


Submission
 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial EntryOnline Production System

SearchAdvanced Search
Journal Search
Keyword Search
Notes to Authors
Links
 Email Alert
Email Alert RSS
RSS
Responsible Institution: Ministry of Industry and Information Technology of the People's Republic of China
Sponsor: Northwestern Polytechnical University
Indexed Database: Core Journal in Chinese Science Citation Database (CSCD) National Chinese Core Journals China Science and Technology Core Journals (Statistical Source Journals of Chinese Scientific and Technological Papers)
Contact: Tel: 029-88493054 E-mail: mst@nwpu.edu.cn
Articles in press have been peer-reviewed and accepted, which are not yet assigned to volumes /issues, but are citable by Digital Object Identifier (DOI).
Display Method:
, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190270
 PDF 1230KB
PDF 1230KB
Abstract:
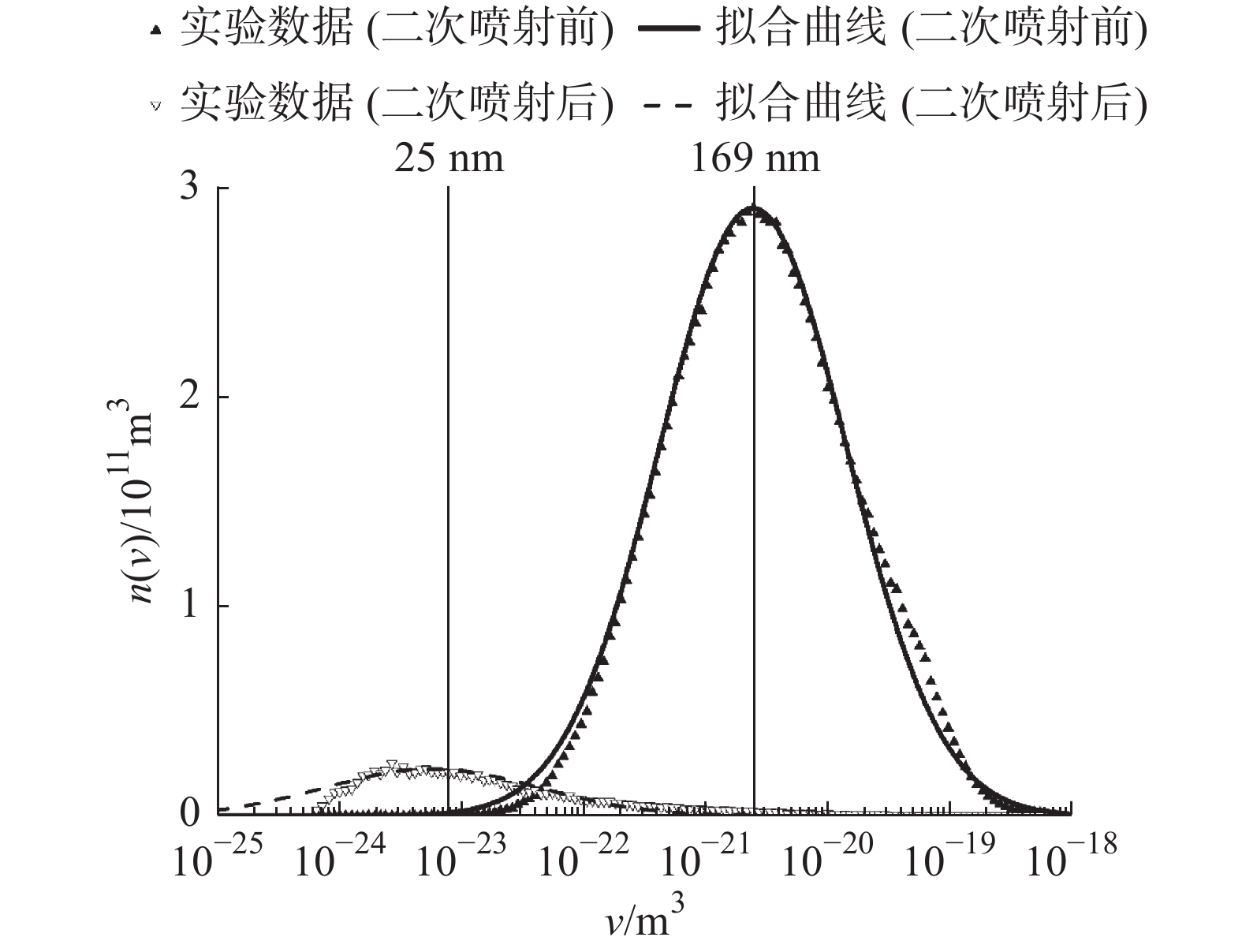
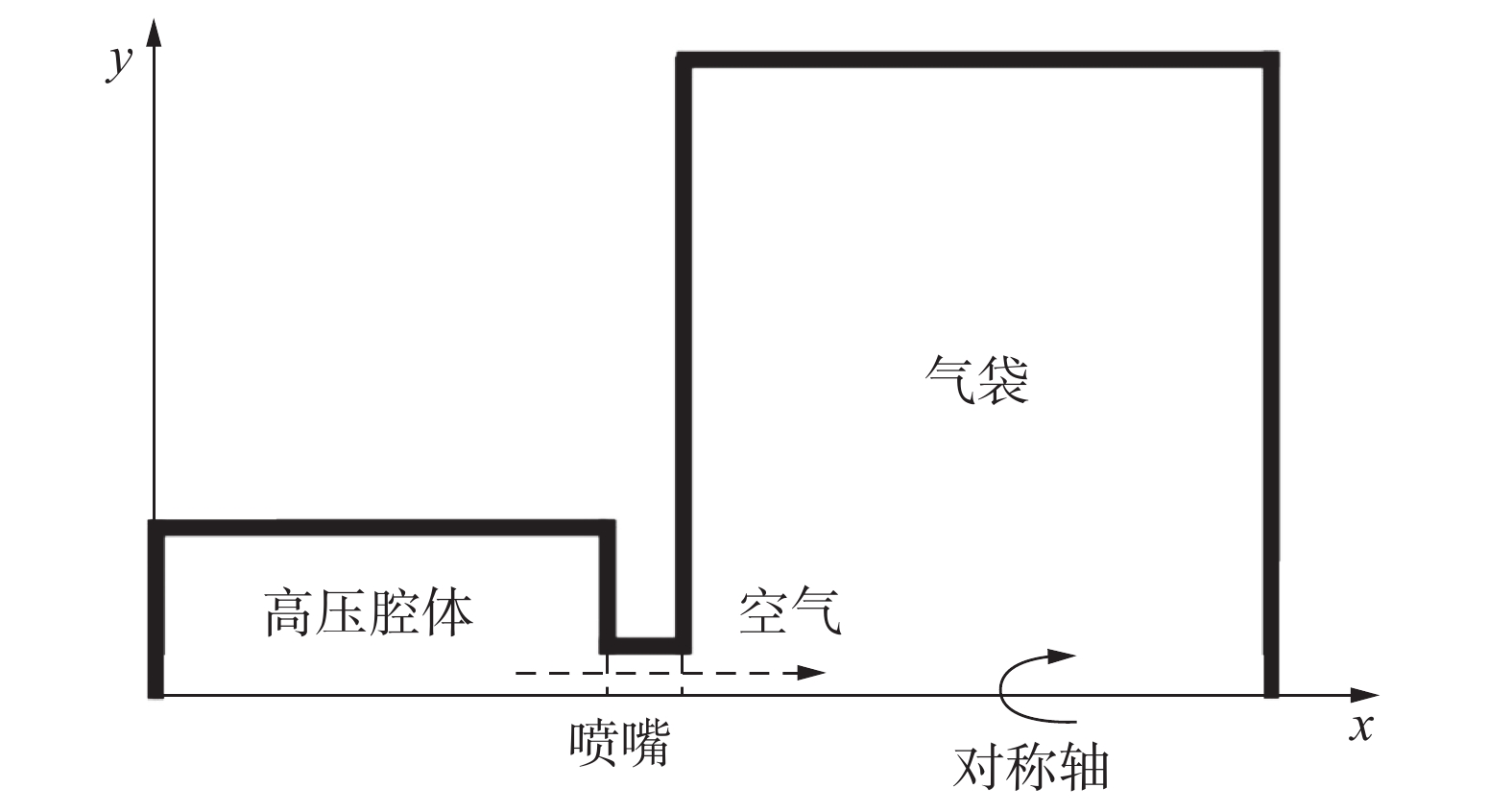
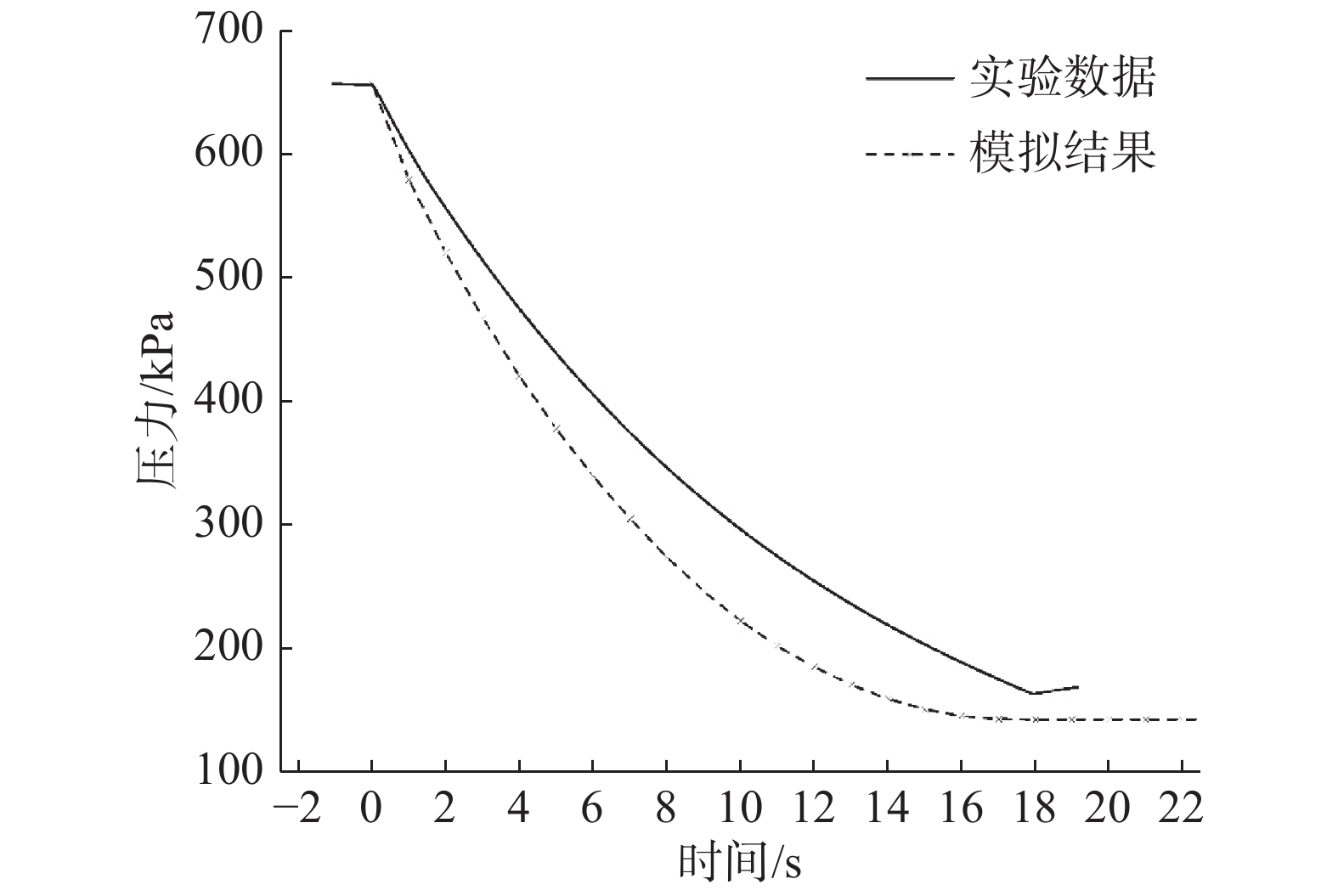
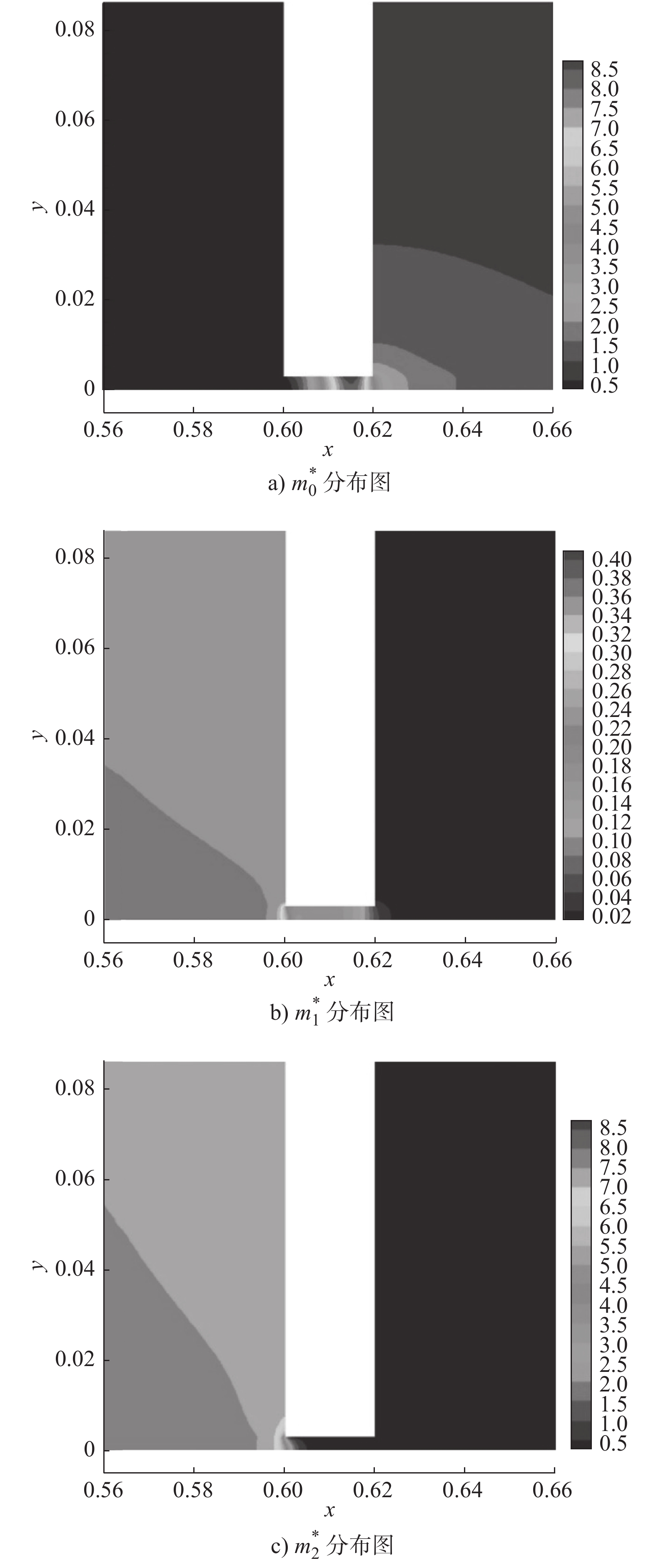
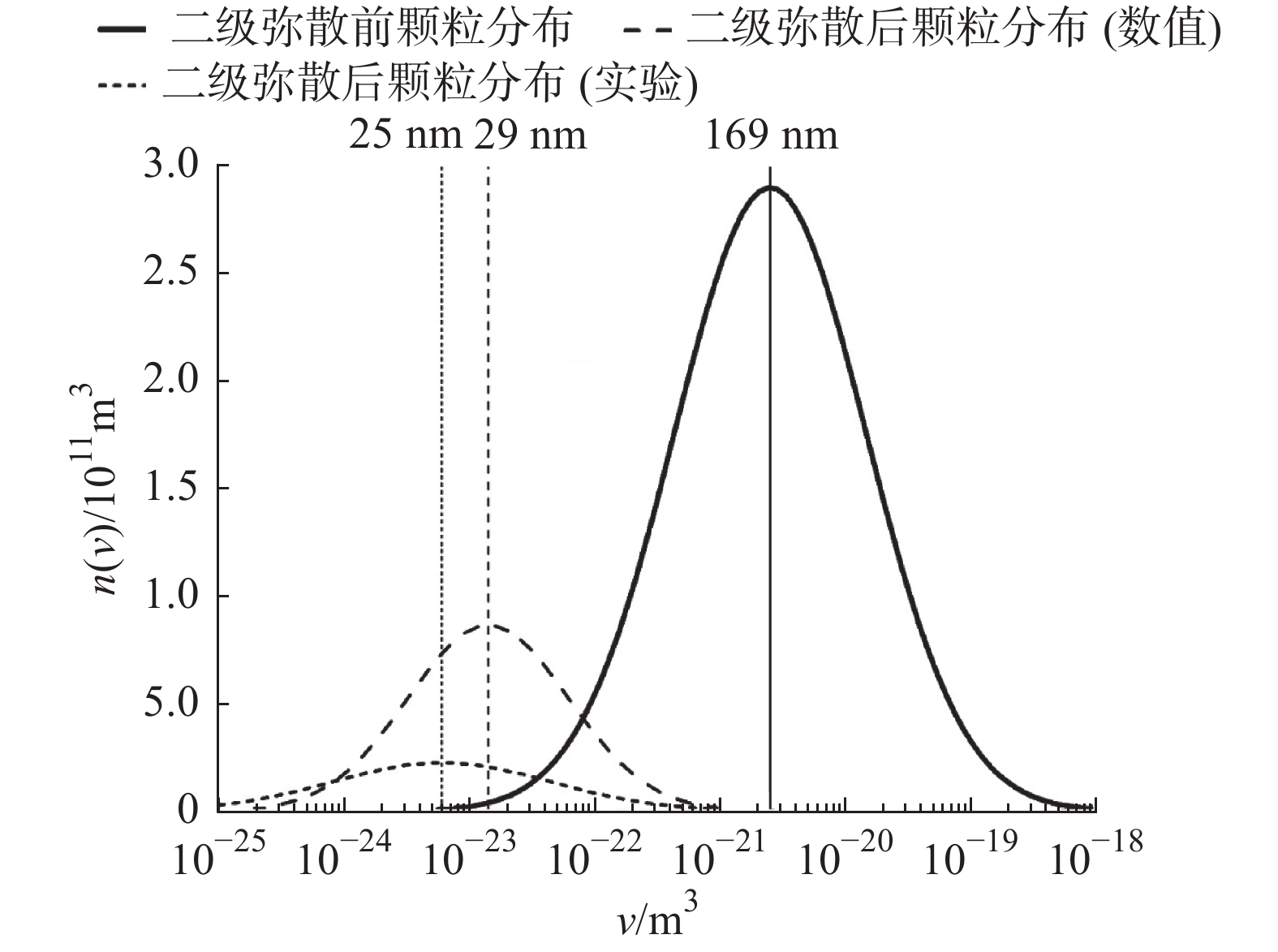
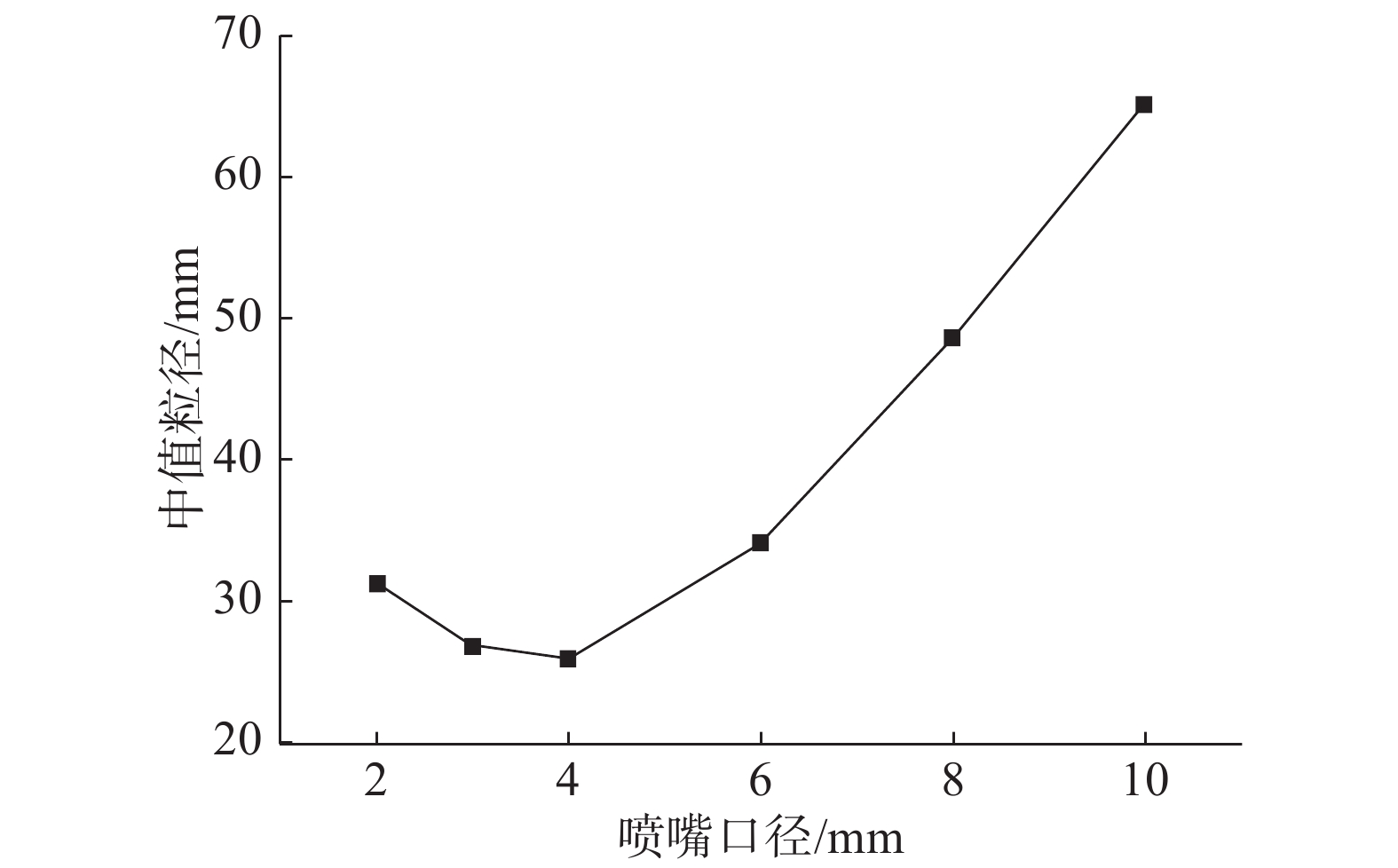
A continuous dispersing device for deagglomerating ultrafine particles is established. The experimental results show that nanoparticles can be dispersed to the primary particle size range via a continuous jet dispersion system. In order to investigate the mechanism and high-pressure dispersion characteristics of high pressure dispersion, the secondary jet dispersion of dry-powder nanoparticles was modeled and numerical simulated. The results show that numerical results of dynamic pressure profile agree with experiments. The particle number density decreases along the flow direction, and the experimental data is lower than the simulation results. The high pressure dispersing nozzle should not be too long to avoid re-agglomeration of the particles when passing through the nozzle. The aspect ratio of nozzle near 2.5 can produce the maximum shear rate at the jet outlet to obtain the best particle dispersion effect.
A continuous dispersing device for deagglomerating ultrafine particles is established. The experimental results show that nanoparticles can be dispersed to the primary particle size range via a continuous jet dispersion system. In order to investigate the mechanism and high-pressure dispersion characteristics of high pressure dispersion, the secondary jet dispersion of dry-powder nanoparticles was modeled and numerical simulated. The results show that numerical results of dynamic pressure profile agree with experiments. The particle number density decreases along the flow direction, and the experimental data is lower than the simulation results. The high pressure dispersing nozzle should not be too long to avoid re-agglomeration of the particles when passing through the nozzle. The aspect ratio of nozzle near 2.5 can produce the maximum shear rate at the jet outlet to obtain the best particle dispersion effect.

, Available online ,
doi: 10.13433/j.cnki.1003-8728.20200111
Abstract:
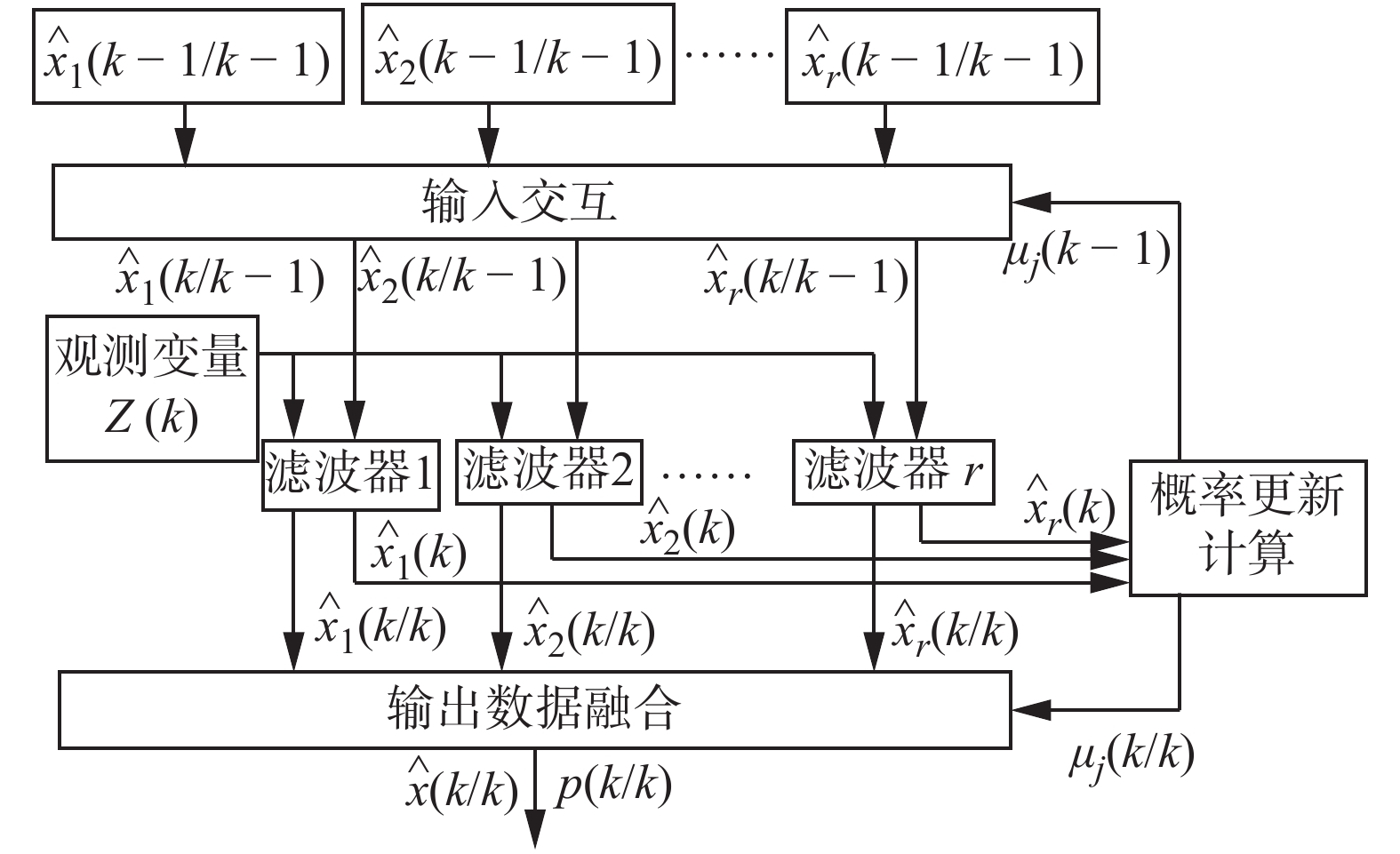
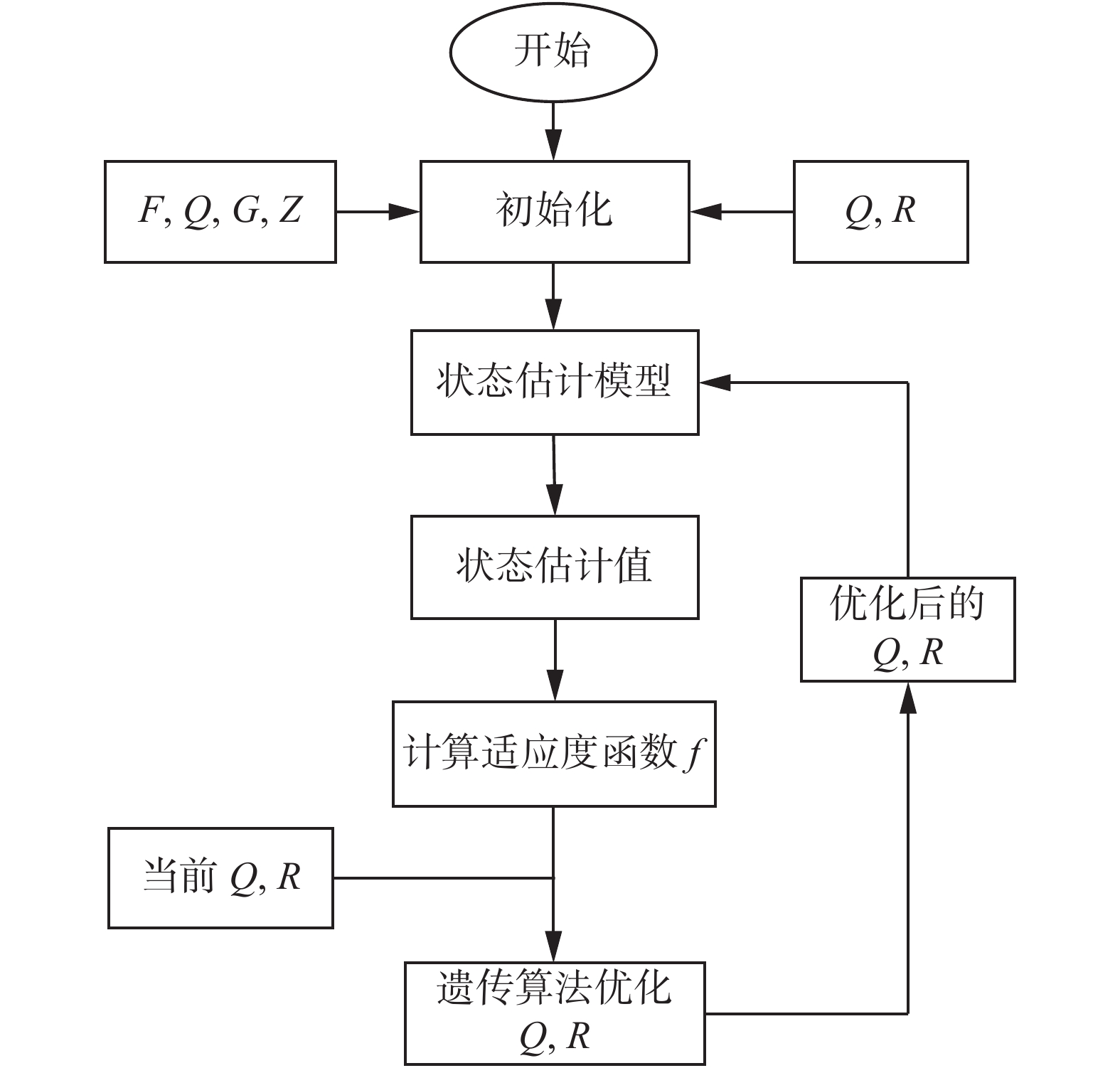
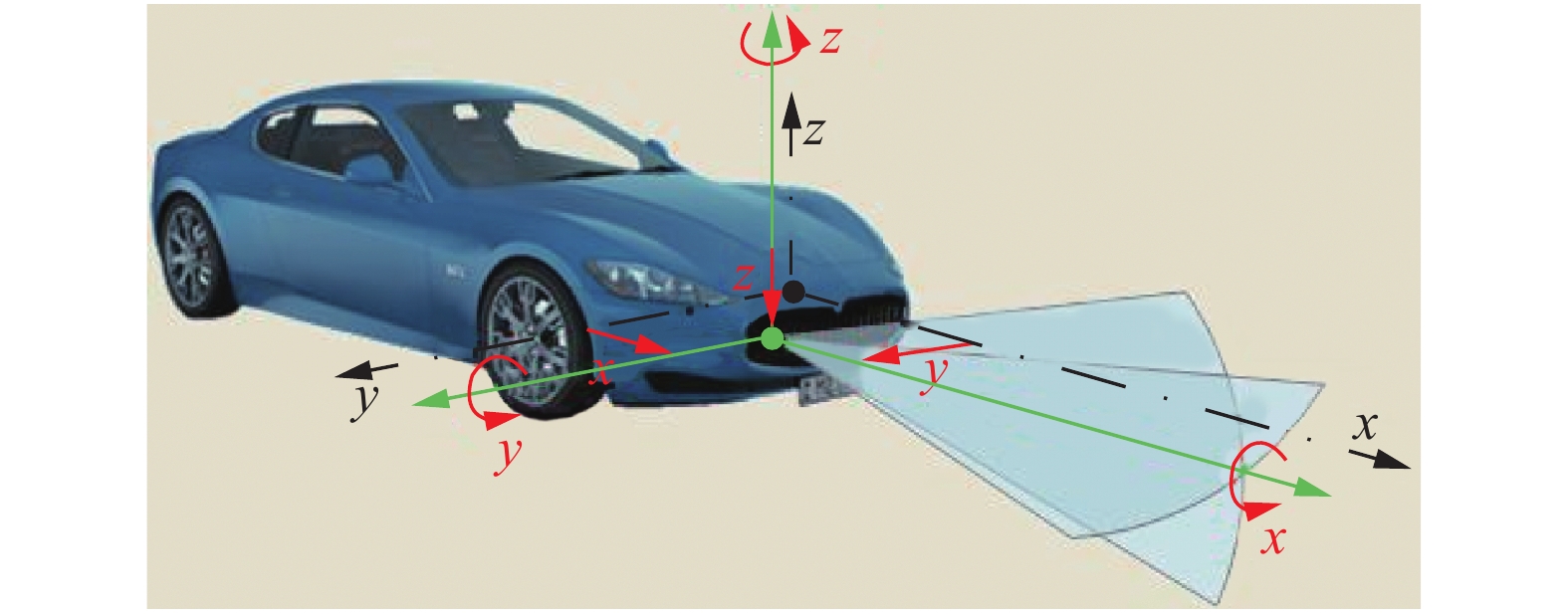
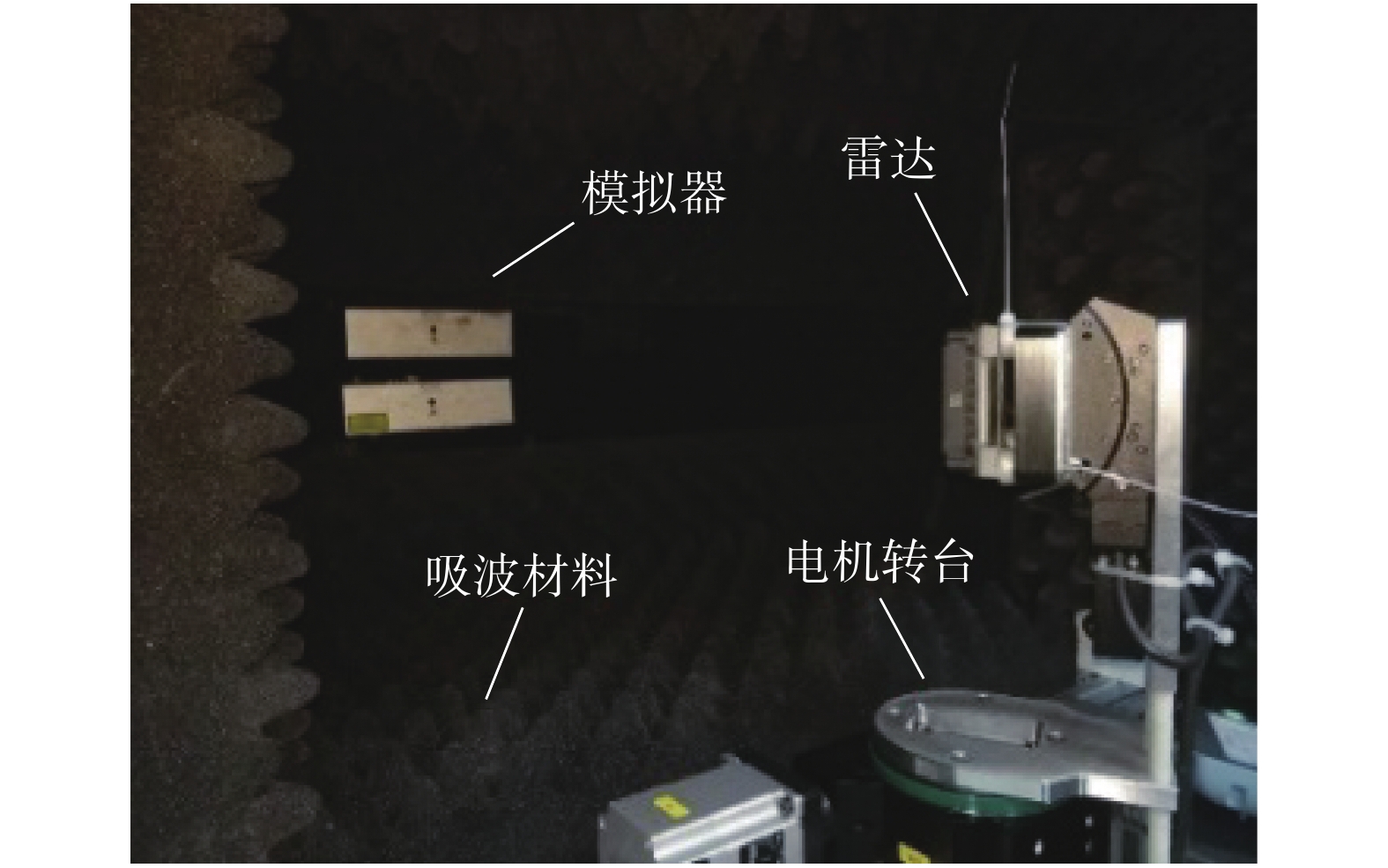
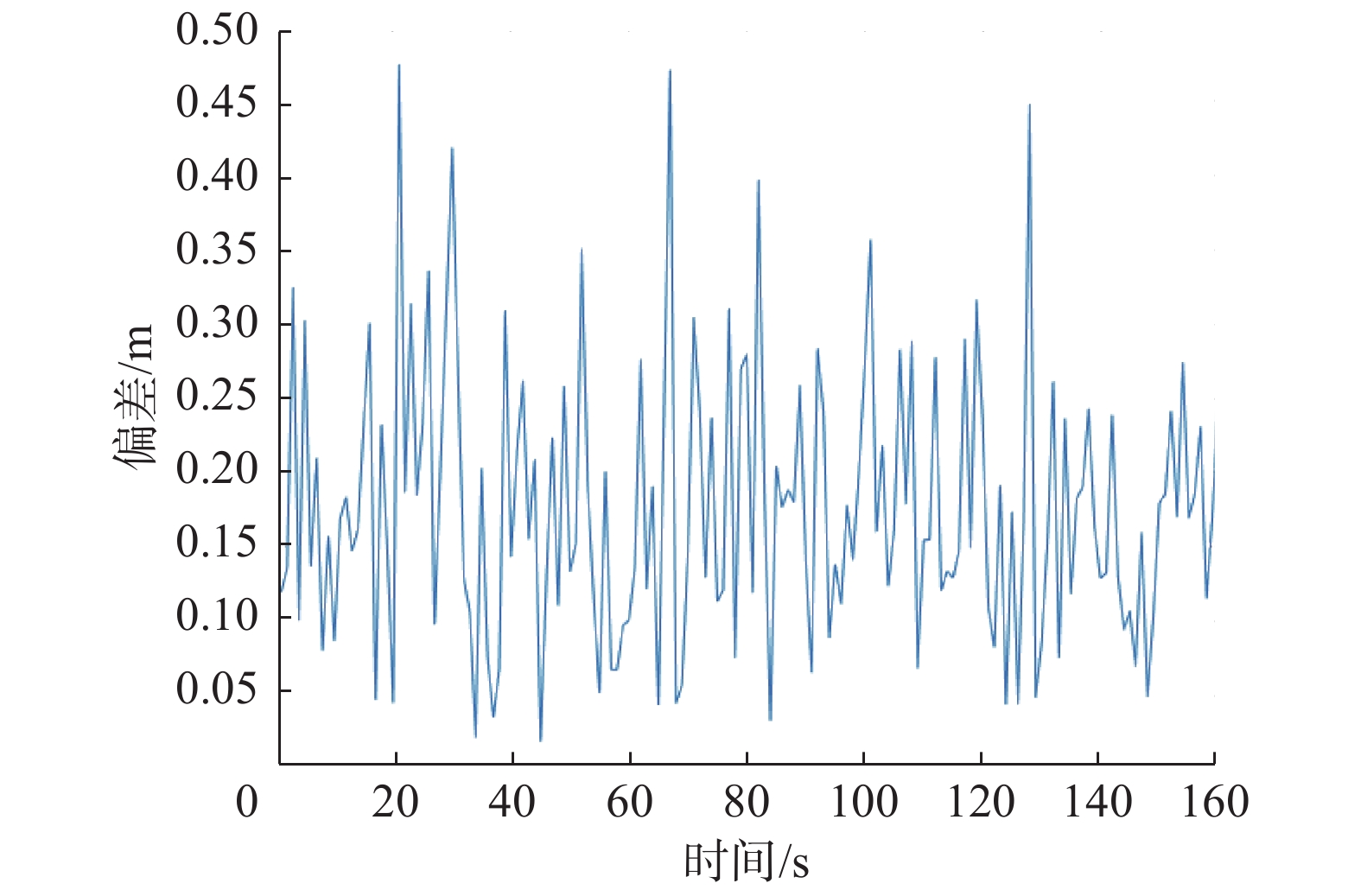
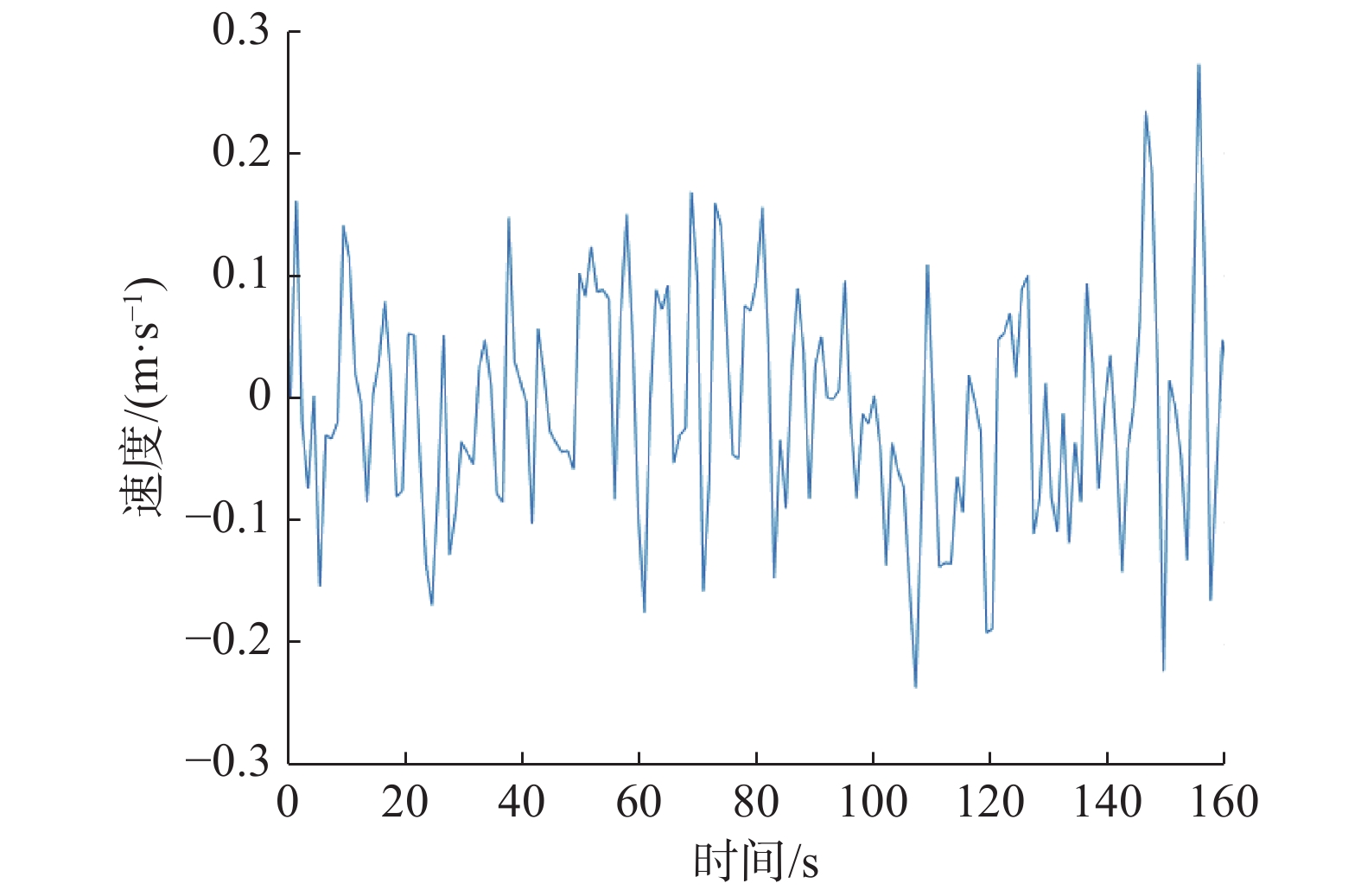
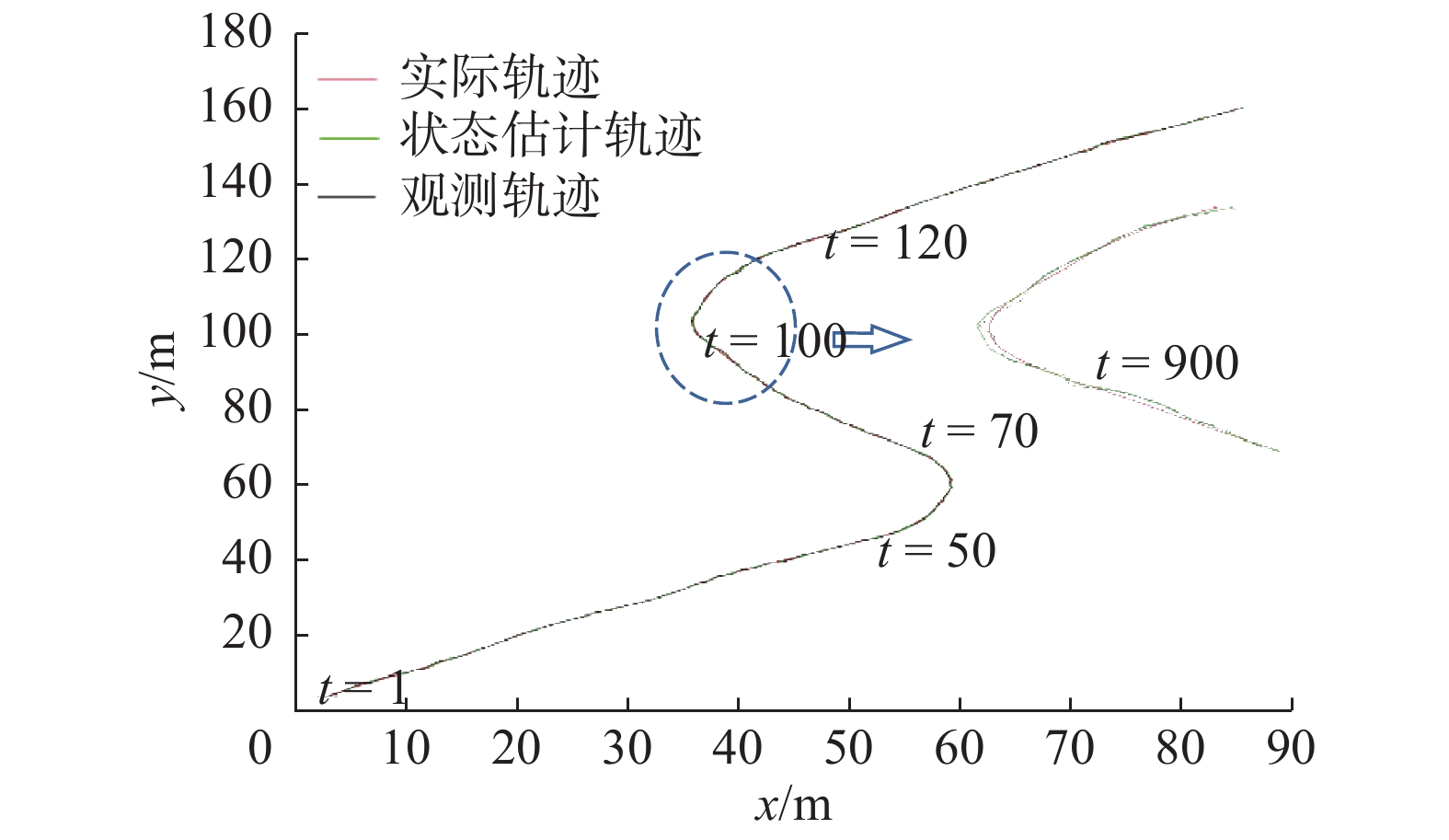
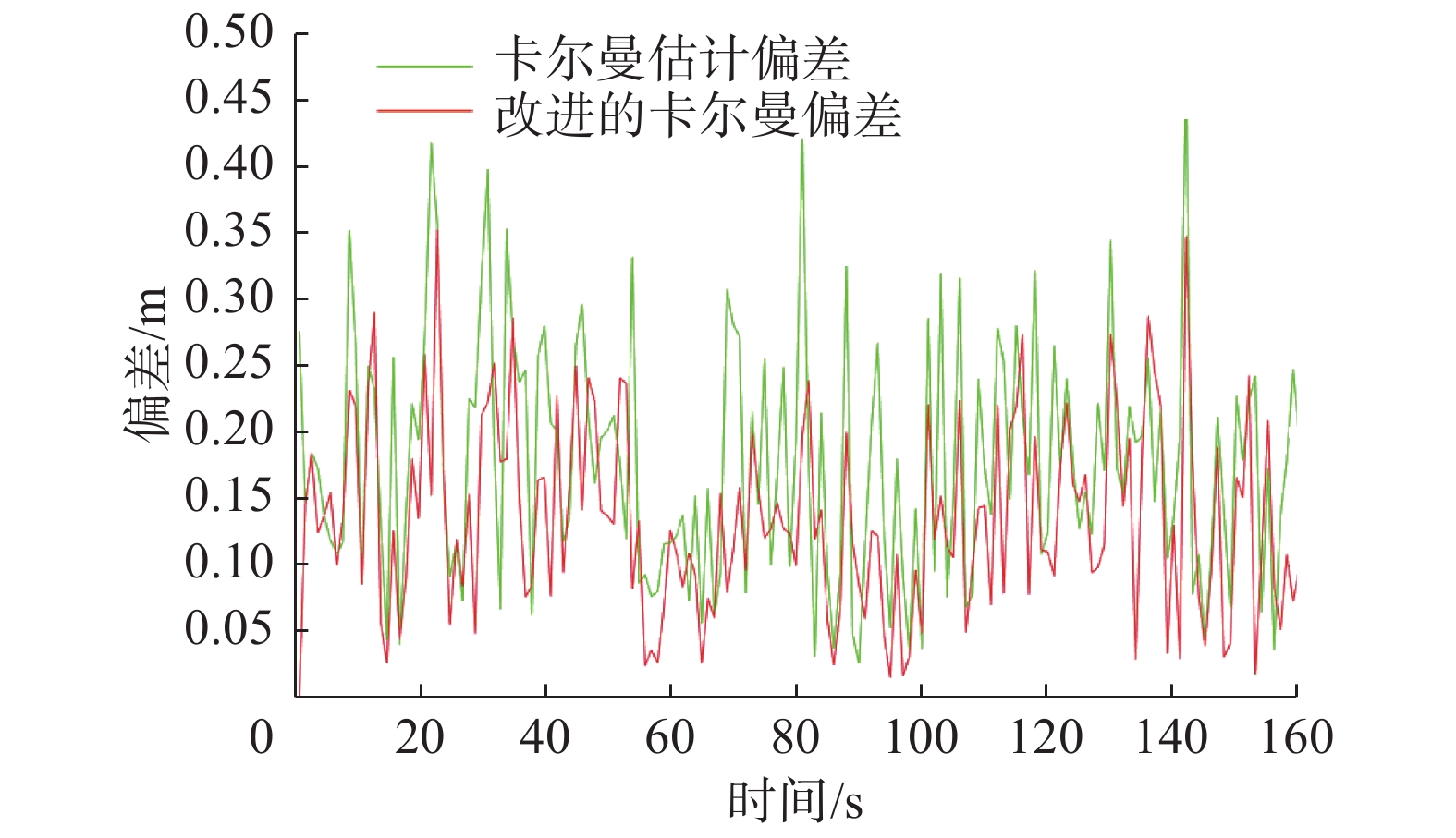
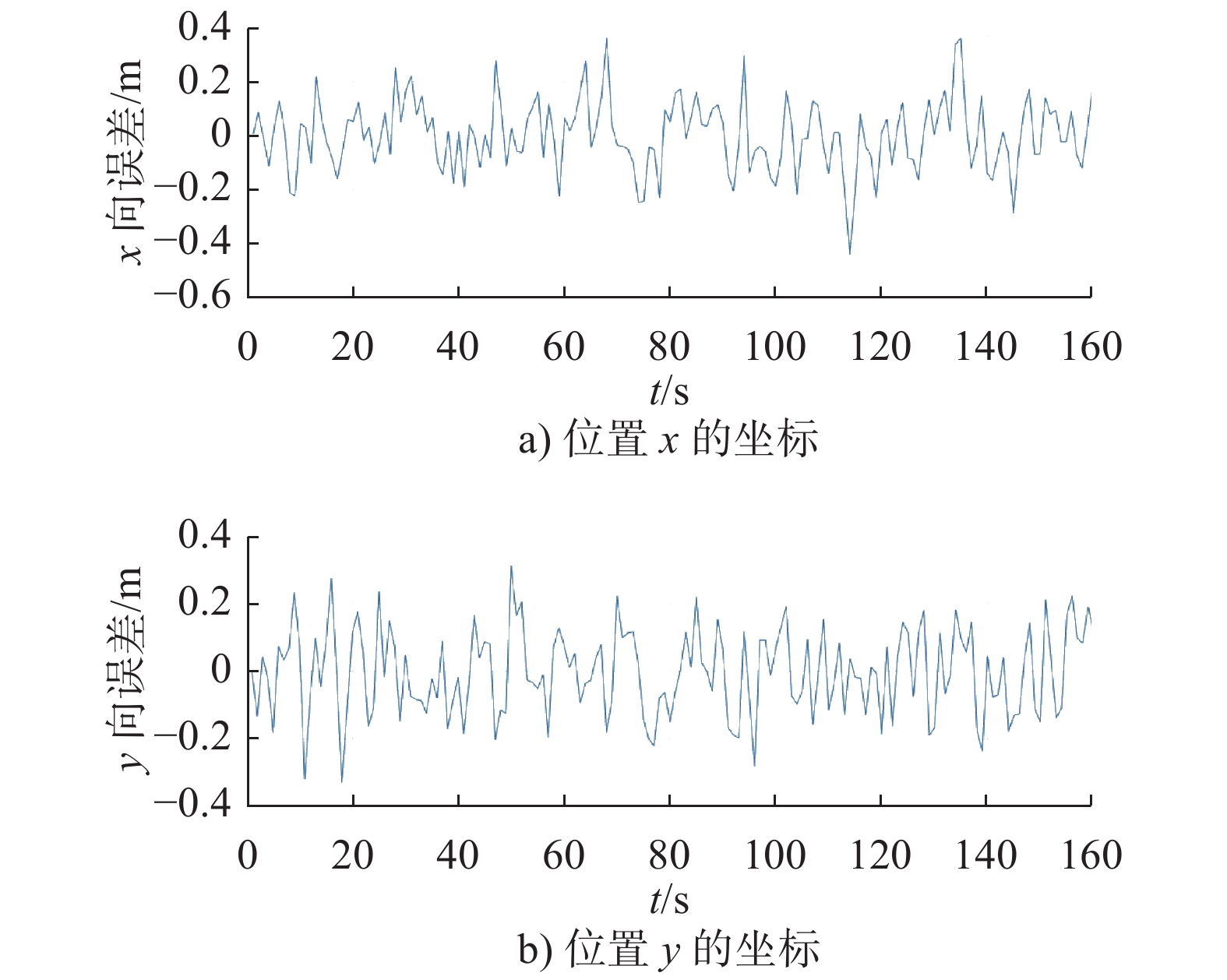
In order to reduce the influence of noise on millimeter wave radar data, an interactive Kalman filter algorithm is used to process the collected data and the optimal value of the data is obtained. The motion state equation of the target vehicle was constructed according to its motion trajectory, and the state matrix and observation matrix in different states were determined. Interactive multi-model filter was designed. The virtual traffic scene was built with dSPACE scene simulation software. The data acquisition of moving targets was realized with hardware-in-the-loop technology, and the radar data noise was analyzed and calculated. During the filtering process, the genetic algorithm was used to continuously optimize the process noise and measurement noise. The filtering performance of the algorithm was verified by the set target motion trajectory. The average error of the radar data obtained by the filtering algorithm was less than 0.1 m. The noise of the radar data was reduced, the positioning and tracking capabilities of the target vehicle were improved.
In order to reduce the influence of noise on millimeter wave radar data, an interactive Kalman filter algorithm is used to process the collected data and the optimal value of the data is obtained. The motion state equation of the target vehicle was constructed according to its motion trajectory, and the state matrix and observation matrix in different states were determined. Interactive multi-model filter was designed. The virtual traffic scene was built with dSPACE scene simulation software. The data acquisition of moving targets was realized with hardware-in-the-loop technology, and the radar data noise was analyzed and calculated. During the filtering process, the genetic algorithm was used to continuously optimize the process noise and measurement noise. The filtering performance of the algorithm was verified by the set target motion trajectory. The average error of the radar data obtained by the filtering algorithm was less than 0.1 m. The noise of the radar data was reduced, the positioning and tracking capabilities of the target vehicle were improved.







, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190260
Abstract:
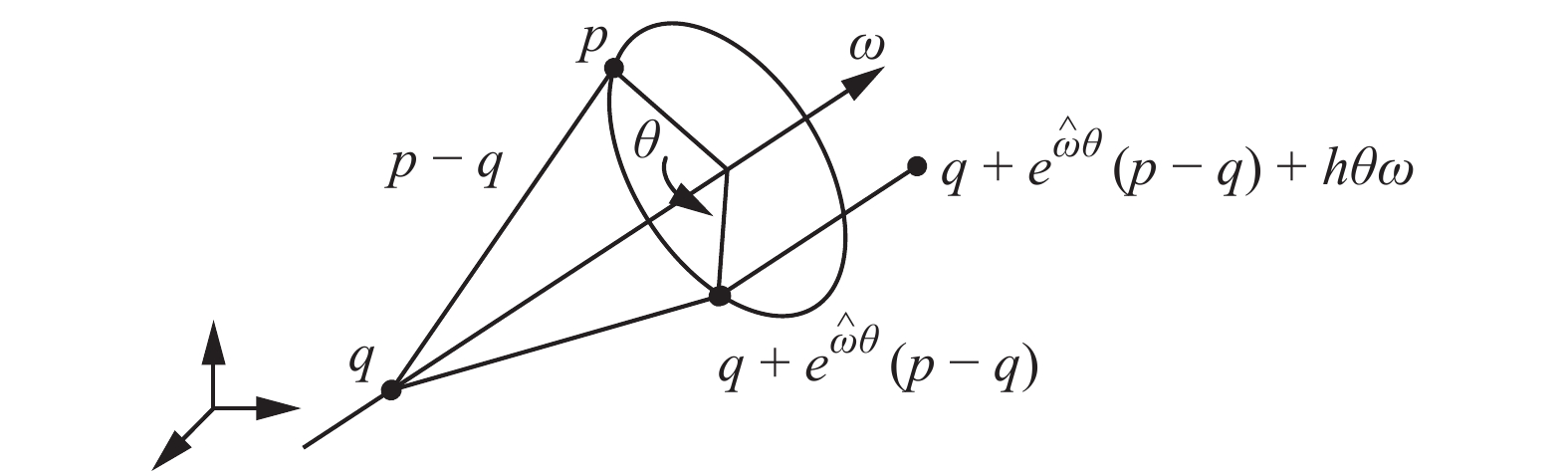
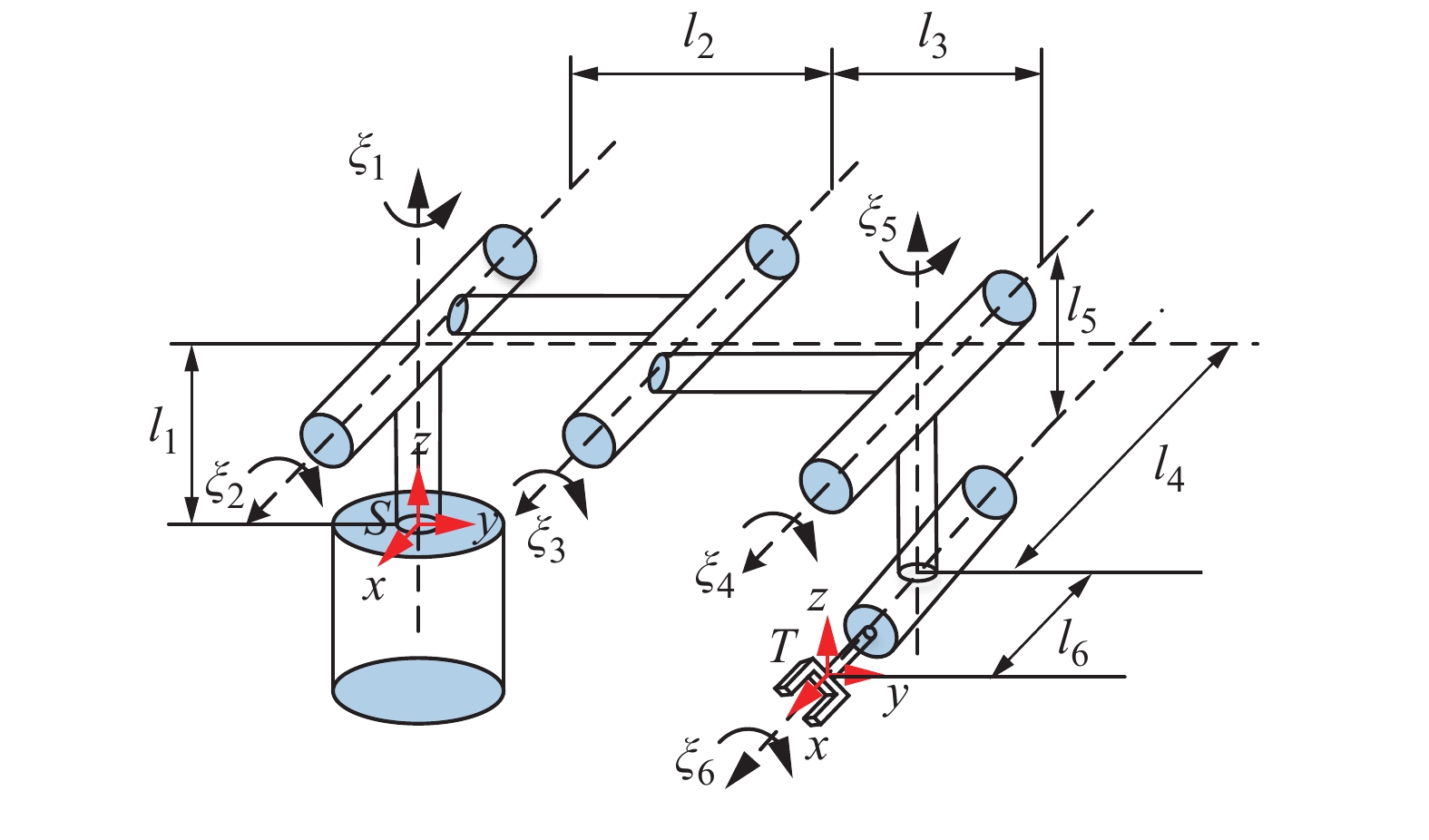
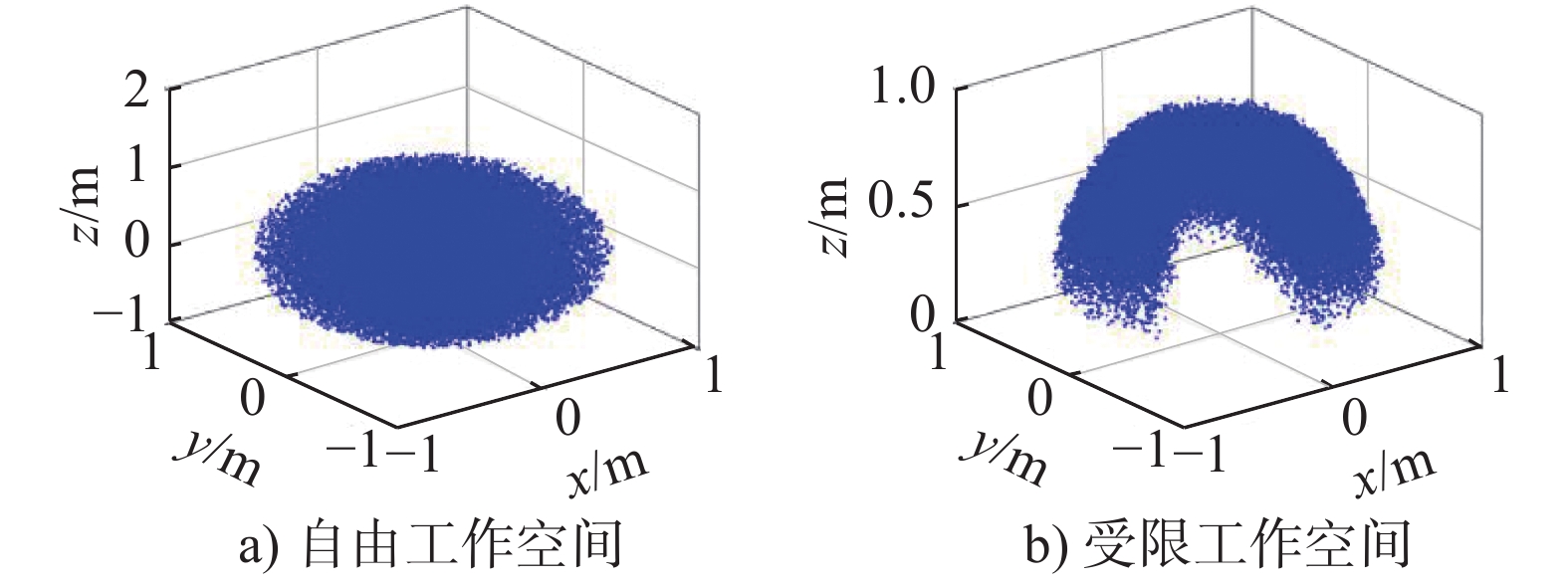
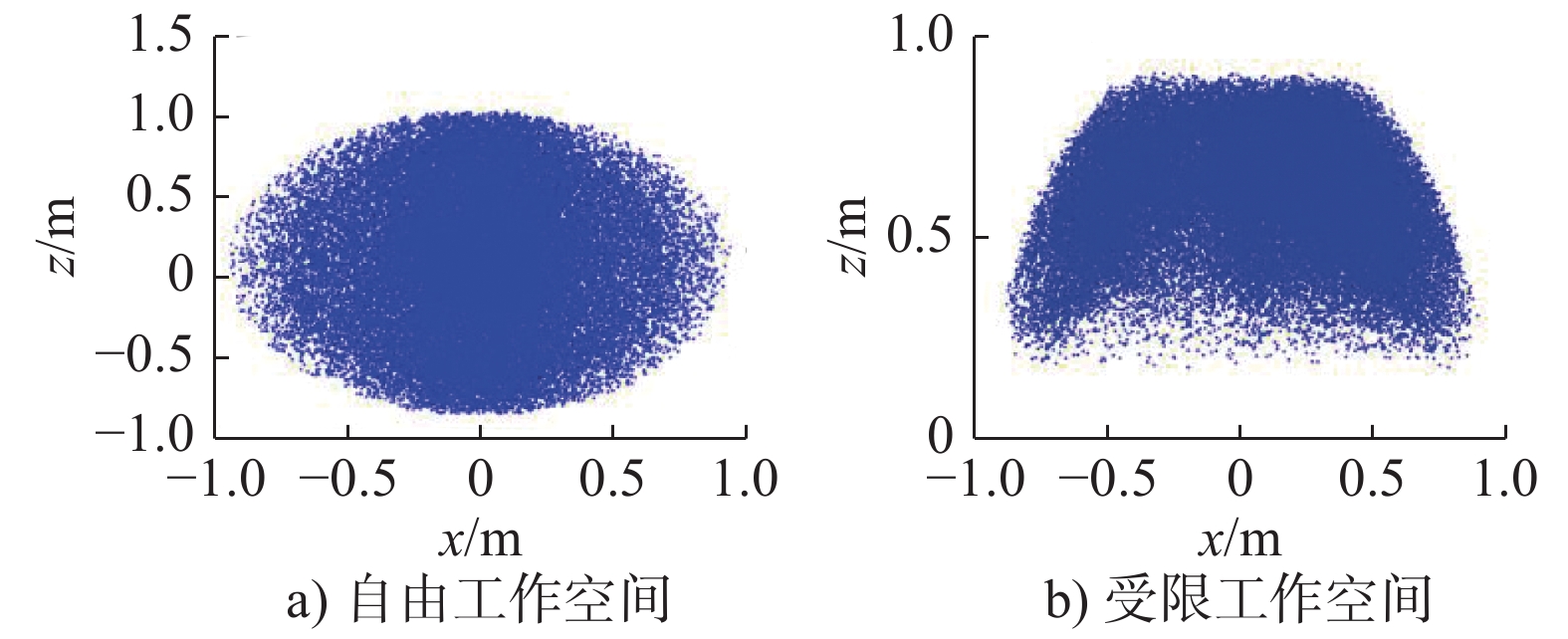
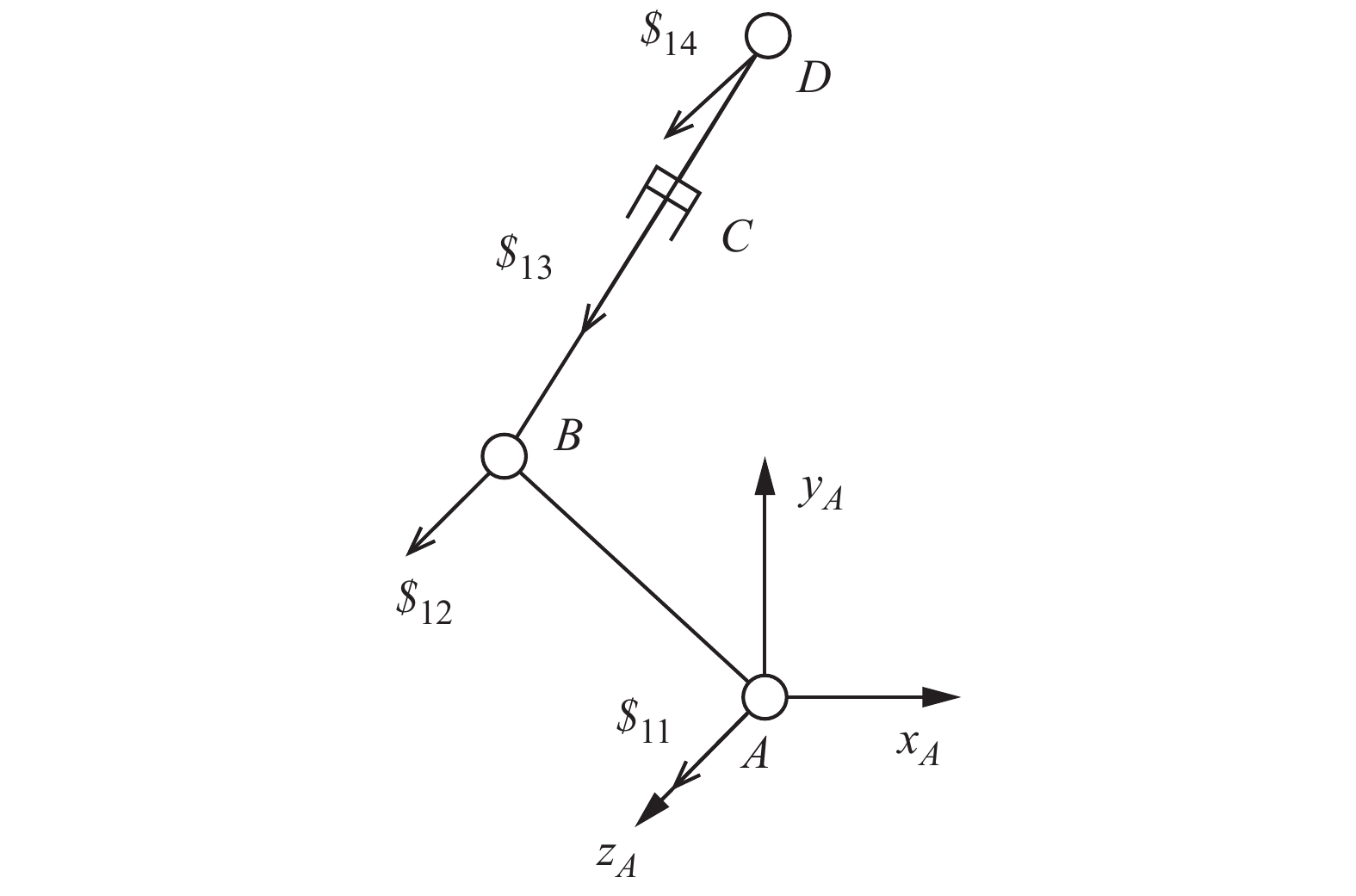
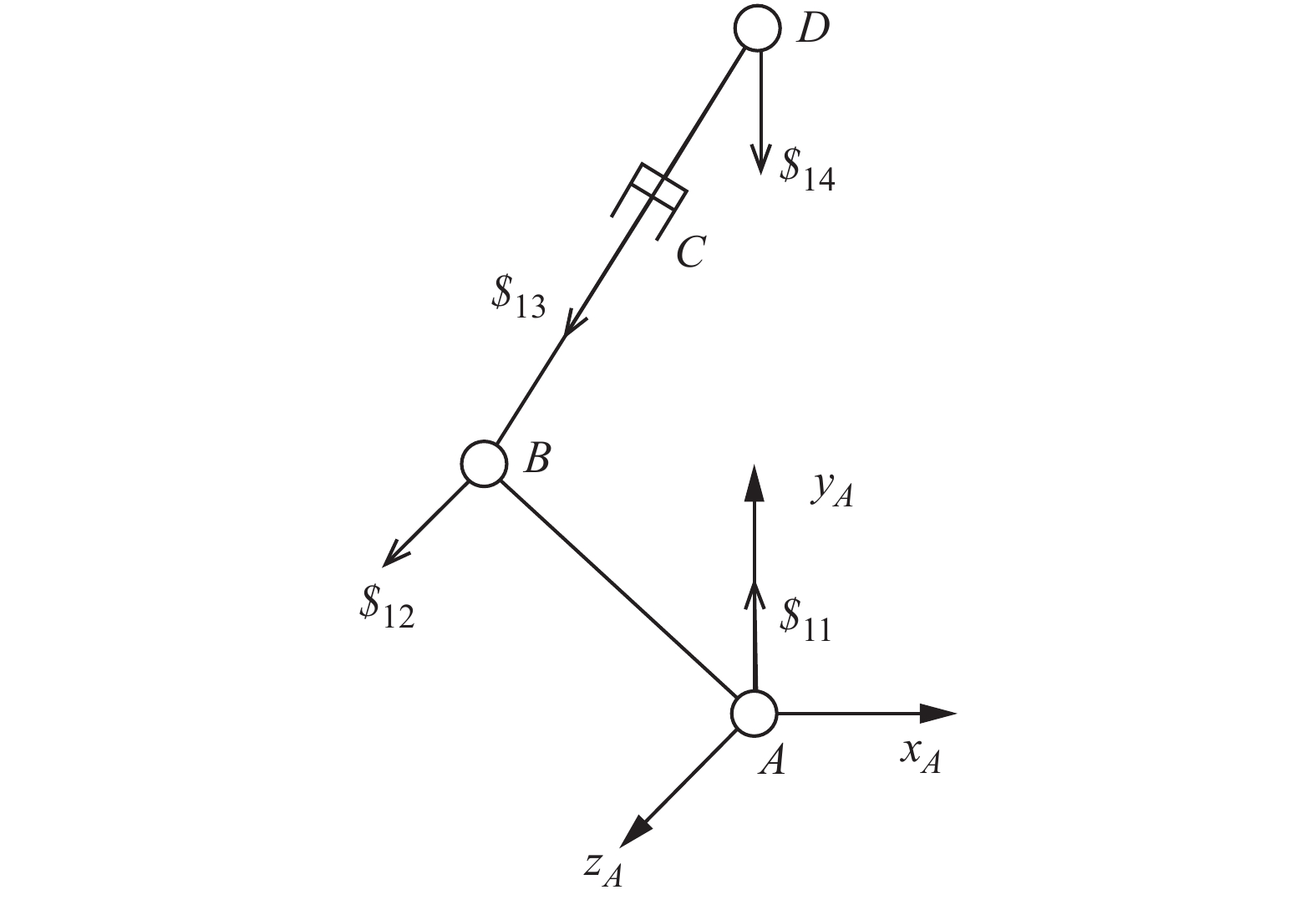
In order to determine the sewing robot′s workspace so as to meet its structural conditions and to improve the planning efficiency before its operation,its kinematics model is established with the screw theory.The correctness of the kinematic model is verified with the Adams software. The Monte Carlo method together with the control variable method is used to analyze the workspace that has regional restrictions and to determine the optimal range of rotation angles for each joint of the sewing robot in its actual working environment. The free and limited conditions of the cloud map of its workspace are simulated with the MATLAB. The simulation results show that the joint rotation angle range determined in this paper satisfies the actual workspace requirements of the sewing robot and provides a theoretical basis for the follow-up research of it.
In order to determine the sewing robot′s workspace so as to meet its structural conditions and to improve the planning efficiency before its operation,its kinematics model is established with the screw theory.The correctness of the kinematic model is verified with the Adams software. The Monte Carlo method together with the control variable method is used to analyze the workspace that has regional restrictions and to determine the optimal range of rotation angles for each joint of the sewing robot in its actual working environment. The free and limited conditions of the cloud map of its workspace are simulated with the MATLAB. The simulation results show that the joint rotation angle range determined in this paper satisfies the actual workspace requirements of the sewing robot and provides a theoretical basis for the follow-up research of it.




, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190255
Abstract:
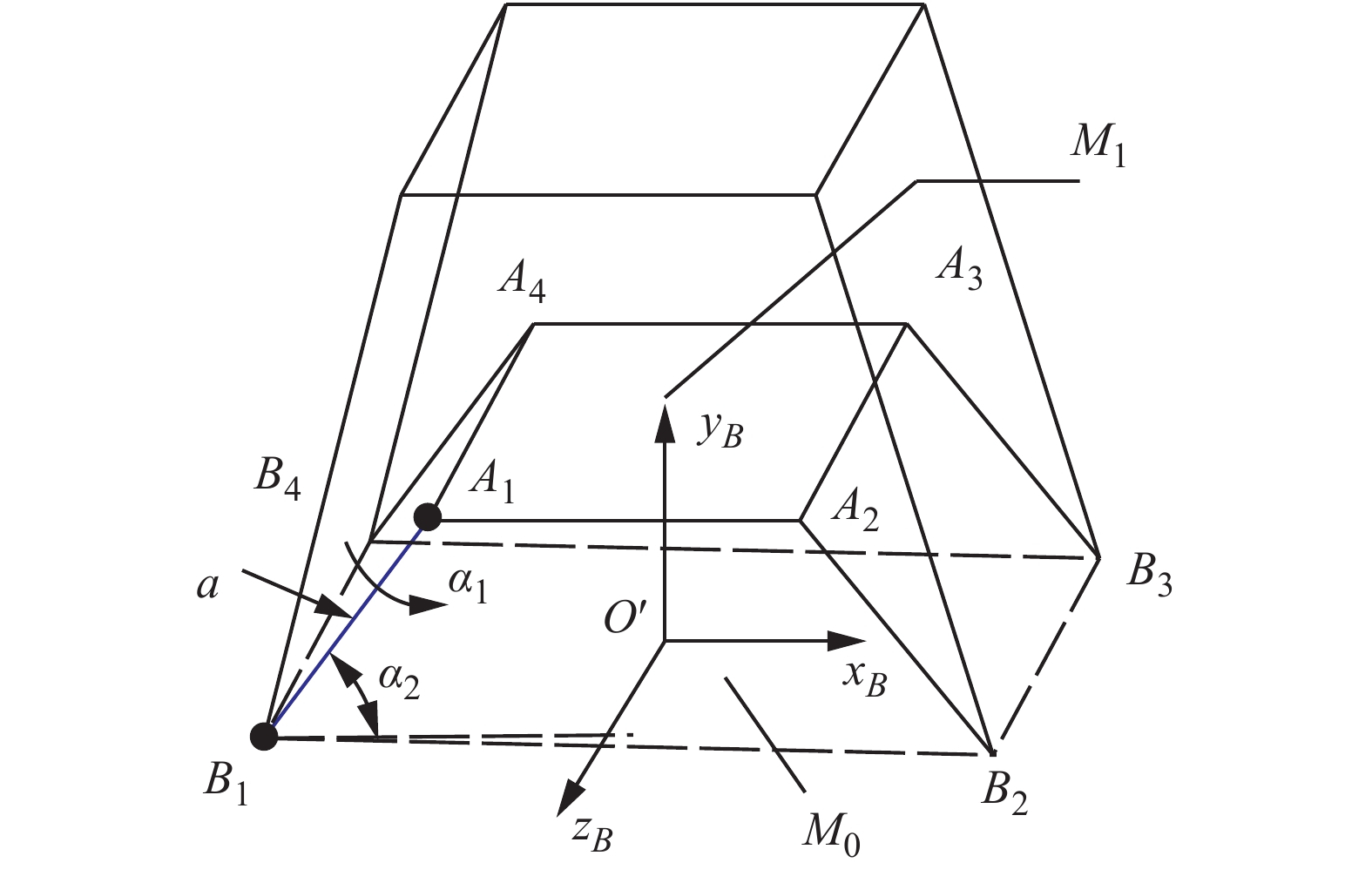
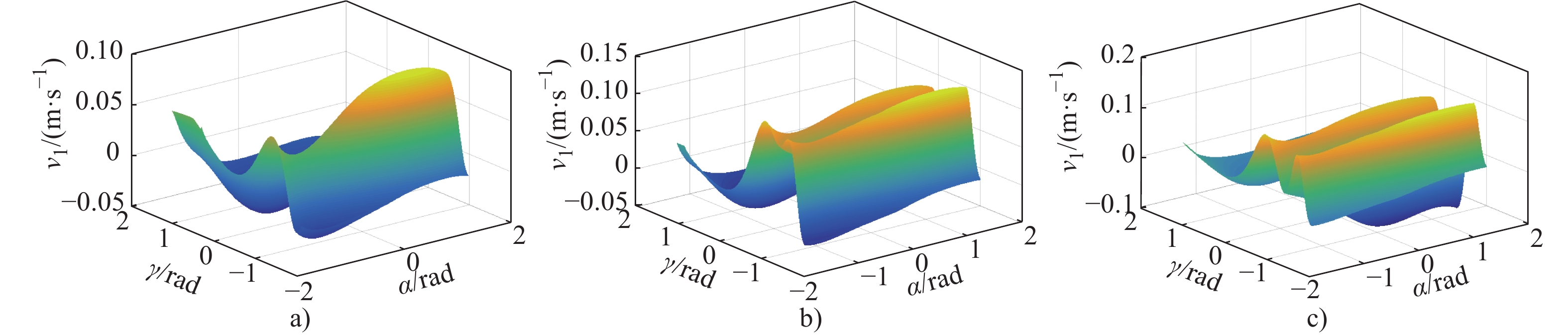
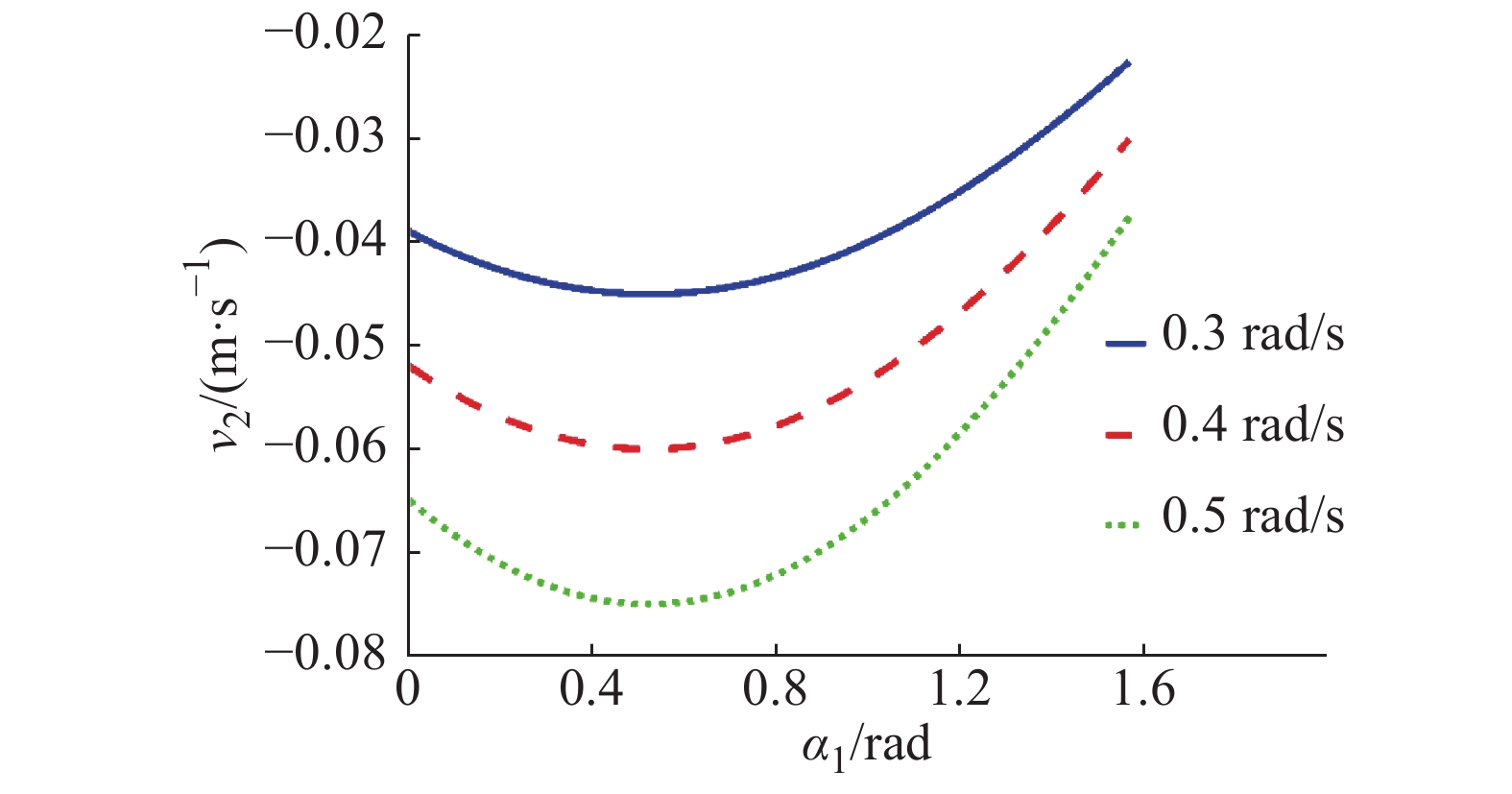
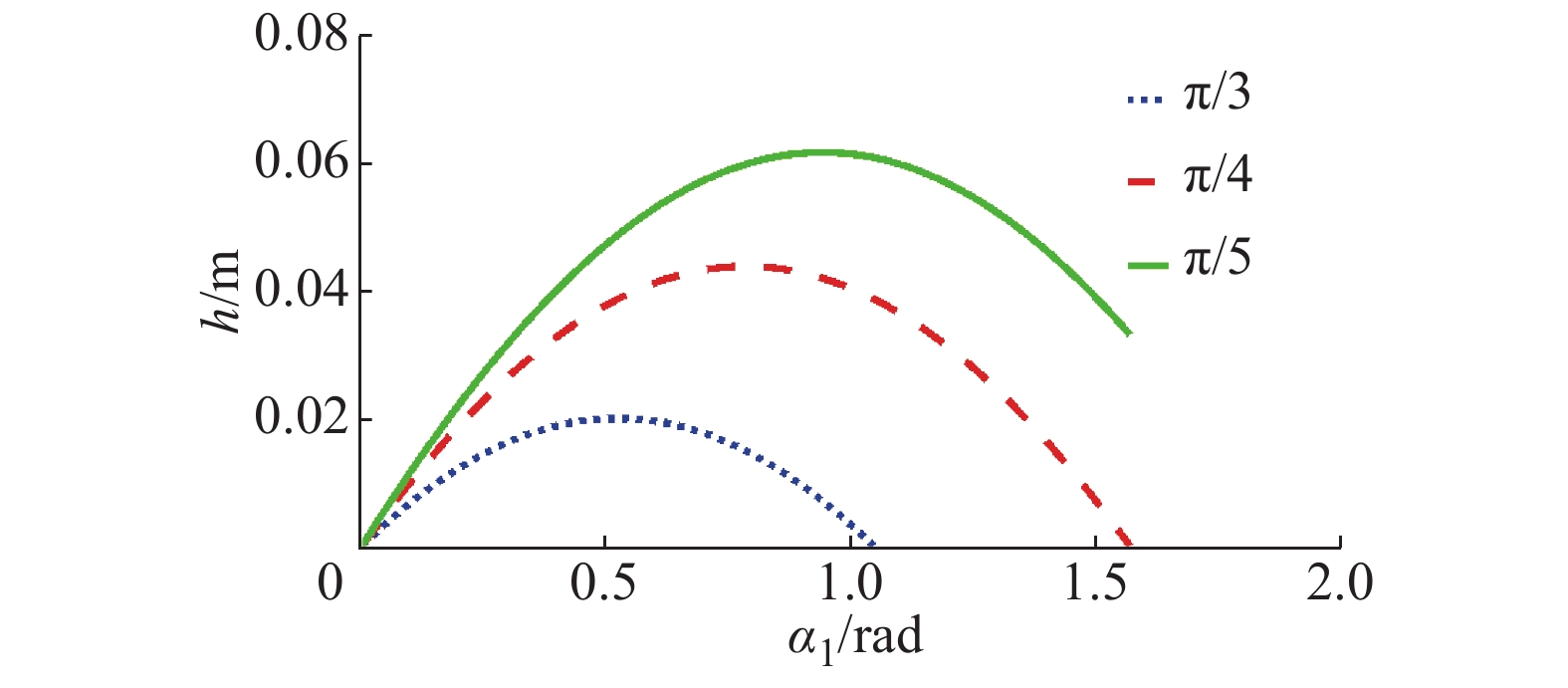
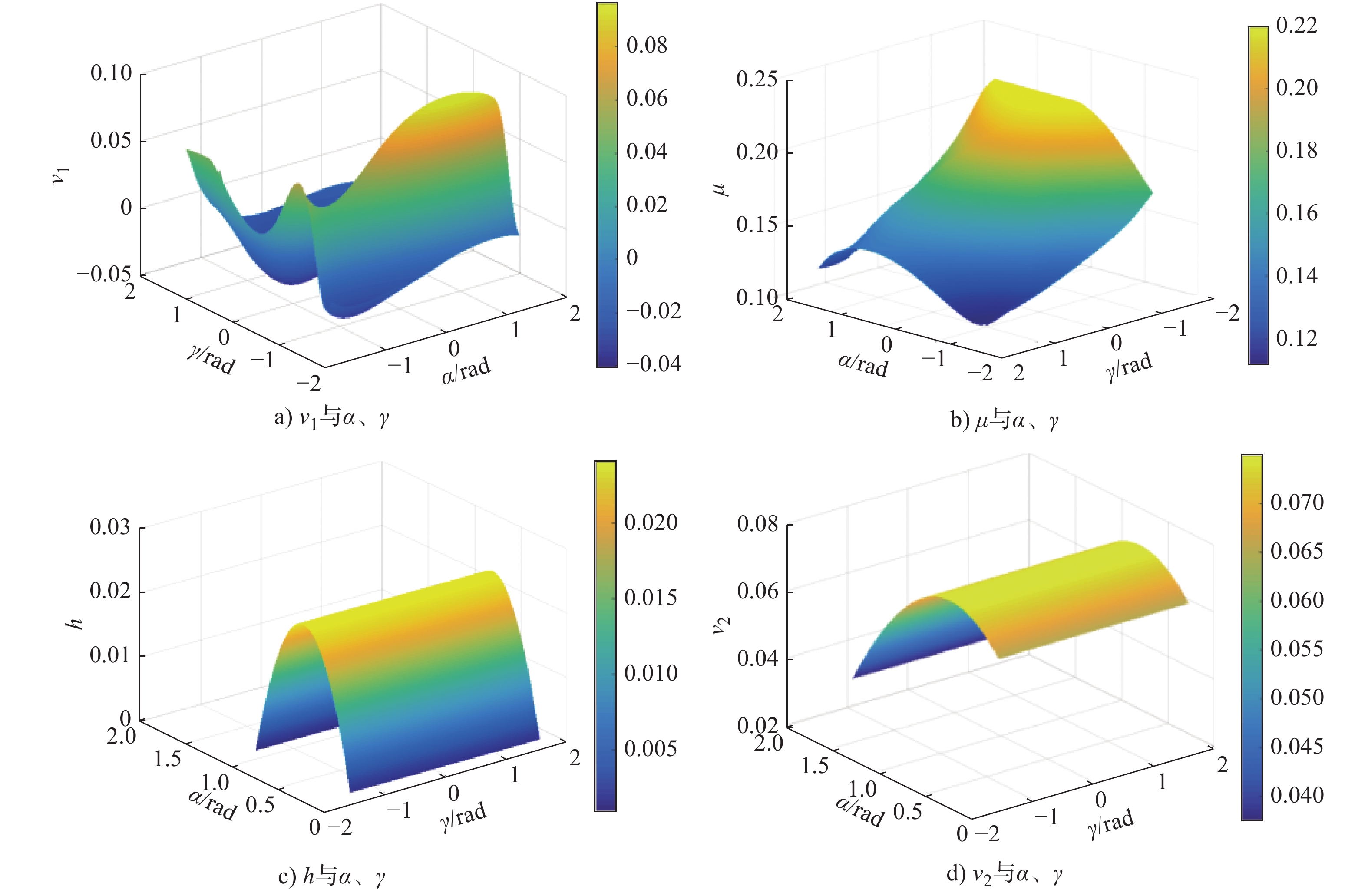
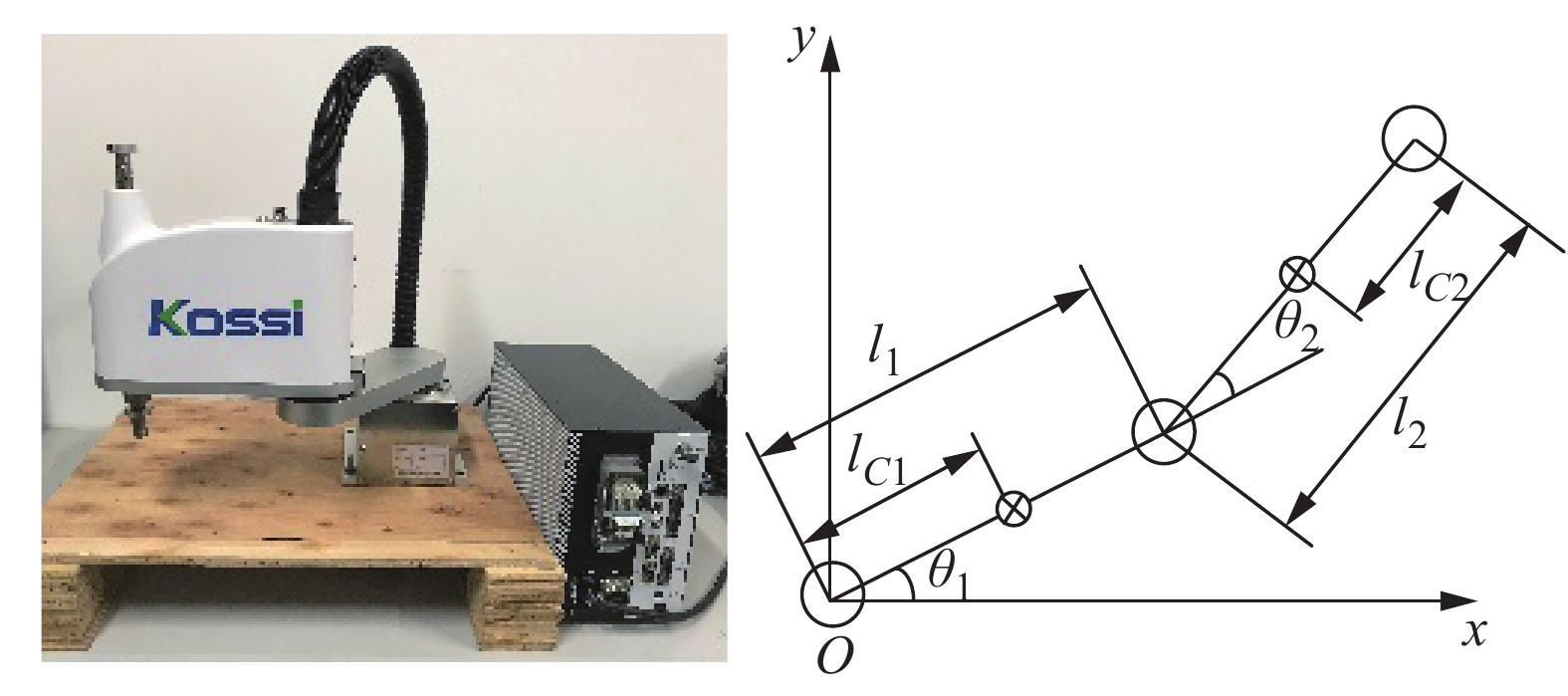
To adapt to the multi-terrain environment, a 4-URPU multiple locomotion modes mobile parallel mechanism is proposed, which integrates three motion modes of quadruped walking, creeping and rolling. The kinematic feasibility of the mechanism in each mode is analyzed by the screw theory. The position solution and velocity Jacobian matrix of the mechanism in each mode are solved, and a multi-objective optimization model is established to obtain a set of relative optimal solutions. The results show that the maximum speed performance index in walking process is lower than that in rolling process, and there are different optimal solutions for different working environments. Finally, a prototype test is carried out to verify the theoretical correctness and kinematic feasibility of the mechanism. The proposed mechanism can be applied to geographic environments with multiple topographic features such as nuclear power accidents, field and natural disasters, and has a certain application prospect.
To adapt to the multi-terrain environment, a 4-URPU multiple locomotion modes mobile parallel mechanism is proposed, which integrates three motion modes of quadruped walking, creeping and rolling. The kinematic feasibility of the mechanism in each mode is analyzed by the screw theory. The position solution and velocity Jacobian matrix of the mechanism in each mode are solved, and a multi-objective optimization model is established to obtain a set of relative optimal solutions. The results show that the maximum speed performance index in walking process is lower than that in rolling process, and there are different optimal solutions for different working environments. Finally, a prototype test is carried out to verify the theoretical correctness and kinematic feasibility of the mechanism. The proposed mechanism can be applied to geographic environments with multiple topographic features such as nuclear power accidents, field and natural disasters, and has a certain application prospect.









, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190227
Abstract:
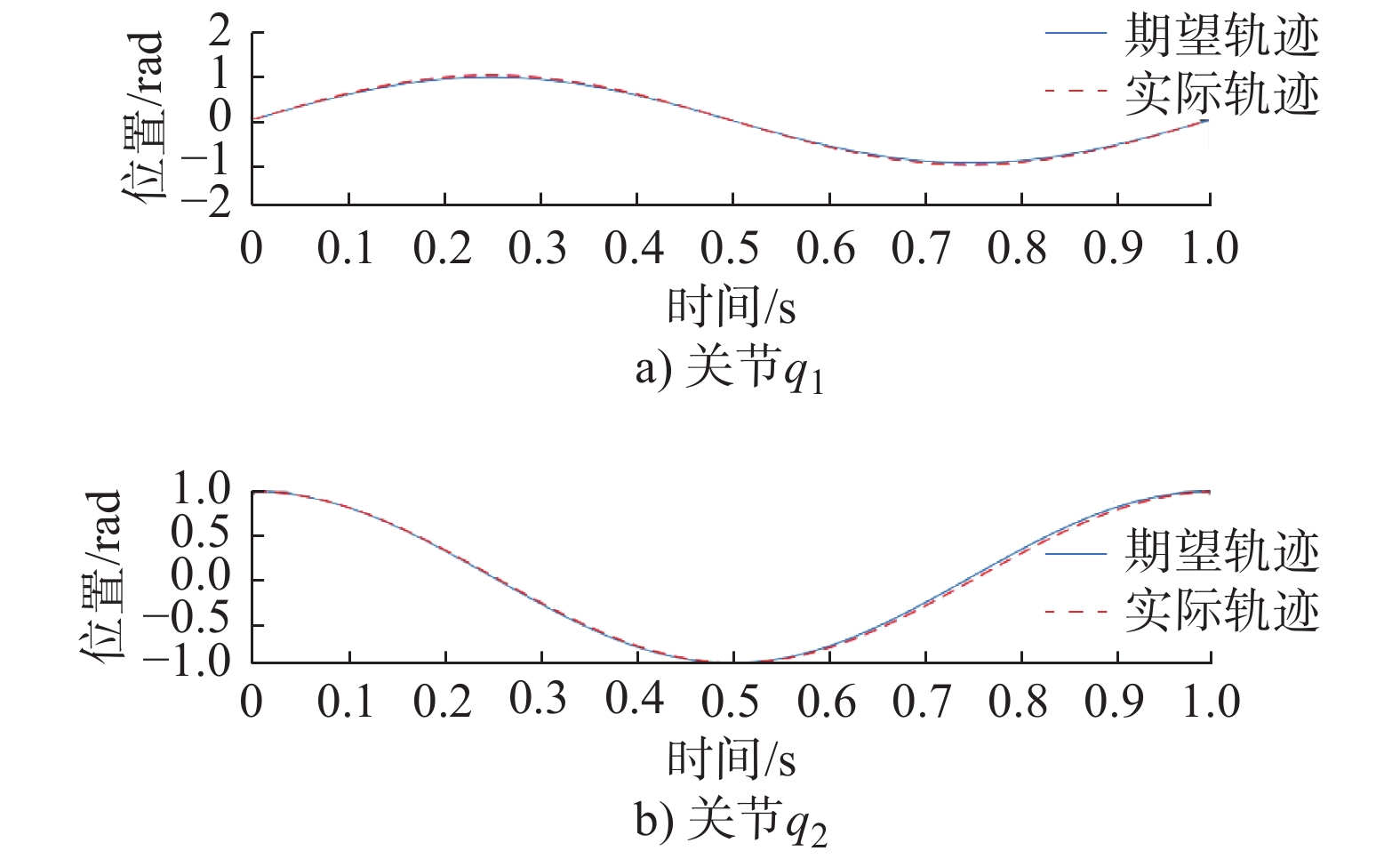
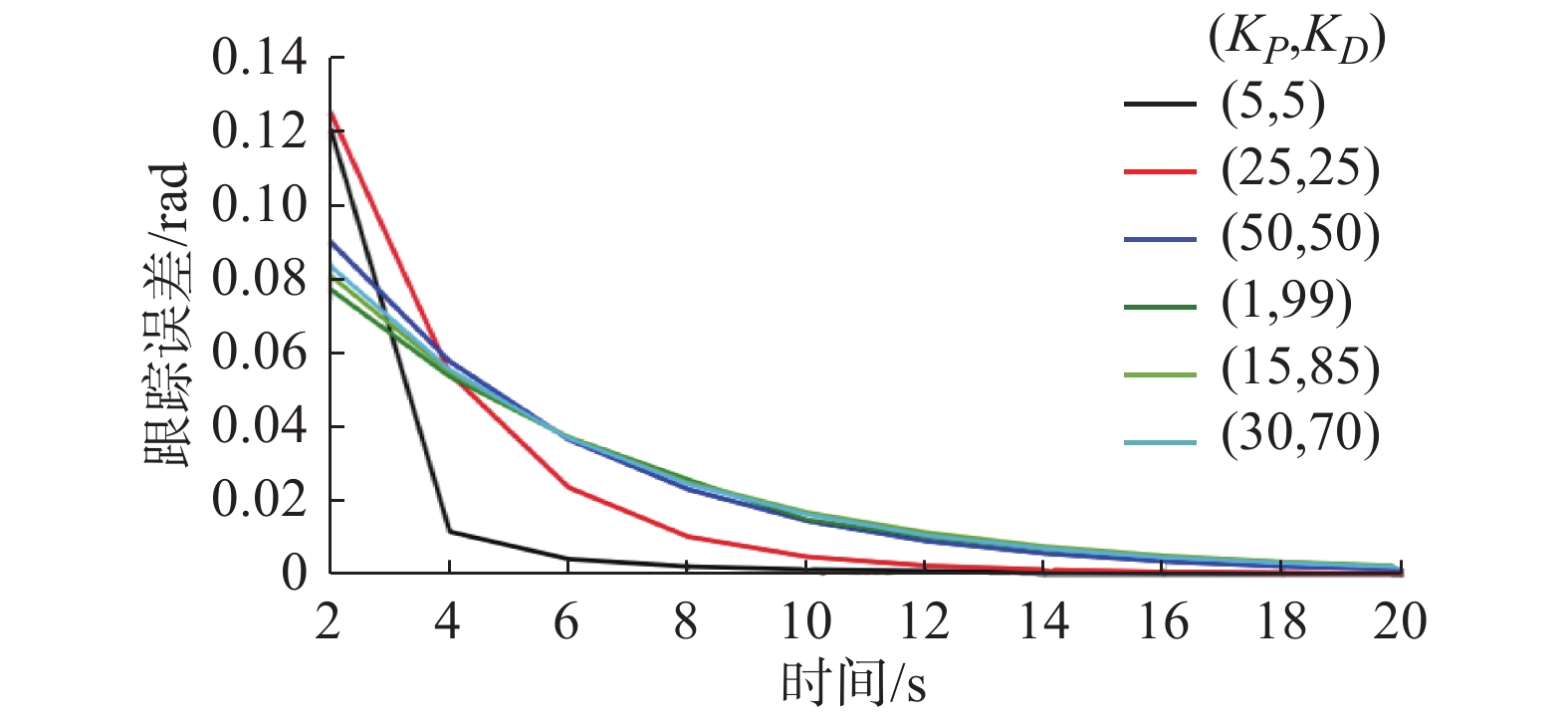
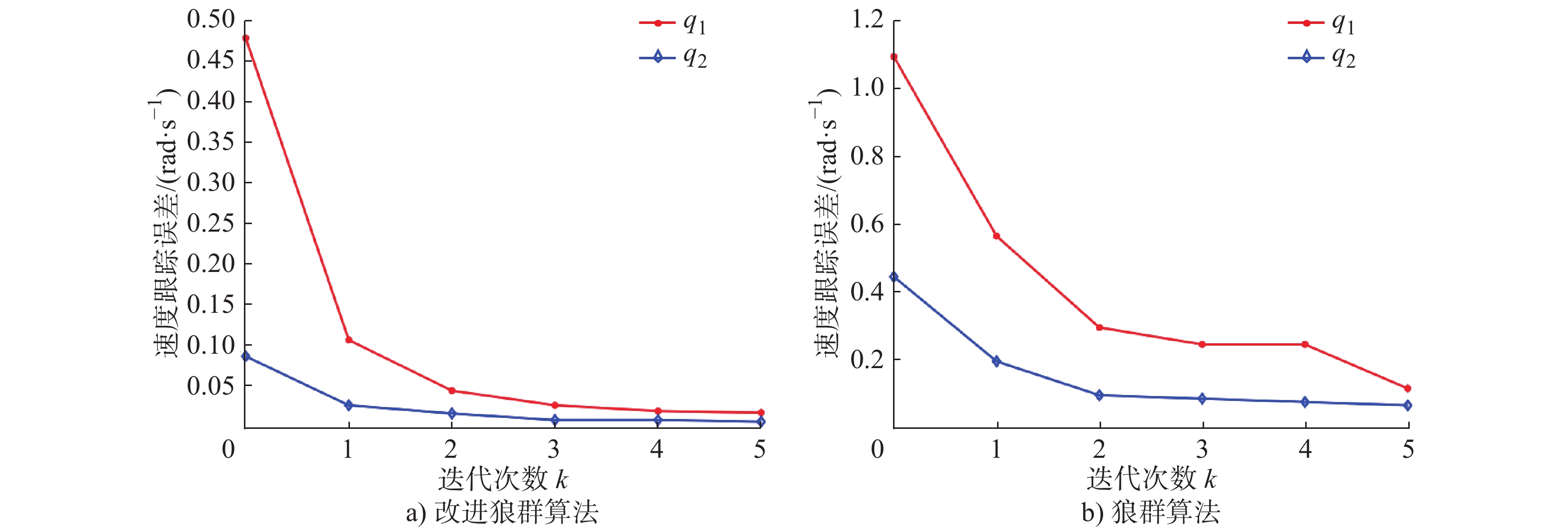
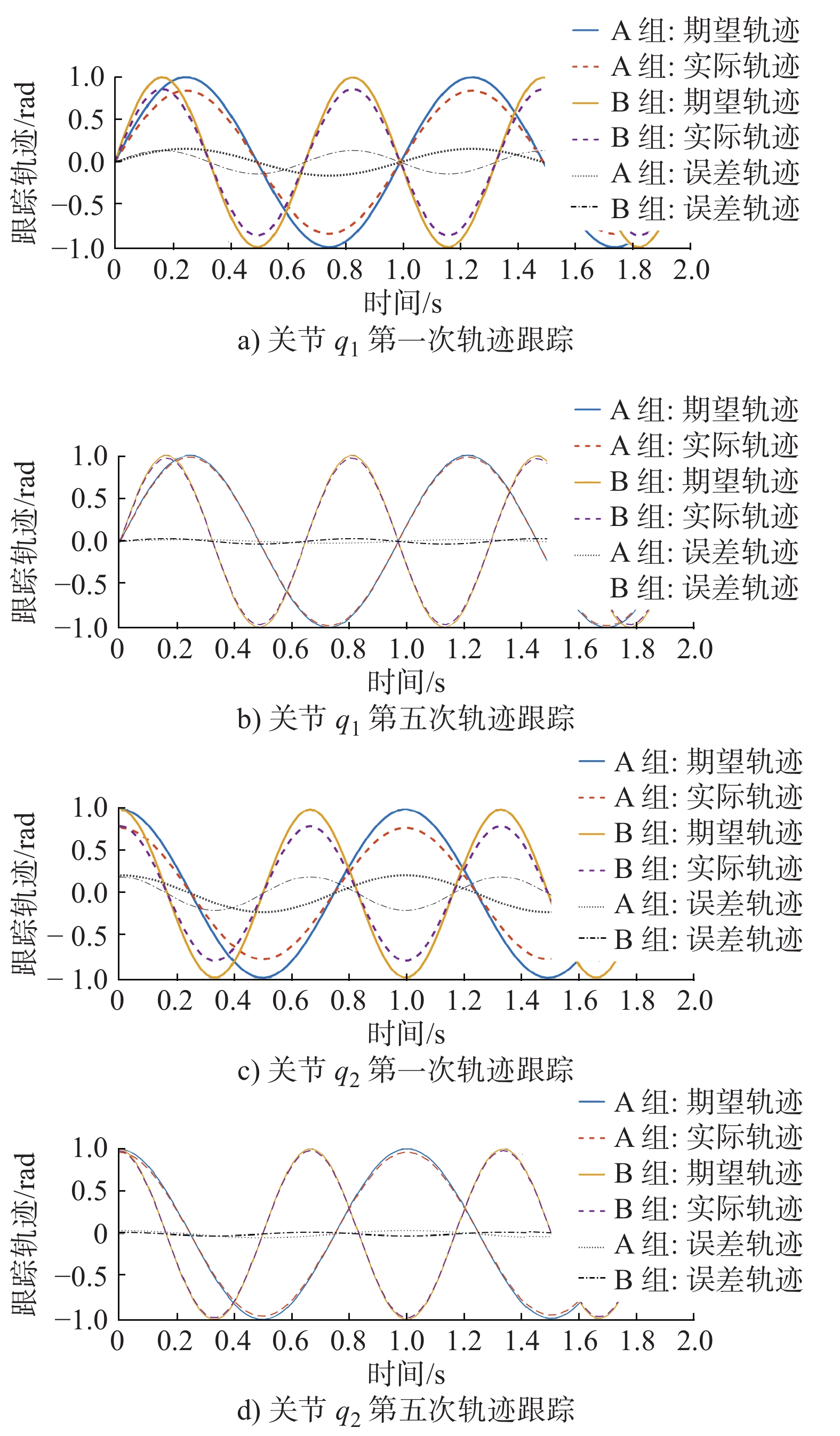
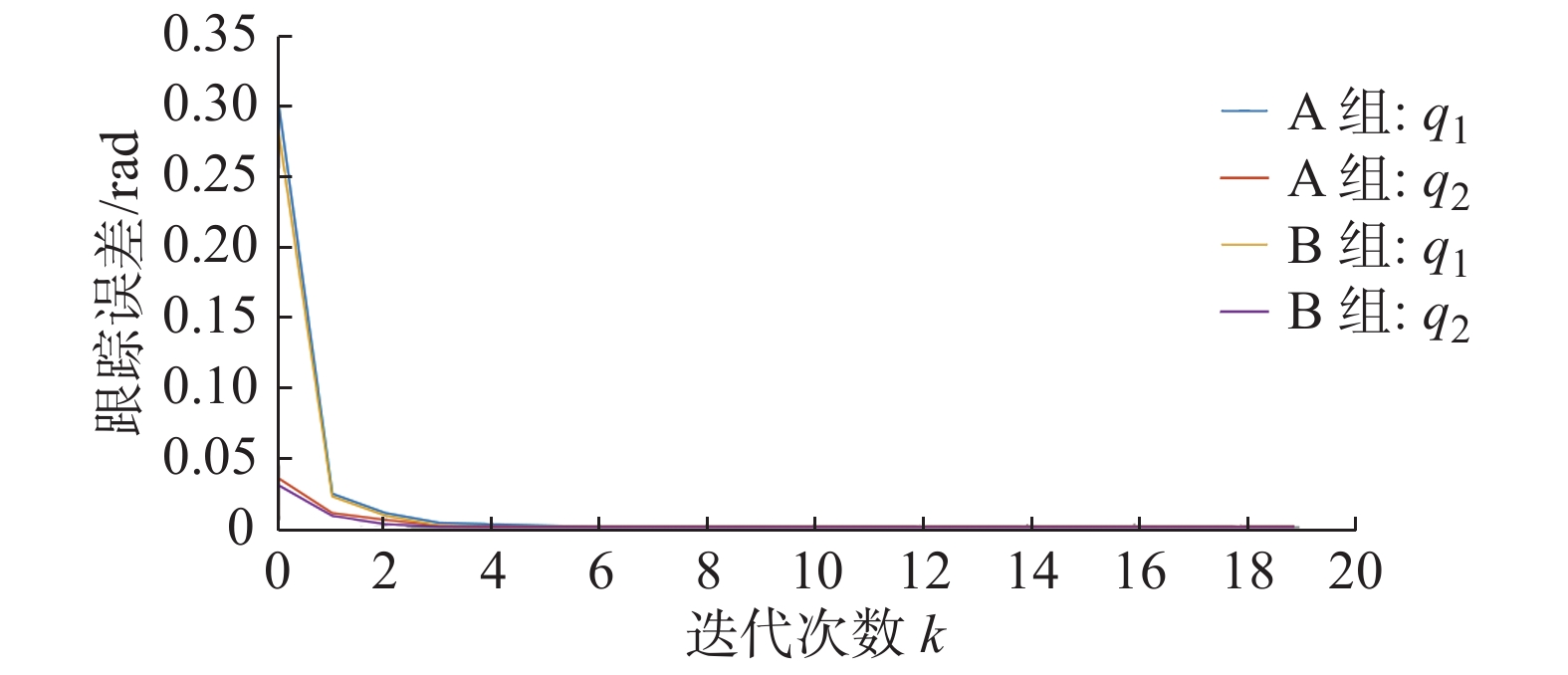
Aiming at reducing the position and speed tracking error of robot repetitive motion, an adaptive iterative learning control strategy based on wolf group algorithm is presented in this paper. According to the SCARA (Selective compliance assembly robot arm) manipulator drive equation, the iterative learning control law of the dynamic system is designed. The wolf group algorithm with adaptive step size is introduced to enable the wolf to dynamically adjust the moving step size according to the prey odor concentration, which improves the convergence speed and accuracy. When the strategy optimizes the parameters of the arm controller KP and KD, the result is effect for control and achieves effective tracking of the desired trajectory. The experimental results show that the adaptive control systems has good flexibility, high tracking accuracy for the system's desired trajectory, and effectively reduces the position and velocity tracking error of the double joint manipulator, which has strong feasibility and effectiveness.
Aiming at reducing the position and speed tracking error of robot repetitive motion, an adaptive iterative learning control strategy based on wolf group algorithm is presented in this paper. According to the SCARA (Selective compliance assembly robot arm) manipulator drive equation, the iterative learning control law of the dynamic system is designed. The wolf group algorithm with adaptive step size is introduced to enable the wolf to dynamically adjust the moving step size according to the prey odor concentration, which improves the convergence speed and accuracy. When the strategy optimizes the parameters of the arm controller KP and KD, the result is effect for control and achieves effective tracking of the desired trajectory. The experimental results show that the adaptive control systems has good flexibility, high tracking accuracy for the system's desired trajectory, and effectively reduces the position and velocity tracking error of the double joint manipulator, which has strong feasibility and effectiveness.





