




Real-time Obstacle Avoidance Algorithm for Coordinated Strategy of Redundant Dual-arm Robots
-
摘要: 针对冗余度双臂机器人协调操作过程中机械臂本体避障及躲避环境障碍问题,提出了基于冗余机械臂自运动特性的双臂机器人协作策略下实时避障算法。首先,利用障碍物在机械臂连杆上的投影矢量筛选掉不会避碰杆件,再计算可能避碰杆件与障碍物的最短距离;其次,根据双臂协作的运动学约束关系,得到冗余度双臂机器人协调搬运避障的运动学逆解;再次,引入梯度“安全距离”和两个避障因子,实时改变机械臂的避障速度,使机器人末端完成协作任务以及双臂实时自避碰及躲避环境障碍物的任务;最后,利用冗余度双臂机器人进行仿真及实验。结果表明:双臂机器人末端执行器执行协作任务的同时机器人双臂可以躲避障碍物,且各关节运动连续、平稳。Abstract: Aiming at the coordinated self-avoidance and avoiding environmental obstacles by redundant dual-arm robots, a real-time obstacle avoidance algorithm based on the self-motion characteristics of redundant manipulators is proposed. Firstly, the projection vector of the obstacle on the manipulator link is used to screen out the non-collision avoidance bar, and then the shortest distance between the possible collision avoidance rod and the obstacle is calculated. Then, according to the kinematic constraint relationship of dual arm cooperation, the inverse kinematics solution of the coordinated