




An Improved Rapidly-exploring Random Tree Algorithm for Manipulator's 3D Path Obstacle Avoidance
-
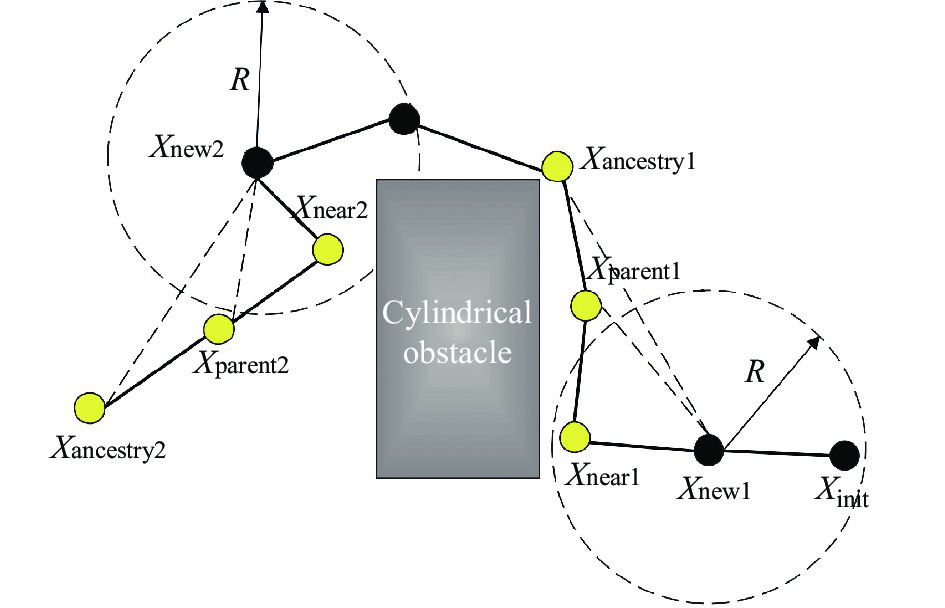
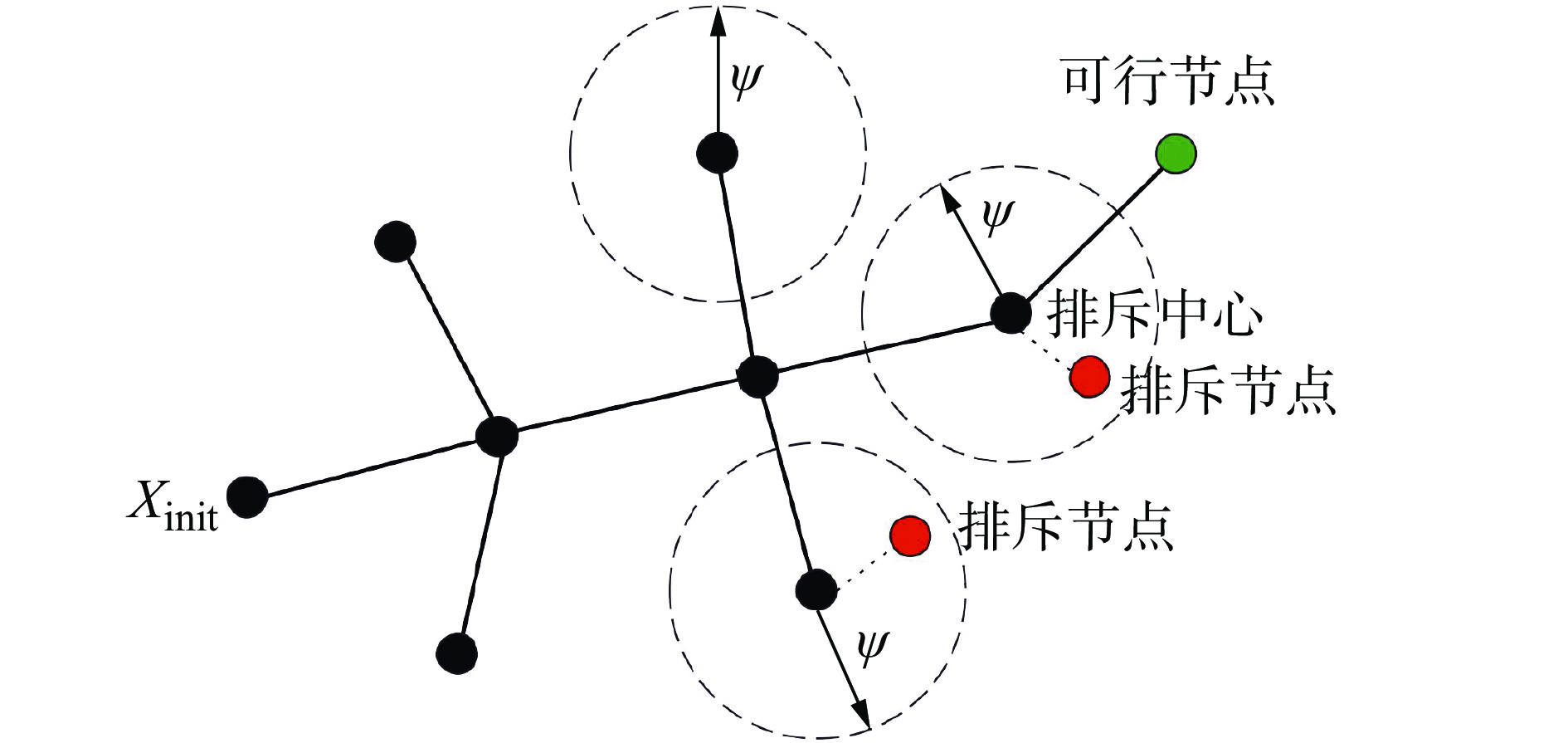
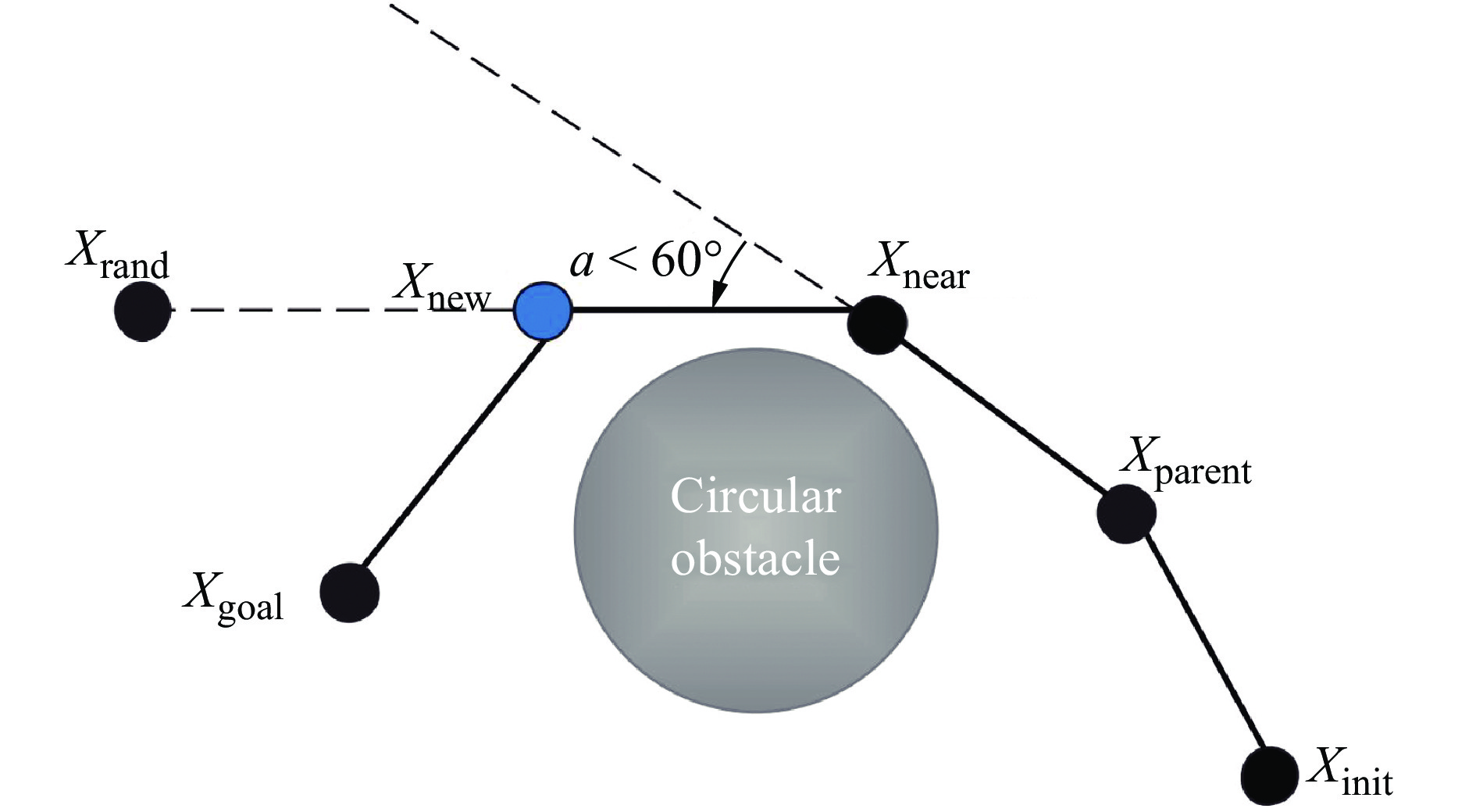
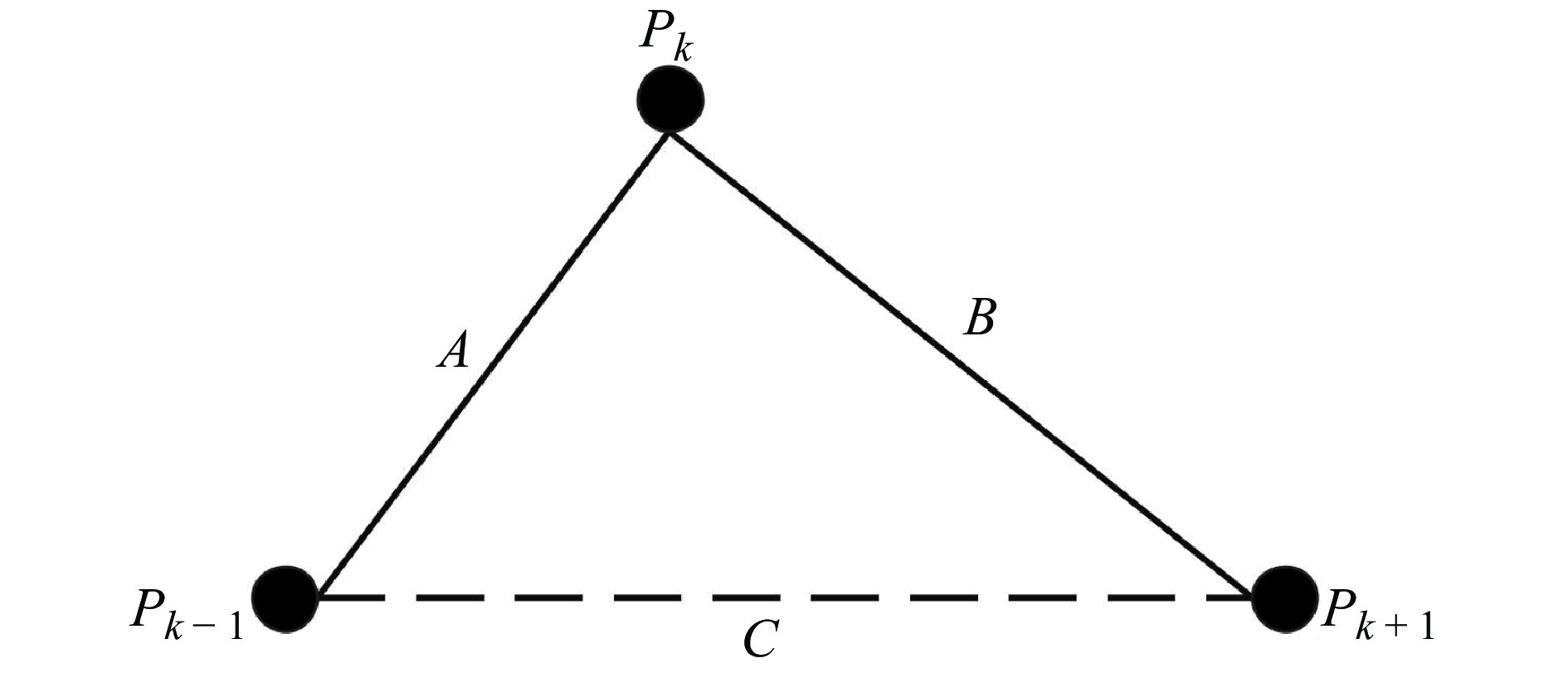
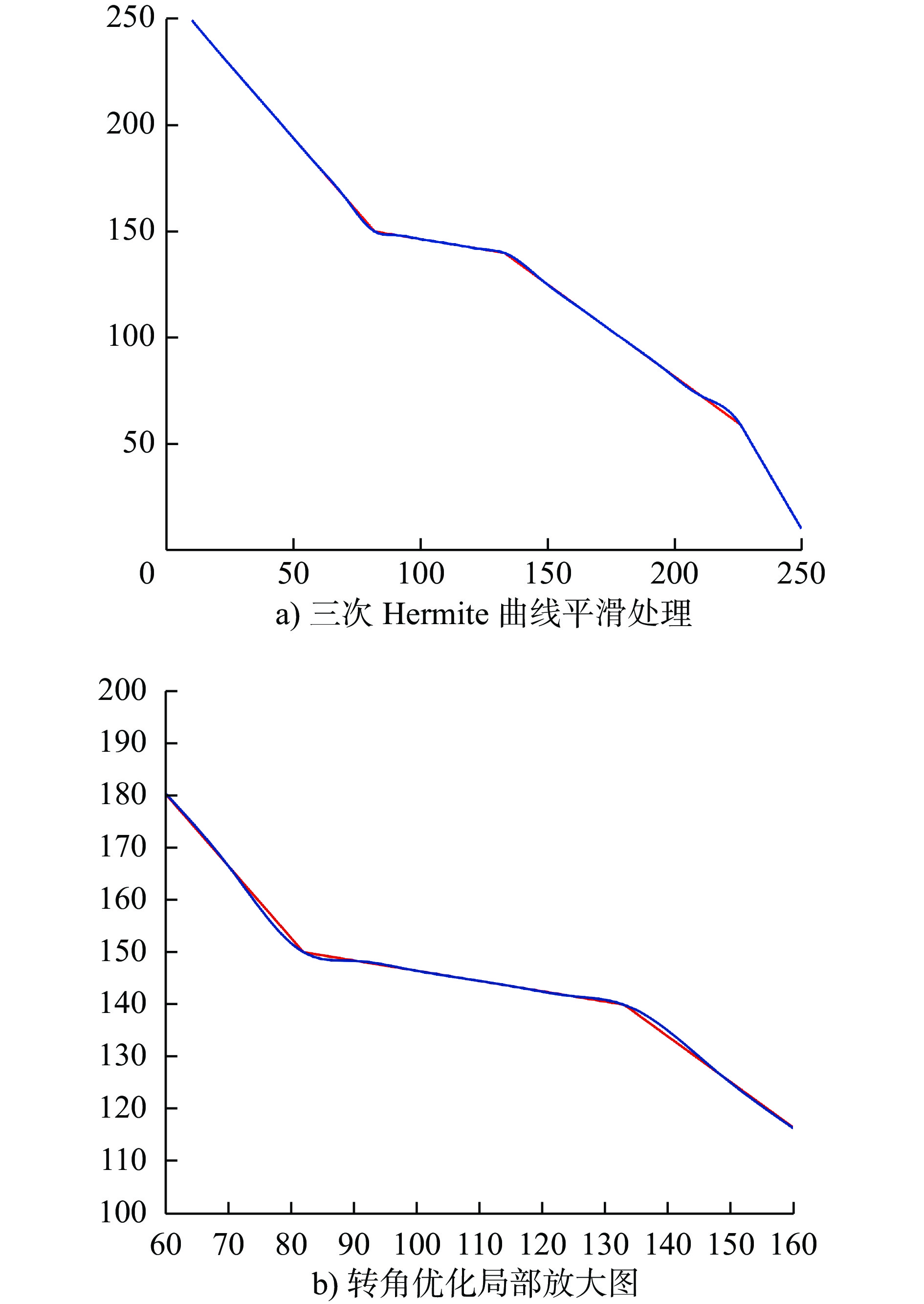
摘要: 标准RRT(Rapidly exploring random tree)算法进行路径规划时,存在规划时间长、规划路径质量差的问题。针对以上问题,提出一种IPRRT算法(Improved RRT algorithm),首先通过重选父节点环节策略剔除冗余路段,区域排斥机制剔除冗余节点,缩短规划路径与规划时间;其次采用线段转角限位与评估函数提升路径质量,最后采用三次Hermite曲线对路径进行平滑处理;通过对深海机械臂进行仿真实验,验证了IPRRT算法的有效性。
-
关键词:
- RRT /
- 机械臂 /
- 路径规划 /
- 三次Hermite曲线 /
- ROS系统
Abstract: The standard rapidly-exploring random tree algorithm for path planning takes a long time and has poor path quality. Therefore, an improved rapidly-exploring random tree algorithm is proposed. Firstly, redundant sections are eliminated by using the re-selecting parent node link strategy, and redundant nodes are eliminated with the regional exclusion mechanism to shorten the planning path and time. Secondly, the line