




Applying Optical Motion Capture to Teleoperation Control of Manipulator
-
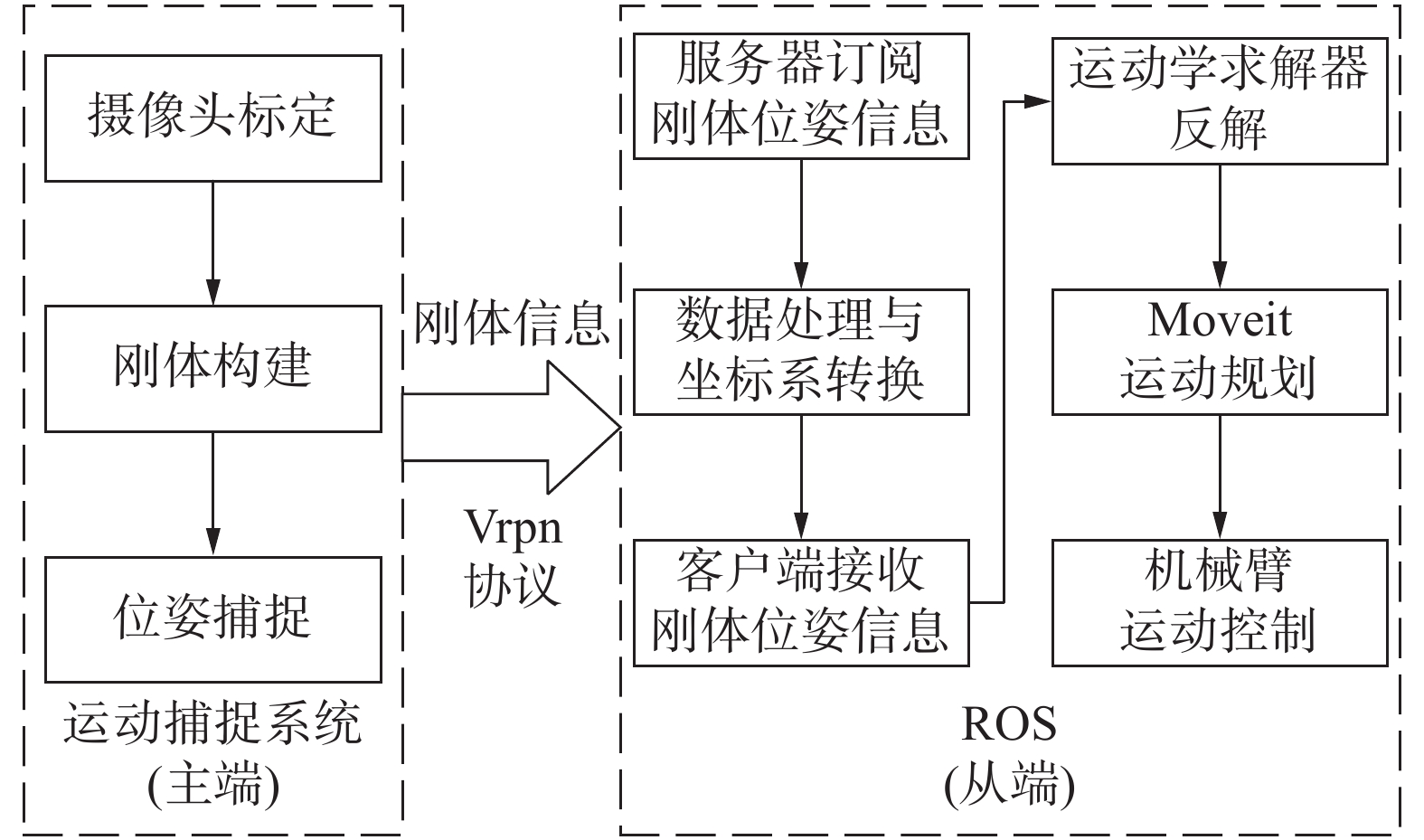
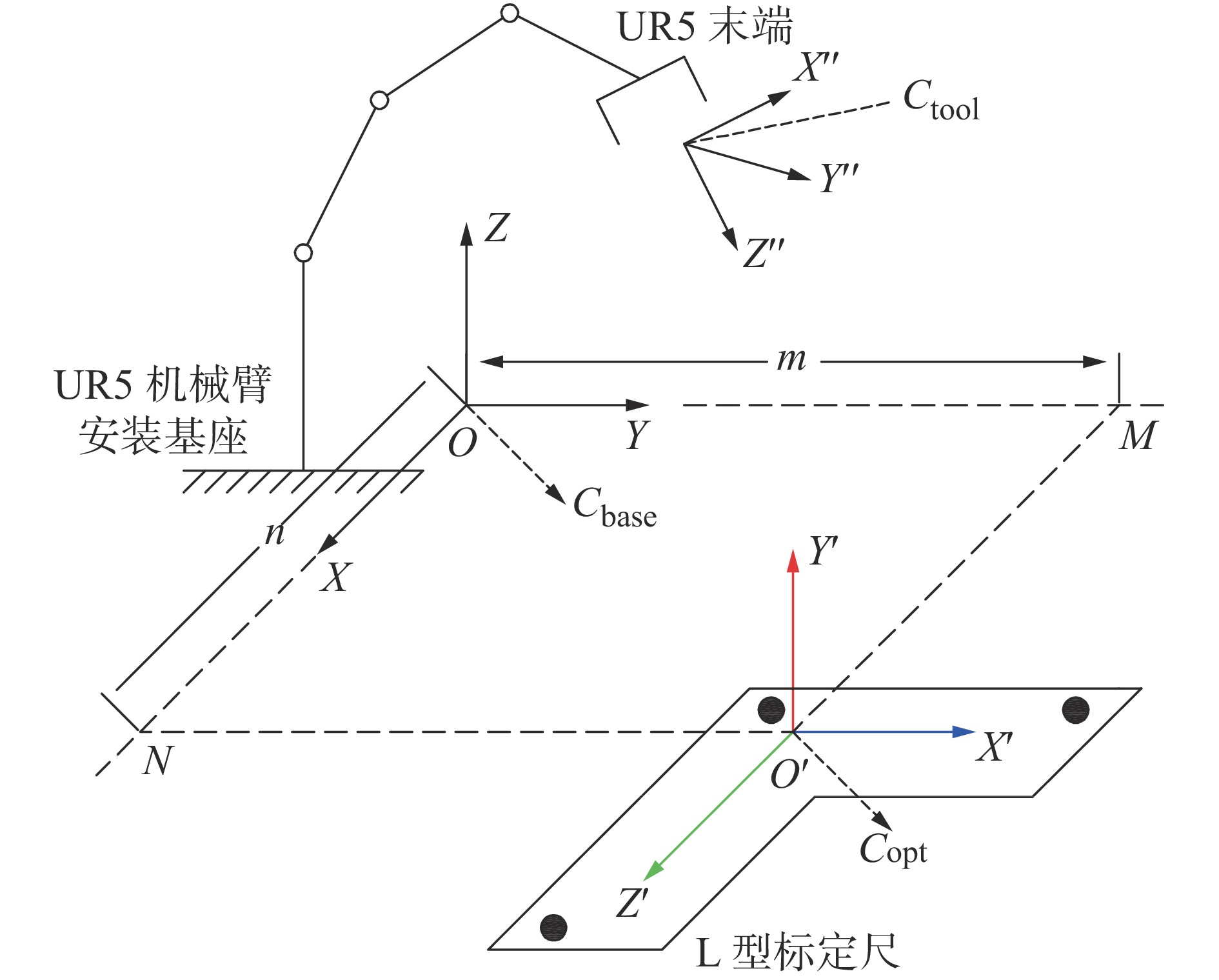
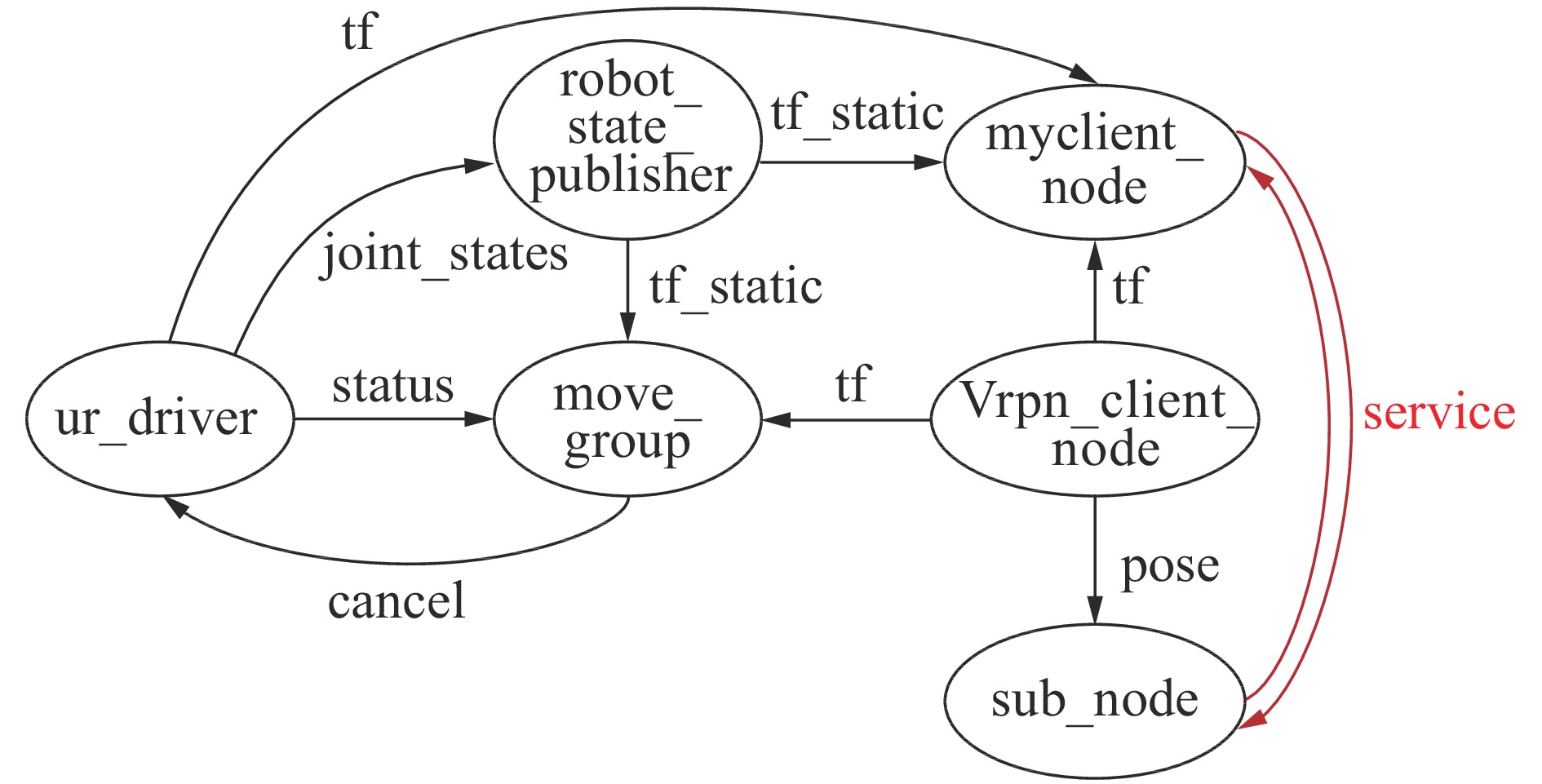
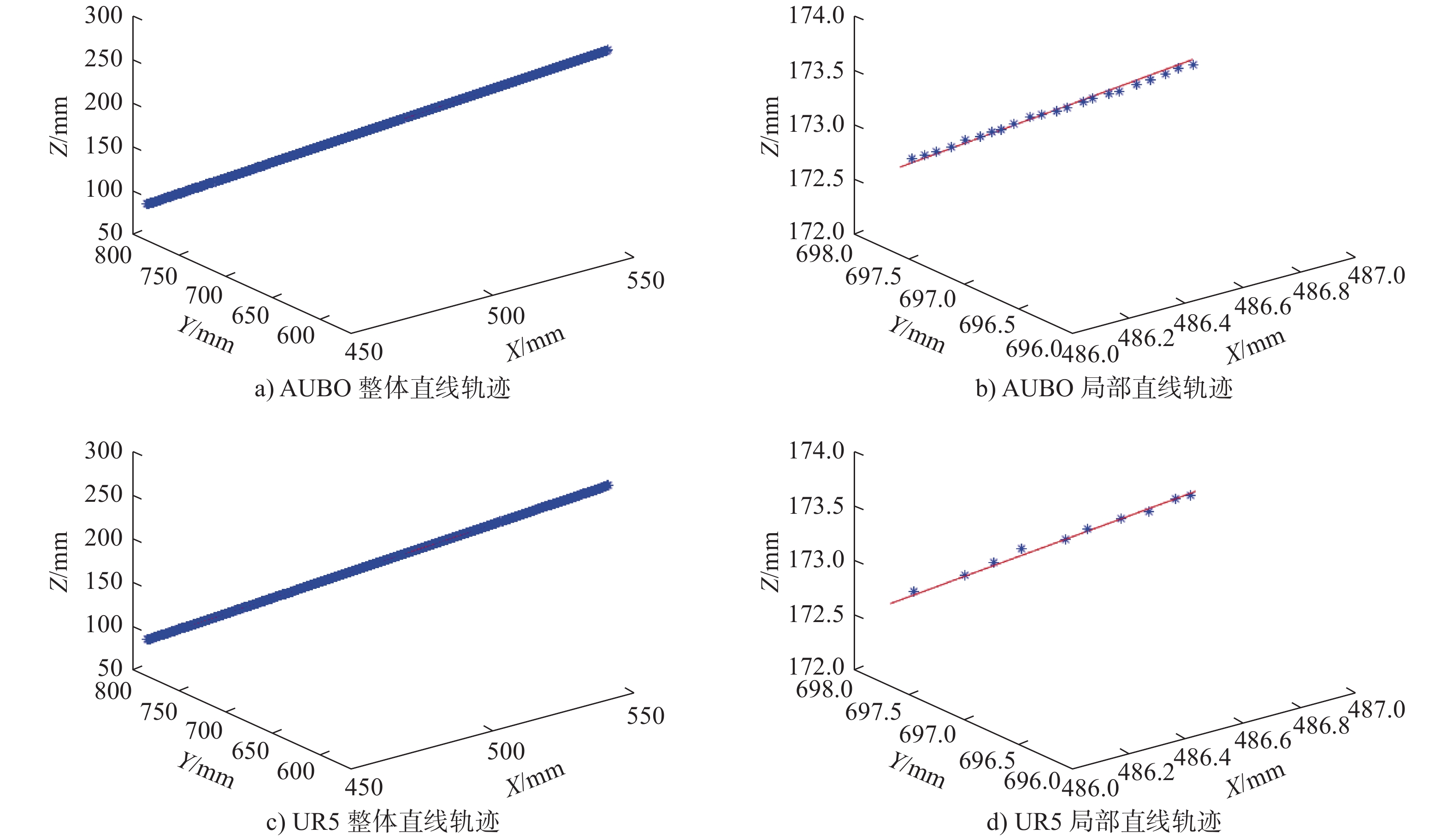
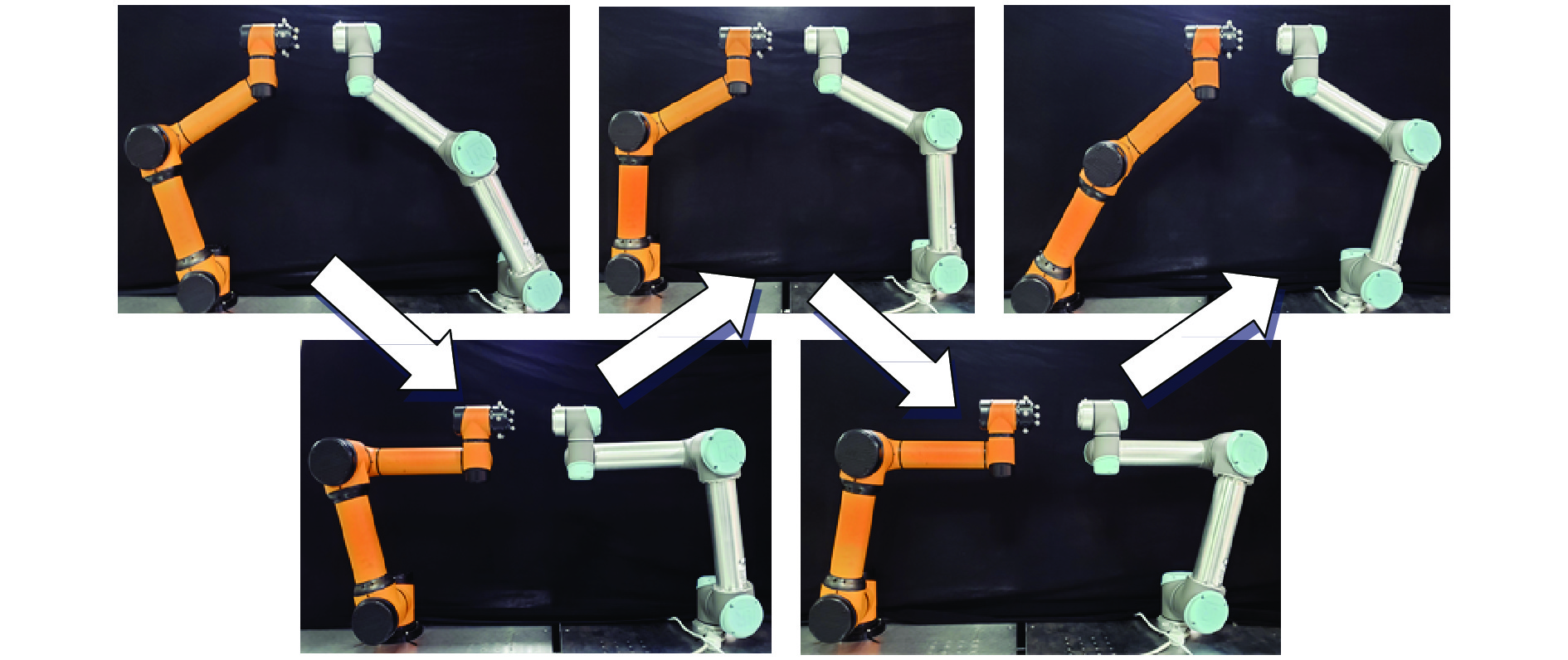
摘要: 针对传统机械臂的遥操作控制直观性不强、操作繁琐等问题,本文提出了一种基于光学运动捕捉的机械臂遥操作控制方法。建立了运动捕捉系统与机械臂的标定模型,实现了坐标系之间的转换;在ROS-kinetic中建立服务器和客户端,实现了不同系统数据之间相互转化与实时传输。通过在引导机械臂末端粘贴标记点、构建刚体的方式进行跟踪试验,结果表明该方法降低了主端的复杂程度,在保证从端操作精度的情况下,可实时地完成六自由度机械臂遥操作任务,方法操作简单、可移植性和可扩展性强。Abstract: Because the teleoperation control of a traditional manipulator has poor intuition and cumbersome operation, the teleoperation control method of a manipulator based on optical motion capture is proposed in this paper. The calibration model of motion capture system and manipulator is established, and the transformation between coordinate systems is realized. The server and client are established with the kinetics of a robot operating system to realize the mutual transformation and real-time transmission of data between different systems. The results show that this method reduces the complexity of the master end and can complete the teleoperation task of the 6-DOF manipulator in real time under the condition of ensuring the operation accuracy of the slave end. The method has the advantage of simple operation, strong portability and expansibility.
