




A Multi-manipulator Cooperative Strategy Optimization Method with Time-varying Gangue Rate Considered
-
摘要: 针对煤炭生产过程中,原煤含矸率时变性引起分拣效率低的问题,本文综合考虑矸石质量、矸石识别置信度、机械臂分拣时间等因素,通过一种多因素融合效益矩阵的方法,优化时变含矸率条件下的多机械臂煤矸分拣策略。提出了一种基于效益矩阵的多机械臂协同策略模型,以分拣效益和拣矸率共同作为策略的评价标准。通过采用相似性原理,构建小样本矸石流模型;利用熵权法量化效益矩阵的元素参量;最后,采用FCFS策略方法及本文策略方法进行多组对比实验,实验结果表明,通过效益矩阵优化的多臂协同策略能够有效解决过矸量大时的矸石任务分配问题,相对FCFS策略方法,提高拣矸率的同时,有效提高了选煤质量。Abstract: In the process of coal production, the time varying of raw coal gangue rate causes low sorting efficiency. With the factors such as gangue quality, gangue recognition and manipulator sorting time considered, this paper uses the multi-factor fusion benefit matrix to optimize the multi-manipulator gangue sorting strategy under the condition of time-varying gangue rate. A multi-manipulator cooperative strategy model based on the benefit matrix was proposed. The sorting efficiency and the sorting gangue rate were used as evaluation criteria. A small sample gangue flow model is constructed by using the similarity principle. The element parameters of the benefit matrix are quantified with the entropy weight method. The experimental results show that the multi-manipulator cooperative strategy optimization method can effectively solve the gangue task allocation problem when the number of gangues is large. The gangue sorting rate and the sorted coal quality are effectively improved.
-
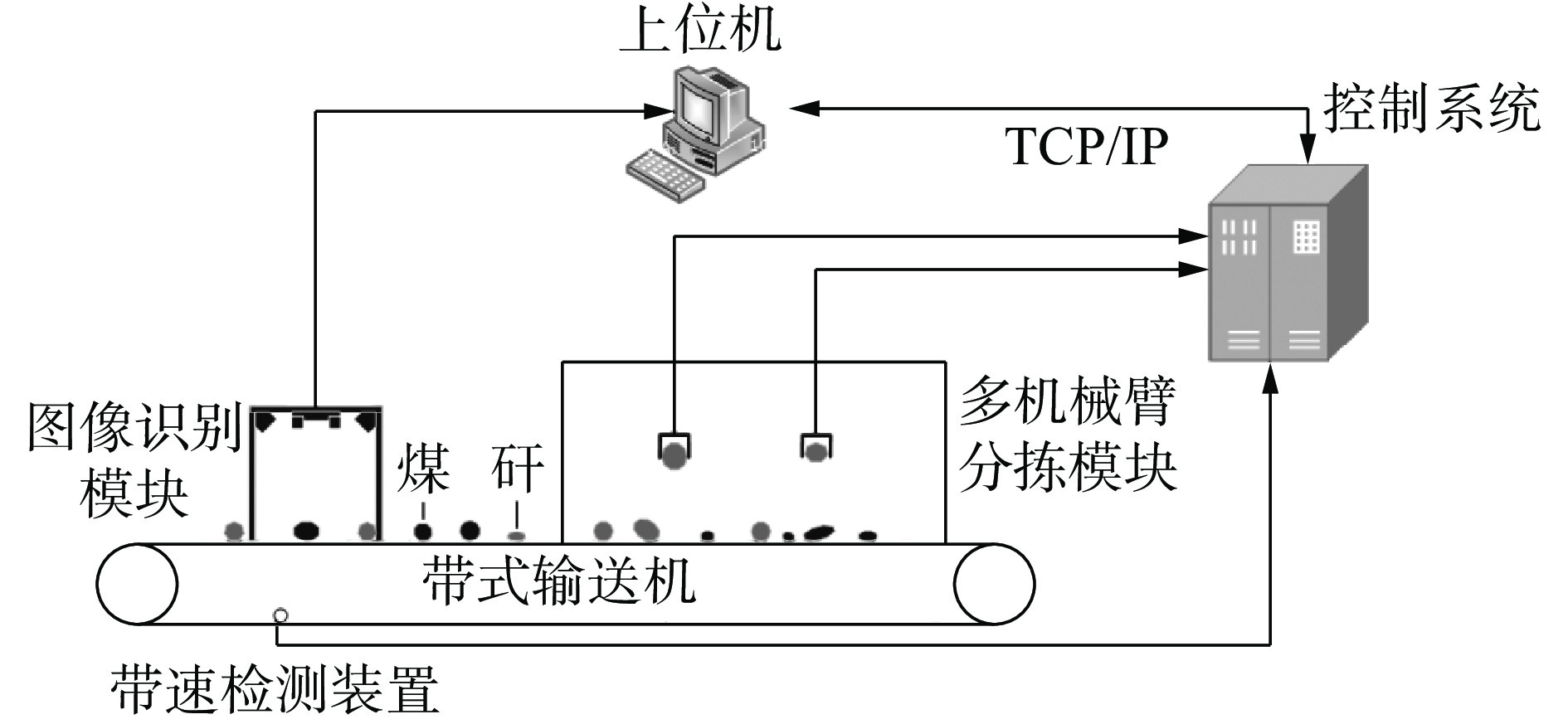
图 1 多机械臂协同煤矸分拣机器人系统架构
Figure 1. System architecture of multi-manipulator cooperative coal-gangue sorting robot
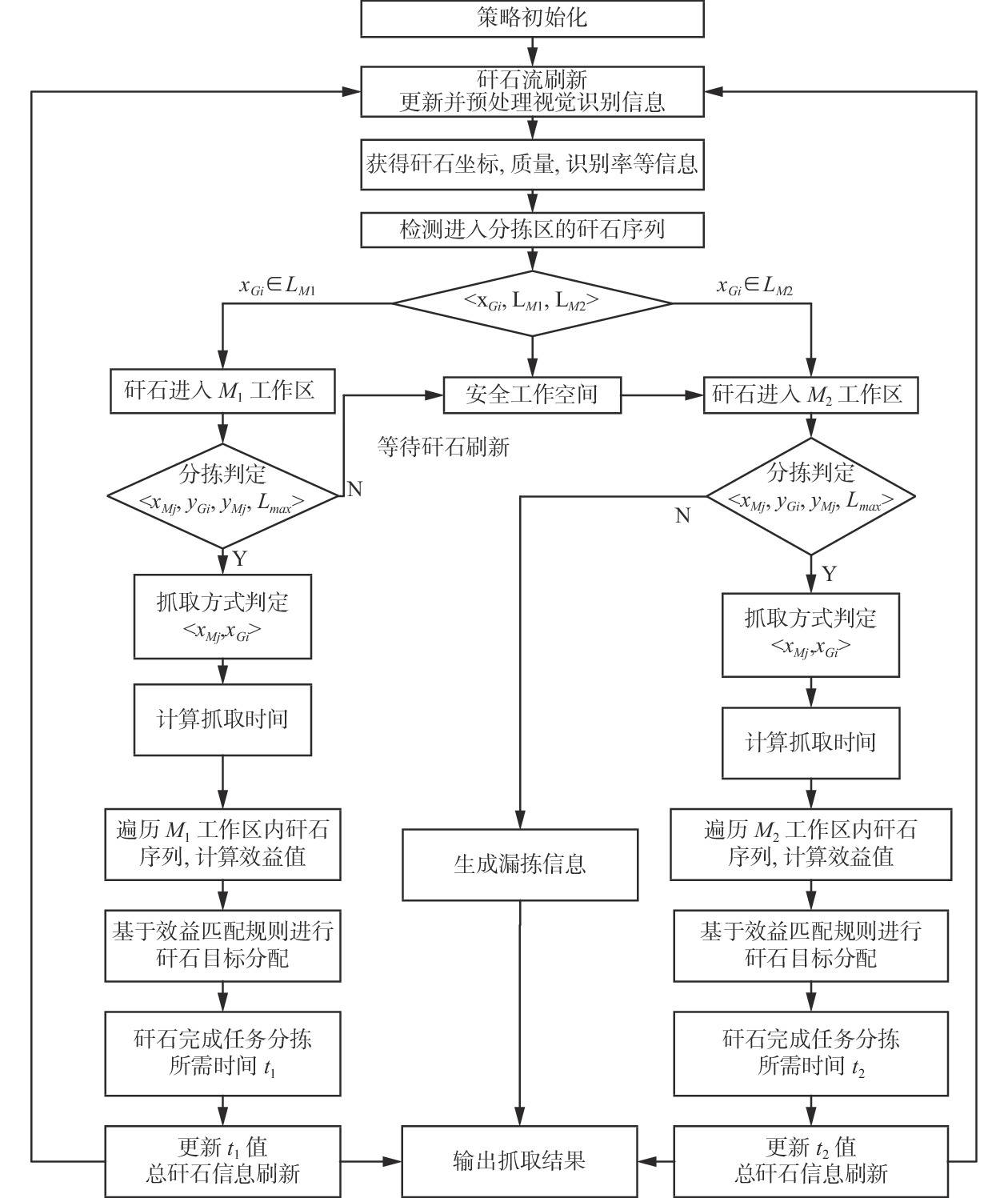
图 4 多机械臂协同煤矸分拣策略流程图
Figure 4. Flow chart of multi-manipulator cooperative coal-gangue sorting strategy

图 5 不同含矸率煤矸流任务分配结果
Figure 5. Task allocation results of coal gangue flow with different gangue contents
表 1 随机矸石流的求解结果
Table 1. The result of solving random gangue flow
含矸率/