, Available online ,
doi: 10.13433/j.cnki.1003-8728.20190254
Abstract:
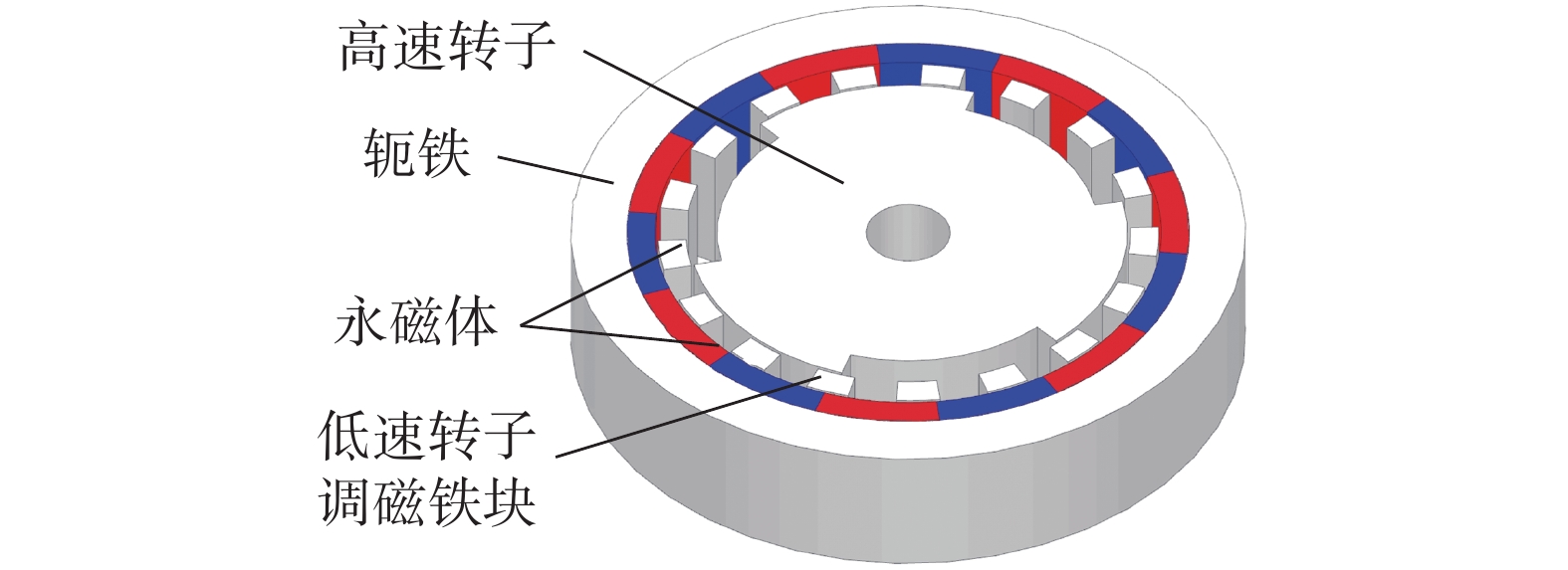
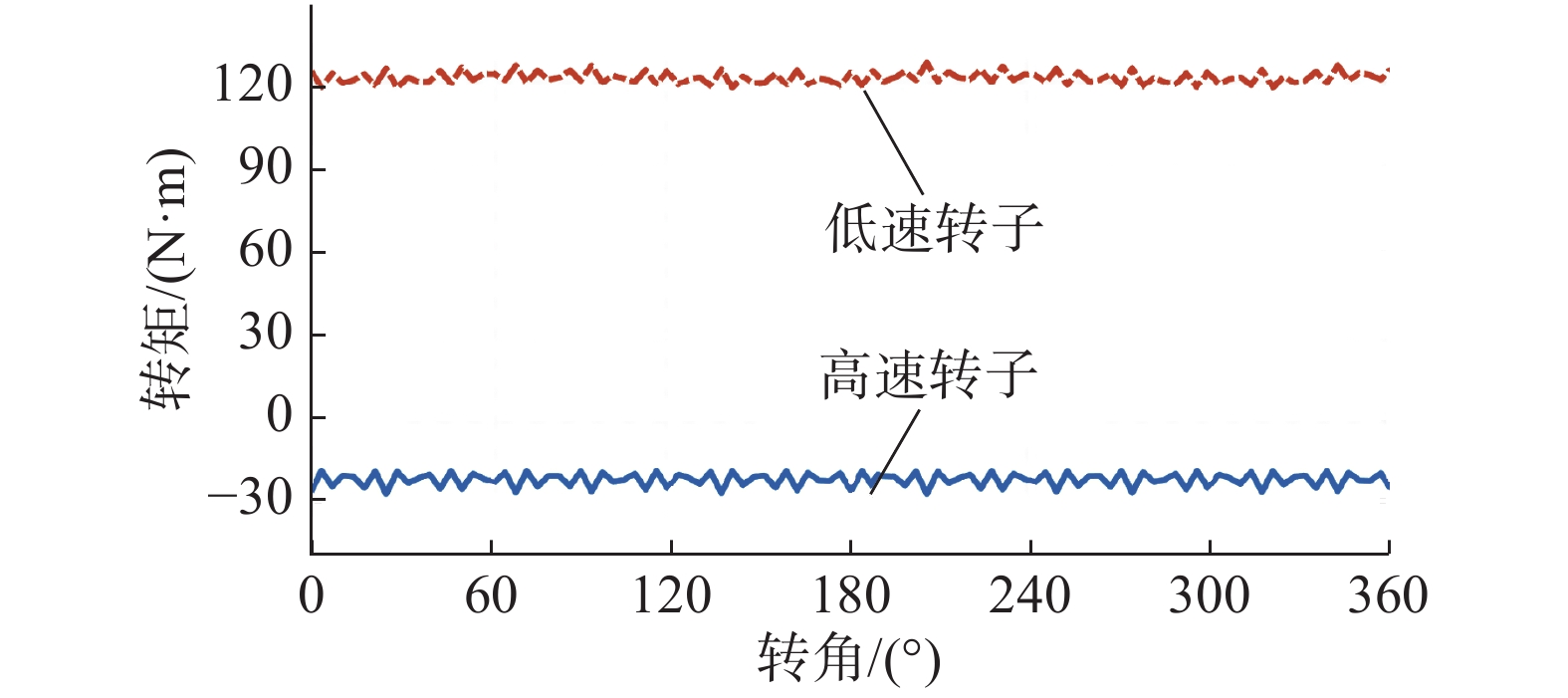
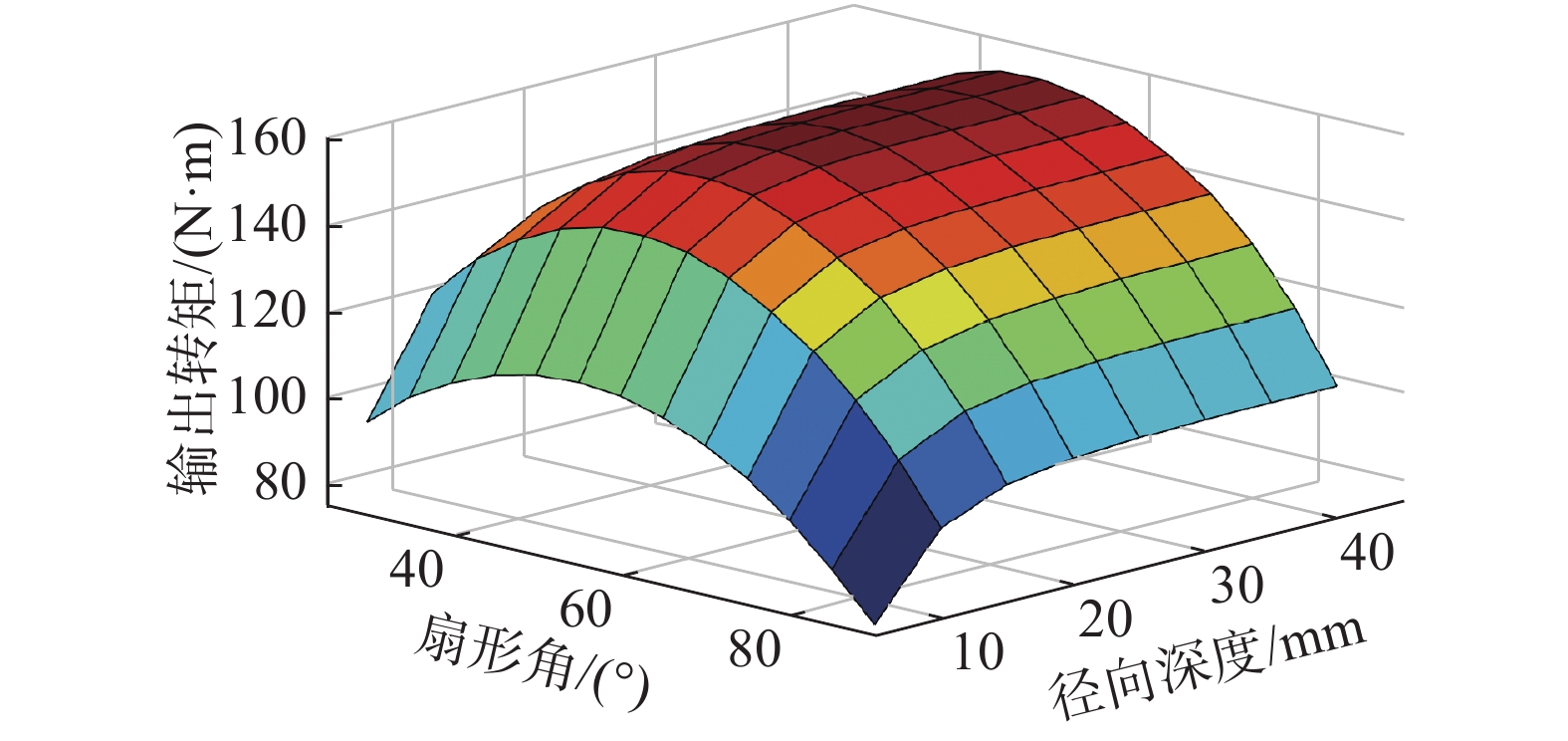
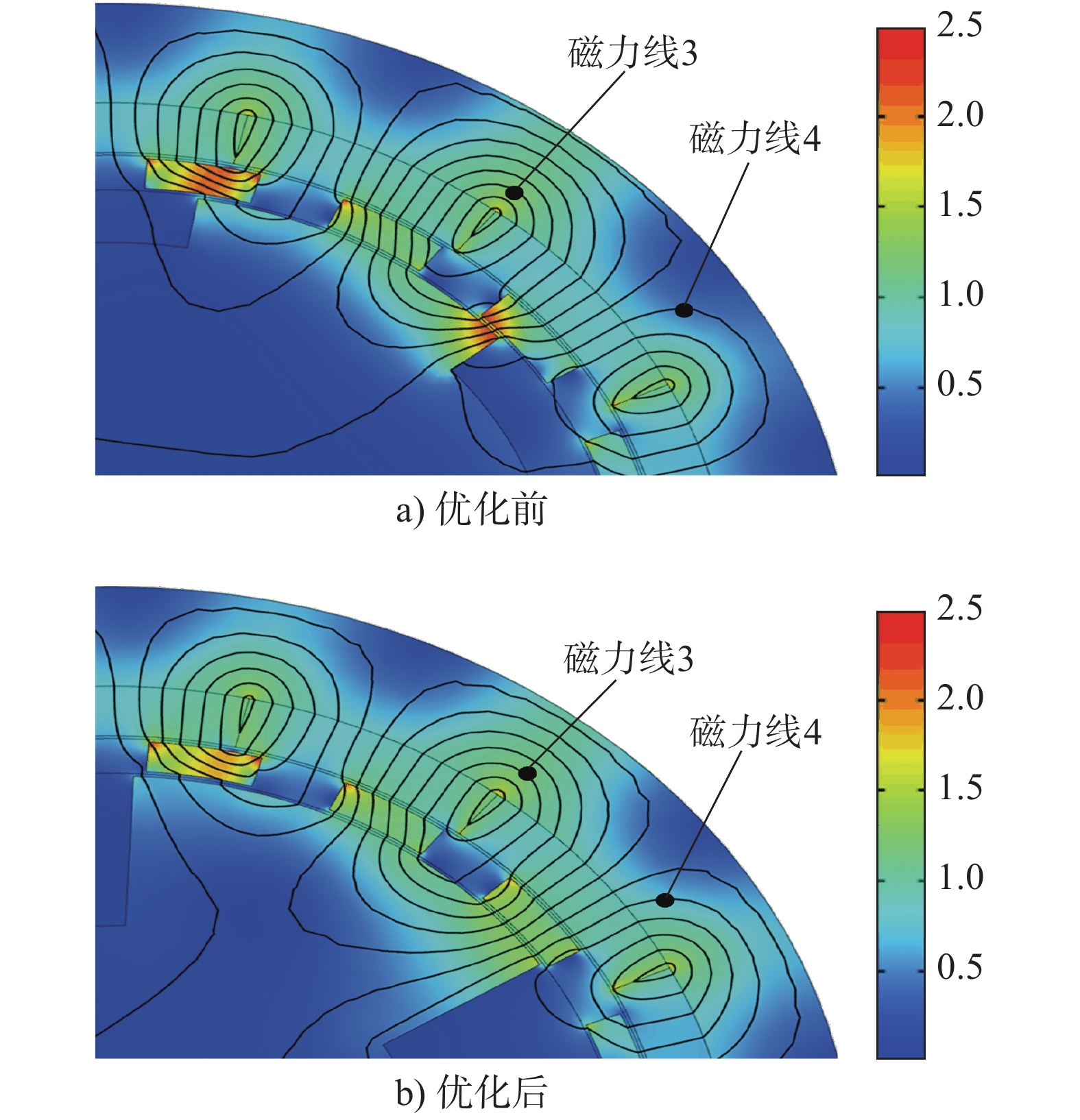
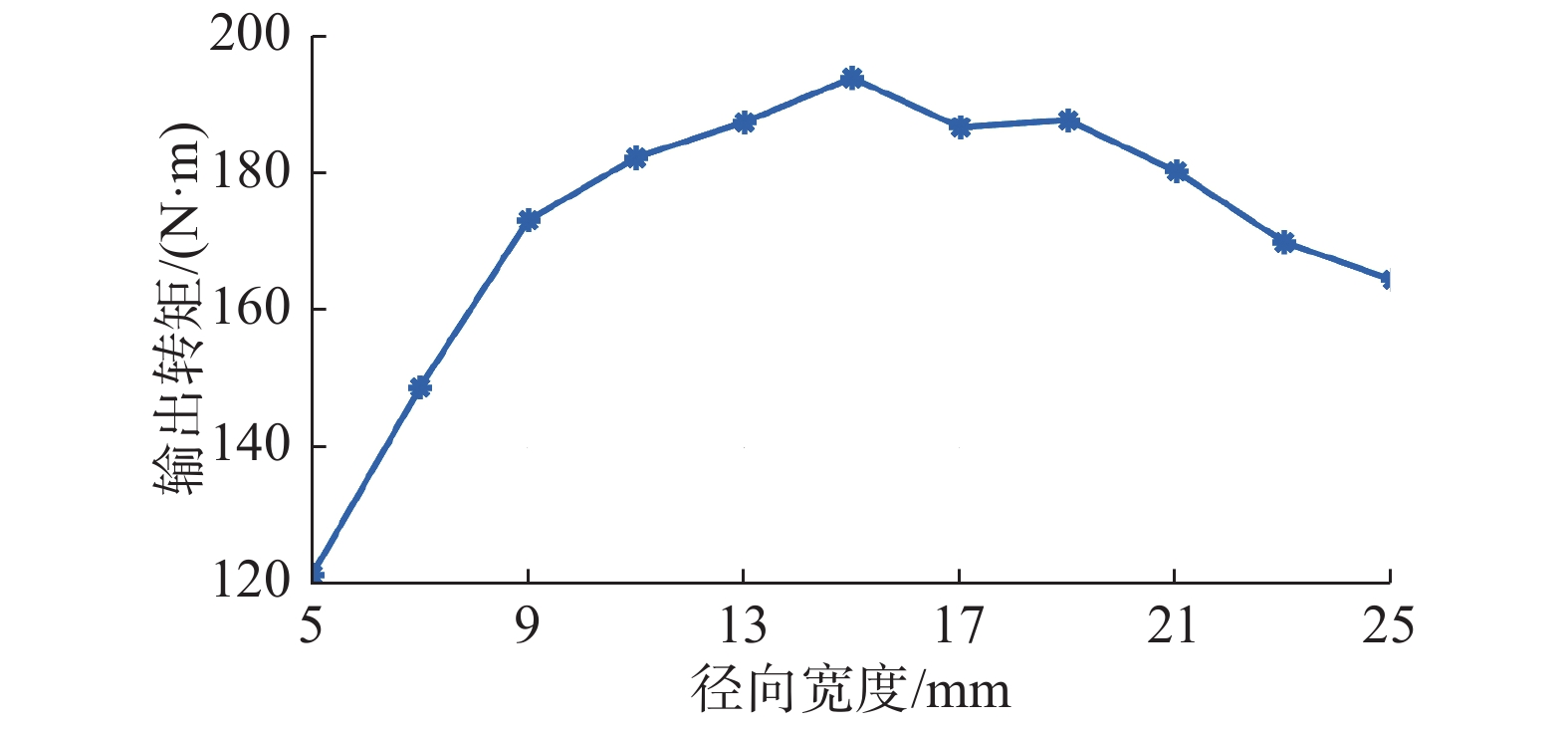
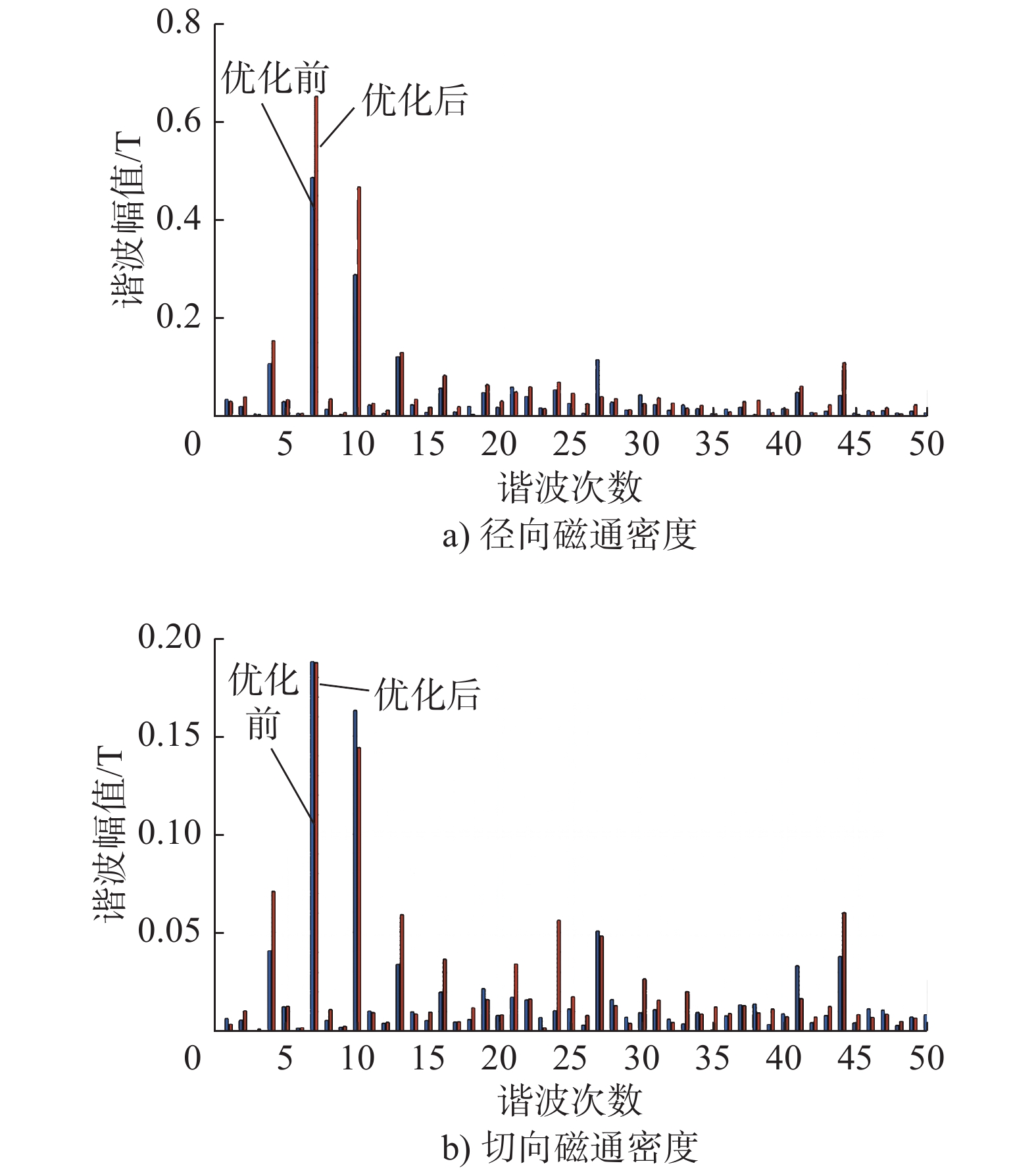
Aiming at the shortcoming that the permanent magnets would be broken in rotors when magnetic gear is working at high speed condition, a rotor-modulate magnetic gear without permanent magnet in rotors is proposed. According to the principle of magnetic field modulation, the relationship between input and output torque and air gap magnetic field is established. The torque transmission capacity is analyzed by 2D FEM. The parametric scanning is used to optimization analysis of different combinations of rotor size parameters to obtain the output torque, the reasons for the influence of rotor size parameters on the output torque are then explored. The simulation result shows that the output torque has a direct relationship with the size parameters of rotor. An optimal size will make the output torque reach the maximum value. After optimization, the output torque increases by 81.2%, and the low-speed rotor size has the greatest influence on the output torque. Finally, the harmonic analysis of the magnetic density in the air gap is carried out. The results show that the main harmonics change before and after the optimization are consistent with the torque variation, and the validity of the design and analysis of the rotor modulate magnetic gear is verified.
Aiming at the shortcoming that the permanent magnets would be broken in rotors when magnetic gear is working at high speed condition, a rotor-modulate magnetic gear without permanent magnet in rotors is proposed. According to the principle of magnetic field modulation, the relationship between input and output torque and air gap magnetic field is established. The torque transmission capacity is analyzed by 2D FEM. The parametric scanning is used to optimization analysis of different combinations of rotor size parameters to obtain the output torque, the reasons for the influence of rotor size parameters on the output torque are then explored. The simulation result shows that the output torque has a direct relationship with the size parameters of rotor. An optimal size will make the output torque reach the maximum value. After optimization, the output torque increases by 81.2%, and the low-speed rotor size has the greatest influence on the output torque. Finally, the harmonic analysis of the magnetic density in the air gap is carried out. The results show that the main harmonics change before and after the optimization are consistent with the torque variation, and the validity of the design and analysis of the rotor modulate magnetic gear is verified.







Display Method:
2024, 43(7): 1101-1119.
doi: 10.13433/j.cnki.1003-8728.20240079
 Abstract
Abstract FullText HTML
FullText HTML
Abstract:
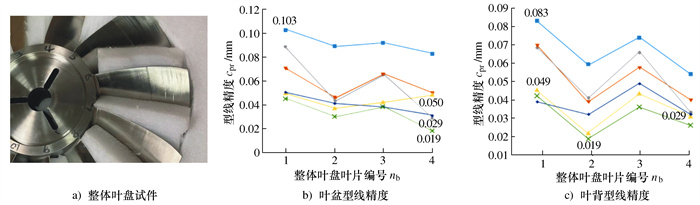
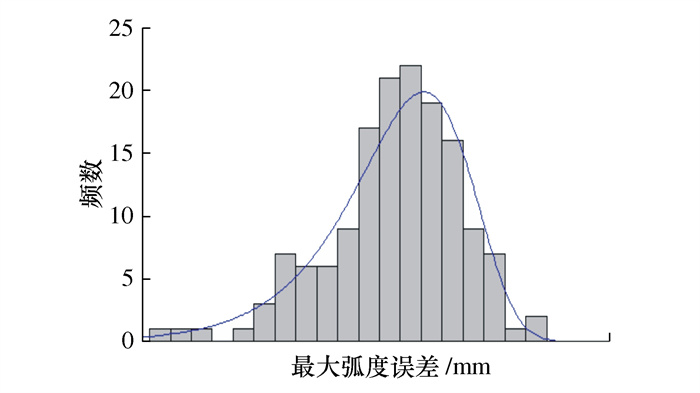
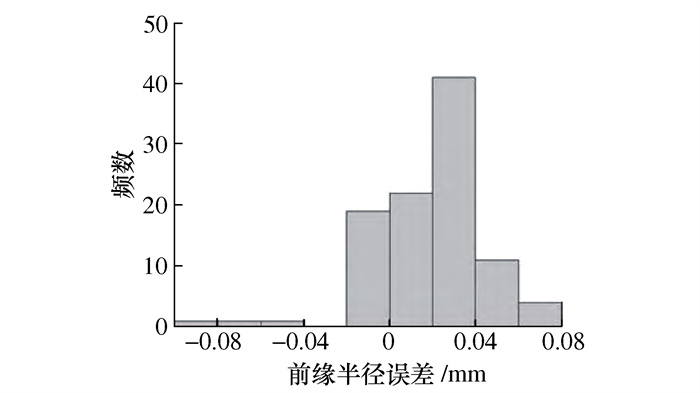
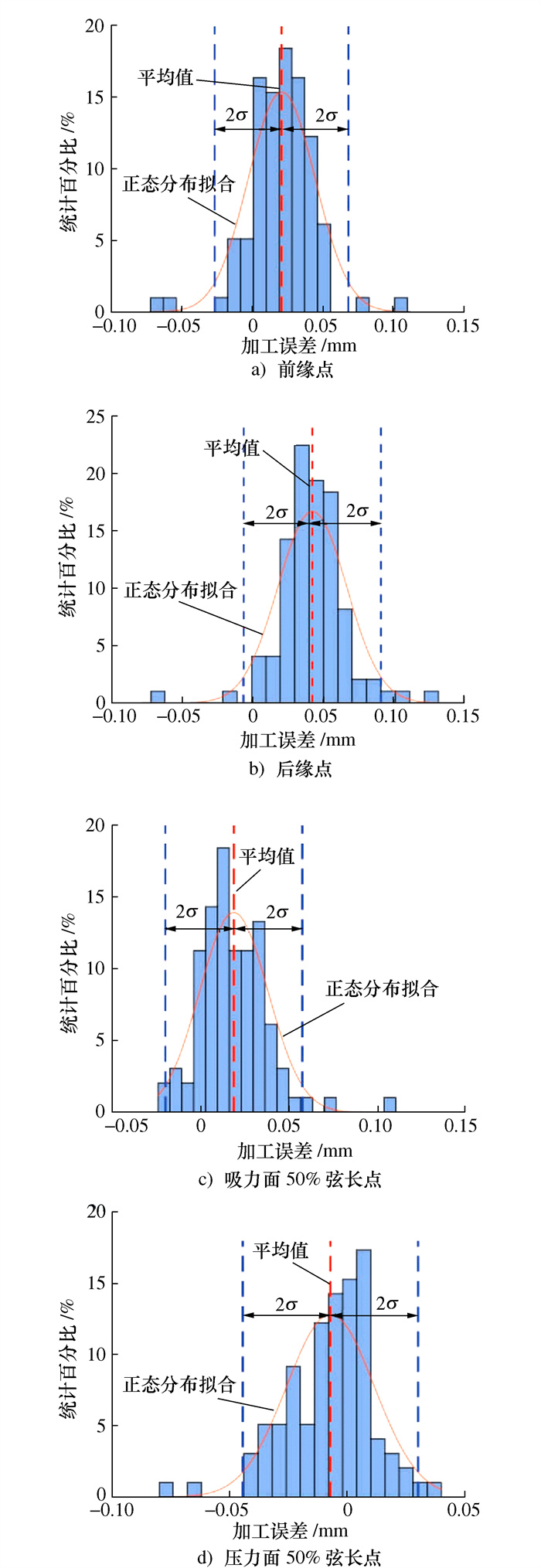
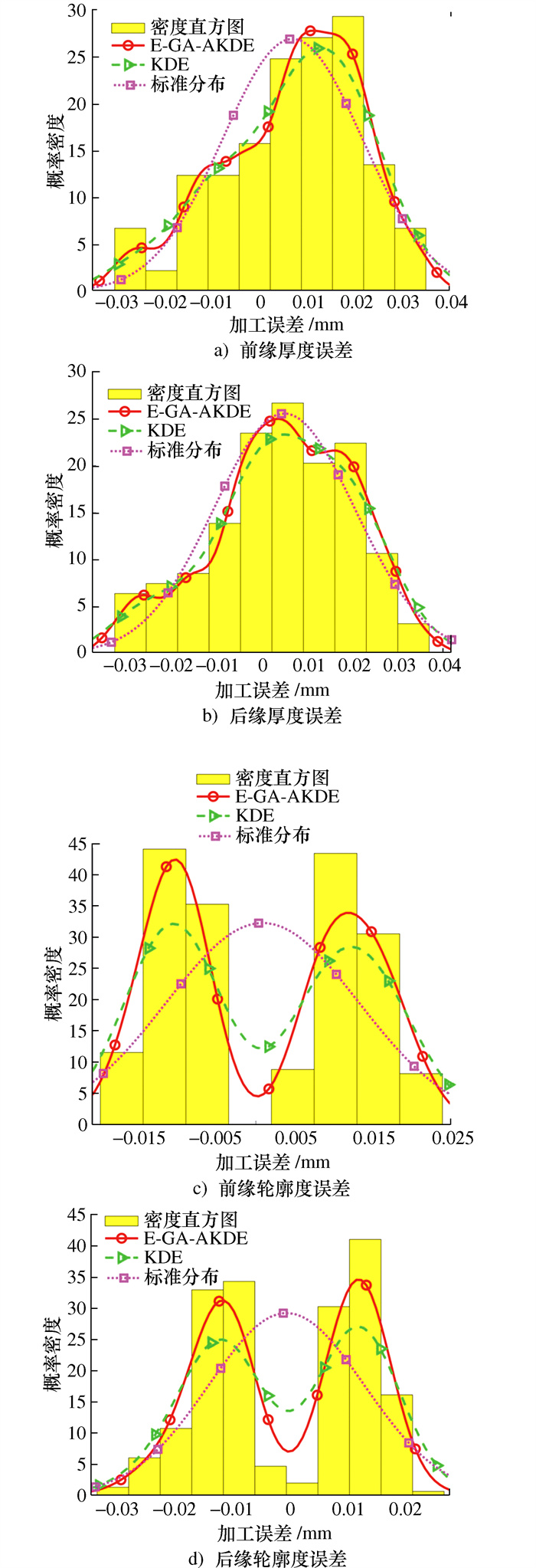
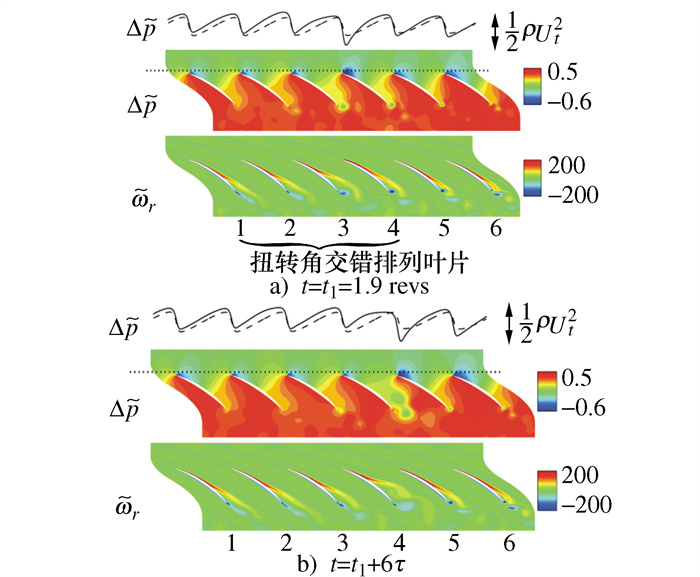
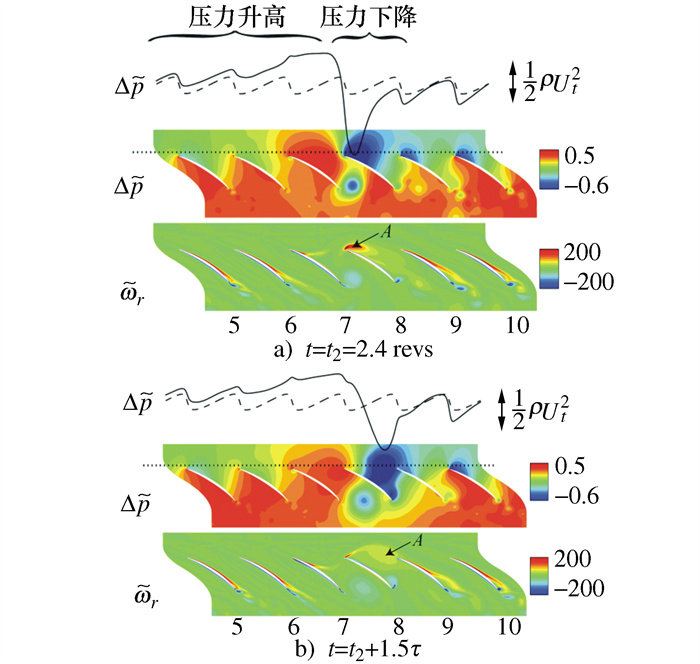
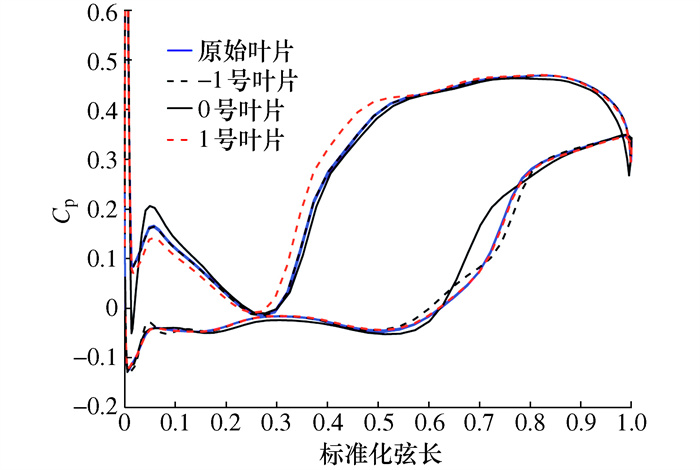
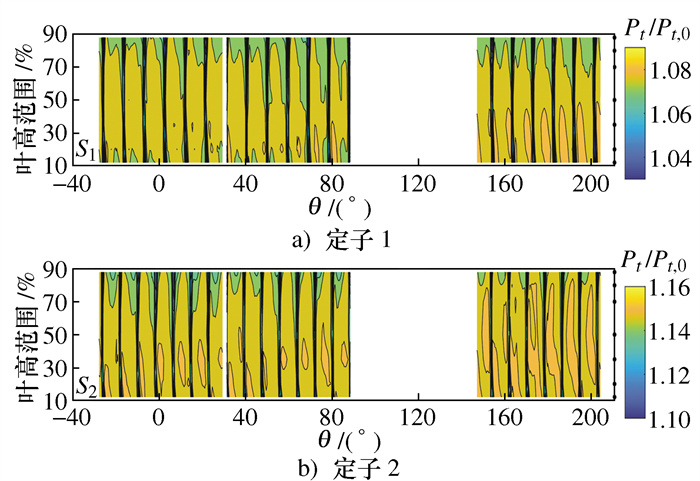
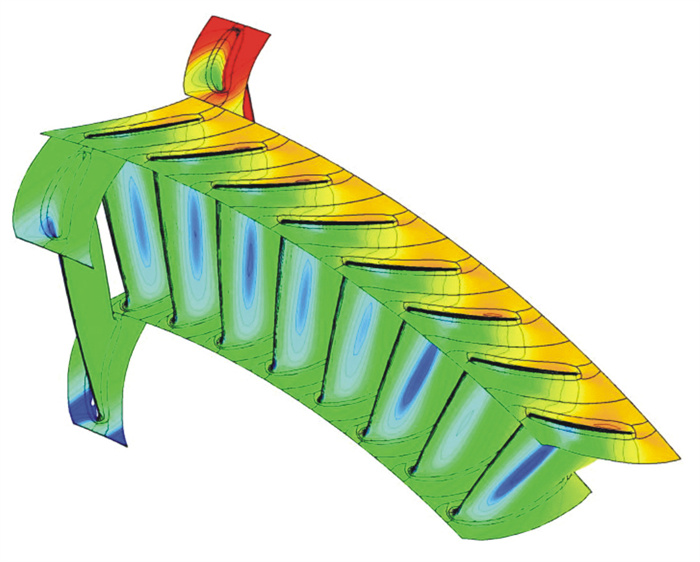
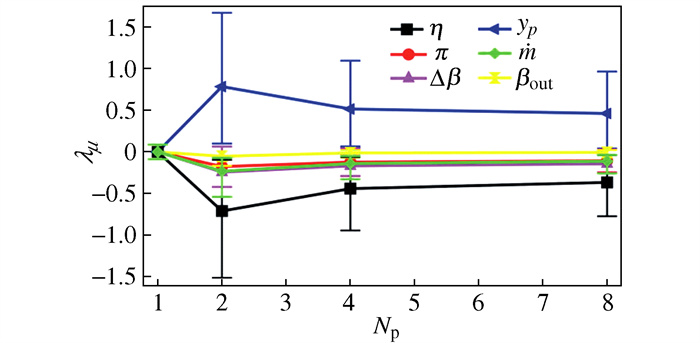
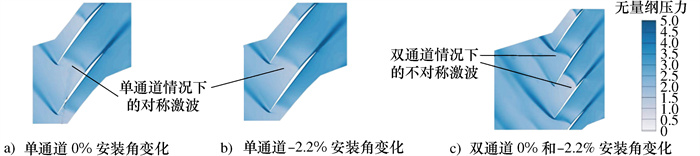
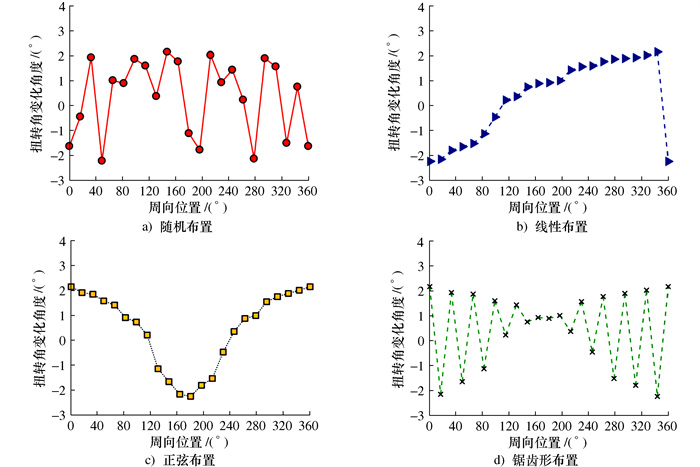
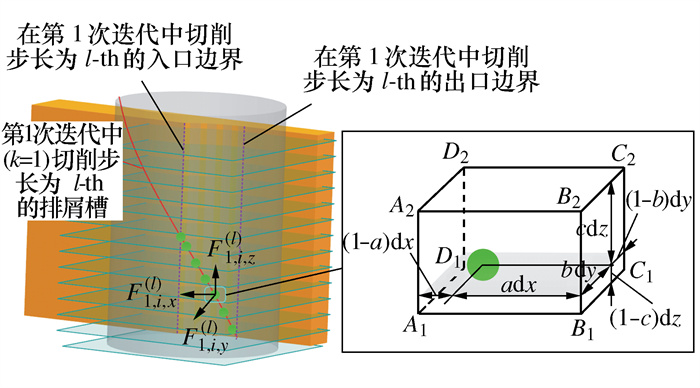
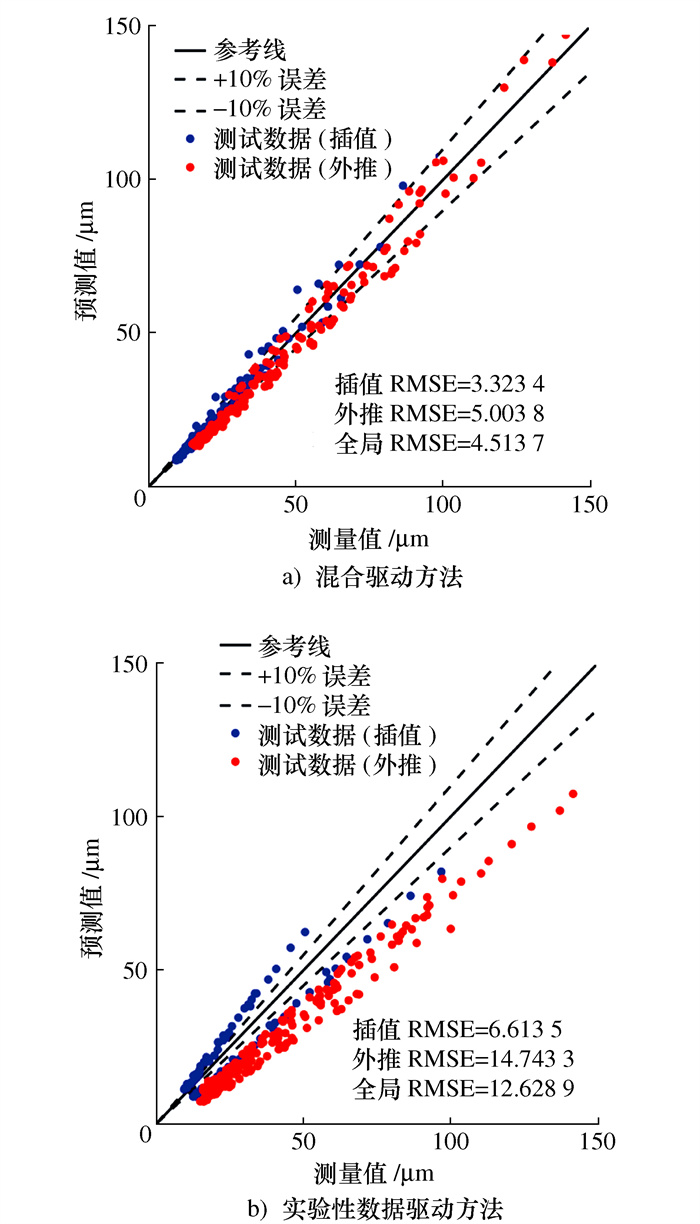
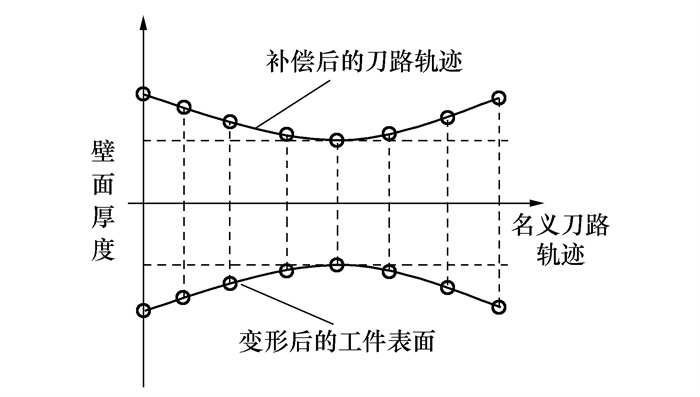
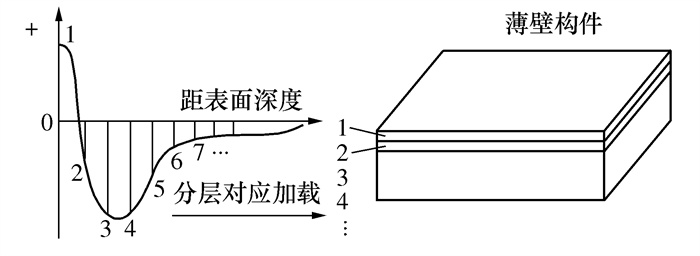
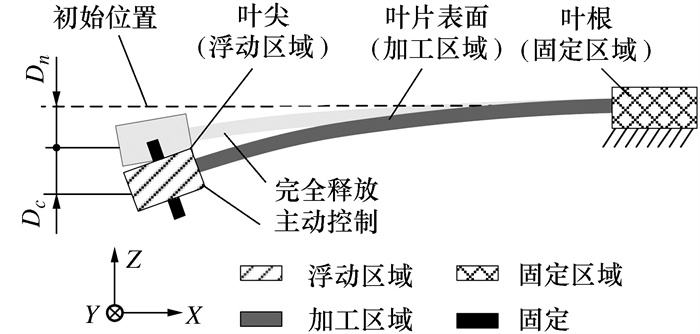
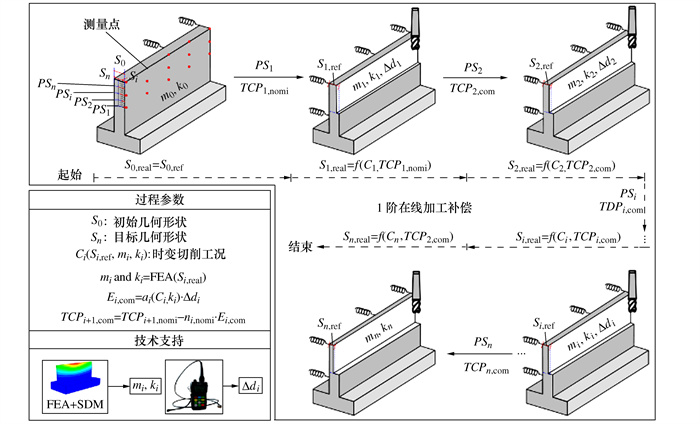
The aero-engine compressor blisk is usually designed as a rotationally symmetric structure. However, in actual machining, the discreteness of machining errors between different blades on the same stage blisk and the individual blade itself will adversely affect the flow field parameters. Therefore, improving the consistency of machining errors of blisk's blades has become a common concern. This paper reviews the related researches on the influence of machining error dispersion on aerodynamic performance of different blades of the same stage in recent years, and the related results of error dispersion control under strong time-varying characteristics of machining process. The error dispersion phenomenon and its causes, the influence law on performance and the control method of machining error dispersion are discussed in three aspects. Finally, the development trend of error dispersion machining control method in the future is prospected, which provides a reference for future related research work.
The aero-engine compressor blisk is usually designed as a rotationally symmetric structure. However, in actual machining, the discreteness of machining errors between different blades on the same stage blisk and the individual blade itself will adversely affect the flow field parameters. Therefore, improving the consistency of machining errors of blisk's blades has become a common concern. This paper reviews the related researches on the influence of machining error dispersion on aerodynamic performance of different blades of the same stage in recent years, and the related results of error dispersion control under strong time-varying characteristics of machining process. The error dispersion phenomenon and its causes, the influence law on performance and the control method of machining error dispersion are discussed in three aspects. Finally, the development trend of error dispersion machining control method in the future is prospected, which provides a reference for future related research work.
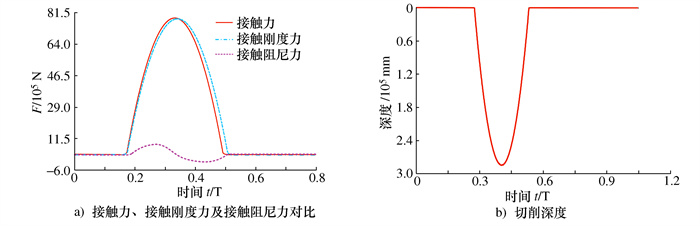
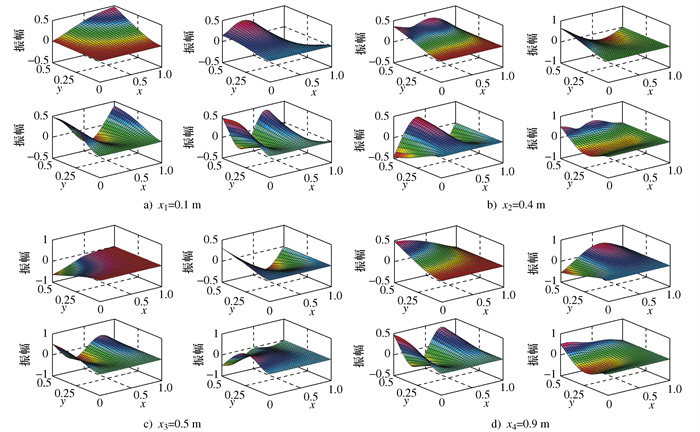
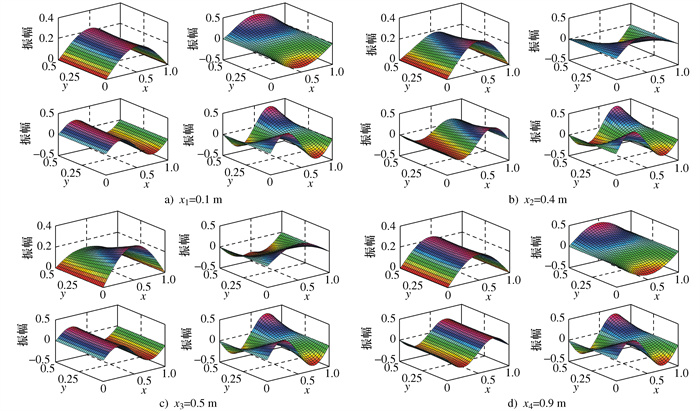
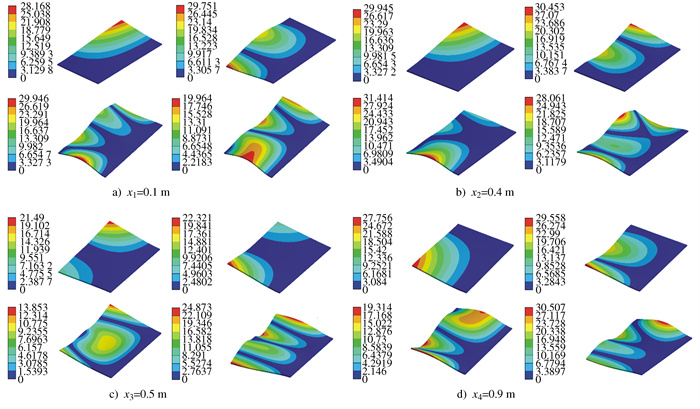
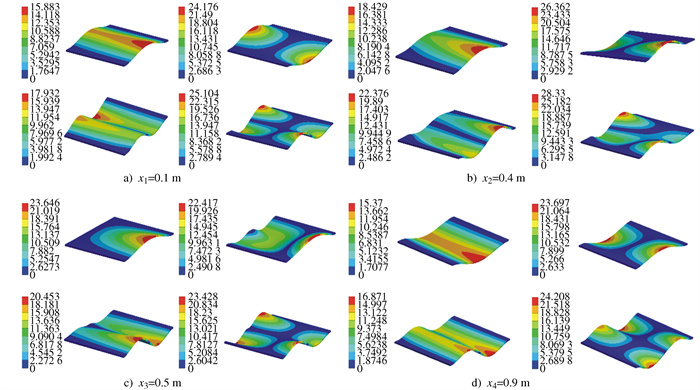
Research of Dynamic Characteristics in Milling of Thin-walled Parts Under Moving Boundary Constraint
2024, 43(7): 1120-1131.
doi: 10.13433/j.cnki.1003-8728.20240078
Abstract:
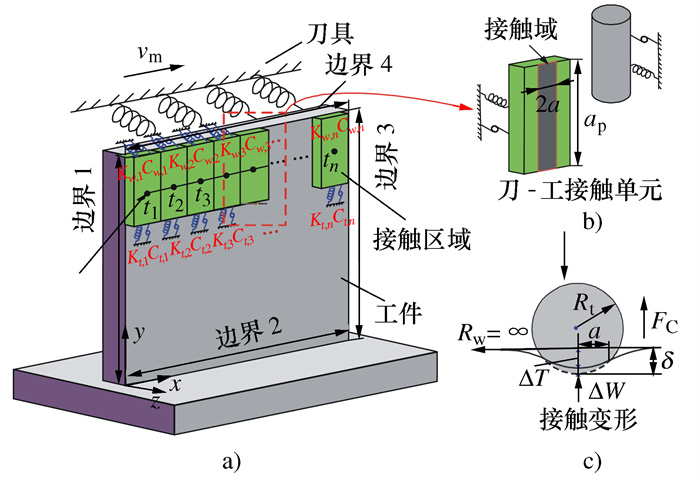
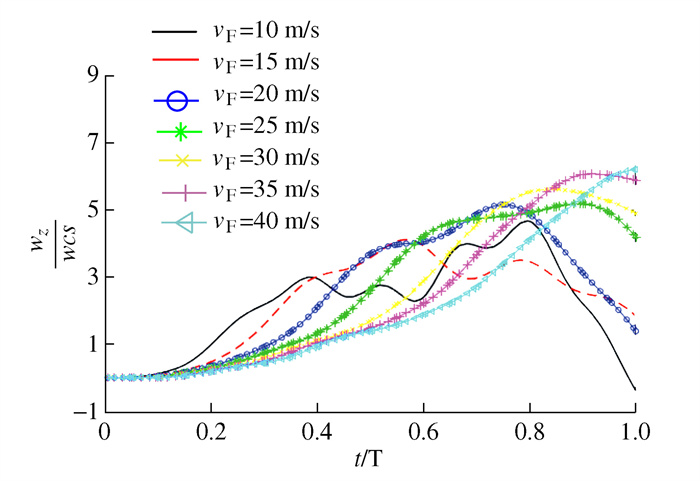
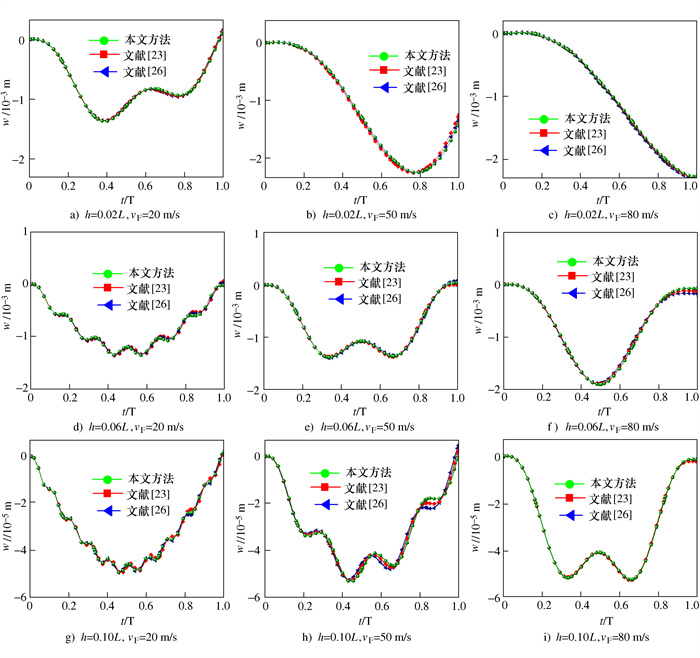
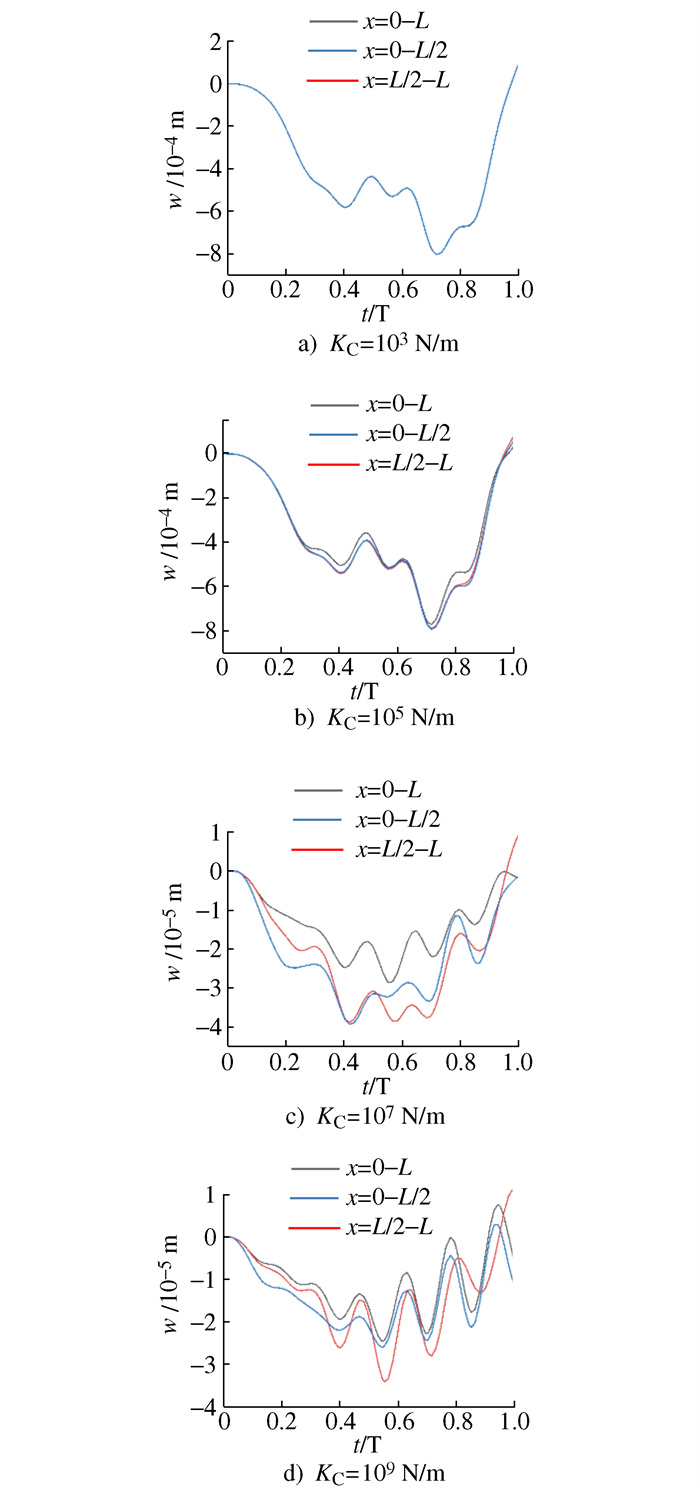
In view of the complexity of the workpiece constraint boundary and the difficulty of predicting the dynamic characteristics in the milling of thin-walled parts, the moving contact boundary constraint (MCC) was proposed, and the influence of MCC on the dynamic characteristics of the system was studied in detail. Firstly, a dynamic model for thin plate cutting was established considering the constraint of tool-worker contact moving boundary, and the tool-worker contact region was extracted, and the complex relationship between the contact stiffness and damping force and the contact parameters was analyzed. Secondly, the dynamic response of the thin plate under arbitrary MCC is predicted, and a more comprehensive selection scheme for arbitrary boundary constraints is formed, including contact moving boundary conditions and classical boundary conditions. The kinematic equation of the system is established based on the thin plate theory, and the combination of the energy term generated by MCC, conventional arbitrary boundary constraint and thin plate deformation is considered comprehensively. Finally, a large number of results via numerical, analytical and experimental methods in existing literature are compared with that under different cases and via finite element method to prove the accuracy of the present method. The results show that the effect of the contact movement constraint on the dynamic characteristics of the system cannot be ignored.
