




Exploring Piecewise Predictive Path Tracking Control of Four Steering Wheel Mobile Robot
-
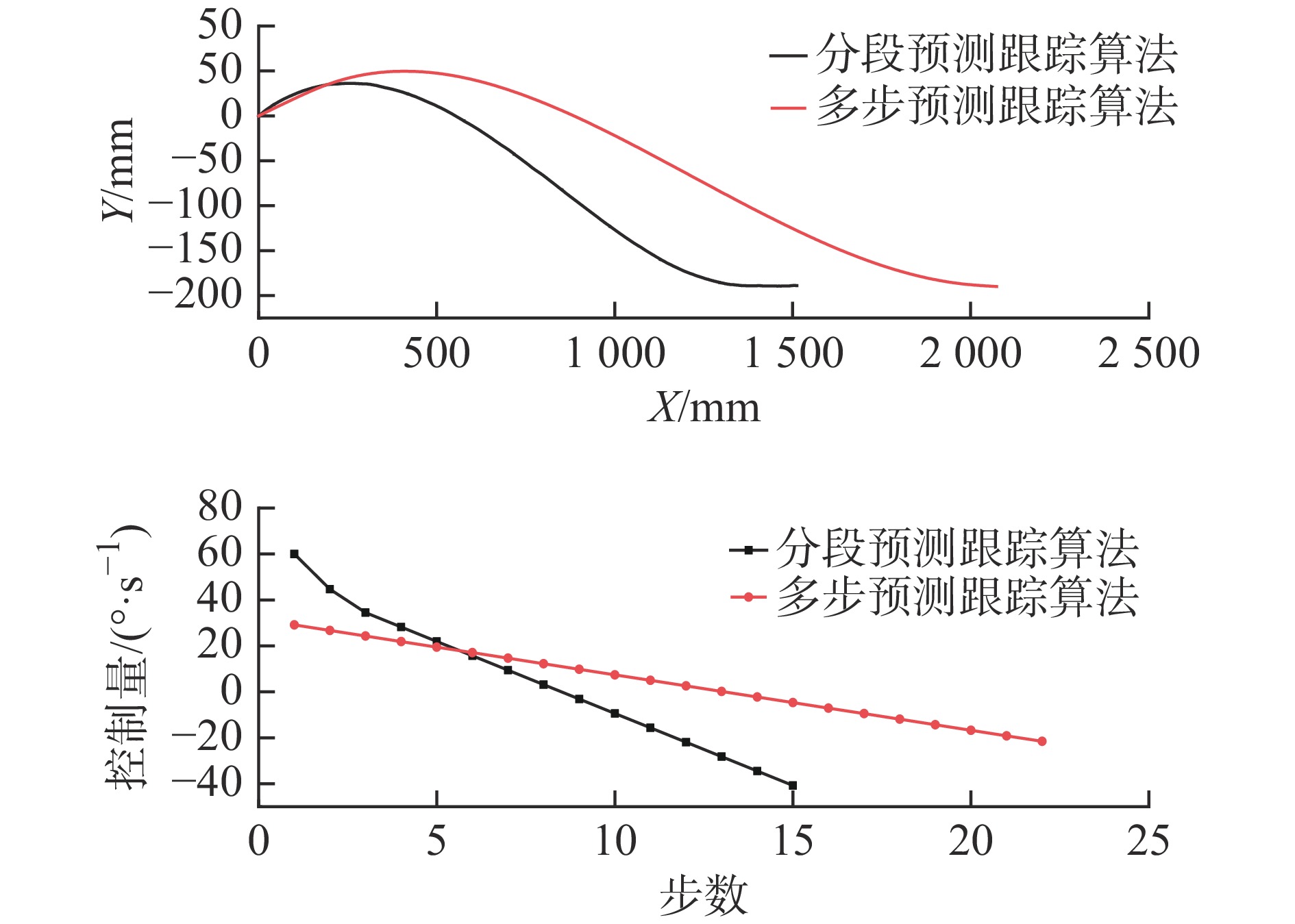
摘要: 针对四舵轮移动机器人路径跟踪特点,使用工控机、运动控制卡,基于Visual C + + 平台开发了一种移动机器人路径跟踪系统。针对四舵轮移动机器人构型,采用速度-几何法建立了机器人运动学控制模型。提出了一种基于最优控制的分段预测路径跟踪算法,避免了对所需参数进行试凑的同时,降低了车体远离目标路径情况下的距离偏差最大超调与纠偏总步数。路径跟踪实验表明,应用所提出的分段预测路径跟踪算法的移动机器人可以较好地跟踪目标路径,相比未使用分段预测路径跟踪算法的多步预测控制,其位置偏差最大超调降低了29.81%,达到35.563 mm,纠偏用时降低了38.10%,达到13 s,且定位精度达到11.292 mm、0.51°,可以较好地满足四舵轮移动机器人定位需求。Abstract: According to the path trackingcharacteristics of a four steering wheel mobile robot, themobile robot’s path tracking system was developed based on the Visual C++ platform with an industrial computer and a motion control card. Based on the configuration of the four steering wheel mobile robot, its kinematics control model was established with the velocity geometry method. On this basis, a piecewise predictive path tracking algorithm based on optimal control was proposed. It not only avoids the trial of required parameters but also reduces the maximum overshoot of distance deviation and the total number of deviation correctionsteps when the vehicle body was away from its target path. The experimental results on path tracking show that the mobile robot using thepiecewise predictive path tracking algorithm can well track the target path. Compared with the multi-step predictive control that does not usethe piecewise predictive path tracking algorithm, the piecewise predictive path tracking algorithm reduces the maximum overshoot of position deviationby 29.81%, reaching 35.563 mm, the time for deviation correction by 38.10%, reaching 13 s, its positioning accuracy being 11.292 mm and 0.51°, better meeting the positioning requirements of a four steering wheel mobile robot.
-
表 1 分段预测跟踪算法测量数据
Table 1. Measurement data of segmented prediction tracking algorithm
采样时间/s 实测坐标/mm 距离偏差/mm X Y 0 0.00349 −0.07014 199.92986 1 106.00286 25.12481 225.12481 2 214.93878 35.56286 235.56286 3 324.14235 34.40946 234.40946 4 432.67459 22.52917 222.52917 5 540.09852 2.91928 202.91928 6 646.53675 −22.82002 177.17998 7 751.82725 −52.57517 147.42483 8 960.75699 −115.41268 84.58732 9 1065.94173 −144.45835 55.54165 10 1172.5166 −168.64139 31.35861 11 1280.34719 −184.07387 15.92613 12 1389.16727 −189.22472 10.77528 13 1511.88128 −188.97767 11.02233  下载: 导出CSV
