




Kinematics Study on Redundant Manipulator with Serial-parallel Hybrid Mechanism of Bolter-drilling Rig
-
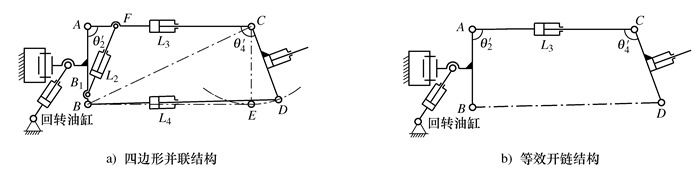
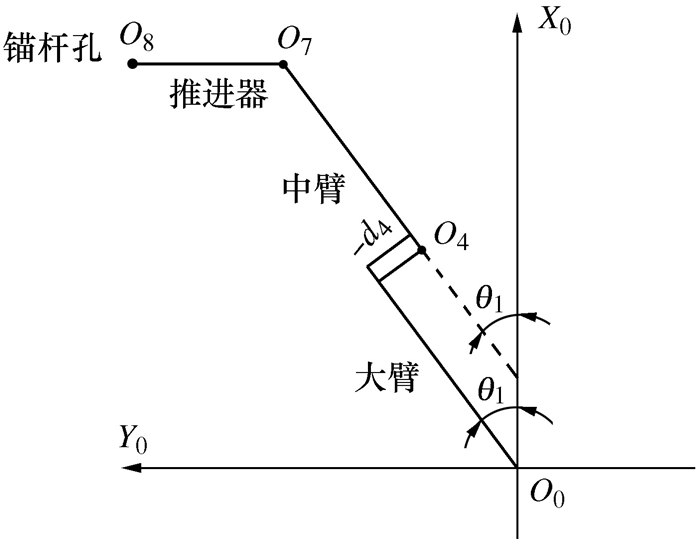
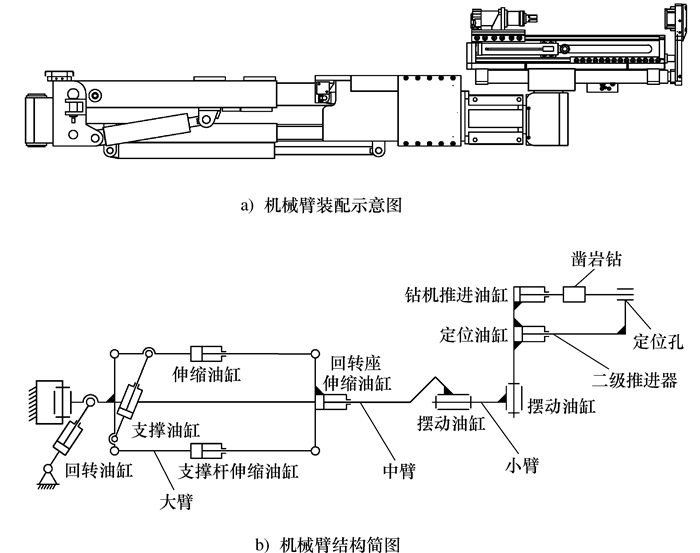
摘要: 锚杆钻车机械臂的自动定位打孔可进一步提高巷道支护工艺的自动化作业程度。本文针对某锚杆钻车的串并联混合8自由度冗余机械臂的逆运动学问题展开研究。该机械臂有两大特点, 一是串并联混合机构, 臂在整体上为串联开链机构, 但其大臂存在一个四边形的并联结构; 二是冗余自由度, 导致逆运动学存在无穷解。针对前者, 为便于使用D-H法建立运动学模型, 推导了并联结构的运动表达式, 将其用一个等效的串联结构来替代。针对后者, 详细分析了机械臂的结构与实际工况, 设置了逆解的3个条件: 1) 为保证推进器获得最大打孔行程, 设置定位油缸为最大伸长量; 2) 根据不同类型锚杆孔设定大臂四边形形状, 可实现姿态补偿; 3) 优先使用中臂进行位置补偿, 以尽量减少大臂的运动。在以上约束下提出基于位姿分离的逆运动学求解方案, 得到的逆解结果充分利用了机械臂的设计特点, 且兼顾人工操作过程的直观、方便性。为验证算法, 针对一个矩形巷道断面的锚杆孔设计, 通过计算机进行了逆解计算, 计算精度与速度均有满意的结果; 将算法部署到PLC上, 在模拟巷道自动打孔试验, 结果满足工程要求。Abstract: The automatic positioning of the manipulator of the bolt-drilling rig is needed in the further implementing the automatic supporting process in the construction of mine laneway. This focus is to solve the inverse kinematics problem of a redundant manipulator with serial-parallel hybrid mechanism and 8 degree of freedom. The manipulator has two characteristics, one of which is the overall series-open-chain mechanism embedded with a partly-parallel quadrilateral mechanism in its base arm, and another of which is the redundant degrees of freedom which leads to infinite solutions for the inverse kinematics. For the former, in order to establish the kinematics model by using the Denavit-Hartenberg(D-H) method, the motion expression of the parallel structure is deduced, and the equivalent open chain structure is proposed to replace the parallel counterpart. For the latter, the structure of the manipulator and its actual work conditions are analyzed, in which three constraints are concluded for solving the inverse kinematics: 1) the positioning cylinder is set at its maximum elongation in order to ensure the maximum stroke of the propeller in actual drilling; 2) according to the types of bolt holes, the quadrilateral shape of the base arm is conditionally set to realize the proper compensation for orientation; 3) the length of the middle arm for position compensation is chosen in higher priority to keep the demand for the moving of the base arm as rarely as possible. Then an inverse kinematics algorithm based on the position-pose separation is proposed for the manipulator, and the results of the solution takes full advantages of the redundant characteristic of the manipulator and is in favor of the straight forward and convenient operation for human operator. For the validation of the algorithm, an example design of bolt-holes for a rectangular section of mine laneway is used; the simulations on a personal laptop show the satisfactory result of the algorithm in the precision and calculation speed; the algorithm is also deployed on a control Programmable Logic Controller (PLC) of a bolt-drilling rig, and the drilling test in a simulated mine laneway shows that the algorithm meets the needs of the practical application.