-
Key words:
- motion capture /
- robot operating system(ROS) /
- teleoperation /
- manipulator
-
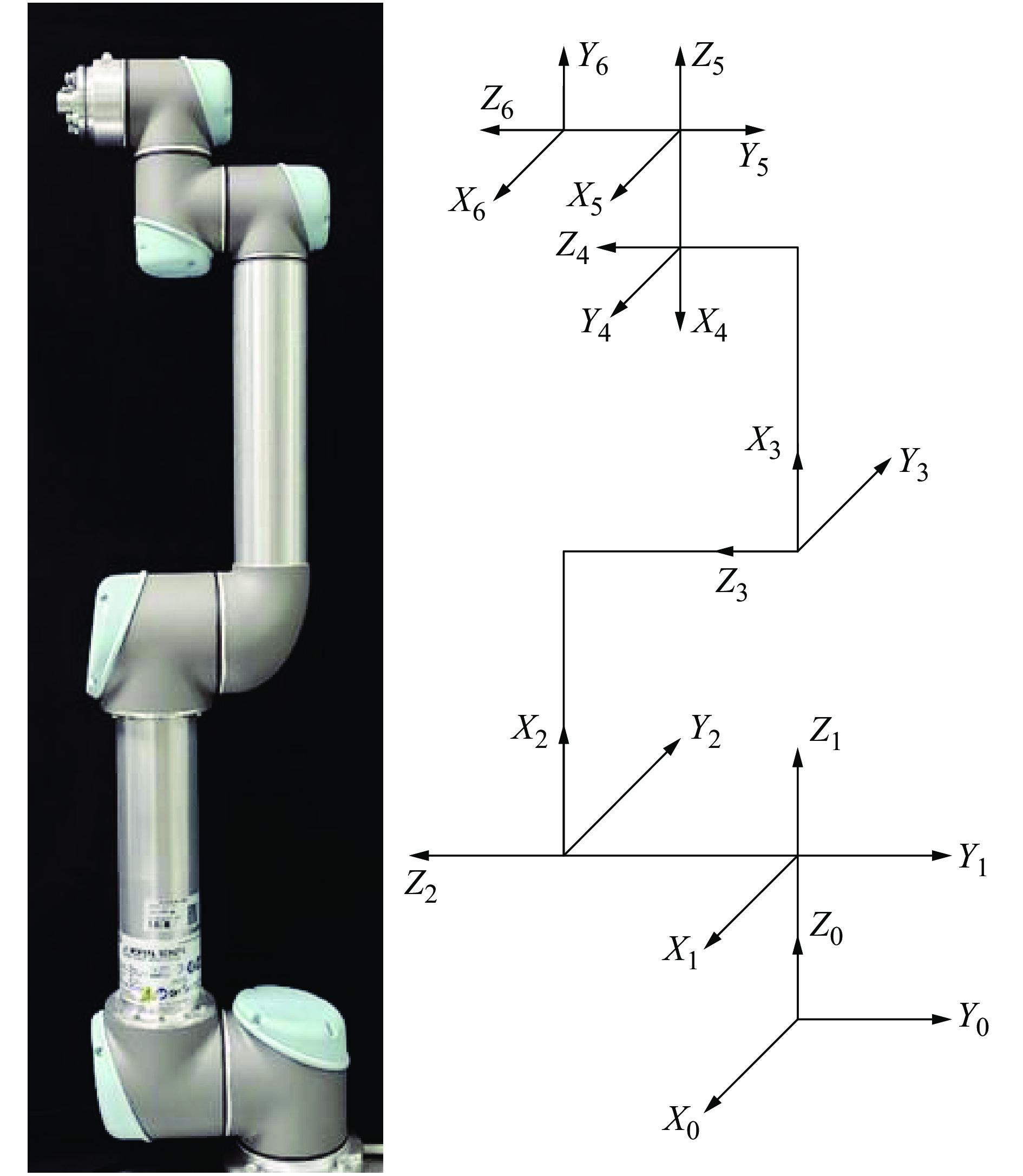
表 1 UR5机械臂D-H参数
Table 1. D-H parameters of UR5 robotic arm
i ai/mm αi/(°) di/mm θi/(°) 1 0 90 89.5 0 2 −425 0 0 −90 3 −392 0 0 0 4 0 90 109.2 −90 5 0 −90 94.65 0 6 0 0 82.3 0  下载: 导出CSV
下载: 导出CSV
表 2 运动响应时间
Table 2. Motion response time
单点跟踪试验次数 算法计算时间t/s 运动响应时间T/s 1 0.007694 0.48 2 0.005931 0.62 3 0.009961 0.69 4 0.007540 0.58 5 0.007053 0.36 6 0.006251 0.72 7 0.005666 0.58 8 0.008269 0.66 9 0.004213 0.32 10 0.006933 0.49
下载: 导出CSV
-
[1] YANA Y, HUA C C, GUAN X P. Finite-time synchronization control for bilateral teleoperation under communication delays[J]. Robotics and Computer-Integrated Manufacturing, 2015, 31: 61-69. doi: 10.1016/j.rcim.2014.07.001 [2] WELKER C G, CHIU V L, VOLOSHINA A S, et al. Teleoperation of an ankle-foot prosthesis with a wrist exoskeleton[J]. IEEE Transactions on Biomedical Engineering, 2021, 68(5): 1714-1725. doi: 10.1109/TBME.2020.3046357 [3] XIONG P W, ZHU X D, SONG A G, et al. A target grabbing strategy for telerobot based on improved stiffness display device[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 661-667. doi: 10.1109/JAS.2016.7510256 [4] 王朝阳, 曲家迪, 张福海, 等. 基于Kinect的类人机械臂关节运动直接示教[J]. 机器人, 2017, 39(5): 697-703. doi: 10.13973/j.cnki.robot.2017.0697WANG C Y, QU J D, ZHANG F H, et al. Direct teaching in joint space for humanoid manipulator using Kinect[J]. Robot, 2017, 39(5): 697-703. (in Chinese) doi: 10.13973/j.cnki.robot.2017.0697 [5] 卢明林, 张宇, 张攀峰, 等. 