




Coupling Dynamics and Coordinated Control Method of Space Floating Manipulator System
-
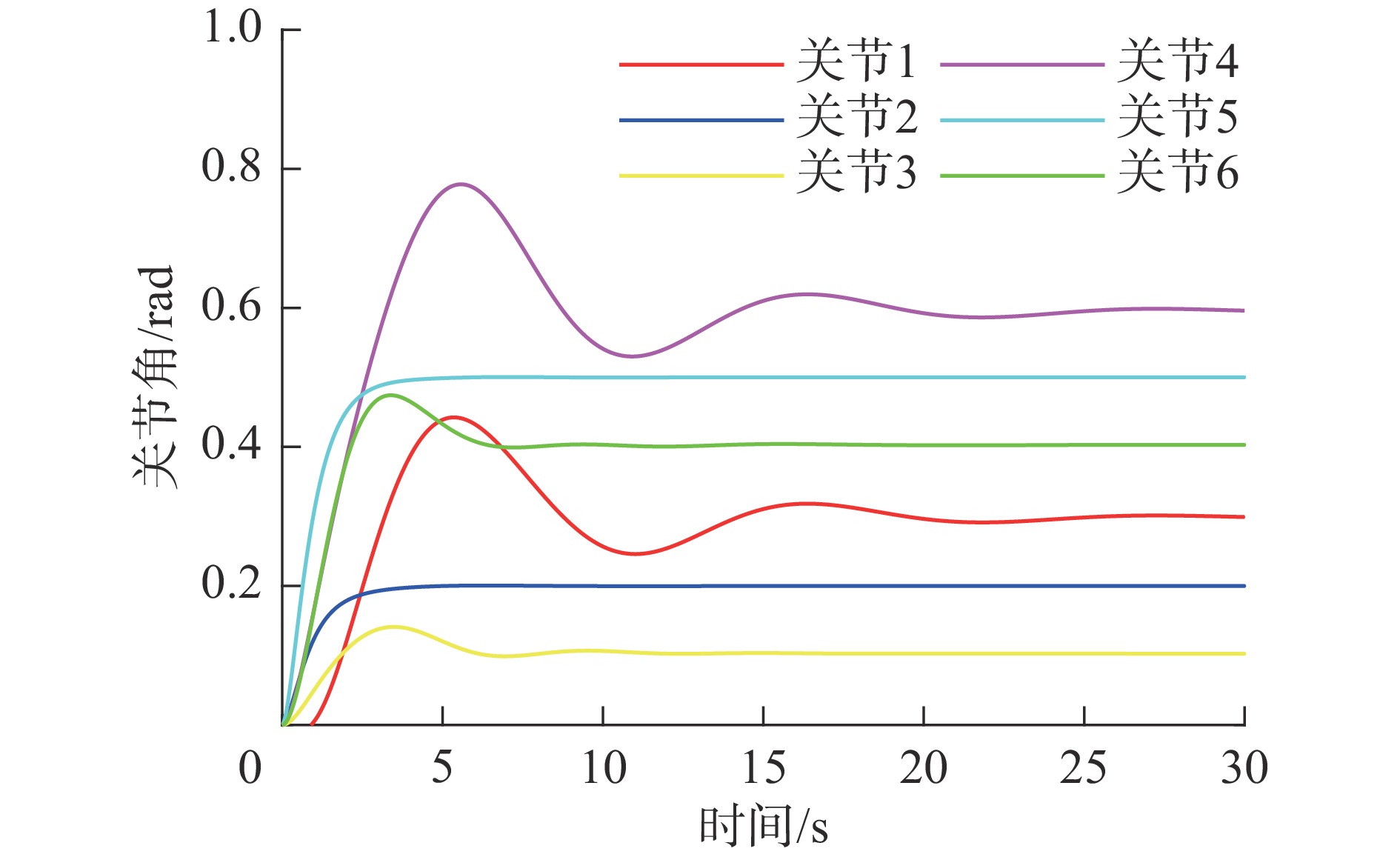
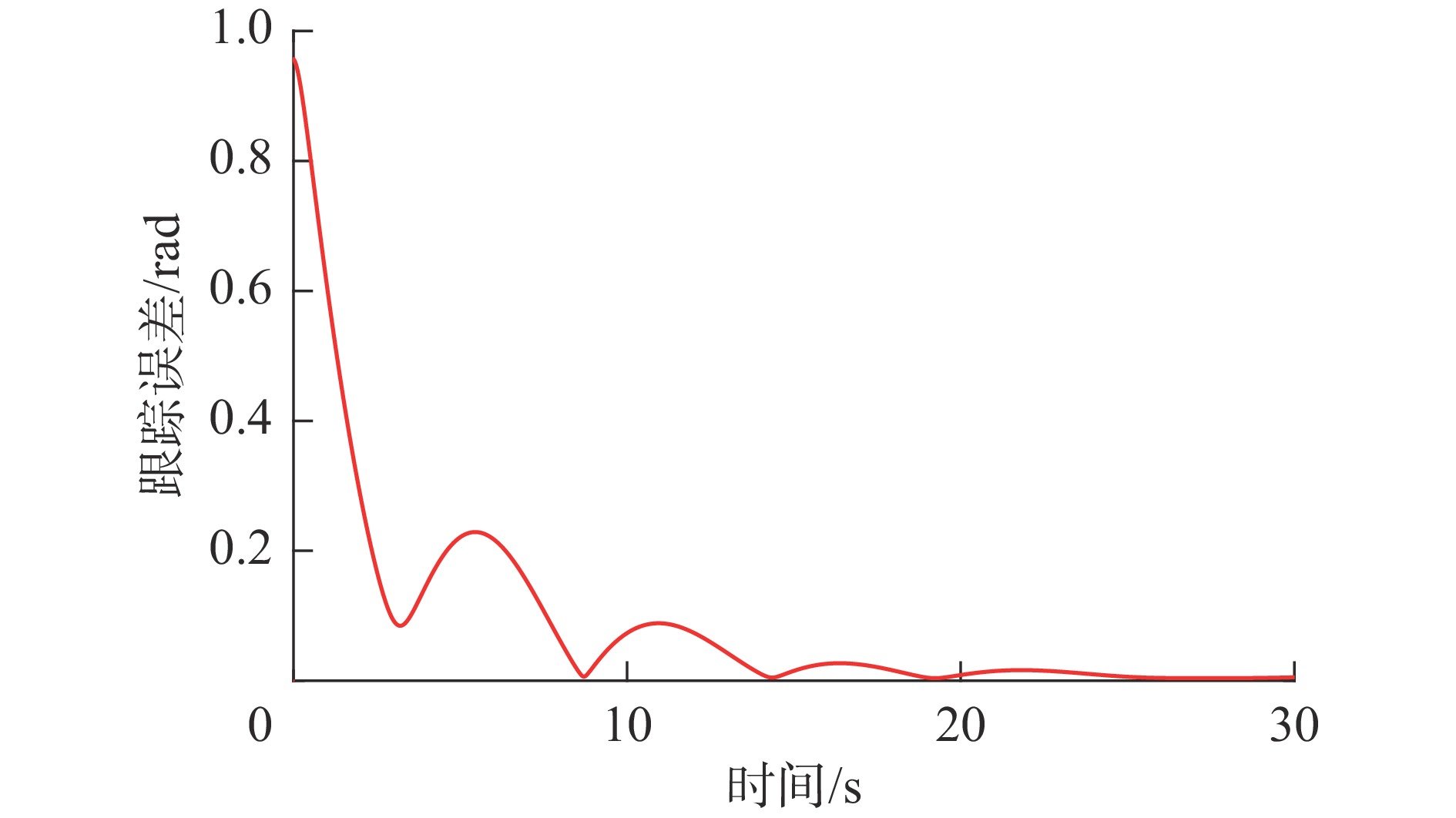
摘要: 在执行空间任务过程中,漂浮基机械臂系统内部的动力学耦合现象使得基体姿态调整和机械臂末端定位与控制问题变得更加复杂。综合考虑多种空间漂浮基机械臂系统共性特征,关注机械臂与基体耦合规律,建立统一的耦合动力学模型,并利用整个系统的非完整性特征和耦合特点,对特定系统设计解耦控制规律。通过控制机械臂关节主动运动实现基体位姿可控和机械臂末端任务不受制约的目的。结果表明,通过合理设置控制参数,在解空间存在的情况下,能够达到漂浮基体与机械臂末端协调运动的目的。Abstract: In the process of space task, the dynamic coupling phenomenon in the floating base manipulator system makes the adjustment of the base posture and the positioning and control of the end of the manipulator more complex. In this paper, considering the common characteristics of various space-based manipulator systems, we focus on the coupling law between the manipulator and the floating base, establish a unified coupling dynamic model, and utilize the non-integrity and coupling characteristics of the whole system to design the coordinated control law for a specific system. Then, by controlling the active motion of the joint of the manipulator, the pose of the base can be controlled and the task at the end of the manipulator can be free. Finally, a simulation experiment is set up to verify the effectiveness of the proposed method. The results show that the coordinated motion of the floating base and the end of the manipulator can be achieved by reasonably setting the control parameters in the presence of solution space.
