




Modeling of Kinematics of Continuous Robot via Plane Circular Method and Experimental Study
-
摘要: 针对当前连续型机器人的运动学逆解求解复杂、低效这一问题,提出了一种基于平面圆弧法的运动学建模方法,其具有运动学逆解求解简单、高效的特点。利用该方法在平面内拟合连续型机器人的弯曲运动形状,建立其运动学模型,分析其驱动空间、关节空间和操作空间的映射关系,并描述其工作空间。分析连续型机器人在平面内弯曲形状的几何约束,建立关节空间变量之间的数学关系,降低求解复杂逆运动学问题的难度。对机器人末端执行器的位置和驱动线长度变化曲线进行仿真分析,求解逆运动学的有效解,并研制原理样机进行样机实验,实验表明该运动学模型的正确性以及逆运动学求解方法的有效性。Abstract: In order to solve the problem that the inverse kinematics solution of continuous robot is complex and inefficient, a kinematics model based on the plane circular method is proposed, which has the characteristics of simple and efficient for inverse kinematics solution. The method is used to fit the shape of the bending motion of the continuous robot in the plane and the kinematics model for the continuous robot is presented. The mapping relationship between the drive space, joint space and operation space are analyzed and the workspace is described. The geometric constraints of the curved shape in the plane of the continuous robot are analyzed, and the mathematical