




Review on Bionic Soft Actuators
-
摘要: 软体驱动器是智能和交互式软体机器人的核心部件,由于其高度的灵活性、良好的环境适应能力以及安全可交互等优势,被广泛应用于工业、农业、医学、救护和公告服务等领域。研究人员通过对生物的模仿制造出了各种类型的软体驱动器。围绕国内外近些年来软体驱动器的研究成果,介绍了国内外软体机器人中所采用的软体驱动器技术的基础研究发展现状;针对软体驱动器的基本特性对其进行了系统归纳分类,介绍了各类型软体驱动器的基本工作原理,介绍了各种软体驱动器各领域的的应用现状以及各种类型驱动器的优缺点和在实践应用中存在的问题;对软体驱动器未来的发展趋势进行展望。Abstract: Soft actuators are the core component of intelligent and interactive soft robot, which provide the ability of deformation, manipulation and movement for the robot. Due to its high flexibility, good adaptability and safe interactivity and other characteristics, it is widely used in industry, agriculture, medical, rescue and service fields. With the in-depth study on the biomimetic mechanism, various soft actuators through biological imitationareinnovated. According to the research results of soft actuators in recent years, firstly, the basic research and development status of soft actuators technology in soft robots at home and abroad are briefly introduced;Secondly, according to the characteristics of soft actuators, it summarizes and classifies them, focuses on the basic working principles of various types of software drivers, and introduces in detail the application status of various software drivers in software robot, as well as the advantages and disadvantages of various drivers and the problems existing in practical application;Finally, the future development trend of soft actuators are prospected.
-
Key words:
- soft actuator /
- actuation method /
- soft robot /
- soft material
-
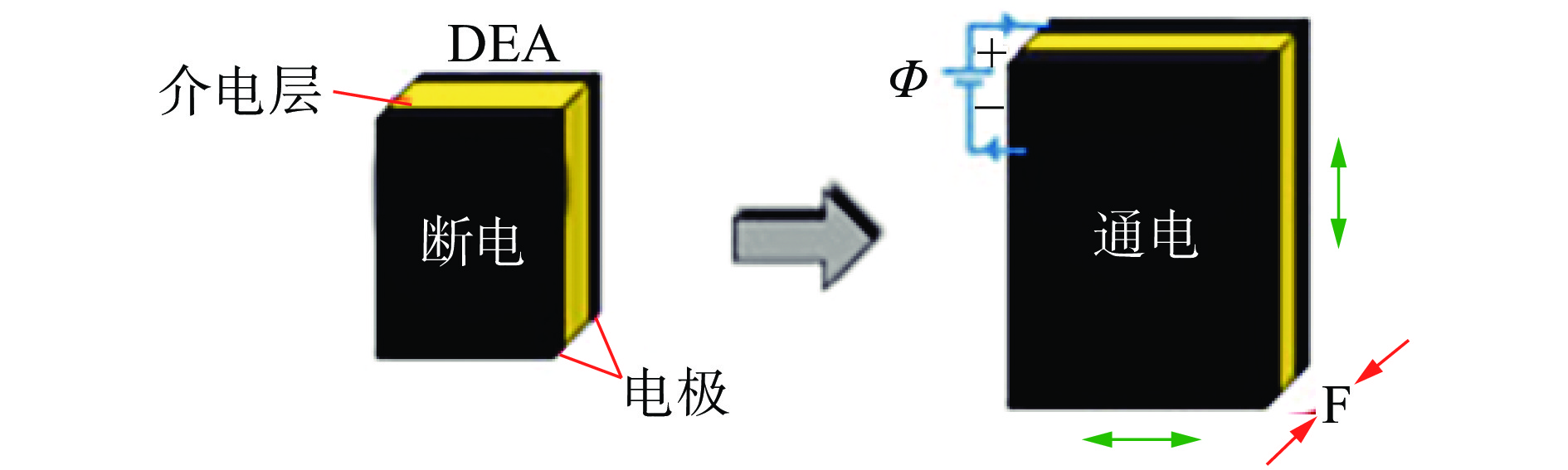
图 9 介电弹性体基本原理图[35]
Figure 9. Schematic diagram of the dielectric elastomer basic principle

图 11 由一个、两个、四个驱动器驱动的扑翼微型机器人[39]
Figure 11. Flapping micro air robot driven by one, two, and four actuators