-
Key words:
- coupling dynamics /
- floating base /
- manipulator /
- cooperative control /
- simulation
-
表 1 运动学参数及定义
Table 1. Kinematic parameters and their definitions
参数 定义 N N=kn(n为机械臂关节,k为机械臂个数) ${\boldsymbol{\phi }}\in {\Re ^n}$ 关节角变量 ${{\boldsymbol{r}}_i} \in {\Re ^3}$ 连杆i位置矢量 ${{\boldsymbol{a}}_i},{{\boldsymbol{b}}_i} \in {\Re ^3}$ 质心i指向关节i的方向向量 ${{\boldsymbol{k}}_i} \in {\Re ^3}$ 关节i的单位方向向量 ${{\boldsymbol{v}}_i},{{\boldsymbol{\omega}}_i} \in {\Re ^3}$ 连杆i的质心速度和角速度 ${{\boldsymbol{V}}_i} = {\left[ {\dot {\boldsymbol{r}}_i^{\rm{T}},{\boldsymbol{\omega}}_i^{\rm{T}}} \right]^{\rm{T}}} \in {\Re ^{{\text{6}} \times {\text{1}}}}$ 连杆i的速度旋量  下载: 导出CSV
下载: 导出CSV
表 2 动力学相关参数及定义
Table 2. Notations of dynamic parameters and their definitions
参数 定义 ${m_i},{I_i}$ 连杆i的质量和惯性张量 ${{\boldsymbol{X}}_P} \in {\Re ^{{\text{6}} \times {\text{1}}}}$ 浮动基体位姿旋量 ${\dot {\boldsymbol{x}}_P} = {\left[ {{\boldsymbol{v}}_0^{\text{T}},{\boldsymbol{\omega}}_0^{\text{T}}} \right]^{\rm{T}}} \in {\Re ^{6 \times 1}}$ 浮动基体速度旋量 ${{\boldsymbol{H}}_P} \in {\Re ^{{{6 \times 6}}}}$ 基体参照自身的惯性张量 ${{\boldsymbol{H}}_\phi } \in {\Re ^{n \times n}}$ 机械臂参照自身的惯性张量 ${{\boldsymbol{H}}_{P\phi }} \in {\Re ^{{\text{6}} \times n}}$ 基体参照机械臂的耦合惯性张量 ${{\boldsymbol{c}}_P} \in {\Re ^{{{6 \times 6}}}}$ 基体的非线性速度相关项 ${{\boldsymbol{c}}_\phi } \in {\Re ^{n \times n}}$ 机械臂的非线性速度相关项 ${{\boldsymbol{c}}_{P\phi }} \in {\Re ^{{\text{6}} \times n}}$ 基体与机械臂之间的非线性耦合速度相关项 ${{\boldsymbol{F}}_P} \in {R^{ {\text{6} } \times {\text{1} } } }$ 作用于基体上的广义外部力项 ${{\boldsymbol{F}}_E} \in {R^{ {\text{6} } \times {\text{1} } } }$ 作用于机械臂末端的广义外部力项 ${\boldsymbol{\tau}} \in {R^{n \times {\text{1}}}}$ 关节力矩项 ${{\boldsymbol{J}}_b} \in {\Re ^{ {\text{6} } \times {\text{6} } } }$ 基体参照自身的雅可比矩阵 ${{\boldsymbol{J}}_\phi } \in {\Re ^{ {6} \times n} }$ 机械臂参照基体的雅可比矩阵