In view of the complexity of the workpiece constraint boundary and the difficulty of predicting the dynamic characteristics in the milling of thin-walled parts, the moving contact boundary constraint (MCC) was proposed, and the influence of MCC on the dynamic characteristics of the system was studied in detail. Firstly, a dynamic model for thin plate cutting was established considering the constraint of tool-worker contact moving boundary, and the tool-worker contact region was extracted, and the complex relationship between the contact stiffness and damping force and the contact parameters was analyzed. Secondly, the dynamic response of the thin plate under arbitrary MCC is predicted, and a more comprehensive selection scheme for arbitrary boundary constraints is formed, including contact moving boundary conditions and classical boundary conditions. The kinematic equation of the system is established based on the thin plate theory, and the combination of the energy term generated by MCC, conventional arbitrary boundary constraint and thin plate deformation is considered comprehensively. Finally, a large number of results via numerical, analytical and experimental methods in existing literature are compared with that under different cases and via finite element method to prove the accuracy of the present method. The results show that the effect of the contact movement constraint on the dynamic characteristics of the system cannot be ignored.
2024, 43(7): 1132-1141.
doi: 10.13433/j.cnki.1003-8728.20240022
Abstract:
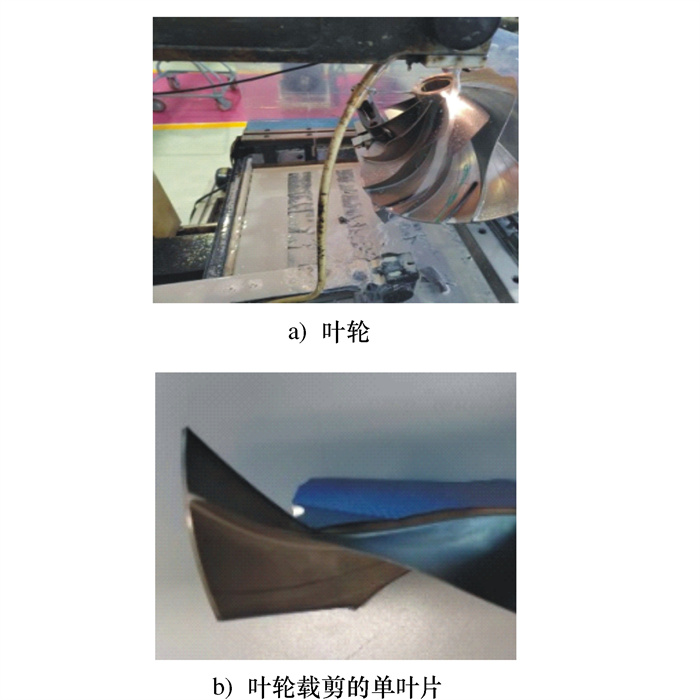
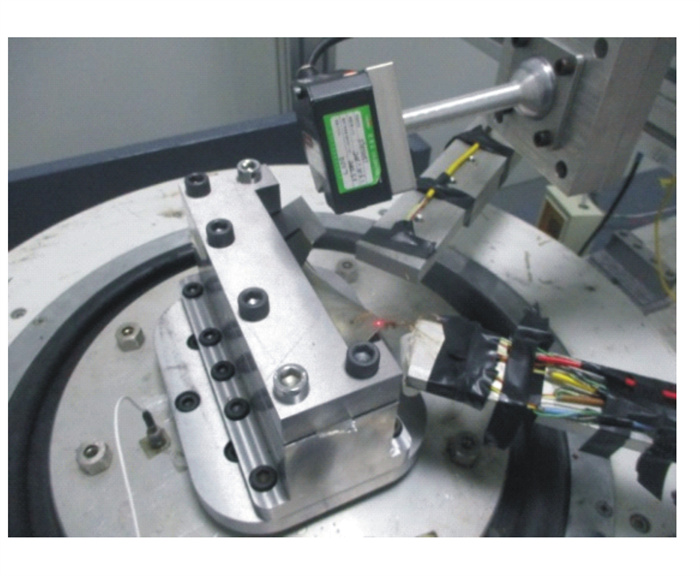
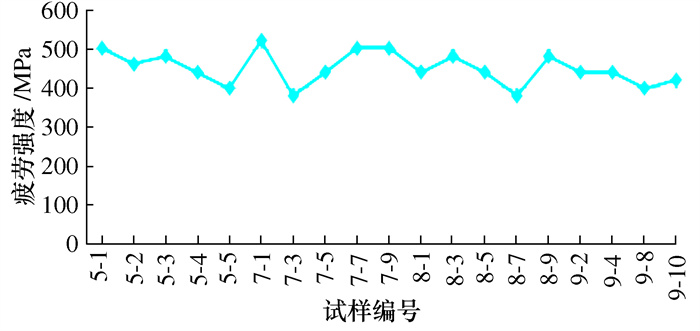
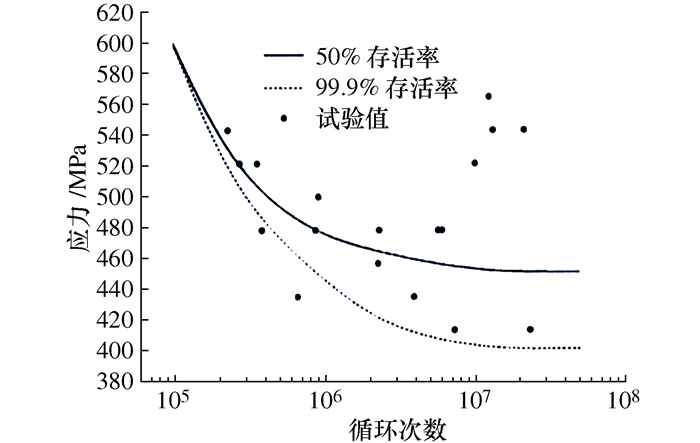
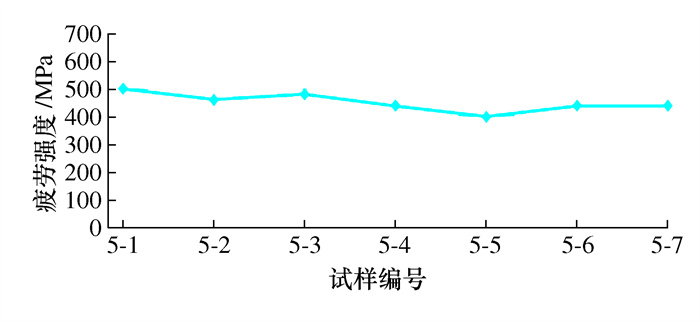
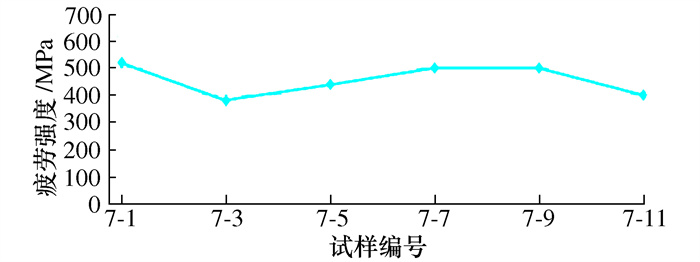
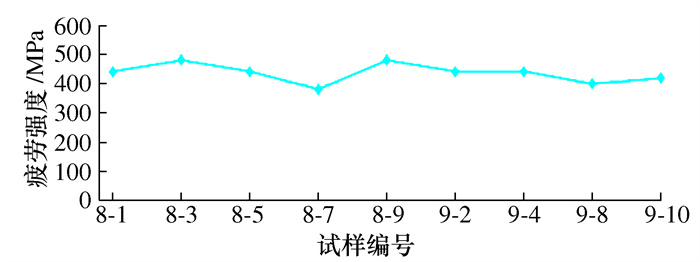
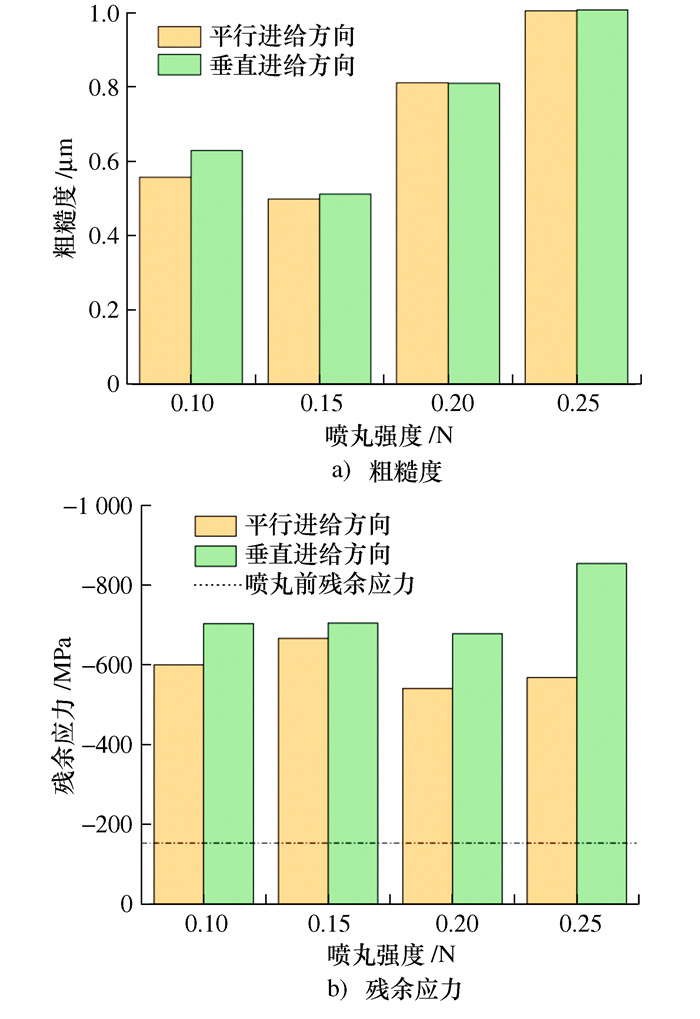
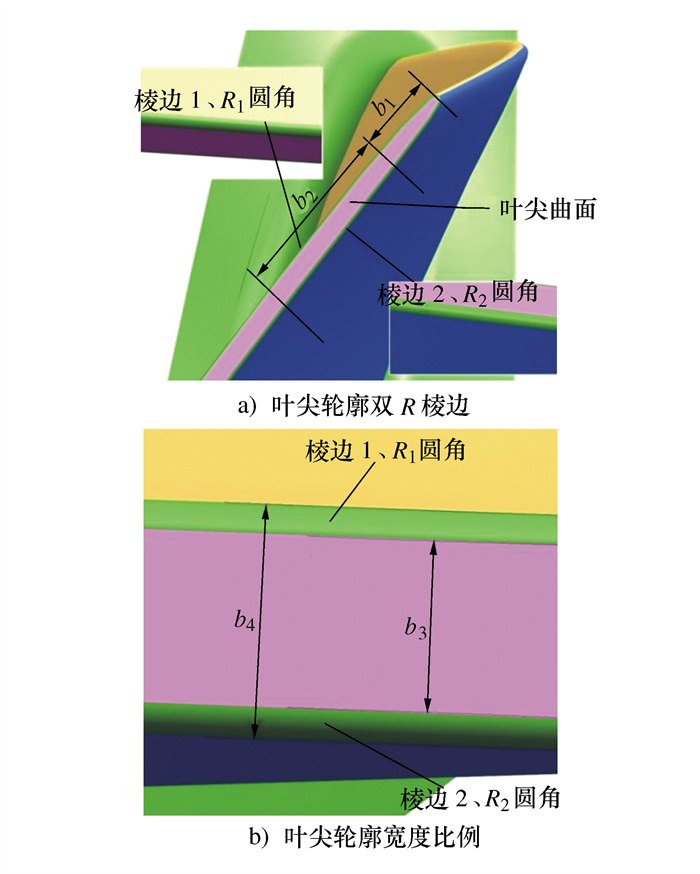
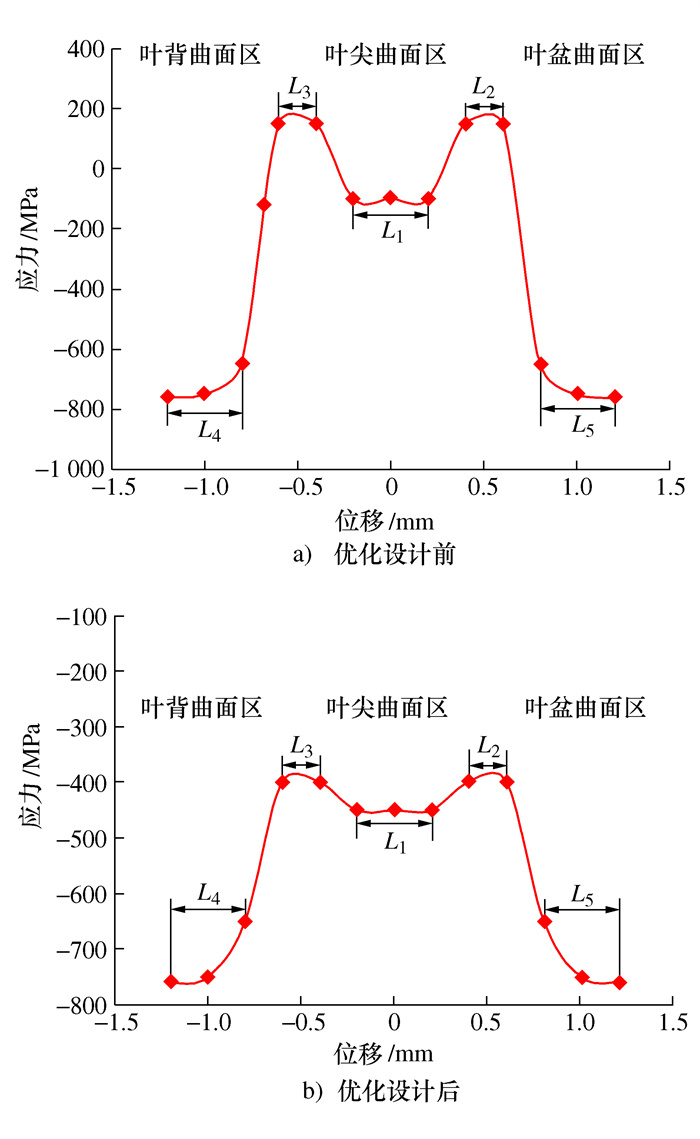
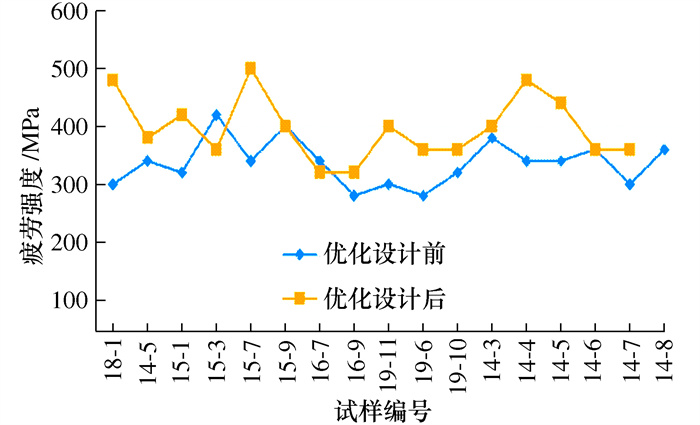
The fatigue strength of centrifugal impeller is the result of the combined influence of the various characteristic quantities on the blade surface integrity. Different processing parameters lead to distinct states of blade surface integrity, resulting in various fatigue performance. the effects of the precision cutting and shot peening on the fatigue performance of TC11 centrifugal impeller blades is focused. By analyzing the fatigue strength data under different processing conditions of the blade, the impeller's structural features have been optimized and designed. The results show that the fatigue strength of the optimized impeller blade increased approximate 15% under the high-frequency fatigue testing at a cycle number of 3×107, which has an important guidance for optimizing the processing parameters and structural design of the new type centrifugal impeller.
The fatigue strength of centrifugal impeller is the result of the combined influence of the various characteristic quantities on the blade surface integrity. Different processing parameters lead to distinct states of blade surface integrity, resulting in various fatigue performance. the effects of the precision cutting and shot peening on the fatigue performance of TC11 centrifugal impeller blades is focused. By analyzing the fatigue strength data under different processing conditions of the blade, the impeller's structural features have been optimized and designed. The results show that the fatigue strength of the optimized impeller blade increased approximate 15% under the high-frequency fatigue testing at a cycle number of 3×107, which has an important guidance for optimizing the processing parameters and structural design of the new type centrifugal impeller.
2024, 43(7): 1142-1150.
doi: 10.13433/j.cnki.1003-8728.20240071
Abstract:
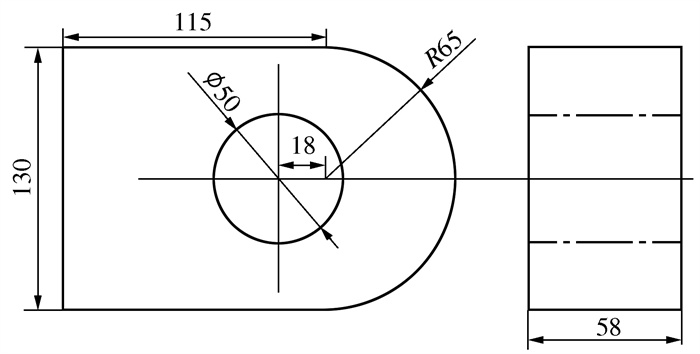
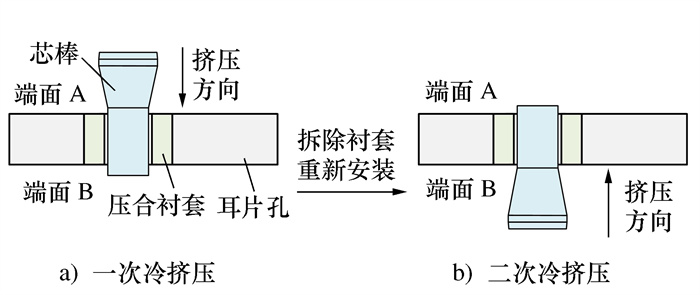
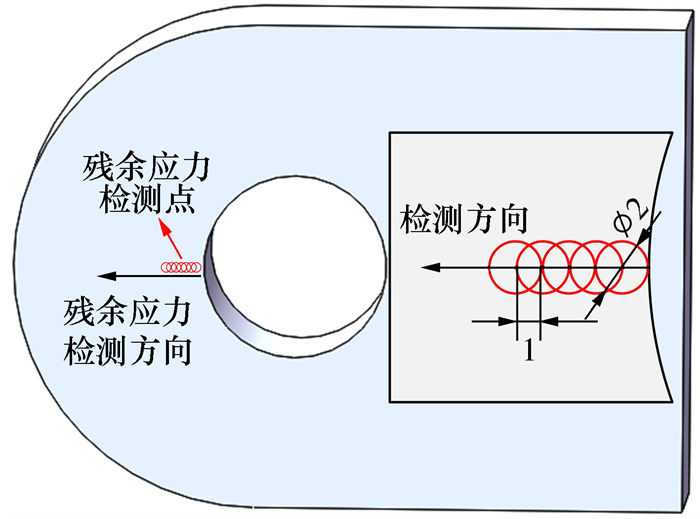
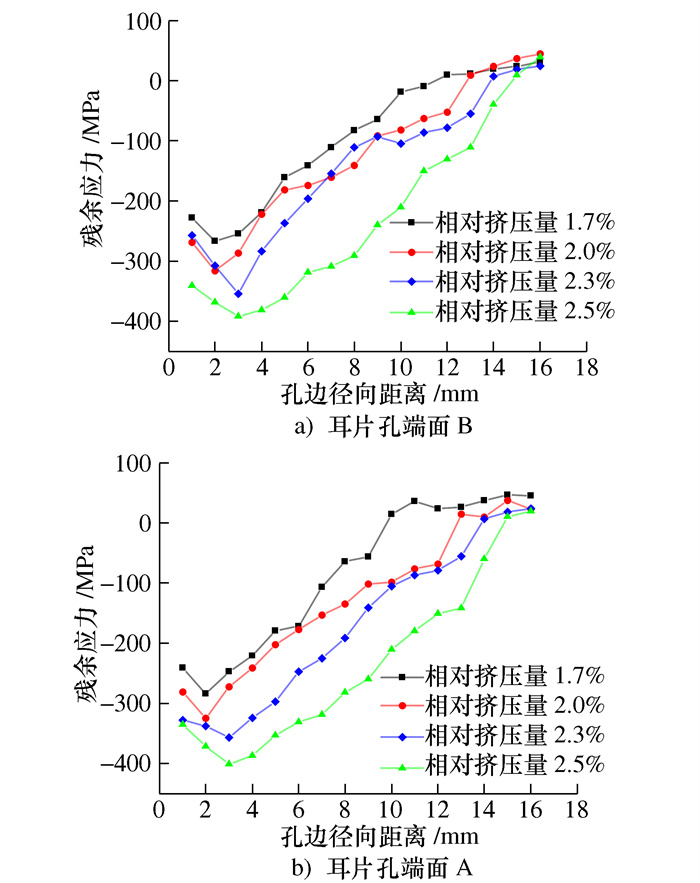
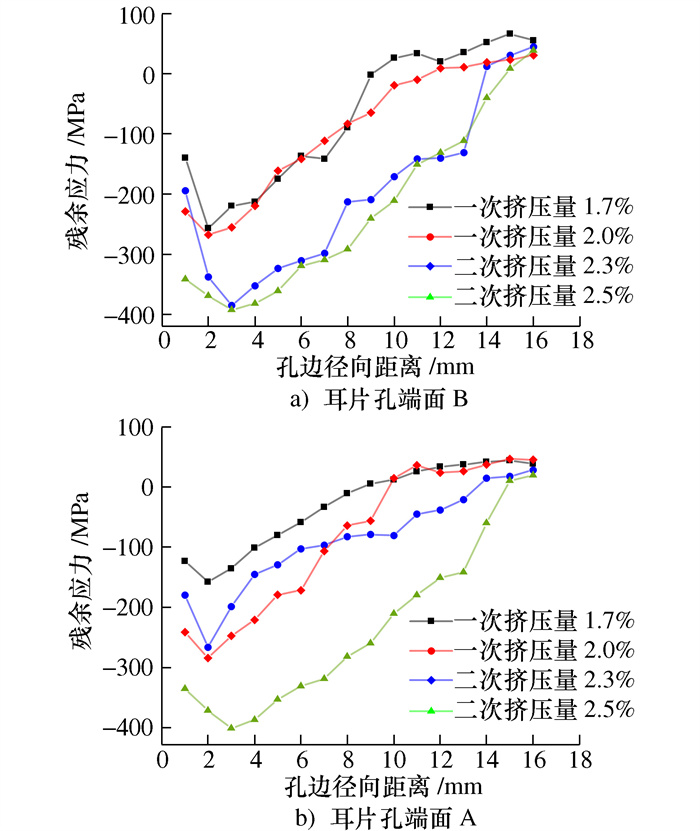
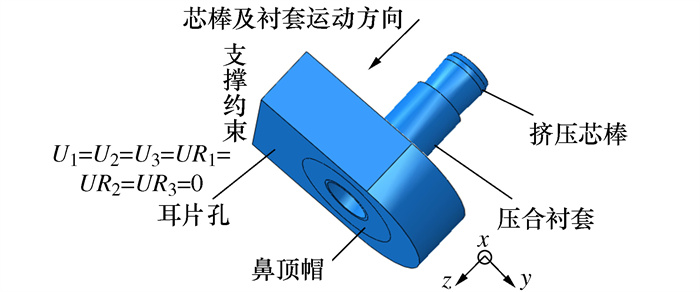
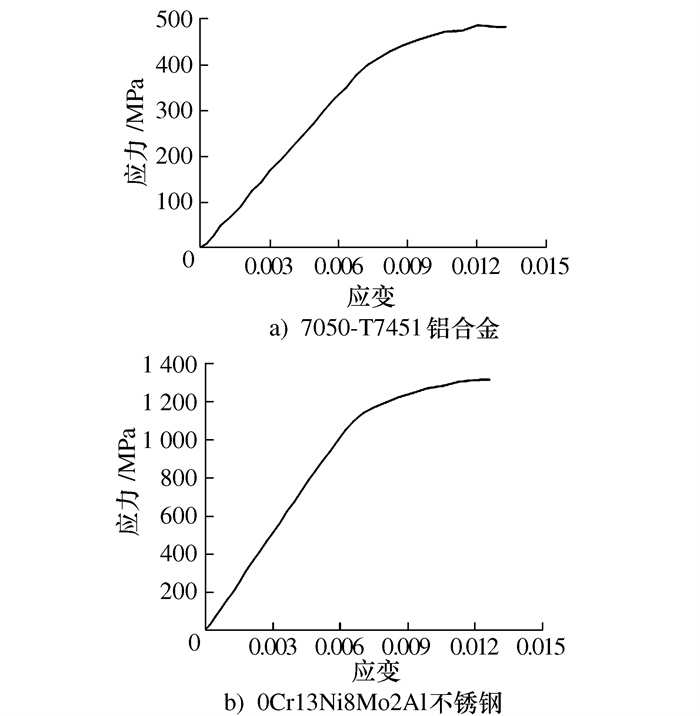
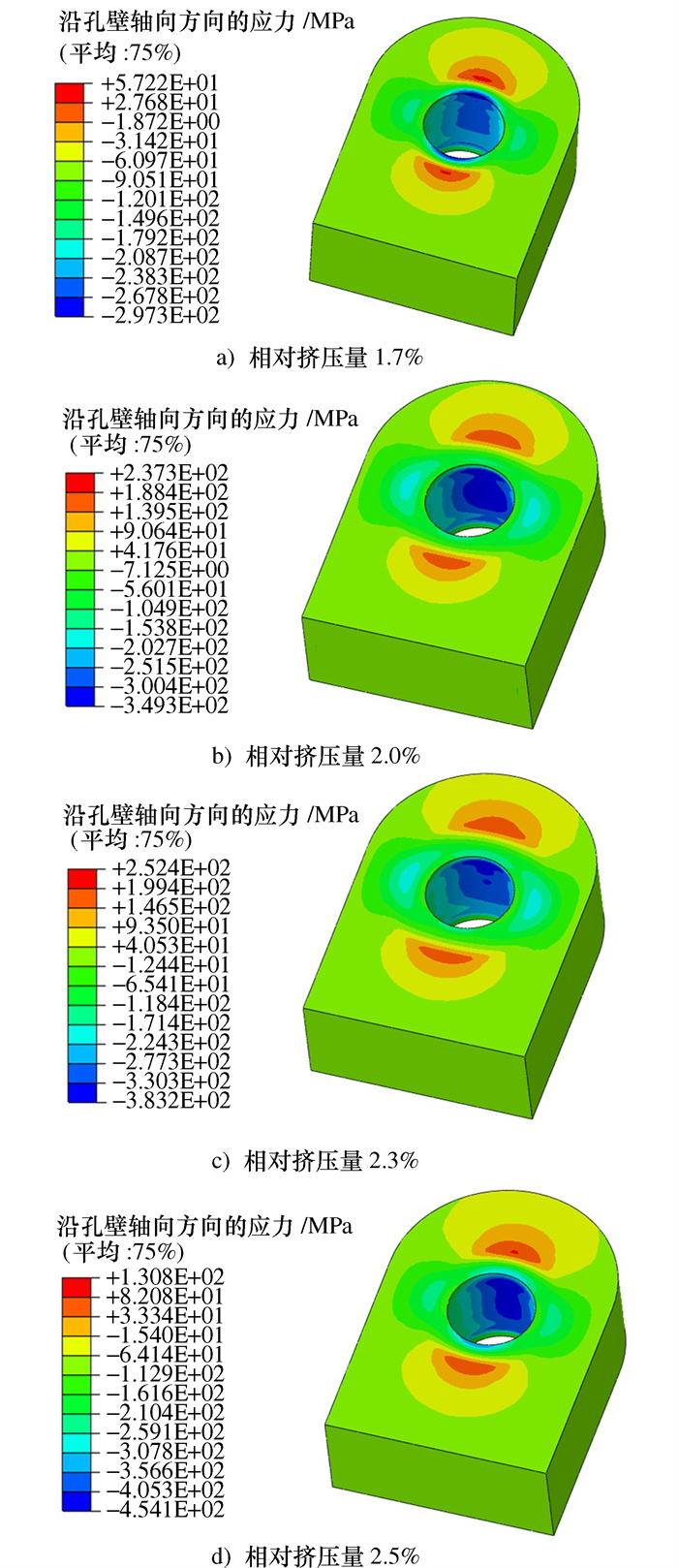
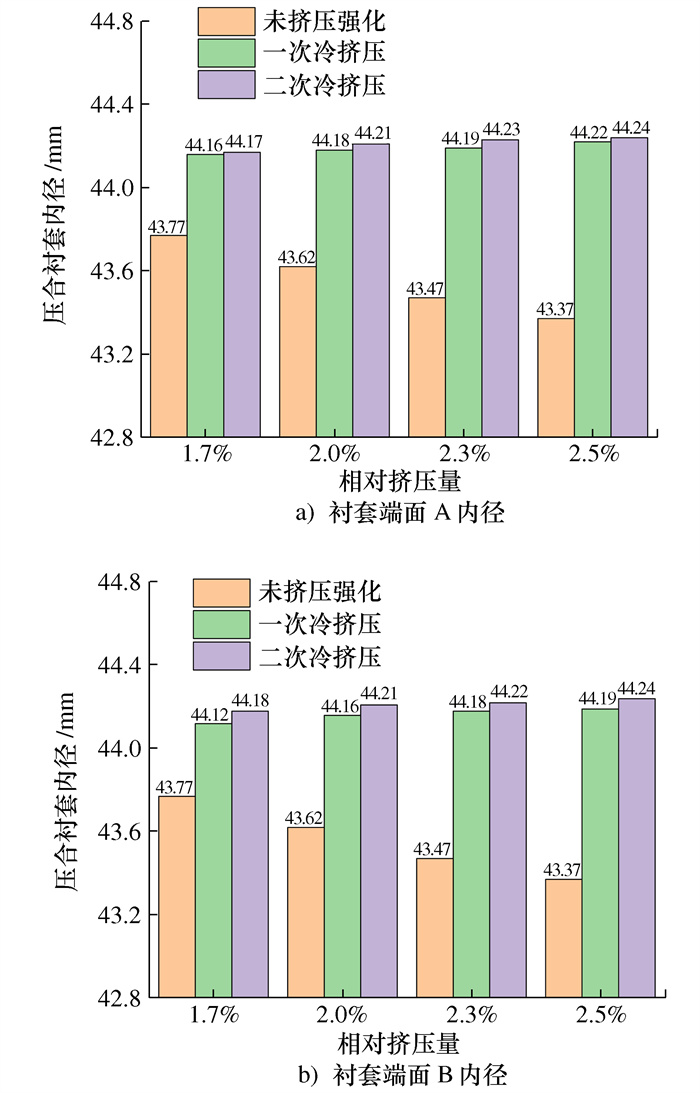
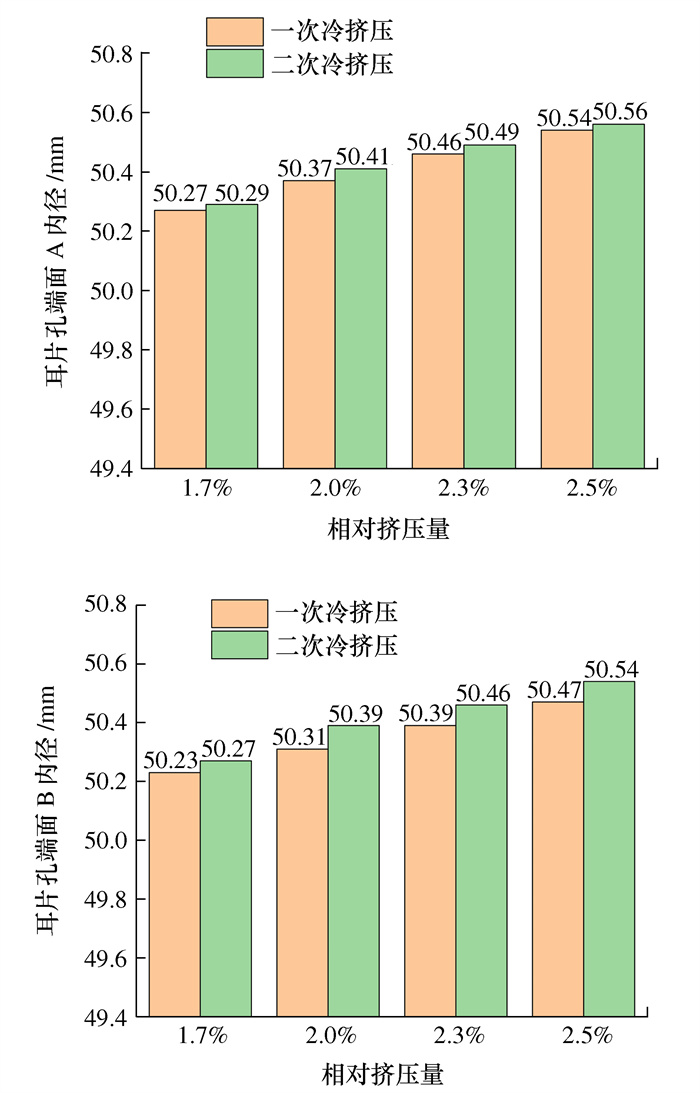
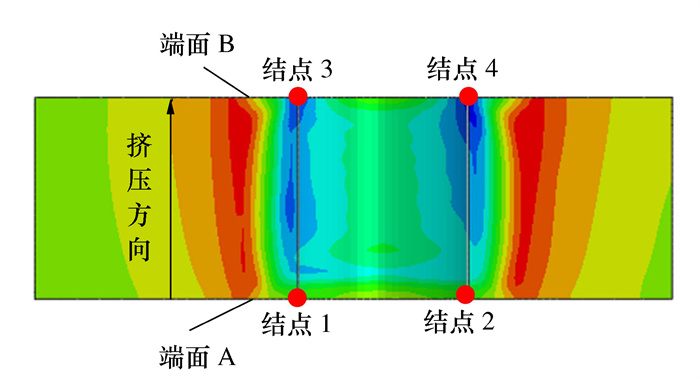
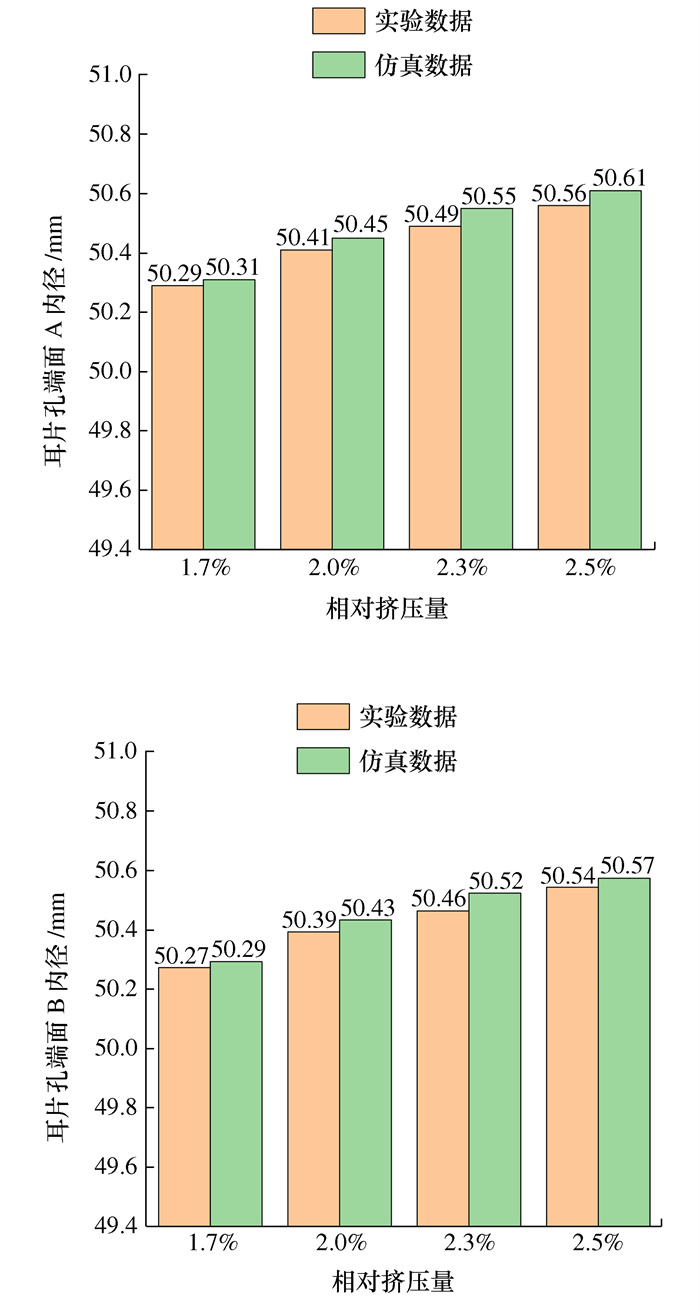
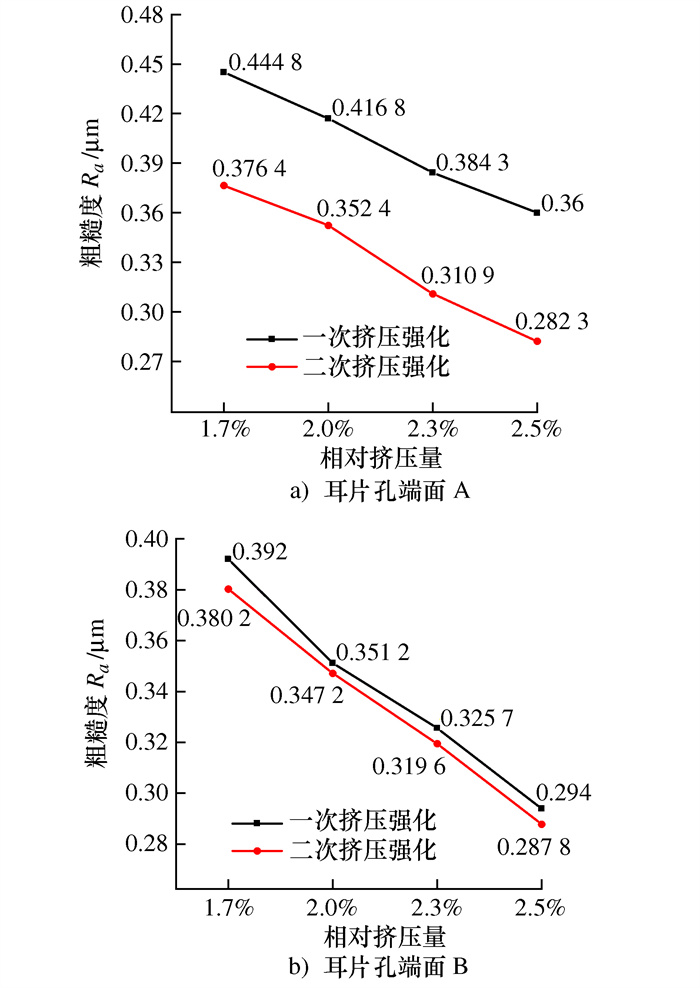
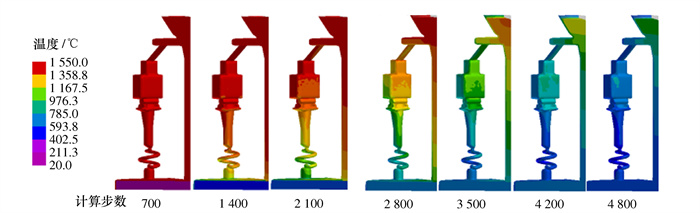
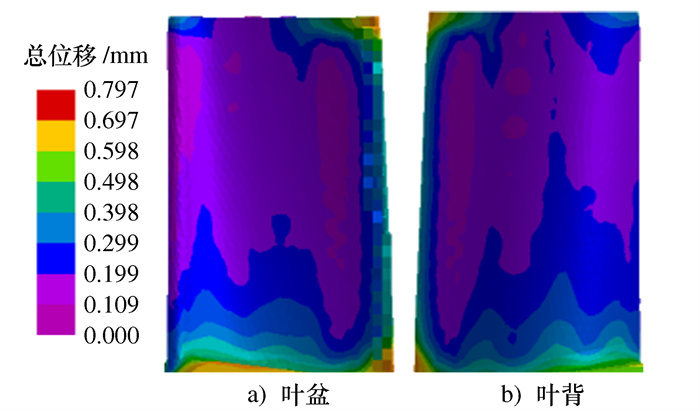
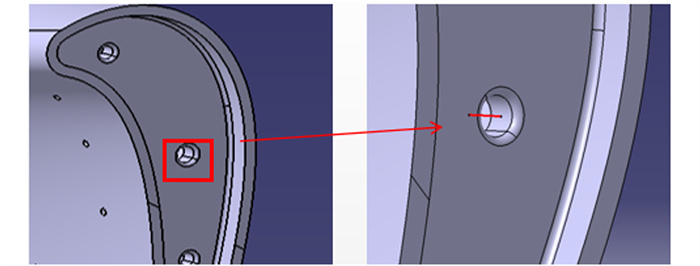
The ear hole of 7050 aluminum alloy was strengthened by using the second cold extrusion of pressed bush; The effects of the second cold extrusion on the residual stress, plastic deformation, and roughness of the inner surface of the ear hole were studied via X-ray diffractometer, coordinate measuring machine, and roughness meter, and which were verified through finite element simulation. The experimental results show that comparing with that in first cold extrusion, the second cold extrusion of the pressed sleeve can effectively improve the non-uniformity of residual stress at both ends of the sample. As the relative extrusion amount of the second cold extrusion increases, the peak residual compressive stress and the depth of the stress layer increase, and the degree of the plastic deformation increases too, meanwhile the surface roughness of the hole wall decreases. When the relative extrusion amount is 2.5%, the maximum residual compressive stress can reach -400.3 MPa, and there is a residual compressive stress layer of about 14 mm. The inner diameters of the sample end face A and end face B increased by 0.56 mm and 0.54 mm, respectively; the surface roughness of the hole wall decreased by 71.0%. Comparing with the first cold extrusion, the second cold extrusion strengthening forms a deeper residual compressive stress layer and plastic deformation layer along the radial direction of the hole wall, significantly improving the overall service performance of the ear hole.
The ear hole of 7050 aluminum alloy was strengthened by using the second cold extrusion of pressed bush; The effects of the second cold extrusion on the residual stress, plastic deformation, and roughness of the inner surface of the ear hole were studied via X-ray diffractometer, coordinate measuring machine, and roughness meter, and which were verified through finite element simulation. The experimental results show that comparing with that in first cold extrusion, the second cold extrusion of the pressed sleeve can effectively improve the non-uniformity of residual stress at both ends of the sample. As the relative extrusion amount of the second cold extrusion increases, the peak residual compressive stress and the depth of the stress layer increase, and the degree of the plastic deformation increases too, meanwhile the surface roughness of the hole wall decreases. When the relative extrusion amount is 2.5%, the maximum residual compressive stress can reach -400.3 MPa, and there is a residual compressive stress layer of about 14 mm. The inner diameters of the sample end face A and end face B increased by 0.56 mm and 0.54 mm, respectively; the surface roughness of the hole wall decreased by 71.0%. Comparing with the first cold extrusion, the second cold extrusion strengthening forms a deeper residual compressive stress layer and plastic deformation layer along the radial direction of the hole wall, significantly improving the overall service performance of the ear hole.
2024, 43(7): 1151-1157.
doi: 10.13433/j.cnki.1003-8728.20240023
Abstract:
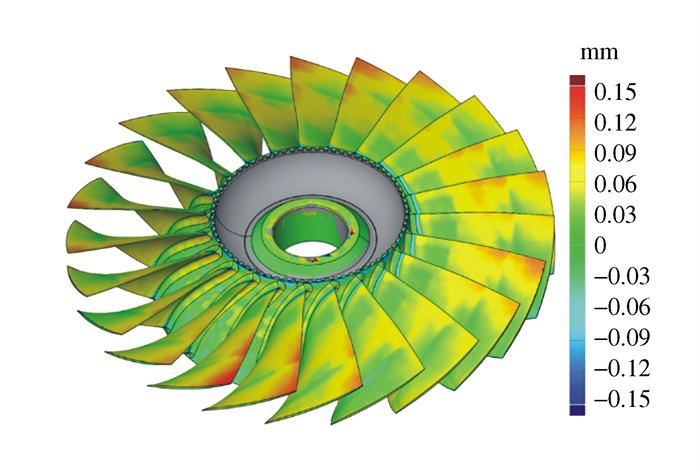
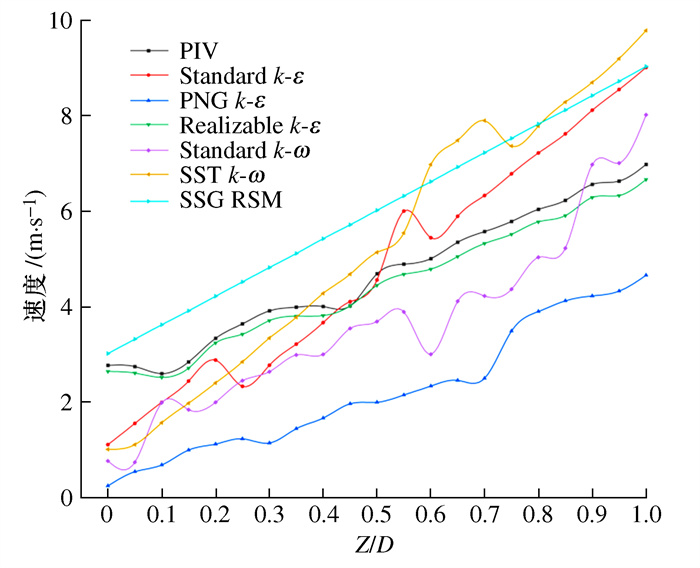
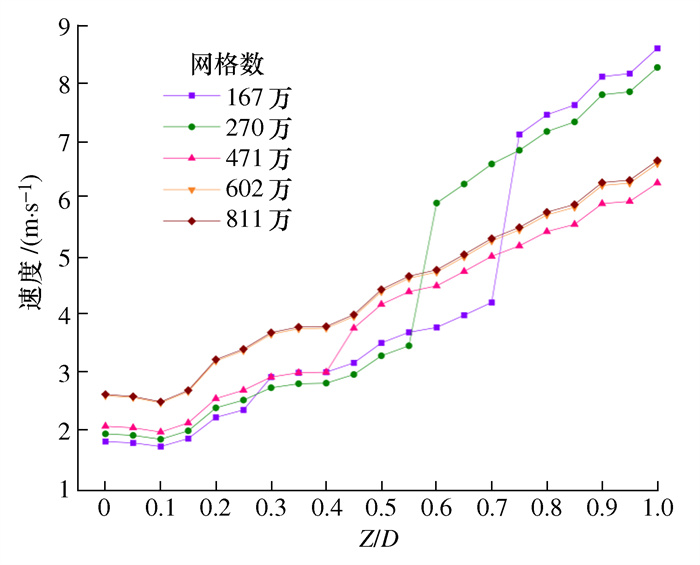
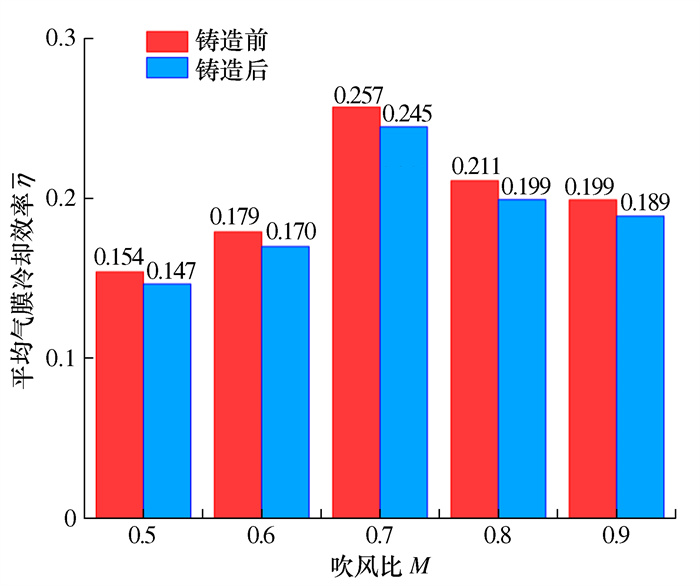
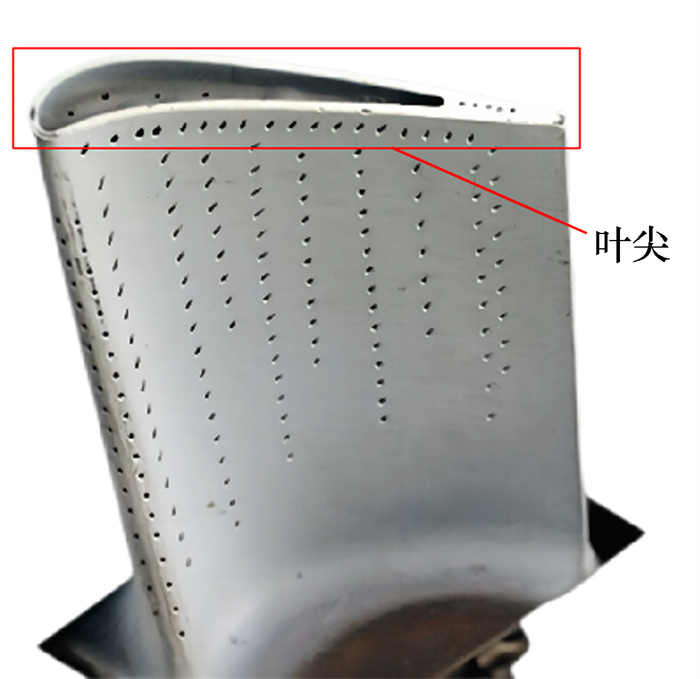
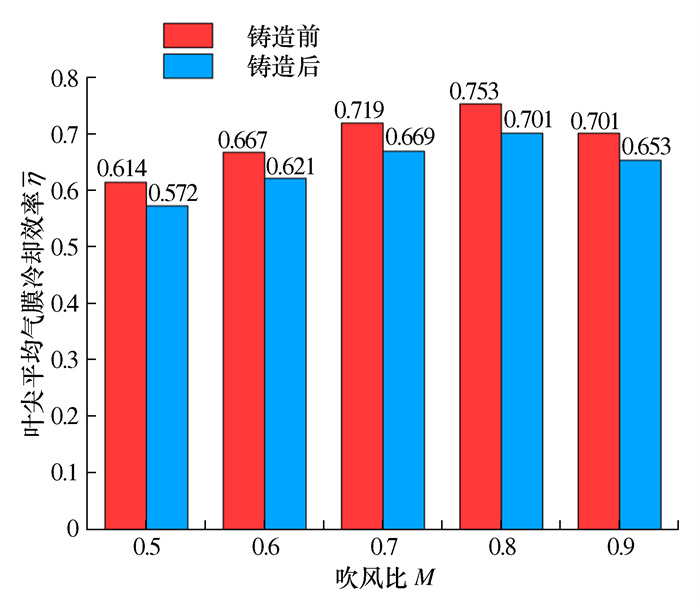
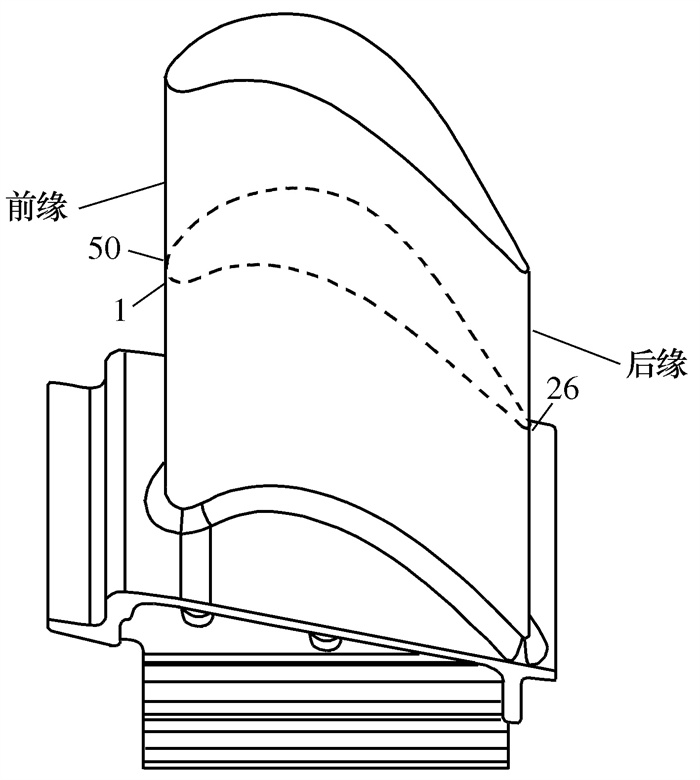
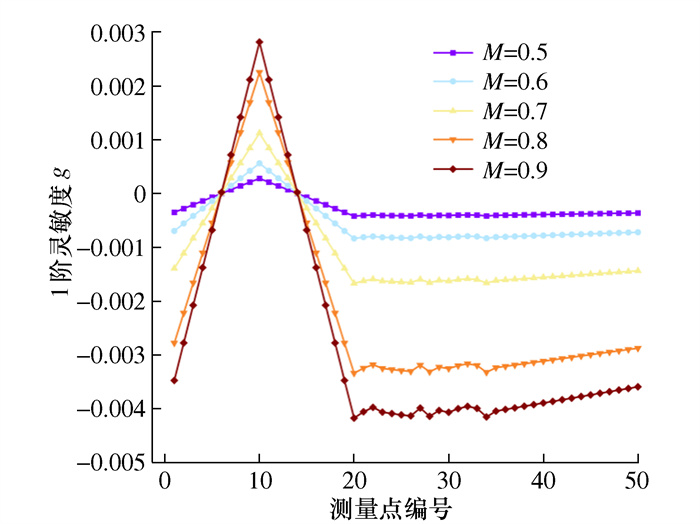
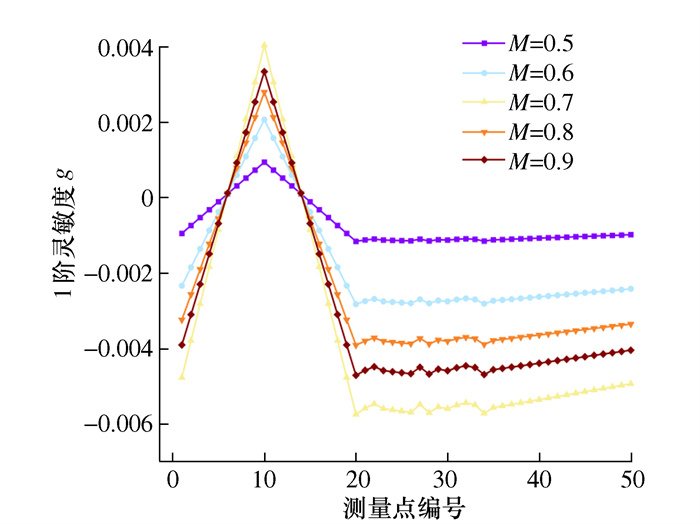
The precision casting process results in a random deviation between the turbine blade geometry and the design, which has an uncertain effect on the blade air cooling efficiency. The uncertainty of turbine blade contour deviation is a minor disturbance problem in geometry. A model for deformation in the investment casting of the turbine blade is established by using the investment casting simulation. According to PIV and the numerical simulation, a realizable k-epsilon turbulence model for fluid-heat coupling calculation was established. A sensitivity calculation method of cooling efficiency considering blade deformation was established, and the sensitivity variation of the turbine blade air-cooling efficiency with the blow ratio was calculated. The results show that the greater the deformation of turbine blades is, the greater the loss of the original cooling efficiency. The overall average blade deformation of 0.25 mm makes the overall air-cooling efficiency loss of about 5%, and the local deformation such as 0.70 mm at the rear edge of the blade make the average air-cooling efficiency to be a loss of about 8%.
The precision casting process results in a random deviation between the turbine blade geometry and the design, which has an uncertain effect on the blade air cooling efficiency. The uncertainty of turbine blade contour deviation is a minor disturbance problem in geometry. A model for deformation in the investment casting of the turbine blade is established by using the investment casting simulation. According to PIV and the numerical simulation, a realizable k-epsilon turbulence model for fluid-heat coupling calculation was established. A sensitivity calculation method of cooling efficiency considering blade deformation was established, and the sensitivity variation of the turbine blade air-cooling efficiency with the blow ratio was calculated. The results show that the greater the deformation of turbine blades is, the greater the loss of the original cooling efficiency. The overall average blade deformation of 0.25 mm makes the overall air-cooling efficiency loss of about 5%, and the local deformation such as 0.70 mm at the rear edge of the blade make the average air-cooling efficiency to be a loss of about 8%.
