




Gyroscopic Effect Decoupling Control of Maglev Rotor Supported by Nonlinear Force
-
摘要: 电磁轴承非线性力支承的飞轮转子各自由度之间产生的强耦合,影响轴承转子系统稳定性。为此建立了径向四自由度的非线性电磁力-刚性转子动力学模型。在此基础上,提出了一种自适应径向基神经网络和滑模控制结合的算法(Adaptive RBFNN&SMC)。基于RBFNN对非线性电磁力和陀螺效应进行整体补偿,应用双曲正切函数作为滑模鲁棒项,对滑模控制进行改进,改善了滑模算法的抖振、抑制了质量不平衡扰动和随机扰动。根据Lyapunov稳定性理论证明了系统的渐进稳定性。最后通过仿真将提出的算法与PID算法和
$ \alpha $ 阶逆系统算法对比,结果表明该算法能有效补偿非线性力、解耦系统和改善抖振问题,同时对于外界扰动具有良好的抑制效果。Abstract: The high-speed maglev flywheel supported by nonlinear force shows strong coupling dynamics, which affects the stability of the rotor-bearing system. Therefore, a four-DOF dynamic model of nonlinear magnetic force-rigid rotor was established, and an adaptive radial basis neural network and sliding mode control algorithm (adaptive RBFNN&SMC) was proposed. The nonlinear force and gyro effect was integrally compensated by the RBFNN. The hyperbolic tangent function was used as the sliding mode robust term to improve the sliding mode control, reduce the chattering of the sliding mode algorithm and suppress the mass imbalance disturbance and random disturbance. A comparation of PID, α-order inverse system and the proposed algorithm was simulated. The results shows that the algorithm proposed can effectively compensate the nonlinear force, decouple the system and improve the chattering problem. At the same time, it can suppresses the external disturbance efficiently. -
