




On Trajectory Planning for a Cable-driven Gangue Sorting Robot
-
摘要: 依据矸石分拣过程和特点,提出一种柔索驱动拣矸机器人的抓取轨迹规划方案。建立柔索驱动拣矸机器人运动学模型,仿真分析验证了模型的正确性,为末端抓斗的运动轨迹是否符合索长变化规律提供判定依据。根据矸石与皮带运输机同步运动的特性、矸石仓位置及拣矸机器人工作空间几何中心受力最佳等条件,将末端抓斗的抓取轨迹规划为启动段、准备段、抓矸段和置矸段;并针对各段不同的运动特点,采用S型速度曲线和五次多项式组合的轨迹规化方法,对末端抓斗的四段运动进行规划。对规划的轨迹方案进行仿真,结果表明,末端抓斗的运动轨迹、速度和加速度连续,索长变化光滑连续,且轨迹参数能适应矸石在皮带运输机上的不同分布情况。Abstract: According to the process and characteristics of the gangue sorting, a grasping trajectory planning scheme for the cable-driven gangue sorting robot was proposed. The kinematic model of the cable-driven gangue sorting robot was firstly expounded, and the accuracy of the model was verified by simulation, which provided a basis for judging whether the trajectory of the end grab conforms to the change rule of the cable length. According to the characteristics of synchronous movement of the gangues and belt conveyor, the position of the gangue bin and the workspace geometric center, the grasping trajectory of the end grab was then planned four sections, namely as start, preparation, gangue grab, and gangue disposal sections. According to the different motion characteristics of the above sections, the S-type velocity curve, quintic polynomial and the combination of both were used to plan the motion of the end grab. The planned trajectory scheme was finally simulated and analyzed. The results