




Research on Trajectory Planning and Vibration Suppression of Flexible Joint Manipulator
-
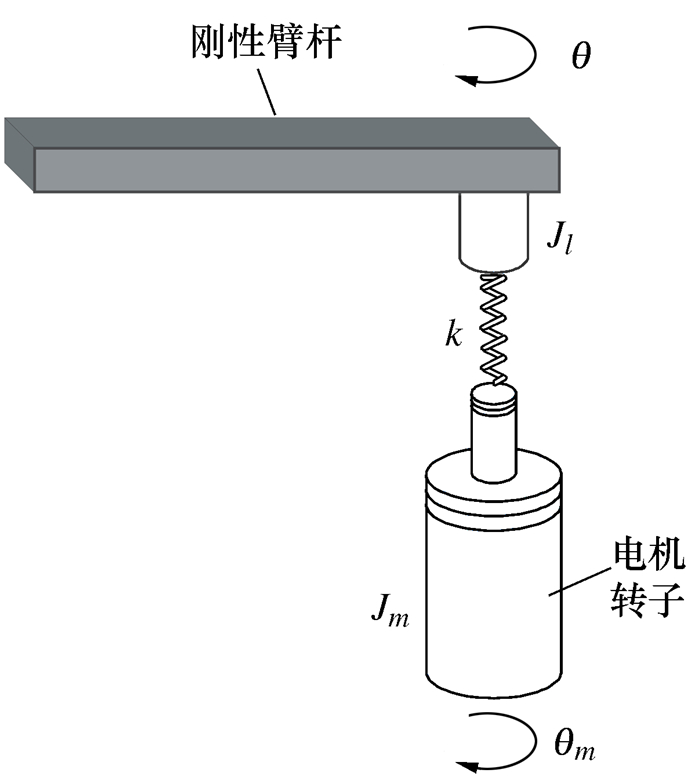
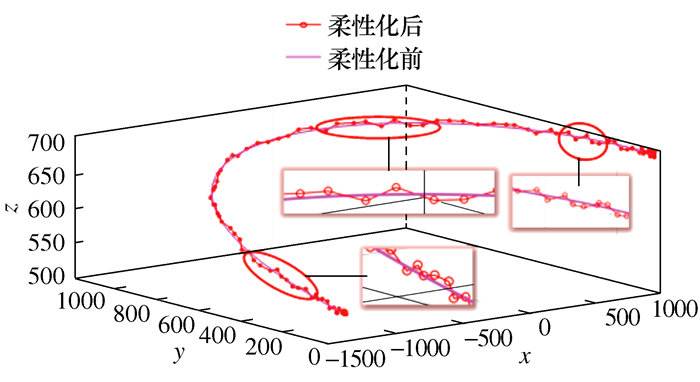
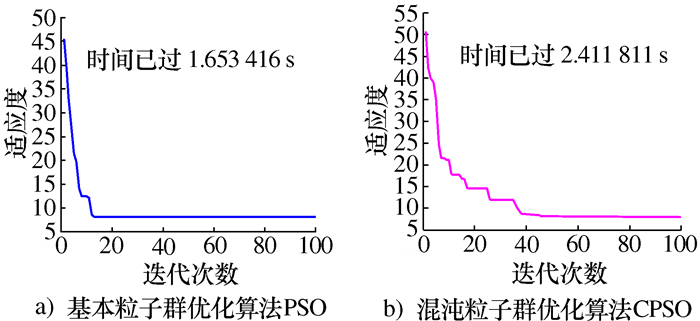
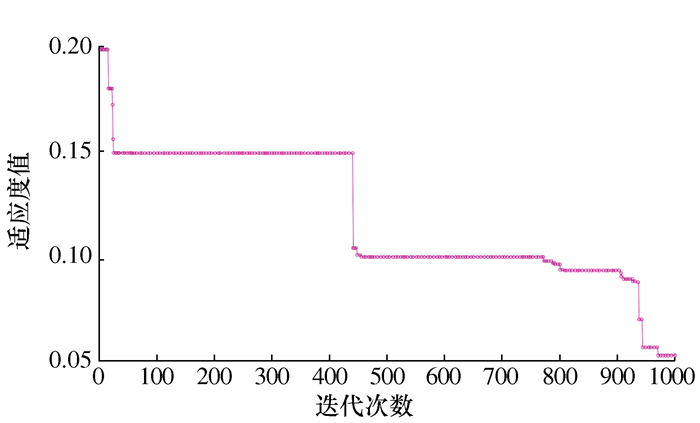
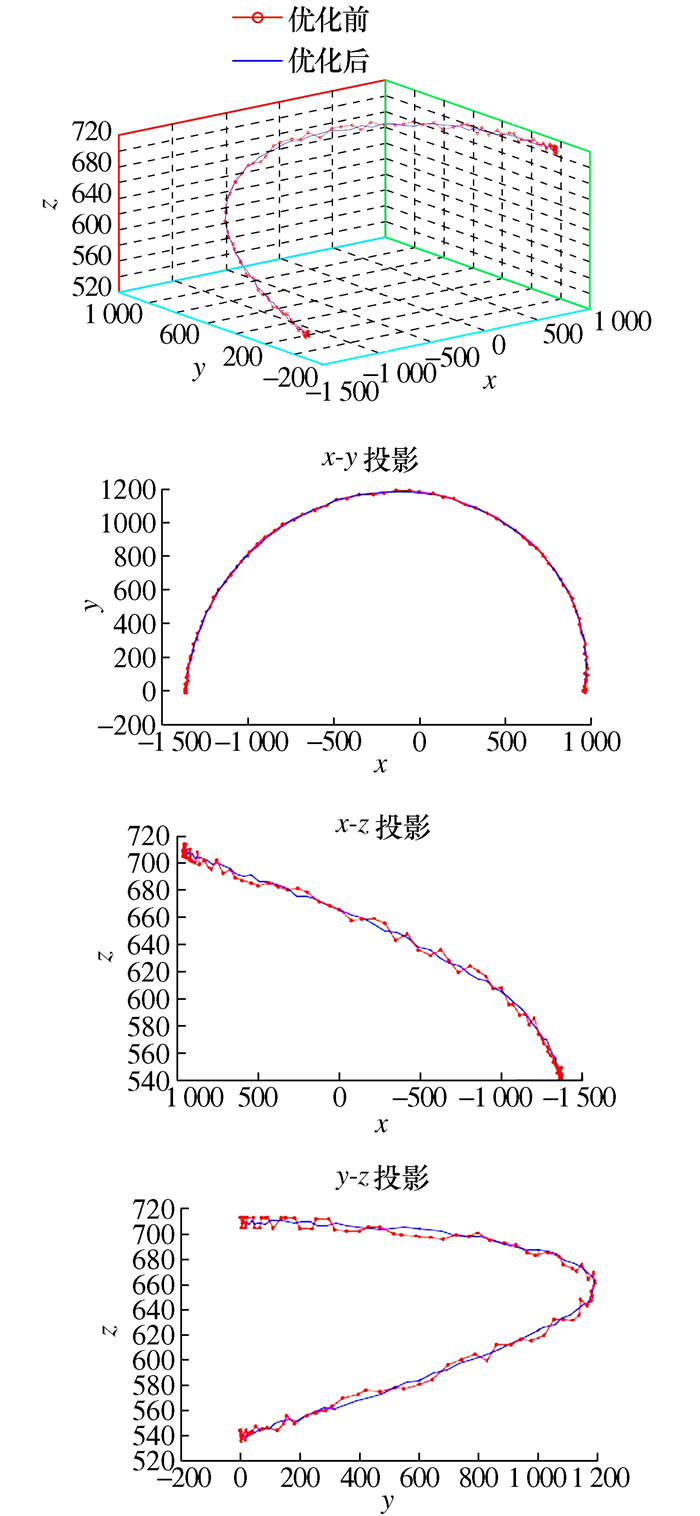
摘要: 针对工业机器人多自由度复杂机械臂系统, 对其建立多刚体运动学模型, 仿真验证末端运动轨迹的真确性。在此基础上, 对机械臂系统的末端关节进行柔性化处理, 添加随机柔性扰动, 得到刚柔耦合机械臂较为真实的末端轨迹曲线。提出了基于混沌粒子群优化算法(CPSO)的振动抑制方案, 通过CPSO算法对机械臂末端轨迹的插值参数进行优化, 定义了柔性末端的振动变形最小的目标函数, 并给出了具体的求解步骤。数值仿真结果表明, 在满足系统约束条件的情况下, 机械臂运行平稳, 不存在角速度突变的情况, 相比于基本粒子群优化算法, CPSO算法保证了粒子群体的随机性, 提高了群体的多样性, 且收敛速度较快, 不会陷入局部最优, 在CPSO优化下的柔性末端轨迹振动明显减小, 从而说明CPSO算法能够有效优化轨迹规划参数, 减小机械臂柔性末端的振动变形。Abstract: Aiming at the complex multi-freedom manipulator system of industrial robot, the multi-rigid body kinematics model was established to verify the authenticity of the end motion trajectory. On this basis, the end joints of the manipulator system were flexibly processed and random flexible perturbations were added to obtain the real end trajectory curve of the rigid-flexible coupling manipulator. The vibration suppression scheme based on chaotic particle swarm optimization (CPSO) was proposed. The interpolation parameters of the end trajectory of the manipulator were optimized by CPSO algorithm. The objective function of the flexible end was defined to minimize the vibration deformation, and the specific solving steps were given. Numerical simulation results show that under the condition of satisfying the constraints of the system, the manipulator runs smoothly without angular velocity mutation. Compared with the fundamental particle swarm optimization algorithm, the CPSO algorithm ensures the randomness of the particle population, improves the diversity of the population, and has a faster convergence speed without falling into local optimum. Under CPSO optimization, the trajectory vibration of the flexible end of the manipulator is significantly reduced, which indicates that the CPSO algorithm can effectively optimize the trajectory planning parameters and reduce the vibration deformation of the flexible end of the manipulator.
