作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
优先发表
优先发表栏目展示本刊经同行评议确定正式录用的文章,这些文章目前处在编校过程,尚未确定卷期及页码,但可以根据DOI进行引用。本栏目内容尚未正式出版,未经编辑部许可,不得转载。
显示方式:
, 最新更新时间 , doi: 10.13433/j.cnki.1003-8728.20190270
 摘要
摘要 HTML
HTML PDF 1230KB
PDF 1230KB
摘要:
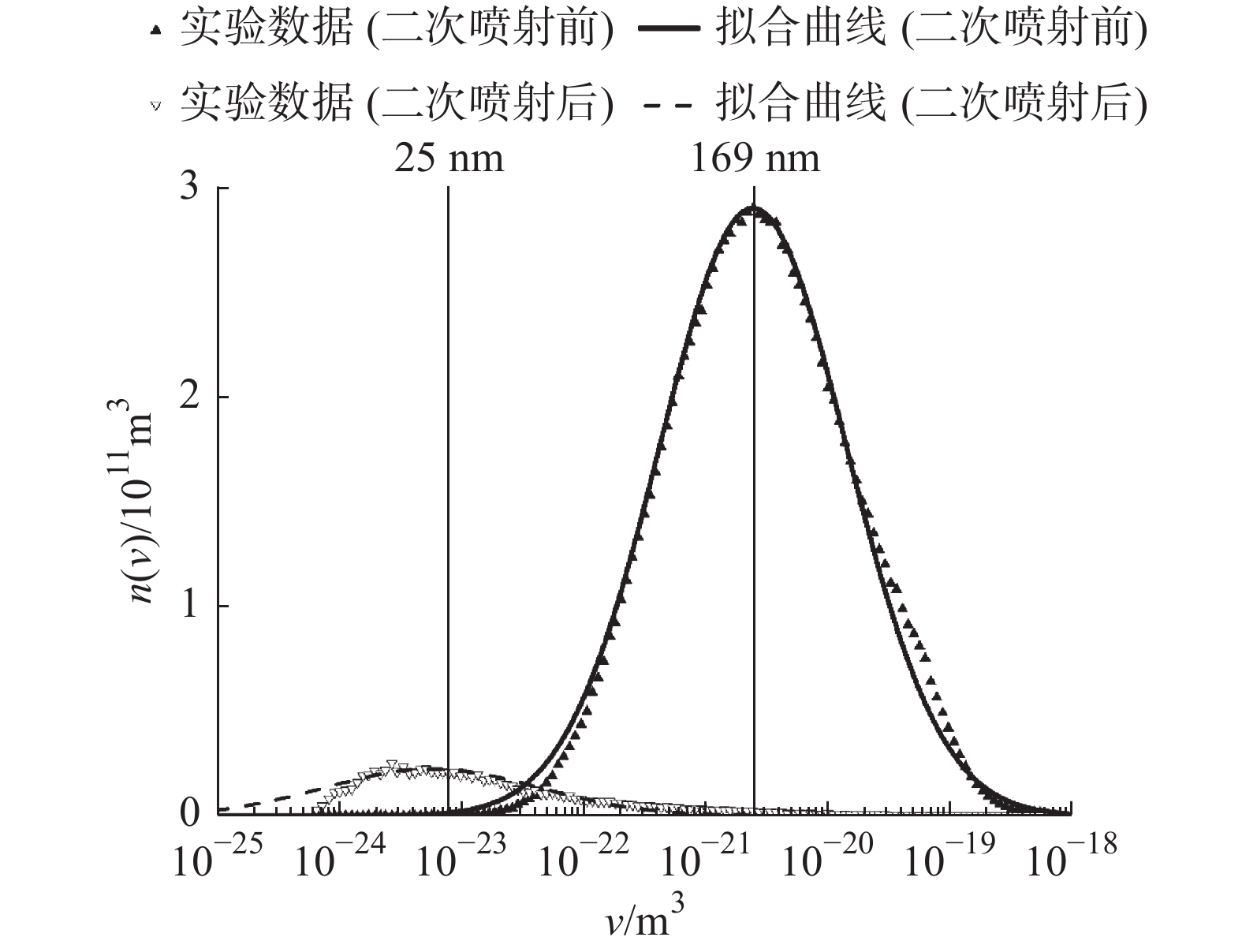
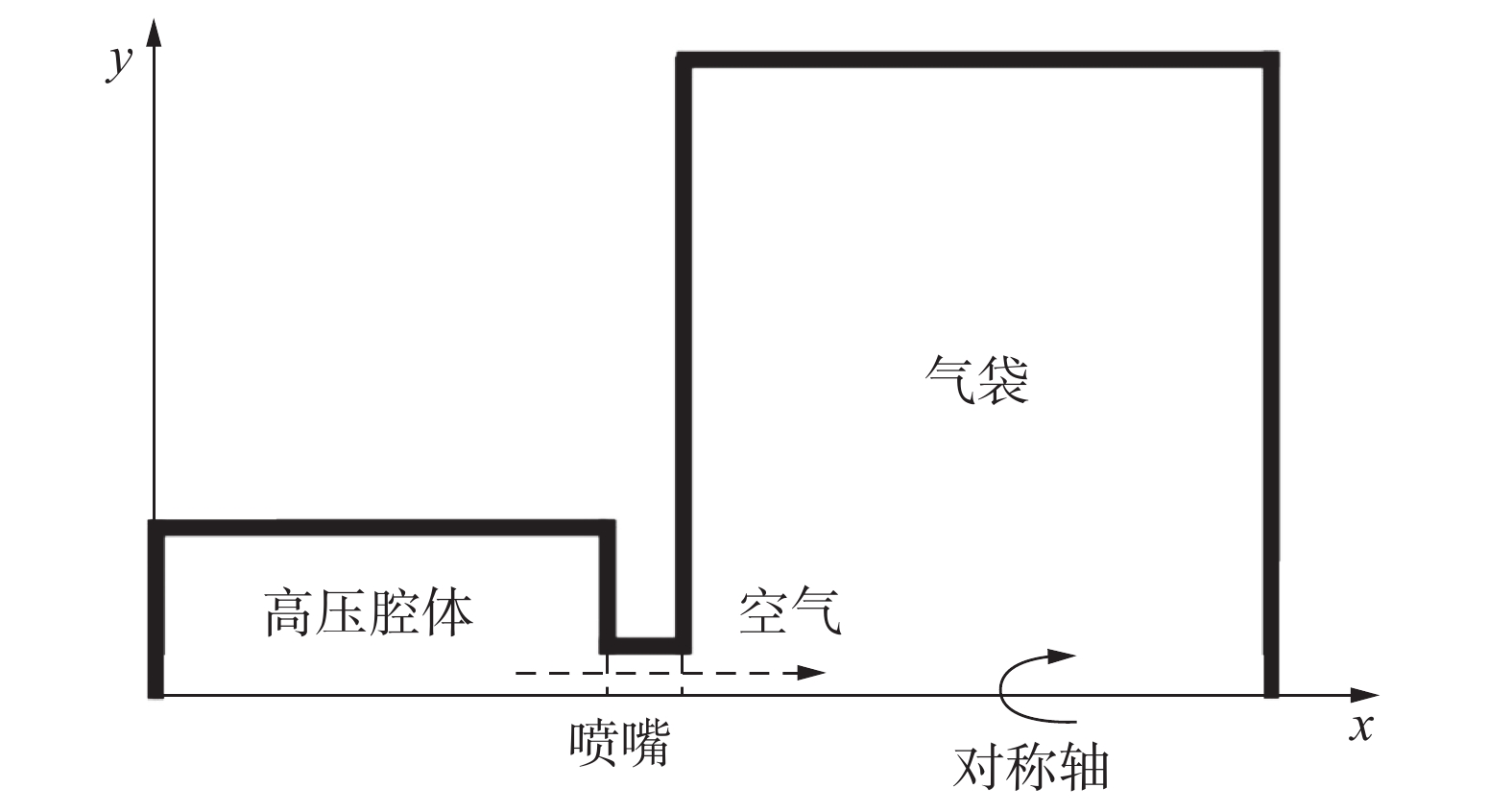
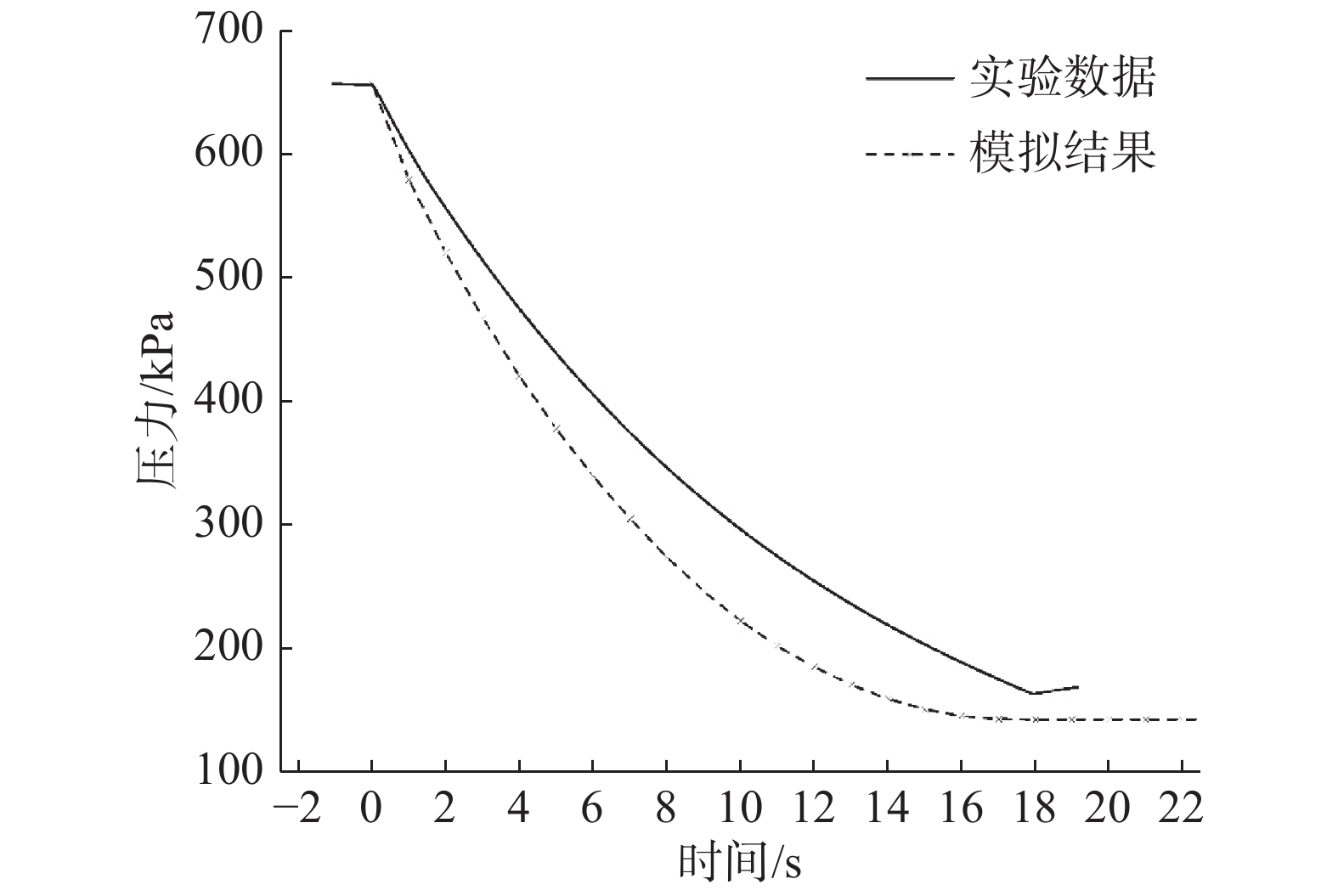
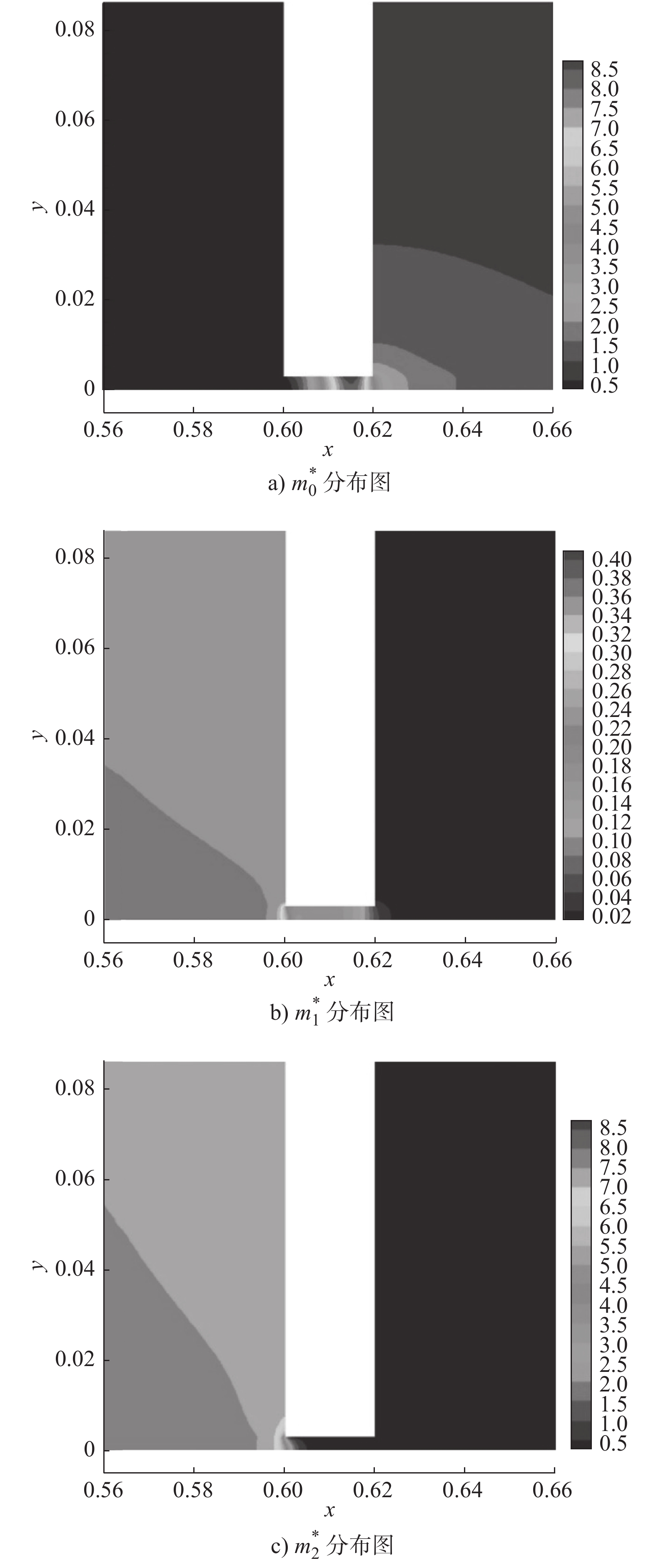
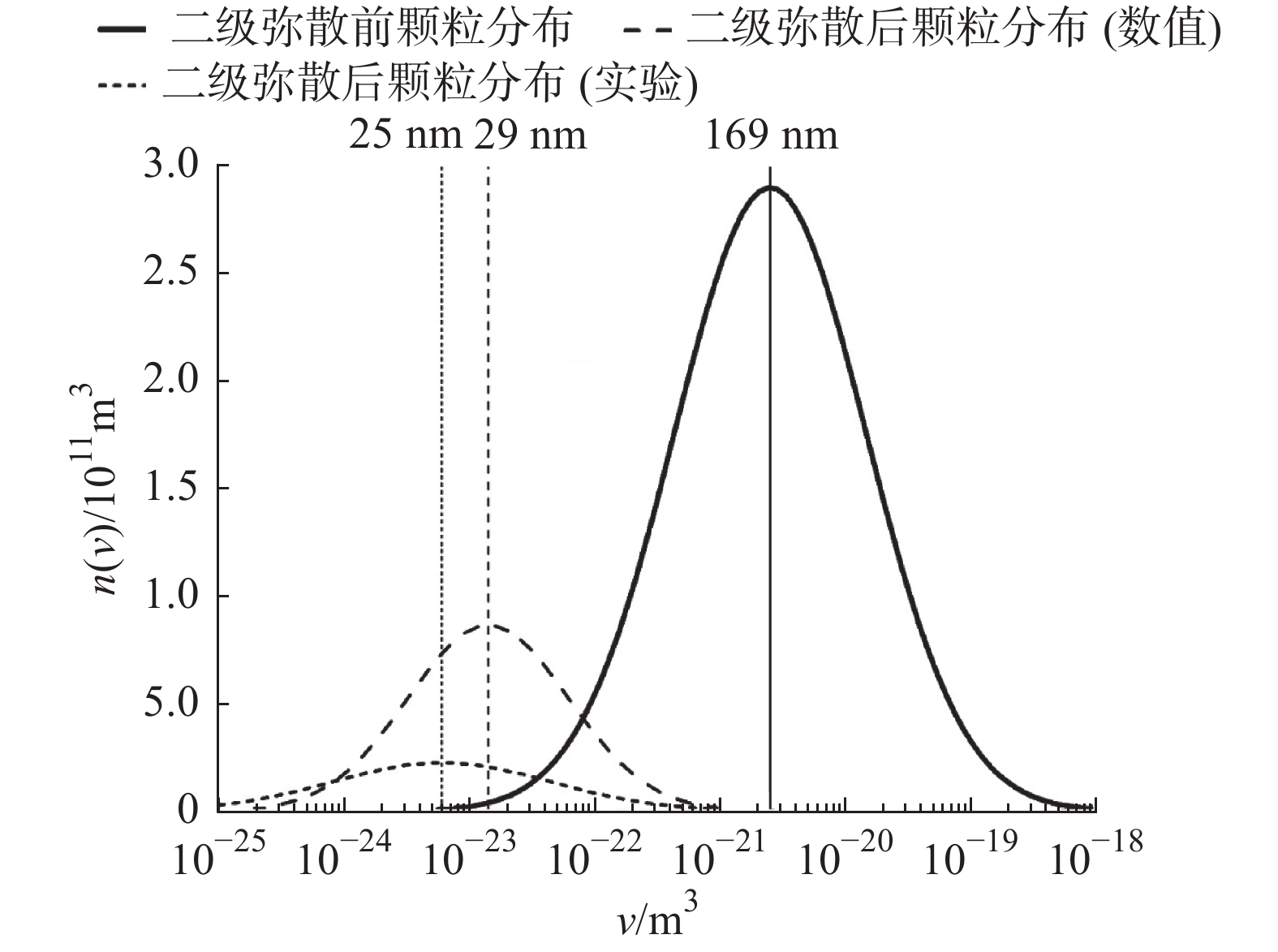
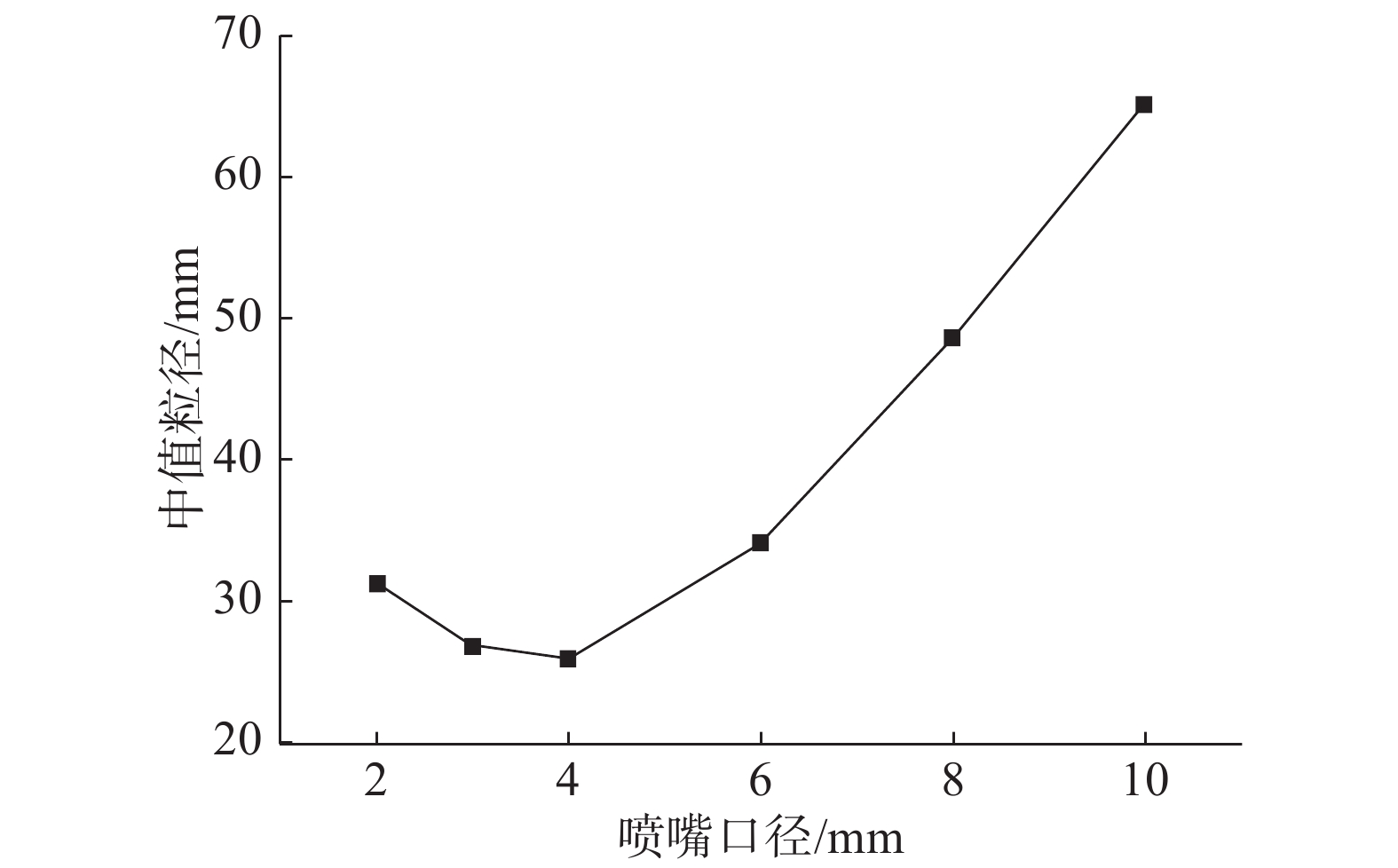
搭建了一种超微颗粒连续分散装置,实验发现纳米颗粒经连续喷射分散可被分散至初级粒径范围。为探讨该装置的机理及高压分散特性,数值模拟了纳米粉体的二级喷射分散过程。结果表明,数值与实验结果的压力动态曲线相符,颗粒数密度沿流动方向降低,实验数据较模拟结果更低。颗粒高压分散的喷嘴不宜过长,以避免颗粒在喷嘴内流动过程中再次团聚,喷嘴长径比在2.5左右可在射流出口产生最大的剪切率,获得最佳的颗粒分散效果。
