作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2023年 42卷 第4期
2023, 42(4): 493-503.
doi: 10.13433/j.cnki.1003-8728.20200621
 摘要
摘要 HTML
HTML PDF 1346KB
PDF 1346KB
摘要:
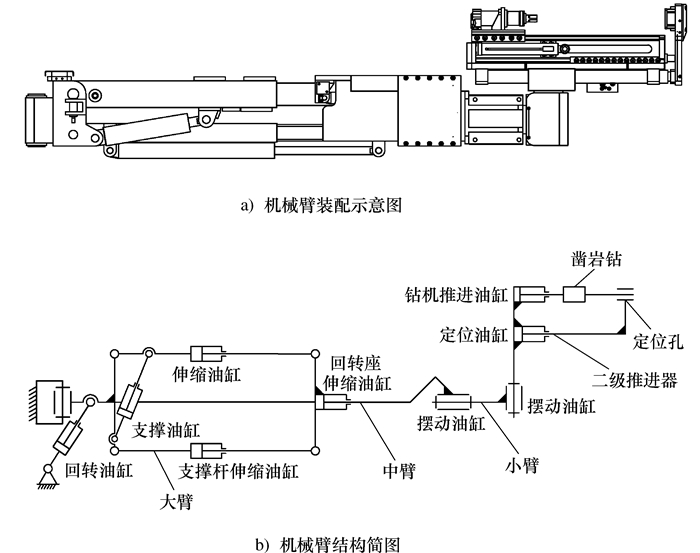
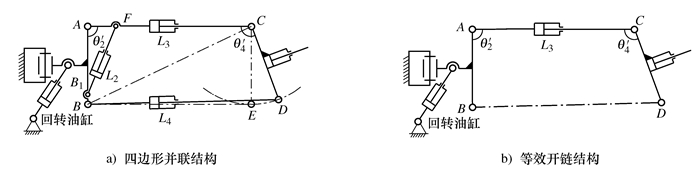
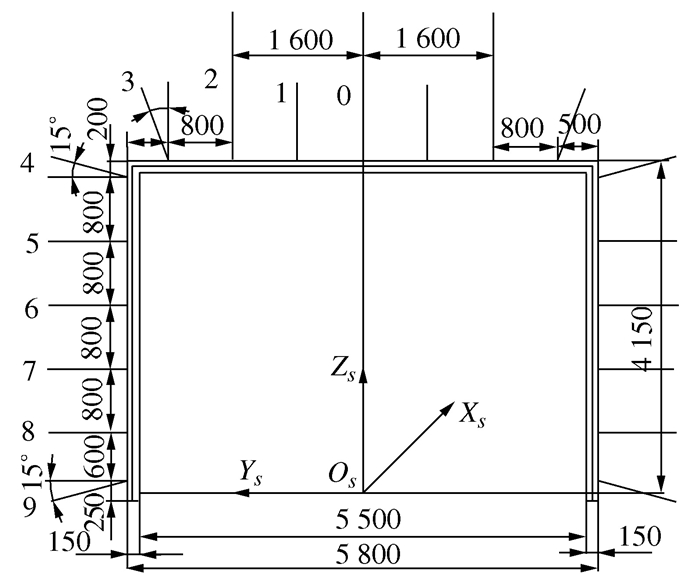
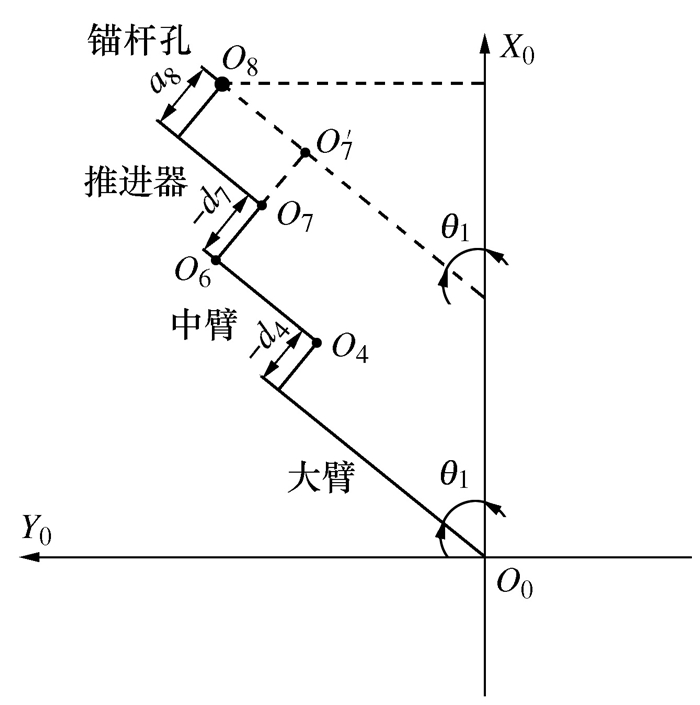
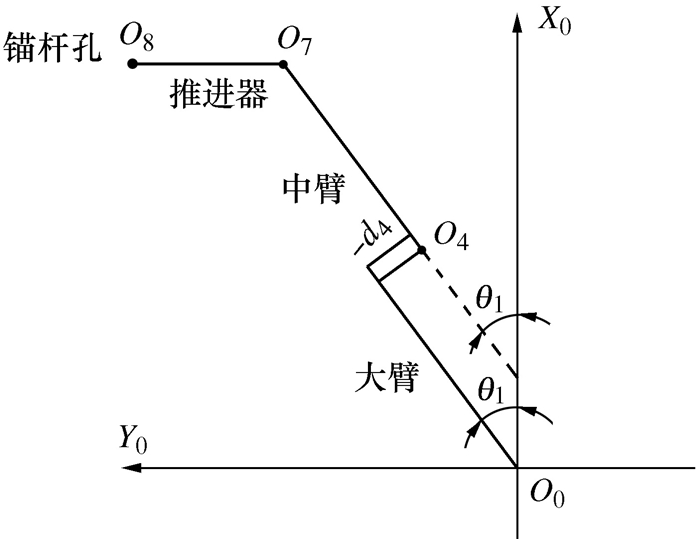
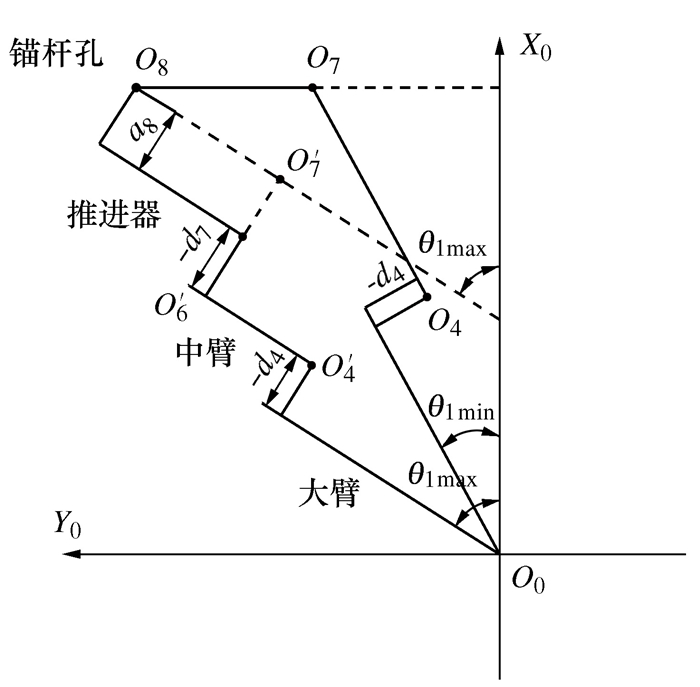
锚杆钻车机械臂的自动定位打孔可进一步提高巷道支护工艺的自动化作业程度。本文针对某锚杆钻车的串并联混合8自由度冗余机械臂的逆运动学问题展开研究。该机械臂有两大特点, 一是串并联混合机构, 臂在整体上为串联开链机构, 但其大臂存在一个四边形的并联结构; 二是冗余自由度, 导致逆运动学存在无穷解。针对前者, 为便于使用D-H法建立运动学模型, 推导了并联结构的运动表达式, 将其用一个等效的串联结构来替代。针对后者, 详细分析了机械臂的结构与实际工况, 设置了逆解的3个条件: 1) 为保证推进器获得最大打孔行程, 设置定位油缸为最大伸长量; 2) 根据不同类型锚杆孔设定大臂四边形形状, 可实现姿态补偿; 3) 优先使用中臂进行位置补偿, 以尽量减少大臂的运动。在以上约束下提出基于位姿分离的逆运动学求解方案, 得到的逆解结果充分利用了机械臂的设计特点, 且兼顾人工操作过程的直观、方便性。为验证算法, 针对一个矩形巷道断面的锚杆孔设计, 通过计算机进行了逆解计算, 计算精度与速度均有满意的结果; 将算法部署到PLC上, 在模拟巷道自动打孔试验, 结果满足工程要求。
锚杆钻车机械臂的自动定位打孔可进一步提高巷道支护工艺的自动化作业程度。本文针对某锚杆钻车的串并联混合8自由度冗余机械臂的逆运动学问题展开研究。该机械臂有两大特点, 一是串并联混合机构, 臂在整体上为串联开链机构, 但其大臂存在一个四边形的并联结构; 二是冗余自由度, 导致逆运动学存在无穷解。针对前者, 为便于使用D-H法建立运动学模型, 推导了并联结构的运动表达式, 将其用一个等效的串联结构来替代。针对后者, 详细分析了机械臂的结构与实际工况, 设置了逆解的3个条件: 1) 为保证推进器获得最大打孔行程, 设置定位油缸为最大伸长量; 2) 根据不同类型锚杆孔设定大臂四边形形状, 可实现姿态补偿; 3) 优先使用中臂进行位置补偿, 以尽量减少大臂的运动。在以上约束下提出基于位姿分离的逆运动学求解方案, 得到的逆解结果充分利用了机械臂的设计特点, 且兼顾人工操作过程的直观、方便性。为验证算法, 针对一个矩形巷道断面的锚杆孔设计, 通过计算机进行了逆解计算, 计算精度与速度均有满意的结果; 将算法部署到PLC上, 在模拟巷道自动打孔试验, 结果满足工程要求。

2023, 42(4): 504-511.
doi: 10.13433/j.cnki.1003-8728.20200633
摘要:
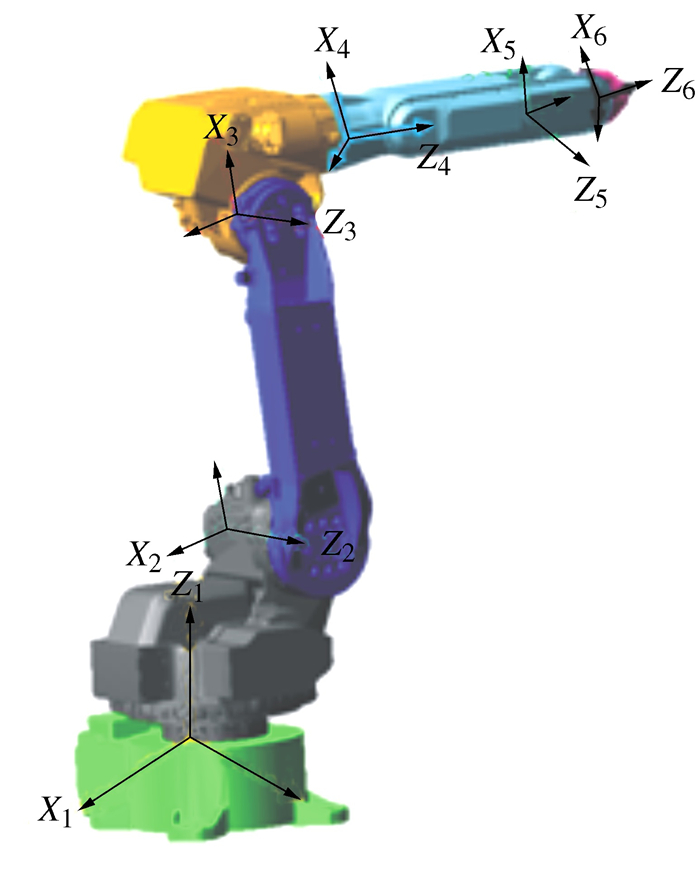
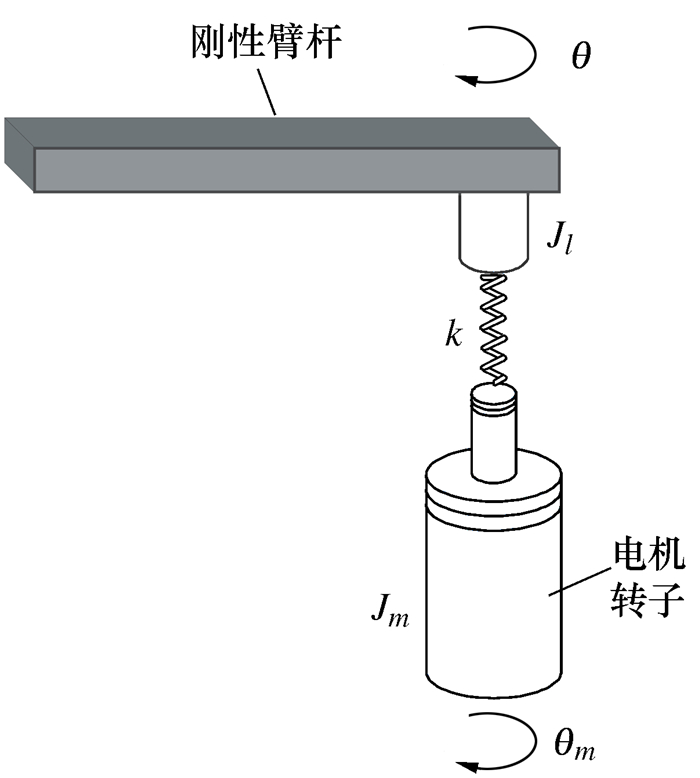
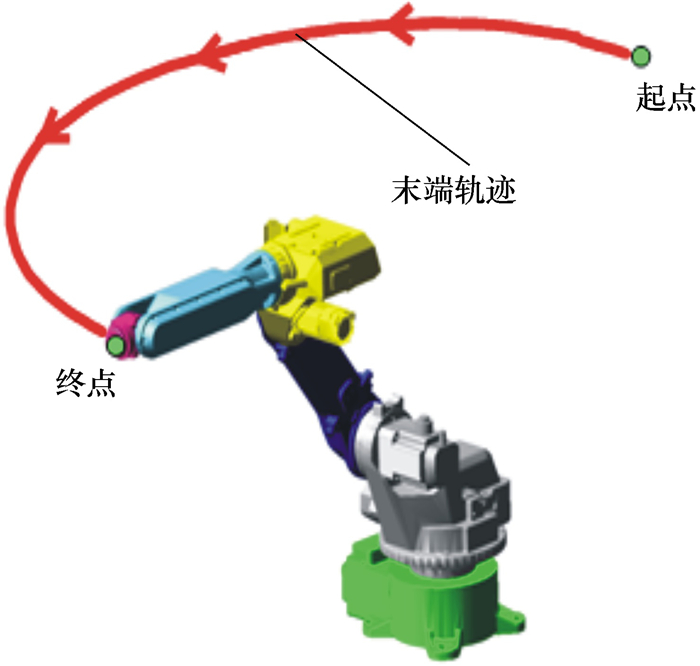
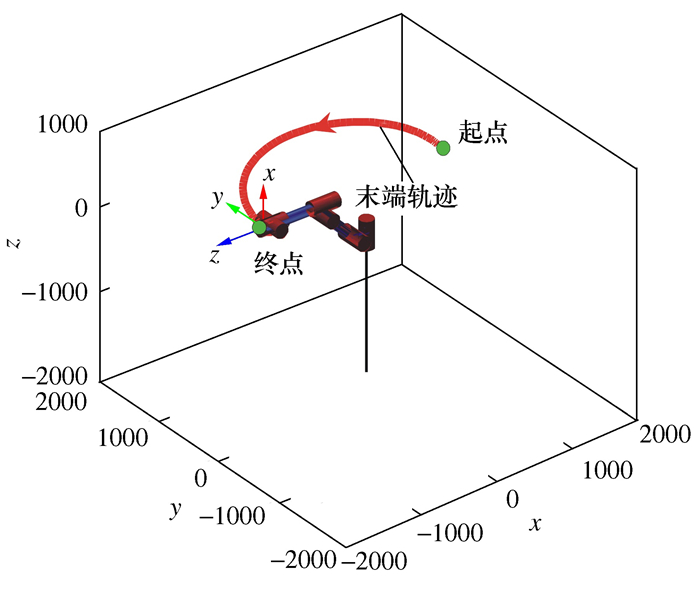
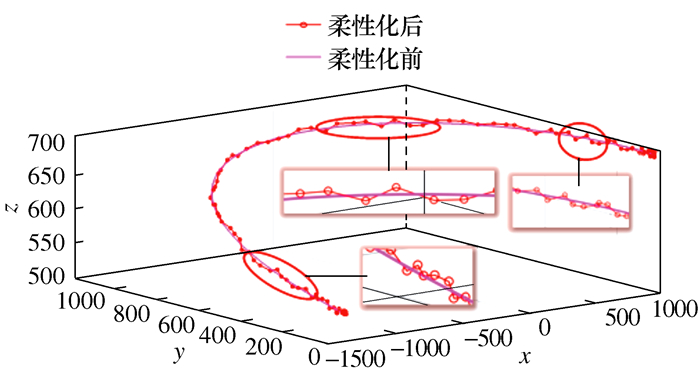
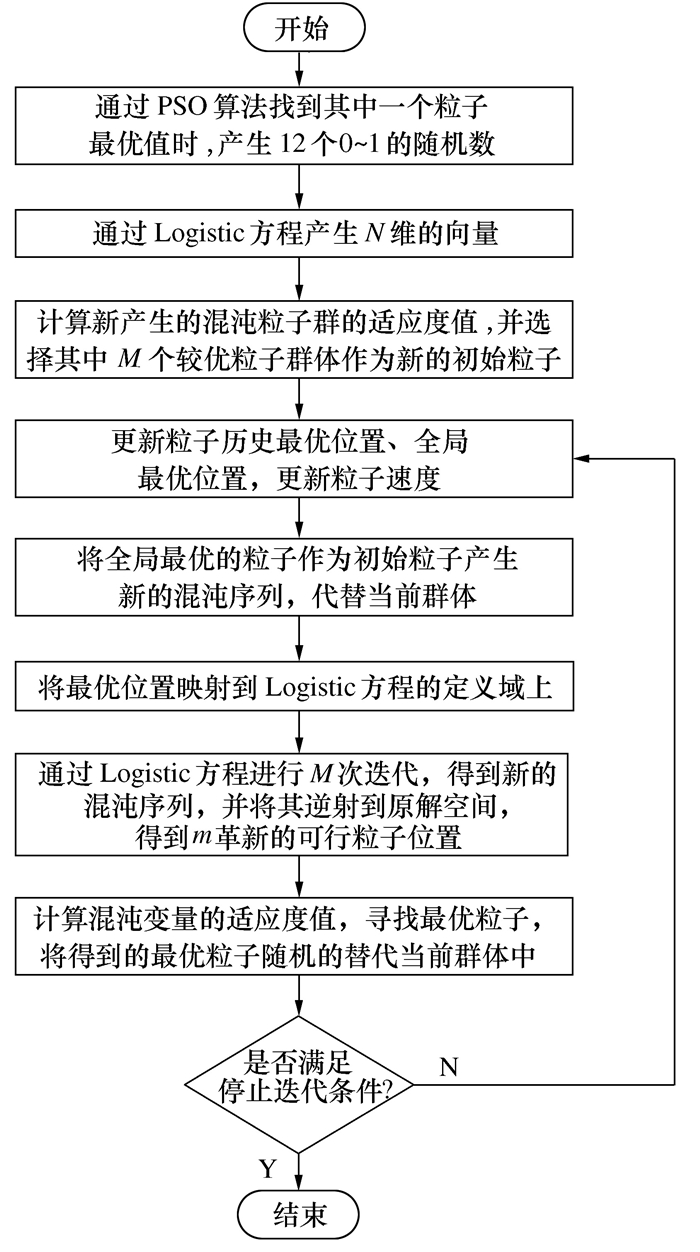
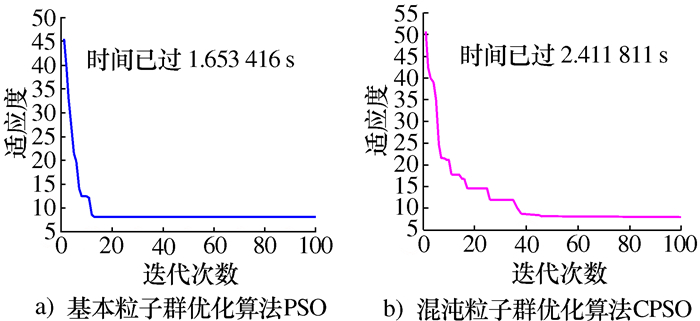
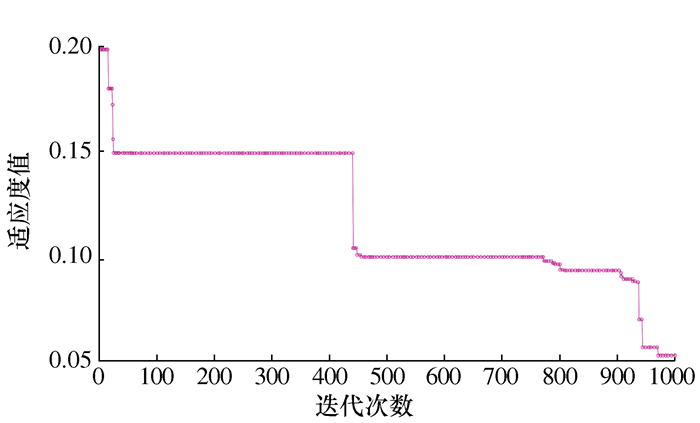
针对工业机器人多自由度复杂机械臂系统, 对其建立多刚体运动学模型, 仿真验证末端运动轨迹的真确性。在此基础上, 对机械臂系统的末端关节进行柔性化处理, 添加随机柔性扰动, 得到刚柔耦合机械臂较为真实的末端轨迹曲线。提出了基于混沌粒子群优化算法(CPSO)的振动抑制方案, 通过CPSO算法对机械臂末端轨迹的插值参数进行优化, 定义了柔性末端的振动变形最小的目标函数, 并给出了具体的求解步骤。数值仿真结果表明, 在满足系统约束条件的情况下, 机械臂运行平稳, 不存在角速度突变的情况, 相比于基本粒子群优化算法, CPSO算法保证了粒子群体的随机性, 提高了群体的多样性, 且收敛速度较快, 不会陷入局部最优, 在CPSO优化下的柔性末端轨迹振动明显减小, 从而说明CPSO算法能够有效优化轨迹规划参数, 减小机械臂柔性末端的振动变形。
针对工业机器人多自由度复杂机械臂系统, 对其建立多刚体运动学模型, 仿真验证末端运动轨迹的真确性。在此基础上, 对机械臂系统的末端关节进行柔性化处理, 添加随机柔性扰动, 得到刚柔耦合机械臂较为真实的末端轨迹曲线。提出了基于混沌粒子群优化算法(CPSO)的振动抑制方案, 通过CPSO算法对机械臂末端轨迹的插值参数进行优化, 定义了柔性末端的振动变形最小的目标函数, 并给出了具体的求解步骤。数值仿真结果表明, 在满足系统约束条件的情况下, 机械臂运行平稳, 不存在角速度突变的情况, 相比于基本粒子群优化算法, CPSO算法保证了粒子群体的随机性, 提高了群体的多样性, 且收敛速度较快, 不会陷入局部最优, 在CPSO优化下的柔性末端轨迹振动明显减小, 从而说明CPSO算法能够有效优化轨迹规划参数, 减小机械臂柔性末端的振动变形。
2023, 42(4): 512-520.
doi: 10.13433/j.cnki.1003-8728.20200647
摘要:
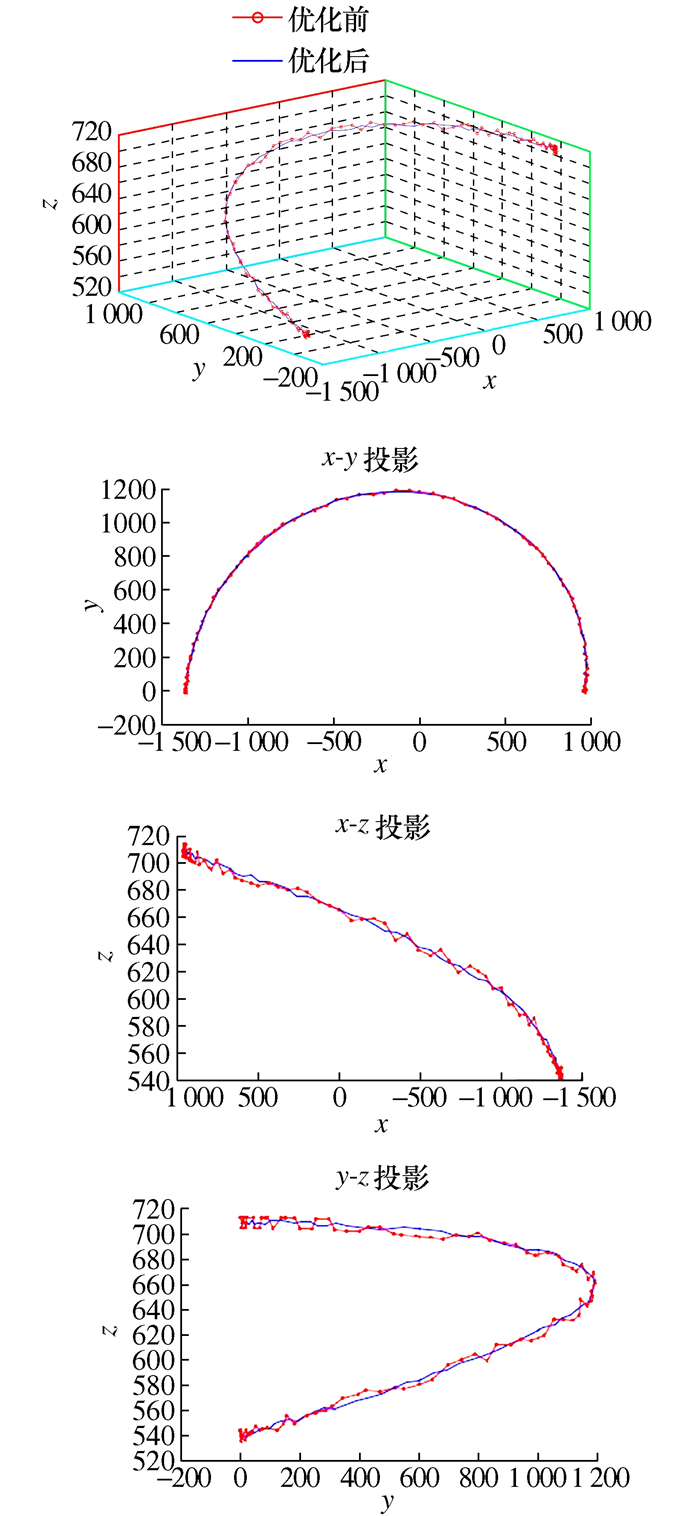
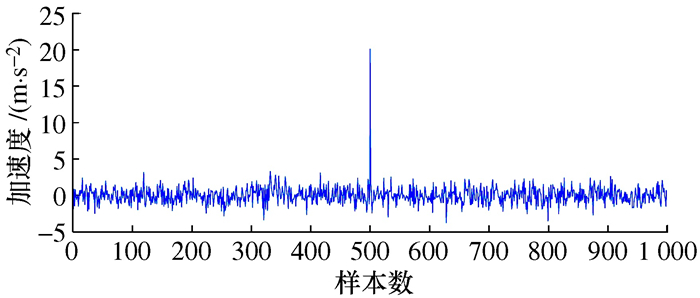
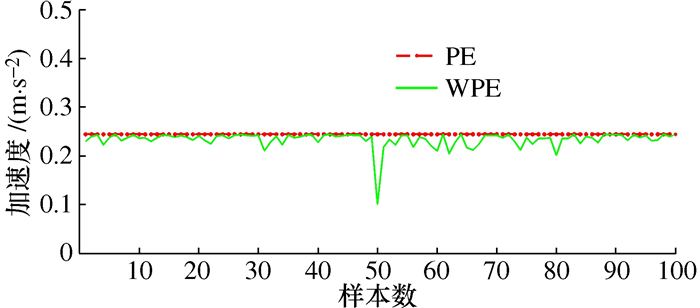
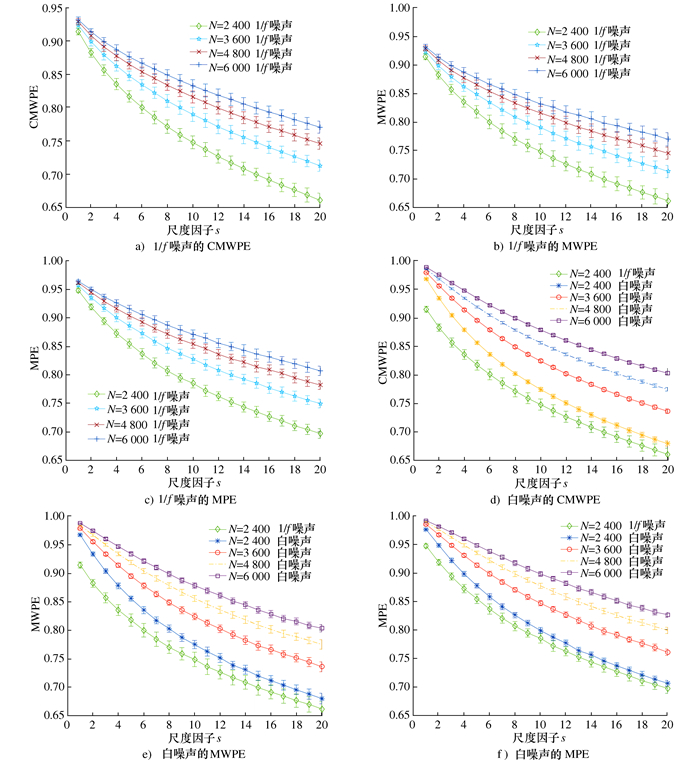
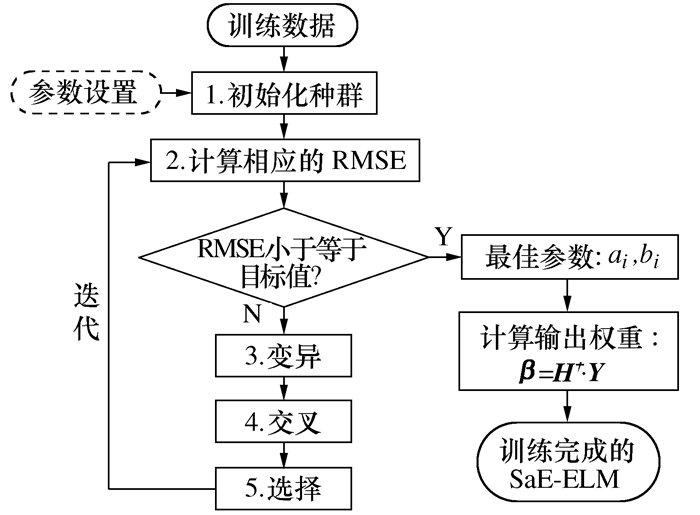
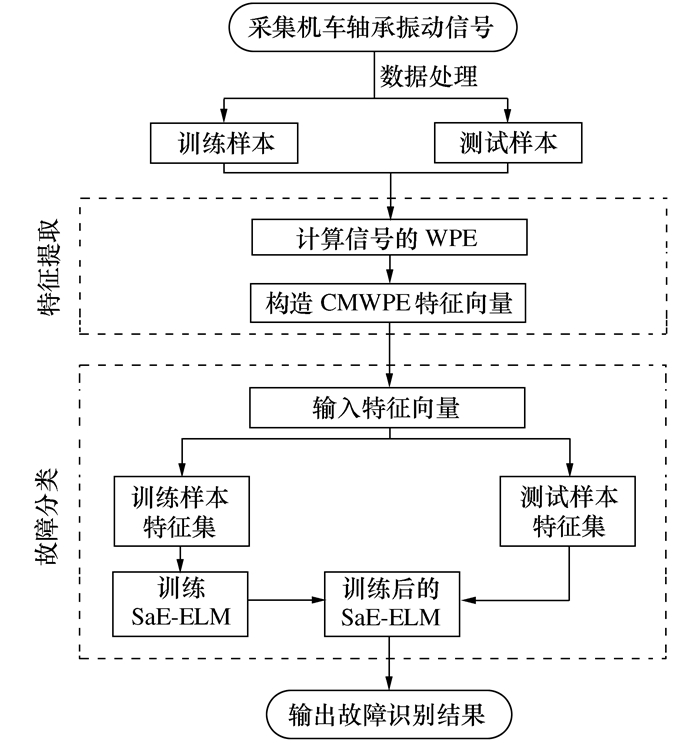
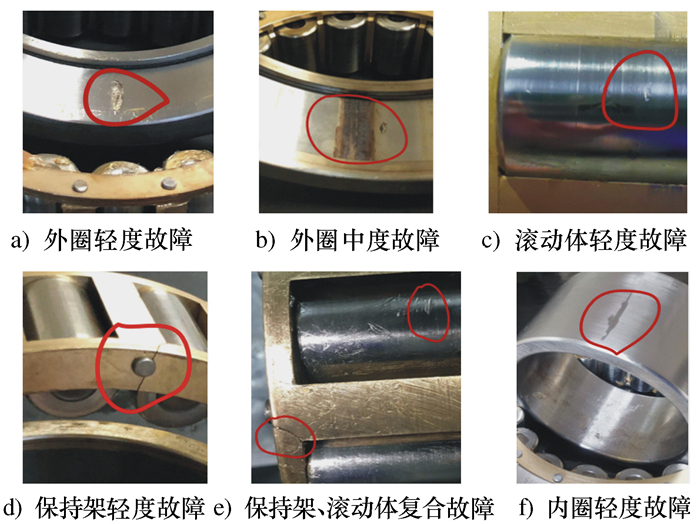
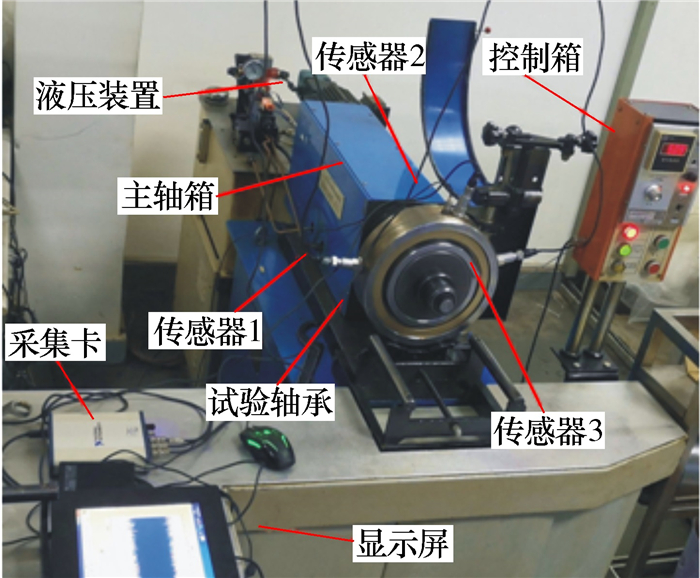
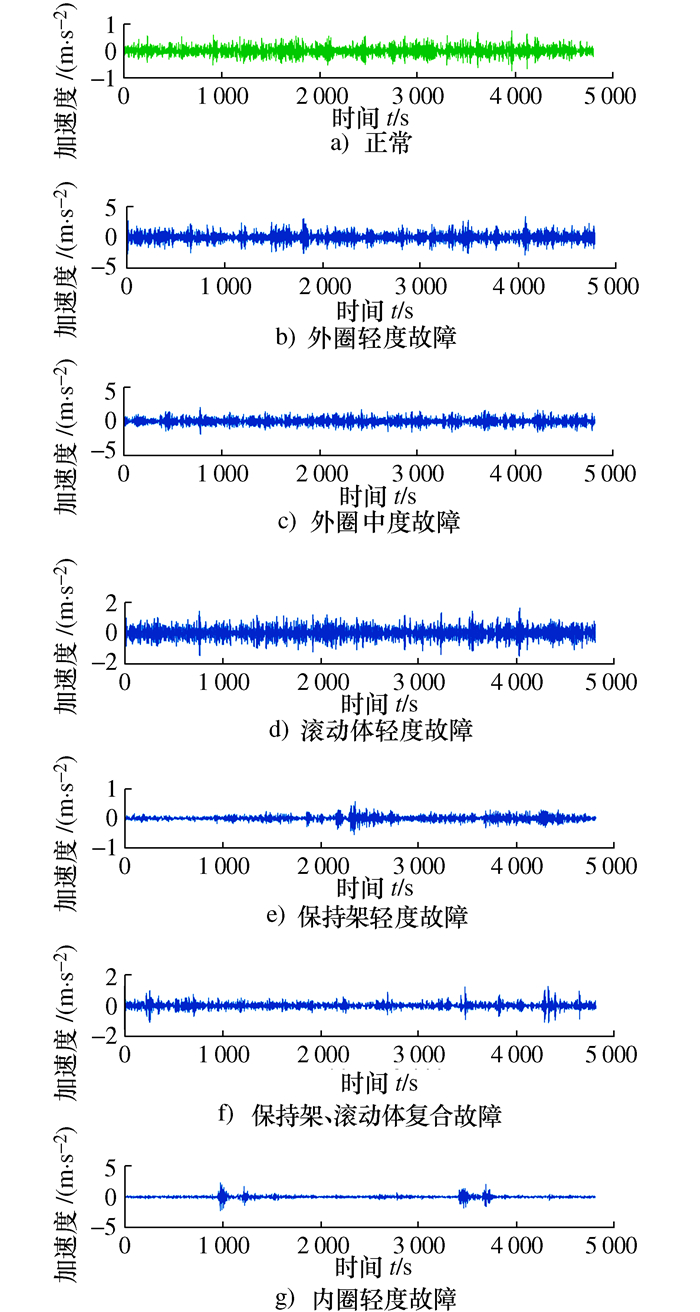
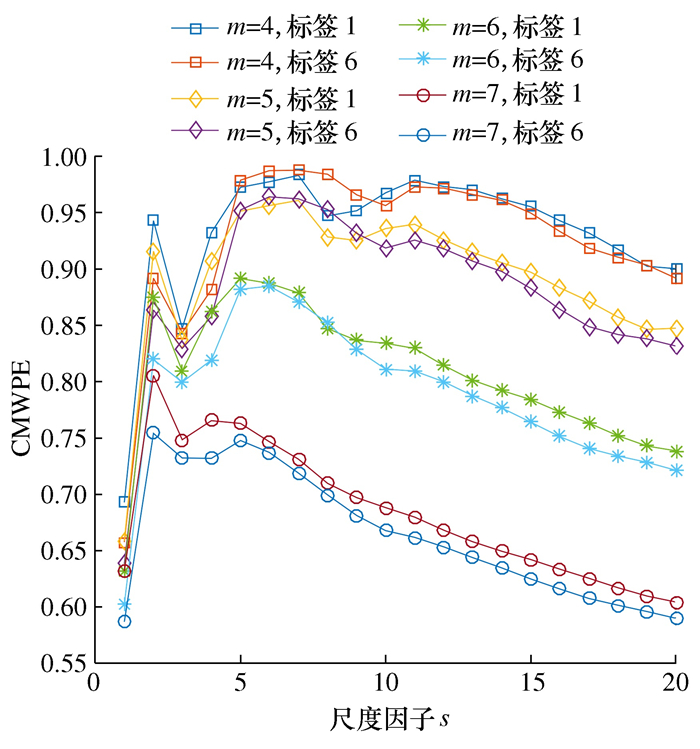
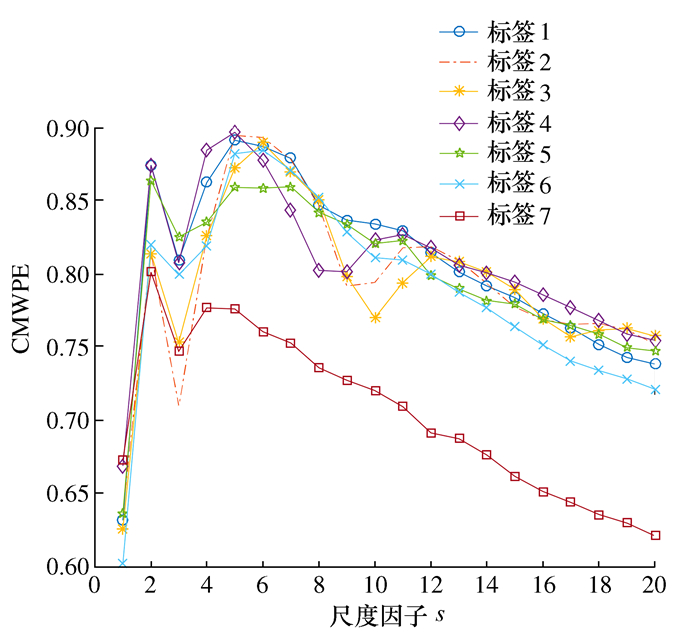
针对DF4型内燃机车轮对轴承不同故障状态的判别问题, 提出了一种基于复合多尺度加权排列熵(Composit multiscale weighted permutation entropy, CMWPE)和自适应进化极限学习机(Self-adaptive evolutionary extreme learning machine, SaE-ELM)的机车轮对轴承故障识别方法。CMWPE基于复合粗粒化和加权排列熵的思想, 能很好地区分信号的不同模式。SaE-ELM通过自适应进化算法对极限学习机的输入权重、隐含层参数和输出权重进行优化, 解决了ELM随机选取网络参数的局限性, 提高了网络的泛化性能。计算机车轮对轴承不同健康状态下振动信号的CMWPE, 利用SaE-ELM识别轴承所属故障类型及故障程度。在机务段的JL-501轴承检测台上采集了7种不同健康状态的轮对轴承试件的振动信号数据。结果表明: CMWPE特征提取效果优于MPE和MWPE; SaE-ELM模式识别效果优于参数不经优化的ELM。所提方法能够有效诊断机车轮对轴承的不同故障, 且故障识别率达到100%。
针对DF4型内燃机车轮对轴承不同故障状态的判别问题, 提出了一种基于复合多尺度加权排列熵(Composit multiscale weighted permutation entropy, CMWPE)和自适应进化极限学习机(Self-adaptive evolutionary extreme learning machine, SaE-ELM)的机车轮对轴承故障识别方法。CMWPE基于复合粗粒化和加权排列熵的思想, 能很好地区分信号的不同模式。SaE-ELM通过自适应进化算法对极限学习机的输入权重、隐含层参数和输出权重进行优化, 解决了ELM随机选取网络参数的局限性, 提高了网络的泛化性能。计算机车轮对轴承不同健康状态下振动信号的CMWPE, 利用SaE-ELM识别轴承所属故障类型及故障程度。在机务段的JL-501轴承检测台上采集了7种不同健康状态的轮对轴承试件的振动信号数据。结果表明: CMWPE特征提取效果优于MPE和MWPE; SaE-ELM模式识别效果优于参数不经优化的ELM。所提方法能够有效诊断机车轮对轴承的不同故障, 且故障识别率达到100%。
2023, 42(4): 521-529.
