




Design and Performance Evaluation of Underwater Vehicle with Reconfigurable Magnetic-coupling Thrusters
-
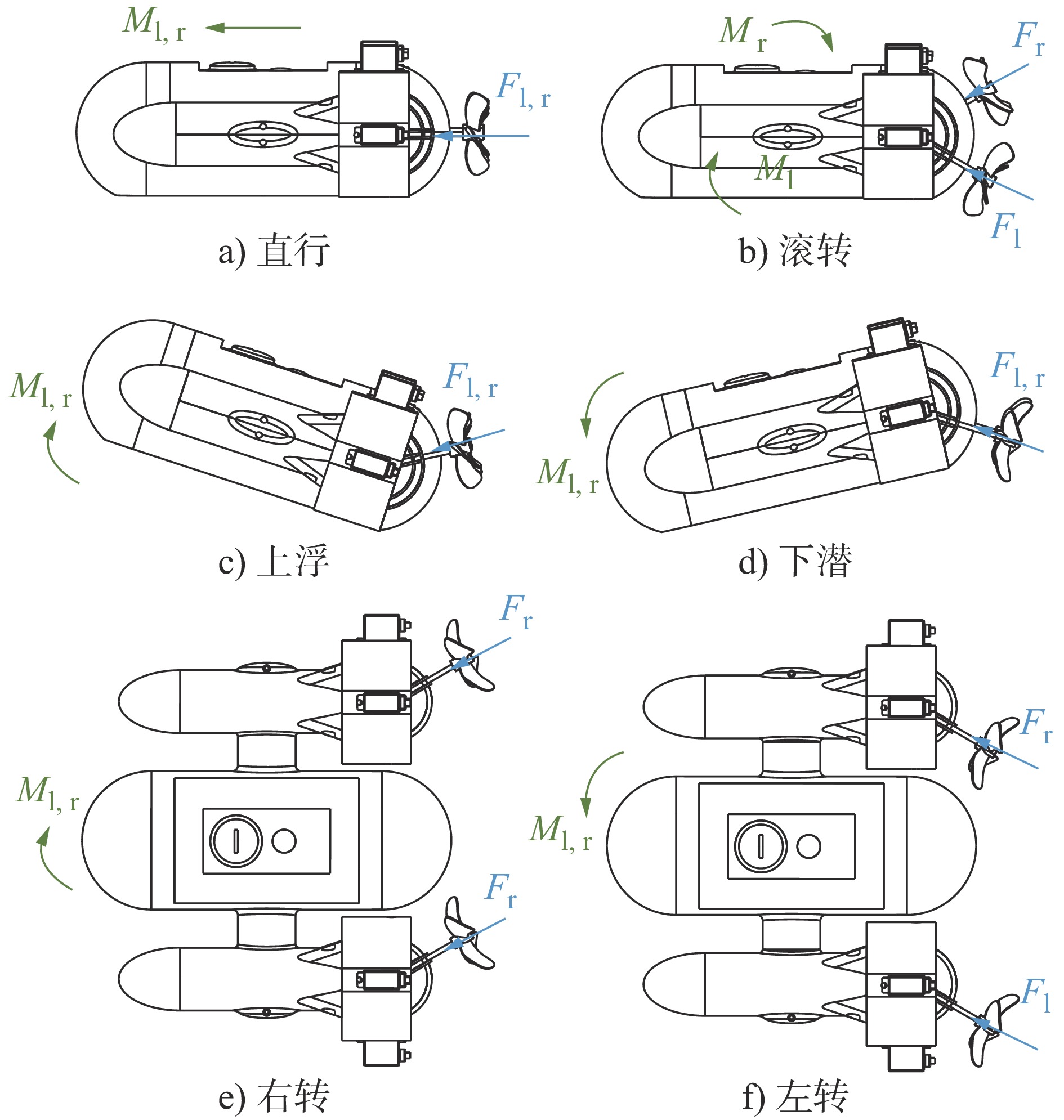
摘要: 为了经济高效地实现矢量推进,提高水下机器人的机动性能,设计了一种新型矢量推进水下机器人。该机器人采用两个可重构磁耦合推进器作为推进系统的主动力单元,每个推进器都具备两个自由度的矢量重构能力,相较于传统水下机器人,拥有更高的可操纵性和灵活性。本文通过建立推进系统模型,完成了机器人的运动规划,并利用测力实验装置,对机器人的动力性能进行了评估。在此基础上,对机器人进行了前进、偏航、上浮、下潜等多自由度的运动控制实验。实验结果表明,该机器人能够高效地实现多个自由度的运动,新型可重构磁耦合推进器能够稳定的提供矢量推力,验证了该设计方案的可行性。Abstract: For vectorial propulsion economically and efficiently to improve the maneuverability of AUV, a novel AUV with vector propulsion was proposed. The propulsion system of the robot formed by two reconfigurable magnetic coupling thrusters. Each thruster has the vector reconstruction capability of two DOFs, which makes it more maneuverable and flexible than the traditional underwater vehicles. The motion planning of the robot is completed by establishing the propulsion system model, and the dynamic performance of the robot is evaluated with force measuring device. Then, the motion control experiments of the robot with multiple degrees of freedom, such as forward motion, yaw motion, heave motion and diving motion, were carried out. The experimental results show that the robot can efficiently realize the movement of multiple degrees of freedom, and the new reconfigurable magnetic coupling thrusters can stably provide vector thrust, which verifies the feasibility of the design scheme.
