




A Path Planning Method for Mine Rescue Robot Based on B-spline-APF-BRRT Algorithm
-
摘要: 针对矿井非结构化、形状狭长的地形结构以及传统BRRT算法规划路径曲折、转折点较多等路径质量较差问题,提出一种基于B样条-APF-BRRT算法的矿井救援机器人路径规划方法。首先根据BRRT路径中产生的目标点和矿井环境中障碍物信息,引入APF目标引力的思想,构建人工势场;然后利用Douglas-Peuker算法进行分线段处理,重新提取关键节点;最后使用B样条函数进行光滑拟合获得路径,减少了APF-BRRT算法所得路径的转折点和长度。对B样条-APF-BRRT算法进行实验,结果表明改进算法所获路径转折点和长度都明显优于BRRT算法,在矿井狭窄巷道中,相对于BRRT算法,B样条-APF-BRRT方法产生的路径更加平滑,转折次数减少到9次,路径长度减少了7.73%。Abstract: To improve the poor path quality such as unstructured mine, long and narrow ground structure and traditional BRRT algorithm, a path planning method for a mine rescue robot based on the B-spline APF-BRRT algorithm is proposed. Firstly, according to the target points generated with the BRRT algorithm and the information on obstacles in the mine environment, the APF target gravity is used to construct the artificial potential field. Then the Douglas-Peuker algorithm is used for line segment processing to extract key nodes. Finally, the B-spline function