作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2023年 42卷 第12期
2023, 42(12): 1959-1966.
doi: 10.13433/j.cnki.1003-8728.20220155
 摘要
摘要 HTML
HTML PDF 1010KB
PDF 1010KB
摘要:
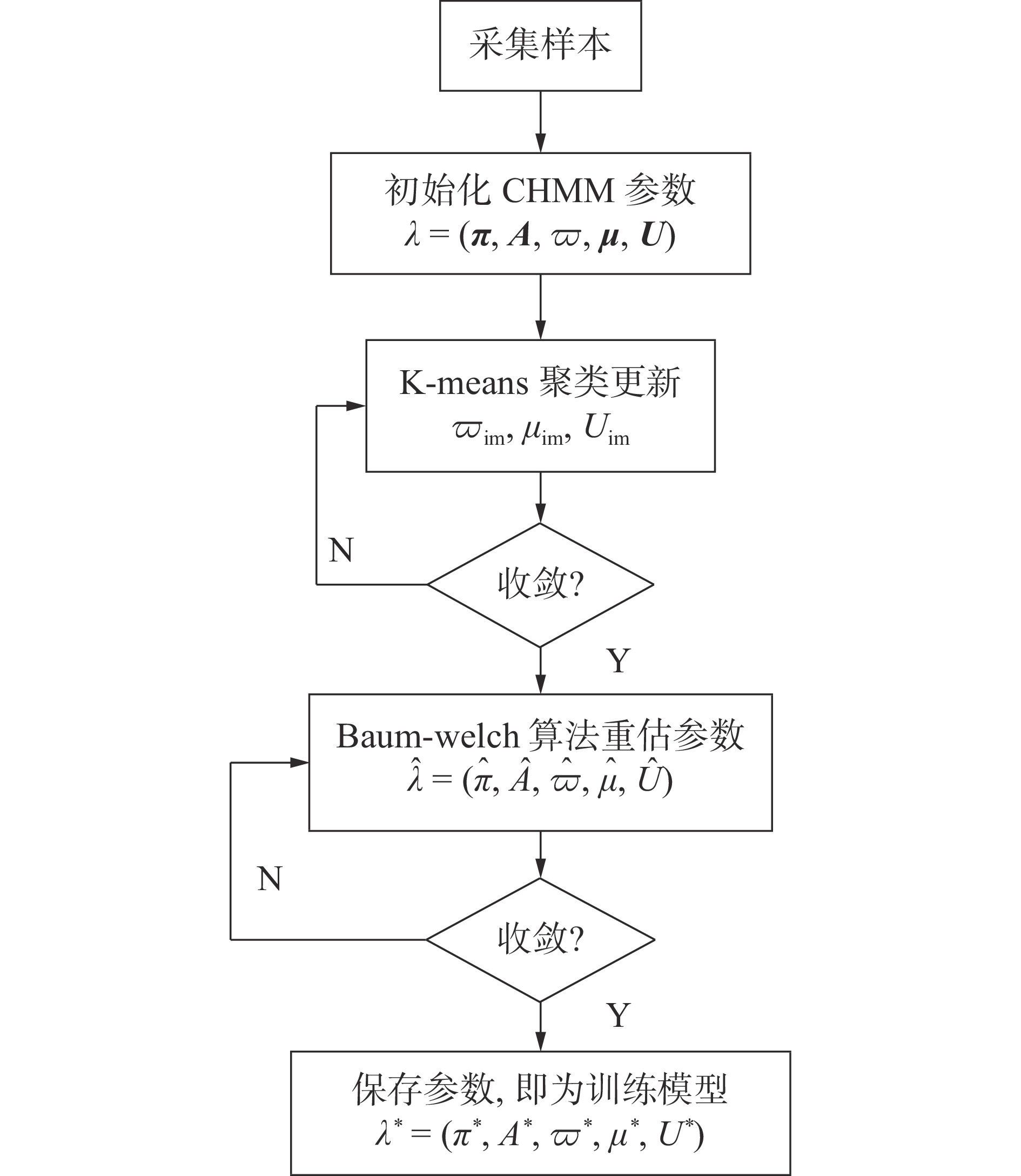
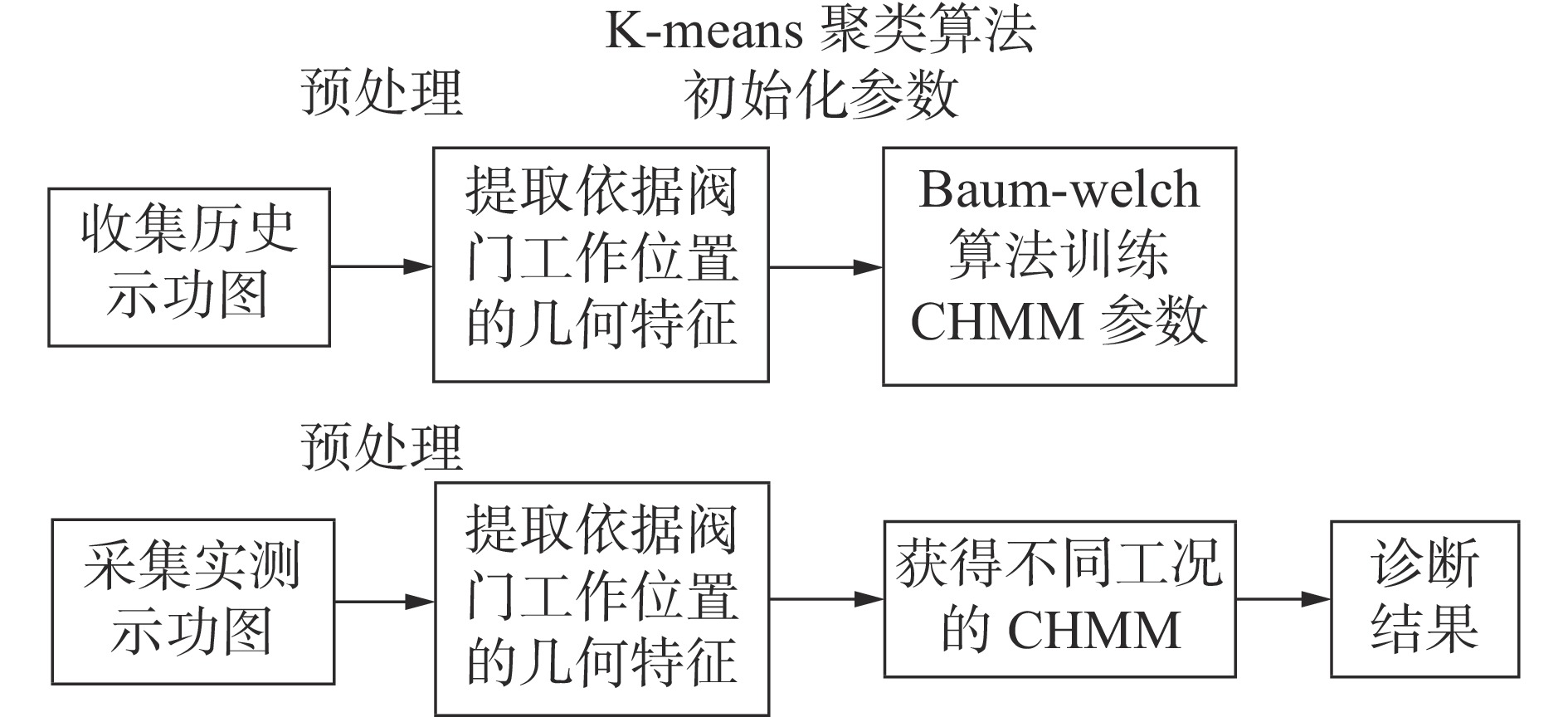
利用人工智能诊断有杆抽油系统故障时,描述工况的示功图成为机器学习的对象,提取示功图特征和建立诊断模型是主要步骤。已有的依据阀门工作位置的几何特征未能直接反映示功图的面积,因此提出一组改进的训练特征,并采用连续隐马尔可夫模型(CHMM)建立诊断模型。为了使参数的初始化更可靠,使用与混合高斯模型相关联的K-means聚类算法。将本文提出的诊断方法用于真实油井的示功图集进行测试,结果表明,本文方法不仅有效,而且改进的训练特征和建模方法都提高了诊断的准确率。
利用人工智能诊断有杆抽油系统故障时,描述工况的示功图成为机器学习的对象,提取示功图特征和建立诊断模型是主要步骤。已有的依据阀门工作位置的几何特征未能直接反映示功图的面积,因此提出一组改进的训练特征,并采用连续隐马尔可夫模型(CHMM)建立诊断模型。为了使参数的初始化更可靠,使用与混合高斯模型相关联的K-means聚类算法。将本文提出的诊断方法用于真实油井的示功图集进行测试,结果表明,本文方法不仅有效,而且改进的训练特征和建模方法都提高了诊断的准确率。
2023, 42(12): 1967-1971.
doi: 10.13433/j.cnki.1003-8728.20220178
摘要:
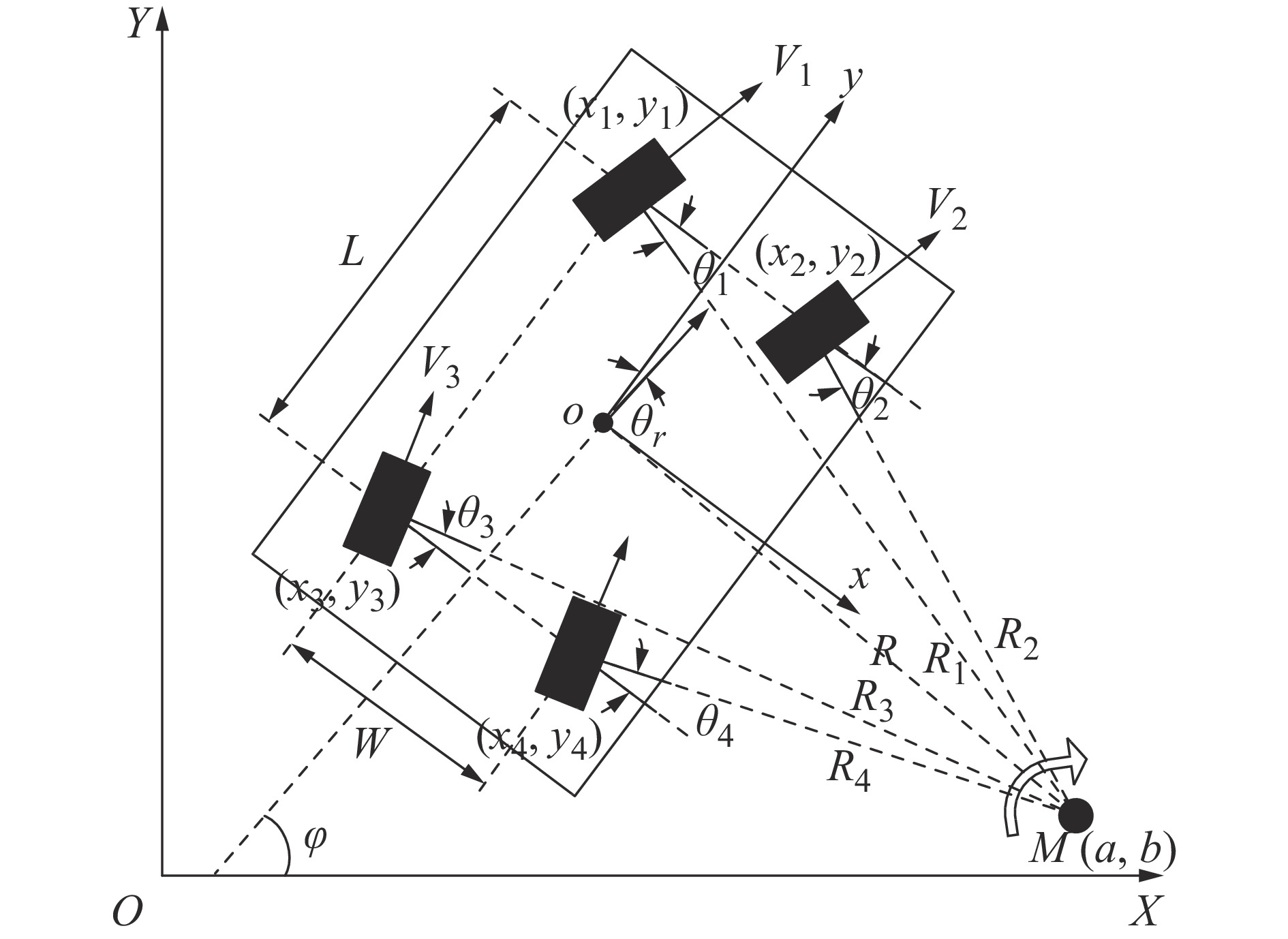
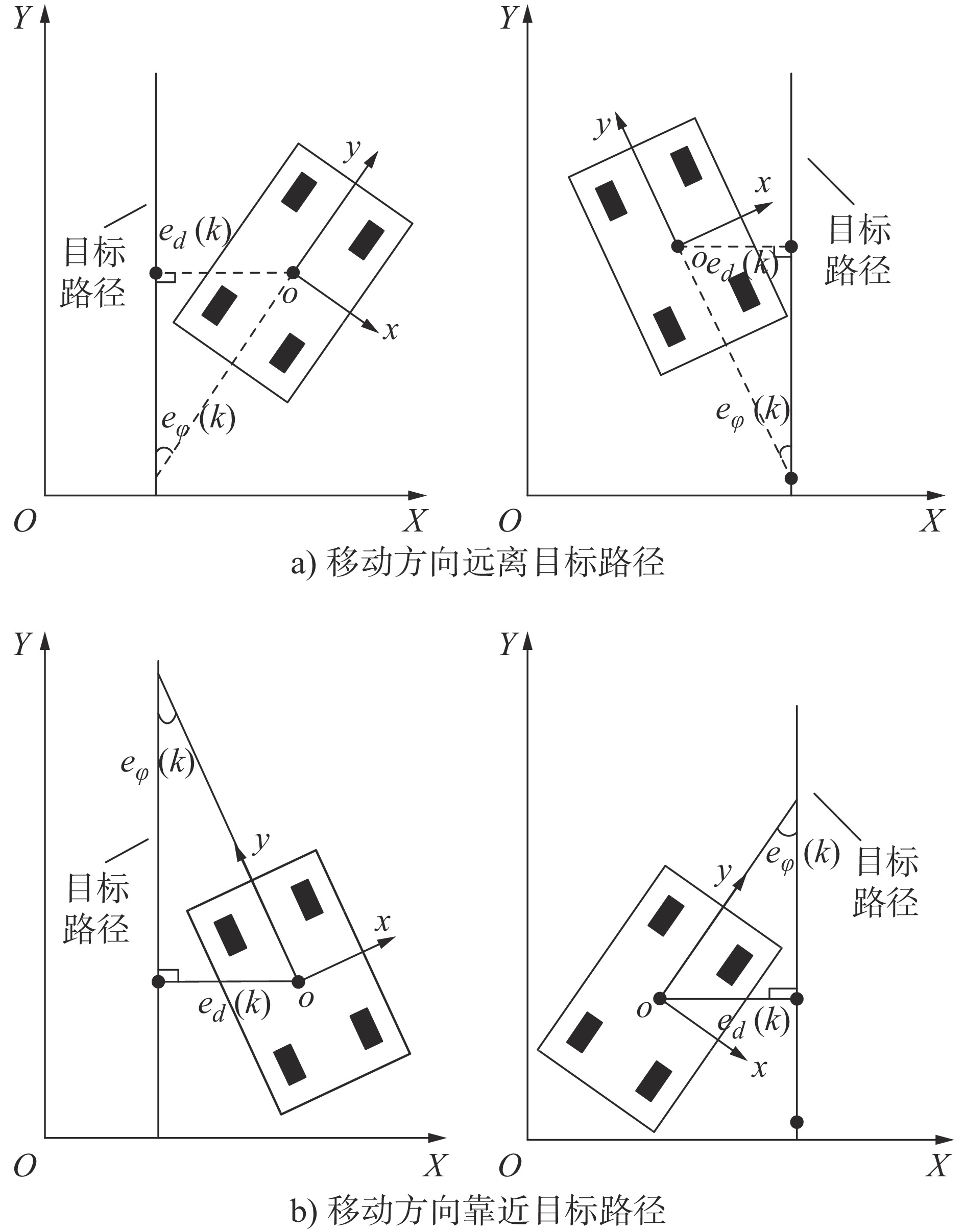
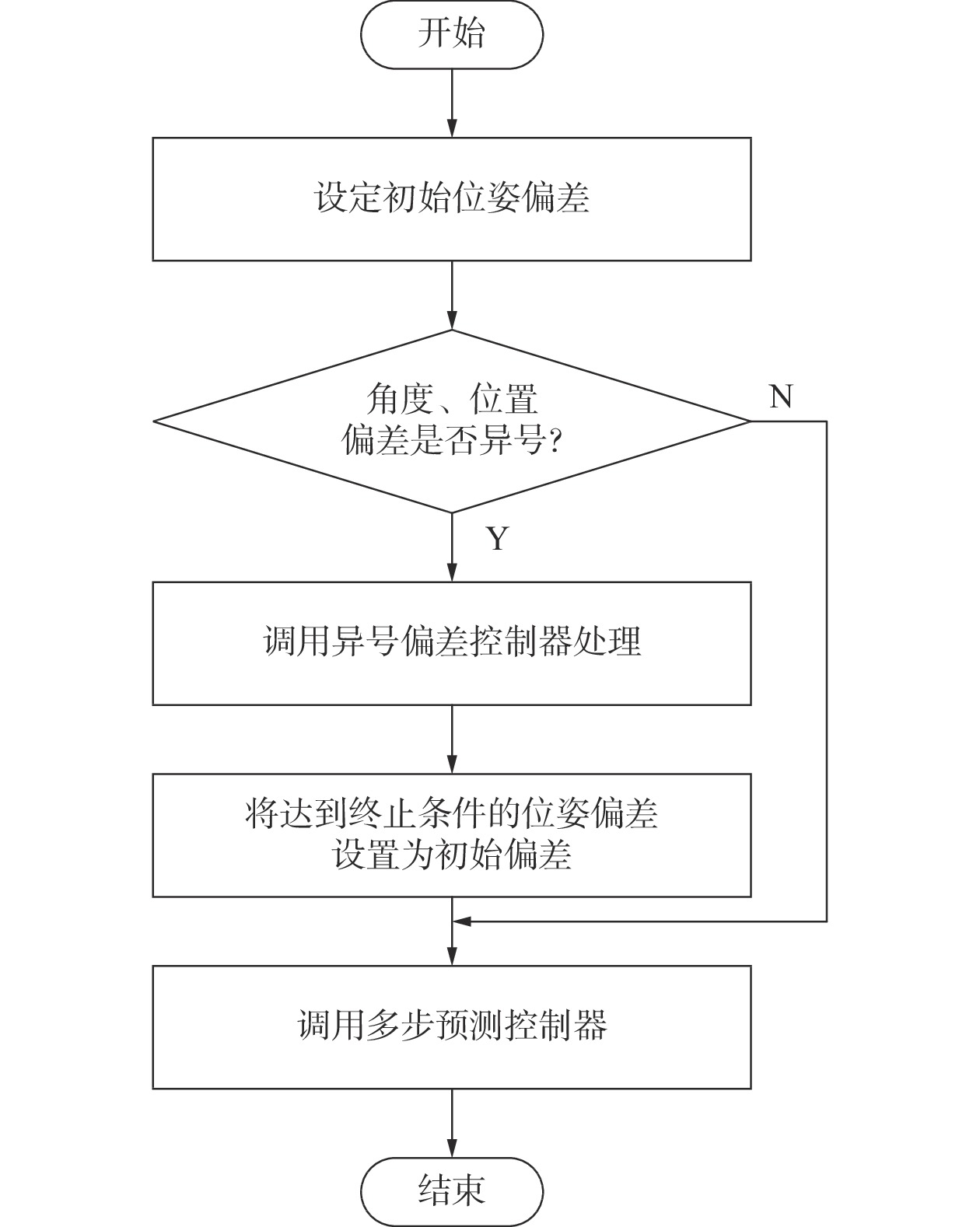
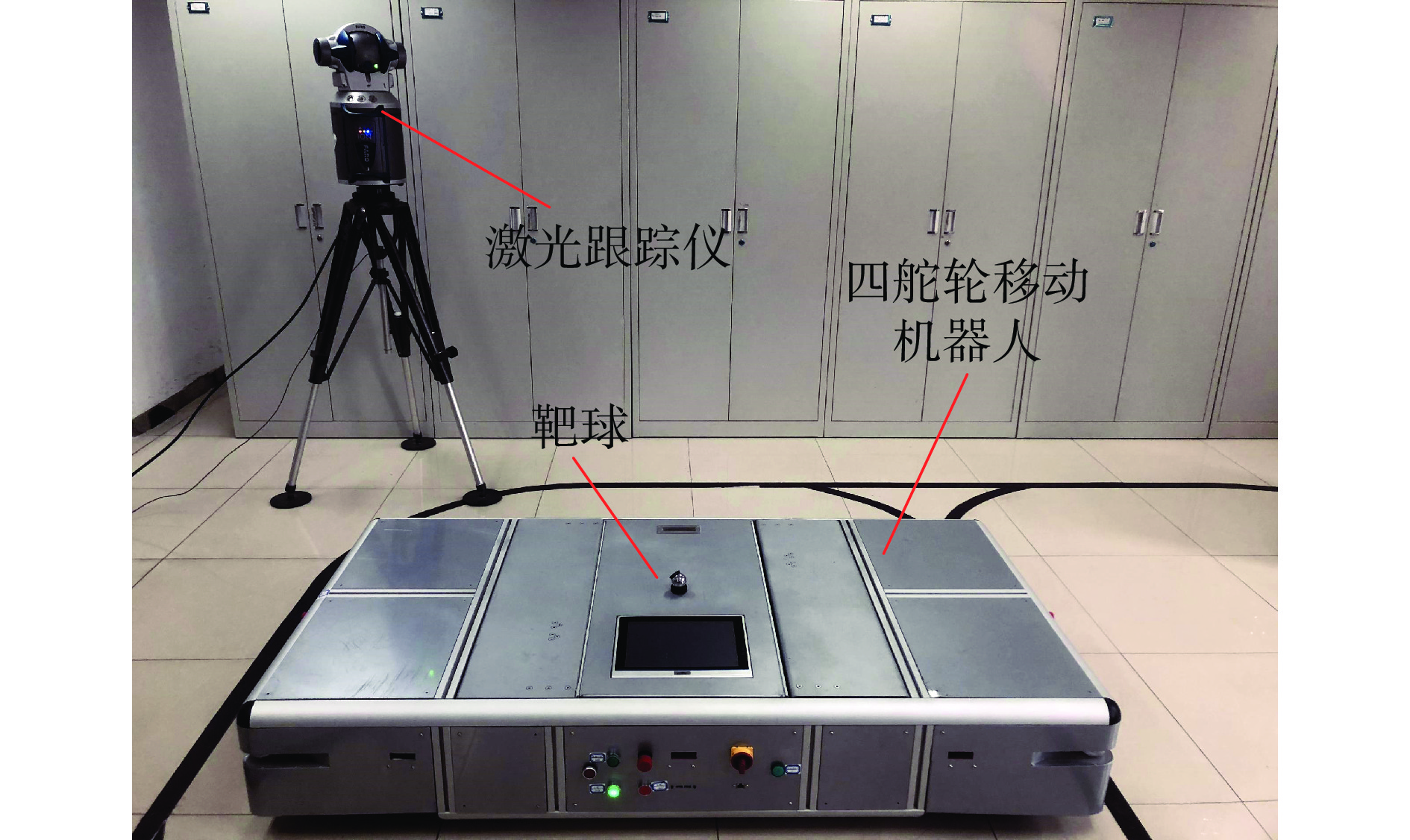
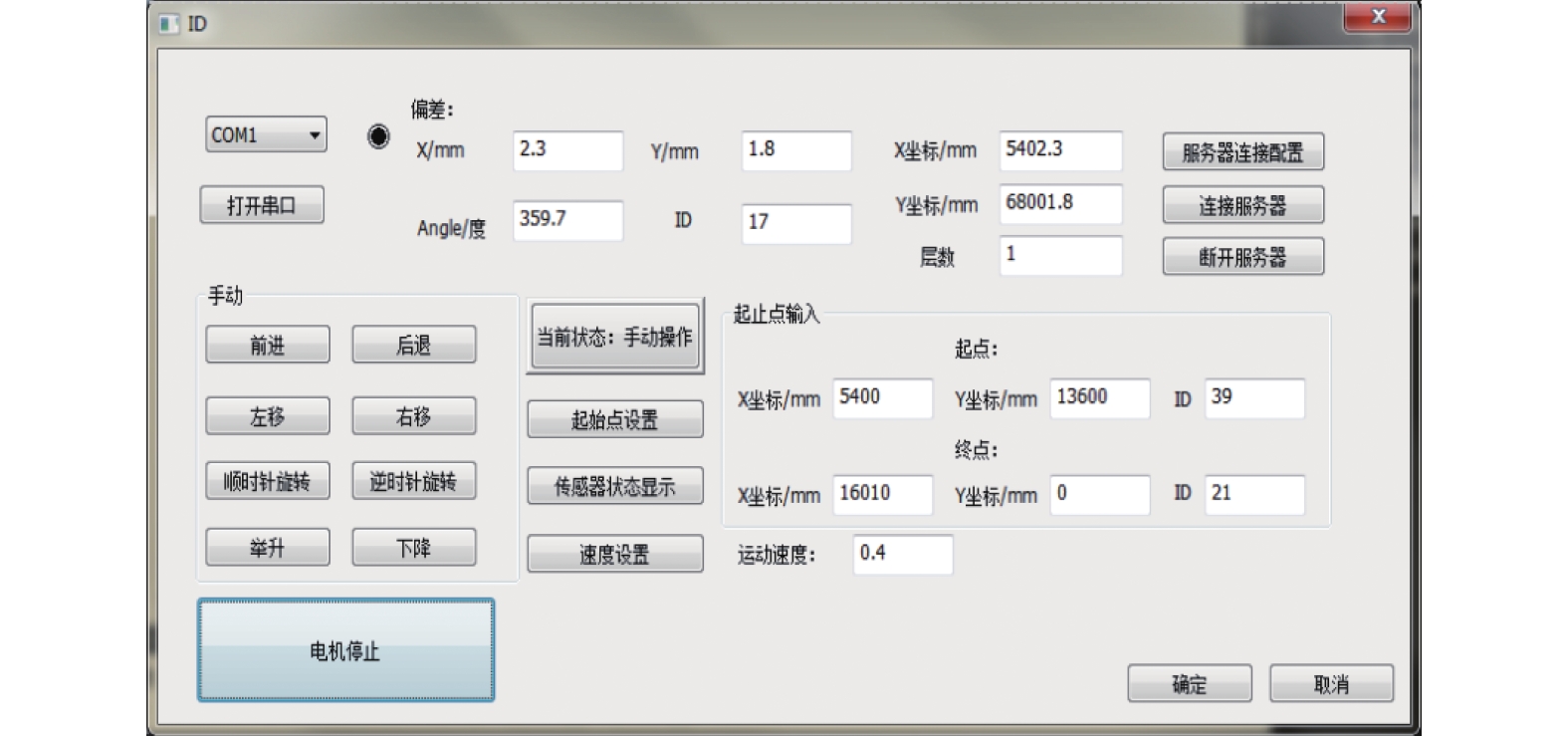
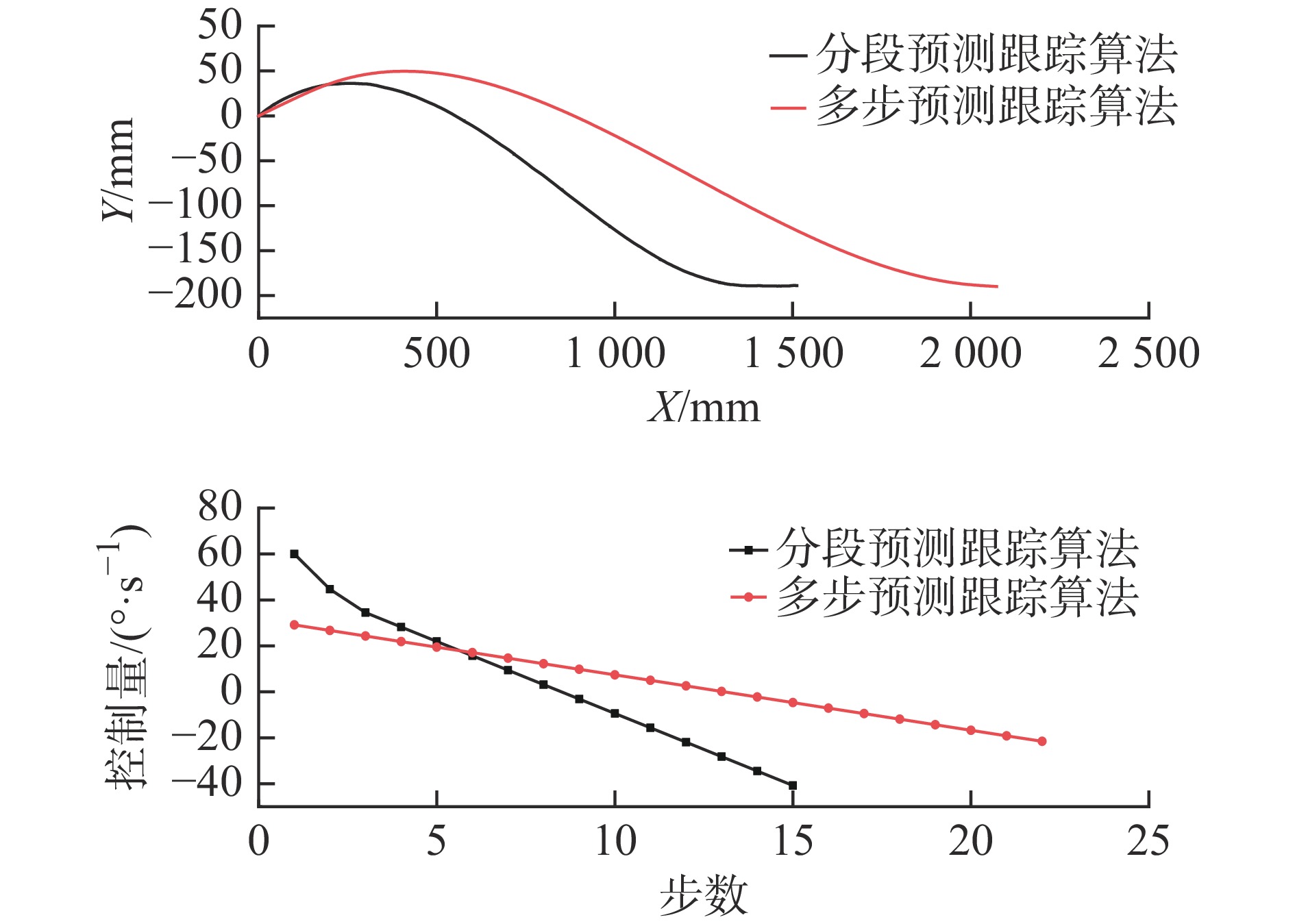
针对四舵轮移动机器人路径跟踪特点,使用工控机、运动控制卡,基于Visual C + + 平台开发了一种移动机器人路径跟踪系统。针对四舵轮移动机器人构型,采用速度-几何法建立了机器人运动学控制模型。提出了一种基于最优控制的分段预测路径跟踪算法,避免了对所需参数进行试凑的同时,降低了车体远离目标路径情况下的距离偏差最大超调与纠偏总步数。路径跟踪实验表明,应用所提出的分段预测路径跟踪算法的移动机器人可以较好地跟踪目标路径,相比未使用分段预测路径跟踪算法的多步预测控制,其位置偏差最大超调降低了29.81%,达到35.563 mm,纠偏用时降低了38.10%,达到13 s,且定位精度达到11.292 mm、0.51°,可以较好地满足四舵轮移动机器人定位需求。
针对四舵轮移动机器人路径跟踪特点,使用工控机、运动控制卡,基于Visual C + + 平台开发了一种移动机器人路径跟踪系统。针对四舵轮移动机器人构型,采用速度-几何法建立了机器人运动学控制模型。提出了一种基于最优控制的分段预测路径跟踪算法,避免了对所需参数进行试凑的同时,降低了车体远离目标路径情况下的距离偏差最大超调与纠偏总步数。路径跟踪实验表明,应用所提出的分段预测路径跟踪算法的移动机器人可以较好地跟踪目标路径,相比未使用分段预测路径跟踪算法的多步预测控制,其位置偏差最大超调降低了29.81%,达到35.563 mm,纠偏用时降低了38.10%,达到13 s,且定位精度达到11.292 mm、0.51°,可以较好地满足四舵轮移动机器人定位需求。
2023, 42(12): 1972-1976.
doi: 10.13433/j.cnki.1003-8728.20220165
摘要:
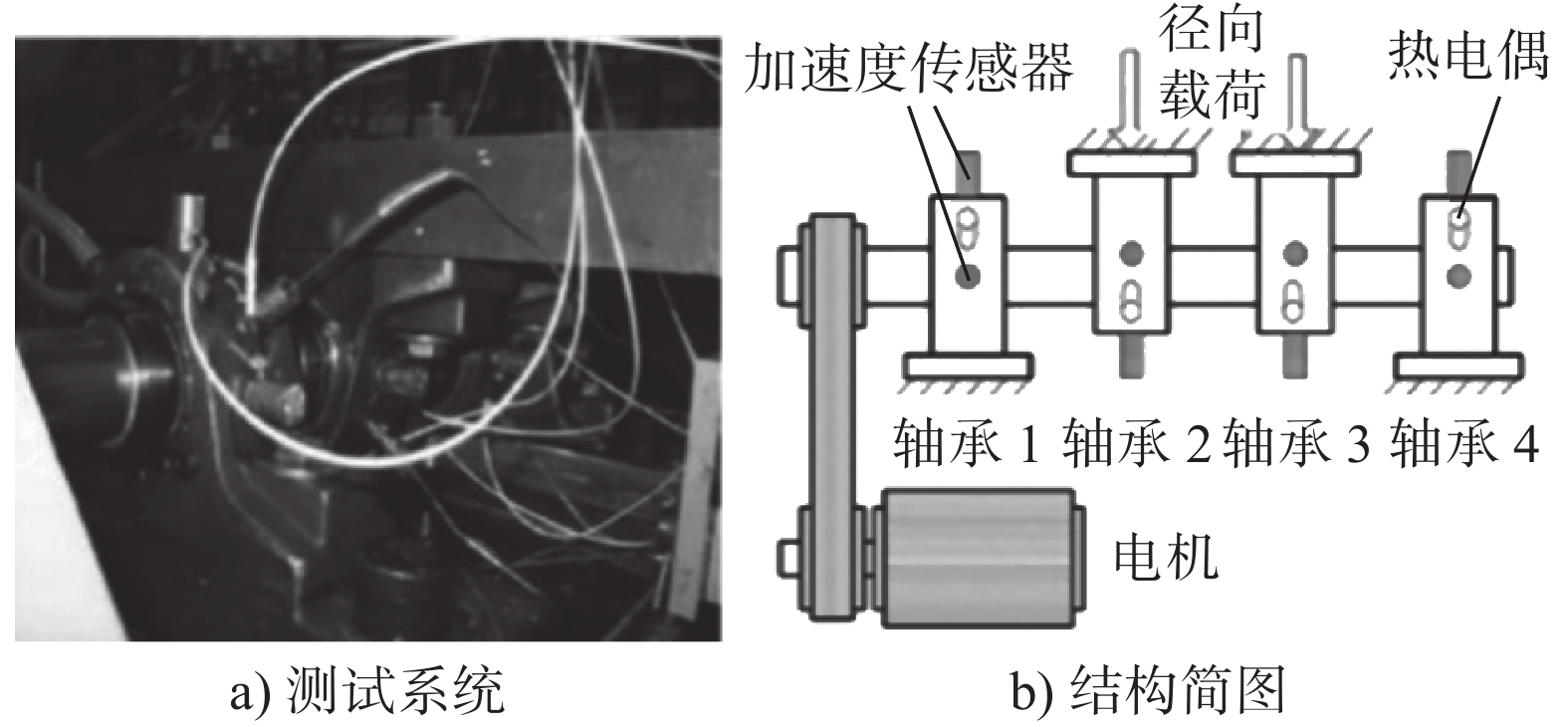
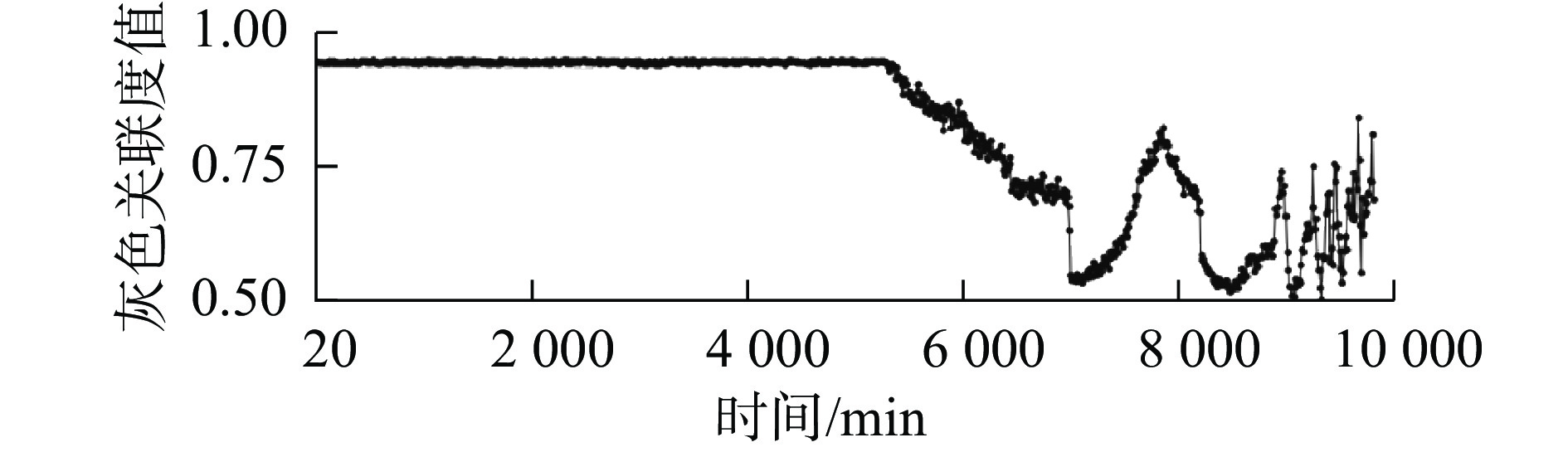
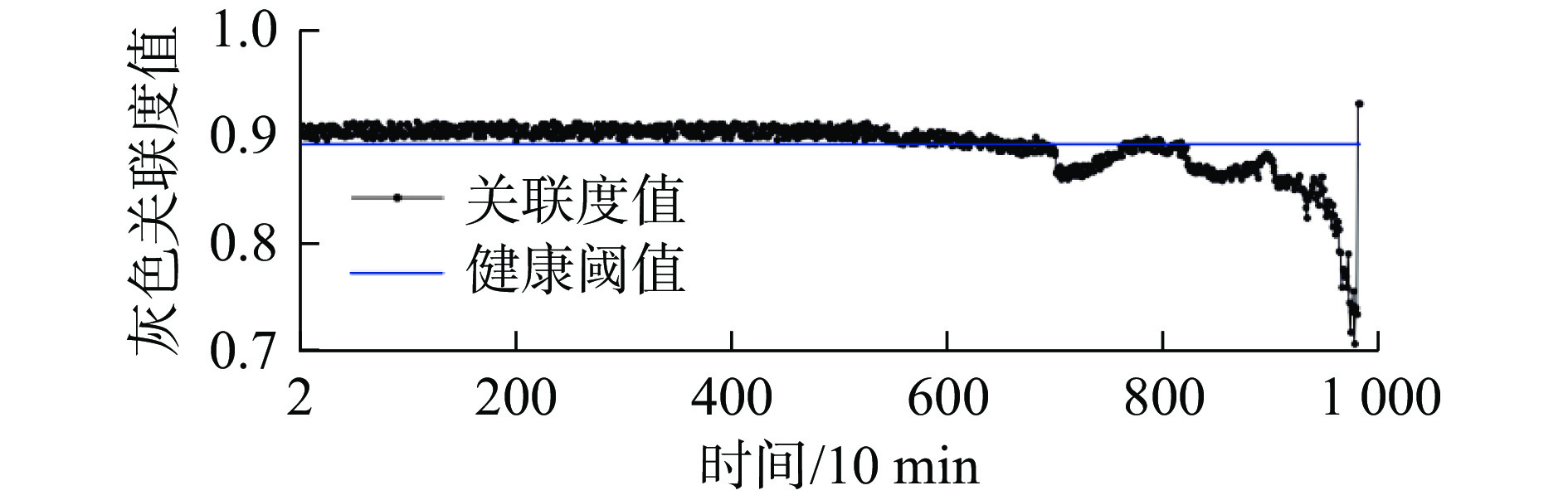
针对滚动轴承性能衰退指标敏感度低且退化起始点难以检测的问题,本文提出了自相关函数结合灰色关联度(Autocorrelation function and gray relational degree,AF-GRD)的轴承早期故障诊断方法。首先,基于希尔伯特变换和自相关函数处理轴承全寿命数据样本组获得自相关系列函数。然后,提取轴承运行初期的第一组数据作为参考样本,计算其余样本和参考样本的灰色关联度并构建轴承性能衰退指标。最后,根据该指标的变化趋势和健康阈值确定轴承早期故障发生的时间段,截取该时段的数据样本进行希尔伯特包络谱分析实现轴承早期故障诊断。利用实验室数据库完成对轴承早期故障诊断,结果表明:所提方法敏感度高而且可以完成轴承早期退化检测。
针对滚动轴承性能衰退指标敏感度低且退化起始点难以检测的问题,本文提出了自相关函数结合灰色关联度(Autocorrelation function and gray relational degree,AF-GRD)的轴承早期故障诊断方法。首先,基于希尔伯特变换和自相关函数处理轴承全寿命数据样本组获得自相关系列函数。然后,提取轴承运行初期的第一组数据作为参考样本,计算其余样本和参考样本的灰色关联度并构建轴承性能衰退指标。最后,根据该指标的变化趋势和健康阈值确定轴承早期故障发生的时间段,截取该时段的数据样本进行希尔伯特包络谱分析实现轴承早期故障诊断。利用实验室数据库完成对轴承早期故障诊断,结果表明:所提方法敏感度高而且可以完成轴承早期退化检测。



2023, 42(12): 1977-1985.
doi: 10.13433/j.cnki.1003-8728.20220175
摘要:
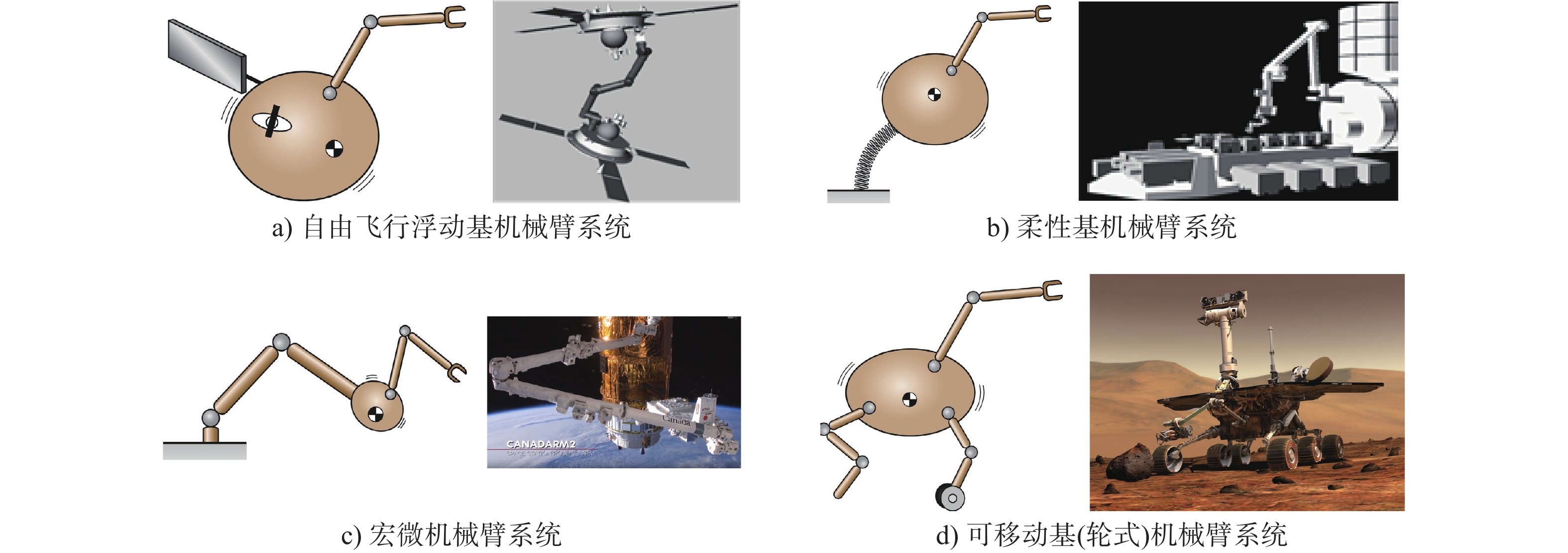
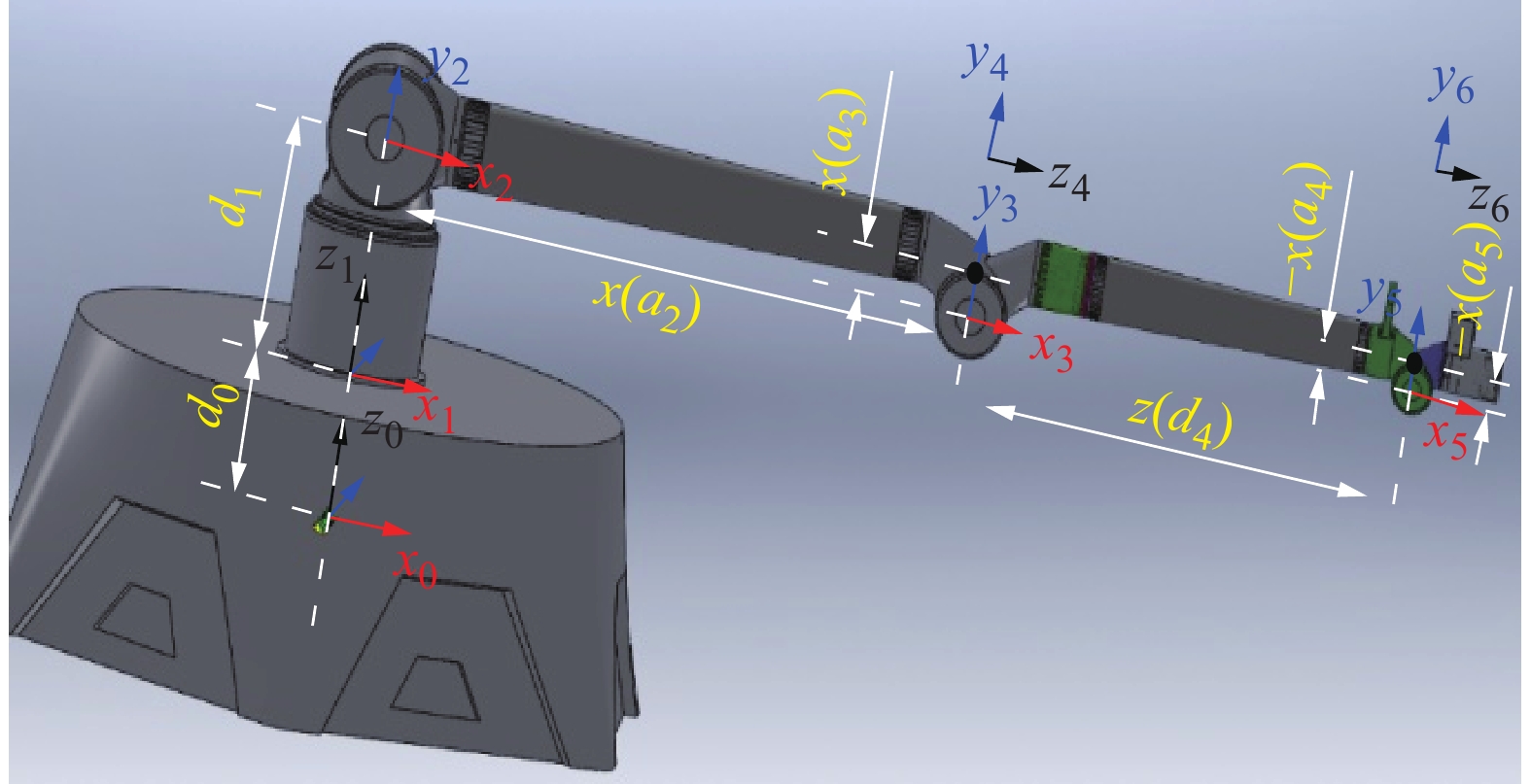
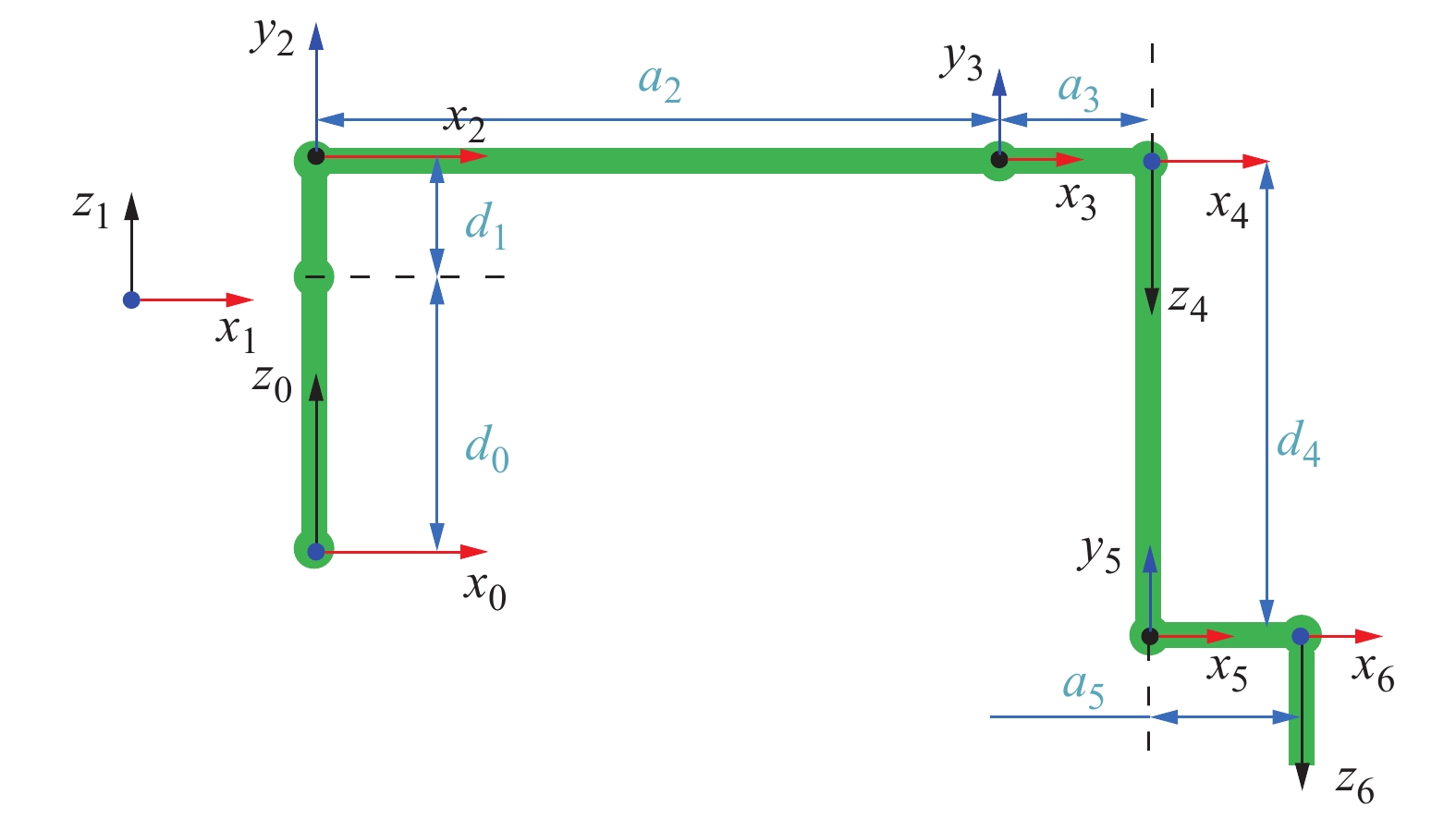
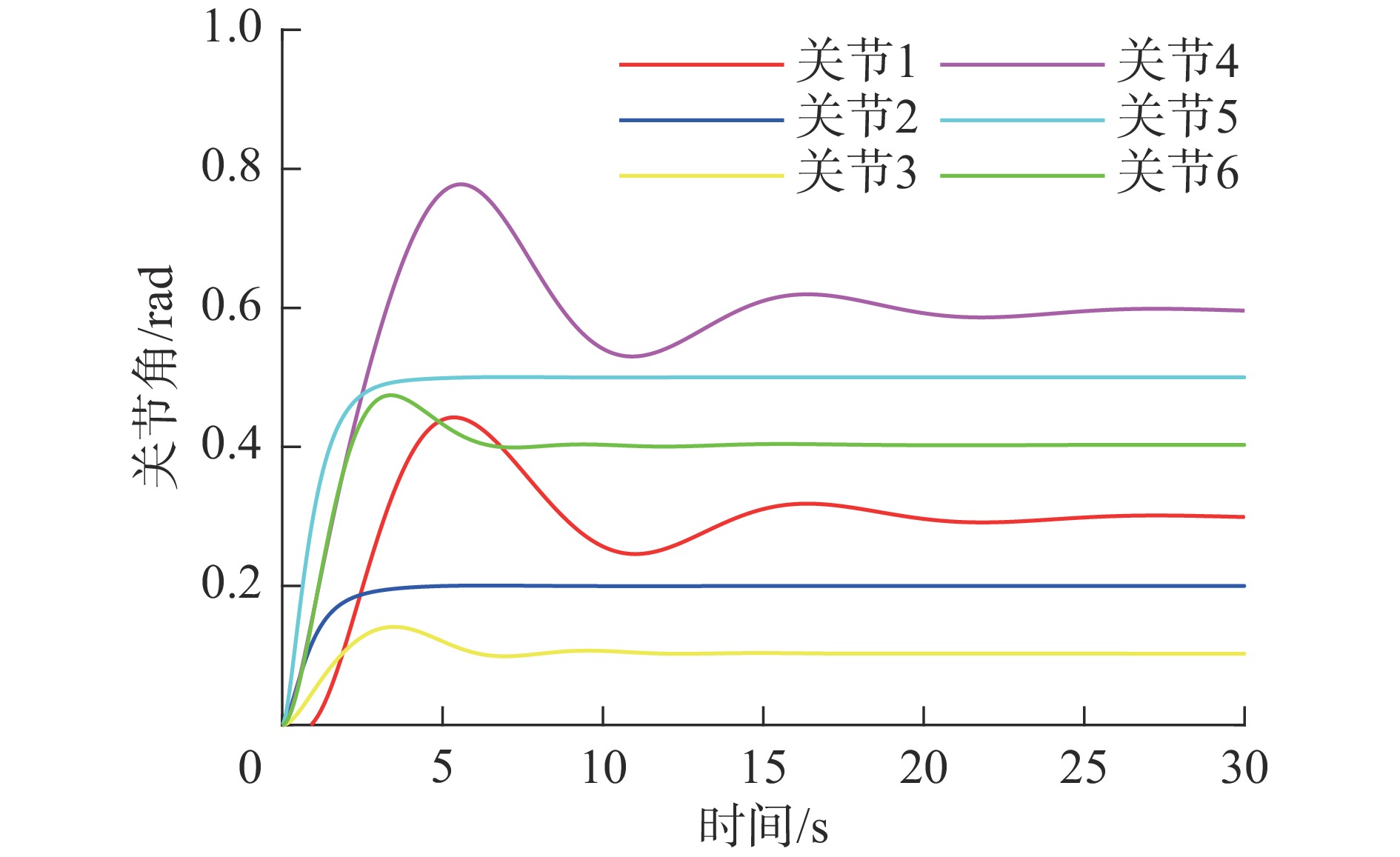
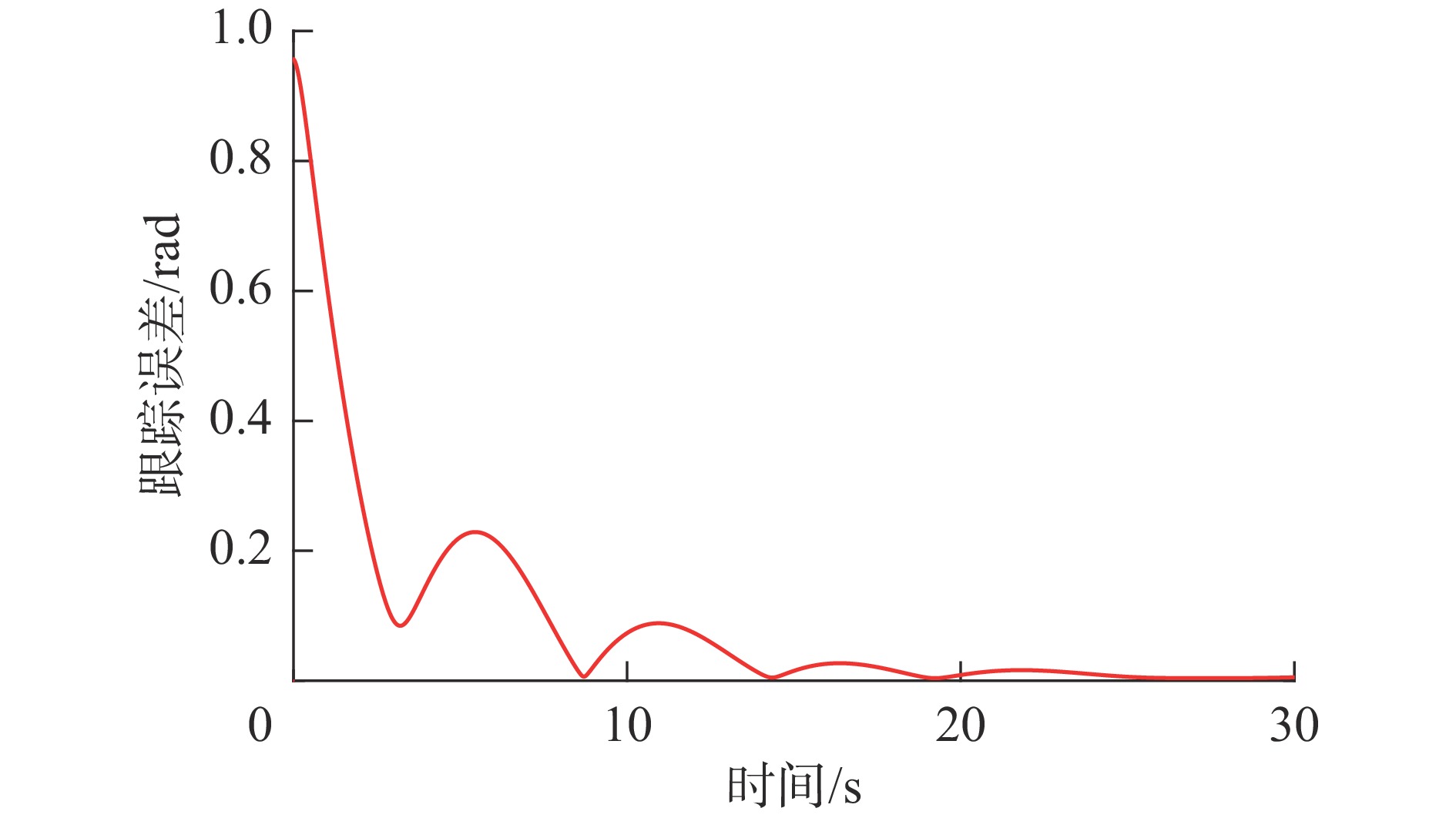
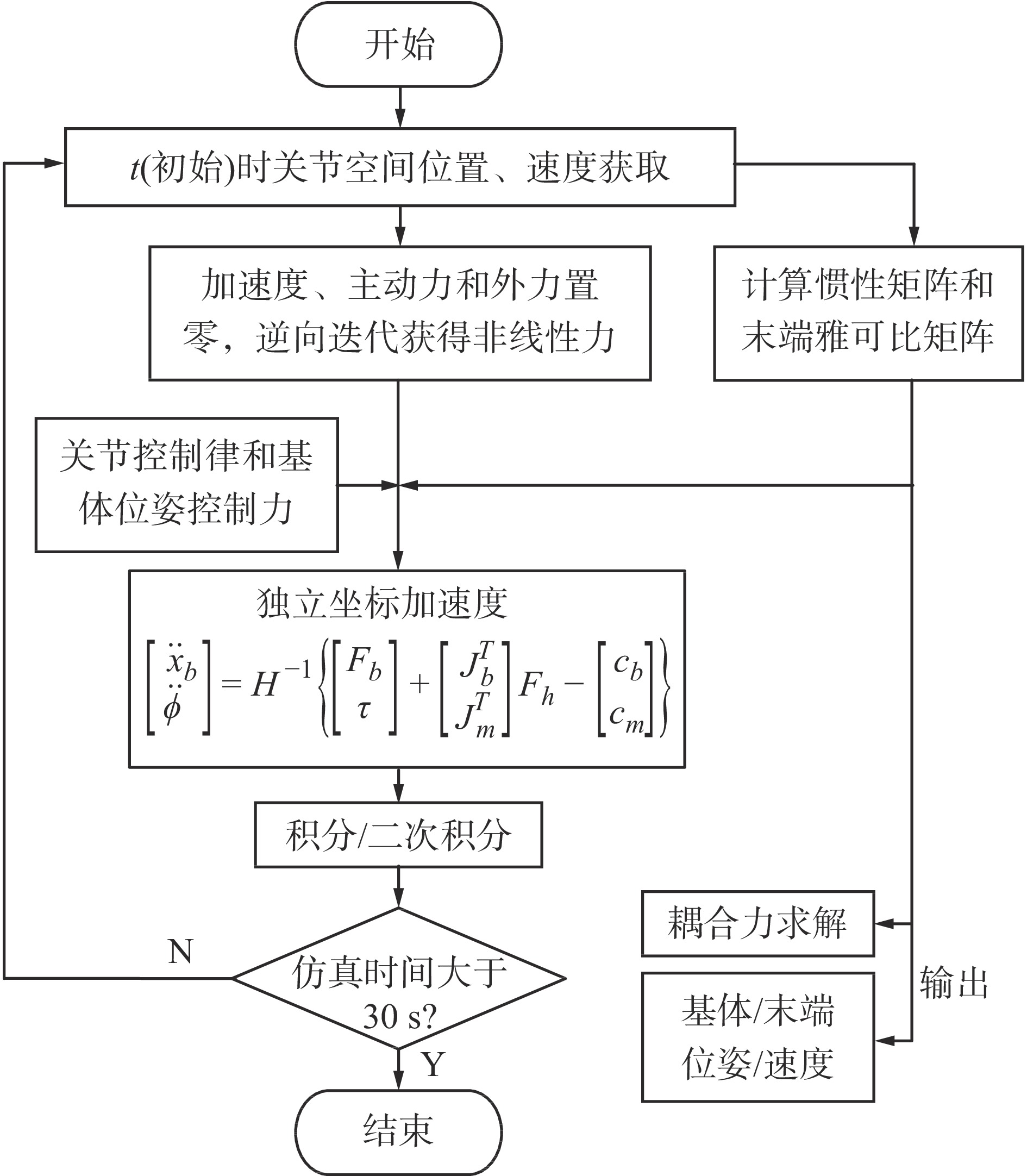
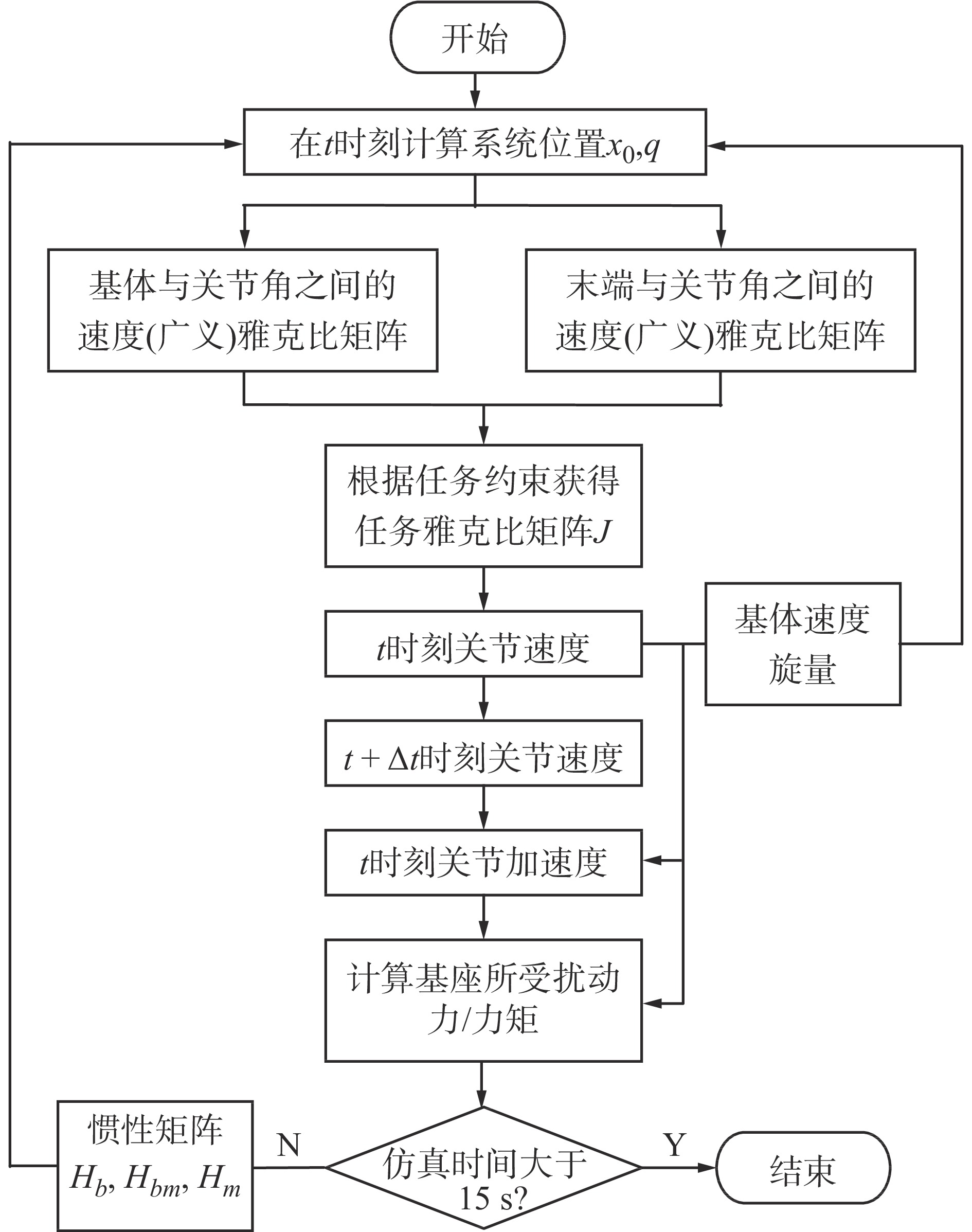
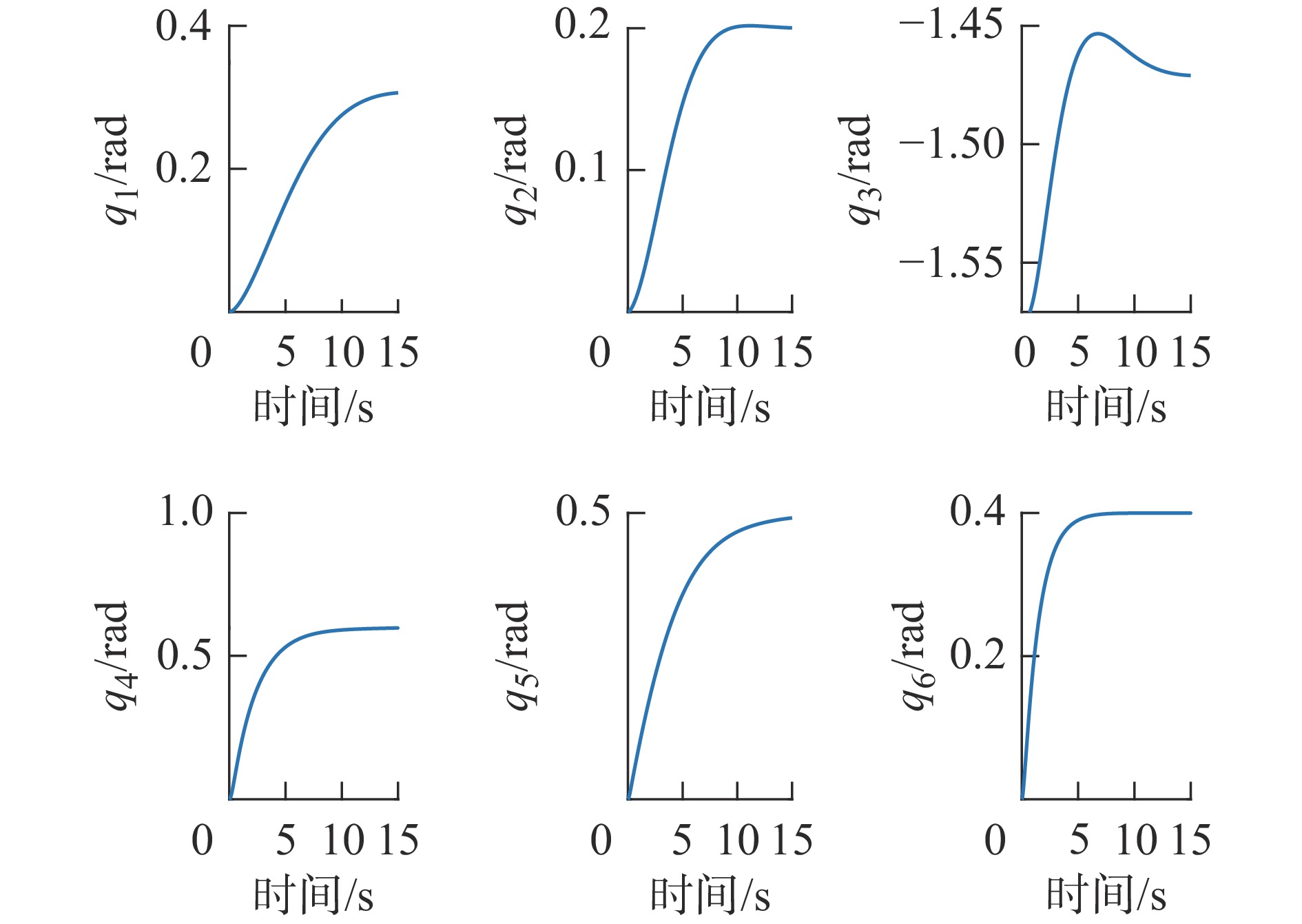
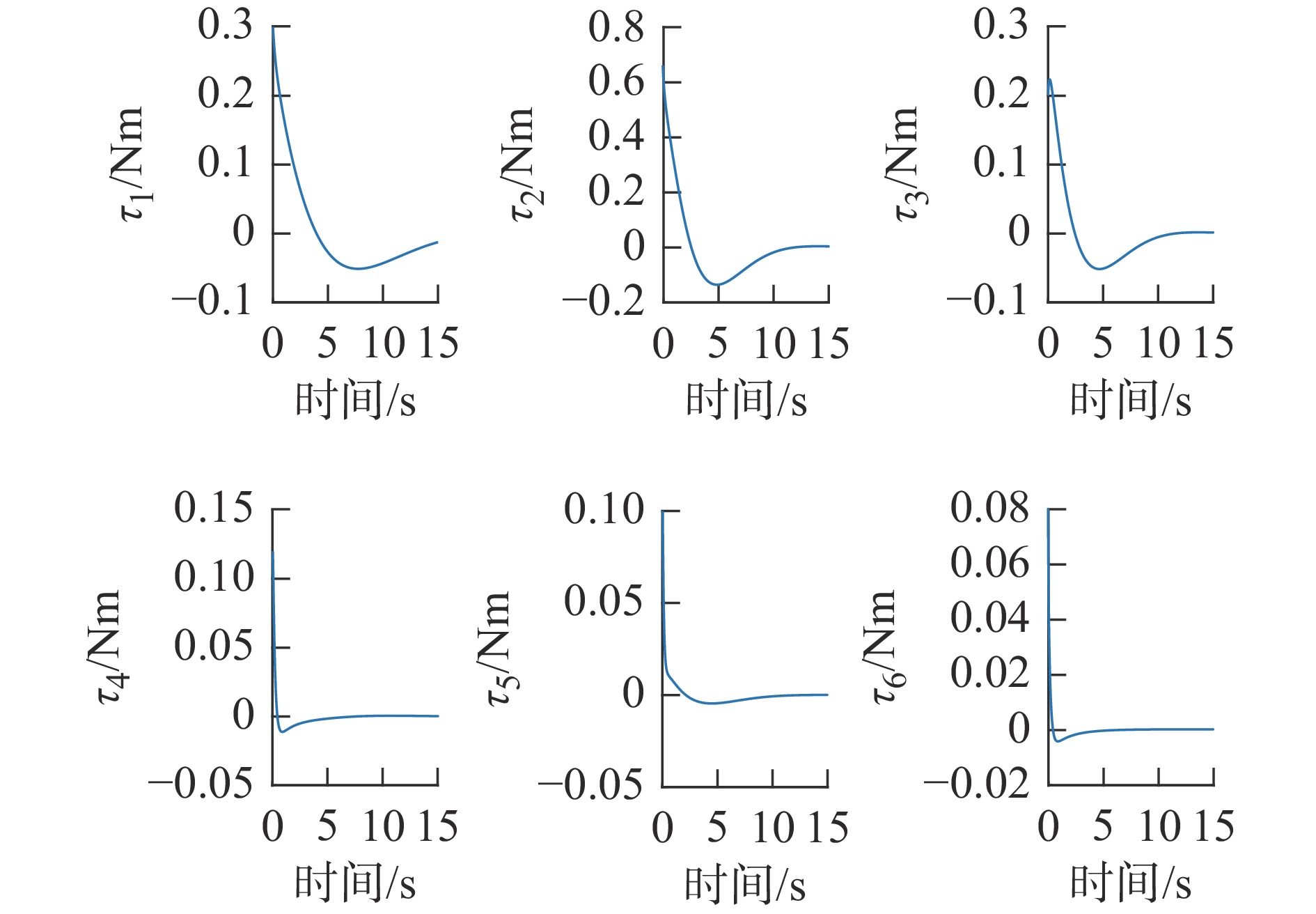
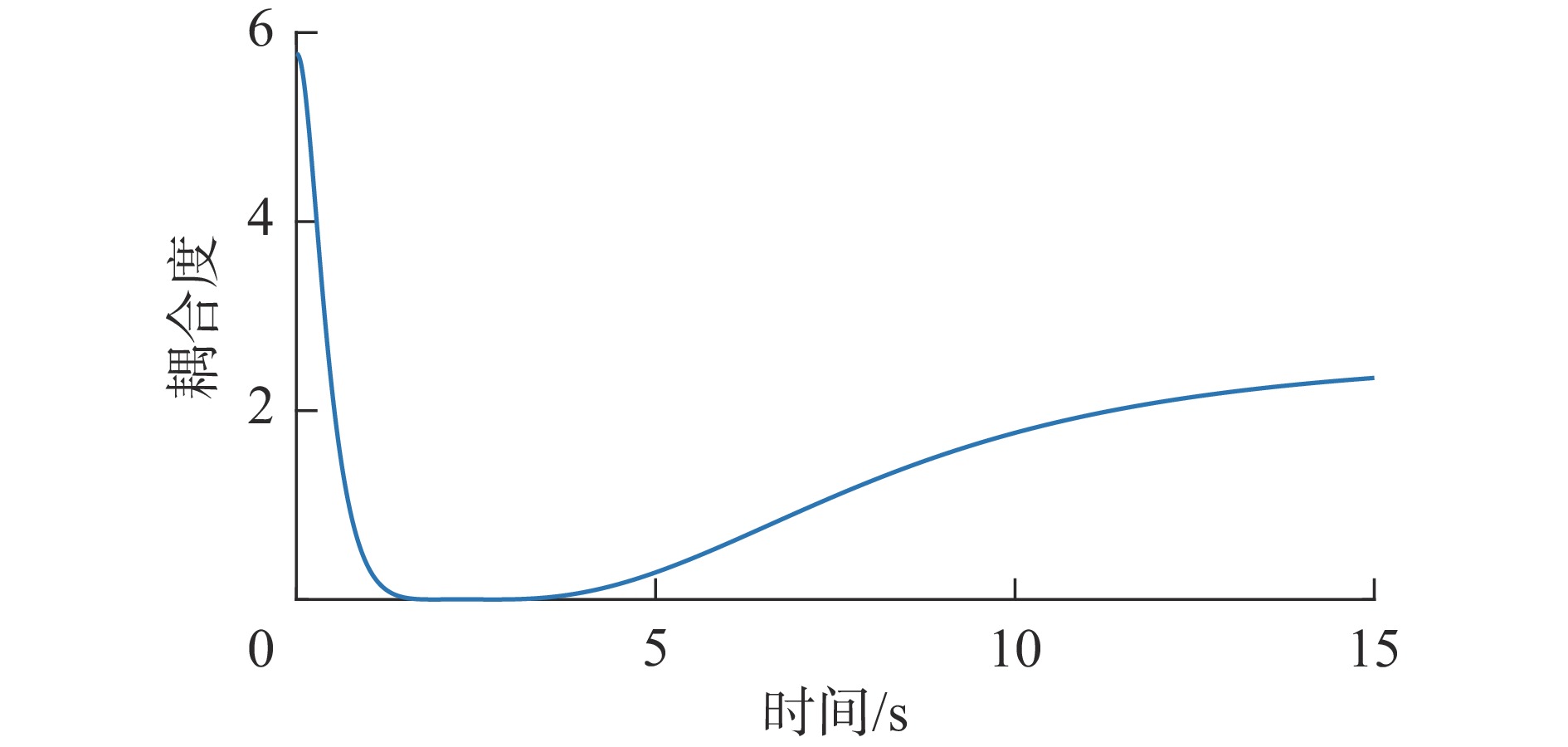
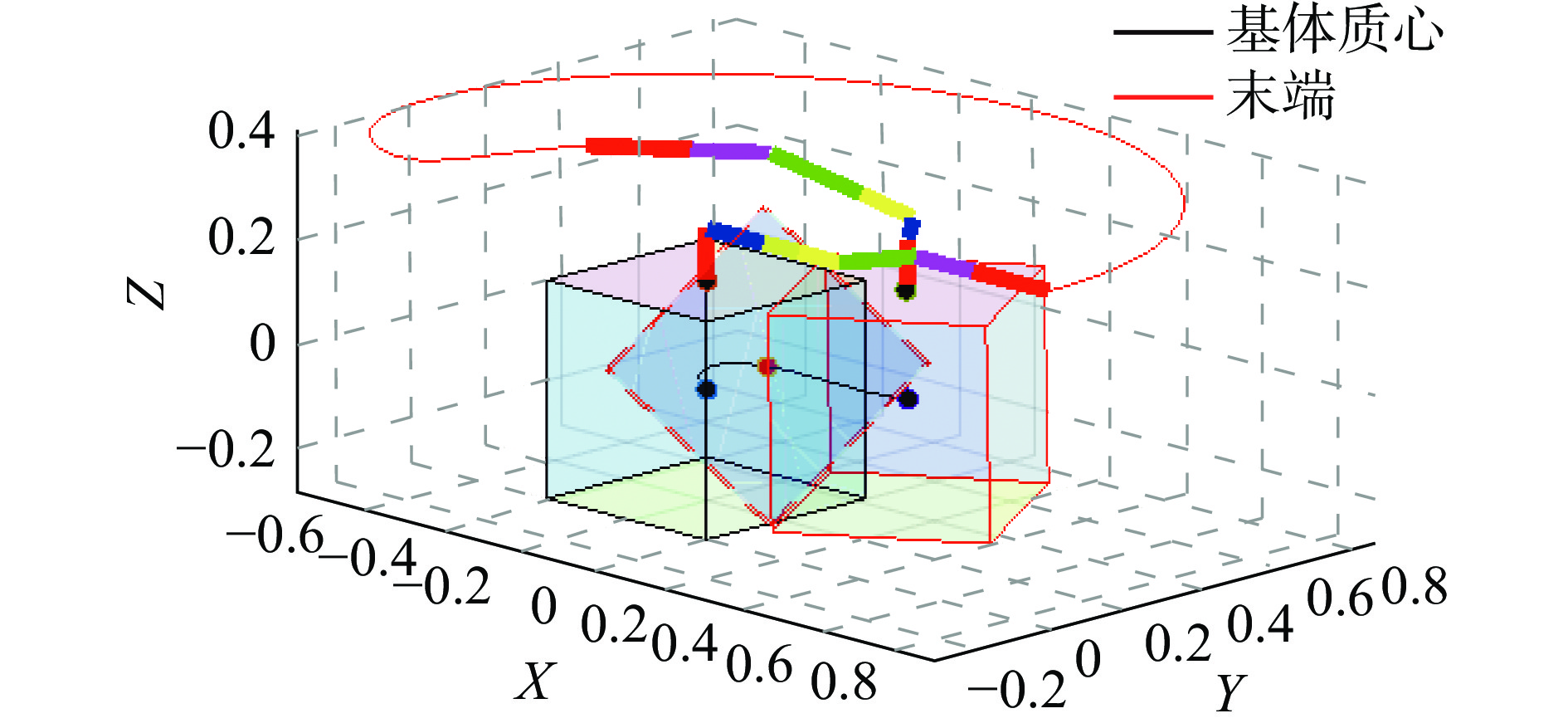
在执行空间任务过程中,漂浮基机械臂系统内部的动力学耦合现象使得基体姿态调整和机械臂末端定位与控制问题变得更加复杂。综合考虑多种空间漂浮基机械臂系统共性特征,关注机械臂与基体耦合规律,建立统一的耦合动力学模型,并利用整个系统的非完整性特征和耦合特点,对特定系统设计解耦控制规律。通过控制机械臂关节主动运动实现基体位姿可控和机械臂末端任务不受制约的目的。结果表明,通过合理设置控制参数,在解空间存在的情况下,能够达到漂浮基体与机械臂末端协调运动的目的。
在执行空间任务过程中,漂浮基机械臂系统内部的动力学耦合现象使得基体姿态调整和机械臂末端定位与控制问题变得更加复杂。综合考虑多种空间漂浮基机械臂系统共性特征,关注机械臂与基体耦合规律,建立统一的耦合动力学模型,并利用整个系统的非完整性特征和耦合特点,对特定系统设计解耦控制规律。通过控制机械臂关节主动运动实现基体位姿可控和机械臂末端任务不受制约的目的。结果表明,通过合理设置控制参数,在解空间存在的情况下,能够达到漂浮基体与机械臂末端协调运动的目的。



