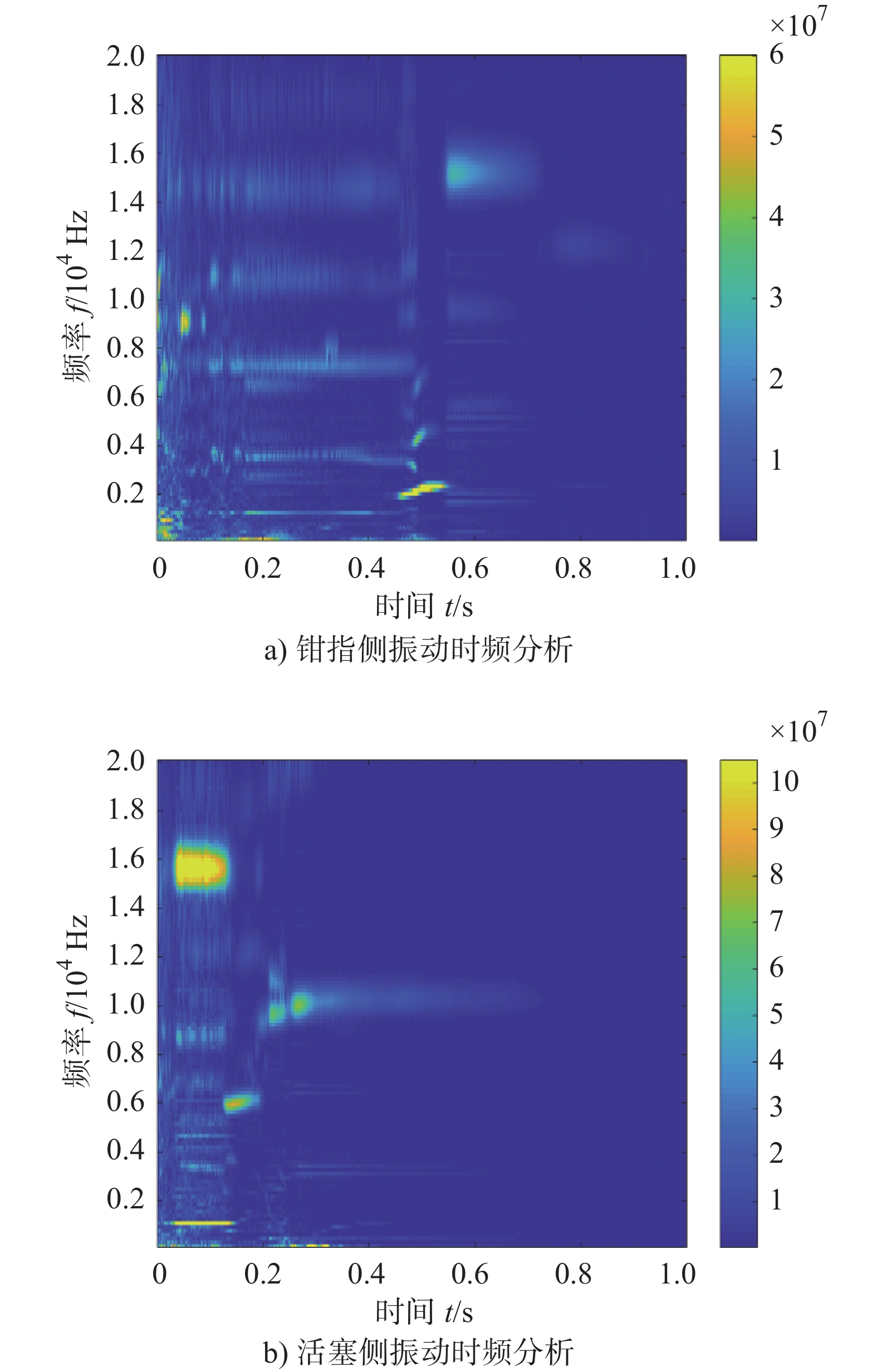
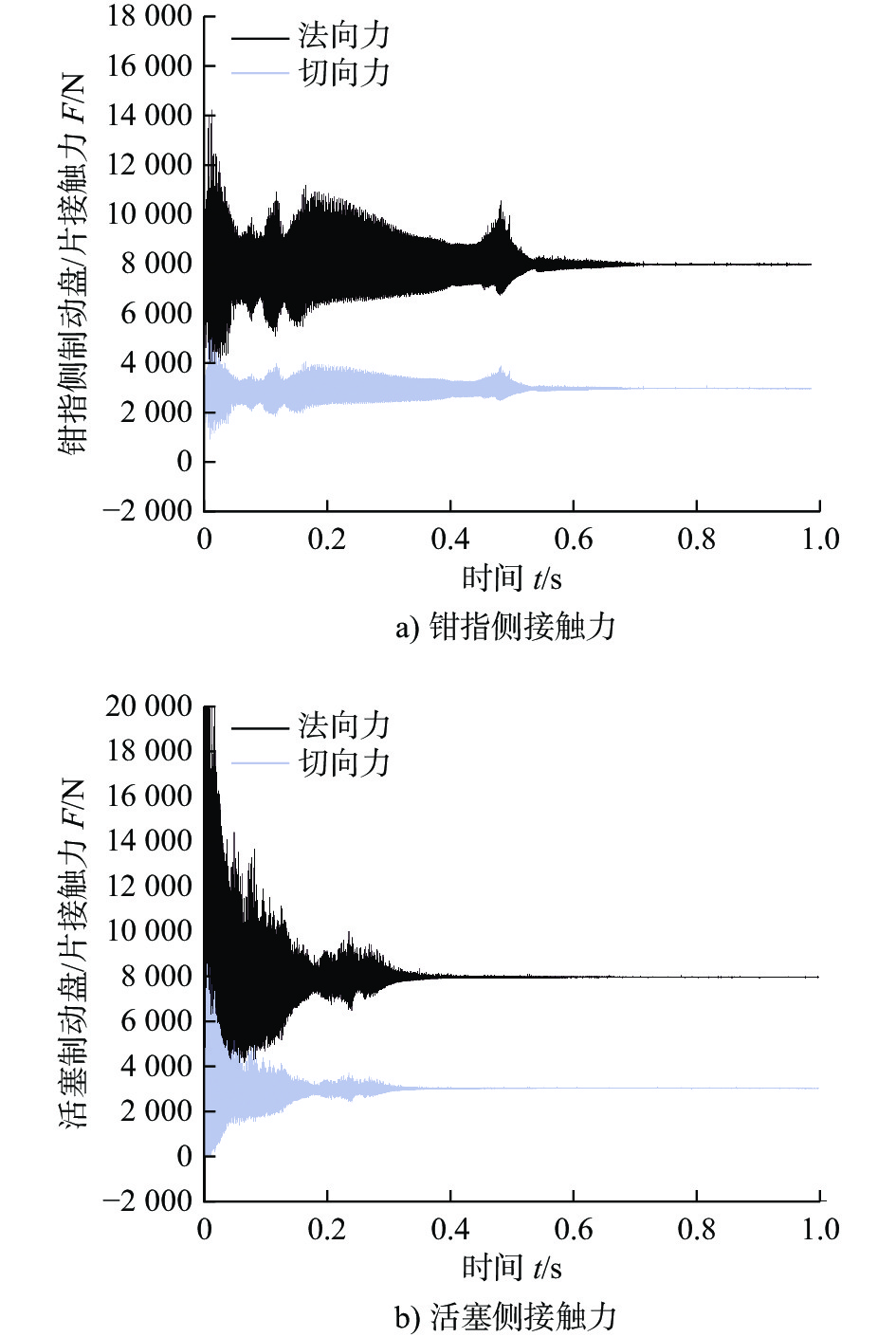
Thermal-mechanical coupling behaviour of disc brake under three different braking modes, namely drag braking, emergency braking and slow braking, is analyzed by using the full thermal-mechanical coupling analysis method. The results show that under the drag braking mode, the temperature distribution of friction pads on both sides of the disc is inconsistent, which is caused by the different deformation forms of friction pads on both sides of brake disc. In addition, the vibration signals and contact force signals of the friction pad between the finger side and the piston side are obviously different. The friction-induced vibration of the pad on the finger side of the disc gradually becomes intensified, and a new vibration frequency is generated, while the vibration of pad on the piston side tends to be stable and the original vibration frequency disappears gradually. In the emergency braking mode, the temperature distribution characteristics of the friction pads on both sides of the brake disc are similar, which are diffused from the inlet friction zone to the outlet friction zone, but the temperature rise is not obvious due to the short time period of action. However, the vibration signals of the friction pads on both sides are totally different, especially that the pad on piston side generates visible and continuous self-excited vibration, and the new vibration frequency is generated. In the slow braking mode, although the outer diameters of the friction pads on both sides are the surface high temperature zone, the high temperature distribution on the surface of the piston pad presents the characteristics of ‘point-like distribution’ in the late braking period. The vibration signals of the friction pad on the finger side are different from those on the piston side. The vibration duration of the friction pad on the finger side is longer, while its vibration intensity is weaker than that on the piston side. The results of interface mechanical signal analysis confirm the conclusion. The results of this study confirm that the thermal-mechanical coupling behaviours of brakes are different under different braking modes.
Thermal-mechanical coupling behaviour of disc brake under three different braking modes, namely drag braking, emergency braking and slow braking, is analyzed by using the full thermal-mechanical coupling analysis method. The results show that under the drag braking mode, the temperature distribution of friction pads on both sides of the disc is inconsistent, which is caused by the different deformation forms of friction pads on both sides of brake disc. In addition, the vibration signals and contact force signals of the friction pad between the finger side and the piston side are obviously different. The friction-induced vibration of the pad on the finger side of the disc gradually becomes intensified, and a new vibration frequency is generated, while the vibration of pad on the piston side tends to be stable and the original vibration frequency disappears gradually. In the emergency braking mode, the temperature distribution characteristics of the friction pads on both sides of the brake disc are similar, which are diffused from the inlet friction zone to the outlet friction zone, but the temperature rise is not obvious due to the short time period of action. However, the vibration signals of the friction pads on both sides are totally different, especially that the pad on piston side generates visible and continuous self-excited vibration, and the new vibration frequency is generated. In the slow braking mode, although the outer diameters of the friction pads on both sides are the surface high temperature zone, the high temperature distribution on the surface of the piston pad presents the characteristics of ‘point-like distribution’ in the late braking period. The vibration signals of the friction pad on the finger side are different from those on the piston side. The vibration duration of the friction pad on the finger side is longer, while its vibration intensity is weaker than that on the piston side. The results of interface mechanical signal analysis confirm the conclusion. The results of this study confirm that the thermal-mechanical coupling behaviours of brakes are different under different braking modes.





2024, 43(3): 457-465.
doi: 10.13433/j.cnki.1003-8728.20220225
Abstract:
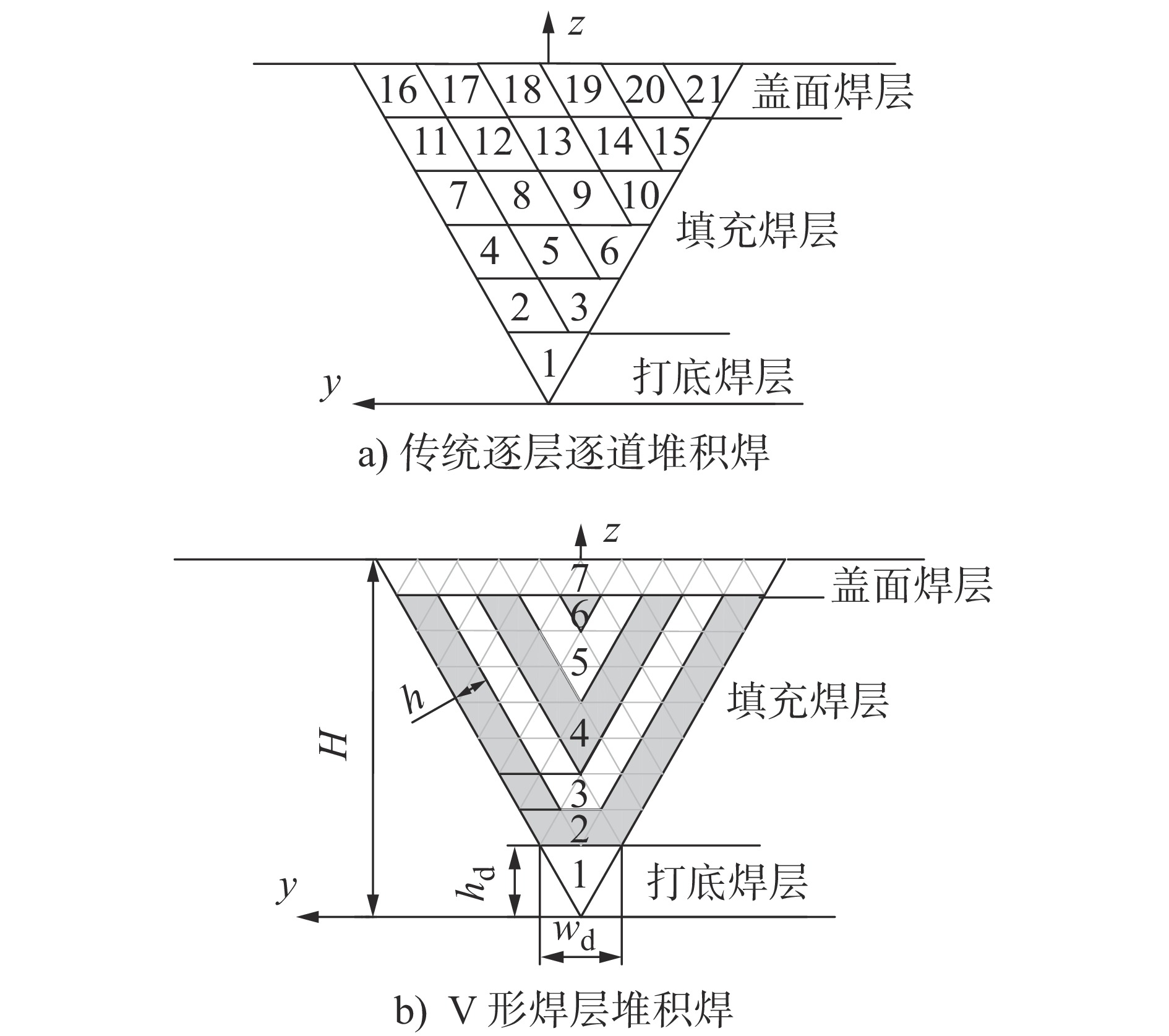
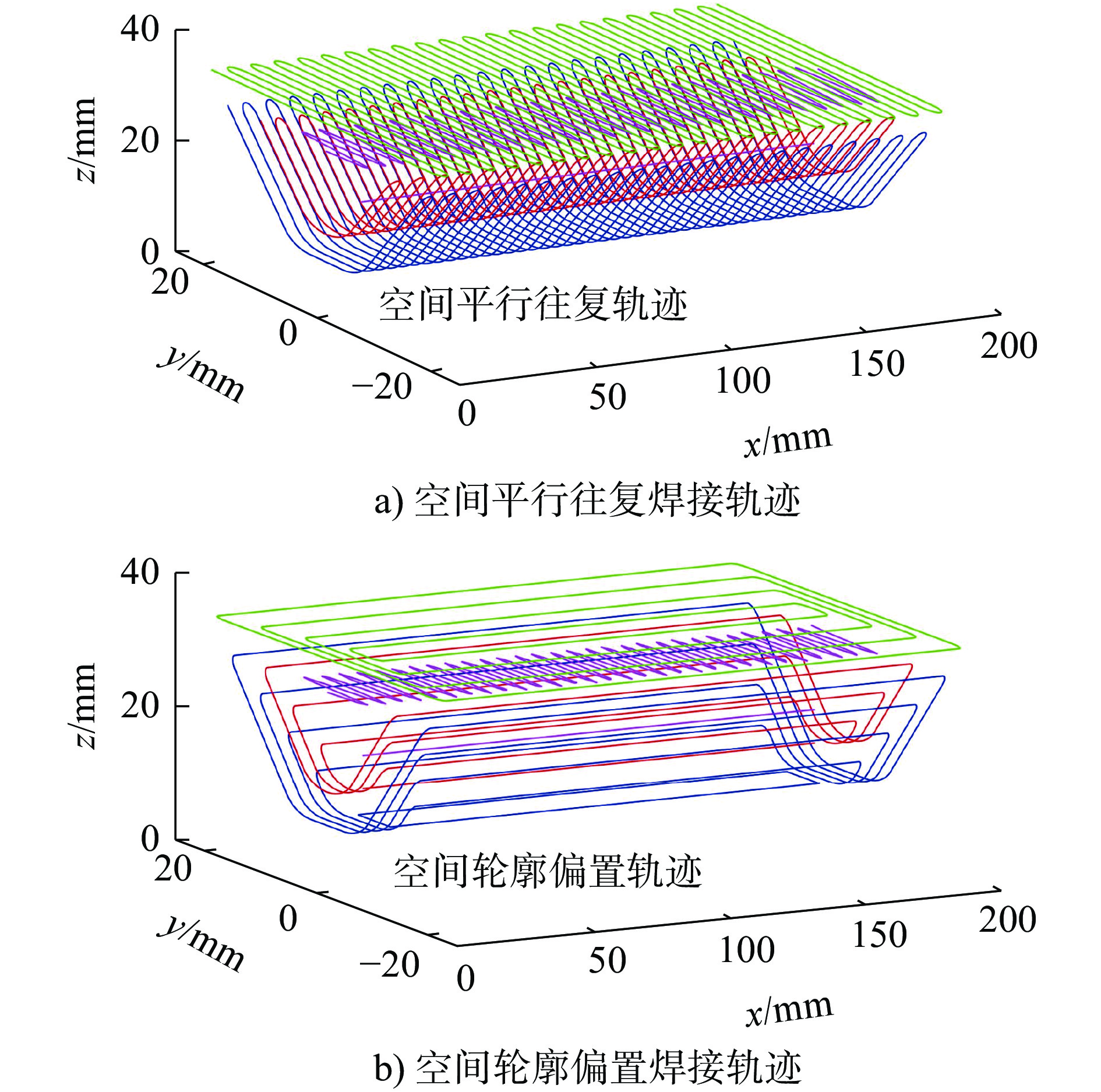
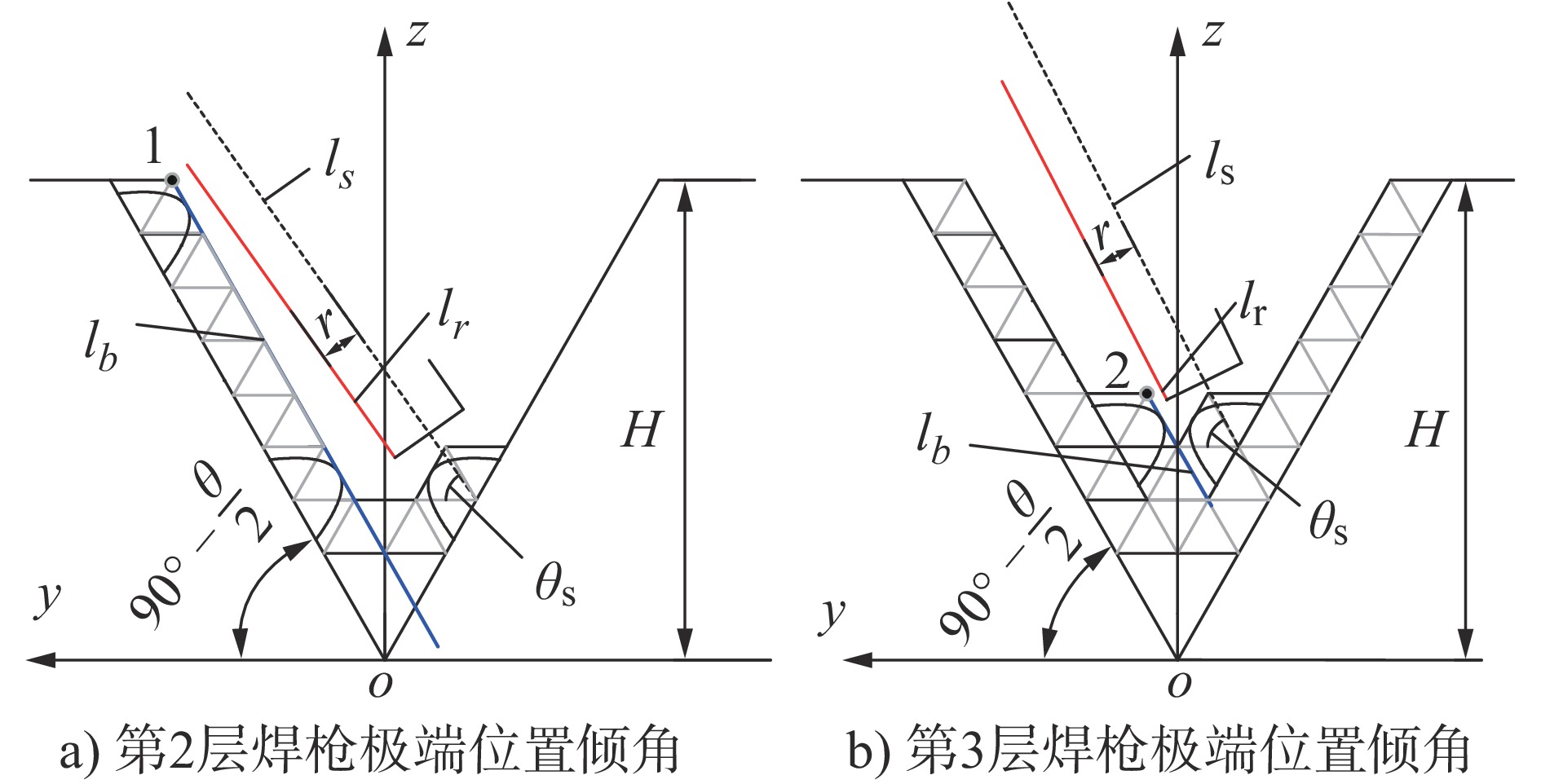
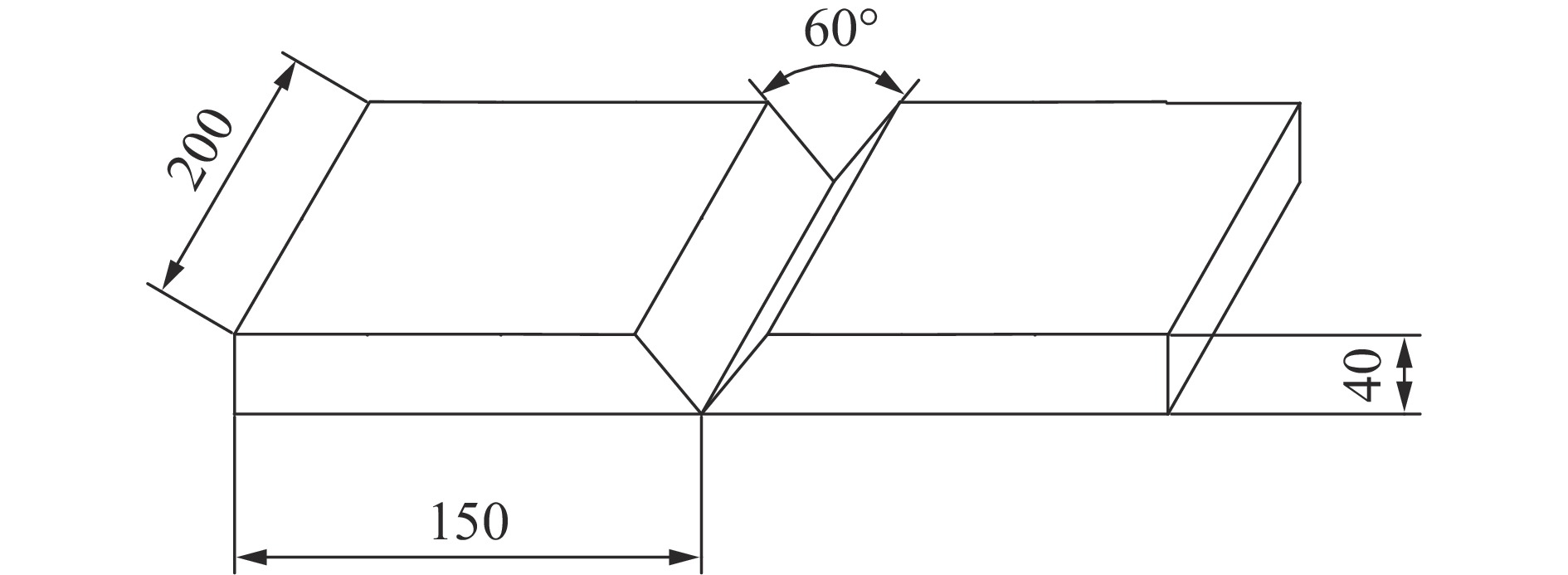
In order to solve the welding deformation problem of the arc welding robot facing the V-shaped groove of the medium and thick plate, by analyzing the characteristics of traditional layer-by-layer stacking welding, which is easy to cause heat accumulation and leads to welding deformation, a combination of V-shaped cross-section projection trajectory, spatial parallel reciprocating trajectory (SPRT) and spatial contour offset trajectory (SCOT) are combined to establish V-shaped welding layer to achieve rapid heat dissipation during welding process. At the same time, on the basis of establishing the analytical expressions of the trajectory equations, the advantages and disadvantages of the SPRT and the SCOT and the traditional layer-by-pass welding are compared and analyzed by Simufact Welding and MATLAB simulation software. To further verify the feasibility, the FANUC industrial robot was used for experiments. The simulation and test results show that based on the deformation of the parts in the y and z axis directions, the SPRT and SCOT are better than the traditional layer-by-layer welding method, and the SCOT is better than the SPRT. However, in the SPRT, the spatial pose adjustment of the robot end effector is relatively simple, the introduction error is small, and the control precision is high during the orbit transformation process, which is more suitable for narrow and short V-grooves; and the SCOT is more suitable for the wider and longer V-grooves.