-

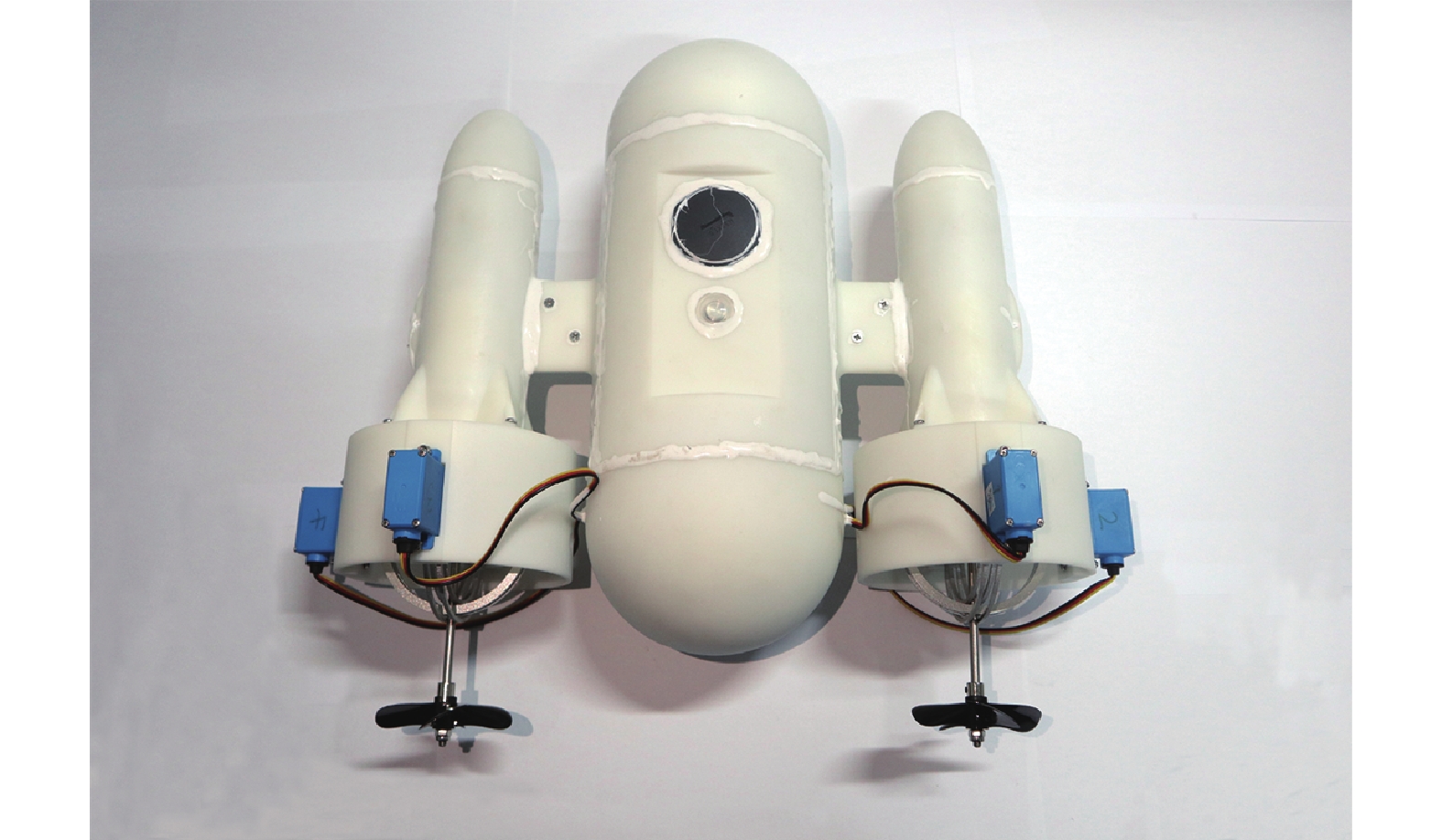
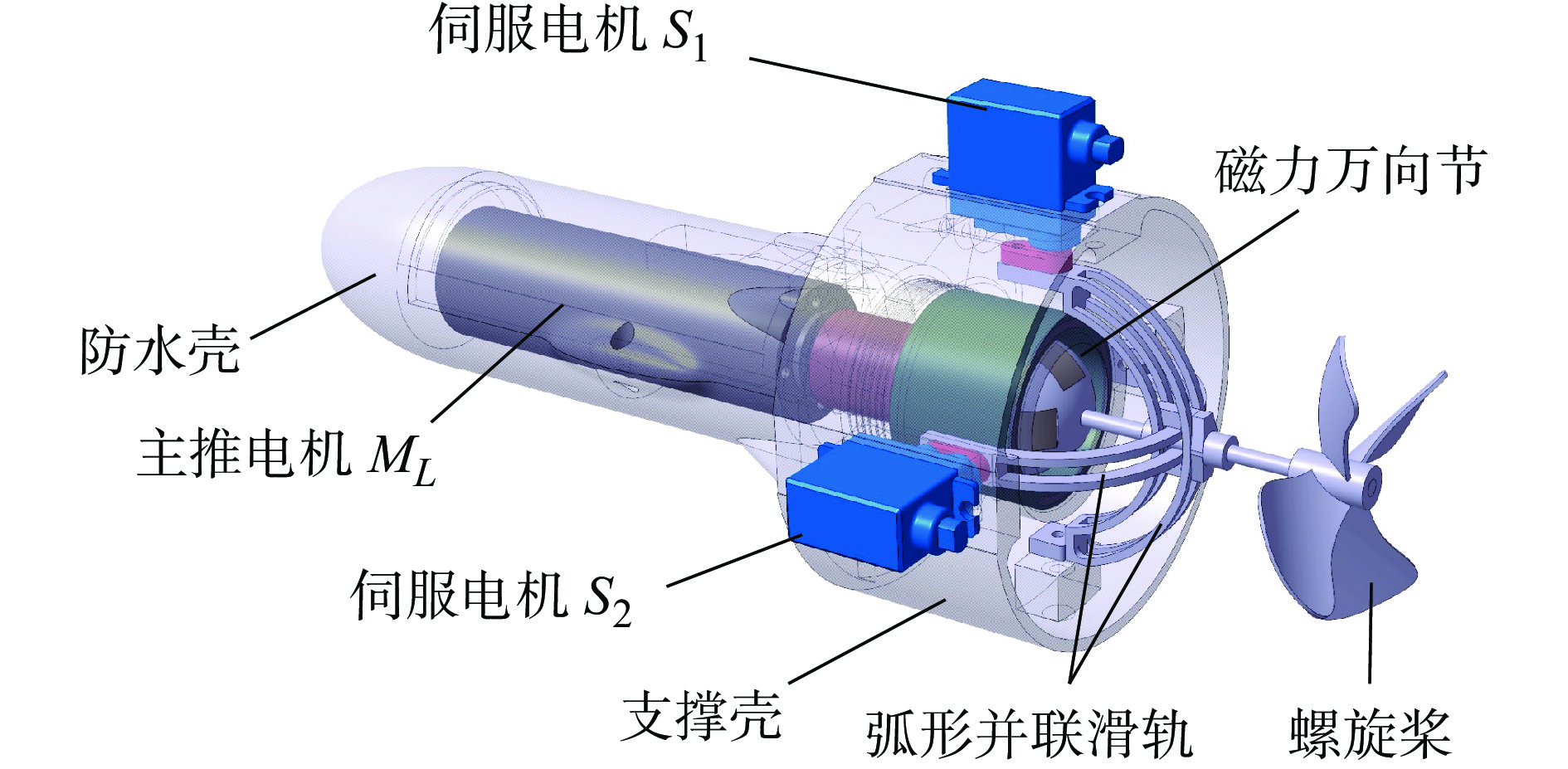
图 1 可重构磁耦合推进水下机器人整体结构
Figure 1. Overall structure of the reconfigurable magnetically coupled propulsion underwater robot
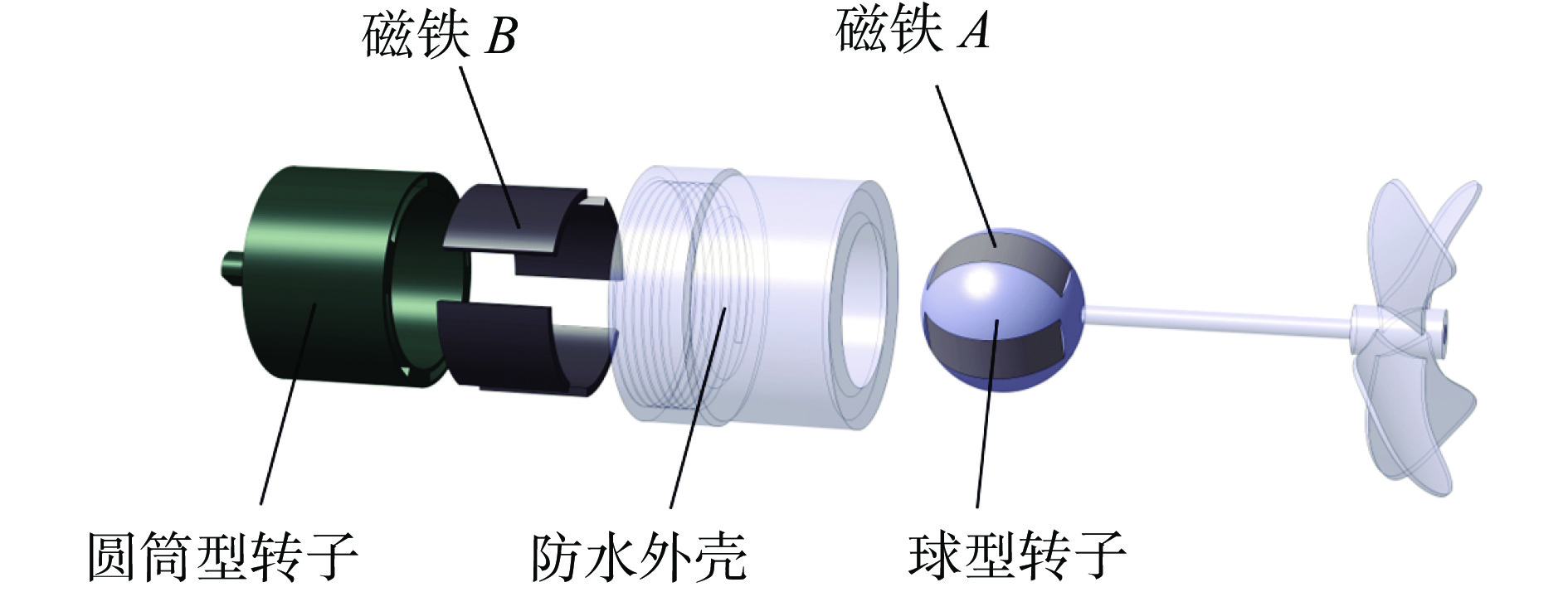
图 4 磁力万向节结构示意图
Figure 4. Schematic diagram of the structure of the magnetic universal joint

图 5 磁力万向节磁铁耦合示意图
Figure 5. Schematic diagram of magnetic coupling in the magnetic universal joint

图 12 机器人水平偏转力矩变化曲线
Figure 12. Variation curve of the horizontal deflection torque of the robot

图 13 机器人竖直偏转力矩变化曲线
Figure 13. Variation curve of the vertical deflection torque of the robot
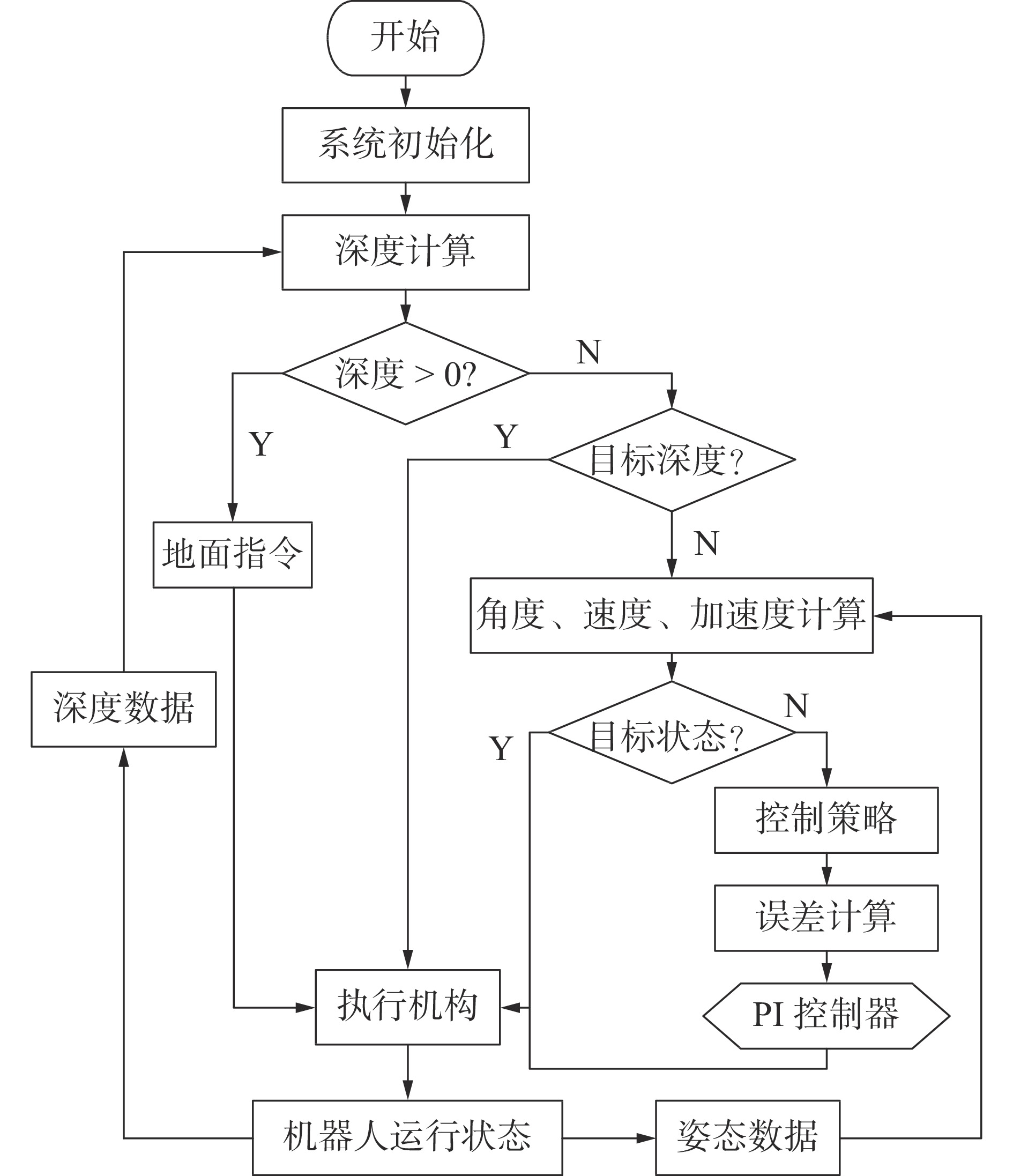
图 14 可重构磁耦合推进水下机器人控制流程
Figure 14. Control process for the reconfigurable magnetically coupled propulsion underwater robot