segment angle limit and the evaluation function are used to improve the path quality. Finally, the cubic Hermite curve is used to smooth the path. The simulation of a deep-sea manipulator verifies the effectiveness of the improved rapidly-exploring random tree algorithm.-
Key words:
- RRT /
- mechanical arm /
- path planning /
- cubic Hermite curve /
- robot operating system
-
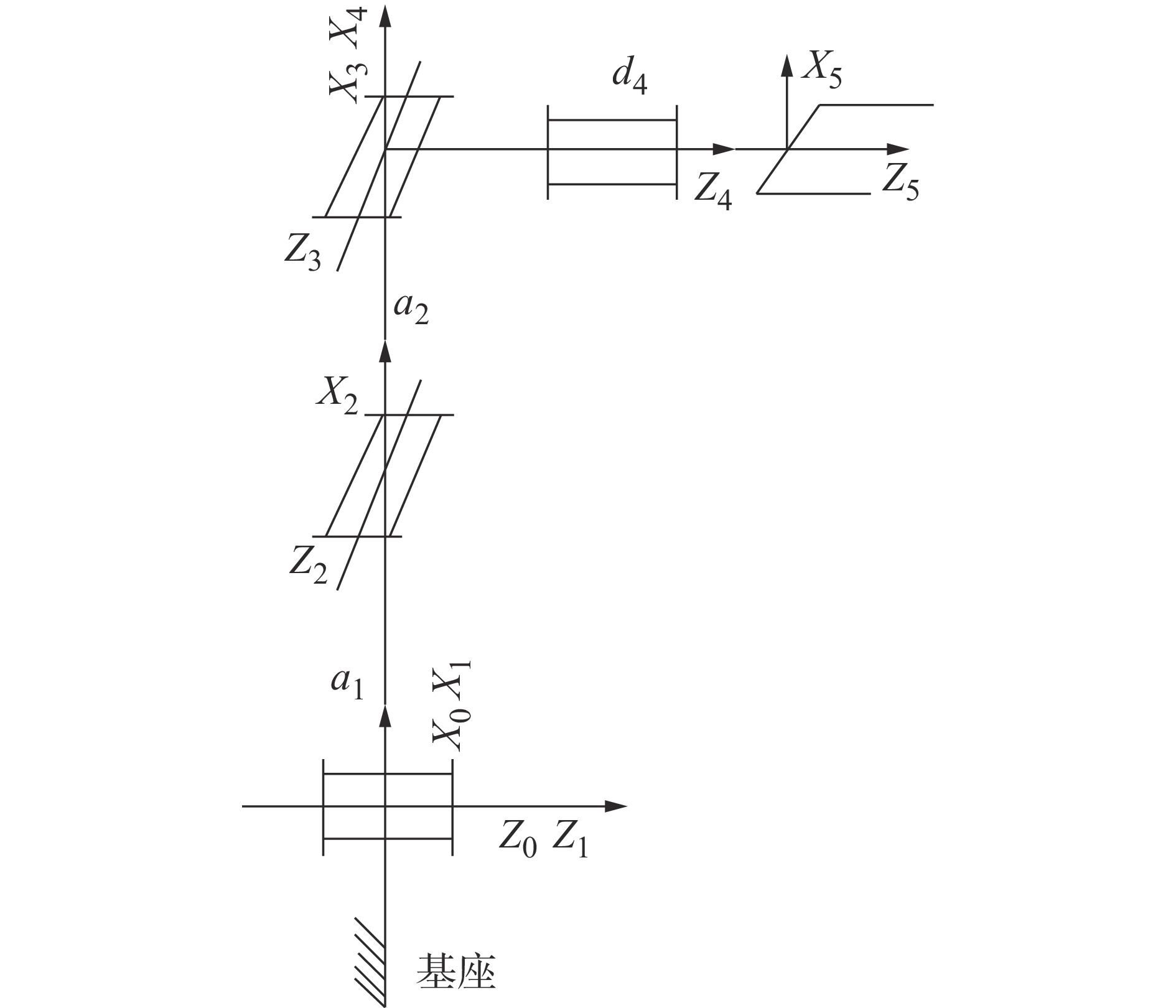
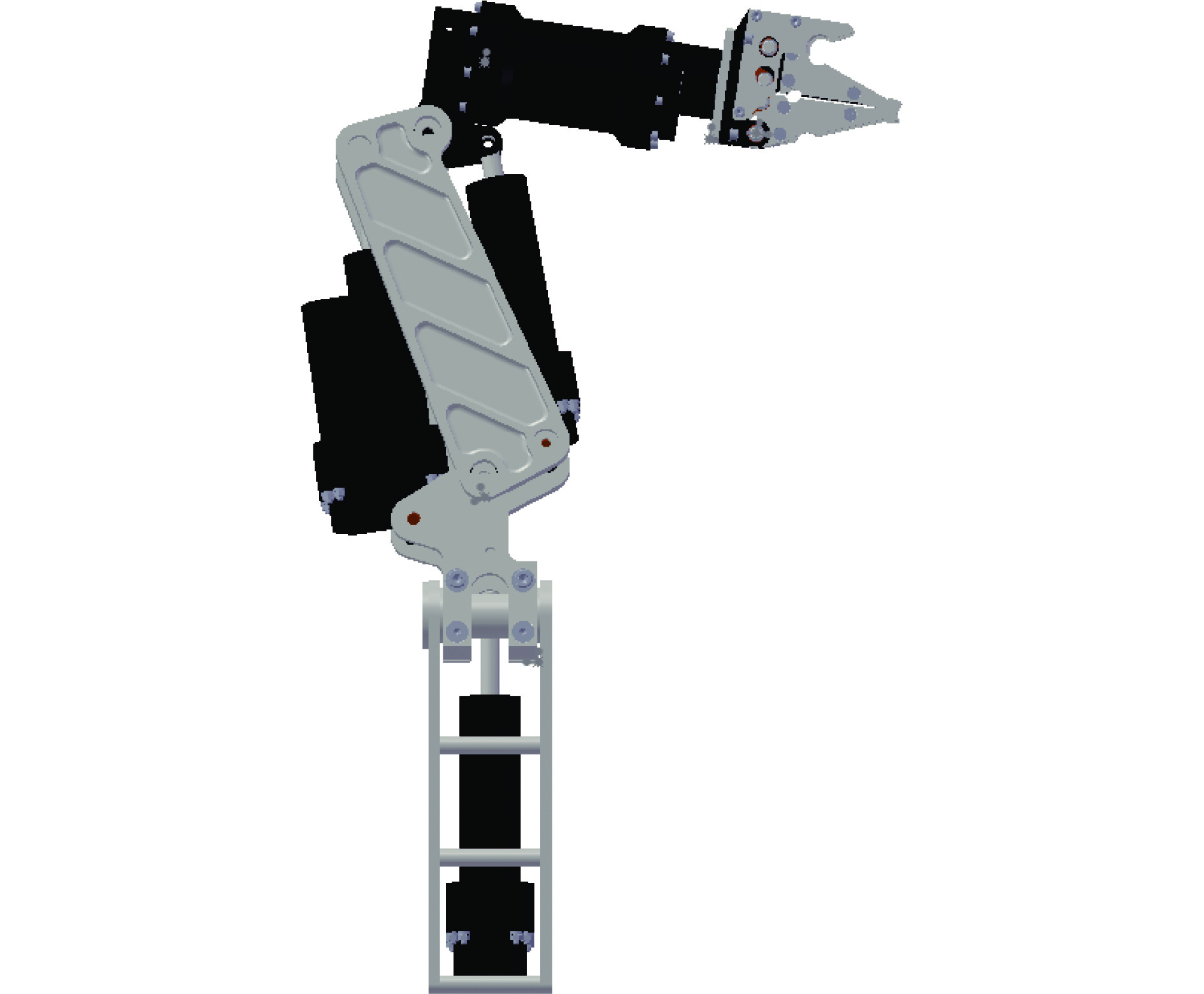
图 2 深海四自由度机械手简化结构及其D-H坐标系
Figure 2. Simplified structure of the deep-sea four-degrees-of-freedom robotic hand and its D-H coordinate system
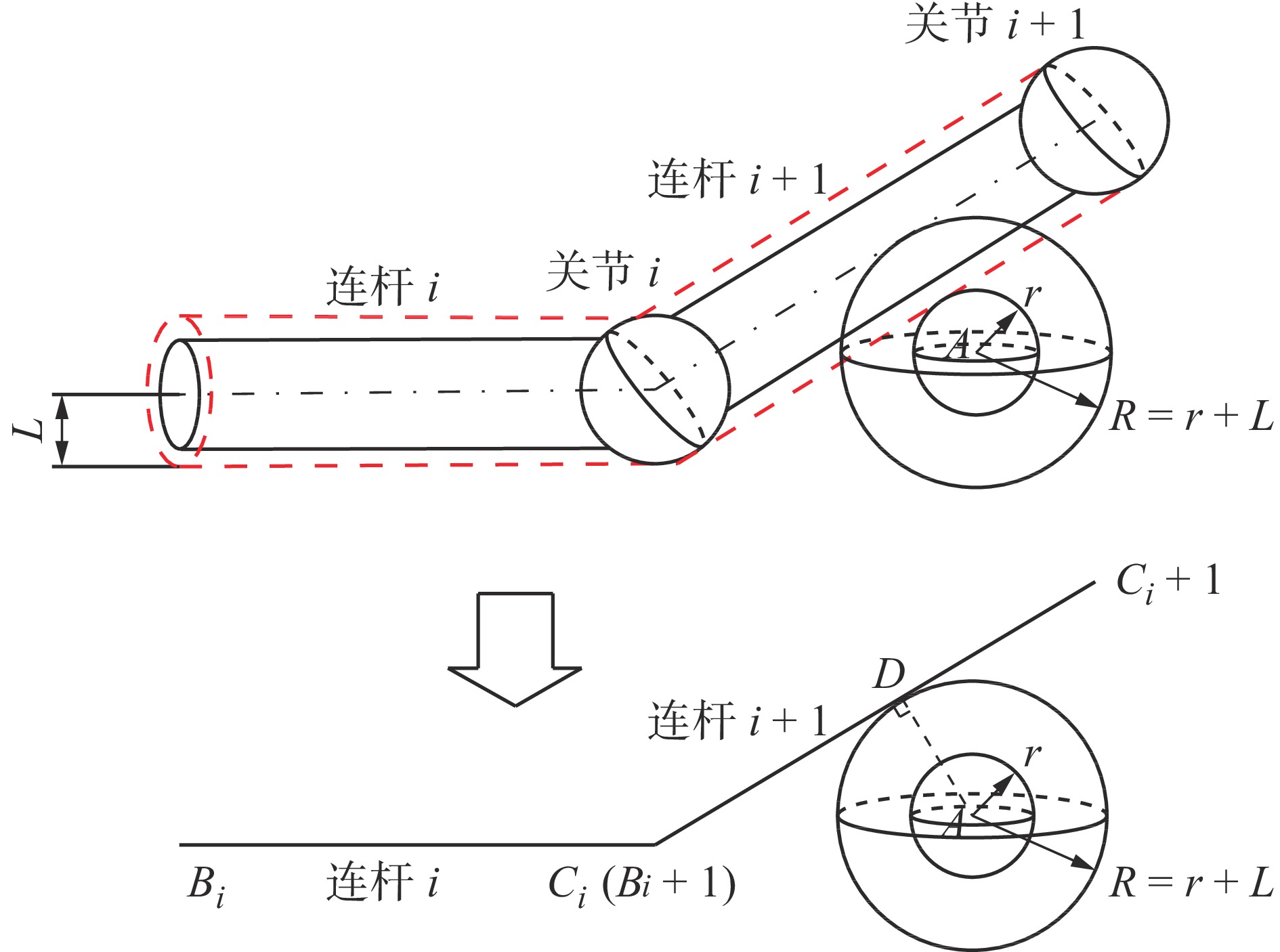
图 3 机械臂关节与连杆简化过程
Figure 3. Simplification process of the robotic arm's joints and links
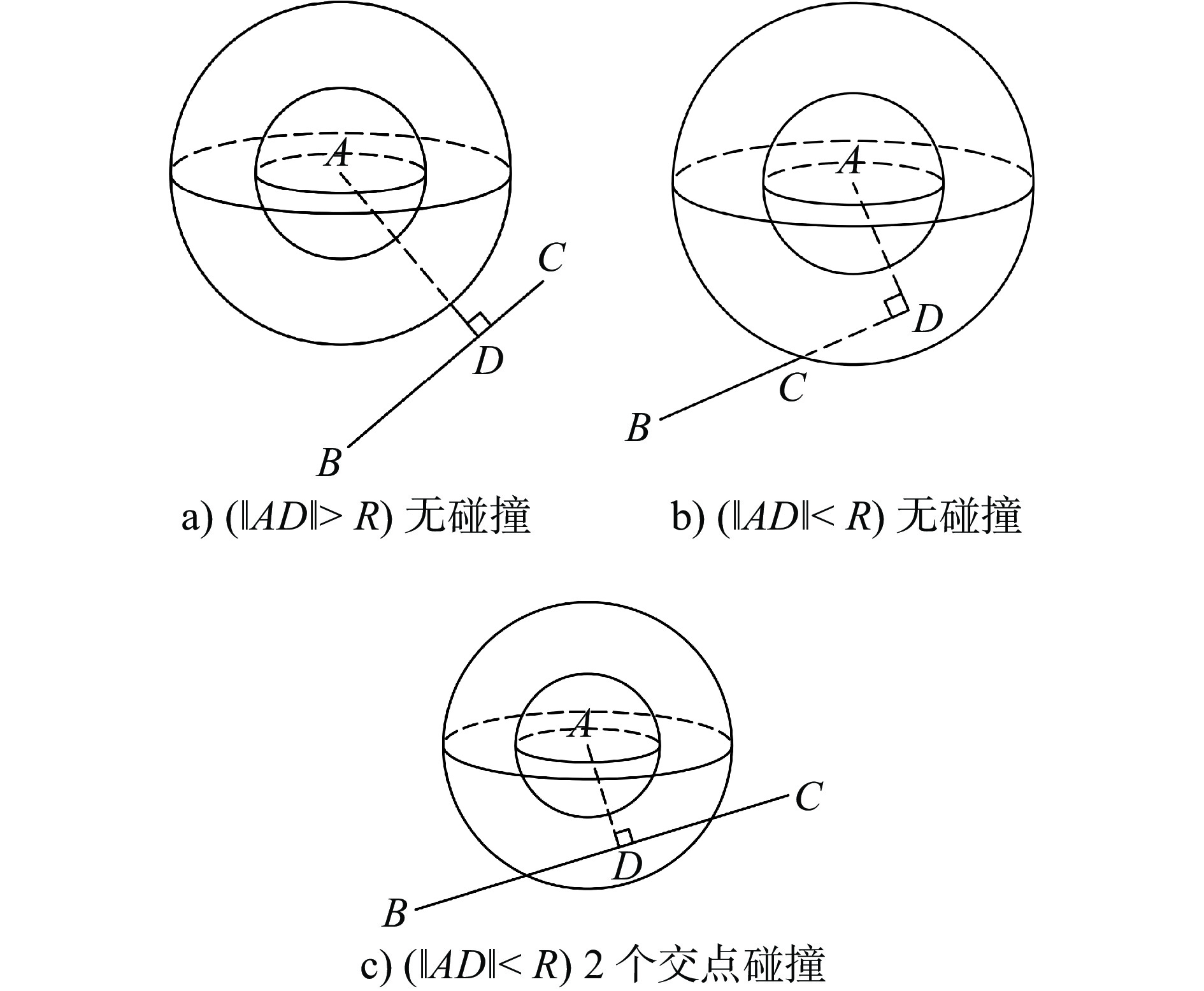
图 4 简化机械臂与外部障碍物碰撞情况
Figure 4. Collision between simplified robotic arm and external obstacles

图 10 5种算法性能展示以及后处理效果(二维)
Figure 10. Performance display of five algorithms and post-processing effects (2D)

图 11 5种算法性能展示以及后处理效果(三维)