showed that the trajectory, velocity and acceleration of the end grab were continuous, the change of cable length was smooth and continuous, and the trajectory parameters determined by the above method could adapt to the different distribution of gangue on the belt conveyor.
-

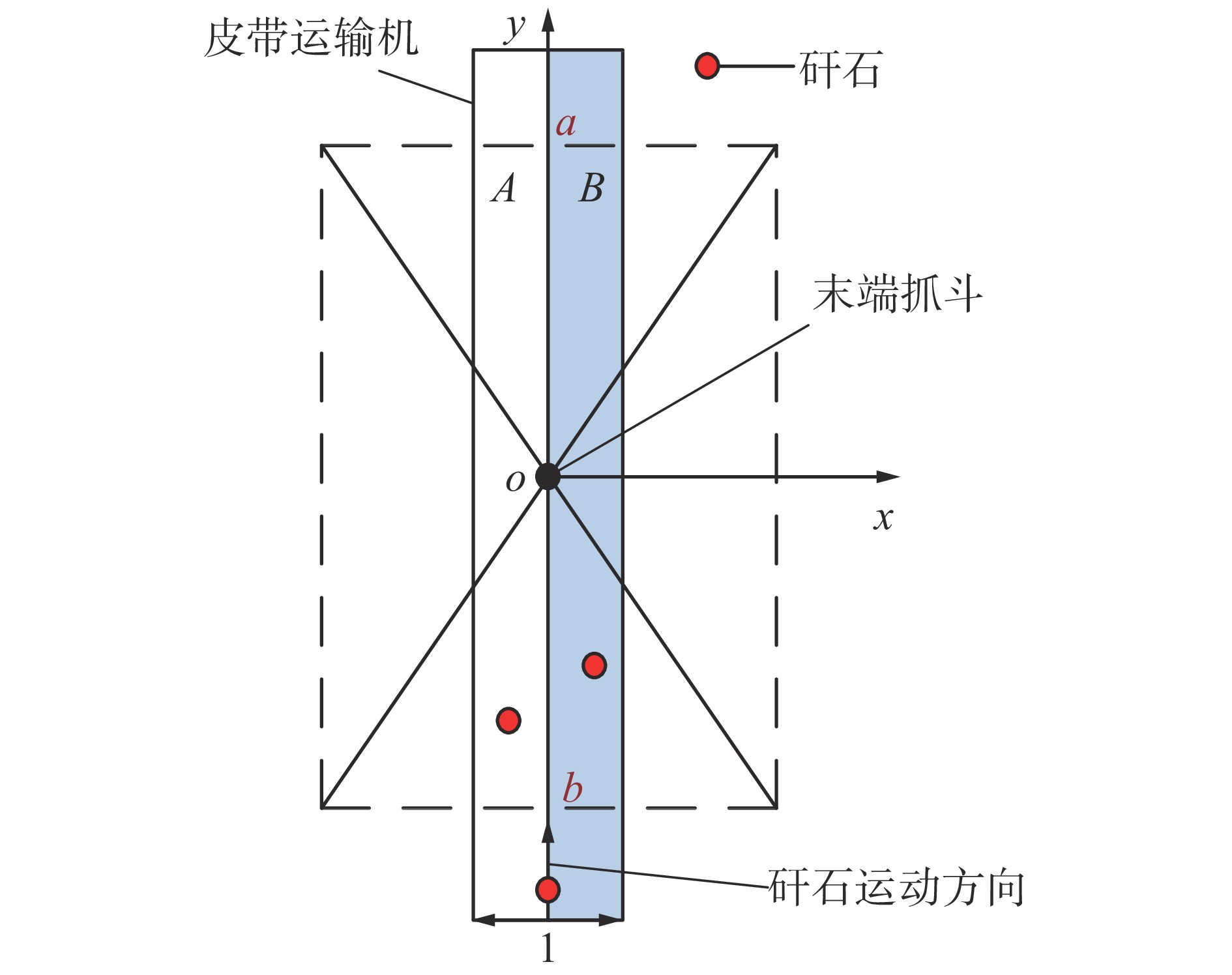
图 6 B区末端抓斗运动轨迹规划方案(单位:m)
Figure 6. Planning scheme of grasping trajectory in the end of B area
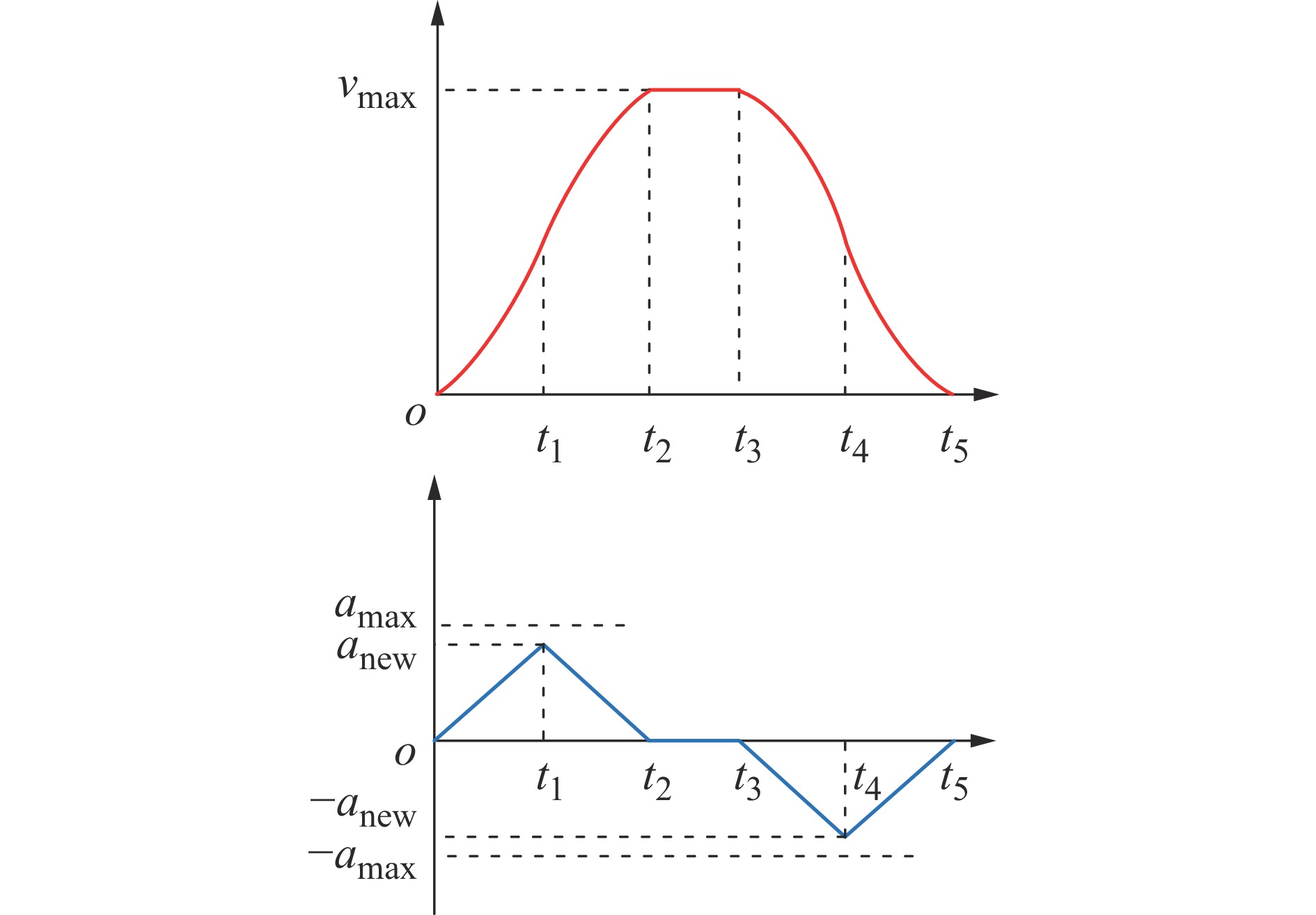
图 7 五段式
${\rm{S}}$ 型速度与加速度曲线Figure 7. Five-section S-type velocity and accelerating curves
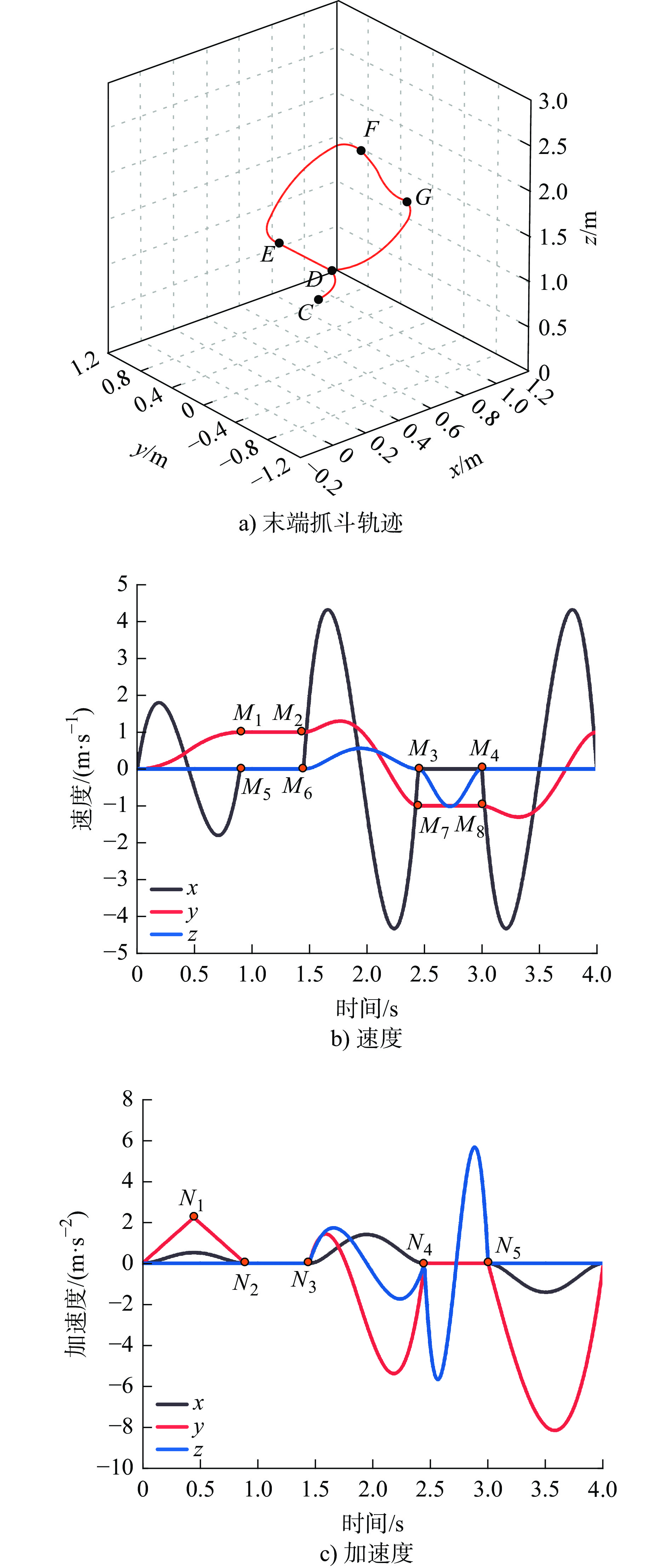
图 8 i = 0.25 m末端抓斗轨迹、速度和加速度仿真结果
Figure 8. Simulation results of end grasping trajectory, velocity and acceleration when i = 0.25 m

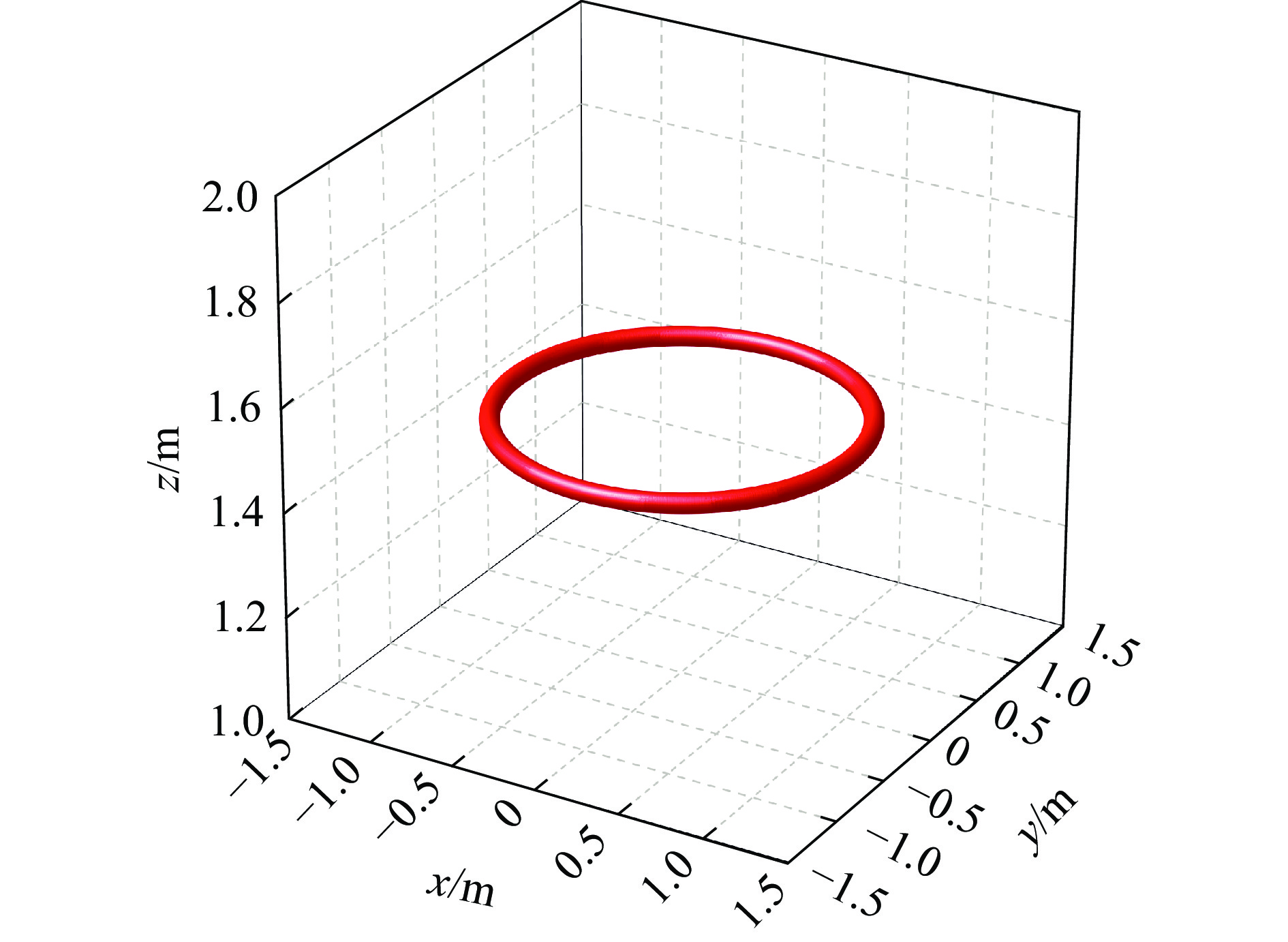
图 10 i = 0 末端抓斗轨迹、速度和加速度仿真结果
Figure 10. Simulation results of end grasping trajectory, velocity and acceleration when i = 0
表 1 各段轨迹规划方法
Table 1. Trajectory planning method for each stage
阶段 方向 采用的轨迹规划方法 启动段CD x 五次多项式 y S型速度曲线 z 无位移 准备段DE x 无位移 y S型速度曲线 z 无位移 抓矸段EF x 五次多项式 y 五次多项式 z 五次多项式 抓矸段FG x 无位移 y S型速度曲线 z 五次多项式 置矸段GD x 五次多项式 y 五次多项式 z 无位移  下载: 导出CSV
下载: 导出CSV
表 2 五次多项式轨迹规划参数
Table 2. Quintic polynomial trajectory planning parameters