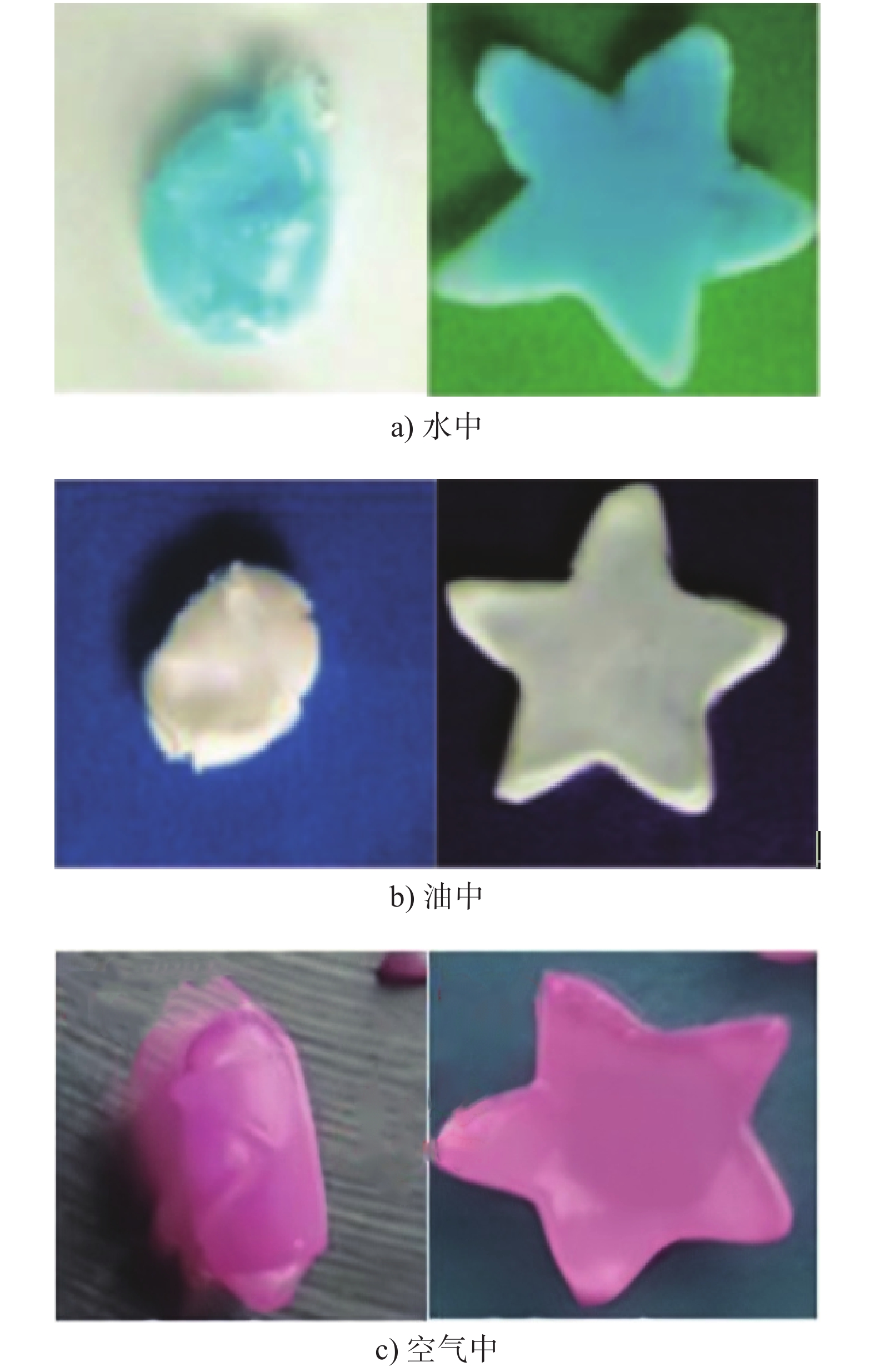
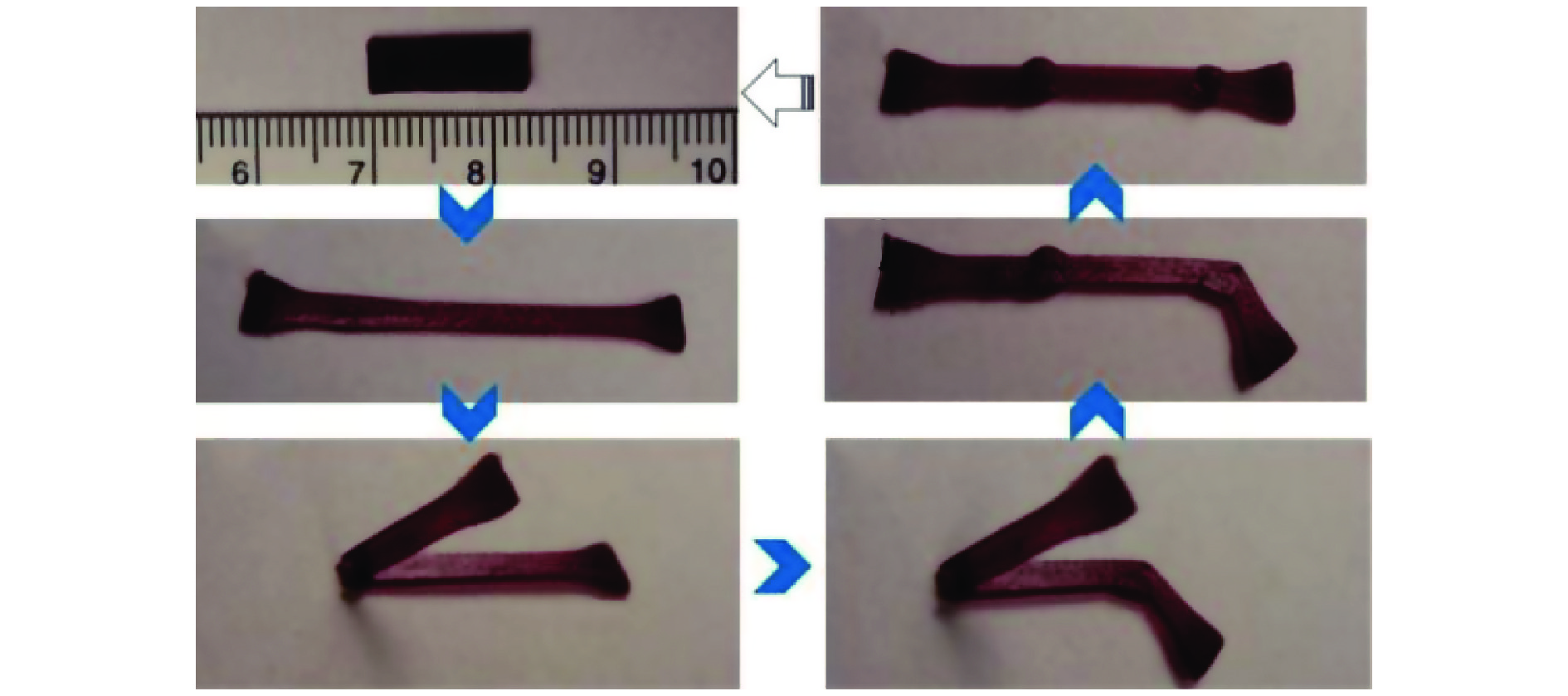
图 13 3种条件下不同温度收缩状态[48]
Figure 13. Different shrinkage states at different temperatures under three conditions
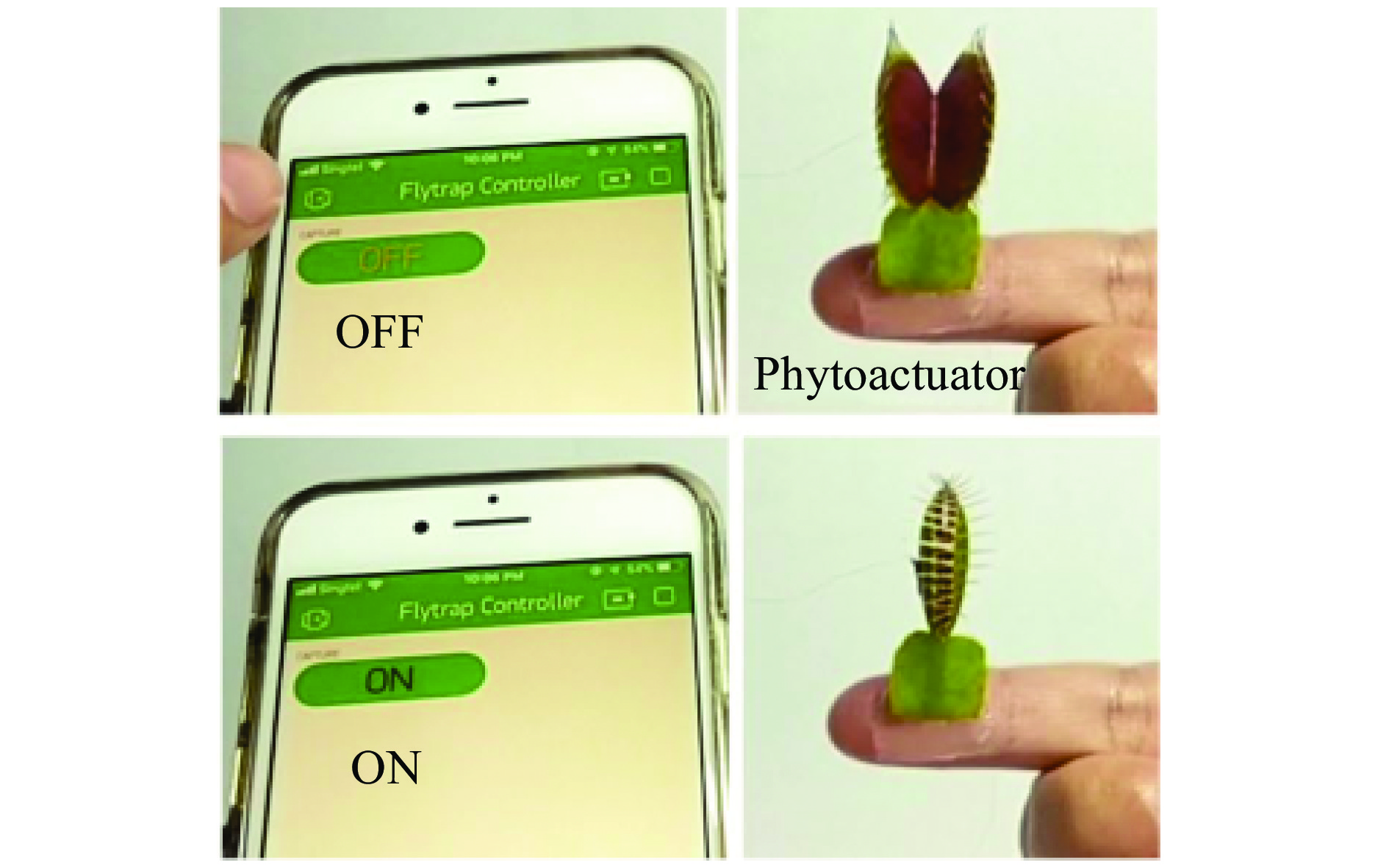
图 14 手机无线控制开合[55]
Figure 14. Wireless opening and closing control using a mobile phone
表 1 驱动器的优缺点及主要应用领域
Table 1. The advantages, disadvantages, and main application areas of the actuators
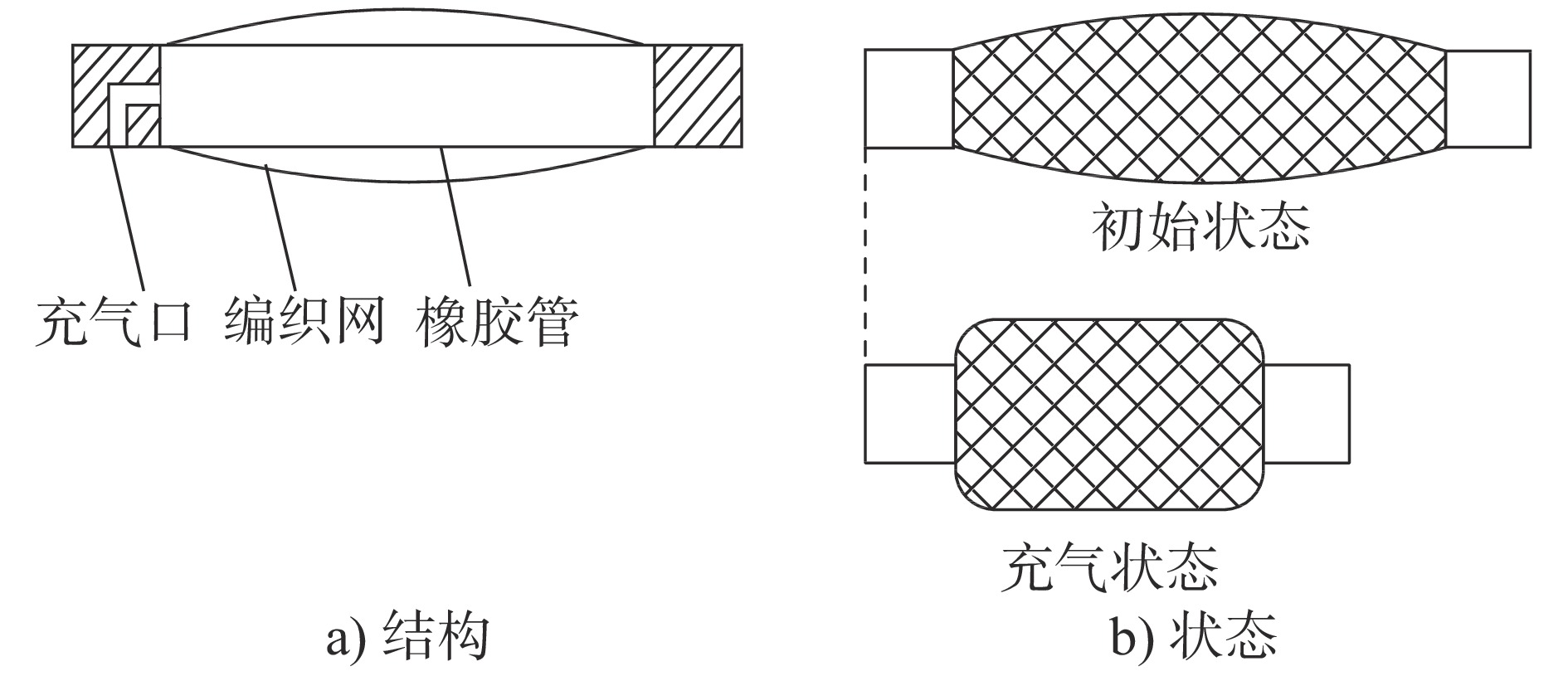
驱动方式 优点 缺点 主要应用领域 气功驱动 柔顺性好、驱动力较大、响应速度快、制造成本低 控制精度差、具有迟滞性、通常需要外接气源、体积大 机器人、航空航天、医疗器械等,如软机械手、软体机器人 SMA驱动 驱动力大、耐腐蚀性好、易制造 热滞性使得控制困难、寿命低、制造成本高 生物医学、航空航天、汽车、机器人等,如主动导管、机器人手臂、微夹持器 SMP驱动 成本低、质量轻、形变量大、
易加工控制精度低、对工作环境要求高 航空航天、生物医疗、
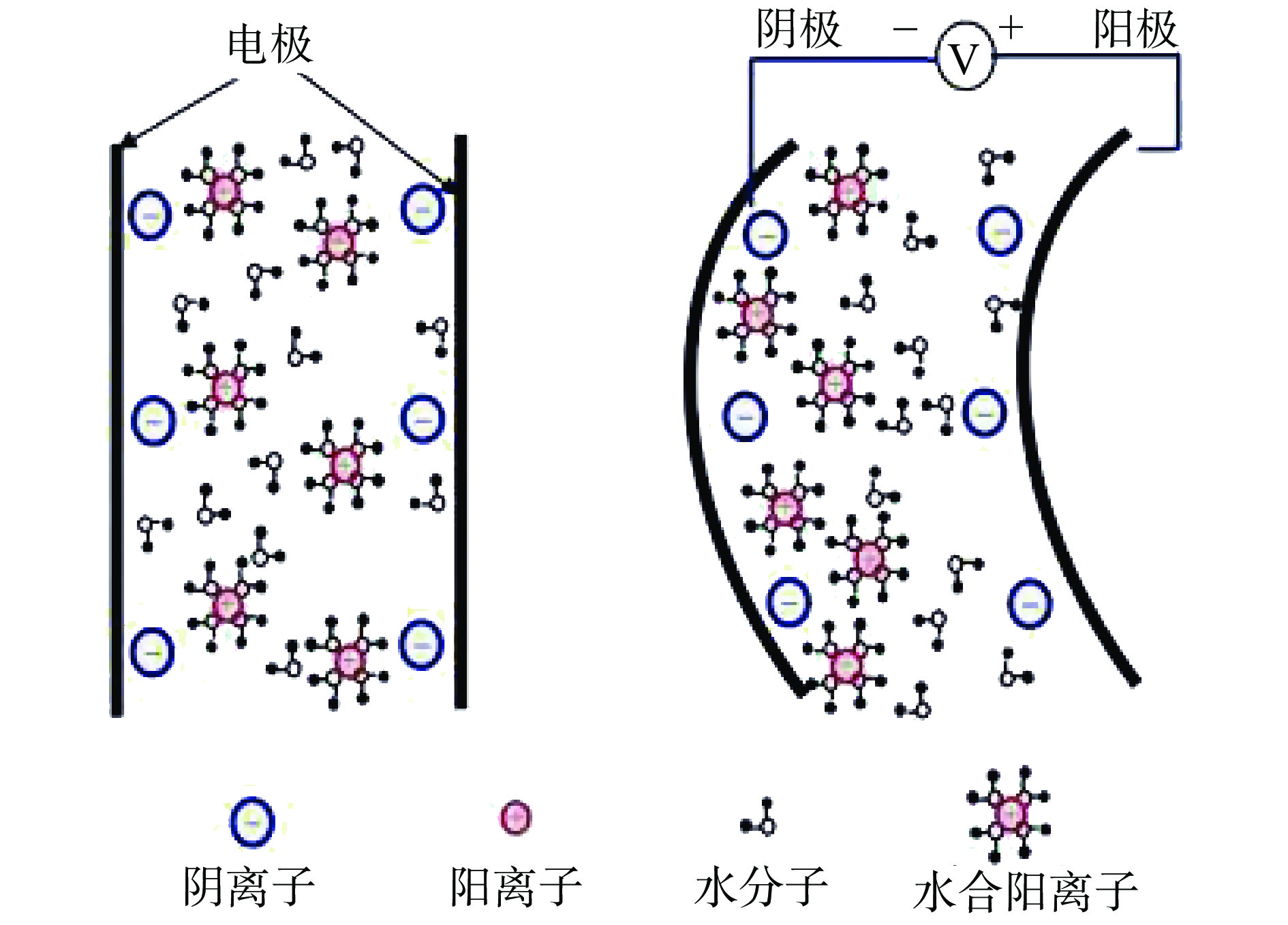
智能器件等DE驱动 质量小、柔性好、响应速度快、形变量较大、能量密度高等 驱动电压较大(通常几千伏),易使材料发生介电击穿,增加成本 软体机器人、可穿戴机器人、生物学、微流体系统等,如柔性机器人手、微泵 IPMC驱动 驱动速度快、驱动电压低、形变量大、与人体肌肉特性最为接近、环境友好 驱动力小,寿命短,不能在无水状态下长期使用 机器人夹持器,传感器 响应凝胶驱动 优良的生物相容性、缓释型、
外环境响应特性,成本低响应时间缓慢、化学稳定性随时间退化、环境要求苛刻 生物医学、机器人、人造皮肤、人工肌肉驱动器、药物输送等 生物混合驱动器 响应速度快、体积小 环境严苛、成本较高 微型机器人、驱动器、
微型心脏泵 下载: 导出CSV
下载: 导出CSV
-
[1] WEHNER M, TRUBY R L, FITZGERALD D J, et al. An integrated design and fabrication strategy for entirely soft, autonomous robots[J]. Nature, 2016, 536(7617): 451-455. doi: 10.1038/nature19100 [2] KARAKASILIOTIS K, THANDIACKAL R, MELO K, et al. From cineradiography to biorobots: an approach for designing robots to emulate and study animal locomotion[J]. Journal of the Royal Society Interface, 2016, 13(119): 20151089. doi: 10.1098/rsif.2015.1089 [3] XIE Z X, DOMEL A G, AN N, et al. Octopus arm-inspired tapered soft actuators with suckers for improved grasping[J]. Soft Robotics, 2020, 7(5): 639-648. doi: 10.1089/soro.2019.0082 [4] 王永青, 邓建辉, 李特, 等. 软体机器人3D打印制造技术研究综述[J]. 