is used to obtain the smooth fitting path, which reduces the number of turning points and the length of path obtained with the APF-BRRT algorithm. The experimental results on the B-spline -APF-BRRT algorithm show that the path's number of turning points and its length obtained with the improved algorithm are obviously better than those obtained with the BRRT algorithm. Compared with the BRRT algorithm, the path generated with the B-spline -APF-BRRT algorithm is smoother in a narrow mine tunnel, the number of turning points is reduced to 9, and the path length is reduced by 7.73%.
-
Key words:
- rescue robot /
- path planning /
- BRRT algorithm /
- APF algorithm /
- B-spline function
-
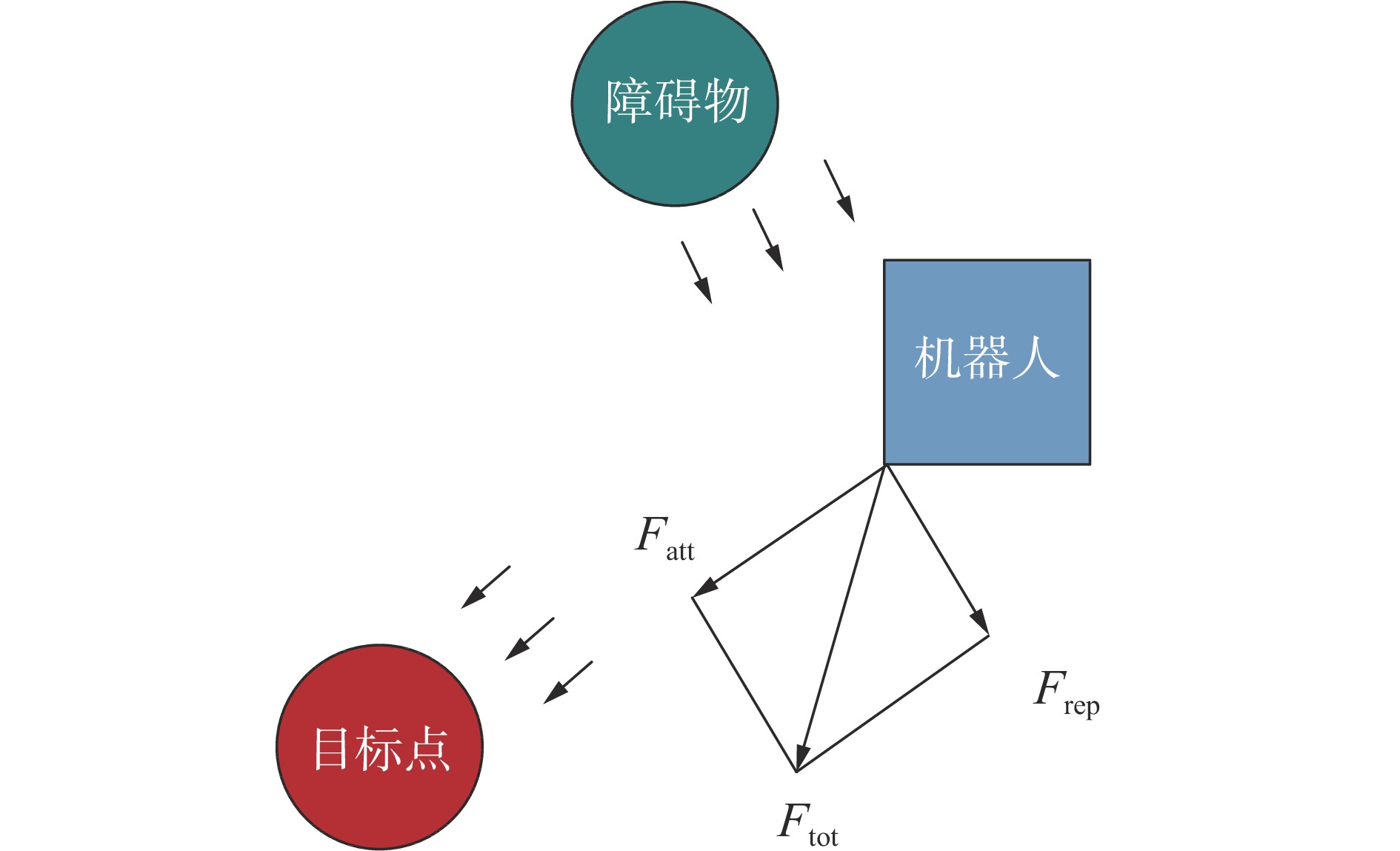
图 2 基于APF的移动机器人受力示意图
Figure 2. Schematic diagram of forces exerted by mobile robot based on APF
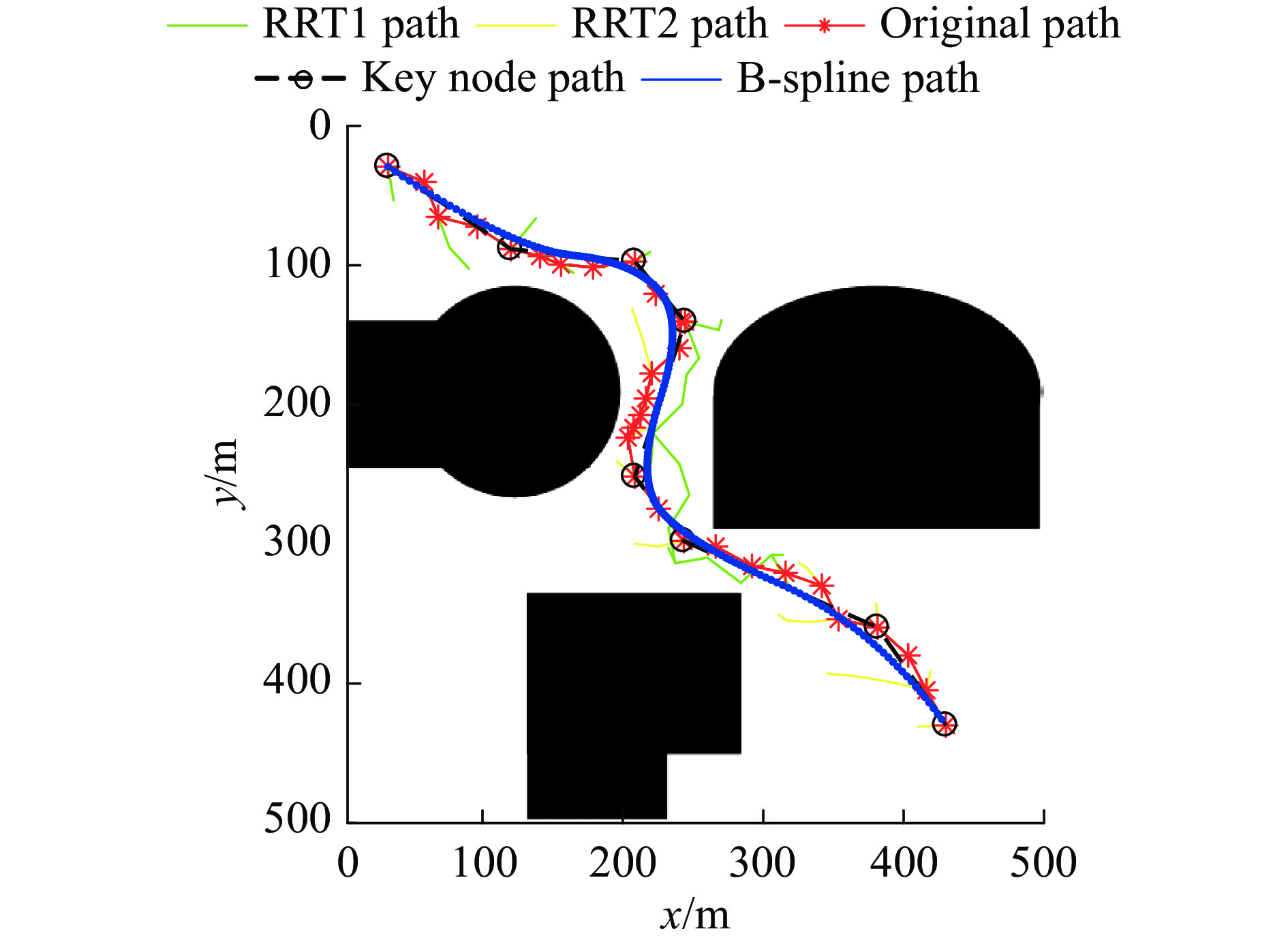
图 5 简单环境下B样条-APF-BRRT运动路径
Figure 5. B-spline-APF-BRRT motion path in a simple environment
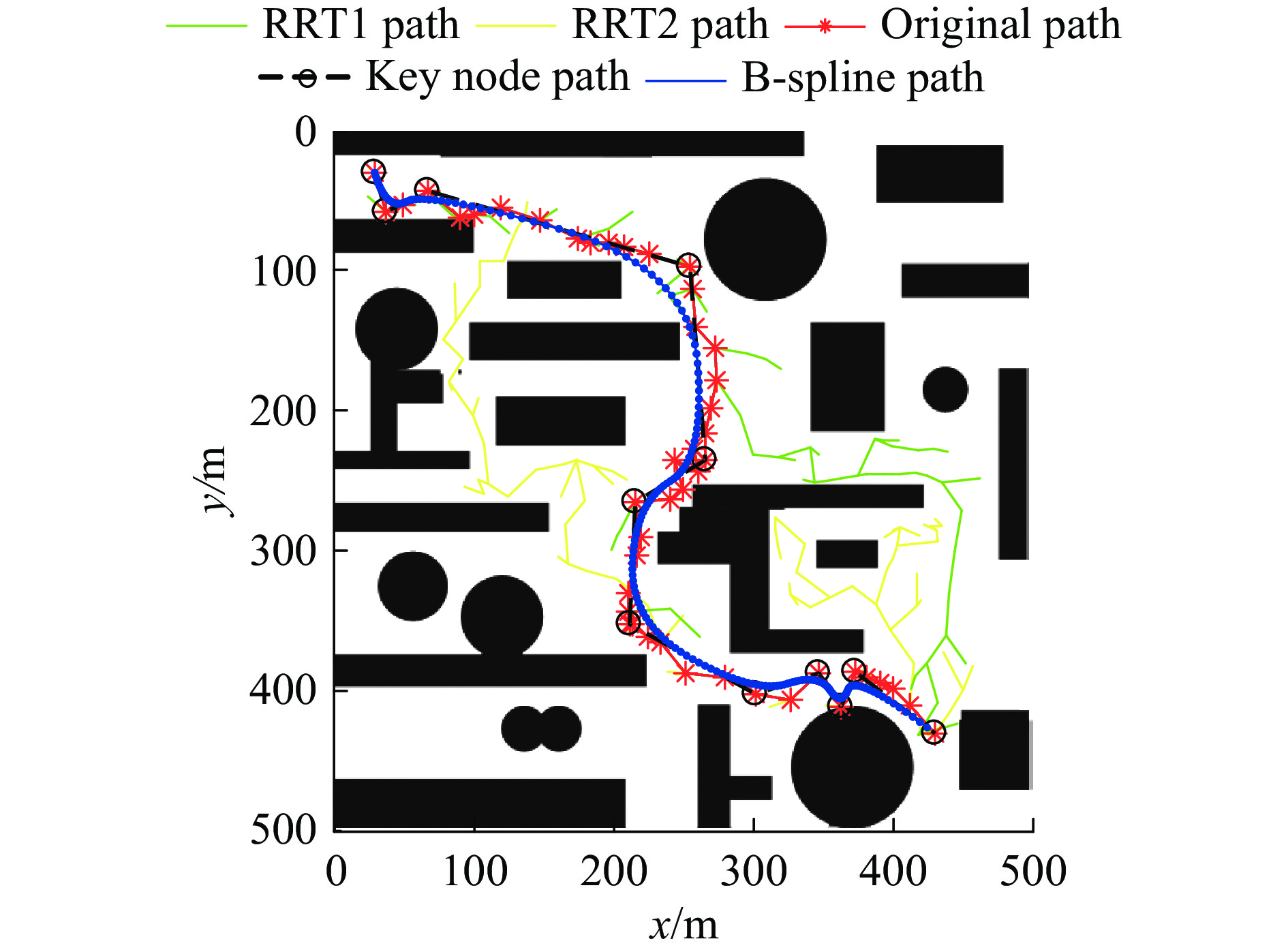