阶段 五次多项式参数 $q_0/{\rm{m}}$ $\dot q_0/({\rm{m\cdot s}}^{-1}) $ $\ddot q_0/({\rm{m\cdot s}}^{-2}) $ $q_t/{\rm{m}} $ $\dot q_t/({\rm{m\cdot s}}^{-1}) $ $\ddot q_t/({\rm{m\cdot s}}^{-2}) $ CD $x_c=0 $ $\dot x_c=0 $ $\ddot x_c=0 $ $ x_D=0 $ $\dot x_D=0 $ $\ddot x_D=0 $ EF $x_E =0.25 $ $\dot x_E =0 $ $\ddot x_E =0 $ $ x_F =1 $ $\dot x_F =0 $ $\ddot x_F =0 $ $y_E=0 $ $\dot y_E=1 $ $\ddot y_E=0 $ $y_F=1-\sqrt {5} $ $\dot y_F=-1 $ $\ddot y_F=0 $ ${\textit{z}}_E=1.5 $ $\dot {\textit{z}}_E=0 $ $\ddot {\textit{z}}_E=0 $ $ {\textit{z}}_F=1.8 $ $\dot {\textit{z}}_F=0 $ $\ddot {\textit{z}}_F=0 $ FG $ {\textit{z}}_F=1.8 $ $\dot {\textit{z}}_F=0 $ $\ddot {\textit{z}}_F=0 $ ${\textit{z}}_G= 1.5$ $\dot {\textit{z}}_G= 0$ $\ddot {\textit{z}}_G= 0 $ GD $ x_G= 1 $ $\dot x_G= 0 $ $\ddot x_G= 0 $ $\dot x_D= 0.25 $ $\dot x_G= 0 $ $\ddot x_G= 0 $ $ y_G= 0 $ $\dot y_G=-1 $ $\ddot y_G=0 $ $ y_D=\sqrt{5}-1 $ $\dot y_D= 1$ $\ddot y_D= 0 $
下载: 导出CSV
表 3 i = 0.25 m时
${\rm{ S}}$ 型速度曲线规划段参数Table 3. Parameters of S-type velocity curve planningstage when i=0.25
阶段 S型速度曲线规划参数 $ {v_{\max }}/( {{\rm{m\cdot s}}}^{-1} ) $ $ a/( {{\rm{m}}\cdot{{\rm{s}}^{-2}}} ) $ $ J/( {{\rm{m}}\cdot{{\rm{s}}^{-3}}} ) $ $ CD $ $ {v_{y\max }} = 1 $ $ {a_y} = \sqrt 5 $ $ {J_y} = 5 $ $ DE $ $ {v_{y\max }} = 1 $ $ {a_y} = \sqrt 5 $ $ {J_y} = 5 $ $ FG $ $ {v_{y\max }} = - 1 $ $ {a_y} = - \sqrt 5 $ $ {J_y} = - 5 $
下载: 导出CSV
表 4 i = 0时
五次多项式规划调整参数 Table 4. Parameters of quintic polynomial planning stage when i=0