下载: 导出CSV
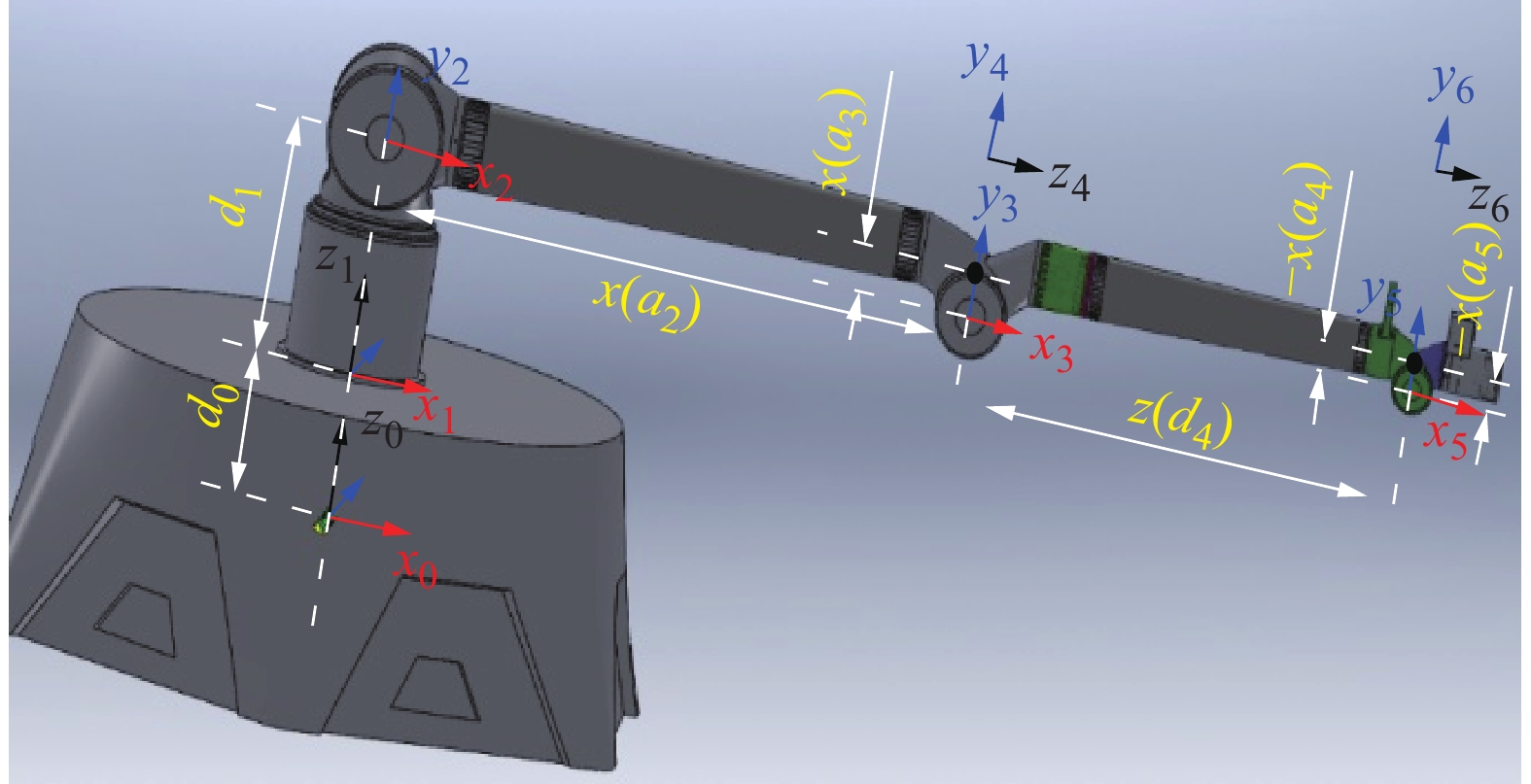
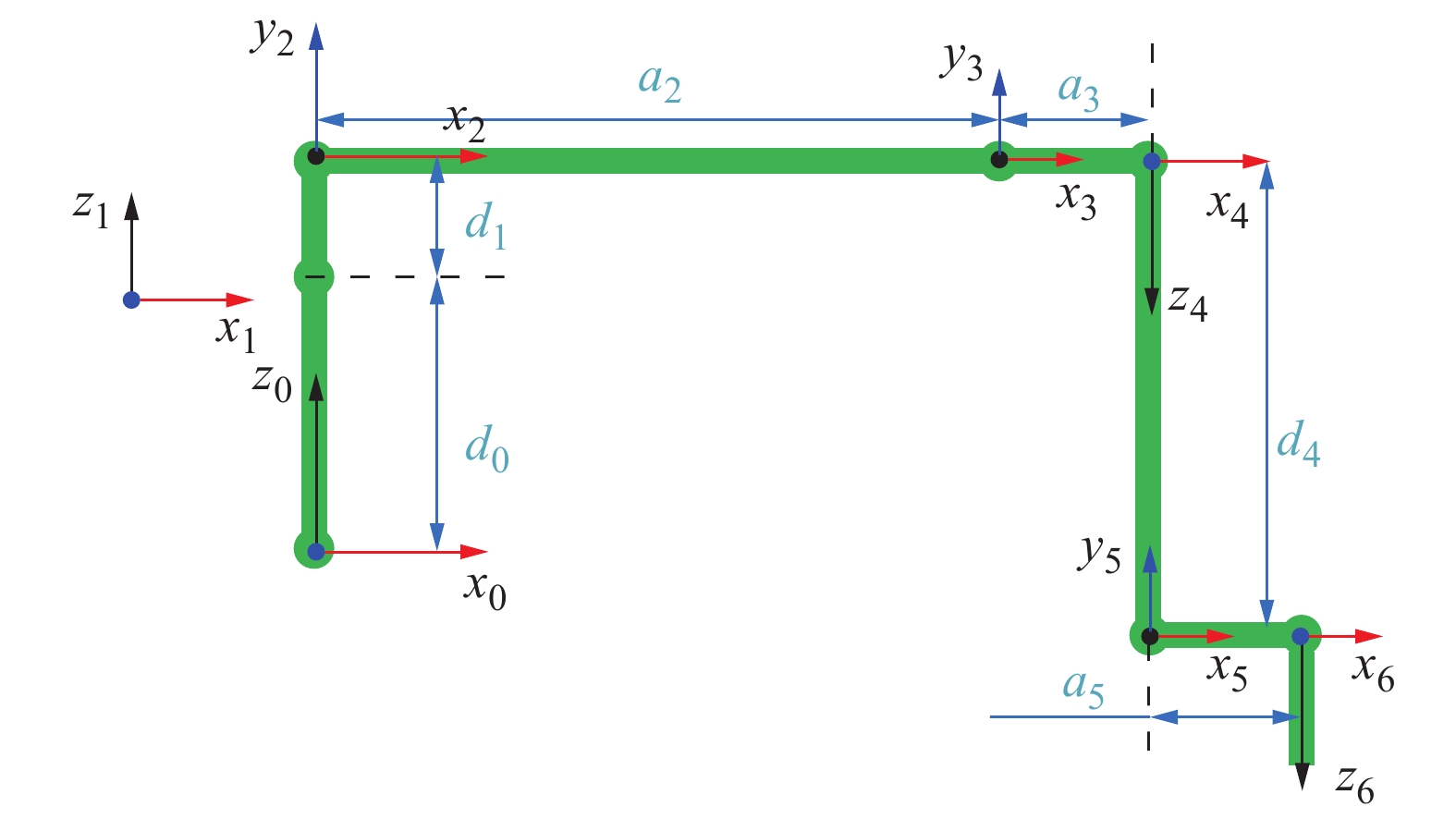
表 3 漂浮基6-DOF机械臂系统几何惯性参数
Table 3. Geometric and inertia parameters of a floating-base
名称 Base L1 L2 L3 L4 L5 L6 质量/kg 13350 49.4 82307 56.59 21443 9.11 4.51 ${\boldsymbol{a}}/{\rm{m} }$ – 0 −0.52 −0.16 0 −0.026 0 – 0 0 0 0 0 0 – −0.205 0 0 −0.4 0 −0.025 ${\boldsymbol{ b}}/{\rm{m} }$ 0 0 1.88 0.25 0 0.105 0 0 0 0 0 0 0 0 0.996 0.105 0 0 1.1 0 ${\boldsymbol{ I}}/\left(\mathrm{ ~ kg} \cdot \mathrm{m}^{2}\right)$ 6168.5 3.338 1967 0.605 2945 6.9 × 10−2 3.7 × 10−2 6168.3 2.236 38063 0.62 2947 6.24 × 10−2 3.07 × 10−2 9738.4 3.088 38627 0.69 152.9 8.65 × 10−2 2.12 × 10−2 0.05 9 × 10−4 0.331 3.13 × 10−2 2.18 × 10−4 1.9 × 10−2 8 × 10−5 1.1 × 10−3 6.70 × 10−5 4.23 × 10−2 1.17 × 10−4 0.279 1.09 × 10−3 4 × 10−3 0.103 −7.7 × 10−6 6.65 2.08 × 10−4 −5.76 × 10−3 7.8 × 10−4 3.6 × 10−6
下载: 导出CSV
-
[1] 田威, 焦嘉琛, 李波, 等. 航空航天制造机器人高精度作业装备与技术综述[J]. 南京航空航天大学学报, 2020, 52(3): 341-352.TIAN W, JIAO J C, LI B, et al. High precision robot operation equipment and technology in aerospace manufacturing[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2020, 52(3): 341-352. (in Chinese) [2] LIU Y W, GE Z, YANG S K, et al. Elephant’s trunk robot: an extremely versatile under-actuated continuum robot driven by a single motor[J]. Journal of Mechanisms and Robotics, 2019, 11(5): 051008. doi: 10.1115/1.4043923 [3] 祁若龙, 张珂, 周维佳, 等. 