handling and obstacle avoidance of redundant dual arm robot is obtained. Then the gradient "safe distance" and two obstacle avoidance factors are introduced, to change the obstacle avoidance speed of the manipulator in real time, the robot terminal can complete the cooperative task and the task of real-time self-collision avoidance and avoidance of environmental obstacles. The results show that both arms of the robot can avoid obstacles while the end effector of the dual arm robot performs cooperative tasks, and each joint moves continuously and smoothly.
-
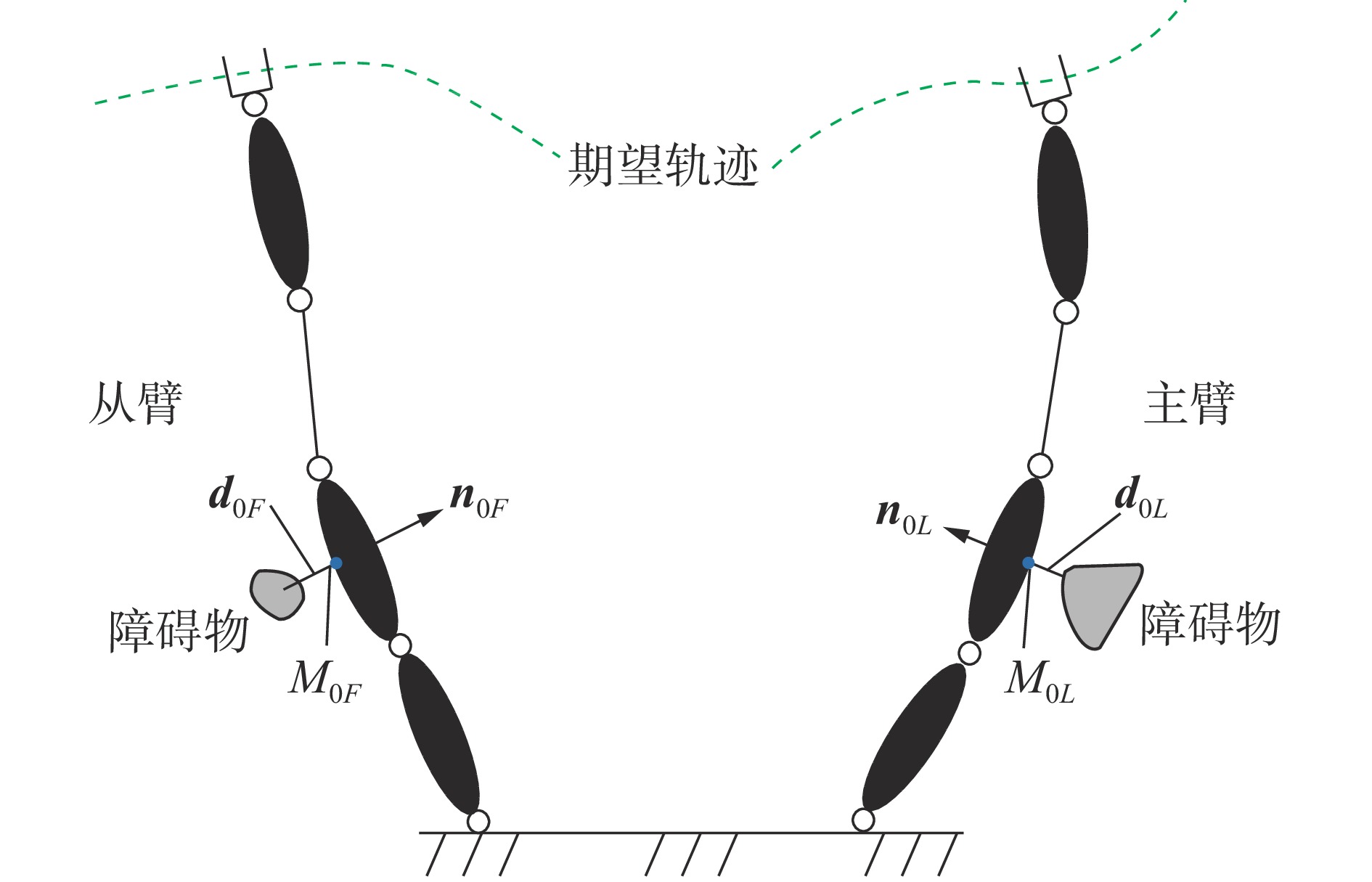
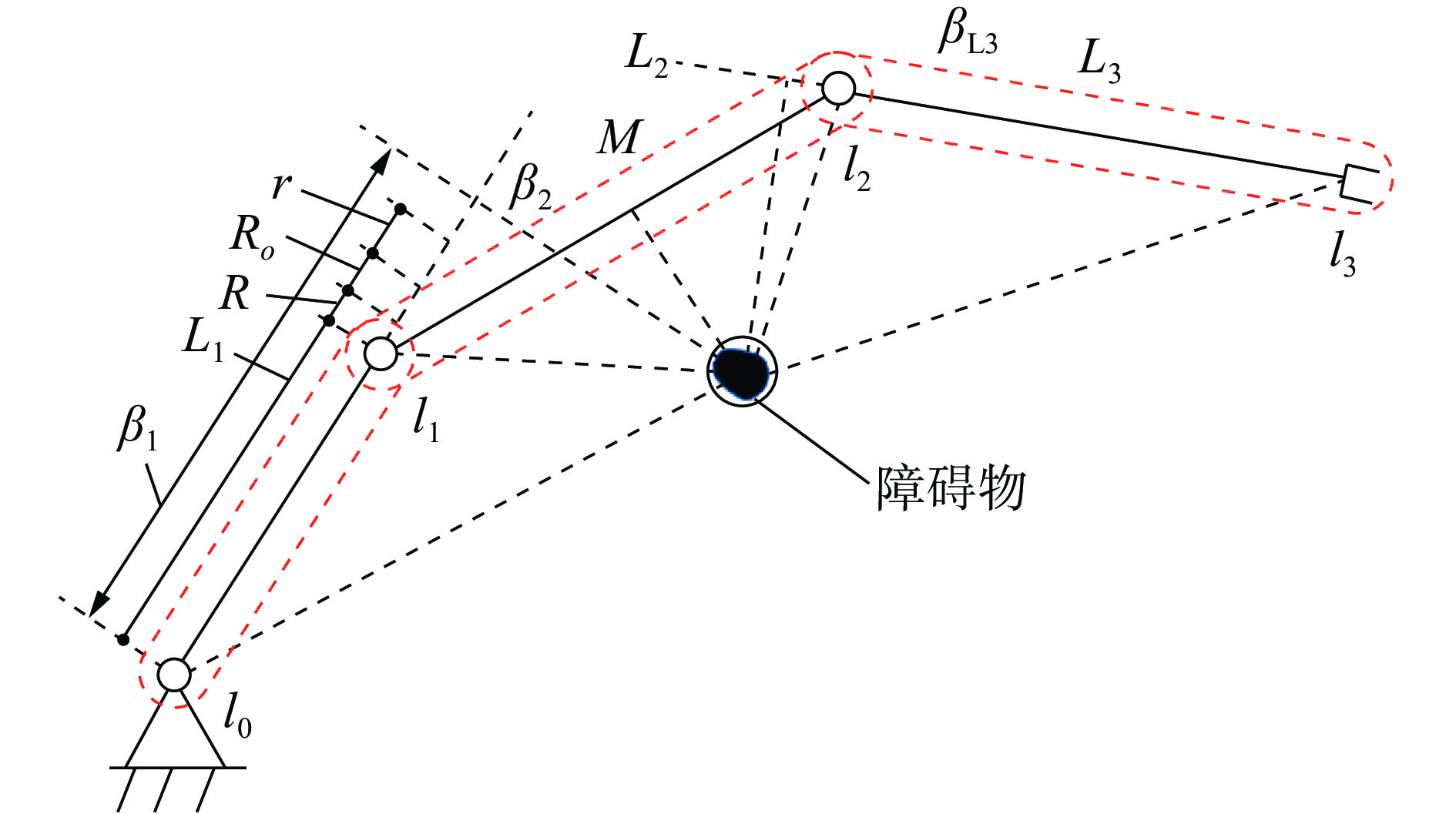
图 2 冗余度双臂机器人避障运动示意图
Figure 2. Schematic diagram of obstacle avoidance motion for redundant dual arm robots
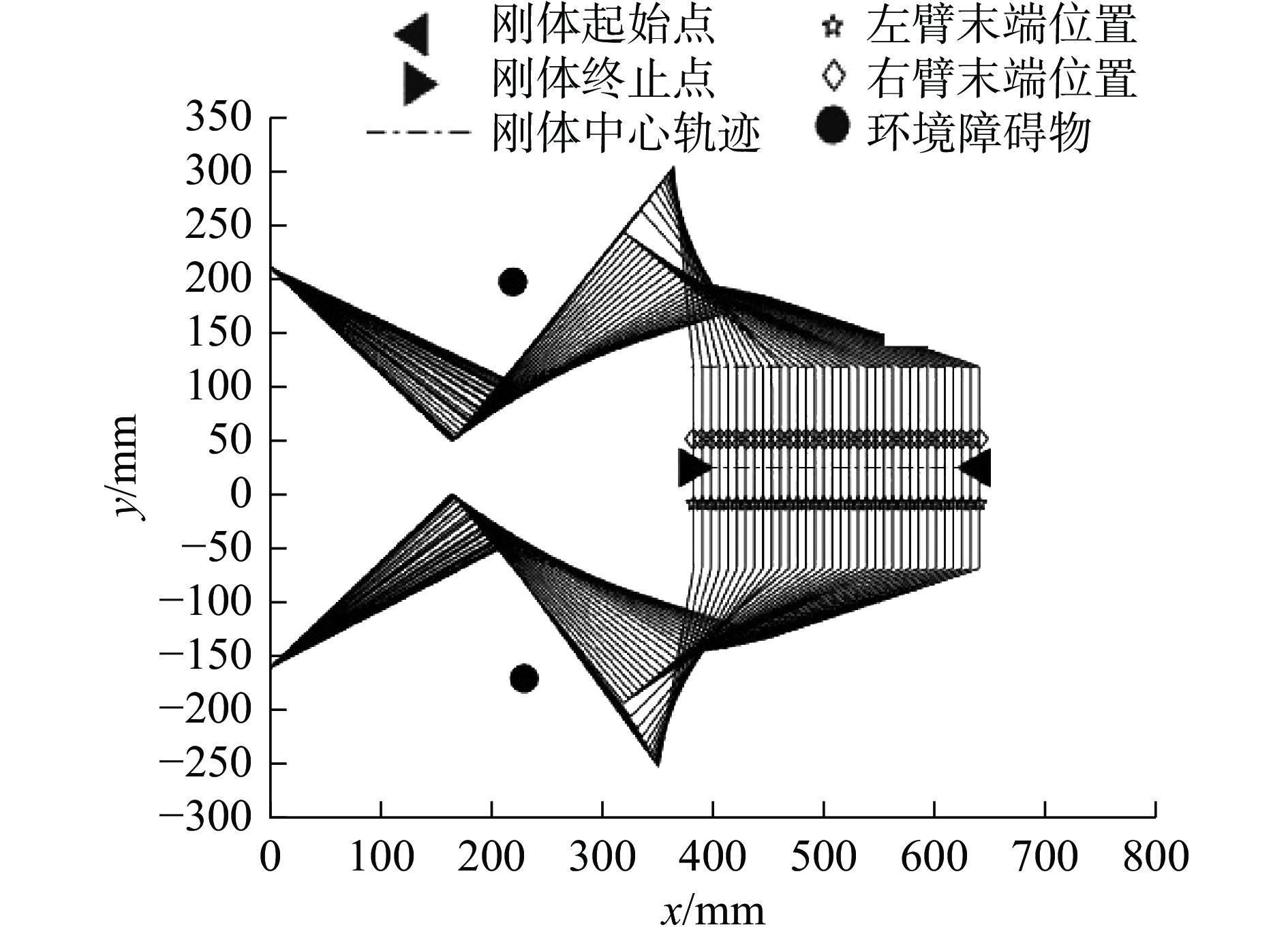
图 7 使用环境障碍物避障与自避障算法机械臂的轨迹
Figure 7. Trajectories of using only self-avoidance and environmental obstacle avoidance algorithm
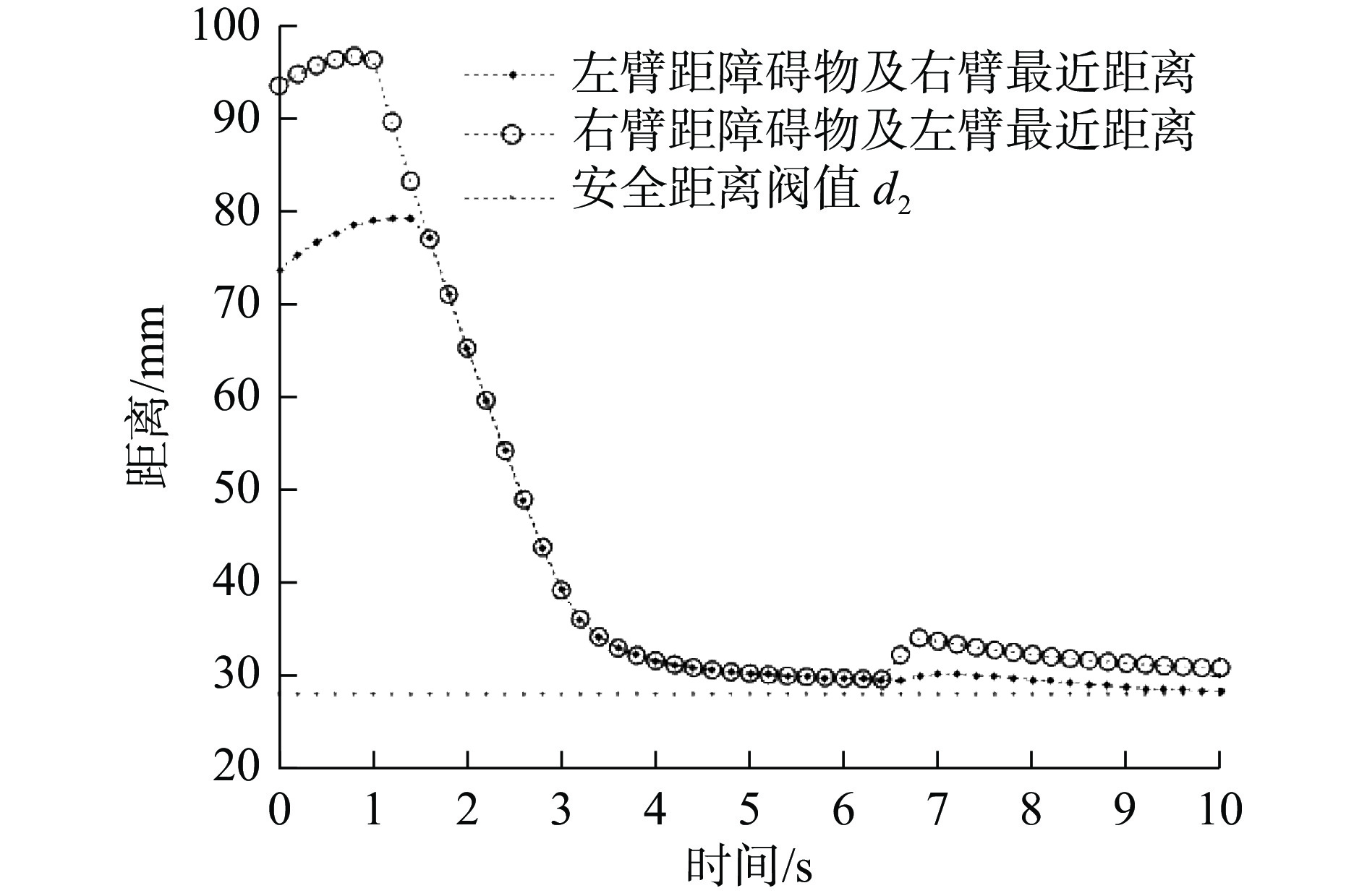
图 8 机器人双臂与障碍物之间的最短距离