机械工程学报, 2021, 57(15): 186-198. doi: 10.3901/JME.2021.15.186WANG Y Q, DENG J H, LI T, et al. Review of research on 3D printing manufacturing technology of soft robots[J]. Journal of Mechanical Engineering, 2021, 57(15): 186-198. (in Chinese) doi: 10.3901/JME.2021.15.186 [5] ELMOUGHNI H M, YILMAZ A F, OZLEM K, et al. Machine-knitted seamless pneumatic actuators for soft robotics: design, fabrication, and characterization[J]. Actuators, 2021, 10(5): 94. doi: 10.3390/act10050094 [6] KIM H I, HAN M W, SONG S H, et al. Soft morphing hand driven by SMA tendon wire[J]. Composites Part B:Engineering, 2016, 105: 138-148. doi: 10.1016/j.compositesb.2016.09.004 [7] GONZALEZ C, LUMIA R. An IPMC microgripper with integrated actuator and sensing for constant finger-tip displacement[J]. Smart Materials and Structures, 2015, 24(5): 055011. doi: 10.1088/0964-1726/24/5/055011 [8] CHRISTIANSON C, GOLDBERG N N, DEHEYN D D, et al. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators[J]. Science Robotics, 2018, 3(17): eaat1893. doi: 10.1126/scirobotics.aat1893 [9] MIRVAKILI S M, HUNTER I W. A torsional artificial muscle from twisted nitinol microwire[C]//Proceedings Volume 10163, Electroactive Polymer Actuators and Devices (EAPAD) 2017. Portland: SPIE, 2017 [10] VALENTIN T M, DUBOIS E M, MACHNICKI C E, et al. 3D printed self-adhesive PEGDA-PAA hydrogels as modular components for soft actuators and microfluidics[J]. Polymer Chemistry, 2019, 10(16): 2015-2028. doi: 10.1039/C9PY00211A [11] XIE D S, MA Z, LIU J B, et al. Pneumatic artificial muscle based on novel winding method[J]. Actuators, 2021, 10(5): 100. doi: 10.3390/act10050100 [12] MAO S X, DONG E B, JIN H, et al. Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by SMAs[J]. Journal Of Bionic Engineering, 2014, 11(3): 400-411. doi: 10.1016/S1672-6529(14)60053-6 [13] ZHANG J H, WANG H, TANG J Q, et al. Modeling and design of a soft pneumatic finger for hand rehabilitation[C]//2015 IEEE International Conference on Information and Automation. Lijiang: IEEE, 2015: 2460-2465 [14] YU B H, YANG J W, DU R X, et al. A versatile pneumatic actuator based on scissor mechanisms: design, modeling, and experiments[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1288-1295. doi: 10.1109/LRA.2021.3057286 [15] GU G Y, GUPTA U, ZHU J, et al. Modeling of viscoelastic electromechanical behavior in a soft dielectric elastomer actuator[J]. IEEE Transactions on Robotics, 2017, 33(5): 1263-1271. doi: 10.1109/TRO.2017.2706285 [16] WANG Y Z, ZHU J. Artificial muscles for jaw movements[J]. Extreme Mechanics Letters, 2016, 6: 88-95. doi: 10.1016/j.eml.2015.12.007 [17] WANG H Q, CHEN J, LAU H Y K, et al. Motion planning based on learning from demonstration for multiple-segment flexible soft robots actuated by electroactive polymers[J]. IEEE Robotics and Automation Letters, 2016, 1(1): 391-398. doi: 10.1109/LRA.2016.2521384 [18] 孙沂琳, 张秋菊, 陈宵燕. 软体驱动器研究综述[J]. 机械设计, 2019, 36(2): 5-18. doi: 10.13841/j.cnki.jxsj.2019.02.002SUN Y L, ZHANG Q J, CHEN X Y. Overview of soft-bodied actuators[J]. Journal of Machine Design, 2019, 36(2): 5-18. (in Chinese) doi: 10.13841/j.cnki.jxsj.2019.02.002 [19] 吴枫, 韩亚丽, 李沈炎, 等. 柔性仿生驱动器研究综述[J]. 现代制造工程, 2020(7): 146-156.WU F, HAN Y L, LI S Y, et al. Review of soft-bionic actuator[J]. Modern Manufacturing Engineering, 2020(7): 146-156. (in Chinese) [20] MART M, TIMO S. Mobile robot system with pneumatic gripping hand[EB/OL]. FESTO, 2020. www. festo. com/bionics [21] CACUCCIOLO V, SHINTAKE J, KUWAJIMA Y, et al. Stretchable pumps for soft machines[J]. Nature, 2019, 572(7770): 516-519. doi: 