relationship between the joint space variables is established to reduce the difficulty of the complex inverse kinematics problems. The position of end-effector and the change of drive line length are simulated and the effective solution of the inverse kinematics is solved. The correctness of the kinematics model and the effectiveness of the inverse kinematics solution are verified by using the prototype experiment.
-
Key words:
- continuous robot /
- inverse kinematics /
- plane circular method /
- prototype experiment
-
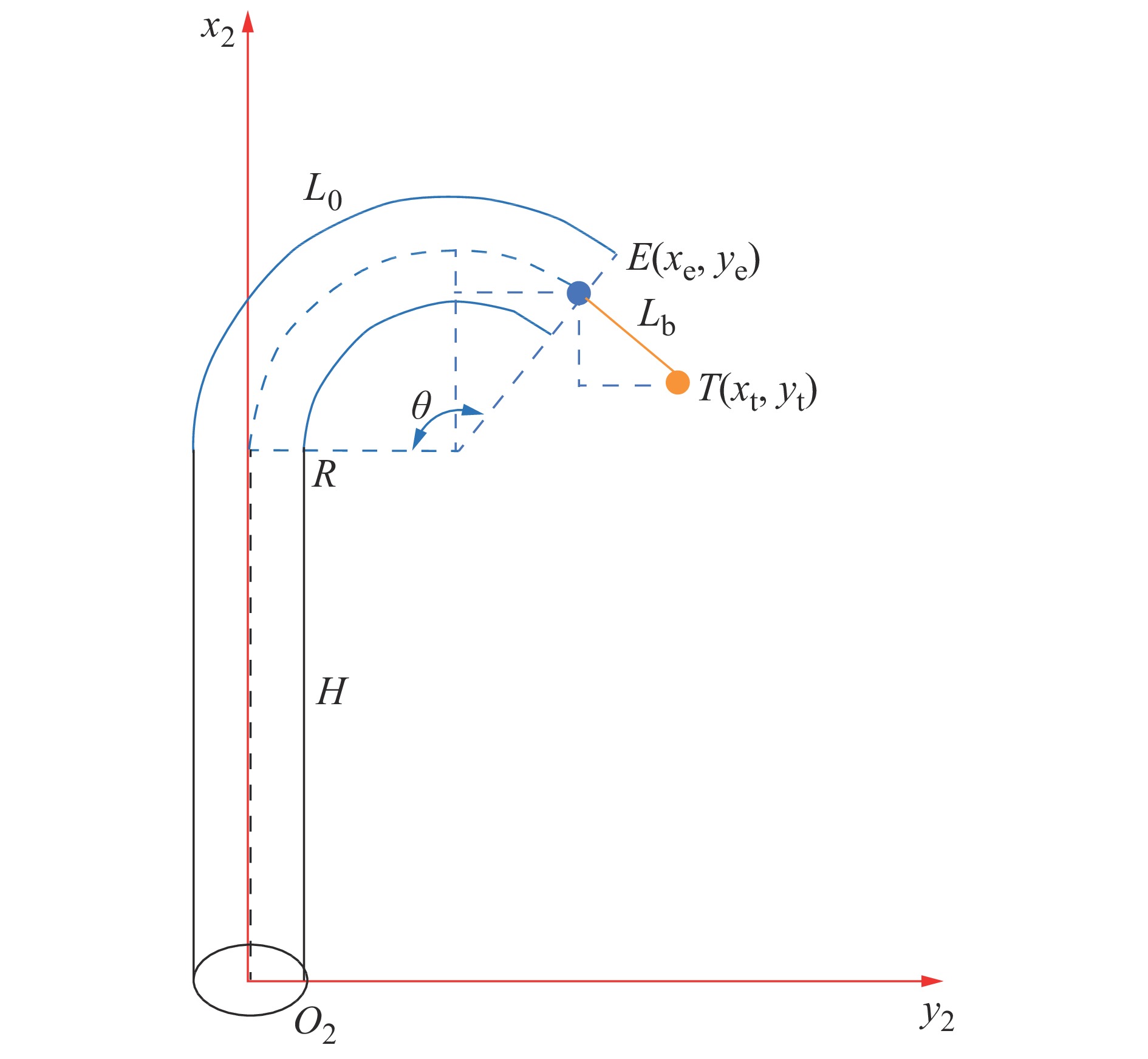
图 3 柔性臂单圆弧弯曲运动几何模型
Figure 3. Geometric model of single circular arc bendingmotion of a flexible arm

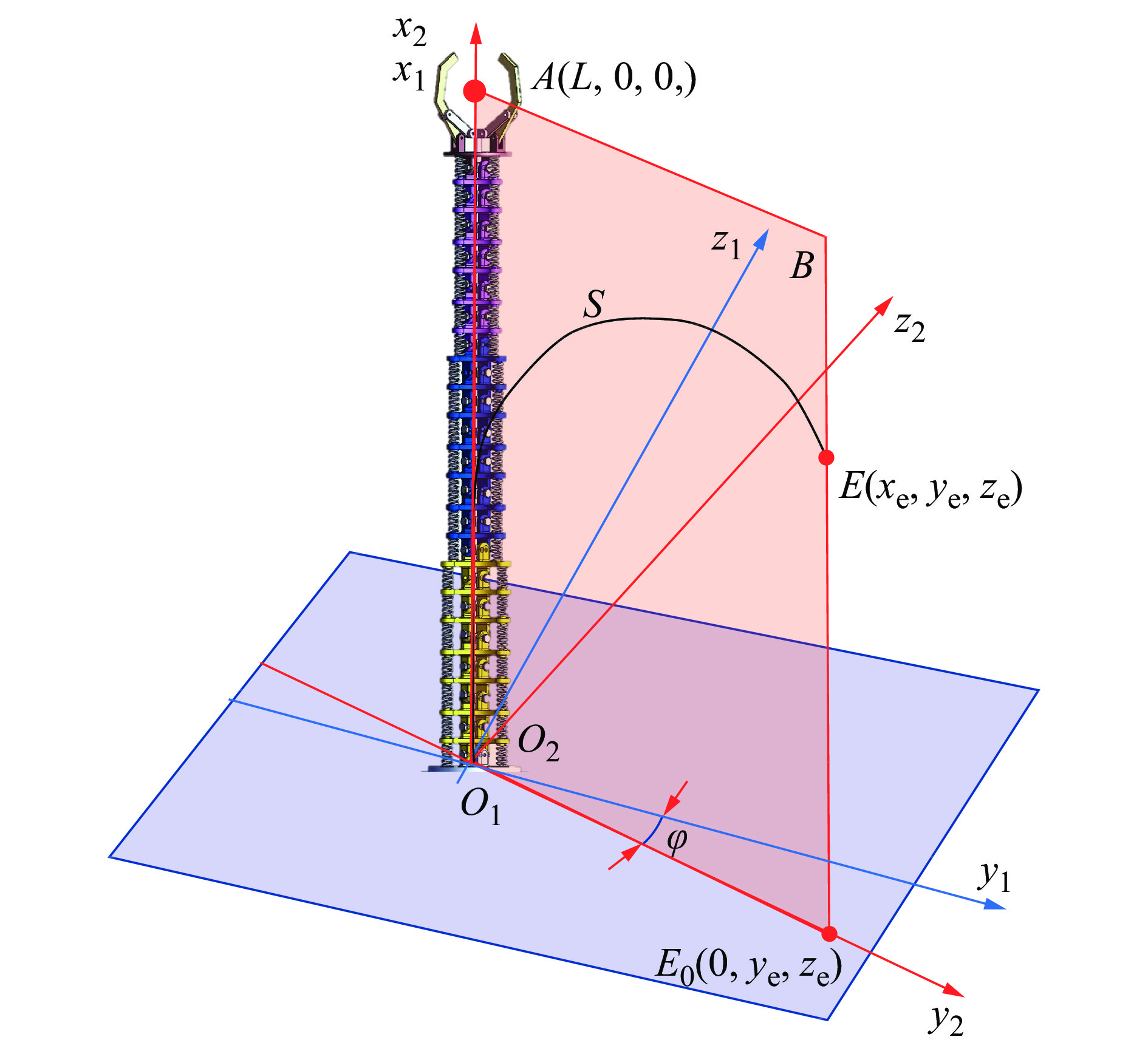
图 6 柔性臂双圆弧弯曲运动几何模型
Figure 6. Geometric model of double circular arc bendingmotion of a flexible arm
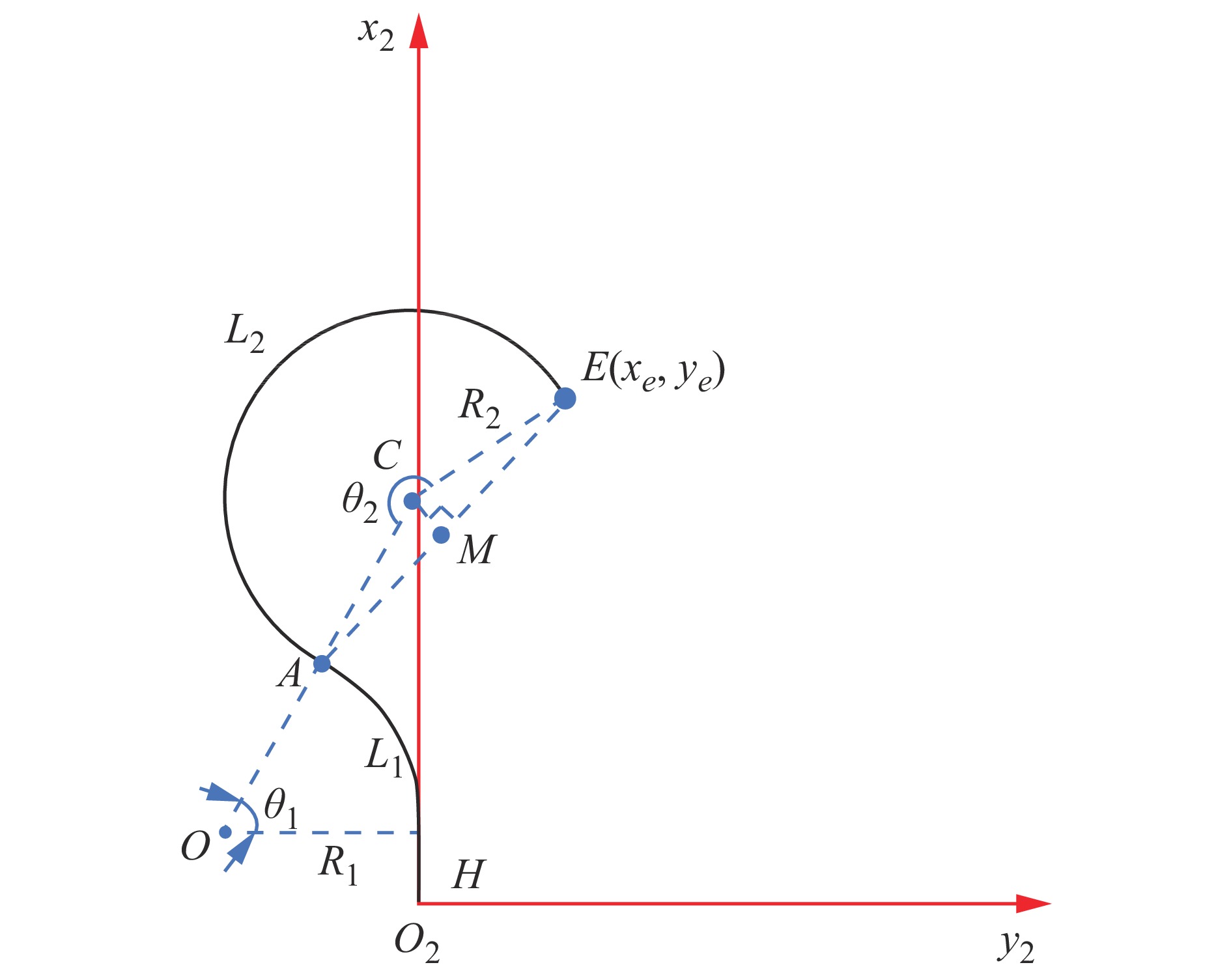
图 7 双圆弧曲线几何关系示意图
Figure 7. Schematic diagram of geometric relationship of double arc curves
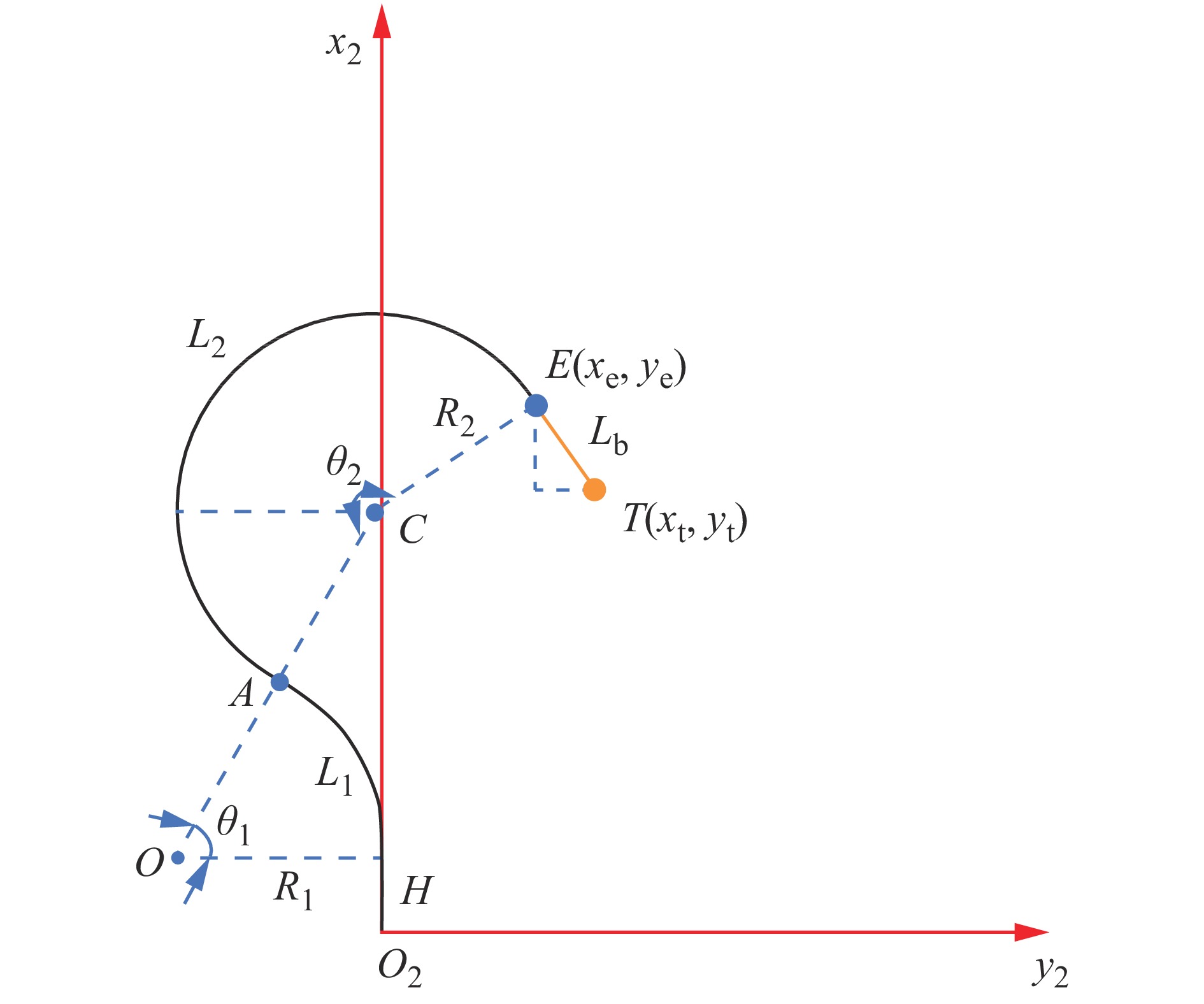
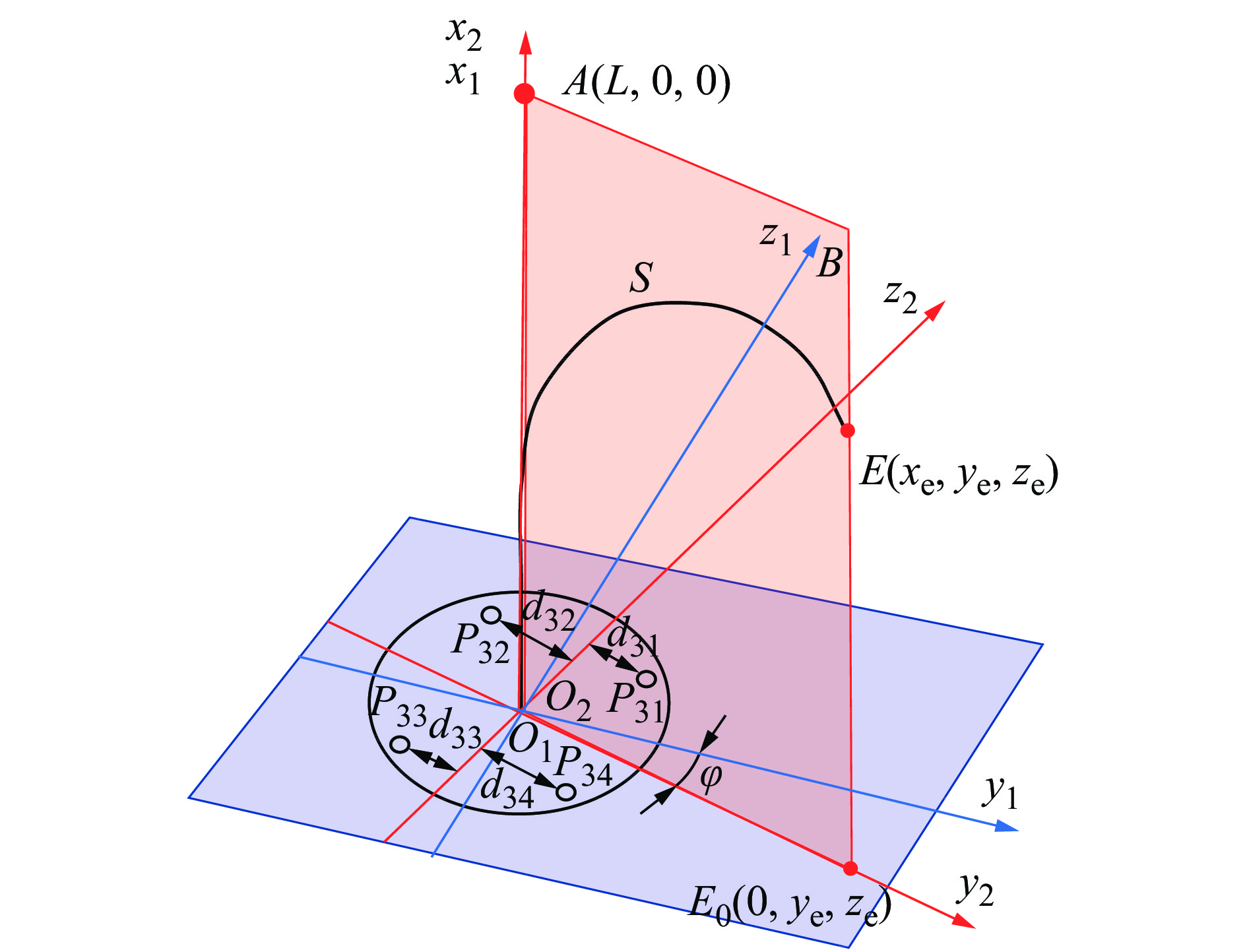
图 8 双圆弧曲线形状下末端执行器几何模型
