作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2021年 40卷 第5期
2021, 40(5): 657-662.
doi: 10.13433/j.cnki.1003-8728.20200080
 摘要
摘要 HTML
HTML PDF 3263KB
PDF 3263KB
摘要:
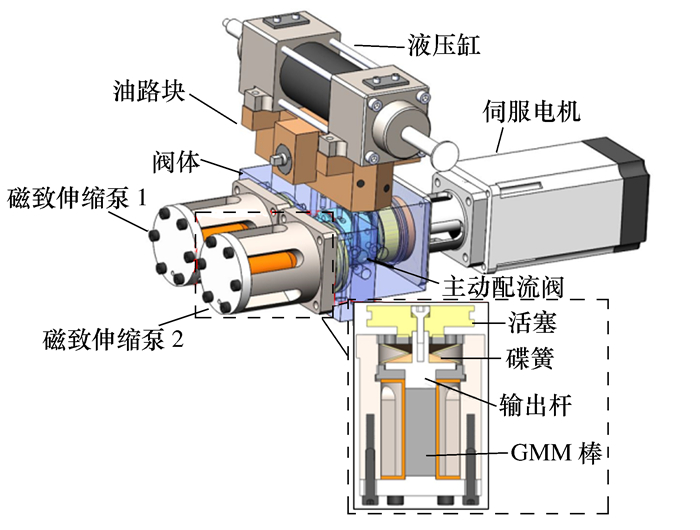
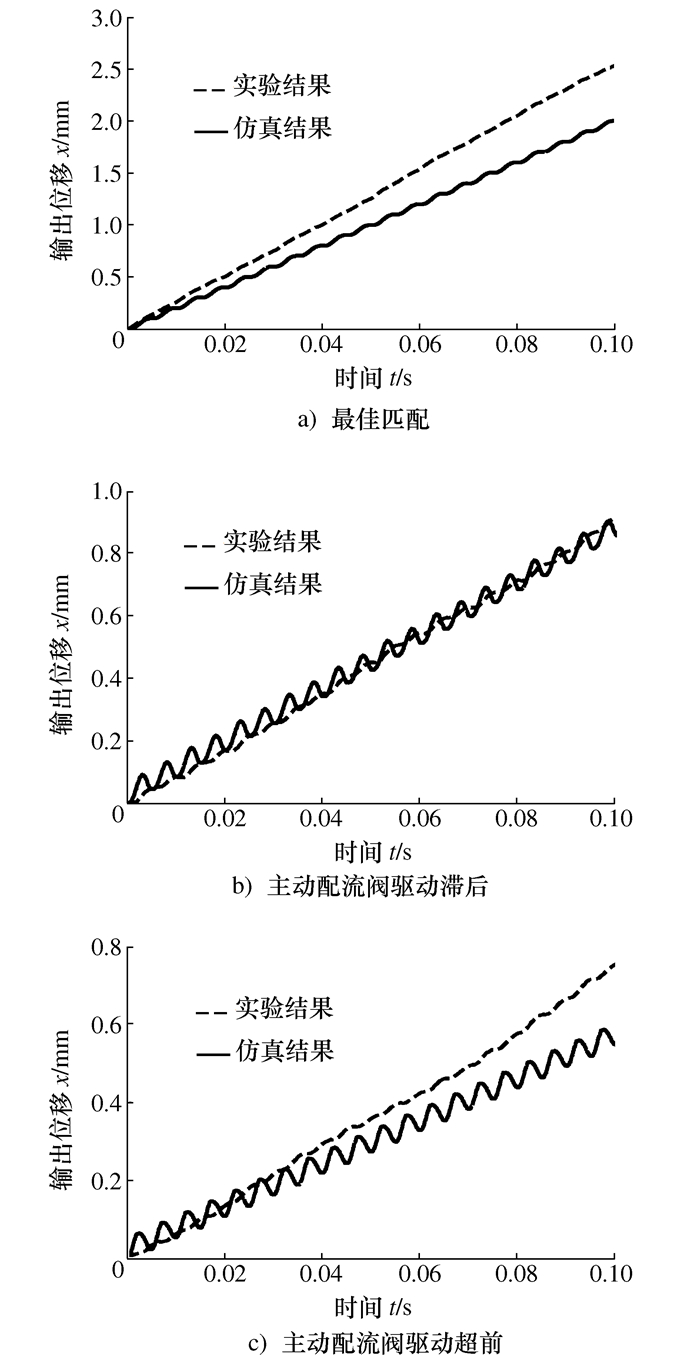
设计了一种磁致伸缩轴向双柱塞泵驱动的作动器,并提出了一种新型的主动配流阀,以双磁致伸缩泵为核心动力元件,组成电静液作动系统,实现了作动器的双向连续位移输出。通过建立作动器系统各部分的数学模型,从原理上分析作动器的输出特性。搭建实验平台测试并验证了作动器在相同转速不同相位角下的流量输出特性。