Figure 8. The shortest distance between robot's arms and obstacles

图 12 考虑机器人本体互为障碍和环境障碍物的影响下机器人协作运动情况
Figure 12. The cooperative motion of a robot is considered when the influence of the arms are mutual obstacles and environmental obstacles
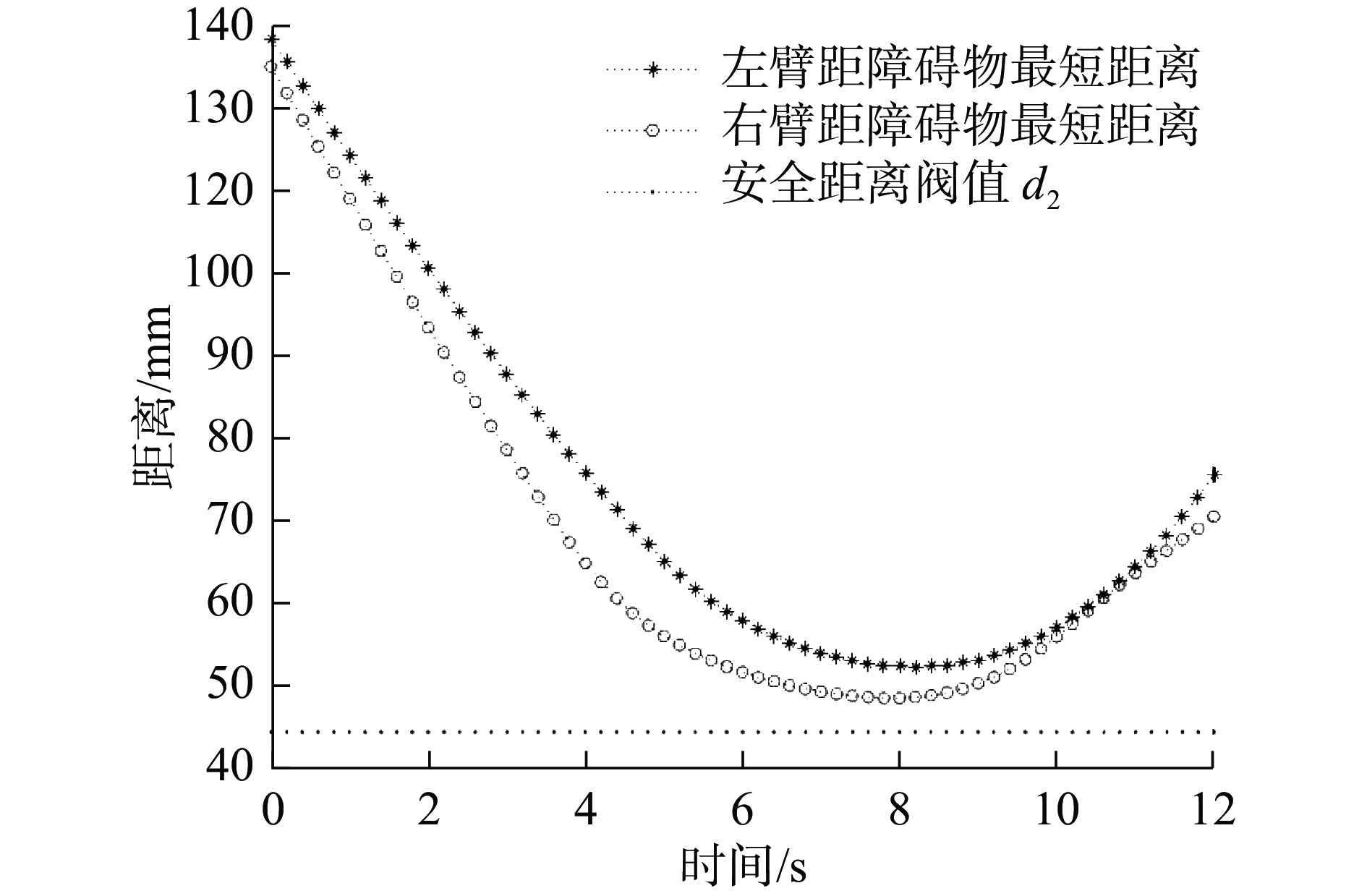
图 13 机器人双臂与障碍物之间的最短距离
Figure 13. The shortest distance between the two arms of the robot and obstacles
-
[1] 王琪, 闵华松. 双臂机器人的协调控制算法综述[J]. 计算机工程与应用, 2021, 57(1): 1-16. doi: 10.3778/j.issn.1002-8331.2008-0025WANG Q, MIN H S. Review of coordinated control algorithms for dual-arm robots[J]. Computer Engineering and Applications, 2021, 57(1): 1-16. (in Chinese) doi: 10.3778/j.issn.1002-8331.2008-0025 [2] 刘立. 双臂协作机器人引领中国机器人新纪元[J]. 机器人产业, 2017(1): 46-49. doi: 10.3969/j.issn.2096-0182.2017.01.007LIU L. Dual-arm cooperative robots lead to a new era of robotics in China[J]. Robot Industry, 2017(1): 46-49. (in Chinese) doi: 10.3969/j.issn.2096-0182.2017.01.007 [3] 倪杭, 王贺升, 陈卫东. 基于软体机器人冗余自由度的实时避障位置控制[J]. 