作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2023年 42卷 第11期
2023, 42(11): 1767-1777.
doi: 10.13433/j.cnki.1003-8728.20220104
 摘要
摘要 HTML
HTML PDF 7560KB
PDF 7560KB
摘要:
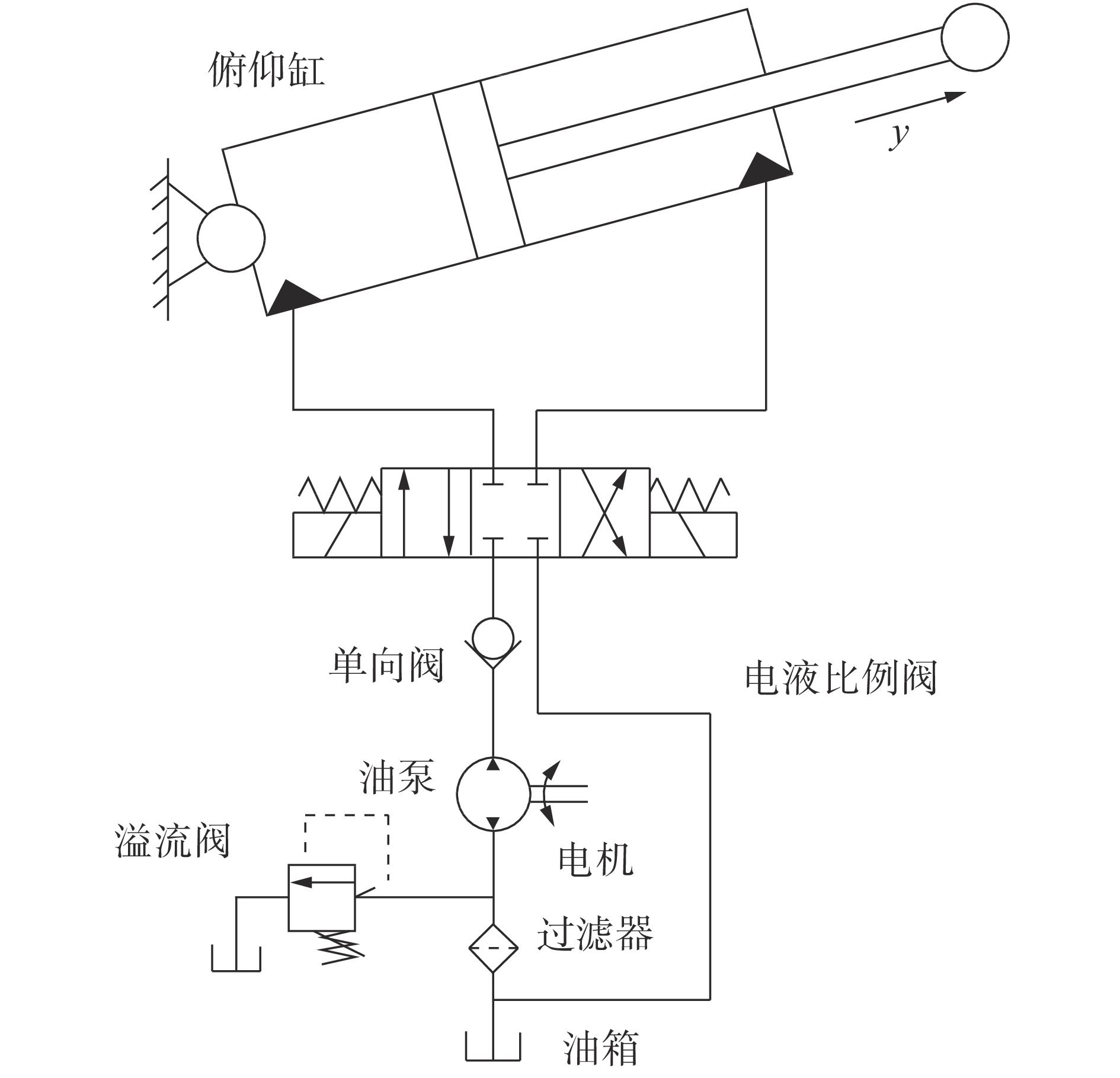
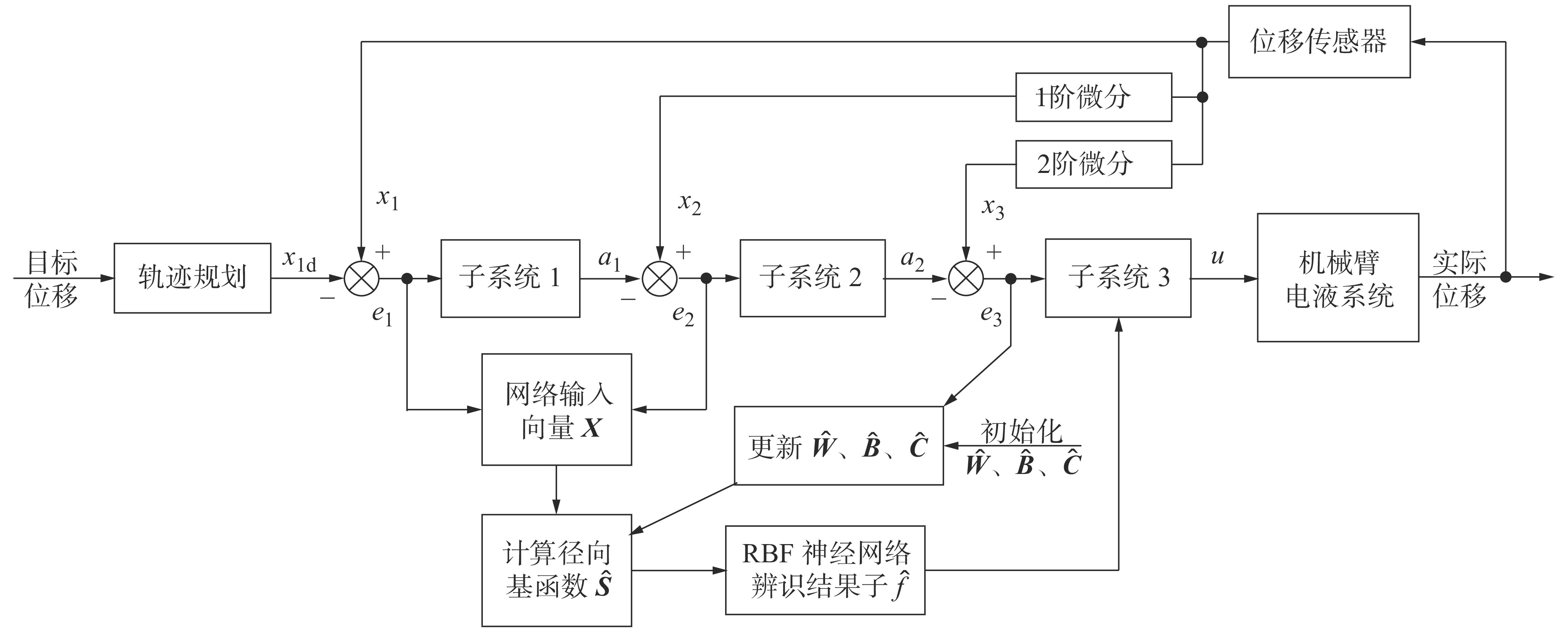
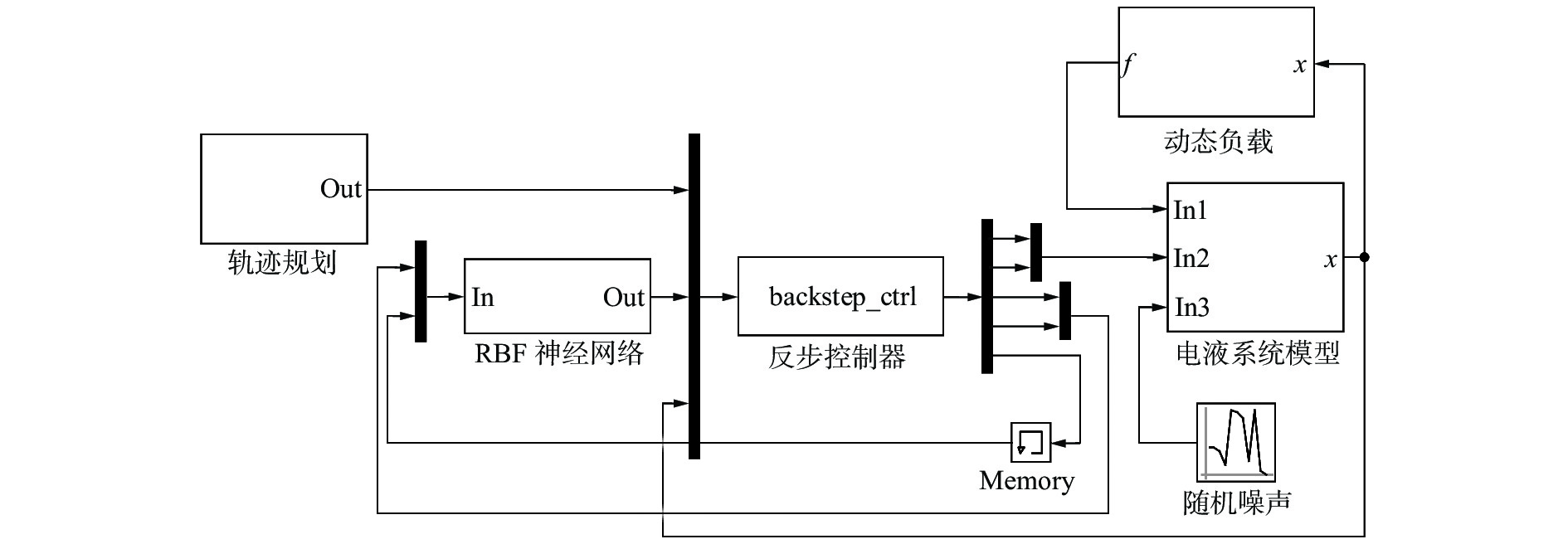
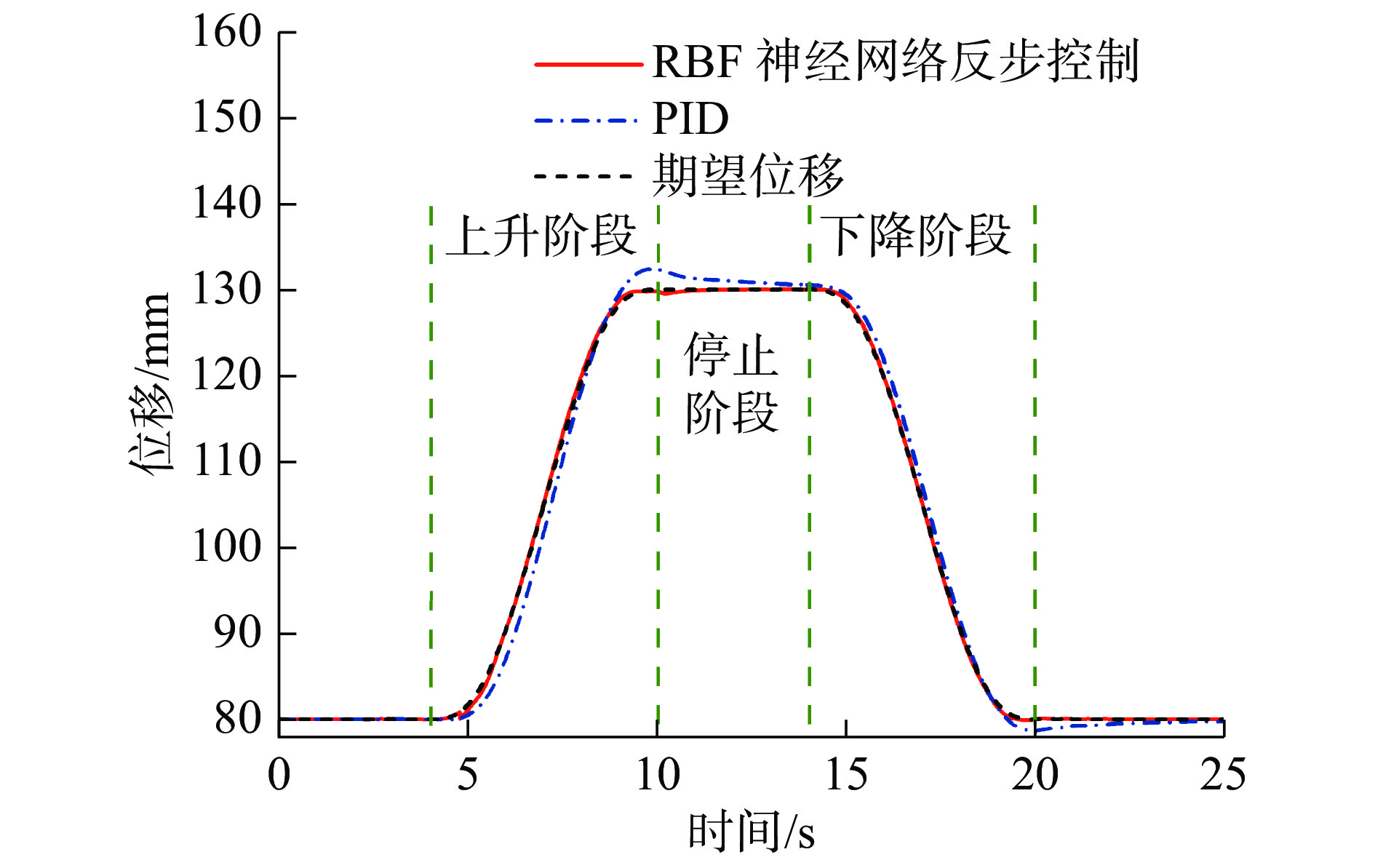
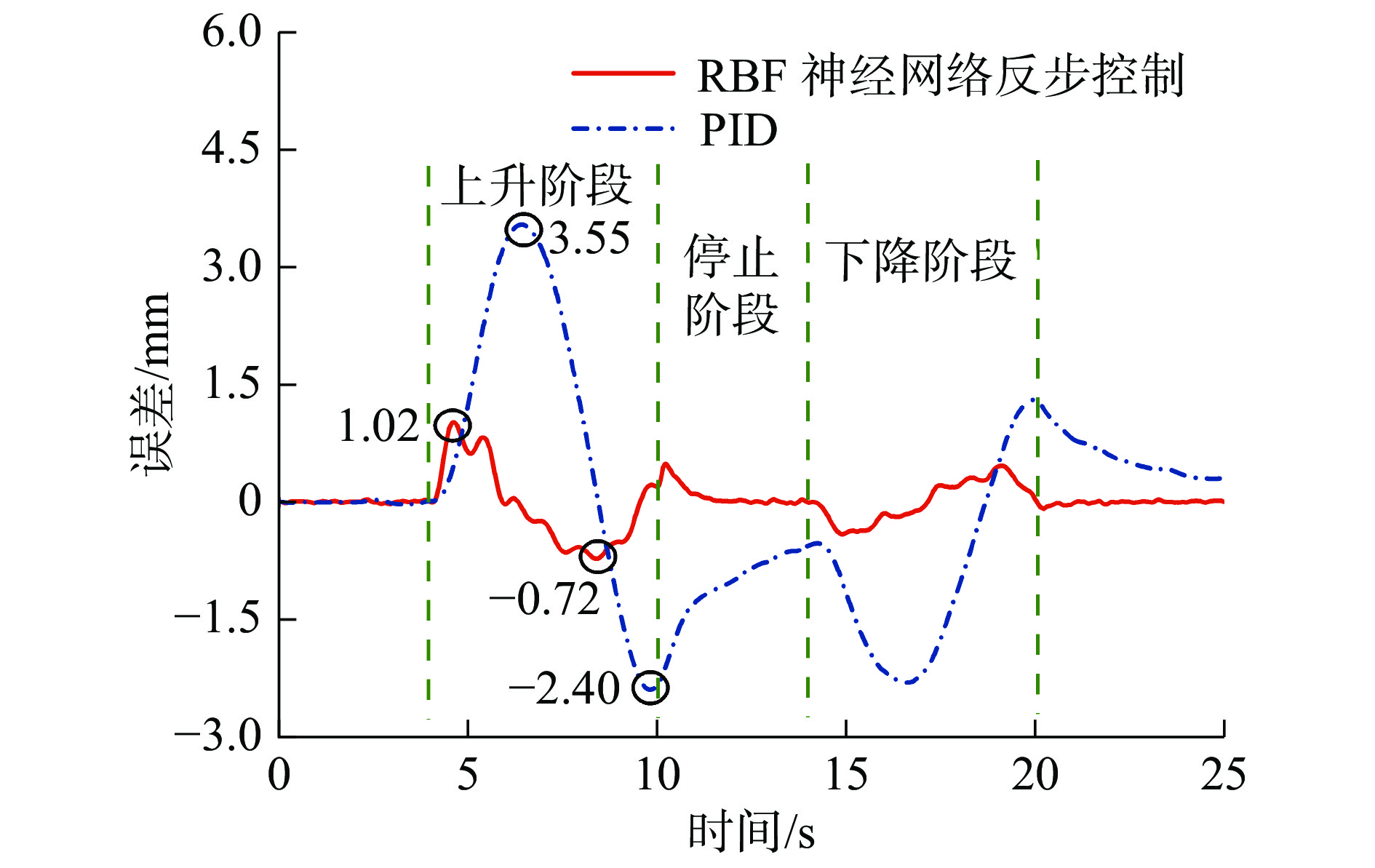
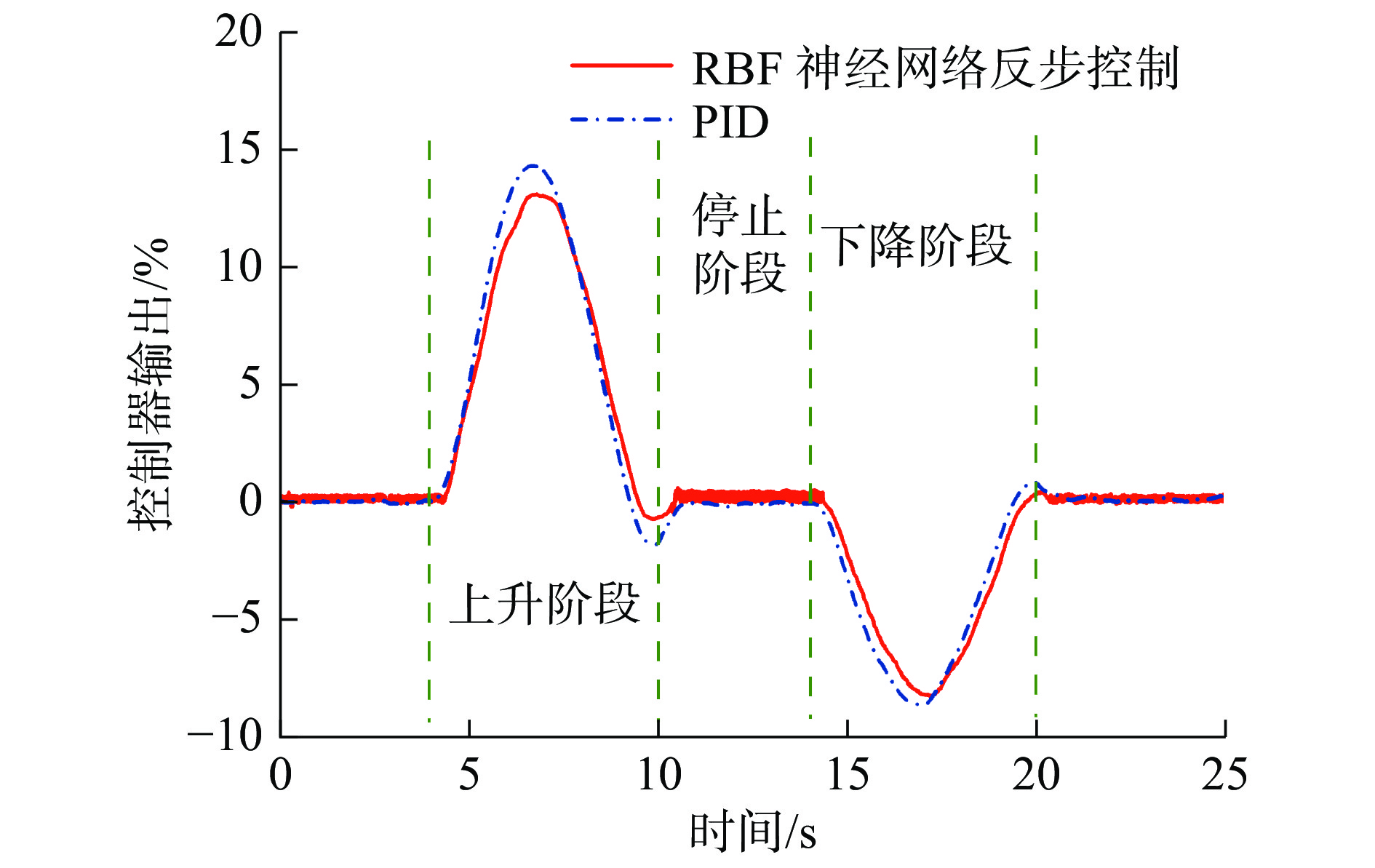
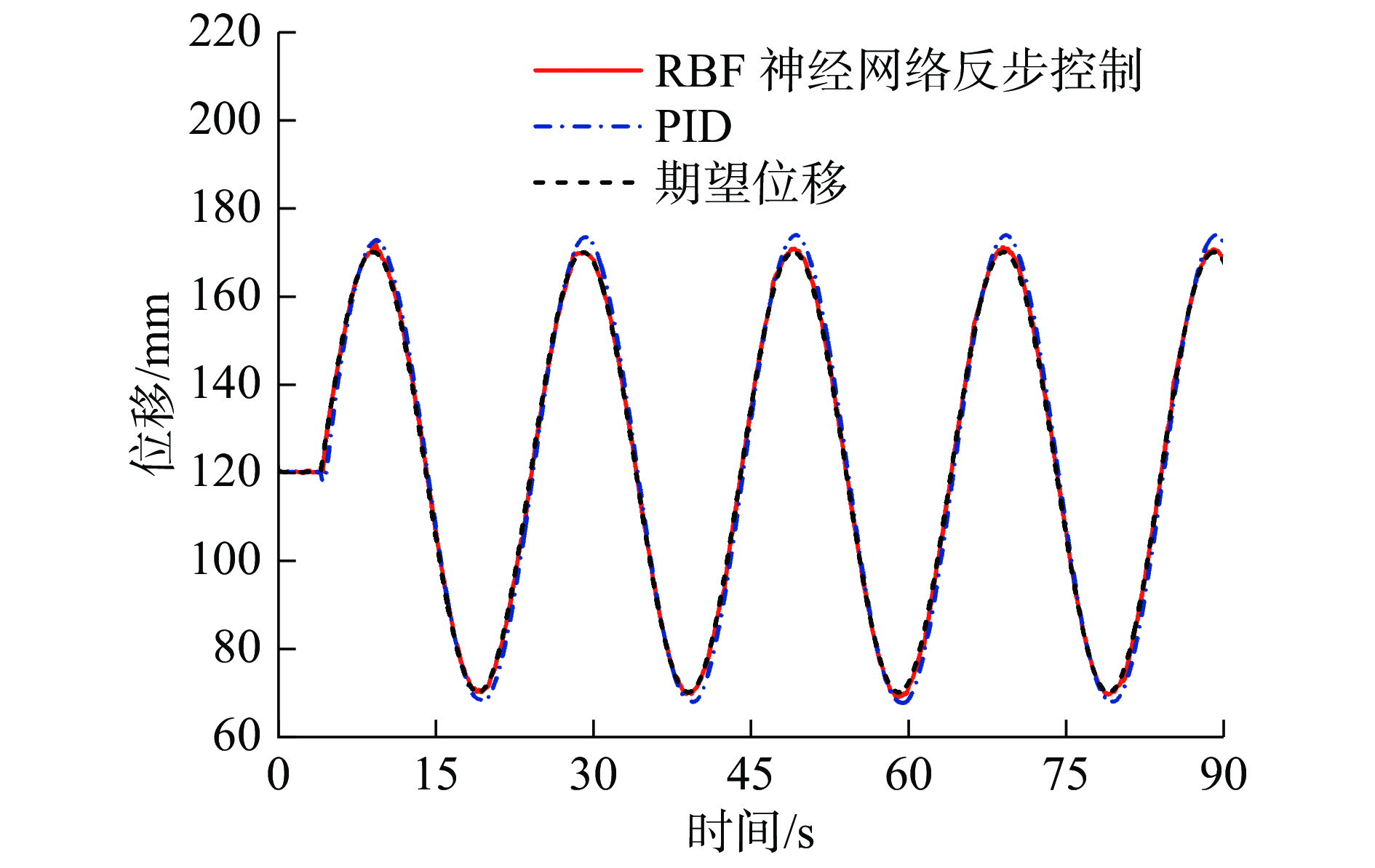
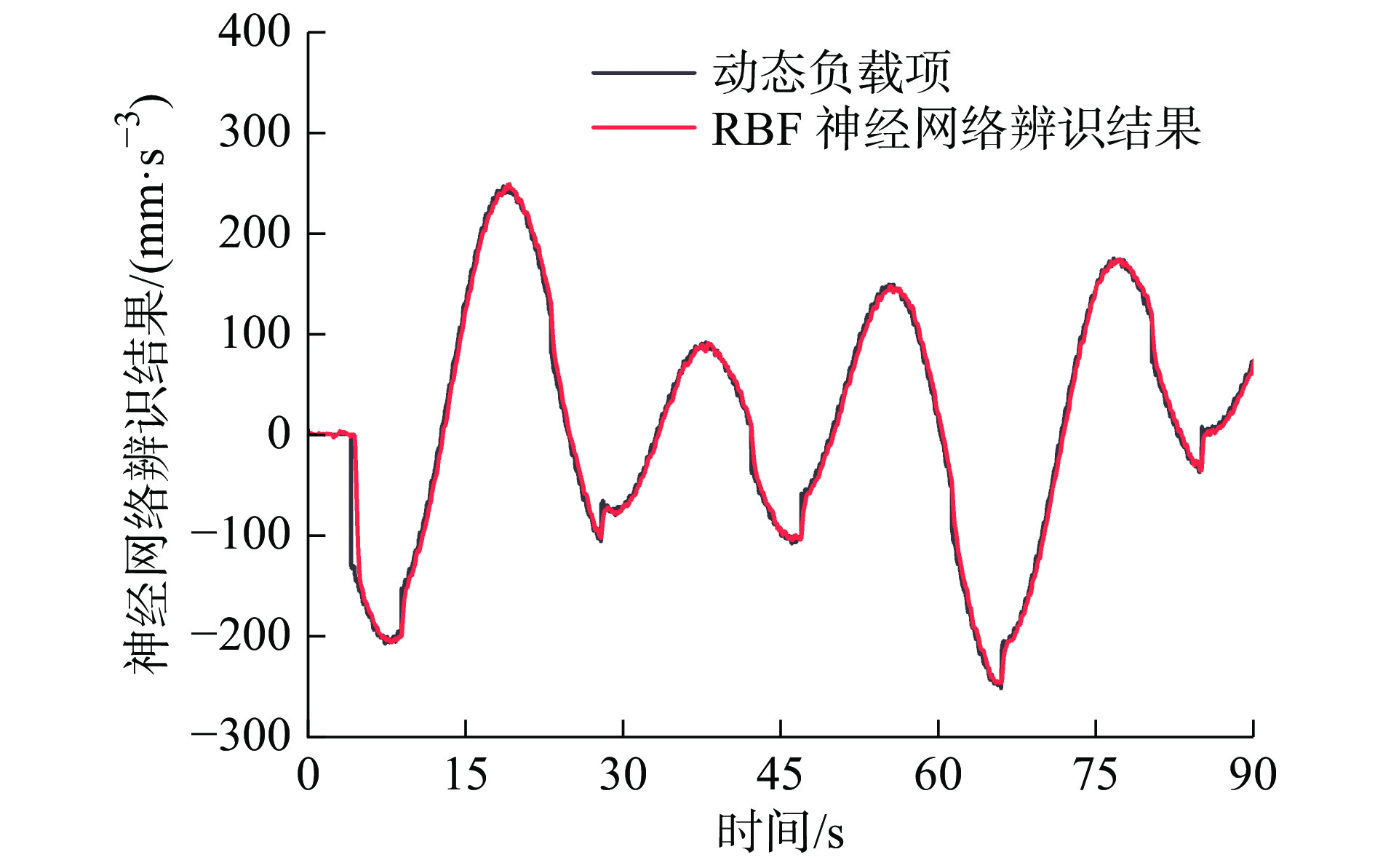
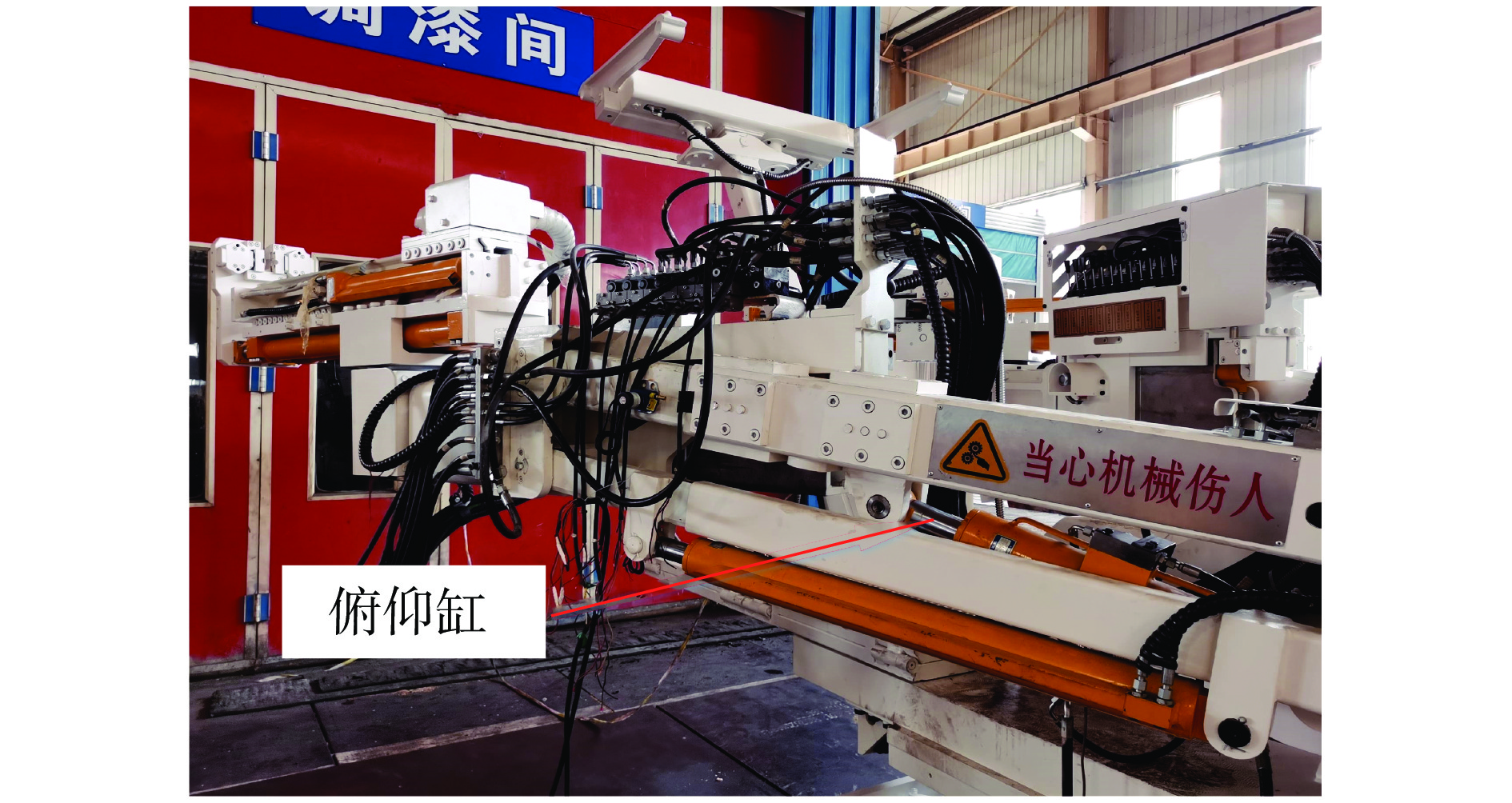
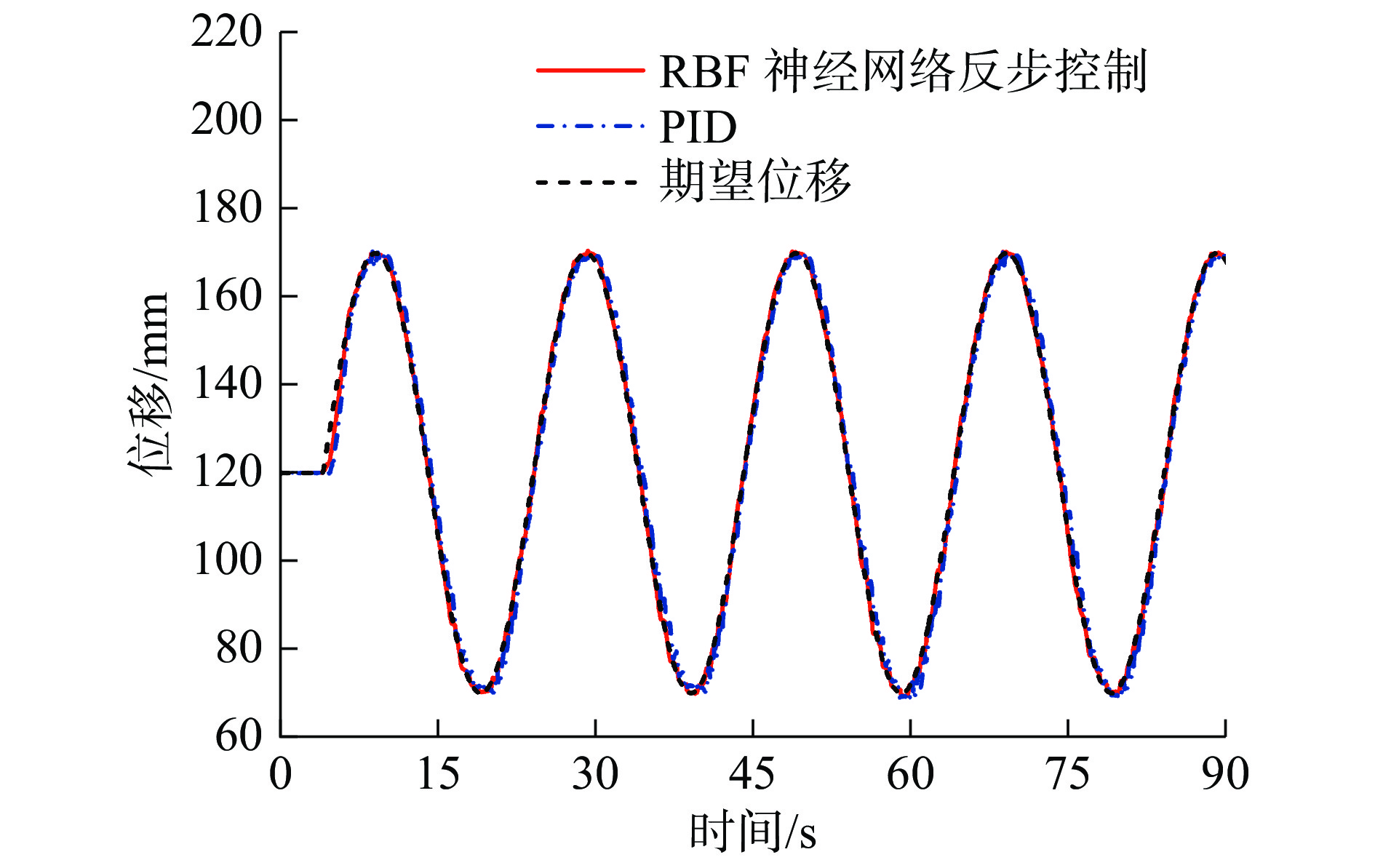
针对重型机械臂的电液驱动系统因非线性、参数时变等因素引起的控制精度下降问题,提出了一种基于RBF神经网络辨识动态负载的反步控制策略。以某锚杆钻车重型机械臂的电液系统为例,建立了系统的数学模型,将其分解为系统内部状态反馈、控制器驱动及外部负载驱动这3个动力学部分。考虑电液系统内部参数变化的缓慢性,通过离线辨识的方法,得到系统内部状态反馈中的标称模型参数。控制器的设计采用反步法,其输出计算需要对外部负载进行辨识,对此采用RBF神经网络进行动态负载辨识,辨识与控制的动态过程及设计原则依据Lyapunov稳定性原理。仿真与实验结果表明:所设计的控制算法有效提高了机械臂的位置跟踪精度,具有响应速度快、轨迹误差小的特点;控制器输出的控制量也相对较小和平滑。
针对重型机械臂的电液驱动系统因非线性、参数时变等因素引起的控制精度下降问题,提出了一种基于RBF神经网络辨识动态负载的反步控制策略。以某锚杆钻车重型机械臂的电液系统为例,建立了系统的数学模型,将其分解为系统内部状态反馈、控制器驱动及外部负载驱动这3个动力学部分。考虑电液系统内部参数变化的缓慢性,通过离线辨识的方法,得到系统内部状态反馈中的标称模型参数。控制器的设计采用反步法,其输出计算需要对外部负载进行辨识,对此采用RBF神经网络进行动态负载辨识,辨识与控制的动态过程及设计原则依据Lyapunov稳定性原理。仿真与实验结果表明:所设计的控制算法有效提高了机械臂的位置跟踪精度,具有响应速度快、轨迹误差小的特点;控制器输出的控制量也相对较小和平滑。










2023, 42(11): 1778-1783.
doi: 10.13433/j.cnki.1003-8728.20220117
摘要:
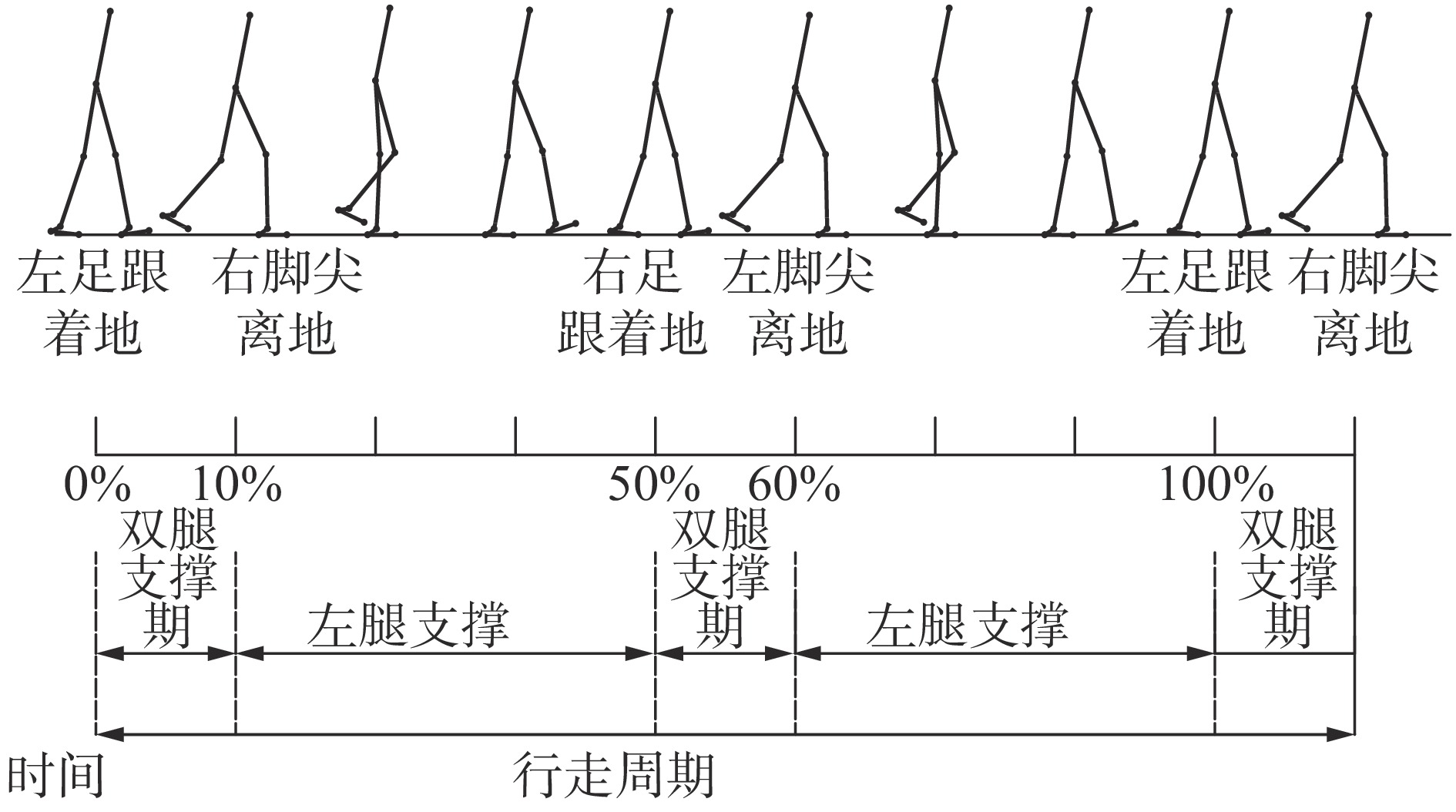
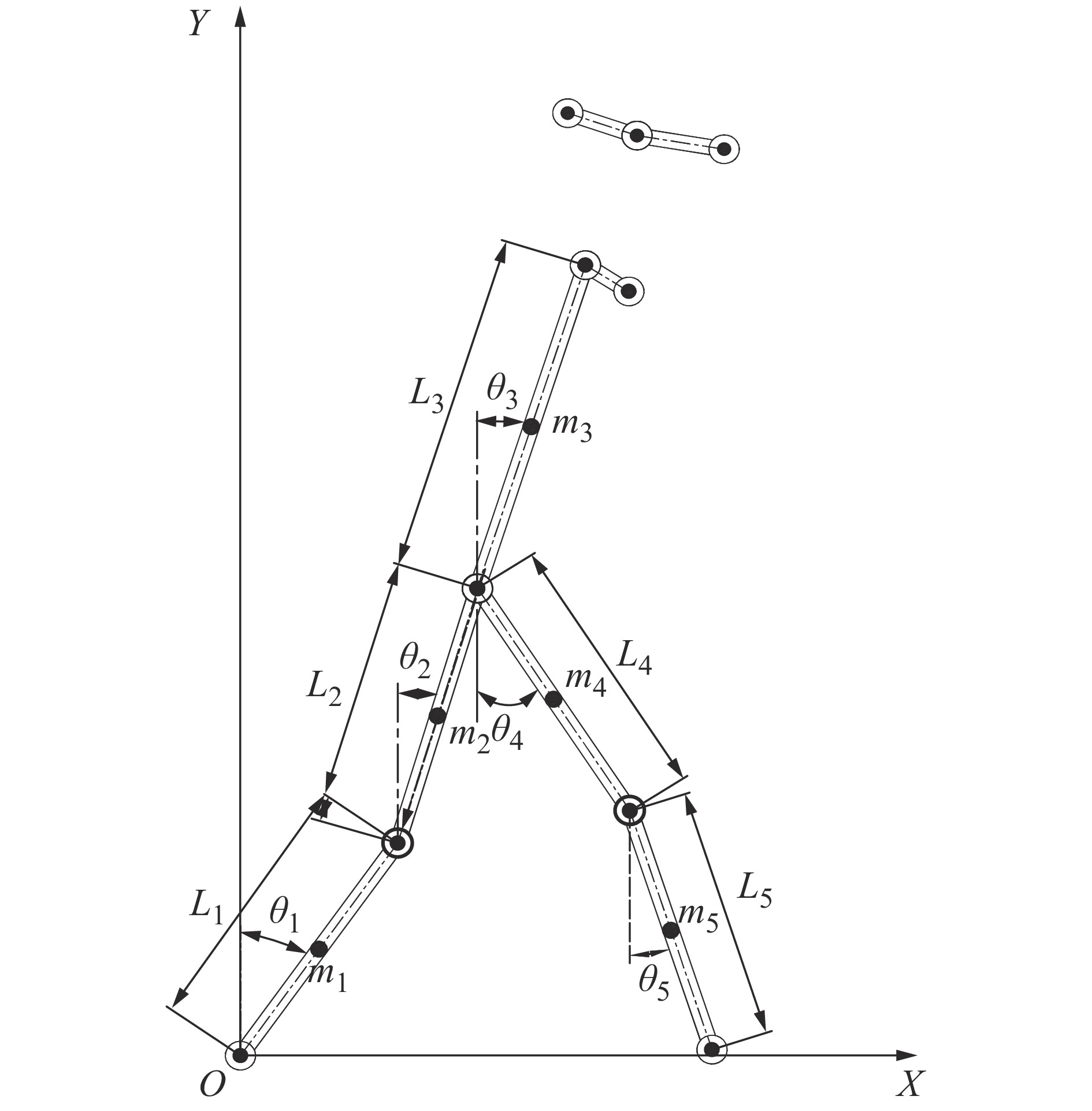
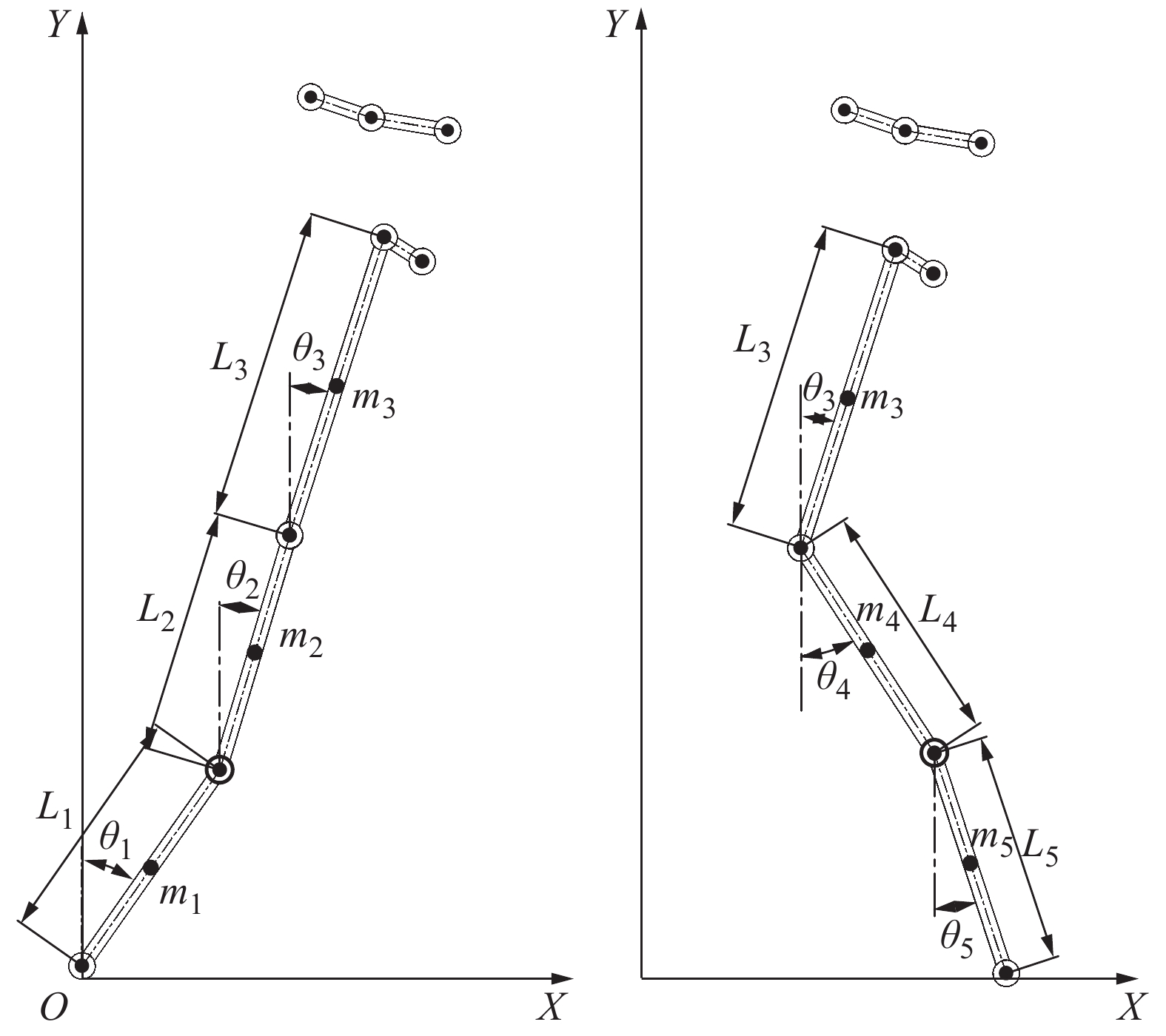
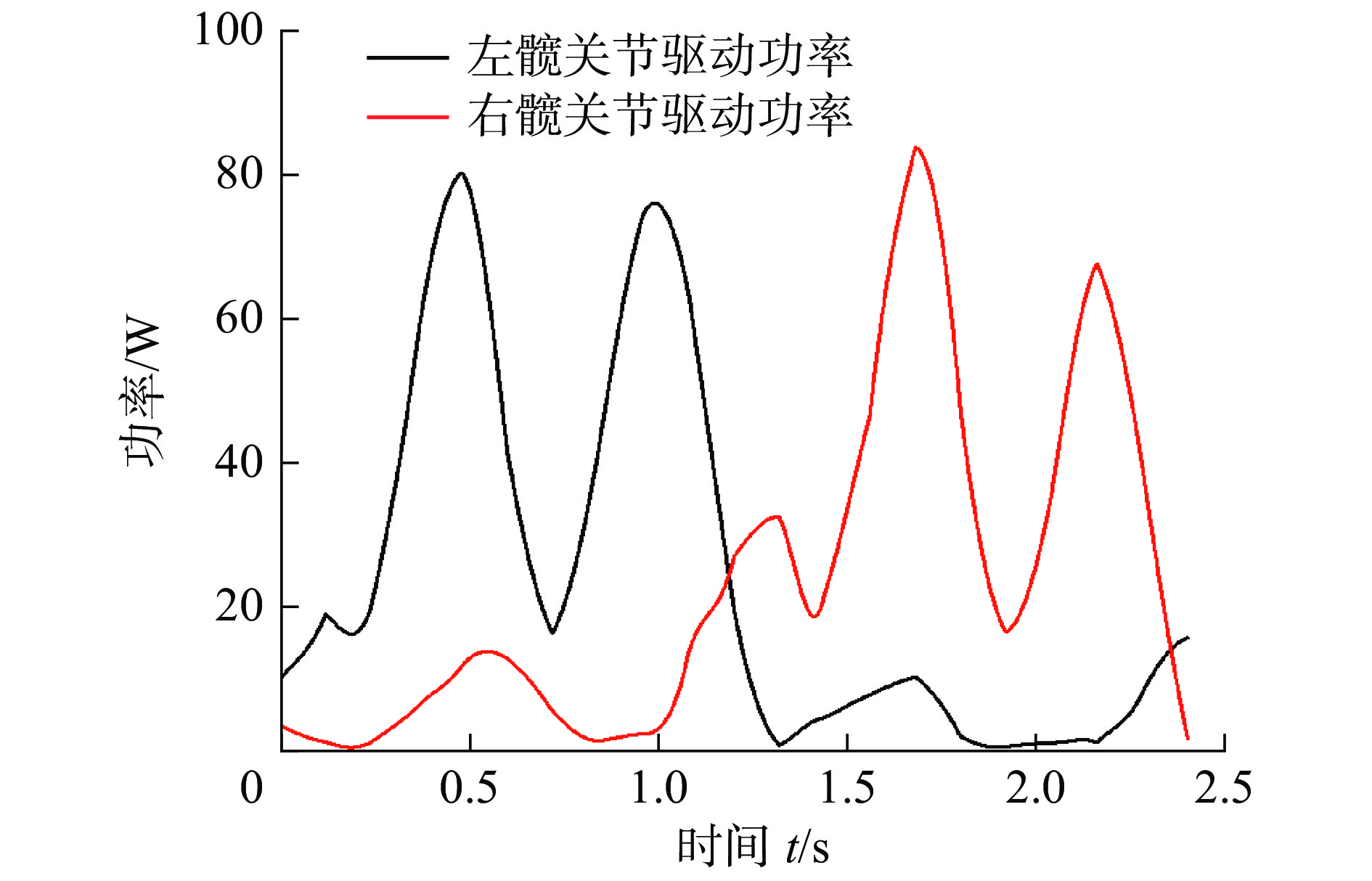
助力型外骨骼是一种人机高度结合的复杂机械结构。为了研究外骨骼在行走模式下负重50kg时各关节所需驱动力矩以及功率变化规律,本文以西南交通大学第三代助力型外骨骼为研究对象,建立外骨骼模型,运用拉格朗日方程对外骨骼进行动力学分析。为实现外骨骼与人体的携行运动,通过姿态传感器对人体行走过程中关节角的变化规律进行了测量与分析,并将其作为驱动函数对ADAMS环境中的外骨骼虚拟样机进行动力学仿真,得出各关节驱动力矩变化曲线,并拟合出各关节功率曲线。所得结果增加了人机携行性以及结果的可靠性,为助力型外骨骼的驱动控制提供了参考依据。
助力型外骨骼是一种人机高度结合的复杂机械结构。为了研究外骨骼在行走模式下负重50kg时各关节所需驱动力矩以及功率变化规律,本文以西南交通大学第三代助力型外骨骼为研究对象,建立外骨骼模型,运用拉格朗日方程对外骨骼进行动力学分析。为实现外骨骼与人体的携行运动,通过姿态传感器对人体行走过程中关节角的变化规律进行了测量与分析,并将其作为驱动函数对ADAMS环境中的外骨骼虚拟样机进行动力学仿真,得出各关节驱动力矩变化曲线,并拟合出各关节功率曲线。所得结果增加了人机携行性以及结果的可靠性,为助力型外骨骼的驱动控制提供了参考依据。









2023, 42(11): 1784-1793.
doi: 10.13433/j.cnki.1003-8728.20220156
摘要:
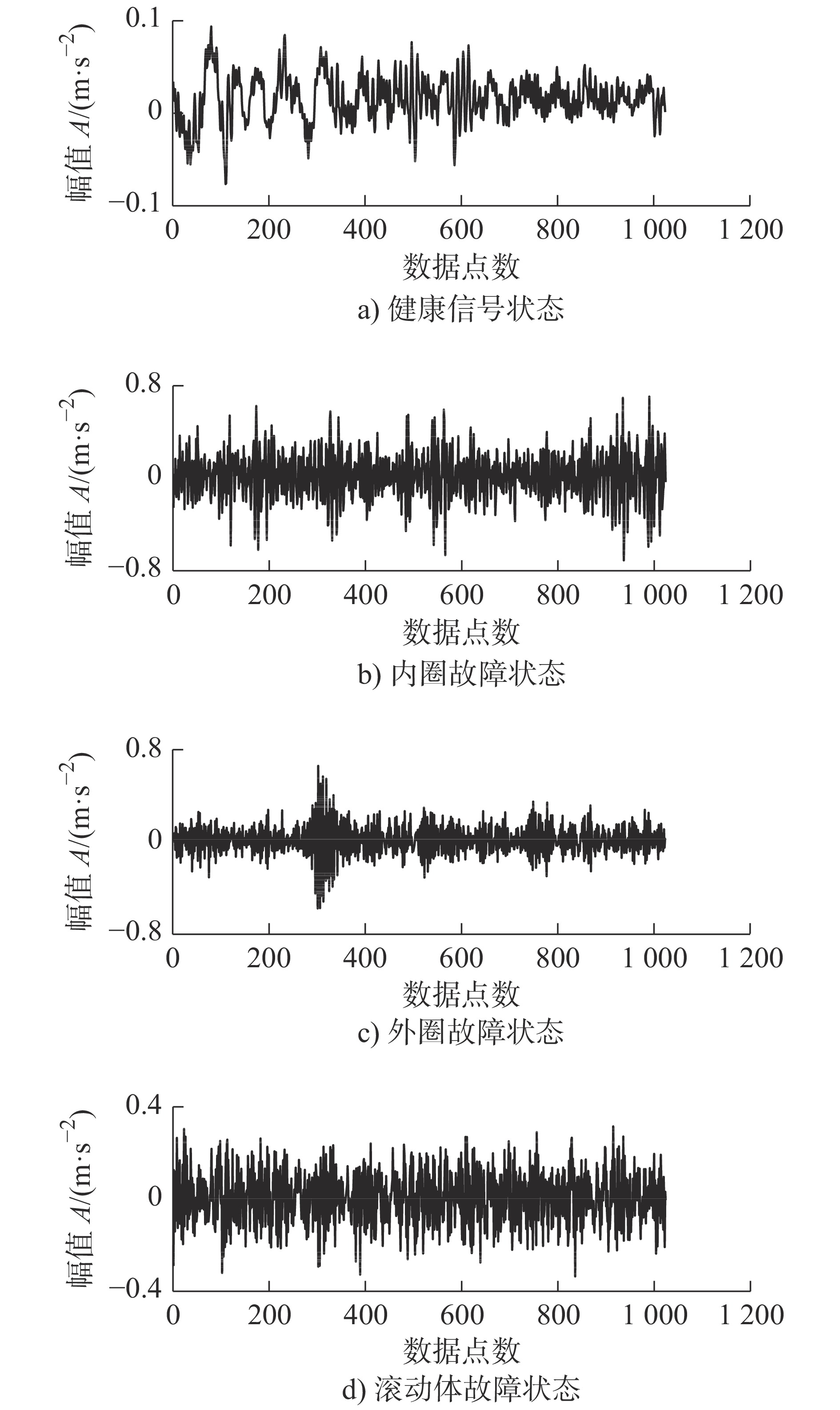
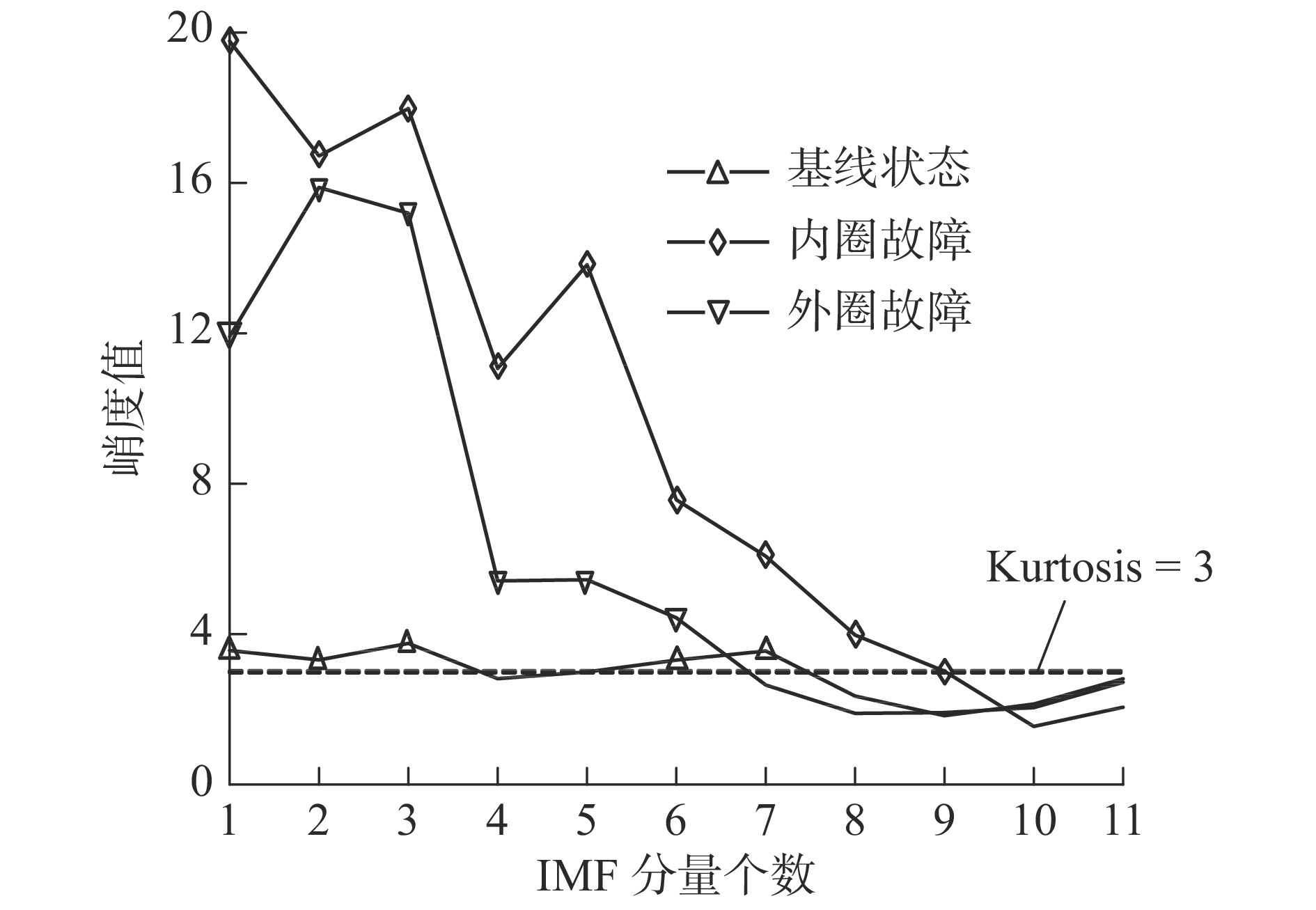
为准确识别滚动轴承当前故障状态,提出一种集合经验模态分解(EEMD)、特征选择与t-分布邻域嵌入(t-SNE)的诊断方法。采用EEMD分解故障信号获得若干本征模态函数(IMF),采用峭度准则筛选有效IMF分量并重构;求出重构信号的高维时、频域特征矩阵并对其归一化,采用t-SNE算法获得对故障状态更敏感的低维特征矩阵;将特征矩阵输入粒子群优化的最小二乘支持向量机(LSSVM)中,实现轴承的故障识别与诊断。采用实验分析并对比几种典型的降维法,证明了t-SNE的优越性,所提方法可以实现故障状态的100%识别,验证了该方法的有效性。
为准确识别滚动轴承当前故障状态,提出一种集合经验模态分解(EEMD)、特征选择与t-分布邻域嵌入(t-SNE)的诊断方法。采用EEMD分解故障信号获得若干本征模态函数(IMF),采用峭度准则筛选有效IMF分量并重构;求出重构信号的高维时、频域特征矩阵并对其归一化,采用t-SNE算法获得对故障状态更敏感的低维特征矩阵;将特征矩阵输入粒子群优化的最小二乘支持向量机(LSSVM)中,实现轴承的故障识别与诊断。采用实验分析并对比几种典型的降维法,证明了t-SNE的优越性,所提方法可以实现故障状态的100%识别,验证了该方法的有效性。