基于遥操作的焊接机器人连续轨迹系统设计[J]. 机械设计与制造, 2019(2): 238-241. doi: 10.3969/j.issn.1001-3997.2019.02.060LU M L, ZHANG Y, ZHANG P F, et al. The continuous path control system design of welding robot based on Tele-operation[J]. Machinery Design & Manufacture, 2019(2): 238-241. (in Chinese) doi: 10.3969/j.issn.1001-3997.2019.02.060 [6] 倪涛, 朱厚文, 张红彦, 等. 基于手控器触觉共享控制的主从遥操作[J]. 农业机械学报, 2016, 47(12): 367-372. doi: 10.6041/j.issn.1000-1298.2016.12.046NI T, ZHU H W, ZHANG H Y, et al. Master-slave teleoperation based on haptic device tactile shared control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(12): 367-372. (in Chinese) doi: 10.6041/j.issn.1000-1298.2016.12.046 [7] 李家霖, 杨洋, 杨铁, 等. 外骨骼式遥操作主手设计及主从异构映射算法研究[J]. 机器人, 2020, 42(6): 651-660.LI J L, YANG Y, YANG T, et al. Design of exoskeletal teleoperation master device and research on master-slave isomerism mapping algorithm[J]. Robot, 2020, 42(6): 651-660. (in Chinese) [8] REBELO J, SEDNAOUI T, DEN EXTER E B, et al. Bilateral robot teleoperation: a wearable arm exoskeleton featuring an intuitive user interface[J]. IEEE Robotics & Automation Magazine, 2014, 21(4): 62-69. [9] 李海源, 刘畅, 严鲁涛, 等. 上肢外骨骼机器人的阻抗控制与关节试验研究[J]. 机械工程学报, 2020, 56(19): 200-209. doi: 10.3901/JME.2020.19.200LI H Y, LIU C, YAN L T, et al. Research on impendence control of an upper limb exoskeleton robot and joint experiments[J]. Journal of Mechanical Engineering, 2020, 56(19): 200-209. (in Chinese) doi: 10.3901/JME.2020.19.200 [10] QUIGLEY M, CONLEY K, GERKEY B P, et al. ROS: an open-source robot operating system[C]//Proceedings of the ICRA Workshop on Open Source Software, 2009 [11] 陈英龙, 宋甫俊, 张军豪, 等. 