Figure 8. Geometric model of an end effector in double arccurve shape
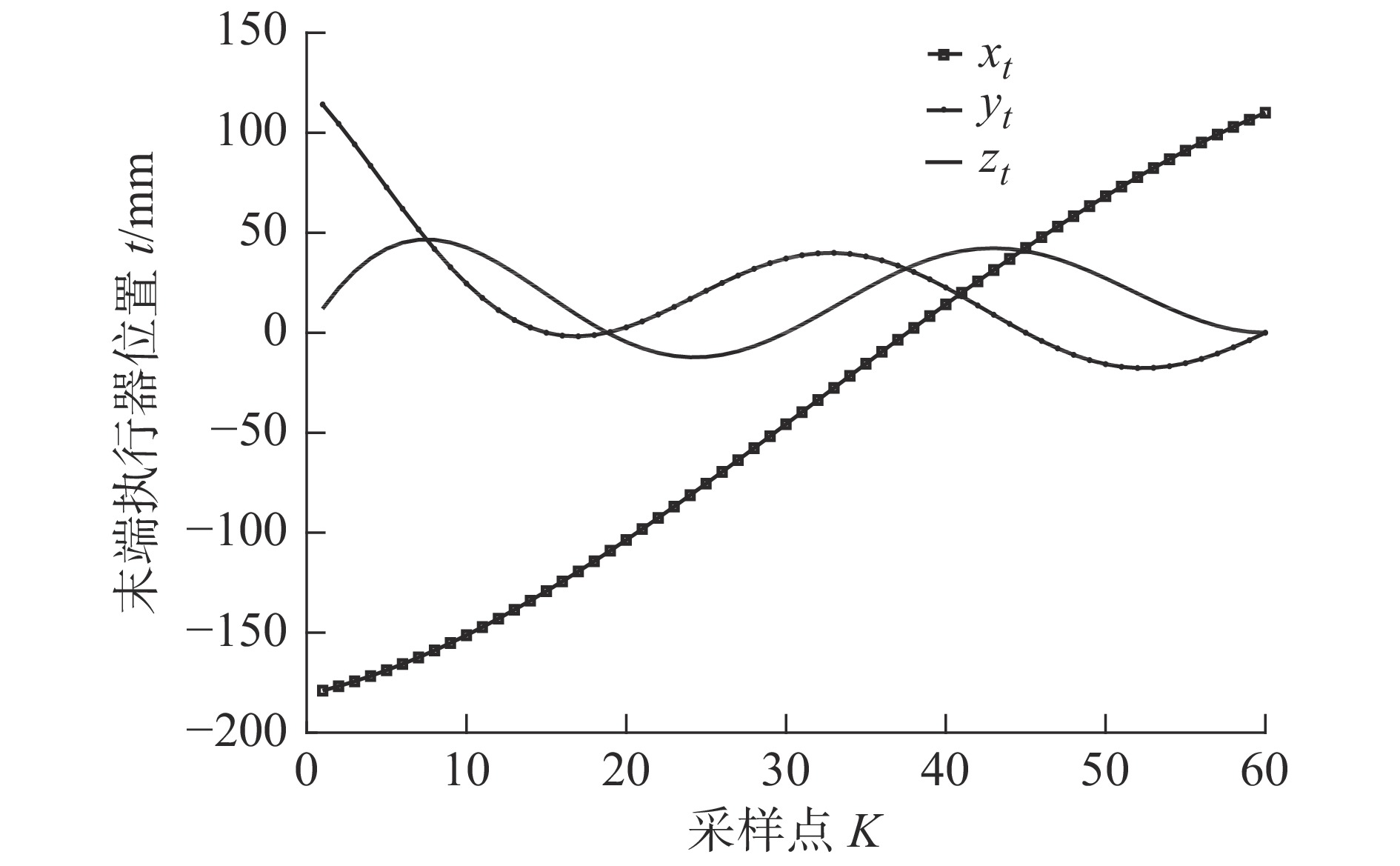
图 10 单圆弧曲线柔性臂末端执行器位置变化曲线
Figure 10. Position change curve of end effector of a flexible arm with single circular arc curve
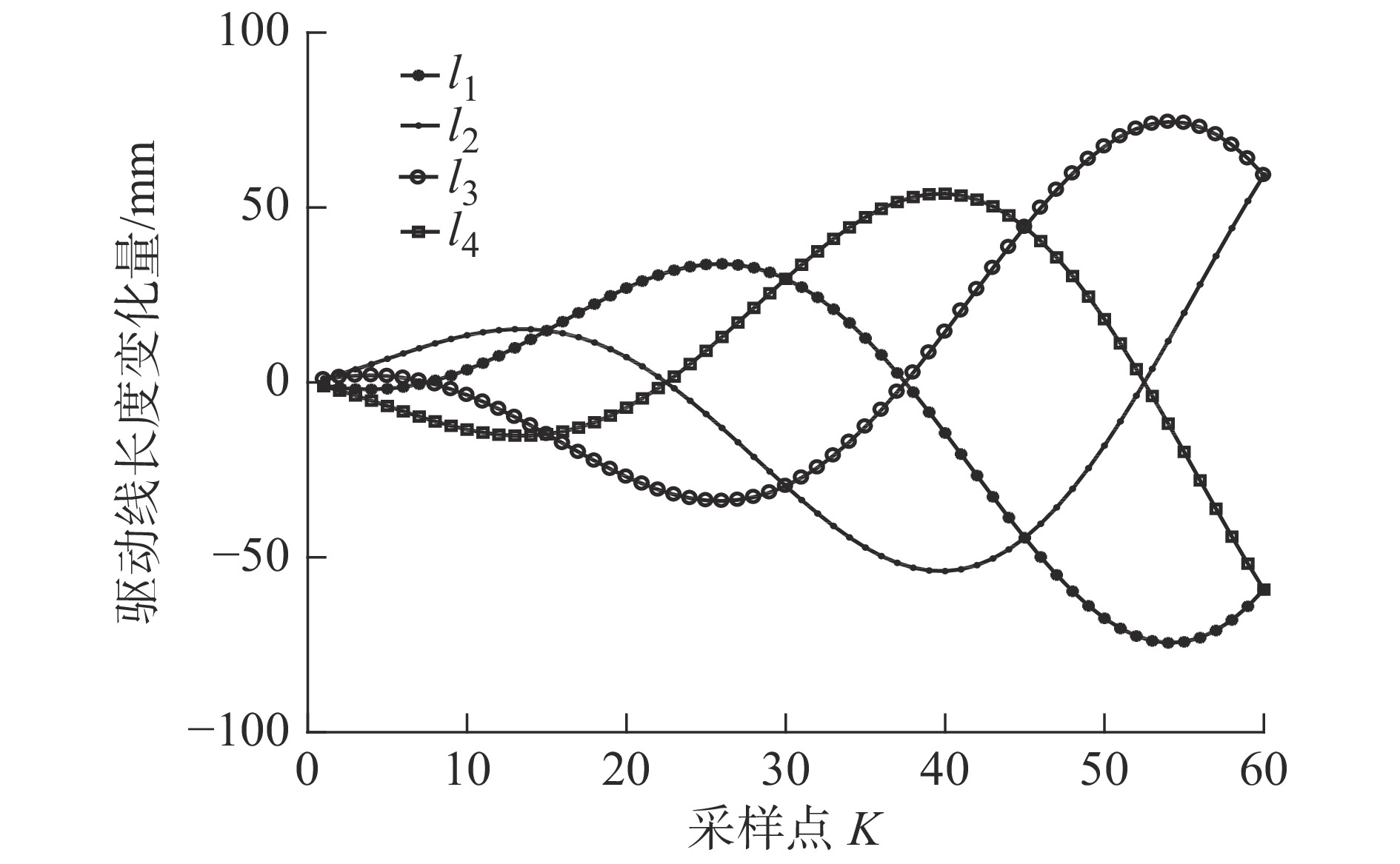
图 11 柔性臂第一段关节组驱动线长度变化曲线
Figure 11. Length variation curve of driving line of the first joint group of a flexible arm

图 12 柔性臂第二段关节组驱动线长度变化曲线
Figure 12. Length variation curve of driving line of the second joint group of a flexible arm
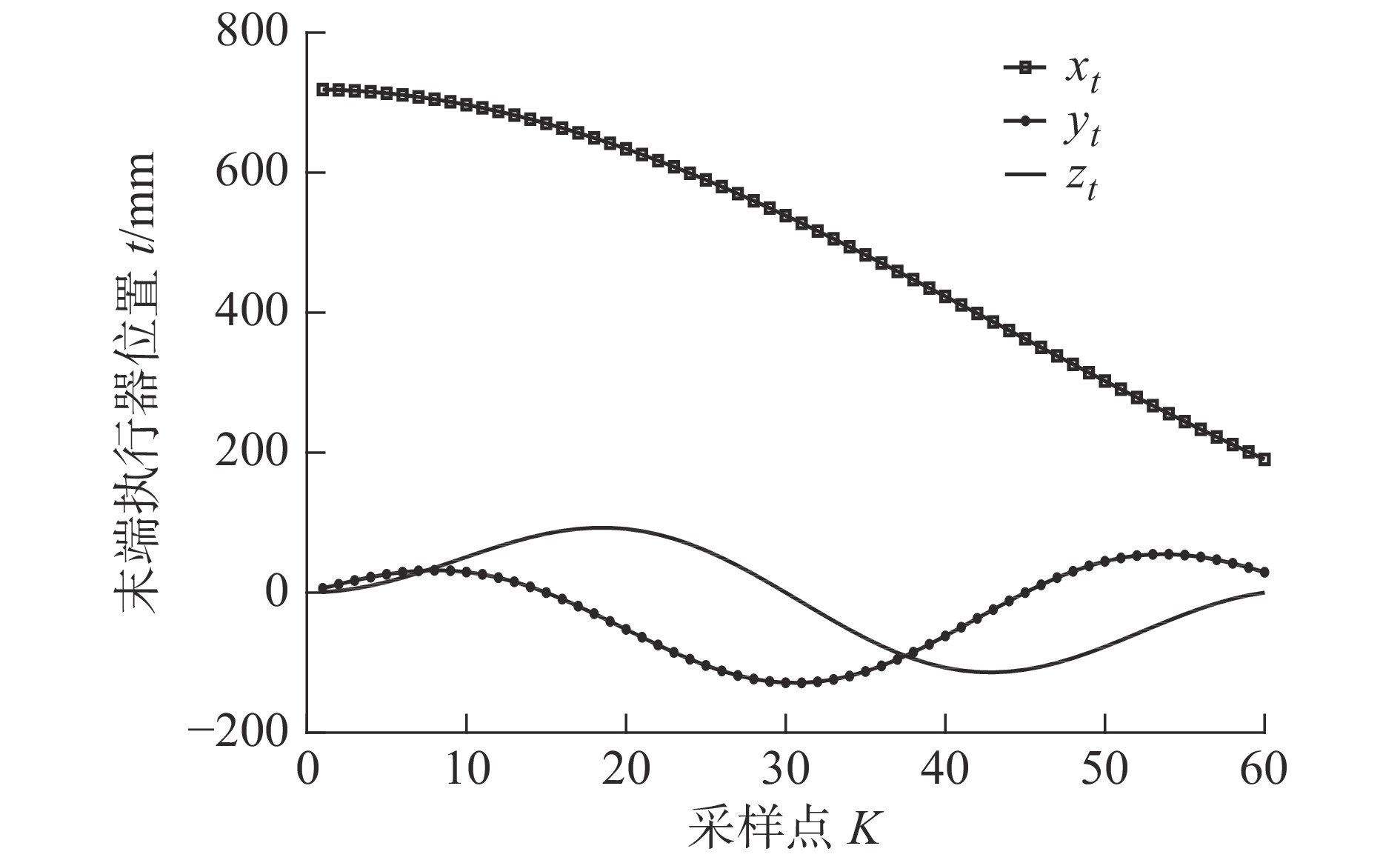
图 13 双圆弧曲线柔性臂末端执行器位置变化曲线
Figure 13. Position change curve of end effector of doublecircular arc flexible arm

图 14 双圆弧弯曲第二段关节组驱动线长度变化曲线
Figure 14. Length change curve of driving line of the second joint group of double arc bending
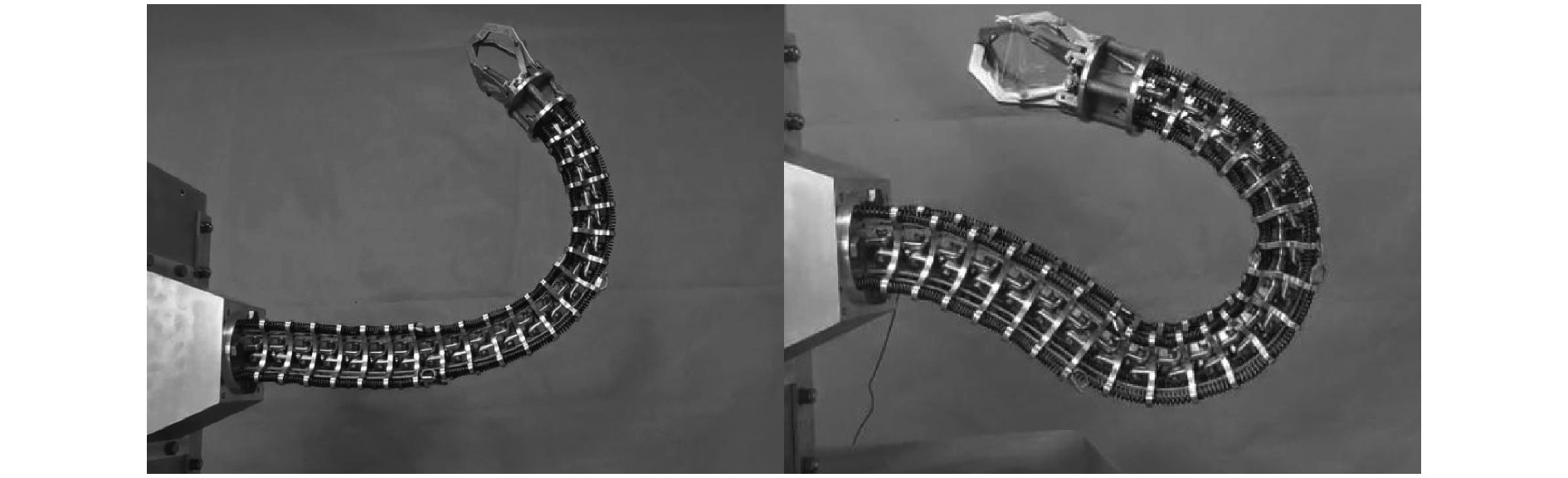
图 15 连续型柔性臂平面内弯曲运动试验
Figure 15. In plane bending motion test of continuous flexible arm
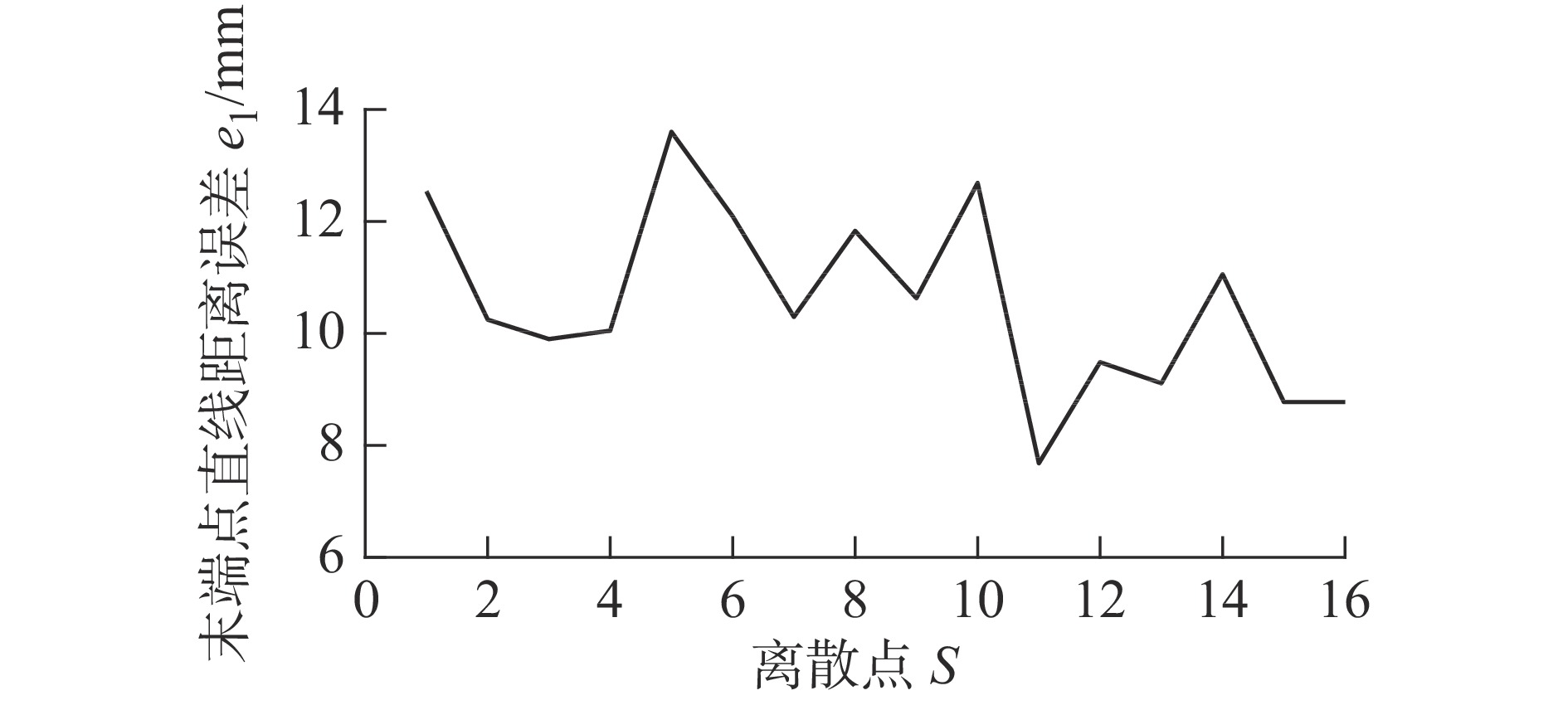
图 16 随机取得16个目标点的直线距离误差曲线
Figure 16. Straight line distance error curve of 16 target points at random

图 17 平面y = 345内目标点直线距离误差曲线