doi: 10.13433/j.cnki.1003-8728.20200642
摘要:
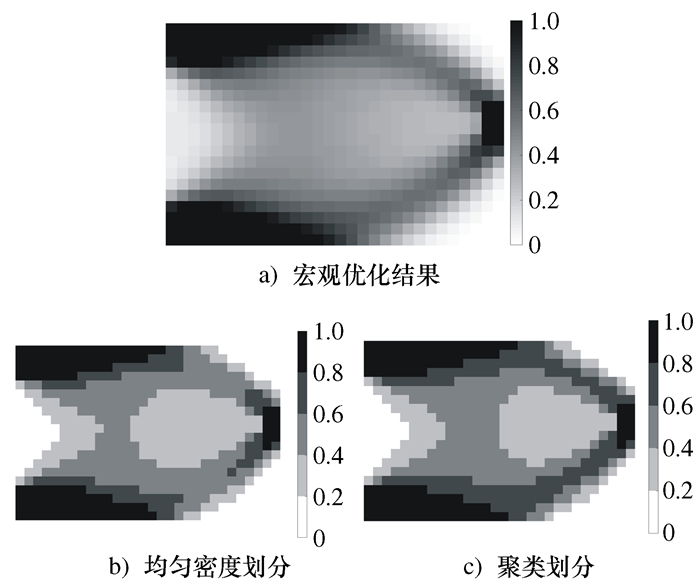
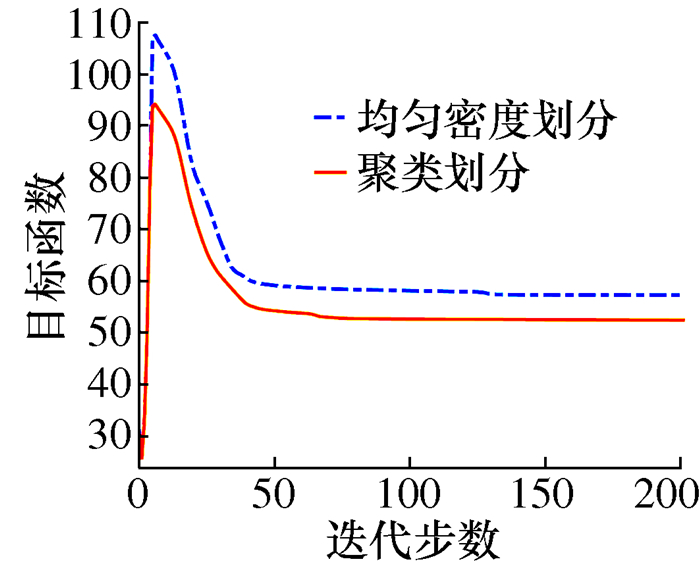
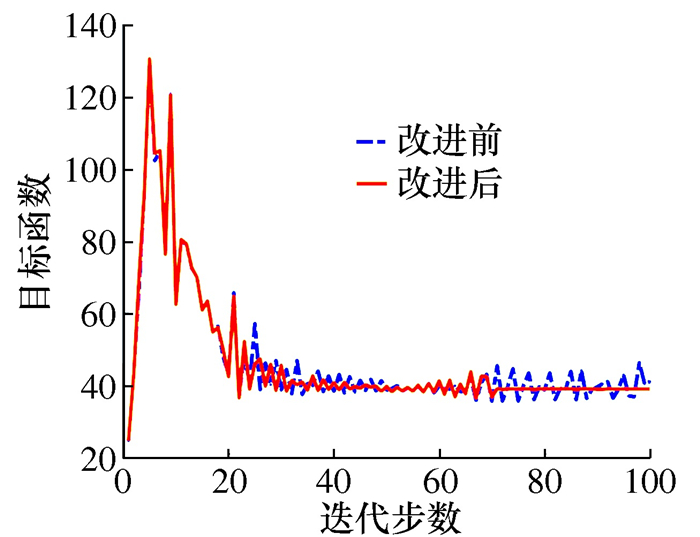
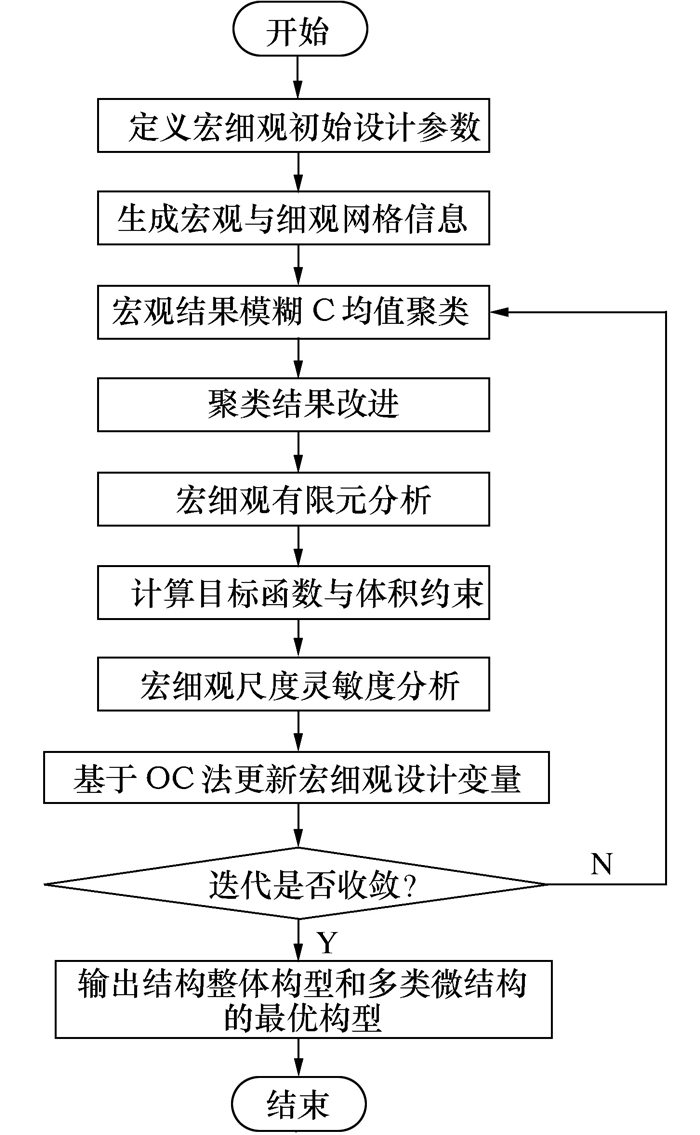
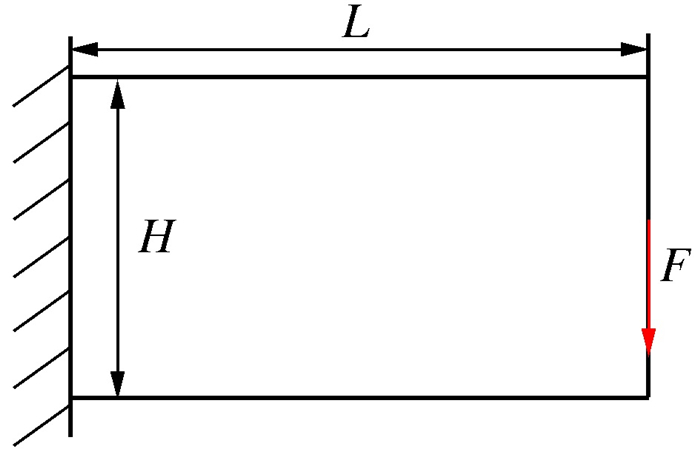
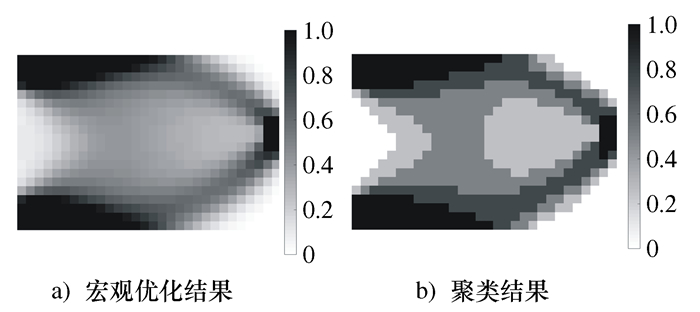
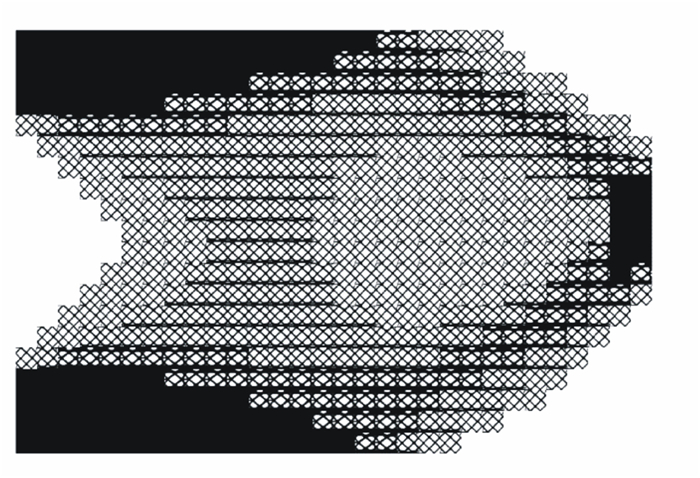
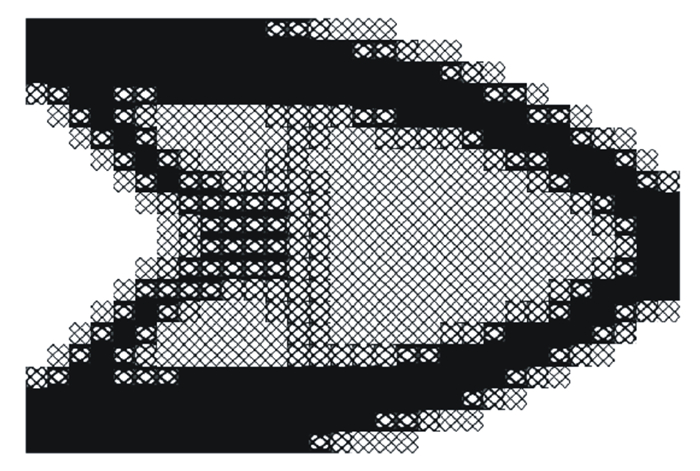
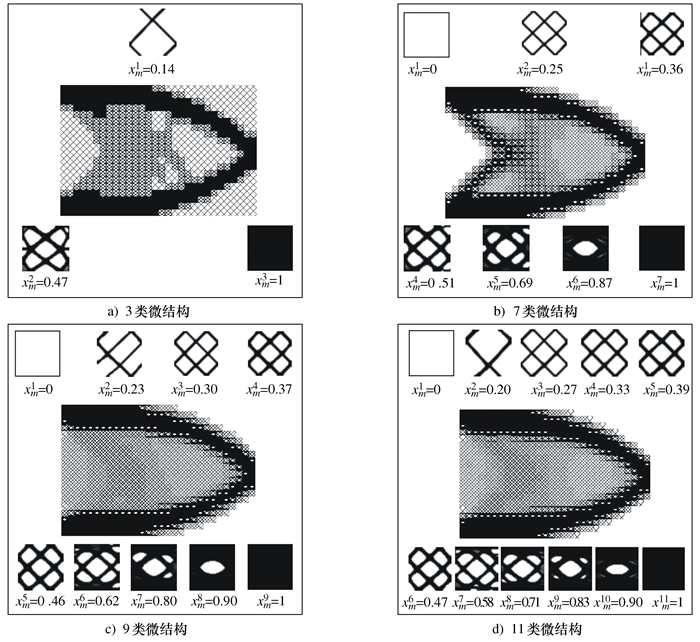
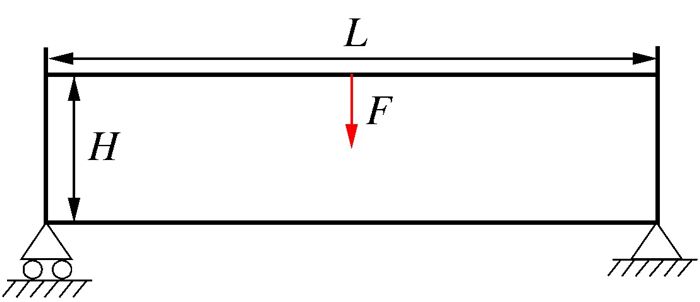
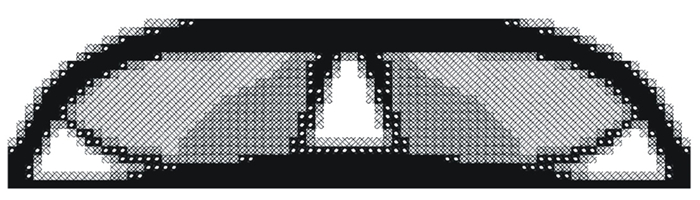
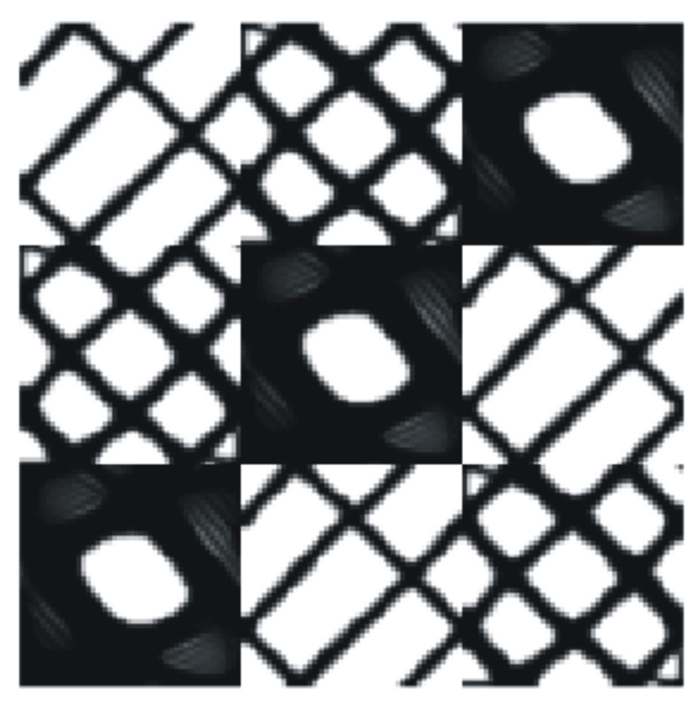
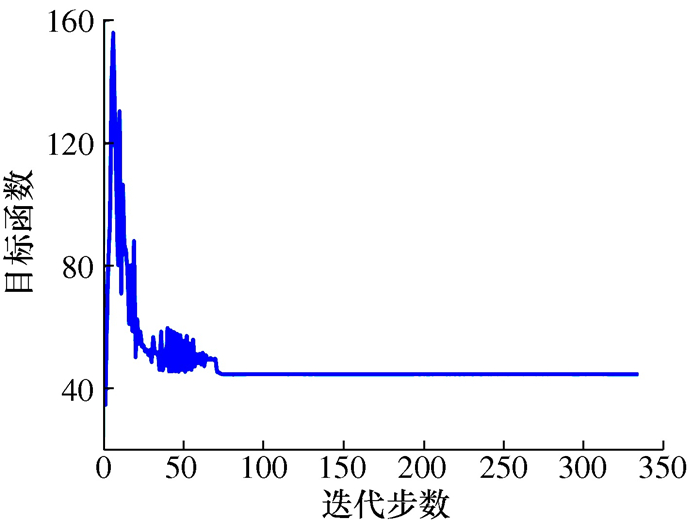
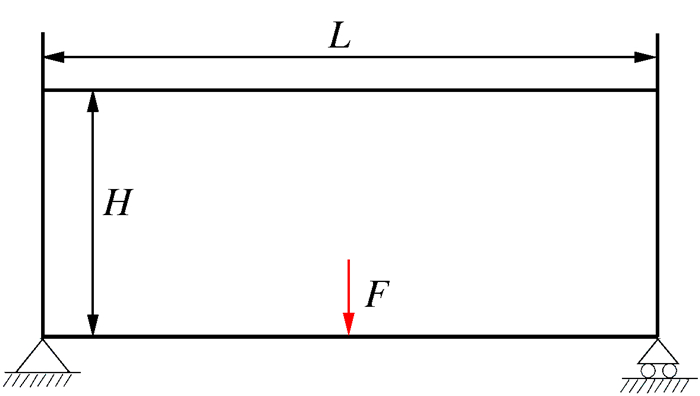
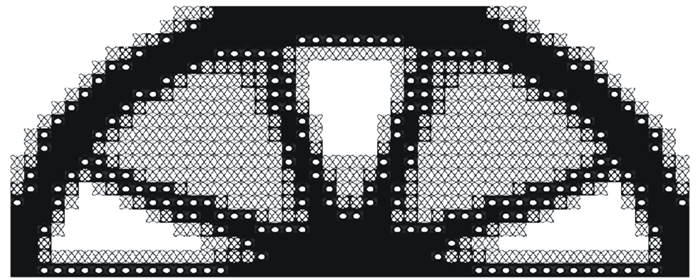
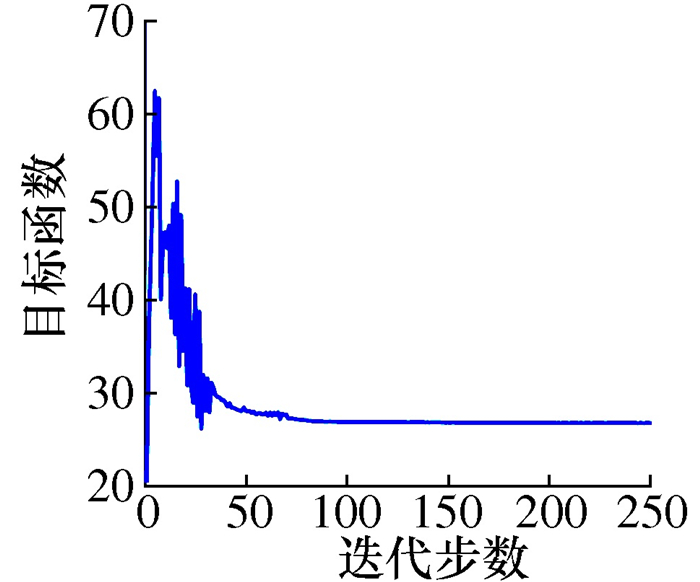
多孔材料因为具有质量轻、比刚度和比强度大、隔振和隔热效果好等优点, 越来越多的应用在航空航天和制造装备等领域。为充分发挥多孔材料的性能, 本文提出同时考虑结构的宏观性能和细观微结构性能的多尺度并行拓扑优化设计方法, 获得性能优良的多孔结构。论文采用聚类方法有效降低了计算成本, 针对并行优化难收敛的问题提出改进模型, 使迭代平稳收敛。最后以经典的悬臂梁、MBB梁和Michell结构为例进行优化设计, 通过对宏细观多尺度并行优化结果的分析, 验证了所提方法的有效性与正确性。
多孔材料因为具有质量轻、比刚度和比强度大、隔振和隔热效果好等优点, 越来越多的应用在航空航天和制造装备等领域。为充分发挥多孔材料的性能, 本文提出同时考虑结构的宏观性能和细观微结构性能的多尺度并行拓扑优化设计方法, 获得性能优良的多孔结构。论文采用聚类方法有效降低了计算成本, 针对并行优化难收敛的问题提出改进模型, 使迭代平稳收敛。最后以经典的悬臂梁、MBB梁和Michell结构为例进行优化设计, 通过对宏细观多尺度并行优化结果的分析, 验证了所提方法的有效性与正确性。

2023, 42(4): 530-537.
doi: 10.13433/j.cnki.1003-8728.20200639
摘要:
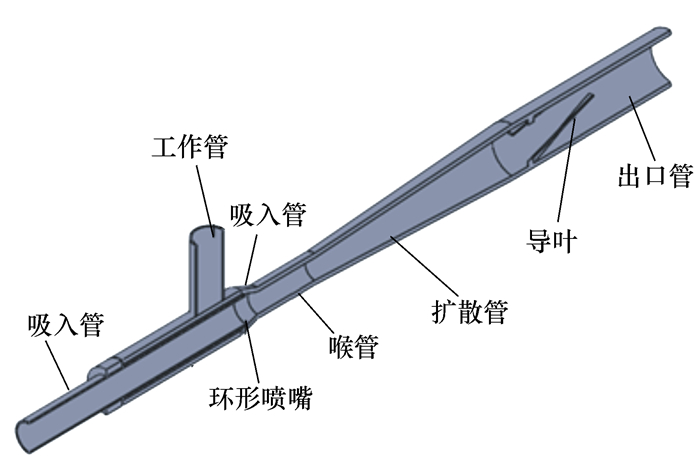
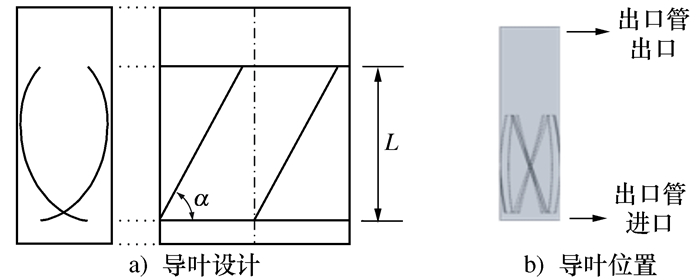
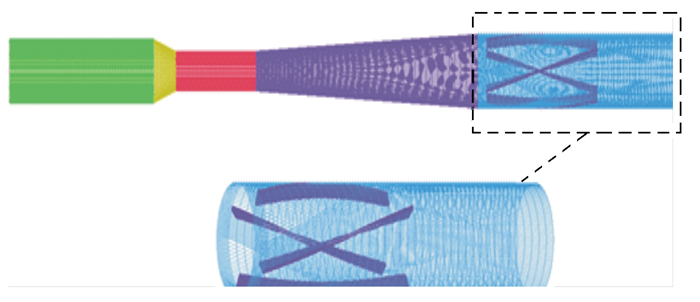
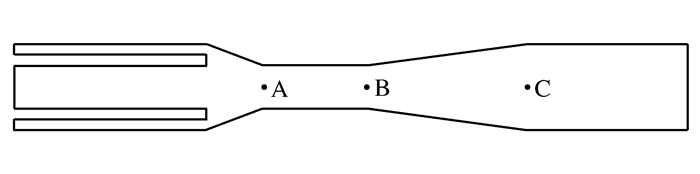
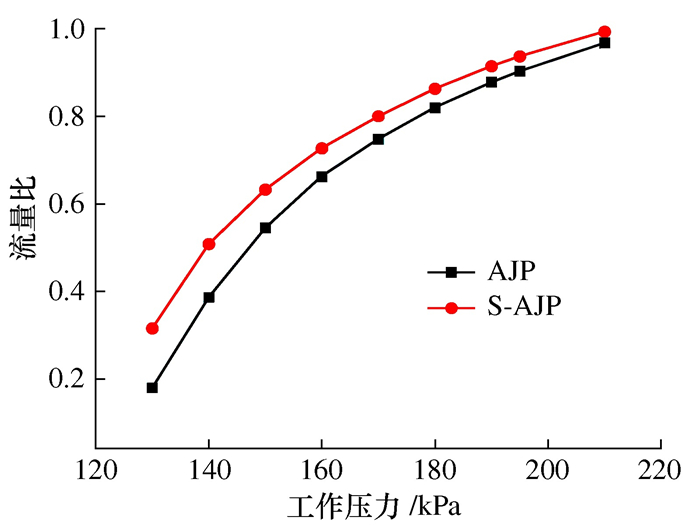
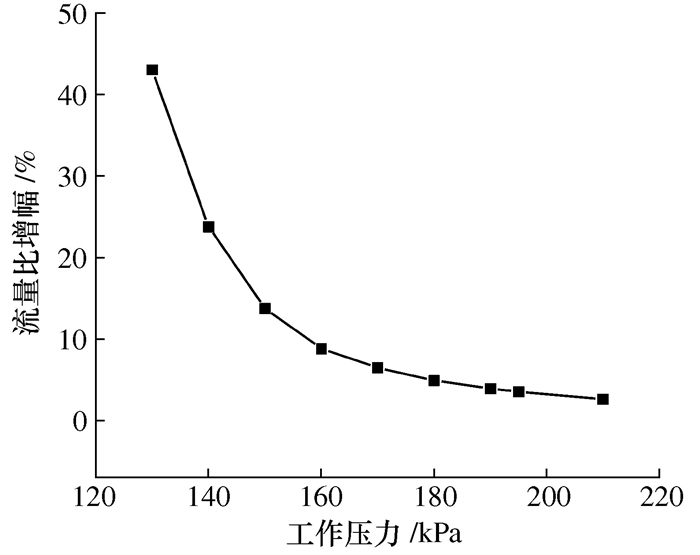
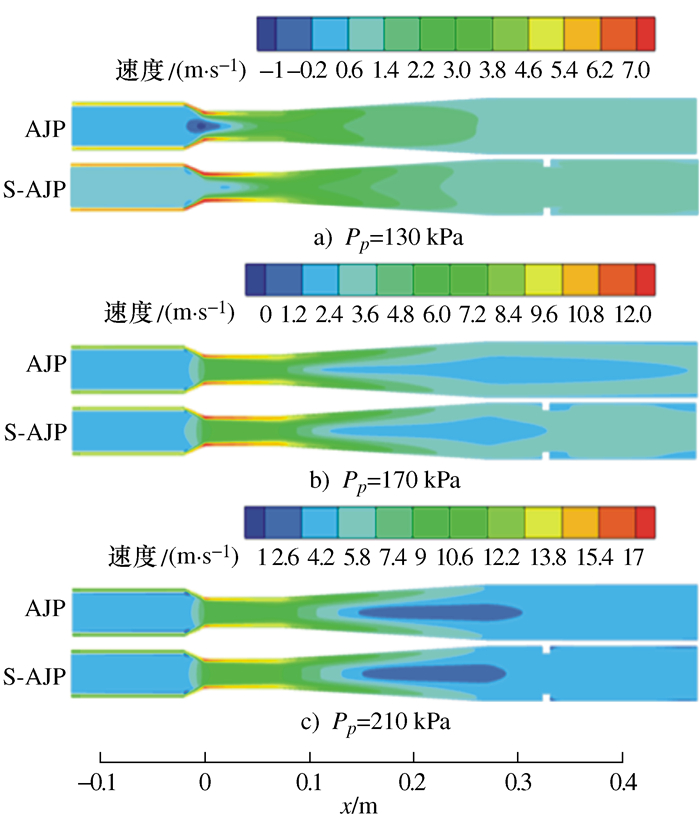
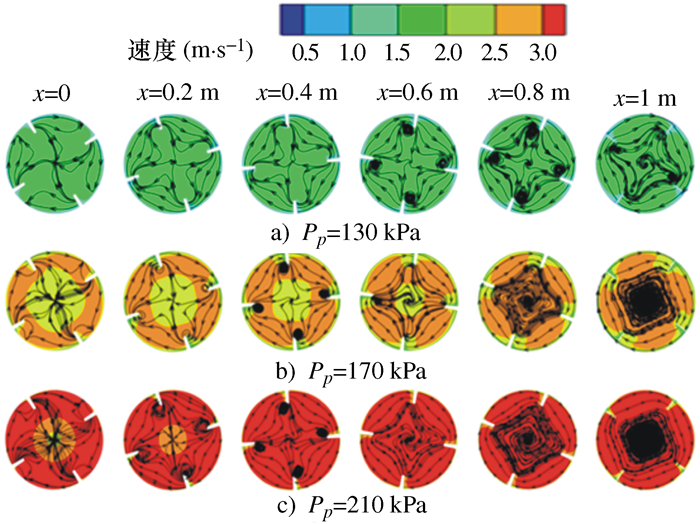
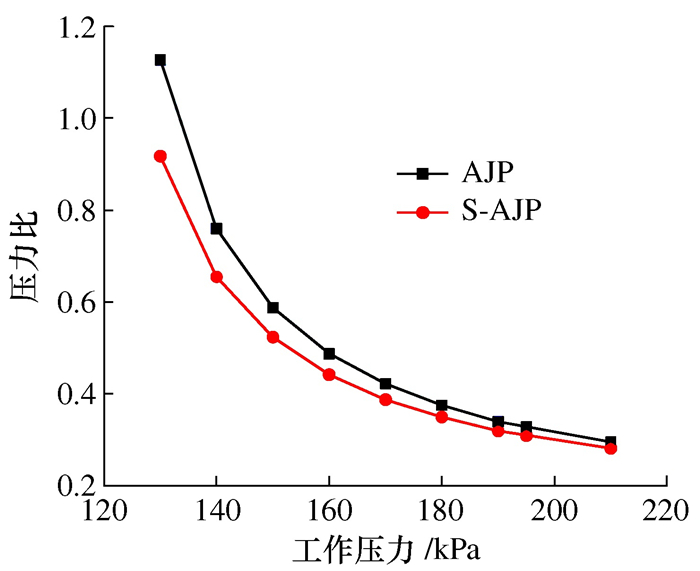
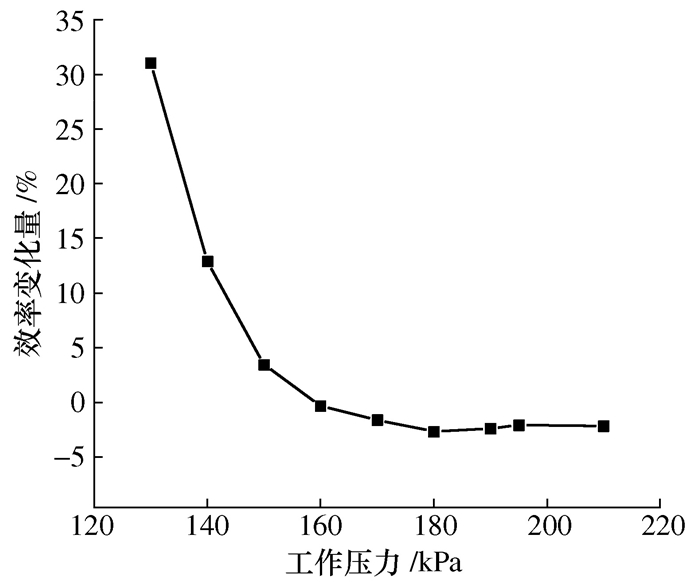
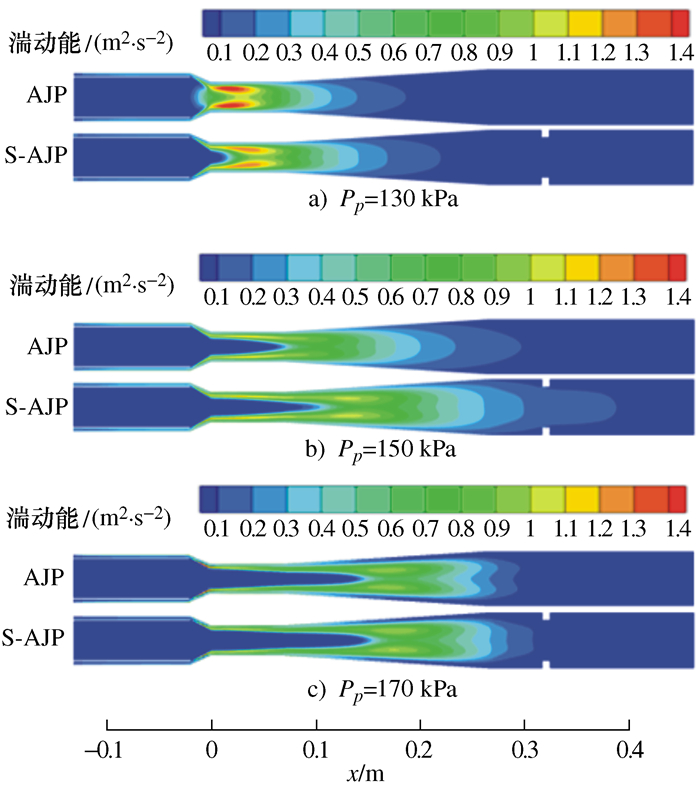
为了提高环形射流泵的输送效率, 本文提出了一种利用导叶结构形成螺旋流的螺旋流环形射流泵。利用数值模拟的方法研究不同工作压力下的螺旋流环形射流泵和原型泵的速度、压力和湍动能分布计算结果, 来分析螺旋流对环形射流泵的性能影响。数值模拟结果表明: 在工作压力为130 kPa时, 螺旋流使环形射流泵的流量比增加了43.1%, 压力比降低了22.8%。螺旋流降低了环形射流泵喉管内的静压, 更容易引起空化。螺旋流使得环形射流泵的效率在工作压力低于160 kPa时大于原型泵。螺旋流环形射流泵内具有更大的湍动能分布区域。随着工作压力升高, 两种结构的环形射流泵湍动能分布差别减小。导叶阻力对螺旋流环形射流泵的效率有着重要的影响。
为了提高环形射流泵的输送效率, 本文提出了一种利用导叶结构形成螺旋流的螺旋流环形射流泵。利用数值模拟的方法研究不同工作压力下的螺旋流环形射流泵和原型泵的速度、压力和湍动能分布计算结果, 来分析螺旋流对环形射流泵的性能影响。数值模拟结果表明: 在工作压力为130 kPa时, 螺旋流使环形射流泵的流量比增加了43.1%, 压力比降低了22.8%。螺旋流降低了环形射流泵喉管内的静压, 更容易引起空化。螺旋流使得环形射流泵的效率在工作压力低于160 kPa时大于原型泵。螺旋流环形射流泵内具有更大的湍动能分布区域。随着工作压力升高, 两种结构的环形射流泵湍动能分布差别减小。导叶阻力对螺旋流环形射流泵的效率有着重要的影响。
2023, 42(4): 538-545.