10.1038/s41586-019-1479-6 [22] BELFORTE G, EULA G, IVANOV A, et al. Bellows textile muscle[J]. The Journal of The Textile Institute, 2014, 105(3): 356-364. doi: 10.1080/00405000.2013.840414 [23] LIU H B, GENG D X, LI J Y. Kinematics analysis and experimental study on three-dimensional space bending flexible pneumatic arm[J]. Advances in Mechanical Engineering, 2020, 12(12): 1687814020985154 [24] 王琦珑, 王伟, 郝大贤, 等. 编织型气动人工肌肉迟滞现象建模与应用[J]. 机械工程学报, 2019, 55(21): 73-80.WANG Q L, WANG W, HAO D X, et al. Hysteresis modeling and application of Mckibben pneumatic artificial muscles[J]. Journal of Mechanical Engineering, 2019, 55(21): 73-80. (in Chinese) [25] 陈煜宇, 刘磊, 李博, 等. 柔性驱动与刚度可调结构/功能一体化微创手术操作臂设计制造与性能研究[J]. 机械工程学报, 2018, 54(17): 53-61. doi: 10.3901/JME.2018.17.053CHEN Y Y, LIU L, LI B, et al. Design, fabrication and performance of a flexible minimally invasive surgery manipulator integrated with soft actuation and variable stiffness[J]. Journal of Mechanical Engineering, 2018, 54(17): 53-61. (in Chinese) doi: 10.3901/JME.2018.17.053 [26] POLYGERINOS P, WANG Z, GALLOWAY K C, et al. Soft robotic glove for combined assistance and at-home rehabilitation[J]. Robotics and Autonomous Systems, 2015, 73: 135-143. doi: 10.1016/j.robot.2014.08.014 [27] MIRVAKILI S M, HUNTER I W. Artificial muscles: mechanisms, applications, and challenges[J]. Advanced Materials, 2018, 30(6): 1704407. doi: 10.1002/adma.201704407 [28] ÖLANDER A. An electrochemical investigation of solid silver-gold alloys[J]. Journal of the American Chemical Society, 1931, 53(10): 3577-3588. doi: 10.1021/ja01361a001 [29] UMEDACHI T, VIKAS V, TRIMMER B A. Highly deformable 3-D printed soft robot generating inching and crawling locomotions with variable friction legs[C]//2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013: 