




Stability Analysis and Spatial Compliant Power Release Mechanism of Vehicle Door Latch with Multi-Mode Motion
-
摘要: 针对高端电动开启车门锁多工况下多支链主被动运动相容及力柔顺需求,基于变拓扑柔顺副提出了新型电动开启空间柔顺机构,该柔顺机构可实现运动空间相容、具有力顺应特征。依汽车门锁原动件、限位不同情况自动切换4种运动模式适应上解保险、开启门锁等不同工况;以含槽连杆槽内端点作为连杆特征点,研究该多模式空间柔顺机构的连杆空间轨迹、力柔顺特征、模式切换特征;根据特征点电动开启过程的相图与轨迹可视化分析,发现柔顺副扭簧刚度kT是影响机构运动稳定性关键因素。提出将最大Lyapunov指数作为柔顺机构动力系统稳定性的评价指标,以带时标连杆特征点三维轨迹构造时变位移序列,用Wolf算法计算其最大Lyapunov指数,进行空间柔顺机构运动稳定性衡量,最终优选得到柔顺副刚度kT值,确保了机构运动稳定性。
-
关键词:
- 汽车门锁 /
- 空间柔顺机构 /
- 运动稳定性 /
- 最大Lyapunov指数 /
- Wolf法
Abstract: In view of the active and passive motion characteristics and force compatibility of vehicle side door latch with power release under multi-working conditions, a new kind of spatial compliant mechanism based on the compliant joint with variable topology is proposed and constructed as the power release mechanism in vehicle latch. The spatial compliant mechanism switches automatically among four motion modes according to different drives and limit conditions. The groove endpoint of the linkage is taken as a characteristic point of the mechanism to describe the spatial motion feature, compliant feature and mode switching feature. According to the visual analysis of phase diagrams and trajectory of the characteristic point, it is found that the compliant joint stiffness kT is a key parameter