




Neural Network Identification and Backstepping Control ofElectro-hydraulic Cylinder for A Heavy-duty Manipulator
-
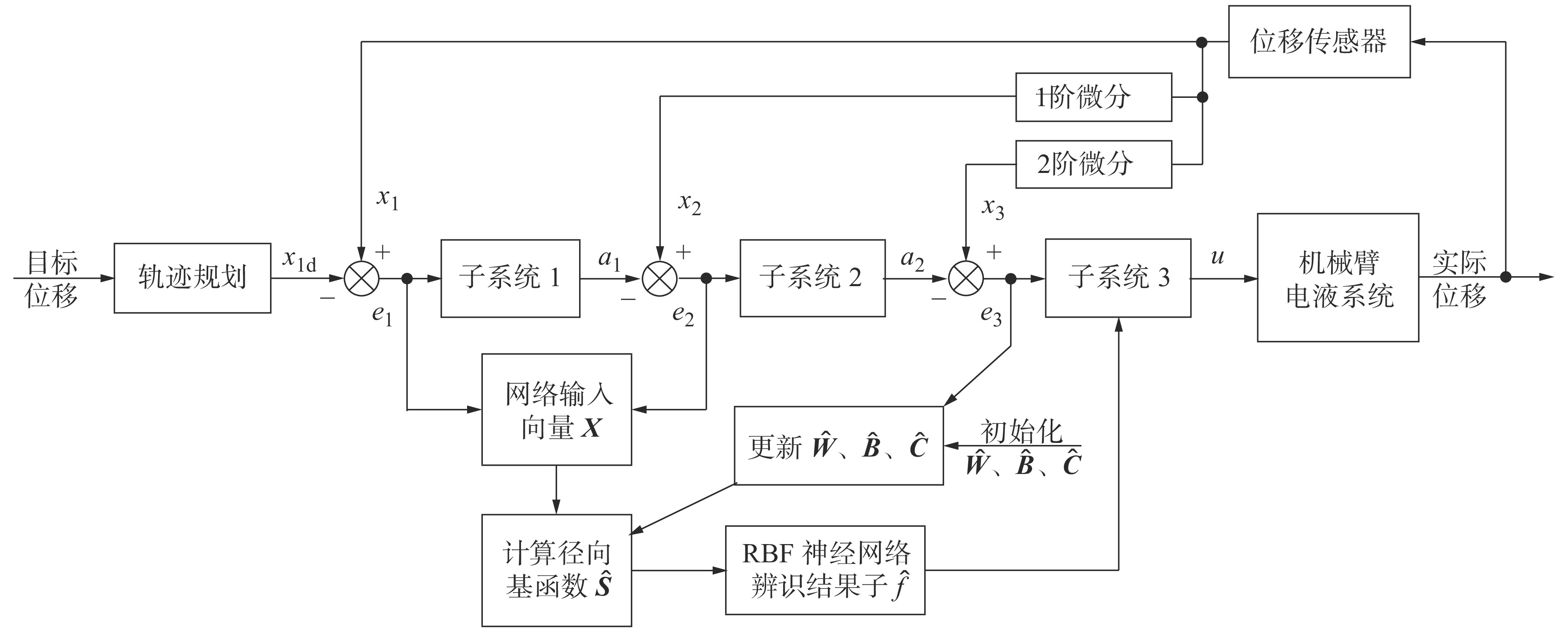
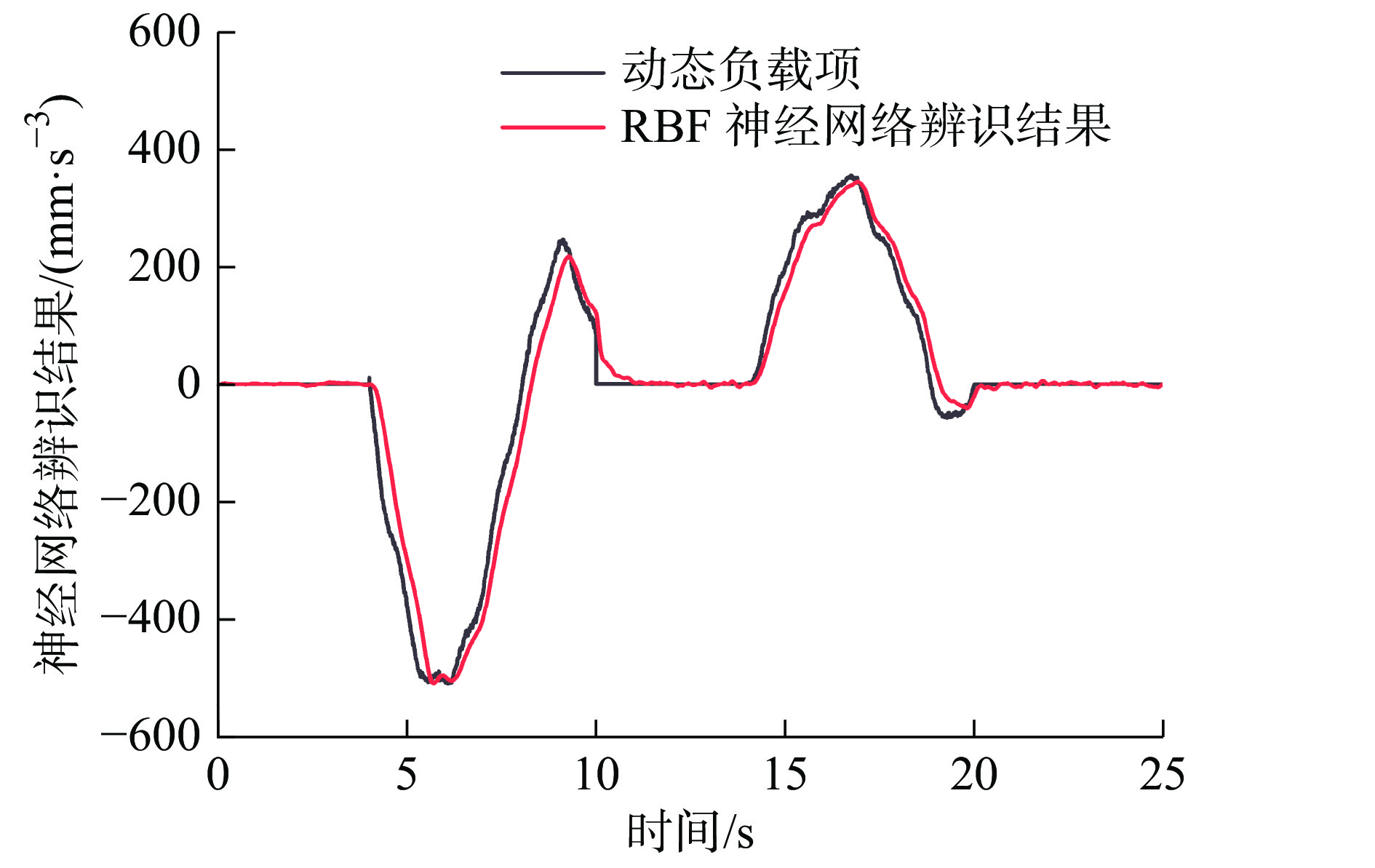
摘要: 针对重型机械臂的电液驱动系统因非线性、参数时变等因素引起的控制精度下降问题,提出了一种基于RBF神经网络辨识动态负载的反步控制策略。以某锚杆钻车重型机械臂的电液系统为例,建立了系统的数学模型,将其分解为系统内部状态反馈、控制器驱动及外部负载驱动这3个动力学部分。考虑电液系统内部参数变化的缓慢性,通过离线辨识的方法,得到系统内部状态反馈中的标称模型参数。控制器的设计采用反步法,其输出计算需要对外部负载进行辨识,对此采用RBF神经网络进行动态负载辨识,辨识与控制的动态过程及设计原则依据Lyapunov稳定性原理。仿真与实验结果表明:所设计的控制算法有效提高了机械臂的位置跟踪精度,具有响应速度快、轨迹误差小的特点;控制器输出的控制量也相对较小和平滑。Abstract: For the problem of control accuracy drop of the electro-hydraulic system used widely in heavy-duty manipulators because of the factors such as nonlinearity and time-varying parameters, a backstepping control method is proposed based on the introducing of Radical Basis Function(RBF) neural network to identify the dynamic load. Taking the hydraulic-driving manipulator of an anchor drilling rig as an example, the mathematical model of the electro-hydraulic system is established. The model consists of three dynamic parts, which are inner state feedback of the system, control driving and outside load driving. The nominal model parameters in the internal state feedback of the system are identified through off-line test due to the relatively slow variation of the parameters. The design of the controller follows the procedure of backstepping method, and the output calculation of the controller needs the estimation of the dynamic load, for which a RBF neural network is adapted. The principle for the update of RBF neural network and the design of controller is based on Lyapunov theory. Many simulations and experiments show that the proposed control method effectively improves the position tracking accuracy of the manipulator, with rapid response and less trajectory error, and relatively smooth and small control output.