阶段 五次多项式参数 $ {q_0} $/${\rm{m}} $ $ \dot q_0 $/$ ( {{\rm{m\cdot s}}}^{-1} ) $ $ \ddot q_0 $/$ ( {{\rm{m}}\cdot{{\rm{s}}^{-2}}} ) $ $ {q_t} $/$ {\rm{m}} $ $ \dot q_t $/$ ( {{\rm{m\cdot s}}}^{-1} ) $ $ \ddot q_t $/$ ( {{\rm{m}}\cdot{{\rm{s}}^{-2}}} ) $ CD x方向无位移,无需五次多项式规划 EF $ {x_E} = 0 $ $ {\dot x _E} = 0 $ $ {\ddot x _E} = 0 $ $ {x_F} = 0 $ $ {\dot x _F} = 0 $ $ {\ddot x _F} = 0 $ GD $ {x_G} = 0 $ $ {\dot x _G} = 0 $ $ {\ddot x _G} = 0 $ $ {x_D} = 0 $ $ {\dot x _D} = 0 $ $ {\ddot x _D} = 0 $
下载: 导出CSV
-
[1] ZHAO Y M, YANG X L, LUO Z F, et al. Progress in developments of dry coal beneficiation[J]. International Journal of Coal Science & Technology, 2014, 1(1): 103-112. [2] MA D, DUAN H Y, LIU J F, et al. The role of gangue on the mitigation of mining-induced hazards and environmental pollution: an experimental investigation[J]. Science of the Total Environment, 2019, 664: 436-448. doi: 10.1016/j.scitotenv.2019.02.059 [3] 陈俊涛, 于恒江, 徐德永. 龙湖选煤厂原煤车间排矸方式的改造[J]. 煤矿机械, 2003(8): 87-88. doi: 10.3969/j.issn.1003-0794.2003.08.045CHEN J T, YU H J, XU D Y. The reform of gangue-ejection way of oral coal shop in Longhu Coal Preparation Plant[J]. Coal Mine Machinery, 2003(8): 87-88. (in Chinese) doi: 10.3969/j.issn.1003-0794.2003.08.045 [4] 荆响, 赵书宁. 原煤预排矸工艺与设备的选择[J]. 煤炭加工与综合利用, 2014(3): 32-34. doi: 10.3969/j.issn.1005-8397.2014.03.009JING X, ZHAO S N. Selection of raw coal pre-discharge process and equipment[J]. Coal Processing & Comprehensive Utilization, 2014(3): 32-34. (in Chinese) doi: 10.3969/j.issn.1005-8397.2014.03.009 [5] 康利, 黄金辉, 刘畅. GDRT型γ射线智能干法分选系统在六家煤矿的应用[J]. 