




Simulation on Multi-joint Power Assignment of Power-assisted Exoskeleton in Human-machine Carrying
-
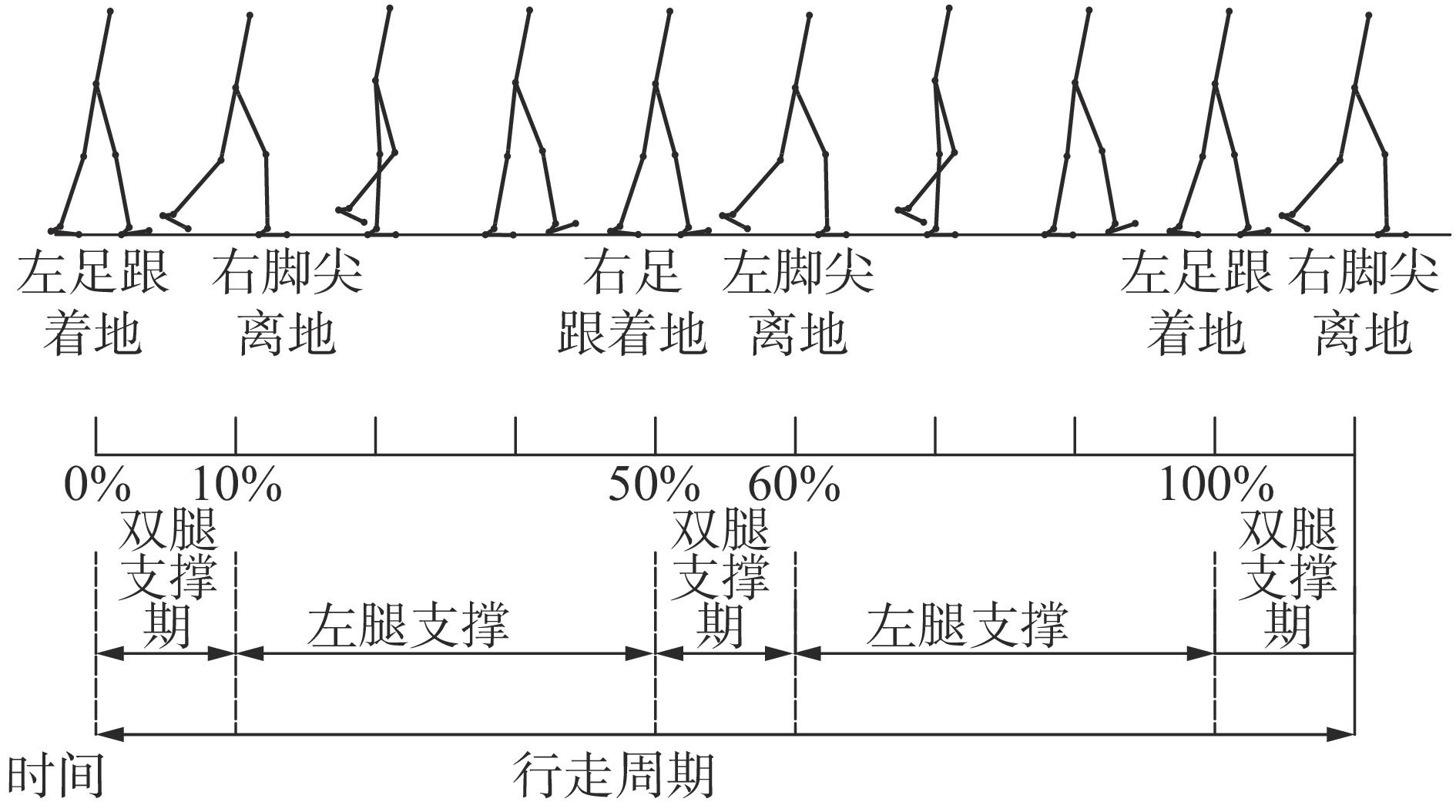
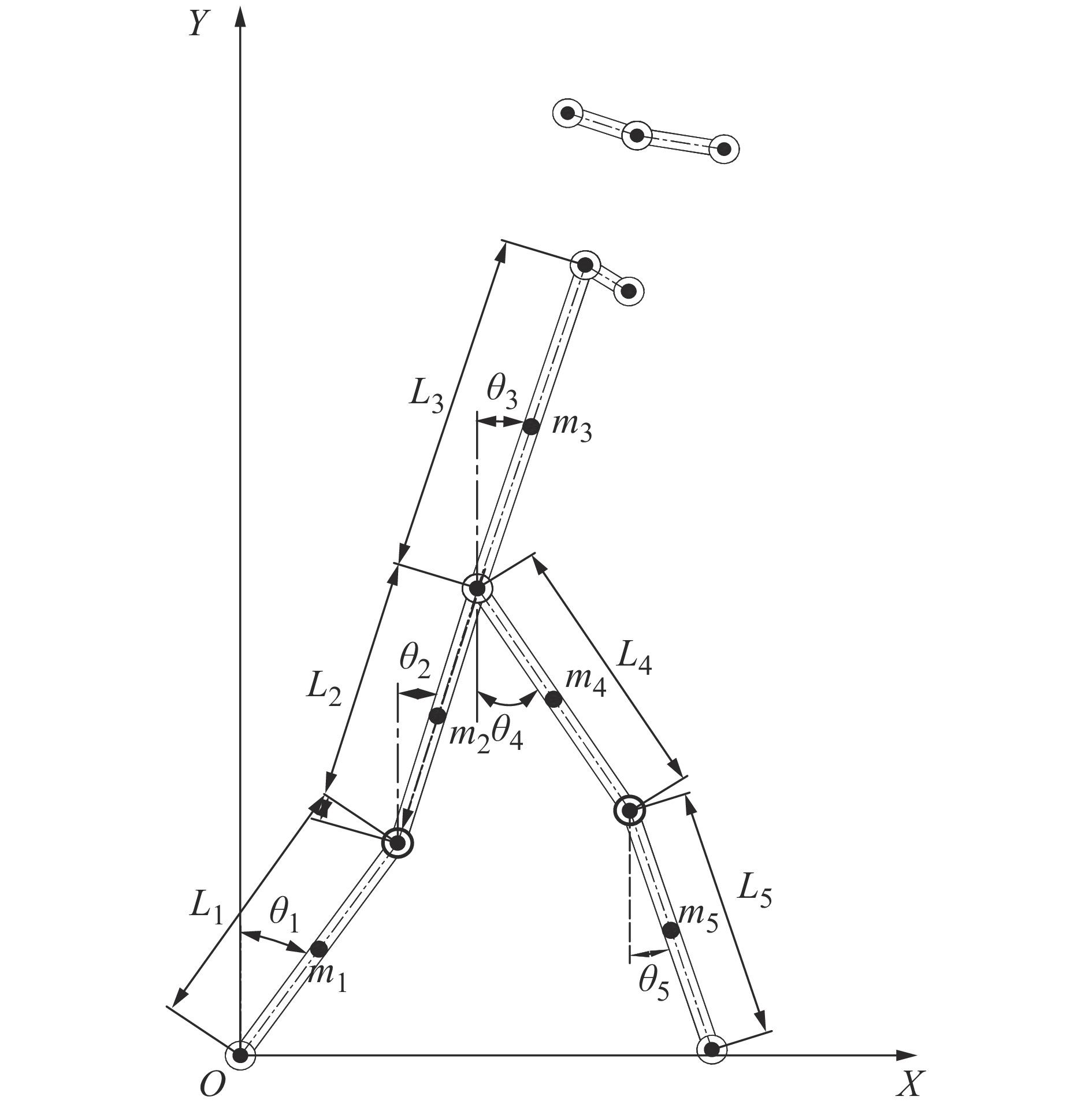
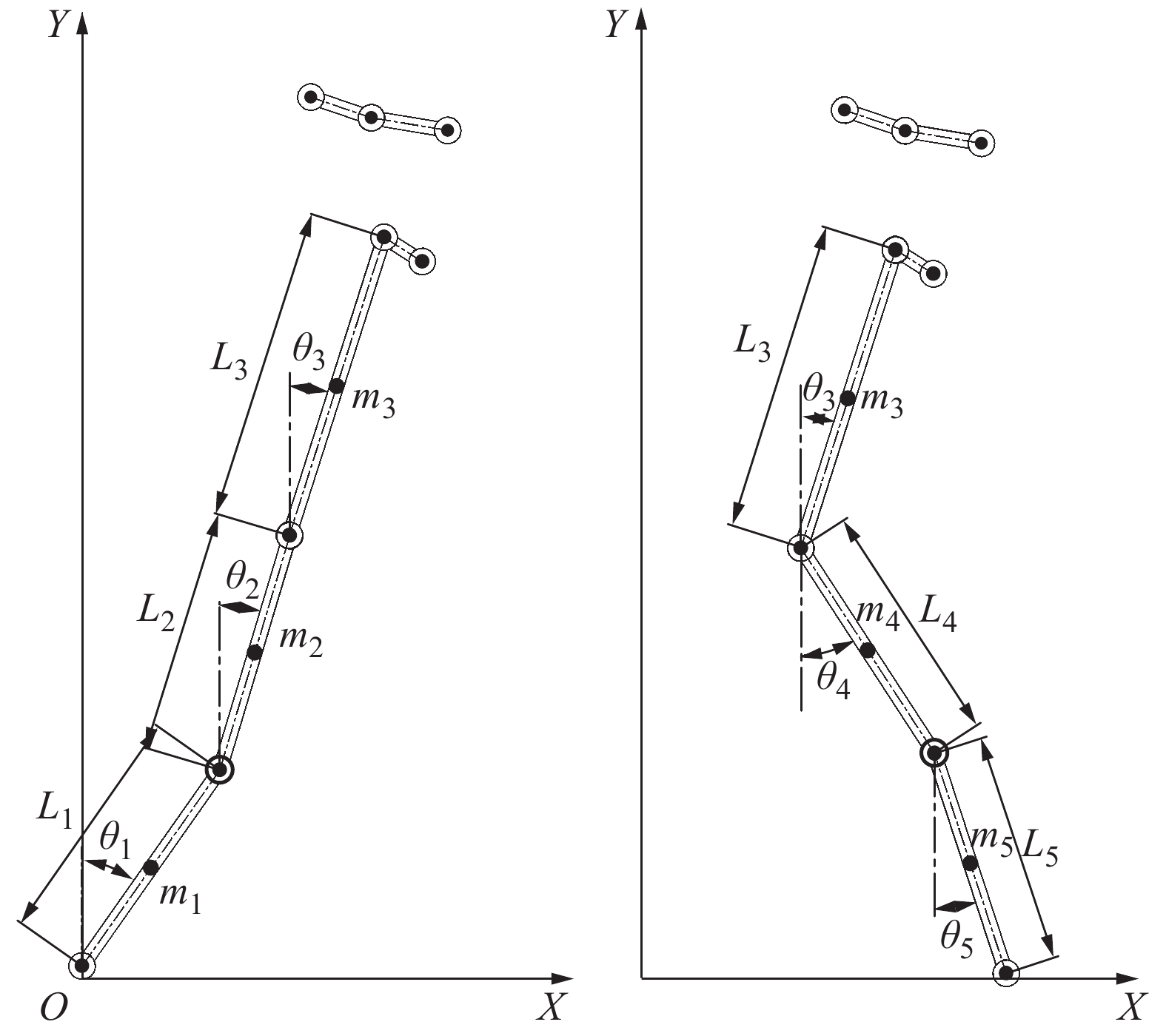
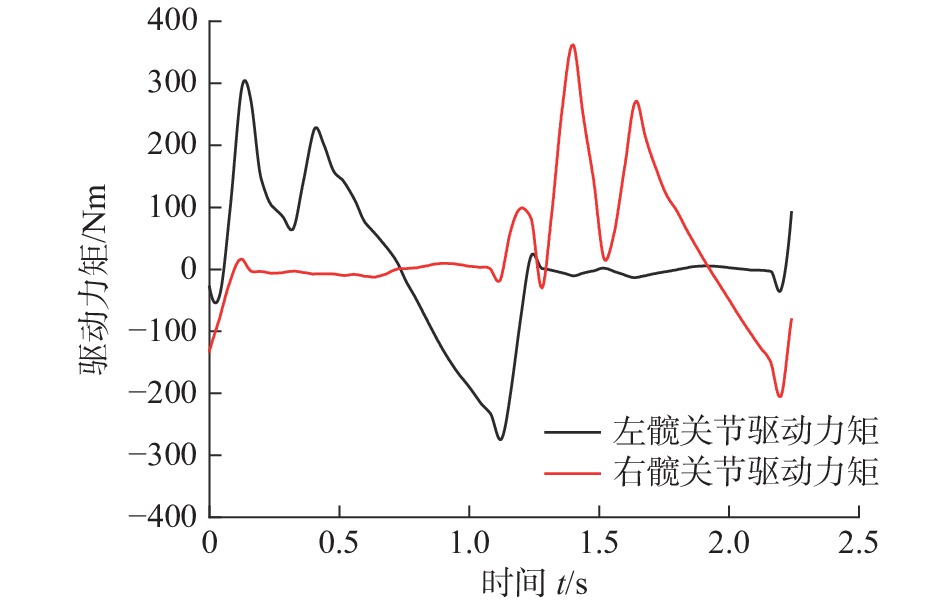
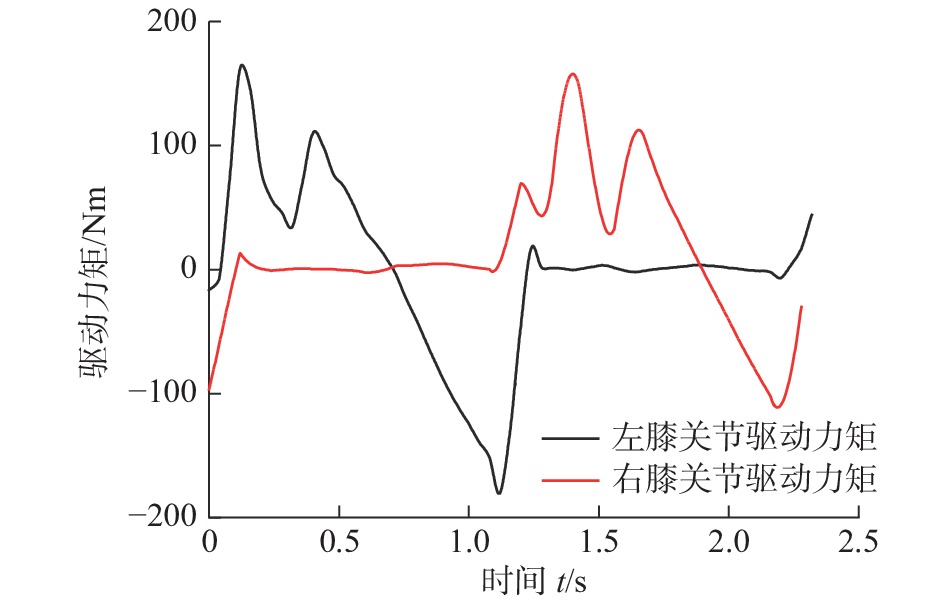
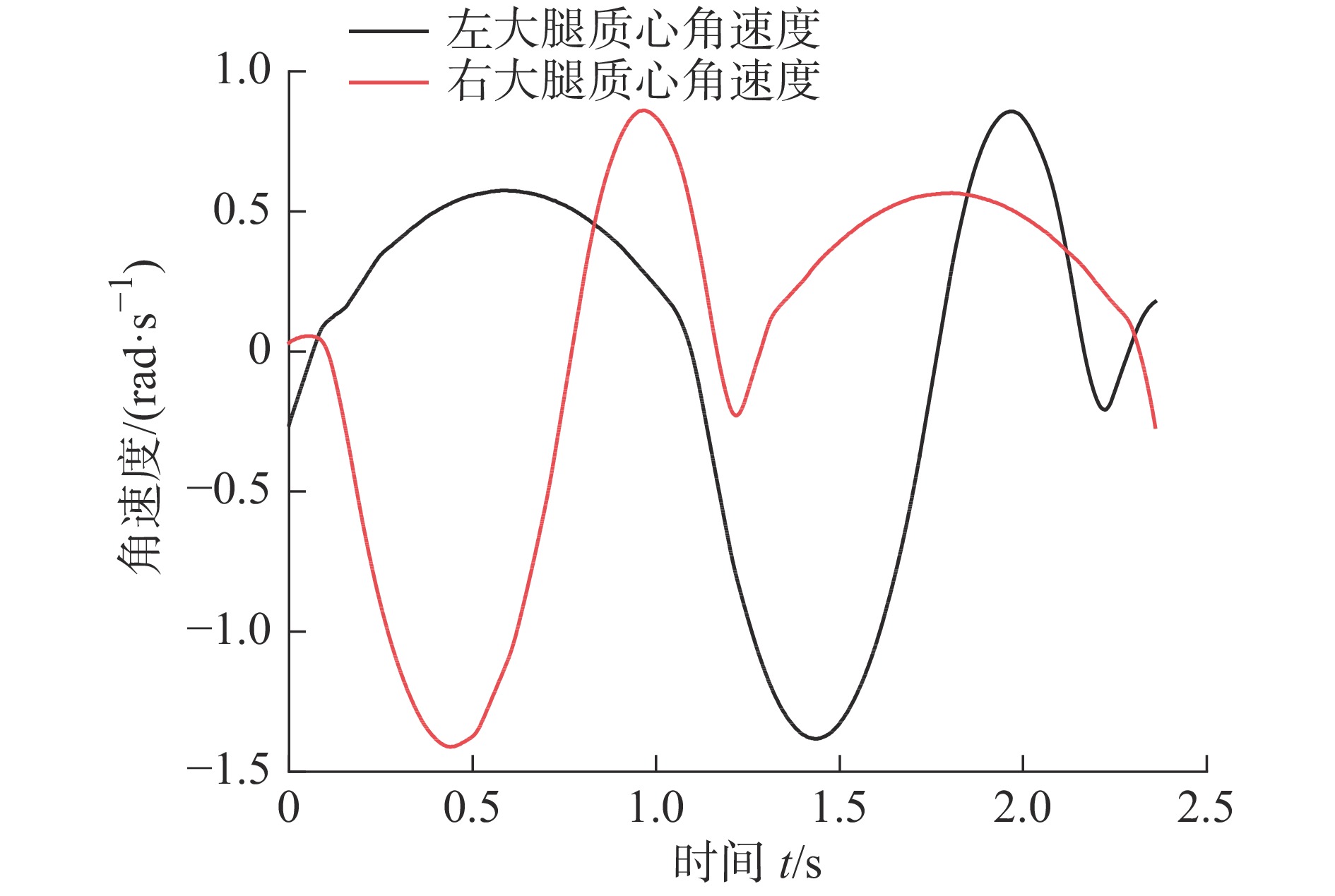
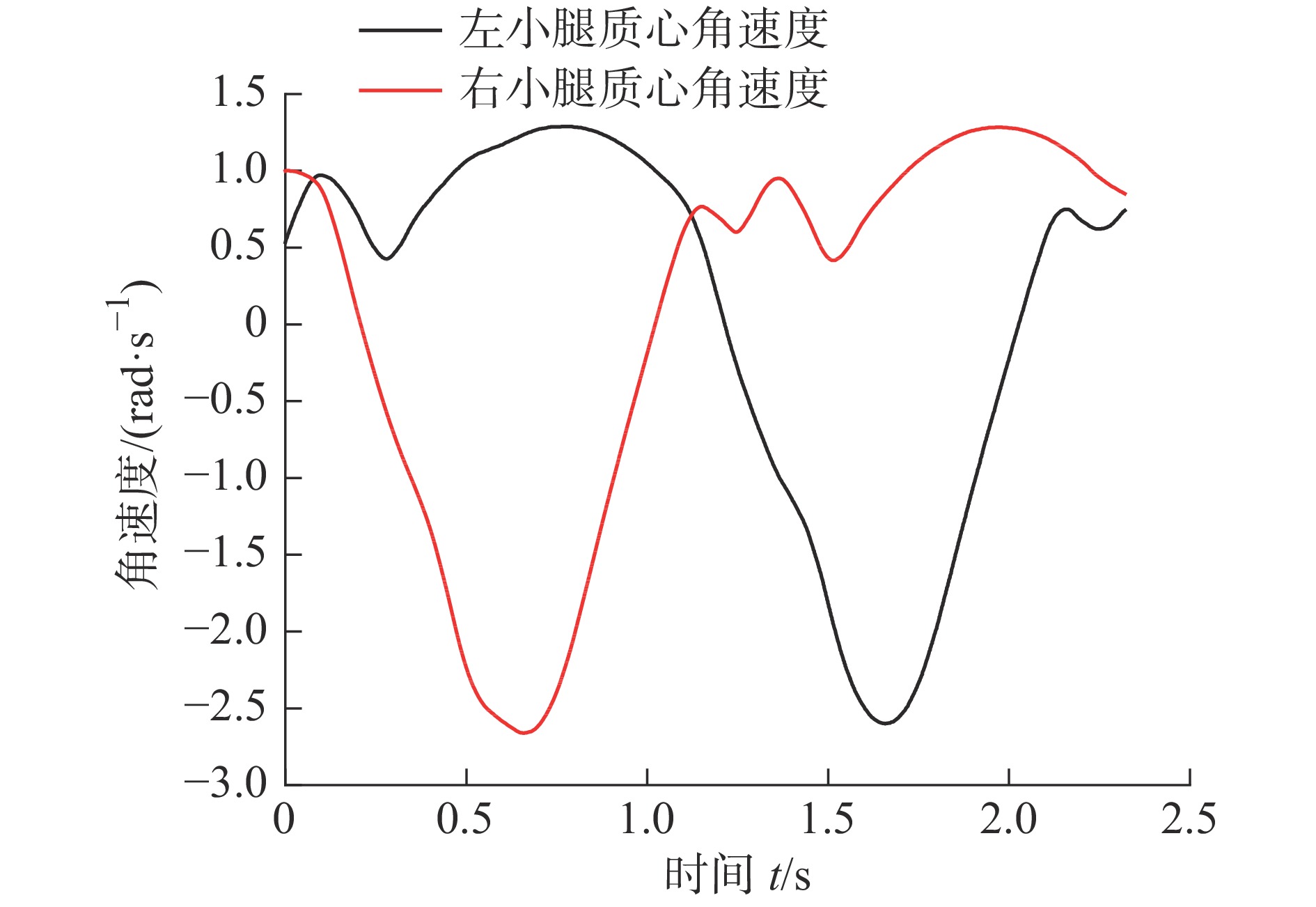
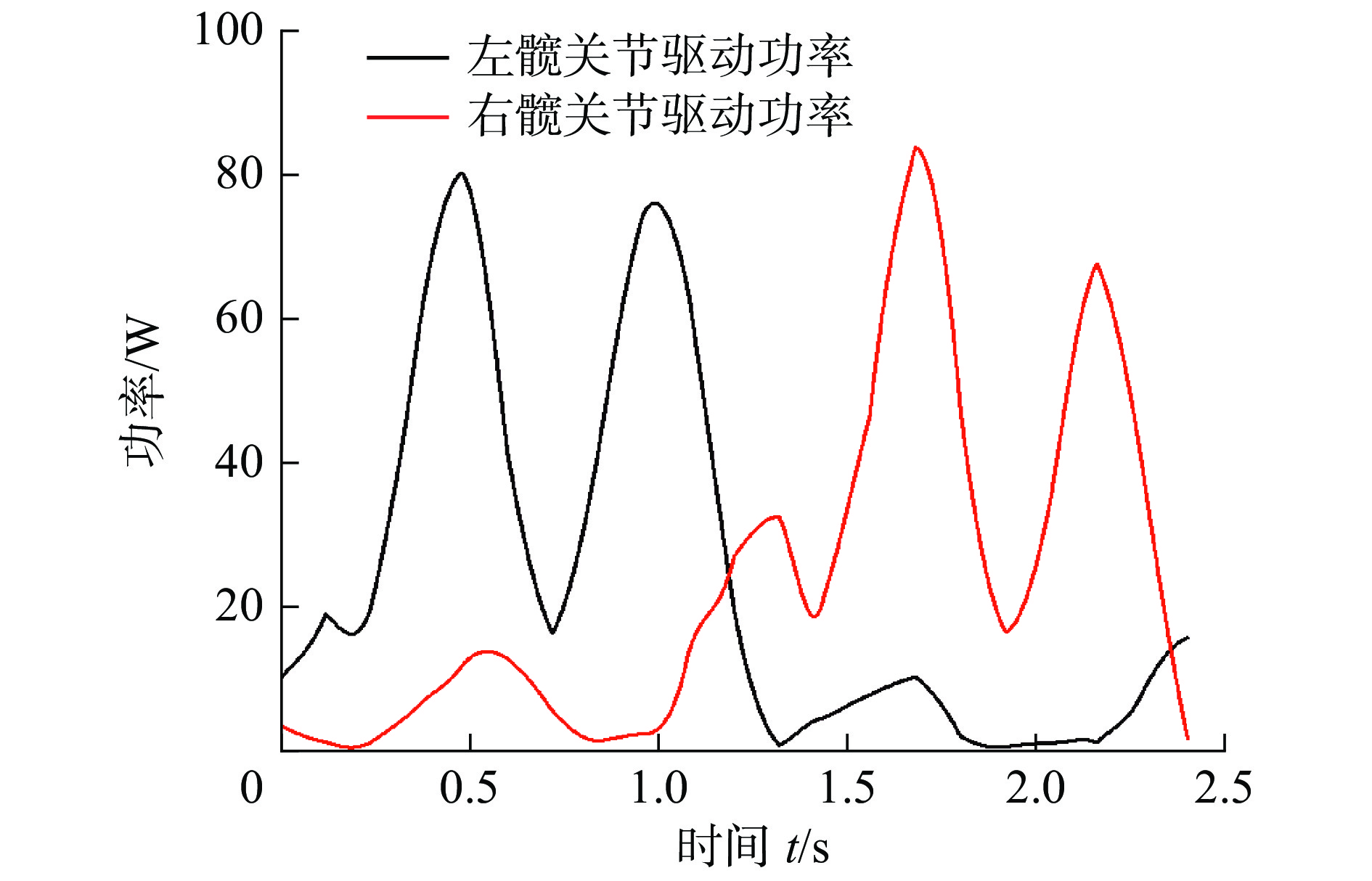
摘要: 助力型外骨骼是一种人机高度结合的复杂机械结构。为了研究外骨骼在行走模式下负重50kg时各关节所需驱动力矩以及功率变化规律,本文以西南交通大学第三代助力型外骨骼为研究对象,建立外骨骼模型,运用拉格朗日方程对外骨骼进行动力学分析。为实现外骨骼与人体的携行运动,通过姿态传感器对人体行走过程中关节角的变化规律进行了测量与分析,并将其作为驱动函数对ADAMS环境中的外骨骼虚拟样机进行动力学仿真,得出各关节驱动力矩变化曲线,并拟合出各关节功率曲线。所得结果增加了人机携行性以及结果的可靠性,为助力型外骨骼的驱动控制提供了参考依据。