Figure 17. Straight line distance error curve of target points in plane y = 345
表 1 4种工况下的绳长变化量
Table 1. Rope length variation under four working conditions
mm 参数 工况1 工况2 工况3 工况4 $\Delta {l_{11}}$ 2.077 14.616 −12.9 8.01 $\Delta {l_{12}}$ 2.077 −14.616 −0.9 2.70 $\Delta {l_{13}}$ −2.077 −14.616 12.9 −8.01 $\Delta {l_{14}}$ −2.077 14.616 0.9 −2.70 $\Delta {l_{21}}$ 20.98 25.698 25.16 −30.98 $\Delta {l_{22}}$ 20.98 −25.698 1.75 −10.32 $\Delta {l_{23}}$ −20.98 −25.698 −25.16 30.98 $\Delta {l_{24}}$ −20.98 25.698 −1.75 10.32 $\Delta {l_{31}}$ 30.979 30.401 46.77 −52.73 $\Delta {l_{32}}$ 30.979 −30.401 3.26 −17.57 $\Delta {l_{33}}$ −30.979 −30.401 −46.77 52.73 $\Delta {l_{34}}$ −30.979 30.401 −3.26 17.57  下载: 导出CSV
下载: 导出CSV
表 2 4种工况下仿真值与实际值
Table 2. Simulation values and actual values underfour working conditions
mm 工况 参数值 x轴 y轴 z轴 1 仿真值 402.3 398.6 0 实际值 403.0 394.0 −4.0 误差 0.7 4.6 4.0 2 仿真值 345.3 0 501.3 实际值 354.0 −8.5 503.0 误差 9.3 8.5 1.7 3 仿真值 400.0 230.0 200.0 实际值 407.5 240.0 201.0 误差 7.5 10.0 1.0 4 仿真值 300.0 −300.0 −150.0 实际值 310.0 −299.0 −148.0 误差 10.0 1.0 2.0