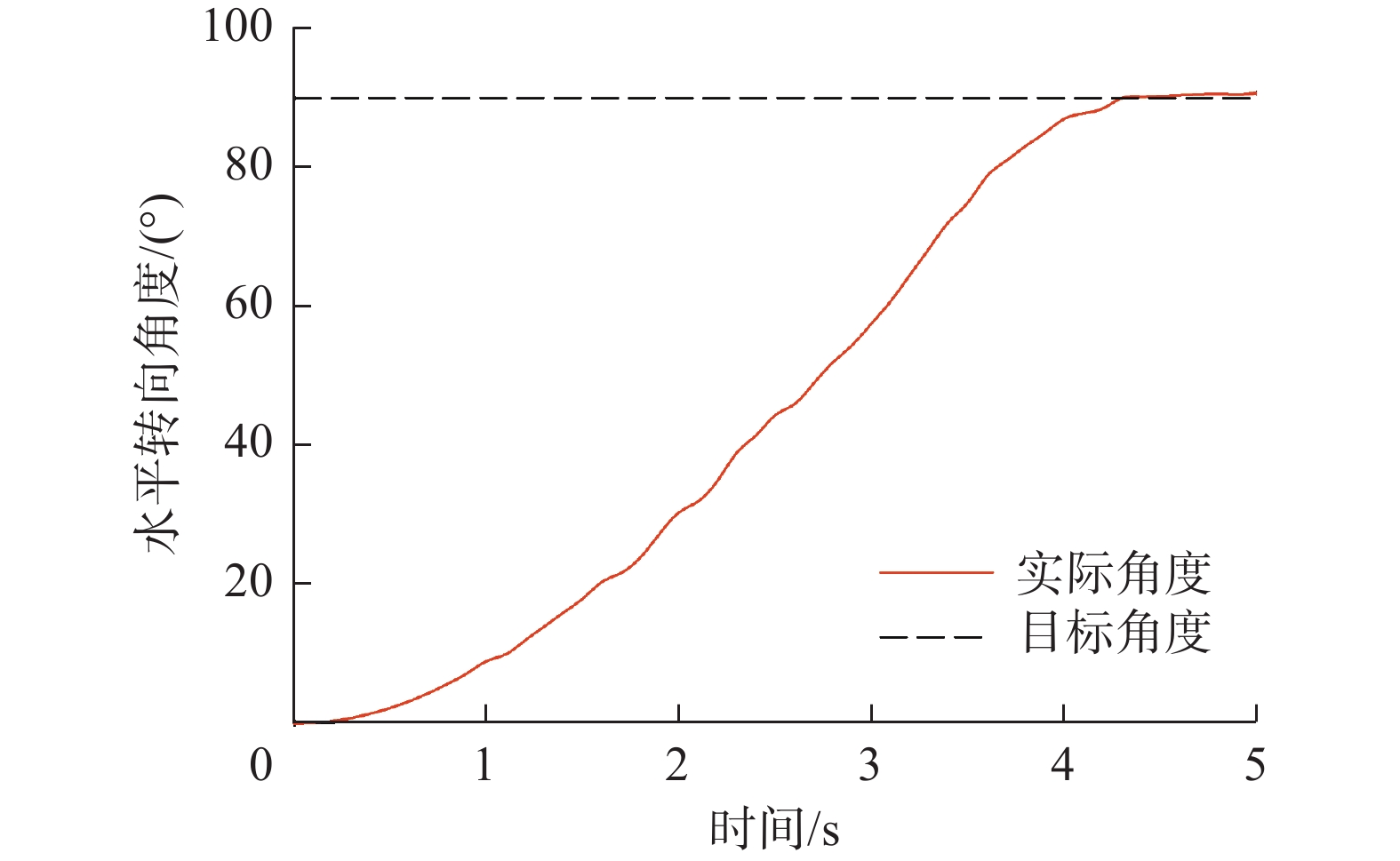
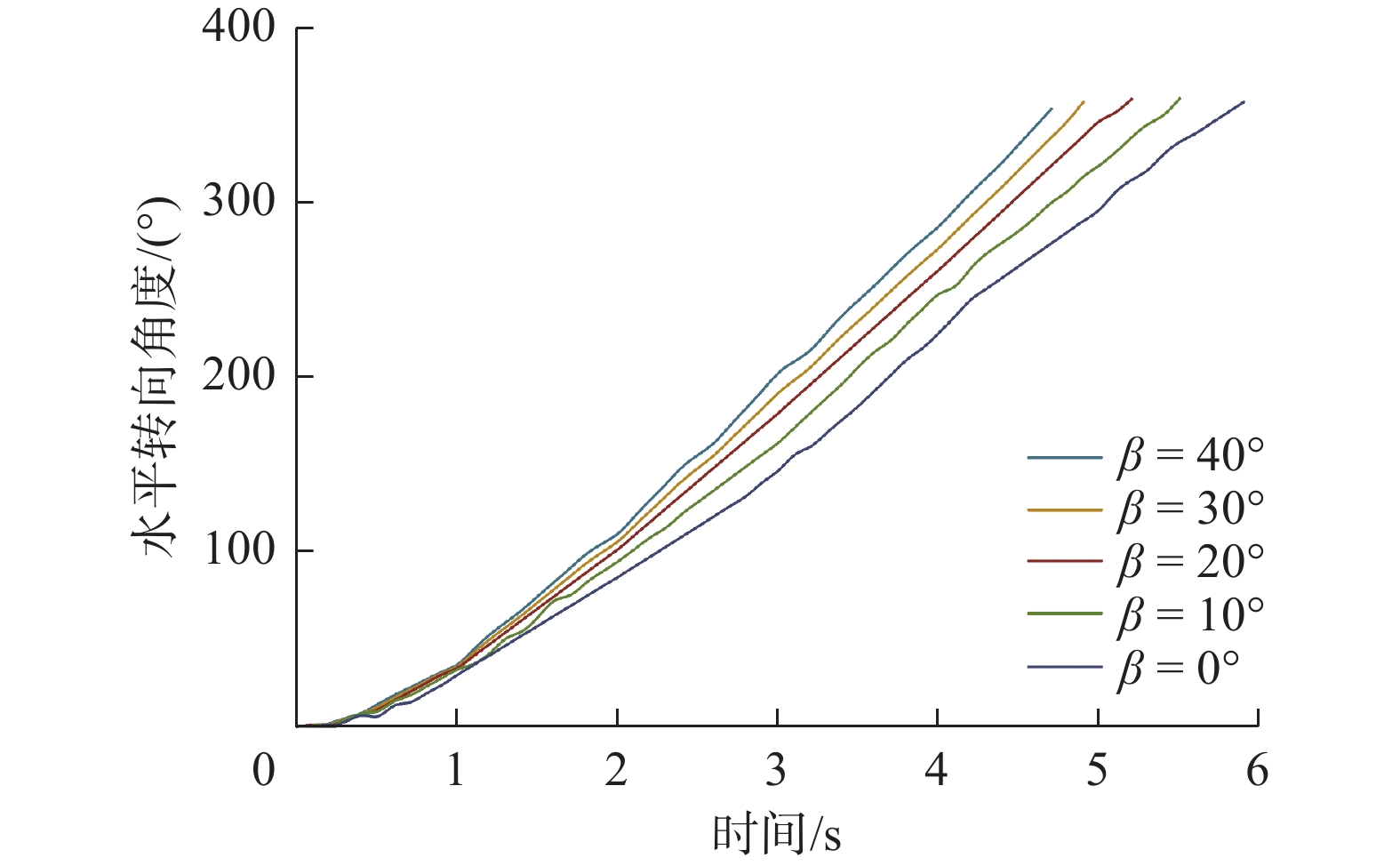
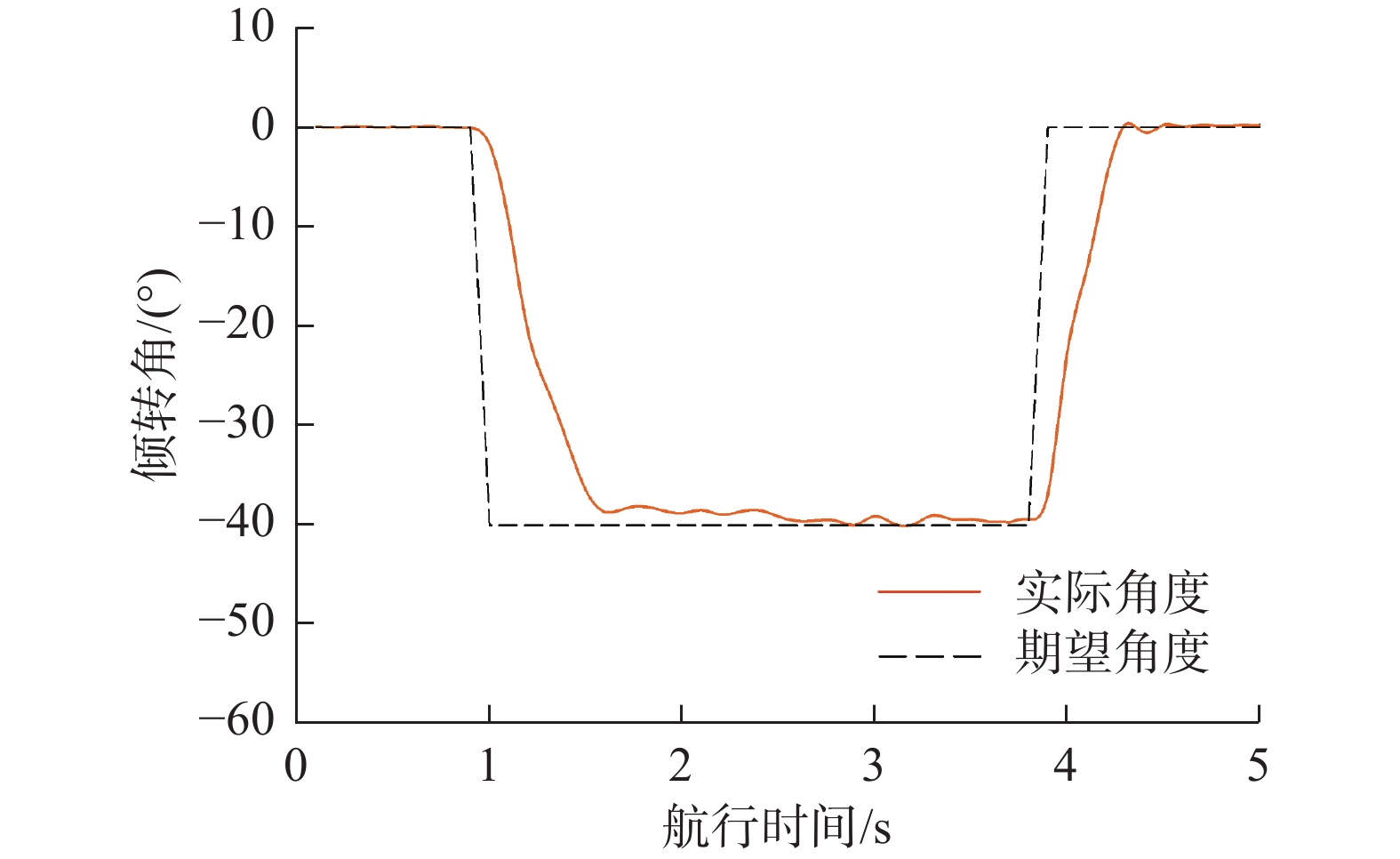
图 17 90°闭环转向偏转角度变化曲线
Figure 17. Variation curve for closed-loop steering deflection angle at 90°
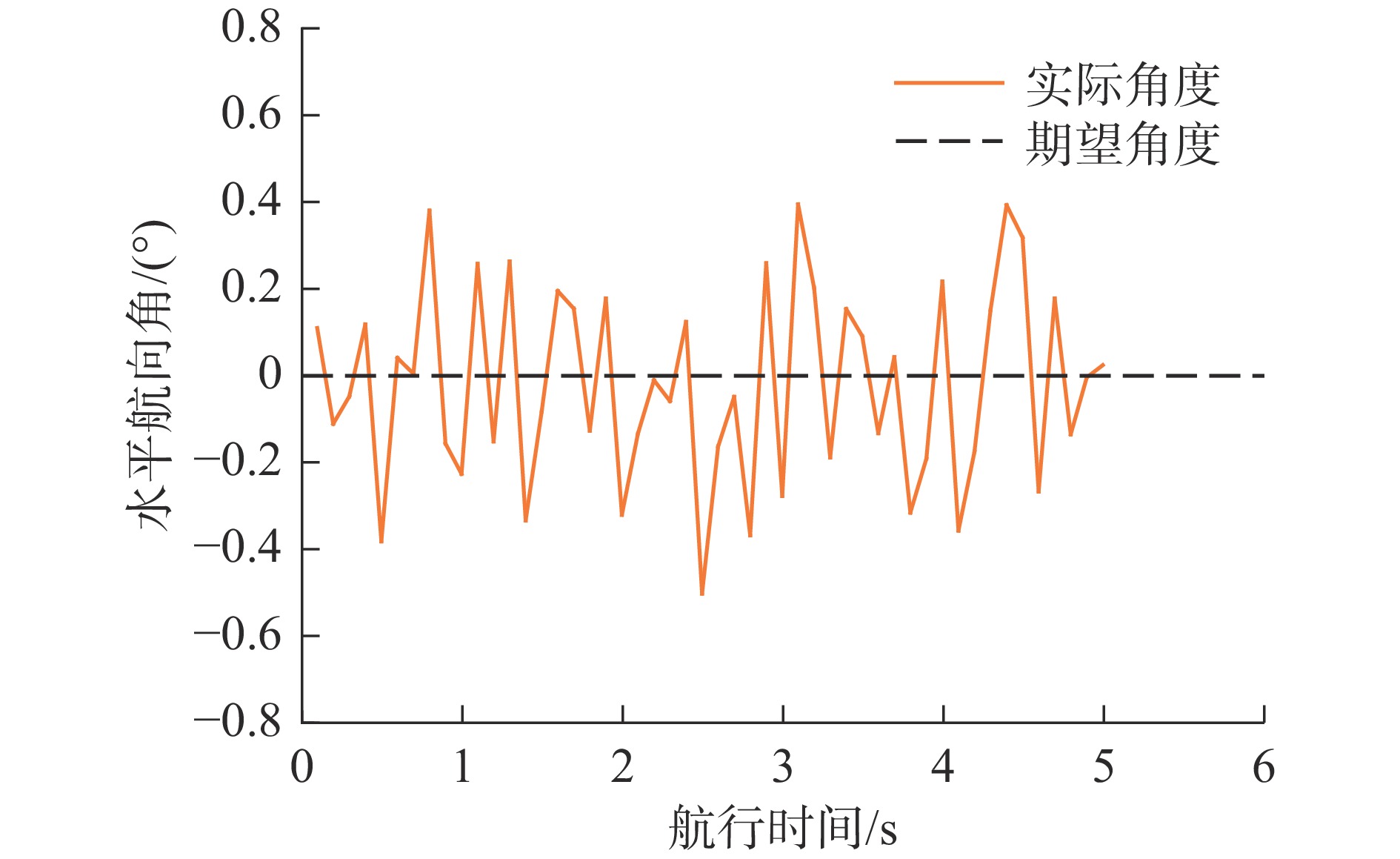
图 19 定向航行测试航向角变化曲线
Figure 19. Variation curve of heading angle in the directed navigation test
表 1 实验样机参数表
Table 1. Experimental prototype parameters
参数名称 数值 整体尺寸(长×宽×高) 365 mm×346 mm×114 mm 整体重量 4.35 kg 螺旋桨(直径×螺距×孔径) 60 mm×40 mm×4 mm 磁力万向节直径 34 mm, 47 mm 主推电机 12 V,30 W,1 200 r/min 电池组 12.5 V,4 000 mA·h,30 C 舵机型号 HS-5086WP 传感器型号 MPU9250,CJMCU5837  下载: 导出CSV
下载: 导出CSV
表 2 水平偏转力矩
Table 2. Horizontal deflection torque