搭建了一种超微颗粒连续分散装置,实验发现纳米颗粒经连续喷射分散可被分散至初级粒径范围。为探讨该装置的机理及高压分散特性,数值模拟了纳米粉体的二级喷射分散过程。结果表明,数值与实验结果的压力动态曲线相符,颗粒数密度沿流动方向降低,实验数据较模拟结果更低。颗粒高压分散的喷嘴不宜过长,以避免颗粒在喷嘴内流动过程中再次团聚,喷嘴长径比在2.5左右可在射流出口产生最大的剪切率,获得最佳的颗粒分散效果。

, 最新更新时间 , doi: 10.13433/j.cnki.1003-8728.20200111
摘要:
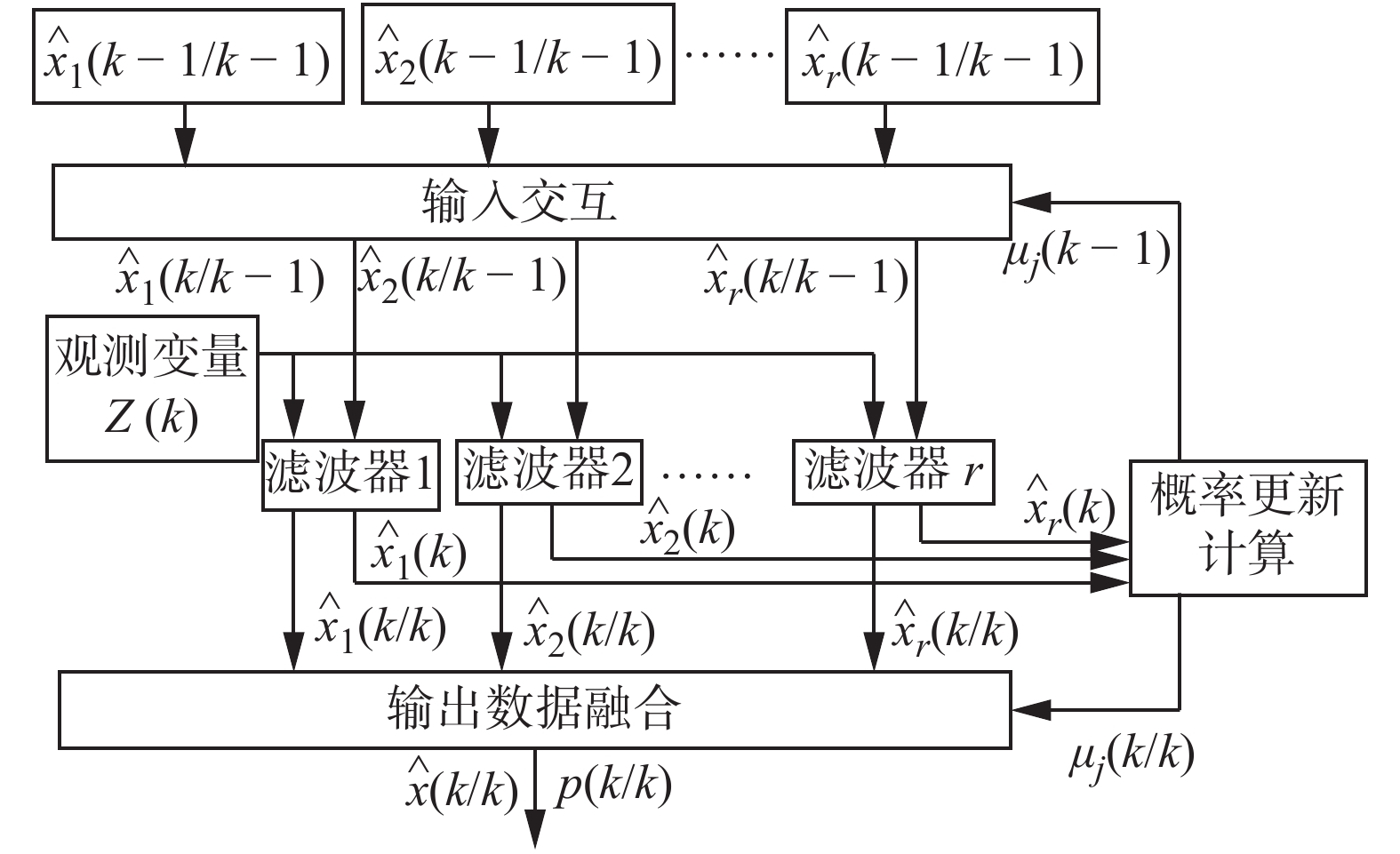
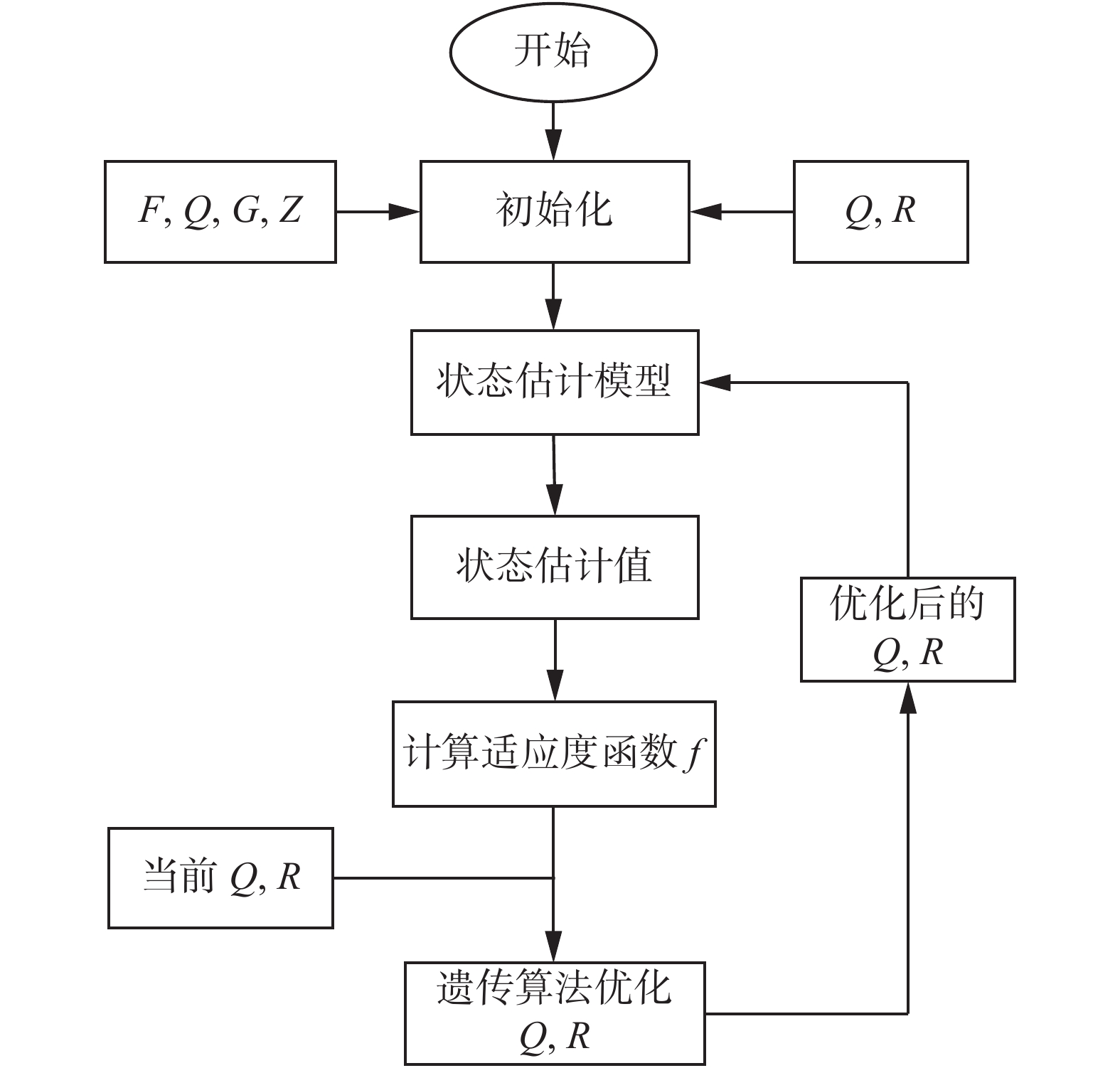
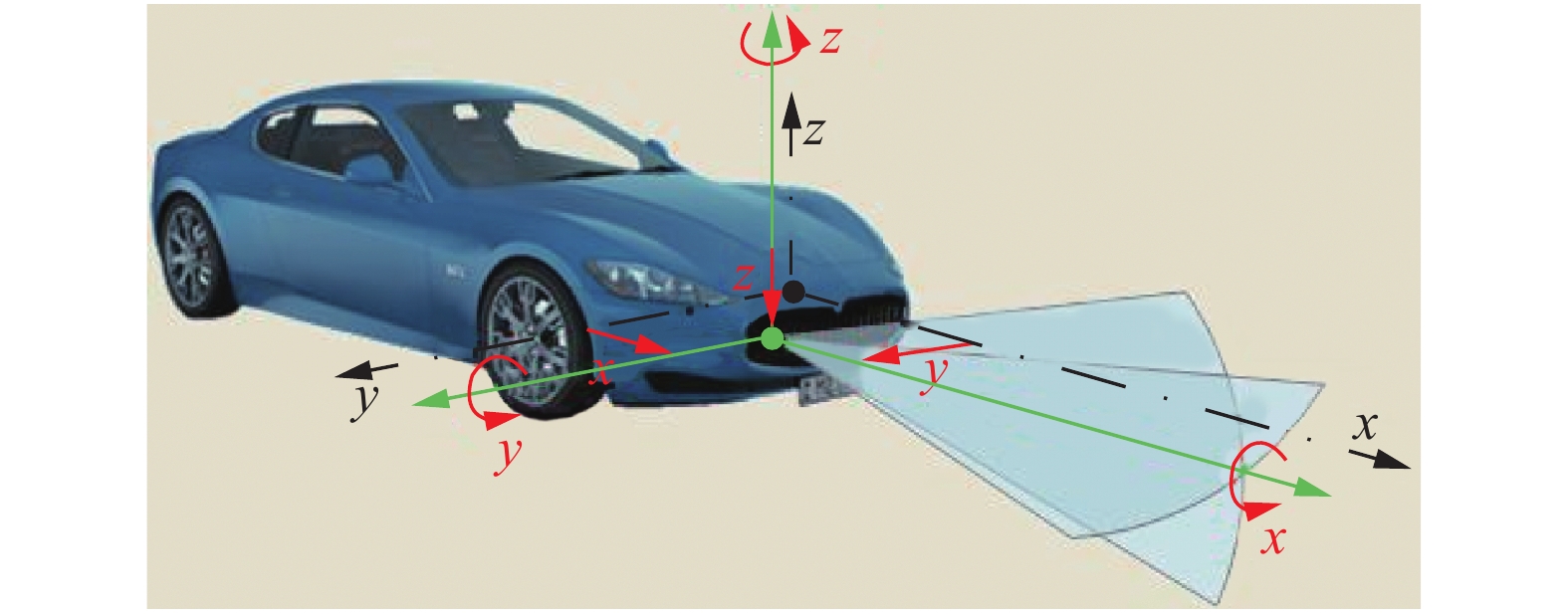
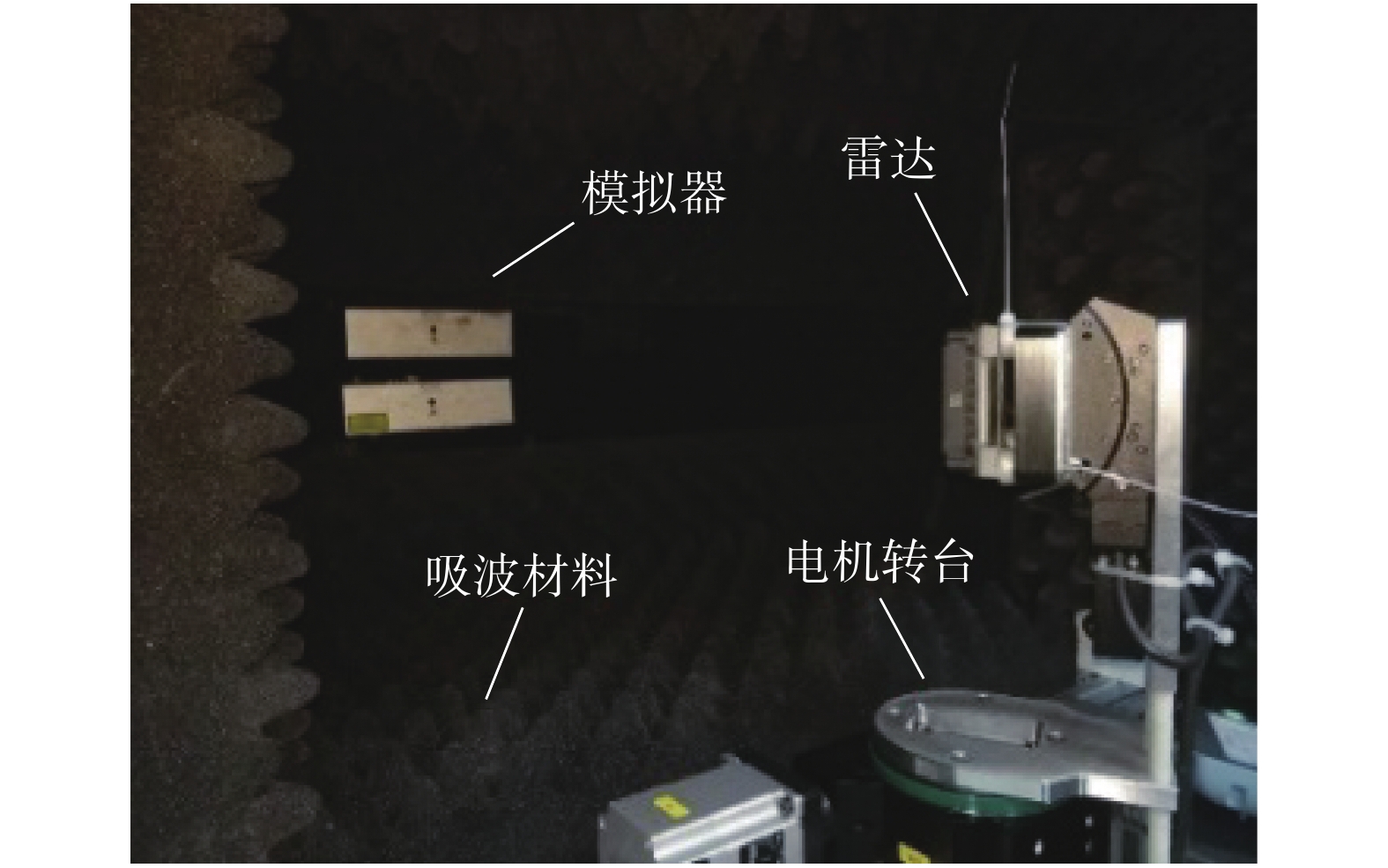
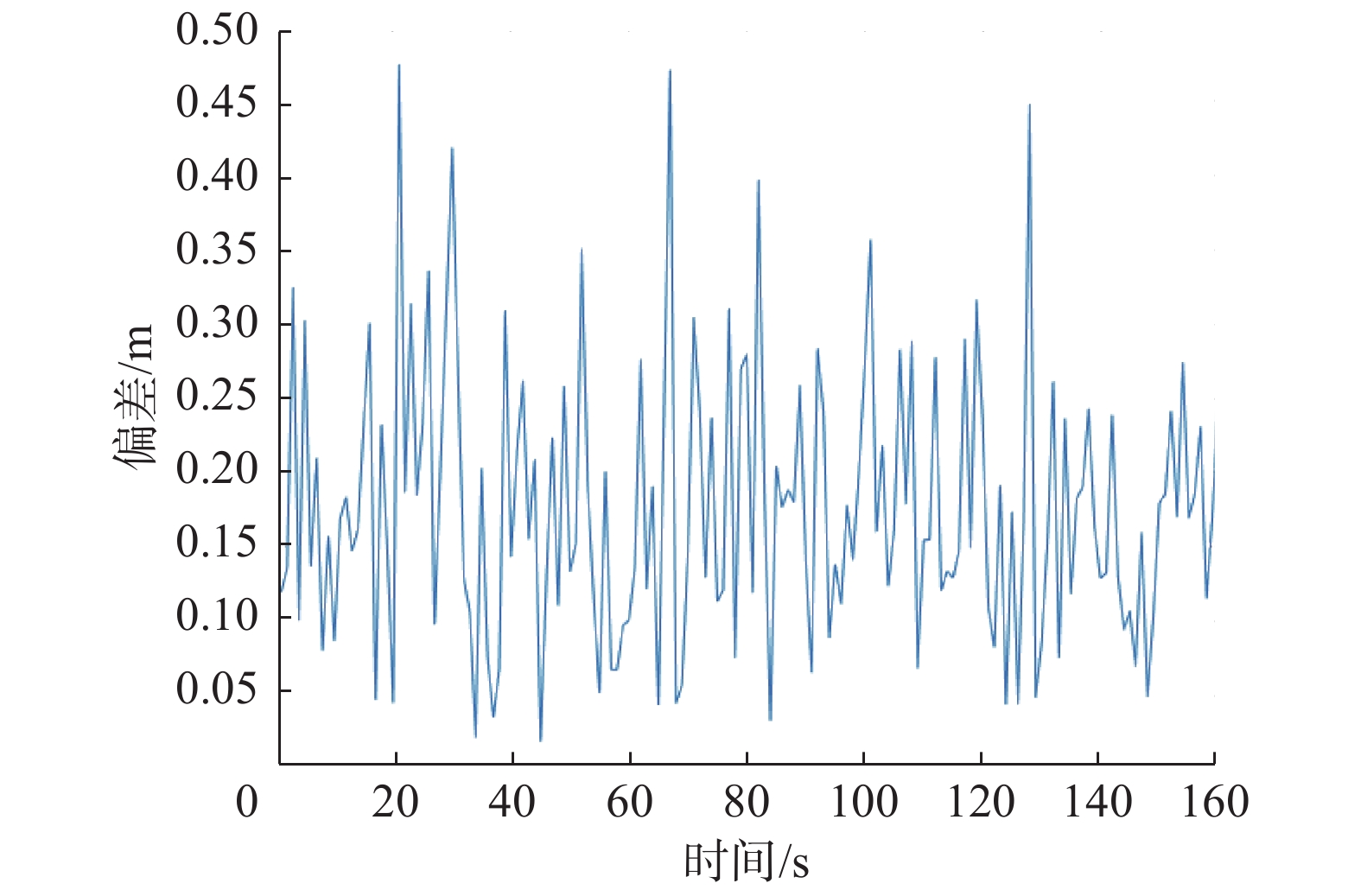
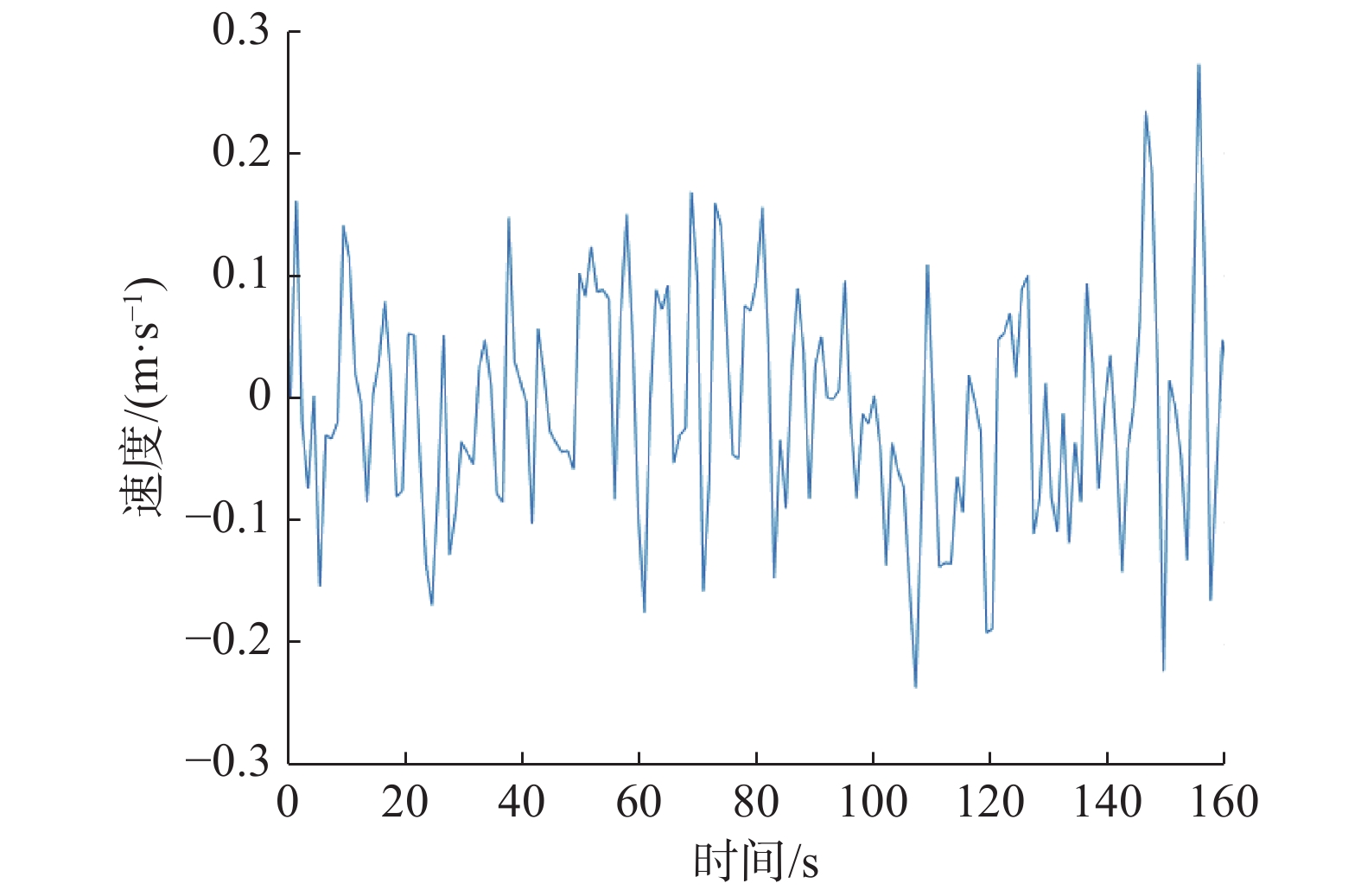
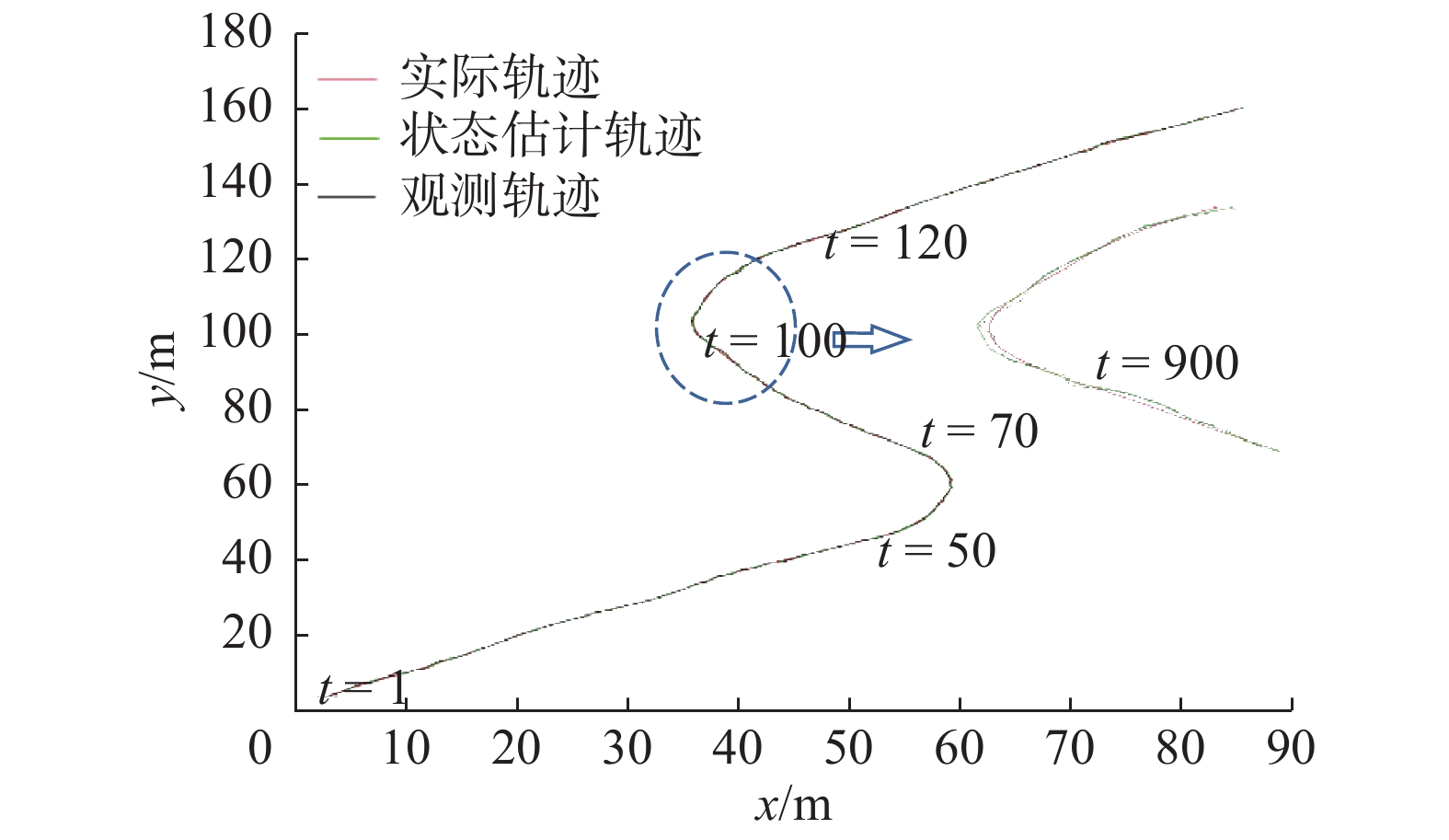
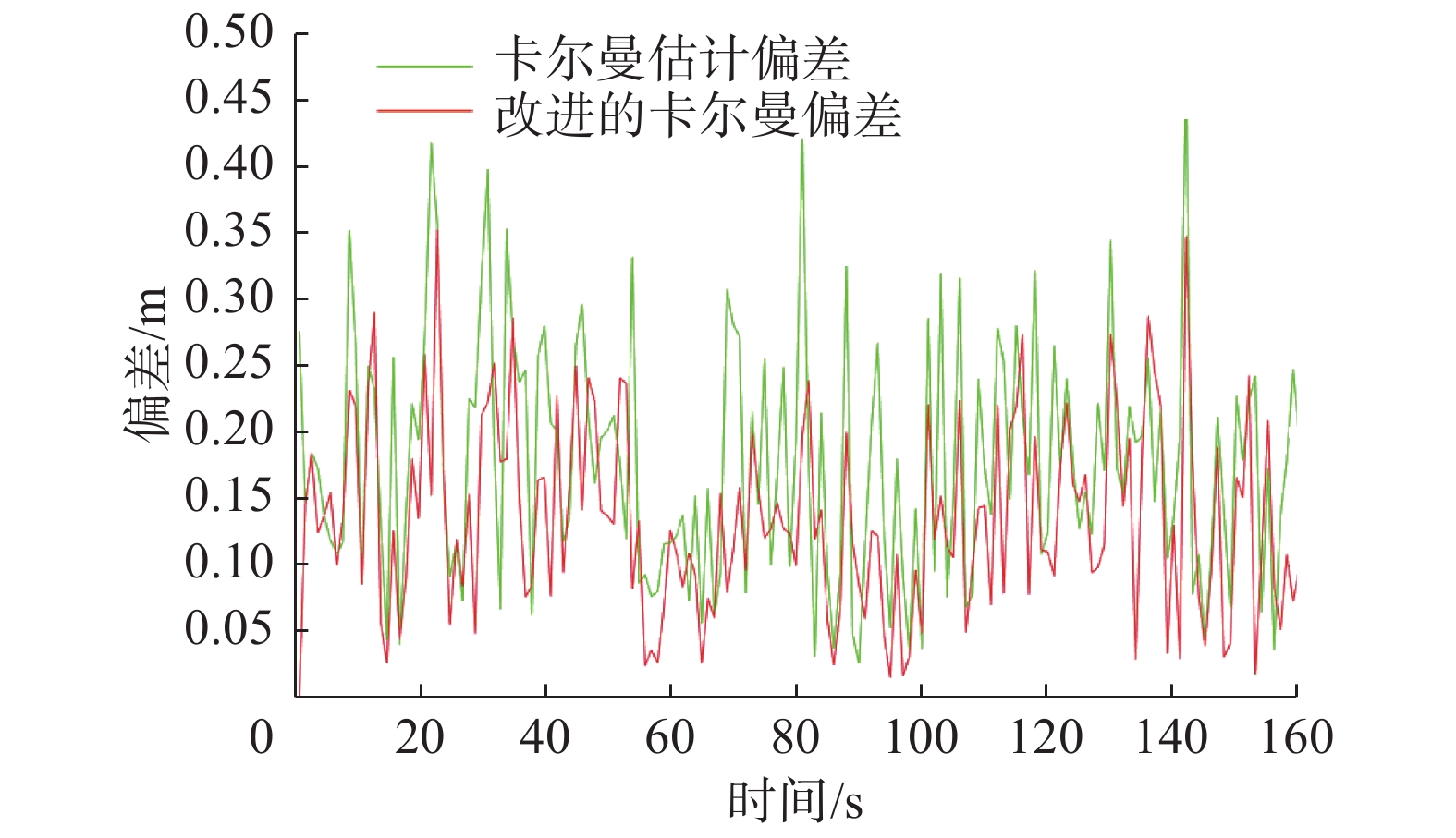
