




Design Topology Characteristics and Reconstruction Analysis of a Novel 9-3 Reconfigurable Parallel Mechanism
-
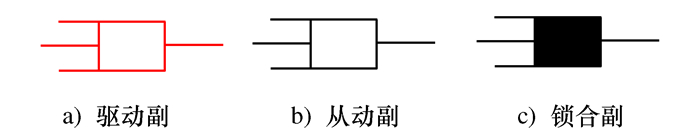
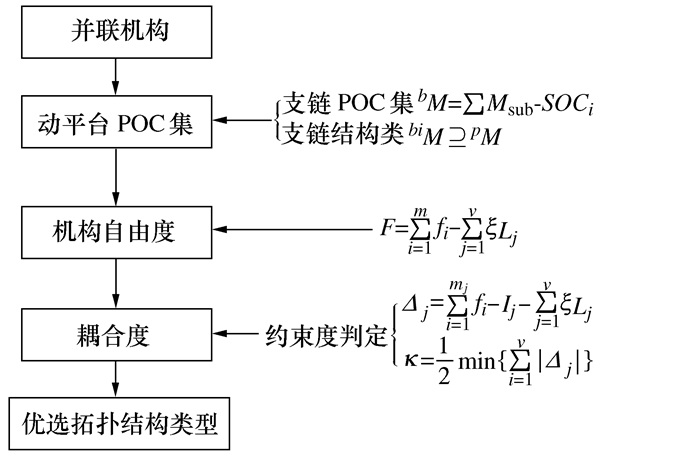
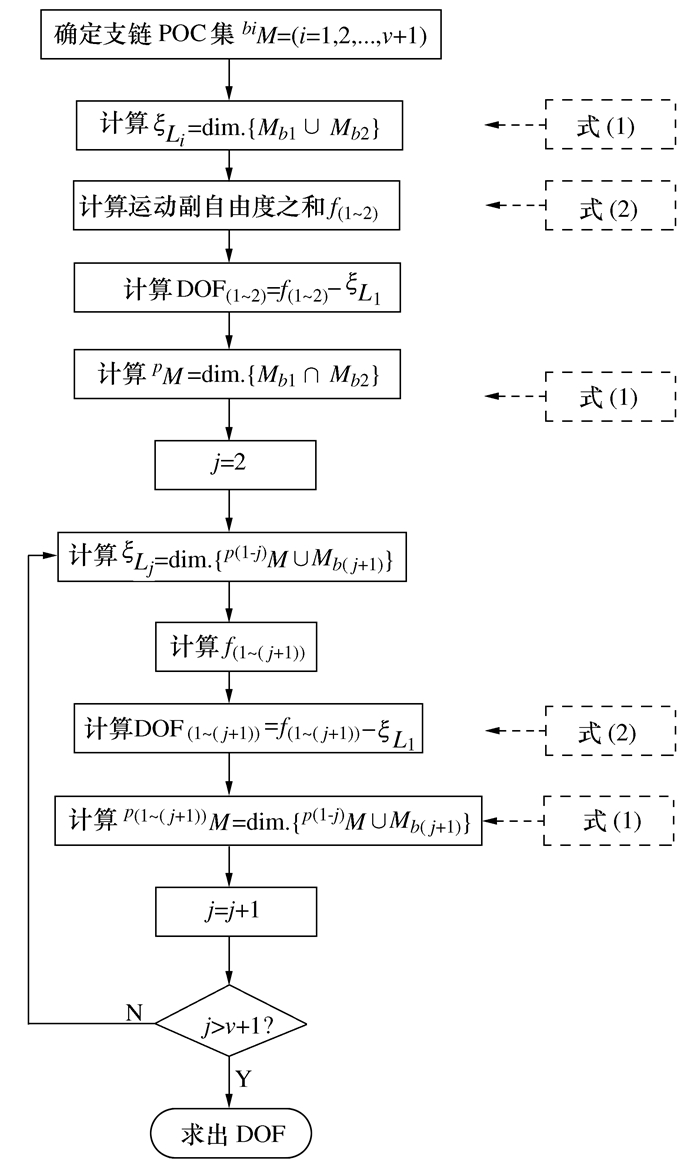
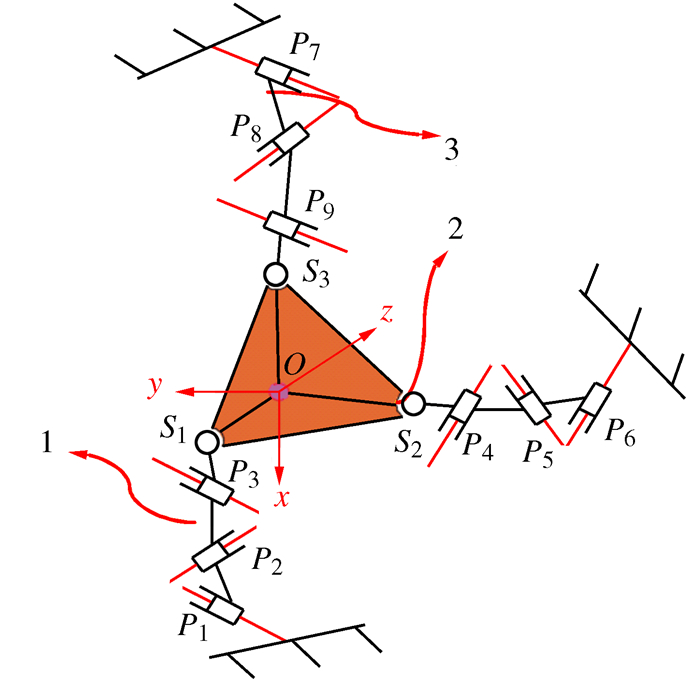
摘要: 可重构并联机构具有变自由度及变构型的优点, 设计了一种零耦合度、含3条冗余支链的新型9-3可重构并联机构。基于方位特征方程的并联机构拓扑结构设计理论与方法, 创建了并联机构拓扑分析的模块化公式, 并解析了机构的拓扑特性。基于一种可转换主、从运动及锁合的变胞移动副, 利用主动模式与从动模式, 将9-3型可重构并联机构转换为6-3A和6-3B这两种构型, 并计算了它们的拓扑指标。结果显示, 它们的耦合度分别为0和1。利用锁合模式, 将6-3A型并联机构进行重构, 得到了5类少自由度并联机构。特别地, 以一种三自由度重构构型为例, 详细分析了其拓扑特性。Abstract: A novel 9-3 reconfigurable parallel mechanism with zero coupling degree and three redundant branches was designed in this paper. Based on the theory and method of topology design of the position and orientation characteristic equation, a modular formula for topology analysis of the parallel mechanism was established, and topological characteristics of the mechanism and reconstructed configuration are analyzed. Based on a metamorphic mobile pair which can convert the master and slave movements and lock, the type 9-3 reconfigurable parallel mechanisms were converted into two configurations, 6-3A and 6-3B, with active mode and driven mode, and their topological indices were calculated. The results show that the coupling degree of 6-3A and 6-3B is 0 and 1, respectively. Furthermore, the 6-3A parallel mechanism was reconstructed to obtain the low-degree of freedom parallel mechanism. A total of 5 classes and 12 configurations were listed. In particular, a three-degree of freedom reconstruction configuration as example, its topological properties are analyzed in detail.
-
Key words:
- parallel mechanism /
- reconstruction /
- topology property /
- coupling degree
-
表 1 重构构型的拓扑结构特征
锁合数 拓扑类型 配置方式 自由度 耦合度 1 <1-0-0> 9 5 0 2 <2-0-0> 9 4 0 <1-1-0> 27 4 0 <3-0-0> 3 3 0 3 <2-1-0> 54 3 0 <1-1-1> 27 3 0 4 <3-1-0> 18 2 0 <2-2-0> 27 2 0 <2-2-1> 81 2 0 <3-2-0> 18 1 0 5 <3-1-1> 27 1 0 <2-2-1> 81 1 0  下载: 导出CSV
下载: 导出CSV
-
[1] STEWART D. A platform with six degrees of freedom[J]. Proceedings of the Institution of Mechanical Engineers, 1965, 180(1): 371-386. doi: 10.1243/PIME_PROC_1965_180_029_02 [2] 姜东, 徐宇, 王桂伦, 等. 锁定状态下球铰连接桁架的刚度性能[J]. 东南大学学报(自然科学版), 2019, 49(5): 820-825.JIANG D, XU Y, WANG G L, et al. Stiffness property of locked truss with spherical hinge connection[J]. Journal of Southeast University (Natural Science Edition), 2019, 49(5): 820-825. (in Chinese) [3] 沈惠平, 赵迎春, 许可, 等. 