2023, 42(11): 1794-1800.
doi: 10.13433/j.cnki.1003-8728.20220137
摘要:
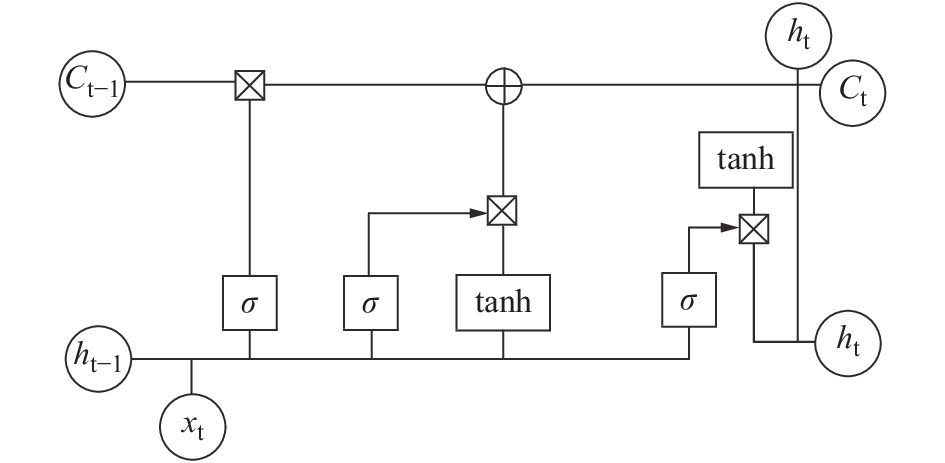
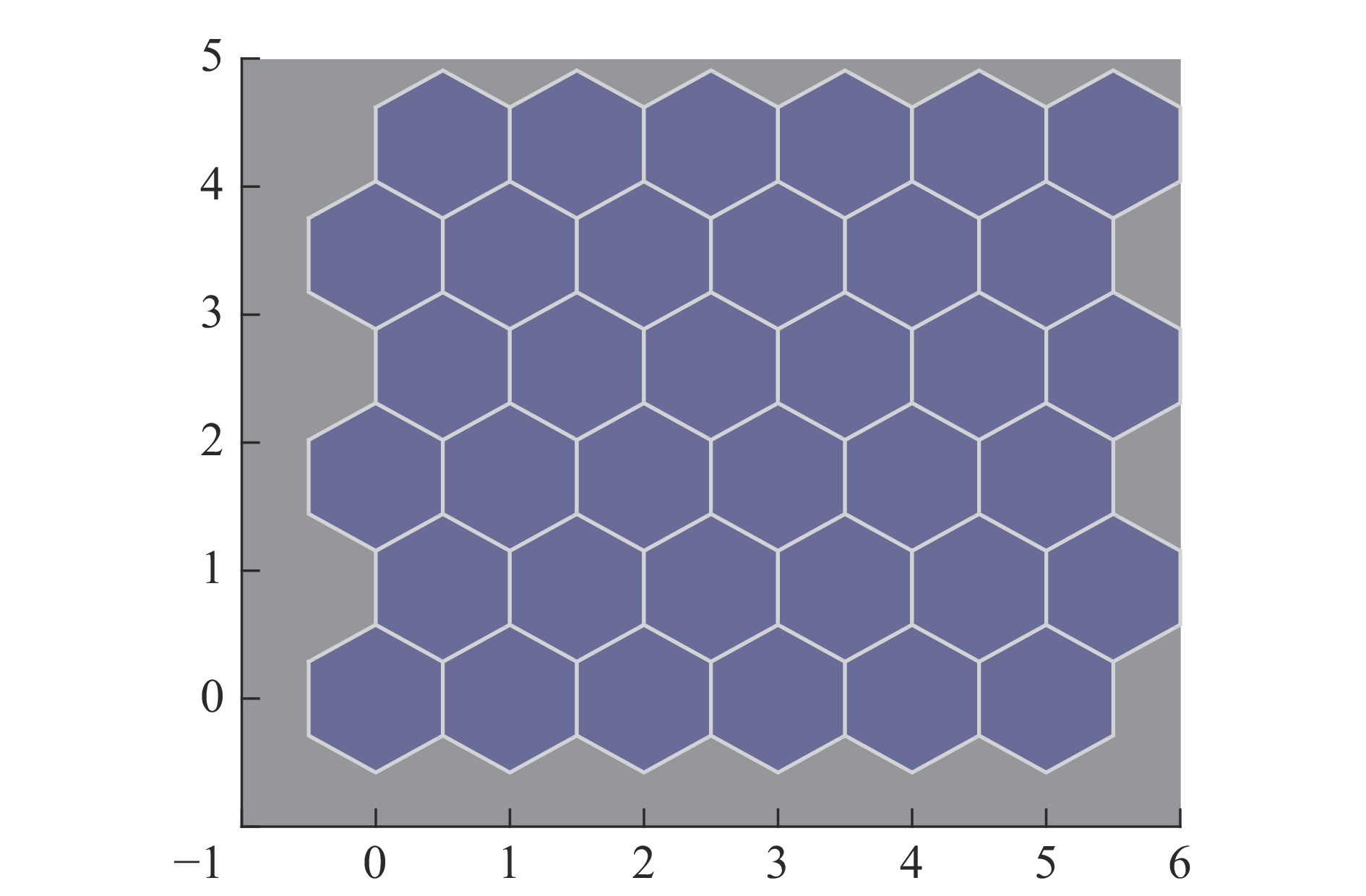
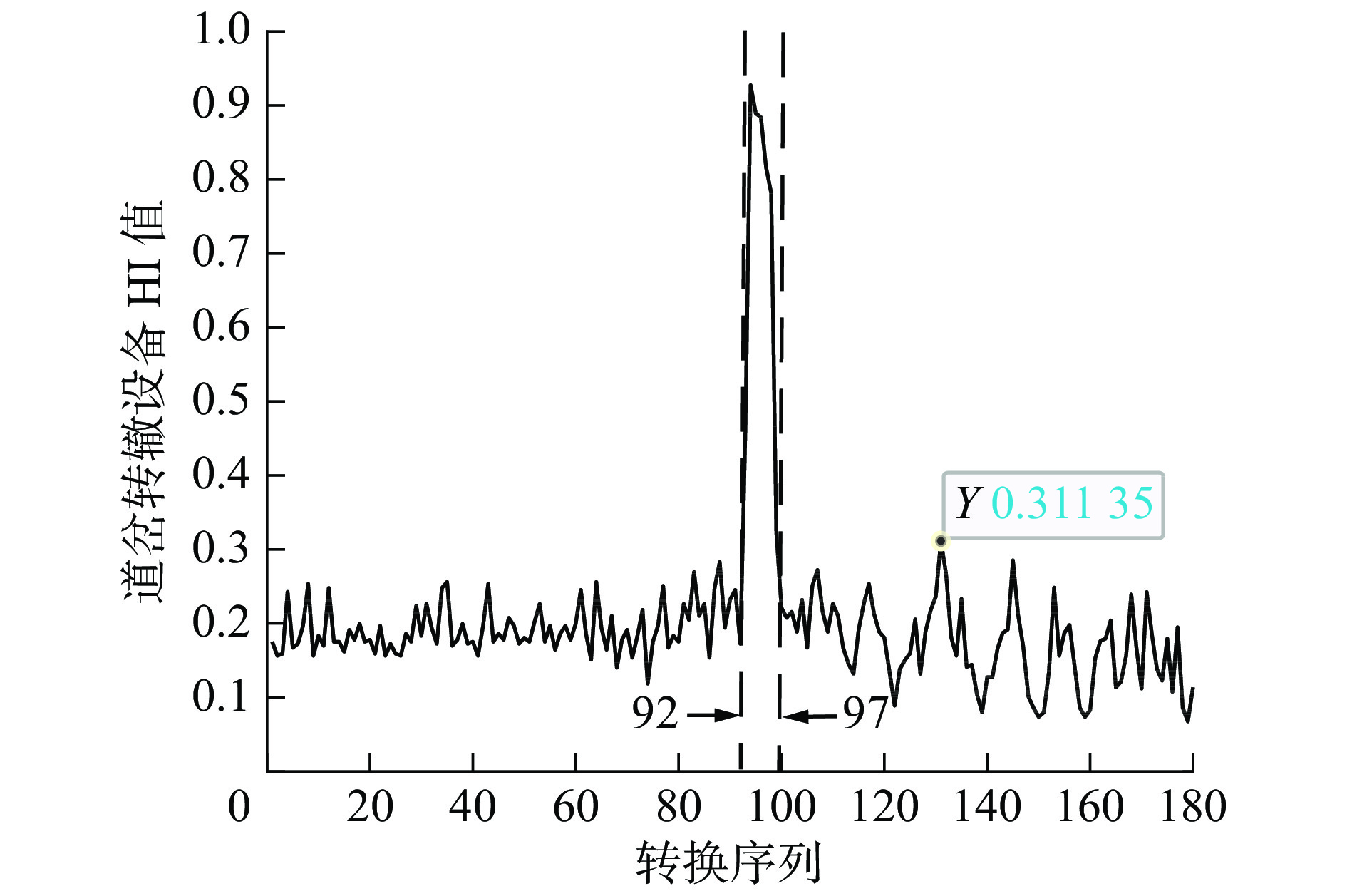
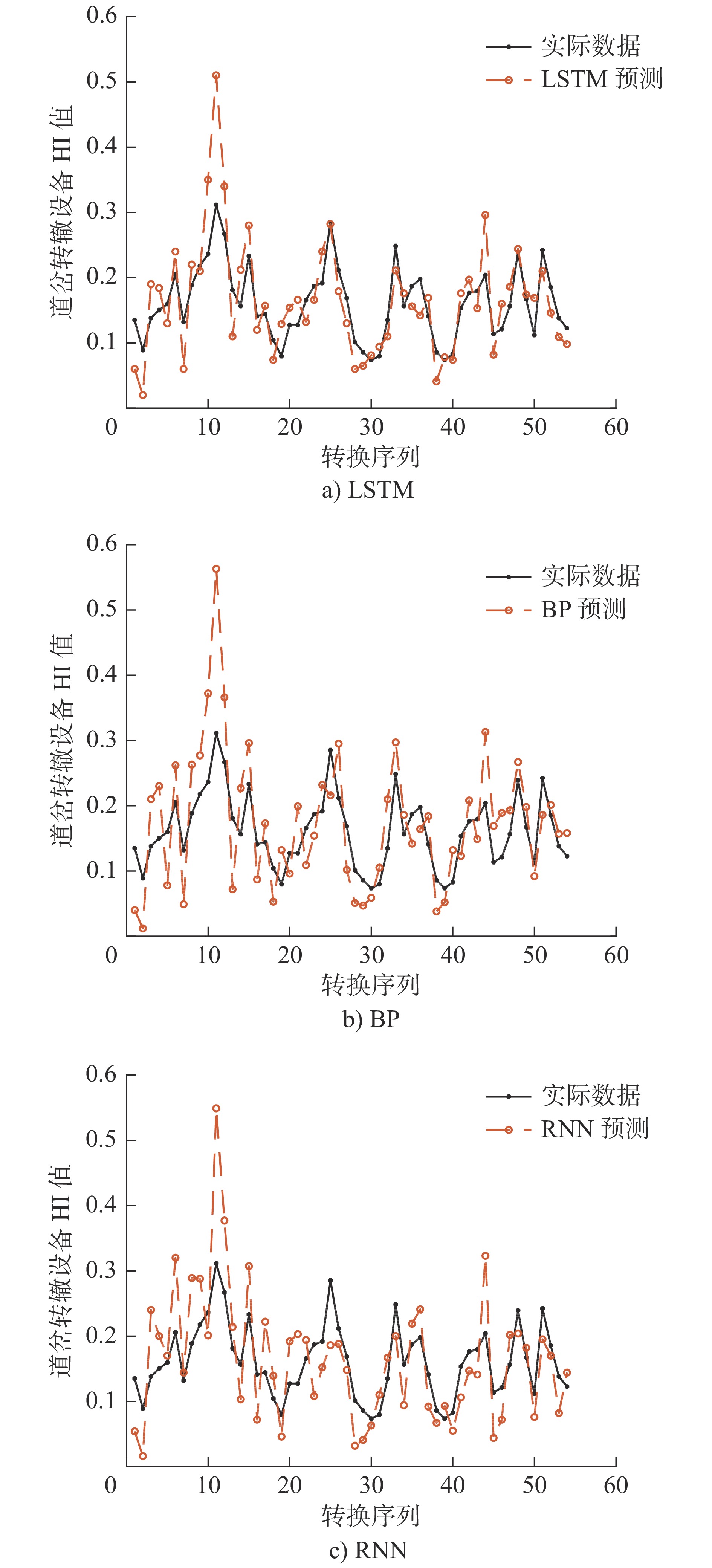
针对道岔转辙设备故障频发,且工作人员无法准确评估及预测其健康状态的问题,进行结合SOM-LSTM混合神经网络的道岔转辙设备健康状态评估及预测方法研究。首先,依据道岔动作功率曲线特点分三段提取其时域特征参数,利用自组织映射神经网络(Self organizing map,SOM)中最小量化误差求解道岔转辙设备健康因子(Health index,HI);其次,运用长短时记忆神经网络(Long short term memory,LSTM)算法预测道岔转辙设备后续健康因子曲线;最后,利用现场采集数据,对算法的有效性进行验证。实验结果表明:SOM方法可有效追踪道岔转辙设备健康状态变化规律,实现对健康因子的快速准确计算;相较于误差反向传播神经网络(Back propagation,BP神经网络)和循环神经网络(Recurrent neural network,RNN神经网络),LSTM算法预测效果较好,准确度提升,对道岔转辙设备的健康管理具有一定的指导意义。
针对道岔转辙设备故障频发,且工作人员无法准确评估及预测其健康状态的问题,进行结合SOM-LSTM混合神经网络的道岔转辙设备健康状态评估及预测方法研究。首先,依据道岔动作功率曲线特点分三段提取其时域特征参数,利用自组织映射神经网络(Self organizing map,SOM)中最小量化误差求解道岔转辙设备健康因子(Health index,HI);其次,运用长短时记忆神经网络(Long short term memory,LSTM)算法预测道岔转辙设备后续健康因子曲线;最后,利用现场采集数据,对算法的有效性进行验证。实验结果表明:SOM方法可有效追踪道岔转辙设备健康状态变化规律,实现对健康因子的快速准确计算;相较于误差反向传播神经网络(Back propagation,BP神经网络)和循环神经网络(Recurrent neural network,RNN神经网络),LSTM算法预测效果较好,准确度提升,对道岔转辙设备的健康管理具有一定的指导意义。




2023, 42(11): 1801-1810.
doi: 10.13433/j.cnki.1003-8728.20220118
摘要:
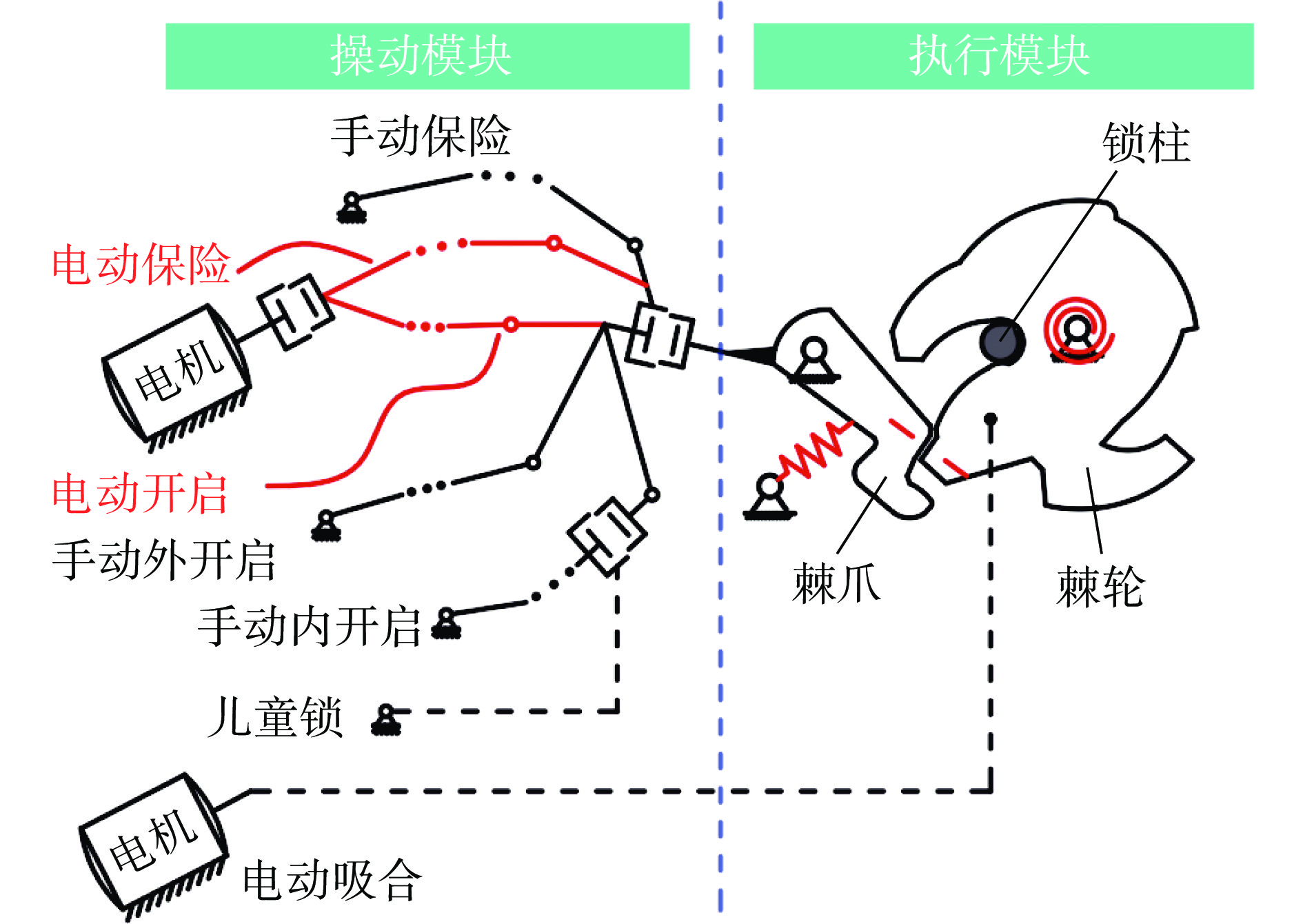
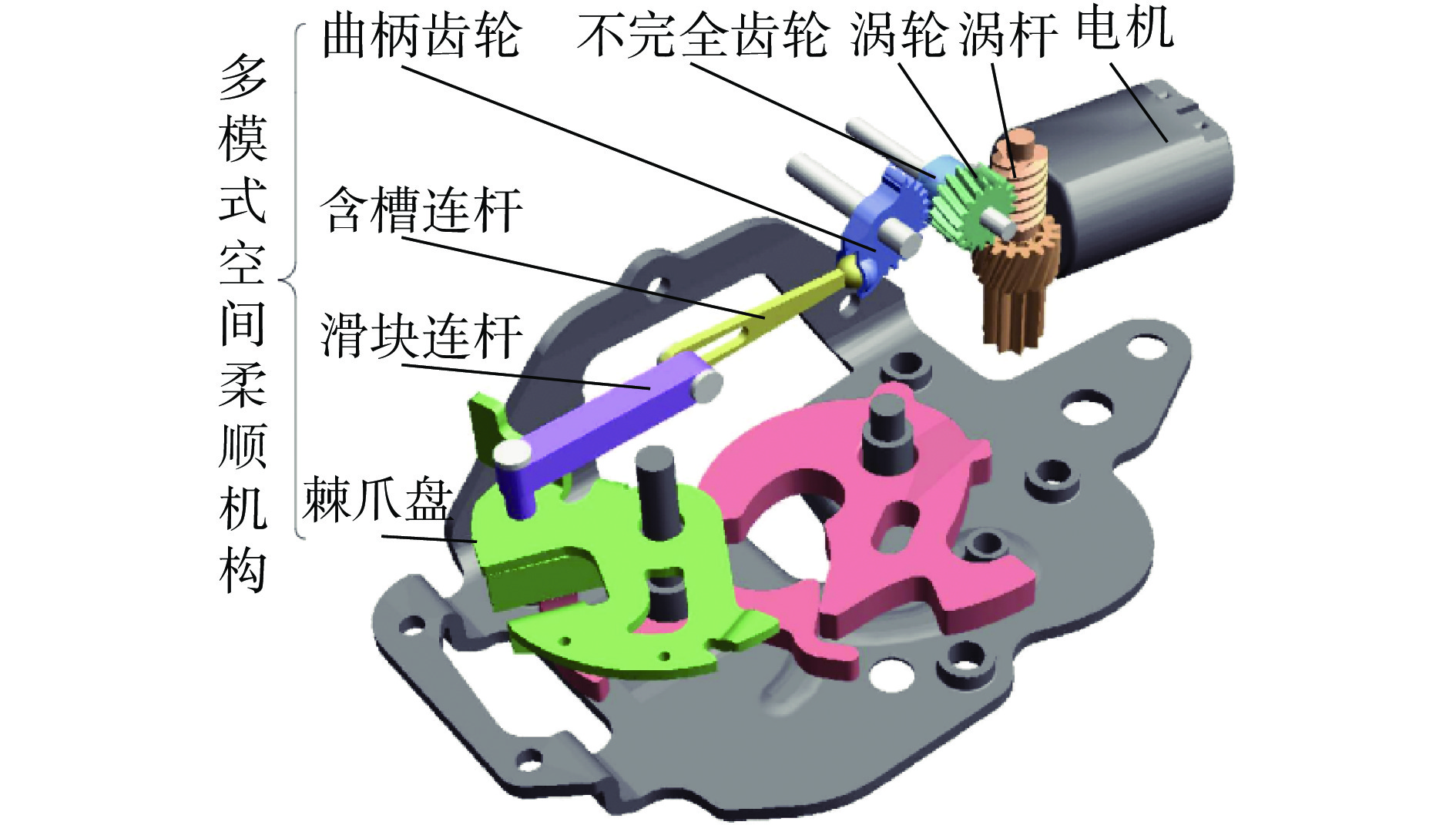
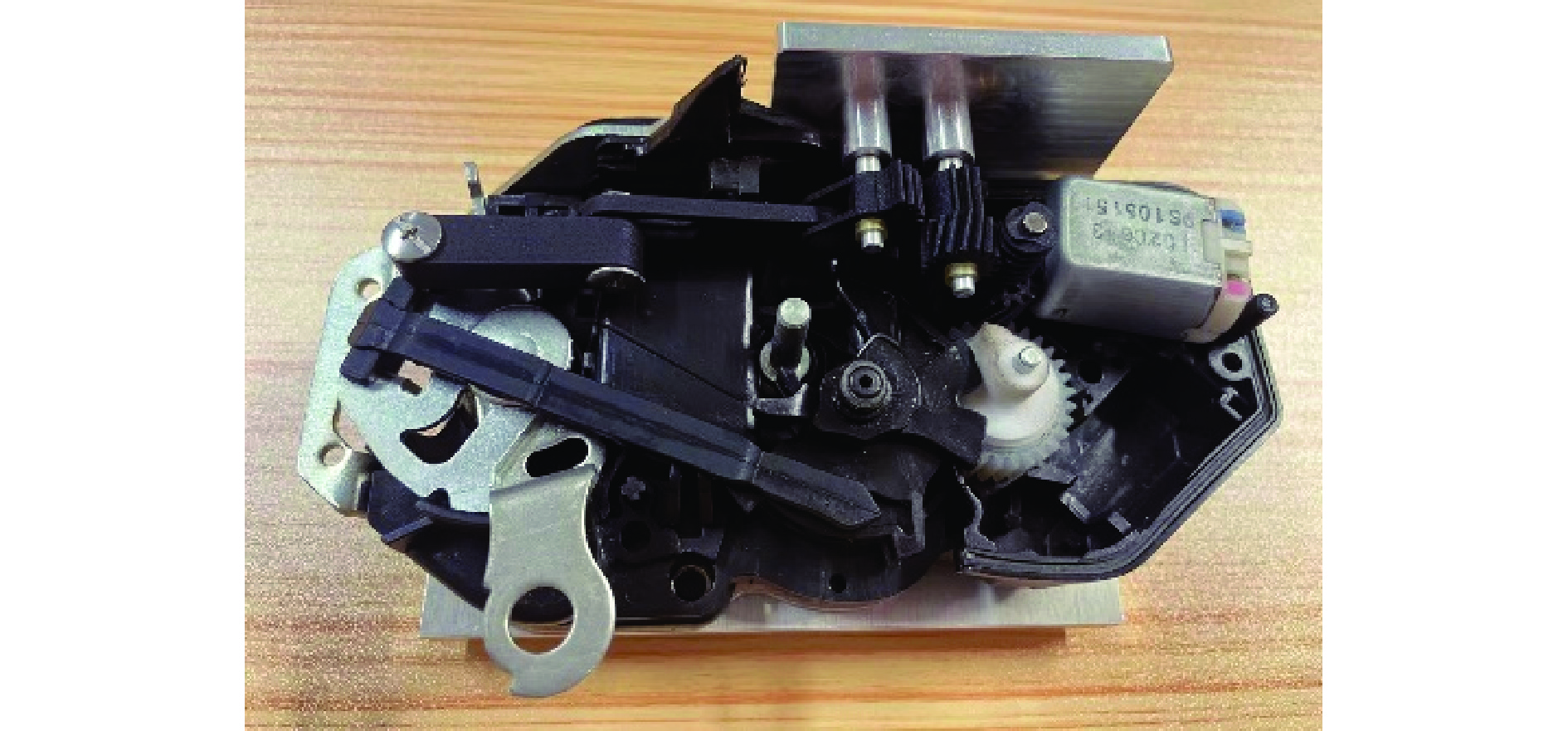
针对高端电动开启车门锁多工况下多支链主被动运动相容及力柔顺需求,基于变拓扑柔顺副提出了新型电动开启空间柔顺机构,该柔顺机构可实现运动空间相容、具有力顺应特征。依汽车门锁原动件、限位不同情况自动切换4种运动模式适应上解保险、开启门锁等不同工况;以含槽连杆槽内端点作为连杆特征点,研究该多模式空间柔顺机构的连杆空间轨迹、力柔顺特征、模式切换特征;根据特征点电动开启过程的相图与轨迹可视化分析,发现柔顺副扭簧刚度kT是影响机构运动稳定性关键因素。提出将最大Lyapunov指数作为柔顺机构动力系统稳定性的评价指标,以带时标连杆特征点三维轨迹构造时变位移序列,用Wolf算法计算其最大Lyapunov指数,进行空间柔顺机构运动稳定性衡量,最终优选得到柔顺副刚度kT值,确保了机构运动稳定性。
针对高端电动开启车门锁多工况下多支链主被动运动相容及力柔顺需求,基于变拓扑柔顺副提出了新型电动开启空间柔顺机构,该柔顺机构可实现运动空间相容、具有力顺应特征。依汽车门锁原动件、限位不同情况自动切换4种运动模式适应上解保险、开启门锁等不同工况;以含槽连杆槽内端点作为连杆特征点,研究该多模式空间柔顺机构的连杆空间轨迹、力柔顺特征、模式切换特征;根据特征点电动开启过程的相图与轨迹可视化分析,发现柔顺副扭簧刚度kT是影响机构运动稳定性关键因素。提出将最大Lyapunov指数作为柔顺机构动力系统稳定性的评价指标,以带时标连杆特征点三维轨迹构造时变位移序列,用Wolf算法计算其最大Lyapunov指数,进行空间柔顺机构运动稳定性衡量,最终优选得到柔顺副刚度kT值,确保了机构运动稳定性。








2023, 42(11): 1811-1820.
doi: 10.13433/j.cnki.1003-8728.20220138
摘要:
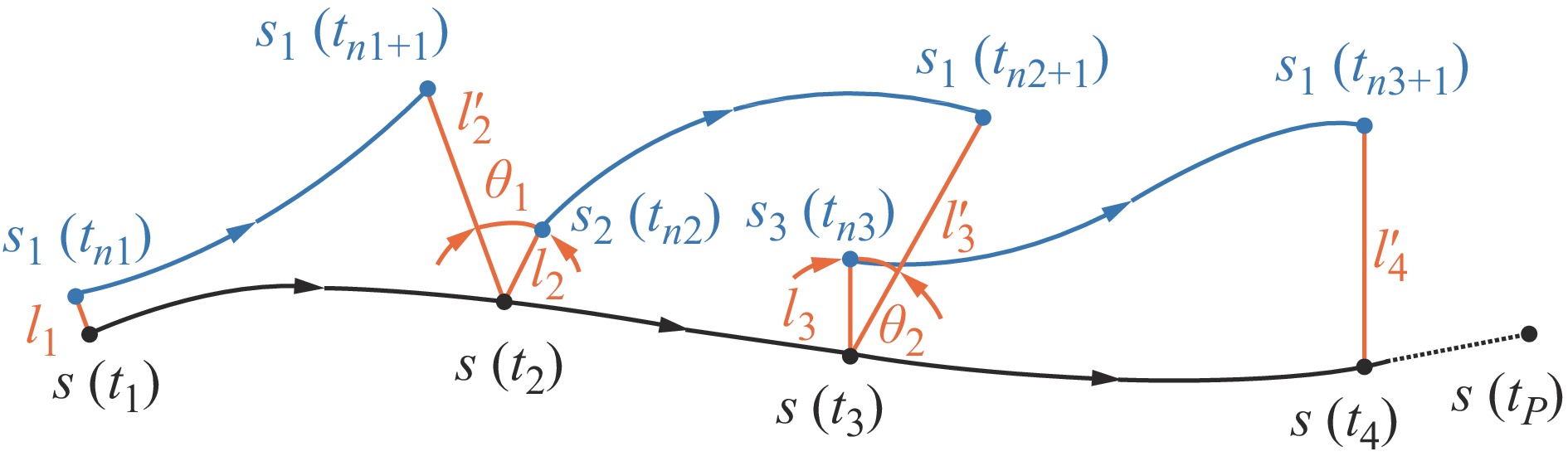
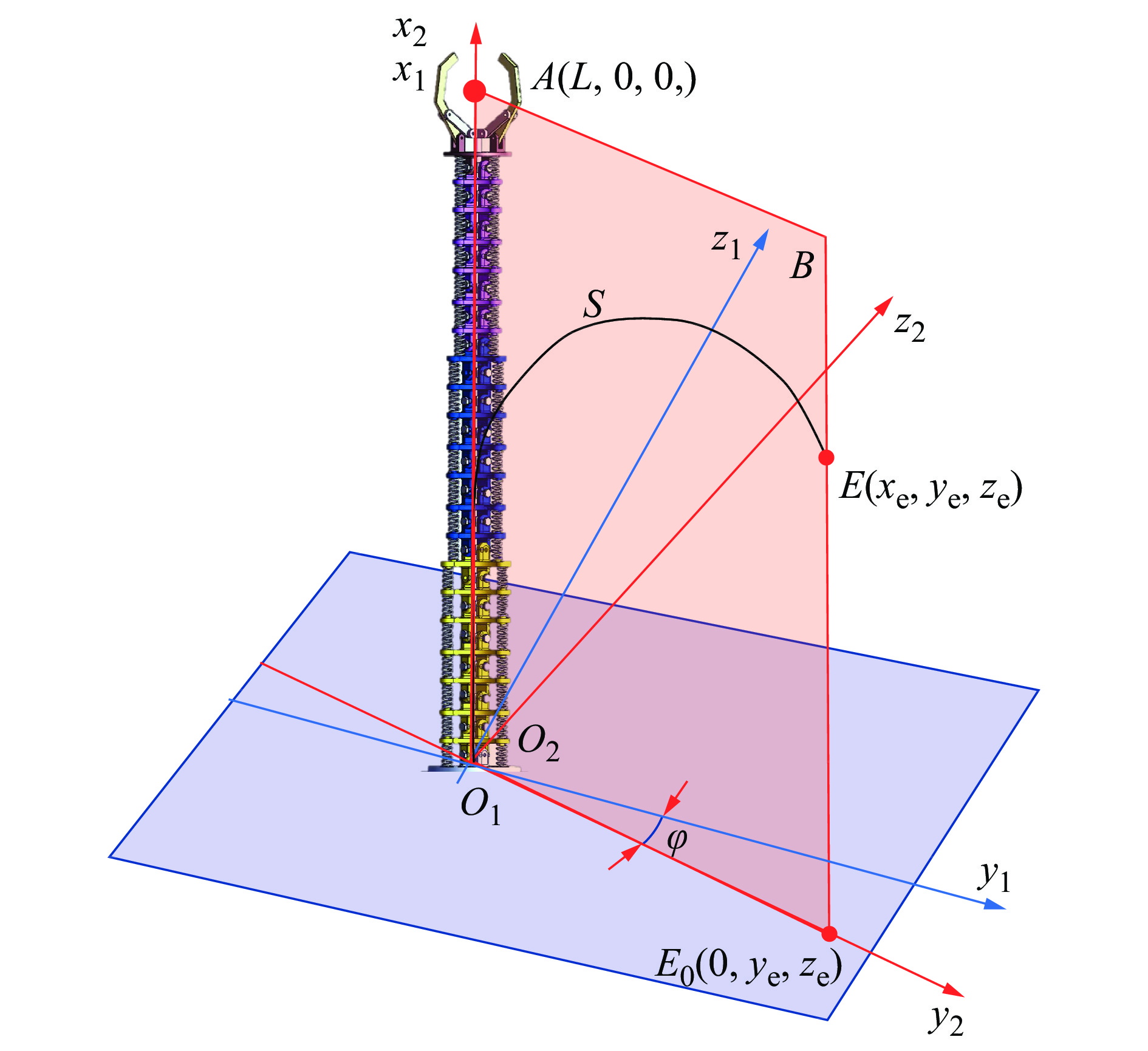
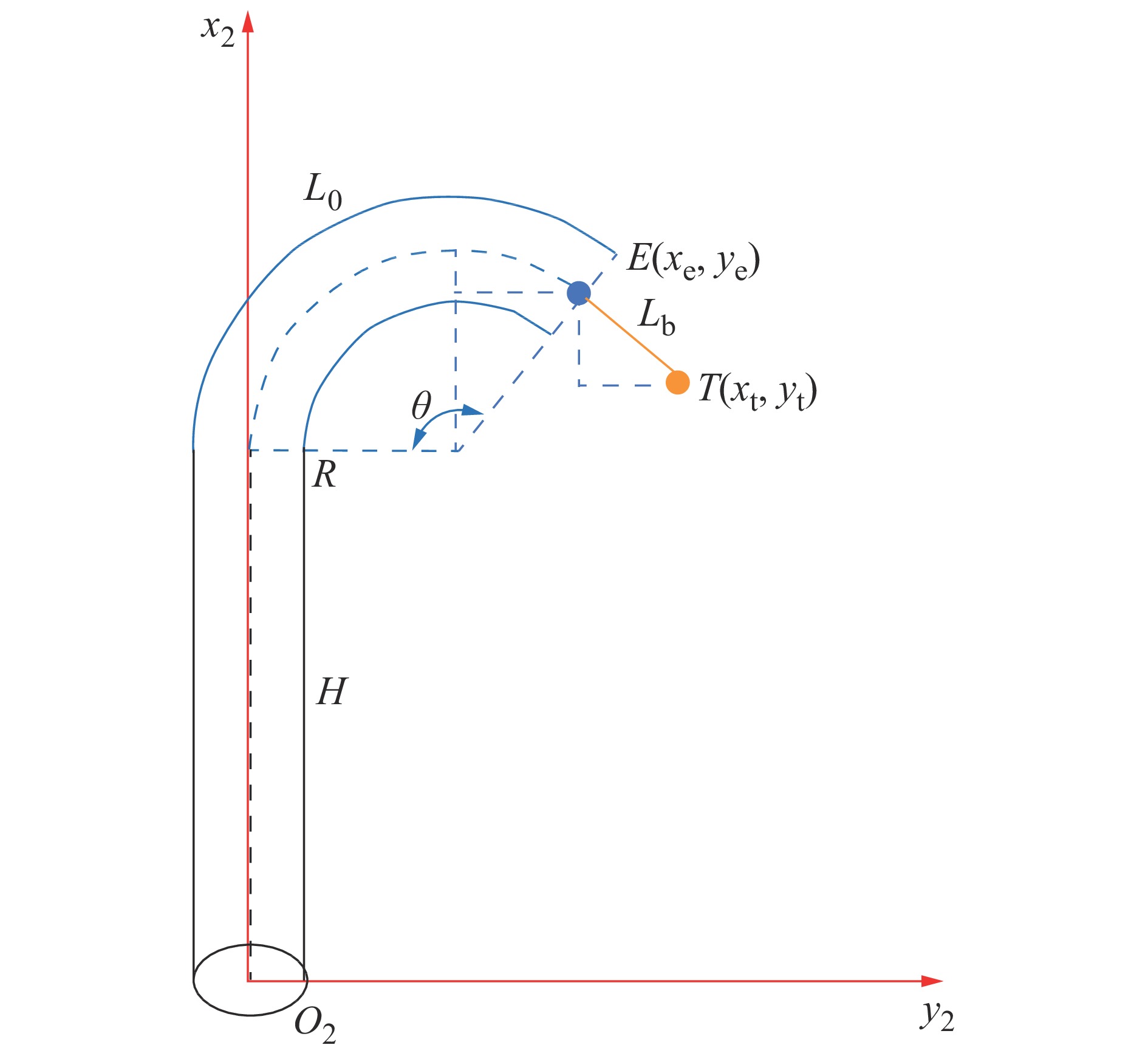
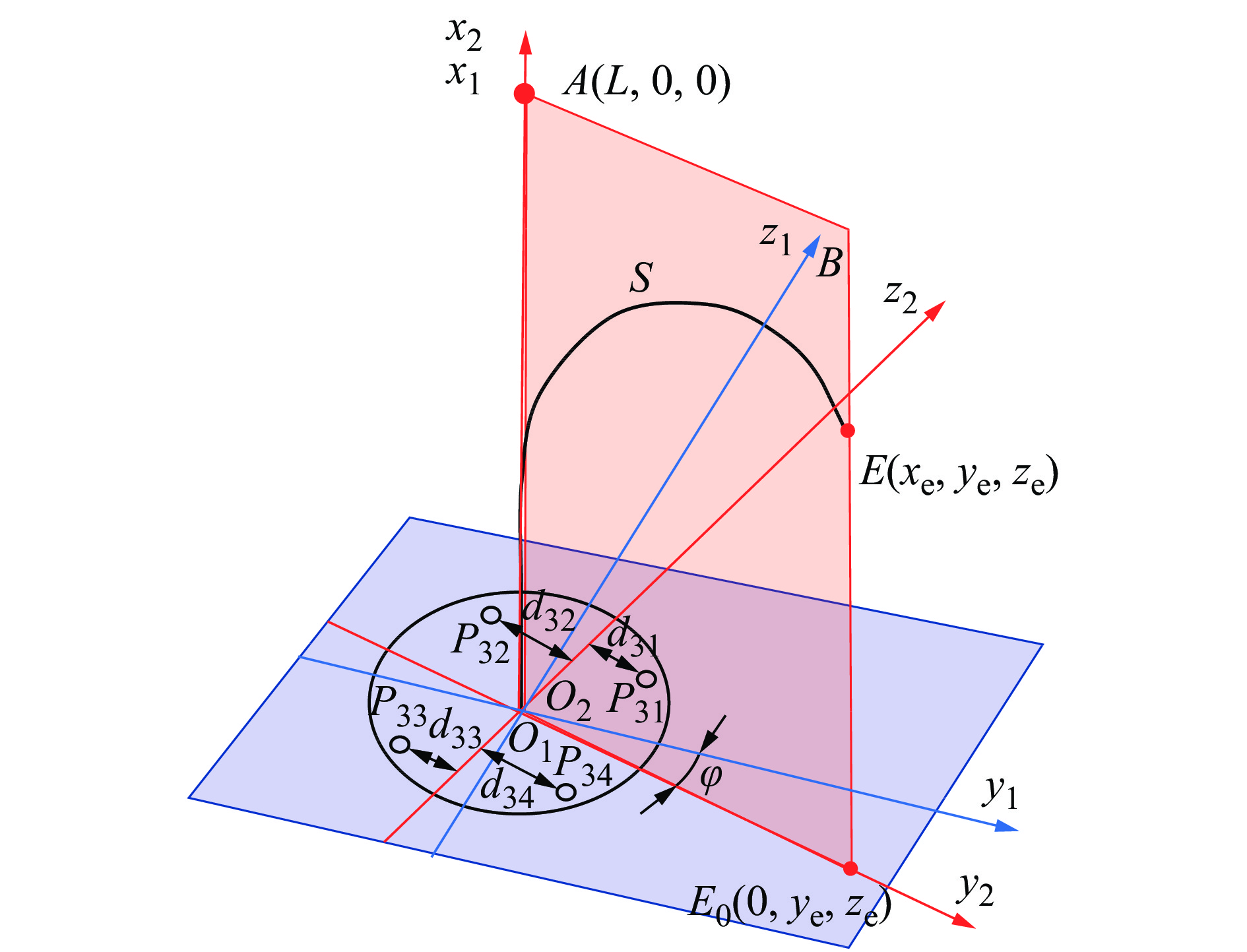
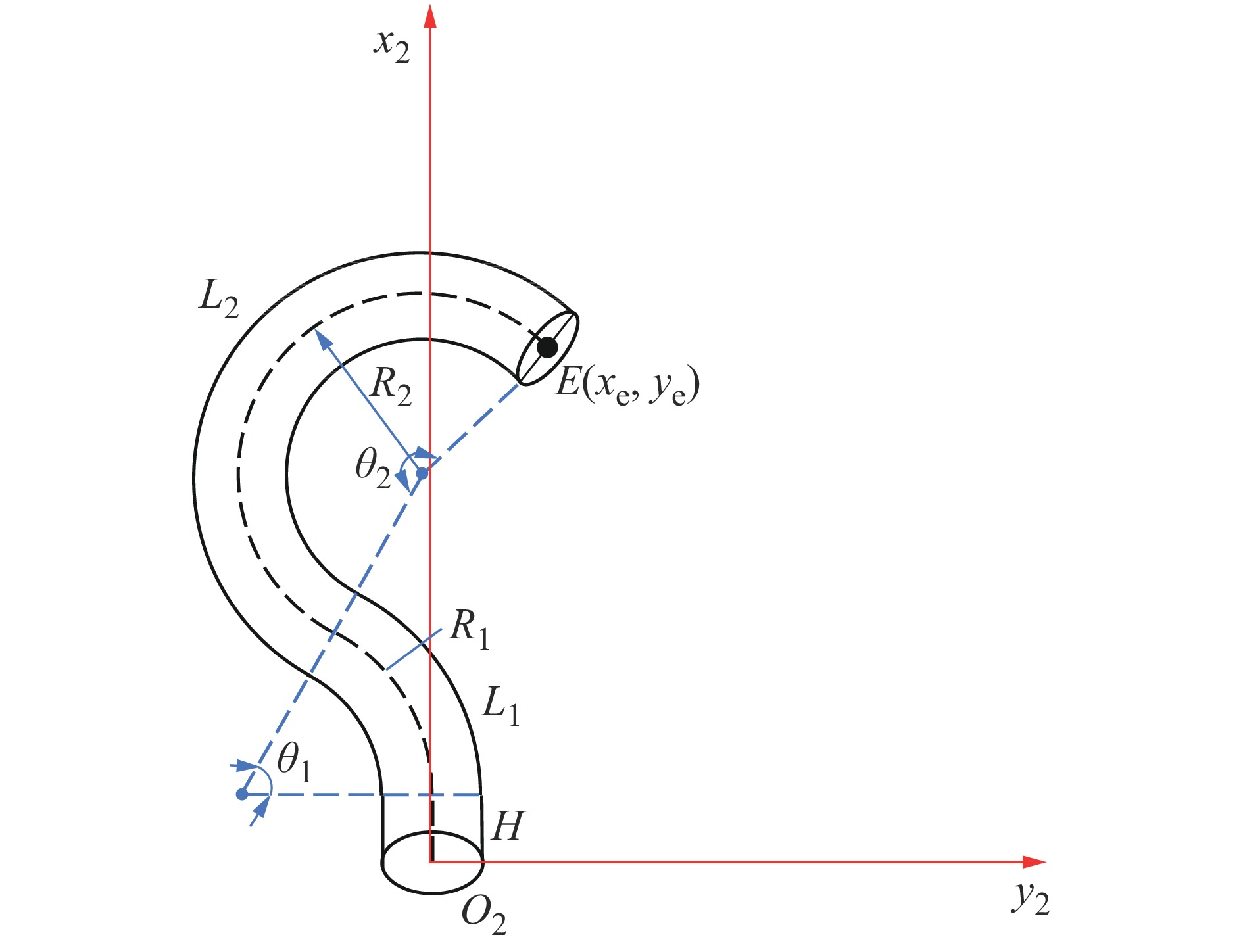
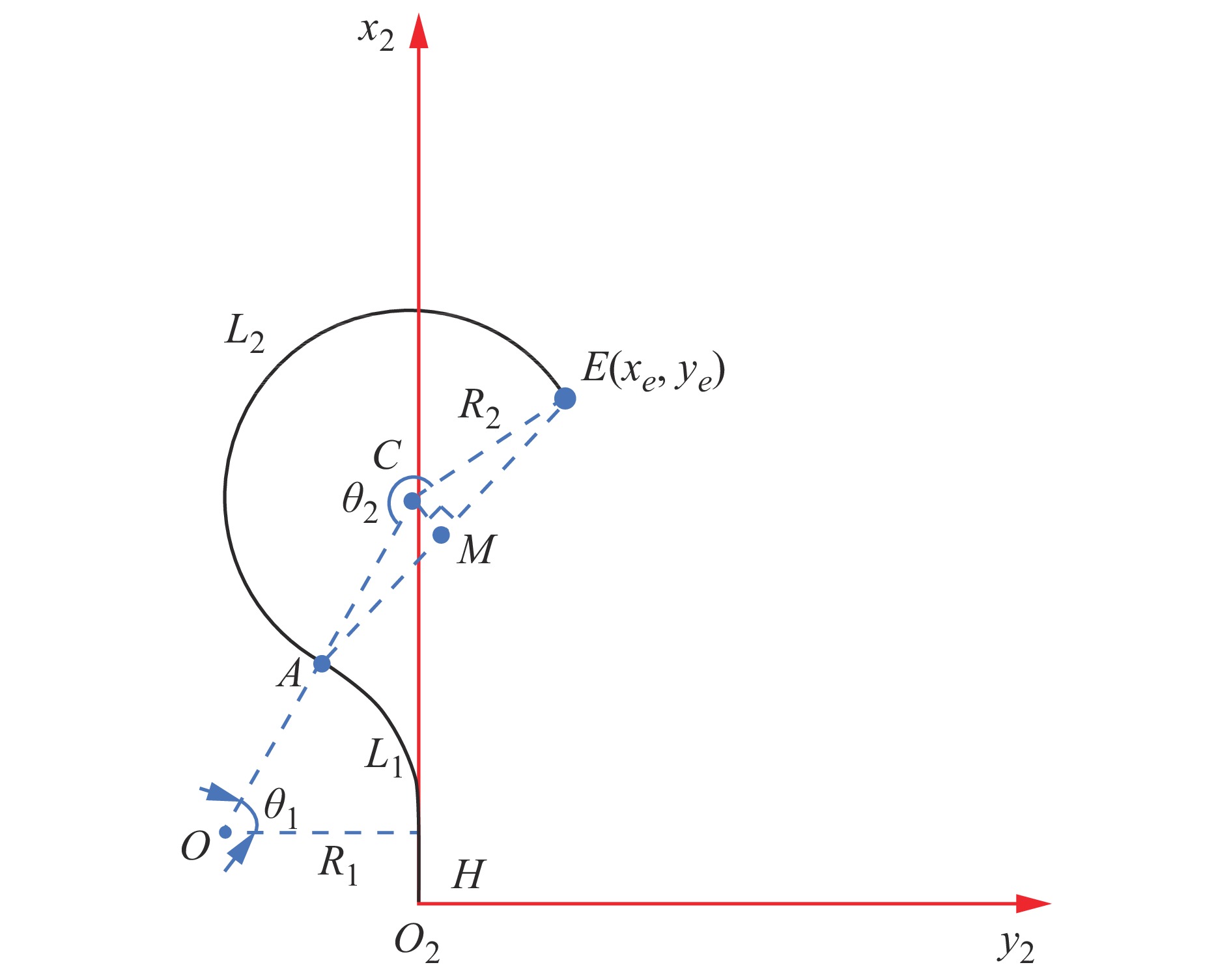
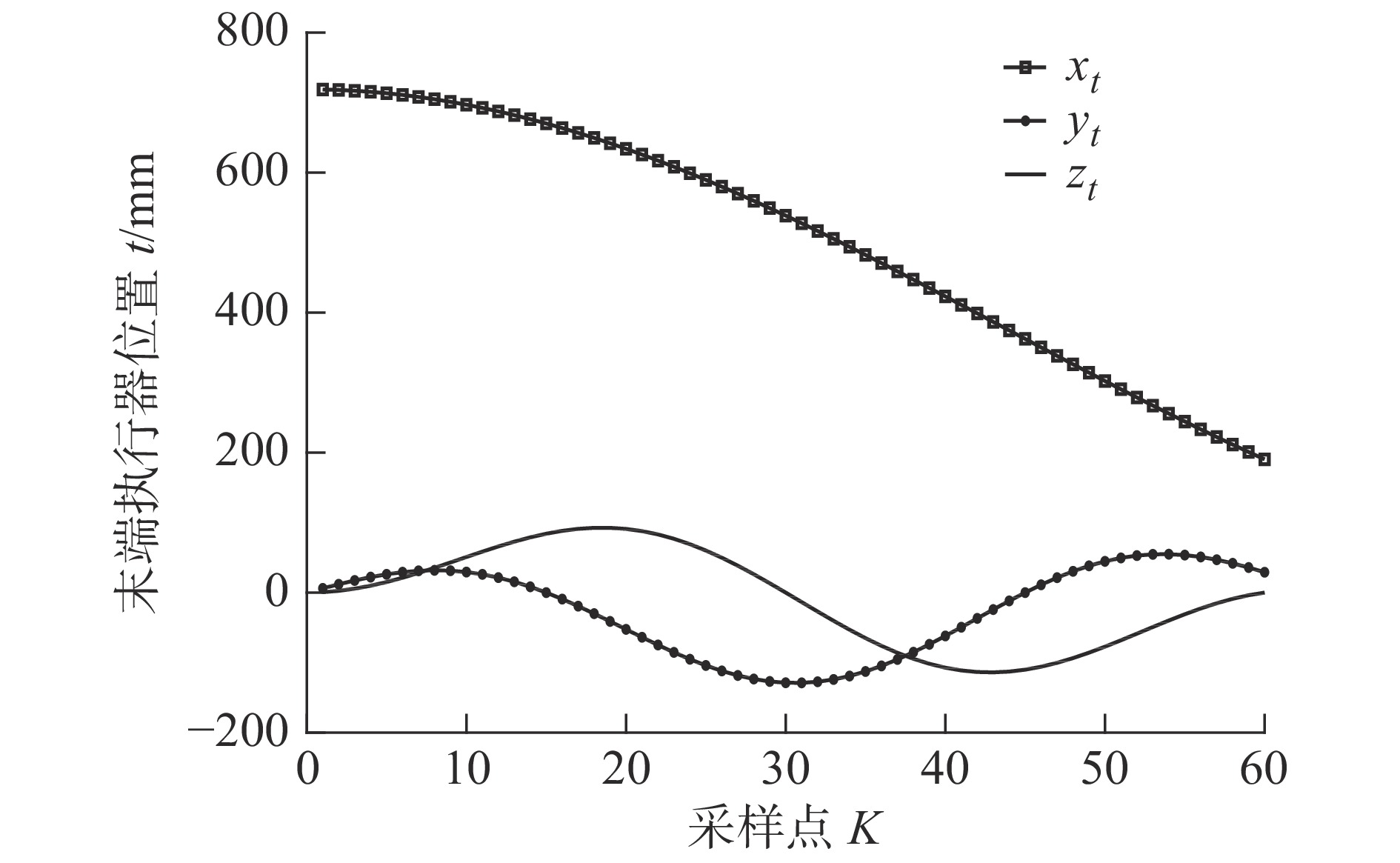
针对当前连续型机器人的运动学逆解求解复杂、低效这一问题,提出了一种基于平面圆弧法的运动学建模方法,其具有运动学逆解求解简单、高效的特点。利用该方法在平面内拟合连续型机器人的弯曲运动形状,建立其运动学模型,分析其驱动空间、关节空间和操作空间的映射关系,并描述其工作空间。分析连续型机器人在平面内弯曲形状的几何约束,建立关节空间变量之间的数学关系,降低求解复杂逆运动学问题的难度。对机器人末端执行器的位置和驱动线长度变化曲线进行仿真分析,求解逆运动学的有效解,并研制原理样机进行样机实验,实验表明该运动学模型的正确性以及逆运动学求解方法的有效性。
针对当前连续型机器人的运动学逆解求解复杂、低效这一问题,提出了一种基于平面圆弧法的运动学建模方法,其具有运动学逆解求解简单、高效的特点。利用该方法在平面内拟合连续型机器人的弯曲运动形状,建立其运动学模型,分析其驱动空间、关节空间和操作空间的映射关系,并描述其工作空间。分析连续型机器人在平面内弯曲形状的几何约束,建立关节空间变量之间的数学关系,降低求解复杂逆运动学问题的难度。对机器人末端执行器的位置和驱动线长度变化曲线进行仿真分析,求解逆运动学的有效解,并研制原理样机进行样机实验,实验表明该运动学模型的正确性以及逆运动学求解方法的有效性。