doi: 10.13433/j.cnki.1003-8728.20200638
摘要:
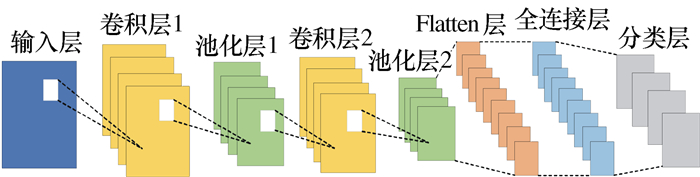
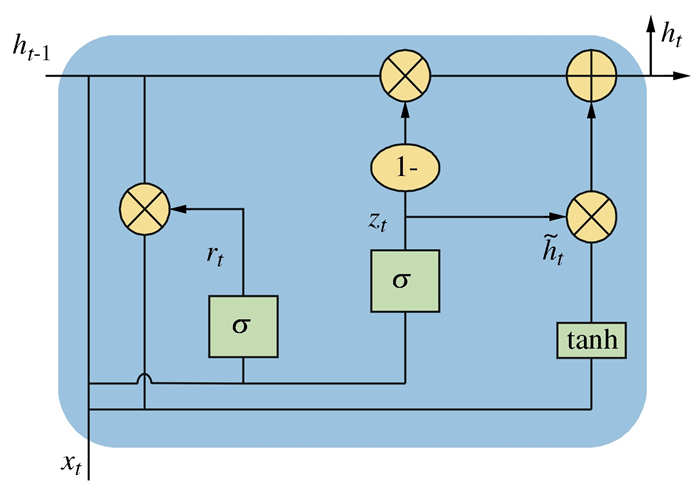
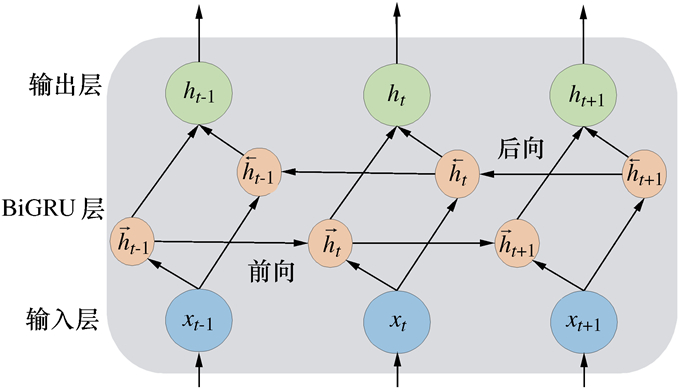
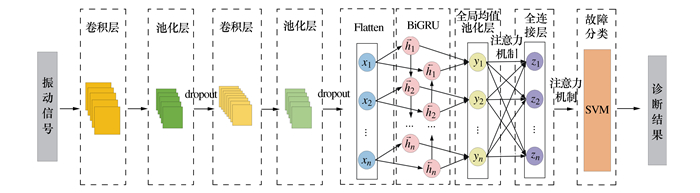
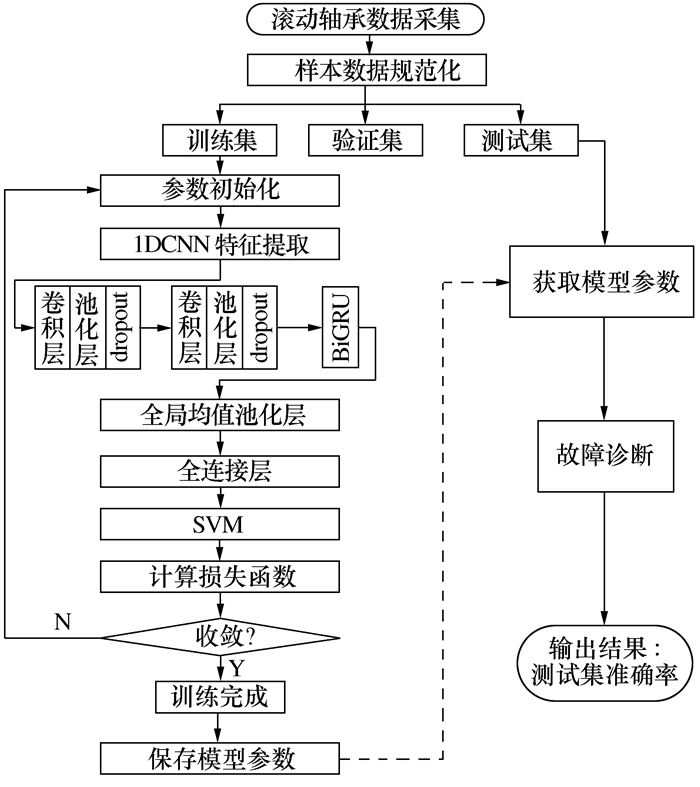
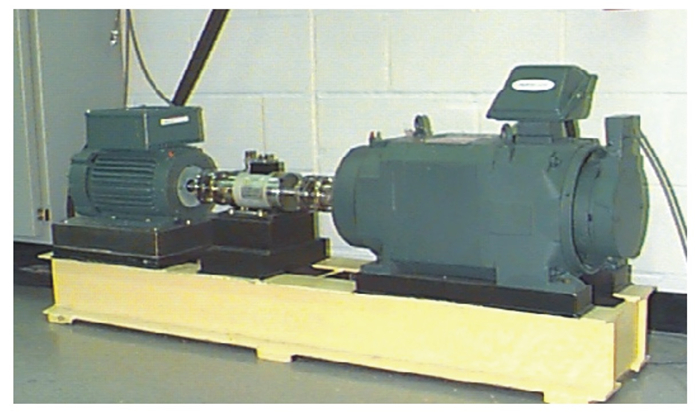
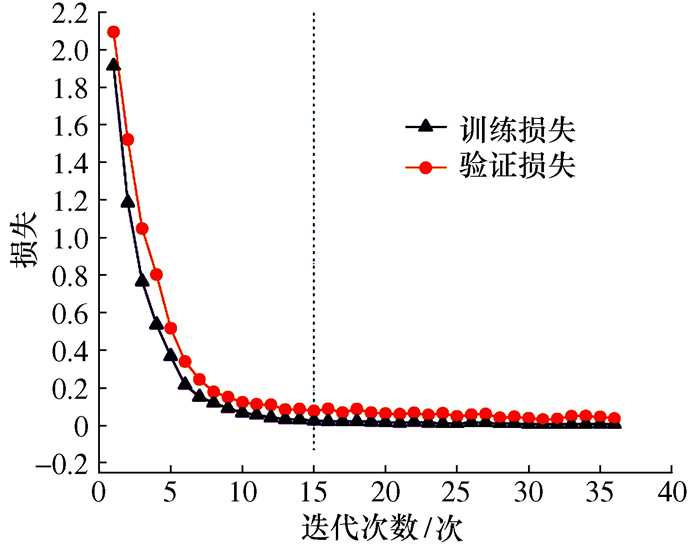
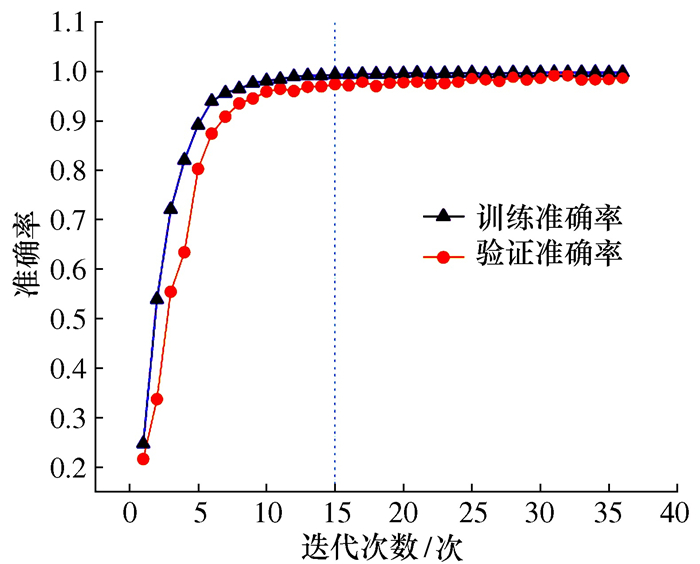
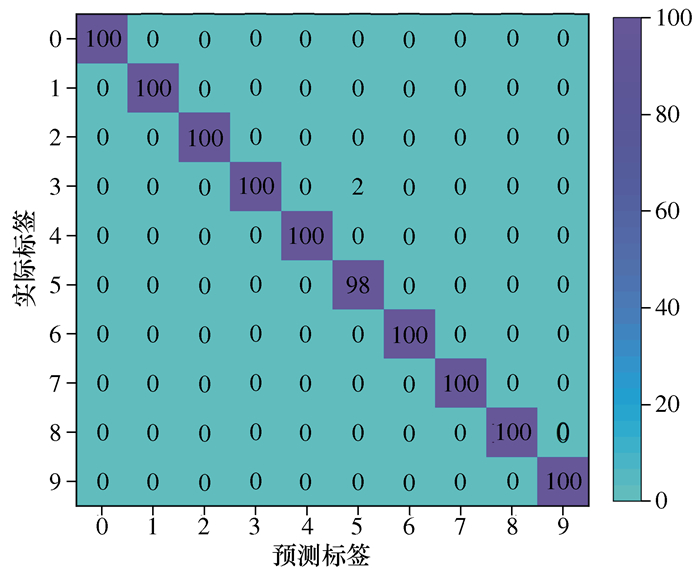
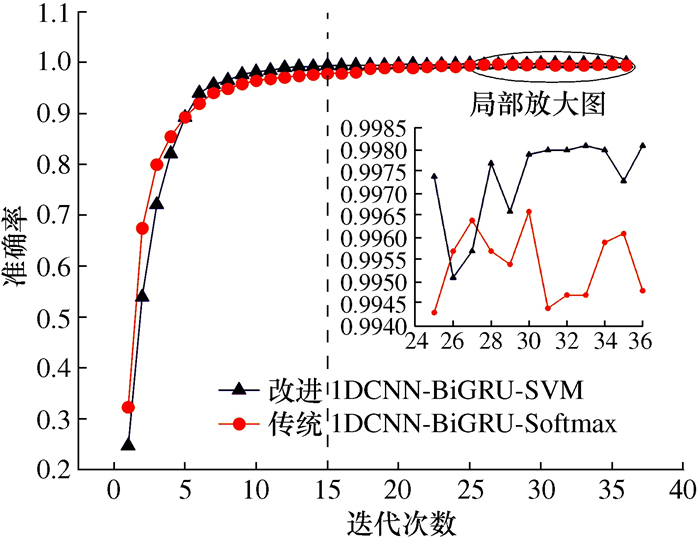
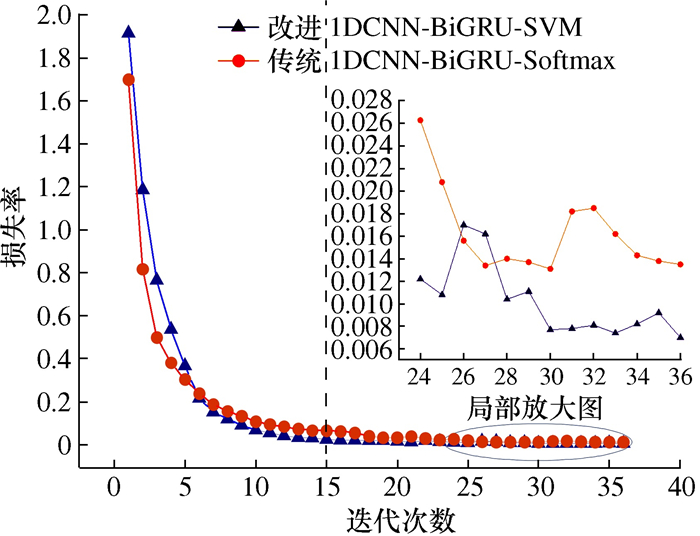
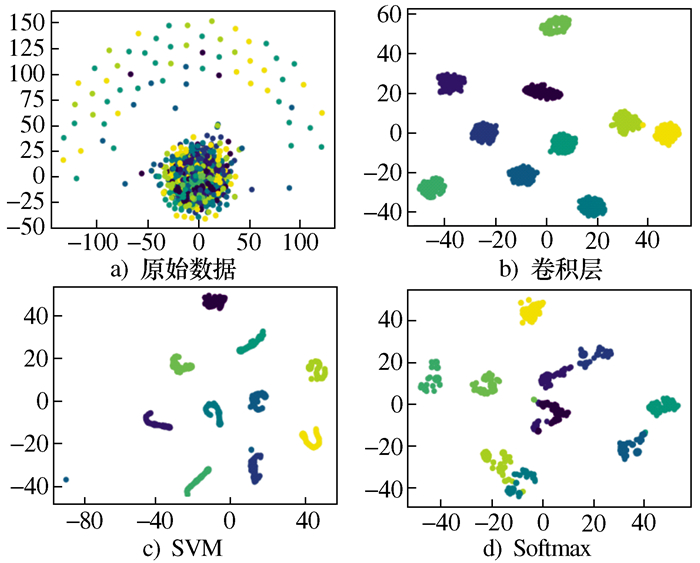
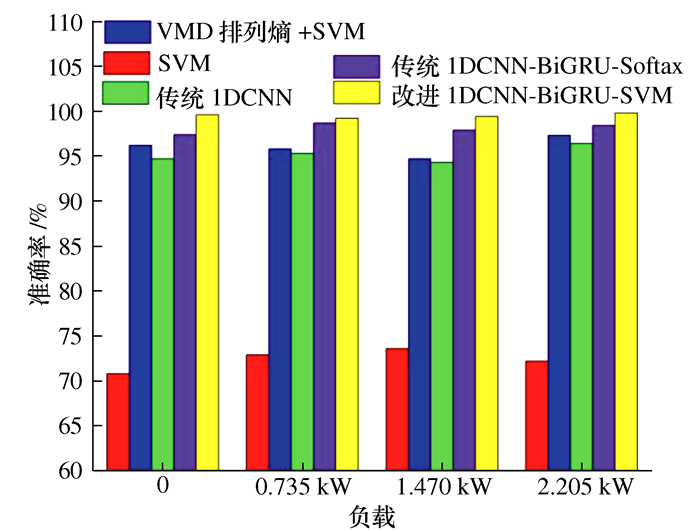
针对传统智能故障诊断依赖于人工经验进行特征提取和传统卷积神经网络(Convolutional neural networks, CNN)参数过多、训练量过大且无法充分利用时间序列信息的缺点, 提出一种基于改进一维卷积神经网络与双向门控循环单元的深度学习新算法。首先, 该方法利用一维卷积神经网络自提取能力进行特征提取, 同时设计了一个全局均值池化层替换传统卷积神经网络的全连接层, 减少参数数量; 其次, 引入双向门控循环单元学习特征信号中的时间序列关系; 最后, 通过支持向量机替换传统CNN中的Softmax层进行故障分类, 进一步提高诊断的准确率。实验表明, 该方法将诊断的准确率提升至99.8%, 并且加快了诊断的速度。通过与其他方法的对比, 证明了该方法有着更高的准确率, 更快的诊断速度, 更好的鲁棒性。
针对传统智能故障诊断依赖于人工经验进行特征提取和传统卷积神经网络(Convolutional neural networks, CNN)参数过多、训练量过大且无法充分利用时间序列信息的缺点, 提出一种基于改进一维卷积神经网络与双向门控循环单元的深度学习新算法。首先, 该方法利用一维卷积神经网络自提取能力进行特征提取, 同时设计了一个全局均值池化层替换传统卷积神经网络的全连接层, 减少参数数量; 其次, 引入双向门控循环单元学习特征信号中的时间序列关系; 最后, 通过支持向量机替换传统CNN中的Softmax层进行故障分类, 进一步提高诊断的准确率。实验表明, 该方法将诊断的准确率提升至99.8%, 并且加快了诊断的速度。通过与其他方法的对比, 证明了该方法有着更高的准确率, 更快的诊断速度, 更好的鲁棒性。
2023, 42(4): 546-552.
doi: 10.13433/j.cnki.1003-8728.20220006
摘要:
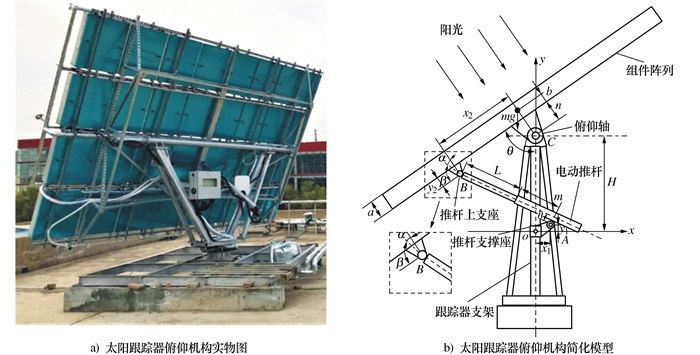
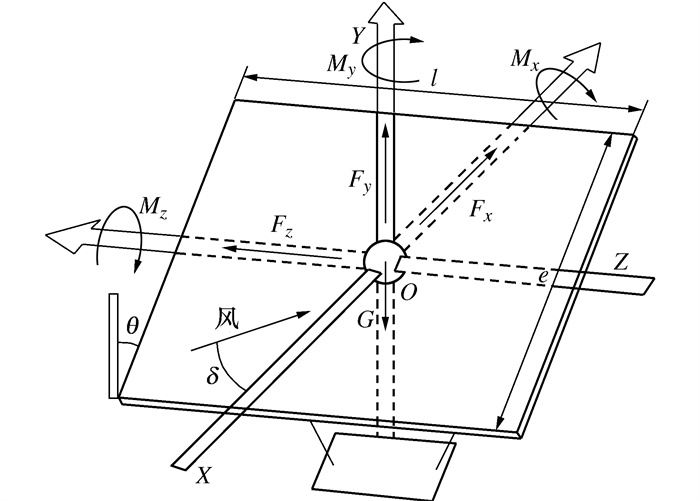
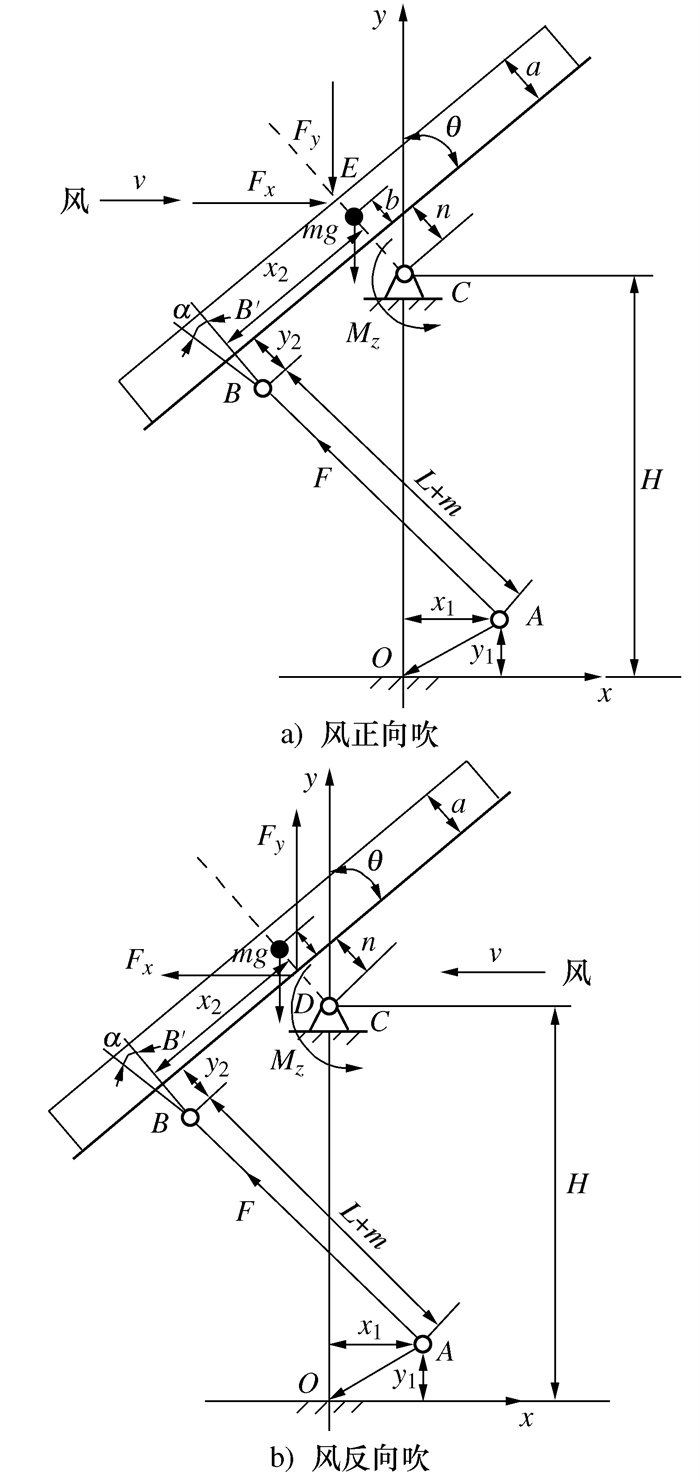
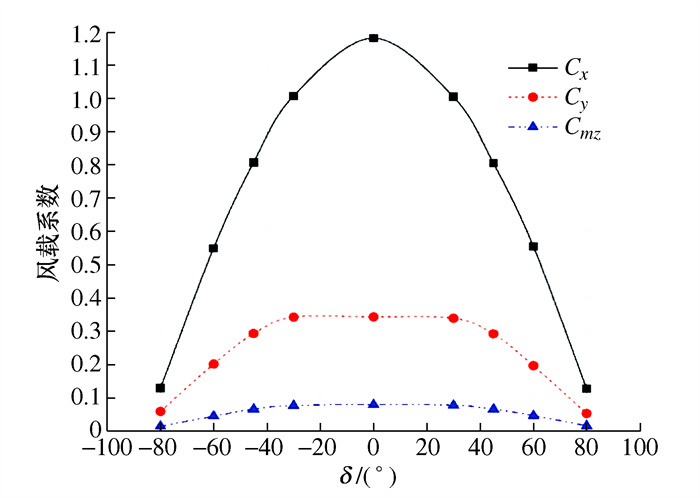
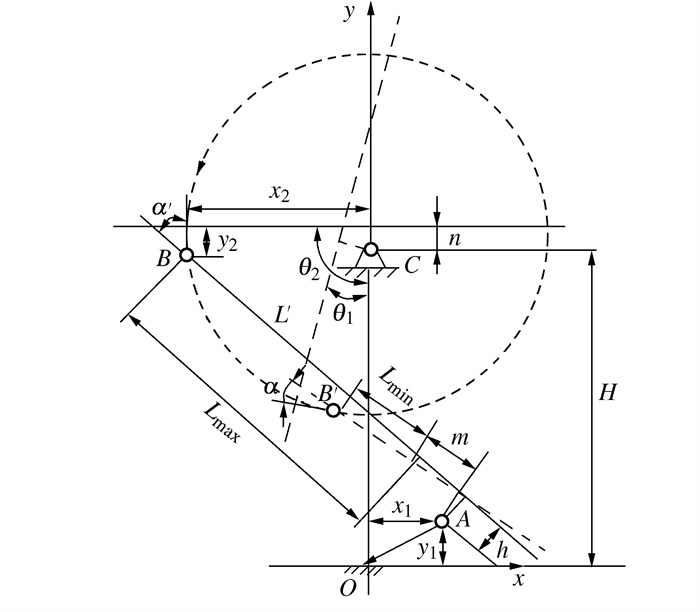
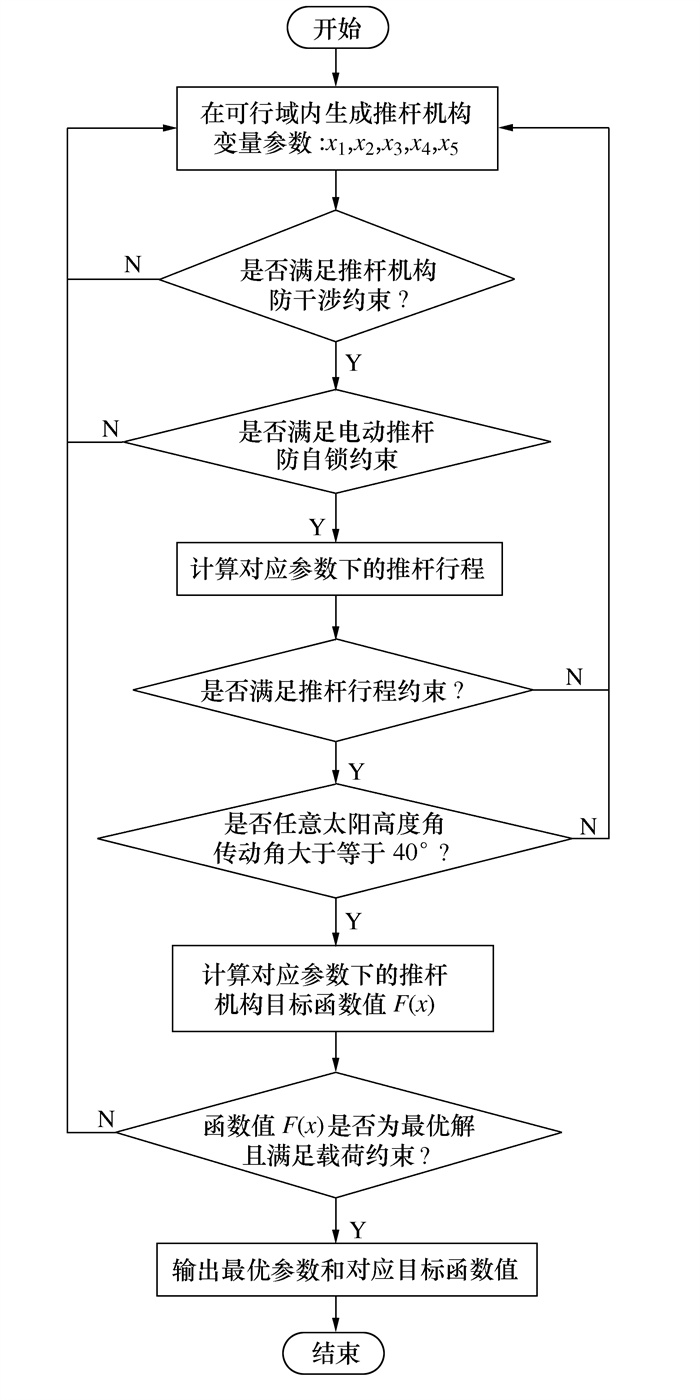
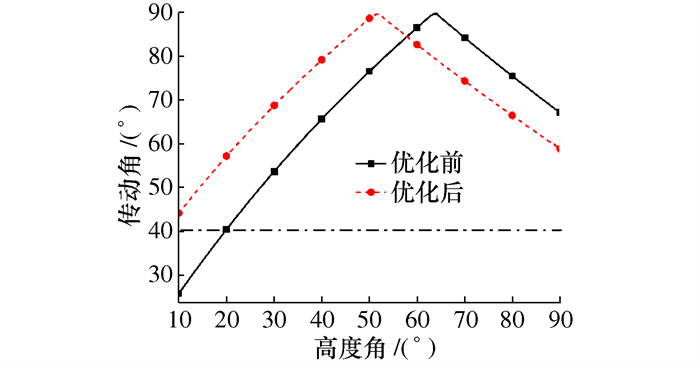
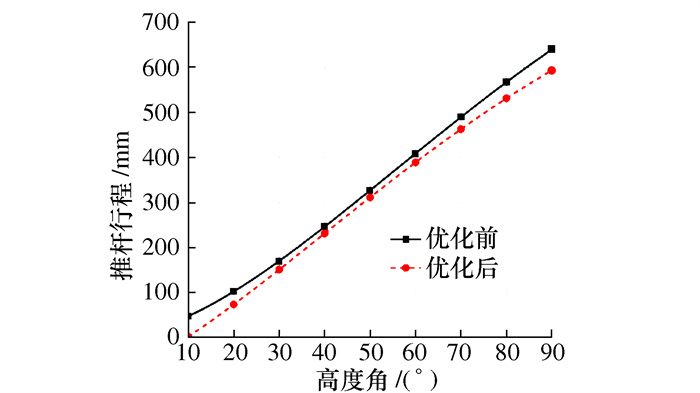
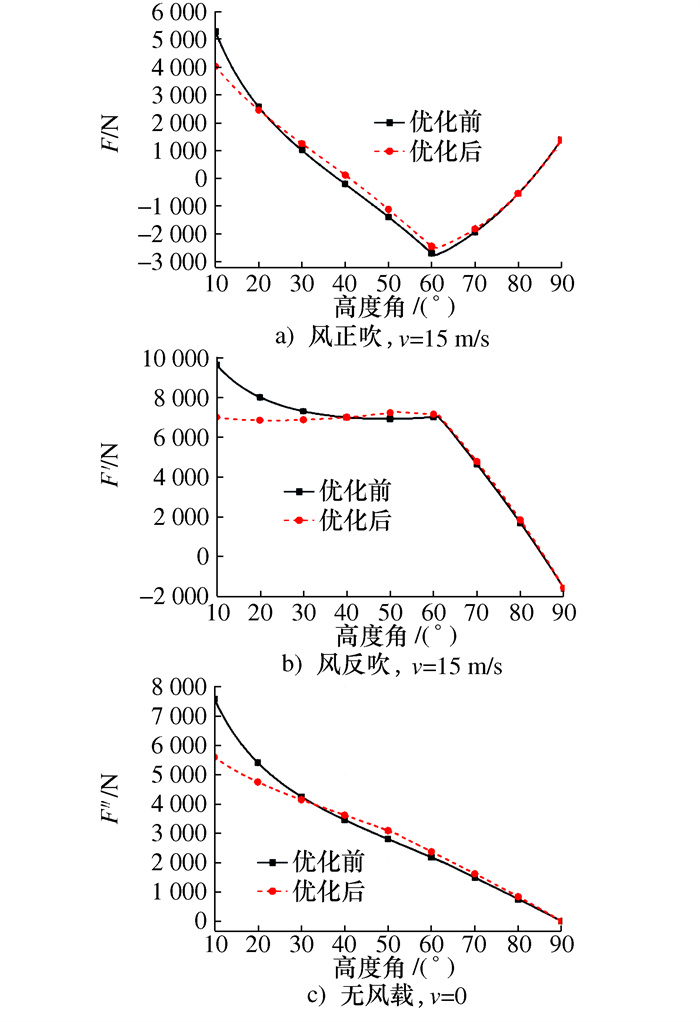
与固定式安装太阳电池板比较,采用太阳能跟踪系统可使其发电量提高25%~40%。本文根据太阳跟踪器俯仰机构几何关系,建立了完整太阳跟踪过程中电动推杆承受载荷最小的优化设计模型,通过编写MATLAB程序,对俯仰机构的布局参数和机构尺寸进行了优化。算例结果表明,优化的俯仰机构增大了最小传动角,提高了机构的传动性能,降低了电动推杆的载荷,保证了机构性能和可靠性。
与固定式安装太阳电池板比较,采用太阳能跟踪系统可使其发电量提高25%~40%。本文根据太阳跟踪器俯仰机构几何关系,建立了完整太阳跟踪过程中电动推杆承受载荷最小的优化设计模型,通过编写MATLAB程序,对俯仰机构的布局参数和机构尺寸进行了优化。算例结果表明,优化的俯仰机构增大了最小传动角,提高了机构的传动性能,降低了电动推杆的载荷,保证了机构性能和可靠性。
2023, 42(4): 553-558.