-
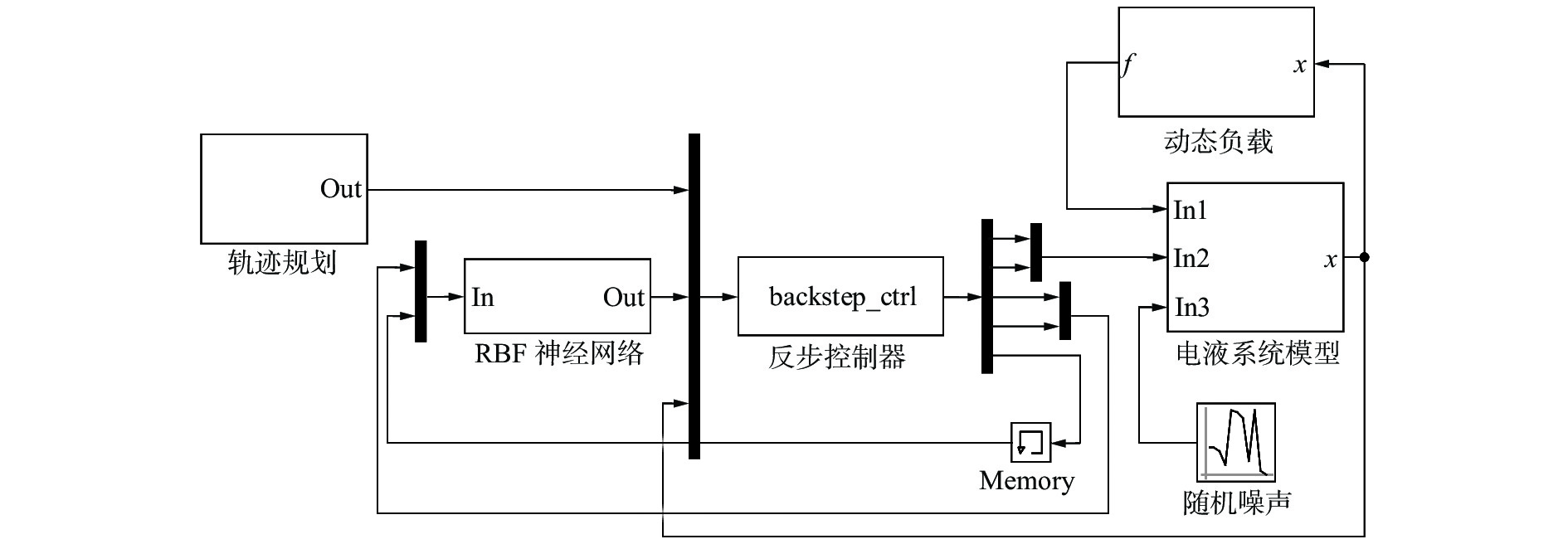
图 5 锚杆钻车机械臂电液系统仿真模型
Figure 5. Simulation model of bolt drilling truck manipulator of an electro-hydraulic system
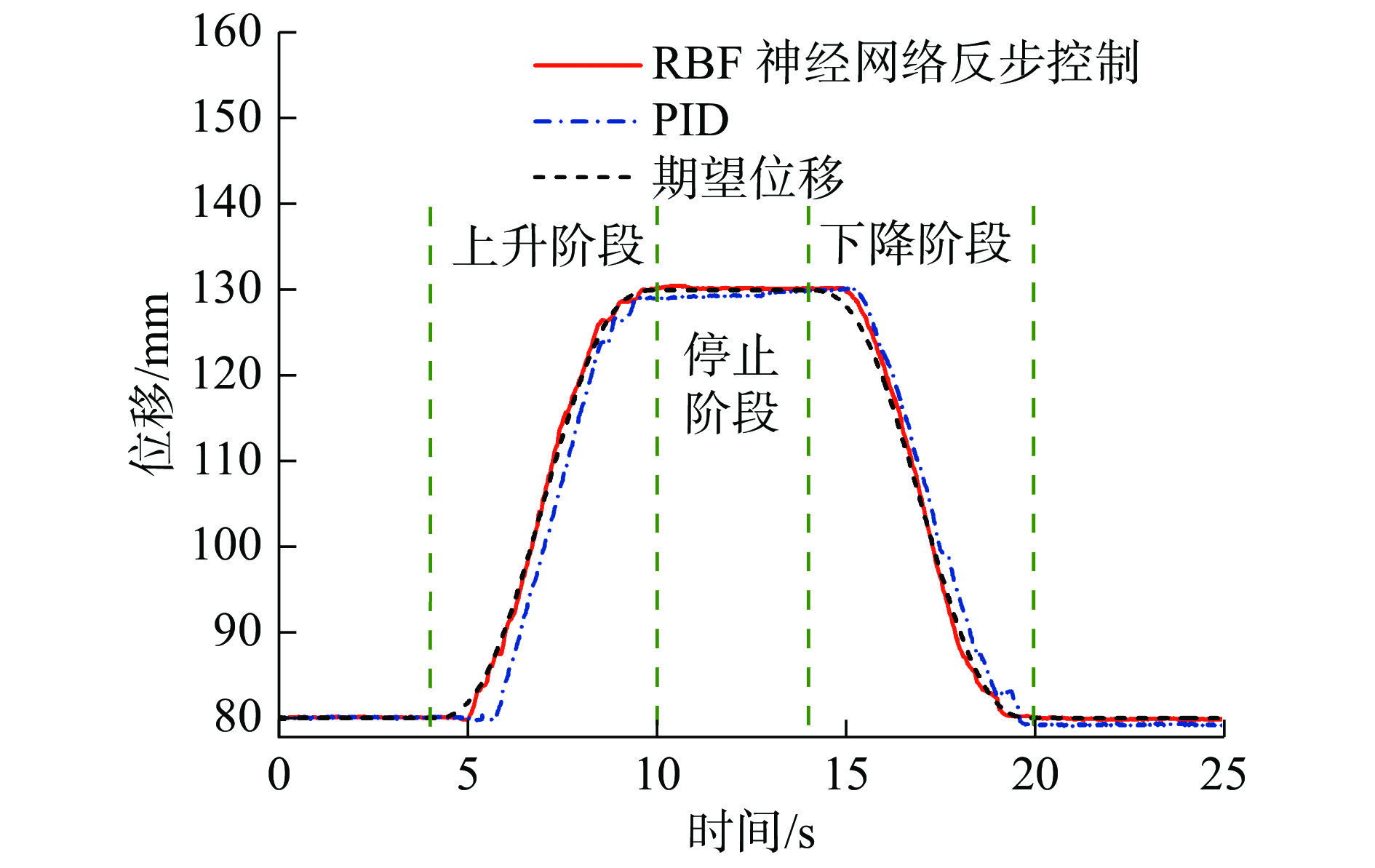
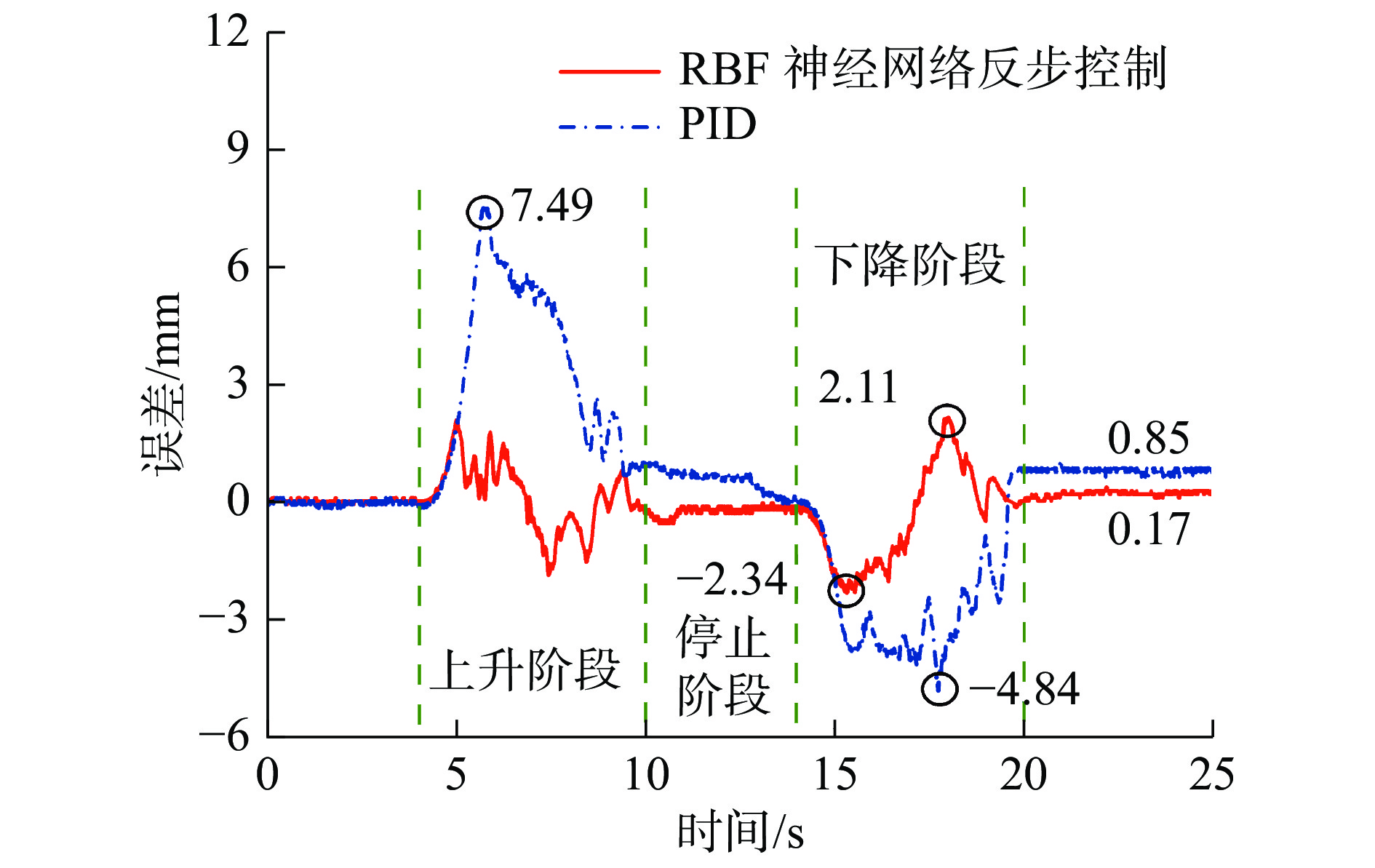
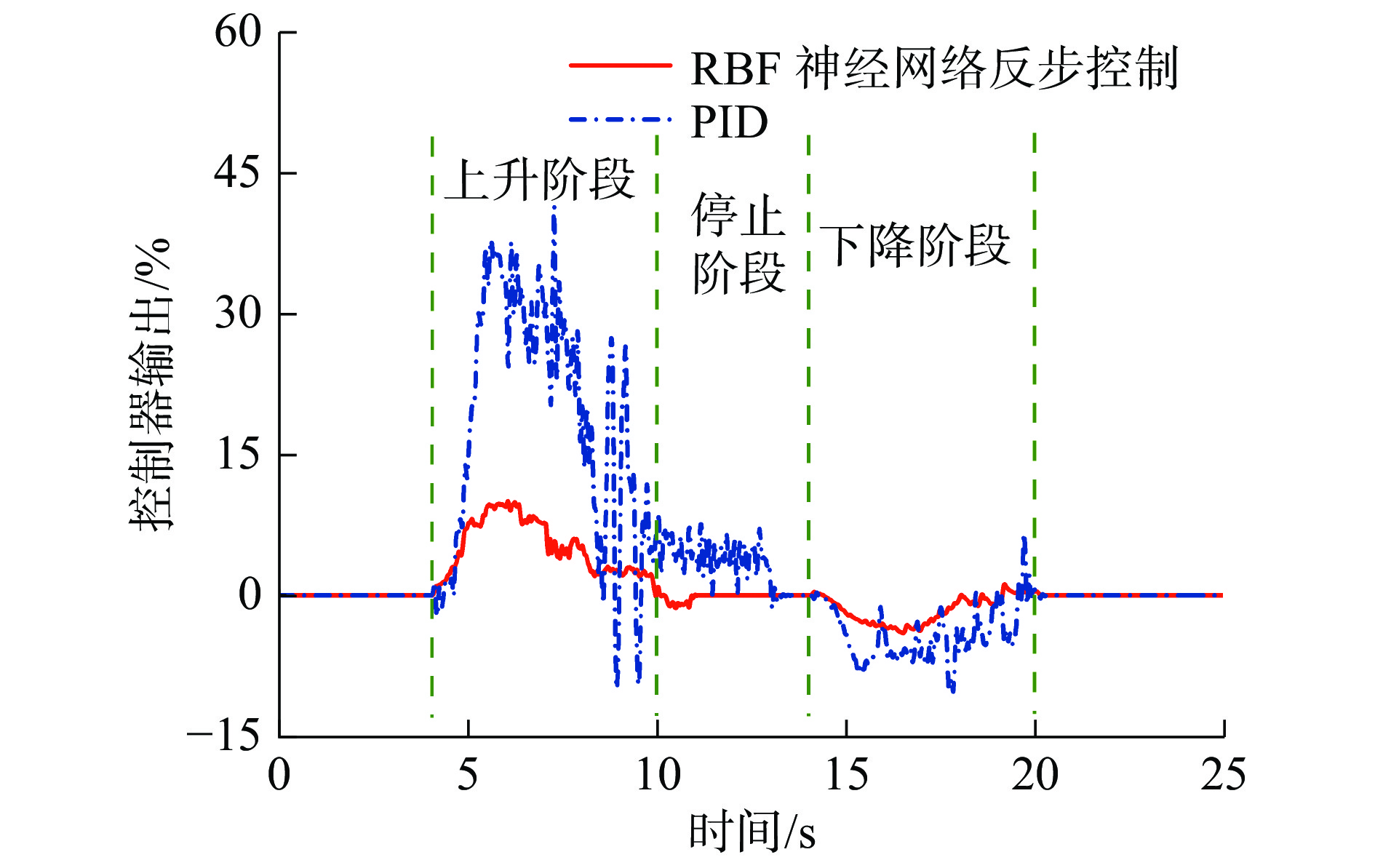
图 15 五次多项式轨迹位置跟踪实验结果
Figure 15. 5th polynomial trajectory position trackingexperimental results

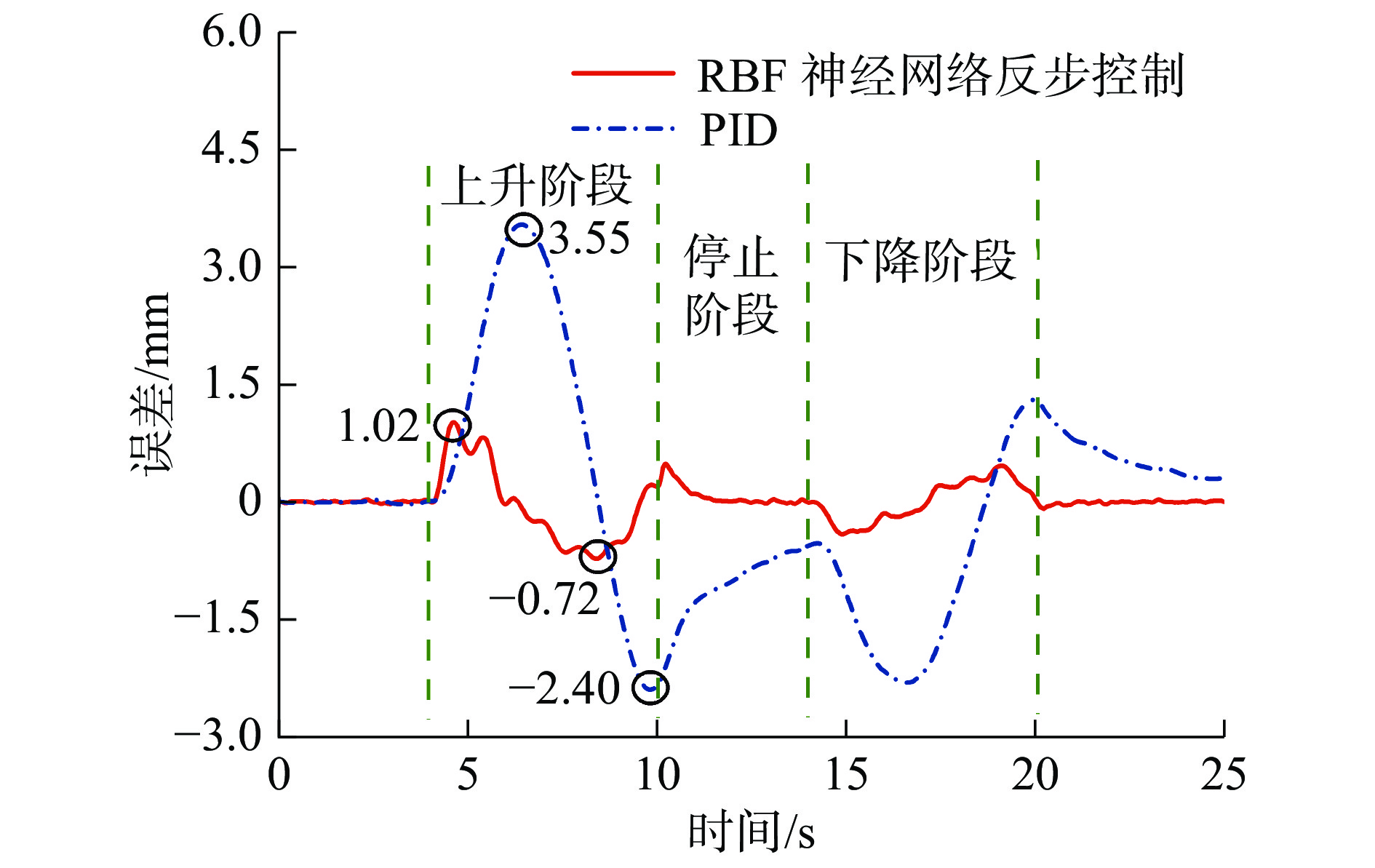
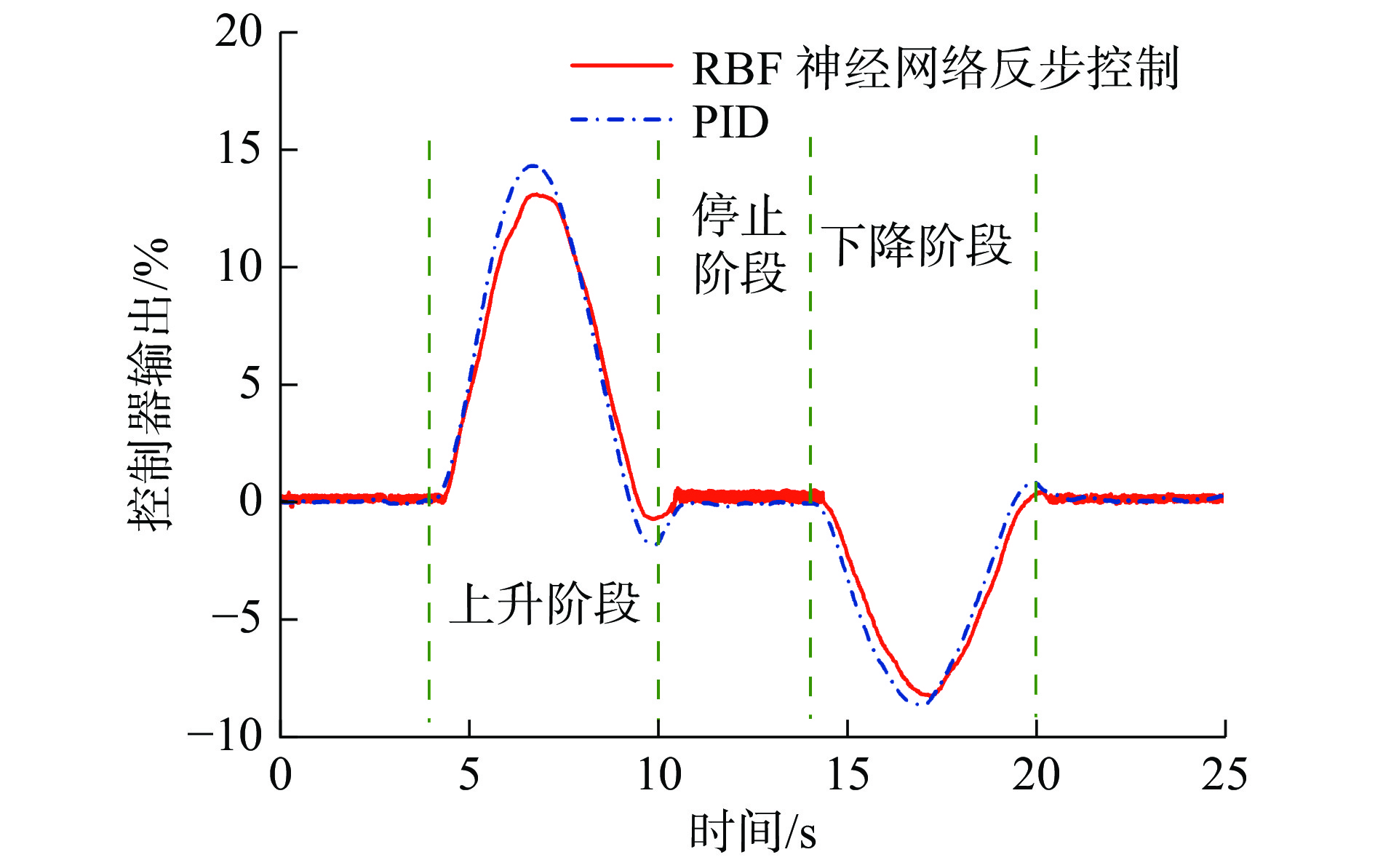
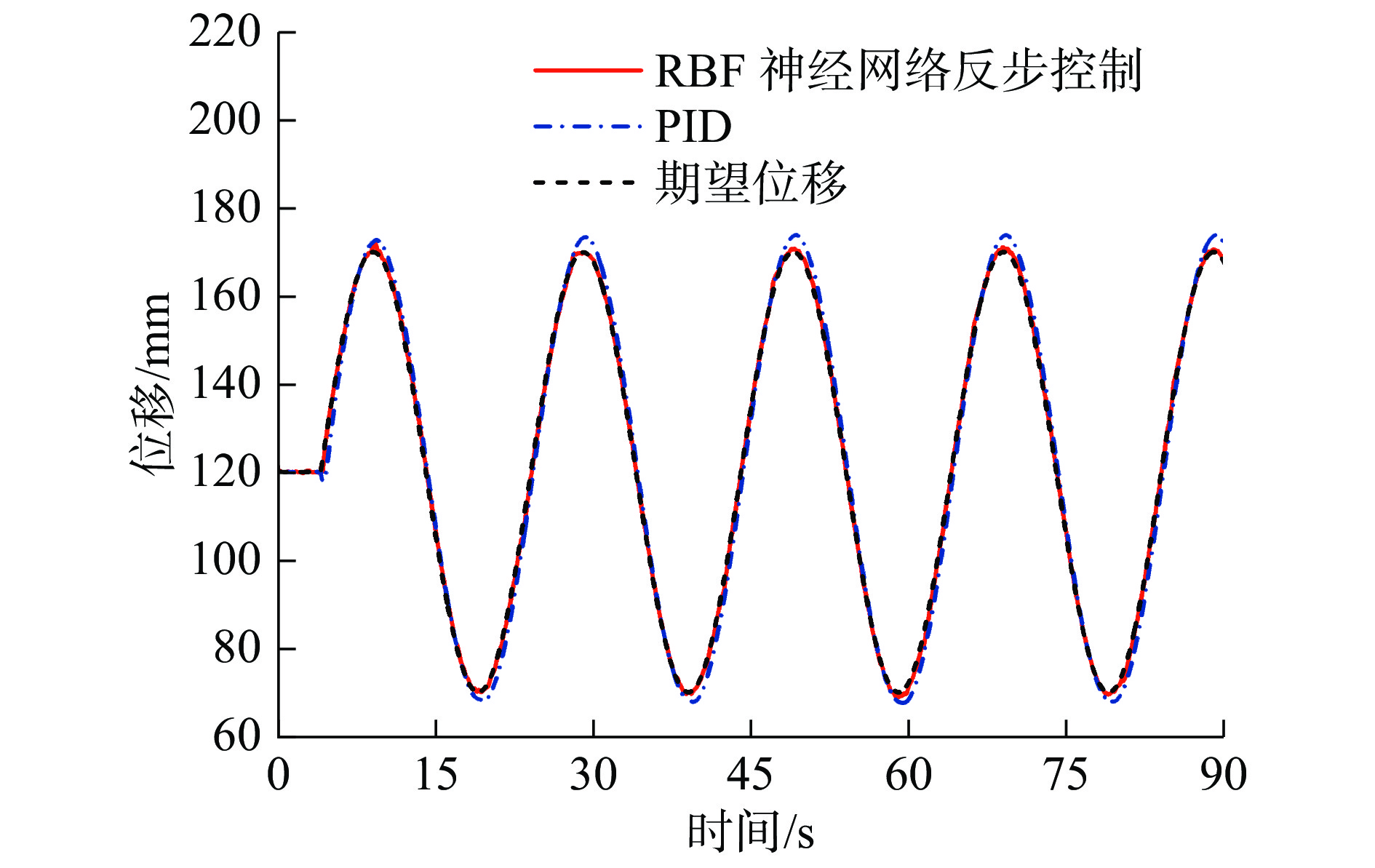
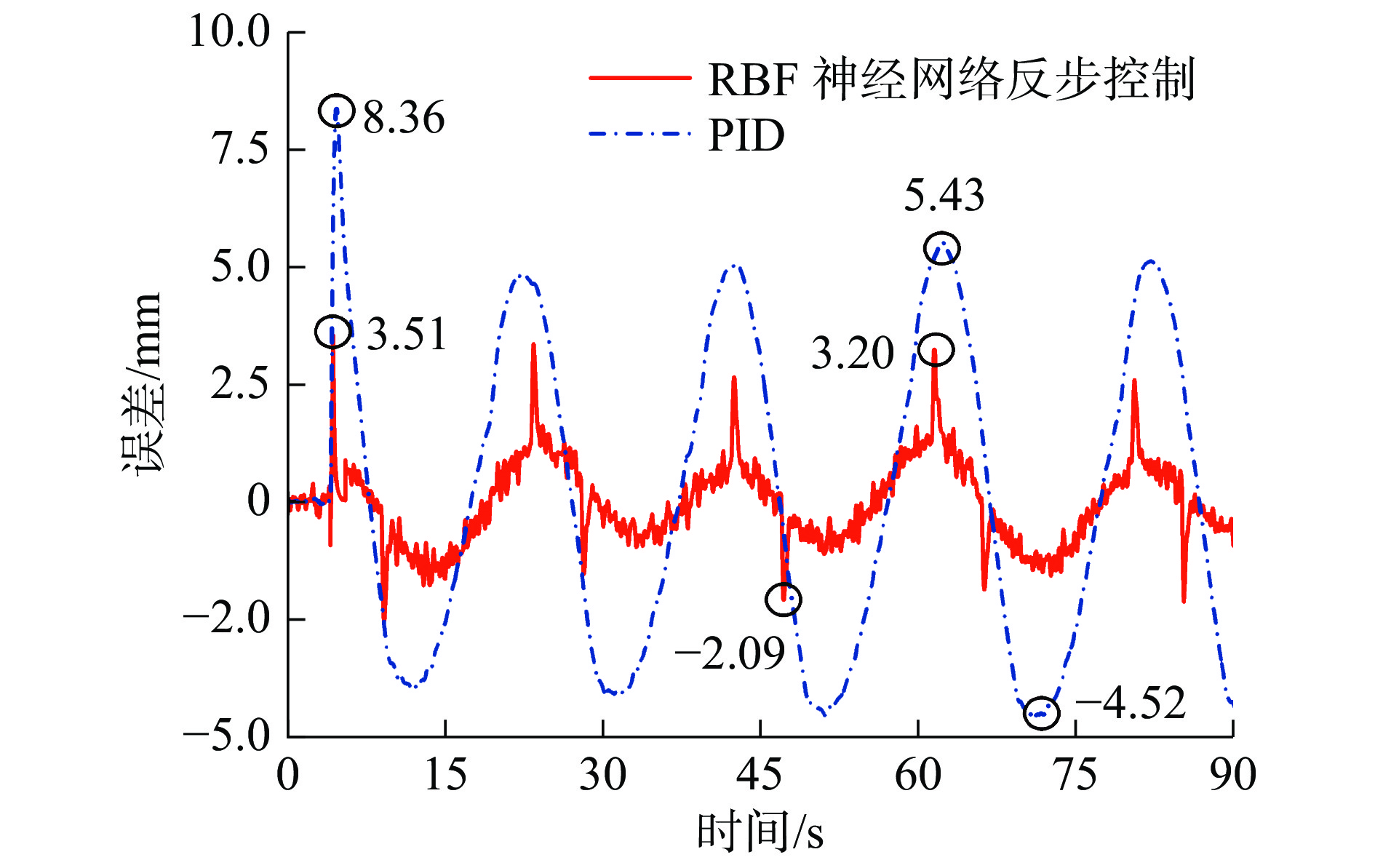
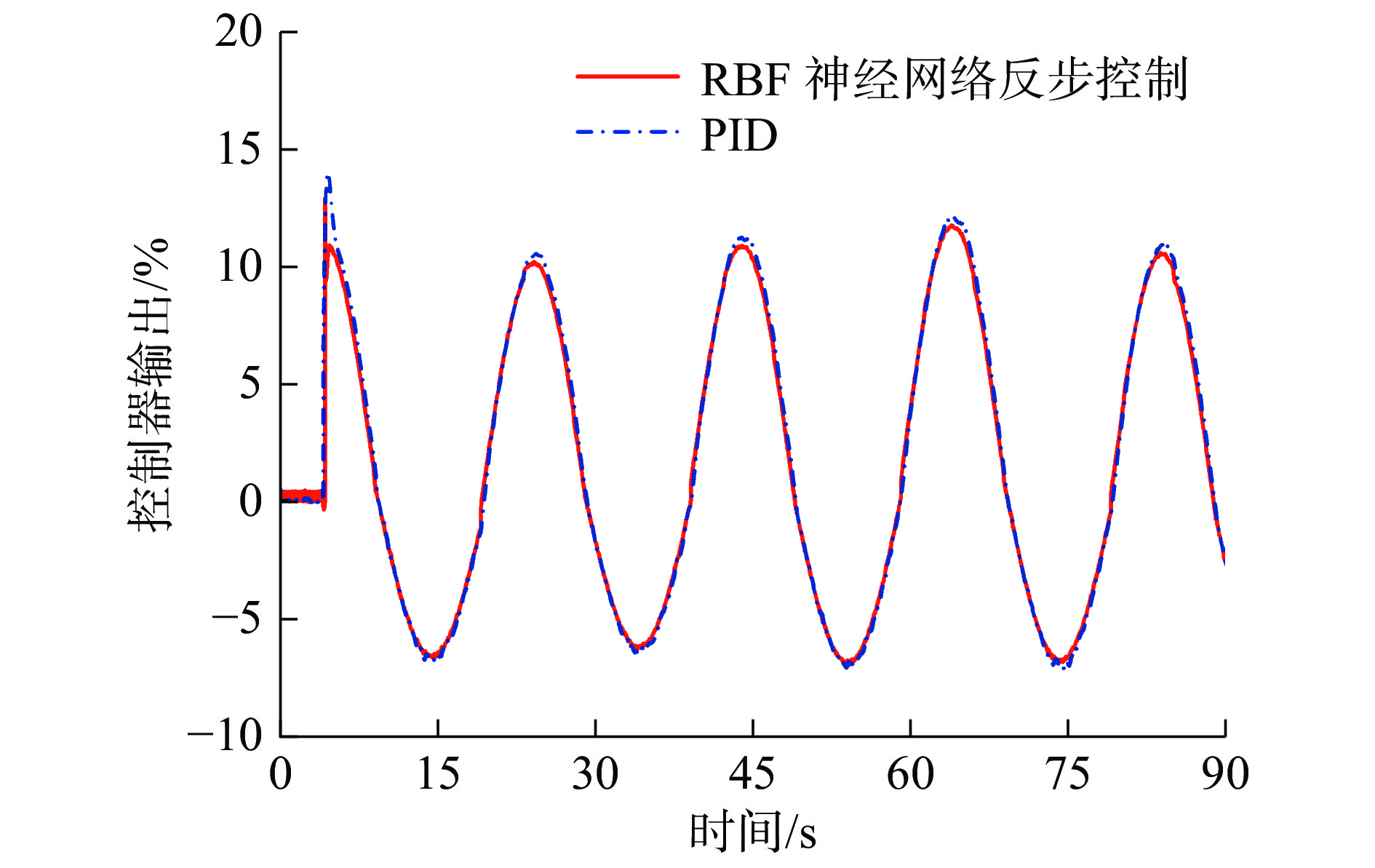
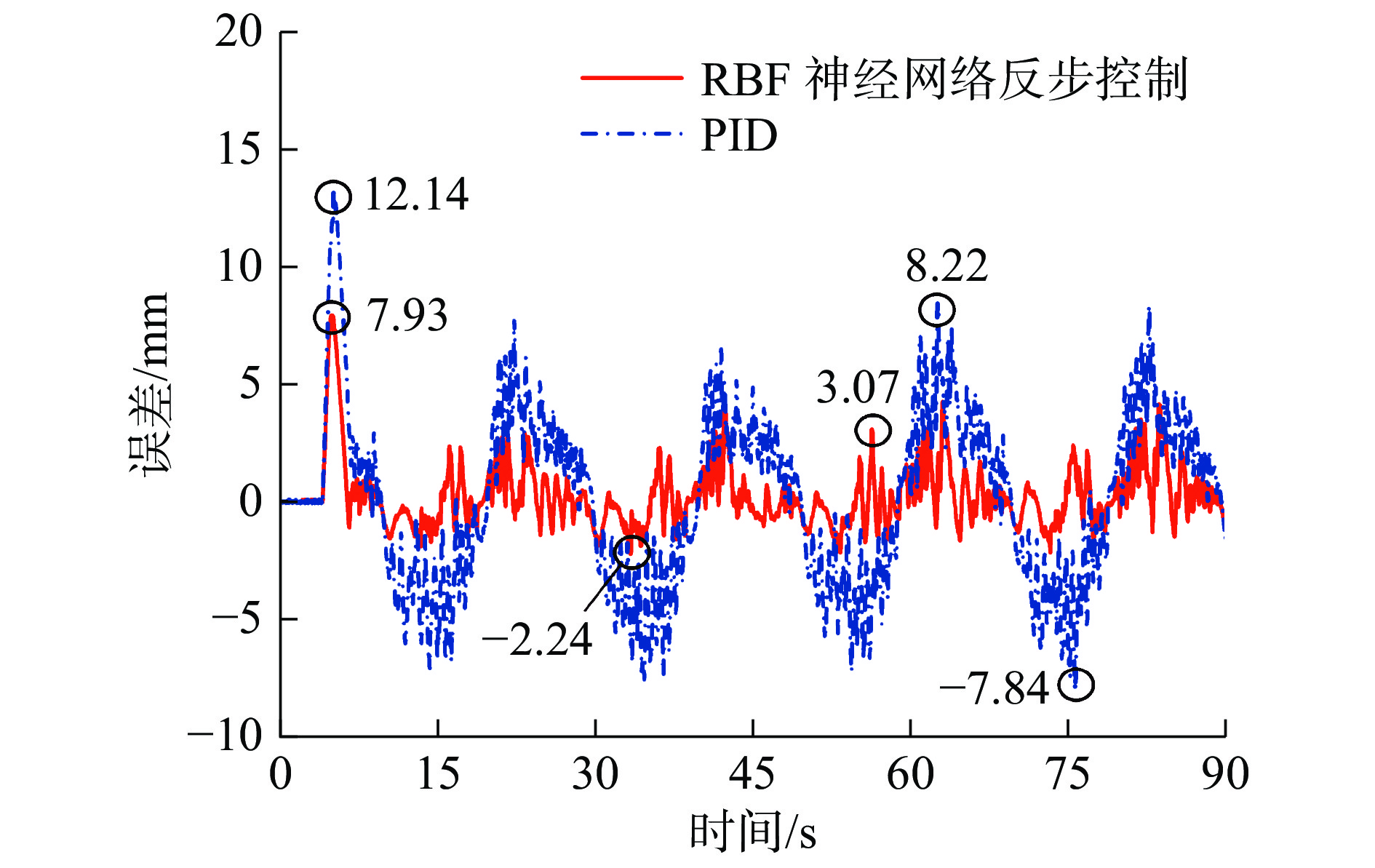
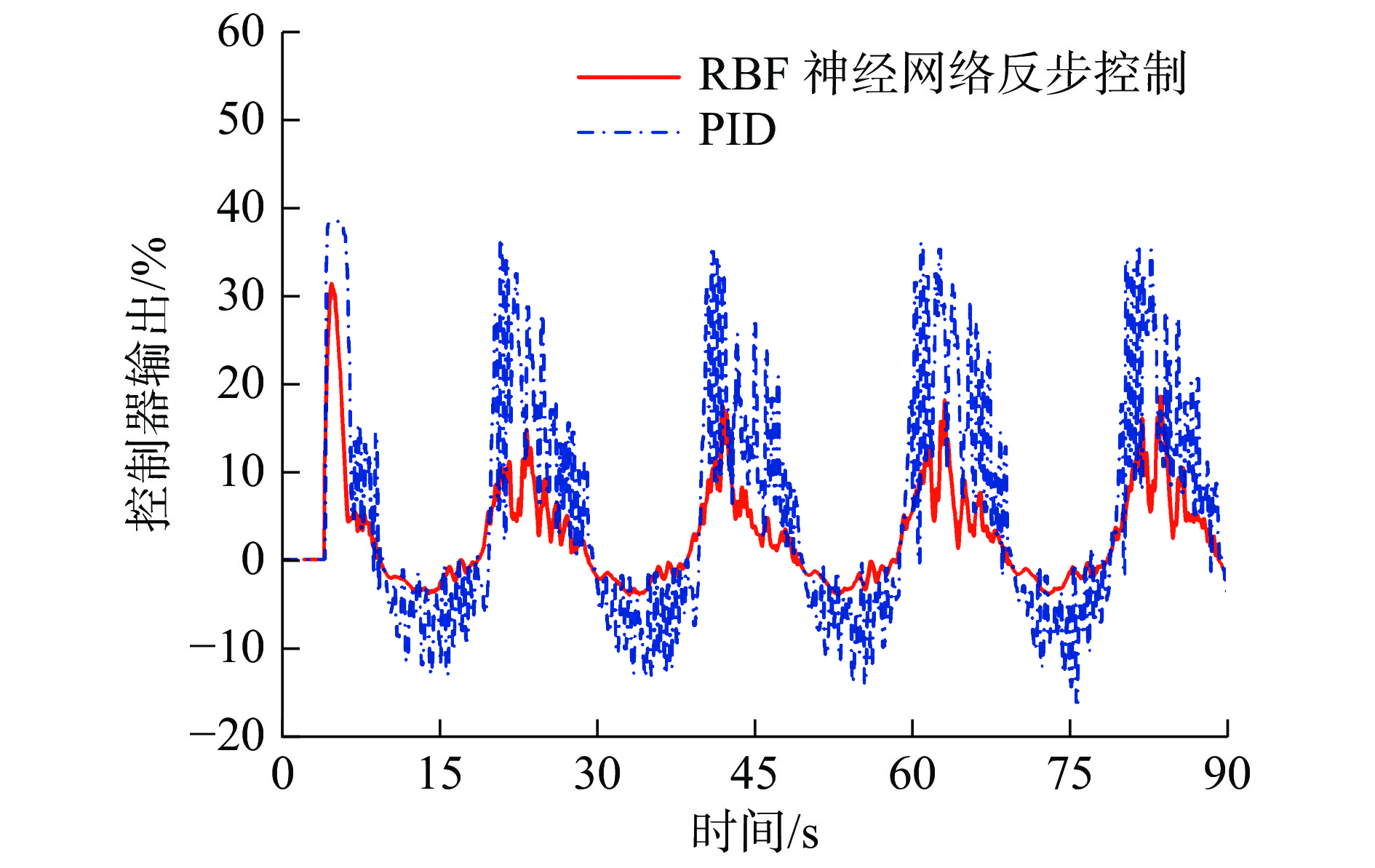
图 18 正弦轨迹位置跟踪实验结果
Figure 18. Sinusoidal trajectory position tracking experimental results
表 1 机械臂电液系统参数表
Table 1. Manipulator's electro-hydraulic system's parameters
参数 数值 机械臂转动惯量/(kg·m2) 5 718 平均有效面积At/m2 6.440×10−3 活塞行程/m 0.28 惯性负载质量/kg 1200 黏性阻尼系数Bp/(Ns·m−1) 2.25×106 液压缸等效总容积Vt/m3 1.803×10−3 油液弹性模量βe/Pa 7×108 比例阀的流量增益kq/[(m3·s−1)·A−1] 1.667×10−3  下载: 导出CSV
下载: 导出CSV
表 2 五次多项式轨迹位置跟踪实验误差对比