2023, 42(11): 1821-1828.
doi: 10.13433/j.cnki.1003-8728.20220172
摘要:
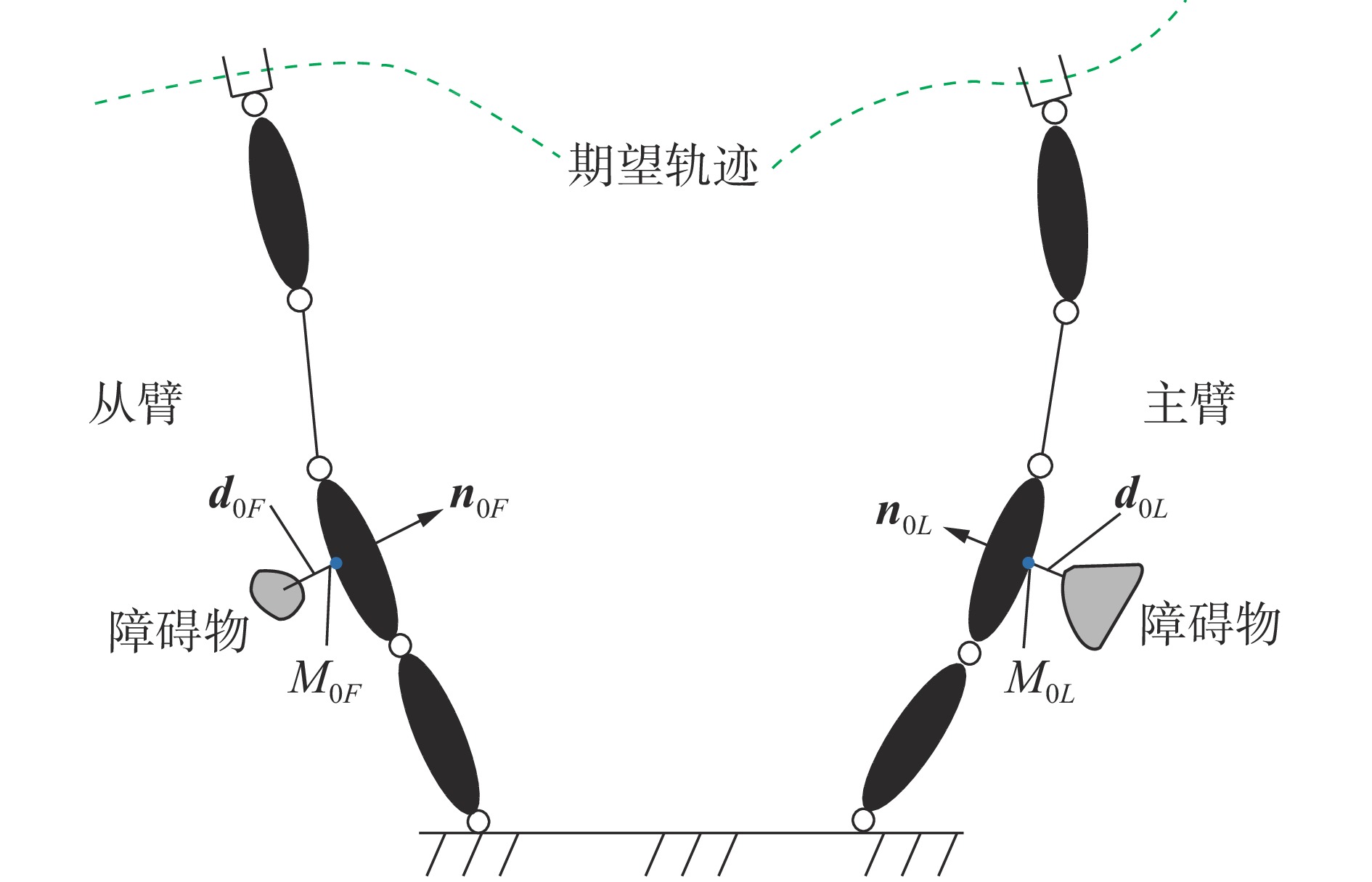
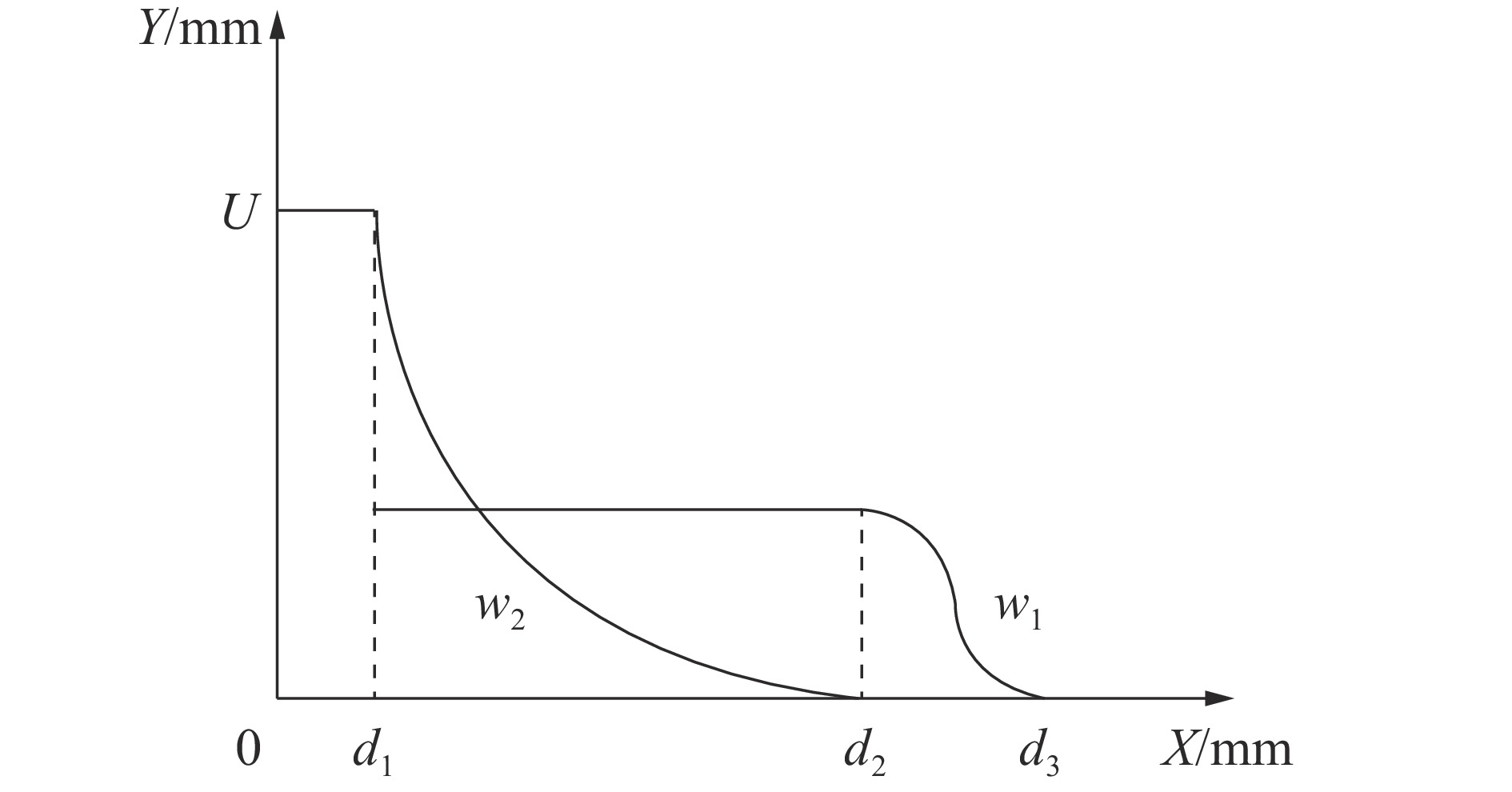
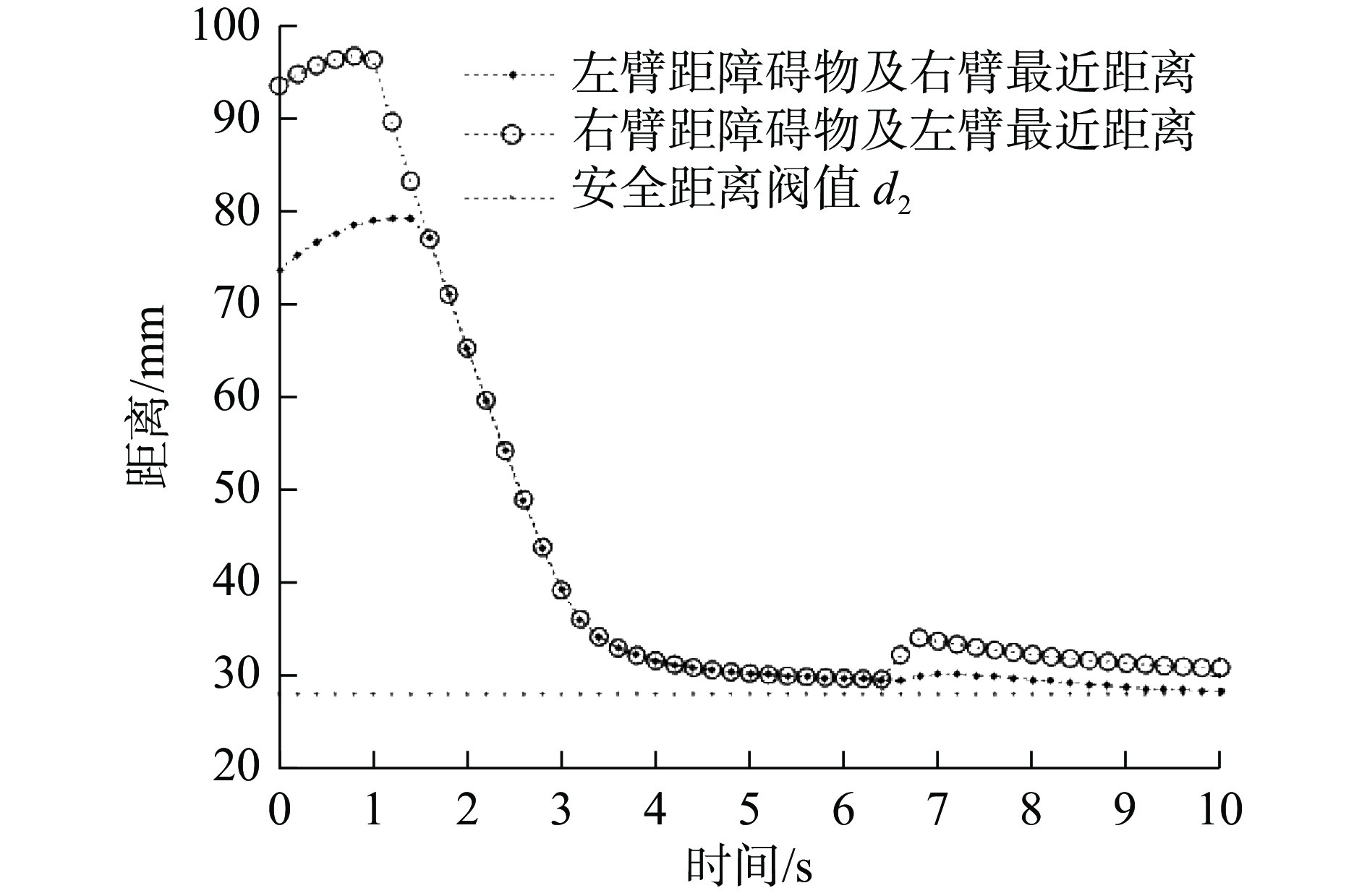
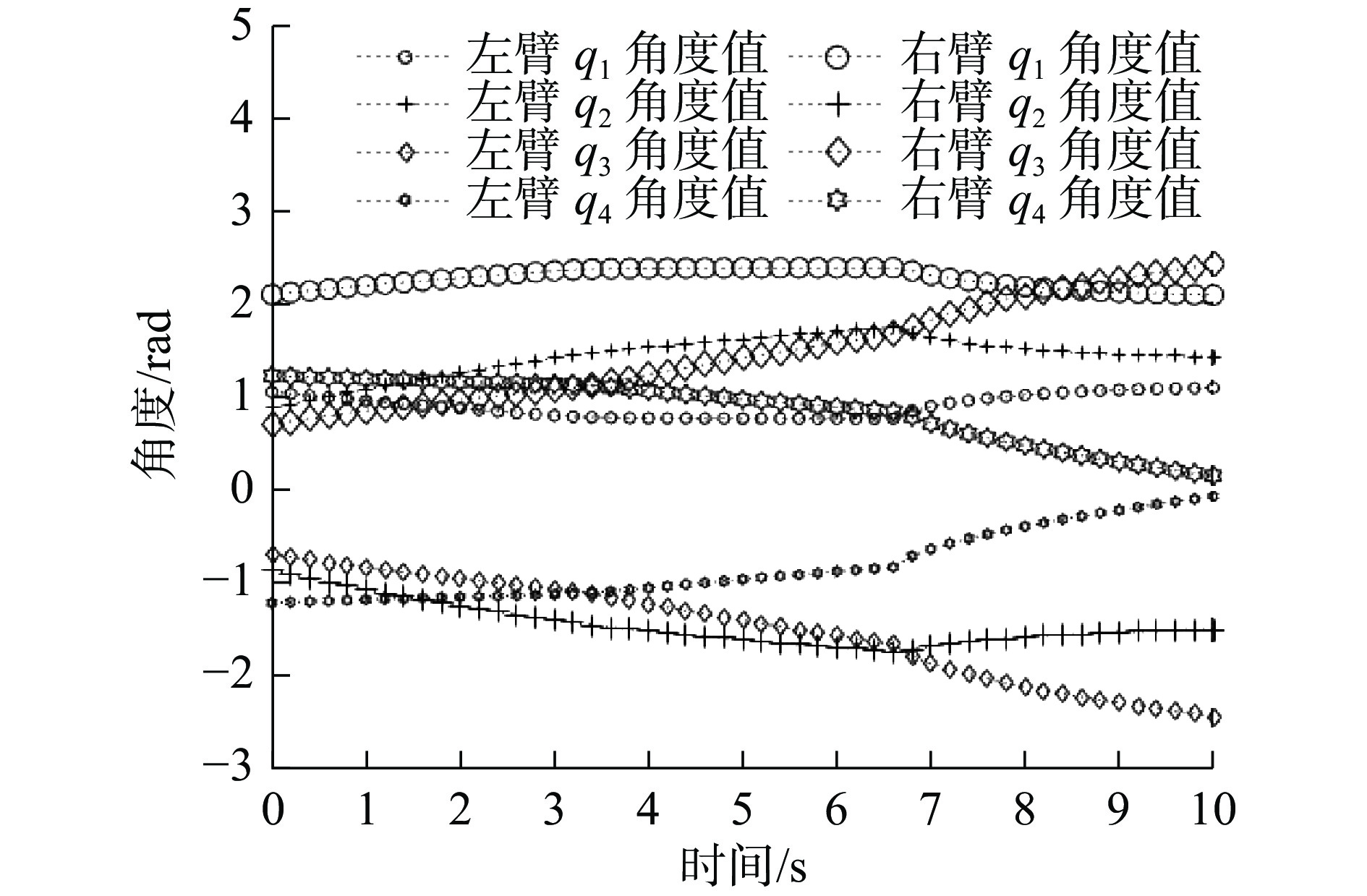
针对冗余度双臂机器人协调操作过程中机械臂本体避障及躲避环境障碍问题,提出了基于冗余机械臂自运动特性的双臂机器人协作策略下实时避障算法。首先,利用障碍物在机械臂连杆上的投影矢量筛选掉不会避碰杆件,再计算可能避碰杆件与障碍物的最短距离;其次,根据双臂协作的运动学约束关系,得到冗余度双臂机器人协调搬运避障的运动学逆解;再次,引入梯度“安全距离”和两个避障因子,实时改变机械臂的避障速度,使机器人末端完成协作任务以及双臂实时自避碰及躲避环境障碍物的任务;最后,利用冗余度双臂机器人进行仿真及实验。结果表明:双臂机器人末端执行器执行协作任务的同时机器人双臂可以躲避障碍物,且各关节运动连续、平稳。
针对冗余度双臂机器人协调操作过程中机械臂本体避障及躲避环境障碍问题,提出了基于冗余机械臂自运动特性的双臂机器人协作策略下实时避障算法。首先,利用障碍物在机械臂连杆上的投影矢量筛选掉不会避碰杆件,再计算可能避碰杆件与障碍物的最短距离;其次,根据双臂协作的运动学约束关系,得到冗余度双臂机器人协调搬运避障的运动学逆解;再次,引入梯度“安全距离”和两个避障因子,实时改变机械臂的避障速度,使机器人末端完成协作任务以及双臂实时自避碰及躲避环境障碍物的任务;最后,利用冗余度双臂机器人进行仿真及实验。结果表明:双臂机器人末端执行器执行协作任务的同时机器人双臂可以躲避障碍物,且各关节运动连续、平稳。










2023, 42(11): 1829-1836.
doi: 10.13433/j.cnki.1003-8728.20220110
摘要:
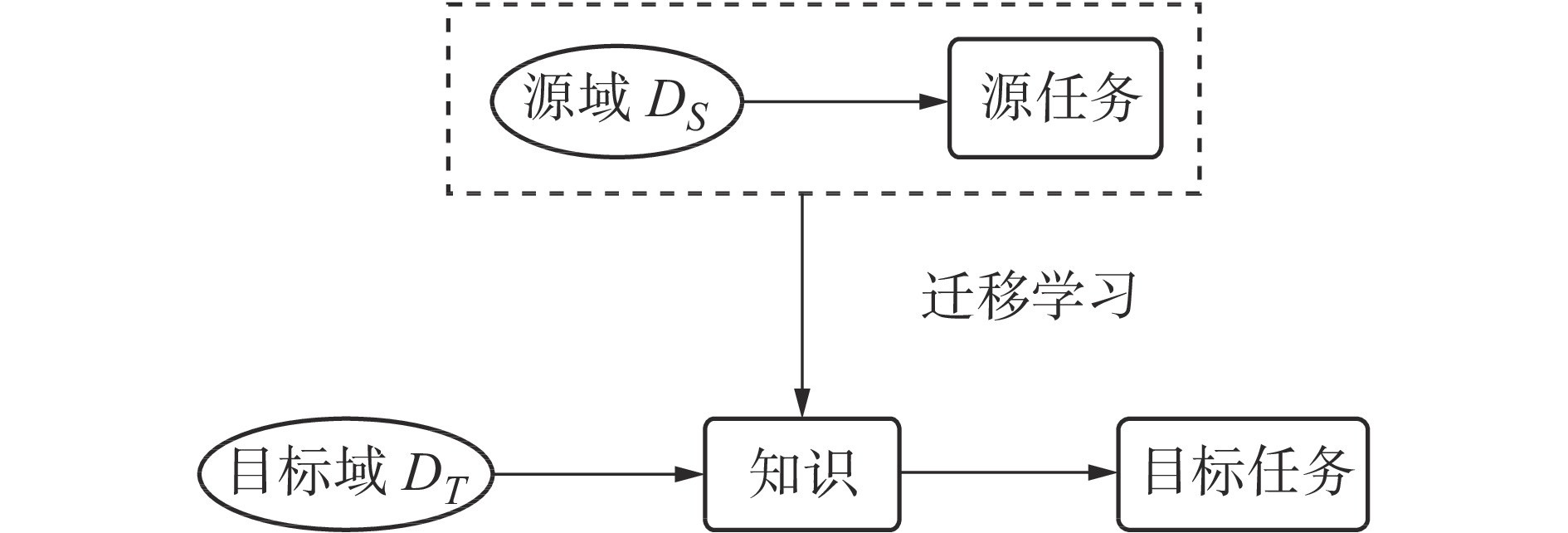
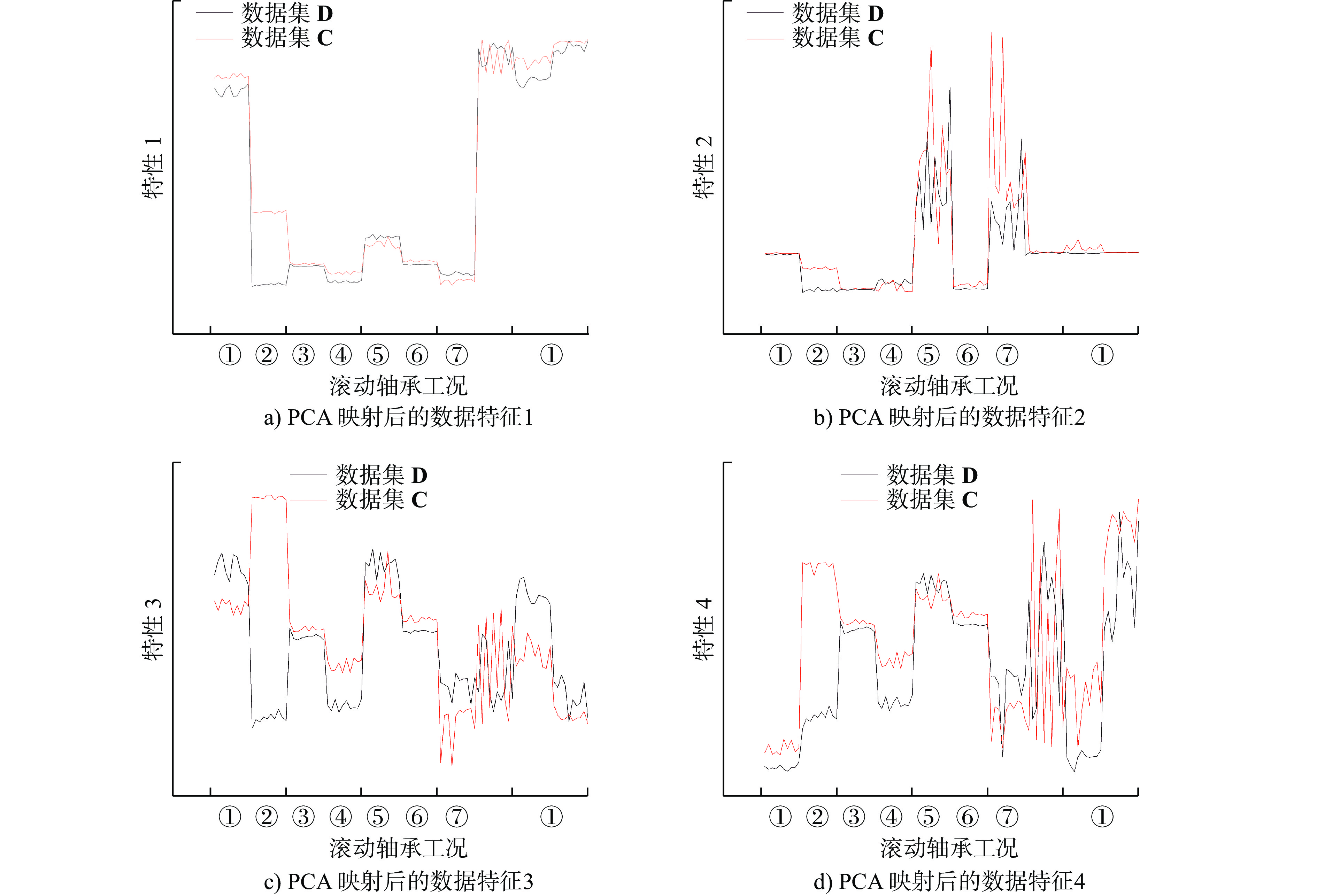
针对不同负载下滚动轴承故障诊断准确率不高和样本稀缺的问题,本文提出了一种基于粒子群优化的半监督迁移学习(PSO-SSTCA)算法。在迁移学习算法的基础上,引入希尔伯特-施密特独立性系数(HSIC)增强迁移学习过程中不同数据标签的依赖性,加入粒子群优化算法自适应寻找多核函数的最优系数,缩小数据集的类内间距,并利用K-近邻算法进行不同负载间滚动轴承的故障诊断。对4种不同负载工况下的滚动轴承振动信号进行分析,结果表明:在单-单、多-单负载工况下,PSO-SSTCA算法的平均准确率分别为85.92%与88%,与重构信号相比分别提高了10.75%与19.42%。该方法有效地为机械设备的状态监测与故障诊断提供了技术支撑。
针对不同负载下滚动轴承故障诊断准确率不高和样本稀缺的问题,本文提出了一种基于粒子群优化的半监督迁移学习(PSO-SSTCA)算法。在迁移学习算法的基础上,引入希尔伯特-施密特独立性系数(HSIC)增强迁移学习过程中不同数据标签的依赖性,加入粒子群优化算法自适应寻找多核函数的最优系数,缩小数据集的类内间距,并利用K-近邻算法进行不同负载间滚动轴承的故障诊断。对4种不同负载工况下的滚动轴承振动信号进行分析,结果表明:在单-单、多-单负载工况下,PSO-SSTCA算法的平均准确率分别为85.92%与88%,与重构信号相比分别提高了10.75%与19.42%。该方法有效地为机械设备的状态监测与故障诊断提供了技术支撑。


2023, 42(11): 1837-1843.
doi: 10.13433/j.cnki.1003-8728.20220105
摘要:
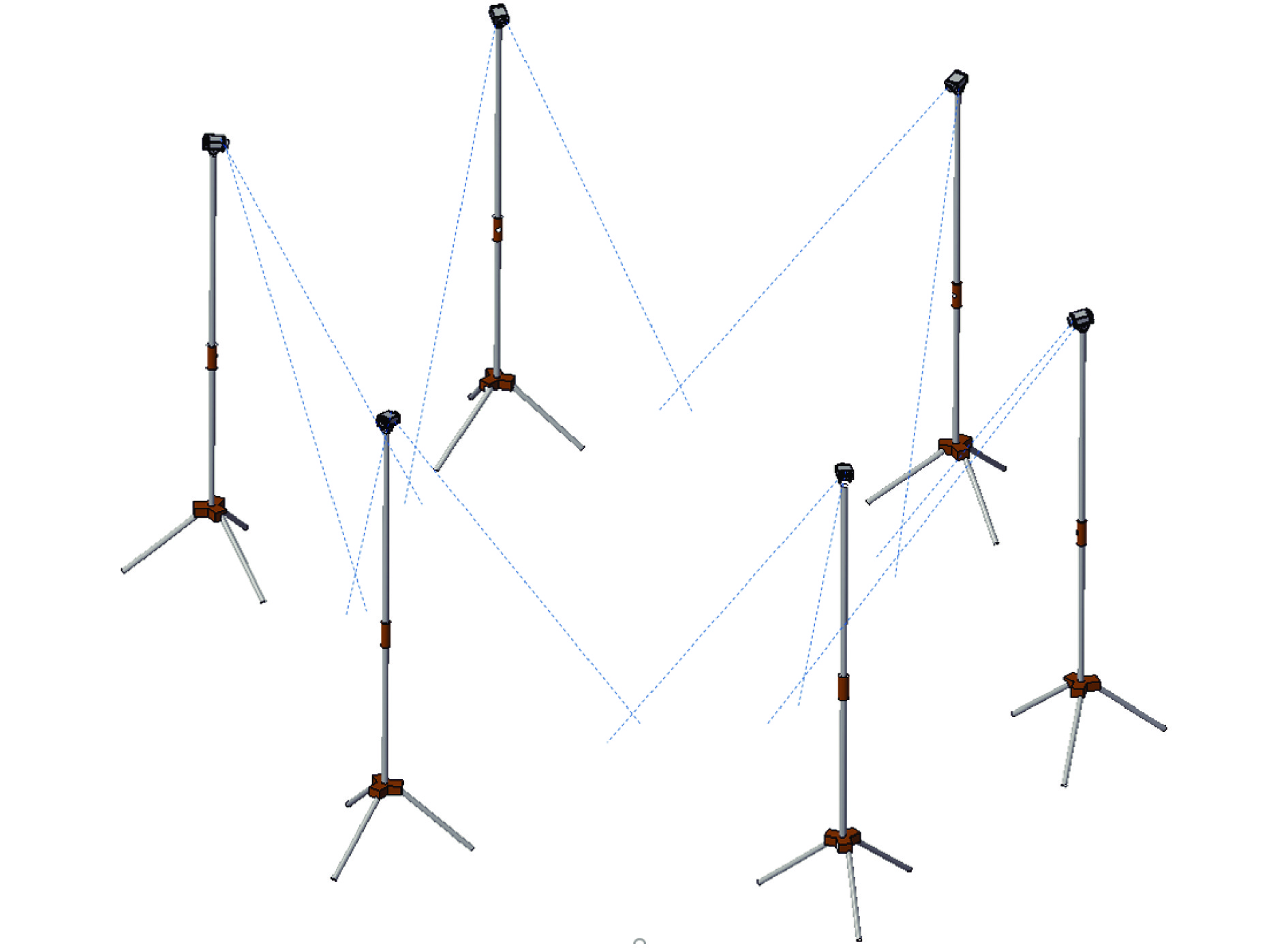
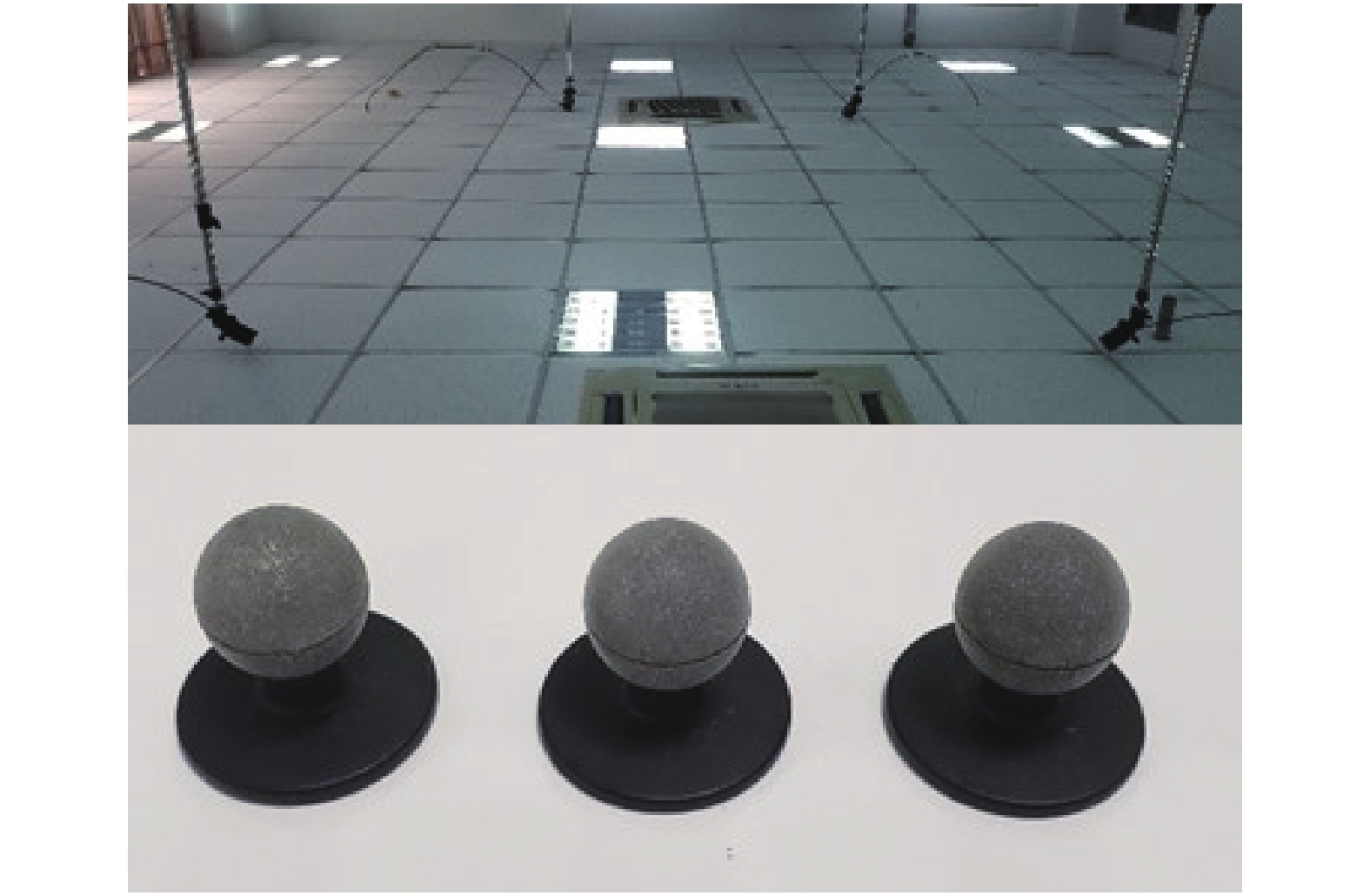
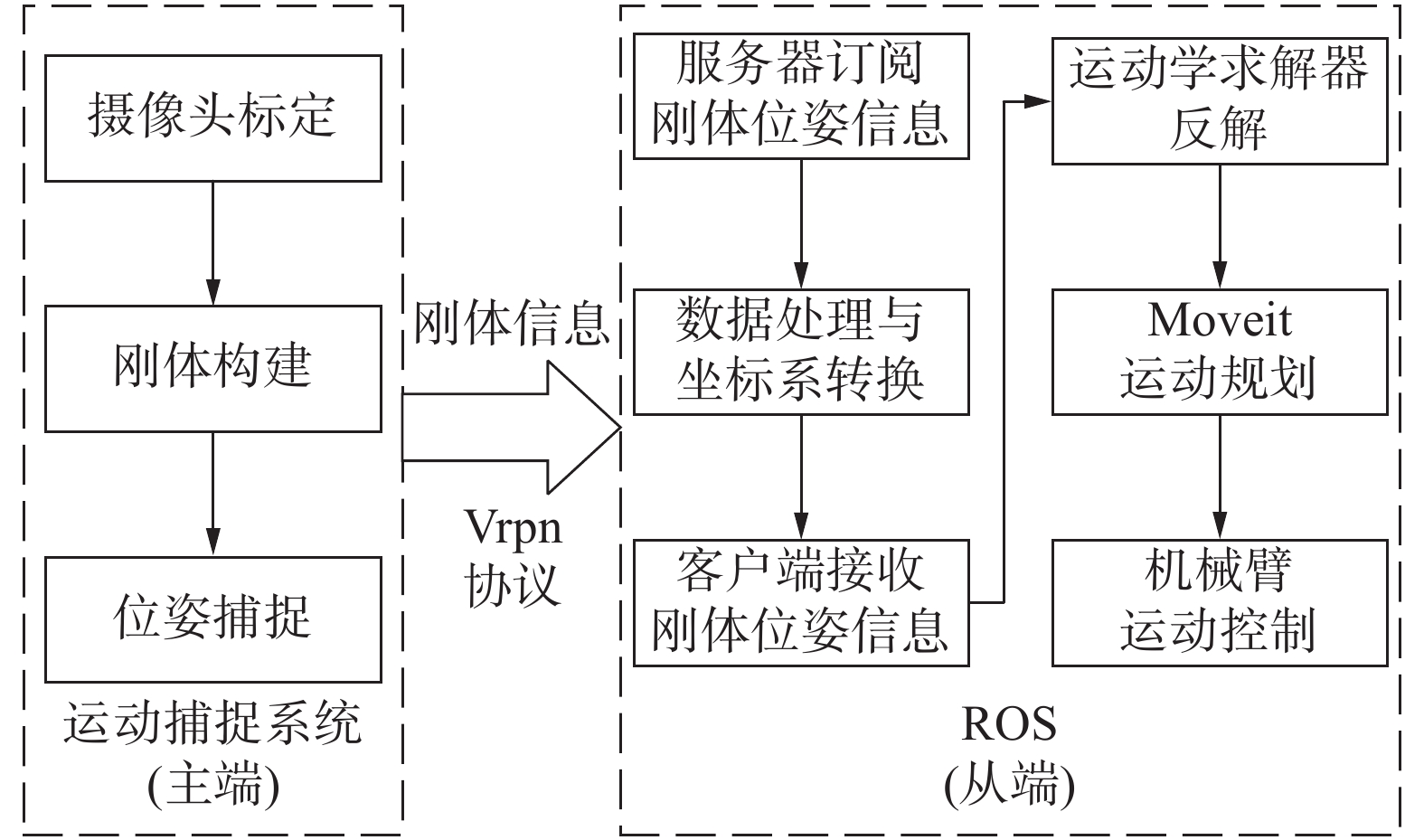
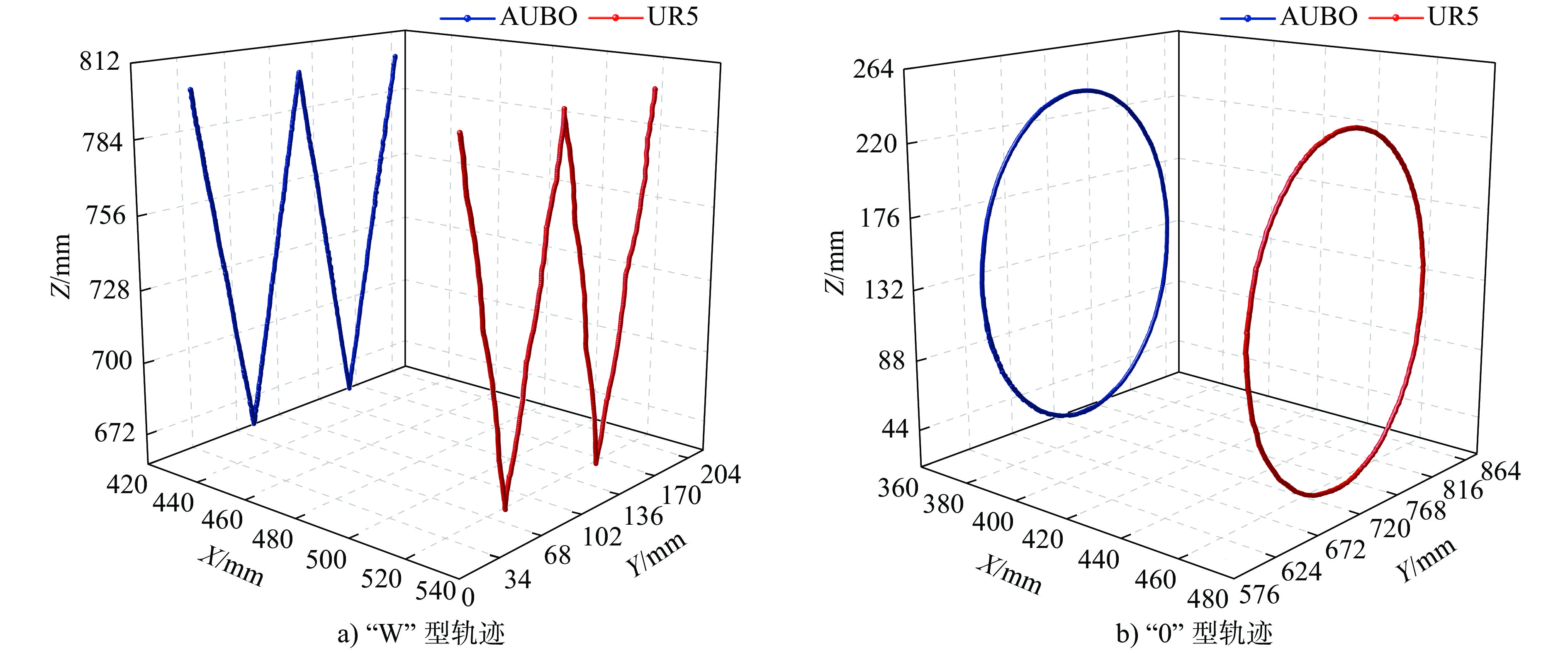
针对传统机械臂的遥操作控制直观性不强、操作繁琐等问题,本文提出了一种基于光学运动捕捉的机械臂遥操作控制方法。建立了运动捕捉系统与机械臂的标定模型,实现了坐标系之间的转换;在ROS-kinetic中建立服务器和客户端,实现了不同系统数据之间相互转化与实时传输。通过在引导机械臂末端粘贴标记点、构建刚体的方式进行跟踪试验,结果表明该方法降低了主端的复杂程度,在保证从端操作精度的情况下,可实时地完成六自由度机械臂遥操作任务,方法操作简单、可移植性和可扩展性强。
针对传统机械臂的遥操作控制直观性不强、操作繁琐等问题,本文提出了一种基于光学运动捕捉的机械臂遥操作控制方法。建立了运动捕捉系统与机械臂的标定模型,实现了坐标系之间的转换;在ROS-kinetic中建立服务器和客户端,实现了不同系统数据之间相互转化与实时传输。通过在引导机械臂末端粘贴标记点、构建刚体的方式进行跟踪试验,结果表明该方法降低了主端的复杂程度,在保证从端操作精度的情况下,可实时地完成六自由度机械臂遥操作任务,方法操作简单、可移植性和可扩展性强。







2023, 42(11): 1844-1851.
doi: 10.13433/j.cnki.1003-8728.20220130
摘要:
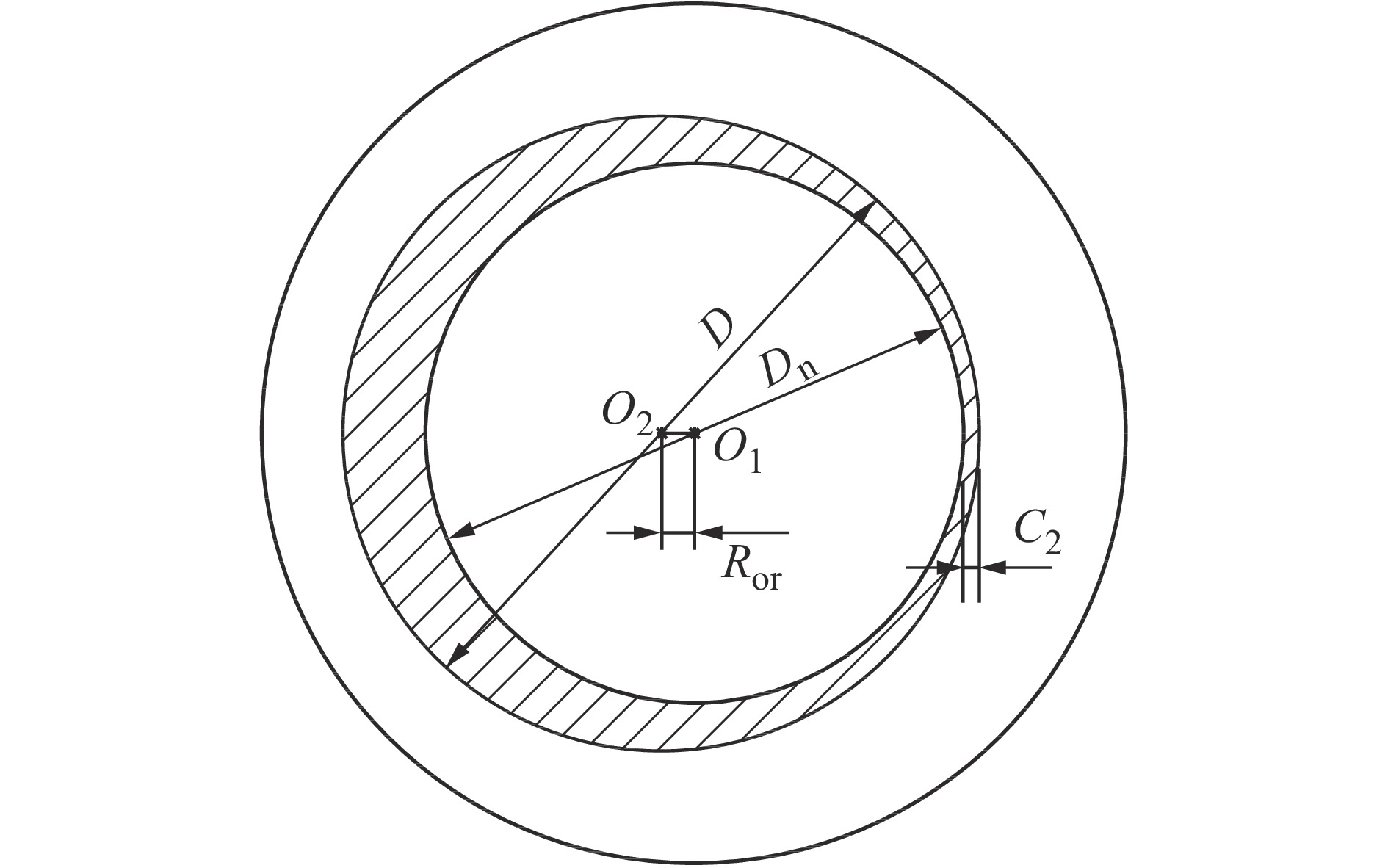
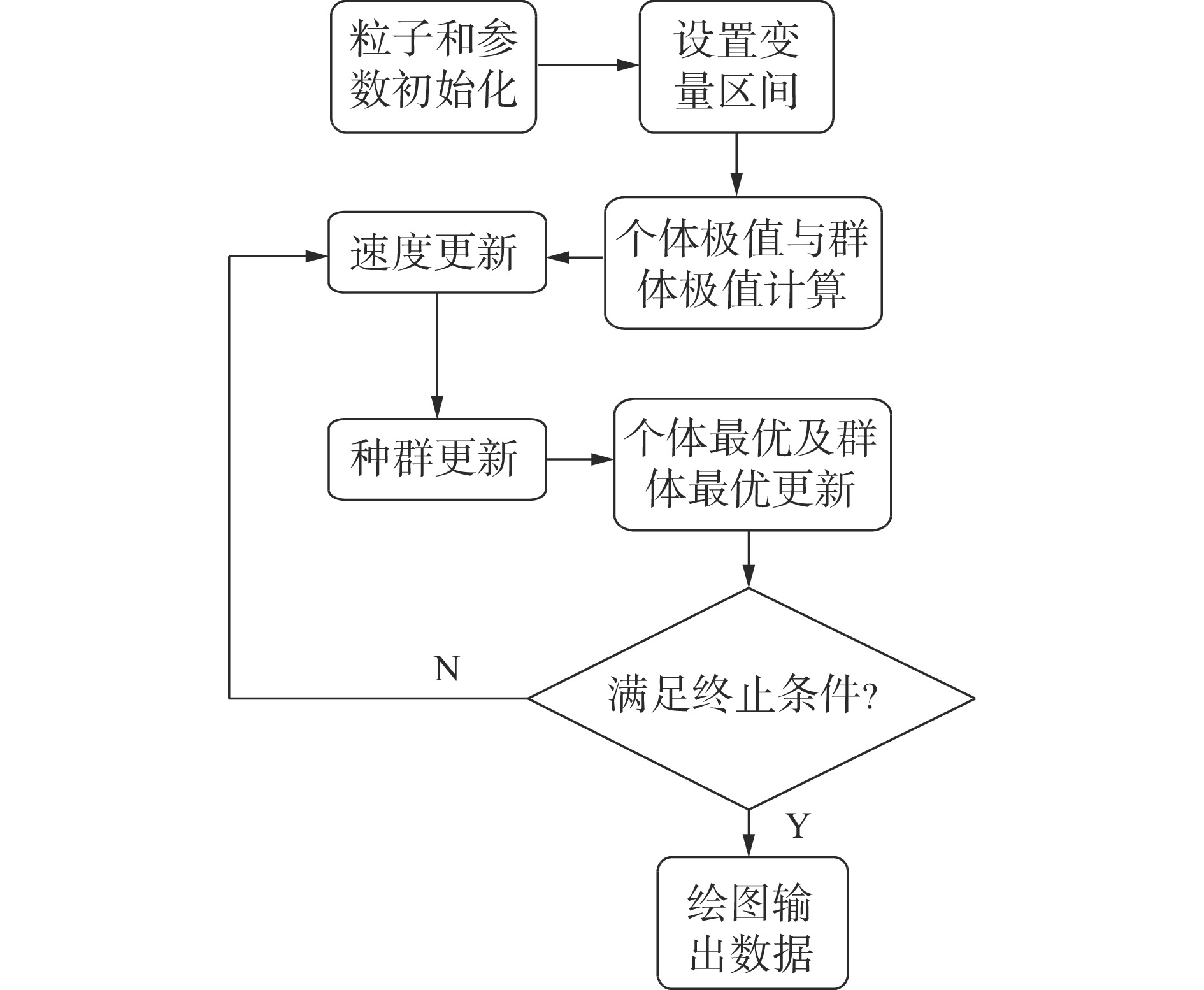
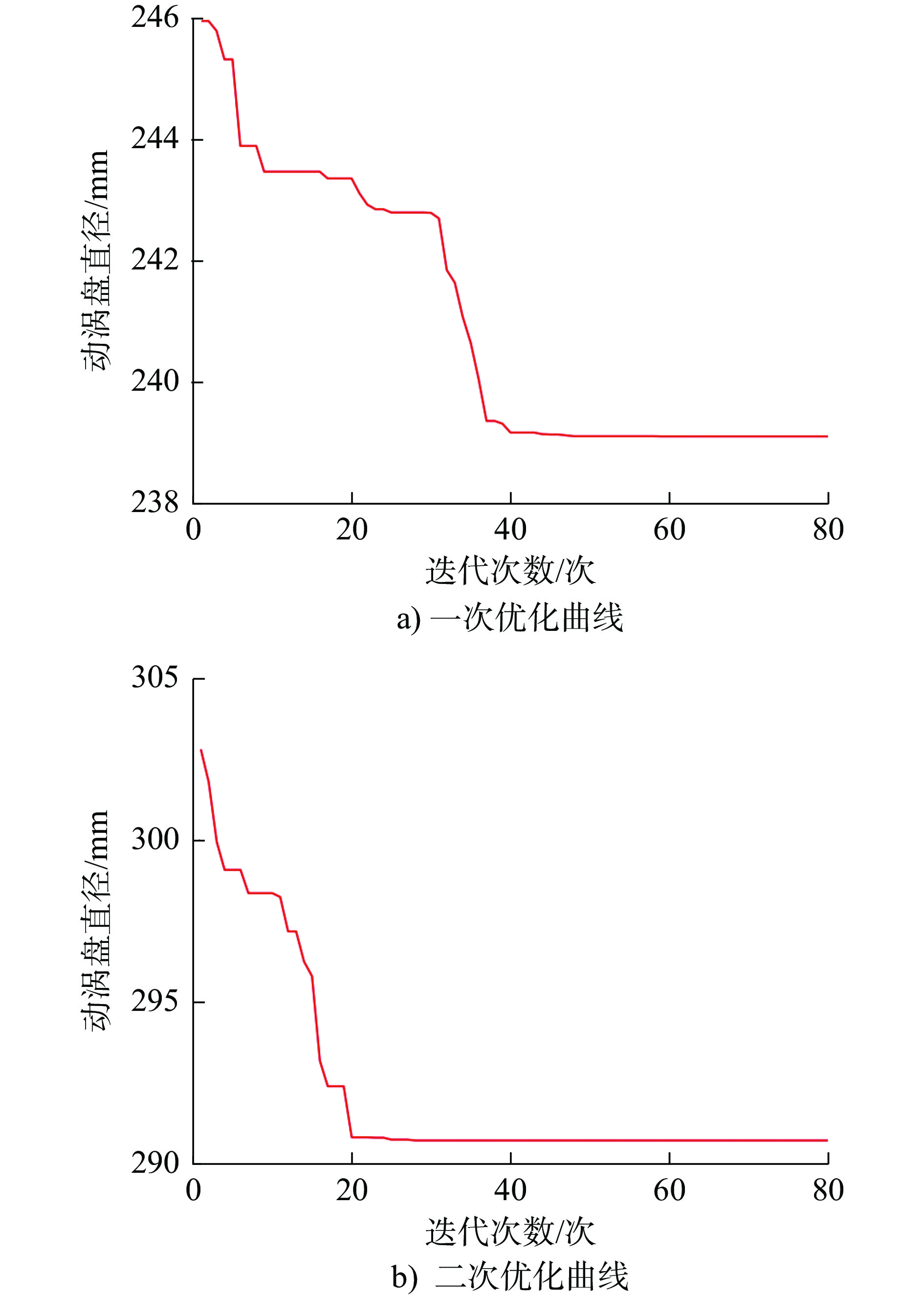
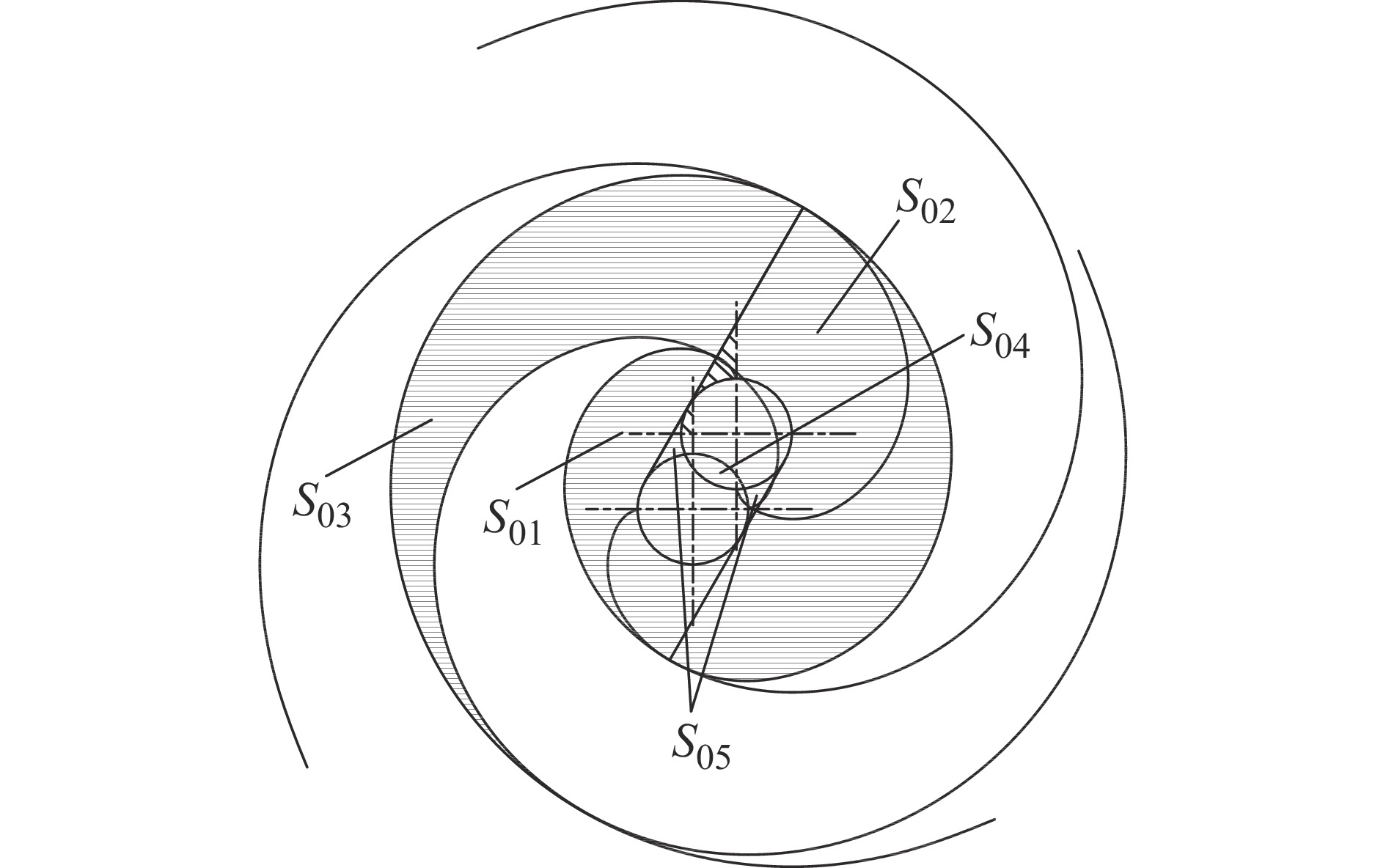
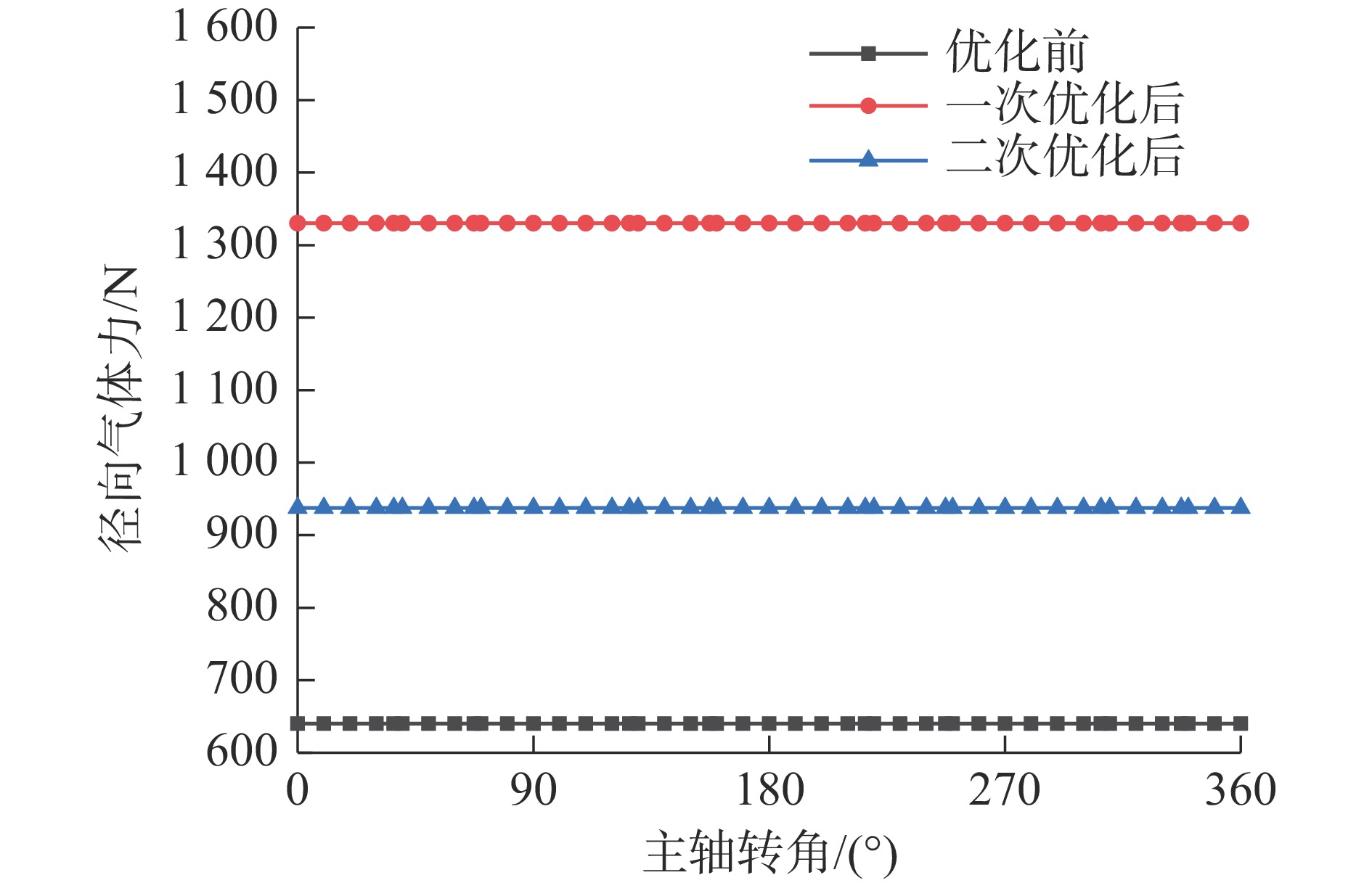
满足一定热力性能的双涡圈涡旋盘的几何参数可有无限多组,而由不同几何参数构建的涡旋盘的动力性能却差别巨大,如何通过优化涡旋盘的几何参数来提高其动力性能成为设计的难点。为此,提出了一种基于粒子群算法的涡旋盘几何参数优化方法。以离心惯性力为优化目标,运用MATLAB软件对其进行迭代优化,并分析了型线几何参数对离心惯性力、轴向气体力、径向气体力、切向气体力以及倾覆力矩的影响。结果表明:优化后涡旋盘所受离心惯性力减小,高转速下离心惯性力减小幅度更大。优化后涡旋盘所受轴向气体力减小,轴向气体力脉动幅度变化不明显。而一味追求较小的的涡旋盘直径,会导致涡旋盘受到的倾覆力矩增大。该优化方法可为双涡圈涡旋盘的设计提供参考。
满足一定热力性能的双涡圈涡旋盘的几何参数可有无限多组,而由不同几何参数构建的涡旋盘的动力性能却差别巨大,如何通过优化涡旋盘的几何参数来提高其动力性能成为设计的难点。为此,提出了一种基于粒子群算法的涡旋盘几何参数优化方法。以离心惯性力为优化目标,运用MATLAB软件对其进行迭代优化,并分析了型线几何参数对离心惯性力、轴向气体力、径向气体力、切向气体力以及倾覆力矩的影响。结果表明:优化后涡旋盘所受离心惯性力减小,高转速下离心惯性力减小幅度更大。优化后涡旋盘所受轴向气体力减小,轴向气体力脉动幅度变化不明显。而一味追求较小的的涡旋盘直径,会导致涡旋盘受到的倾覆力矩增大。该优化方法可为双涡圈涡旋盘的设计提供参考。