In order to solve the welding deformation problem of the arc welding robot facing the V-shaped groove of the medium and thick plate, by analyzing the characteristics of traditional layer-by-layer stacking welding, which is easy to cause heat accumulation and leads to welding deformation, a combination of V-shaped cross-section projection trajectory, spatial parallel reciprocating trajectory (SPRT) and spatial contour offset trajectory (SCOT) are combined to establish V-shaped welding layer to achieve rapid heat dissipation during welding process. At the same time, on the basis of establishing the analytical expressions of the trajectory equations, the advantages and disadvantages of the SPRT and the SCOT and the traditional layer-by-pass welding are compared and analyzed by Simufact Welding and MATLAB simulation software. To further verify the feasibility, the FANUC industrial robot was used for experiments. The simulation and test results show that based on the deformation of the parts in the y and z axis directions, the SPRT and SCOT are better than the traditional layer-by-layer welding method, and the SCOT is better than the SPRT. However, in the SPRT, the spatial pose adjustment of the robot end effector is relatively simple, the introduction error is small, and the control precision is high during the orbit transformation process, which is more suitable for narrow and short V-grooves; and the SCOT is more suitable for the wider and longer V-grooves.




2024, 43(3): 466-473.
doi: 10.13433/j.cnki.1003-8728.20220277
Abstract:
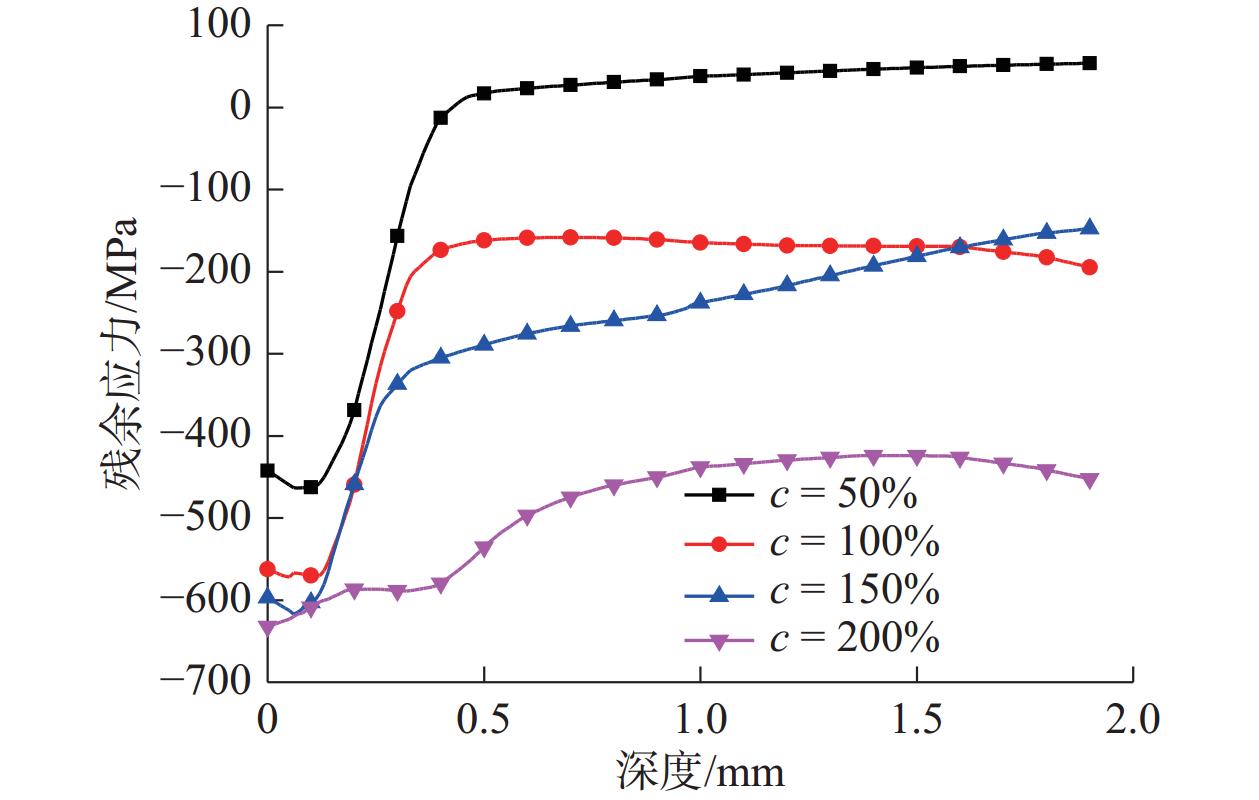
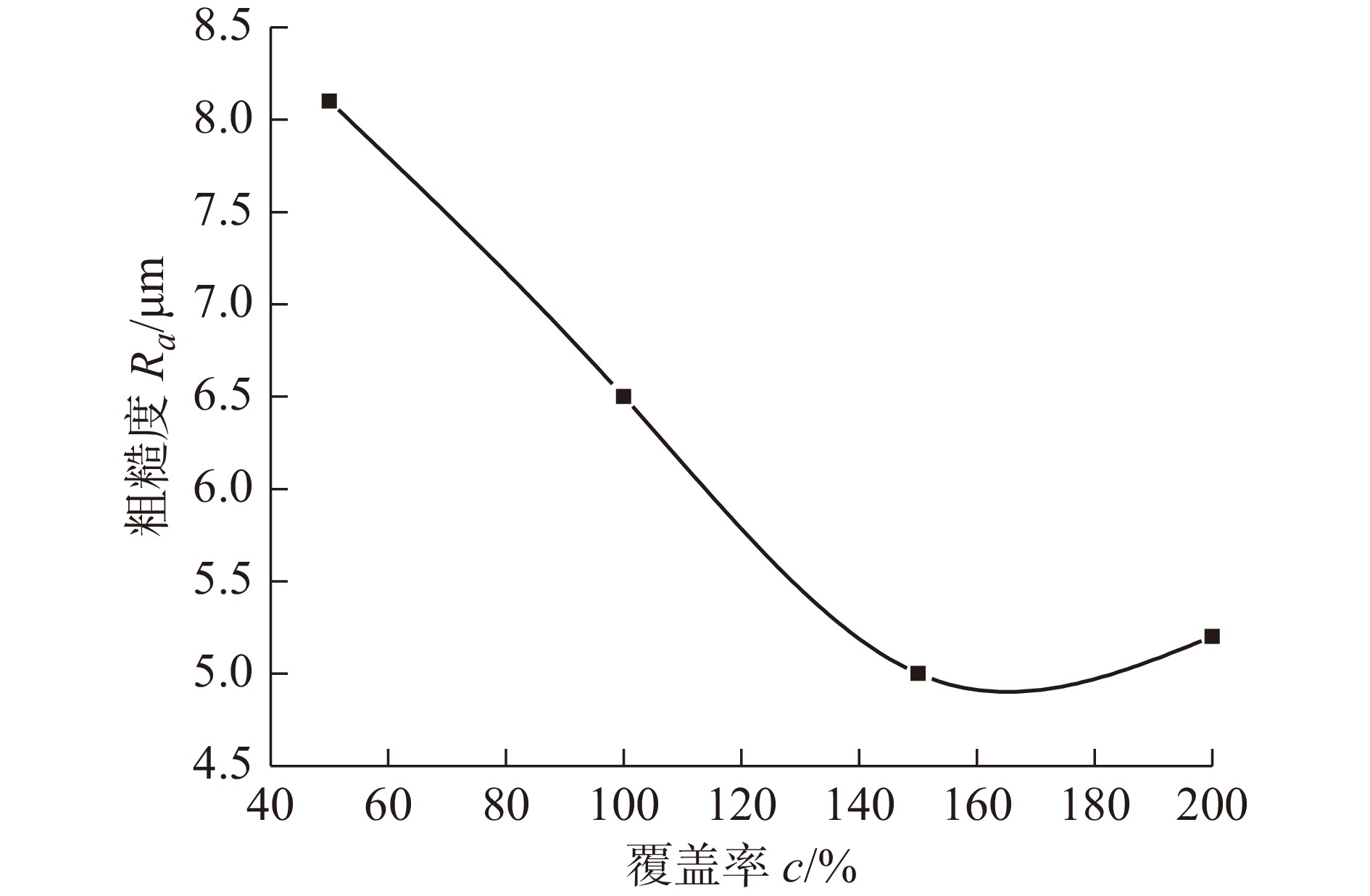
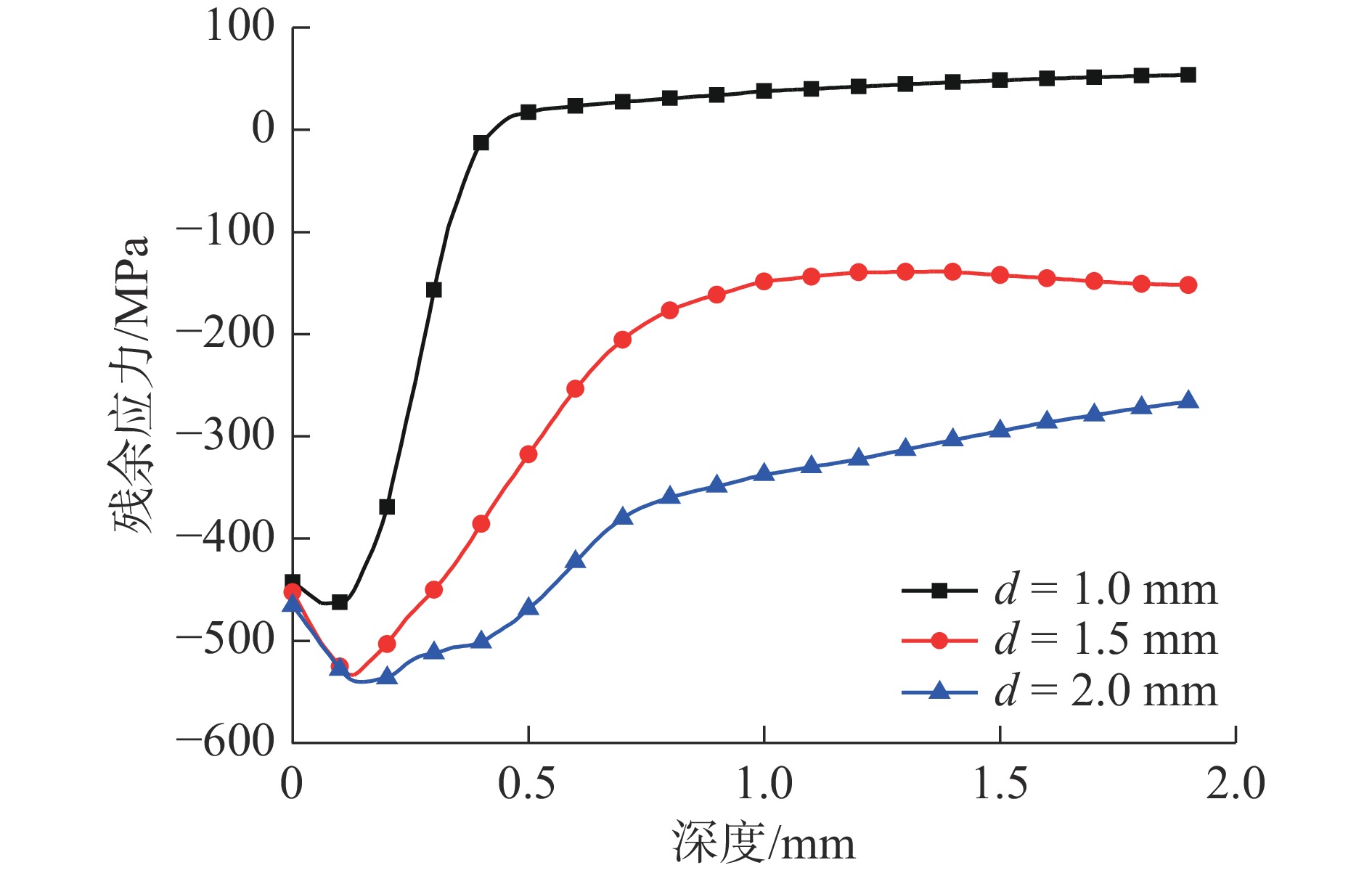
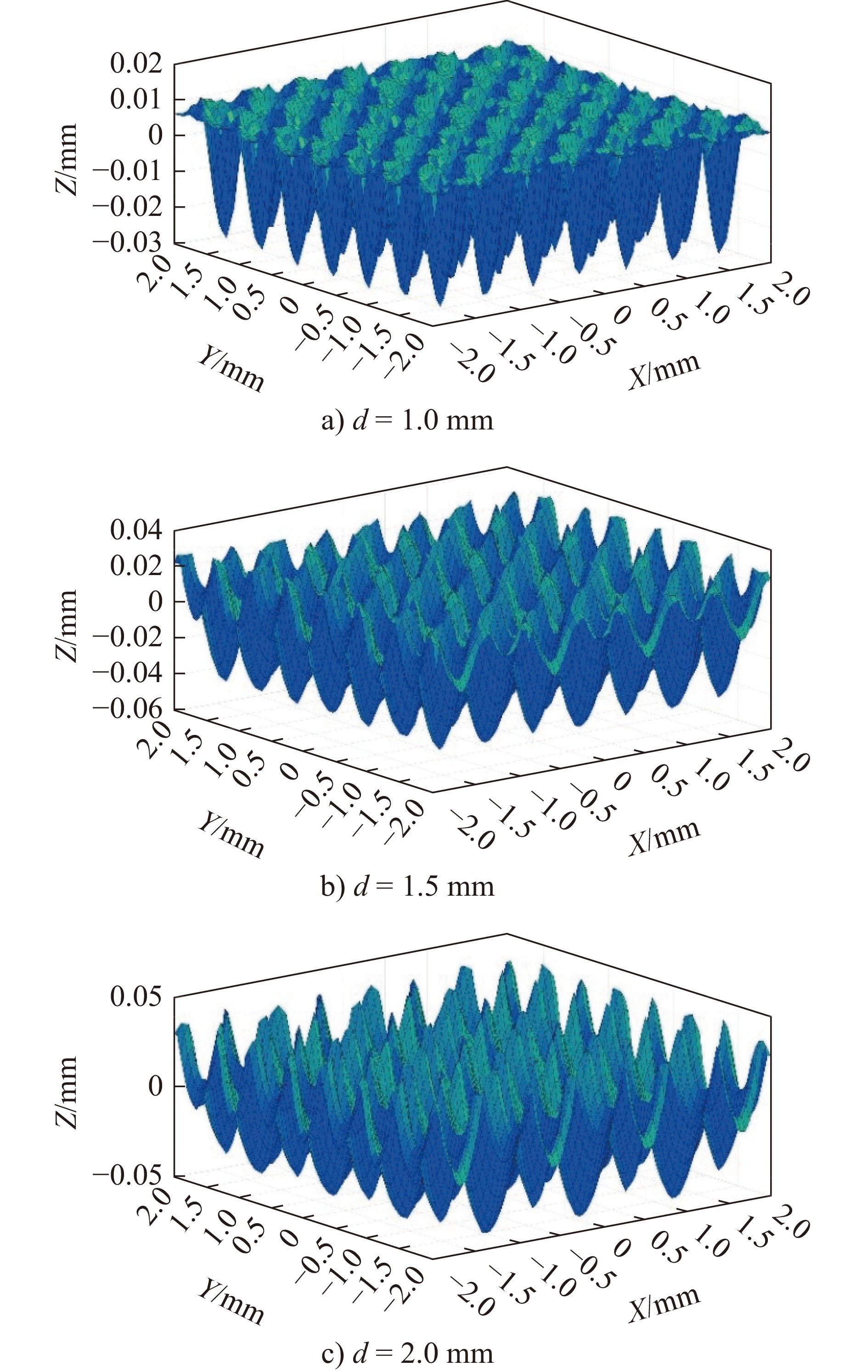
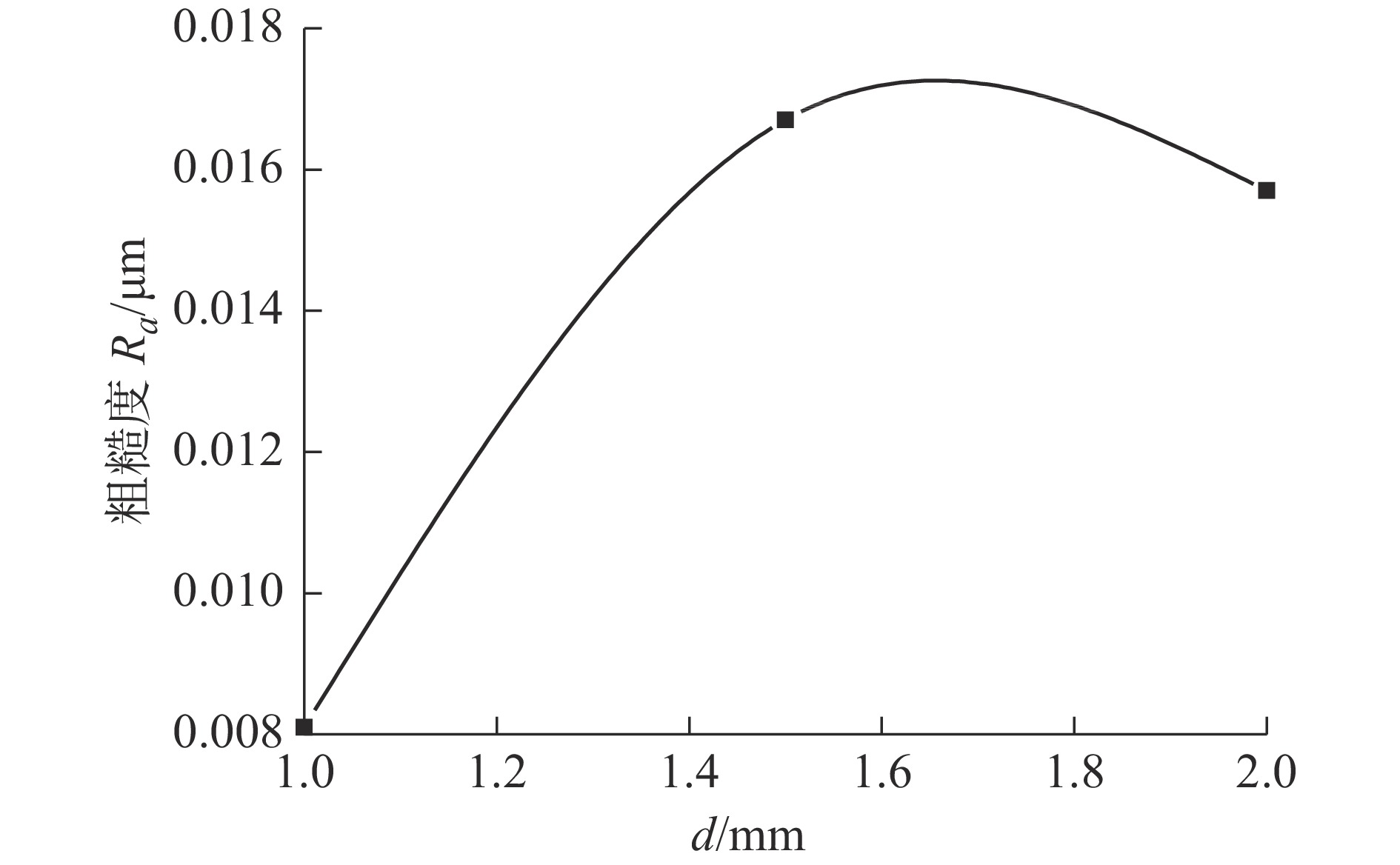
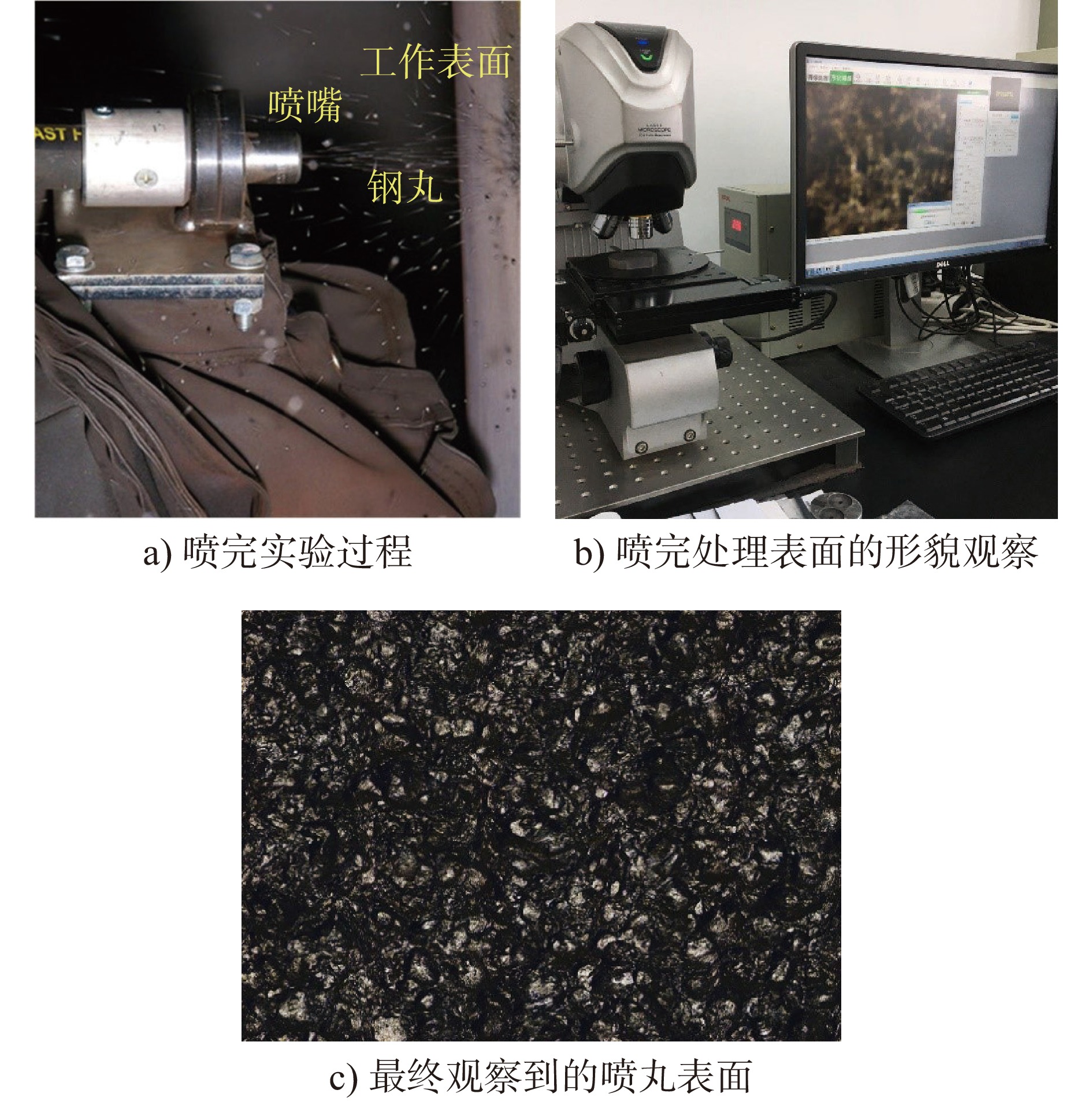
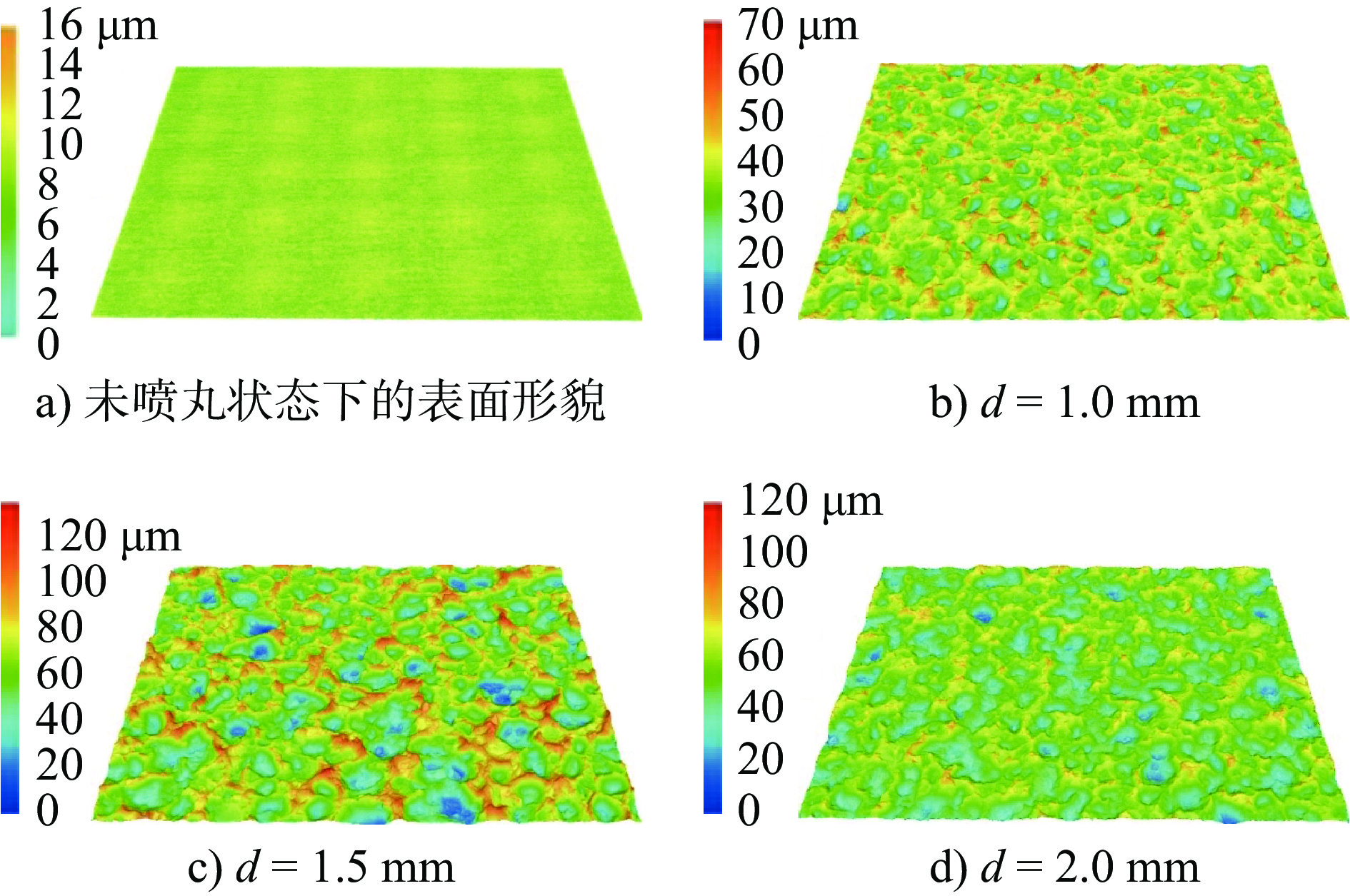
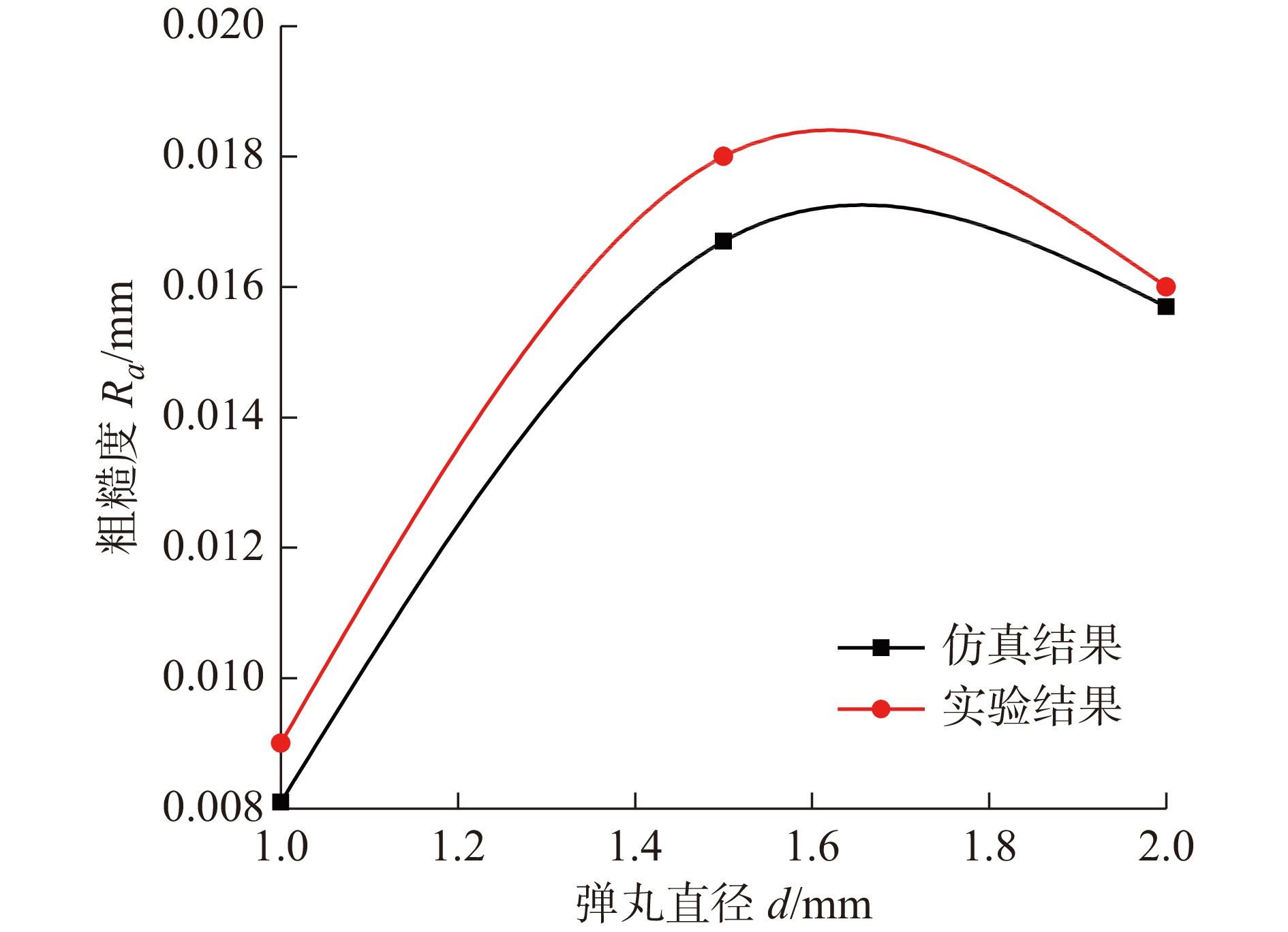
In order to explore the influence of the different shot peening parameters on the shot peening results in the shot peening process of 7075 aluminum alloy, the corresponding shot peening process is simulated via ABAQUS software, and the effects of the different shot peening parameters on the surface residual stress distribution, surface roughness and surface three-dimensional morphology are observed. At the same time, the corresponding shot peening process is studied based on the experimental process, by comparing the simulation and experimental results, it is finally found that although there is a certain gap between the two in specific values, the two show obvious consistency in change trend. Therefore, it can be considered that the analysis results of the two are more reliable. At the same time, it is concluded that under the condition of simply adjusting the projectile size and velocity, it is difficult to give consideration to both the surface residual stress and the surface roughness at the same time, but the improvement of shot peening coverage can better take these two aspects into account at the cost of reducing production efficiency.
In order to explore the influence of the different shot peening parameters on the shot peening results in the shot peening process of 7075 aluminum alloy, the corresponding shot peening process is simulated via ABAQUS software, and the effects of the different shot peening parameters on the surface residual stress distribution, surface roughness and surface three-dimensional morphology are observed. At the same time, the corresponding shot peening process is studied based on the experimental process, by comparing the simulation and experimental results, it is finally found that although there is a certain gap between the two in specific values, the two show obvious consistency in change trend. Therefore, it can be considered that the analysis results of the two are more reliable. At the same time, it is concluded that under the condition of simply adjusting the projectile size and velocity, it is difficult to give consideration to both the surface residual stress and the surface roughness at the same time, but the improvement of shot peening coverage can better take these two aspects into account at the cost of reducing production efficiency.






2024, 43(3): 474-482.
doi: 10.13433/j.cnki.1003-8728.20220221
Abstract:
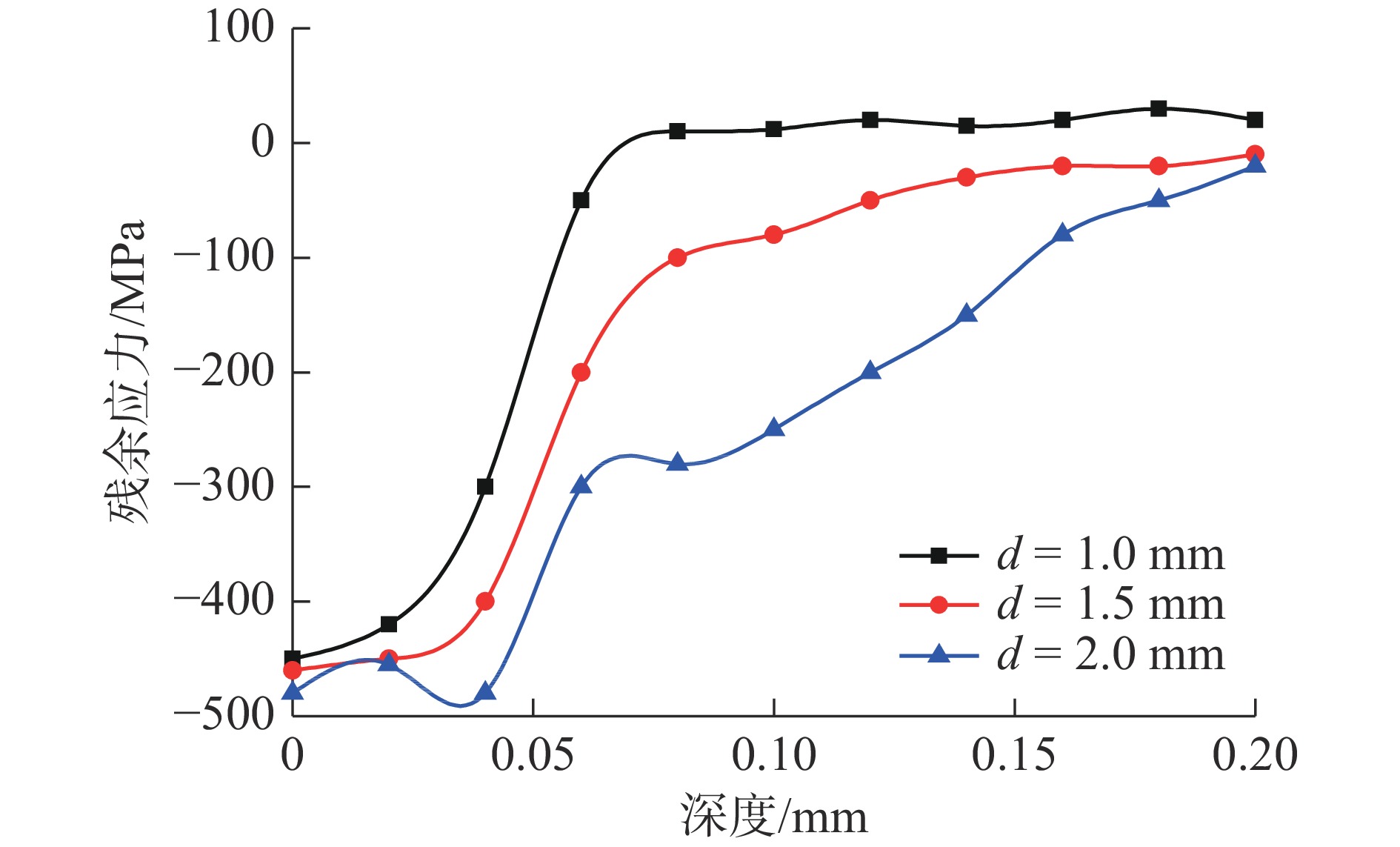
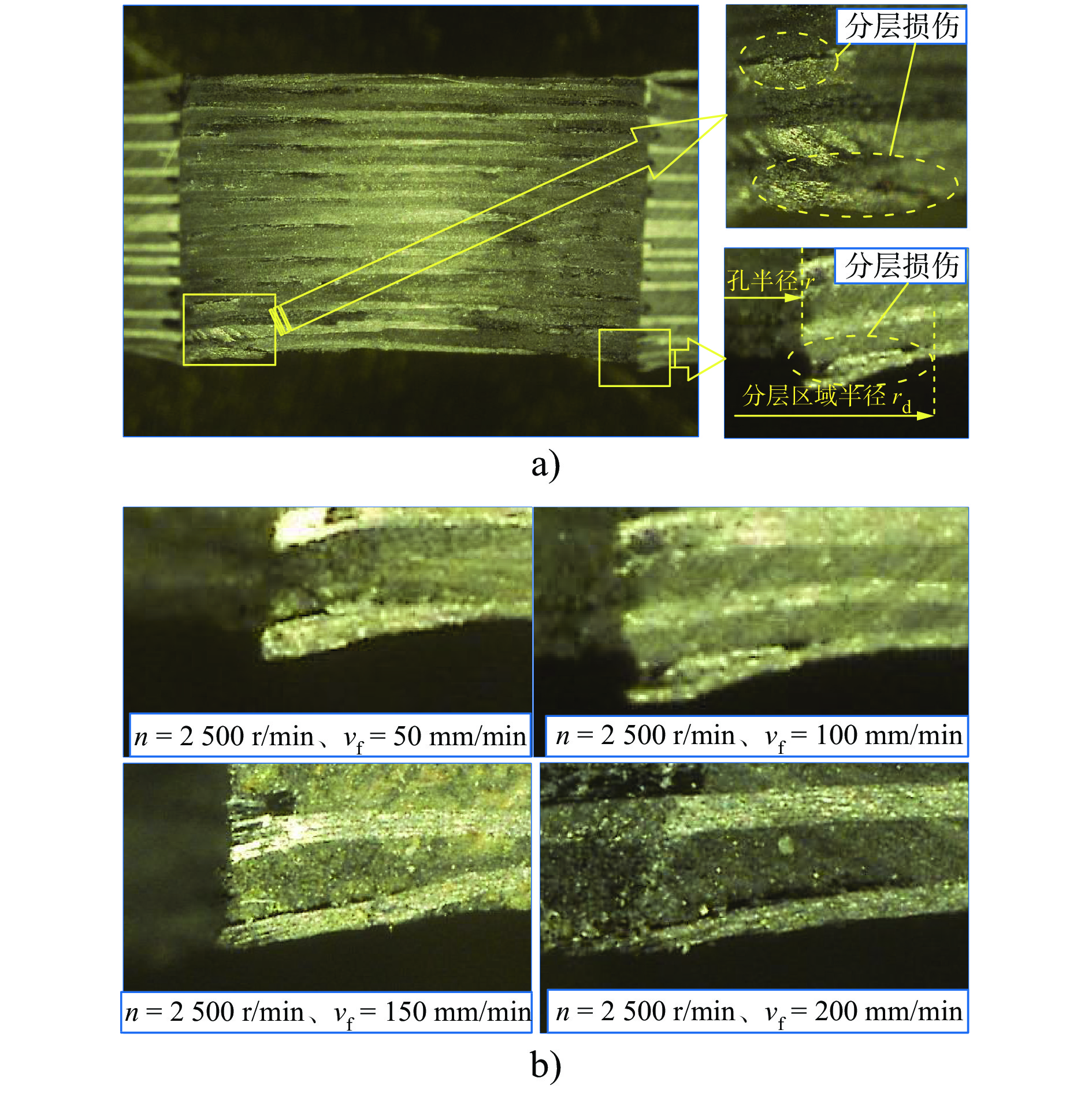
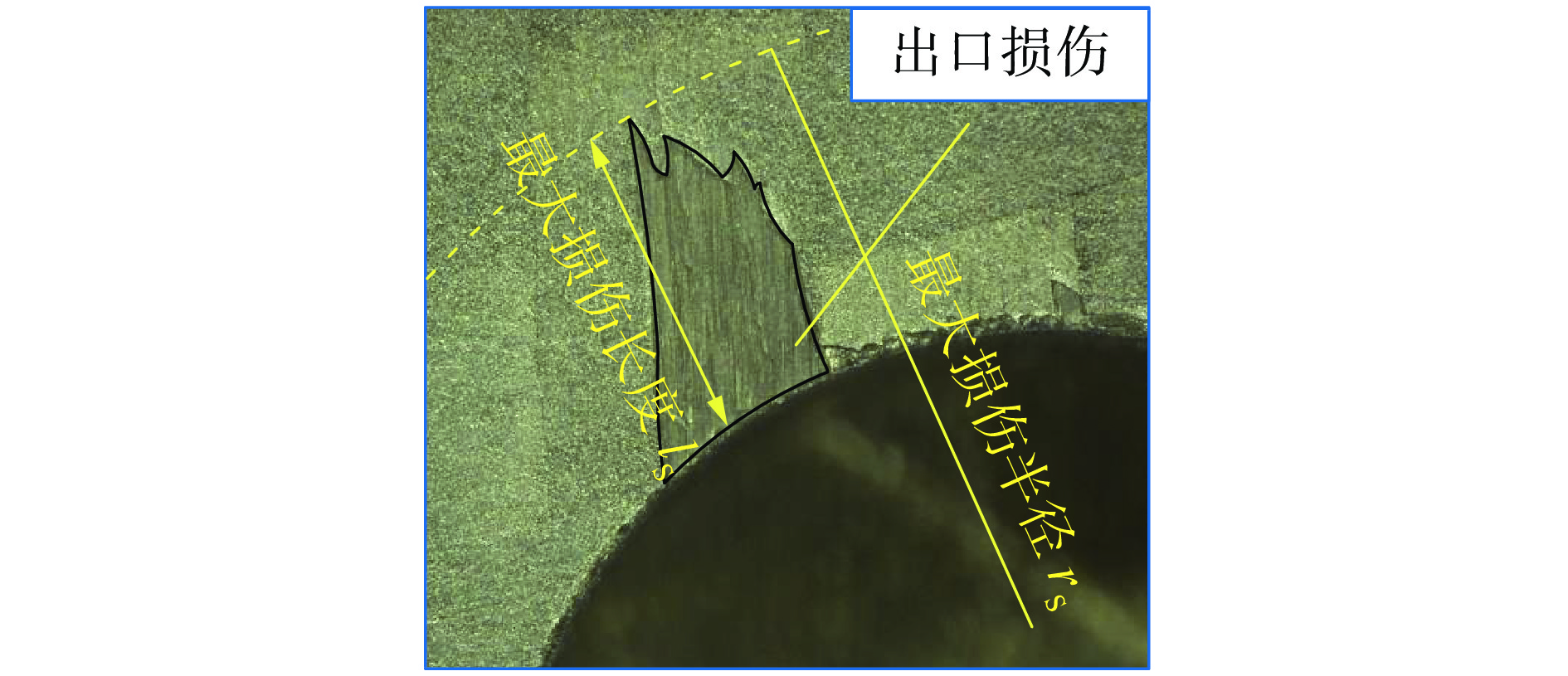
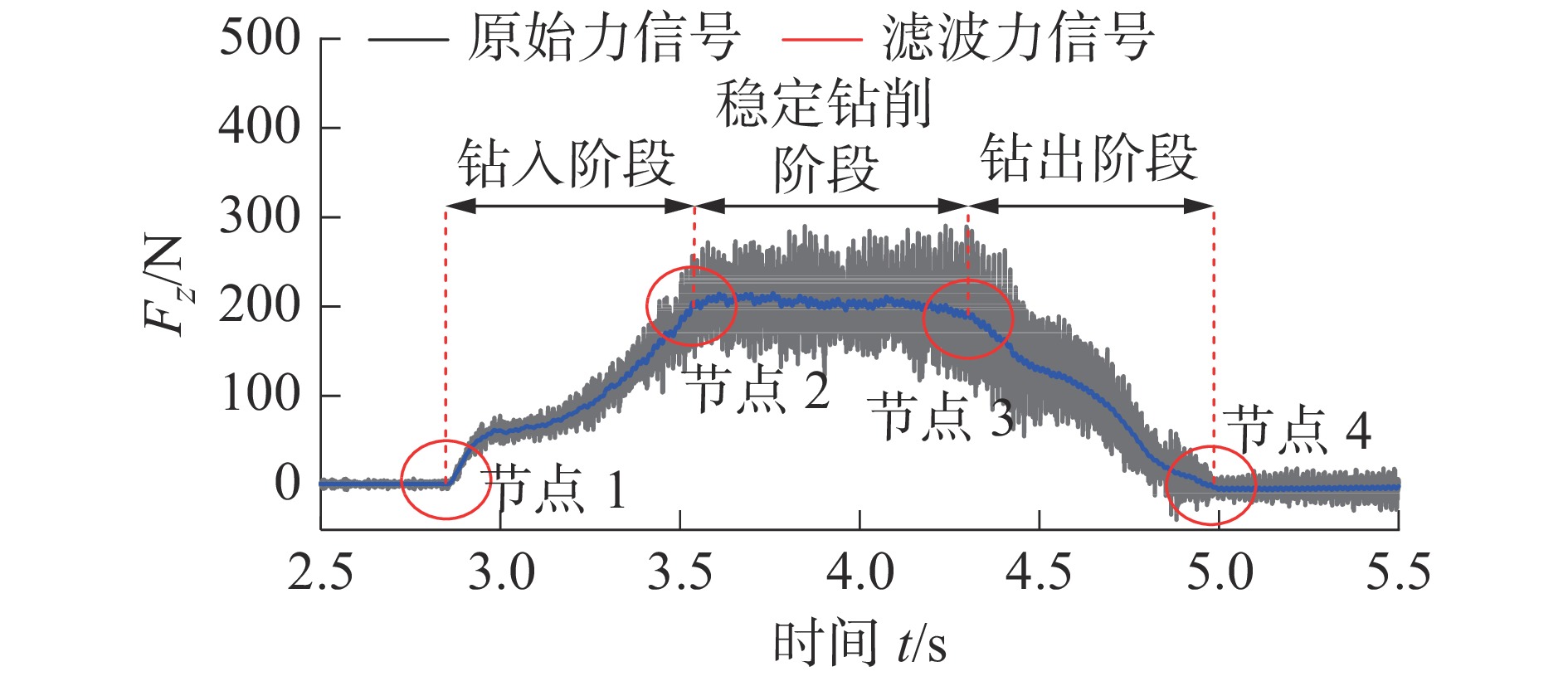
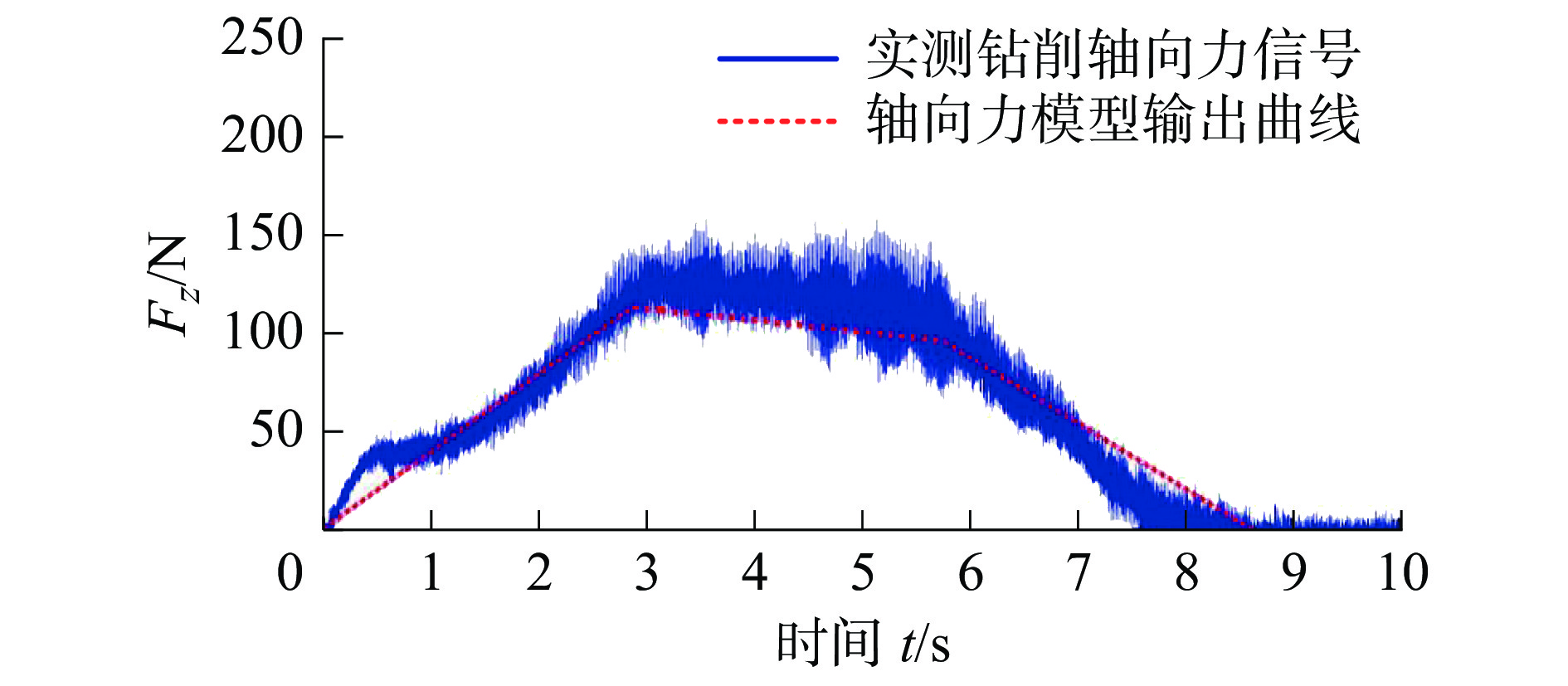
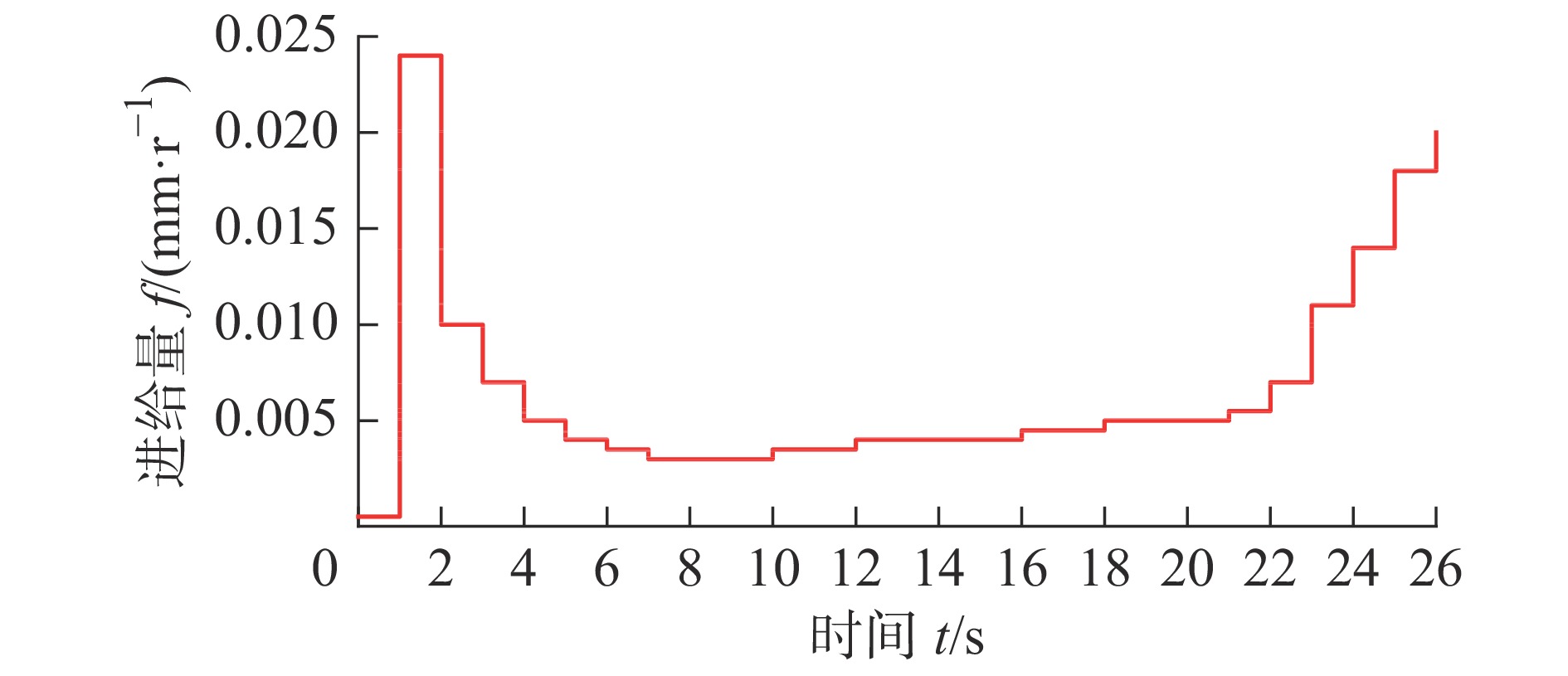
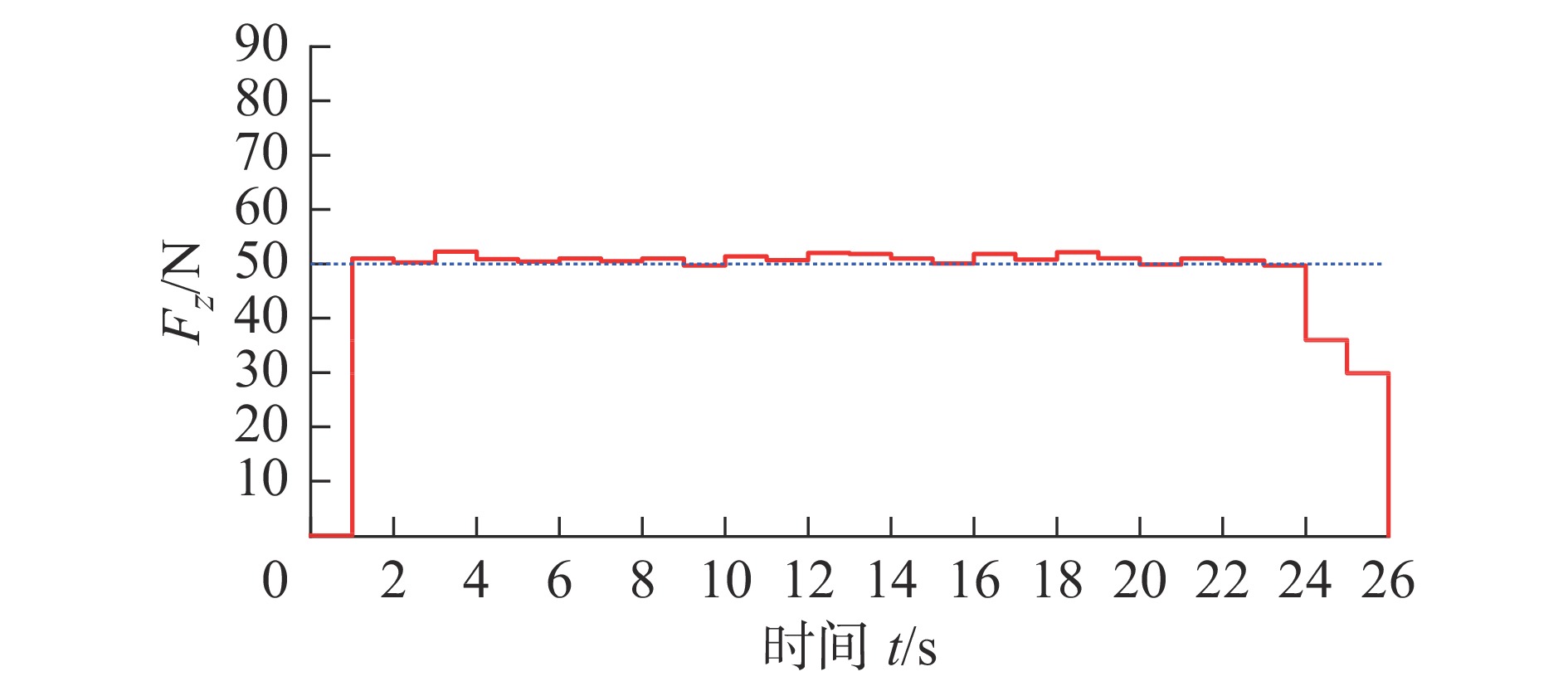
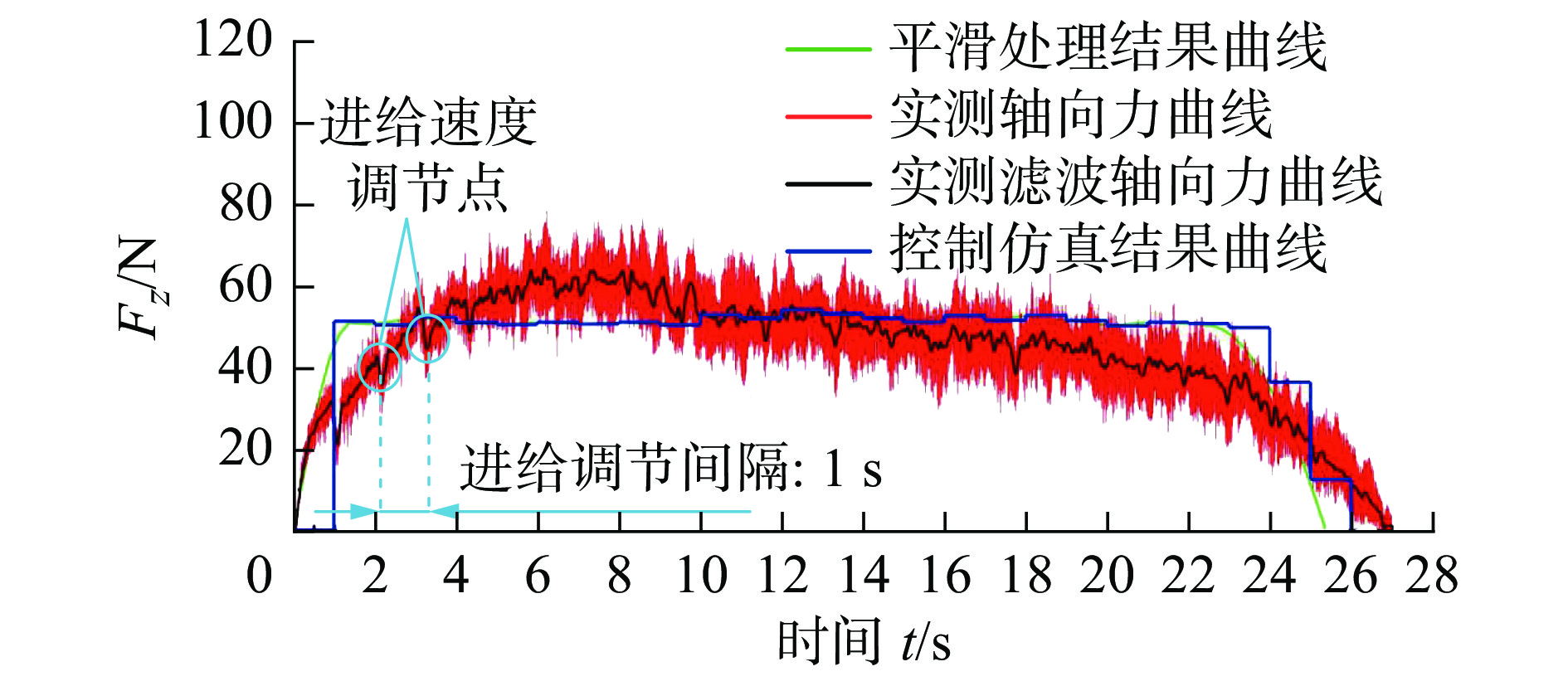
The axial force of drilling is closely related to the quality of CFRP hole-making. In order to reasonably control the axial force to reduce hole-making defects, the simulation and experimental study on the axial force adaptive control in CFRP hole-making process were carried out. Firstly, the axial force and hole-making quality were quantitatively studied through CFRP drilling experiments. Secondly, a three-stage axial force model was established by considering the different machining characteristics of CFRP in the drilling entry stage, steady drilling stage and drilling out stage. Finally, the simulation and experimental study on the axial force adaptive control was carried out based on the three-stage model and fuzzy logic. The results show that it is feasible to control the axial force intelligently by using the fuzzy logic control algorithm and combining with CFRP processing characteristics. In addition, adjusting the axial force according to the simulation information can effectively reduce the hole-making defects and improve the hole wall quality. It provides a new idea for intelligent control of axial force in hole-making process of large thickness carbon fiber composites.