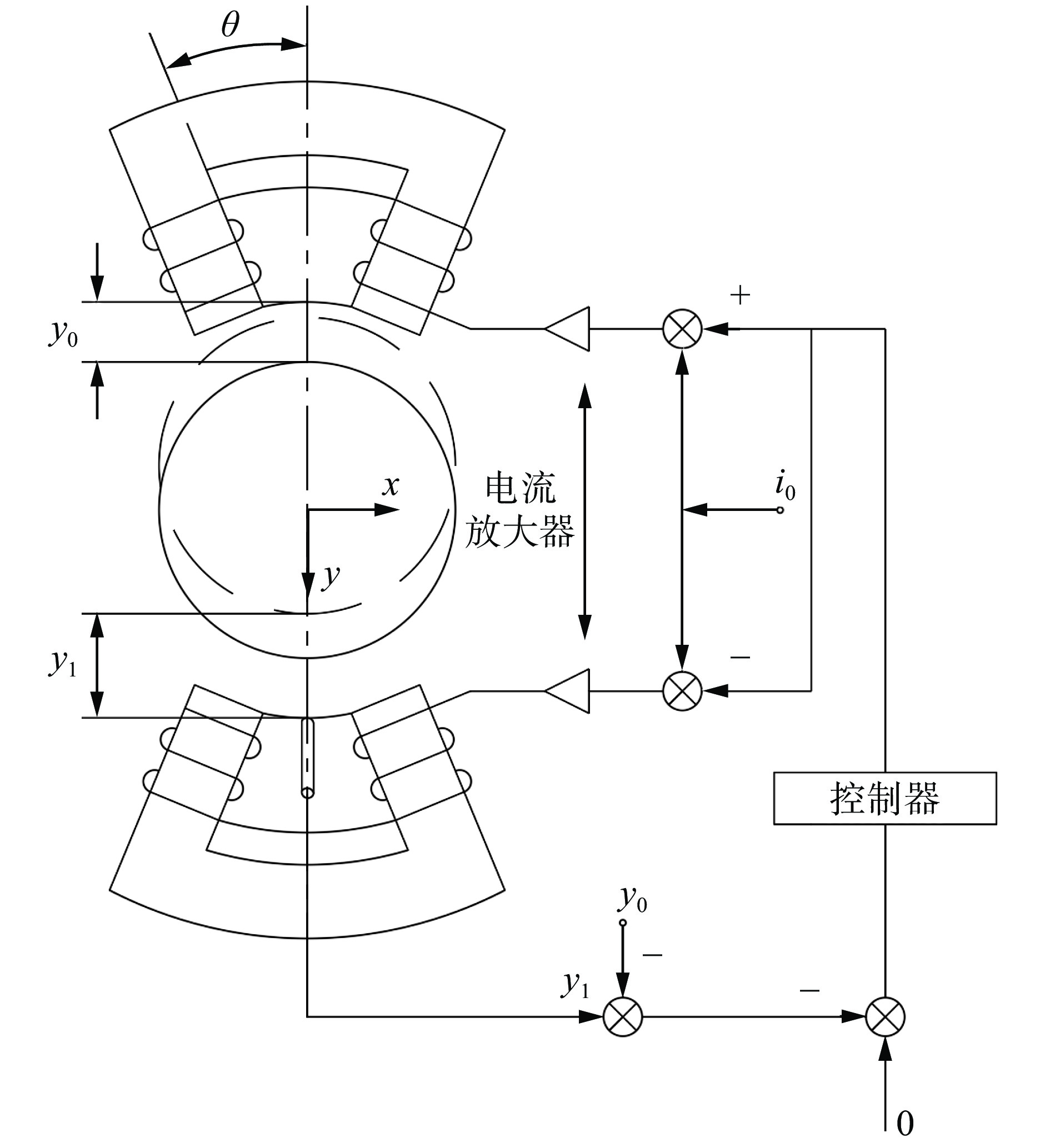
图 2 电磁轴承控制回路示意图
Figure 2. Schematic diagram of the electromagnetic bearing control circuit

图 5 开关函数、双曲正切函数曲线
Figure 5. The switching function and hyperbolic tangent function curves

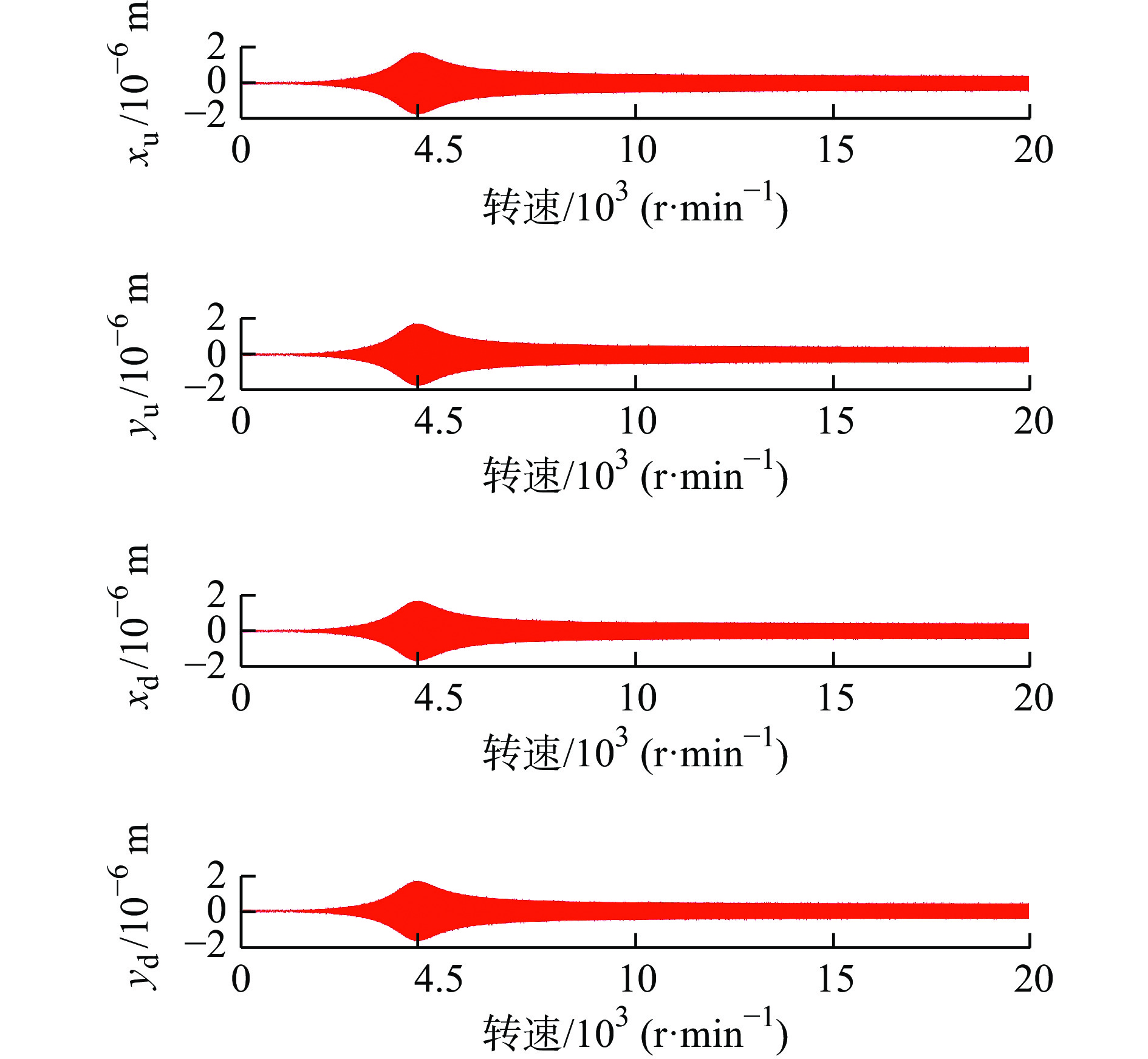
图 7 本文算法下加速响应曲线
Figure 7. The acceleration response curve under the proposed algorithm

图 8 600 W·h磁悬浮飞轮实验样机本体
Figure 8. 600 W·h magnetic suspension flywheel experimental prototype
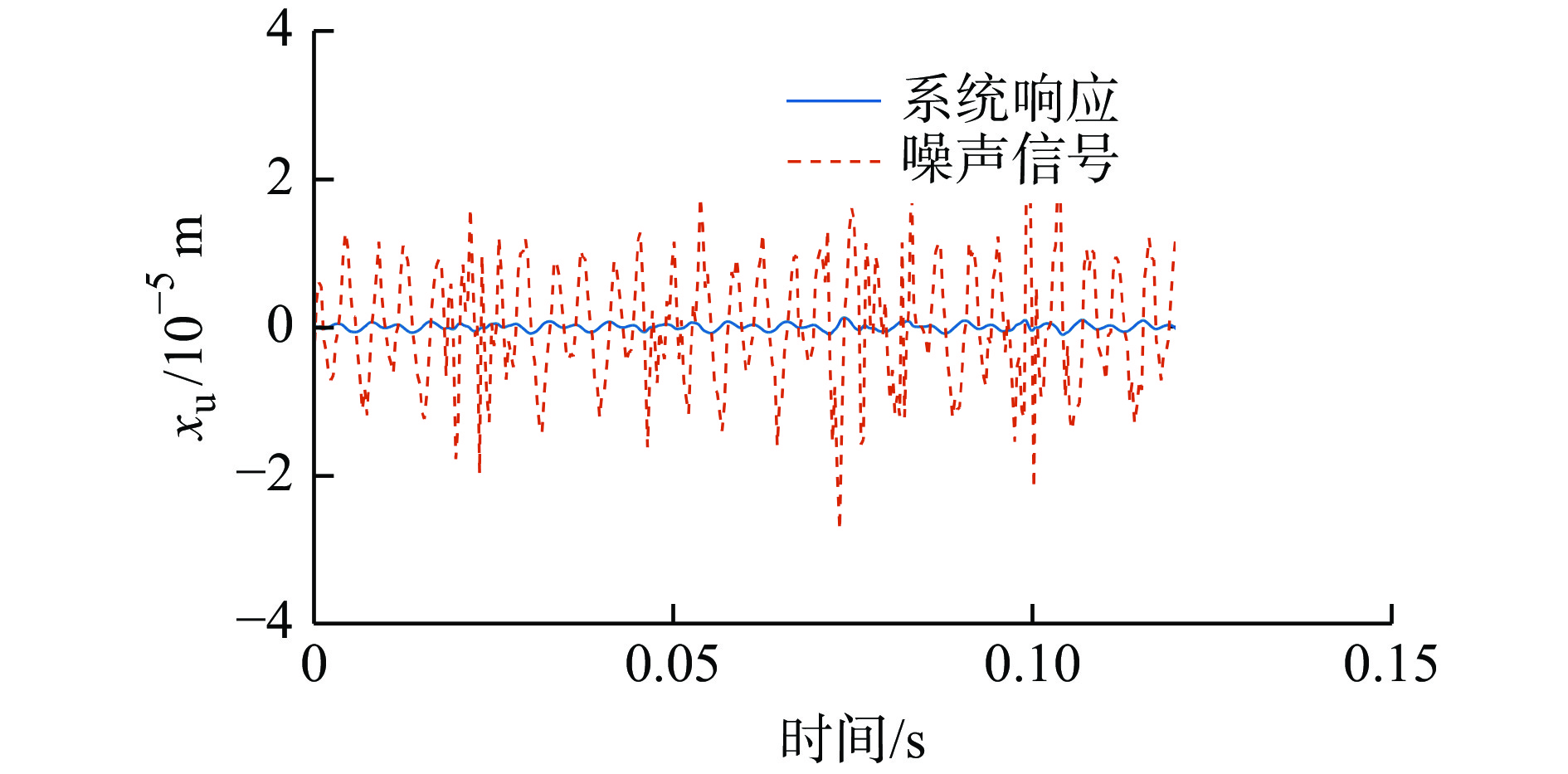
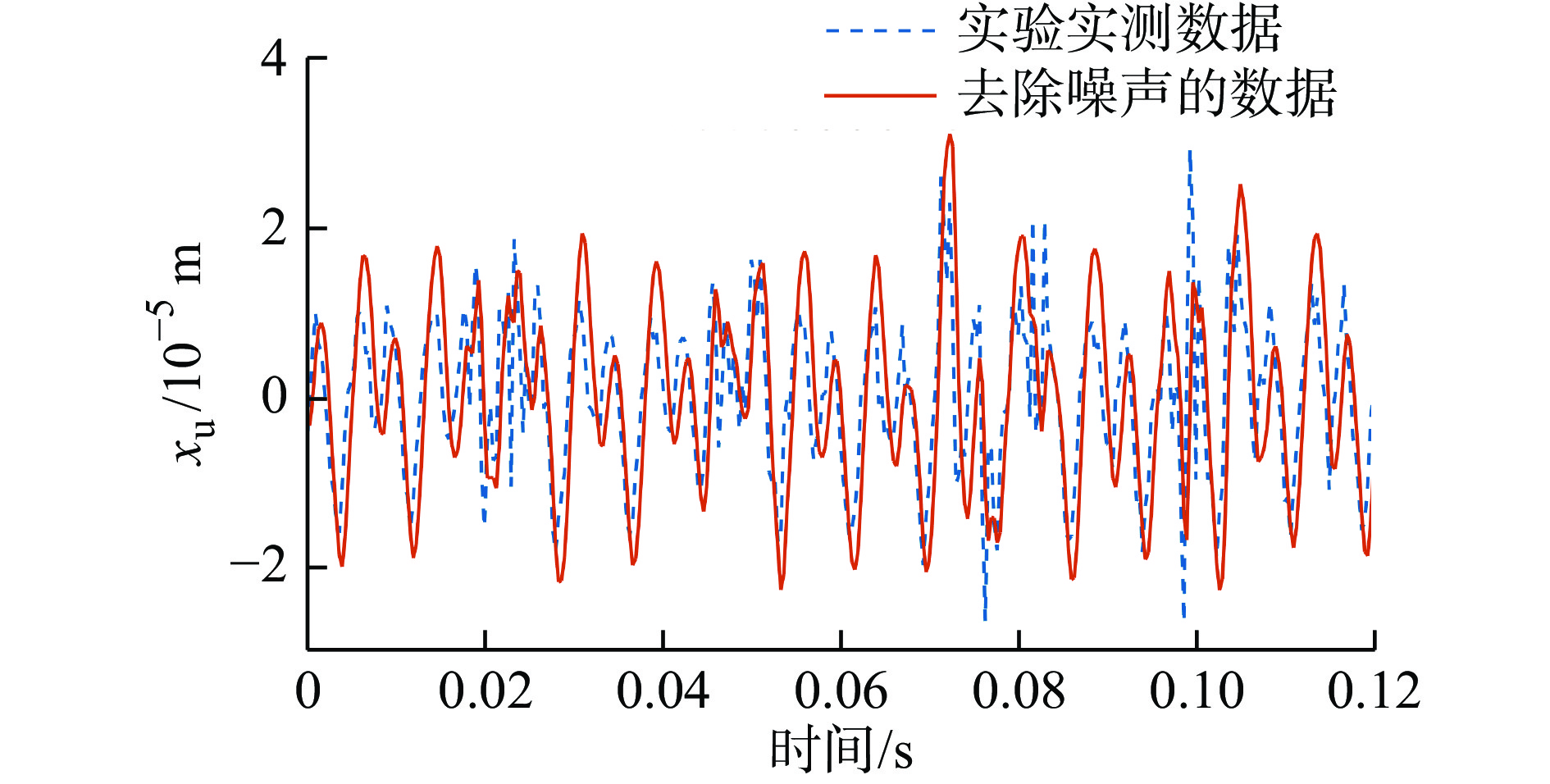
图 10 本文算法上电磁轴承x方向噪声曲线及响应曲线
Figure 10. Noise curve and response curve in the x-direction of electromagnetic bearing under the proposed algorithm

图 11 本文算法yu、xd、yd噪声干扰响应曲线
Figure 11. Disturbance response curves of yu, xd, and yd under the proposed algorithm

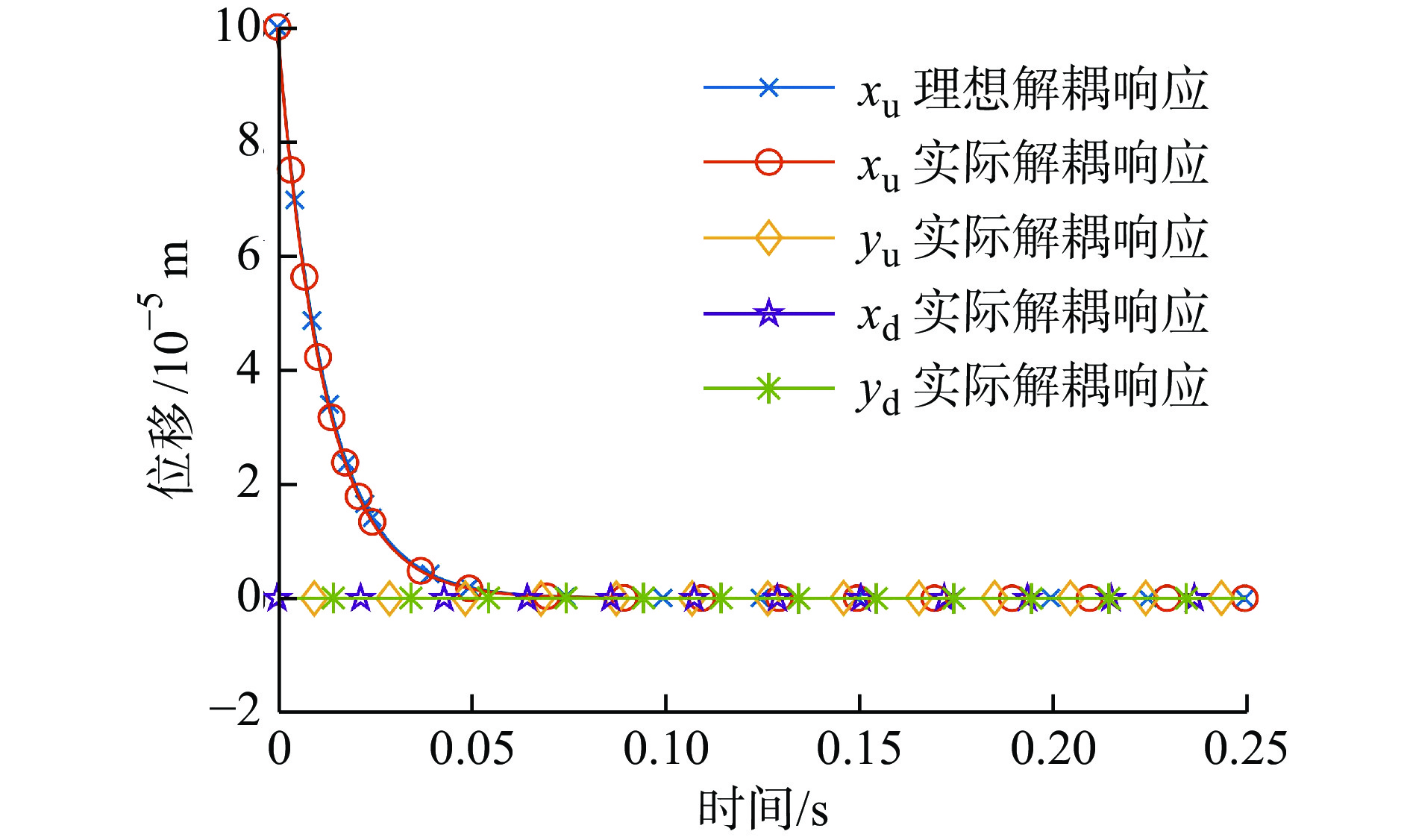
图 12 本文算法所有自由度受扰响应曲线
Figure 12. Disturbance response curves of all degrees of freedom under the proposed algorithm
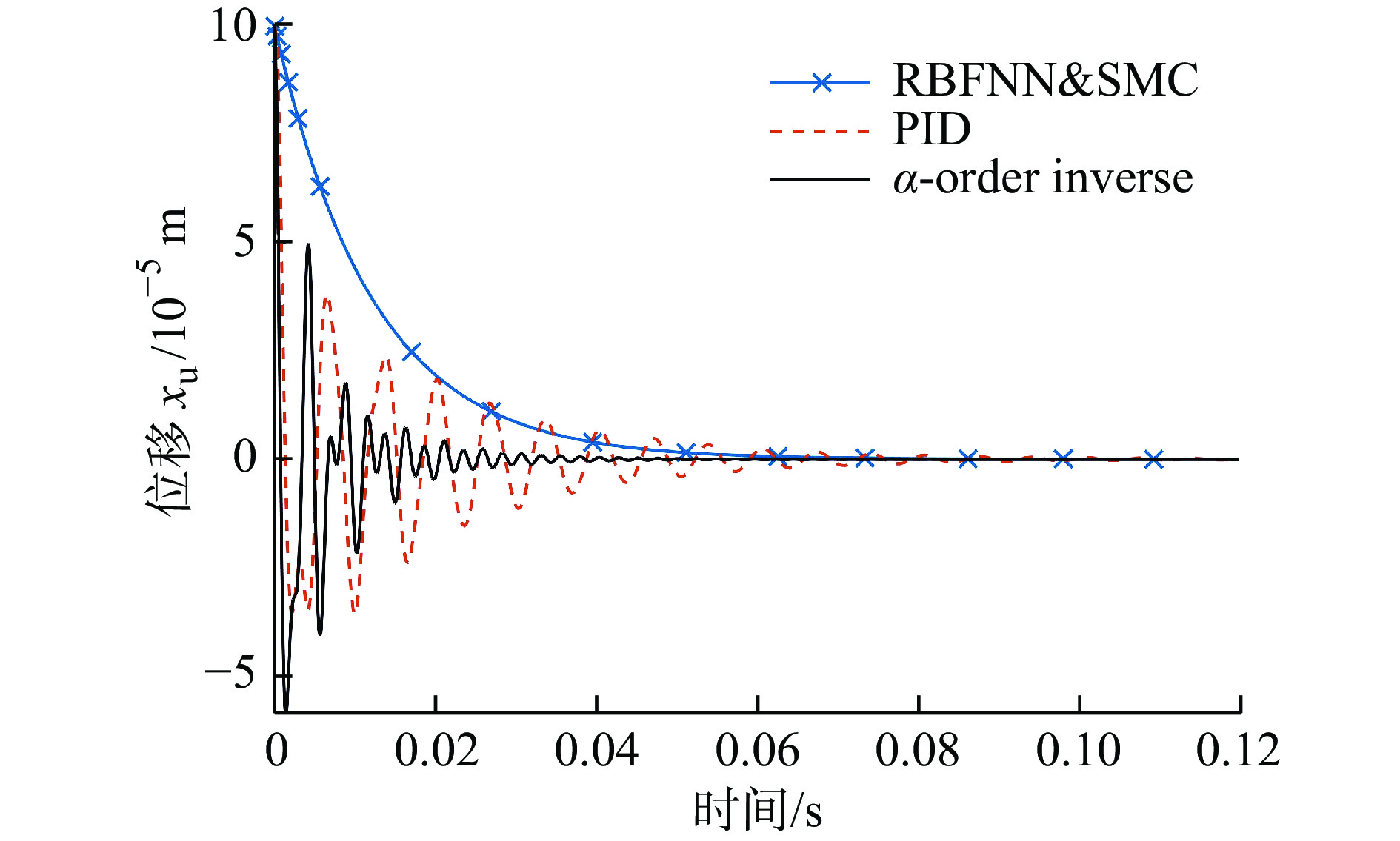
图 13 4 500 r/min xu非零初始状态响应对比
Figure 13. Response comparison of xu with nonzero initial state at 4 500 r/min

图 14 4 500 r/min yu非零初始状态响应对比