-
Key words:
- bolter-drilling rig /
- redundant manipulator /
- D-H method /
- inverse kinematics /
- position-pose separation
-
表 1 机械臂D-H参数
连杆 θi/(°) di/mm ai/mm αi/(°) 关节变量范围 1 0 170 235 -90 (-0.26°, 42.75°) 2 90 0 0 90 (44.21°, 96.56°) 3 0 d3 0 -90 (1 770, 2 370) mm 4 0 -100.5 165 90 (-6.56°+γ, 45.79°+γ) 5 0 d5 0 0 (664, 1 164) mm 6 -90 0 0 -90 (-90°, 90°) 7 180 -278.5 0 -90 (90°, 270°) 8 90 d8 374 0 (1 175, 2 225) mm  下载: 导出CSV
下载: 导出CSV
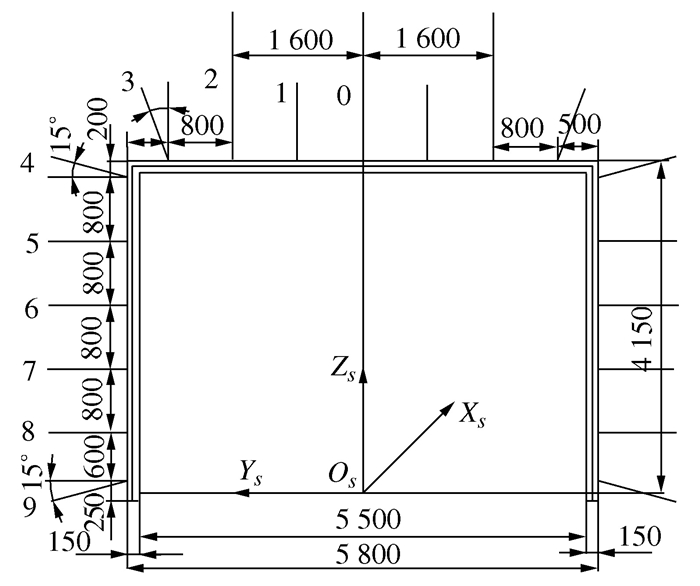
表 2 锚杆孔相对于断面坐标系的位姿坐标
目标位姿 孔序 1 2 3 4 5 6 7 8 9 xs/mm 0 0 0 0 0 0 0 0 0 ys/mm 800 1 600 2 400 2 900 2 900 2 900 2 900 2 900 2 900 zs/mm 4 150 4 150 4 150 3 950 3 150 2 350 1 550 750 150 αs/(°) 90 90 90 90 90 90 90 90 90 βs/(°) -90 -90 -70 -15 0 0 0 0 15
下载: 导出CSV
表 3 锚杆孔逆解结果
孔序 逆解结果 θ1/(°) θ2/(°) d3/mm θ4/(°) d5/mm θ6/(°) θ7/(°) d8/mm 1 19.434 5 71.800 4 2 122.8 18.199 6 664 0 90 2 225 2 33.149 6 71.800 4 2 122.8 18.199 6 839.8 0 90 2 225 3 33.230 0 73.380 6 2 122.8 16.619 4 842.6 -16.933 0 100.802 7 2 225 4 9.197 9 47.115 3 2 178.3 42.884 7 1 164 -74.813 6 98.881 9 2 225 5 4.494 4 55.446 5 2 178.3 34.553 5 972.3 -90 94.494 4 2 225 6 4.494 4 78.296 8 2 147.0 11.703 2 664 -90 94.4944 2 225 7 4.494 4 64.020 1 2 147.0 25.979 9 836.3 90 265.505 6 2 225 8 4.494 4 86.176 6 2 107.0 3.823 4 664 90 265.505 6 2 225 9 9.197 9 87.443 6 2 098.2 2.556 4 664 74.813 6 261.118 1 2 225
下载: 导出CSV
表 4 锚杆孔逆解误差分析
孔位 锚杆孔目标位置 偏差 xs0/mm ys0/mm zs0/mm Δx/10-13 mm Δy/10-13 mm Δz/10-13 mm 1 3 000 260 2 893 -4.55 -2.27 0 2 3 000 1 060 2 893 -4.55 0 0 3 3 000 1 860 2 893 4.55 -821 0 4 3 000 2 360 2 693 4.55 50 791 0 5 3 000 2 360 1 893 0 13.64 0 6 3 000 2 360 1 093 0 13.64 0 7 3 000 2 360 293 0 9.09 -1.14 8 3 000 2 360 -507 4.55 9.09 -3.41 9 3 000 2 360 -1 107 0 50 787 -4.55
下载: 导出CSV
-
[1] 王步康. 煤矿巷道掘进技术与装备的现状及趋势分析[J]. 煤炭科学技术, 2020, 48(11): 1-11. https://www.cnki.com.cn/Article/CJFDTOTAL-MTKJ202011001.htmWANG B K. Current status and trend analysis of readway driving technology and equipment in coal mine[J]. Coal Science and Technology, 2020, 48(11): 1-11. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MTKJ202011001.htm [2] 康红普. 我国煤矿巷道锚杆支护技术发展60年及展望[J]. 中国矿业大学学报, 2016, 45(6): 1071-1081. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKD201606001.htmKANG H P. Sixty years development and prospects of rock bolting technology for underground coal mine roadways in China[J]. Journal of China University of Mining & Technology, 2016, 45(6): 1071-1081. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKD201606001.htm [3] 葛世荣, 胡而已, 裴文良. 煤矿机器人体系及关键技术[J]. 煤炭学报, 2020, 45(1): 455-463. https://www.cnki.com.cn/Article/CJFDTOTAL-MTXB202001045.htmGE S R, HU E Y, PEI W L. Classification system and key technology of coal mine robot[J]. Journal of China Coal Society, 2020, 45(1): 455-463. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MTXB202001045.htm [4] 王国庆, 许红盛, 王恺睿. 煤矿机器人研究现状与发展趋势[J]. 煤炭科学技术, 2014, 42(2): 73-77. https://www.cnki.com.cn/Article/CJFDTOTAL-MTKJ201402021.htmWANG G Q, XU H S, WANG K R. Research status and development trend of coal mining robots[J]. Coal Science and Technology, 2014, 42(2): 73-77. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MTKJ201402021.htm [5] 云洋, 宋华, 徐炳吉. 六自由度工业机械臂运动学仿真研究[J]. 机械科学与技术, 2018, 37(8): 1167-1176. https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX201808005.htmYUN Y, SONG H, XU B J. Study on kinematics simulation for six degree-of-freedom industrial robot arms[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(8): 1167-1176. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX201808005.htm [6] 敖天翔, 刘满禄, 张华, 等. 结合旋量和代数方法的工业机械臂逆运动学解法[J]. 机械科学与技术, 2017, 36(8): 1224-1229. doi: 10.13433/j.cnki.1003-8728.2017.0813AO T X, LIU M L, ZHANG H, et al. Inverse kinematic solution of industrial robot arm with combination of screw theory and algebraic methods[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(8): 1224-1229. (in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.0813 [7] BUSS S R. Introduction to inverse kinematics with jacobian transpose, pseudoinverse and damped least squares methods[J]. IEEE Transactions on Robotics and Automation, 2004, 17(1): 681-685. [8] WHITNEY D E. Resolved motion rate control of manipulators and human prostheses[J]. IEEE Transactions on Man-Machine Systems, 1969, 10(2): 47-53. [9] 夏晶, 马宏伟, 王海荣, 等. 基于零空间的冗余机械臂轨迹有效性判断方法[J]. 华中科技大学学报(自然科学版), 2019, 47(4): 25-31.XIA J, MA H W, WANG H R, et al. Feasibility evaluation method for trajectory of redundant manipulators based on null-space[J]. Journal of Huazhong University of Science & Technology (Natural Science Edition), 2019, 47(4): 25-31. (in Chinese) [10] 夏毅敏, 马劼嵩, 张亚洲, 等. 基于柔度误差检测的锚杆台车机械臂定位[J]. 华南理工大学学报(自然科学版), 2020, 48(3): 83-90. https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG202003010.htmXIA Y M, MA J S, ZHANG Y Z, et al. Bolting jumbo boom positioning based on compliance error detection[J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(3): 83-90. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG202003010.htm [11] FALCONI R, GRANDI R, MELCHIORRI C. Inverse kinematics of serial manipulators in cluttered environments using a new paradigm of particle swarm optimization[J]. IFAC Proceedings Volumes, 2014, 47(3): 8475-8480. [12] ALKAYYALI M, TUTUNJI T A. PSO-based algorithm for inverse kinematics solution of robotic arm manipulators[C]//20th International Conference on Research and Education in Mechatronics. Wels, Austria: IEEE, 2019. [13] 谢习华, 范诗萌, 周烜亦, 等. 基于改进差分进化算法的机械臂运动学逆解[J]. 机器人, 2019, 41(1): 50-57.XIE X H, FAN S M, ZHOU X Y, et al. Inverse kinematics of manipulator based on the improved differential evolution algorithm[J]. Robot, 2019, 41(1): 50-57. (in Chinese) [14] 刘世平, 曹俊峰, 孙涛, 等. 基于BP神经网络的冗余机械臂逆运动学分析[J]. 中国机械工程, 2019, 30(24): 2974-2977+2985. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201924013.htmLIU S P, CAO J F, SUN T, et al. Inverse kinematics analysis of redundant manipulators based on BP neural network[J]. China Mechanical Engineering, 2019, 30(24): 2974-2977+2985. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201924013.htm [15] 蔡改贫, 刘鑫, 罗小燕, 等. 采用APSO-LM-BP神经网络的挖掘机器人运动学逆解研究[J]. 机械科学与技术, 2020, 39(5): 706-713. doi: 10.13433/j.cnki.1003-8728.20190200CAI G P, LIU X, LUO X Y, et al. Inverse kinematics solution of mining robot via APSO-LM-BP neural network[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(5): 706-713. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20190200 [16] 周友行, 何清华, 徐海良, 等. 多关节凿岩机械手快速定位方法[J]. 中南工业大学学报(自然科学版), 2001, 32(6): 622-625. doi: 10.3969/j.issn.1672-7207.2001.06.018ZHOU Y X, HE Q H, XU H L, et al. The speediness orientation of the multi-joint rock-drilling manipulator[J]. Journal of Central South University (Science and Technology), 2001, 32(6): 622-625. (in Chinese) doi: 10.3969/j.issn.1672-7207.2001.06.018 [17] 王恒升, 何清华, 邓春萍. 三角钻臂的运动控制研究[J]. 同济大学学报(自然科学版), 2006, 34(5): 660-664. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ200605018.htmWANG H S, HE Q H, DENG C P. Motion control of triangle boom[J]. Journal of Tongji University (Natural Science), 2006, 34(5): 660-664. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ200605018.htm [18] WANG H S, ZHAN D Y, HUANG P L, et al. Inverse kinematics of a heavy duty manipulator with 6-DOF based on dual quaternion[J]. Journal of Central South University, 2015, 22(7): 2568-2577. doi: 10.1007/s11771-015-2786-1 [19] 房立金, 高瑞. 一般6R机器人逆运动学算法的改进[J]. 机械科学与技术, 2018, 37(9): 1325-1330.FANG L J, GAO R. Improving inverse kinematics algorithm for general 6-DOF robots[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(9): 1325-1330. (in Chinese) -




 点击查看大图
点击查看大图
图(7) / 表(4)
计量
- 文章访问数: 79
- HTML全文浏览量: 59
- PDF下载量: 20
- 被引次数: 0