机械臂高斯运动轨迹规划及操作成功概率预估计方法[J]. 机械工程学报, 2019, 55(1): 42-51. doi: 10.3901/JME.2019.01.042QI R L, ZHANG K, ZHOU W J, et al. Trajectory planning and success probability estimation of operation for gaussian motion manipulators[J]. Journal of Mechanical Engineering, 2019, 55(1): 42-51. (in Chinese) doi: 10.3901/JME.2019.01.042 [4] 王天然. 机器人技术的发展[J]. 机器人, 2017, 39(4): 385-386.WANG T R. Development of the robotics[J]. Robot, 2017, 39(4): 385-386. (in Chinese) [5] 路达, 刘金国, 高海波. 星球表面着陆巡视一体化探测机器人研究进展[J]. 航空学报, 2021, 42(1): 93-109.LU D, LIU J G, GAO H B. Integrated exploration robots for planetary surface landing and patrolling: a review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 93-109. (in Chinese) [6] FENG F, TANG L N, XU J F, et al. A review of the end-effector of large space manipulator with capabilities of misalignment tolerance and soft capture[J]. Science China Technological Sciences, 2016, 59(11): 1621-1638. doi: 10.1007/s11431-016-0084-7 [7] MOOSAVIAN S A A, PAPADOPOULOS E. Free-flying robots in space: an overview of dynamics modeling, planning and control[J]. Robotica, 2007, 25(5): 537-547. doi: 10.1017/S0263574707003438 [8] JING Z L, XU Q M, HUANG J Z. A review on kinematic analysis and dynamic stable control of space flexible manipulators[J]. Aerospace Systems, 2019, 2(1): 1-14. doi: 10.1007/s42401-018-00024-4 [9] 陈正仓, 周维佳. 漂浮基空间机械臂系统的非完整性研究[J]. 