




Path Tracking Control of Unmanned Vehicle Using State Extended Model Predictive Control and Angle Compensation
-
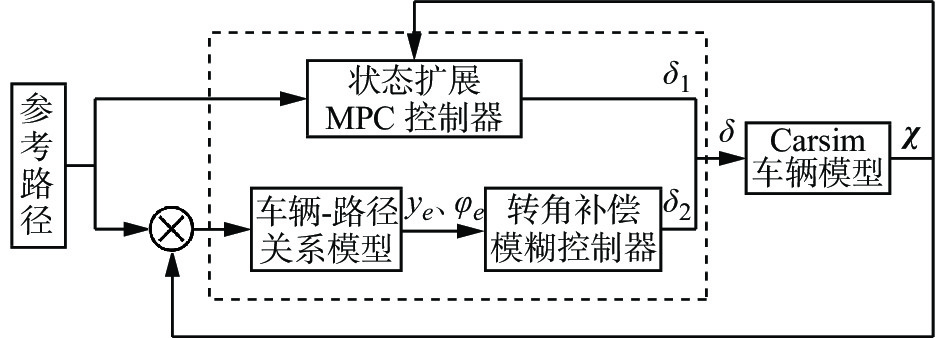
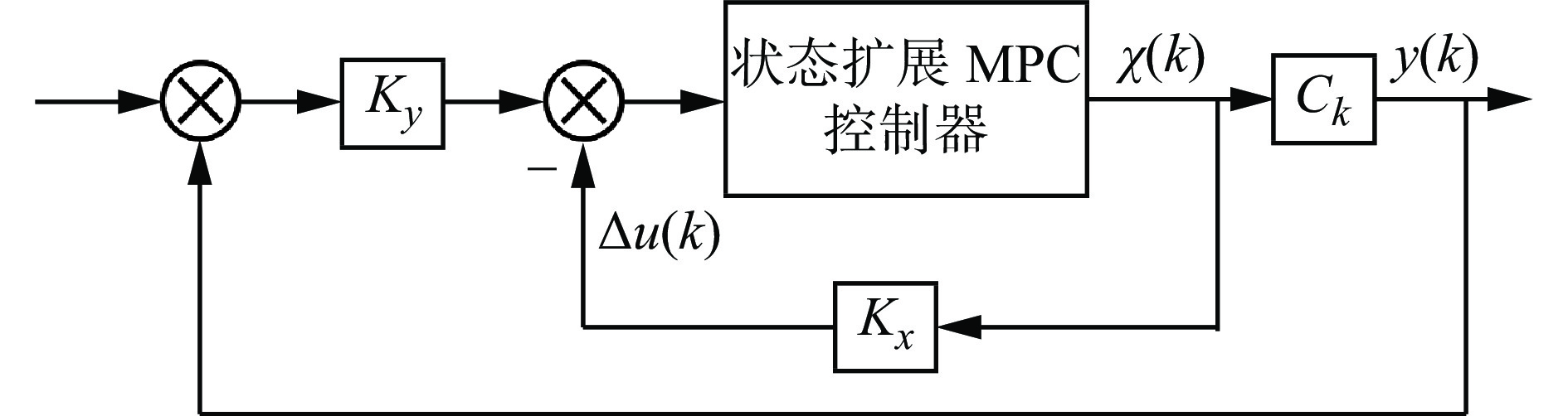
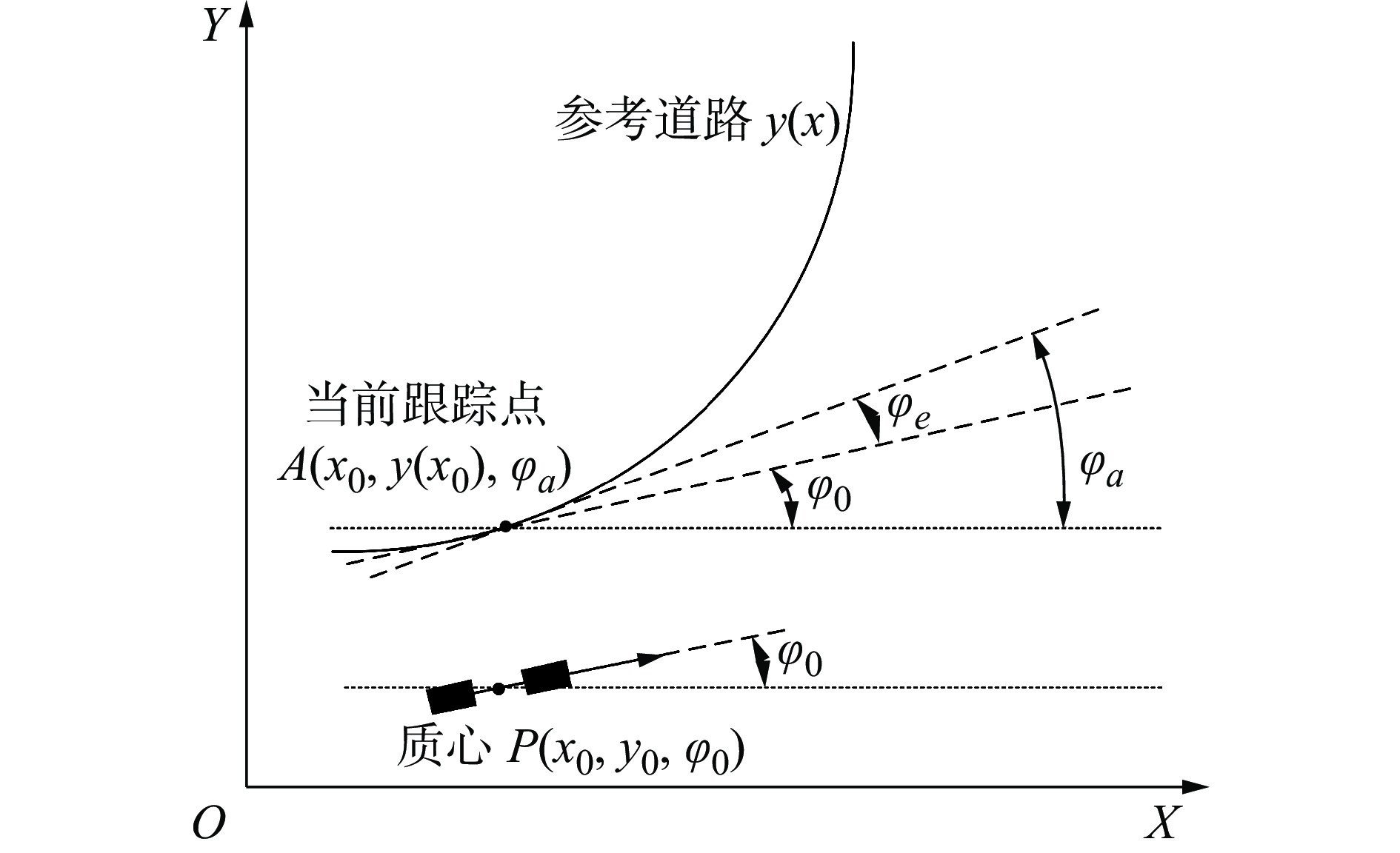
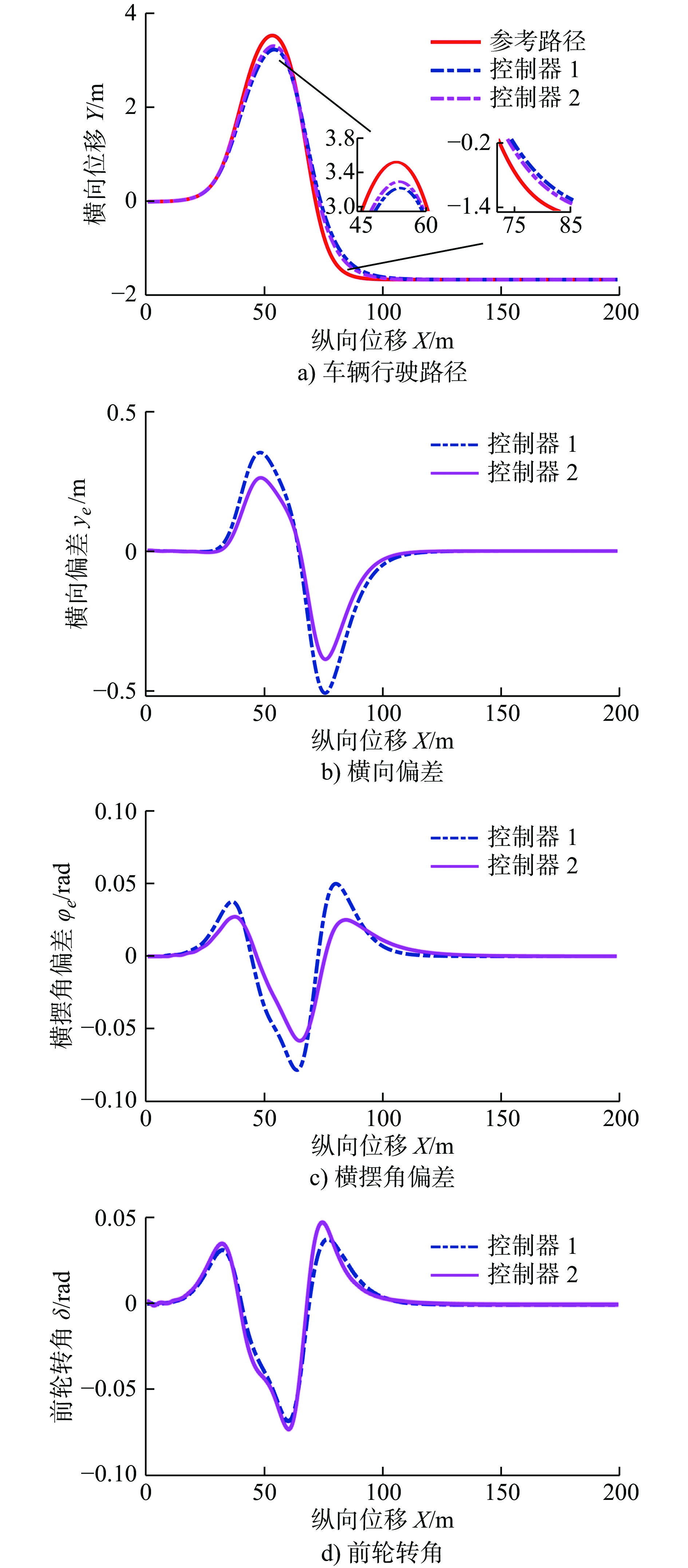
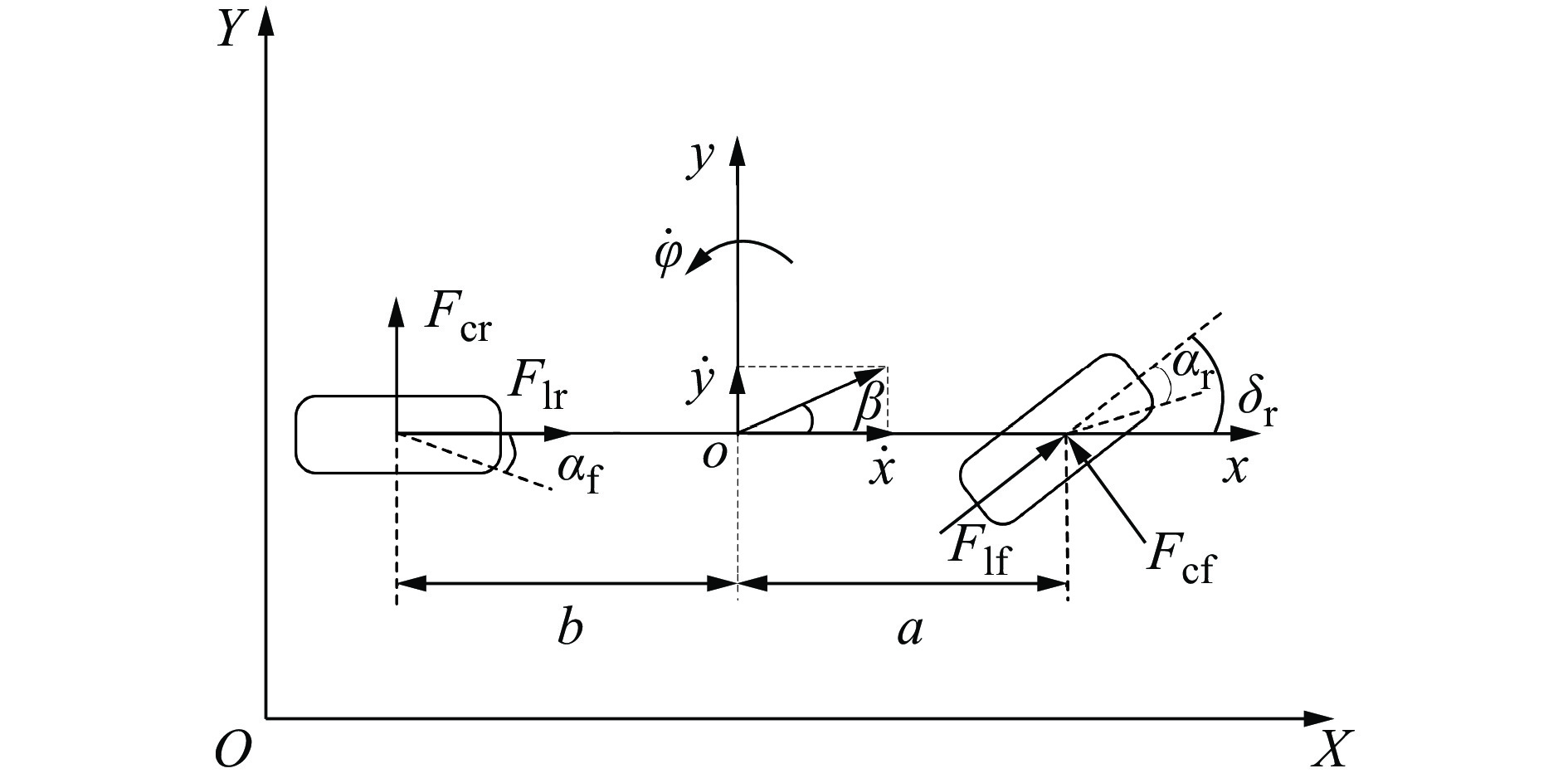
摘要: 采用传统模型预测控制(MPC)的无人车难以同时保证路径跟踪精度和实时性,针对此问题,本文设计了一种采用状态扩展MPC与转角补偿的路径跟踪控制器。建立了车辆三自由度动力学模型,设计了基于状态扩展的双反馈MPC控制器,并根据车速调整控制器参数;建立了车辆-道路跟踪模型,根据车辆横向和航向偏差设计了转角补偿模糊控制器;利用MATLAB/Simulink和Carsim软件对所设计的路径跟踪控制器进行联合仿真分析。结果表明:相比采用传统MPC控制器的车辆,在中、低车速下,状态扩展MPC控制器的控制增量求解时间平均值降低14%以上,路径跟踪控制器跟踪道路的横向和航向偏差最大值分别降低23%和17%以上,具有较好的路径跟踪性能。Abstract: It is difficult for an unmanned vehicle to use the traditional model predictive control (MPC) algorithm to ensure path tracking accuracy and real-time performance at the same time. To solve this problem, the paper designs a path tracking controller using the state-extension MPC and angle compensation. A 3-degree-of-freedom vehicle dynamic model is established, a dual-feedback MPC controller based on state extension is designed and the controller's parameters are adjusted according to the unmanned vehicle's speed. The vehicle-road tracking model is established, and the fuzzy controller for angle compensation is designed according to the unmanned vehicle's lateral and heading deviation. The MATLAB/Simulink and Carsim software are used to conduct the joint simulation of the designed path tracking controller. The results show that compared with the traditional MPC controller of an unmanned vehicle, at its medium and low speed, the average time for solving the control increment of the state extension MPC controller is reduced by more than 14% and that the maximum lateral and heading deviation of the path tracking controller is reduced by more than 23% and 17% respectively, thus having a better path tracking performance.