Figure 11. Performance display of five algorithms and post-processing effects (3D)
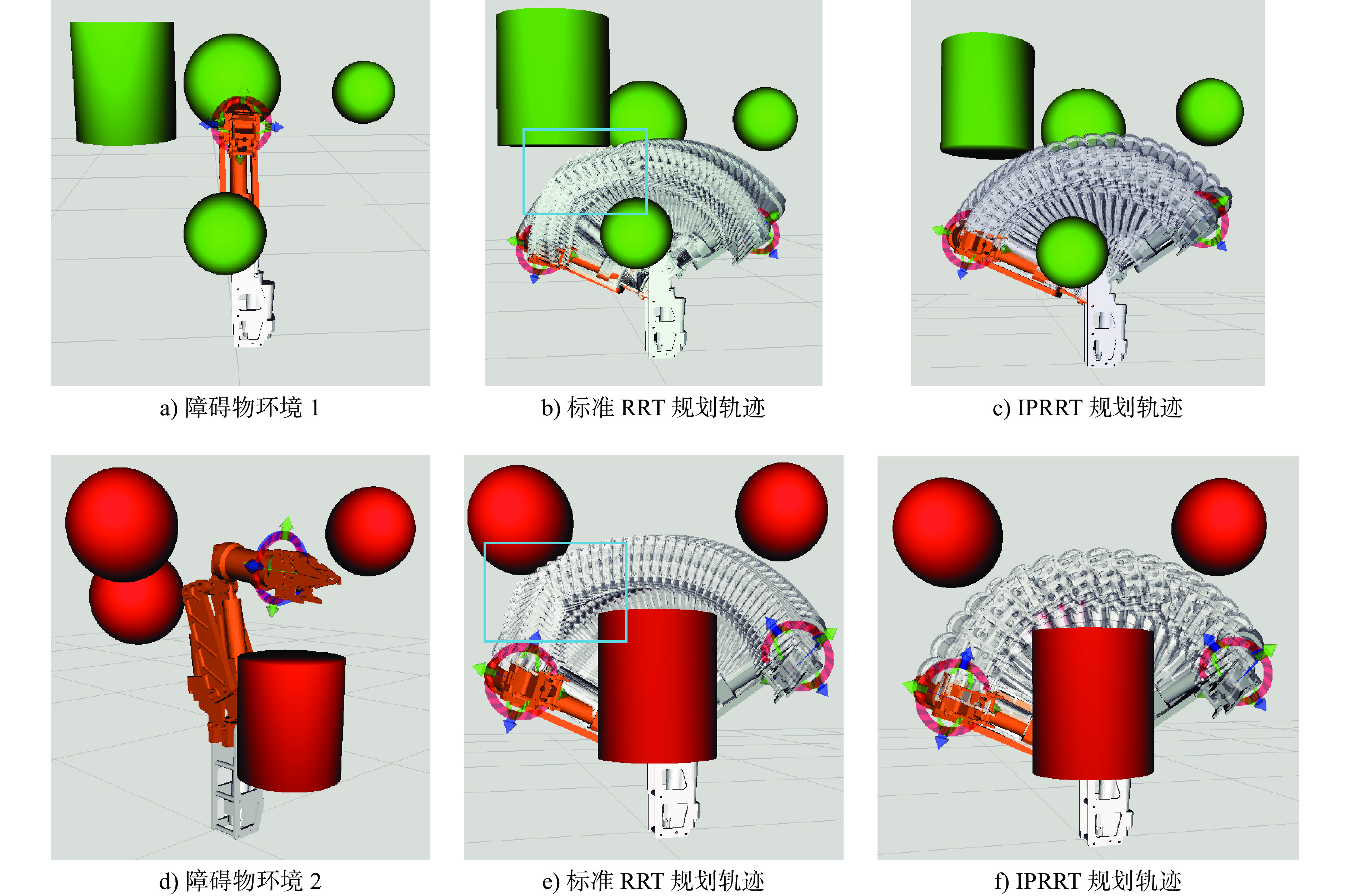
图 14 改进算法避障性能测试
Figure 14. Obstacle avoidance performance test of the improved algorithm
表 1 深海机械手连杆参数表
Table 1. Deep-sea robotic hand link parameters
$ i $ $ {\alpha _{i - 1}} $ $ {a_{i - 1}} $ $ d_i $ $ \theta_{i} $ 1 0 0 0 $ {\mathop q\limits^ * }_1 $ 2 −90° $a_{1}=0.061 \mathrm{ ~ m}$ 0 $ {\mathop q\limits^ * }_2 $ 3 0 $ a_{2}=0.315 \mathrm{ ~ m} $ 0 $ {\mathop q\limits^ * }_3 $ 4 90° 0 0 $ {\mathop q\limits^ * }_4 $ 5 0 0 ${d_4} = 0.257 \mathrm{ ~ m}$ 0  下载: 导出CSV
下载: 导出CSV
Regional exclusion strategy 1:Xrand ← RANDOM_FUCTION(); 2:if OBSTACLE_COLLISION(Xnear,Xnew) 3:Xnear ←NEAREST_TREE (T,Xrand): 4:if $ {({X_1} - {X_2})^2} + {({Y_1} - {Y_2})^2} > {\psi ^2} $ 5: return Xrand 6: else 7: return Null 8: end if 9: else 10: return Null 11:end if
下载: 导出CSV
表 2 5种算法100次仿真实验数据(二维)
Table 2. Data from 100 simulations for five algorithms (2D)