机械设计与制造, 2018(10): 257-260. doi: 10.3969/j.issn.1001-3997.2018.10.068CHEN Z C, ZHOU W J. Research on non-holonomic of a space-based manipulator system[J]. Machinery Design & Manufacture, 2018(10): 257-260. (in Chinese) doi: 10.3969/j.issn.1001-3997.2018.10.068 [10] YOSHIDA K. Engineering test satellite VII flight experiments for space robot dynamics and control: theories on laboratory test beds ten years ago, now in orbit[J]. The International Journal of Robotics Research, 2003, 22(5): 321-335. doi: 10.1177/0278364903022005003 [11] SICILIANO B, KHATIB O. Springer handbook of robotics[M]. 2nd ed. Cham: Springer, 2016: 1032-1060. [12] YANG G X, LIU Y W, GUAN L R. Design and simulation optimization of obstacle avoidance system for planetary exploration mobile robots[J]. Journal of Physics:Conference Series, 2019, 1176(3): 032038. [13] SONE H, NENCHEV D. Reactionless camera inspection with a free-flying space robot under reaction null-space motion control[J]. Acta Astronautica, 2016, 128: 707-721. doi: 10.1016/j.actaastro.2016.08.027 [14] WEHAGE K T, WEHAGE R A, RAVANI B. Generalized coordinate partitioning for complex mechanisms based on kinematic substructuring[J]. Mechanism and Machine Theory, 2015, 92: 464-483. doi: 10.1016/j.mechmachtheory.2015.06.006 [15] PAPPALARDO C M, LETTIERI A, GUIDA D. Stability analysis of rigid multibody mechanical systems with holonomic and nonholonomic constraints[J]. Archive of Applied Mechanics, 2020, 90(9): 1961-2005. doi: 10.1007/s00419-020-01706-2 [16] SHAH S V, ANURAG V V, HAFEZ A H A, et al. Switching method to avoid algorithmic singularity in vision-based control of a space robot[C]//2015 International Conference on Advanced Robotics (ICAR). Istanbul, Turkey: IEEE, 2015: 271-276. [17] 吴玉香, 李杨, 关伟鹏. 