2023, 42(12): 1986-1995.
doi: 10.13433/j.cnki.1003-8728.20220158
摘要:
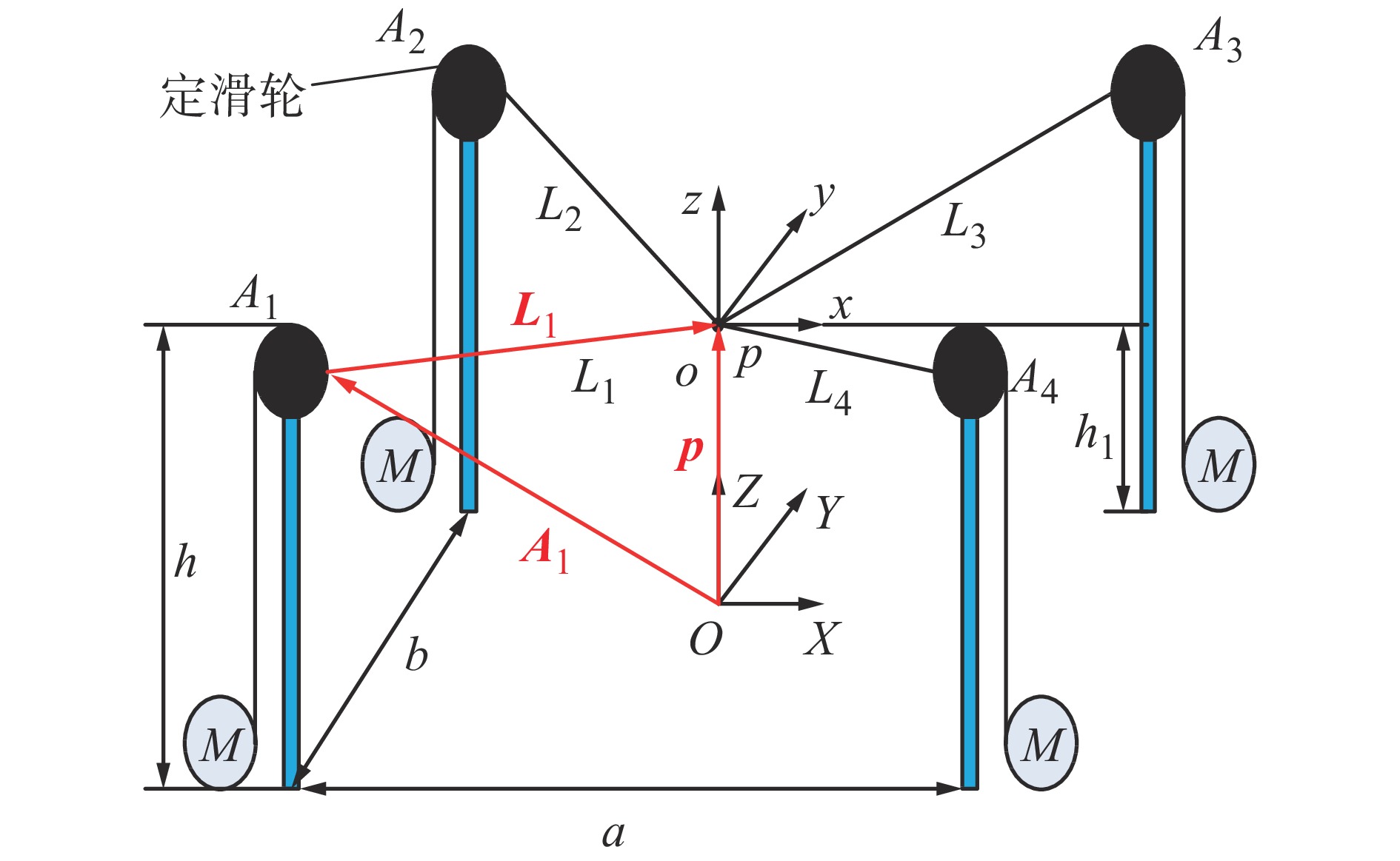
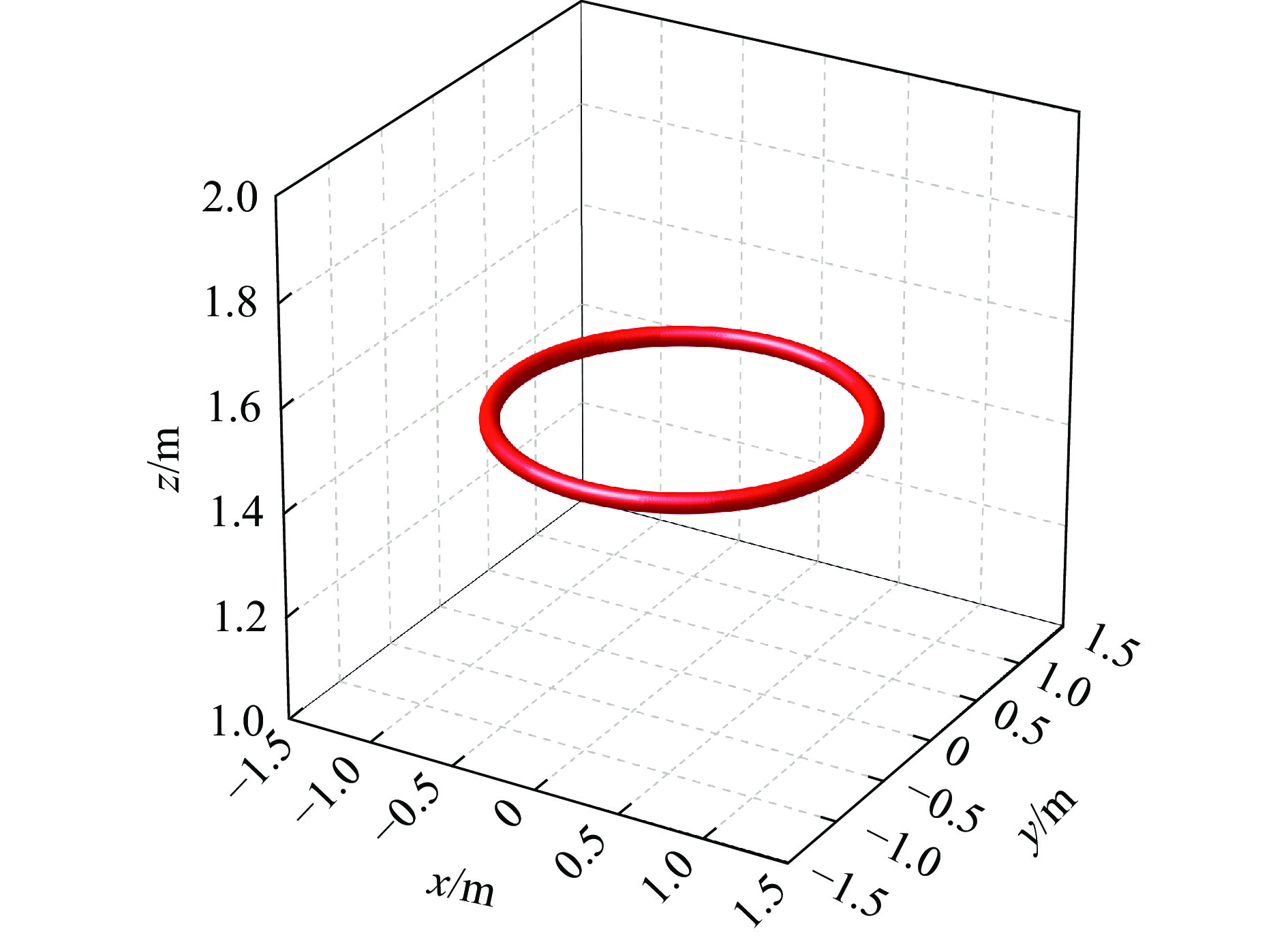
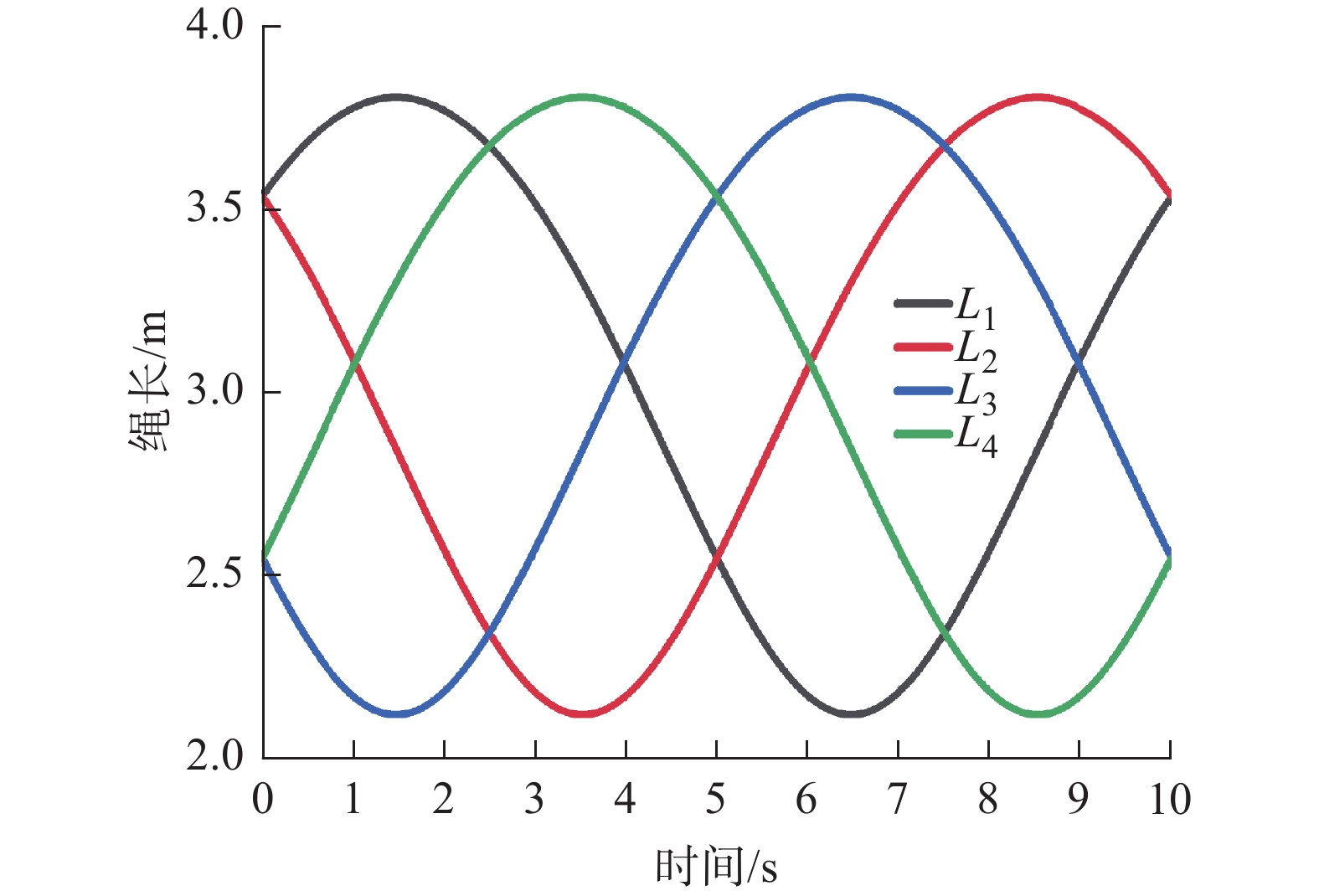
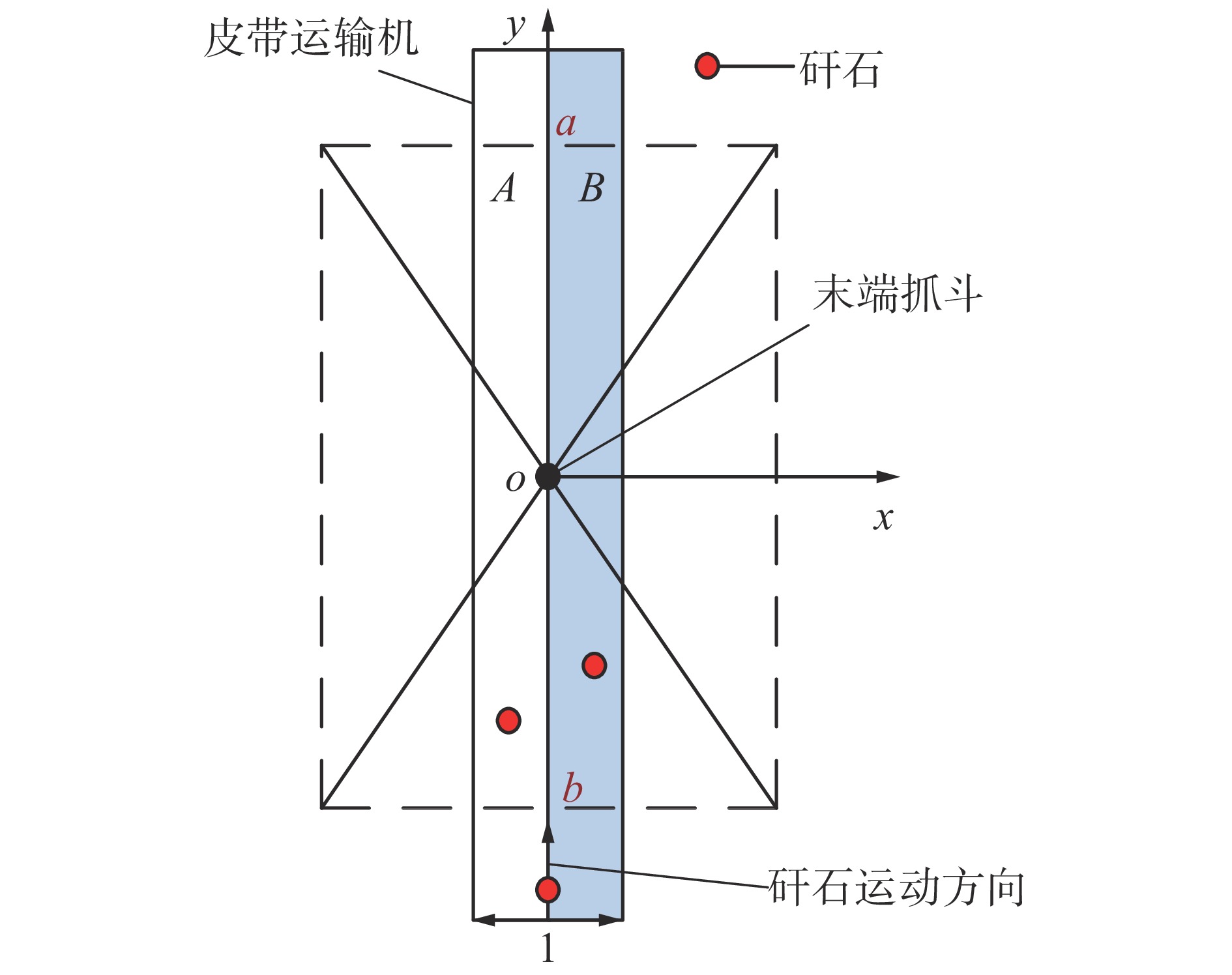
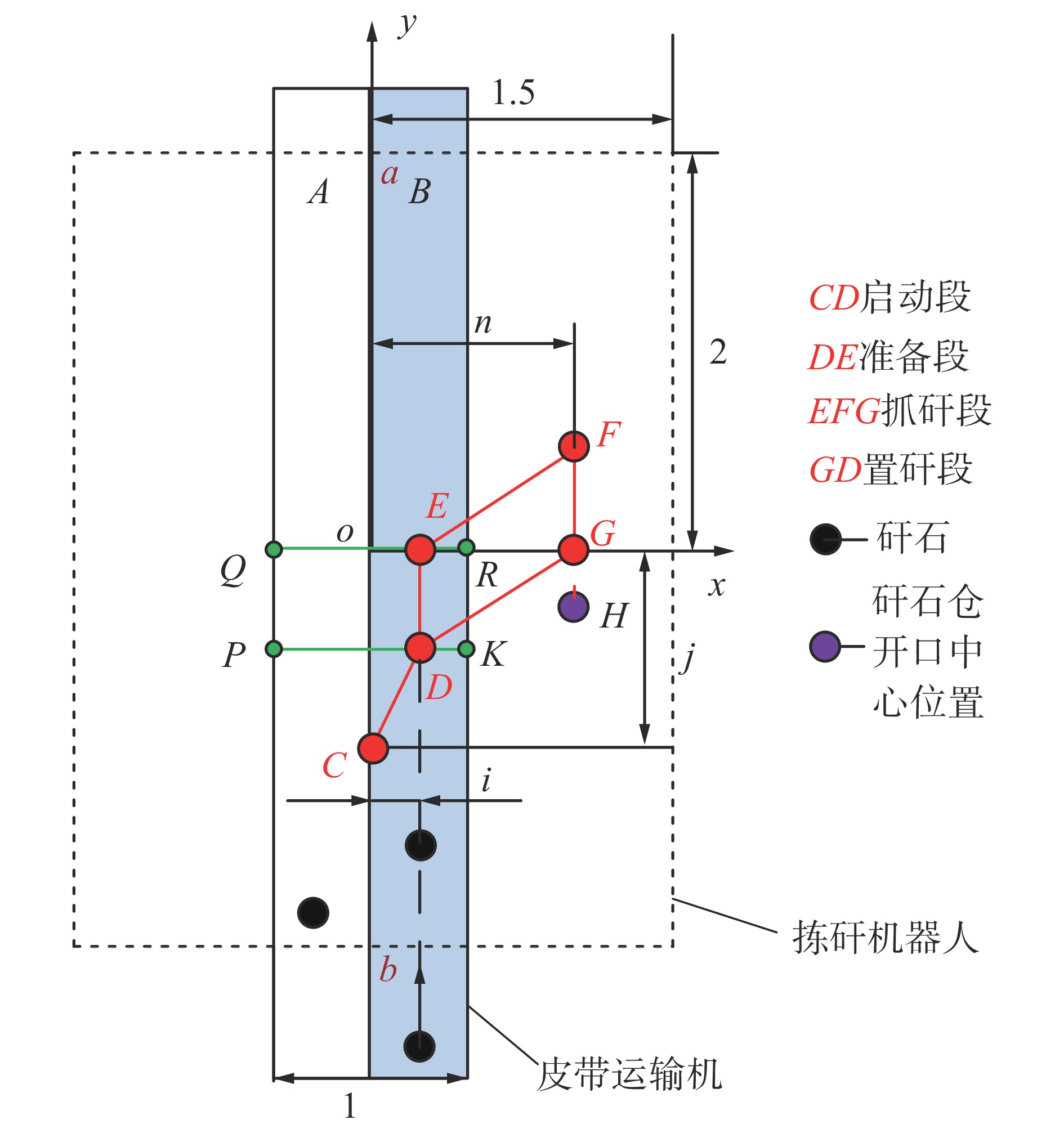
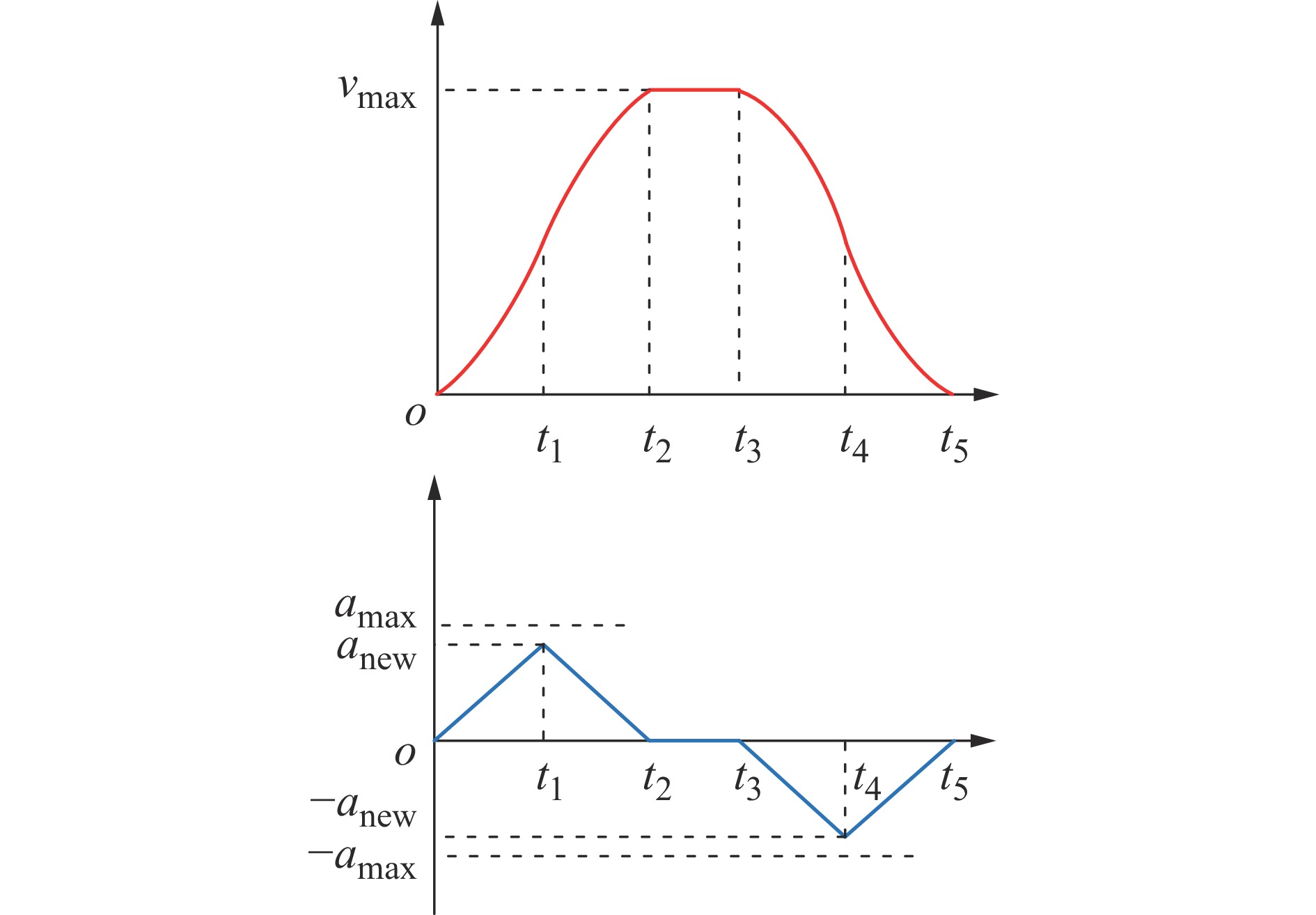
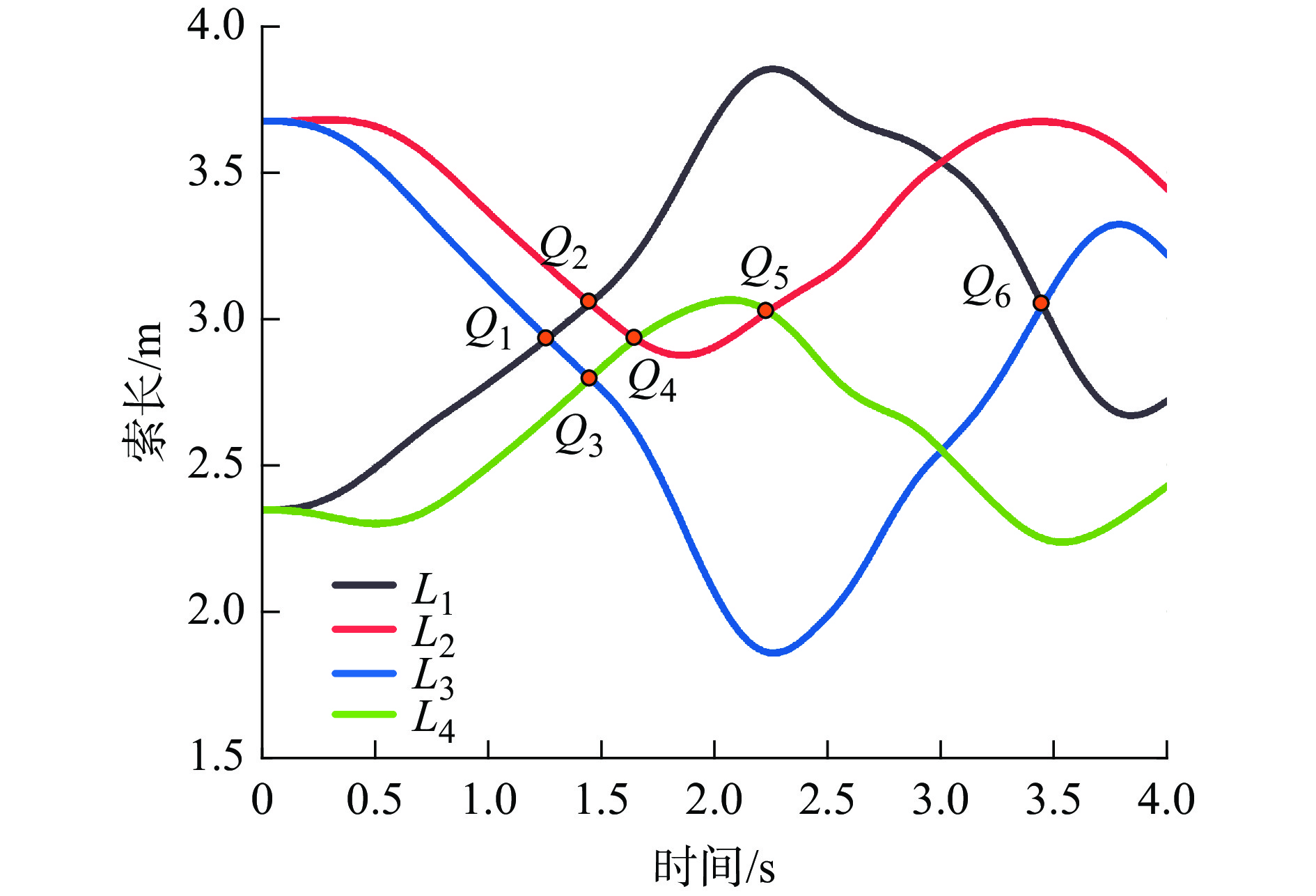
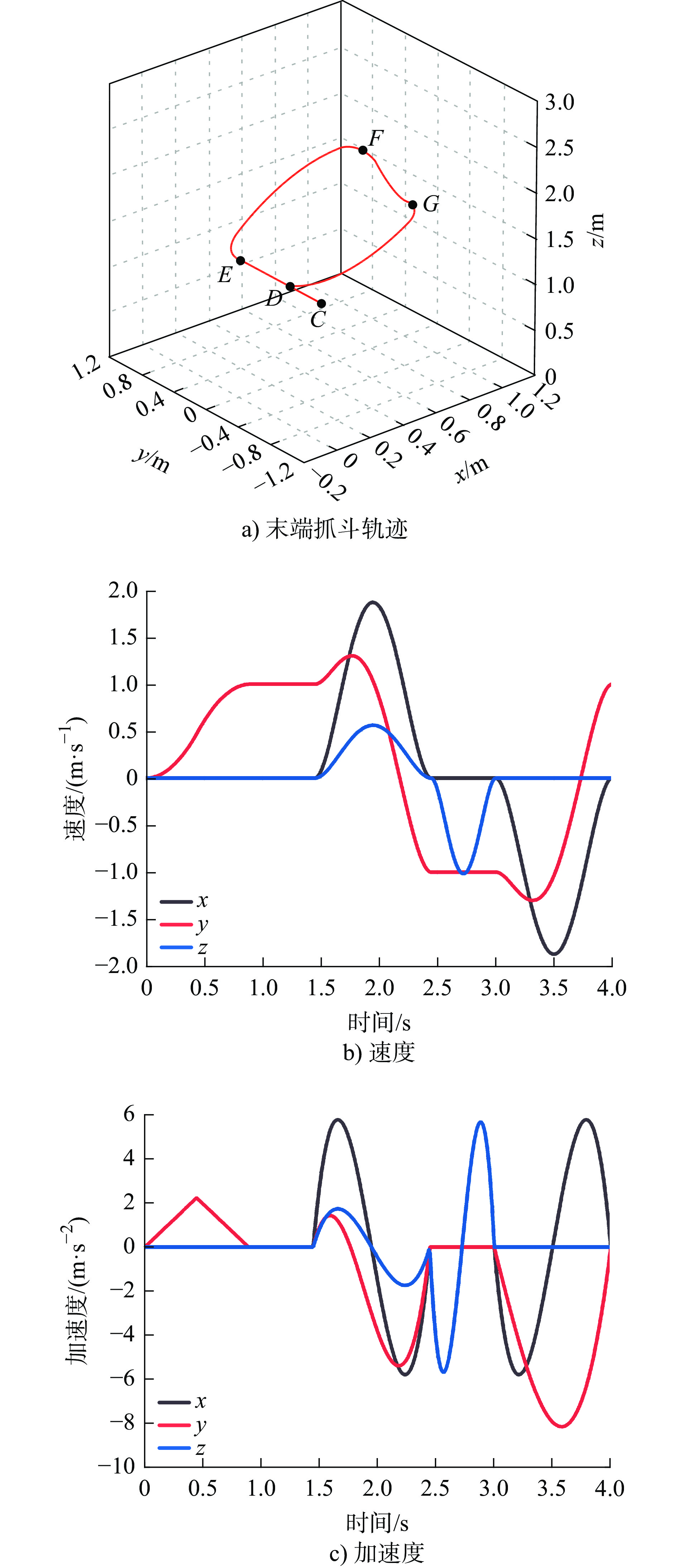
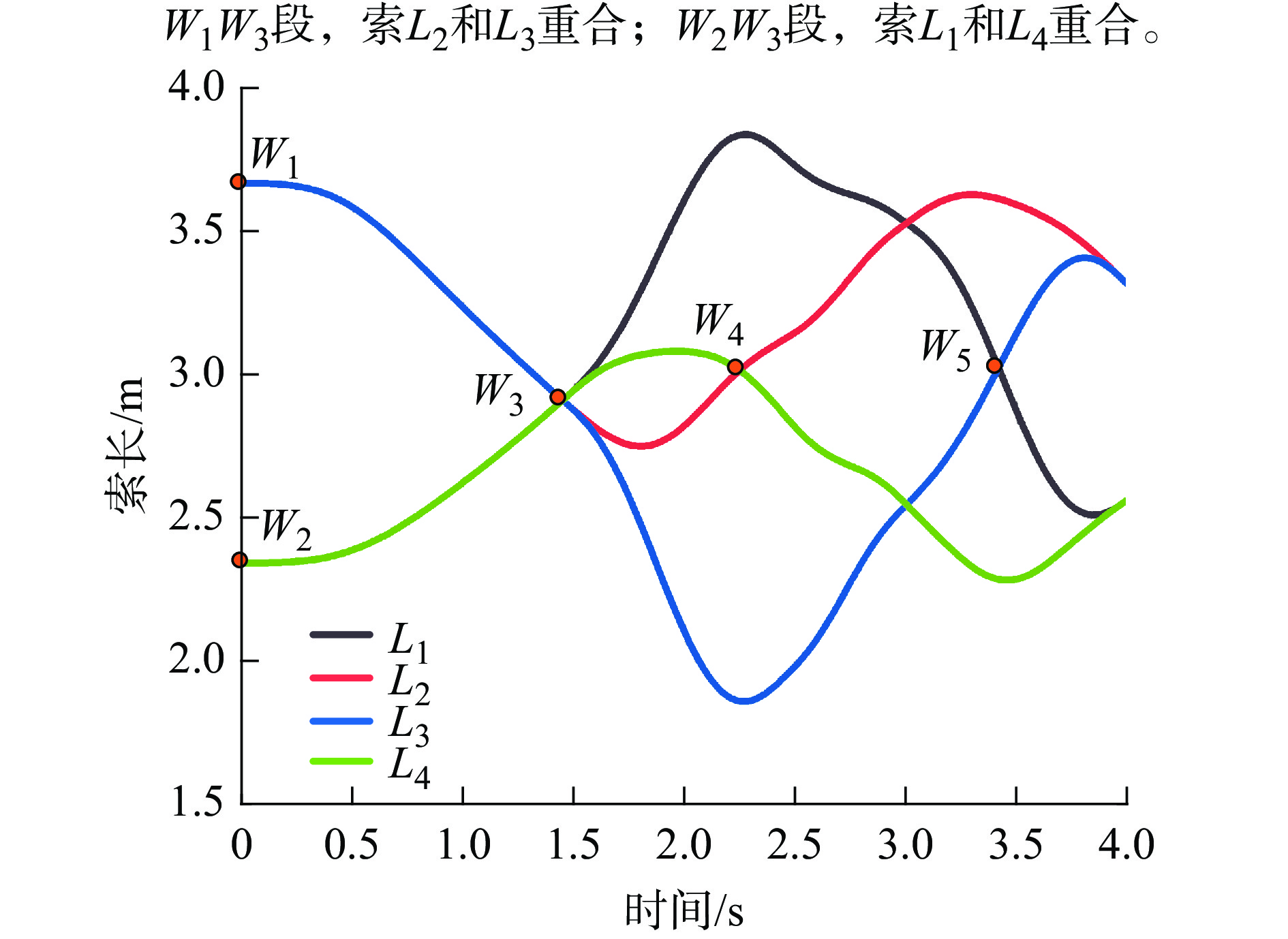
依据矸石分拣过程和特点,提出一种柔索驱动拣矸机器人的抓取轨迹规划方案。建立柔索驱动拣矸机器人运动学模型,仿真分析验证了模型的正确性,为末端抓斗的运动轨迹是否符合索长变化规律提供判定依据。根据矸石与皮带运输机同步运动的特性、矸石仓位置及拣矸机器人工作空间几何中心受力最佳等条件,将末端抓斗的抓取轨迹规划为启动段、准备段、抓矸段和置矸段;并针对各段不同的运动特点,采用S型速度曲线和五次多项式组合的轨迹规化方法,对末端抓斗的四段运动进行规划。对规划的轨迹方案进行仿真,结果表明,末端抓斗的运动轨迹、速度和加速度连续,索长变化光滑连续,且轨迹参数能适应矸石在皮带运输机上的不同分布情况。
依据矸石分拣过程和特点,提出一种柔索驱动拣矸机器人的抓取轨迹规划方案。建立柔索驱动拣矸机器人运动学模型,仿真分析验证了模型的正确性,为末端抓斗的运动轨迹是否符合索长变化规律提供判定依据。根据矸石与皮带运输机同步运动的特性、矸石仓位置及拣矸机器人工作空间几何中心受力最佳等条件,将末端抓斗的抓取轨迹规划为启动段、准备段、抓矸段和置矸段;并针对各段不同的运动特点,采用S型速度曲线和五次多项式组合的轨迹规化方法,对末端抓斗的四段运动进行规划。对规划的轨迹方案进行仿真,结果表明,末端抓斗的运动轨迹、速度和加速度连续,索长变化光滑连续,且轨迹参数能适应矸石在皮带运输机上的不同分布情况。


2023, 42(12): 1996-2002.
doi: 10.13433/j.cnki.1003-8728.20220170
摘要:
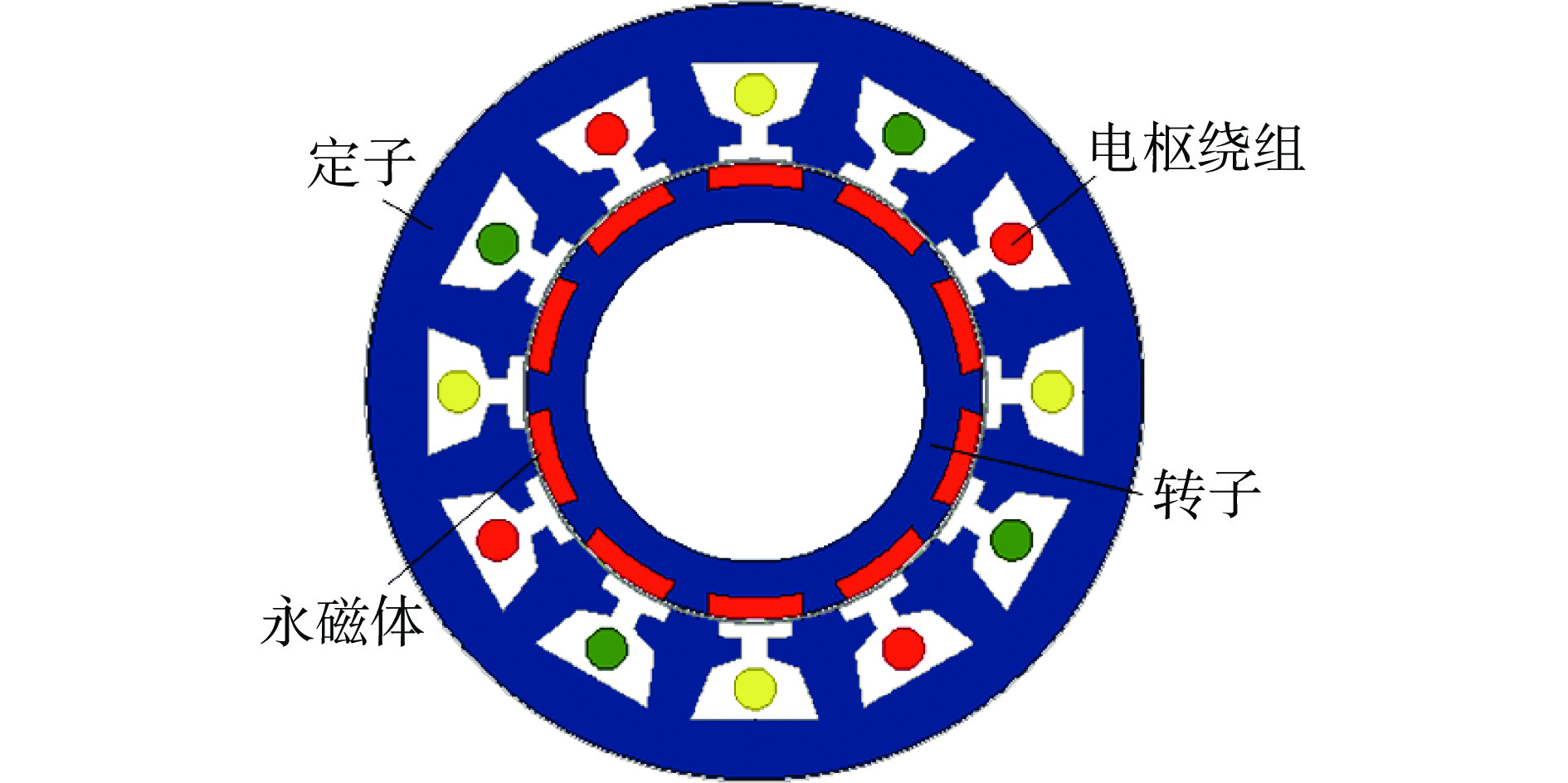
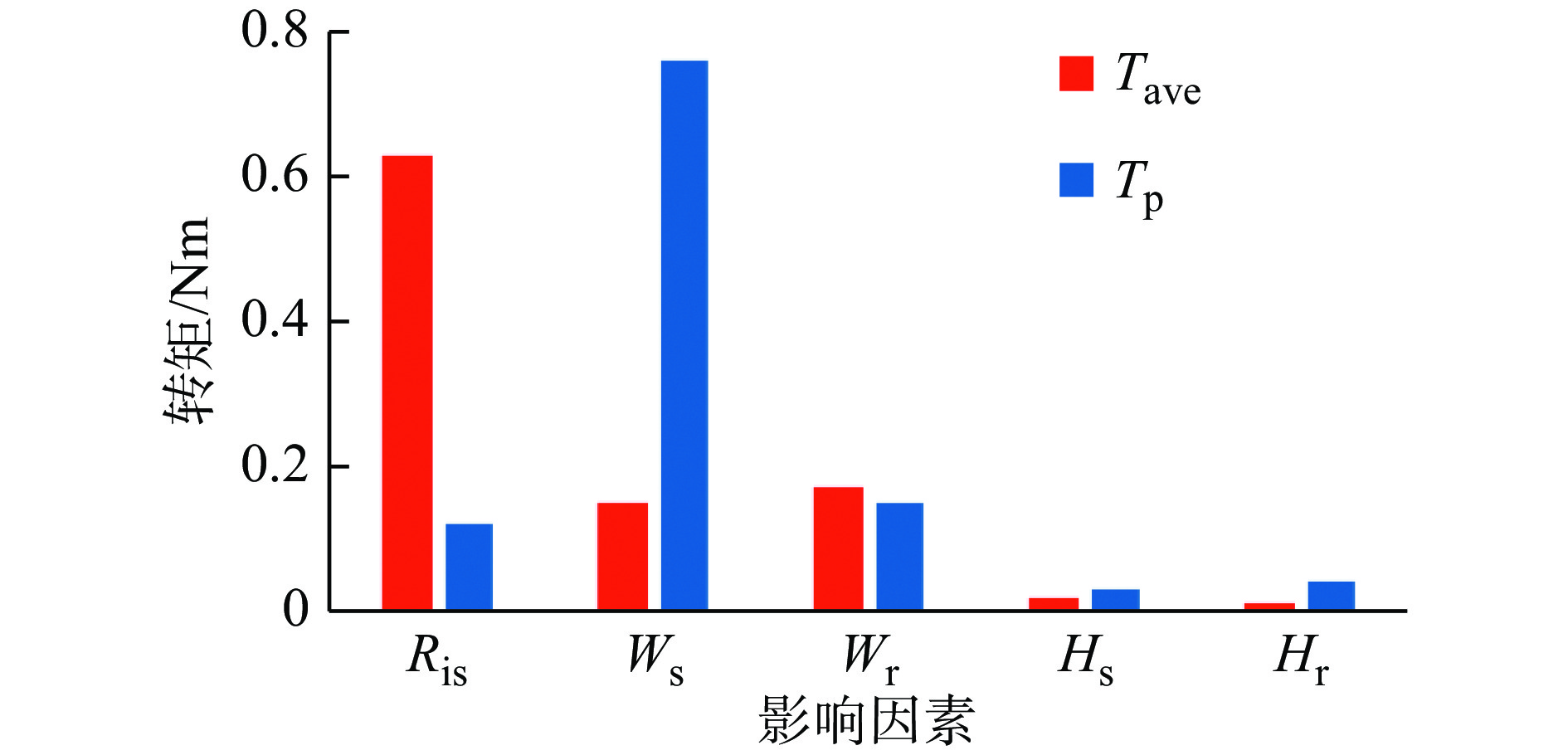
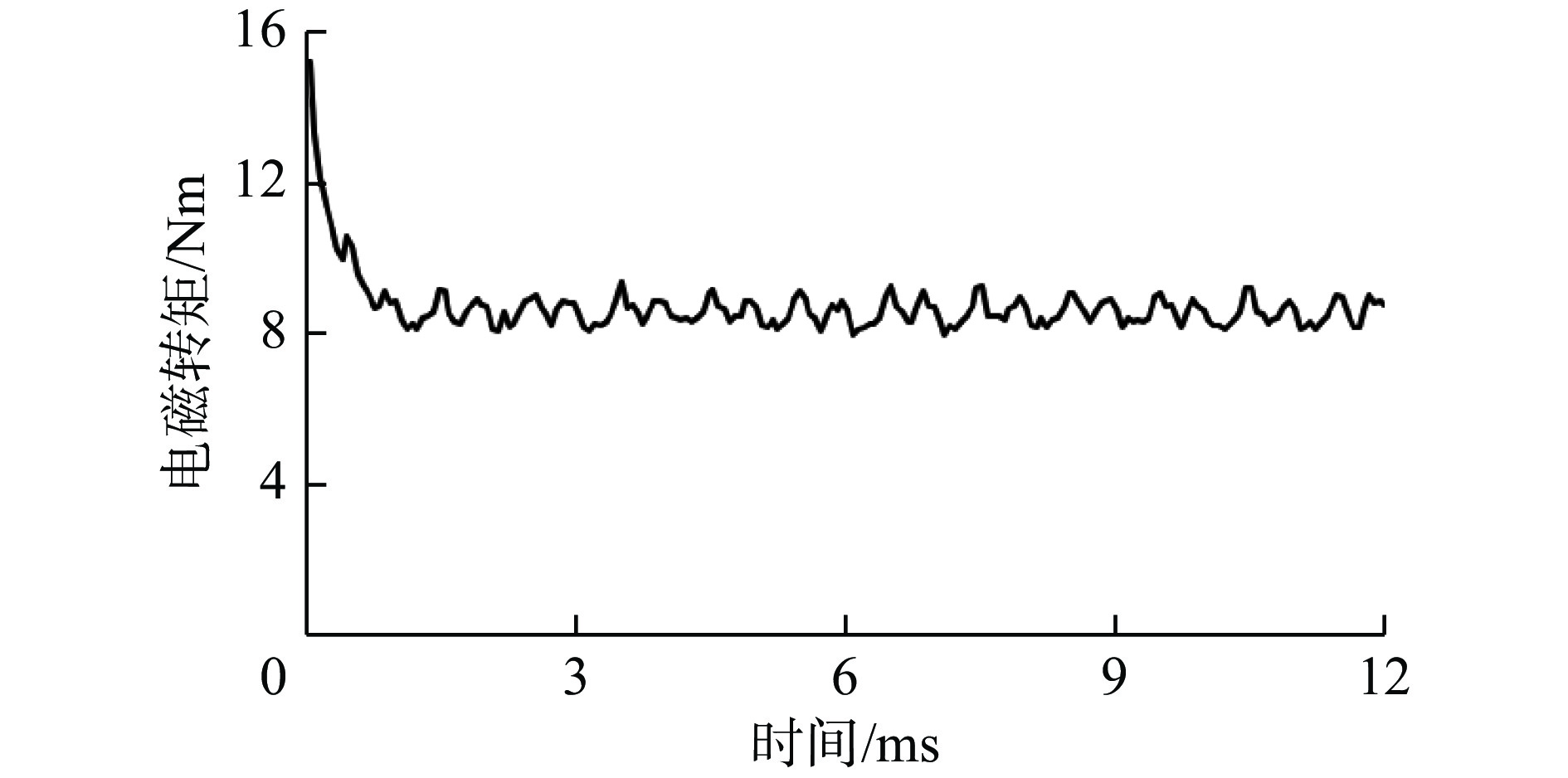
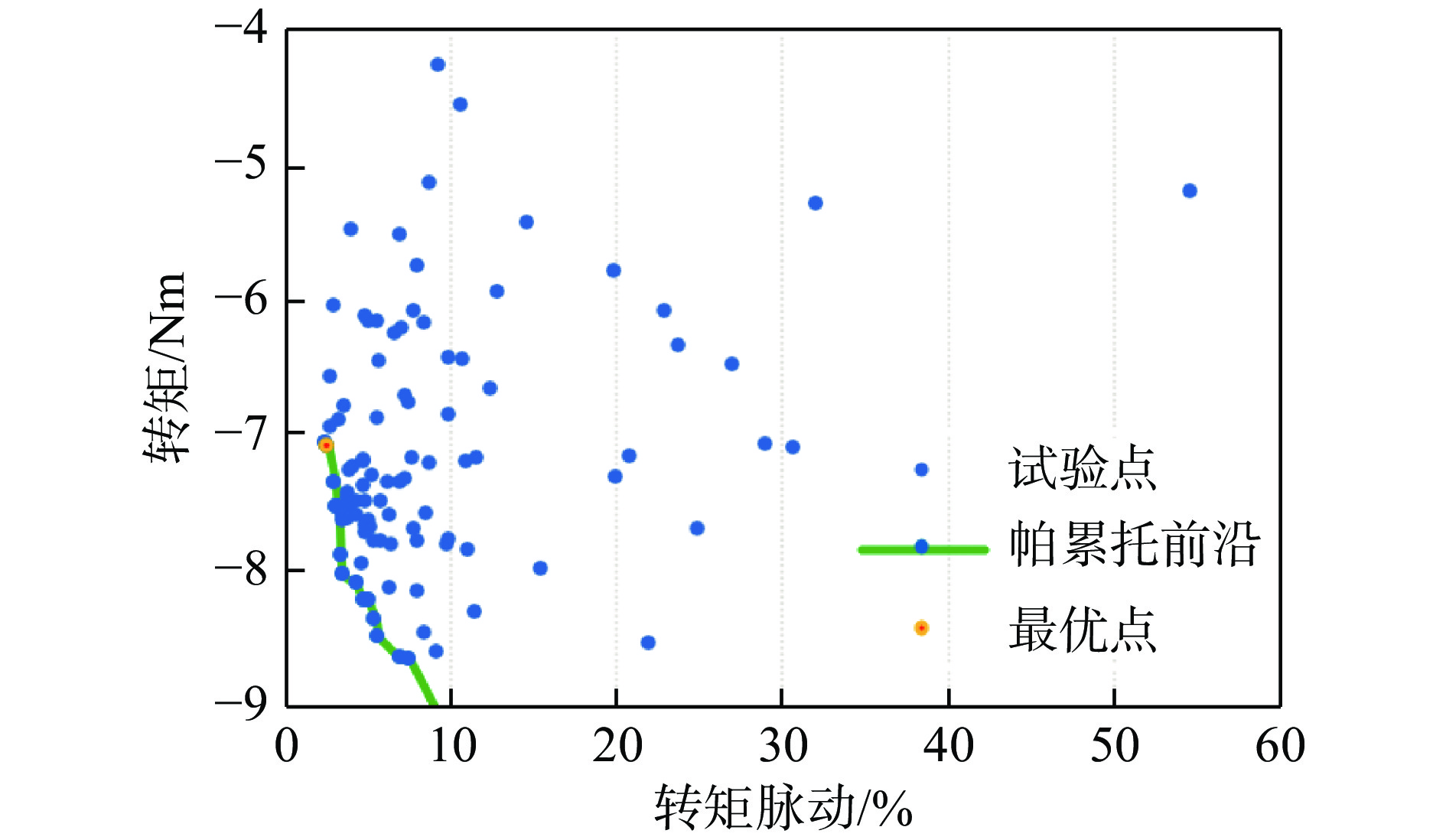
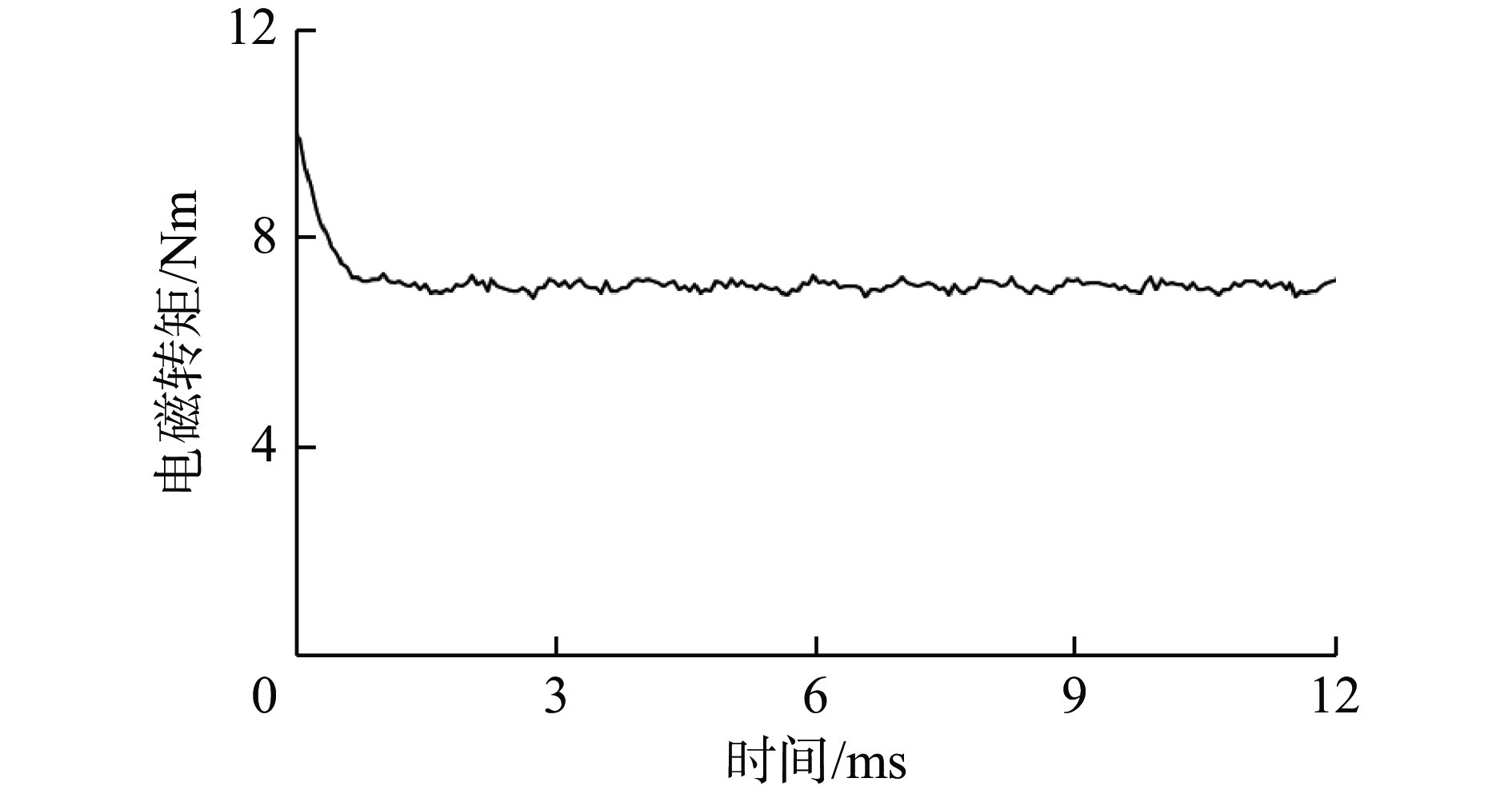
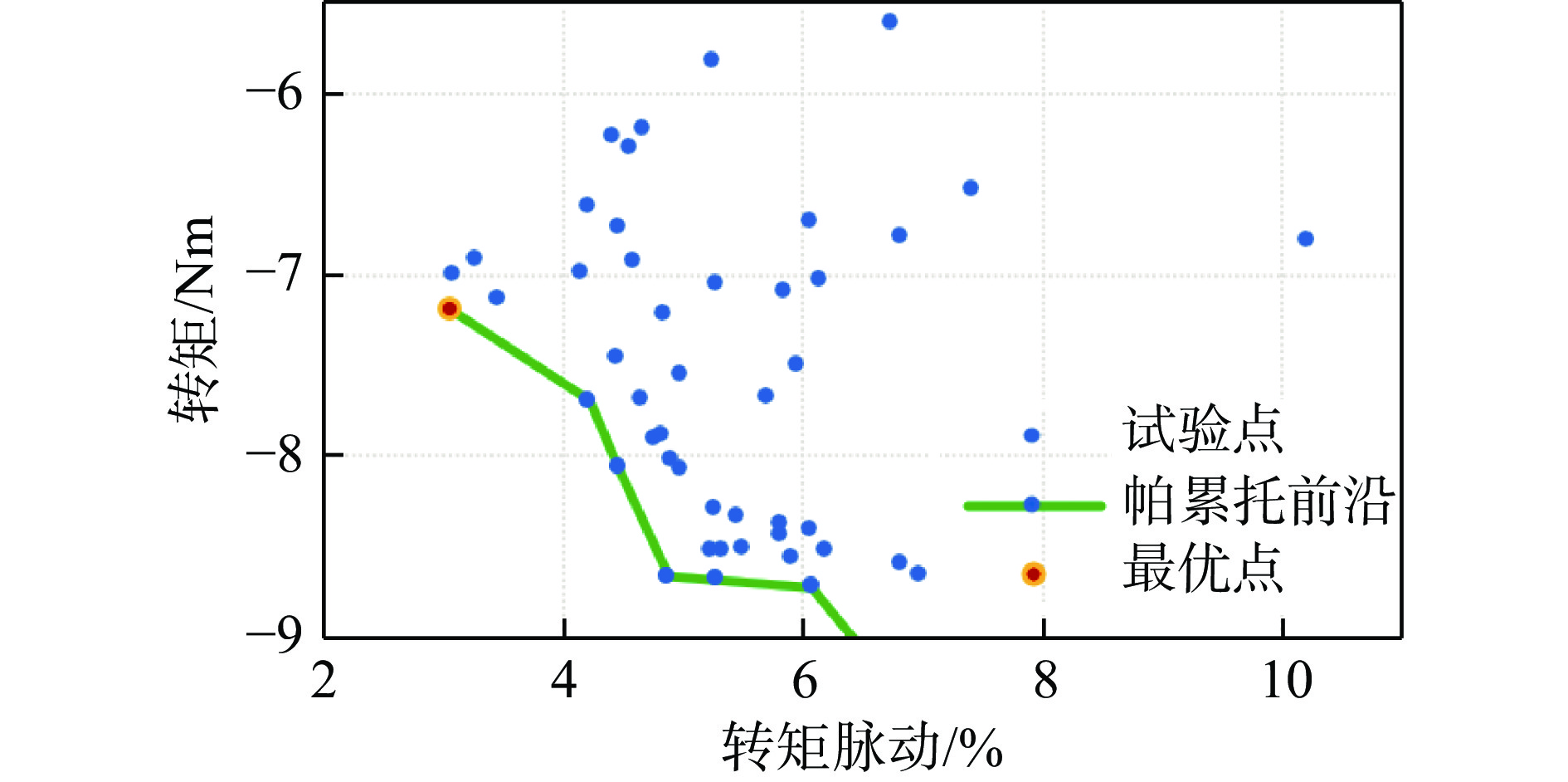
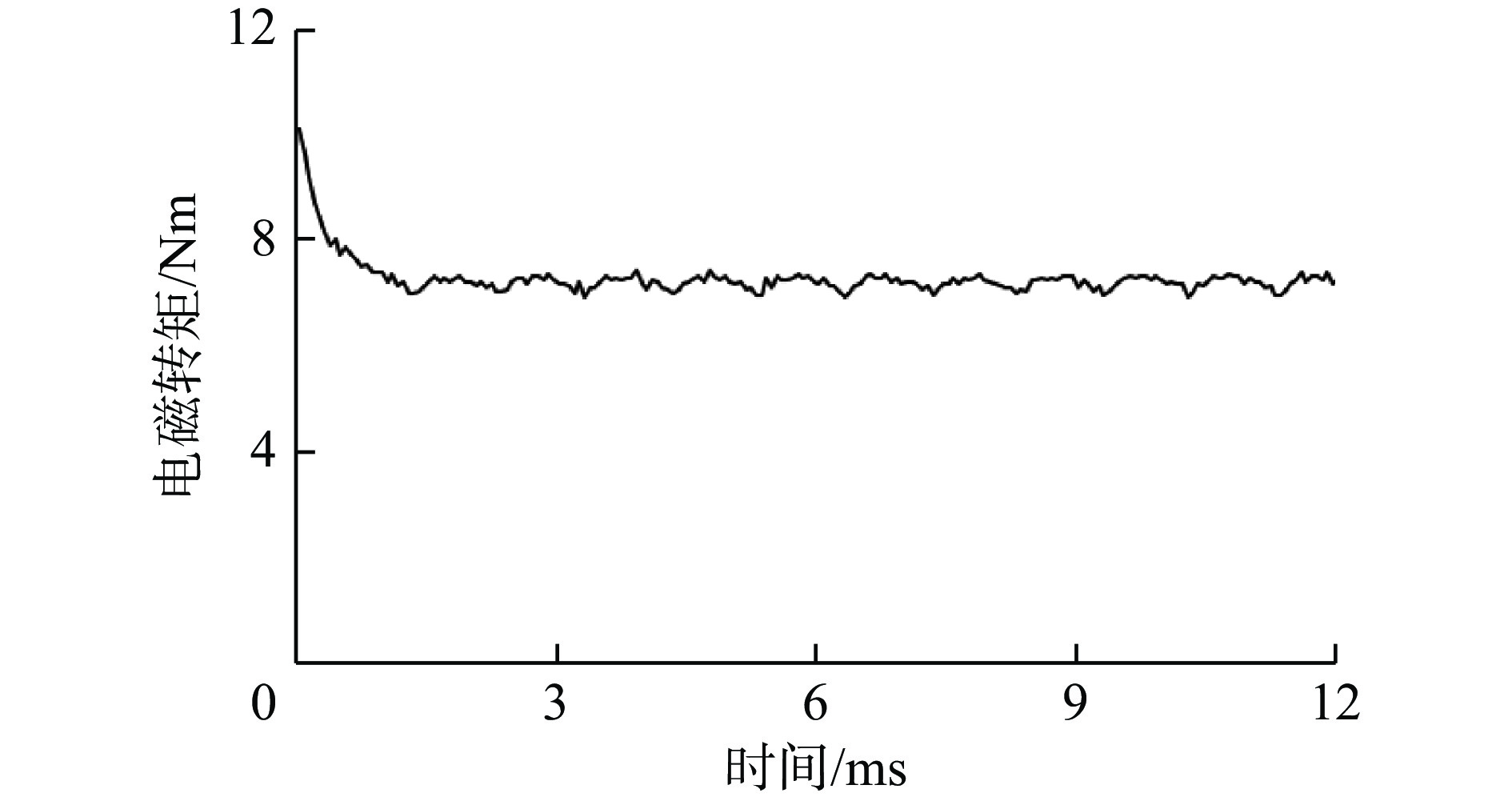
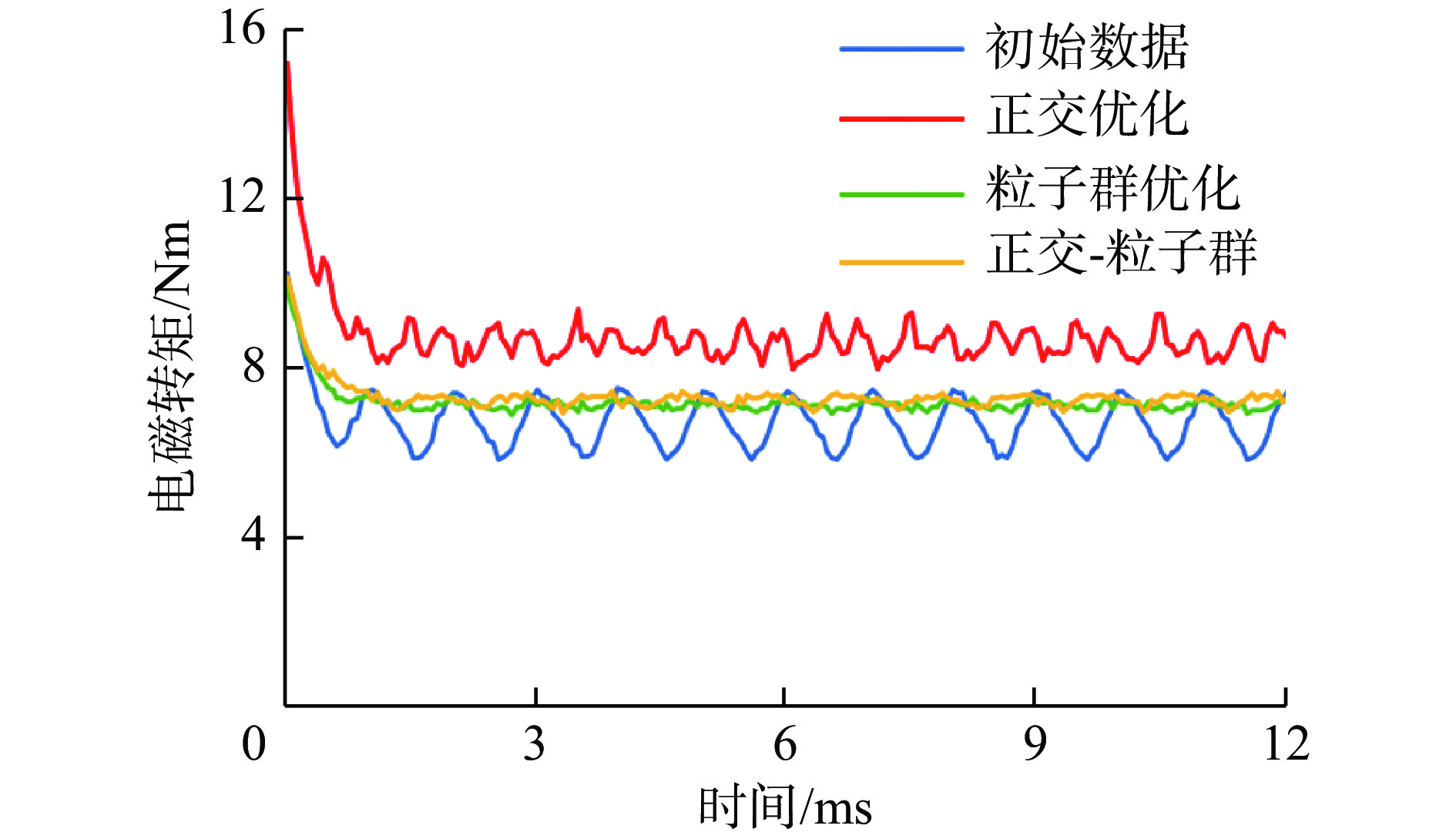
永磁游标电机有低速大转矩运行、直接驱动等优点,在保证转矩密度的同时降低转矩脉动是该类电机优化的主要目标。以内转子永磁游标电机为研究对象,利用敏感性分析确定优化因素,采用多目标正交优化、粒子群算法对该电机进行了优化,提出了二者相结合的正交-粒子群优化算法。利用有限元法对上述3种优化结果进行仿真,结果表明,该方法解决了正交优化精度不足和粒子群优化计算量大的问题;优化后使电机电磁转矩增加8.5%,转矩脉动减小8.23%,提升了电机的性能。
永磁游标电机有低速大转矩运行、直接驱动等优点,在保证转矩密度的同时降低转矩脉动是该类电机优化的主要目标。以内转子永磁游标电机为研究对象,利用敏感性分析确定优化因素,采用多目标正交优化、粒子群算法对该电机进行了优化,提出了二者相结合的正交-粒子群优化算法。利用有限元法对上述3种优化结果进行仿真,结果表明,该方法解决了正交优化精度不足和粒子群优化计算量大的问题;优化后使电机电磁转矩增加8.5%,转矩脉动减小8.23%,提升了电机的性能。
2023, 42(12): 2003-2010.
doi: 10.13433/j.cnki.1003-8728.20220183
摘要:
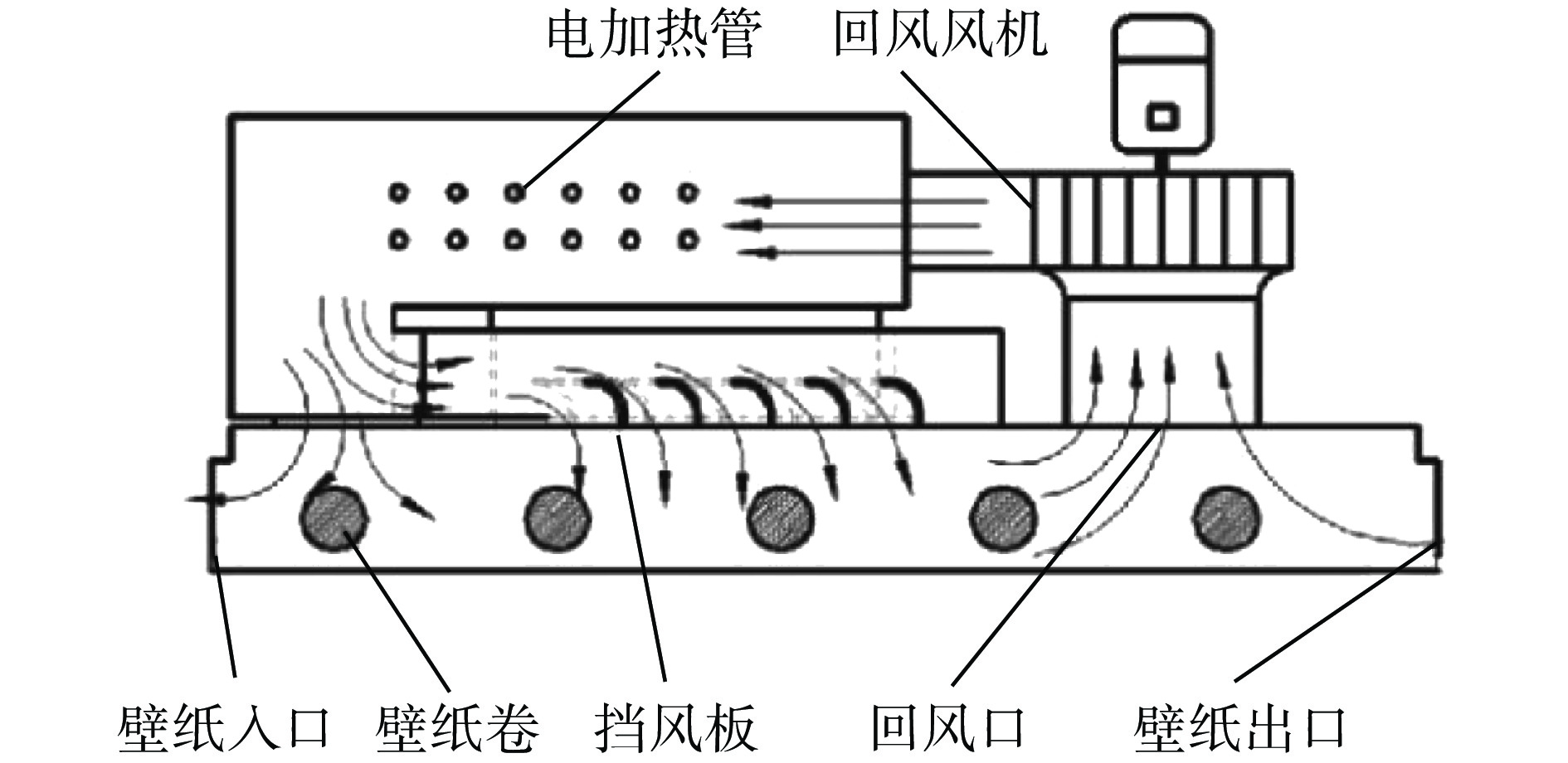
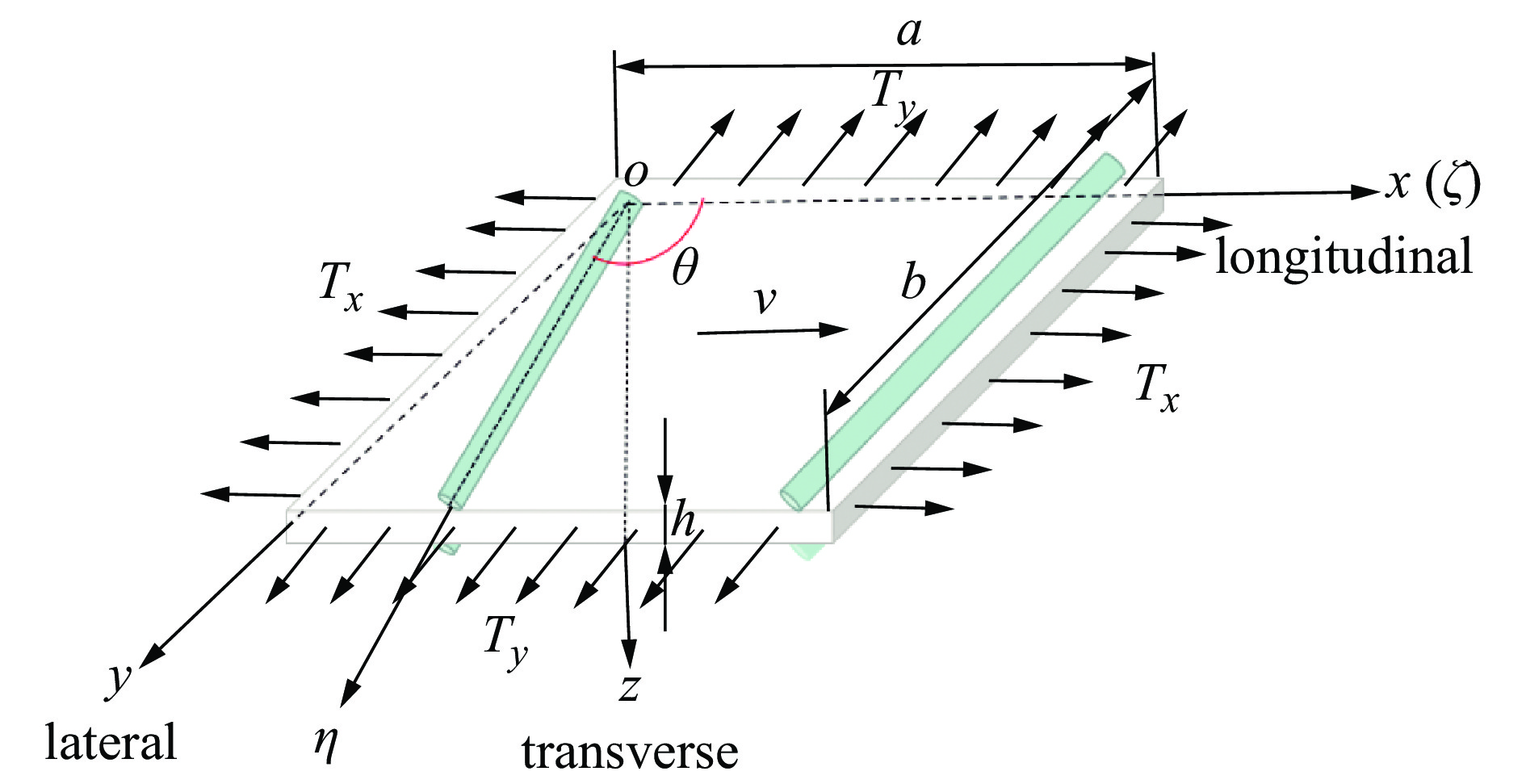
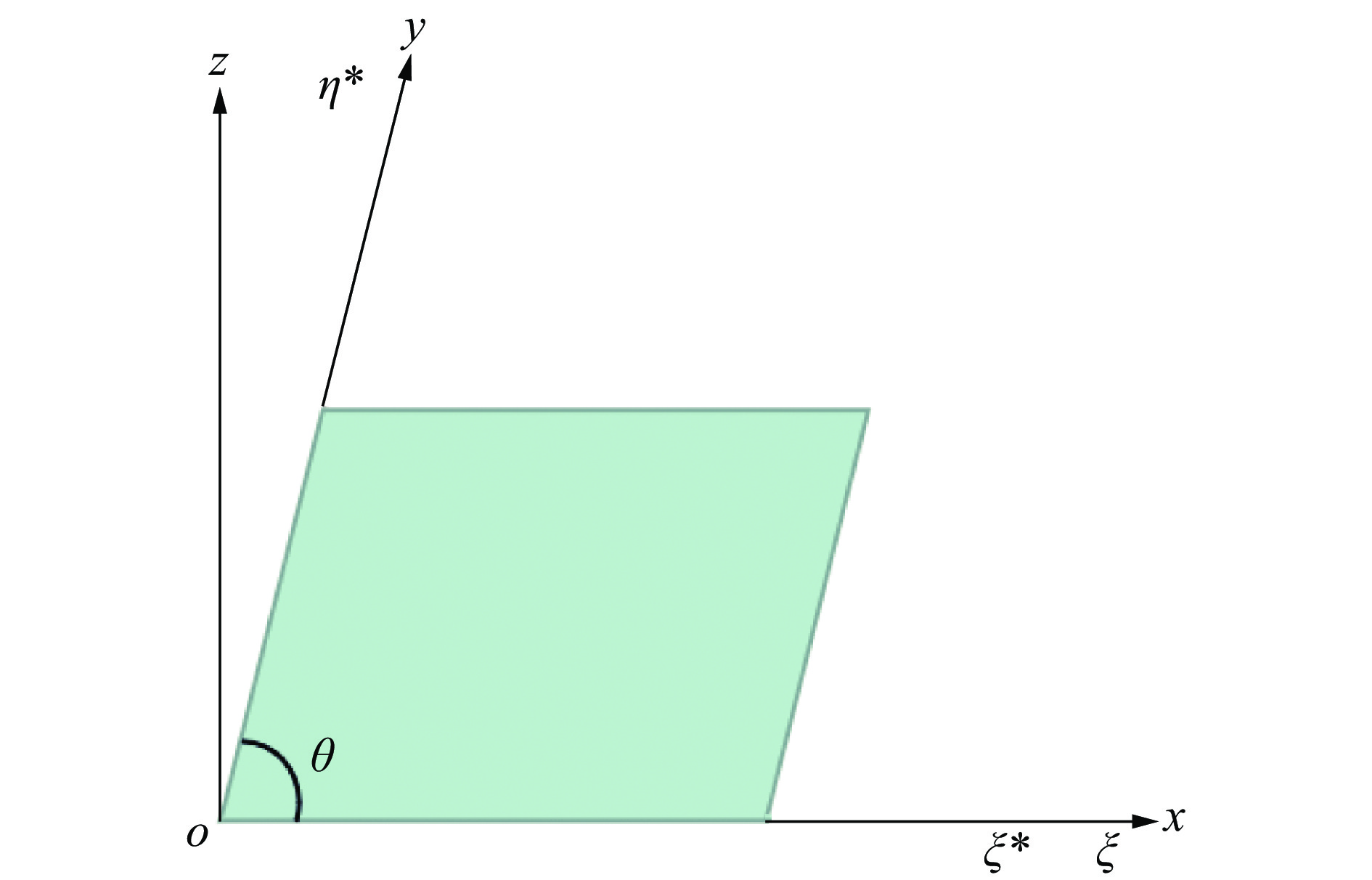
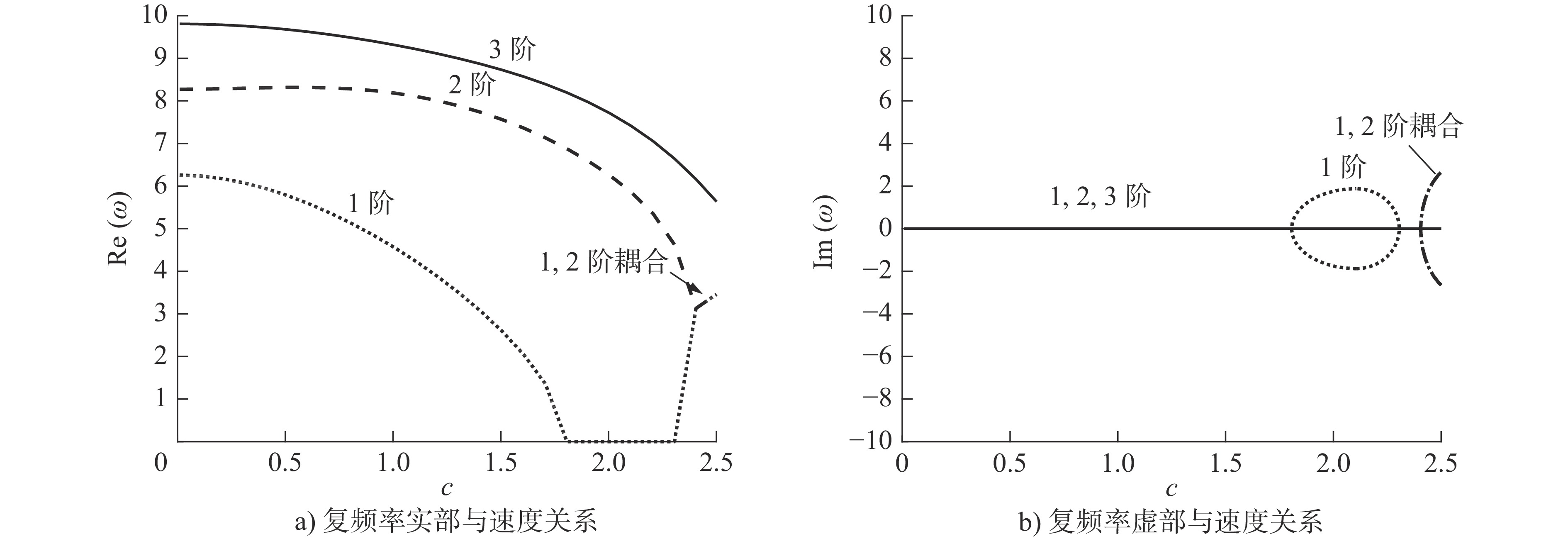
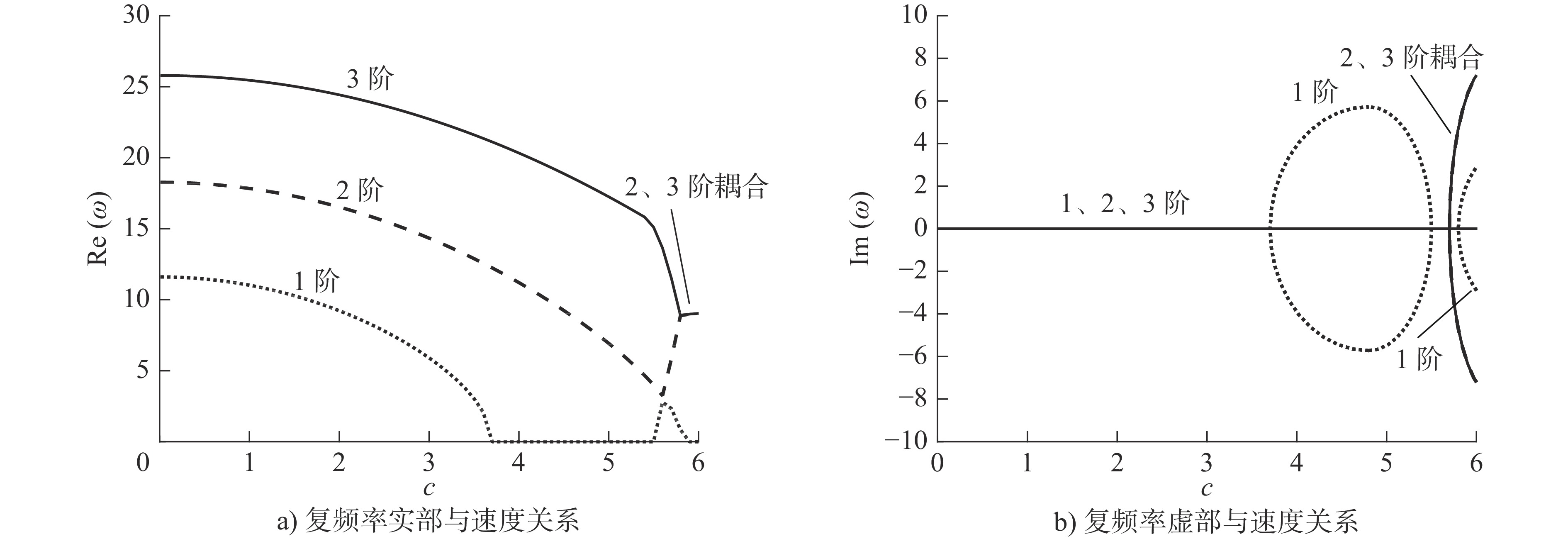
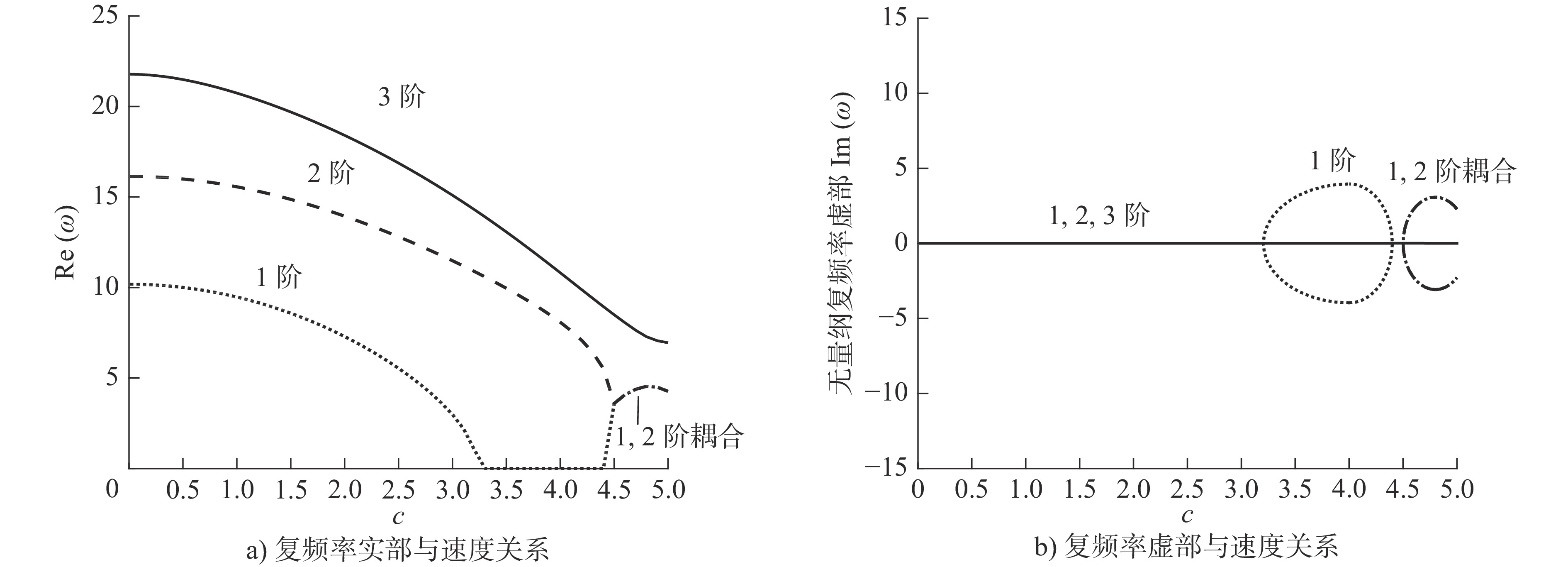
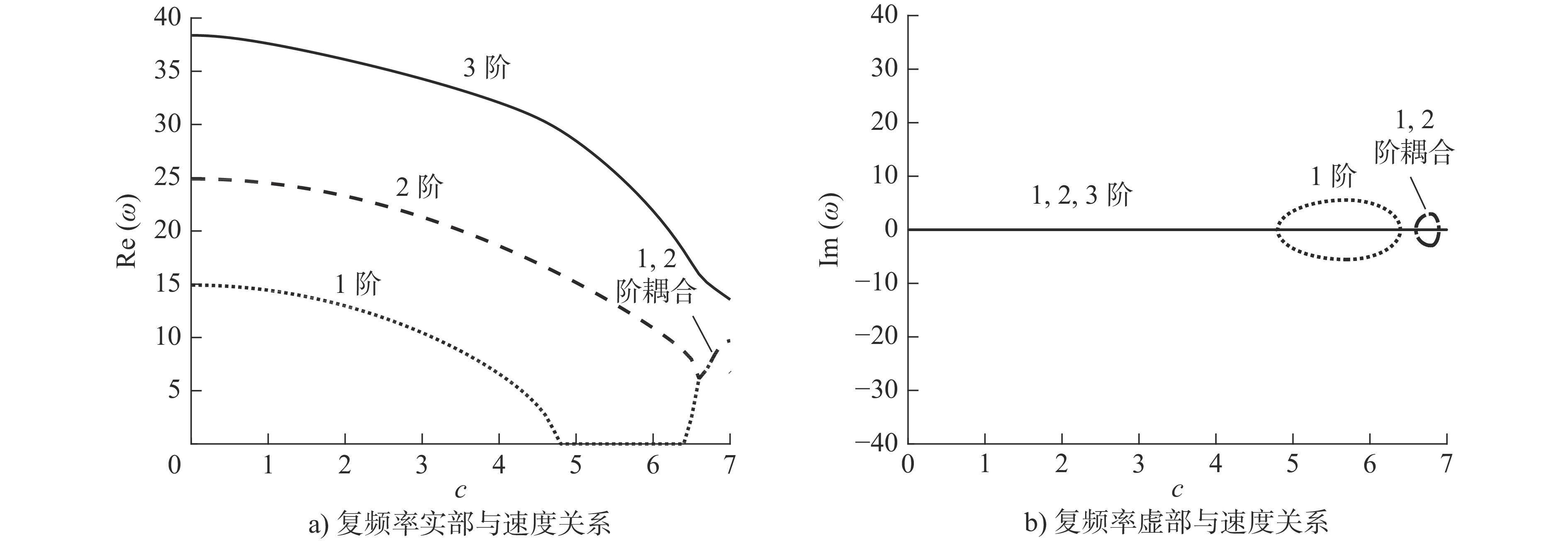
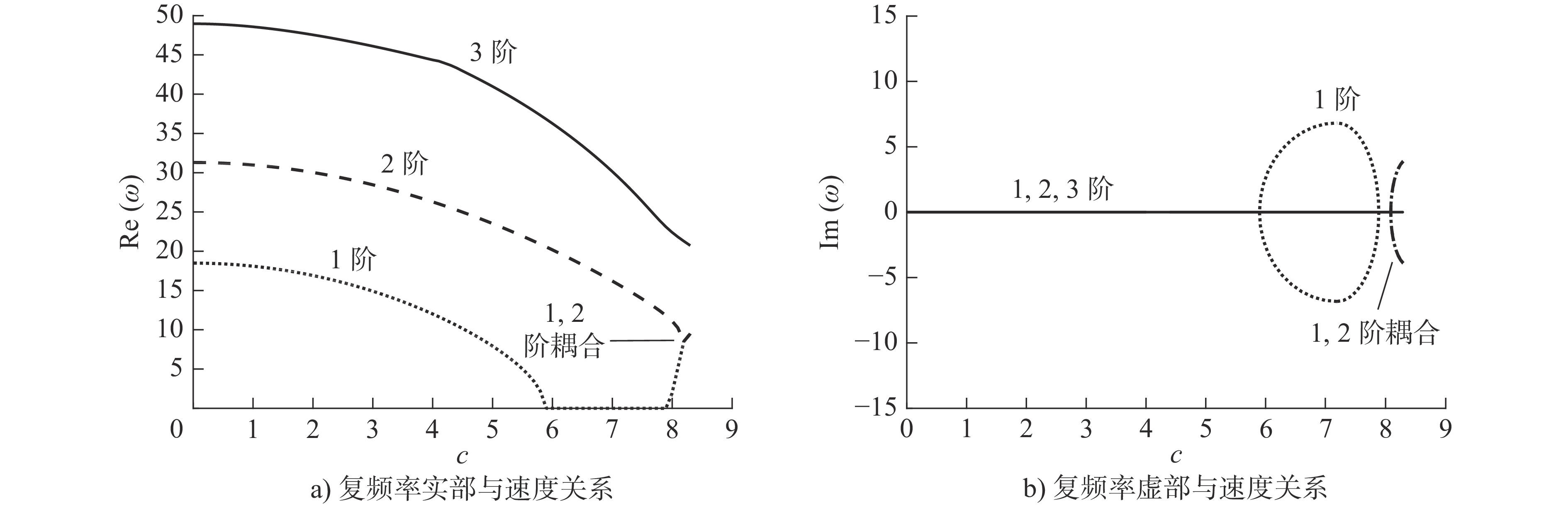
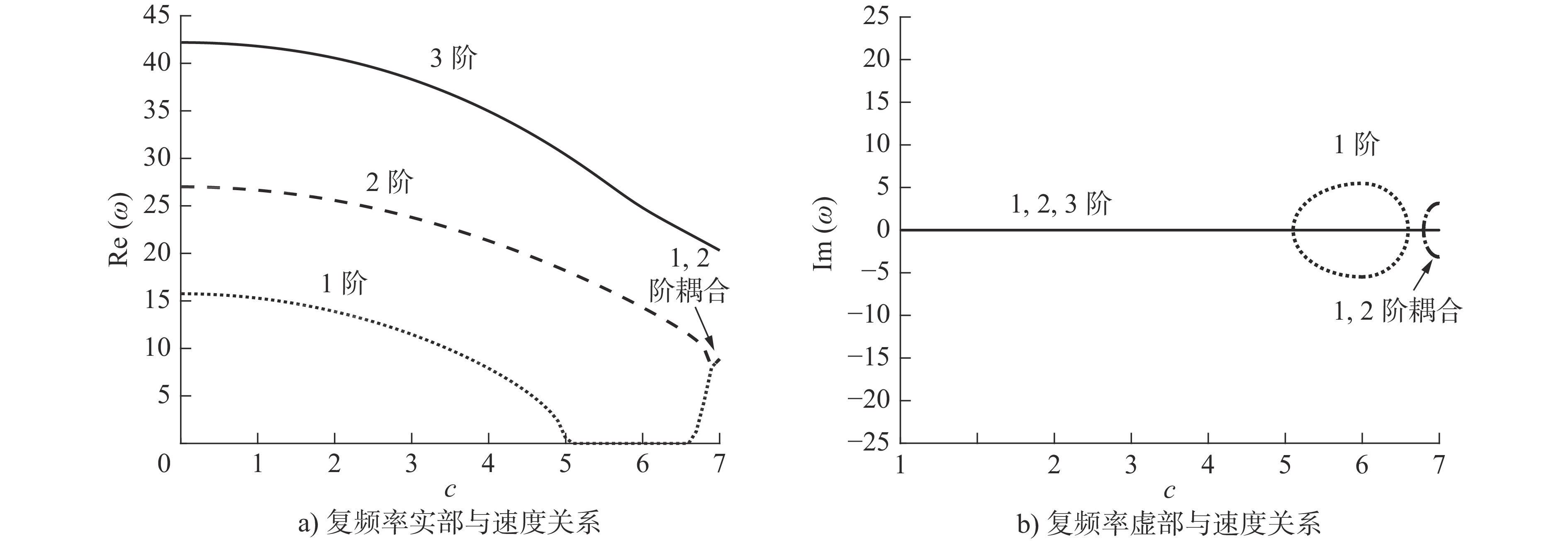
TPU薄膜在生产过程中有斜支承导向辊对薄膜起导向传输和支承作用,此外还需要有加热烘干系统进行即时干燥,这些过程都不可避免的引起TPU薄膜的横向振动,从而影响薄膜的制备精度和质量。根据D'Alembert原理,建立具有运动速度的TPU薄膜的动力学模型及热传导方程,解耦后得到含有热弹耦合系数的运动TPU薄膜振动方程;考虑薄膜导向辊斜支承作用,建立无量纲化的斜支承下TPU薄膜的振动方程;采用微分求积法对耦合方程进行离散,研究运动TPU薄膜复频率变化对无量纲速度、斜支承角度、热弹耦合系数、张力比的影响,定量分析各参数对运动TPU薄膜振动稳定性的影响,从而提高汽车TPU薄膜的涂布精度和制备质量。
TPU薄膜在生产过程中有斜支承导向辊对薄膜起导向传输和支承作用,此外还需要有加热烘干系统进行即时干燥,这些过程都不可避免的引起TPU薄膜的横向振动,从而影响薄膜的制备精度和质量。根据D'Alembert原理,建立具有运动速度的TPU薄膜的动力学模型及热传导方程,解耦后得到含有热弹耦合系数的运动TPU薄膜振动方程;考虑薄膜导向辊斜支承作用,建立无量纲化的斜支承下TPU薄膜的振动方程;采用微分求积法对耦合方程进行离散,研究运动TPU薄膜复频率变化对无量纲速度、斜支承角度、热弹耦合系数、张力比的影响,定量分析各参数对运动TPU薄膜振动稳定性的影响,从而提高汽车TPU薄膜的涂布精度和制备质量。