affecting the motion stability of the mechanism. The largest Lyapunov exponent is used as an evaluation index for the dynamic system stability of the mechanism to measure the motion stability of the spatial compliant mechanism. Based on three-dimensional trajectory of the characteristic point of groove-linkage with time scale, time-varying displacement sequence is constructed, which is used to calculate the largest Lyapunov exponent by using the Wolf algorithm. Finally, the key parameter kT is obtained to ensure the stability of the mechanism. -
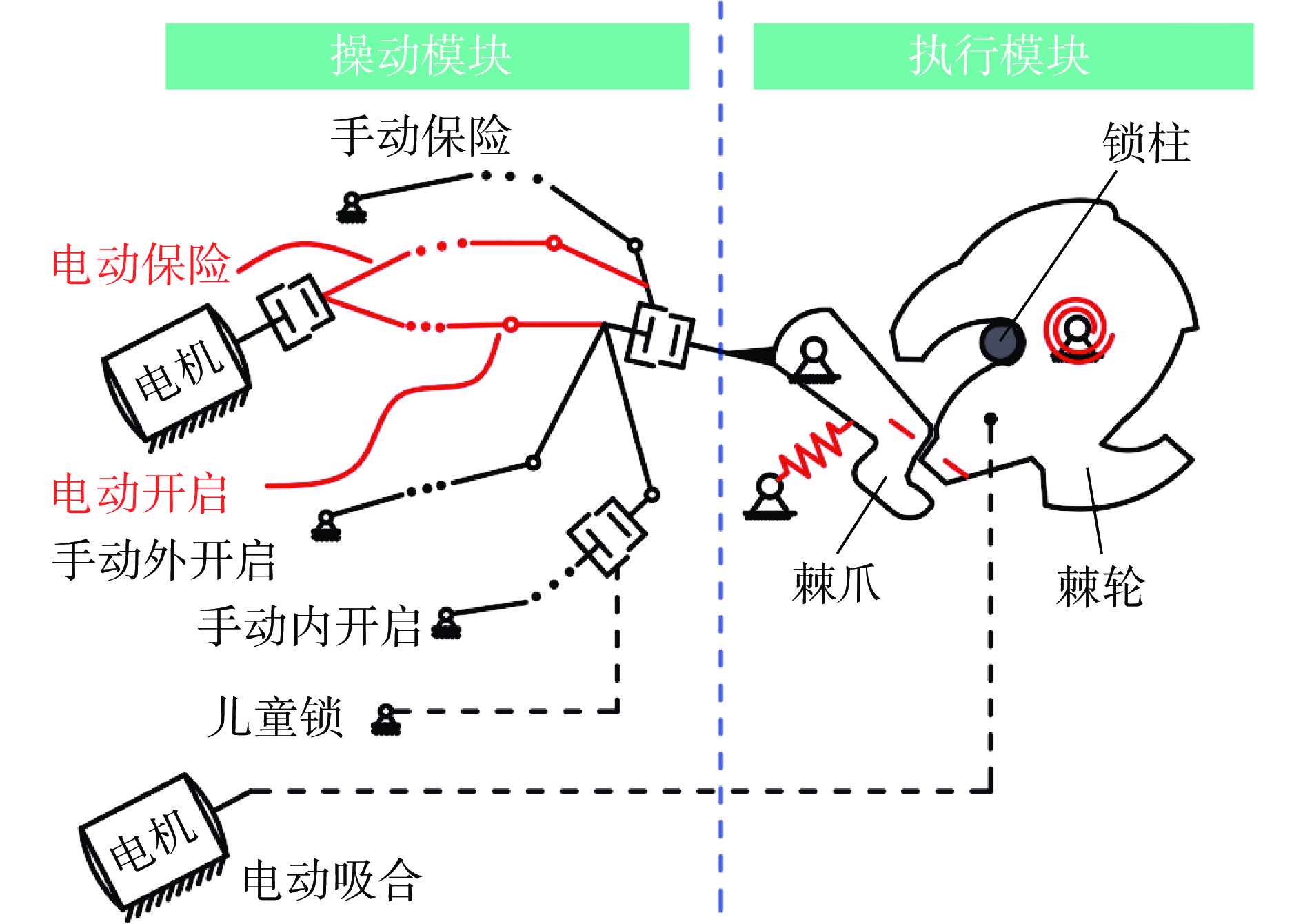
图 1 高端汽车侧门锁多支链机构示意图
Figure 1. Schematic diagram for the interior mechanisms of a vehicle
's side door latch 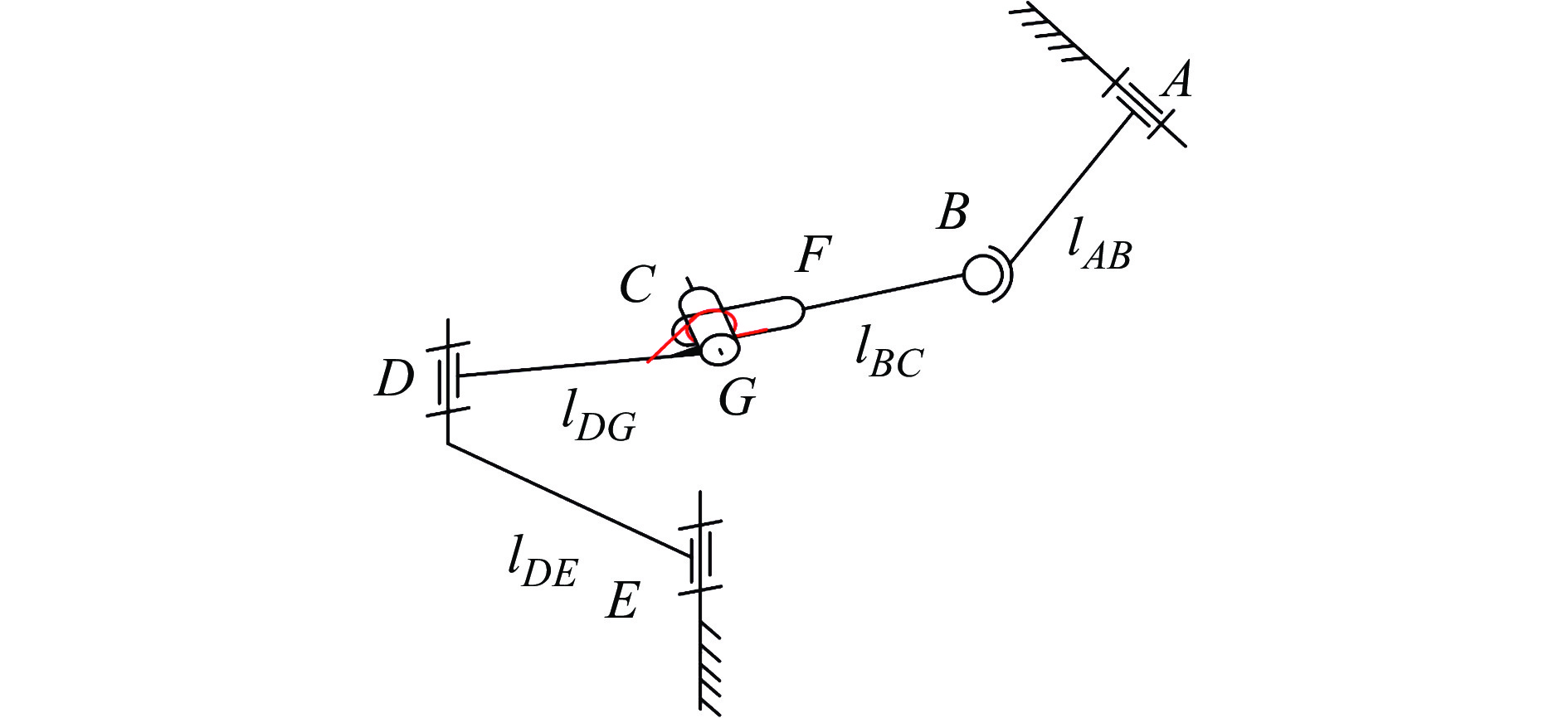
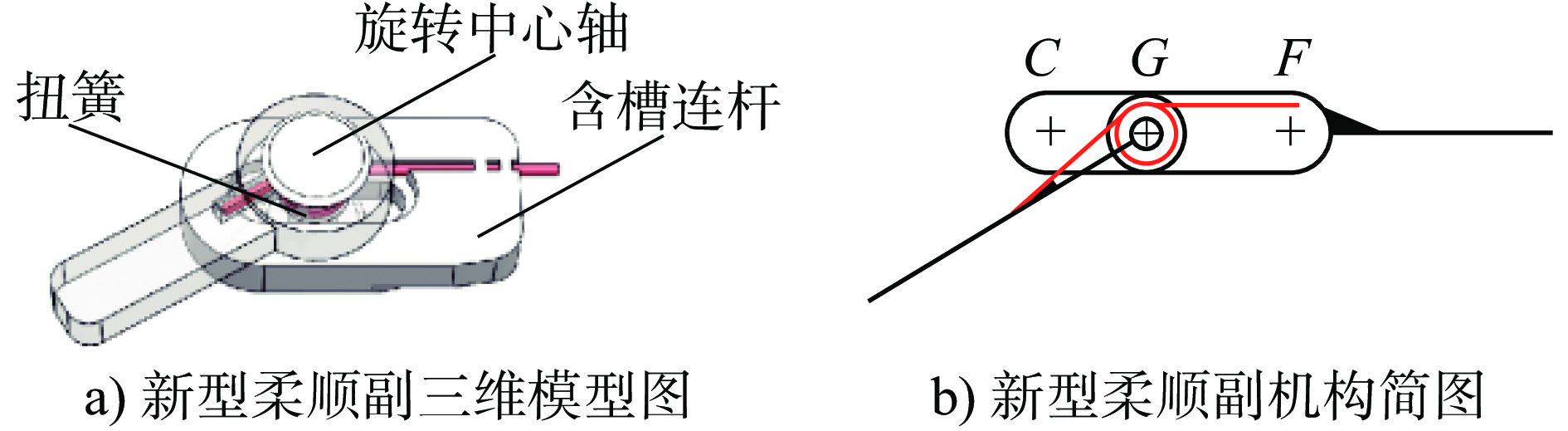
图 3 多模式空间柔顺机构简图
Figure 3. Schematic diagram of a multi-mode spatial compliant mechanism

图 4 多模式空间柔顺机构锁内应用
Figure 4. Application of spatial compliant mechanism with multi-mode motion to the vehicle's side door latch
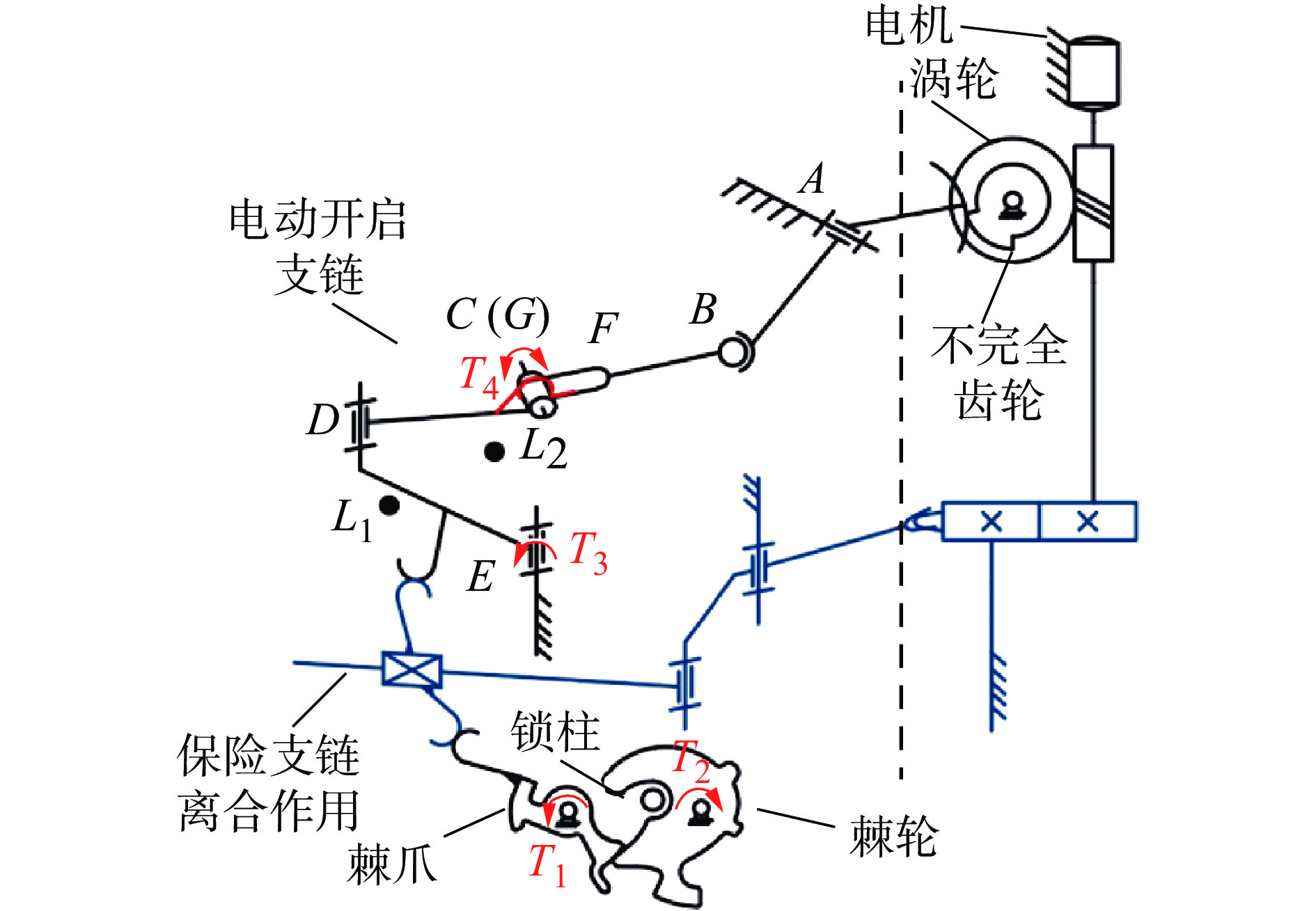
图 5 空间柔顺机构所构造汽车门锁机构简图
Figure 5. Schematic diagram of the vehicle's side door latch's interior mechanisms constructed with the spatial compliance mechanism

图 6 多模式空间柔顺机构构造的汽车门锁仿真模型
Figure 6. The simulation model of the vehicle's latchconstructed with the spatial compliance mechanism