2024, 43(7): 1158-1167.
doi: 10.13433/j.cnki.1003-8728.20240024
Abstract:
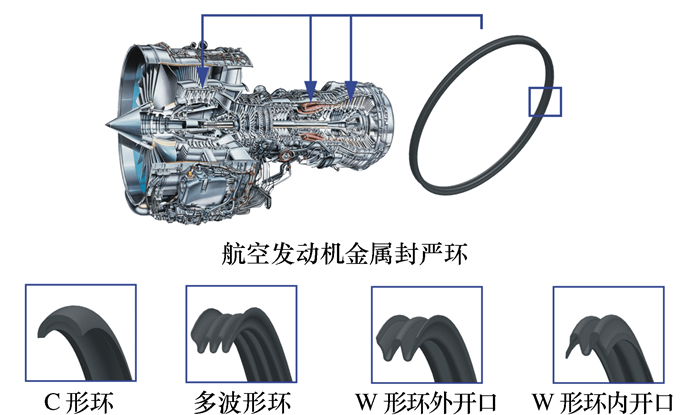
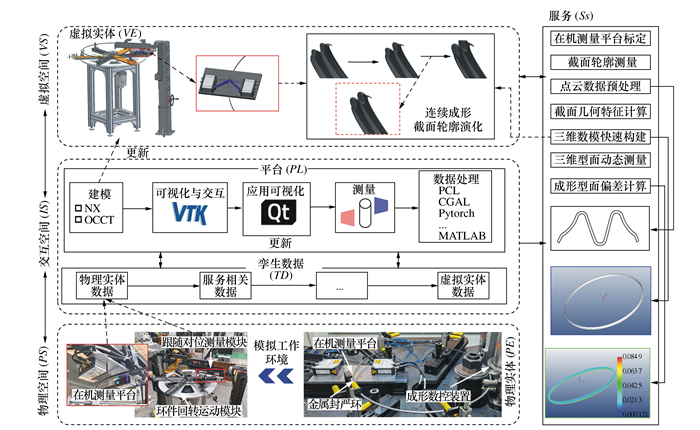
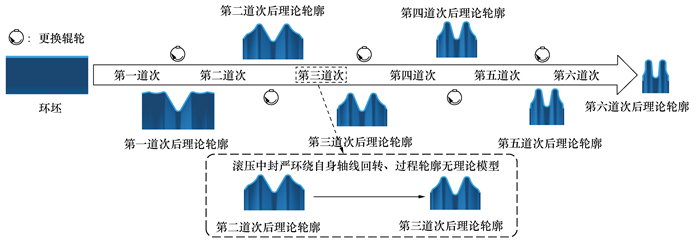
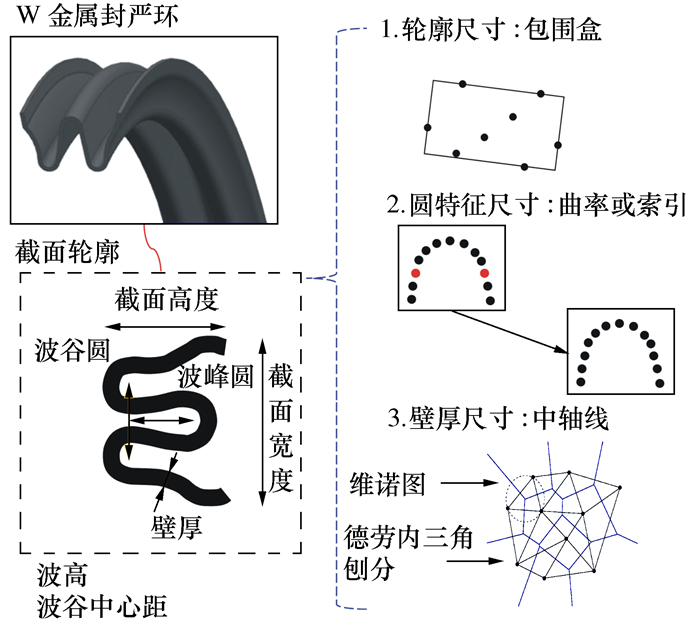
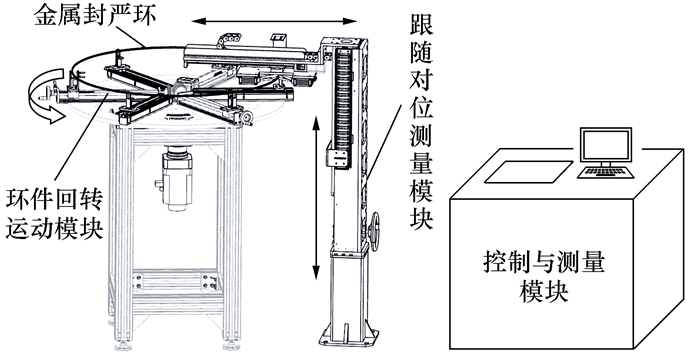
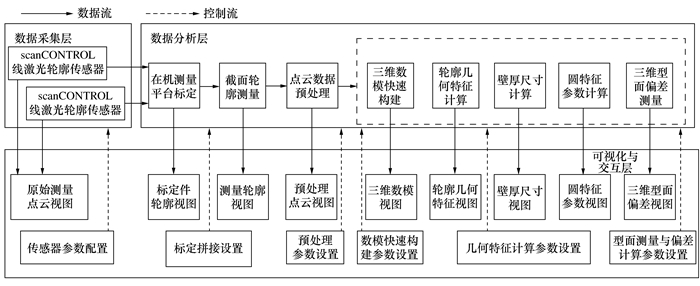
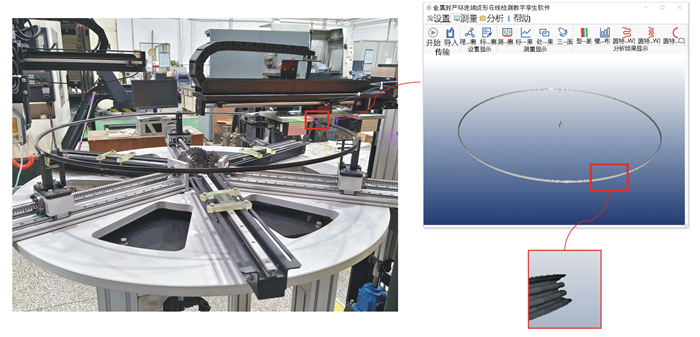
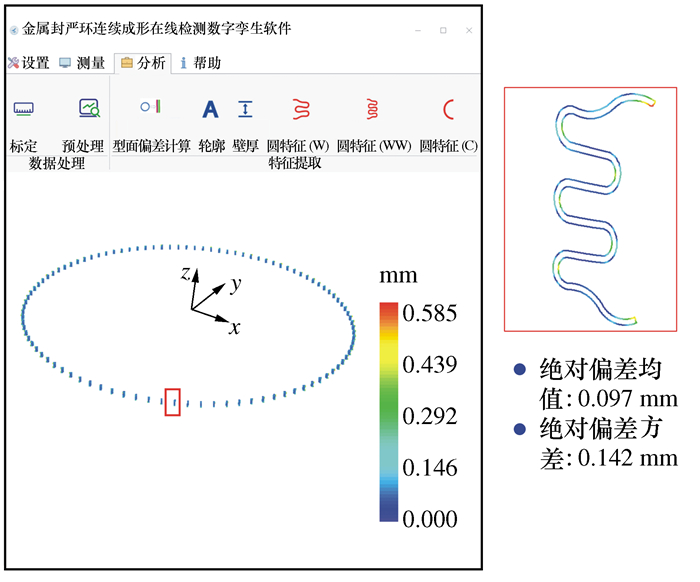
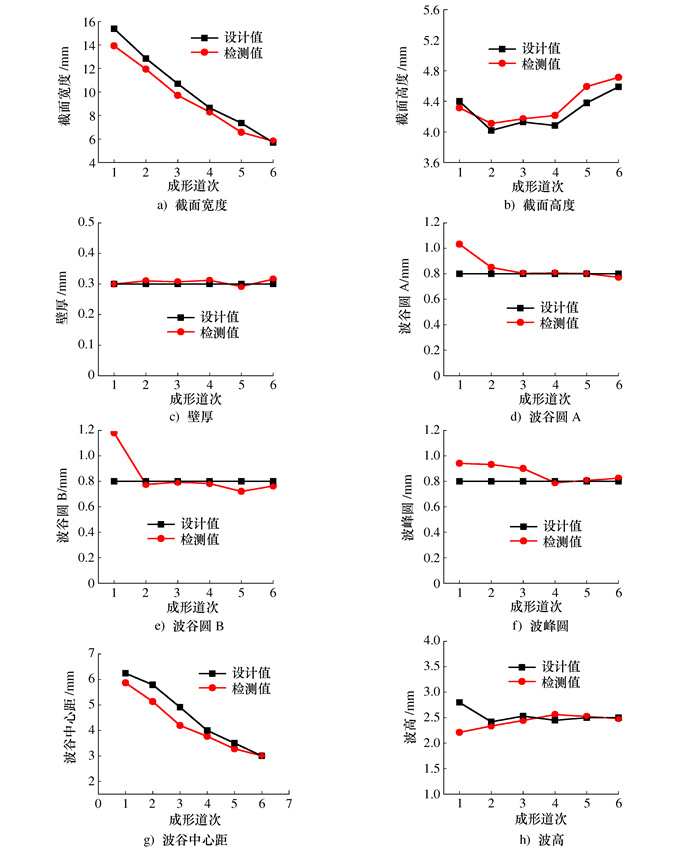
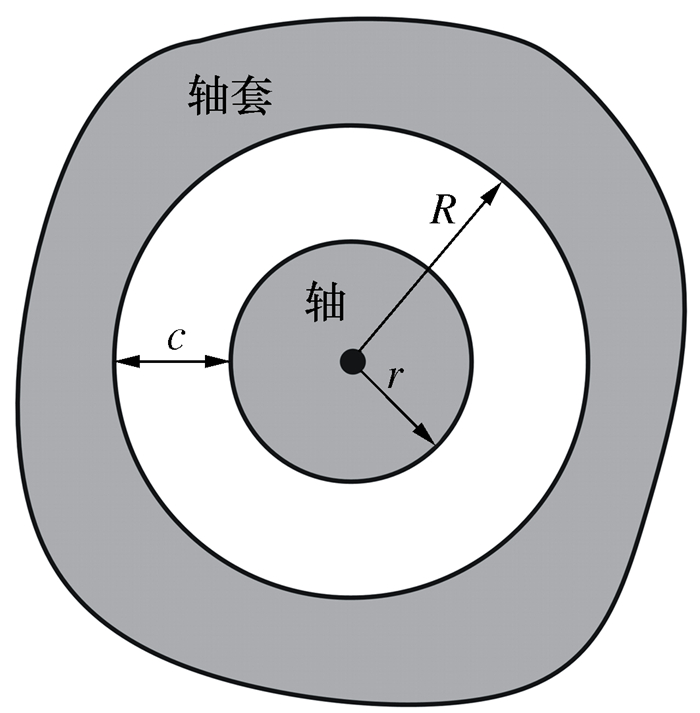
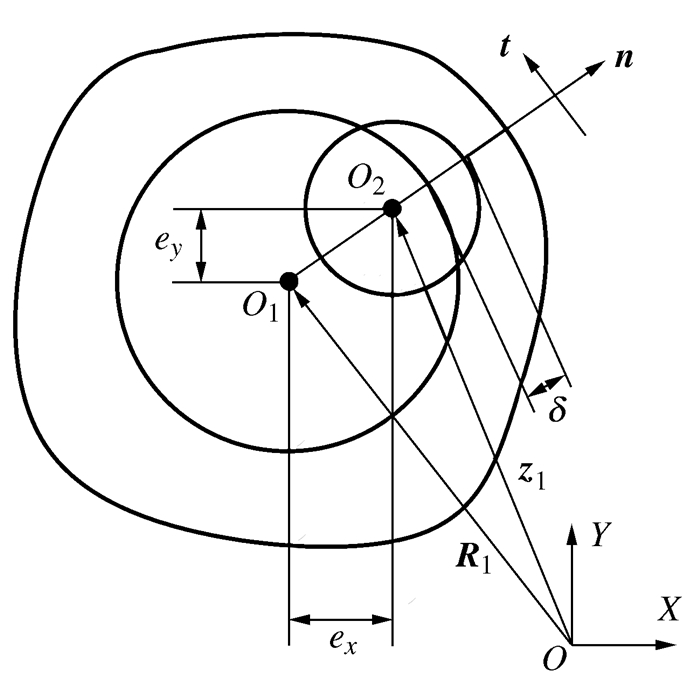
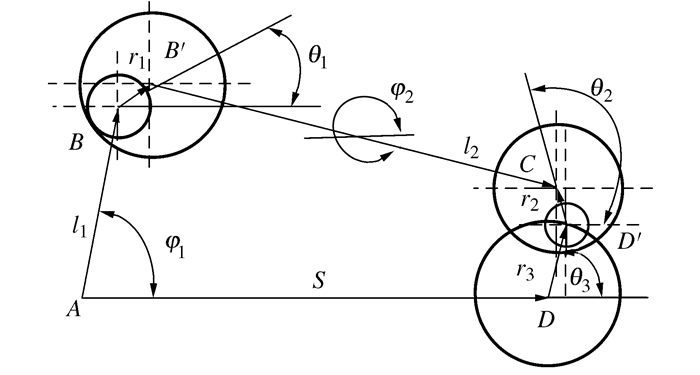
Metallic sealing ring is widely used in aero-engine sealing systems, and its formed quality has an important impact on the aircraft service reliability. However, the thin-walled, complex irregular section and closed ring structure of sealing rings lead to the following problems: first, the formed results are heavily dependent on final destructive sampling inspection, and the actual products have not undergone complete quality inspection; second, there is no means of geometric quality inspection during the forming process, which makes it impossible to inspect defects in time, and the lack of geometric data makes the process optimization difficult. Therefore, a digital twin geometric model framework for metallic sealing rings is proposed, which includes four parts: physical space, virtual space, interaction space and services, and it can provide on-machine measurement platform calibration, section profile measurement, point cloud preprocessing, section geometric features computation, 3-D digital model construction, 3-D surface dynamic measurement, forming deviation computation and other continuous forming quality on-line inspection techniques, so as to build a digital twin geometric model that reflects the changes in the forming process and provides support for the inspection, analysis and prediction of the forming quality, as well as the acquisition of the basic data required for the subsequent process optimization and design. On this basis, an on-line inspection simulation test device and a digital twin software are developed, and their applications are introduced.
Metallic sealing ring is widely used in aero-engine sealing systems, and its formed quality has an important impact on the aircraft service reliability. However, the thin-walled, complex irregular section and closed ring structure of sealing rings lead to the following problems: first, the formed results are heavily dependent on final destructive sampling inspection, and the actual products have not undergone complete quality inspection; second, there is no means of geometric quality inspection during the forming process, which makes it impossible to inspect defects in time, and the lack of geometric data makes the process optimization difficult. Therefore, a digital twin geometric model framework for metallic sealing rings is proposed, which includes four parts: physical space, virtual space, interaction space and services, and it can provide on-machine measurement platform calibration, section profile measurement, point cloud preprocessing, section geometric features computation, 3-D digital model construction, 3-D surface dynamic measurement, forming deviation computation and other continuous forming quality on-line inspection techniques, so as to build a digital twin geometric model that reflects the changes in the forming process and provides support for the inspection, analysis and prediction of the forming quality, as well as the acquisition of the basic data required for the subsequent process optimization and design. On this basis, an on-line inspection simulation test device and a digital twin software are developed, and their applications are introduced.
2024, 43(7): 1168-1179.
doi: 10.13433/j.cnki.1003-8728.20230009
Abstract:
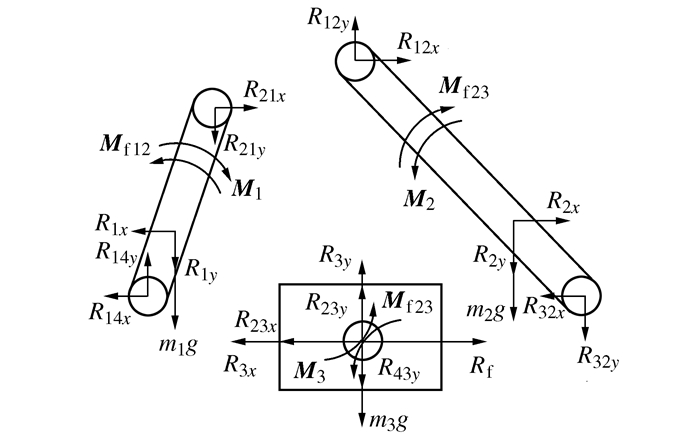
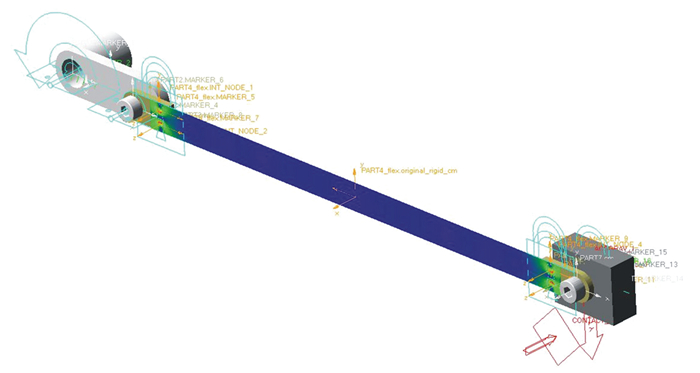
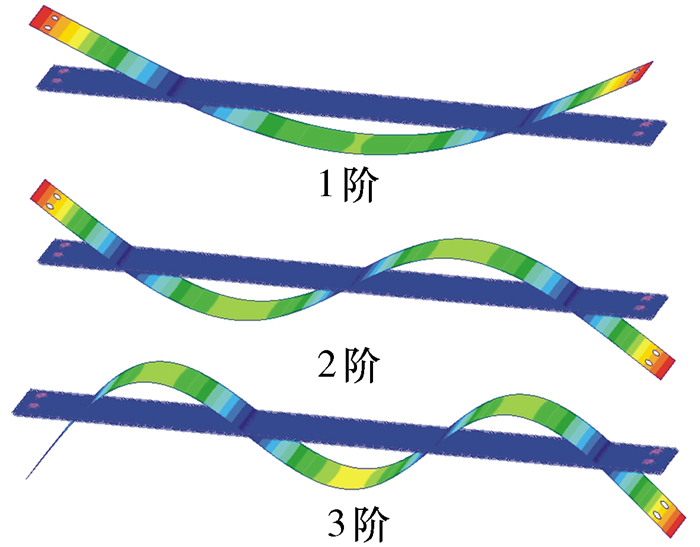
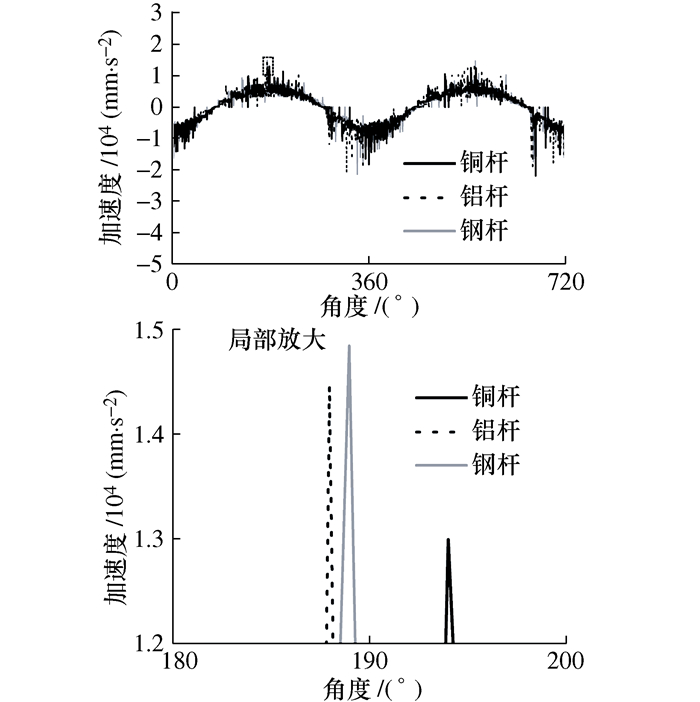
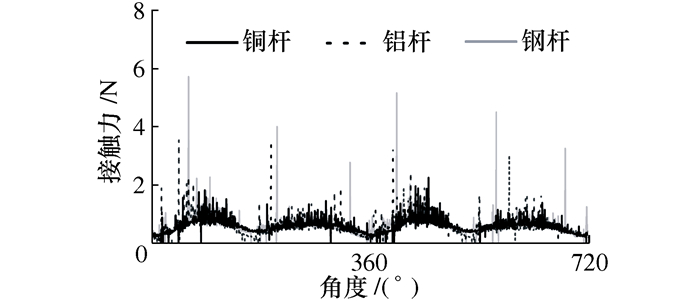
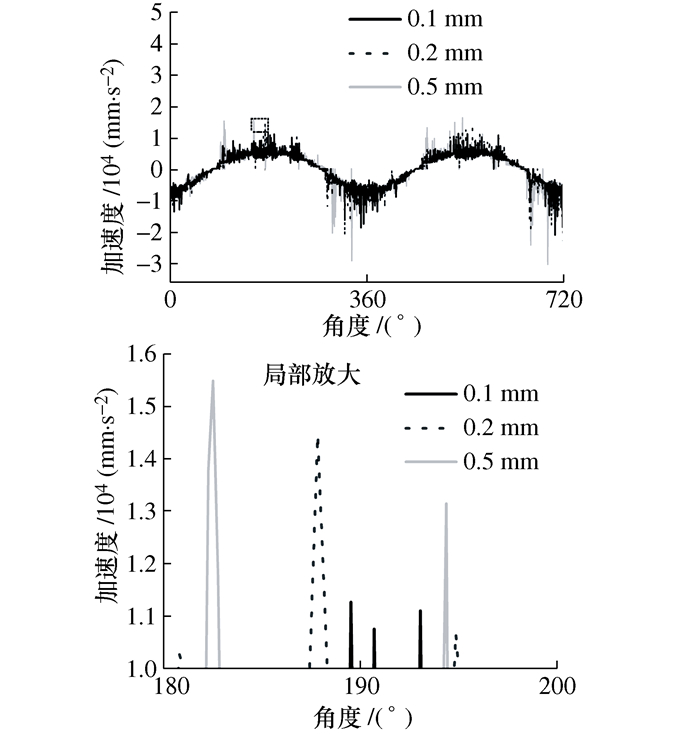
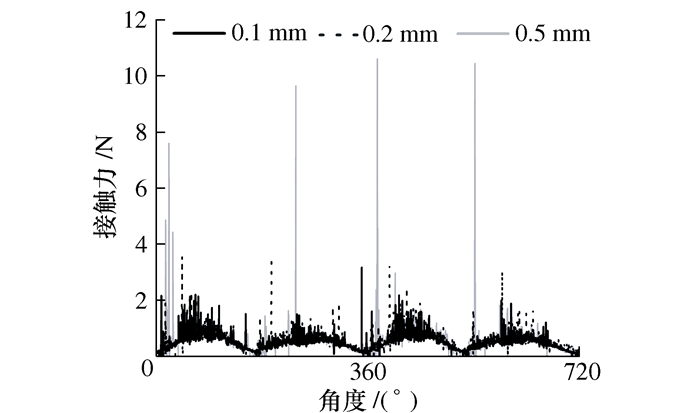
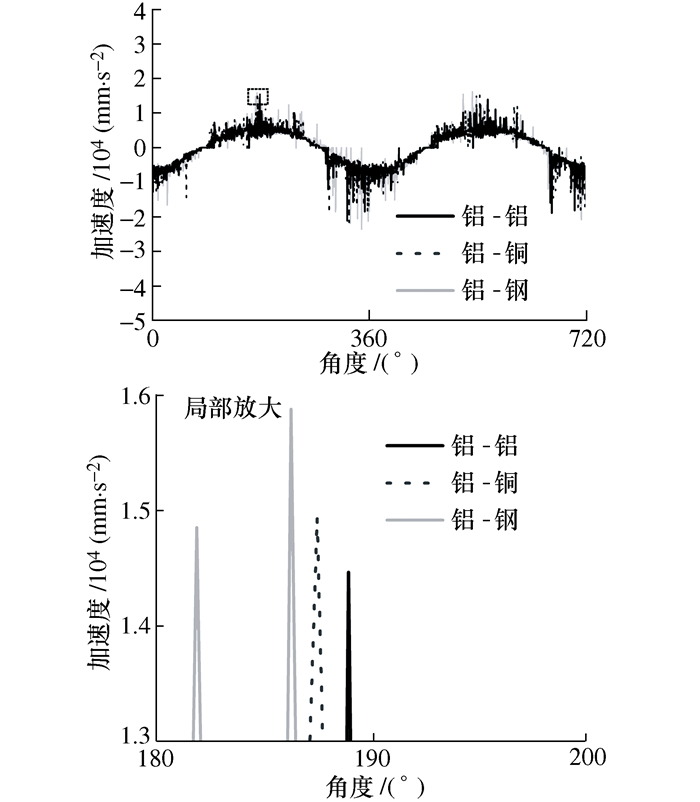
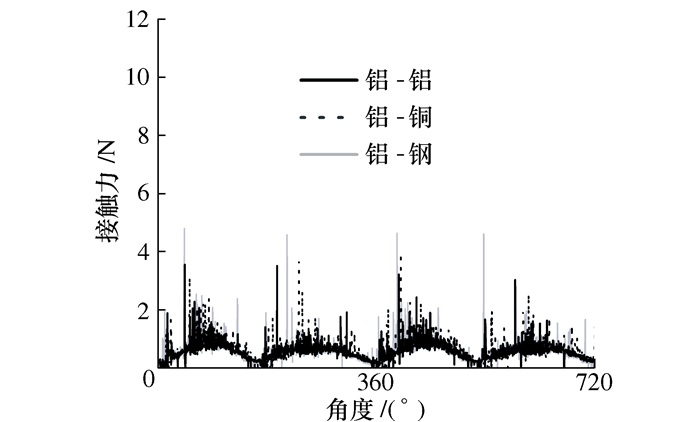
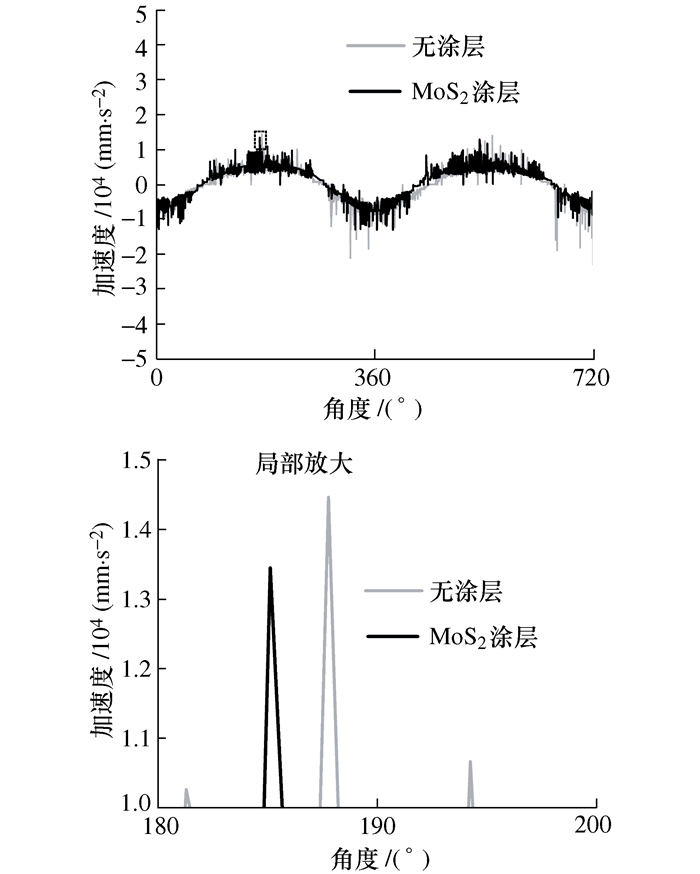
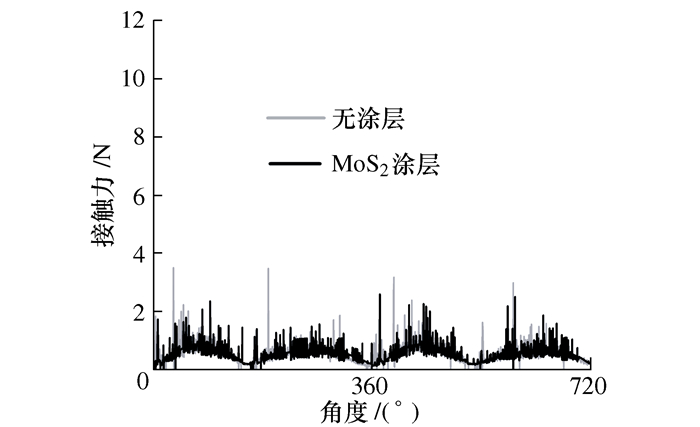
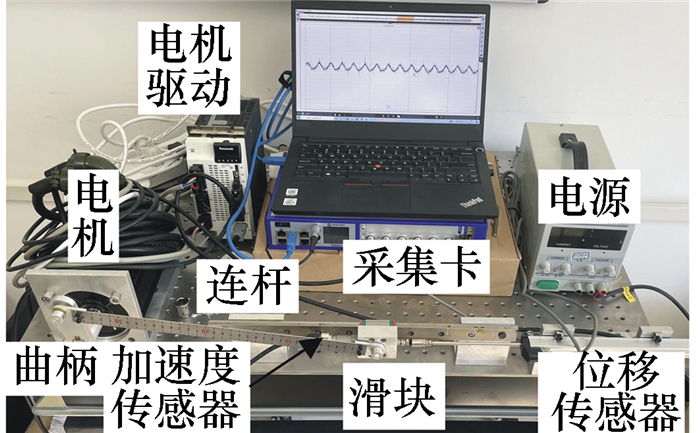
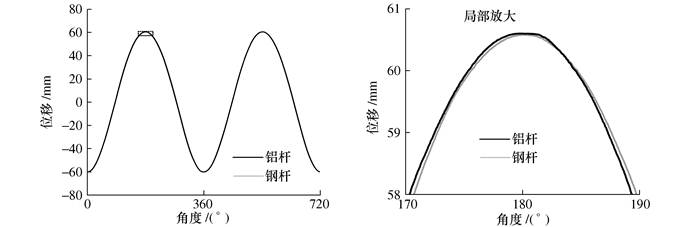
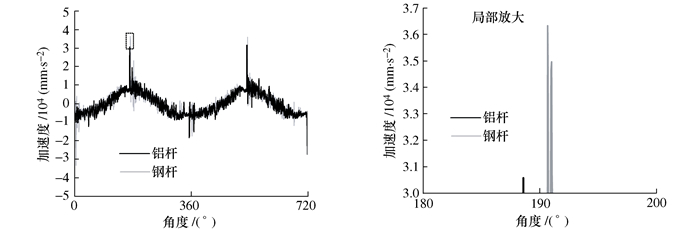
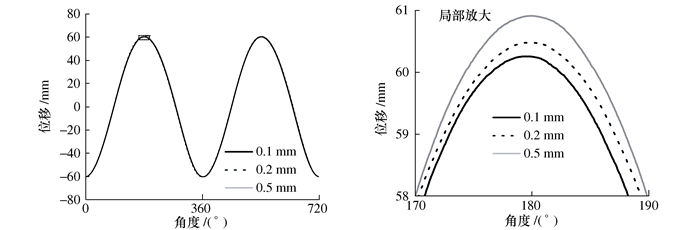
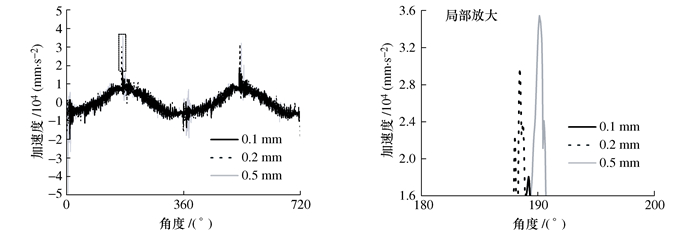
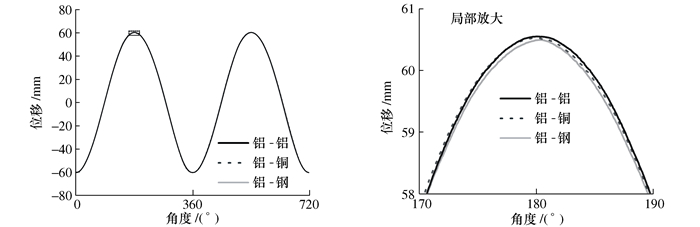
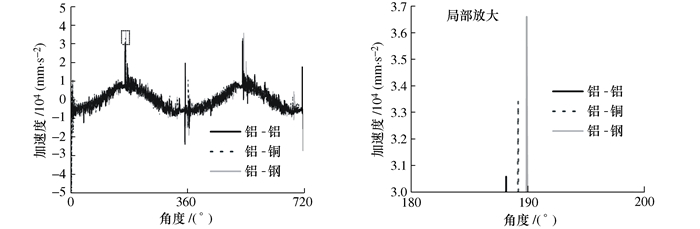
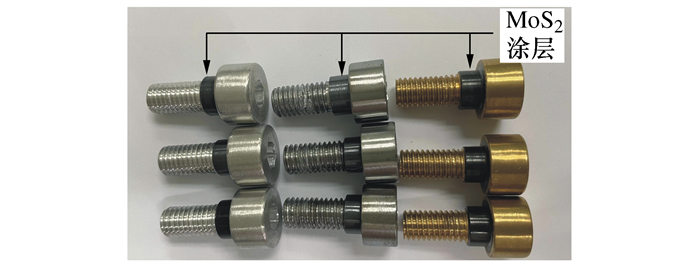
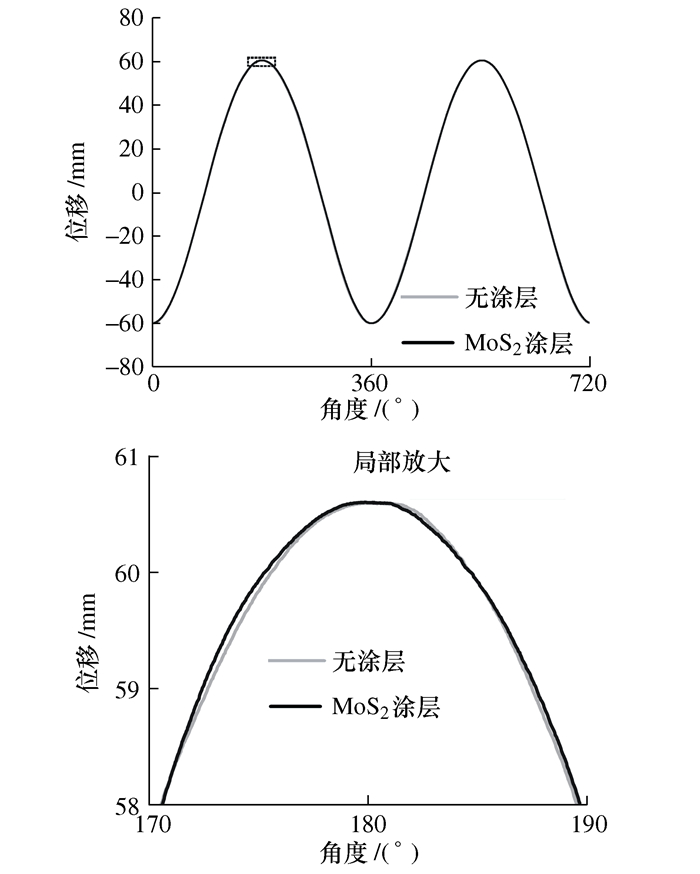
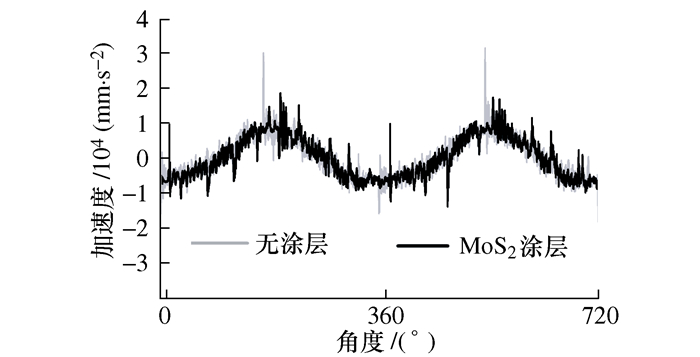
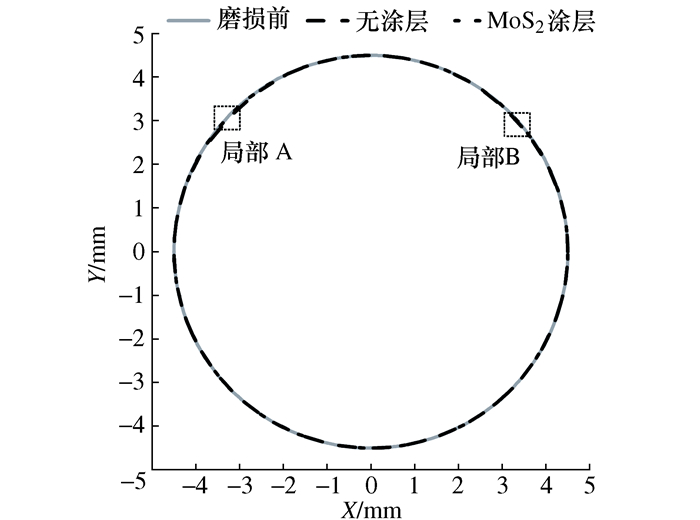
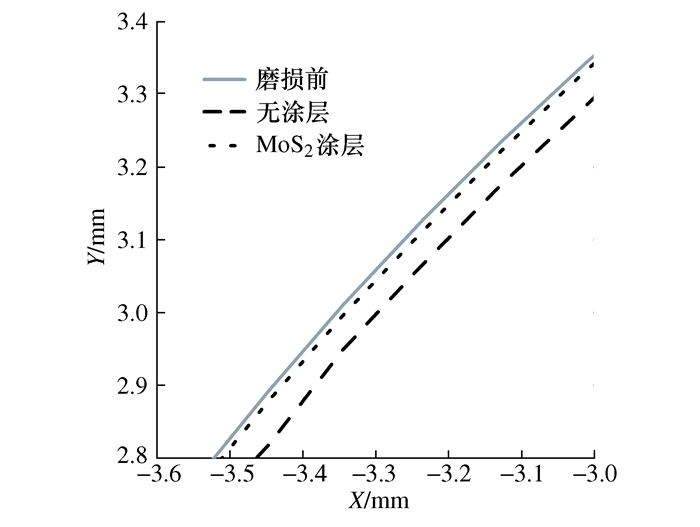
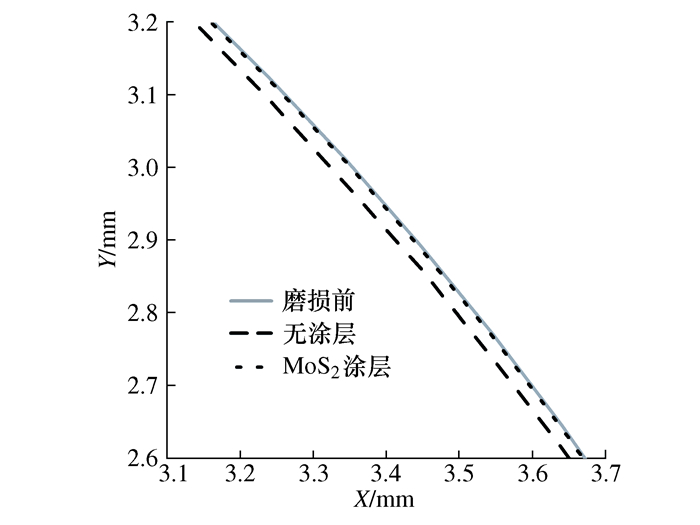
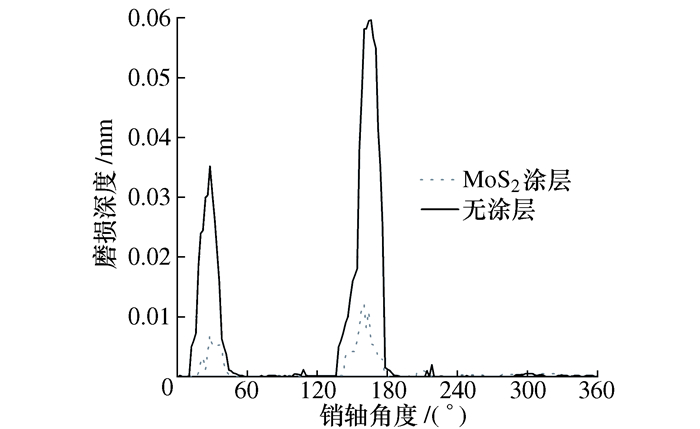
In order to study the influence of the flexible connecting rod and hinge contact pair with solid lubrication coating MoS2 on the dynamic characteristics of the hinge mechanism with clearance, the crank slider mechanism was taken as the research object, and Adams software was used for numerical simulation analysis. The influences of the flexible connecting rod material, hinge clearance, hinge contact pair material and solid lubrication coating on the surface of hinge contact pair on the dynamic characteristics of crank slider mechanism were studied. By setting up a crank slide test bench with clearance hinge, which is consistent with the numerical simulation parameters, the test proves that the vibration of the mechanism can be reduced by the flexible connecting rod, the smaller clearance value and the contact pair material with smaller contact stiffness, and the coated hinge can effectively reduce the wear of the contact surface. The experimental results are consistent with the numerical simulation results, which can effectively reflect the influence rule of the various working conditions on the mechanism with clearance, and provide theoretical basis and experimental basis for studying the solid lubrication coating in the aerospace field on the damping and impact resistance of the mechanism with clearance hinge contact pair.
In order to study the influence of the flexible connecting rod and hinge contact pair with solid lubrication coating MoS2 on the dynamic characteristics of the hinge mechanism with clearance, the crank slider mechanism was taken as the research object, and Adams software was used for numerical simulation analysis. The influences of the flexible connecting rod material, hinge clearance, hinge contact pair material and solid lubrication coating on the surface of hinge contact pair on the dynamic characteristics of crank slider mechanism were studied. By setting up a crank slide test bench with clearance hinge, which is consistent with the numerical simulation parameters, the test proves that the vibration of the mechanism can be reduced by the flexible connecting rod, the smaller clearance value and the contact pair material with smaller contact stiffness, and the coated hinge can effectively reduce the wear of the contact surface. The experimental results are consistent with the numerical simulation results, which can effectively reflect the influence rule of the various working conditions on the mechanism with clearance, and provide theoretical basis and experimental basis for studying the solid lubrication coating in the aerospace field on the damping and impact resistance of the mechanism with clearance hinge contact pair.
2024, 43(7): 1180-1188.
doi: 10.13433/j.cnki.1003-8728.20230041
Abstract:
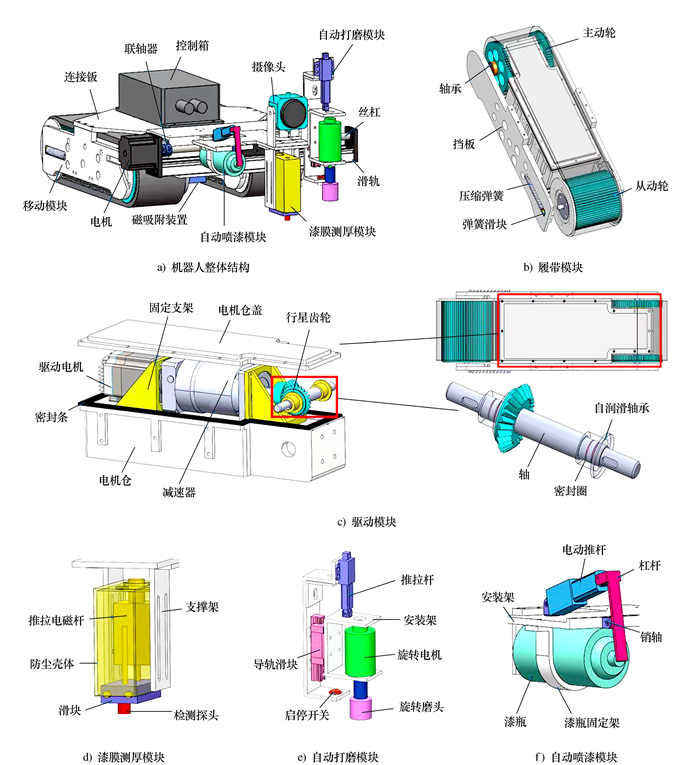
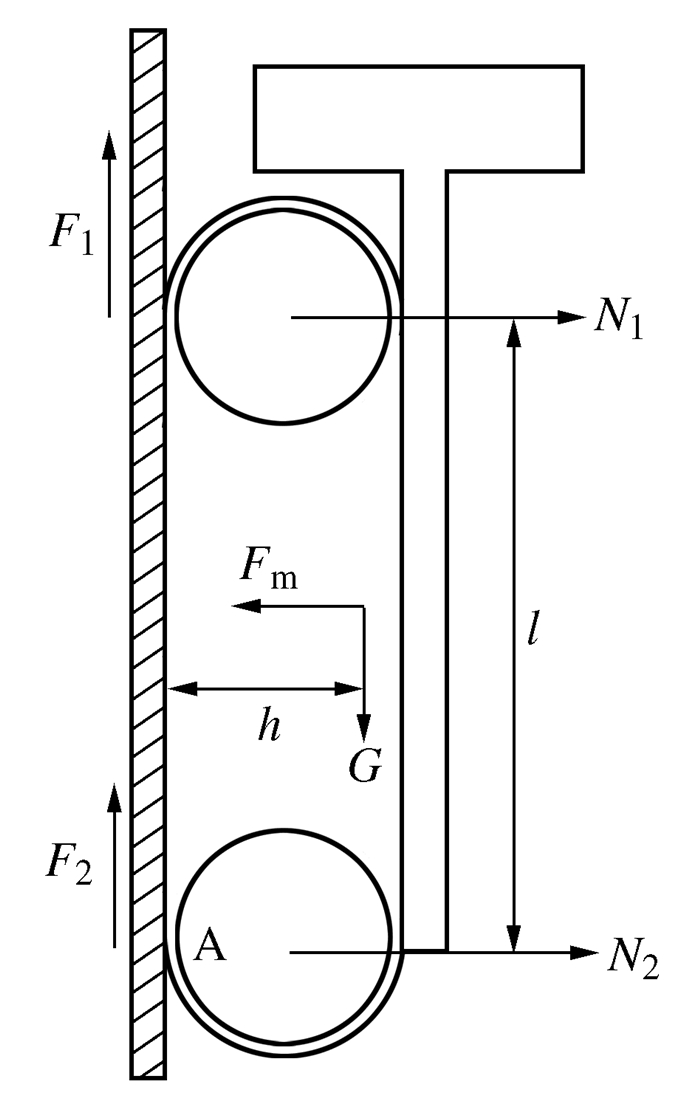
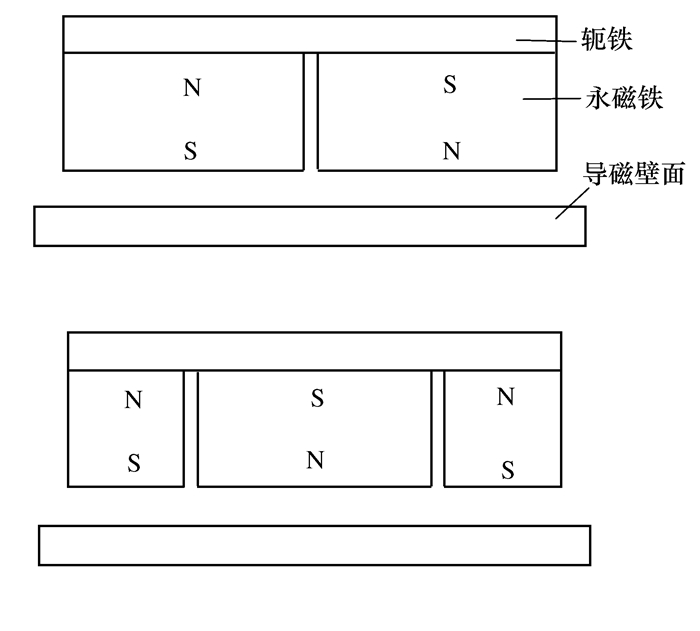
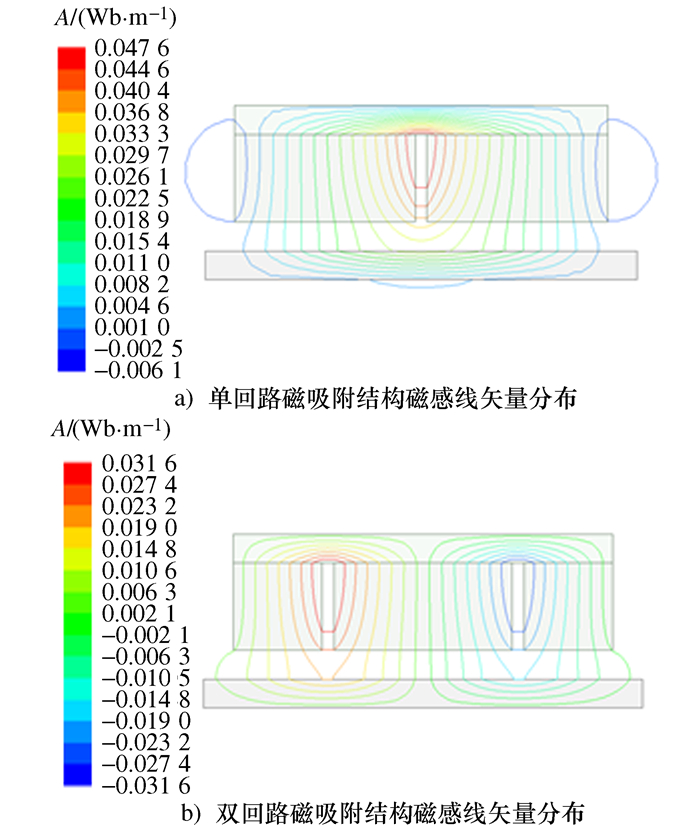
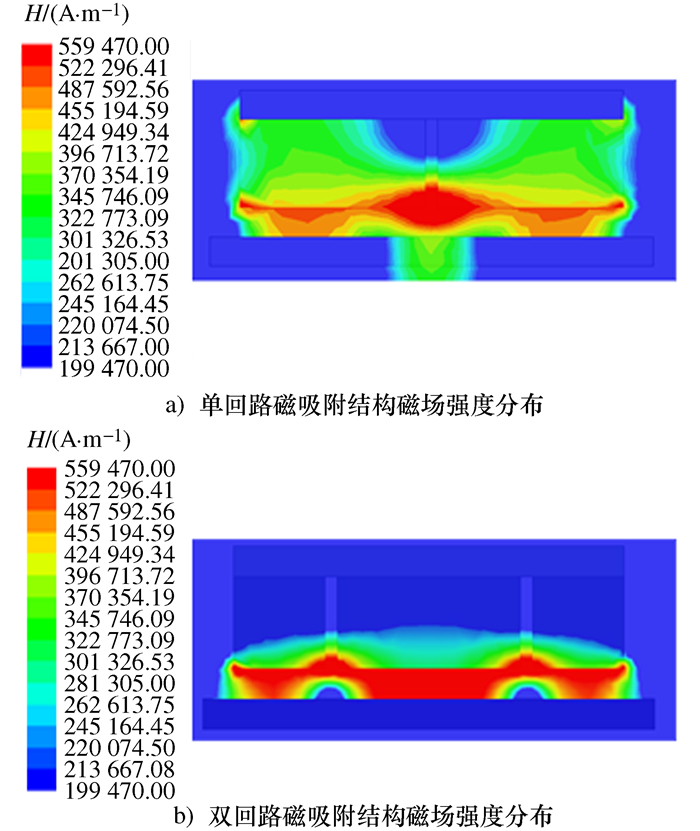
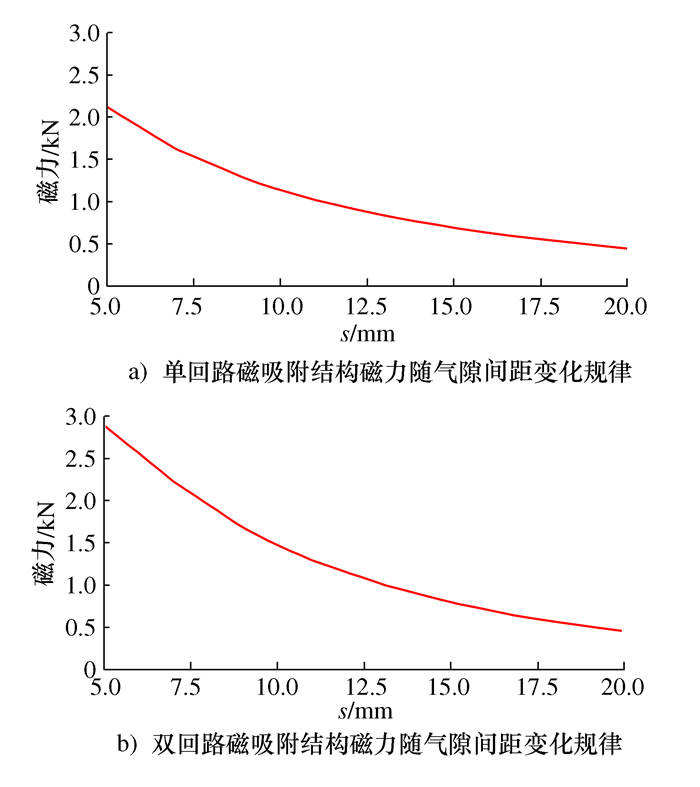
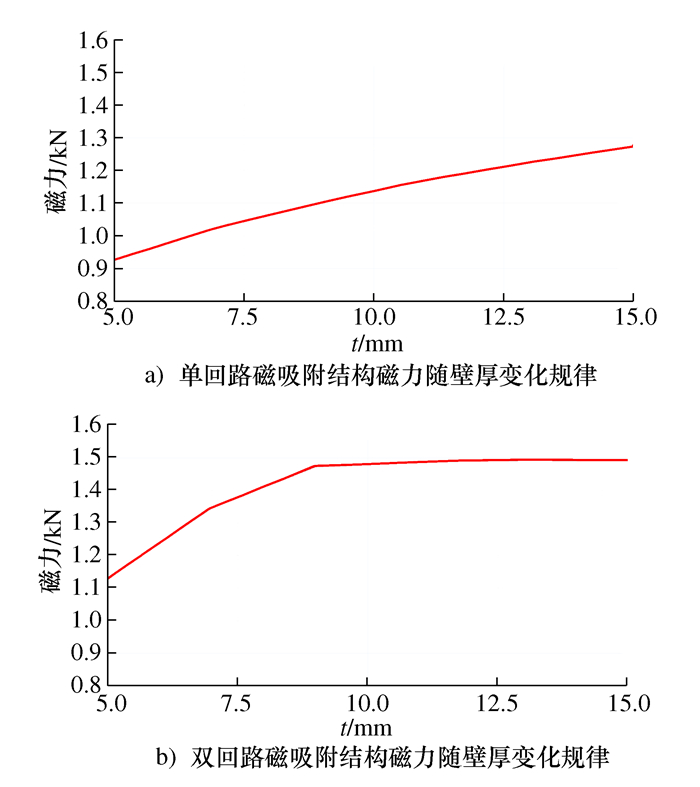
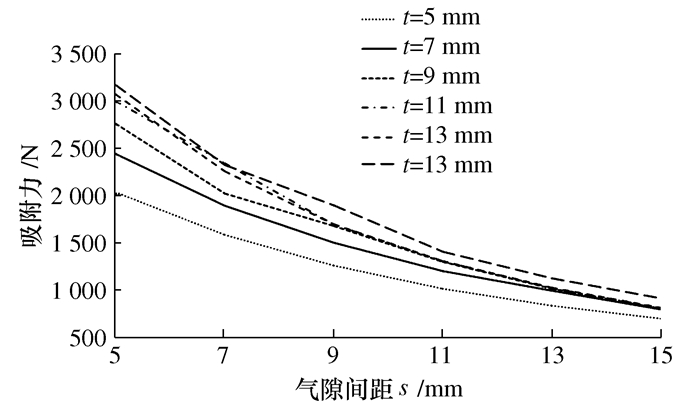
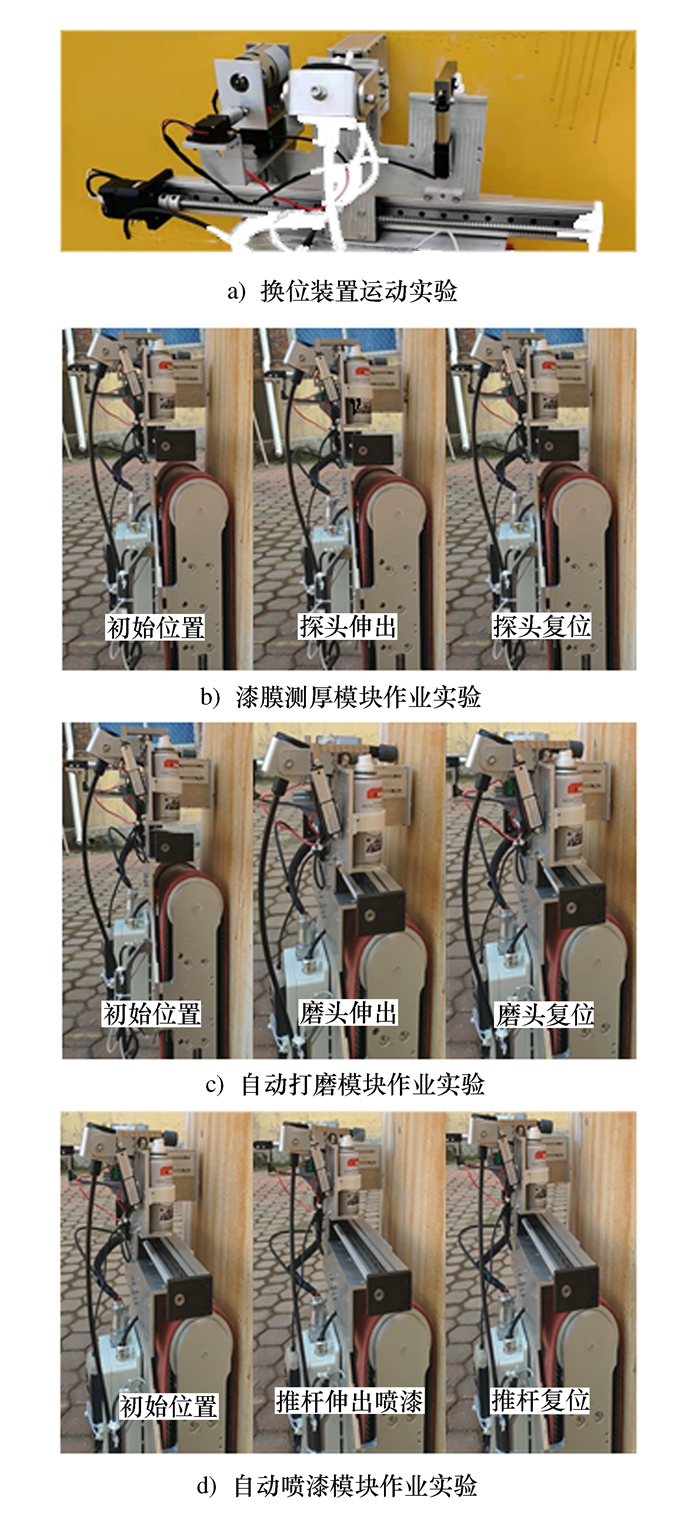
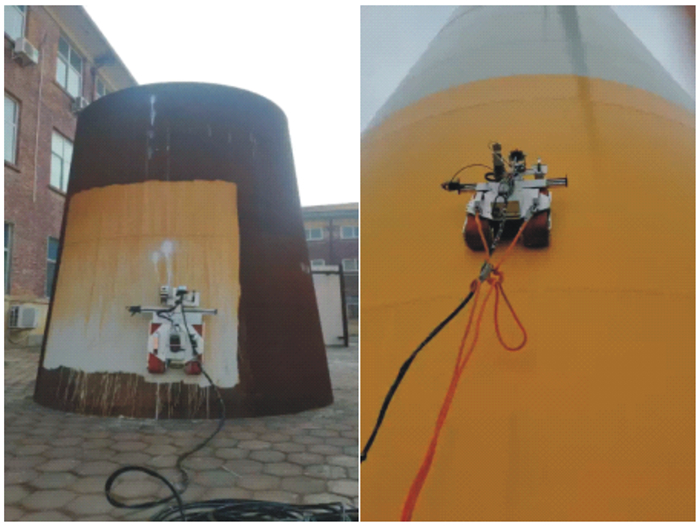
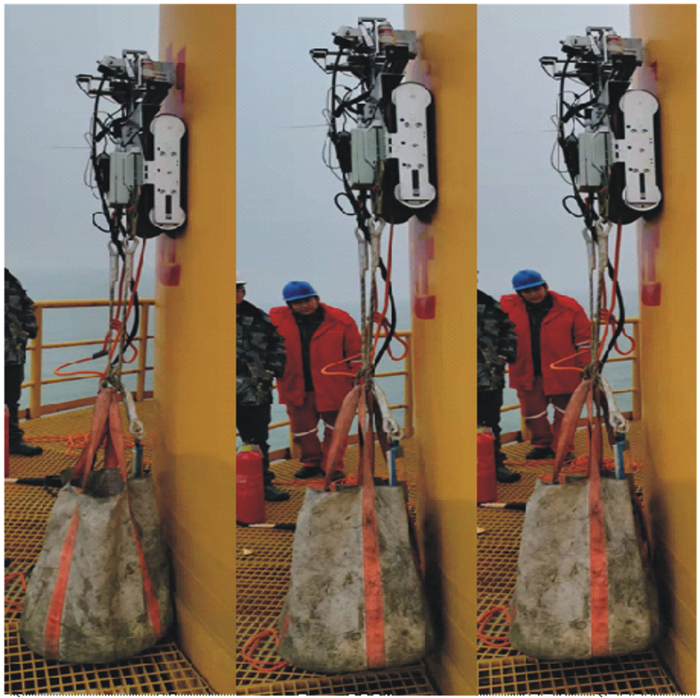
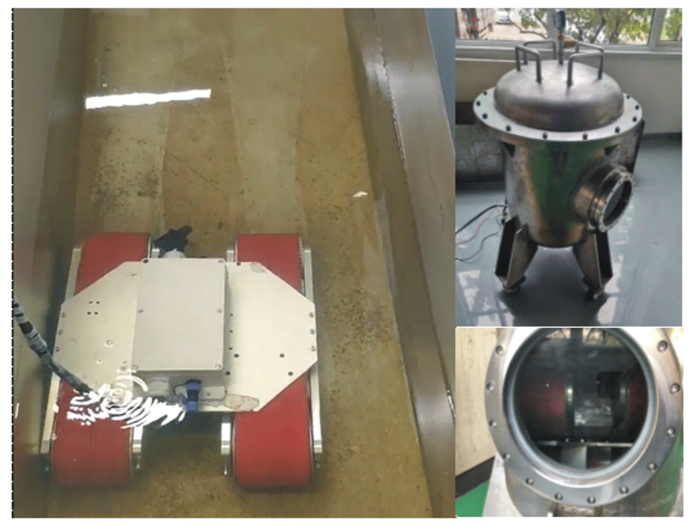
In order to solve the low efficiency and insufficient adsorption capacity of traditional wall-climbing robot in offshore wind power tower facade, a modular crawler wall-climbing robot was proposed based on the modular design method, which can be used for surface paint film detection and operation and maintenance. The structure and principle of the working robot in detail is introduced. In order to prevent the robot from slipping and overturning, the mechanical analysis is carried out. A gap-type permanent magnet adsorption model was established, and Maxwell software was used to make parametric simulation comparison with traditional magnetic circuit design, and the effects of the air gap and wall thickness on the robot adsorption force were analyzed. The simulation experiment and real operation of the prototype platform show that the robot can realize the high-altitude and underwater operation of the tower with a stable motion posture, which verifies the feasibility of its modular operation, and has strong adsorption capacity and obstacle surmounting ability.