2023, 42(12): 2011-2020.
doi: 10.13433/j.cnki.1003-8728.20220157
摘要:
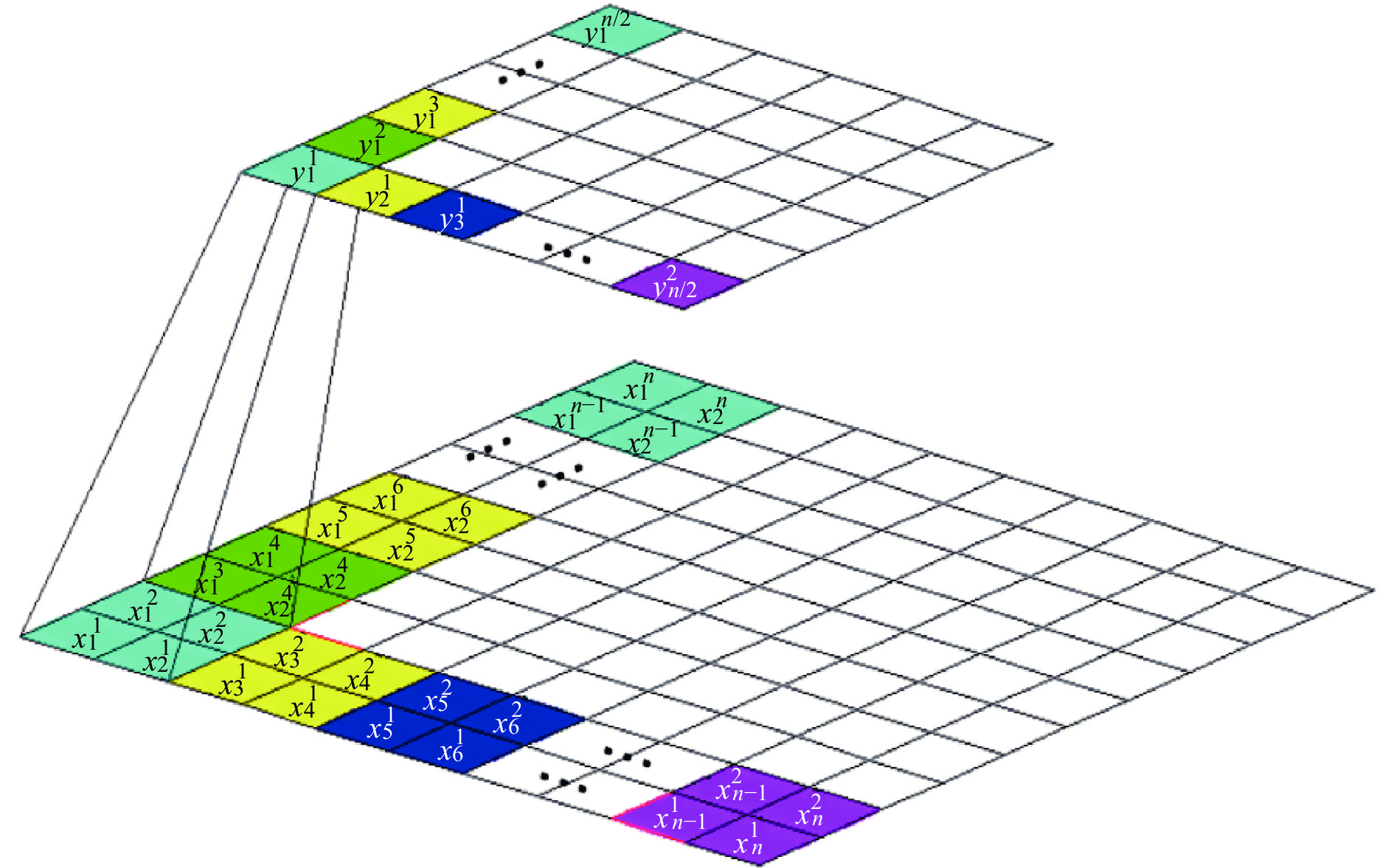
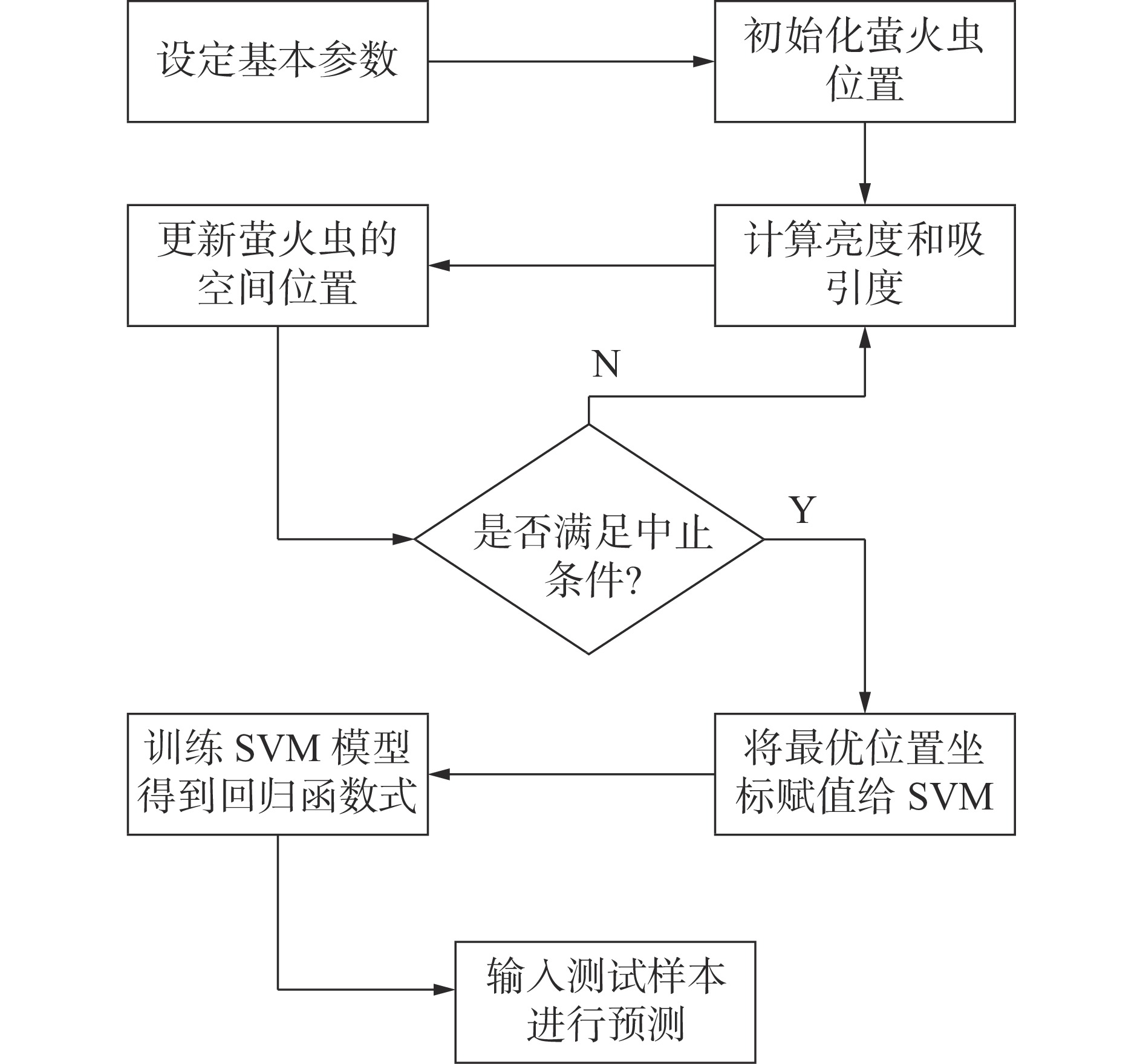
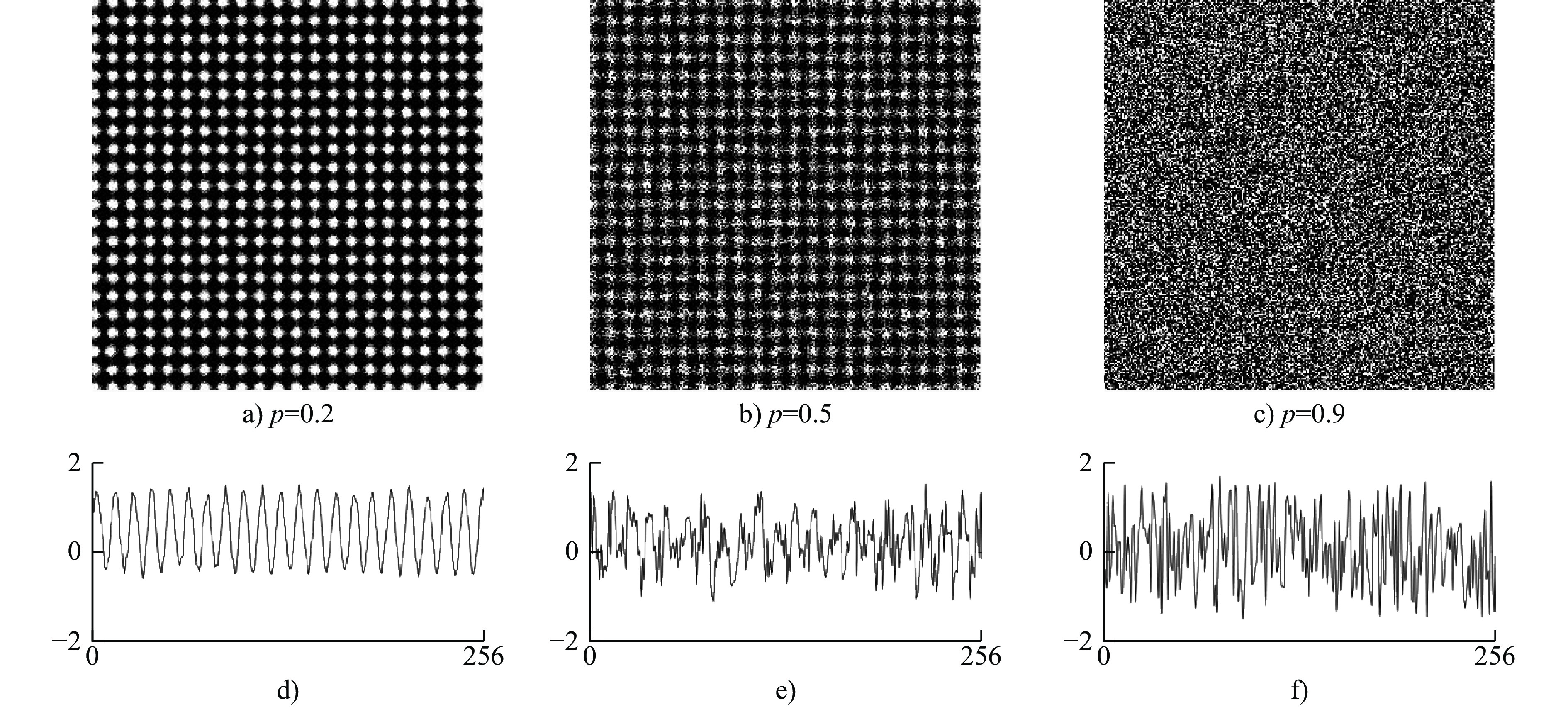
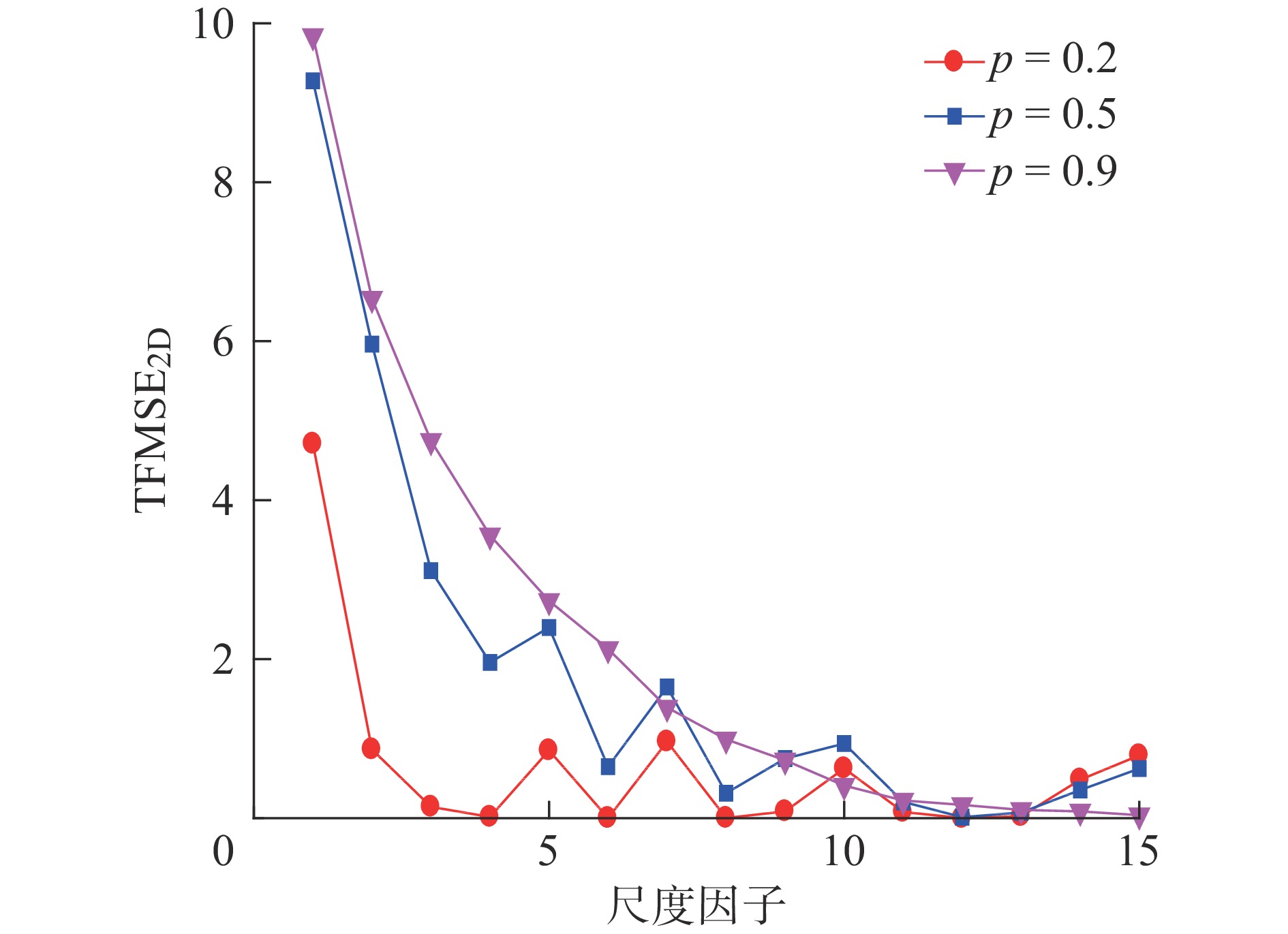
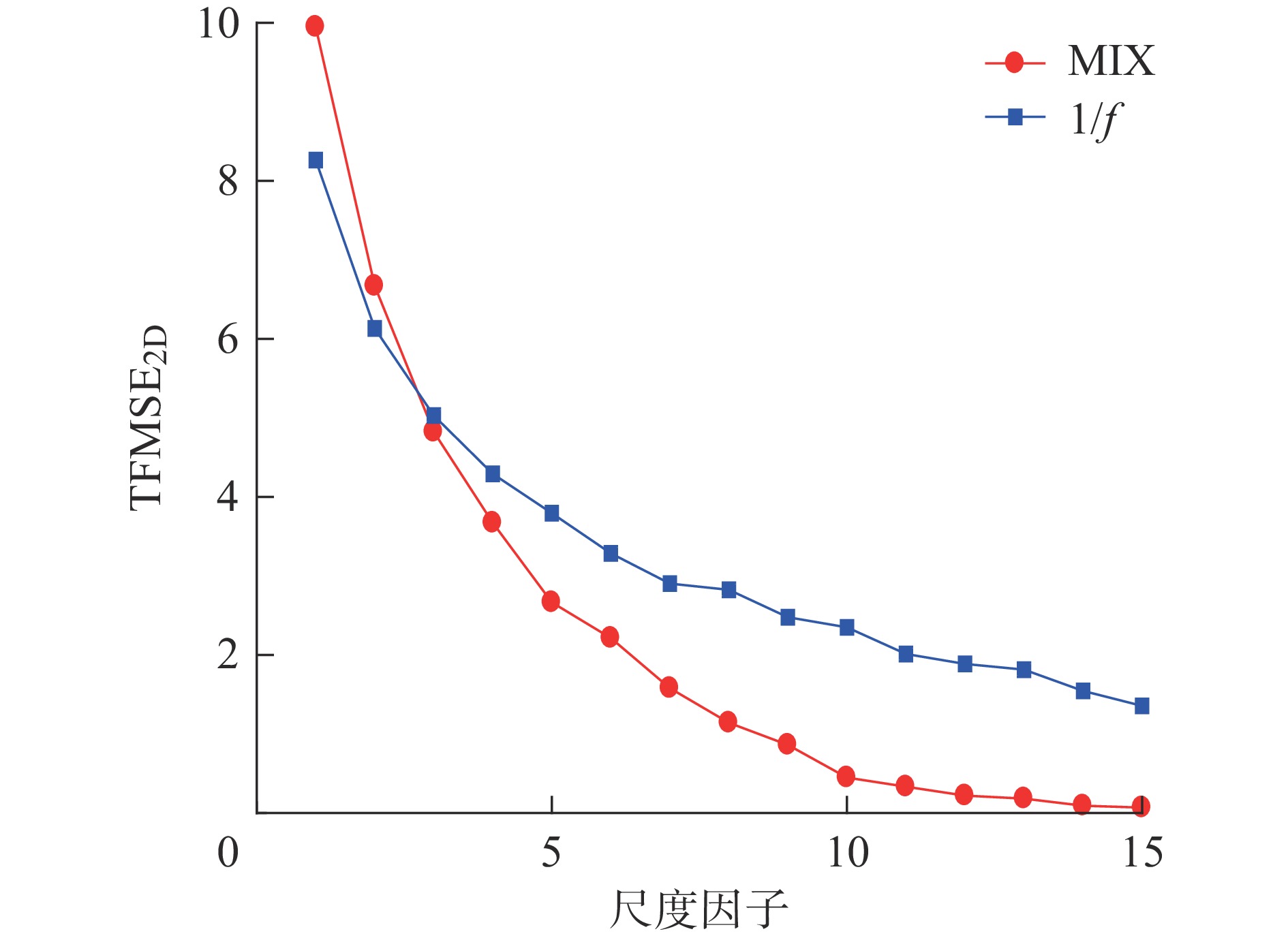
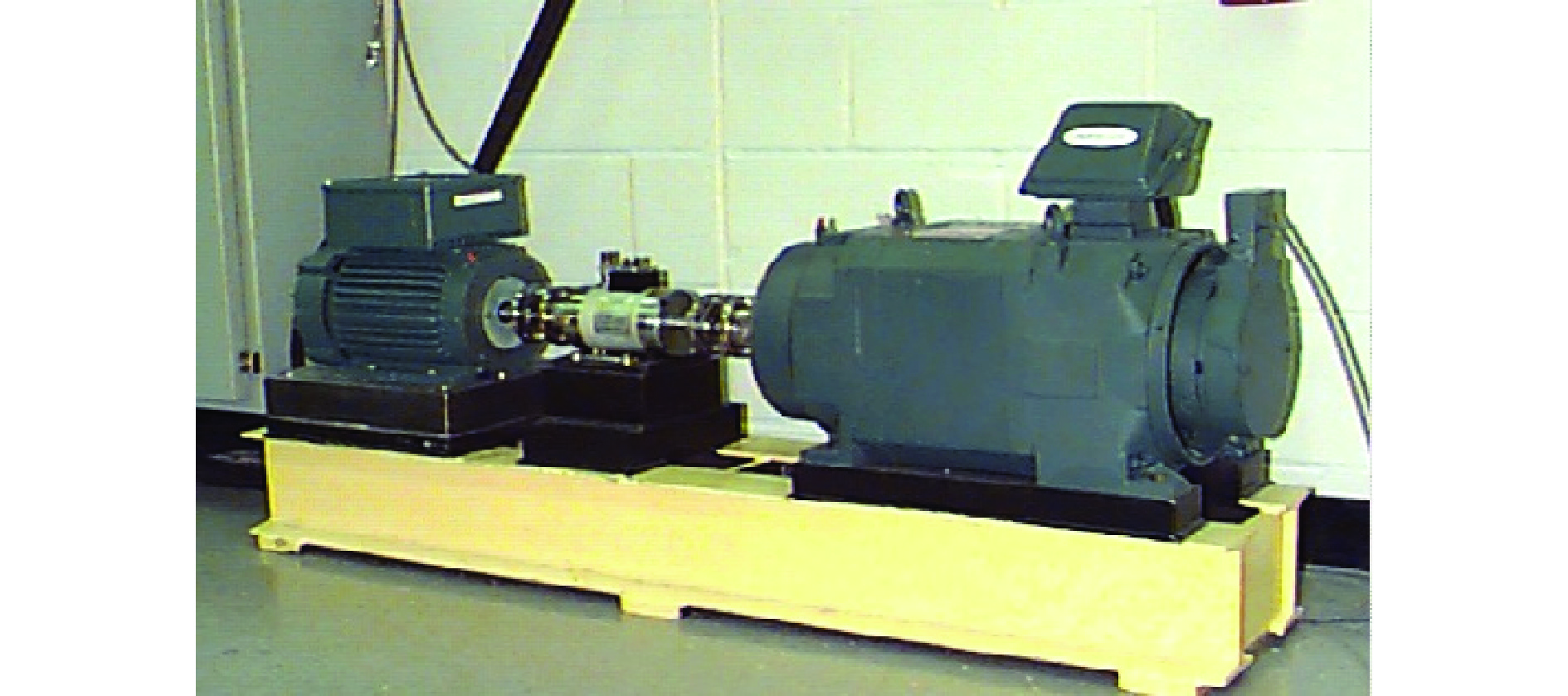
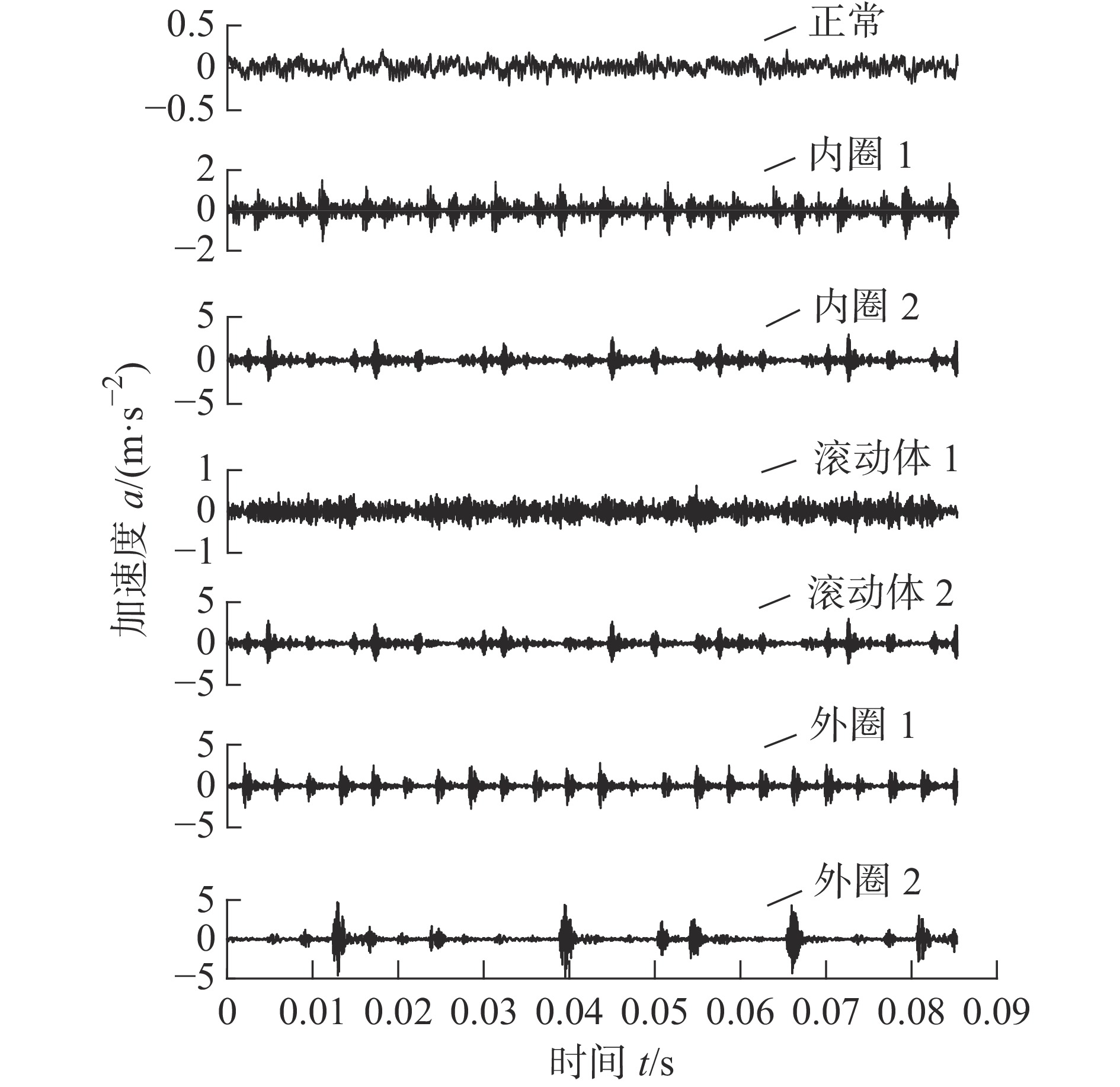
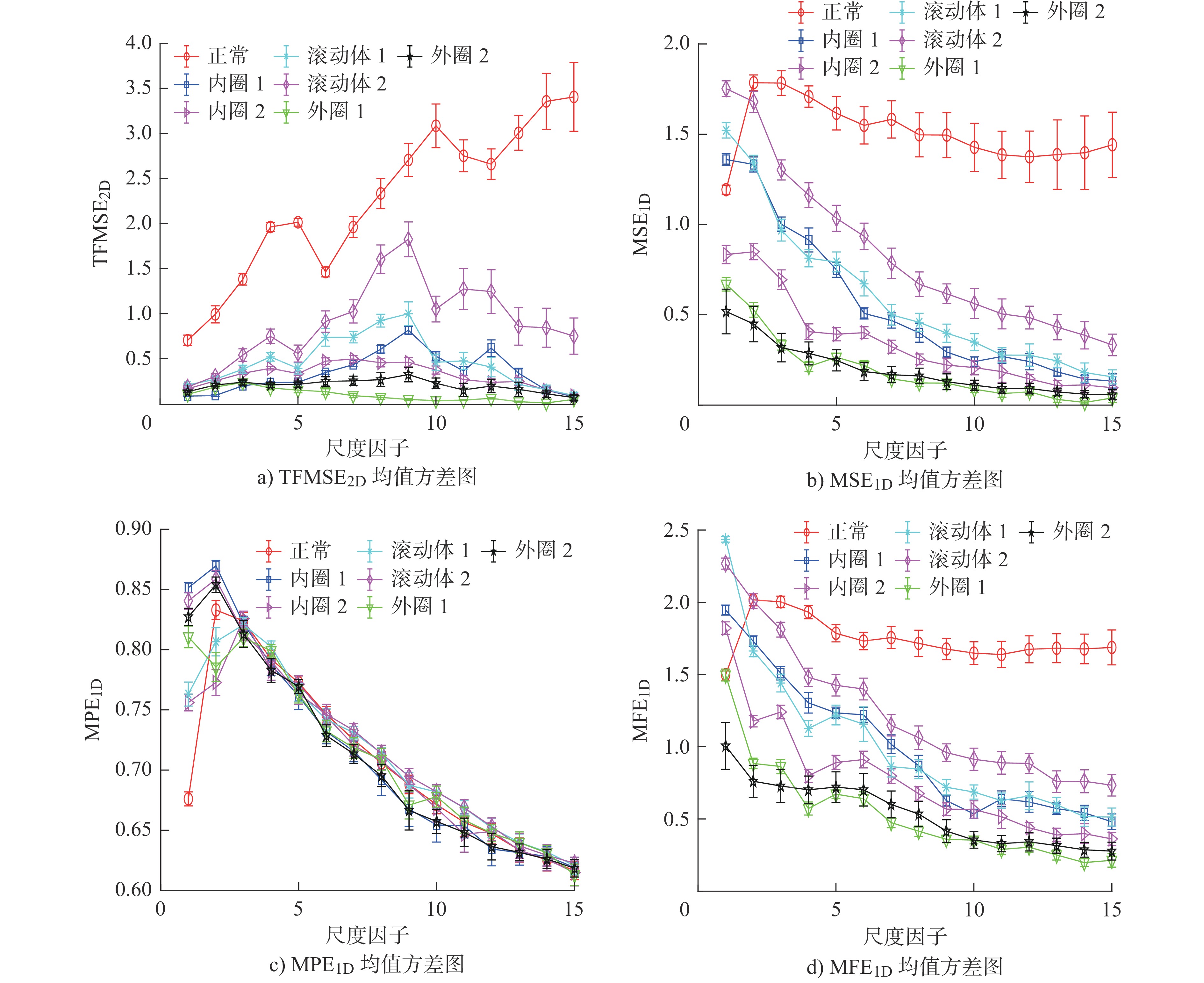
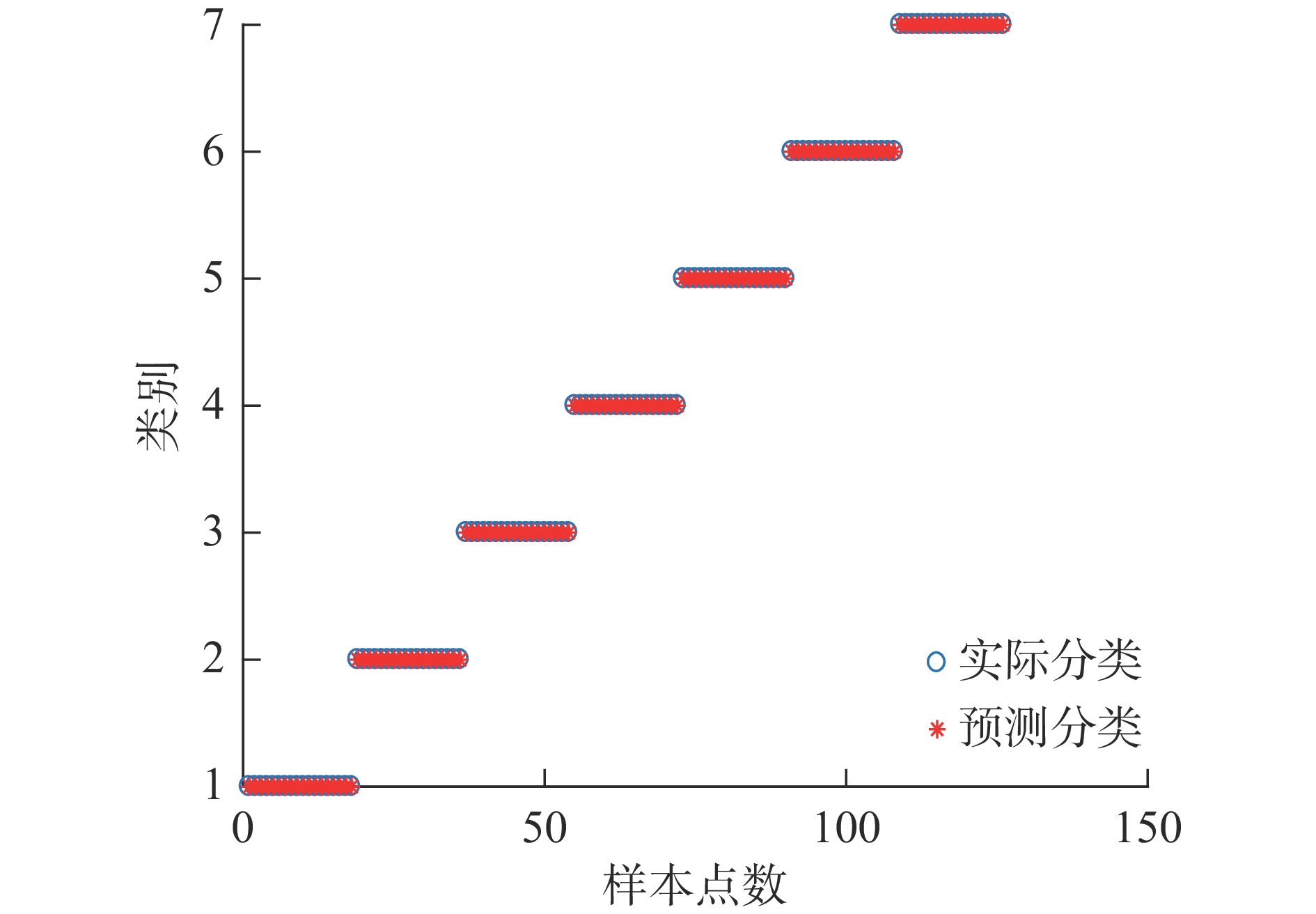
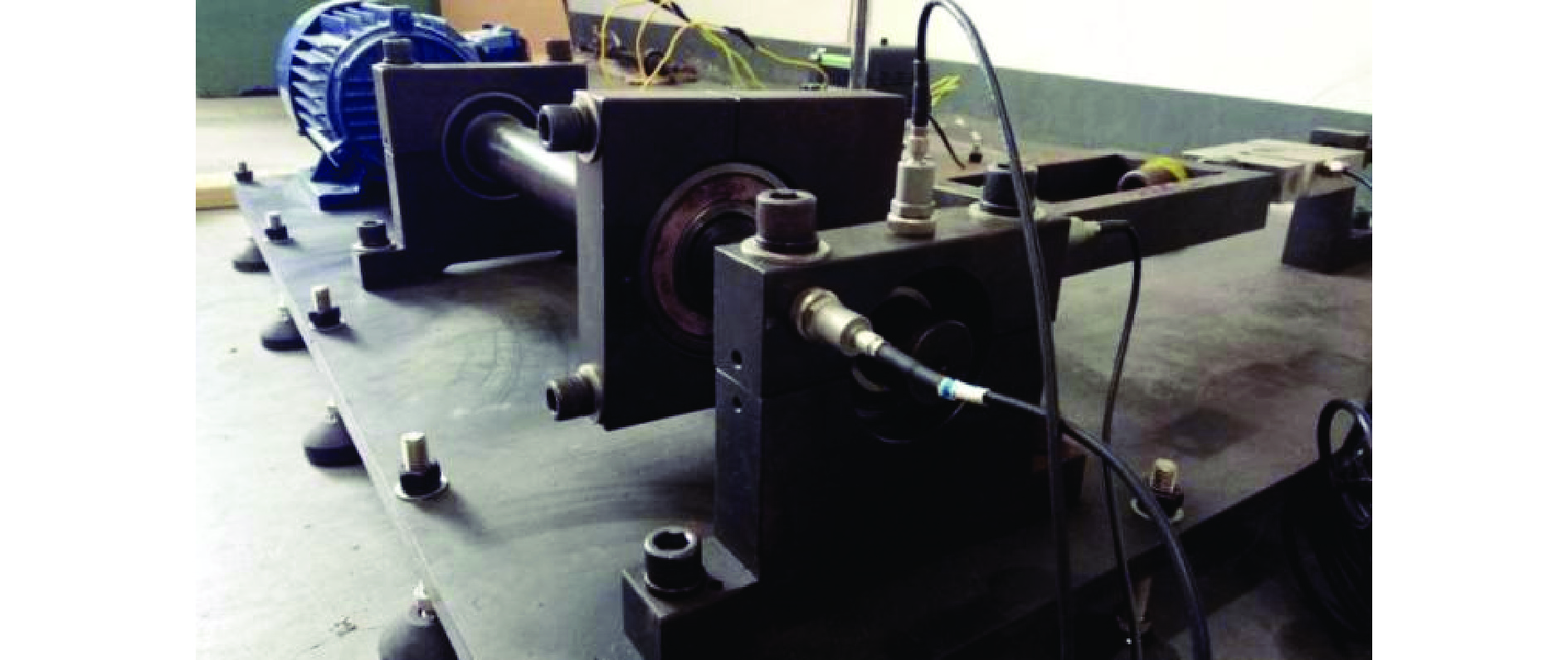
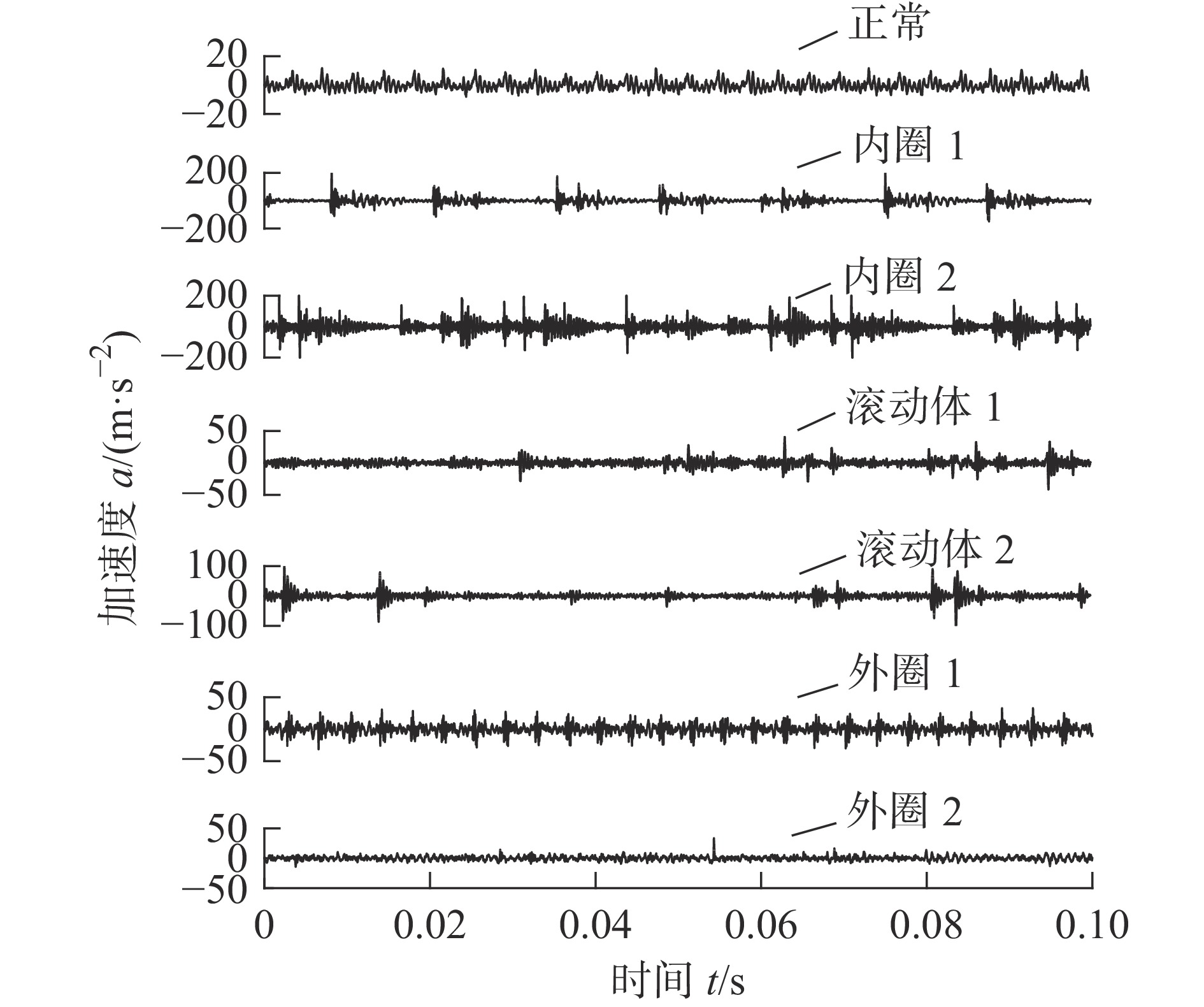
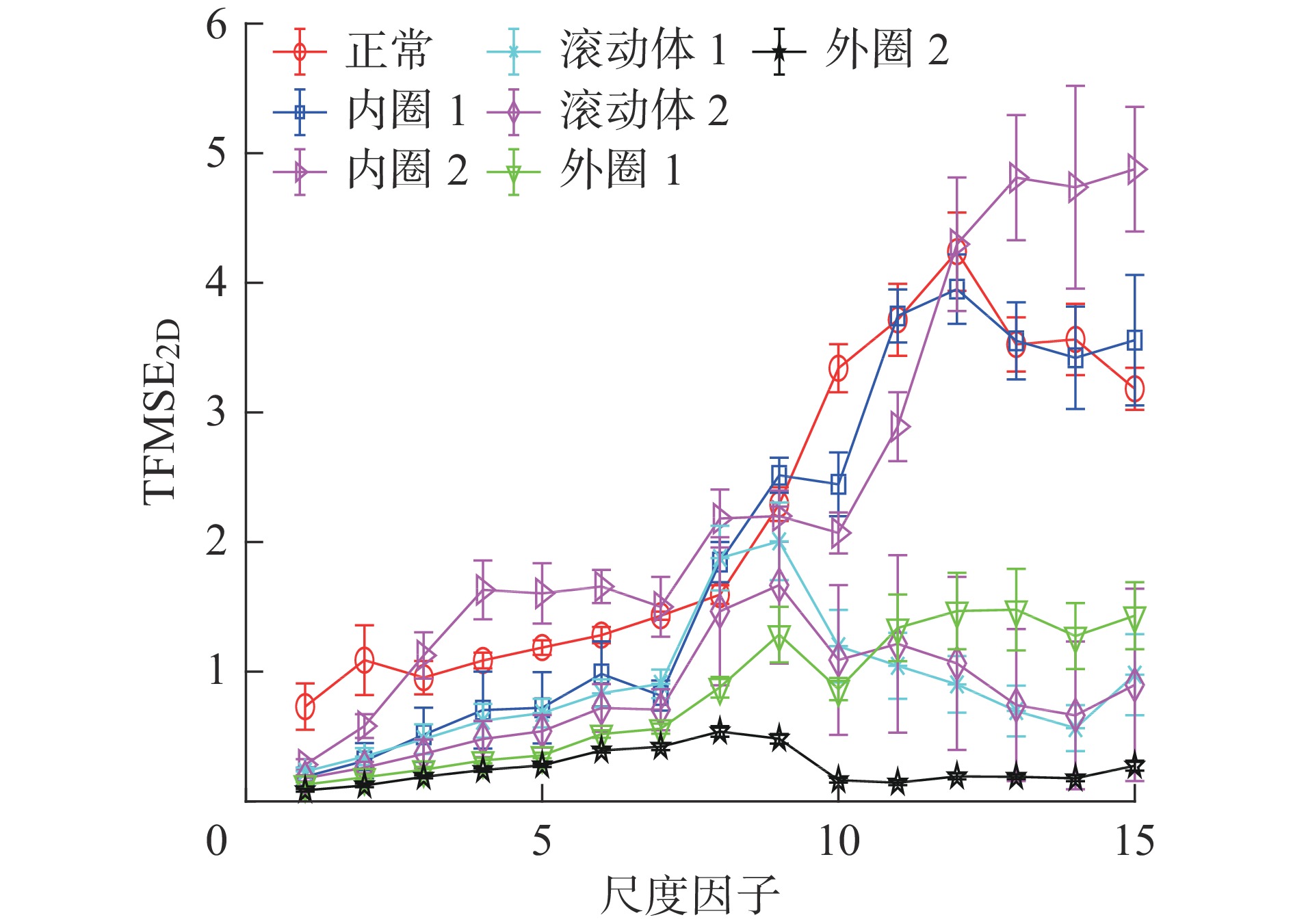
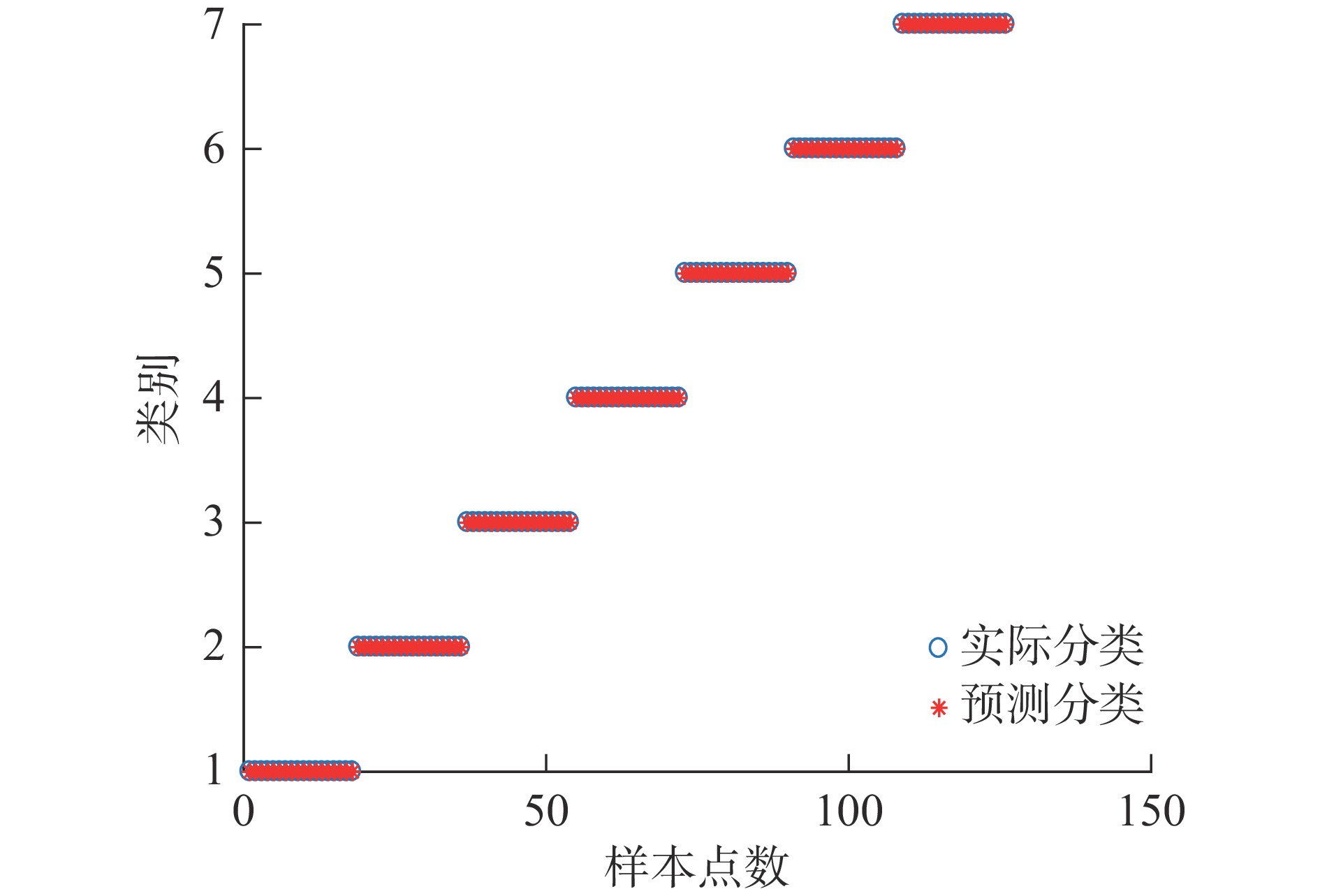
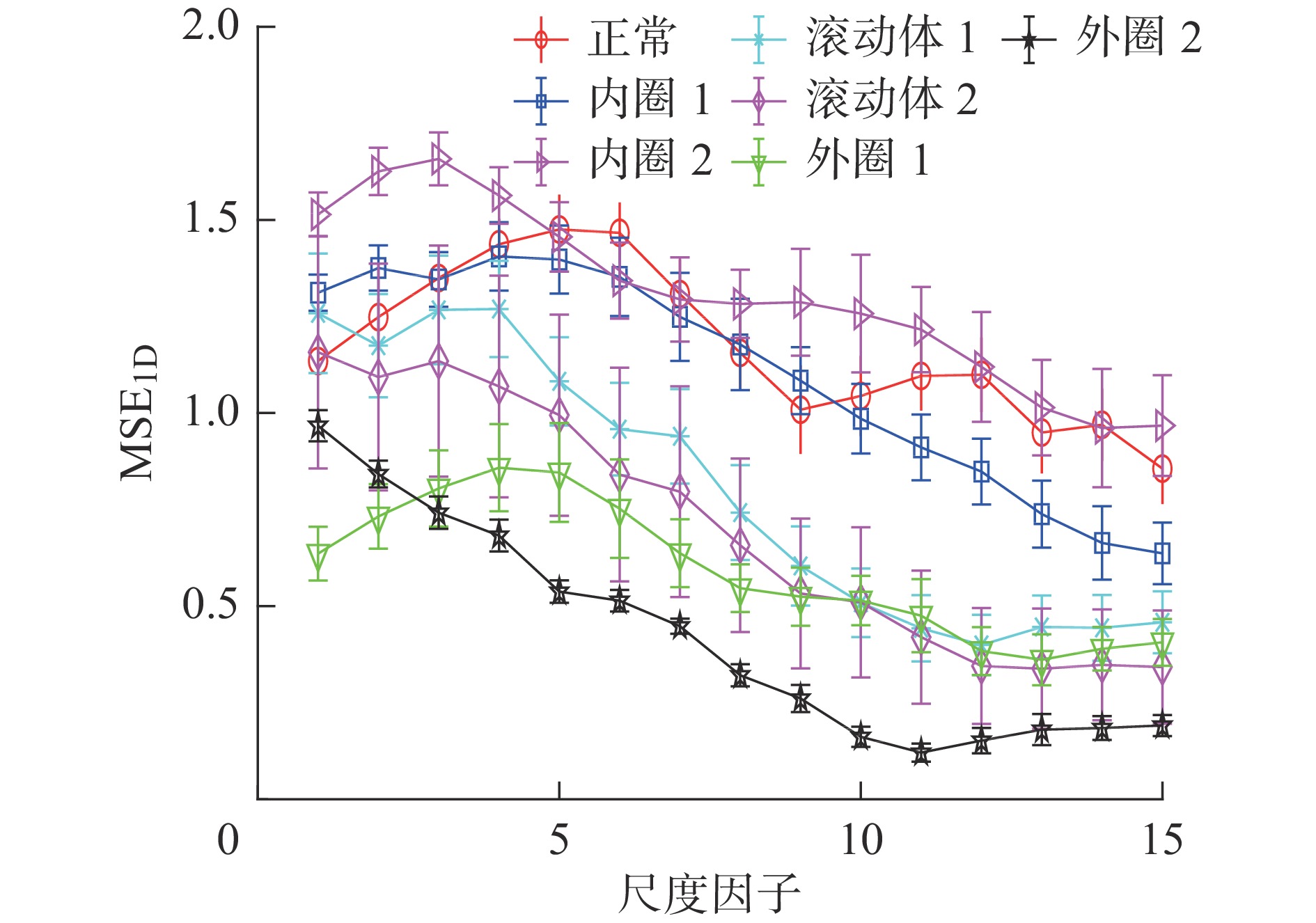
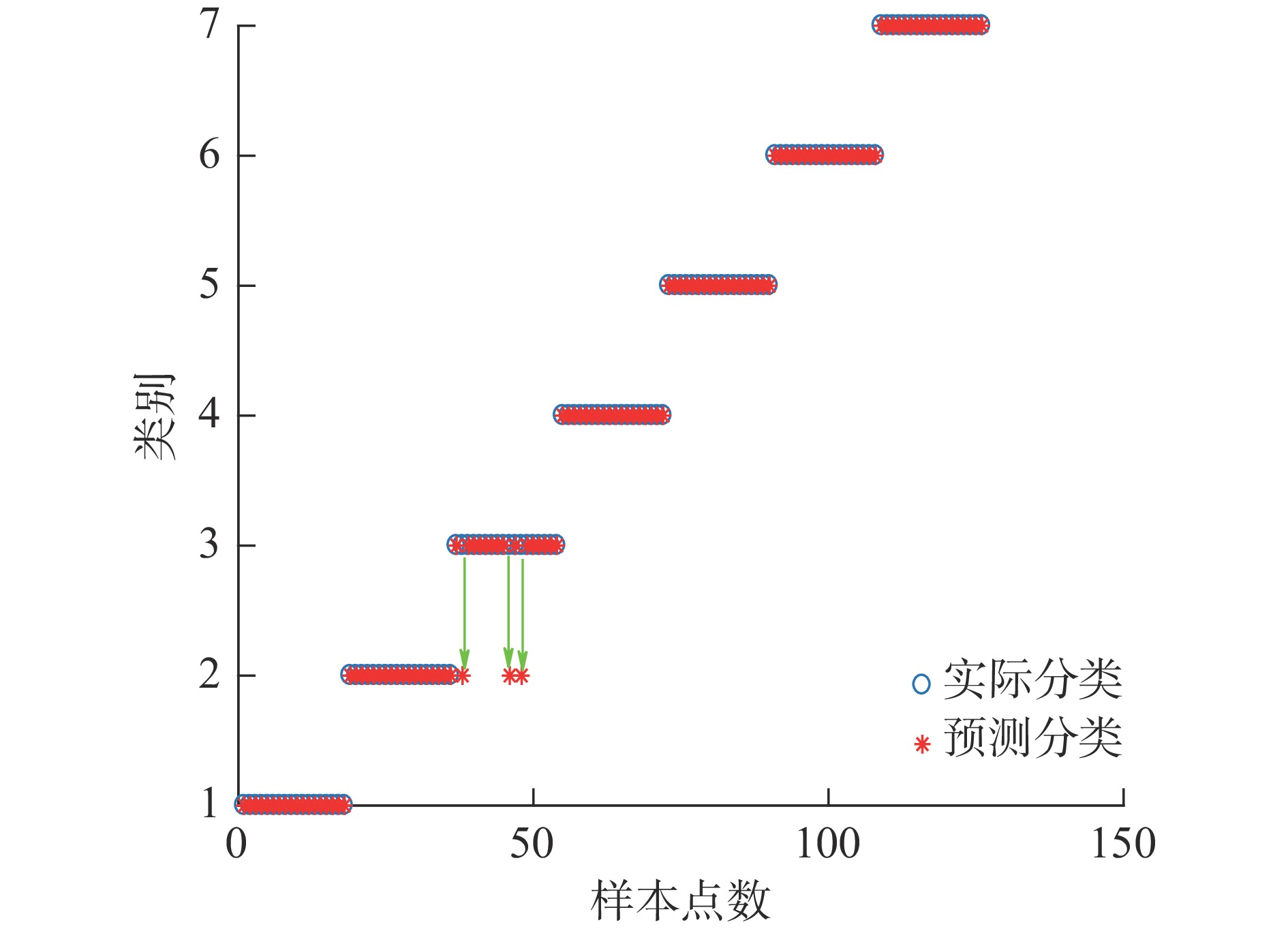
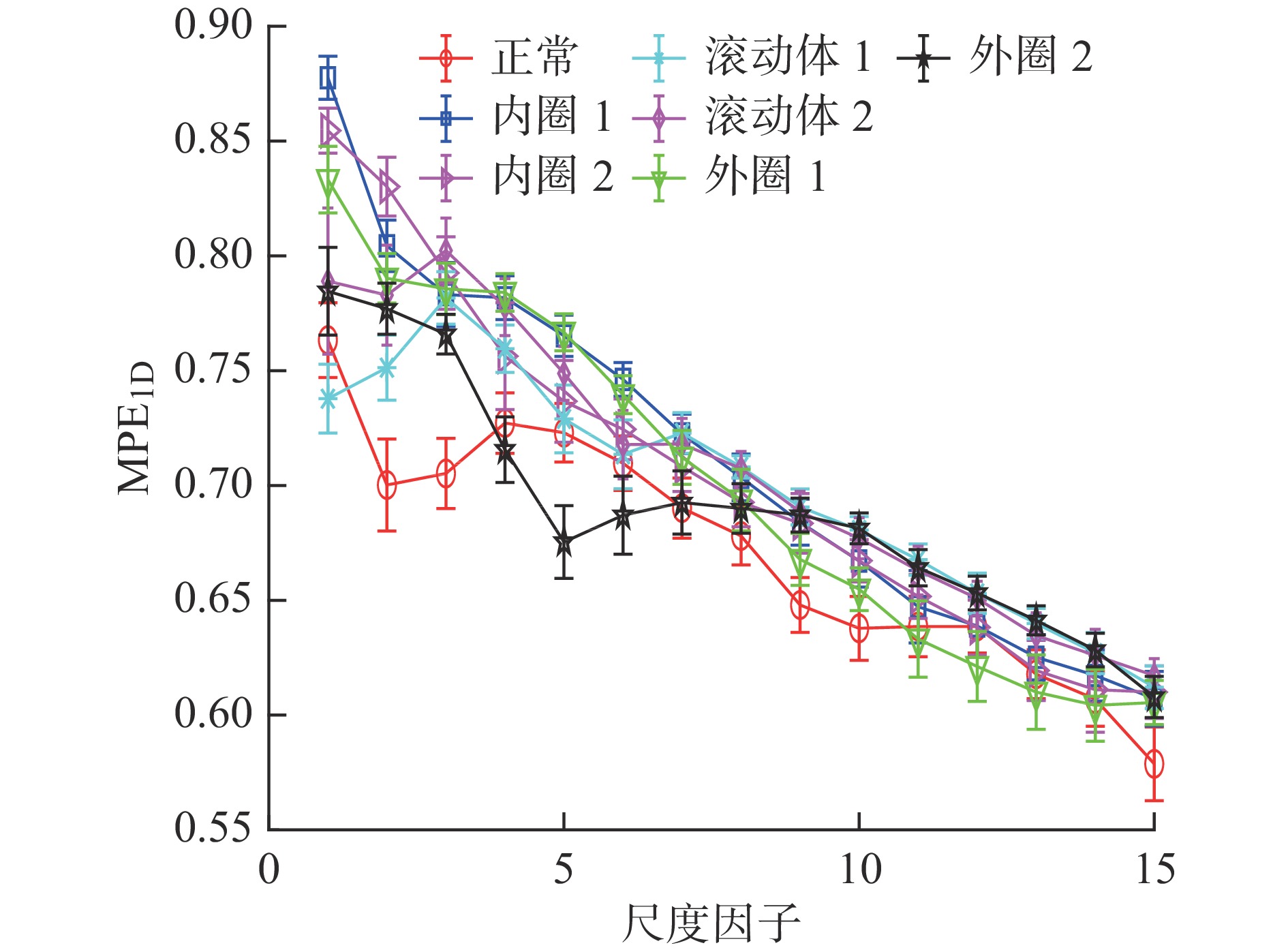
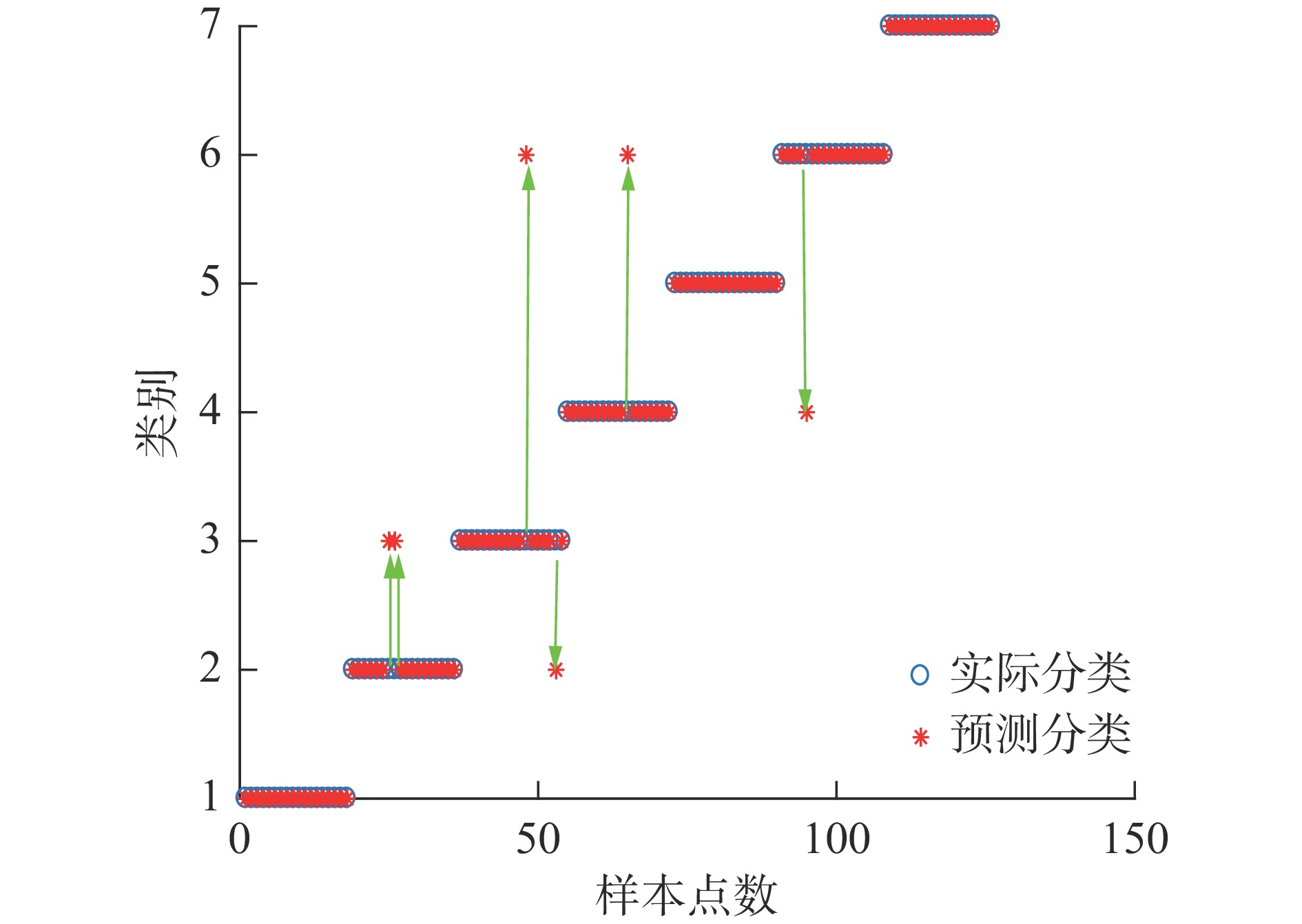
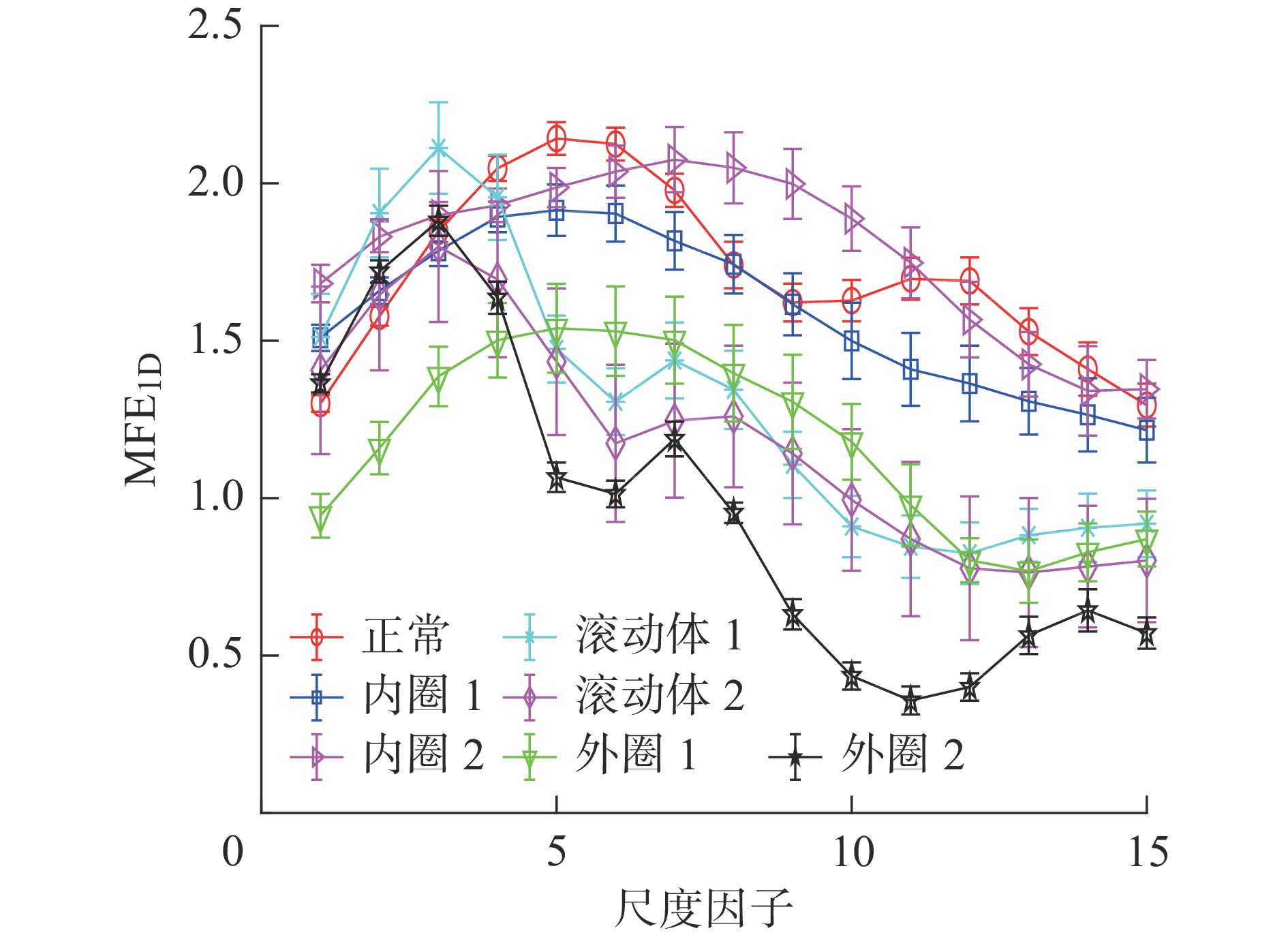
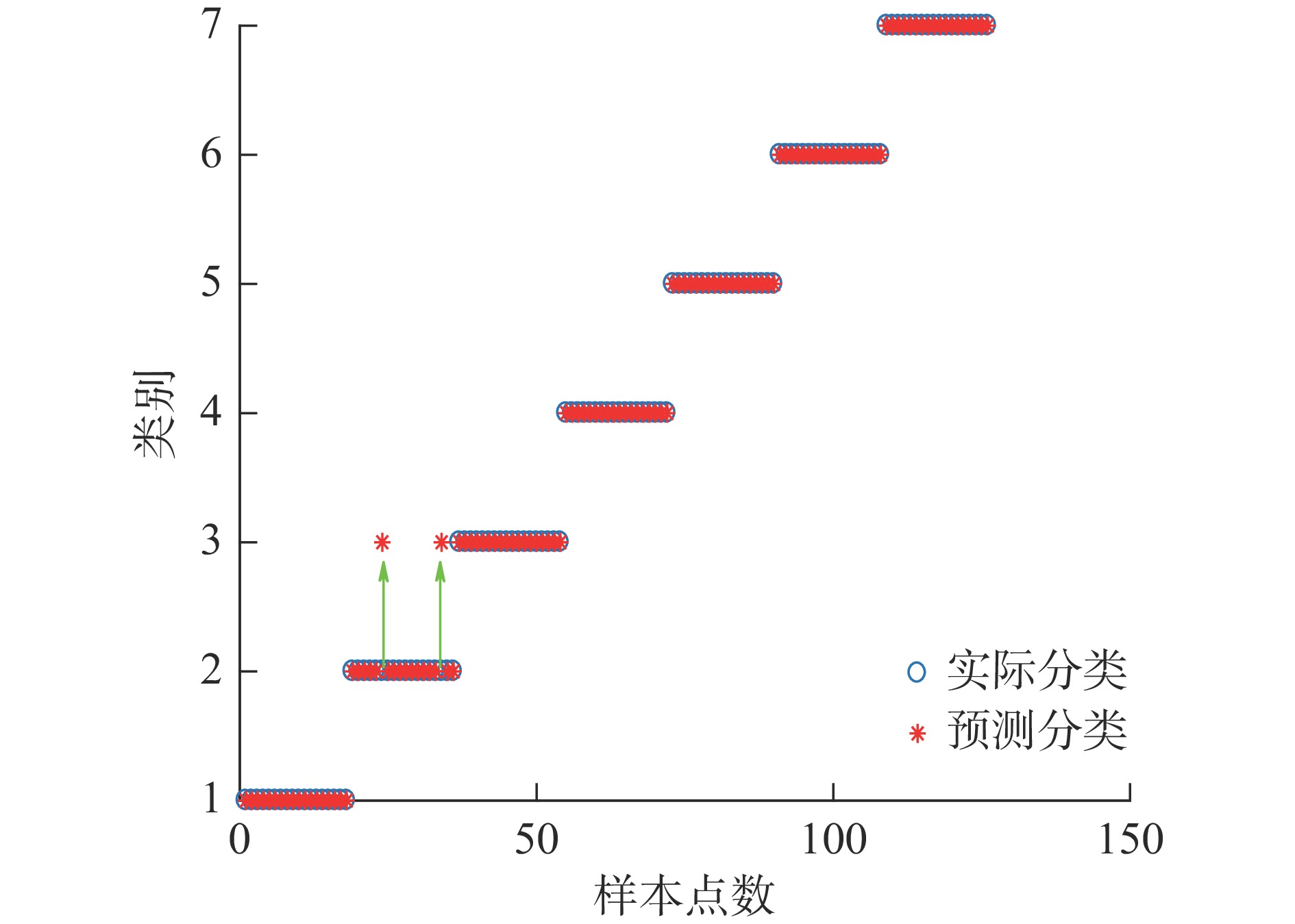
多尺度熵是一种有效表征一维振动信号复杂性和不规则程度的非线性动力学方法,但其只考虑了信号的时域复杂性,而忽略了频域信息。为了综合利用振动信号时频域信息和量度时频分布的复杂性特征,将二维多尺度熵引入到滚动轴承的故障诊断中,提出了一种基于二维时频多尺度熵和萤火虫算法优化支持向量机的滚动轴承故障诊断方法。首先,采用连续小波变换将一维时间序列转换为时频图像;其次,计算时频图像的二维多尺度熵值;再次,将得到的二维多尺度熵值输入到萤火虫优化的支持向量机中进行分类和预测;最后,通过滚动轴承试验数据分析验证所提方法的有效性。结果表明:论文所提方法能够准确地识别滚动轴承的故障类型和故障程度。
多尺度熵是一种有效表征一维振动信号复杂性和不规则程度的非线性动力学方法,但其只考虑了信号的时域复杂性,而忽略了频域信息。为了综合利用振动信号时频域信息和量度时频分布的复杂性特征,将二维多尺度熵引入到滚动轴承的故障诊断中,提出了一种基于二维时频多尺度熵和萤火虫算法优化支持向量机的滚动轴承故障诊断方法。首先,采用连续小波变换将一维时间序列转换为时频图像;其次,计算时频图像的二维多尺度熵值;再次,将得到的二维多尺度熵值输入到萤火虫优化的支持向量机中进行分类和预测;最后,通过滚动轴承试验数据分析验证所提方法的有效性。结果表明:论文所提方法能够准确地识别滚动轴承的故障类型和故障程度。
2023, 42(12): 2021-2029.
doi: 10.13433/j.cnki.1003-8728.20220176
摘要:
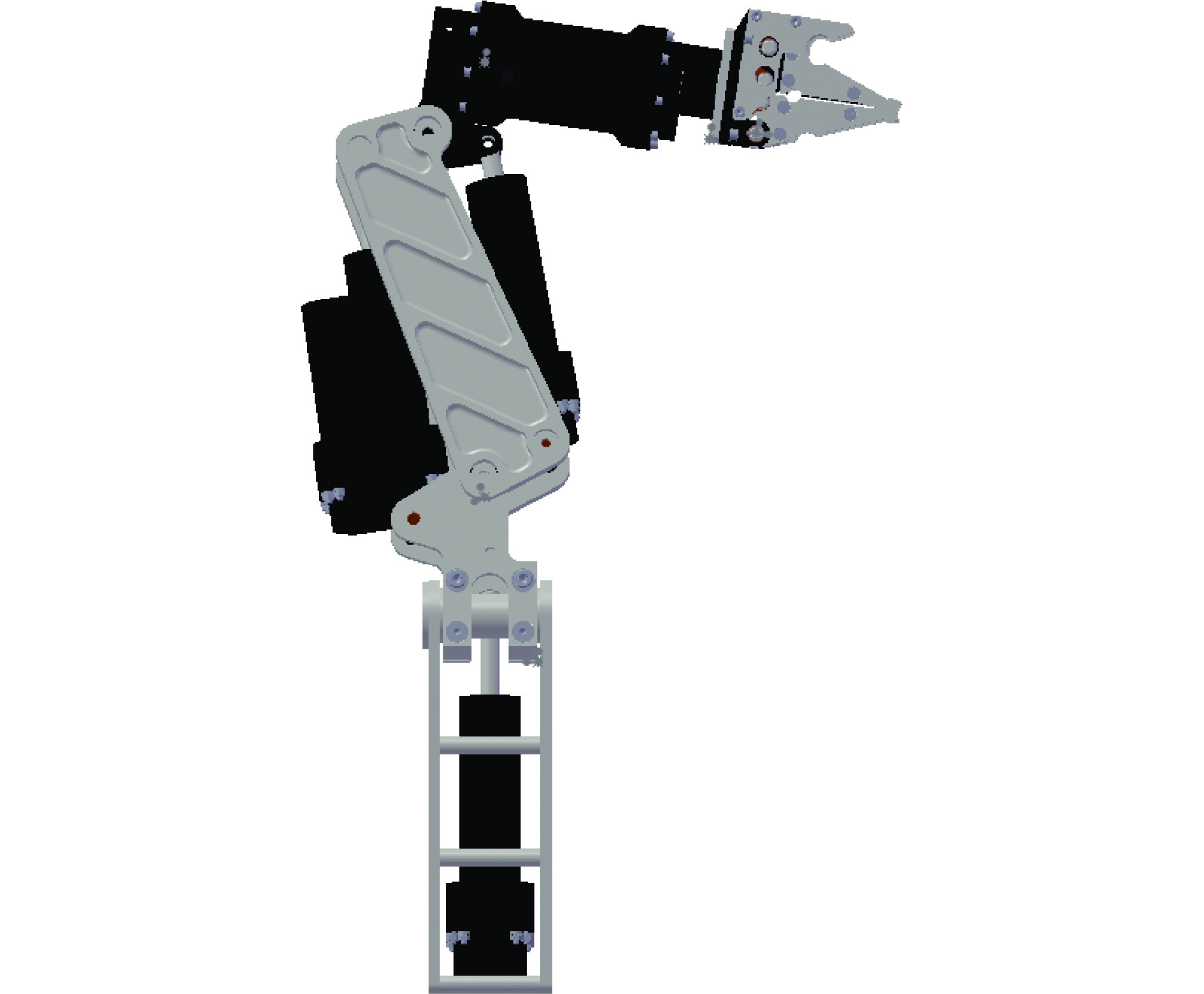
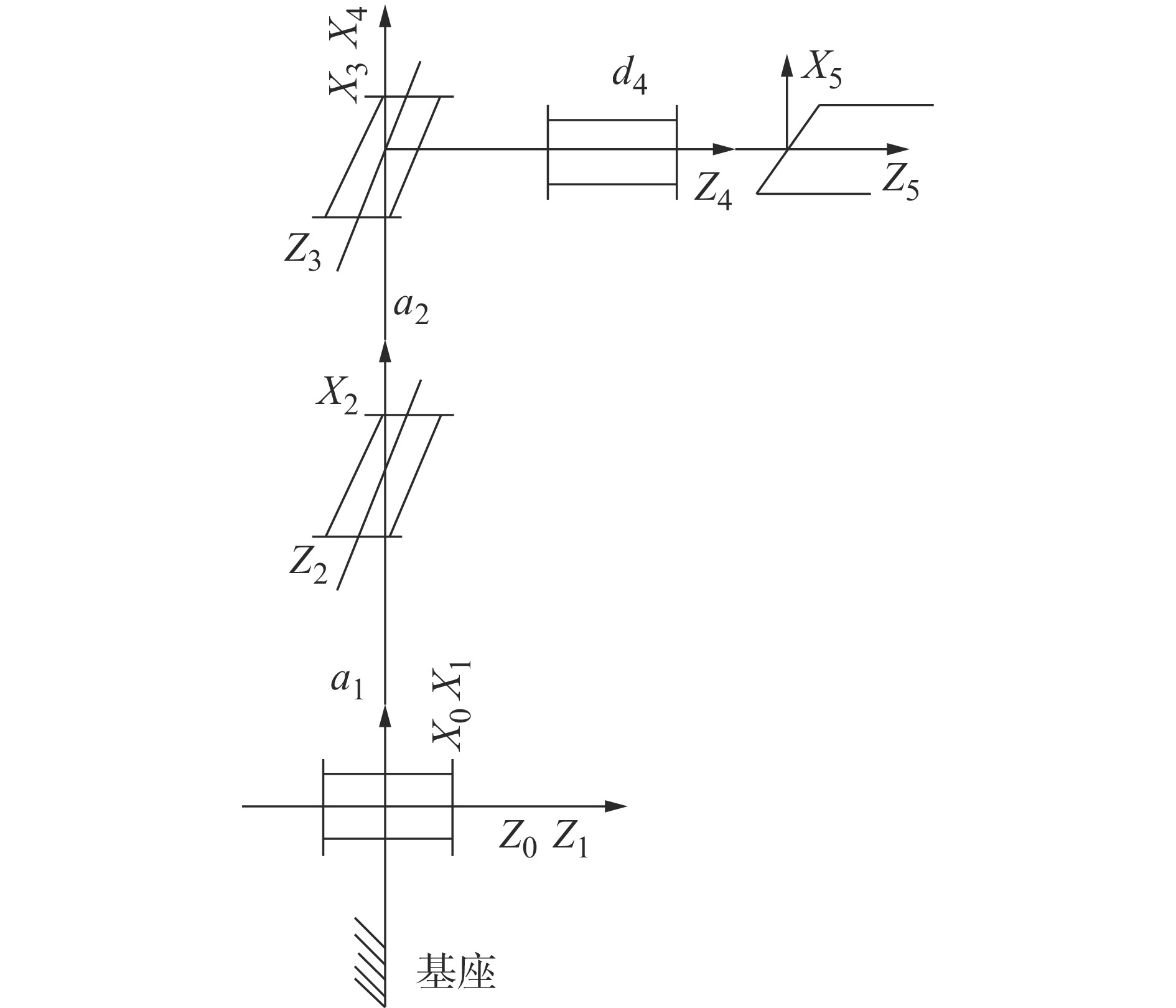
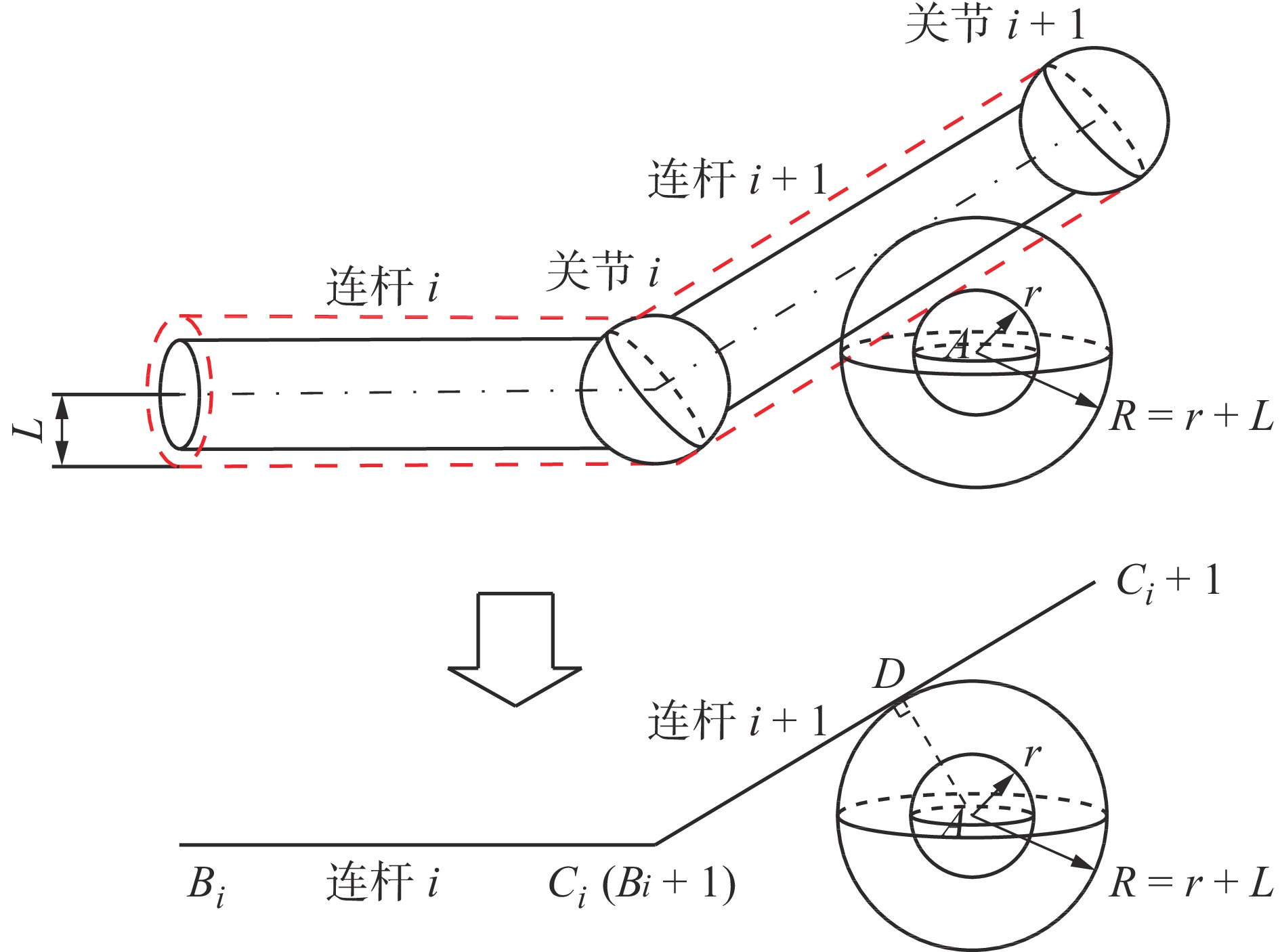
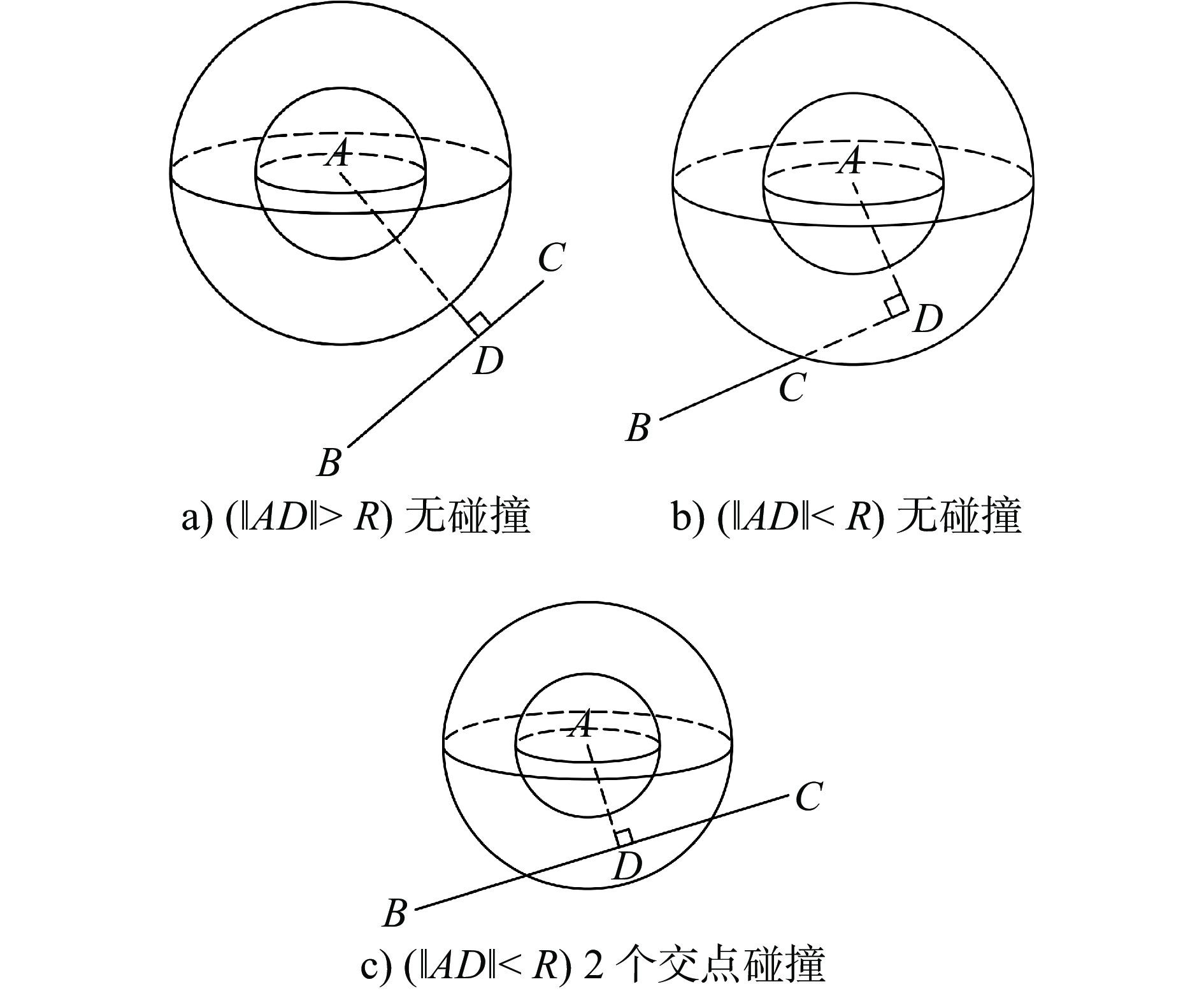
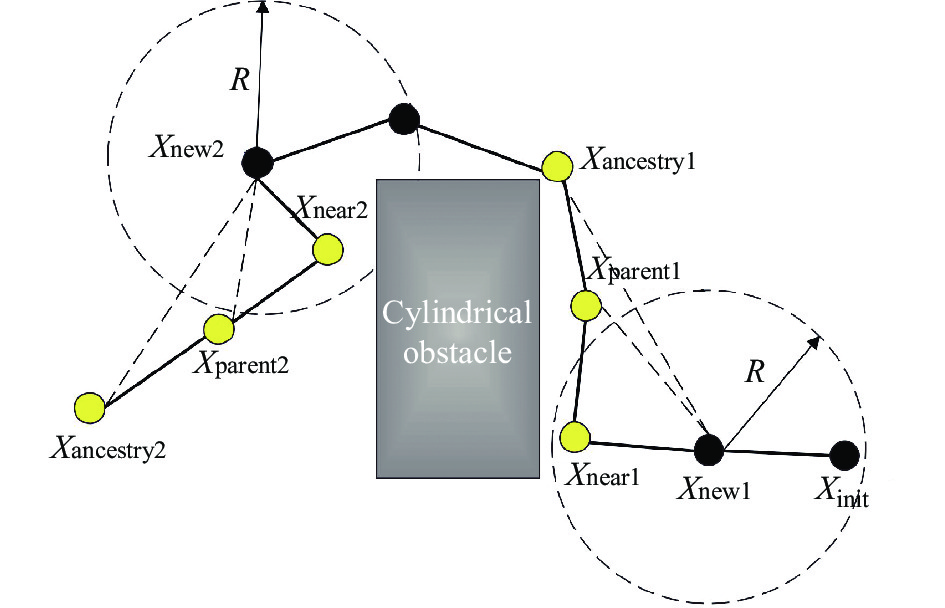
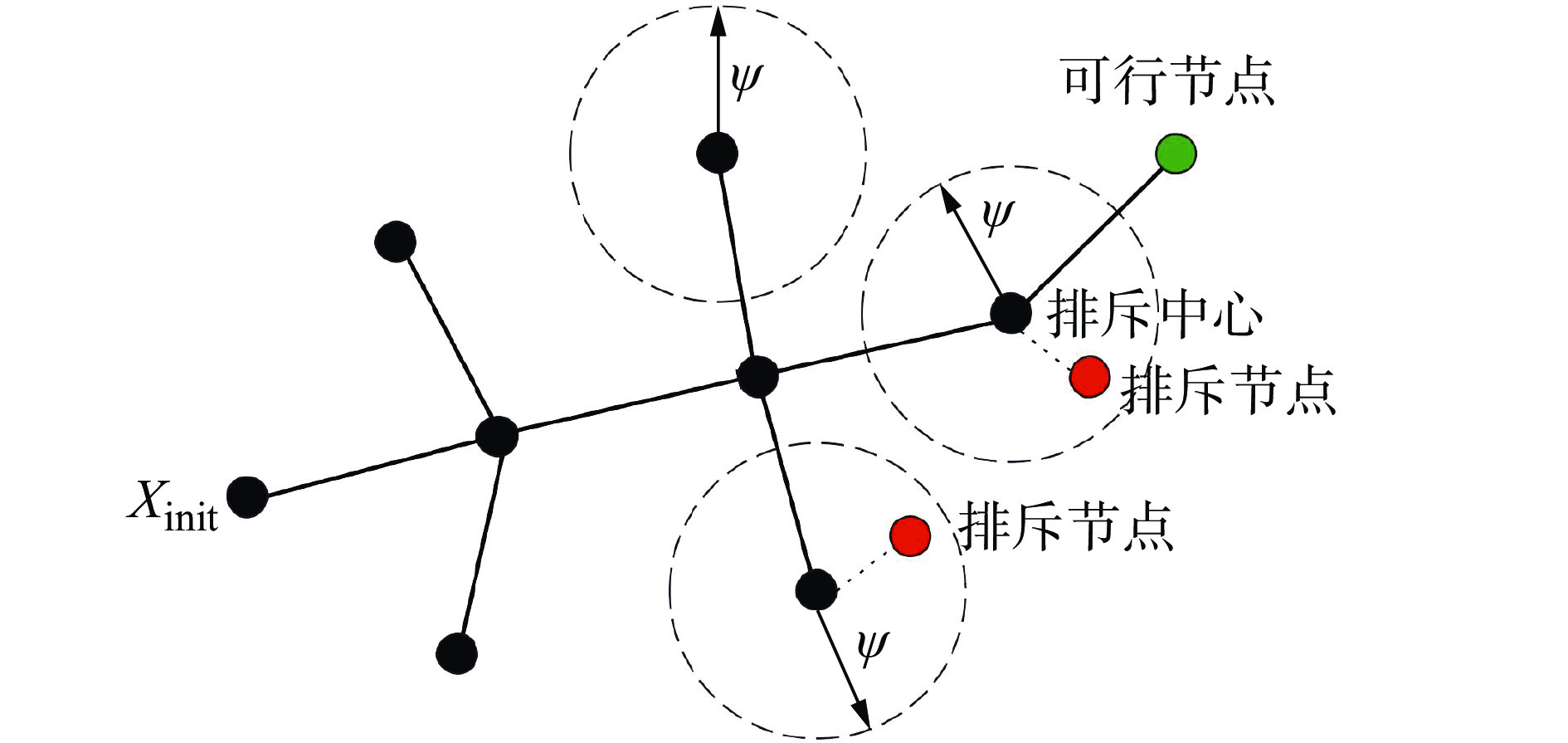
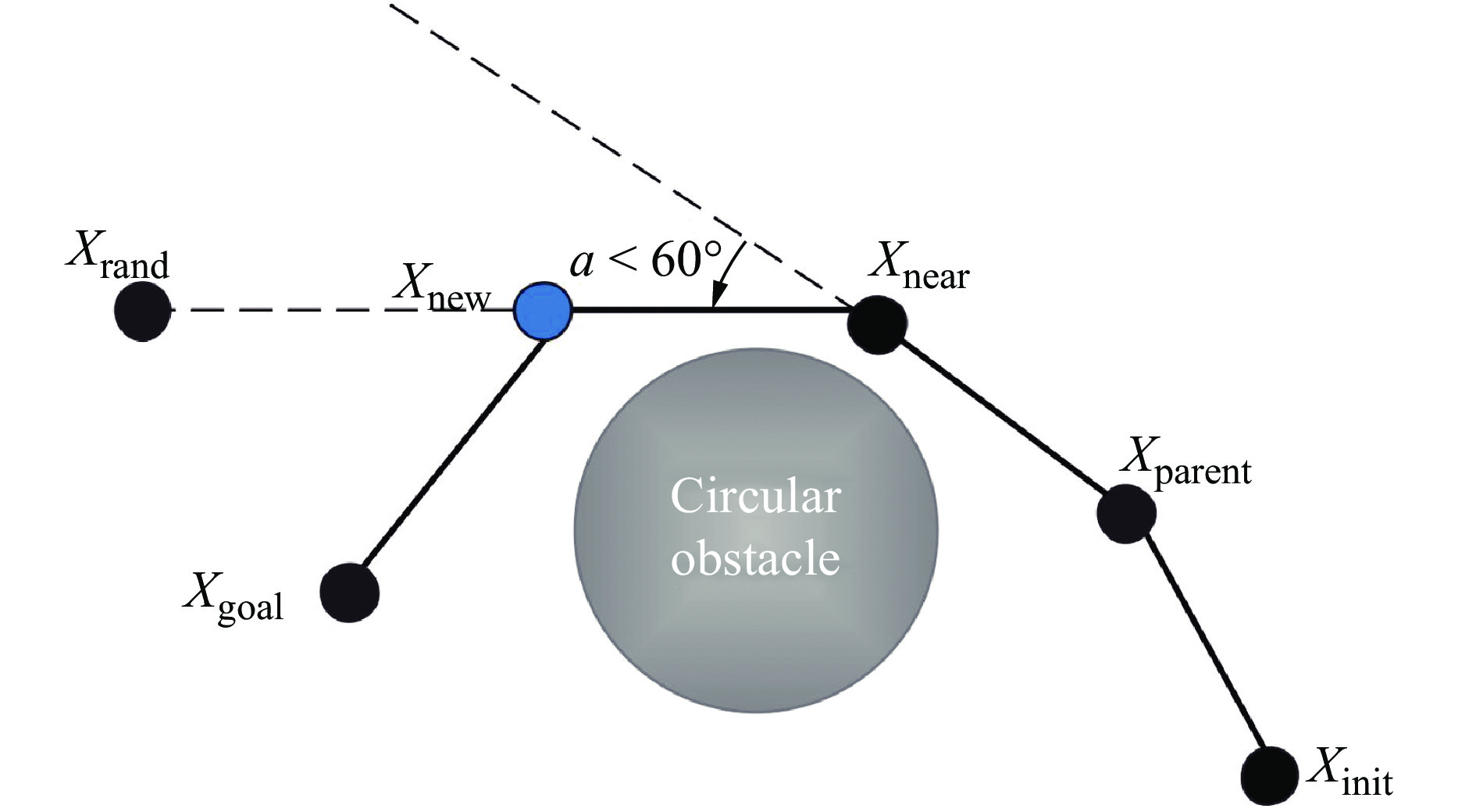
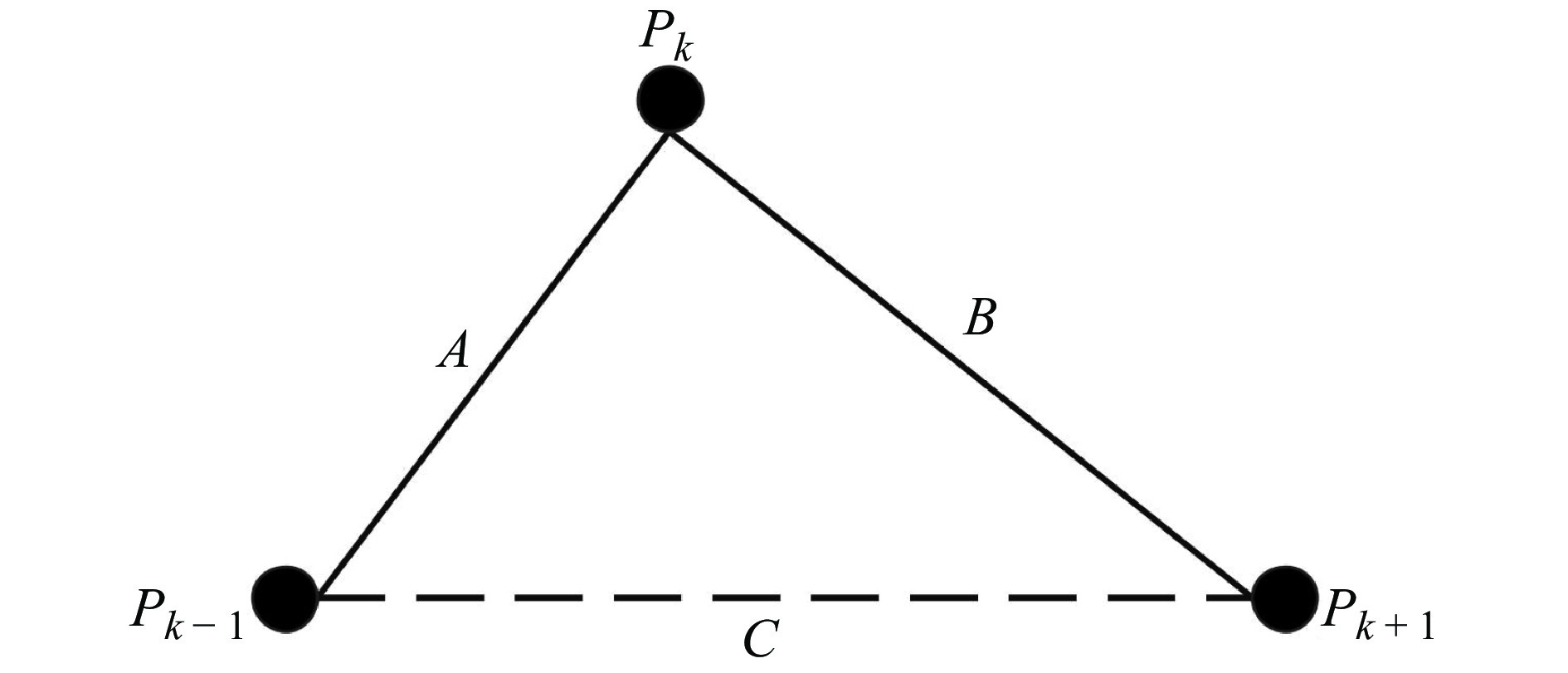
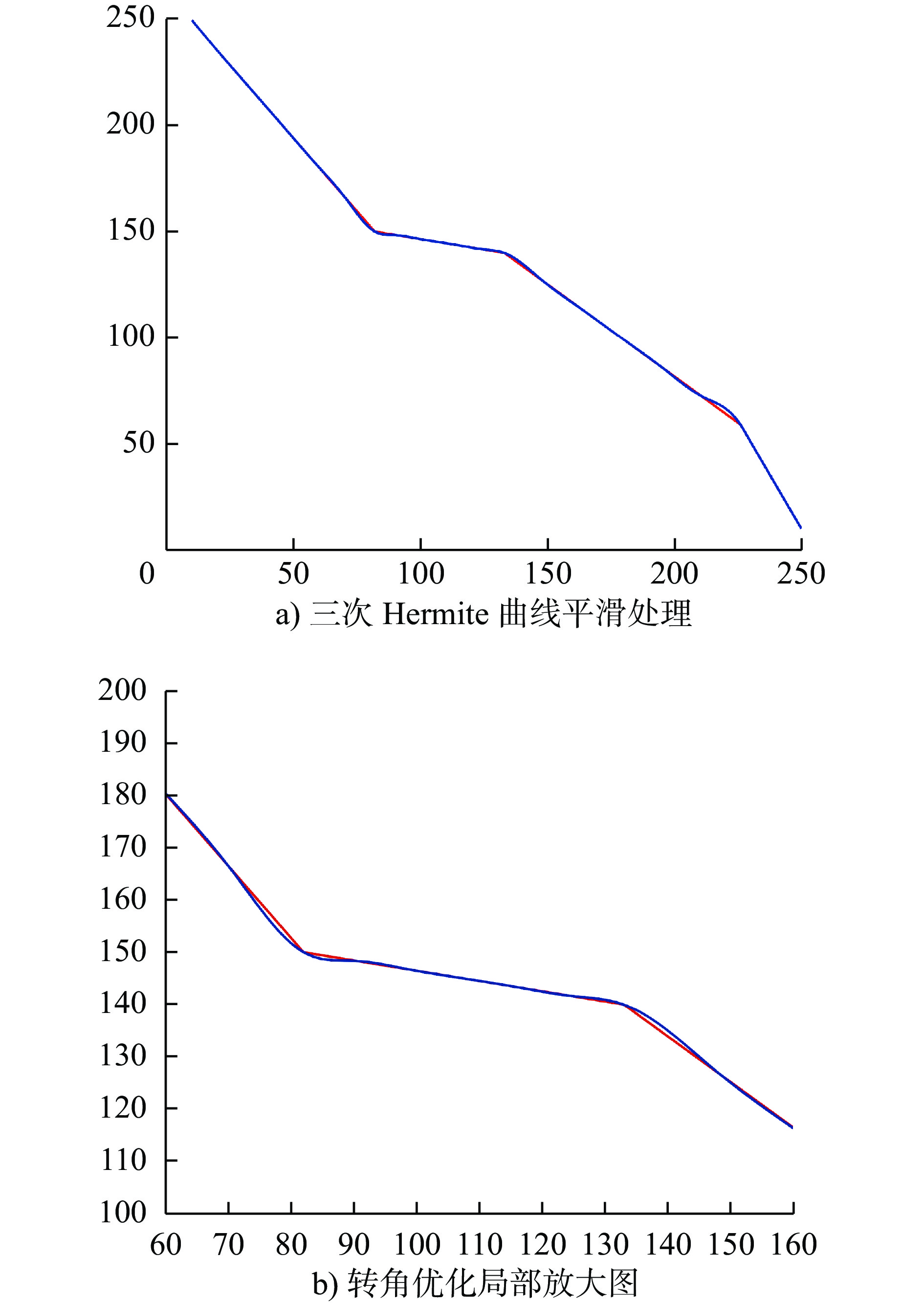
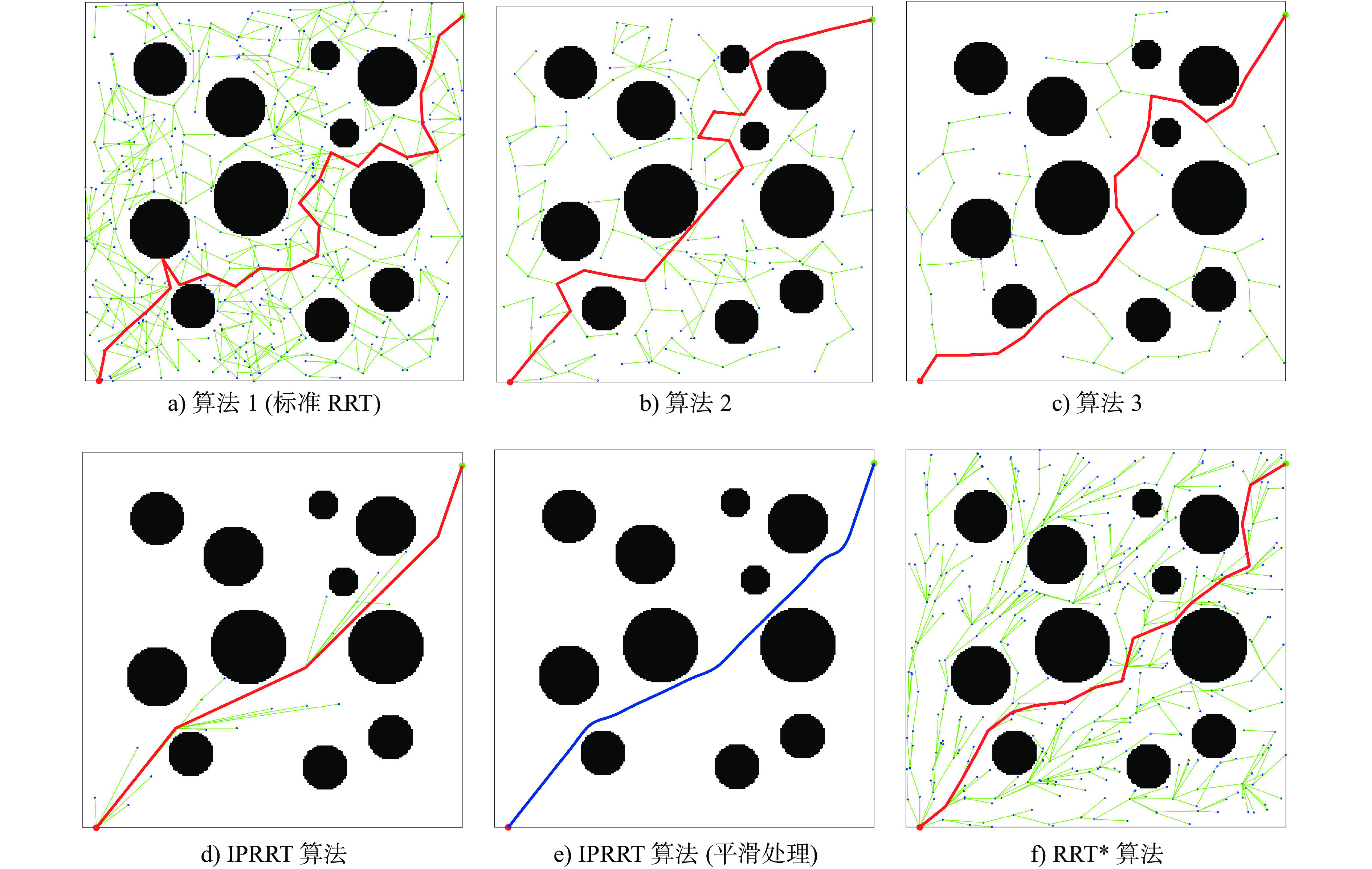
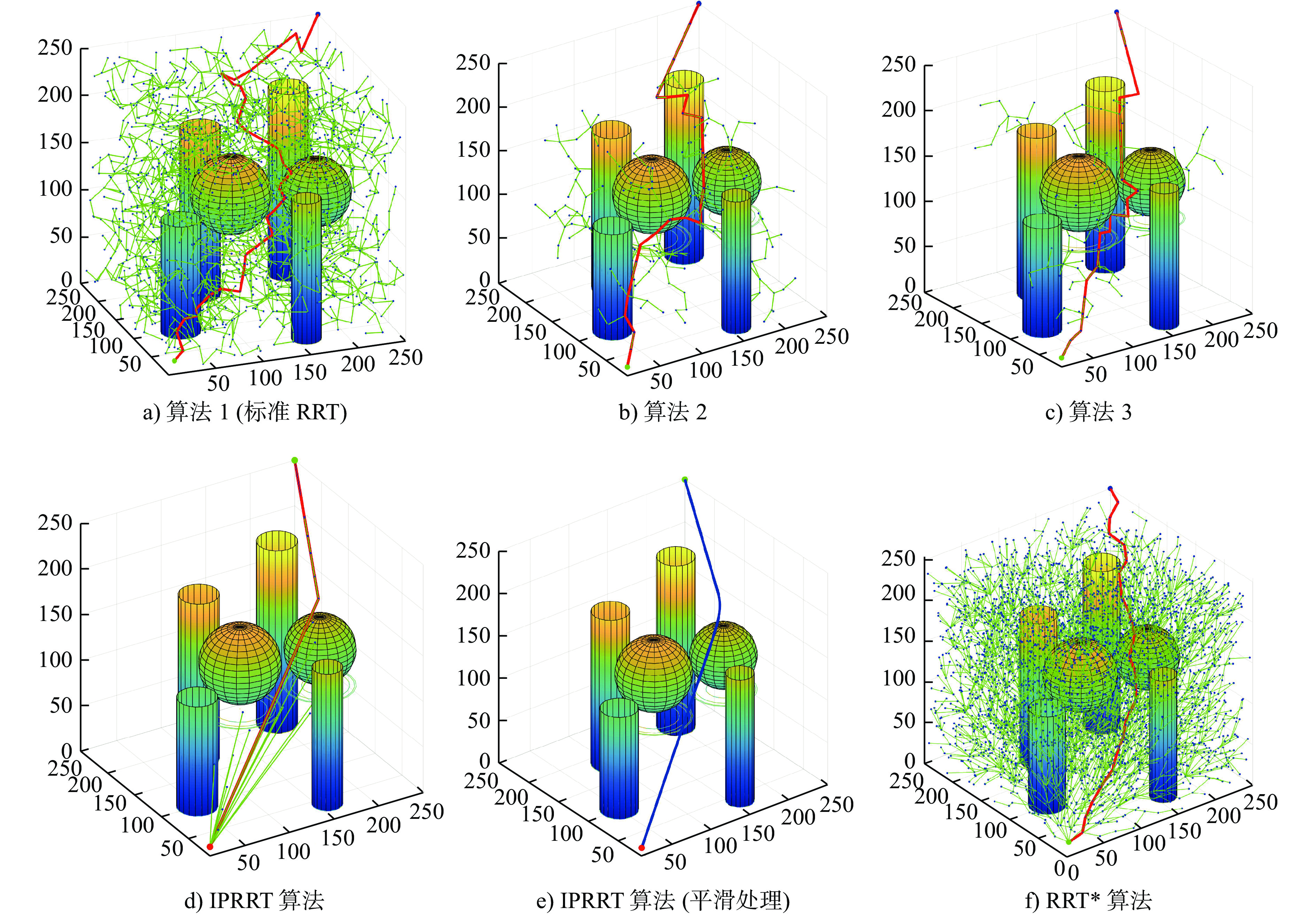
标准RRT(Rapidly exploring random tree)算法进行路径规划时,存在规划时间长、规划路径质量差的问题。针对以上问题,提出一种IPRRT算法(Improved RRT algorithm),首先通过重选父节点环节策略剔除冗余路段,区域排斥机制剔除冗余节点,缩短规划路径与规划时间;其次采用线段转角限位与评估函数提升路径质量,最后采用三次Hermite曲线对路径进行平滑处理;通过对深海机械臂进行仿真实验,验证了IPRRT算法的有效性。
标准RRT(Rapidly exploring random tree)算法进行路径规划时,存在规划时间长、规划路径质量差的问题。针对以上问题,提出一种IPRRT算法(Improved RRT algorithm),首先通过重选父节点环节策略剔除冗余路段,区域排斥机制剔除冗余节点,缩短规划路径与规划时间;其次采用线段转角限位与评估函数提升路径质量,最后采用三次Hermite曲线对路径进行平滑处理;通过对深海机械臂进行仿真实验,验证了IPRRT算法的有效性。