煤炭加工与综合利用, 2017(3): 22-24.KANG L, HUANG J H, LIU C. Application of GDRT type γ-ray intelligent dry separation system in Liujia coal mine[J]. Coal Processing & Comprehensive Utilization, 2017(3): 22-24. (in Chinese) [6] 赵宏霞, 丁芳亮. KRS-智能干法分选系统在矿物分选中的应用[J]. 煤炭加工与综合利用, 2016(9): 24-26.ZHAO H X, DING F L. Application of KRS-intelligent dry separation system in mineral separation[J]. Coal Processing & Comprehensive Utilization, 2016(9): 24-26. (in Chinese) [7] 高明. 塔山选煤厂原煤准备车间技术改造[J]. 选煤技术, 2015(3): 43-45.GAO M. Technical modification on raw coal prepared plant of Tashan coal preparation plant[J]. Coal Preparation Technology, 2015(3): 43-45. (in Chinese) [8] 訾斌, 段宝岩, 黄进. 大射电望远镜馈源柔索支撑系统的建模与控制[J]. 西安交通大学学报, 2006, 40(6): 681-685. doi: 10.3321/j.issn:0253-987X.2006.06.015ZI B, DUAN B Y, HUANG J. Modeling and control of the feed cable-supporting system for large spherical radio telescope[J]. Journal of Xi'an Jiaotong University, 2006, 40(6): 681-685. (in Chinese) doi: 10.3321/j.issn:0253-987X.2006.06.015 [9] 于亮亮, 仇原鹰, 苏宇. 高速柔索牵引摄像机器人动力工作空间研究[J]. 工程力学, 2013, 30(11): 245-250.YU L L, QIU Y Y, SU Y. Dynamic workspace of a high-speed cable-driven camera robot[J]. Engineering Mechanics, 2013, 30(11): 245-250. (in Chinese) [10] 宋达, 张立勋, 王炳军, 等. 