In order to solve the low efficiency and insufficient adsorption capacity of traditional wall-climbing robot in offshore wind power tower facade, a modular crawler wall-climbing robot was proposed based on the modular design method, which can be used for surface paint film detection and operation and maintenance. The structure and principle of the working robot in detail is introduced. In order to prevent the robot from slipping and overturning, the mechanical analysis is carried out. A gap-type permanent magnet adsorption model was established, and Maxwell software was used to make parametric simulation comparison with traditional magnetic circuit design, and the effects of the air gap and wall thickness on the robot adsorption force were analyzed. The simulation experiment and real operation of the prototype platform show that the robot can realize the high-altitude and underwater operation of the tower with a stable motion posture, which verifies the feasibility of its modular operation, and has strong adsorption capacity and obstacle surmounting ability.

2024, 43(7): 1189-1198.
doi: 10.13433/j.cnki.1003-8728.20230040
Abstract:
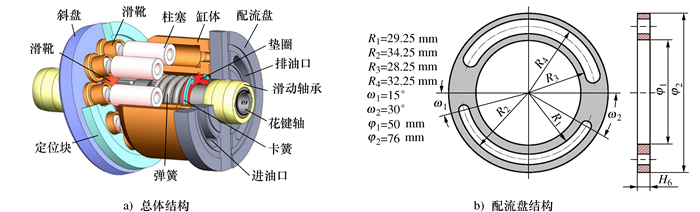
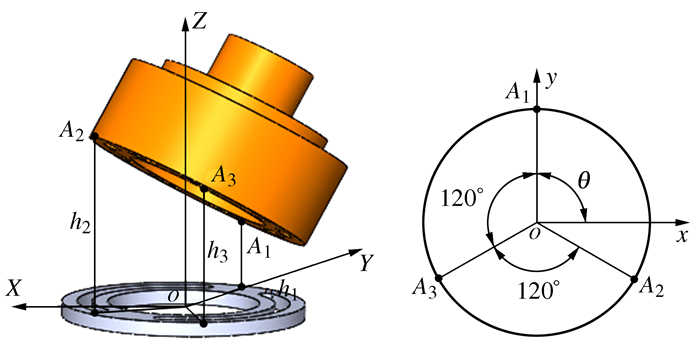
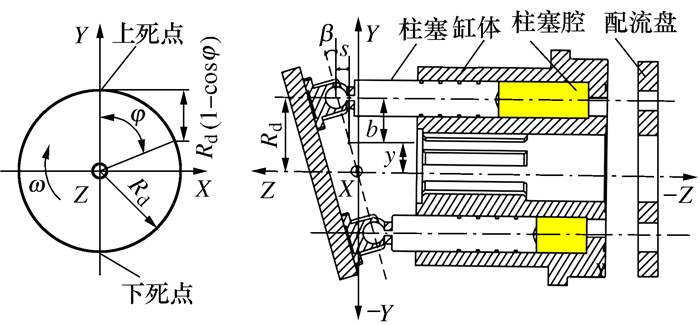
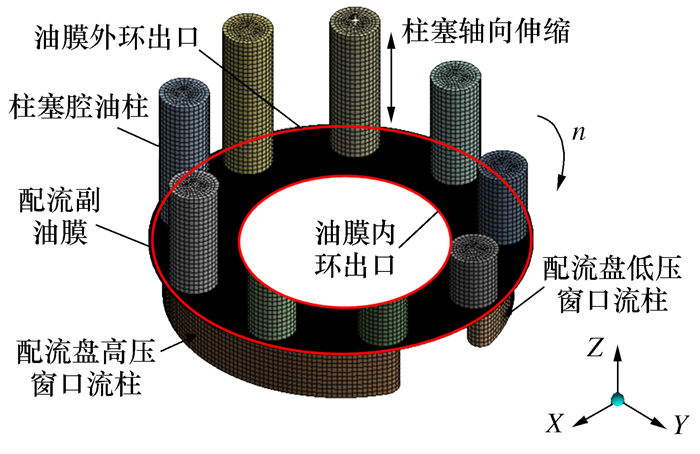
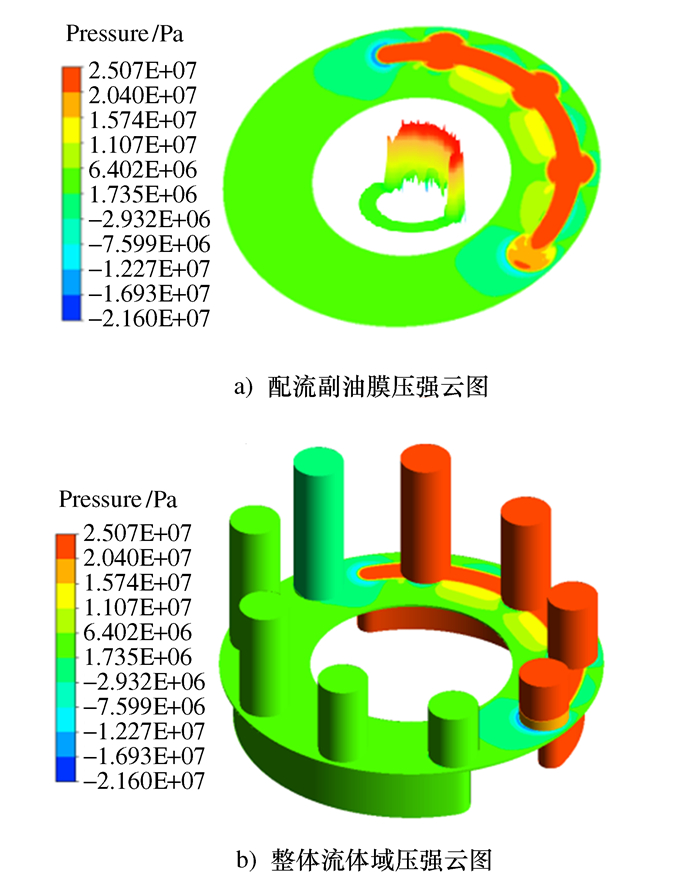
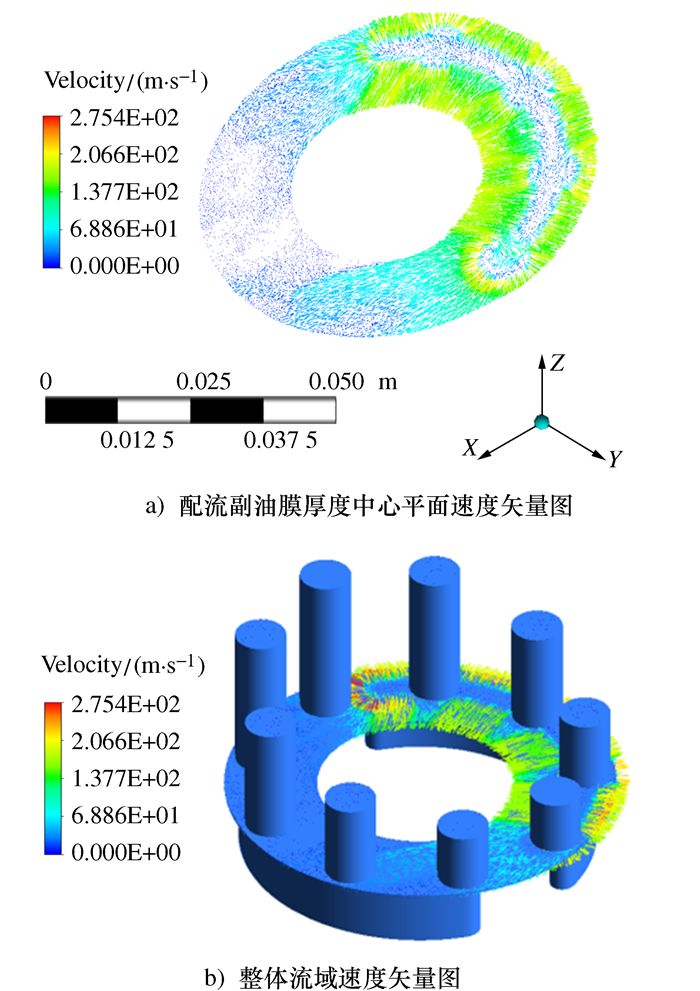
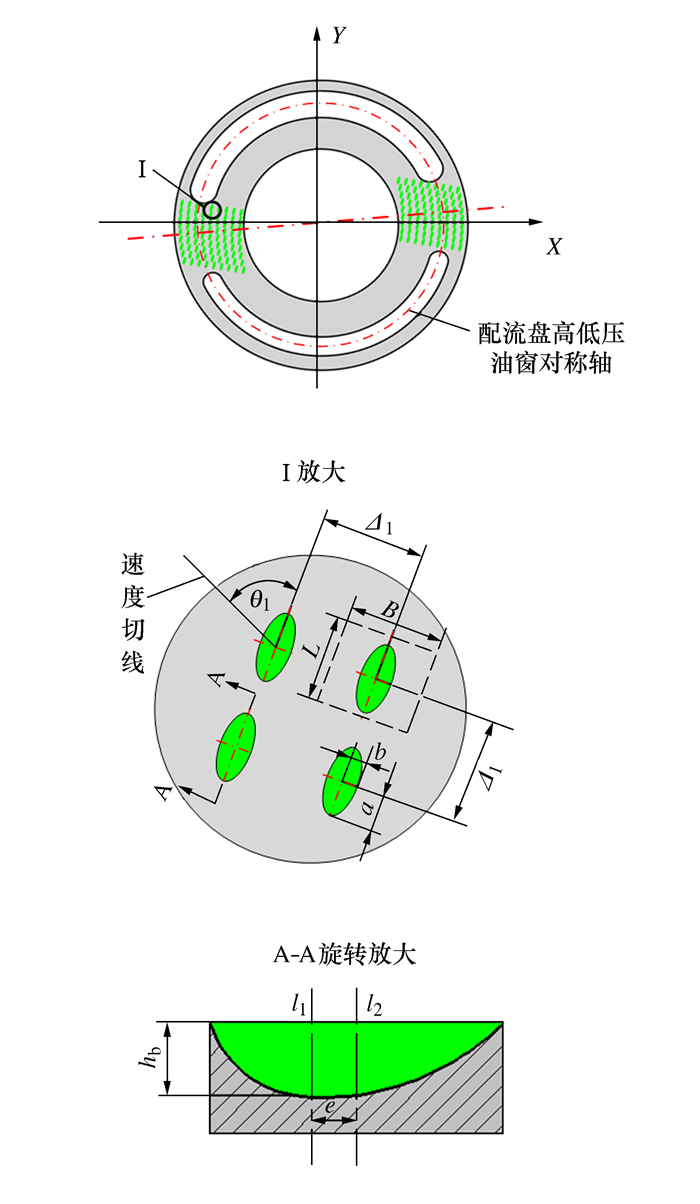
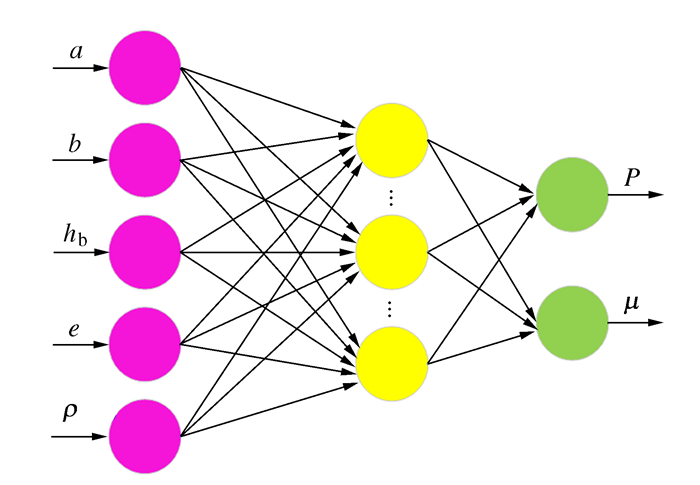
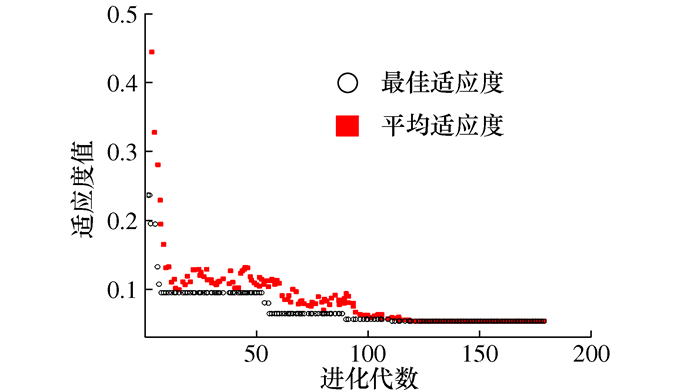
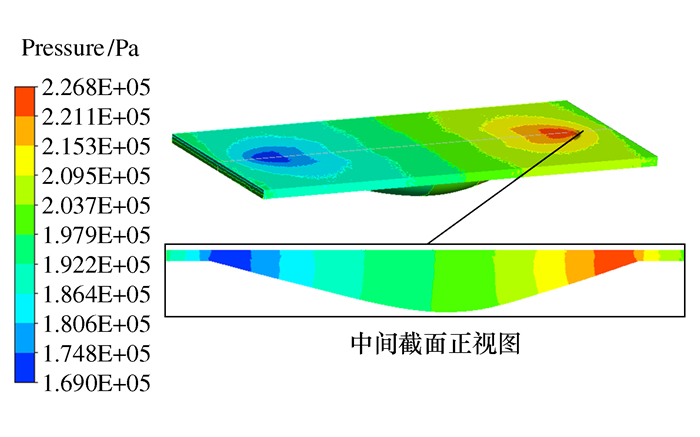
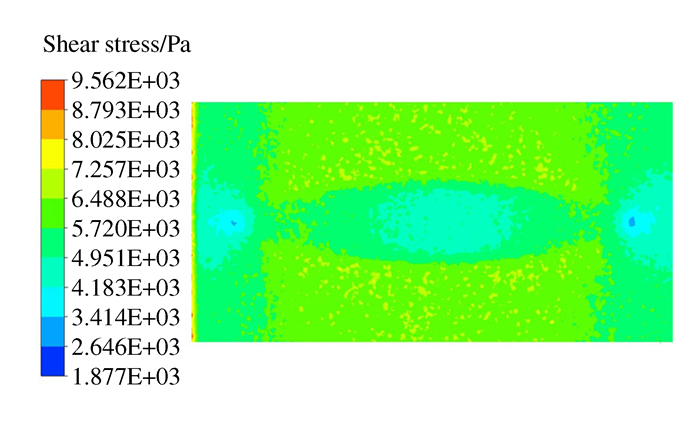
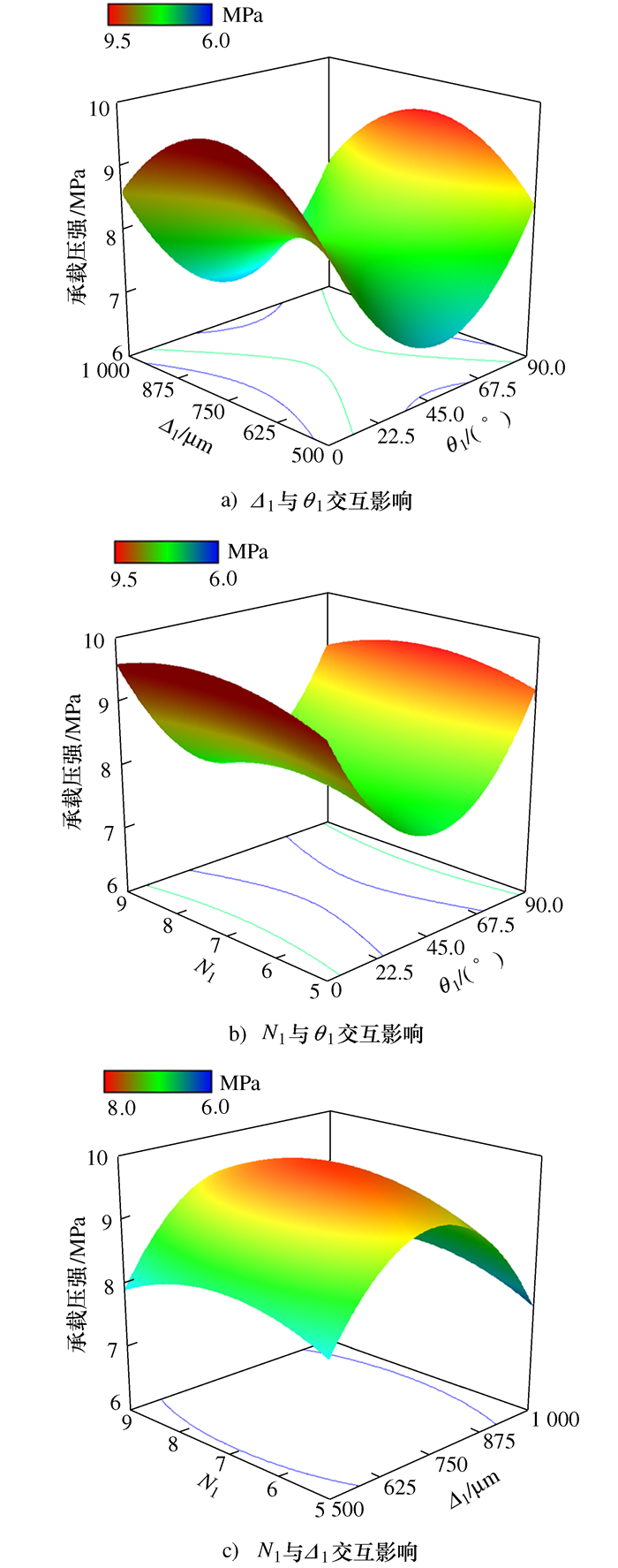
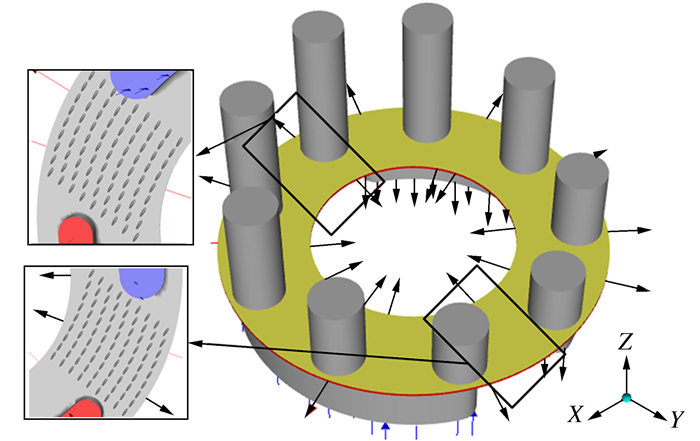
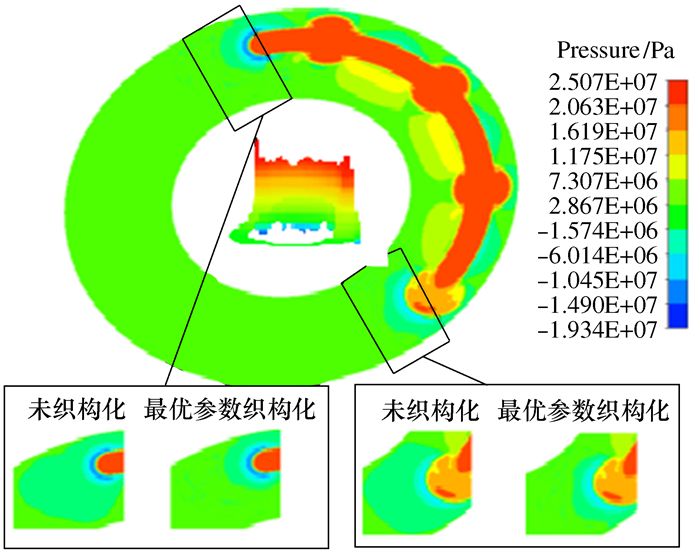
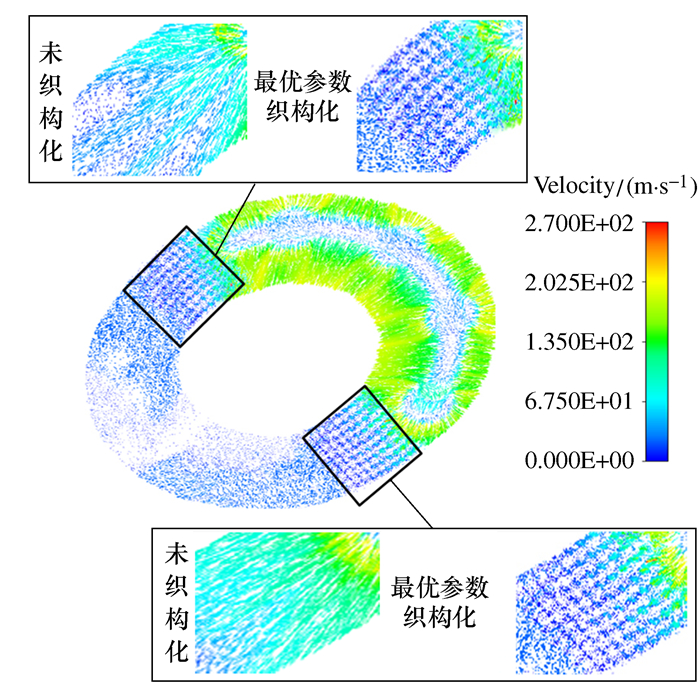
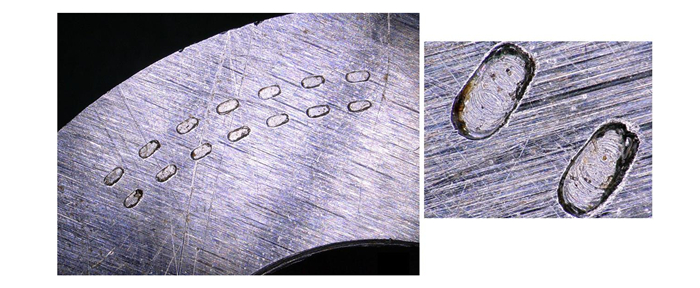
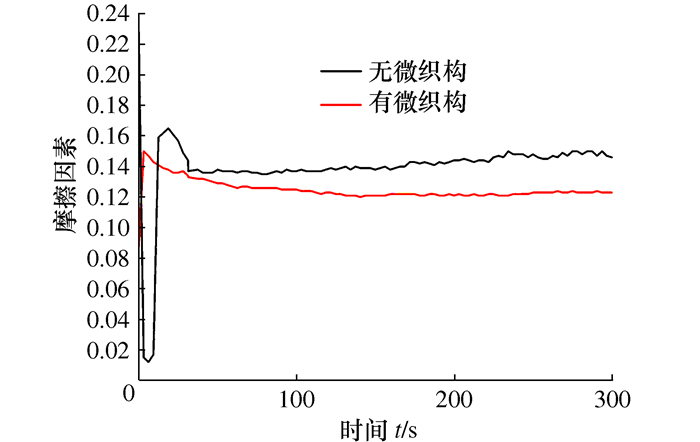
In order to improve the bearing pressure, friction-wear resistance and loss-volume efficiency of the port plate pair of an axial piston pump, the port plate of a swash-plate axial piston pump was taken as the prototype to study the influence of shape parameters of elliptic opening offset parabola micro-texture (EOOPT) on the bearing pressure and friction coefficient of the port plate pair with the CFD method based on the orthogonal experimental theory. The shape parameters of EOOPT are optimized with the neural network and the genetic algorithm jointly. Then, the response surface analysis was used to study the influence of EOOPT distribution parameters on the bearing pressure, friction coefficient and leakage amount of the port plate pair, and the shape parameters were optimized. Finally, the relative performance of the port plate pair with the EOOPT texture is compared with that of the port plate pair without EOOPT texture. The results show that the bearing pressure of the former is 11.23% higher than that of the latter and that the friction coefficient and leakage amount are reduced by 16.67% and 2.96% respectively.
In order to improve the bearing pressure, friction-wear resistance and loss-volume efficiency of the port plate pair of an axial piston pump, the port plate of a swash-plate axial piston pump was taken as the prototype to study the influence of shape parameters of elliptic opening offset parabola micro-texture (EOOPT) on the bearing pressure and friction coefficient of the port plate pair with the CFD method based on the orthogonal experimental theory. The shape parameters of EOOPT are optimized with the neural network and the genetic algorithm jointly. Then, the response surface analysis was used to study the influence of EOOPT distribution parameters on the bearing pressure, friction coefficient and leakage amount of the port plate pair, and the shape parameters were optimized. Finally, the relative performance of the port plate pair with the EOOPT texture is compared with that of the port plate pair without EOOPT texture. The results show that the bearing pressure of the former is 11.23% higher than that of the latter and that the friction coefficient and leakage amount are reduced by 16.67% and 2.96% respectively.
2024, 43(7): 1199-1206.
doi: 10.13433/j.cnki.1003-8728.20230029
Abstract:
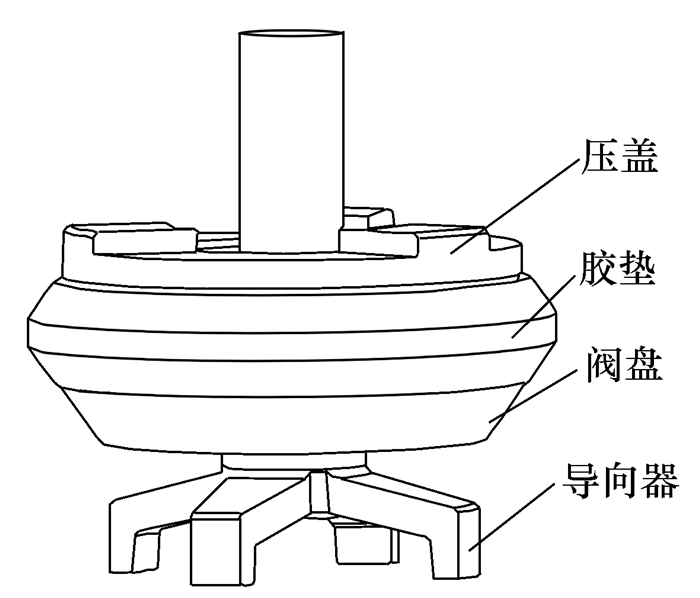
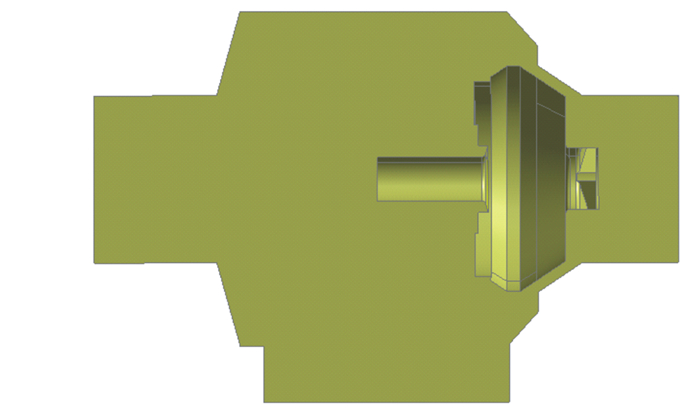
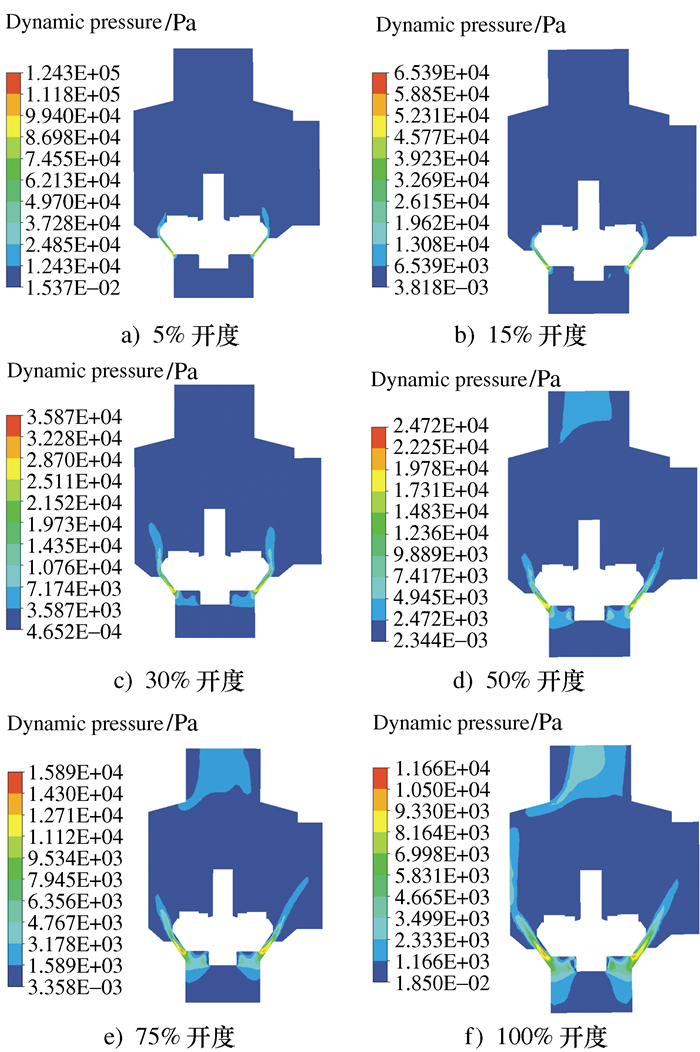
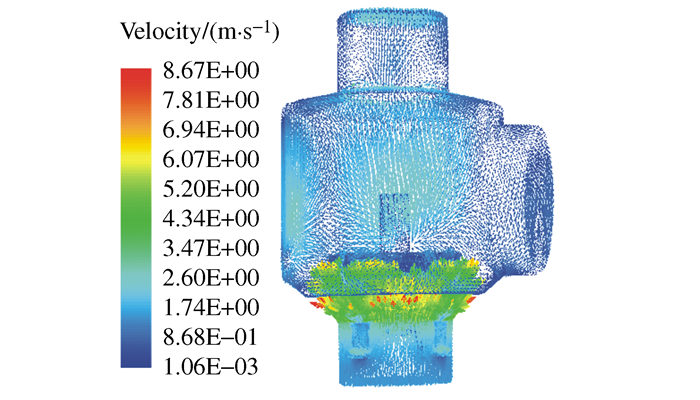
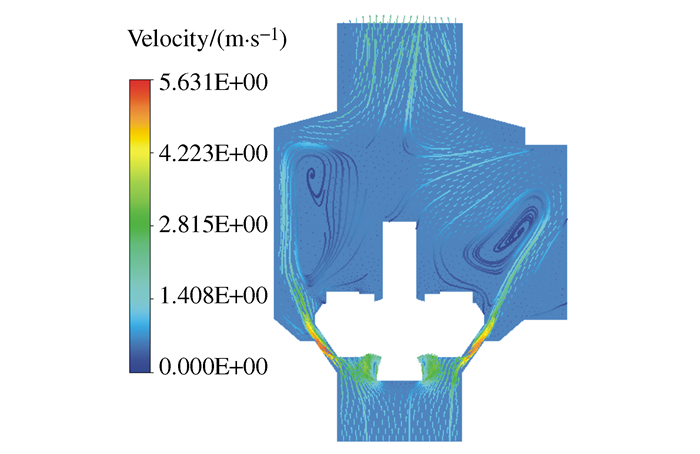
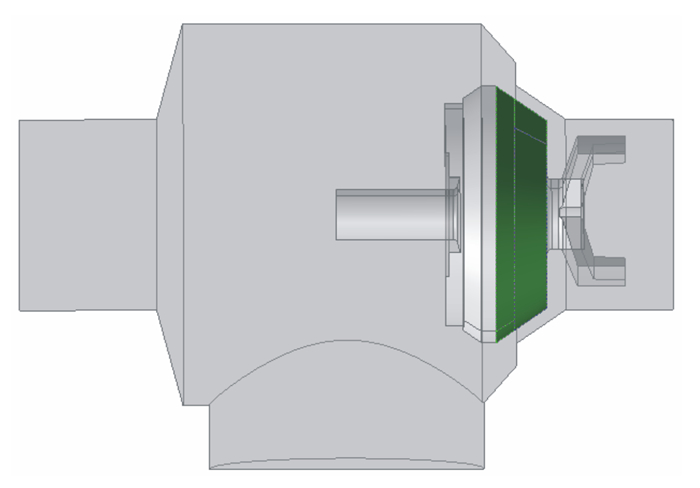
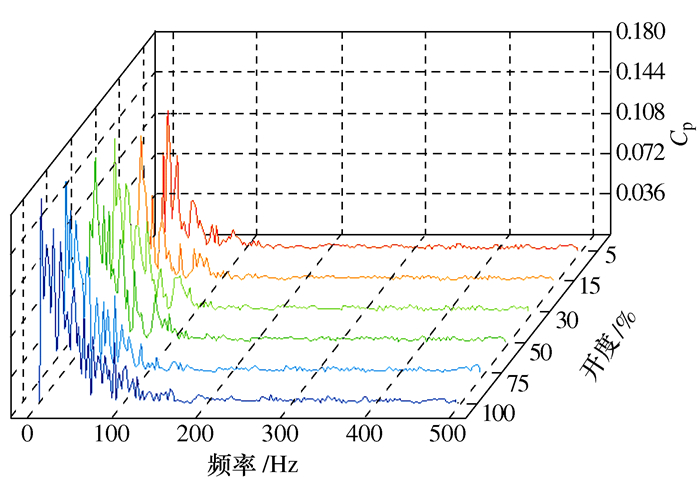
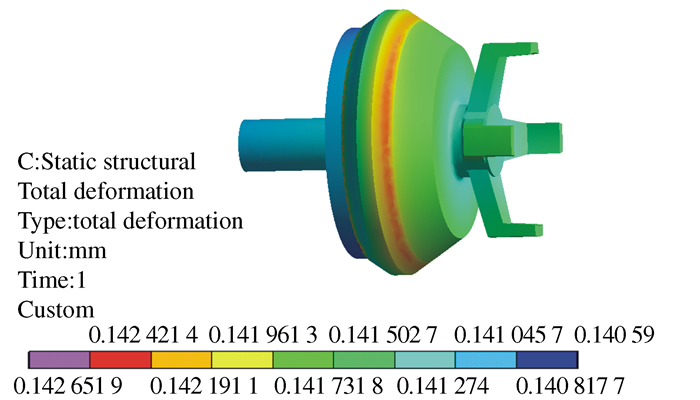
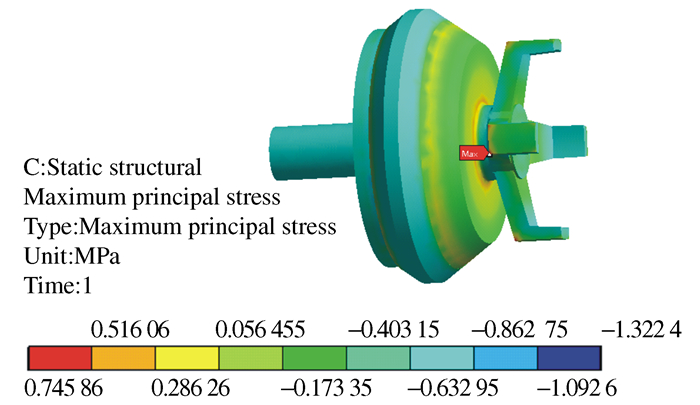
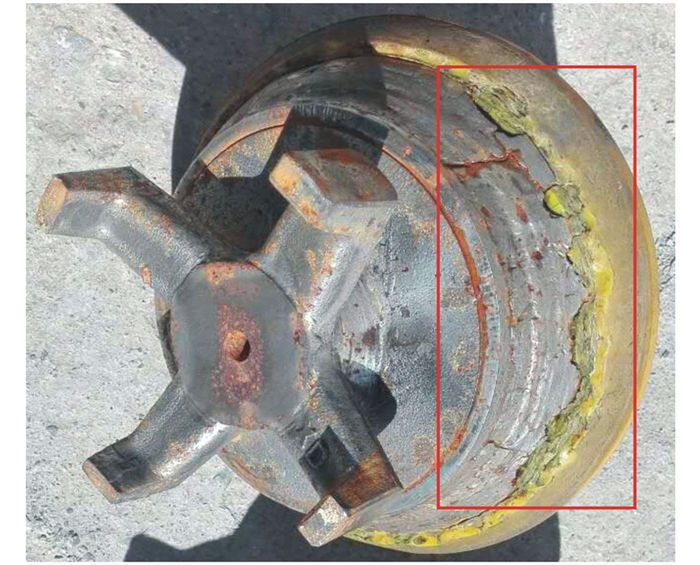
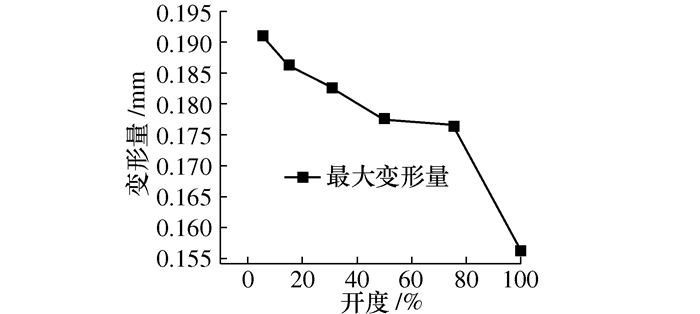
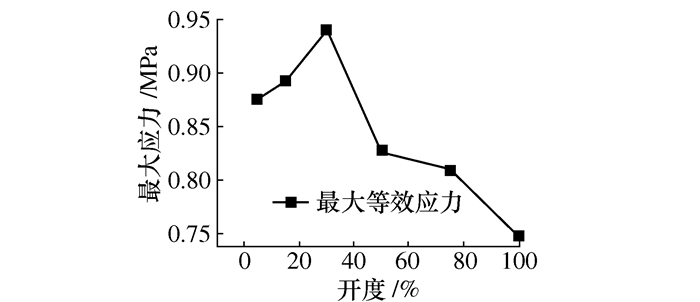
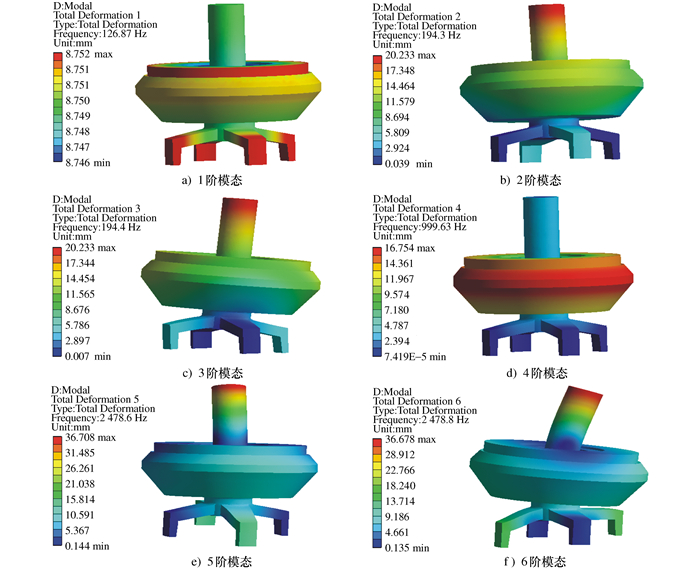
Aiming at the root causes of forced vibration and flow-induced vibration problems during the opening process of the check valve, a fluid-structure interaction simulation model with different opening degrees of 5%, 15%, 30%, 50%, 75% and 100% was constructed. The characteristics of the fluid and solid fields and the flow-exciting force exerted by the fluid on the valve spool were numerically analyzed, and the pressure cloud map of the flow field, the velocity vector cloud map, the peak frequency of the flow-induced vibration force, and mode shapes and natural frequencies of the valve core at each opening degree were obtained. The results show that: during the opening process of the check valve, there is a large pressure difference on both sides of the valve core, and the deformation area is mainly concentrated in the rubber pad. When the high-speed fluid in the valve cavity contacts the low-speed fluid, a vortex is formed by shearing, and the flow vortex changes periodically. The flow-exciting force generated by the vortex causes the spool vibration, and the peak frequency distribution of the flow-exciting force pulsation on the spool gradually increases and fluctuates more.
Aiming at the root causes of forced vibration and flow-induced vibration problems during the opening process of the check valve, a fluid-structure interaction simulation model with different opening degrees of 5%, 15%, 30%, 50%, 75% and 100% was constructed. The characteristics of the fluid and solid fields and the flow-exciting force exerted by the fluid on the valve spool were numerically analyzed, and the pressure cloud map of the flow field, the velocity vector cloud map, the peak frequency of the flow-induced vibration force, and mode shapes and natural frequencies of the valve core at each opening degree were obtained. The results show that: during the opening process of the check valve, there is a large pressure difference on both sides of the valve core, and the deformation area is mainly concentrated in the rubber pad. When the high-speed fluid in the valve cavity contacts the low-speed fluid, a vortex is formed by shearing, and the flow vortex changes periodically. The flow-exciting force generated by the vortex causes the spool vibration, and the peak frequency distribution of the flow-exciting force pulsation on the spool gradually increases and fluctuates more.
2024, 43(7): 1207-1213.
doi: 10.13433/j.cnki.1003-8728.20240005
Abstract:
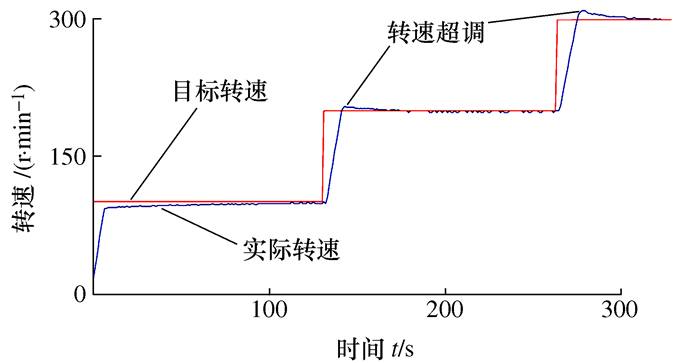
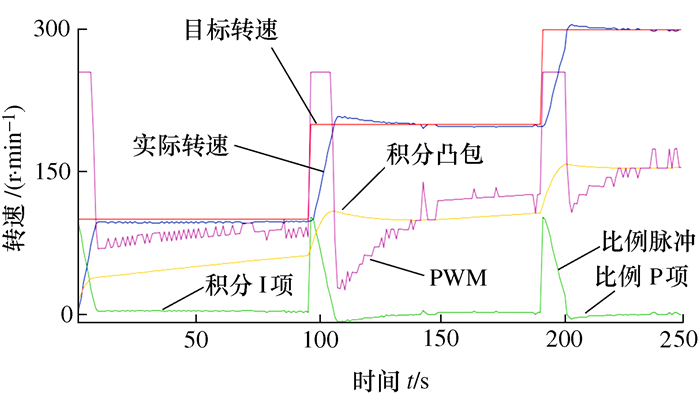
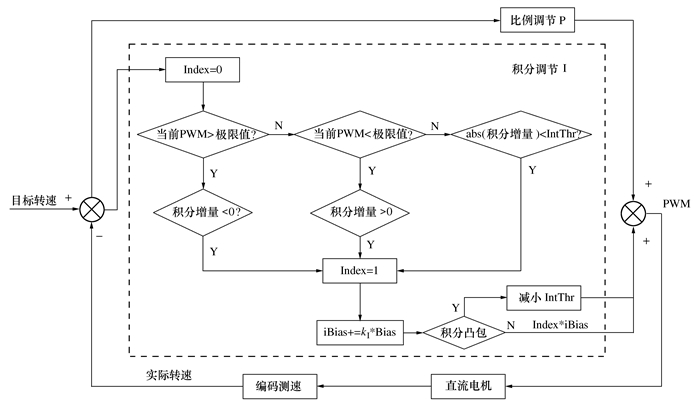
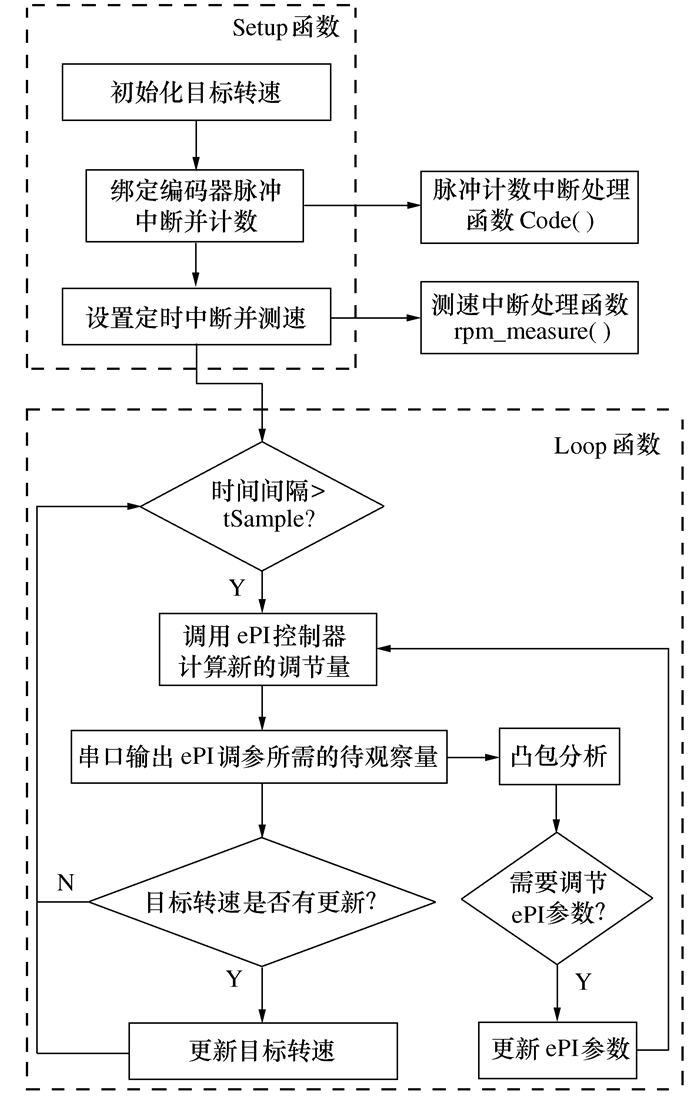
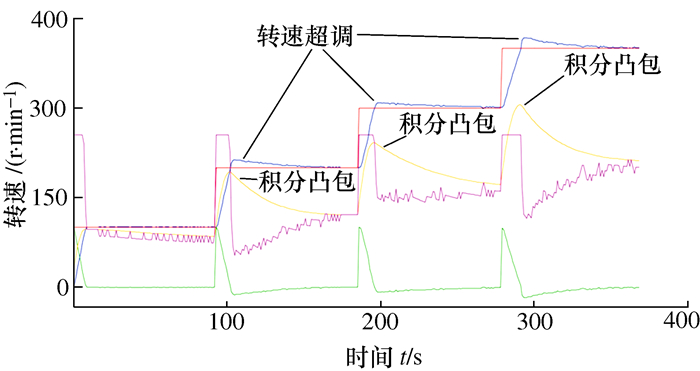
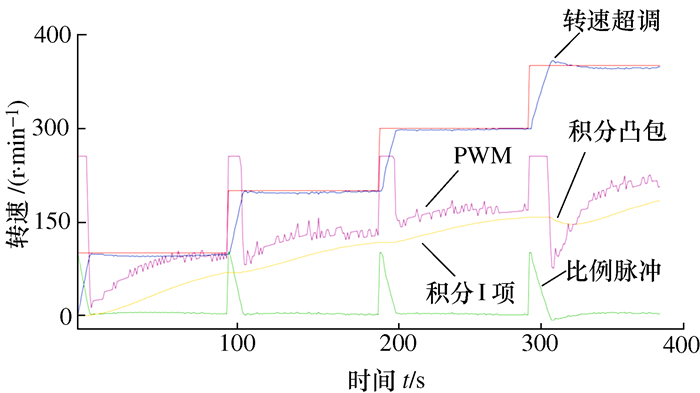
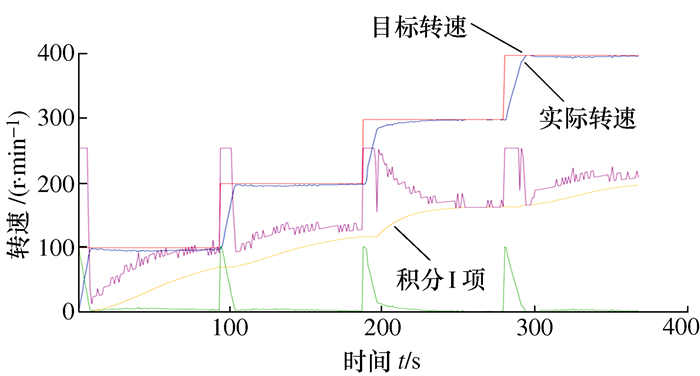
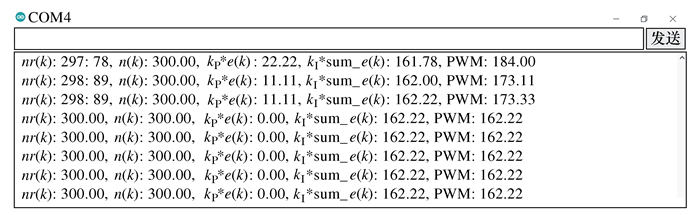
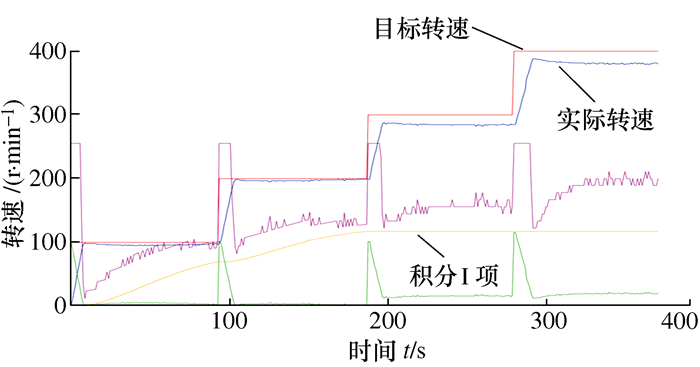
In response to the speed overshoot problem that is prone to occur during the parameter tuning process of motor Proportional Integral (PI) controller, the concept of integral convex hull and the analysis method of integral convex hull are proposed. On this basis, an anti-overshoot enhanced Proportional Integral (ePI) controller based on integral convex hull suppression was designed. On the basis of PI control parameters, an integral threshold parameter was designed to control the accumulation of integral terms and added to the calculation formula of the pulse-width modulation (PWM) value of the driving motor. By visualizing the elimination of integral convex hulls, the ePI controller parameters such as the proportional, integral, and integral threshold parameters, can be quickly debugged to prevent speed overshoot. A simulation platform was constructed based on Arduino and proteus. Through experiments, the anti-overshoot simulation results of PI controller and ePI controller based on integral convex hull suppression were compared. The experimental results show that the ePI controller is more effective in overshoot control, and overshoot rate decreases with the decrease of the integral threshold.
In response to the speed overshoot problem that is prone to occur during the parameter tuning process of motor Proportional Integral (PI) controller, the concept of integral convex hull and the analysis method of integral convex hull are proposed. On this basis, an anti-overshoot enhanced Proportional Integral (ePI) controller based on integral convex hull suppression was designed. On the basis of PI control parameters, an integral threshold parameter was designed to control the accumulation of integral terms and added to the calculation formula of the pulse-width modulation (PWM) value of the driving motor. By visualizing the elimination of integral convex hulls, the ePI controller parameters such as the proportional, integral, and integral threshold parameters, can be quickly debugged to prevent speed overshoot. A simulation platform was constructed based on Arduino and proteus. Through experiments, the anti-overshoot simulation results of PI controller and ePI controller based on integral convex hull suppression were compared. The experimental results show that the ePI controller is more effective in overshoot control, and overshoot rate decreases with the decrease of the integral threshold.