The axial force of drilling is closely related to the quality of CFRP hole-making. In order to reasonably control the axial force to reduce hole-making defects, the simulation and experimental study on the axial force adaptive control in CFRP hole-making process were carried out. Firstly, the axial force and hole-making quality were quantitatively studied through CFRP drilling experiments. Secondly, a three-stage axial force model was established by considering the different machining characteristics of CFRP in the drilling entry stage, steady drilling stage and drilling out stage. Finally, the simulation and experimental study on the axial force adaptive control was carried out based on the three-stage model and fuzzy logic. The results show that it is feasible to control the axial force intelligently by using the fuzzy logic control algorithm and combining with CFRP processing characteristics. In addition, adjusting the axial force according to the simulation information can effectively reduce the hole-making defects and improve the hole wall quality. It provides a new idea for intelligent control of axial force in hole-making process of large thickness carbon fiber composites.






2024, 43(3): 483-489.
doi: 10.13433/j.cnki.1003-8728.20220279
Abstract:
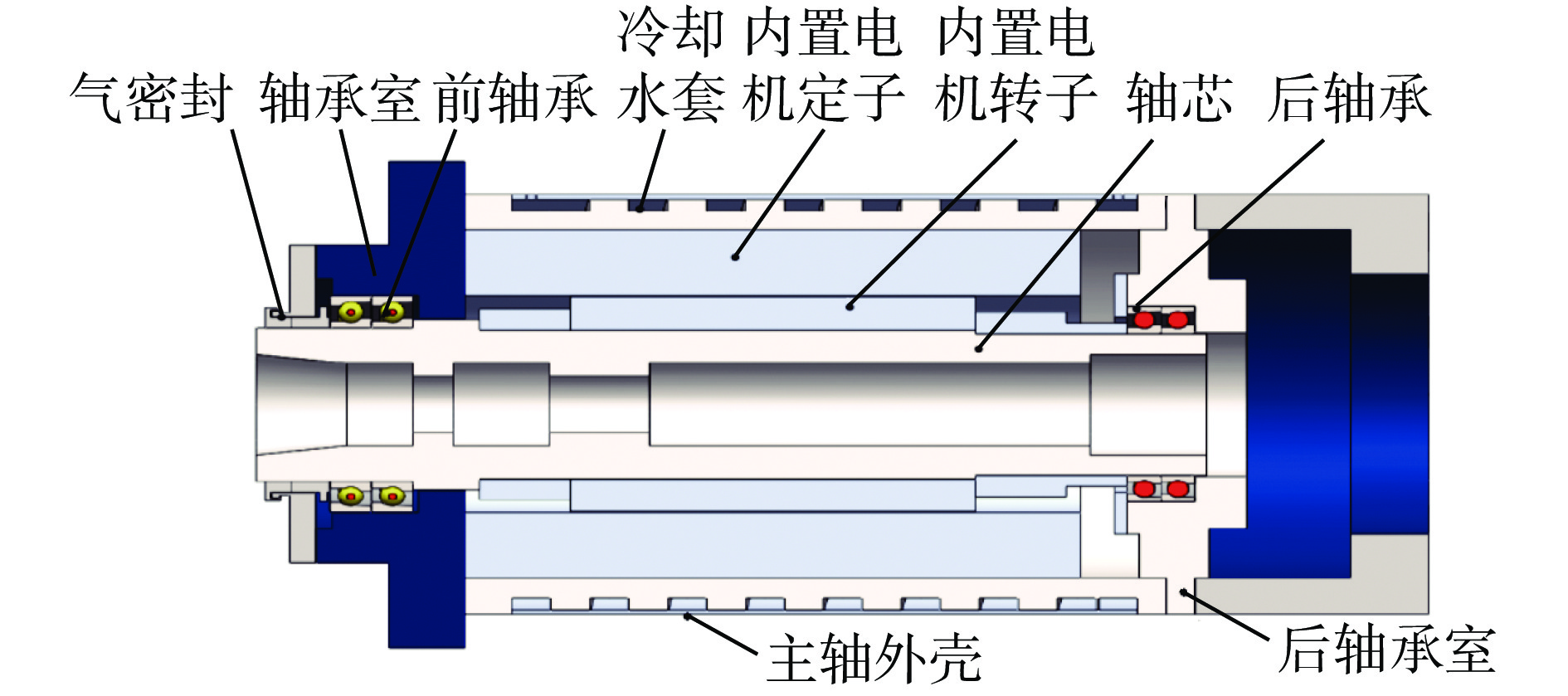
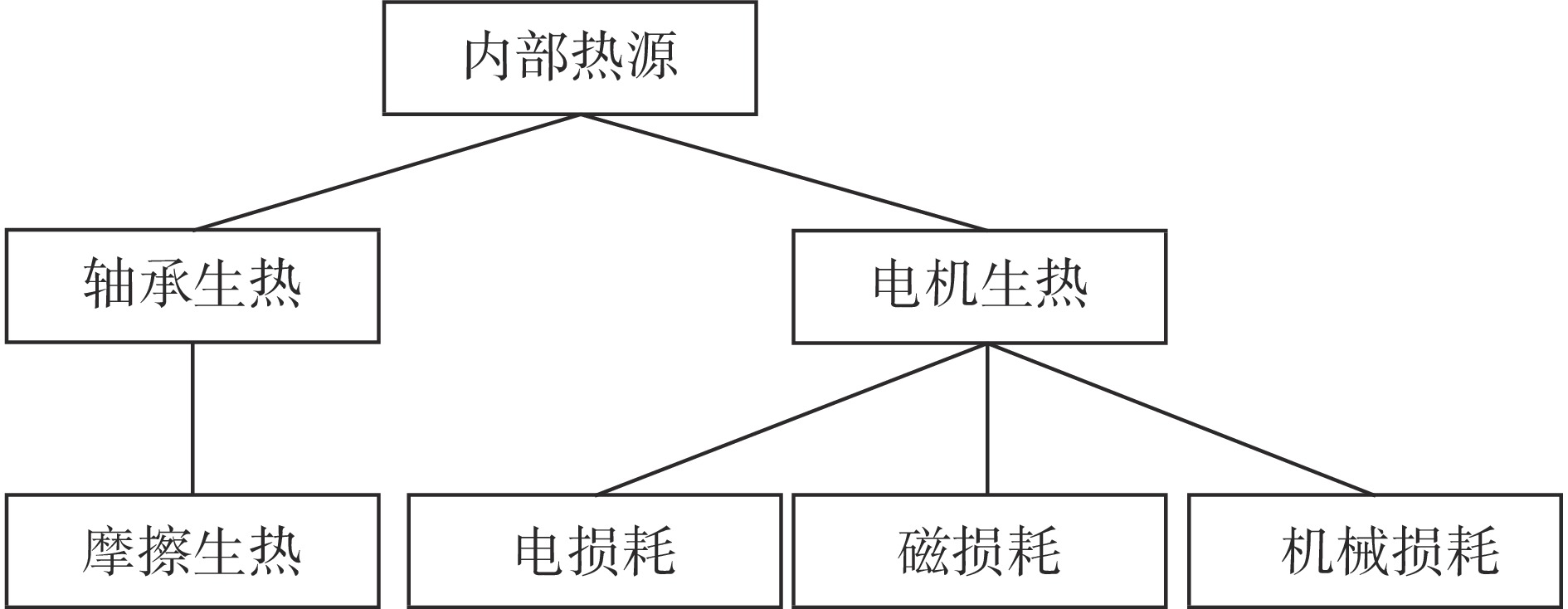
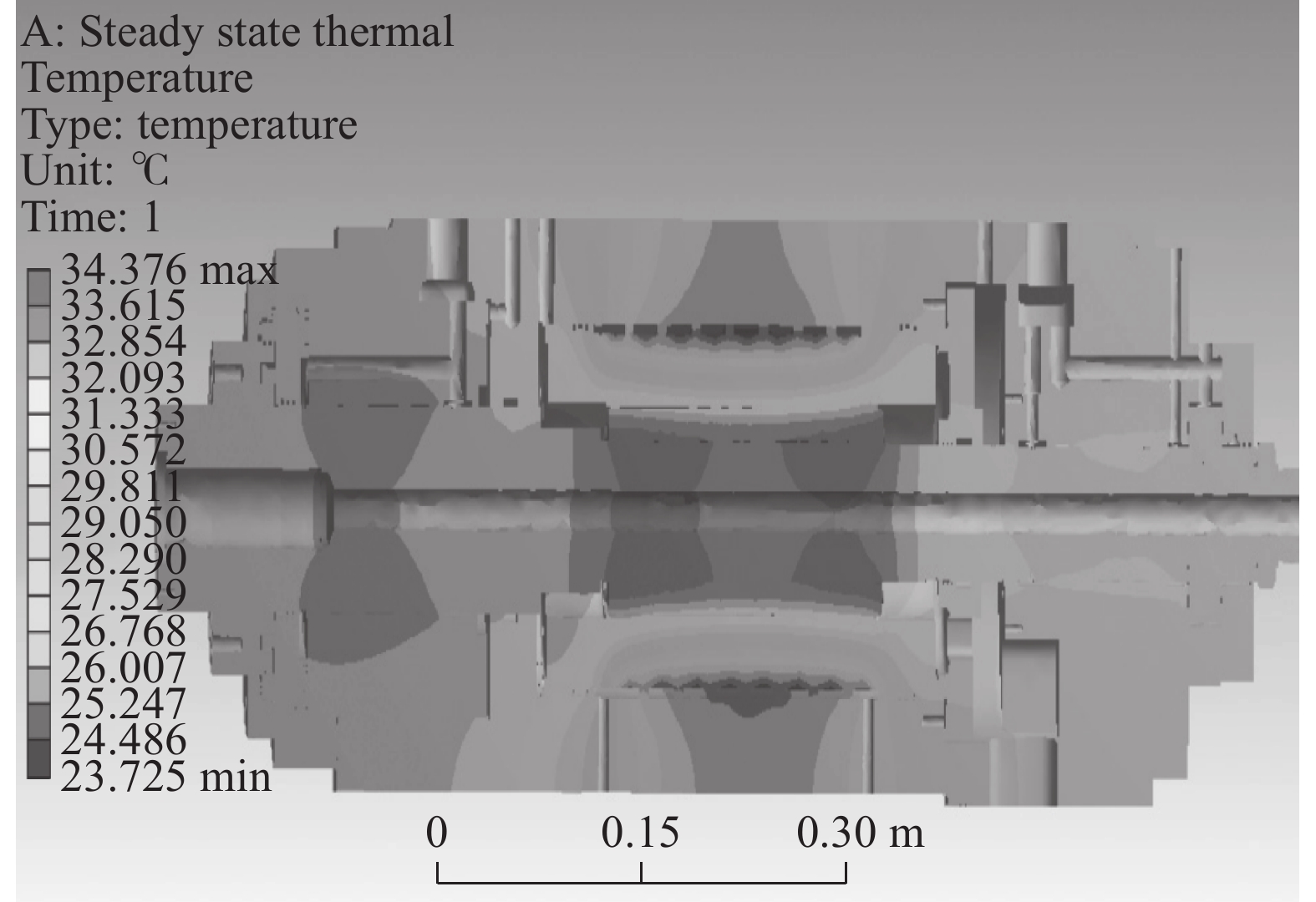
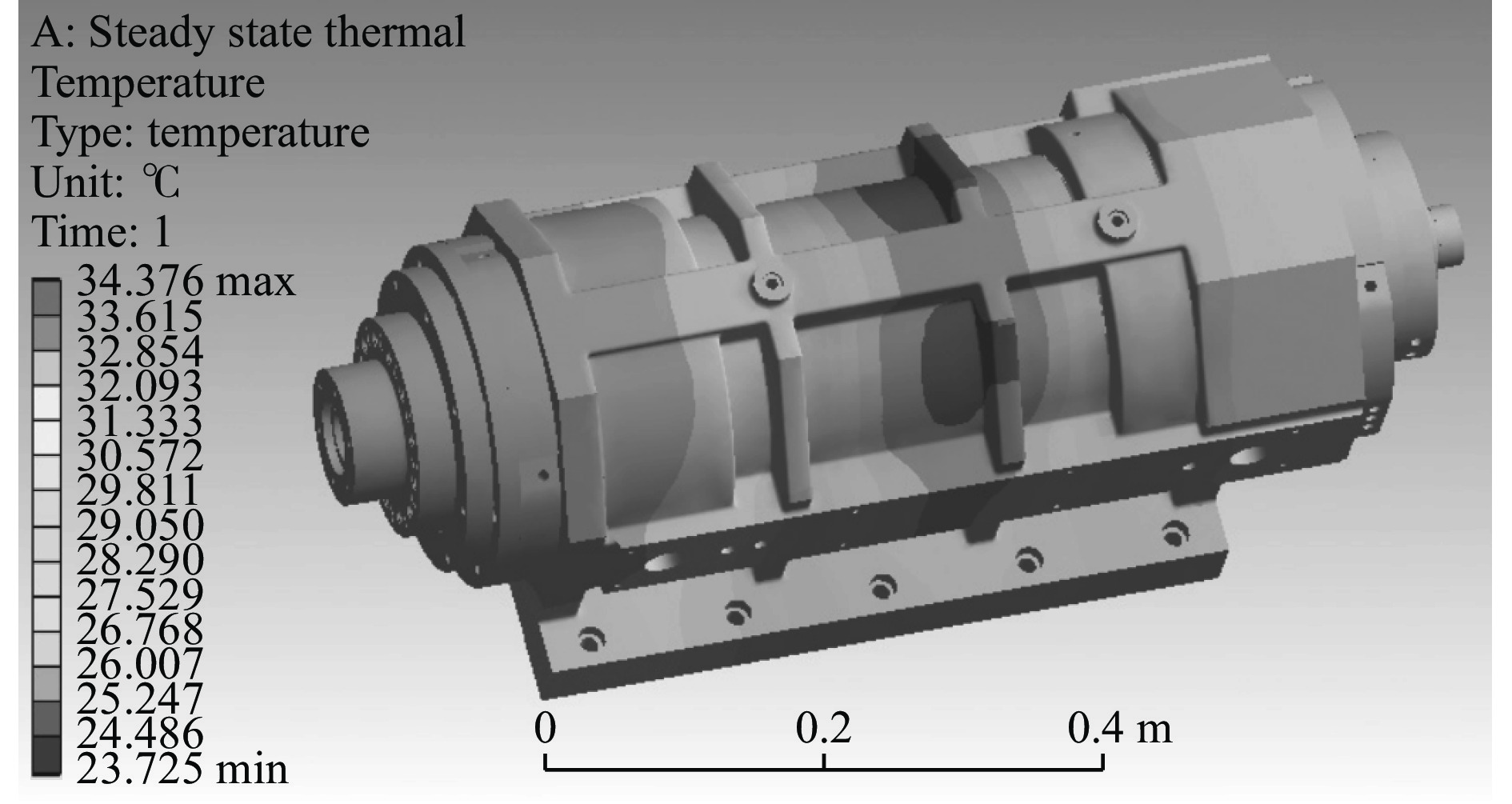
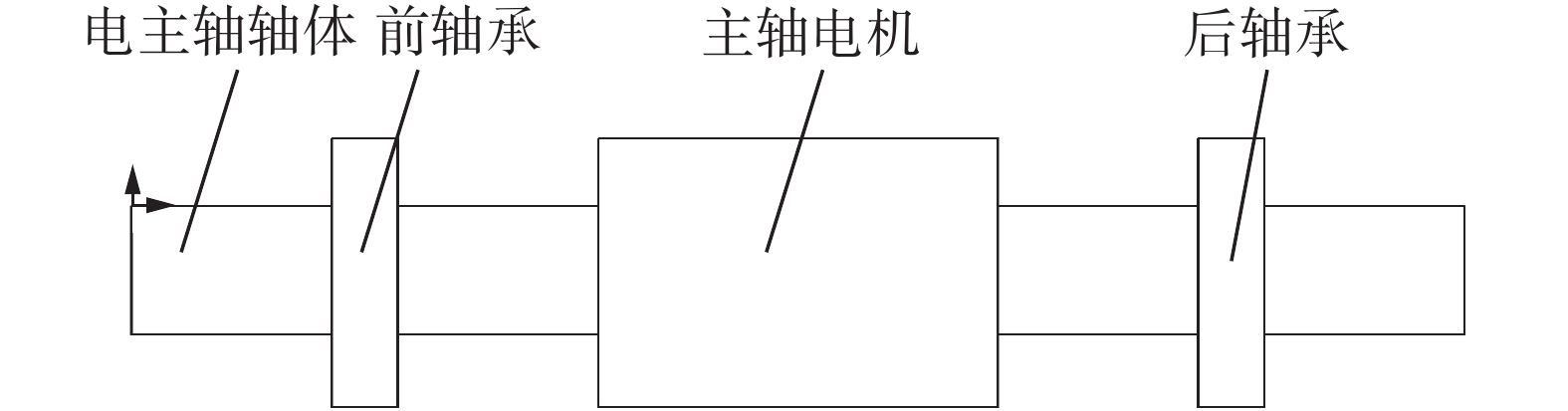
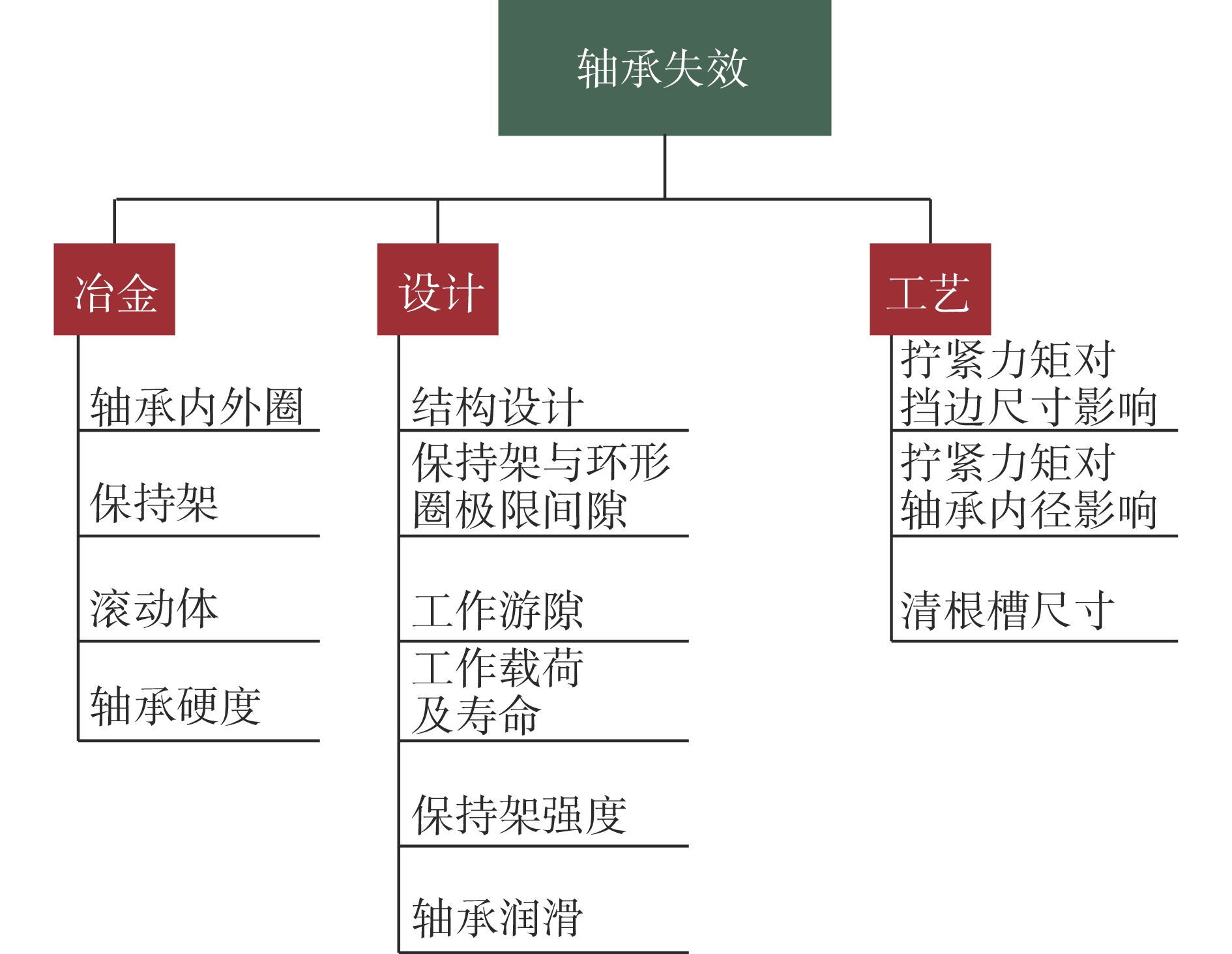
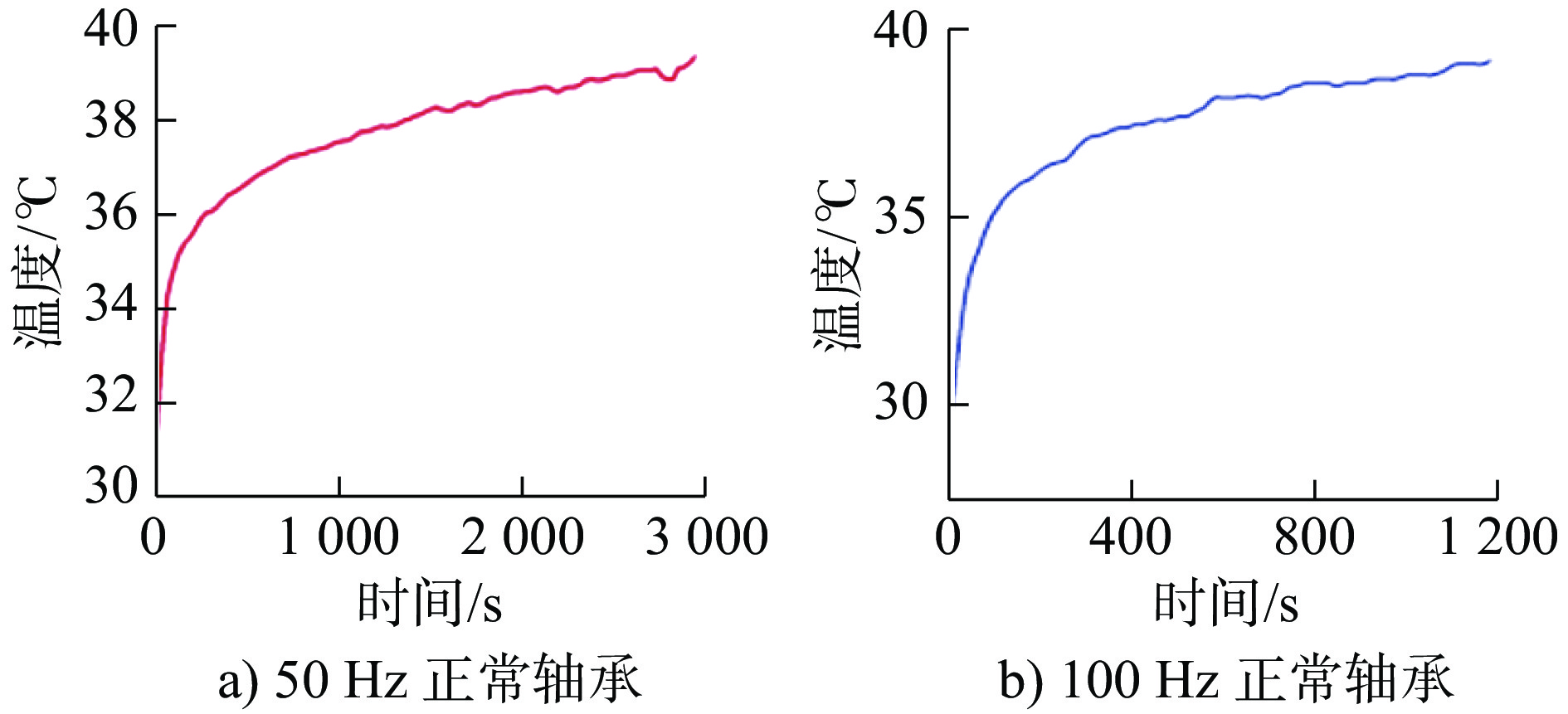
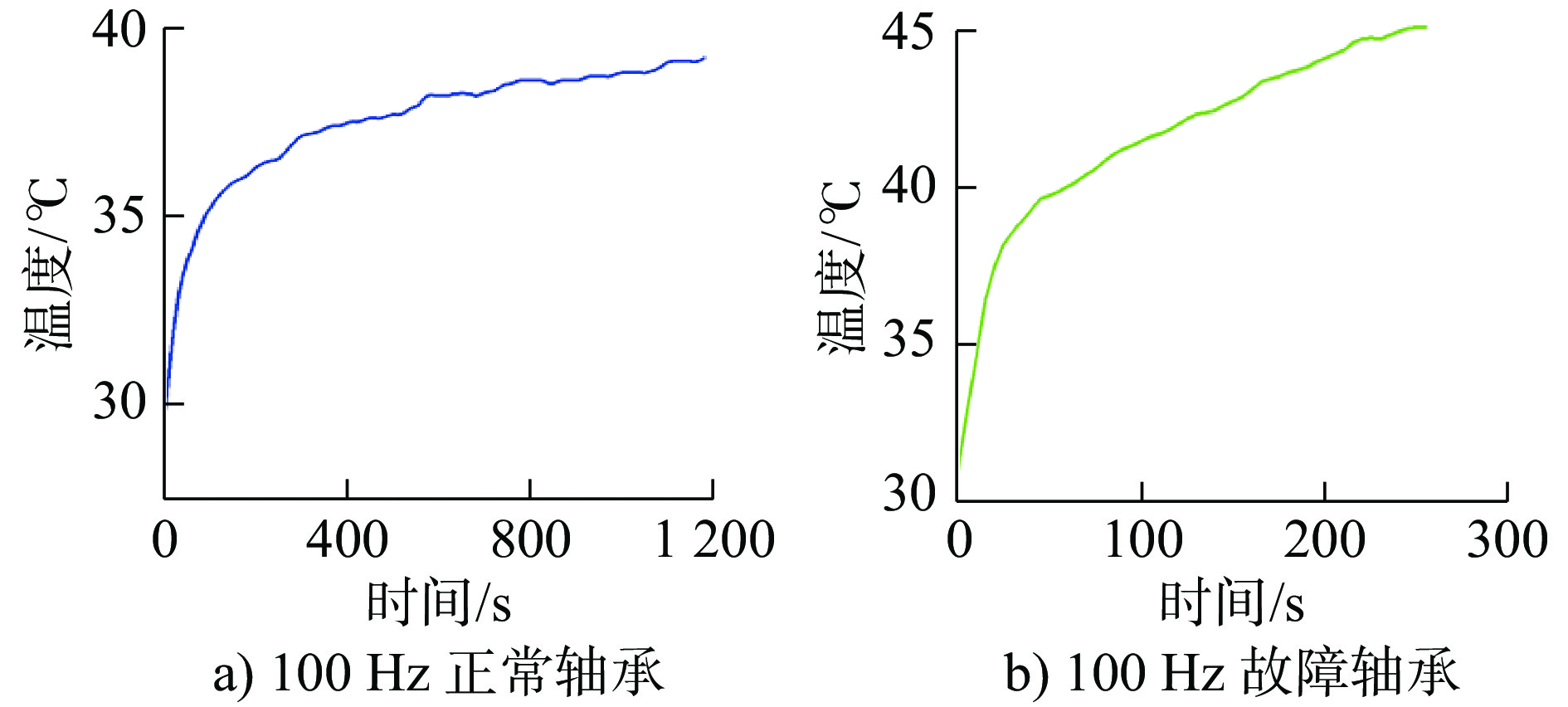
To reduce the thermal deformation of a motorized spindle's shaft body and the common faults of important parts such as bearing in the processing center, a real-time thermal error compensation calculation method based on collecting the temperature change of the motorized spindle and the bearing's common fault diagnosis method were proposed. The thermal error compensation calculation method can improve the machining accuracy of the motorized spindle unit through processing the temperature measurement point data of the shaft body. The fault diagnosis method is used to set different thresholds for different temperature nodes. The threshold corresponds to the fault characteristics of a certain important part inside the motorized spindle unit. When the change in a temperature node exceeds the threshold, the alarm is given to diagnose the faults of a particular part.
To reduce the thermal deformation of a motorized spindle's shaft body and the common faults of important parts such as bearing in the processing center, a real-time thermal error compensation calculation method based on collecting the temperature change of the motorized spindle and the bearing's common fault diagnosis method were proposed. The thermal error compensation calculation method can improve the machining accuracy of the motorized spindle unit through processing the temperature measurement point data of the shaft body. The fault diagnosis method is used to set different thresholds for different temperature nodes. The threshold corresponds to the fault characteristics of a certain important part inside the motorized spindle unit. When the change in a temperature node exceeds the threshold, the alarm is given to diagnose the faults of a particular part.