算法类型 规划时间/s 节点总数/个 路径节点数/个 路径规划长度/cm $\alpha_{\rm{ Max}} > {60^ \circ }$/次 算法1(标准RRT) 10.71 184.80 23.02 450.54 100 算法2 2.54 54.21 20.95 409.16 95 算法3 2.05 45.23 21.09 414.58 97 IPRRT算法 0.95 21.28 5.89 357.58 0 RRT*算法 14.43 434.84 17.94 364.10 34 注:$\alpha_{\rm{ max}} > {60^ \circ }$/次表示为100次路径规划中,单次路径线段转角最大值大于60°的次数。
下载: 导出CSV
表 3 5种算法100次仿真实验数据(三维)
Table 3. Data from 100 simulations for five algorithms (3D)
算法类型 规划时间/s 节点总数/个 路径节点数/个 路径规划长度/cm $\alpha_{\rm{max}} > {60^ \circ }$/次 算法1(标准RRT) 81.16 1352.90 32 628.38 100 算法2 4.32 70.29 26.25 515.23 99 算法3 3.79 57.06 26.04 510.40 100 IPRRT算法 1.62 21.56 4.94 440.62 0 RRT*算法 412.21 4092.62 21.32 457.64 52
下载: 导出CSV
表 4 不同算法路径平滑度
Table 4. Path smoothness of different algorithms
标准RRT算法 RRT*算法 IPRRT算法 326.21 97.85 23.94
下载: 导出CSV
-
[1] SIVČEV S, COLEMAN J, OMERDIĆ E, et al. Underwater manipulators: a review[J]. Ocean Engineering, 2018, 163: 431-450. doi: 10.1016/j.oceaneng.2018.06.018 [2] CAPOCCI R, OMERDIC E, DOOLY G, et al. Fault-tolerant control for ROVs using control reallocation and power isolation[J]. Journal of Marine Science and Engineering, 2018, 6(2): 