-
Key words:
- flexible joint manipulator /
- trajectory planning /
- vibration suppression /
- CPSO
-
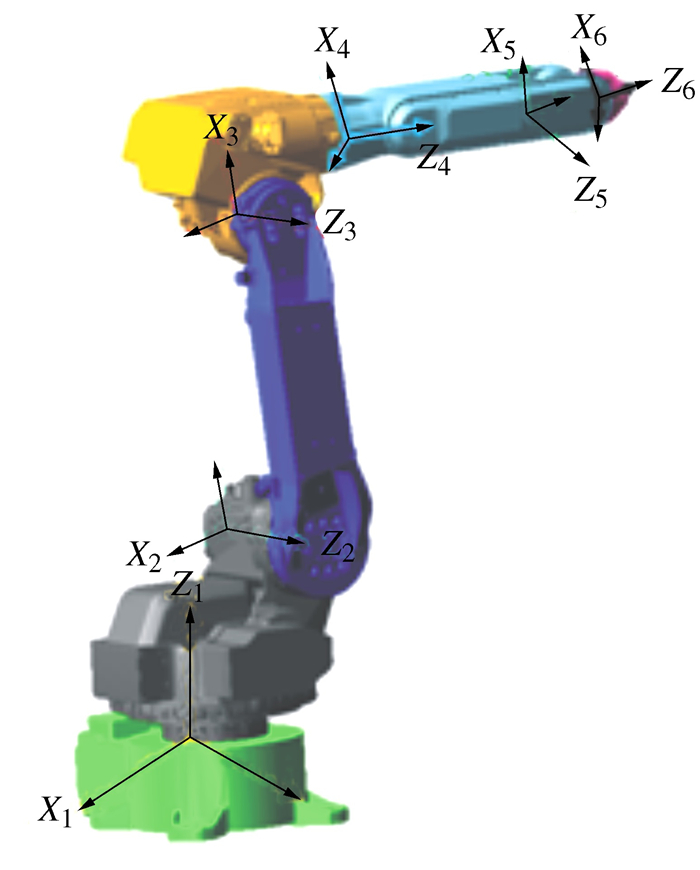
表 1 QJR6-1机器人D-H坐标
i θi/(°) di/mm ai/mm αi/(°) 1 θ1 0 160 90 2 θ2 0 580 0 3 θ3 0 130 90 4 θ4 688.5 0 90 5 θ5 0 0 -90 6 θ6 108 0 0  下载: 导出CSV
下载: 导出CSV
表 2 伺服电机参数规格
参数 数值 额定转矩 2.39 NM 额定电流 4 A 线电阻 2.01 Ω 反电势 40 V 转动惯量 1.51×10-4 kg·m2 额定转速 300 r/min
下载: 导出CSV
表 4 各关节转角范围
关节i [θimin, θimax] 1 [-168°, 168°] 2 [-89°, 150°] 3 [-111°, 87°] 4 [-170°, 170°] 5 [-125°, 125°] 6 [-360°, 360°]
下载: 导出CSV
-
[1] 张玉玲, 谷勇霞, 赵杰亮, 等. 机械臂臂杆刚度主动控制下的末端振动特性研究[J]. 力学学报, 2020, 52(4): 985-995. https://www.cnki.com.cn/Article/CJFDTOTAL-LXXB202004010.htmZHANG Y L, GU Y X, ZHAO J L, et al. Research on vibration characteristics of the manipulator end under active control of arm stiffness[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52(4): 985-995. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-LXXB202004010.htm [2] 李扬, 侯加林, 苑进, 等. 基于改进PSO的模糊PID高枝修剪机械臂末端抑振算法与试验[J]. 农业工程学报, 2017, 33(10): 49-58. https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201710007.htmLI Y, HOU J L, YUAN J, et al. Experiment and vibration suppression algorithm for high-branch pruning manipulator based on fuzzy PID with improved PSO[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(10): 49-58. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201710007.htm [3] 李琳, 胡锡钦, 邹焱飚. 模态参数识别和输入整形相结合的抑振方法[J]. 振动、测试与诊断, 2019, 39(3): 565-570. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCS201903017.htmLI L, HU X Q, ZOU Y B. Residual vibration suppression by an integrated method of parameter identification and input shaping[J]. Journal of Vibration, Measurement & Diagnosis, 2019, 39(3): 565-570. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCS201903017.htm [4] 卢明明, 陈建中, 周家康, 等. 改进人工蜂群在三维椭圆振动切削颤振抑制中的应用[J]. 光学精密工程, 2019, 27(4): 879-888.LU M M, CHEN J Z, ZHOU J K, et al. Application of improved artificial bee colony algorithm on chatter suppression in three-dimensional elliptical vibration cutting[J] Optics and Precision Engineering, 2019, 27(4): 879-888. (in Chinese) [5] PHAM M N, HAMELIN P, HAZEL B, et al. A two-stage state feedback controller supported by disturbance-state observer for vibration control of a flexible-joint robot[J]. Robotica, 2020, 38(6): 1082-1104. doi: 10.1017/S0263574719001267 [6] KRAUS K, ŠIKA Z, BENEŠ P, et al. Mechatronic