doi: 10.13433/j.cnki.1003-8728.20220007
摘要:
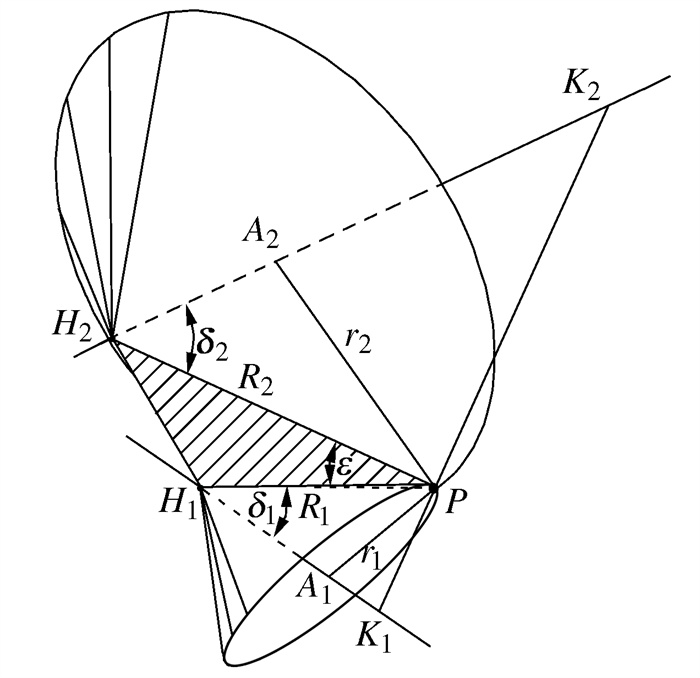
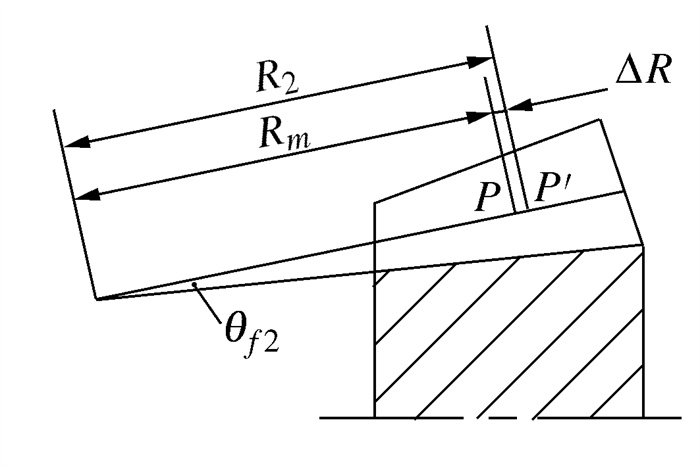
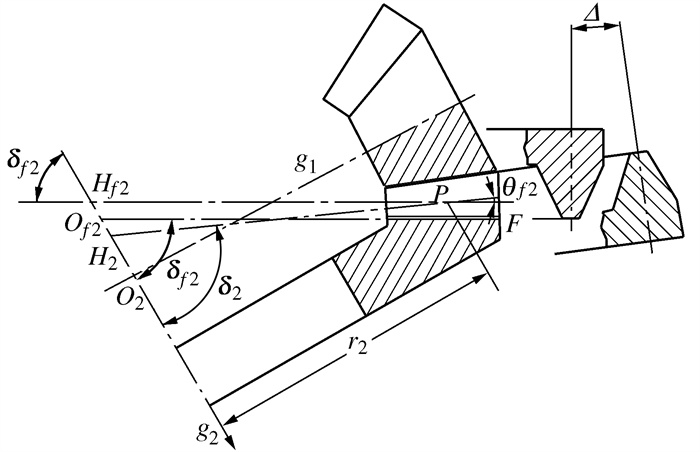
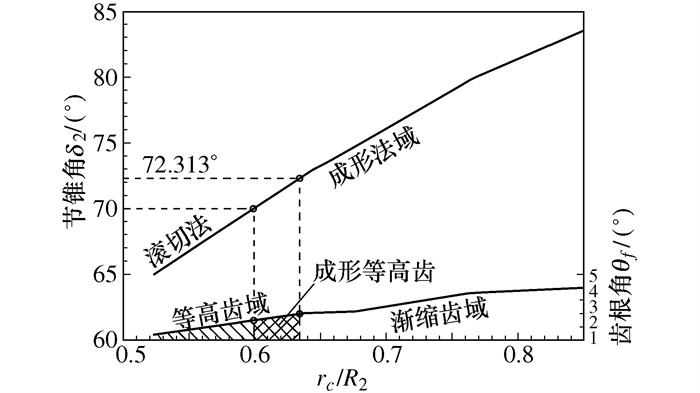
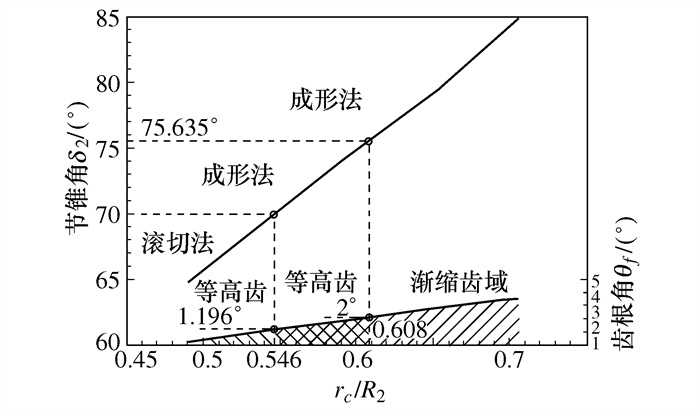
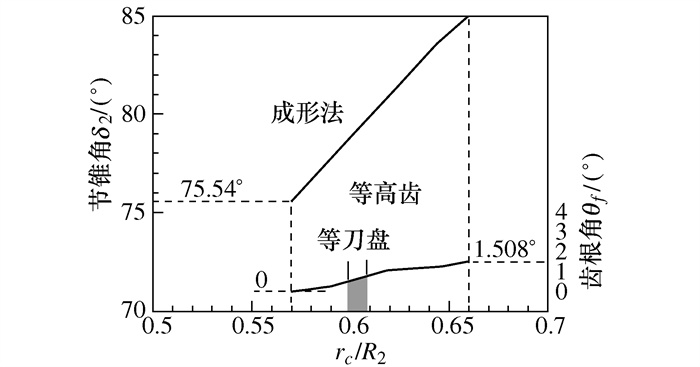
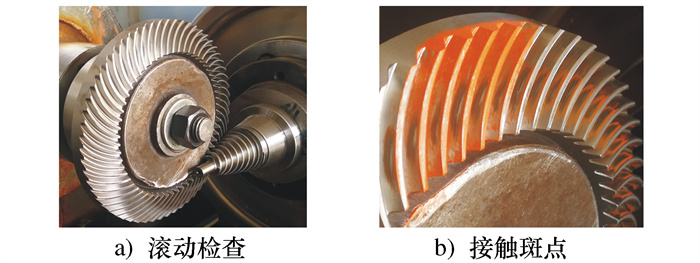
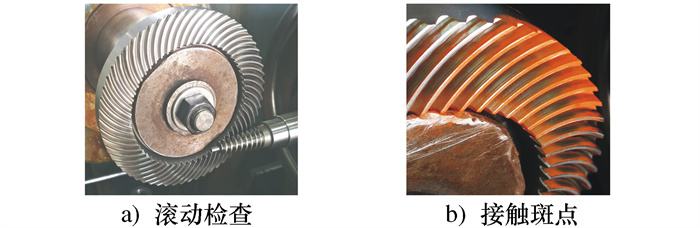
研究了准双曲面齿轮的节锥和轮齿收缩的形成与演变规律,分析了刀盘半径、齿根角、节锥等参数之间的耦合关系。根据节点纵向变位原理,提出了等高成形法高减比准双曲面(High reduction hypoid,HRH)齿轮的制式设计方法;通过纵向变位系数和刀盘半径的恰当匹配,确定了适合等高成形法HRH齿轮的节锥角、齿根角的几何可行域,其中等径刀盘设计为工程应用提供了便利。给出了3种HRH齿轮等高成形法的几何制式设计样例,完成了3∶60、1∶60两种HRH齿轮加工、滚检与动态性能试验,试验所设计HRH齿轮齿形与啮合关系正确,接触性能良好。证明了所提出的纵向变位HRH齿轮等高成形法设计方法的可行性。
研究了准双曲面齿轮的节锥和轮齿收缩的形成与演变规律,分析了刀盘半径、齿根角、节锥等参数之间的耦合关系。根据节点纵向变位原理,提出了等高成形法高减比准双曲面(High reduction hypoid,HRH)齿轮的制式设计方法;通过纵向变位系数和刀盘半径的恰当匹配,确定了适合等高成形法HRH齿轮的节锥角、齿根角的几何可行域,其中等径刀盘设计为工程应用提供了便利。给出了3种HRH齿轮等高成形法的几何制式设计样例,完成了3∶60、1∶60两种HRH齿轮加工、滚检与动态性能试验,试验所设计HRH齿轮齿形与啮合关系正确,接触性能良好。证明了所提出的纵向变位HRH齿轮等高成形法设计方法的可行性。
2023, 42(4): 559-565.
doi: 10.13433/j.cnki.1003-8728.20230089
摘要:
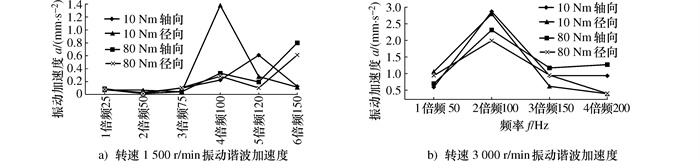
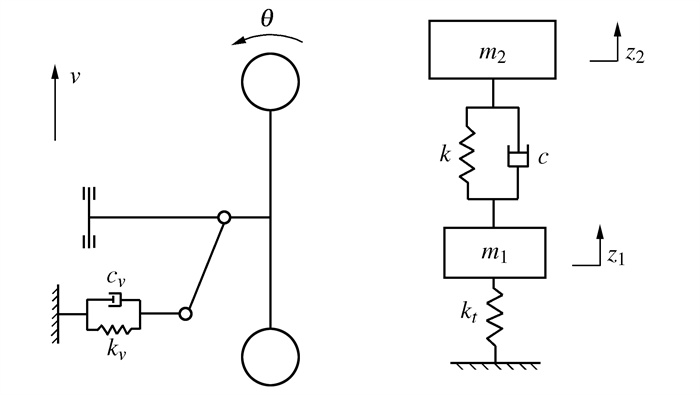
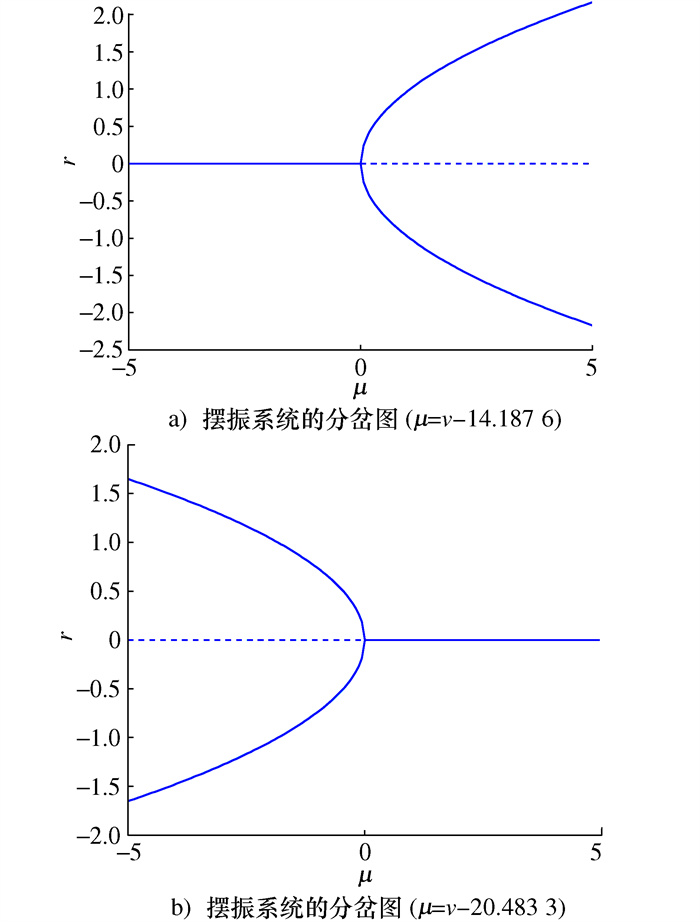
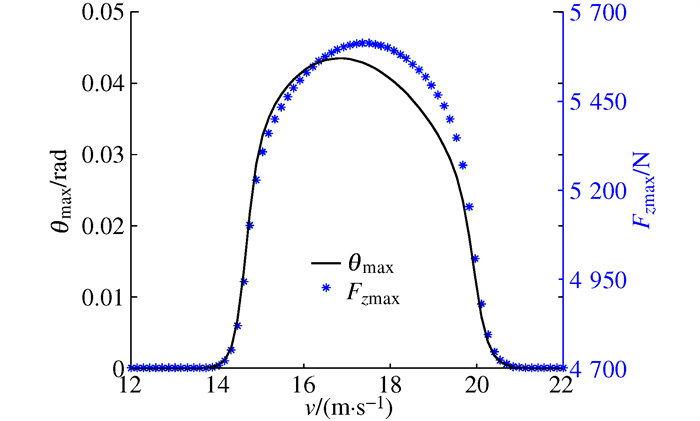
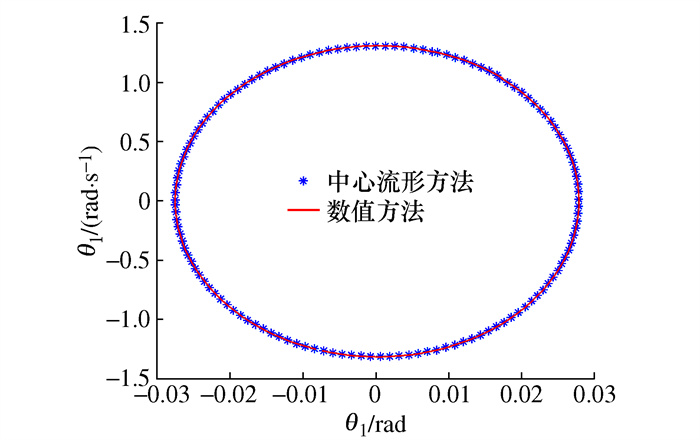
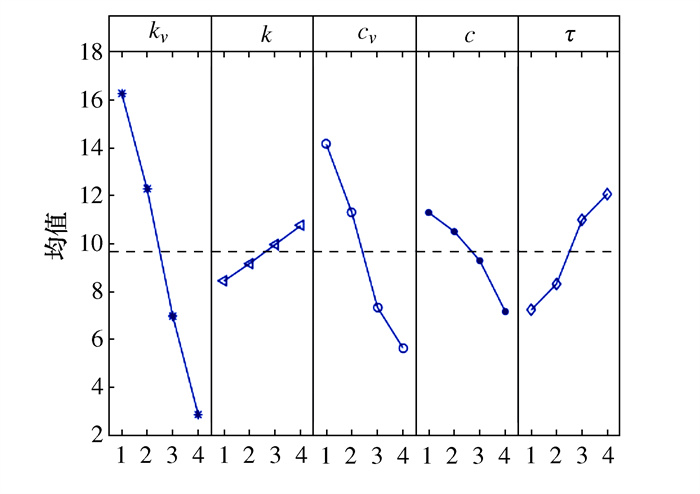
为了分析汽车摆振系统的失稳机制,以某样车的右前轮为例,基于1/4车辆动力学模型,通过第二类拉格朗日方程建立了三自由度单轮摆振系统动力学模型。在系统状态方程的基础上,应用Hurwitz准则求解得到了摆振系统的临界失稳车速,进而获得了摆振系统在临界失稳车速处的特征值。结果表明,临界车速工况下的系统平衡点是非双曲平衡点,因此,以车速为分岔参数,通过中心流形理论得到了系统在临界车速处的二维中心流形。在此基础上深入分析了摆振系统的Hopf分岔特性,并得到了摆振系统的近似周期解。最后,通过四水平五参数正交实验设计,获得了转向系和悬架系的结构参数对系统临界失稳车速的灵敏度。研究发现,系统临界失稳车速对主销后倾角最为敏感,其次是转向系和悬架系的阻尼。因此,在工程实践中,应该优先考虑通过调整主销后倾角来抑制汽车摆振。
为了分析汽车摆振系统的失稳机制,以某样车的右前轮为例,基于1/4车辆动力学模型,通过第二类拉格朗日方程建立了三自由度单轮摆振系统动力学模型。在系统状态方程的基础上,应用Hurwitz准则求解得到了摆振系统的临界失稳车速,进而获得了摆振系统在临界失稳车速处的特征值。结果表明,临界车速工况下的系统平衡点是非双曲平衡点,因此,以车速为分岔参数,通过中心流形理论得到了系统在临界车速处的二维中心流形。在此基础上深入分析了摆振系统的Hopf分岔特性,并得到了摆振系统的近似周期解。最后,通过四水平五参数正交实验设计,获得了转向系和悬架系的结构参数对系统临界失稳车速的灵敏度。研究发现,系统临界失稳车速对主销后倾角最为敏感,其次是转向系和悬架系的阻尼。因此,在工程实践中,应该优先考虑通过调整主销后倾角来抑制汽车摆振。
2023, 42(4): 566-572.
doi: 10.13433/j.cnki.1003-8728.20200643
摘要:
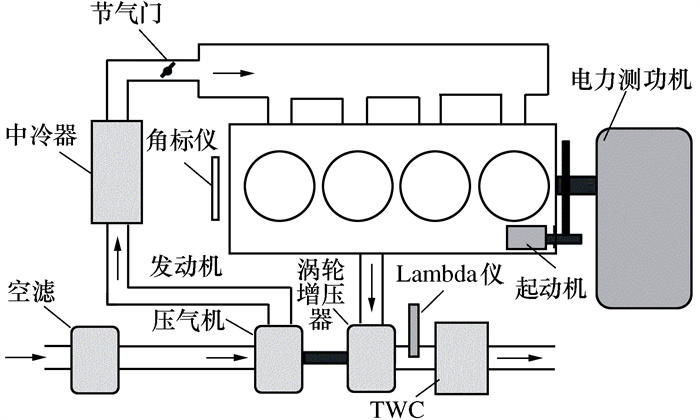
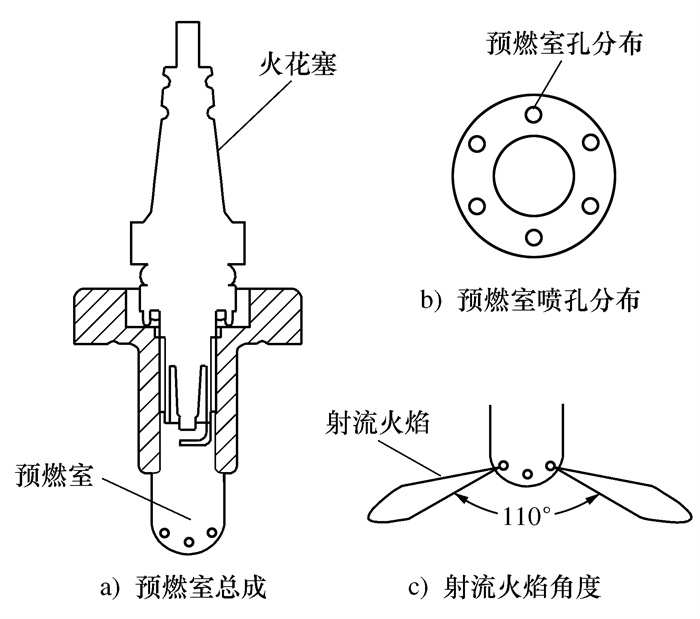
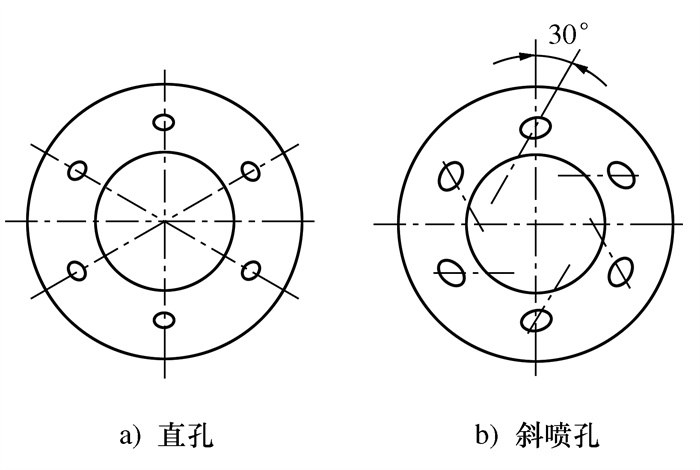
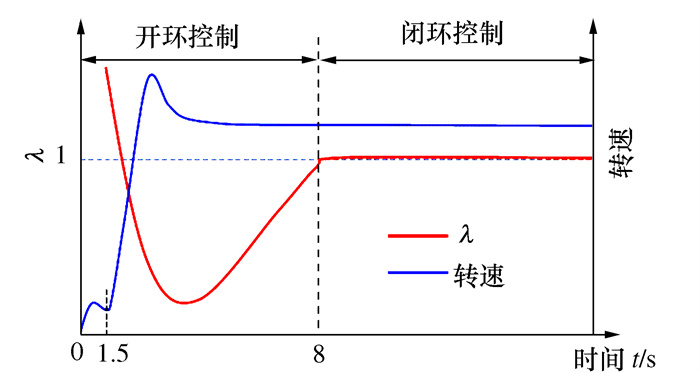
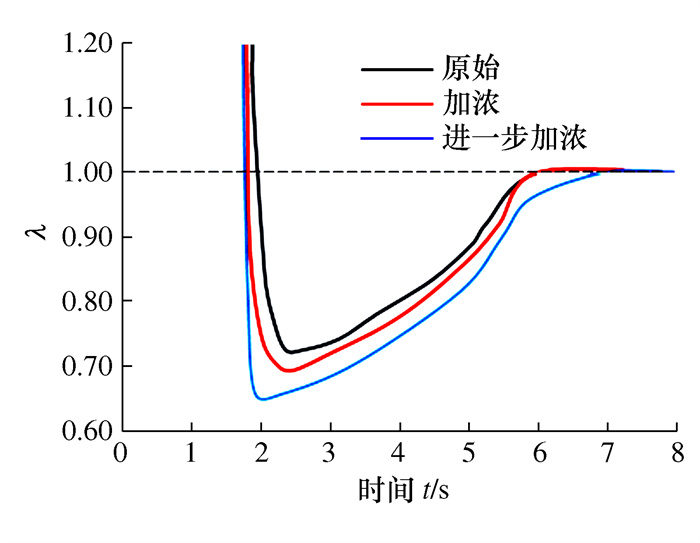
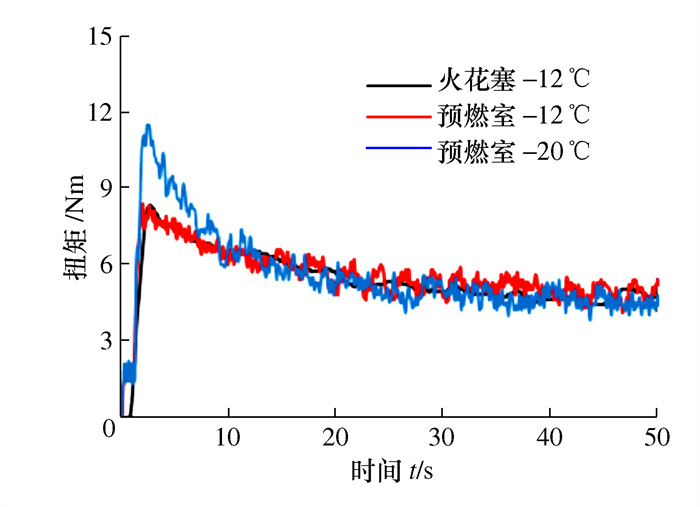
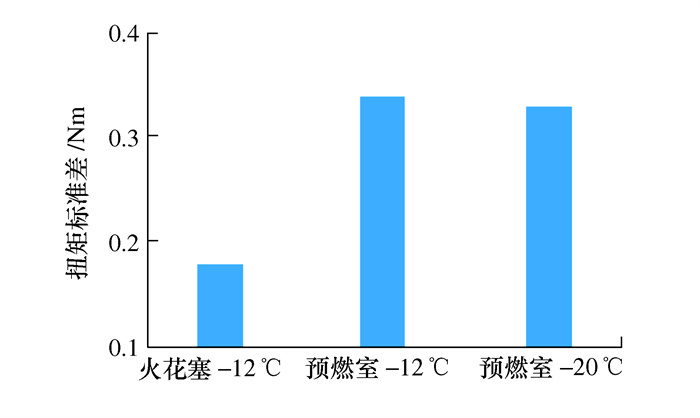
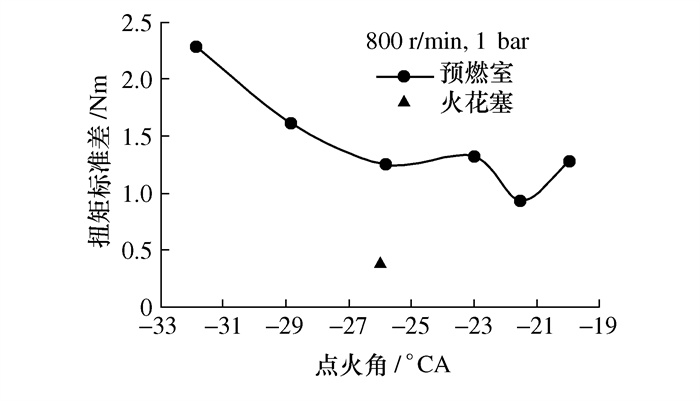
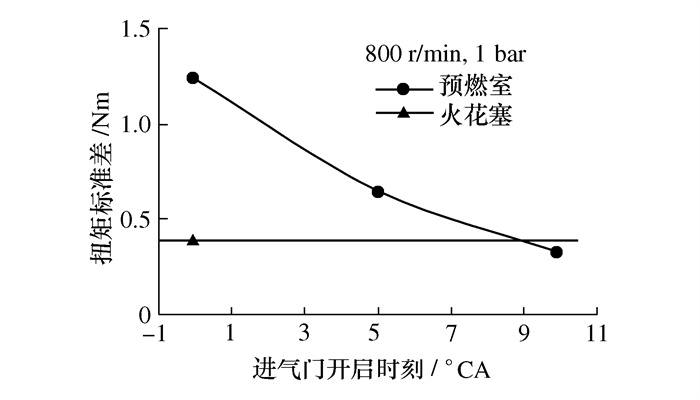
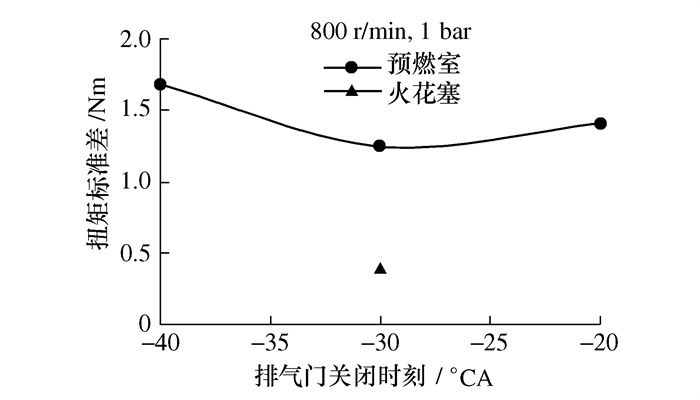
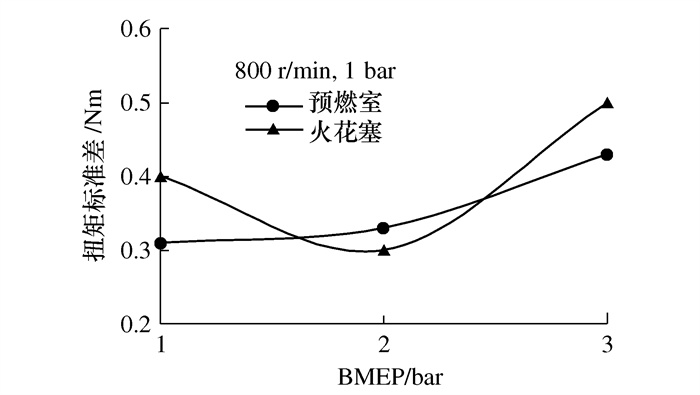
预燃室射流点火是改善汽油发动机热效率的有效手段,为了研究和改善被动预燃室低温冷起动及低负荷时的燃烧稳定性,设计了不同容积、孔面积、材料、喷孔结构的被动预燃室装置,安装在一台涡轮增压汽油发动机上,进行了低温冷起动试验,以及低速、低负荷燃烧稳定性试验。研究结果表明,被动预燃室容积、孔面积、材料、喷孔结构对低温冷起动性能有显著影响。预燃室容积较小时,预燃室内部淬熄层占预燃室容积的比例大,预燃室内部混合气少。较小的孔径或孔面积减少了预燃室内残余废气的排出。旋转孔使得预燃室内部废气分层,火花塞附近废气比例大。较高的导热率使预燃室冷起动时预燃室散热较快。因此,小容积、小孔径、高导热率材料以及旋转喷孔等均不利于发动机冷起动。优化结构的被动预燃室在-20 ℃~-8 ℃的冷起动工况下能实现发动机稳定着火起动。点火角和排气VVT对发动机的燃烧稳定性影响较小。进气VVT对预燃室燃烧稳定性影响较大,进气门开起时刻推迟,着火上止点附近缸内湍动能变强;另一方面实际压缩比变大,主燃烧压入预燃室内部的新鲜混合气比例提高,预燃室点火燃烧稳定性显著改善。
预燃室射流点火是改善汽油发动机热效率的有效手段,为了研究和改善被动预燃室低温冷起动及低负荷时的燃烧稳定性,设计了不同容积、孔面积、材料、喷孔结构的被动预燃室装置,安装在一台涡轮增压汽油发动机上,进行了低温冷起动试验,以及低速、低负荷燃烧稳定性试验。研究结果表明,被动预燃室容积、孔面积、材料、喷孔结构对低温冷起动性能有显著影响。预燃室容积较小时,预燃室内部淬熄层占预燃室容积的比例大,预燃室内部混合气少。较小的孔径或孔面积减少了预燃室内残余废气的排出。旋转孔使得预燃室内部废气分层,火花塞附近废气比例大。较高的导热率使预燃室冷起动时预燃室散热较快。因此,小容积、小孔径、高导热率材料以及旋转喷孔等均不利于发动机冷起动。优化结构的被动预燃室在-20 ℃~-8 ℃的冷起动工况下能实现发动机稳定着火起动。点火角和排气VVT对发动机的燃烧稳定性影响较小。进气VVT对预燃室燃烧稳定性影响较大,进气门开起时刻推迟,着火上止点附近缸内湍动能变强;另一方面实际压缩比变大,主燃烧压入预燃室内部的新鲜混合气比例提高,预燃室点火燃烧稳定性显著改善。
2023, 42(4): 573-579.
doi: 10.13433/j.cnki.1003-8728.20200636
摘要:
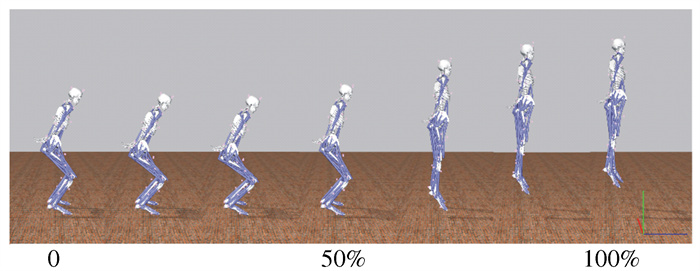
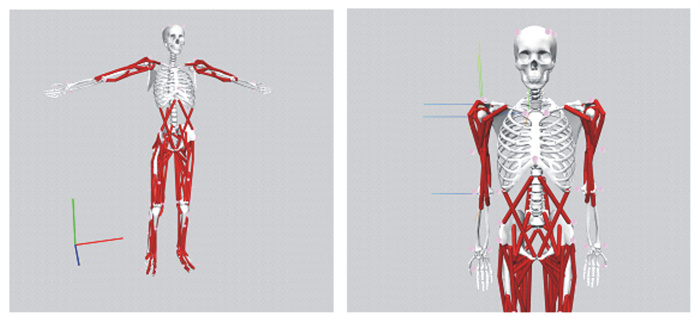
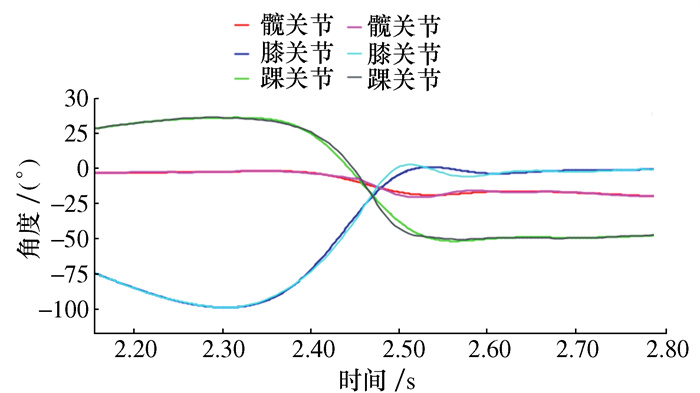
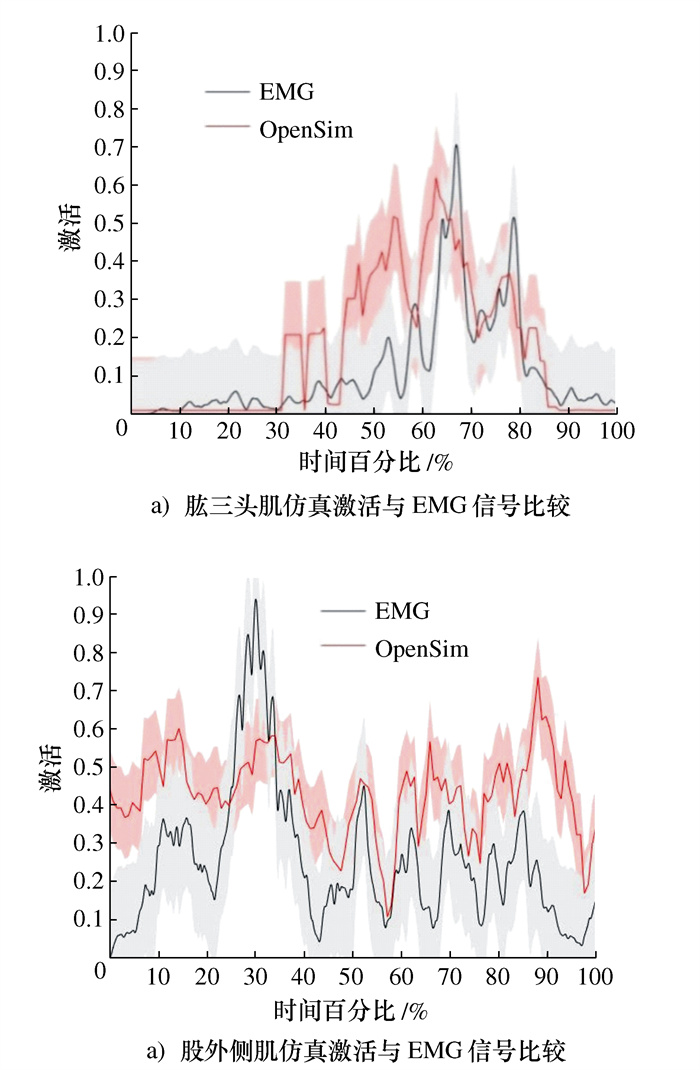
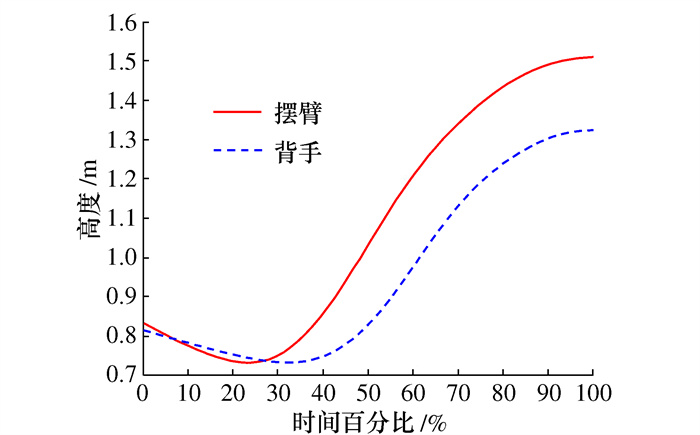
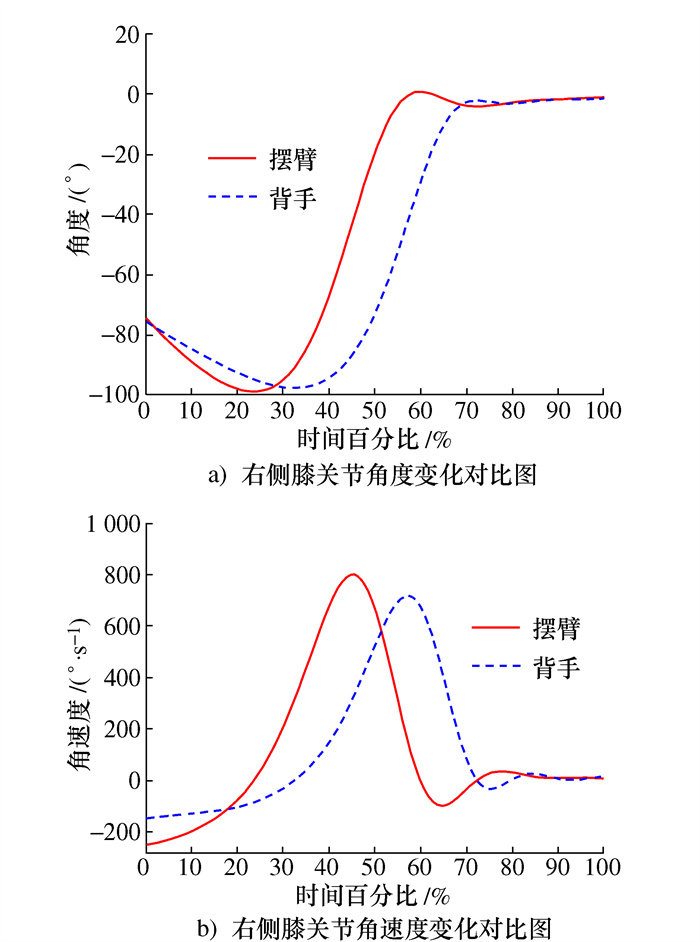
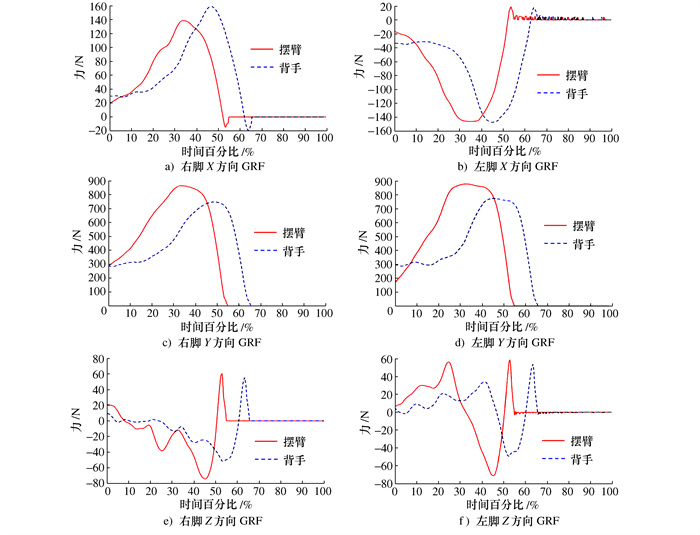
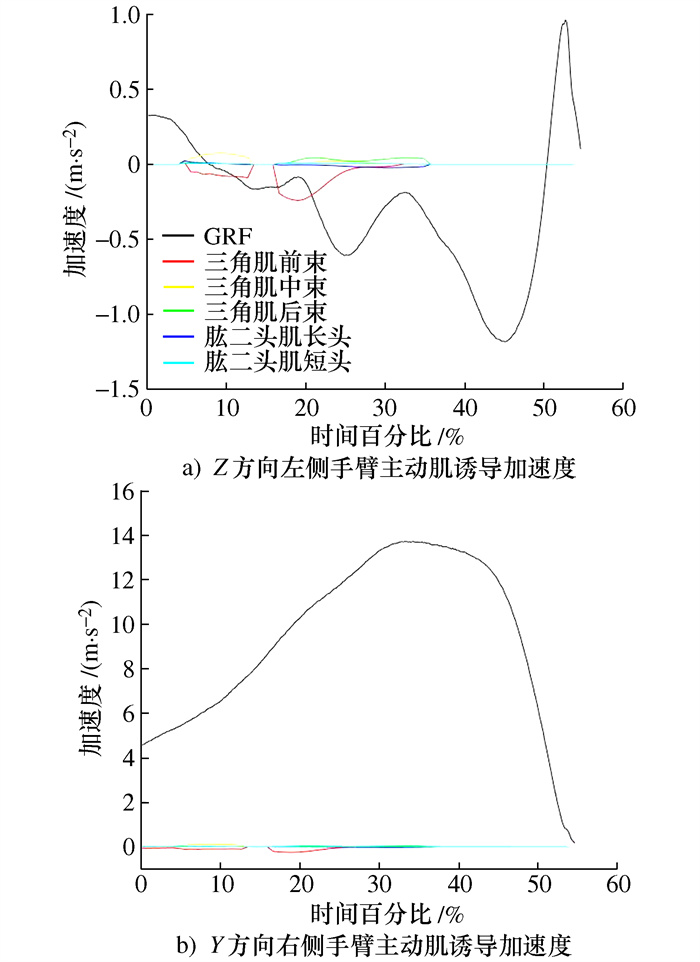
本文基于OpenSim建立了一个包括上下肢在内的人体整体骨骼肌肉仿真模型,通过Vicon红外摄像系统、Kistler三维测力平台以及遥测肌电对摆臂与背手两种原地纵跳动作进行同步测试,并结合逆运动学、逆动力学等仿真工具寻求上下肢肌肉协调工作提升原地纵跳动作效果的实证。结果表明:本文所建立的人体整体肌肉骨骼仿真模型具有高度可靠性,分析得出摆臂原地纵跳动作中三角肌前束对重心的提高贡献最大。研究结果可为将来上下肢助力外骨骼的设计与研究提供帮助。
本文基于OpenSim建立了一个包括上下肢在内的人体整体骨骼肌肉仿真模型,通过Vicon红外摄像系统、Kistler三维测力平台以及遥测肌电对摆臂与背手两种原地纵跳动作进行同步测试,并结合逆运动学、逆动力学等仿真工具寻求上下肢肌肉协调工作提升原地纵跳动作效果的实证。结果表明:本文所建立的人体整体肌肉骨骼仿真模型具有高度可靠性,分析得出摆臂原地纵跳动作中三角肌前束对重心的提高贡献最大。研究结果可为将来上下肢助力外骨骼的设计与研究提供帮助。

2023, 42(4): 580-584.