2023, 42(11): 1852-1859.
doi: 10.13433/j.cnki.1003-8728.20220161
摘要:
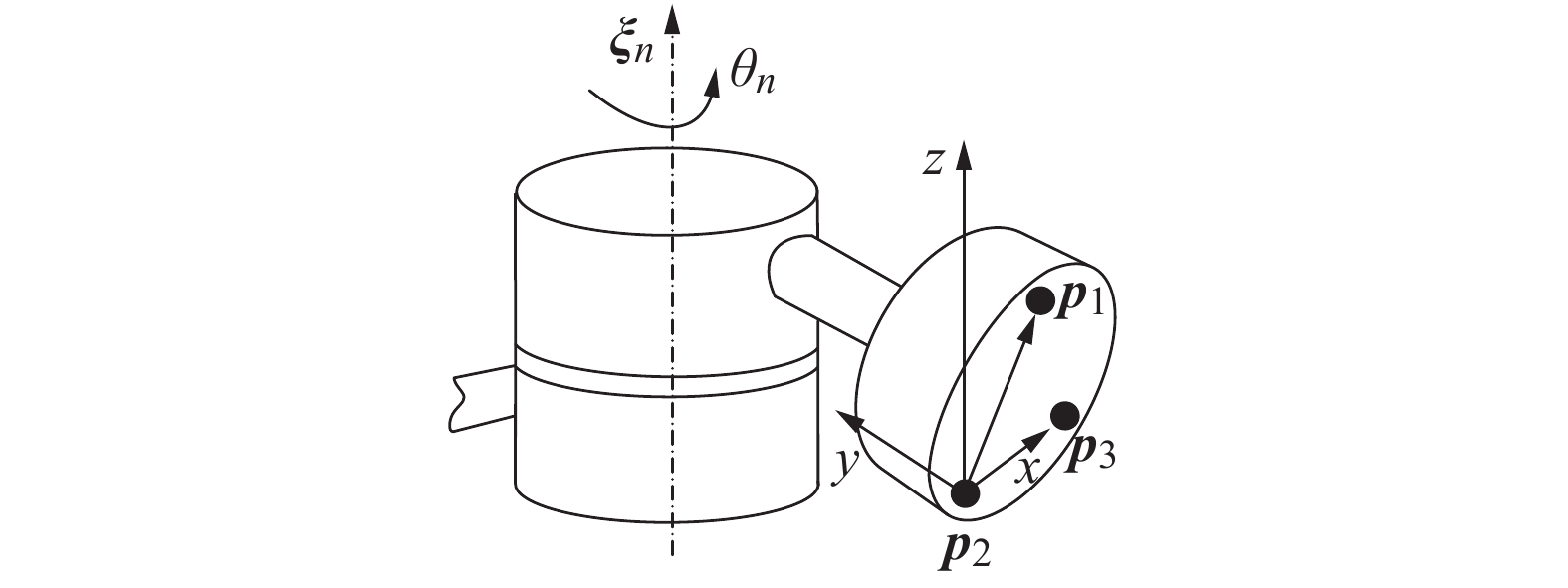
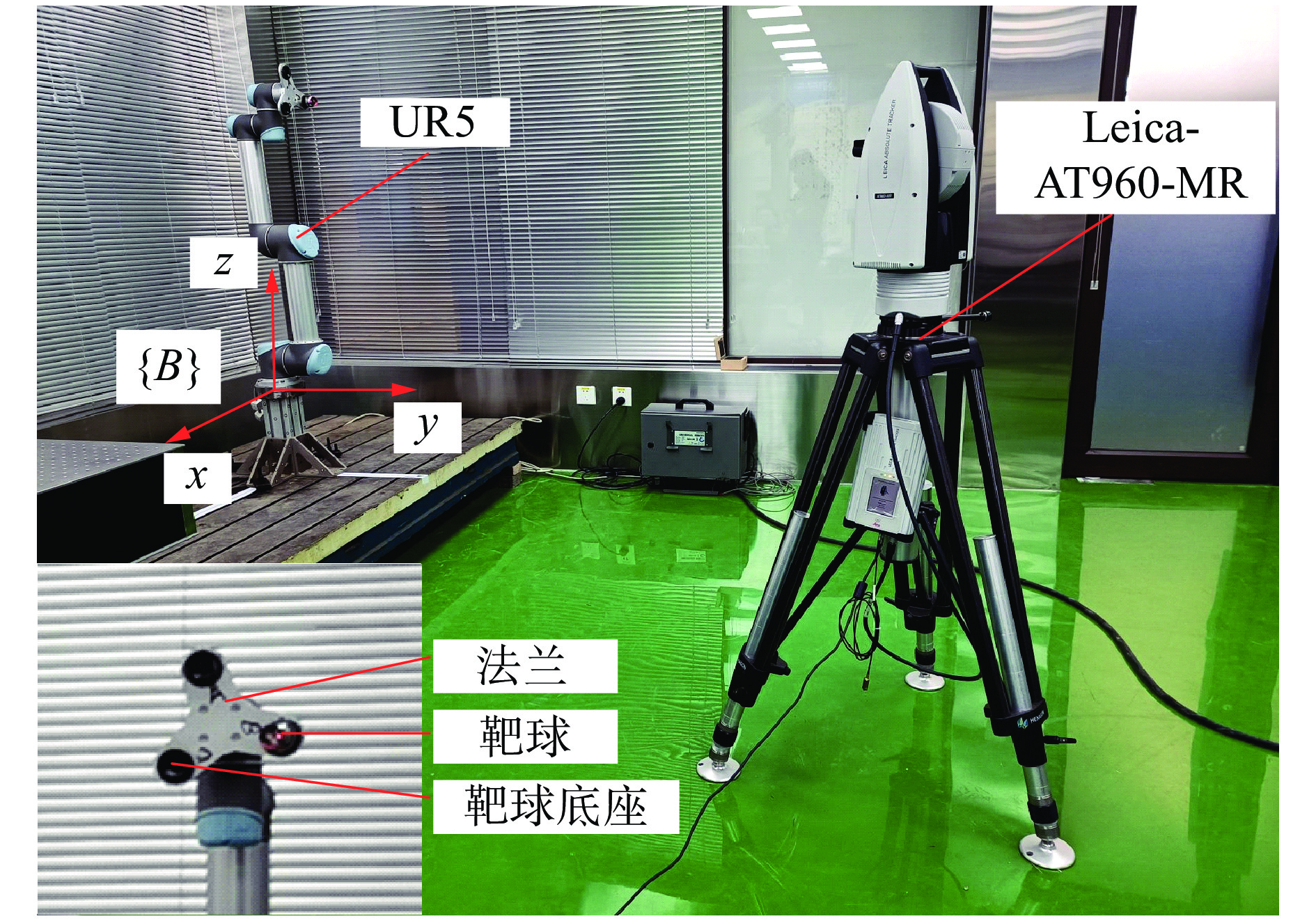
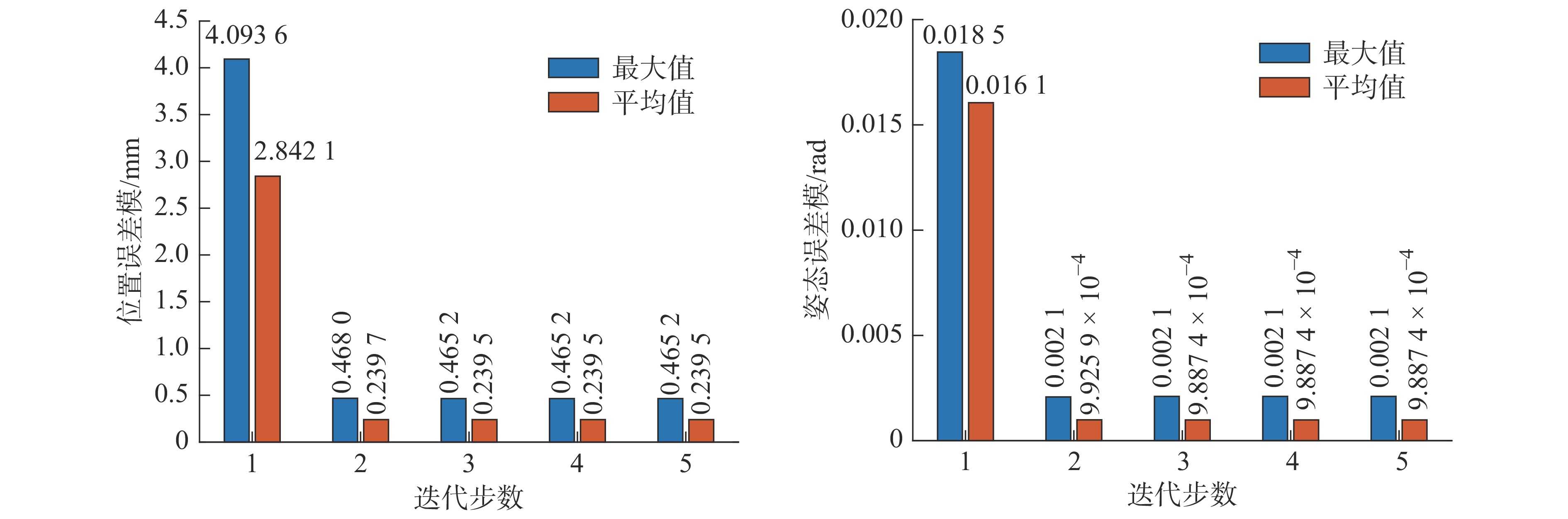
针对机器人位姿标定模型中位置和姿态数据的权重不合理导致参数识别精度低甚至发散问题,给出一种直接基于末端位置坐标测量的机器人位姿标定方法,避免了位置和姿态数据量级不同对参数识别精度的影响。采用指数积方法,建立一种包含3点位置信息的机器人运动学模型。通过对运动学模型取微分,利用指数映射微分公式推导出机器人末端3点位置误差与几何参数误差之间映射关系的显示表达并给出参数误差识别方法。采用激光跟踪仪作为测量设备,以UR5机器人为标定对象进行运动学参数标定和验证试验。试验结果表明,机器人末端位置误差模和姿态误差模的平均值分别降低了90%和92%。
针对机器人位姿标定模型中位置和姿态数据的权重不合理导致参数识别精度低甚至发散问题,给出一种直接基于末端位置坐标测量的机器人位姿标定方法,避免了位置和姿态数据量级不同对参数识别精度的影响。采用指数积方法,建立一种包含3点位置信息的机器人运动学模型。通过对运动学模型取微分,利用指数映射微分公式推导出机器人末端3点位置误差与几何参数误差之间映射关系的显示表达并给出参数误差识别方法。采用激光跟踪仪作为测量设备,以UR5机器人为标定对象进行运动学参数标定和验证试验。试验结果表明,机器人末端位置误差模和姿态误差模的平均值分别降低了90%和92%。



2023, 42(11): 1860-1866.
doi: 10.13433/j.cnki.1003-8728.20220154
摘要:
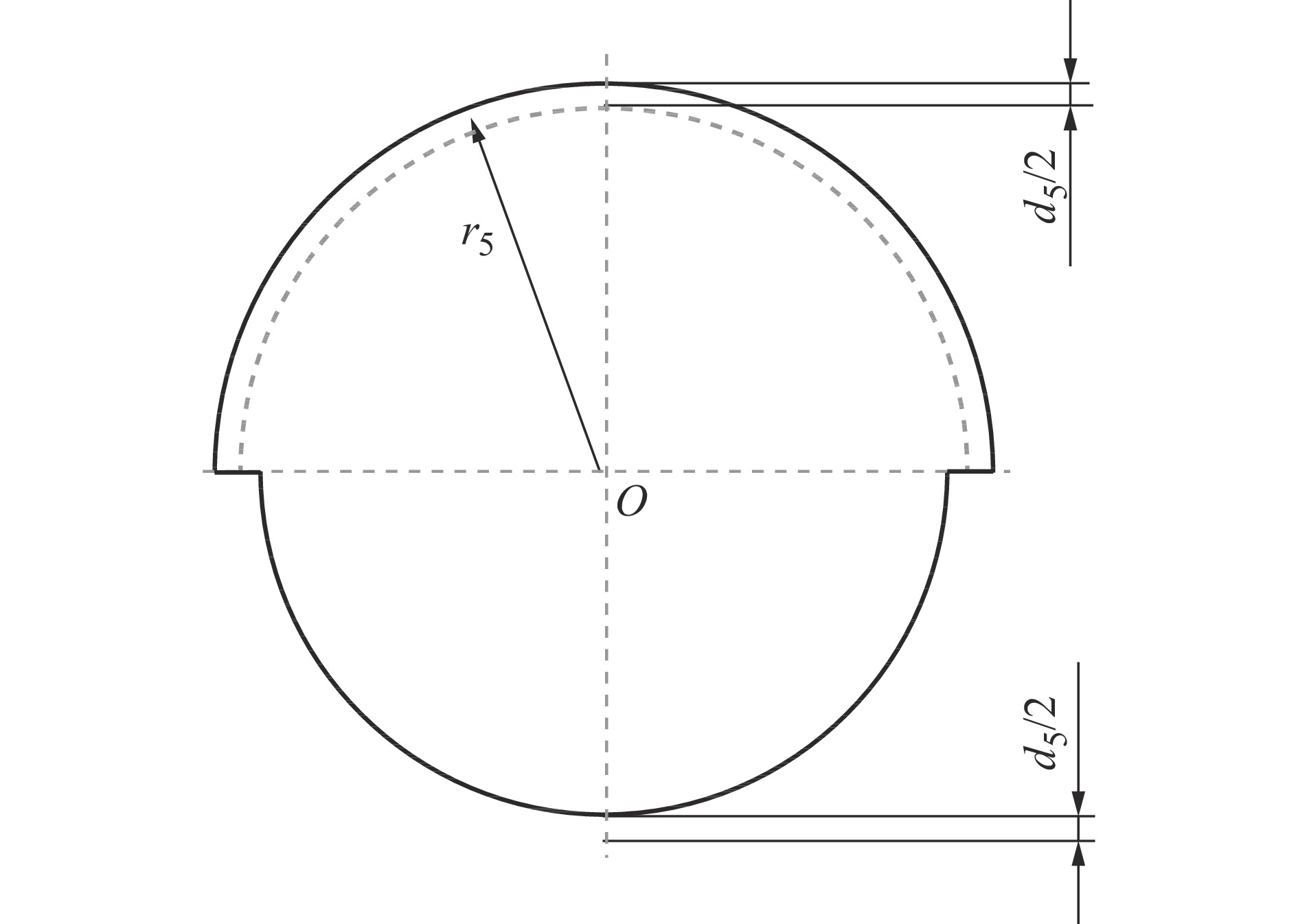
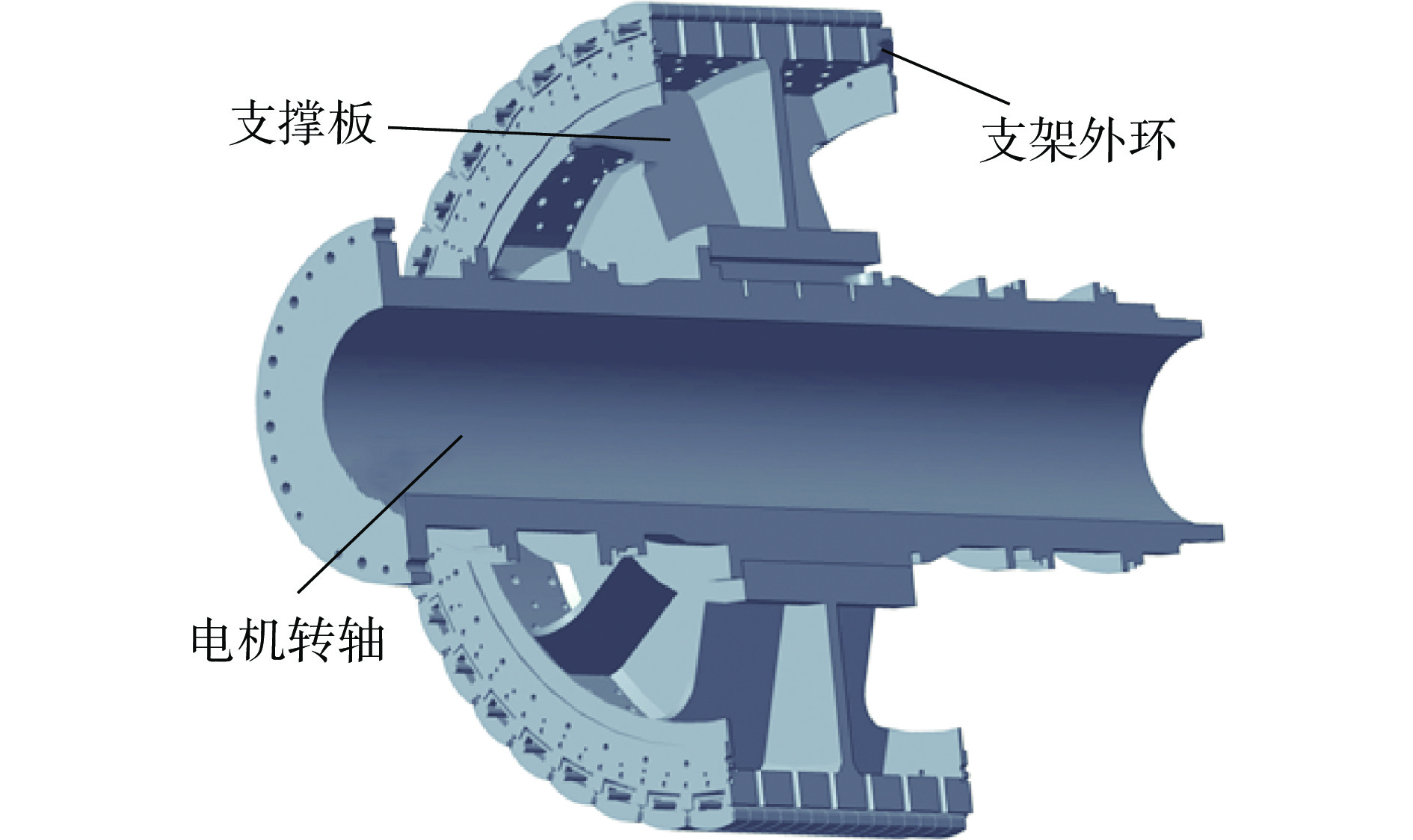
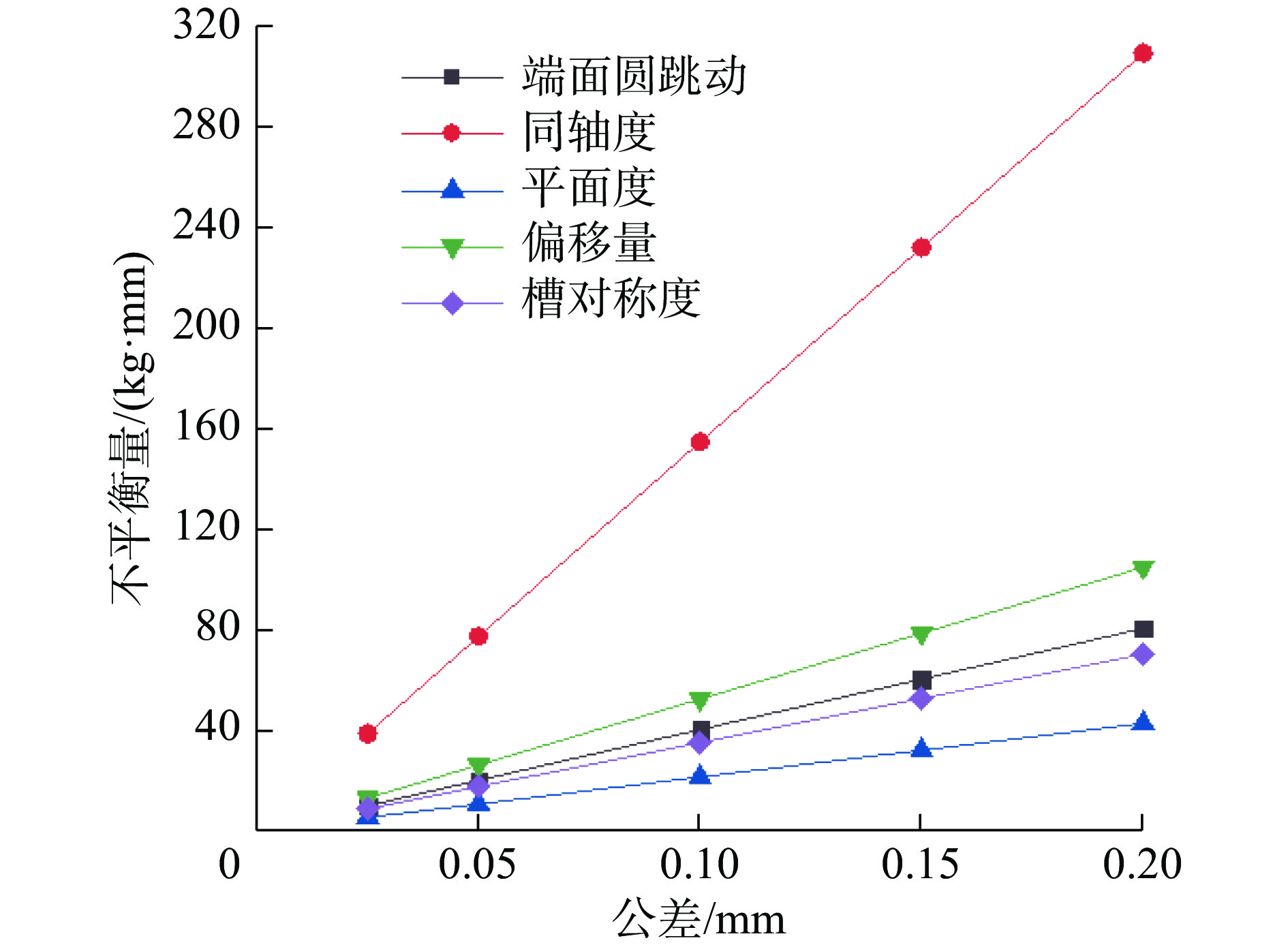
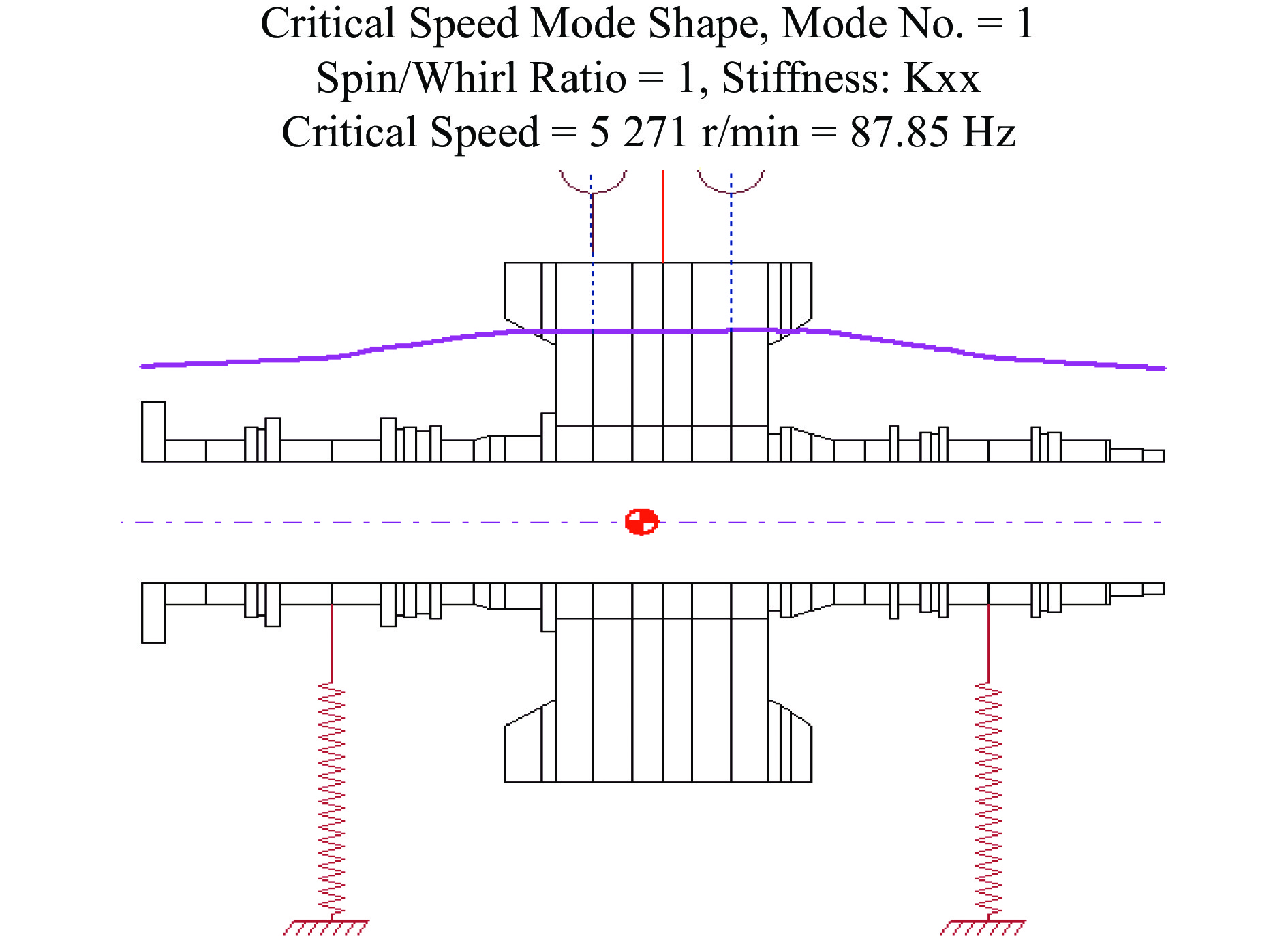
针对低速巡航下核动力潜艇永磁电机转子振动控制要求高、且因永磁体结构磁干扰难以通过动平衡机进行不平衡量控制的问题,提出一种从加工工艺精度来减少转子结构不平衡振动响应的分析方法,以满足潜艇巡航时低振动隐蔽性的需求。首先根据零部件加工工艺情况,构建出五种典型加工工艺的公差模型,揭示加工精度等级与转子结构不平衡量之间的内在关系,然后采用有限元法,建立典型加工工艺下转子不平衡激励下的动力学模型,通过稳态同步响应分析得出转子的振动响应图谱,最后根据振动响应值大小来评价加工精度等级对转子振动的影响程度,找出巡航状态89 r/min额定转速下电机转轴同轴度加工精度对电机振动幅值影响最大,而电机转轴端面平面度的影响最小。论文结论可为在满足装配需求前提下转子加工精度等级的优化提供参考。
针对低速巡航下核动力潜艇永磁电机转子振动控制要求高、且因永磁体结构磁干扰难以通过动平衡机进行不平衡量控制的问题,提出一种从加工工艺精度来减少转子结构不平衡振动响应的分析方法,以满足潜艇巡航时低振动隐蔽性的需求。首先根据零部件加工工艺情况,构建出五种典型加工工艺的公差模型,揭示加工精度等级与转子结构不平衡量之间的内在关系,然后采用有限元法,建立典型加工工艺下转子不平衡激励下的动力学模型,通过稳态同步响应分析得出转子的振动响应图谱,最后根据振动响应值大小来评价加工精度等级对转子振动的影响程度,找出巡航状态89 r/min额定转速下电机转轴同轴度加工精度对电机振动幅值影响最大,而电机转轴端面平面度的影响最小。论文结论可为在满足装配需求前提下转子加工精度等级的优化提供参考。




2023, 42(11): 1867-1871.
doi: 10.13433/j.cnki.1003-8728.20220166
摘要:
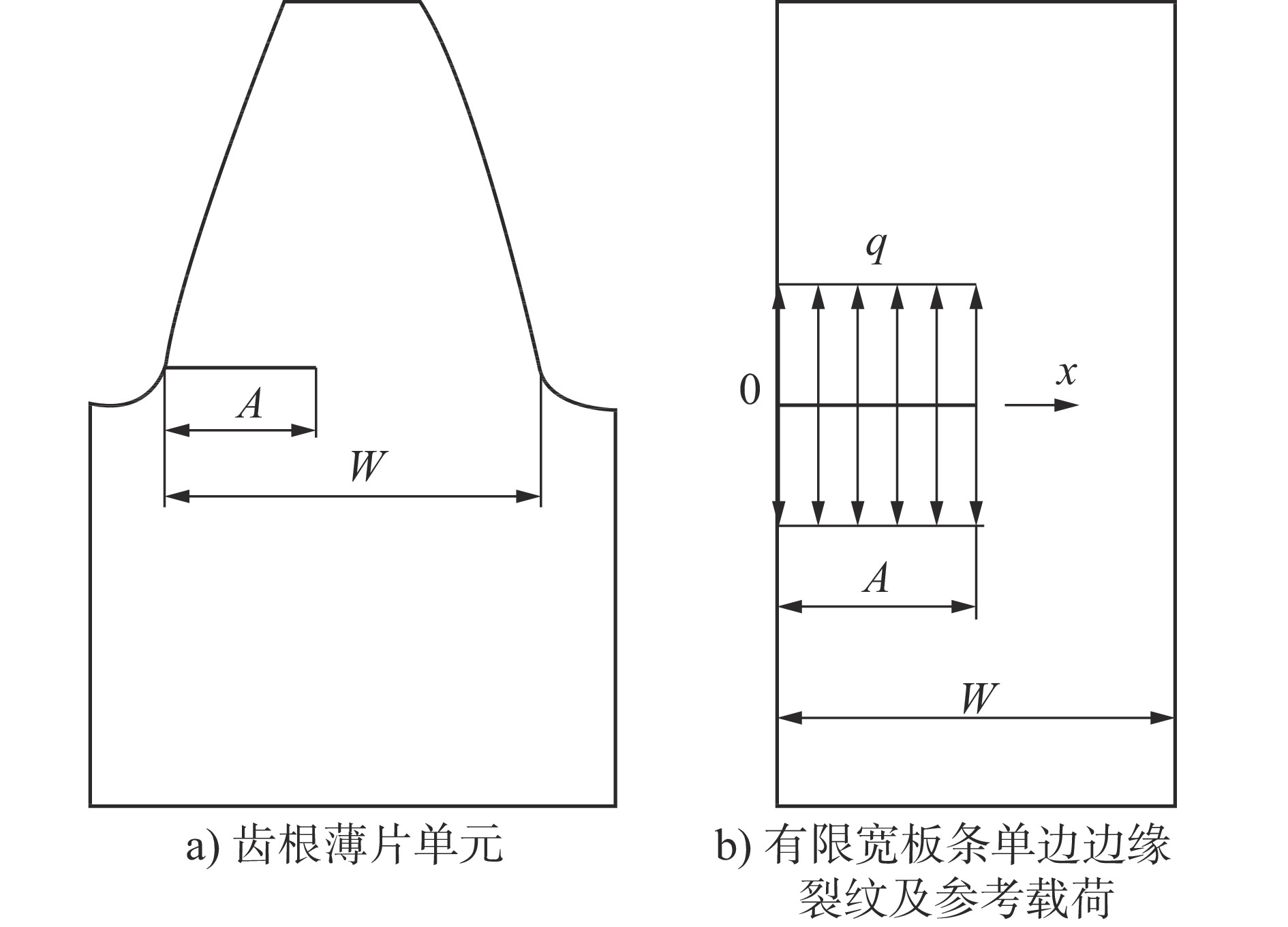
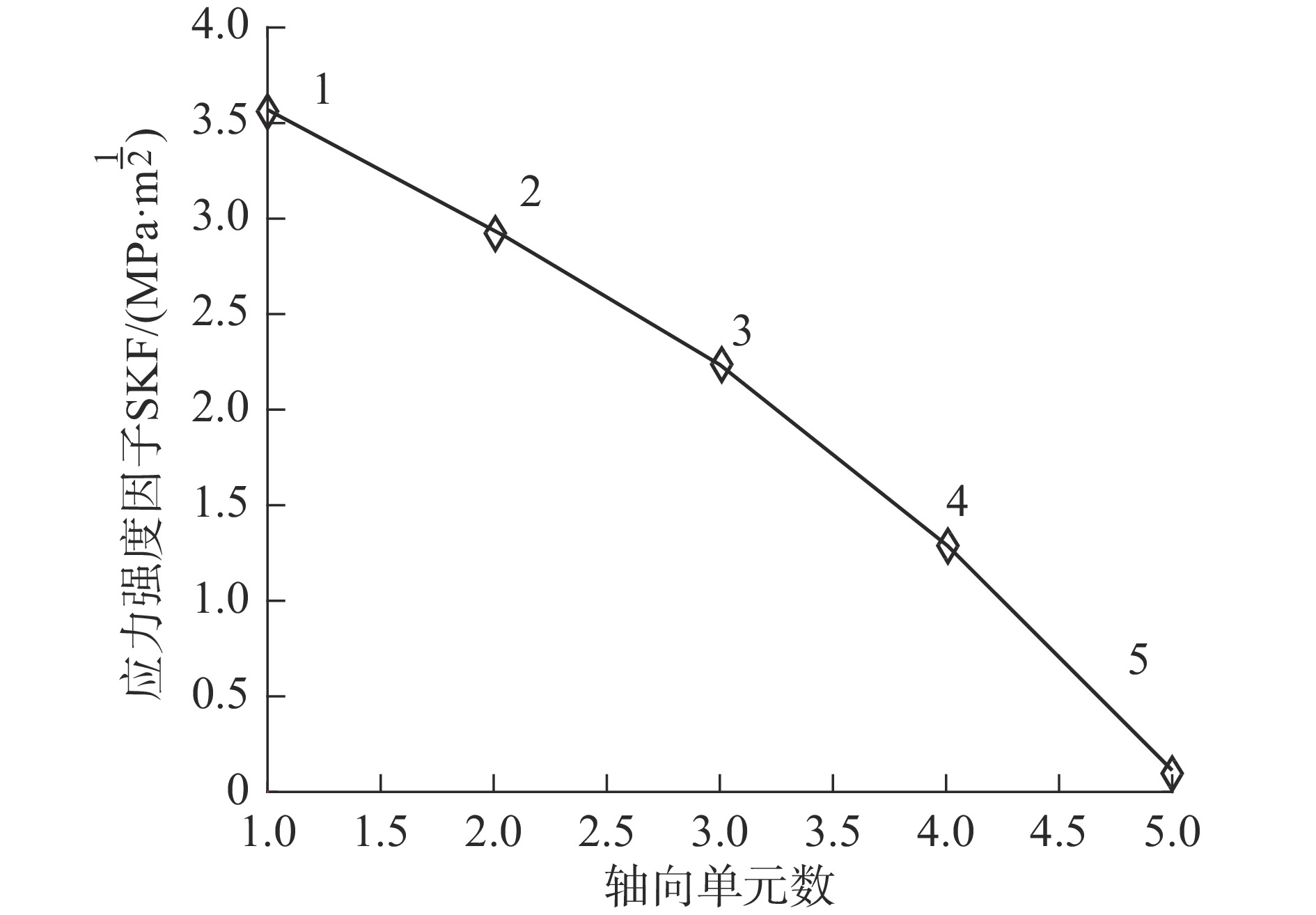
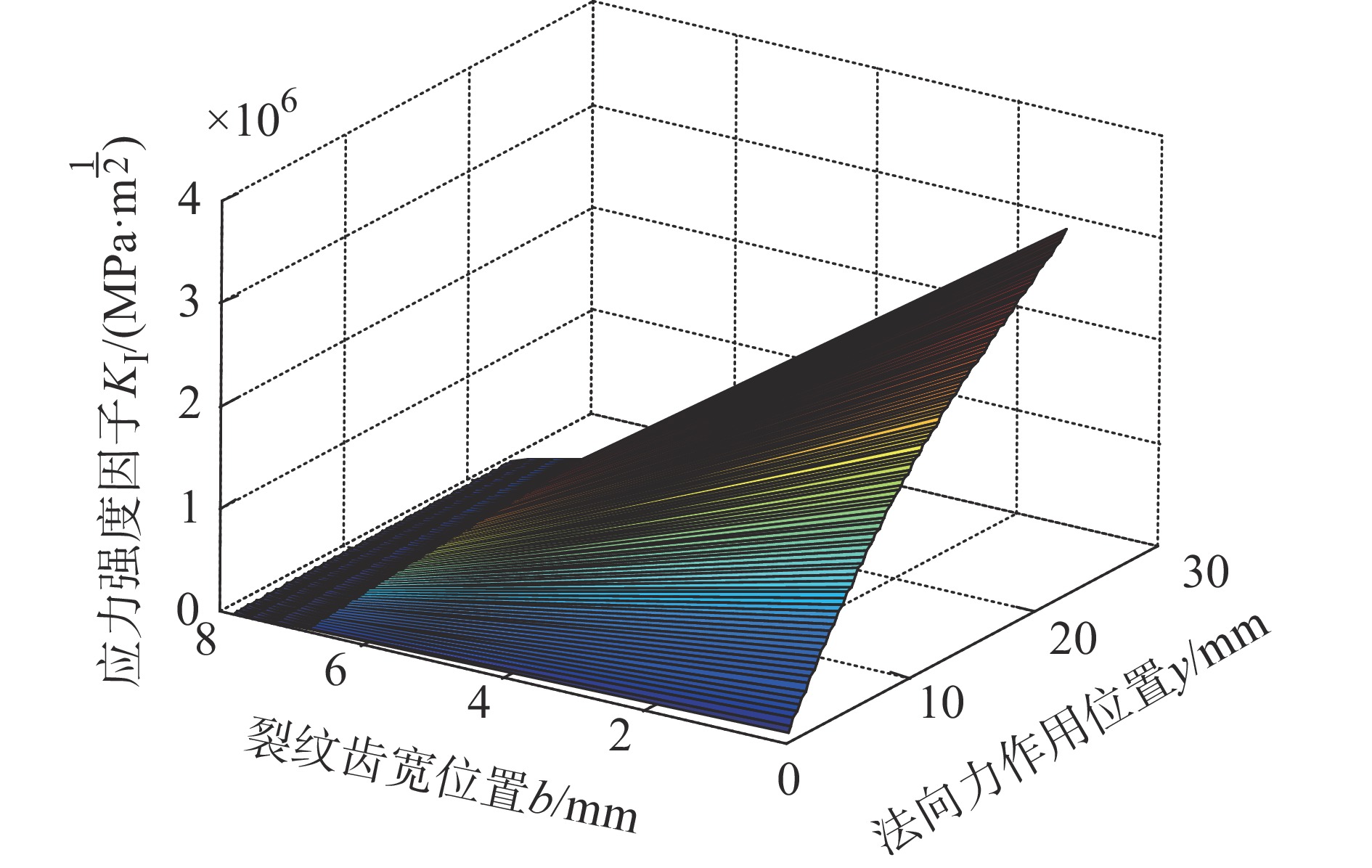
齿轮齿根是具有非穿透性的三维裂纹,其应力强度因子计算求解难度大且过程复杂。对此应用片条合成权函数法将三维裂纹问题转化为一系列“等效的”薄片单元二维裂纹问题。根据作用在薄片单元上的法向力按照其啮合刚度进行分配,求出作用于每个薄片单元上的法向力,再运用二维裂纹权函数法计算每个薄片单元裂纹应力强度因子。其求解结果与有限元法计算结果十分吻合,最大误差为3.9%。
齿轮齿根是具有非穿透性的三维裂纹,其应力强度因子计算求解难度大且过程复杂。对此应用片条合成权函数法将三维裂纹问题转化为一系列“等效的”薄片单元二维裂纹问题。根据作用在薄片单元上的法向力按照其啮合刚度进行分配,求出作用于每个薄片单元上的法向力,再运用二维裂纹权函数法计算每个薄片单元裂纹应力强度因子。其求解结果与有限元法计算结果十分吻合,最大误差为3.9%。



2023, 42(11): 1872-1879.
doi: 10.13433/j.cnki.1003-8728.20220140
摘要:
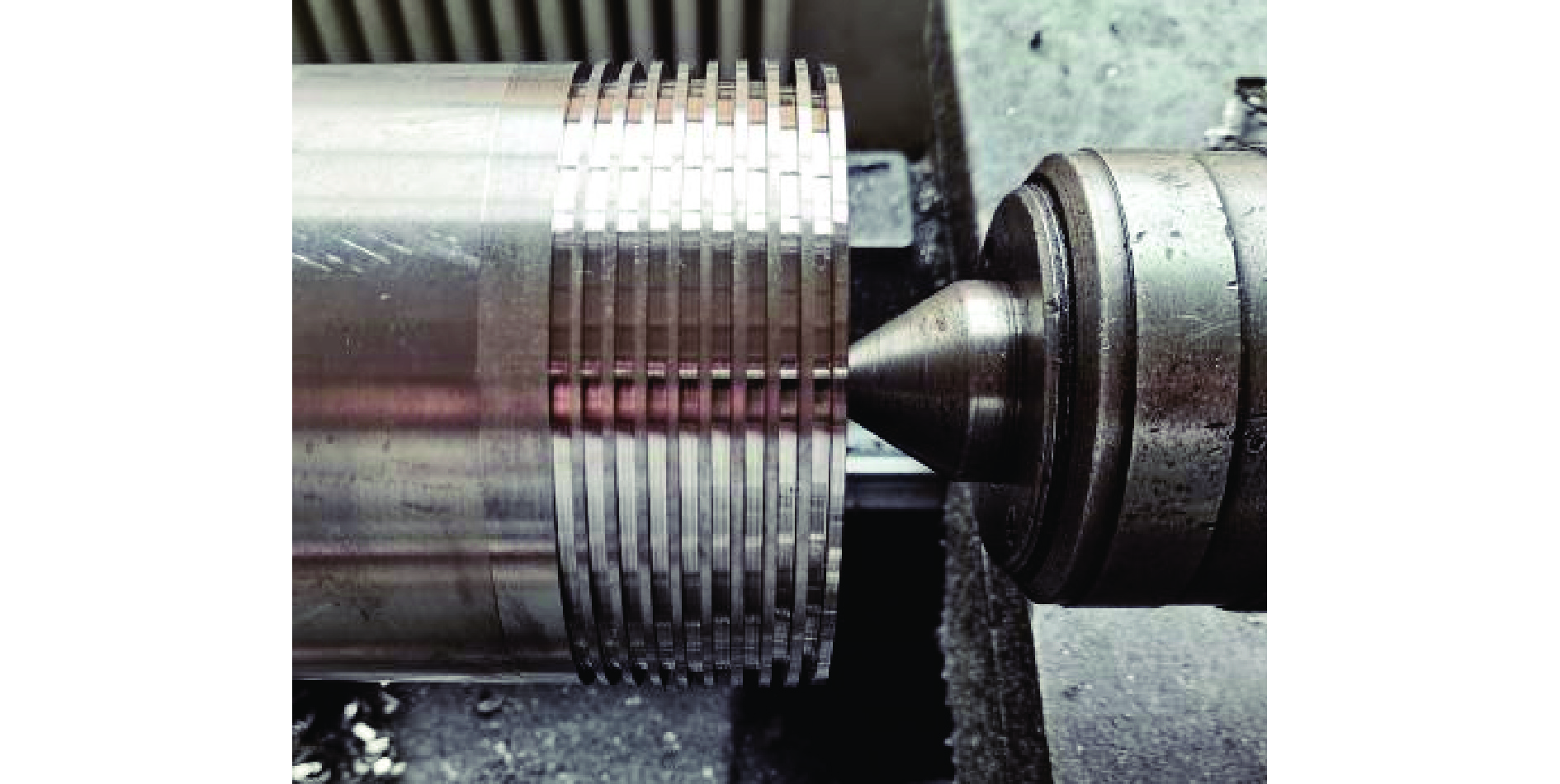
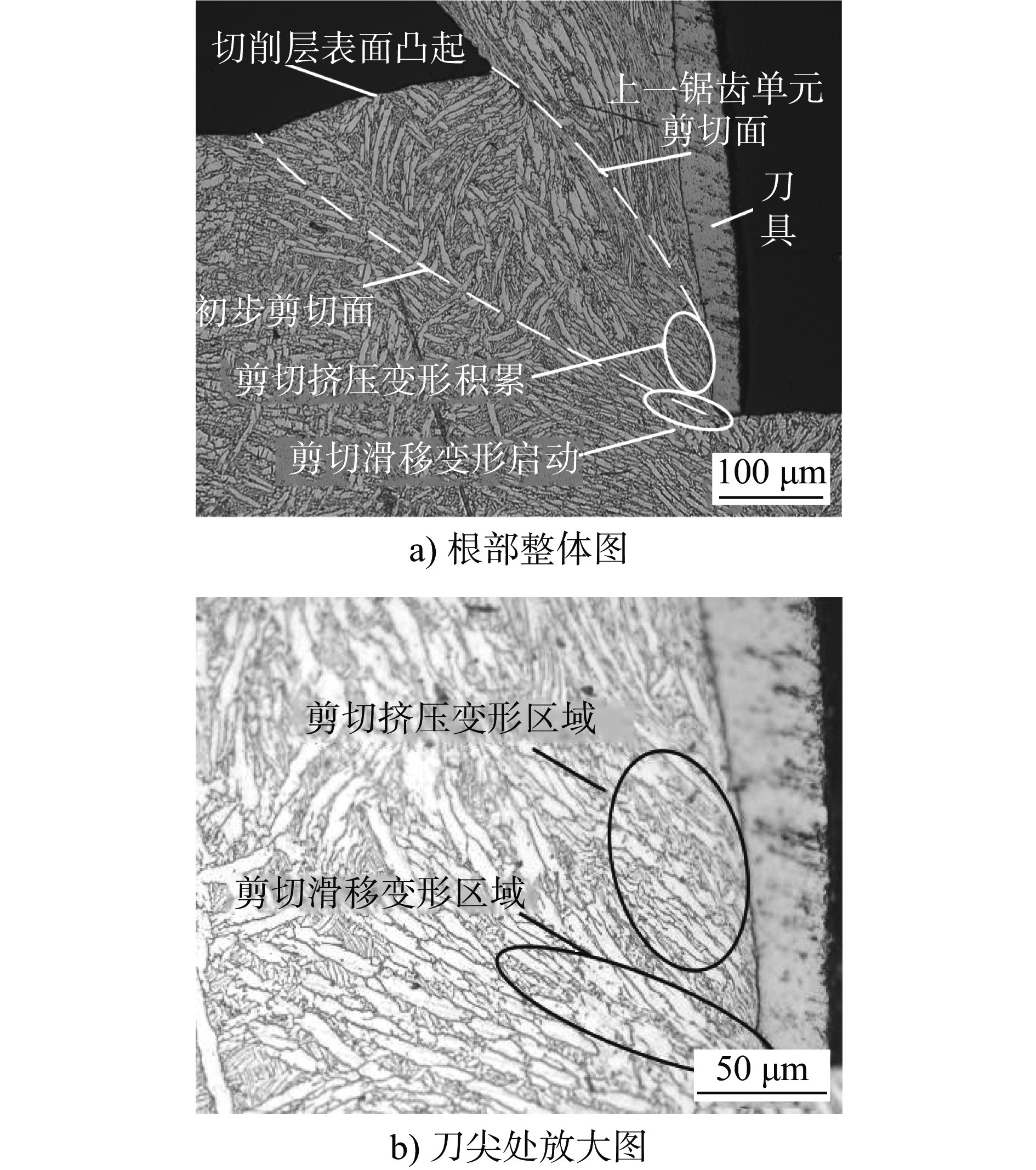
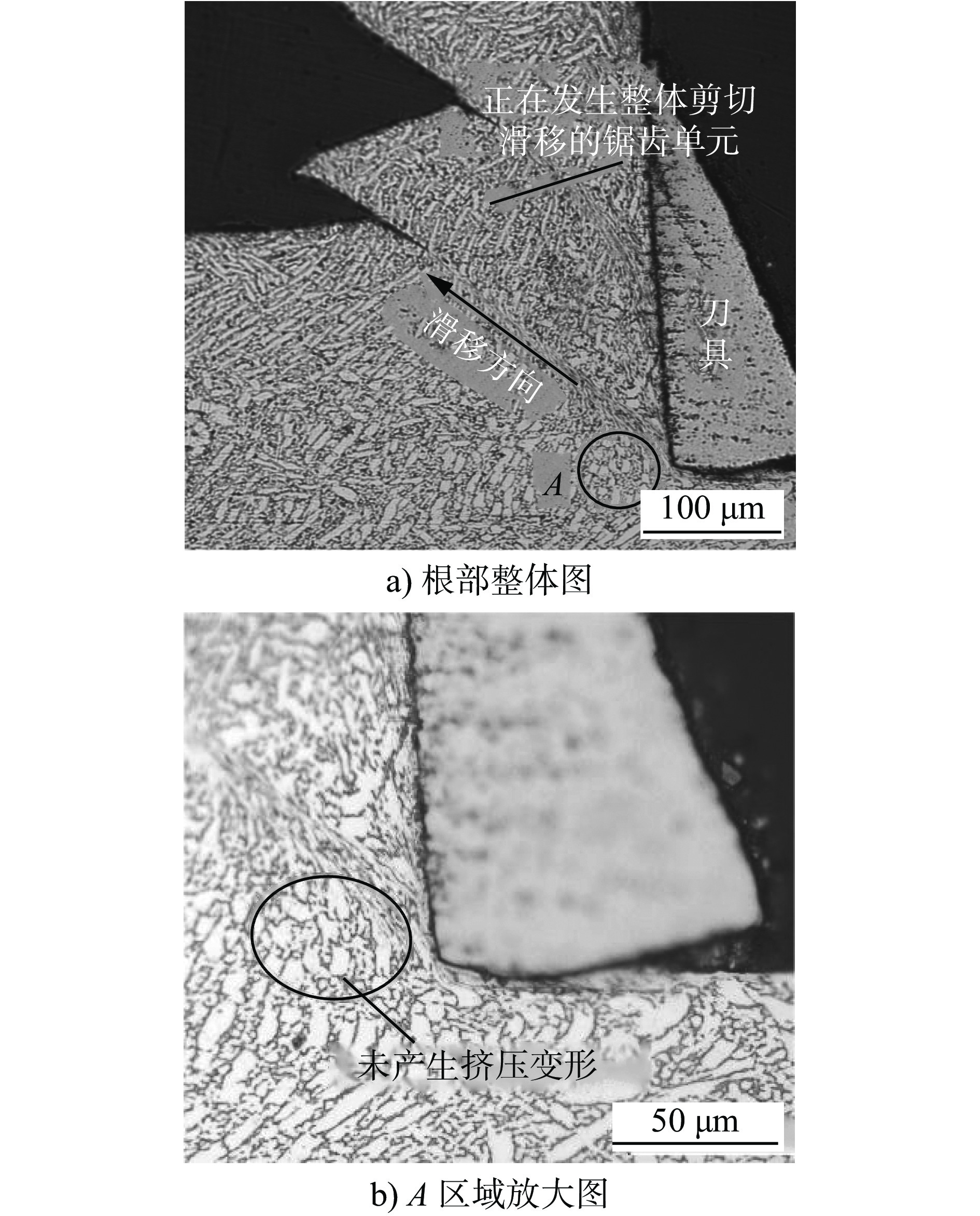
通过根切试验获得了大量锯齿形切屑根部样本,对样本进行金相处理之后得到了清晰的锯齿形切屑根部组织图片,基于切屑根部组织的变形特征,分析了锯齿形切屑的形成过程及机理,并建立了锯齿形切屑形成过程模型。研究结果表明:锯齿形切屑形成过程可分为第1变形区内剪切挤压变形积累和初步剪切面的形成阶段、切屑自由表面与切削层自由表面分离即剪切面的形成阶段、第1和第2变形区内锯齿单元发生整体集中剪切滑移阶段;锯齿形切屑的形成是由于第1变形区内靠近刀尖处材料发生热塑性失稳导致;绝热剪切带内部和切削层表面处有裂纹产生,裂纹产生于锯齿单元整体剪切滑移阶段,并且靠近切削层表面处更容易产生裂纹。
通过根切试验获得了大量锯齿形切屑根部样本,对样本进行金相处理之后得到了清晰的锯齿形切屑根部组织图片,基于切屑根部组织的变形特征,分析了锯齿形切屑的形成过程及机理,并建立了锯齿形切屑形成过程模型。研究结果表明:锯齿形切屑形成过程可分为第1变形区内剪切挤压变形积累和初步剪切面的形成阶段、切屑自由表面与切削层自由表面分离即剪切面的形成阶段、第1和第2变形区内锯齿单元发生整体集中剪切滑移阶段;锯齿形切屑的形成是由于第1变形区内靠近刀尖处材料发生热塑性失稳导致;绝热剪切带内部和切削层表面处有裂纹产生,裂纹产生于锯齿单元整体剪切滑移阶段,并且靠近切削层表面处更容易产生裂纹。









