




Hopf Bifurcation and Sensitivity Analysis of Vehicle Shimmy System
-
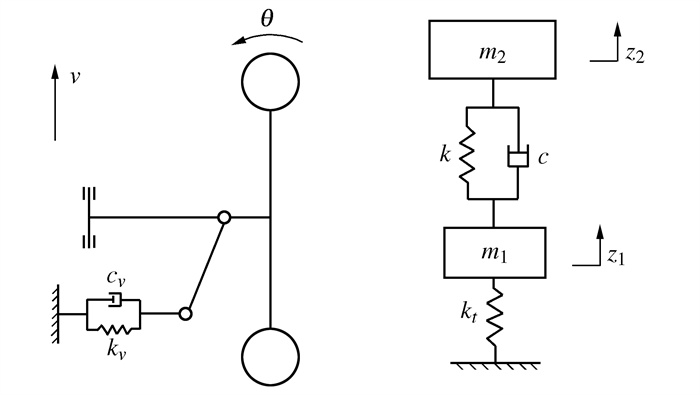
摘要: 为了分析汽车摆振系统的失稳机制,以某样车的右前轮为例,基于1/4车辆动力学模型,通过第二类拉格朗日方程建立了三自由度单轮摆振系统动力学模型。在系统状态方程的基础上,应用Hurwitz准则求解得到了摆振系统的临界失稳车速,进而获得了摆振系统在临界失稳车速处的特征值。结果表明,临界车速工况下的系统平衡点是非双曲平衡点,因此,以车速为分岔参数,通过中心流形理论得到了系统在临界车速处的二维中心流形。在此基础上深入分析了摆振系统的Hopf分岔特性,并得到了摆振系统的近似周期解。最后,通过四水平五参数正交实验设计,获得了转向系和悬架系的结构参数对系统临界失稳车速的灵敏度。研究发现,系统临界失稳车速对主销后倾角最为敏感,其次是转向系和悬架系的阻尼。因此,在工程实践中,应该优先考虑通过调整主销后倾角来抑制汽车摆振。Abstract: In order to analyze the instability mechanism of vehicle shimmy system, the right front wheel of a sample vehicle is taken as an example, based on the dynamic model for a quarter vehicle system, a three degrees-of-freedom dynamic model for single-wheel shimmy system is established by using the second Lagrange equation. According to the system state equation, the critical instability speed of the shimmy system is solved by applying Hurwitz criterion, and the eigenvalues of the shimmy system are obtained at the critical speed. The results show that the system equilibrium point at the critical instability speed is a non hyperbolic equilibrium point, then the vehicle speed is selected as a bifurcation parameter, and the two-dimensional center manifold is obtained by means of the center manifold theory. On this basis, the Hopf bifurcation characteristic of the shimmy system is analyzed and the analytical solution of the shimmy system is derived. Finally, with the help of four-level and five-parameter orthogonal experiments, the sensitivity of the structural parameters of the steering system and suspension system to the critical instability speed of the system is analyzed and the analytical solution of the shimmy system is derived. Finally, with the help of four-level and suspension system to the critical instability speed of the system is obtained. The study found that the critical instability speed of the shimmy system is the most sensitive to caster angle, followed by the damping of the steering system and the suspension system. Therefore, in engineering, it should be given priority to attenuate vehicle shimmy by adjusting caster angle.