通过数学模型与实验的对比,预测了在不同管路长度下作动器的输出特性变化规律。实验结果表明,在驱动频率180 Hz下,最大输出流量可达2.7 L/min。
设计了一种磁致伸缩轴向双柱塞泵驱动的作动器,并提出了一种新型的主动配流阀,以双磁致伸缩泵为核心动力元件,组成电静液作动系统,实现了作动器的双向连续位移输出。通过建立作动器系统各部分的数学模型,从原理上分析作动器的输出特性。搭建实验平台测试并验证了作动器在相同转速不同相位角下的流量输出特性。通过数学模型与实验的对比,预测了在不同管路长度下作动器的输出特性变化规律。实验结果表明,在驱动频率180 Hz下,最大输出流量可达2.7 L/min。






2021, 40(5): 663-669.
doi: 10.13433/j.cnki.1003-8728.20200070
摘要:
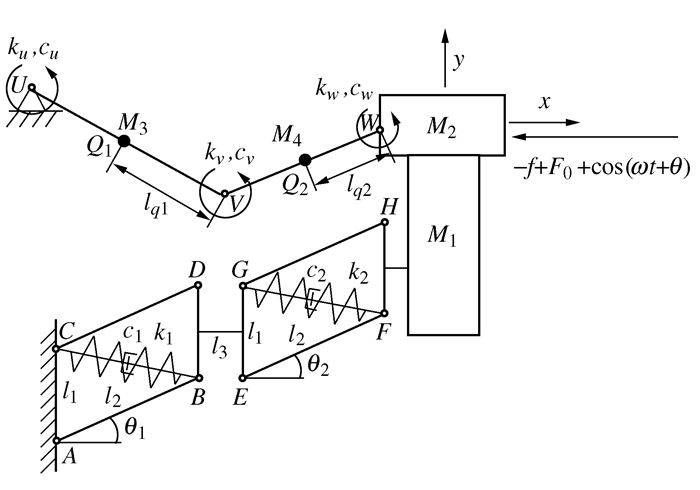