4590-4595 [30] SEOK S, ONAL C D, CHO K J, et al. Meshworm: A peristaltic soft robot with antagonistic nickel titanium coil actuators[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(5): 1485-1497. doi: 10.1109/TMECH.2012.2204070 [31] SULEMAN A, CRAWFORD C. Design and testing of a biomimetic tuna using shape memory alloy induced propulsion[J]. Computers & Structures, 2008, 86(3-5): 491-499. [32] 杨浩. 基于形状记忆合金弹簧的柔性驱动模块的设计与控制研究[D]. 合肥: 中国科学技术大学, 2019YANG H. Design and control of flexible drive module based on shape memory alloy spring[D]. Hefei: University of Science and Technology of China, 2019. (in Chinese) [33] YANG Y, CHEN Y H, WEI Y, et al. 3D printing of shape memory polymer for functional part fabrication[J]. International Journal of Advanced Manufacturing Technology, 2016, 84(9-12): 2079-2095. doi: 10.1007/s00170-015-7843-2 [34] ZHANG H J, XIA H S, ZHAO Y. Light-controlled complex deformation and motion of shape-memory polymers using a temperature gradient[J]. ACS Macro Letters, 2014, 3(9): 940-943. doi: 10.1021/mz500520b [35] ZHAO P F, CAI Y, LIU C, et al. Study on the bio-inspired electrochromic device enabled via dielectric elastomer actuator[J]. Optical Materials, 2021, 111: 110569. doi: 10.1016/j.optmat.2020.110569 [36] RÖNTGEN W C. Ueber Töne, welche durch intermittirende Bestrahlung eines Gases entstehen[J]. Annalen der Physik, 1881, 248(1): 155-159. doi: 10.1002/andp.18812480114 [37] PELRINE R E, KORNBLUH R D, JOSEPH J P. Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation[J]. Sensors and Actuators A:Physical, 1998, 64(1): 77-85. doi: 10.1016/S0924-4247(97)01657-9 [38] FRANKE M, EHRENHOFER A, LAHIRI S, et al. Dielectric elastomer actuator driven soft robotic structures with bioinspired