Figure 14. Response comparison of yu with nonzero initial state at 4 500 r/min
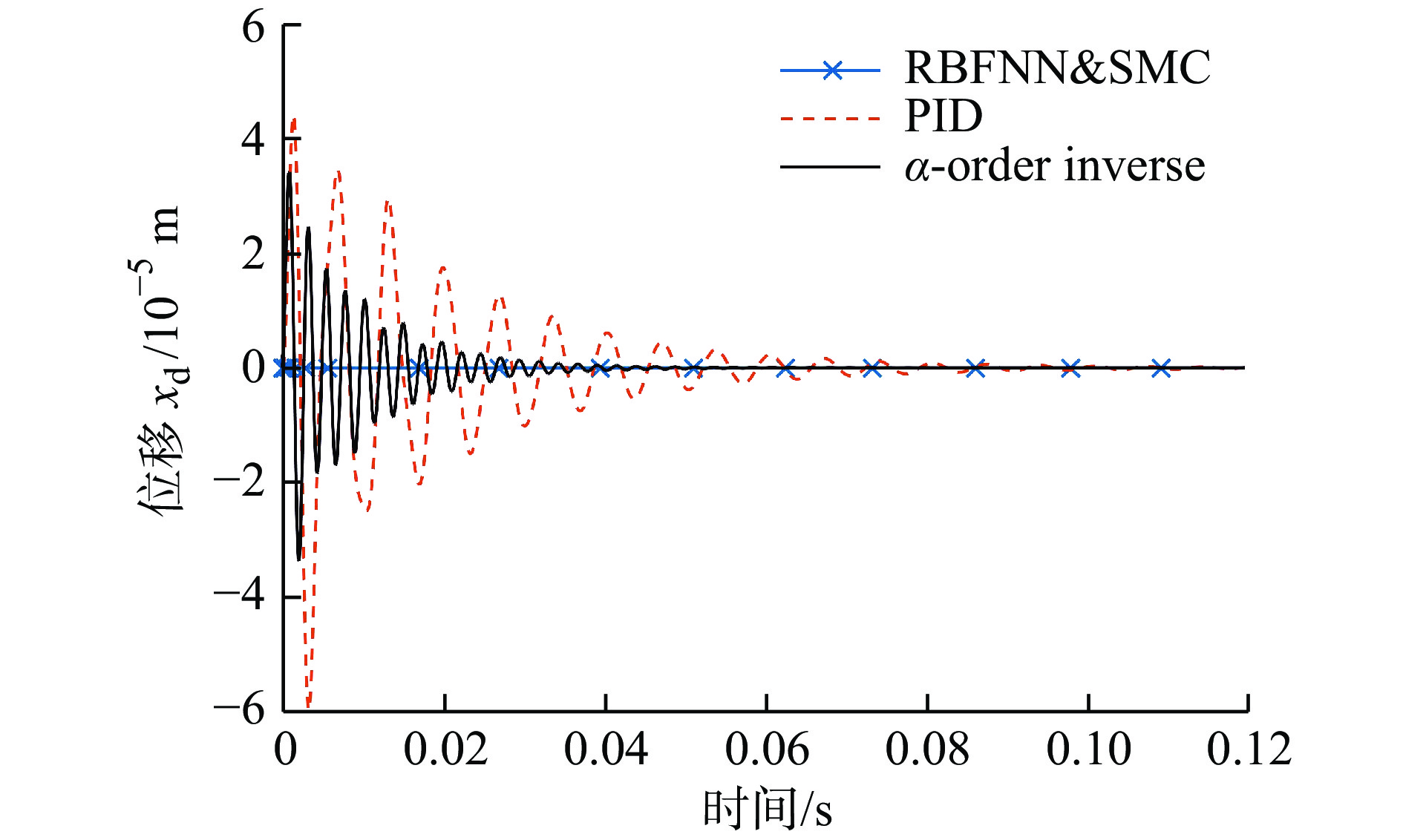
图 15 4 500 r/min xd非零初始状态响应对比
Figure 15. Response comparison of xd with nonzero initial state at 4 500 r/min
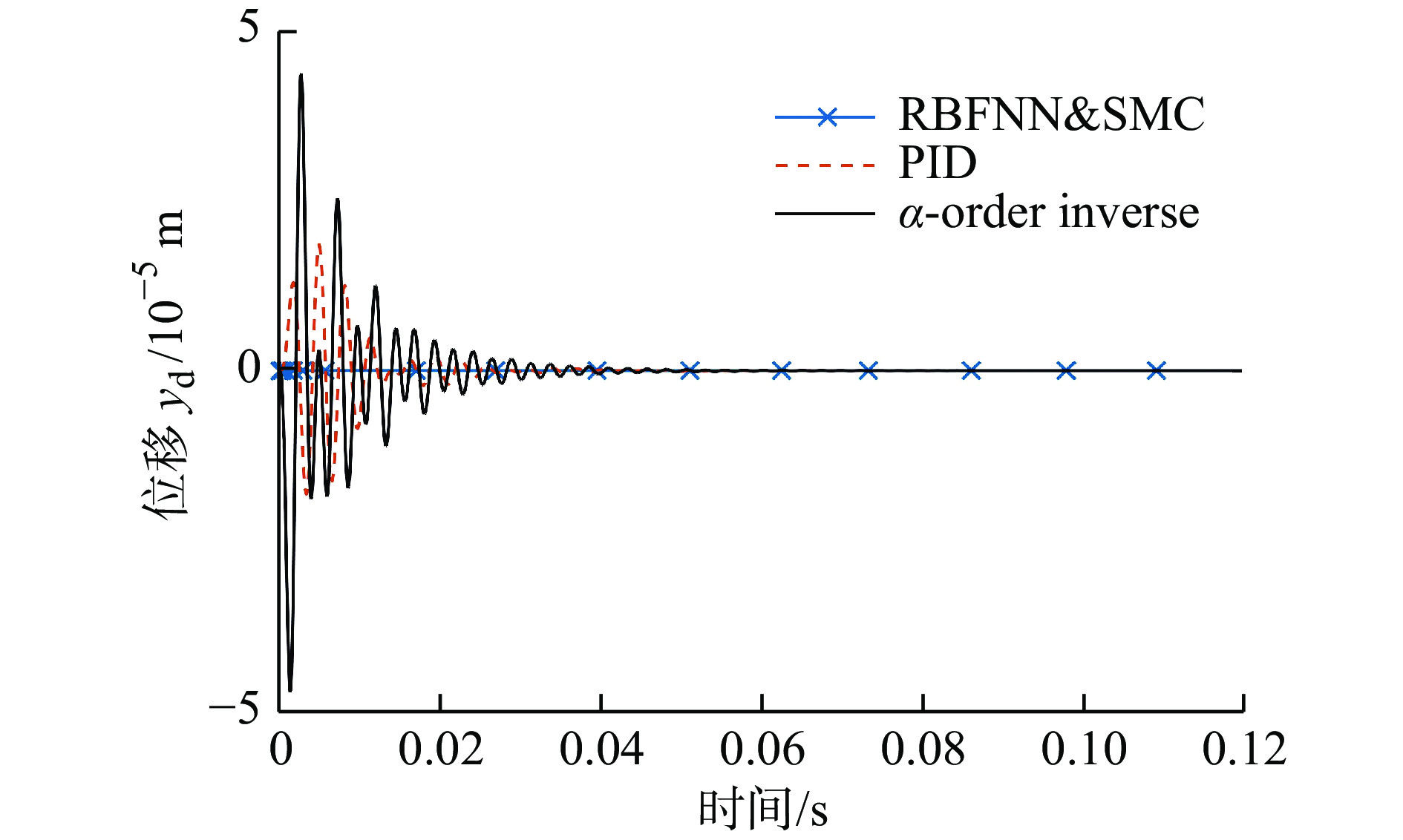
图 16 4 500 r/min yd非零初始状态响应对比
Figure 16. Response comparison of yd with nonzero initial state at 4 500 r/min
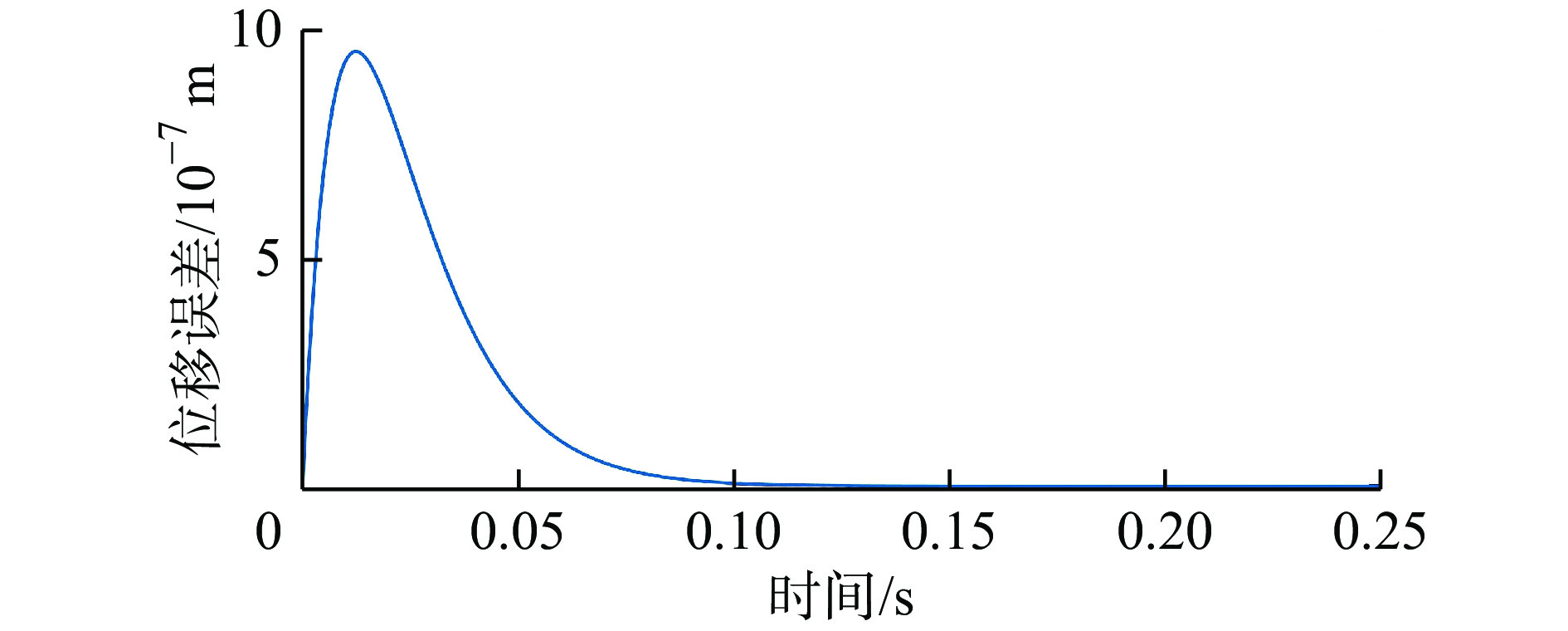
图 18 本文算法受初始扰动解耦误差
Figure 18. Decoupling error under the proposed algorithm with initial disturbance
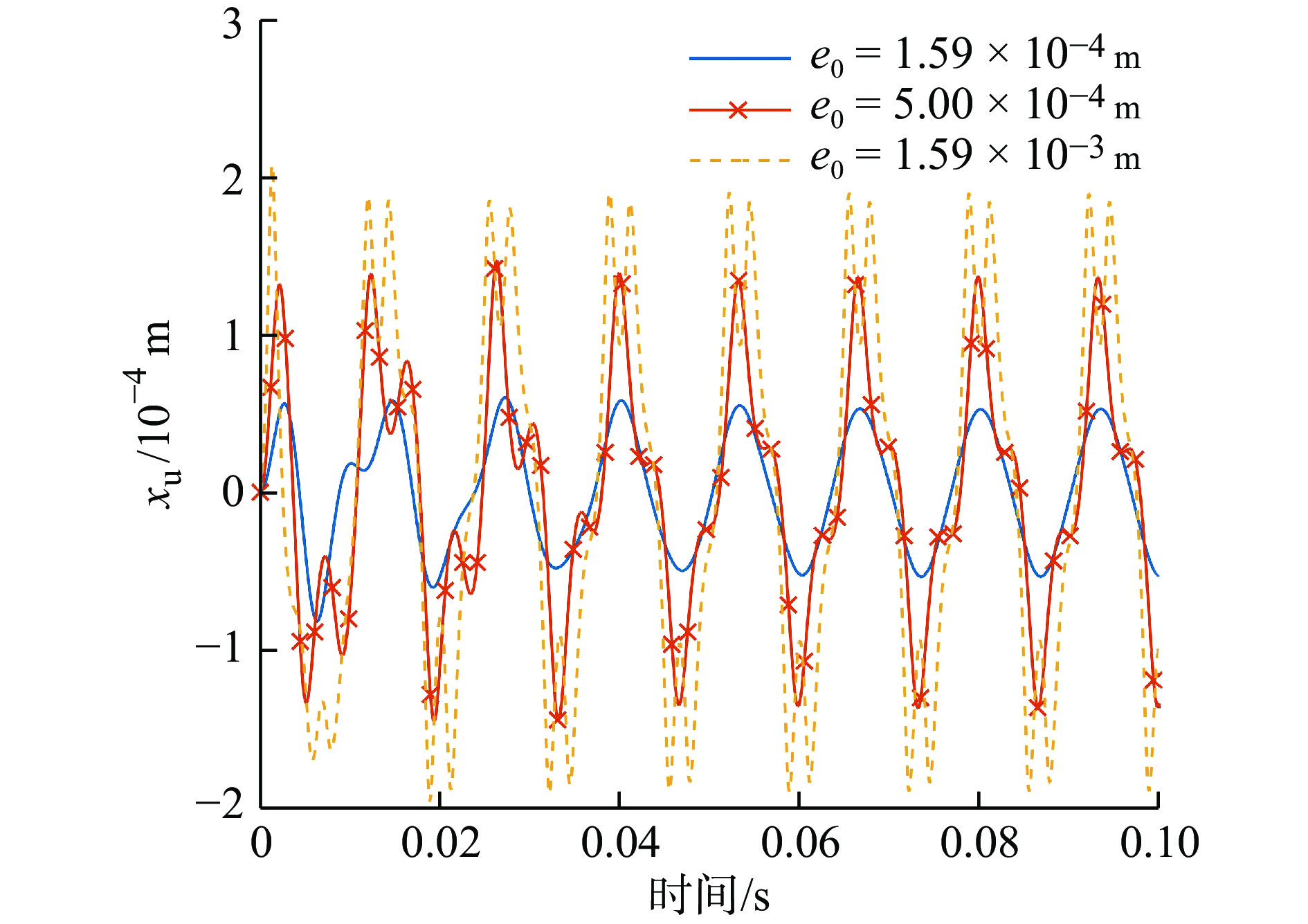
图 19 4 500 r/min PID控制下不同偏心距的xu响应对比
Figure 19. Response comparison of xu with different eccentricities under PID control at 4 500 r/min
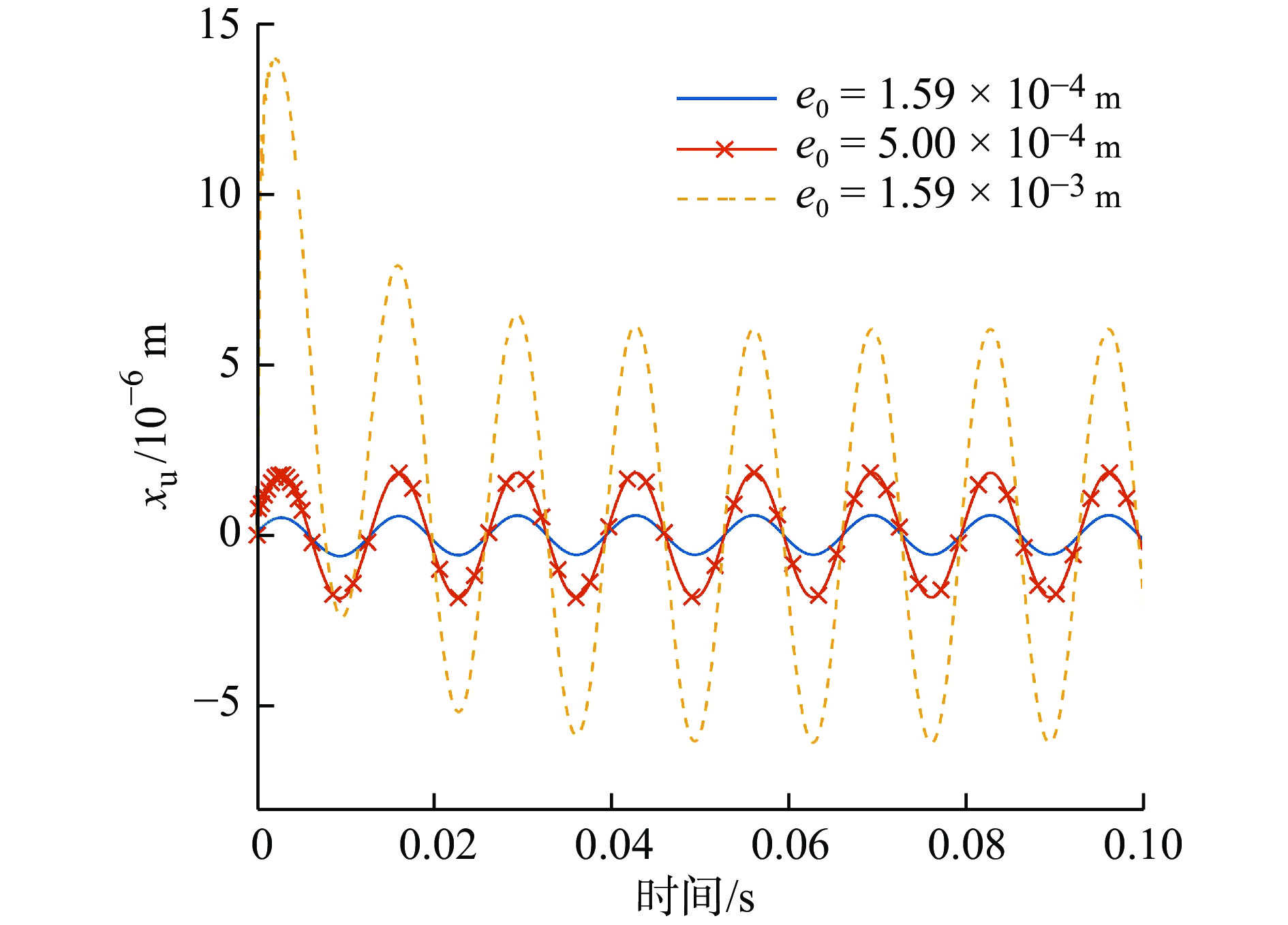
图 20 4 500 r/min 本文算法下不同偏心距的xu响应对比
Figure 20. Response comparison of xu with different eccentricities under the proposed algorithm at 4 500 r/min
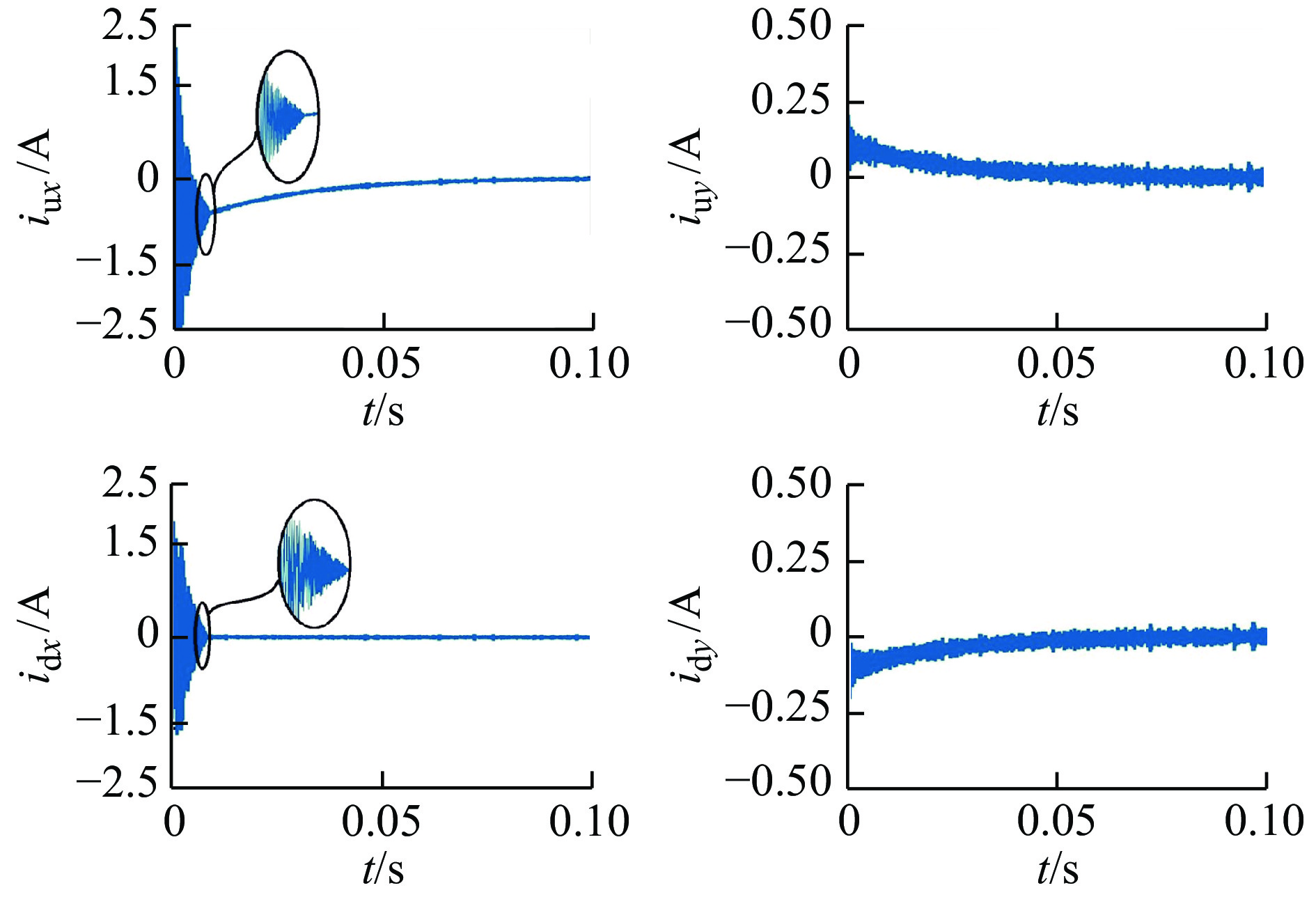
图 21 采用
${{\rm{sgn}}} \left( {{{\boldsymbol{s}}}} \right)$ 的控制电流曲线Figure 21. Control current curve using sgn(s)
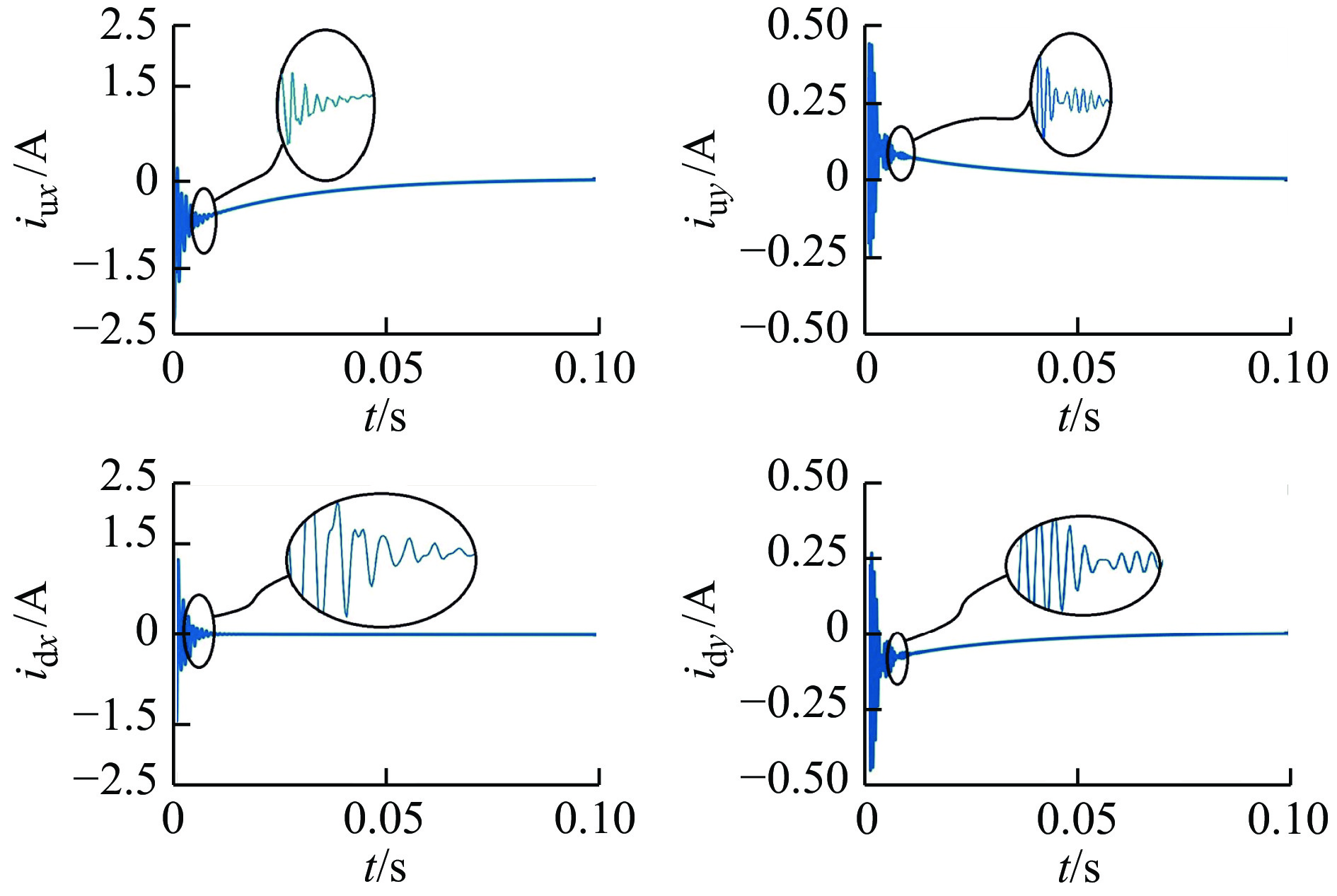
图 22 采用
$\tan ({{\boldsymbol{s}}/}{\boldsymbol{\delta}} ) $ 的控制电流曲线Figure 22. Control current curve using
$\tan ({{\boldsymbol{s}}/}{\boldsymbol{\delta}} ) $ 表 1 系统计算参数