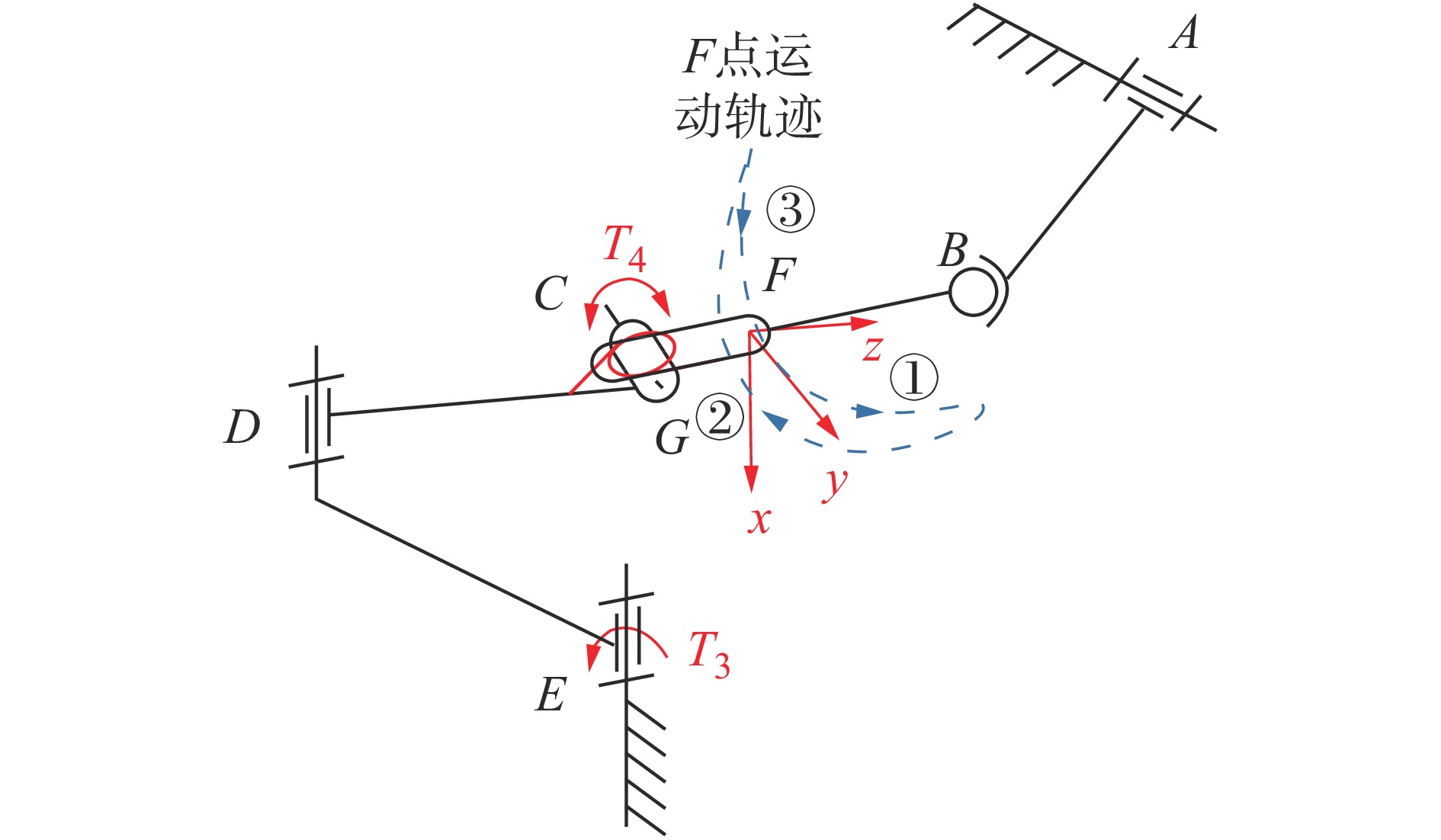
图 7 特征点F分段轨迹示意图
Figure 7. Schematic diagram of characteristic point F sectional trajectory

图 8 扭簧不同刚度kT下,特征点F轨迹与相图
Figure 8. Motion trajectories and phases of characteristic point F trajectory with different kT
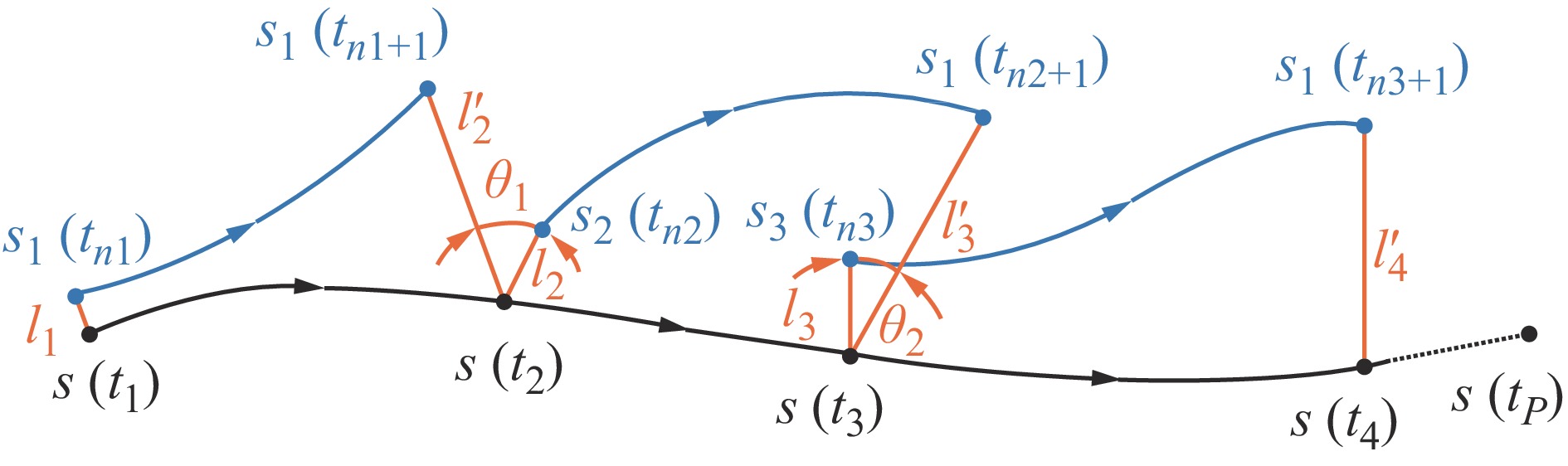
图 9 Wolf数值法求解Lyapunov过程示意图
Figure 9. Schematic diagram of the Wolf method used to solve the Lyapunov exponents

图 10 柔顺副扭簧不同刚度kT下,最大Lyapunov指数图
Figure 10. The curves of the Lyapunov exponents along time series data with different stiffness kT
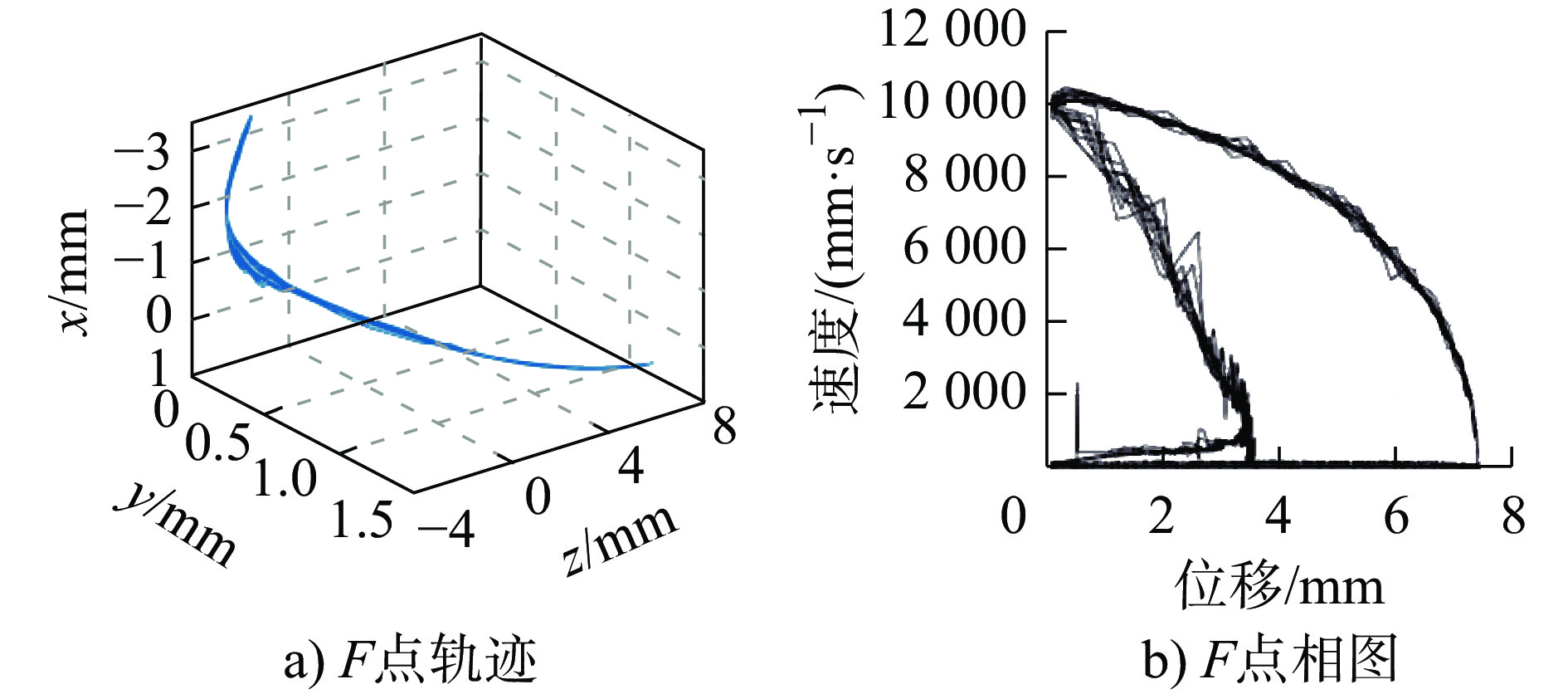
图 11 kT =1.53 N∙mm/°时,特征点F轨迹与相图
Figure 11. The trajectory and phase of characteristic point F when compliance joint stiffness kT = 1.53 N∙mm/°

图 12 含多模式空间柔顺机构的汽车门锁样机实物
Figure 12. Prototype of vehicle's side door latch of themulti-mode spatial compliant mechanism
表 1 各工况空间柔顺机构过程及其对应的车门锁机构运动
Table 1. Kinematical representation and relationship between vehicle's side door latch and spatial compliant mechanism under various working modes
空间柔顺机构多运动模式及其机构简图 不同工况下汽车门锁机构简图 1.RSRRR运动模式 电动开启工况(开启阶段) AB杆逆时针旋转,旋转中心G运动到槽内极限位置柔顺副转化为R副,机构运动中自由度为1,具有确定性运动。 初始位姿 
电机正转,不完全齿轮与AB杆啮合,驱动AB杆逆时针旋转,带动DE杆脱开L1限位块并运动至L2限位块处,棘爪释放棘轮,汽车门锁实现电动开启功能。 
运动过程 
2. RRPRSR运动模式 电动开启工况(复位阶段) DE杆受扭簧力T3的影响逆时针旋转,机构自由度为2,机构处于欠驱动状态,扭簧力T4约束一个自由度运动,机构实现力自适应复位运动。 初始位姿 
不完全齿轮与AB杆脱啮,在扭簧力矩T1和T3的作用下,DE杆从L2限位块处向L1限位块处复位,实现汽车门锁电动开启自动复位。 