robot arm with active vibration absorbers[J]. Journal of Vibration and Control, 2020, 26(13-14): 1145-1156. doi: 10.1177/1077546320918488 [7] CHEN Z S, WANG X S. Dynamic modeling and residual vibration suppression of the redundantly-actuated cable driving parallel manipulator[J]. IEEE Access, 2020, 8: 99422-99430. doi: 10.1109/ACCESS.2020.2997766 [8] NEWMAN M, LU K Y, KHOSHDARREGI M. Suppression of robot vibrations using input shaping and learning-based structural models[J]. Journal of Intelligent Material Systems and Structures, 2021, 32(9): 1001-1012. doi: 10.1177/1045389X20947166 [9] BIGLARI H, GOLMOHAMMADI M, HAYATI S, et al. Vibration reduction of a flexible robot link using a frictional damper[J]. Journal of Vibration and Control, 2021, 27(9-10): 985-997. [10] 杨佳炜. 带有柔性关节的空间机械臂系统的振动控制[D]. 南京: 南京航空航天大学, 2019.YANG J W. Vibration suppression of space manipulator system with flexible joints[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019. (in Chinese) [11] 高晓飞, 李春书, 齐立哲, 等. 6R轻量化关节机器人的静刚度建模及分析[J]. 河北工业大学学报, 2017, 46(3): 29-34. https://www.cnki.com.cn/Article/CJFDTOTAL-HBGB201703006.htmGAO X F, LI C S, QI L Z, et al. On static stiffness modeling of 6R lightweight joint robot[J]. Journal of Hebei University of Technology, 2017, 46(3): 29-34. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HBGB201703006.htm [12] 杨永泰. 空间柔性机械臂动力学建模、轨迹规划与振动抑制研究[D]. 北京: 北京理工大学, 2014.YANG Y T. Dynamic modeling, trajectory planning and vibration suppressing of the spatial flexible manipulator[D]. Beijing: Beijing Institute of Technology, 2014. (in Chinese) [13] KENNEDY J, EBERHART R. Particle swarm optimization[C]//Proceedings of ICNN'95-International Conference on Neural Networks. Perth: IEEE, 1995: 1942-1948. [14] 刘华蓥, 林玉娥, 张君施. 基于混沌搜索解决早熟收敛的混合粒子群算法[J]. 计算机工程与应用, 2006, 42(13): 77-79.LIU H Y, LIN Y E, ZHANG J S. A hybrid particle swarm optimization based on chaos strategy to handle local convergence[J]. Computer Engineering and Applications, 2006, 42(13): 77-79. (in Chinese) [15] 夏红伟, 翟彦斌, 马广程, 等. 基于混沌粒子群优化算法的空间机械臂轨迹规划算法[J]. 中国惯性技术学报, 2014, 22(2): 211-216.XIA H W, ZHAI Y B, MA G C, et al. Path planning algorithm of space manipulator based on chaos particle swarm optimization algorithm[J]. Journal of Chinese Inertial Technology, 2014, 22(2): 211-216. (in Chinese) -




 点击查看大图
点击查看大图
图(9) / 表(4)
计量
- 文章访问数: 310
- HTML全文浏览量: 135
- PDF下载量: 37
- 被引次数: 0