-
Key words:
- path tracking /
- state extension /
- model predictive control /
- dual-feedback /
- fuzzy control
-
表 1 模糊控制规则表
Table 1. Fuzzy control rule table
ye $ {\varphi _{{e}}} $ NB NM NS ZO PS PM PB NB PB PB PB PB PM PS PS NM PB PB PM PM PS ZO NS NS PB PM PM PS ZO NM NM ZO PM PS PS ZO NS NM NM PS PM PS ZO NS NM NM NB PM PS ZO NM NM NM NB NB PB NS NM NB NB NM NB NB  下载: 导出CSV
下载: 导出CSV
表 2 整车参数
Table 2. Vehicle parameters
参数 数值 整车质量m/kg 1783 横摆转动惯量Iz /(kg·m2) 4175 前轮侧偏刚度Cf /(N·rad−1) 66900 后轮侧偏刚度Cr /(N·rad−1) 62700 质心距前轴距离a/m 1.232 质心距前轴距离b/m 1.468 路面附着系数µ 1 前轮纵向滑移率sf 0.2 后轮纵向滑移率sr 0.2
下载: 导出CSV
表 3 状态扩展MPC控制器参数A
Table 3. State-expanding MPC controller parameters A
参数 数值 离散时间步长T/s 0.05 预测时域Np 10 控制时域Nc 5 输出量误差权重系数矩阵$\bar {\boldsymbol{Q}} $ diag([200,100]) 控制增量权重系数R 5 × 104
下载: 导出CSV
表 4 状态扩展MPC控制器参数B
Table 4. State-expanding MPC controller parameters B
参数 数值 离散时间步长T/s 0.05 预测时域Np 12 控制时域Nc 6 输出量误差权重系数矩阵$\bar {\boldsymbol{Q}} $ diag([200,100]) 控制增量权重系数R 1 × 104
下载: 导出CSV
表 5 双移线工况控制器控制增量求解时间对比
Table 5. Comparison of control increment solution time for the double-shift-line working condition
车速/(
km·h−1)指标 传统MPC/ms 状态扩展MPC/ms 改善程度/% 36 平均时间 13.56 10.56 22.1 最大时间 32.52 19.15 41.1 54 平均时间 14.88 12.66 14.9 最大时间 28.46 20.56 27.7 72 平均时间 17.21 12.20 29.1 最大时间 37.33 20.14 46.0
下载: 导出CSV
表 6 双移线工况横向偏差对比
Table 6. Comparison of lateral deviation for the double-shift-line working condition
车速/
(km·h−1)指标 控制器
1/m控制器
2/m改善
程度/%36 平均偏差 0.086 0.062 27.9 最大偏差 0.509 0.388 23.8 54 平均偏差 0.084 0.072 14.3 最大偏差 0.658 0.469 28.7 72 平均偏差 0.125 0.107 14.4 最大偏差 0.740 0.517 30.1
下载: 导出CSV
表 7 双移线工况横摆角偏差对比
Table 7. Comparison of yaw angle deviation for the double-shift-line working condition
车速/
(km·h−1)指标 控制器1/rad 控制器2/rad 改善程度/% 36 平均偏差 0.013 0.010 23.1 最大偏差 0.078 0.058 25.6 54 平均偏差 0.015 0.011 26.7 最大偏差 0.084 0.069 17.9 72 平均偏差 0.018 0.013 27.8 最大偏差 0.090 0.073 18.9
下载: 导出CSV
-
[1] 张亮修, 张铁柱, 吴光强. 考虑误差校正的智能车辆路径跟踪鲁棒预测控制[J]. 西安交通大学学报, 2020, 54(3): 20-27.ZHANG L X, ZHANG T Z, WU G Q. Robust predictive control for intelligent vehicle path tracking considering error feedback correction[J]. Journal of Xi'an Jiaotong University, 2020, 54(3): 20-27. (in Chinese) [2] 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. doi: 10.3901/JME.2020.10.127XIONG L, YANG X, ZHUO G R, et al. Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143. (in Chinese) doi: 10.3901/JME.2020.10.127 [3] 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 7(2): 151-159. doi: 10.3969/j.issn.1674-8484.2016.02.003GUO J H, LI K Q, LUO Y G. Review on the research of motion control for intelligent vehicles[J]. Journal of Automotive Safety and Energy, 2016, 7(2): 151-159. (in Chinese) doi: 10.3969/j.issn.1674-8484.2016.02.003 [4] LIU K, GONG J W, KURT A, et al. Dynamic modeling and control of high-speed automated vehicles for lane change maneuver[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(3): 329-339. doi: 10.1109/TIV.2018.2843177 [5] JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. doi: 10.1109/TVT.2016.2555853 [6] FALCONE P. Nonlinear model predictive control for autonomous vehicles[D]. Benevento: University of Sannio, 2007 [7] 潘世举, 李华, 苏致远, 等. 