2023, 42(12): 2030-2039.
doi: 10.13433/j.cnki.1003-8728.20230331
摘要:
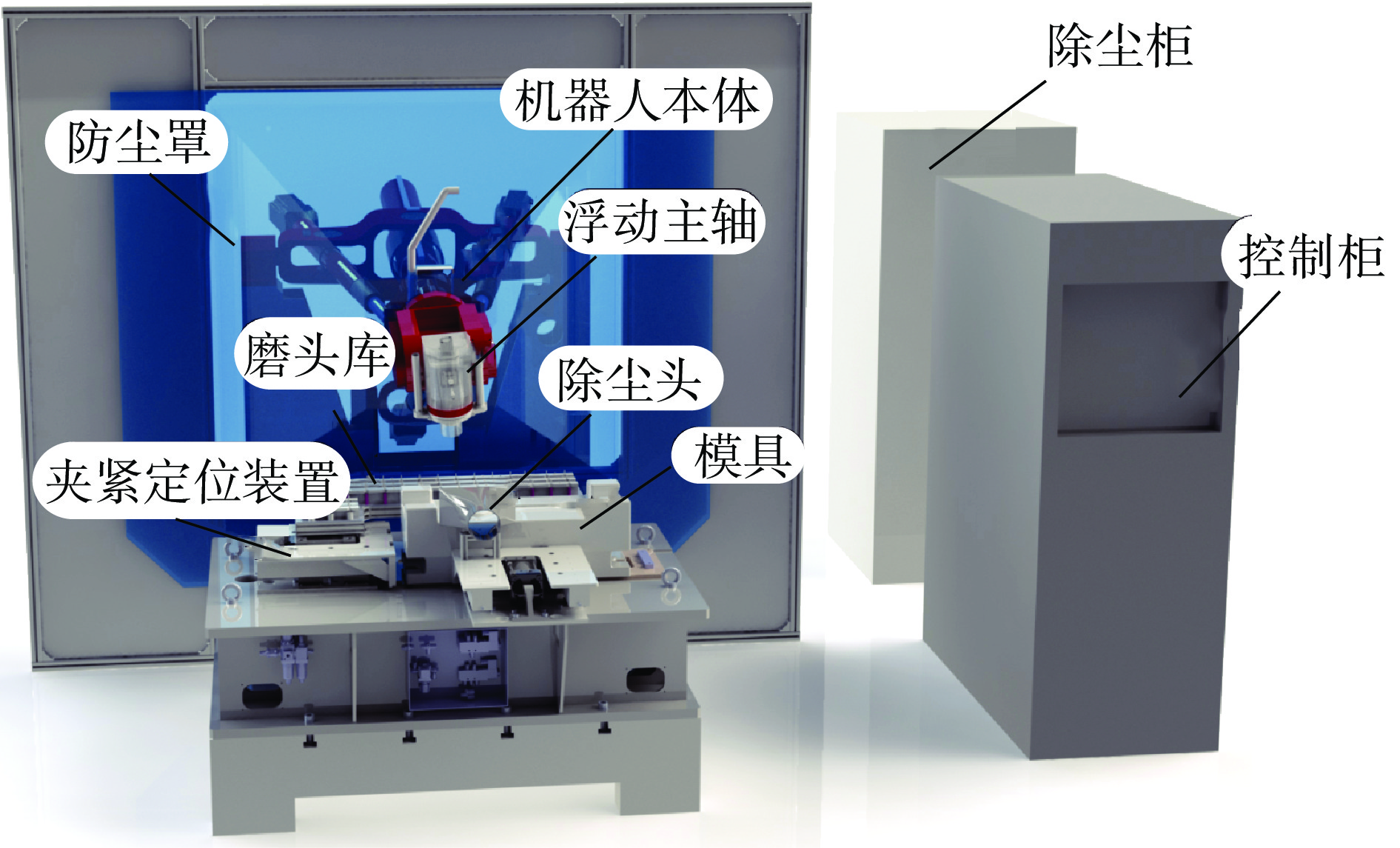
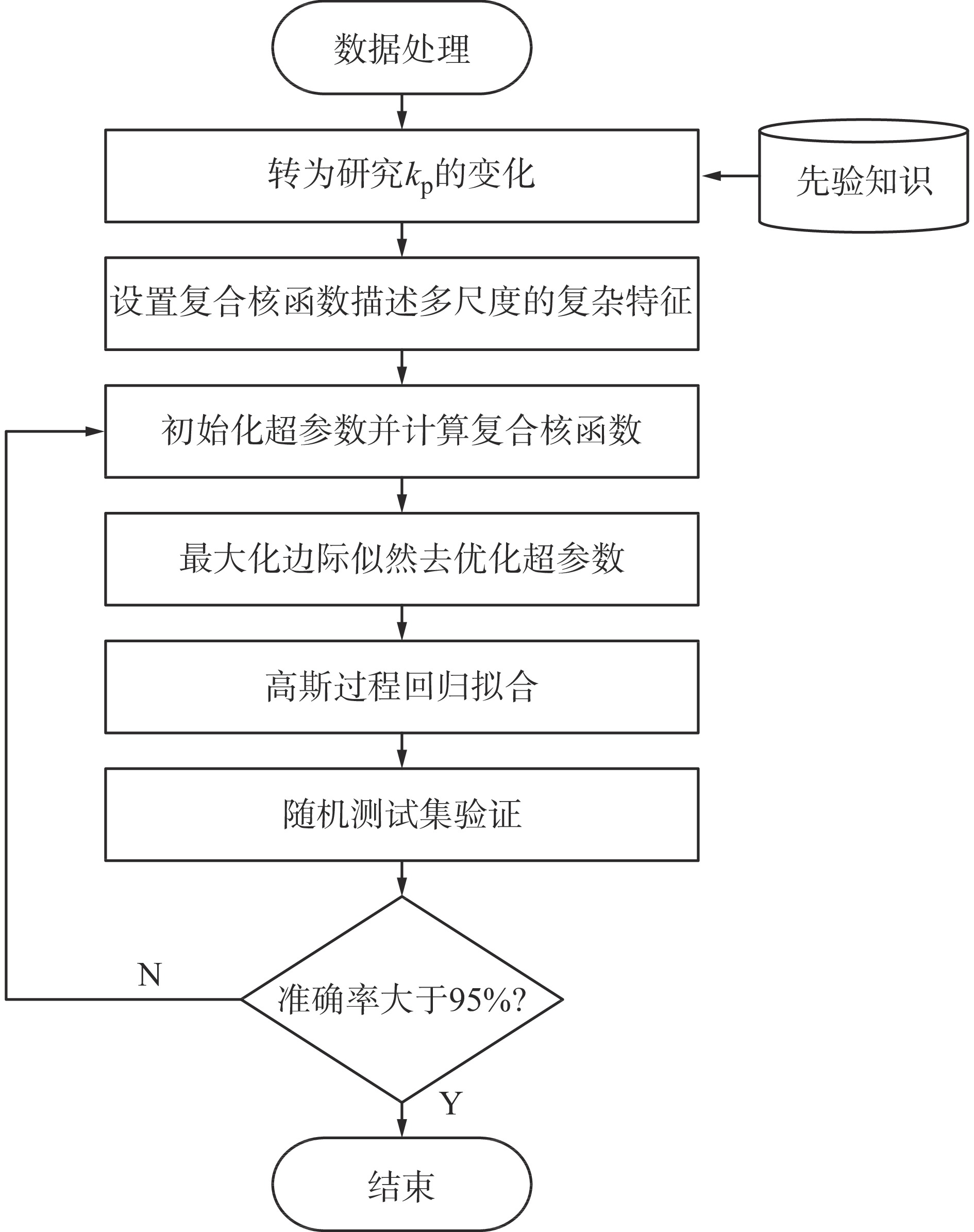
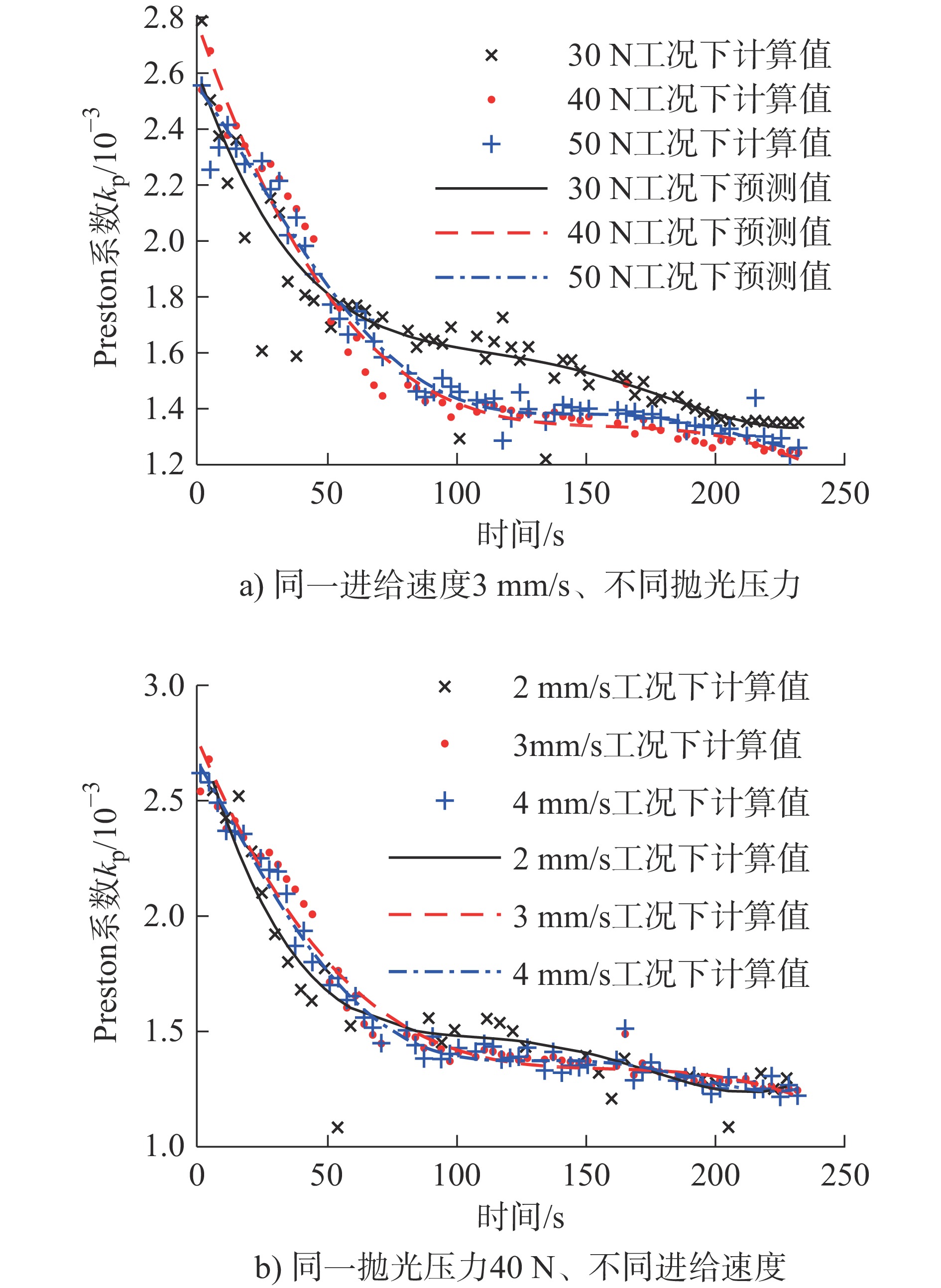
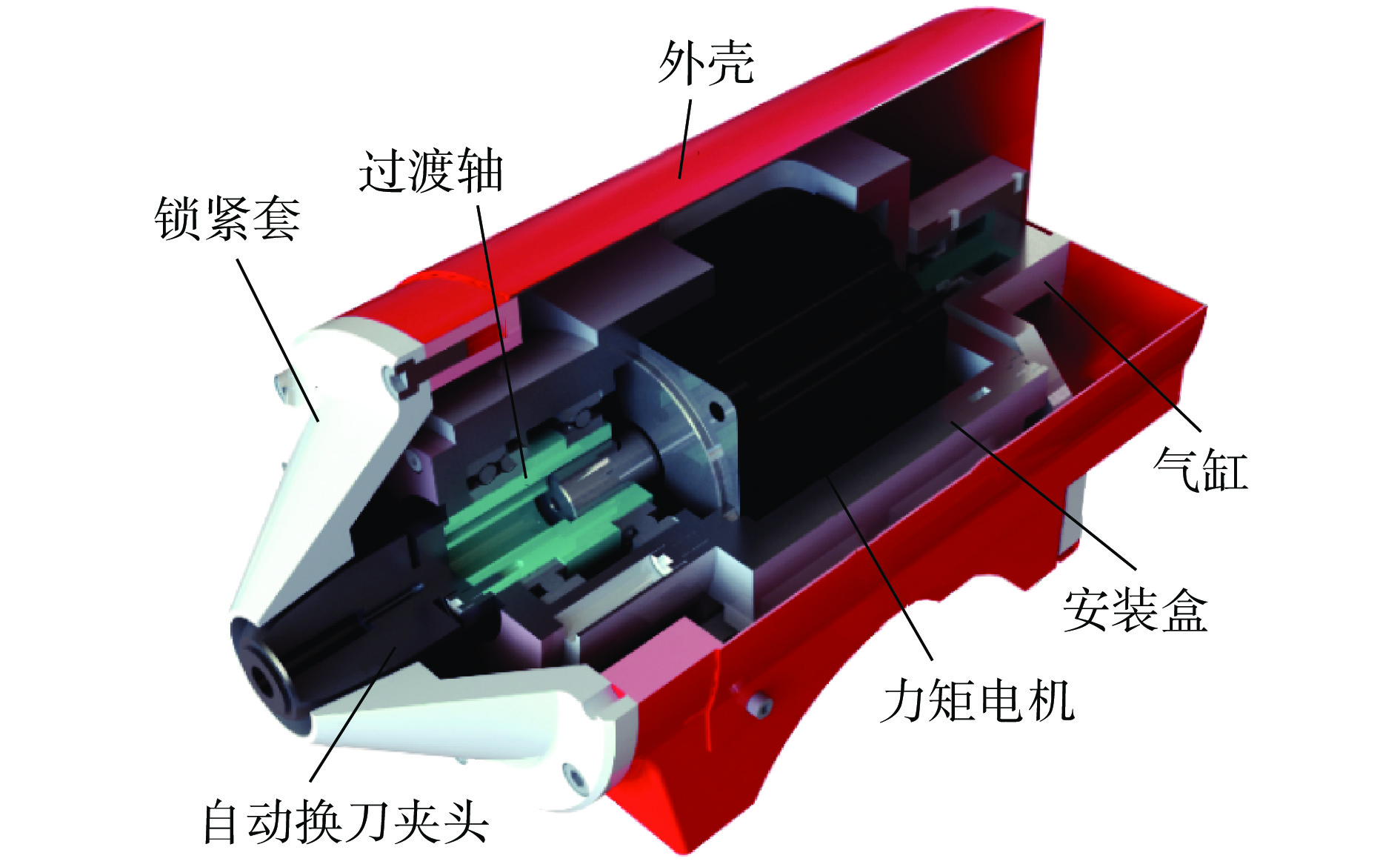
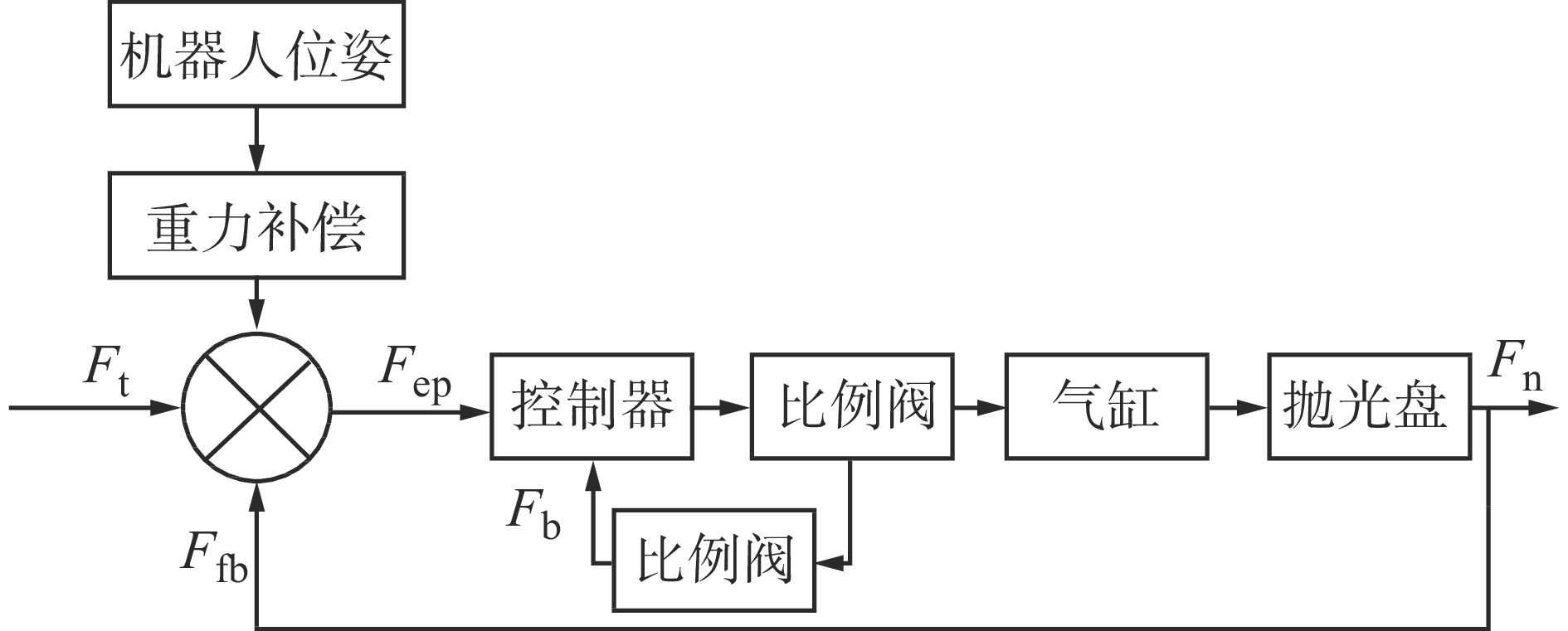
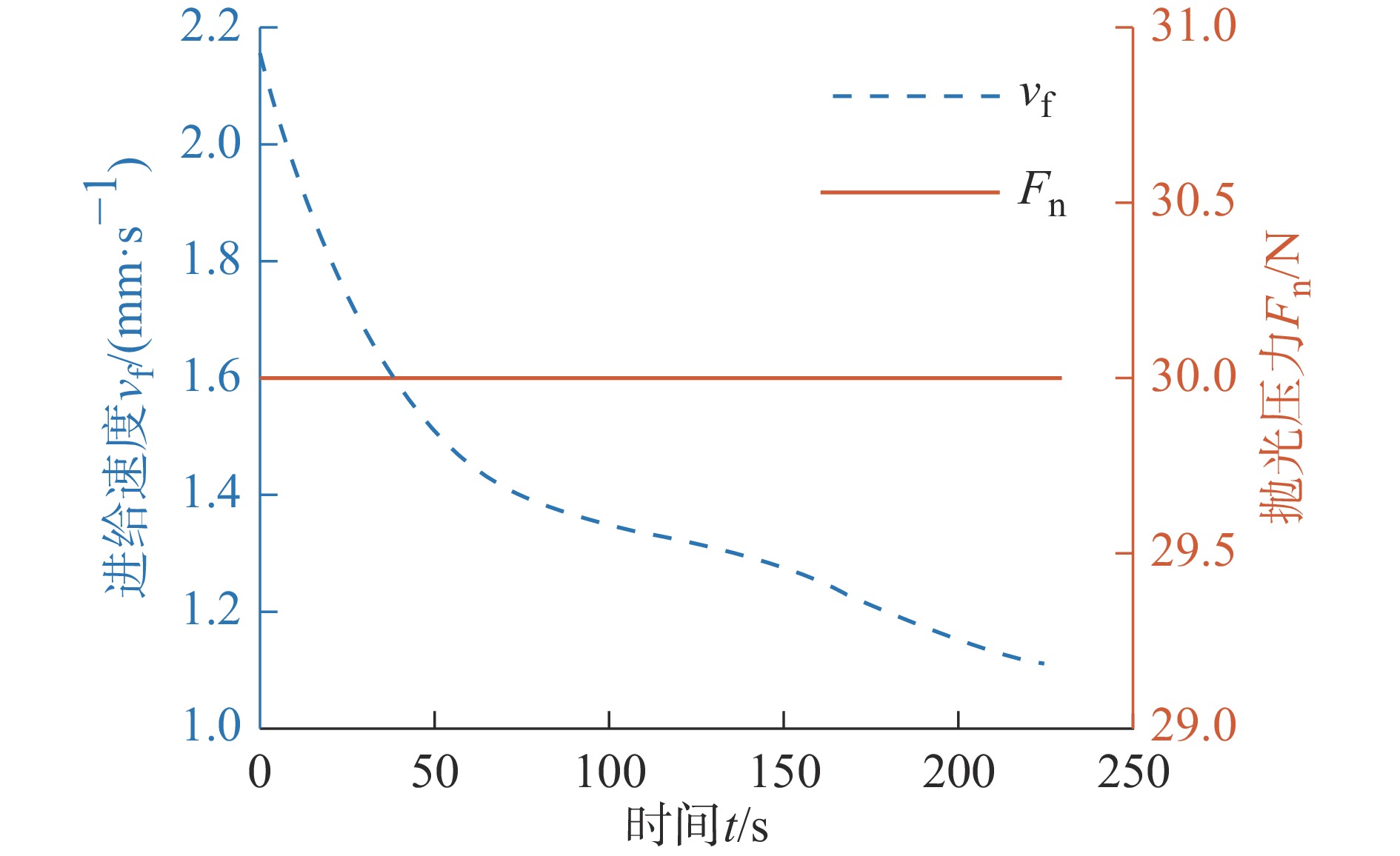
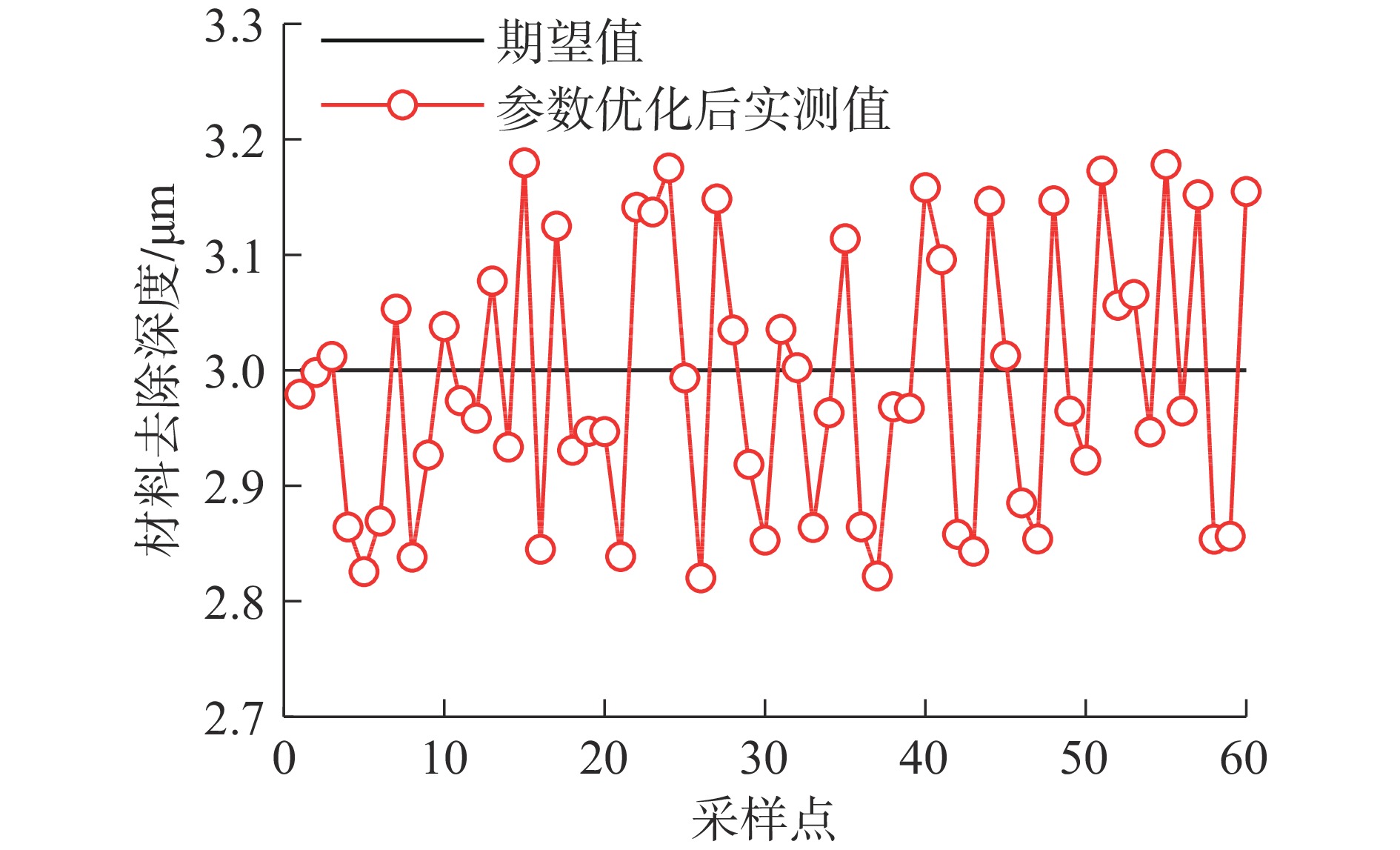
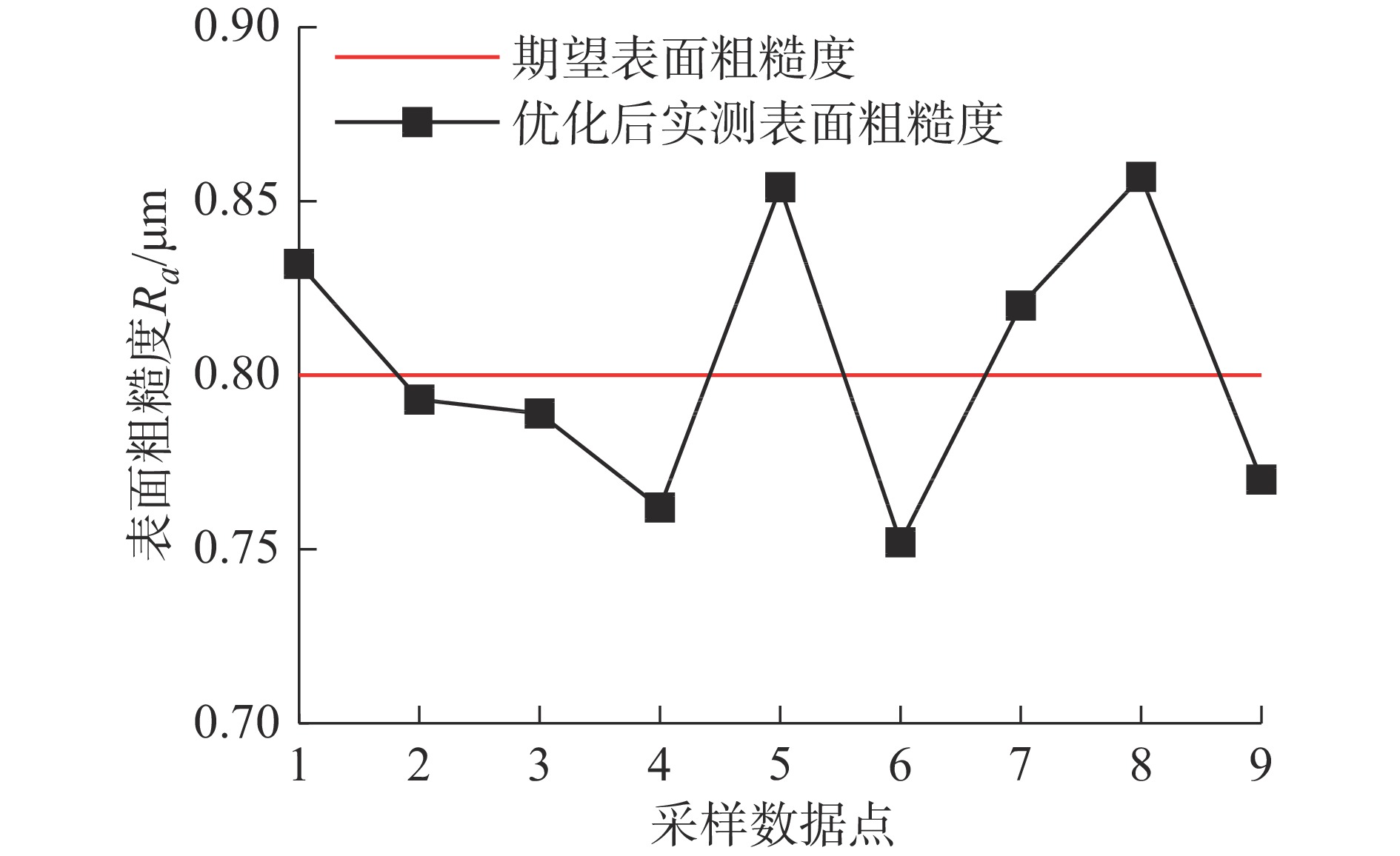
为了解决连杆模具抛光过程中人工抛光时间长、劳动强度大等问题,建立了一套混联机器人柔性抛光系统。在该系统上对材料去除模型进行了研究,建立了考虑抛光工具磨损的材料去除模型,能够良好预测一定抛光参数下的材料去除量;在此基础上,对模具型腔表面自动分片,并使用UG和示教相结合的方法生成加工轨迹;根据模具抛光力的控制需要,建立了一套气动控制系统,使用自主设计的浮动恒力抛光主轴结合PID控制算法实现了恒力抛光。最后在该柔性抛光系统上进行了汽车连杆模具抛光实验,实验结果表明了该柔性抛光系统能够较好地完成连杆模具抛光任务,得到较好的抛光效果。
为了解决连杆模具抛光过程中人工抛光时间长、劳动强度大等问题,建立了一套混联机器人柔性抛光系统。在该系统上对材料去除模型进行了研究,建立了考虑抛光工具磨损的材料去除模型,能够良好预测一定抛光参数下的材料去除量;在此基础上,对模具型腔表面自动分片,并使用UG和示教相结合的方法生成加工轨迹;根据模具抛光力的控制需要,建立了一套气动控制系统,使用自主设计的浮动恒力抛光主轴结合PID控制算法实现了恒力抛光。最后在该柔性抛光系统上进行了汽车连杆模具抛光实验,实验结果表明了该柔性抛光系统能够较好地完成连杆模具抛光任务,得到较好的抛光效果。










2023, 42(12): 2040-2046.
doi: 10.13433/j.cnki.1003-8728.20220167
摘要:
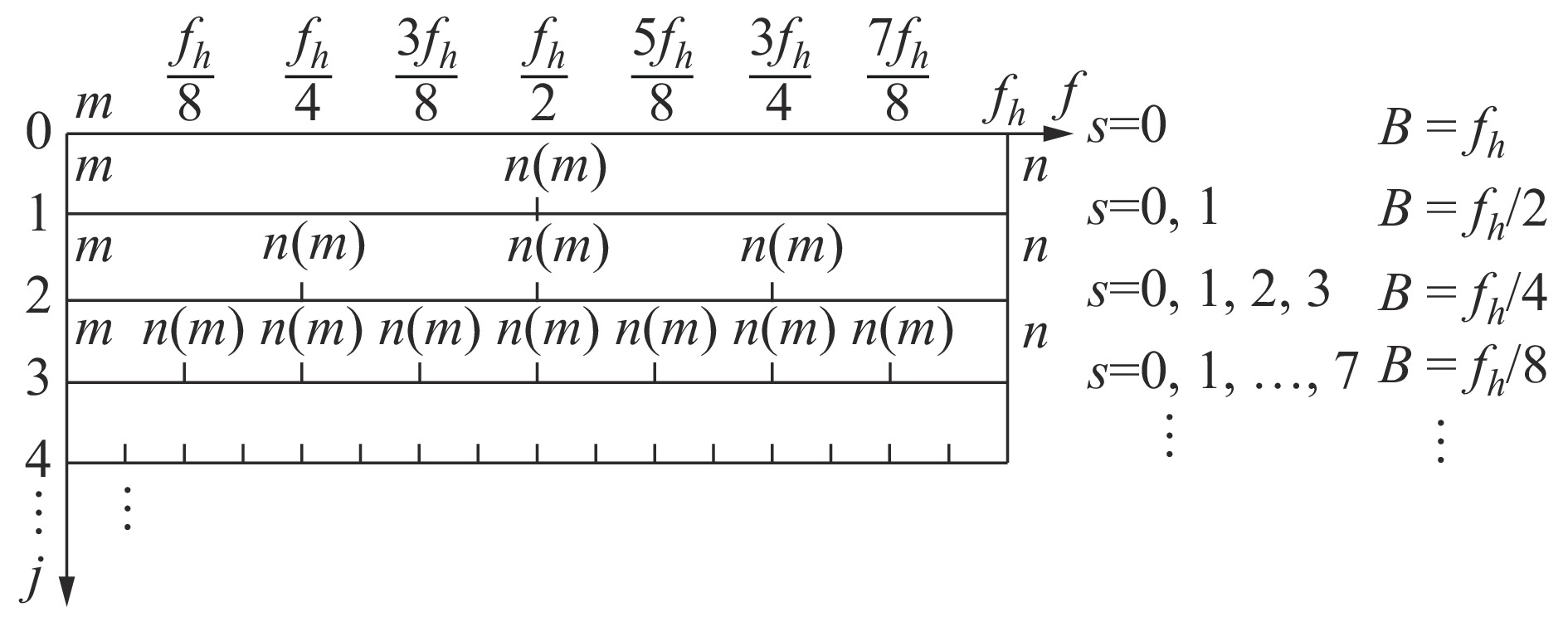
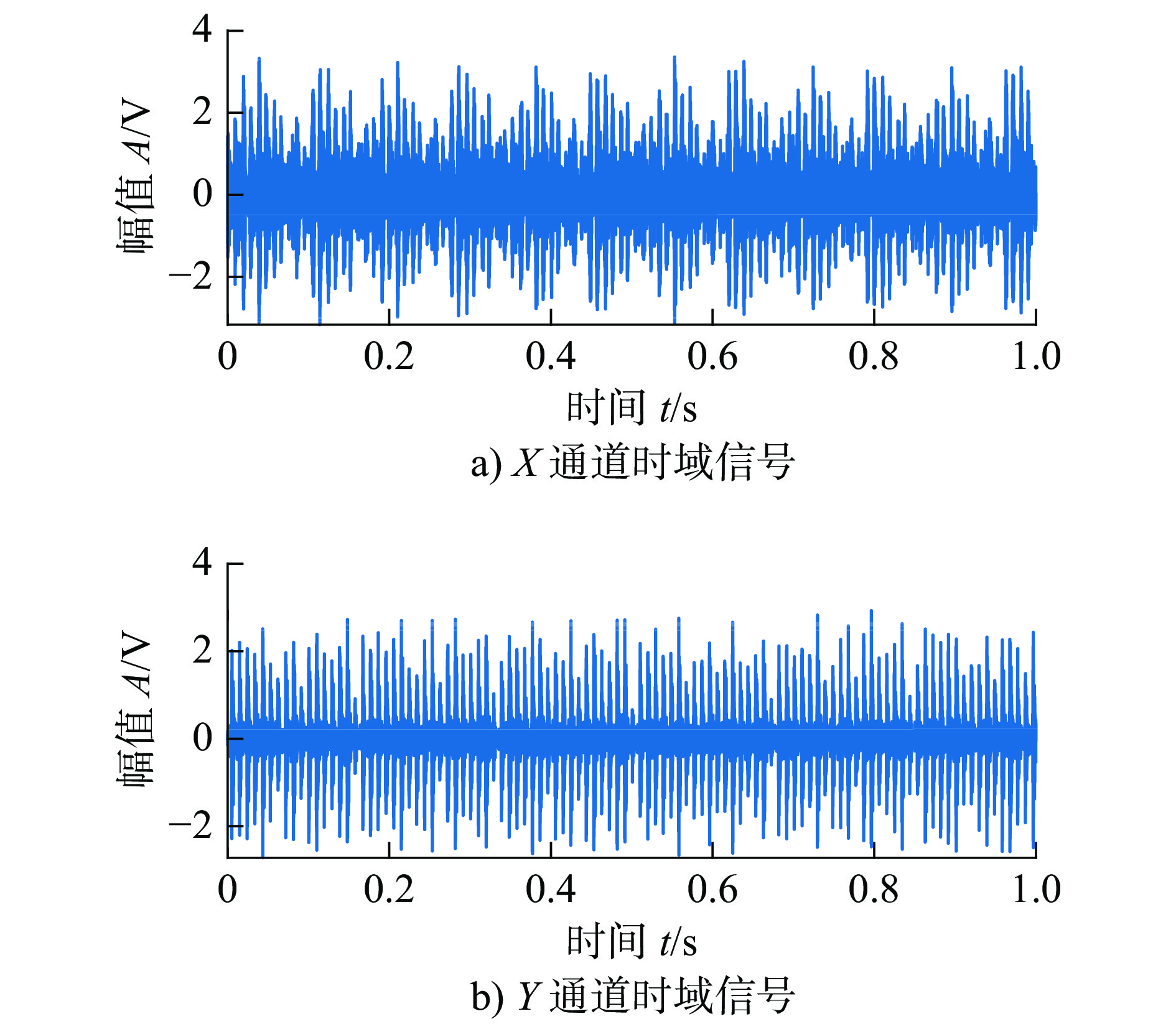
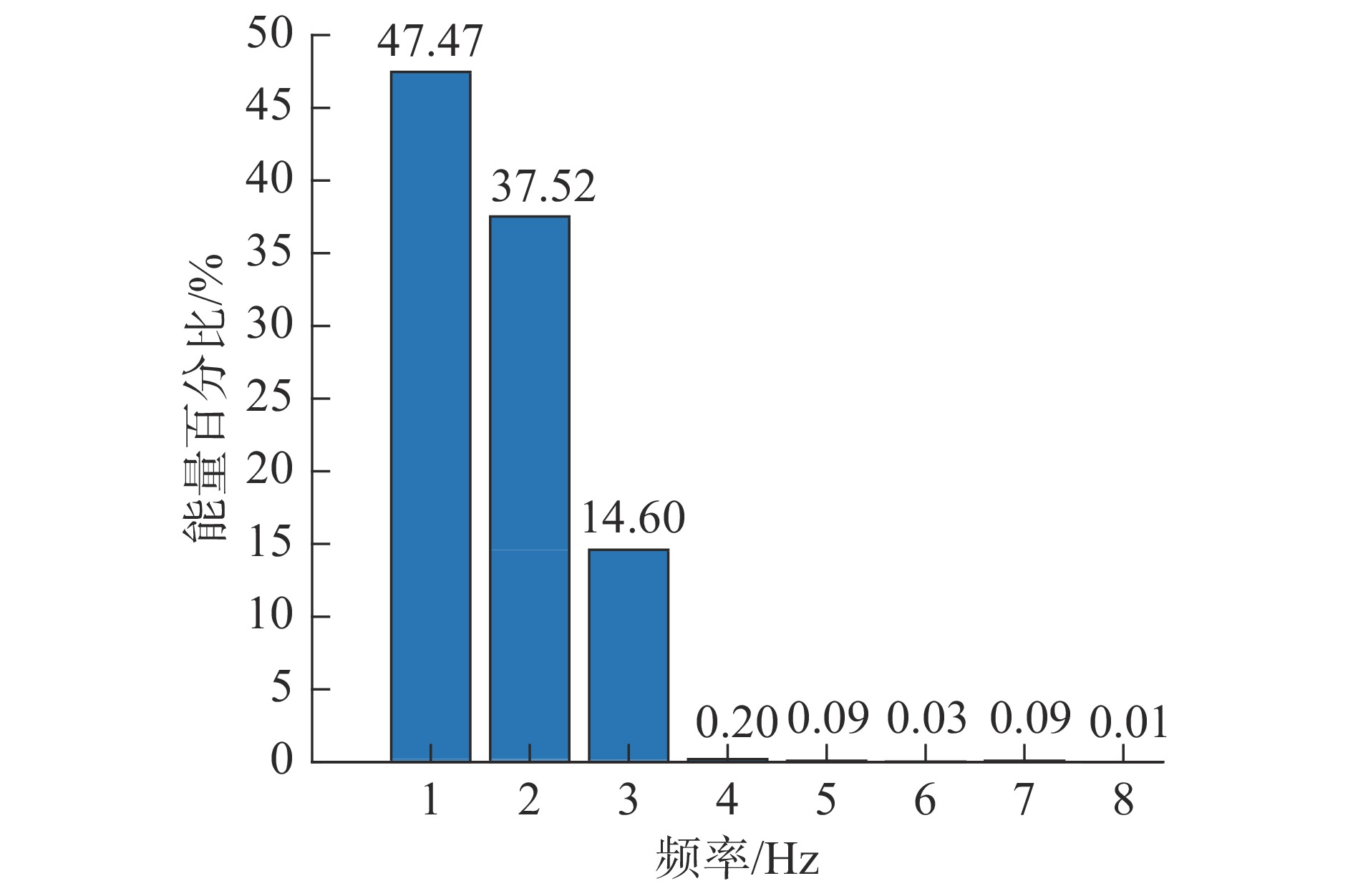
滚动轴承在旋转类机械设备中运行时,会产生成分复杂的振动信号。现有滚动轴承信号处理方法多使用单通道信息,无法反映整个截面故障状态。本文提出了一种基于全矢改进连续谐波小波包变换的故障特征提取方法。首先使用相互正交的两个传感器,实现滚动轴承某一截面上双通道振动信号采集;其次利用全矢谱技术将所采集的同源双通道信号进行融合;然后使用改进连续谐波小波包变换分解融合后的信号;再从各子带中提取能反映各类故障特征的能量值组成特征向量;最后利用美国凯斯西储大学滚动轴承实验台的一组实测故障数据验证该方法的正确性。
滚动轴承在旋转类机械设备中运行时,会产生成分复杂的振动信号。现有滚动轴承信号处理方法多使用单通道信息,无法反映整个截面故障状态。本文提出了一种基于全矢改进连续谐波小波包变换的故障特征提取方法。首先使用相互正交的两个传感器,实现滚动轴承某一截面上双通道振动信号采集;其次利用全矢谱技术将所采集的同源双通道信号进行融合;然后使用改进连续谐波小波包变换分解融合后的信号;再从各子带中提取能反映各类故障特征的能量值组成特征向量;最后利用美国凯斯西储大学滚动轴承实验台的一组实测故障数据验证该方法的正确性。






2023, 42(12): 2047-2054.
doi: 10.13433/j.cnki.1003-8728.20220164
摘要:
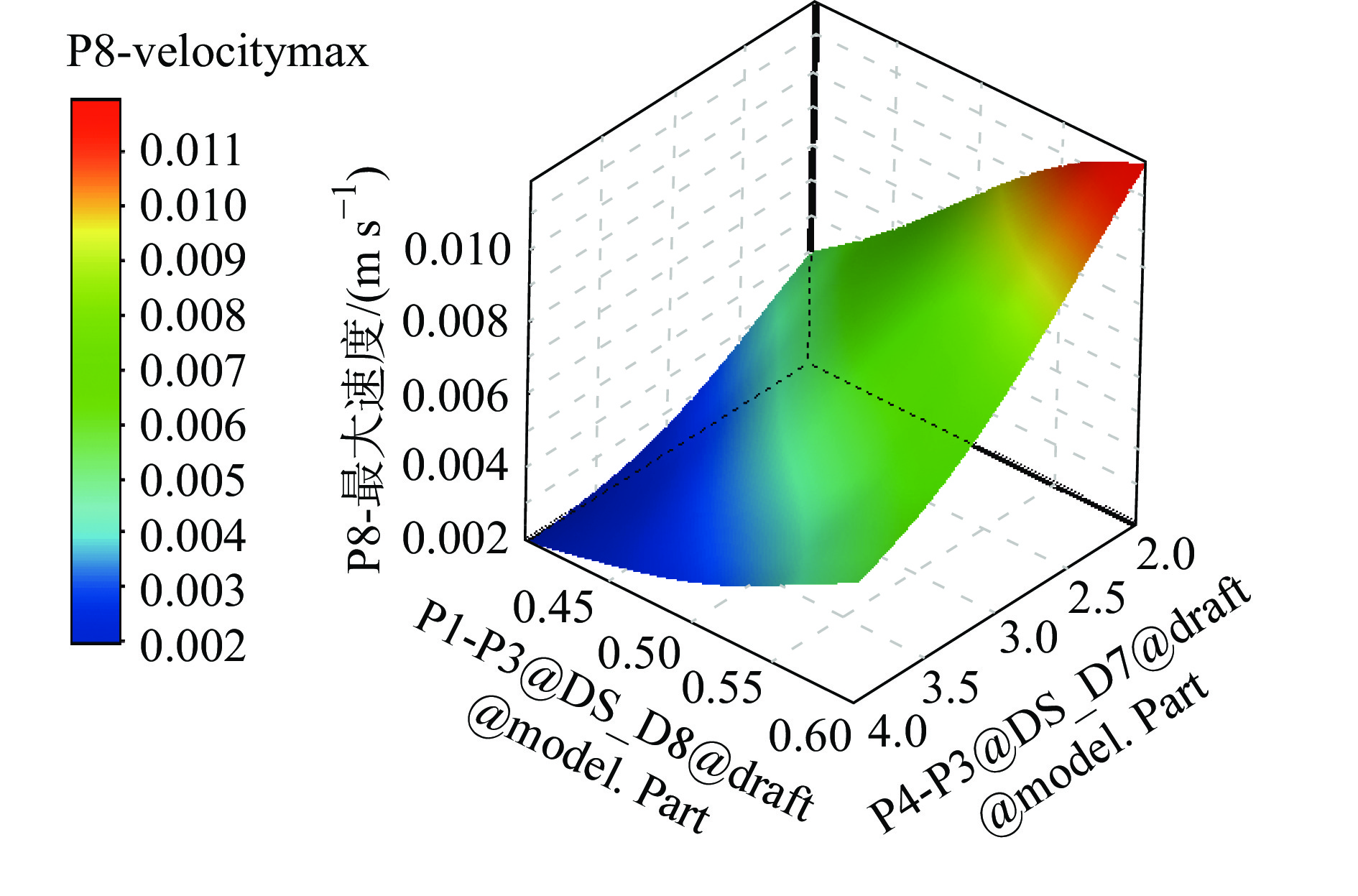
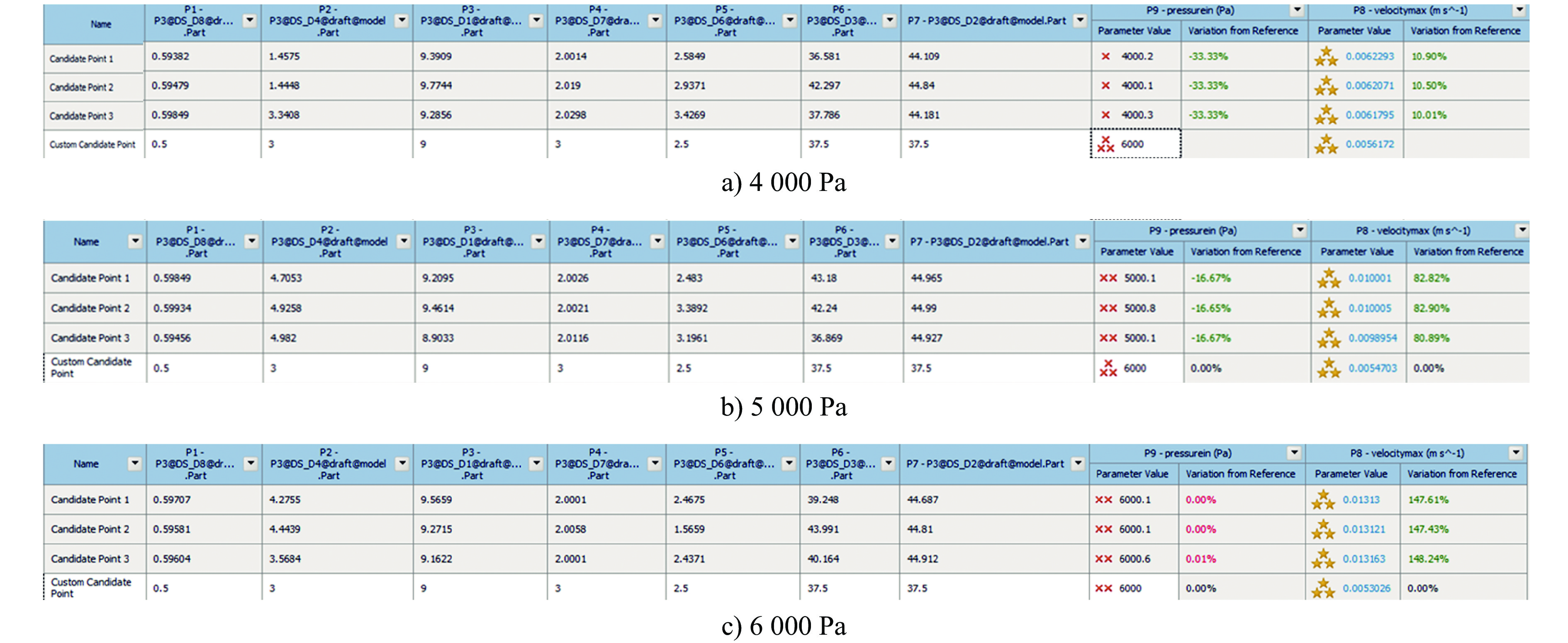
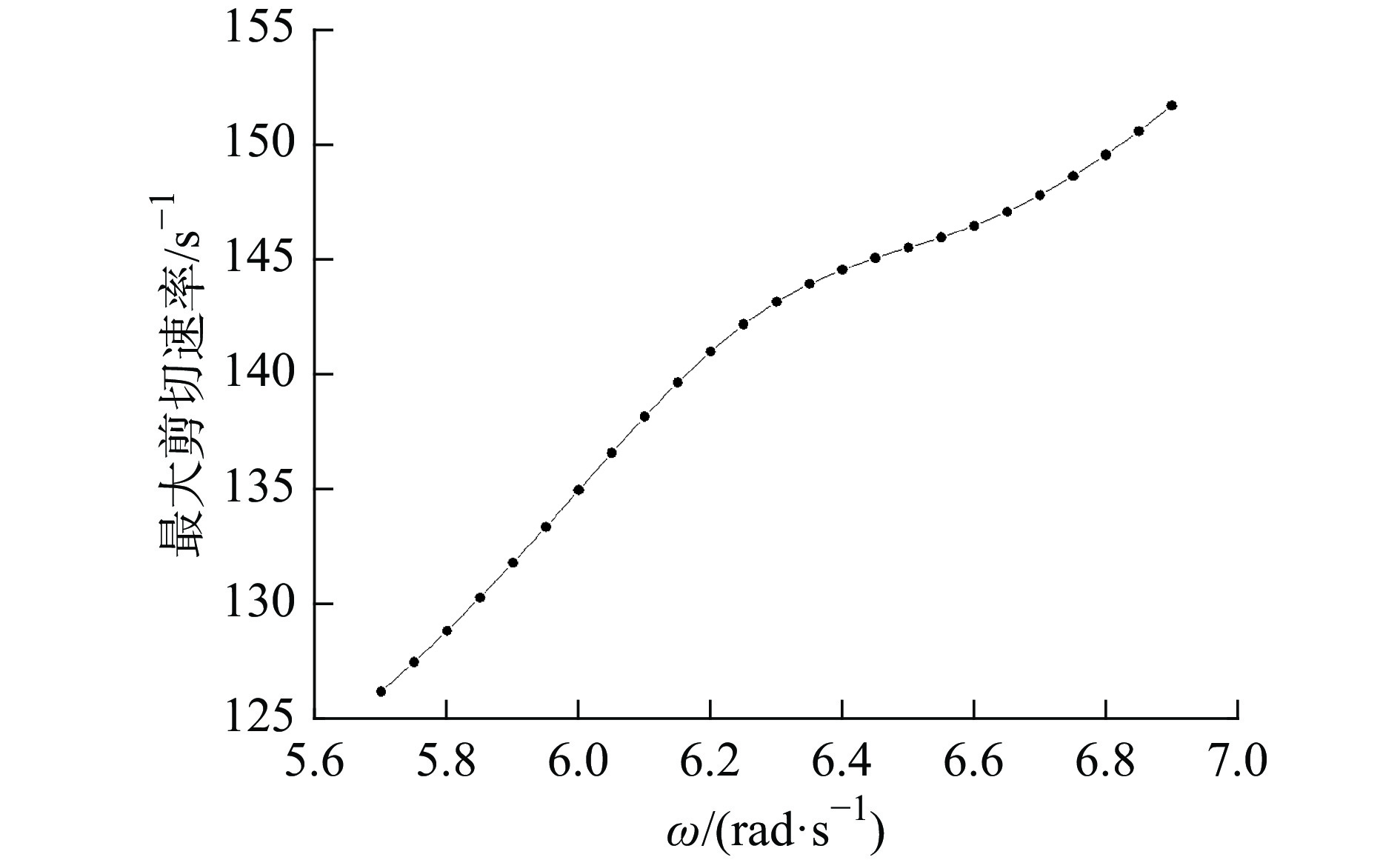
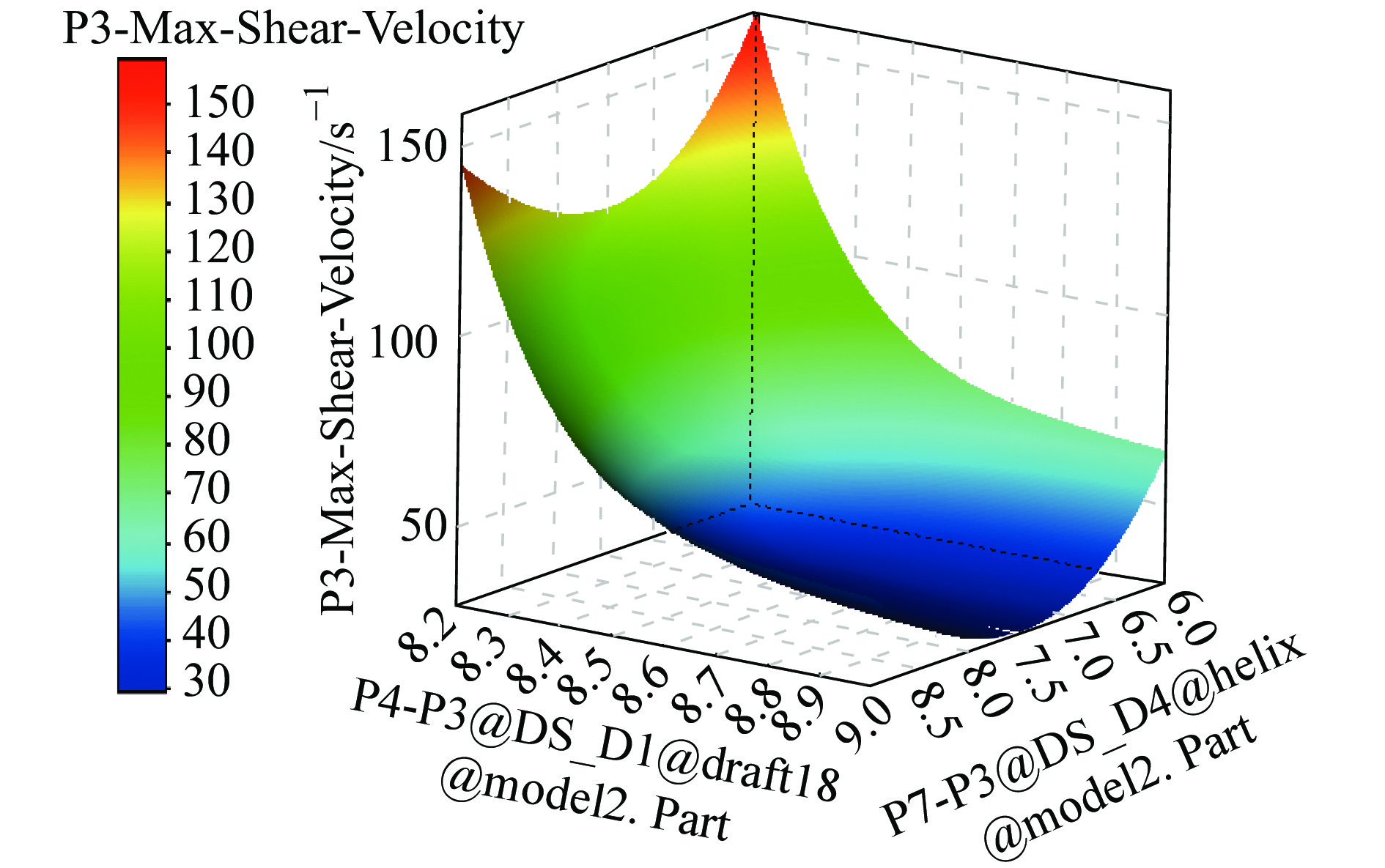
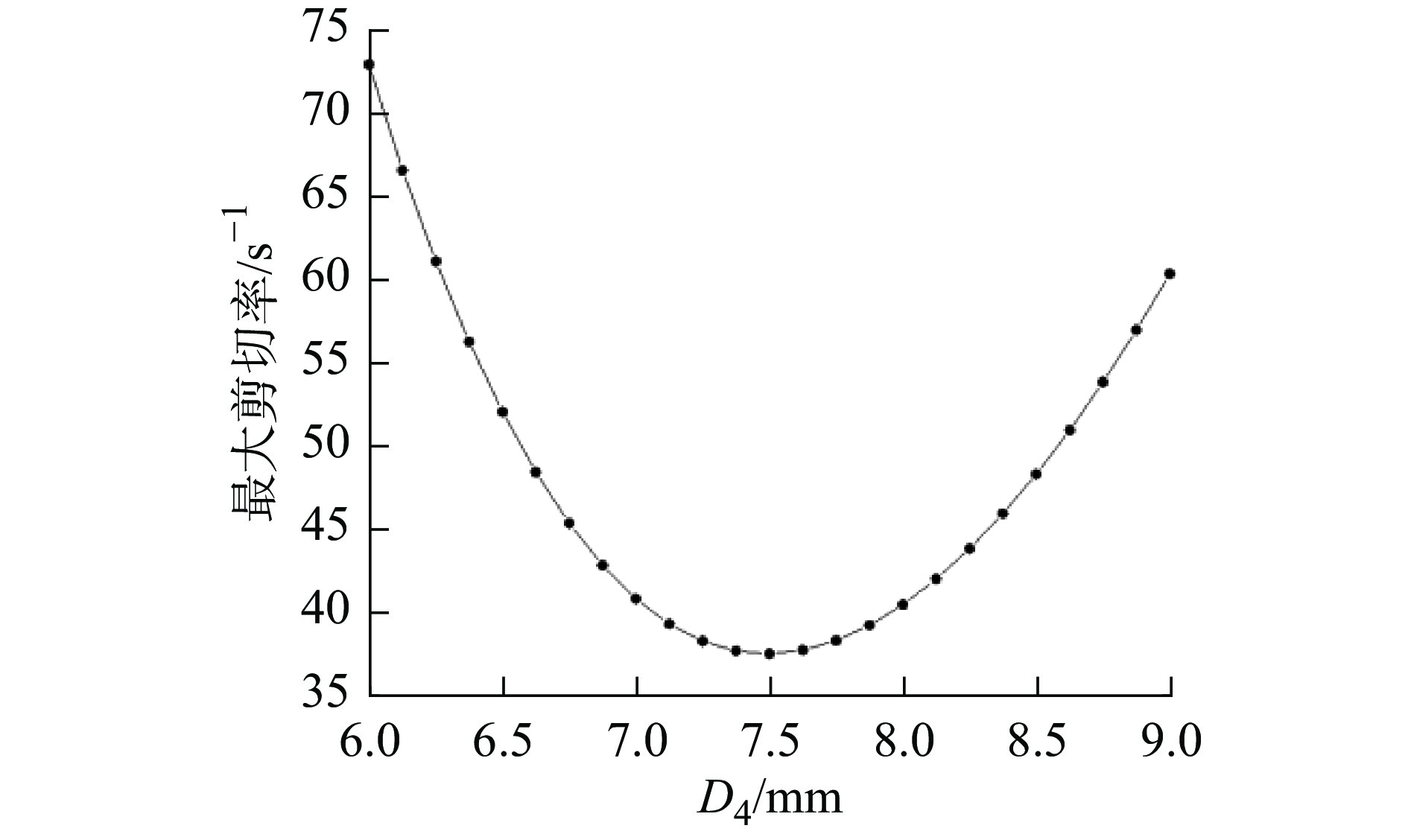
为了满足微流挤出工艺陶瓷3D打印机连续打印多材料以及均匀混合的要求,设计了变内径螺杆挤出式3D打印机挤出混料新结构,不仅可以实现高固含量浆料在喷头内部单向输送,同时通过变内径螺杆旋转搅拌使两种材料混合均匀。通过Ansys响应面优化,在挤出头段以最小压力实现最大面积加权平均速度为目标函数,实现在低功耗高输出的不同需求下匹配不同挤出速度;在螺杆段以优化最大剪切速率为目标函数,实现两种陶瓷浆料的均匀混合。结果表明,通过参数化优化后可以在螺杆低转速与小型化的要求下,实现不同小流率高精度打印及两种材料的均匀混合。
为了满足微流挤出工艺陶瓷3D打印机连续打印多材料以及均匀混合的要求,设计了变内径螺杆挤出式3D打印机挤出混料新结构,不仅可以实现高固含量浆料在喷头内部单向输送,同时通过变内径螺杆旋转搅拌使两种材料混合均匀。通过Ansys响应面优化,在挤出头段以最小压力实现最大面积加权平均速度为目标函数,实现在低功耗高输出的不同需求下匹配不同挤出速度;在螺杆段以优化最大剪切速率为目标函数,实现两种陶瓷浆料的均匀混合。结果表明,通过参数化优化后可以在螺杆低转速与小型化的要求下,实现不同小流率高精度打印及两种材料的均匀混合。








