




Analysis and Experiment on Coating Thickness Model of Robot Spraying
-
摘要: 针对当前建立的机器人喷涂模型对复杂数据分析拟合能力较弱的问题,本文从喷涂漆膜沉积机理出发,深入研究并分析了机器人喷涂沉积厚度模型,以静态喷涂厚度建模方法为基础,提出了椭圆双高斯和模型,并使用单通道厚度建模方法和多通道厚度建模方法,研究了其动态涂层膜厚的分布规律。通过喷涂试验分析并求解了所建模型的参数,进而以此模型建立得到静态喷涂膜厚分布图。通过试验结果与理论数据之间的对比验证,进一步证实了该模型的有效性和实用性。Abstract: Aiming at the problem that the currently established robot spraying model has weak ability to analyze and fit complex data, this paper deeply studied and analyzed the robot spraying deposition thickness model based on the spraying film deposition mechanism. Based on the static spraying thickness modeling method, an elliptical double Gaussian sum model was proposed, and the distribution law of dynamic coating thickness was studied by using single channel thickness modeling method and multi-channel thickness modeling method. The parameters of the model were analyzed and solved through the spraying test, and then the static spraying film thickness distribution was established based on the model. The effectiveness and practicability of the model were further confirmed by the comparison between the experimental results and the theoretical data.
-
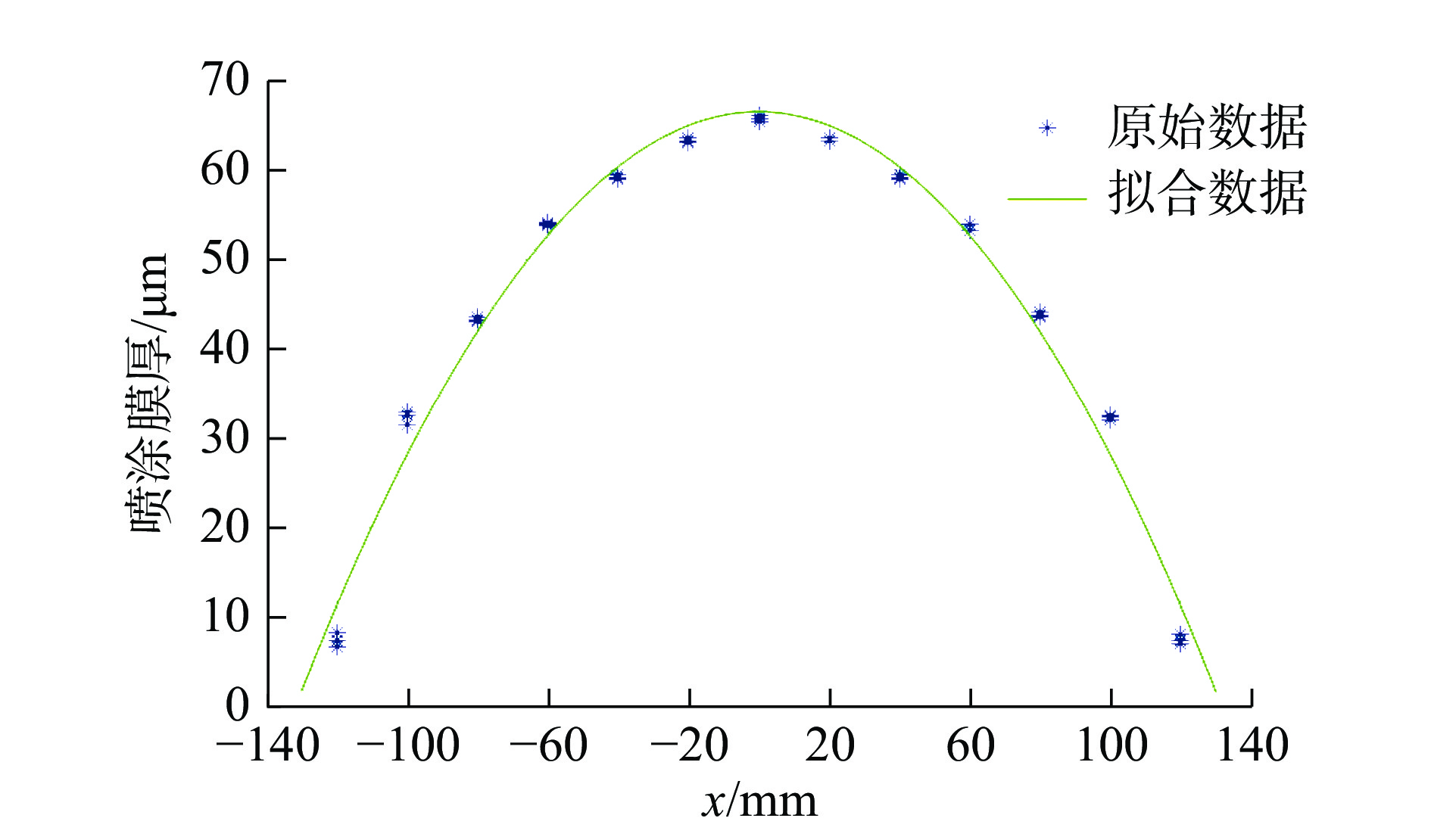
表 1 x轴方向涂膜厚度分布情况
Table 1. Film thickness distribution in x-axis direction
坐标/mm 膜厚/μm 平均膜厚/μm 1 2 3 −120 6.5 7.3 8.2 7.3 −100 31.3 32.8 32.4 32.1 −80 42.9 43.1 43.5 43.1 −60 54.1 53.7 53.9 53.9 −40 59.1 59.3 58.9 59.1 −20 63.4 62.9 63.1 63.1 0 65.2 65.7 65.9 65.6 20 63.1 63.5 63.2 63.2 40 58.9 59.3 59.1 59.1 60 53.1 53.9 53.8 53.6 80 43.6 43.5 44.1 43.7 100 32.4 32.3 31.9 32.2 120 6.8 7.2 7.9 7.3  下载: 导出CSV
下载: 导出CSV
表 2 y轴方向涂膜厚度分布情况
Table 2. Film thickness distribution in y-axis direction
坐标/mm 膜厚/μm 平均膜厚/μm 1 2 3 −60 7.3 8.2 8.9 8.1 −40 16.5 17.3 16.2 16.7 −20 49.2 50.4 48.5 49.3 0 65.3 66.2 65.4 65.6 20 50.2 48.7 53.1 50.6 40 16.3 18 16.6 17.0 60 7.5 8.1 8.4 8.0
下载: 导出CSV
表 3
x轴方向模厚误差 Table 3. Film thickness error in x-axis direction
坐标/mm 绝对平均误差/μm 相对平均误差/μm −120 3.9 0.53 −100 3.8 0.12 −80 1.0 0.02 −60 1.3 0.02 −40 1.0 0.02 −20 1.8 0.03 0 0.9 0.01 20 1.7 0.03 40 1.0 0.02 60 1.0 0.02 80 1.6 0.04 100 3.9 0.12 120 3.9 0.53