doi: 10.13433/j.cnki.1003-8728.20220060
摘要:
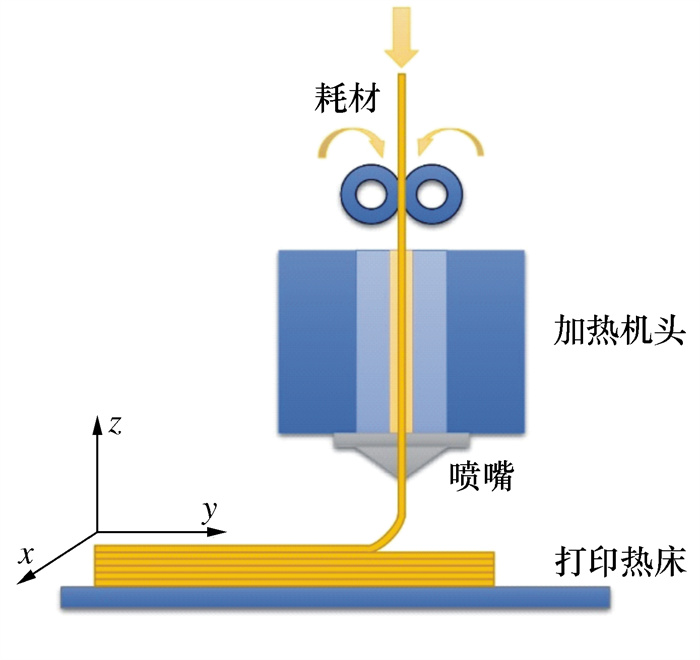
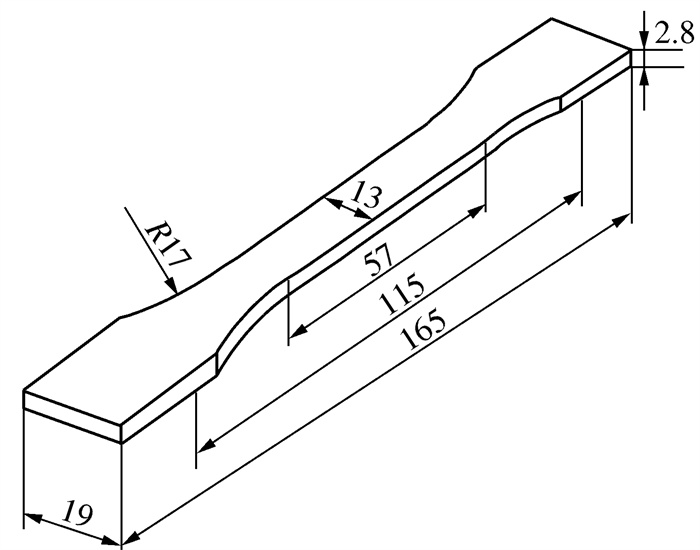
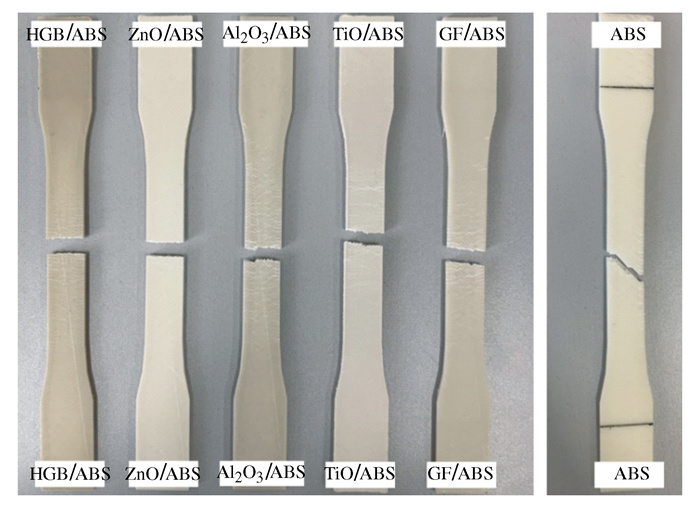
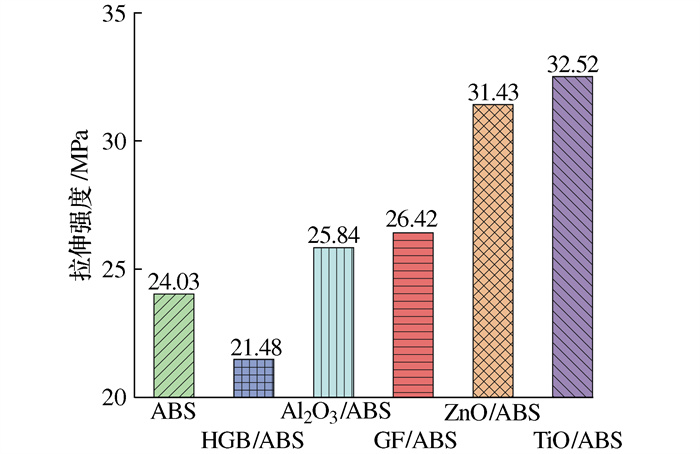
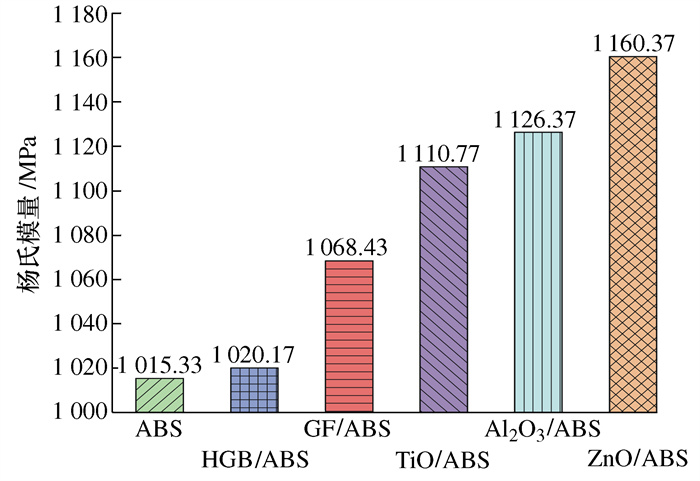
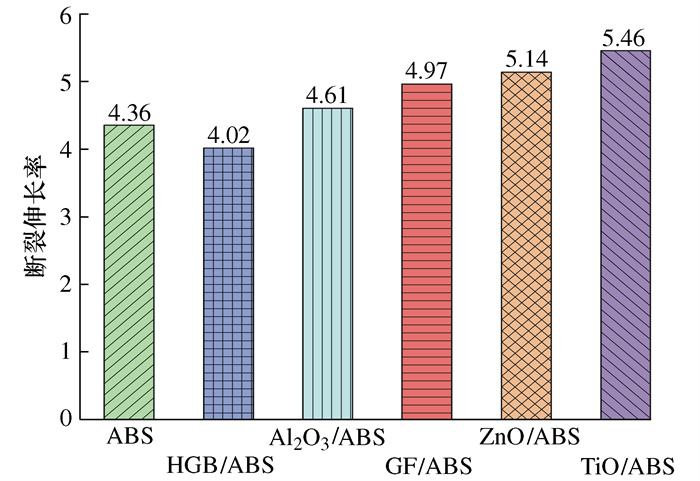
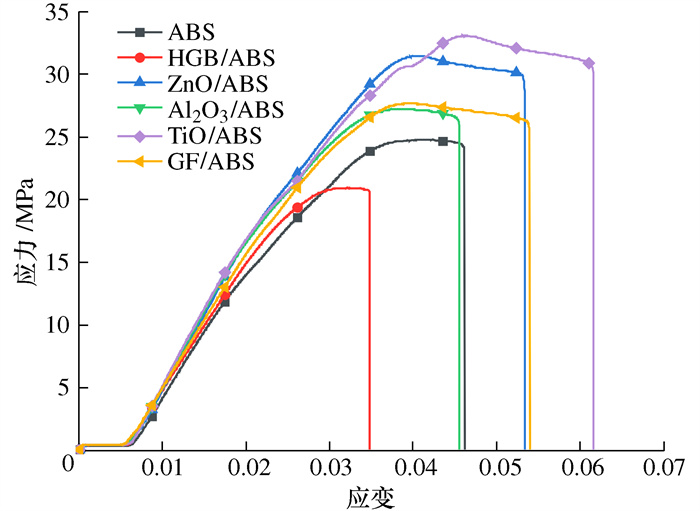
以丙烯腈-丁二烯-苯乙烯(ABS)为基体,以HGB、GF、ZnO、TiO和Al2O3为改性填料,制备五种改性ABS复合材料,进而利用熔融沉积成型(FDM)3D技术打印复合材料试件,测定试件的力学性能,并绘制应力应变曲线,然后进行不同改性材料拉伸强度、杨氏模量及断裂伸长率等力学性能分析。结果表明,与纯ABS材料相比,HGB的填充会导致ABS试件杨氏模量增加,但拉伸强度和断裂伸长率降低;GF的填充能够同时增加ABS试件的拉伸强度、杨氏模量及断裂伸长率;ZnO、TiO及Al2O3等纳米颗粒的填充均使ABS试件的拉伸强度、杨氏模量和断裂伸长率增强,其中TiO对ABS拉伸强度的增强效果最好,拉伸强度增加高达35.33%。
以丙烯腈-丁二烯-苯乙烯(ABS)为基体,以HGB、GF、ZnO、TiO和Al2O3为改性填料,制备五种改性ABS复合材料,进而利用熔融沉积成型(FDM)3D技术打印复合材料试件,测定试件的力学性能,并绘制应力应变曲线,然后进行不同改性材料拉伸强度、杨氏模量及断裂伸长率等力学性能分析。结果表明,与纯ABS材料相比,HGB的填充会导致ABS试件杨氏模量增加,但拉伸强度和断裂伸长率降低;GF的填充能够同时增加ABS试件的拉伸强度、杨氏模量及断裂伸长率;ZnO、TiO及Al2O3等纳米颗粒的填充均使ABS试件的拉伸强度、杨氏模量和断裂伸长率增强,其中TiO对ABS拉伸强度的增强效果最好,拉伸强度增加高达35.33%。
2023, 42(4): 585-591.
doi: 10.13433/j.cnki.1003-8728.20200630
摘要:
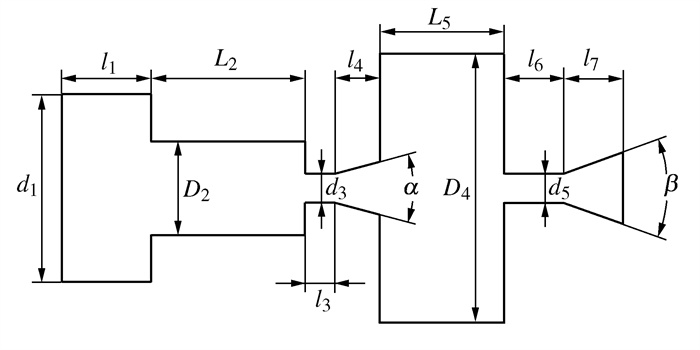
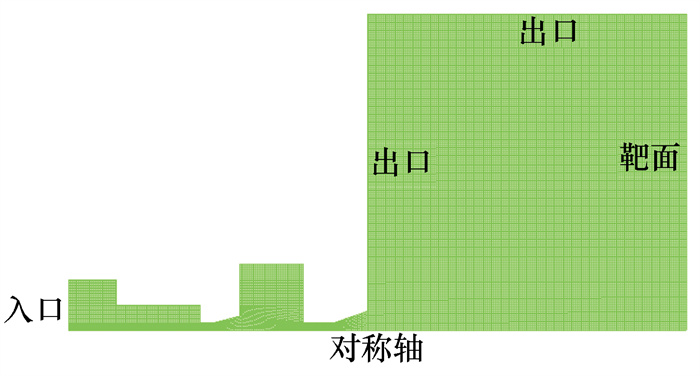
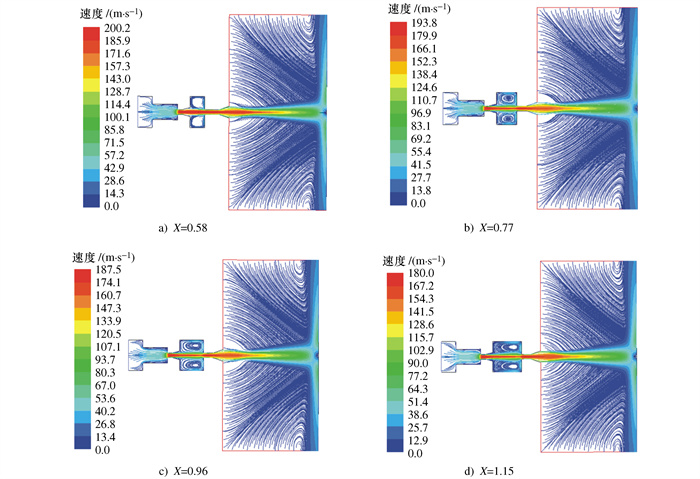
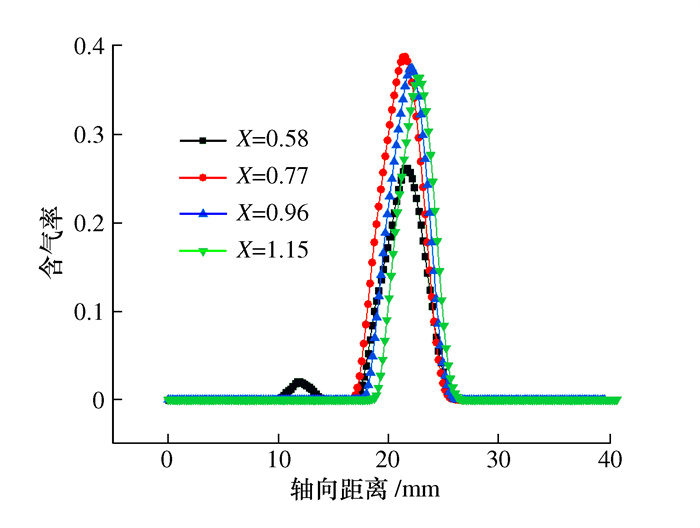
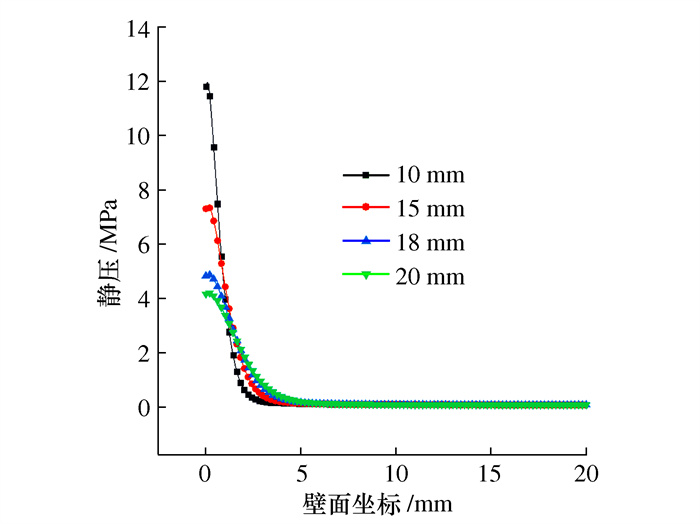
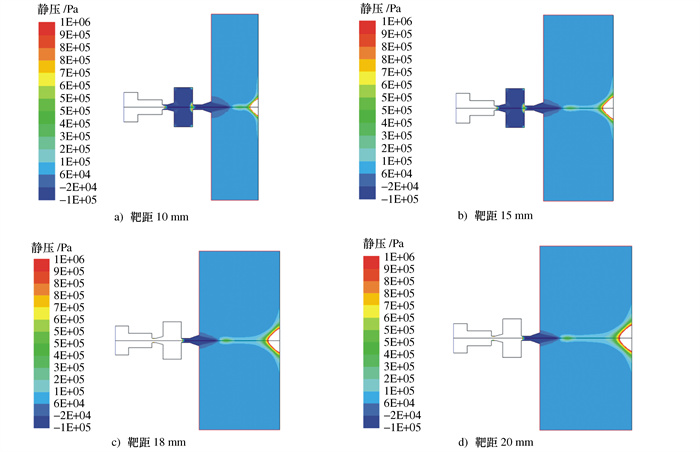
以风琴管喷嘴为基础,串联一个谐振腔形成双腔室自激振荡脉冲喷嘴,利用Fluent对其流场进行数值模拟,分析射流靶距、二级谐振腔腔长比、腔径比的变化对空化射流流场的影响。结果表明:谐振腔尺寸过大或过小均会影响涡环结构的形成,进而影响空化效果。当谐振腔腔长比为0.77、腔径比为2.6时,谐振腔内涡环结构对称性好,轴向含气率高,射流速度较高,该结构利于清洗效率的提高。靶面滞止压力可对空化效果产生影响。当射流靶距较小时,在滞止压力的作用下二级谐振腔无涡环结构产生,轴向含气率较低。当靶距增加到18 mm时滞止压力产生的影响减小,轴向含气率明显提高,因此清洗靶距应至少为18 mm。但靶距的增加会降低射流到达靶面的动能,因此最佳靶距应取18 mm。
以风琴管喷嘴为基础,串联一个谐振腔形成双腔室自激振荡脉冲喷嘴,利用Fluent对其流场进行数值模拟,分析射流靶距、二级谐振腔腔长比、腔径比的变化对空化射流流场的影响。结果表明:谐振腔尺寸过大或过小均会影响涡环结构的形成,进而影响空化效果。当谐振腔腔长比为0.77、腔径比为2.6时,谐振腔内涡环结构对称性好,轴向含气率高,射流速度较高,该结构利于清洗效率的提高。靶面滞止压力可对空化效果产生影响。当射流靶距较小时,在滞止压力的作用下二级谐振腔无涡环结构产生,轴向含气率较低。当靶距增加到18 mm时滞止压力产生的影响减小,轴向含气率明显提高,因此清洗靶距应至少为18 mm。但靶距的增加会降低射流到达靶面的动能,因此最佳靶距应取18 mm。
2023, 42(4): 592-596.
doi: 10.13433/j.cnki.1003-8728.20230102
摘要:
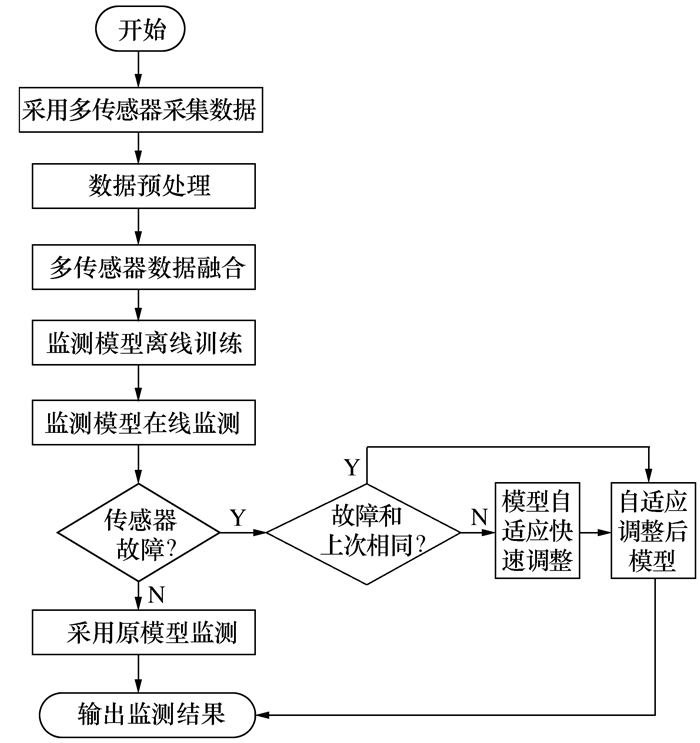
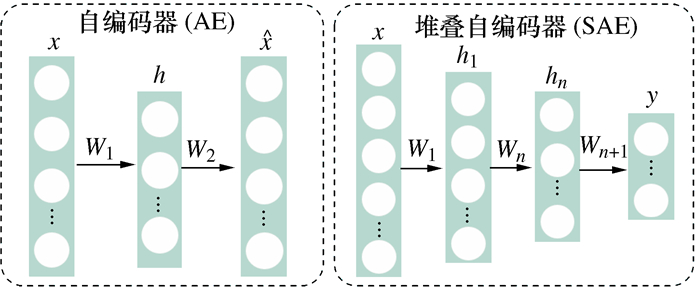
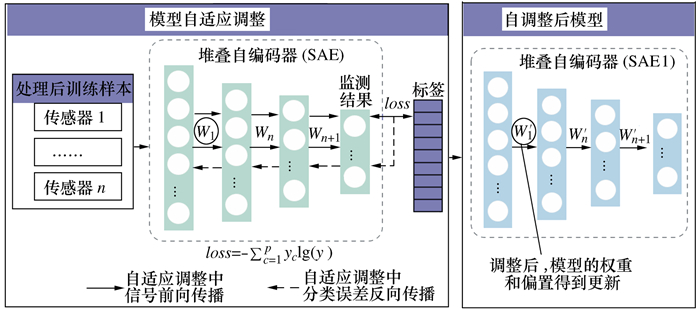
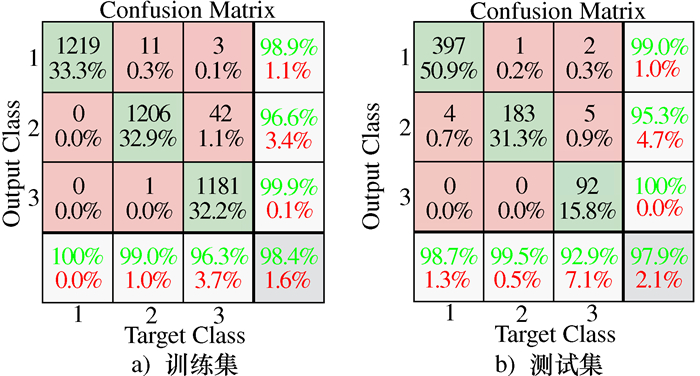
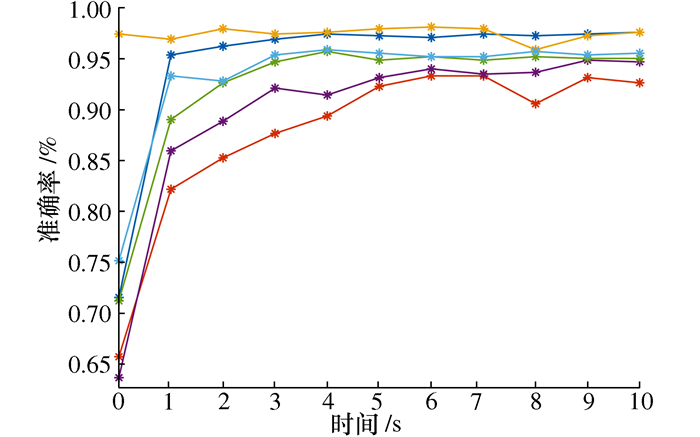
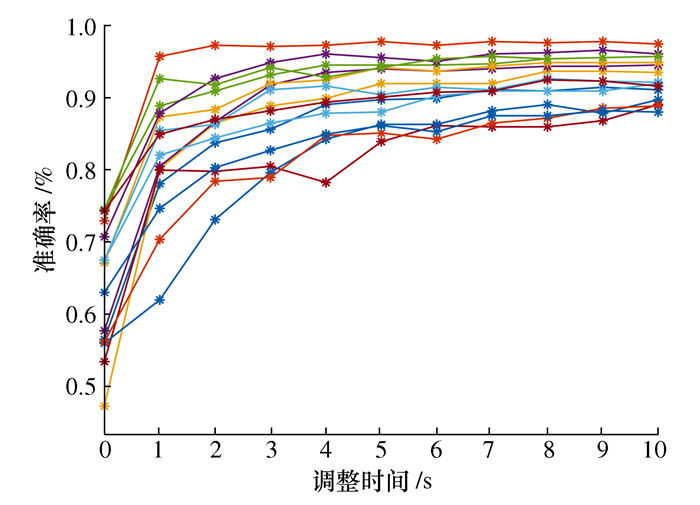
针对多传感器监测场景中传感器突发故障导致监测模型失效的问题, 本文提出了一种堆叠自编码器深度学习模型的自适应快速调整方法。根据传感器故障时采集数据的分布特点自适应调整原始数据集, 采用调整后的数据集正向传播和监测误差反向传播微调模型更新模型的权重和偏置, 实现监测模型自适应快速调整。以机械加工过程中刀具磨损状态监测为例, 采用加州大学伯克利分校的BEST实验室提供的刀具数据集验证了自适应调整方法的有效性。结果表明, 该方法可解决当传感器突发故障时, 在实时监测不中断的情况下, 自适应调整后的监测模型可以准确地对刀具状态进行监测。
针对多传感器监测场景中传感器突发故障导致监测模型失效的问题, 本文提出了一种堆叠自编码器深度学习模型的自适应快速调整方法。根据传感器故障时采集数据的分布特点自适应调整原始数据集, 采用调整后的数据集正向传播和监测误差反向传播微调模型更新模型的权重和偏置, 实现监测模型自适应快速调整。以机械加工过程中刀具磨损状态监测为例, 采用加州大学伯克利分校的BEST实验室提供的刀具数据集验证了自适应调整方法的有效性。结果表明, 该方法可解决当传感器突发故障时, 在实时监测不中断的情况下, 自适应调整后的监测模型可以准确地对刀具状态进行监测。
2023, 42(4): 597-607.
doi: 10.13433/j.cnki.1003-8728.20200623
摘要:
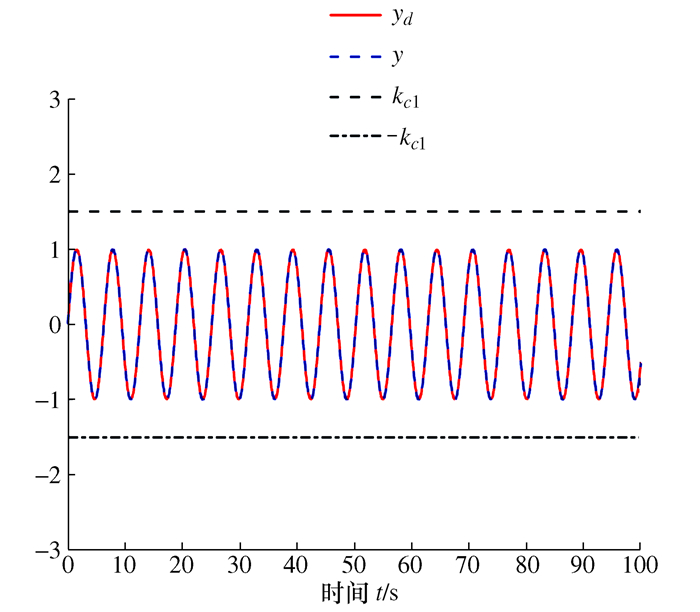
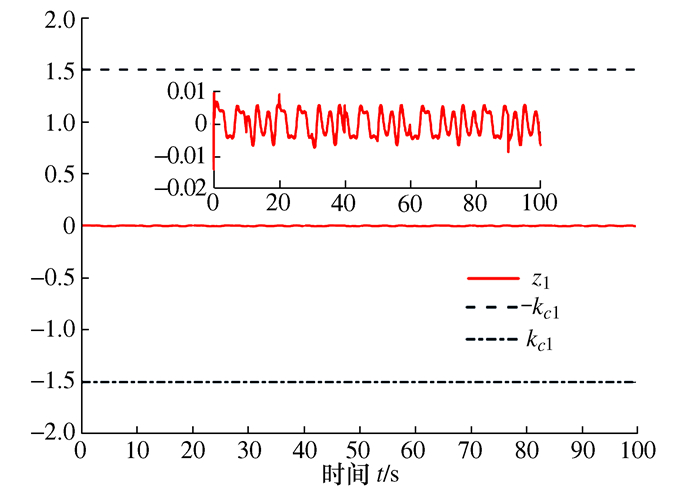
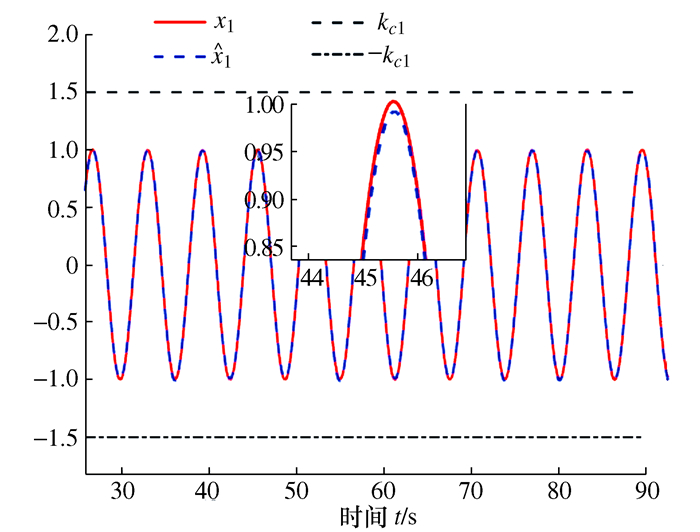
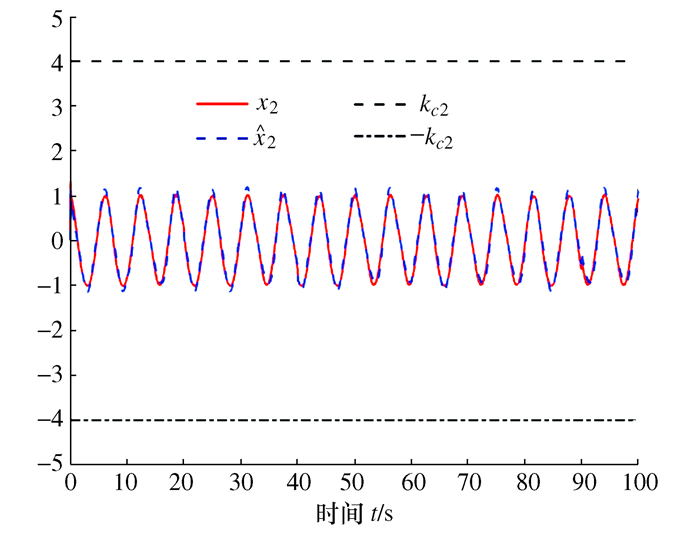
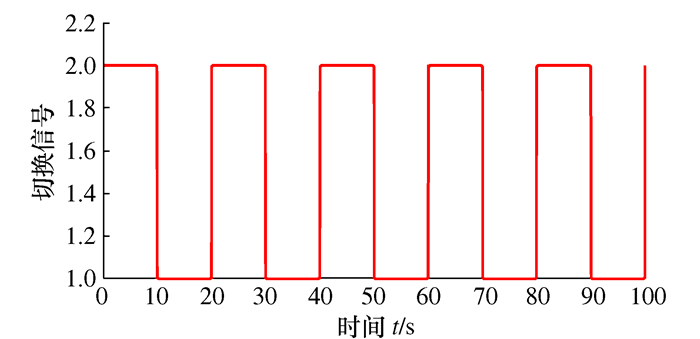
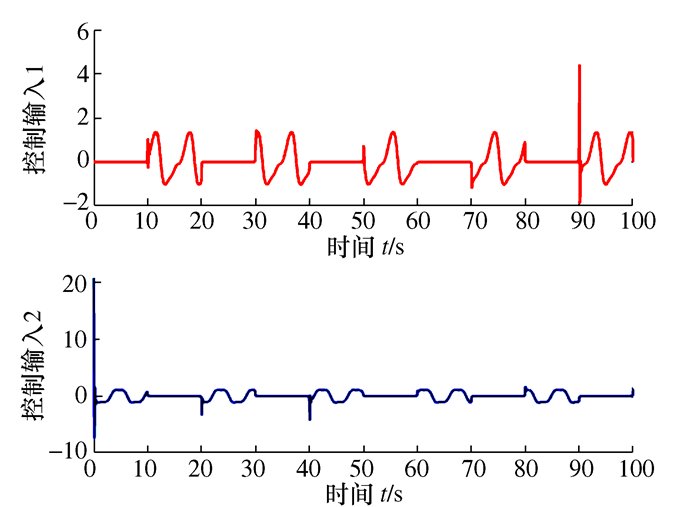
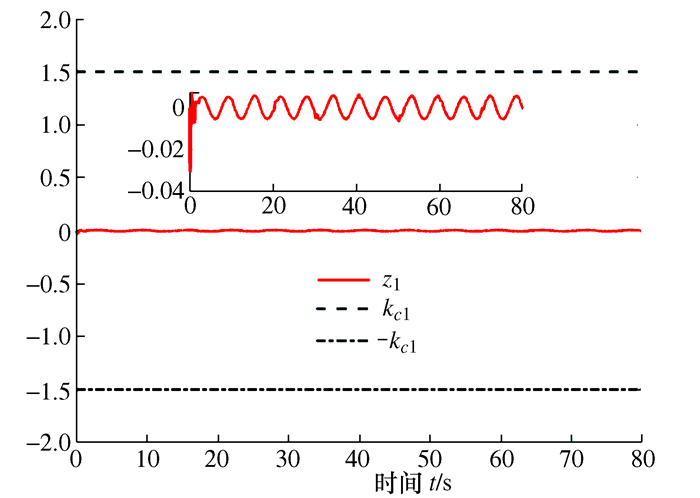
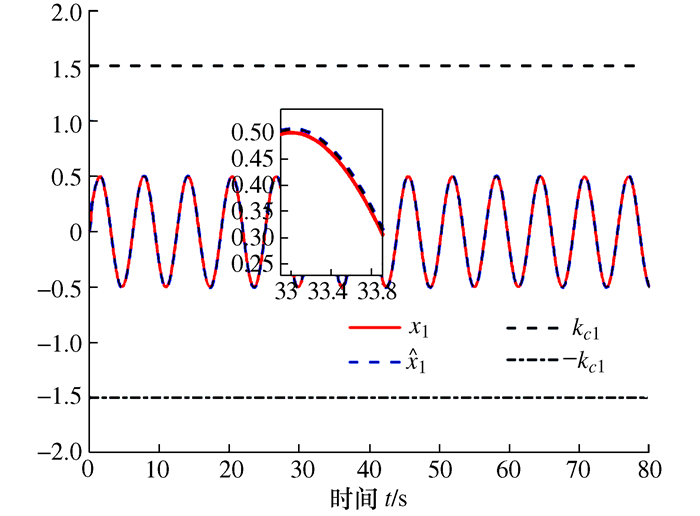
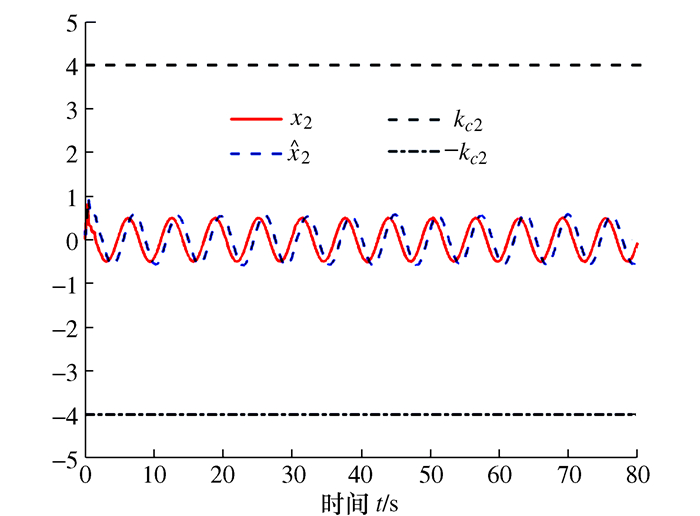
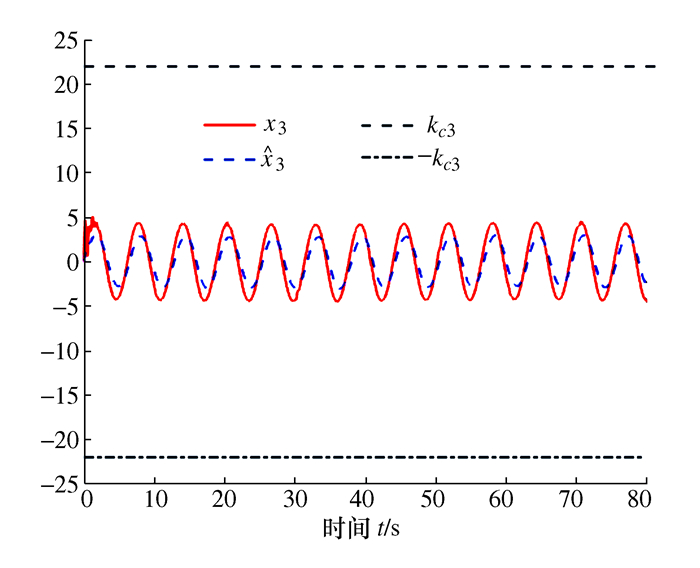
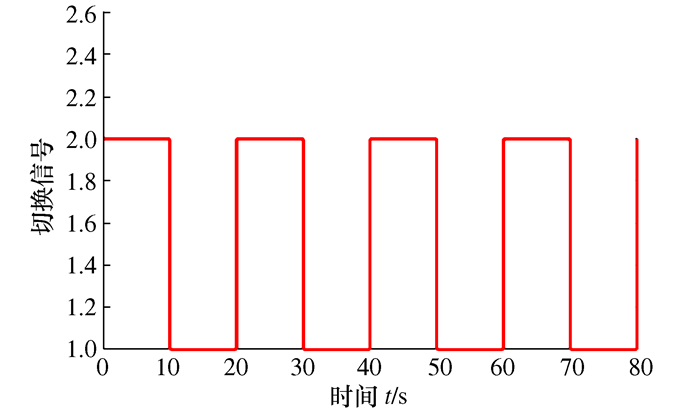
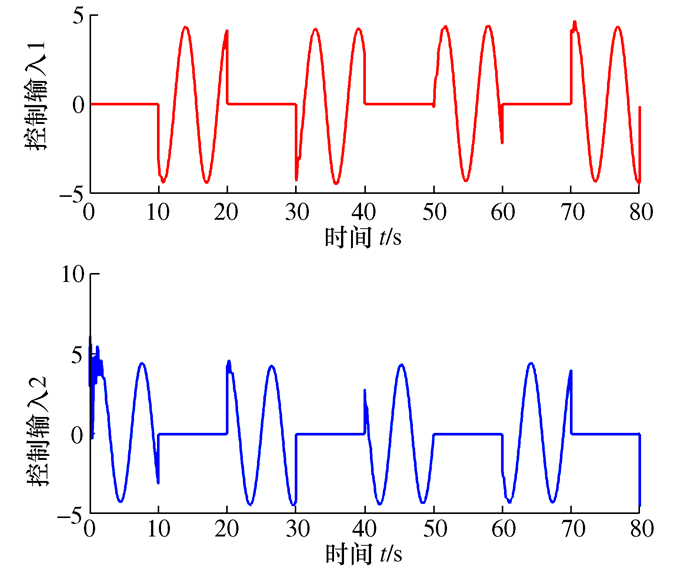
为了解决具有状态约束的机械臂的控制问题, 本文针对一类具有全状态约束和状态不完全可测的切换严格反馈非线性系统进行研究, 通过引入状态观测器、自适应神经网络和动态表面控制技术, 设计了一种基于径向基函数(RBF)神经网络的自适应输出反馈控制方法。利用Lyapunov方法和平均驻留时间理论(ADT)保证了闭环系统所有信号是半全局一致最终有界的(SGUUB), 通过数值例子仿真验证了所提方法的有效性。最后将该方法应用于带电机驱动的机械臂并进行仿真实验, 仿真结果表明, 机械臂轨迹跟踪误差很小, 有着良好的控制精度, 同时也表明所提出的控制算法能够应用于实际工程模型。
为了解决具有状态约束的机械臂的控制问题, 本文针对一类具有全状态约束和状态不完全可测的切换严格反馈非线性系统进行研究, 通过引入状态观测器、自适应神经网络和动态表面控制技术, 设计了一种基于径向基函数(RBF)神经网络的自适应输出反馈控制方法。利用Lyapunov方法和平均驻留时间理论(ADT)保证了闭环系统所有信号是半全局一致最终有界的(SGUUB), 通过数值例子仿真验证了所提方法的有效性。最后将该方法应用于带电机驱动的机械臂并进行仿真实验, 仿真结果表明, 机械臂轨迹跟踪误差很小, 有着良好的控制精度, 同时也表明所提出的控制算法能够应用于实际工程模型。

2023, 42(4): 608-614.