2023, 42(12): 2055-2063.
doi: 10.13433/j.cnki.1003-8728.20220184
摘要:
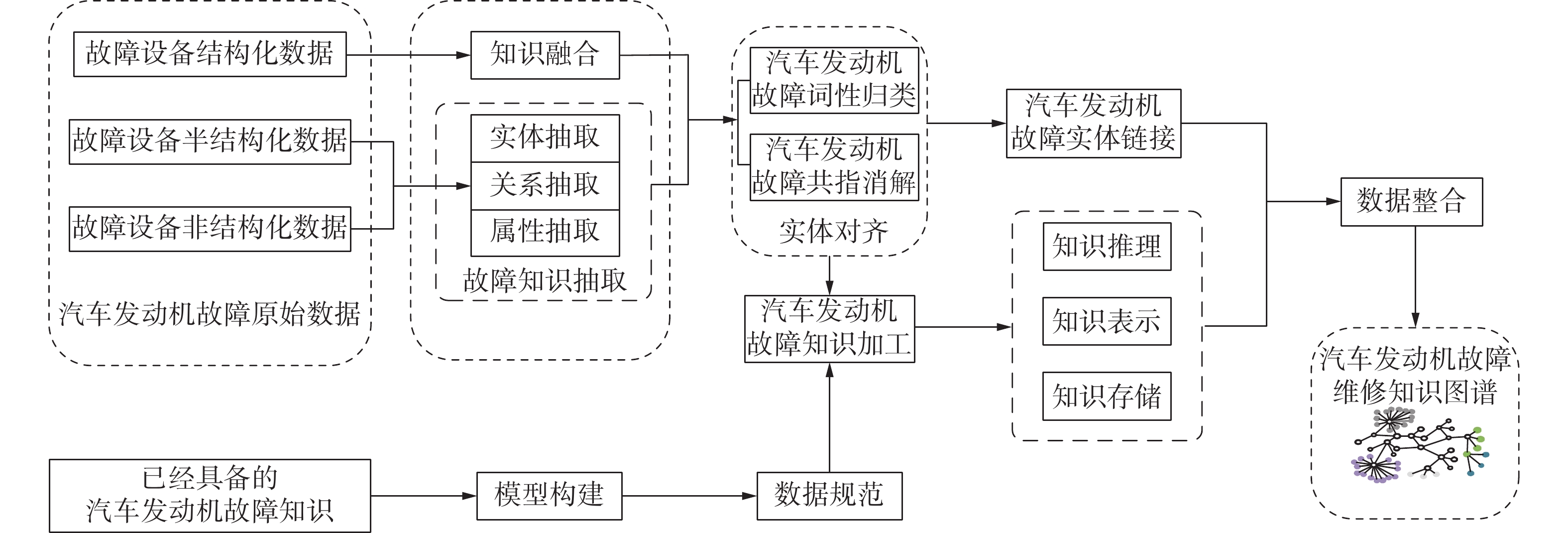
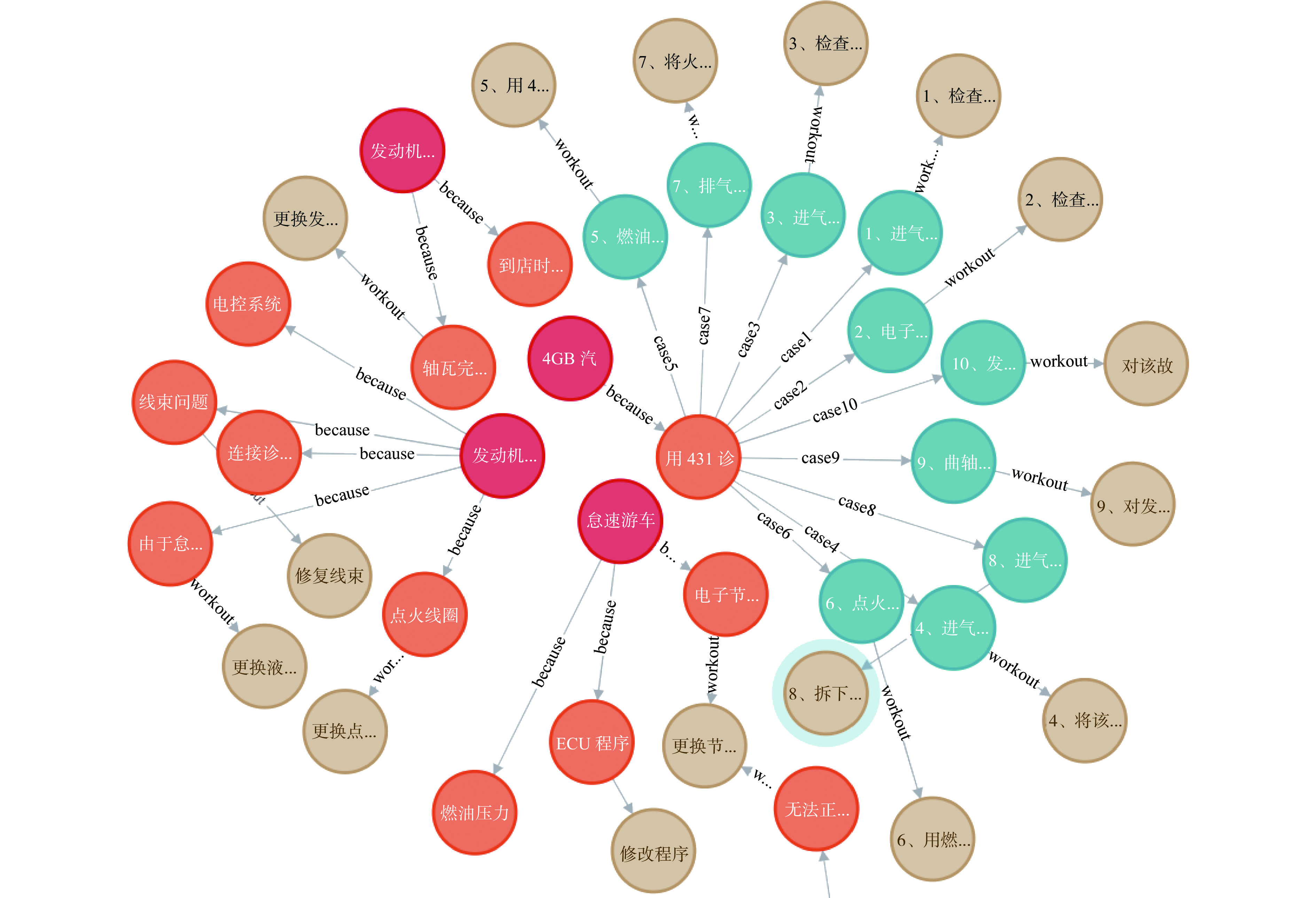
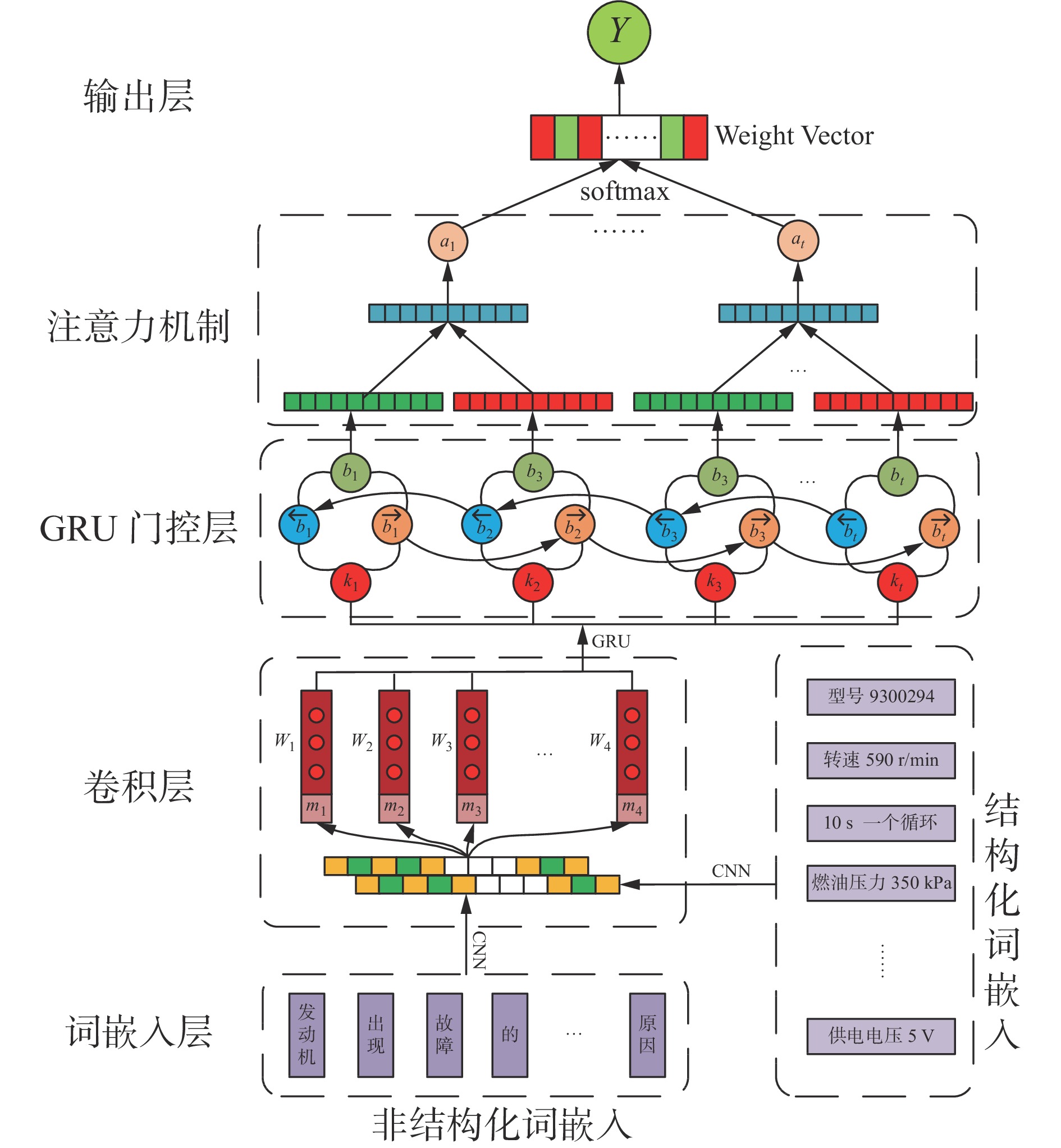
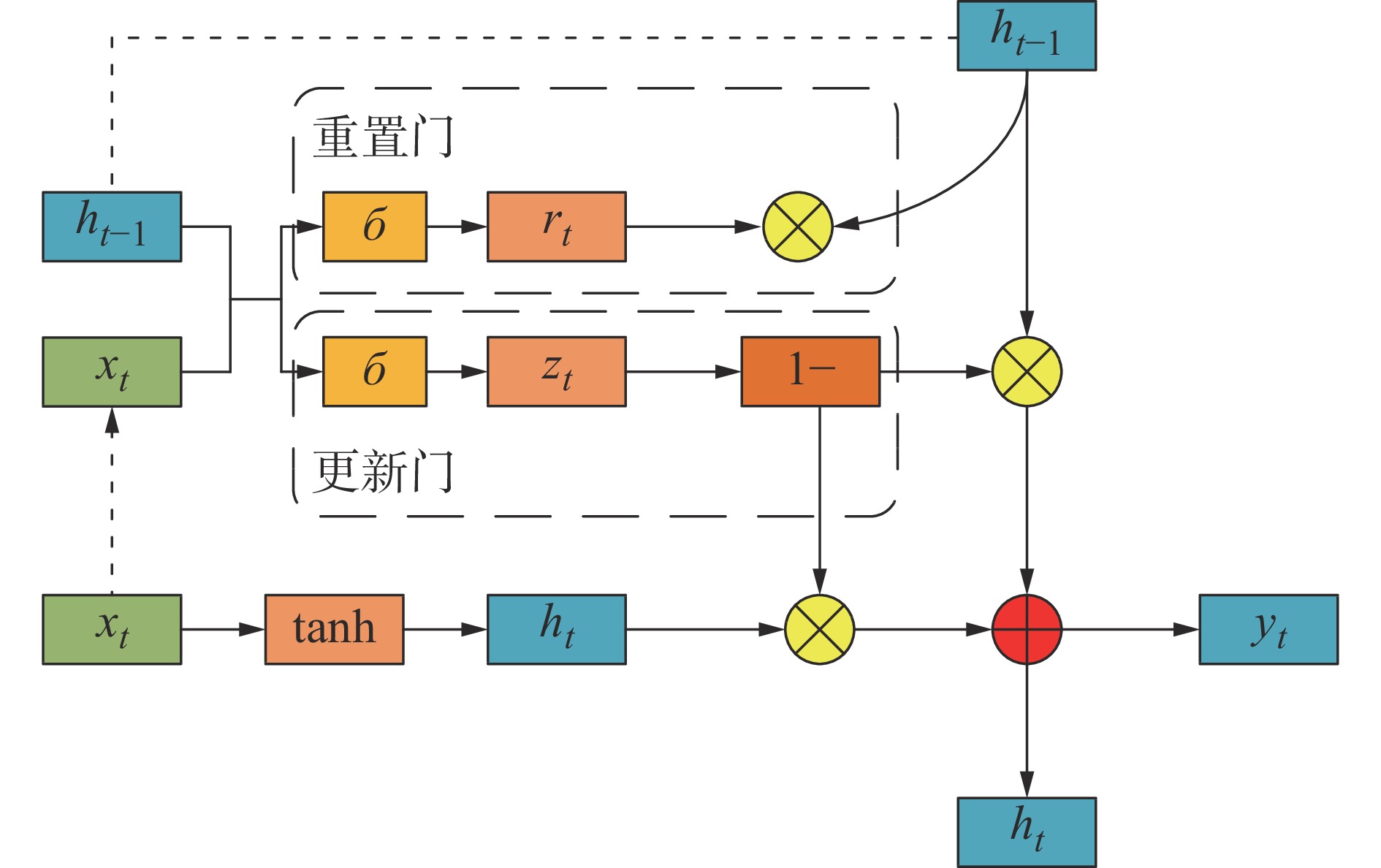
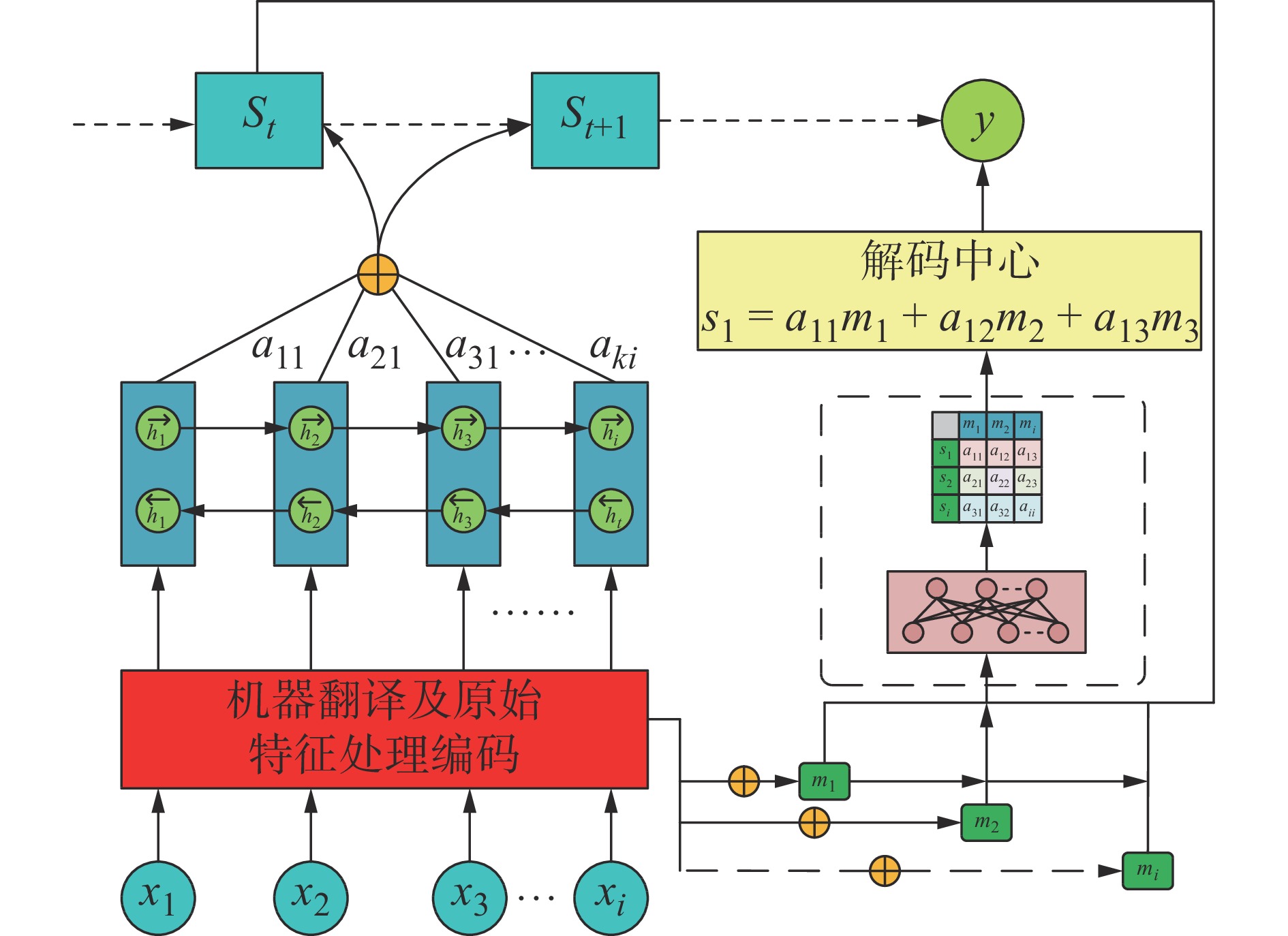
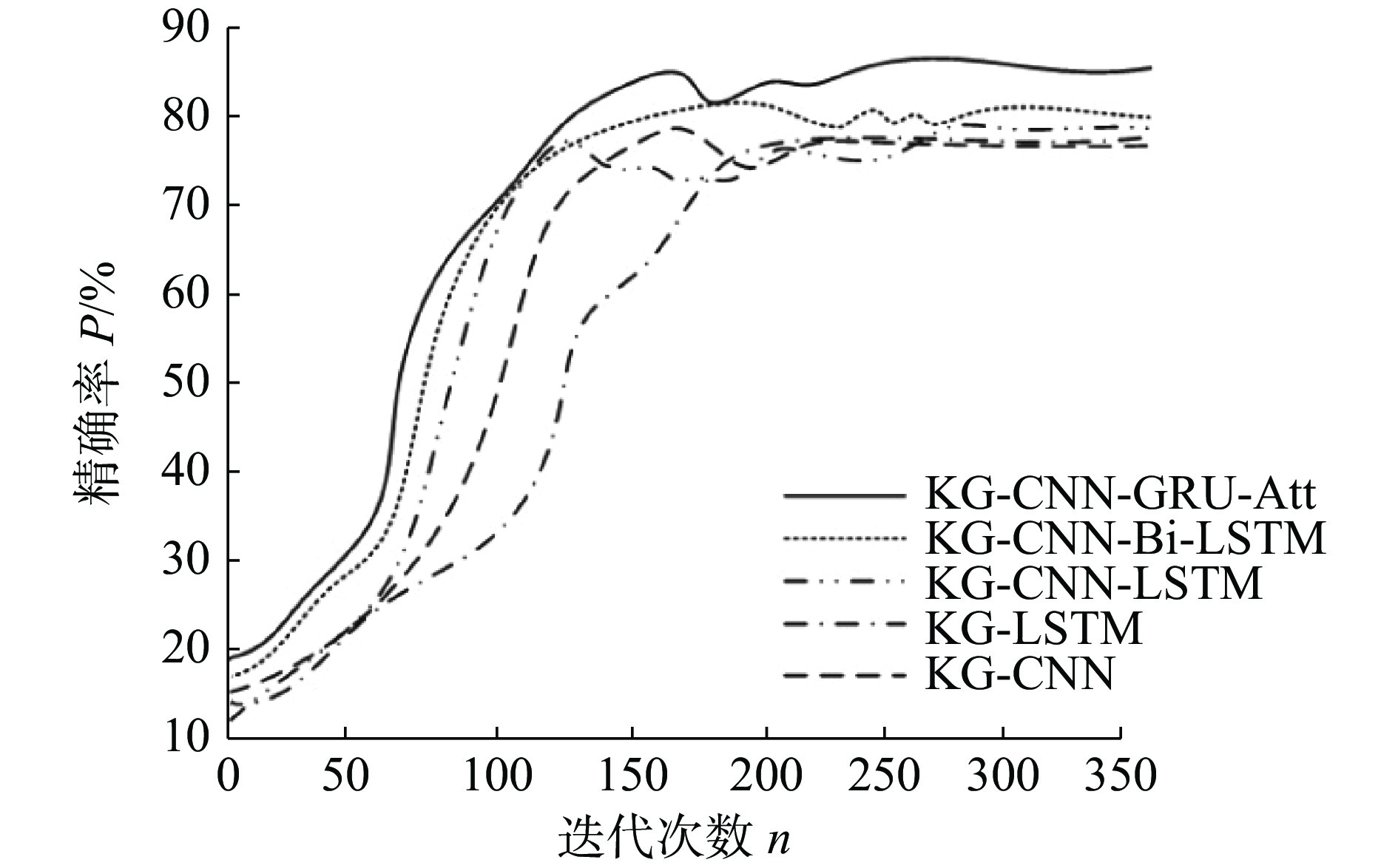
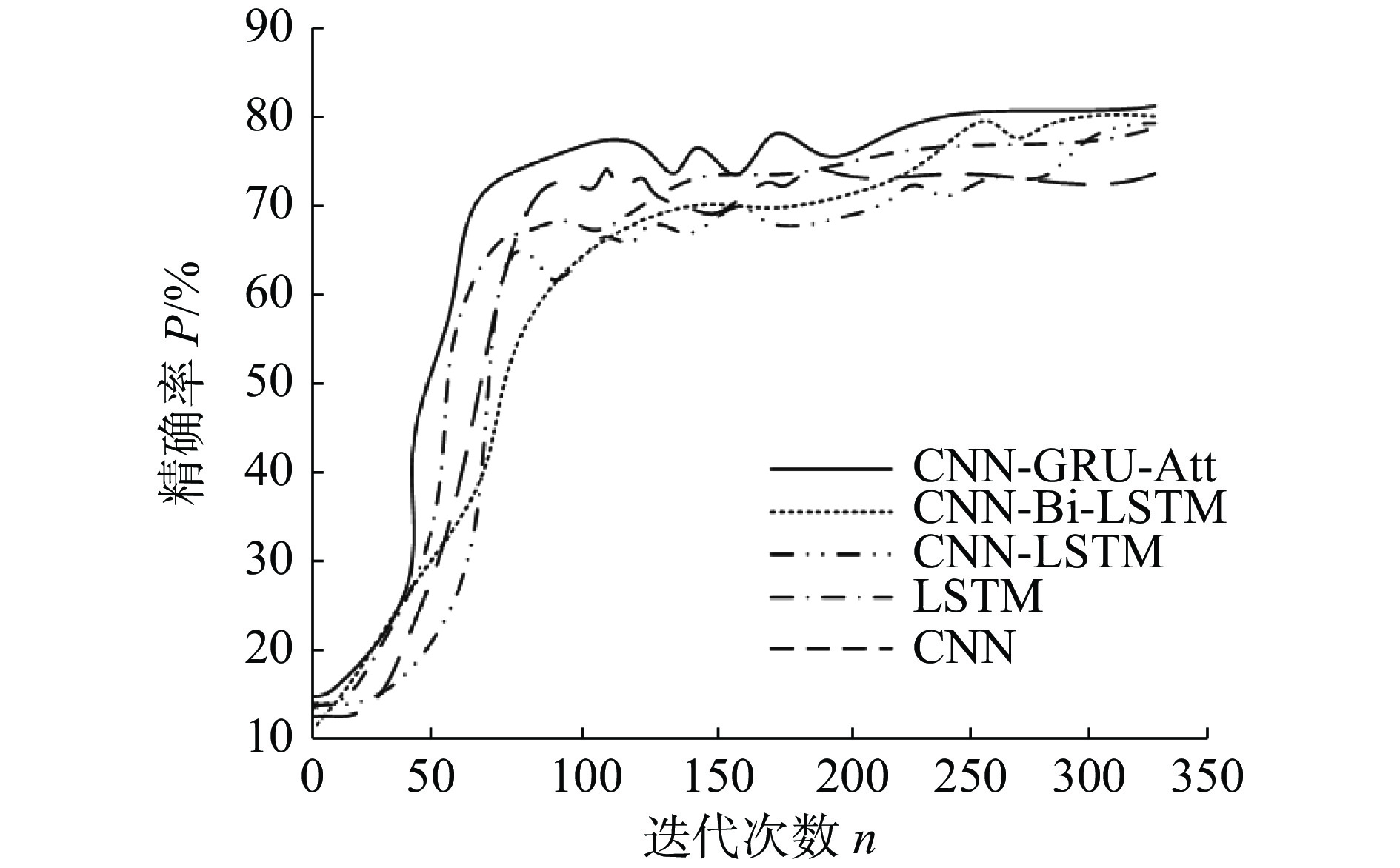
针对汽车发动机故障率高且种类多,故障征兆与故障之间存在多对多的复杂耦联关系,故障溯源难度大、准确率低等问题,提出了融合知识图谱和多元神经网络的发动机故障智能预测方法。将发动机运行状态、故障现象、故障原因和维修记录作为输入信息,通过知识抽取、消歧和加工形成为可表示、可推理的结构化知识网络,并进行特征向量转换;建立了包含故障记录嵌入层、卷积层、GRU门控层和注意力机制的多元神经网络通路,通过特征向量训练形成了发动机故障预测模型,实现了发动机定性故障现象到定量故障推理,再到定性故障预测输出的映射变换;通过实际维修案例验证了所提KG-CNN-GRU-Att方法的可行性和有效性。
针对汽车发动机故障率高且种类多,故障征兆与故障之间存在多对多的复杂耦联关系,故障溯源难度大、准确率低等问题,提出了融合知识图谱和多元神经网络的发动机故障智能预测方法。将发动机运行状态、故障现象、故障原因和维修记录作为输入信息,通过知识抽取、消歧和加工形成为可表示、可推理的结构化知识网络,并进行特征向量转换;建立了包含故障记录嵌入层、卷积层、GRU门控层和注意力机制的多元神经网络通路,通过特征向量训练形成了发动机故障预测模型,实现了发动机定性故障现象到定量故障推理,再到定性故障预测输出的映射变换;通过实际维修案例验证了所提KG-CNN-GRU-Att方法的可行性和有效性。


2023, 42(12): 2064-2071.
doi: 10.13433/j.cnki.1003-8728.20220173
摘要:
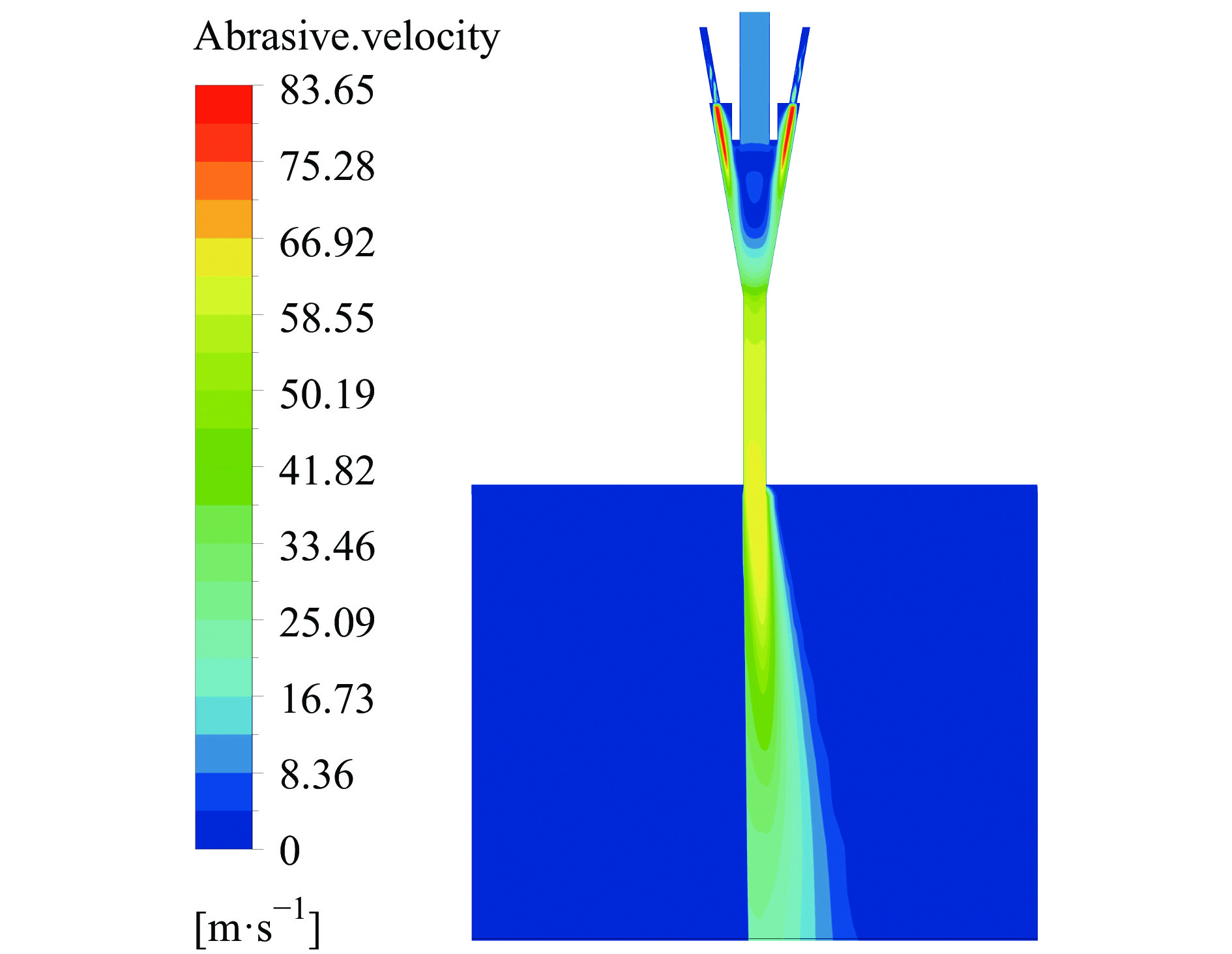
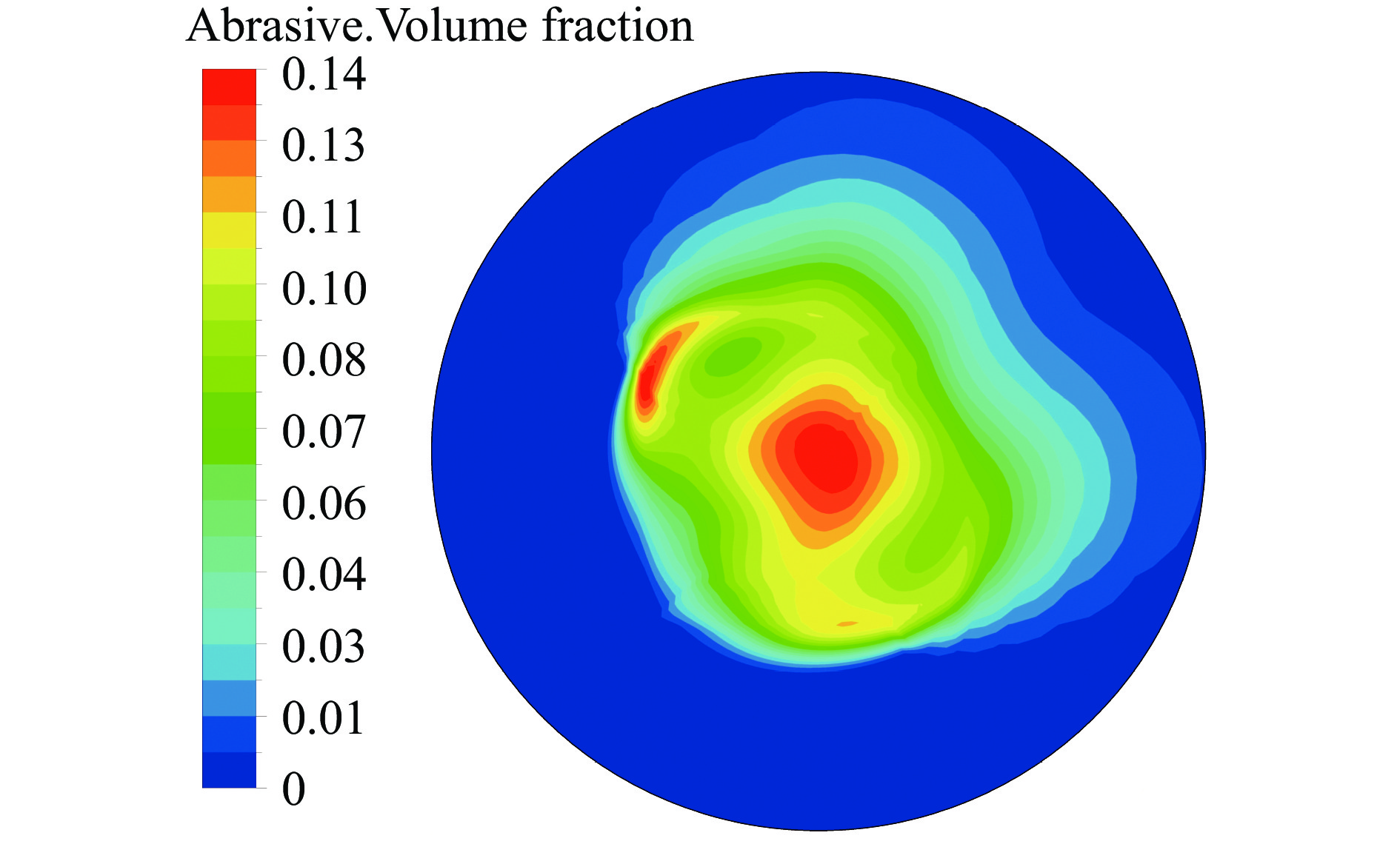
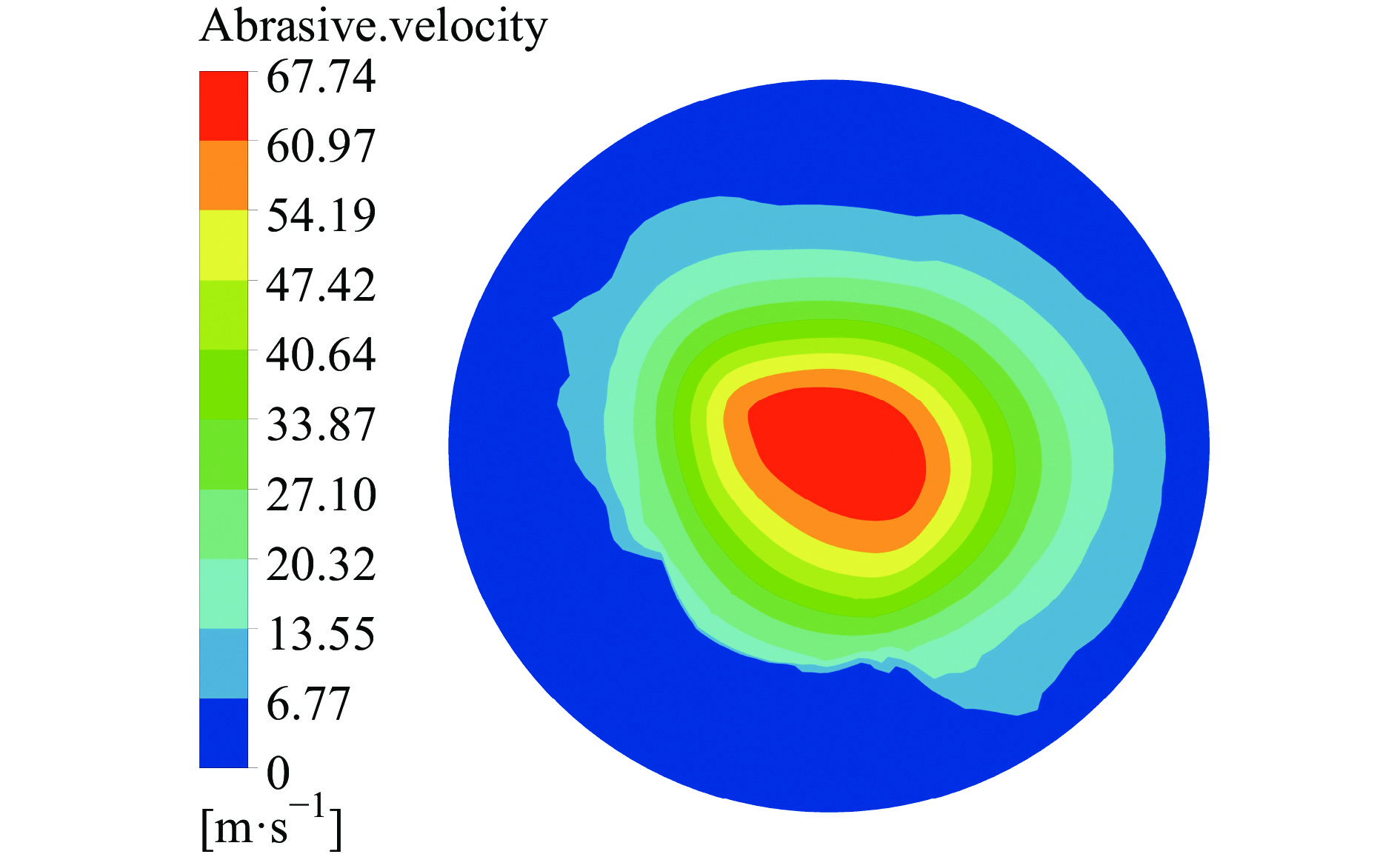
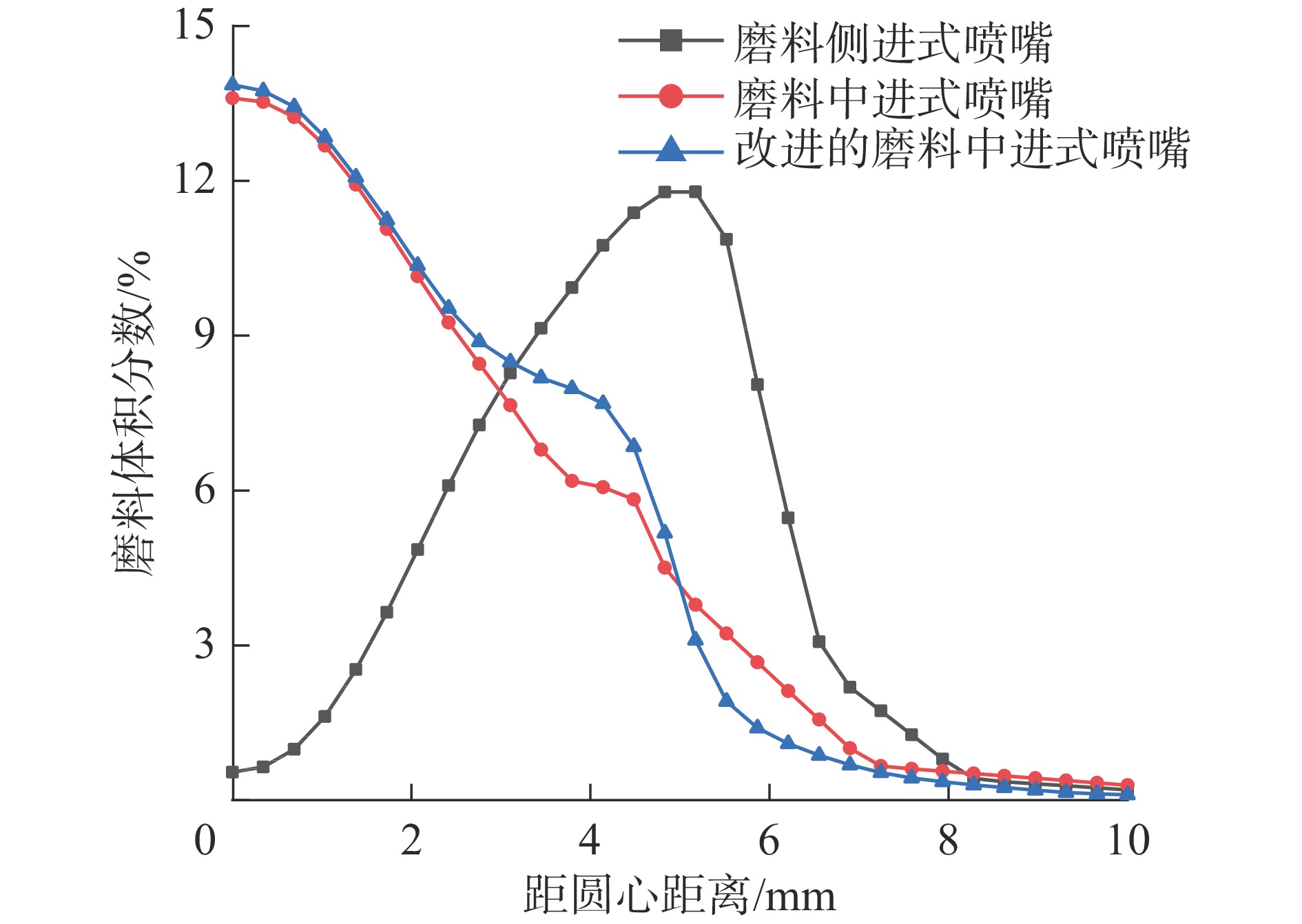
针对传统的后混合磨料水射流喷嘴中的磨料与水混合均匀性差,磨料射流能量低的问题。本文基于CFD欧拉多相流模型,利用Fluent软件对比磨料侧进式喷嘴、磨料中进式喷嘴以及改进的磨料中进式喷嘴在相同边界条件下计算得到的内外流场结果。分析结果表明:磨料侧进式喷嘴的磨料主要分布在速度较低的区域,未能进入高速水流内部,导致喷嘴内外流场的中心位置磨料射流能量低,磨料与水混合均匀性差;磨料中进式喷嘴很好的解决了磨料不能进入高速水流内部的问题,磨料体积分数和磨料速度从中心向外逐渐减小,射流效果明显改善;改进的磨料中进式喷嘴减小了高速水流在原磨料中进式喷嘴混合腔内的碰撞损耗,磨料在外流场的速度及动能都有一定提高。
针对传统的后混合磨料水射流喷嘴中的磨料与水混合均匀性差,磨料射流能量低的问题。本文基于CFD欧拉多相流模型,利用Fluent软件对比磨料侧进式喷嘴、磨料中进式喷嘴以及改进的磨料中进式喷嘴在相同边界条件下计算得到的内外流场结果。分析结果表明:磨料侧进式喷嘴的磨料主要分布在速度较低的区域,未能进入高速水流内部,导致喷嘴内外流场的中心位置磨料射流能量低,磨料与水混合均匀性差;磨料中进式喷嘴很好的解决了磨料不能进入高速水流内部的问题,磨料体积分数和磨料速度从中心向外逐渐减小,射流效果明显改善;改进的磨料中进式喷嘴减小了高速水流在原磨料中进式喷嘴混合腔内的碰撞损耗,磨料在外流场的速度及动能都有一定提高。

2023, 42(12): 2072-2078.
doi: 10.13433/j.cnki.1003-8728.20220177
摘要:
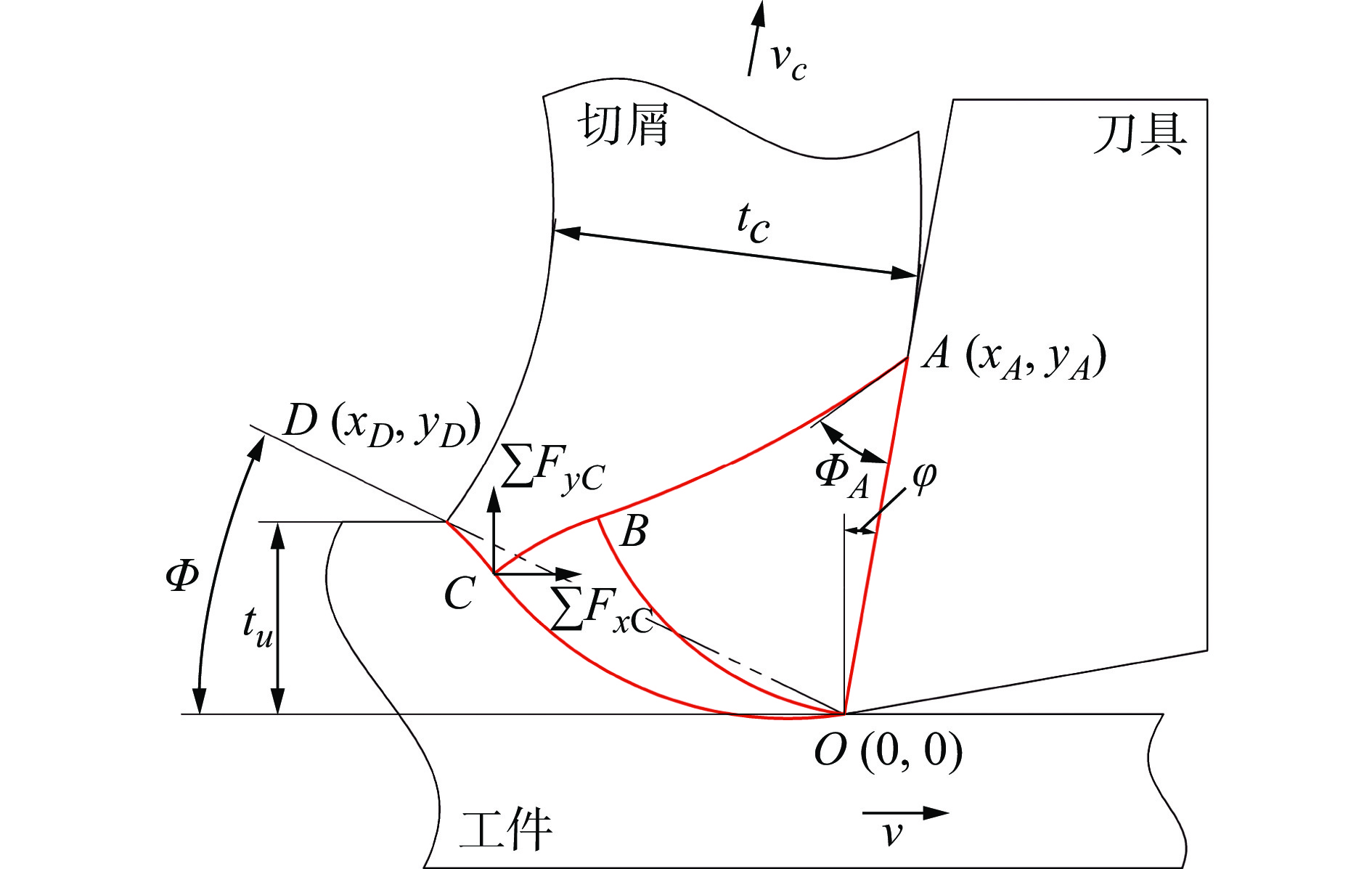
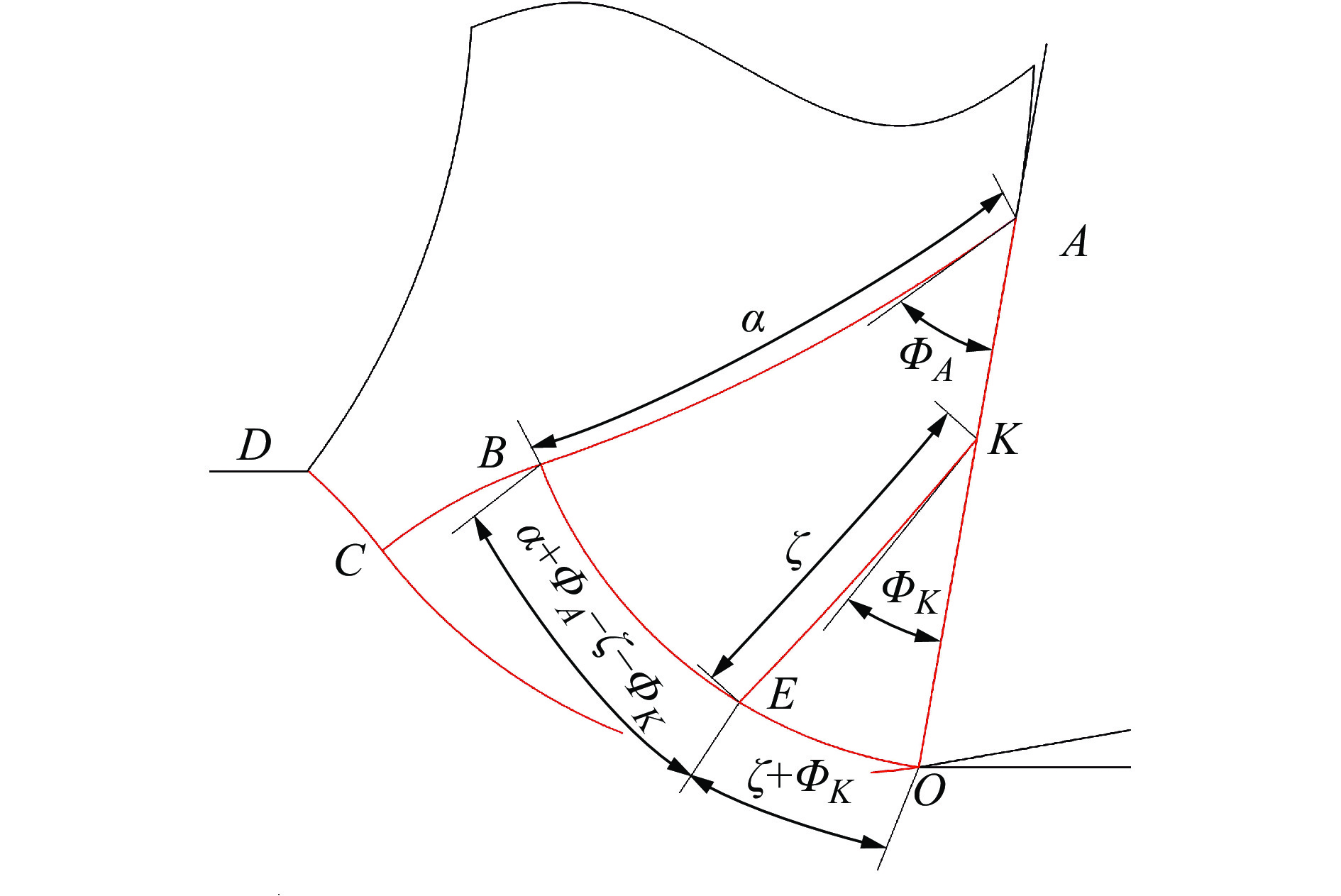
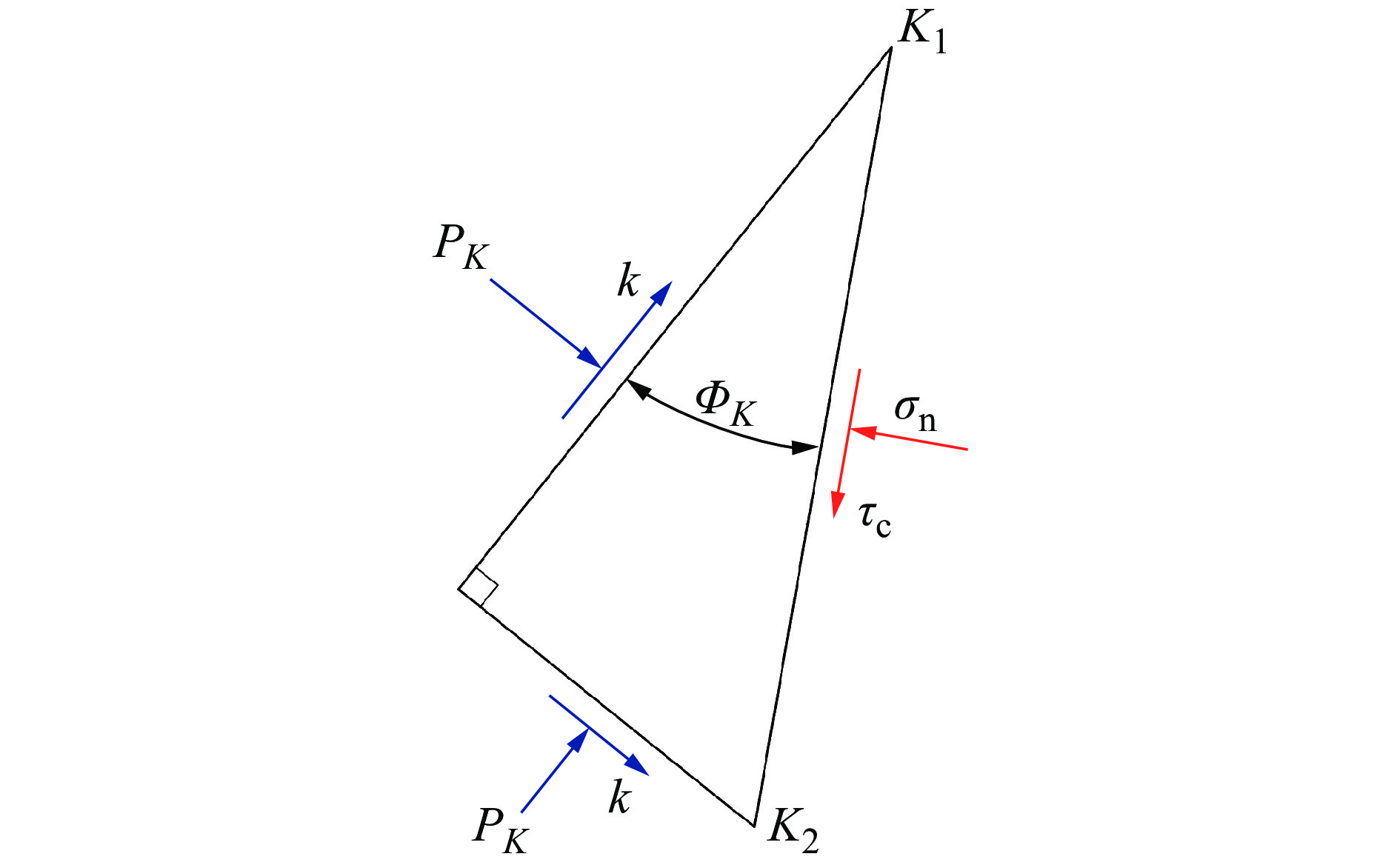
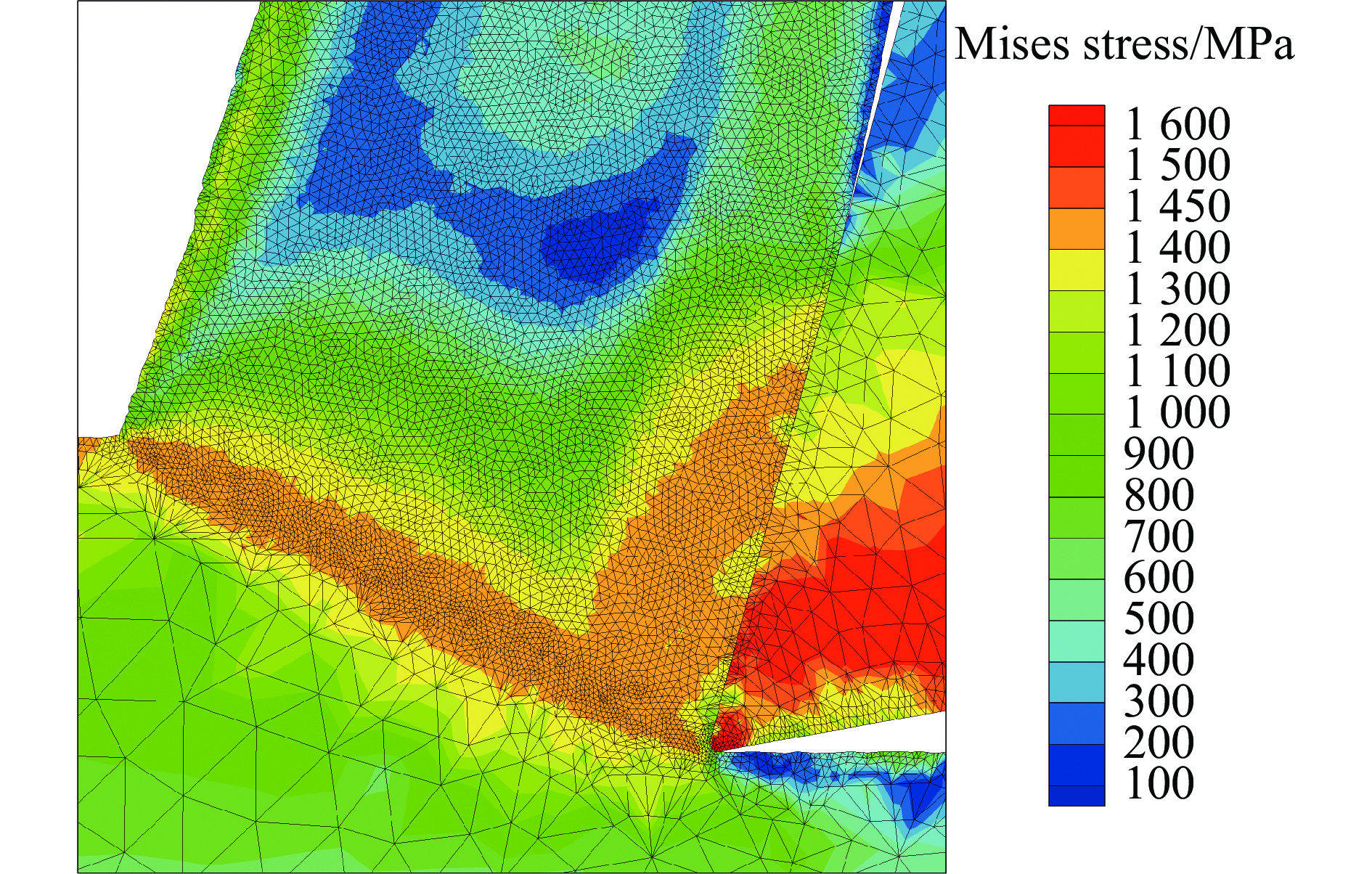
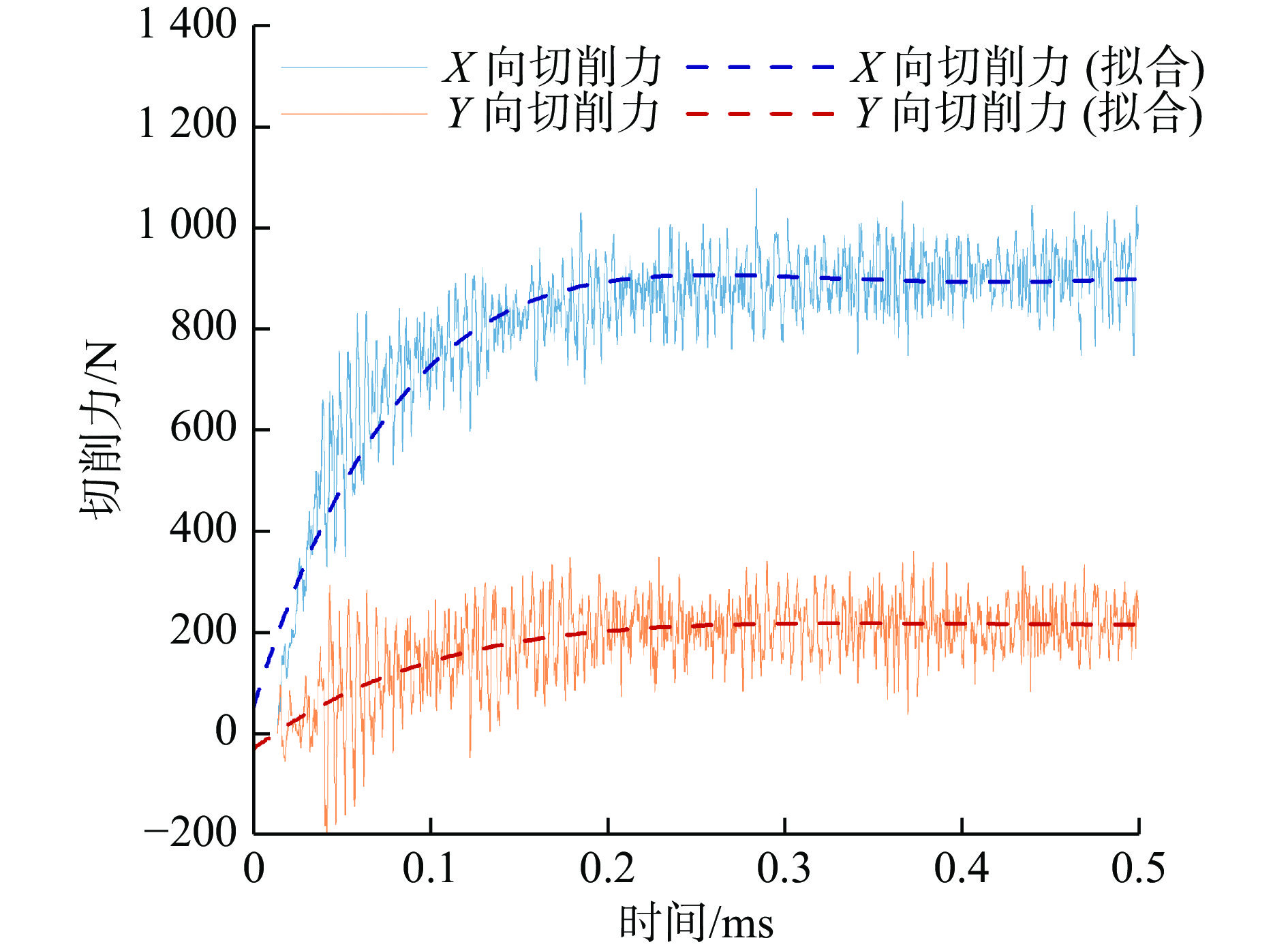
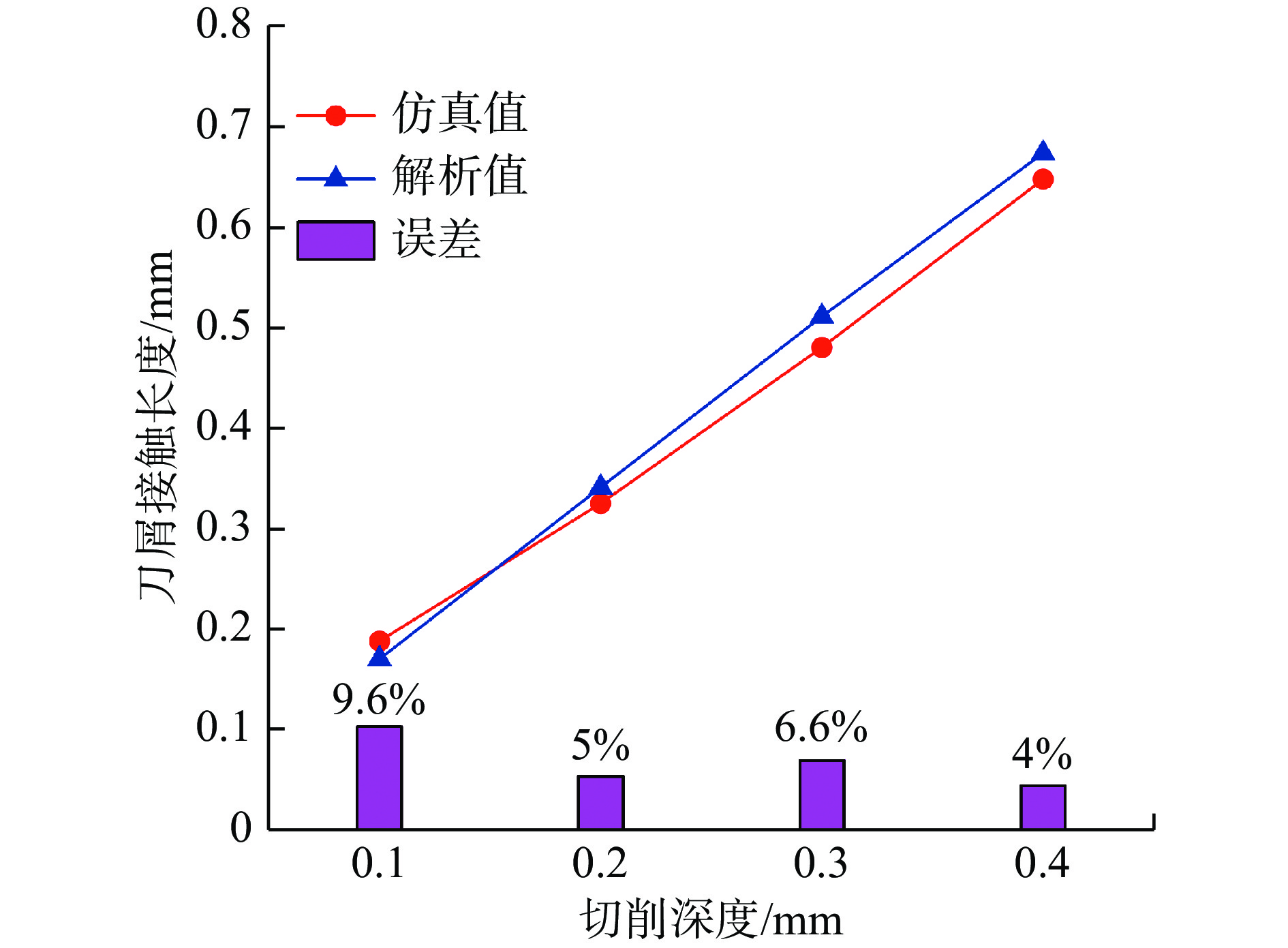
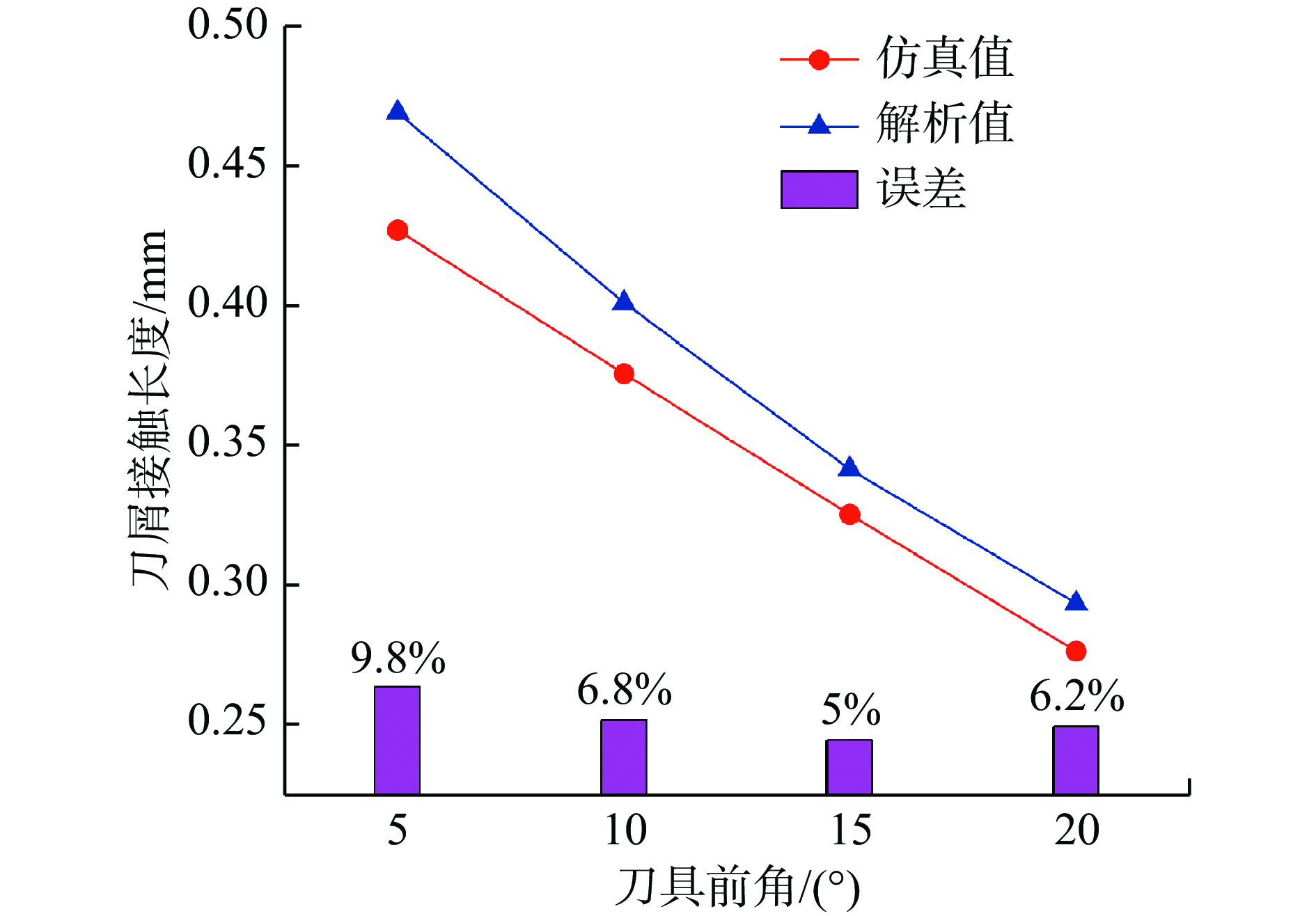
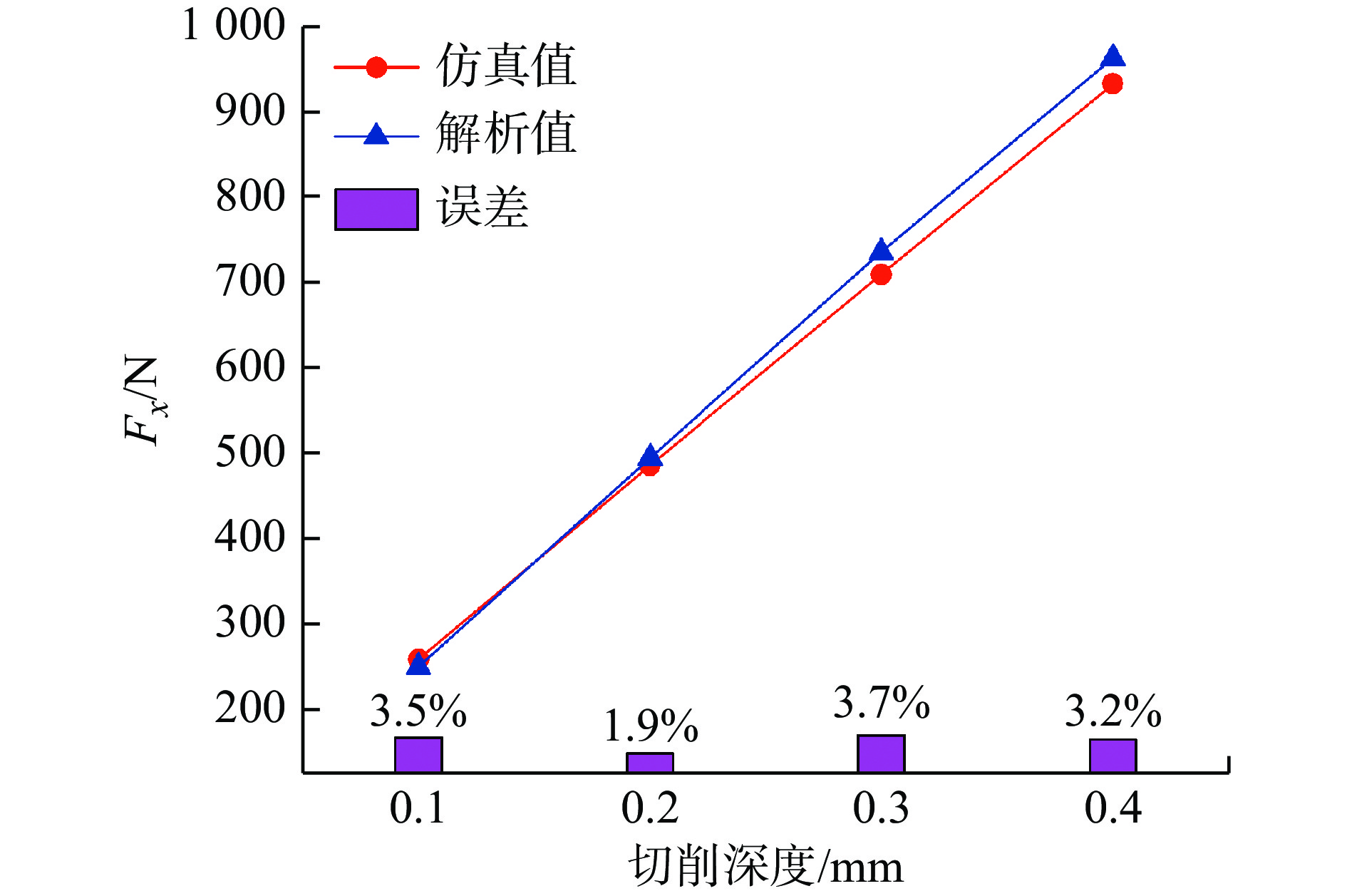
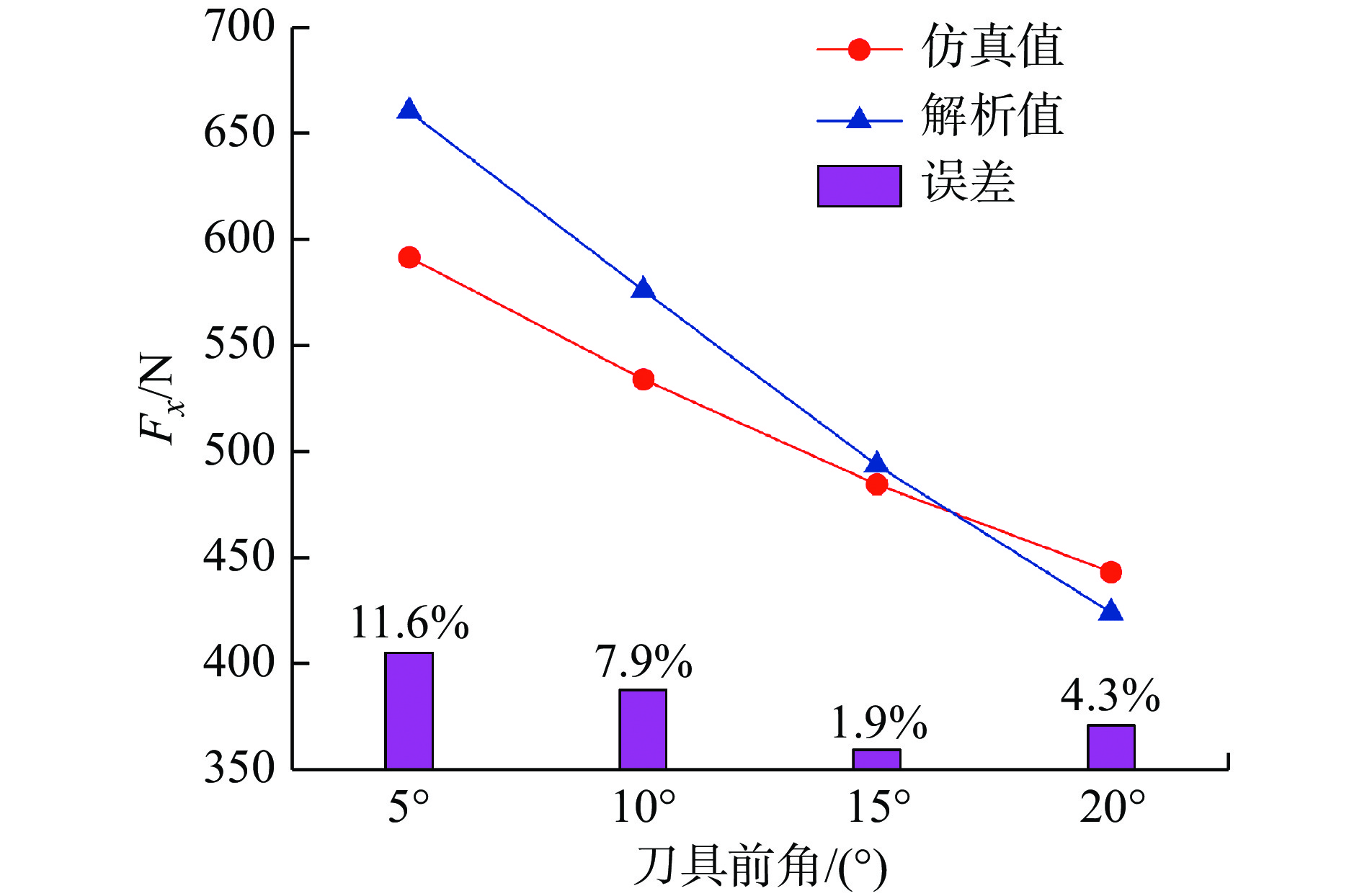
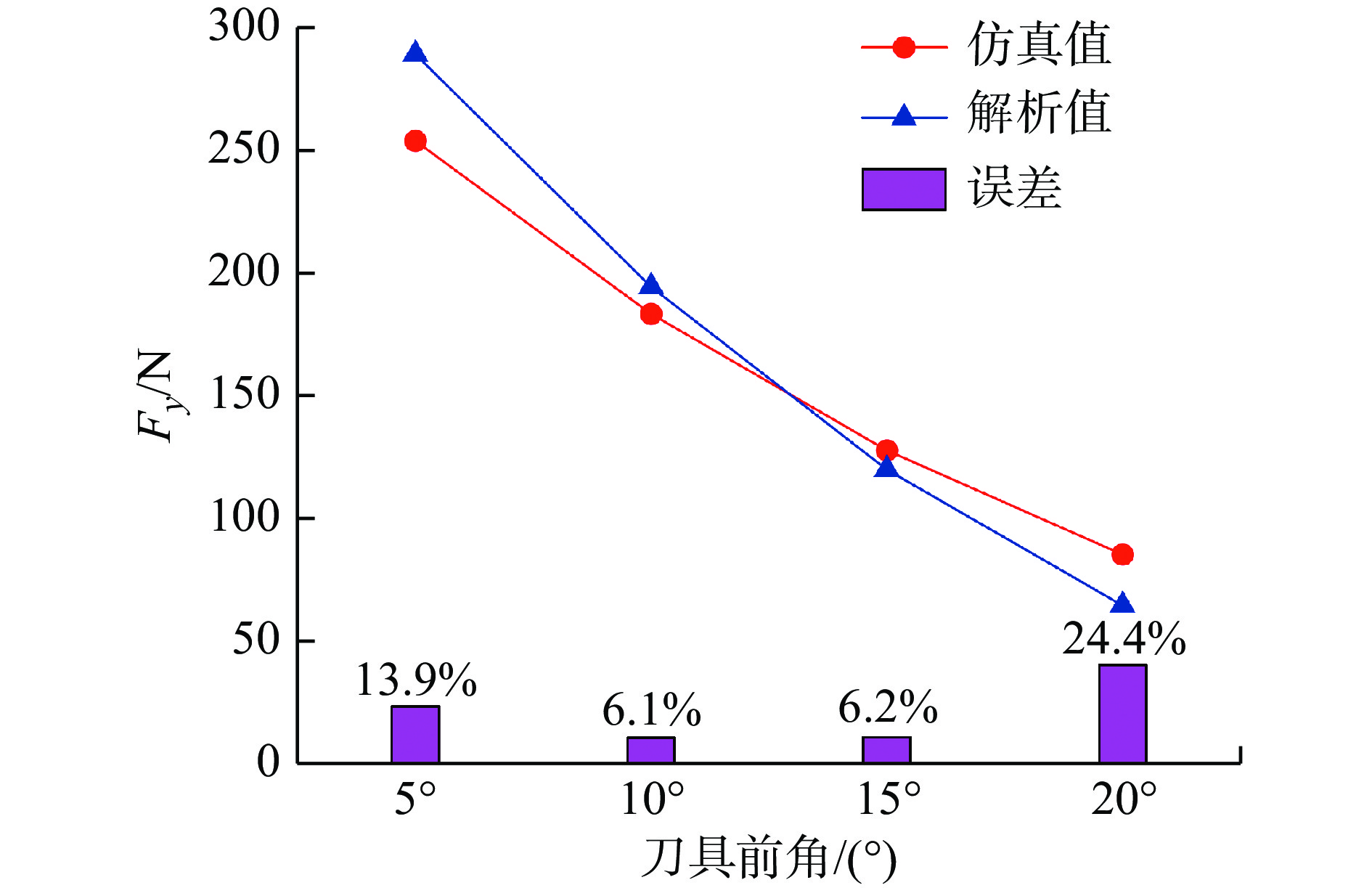
刀具与切屑接触的摩擦因数呈不均匀分布增加了正交切削分析的难度,缺少一个完善的解析模型。针对于此,本文采用矩阵算子法构建了一种考虑在刀−屑接触面上变摩擦因数的滑移线场。通过Oxley的剪切切削理论找出工件表面材料塑性剪切变形的位置,为滑移线场的添加几何约束条件,从而求解滑移线参数。根据滑移线场,导出刀−屑接触长度,推算出切削力的解析式。模型计算结果与GH4169切削有限元仿真结果对比发现:刀−屑接触长度误差在9.8%内,两者的切削力在变化趋势上一致且数值上相近,验证了滑移线场的准确性。上述研究成果为变摩擦因数的正交切削分析刀−屑接触长度和切削力提供了理论方法。
刀具与切屑接触的摩擦因数呈不均匀分布增加了正交切削分析的难度,缺少一个完善的解析模型。针对于此,本文采用矩阵算子法构建了一种考虑在刀−屑接触面上变摩擦因数的滑移线场。通过Oxley的剪切切削理论找出工件表面材料塑性剪切变形的位置,为滑移线场的添加几何约束条件,从而求解滑移线参数。根据滑移线场,导出刀−屑接触长度,推算出切削力的解析式。模型计算结果与GH4169切削有限元仿真结果对比发现:刀−屑接触长度误差在9.8%内,两者的切削力在变化趋势上一致且数值上相近,验证了滑移线场的准确性。上述研究成果为变摩擦因数的正交切削分析刀−屑接触长度和切削力提供了理论方法。