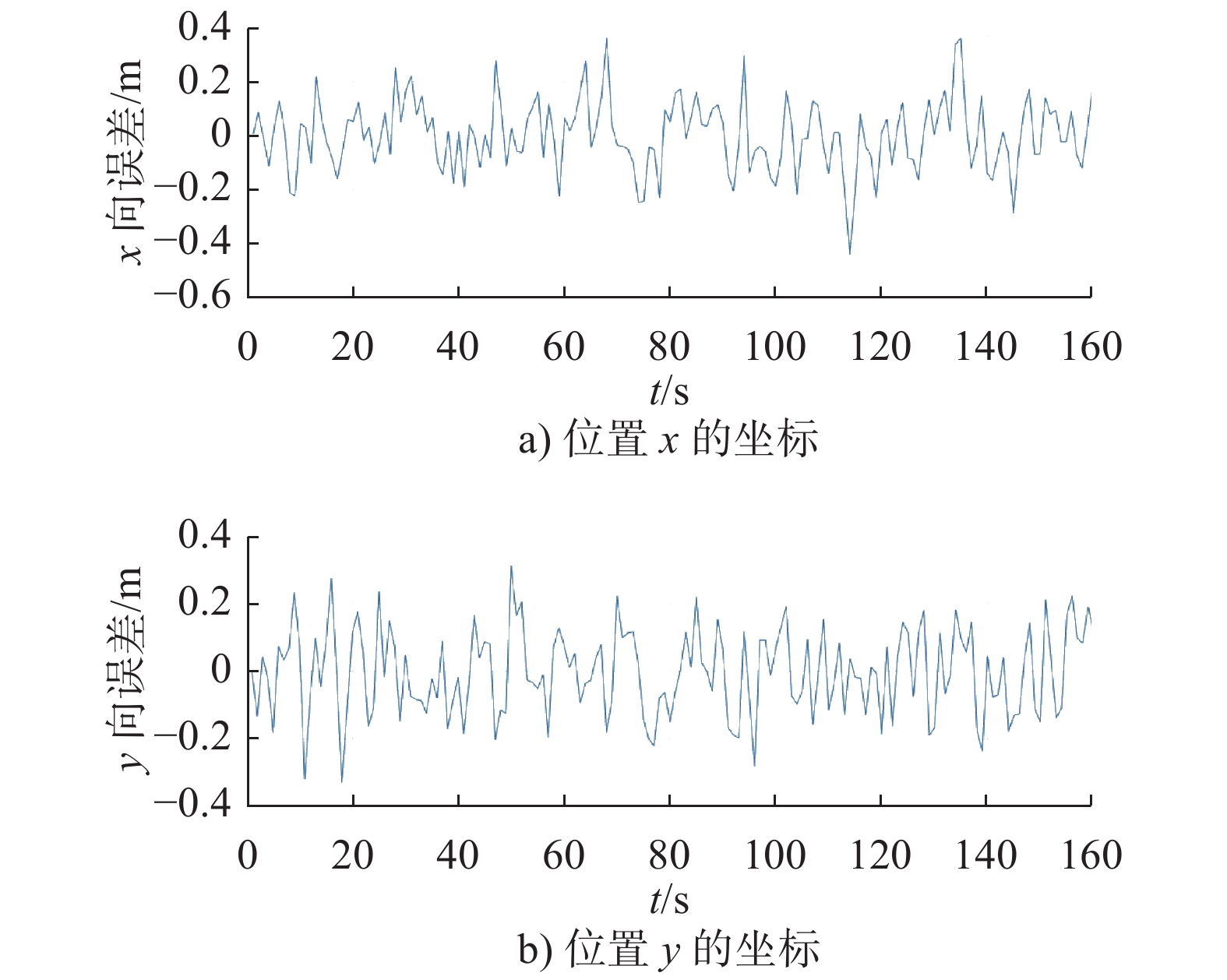
为了减少车载毫米波雷达数据中的噪声影响,本文采用了改进的交互式卡尔曼滤波算法对采集数据进行了处理,得到了目标运动状态的最优值。依据目标车辆的运行轨迹构建了运动状态方程,确定了不同状态下的状态矩阵和观测矩阵,同时设计了交互式多模型滤波器,借助于dSPACE场景仿真软件建立了虚拟交通场景,利用硬件在环技术实现了运动目标的数据采集,分析计算了雷达数据噪声,在滤波过程中,利用遗传算法对过程噪声和量测噪声进行在线优化,得到噪声的最优组合。通过激光雷达对目标的探测结果对算法的滤波性能进行了验证,滤波算法求得的数据平均误差小于0.1 m,对数据的噪声起到一定的抑制作用,提高了对目标车辆的定位与追踪能力。
为了减少车载毫米波雷达数据中的噪声影响,本文采用了改进的交互式卡尔曼滤波算法对采集数据进行了处理,得到了目标运动状态的最优值。依据目标车辆的运行轨迹构建了运动状态方程,确定了不同状态下的状态矩阵和观测矩阵,同时设计了交互式多模型滤波器,借助于dSPACE场景仿真软件建立了虚拟交通场景,利用硬件在环技术实现了运动目标的数据采集,分析计算了雷达数据噪声,在滤波过程中,利用遗传算法对过程噪声和量测噪声进行在线优化,得到噪声的最优组合。通过激光雷达对目标的探测结果对算法的滤波性能进行了验证,滤波算法求得的数据平均误差小于0.1 m,对数据的噪声起到一定的抑制作用,提高了对目标车辆的定位与追踪能力。