doi: 10.13433/j.cnki.1003-8728.20200635
摘要:
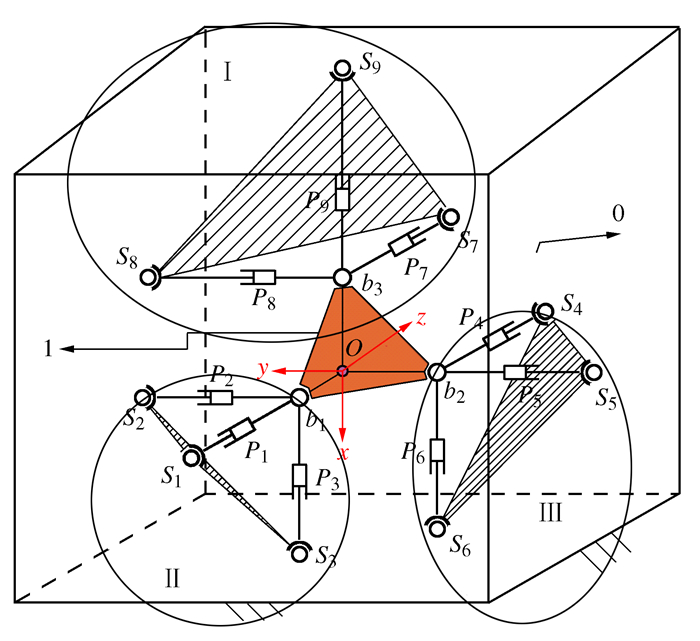
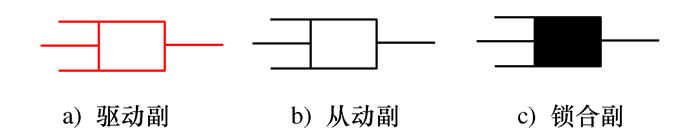
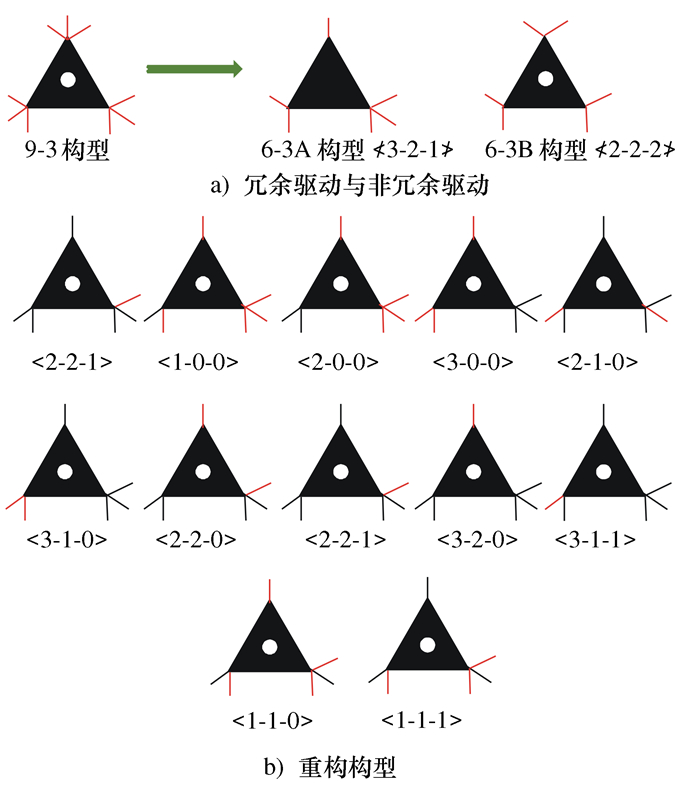
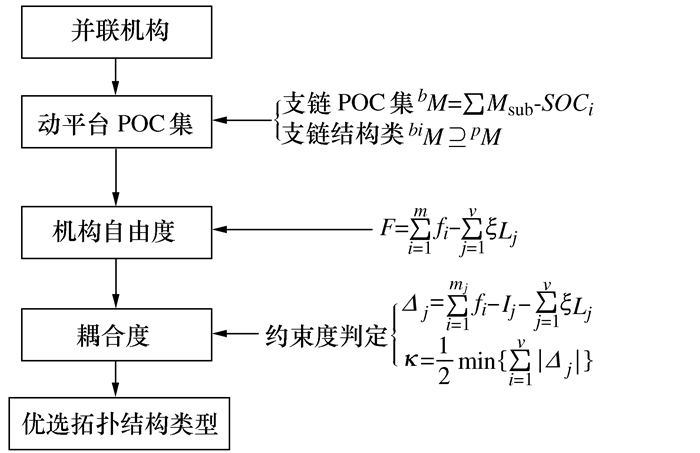
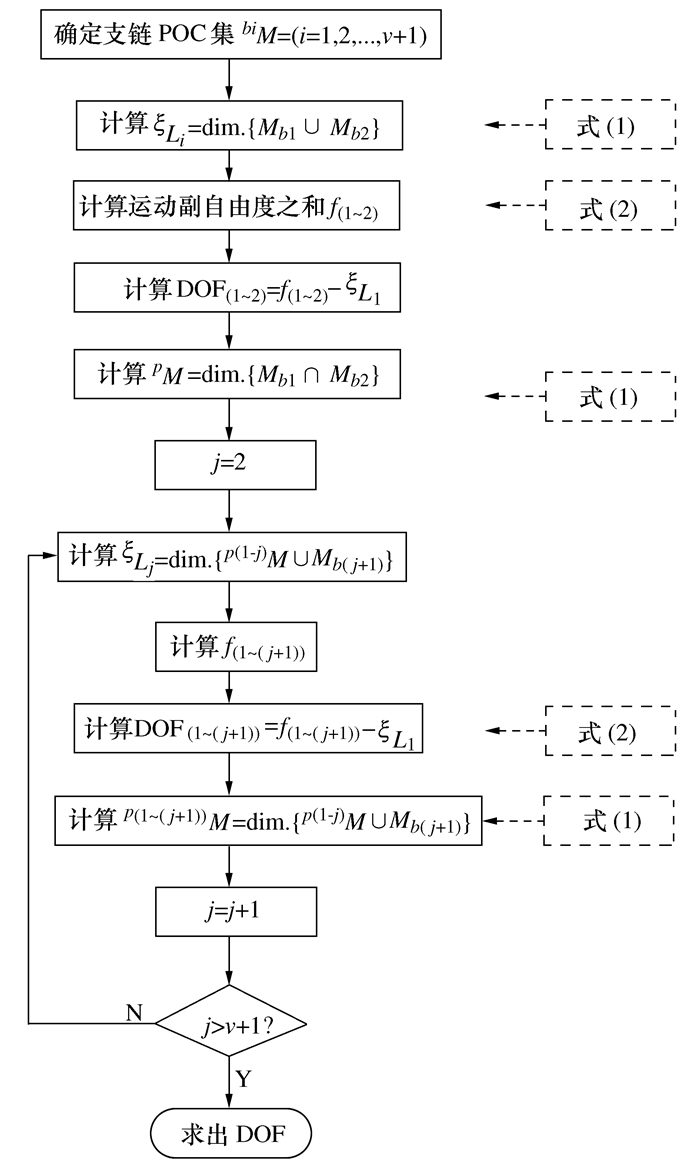
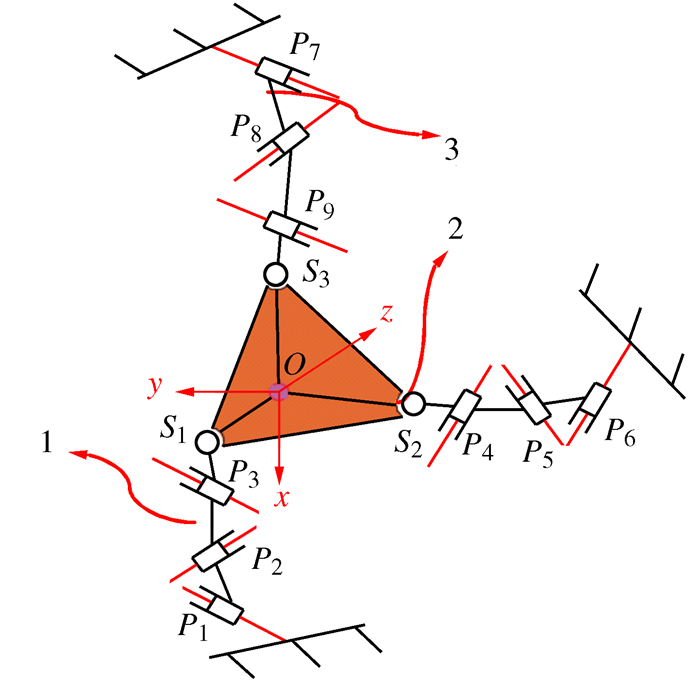
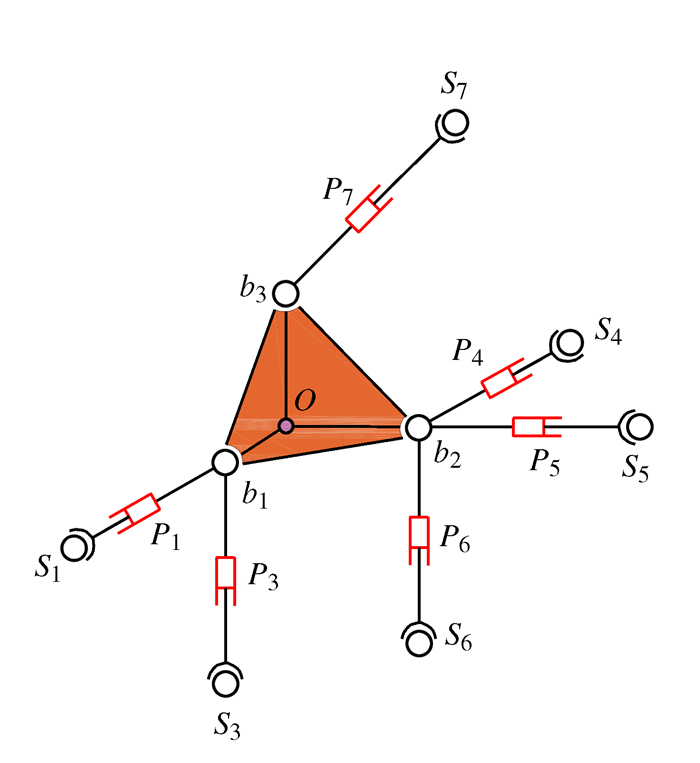
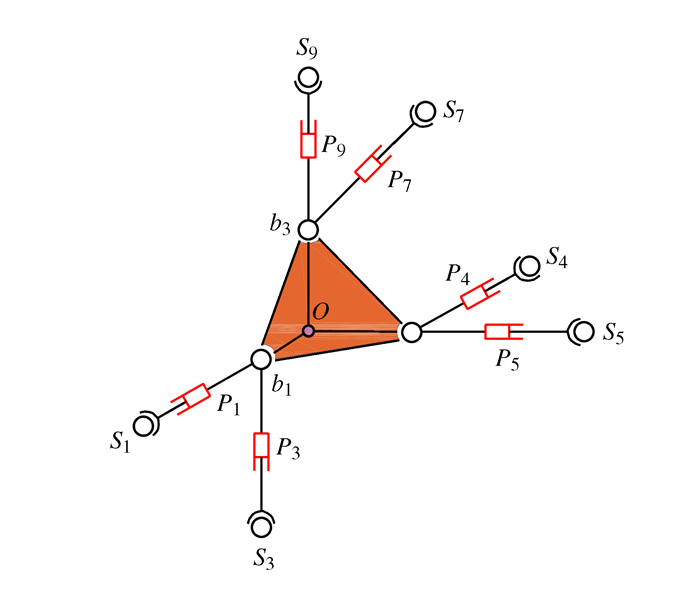
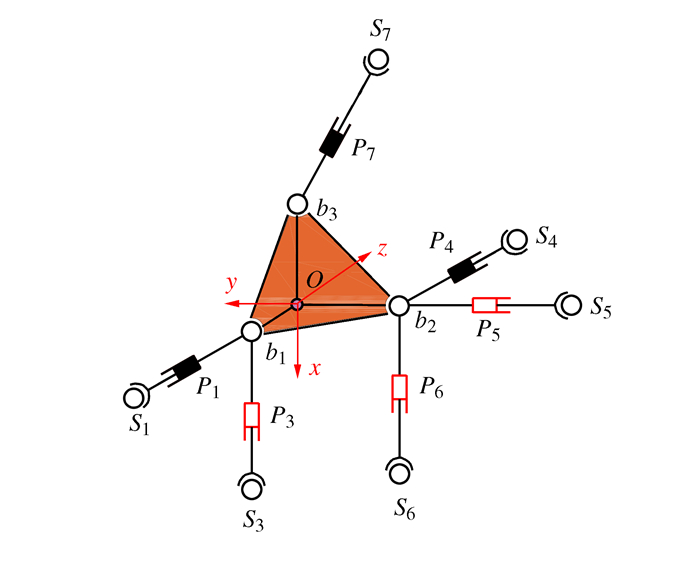
可重构并联机构具有变自由度及变构型的优点, 设计了一种零耦合度、含3条冗余支链的新型9-3可重构并联机构。基于方位特征方程的并联机构拓扑结构设计理论与方法, 创建了并联机构拓扑分析的模块化公式, 并解析了机构的拓扑特性。基于一种可转换主、从运动及锁合的变胞移动副, 利用主动模式与从动模式, 将9-3型可重构并联机构转换为6-3A和6-3B这两种构型, 并计算了它们的拓扑指标。结果显示, 它们的耦合度分别为0和1。利用锁合模式, 将6-3A型并联机构进行重构, 得到了5类少自由度并联机构。特别地, 以一种三自由度重构构型为例, 详细分析了其拓扑特性。
可重构并联机构具有变自由度及变构型的优点, 设计了一种零耦合度、含3条冗余支链的新型9-3可重构并联机构。基于方位特征方程的并联机构拓扑结构设计理论与方法, 创建了并联机构拓扑分析的模块化公式, 并解析了机构的拓扑特性。基于一种可转换主、从运动及锁合的变胞移动副, 利用主动模式与从动模式, 将9-3型可重构并联机构转换为6-3A和6-3B这两种构型, 并计算了它们的拓扑指标。结果显示, 它们的耦合度分别为0和1。利用锁合模式, 将6-3A型并联机构进行重构, 得到了5类少自由度并联机构。特别地, 以一种三自由度重构构型为例, 详细分析了其拓扑特性。
2023, 42(4): 615-621.
doi: 10.13433/j.cnki.1003-8728.20200644
摘要:
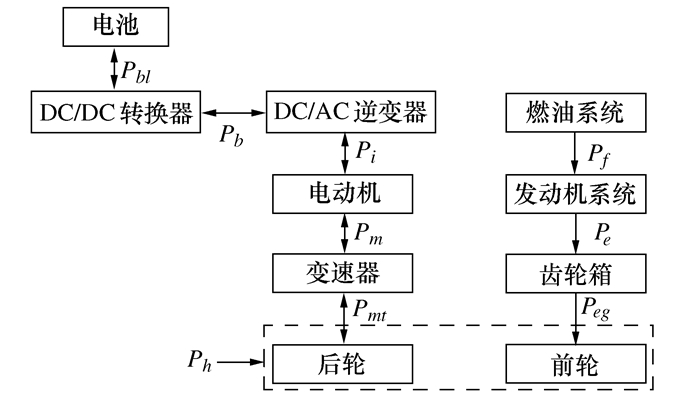
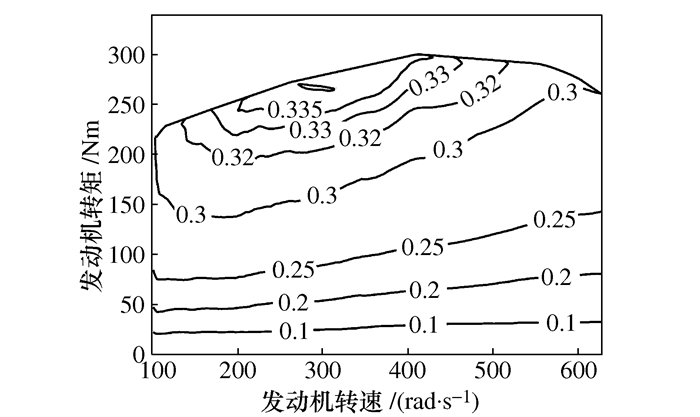
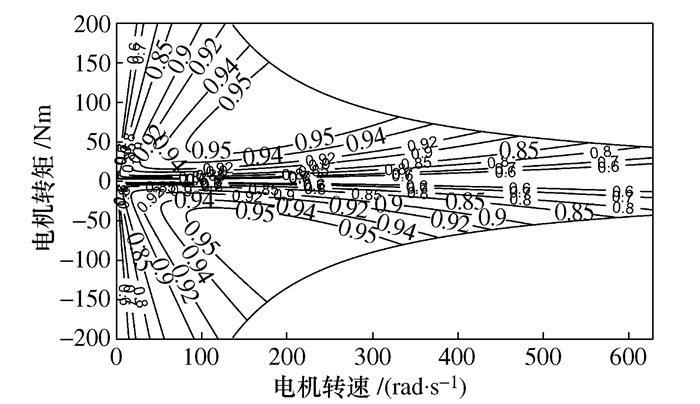
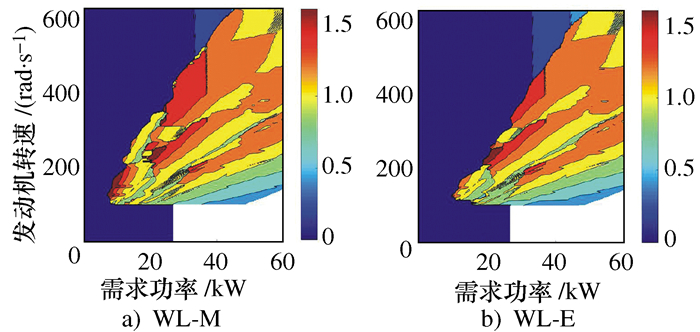
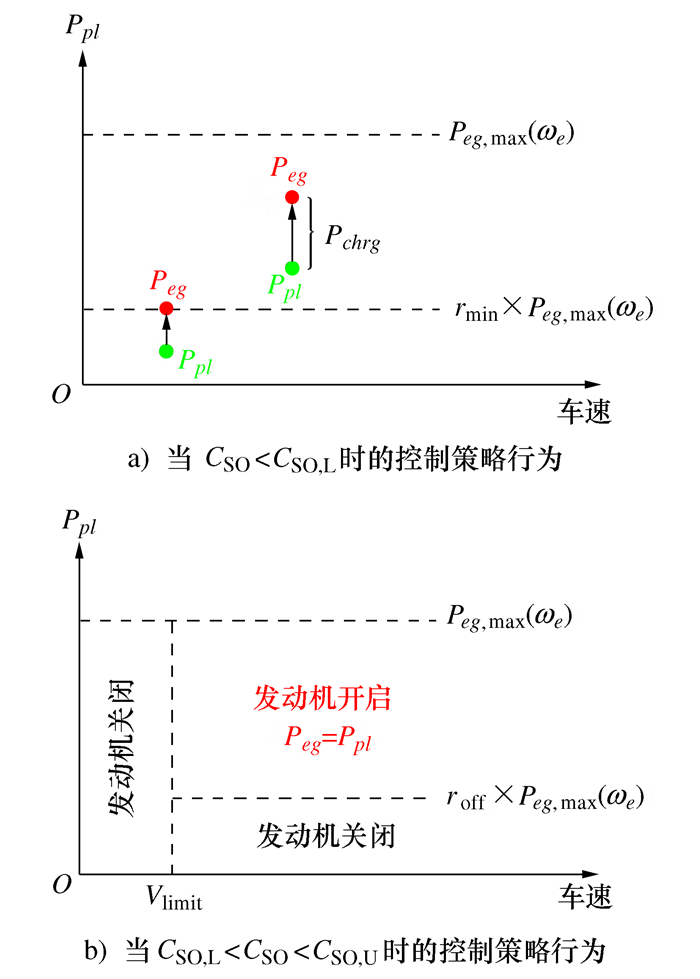
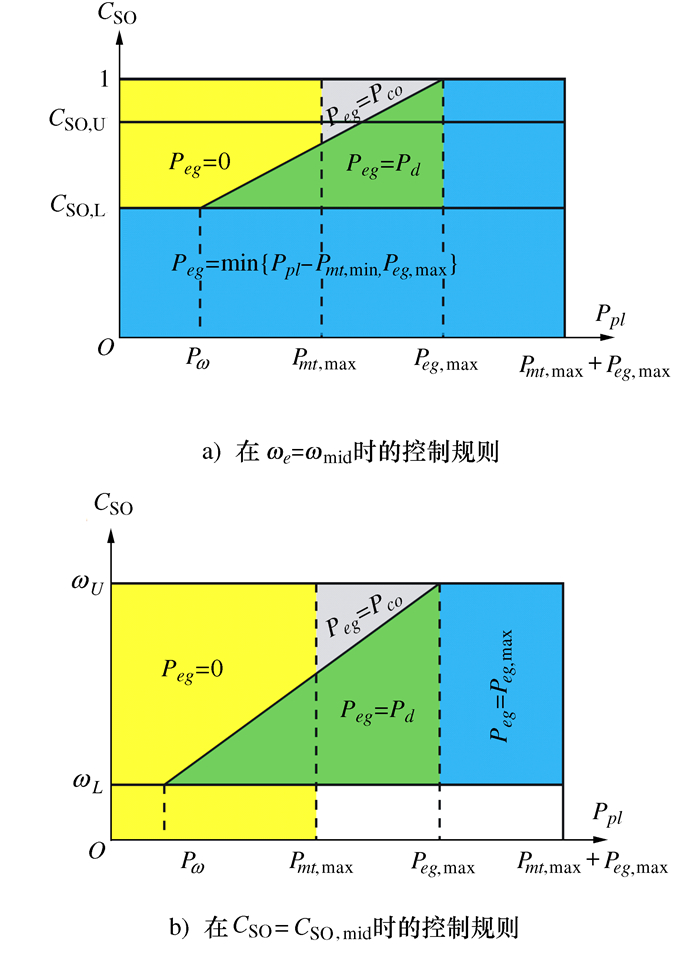
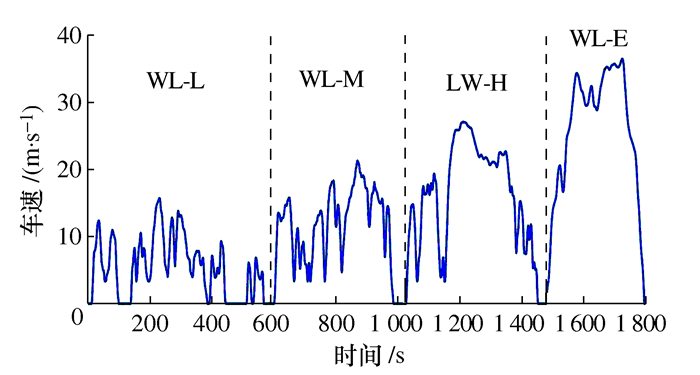
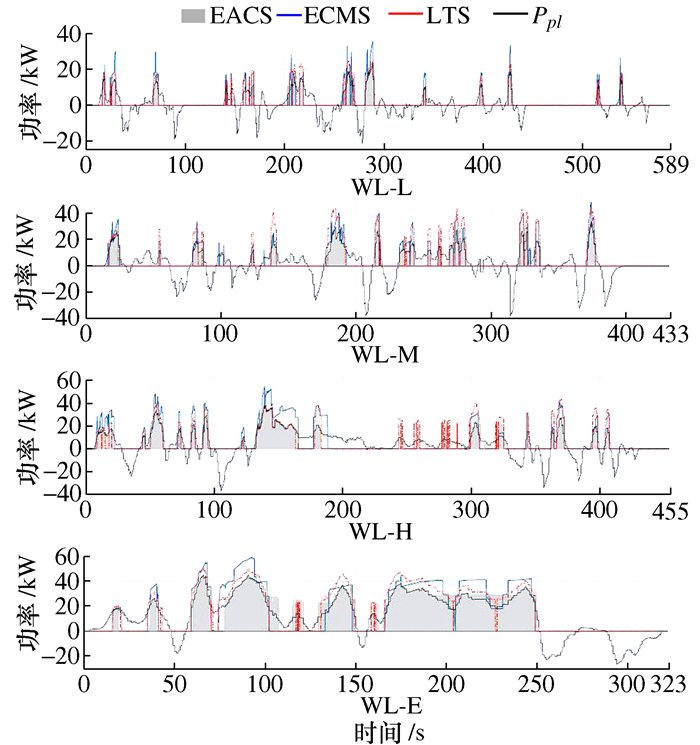
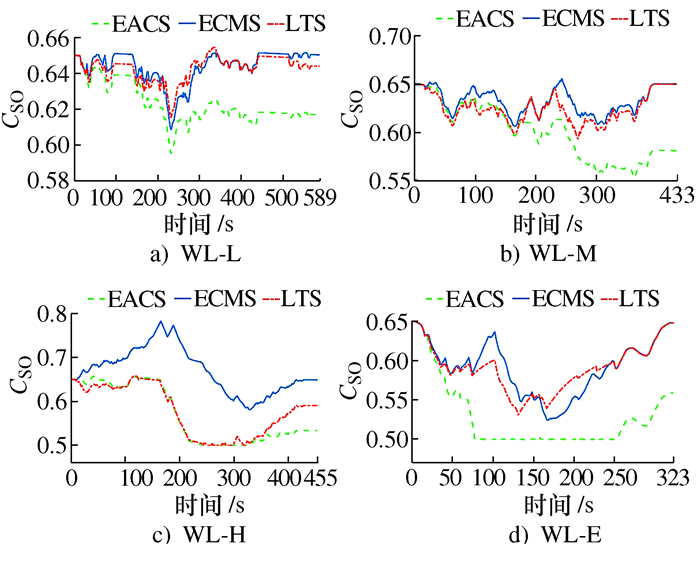
针对并联混合动力汽车的能量管理问题, 提出了一种新的启发式控制策略, 即负载跟随阈值改变策略(LTS)。LTS控制策略基于阈值变化机制和负载跟随方法, 可以与电池荷电状态(SOC)保持成比例的微小偏差, 能够有效确保电池持续稳定运行。与目前应用阈值变化机制的规则控制策略不同, 本文设计LTS控制策略的阈值通过电池荷电状态(SOC)和发动机转速来综合调整动力输出方式, 其能量管理的精细化程度更高。为了验证策略的有效性, 将该策略应用于混合动力汽车进行仿真测试, 并与传统的等效燃油消耗率最小化策略(ECMS)和电动辅助控制策略(EACS)进行性能对比。结果表明: 在燃油经济性方面, LTS控制策略优于EACS控制策略3.1%~10.4%, LTS控制策略优于ECMS控制策略2.5%~5.7%。在电池荷电状态(SOC)方面, LTS控制策略可以使得CSO值大于60%, 电池具有较好的运行状态。
针对并联混合动力汽车的能量管理问题, 提出了一种新的启发式控制策略, 即负载跟随阈值改变策略(LTS)。LTS控制策略基于阈值变化机制和负载跟随方法, 可以与电池荷电状态(SOC)保持成比例的微小偏差, 能够有效确保电池持续稳定运行。与目前应用阈值变化机制的规则控制策略不同, 本文设计LTS控制策略的阈值通过电池荷电状态(SOC)和发动机转速来综合调整动力输出方式, 其能量管理的精细化程度更高。为了验证策略的有效性, 将该策略应用于混合动力汽车进行仿真测试, 并与传统的等效燃油消耗率最小化策略(ECMS)和电动辅助控制策略(EACS)进行性能对比。结果表明: 在燃油经济性方面, LTS控制策略优于EACS控制策略3.1%~10.4%, LTS控制策略优于ECMS控制策略2.5%~5.7%。在电池荷电状态(SOC)方面, LTS控制策略可以使得CSO值大于60%, 电池具有较好的运行状态。
2023, 42(4): 622-628.