机器人, 2017, 39(3): 265-271.NI H, WANG H S, CHEN W D. Real-time obstacle avoidance and position control for a soft robot based on its redundant freedom[J]. Robot, 2017, 39(3): 265-271. (in Chinese) [4] 吴长征, 岳义, 韦宝琛, 等. 双臂机器人自碰撞检测及其运动规划[J]. 上海交通大学学报, 2018, 52(1): 45-53. doi: 10.16183/j.cnki.jsjtu.2018.01.008WU C Z, YUE Y, WEI B C, et al. Self-collision detection and motion planning for dual-arm robot[J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 45-53. (in Chinese) doi: 10.16183/j.cnki.jsjtu.2018.01.008 [5] CAO H R, GU X Q, YU C H. Obstacle avoidance algorithm for redundant manipulators based on weighted generalized inverse[J]. Applied Mechanics and Materials, 2017, 872: 303-309. doi: 10.4028/www.scientific.net/AMM.872.303 [6] SERAJI H, STEELE R, IVIEV R. Sensor-based collision avoidance: theory and experiments[J]. Journal of Robotic Systems, 1996, 13(9): 571-586. doi: 10.1002/(SICI)1097-4563(199609)13:9<571::AID-ROB2>3.0.CO;2-J [7] 姜力, 周扬, 孙奎, 等. 七自由度冗余机械臂避障控制[J]. 