, 最新更新时间 , doi: 10.13433/j.cnki.1003-8728.20190260
摘要:
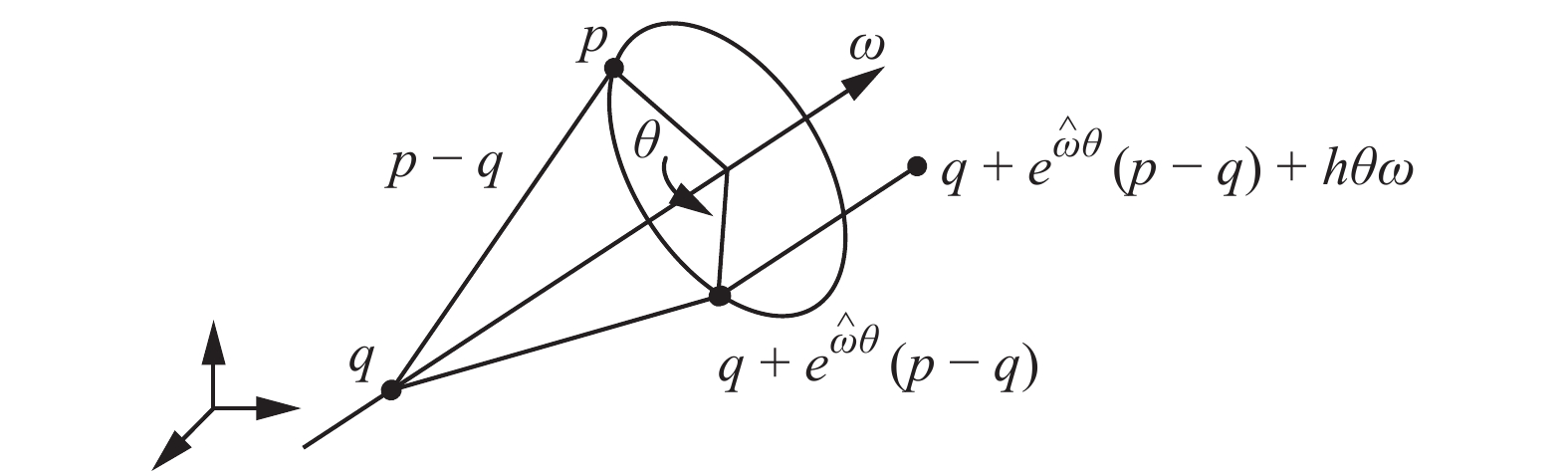
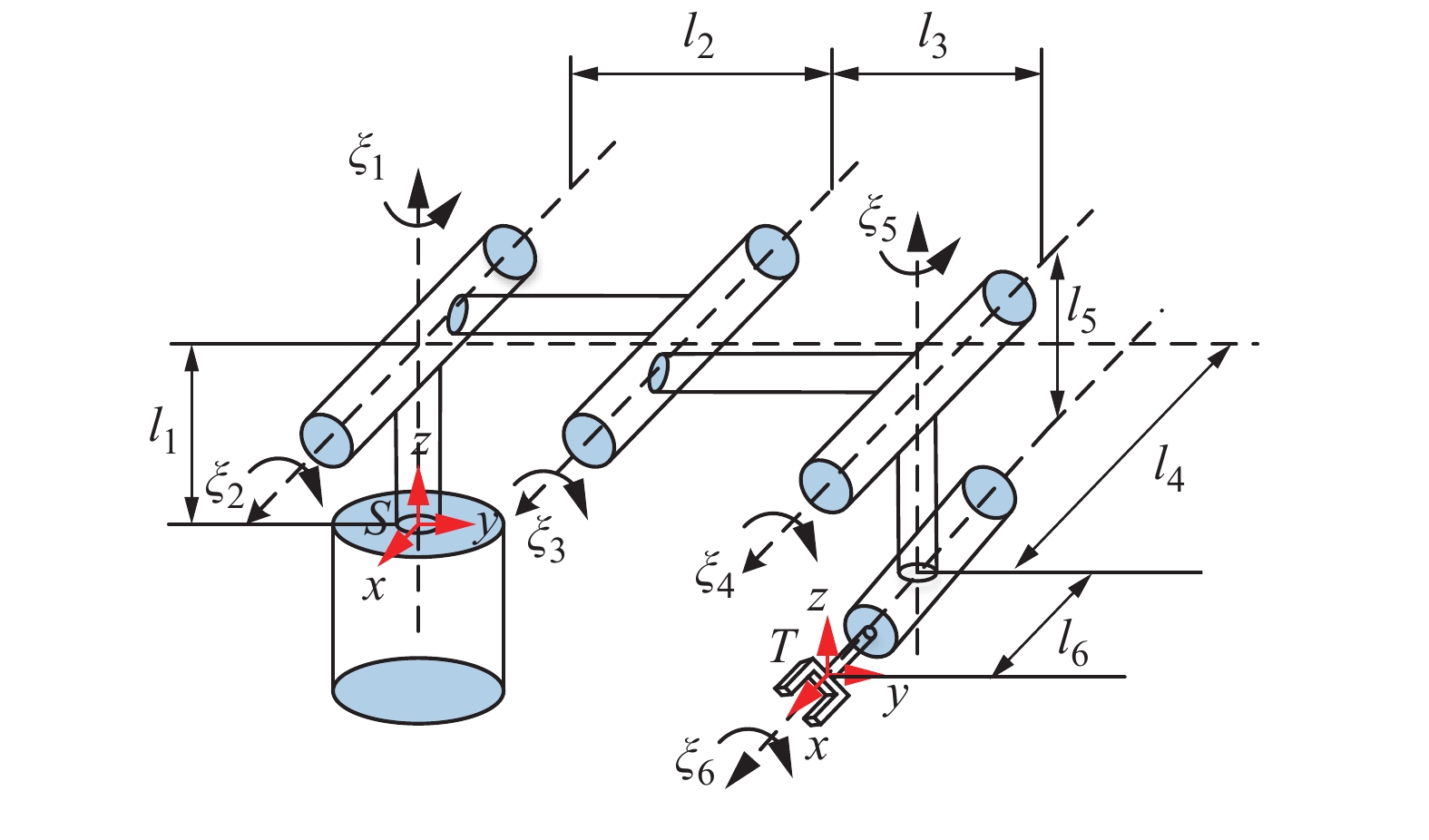
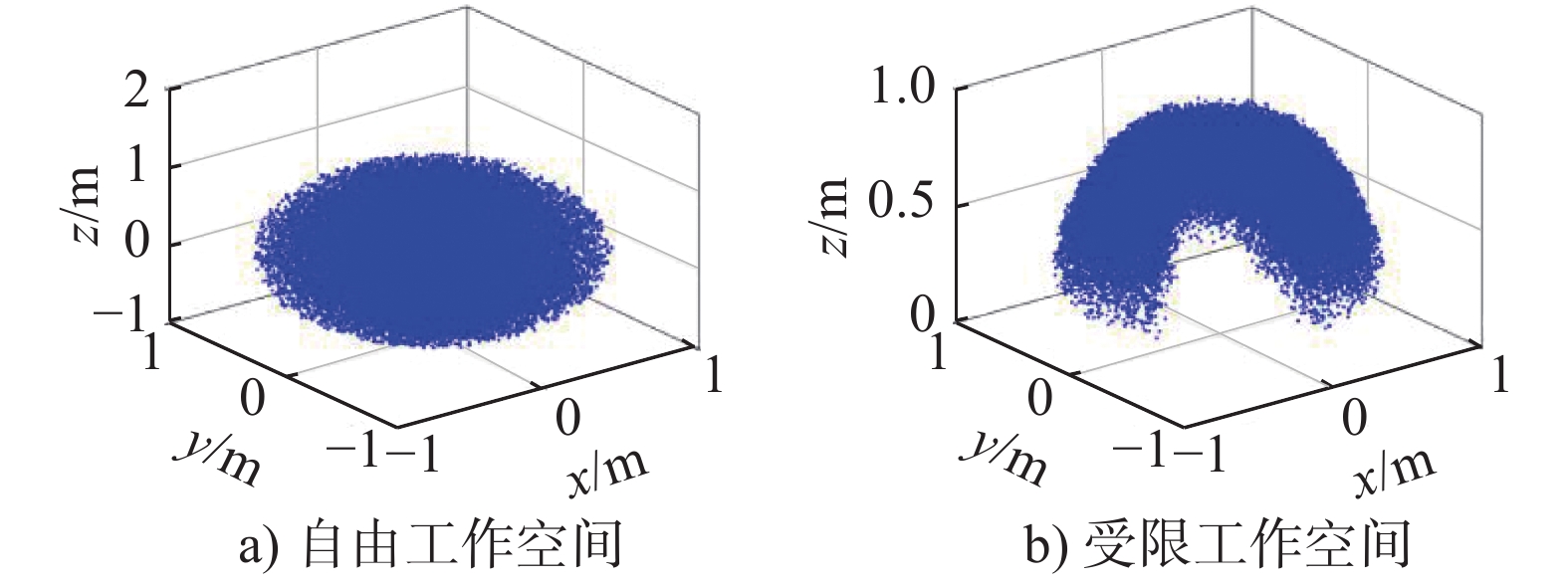
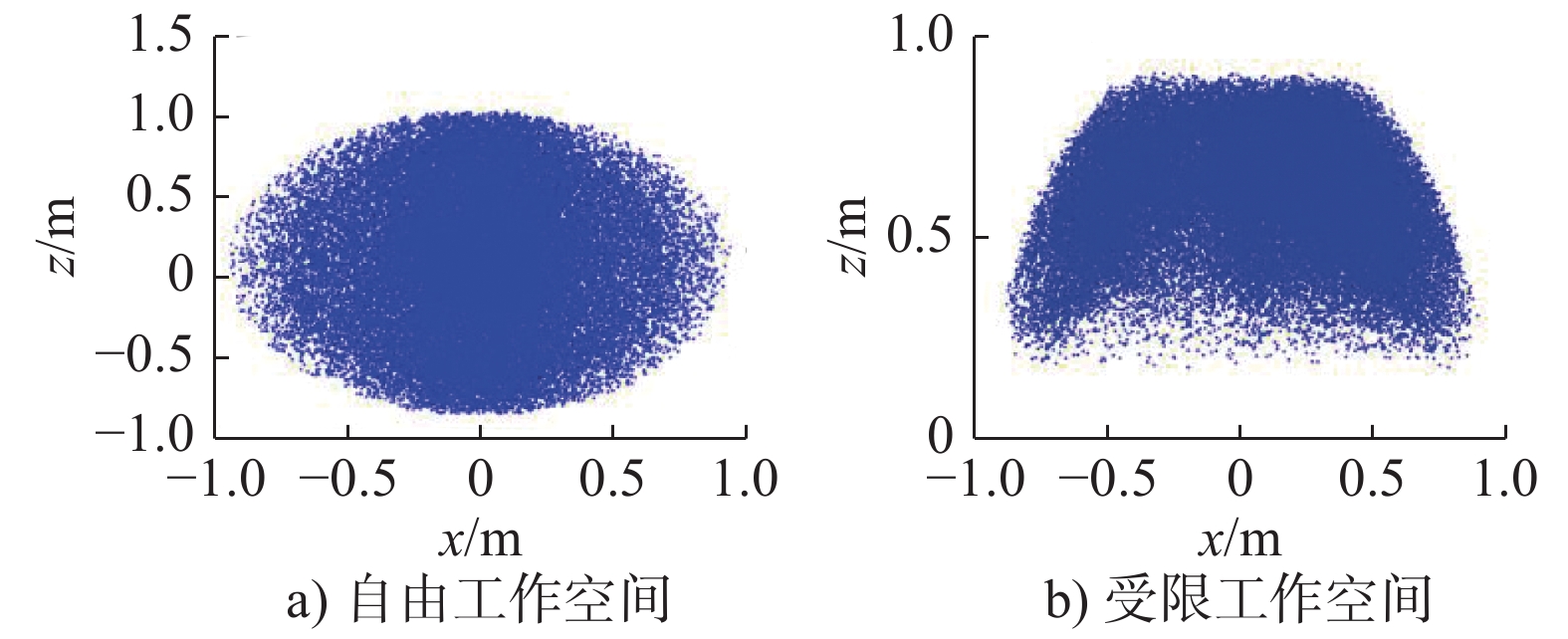
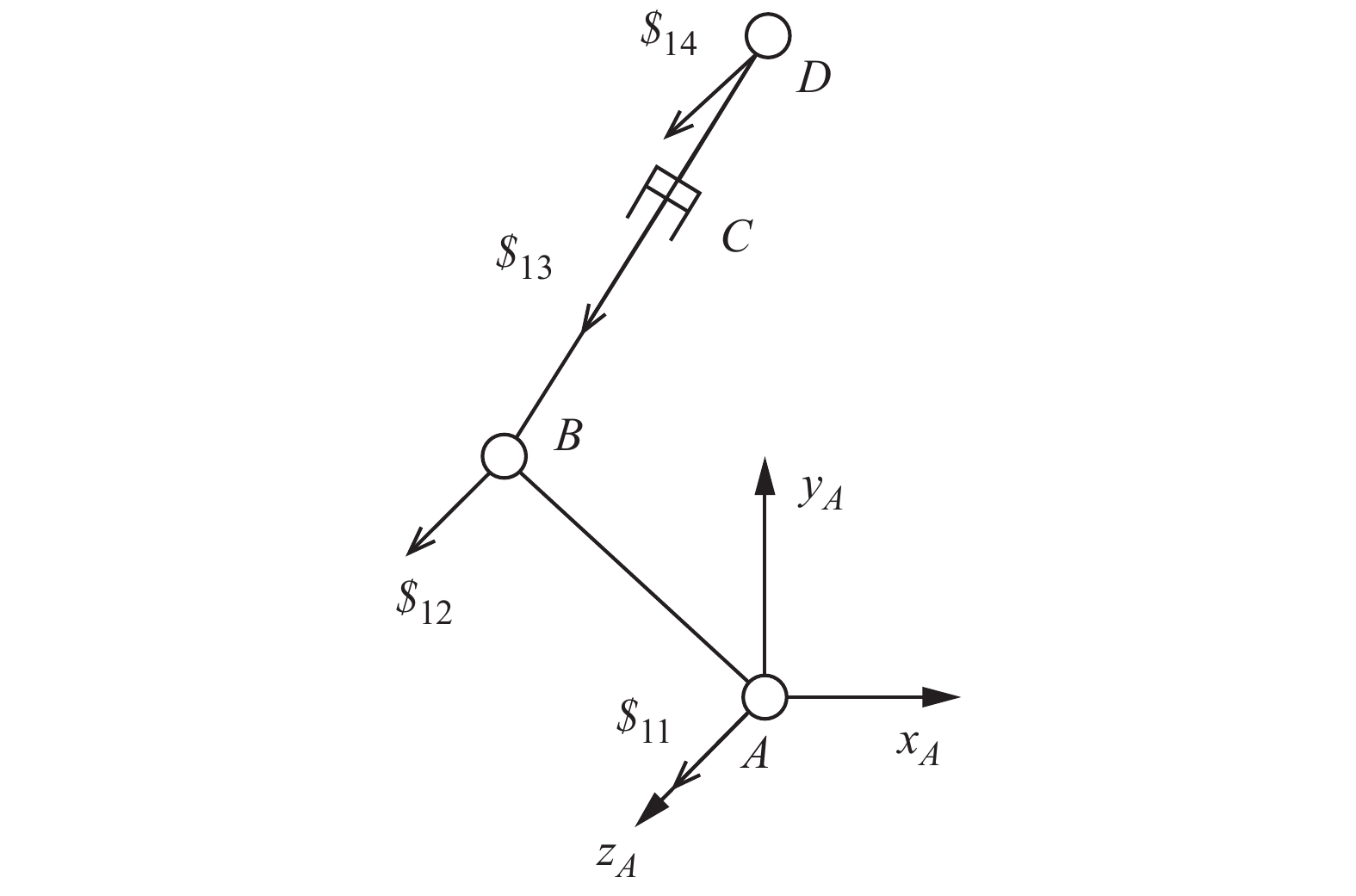
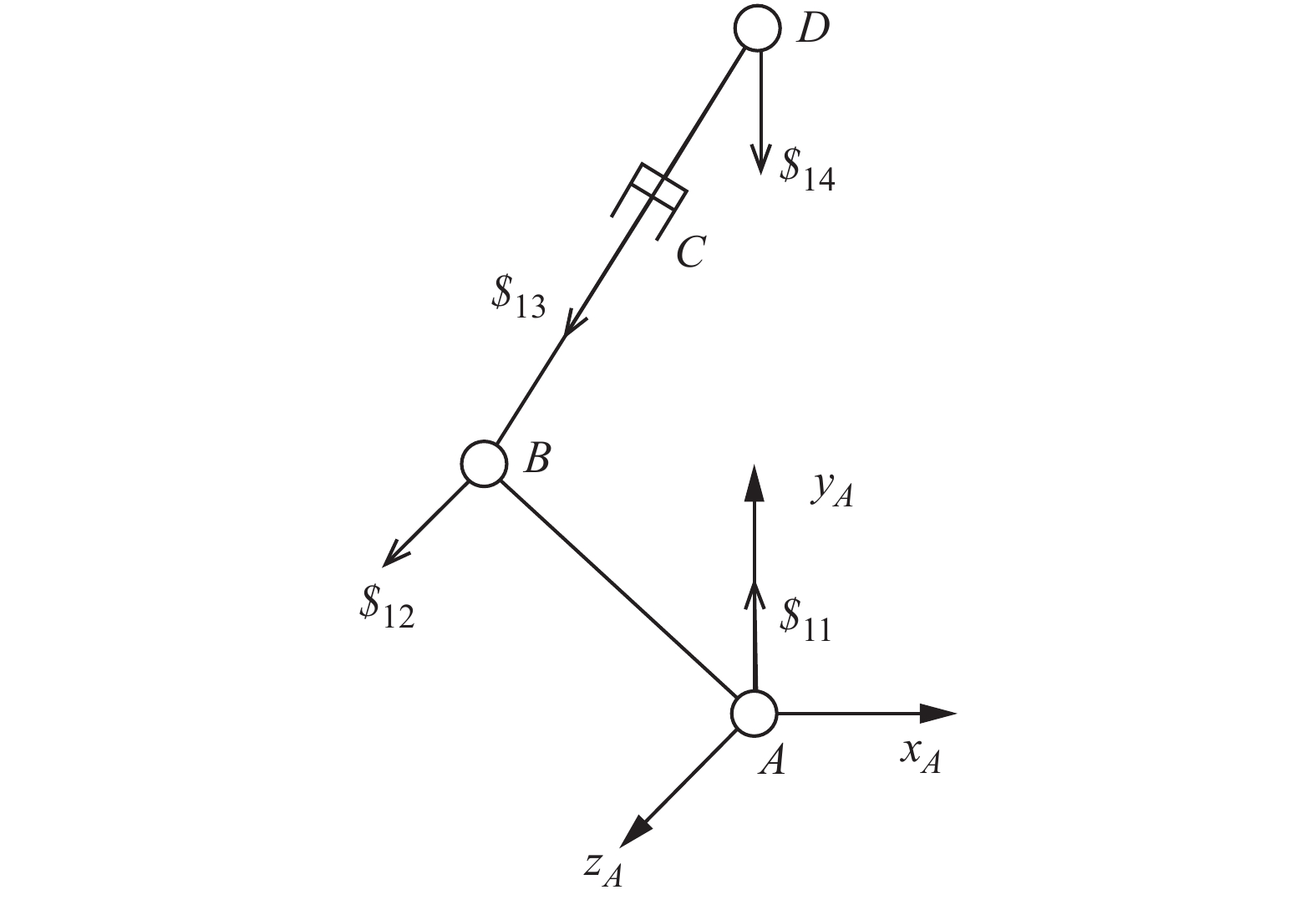
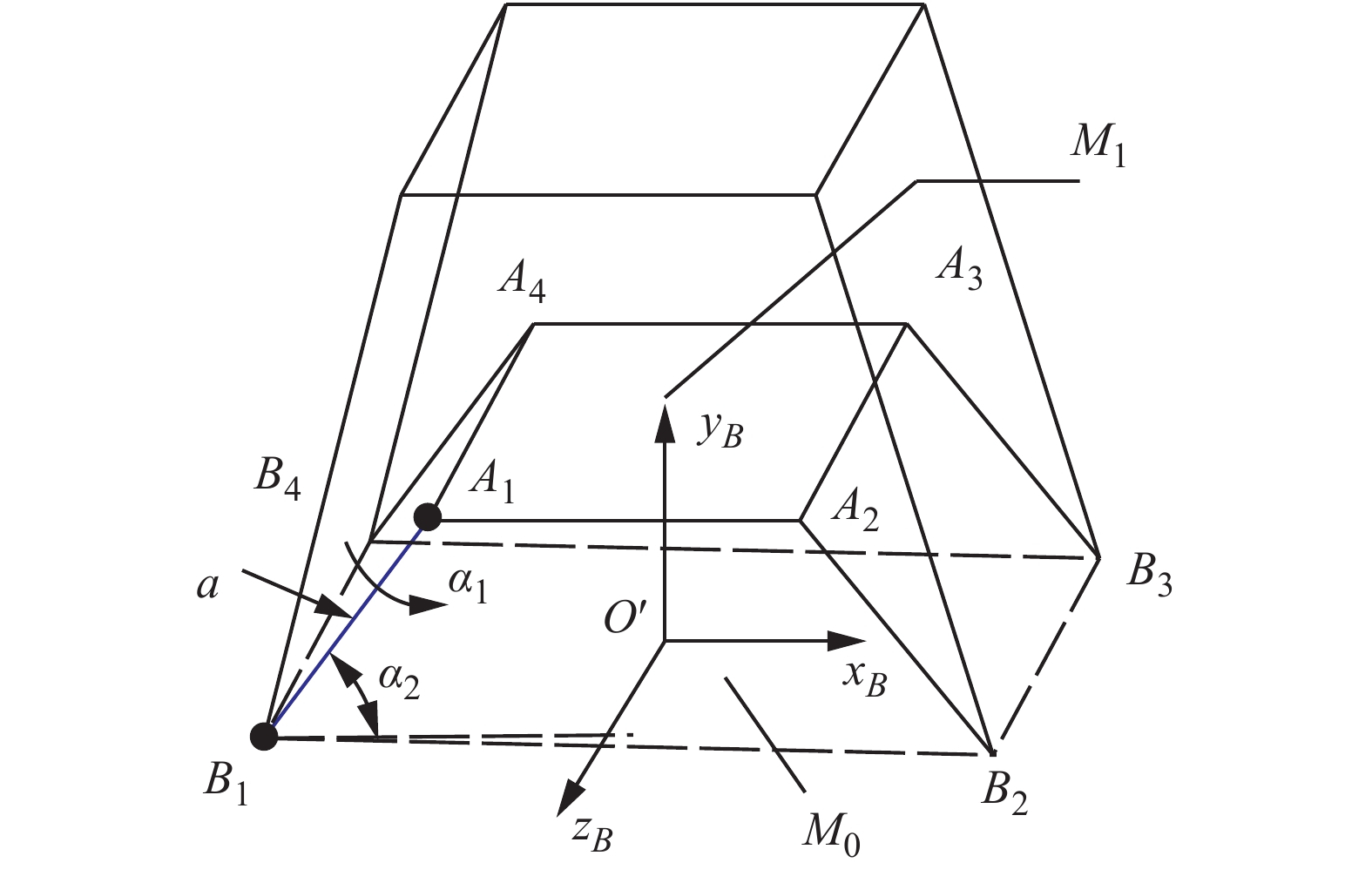
为确定符合缝纫机结构条件的缝纫机器人工作空间,提高机器人缝纫作业前的规划效率,应用旋量法建立运动学模型,并使用Adams软件验证了所建运动学模型的正确性。采用蒙特卡洛法结合控制变量法分析具有区域限制性的工作空间,确定出机器人各关节在实际工作环境中最佳的转角范围。利用MATLAB仿真得到机器人自由与受限情况下的工作空间云图,对比结果表明所确定的关节转角范围满足机器人实际的工作空间要求。
为确定符合缝纫机结构条件的缝纫机器人工作空间,提高机器人缝纫作业前的规划效率,应用旋量法建立运动学模型,并使用Adams软件验证了所建运动学模型的正确性。采用蒙特卡洛法结合控制变量法分析具有区域限制性的工作空间,确定出机器人各关节在实际工作环境中最佳的转角范围。利用MATLAB仿真得到机器人自由与受限情况下的工作空间云图,对比结果表明所确定的关节转角范围满足机器人实际的工作空间要求。