2023, 42(12): 2079-2084.
doi: 10.13433/j.cnki.1003-8728.20220181
摘要:
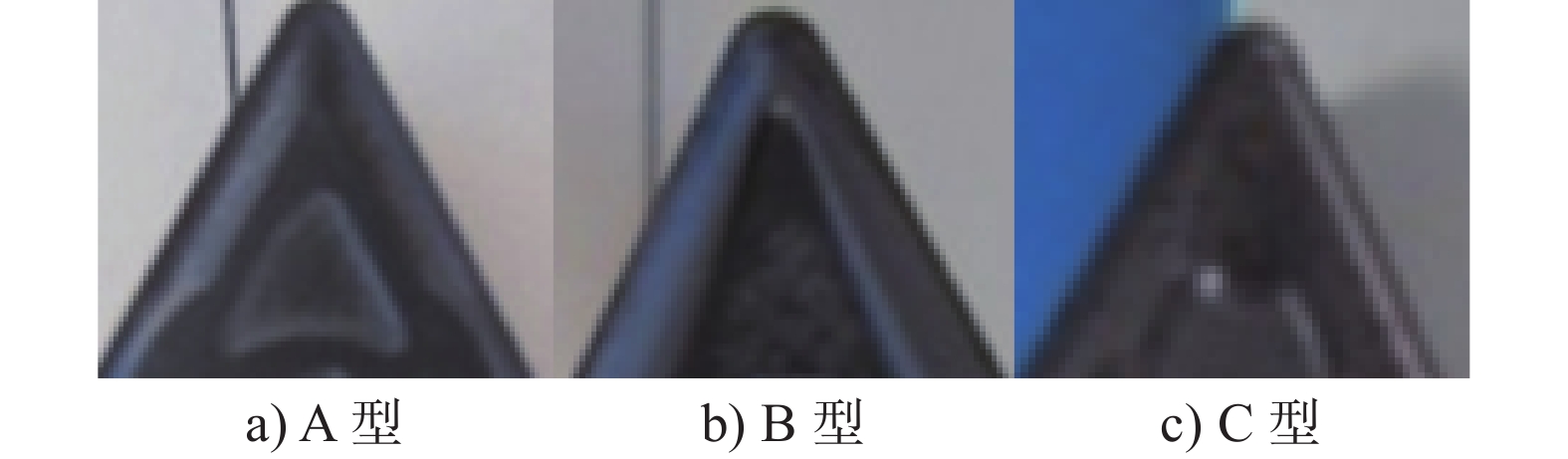
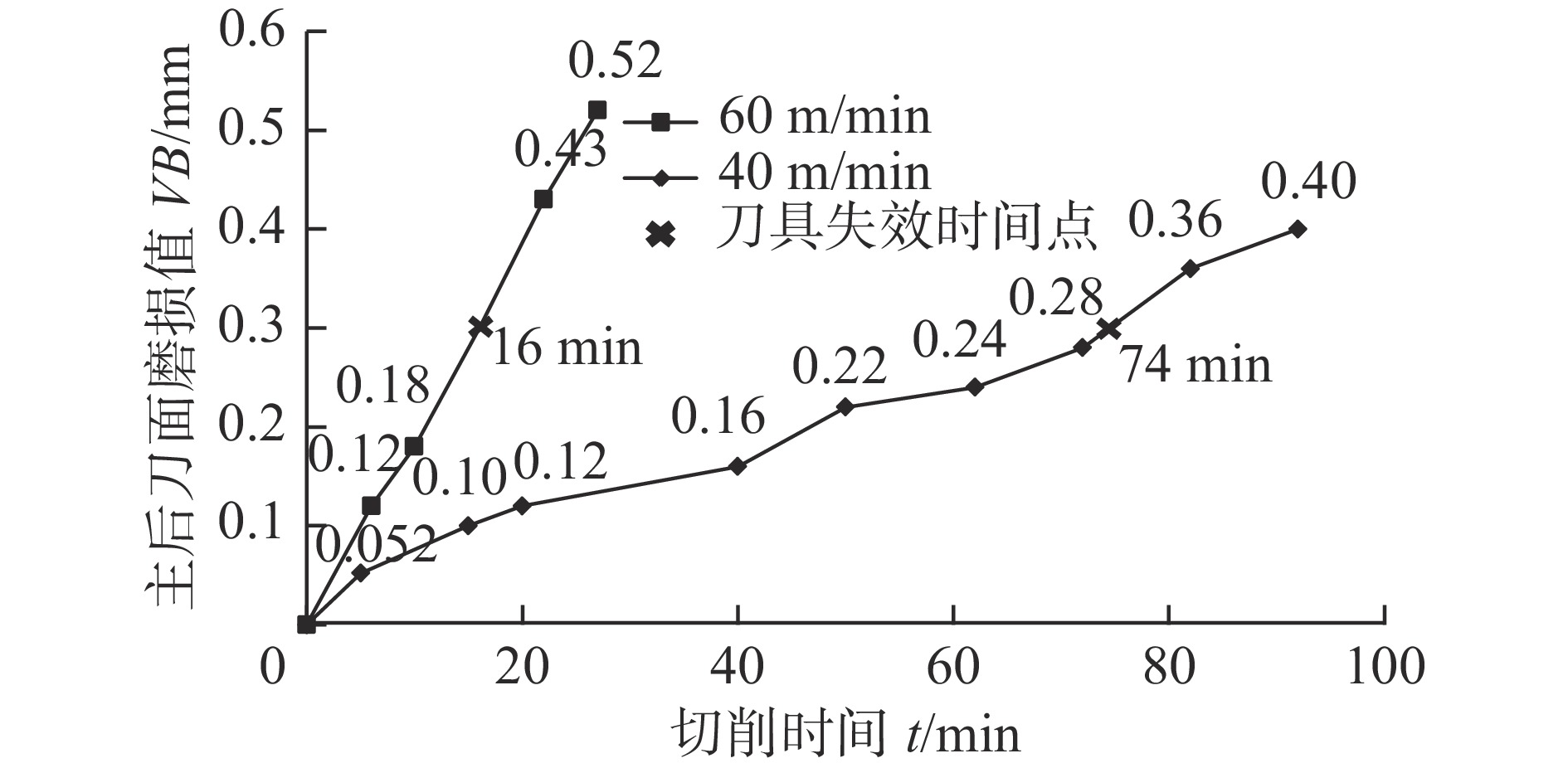
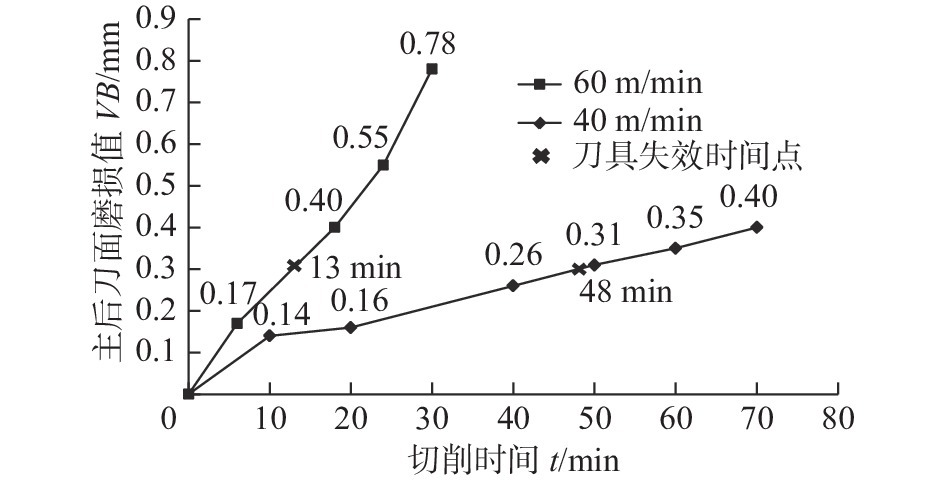
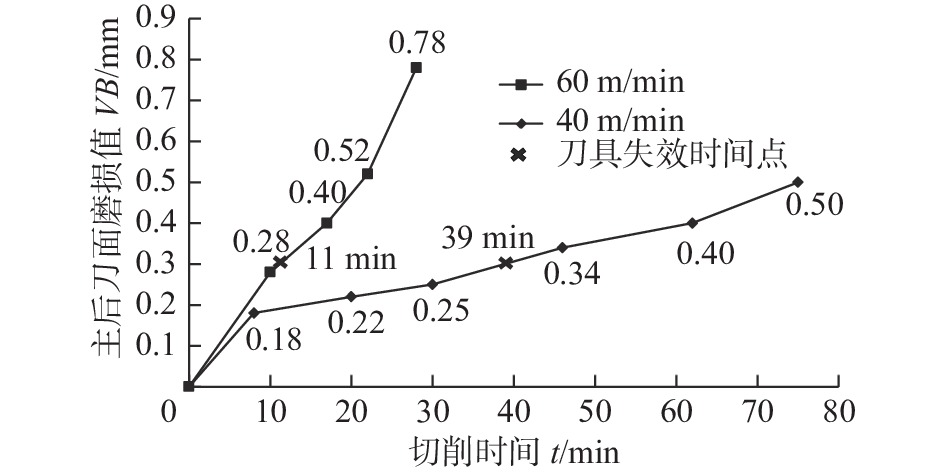
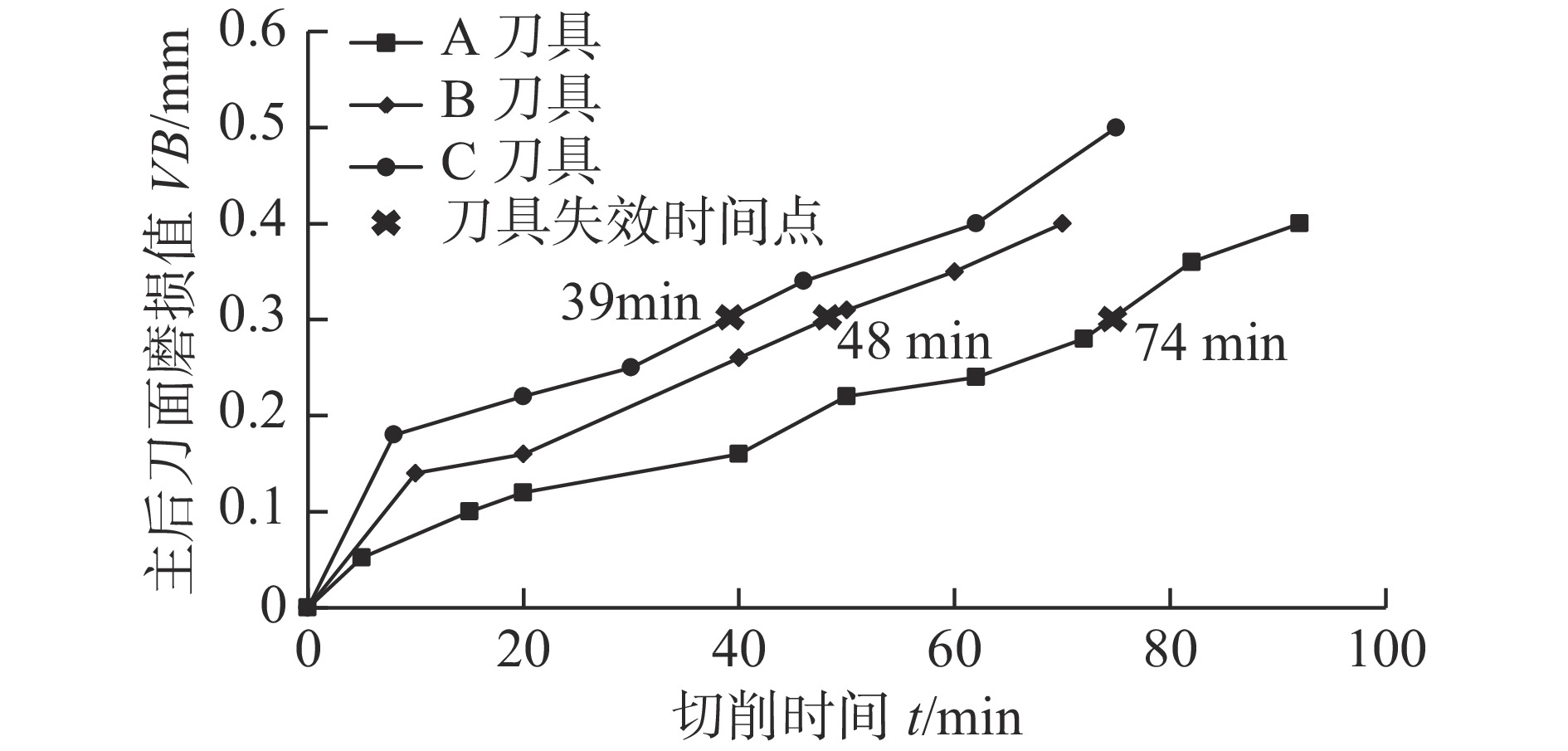
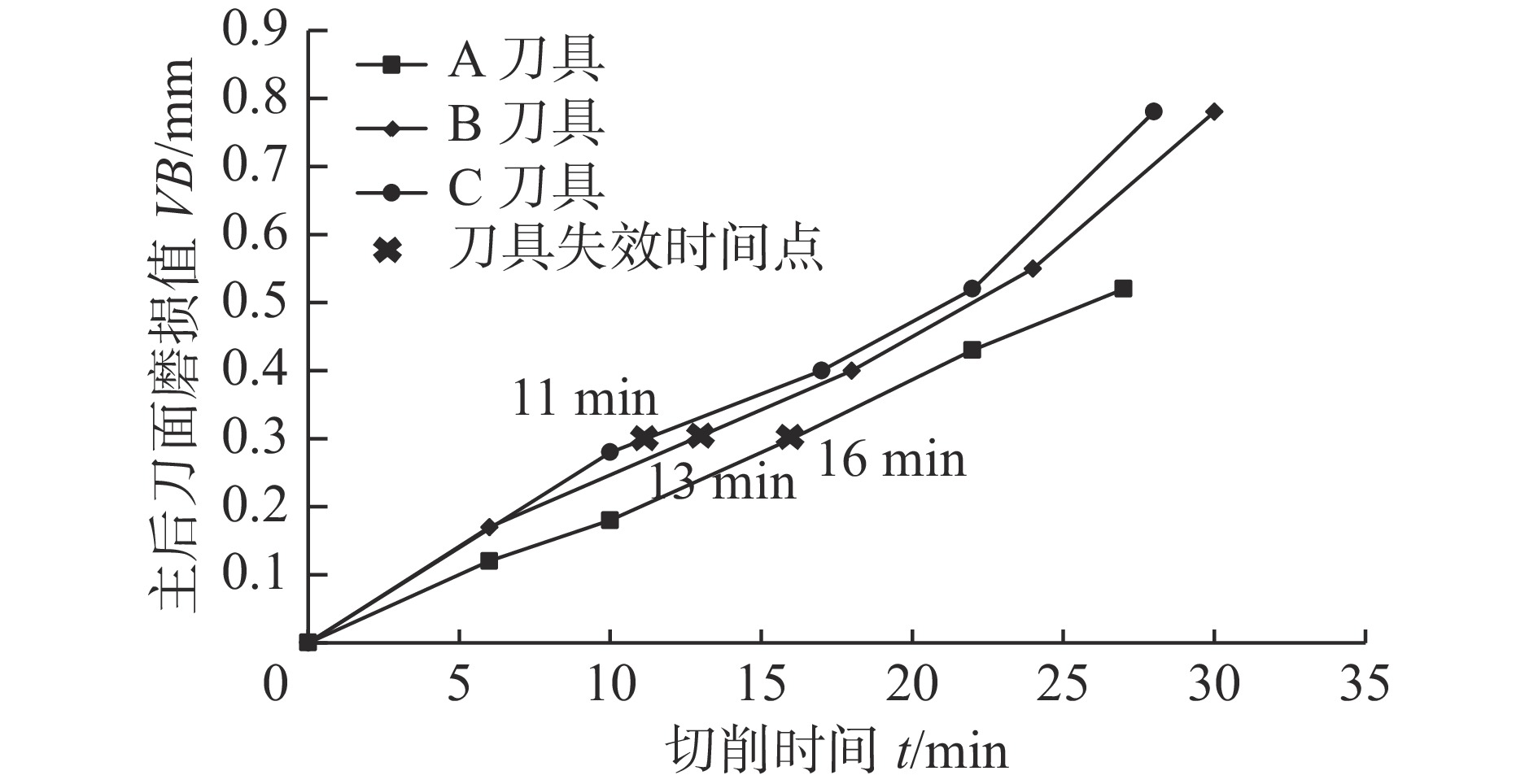
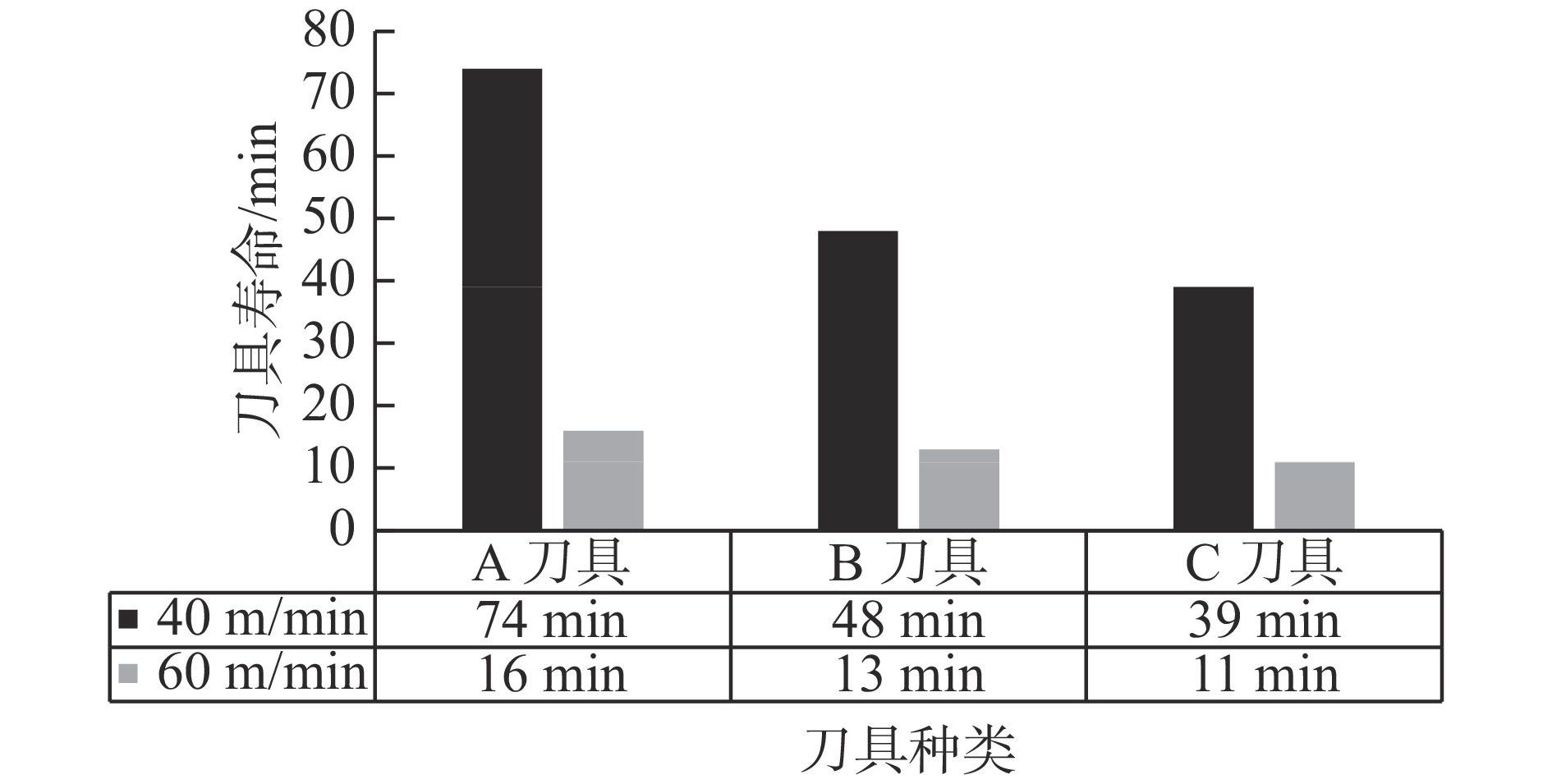
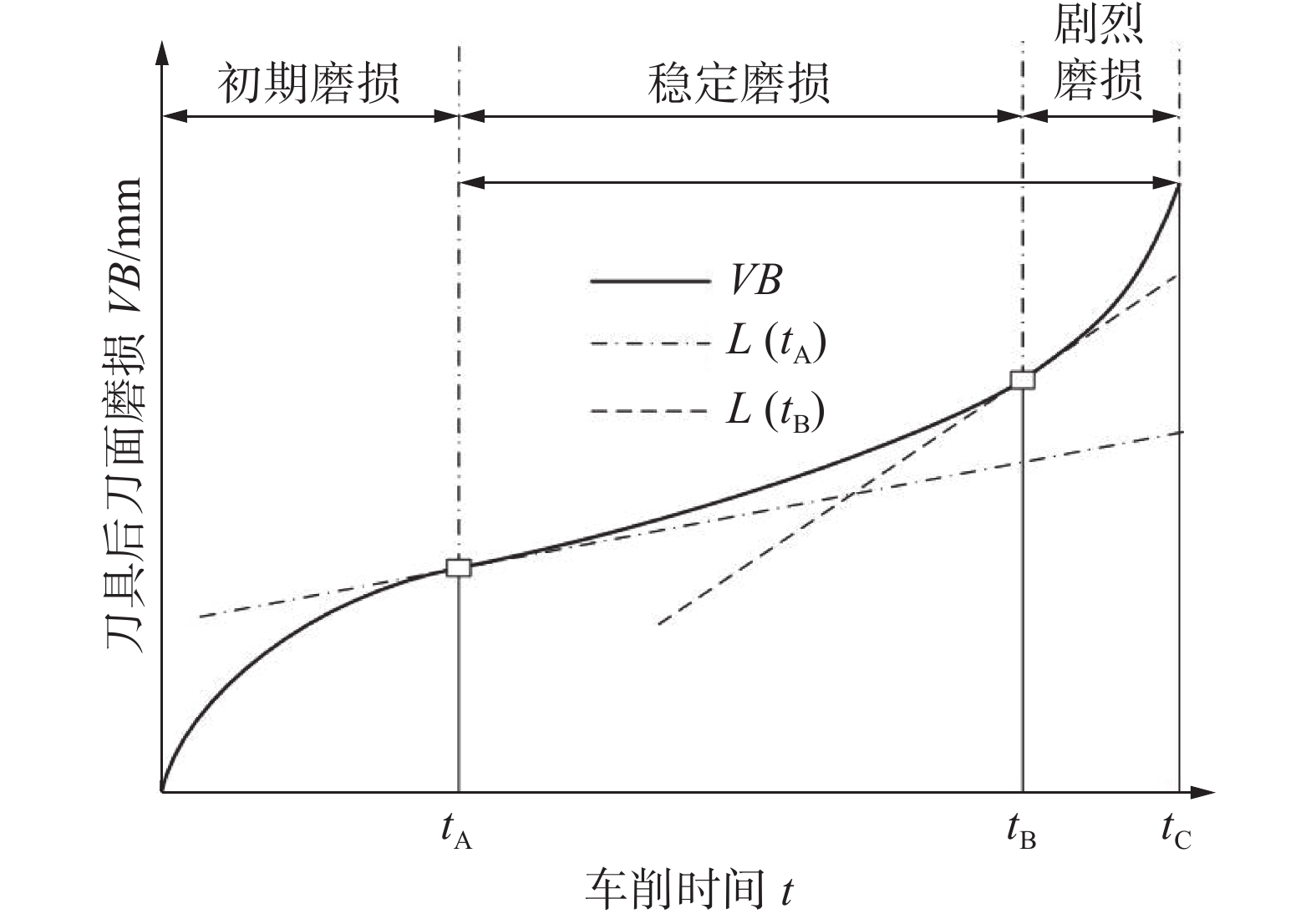
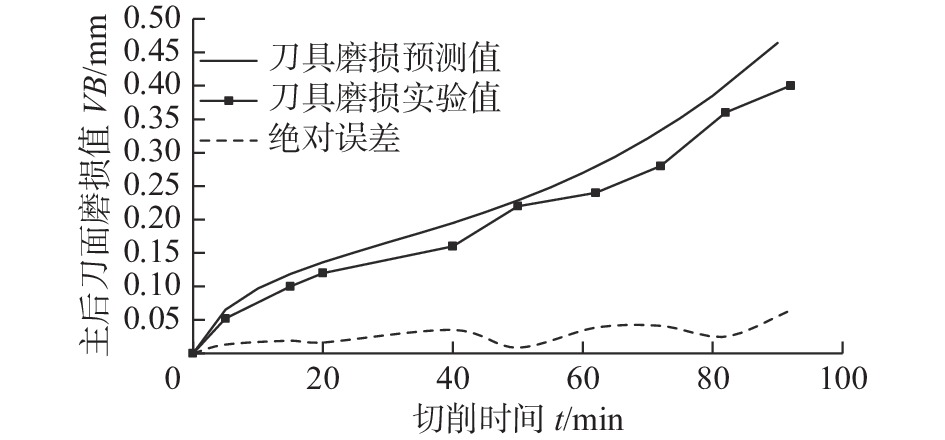
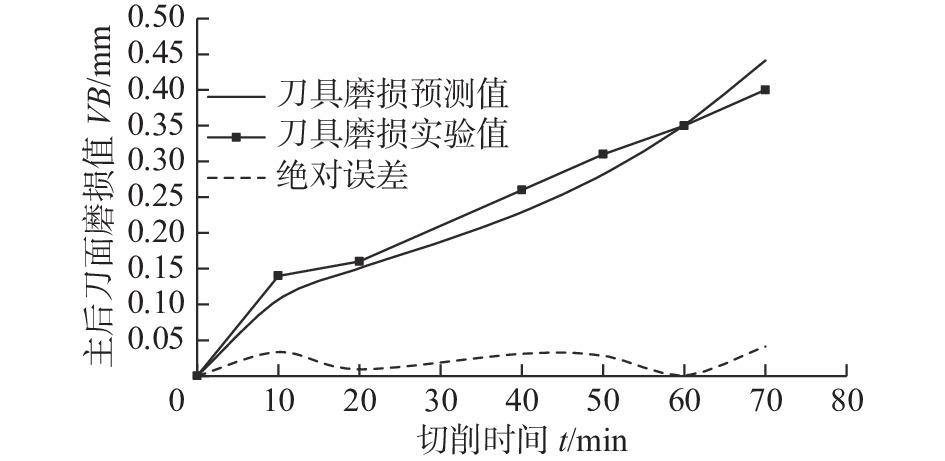
用A、B和C这3种不同型号的刀具,采用40 m/min和60 m/min两种切削速度对高温合金GH901进行了车削实验,通过观察刀具后刀面磨损状态,建立了各类型刀具的主后刀面磨损曲线,并根据刀具磨损情况和磨损曲线对刀具类型进行了优选,最后利用典型磨损曲线建立了刀具磨损预测模型。实验与模型预测结果的最大均方根误差和最大平均绝对误差分别为0.043 49,0.039 43 mm,误差偏小证明了该预测模型的有效性。综合车削性能由高到低依次是A、B和C刀具。切屑类型以长环形螺旋切屑为主,切削速度越高,刀具寿命明显降低。
用A、B和C这3种不同型号的刀具,采用40 m/min和60 m/min两种切削速度对高温合金GH901进行了车削实验,通过观察刀具后刀面磨损状态,建立了各类型刀具的主后刀面磨损曲线,并根据刀具磨损情况和磨损曲线对刀具类型进行了优选,最后利用典型磨损曲线建立了刀具磨损预测模型。实验与模型预测结果的最大均方根误差和最大平均绝对误差分别为0.043 49,0.039 43 mm,误差偏小证明了该预测模型的有效性。综合车削性能由高到低依次是A、B和C刀具。切屑类型以长环形螺旋切屑为主,切削速度越高,刀具寿命明显降低。





2023, 42(12): 2085-2092.
doi: 10.13433/j.cnki.1003-8728.20220160
摘要:
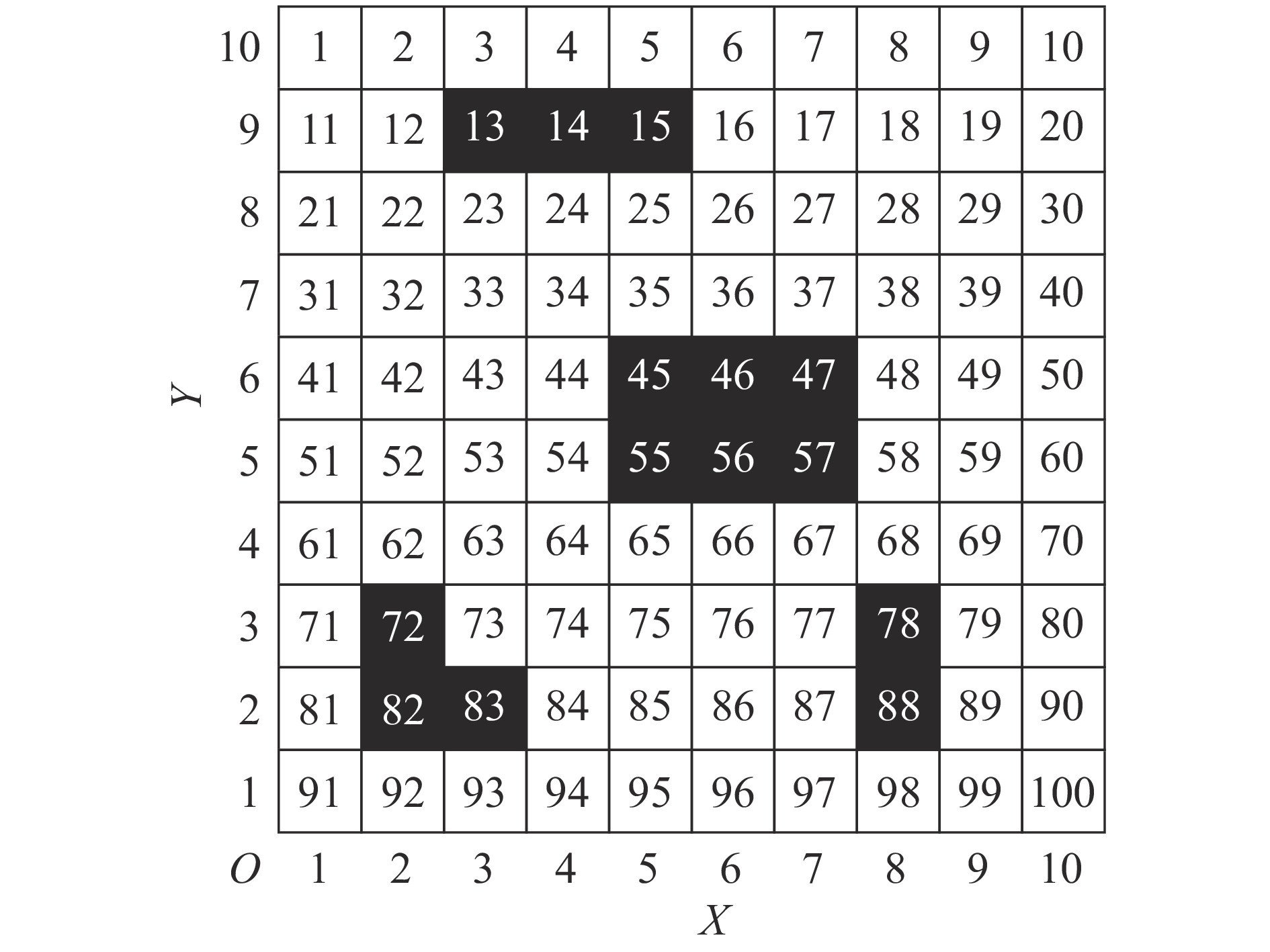
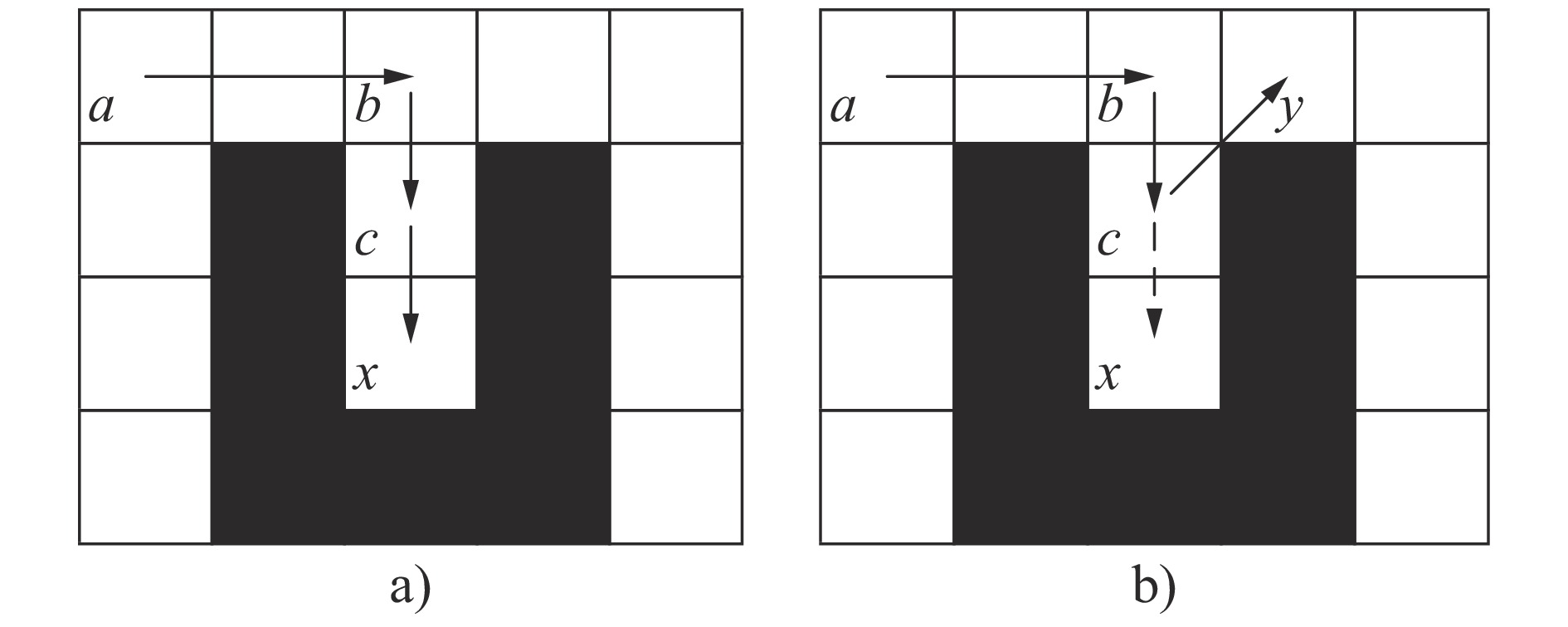
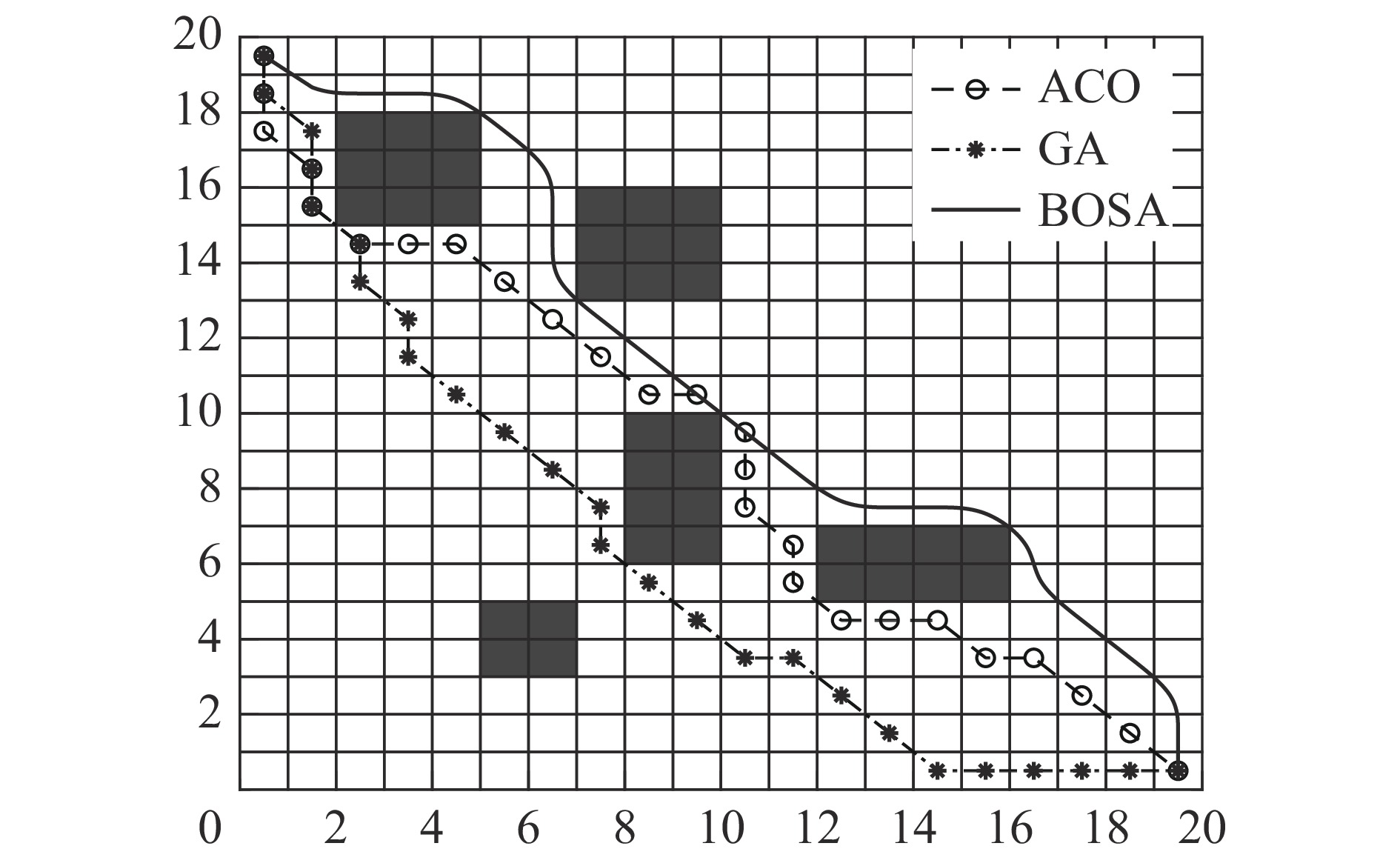
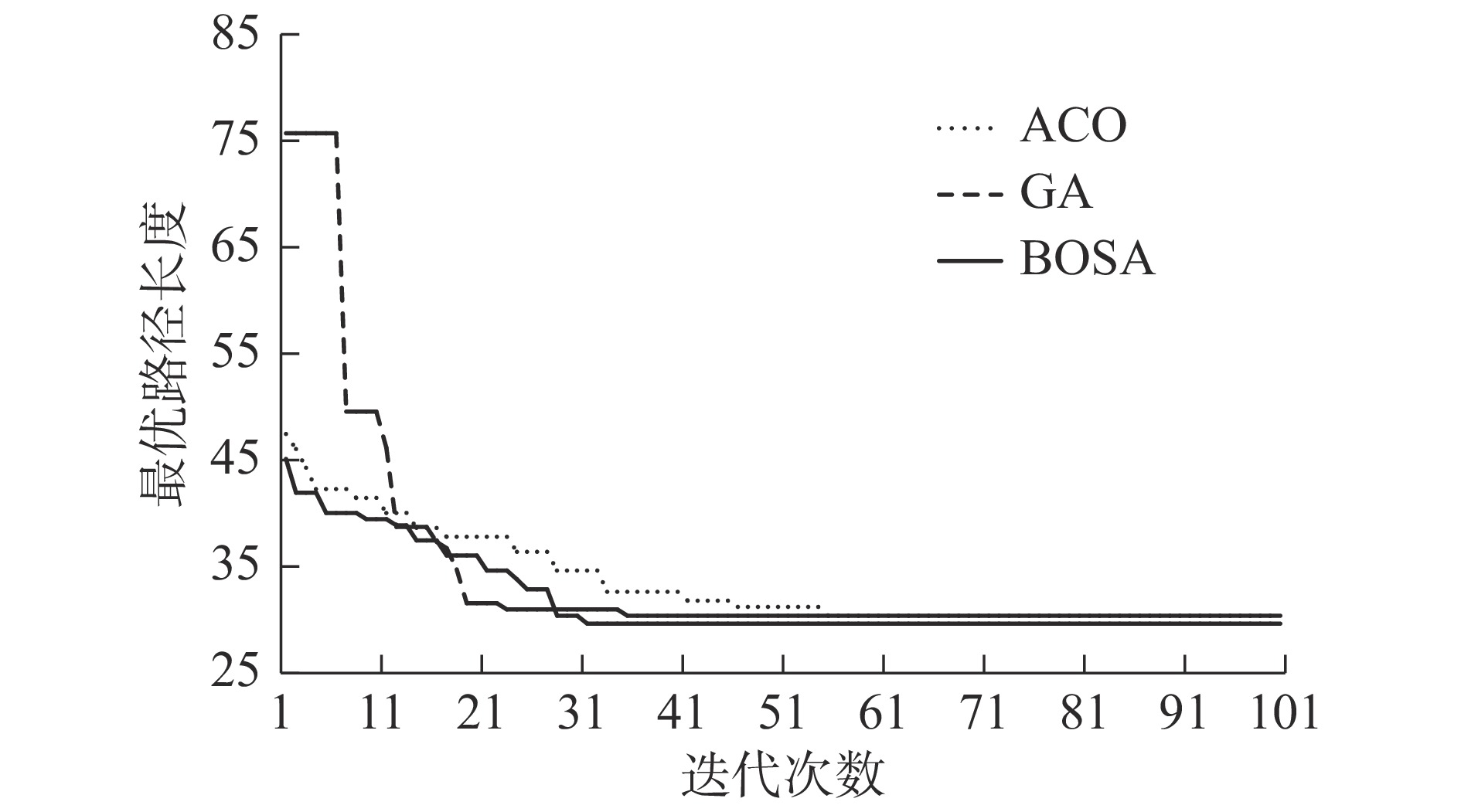
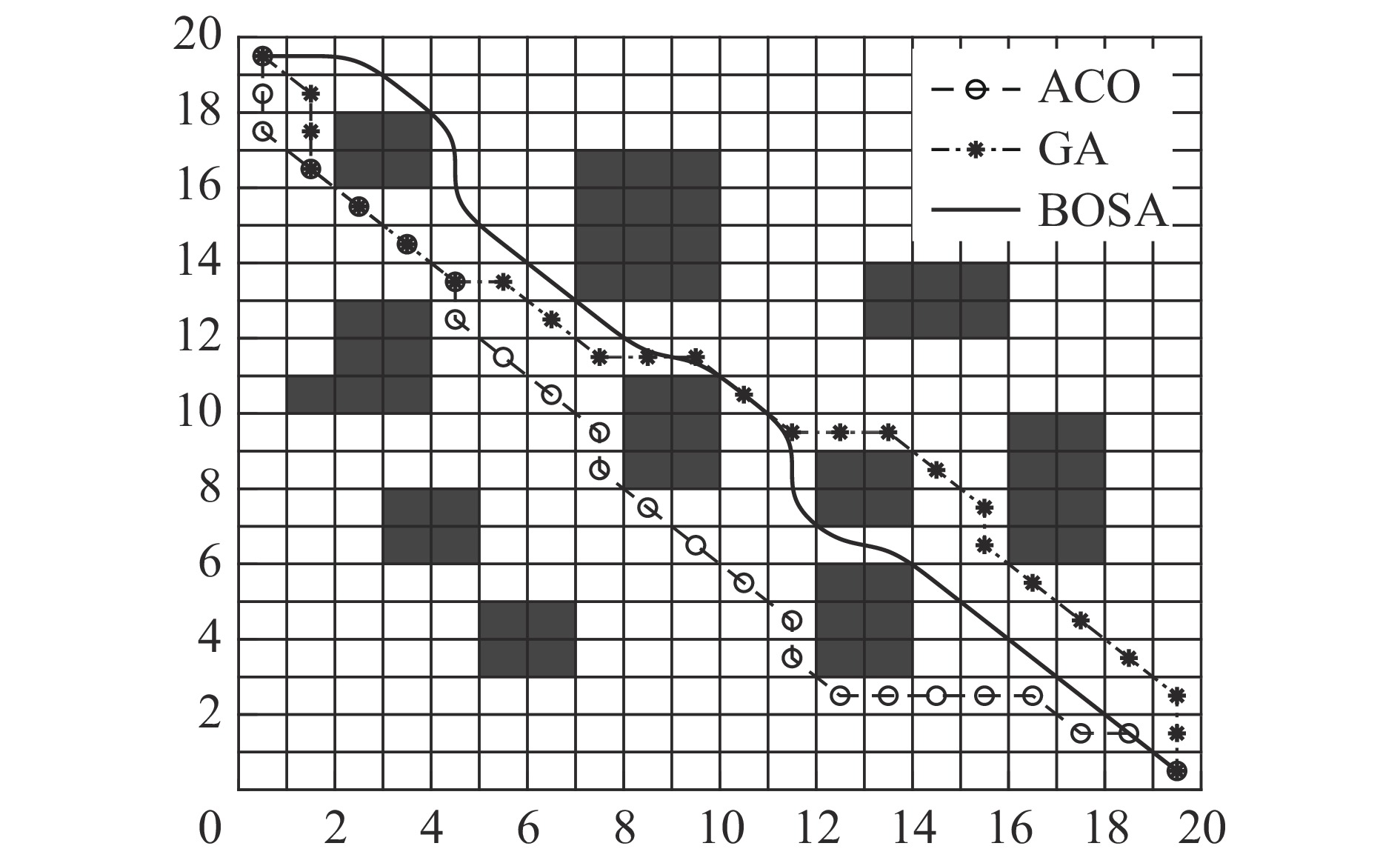
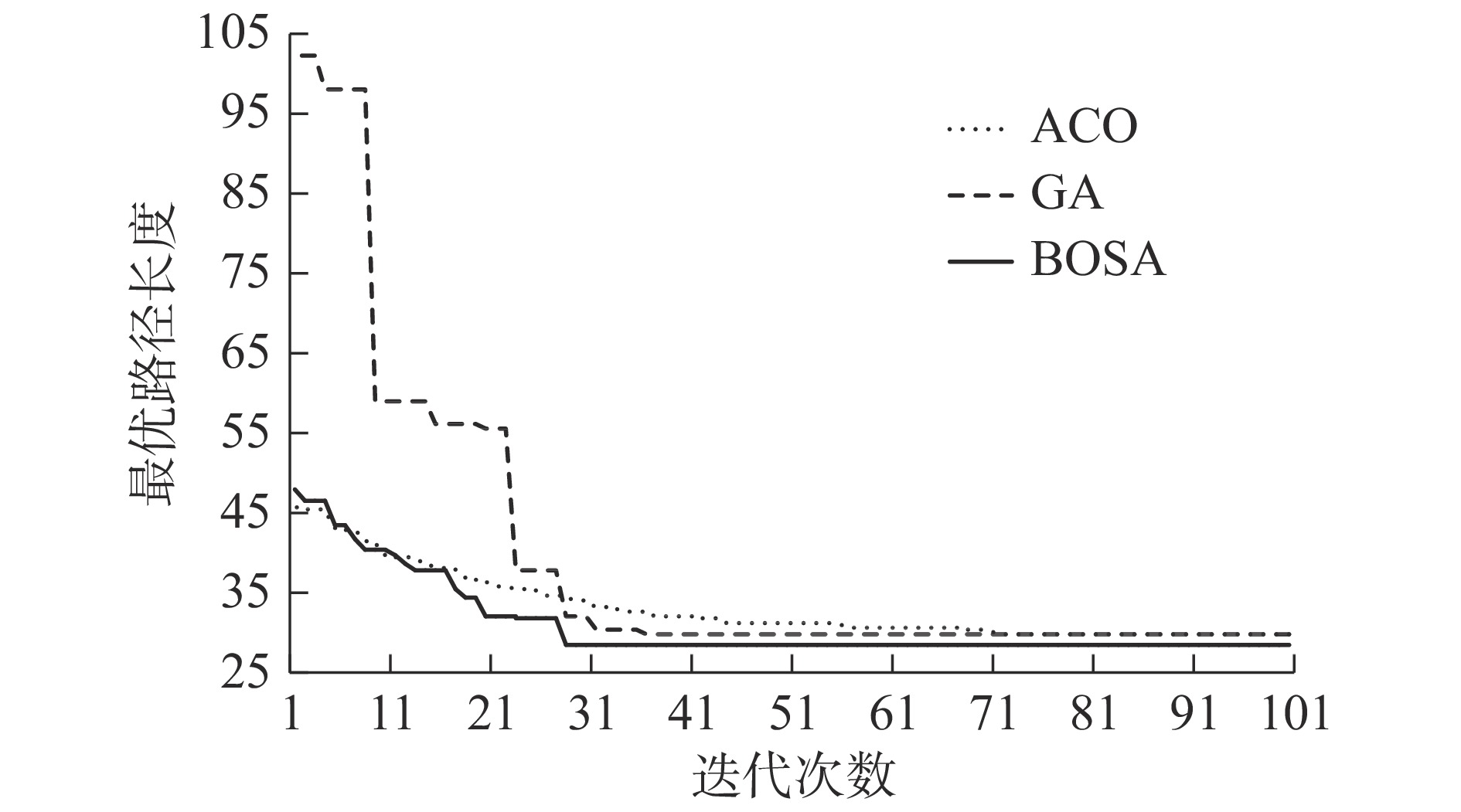
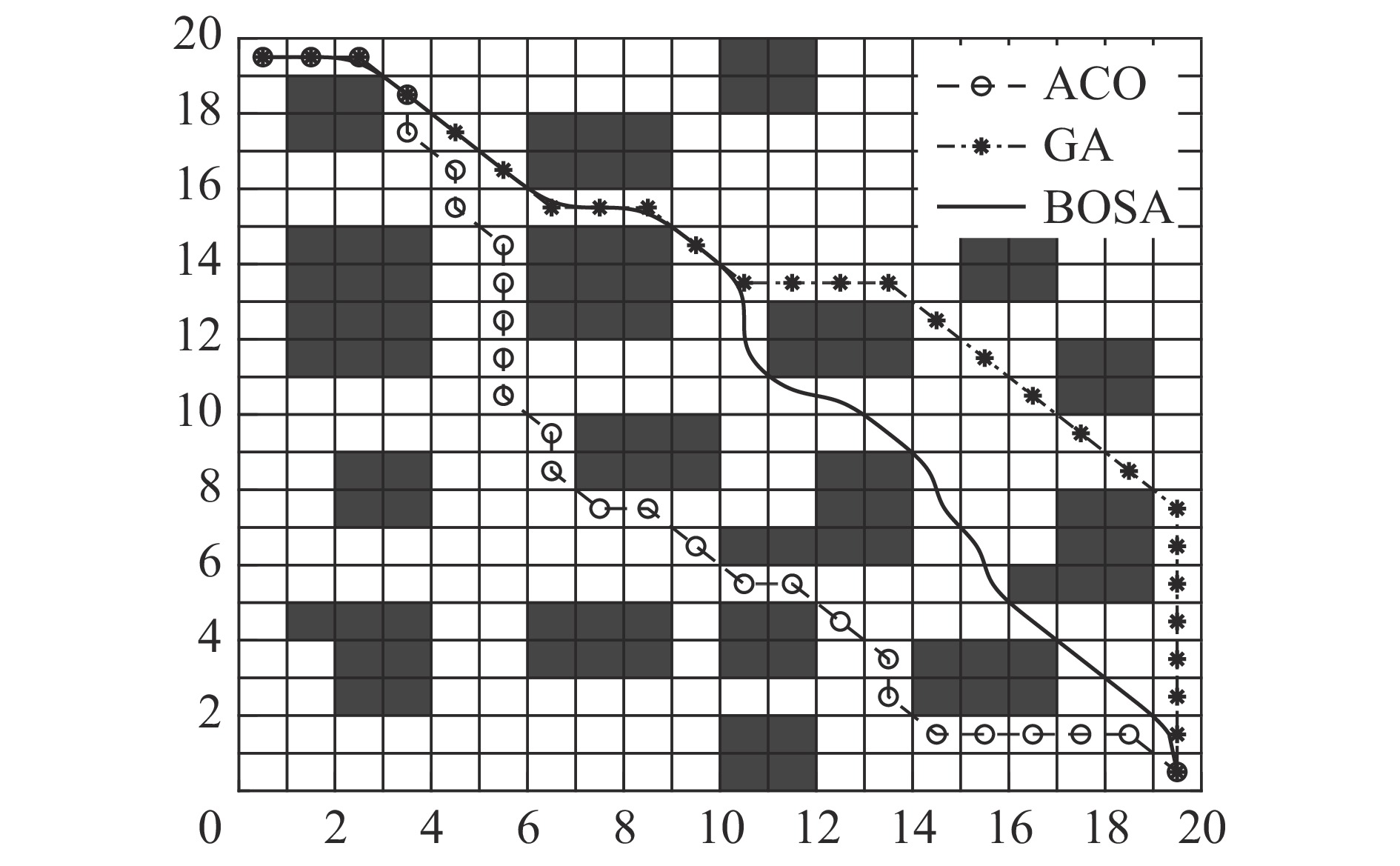
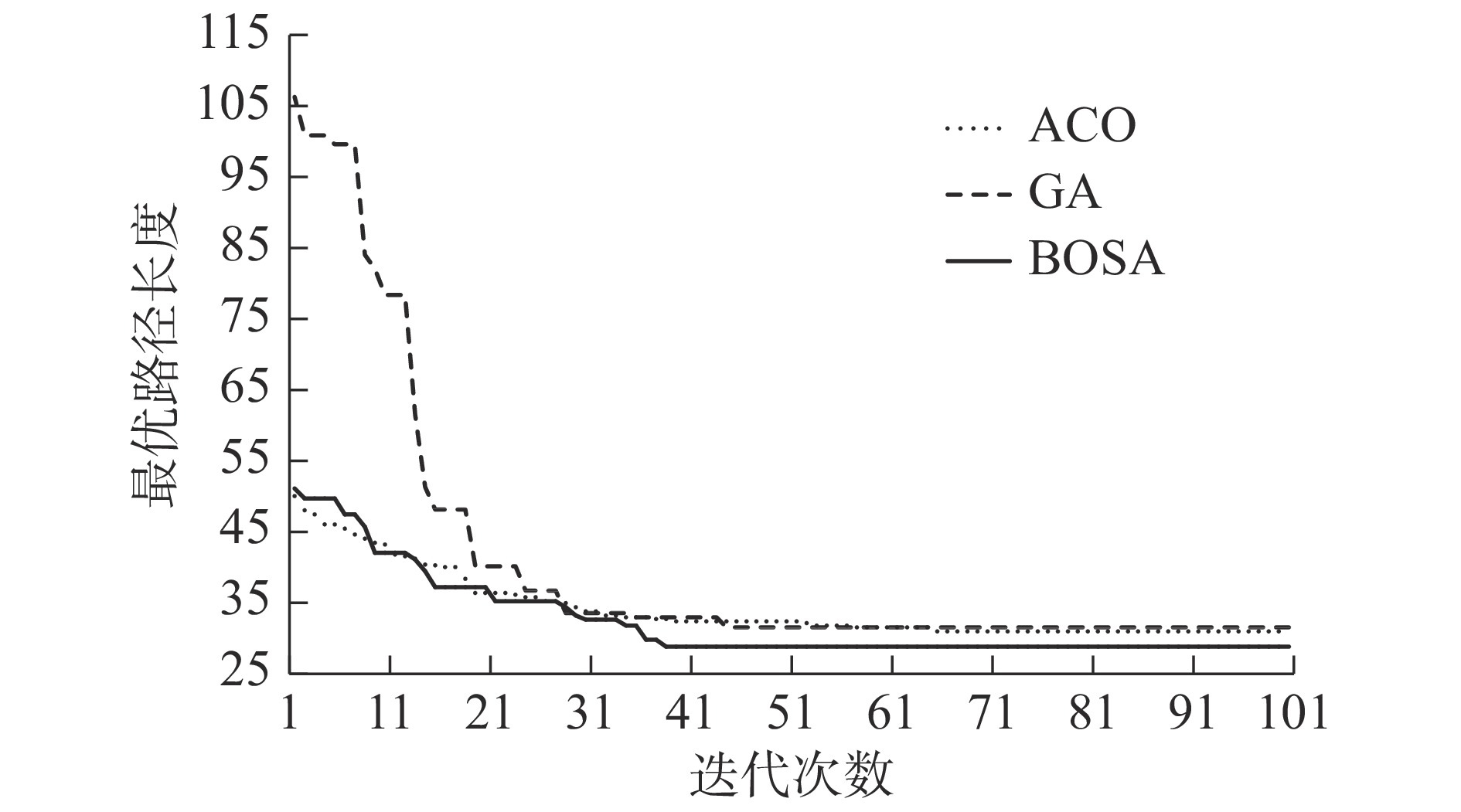
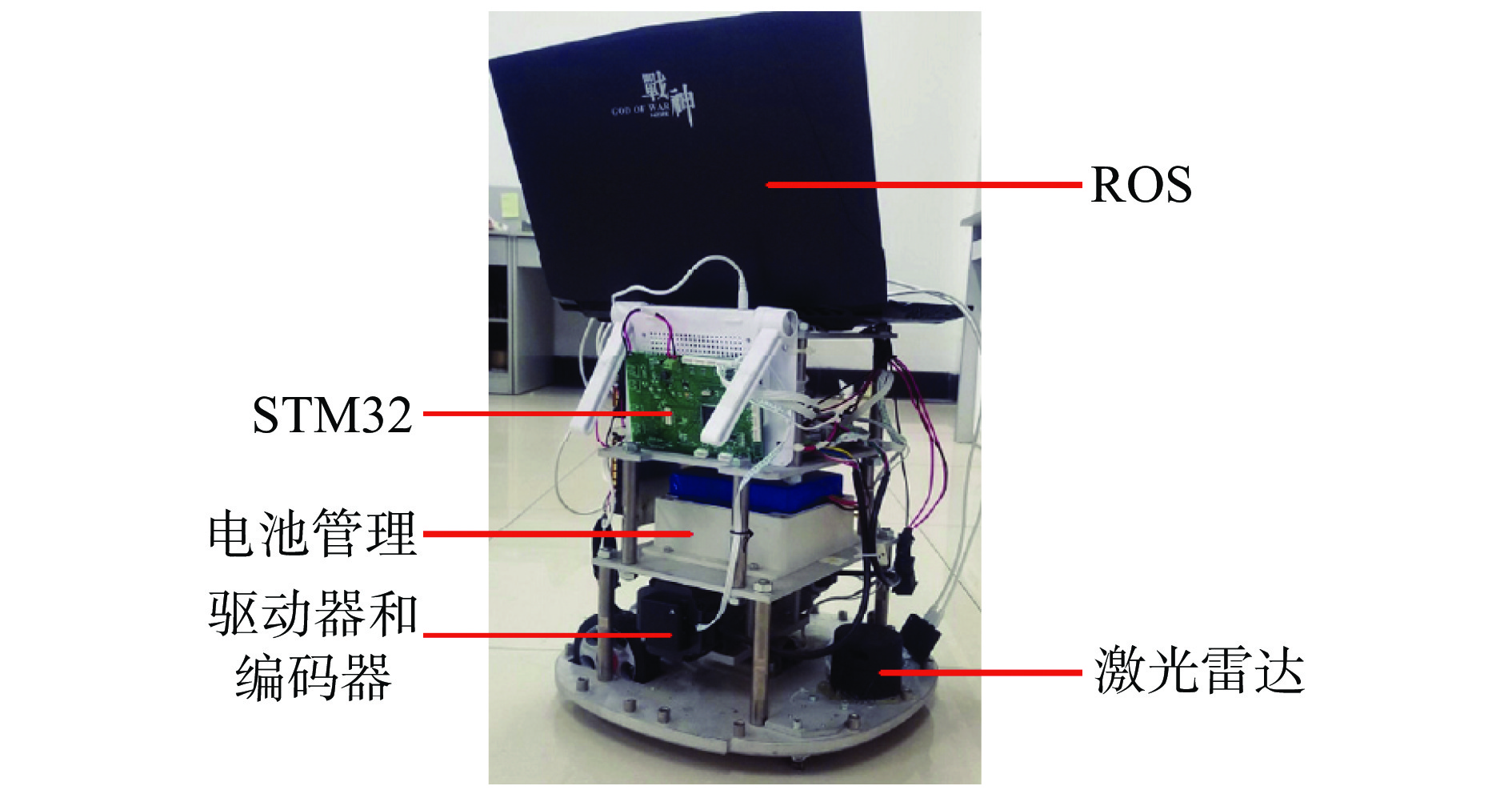
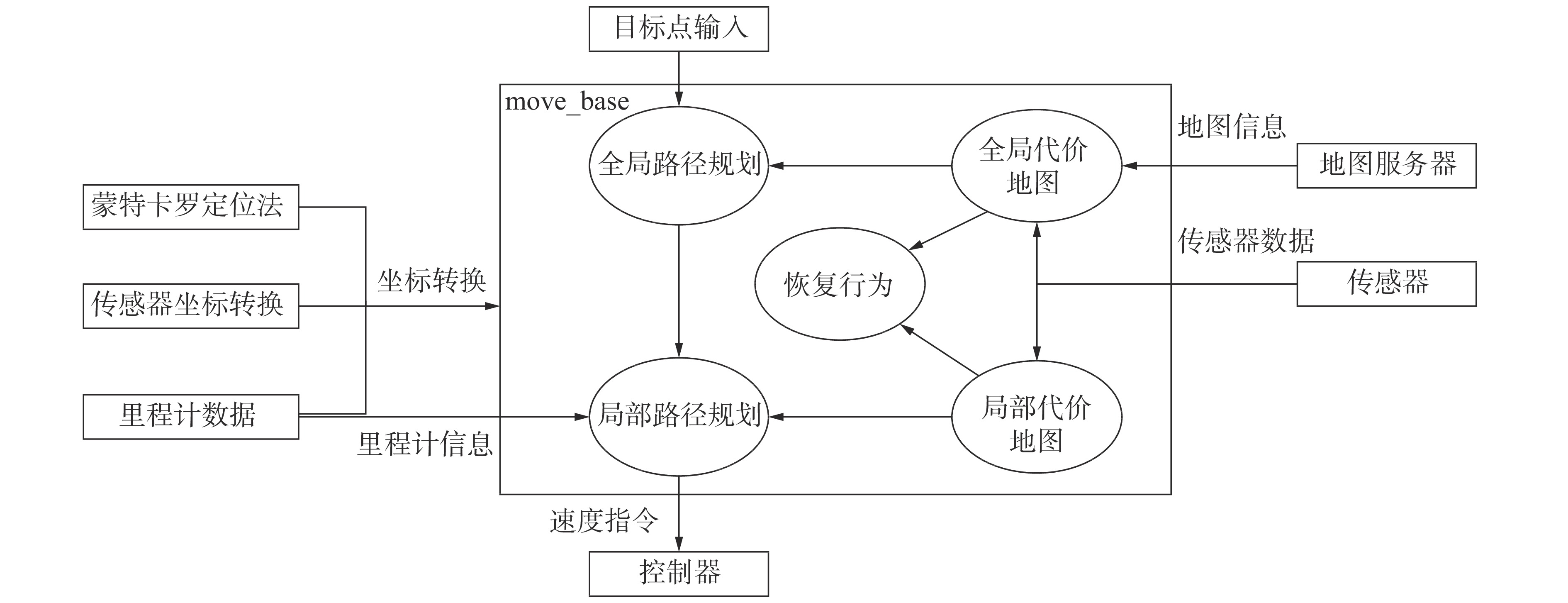
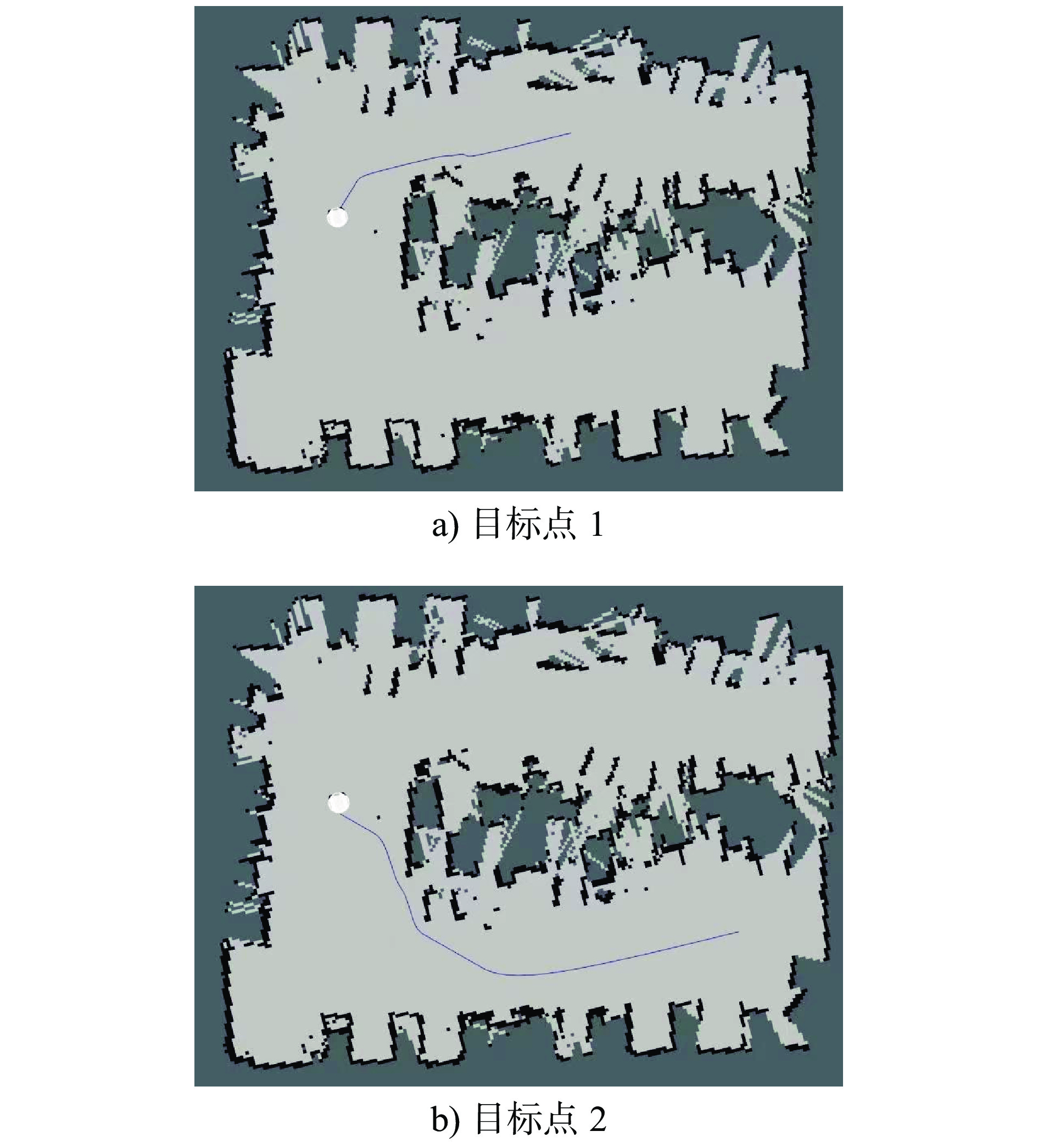
针对移动机器人路径规划问题提出了一种改进的蝴蝶优化算法。将蝴蝶优化算法与栅格法相结合,并对两种方法结合后的算法进行了具体说明;引入了禁忌表和回溯法,解决了算法在路径寻优中无后续扩展节点的问题;结合三次B样条曲线将路径规划中的最优节点作为控制点进行平滑输出,使移动机器人实际运动路径更加平滑。通过仿真实验,将改进算法与蚁群算法、遗传算法进行比较,证实了改进算法能够有效解决路径规划问题。将改进算法应用到实际的基于ROS的移动机器人上,实验结果证明了改进算法的有效性和可行性。
针对移动机器人路径规划问题提出了一种改进的蝴蝶优化算法。将蝴蝶优化算法与栅格法相结合,并对两种方法结合后的算法进行了具体说明;引入了禁忌表和回溯法,解决了算法在路径寻优中无后续扩展节点的问题;结合三次B样条曲线将路径规划中的最优节点作为控制点进行平滑输出,使移动机器人实际运动路径更加平滑。通过仿真实验,将改进算法与蚁群算法、遗传算法进行比较,证实了改进算法能够有效解决路径规划问题。将改进算法应用到实际的基于ROS的移动机器人上,实验结果证明了改进算法的有效性和可行性。
2023, 42(12): 2093-2099.
doi: 10.13433/j.cnki.1003-8728.20220162
摘要:
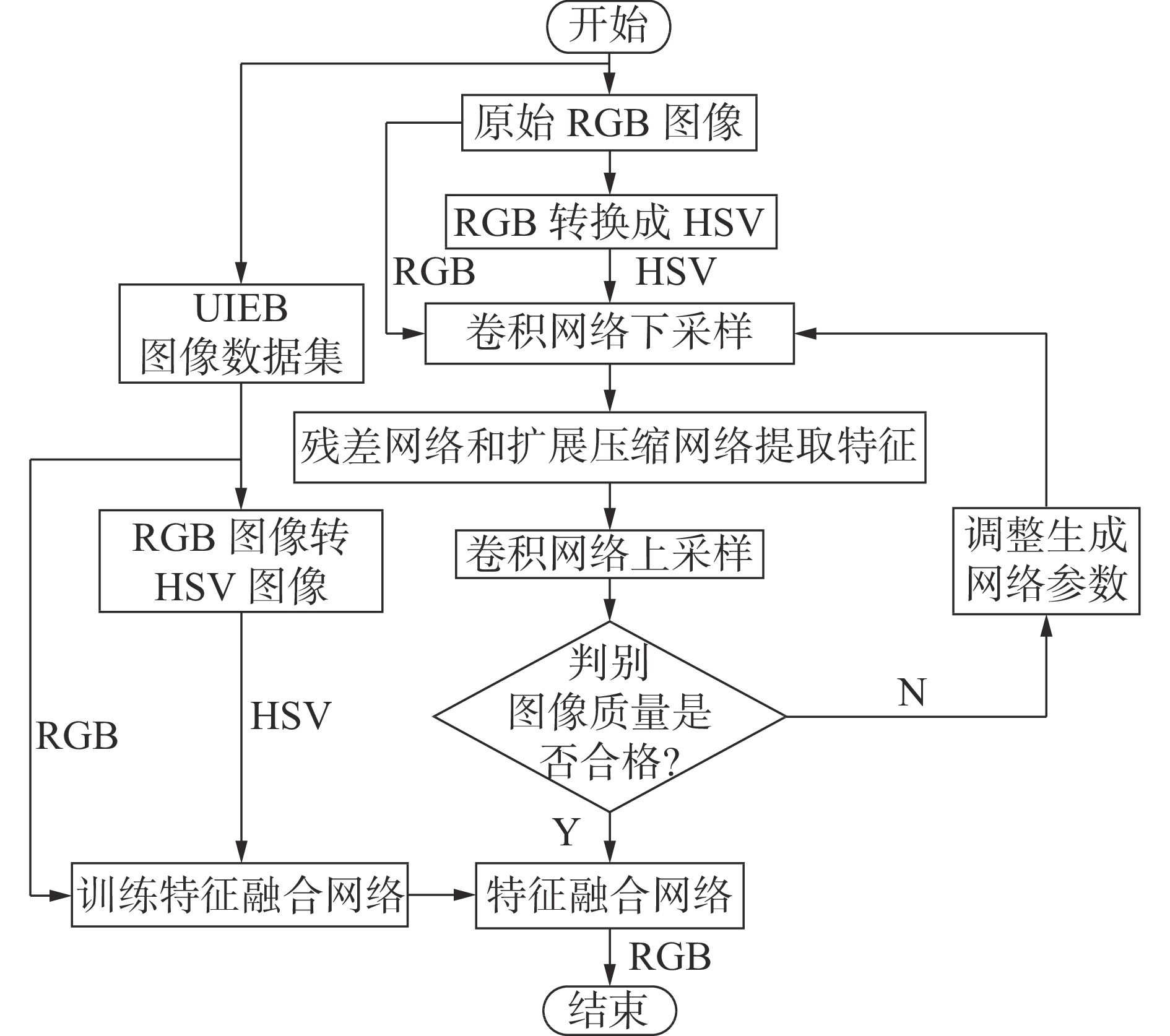
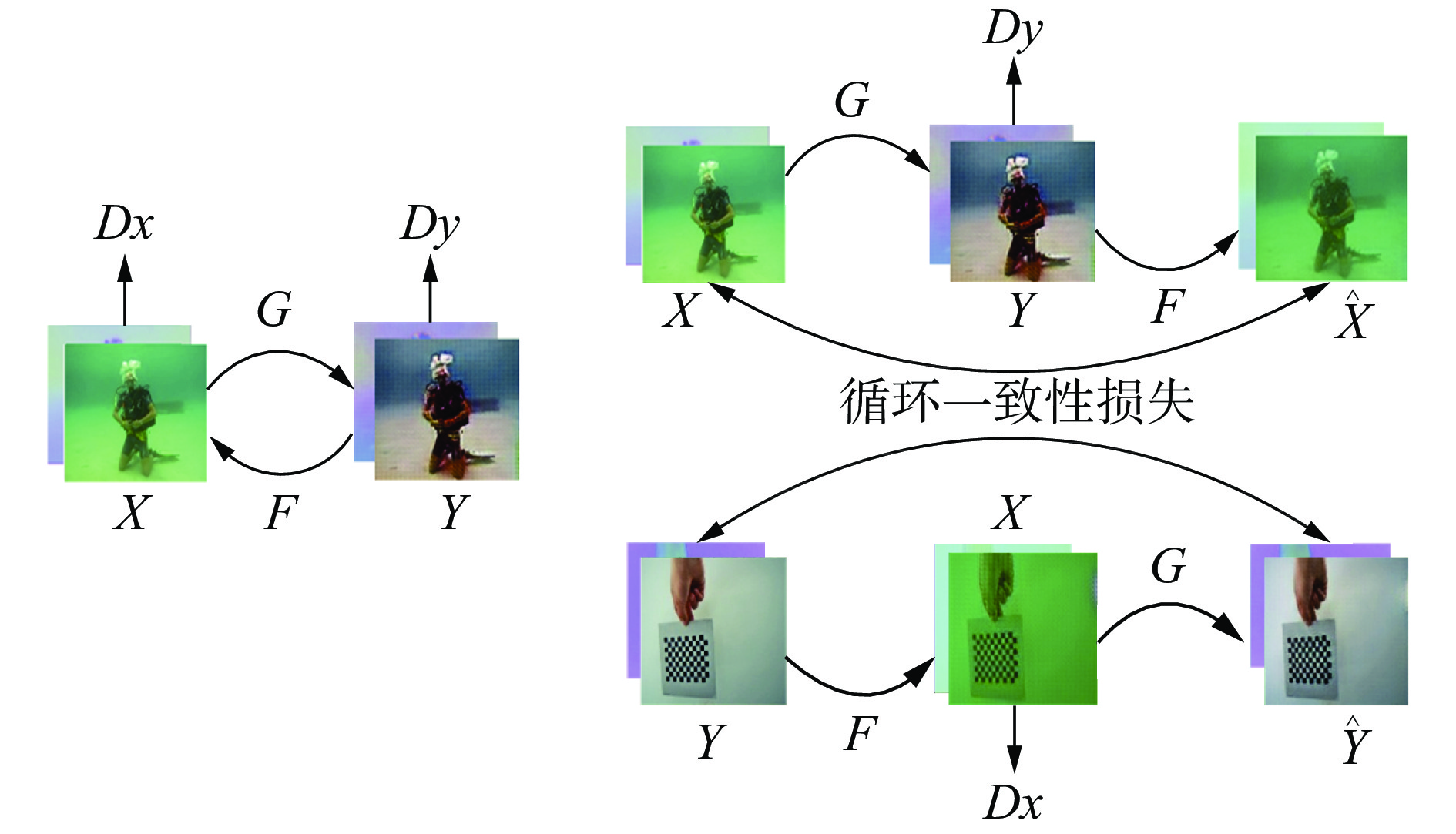
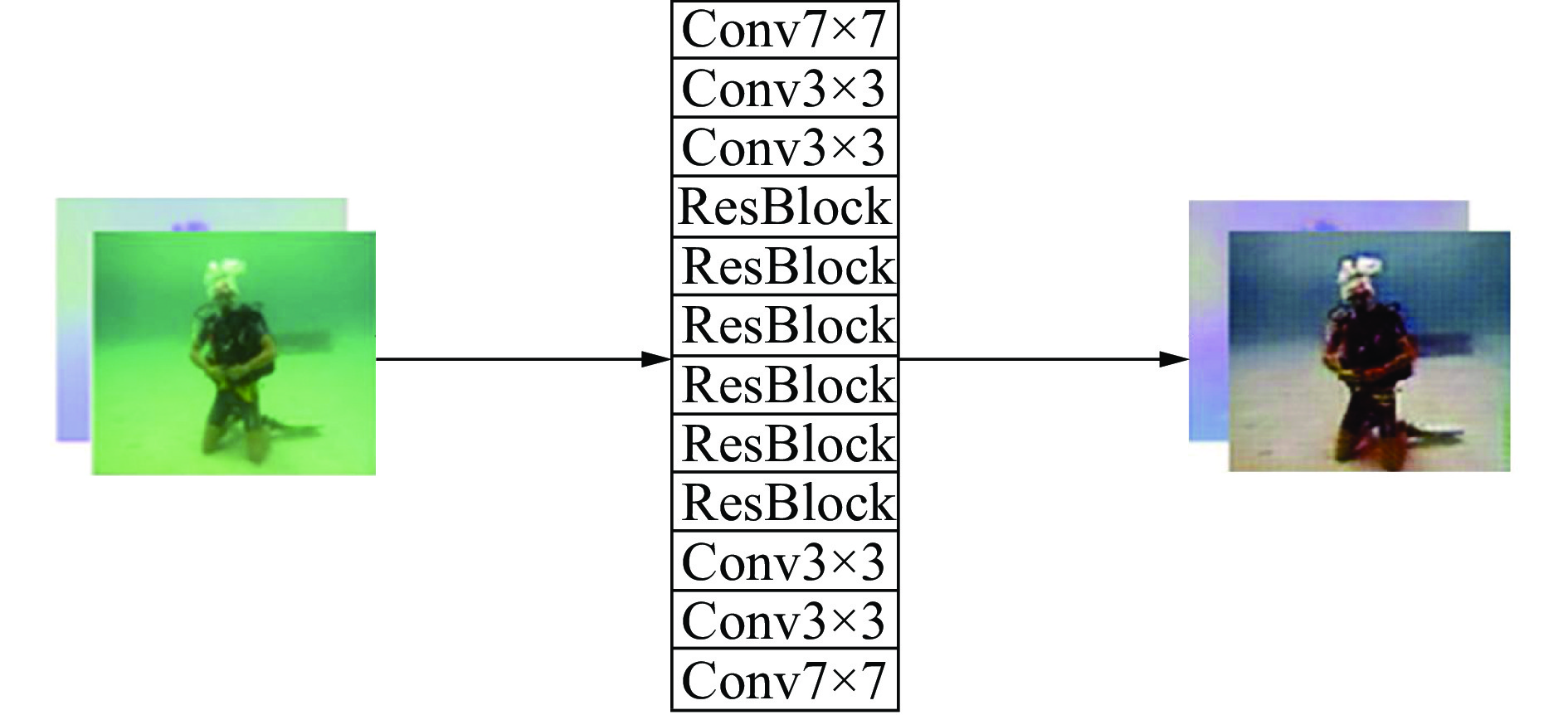
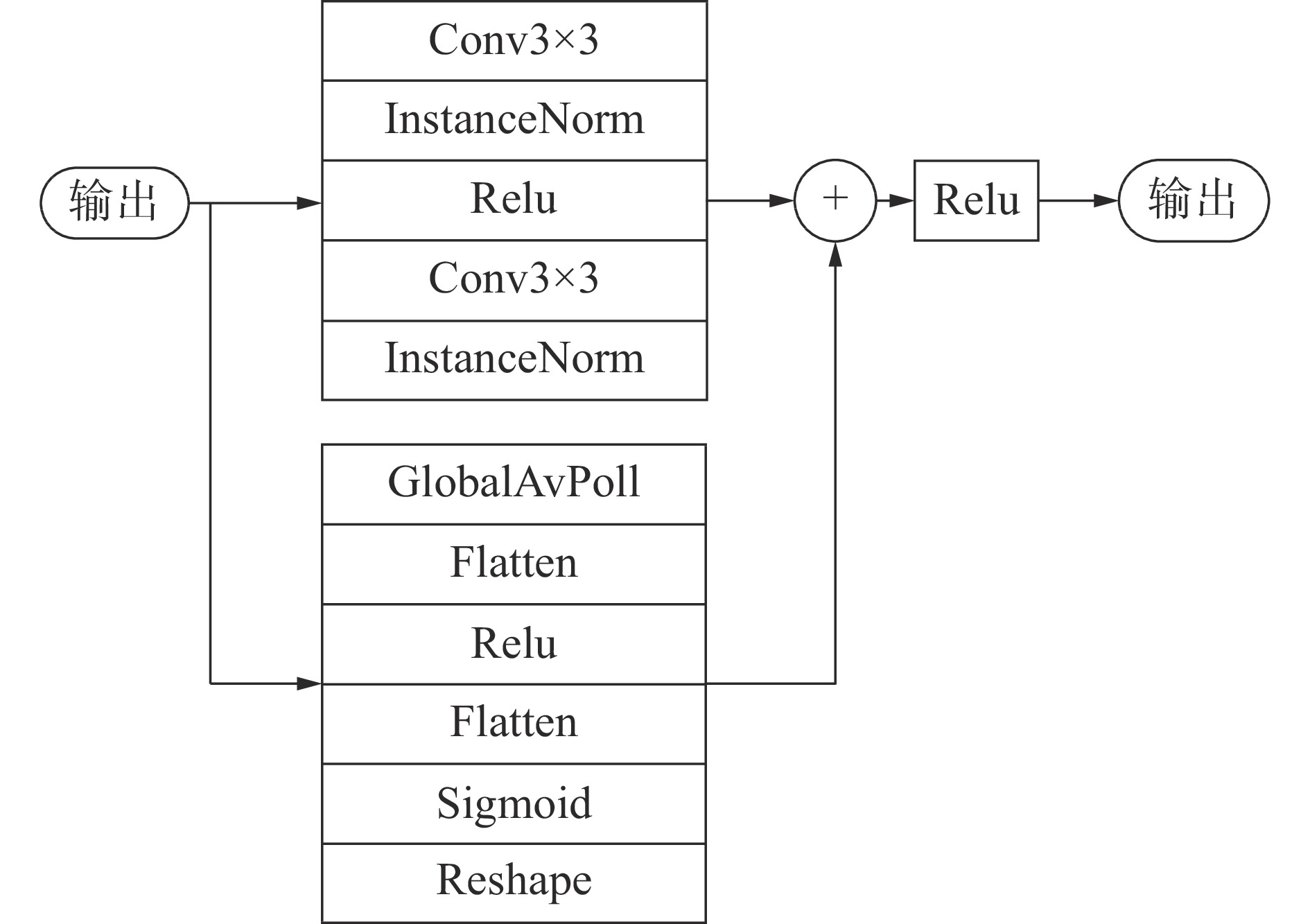
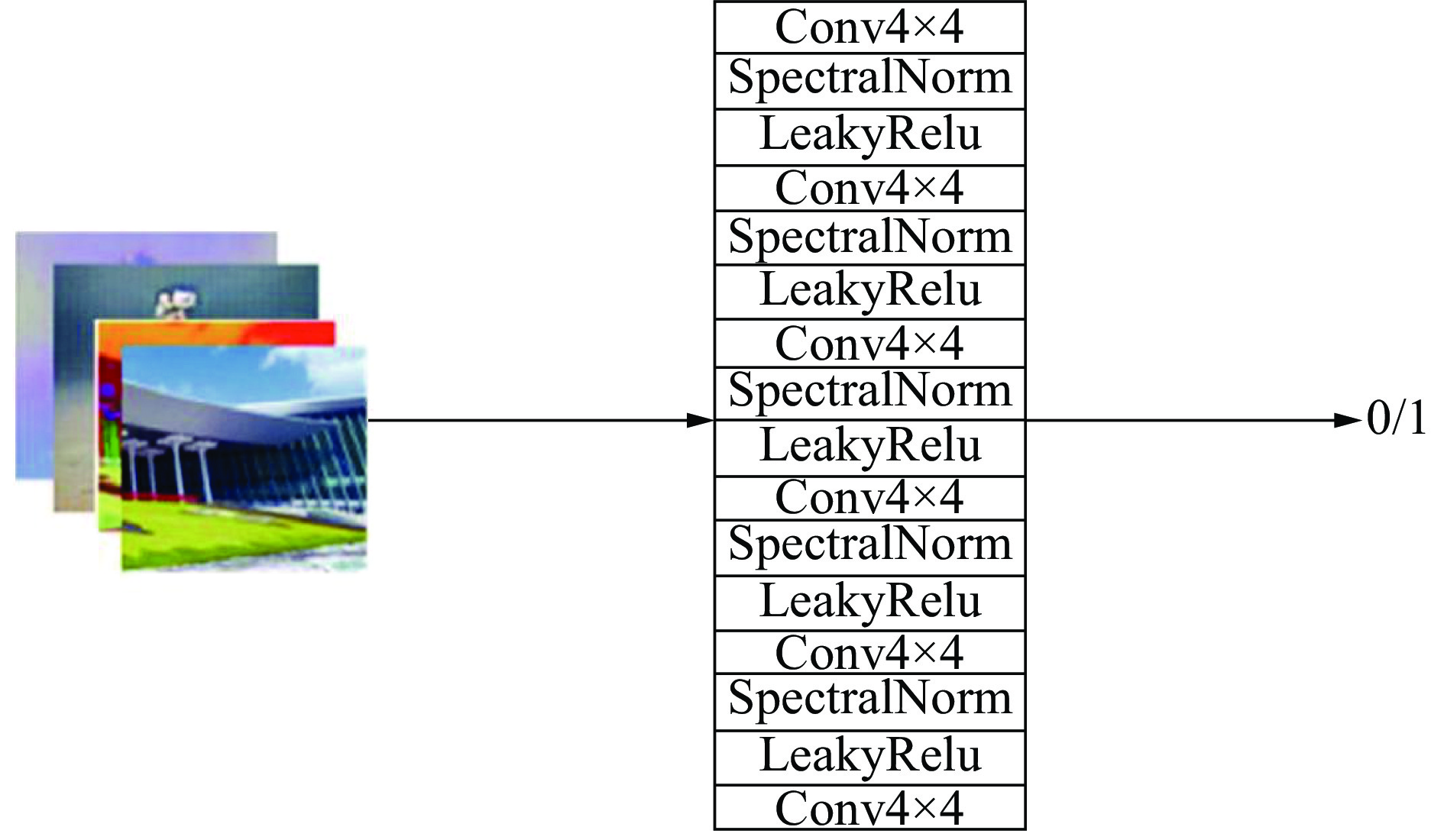
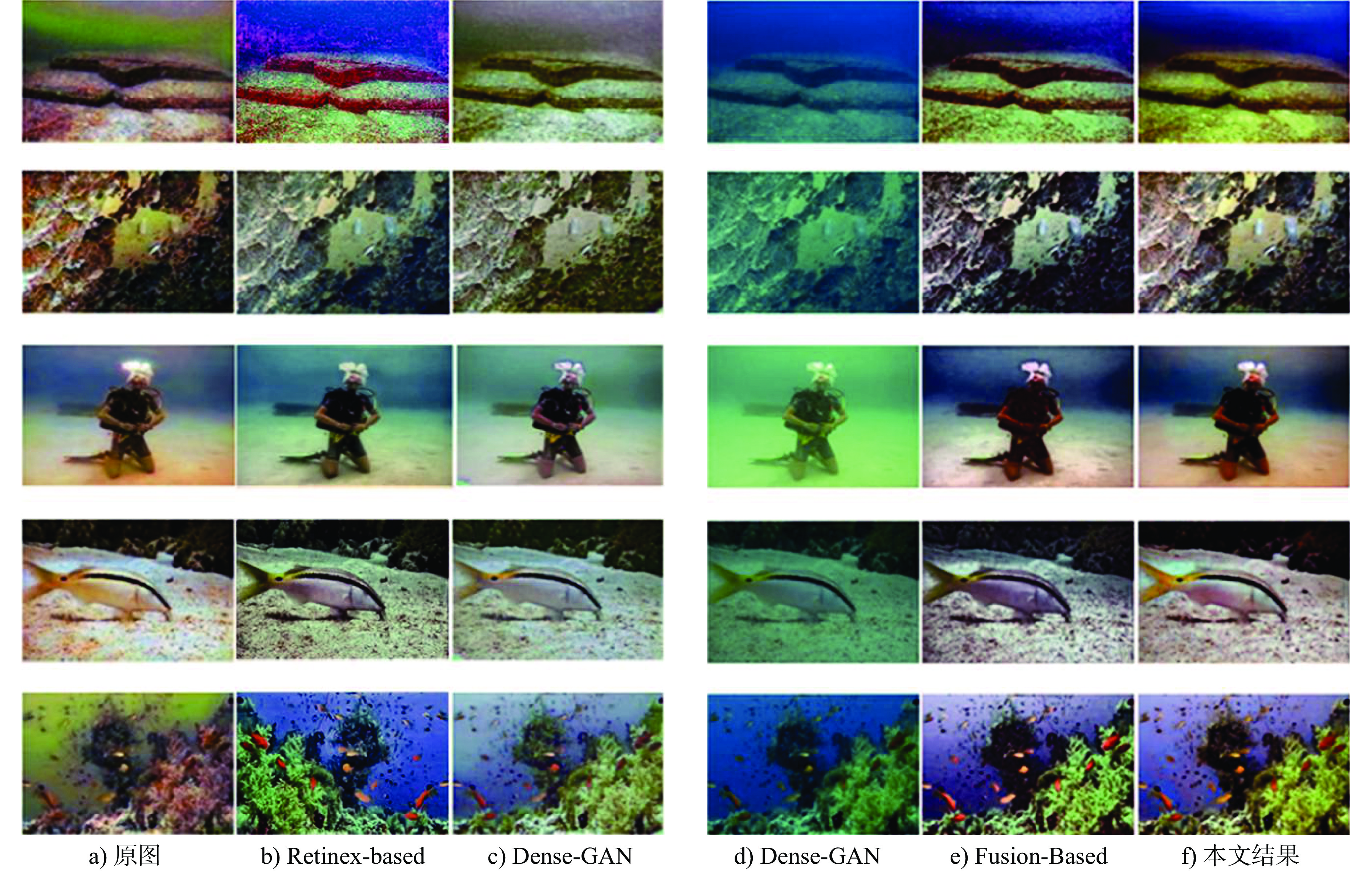
针对基于深度学习方法的水下图像增强只考虑水下图像的RGB 颜色特征空间造成的增强效果不理想现象,本文在循环生成对抗网络的基础上改进了一种水下彩色图像增强算法。首先运用循环生成对抗网络在图像的RGB和HSV 颜色特征空间进行训练,将图像经过卷积网络下采样提取到的特征送入残差网络和扩展压缩模块,其中扩展压缩模块可以调整图像RGB 和HSV 通道的权重。预训练好的生成对抗网络作用在成对的水下降质图像与增强后的图像进行监督训练,采用特征融合网络将对抗生成网络输出的RGB 和HSV 六通道图像融合成RGB三通道图像。实验结果表明,该方法能够有效结合图像的RGB和HSV 空间的特征信息,提升水下图像的对比度和亮度,校正水下图像的颜色偏差。
针对基于深度学习方法的水下图像增强只考虑水下图像的RGB 颜色特征空间造成的增强效果不理想现象,本文在循环生成对抗网络的基础上改进了一种水下彩色图像增强算法。首先运用循环生成对抗网络在图像的RGB和HSV 颜色特征空间进行训练,将图像经过卷积网络下采样提取到的特征送入残差网络和扩展压缩模块,其中扩展压缩模块可以调整图像RGB 和HSV 通道的权重。预训练好的生成对抗网络作用在成对的水下降质图像与增强后的图像进行监督训练,采用特征融合网络将对抗生成网络输出的RGB 和HSV 六通道图像融合成RGB三通道图像。实验结果表明,该方法能够有效结合图像的RGB和HSV 空间的特征信息,提升水下图像的对比度和亮度,校正水下图像的颜色偏差。