推进器输出率/% 偏转力矩/Nm a=10° a=20° a=30° a=40° a=50° 20 0.020 0.021 0.025 0.027 0.024 40 0.156 0.177 0.196 0.187 0.183 60 0.311 0.334 0.350 0.364 0.356 80 0.453 0.493 0.501 0.515 0.510 100 0.583 0.635 0.665 0.689 0.673
下载: 导出CSV
表 3 竖直偏转力矩
Table 3. Vertical deflection torque
推进器输出率/% 偏转力矩/Nm b=10° b=20° b=30° b=40° b=50° 20 0.005 0.007 0.011 0.140 0.017 40 0.027 0.043 0.063 0.087 0.113 60 0.045 0.083 0.136 0.167 0.221 80 0.071 0.146 0.198 0.258 0.303 100 0.109 0.165 0.259 0.315 0.359
下载: 导出CSV
-
[1] GAO F D, HAN Y Y, WANG H D, et al. Analysis and innovation of key technologies for autonomous underwater vehicles[J]. Journal of Central South University, 2015, 22(9): 3347-3357. doi: 10.1007/s11771-015-2875-1 [2] WANG X M, LIANG S G. Maneuverability analysis of a novel portable modular AUV[J]. Mathematical Problems in Engineering, 2019, 2019: 1631930. [3] LI Y X, GAO P, WANG Y, et al. The implementation and evaluation of a multi-DOFs Coanda-effect jet device for underwater robots[J]. Applied Ocean Research, 2021, 108: 102545. doi: 10.1016/j.apor.2021.102545 [4] FAGUNDES G H, CHOCRON O, BENBOUZID M, et al. Advances in reconfigurable vectorial thrusters for adaptive underwater robots[J]. Journal of Marine Science and Engineering, 2021, 9(2): 170. doi: 10.3390/jmse9020170 [5] PUGI L, ALLOTTA B, PAGLIAI M. Redundant and reconfigurable propulsion systems to improve motion capability of underwater vehicles[J]. Ocean Engineering, 2018, 148: 376-385. doi: 10.1016/j.oceaneng.2017.11.039 [6] WANG T, WANG J Q, WU C, et al. Disturbance-rejection control for the hover and transition