基于跟踪误差模型的智能车辆轨迹跟踪方法[J]. 汽车工程, 2019, 41(9): 1021-1027.PAN S J, LI H, SU Z Y, et al. Trajectory tracking method for intelligent vehicles based on tracking-error model[J]. Automotive Engineering, 2019, 41(9): 1021-1027. (in Chinese) [8] 毛丁丁, 邓亚东. 四轮转向智能车辆轨迹跟踪及稳定控制研究[J]. 机械科学与技术, 2020, 39(7): 1094-1099.MAO D D, DENG Y D. Research on trajectory tracking and stability control of 4WS intelligent vehicle[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(7): 1094-1099. (in Chinese) [9] 刘凯, 陈慧岩, 龚建伟, 等. 高速无人驾驶车辆的操控稳定性研究[J]. 汽车工程, 2019, 41(5): 514-521.LIU K, CHEN H Y, GONG J W, et al. A research on handling stability of high-speed unmanned vehicles[J]. Automotive Engineering, 2019, 41(5): 514-521. (in Chinese) [10] 白国星, 刘丽, 孟宇, 等. 基于非线性模型预测控制的移动机器人实时路径跟踪[J]. 农业机械学报, 2020, 51(9): 47-52. doi: 10.6041/j.issn.1000-1298.2020.09.006BAI G X, LIU L, MENG Y, et al. Real-time path tracking of mobile robot based on nonlinear model predictive control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 47-52. (in Chinese) doi: 10.6041/j.issn.1000-1298.2020.09.006 [11] 杨阳阳, 何志刚, 汪若尘, 等. 基于转角补偿的智能车辆循迹控制系统[J]. 仪表技术与传感器, 2019(5): 73-77. doi: 10.3969/j.issn.1002-1841.2019.05.018YANG Y Y, HE Z G, WANG R C, et al. Path tracking control system of intelligent vehicle based on steering angle compensation[J]. Instrument Technique and Sensor, 2019(5): 73-77. (in Chinese) doi: 10.3969/j.issn.1002-1841.2019.05.018 [12] 李军, 唐爽, 黄志祥, 等. 融合稳定性的高速无人驾驶车辆纵横向协调控制方法[J]. 交通运输工程学报, 2020, 20(2): 205-218.LI J, TANG S, HUANG Z X, et al. Longitudinal and lateral coordination control method of high-speed unmanned vehicles with integrated stability[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 205-218. (in Chinese) [13] 赵熙临, 殷丽娟. 基于状态扩展的双反馈模型预测控制技术研究[J]. 系统仿真学报, 2015, 27(3): 591-597.ZHAO X L, YIN L J. Research on model predictive control with dual feedback based on state extension[J]. Journal of System Simulation, 2015, 27(3): 591-597. (in Chinese) [14] 张亮修, 吴光强, 郭晓晓. 自主车辆线性时变模型预测路径跟踪控制[J]. 同济大学学报(自然科学版), 2016, 44(10): 1595-1603. doi: 10.11908/j.issn.0253-374x.2016.10.018ZHANG L X, WU G Q, GUO X X. Path tracking using linear time-varying model predictive control for autonomous vehicle[J]. Journal of Tongji University (Natural Science), 2016, 44(10): 1595-1603. (in Chinese) doi: 10.11908/j.issn.0253-374x.2016.10.018 [15] 徐兴, 汤赵, 王峰, 等. 基于变权重系数的分布式驱动无人车轨迹跟踪[J]. 中国公路学报, 2019, 32(12): 36-45.XU X, TANG Z, WANG F, et al. Varied weight coefficients based trajectory tracking of distributed drive self-driving vehicle[J]. China Journal of Highway and Transport, 2019, 32(12): 36-45. (in Chinese) [16] 汪伟, 赵又群, 许健雄, 等. 基于模糊控制的汽车路径跟踪研究[J]. 中国机械工程, 2014, 25(18): 2532-2538. doi: 10.3969/j.issn.1004-132X.2014.18.023WANG W, ZHAO Y Q, XU J X, et al. Research on vehicle path tracking based on fuzzy control[J]. China Mechanical Engineering, 2014, 25(18): 2532-2538. (in Chinese) doi: 10.3969/j.issn.1004-132X.2014.18.023 -





 点击查看大图
点击查看大图
计量
- 文章访问数: 111
- HTML全文浏览量: 126
- PDF下载量: 17
- 被引次数: 0