2023, 42(12): 2100-2109.
doi: 10.13433/j.cnki.1003-8728.20220163
摘要:
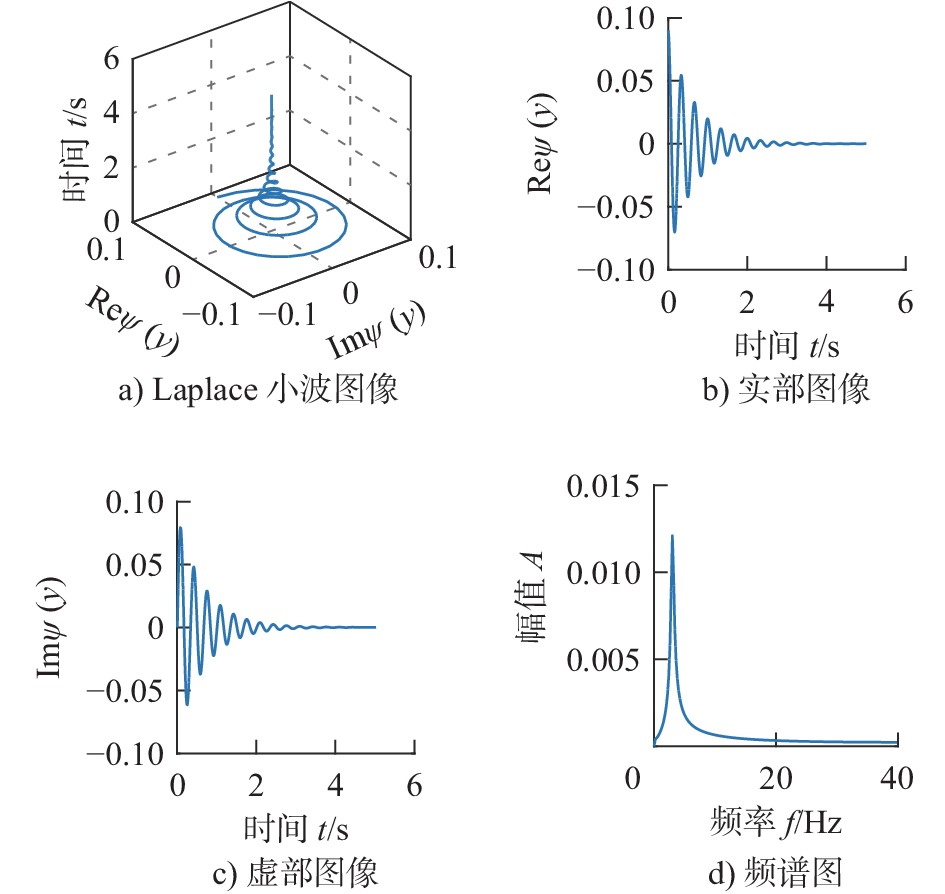
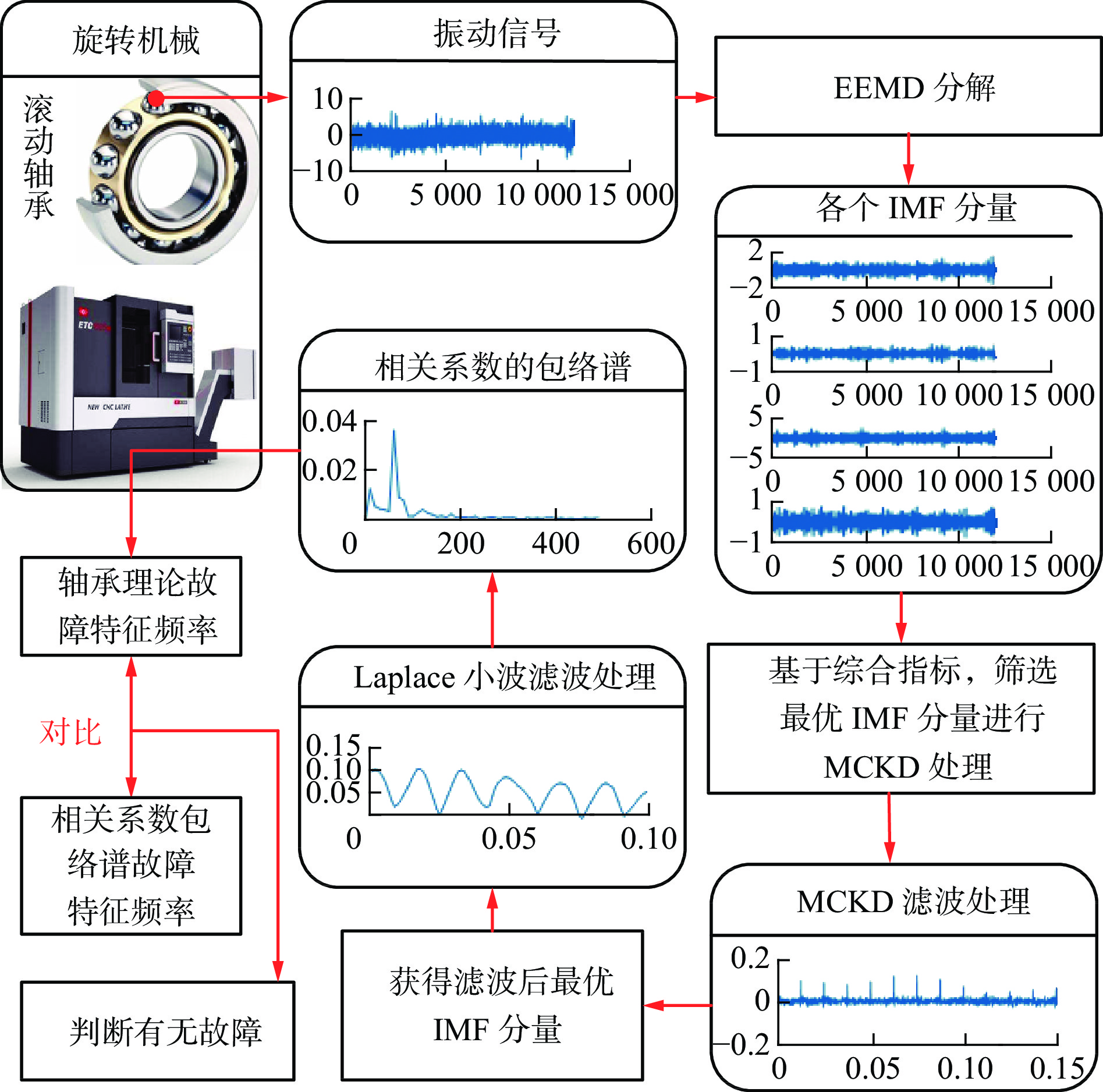
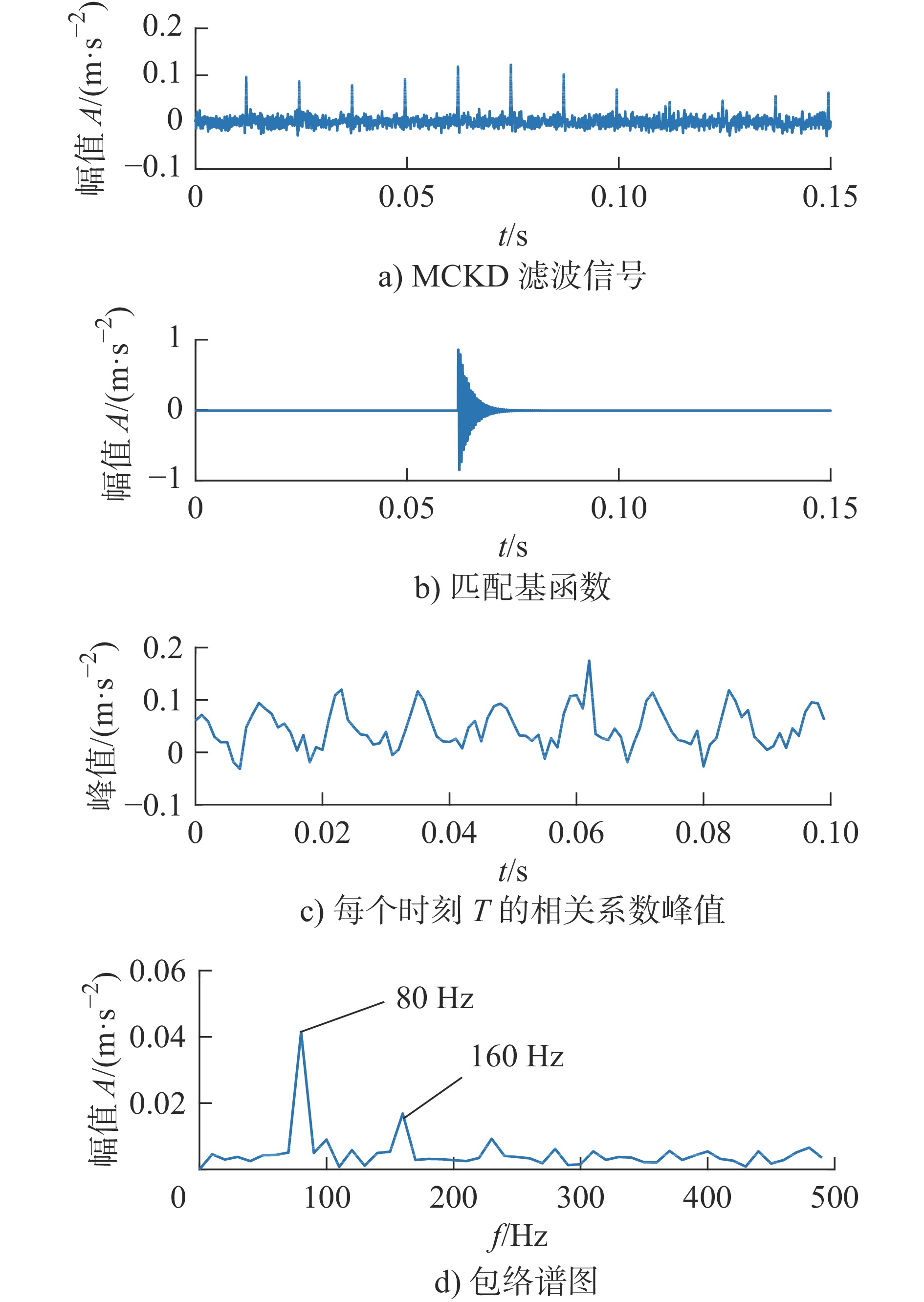
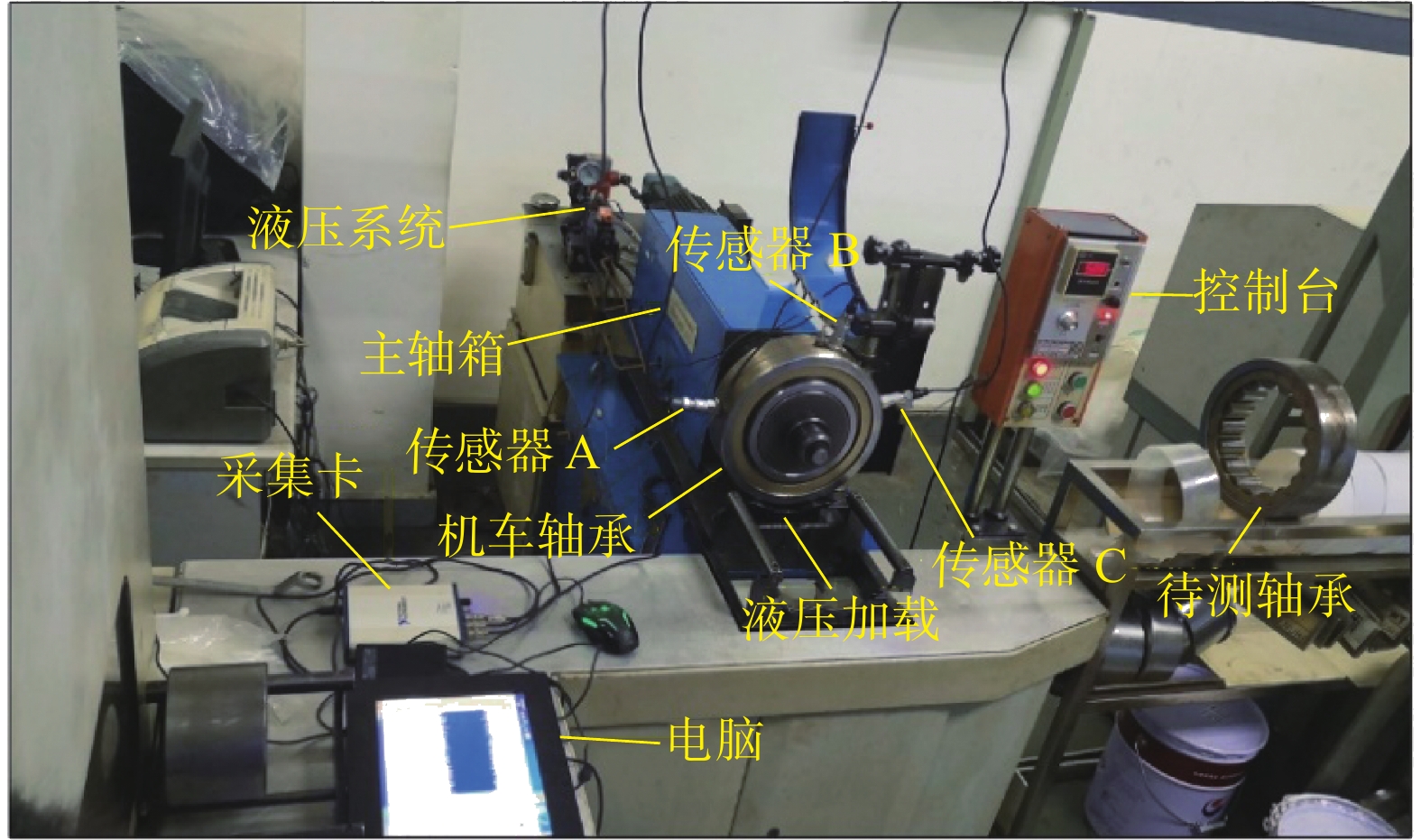
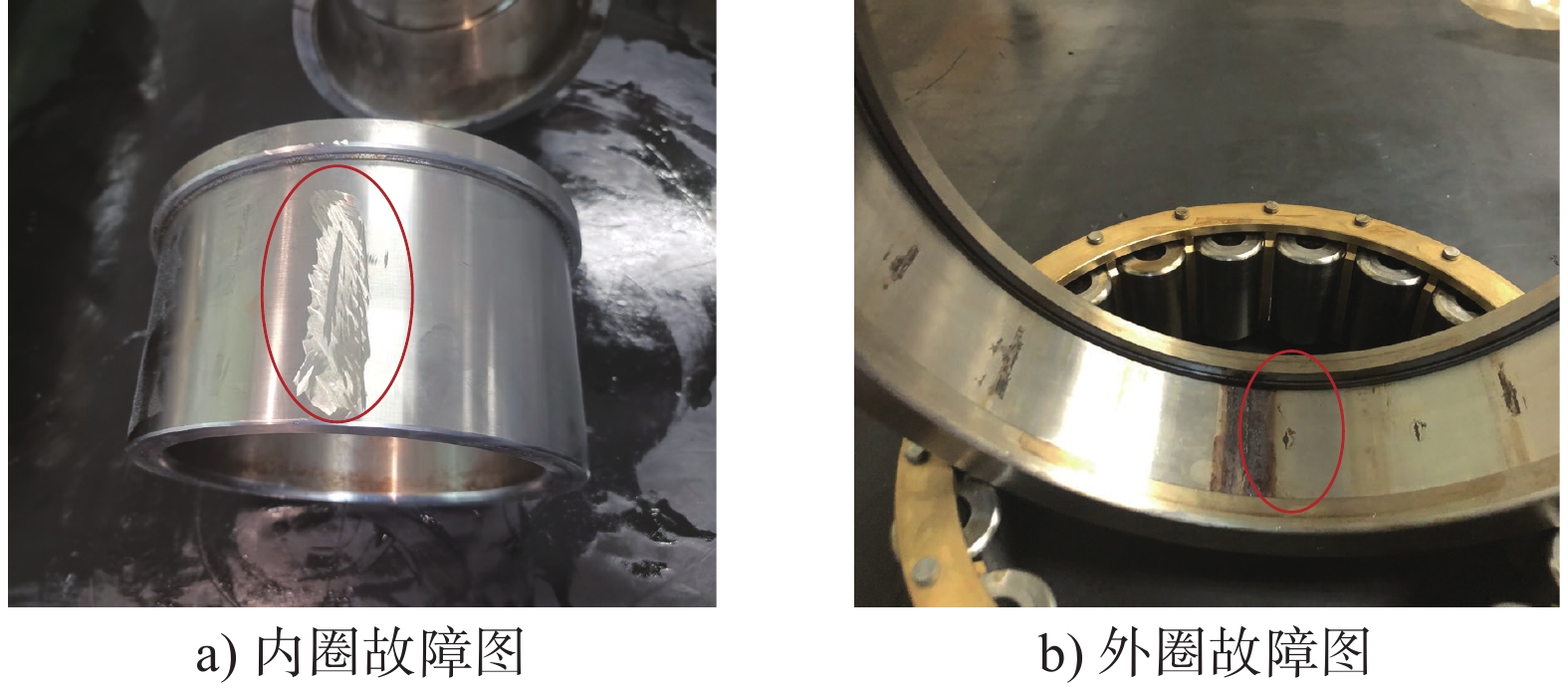
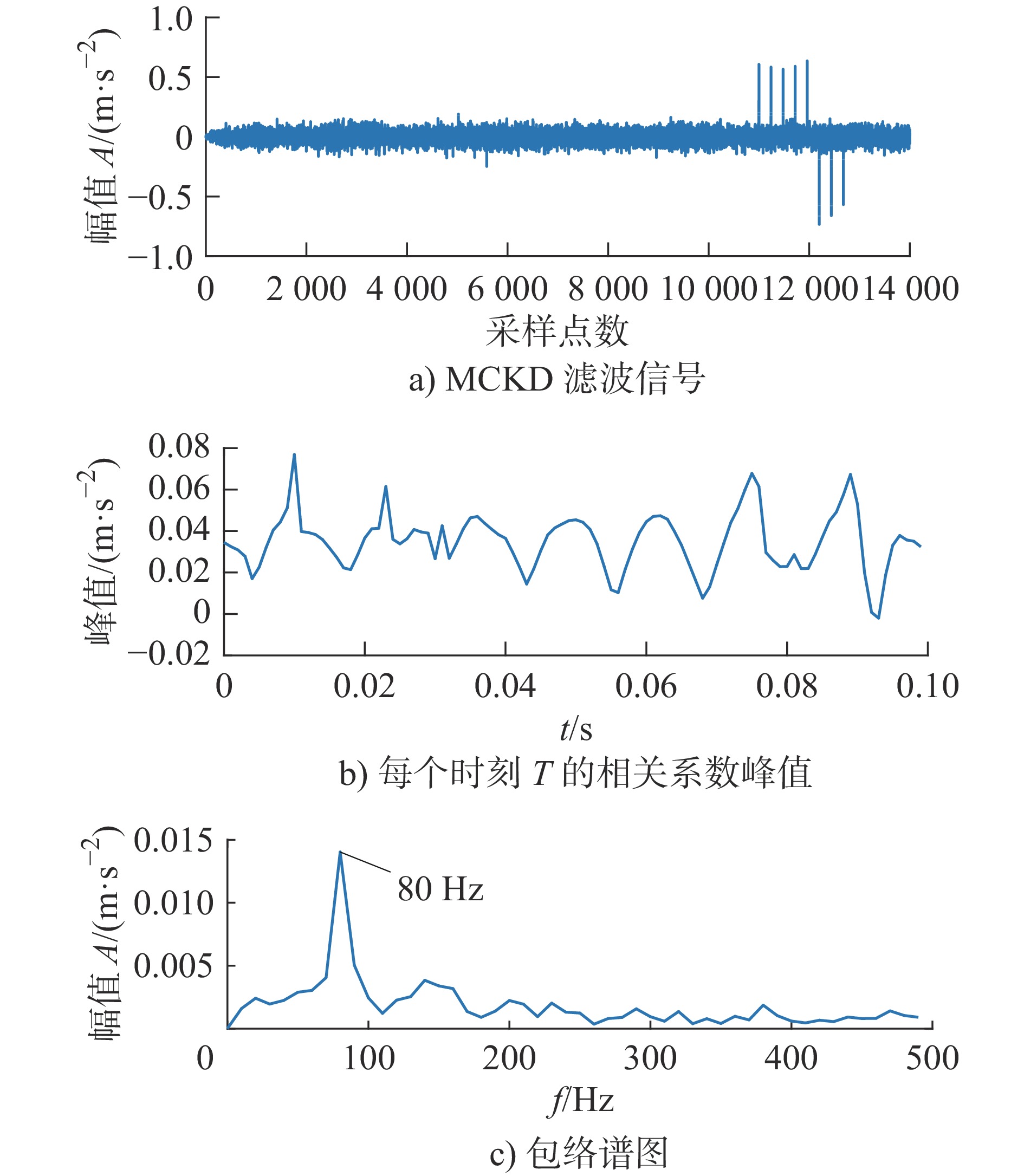
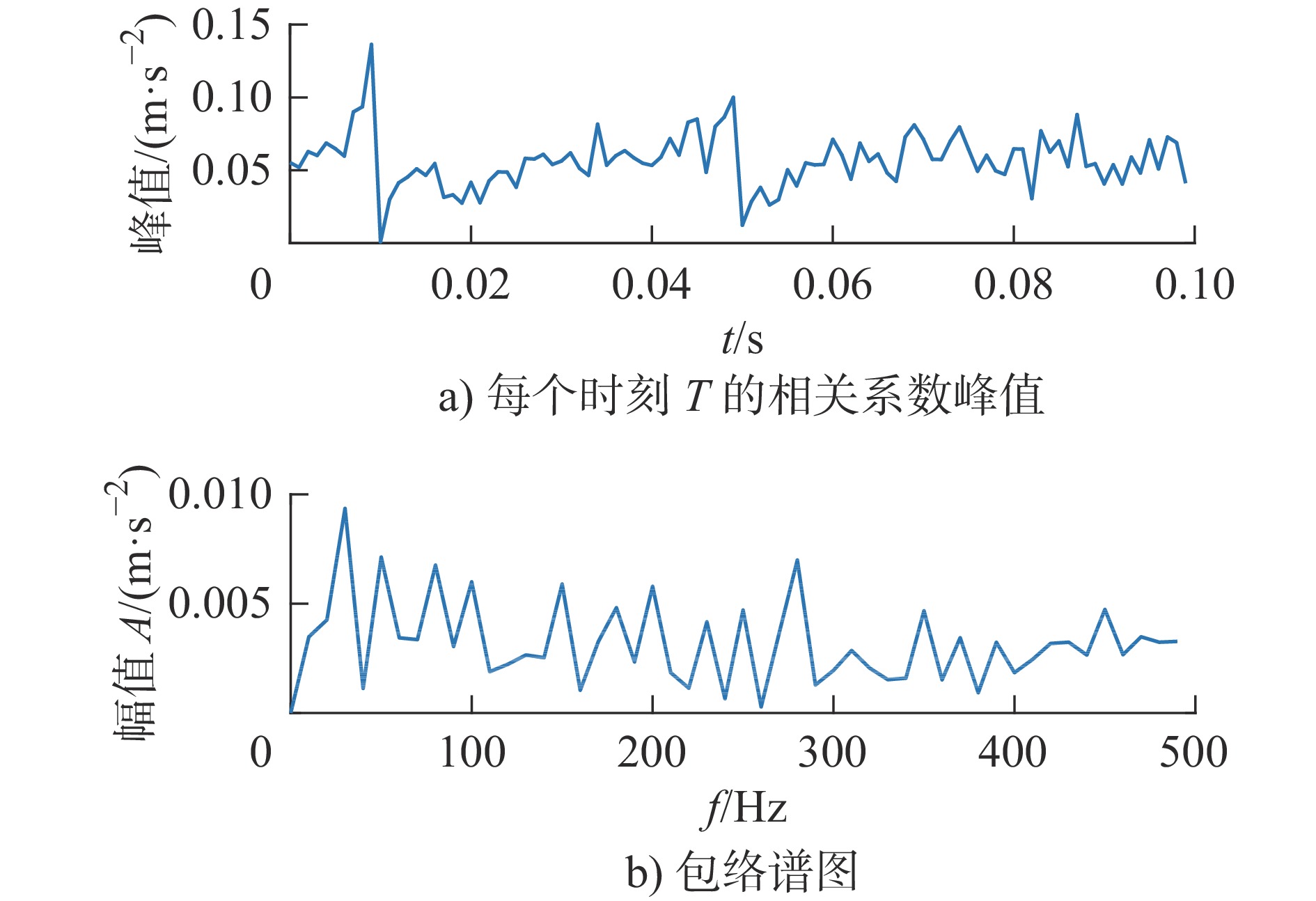
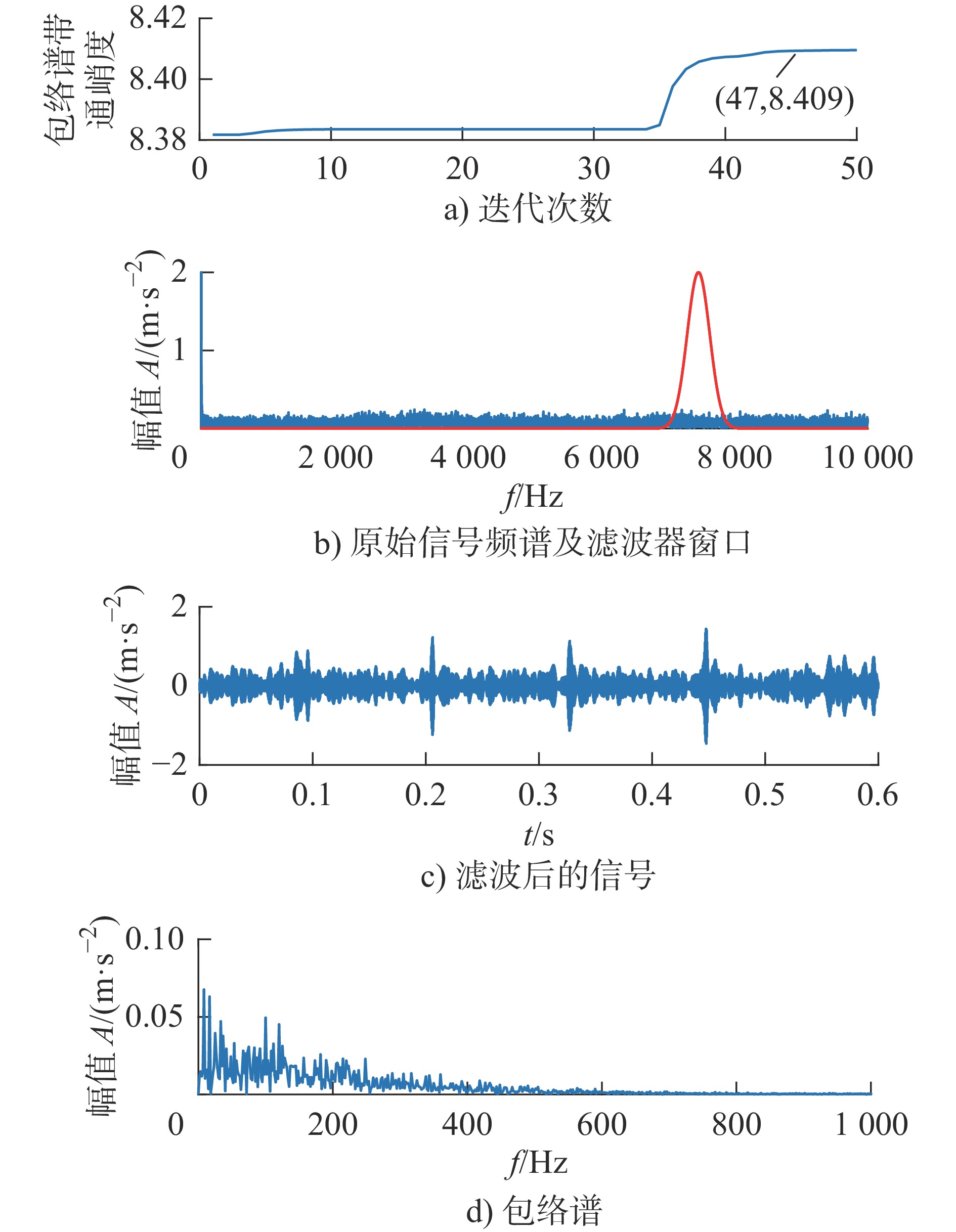
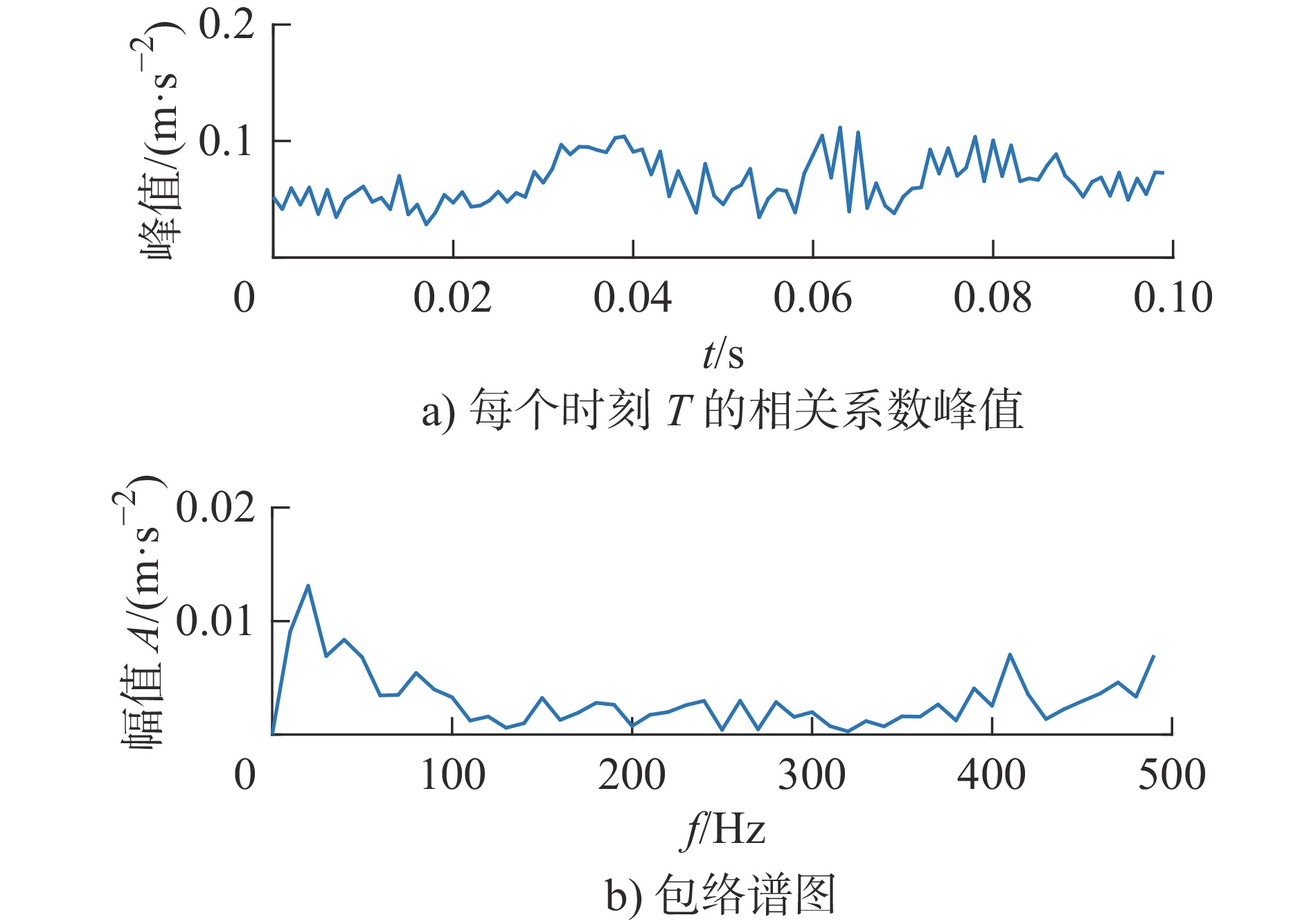
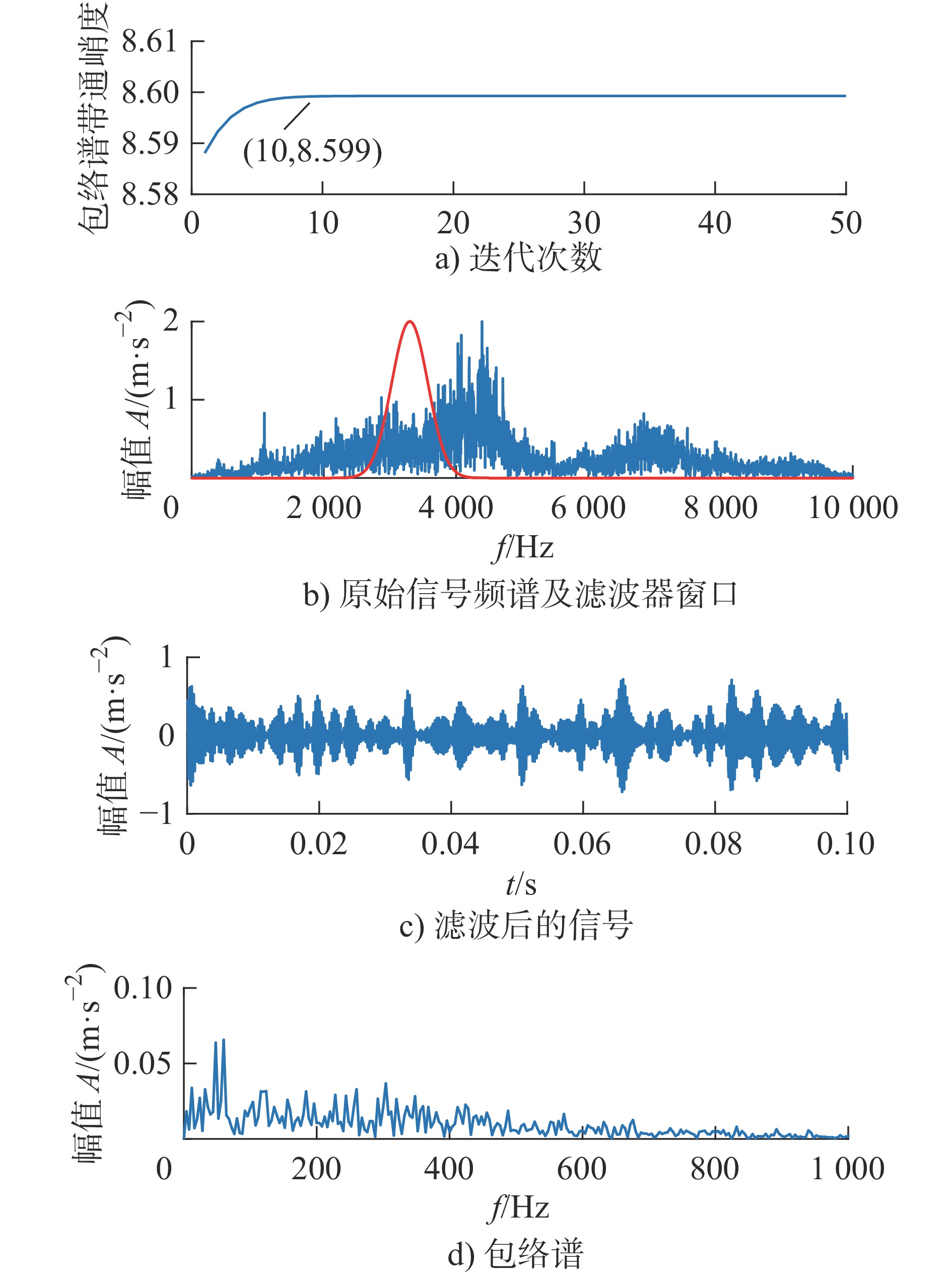
针对轴承故障冲击特征提取时存在噪声和转频等成分的干扰问题,提出一种相关系数包络谱联合综合指标CeK的轴承故障诊断方法。在信号预处理阶段采用新的综合指标CeK从总体平均经验模态分解(Ensemble empirical mode decomposition,EEMD)得到的多个本征模态分量(Intrinsic mode function,IMF)中选取最优分量,进一步使用最大相关峭度反褶积(Maximum correlated kurtosis deconvolution,MCKD)对最优分量进行滤波降噪处理,最后使用Laplace小波相关滤波法提取故障冲击相关系数的峰值,做相关系数的包络谱图。通过仿真信号的分析结果,验证了本文方法的可行性。借助于南昌铁路局采集的真实故障信号,并以峭度指标代替本文提出的综合指标进行后续处理以及自适应Morlet小波滤波提取故障特征的分析结果,突出了利用综合指标CeK和相关系数包络谱提取故障特征频率的优越性。
针对轴承故障冲击特征提取时存在噪声和转频等成分的干扰问题,提出一种相关系数包络谱联合综合指标CeK的轴承故障诊断方法。在信号预处理阶段采用新的综合指标CeK从总体平均经验模态分解(Ensemble empirical mode decomposition,EEMD)得到的多个本征模态分量(Intrinsic mode function,IMF)中选取最优分量,进一步使用最大相关峭度反褶积(Maximum correlated kurtosis deconvolution,MCKD)对最优分量进行滤波降噪处理,最后使用Laplace小波相关滤波法提取故障冲击相关系数的峰值,做相关系数的包络谱图。通过仿真信号的分析结果,验证了本文方法的可行性。借助于南昌铁路局采集的真实故障信号,并以峭度指标代替本文提出的综合指标进行后续处理以及自适应Morlet小波滤波提取故障特征的分析结果,突出了利用综合指标CeK和相关系数包络谱提取故障特征频率的优越性。



2023, 42(12): 2110-2117.
doi: 10.13433/j.cnki.1003-8728.20220174
摘要:
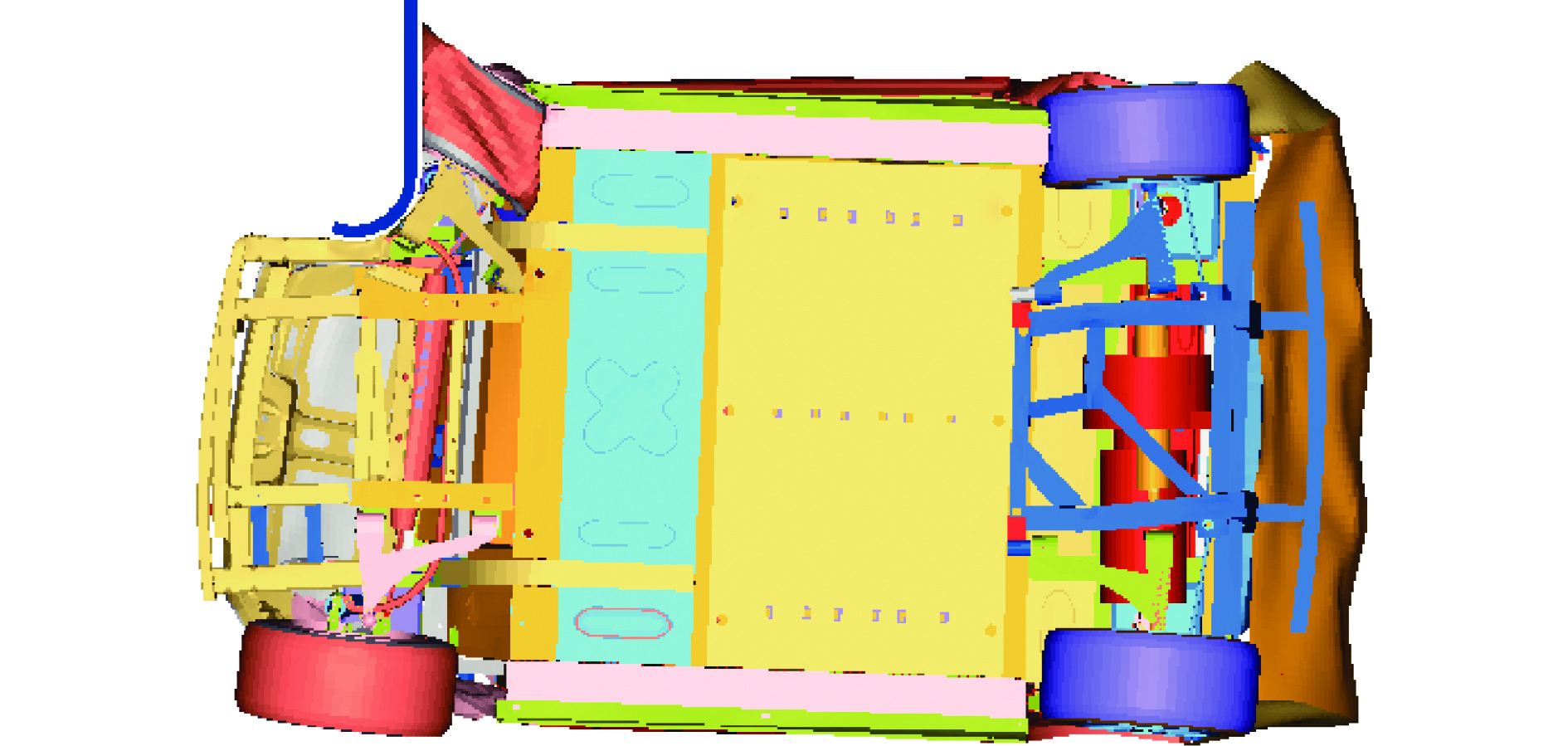
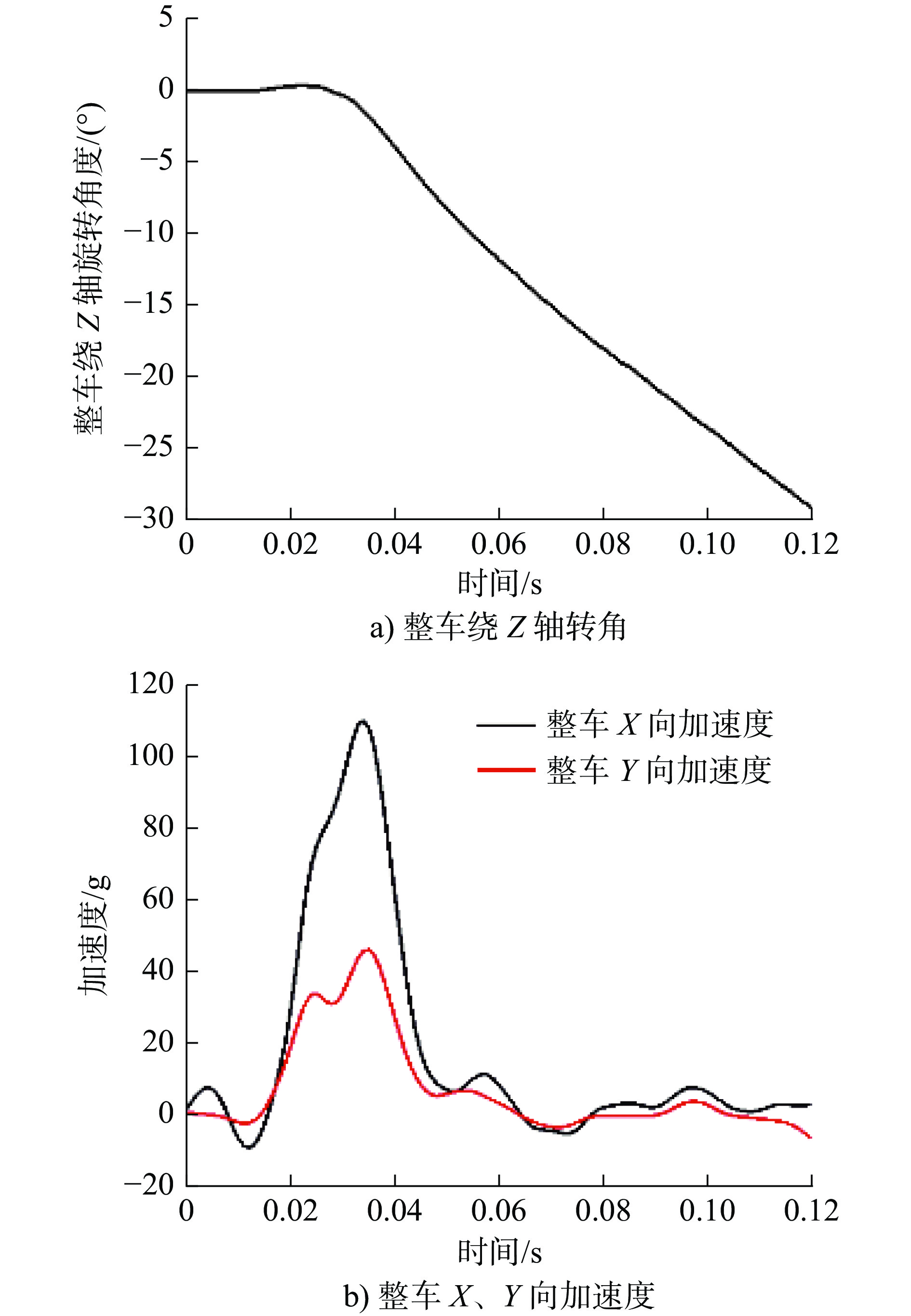
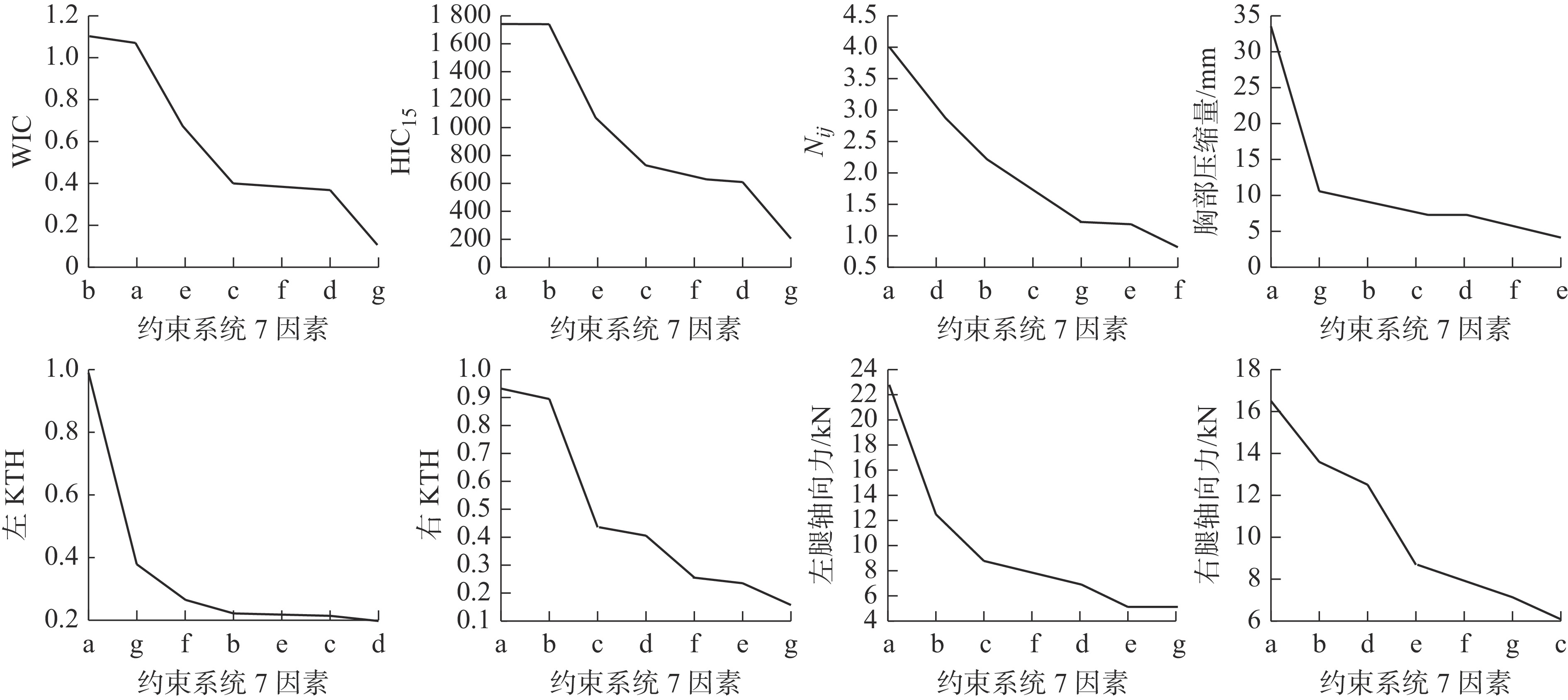
根据某微型电动汽车的实验对标整车模型,建立有效的简易约束系统模型,研究64 km/h小偏置碰的乘员动态响应及约束系统输入条件。通过对约束系统中侧气帘质量流缩放率、安全气囊点火时间及安全带限力峰值等7个相关参数进行单变量乘员伤害分析,确定在小偏置碰撞下约束系统4个主要影响因素。设计四因素九水平的正交试验,计算约束系统不同匹配参数对乘员加权伤害指标(WIC)以及乘员头部、颈部、胸部、腿部等的影响等级,结合等级极差比参数给出小偏置碰约束系统调整及匹配建议。并进一步构建约束系统参数与WIC的高阶多项式代理模型,确定了约束系统的最优组合解。结果表明头部损伤指标 HIC15降低了64%,整体加权综合损伤 WIC 值降低56%。
根据某微型电动汽车的实验对标整车模型,建立有效的简易约束系统模型,研究64 km/h小偏置碰的乘员动态响应及约束系统输入条件。通过对约束系统中侧气帘质量流缩放率、安全气囊点火时间及安全带限力峰值等7个相关参数进行单变量乘员伤害分析,确定在小偏置碰撞下约束系统4个主要影响因素。设计四因素九水平的正交试验,计算约束系统不同匹配参数对乘员加权伤害指标(WIC)以及乘员头部、颈部、胸部、腿部等的影响等级,结合等级极差比参数给出小偏置碰约束系统调整及匹配建议。并进一步构建约束系统参数与WIC的高阶多项式代理模型,确定了约束系统的最优组合解。结果表明头部损伤指标 HIC15降低了64%,整体加权综合损伤 WIC 值降低56%。