下载: 导出CSV
-
[1] 孙立宁, 胡海燕, 李满天. 连续型机器人研究综述[J]. 机器人, 2010, 32(5): 688-694.SUN L N, HU H Y, LI M T. A review on continuum robot[J]. Robot, 2010, 32(5): 688-694. (in Chinese) [2] 韦贵炜, 徐振邦, 赵智远, 等. 线驱动连续型机械臂设计与运动学仿真[J]. 机械传动, 2019, 43(11): 32-38.WEI G W, XU Z B, ZHAO Z Y, et al. Design and kinematics simulation of a wire-driven multi-section continuous manipulator[J]. Journal of Mechanical Transmission, 2019, 43(11): 32-38. (in Chinese) [3] 王田苗, 郝雨飞, 杨兴帮, 等. 软体机器人: 结构、驱动、传感与控制[J]. 机械工程学报, 2017, 53(13): 1-13. doi: 10.3901/JME.2017.13.001WANG T M, HAO Y F, YANG X B, et al. Soft robotics: structure, actuation, sensing and control[J]. Journal of Mechanical Engineering, 2017, 53(13): 1-13. (in Chinese) doi: 10.3901/JME.2017.13.001 [4] 林阳, 赵欢, 丁汉. 基于多种群遗传算法的一般机器人逆运动学求解[J]. 机械工程学报, 2017, 53(3): 1-8. doi: 10.3901/JME.2017.03.001LIN Y, ZHAO H, DING H. Solution of inverse kinematics for general robot manipulators based on multiple population genetic algorithm[J]. Journal of Mechanical Engineering, 2017, 53(3): 1-8. (in Chinese) doi: 10.3901/JME.2017.03.001 [5] 陈鹏, 刘璐, 余飞, 等. 