Table 1. System calculation parameters
参数 数值 参数 数值 $\;{{\boldsymbol{\varLambda }}}$ ${\text{diag}}\left( {80,80,80,80} \right)$ ${k_{i} }$ 0 ${{\boldsymbol{\phi}} ^{ - 1} }$ ${\text{diag}}\left( {15,15,15,15} \right)$ $ {k_{\text{d}}} $ 8.34 ${{\boldsymbol{\gamma}} }$ ${\text{diag}}\left( {20,20,20,20} \right)$ ${l_{\text{u}}}/{\text{m}}$ 0.273 ${\boldsymbol{\nu}} $ 20 ${l_{\text{d}}}/{\text{m}}$ 0.282 ${\boldsymbol{\delta}} $ $5 \times {10^{ - 3}}$ $m/{\text{kg}}$ 56.8 ${b_{j} }$ 10 $J/({\text{kg}} \cdot {{\text{m}}^{-2}})$ 1.14 ${ { {\boldsymbol{c} } }_{i} }$ $[ { - 3}\quad { - 2}\quad{ - 1}\quad 0\quad \\ 1\quad 2\quad 3 ] \times {10^{ - 6} }$ ${J_{\textit{z}}}/({\text{kg}} \cdot {{\text{m}}^{-2}})$ 0.93 ${k_{\text{p}}}$ $16\;680 $ $e_0/{\text{m}}$ $1.59 \times {10^{ - 6}}$  下载: 导出CSV
下载: 导出CSV
-
[1] SRINIVAS R S, TIWARI R, KANNABABU C. Application of active magnetic bearings in flexible rotordynamic systems-A state-of-the-art review[J]. Mechanical Systems and Signal Processing, 2018, 106: 537-572. doi: 10.1016/j.ymssp.2018.01.010 [2] DRAGONI E. Mechanical design of flywheels for energy storage: a review with state-of-the-art developments[J]. Proceedings of the Institution of Mechanical Engineers, Part L: Journal of Materials: Design and Applications, 2019, 233(5): 995-1004. doi: 10.1177/1464420717729415 [3] 魏彤, 沈繁呈. 