%组 总个数 分拣
个数漏拣
个数拣矸
率/%分拣质量/
kg10 1 106 96 10 90.6 1028.28 106 101 5 95.2 1052.20 2 117 96 21 82.0 859.15 117 101 14 86.0 942.66 3 74 62 12 83.7 670.66 74 68 6 91.9 689.59 4 91 79 12 86.8 716.55 91 80 11 87.9 744.02 5 110 90 20 81.8 875.27 110 90 20 81.8 965.80 20 1 194 126 68 64.9 1342.34 194 143 51 73.7 1646.10 2 200 140 60 70.0 1523.70 200 153 45 76.5 1909.60 3 195 147 48 75.4 1587.79 195 159 36 81.5 1886.10 4 163 105 58 64.4 1041.56 163 113 50 69.3 1317.50 5 268 174 94 64.9 1679.06 268 195 73 72.8 2342.00 30 1 352 160 192 45.5 1546.92 352 170 180 48.0 2158.60 2 233 117 116 50.0 1285.00 233 138 112 59.2 2035.20 3 231 116 115 50.2 1134.12 231 130 101 56.3 1710.70 4 251 114 137 45.0 1118.19 251 123 128 49.0 1668.20 5 242 127 115 52.5 1254.65 242 135 107 55.8 1735.70 40 1 372 157 215 42.2 1784.47 372 162 210 43.5 3107.90 2 327 134 193 41.0 1484.83 327 148 177 45.3 2158.90 3 351 147 204 41.9 1731.05 351 163 188 46.4 2837.80 4 374 159 243 42.0 1856.00 374 172 202 45.9 3195.90 5 393 150 243 38.0 1551.52 393 159 234 40.5 2740.30  下载: 导出CSV
下载: 导出CSV
-
[1] WANG G F, XU Y X, REN H W. Intelligent and ecological coal mining as well as clean utilization technology in China: Review and prospects[J]. International Journal of Mining Science and Technology, 2019, 29(2): 161-169. doi: 10.1016/j.ijmst.2018.06.005 [2] LUTTRELL G H, HONAKER R Q. Coal preparation[M]//MALHOTRA R. Fossil Energy. New York: Springer, 2020: 357-386. [3] MIJAŁ W, TORA B. Development of dry coal gravity separation techniques[J]. IOP Conference Series: Materials Science and Engineering, 2018, 427(1): 012003. [4] 商德勇, 章林, 牛艳奇, 等. 煤矸分拣机器人设计与关键技术分析[J]. 