2024, 43(3): 490-496.
doi: 10.13433/j.cnki.1003-8728.20220214
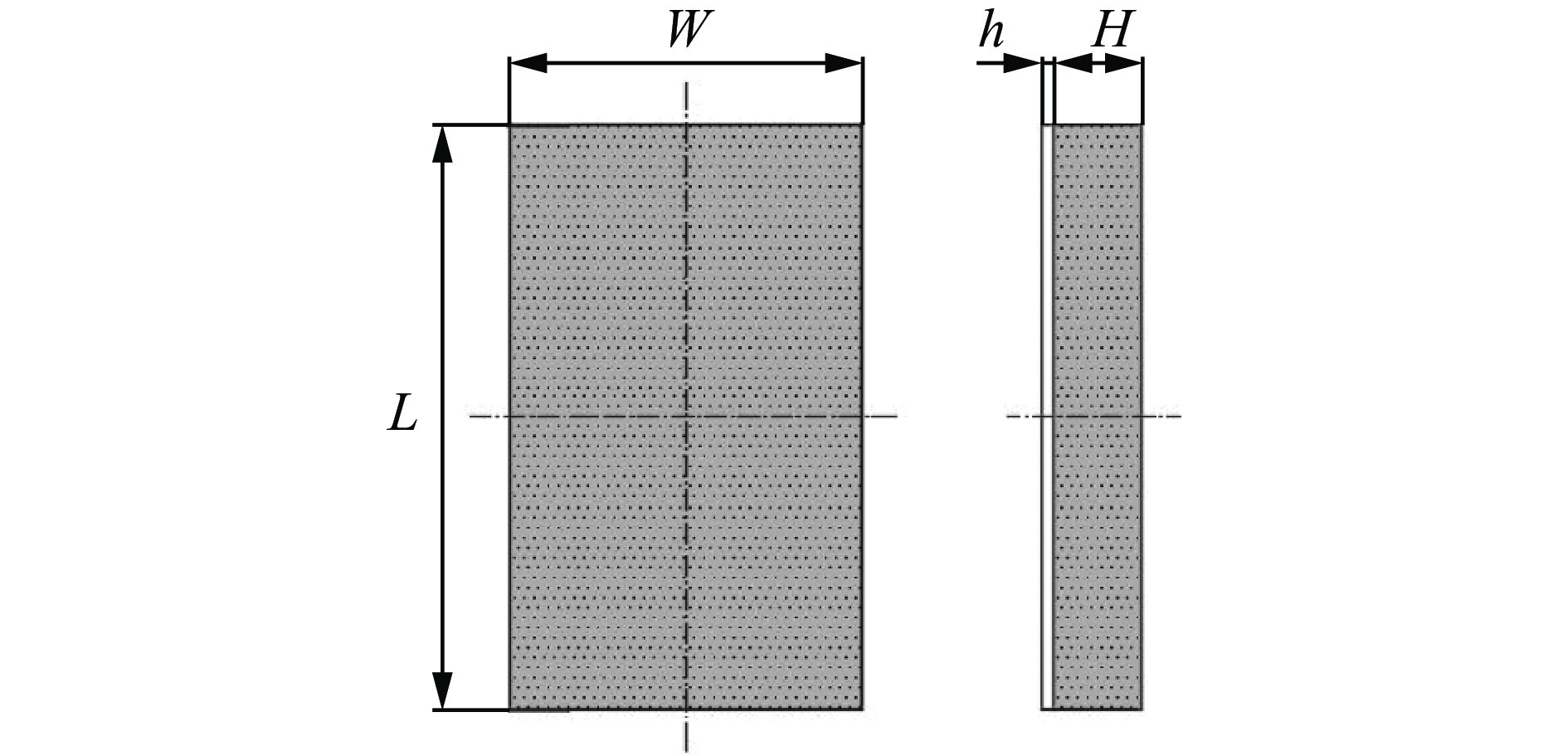
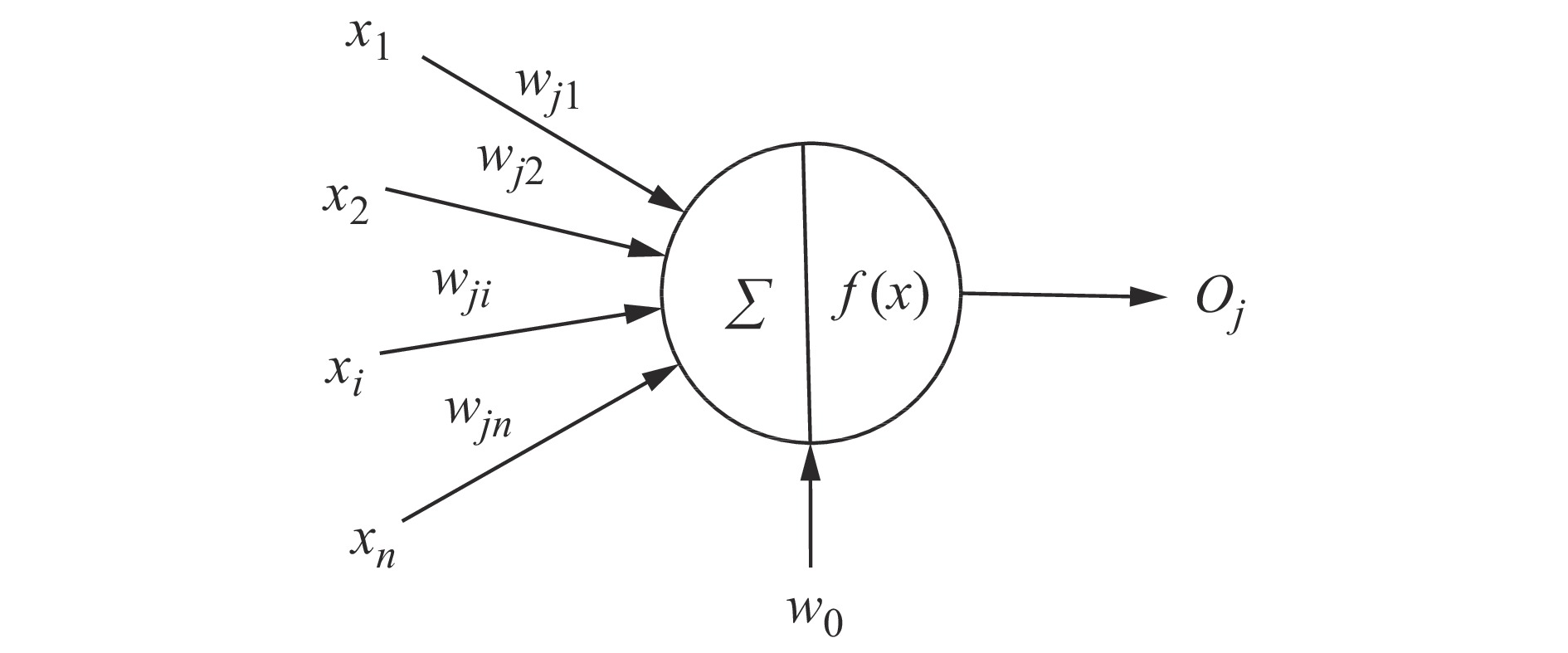
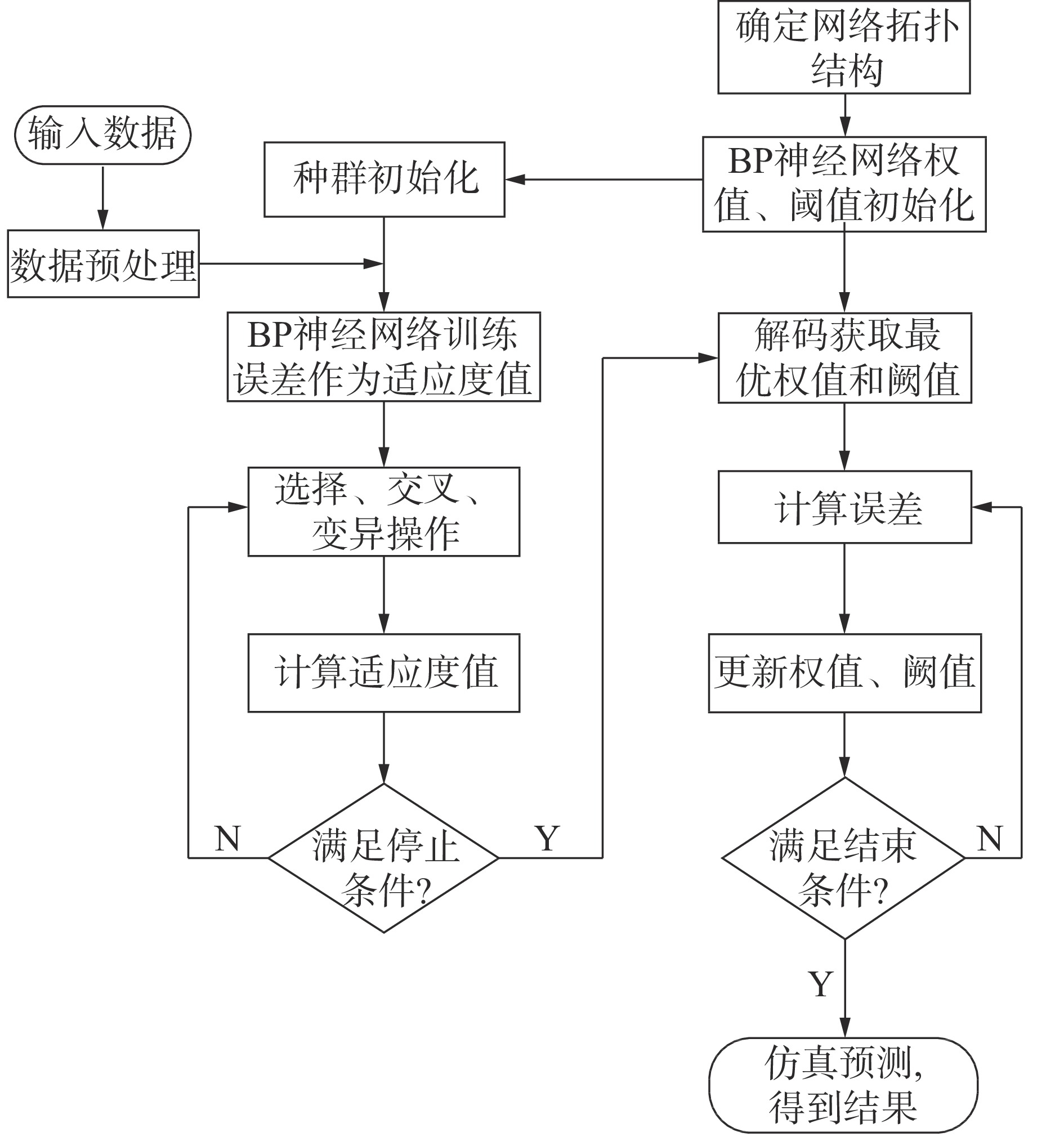
Abstract:
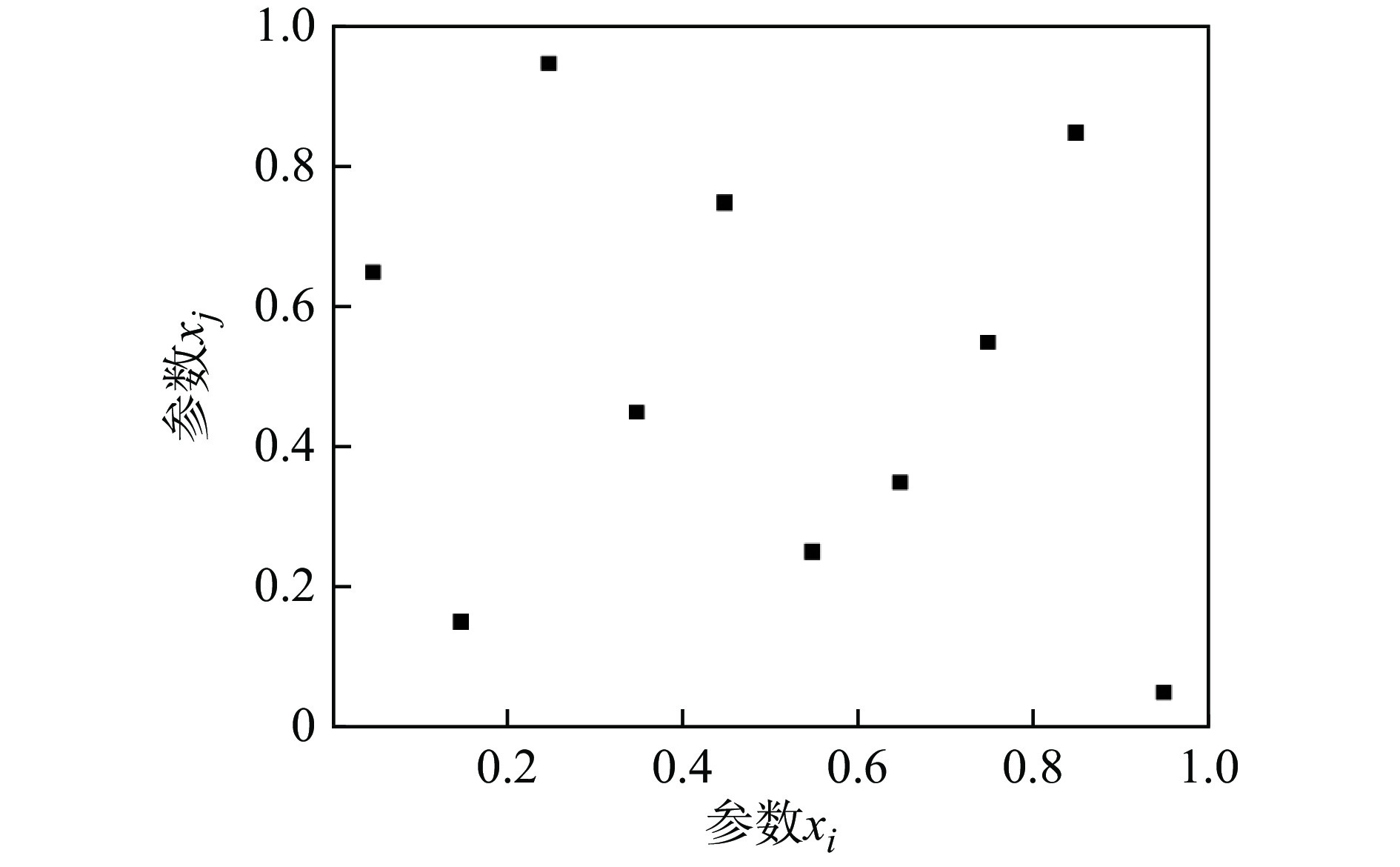
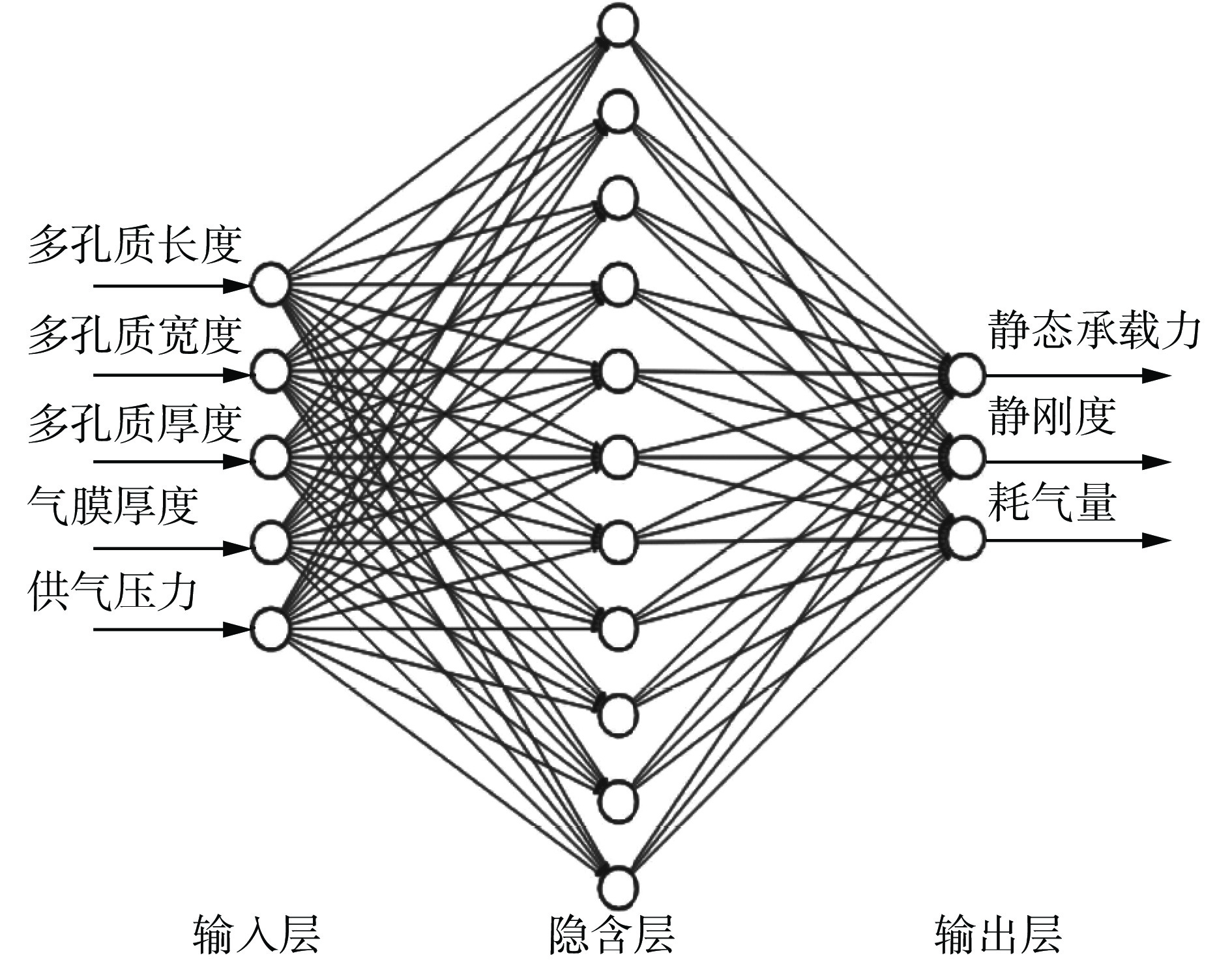
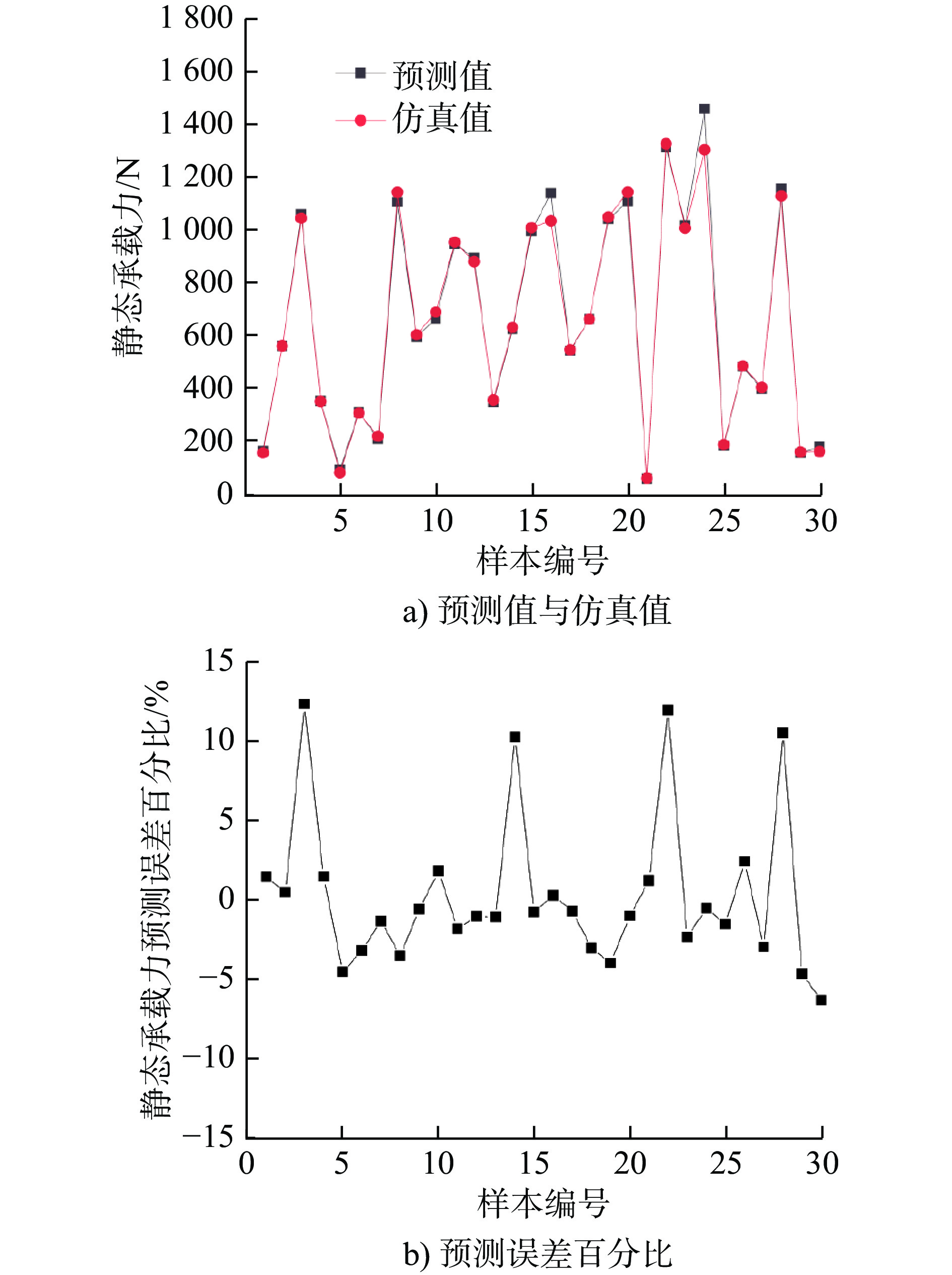
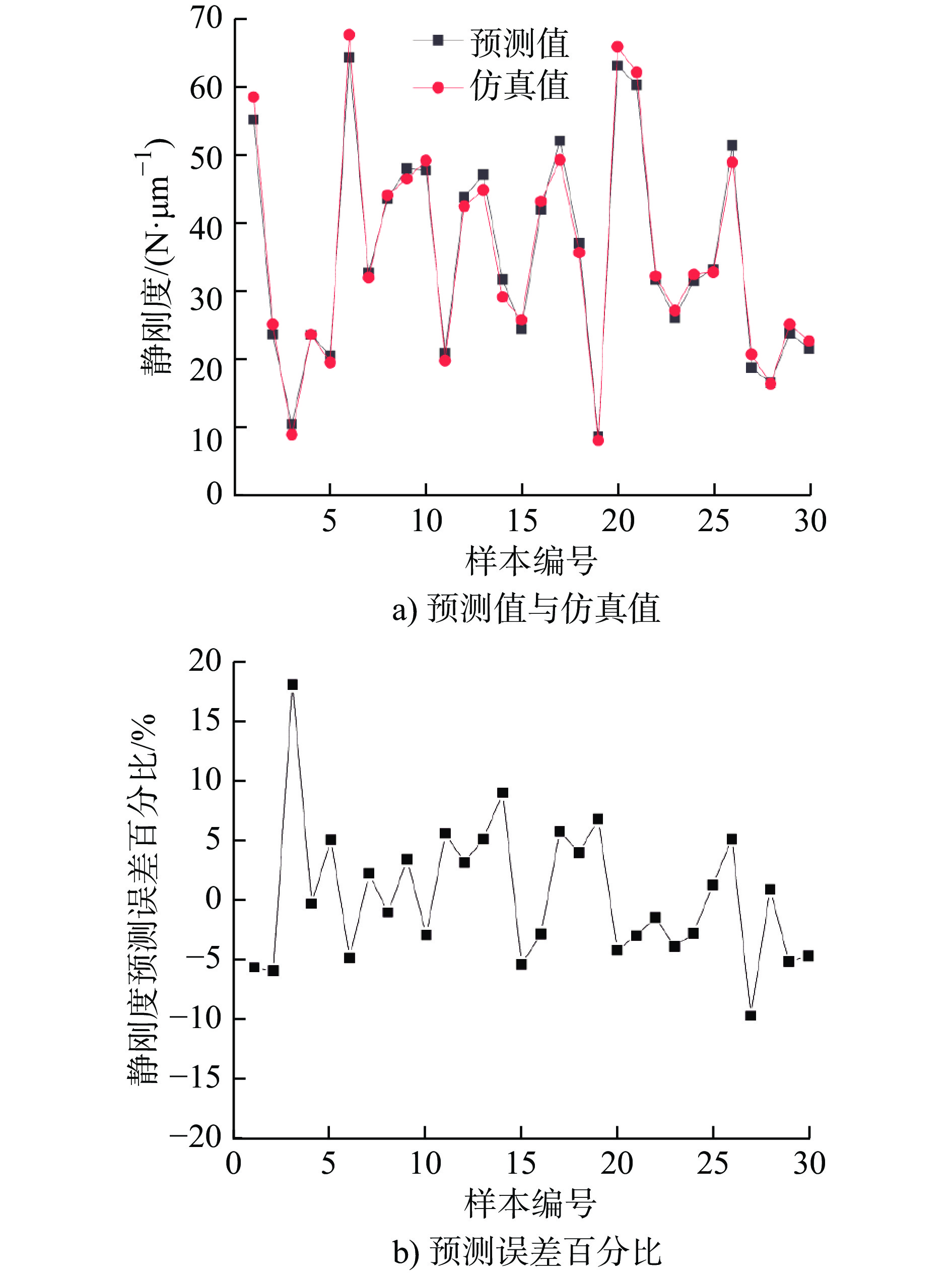
In the design of porous hydrostatic bearings, bearing's design parameter is one of the key factors affecting its static and dynamic characteristics. Normally, several repetitions of modeling and simulation are required to obtain suitable bearing design parameters, and due to the complex bearing structure makes modeling difficult and simulation time long, which seriously affects the efficiency of bearing design. In this paper, a bearing static characteristic prediction model based on genetic algorithm (GA) optimized BP (Back Propagation) neural network is constructed, Latin hypercube sampling method is used to sample the bearing parameter design space, and perform Fluent fluid simulation. The data is used for the training and testing of the GA-BP neural network model to realize the prediction of static characteristics of porous hydrostatic bearing under any design parameters in the design space. The research results show that the trained GA-BP neural network model can accurately predict the static characteristics of porous hydrostatic bearings with a prediction accuracy of over 95%, which is great significance for the rapid design and parameter optimization of porous hydrostatic bearings.
In the design of porous hydrostatic bearings, bearing's design parameter is one of the key factors affecting its static and dynamic characteristics. Normally, several repetitions of modeling and simulation are required to obtain suitable bearing design parameters, and due to the complex bearing structure makes modeling difficult and simulation time long, which seriously affects the efficiency of bearing design. In this paper, a bearing static characteristic prediction model based on genetic algorithm (GA) optimized BP (Back Propagation) neural network is constructed, Latin hypercube sampling method is used to sample the bearing parameter design space, and perform Fluent fluid simulation. The data is used for the training and testing of the GA-BP neural network model to realize the prediction of static characteristics of porous hydrostatic bearing under any design parameters in the design space. The research results show that the trained GA-BP neural network model can accurately predict the static characteristics of porous hydrostatic bearings with a prediction accuracy of over 95%, which is great significance for the rapid design and parameter optimization of porous hydrostatic bearings.


2024, 43(3): 497-503.
doi: 10.13433/j.cnki.1003-8728.20220248
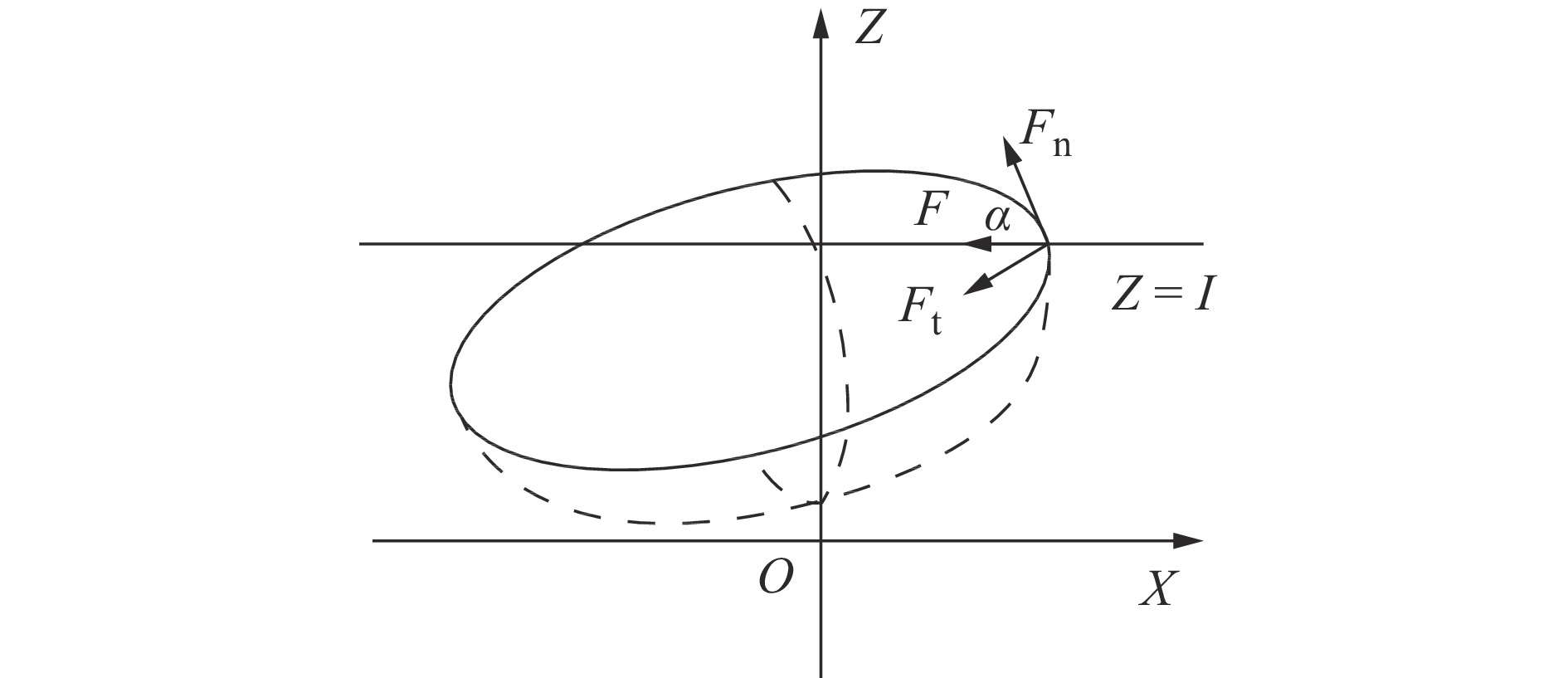
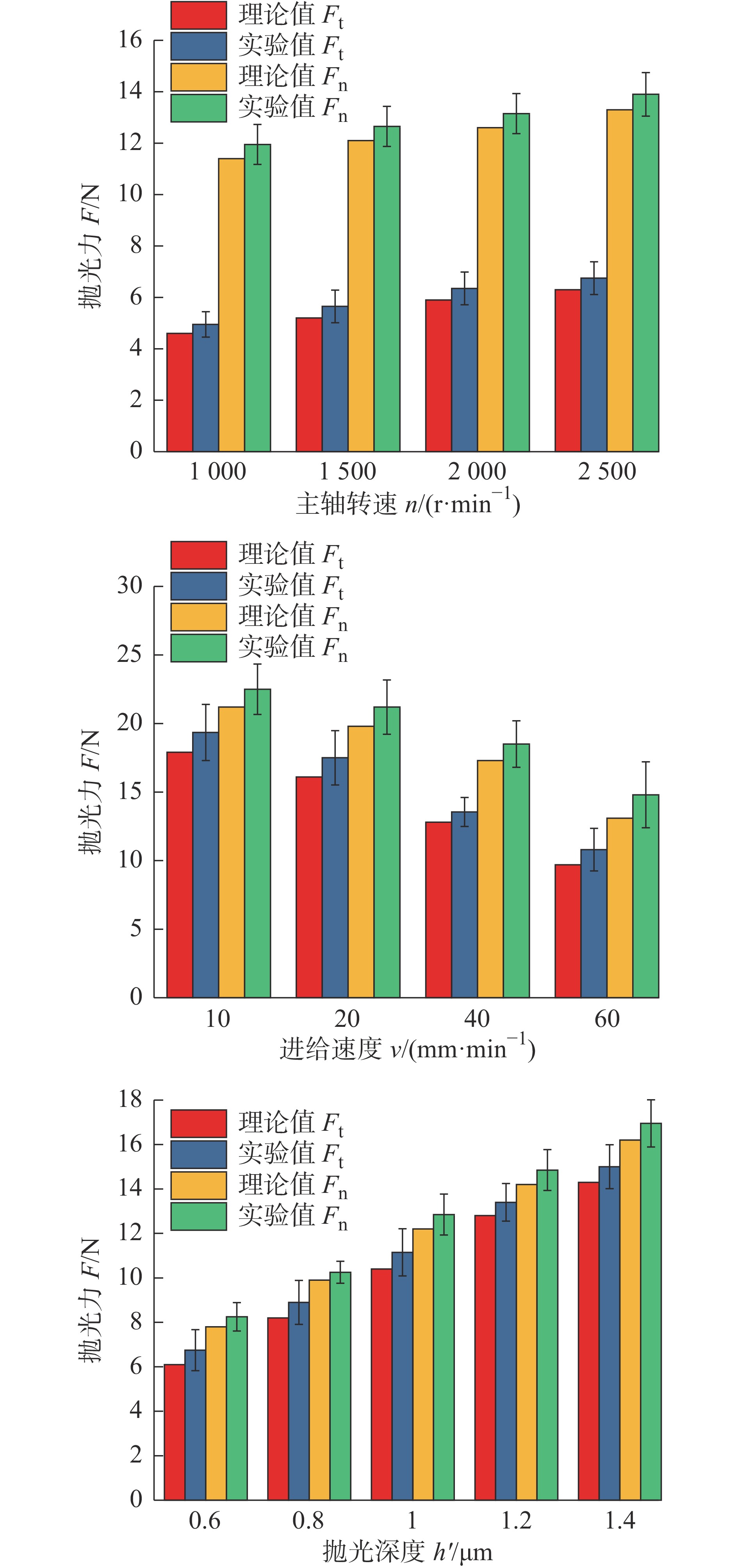
Abstract:
Aiming at the difficult processing of CoCrMo alloy, the processing method of ultrasonic vibration assisted polishing is used to improve the processing effect. According to the motion characteristics of the ultrasonic vibration device, the speed of the single abrasive particle, the coordinate of the contact track between the single abrasive particle and the workpiece, and the force of the single abrasive particle are analyzed, and the polishing force prediction model for the polishing system is established. The effects of the spindle speed, feed speed and polishing depth on the surface quality of CoCrMo alloy are discussed and the validity of the prediction model is verified by experiments. The results show that the polishing force prediction model is consistent with the experiment. The polishing force increases with the increasing of spindle speed and polishing depth, and decreases with the increasing of feed speed. This research will provide a theoretical basis for the ultrasonic vibration-assisted polishing process.
Aiming at the difficult processing of CoCrMo alloy, the processing method of ultrasonic vibration assisted polishing is used to improve the processing effect. According to the motion characteristics of the ultrasonic vibration device, the speed of the single abrasive particle, the coordinate of the contact track between the single abrasive particle and the workpiece, and the force of the single abrasive particle are analyzed, and the polishing force prediction model for the polishing system is established. The effects of the spindle speed, feed speed and polishing depth on the surface quality of CoCrMo alloy are discussed and the validity of the prediction model is verified by experiments. The results show that the polishing force prediction model is consistent with the experiment. The polishing force increases with the increasing of spindle speed and polishing depth, and decreases with the increasing of feed speed. This research will provide a theoretical basis for the ultrasonic vibration-assisted polishing process.