光学 精密工程, 2013, 21(7): 1795-1802. doi: 10.3788/OPE.20132107.1795JIANG L, ZHOU Y, SUN K, et al. Obstacle avoidance control for 7-DOF redundant manipulators[J]. Optics and Precision Engineering, 2013, 21(7): 1795-1802. (in Chinese) doi: 10.3788/OPE.20132107.1795 [8] 张建华, 胡平, 张小俊, 等. 基于主从任务转化的闭环控制避障算法[J]. 机械工程学报, 2017, 53(1): 21-27. doi: 10.3901/JME.2017.01.021ZHANG J H, HU P, ZHANG X J, et al. Closed loop control algorithm for obstacle avoidance based on the transformation of master and slave tasks[J]. Journal of Mechanical Engineering, 2017, 53(1): 21-27. (in Chinese) doi: 10.3901/JME.2017.01.021 [9] 万俊, 姚佳烽, 余亮, 等. 基于伪距离的冗余机器人避障算法[J]. 机械工程学报, 2020, 56(17): 59-70. doi: 10.3901/JME.2020.17.059WAN J, YAO J F, YU L, et al. Obstacle avoidance algorithm for redundant manipulators based on pseudo-distance method[J]. Journal of Mechanical Engineering, 2020, 56(17): 59-70. (in Chinese) doi: 10.3901/JME.2020.17.059 [10] 隋婷婷, 马骁, 郭健, 等. 冗余空间机械臂避障动力学控制研究[J]. 