, 最新更新时间 , doi: 10.13433/j.cnki.1003-8728.20190255
摘要:
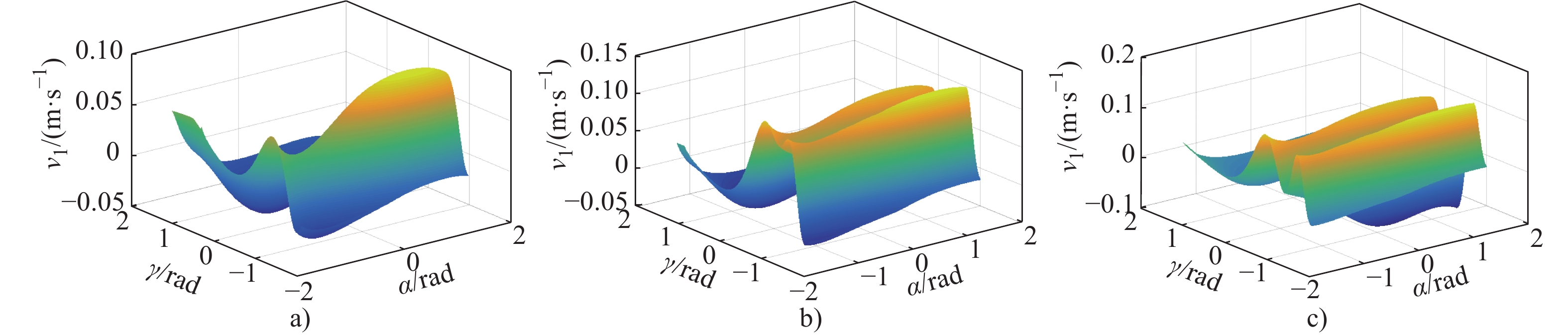
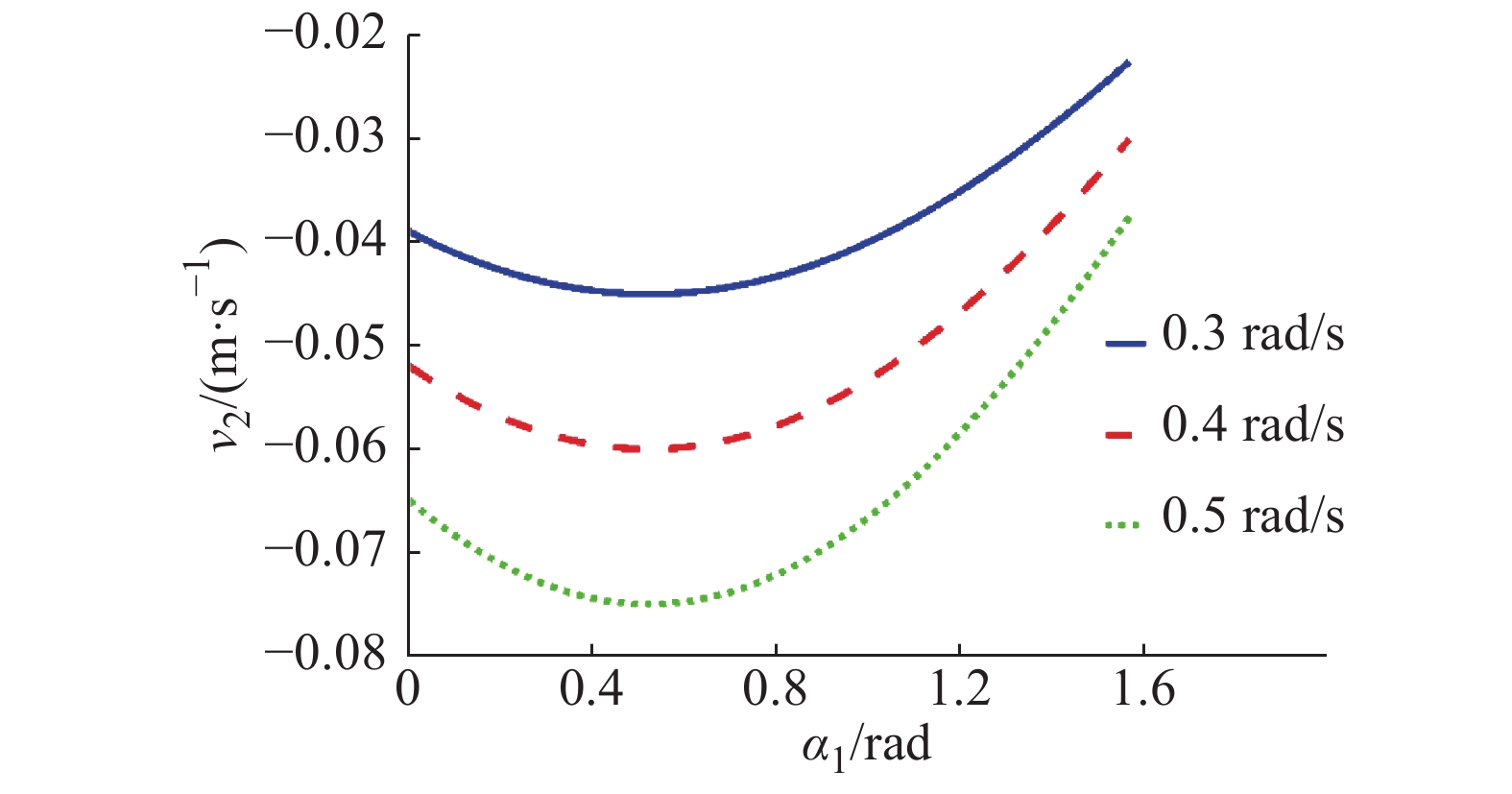
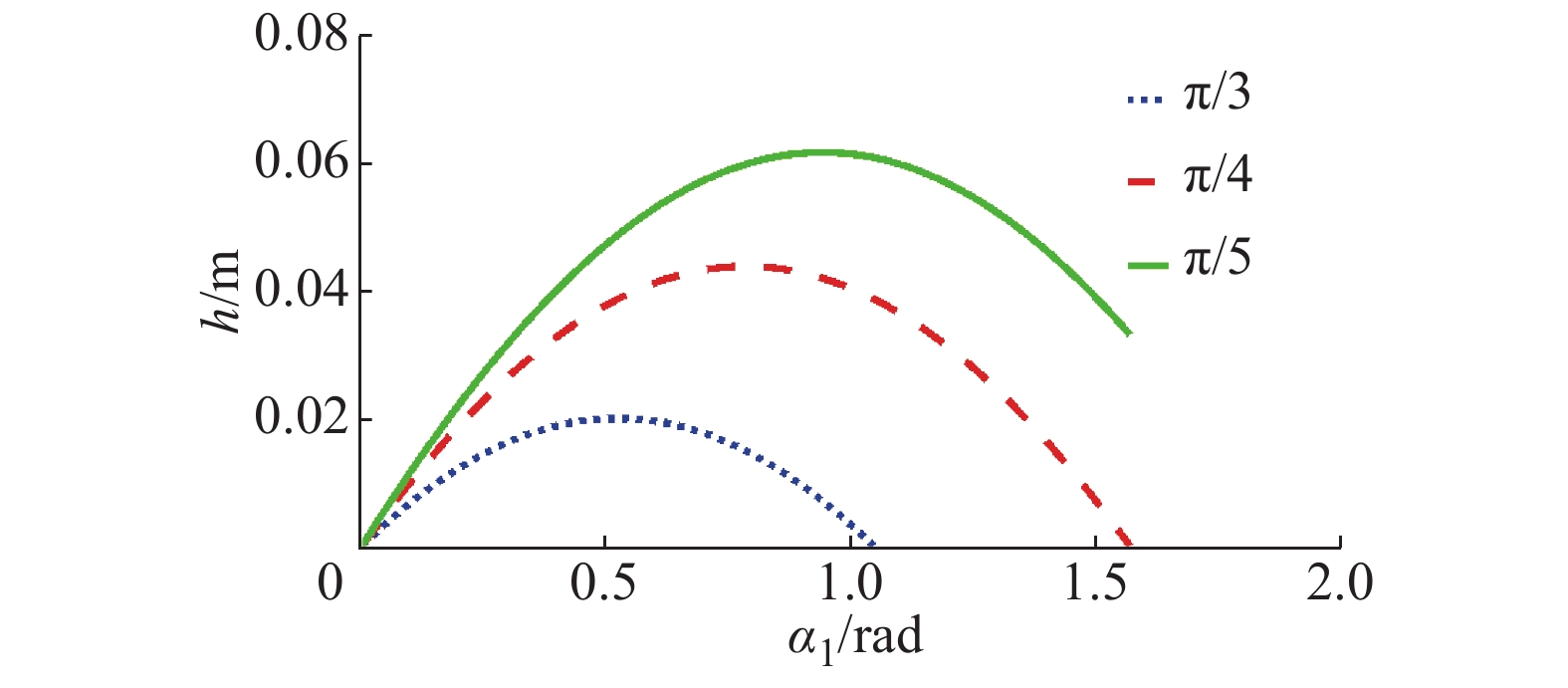
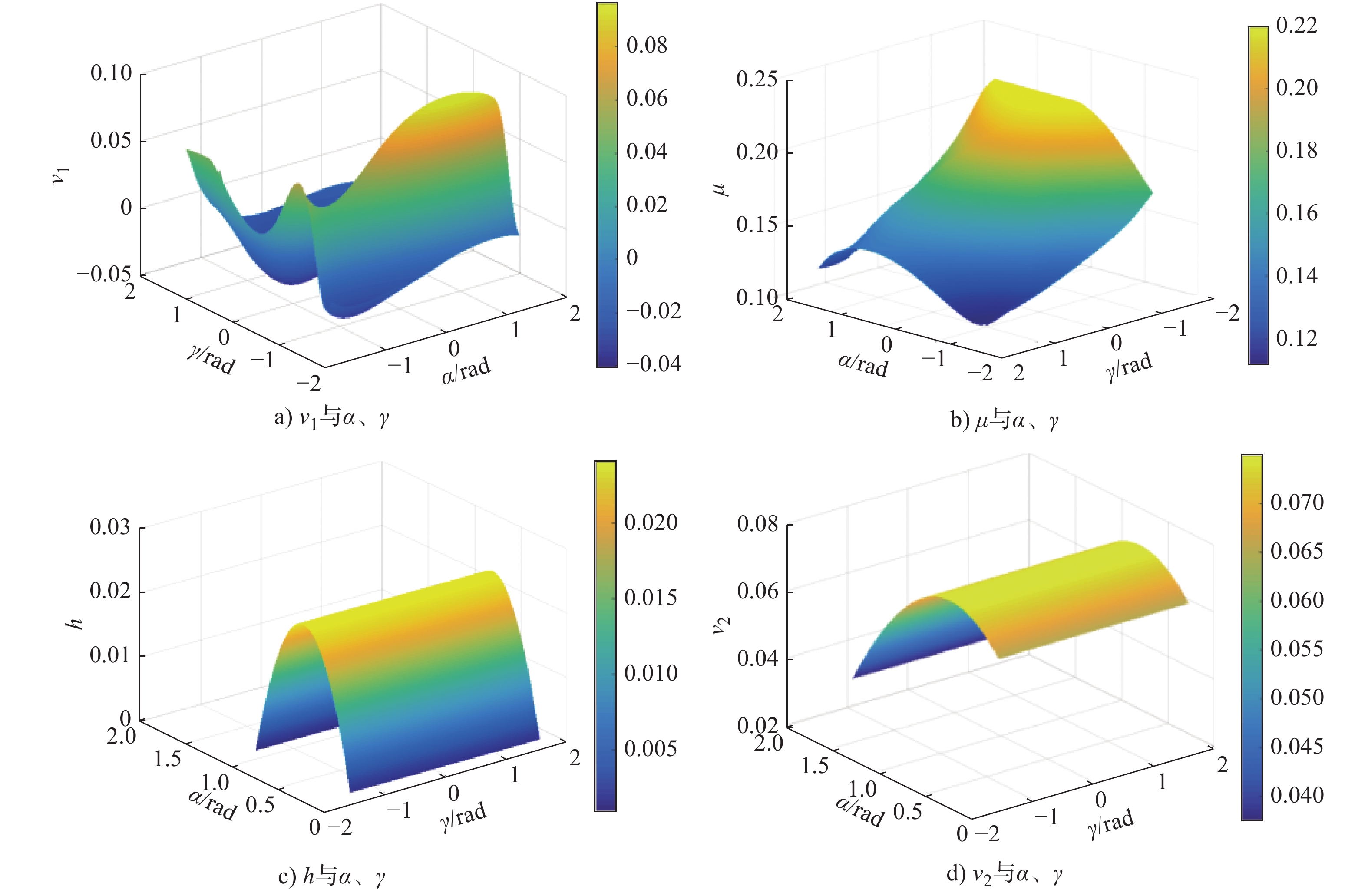
为适应多重地形特征环境,本文提出一种集四足步行、蠕动和“全姿态”滚动等运动模式为一体的4-URPU多模式移动并联机构。利用螺旋理论分析了机构在各模式下的运动可行性,求解各模式下机构的位置解及速度雅可比矩阵,并建立多目标优化模型,得到一组相对最优解的集合。结果表明,行走过程中的速度性能指标的最大值低于机构在滚动过程中的速度性能指标,不同的工作环境有不同的最优解决方案。最后对机构进行样机试验,验证了该机构的理论正确性以及运动可行性。所提出的机构可应用于核电事故、野外、自然灾害等具有多重地形特征的地理环境中,有一定的应用前景。