Table 2. 5th polynomial trajectory position tracking experimental error comparison
mm 控制方法 最大值 最小值 均方根误差 稳态误差 PID控制器 7.49 − 4.84 2.43 0.85 RBF神经网
络反步控制2.11 − 2.34 0.73 0.17
下载: 导出CSV
表 3 正弦信号轨迹位置跟踪实验误差对比
Table 3. Sinusoidal signal trajectory position tracking experimental error comparison
mm 控制方法 最大值 最小值 均方根误差 平均绝对误差 PID控制器 12.14 − 7.84 3.66 3.03 RBF神经网
络反步控制7.93 − 2.24 1.39 0.95
下载: 导出CSV
-
[1] 赵斌, 权龙, 黄家海, 等. 大型液压铲上车回转驱动系统及特性研究[J]. 机械工程学报, 2017, 53(6): 176-186. doi: 10.3901/JME.2017.06.176ZHAO B, QUAN L, HUANG J H, et al. Driven system and characteristics research of large hydraulic shovel swing motion[J]. Journal of Mechanical Engineering, 2017, 53(6): 176-186. (in Chinese) doi: 10.3901/JME.2017.06.176 [2] 杨健健, 张强, 王超, 等. 煤矿掘进机的机器人化研究现状与发展[J]. 煤炭学报, 2020, 45(8): 2995-3005.YANG J J, ZHANG Q, WANG C, et al. Status and development of robotization research on roadheader for coal mines[J]. Journal of China Coal Society, 2020, 45(8): 2995-3005. (in Chinese) [3] KOVARI A. Effect of leakage in electrohydraulic servo systems based on complex nonlinear mathematical model and experimental results[J]. Acta Polytechnica Hungarica, 2015, 12(3): 129-146. [4] 严骏, 黎波, 郭刚, 等. 