2024, 43(3): 504-512.
doi: 10.13433/j.cnki.1003-8728.20220270
Abstract:
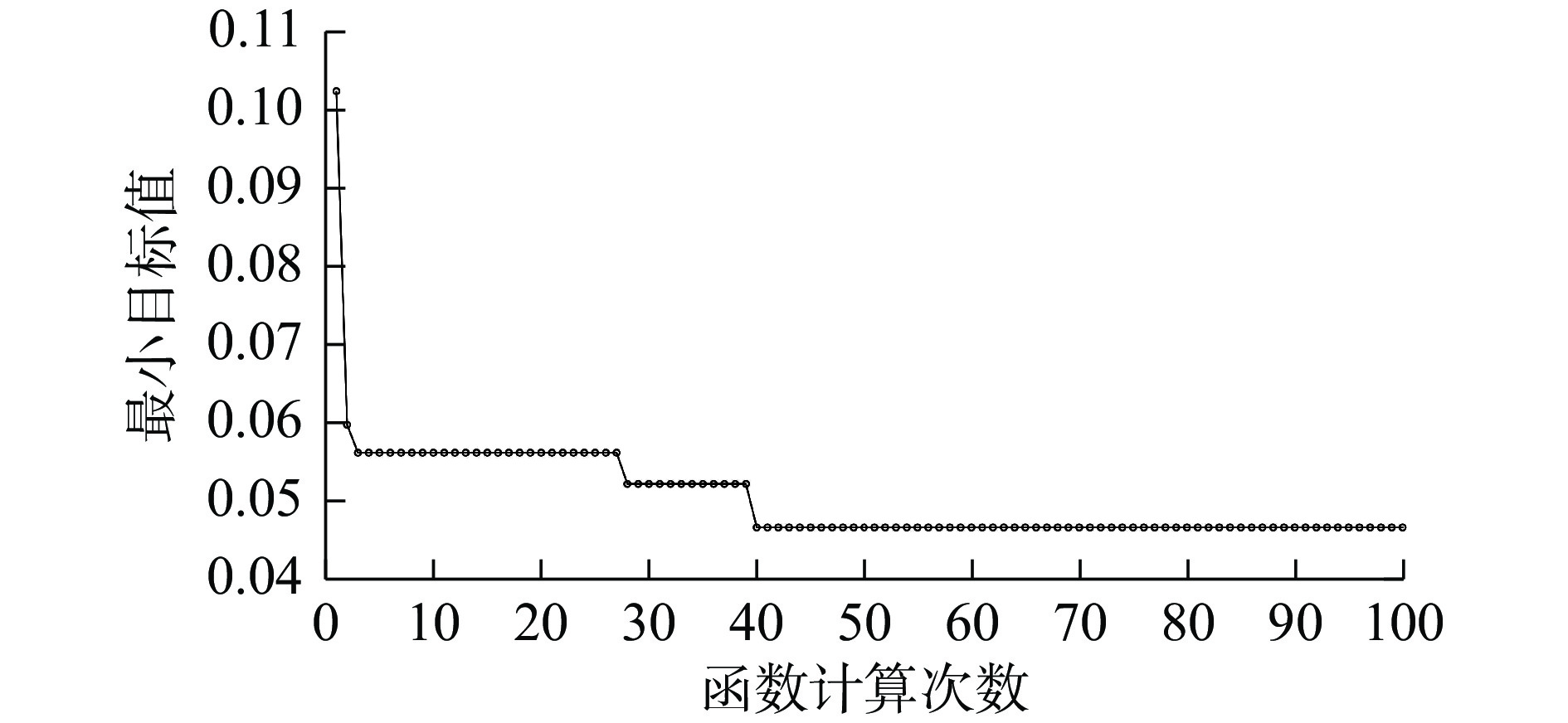
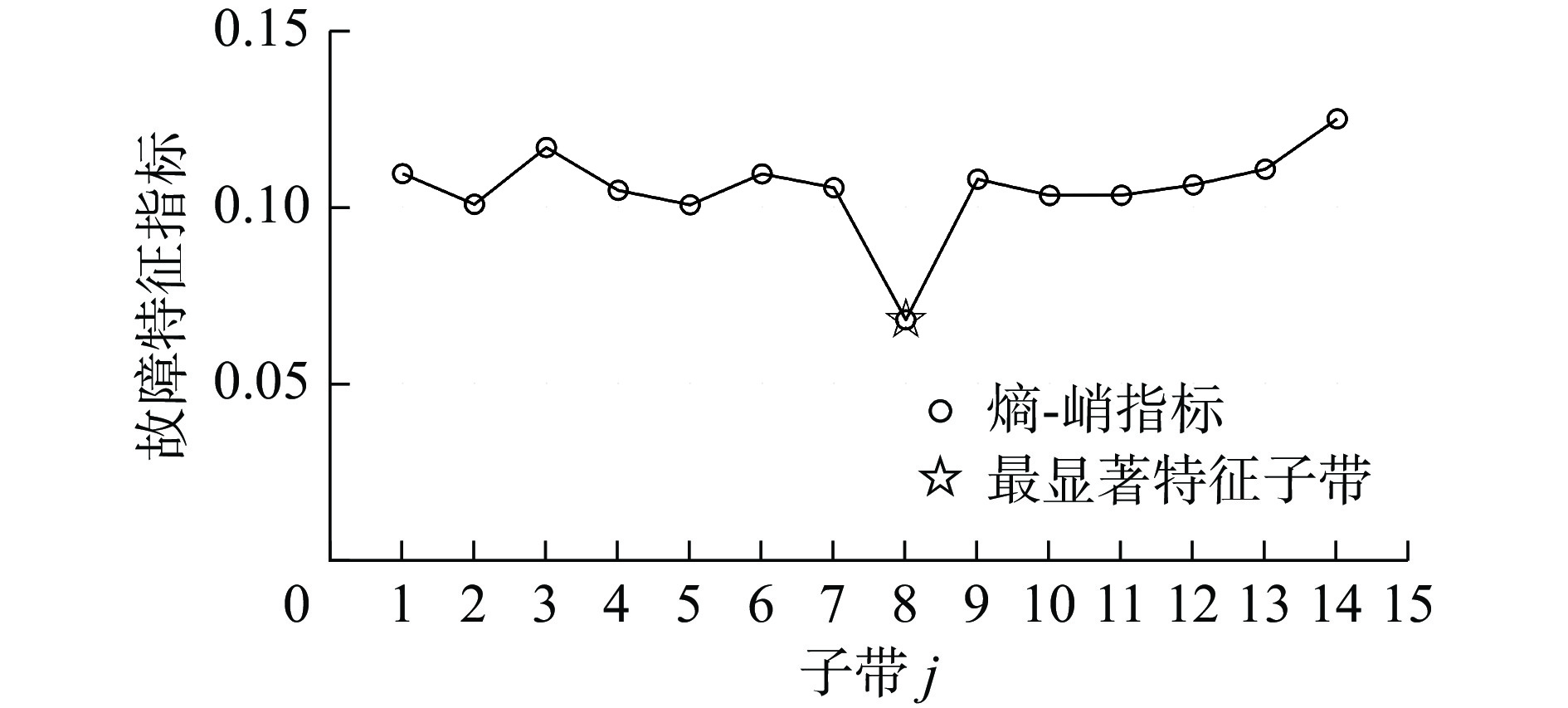
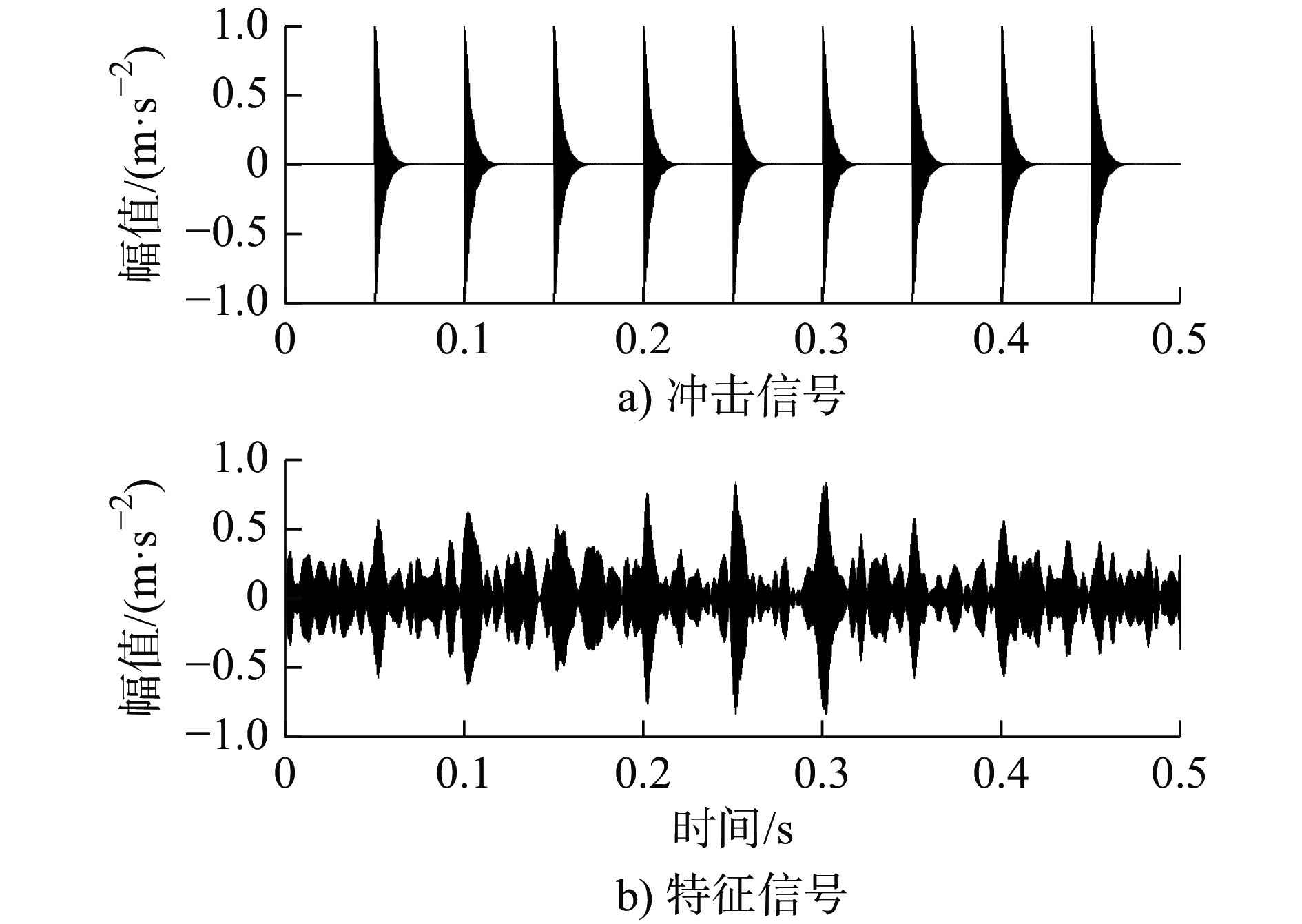
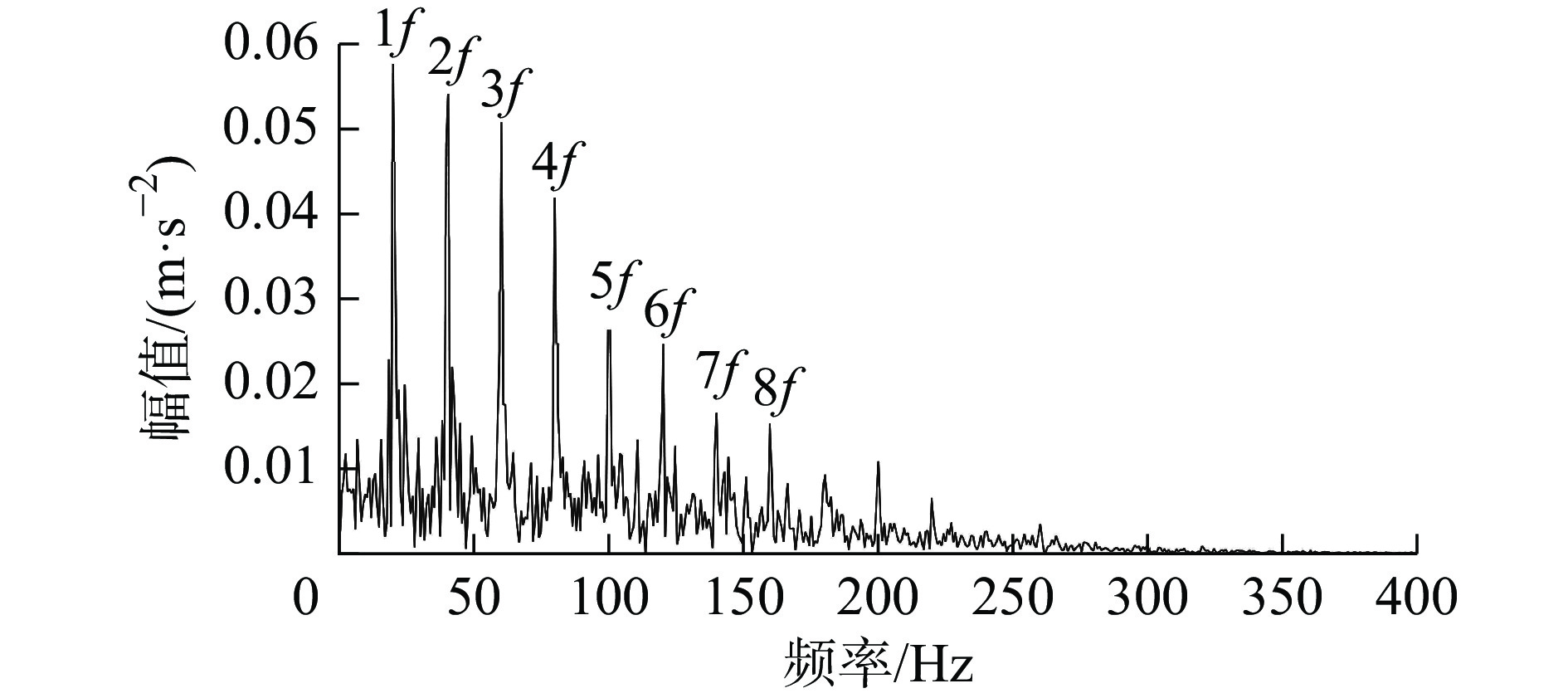
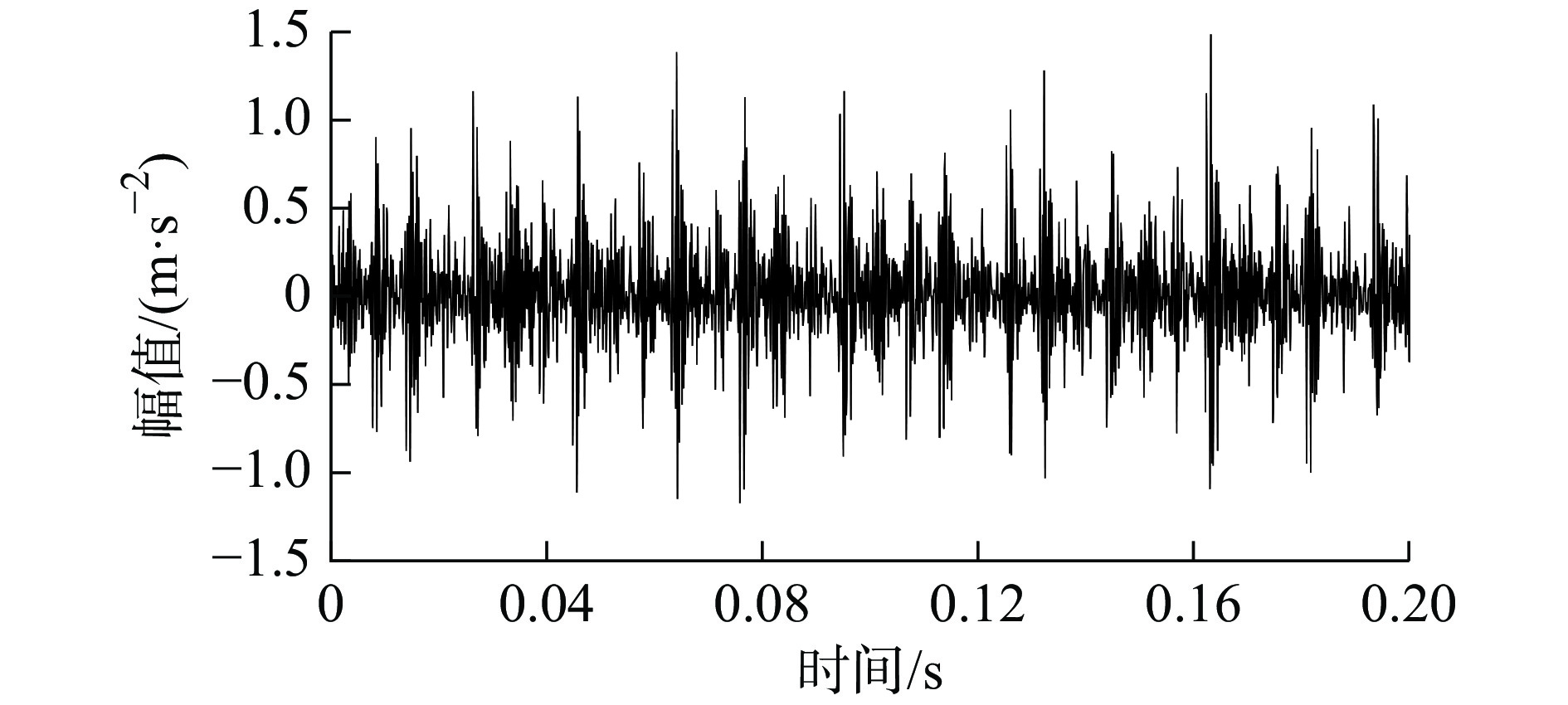
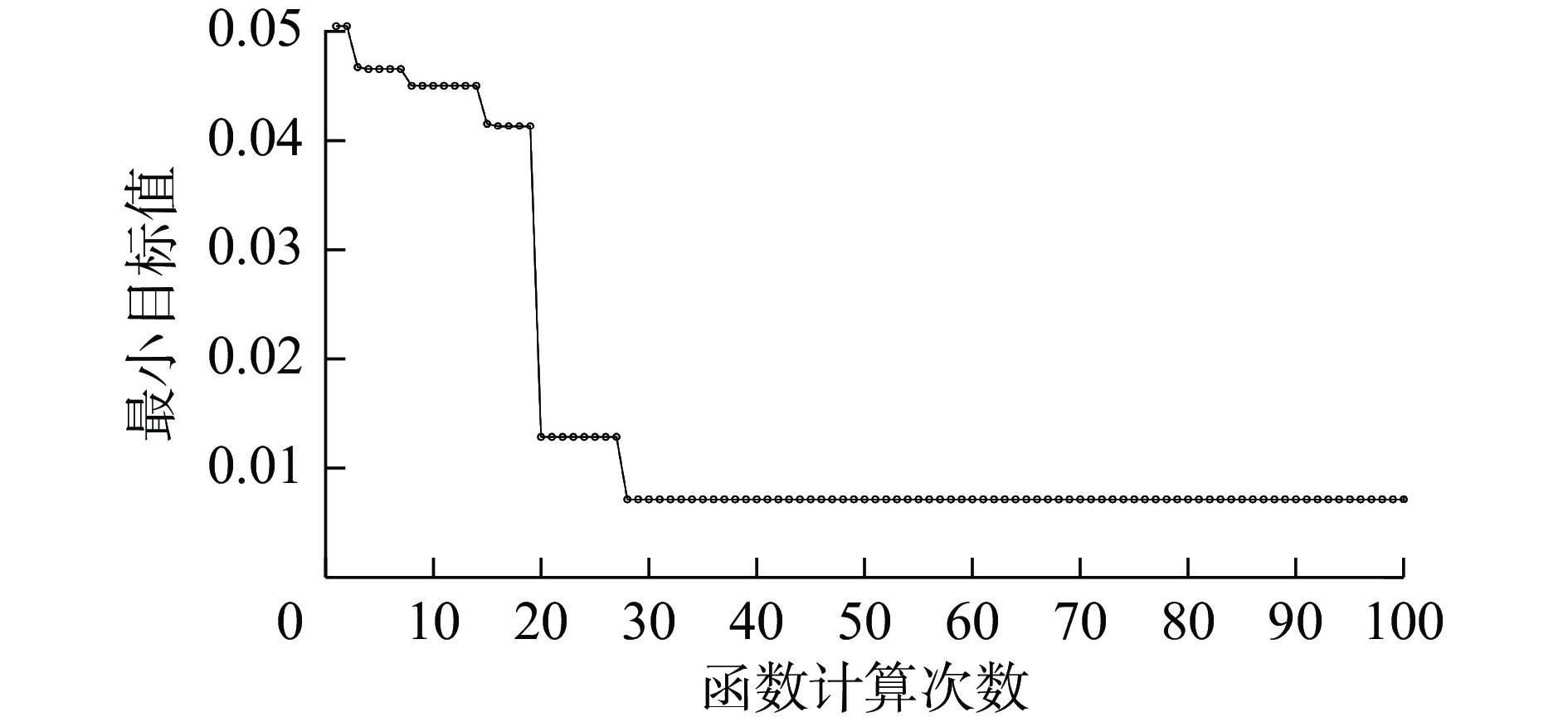
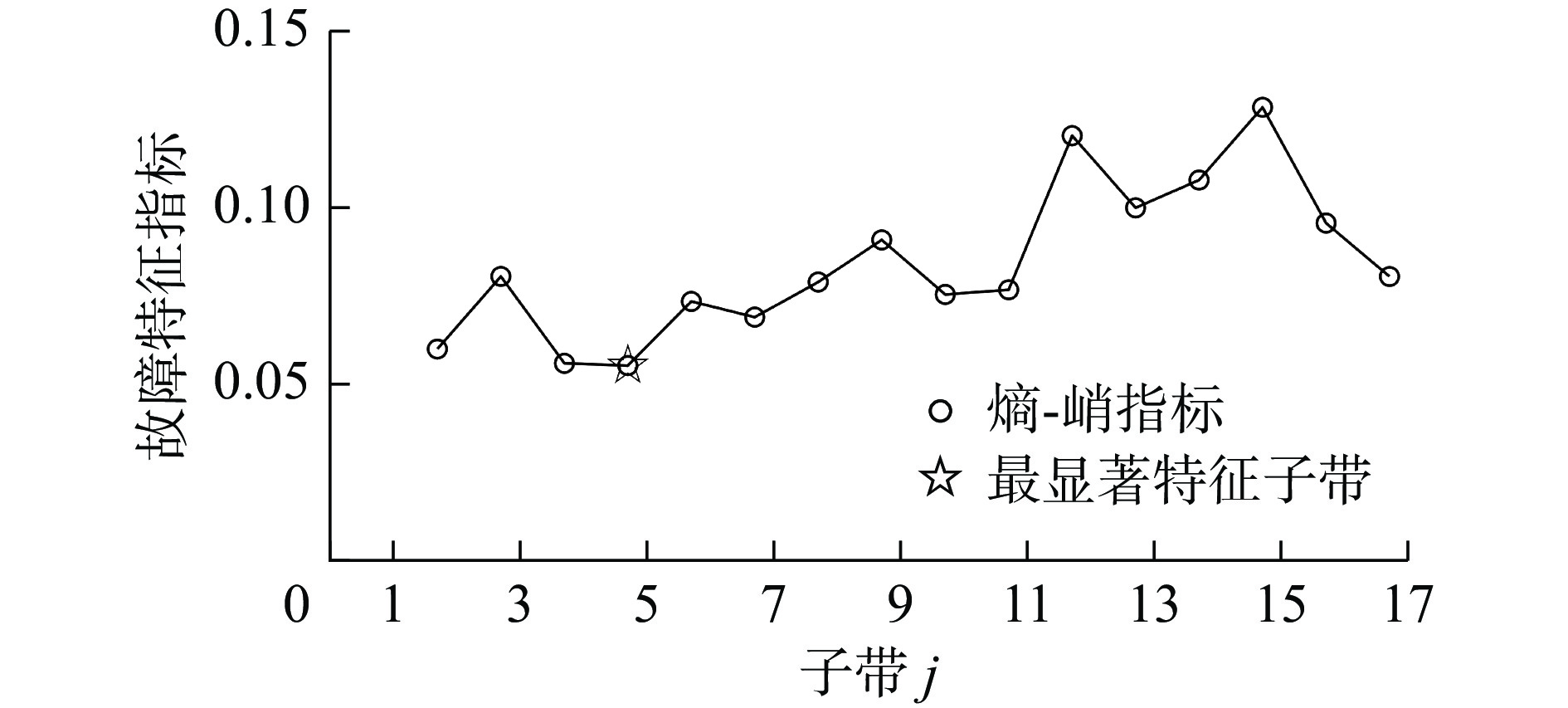
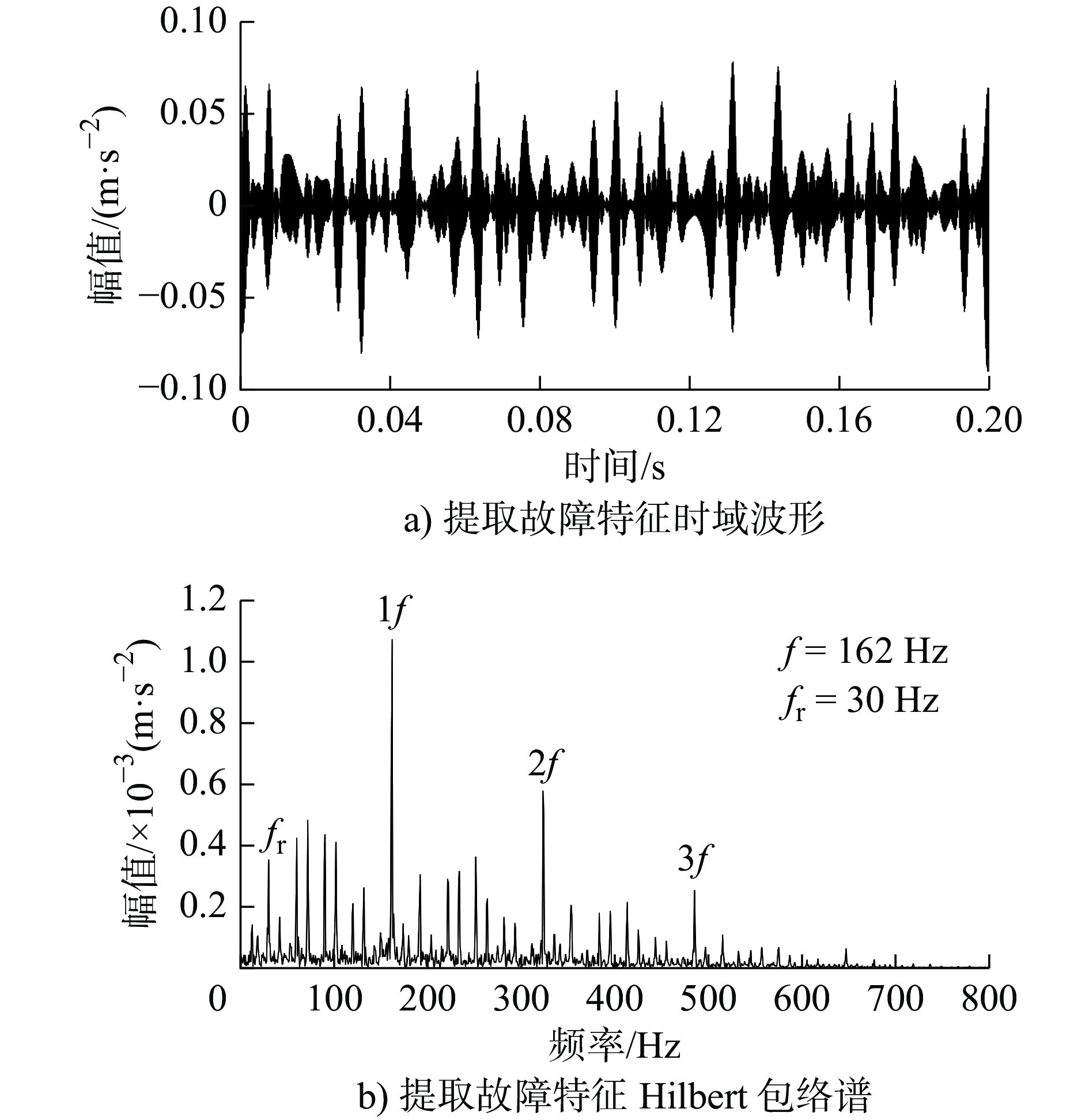
It is costly to use the grid search and optimization algorithm to tune the parameters of tunable quality-factor wavelet transform (TQWT). A method for bearing fault diagnosis based on the Bayesian optimization of TQWT parameters was proposed. The optimal solution of the entropy-kurtosis synthetic objective function was solved by using the Bayesian optimization algorithm in the space of TQWT parameters, according to which the TQWT parameters were set to decompose the original bearing fault signals. The sub-band signal with the minimum value of the entropy-kurtosis index was selected to reconstruct its feature signals with the inverse TQWT transform, and the signal was then processed with an envelope demodulation algorithm. The type of bearing fault was judged with the reconstructed feature signal envelope spectrum. The simulation results on the actually measured bearing vibration signals and their analysis show that the proposed method can accurately extract the characteristic frequency information on fault and diagnose bearing faults at an early stage.
It is costly to use the grid search and optimization algorithm to tune the parameters of tunable quality-factor wavelet transform (TQWT). A method for bearing fault diagnosis based on the Bayesian optimization of TQWT parameters was proposed. The optimal solution of the entropy-kurtosis synthetic objective function was solved by using the Bayesian optimization algorithm in the space of TQWT parameters, according to which the TQWT parameters were set to decompose the original bearing fault signals. The sub-band signal with the minimum value of the entropy-kurtosis index was selected to reconstruct its feature signals with the inverse TQWT transform, and the signal was then processed with an envelope demodulation algorithm. The type of bearing fault was judged with the reconstructed feature signal envelope spectrum. The simulation results on the actually measured bearing vibration signals and their analysis show that the proposed method can accurately extract the characteristic frequency information on fault and diagnose bearing faults at an early stage.





2024, 43(3): 513-519.
doi: 10.13433/j.cnki.1003-8728.20220196
Abstract:
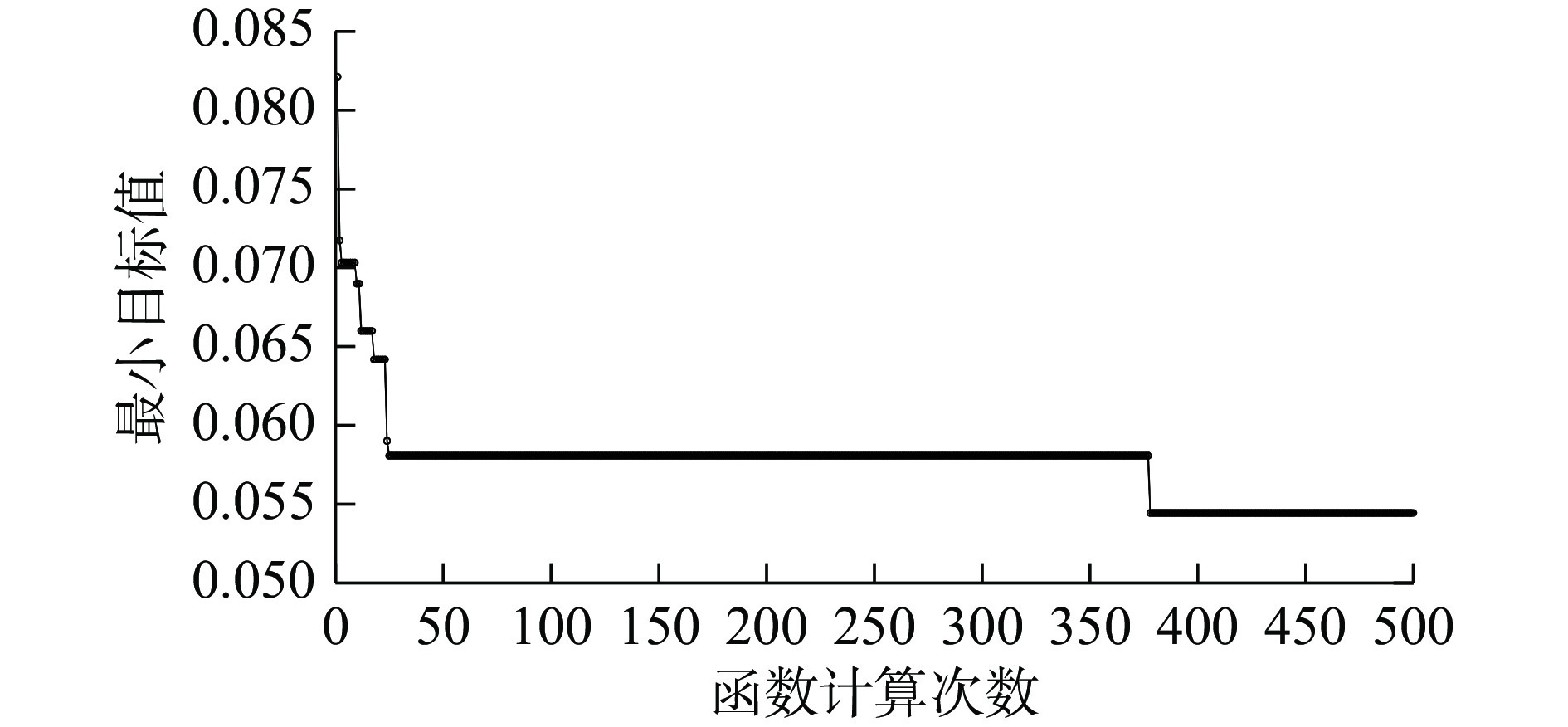
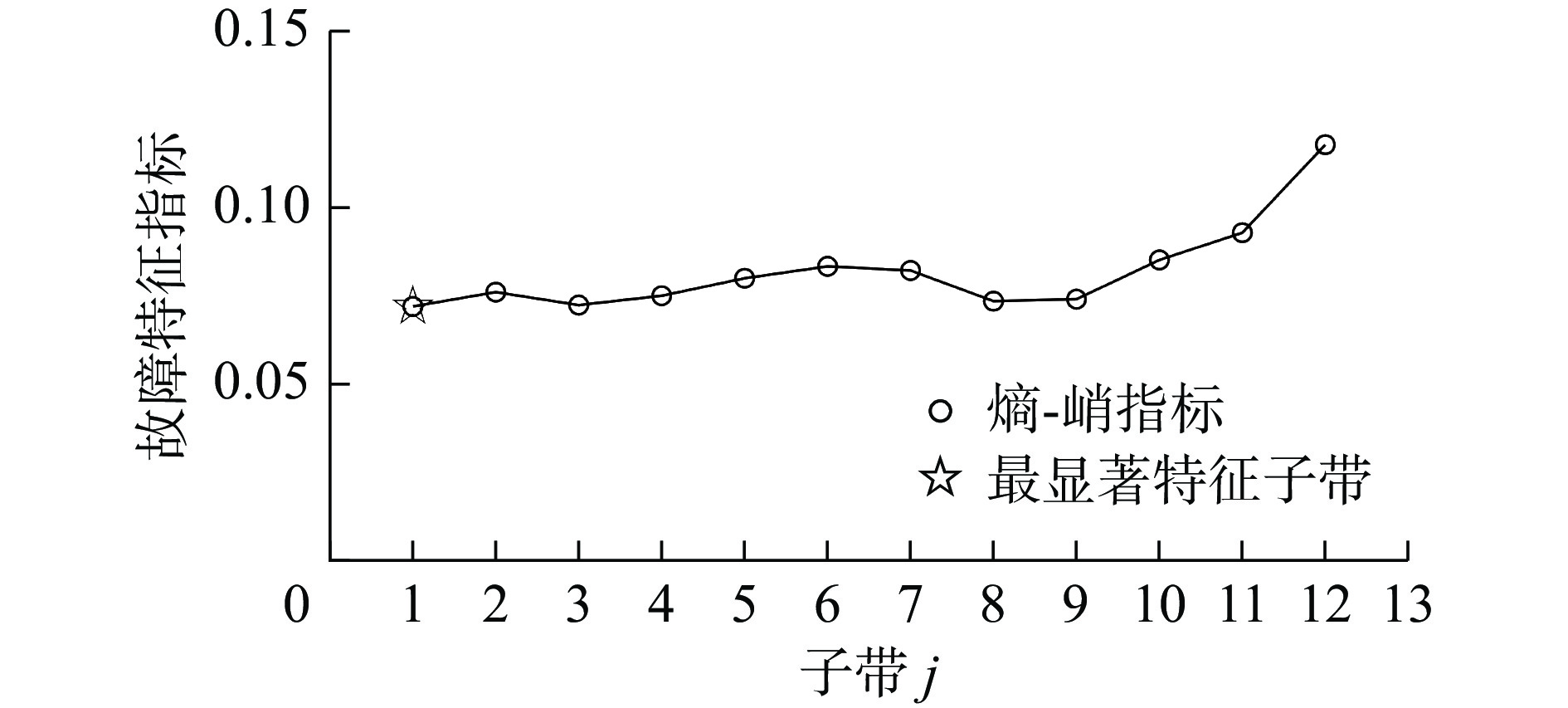
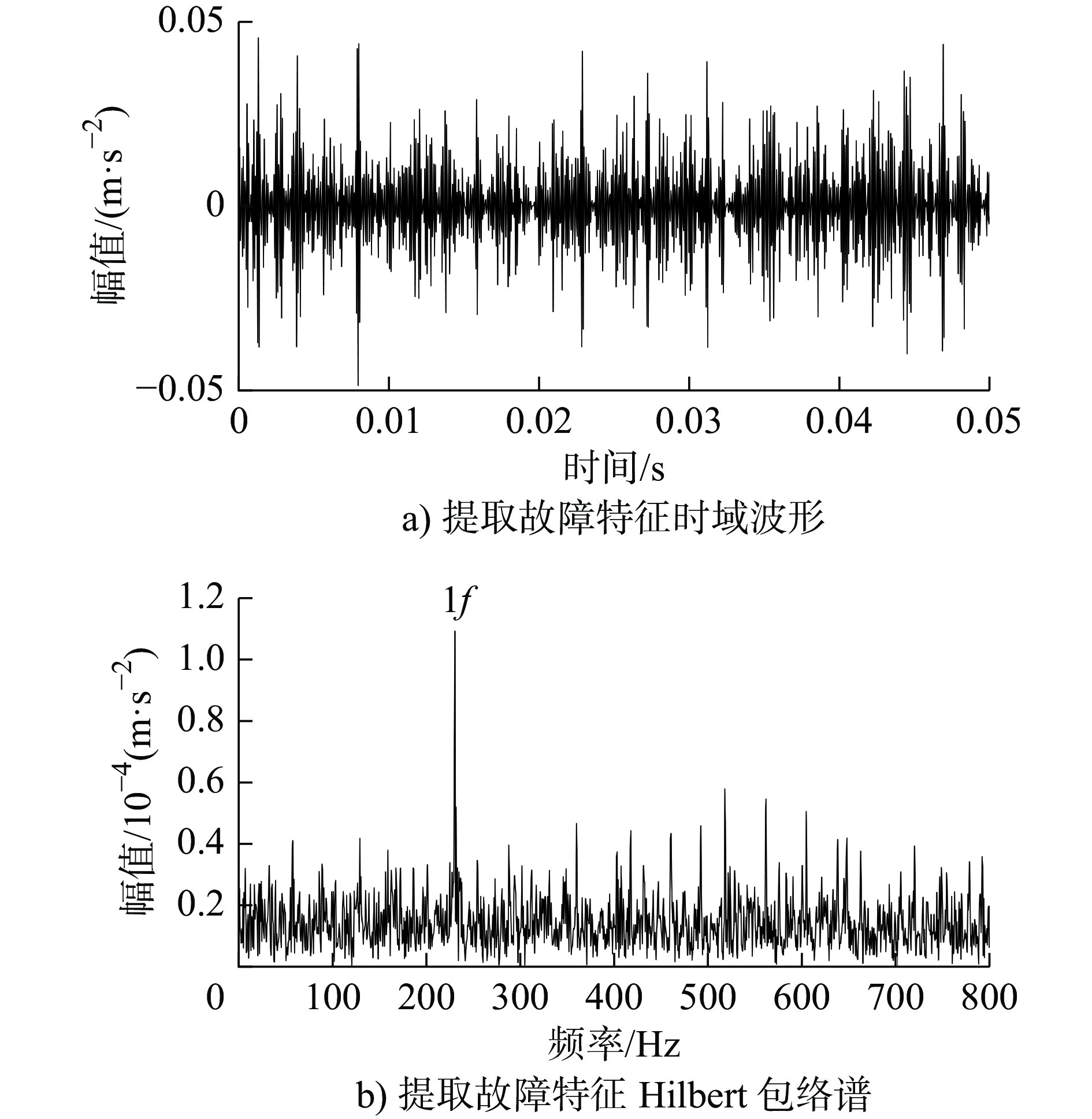
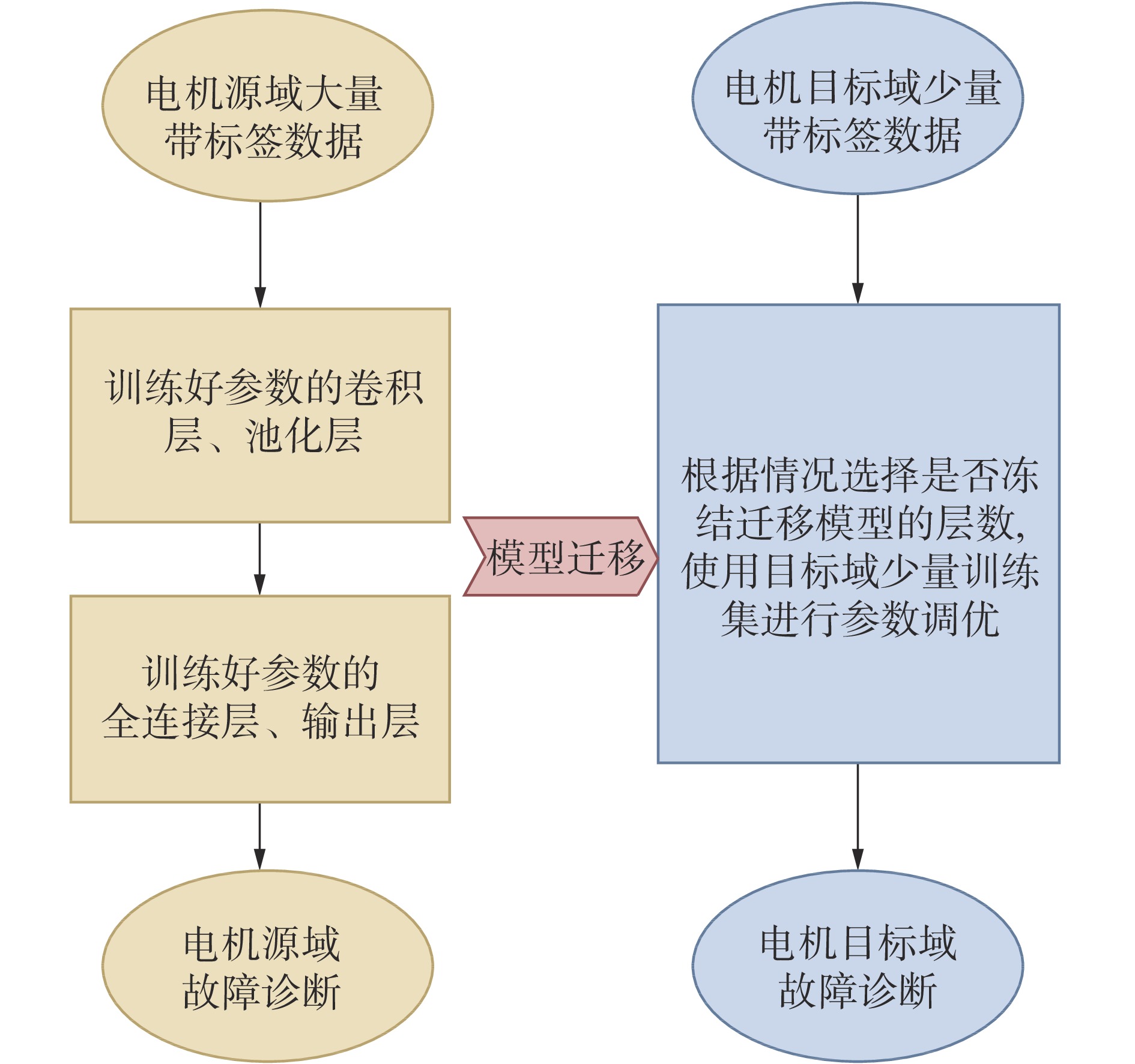
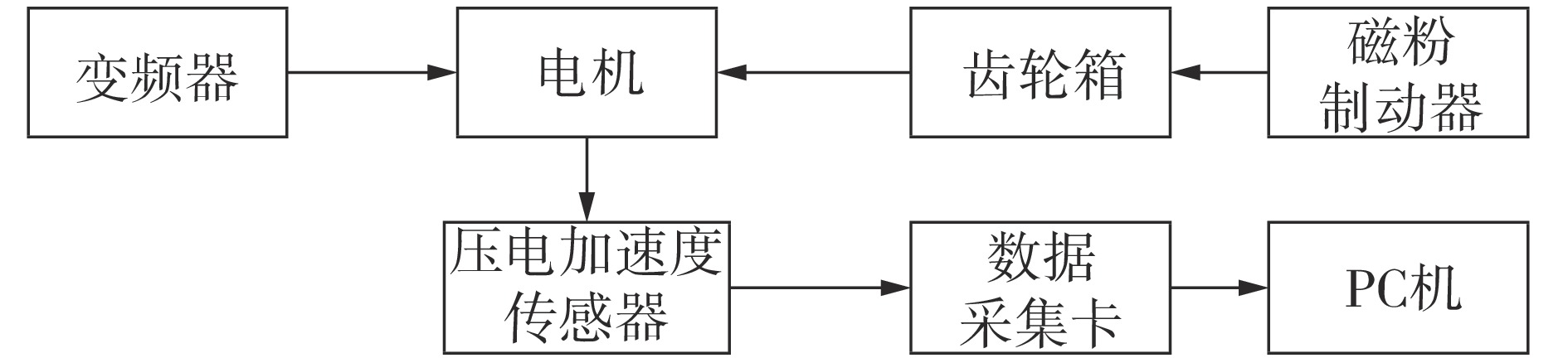
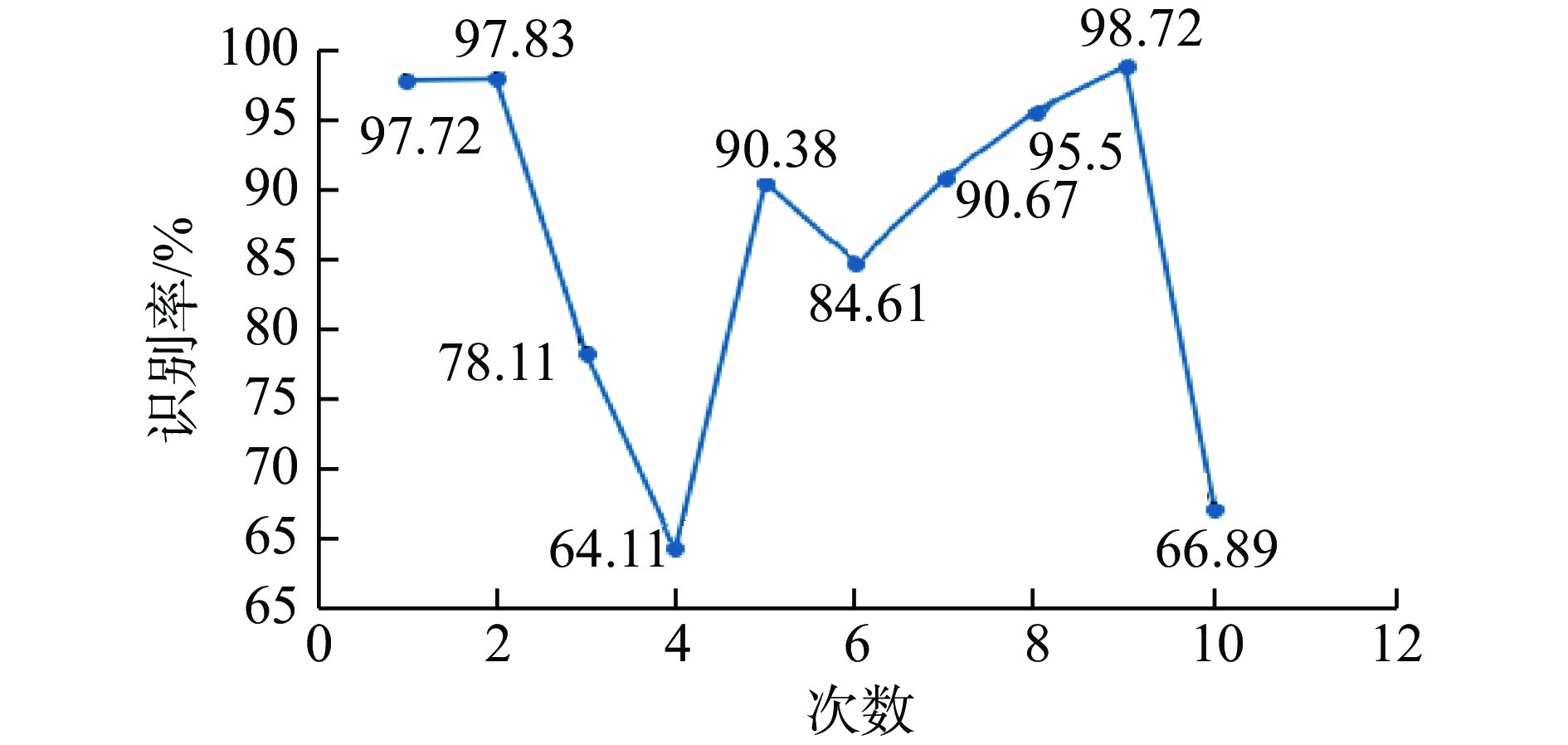
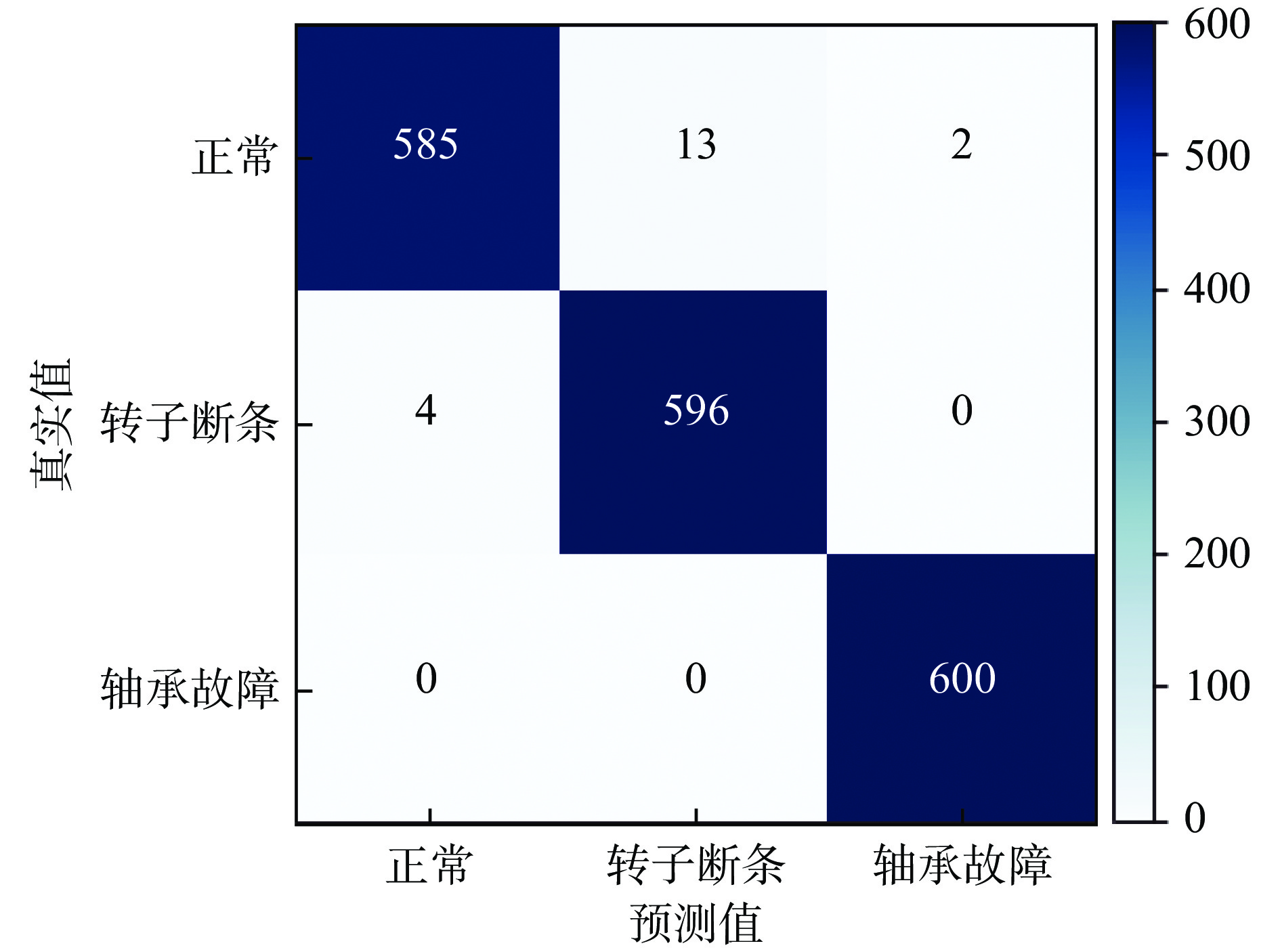
Aiming at the problem that the lack of labeled data will lead to poor training of convolutional neural network (CNN), a motor fault diagnosis method based on the combination of migration learning and CNN is proposed for three-phase asynchronous motor fault diagnosis. Firstly, an experimental platform for motor fault diagnosis is built, the label data of input CNN model is obtained by acceleration sensor, and the pre-trained model is obtained through training. Then, the obtained pre-training model is transferred to the target domain with transfer learning, and a small amount of labeled data in the target domain is cleared for training and fine-tuning parameters, and the CNN parameters are optimized by training the labeled data in the target domain. Finally, a new model with good classification ability for the target domain data is obtained, so as to realize the motor fault diagnosis in the case of scarce labeled data in the target domain. By comparing this method with ordinary CNN, variational modal decomposition (VMD)-support vector machine (SVM), VMD-K nearest neighbor (KNN) and VMD-BP neural network recognition models for validation, the results show that the pattern recognition method of migrating CNN model proposed in this paper has better recognition effect.