为适应多重地形特征环境,本文提出一种集四足步行、蠕动和“全姿态”滚动等运动模式为一体的4-URPU多模式移动并联机构。利用螺旋理论分析了机构在各模式下的运动可行性,求解各模式下机构的位置解及速度雅可比矩阵,并建立多目标优化模型,得到一组相对最优解的集合。结果表明,行走过程中的速度性能指标的最大值低于机构在滚动过程中的速度性能指标,不同的工作环境有不同的最优解决方案。最后对机构进行样机试验,验证了该机构的理论正确性以及运动可行性。所提出的机构可应用于核电事故、野外、自然灾害等具有多重地形特征的地理环境中,有一定的应用前景。









, 最新更新时间 , doi: 10.13433/j.cnki.1003-8728.20190227
摘要:
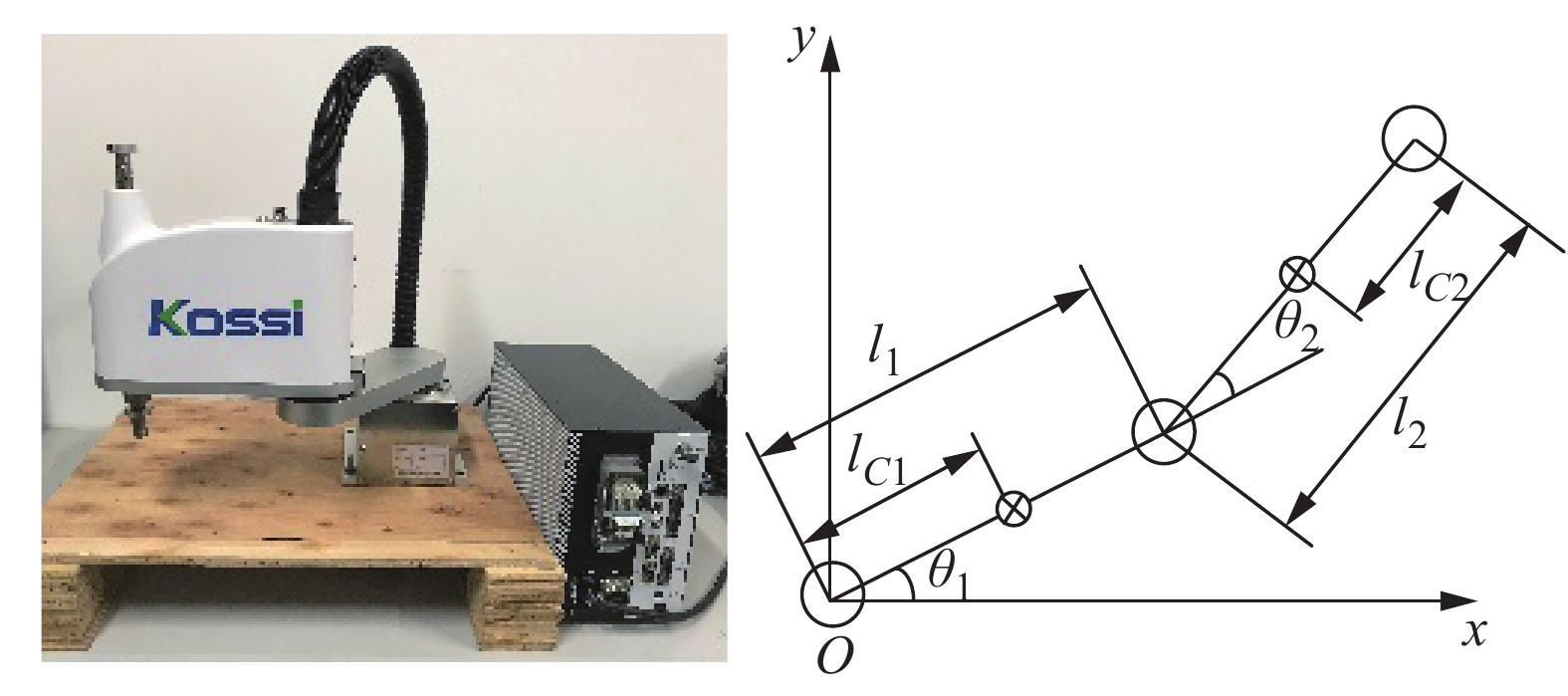
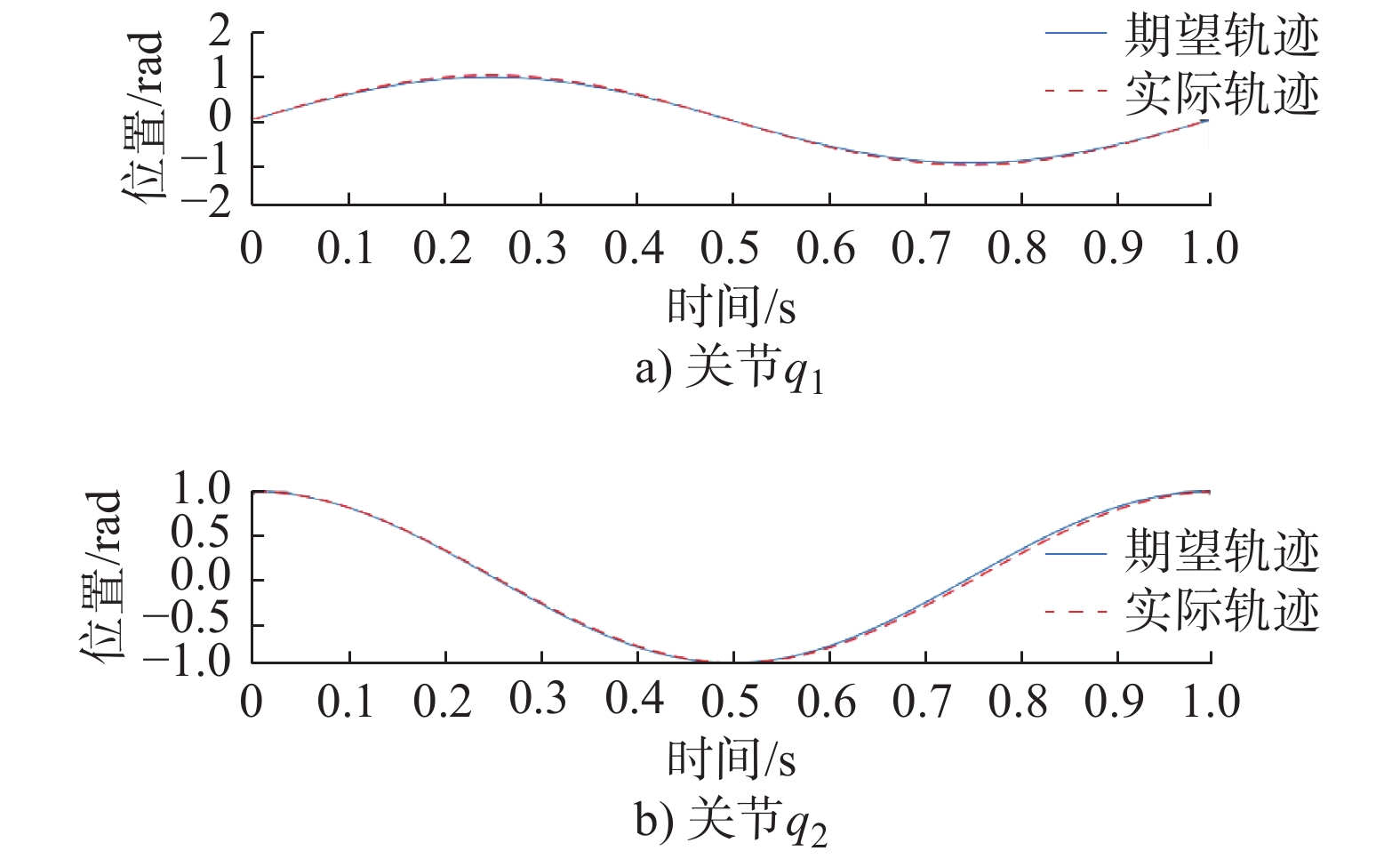
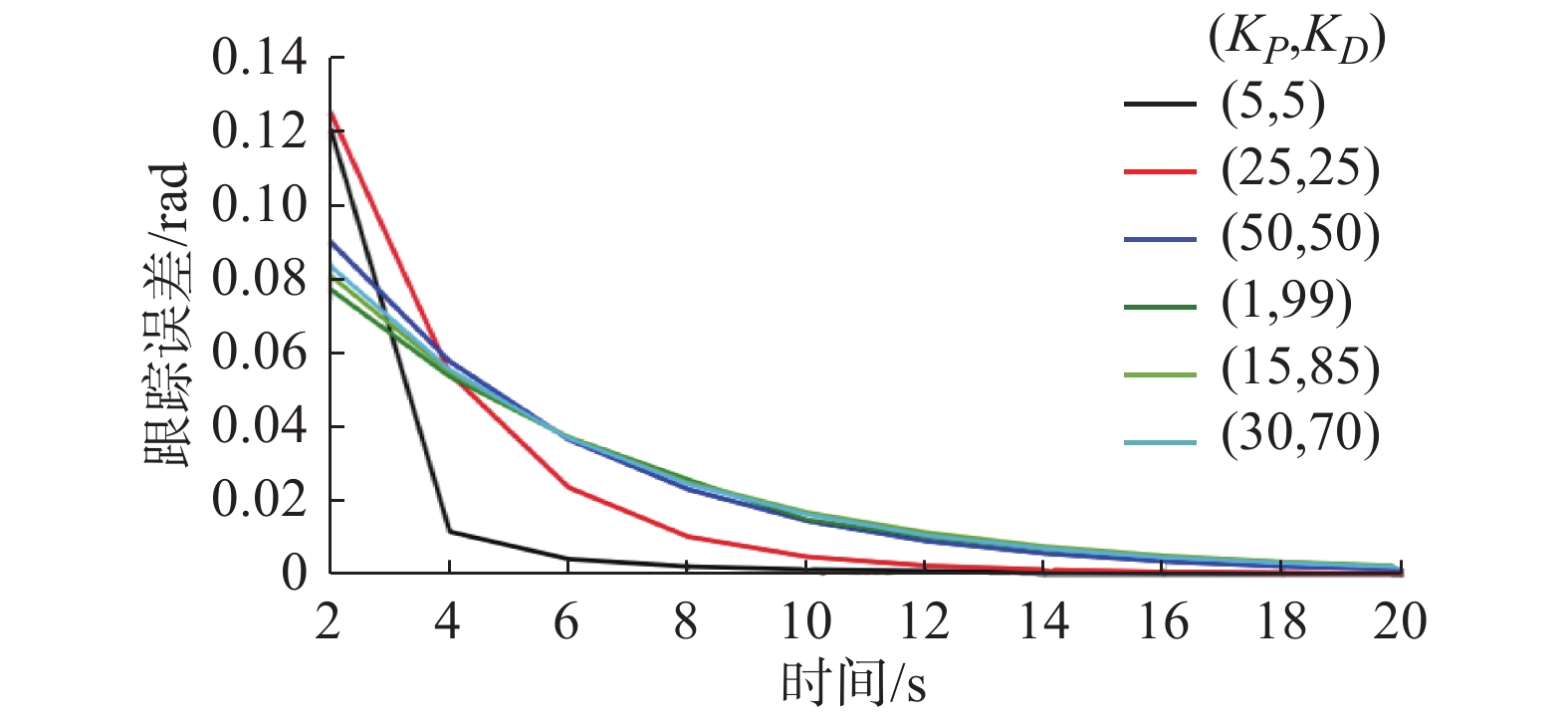
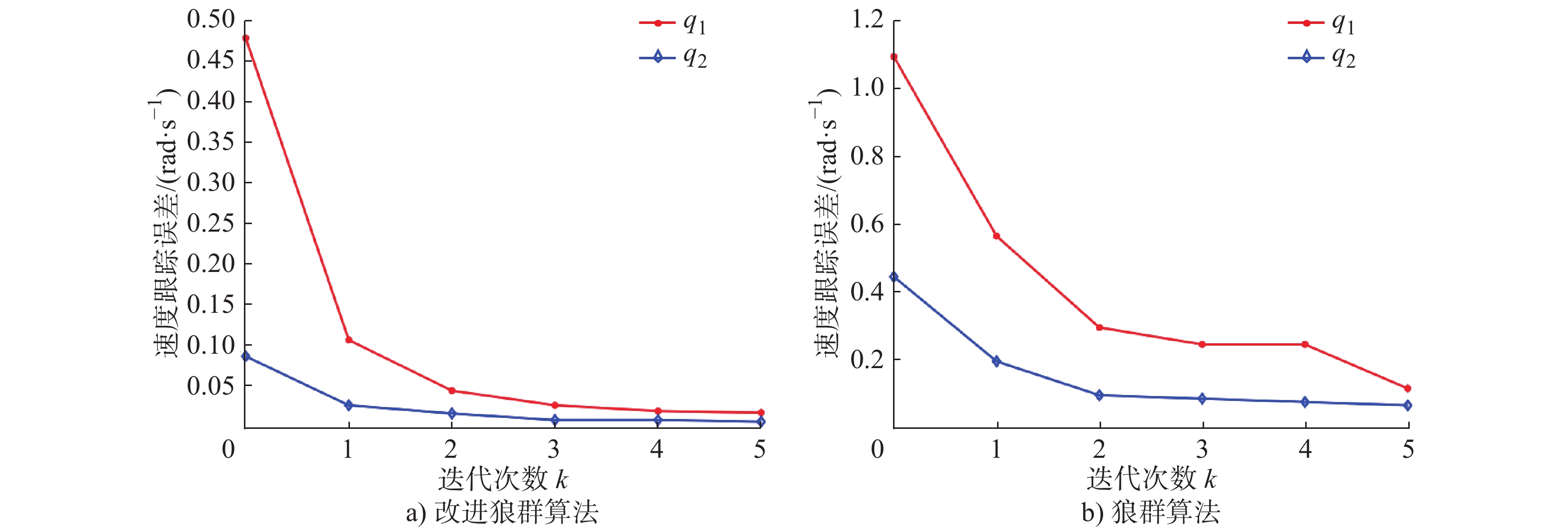
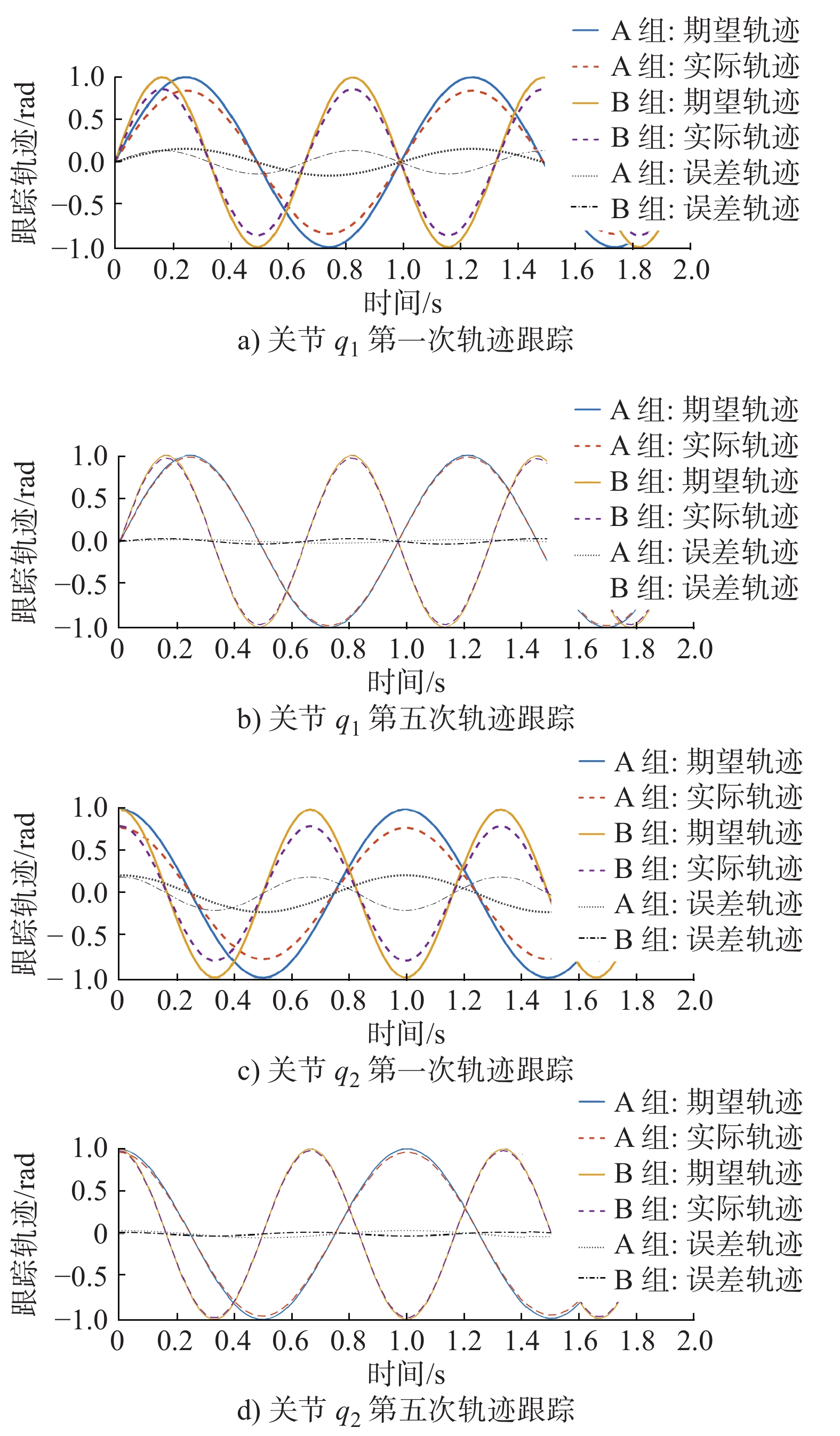
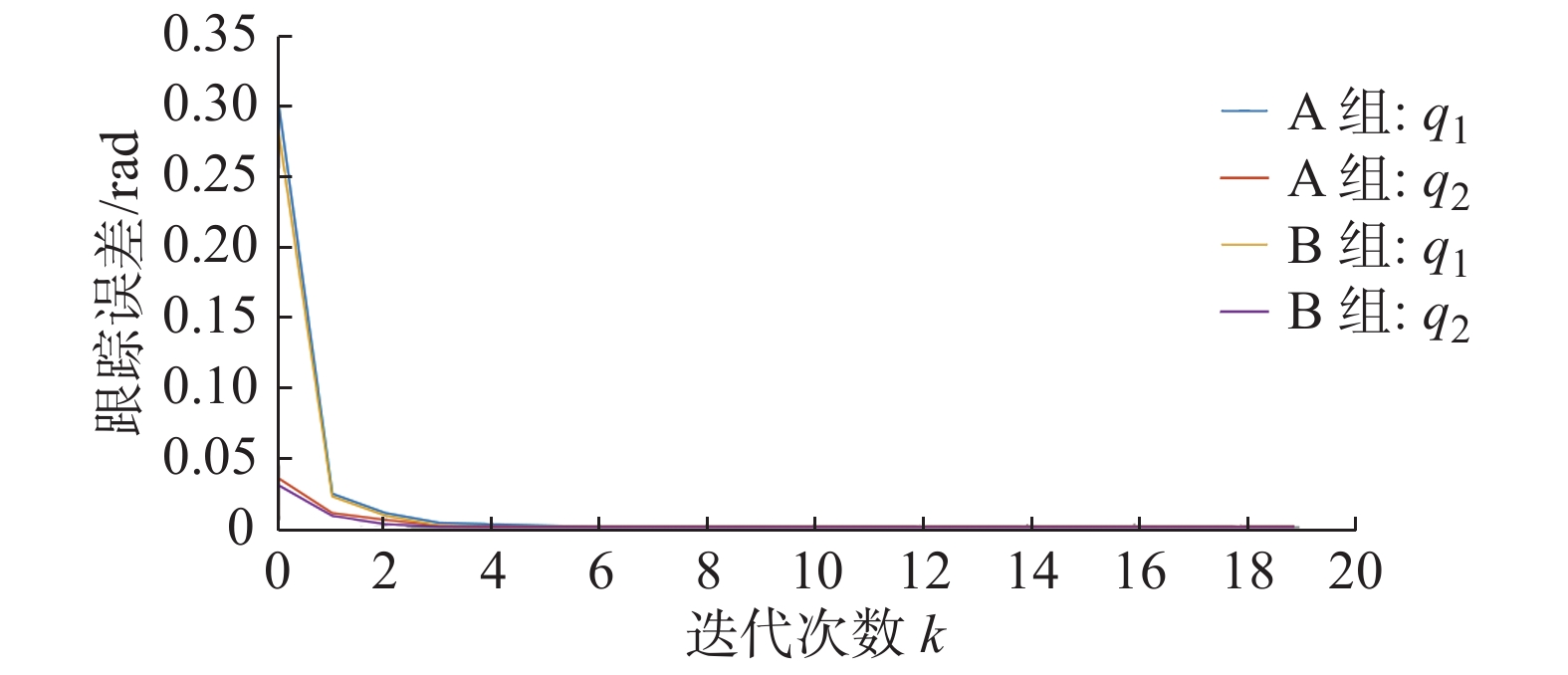
针对减小机器人重复运动的位置、速度跟踪误差的问题,给出一种基于狼群算法优化的机械臂自适应迭代学习控制策略。根据SCARA(Selective compliance assembly robot arm)机械臂驱动方程,设计动力学系统的迭代学习控制律。引入自适应步长的狼群算法,使狼群能够根据猎物气味浓度动态调整移动步长,提高了算法的收敛速度和精度。