基于Hammerstein模型的挖掘臂伺服系统参数辨识[J]. 兵工学报, 2012, 33(12): 1527-1532.YAN J, LI B, GUO G, et al. Parameter identification of servo system for excavator arm based on Hammerstein model[J]. Acta Armamentarii, 2012, 33(12): 1527-1532. (in Chinese) [5] SHEN J X, CUI H X, FENG K, et al. Parameter identification and control algorithm of electrohydraulic servo system for robotic excavator based on improved Hammerstein model[J]. Mathematical Problems in Engineering, 2020, 2020: 9216019. [6] YUAN H B, NA H C, KIM Y B. System identification and robust position control for electro-hydraulic servo system using hybrid model predictive control[J]. Journal of Vibration and Control, 2018, 24(18): 4145-4159. doi: 10.1177/1077546317721417 [7] 余臻, 李喆瀚, 刘利军. 电液伺服系统多项式非线性建模与控制一体化设计[J]. 控制理论与应用, 2021, 38(3): 364-372.YU Z, LI Z H, LIU L J. Integrated design of polynomial nonlinear modeling and control of electro-hydraulic servo systems[J]. Control Theory & Applications, 2021, 38(3): 364-372. (in Chinese) [8] 李文顶, 施光林. 电液伺服系统RBF神经网络滑模控制[J]. 液压与气动, 2019, 43(2): 109-114.LI W D, SHI G L. RBF neural network sliding mode control for electro hydraulic servo system[J]. Chinese Hydraulics & Pneumatics, 2019, 43(2): 109-114. (in Chinese) [9] 杨旭华. 神经网络及其在控制中的应用研究[D]. 杭州: 浙江大学, 2004YANG X H. Study on neural networks machine and its application in control[D]. Hangzhou: Zhejiang University, 2004. (in Chinese) [10] 刘金琨. 智能控制[M]. 4版. 北京: 电子工业出版社, 2017LIU J K. Intelligent control[M]. 4th ed. Beijing: Publishing House of Electronics Industry, 2017. (in Chinese) [11] 李砚浓, 李汀兰, 姜艺, 等. 基于RBF神经网络自适应PID四旋翼飞行器控制[J]. 控制工程, 2016, 23(3): 378-382.LI Y N, LI T L, JIANG Y, et al. Adaptive PID control of quadrotor based on RBF neural network[J]. Control Engineering of China, 2016, 23(3): 378-382. (in Chinese) [12] 秦斌, 周浩, 杜康, 等. 基于RBF网络的风电机组变桨距滑模控制[J]. 电工技术学报, 2013, 28(5): 37-41.QIN B, ZHOU H, DU K, et al. Sliding mode control of pitch angle based on RBF neural-network[J]. Transactions of China Electrotechnical Society, 2013, 28(5): 37-41. (in Chinese) [13] 赵希梅, 金洋洋, 王丽梅. PMLSM伺服系统的自适应RBFNN反推控制[J]. 