2023, 42(11): 1880-1886.
doi: 10.13433/j.cnki.1003-8728.20230298
摘要:
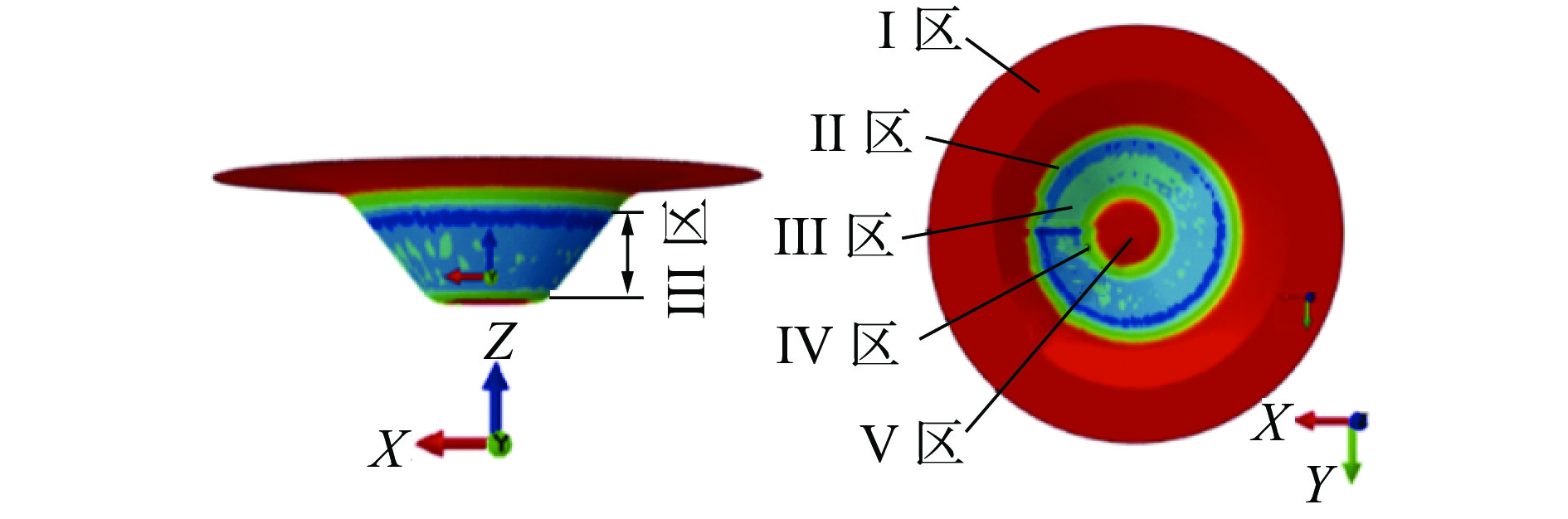
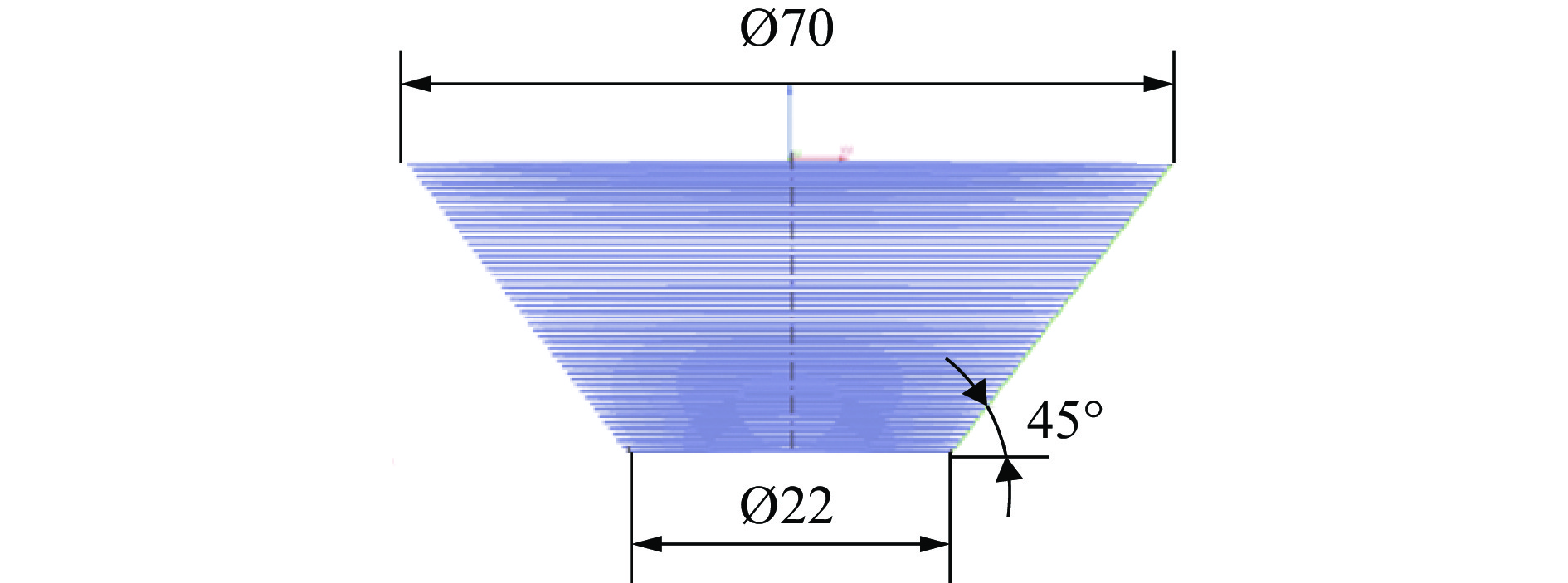
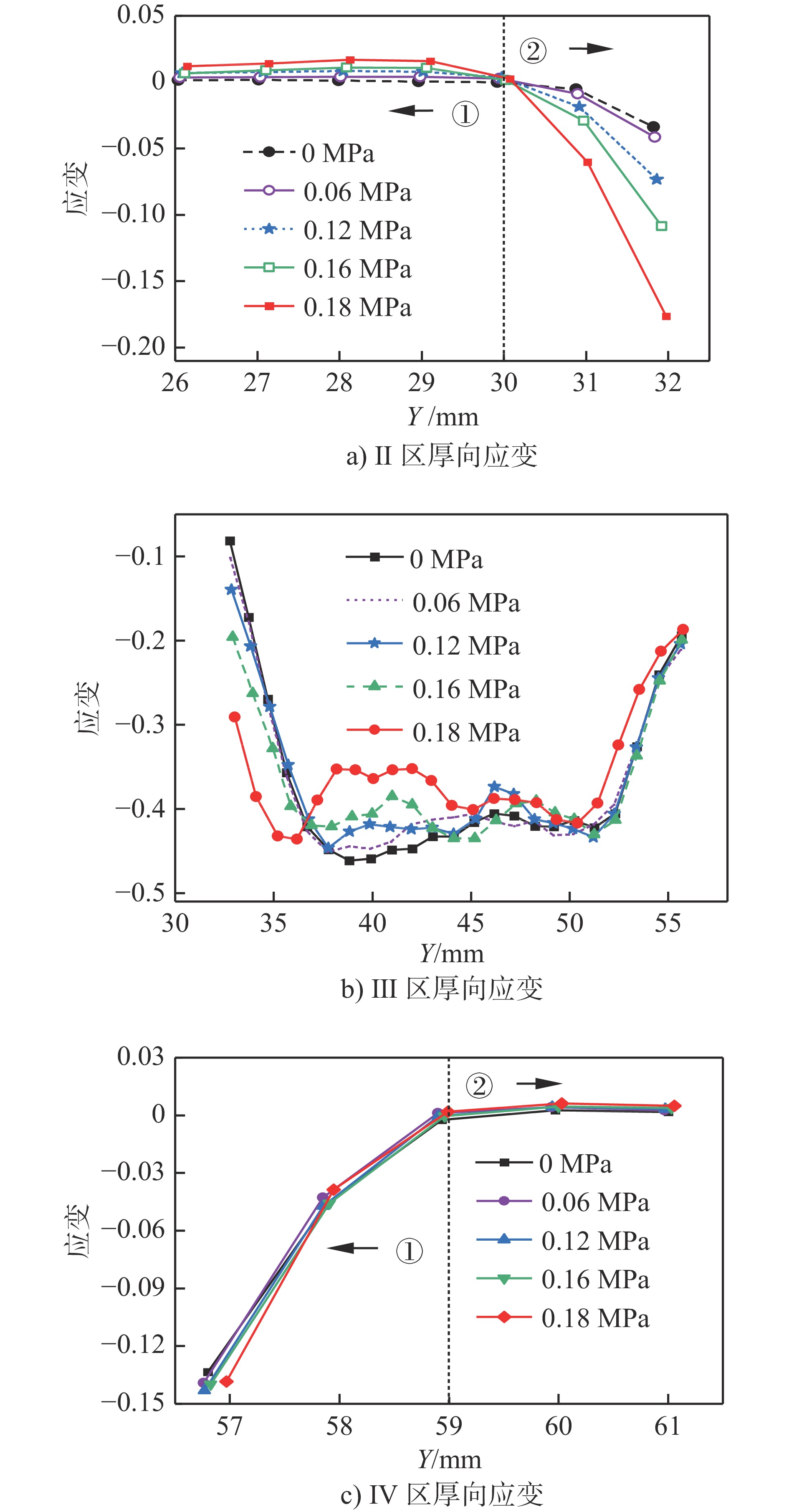
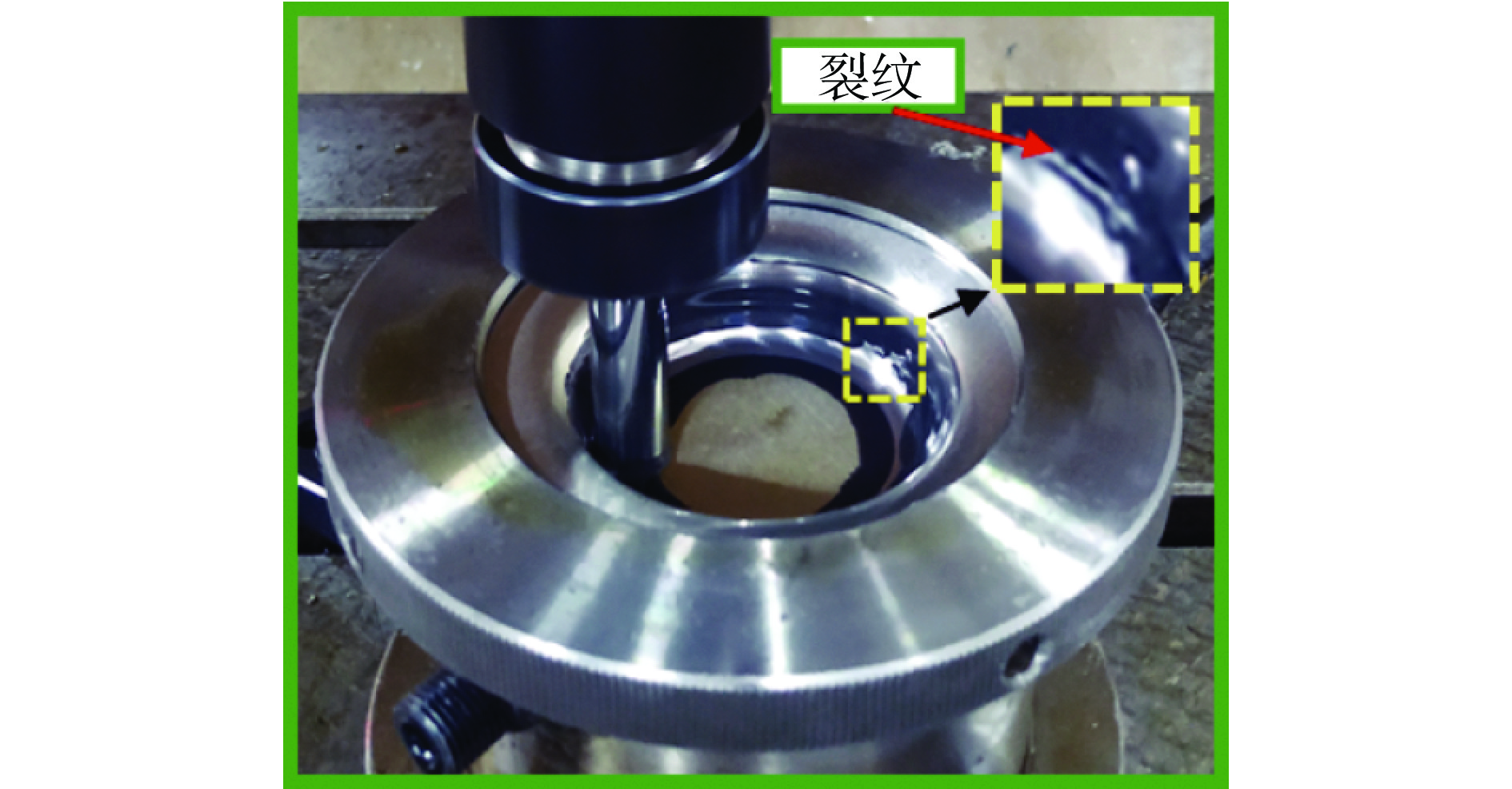
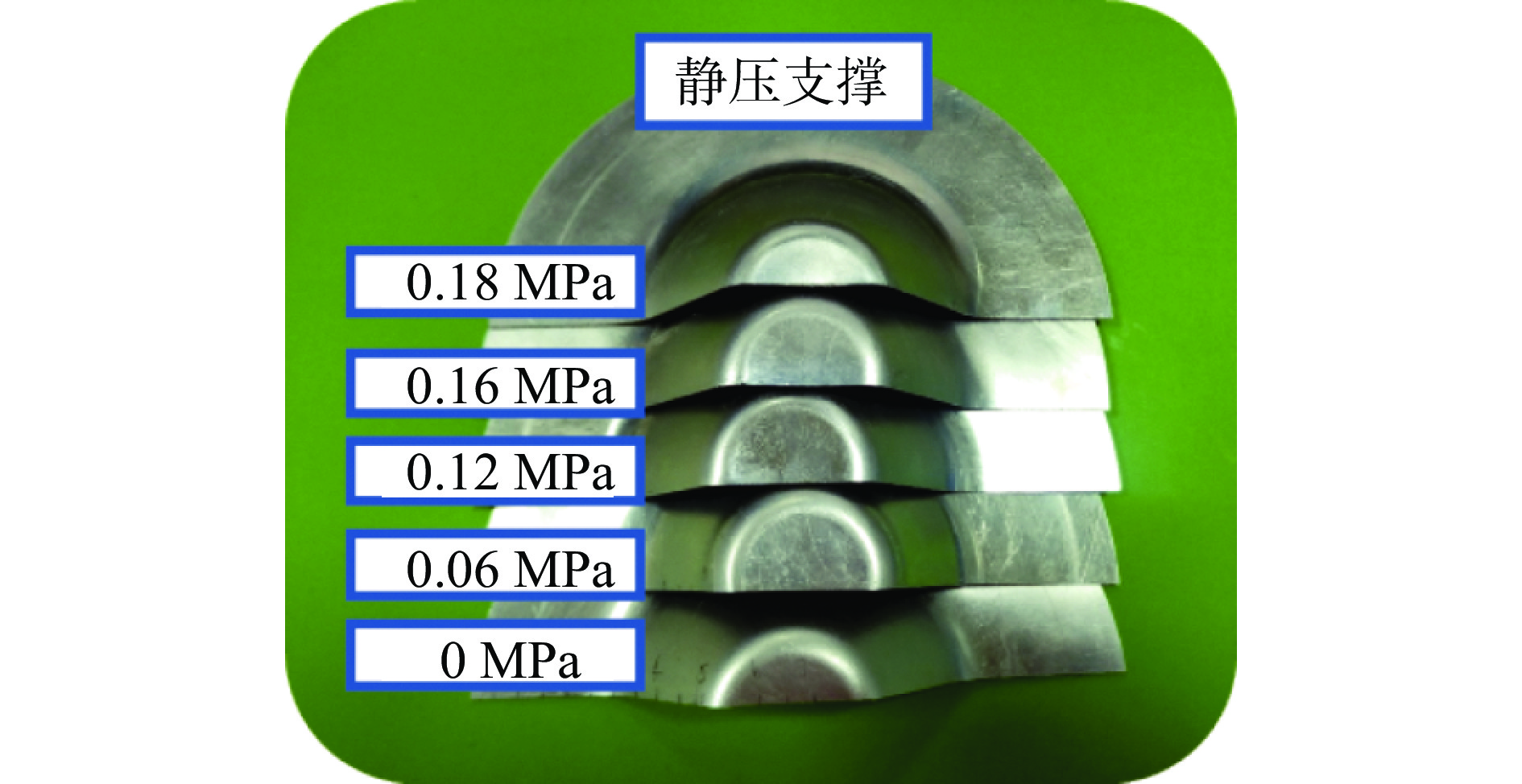
采用单点渐进成形技术单道次成形复杂形状的薄壁零件时,厚度分布不均匀及过度减薄易于引起板材的断裂和成形失效。将静压支撑引入单点渐进成形中,形成一种静压支撑单点渐进成形工艺;通过促进材料流动和厚向应变分布来提高板材厚度分布的均匀性。选用初始厚度为1 mm的1060铝板,以静压支撑单点渐进成形的圆锥台件为研究对象,通过数值模拟和实验研究分析了静压参数对厚向应变分布和材料流动规律的影响。结果表明:0 ~ 0.18 MPa的静压支撑有利于过渡变形区Ⅱ的快速成形,有利于主变形区Ⅲ的厚向应变分布;在有利压力范围内,静压压力越大,由Ⅱ区流向Ⅲ区的材料越多,厚向应变分布越均匀,制件成形性能越好。
采用单点渐进成形技术单道次成形复杂形状的薄壁零件时,厚度分布不均匀及过度减薄易于引起板材的断裂和成形失效。将静压支撑引入单点渐进成形中,形成一种静压支撑单点渐进成形工艺;通过促进材料流动和厚向应变分布来提高板材厚度分布的均匀性。选用初始厚度为1 mm的1060铝板,以静压支撑单点渐进成形的圆锥台件为研究对象,通过数值模拟和实验研究分析了静压参数对厚向应变分布和材料流动规律的影响。结果表明:0 ~ 0.18 MPa的静压支撑有利于过渡变形区Ⅱ的快速成形,有利于主变形区Ⅲ的厚向应变分布;在有利压力范围内,静压压力越大,由Ⅱ区流向Ⅲ区的材料越多,厚向应变分布越均匀,制件成形性能越好。








2023, 42(11): 1887-1894.
doi: 10.13433/j.cnki.1003-8728.20220159
摘要:
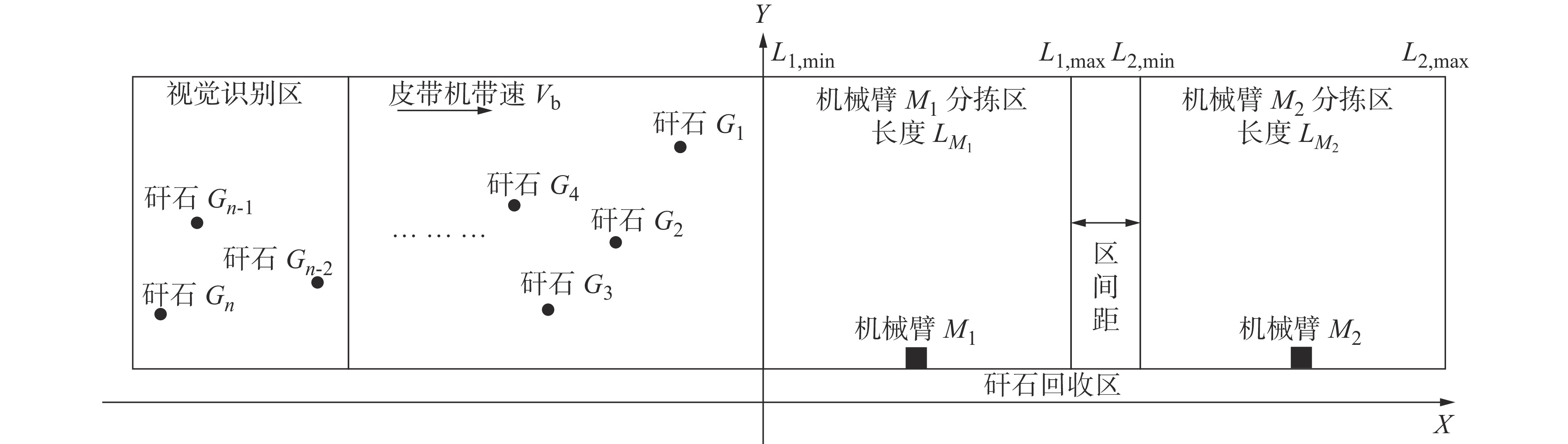
针对煤炭生产过程中,原煤含矸率时变性引起分拣效率低的问题,本文综合考虑矸石质量、矸石识别置信度、机械臂分拣时间等因素,通过一种多因素融合效益矩阵的方法,优化时变含矸率条件下的多机械臂煤矸分拣策略。提出了一种基于效益矩阵的多机械臂协同策略模型,以分拣效益和拣矸率共同作为策略的评价标准。通过采用相似性原理,构建小样本矸石流模型;利用熵权法量化效益矩阵的元素参量;最后,采用FCFS策略方法及本文策略方法进行多组对比实验,实验结果表明,通过效益矩阵优化的多臂协同策略能够有效解决过矸量大时的矸石任务分配问题,相对FCFS策略方法,提高拣矸率的同时,有效提高了选煤质量。
针对煤炭生产过程中,原煤含矸率时变性引起分拣效率低的问题,本文综合考虑矸石质量、矸石识别置信度、机械臂分拣时间等因素,通过一种多因素融合效益矩阵的方法,优化时变含矸率条件下的多机械臂煤矸分拣策略。提出了一种基于效益矩阵的多机械臂协同策略模型,以分拣效益和拣矸率共同作为策略的评价标准。通过采用相似性原理,构建小样本矸石流模型;利用熵权法量化效益矩阵的元素参量;最后,采用FCFS策略方法及本文策略方法进行多组对比实验,实验结果表明,通过效益矩阵优化的多臂协同策略能够有效解决过矸量大时的矸石任务分配问题,相对FCFS策略方法,提高拣矸率的同时,有效提高了选煤质量。






2023, 42(11): 1895-1903.
doi: 10.13433/j.cnki.1003-8728.20220103
摘要:
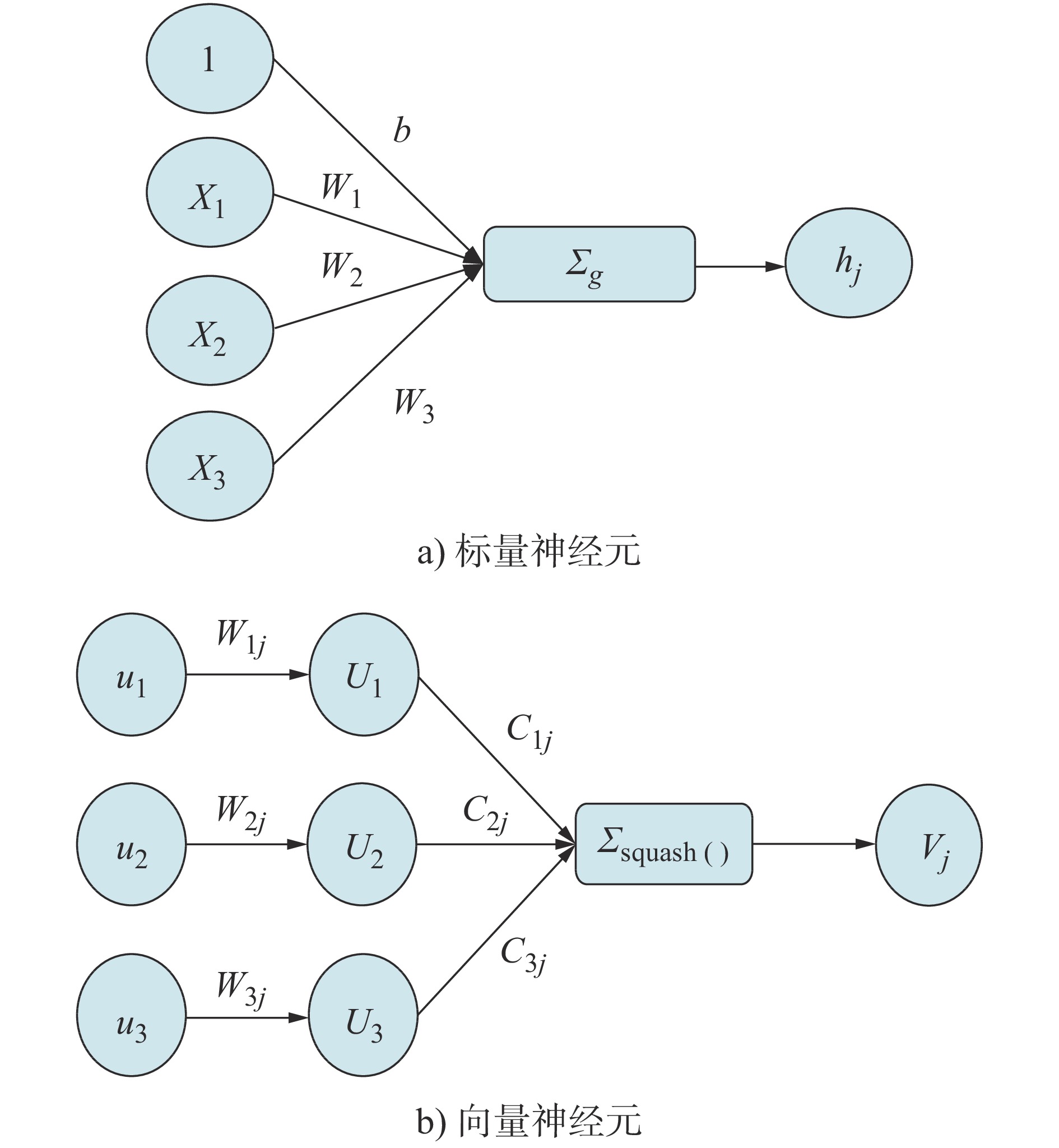
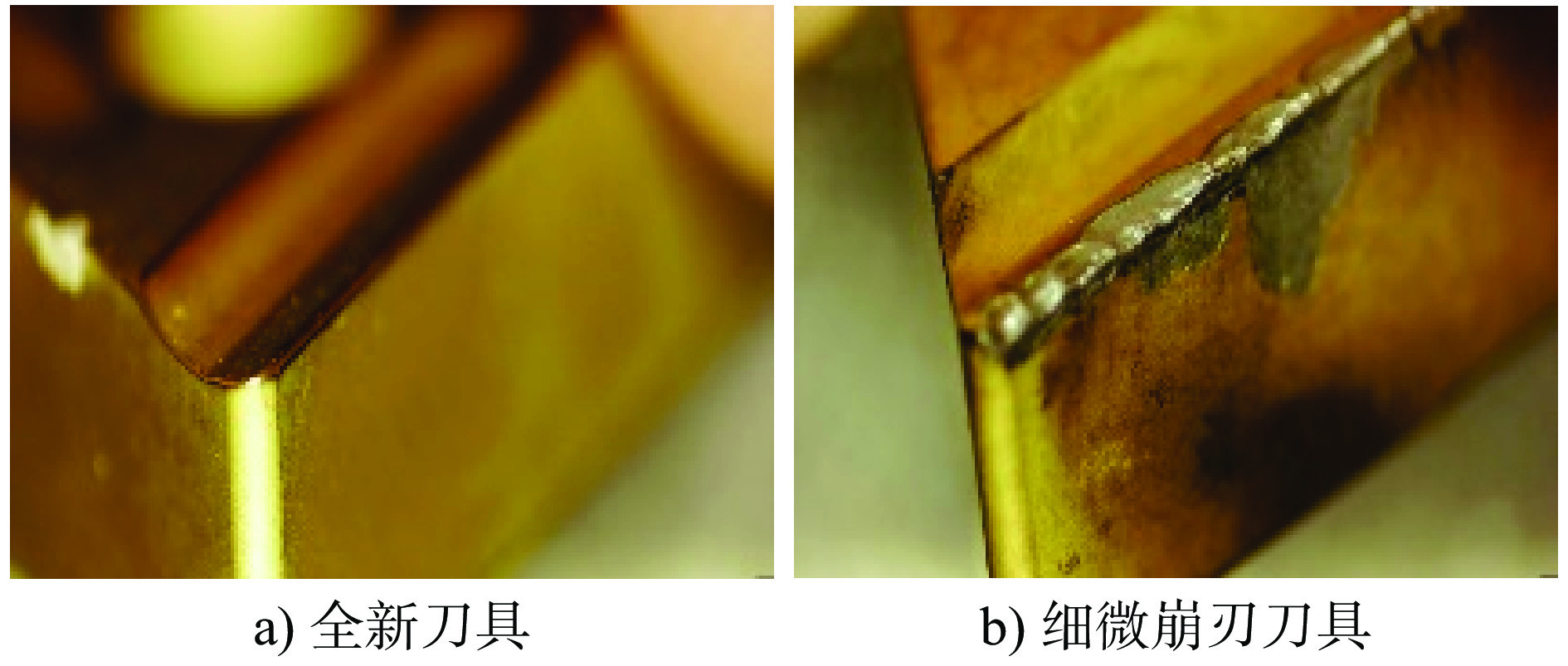
刀具状态监测是实现加工过程智能化的关键技术之一,其状态直接影响到工件的表面质量和加工效率。在切削加工过程中刀具的细微崩刃不易察觉但却对工件表面质量影响较大,针对该问题提出了一种基于多尺度卷积胶囊网络的方法实现刀具破损状态监测。首先通过采集振动信号来表征刀具的状态,然后在模型中通过多尺度卷积层初步提取信号特征,随后将特征胶囊化输入胶囊层中进一步挖掘特征中的隐藏信息,最终通过分类层识别刀具在不同切削参数下是否发生细微崩刃。实验结果表明,该方法能够在噪声环境中准确识别不同切削参数下切削刃是否微崩,并且识别精度优于卷积神经网络(Convolutional neural network, CNN)和宽核卷积神经网络(Convolution neural network with wide first-layer kernels, WDCNN)。
刀具状态监测是实现加工过程智能化的关键技术之一,其状态直接影响到工件的表面质量和加工效率。在切削加工过程中刀具的细微崩刃不易察觉但却对工件表面质量影响较大,针对该问题提出了一种基于多尺度卷积胶囊网络的方法实现刀具破损状态监测。首先通过采集振动信号来表征刀具的状态,然后在模型中通过多尺度卷积层初步提取信号特征,随后将特征胶囊化输入胶囊层中进一步挖掘特征中的隐藏信息,最终通过分类层识别刀具在不同切削参数下是否发生细微崩刃。实验结果表明,该方法能够在噪声环境中准确识别不同切削参数下切削刃是否微崩,并且识别精度优于卷积神经网络(Convolutional neural network, CNN)和宽核卷积神经网络(Convolution neural network with wide first-layer kernels, WDCNN)。





2023, 42(11): 1904-1911.
doi: 10.13433/j.cnki.1003-8728.20220135
摘要:
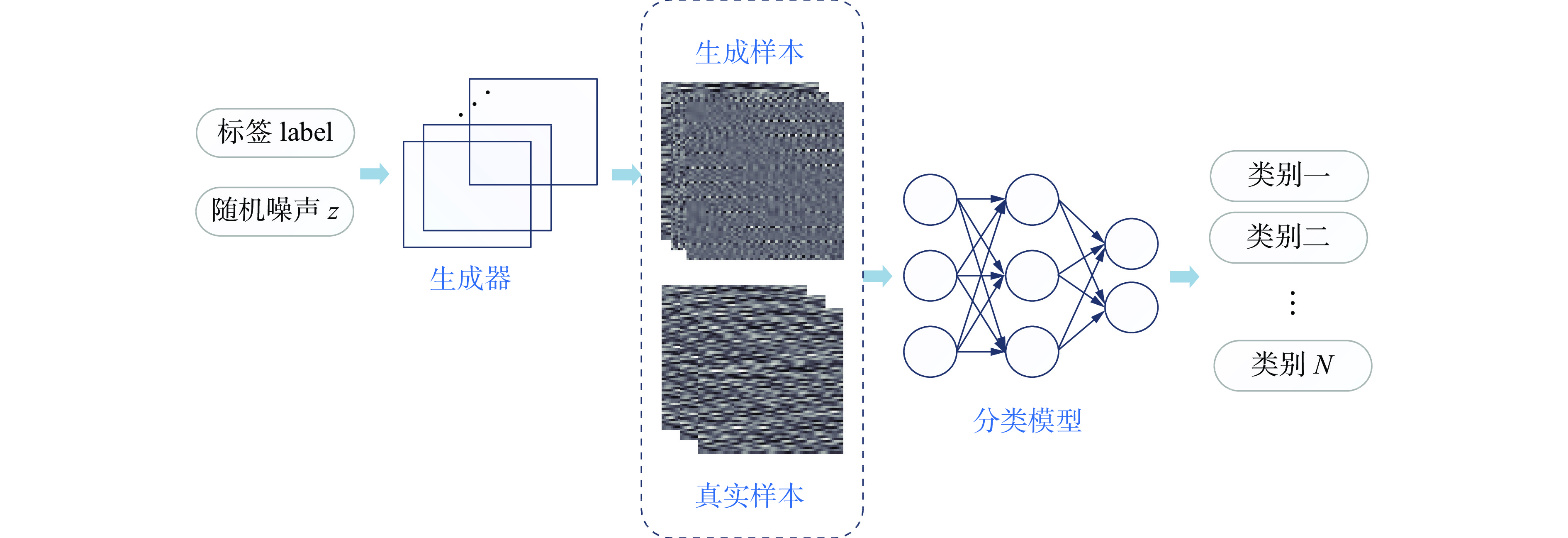
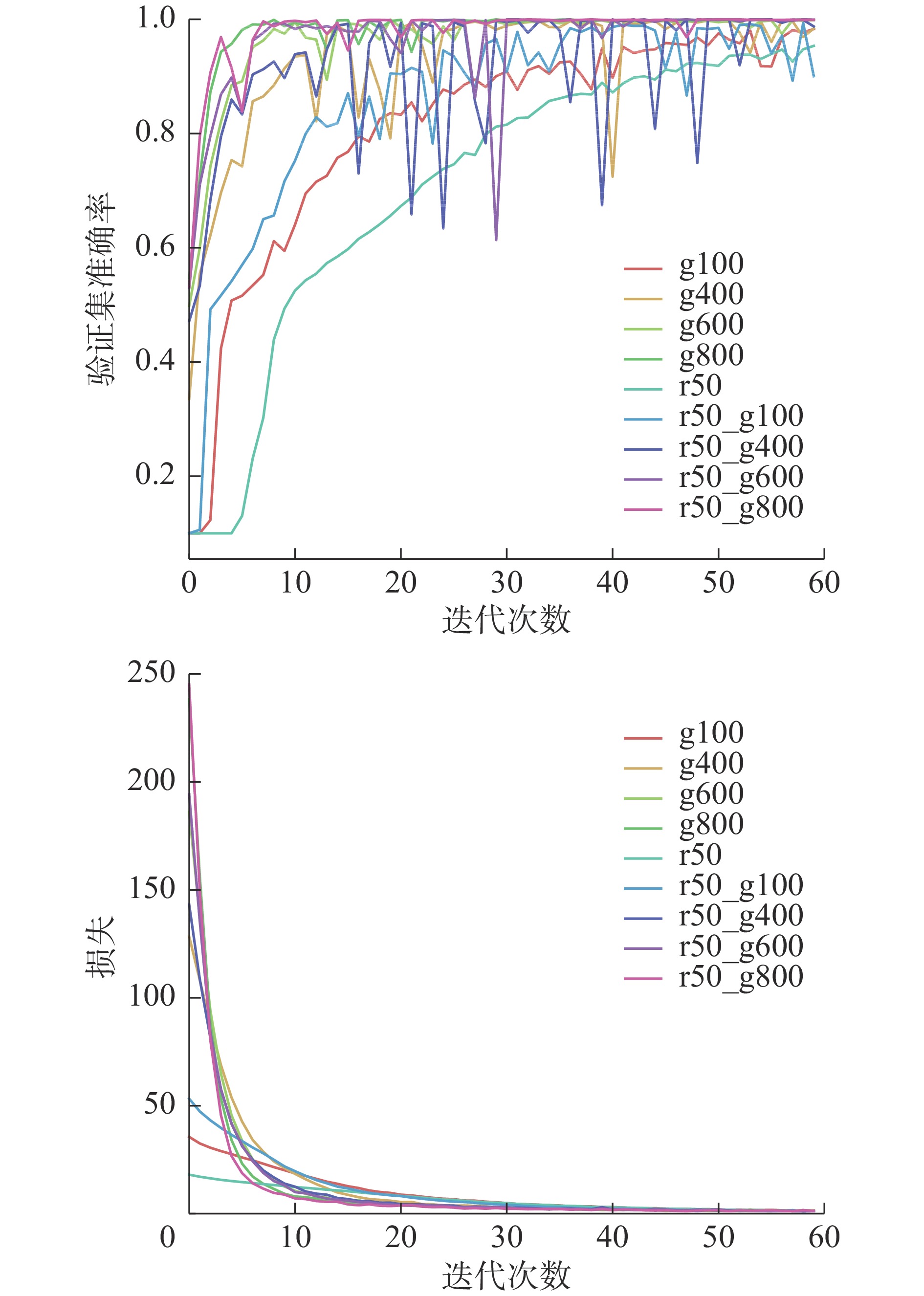
在实际智能设备的故障诊断中,往往很难获得大量的故障样本,这对基于机器学习的故障诊断的分类精度造成不可估量的影响。为了提高小样本情况下的故障诊断精度,提出一种基于条件对抗网络的生成模型(Conditional generative adversarial networks-gradient penalty, CGAN-GP),用于数据增强来获得充足的故障样本。CGAN-GP利用二维卷积,学习预处理后获得的二维故障样本的分布特性,生成与真实样本相似的样本,并使用Wasserstein距离和梯度惩罚(Gradient penalty, GP)策略解决模型训练中的问题,同时将故障样本的标签信息输入模型引导模型生成特定的故障样本,实现一个模型可生成多种故障样本,并且在CWRU轴承数据集上得以验证。研究表明提出的模型可以生成与真实样本特征相似的高质量样本,能够有效提高小样本情况下故障诊断的识别率。
在实际智能设备的故障诊断中,往往很难获得大量的故障样本,这对基于机器学习的故障诊断的分类精度造成不可估量的影响。为了提高小样本情况下的故障诊断精度,提出一种基于条件对抗网络的生成模型(Conditional generative adversarial networks-gradient penalty, CGAN-GP),用于数据增强来获得充足的故障样本。CGAN-GP利用二维卷积,学习预处理后获得的二维故障样本的分布特性,生成与真实样本相似的样本,并使用Wasserstein距离和梯度惩罚(Gradient penalty, GP)策略解决模型训练中的问题,同时将故障样本的标签信息输入模型引导模型生成特定的故障样本,实现一个模型可生成多种故障样本,并且在CWRU轴承数据集上得以验证。研究表明提出的模型可以生成与真实样本特征相似的高质量样本,能够有效提高小样本情况下故障诊断的识别率。








2023, 42(11): 1912-1918.
doi: 10.13433/j.cnki.1003-8728.20220107
摘要:
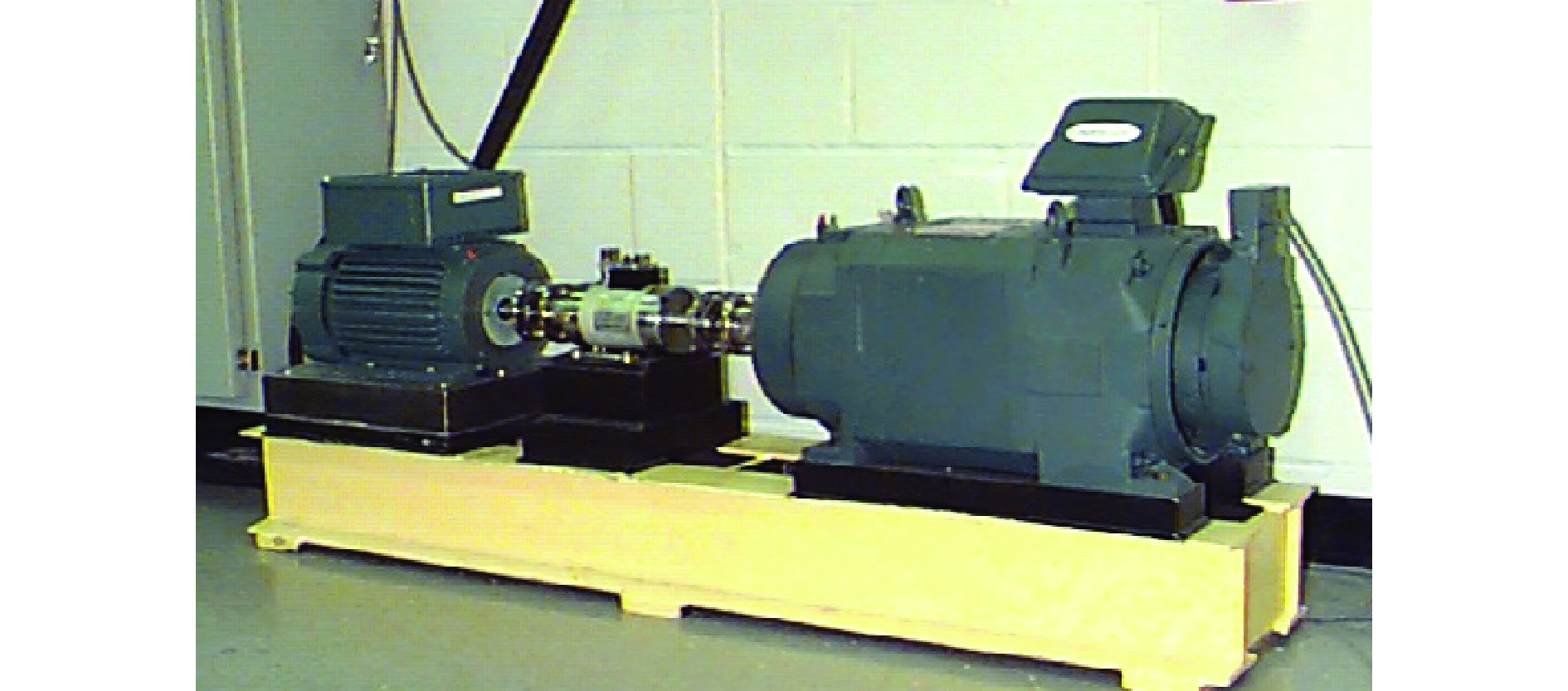
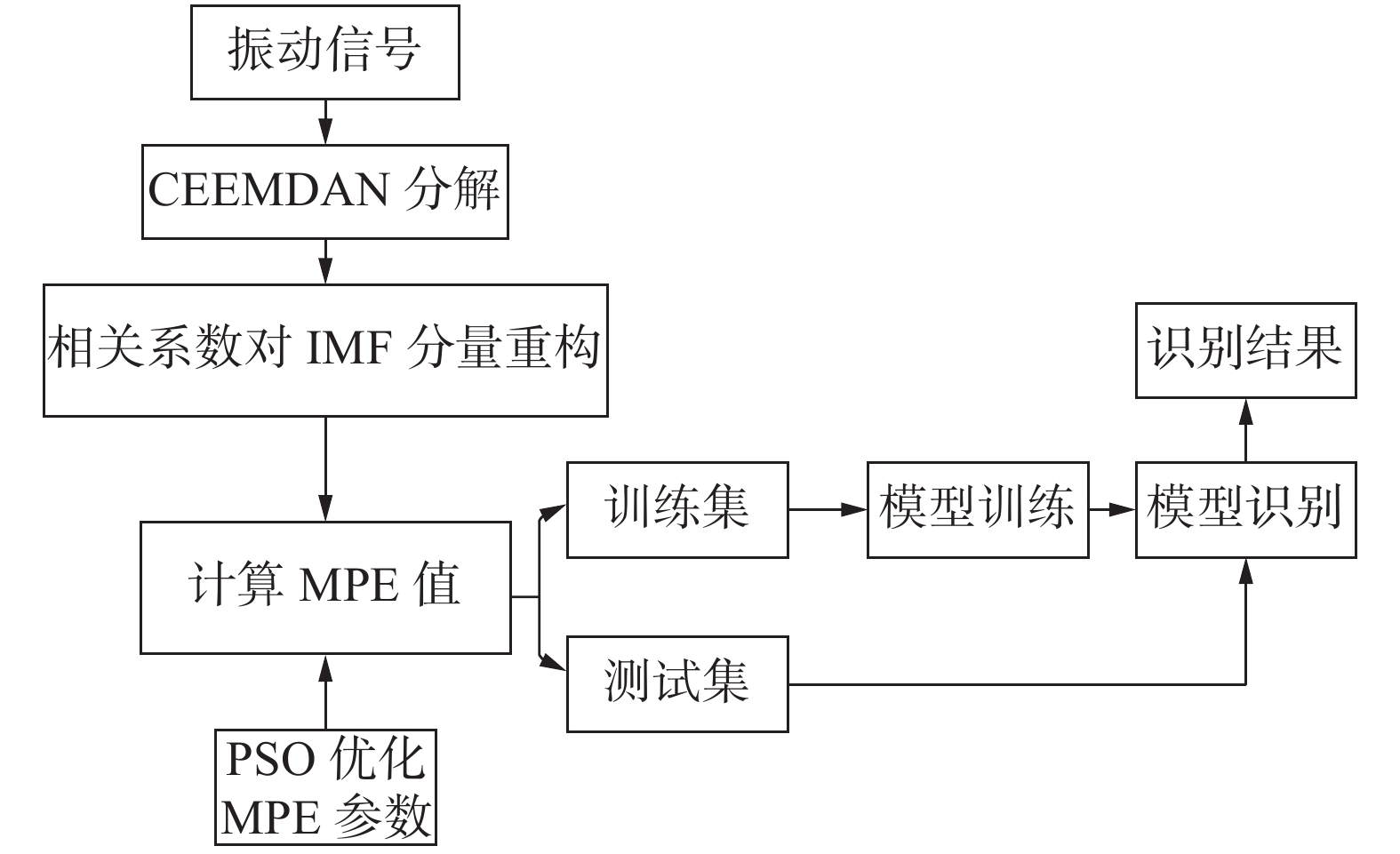
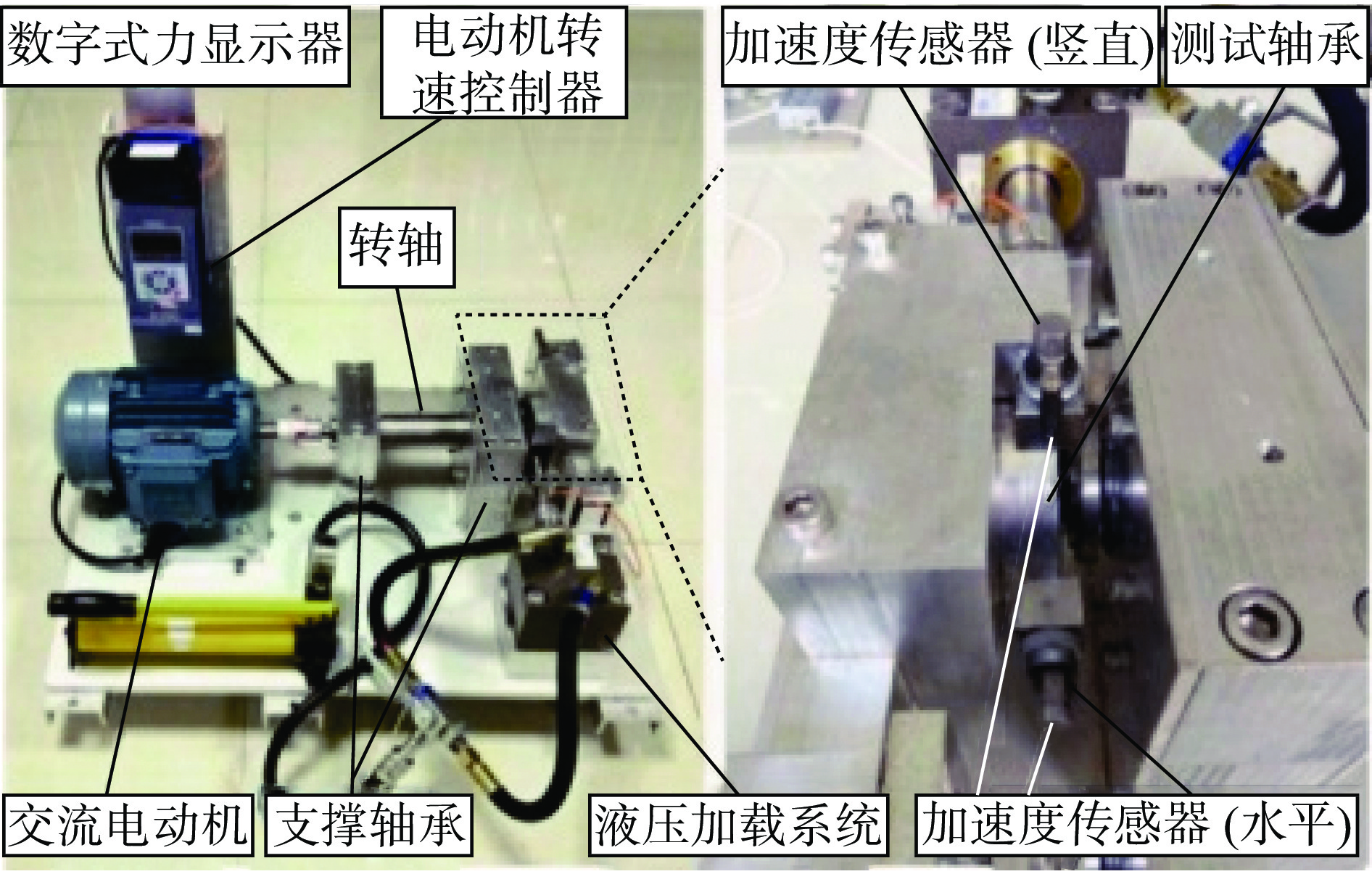
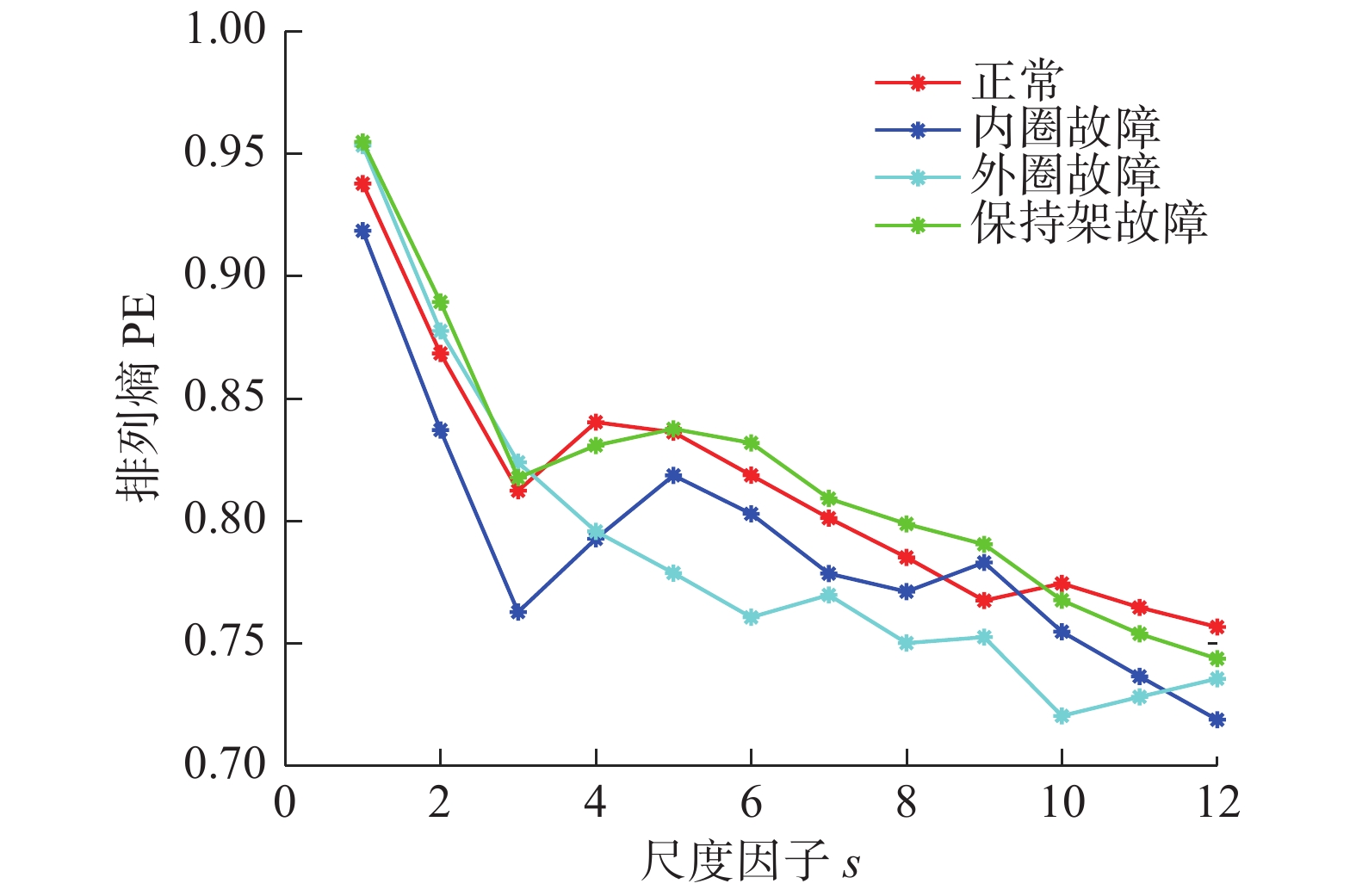
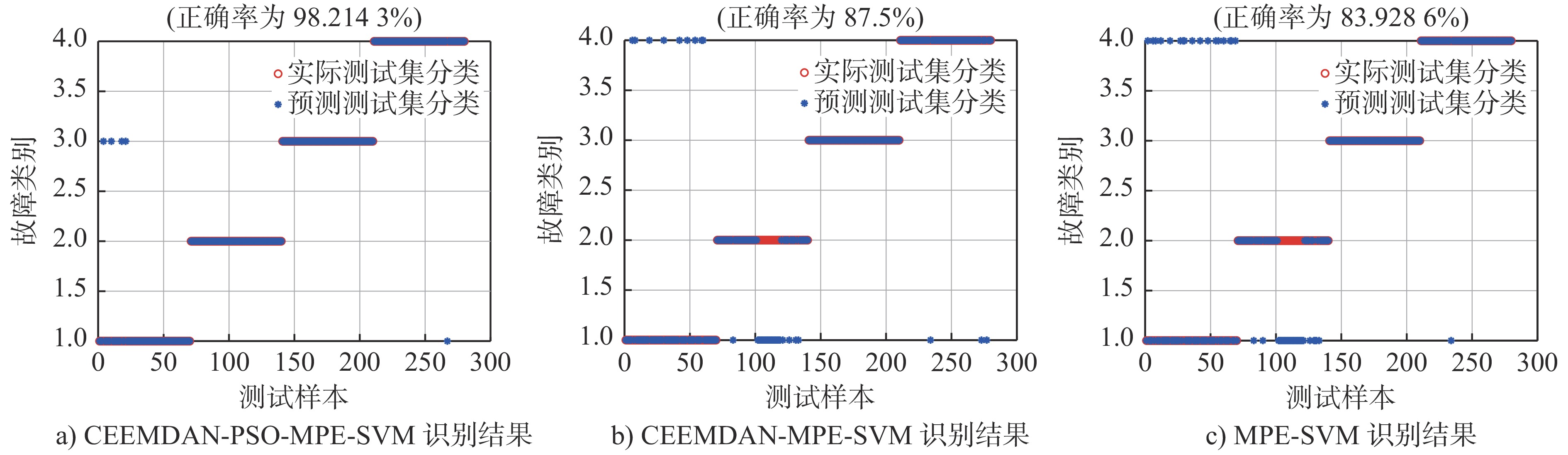
针对滚动轴承的早期故障特征微弱的特点,提出了自适应噪声完备集合经验模态分解(CEEMDAN)与多尺度排列熵(MPE)结合提取故障特征,采用支持向量机(SVM)进行故障状态判别的滚动轴承早期故障诊断方法。利用CEEMDAN将信号分解为若干分量,计算各分量与原信号的相关系数,将大于相关系数阈值的分量重构,对MPE的参数运用PSO算法寻优,计算重构后的信号的MPE值并作为故障特征向量,使用SVM对故障状态进行识别。将该方法运用于XJTU-SY滚动轴承加速寿命试验数据集,并与MPE参数未优化以及未CEEMDAN分解且MPE参数未优化得到的MPE值作为特征向量SVM进行识别的结果进行对比,结果表明本文所提方法的故障识别率分别提高了10.71%和14.28%。
针对滚动轴承的早期故障特征微弱的特点,提出了自适应噪声完备集合经验模态分解(CEEMDAN)与多尺度排列熵(MPE)结合提取故障特征,采用支持向量机(SVM)进行故障状态判别的滚动轴承早期故障诊断方法。利用CEEMDAN将信号分解为若干分量,计算各分量与原信号的相关系数,将大于相关系数阈值的分量重构,对MPE的参数运用PSO算法寻优,计算重构后的信号的MPE值并作为故障特征向量,使用SVM对故障状态进行识别。将该方法运用于XJTU-SY滚动轴承加速寿命试验数据集,并与MPE参数未优化以及未CEEMDAN分解且MPE参数未优化得到的MPE值作为特征向量SVM进行识别的结果进行对比,结果表明本文所提方法的故障识别率分别提高了10.71%和14.28%。