一种仿人机械臂的运动学逆解的几何求解方法[J]. 机器人, 2012, 34(2): 211-216. doi: 10.3724/SP.J.1218.2012.00211CHEN P, LIU L, YU F, et al. A geometrical method for inverse kinematics of a kind of humanoid manipulator[J]. Robot, 2012, 34(2): 211-216. (in Chinese) doi: 10.3724/SP.J.1218.2012.00211 [6] 胡海燕, 王鹏飞, 孙立宁, 等. 线驱动连续型机器人的运动学分析与仿真[J]. 机械工程学报, 2010, 46(19): 1-8. doi: 10.3901/JME.2010.19.001HU H Y, WANG P F, SUN L N, et al. Kinematic analysis and simulation for cable-driven continuum robot[J]. Journal of Mechanical Engineering, 2010, 46(19): 1-8. (in Chinese) doi: 10.3901/JME.2010.19.001 [7] DONG X, RAFFLES M, GUZMAN S C, et al. Design and analysis of a family of snake arm robots connected by compliant joints[J]. Mechanism and Machine Theory, 2014, 77: 73-91. doi: 10.1016/j.mechmachtheory.2014.01.017 [8] DONG X, RAFFLES M, COBOS-GUZMAN S, et al. A novel continuum robot using twin-pivot compliant joints: design, modeling, and validation[J]. Journal of Mechanisms and Robotics, 2016, 8(2): 021010. doi: 10.1115/1.4031340 [9] DONG