柔索牵引式力觉交互机器人控制策略[J]. 机器人, 2018, 40(4): 440-447.SONG D, ZHANG L X, WANG B J, et al. The control strategy of flexible cable driven force interactive robot[J]. Robot, 2018, 40(4): 440-447. (in Chinese) [11] 刘鹏, 马宏伟, 乔心州, 等. 柔索驱动拣矸机器人最小索拉力等值曲面研究[J]. 西安科技大学学报, 2020, 40(5): 797-804.LIU P, MA H W, QIAO X Z, et al. On the contour surfaces of minimum tensions for a cable-driven coal-gangue picking robot[J]. Journal of Xi′an University of Science and Technology, 2020, 40(5): 797-804. (in Chinese) [12] 谢少荣, 刘思淼, 罗均, 等. 一种混合驱动柔索并联仿生眼的轨迹规划[J]. 机器人, 2015, 37(4): 395-402.XIE S R, LIU S M, LUO J, et al. Trajectory planning of a bionic eye using hybrid-driven cable parallel mechanism[J]. Robot, 2015, 37(4): 395-402. (in Chinese) [13] 范伟, 彭光正, 高建英, 等. 气动人工肌肉驱动球面并联机器人的位置控制研究[J]. 北京理工大学学报, 2004, 24(6): 516-519.FAN W, PENG G Z, GAO J Y, et al. A study on the position control of a spherical parallel robot actuated by pneumatic muscle actuators[J]. Transactions of Beijing Institute of Technology, 2004, 24(6): 516-519. (in Chinese) [14] 洪逸凡, 谭建平. 基于柔索驱动的锅炉检测机器人轨迹规划研究[J]. 传感器与微系统, 2021, 40(7): 25-27.HONG Y F, TAN J P. Study on trajectory planning of cable-driven robot for boiler detection[J]. Transducer and Microsystem Technologies, 2021, 40(7): 25-27. (in Chinese) [15] QIAO S, BAO K L, ZI B, et al. Dynamic trajectory planning for a three degrees-of-freedom cable-driven