该策略对机械臂控制器参数KP、KD进行寻优时,得到了良好的控制效果,实现了对期望轨迹的有效跟踪。实验结果表明,该算法灵活性好,对系统期望轨迹具有较高的跟踪精度,有效降低了双关节机械臂的位置、速度跟踪误差,具有较强的可行性与有效性。
针对减小机器人重复运动的位置、速度跟踪误差的问题,给出一种基于狼群算法优化的机械臂自适应迭代学习控制策略。根据SCARA(Selective compliance assembly robot arm)机械臂驱动方程,设计动力学系统的迭代学习控制律。引入自适应步长的狼群算法,使狼群能够根据猎物气味浓度动态调整移动步长,提高了算法的收敛速度和精度。该策略对机械臂控制器参数KP、KD进行寻优时,得到了良好的控制效果,实现了对期望轨迹的有效跟踪。实验结果表明,该算法灵活性好,对系统期望轨迹具有较高的跟踪精度,有效降低了双关节机械臂的位置、速度跟踪误差,具有较强的可行性与有效性。





, 最新更新时间 , doi: 10.13433/j.cnki.1003-8728.20190254
摘要:
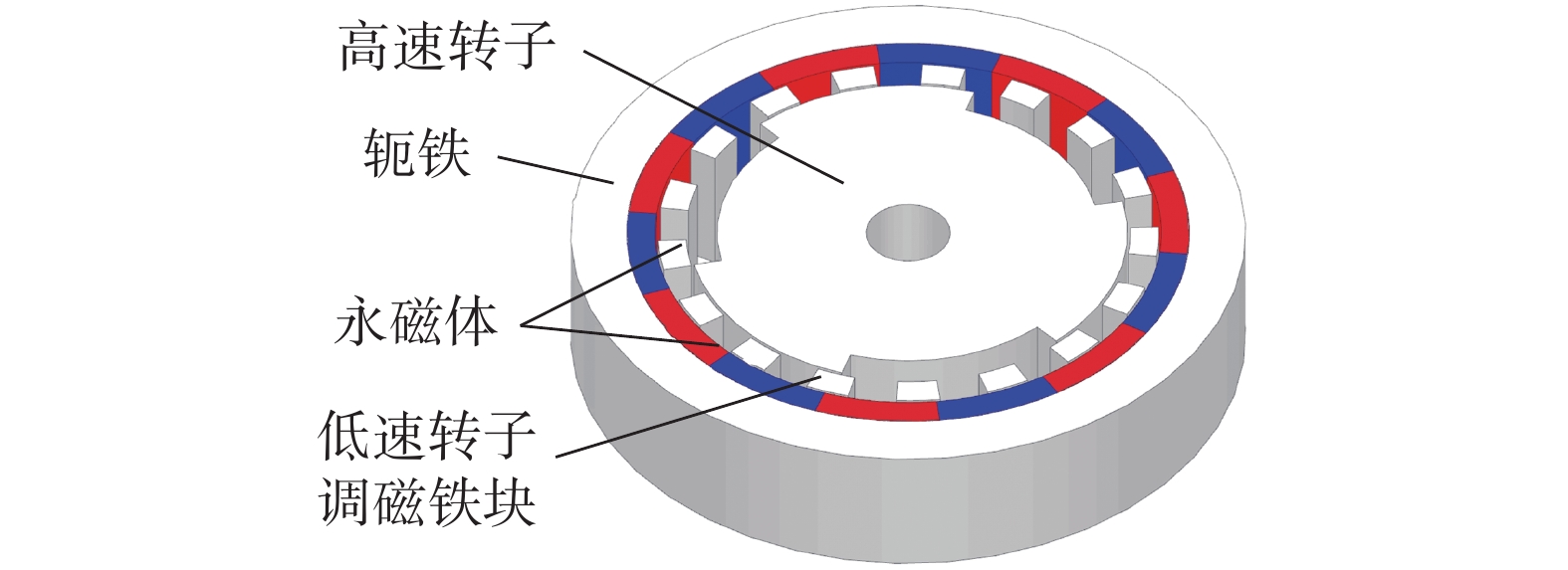
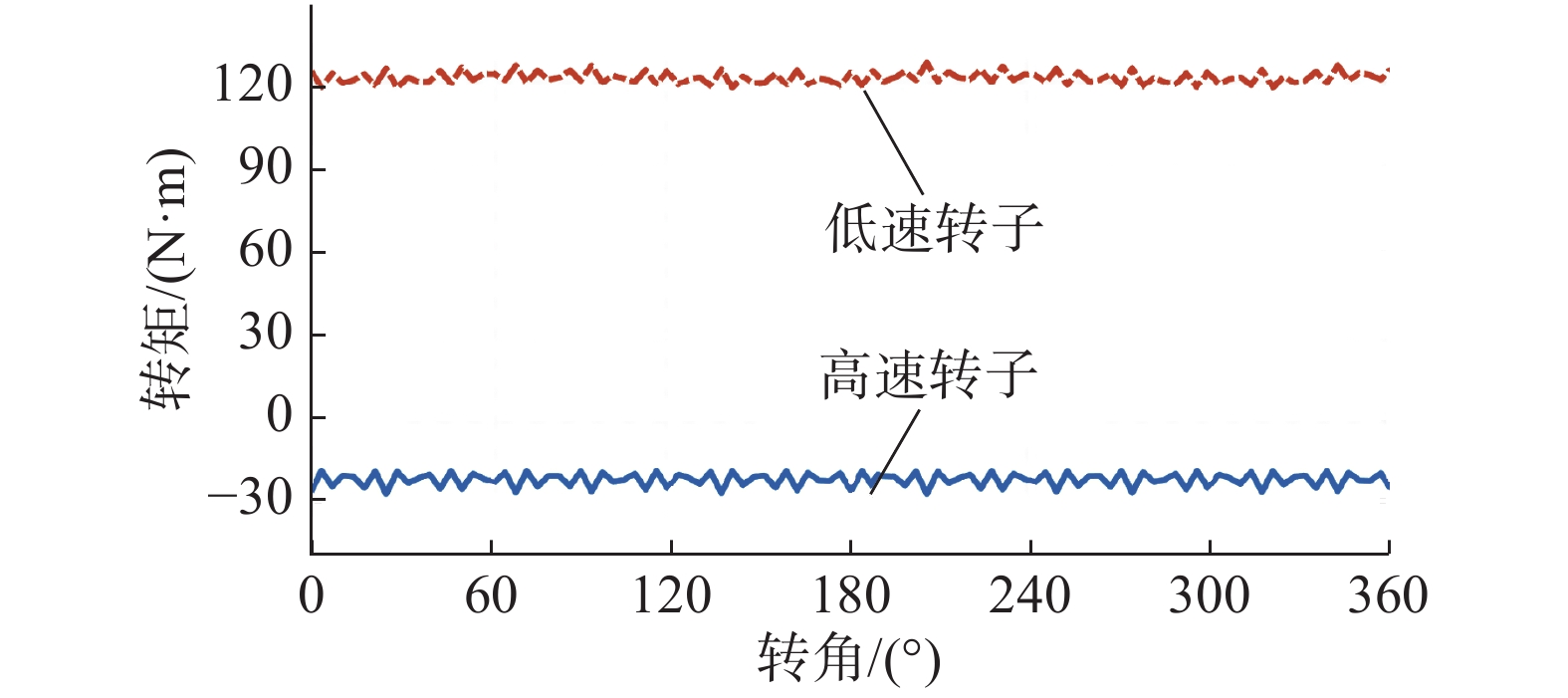
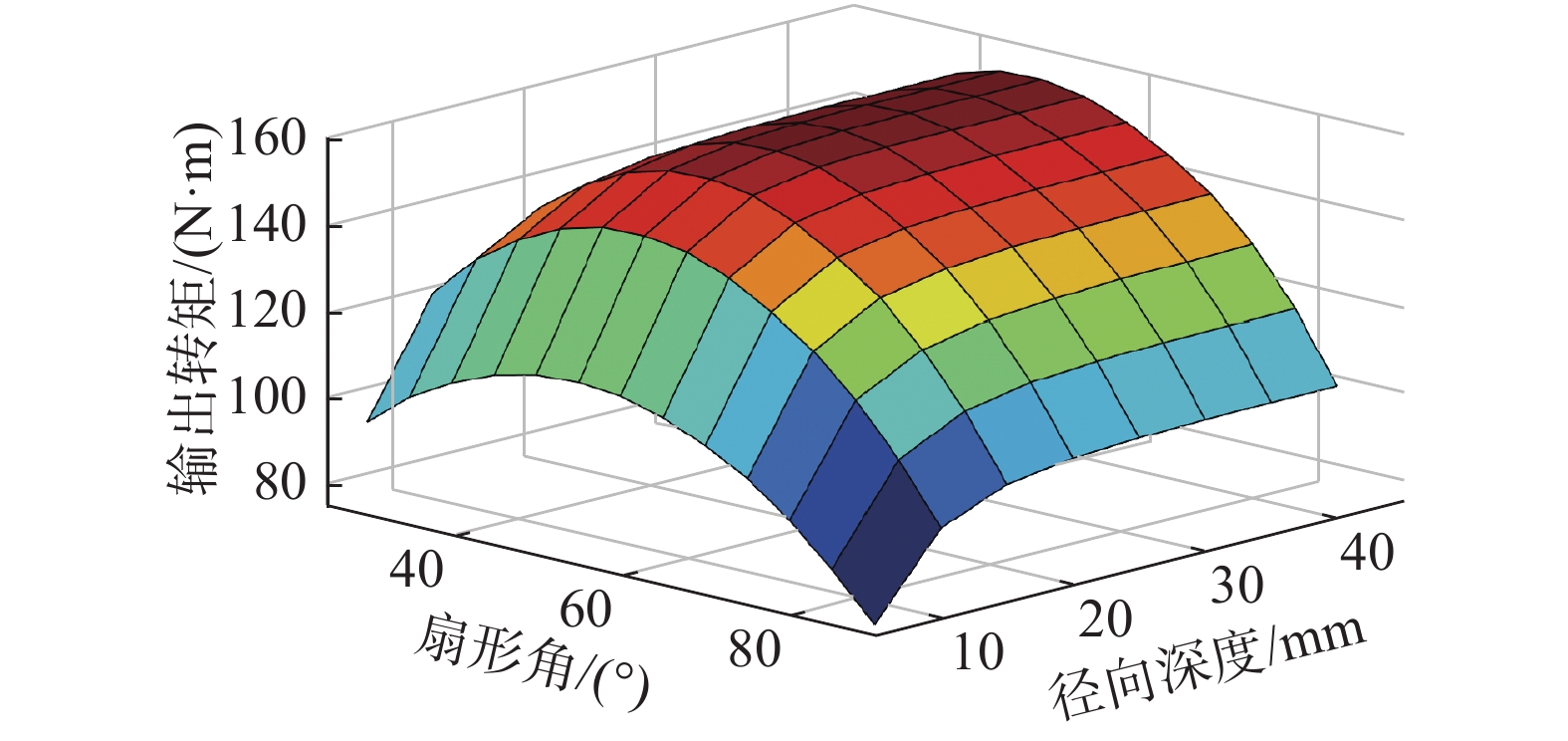
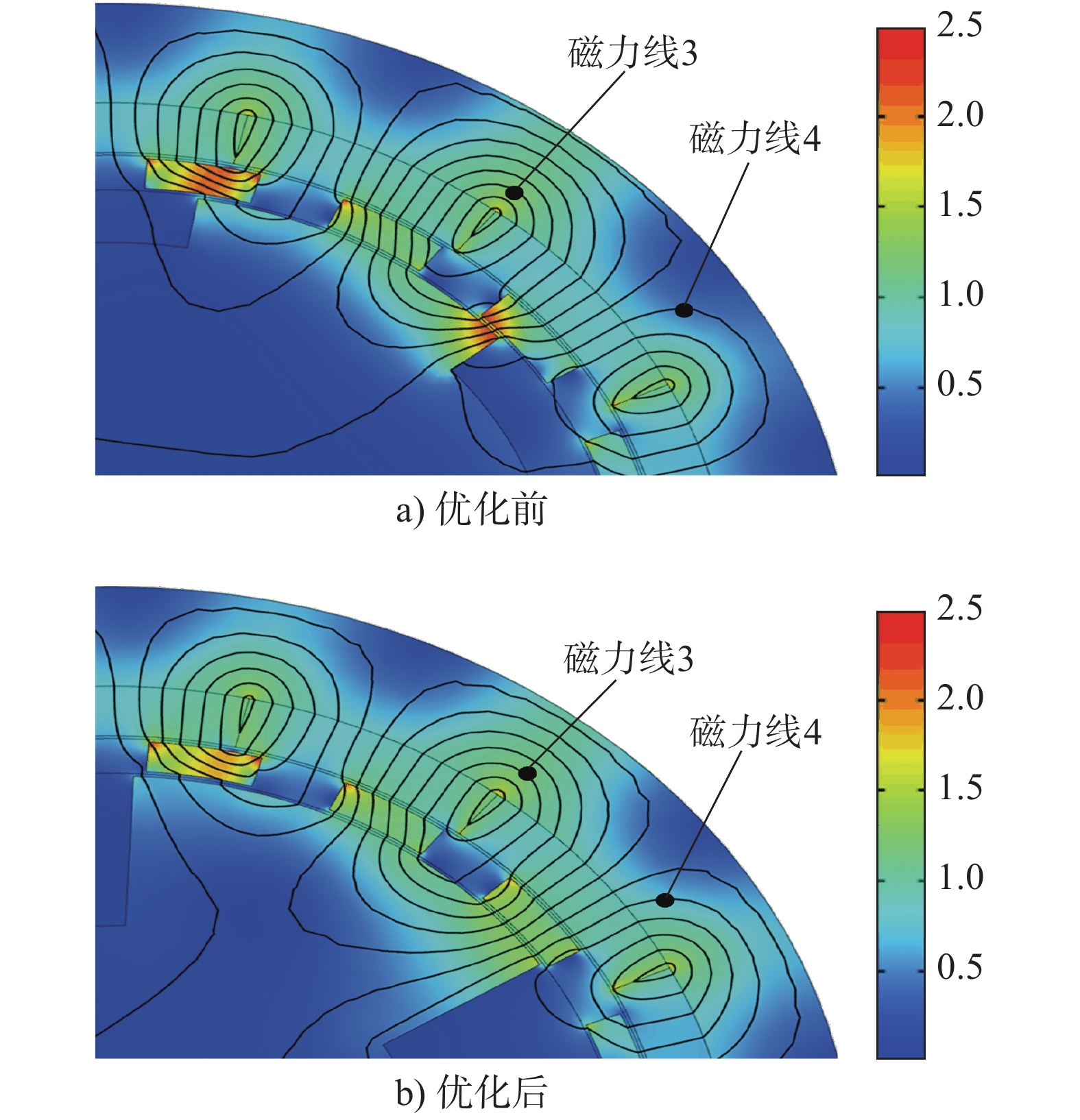