2023, 42(12): 2118-2124.
doi: 10.13433/j.cnki.1003-8728.20220179
摘要:
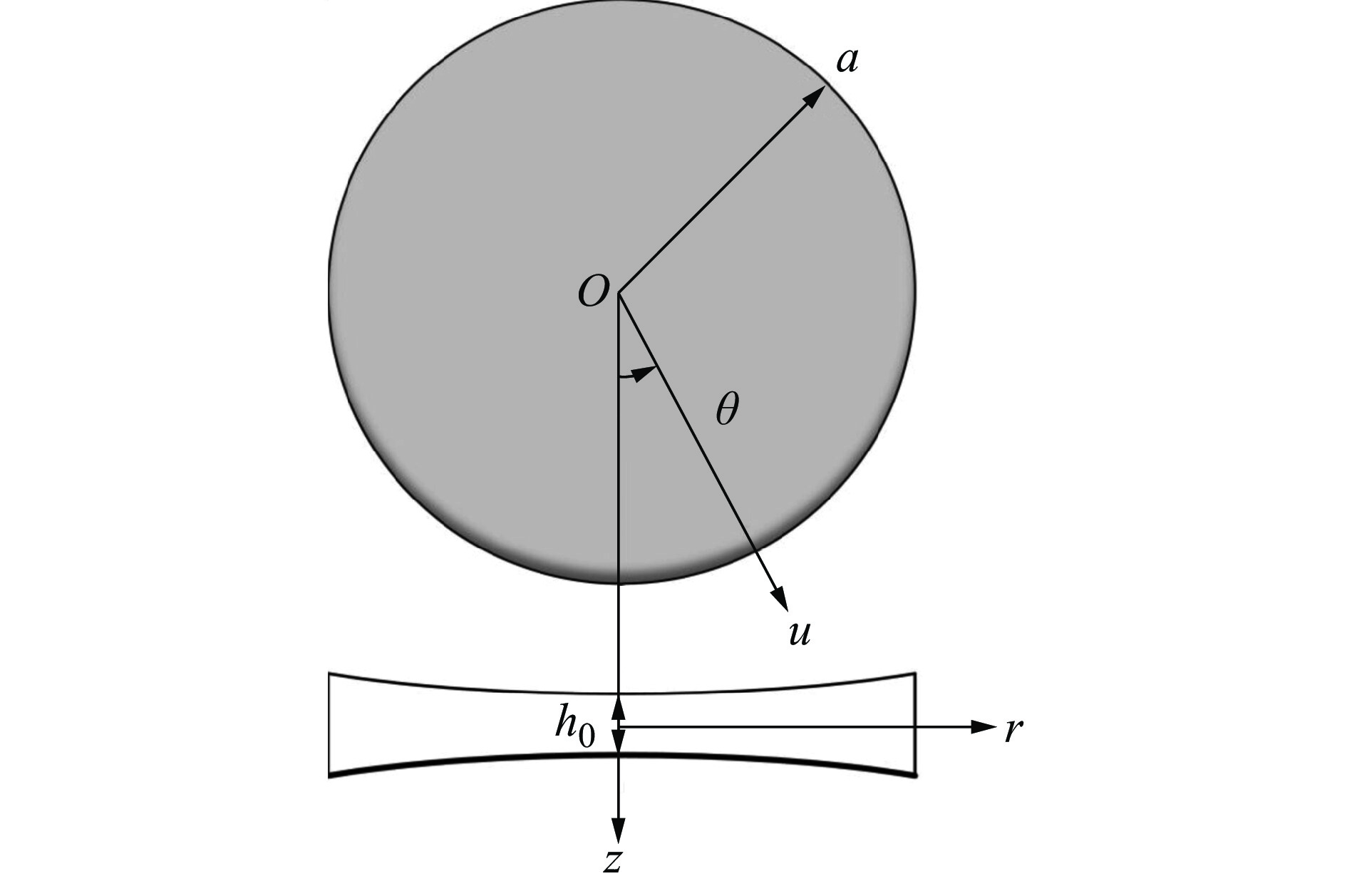
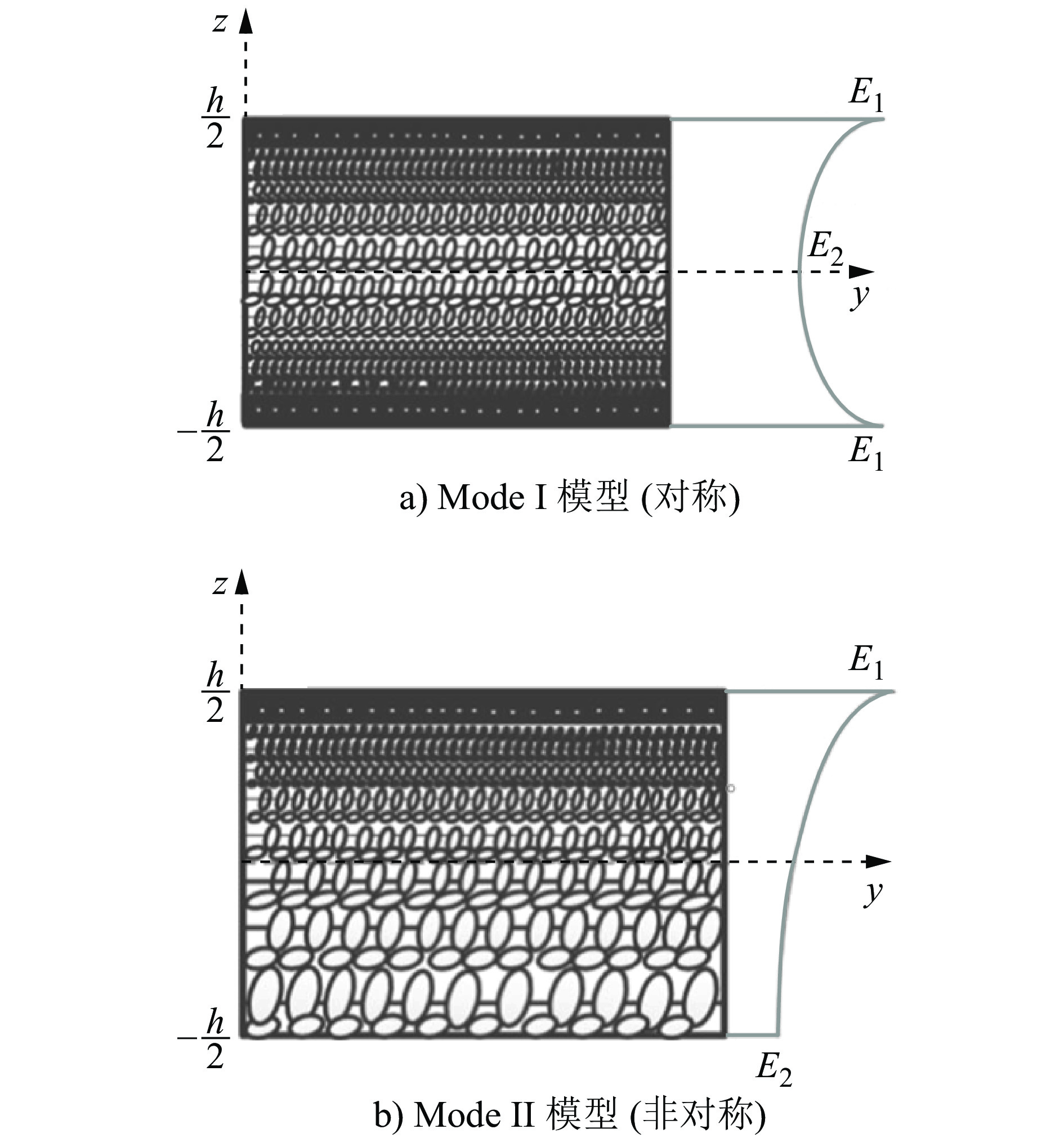
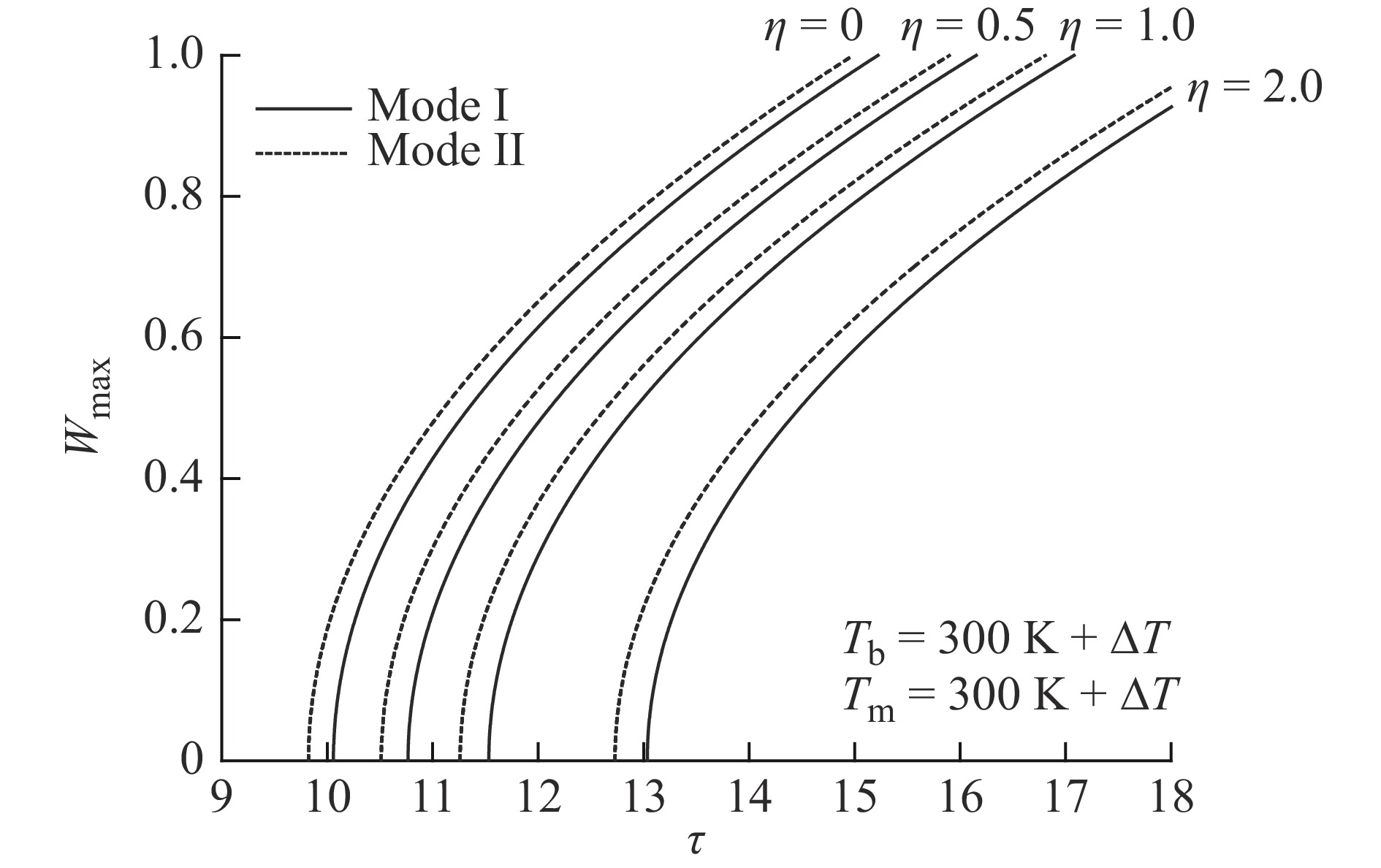
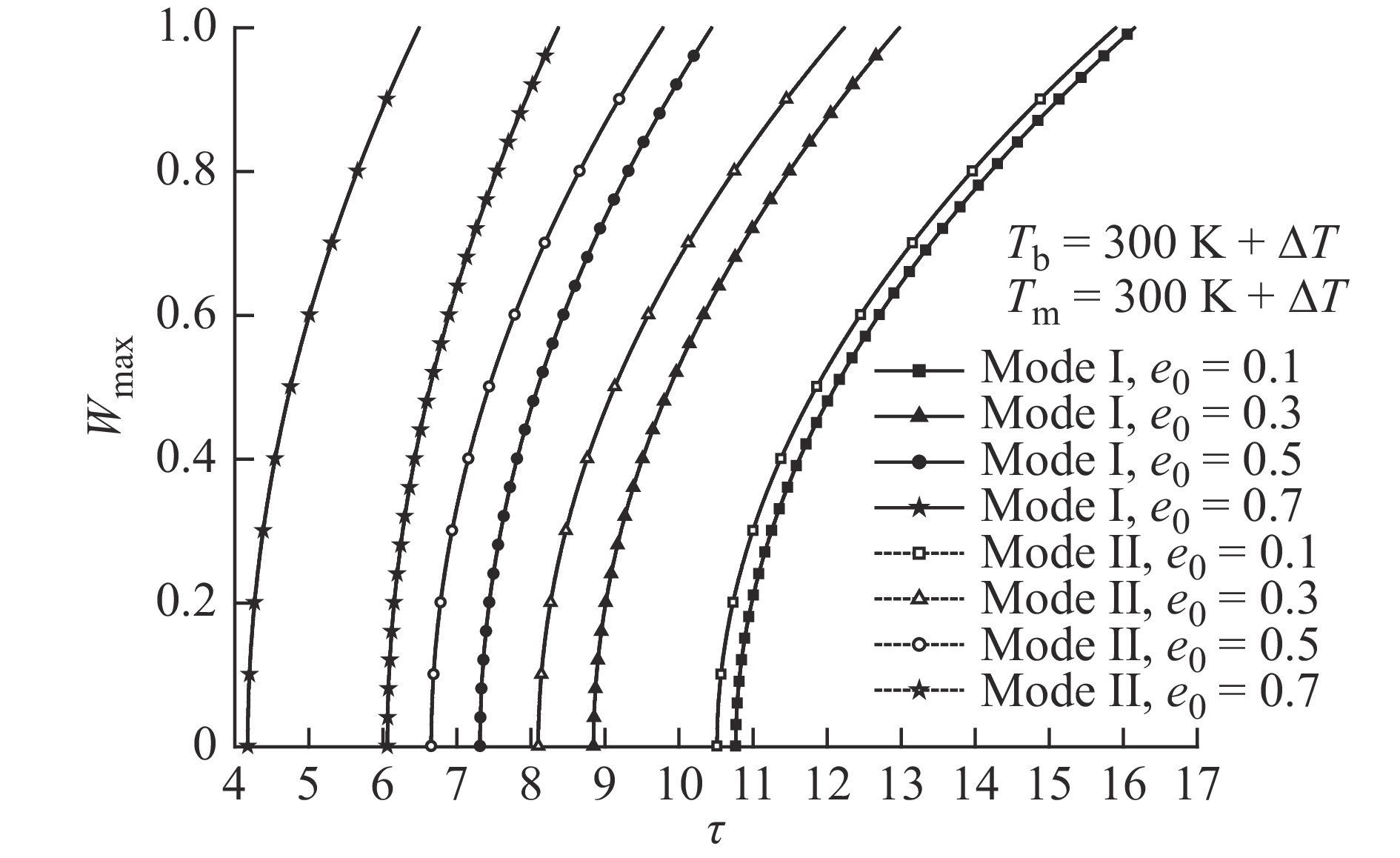
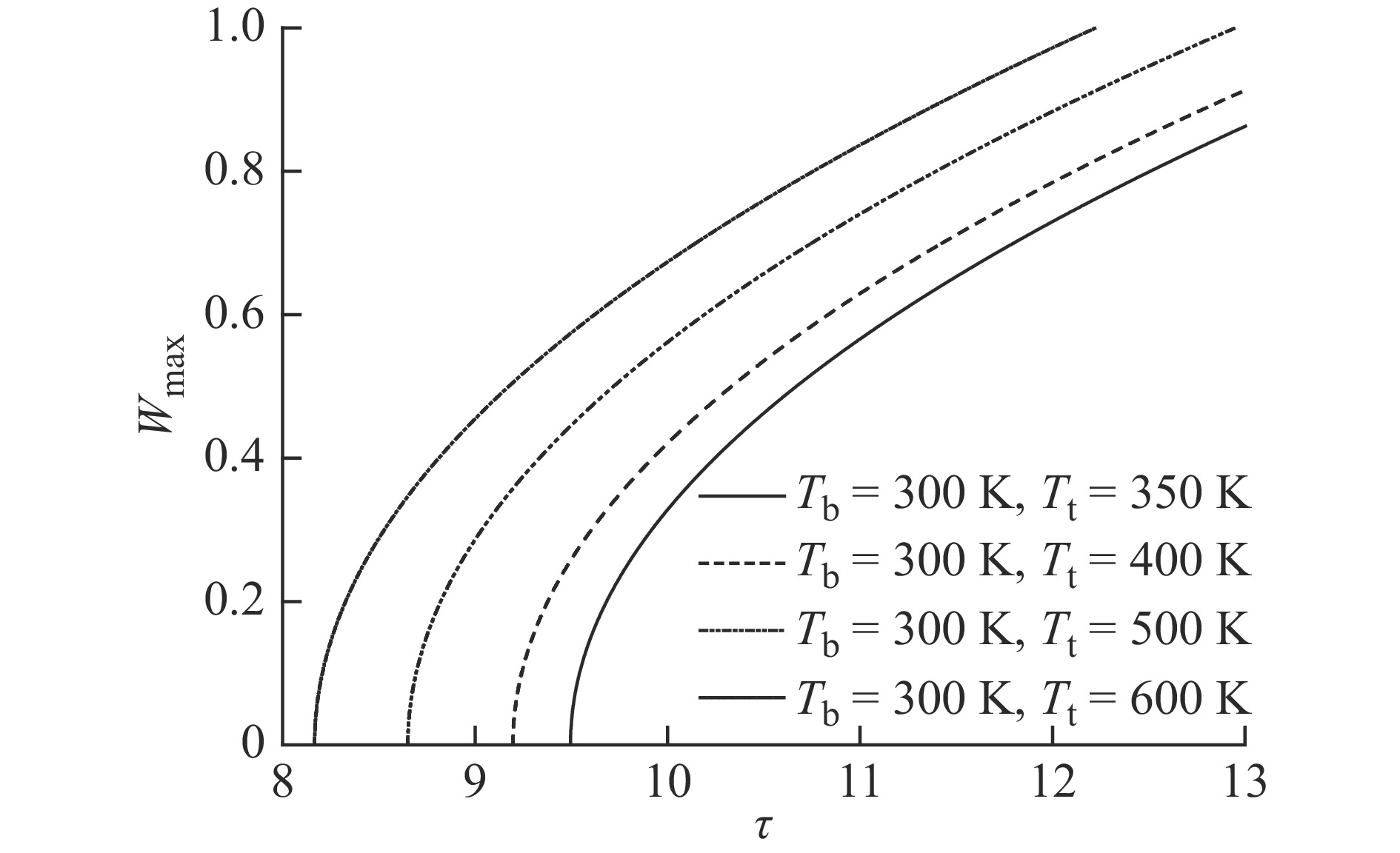
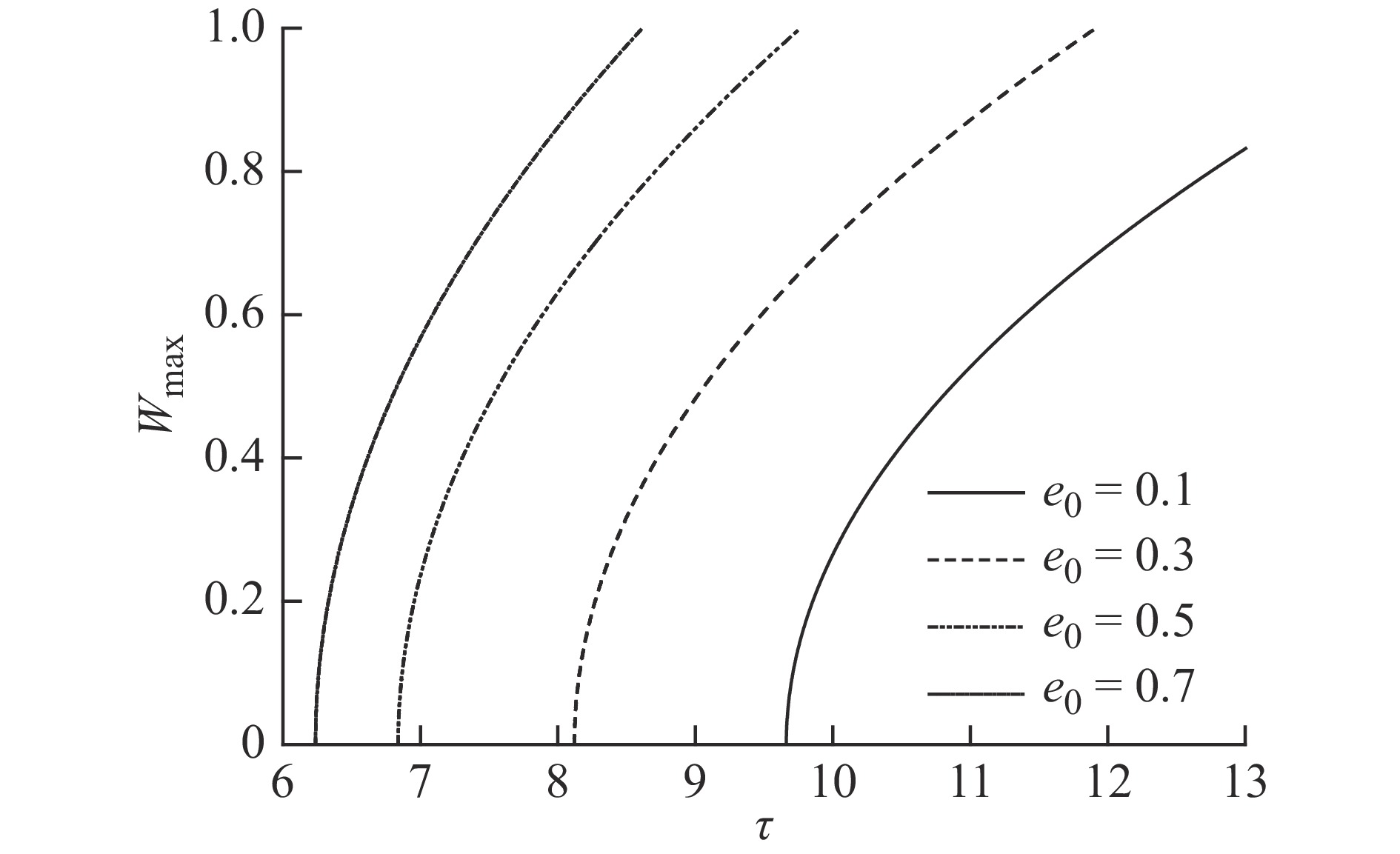
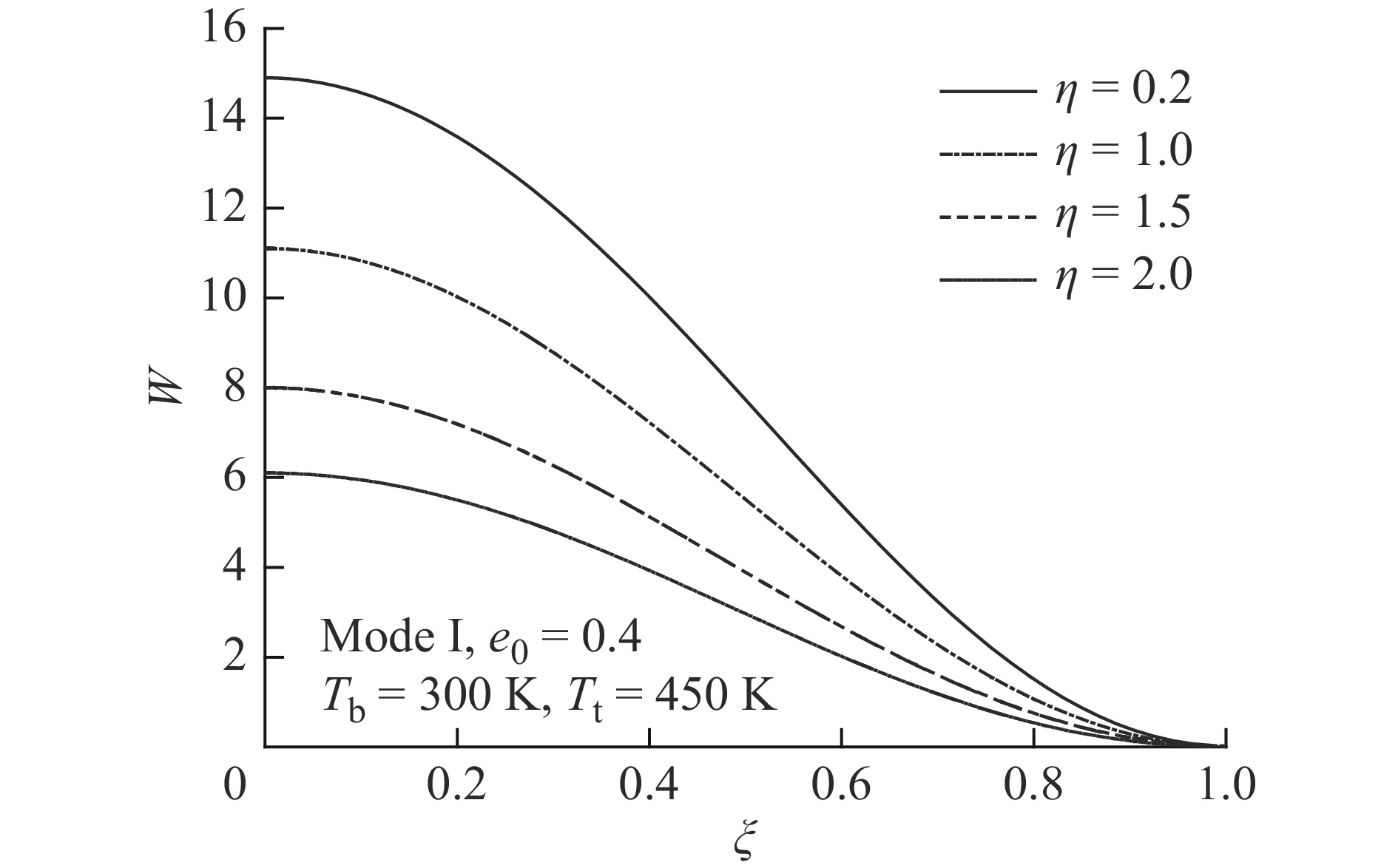
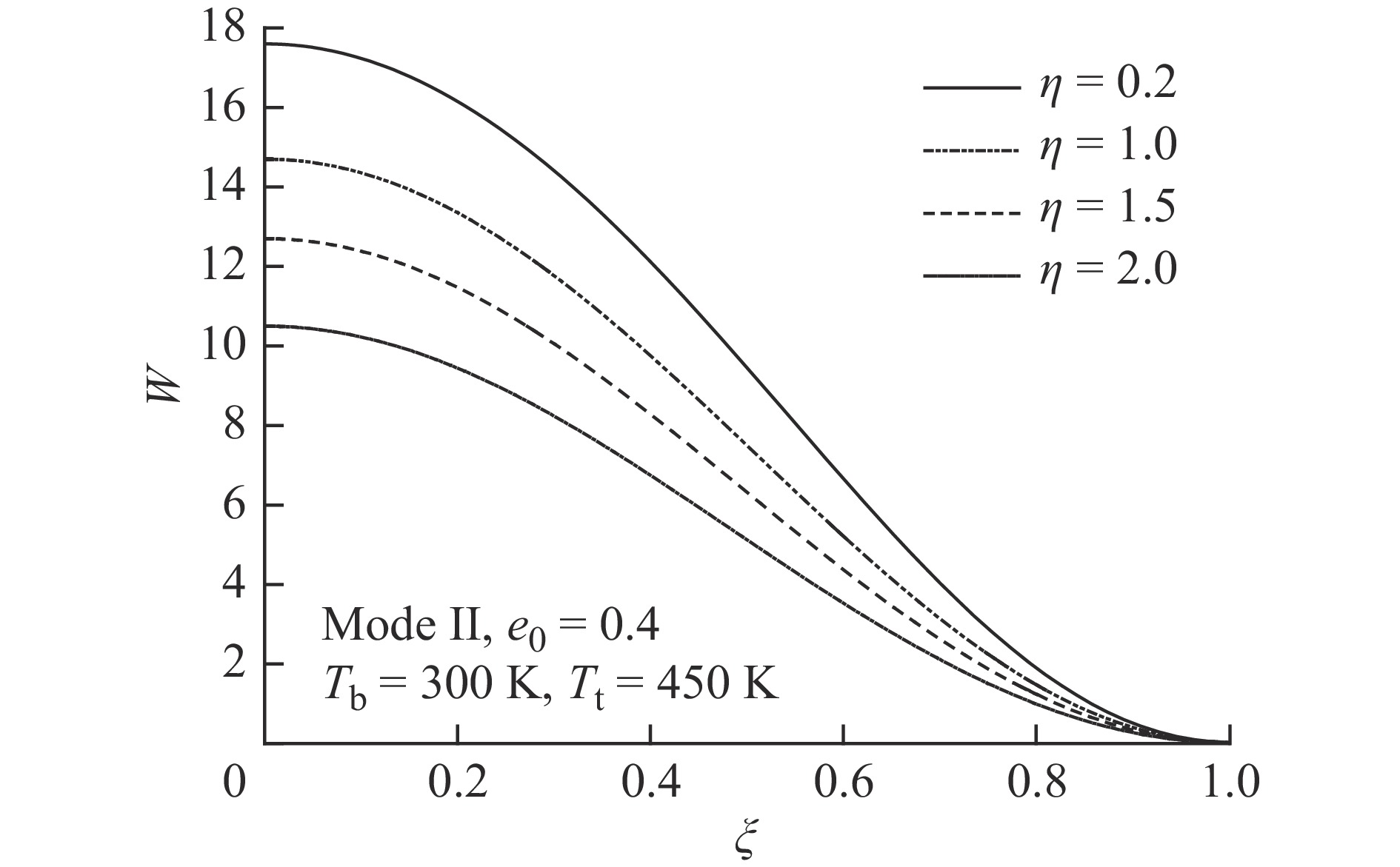
为分析多孔梯度材料圆板在非均匀温度场中的热后屈曲响应,基于经典板理论和物理中面概念建立了梯度多孔材料圆板在热载荷作用下的控制微分方程,其中假设厚度变化沿半径为二次抛物线型且板在其厚度上具有对称和非对称的非均匀孔隙率分布。采用打靶法数值求解了问题的屈曲和后屈曲响应,给出了均匀升温和热传导下的梯度多孔非线性变厚度圆板后屈曲平衡路径。结果显示:变厚度系数、孔隙率系数、孔隙分布方式以及温度场对板的临界载荷和后屈曲平衡路径均有影响;在不同温度场中孔隙率系数越大,屈曲时的临界载荷越小;孔隙率对称分布下的临界载荷大于非对称情况下的。
为分析多孔梯度材料圆板在非均匀温度场中的热后屈曲响应,基于经典板理论和物理中面概念建立了梯度多孔材料圆板在热载荷作用下的控制微分方程,其中假设厚度变化沿半径为二次抛物线型且板在其厚度上具有对称和非对称的非均匀孔隙率分布。采用打靶法数值求解了问题的屈曲和后屈曲响应,给出了均匀升温和热传导下的梯度多孔非线性变厚度圆板后屈曲平衡路径。结果显示:变厚度系数、孔隙率系数、孔隙分布方式以及温度场对板的临界载荷和后屈曲平衡路径均有影响;在不同温度场中孔隙率系数越大,屈曲时的临界载荷越小;孔隙率对称分布下的临界载荷大于非对称情况下的。
2023, 42(12): 2125-2131.
doi: 10.13433/j.cnki.1003-8728.20220106
摘要:
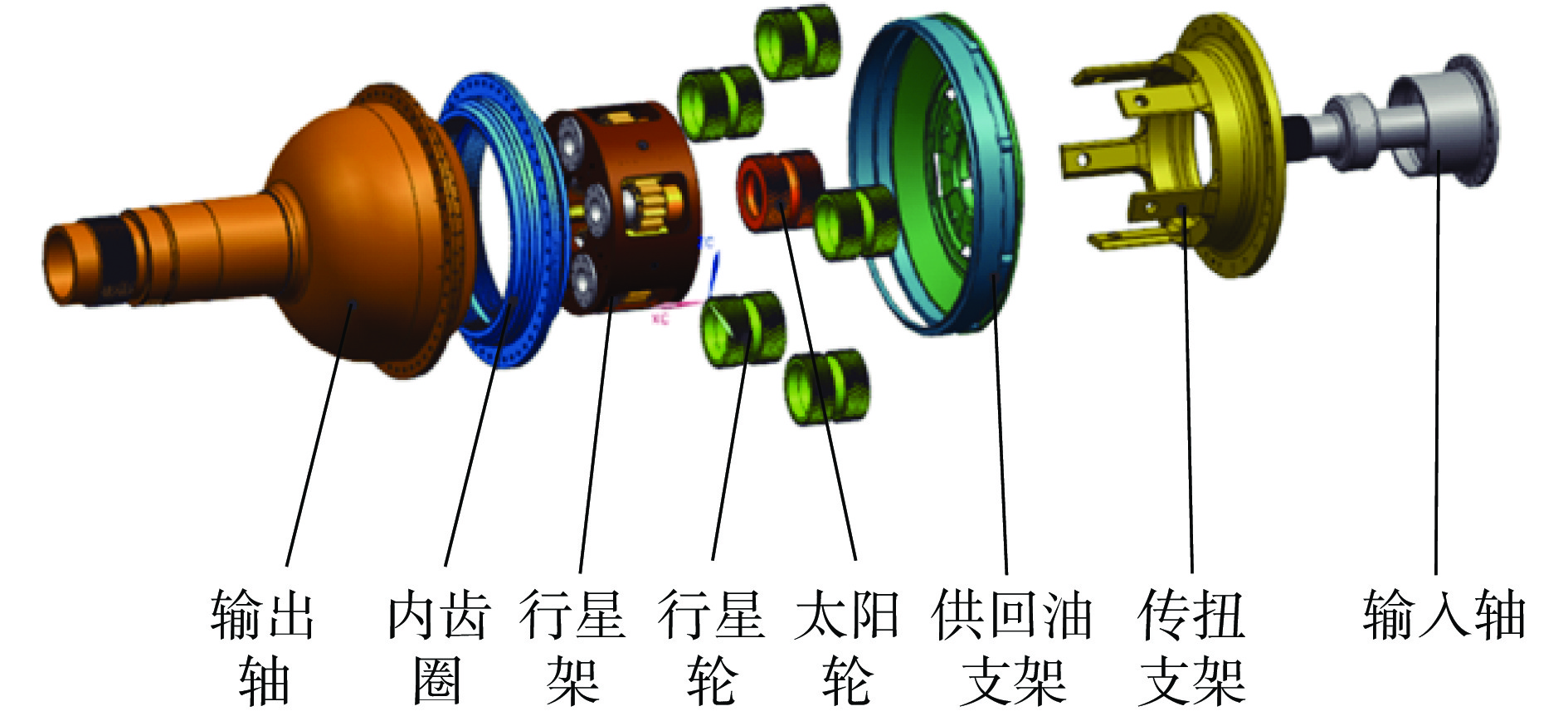
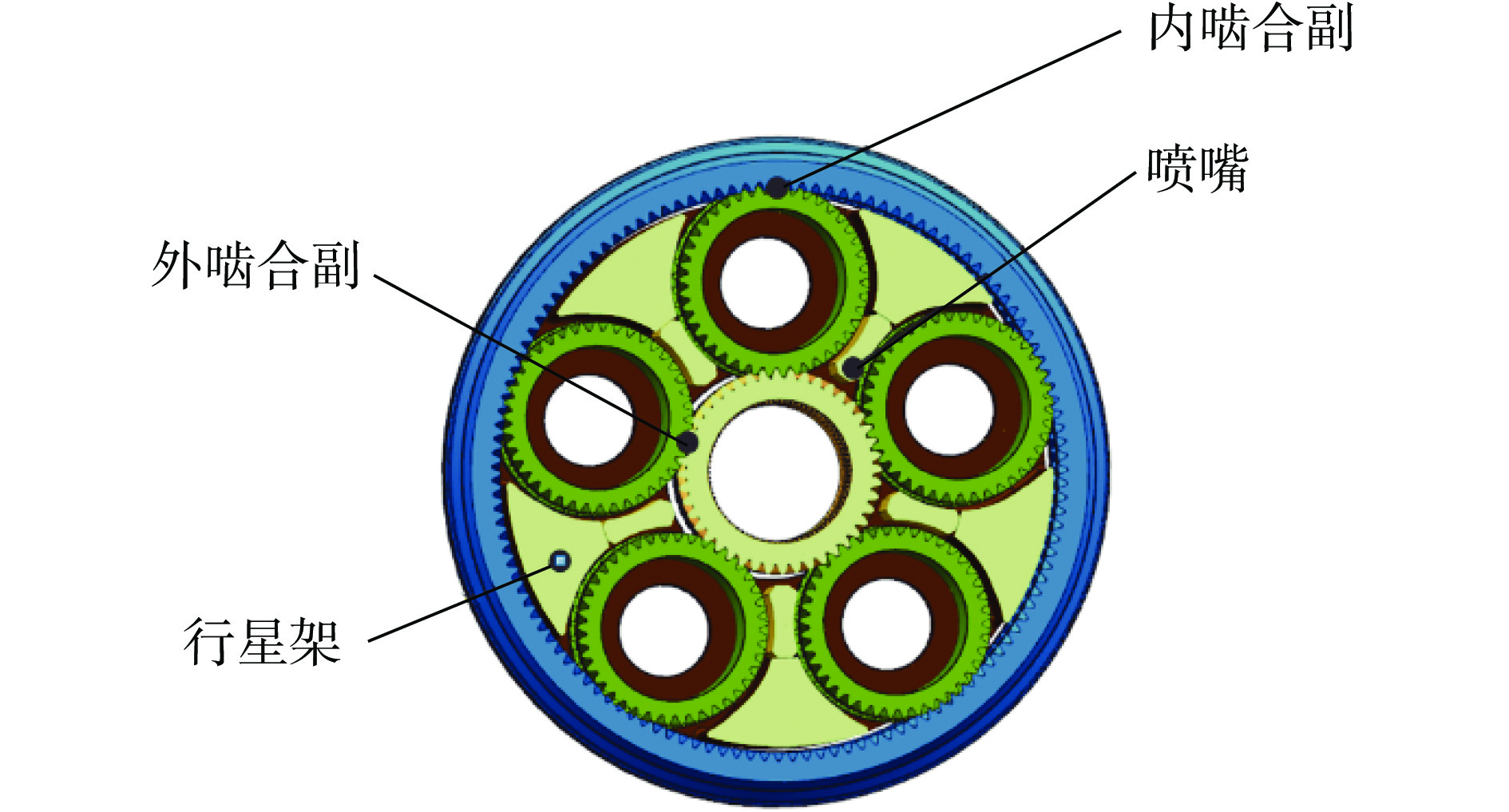
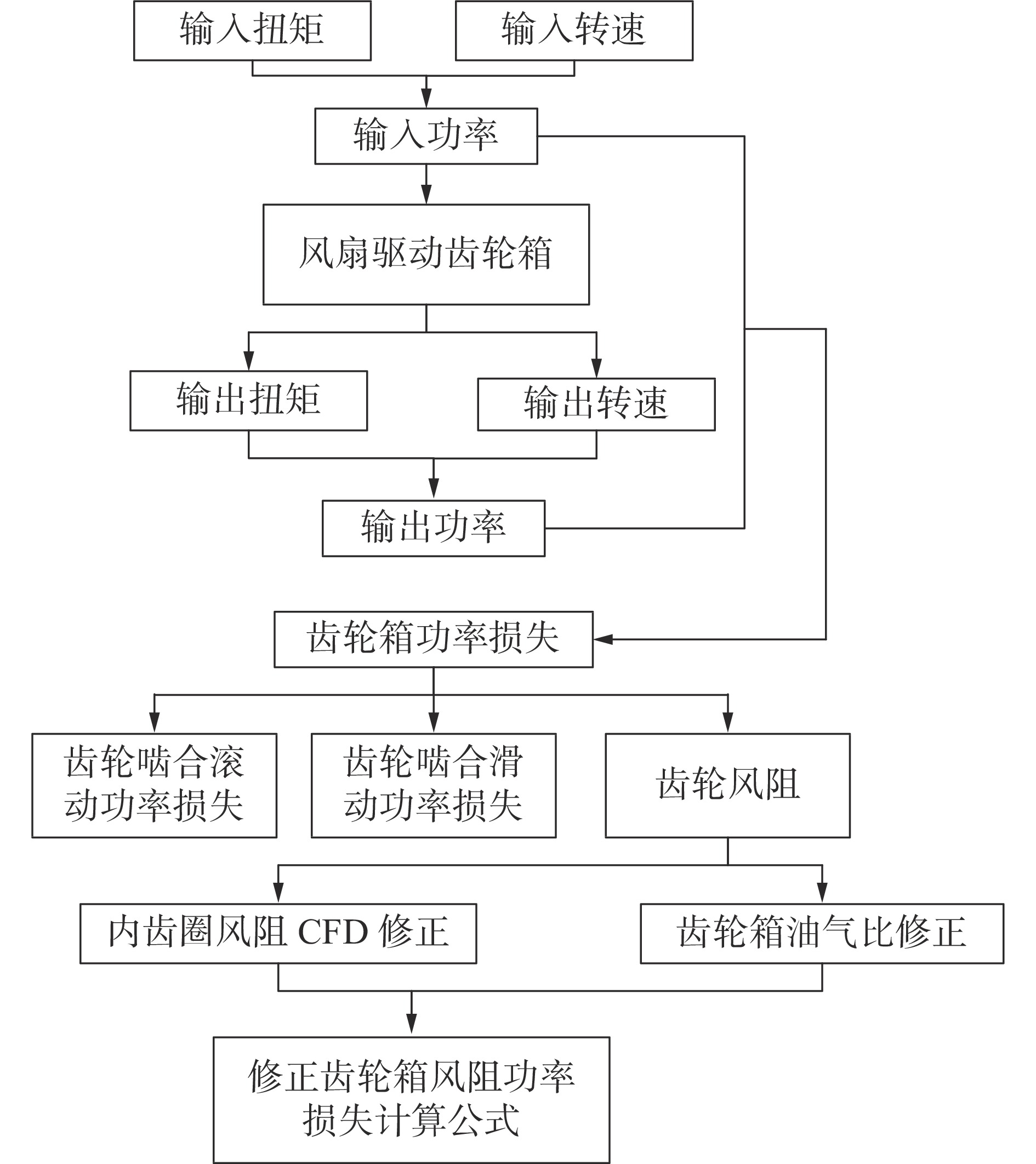
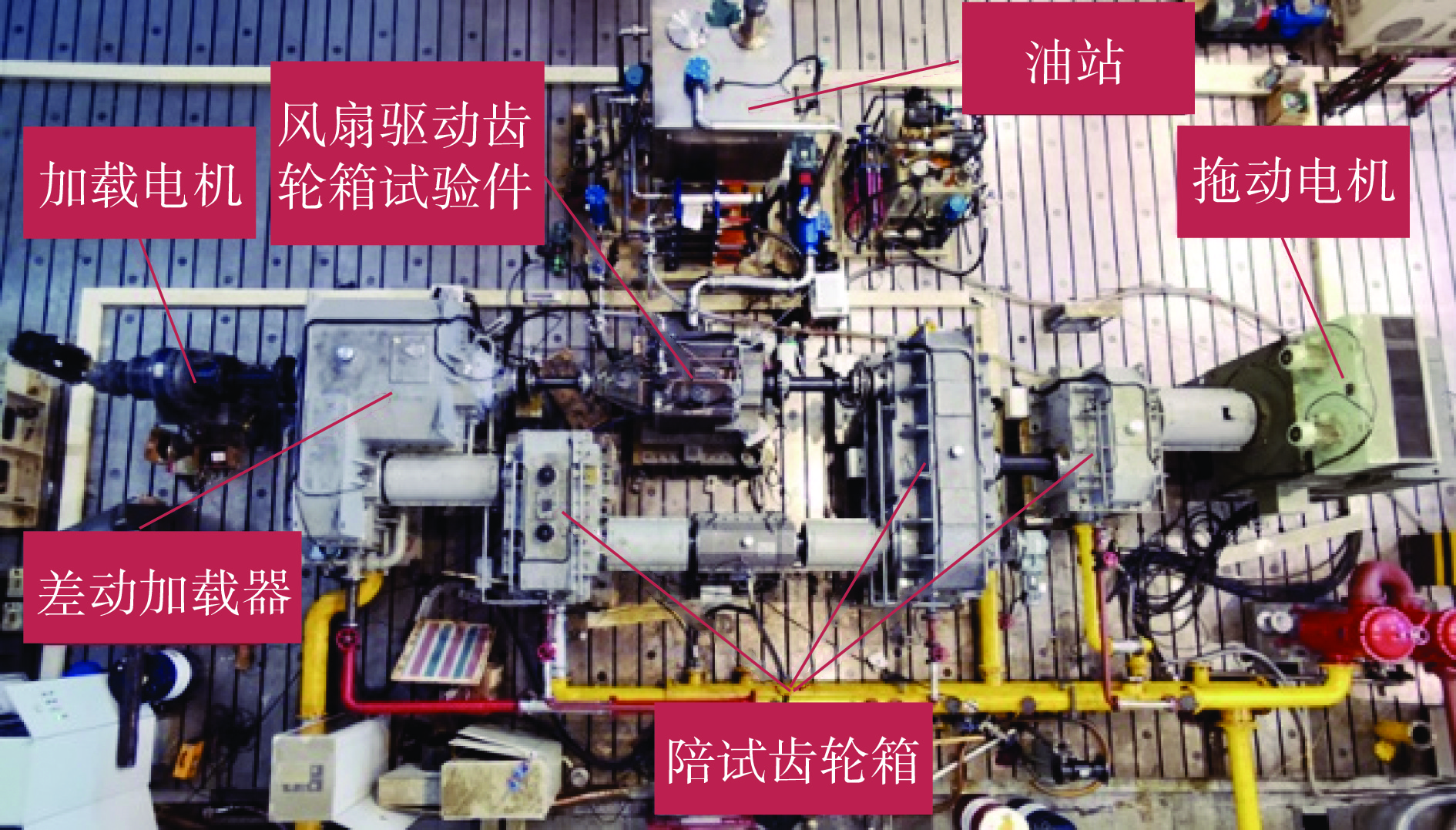
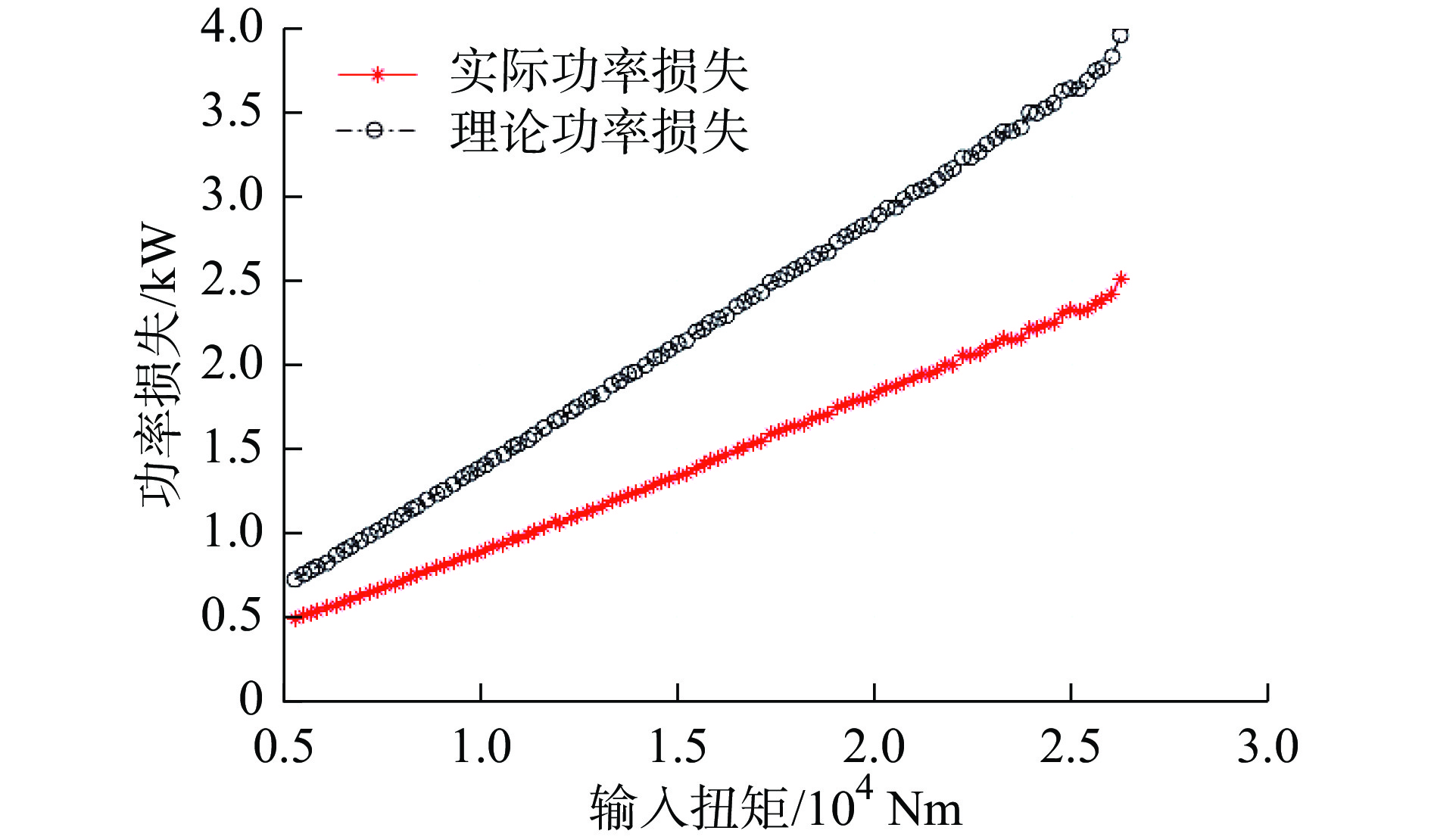
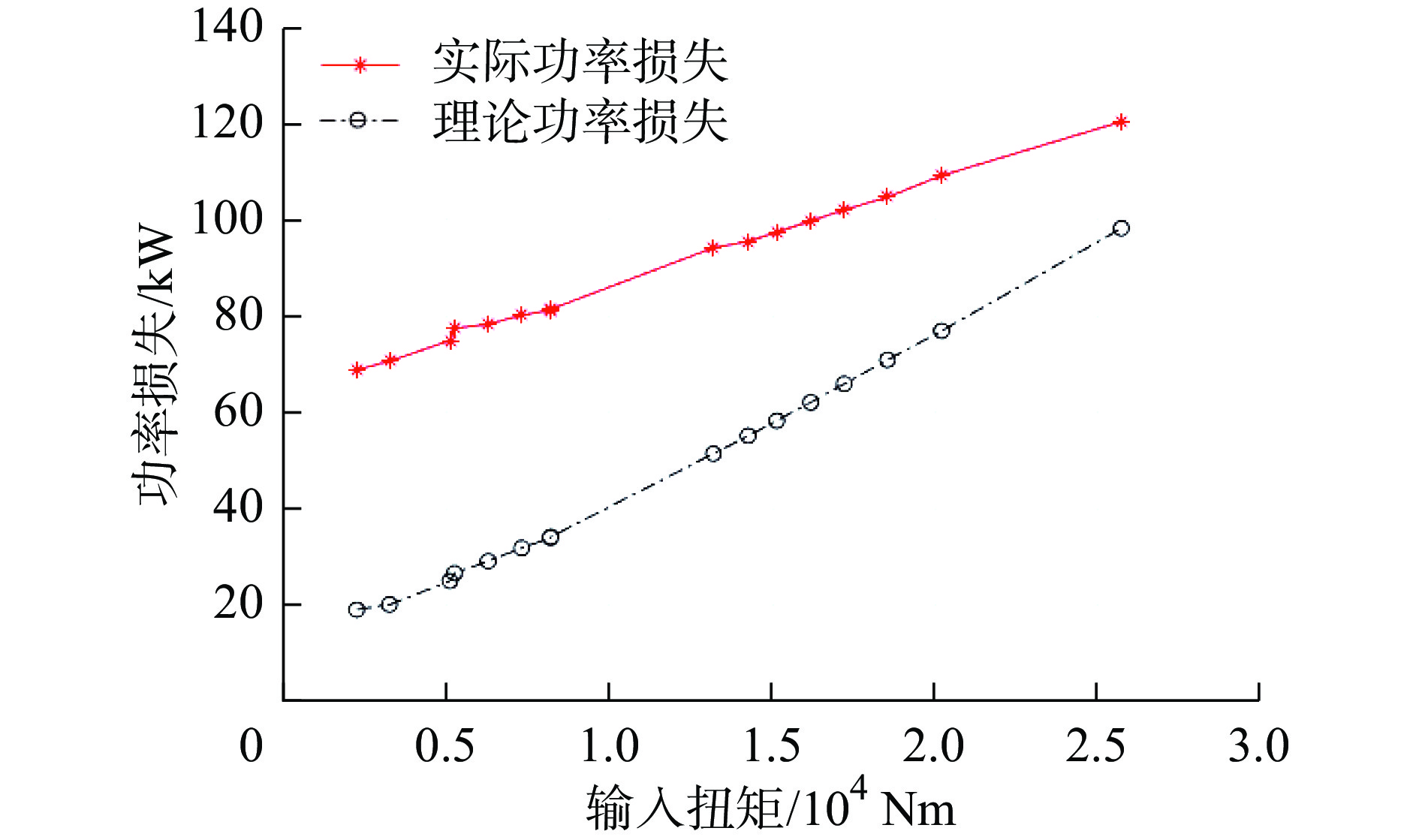
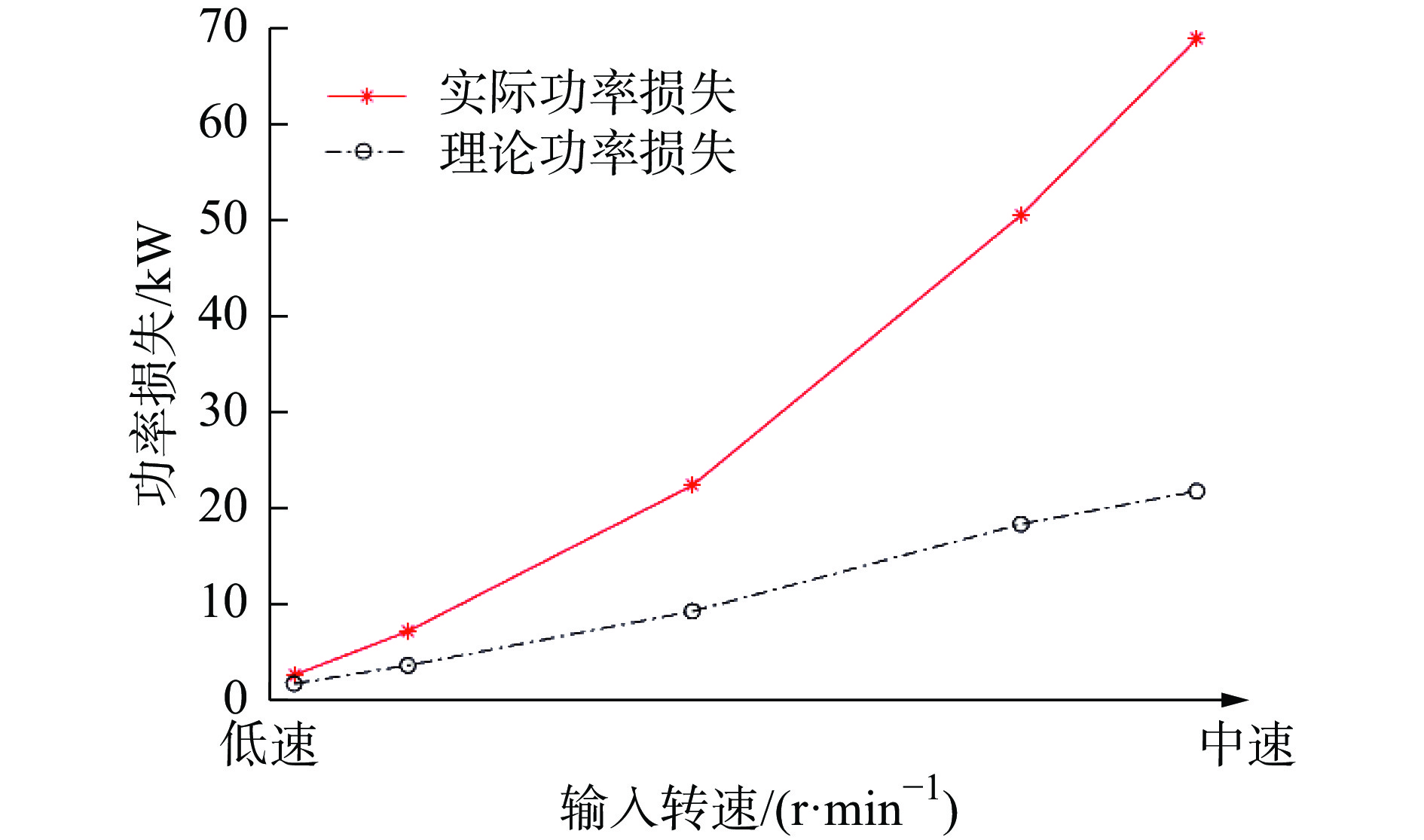
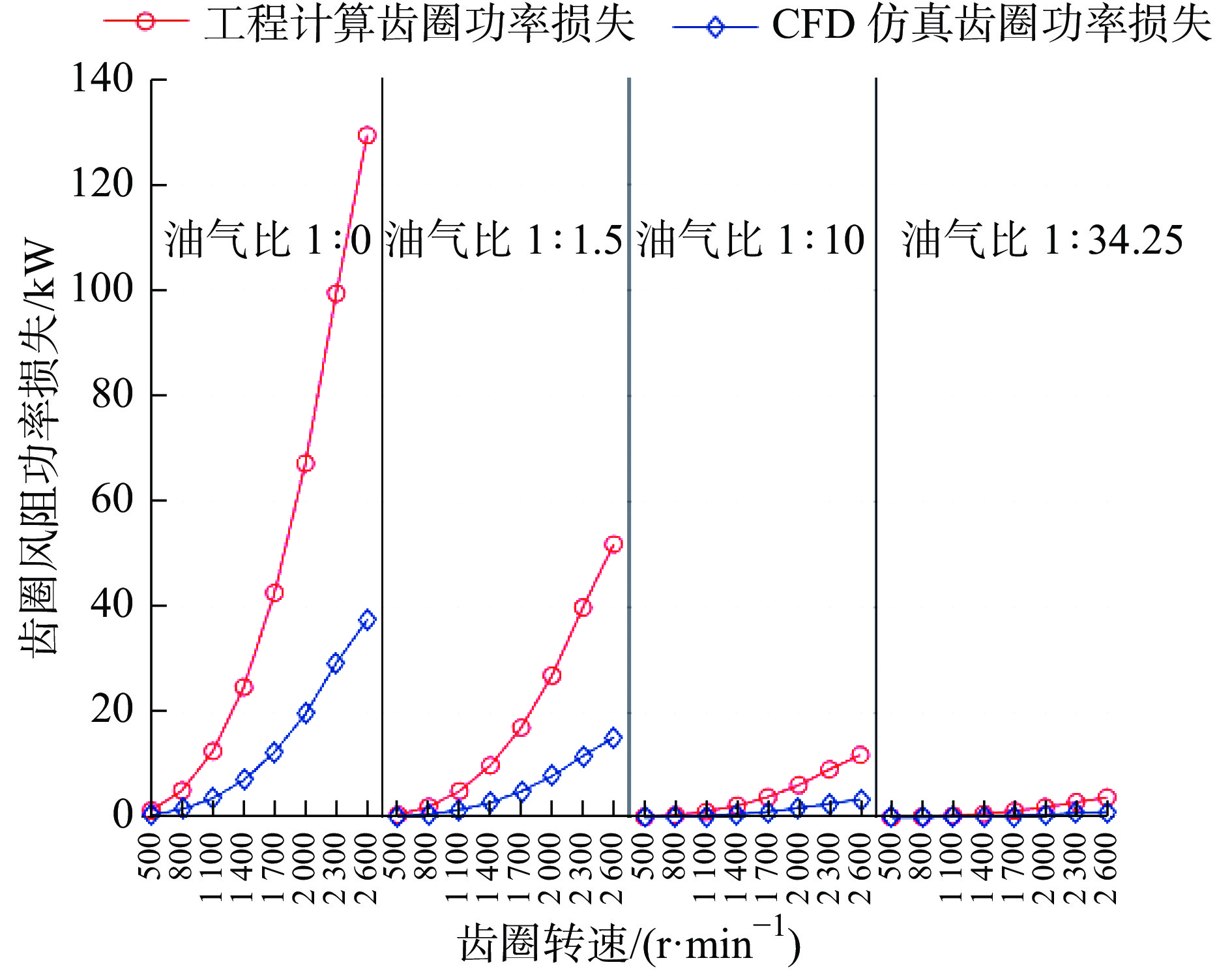
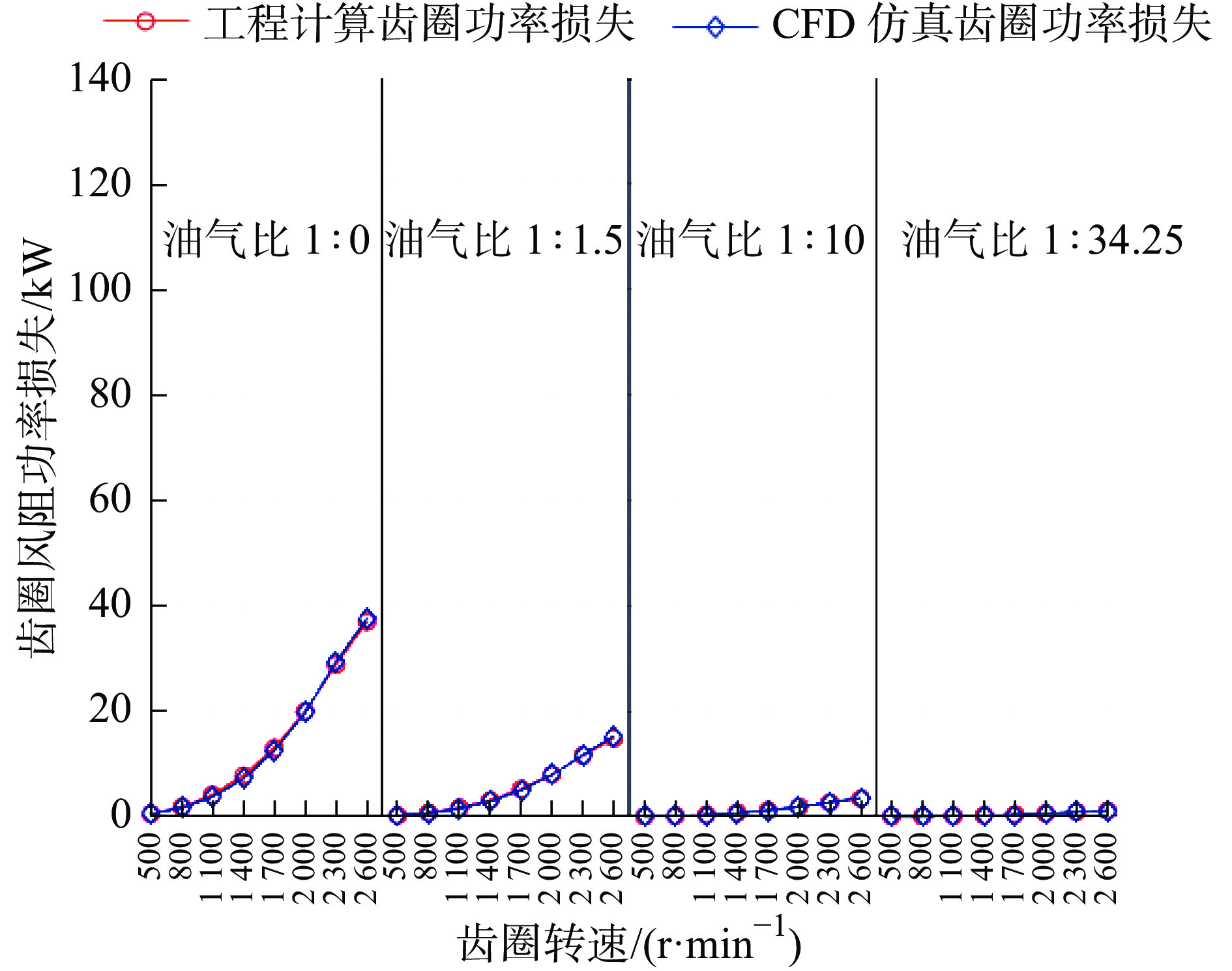
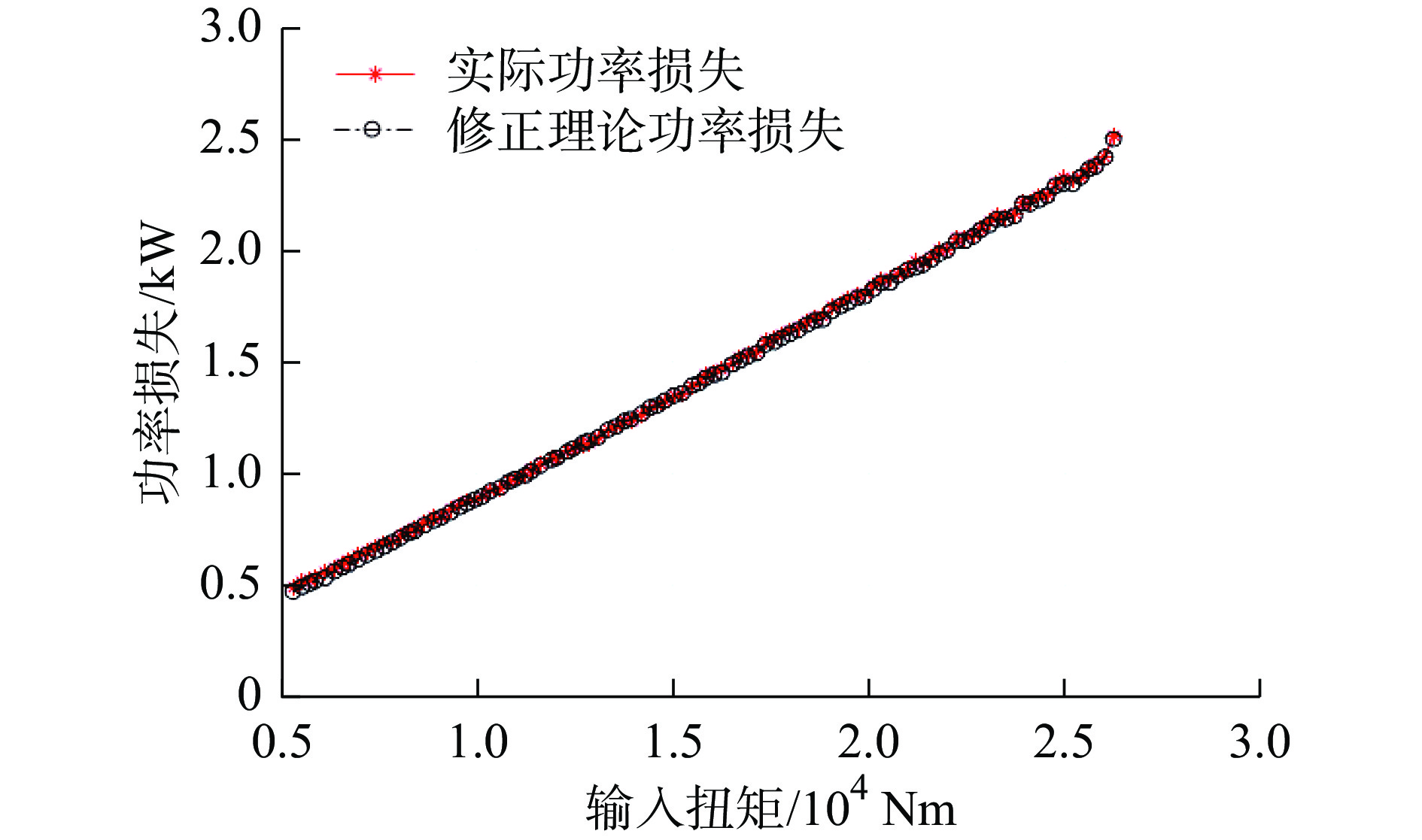
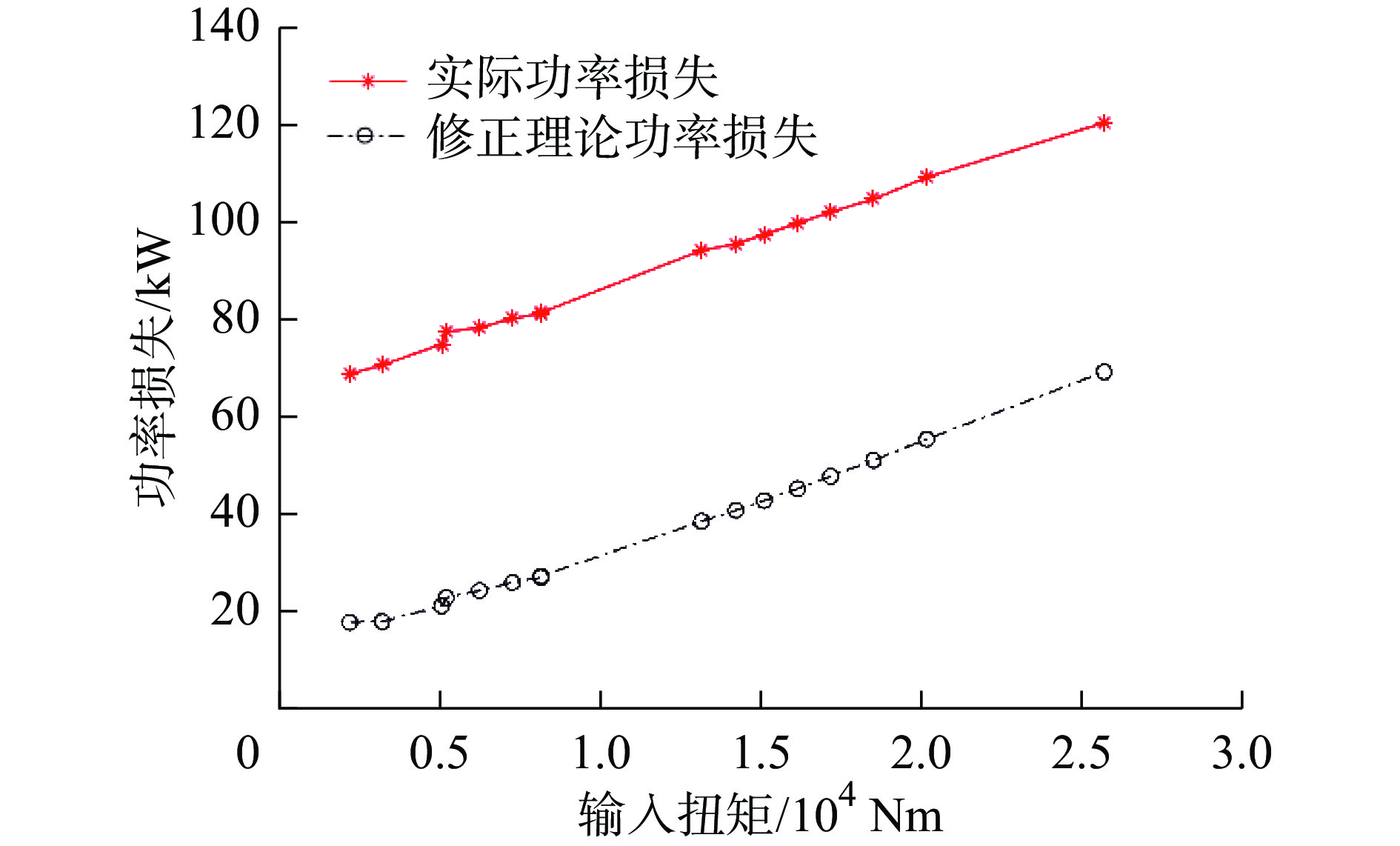
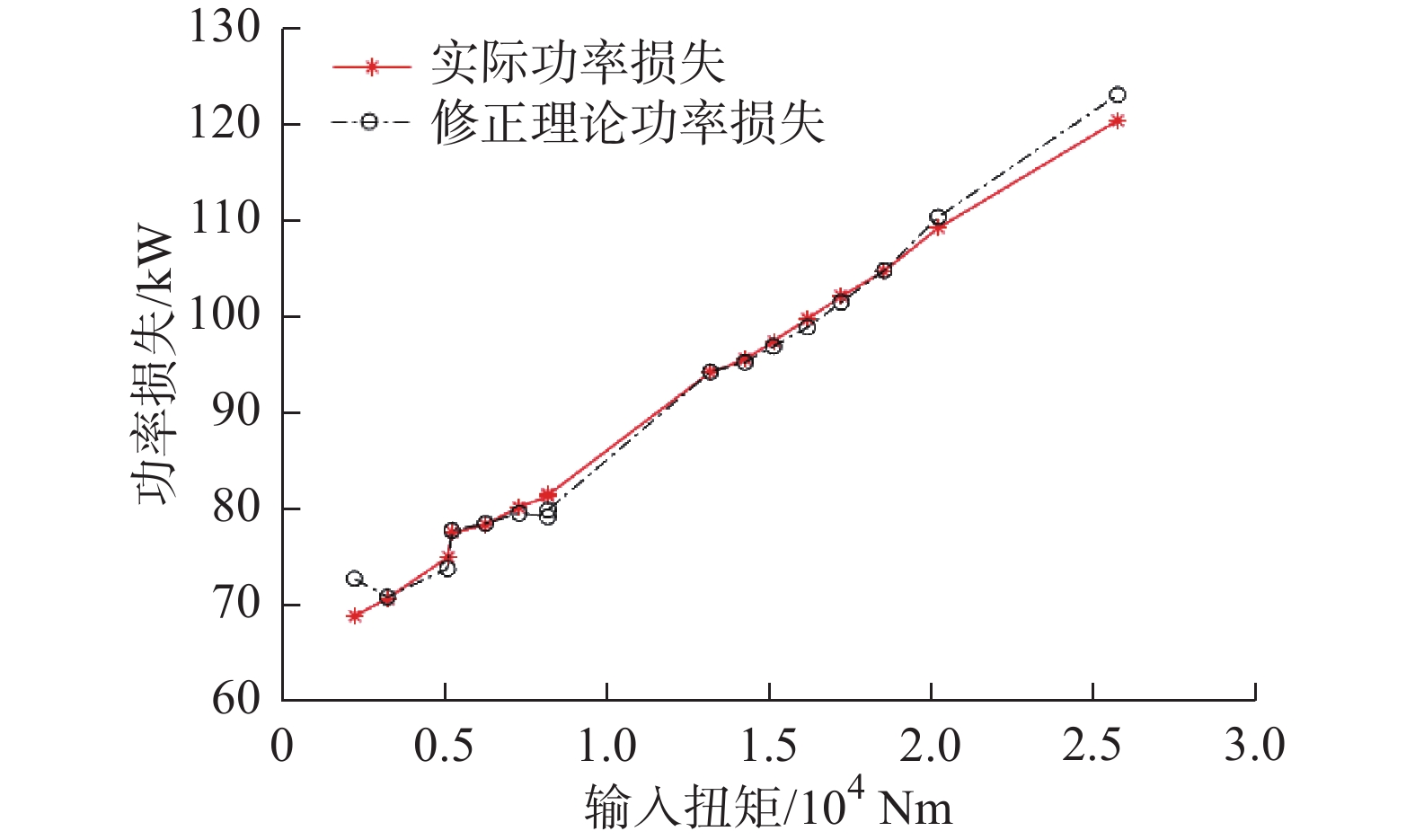
为研究风扇驱动齿轮箱风阻功率损失,基于齿轮风阻原始公式,阐明了油气比1∶34.25的通用风阻公式在风扇驱动齿轮箱中应用的局限性,除油气比外,内齿圈风阻计算公式需通过CFD仿真进行了修正;通过直接法测量GTF风扇驱动齿轮箱不同工况下的功率损失,结果表明:在轻载状态下齿轮箱总功率损失与转速成明显的指数关系,风阻损失占主导,理论值与实测值相差50 kW;不同转速相同扭矩状态下,修正理论功率损失和实测功率损失之间的差值由齿轮风阻引起,风扇驱动齿轮箱中拟合油气比约为1∶1.37;并给出齿轮箱风阻功率损失计算公式修正系数。
为研究风扇驱动齿轮箱风阻功率损失,基于齿轮风阻原始公式,阐明了油气比1∶34.25的通用风阻公式在风扇驱动齿轮箱中应用的局限性,除油气比外,内齿圈风阻计算公式需通过CFD仿真进行了修正;通过直接法测量GTF风扇驱动齿轮箱不同工况下的功率损失,结果表明:在轻载状态下齿轮箱总功率损失与转速成明显的指数关系,风阻损失占主导,理论值与实测值相差50 kW;不同转速相同扭矩状态下,修正理论功率损失和实测功率损失之间的差值由齿轮风阻引起,风扇驱动齿轮箱中拟合油气比约为1∶1.37;并给出齿轮箱风阻功率损失计算公式修正系数。
2023, 42(12): 2132-2143.
doi: 10.13433/j.cnki.1003-8728.20220180
摘要:
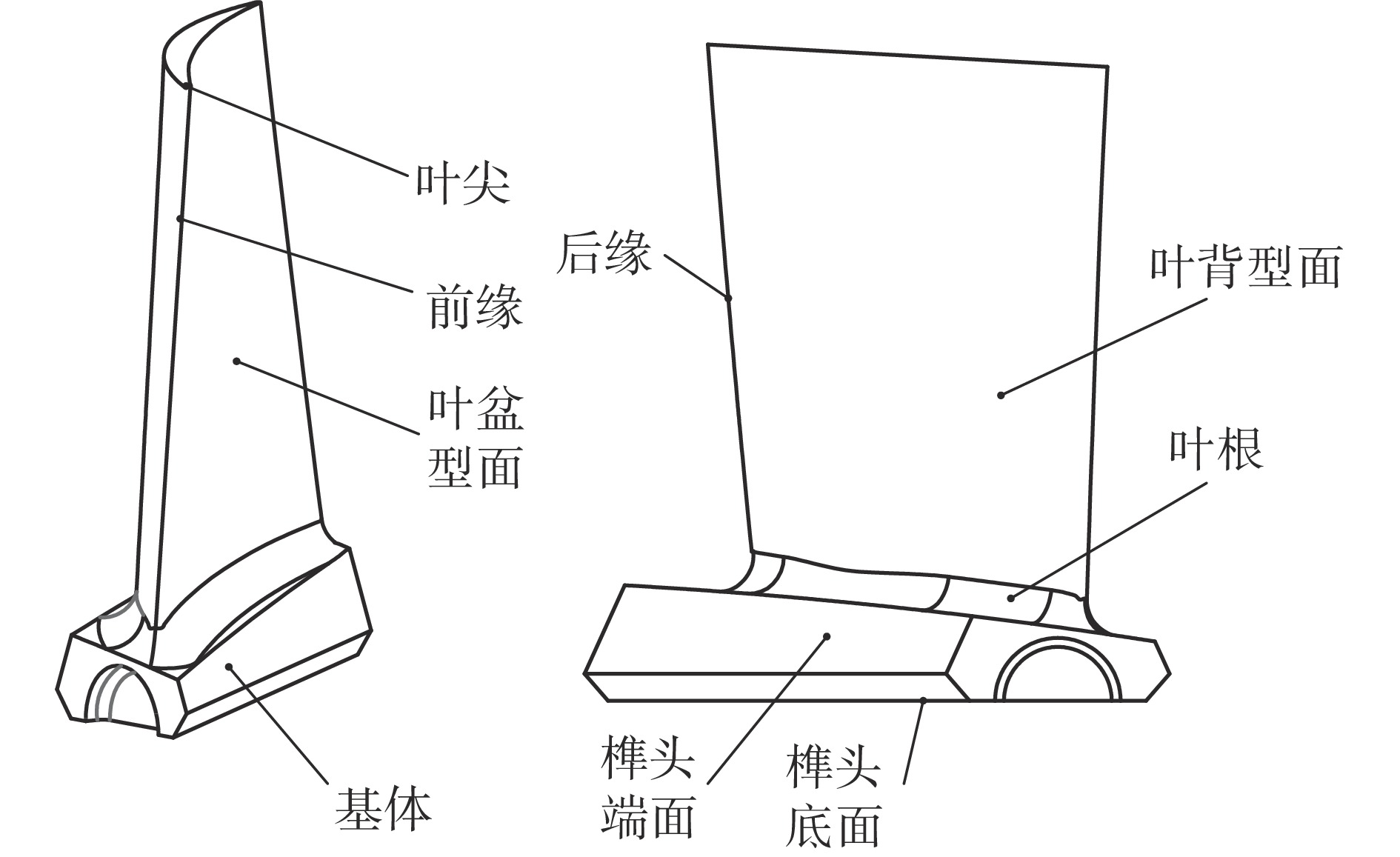
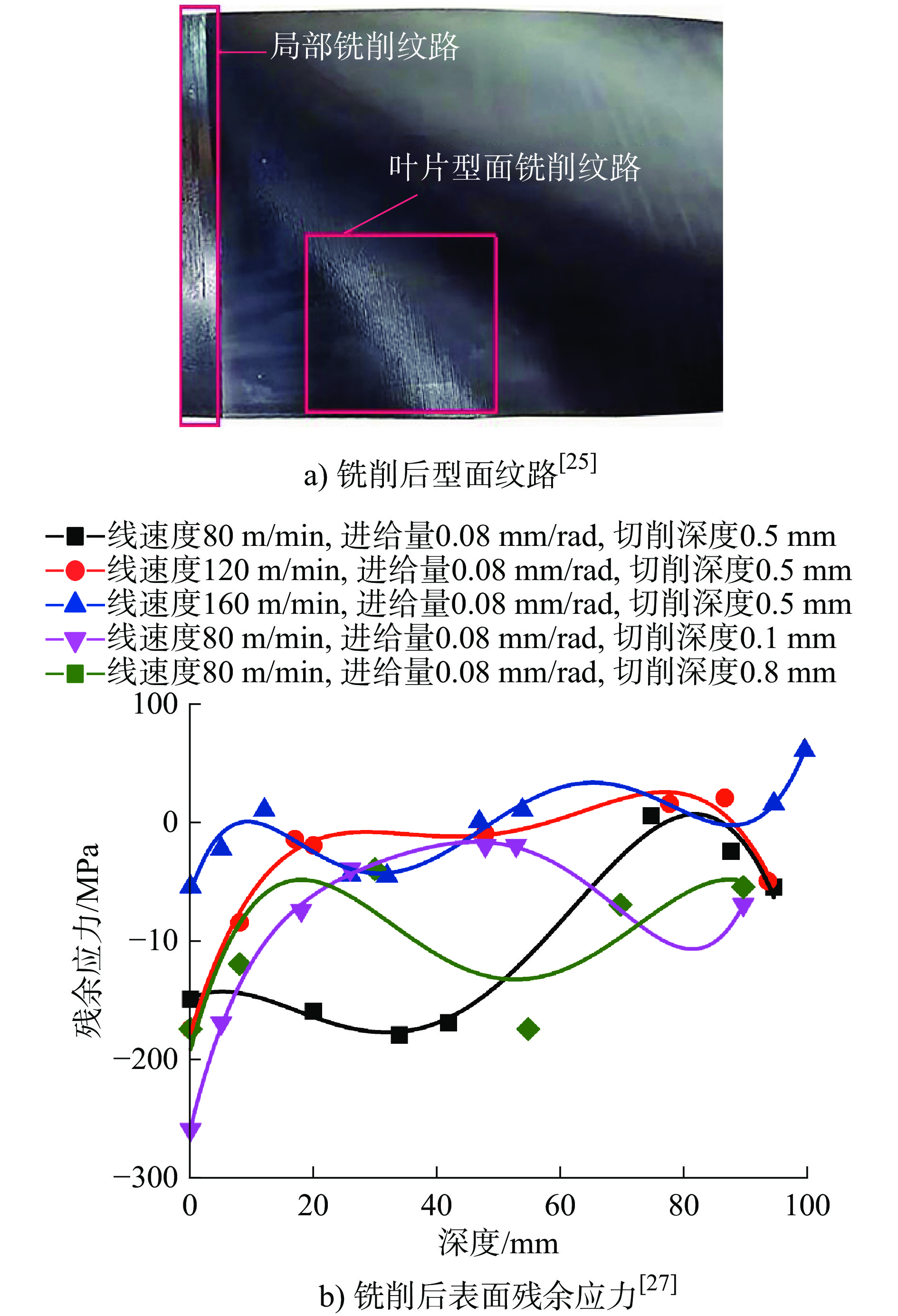
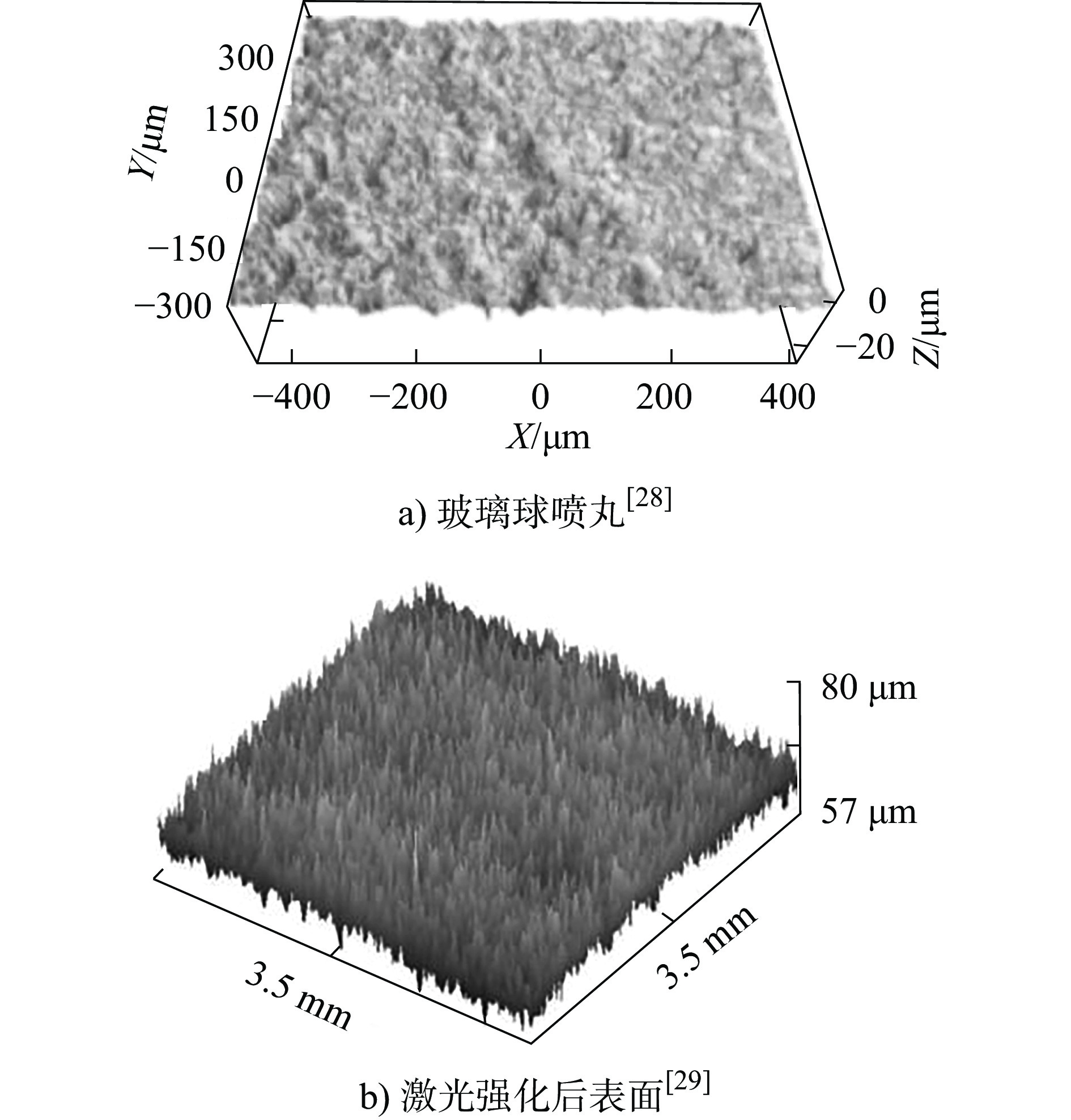
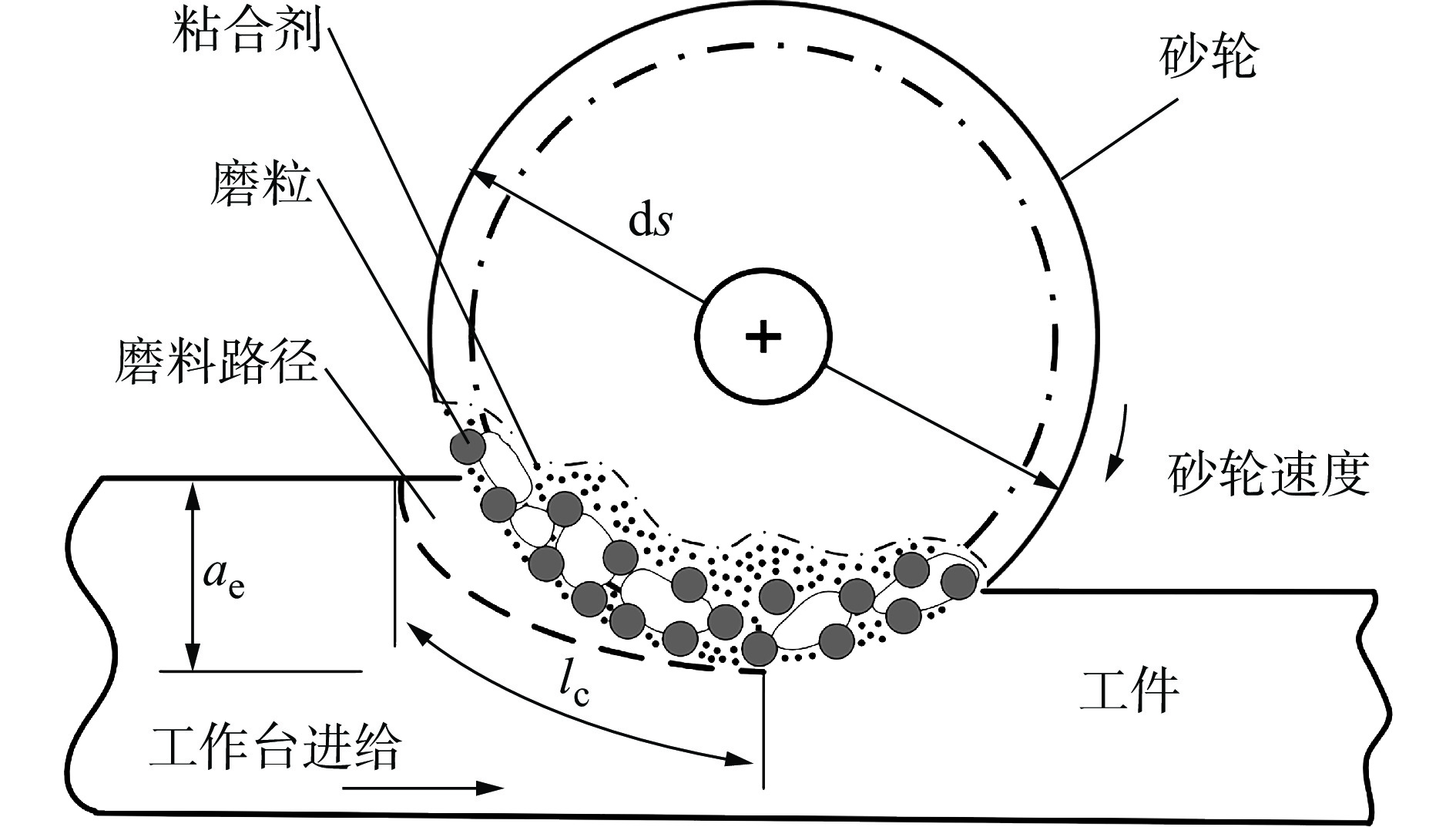
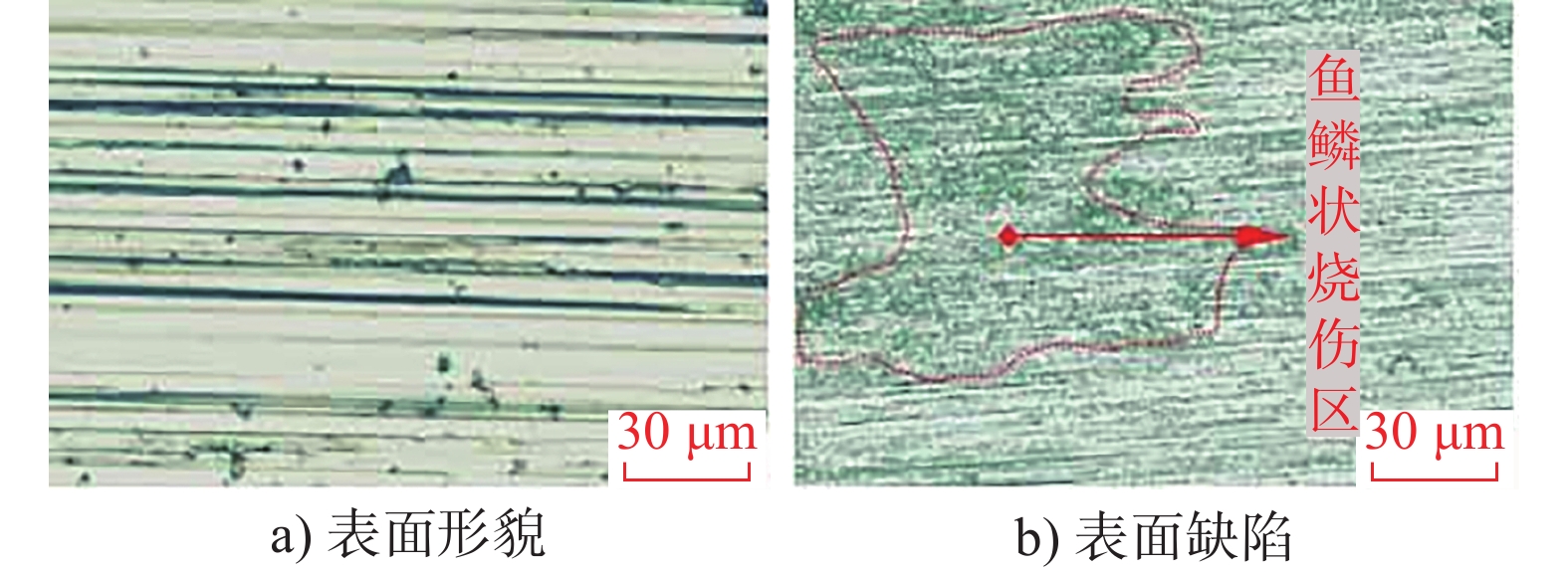
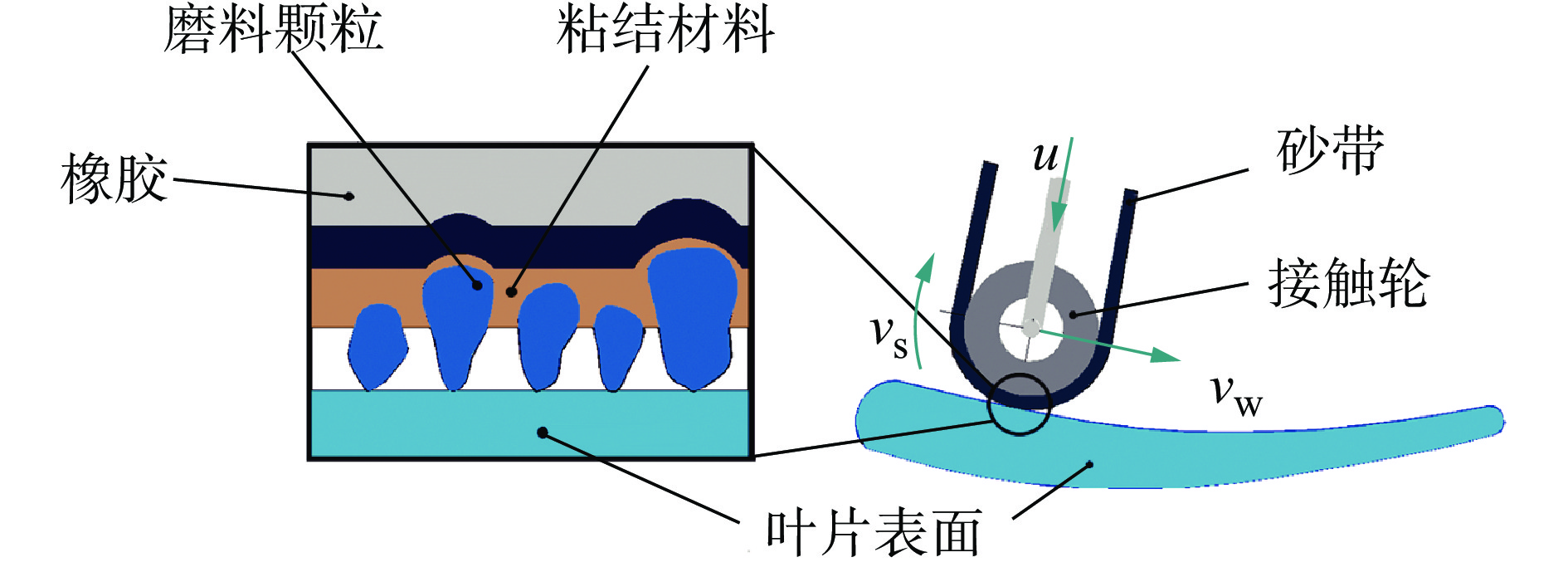
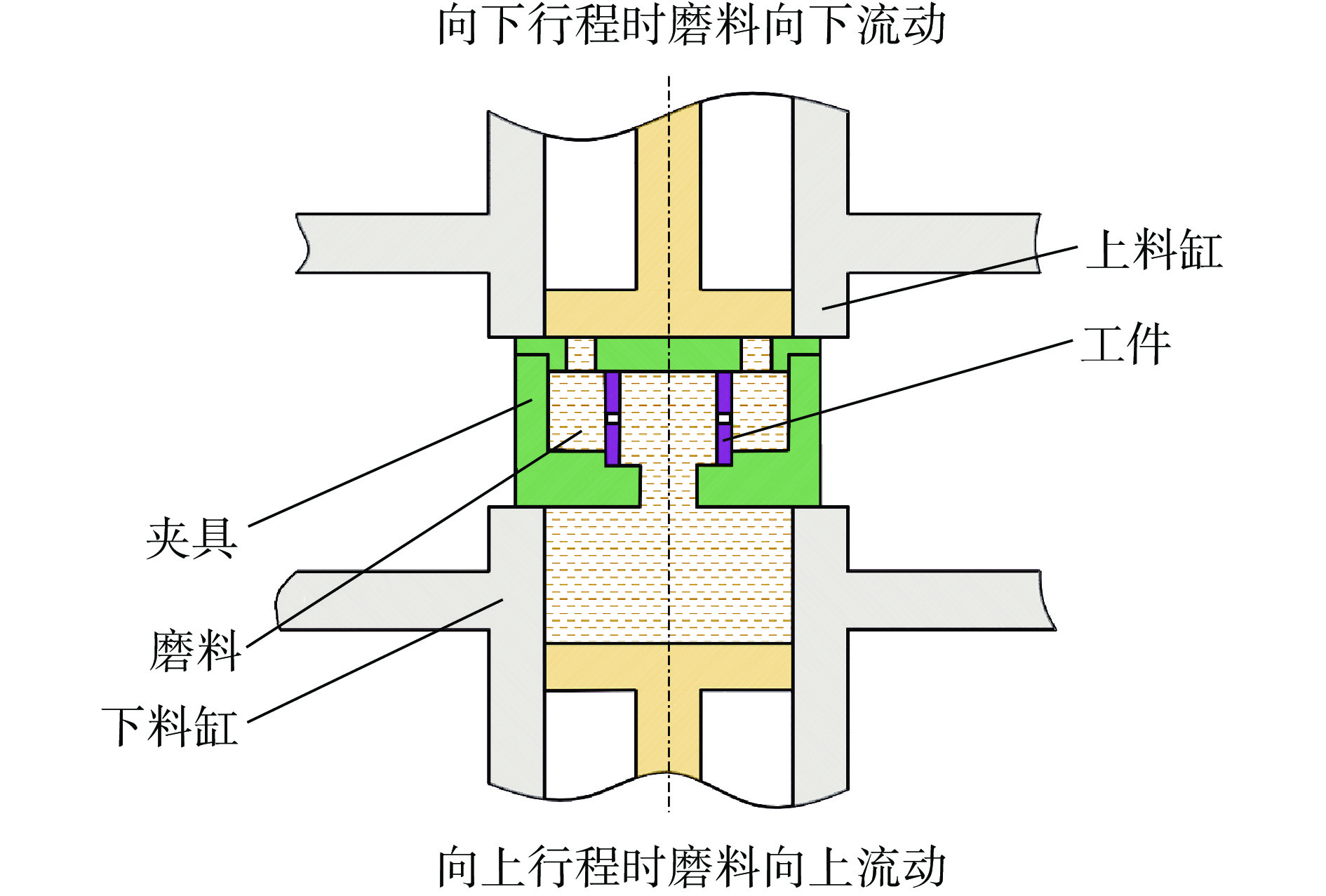
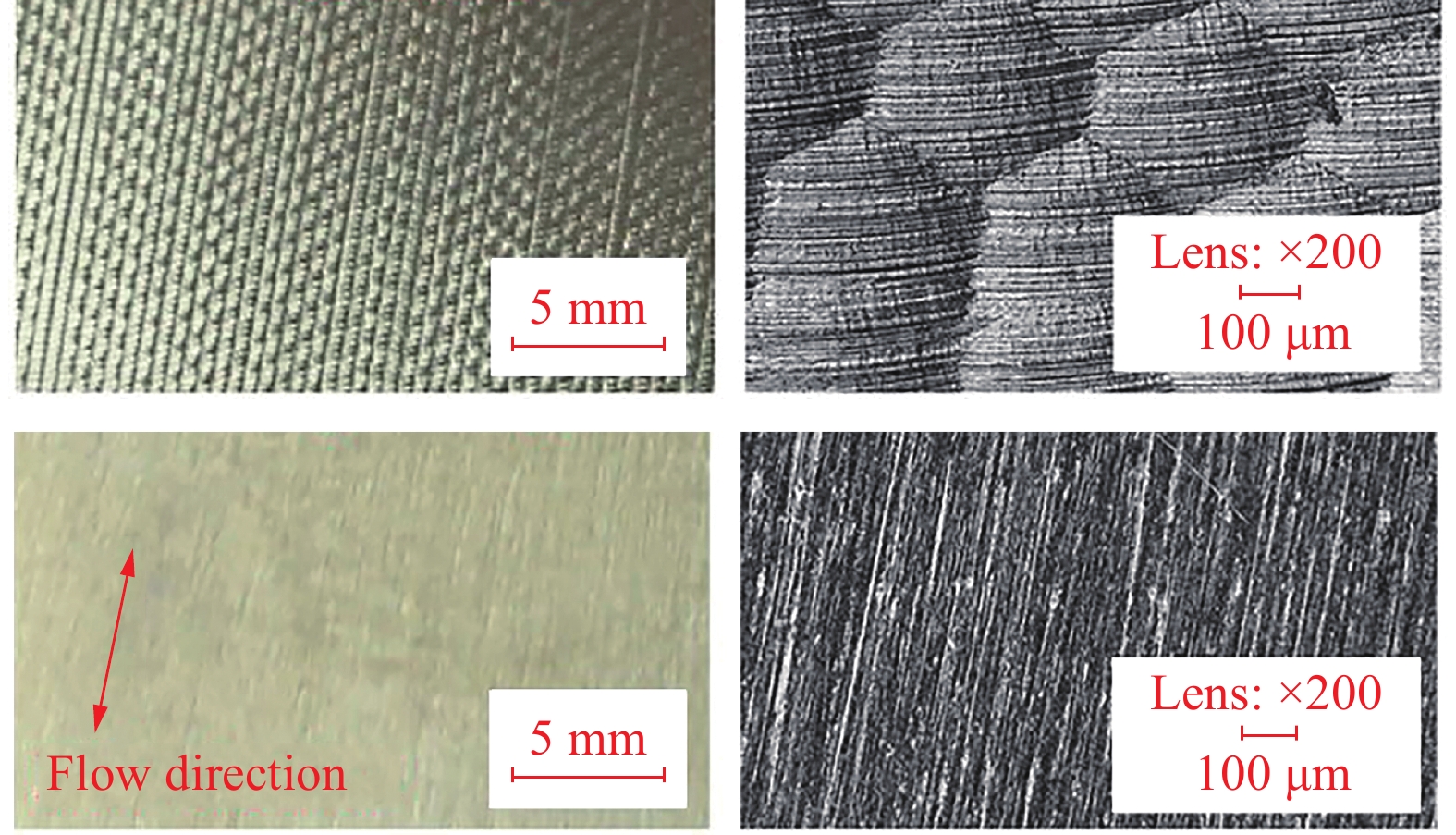
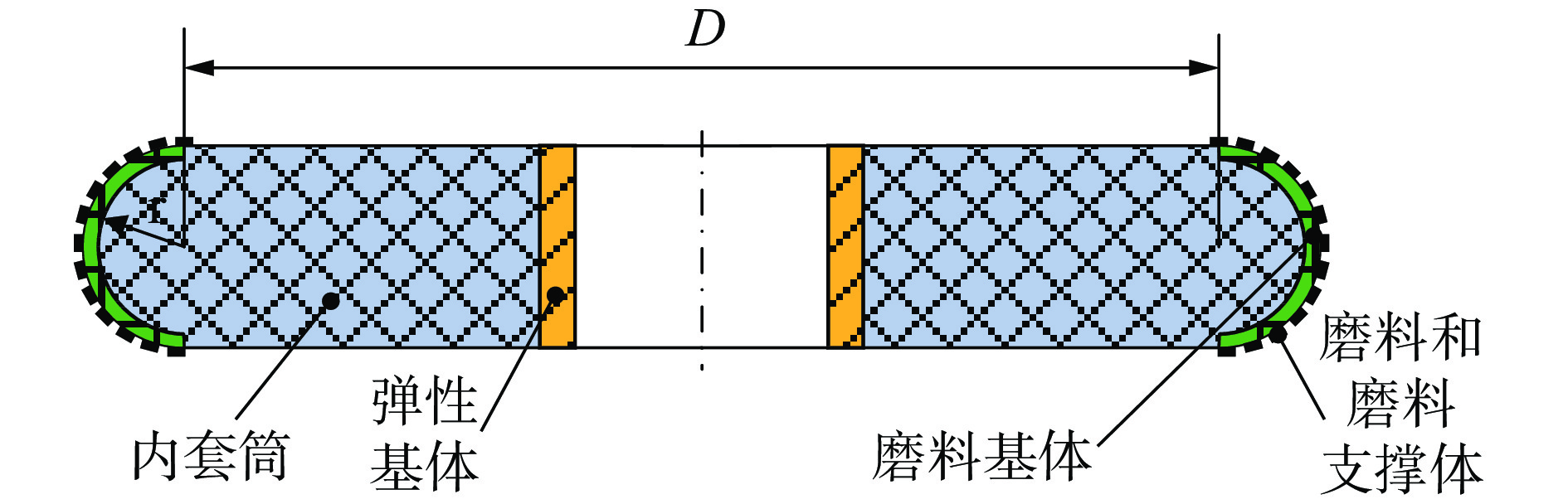
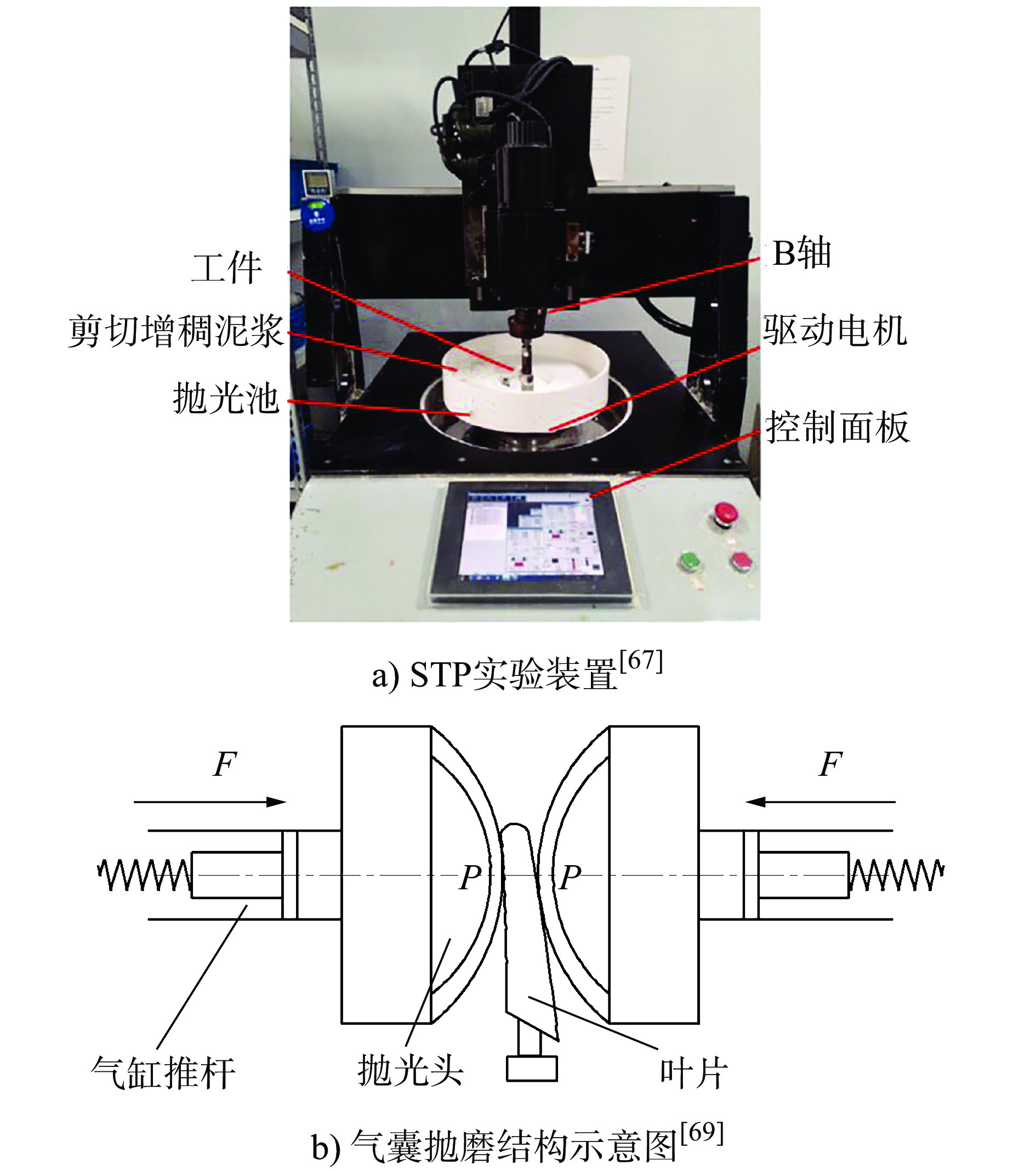
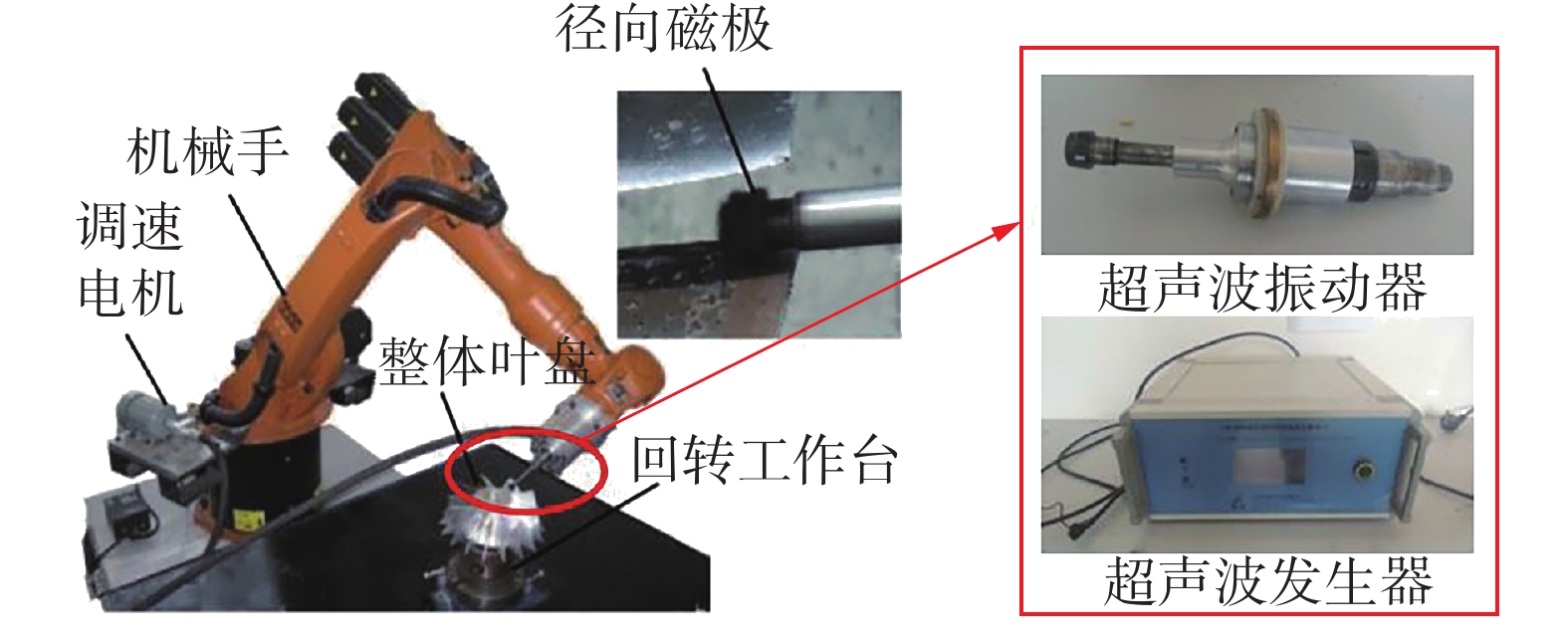
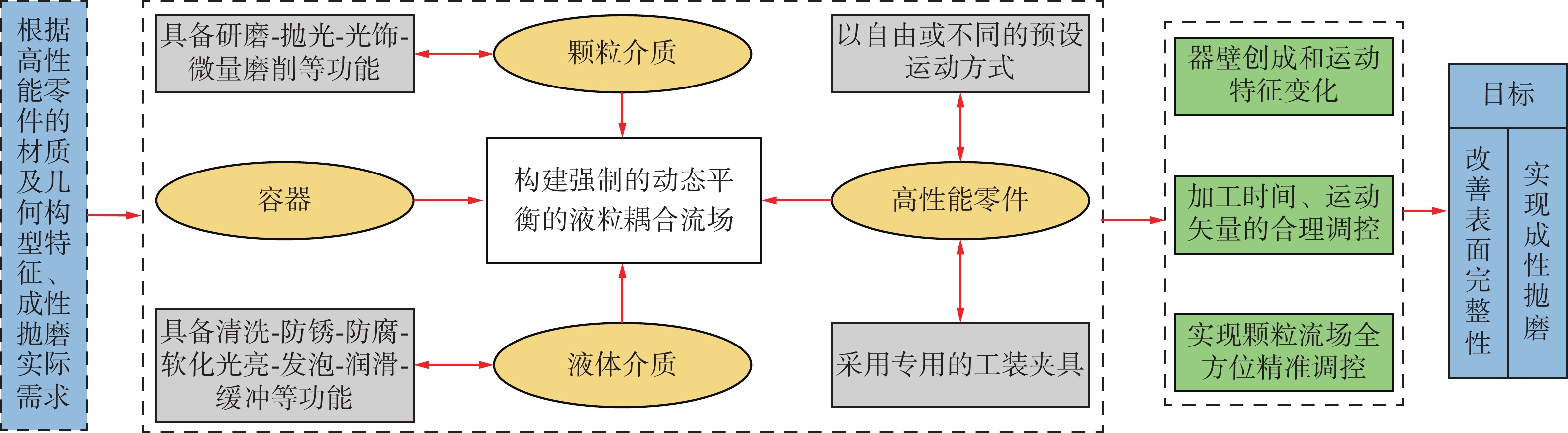
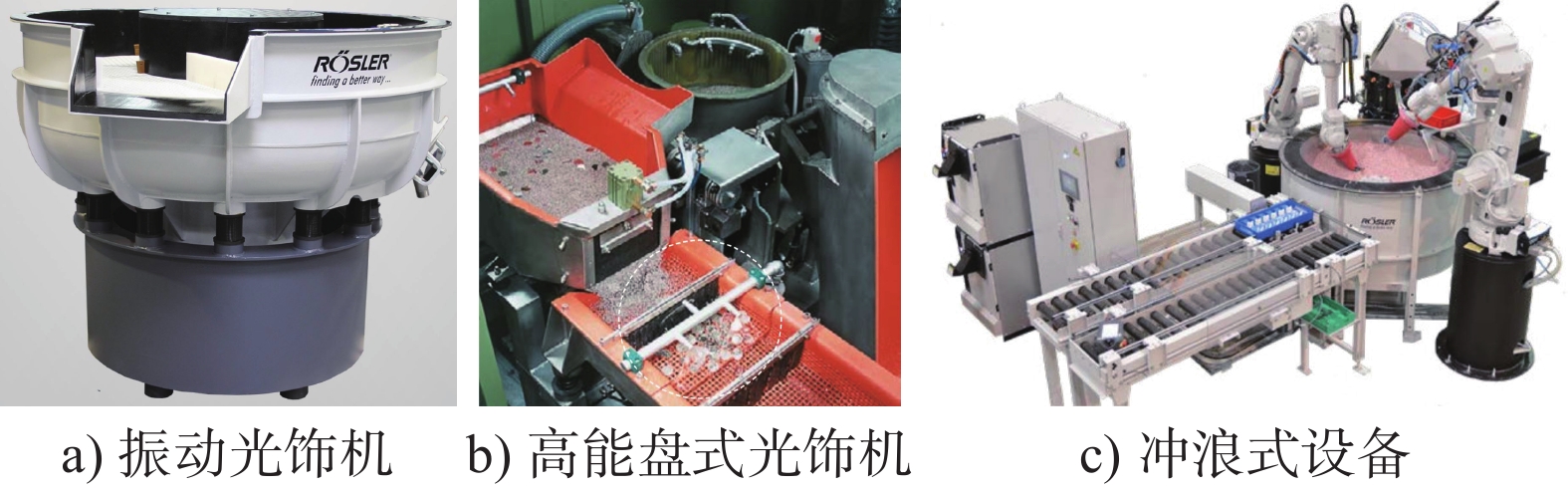
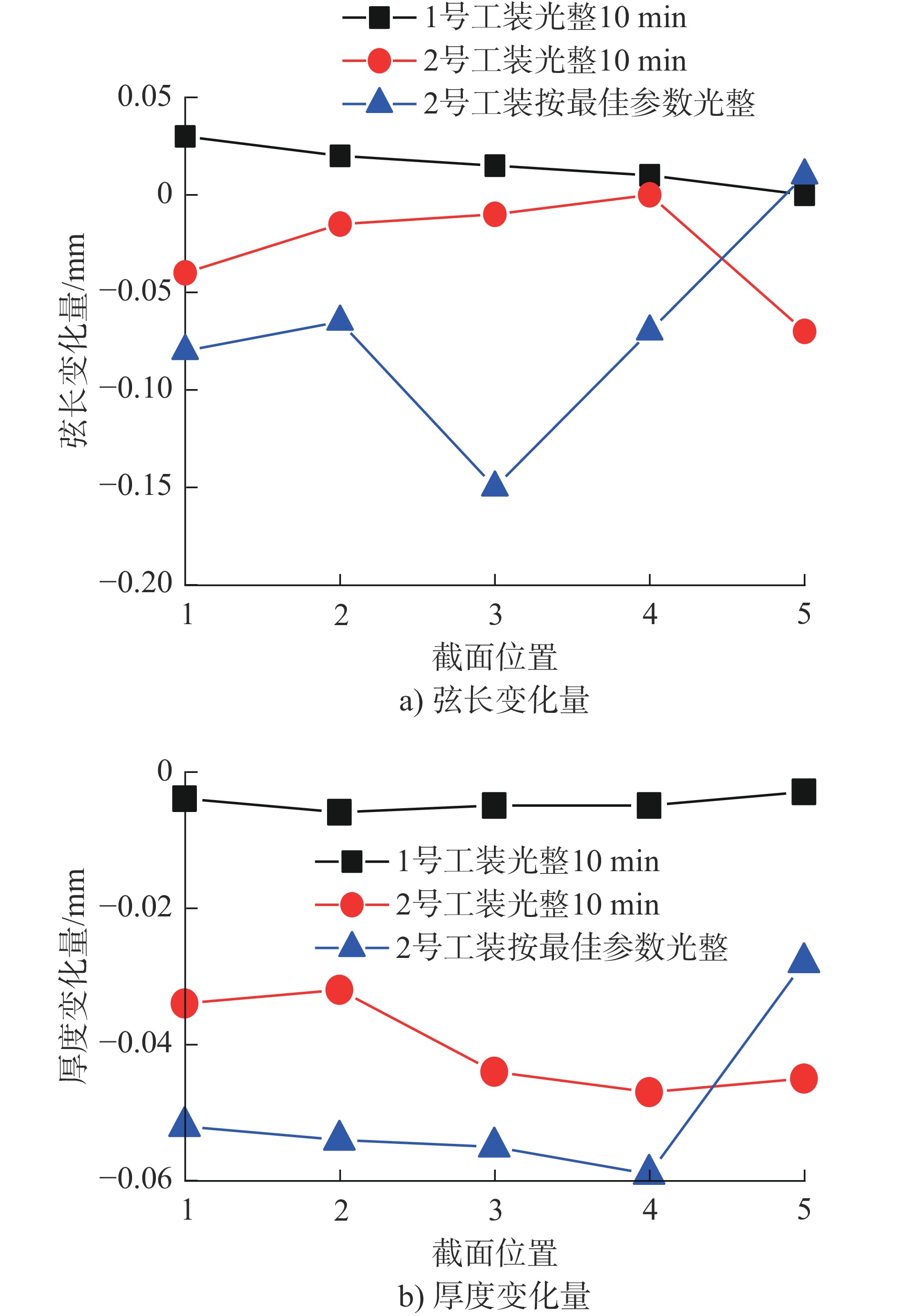
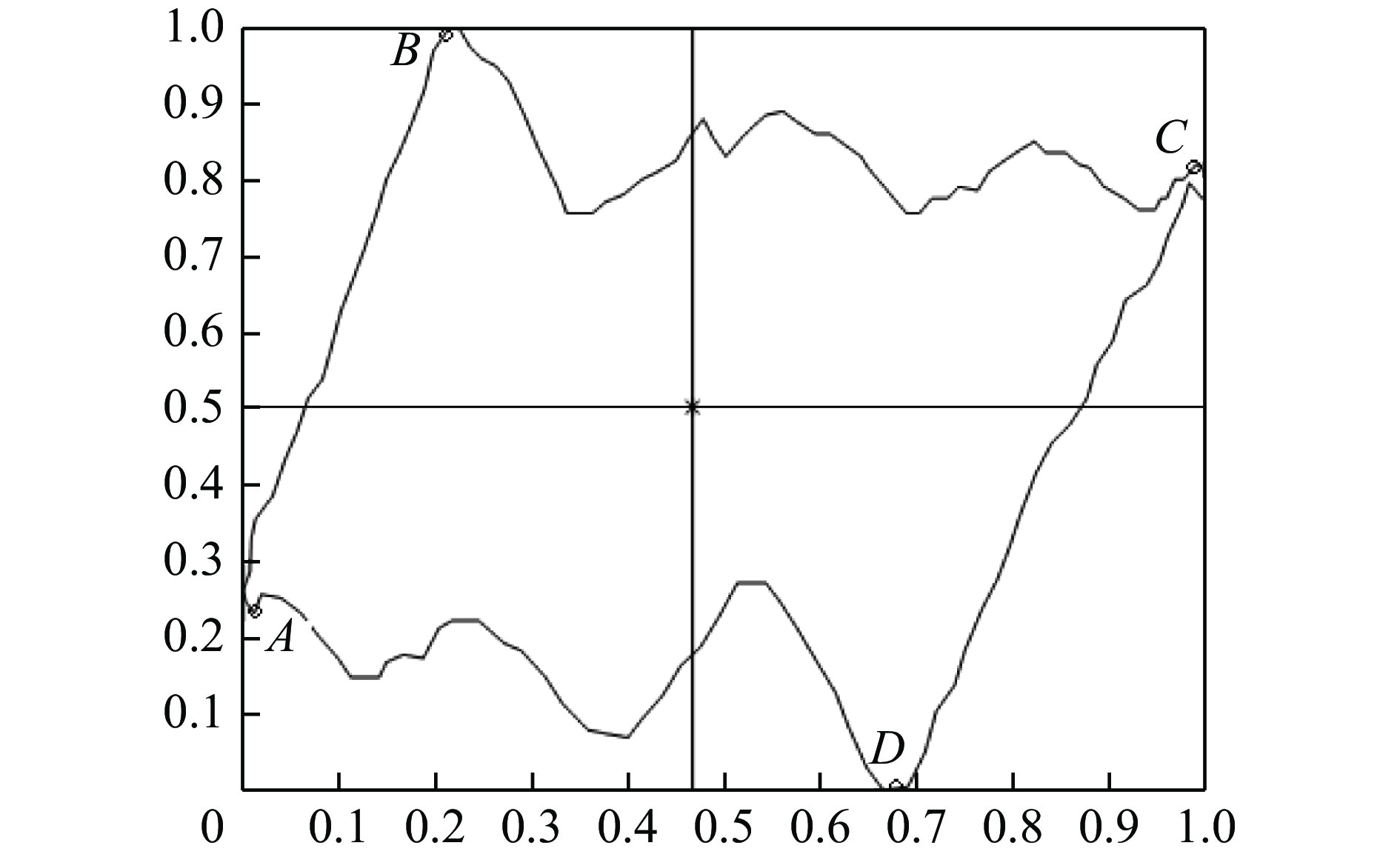
叶片是航空发动机的核心部件,其苛刻的工况对其加工精度和表面完整性提出了更高要求。针对铣削叶片现有成性技术,阐述了叶片典型结构及抛磨前的表面状态,归纳了叶片抛磨技术关键共性难点。以表面完整性为评价指标,从手工抛磨、砂轮抛磨、砂带抛磨、磨粒流抛磨、柔性工具抛磨、磁力辅助抛磨、滚磨光整加工等方面介绍了航空发动机叶片抛磨的国内外研究进展,对比了各种抛磨技术的优缺点及适用范围。
叶片是航空发动机的核心部件,其苛刻的工况对其加工精度和表面完整性提出了更高要求。针对铣削叶片现有成性技术,阐述了叶片典型结构及抛磨前的表面状态,归纳了叶片抛磨技术关键共性难点。以表面完整性为评价指标,从手工抛磨、砂轮抛磨、砂带抛磨、磨粒流抛磨、柔性工具抛磨、磁力辅助抛磨、滚磨光整加工等方面介绍了航空发动机叶片抛磨的国内外研究进展,对比了各种抛磨技术的优缺点及适用范围。