下载: 导出CSV
表 4 y轴方向模厚误差
Table 4. Film thickness error in y-axis direction
坐标/mm 绝对平均误差/μm 相对平均误差/μm −60 3.2 0.40 −40 1.9 0.10 −20 0.5 0.01 0 1.3 0.02 20 1.8 0.04 40 1.6 0.09 60 3.1 0.39
下载: 导出CSV
-
[1] 马淑梅, 谢涛, 李爱平, 等. 直纹曲面喷漆机器人喷枪轨迹多目标优化[J]. 同济大学学报(自然科学版), 2018, 46(3): 359-367.MA S M, XIE T, LI A P, et al. Multi-objective trajectory optimization of spray painting robot for ruled surfaces[J]. Journal of Tongji University (Natural Science), 2018, 46(3): 359-367. (in Chinese) [2] 张淑珍, 毛伟, 甄晶博, 等. 静电喷涂涂层厚度分布模型的研究进展[J]. 表面技术, 2019, 48(1): 291-297. doi: 10.16490/j.cnki.issn.1001-3660.2019.01.038ZHANG S Z, MAO W, ZHEN J B, et al. Research progress of coating thickness distribution model by electrostatic spraying[J]. Surface Technology, 2019, 48(1): 291-297. (in Chinese) doi: 10.16490/j.cnki.issn.1001-3660.2019.01.038 [3] ANTONIO J K. Optimal trajectory planning for spray coating[C]//Proceedings of the 1994 IEEE International Conference on Robotics and Automation. San Diego: IEEE, 1994: 2570-2577. [4] GYORFI J S, GAMOTA D R, MOK S M, et al. Evolutionary path planning with subpath constraints[J]. IEEE Transactions on Electronics Packaging Manufacturing, 2010, 33(2): 143-151. doi: 10.1109/TEPM.2010.2046327 [5] CHEN W Z, CHEN Y, ZHANG W M, et al. Paint thickness simulation for robotic painting of curved surfaces based on Euler–Euler approach[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2019, 41(4): 199. doi: 10.1007/s40430-019-1651-9 [6] CHEN Y, CHEN W Z, LI B, et al. Paint thickness simulation for painting robot trajectory planning: a review[J]. Industrial Robot, 2017, 44(5): 629-638. doi: 10.1108/IR-07-2016-0205 [7] DIAO X D, ZENG S X, TAM V W Y. Development of an optimal trajectory model for spray painting on a free surface[J]. Computers & Industrial Engineering, 2009, 57(1): 209-216. [8] 袁嘉添. 机器人喷涂仿真系统的研究与开发[D]. 广东: 广东工业大学, 2018.YUAN J T. A dissertation submitted to Guangdong university of technology for the degree of master[D]. Guangdong: Guangdong University of Technology, 2018. (in Chinese) [9] 马淑梅, 罗曦, 李爱平, 等. 