下载: 导出CSV
表 2 多步预测跟踪算法测量数据
Table 2. Measurement data of multi-step predictive tracking algorithm
采样时间/s 实测坐标/mm 距离偏差/mm X Y 0 0.04521 0.00328 200.00328 1 96.59258 18.75479 218.75479 2 194.81261 36.39371 236.39371 3 294.06749 46.82344 246.82344 4 393.87914 50.66718 250.66718 5 493.87692 48.6926 248.6926 6 593.78852 41.73392 241.73392 7 693.43019 30.63436 230.63436 8 792.69534 16.20659 216.20659 9 891.54410 −0.79079 199.20921 10 989.99182 −19.66355 180.33645 11 1088.09793 −39.78136 160.21864 12 1185.95494 −60.56924 139.43076 13 1283.67755 −81.49330 118.5067 14 1381.39184 −102.0431 97.9569 15 1479.22459 −121.7130 78.287 16 1577.29257 −139.9841 60.0159 17 1675.69182 −156.3103 43.6897 18 1774.48667 −170.1084 29.8916 19 1873.6987 −180.7575 19.2425 20 1973.29609 −187.60731 12.39269 21 2073.18178 −188.50837 11.49163
下载: 导出CSV
-
[1] KIM J J, KIM D J, KOO K W. Position recognition and driving control for an autonomous mobile robot that tracks tile grid pattern[J]. The Transactions of the Korean Institute of Electrical Engineers, 2021, 70(6): 945-952. doi: 10.5370/KIEE.2021.70.6.945 [2] LIU S D, HOU Z S, TIAN T T, et al. Path tracking control of a self-driving wheel excavator via an enhanced data-driven model-free adaptive control approach[J]. IET Control Theory & Applications, 2020, 14(2): 220-232. [3] TARFE V S, SELVAKUMAR A A. Path tracing for ground wheeled robot in partially known environment[J]. International Journal of Information and Communication Technology, 2016, 9(3): 356-365. doi: 10.1504/IJICT.2016.079131 [4] YUAN J, SUN F C, HUANG Y L. Trajectory generation and tracking control for double-steering tractor-trailer mobile robots with on-axle hitching[J]. IEEE Transactions on Industrial Electronics, 2015, 62(12): 7665-7677. doi: 10.1109/TIE.2015.2455016 [5] 吴宁强, 李文锐, 王艳霞, 等. 重载AGV车辆跟踪算法和运动特性研究[J]. 重庆理工大学学报(自然科学), 2018, 32(10): 53-57.WU N Q, LI W R, WANG Y X, et al. Study on the tracking algorithm and motion characteristics of heavy duty AGV vehicle[J]. Journal of Chongqing University of Technology (Natural Science), 2018, 32(10): 53-57. (in Chinese) [6] KIM T H, MARUTA I, SUGIE T. Robust PID controller tuning based on the constrained particle swarm optimization[J]. Automatica, 2008, 44(4): 1104-1110. doi: 10.1016/j.automatica.2007.08.017 [7] MAI T A, DANG T S, DUONG D T, et al. A combined backstepping and adaptive fuzzy PID approach for trajectory tracking of autonomous mobile robots[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2021, 43(3): 156. doi: 10.1007/s40430-020-02767-8 [8] LIU Y J, DOU C H, SUN Q Y, et al. Optimal control of path tracking for vehicle-handling dynamics[J]. SAE International Journal of Passenger Cars-Mechanical Systems, 2020, 13(3): 225-243. [9] CHEN X B, PENG Y B, HANG P, et al. Path tracking control of four-wheel independent steering electric vehicles based on optimal control[C]//Proceedings of the 39th Chinese Control Conference (CCC). Shenyang, China: IEEE, 2020. [10] 李玖阳, 胡敏, 王许煜, 等. 基于ALPSO算法的低轨卫星小推力离轨最优控制方法[J]. 系统工程与电子技术, 2021, 43(1): 199-207.LI J Y, HU M, WANG X Y, et al. Optimal control method for low thrust deorbit of the low earth orbit satellite based on ALPSO algorithm[J]. Systems Engineering and Electronics, 2021, 43(1): 199-207. (in Chinese) [11] 陆文星, 李楚. 改进PSO算法优化LSSVM模型的短期客流量预测[J]. 计算机工程与应用, 2019, 55(18): 267-255.LU Wenxing, LI Chu. Forecasting of short-time tourist flow based on improved PSO algorithm optimized LSSVM model[J]. Computer Engineering and Applications, 2019, 55(18): 267-255. (in Chinese) [12] YULIANTI L, NAZRA A, ZULAKMAL, et al. On discounted LQR control problem for disturbanced singular system[J]. Archives of Control Sciences, 2019, 29(1): 147-156. [13] ZHANG G M. Finding out normal coordinates with the method of undetermined coefficients: An alternative starting point of solving a small oscillation problem with two degrees of freedom[J]. International Journal of Mechanical Engineering Education, 2016, 44(3): 185-197. doi: 10.1177/0306419016637488 [14] BOURDIN L, DHAR G. Continuity/constancy of the Hamiltonian function in a Pontryagin maximum principle for optimal sampled-data control problems with free sampling times[J]. Mathematics of Control, Signals, and Systems, 2019, 31(4): 503-544. doi: 10.1007/s00498-019-00247-6 [15] BAAYEN J H, POSTEK K. Hidden invariant convexity for global and conic-intersection optimality guarantees in discrete-time optimal control[J]. Journal of Global Optimization, 2022, 82(2): 263-281. doi: 10.1007/s10898-021-01072-5 -


 点击查看大图
点击查看大图
图(6) / 表(2)
计量
- 文章访问数: 110
- HTML全文浏览量: 63
- PDF下载量: 42
- 被引次数: 0