-
Key words:
- shimmy /
- center manifold /
- Hopf bifurcation /
- sensitivity analysis
-
表 1 某样车结构参数
参数 数值 车轮围绕主销的转动惯量J 6.00 kg·m2 车轮绕其旋转轴的转动惯量Jy 3.95 kg·m2 非簧载质量m1 38.00 kg 簧载质量m2 452.50 kg 转向系统等效角阻尼cv 45.00 Nm·s/rad 悬架阻尼c 2.30 kN·s/m 转向系统等效角刚度kv 14.80 kN·m/rad 轮胎的垂向刚度kt 260.00 kN/m 悬架刚度k 31.60 kN/m 轮胎滚动半径量R 0.36 m 轮胎拖距n 0.05 m 从车轮中心到主销的横向距离A 0.068 m 车轮中心到下控制臂和副车架铰链中心距离B 0.48 m 轮胎的松弛长度σ 0.65 m 接地印迹长度a 0.20 m 后倾角τ 0.083 rad 轮胎公式拟合参数c1 -30.30 kN/rad 轮胎公式拟合参数c2 -7.96 rad 轮胎公式拟合参数c3 3.25×103 kN/rad 轮胎垂向静载荷Fz0 4.70 kN  下载: 导出CSV
下载: 导出CSV
表 2 临界车速的求解
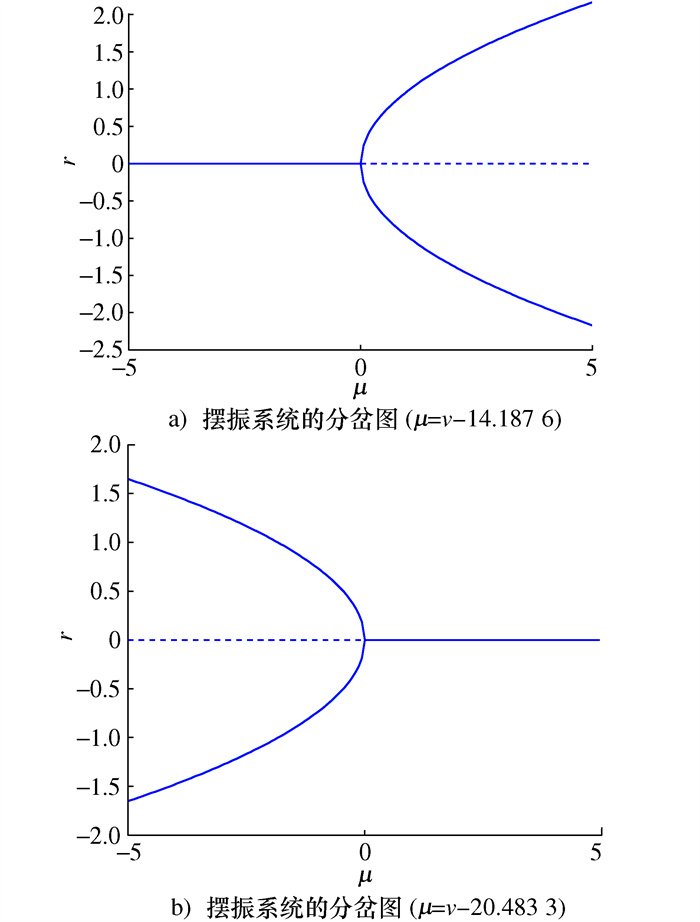
i vi/(m·s-1) 1 14.187 6 2 20.483 3 3 -5.681 0×1018 4 6.626 5×1017 5 -432.362 1+325.213 1i 6 -432.362 1-325.213 1i 7 -10.188 5+37.595 3i 8 -10.188 5-37.595 3i 9 -5.876 0+38.079 1i 10 -5.876 0-38.079 1i 11 -0.823 6+3.267 5i 12 -0.823 6-3.267 5i 13 496.886 3-334.240 4i 14 496.886 3+334.240 4i
下载: 导出CSV
表 3 摆振系统的特征值
特征值λi v1=14.187 6 m/s v2=20.483 3 m/s 1 -30.132 1+84.102 7i -29.628 4+87.661 8i 2 -30.132 1-84.102 7i -29.628 4-87.661 8i 3 -30.521 8 -41.216 4 4 -2.075 1+7.749 7i -2.074 4+7.749 9i 5 -2.075 1-7.749 7i -2.074 4-7.749 9i 6 +47.330 4i +47.248 8i 7 -47.330 4i -47.248 8i
下载: 导出CSV
表 4 不同速度下的摆振幅值
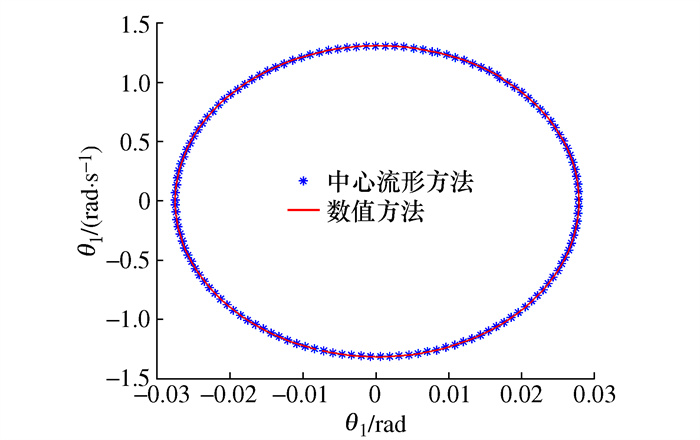
车辆速度/(m·s-1) 数值结果/rad 解析结果/rad 13.70 5.863 5×10-6 2.794 8×10-6 14.20 9.196 9×10-4 1.935 3×10-4 14.70 0.027 84 0.027 87 20.00 0.015 93 0.011 82 20.50 6.833 7×10-4 1.506 0×10-4 21.00 1.150 2×10-5 3.826 3×10-6
下载: 导出CSV
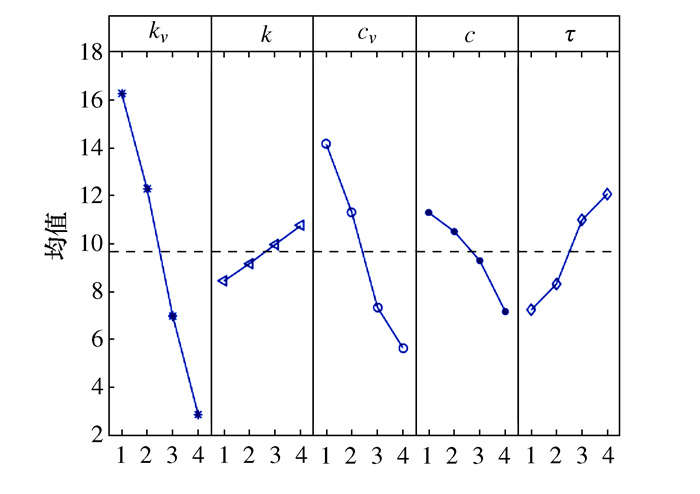
表 5 各因素的水平表
水平 因素 kv/(kN·m·rad-1) k/(kN·m-1) cv/(Nm·s·rad-1) c/(N·s·m-1) τ/rad 1 13 320 28 440 40.50 2 070 0.075 2 14 060 30 020 42.75 2 185 0.079 3 14 800 31 600 45 2 300 0.083 4 15 540 33 180 47.25 2 415 0.087
下载: 导出CSV
表 6 正交实验的安排和结果
编号 因素水平 Δv/ (m·s-1) kv k cv c τ 1 1 1 1 1 1 19.182 5 2 1 2 2 2 2 17.315 9 3 1 3 3 3 3 15.477 6 4 1 4 4 4 4 13.628 7 5 2 1 2 3 4 15.093 4 6 2 2 1 4 3 15.442 4 7 2 3 4 1 2 9.301 1 8 2 4 3 2 1 9.841 6 9 3 1 3 4 2 0.000 0 10 3 2 4 3 1 0.000 0 11 3 3 1 2 4 15.322 6 12 3 4 2 1 3 12.893 0 13 4 1 4 2 3 0.000 0 14 4 2 3 1 4 4.463 1 15 4 3 2 4 1 0.000 0 16 4 4 1 3 2 7.004 7
下载: 导出CSV
-