2024, 43(7): 1214-1221.
doi: 10.13433/j.cnki.1003-8728.20230047
Abstract:
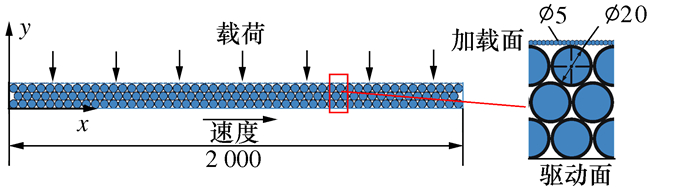
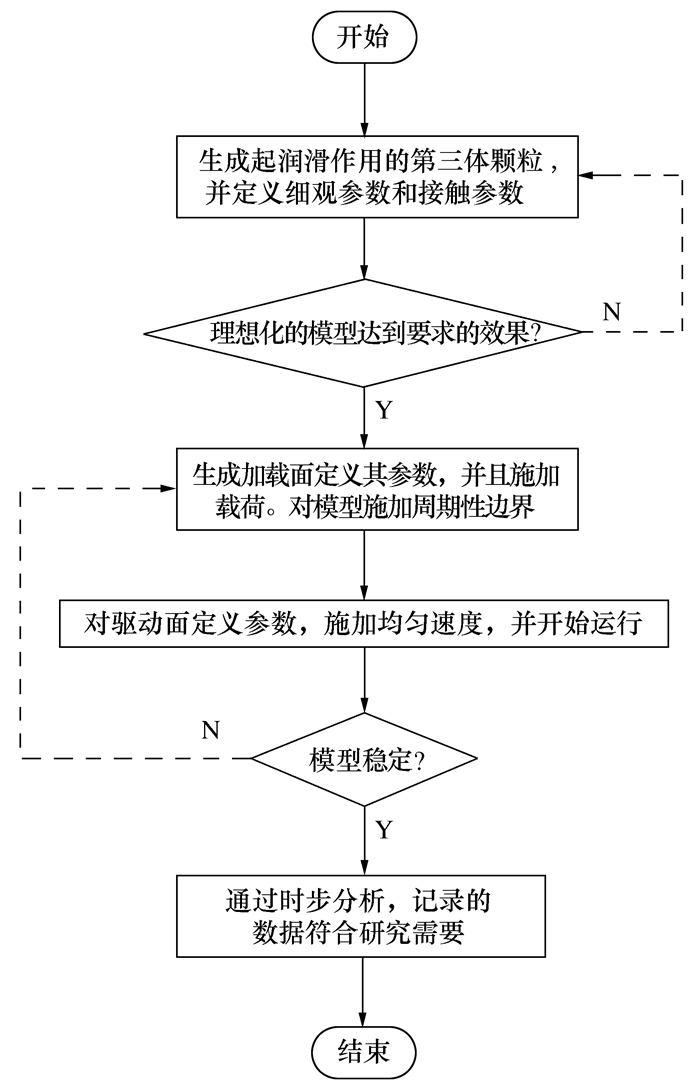
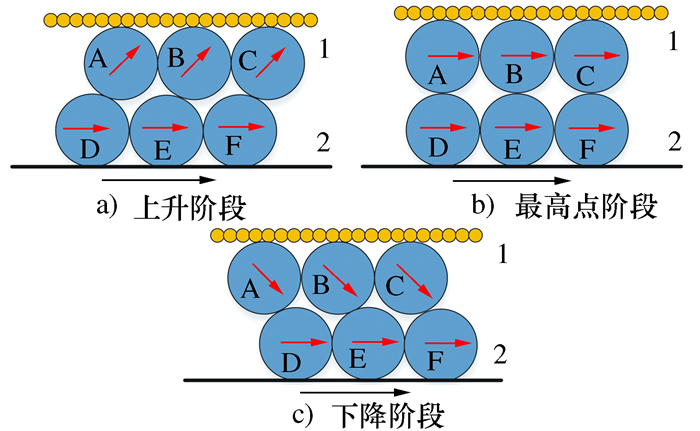
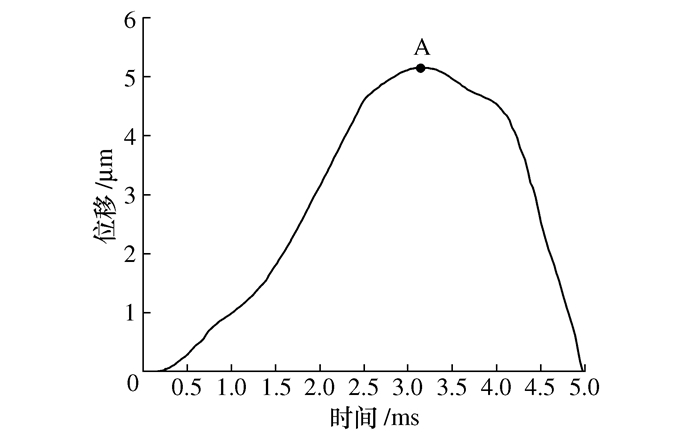
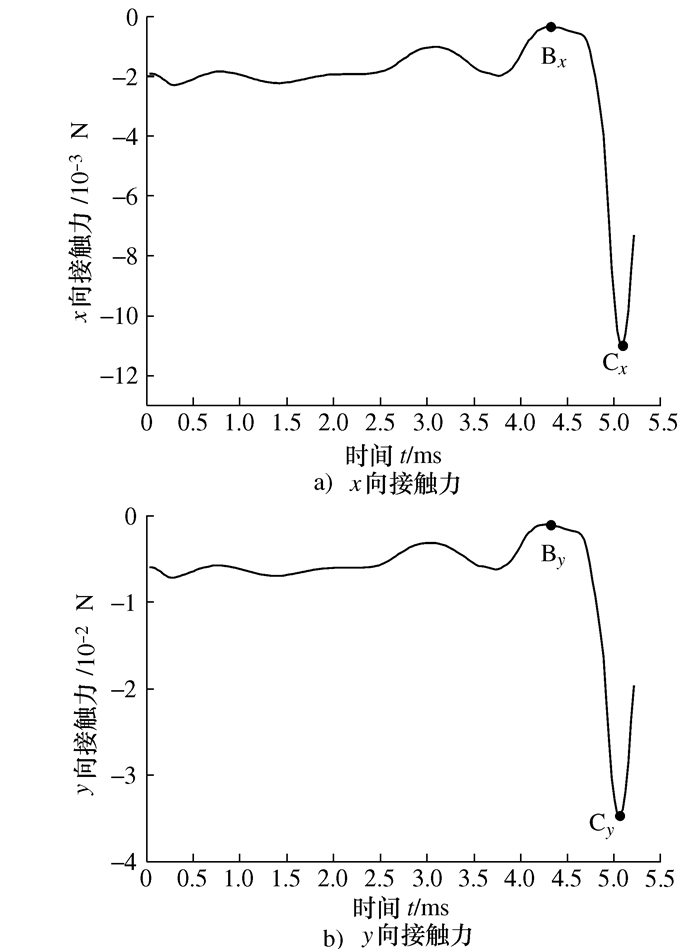
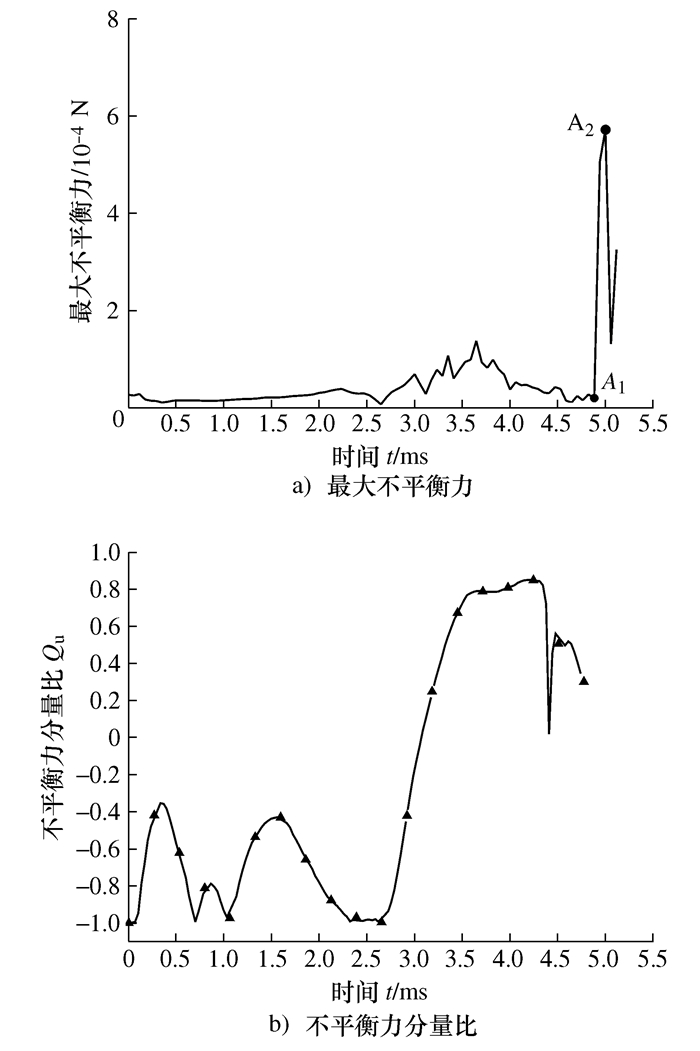
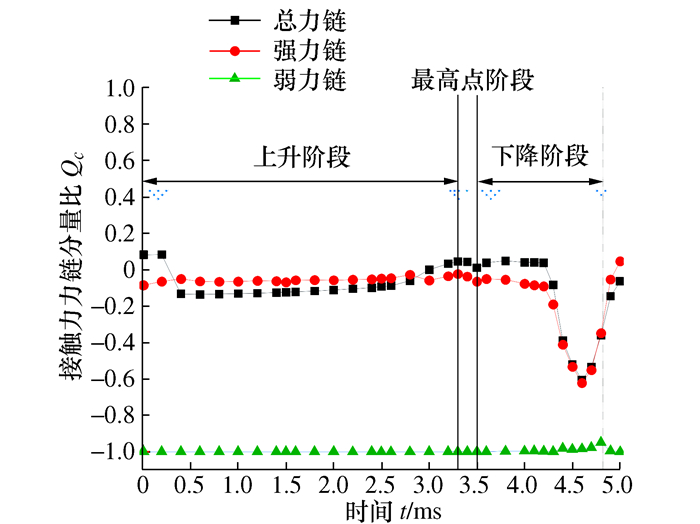
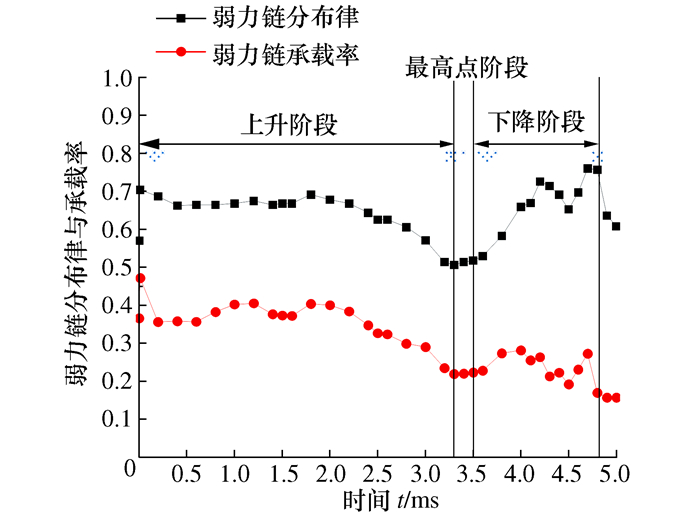
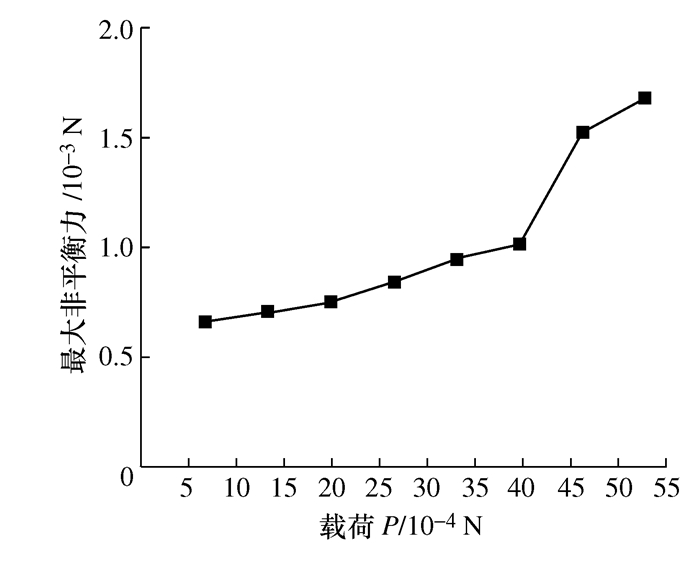
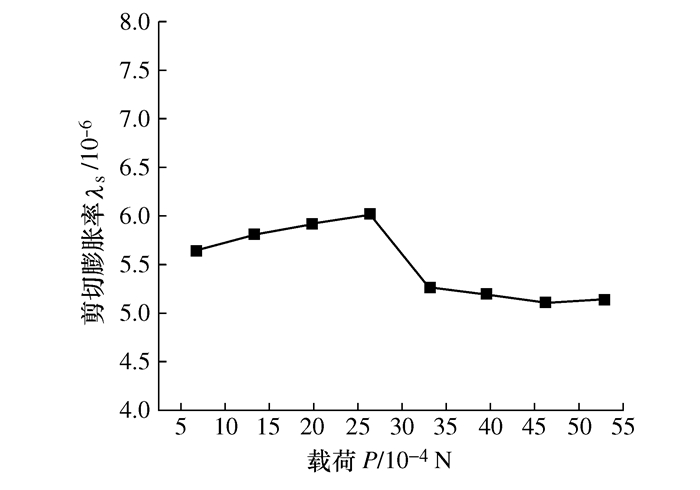
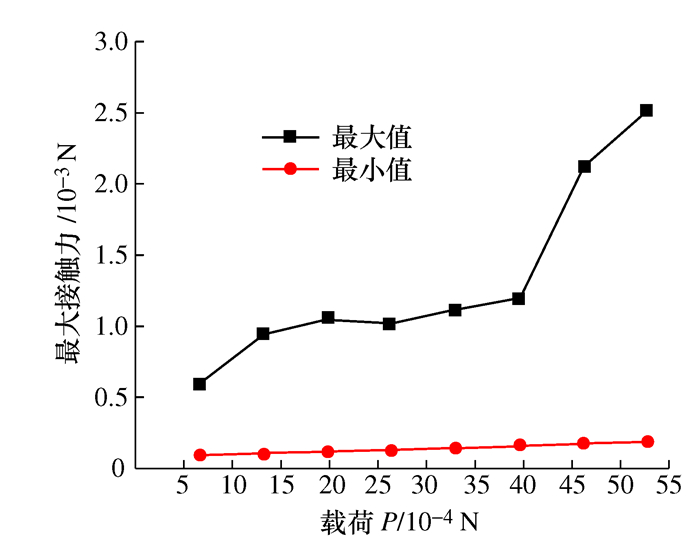
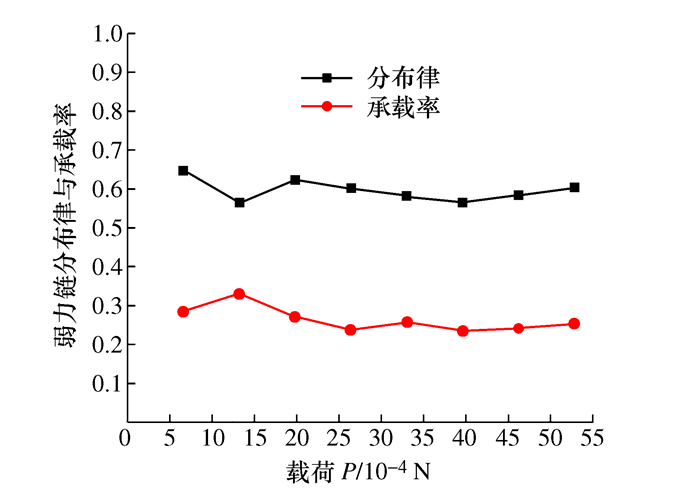
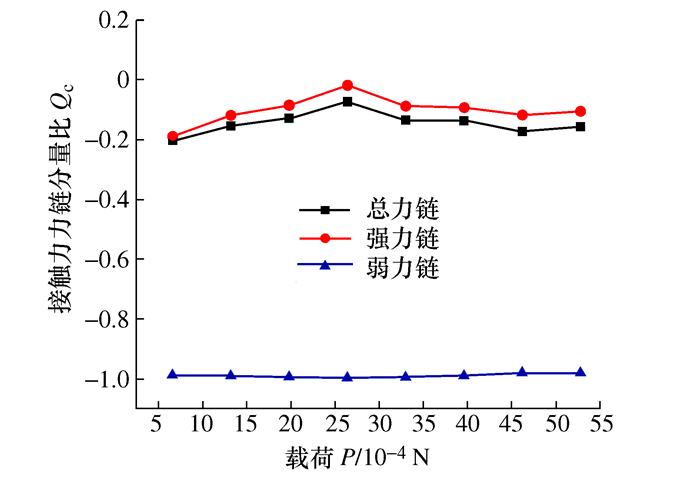
The use of grinding and polishing as post processing can improve the surface quality of a workpiece. This paper mainly solves the problem of how to maximize the values of grinding and polishing processes. Since granular flow lubrication is suitable for extreme environment and environmental protection, the paper uses granular flow for grinding and polishing. A parallel plate model was established with the discrete element method. Granular flow was used as the third body to fill the gap between friction pairs, and the workpiece surface and tool were used as the first body to apply normal force and shear force to the granular flow system. The polishing process was numerically simulated. The results show that the shear dilatancy process of a single particle can be divided into rising stage, peak stage and falling stage. The weak chain direction in different stages is inclined to the x axis. In the rising stage, the weak chain direction is stable and can improve the machining efficiency and surface quality of the workpiece. When the load is large, the distribution law and the bearing rate of strong and weak force chains are stable. When the load is small, the shear dilatancy rate decreases and the strong chain direction is inclined to the x axis. This study numerically simulates the force chain and shear dilatancy that are not easily detected, thus providing a theoretical basis for the use of granular flow under the condition of grinding and polishing.
The use of grinding and polishing as post processing can improve the surface quality of a workpiece. This paper mainly solves the problem of how to maximize the values of grinding and polishing processes. Since granular flow lubrication is suitable for extreme environment and environmental protection, the paper uses granular flow for grinding and polishing. A parallel plate model was established with the discrete element method. Granular flow was used as the third body to fill the gap between friction pairs, and the workpiece surface and tool were used as the first body to apply normal force and shear force to the granular flow system. The polishing process was numerically simulated. The results show that the shear dilatancy process of a single particle can be divided into rising stage, peak stage and falling stage. The weak chain direction in different stages is inclined to the x axis. In the rising stage, the weak chain direction is stable and can improve the machining efficiency and surface quality of the workpiece. When the load is large, the distribution law and the bearing rate of strong and weak force chains are stable. When the load is small, the shear dilatancy rate decreases and the strong chain direction is inclined to the x axis. This study numerically simulates the force chain and shear dilatancy that are not easily detected, thus providing a theoretical basis for the use of granular flow under the condition of grinding and polishing.
2024, 43(7): 1222-1229.
doi: 10.13433/j.cnki.1003-8728.20230021
Abstract:
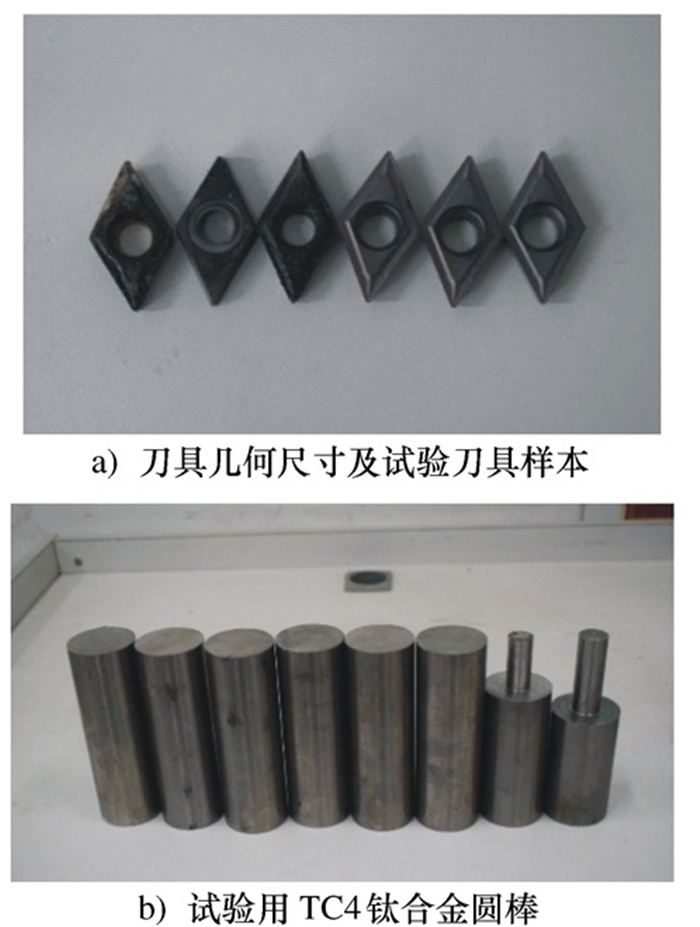
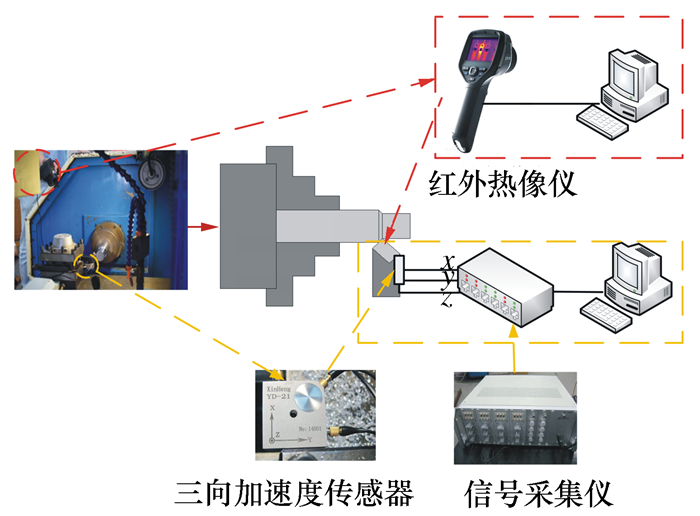
As a "21st century strategic metal", titanium alloy is widely used in the aviation field, and its processing quality is very important. Therefore, it is of great significance to optimize the machining of titanium alloys. In this paper, a synchronous measurement system for cutting temperature and vibration is built. The temperature and vibration signals near the tip of the turning tool are collected by an infrared thermal imager and a three-way acceleration sensor. A multi-feature fusion optimization model based on the cutting temperature and vibration is established, and the particle swarm optimization gray wolf algorithm is used to solve the multi-feature fusion optimization model to obtain the optimal cutting parameters. The study shows that within the range of cutting parameters designed by the experiment, the optimal solution of cutting parameters is 753.98 m/s of cutting speed, 30 mm/min of feed rate, 0.4 mm of cutting depth, and provides a theoretical basis for optimizing the machining quality of titanium alloys.
As a "21st century strategic metal", titanium alloy is widely used in the aviation field, and its processing quality is very important. Therefore, it is of great significance to optimize the machining of titanium alloys. In this paper, a synchronous measurement system for cutting temperature and vibration is built. The temperature and vibration signals near the tip of the turning tool are collected by an infrared thermal imager and a three-way acceleration sensor. A multi-feature fusion optimization model based on the cutting temperature and vibration is established, and the particle swarm optimization gray wolf algorithm is used to solve the multi-feature fusion optimization model to obtain the optimal cutting parameters. The study shows that within the range of cutting parameters designed by the experiment, the optimal solution of cutting parameters is 753.98 m/s of cutting speed, 30 mm/min of feed rate, 0.4 mm of cutting depth, and provides a theoretical basis for optimizing the machining quality of titanium alloys.

2024, 43(7): 1230-1237.
doi: 10.13433/j.cnki.1003-8728.20230027
Abstract:
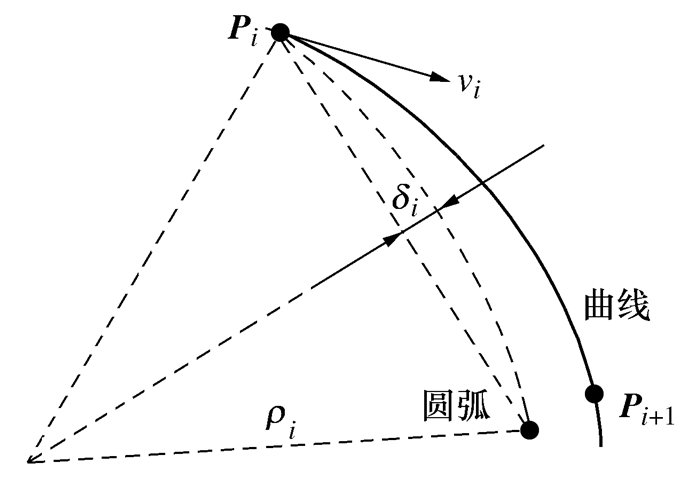
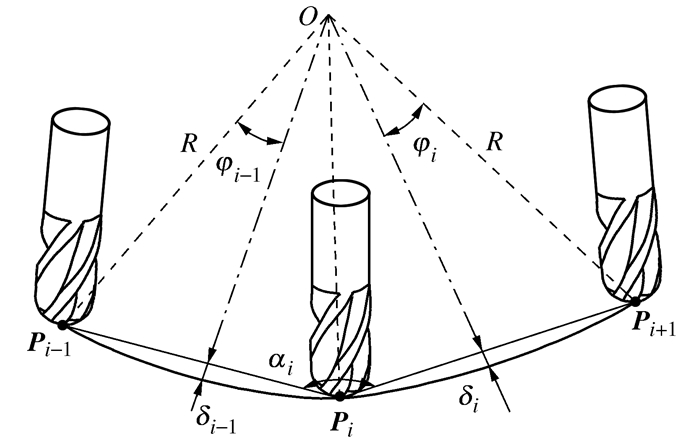
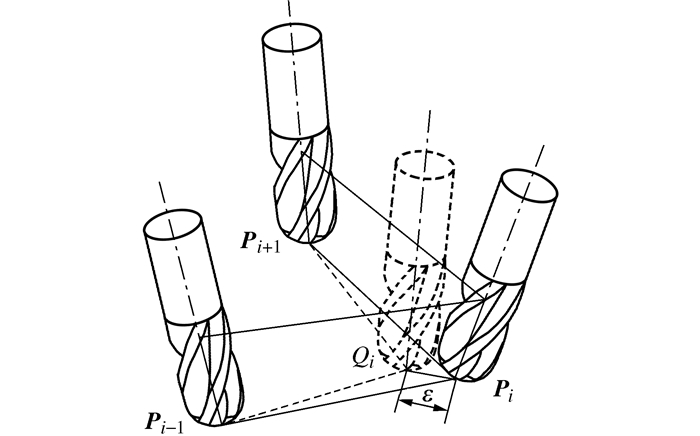
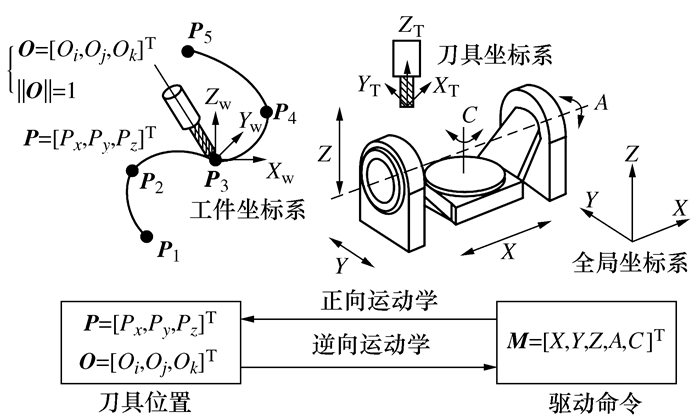
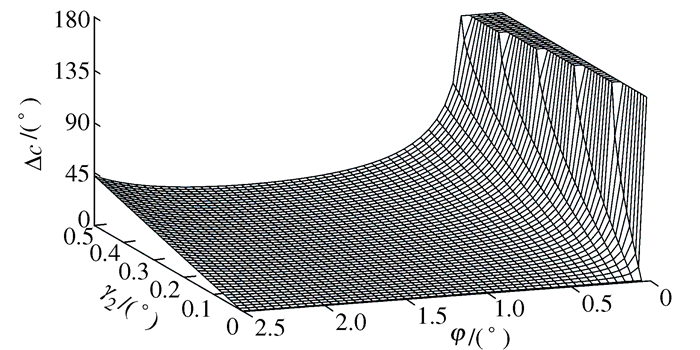
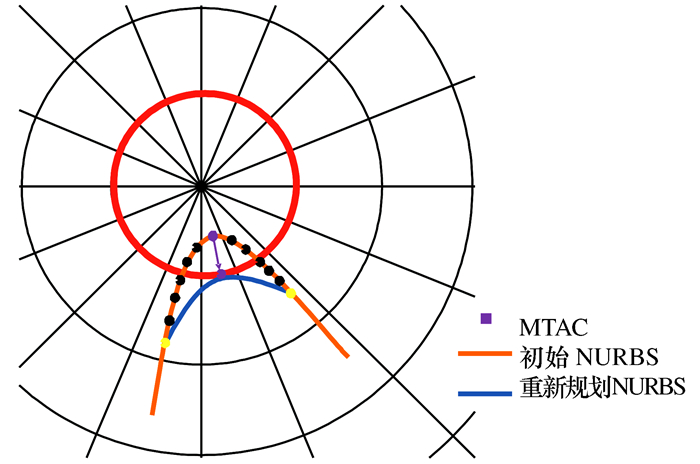
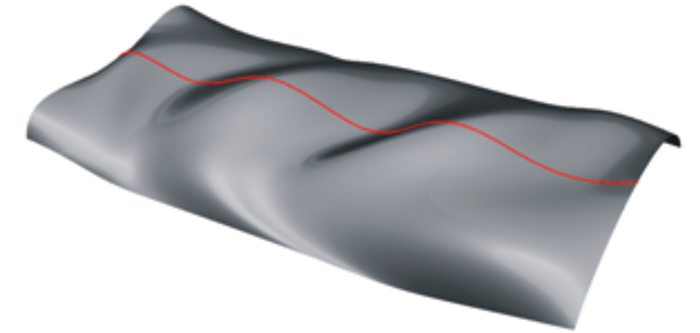
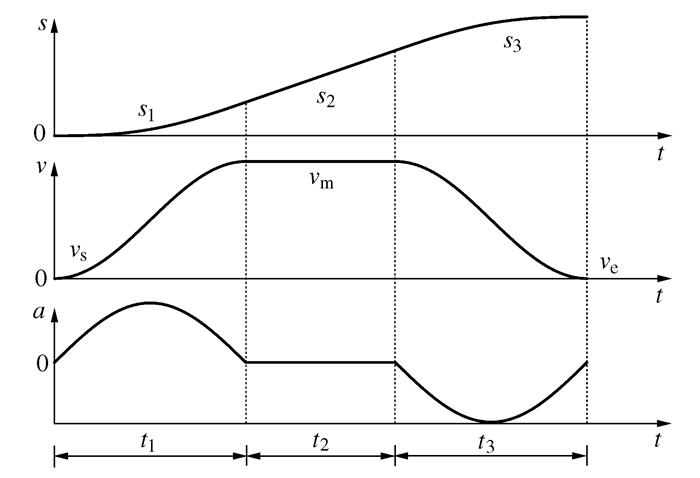
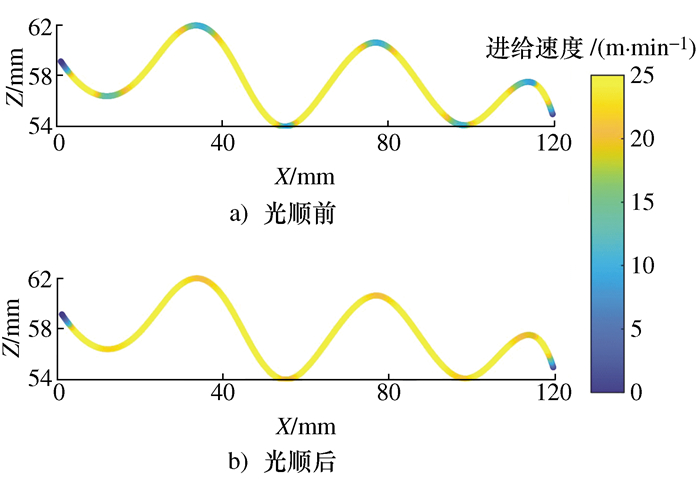
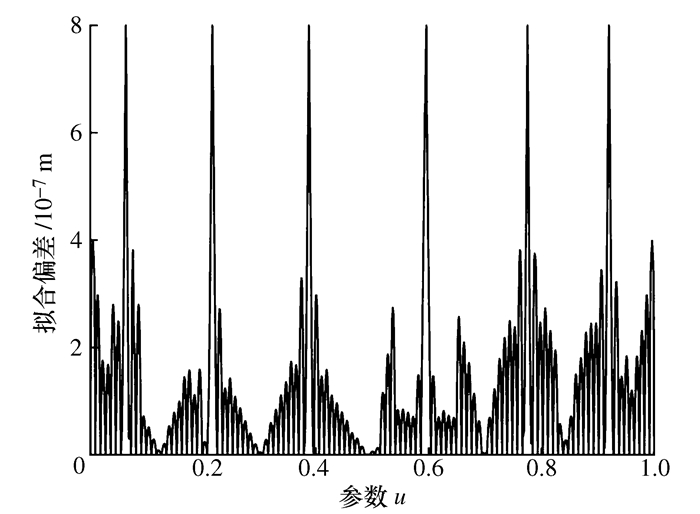
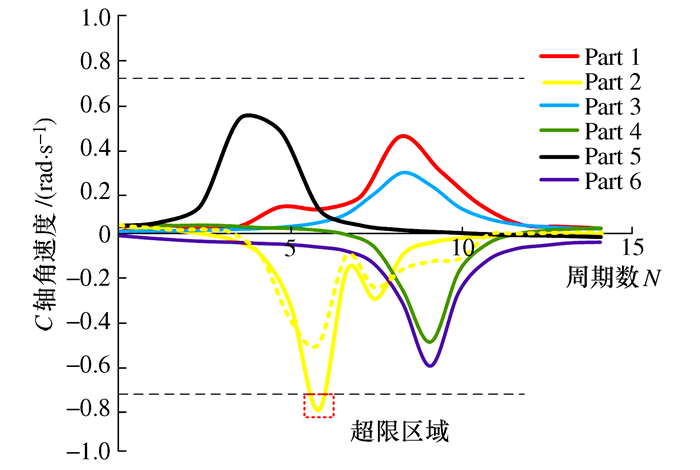
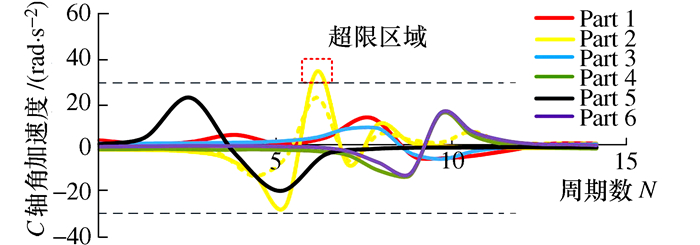
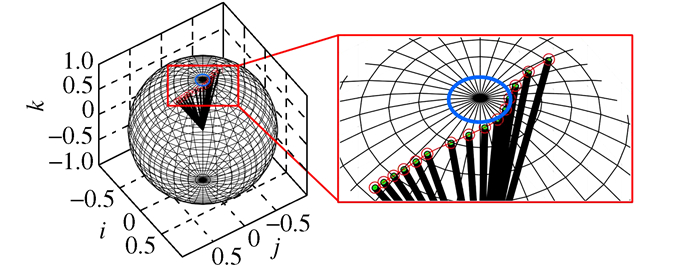
Aiming at the problems existing in the current five-axis machining that the translation axis at the corner of the toolpath decelerates excessively and the angle of the rotation axis changes drastically in the singular area. This paper takes the AC dual-table five-axis machine tool as the research object and proposes a path optimization method that satisfies the kinematics constraints of the machine tool. Firstly, the method takes the maximum allowable offset before and after the smoothing of the tool center point as a constraint, and uses the corner vector and the double-chord bow height for modeling to seek the local energy optimal solution at the corner of the micro-line segment. Then the cutter axis vector points inside and at the edges of the singular range are planned again so that the end of the vector just bypasses the singular region on the unit sphere; thus the original machining characteristics are greatly preserved. Finally, the optimization effect is evaluated by the trigonometric function acceleration and deceleration control algorithm. The simulation results show that the path optimization method improves the average feed rate by 10.64% while the fitting deviation and bow height error do not exceed the allowable values, and can effectively avoid the occurrence of singularities in machining. Consequently, the proposed method has high theoretical significance and practical application value in improving the efficiency and quality of five-axis machining.
Aiming at the problems existing in the current five-axis machining that the translation axis at the corner of the toolpath decelerates excessively and the angle of the rotation axis changes drastically in the singular area. This paper takes the AC dual-table five-axis machine tool as the research object and proposes a path optimization method that satisfies the kinematics constraints of the machine tool. Firstly, the method takes the maximum allowable offset before and after the smoothing of the tool center point as a constraint, and uses the corner vector and the double-chord bow height for modeling to seek the local energy optimal solution at the corner of the micro-line segment. Then the cutter axis vector points inside and at the edges of the singular range are planned again so that the end of the vector just bypasses the singular region on the unit sphere; thus the original machining characteristics are greatly preserved. Finally, the optimization effect is evaluated by the trigonometric function acceleration and deceleration control algorithm. The simulation results show that the path optimization method improves the average feed rate by 10.64% while the fitting deviation and bow height error do not exceed the allowable values, and can effectively avoid the occurrence of singularities in machining. Consequently, the proposed method has high theoretical significance and practical application value in improving the efficiency and quality of five-axis machining.
2024, 43(7): 1238-1243.
doi: 10.13433/j.cnki.1003-8728.20230008
Abstract:
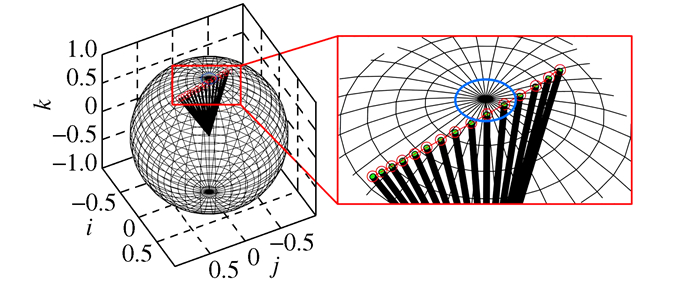
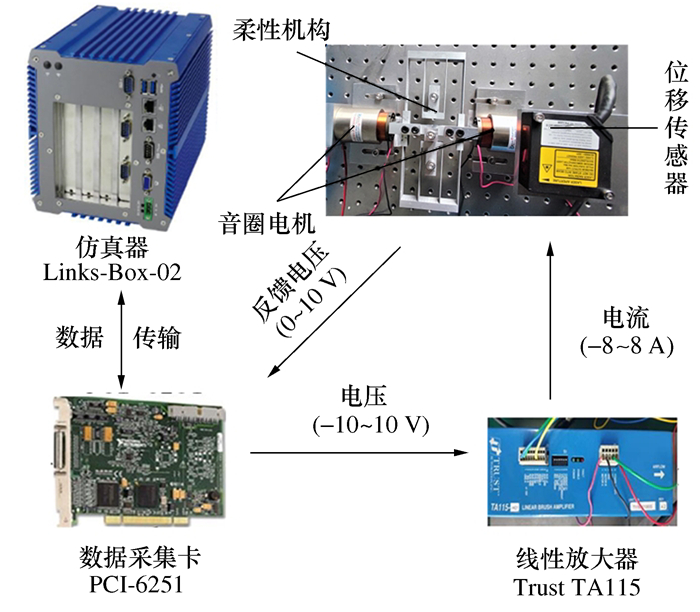
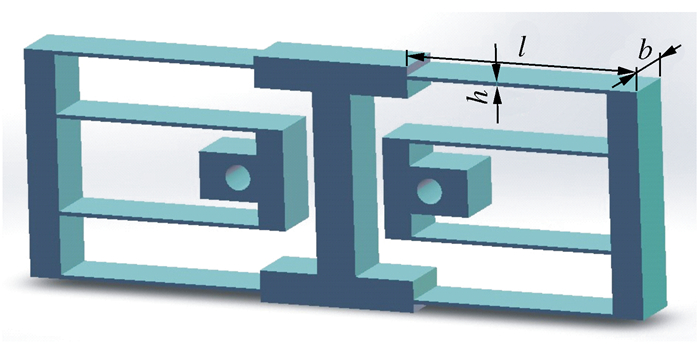
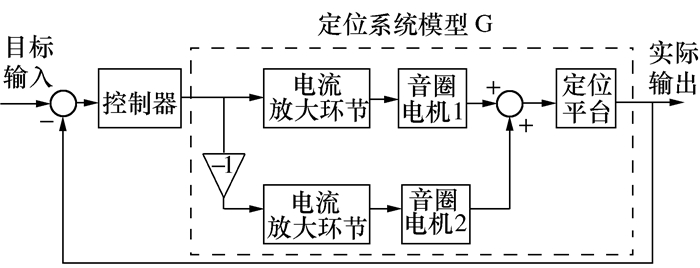
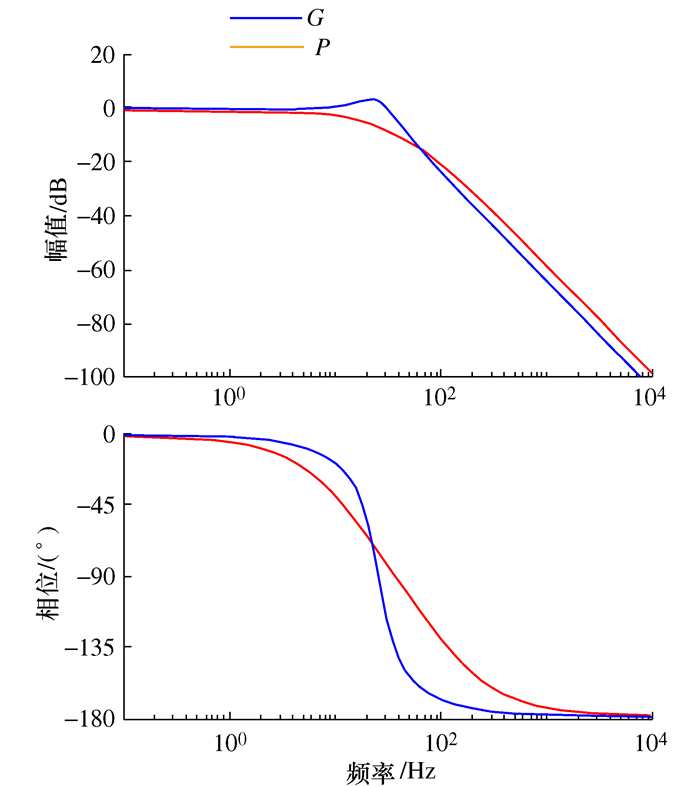
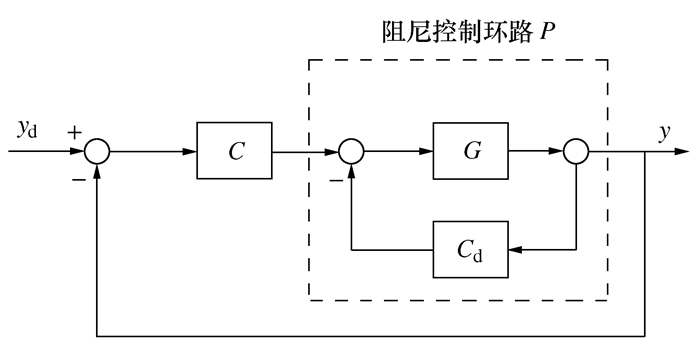
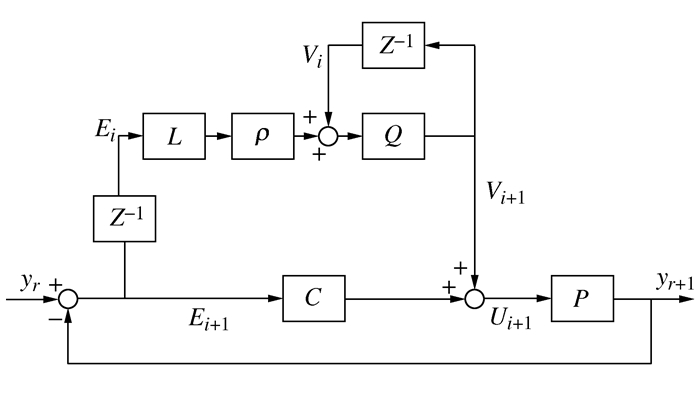
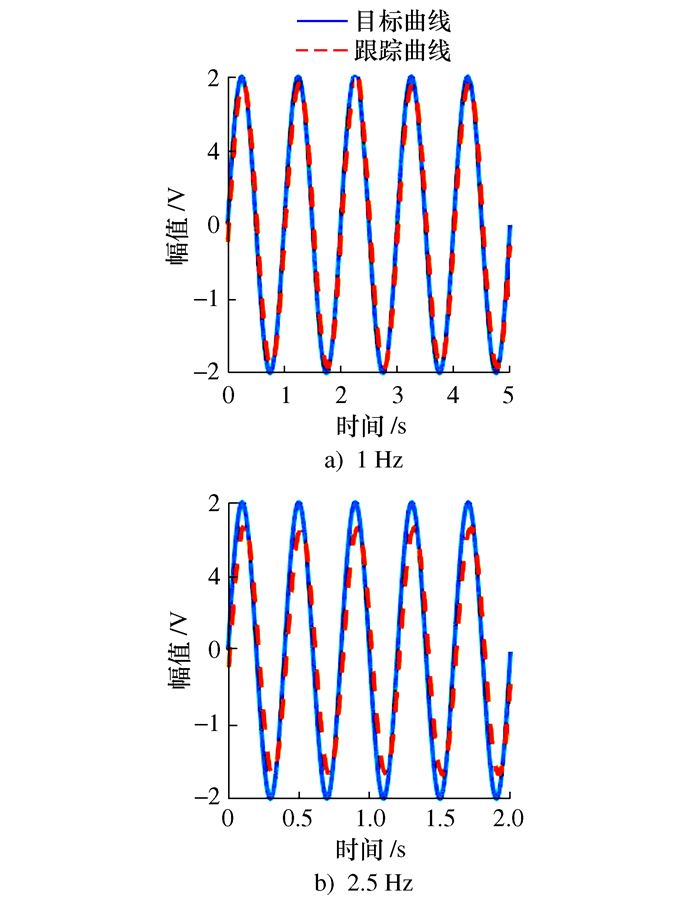
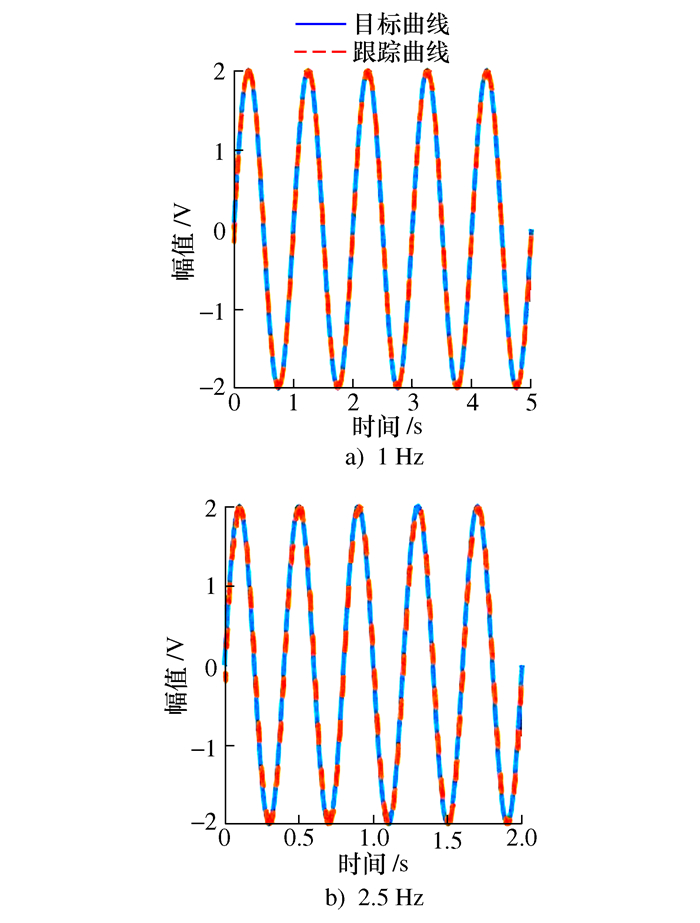
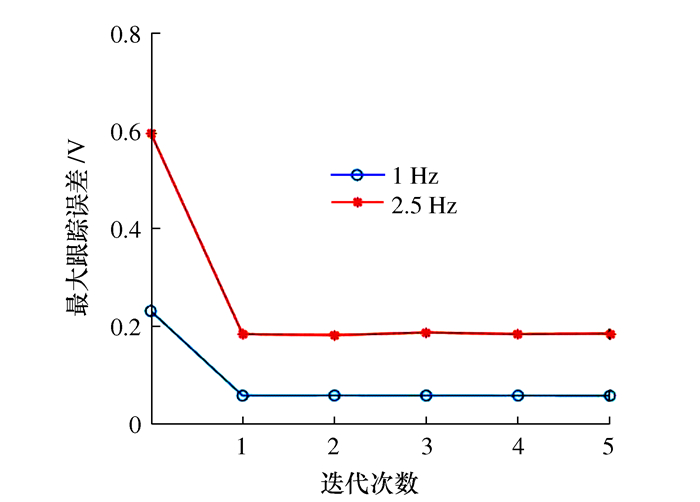
In order to solve the problems of small driving force and low damping resonance of the flexure micro-positioning stage driven by voice coil motors (VCM), a push-pull mode of VCMs on both sides is adopted to enhance the driving force, and the inner loop damping controller combined with iterative learning control (ILC) method is used to realize the precise control of the stage. Firstly, a micro-positioning stage of compound parallelogram flexure mechanism driven by dual VCMs with complementary configuration is built. Secondly, an inner loop damping speed feedback controller is designed. Then, the inverse model ILC method is used to eliminate the periodic interference and error. Finally, the tracking experiment is carried out. The results show that when tracking the sine wave of 1 Hz and 2.5 Hz, the maximum error is reduced by 74.6% and 68.6% respectively compared with PI control, which meets the requirements of precise control of the micro-positioning stage.
In order to solve the problems of small driving force and low damping resonance of the flexure micro-positioning stage driven by voice coil motors (VCM), a push-pull mode of VCMs on both sides is adopted to enhance the driving force, and the inner loop damping controller combined with iterative learning control (ILC) method is used to realize the precise control of the stage. Firstly, a micro-positioning stage of compound parallelogram flexure mechanism driven by dual VCMs with complementary configuration is built. Secondly, an inner loop damping speed feedback controller is designed. Then, the inverse model ILC method is used to eliminate the periodic interference and error. Finally, the tracking experiment is carried out. The results show that when tracking the sine wave of 1 Hz and 2.5 Hz, the maximum error is reduced by 74.6% and 68.6% respectively compared with PI control, which meets the requirements of precise control of the micro-positioning stage.
2024, 43(7): 1244-1248.
doi: 10.13433/j.cnki.1003-8728.20230028
Abstract:
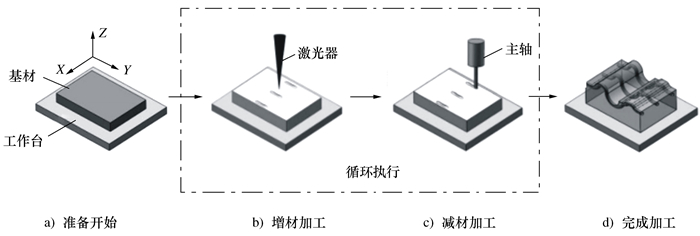
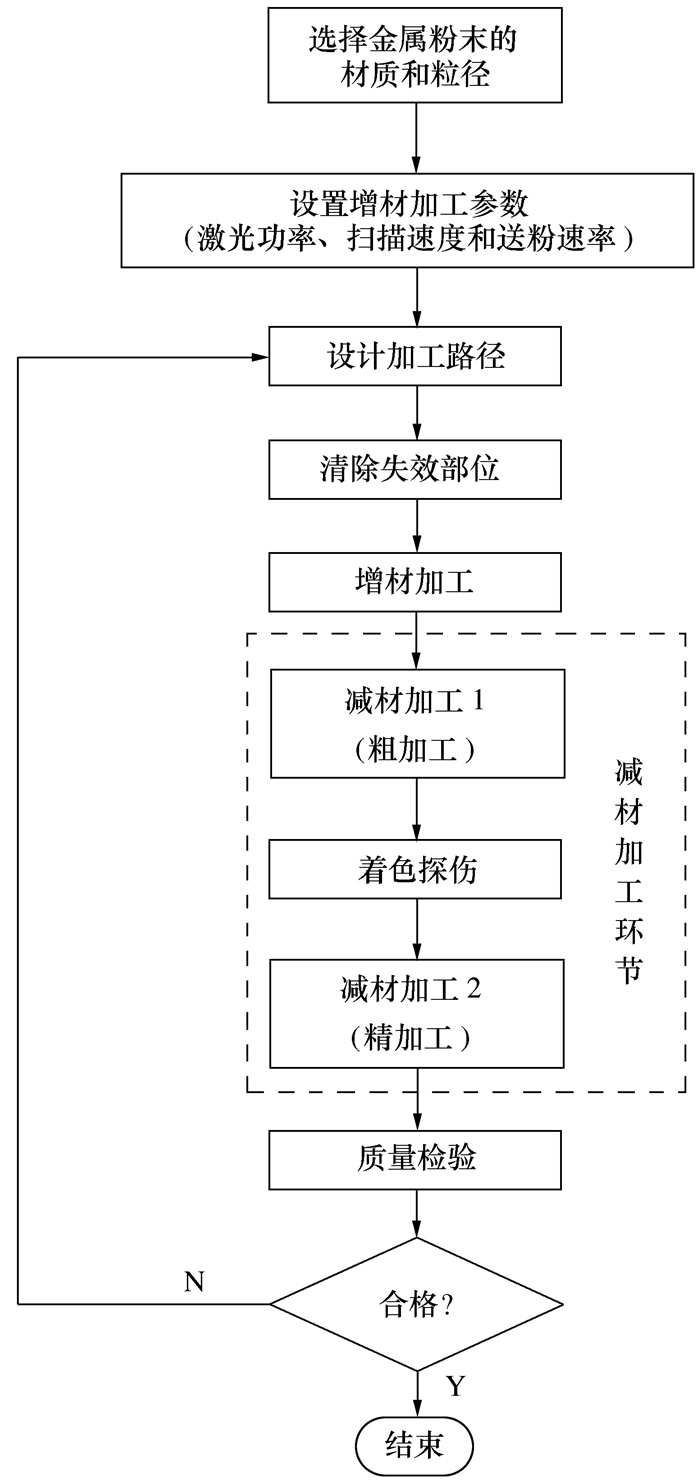
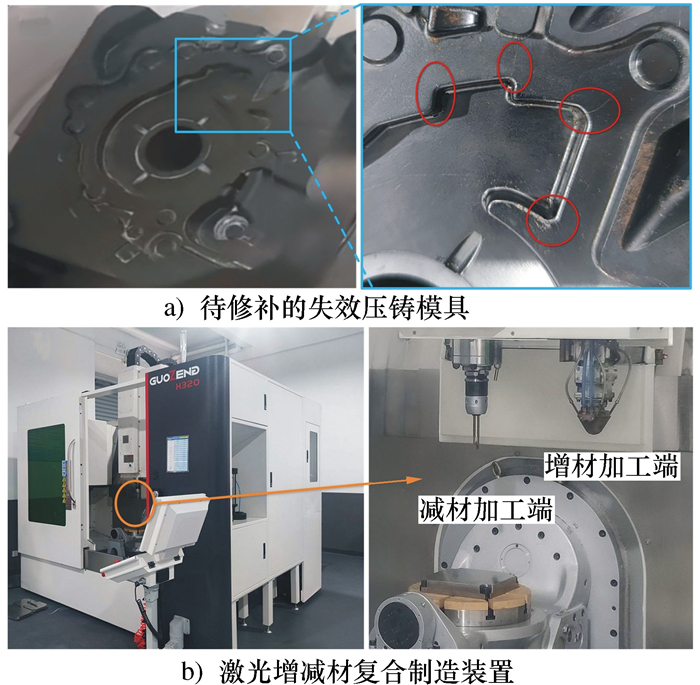
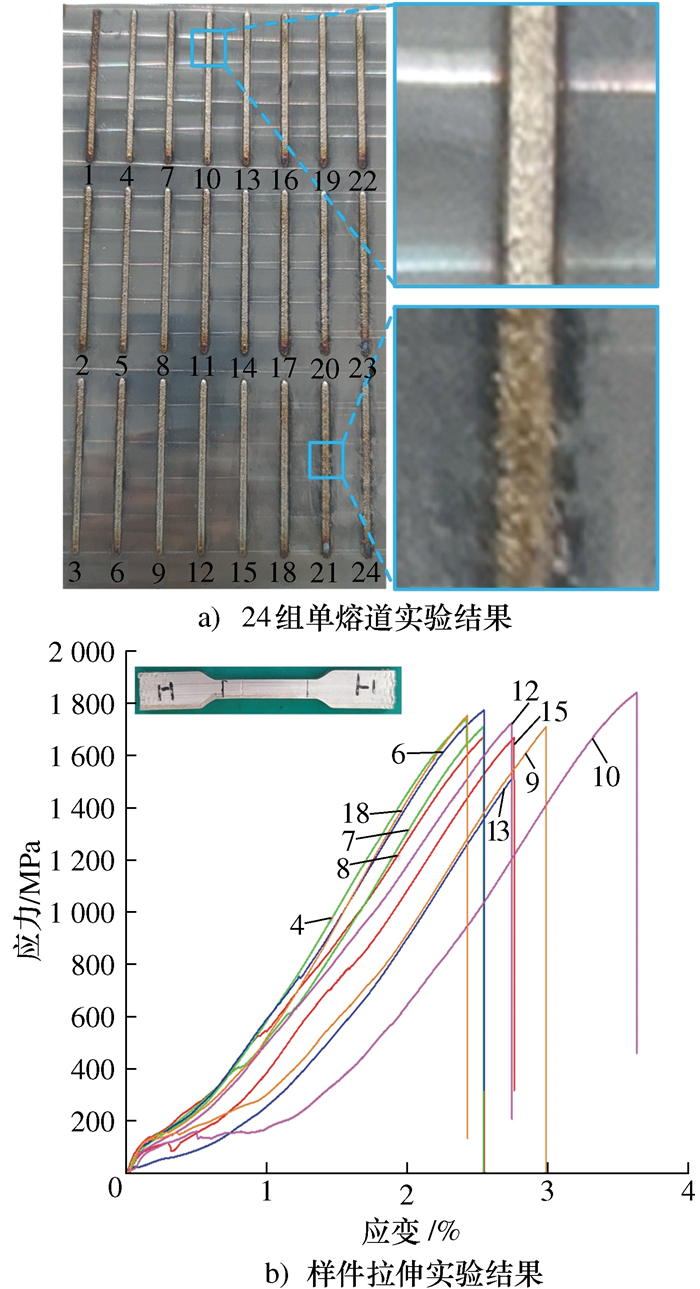
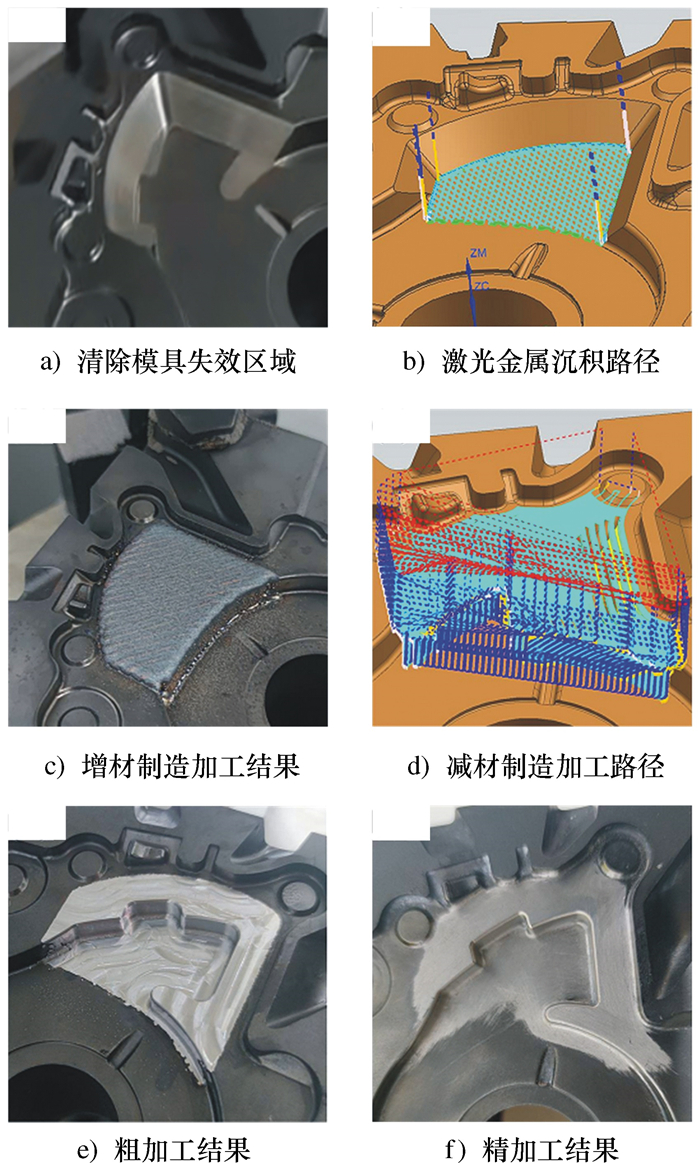
Laser metal deposition with powder additive/subtractive hybrid manufacturing technology is an ideal candidate processing for repairing and remanufacturing of high value tools and dies. In order to improve the efficiency and accuracy of die repairing, the process of die repairing by using the additive/subtractive hybrid manufacturing technology is studied. In the first, the optimal repairing parameters are determined according to the specific operating conditions and material performance requirements. In addition, the application conditions and scope of the repairing process are also discussed. It is demonstrated through the experimental results that when the present technological plan is applied, the die can be repaired without stitching traces, and the hardness increased by 7.4 HRC, the performance of the die is improved.
Laser metal deposition with powder additive/subtractive hybrid manufacturing technology is an ideal candidate processing for repairing and remanufacturing of high value tools and dies. In order to improve the efficiency and accuracy of die repairing, the process of die repairing by using the additive/subtractive hybrid manufacturing technology is studied. In the first, the optimal repairing parameters are determined according to the specific operating conditions and material performance requirements. In addition, the application conditions and scope of the repairing process are also discussed. It is demonstrated through the experimental results that when the present technological plan is applied, the die can be repaired without stitching traces, and the hardness increased by 7.4 HRC, the performance of the die is improved.