X, AXINTE D, PALMER D, et al. Development of a slender continuum robotic system for on-wing inspection/repair of gas turbine engines[J]. Robotics and Computer -Integrated Manufacturing, 2017, 44: 218-229. doi: 10.1016/j.rcim.2016.09.004 [10] 高庆吉, 王维娟, 牛国臣, 等. 飞机油箱检查机器人的仿生结构及运动学研究[J]. 航空学报, 2013, 34(7): 1748-1756.GAO Q J, WANG W J, NIU G C, et al. Study of bionic structure and kinematics of robot for aircraft fuel tank inspection[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(7): 1748-1756. (in Chinese) [11] 牛国臣, 张云霄. 连续型机器人运动学仿真和操控系统设计[J]. 智能系统学报, 2020, 15(6): 1058-1067.NIU G C, ZHANG Y X. Kinematics simulation and control system design of continuous robot[J]. CAAI Transactions on Intelligent Systems, 2020, 15(6): 1058-1067. (in Chinese) [12] QIN G D, JI A H, CHENG Y, et al. A snake-inspired layer-driven continuum robot[J]. Soft Robotics, 2022, 9(4): 788-797. doi: 10.1089/soro.2020.0165 [13] GODAGE I S, WALKER I D. Dual quaternion based modal kinematics for multisection continuum arms[C]//Proceedings of 2015 IEEE International Conference