40. doi: 10.3390/jmse6020040 [3] TAHIR Z, QURESHI A H, AYAZ Y, et al. Potentially guided bidirectionalized RRT* for fast optimal path planning in cluttered environments[J]. Robotics and Autonomous Systems, 2018, 108: 13-27. doi: 10.1016/j.robot.2018.06.013 [4] PI R, YOUAKIM D, CIESLAK P, et al. Multi-representation multi-heuristic A* motion planning for a dual-arm underwater vehicle manipulation system[J]. IFAC-PapersOnLine, 2019, 52(21): 205-210. doi: 10.1016/j.ifacol.2019.12.308 [5] QING G, ZHENG Z, YUE X. Path-planning of automated guided vehicle based on improved Dijkstra algorithm[C]//2017 29th Chinese Control and Decision Conference (CCDC). Chongqing: IEEE, 2017: 7138-7143. [6] MARON O, LOZANO-PEREZ T. Visible decomposition: real-time path planning in large planar environments[R]. Cambridge: Massachusetts Institute of Technology, 1996. [7] BESCHI M, MUTTI S, NICOLA G, et al. Optimal robot motion planning of redundant robots in machining and additive manufacturing applications[J]. Electronics, 2019, 8(12): 1437. doi: 10.3390/electronics8121437 [8] MAO L, JI X M, QIN F. A robot obstacle avoidance method based on improved genetic algorithm[C]//2018 11th International Conference on Intelligent Computation Technology and Automation (ICICTA). Changsha: IEEE, 2018: 327-331. [9] LI G Q, LIANG D W, ZHAO Q Y, et al. Improved artificial fish swarm algorithm approach to robot path planning problems[C]//2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE). Dalian: IEEE, 2020: 71-75. [10] ALOMARI A, PHILLIPS W, ASLAM N, et al. Dynamic fuzzy-logic based path planning for mobility-assisted localization in wireless sensor networks[J]. Sensors, 2017, 17(8): 1904. doi: 10.3390/s17081904 [11] LI Y, MA T, CHEN P Y, et al. Autonomous underwater vehicle optimal path planning method for seabed terrain matching navigation[J]. Ocean Engineering, 2017, 133: 107-115. doi: 10.1016/j.oceaneng.2017.01.026 [12] KANNAN A, GUPTA P, TIWARI R, et al. Robot motion planning using adaptive hybrid sampling in probabilistic roadmaps[J]. Electronics, 2016, 5(2): 