电机与控制学报, 2020, 24(4): 149-157.ZHAO X M, JIN Y Y, WANG L M. Adaptive RBFNN backstepping control for PMLSM servo system[J]. Electric Machines and Control, 2020, 24(4): 149-157. (in Chinese) [14] TRAN D T, TRUONG H V A, AHN K K. Adaptive backstepping sliding mode control based RBFNN for a hydraulic manipulator including actuator dynamics[J]. Applied Sciences, 2019, 9(6): 1265. doi: 10.3390/app9061265 [15] TRAN D T, NGUYEN M N, AHN K K. RBF neural network based backstepping control for an electrohy-draulic elastic manipulator[J]. Applied Sciences, 2019, 9(11): 2237. doi: 10.3390/app9112237 [16] LU S M, LI D J. Adaptive neural network control for nonlinear hydraulic servo-system with time-varying state constraints[J]. Complexity, 2017, 2017: 6893521. [17] DENG P, ZENG L C, LIU Y. RBF neural network backstepping sliding mode adaptive control for dynamic pressure cylinder electrohydraulic servo pressure system[J]. Complexity, 2018, 2018: 4159639. [18] GUO Q, ZHANG Y, CELLER B G, et al. Neural adaptive backstepping control of a robotic manipulator with prescribed performance constraint[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(12): 3572-3583. doi: 10.1109/TNNLS.2018.2854699 [19] GUO Q, CHEN Z L. Neural adaptive control of single-rod electrohydraulic system with lumped uncertainty[J]. Mechanical Systems and Signal Processing, 2021, 146: 106869. doi: 10.1016/j.ymssp.2020.106869 [20] 蔡改贫, 刘鑫, 罗小燕, 等. 改进PSO算法优化的电液位置伺服系统滑模控制[J]. 机械科学与技术, 2019, 38(8): 1223-1230.CAI G P, LIU X, LUO X Y, et al. Sliding mode control of electro-hydraulic position servo system optimized by improved PSO algorithm[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(8): 1223-1230. (in Chinese) [21] 何玉彬, 刘艳秋, 徐立勤, 等. 电液伺服系统的神经网络在线自学习自适应控制[J]. 中国电机工程学报, 1998, 18(6): 434-437. doi: 10.3321/j.issn:0258-8013.1998.06.013HE Y B, LIU Y Q, XU L Q, et al. Neural network based on linse self learning adaptive control for electro hydraulic servo system[J]. Proceedings of the CSEE, 1998, 18(6): 434-437. (in Chinese) doi: 10.3321/j.issn:0258-8013.1998.06.013 [22] 刘胜斐, 孙青林, 陈增强, 等. 比例阀控电液系统抗扰换向滞后补偿反步控制[J]. 