Abstract: The power-assisted exoskeleton is a complex mechanical structure with a high degree of integration between man and machine. In order to study the driving torque and power change rules of each joint when the exoskeleton is walking with a weight of 50 kg, this paper takes the third-generation assisted exoskeleton of Southwest Jiaotong University as the research object and establishes an exoskeleton dynamics model. Then, the Lagrangian equation was used to analyze the dynamics of the exoskeleton. In order to realize the carrying movement of the of the exoskeleton and the human body, we used the attitude sensor to measure and analyze the change of the joint angle during the human walking process, and use it as a driving function to simulate the dynamics of the exoskeleton virtual prototype in the ADAMS environment. Finally, we fit the obtained driving torque curve of each joint, and the analysis result can provide a reliable reference for the drive control of the assisted exoskeleton.
-
Key words:
- lower extremity exoskeleton /
- dynamics simulation /
- human-machine carrying /
- drive power
-
[1] 汪步云, 汪志红, 许德章. 下肢外骨骼助力机器人本体结构设计与运动学分析[J]. 机械科学与技术, 2018, 37(4): 553-559.WANG B Y, WANG Z H, XU D Z. Mechanical design and kinematics analysis on a wearable power-assisted robot for lower extremity exoskeleton[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(4): 553-559. (in Chinese) [2] 桓茜, 王伟. 外骨骼助行机器人连续步态规划分析[J]. 机械设计与制造工程, 2021, 50(4): 26-30. doi: 10.3969/j.issn.2095-509X.2021.04.006HENG X, WANG W. Analysis of continuous gait planningfor exoskeleton walking robot[J]. Machine Design and Manufacturing Engineering, 2021, 50(4): 26-30. (in Chinese) doi: 10.3969/j.issn.2095-509X.2021.04.006 [3] 赵彦峻, 徐诚. 