运动过程 
3. RRPRS运动模式 手动开启工况 AB杆刚化不可动,DE杆顺时针驱动,运动过程中自由
度为1,具有确定
性运动。初始位姿 
AB杆受蜗轮蜗杆自锁影响被锁定,变为机架,DE杆顺时针旋转脱开 L1限位块运动至 L2限位块,棘爪释放棘轮,实现门锁手动开启且不影响电动开启支链。 
运动过程 
4.RRRP运动模式 上保险工况 AB杆顺时针驱动,DE杆受限位影响刚化不可动。B点S副消极为R副。扭簧提供弹性储能,实现机构自动复位。运动过程中自由度为1,具有确定性运动。 初始位姿 
电机反转,不完全齿轮与AB杆啮合,驱动AB杆顺时针旋转、保险支链运动,实现保险支链与电动开启支链脱离,完成上保险动作且与电动开启支链兼容。 
运动过程 
 下载: 导出CSV
下载: 导出CSV
表 2 空间柔顺机构几何和物理参数
Table 2. Geometric and physical parameters of the spatial compliant mechanism
零件 机构简图 材料 质量/kg 长度/mm 曲柄齿轮 lAB 7500尼龙 6.63 × 10−4 8.1 含槽连杆 lBC 7500尼龙 3.06 × 10−4 31.3 滑块连杆 lCD 7500尼龙 1.08 × 10−3 29.0 棘爪盘 lDE 45#钢 1.35 × 10−2 19.0
下载: 导出CSV
表 3 门锁机构内部扭簧参数设置
Table 3. Interior torsion springs' parameter design for latch mechanism
扭簧 刚度/
(N·mm·°−1)初始角度/(°) 预载荷/(N·mm) 棘爪扭簧 0.4927 25.10 21.300 棘轮扭簧 0.4927 23.27 340.725 棘爪盘扭簧 2.2119 105 265.428 柔顺副扭簧 1.0000 180 0
下载: 导出CSV
表 4 门锁机构各工况下不同运动模式的运动特性
Table 4. Different motion characteristics of the vehicle's side door latch under different working modes
工况 驱动时间/ms 运动速度 自由度 驱动力矩/(N·mm) 电动开启 82 快 1,2 13.3 手动开启 1000 慢 1 13.3 电动保险 25 极快 1 5.2
下载: 导出CSV
表 5 扭簧不同刚度kT对应最大Lyapunov指数
Table 5. The largest Lyapunov exponents corresponding to different kT
kT /(N·mm·°−1) 最大Lyapunov指数λmax 0.5 0.004578 1.0 0.004951 1.5 0.000842 2.0 0.003283 3.0 0.004578 5.0 0.001759
下载: 导出CSV
表 6 kT插值搜索区域对应的最大Lyapunov指数