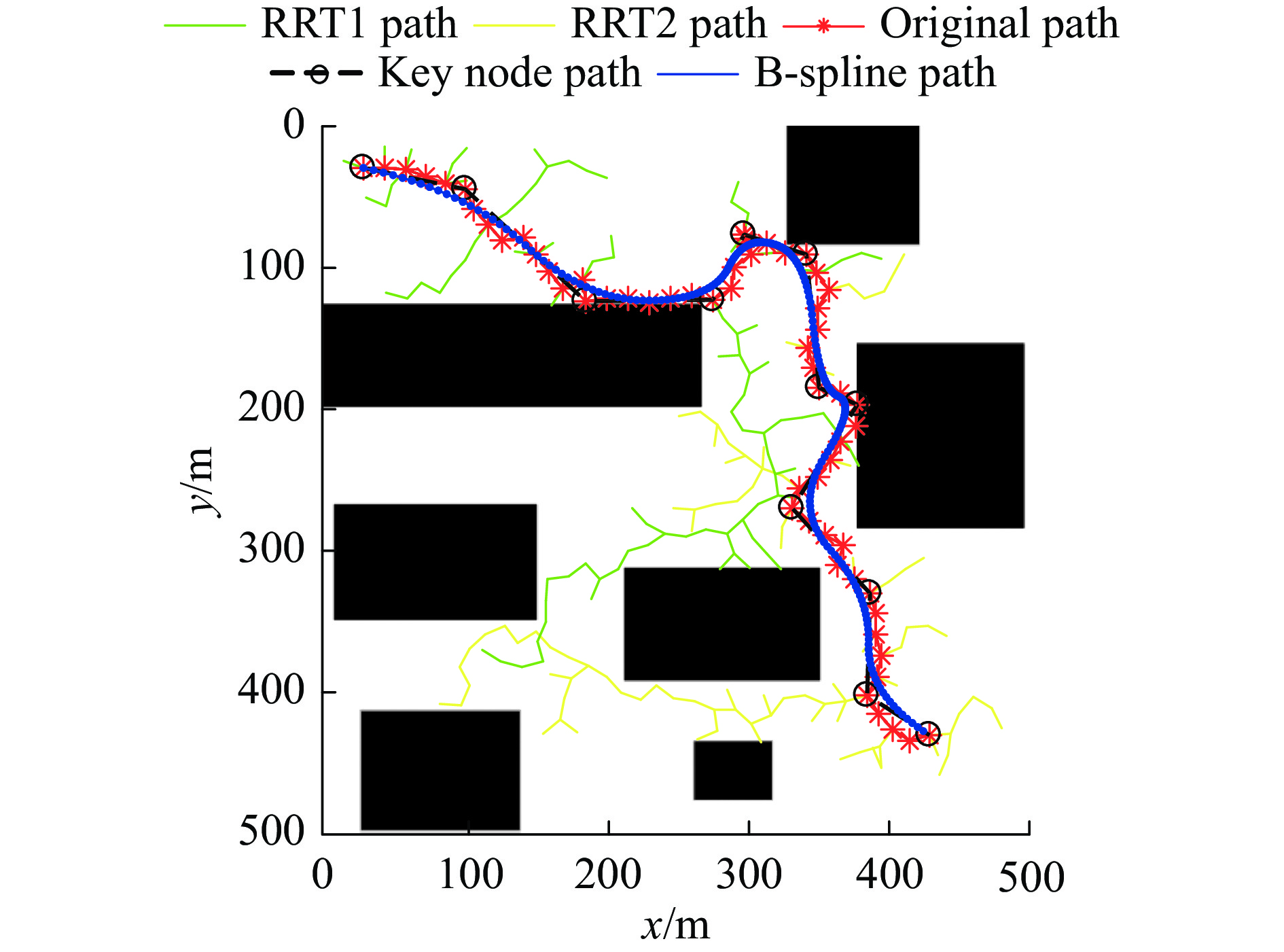
图 6 复杂环境下B样条-APF-BRRT运动路径
Figure 6. B-spline-APF-BRRT motion paths in complex environments
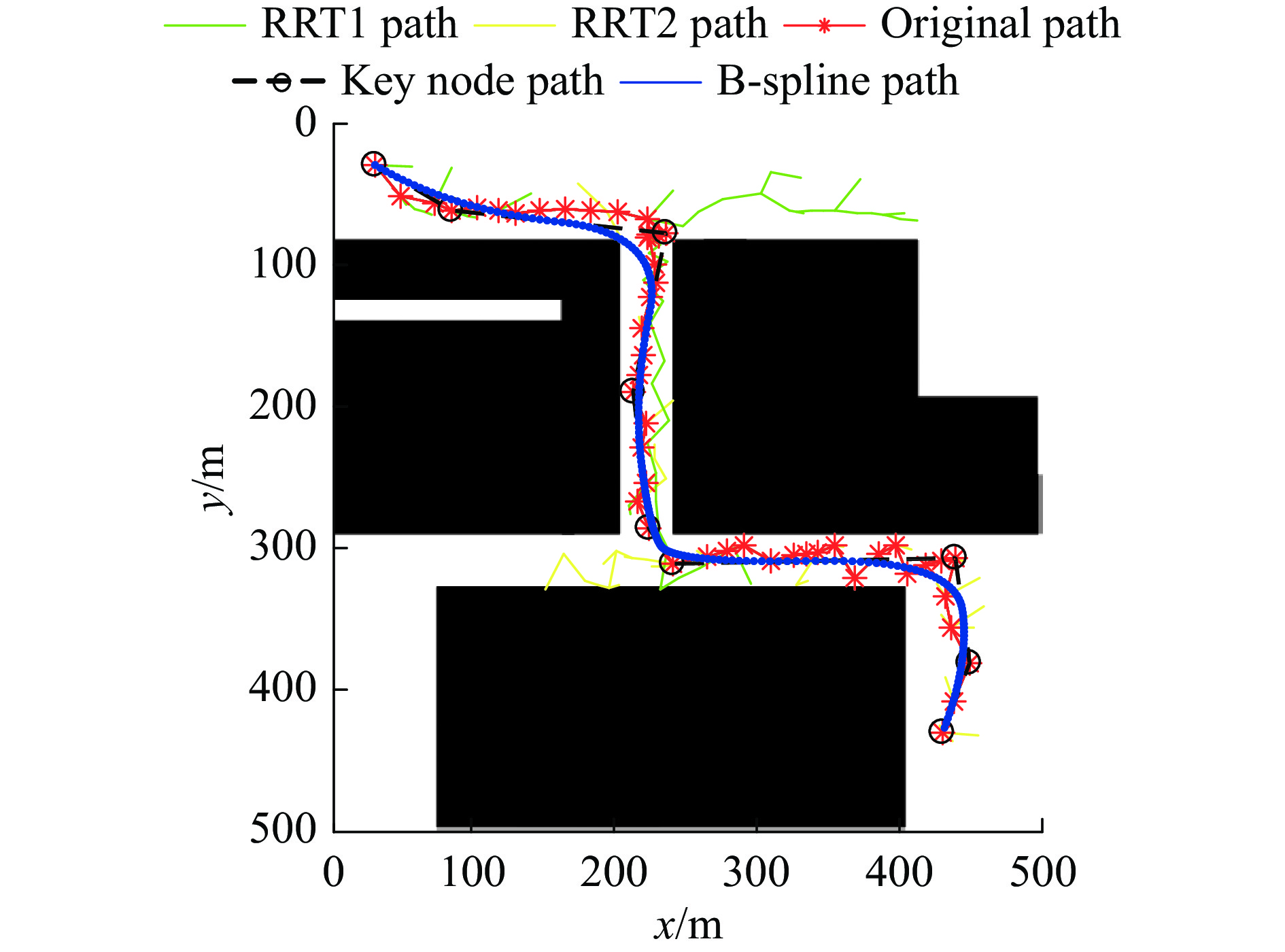
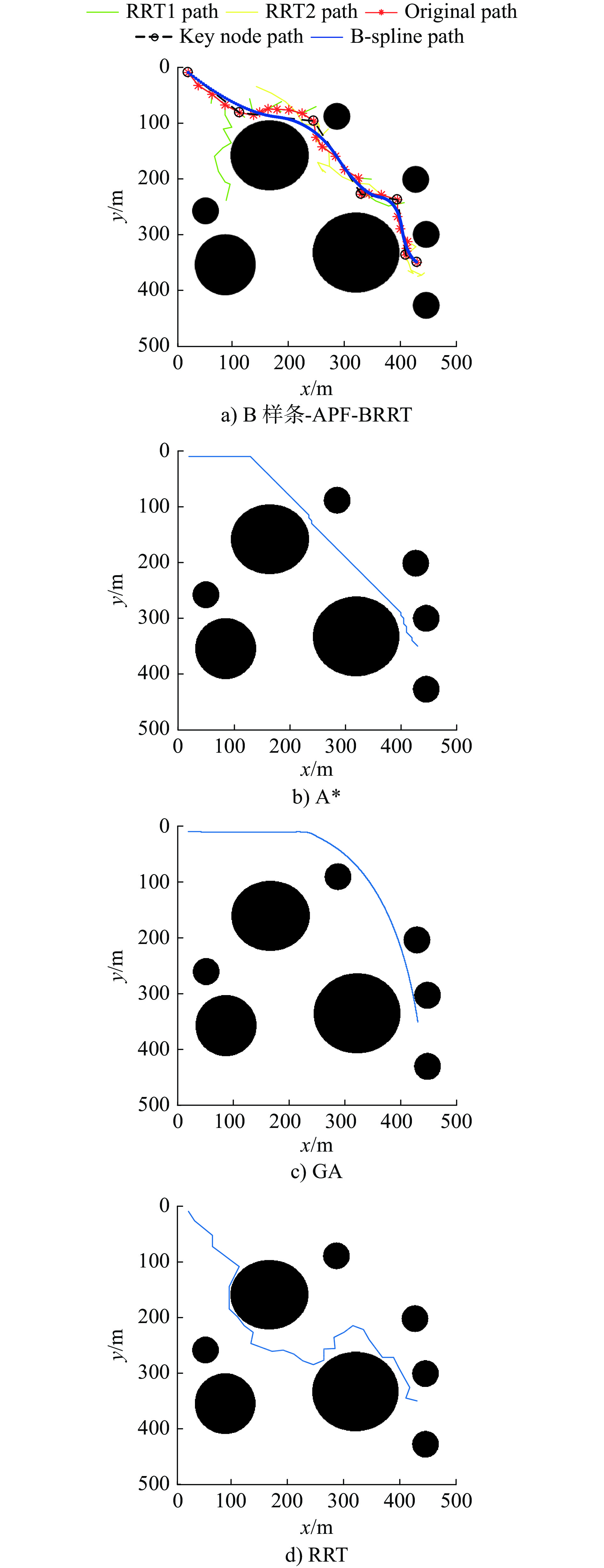
图 7 狭窄巷道环境下B样条-APF-BRRT运动路径
Figure 7. B-spline-APF-BRRT motion path in narrow alleyenvironment
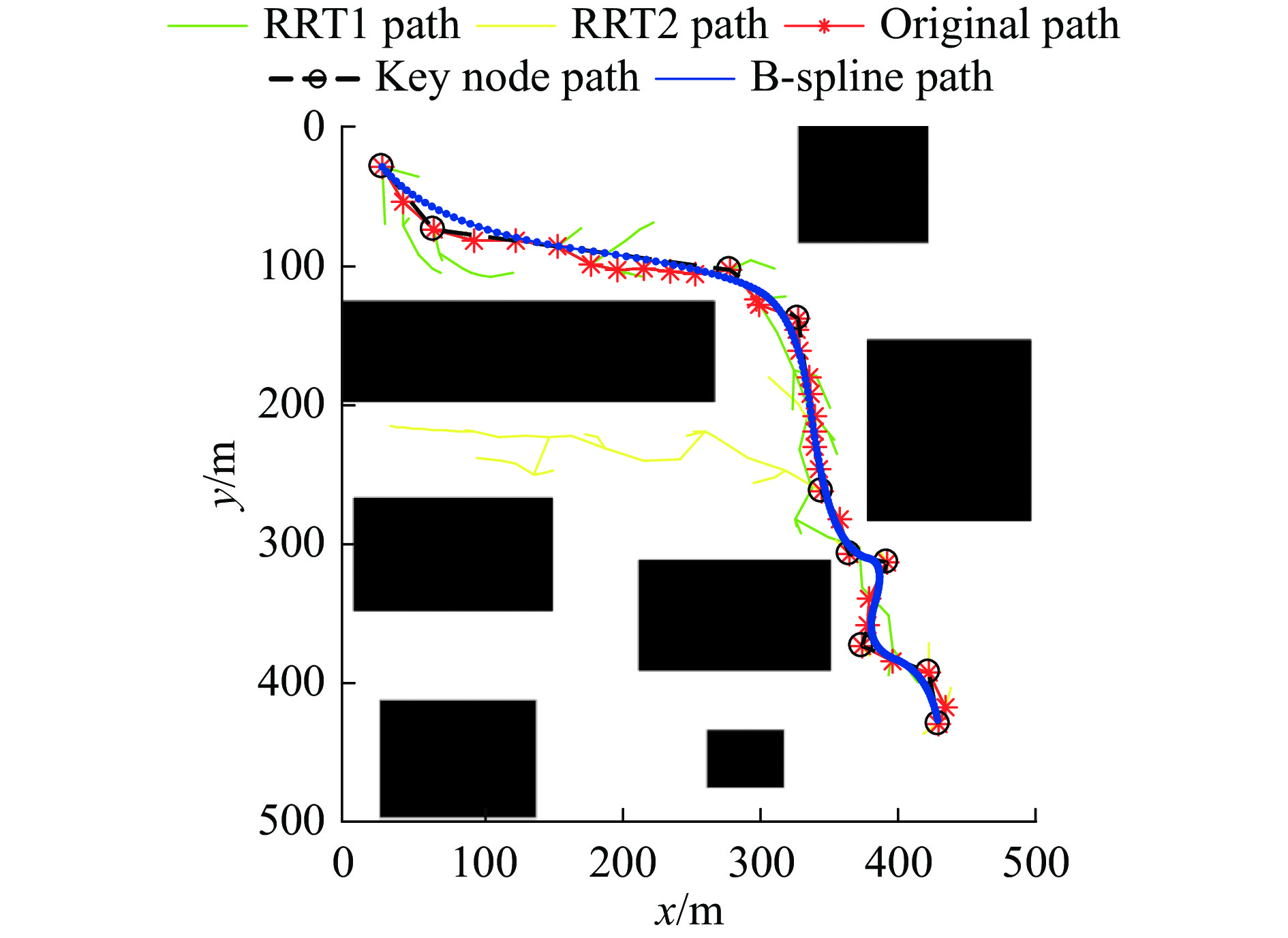
图 8 简单环境下B样条-APF-BRRT运动路径
Figure 8. B-spline-APF-BRRT motion path in simple environments
表 1 3种算法在不同环境下的性能测试对比结果
Table 1. Comparison results of three algorithms′ performance tests in different environments
地图 简单环境 复杂环境 狭窄巷道 原始路径长度/m 688.31 805.38 862.30 本文路径长度/m 660.30 756.42 795.62 原始路径节点总数/个 27 34 37 提取的关键节点/个 9 11 11 原始路径转折次数/次 25 32 34 本文路径转折次数/次 7 9 9  下载: 导出CSV
下载: 导出CSV
表 2 有无APF算法性能测试结果对比
Table 2. Comparison of performance test results with and without APF algorithm
算法 B-APF-BRRT B-BRRT 路径长度/m 674.38 730.54 节点总数/个 9 11 转折次数/次 7 9
下载: 导出CSV
表 3 本文算法与传统算法性能测试对比结果