带有未知参数和有界扰动的机械臂混沌反控制[J]. 华南理工大学学报(自然科学版), 2018, 46(10): 63-71.WU Y X, LI Y, GUAN W P. Anti-control of chaos for manipulator with unknown parameters and bounded disturbances[J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(10): 63-71. (in Chinese) [18] WANG H L. Adaptive control of robot manipulators with uncertain kinematics and dynamics[J]. IEEE Transactions on Automatic Control, 2017, 62(2): 948-954. doi: 10.1109/TAC.2016.2575827 [19] 张博, 梁斌, 王学谦, 等. 基于自适应反作用零空间控制的大型非合作目标动力学参数实时辨识仿真[J]. 机器人, 2016, 38(1): 98-106.ZHANG B, LIANG B, WANG X Q, et al. Simulation of real-time dynamic parameter identification for large non-cooperative targets using adaptive reaction null space control[J]. Robot, 2016, 38(1): 98-106. (in Chinese) [20] ZHANG D, WEI B. A review on model reference adaptive control of robotic manipulators[J]. Annual Reviews in Control, 2017, 43: 188-198. doi: 10.1016/j.arcontrol.2017.02.002 [21] HINATA R, NENCHEV D N. Balance stabilization with angular momentum damping derived from the reaction null-space[C]//18th International Conference on Humanoid Robots (Humanoids). Beijing, China: IEEE, 2018: 188-195. [22] 陈正仓. 漂浮基空间机械臂耦合动力学与基体无扰研究[D]. 沈阳: 中国科学院沈阳自动化研究所, 2017.CHEN Z C. Research on coupled dynamics of a space-based manipulator system and zero-disturbance of its floating base[D]. Shenyang: Shenyang Institute of Automation Chinese Academy of Sciences, 2017. (in Chinese) -





 点击查看大图
点击查看大图

图(14) / 表(3)
计量
- 文章访问数: 132
- HTML全文浏览量: 46
- PDF下载量: 26
- 被引次数: 0