控制理论与应用, 2020, 37(7): 1521-1534. doi: 10.7641/CTA.2020.80972LIU S F, SUN Q L, CHEN Z Q, et al. Switch delay compensation and disturbance rejection control for proportional valve controlled electro-hydraulic system with backstepping method[J]. Control Theory & Applications, 2020, 37(7): 1521-1534. (in Chinese) doi: 10.7641/CTA.2020.80972 [23] 石胜利, 李建雄, 方一鸣. 具有输入饱和的电液伺服系统反步位置跟踪控制[J]. 中南大学学报(自然科学版), 2016, 47(10): 3369-3374.SHI S L, LI J X, FANG Y M. Backstepping position tracking control for electro-hydraulic servo system with input saturation[J]. Journal of Central South University (Science and Technology), 2016, 47(10): 3369-3374. (in Chinese) [24] WON D, KIM W, SHIN D, et al. High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2): 787-795. doi: 10.1109/TCST.2014.2325895 [25] 龚佩芬. 液压位置伺服系统的模型辨识和滑模变结构控制[D]. 西安: 西安理工大学, 2017GONG P F. Research on model identification and sliding mode variable structure control of hydraulic position servo system[D]. Xi'an: Xi'an University of Technology, 2017. (in Chinese) -




 点击查看大图
点击查看大图

计量
- 文章访问数: 262
- HTML全文浏览量: 85
- PDF下载量: 70
- 被引次数: 0