非线性强陀螺效应磁悬浮转子的解耦控制[J]. 轴承, 2014(11): 6-11. doi: 10.3969/j.issn.1000-3762.2014.11.003WEI T, SHENG F C. Decoupling control for magnetically suspended rotor with non-linearity strong gyroscopic effect[J]. Bearing, 2014(11): 6-11. (in Chinese) doi: 10.3969/j.issn.1000-3762.2014.11.003 [4] YI J, REN G P, ZHANG H T, et al. A model reference adaptive controller with feedforward decoupling for active magnetic bearing rotor system[C]//Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC). Chengdu: IEEE, 2019 [5] WANG C, ZHENG S Q, XIE J J. Decoupling control for high-speed magnetically suspended rotor systems using linear active disturbance rejection method[C]//Proceedings of the 2018 37th Chinese Control Conference (CCC). Wuhan: IEEE, 2018 [6] ZHANG G, YIN Q Z, JIANG D D, et al. Research on nonlinear dynamics of five-DOF active magnetic bearings-rotor system[J]. Journal of Mechanical Engineering, 2010, 46(20): 15-21. doi: 10.3901/JME.2010.20.015 [7] SAEED N A F A H, KAMEL M. Nonlinear PD-controller to suppress the nonlinear oscillations of horizontally supported Jeffcott-rotor system[J]. International Journal of Non-Linear Mechanics, 2016, 87: 109-124. doi: 