一种可重构、部分运动解耦的空间n维平移1维转动并联机构的拓扑及其运动学设计[J]. 中国机械工程, 2019, 30(4): 413-422.SHEN H P, ZHAO Y C, XU K, et al. Topology and kinematics design of spatially n T1R-type reconfigurable and partial motion decoupling parallel mechanism[J]. China Mechanical Engineering, 2019, 30(4): 413-422. (in Chinese) [4] 刘艳梨, 程世利, 蒋素荣, 等. 带位移传感器的6-UPS并联机构运动学正解[J]. 机械工程学报, 2018, 54(5): 1-7.LIU Y L, CHENG S L, JIANG S R, et al. Forward kinematics of 6-UPS parallel manipulators with one displacement sensor[J]. Journal of Mechanical Engineering, 2018, 54(5): 1-7. (in Chinese) [5] FAUGERE J C, LAZARD D. Combinatorial classes of parallel manipulators[J]. Mechanism and Machine Theory, 1995, 30(6): 765-776. doi: 10.1016/0094-114X(94)00069-W [6] 李庠, 李瑞琴, 李辉, 等. 可重构单驱动3-RRR平面并联机构连杆曲线与姿态的数值解法[J]. 兵工学报, 2021, 42(5): 1074-1082. https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO202105020.htmLI Y, LI R Q, LI H, et al. A numerical solution of coupler curve and orientation for reconfigurable single-driven 3-RRR planar parallel mechanism[J]. Acta Armamentarii, 2021, 42(5): 1074-1082. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO202105020.htm [7] DAI J S, GOSSELIN C, HUANG T. Stiffness analysis, motion design and reconfiguration study of parallel mechanisms and manipulators[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2016, 230(3): 339-340. doi: 10.1177/0954406216633958 [8] 伍帅, 徐洁琼, 王子汉, 等. 一类二自由度碰撞振动系统的余维二擦边分岔研究[J]. 振动与冲击, 2020, 39(20): 113-120. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ202020016.htmWU S, XU J Q, WANG Z H, et al. Co-dimensional-two grazing bifurcation of two-degree-of-freedom vibro-impact systems[J]. Journal of Vibration and Shock, 2020, 39(20): 113-120. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ202020016.htm [9] GAN D M, DAI J S, LIAO Q Z. Constraint analysis on mobility change of a novel metamorphic parallel mechanism[J]. Mechanism and Machine Theory, 2010, 45(12): 1864-1876. doi: 10.1016/j.mechmachtheory.2010.08.004 [10] ZHANG K T, DAI J S, FANG Y F. Topology and constraint analysis of phase change in the metamorphic chain and its evolved mechanism[J]. Journal of Mechanical Design, 2010, 132(12): 121001. doi: 10.1115/1.4002691 [11] GAN D M, DAI J S, LIAO Q Z. Mobility change in two types of metamorphic parallel mechanisms[J]. Journal of Mechanisms and Robotics, 2009, 1(4): 041007. doi: 10.1115/1.3211023 [12] 侯志利, 武文革, 李瑞琴, 等. 