2023, 42(11): 1919-1928.
doi: 10.13433/j.cnki.1003-8728.20220230
摘要:
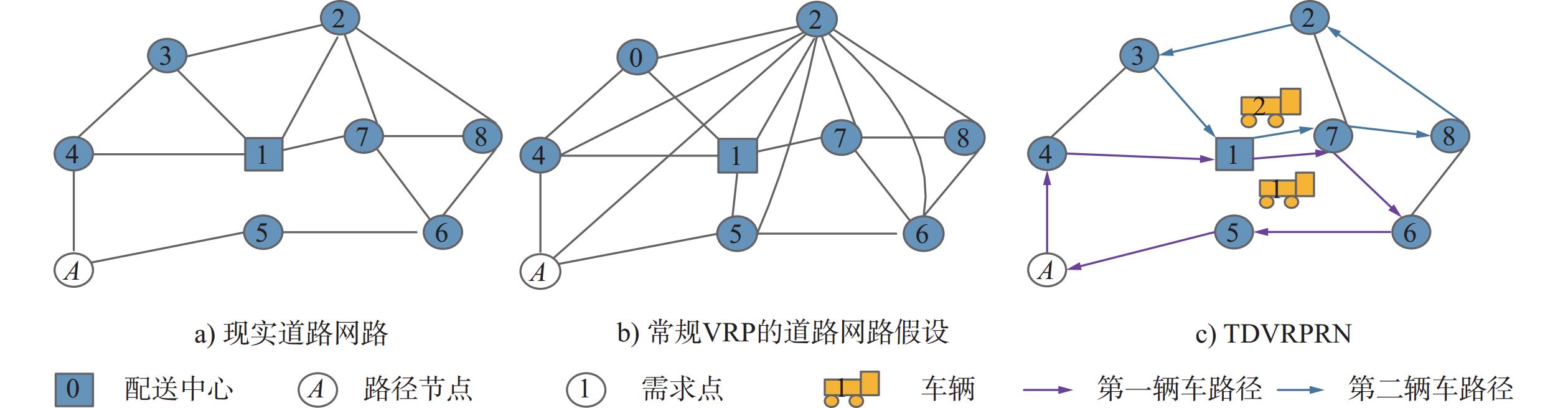
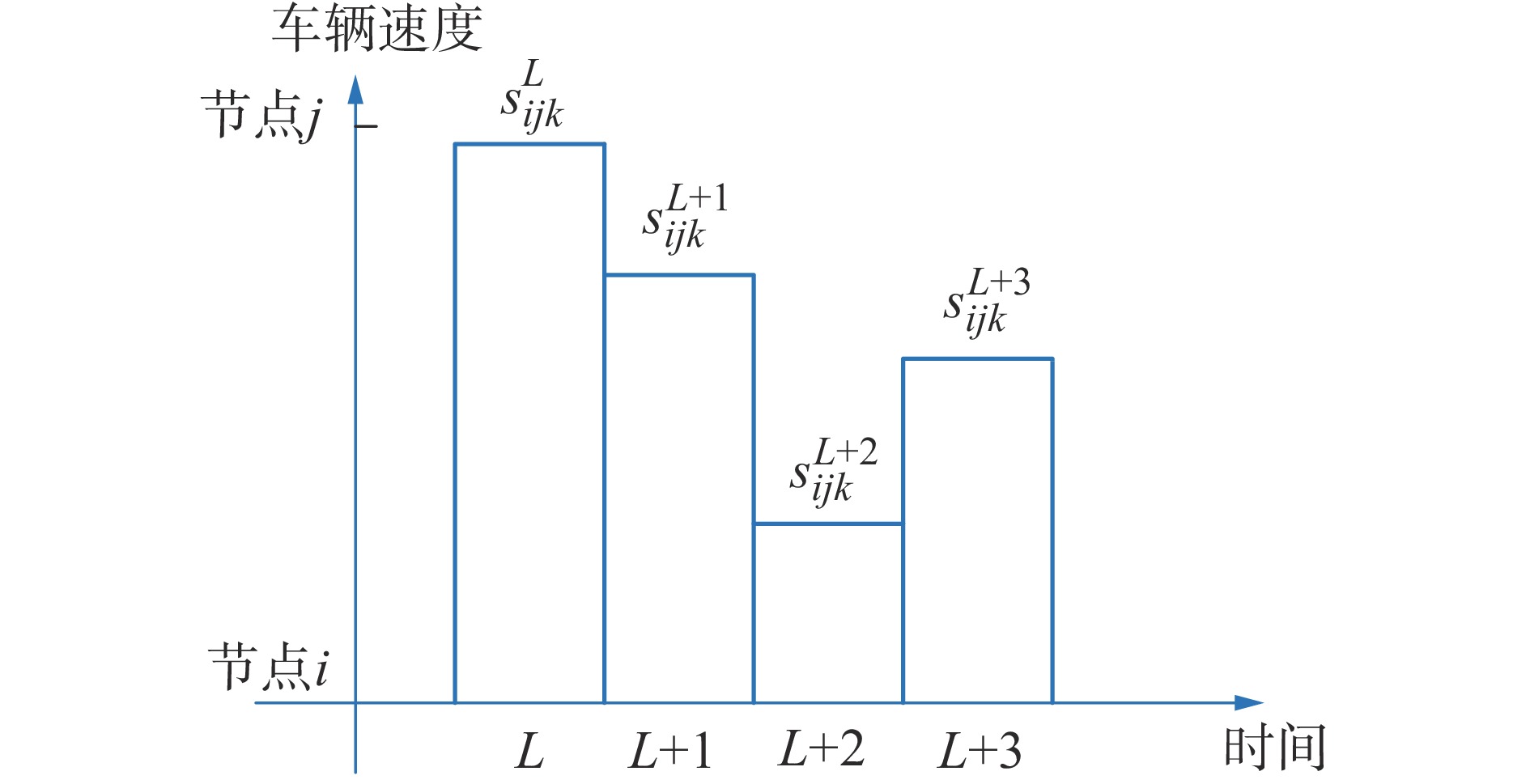
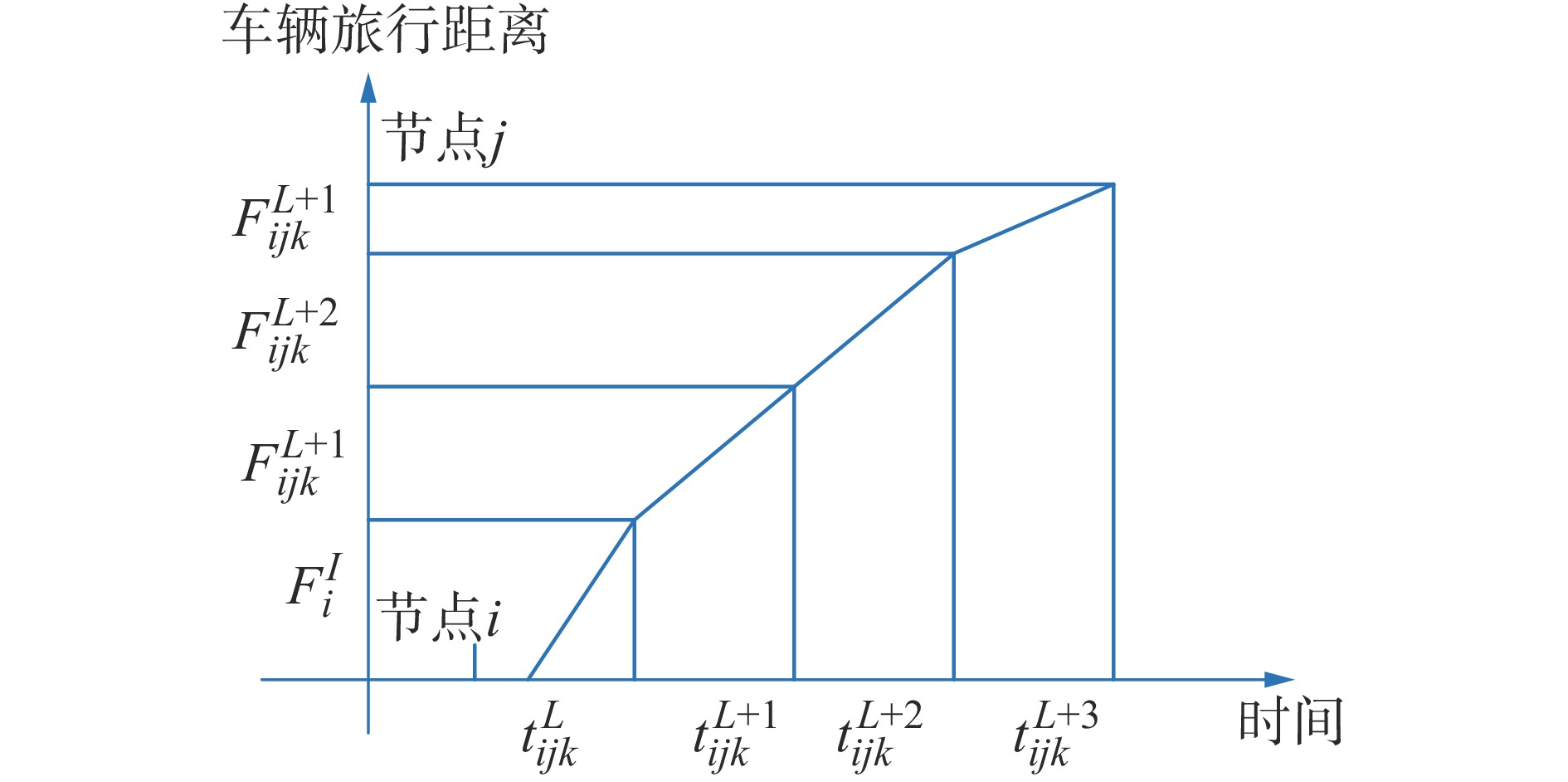
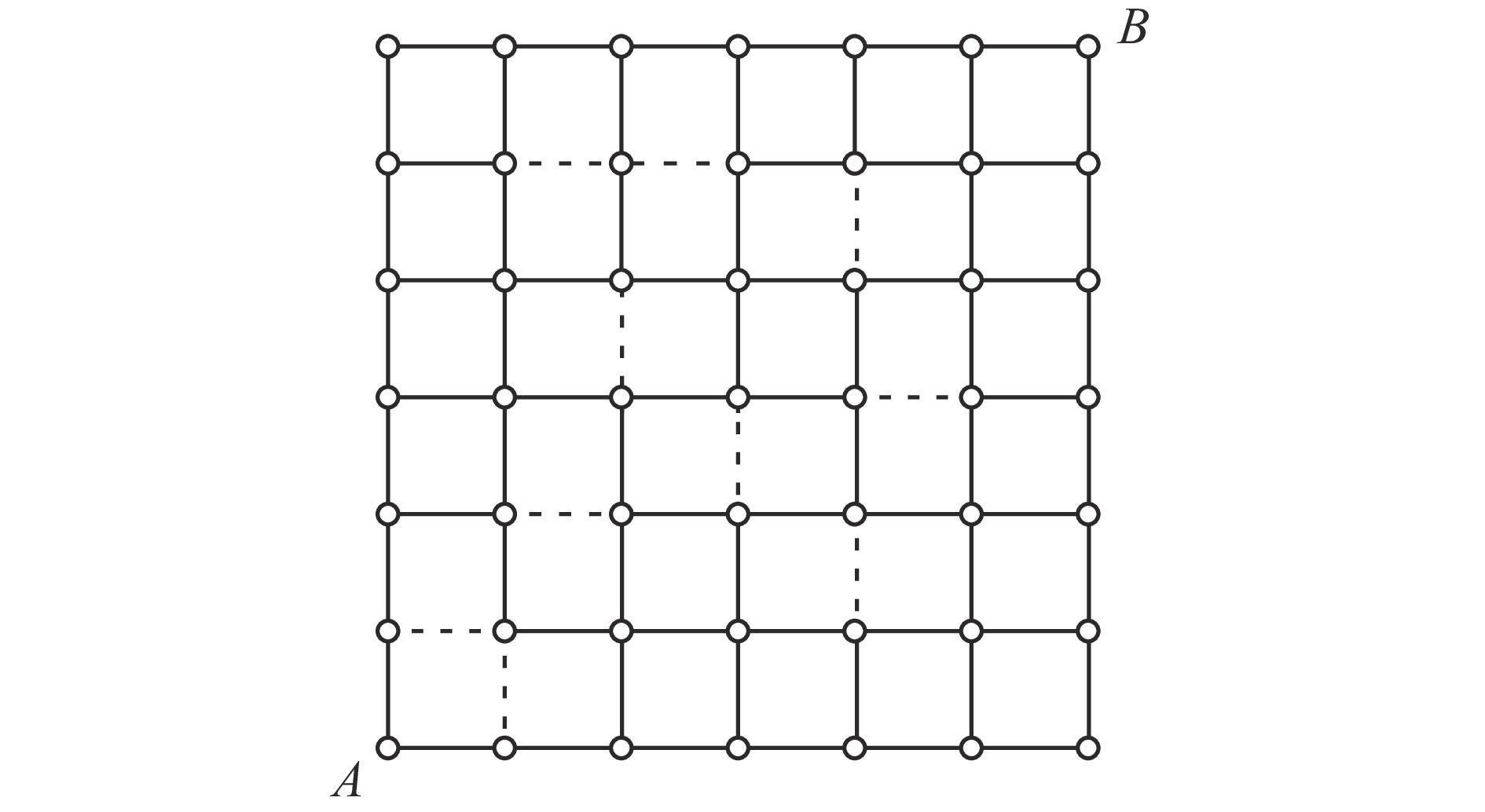
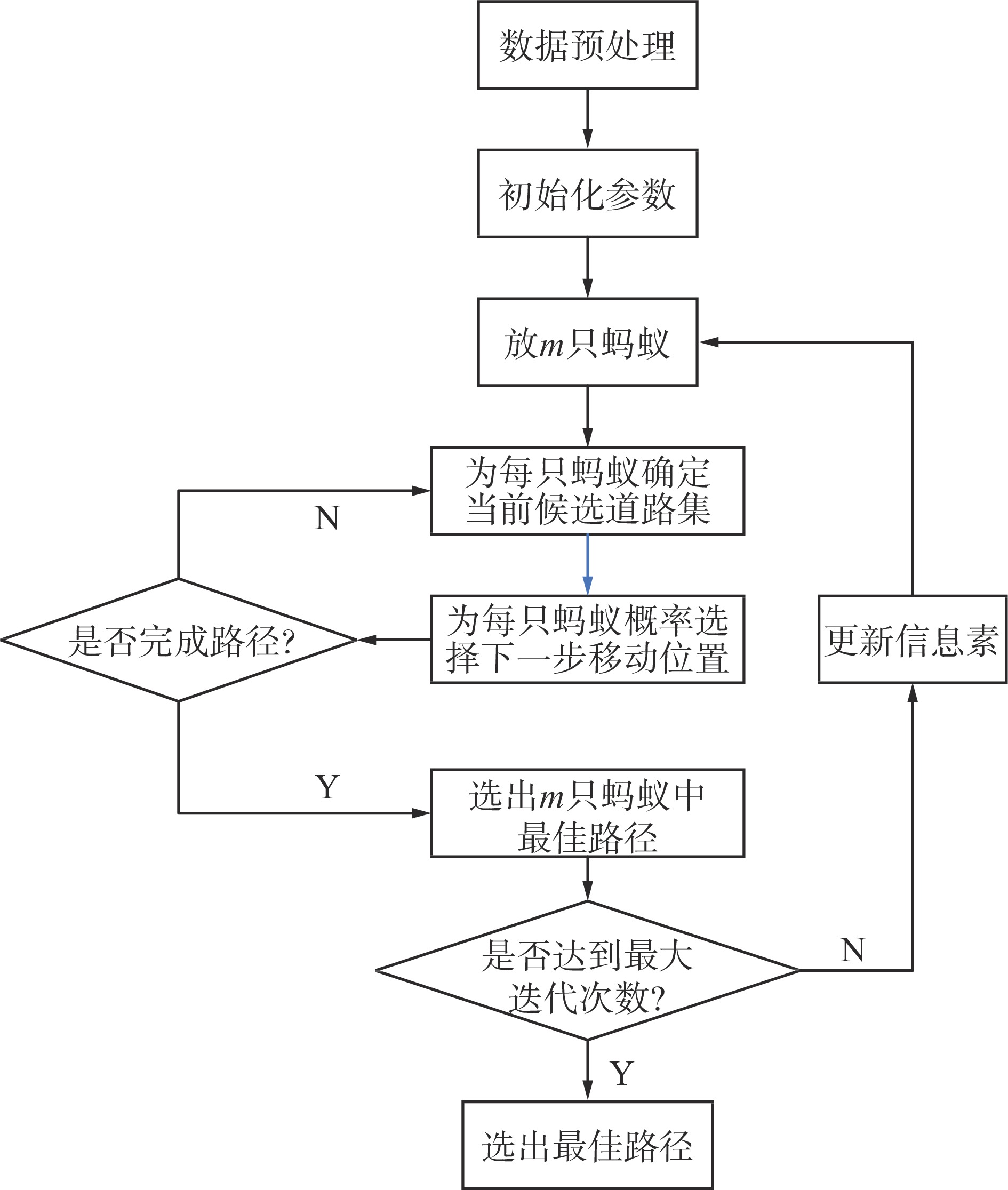
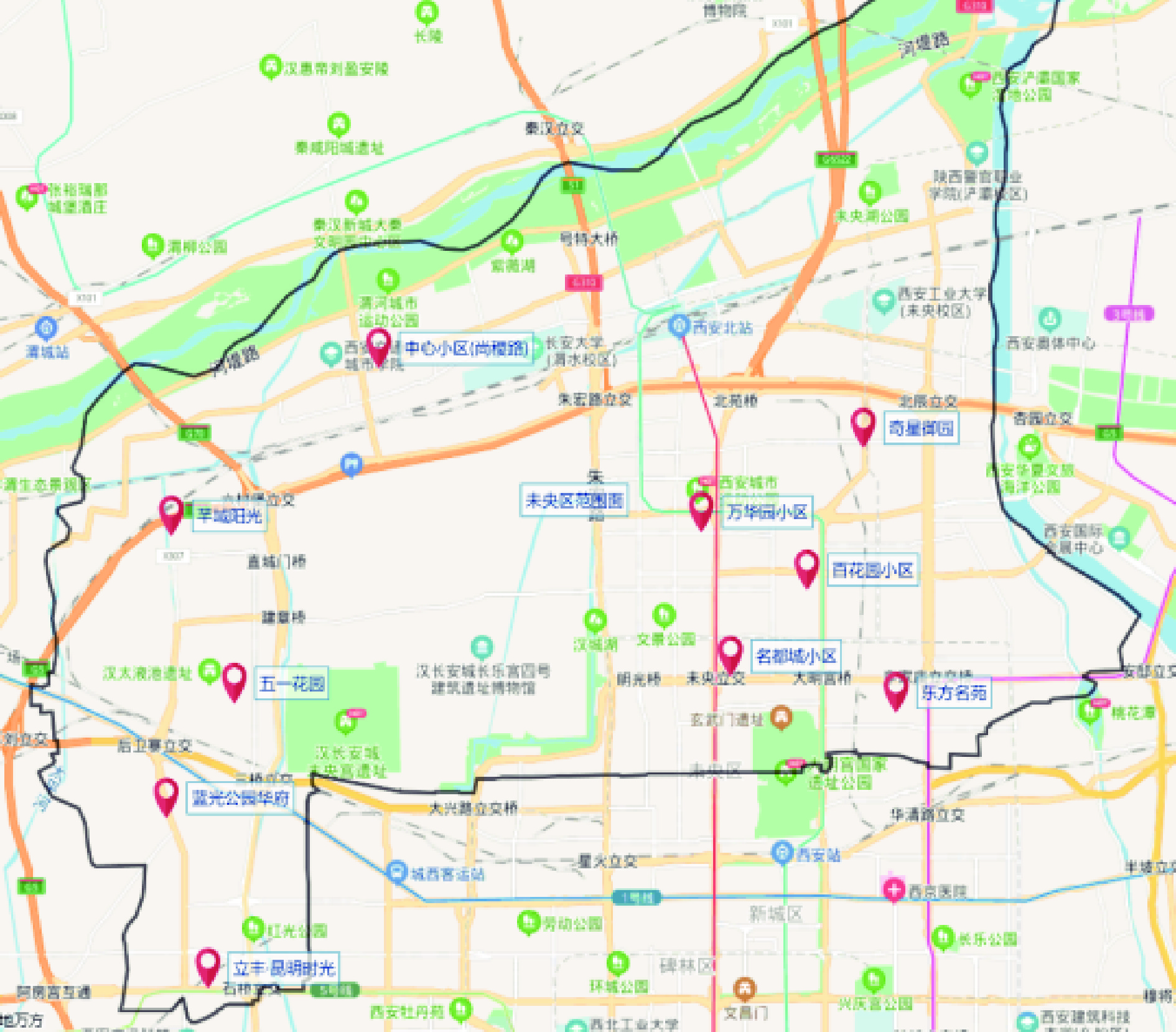
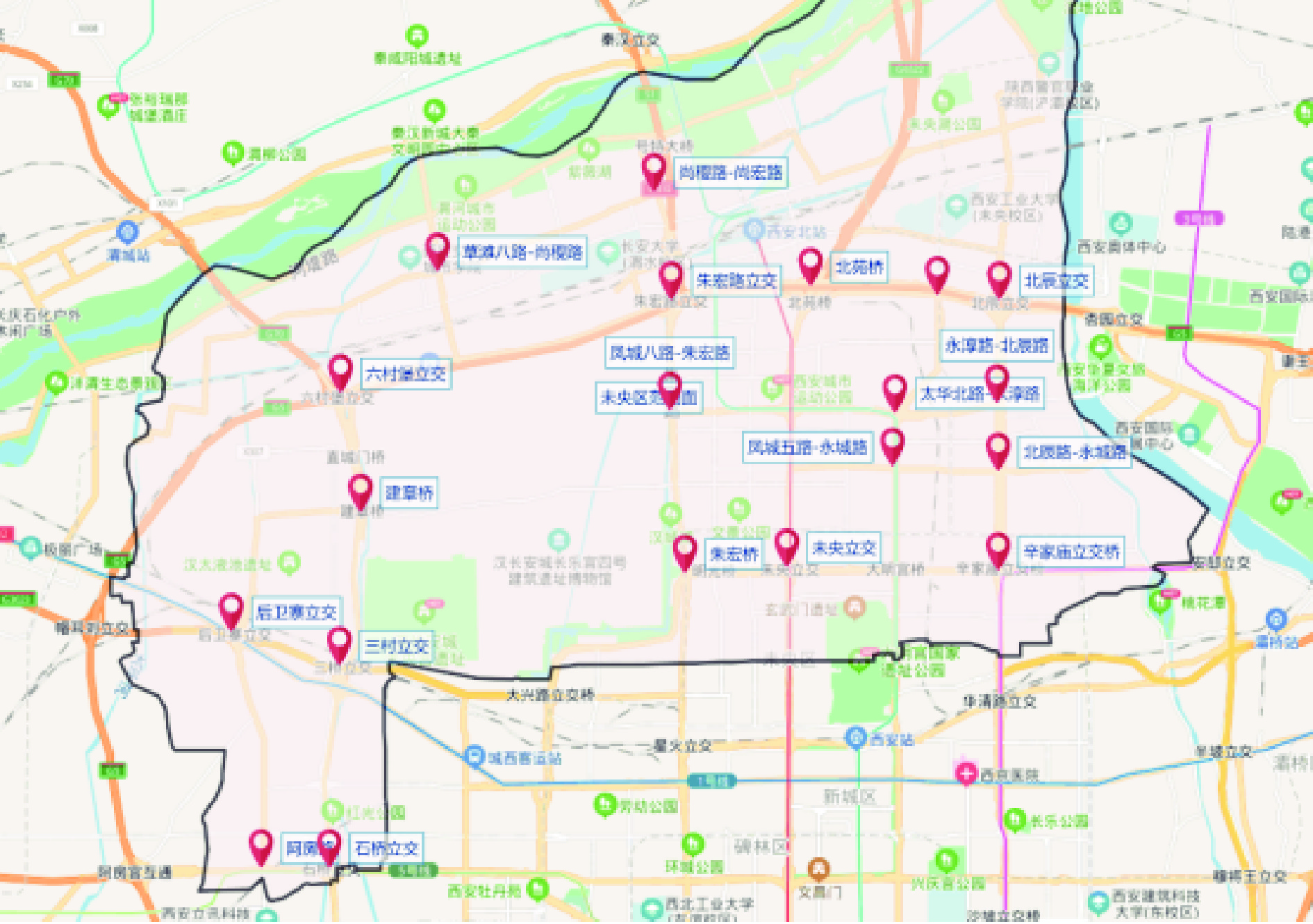
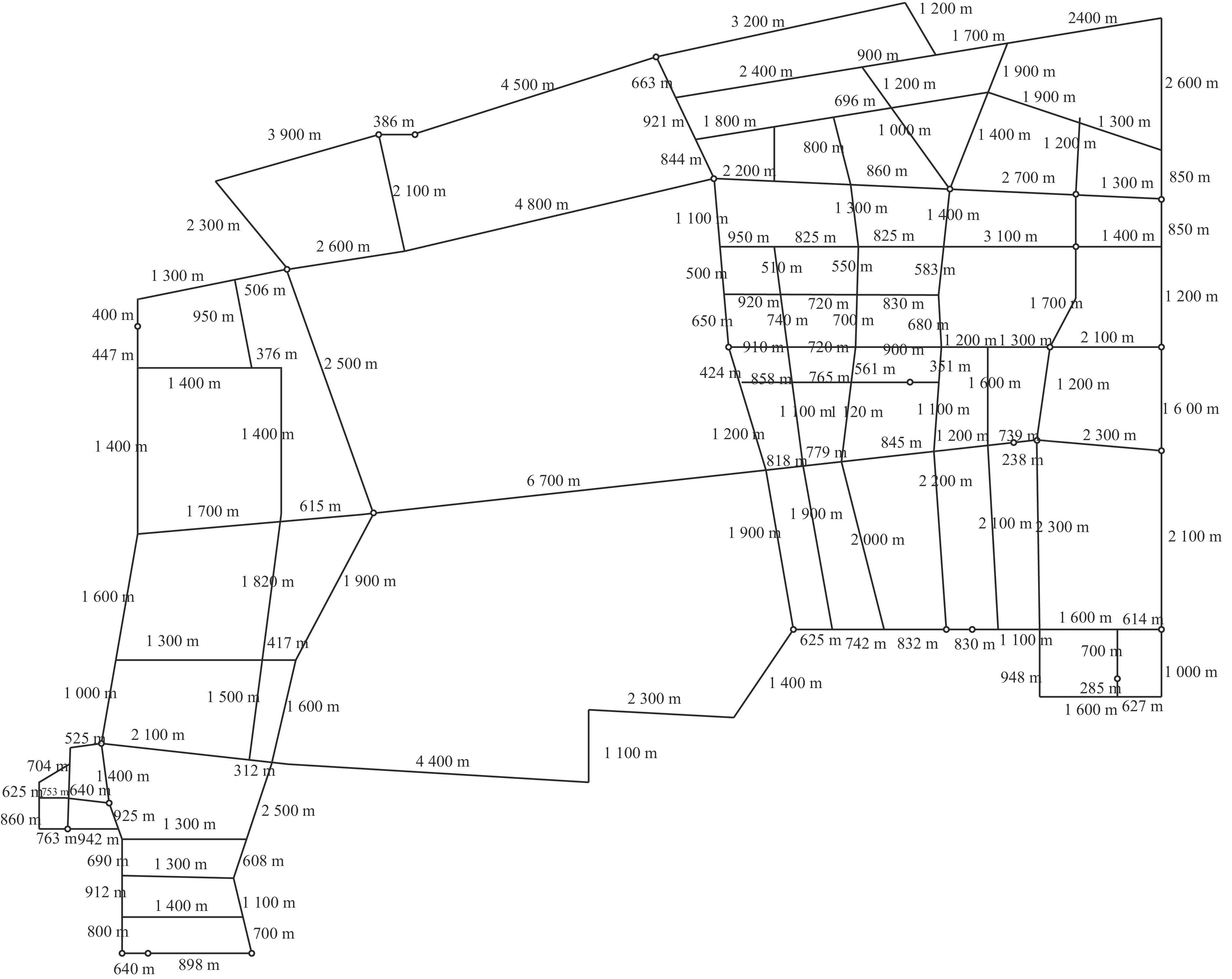
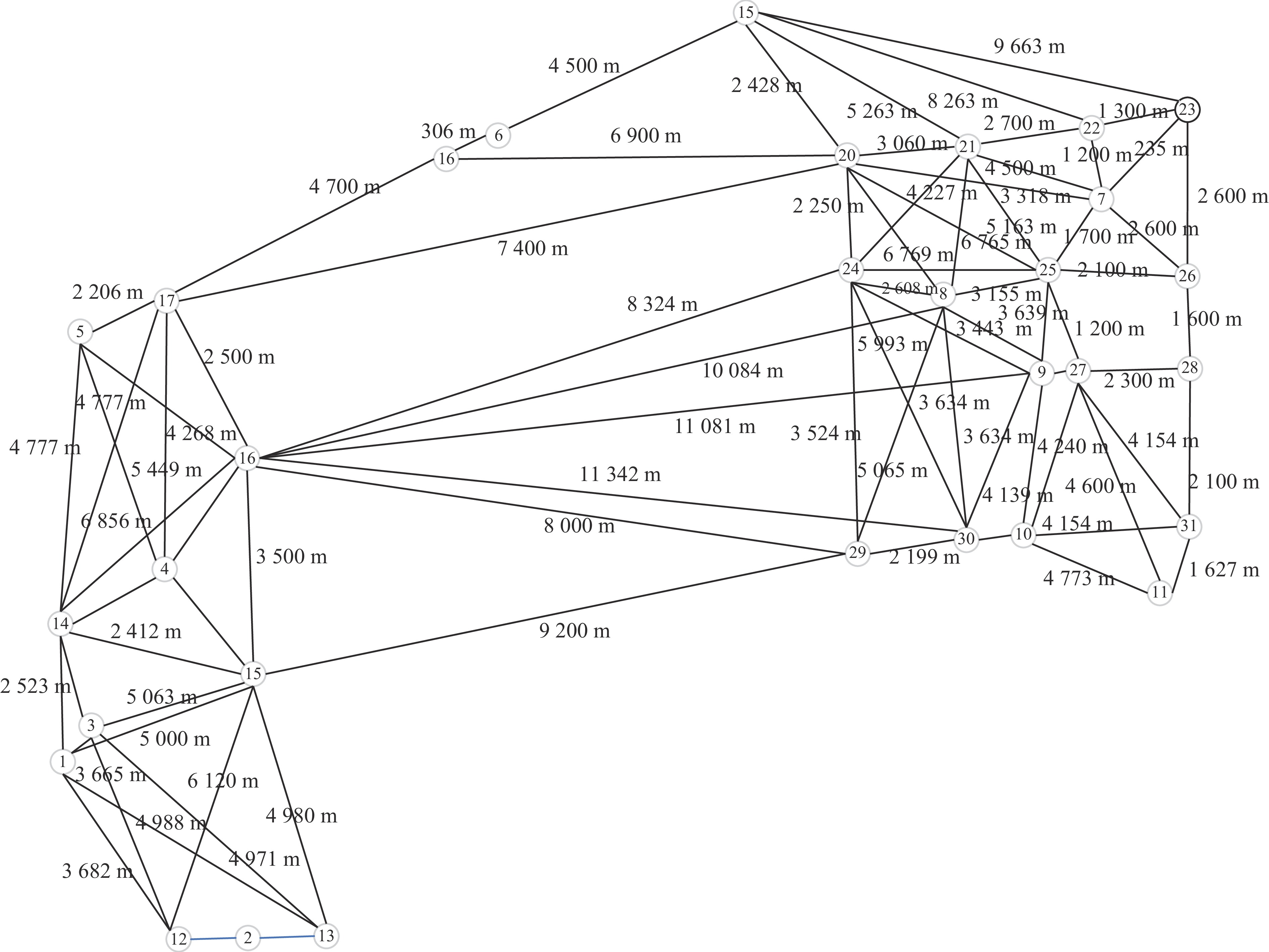
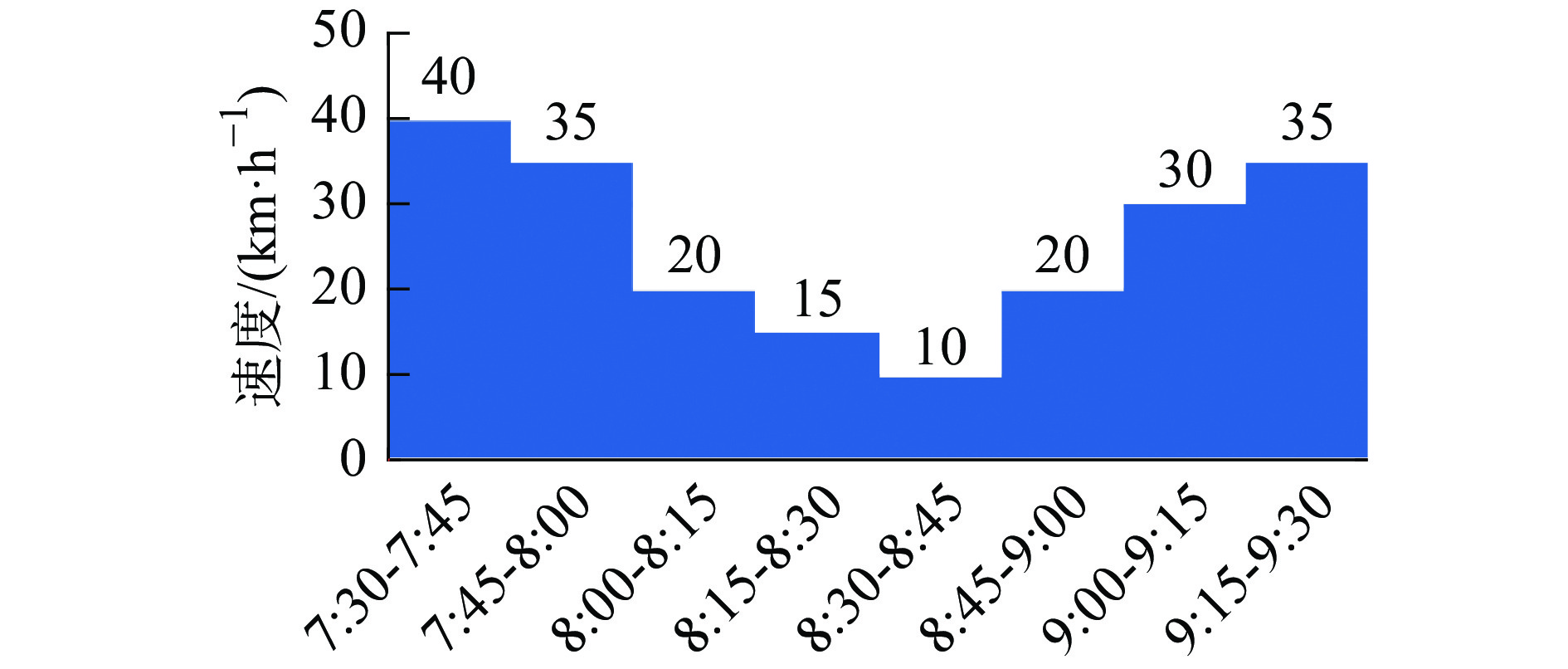
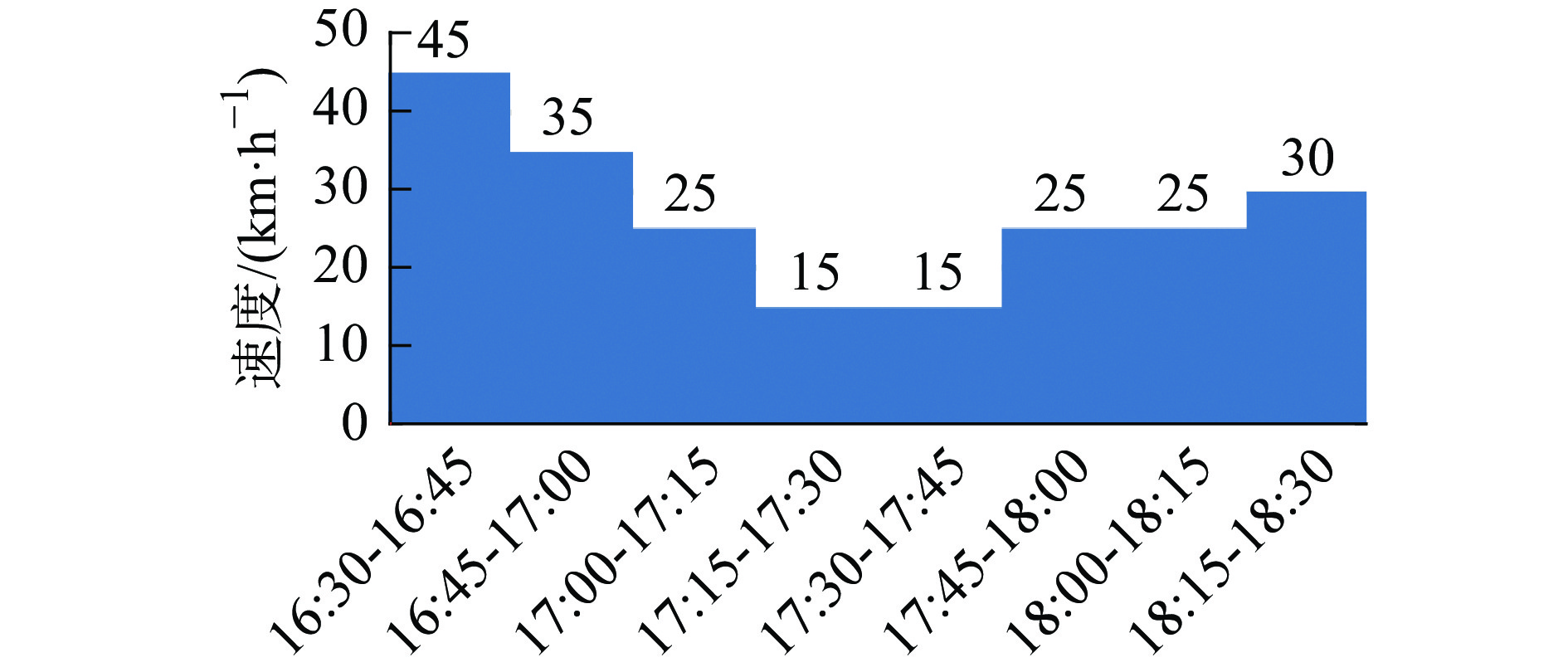
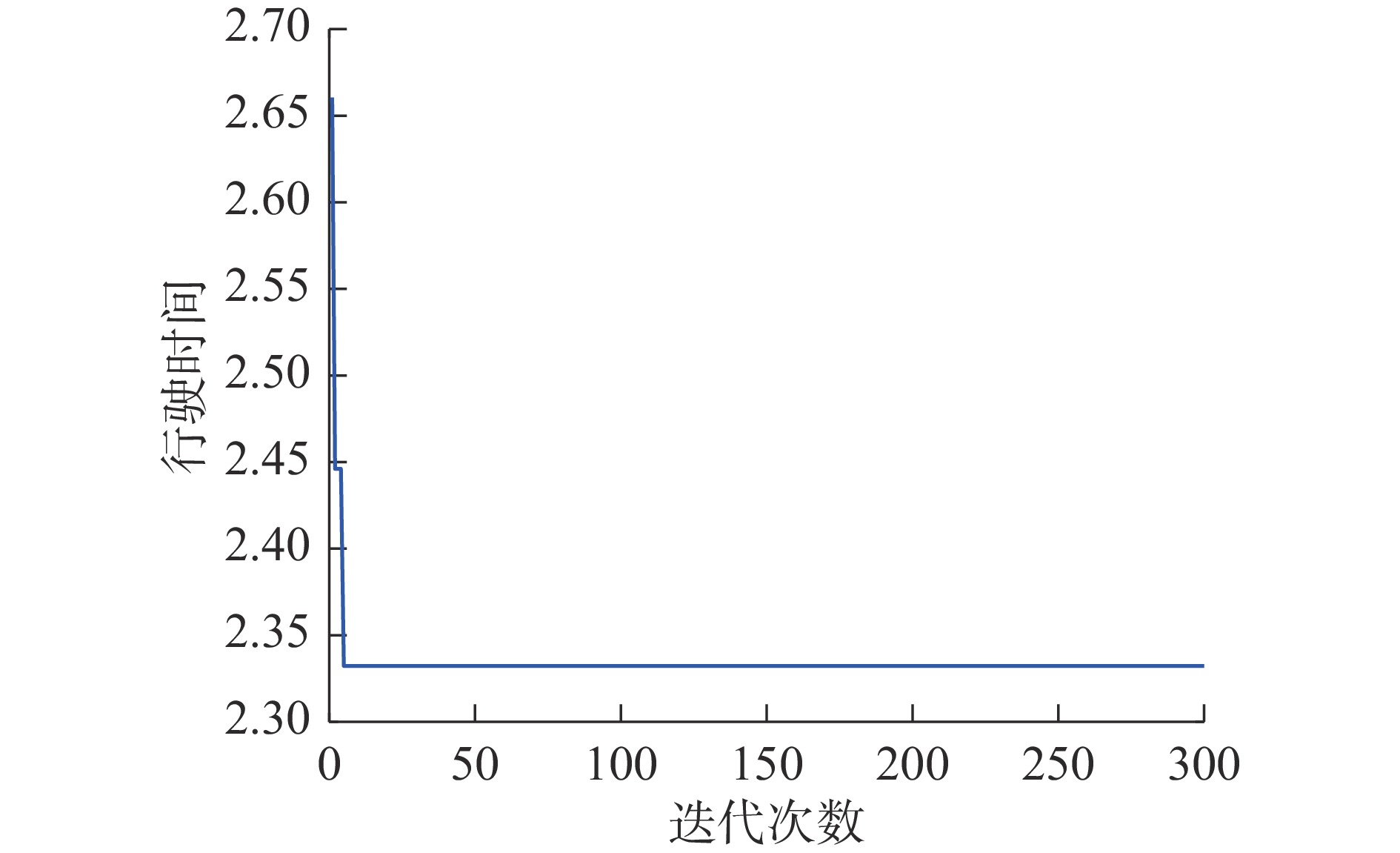
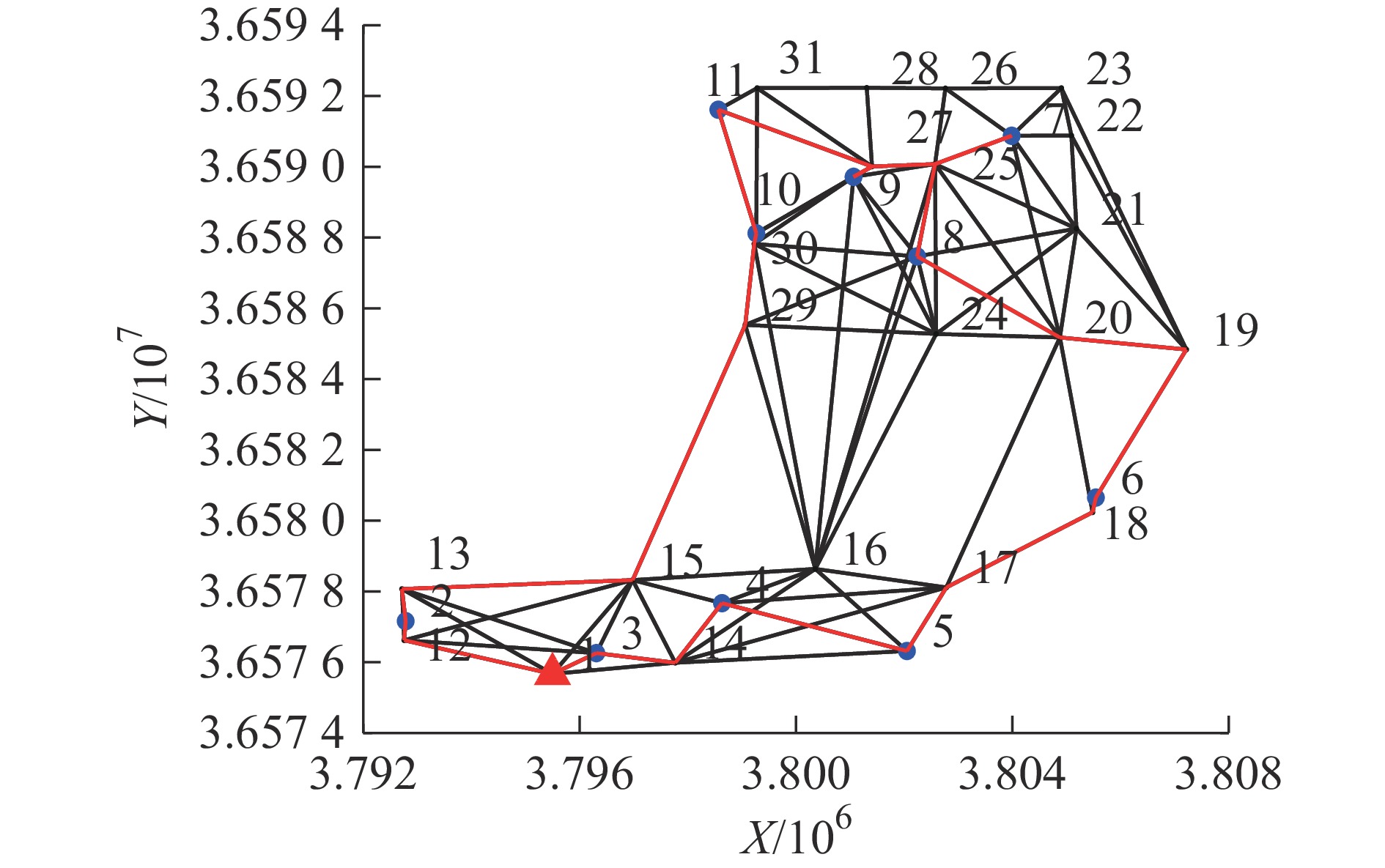
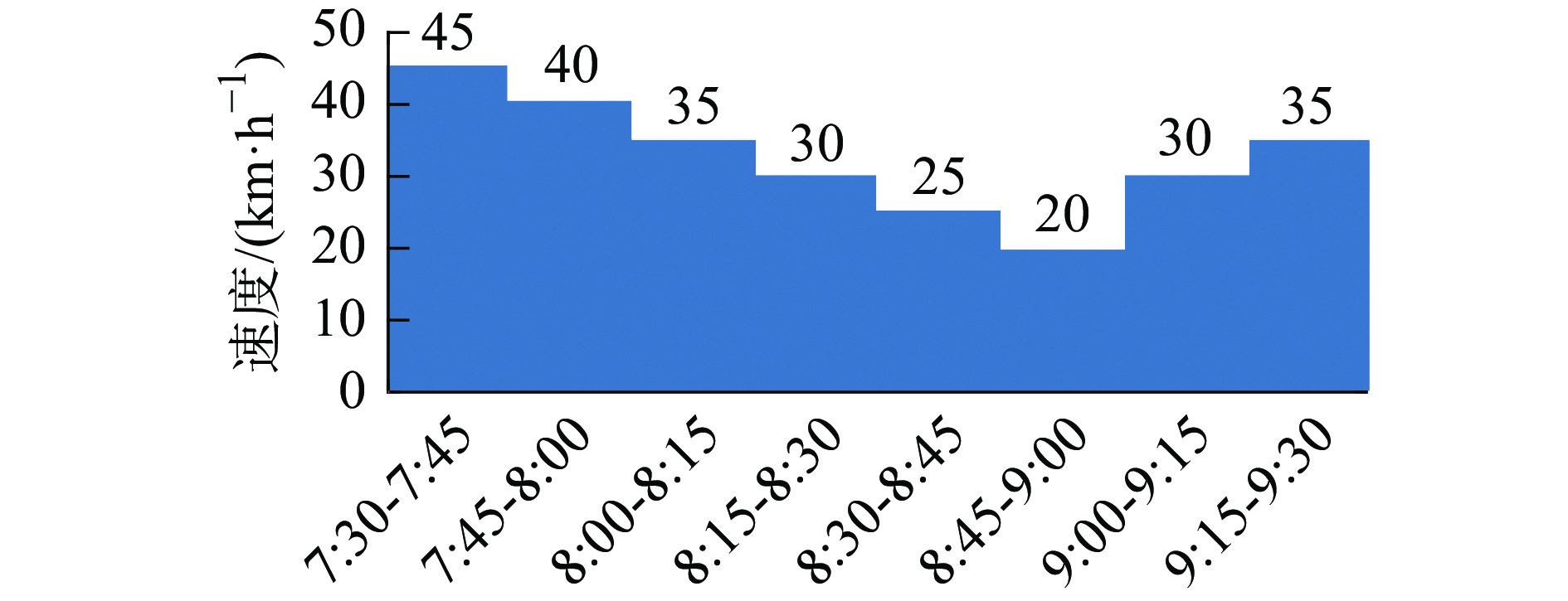
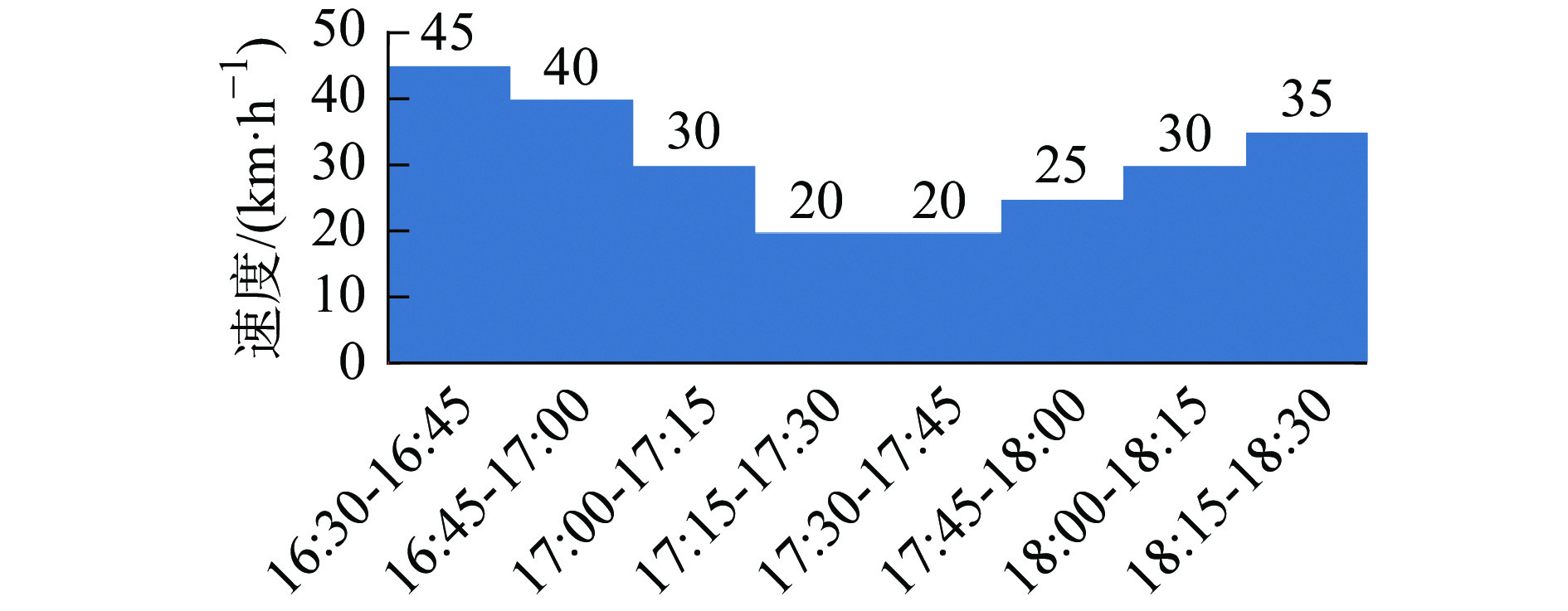
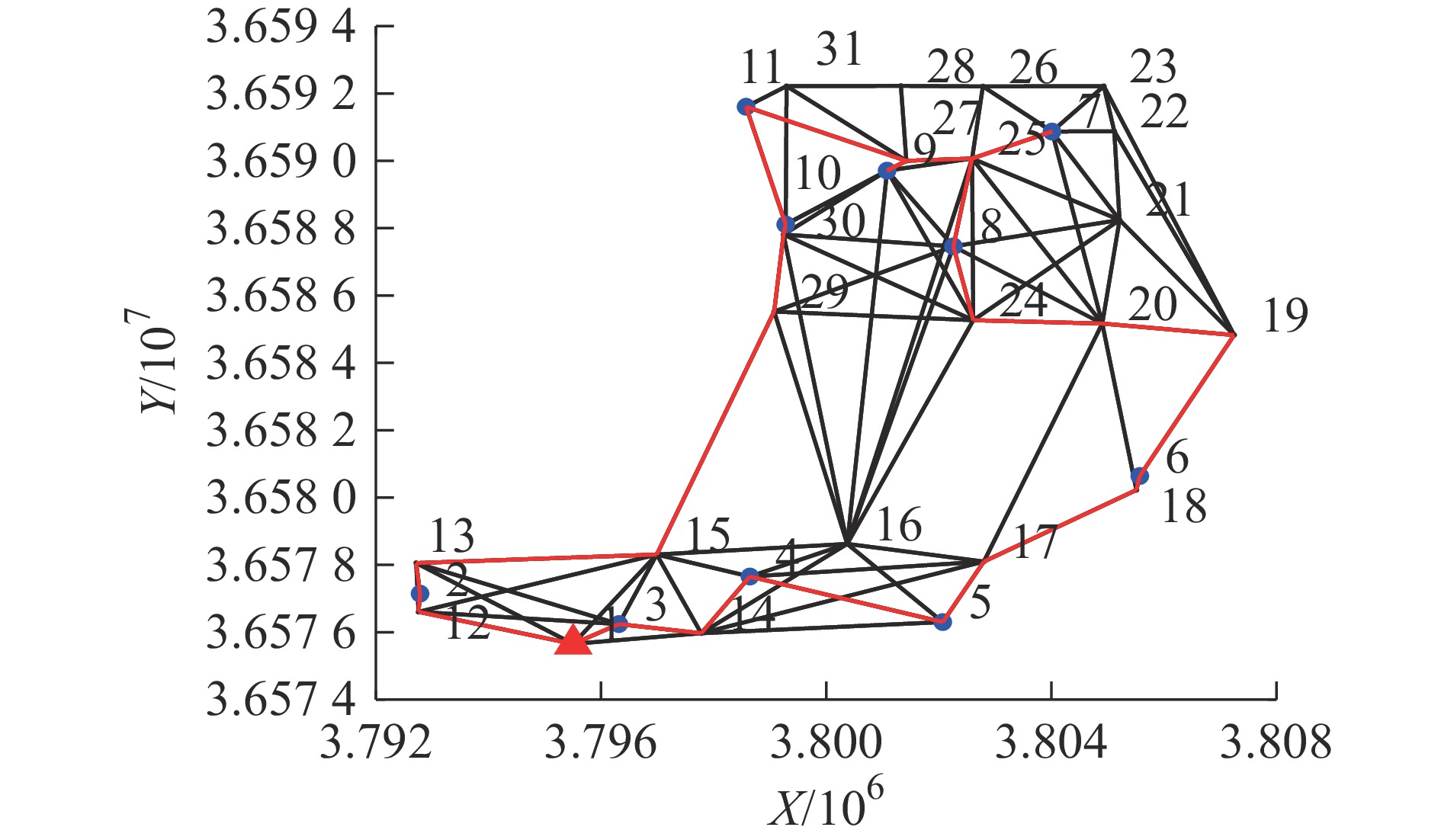
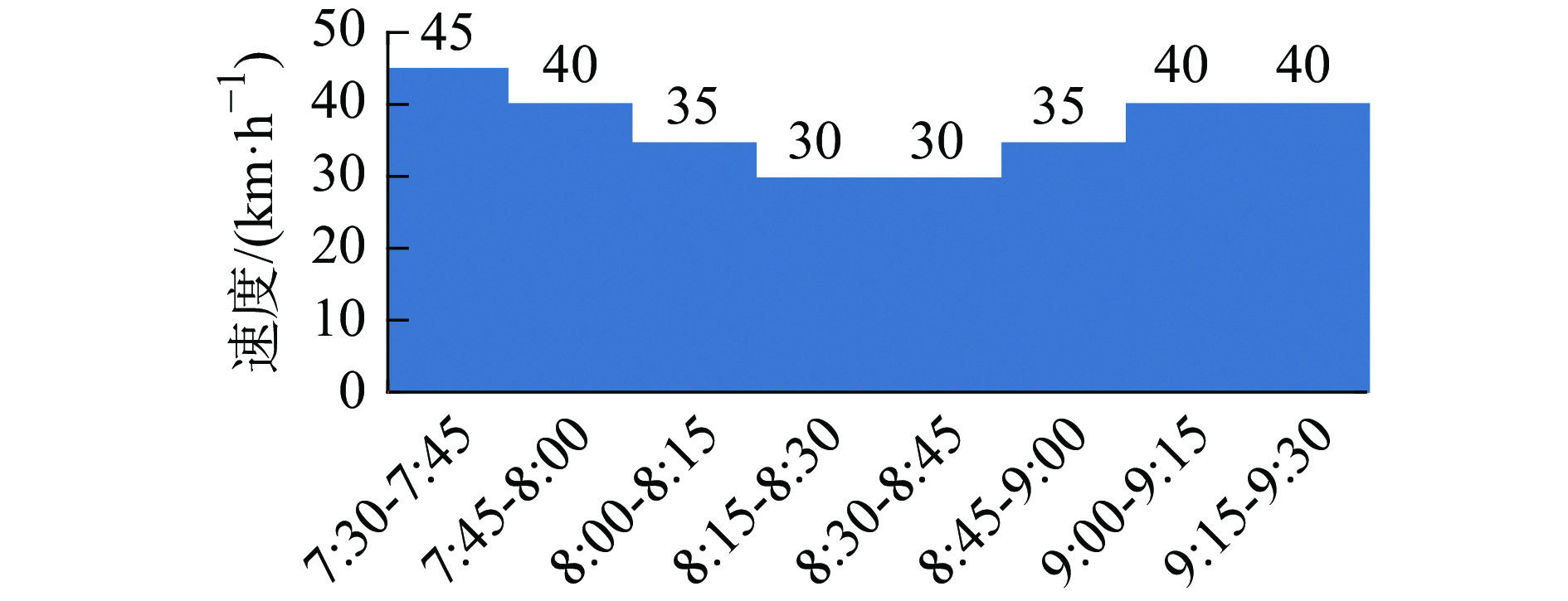
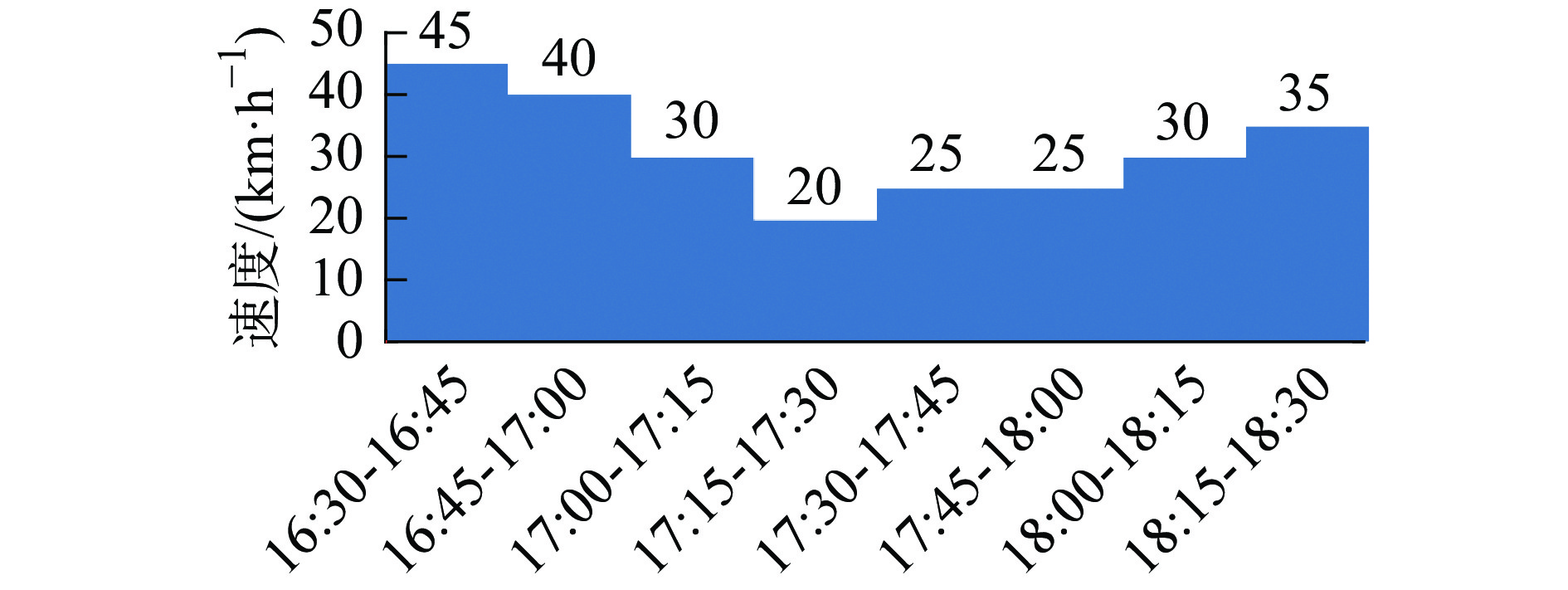
针对车辆路径优化问题在现实中涉及的时变旅行时间特征和道路网络因素,研究时变条件下基于道路网的车辆路径优化问题。首先,考虑车辆旅行速度的时变特征,构建旅行速度的分段函数,采用跨时域的方法利用离散速度计算动态旅行时间;其次,基于关键节点的概念简化道路网络,克服车辆路径问题在考虑道路网时存在的维度灾问题。基于以上,结合时变旅行时间和基于关键点构建的道路网路,建立以总旅行时间最小为目标的优化模型;根据问题特征,设计蚁群算法求解;以西安市未央区桶装水配送区域实例进行测试,验证模型和算法的有效性,分析不同速度-时间变化模式和车辆出发时间的敏感性。
针对车辆路径优化问题在现实中涉及的时变旅行时间特征和道路网络因素,研究时变条件下基于道路网的车辆路径优化问题。首先,考虑车辆旅行速度的时变特征,构建旅行速度的分段函数,采用跨时域的方法利用离散速度计算动态旅行时间;其次,基于关键节点的概念简化道路网络,克服车辆路径问题在考虑道路网时存在的维度灾问题。基于以上,结合时变旅行时间和基于关键点构建的道路网路,建立以总旅行时间最小为目标的优化模型;根据问题特征,设计蚁群算法求解;以西安市未央区桶装水配送区域实例进行测试,验证模型和算法的有效性,分析不同速度-时间变化模式和车辆出发时间的敏感性。