人体下肢外骨骼设计与仿真分析[J]. 系统仿真学报, 2008(17): 4756-4759.ZHAO Y J, XU C. Design and simulation of human lower extremity exoskeleton[J]. Journal of System Simulation, 2008(17): 4756-4759. (in Chinese) [4] TOXIRI S, NÄF M B, LAZZARONI M, et al. Back-support exoskeletons for occupational use: an overview of technological advances and trends[J]. IISE Transactions on Occupational Ergonomics and Human Factors, 2019, 7(3-4): 237-249. doi: 10.1080/24725838.2019.1626303 [5] 李会营, 王惠源, 张鹏军, 等. 外骨骼机器人发展趋势研究[J]. 机械工程师, 2011(8): 9-10. doi: 10.3969/j.issn.1002-2333.2011.08.003LI H Y, WANG H Y, ZHANG P J, et al. Development trend research of the exoskeleton robot[J]. Mechanical Engineer, 2011(8): 9-10. (in Chinese) doi: 10.3969/j.issn.1002-2333.2011.08.003 [6] BRAHMI B, SAAD M, RAHMAN M H, et al. Cartesian trajectory tracking of a 7-DOF exoskeleton robotbased on human inverse kinematics[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(3): 600-611. doi: 10.1109/TSMC.2017.2695003 [7] JIANG W, MA B B, ZHANG X M, et al. Overview of lower extremity exoskeleton technology[J]. IOP Conference Series:Earth and Environmental Science, 2021, 714: 032027. doi: 10.1088/1755-1315/714/3/032027 [8] 张淑珍, 周瑞, 毕彦峰, 等. 下肢外骨骼机器人踝关节建模及动力学仿真[J]. 机械科学与技术, 2020, 39(5): 695-700.ZHANG S Z, ZHOU R, BI Y F, et al. Ankle joint modeling and dynamics simulation of wearable lower limb exoskeleton robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(5): 695-700. (in Chinese) [9] 赵耀虹, 夏昊, 夭银银, 等. 球面外骨骼并联机构的运动学及工作空间分析[J]. 生物医学工程学杂志, 2019, 36(2): 213-222. doi: 10.7507/1001-5515.201806024ZHAO Y H, XIA H, YAO Y Y, et al. Kinematics and workspace analysis of a