可控5R平面并联机构构型重构设计与实验研究[J]. 机械传动, 2016, 40(9): 56-60. https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201609012.htmHOU Z L, WU W G, LI R Q, et al. Configuration reconfigurable design and experimental study of controllable 5r planar parallel mechanism[J]. Journal of Mechanical Transmission, 2016, 40(9): 56-60. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201609012.htm [13] 邹琦, 曲海波, 郭盛. 一种三自由度可重构并联机构优化设计及性能分析[J]. 中国机械工程, 2018, 29(10): 1172-1178.ZOU Q, QU H B, GUO S, et al. Optimal design and performance analysis of a 3-DOF reconfigurable parallel mechanism[J]. China Mechanical Engineering, 2018, 29(10): 1172-1178. (in Chinese) [14] 孙辉辉, 罗建国, 丁军, 等. 缠绕式可重构柔索并联机器人驱动机构运动分析[J]. 华北科技学院学报, 2016, 13(6): 59-62. https://www.cnki.com.cn/Article/CJFDTOTAL-HBKJ201606013.htmSUN H H, LUO J G, DING J, et al. Analysis of driving mechanism motion of windingr econfigurable cable parallel robot[J]. Journal of North China Institute of Science and Technology, 2016, 13(6): 59-62. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HBKJ201606013.htm [15] CARBONARI L, CALLEGARI M, PALMIERI G, et al. A new class of reconfigurable parallel kinematic machines[J]. Mechanism and Machine Theory, 2014, 79: 173-183. [16] 沈惠平, 王达, 李菊, 等. 1T2R并联机的拓扑降耦设计其与运动性能分析[J]. 农业机械学报, 2021, 52(5): 370-377+426.SHEN H P, WANG D, LI J, et al. Topological coupling-reducing design and kinematic performance analysis for 1T2R parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(5): 370-377+426. (in Chinese) [17] 范旭伟, 杨莉莉, 程禹, 等. Stewart平台的最优构型设计方法研究[J]. 系统仿真学报, 2020, 32(10): 1981-1988. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ202010017.htmFANG X W, YANG L L, CHENG Y, et al. Research on optimal configuration design method of Stewart platform[J]. Journal of System Simulation, 2020, 32(10): 1981-1988. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ202010017.htm [18] 黄凯伟, 沈惠平, 李菊, 等. 一种具有部分运动解耦和符号式位置正解的分动空间2T1R并联机构拓扑设计与动力学建模[J]. 中国机械工程, 2022, 33(2): 160-169. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX202202005.htmHUANG K W, SHEN H P, LI J, et al. Topological design and dynamics modeling of a spatial 2T1R parallel mechanism with partially motion decoupling and symbolic forward kinematics[J]. China Mechanical Engineering, 2022, 33(2): 160-169. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX202202005.htm -


 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 122
- HTML全文浏览量: 29
- PDF下载量: 13
- 被引次数: 0