10.1016/j.ijnonlinmec.2016.10.003 [8] KANDIL A, SAYED M, SAEED N A. On the nonlinear dynamics of constant stiffness coefficients 16-pole rotor active magnetic bearings system[J]. European Journal of Mechanics - A/Solids, 2020, 84: 104051. doi: 10.1016/j.euromechsol.2020.104051 [9] AHRENS M, KUČERA L. Cross feedback control of a magnetic bearing system-controller design considering gyroscopic effects[C]//Proceedings of the 3rd International Symposium on Magnetic Suspension Technology. Tallahassee: ETH, 1996: 177-191 [10] OUYANG H M, LIU F, ZHANG G M, et al. Vibration suppression for rotor system of magnetic suspended wind turbines using cross-feedback-based sliding mode control[C]//Proceedings of 2015 IEEE/SICE International Symposium on System Integration. Nagoya: IEEE, 2015: 112-115 [11] 李国栋, 张庆春, 王世俊, 等. 电磁轴承陀螺力矩耦合及其交叉解耦分析[J]. 哈尔滨工业大学学报, 2005, 37(12): 1618-1620. doi: 10.3321/j.issn:0367-6234.2005.12.006LI G D, ZHANG Q C, WANG S J, et al. Analysis of gyroscopic coupling and cross decoupling properties on the electromagnetic bearing[J]. Journal of Harbin Institute of Technology, 2005, 37(12): 1618-1620. (in Chinese) doi: 10.3321/j.issn:0367-6234.2005.12.006 [12] CHENG X, CHENG B X, DENG S, et al. State-feedback decoupling control of 5-DOF