on Robotics and Automation. Seattle: IEEE, 2015: 1416-1422. [14] GODAGE I S, MEDRANO-CERDA G A, BRANSON D T, et al. Modal kinematics for multisection continuum arms[J]. Bioinspiration & Biomimetics, 2015, 10(3): 035002. [15] 李旻翰, 康荣杰. 仿章鱼连续型机构运动学建模与控制仿真[J]. 中国科技论文, 2016, 11(10): 1085-1088.LI M H, KANG R J. Kinematic modeling and control simulation for an octopus-like continuum mechanism[J]. China Sciencepaper, 2016, 11(10): 1085-1088. (in Chinese) [16] 方跃法, 林华杰. 连续体并联抓取机器人的结构设计及运动学分析[J]. 北京交通大学学报, 2019, 43(4): 80-87.FANG Y F, LIN H J. Structural design and kinematics analysis of the continuum parallel grasping manipulator[J]. Journal of Beijing Jiaotong University, 2019, 43(4): 80-87. (in Chinese) [17] 赵志刚, 陈志刚. 柔性气动连续体机器人关节结构设计与运动学分析[J]. 机械科学与技术, 2015, 34(2): 184-187.ZHAO Z G, CHEN Z G. Mechanism design and kinematics analysis of pneumatic soft continuum robot joint[J]. Mechanical Science and Technology for Aerospace Engineering, 2015, 34(2): 184-187. (in Chinese) -



 点击查看大图
点击查看大图
计量
- 文章访问数: 139
- HTML全文浏览量: 130
- PDF下载量: 24
- 被引次数: 0