skeletal and muscular reinforcement[J]. Frontiers in Robotics and AI, 2020, 7: 510757. doi: 10.3389/frobt.2020.510757 [39] CHEN Y F, ZHAO H C, MAO J, et al. Controlled flight of a microrobot powered by soft artificial muscles[J]. Nature, 2019, 575(7782): 324-329. doi: 10.1038/s41586-019-1737-7 [40] SADEGHIPOUR K, SALOMON R, NEOGI S. Development of a novel electrochemically active membrane and 'smart' material based vibration sensor/damper[J]. Smart Materials and Structures, 1992, 1(2): 172-179. doi: 10.1088/0964-1726/1/2/012 [41] CHEN Z. A review on robotic fish enabled by ionic polymer-metal composite artificial muscles[J]. Robotics and Biomimetics, 2017, 4(1): 24. doi: 10.1186/s40638-017-0081-3 [42] JO C, PUGAL D, OH I K, et al. Recent advances in ionic polymer-metal composite actuators and their modeling and applications[J]. Progress in Polymer Science, 2013, 38(7): 1037-1066. doi: 10.1016/j.progpolymsci.2013.04.003 [43] SEGALMAN D J, WITKOWSKI W R, ADOLF D B, et al. Theory and application of electrically controlled polymeric gels[J]. Smart Materials and Structures, 1992, 1(1): 95-100. doi: 10.1088/0964-1726/1/1/015 [44] GUO D J, HAN Y B, HUANG J J, et al. Hydrophilic poly(vinylidene fluoride) film with enhanced inner channels for both water- and ionic liquid-driven ion-exchange polymer metal composite actuators[J]. ACS Applied Materials & Interfaces, 2019, 11(2): 2386-2397. [45] CHEN Z, SHATARA S, TAN X B. Modeling of biomimetic robotic fish propelled by an ionic polymer-metal composite caudal fin[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(3): 448-459. doi: 10.1109/TMECH.2009.2027812 [46] MOSCHOU E A, PETEU S F, BACHAS L G, et al. Artificial muscle material with fast electroactuation under neutral pH conditions[J]. Chemistry of