2023, 42(11): 1929-1936.
doi: 10.13433/j.cnki.1003-8728.20220168
摘要:
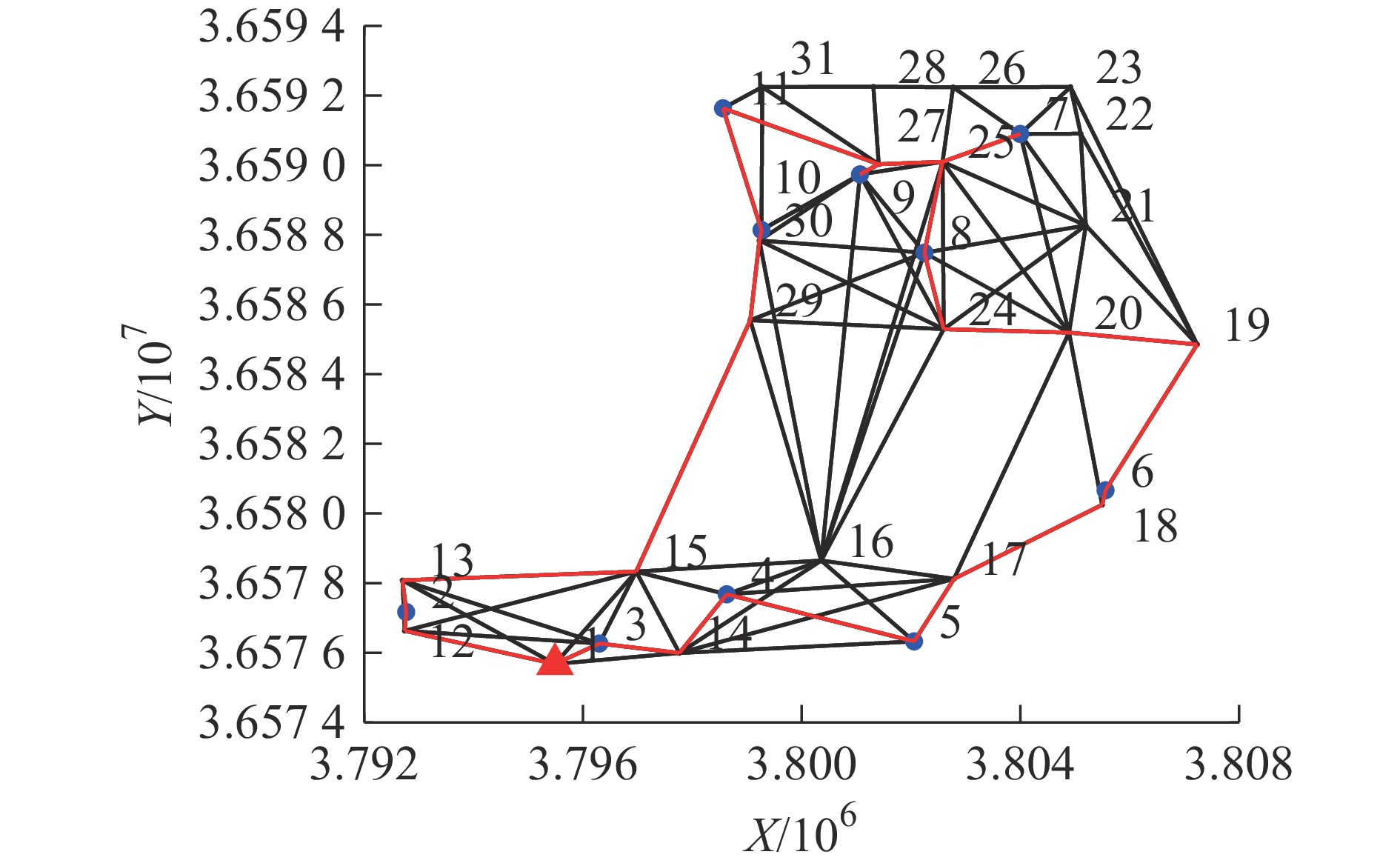
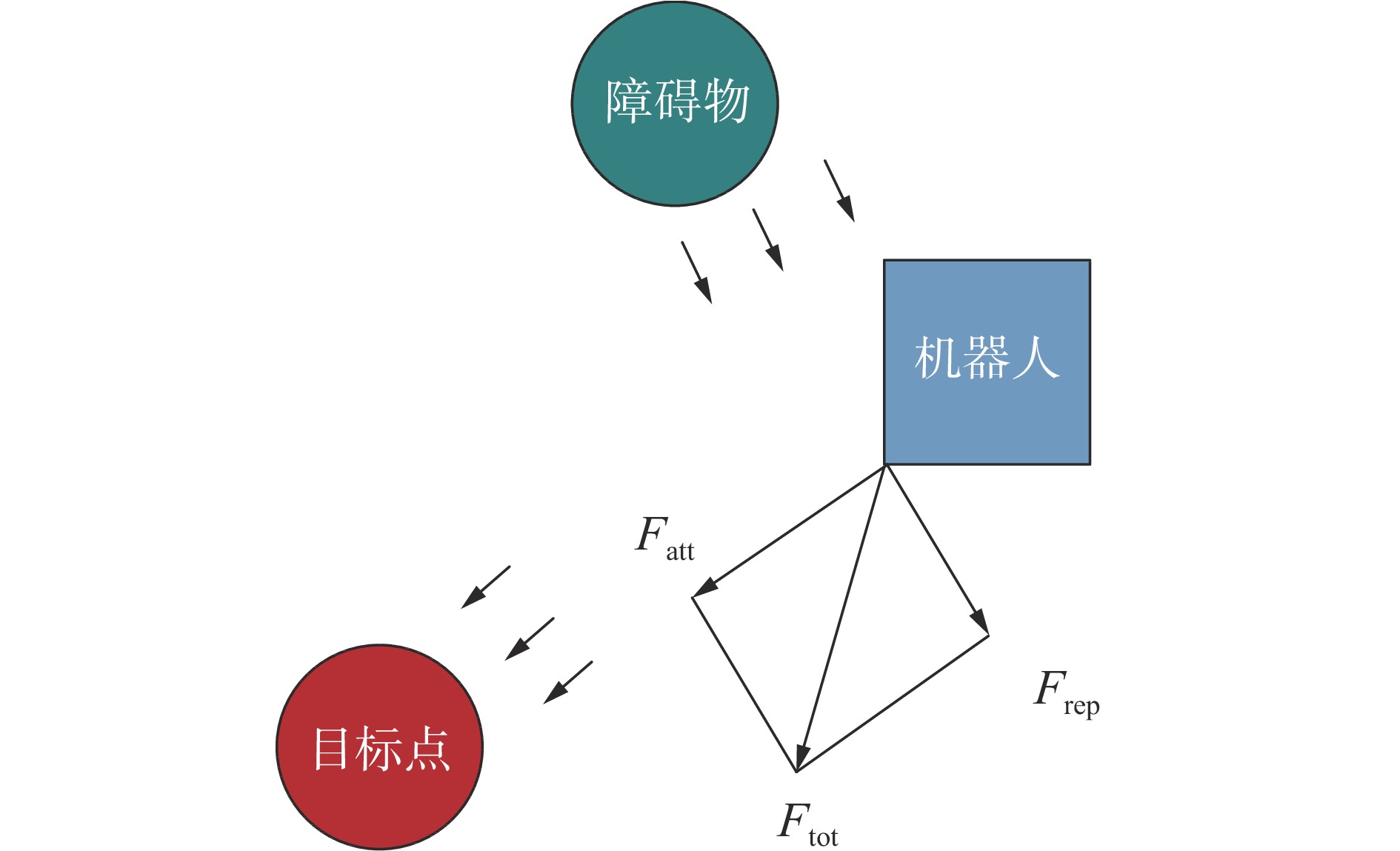
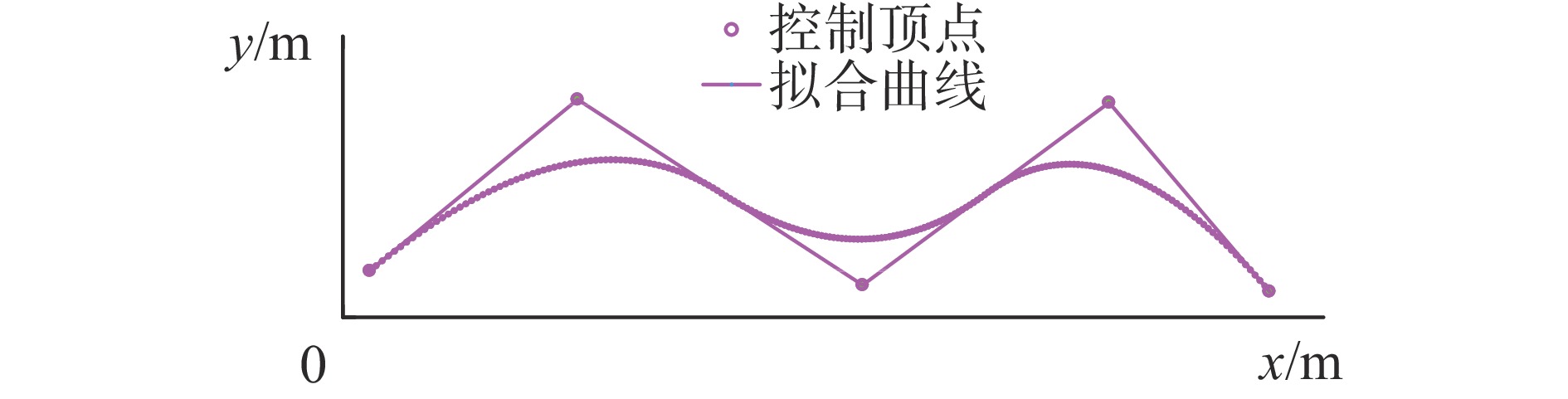
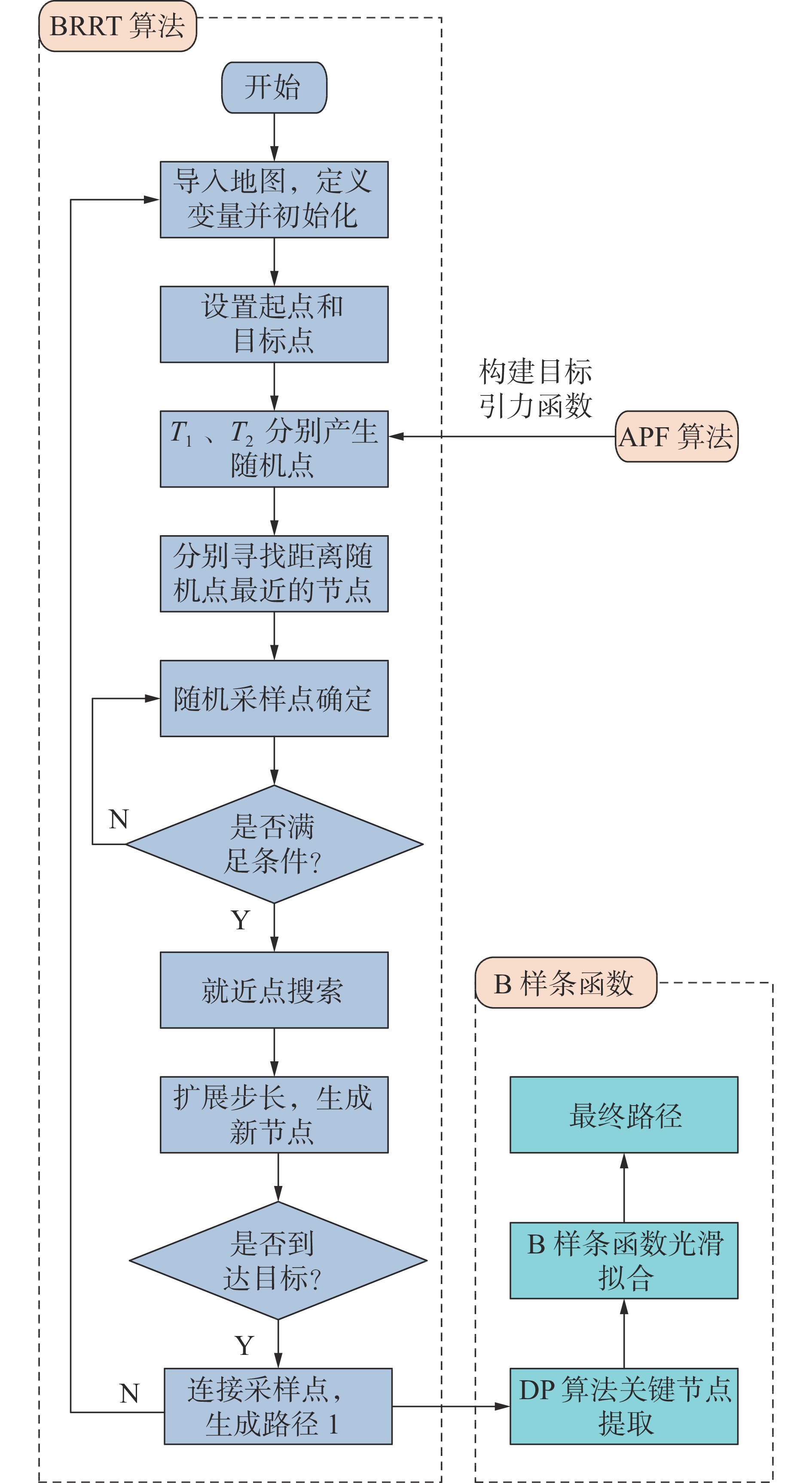
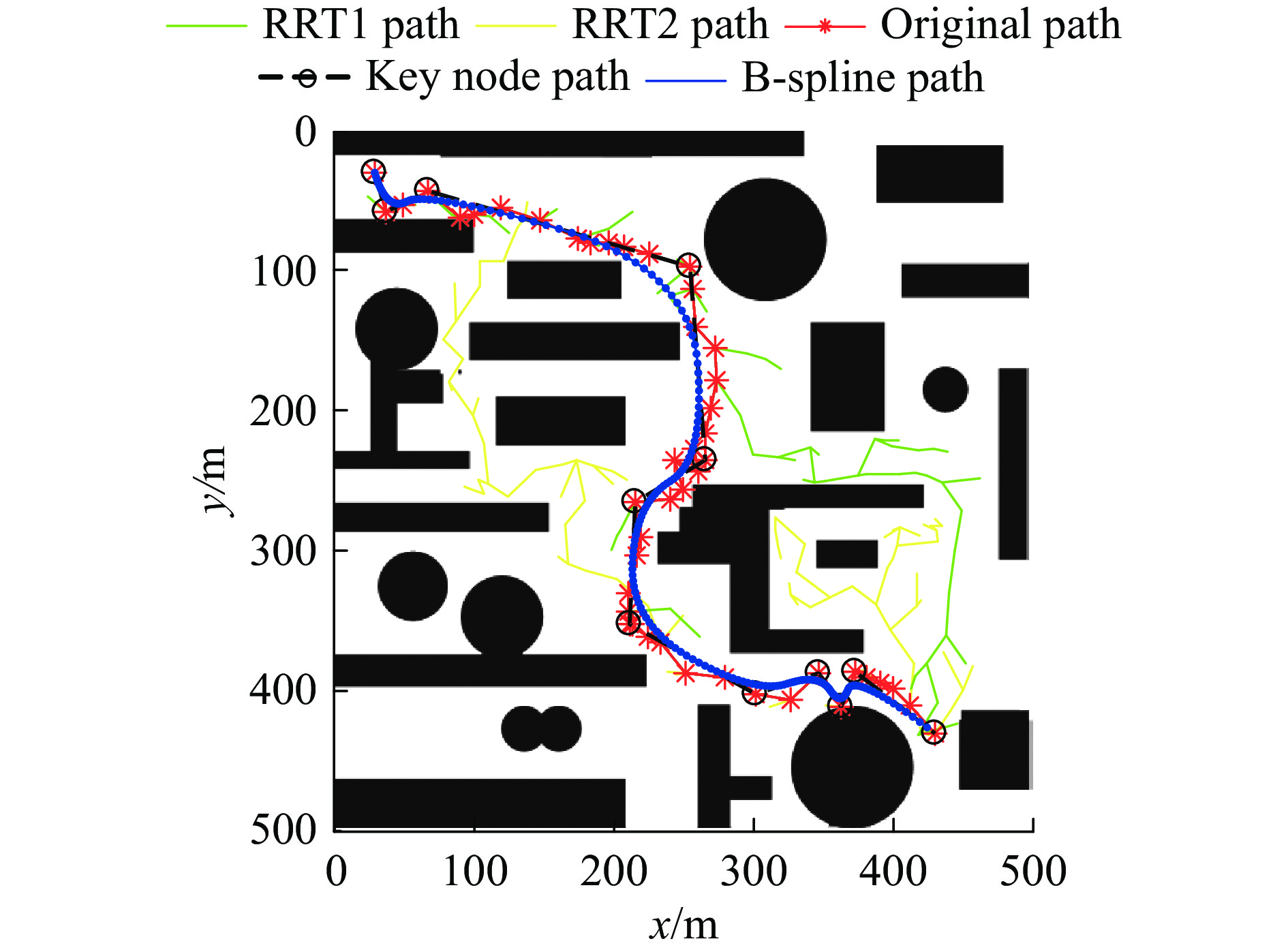
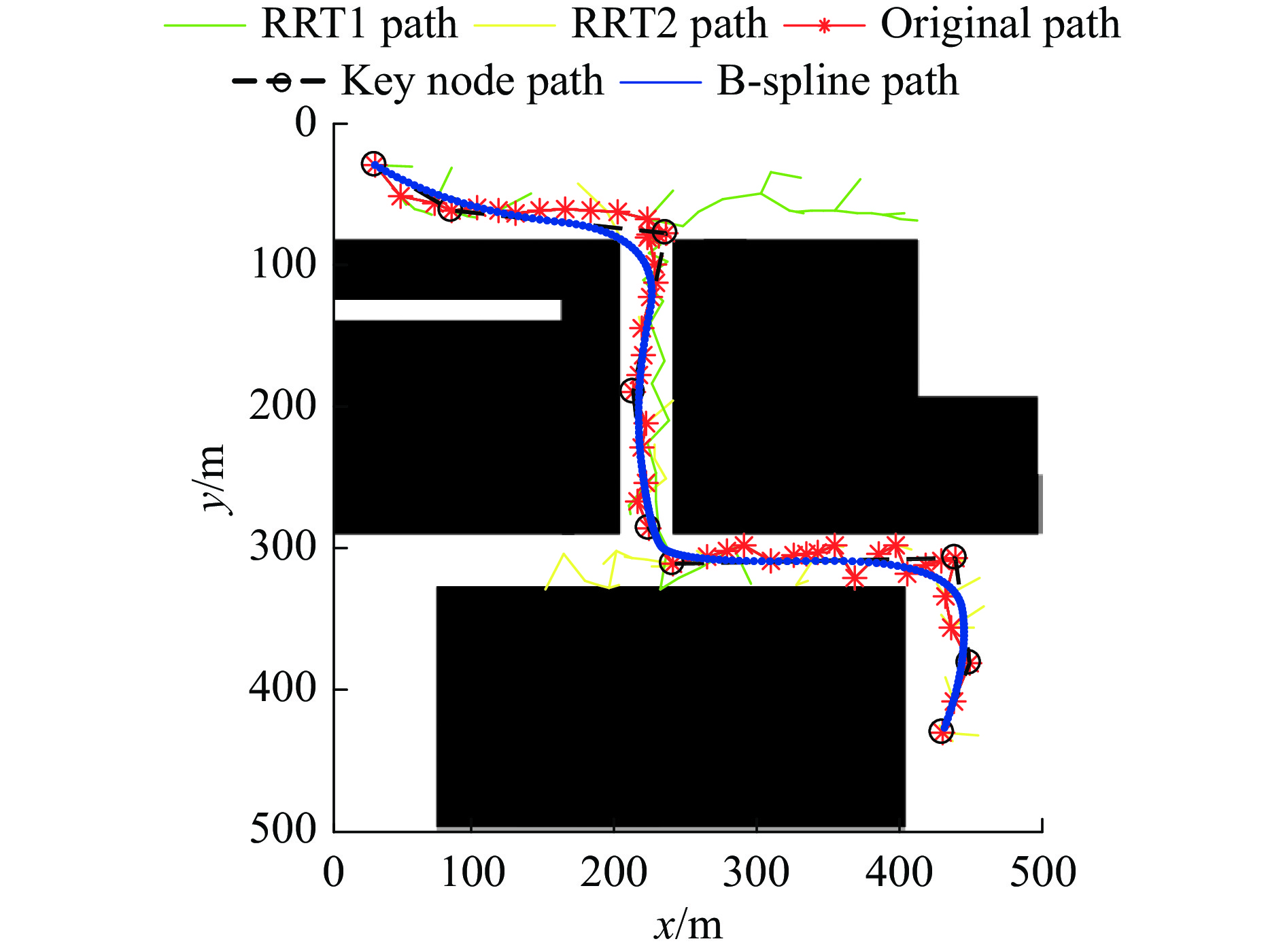
针对矿井非结构化、形状狭长的地形结构以及传统BRRT算法规划路径曲折、转折点较多等路径质量较差问题,提出一种基于B样条-APF-BRRT算法的矿井救援机器人路径规划方法。首先根据BRRT路径中产生的目标点和矿井环境中障碍物信息,引入APF目标引力的思想,构建人工势场;然后利用Douglas-Peuker算法进行分线段处理,重新提取关键节点;最后使用B样条函数进行光滑拟合获得路径,减少了APF-BRRT算法所得路径的转折点和长度。对B样条-APF-BRRT算法进行实验,结果表明改进算法所获路径转折点和长度都明显优于BRRT算法,在矿井狭窄巷道中,相对于BRRT算法,B样条-APF-BRRT方法产生的路径更加平滑,转折次数减少到9次,路径长度减少了7.73%。
针对矿井非结构化、形状狭长的地形结构以及传统BRRT算法规划路径曲折、转折点较多等路径质量较差问题,提出一种基于B样条-APF-BRRT算法的矿井救援机器人路径规划方法。首先根据BRRT路径中产生的目标点和矿井环境中障碍物信息,引入APF目标引力的思想,构建人工势场;然后利用Douglas-Peuker算法进行分线段处理,重新提取关键节点;最后使用B样条函数进行光滑拟合获得路径,减少了APF-BRRT算法所得路径的转折点和长度。对B样条-APF-BRRT算法进行实验,结果表明改进算法所获路径转折点和长度都明显优于BRRT算法,在矿井狭窄巷道中,相对于BRRT算法,B样条-APF-BRRT方法产生的路径更加平滑,转折次数减少到9次,路径长度减少了7.73%。





2023, 42(11): 1937-1945.
doi: 10.13433/j.cnki.1003-8728.20220171
摘要:
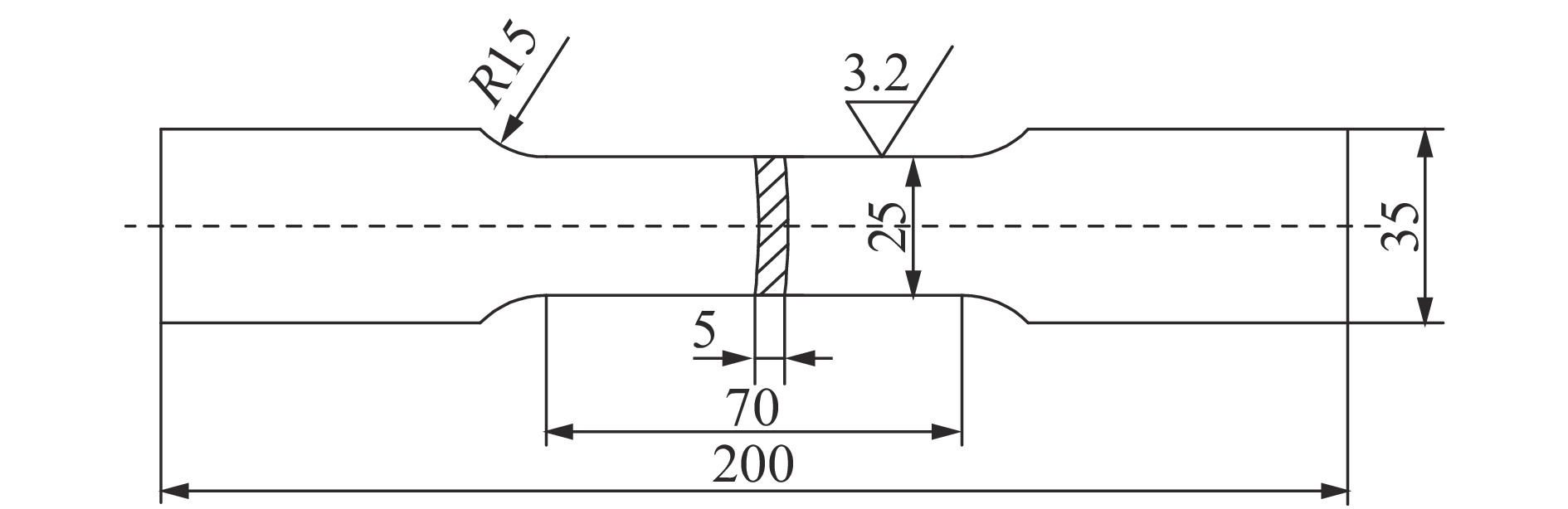
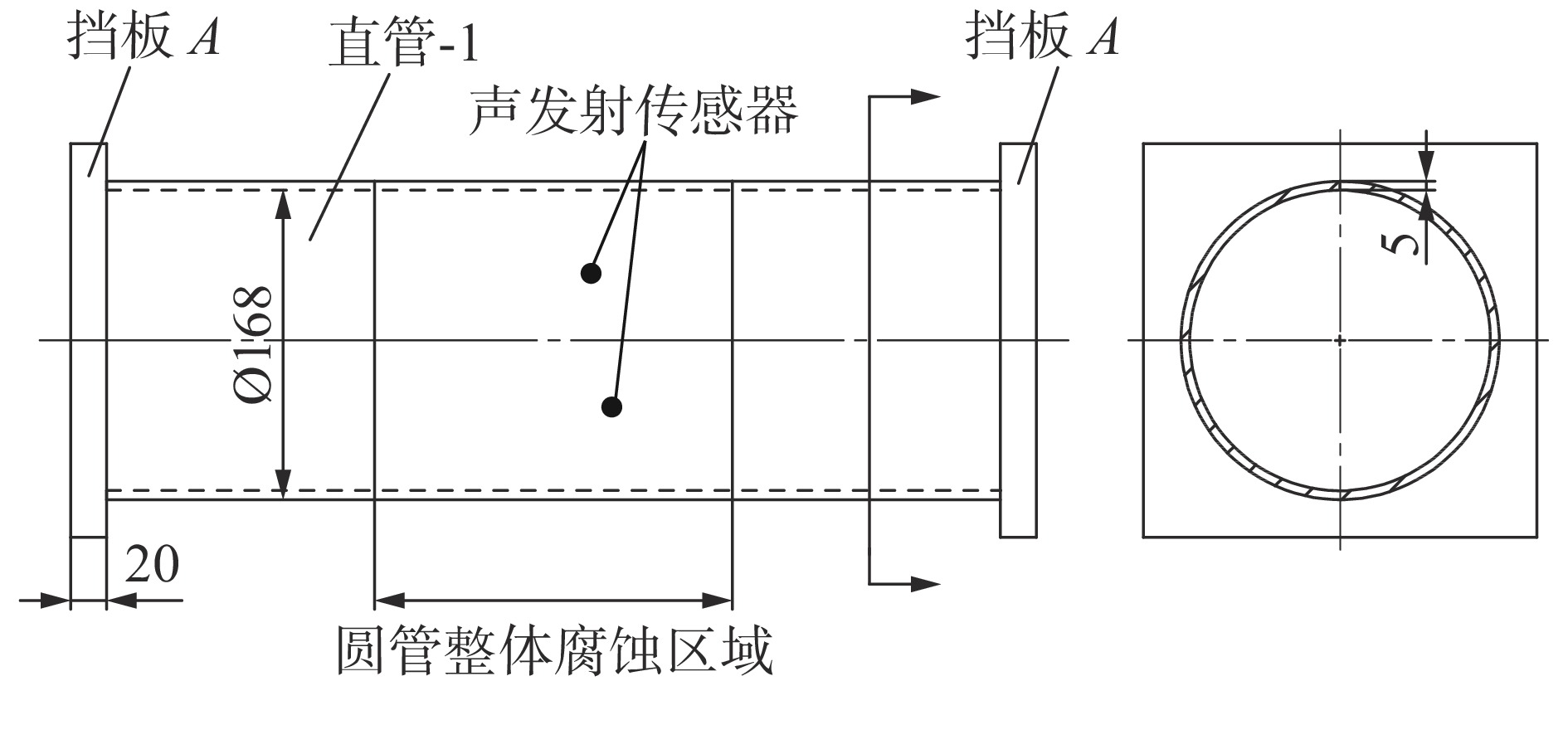
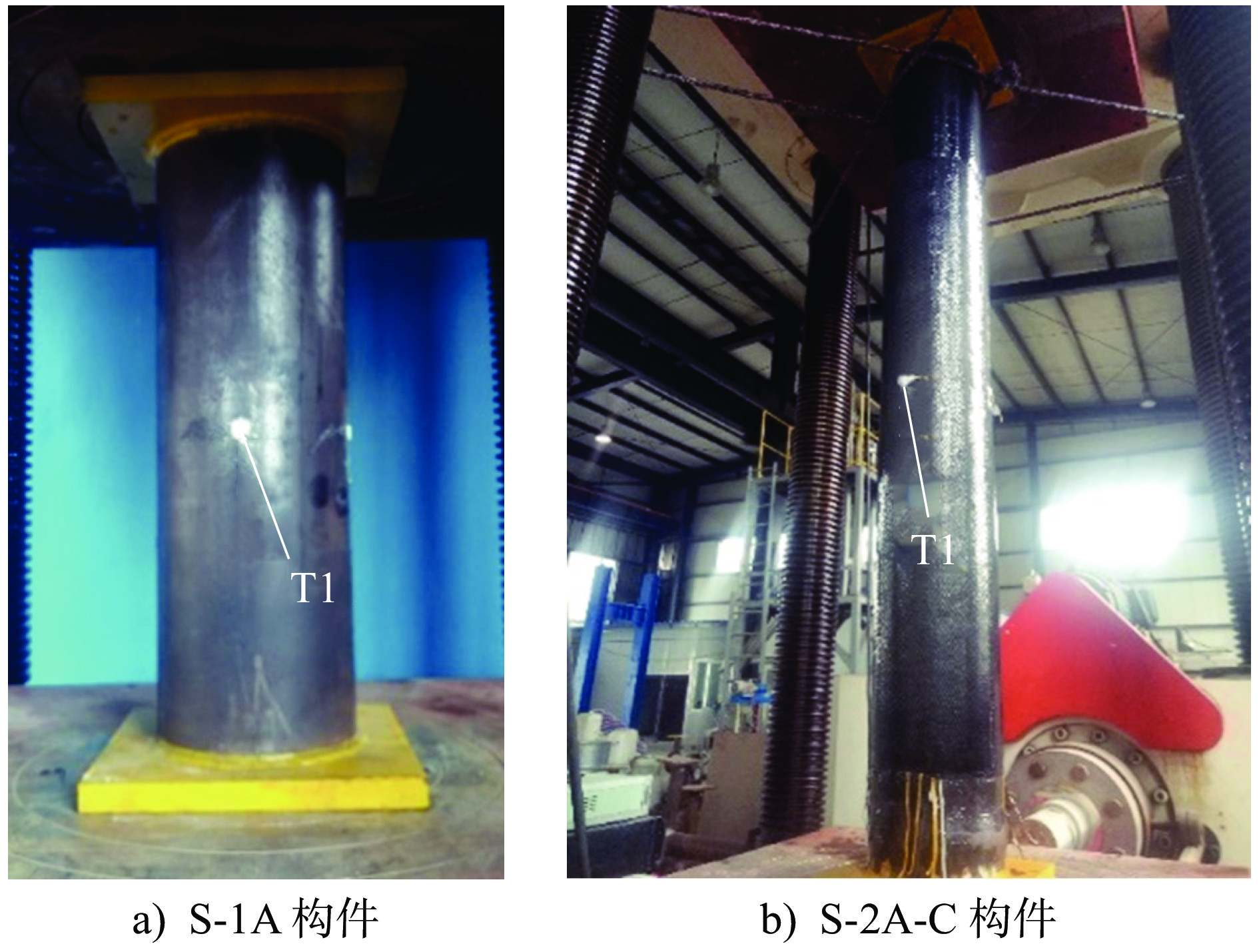
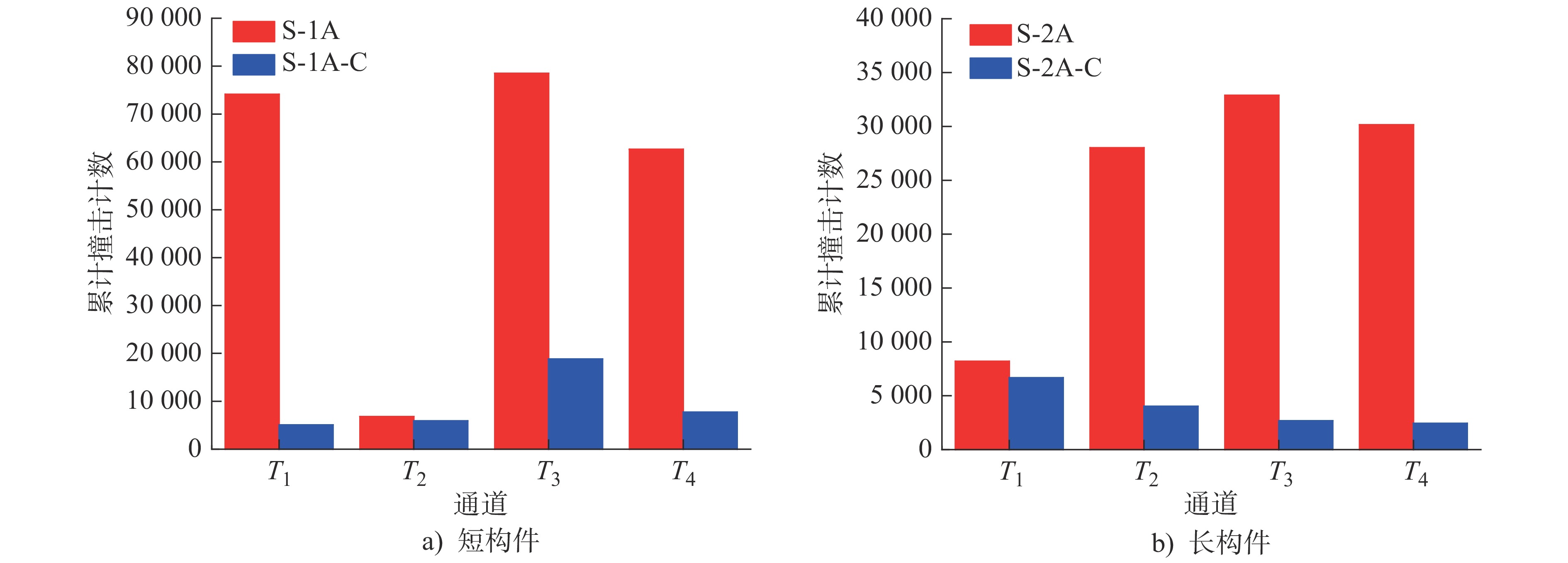
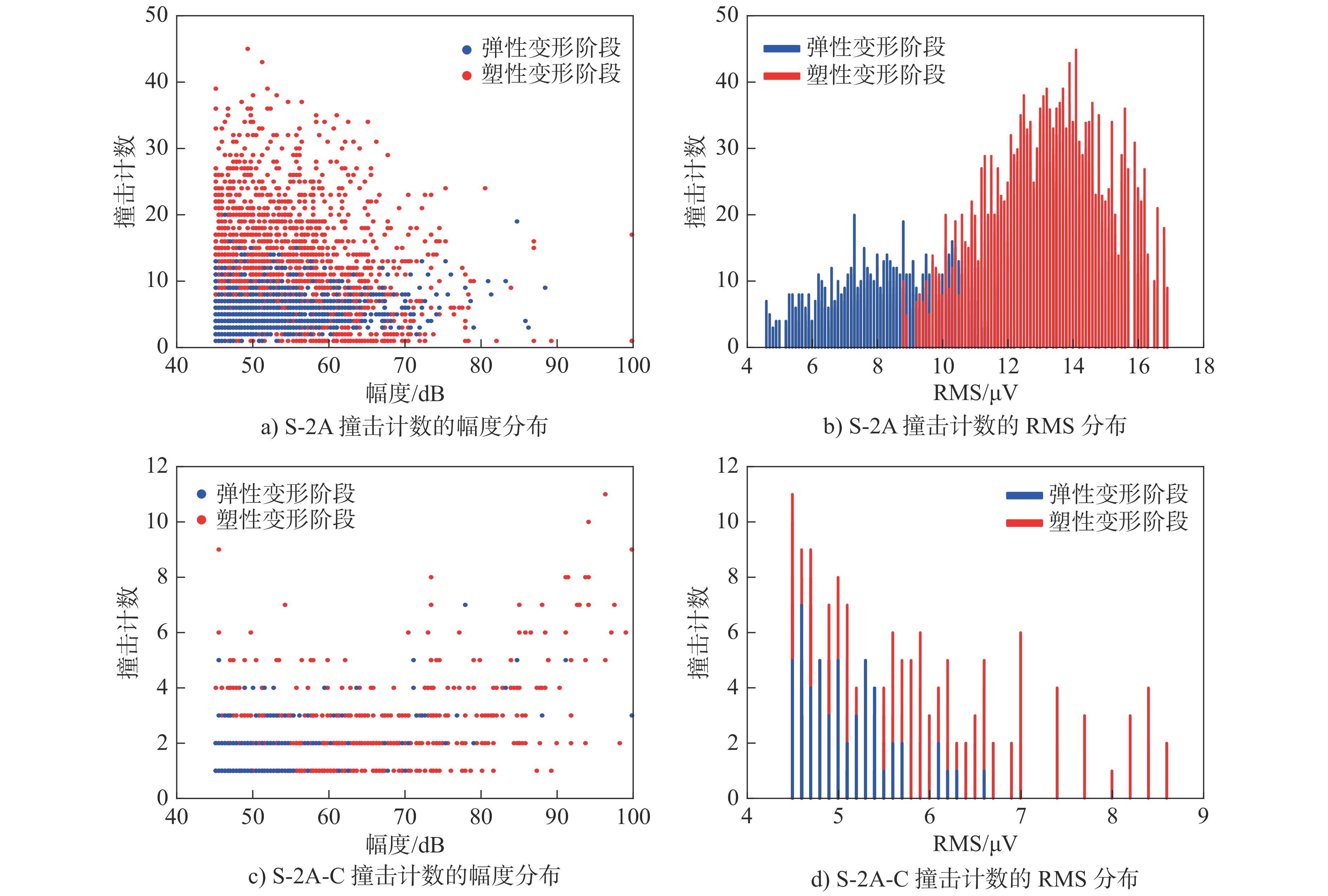
为研究腐蚀管柱加固前后的承载力变化,使用声发射仪采集了准静态压缩过程中有腐蚀缺陷和经碳纤维增强复合材料(CFRP)加固的管柱构件的声发射参数。通过比较声发射的撞击数、幅度、均方根植(RMS)、振铃计数率和累积能量计数等参数,对构件的承载力进行了研究。结果表明:声发射特征参数能够较好的体现构件材料的弹性阶段、屈服阶段、强化阶段、颈缩和断裂过程;幅度和RMS可以反映试验过程中试件内部损伤破坏进程;振铃计数和累积能量的变化趋势能够体现管柱构件的压缩变形过程;CFRP加固后的管柱变形小,承载力提高,声发射振铃计数降低,累积能量计数增大。
为研究腐蚀管柱加固前后的承载力变化,使用声发射仪采集了准静态压缩过程中有腐蚀缺陷和经碳纤维增强复合材料(CFRP)加固的管柱构件的声发射参数。通过比较声发射的撞击数、幅度、均方根植(RMS)、振铃计数率和累积能量计数等参数,对构件的承载力进行了研究。结果表明:声发射特征参数能够较好的体现构件材料的弹性阶段、屈服阶段、强化阶段、颈缩和断裂过程;幅度和RMS可以反映试验过程中试件内部损伤破坏进程;振铃计数和累积能量的变化趋势能够体现管柱构件的压缩变形过程;CFRP加固后的管柱变形小,承载力提高,声发射振铃计数降低,累积能量计数增大。





2023, 42(11): 1946-1951.
doi: 10.13433/j.cnki.1003-8728.20220267
摘要:
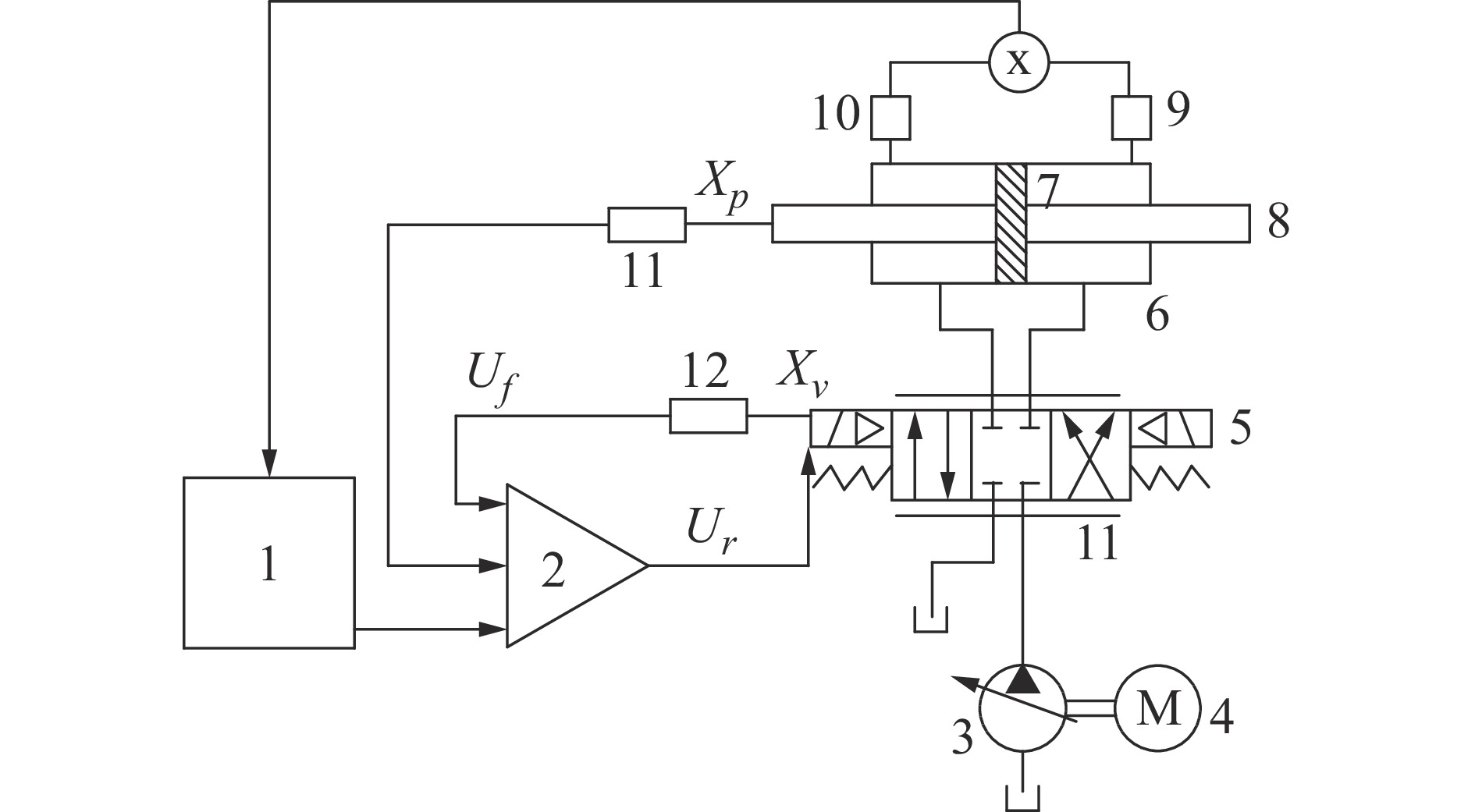
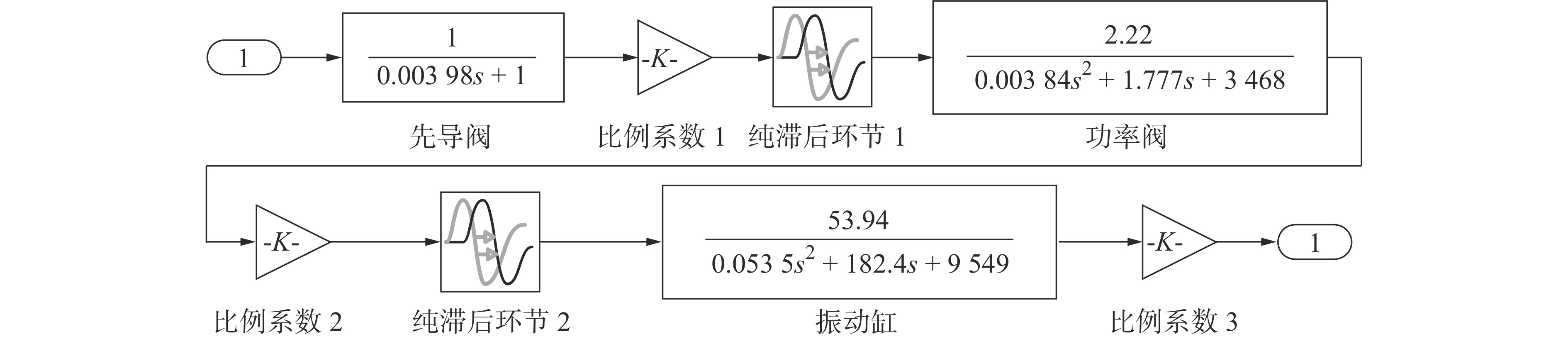
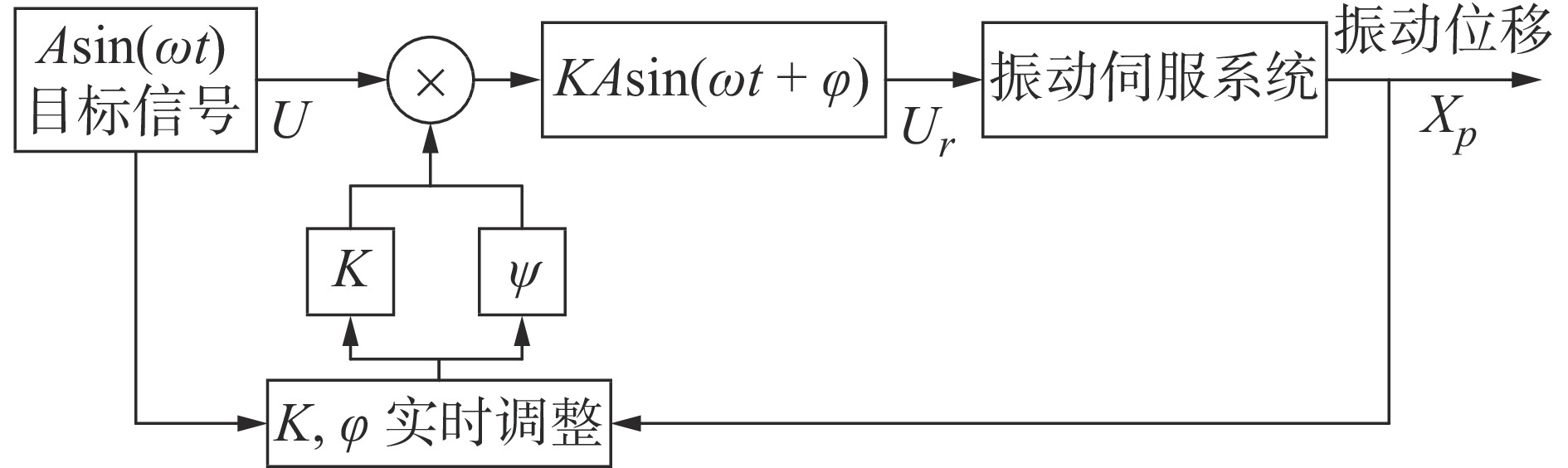
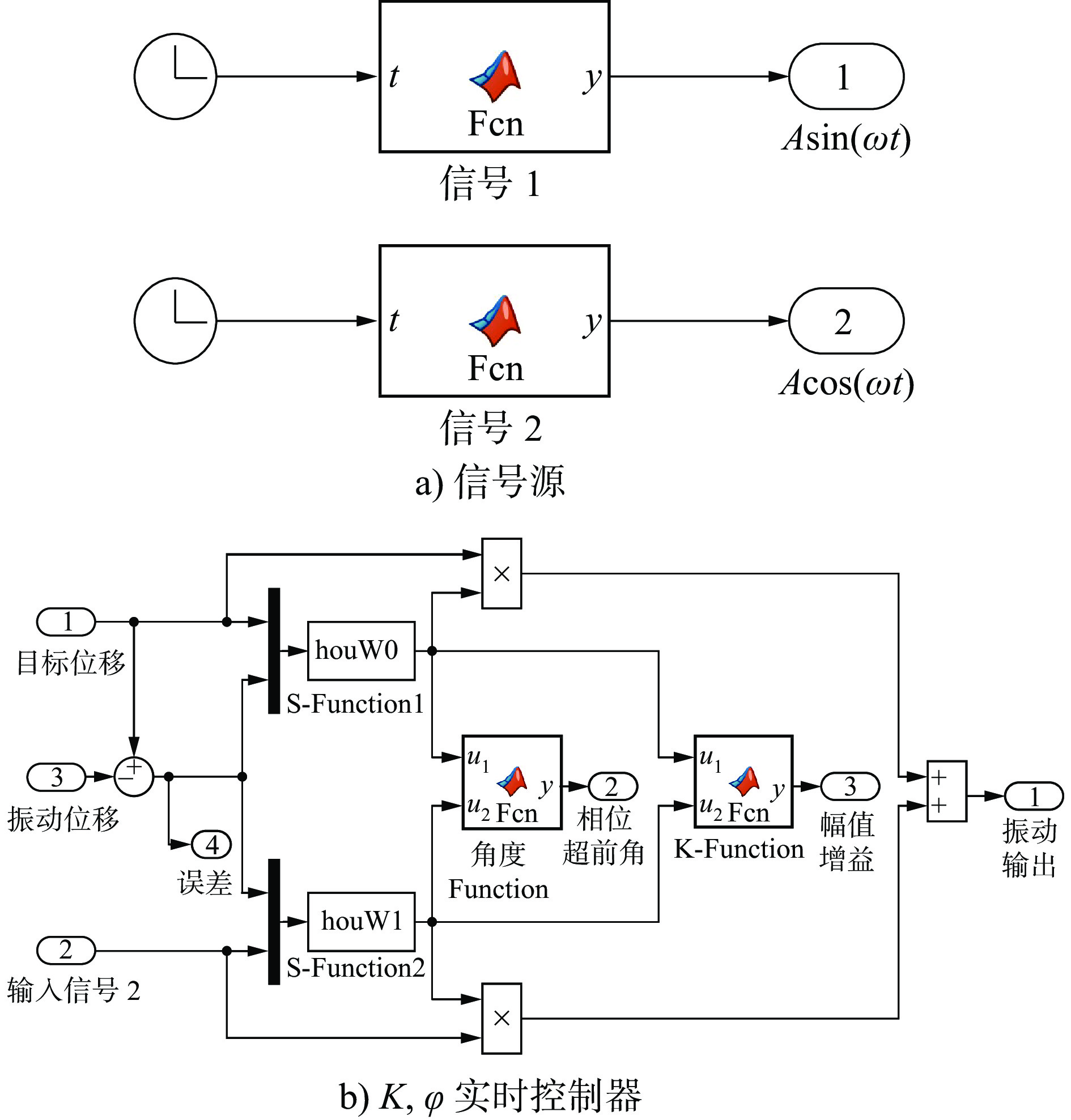
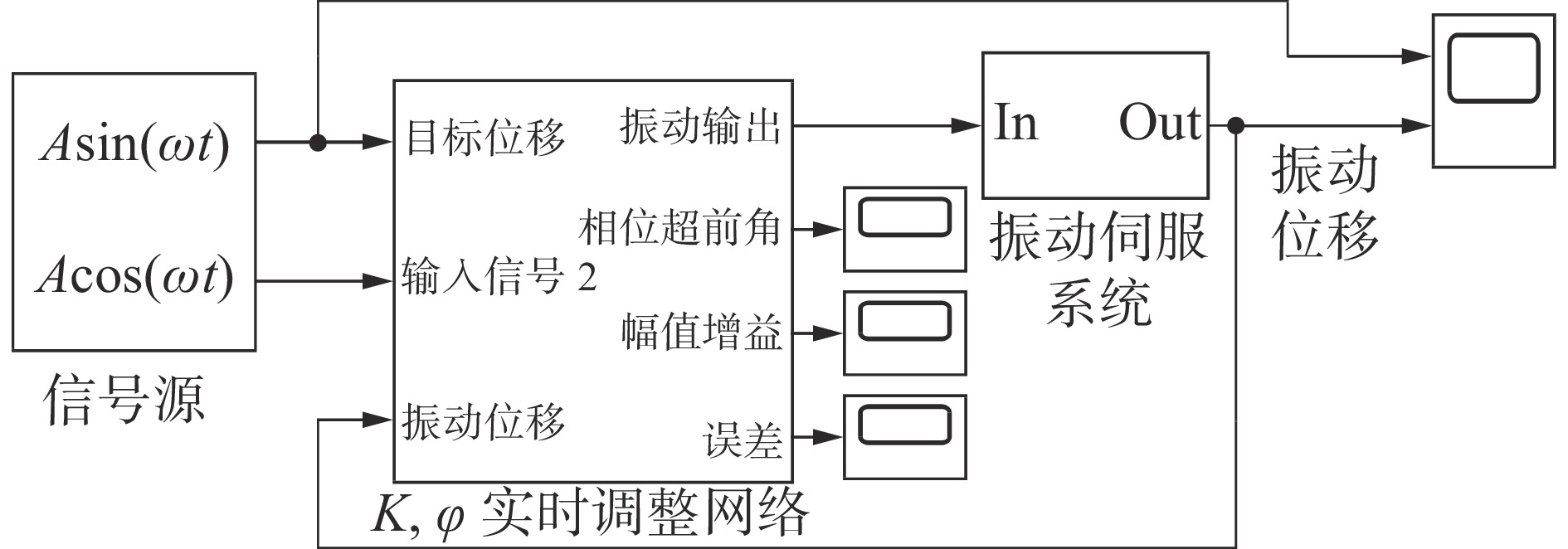
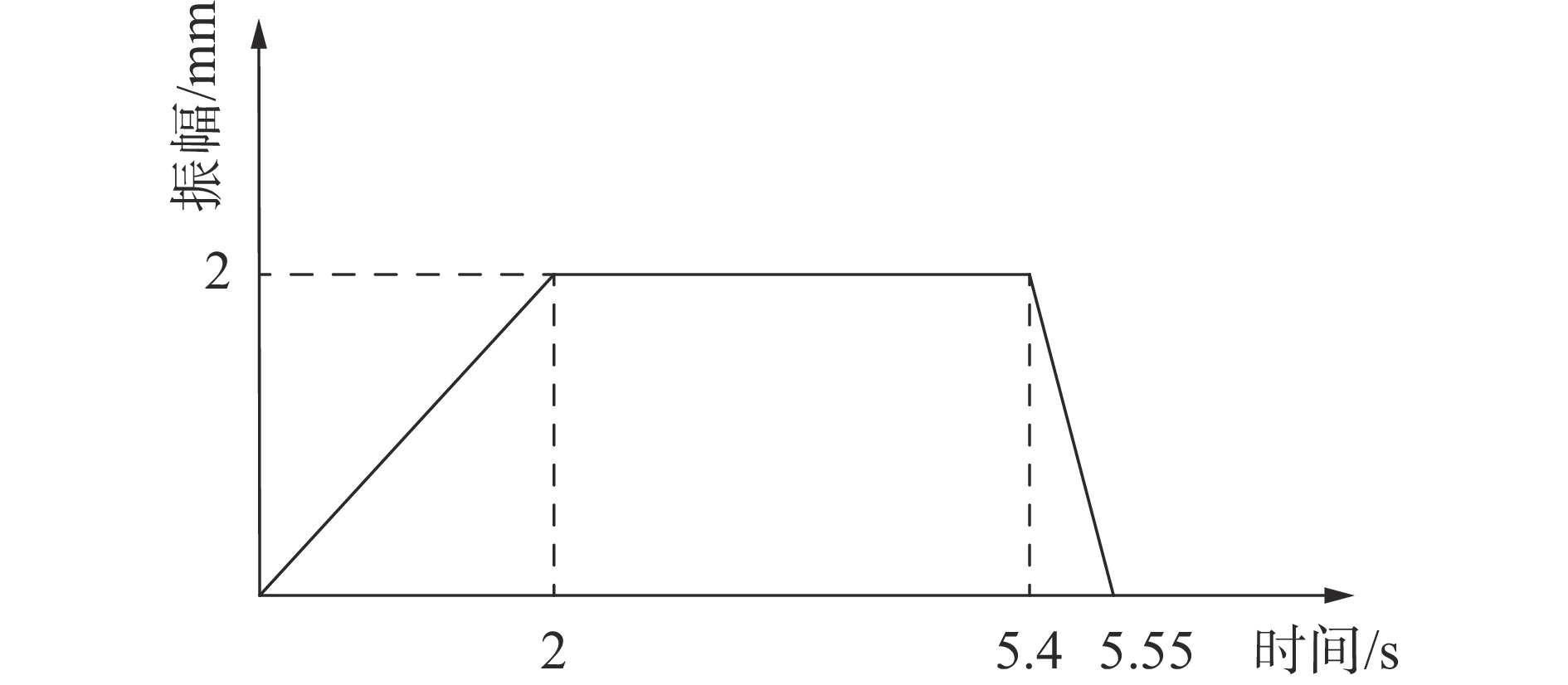
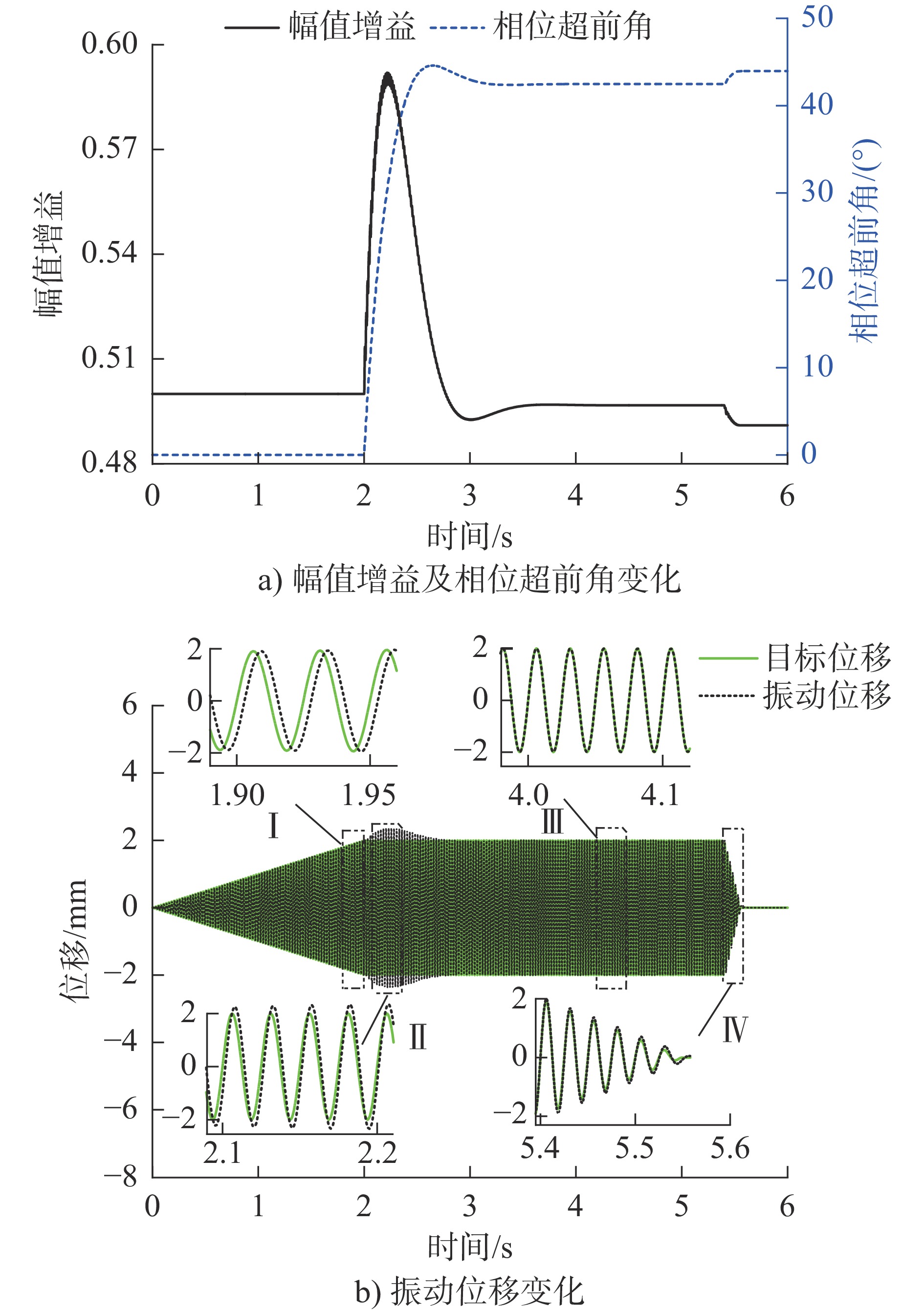
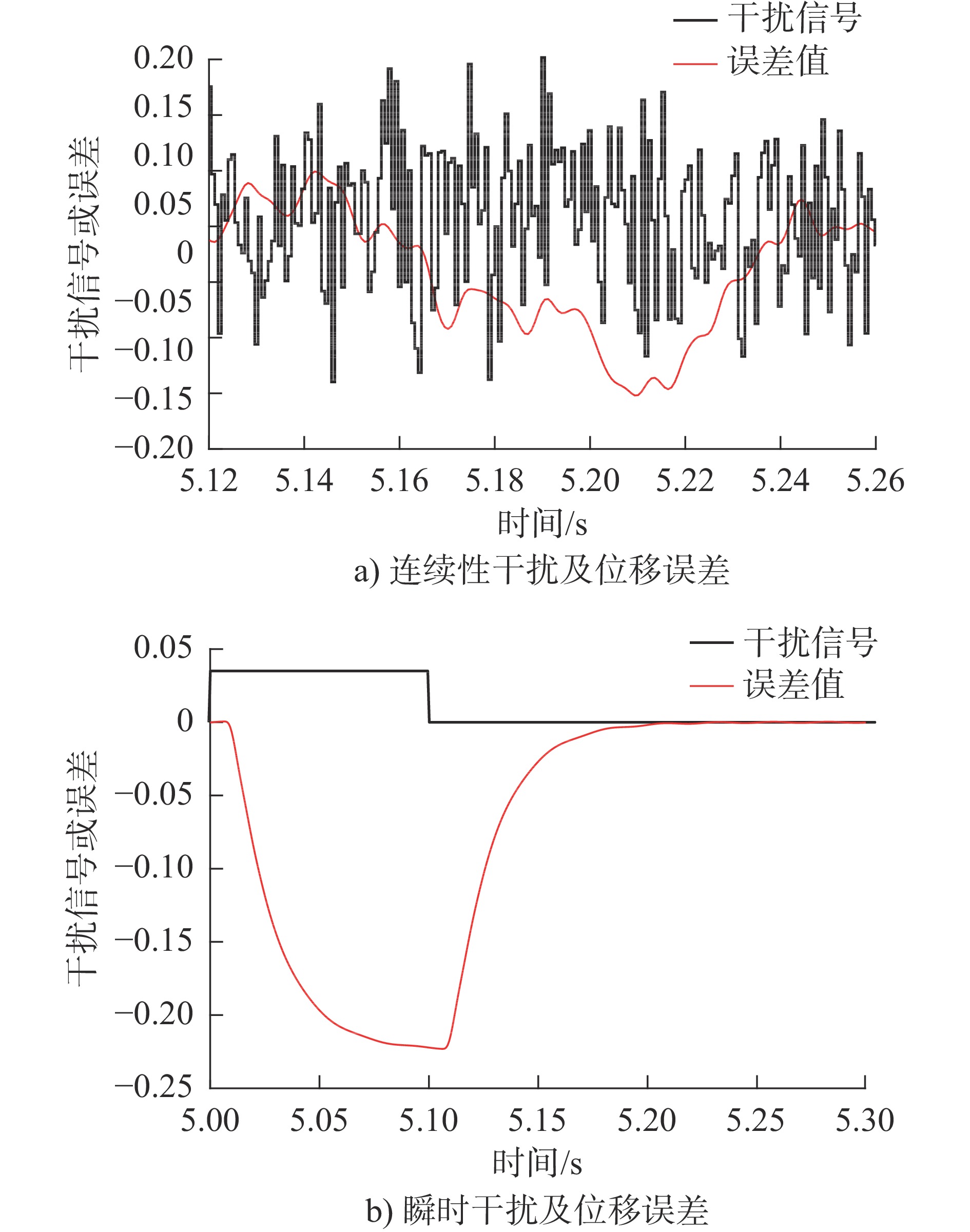
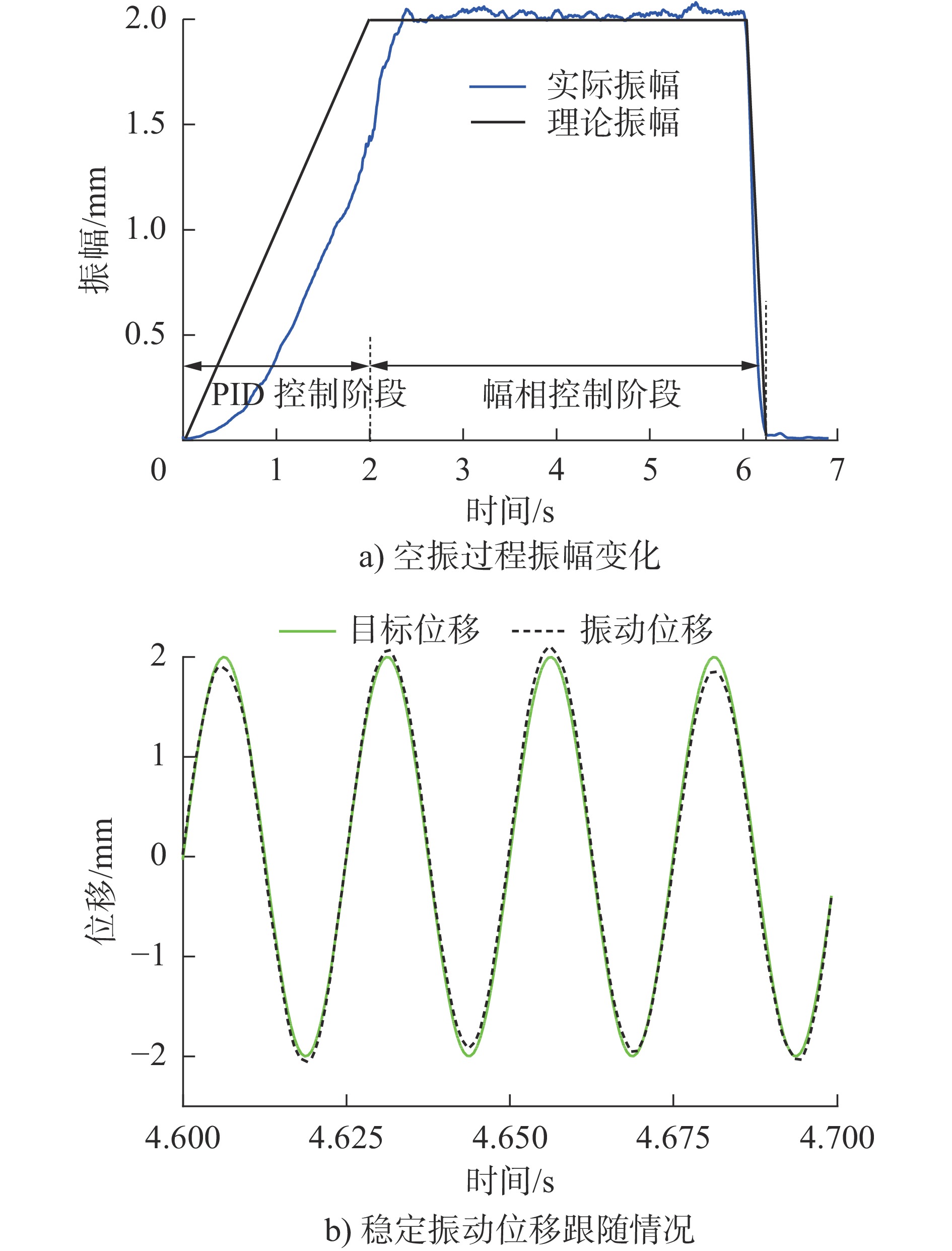
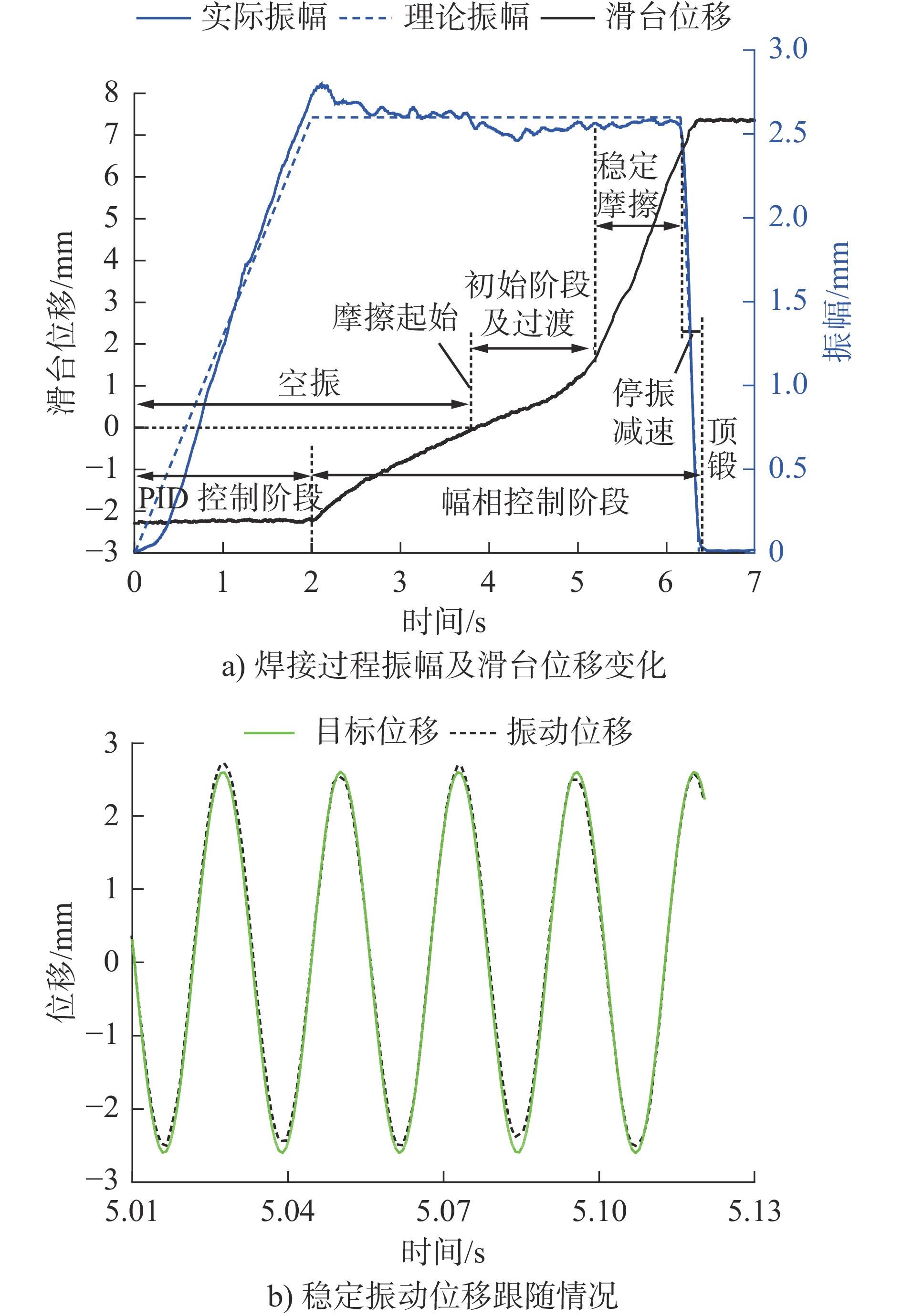
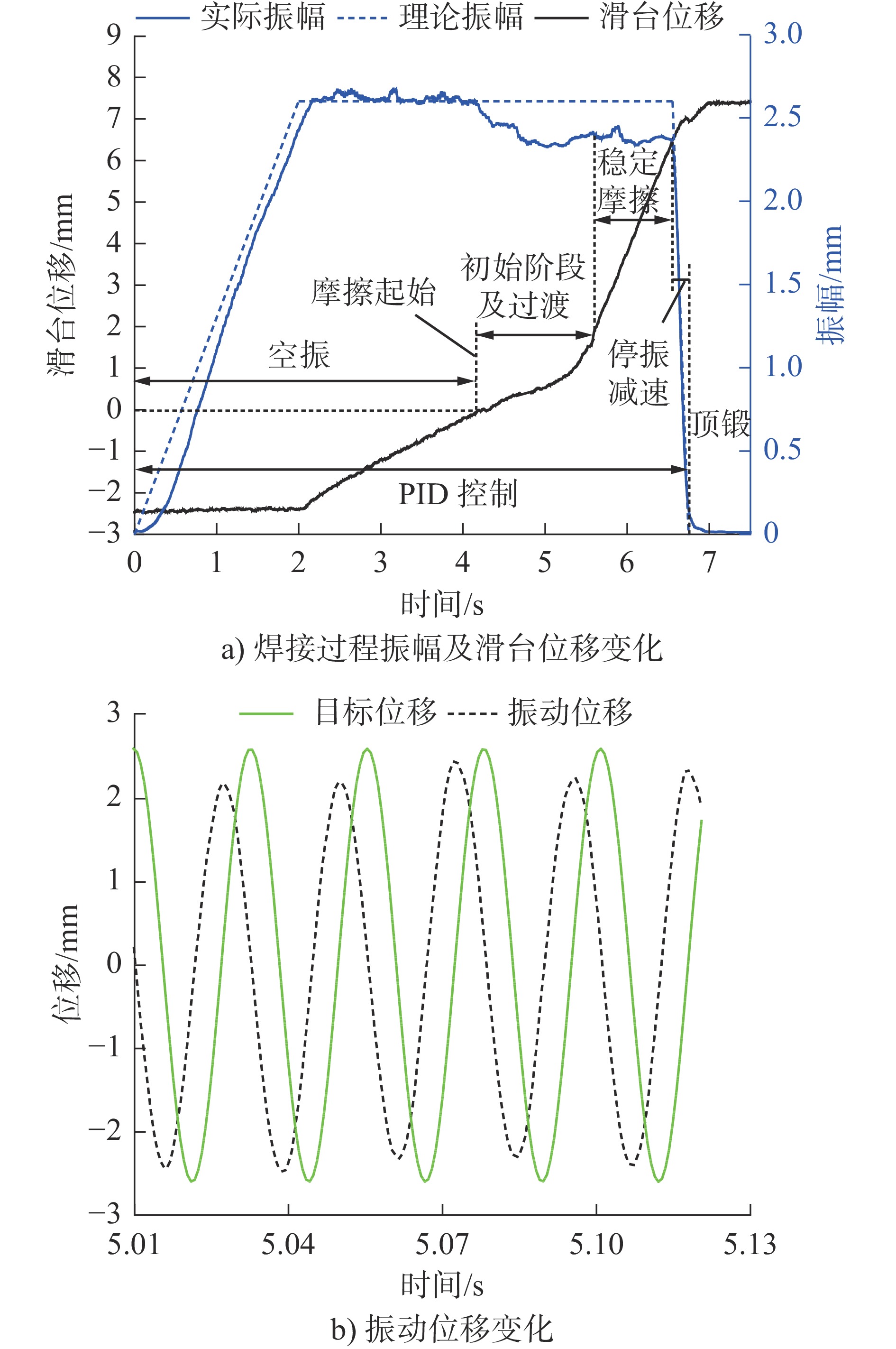
为保证线性摩擦焊接过程能量输入的稳定性,提高线性摩擦焊机振动系统幅值与相位的控制精度,建立了振动系统目标信号、输入信号与输出信号之间的关系,提出幅相控制策略,设计了幅相控制算法控制器,并采用Simulink建立了系统控制模型,通过模拟仿真,得到了不同焊接参数下的算法输入参数。通过典型参数下的焊接试验,验证了幅相控制的可行性。根据焊接过程参数分析了不同控制方法的控制效果,结果表明采用所设计的幅相控制策略,焊接过程中振动系统的振幅误差为1.2%,相位误差为0.16°。
为保证线性摩擦焊接过程能量输入的稳定性,提高线性摩擦焊机振动系统幅值与相位的控制精度,建立了振动系统目标信号、输入信号与输出信号之间的关系,提出幅相控制策略,设计了幅相控制算法控制器,并采用Simulink建立了系统控制模型,通过模拟仿真,得到了不同焊接参数下的算法输入参数。通过典型参数下的焊接试验,验证了幅相控制的可行性。根据焊接过程参数分析了不同控制方法的控制效果,结果表明采用所设计的幅相控制策略,焊接过程中振动系统的振幅误差为1.2%,相位误差为0.16°。