Table 3. Comparison of the performance test results ofthis paper′s algorithm and the traditional algorithm
算法 本文算法 A* GA RRT 路径长度/m 601.34 592.27 740.00 720.79 时间/s 3.20 37.58 29.92 5.44 转折次数/次 3 7 1 20
下载: 导出CSV
-
[1] 葛世荣. 煤矿机器人现状及发展方向[J]. 中国煤炭, 2019, 45(7): 18-27.GE S R. Present situation and development direction of coal mine robots[J]. China Coal, 2019, 45(7): 18-27. (in Chinese) [2] LI M G, ZHU H, YOU S Z, et al. UWB-Based localization system aided with inertial sensor for underground coal mine applications[J]. IEEE Sensors Journal, 2020, 20(12): 6652-6669. doi: 10.1109/JSEN.2020.2976097 [3] JU C Y, LUO Q H, YAN X Z. Path planning using an improved A-star algorithm[C]//2020 11th International Conference on Prognostics and System Health Management (PHM-2020 Jinan). Jinan, China: IEEE, 2020: 23-26. [4] LI W Z, LIU J J, YAO S L. An improved Dijkstra′s algorithm for shortest path planning on 2D grid maps[C]//2019 IEEE 9th International Conference on Electronics Information and Emergency Communication (ICEIEC). Beijing, China: IEEE, 2019: 438-441. [5] CHEN X Y, DAI Y H. Research on an improved ant colony algorithm fusion with genetic algorithm for route planning[C]//2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC). Chongqing, China: IEEE, 2020: 1273-1278. [6] KONG S, ZHANG L Q. A path planning algorithm for sweeping robot based on improved neural network[C]//2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE). Xiamen, China: IEEE, 2019: 359-362. [7] CHEN L, SHAN Y X, TIAN W, et al. A fast and efficient double-Tree RRT*-Like sampling-based planner applying on mobile robotic systems[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(6): 2568-2578. doi: 10.1109/TMECH.2018.2821767 [8] 李兆强, 张时雨. 基于快速RRT算法的三维路径规划算法研究[J]. 系统仿真学报, 2022, 34(3): 503-511. doi: 10.16182/j.issn1004731x.joss.20-0829LI Z Q, ZHANG S Y. Research on 3D path planning Algorithm based on fast RRT algorithm[J]. Journal of System Simulation, 2022, 34(3): 503-511. (in Chinese) doi: 10.16182/j.issn1004731x.joss.20-0829 [9] 姜媛媛, 陶德俊, 时美乐, 等. DP-B样条移动机器人路径光滑算法[J]. 机械科学与技术, 2020, 39(4): 554-560. doi: 10.13433/j.cnki.1003-8728.20190157JIANG Y Y, TAO D J, SHI M L, et al. Path smoothing algorithm of mobile robot based on DP-B spline[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(4): 554-560. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20190157 [10] ZHAO X L, CAO Z Q, GENG W J, et al. Path planning of manipulator based on RRT-Connect and Bezier curve[C]//2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER). Suzhou, China: IEEE, 2019: 649-653. [11] MASHAYEKHI R, IDRIS M Y I, ANISI M H, et al. Informed RRT*-Connect: an asymptotically optimal single-query path planning method[J]. IEEE Access, 2020, 8: 19842-19852. doi: 10.1109/ACCESS.2020.2969316 [12] SHU X, NI F L, ZHOU Z, LIU Y C, LIU H, ZOU T. Locally guided multiple Bi-RRT* for fast path planning in narrow passages[C]//2019 IEEE International Conference on Robotics and Biomimetics (ROBIO). Dali, China: IEEE, 2019: 2085-2091. [13] 刘奥博, 袁杰. 