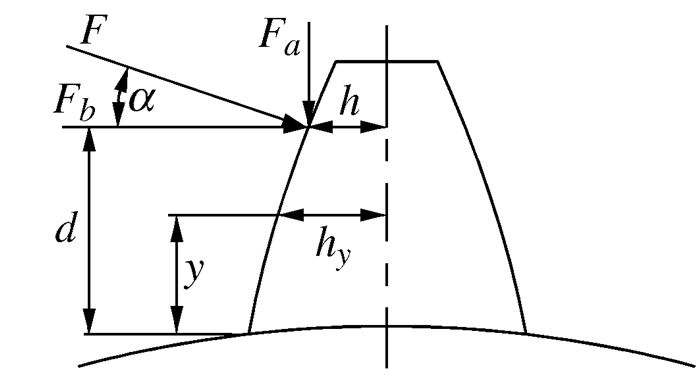
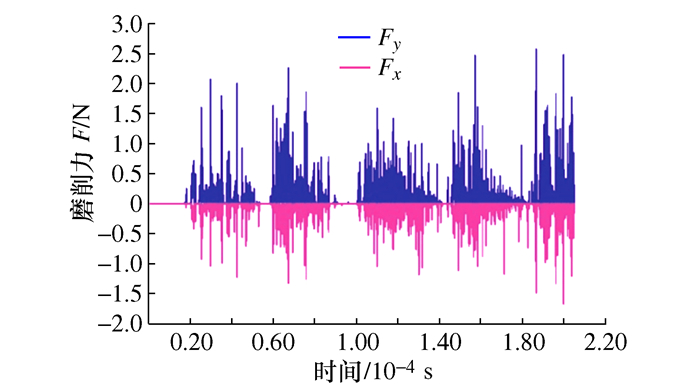
利用双直角坐标法求解抗振外骨骼辅助铆接的人机耦合力学模型,根据拉格朗日原理建立铆接工具水平方向和垂直方向的运动微分方程,得到影响抗振外骨骼减振性能的减振器参数。基于人机耦合力学模型和现有外骨骼样机参数,以标准正交表L16(45)设计5因素4水平的正交仿真试验,分析减振器参数对抗振外骨骼减振性能的影响。ADAMS仿真试验结果表明:减振器参数对水平方向力Fx和合力均值μF影响显著,而对竖直方向力Fy影响较小;减振器参数对Fx的影响显著性排序为:l1>c2>k1>k2>c1, 对μF的影响显著性排序为:l1>c2>k2>k1>c1;减振器安装位置l1是Fx和μF的主要影响因素,试验范围内的最佳参数组合为l1(4)k1(4)k2(4)c1(4)c2(4)。