2023, 42(11): 1952-1958.
doi: 10.13433/j.cnki.1003-8728.20230326
摘要:
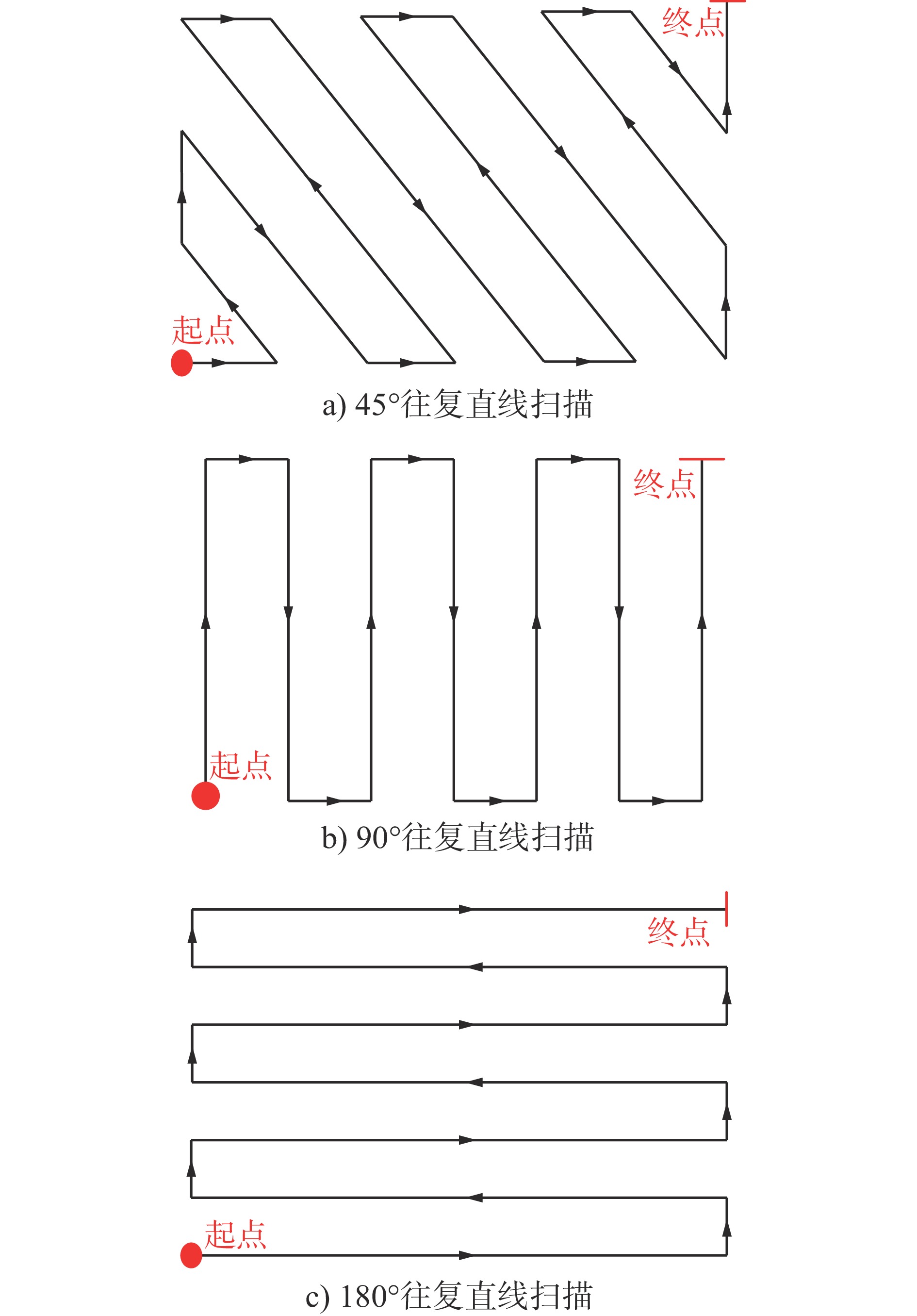
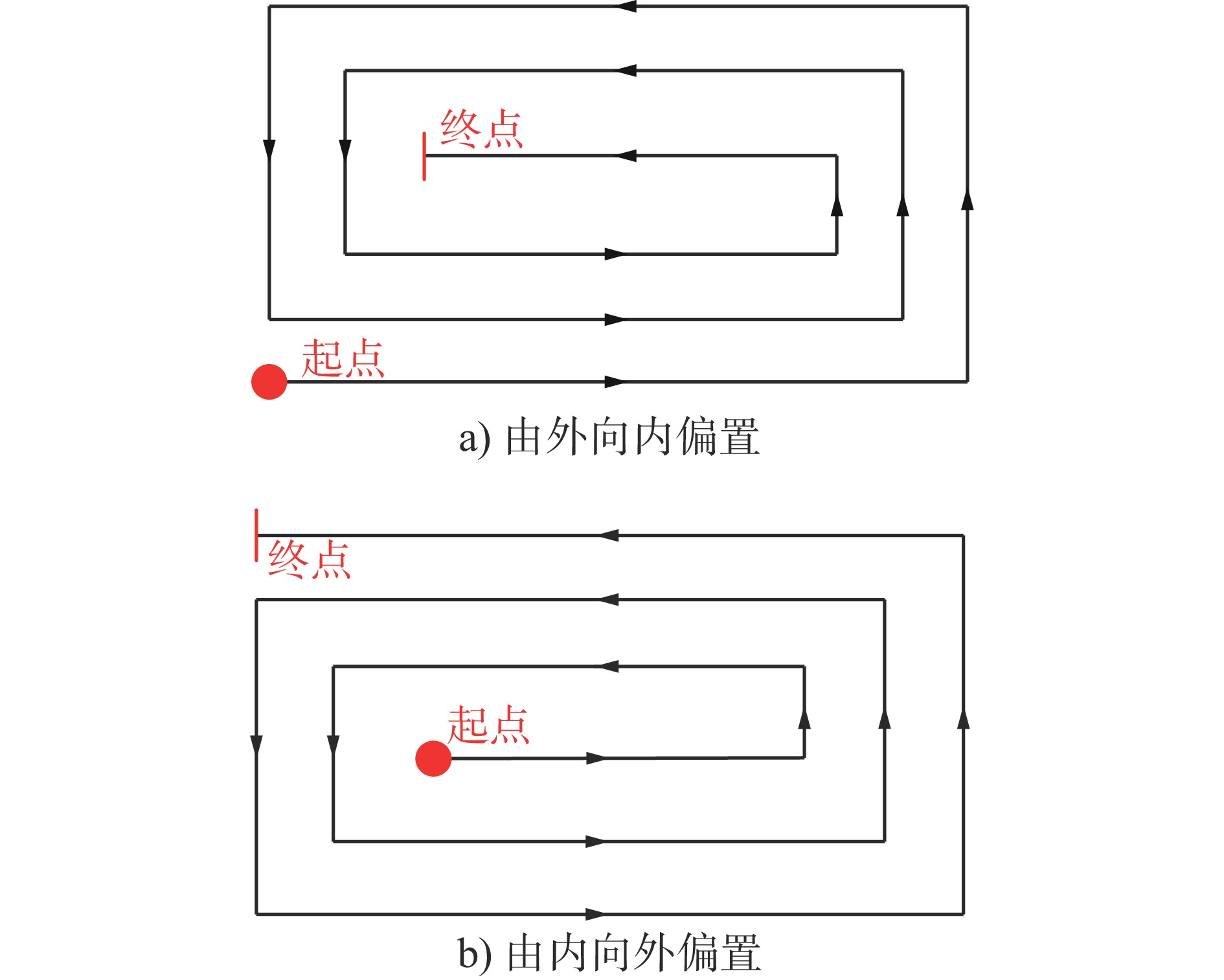
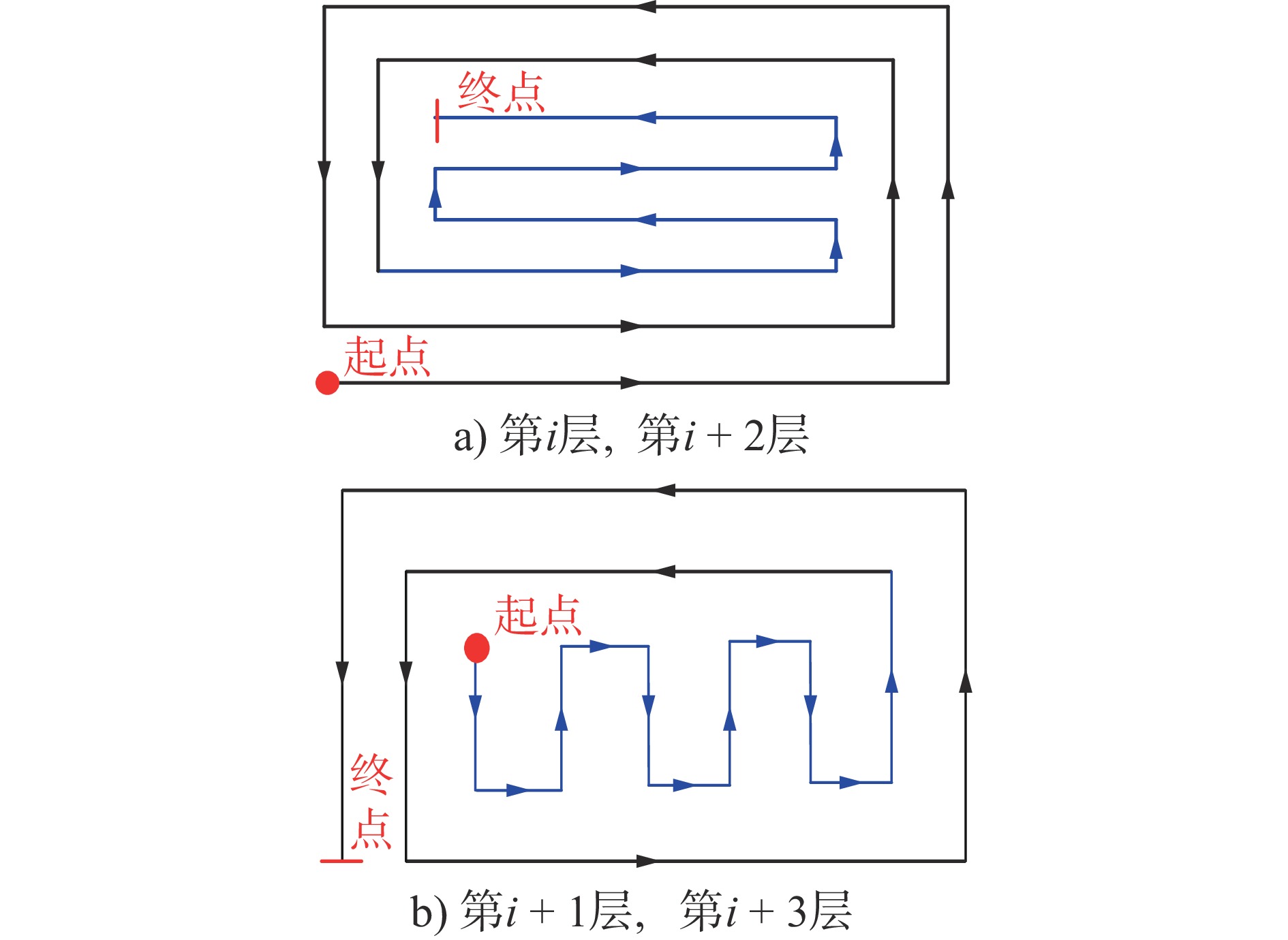
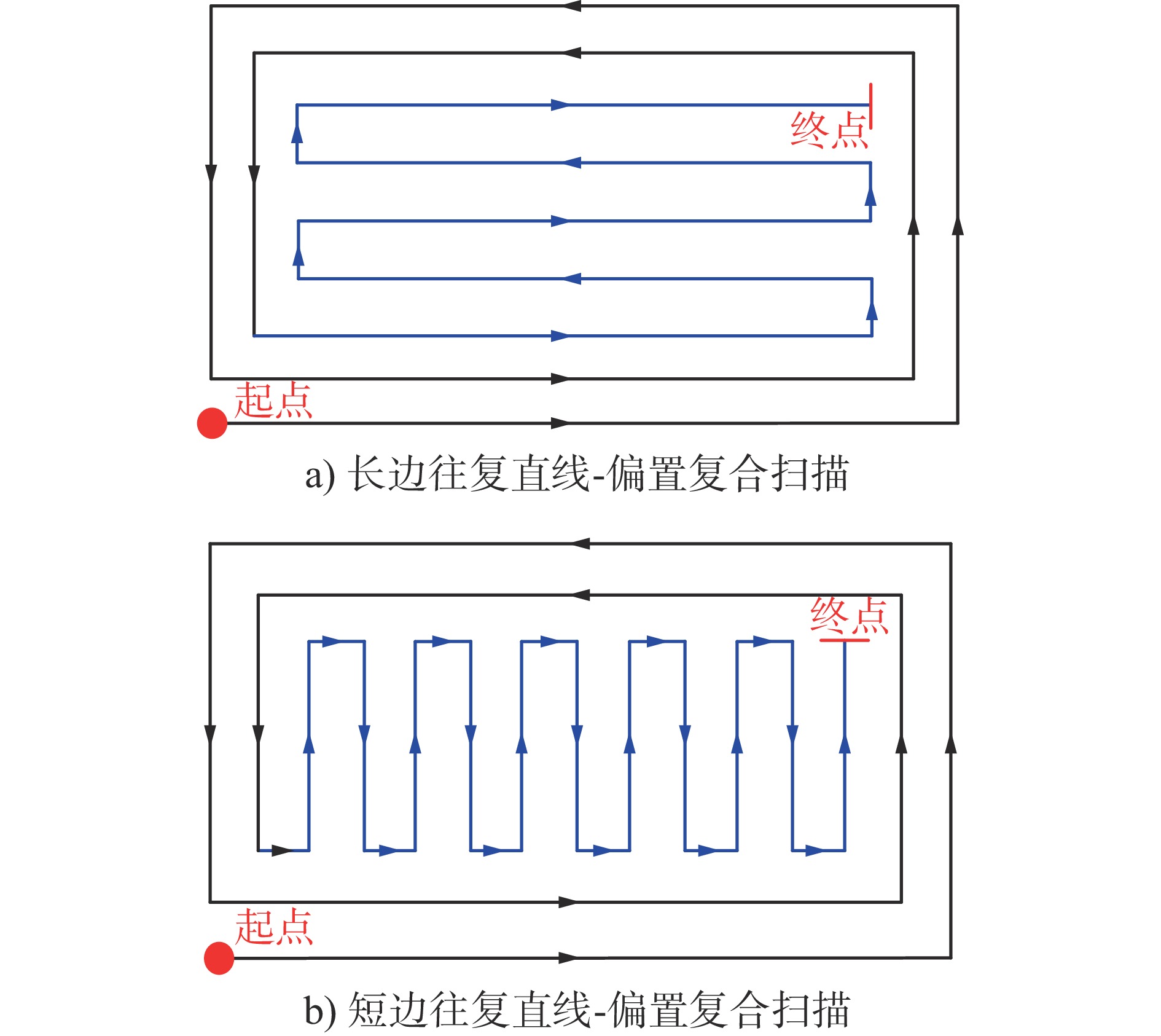
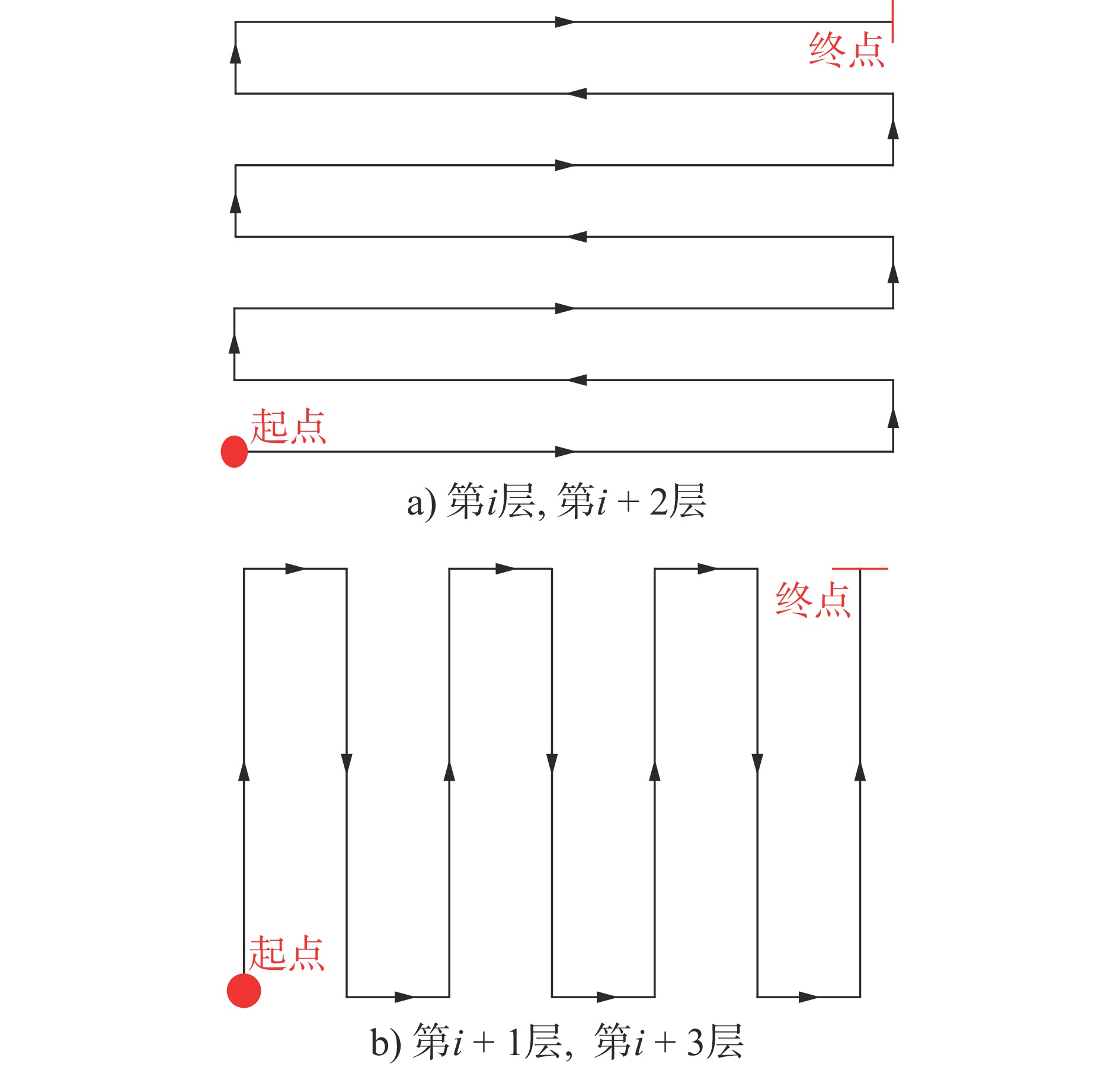
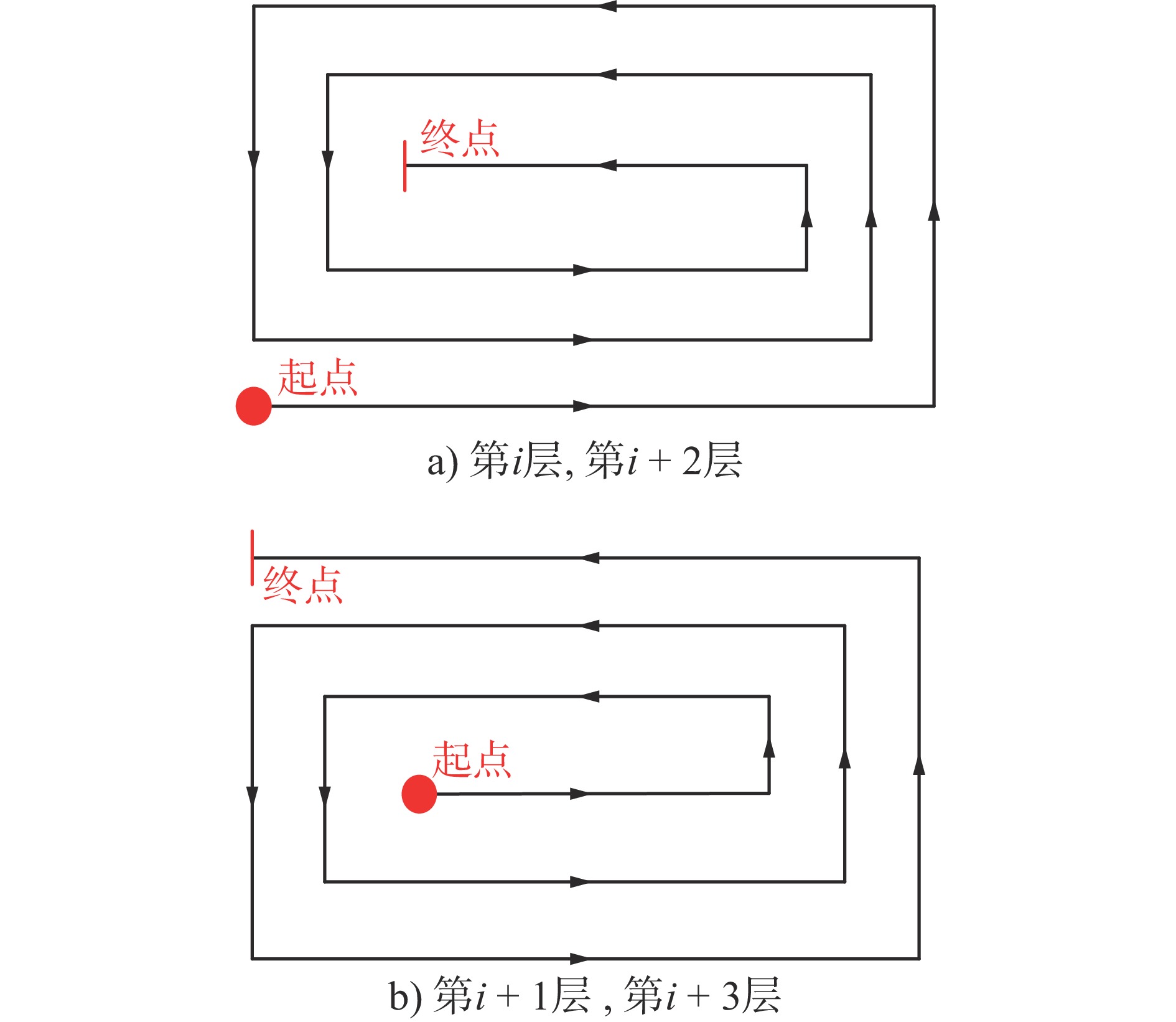
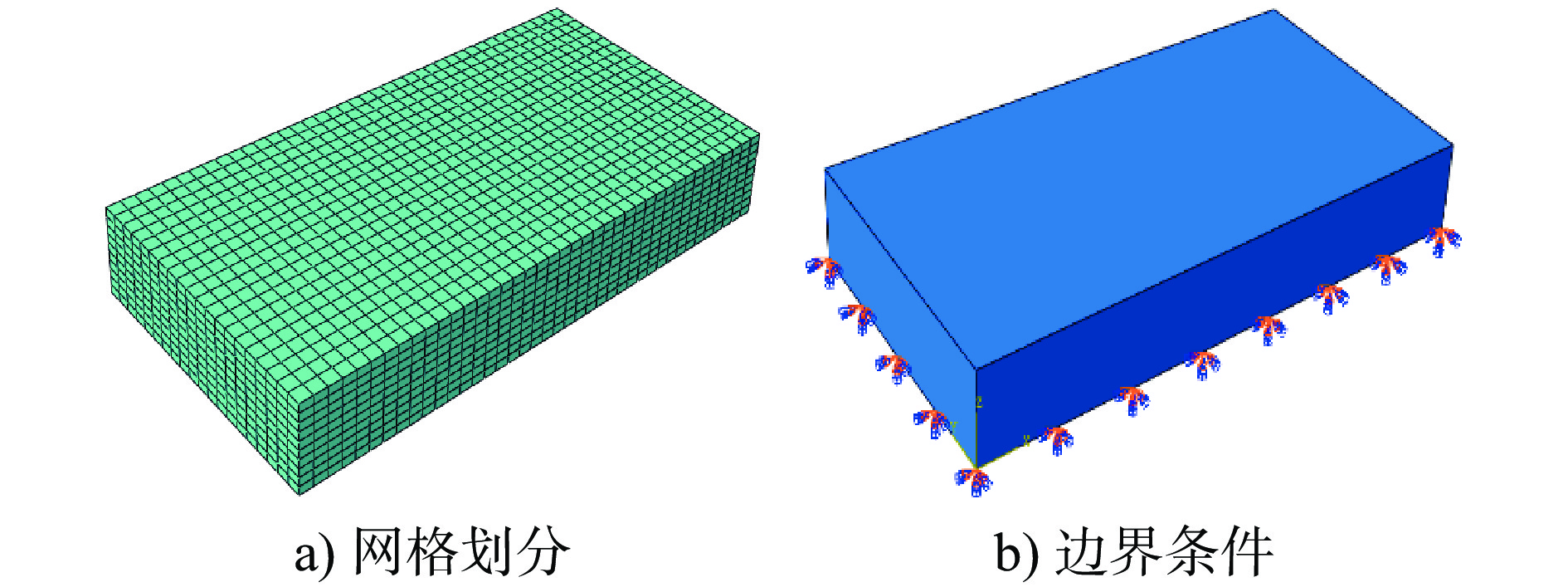
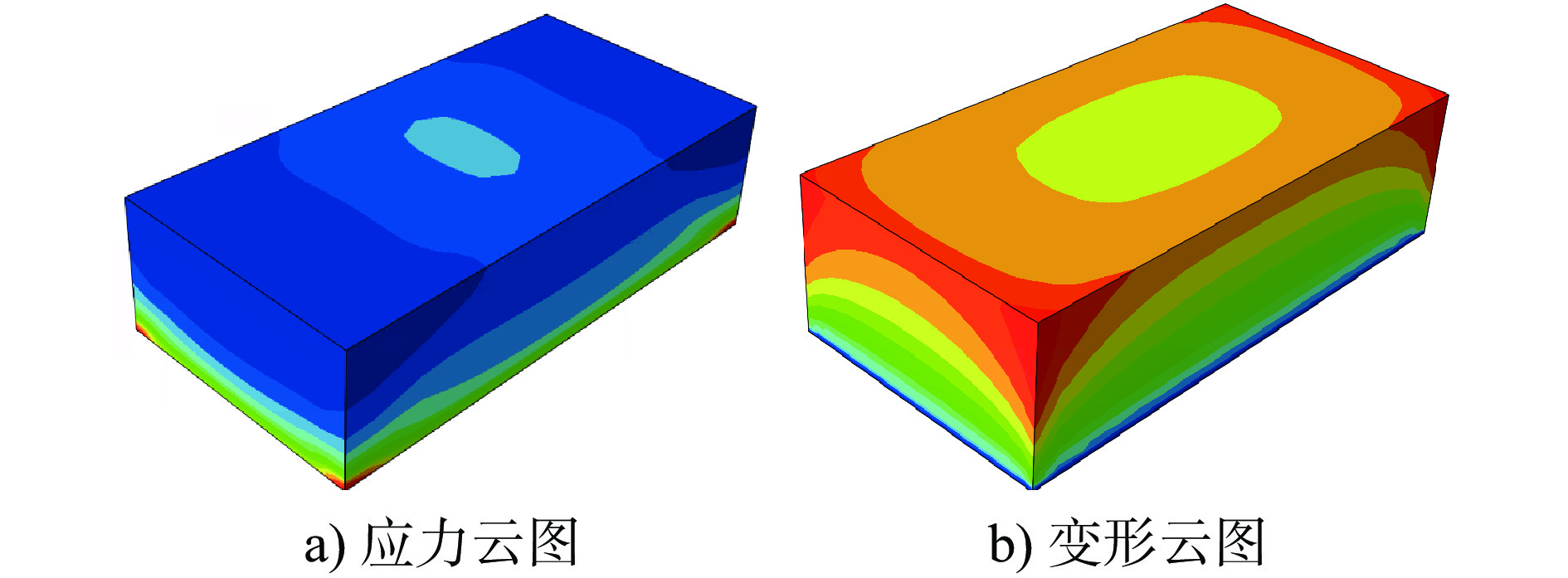
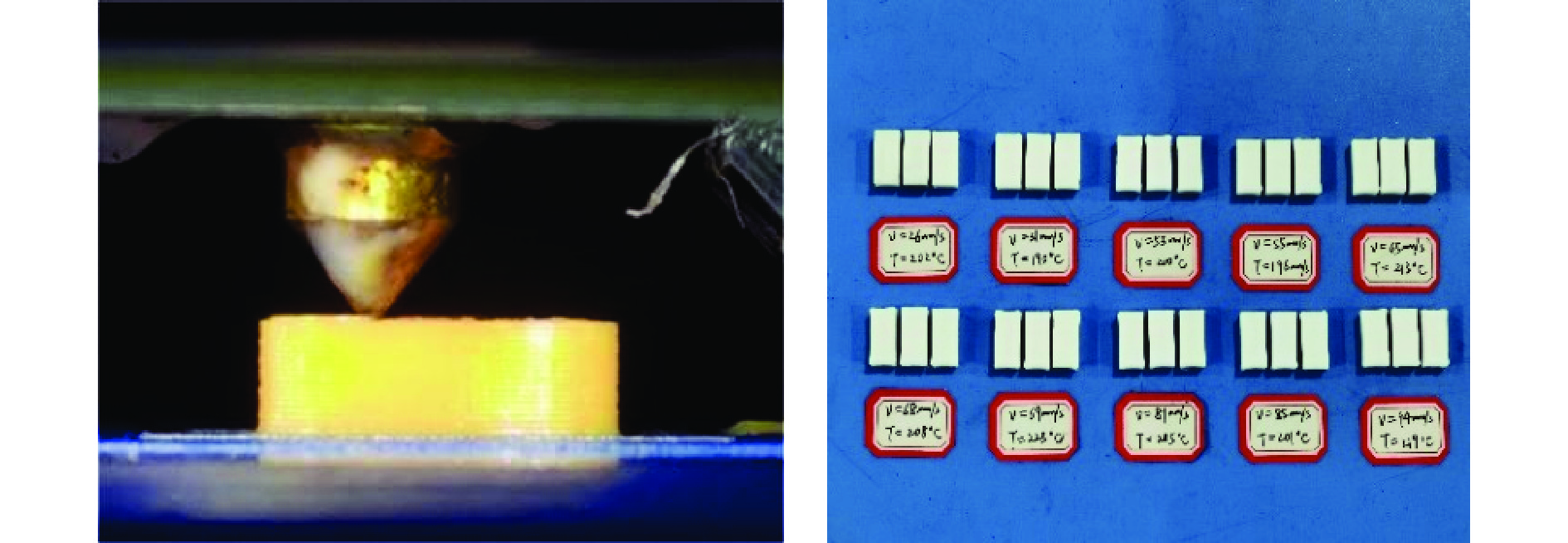
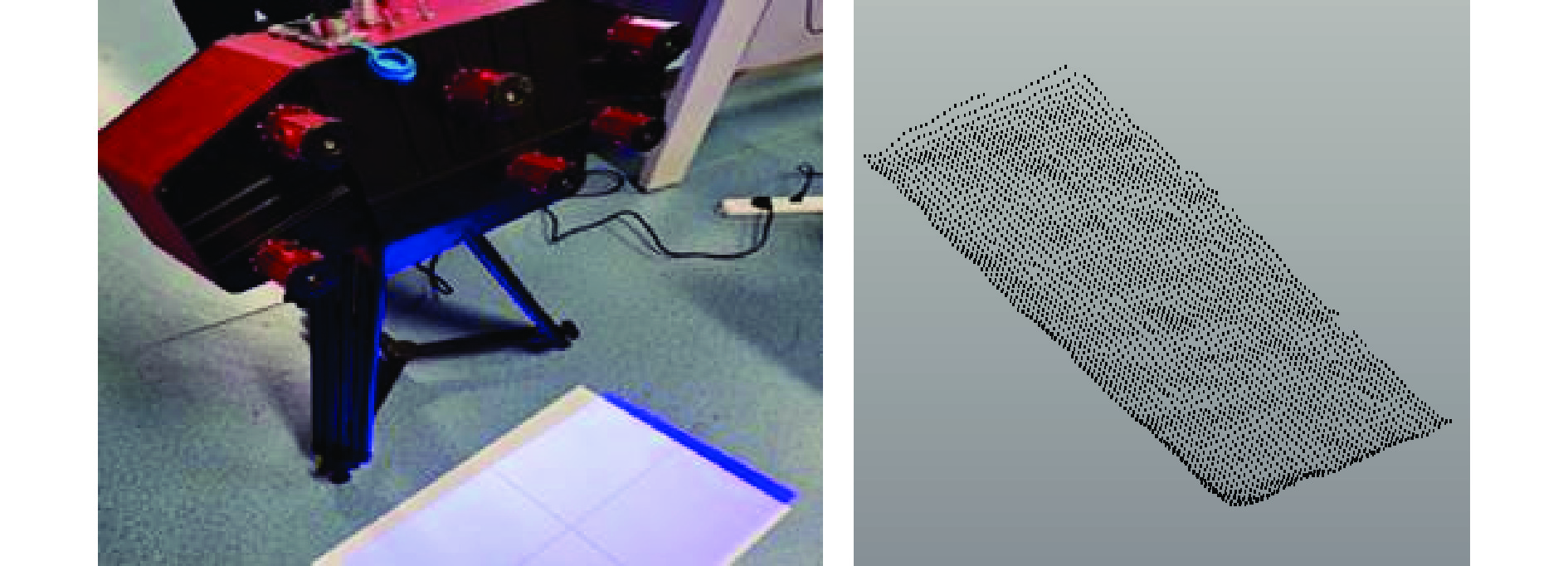
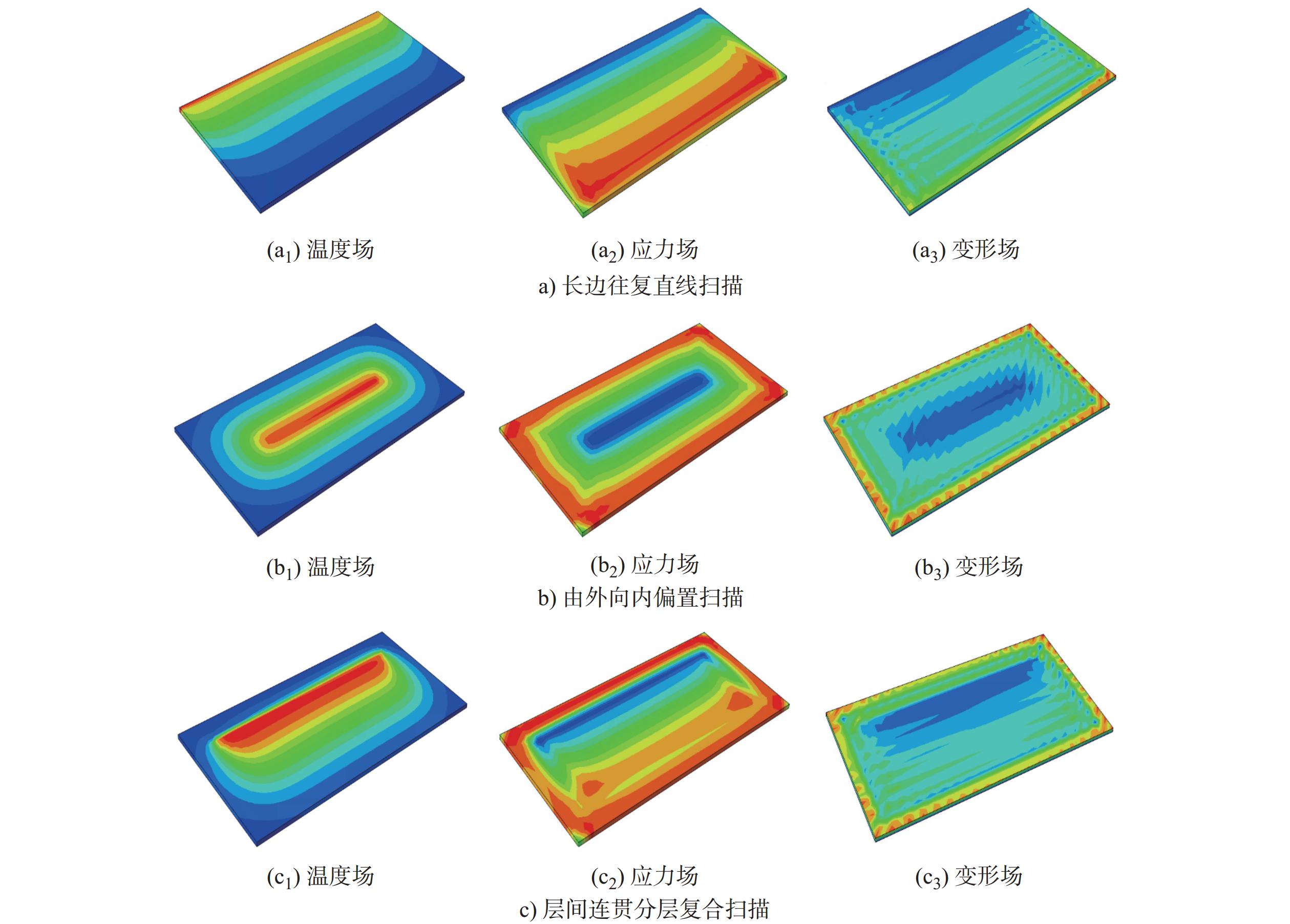
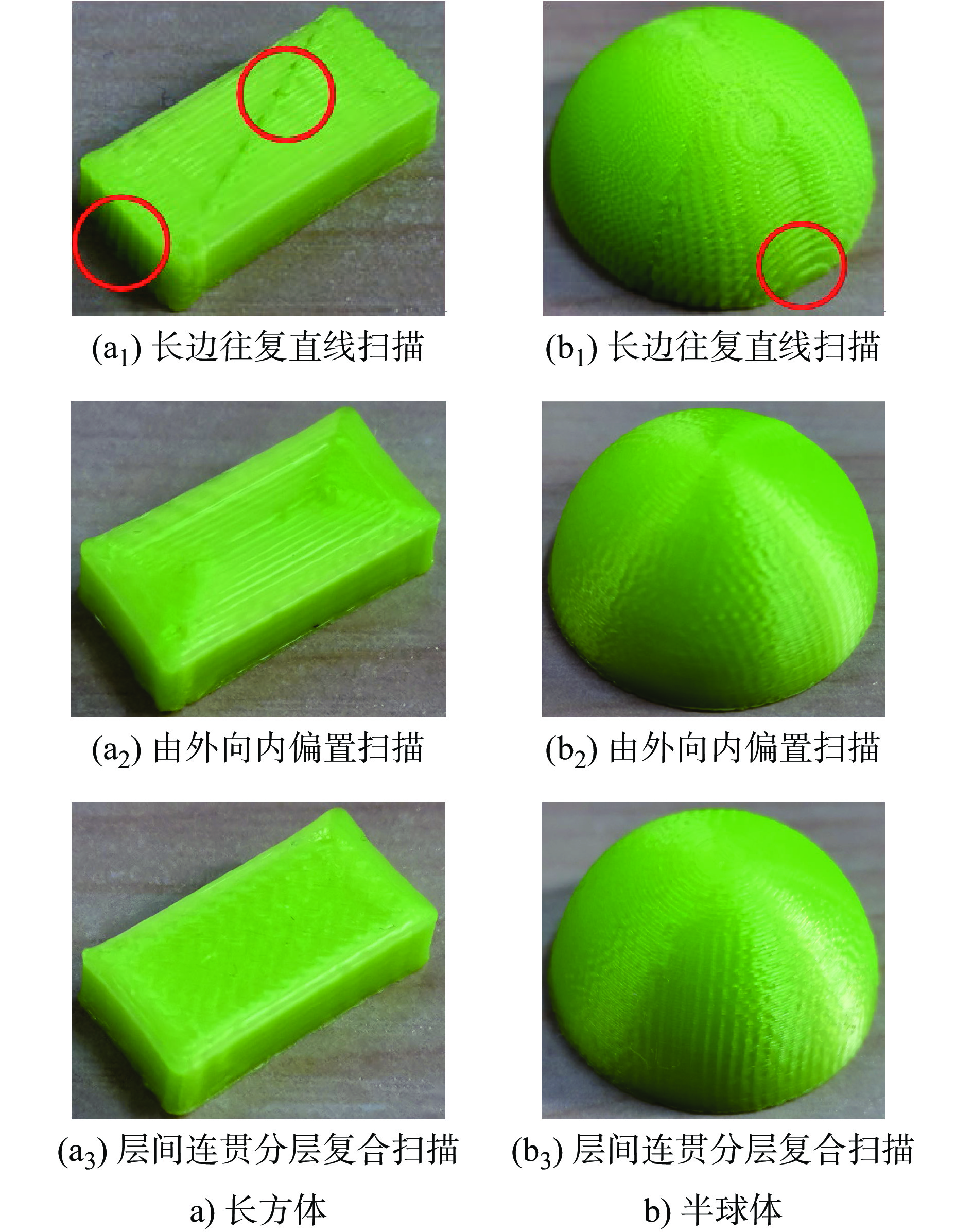
3D打印扫描路径是影响打印质量和效率的重要因素。本文在研究熔融沉积成型(Fused deposition modeling,FDM)打印原理及有限元仿真的基础上,旨在给出一种层间连贯分层复合扫描路径方法。首先分析了往复直线扫描与偏置扫描的工艺特点并提出了层间连贯的分层复合扫描路径;然后采用生死单元技术建立了FDM成形过程有限元模型并进行了实验验证。结合有限元仿真与实验,结果表明,本文所提扫描路径不仅将往复直线扫描和偏置扫描的优势融合,且分层复合的挤出方式增加了打印的连贯性和整体性。
3D打印扫描路径是影响打印质量和效率的重要因素。本文在研究熔融沉积成型(Fused deposition modeling,FDM)打印原理及有限元仿真的基础上,旨在给出一种层间连贯分层复合扫描路径方法。首先分析了往复直线扫描与偏置扫描的工艺特点并提出了层间连贯的分层复合扫描路径;然后采用生死单元技术建立了FDM成形过程有限元模型并进行了实验验证。结合有限元仿真与实验,结果表明,本文所提扫描路径不仅将往复直线扫描和偏置扫描的优势融合,且分层复合的挤出方式增加了打印的连贯性和整体性。