magnetic bearings based on α-order inverse system[J]. Mechatronics, 2020, 68: 102358. doi: 10.1016/j.mechatronics.2020.102358 [13] YU Y J, SUN X D, ZHANG W Y. Modeling and decoupling control for rotor system in magnetic levitation wind turbine[J]. IEEE Access, 2017, 5: 15516-15528. doi: 10.1109/ACCESS.2017.2732450 [14] WANG S S, ZHU H Q, WU M Y, et al. Active disturbance rejection decoupling control for three-degree-of-freedom six-pole active magnetic bearing based on BP neural network[J]. IEEE Transactions on Applied Superconductivity, 2020, 30(4): 3603505. [15] KONDAIAH V V, RAO J S, RAO V V S. Estimation of loss factor and system parameters of active magnetic thrust bearing using RBF neural networks and differential evolution[C]//Proceedings of 2015 IEEE Workshop on Computational Intelligence: Theories, Applications and Future Directions. Kanpur: IEEE, 2015: 1-6 [16] 赵宏凯, 蒋科坚. 基于RBF神经网络的电磁轴承基础激励主动控制研究[J]. 机电工程, 2020, 37(12): 1425-1431. doi: 10.3969/j.issn.1001-4551.2020.12.005ZHAO H K, JIANG K J. Active control for the base motion of active magnetic bearings based on RBF neural network[J]. Journal of Mechanical & Electrical Engineering, 2020, 37(12): 1425-1431. (in Chinese) doi: 10.3969/j.issn.1001-4551.2020.12.005 [17] ZAD H S, KHAN T