Table 6. The largest Lyapunov exponents corresponding toadditional kT values' search regions
kT /(N·mm·°−1) 最大Lyapunov指数λmax 1.45 0.000766 1.46 0.001972 1.47 0.000657 1.48 0.000633 1.49 0.001390 1.50 0.000842 1.51 0.002058 1.52 0.000809 1.53 0.000000 1.54 0.002609 1.55 0.003664
下载: 导出CSV
-
[1] CHIANG Y J, BARBER G C. Operating effort and related statistical tolerance analyses of automotive latching mechanisms[J]. International Journal of Materials and Product Technology, 2002, 17(5-6): 353-367. [2] 李春风. 汽车门锁机构及其控制系统的研制[D]. 南京: 南京航空航天大学, 2009: 5-9.LI C F. Research on the mechanism of automobile door locks and its control system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009: 5-9. (in Chinese) [3] NELSEN J, SEO C. An improved methodology for calculation of the inertial resistance of automotive latching systems[C]//Proceedings of SAE 2014 World Congress & Exhibition. SAE, 2014. [4] UDRISTE D I, NEGRUS E M. Construction and kinematics of automotive side door latch mechanisms[C]//Proceedings of SAE 2005 World Congress & Exhibition. SAE, 2005 [5] 王炎, 杭鲁滨, 刘哲, 等. 电动开启汽车门锁的传动机构连杆轨迹研究[J]. 机械传动, 2019, 43(5): 52-56. doi: 10.16578/j.issn.1004.2539.2019.05.011WANG Y, HANG L B, LIU Z, et al. Research on the connecting rod trajectory of transmission mechanism of electric car door lock[J]. Journal of Mechanical Transmission, 2019, 43(5): 52-56. (in Chinese) doi: 10.16578/j.issn.1004.2539.2019.05.011 [6] 陈晓东, 邓子龙, 高兴军, 等. 