parallel robot using quintic b-splines[J]. Journal of Mechanical Design, 2020, 142(7): 073301. doi: 10.1115/1.4045723 [16] ZHAO T, ZI B, QIAN S, et al. Algebraic method-based point-to-point trajectory planning of an under-constrained cable-suspended parallel robot with variable angle and height cable mast[J]. Chinese Journal of Mechanical Engineering, 2020, 33(1): 54. doi: 10.1186/s10033-020-00473-z [17] XU J J, PARK K S. Moving obstacle avoidance for cable-driven parallel robots using improved RRT[J]. Microsystem Technologies, 2021, 27(6): 2281-2292. doi: 10.1007/s00542-020-05100-4 [18] 黄佳怡, 陈柏, 胡忠文, 等. 一种柔索驱动太空舱外搬运机器人研究[J]. 机械科学与技术, 2012, 31(11): 1748-1753. doi: 10.13433/j.cnki.1003-8728.2012.11.010HUANG J Y, CHEN B, HU Z W, et al. A cable-driven extravehicular transport robot analysis[J]. Mechanical Science and Technology for Aerospace Engineering, 2012, 31(11): 1748-1753. (in Chinese) doi: 10.13433/j.cnki.1003-8728.2012.11.010 [19] GARRIDO J, YU W, LI X O. Robot trajectory generation using modified hidden Markov model and Lloyd's algorithm in joint space[J]. Engineering Applications of Artificial Intelligence, 2016, 53: 32-40. doi: 10.1016/j.engappai.2016.03.006 [20] 温贻芳, 孙立宁, 徐朋. 表面改性冗余机器人关节空间的轨迹优化算法[J]. 机械科学与技术, 2018, 37(12): 1870-1874. doi: 10.13433/j.cnki.1003-8728.20180081WEN Y F, SUN L N, XU P. Trajectory optimization algorithm for joint space of a surface modified redundant robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(12): 1870-1874. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20180081 [21] FRANCISCO V, VICENTE M, ANTONIO B. Trajectory planning in workspaces with obstacles taking into account the dynamic robot behaviour[J]. Mechanism and Machine Theory, 2006, 41(5): 525-536. doi: 10.1016/j.mechmachtheory.2005.08.002 [22] ANDULKAR M V, CHIDDARWAR S S, MARATHE A S. Novel integrated offline trajectory generation approach for robot assisted spray painting operation[J]. Journal of Manufacturing Systems, 2015, 37: 201-216. doi: 10.1016/j.jmsy.2015.03.006 [23] 北京起重运输机械设计研究院, 武汉丰凡科技开发有限责任公司. DTⅡ(A)型带式输送机设计手册[M]. 2版. 北京: 冶金工业出版社, 2013.Beijing Crane Transportation Machinery Design Institute, Wuhan Fengfan Technology Development Co., Ltd. Type DTⅡ(A) belt conveyor drawings manual for designing[M]. 2nd ed. Beijing: Metallurgical Industry Press, 2013. (in Chinese) [24] 李振娜, 王涛, 王斌锐, 等. 基于带约束S型速度曲线的机械手笛卡尔空间轨迹规划[J]. 智能系统学报, 2019, 14(4): 655-661. doi: 10.11992/tis.201806025LI Z N, WANG T, WANG B R, et al. Trajectory planning for manipulator in Cartesian space based on constrained S-curve velocity[J]. CAAI Transactions on Intelligent Systems, 2019, 14(4): 655-661. (in Chinese) doi: 10.11992/tis.201806025 -



 点击查看大图
点击查看大图
计量
- 文章访问数: 82
- HTML全文浏览量: 30
- PDF下载量: 29
- 被引次数: 0