基于临场感的遥操作机器人共享控制研究综述[J]. 浙江大学学报(工学版), 2021, 55(5): 831-842. doi: 10.3785/j.issn.1008-973X.2021.05.004CHEN Y L, SONG F J, ZHANG J H, et al. Telerobotic shared control strategy based on telepresence: a review[J]. Journal of Zhejiang University (Engineering Science), 2021, 55(5): 831-842. (in Chinese) doi: 10.3785/j.issn.1008-973X.2021.05.004 [12] 曾欣, 宋爱国, 周永辉, 等. 面向机械臂遥操作的虚拟人机交互系统设计[J]. 载人航天, 2020, 26(3): 353-360. doi: 10.3969/j.issn.1674-5825.2020.03.013ZENG X, SONG A G, ZHOU Y H, et al. Design of a virtual human-machine system for manipulator teleoperation[J]. Manned Spaceflight, 2020, 26(3): 353-360. (in Chinese) doi: 10.3969/j.issn.1674-5825.2020.03.013 [13] 杨淞麟, 刘满禄, 张俊俊, 等. 核应急机器人末端工具快换装置的设计及分析[J]. 机械设计, 2021, 38(7): 56-62. doi: 10.13841/j.cnki.jxsj.2021.07.009YANG S L, LIU M L, ZHANG J J, et al. Design and analysis of the end-effector's quick-change device for nuclear emergency-response robots[J]. Journal of Machine Design, 2021, 38(7): 56-62. (in Chinese) doi: 10.13841/j.cnki.jxsj.2021.07.009 [14] GUO Z Y, YANG W J, LI M L, et al. ALLIANCE-ROS: a software framework on ROS for fault-tolerant and cooperative mobile robots[J]. Chinese Journal of Electronics, 2018, 27(3): 467-475. doi: 10.1049/cje.2018.03.001 [15] TAYLOR R M, HUDSON T C, SEEGER A, et al. VRPN[P]. Virtual Reality Software and Technology, 2001. -




 点击查看大图
点击查看大图

图(11) / 表(2)
计量
- 文章访问数: 74
- HTML全文浏览量: 95
- PDF下载量: 22
- 被引次数: 0