modes of a negative-buoyancy quad tilt-rotor autonomous underwater vehicle[J]. Applied Sciences, 2018, 8(12): 2459. doi: 10.3390/app8122459 [7] EHLERS K, MEYER B, MAEHLE E. Full holonomic control of the Omni-directional AUV SMART-E[C]//ISR/Robotik 2014; 41st International Symposium on Robotics. Munich: VDE, 2014: 1-6 [8] LI Y X, GUO S X, WANG Y. Design and characteristics evaluation of a novel spherical underwater robot[J]. Robotics and Autonomous Systems, 2017, 94: 61-74. doi: 10.1016/j.robot.2017.03.014 [9] KOPMAN V, CAVALIERE N, PORFIRI M. MASUV-1: a miniature underwater vehicle with multidirectional thrust vectoring for safe animal interactions[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(3): 563-571. doi: 10.1109/TMECH.2011.2108307 [10] BA X, LUO X H, SHI Z C, et al. A vectored water jet propulsion method for autonomous underwater vehicles[J]. Ocean Engineering, 2013, 74: 133-140. doi: 10.1016/j.oceaneng.2013.10.003 [11] LIU T, HU Y L, XU H, et al. Investigation of the vectored thruster AUVs based on 3SPS-S parallel manipulator[J]. Applied Ocean Research, 2019, 85: 151-161. doi: 10.1016/j.apor.2019.01.025 [12] VEGA E P, CHOCRON O, BENBOUZID M. A flat design and a validated model for an AUV reconfigurable magnetic coupling thruster[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(6): 2892-2901. doi: 10.1109/TMECH.2016.2590141 [13] CHOCRON O, PRIEUR U, PINO L. A validated feasibility prototype for AUV reconfigurable magnetic coupling thruster[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(2): 642-650. doi: 10.1109/TMECH.2013.2250987 [14] GASPAROTO H F, CHOCRON O, BENBOUZID M, et al. Torque analysis of a flat reconfigurable magnetic coupling thruster for marine renewable energy systems maintenance AUVs[J]. Energies, 2019, 12(1): 56. [15] 杨岳, 何雪浤, 谷海涛, 等. 水下机器人耐压壳体结构优化[J]. 机械科学与技术, 2016, 35(4): 614-619.YANG Y, HE X H, GU H T, et al. Structure optimization of underwater robot pressure hull[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(4): 614-619. (in Chinese) [16] LI Y X, TIAN C, WANG Y, et al. Design and simulation of a collaborative propulsion system for the underwater robot[J]. International Journal of Robotic Engineering, 2019, 4(1): 019. -







 点击查看大图
点击查看大图
计量
- 文章访问数: 154
- HTML全文浏览量: 144
- PDF下载量: 44
- 被引次数: 0