Aiming at the problem that the lack of labeled data will lead to poor training of convolutional neural network (CNN), a motor fault diagnosis method based on the combination of migration learning and CNN is proposed for three-phase asynchronous motor fault diagnosis. Firstly, an experimental platform for motor fault diagnosis is built, the label data of input CNN model is obtained by acceleration sensor, and the pre-trained model is obtained through training. Then, the obtained pre-training model is transferred to the target domain with transfer learning, and a small amount of labeled data in the target domain is cleared for training and fine-tuning parameters, and the CNN parameters are optimized by training the labeled data in the target domain. Finally, a new model with good classification ability for the target domain data is obtained, so as to realize the motor fault diagnosis in the case of scarce labeled data in the target domain. By comparing this method with ordinary CNN, variational modal decomposition (VMD)-support vector machine (SVM), VMD-K nearest neighbor (KNN) and VMD-BP neural network recognition models for validation, the results show that the pattern recognition method of migrating CNN model proposed in this paper has better recognition effect.





2024, 43(3): 520-525.
doi: 10.13433/j.cnki.1003-8728.20220242
Abstract:
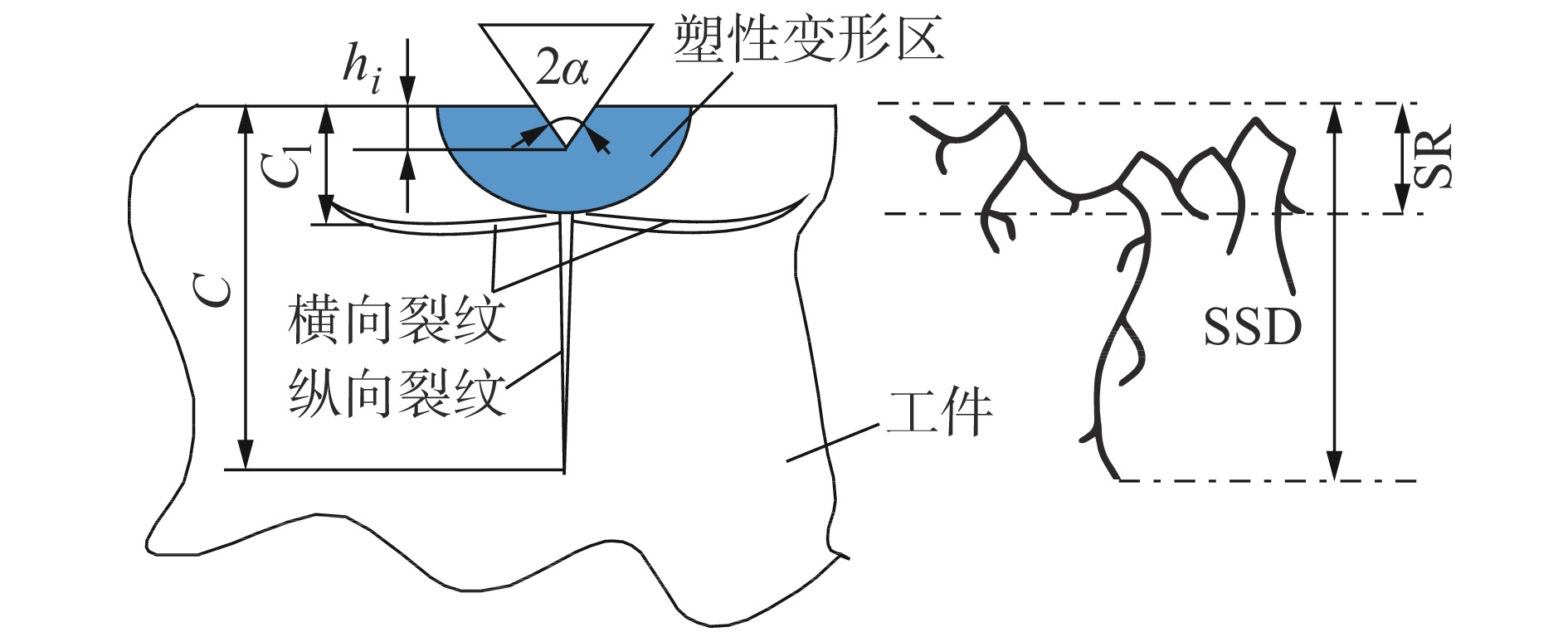
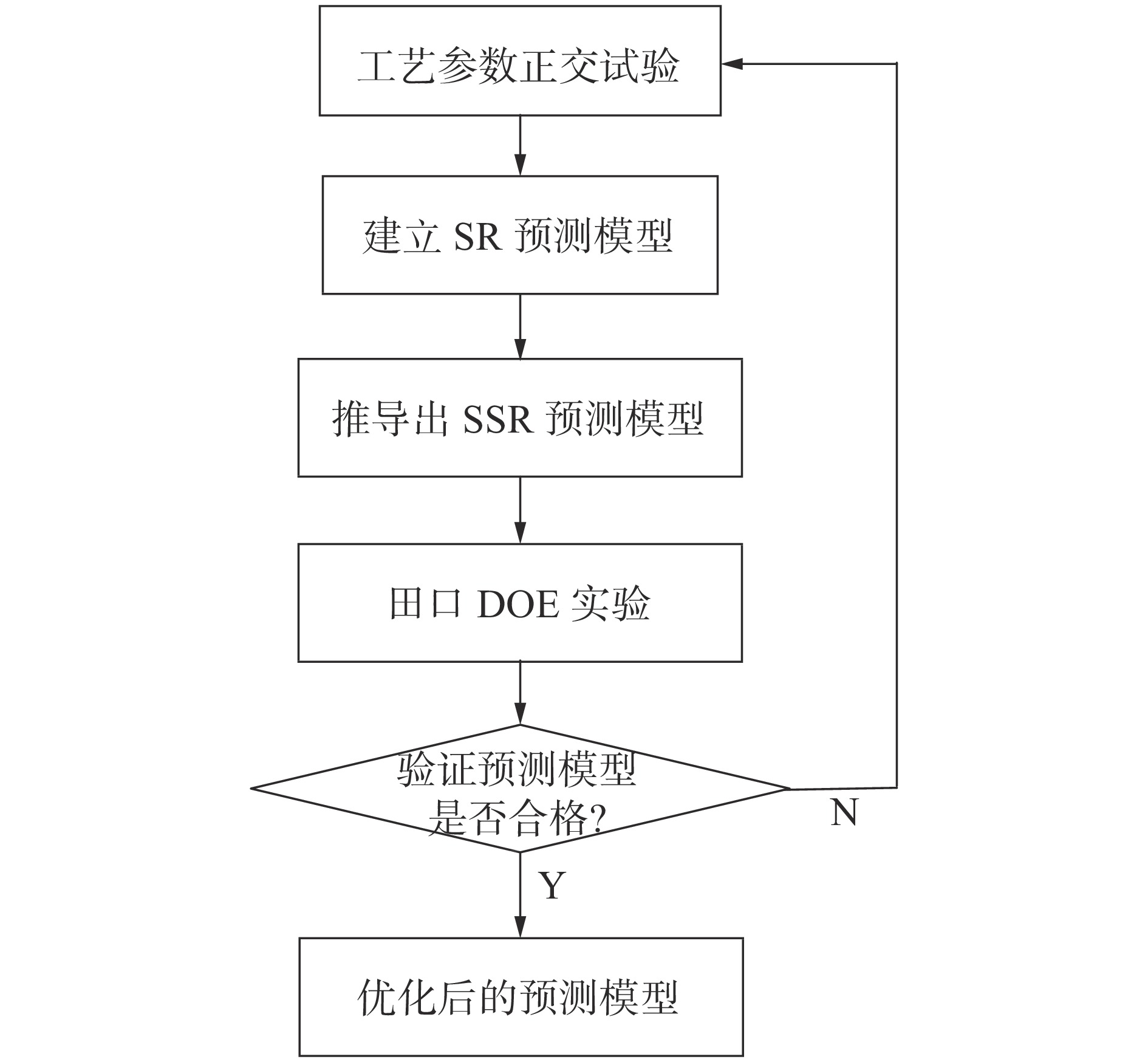
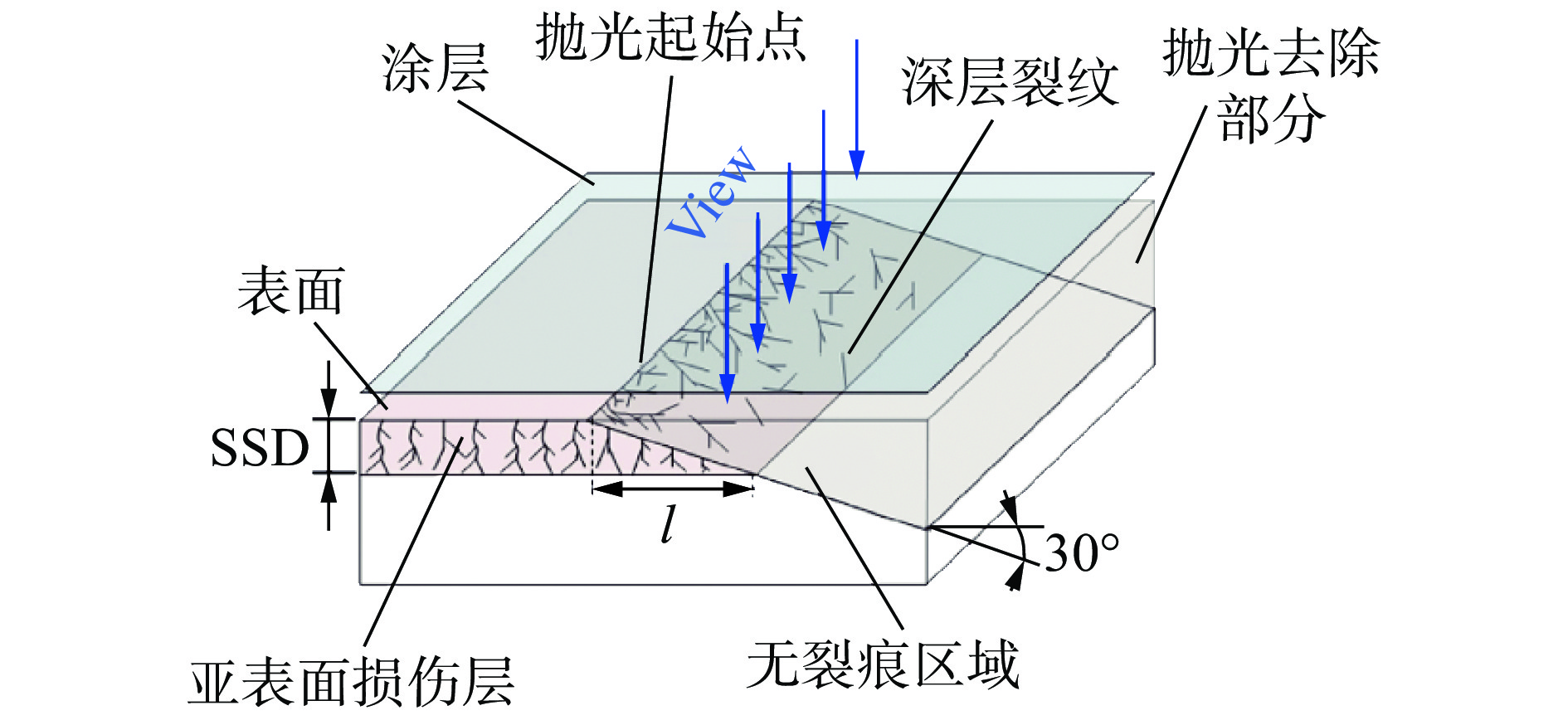
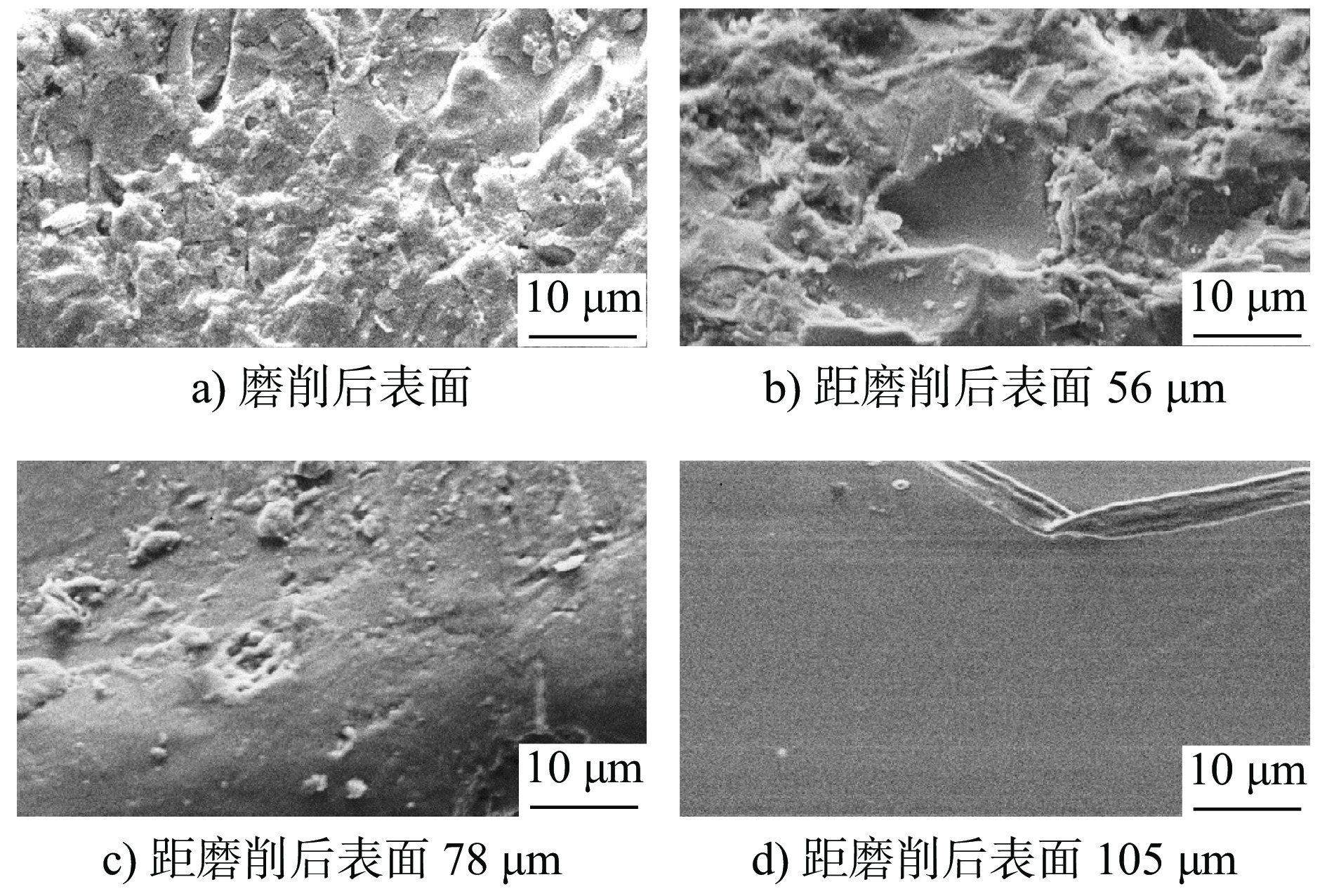
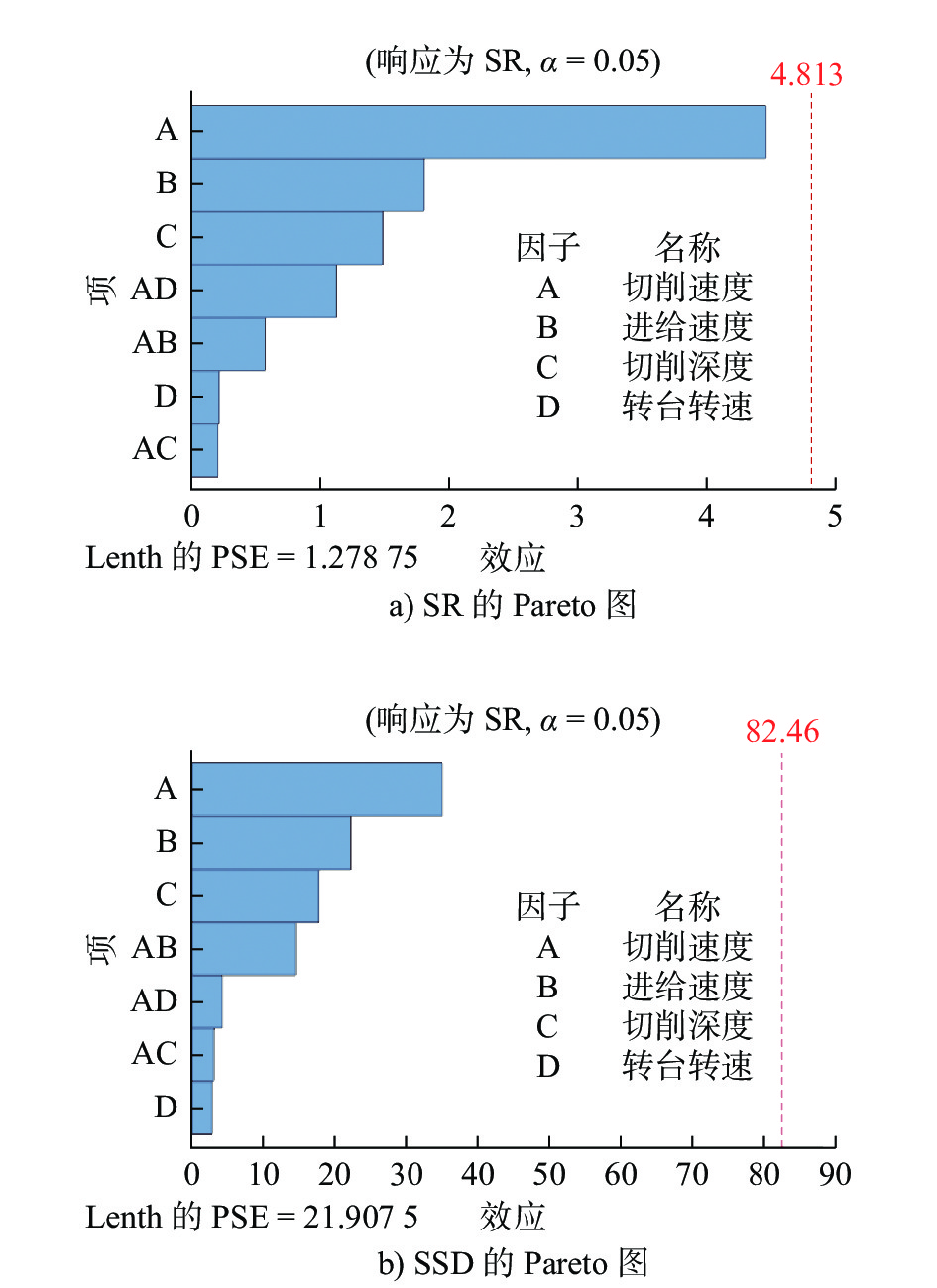
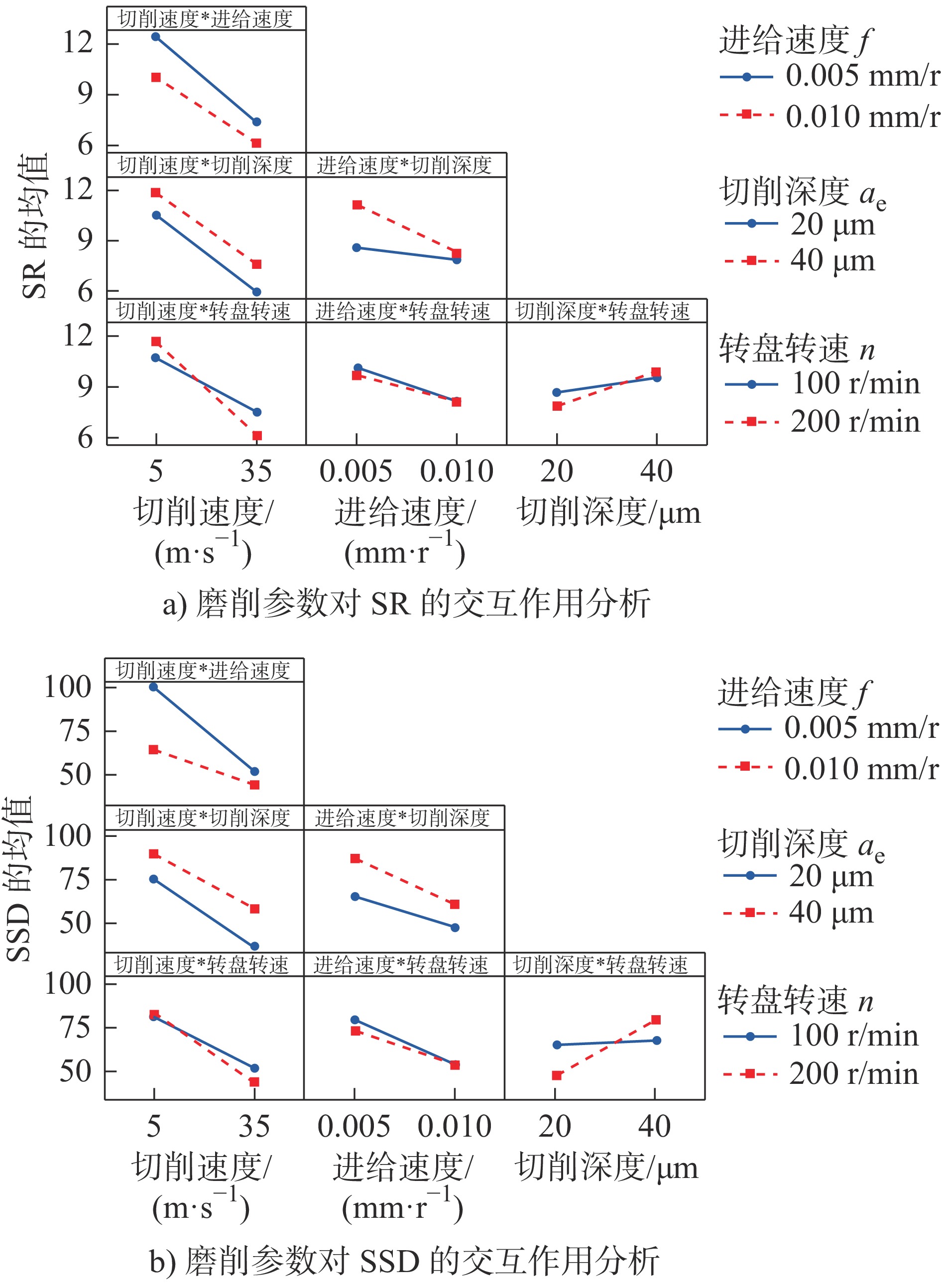
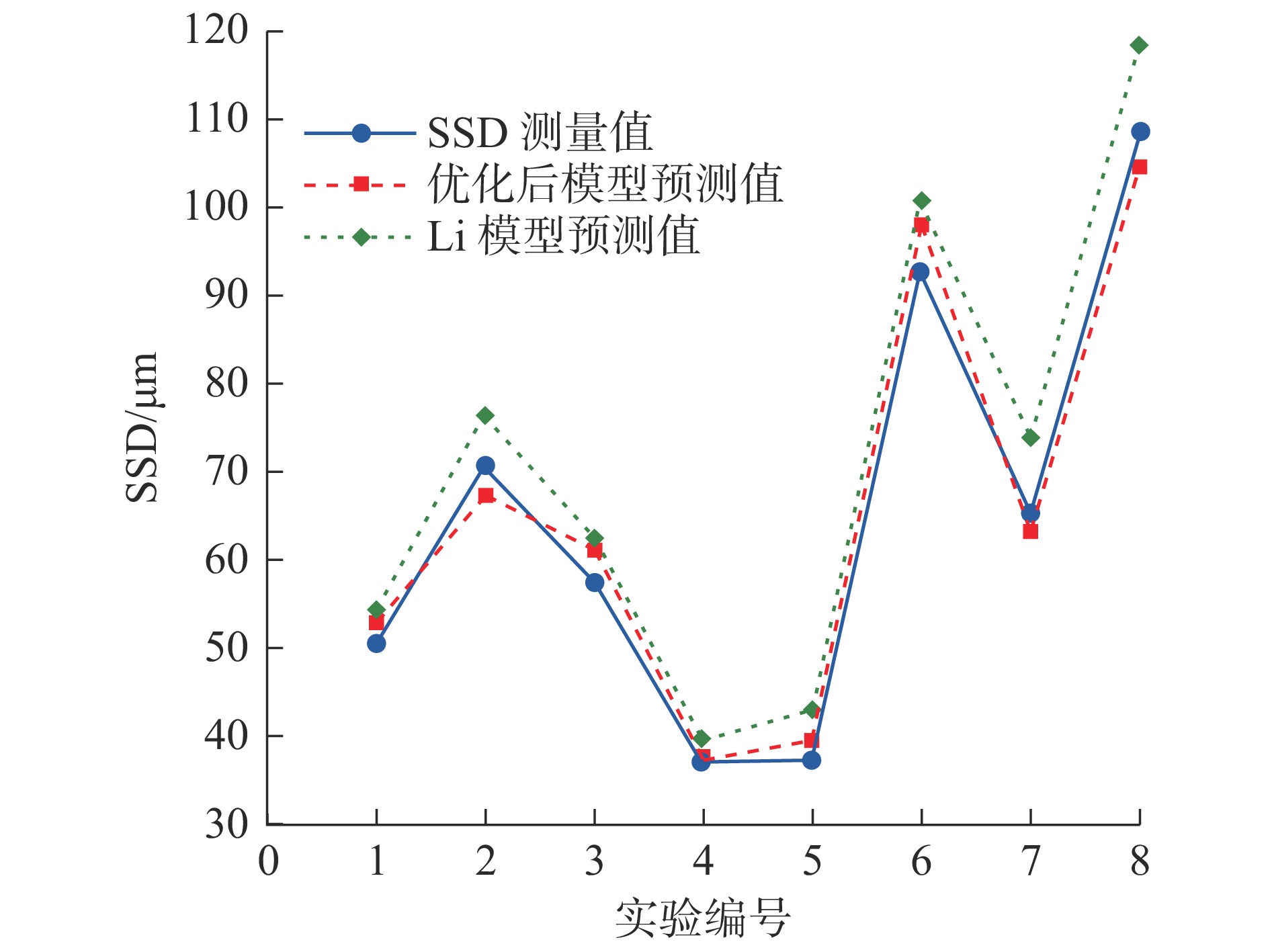
In order to master the optical glass cup wheel grinding and surface roughness (SR) and subsurface damage (SSD) mechanism, the prediction model for surface roughness of BK7 optical glass in grinding of cup wheel is established, and the influence on the surface roughness is studied by changing the grinding parameters. The DOE experiment is designed to study the significant characteristic factors affecting the SR and SSD, and the interaction among the different factors has been analyzed. The experimental results have shown that the prediction model is reliable, and the average error between the prediction and the experimental results of surface roughness obtained is 5.47%. The surface crack is observed and its depth is measured via electron microscope by using the angle polishing method. Finally, a novel prediction model for subsurface damage by using the grinding parameters is established based on the Li model. The results have shown that the results of experiment model are in a good agreement with those results by using the prediction model, the average error between the predicted and experimental results is 6.19%, and the results via the novel prediction model are better than that via Li model.
In order to master the optical glass cup wheel grinding and surface roughness (SR) and subsurface damage (SSD) mechanism, the prediction model for surface roughness of BK7 optical glass in grinding of cup wheel is established, and the influence on the surface roughness is studied by changing the grinding parameters. The DOE experiment is designed to study the significant characteristic factors affecting the SR and SSD, and the interaction among the different factors has been analyzed. The experimental results have shown that the prediction model is reliable, and the average error between the prediction and the experimental results of surface roughness obtained is 5.47%. The surface crack is observed and its depth is measured via electron microscope by using the angle polishing method. Finally, a novel prediction model for subsurface damage by using the grinding parameters is established based on the Li model. The results have shown that the results of experiment model are in a good agreement with those results by using the prediction model, the average error between the predicted and experimental results is 6.19%, and the results via the novel prediction model are better than that via Li model.