目标偏置双向RRT*算法的机器人路径规划[J]. 计算机工程与应用, 2022, 58(6): 234-240.LIU A B, YUAN J. Robot path planning based on goal biased bidirectional RRT* algorithm[J]. Computer Engineering and Applications, 2022, 58(6): 234-240. (in Chinese) [14] 皇甫淑云. 矿井救灾机器人障碍物识别与路径规划研究[D]. 徐州: 中国矿业大学, 2020.HUANGFU S Y. Research on obstacle identification and path planning of mine disaster relief robot[D]. Xuzhou: China University of Mining and Technology, 2020. (in Chinese) [15] 许万, 杨晔, 余磊涛, 等. 一种基于改进RRT*的全局路径规划算法[J]. 控制与决策, 2022, 37(4): 829-838.XU W, YANG Y, YU L T, et al. A global path planning algorithm based on improved RRT*[J]. Control and Decision, 2022, 37(4): 829-838. (in Chinese) [16] LI K Y, LU Y G, ZHANG Y C. Dynamic obstacle avoidance path planning of UAV based on improved APF[C]//2020 5th International Conference on Communication, Image and Signal Processing (CCISP). Chengdu, China: IEEE, 2020: 159-163. [17] 黄肖文, 任彦. 基于APF-RRT融合算法的无人机航迹规划研究[J]. 绿色科技, 2020(6): 220-221. doi: 10.16663/j.cnki.lskj.2020.06.074HUANG X W, REN Y. Design and realization of data dynamic distribution algorithm for HDFS[J]. Journal of Green Science and Technology, 2020(6): 220-221. (in Chinese) doi: 10.16663/j.cnki.lskj.2020.06.074 [18] ZHU J, ZHAO S L, ZHAO R. Path planning for autonomous underwater vehicle based on artificial potential field and modified RRT[C]//2021 International Conference on Computer, Control and Robotics (ICCCR). Shanghai: IEEE, 2021: 21-25. [19] WU Z C, SU W Z, LI J H. Multi-robot path planning based on improved artificial potential field and B-spline curve optimization[C]//2019 Chinese Control Conference (CCC). Guangzhou: IEEE, 2019: 4691-4696. [20] WANG X L, ZHANG D. Selecting optimal threshold value of Douglas-Peucker algorithm based on curve fit[C]//2010 First International Conference on Networking and Distributed Computing. Hangzhou: IEEE, 2010: 251-254. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 117
- HTML全文浏览量: 90
- PDF下载量: 13
- 被引次数: 0