船舶工业机器人曲面喷涂喷枪轨迹离线规划[J]. 同济大学学报(自然科学版), 2017, 45(2): 289-295.MA S M, LUO X, LI A P, et al. Offline trajectory planning on curved surface for spray painting robot in shipbuilding industry[J]. Journal of Tongji University (Natural Science), 2017, 45(2): 289-295. (in Chinese) [10] CHEN W, ZHAO D A. Path planning for spray painting robot of workpiece surfaces[J]. Mathematical Problems in Engineering, 2013, 2013: 659457. [11] 陈省身, 陈维桓. 微分几何讲义[M]. 2版. 北京: 北京大学出版社, 2001: 201-211.CHEN S S, CHEN W H. Lecture notes on differential geometry[M]. Beijing: Peking University Press, 2001. (in Chinese) [12] 冯浩, 吴秋, 王小平. 基于椭圆双β模型的球面喷涂轨迹优化[J]. 机械设计与制造, 2016(4): 249-252. doi: 10.3969/j.issn.1001-3997.2016.04.065FENG H, WU Q, WANG X P. Optimization of spraying trajectory for spherical surface based on ellipse dual-β model[J]. Machinery Design & Manufacture, 2016(4): 249-252. (in Chinese) doi: 10.3969/j.issn.1001-3997.2016.04.065 [13] YU S R, FENG H. Modeling and forecast of glazing thickness deposition rate using artificial neural network[C]//2011 International Conference on Mechatronic Science, Electric Engineering and Computer (MEC). Jilin: IEEE, 2011: 1378-1381. [14] 王国磊, 伊强, 缪东晶, 等. 面向机器人喷涂的多变量涂层厚度分布模型[J]. 清华大学学报(自然科学版), 2017, 57(3): 324-330. doi: 10.16511/j.cnki.qhdxxb.2017.26.017WANG G L, YI Q, MIAO D J, et al. Multivariable coating thickness distribution model for robotic spray painting[J]. Journal of Tsinghua University (Science & Technology), 2017, 57(3): 324-330. (in Chinese) doi: 10.16511/j.cnki.qhdxxb.2017.26.017 [15] 吴洪键, 刘敏, 邓思豪, 等. 涂层厚度数学模型的建立及喷涂轨迹间距优化[J]. 热加工工艺, 2017, 46(16): 128-132. doi: 10.14158/j.cnki.1001-3814.2017.16.032WU H J, LIU M, DENG S H, et al. Establishment of coating thickness mathematic model and optimization of spacing of spray track[J]. Hot Working Technology, 2017, 46(16): 128-132. (in Chinese) doi: 10.14158/j.cnki.1001-3814.2017.16.032 -





 点击查看大图
点击查看大图
图(10) / 表(4)
计量
- 文章访问数: 147
- HTML全文浏览量: 68
- PDF下载量: 22
- 被引次数: 0