2024, 43(3): 526-532.
doi: 10.13433/j.cnki.1003-8728.20220222
Abstract:
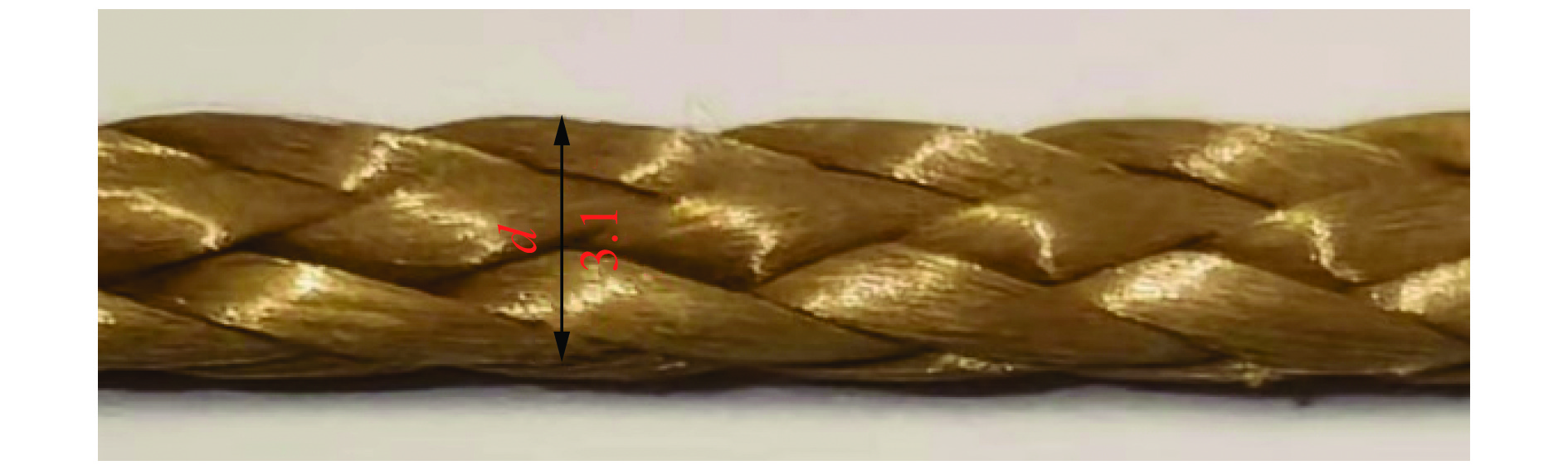
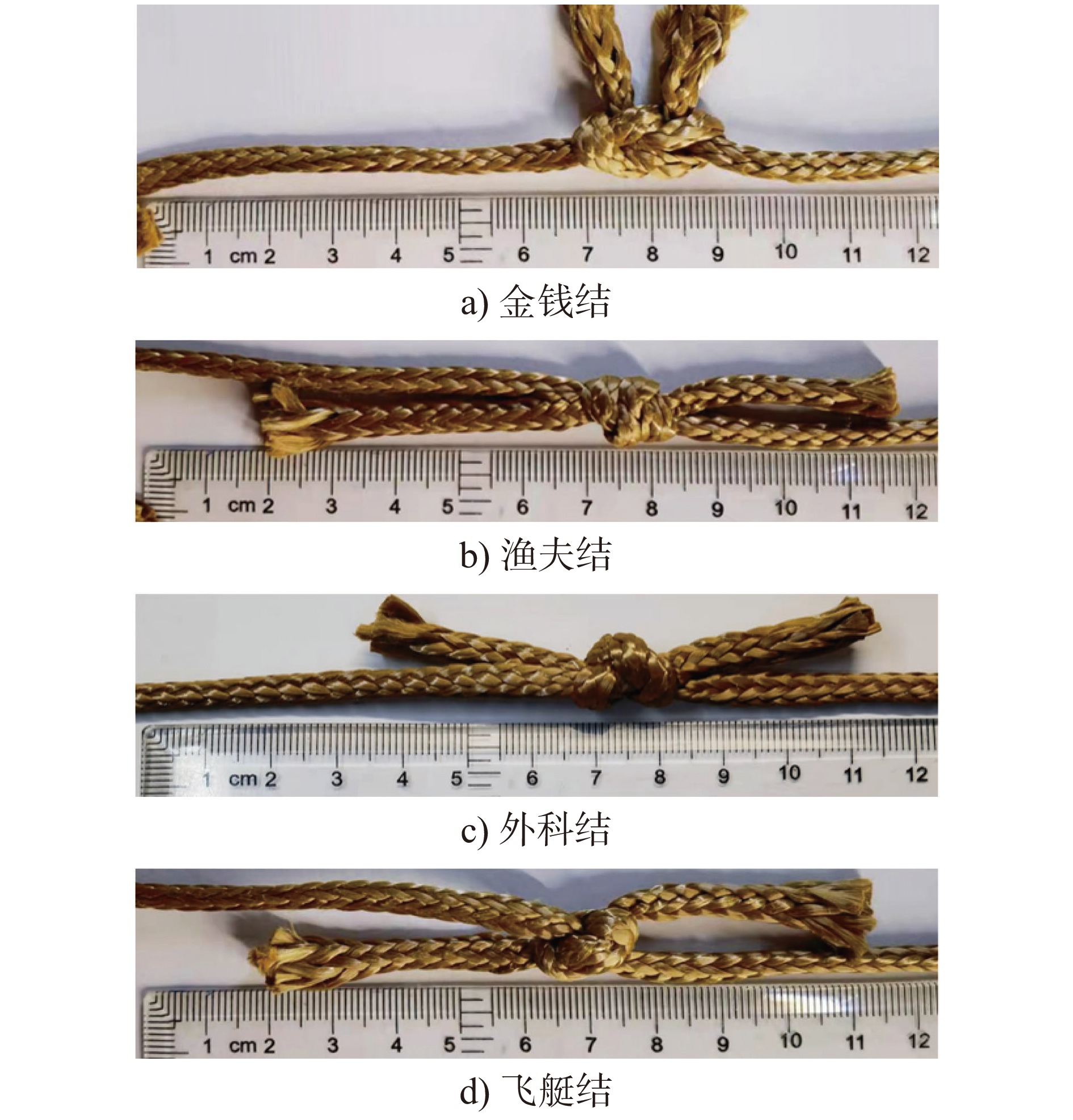
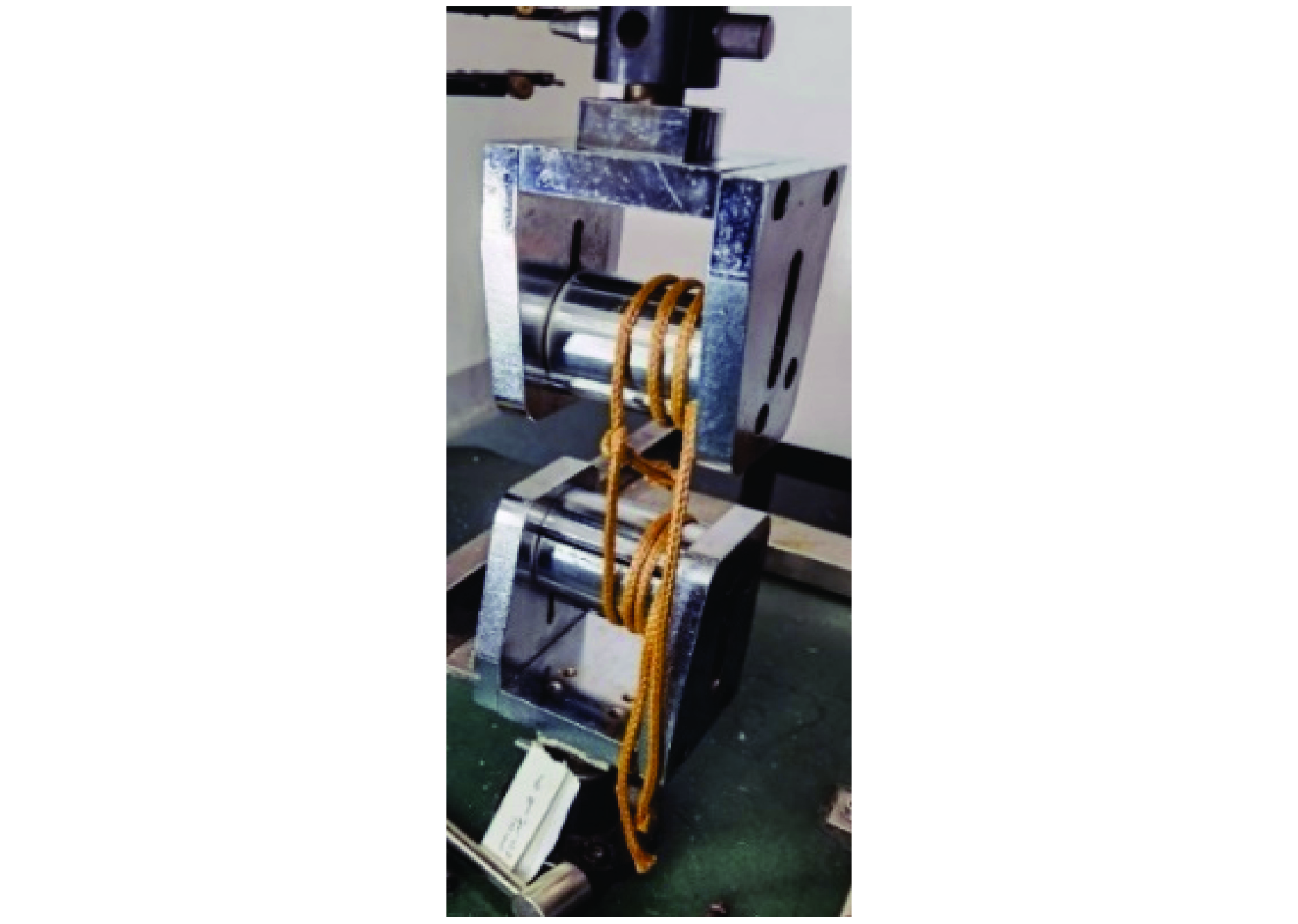
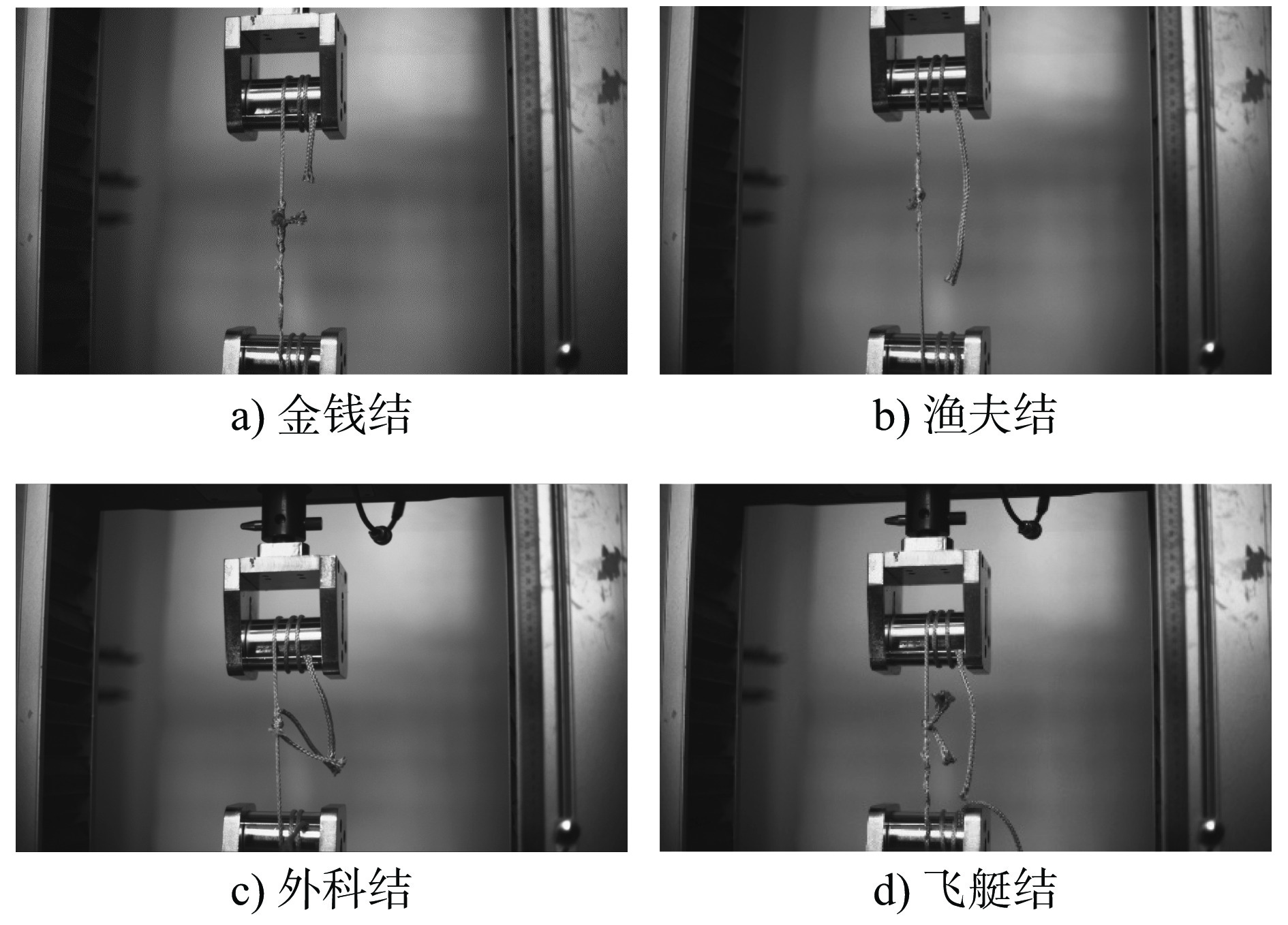
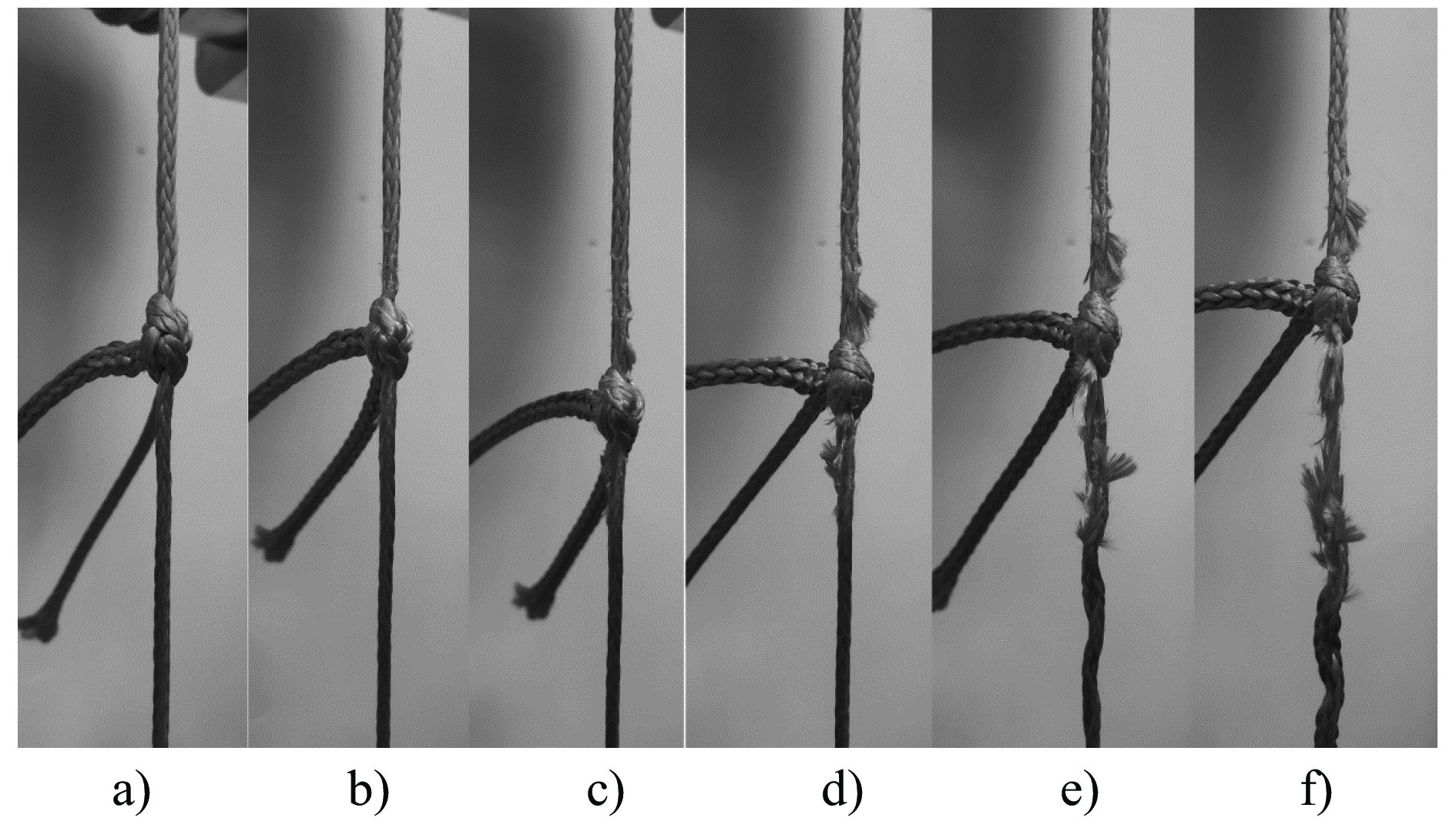
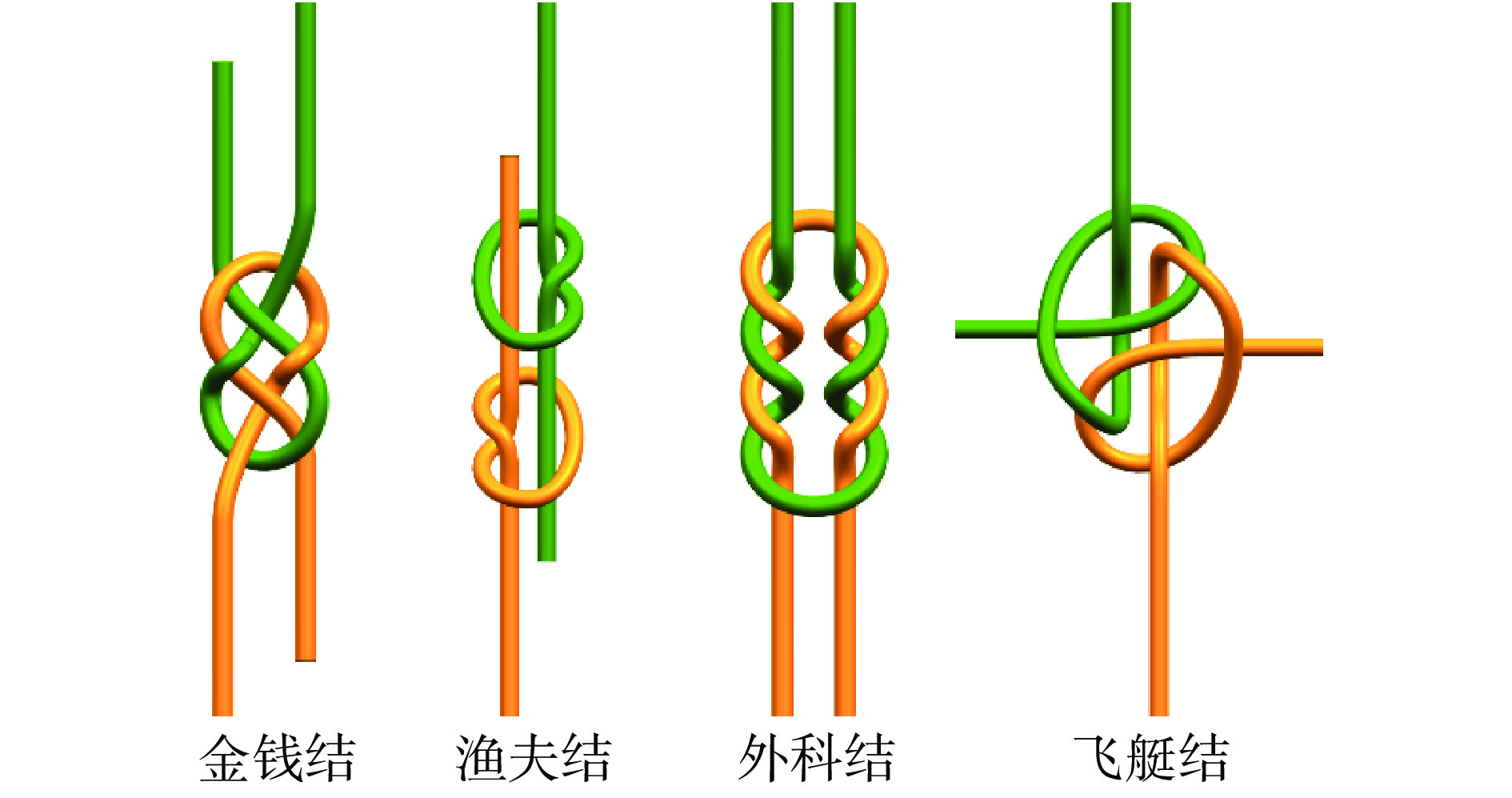
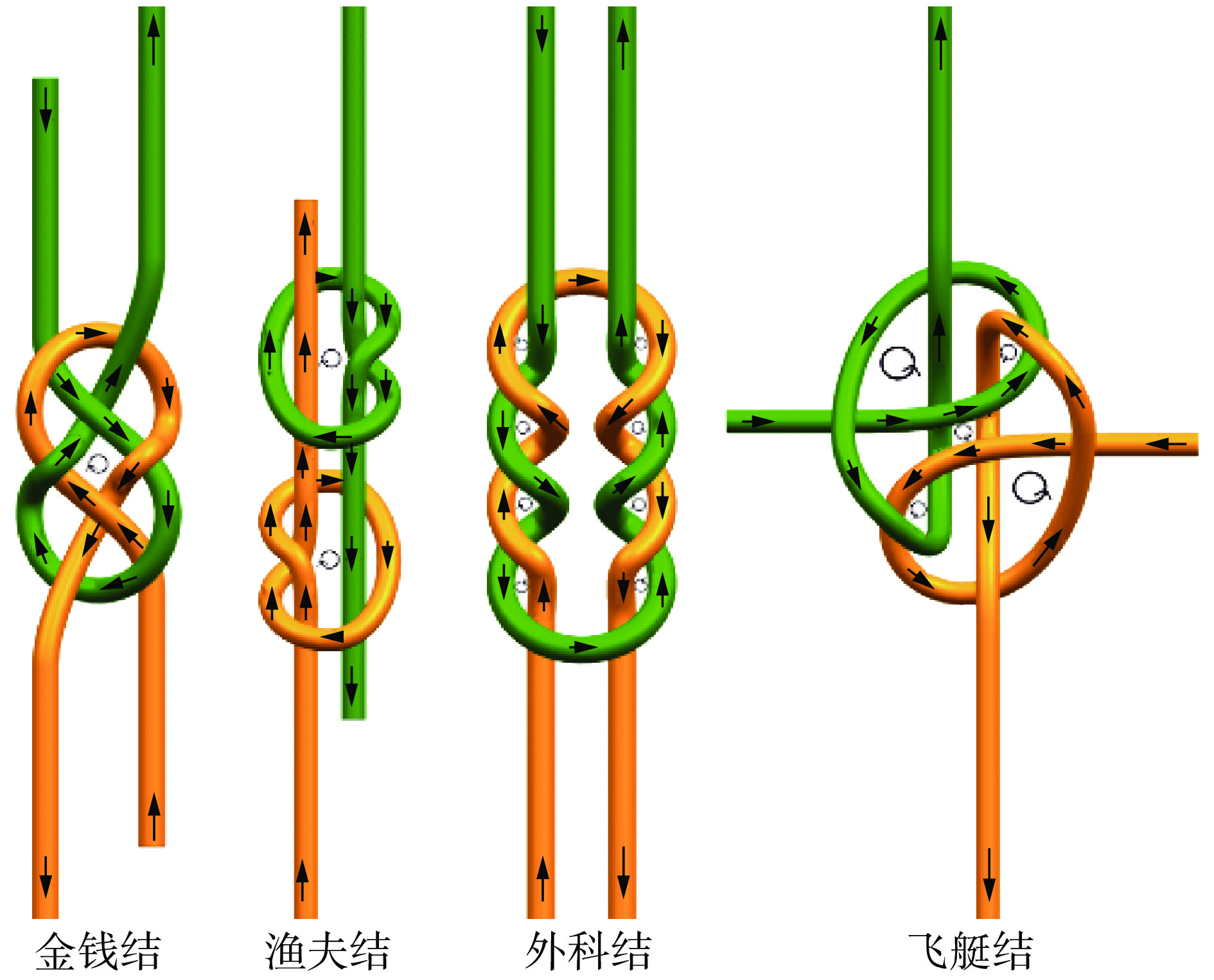
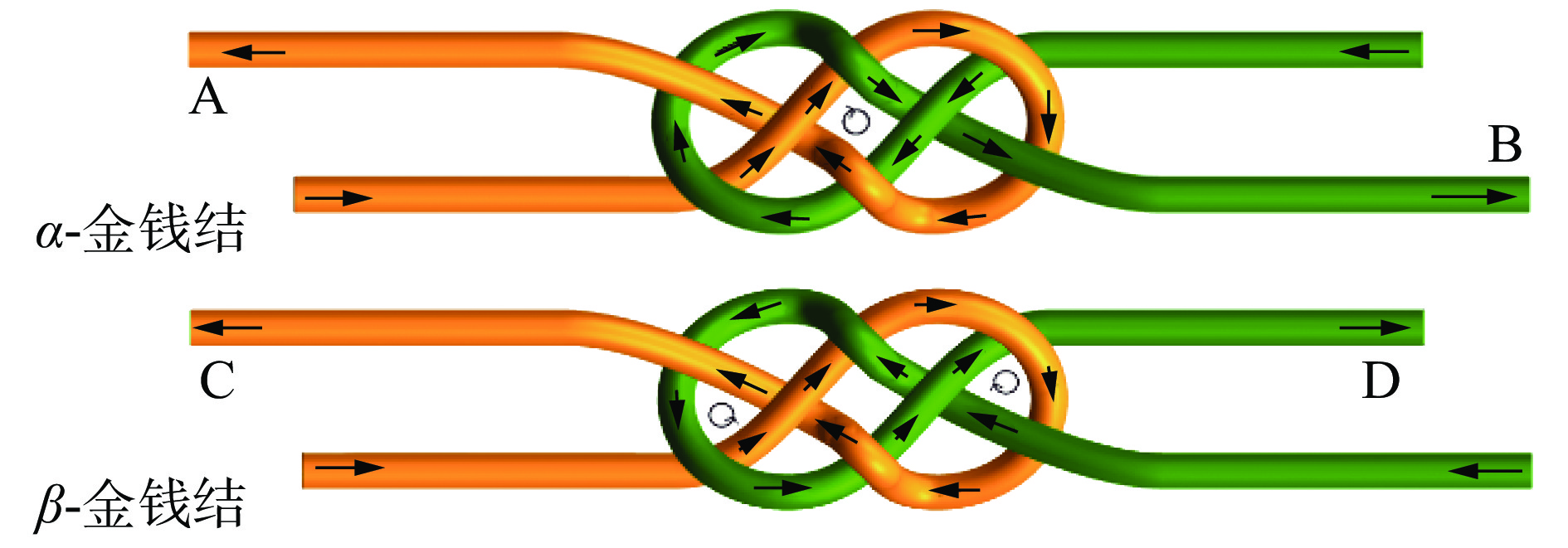
A poly-p-phenylene benzobisoxazole(PBO) rope has excellent properties and is widely used in aerospace and many other fields. This paper studies rope knots through comparing tensile experimental results between knotted and non-knotted ropes. It is found that the knotted rope greatly reduces its tensile properties. In order to deeply explore the reasons why knotting reduces the tensile properties of a rope, the knot model is established by using the UG software to study its knot vortex and equivalent length, Through the experimental study of tensile properties of various knots, a method for evaluating the effects of the rope's knot vortex on the tensile properties is proposed. The experimental results show that the evaluation method can evaluate the tensile properties of knots according to the ratio of the equivalent length of knots to the total number of vortex sides.
A poly-p-phenylene benzobisoxazole(PBO) rope has excellent properties and is widely used in aerospace and many other fields. This paper studies rope knots through comparing tensile experimental results between knotted and non-knotted ropes. It is found that the knotted rope greatly reduces its tensile properties. In order to deeply explore the reasons why knotting reduces the tensile properties of a rope, the knot model is established by using the UG software to study its knot vortex and equivalent length, Through the experimental study of tensile properties of various knots, a method for evaluating the effects of the rope's knot vortex on the tensile properties is proposed. The experimental results show that the evaluation method can evaluate the tensile properties of knots according to the ratio of the equivalent length of knots to the total number of vortex sides.



2024, 43(3): 533-539.
doi: 10.13433/j.cnki.1003-8728.20220276
Abstract:
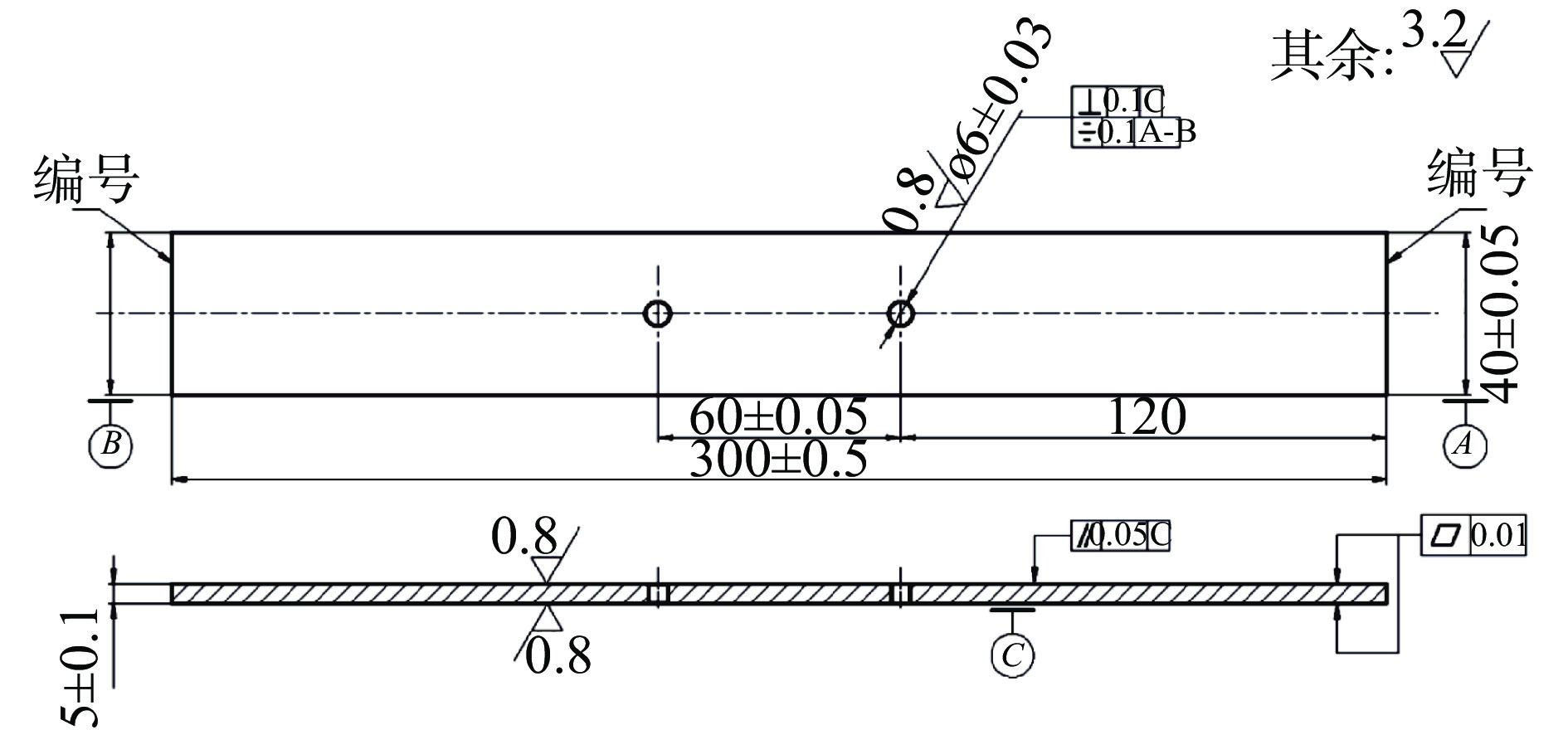
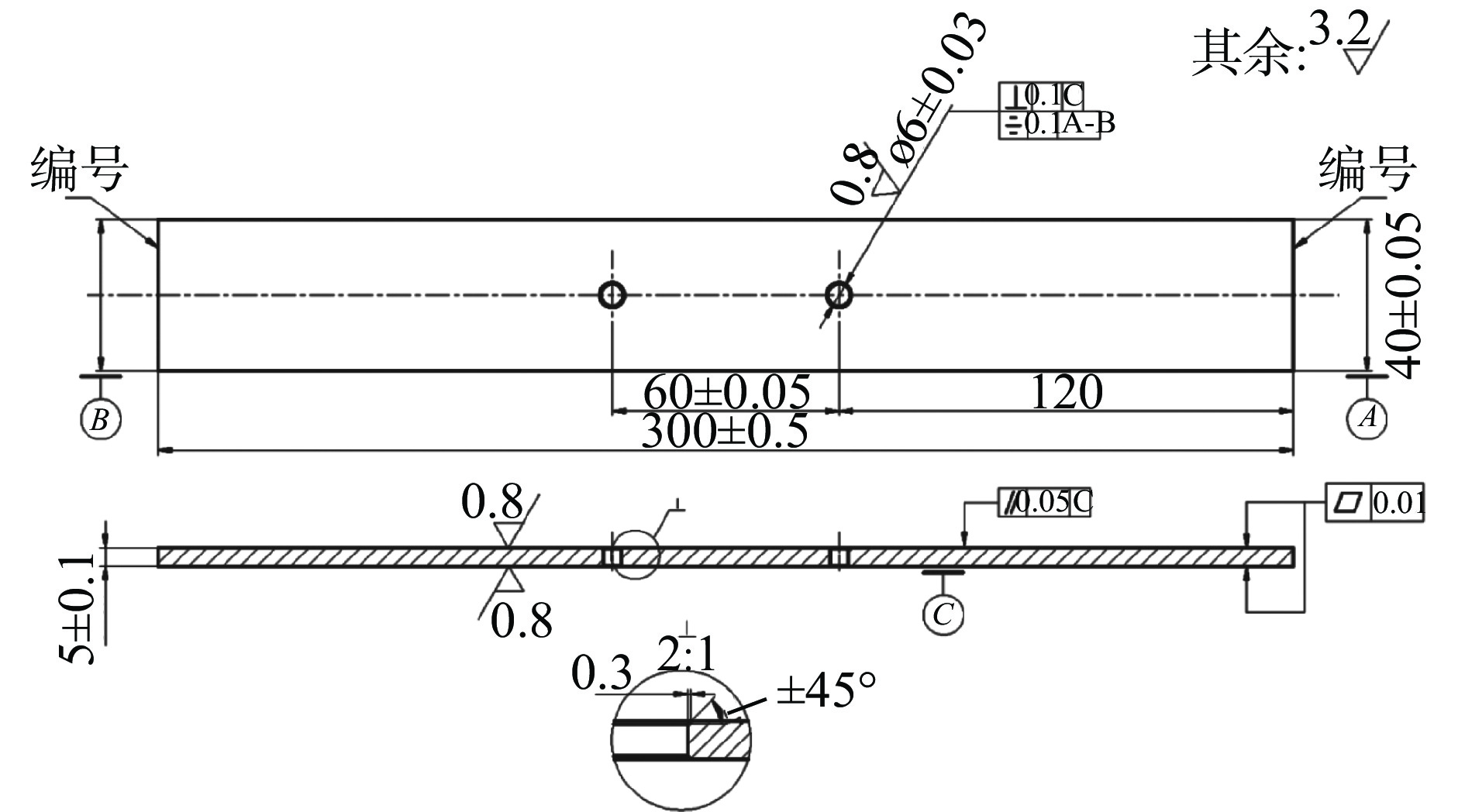
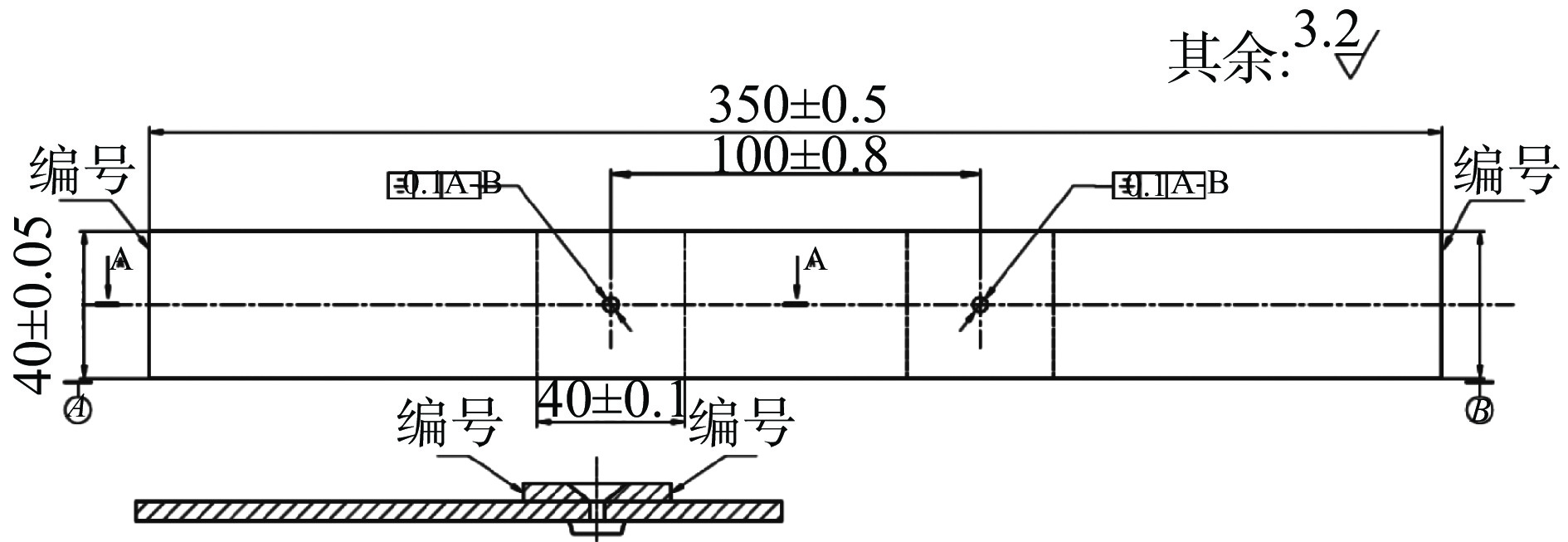
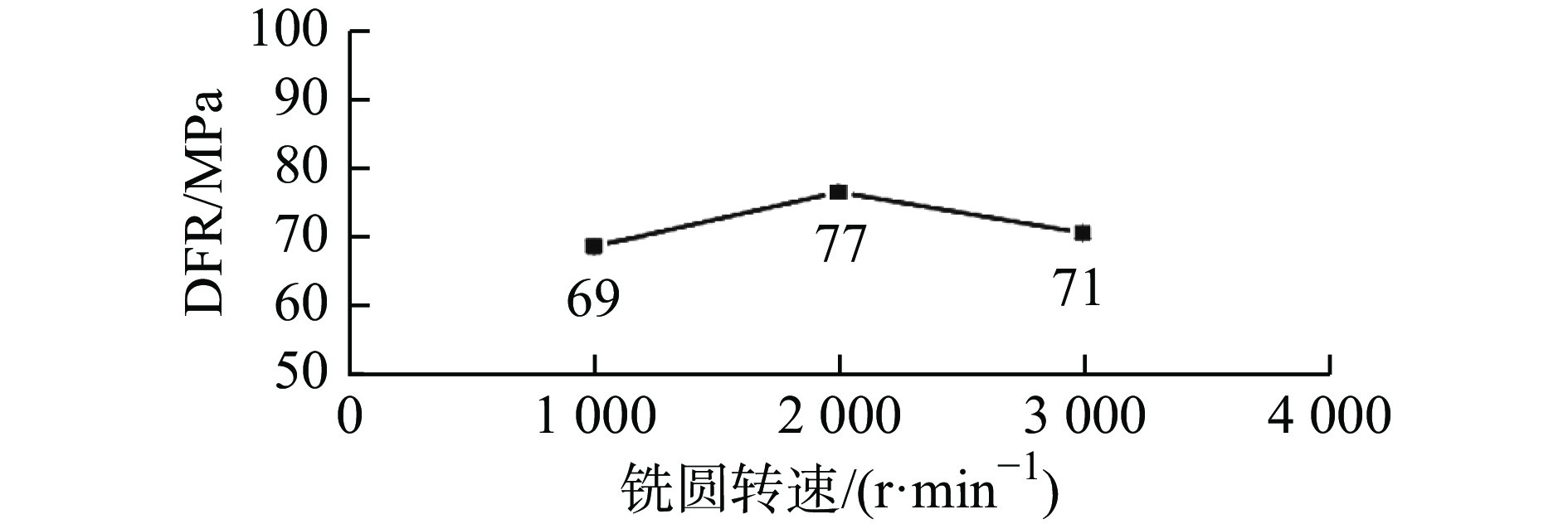
Research the effects of the milling speed on U-notch details, and chamfer and feed rate on the opening details, and interference details on DFR in aluminum-lithium alloy. The results show that in a certain range of milling speed, there is an optimal milling speed; the hole edge chamfer can effectively reduce the stress concentration and improve the fatigue performance; interference fit riveting introduces the residual compressive stress into the hole wall, which has a certain strengthening effect on the hole connection, By increasing the amount of interference, the connection can reach the fatigue life equivalent to that of the whole material, which is no longer the weakest link in riveting parts.