spherical exoskeleton parallel mechanism[J]. Journal of Biomedical Engineering, 2019, 36(2): 213-222. (in Chinese) doi: 10.7507/1001-5515.201806024 [10] 张斌, 刘放, 杨小平, 等. 可穿戴式助力外骨骼特征动作动力学研究[J]. 机械设计与制造, 2018(8): 142-144. doi: 10.3969/j.issn.1001-3997.2018.08.041ZHANG B, LIU F, YANG X P, et al. The feature action dynamics analysis of booster wearable exoskeleton[J]. Machinery Design & Manufacture, 2018(8): 142-144. (in Chinese) doi: 10.3969/j.issn.1001-3997.2018.08.041 [11] 邓斌, 赵英朋. 新型下肢外骨骼机器人动力学仿真[J]. 机械设计与制造, 2021(6): 300-304. doi: 10.3969/j.issn.1001-3997.2021.06.069DENG B, ZHAO Y P. Dynamics simulation of new exoskeleton robot[J]. Machinery Design & Manufacture, 2021(6): 300-304. (in Chinese) doi: 10.3969/j.issn.1001-3997.2021.06.069 [12] 王刚, 曹恩国, 赵永武, 等. 基于重力势能转化的下肢外骨骼设计与动力学研究[J]. 现代制造工程, 2020(10): 51-56.WANG G, CAO E G, ZHAO Y W, et al. Design and dynamics research of lower extremity exoskeleton based on gravitational potential energy transformation[J]. Modern Manufacturing Engineering, 2020(10): 51-56. (in Chinese) [13] 程思远, 陈广锋, 王琳霞, 等. 下肢康复外骨骼机器人动力学分析及仿真[J]. 东华大学学报(自然科学版), 2019, 45(6): 899-905.CHENG S Y, CHEN G F, WANG L X, et al. Dynamics analysis and simulation of lower limb rehabilitative exoskeleton robot[J]. Journal of Donghua University (Natural Science Edition), 2019, 45(6): 899-905. (in Chinese) [14] 伍赛, 涂细凯, 李佳璐, 等. 下肢康复外骨骼的造型与结构优化设计研究[J]. 机械科学与术, 2020, 39(6): 891-897.WU S, TU X K, LI J L, et al. Research on modeling and structural optimization design of lower extremity rehabilitation exoskeleton[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(6): 891-897. (in Chinese) [15] 韩亚丽, 王兴松. 