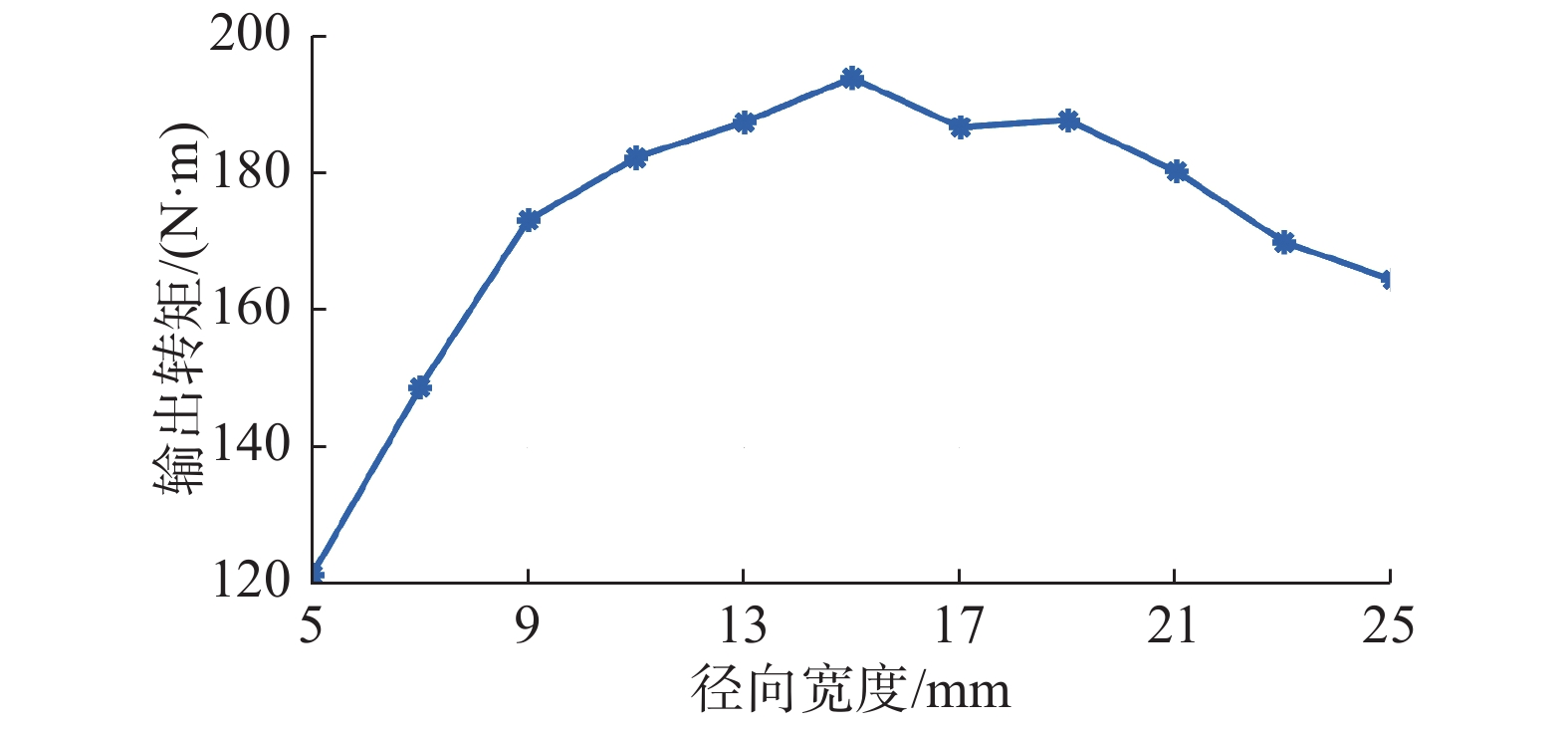
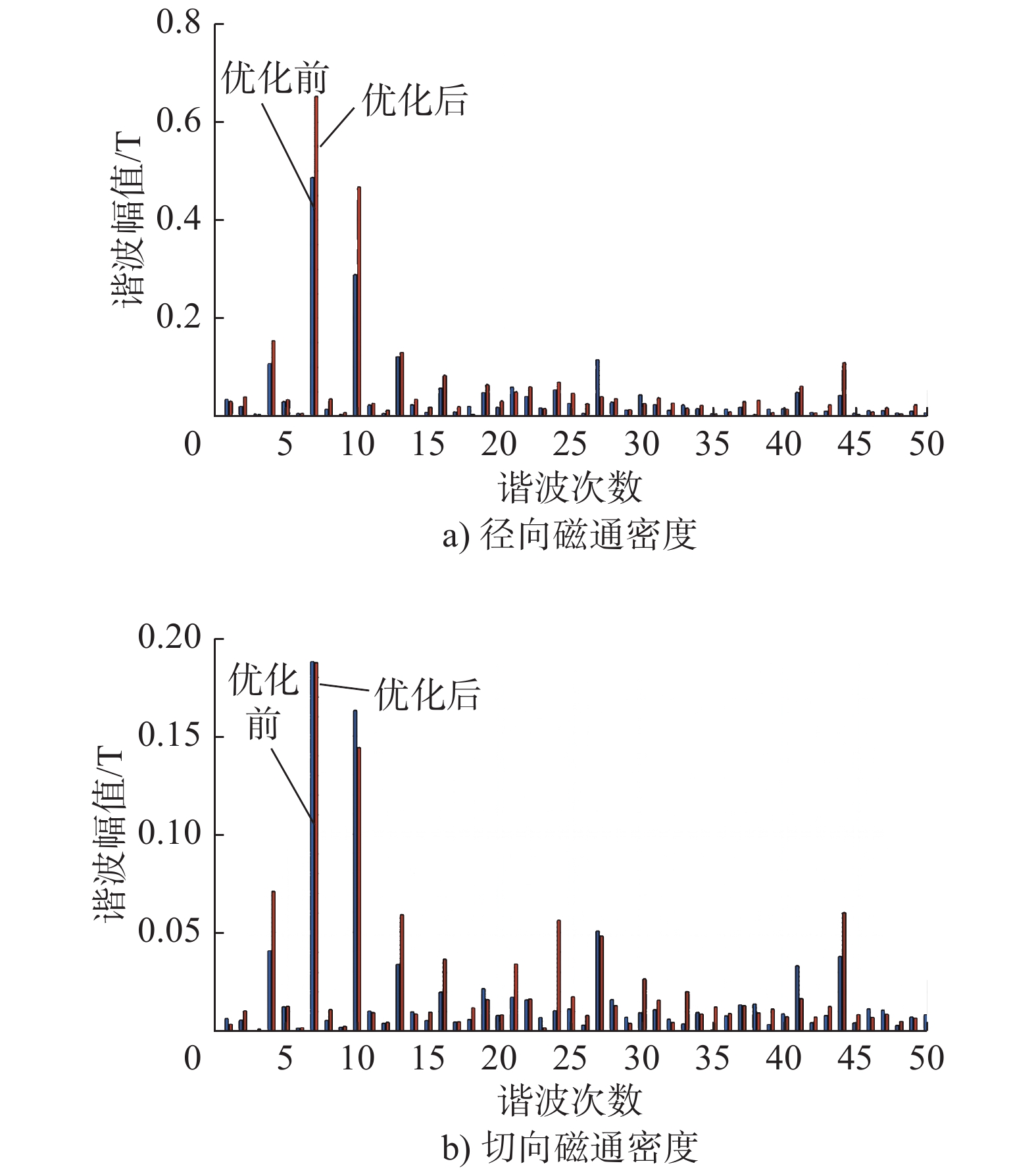
针对传统磁力齿轮高速运转时转子永磁体会破坏的缺点,提出没有永磁体的转子调磁式磁力齿轮。根据磁场调制原理建立了输入输出转矩与气隙磁场间的关系,使用二维有限元法分析其转矩传递能力;使用参数化扫描对不同的转子尺寸参数组合进行优化分析,得到输出转矩与转子尺寸间的关系,并探究各转子尺寸参数对输出转矩影响的原因。仿真结果表明:输出转矩与转子的尺寸参数有直接关系,存在最优尺寸使输出转矩达到最大值;优化后输出转矩增加了81.2%,低速转子尺寸对输出转矩影响最大。最后对气隙中磁密进行谐波分析,结果表明优化前后主要谐波的变化与转矩变化一致,验证了转子调磁式磁力齿轮设计分析的有效性。
针对传统磁力齿轮高速运转时转子永磁体会破坏的缺点,提出没有永磁体的转子调磁式磁力齿轮。根据磁场调制原理建立了输入输出转矩与气隙磁场间的关系,使用二维有限元法分析其转矩传递能力;使用参数化扫描对不同的转子尺寸参数组合进行优化分析,得到输出转矩与转子尺寸间的关系,并探究各转子尺寸参数对输出转矩影响的原因。仿真结果表明:输出转矩与转子的尺寸参数有直接关系,存在最优尺寸使输出转矩达到最大值;优化后输出转矩增加了81.2%,低速转子尺寸对输出转矩影响最大。最后对气隙中磁密进行谐波分析,结果表明优化前后主要谐波的变化与转矩变化一致,验证了转子调磁式磁力齿轮设计分析的有效性。