煤炭科学技术, 2022, 50(3): 232-238.SHANG D Y, ZHANG L, NIU Y Q, et al. Design and key technology analysis of coal-gangue sorting robot[J]. Coal Science and Technology, 2022, 50(3): 232-238. (in Chinese) [5] ZHAO M H. Intelligent sorting system of coal gangue with machine vision[C]//2018 10th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC). Hangzhou: IEEE, 2018: 4-7. [6] SUN Z Y, HUANG L L, JIA R Q. Coal and gangue separating robot system based on computer vision[J]. Sensors, 2021, 21(4): 1349. doi: 10.3390/s21041349 [7] 郭永存, 于中山, 卢熠昌. 基于PSO优化NP-FSVM的煤矸光电智能分选技术研究[J]. 煤炭科学技术, 2019, 47(4): 13-19.GUO Y C, YU Z S, LU Y C. Research on photoelectric intelligent separation technology of coal and gangue based on NP-FSVM with the PSO algorithm[J]. Coal Science and Technology, 2019, 47(4): 13-19. (in Chinese) [8] 王鹏, 曹现刚, 夏晶, 等. 基于机器视觉的多机械臂煤矸石分拣机器人系统研究[J]. 工矿自动化, 2019, 45(9): 47-53.WANG P, CAO X G, XIA J, et al. Research on multi-manipulator coal and gangue sorting robot system based on machine vision[J]. Industry and Mine Automation, 2019, 45(9): 47-53. (in Chinese) [9] 曹现刚, 费佳浩, 王鹏, 等. 基于多机械臂协同的煤矸分拣方法研究[J]. 煤炭科学技术, 2019, 47(4): 7-12.CAO X G, FEI J H, WANG P, et al. Study on coal-gangue sorting method based on multi-manipulator collaboration[J]. Coal Science and Technology, 2019, 47(4): 7-12. (in Chinese) [10] 裴新宇, 刘宝举, 邓敏, 等. 基于合同网的对地观测资源动态协同规划方法[J]. 北京航空航天大学学报, 2020, 46(10): 1853-1862.PEI X Y, LIU B J, DENG M, et al. Dynamic collaborative planning method of earth observation resources based on contract network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1853-1862. (in Chinese) [11] 吴仁杰, 阴艳超, 徐凯. 机械臂多任务协同建模与分配方法[J]. 机械科学与技术, 2020, 39(3): 433-437.WU R J, YIN Y C, XU K. Multi-task collaborative modeling and assignment method of manipulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(3): 433-437. (in Chinese) [12] 秦新立, 宗群, 李晓瑜, 等. 基于改进蚁群算法的多机器人任务分配[J]. 空间控制技术与应用, 2018, 44(5): 55-59.QIN X L, ZONG Q, LI X Y, et al. Task allocation of multi-robot based on improved ant colony algorithm[J]. Aerospace Control and Application, 2018, 44(5): 55-59. (in Chinese) [13] 邹适宇, 李复名, 谢爱平, 等. 