doi: 10.13433/j.cnki.1003-8728.20200637
摘要:
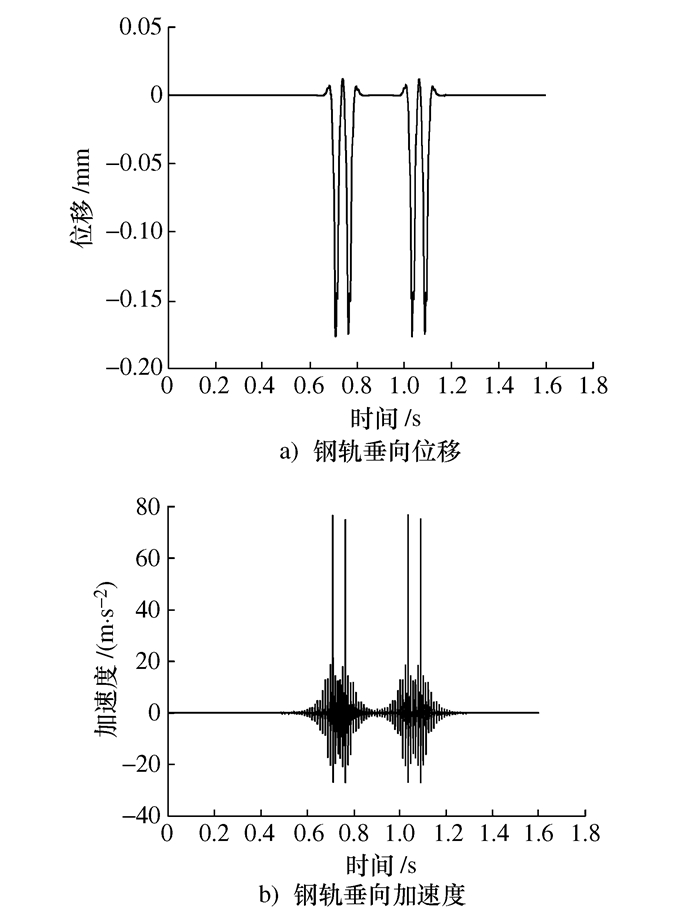
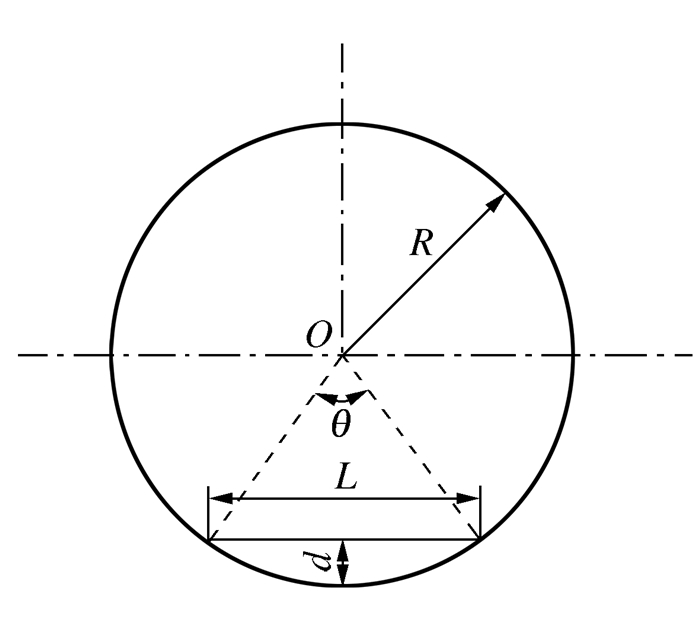
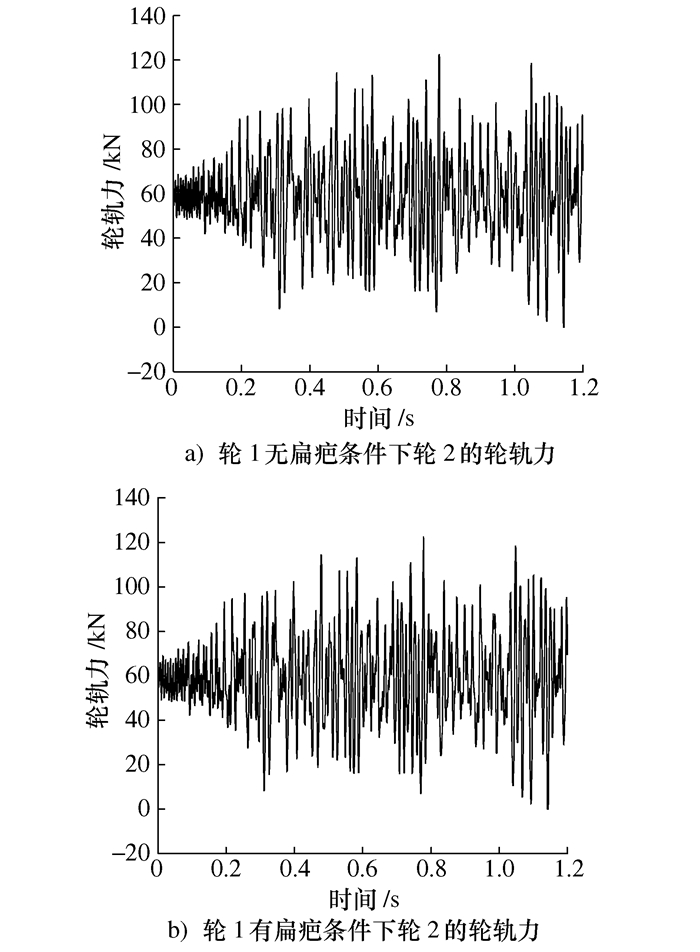
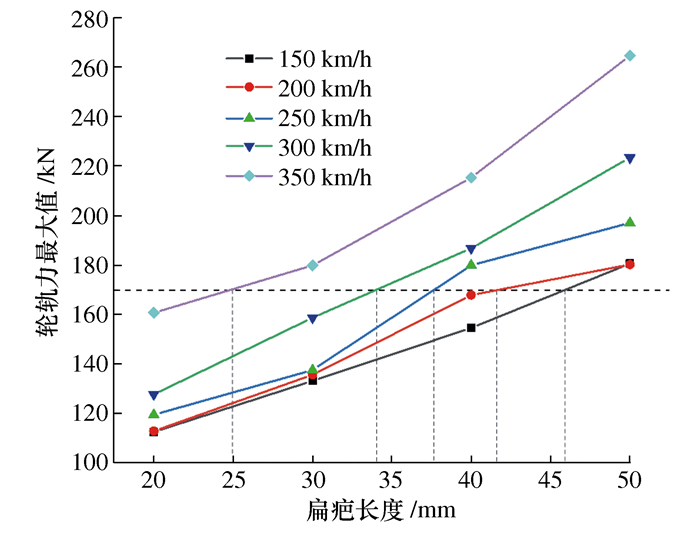
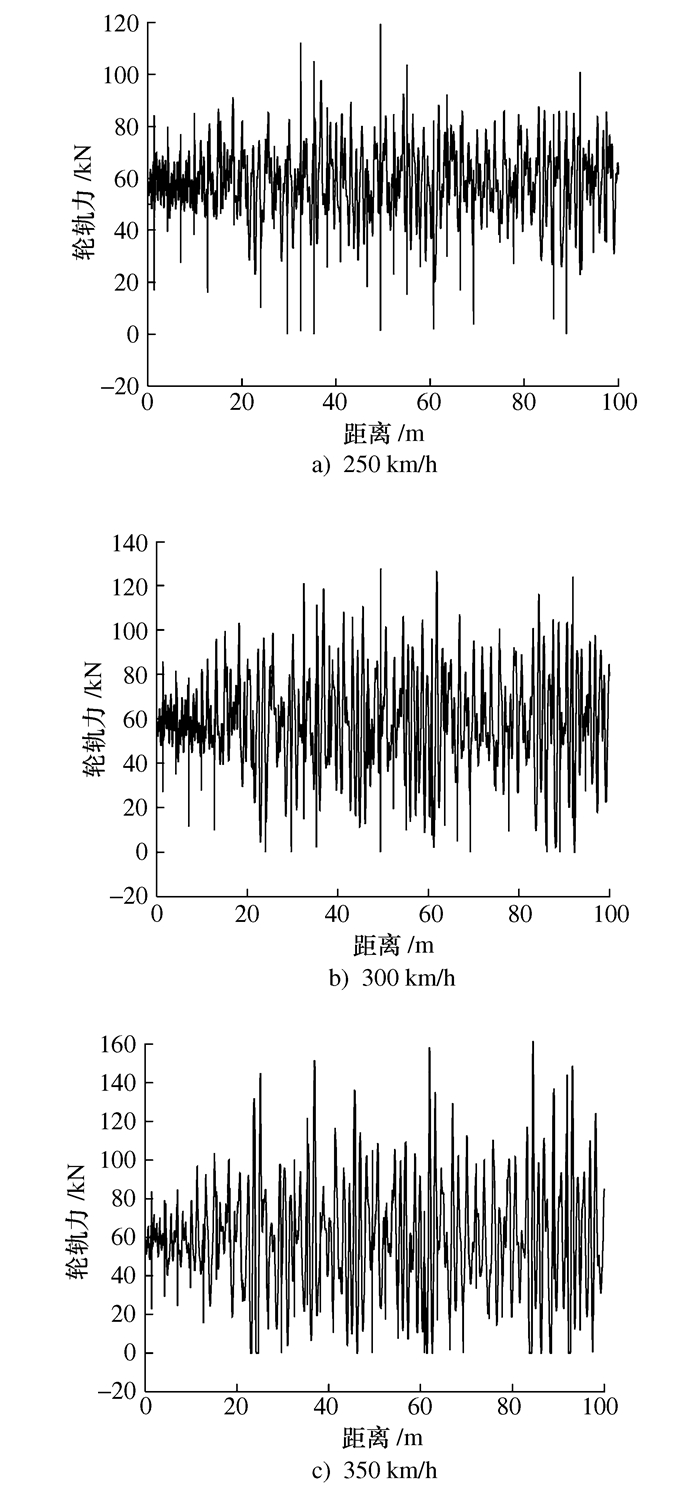
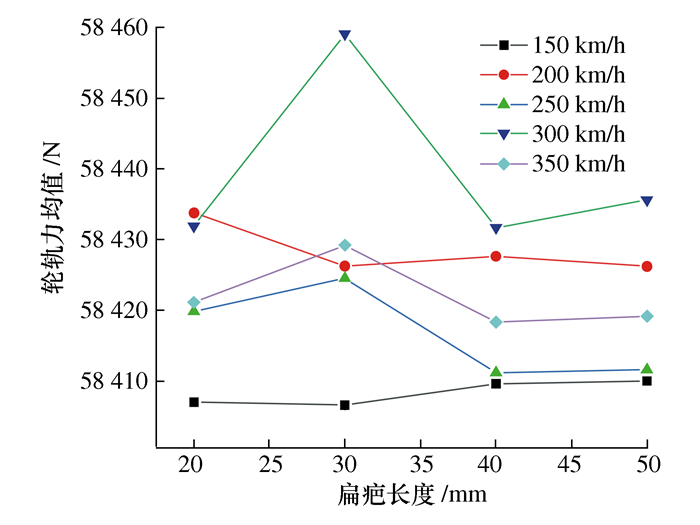
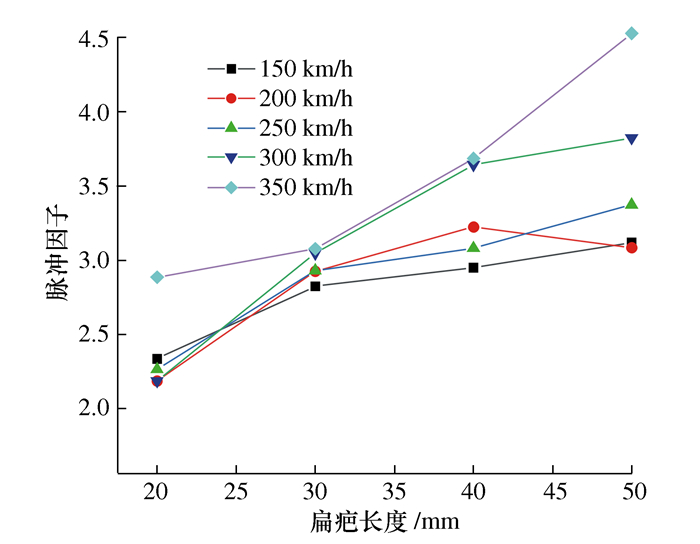
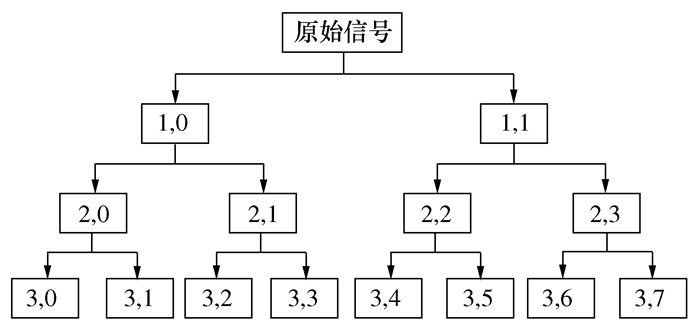
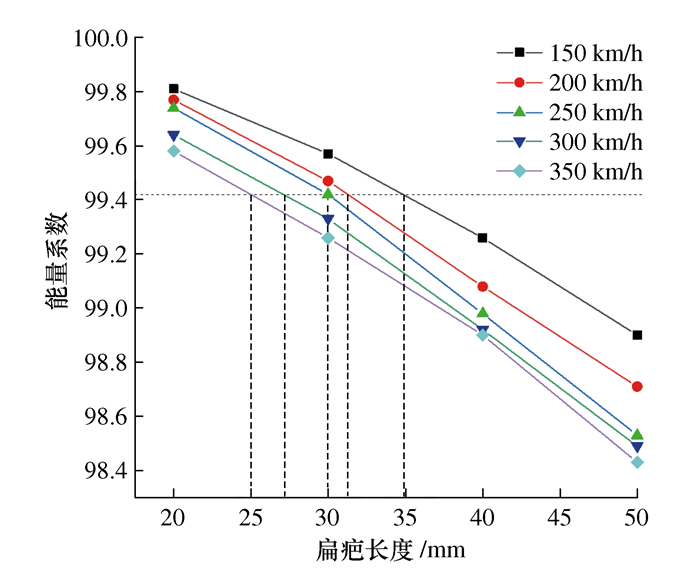
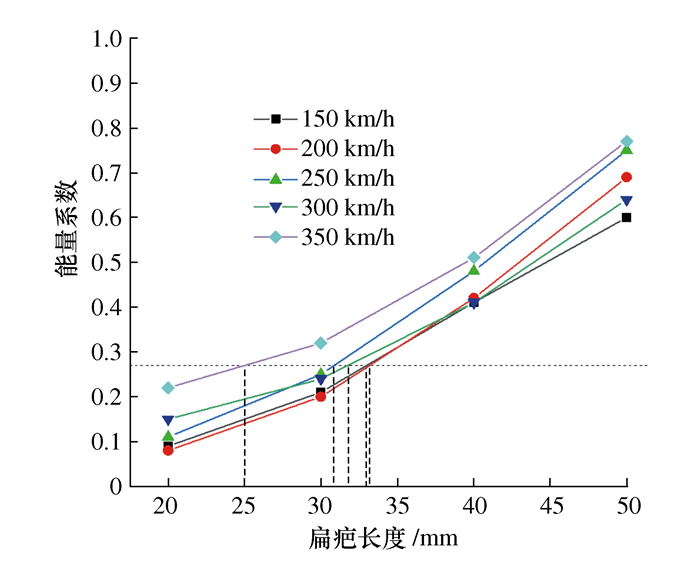
扁疤是轨道交通车辆车轮踏面的典型故障之一, 其对于列车运行的平稳性和安全性有很大影响。目前尚未对不同速度下的扁疤限值制定统一的标准。本文对动力学仿真计算得到的轮轨力随机响应采用一种全局性的小波包分解处理方法, 提取轮轨力随机信号的能量系数作为评判指标, 从能量特征的角度研究了不同速度等级下的车轮扁疤安全限值, 并与在时域信号中提取轮轨力随机响应的最大值、均值和脉冲因子作为评判扁疤安全限值的方法相比较。结果表明: 小波包能量系数从全局性角度描述轮轨力特性, 节点能量系数呈线性规律, 可作为高速铁路车轮扁疤安全限值的评判指标。研究得出当列车速度在150~250 km/h范围内, 扁疤长度应控制在30 mm以内; 当列车速度在250~350 km/h范围内, 扁疤长度应控制在25 mm以内。
扁疤是轨道交通车辆车轮踏面的典型故障之一, 其对于列车运行的平稳性和安全性有很大影响。目前尚未对不同速度下的扁疤限值制定统一的标准。本文对动力学仿真计算得到的轮轨力随机响应采用一种全局性的小波包分解处理方法, 提取轮轨力随机信号的能量系数作为评判指标, 从能量特征的角度研究了不同速度等级下的车轮扁疤安全限值, 并与在时域信号中提取轮轨力随机响应的最大值、均值和脉冲因子作为评判扁疤安全限值的方法相比较。结果表明: 小波包能量系数从全局性角度描述轮轨力特性, 节点能量系数呈线性规律, 可作为高速铁路车轮扁疤安全限值的评判指标。研究得出当列车速度在150~250 km/h范围内, 扁疤长度应控制在30 mm以内; 当列车速度在250~350 km/h范围内, 扁疤长度应控制在25 mm以内。
2023, 42(4): 629-637.
doi: 10.13433/j.cnki.1003-8728.20200645
摘要:
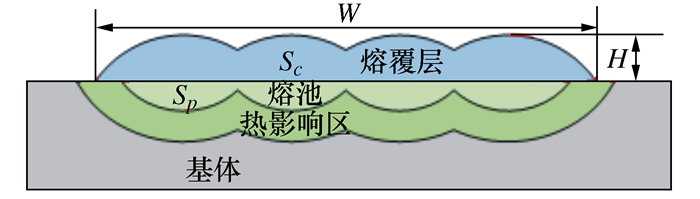
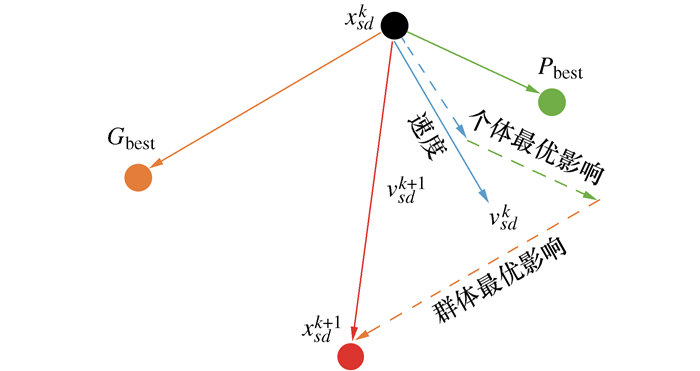
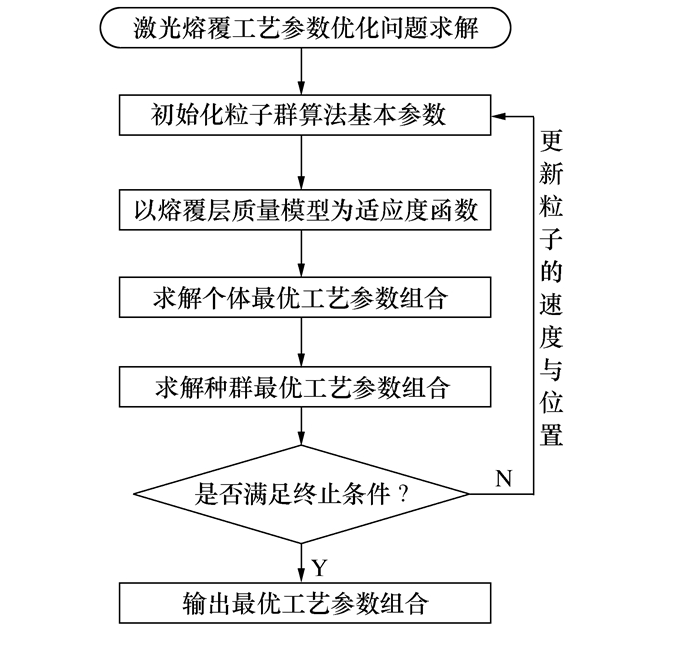
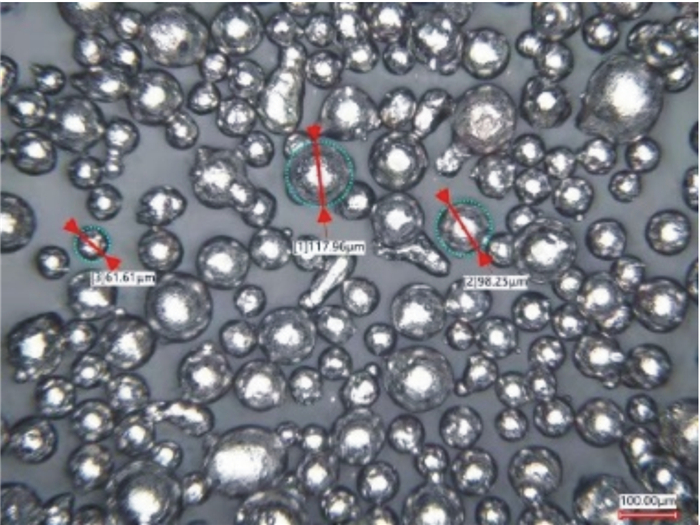
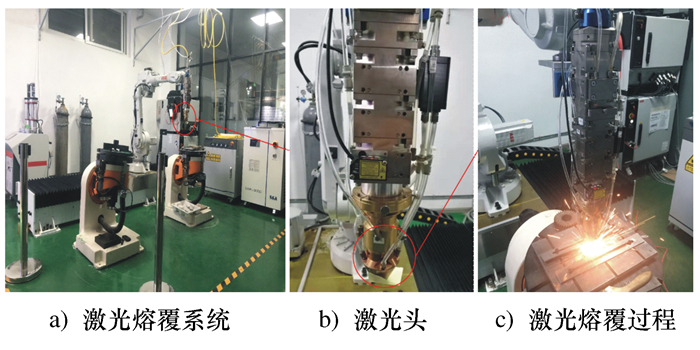
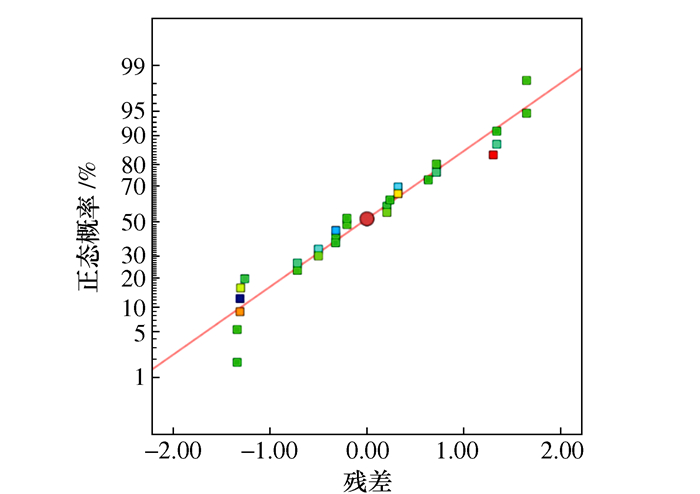
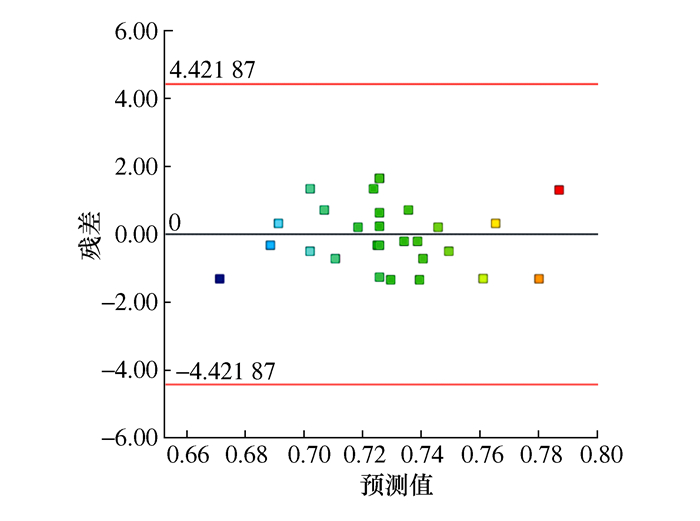
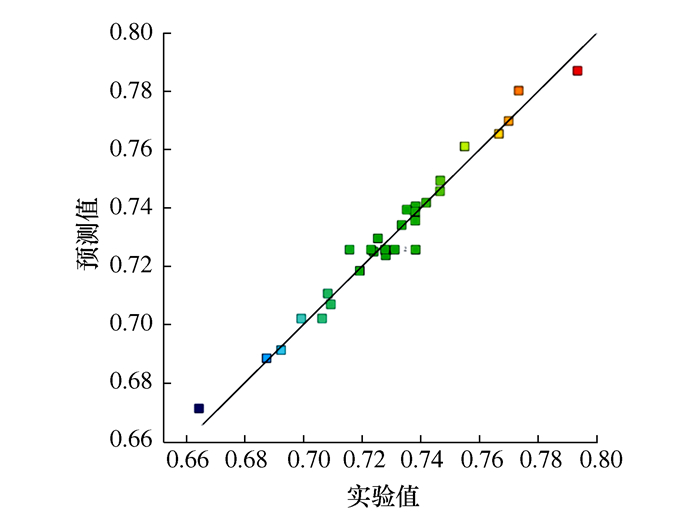
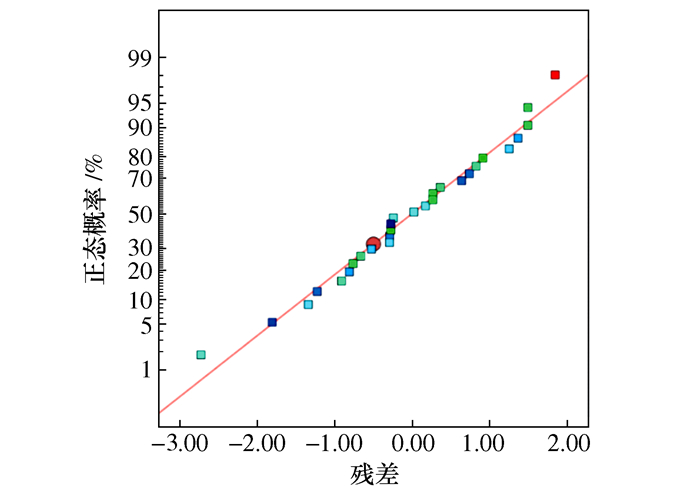
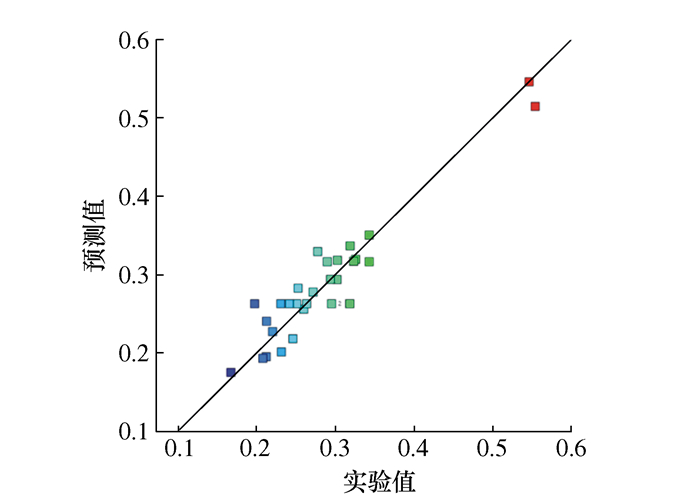
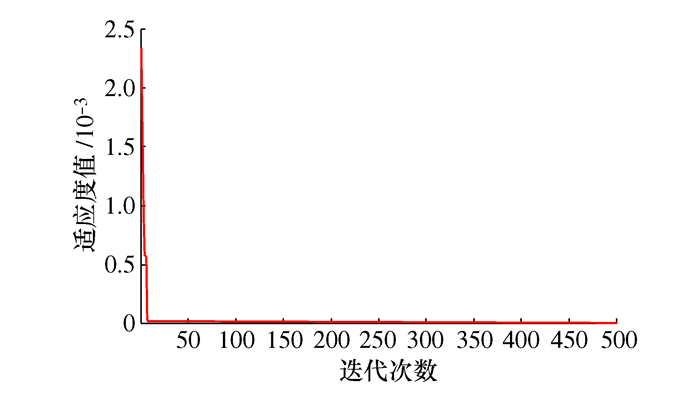
为制备高质量的熔覆层, 保证再制造机械零部件再服役寿命, 提出了一种响应面法与粒子群算法集成的激光熔覆工艺参数优化方法。该方法以熔覆层质量为优化目标, 以工艺参数为优化变量, 基于实验结果构建工艺参数与熔覆层质量间的响应面近似数学模型, 使用粒子群算法对优化问题进行求解得到最优工艺参数组合。最后通过激光多道熔覆实验进行验证, 结果表明该方法优化后的工艺参数能够有效改善熔覆层质量, 进而节约实验成本、提高生产效率。
为制备高质量的熔覆层, 保证再制造机械零部件再服役寿命, 提出了一种响应面法与粒子群算法集成的激光熔覆工艺参数优化方法。该方法以熔覆层质量为优化目标, 以工艺参数为优化变量, 基于实验结果构建工艺参数与熔覆层质量间的响应面近似数学模型, 使用粒子群算法对优化问题进行求解得到最优工艺参数组合。最后通过激光多道熔覆实验进行验证, 结果表明该方法优化后的工艺参数能够有效改善熔覆层质量, 进而节约实验成本、提高生产效率。

2023, 42(4): 638-643.
doi: 10.13433/j.cnki.1003-8728.20200641
摘要:
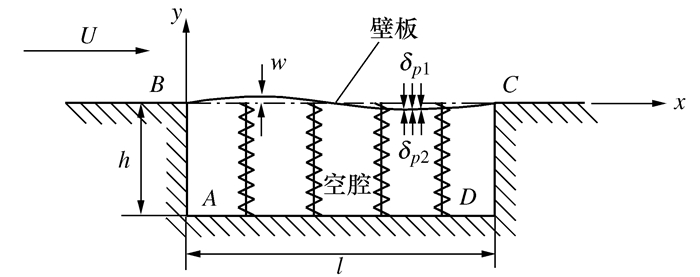
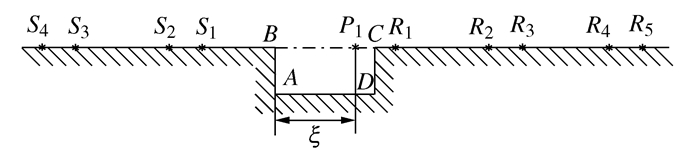
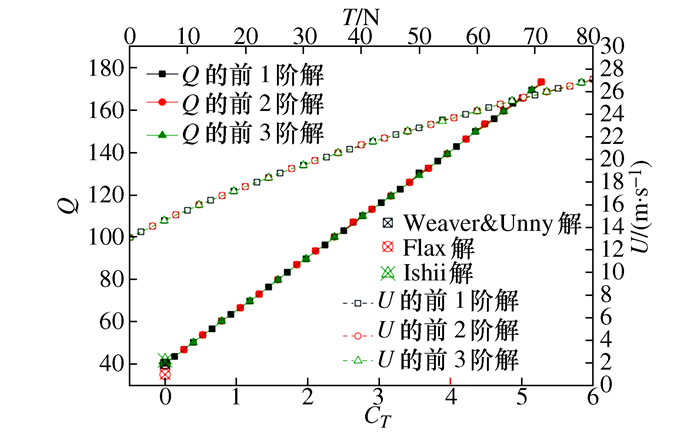
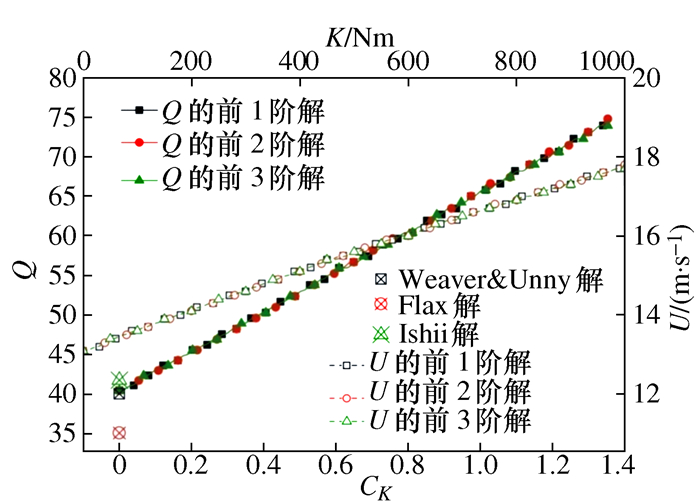
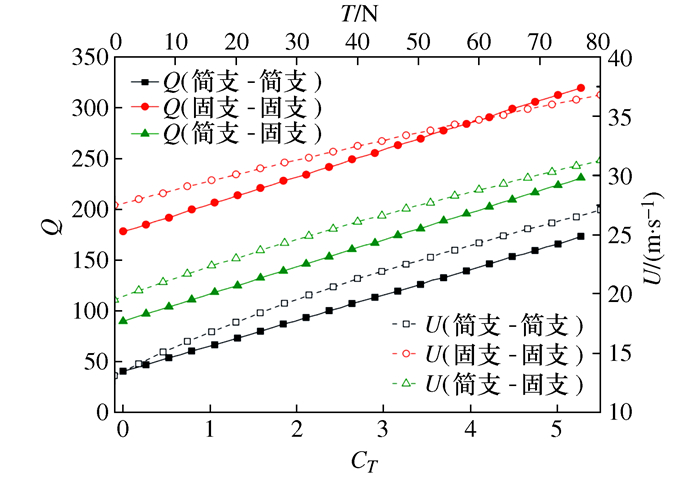
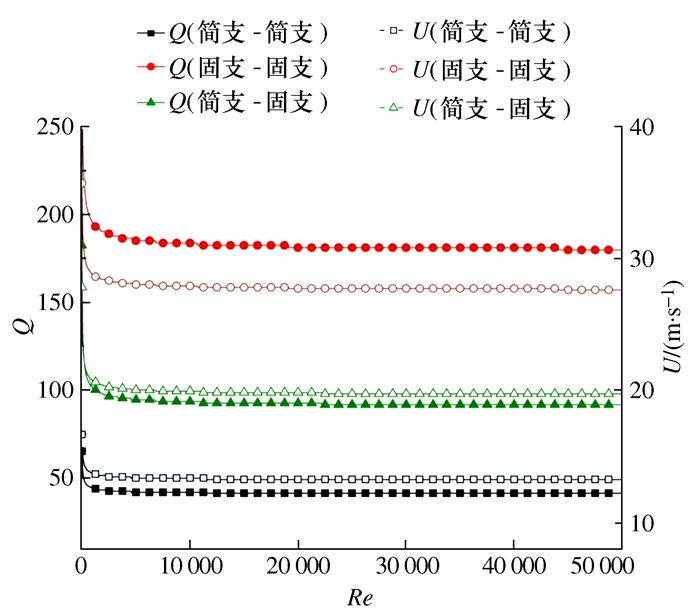
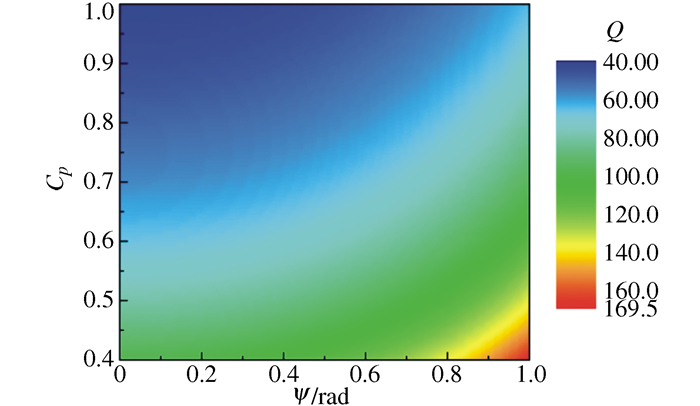
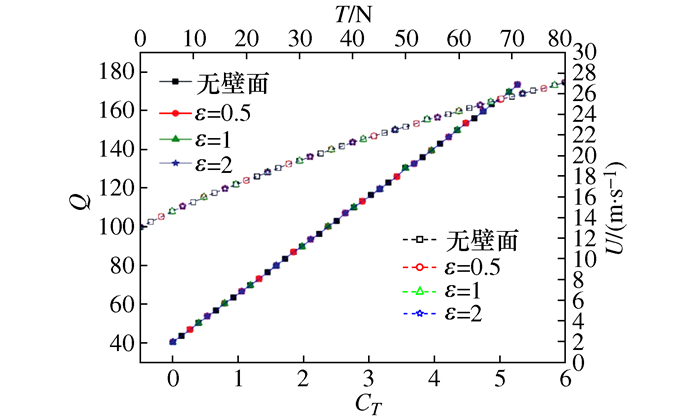
本文针对含有空腔的两端固定壁板模型的发散失稳进行了研究,基于势流理论、薄翼理论、Galerkin法等理论方法,建立了一种简化的失稳模态求解方式,计算了不同边界条件(简支-简支、简支-固支、固支-固支)下空腔壁板的失稳边界,并对流体黏性、湍流度、空腔壁面对失稳边界的影响进行了分析。结果表明,低雷诺数(Re)下流体黏性较大,对壁板产生较强增稳作用,当Re≫2 000时可以合理忽略黏性作用;湍流度对系统失稳边界有较强影响;该种空腔壁板工况下,空腔体壁面对失稳流速影响微弱。
本文针对含有空腔的两端固定壁板模型的发散失稳进行了研究,基于势流理论、薄翼理论、Galerkin法等理论方法,建立了一种简化的失稳模态求解方式,计算了不同边界条件(简支-简支、简支-固支、固支-固支)下空腔壁板的失稳边界,并对流体黏性、湍流度、空腔壁面对失稳边界的影响进行了分析。结果表明,低雷诺数(Re)下流体黏性较大,对壁板产生较强增稳作用,当Re≫2 000时可以合理忽略黏性作用;湍流度对系统失稳边界有较强影响;该种空腔壁板工况下,空腔体壁面对失稳流速影响微弱。

2023, 42(4): 644-650.