2024, 43(7): 1249-1256.
doi: 10.13433/j.cnki.1003-8728.20230012
Abstract:
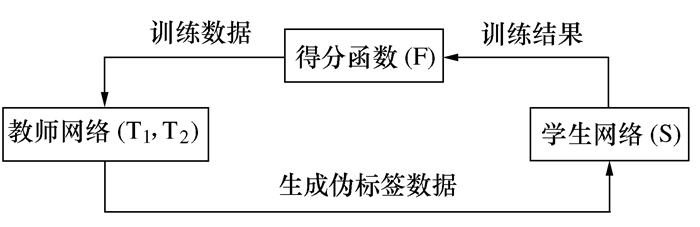
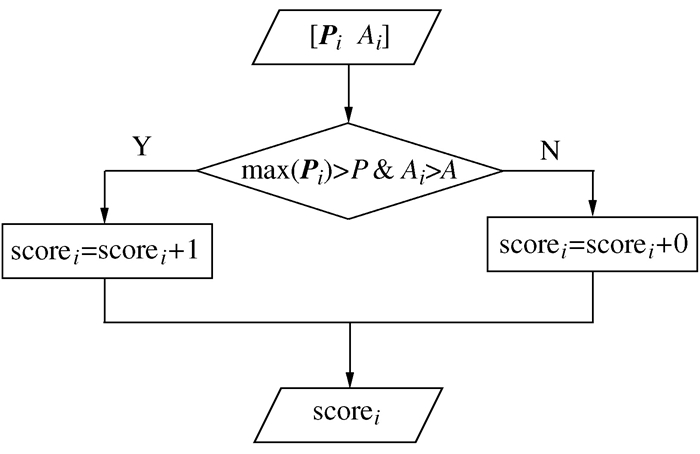
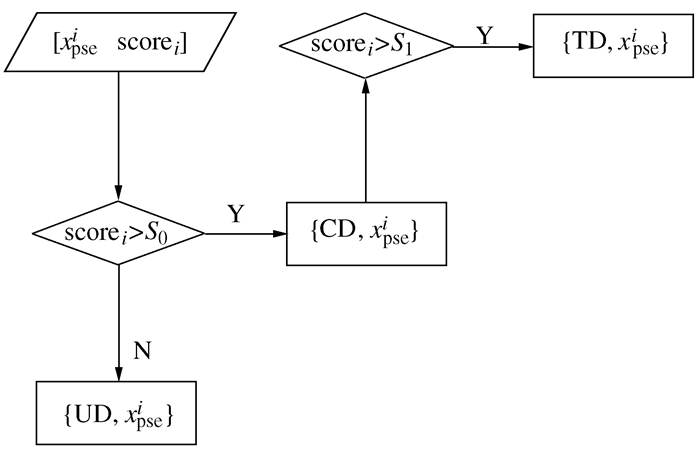
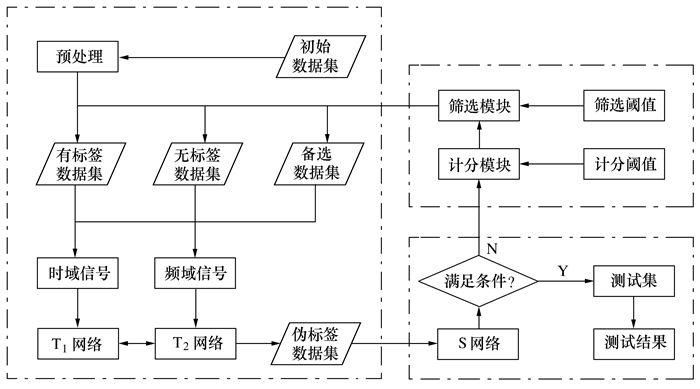
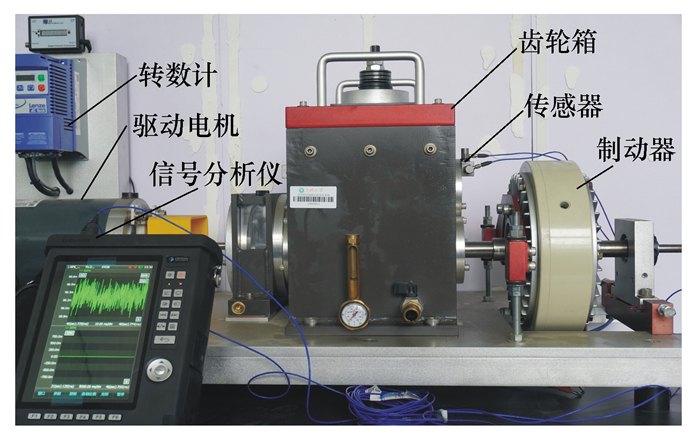
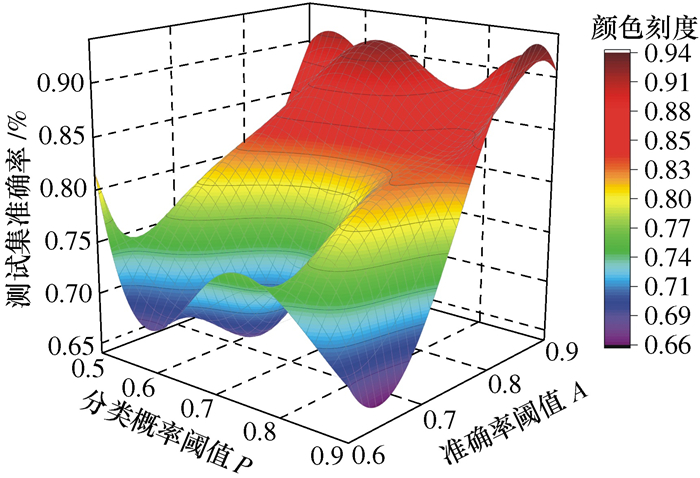
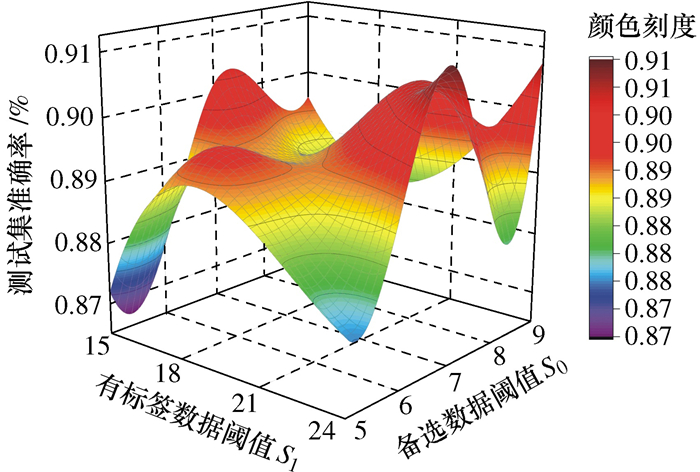
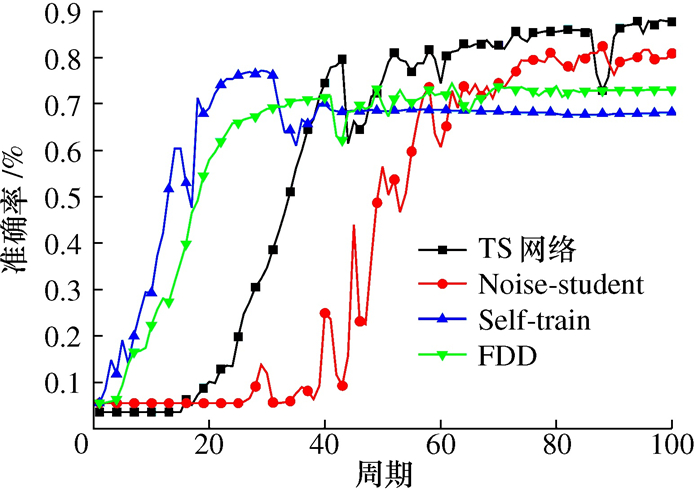
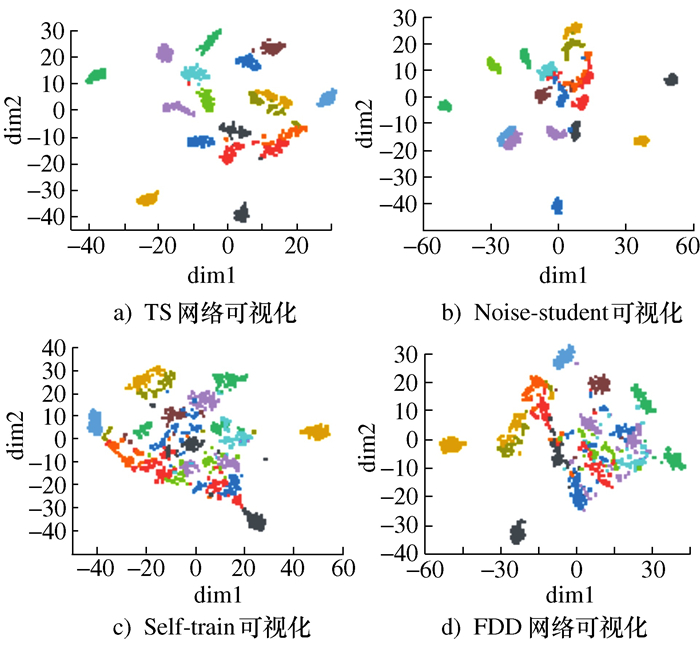
In practical industrial applications, the fault diagnosis accuracy of mechanical equipment is low due to the small amount of labeled data. A TS neural network model based on semi-supervised learning strategy is proposed to solve this problem. Firstly, the teacher network (T) is trained by co-training from both the time domain and frequency domain, then it is used to convert unlabeled data into high-quality pseudo-labeled data. Secondly, the pseudo-labeled data is used to train the student network (S) and avoid network overfitting by judging and scoring the data. Finally, the pseudo-label data is filtered into the labeled data through the scoring function. The results of gear fault diagnosis show that the TS network has a fault classification accuracy of 90.31%, which is 15%-20% higher than other semi-supervised methods. Under the condition of SNR of 5, 0 and -5, the model can achieve diagnostic accuracy of 86.81%, 78.00% and 52.78%.
In practical industrial applications, the fault diagnosis accuracy of mechanical equipment is low due to the small amount of labeled data. A TS neural network model based on semi-supervised learning strategy is proposed to solve this problem. Firstly, the teacher network (T) is trained by co-training from both the time domain and frequency domain, then it is used to convert unlabeled data into high-quality pseudo-labeled data. Secondly, the pseudo-labeled data is used to train the student network (S) and avoid network overfitting by judging and scoring the data. Finally, the pseudo-label data is filtered into the labeled data through the scoring function. The results of gear fault diagnosis show that the TS network has a fault classification accuracy of 90.31%, which is 15%-20% higher than other semi-supervised methods. Under the condition of SNR of 5, 0 and -5, the model can achieve diagnostic accuracy of 86.81%, 78.00% and 52.78%.
2024, 43(7): 1257-1265.
doi: 10.13433/j.cnki.1003-8728.20230019
Abstract:
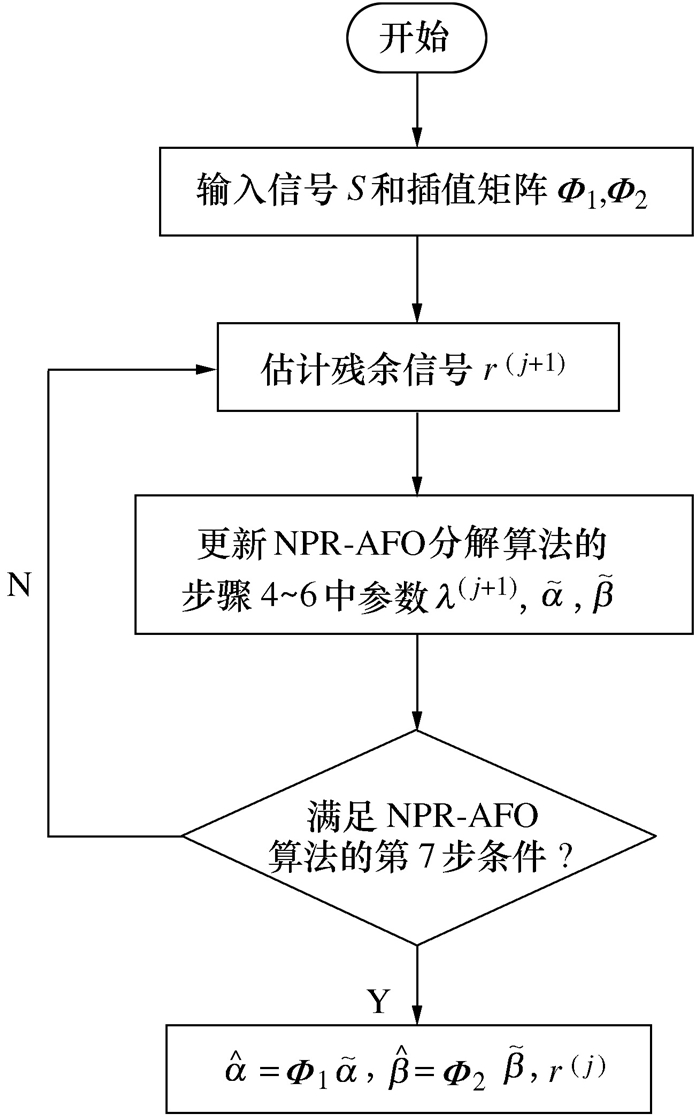
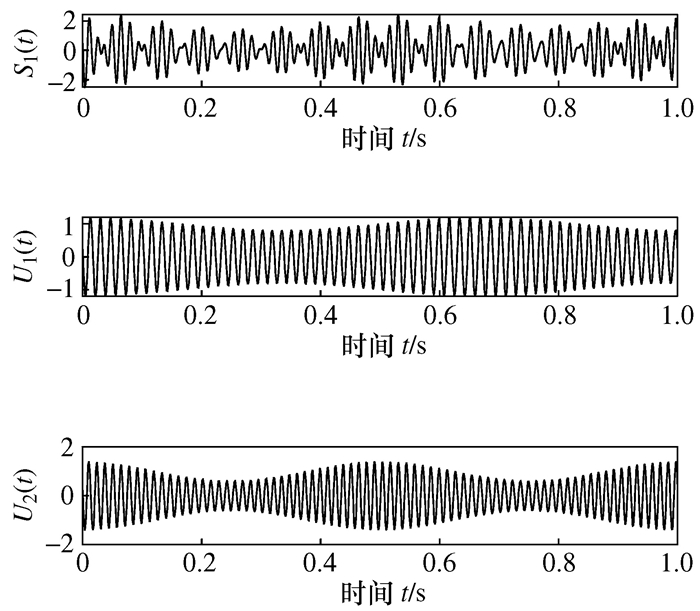
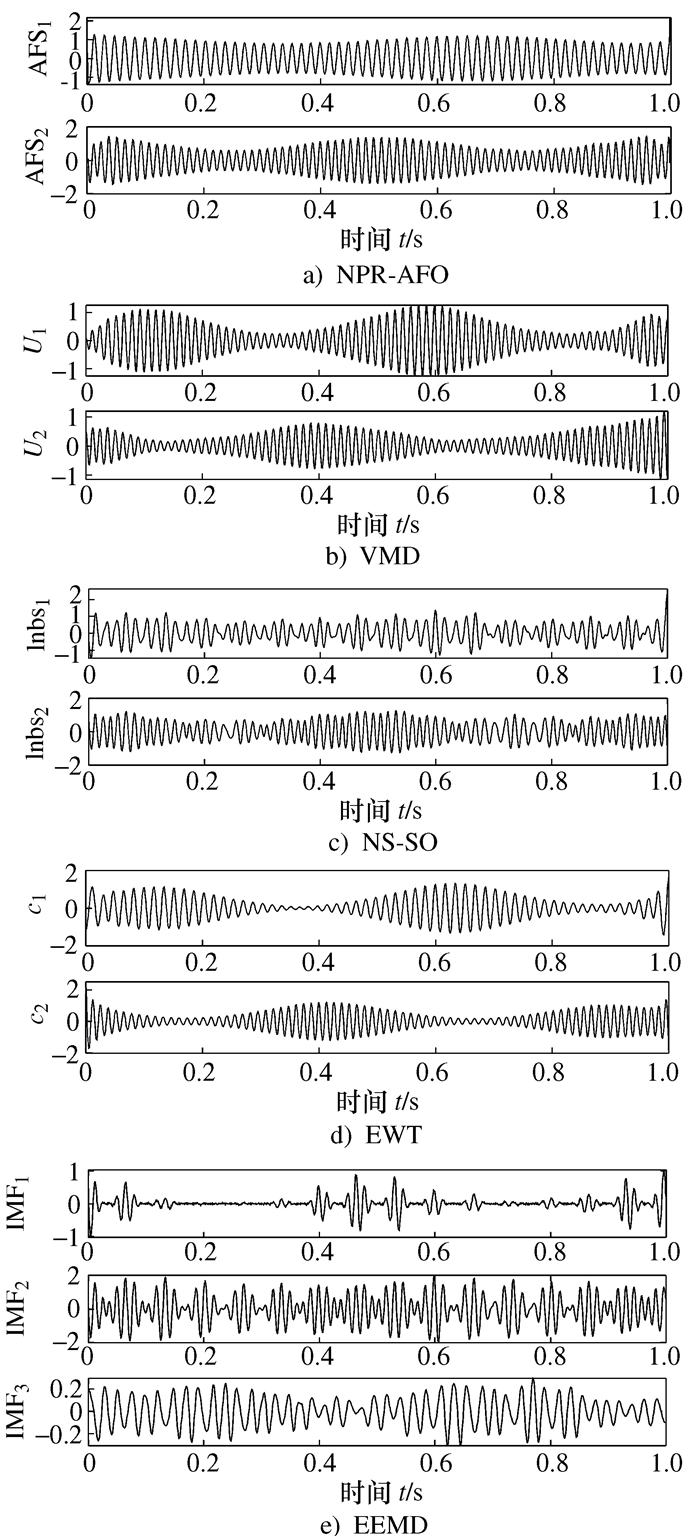
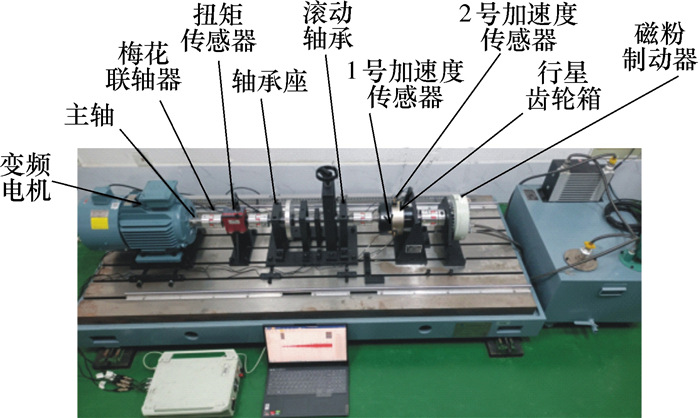
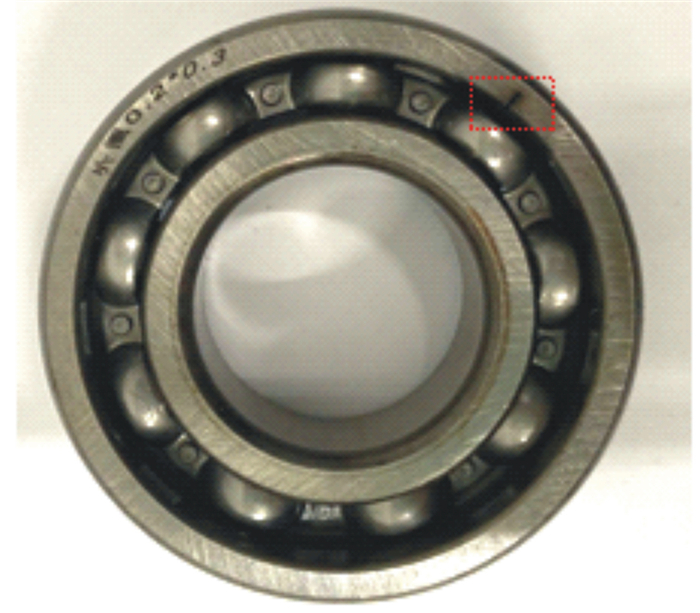
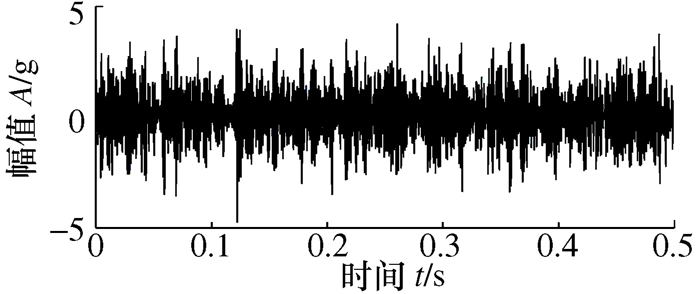
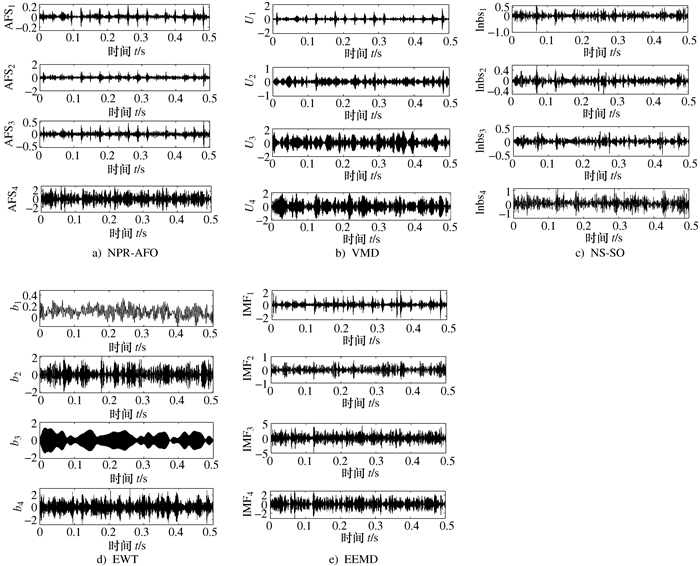
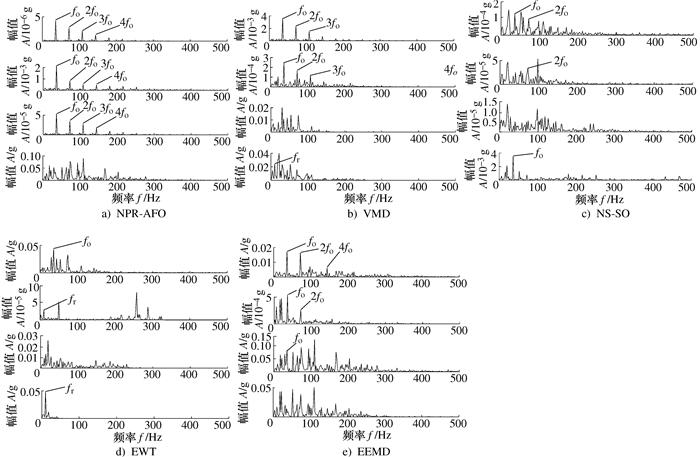
The operator-based null-space tracking algorithm can realize the adaptive decomposition of complex signals, and it is a key step to construct and solve the signal model. A new signal decomposition model based on AFO is further established by defining a new AM-FM operator (AFO) which can completely annihilate AM-FM signals. In order to improve the robustness of parameters to signal decomposition, a nonparametric regularization (NPR) method is used to solve the constrained optimization problem of the above models, and an NPR-based adaptive signal decomposition method, called NPR-AFO, is proposed. This paper introduces the NPR-AFO method into mechanical fault diagnosis, and compares it with other existing decomposition methods through simulation and analysis of the measured data of local faults of rolling bearings. The results show that the proposed method can not only effectively extract fault features, but also the state failure characteristics are more obvious.
The operator-based null-space tracking algorithm can realize the adaptive decomposition of complex signals, and it is a key step to construct and solve the signal model. A new signal decomposition model based on AFO is further established by defining a new AM-FM operator (AFO) which can completely annihilate AM-FM signals. In order to improve the robustness of parameters to signal decomposition, a nonparametric regularization (NPR) method is used to solve the constrained optimization problem of the above models, and an NPR-based adaptive signal decomposition method, called NPR-AFO, is proposed. This paper introduces the NPR-AFO method into mechanical fault diagnosis, and compares it with other existing decomposition methods through simulation and analysis of the measured data of local faults of rolling bearings. The results show that the proposed method can not only effectively extract fault features, but also the state failure characteristics are more obvious.
2024, 43(7): 1266-1276.
doi: 10.13433/j.cnki.1003-8728.20230017
Abstract:
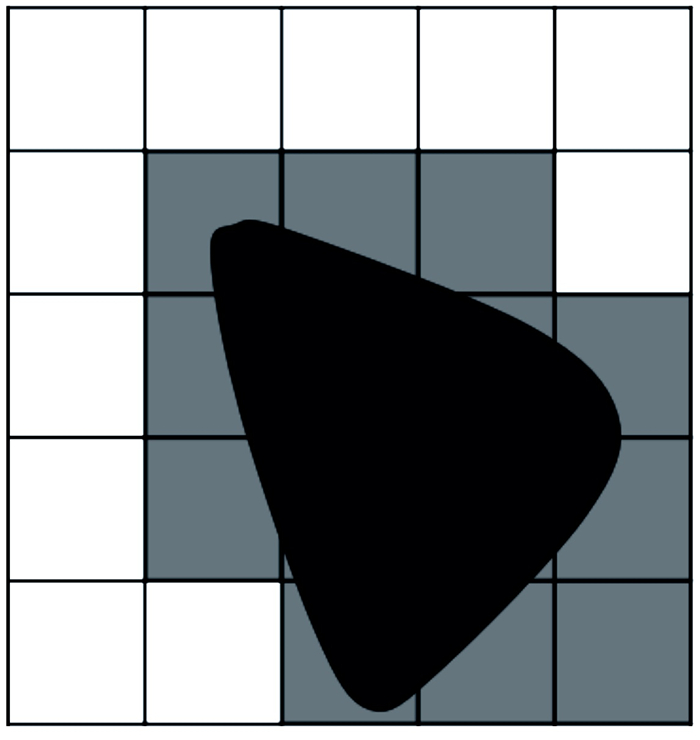
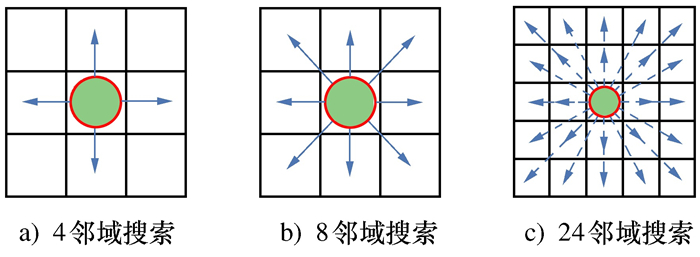
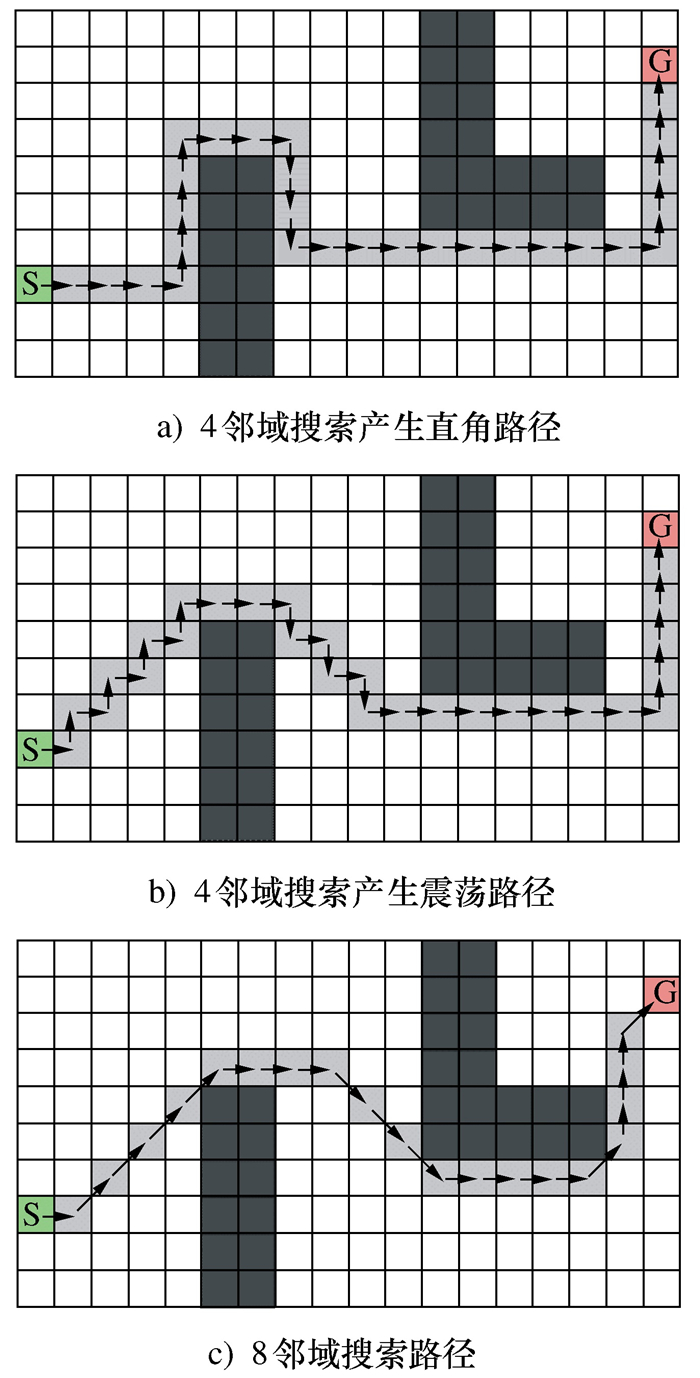
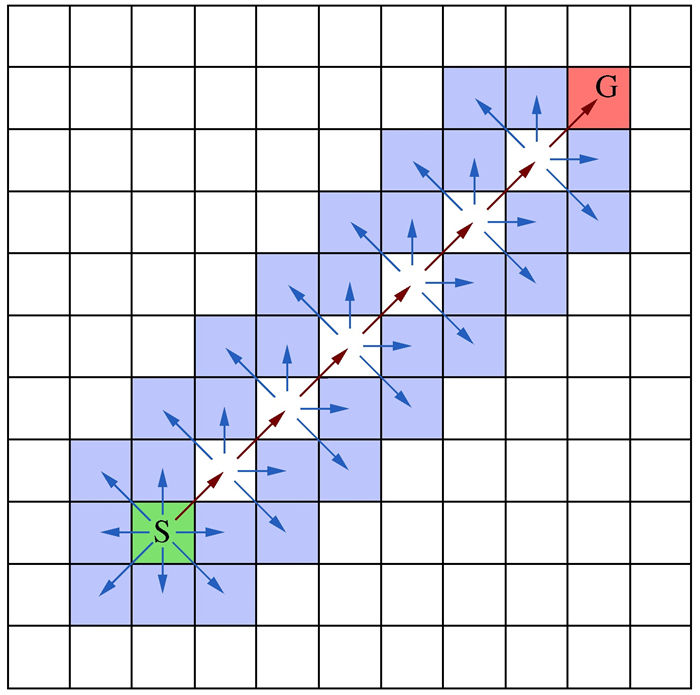
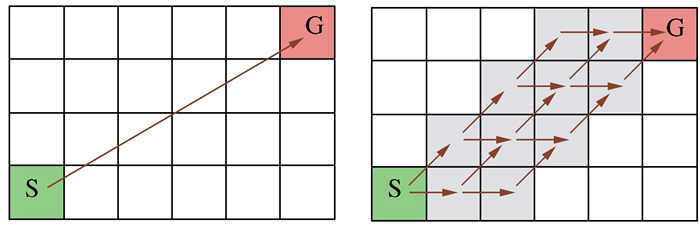
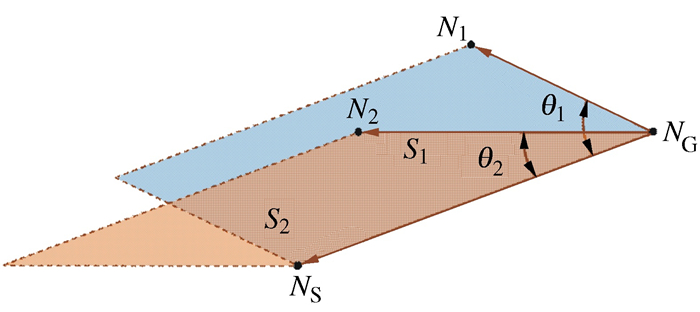
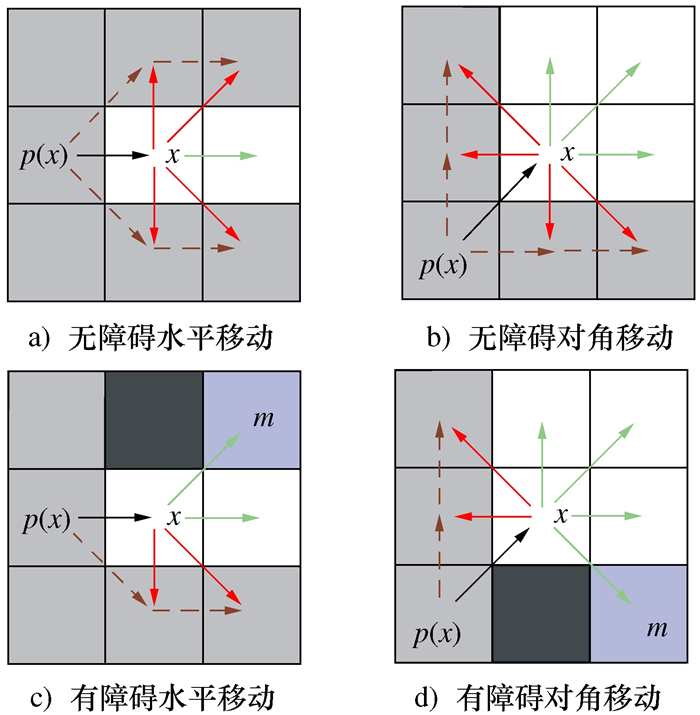
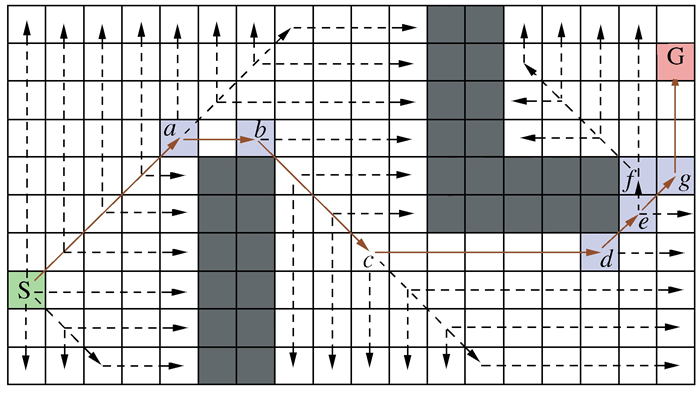
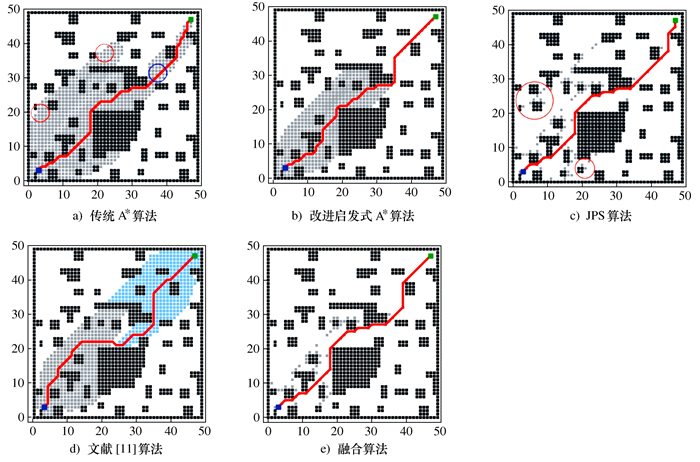
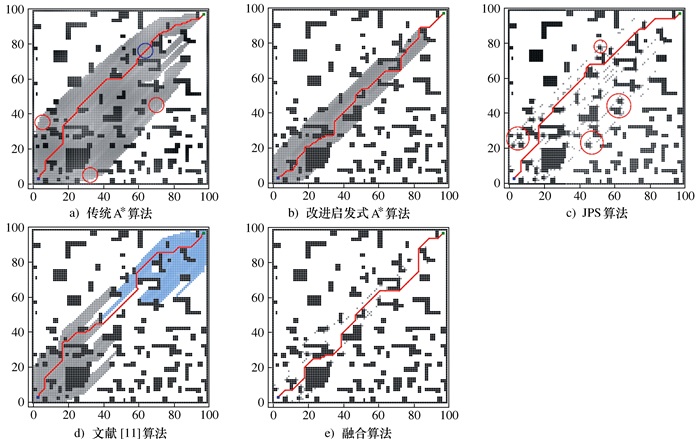
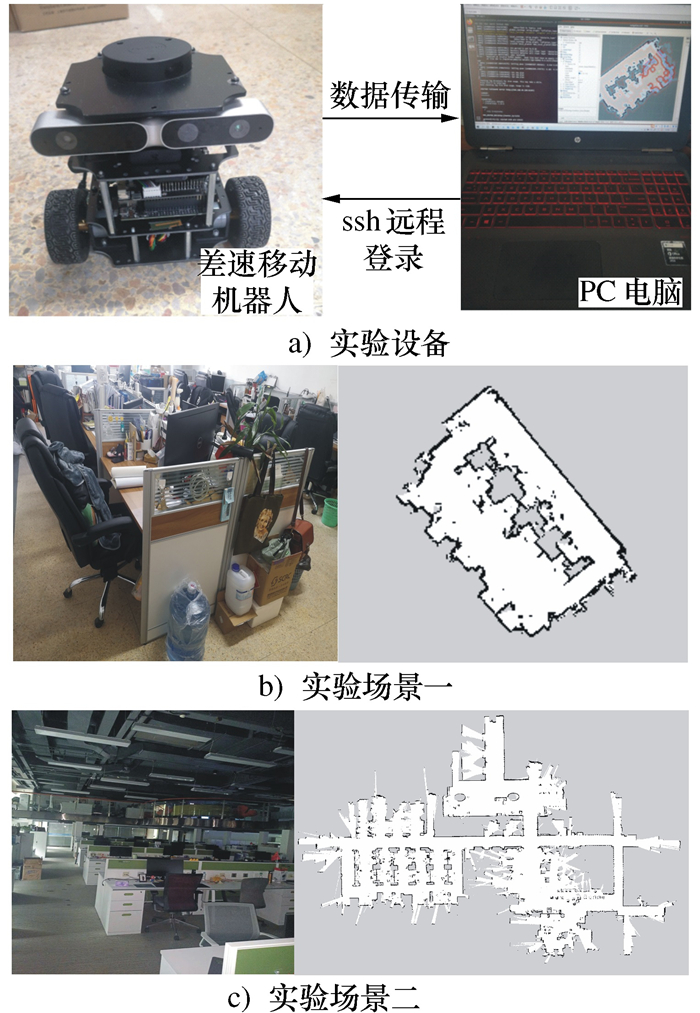
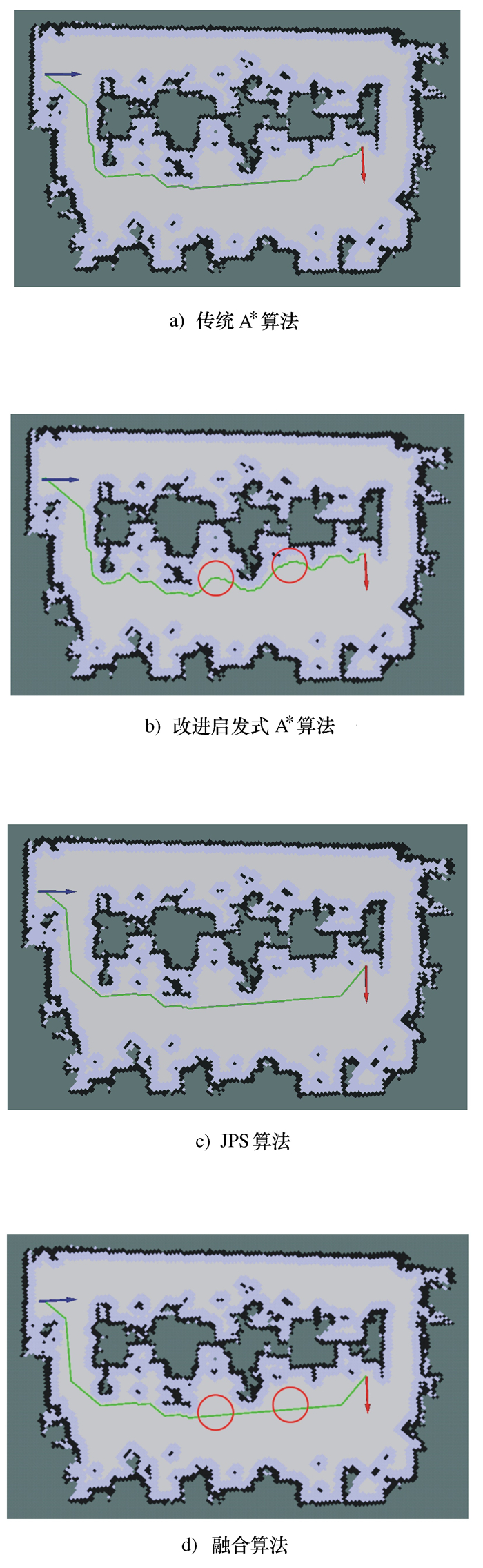
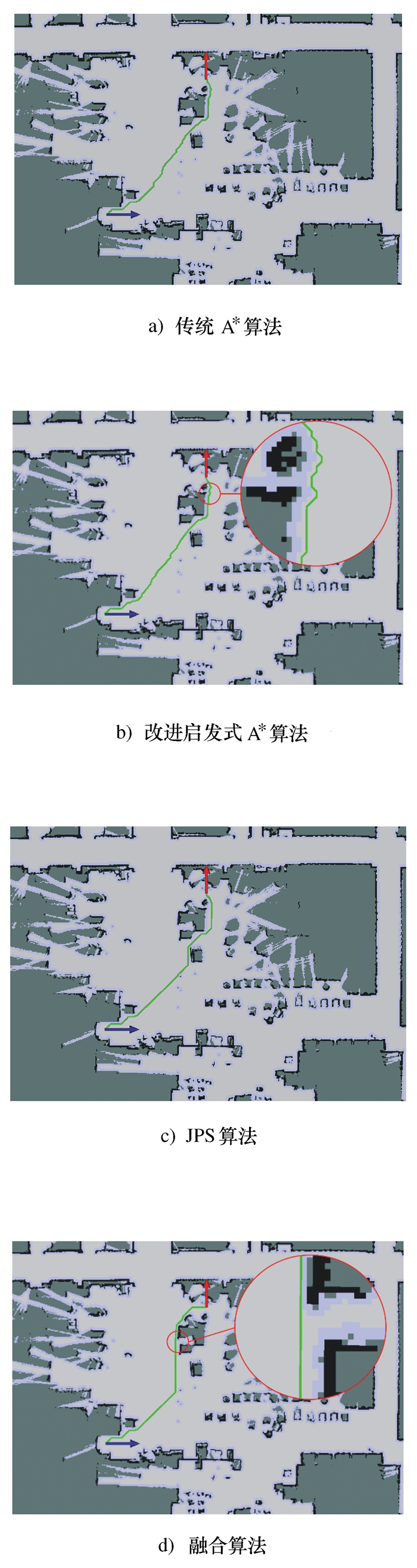
The traditional A* routing algorithm has many problems in the search process, such as many redundant nodes, low overall search efficiency and large computational memory consumption. To solve these problems, in this paper, starting from the two important decision points of the A* algorithm, an improved fusion algorithm was proposed by improving the cost evaluation function and adjacent node search strategy of the algorithm. Firstly, the combination of vector cross-product and scale balance factor was selected to optimize the heuristic function of traditional A* algorithm, which reduced the redundant nodes with the same generation value around the optimal path in the routing process of A* algorithm and reduced the search of symmetric path. Secondly, the algorithm integrated the jump point search strategy and realized the variable step size jump search of the path through logical judgment, which avoided the disadvantages of low search efficiency of A* algorithm layer by layer. Through simulation analysis in grid maps of different sizes, it was found that, compared with the traditional A* algorithm, the improved fusion algorithm reduced the number of node searches by approximately 95% at the same path length, and effectively filtered many redundant hops generated by complex shape obstacles around the path compared with the traditional JPS routing algorithm. Finally, the improved fusion algorithm was applied to ROS mobile robot, and comparative experiments were carried out to verify the feasibility of the algorithm. The experimental results showed that the search efficiency of the improved fusion algorithm was approximately 94% higher than that of A* algorithm on the basis of obtaining efficient and safe paths.
The traditional A* routing algorithm has many problems in the search process, such as many redundant nodes, low overall search efficiency and large computational memory consumption. To solve these problems, in this paper, starting from the two important decision points of the A* algorithm, an improved fusion algorithm was proposed by improving the cost evaluation function and adjacent node search strategy of the algorithm. Firstly, the combination of vector cross-product and scale balance factor was selected to optimize the heuristic function of traditional A* algorithm, which reduced the redundant nodes with the same generation value around the optimal path in the routing process of A* algorithm and reduced the search of symmetric path. Secondly, the algorithm integrated the jump point search strategy and realized the variable step size jump search of the path through logical judgment, which avoided the disadvantages of low search efficiency of A* algorithm layer by layer. Through simulation analysis in grid maps of different sizes, it was found that, compared with the traditional A* algorithm, the improved fusion algorithm reduced the number of node searches by approximately 95% at the same path length, and effectively filtered many redundant hops generated by complex shape obstacles around the path compared with the traditional JPS routing algorithm. Finally, the improved fusion algorithm was applied to ROS mobile robot, and comparative experiments were carried out to verify the feasibility of the algorithm. The experimental results showed that the search efficiency of the improved fusion algorithm was approximately 94% higher than that of A* algorithm on the basis of obtaining efficient and safe paths.
2024, 43(7): 1277-1282.
doi: 10.13433/j.cnki.1003-8728.20230044
Abstract:
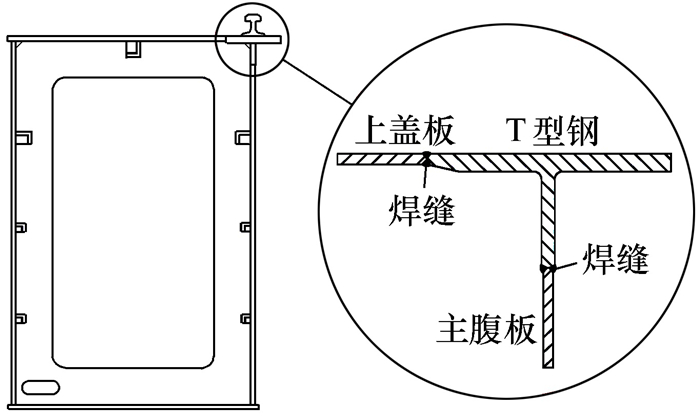
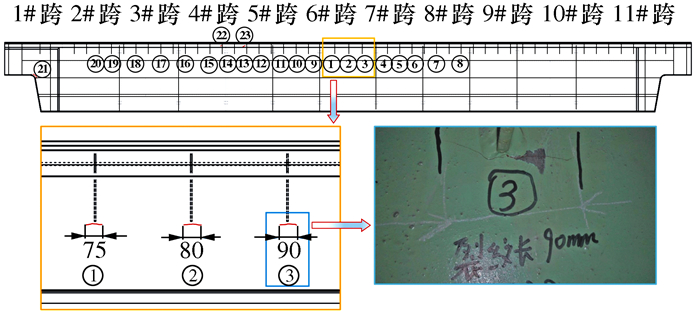
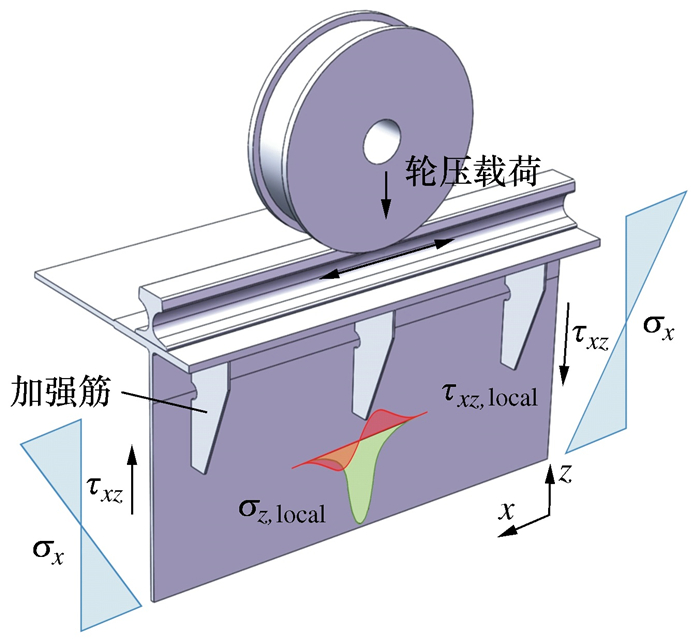
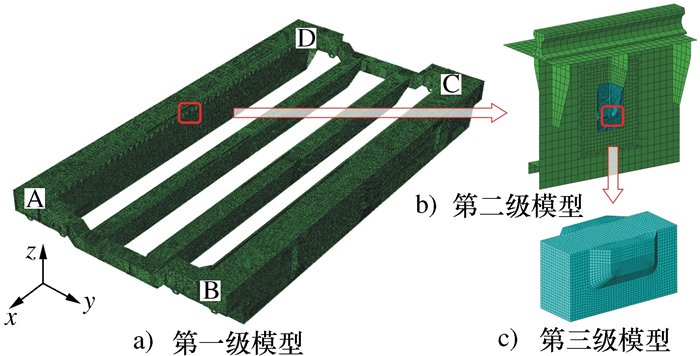
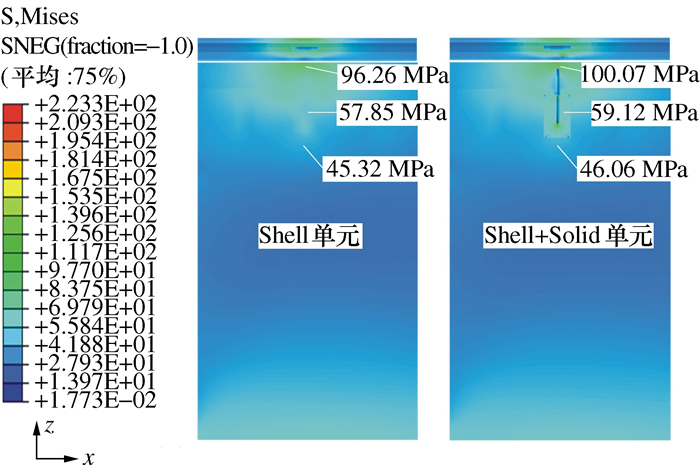
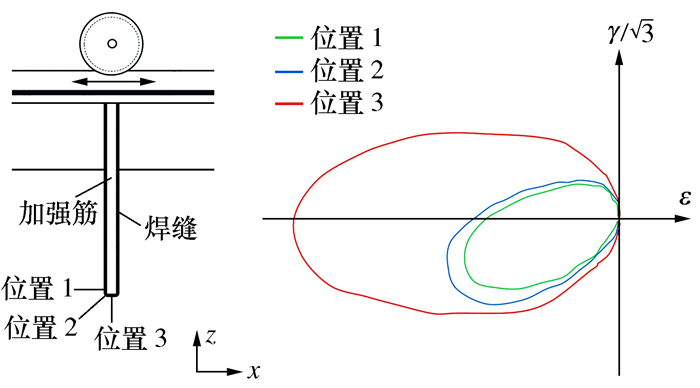
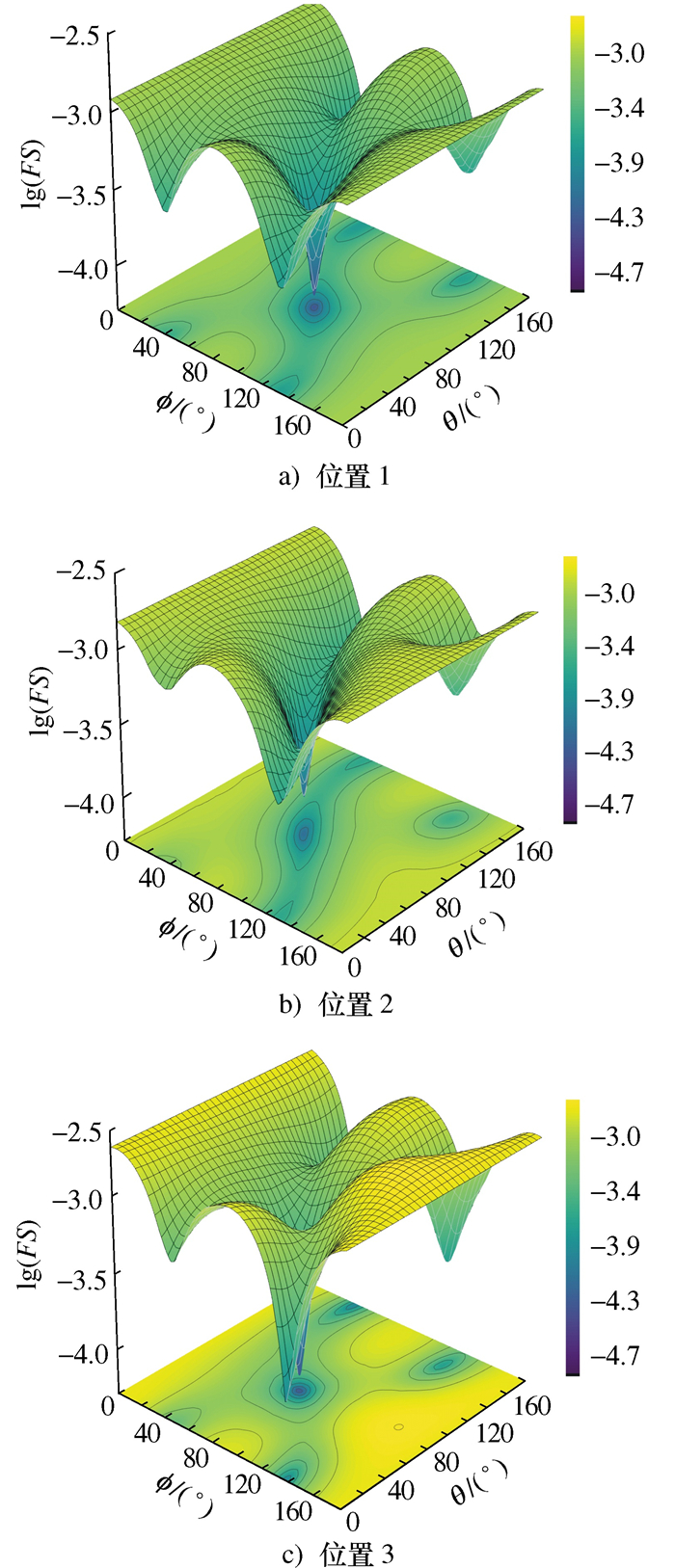
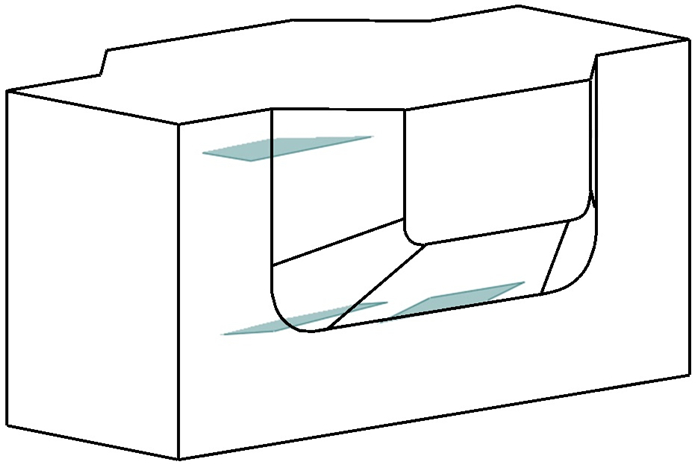
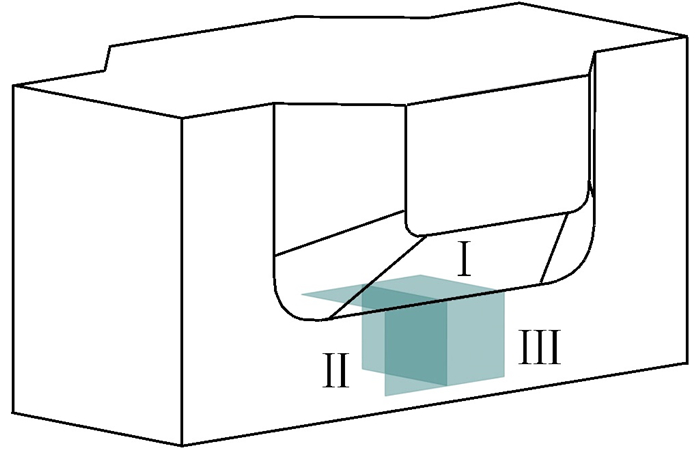
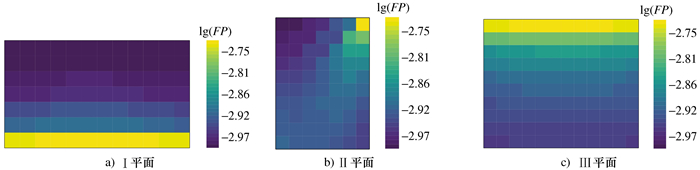
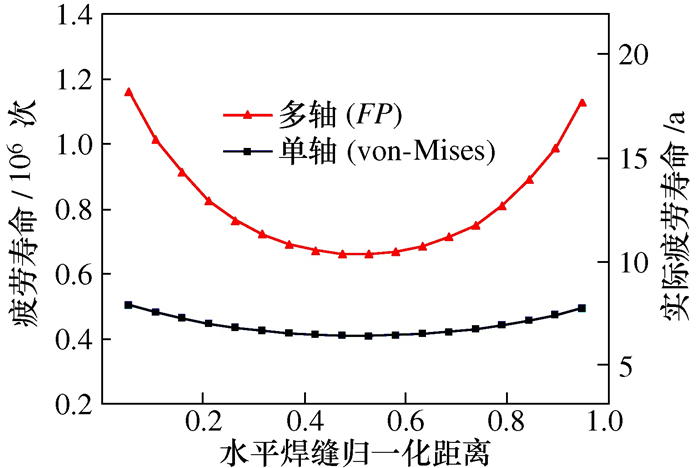
The metal structure of casting crane is a typical complex welding structure. Under the combined action of moving wheel pressure load and complex weld geometry, fatigue cracks often appear in several unconventional locations. In view of the intensive fatigue damage problem in the connection area of T-shaped steel and small rib plate under the main beam track of an in-service casting crane, the Soild-Shell mixed element and sub-model technology were used to establish the fine finite element model for crack area. The complete stress change process of the whole metal structure under the action of moving wheel pressure load was simulated, and the obvious multiaxial characteristics of the crack area were analyzed. The multiaxial fatigue model based on the critical plane method were used to calculate and discuss the fatigue performance of the crack area. The results show that the multiaxial stress is the main reason for the initiation of cracks at the crack area, and the F-S multiaxial fatigue model can effectively evaluate the fatigue performance of the crack area.
The metal structure of casting crane is a typical complex welding structure. Under the combined action of moving wheel pressure load and complex weld geometry, fatigue cracks often appear in several unconventional locations. In view of the intensive fatigue damage problem in the connection area of T-shaped steel and small rib plate under the main beam track of an in-service casting crane, the Soild-Shell mixed element and sub-model technology were used to establish the fine finite element model for crack area. The complete stress change process of the whole metal structure under the action of moving wheel pressure load was simulated, and the obvious multiaxial characteristics of the crack area were analyzed. The multiaxial fatigue model based on the critical plane method were used to calculate and discuss the fatigue performance of the crack area. The results show that the multiaxial stress is the main reason for the initiation of cracks at the crack area, and the F-S multiaxial fatigue model can effectively evaluate the fatigue performance of the crack area.
2018, 37(8): 1167-1176.
doi: 10.13433/j.cnki.1003-8728.20180029
2018, 37(8): 1177-1182.
doi: 10.13433/j.cnki.1003-8728.20180012
2018, 37(8): 1161-1166.
doi: 10.13433/j.cnki.1003-8728.20180025
2018, 37(8): 1149-1155.
doi: 10.13433/j.cnki.1003-8728.20180024
2018, 37(8): 1156-1160.
doi: 10.13433/j.cnki.1003-8728.20180048
- 1Study on Kinematics Simulation for Six Degree-of-Freedom Industrial Robot Arms
- 2Modeling and Analysis of Synchronization Error of Double-drive Feed System
- 3Analysis and Simulation of Motion Characteristics of Silkworm-robot
- 4Reliability Analysis of Failure Dynamic Mechanical System using Vine Copula Model
- 5Analysis of Influence of Rod Length Error on Position Accuracy of Underwater Extended Mechanism
- More >