计算机仿真, 2019, 36(5): 349-353. doi: 10.3969/j.issn.1006-9348.2019.05.071SUI T T, MA X, GUO J, et al. Study on dynamic control of obstacle avoidance for redundant space manipulator[J]. Computer Simulation, 2019, 36(5): 349-353. (in Chinese) doi: 10.3969/j.issn.1006-9348.2019.05.071 [11] 申浩宇, 吴洪涛, 陈柏, 等. 基于主从任务转化的冗余度机器人避障算法[J]. 机器人, 2014, 36(4): 425-429.SHEN H Y, WU H T, CHEN B, et al. Obstacle avoidance algorithm for redundant robots based on transition between the primary and secondary tasks[J]. Robot, 2014, 36(4): 425-429. (in Chinese) [12] 朱战霞, 靖飒, 仲剑飞, 等. 基于碰撞检测的空间冗余机械臂避障路径规划[J]. 西北工业大学学报, 2020, 38(1): 183-190. doi: 10.3969/j.issn.1000-2758.2020.01.023ZHU Z X, JING S, ZHONG J F, et al. Obstacle avoidance path planning of space redundant manipulator based on a collision detection algorithm[J]. Journal of Northwestern Polytechnical University, 2020, 38(1): 183-190. (in Chinese) doi: 10.3969/j.issn.1000-2758.2020.01.023 [13] ABDELWAHID M, YAN D, LI T J, et al. Real-time collision avoidance of a redundant dual-Arm robot based on distance function method[C]//International Conference on Mechatronics and Automation. Changchun, China: IEEE, 2018: 2400-2405. [14] LIU Y C, YU C X, SHENG J Y, et al. Self-collision avoidance trajectory planning and robust control of a dual-arm space robot[J]. International Journal of Control, Automation and Systems, 2018, 16(6): 2896-2905. doi: 10.1007/s12555-017-0757-z [15] 申浩宇, 吴洪涛, 陈柏, 等. 冗余度双臂机器人协调避障算法[J]. 农业机械学报, 2015, 46(9): 356-361.SHEN H Y, WU H T, CHEN B, et al. Obstacle avoidance algorithm for coordinated motion of redundant dual-arm robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 356-361. (in Chinese) [16] SICILIANO B, KHATIB O. Springer handbook of robotics[M]. 2nd ed. Cham: Springer, 2016. [17] CHIACCHIO P, CHIAVERINI S, SICILIANO B. Direct and inverse kinematics for coordinated motion tasks of a two-manipulator system[J]. Journal of Dynamic Systems, Measurement, and Control, 1996, 118(4): 691-697. doi: 10.1115/1.2802344 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 139
- HTML全文浏览量: 72
- PDF下载量: 20
- 被引次数: 0