doi: 10.13433/j.cnki.1003-8728.20200620
摘要:
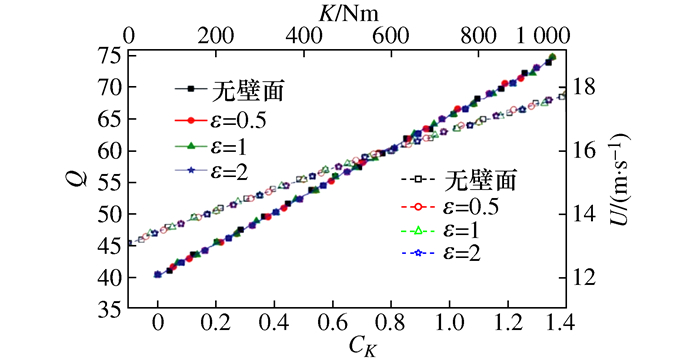
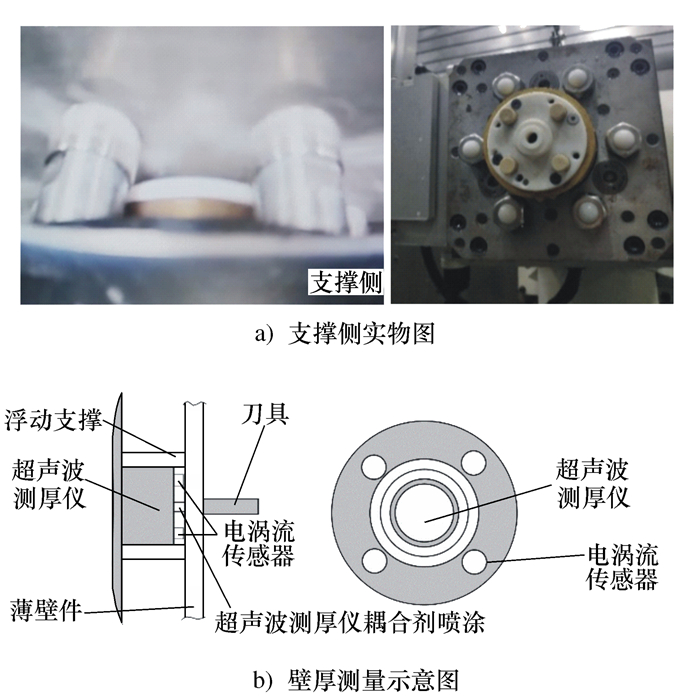
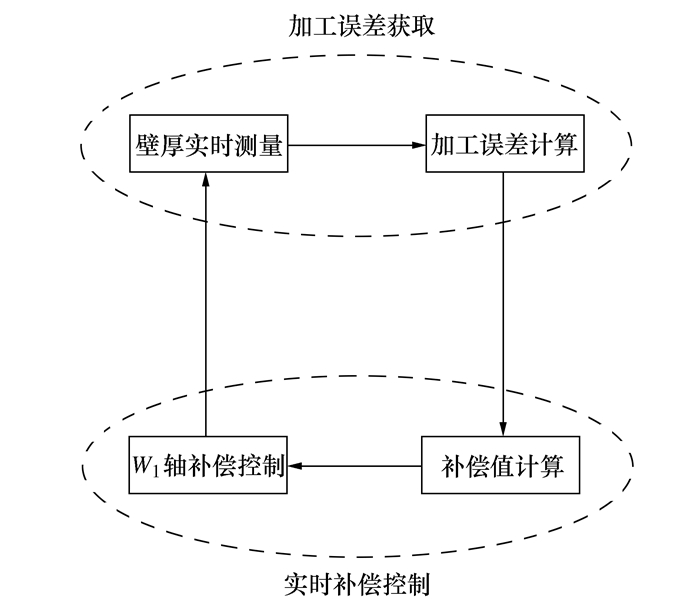
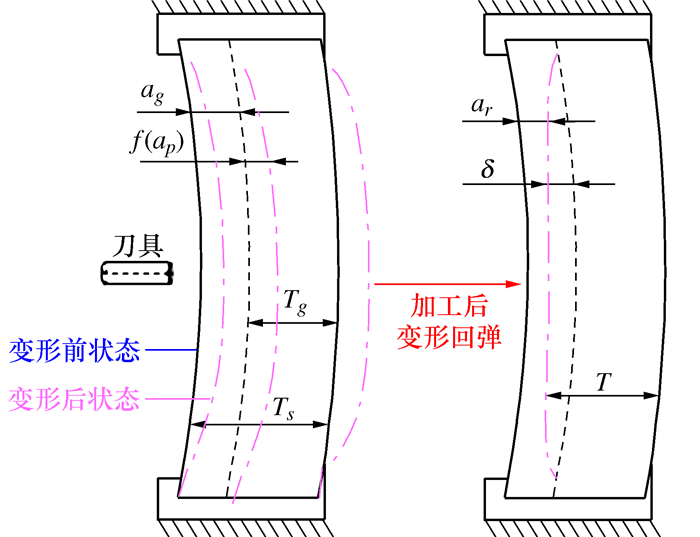
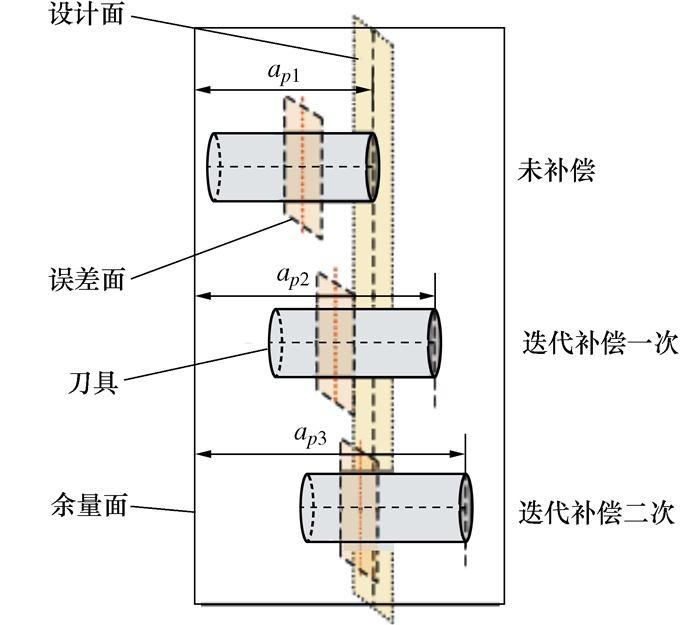
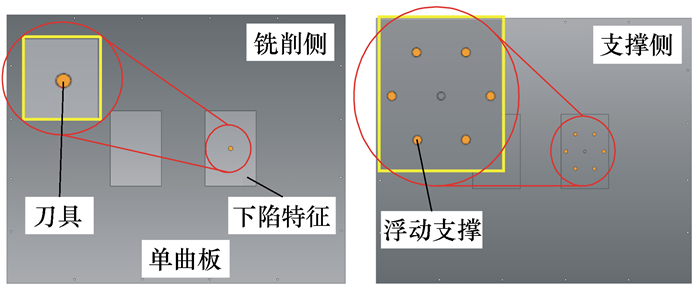
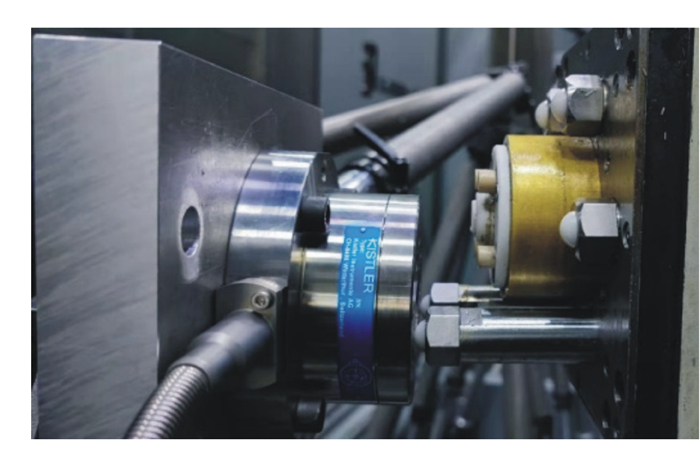
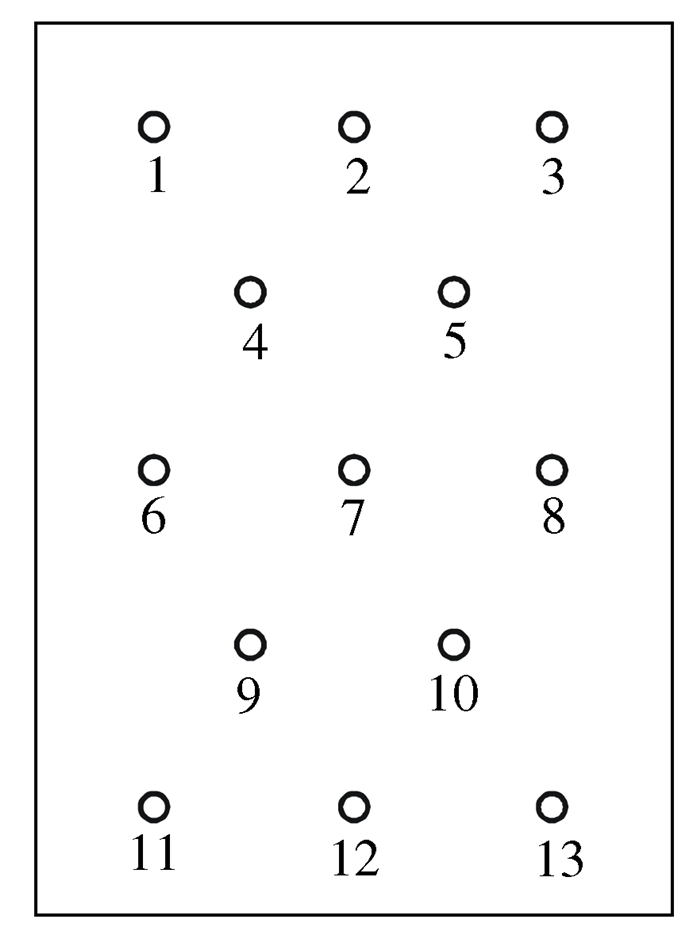
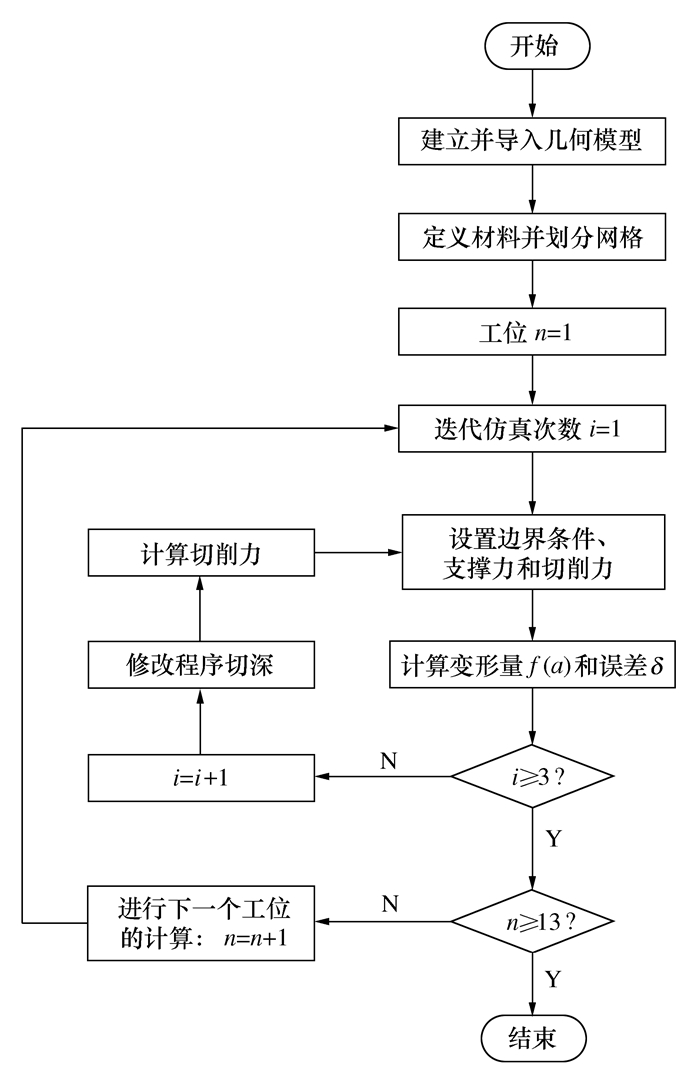
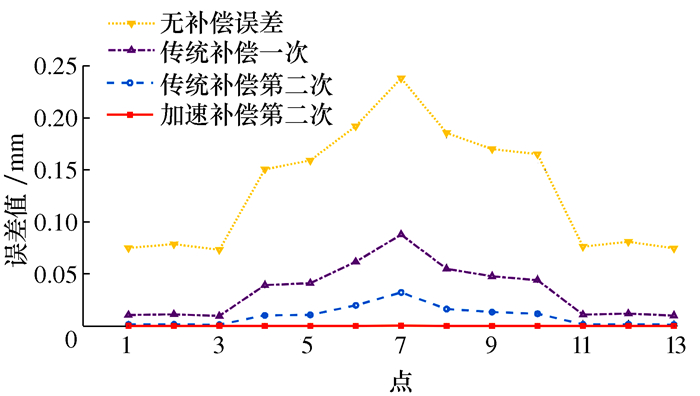
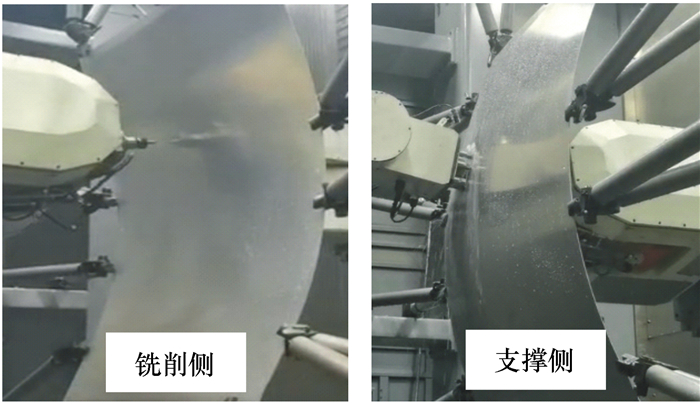
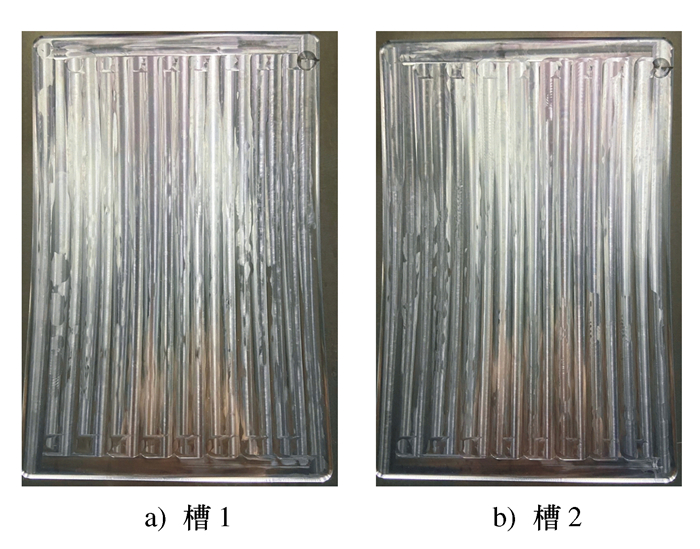
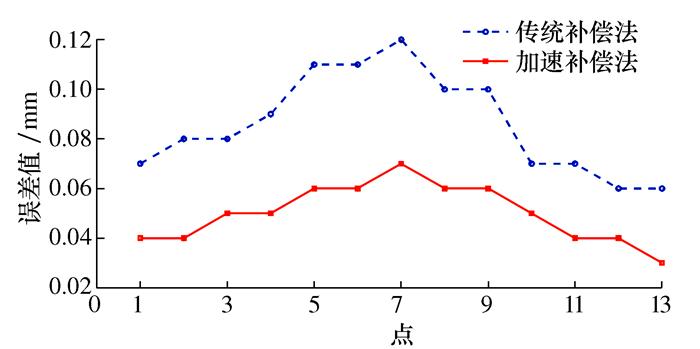
针对传统的飞机蒙皮镜像加工误差补偿方法收敛速度慢, 在大进给高速加工中很难完成较好的补偿效果的问题, 提出了一种蒙皮镜像加工误差实时补偿优化方法。该方法基于双点弦截法, 借助超声波测厚仪前两次获得的蒙皮壁厚与程序切削深度, 计算下一点的补偿值, 并通过控制镜像铣补偿轴运动实现加工误差补偿, 有效的提升了飞机蒙皮镜像铣的补偿效果, 减小了加工误差。最后通过有限元仿真和试验证明了该方法的优越性, 最大加工误差降低了41.67%, 总体加工误差降低了41.96%。
针对传统的飞机蒙皮镜像加工误差补偿方法收敛速度慢, 在大进给高速加工中很难完成较好的补偿效果的问题, 提出了一种蒙皮镜像加工误差实时补偿优化方法。该方法基于双点弦截法, 借助超声波测厚仪前两次获得的蒙皮壁厚与程序切削深度, 计算下一点的补偿值, 并通过控制镜像铣补偿轴运动实现加工误差补偿, 有效的提升了飞机蒙皮镜像铣的补偿效果, 减小了加工误差。最后通过有限元仿真和试验证明了该方法的优越性, 最大加工误差降低了41.67%, 总体加工误差降低了41.96%。

2023, 42(4): 651-656.
doi: 10.13433/j.cnki.1003-8728.20200391
摘要:
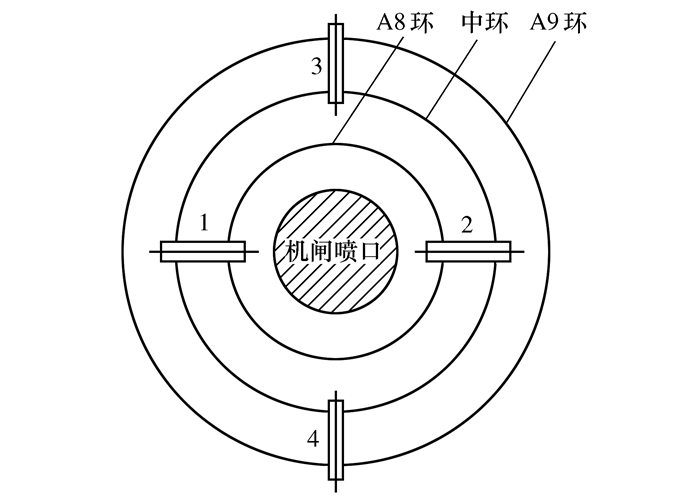
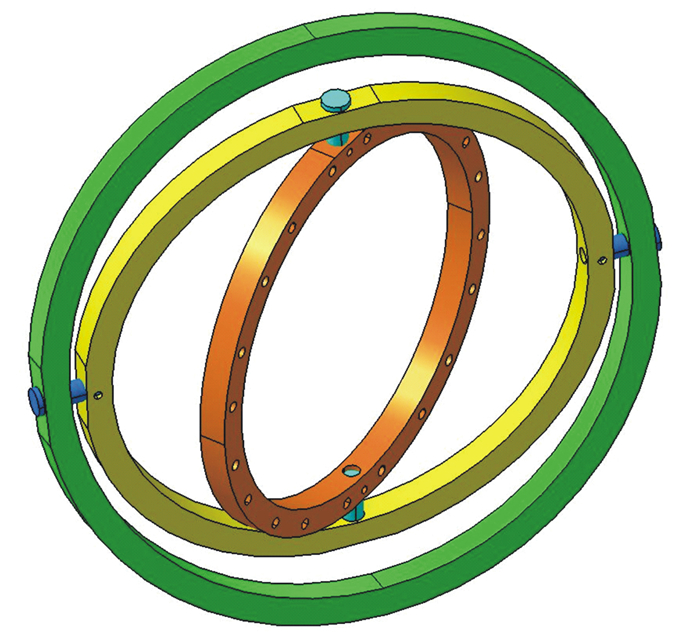
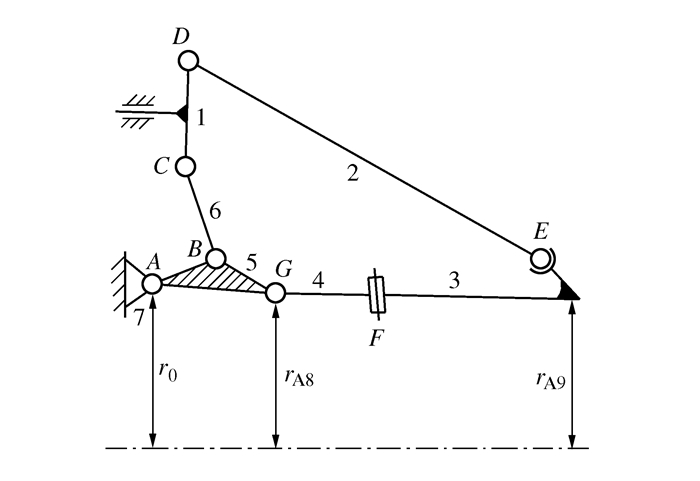
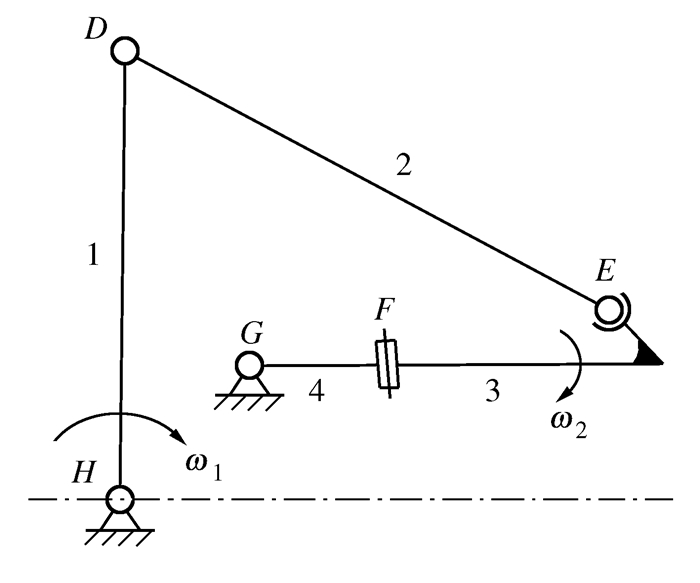
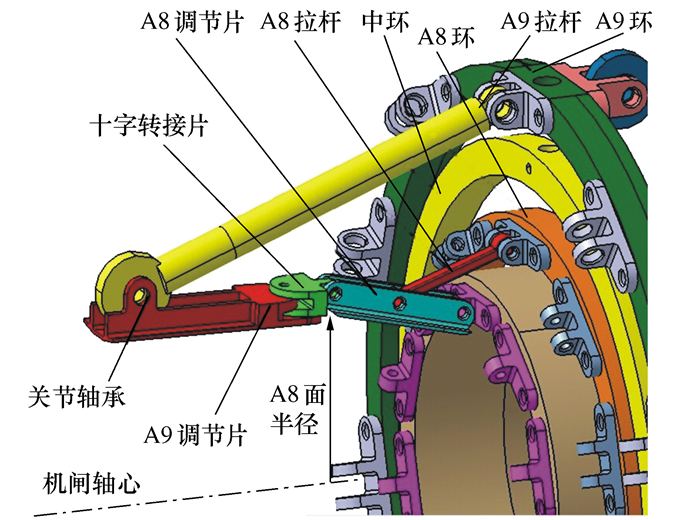
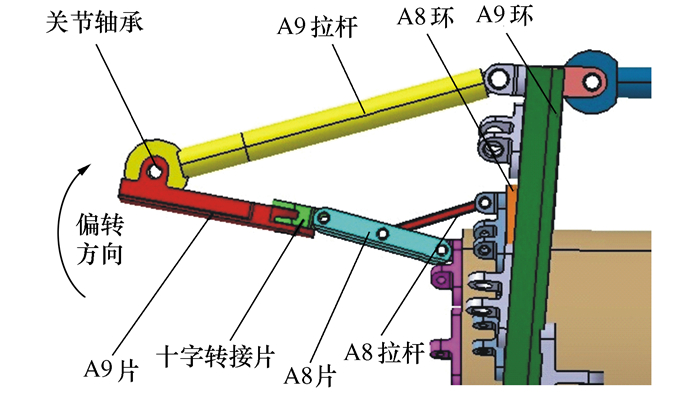
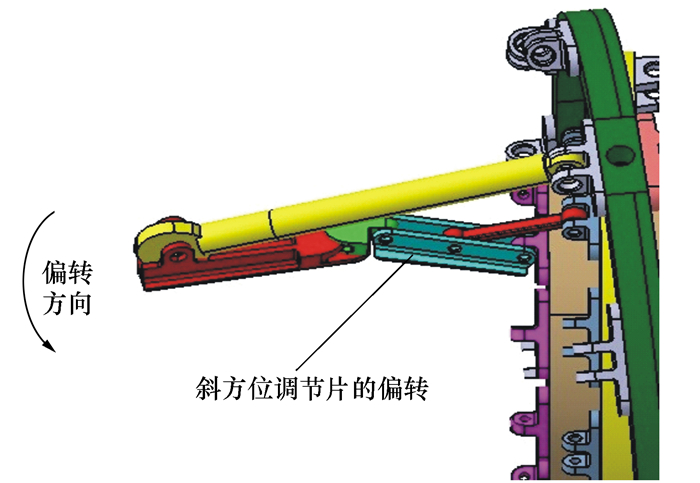
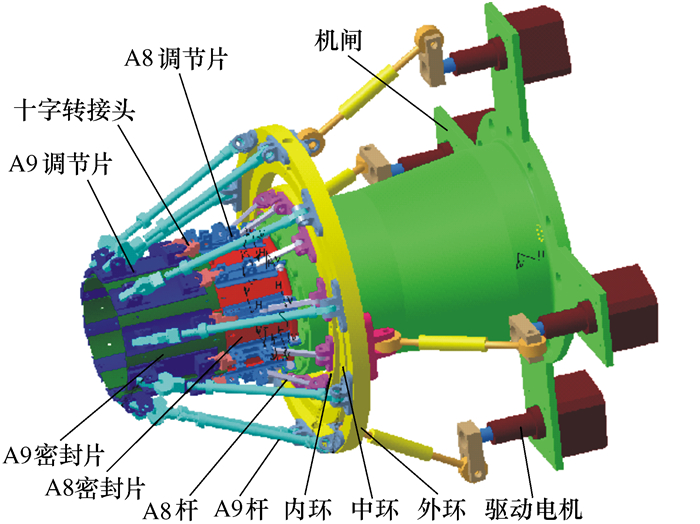
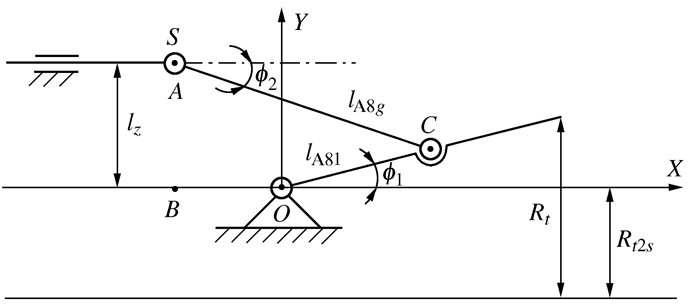
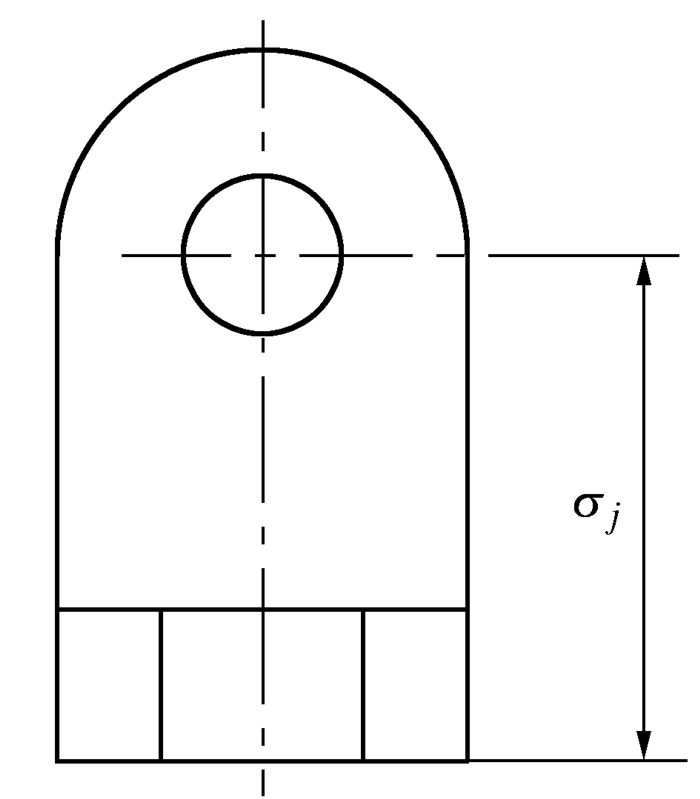
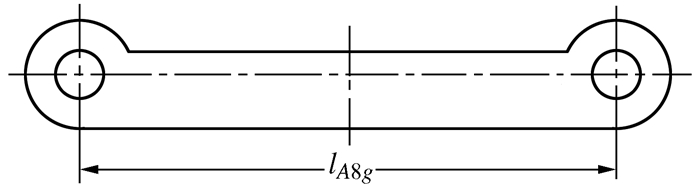
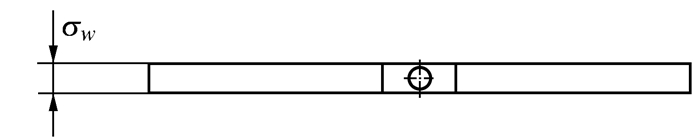
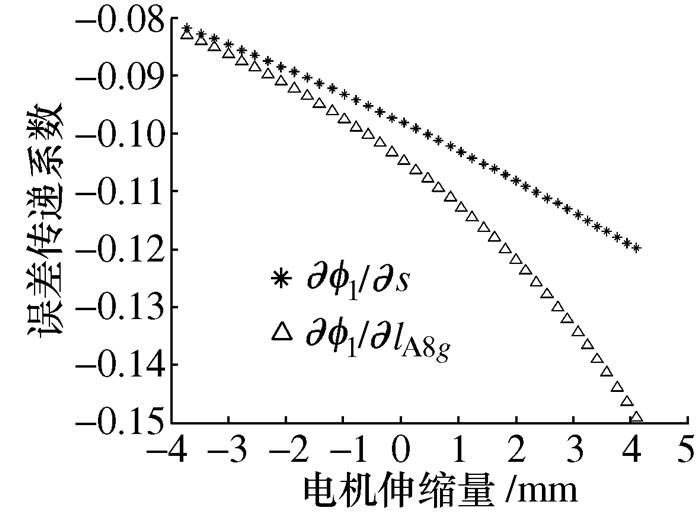
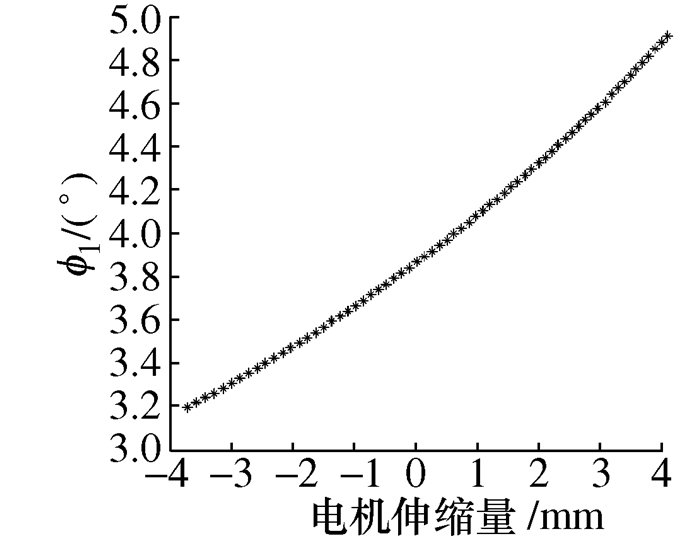
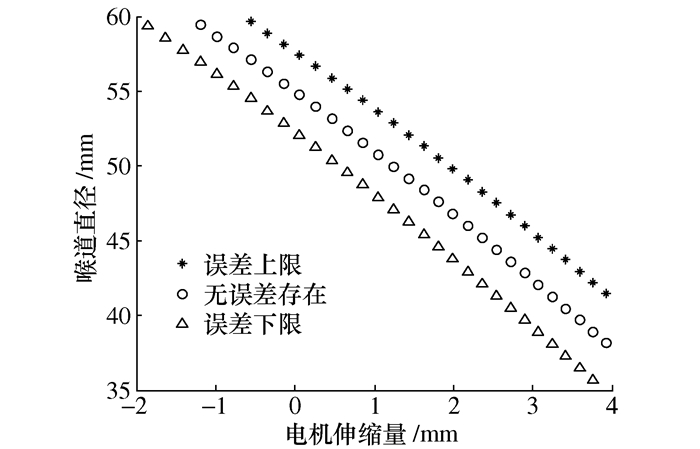
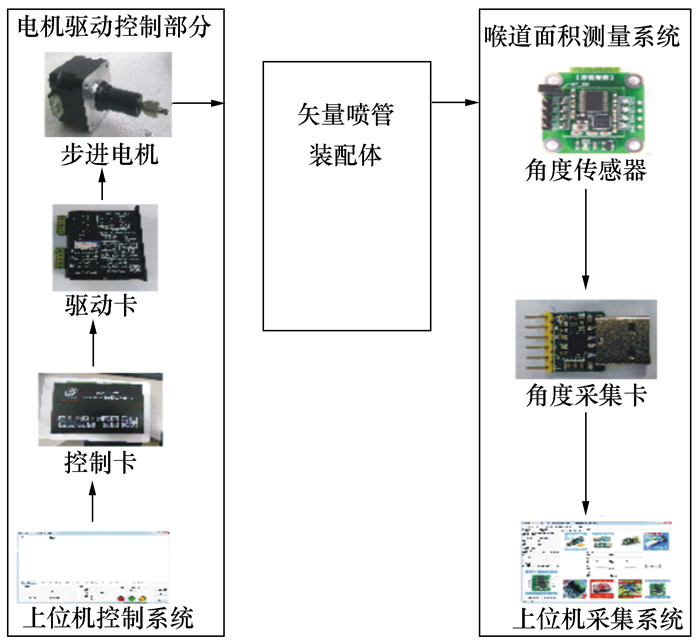
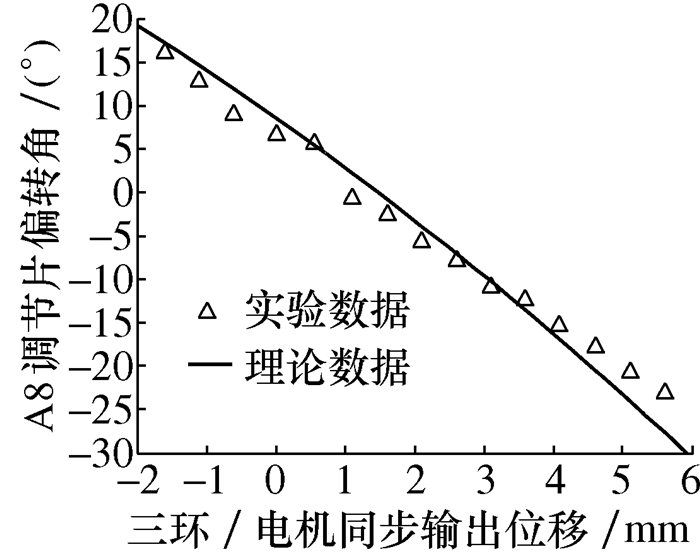
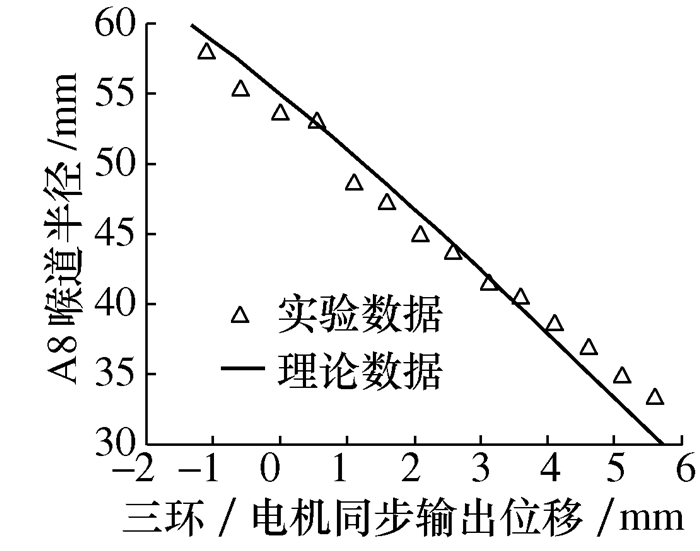
推力矢量技术主要通过控制矢量喷管偏转来实现矢量控制, 轴对称矢量喷管具有偏转机构设计简便、矢量作用效果明显等优点, 其喉道运动是完成喷气收扩的基础, 为了研究其运动规律, 设计了三环连杆传动控制结构; 建立了喉道运动学及精度分析模型, 讨论了A8两铰孔位置误差、电机伸缩量误差、两个铰座孔的位置误差、外环厚度方向误差对喉道的误差影响; 设计搭建矢量喷管实体实验平台, 通过非矢量运动实验, 验证运动学及精度分析模型的正确性, 为进一步喉道和喷口控制分析奠定一定基础。
推力矢量技术主要通过控制矢量喷管偏转来实现矢量控制, 轴对称矢量喷管具有偏转机构设计简便、矢量作用效果明显等优点, 其喉道运动是完成喷气收扩的基础, 为了研究其运动规律, 设计了三环连杆传动控制结构; 建立了喉道运动学及精度分析模型, 讨论了A8两铰孔位置误差、电机伸缩量误差、两个铰座孔的位置误差、外环厚度方向误差对喉道的误差影响; 设计搭建矢量喷管实体实验平台, 通过非矢量运动实验, 验证运动学及精度分析模型的正确性, 为进一步喉道和喷口控制分析奠定一定基础。