基于变胞变换的柔性恒力机械手设计[J]. 机械传动, 2019, 43(12): 89-92. doi: 10.16578/j.issn.1004.2539.2019.12.016CHEN X D, DENG Z L, GAO X J, et al. Design of flexible constant force manipulator based on metamorphic mechanism transform[J]. Journal of Mechanical Transmission, 2019, 43(12): 89-92. (in Chinese) doi: 10.16578/j.issn.1004.2539.2019.12.016 [7] TANK E, SÖYLEMEZ E. Analysis and design of a compliant variable stroke mechanism[J]. Mechanism and Machine Theory, 2010, 45(10): 1385-1394. doi: 10.1016/j.mechmachtheory.2010.06.005 [8] 尹鹏, 李满天, 郭伟, 等. 面向足式机器人的新型可调刚度柔性关节的设计及性能测试[J]. 机器人, 2014, 36(3): 322-329.YIN P, LI M T, GUO W, et al. Design and testing of a novel joint with adjustable stiffness for legged robot[J]. Robot, 2014, 36(3): 322-329. (in Chinese) [9] 王明远, 杭鲁滨, 刘哲, 等. 含变自由度力自适应复位组合柔顺副的汽车门锁机构[J]. 中国机械工程, 2020, 31(12): 1437-1443.WANG M Y, HANG L B, LIU Z, et al. Vehicle side door latch power release mechanism with variable DOF force-adaptive-recovery combined compliant pair[J]. China Mechanical Engineering, 2020, 31(12): 1437-1443. (in Chinese) [10] 于霖冲, 焦俊婷, 李向宏. 基于RBF神经网络的柔性机构非线性运动模型辨识[J]. 