16. [13] KARAMAN S, FRAZZOLI E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. doi: 10.1177/0278364911406761 [14] JAILLET L, CORTÉS J, SIMÉON T. Sampling-based path planning on configuration-space costmaps[J]. IEEE Transactions on Robotics, 2010, 26(4): 635-646. doi: 10.1109/TRO.2010.2049527 [15] 周星合. 基于作业任务的ROV双臂运动规划方法的研究[D]. 哈尔滨: 哈尔滨工程大学, 2017.ZHOU X H. Research on ROV dual-arm motion planning method based on job task[D]. Harbin: Harbin Engineering University, 2017. (in Chinese) [16] YOUAKIM D, RIDAO P. Motion planning survey for autonomous mobile manipulators underwater manipulator case study[J]. Robotics and Autonomous Systems, 2018, 107: 20-44. doi: 10.1016/j.robot.2018.05.006 [17] WANG J K, MENG M Q H, KHATIB O. EB-RRT: optimal motion planning for mobile robots[J]. IEEE Transactions on Automation Science and Engineering, 2020, 17(4): 2063-2073. doi: 10.1109/TASE.2020.2987397 [18] 张立彬, 林后凯, 谭大鹏. 基于栅格空间的自适应GB_RRT*机械臂路径规划[J]. 计算机集成制造系统, 2022, 28(6): 1638-1649. doi: 10.13196/j.cims.2022.06.004ZHANG L B, LIN H K, TAN D P. Manipulator path planning based on grid space-based adaptive goal bias rapidly exploring random tree star[J]. Computer Integrated Manufacturing Systems, 2022, 28(6): 1638-1649. (in Chinese) doi: 10.13196/j.cims.2022.06.004 [19] KANG J G, LIM D W, CHOI Y S, et al. Improved RRT-Connect algorithm based on triangular inequality for robot path planning[J]. Sensors, 2021, 21(2): 333. doi: 10.3390/s21020333 [20] 马冀桐, 王毅, 何宇, 等. 基于构型空间先验知识引导点的柑橘采摘机械臂运动规划[J]. 农业工程学报, 2019, 35(8): 100-108.MA J T, WANG Y, HE Y, et al. Motion planning of citrus harvesting manipulator based on informed guidance point of configuration space[J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(8): 100-108. (in Chinese) [21] 祁若龙, 周维佳, 王铁军. 一种基于遗传算法的空间机械臂避障轨迹规划方法[J]. 机器人, 2014, 36(3): 263-270.QI R L, ZHOU W J, WANG T J. An obstacle avoidance trajectory planning scheme for space manipulators based on genetic algorithm[J]. Robot, 2014, 36(3): 263-270. (in Chinese) -



 点击查看大图
点击查看大图
计量
- 文章访问数: 116
- HTML全文浏览量: 50
- PDF下载量: 22
- 被引次数: 0