基于改进烟花算法的资源分配[J]. 航空学报, 2021, 42(9): 324716.ZOU S Y, LI F M, XIE A P, et al. Resource allocation based on improved fireworks algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(9): 324716. (in Chinese) [14] 栾飞, 吴书强, 李富康, 等. 一种求解柔性作业车间调度问题的鲸鱼群优化算法[J]. 机械科学与技术, 2020, 39(2): 241-246.LUAN F, WU S Q, LI F K, et al. A whale swarm optimization algorithm for solving flexible job shop scheduling problem[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(2): 241-246. (in Chinese) [15] 段俊花, 朱怡安, 黄姝娟, 等. 多模态融合的多机器人任务分配算法研究[J]. 西北工业大学学报, 2013, 31(6): 974-978.DUAN J H, ZHU Y A, HUANG S J, et al. A new multi-robot task allocation algorithm based on multi-modality synthesis[J]. Journal of Northwestern Polytechnical University, 2013, 31(6): 974-978. (in Chinese) [16] BIBU G D, NWANKWO G C. Comparative analysis between first-come-first-serve (FCFS) and shortest-job- first (SJF) scheduling algorithms[J]. International Journal of Computer Science and M obile Computing, 2019, 8(5): 176-181. [17] 曹现刚, 吴旭东, 王鹏, 等. 面向煤矸分拣机器人的多机械臂协同策略[J]. 煤炭学报, 2019, 44(S2): 763-774.CAO X G, WU X D, WANG P, et al. Collaborative strategy of multi-manipulator for coal-gangue sorting robot[J]. Journal of China Coal Society, 2019, 44(S2): 763-774. (in Chinese) [18] HUANG D, HAN M. Research on evaluation method of freight transportation environmental sustainability[J]. Sustainability, 2021, 13(5): 2913. doi: 10.3390/su13052913 [19] LIM H, KIM S, KIM Y, et al. Relative importance analysis of safety climate evaluation factors using analytical hierarchical process (AHP)[J]. Sustainability, 2021, 13(8): 4212. doi: 10.3390/su13084212 [20] ZHU Y X, TIAN D Z, YAN F. Effectiveness of entropy weight method in decision-making[J]. Mathematical Problems in Engineering, 2020, 2020: 3564835. -




 点击查看大图
点击查看大图
计量
- 文章访问数: 70
- HTML全文浏览量: 51
- PDF下载量: 11
- 被引次数: 0