组合机床与自动化加工技术, 2005(11): 29-30. doi: 10.3969/j.issn.1001-2265.2005.11.010YU L C, JIAO J T, LI X H. Model identification of flexible mechanism nonlinear motion based on RBF neural network[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2005(11): 29-30. (in Chinese) doi: 10.3969/j.issn.1001-2265.2005.11.010 [11] 王汝贵, 陈辉庆, 戴建生. 新型可控变胞式码垛机器人机构动态稳定性研究[J]. 机械工程学报, 2017, 53(13): 39-47. doi: 10.3901/JME.2017.13.039WANG R G, CHEN H Q, DAI J S. Dynamic stability study of a novel controllable metamorphic palletizing robot mechanism[J]. Journal of Mechanical Engineering, 2017, 53(13): 39-47. (in Chinese) doi: 10.3901/JME.2017.13.039 [12] 罗利军, 李银山, 李彤, 等. 李雅普诺夫指数谱的研究与仿真[J]. 计算机仿真, 2005, 22(12): 285-288. doi: 10.3969/j.issn.1006-9348.2005.12.080LUO L J, LI Y S, LI T, et al. Research and simulation of Lyapunov′s exponents[J]. Computer Simulation, 2005, 22(12): 285-288. (in Chinese) doi: 10.3969/j.issn.1006-9348.2005.12.080 [13] WOLF A, SWIFT J B, SWINNEY H L, et al. Determining Lyapunov exponents from a time series[J]. Physica D:Nonlinear Phenomena, 1985, 16(3): 285-317. doi: 10.1016/0167-2789(85)90011-9 [14] ERKAYA S, DOĞAN S. A comparative analysis of joint clearance effects on articulated and partly compliant mechanisms[J]. Nonlinear Dynamics, 2015, 81(1-2): 323-341. doi: 10.1007/s11071-015-1994-4 [15] 侯雨雷, 井国宁, 汪毅, 等. 一种含间隙并联机构动力学仿真与混沌响应分析[J]. 