[1] 张宁, 殷国栋, 陈南, 等. 车辆动力学中的摆振问题研究现状综述[J]. 机械工程学报, 2017, 53(14): 16-28. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201714002.htmZHANG N, YIN G D, CHEN N, et al. A state-of-the-art survey on shimmy problem in vehicle dynamics[J]. Journal of Mechanical Engineering, 2017, 53(14): 16-28. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201714002.htm [2] BUCCHI F, CERU F, FRENDO F. Stability analysis of a novel four-wheeled motorcycle in straight running[J]. Meccanica, 2017, 52(11): 2603-2613. [3] 谢帅, 舒成辉, 贾天娇, 等. 起落架摆振多体动力学建模及其在摆振飞行试验中的应用[J]. 机械科学与技术, 2018, 37(1): 148-151. doi: 10.13433/j.cnki.1003-8728.2018.0122XIE S, SHU C H, JIA T J, et al. Multi-body dynamics modeling of landing gear shimmy and application in shimmy flight test based on model[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(1): 148-151. (in Chinese) doi: 10.13433/j.cnki.1003-8728.2018.0122 [4] TOMIATI N, COLOMBO A, MAGNANI G. A nonlinear model of bicycle shimmy[J]. Vehicle System Dynamics, 2019, 57(3): 315-335. doi: 10.1080/00423114.2018.1465574 [5] RAN S H, BESSELINK I J M, NIJMEIJER H. Energy analysis of the von schlippe tyre model with application to shimmy[J]. Vehicle System Dynamics, 2015, 53(12): 1795-1810. doi: 10.1080/00423114.2015.1093151 [6] BEREGI S, TAKACS D, STEPAN G. Bifurcation analysis of wheel shimmy with non-smooth effects and time delay in the tyre-ground contact[J]. Nonlinear Dynamics, 2019, 98(1): 841-858. doi: 10.1007/s11071-019-05123-1 [7] MI T, STEPAN G, TAKACS D, et al. Shimmy model for electric vehicle with independent suspensions[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2018, 232(3): 330-340. doi: 10.1177/0954407017701282 [8] ZHURAVLEV V P, KLIMOV D M, POTNIKOV P K. A new model of shimmy[J]. Mechanics of Solids, 2013, 48(5): 490-499. doi: 10.3103/S0025654413050026 [9] LU J W, JIANG J Z, LI J H, et al. Analysis of dynamic mechanism and global response of vehicle shimmy system with multi-clearance joints[J]. Journal of Vibration and Control, 2018, 24(11): 2312-2326. doi: 10.1177/1077546316685681 [10] 王威, 陈军, 宋玉玲. 含双间隙模型轿车转向系非线性动力学特性研究[J]. 农业机械学报, 2013, 44(10): 41-46. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201310007.htmWANG W, CHEN J, SONG Y L. Nonlinear dynamic characteristics of car's steering system with double clearance models[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(10): 41-46. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201310007.htm [11] LI S, LIN Y. Study on the bifurcation character of steering wheel self-excited shimmy of motor vehicle[J]. Vehicle System Dynamics, 2006, 44(S1): 115-128. [12] 张琪昌, 李小涛, 田瑞兰. 汽车转向轮摆振的稳定性及分岔行为分析[J]. 振动与冲击, 2018, 27(1): 84-88+184. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200801019.htmZHANG Q C, LI X T, TIAN R L. Study on stability and bifurcation behavior of a car turning wheel shimmy[J]. Journal of Vibration and Shock, 2018, 27(1): 84-88+184. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ200801019.htm [13] 刘献栋, 张紫广, 何田, 等. 基于增量谐波平衡法的汽车转向轮非线性摆振的研究[J]. 汽车工程, 2011, 33(2): 142-147. doi: 10.19562/j.chinasae.qcgc.2011.02.011LIU X D, ZHANG Z G, HE T, et al. A research on the nonlinear shimmy of automotive steering wheels based on incremental harmonic balance method[J]. Automotive Engineering, 2011, 33(2): 142-147. (in Chinese) doi: 10.19562/j.chinasae.qcgc.2011.02.011 [14] 肖闯, 殷智宏. 单转向轮摆振非线性动力学研究[J]. 中国机械工程, 2013, 24(8): 1131-1135. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201308031.htmXIAO C, YIN Z H. Research on nonlinear dynamics of caster wheel shimmy[J]. China Mechanical Engineering, 2013, 24(8): 1131-1135. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201308031.htm [15] WEI D G, ZHU Y J, JIANG T, et al. Multiple limit cycles shimmy of the dual-front axle steering heavy truck based on bisectional road[J]. Journal of Computational and Nonlinear Dynamics, 2019, 14(5): 051005. doi: 10.1115/1.4042294 [16] GAO L L, MA F, JIN C, et al. Shimmy characteristic analysis for steering system of heavy mining dump trucks[J]. Journal of Vibration and Acoustics, 2020, 142(2): 024501. doi: 10.1115/1.4045918 [17] WEI H, LU J W, LU H Y, et al. Hopf bifurcation and energy transfer of automobile shimmy system with consideration of road roughness excitation[J]. Vehicle System Dynamics, 2022, 60(2): 454-469. doi: 10.1080/00423114.2020.1821903 [18] PACEJKA H B. Tire and vehicle dynamics[M]. Oxford: Butterworth and Heinemann, 2006. [19] DING W J. Self-excited vibration: theory, paradigms, and research methods[M]. Beijing: Tsinghua University Press, 2011. [20] 刘文卿. 实验设计[M]. 北京: 清华大学出版社, 2020.LIU W Q. Design of experiments[M]. Beijing: Tsinghua University Press, 2020. (in Chinese) -

 点击查看大图
点击查看大图
图(5) / 表(7)
计量
- 文章访问数: 68
- HTML全文浏览量: 31
- PDF下载量: 13
- 被引次数: 0