试验结果确定了减振器参数对减振性能的影响,为减振器参数设计及类似的减振结构设计提供参考依据。
利用双直角坐标法求解抗振外骨骼辅助铆接的人机耦合力学模型,根据拉格朗日原理建立铆接工具水平方向和垂直方向的运动微分方程,得到影响抗振外骨骼减振性能的减振器参数。基于人机耦合力学模型和现有外骨骼样机参数,以标准正交表L16(45)设计5因素4水平的正交仿真试验,分析减振器参数对抗振外骨骼减振性能的影响。ADAMS仿真试验结果表明:减振器参数对水平方向力Fx和合力均值μF影响显著,而对竖直方向力Fy影响较小;减振器参数对Fx的影响显著性排序为:l1>c2>k1>k2>c1, 对μF的影响显著性排序为:l1>c2>k2>k1>c1;减振器安装位置l1是Fx和μF的主要影响因素,试验范围内的最佳参数组合为l1(4)k1(4)k2(4)c1(4)c2(4)。试验结果确定了减振器参数对减振性能的影响,为减振器参数设计及类似的减振结构设计提供参考依据。





2021, 40(5): 670-677.
doi: 10.13433/j.cnki.1003-8728.20200114
摘要:
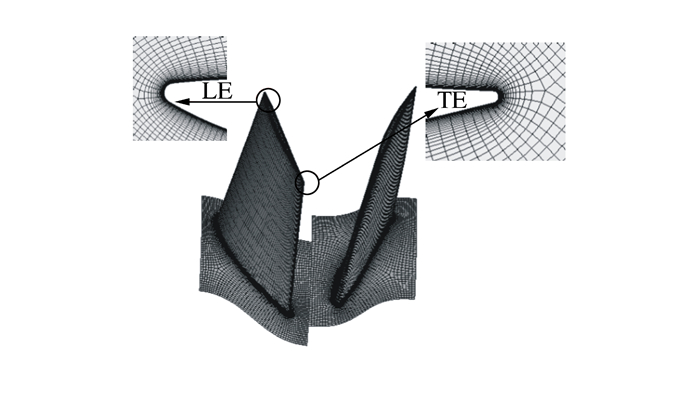
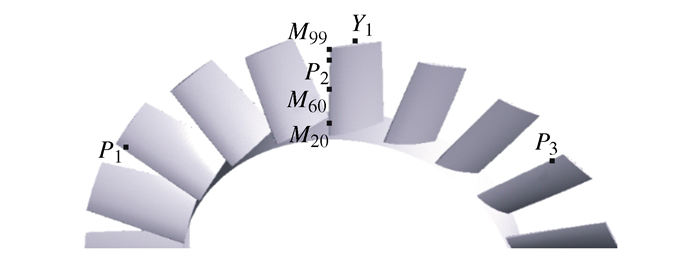
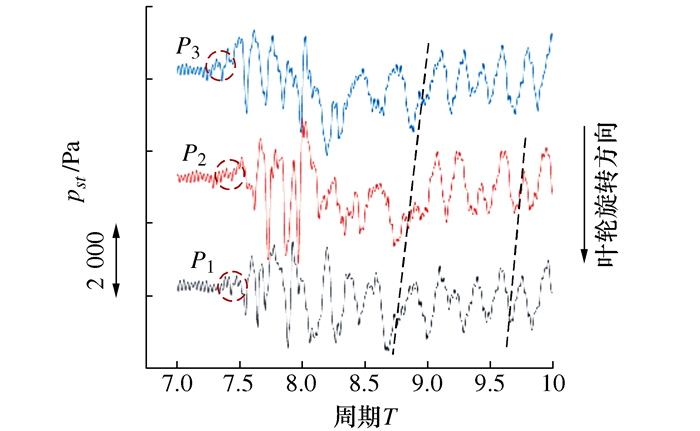
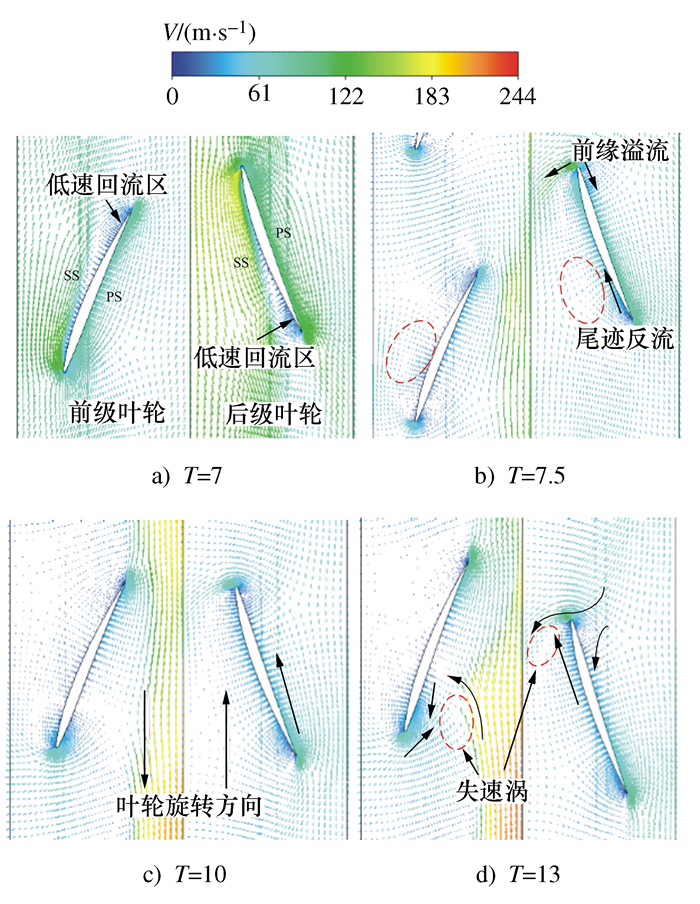
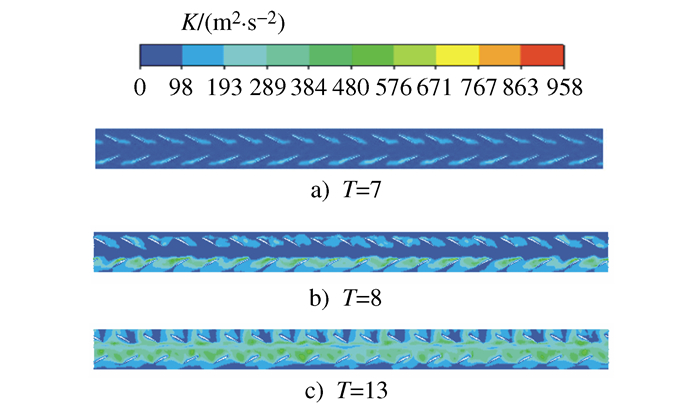
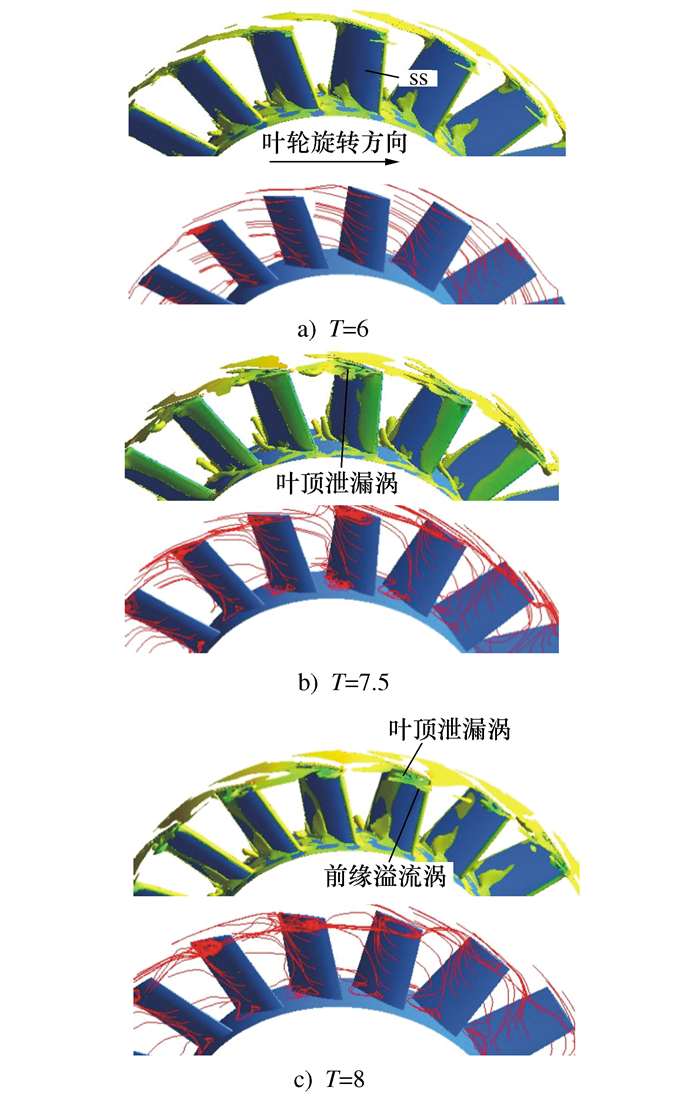
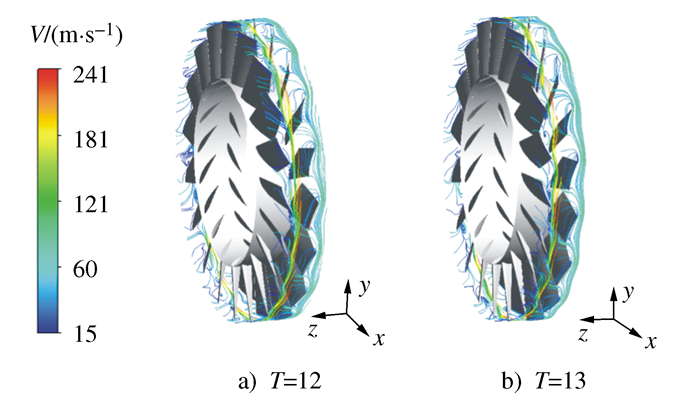