Research the effects of the milling speed on U-notch details, and chamfer and feed rate on the opening details, and interference details on DFR in aluminum-lithium alloy. The results show that in a certain range of milling speed, there is an optimal milling speed; the hole edge chamfer can effectively reduce the stress concentration and improve the fatigue performance; interference fit riveting introduces the residual compressive stress into the hole wall, which has a certain strengthening effect on the hole connection, By increasing the amount of interference, the connection can reach the fatigue life equivalent to that of the whole material, which is no longer the weakest link in riveting parts.





2024, 43(3): 540-545.
doi: 10.13433/j.cnki.1003-8728.20220250
Abstract:
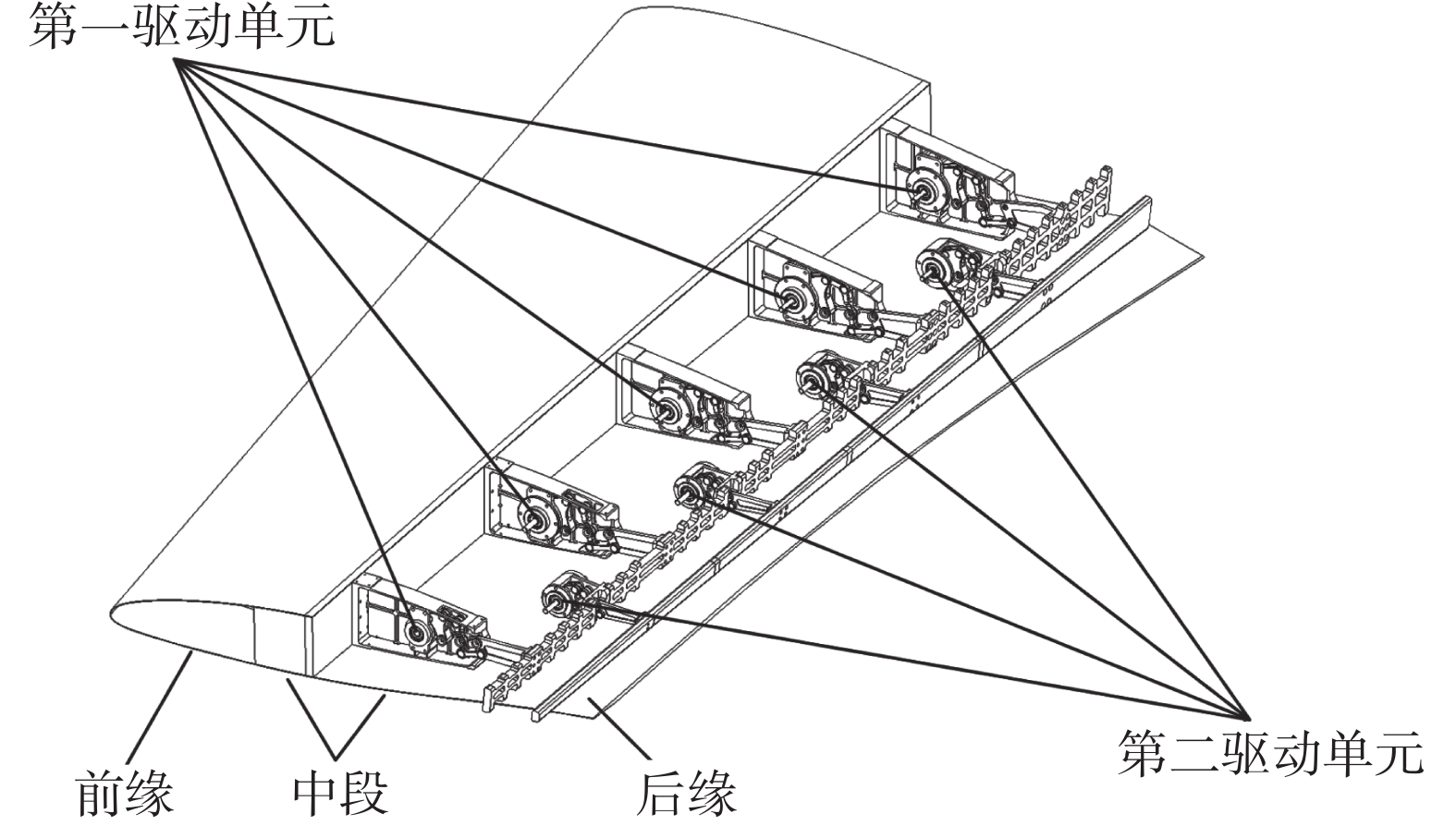
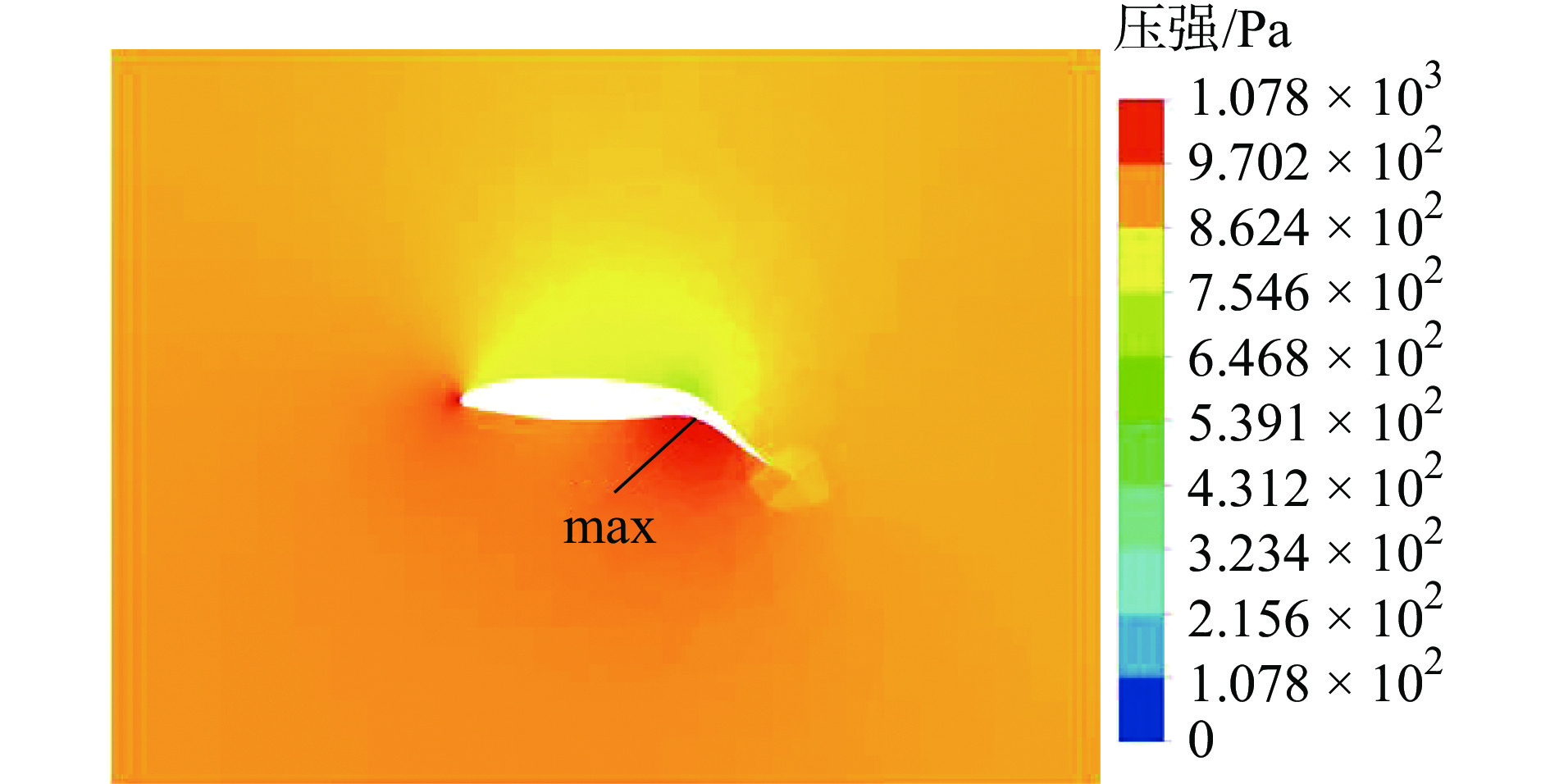
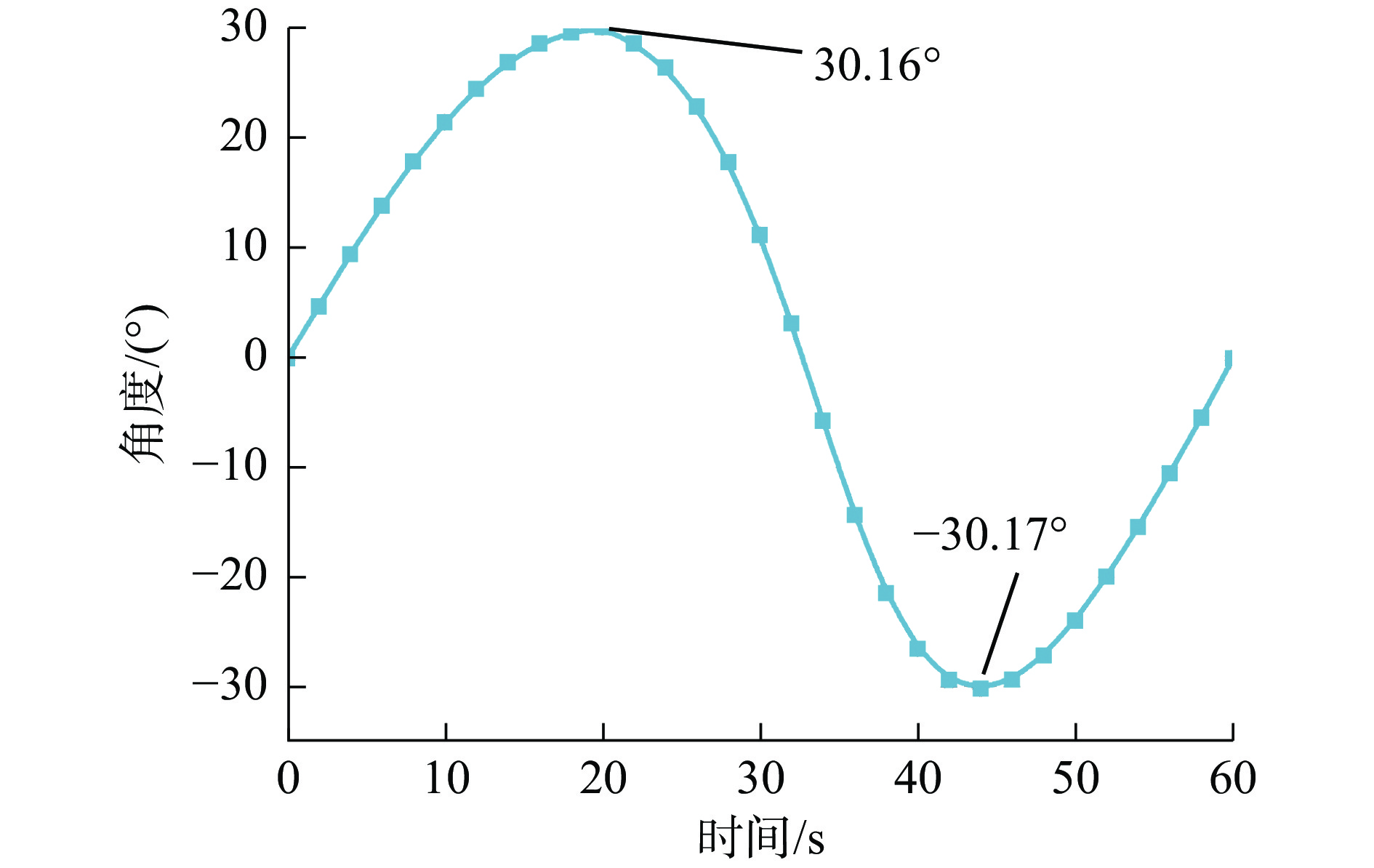
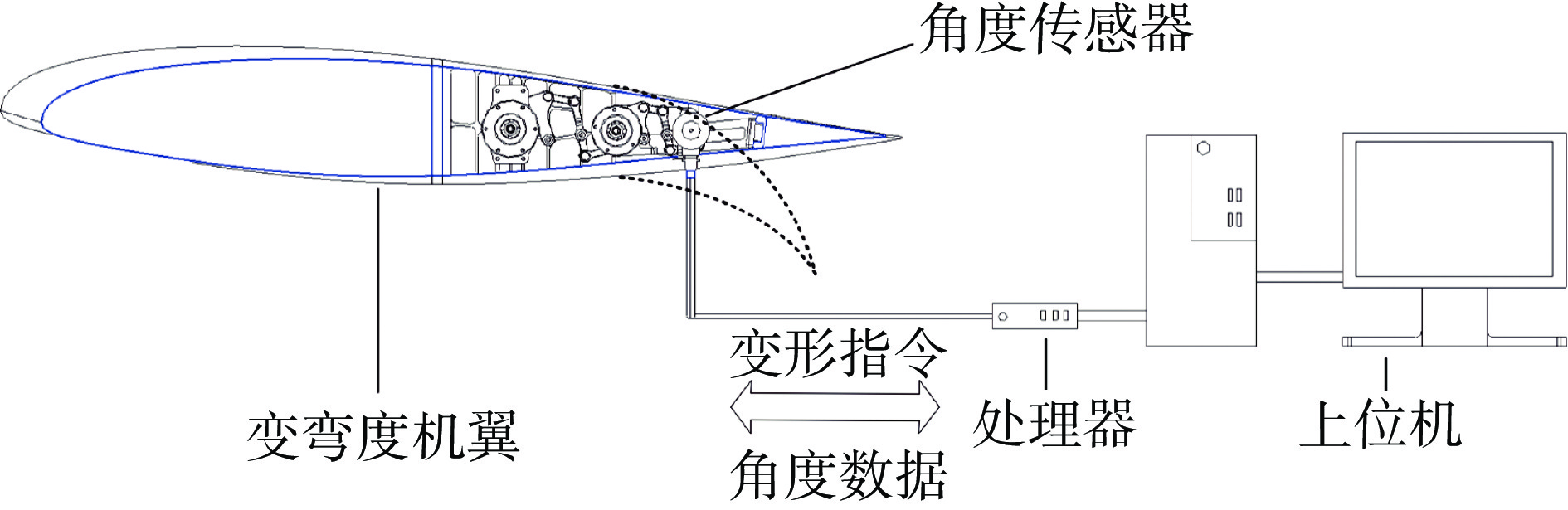
For the purpose of optimizing the aerodynamic characteristics and improving the flight efficiency of aircraft, a variable camber wing with multi-stage linkage driving mechanism is studied. The aerodynamic characteristics of the wing at the maximum deformation angle are studied by the fluid analysis function of ANSYS. The structural strength of the driving mechanism under the limit load condition is studied by the static analysis function of ANSYS. The motion of the driving mechanism is studied through simulation analysis and prototype test. The results indicate that the maximum lift coefficient of the deformed wing is 1.4, and the maximum aerodynamic pressure is 1 078 Pa, which is less than the yield aerodynamic pressure of the lower surface of 4 916 Pa. The maximum stress of the driving mechanism is 37.3 MPa, which is less than the structural yield strength of 55.2 MPa. The wing deformation angle is greater than ±25°, which meets the requirement of improving aerodynamic characteristics of aircraft.
For the purpose of optimizing the aerodynamic characteristics and improving the flight efficiency of aircraft, a variable camber wing with multi-stage linkage driving mechanism is studied. The aerodynamic characteristics of the wing at the maximum deformation angle are studied by the fluid analysis function of ANSYS. The structural strength of the driving mechanism under the limit load condition is studied by the static analysis function of ANSYS. The motion of the driving mechanism is studied through simulation analysis and prototype test. The results indicate that the maximum lift coefficient of the deformed wing is 1.4, and the maximum aerodynamic pressure is 1 078 Pa, which is less than the yield aerodynamic pressure of the lower surface of 4 916 Pa. The maximum stress of the driving mechanism is 37.3 MPa, which is less than the structural yield strength of 55.2 MPa. The wing deformation angle is greater than ±25°, which meets the requirement of improving aerodynamic characteristics of aircraft.



2024, 43(3): 546-552.
doi: 10.13433/j.cnki.1003-8728.20220278
Abstract:
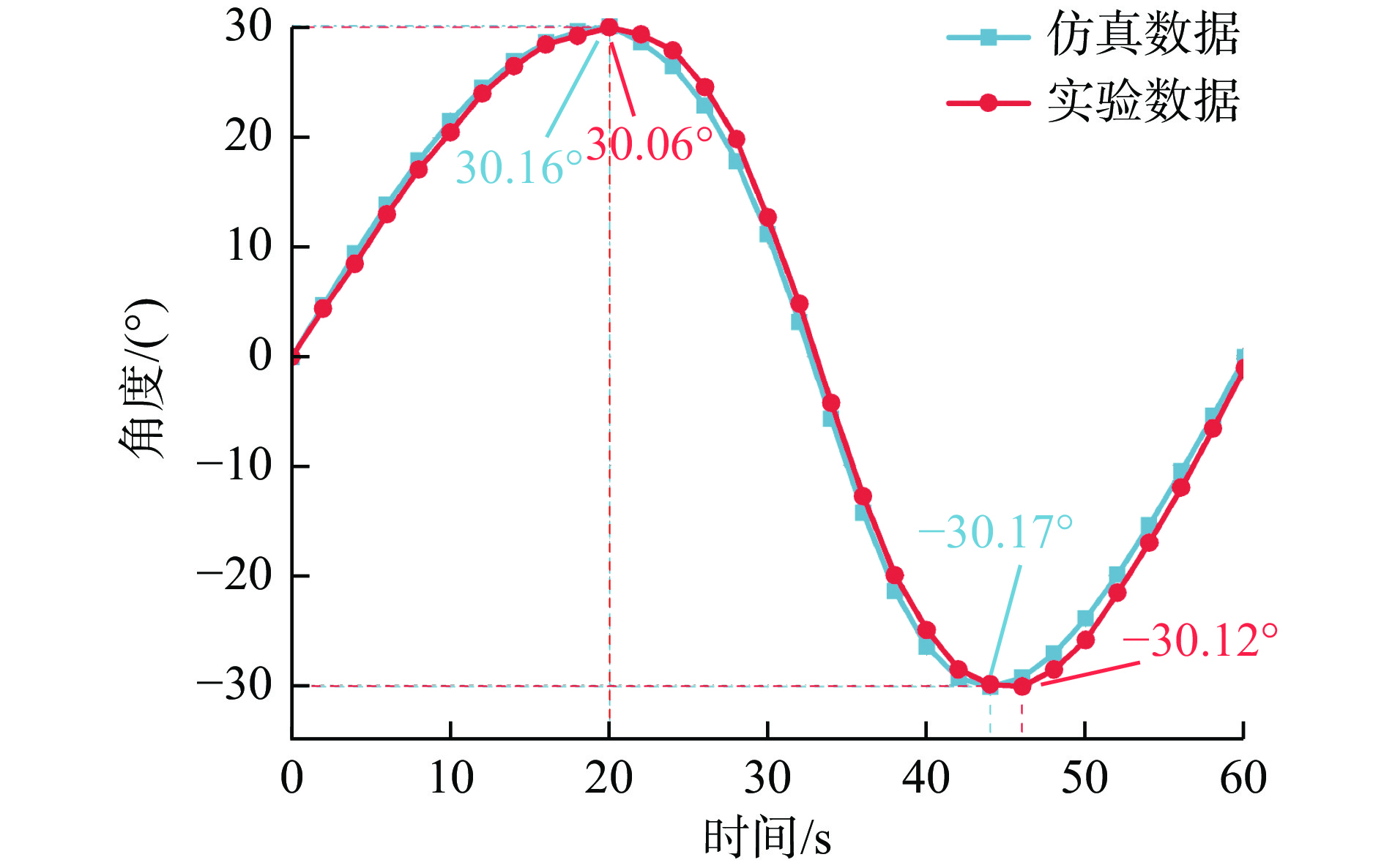
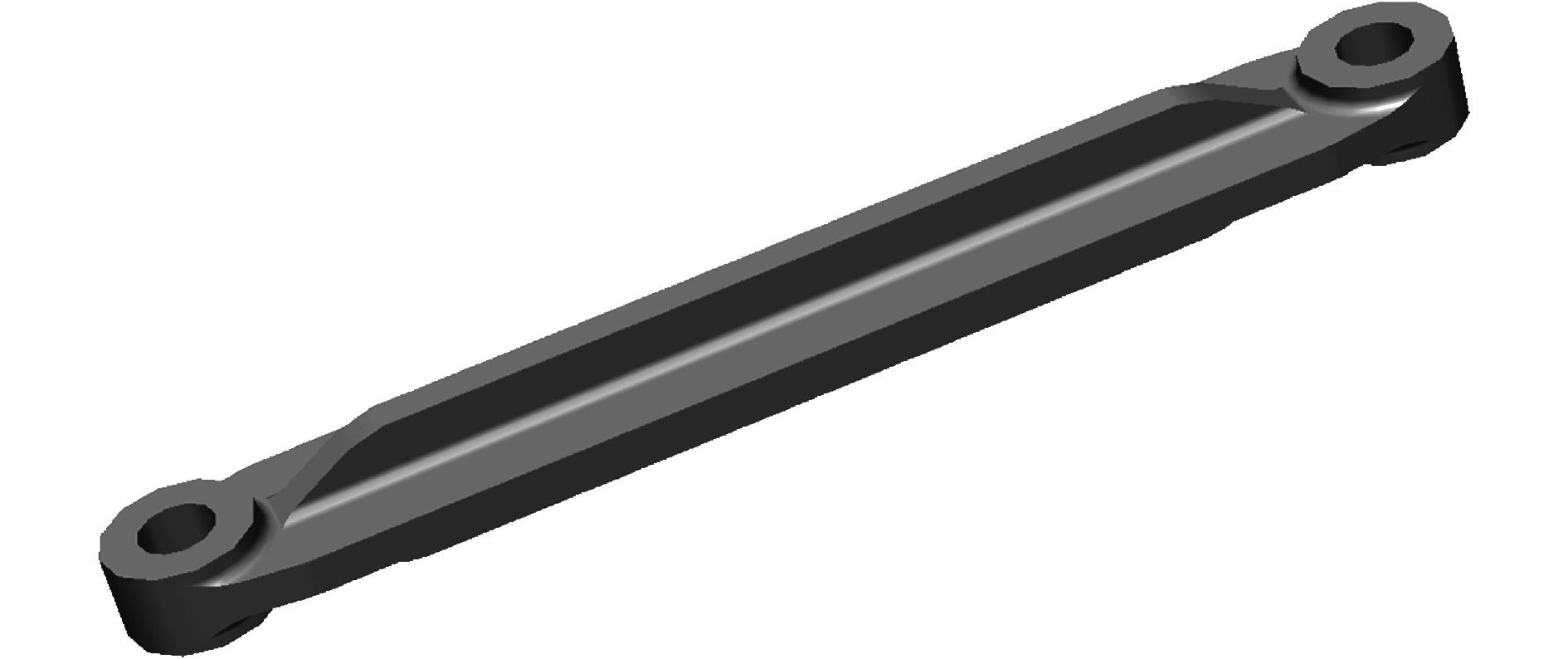
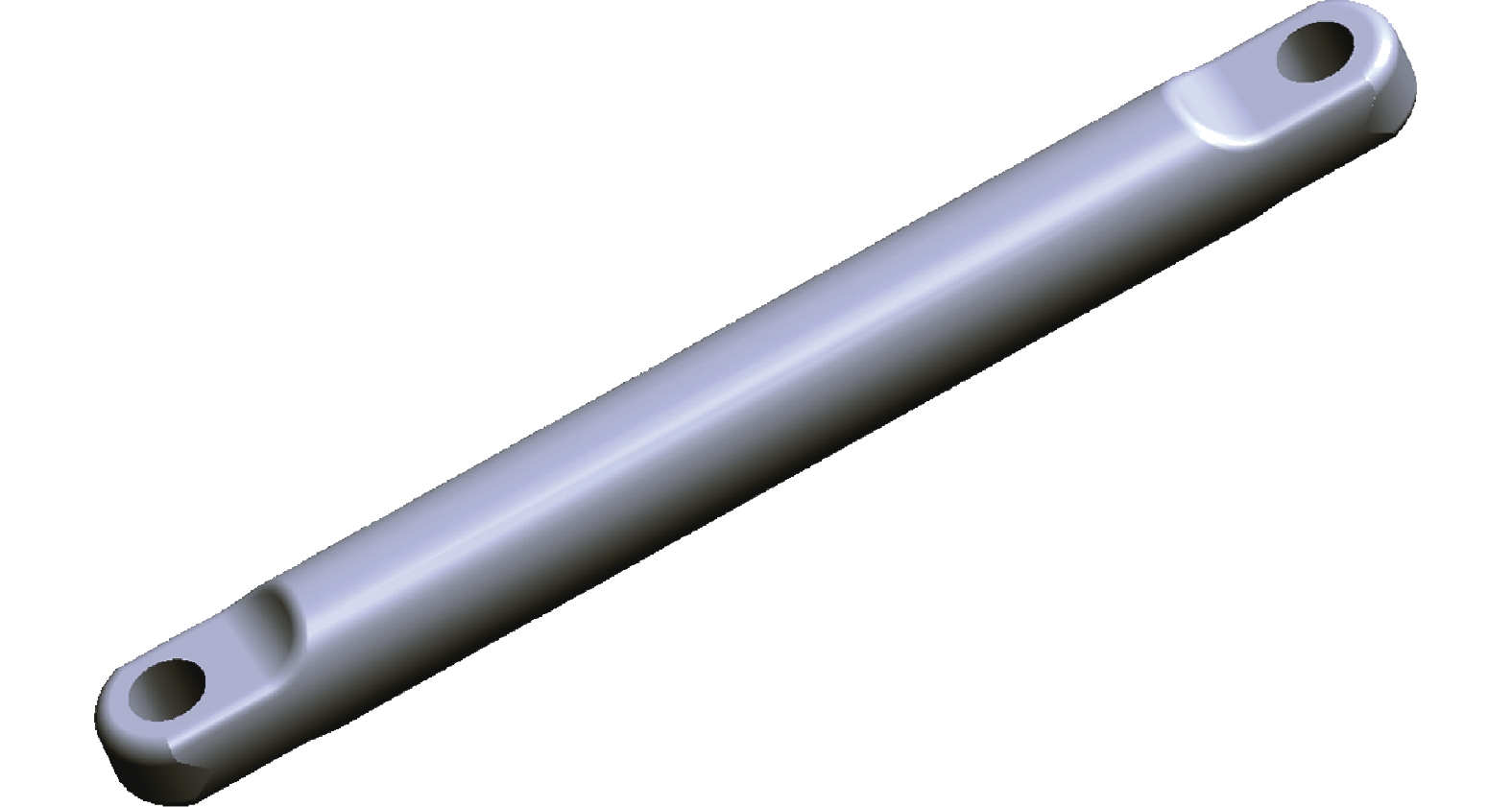
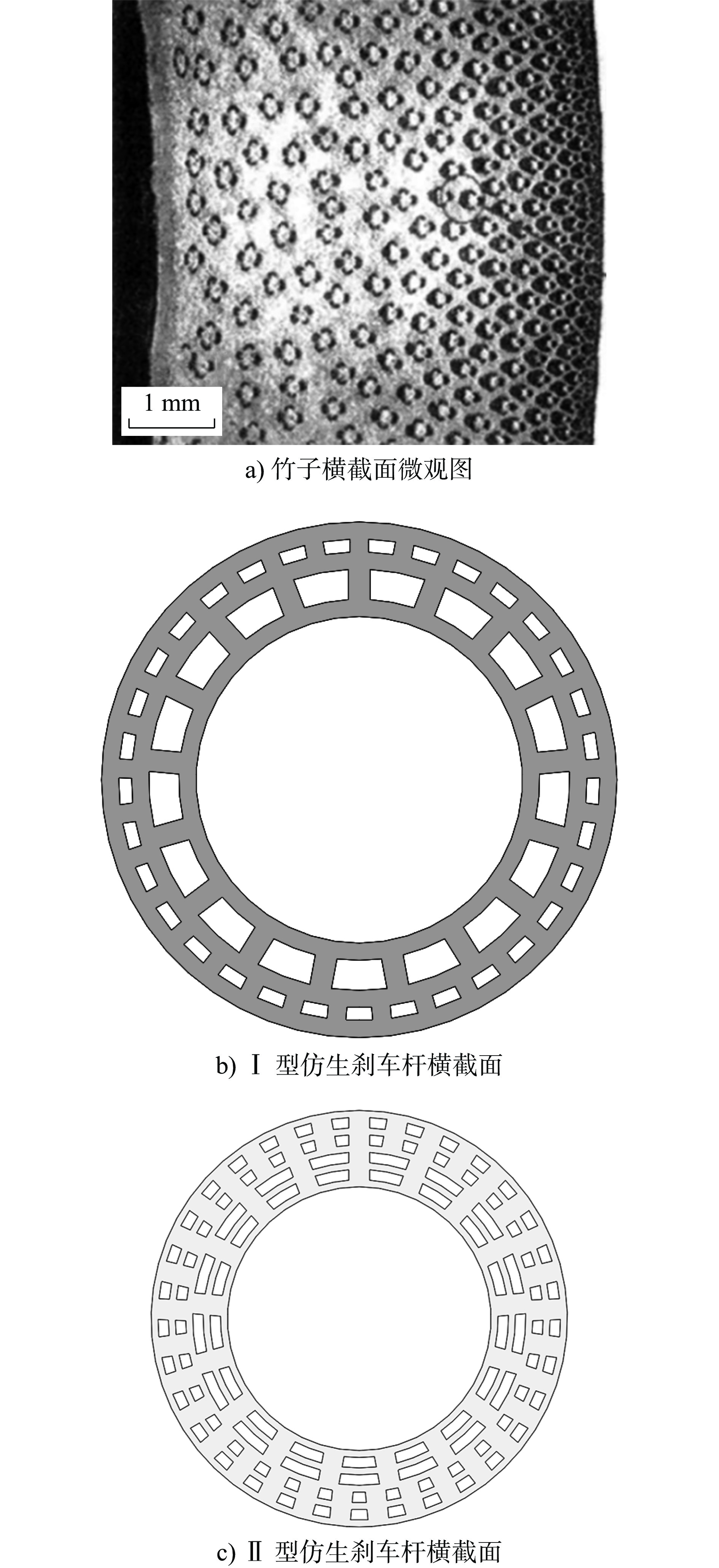
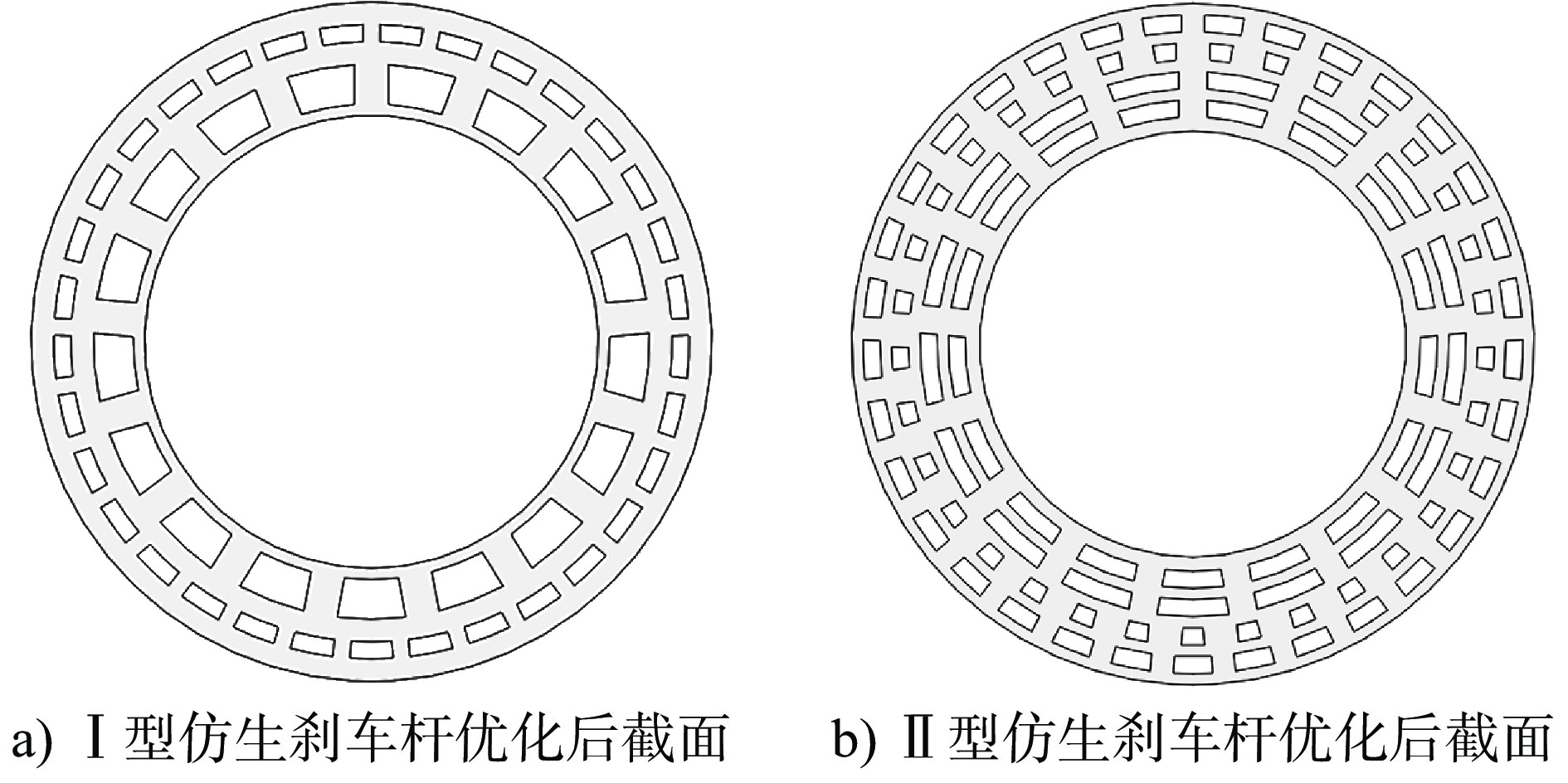
The landing gear is one of the important components of the aircraft. In order to reduce the structural weight and stress concentration, combined with the development of 3D printing technology, on the premise of no increase in the total mass and no breakthrough in the overall dimension, the original cross structure is changed into a hollow cylinder structure. With reference to the bamboo structure, two bionic structures of brake rod on landing gear are designed, and further parameter optimization is carried out by using the response surface method. The simulation results show that the quality of the two bamboo-like structures is reduced by 17% and 14.98%, respectively, and the maximum equivalent stress is reduced by 57.34% and 57.90%, respectively. It shows that the imitation bamboo structure has a good effect on reducing the maximum equivalent stress. The optimization method has practical significance for the lightweight design of rod structure, and can be popularized.
The landing gear is one of the important components of the aircraft. In order to reduce the structural weight and stress concentration, combined with the development of 3D printing technology, on the premise of no increase in the total mass and no breakthrough in the overall dimension, the original cross structure is changed into a hollow cylinder structure. With reference to the bamboo structure, two bionic structures of brake rod on landing gear are designed, and further parameter optimization is carried out by using the response surface method. The simulation results show that the quality of the two bamboo-like structures is reduced by 17% and 14.98%, respectively, and the maximum equivalent stress is reduced by 57.34% and 57.90%, respectively. It shows that the imitation bamboo structure has a good effect on reducing the maximum equivalent stress. The optimization method has practical significance for the lightweight design of rod structure, and can be popularized.




2018, 37(8): 1167-1176.
doi: 10.13433/j.cnki.1003-8728.20180029
2018, 37(8): 1177-1182.
doi: 10.13433/j.cnki.1003-8728.20180012
2018, 37(8): 1161-1166.
doi: 10.13433/j.cnki.1003-8728.20180025
2018, 37(8): 1149-1155.
doi: 10.13433/j.cnki.1003-8728.20180024
2018, 37(8): 1156-1160.
doi: 10.13433/j.cnki.1003-8728.20180048
- 1Study on Kinematics Simulation for Six Degree-of-Freedom Industrial Robot Arms
- 2Modeling and Analysis of Synchronization Error of Double-drive Feed System
- 3Analysis and Simulation of Motion Characteristics of Silkworm-robot
- 4Reliability Analysis of Failure Dynamic Mechanical System using Vine Copula Model
- 5Analysis of Influence of Rod Length Error on Position Accuracy of Underwater Extended Mechanism
- More >