Materials, 2004, 16(12): 2499-2502. doi: 10.1021/cm049921p [47] YANG C, LIU Z, CHEN C, et al. Reduced graphene oxide-containing smart hydrogels with excellent electro-response and mechanical properties for soft actuators[J]. ACS Applied Materials & Interfaces, 2017, 9(18): 15758-15767. [48] ZHENG J, XIAO P, LE X X, et al. Mimosa inspired bilayer hydrogel actuator functioning in multi-environment[J]. Journal of Materials Chemistry C, 2018, 6(6): 1320-1327. doi: 10.1039/C7TC04879C [49] BERS D M, ZHU Y. Excitation-contraction coupling and cardiac contractile force[M]. Springer Link, 2010 [50] ZIMMERMANN W, MELNYCHENKO I, ESCHENHAGEN T. Engineered heart tissue for regeneration of diseased hearts[J]. Biomaterials, 2004, 25(9): 1639-1647. doi: 10.1016/S0142-9612(03)00521-0 [51] TANAKA Y, SATO K, SHIMIZU T, et al. A micro-spherical heart pump powered by cultured cardiomyocytes[J]. Lab on A Chip, 2007, 7(2): 207-212. doi: 10.1039/B612082B [52] FEINBERG A W, FEIGEL A, SHEVKOPLYAS S S, et al. Muscular Thin Films for Building Actuators and Powering Devices[J]. Science, 2007, 317(5843): 1366-1370. doi: 10.1126/science.1146885 [53] AKIYAMA Y, ODAIRA K, SAKIYAMA K, et al. Rapidly-moving insect muscle-powered microrobot and its chemical acceleration[J]. Biomedical Microdevices, 2012, 14(6): 979-986. doi: 10.1007/s10544-012-9700-5 [54] PARK S J, GAZZOLA M, PARK K S, et al. Phototactic guidance of a tissue-engineered soft-robotic ray[J]. Science, 2016, 353(6295): 158-162. doi: 10.1126/science.aaf4292 [55] LI W L, MATSUHISA N, LIU Z Y, et al. An on-demand plant-based actuator created using conformable electrodes[J]. Nature Electronics, 2021, 4(2): 134-142. doi: 10.1038/s41928-020-00530-4 -



 点击查看大图
点击查看大图
计量
- 文章访问数: 204
- HTML全文浏览量: 304
- PDF下载量: 89
- 被引次数: 0