I, LAZOGLU I. Design and adaptive sliding-mode control of hybrid magnetic bearings[J]. IEEE Transactions on Industrial Electronics, 2018, 65(3): 2537-2547. doi: 10.1109/TIE.2017.2739682 [18] TSAI Y W, PHAN V D, DUONG V A. Sliding mode control for active magnetic bearings of a flywheel energy storage system[C]//Proceedings of 2016 IEEE International Conference on Control and Robotics Engineering. Singapore: IEEE, 2016: 1-5 [19] GAO H, MENG X H, QIAN K J. The impact analysis of beating vibration for active magnetic bearing[J]. IEEE Access, 2019, 7: 134104-134112. doi: 10.1109/ACCESS.2019.2932723 [20] MANDO A K, YEMÉLÉ D, SOKAMTE W T, et al. Structural stability and control at high speed regime of two-dimensional active magnetic bearing systems[J]. Journal of Sound and Vibration, 2019, 455: 161-187. doi: 10.1016/j.jsv.2019.04.032 [21] 刘金琨. 滑模变结构控制MATLAB仿真[M]. 3版. 北京: 清华大学出版社, 2015: 38-40LIU J K. Sliding mode control design and MATLAB simulation[M]. 3rd ed. Beijing: Tsinghua University Press, 2015: 38-40. (in Chinese) [22] POLYCARPOU M M, IOANNOU P A. A robust adaptive nonlinear control design[J]. Automatica, 1996, 32(3): 423-427. doi: 10.1016/0005-1098(95)00147-6 -






 点击查看大图
点击查看大图
计量
- 文章访问数: 89
- HTML全文浏览量: 61
- PDF下载量: 19
- 被引次数: 0