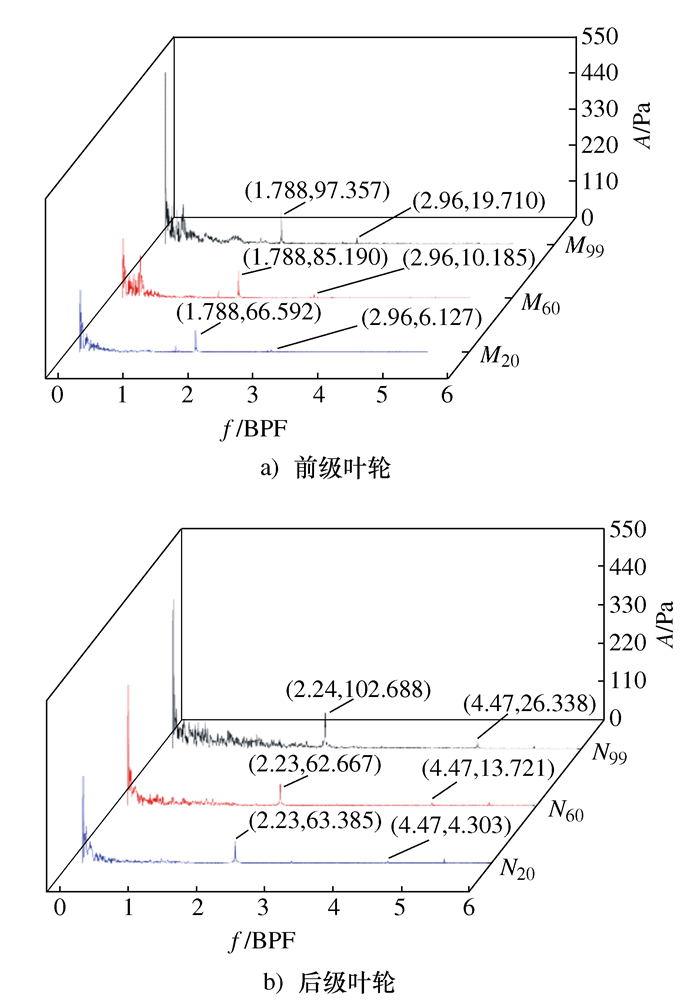
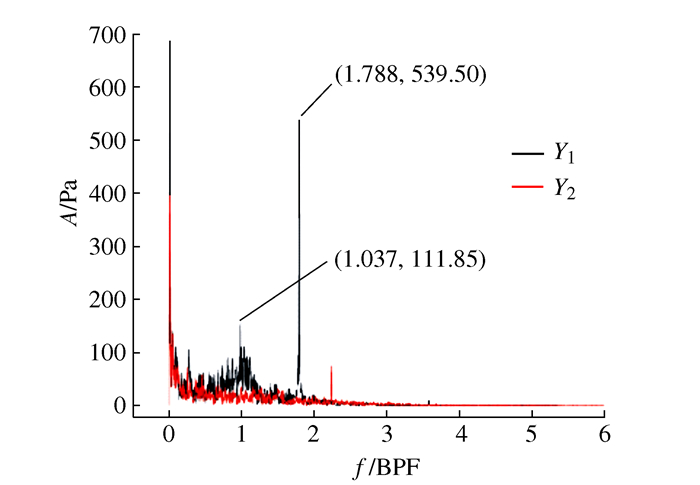
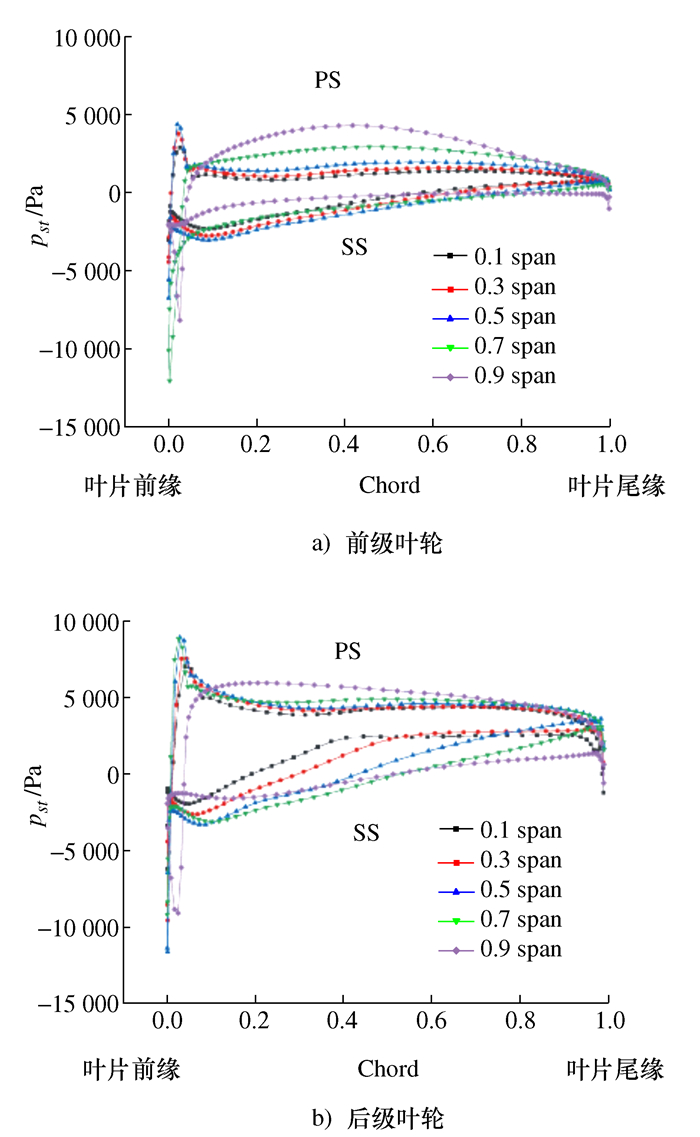
为了揭示畸变进气条件下,压入式矿用对旋主通风机内部非定常流动特性及失速机理,将分离涡模拟(Detached eddy simulation,DES)方法和出口节流阀函数相结合,对对旋风机三维全流道内的流动进行数值模拟与分析。结果表明:在节流阀系数为0.8的开度下,两级叶轮区域均出现了失速扰动,且扰动的起始位置均发生在叶顶处;虽然后级叶轮叶根区域也同样出现扰动,但这种扰动与叶顶区域的扰动是各自独立形成的,“突尖型”失速先兆伴随着“前缘溢流”与“尾迹反流”现象的发生而出现。虽然后级叶轮相对于前级叶轮先发生失速先兆现象,但随着流量的减小,在完全失速阶段,前级叶轮叶顶间隙内的气流脉动强度明显高于后级叶轮,两级叶轮之间的干涉作用强烈。
为了揭示畸变进气条件下,压入式矿用对旋主通风机内部非定常流动特性及失速机理,将分离涡模拟(Detached eddy simulation,DES)方法和出口节流阀函数相结合,对对旋风机三维全流道内的流动进行数值模拟与分析。结果表明:在节流阀系数为0.8的开度下,两级叶轮区域均出现了失速扰动,且扰动的起始位置均发生在叶顶处;虽然后级叶轮叶根区域也同样出现扰动,但这种扰动与叶顶区域的扰动是各自独立形成的,“突尖型”失速先兆伴随着“前缘溢流”与“尾迹反流”现象的发生而出现。虽然后级叶轮相对于前级叶轮先发生失速先兆现象,但随着流量的减小,在完全失速阶段,前级叶轮叶顶间隙内的气流脉动强度明显高于后级叶轮,两级叶轮之间的干涉作用强烈。




2021, 40(5): 678-689.