机械设计, 2018, 35(4): 21-31. doi: 10.13841/j.cnki.jxsj.2018.04.004HOU Y L, JING G N, WANG Y, et al. Dynamicsimulation and chaotic responses analysis of a parallel mechanism with clearance[J]. Journal of Machine Design, 2018, 35(4): 21-31. (in Chinese) doi: 10.13841/j.cnki.jxsj.2018.04.004 [16] WANG M Y, HANG L B. Research and application of variable DOF compliant five-bar mechanism based on novel compliant torsion joint in vehicle side door latch[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2020, 234(19): 3789-3808. doi: 10.1177/0954406220917423 [17] 刘申. 基于嵌入延迟坐标的勘探地震资料消噪方法的研究[D]. 长春: 吉林大学, 2008.LIU S. De-noising method of Seismic exploration data based on embedded delay coordinates[D]. Changchun: Jilin University, 2008. (in Chinese) [18] KING G P, STEWART I. Phase space reconstruction for symmetric dynamical systems[J]. Physica D:Nonlinear Phenomena, 1992, 58(1-4): 216-228. doi: 10.1016/0167-2789(92)90110-9 [19] 李文云. 基于混沌时间序列预测法的岩土施工变形分析[D]. 昆明: 昆明理工大学, 2016.LI W Y. Deformation analysis on geotechnical construction baed on chaotic time series prediction method[D]. Kunming: Kunming University of Science and Technology, 2016. (in Chinese) [20] 龚祝平. 混沌时间序列的平均周期计算方法[J]. 系统工程, 2010, 28(12): 111-113.GONG Z P. The calculating method of the average period of chaotic time series[J]. Systems Engineering, 2010, 28(12): 111-113. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 134
- HTML全文浏览量: 48
- PDF下载量: 21
- 被引次数: 0