下肢助力外骨骼的动力学分析及仿真[J]. 系统仿真学报, 2013, 25(1): 61-67.HAN Y L, WANG X S. Dynamic analysis and simulation of lower limb power-assisted exoskeleton[J]. Journal of System Simulation, 2013, 25(1): 61-67. (in Chinese) [16] 张铭奎, 程文明, 李怀仙. 蹲起时助力外骨骼驱动及人机耦合作用驱动补偿[J]. 机器人, 2017, 39(4): 514-522.ZHANG M K, CHENG W M, LI H X. Drive of the powered exoskeleton and driving compensation with the human-machine coupling interaction while squatting[J]. Robot, 2017, 39(4): 514-522. (in Chinese) [17] 陈炜, 王立柱, 张林琰, 等. 下肢外骨骼康复机器人动力学分析与仿真[J]. 机械设计, 2018, 35(4): 71-77.CHEN W, WANG L Z, ZHANG L Y, et al. Dynamic analysis and simulation for lower limb exoskeleton rehabilitation robot[J]. Journal of Machine Design, 2018, 35(4): 71-77. (in Chinese) -

 下载:
下载:




 点击查看大图
点击查看大图
图(13)
计量
- 文章访问数: 148
- HTML全文浏览量: 61
- PDF下载量: 42
- 被引次数: 0