doi: 10.13433/j.cnki.1003-8728.20200104
摘要:
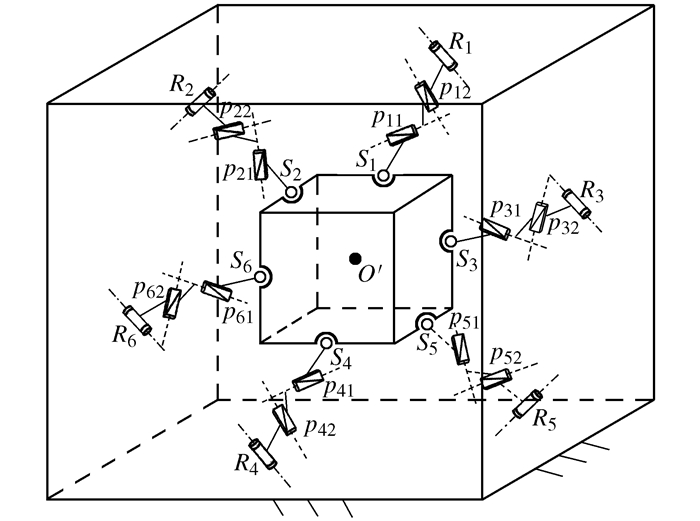
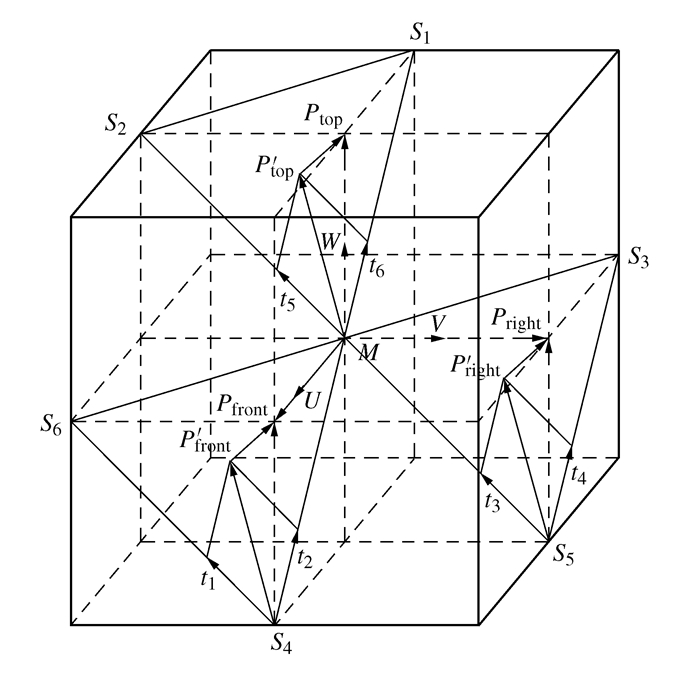
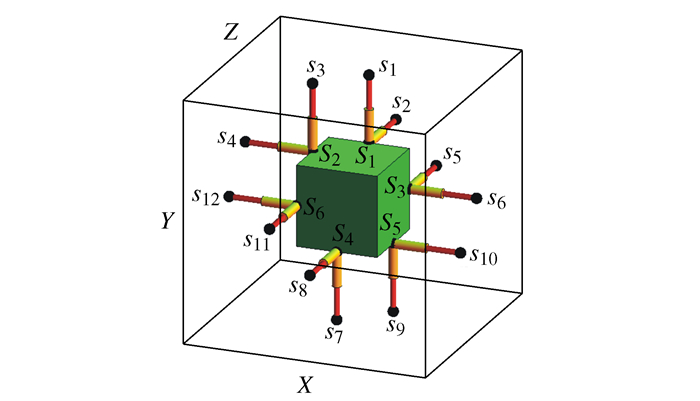
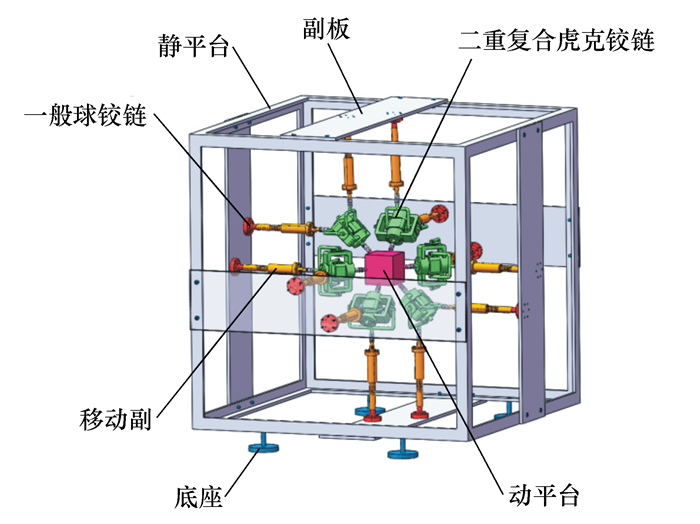
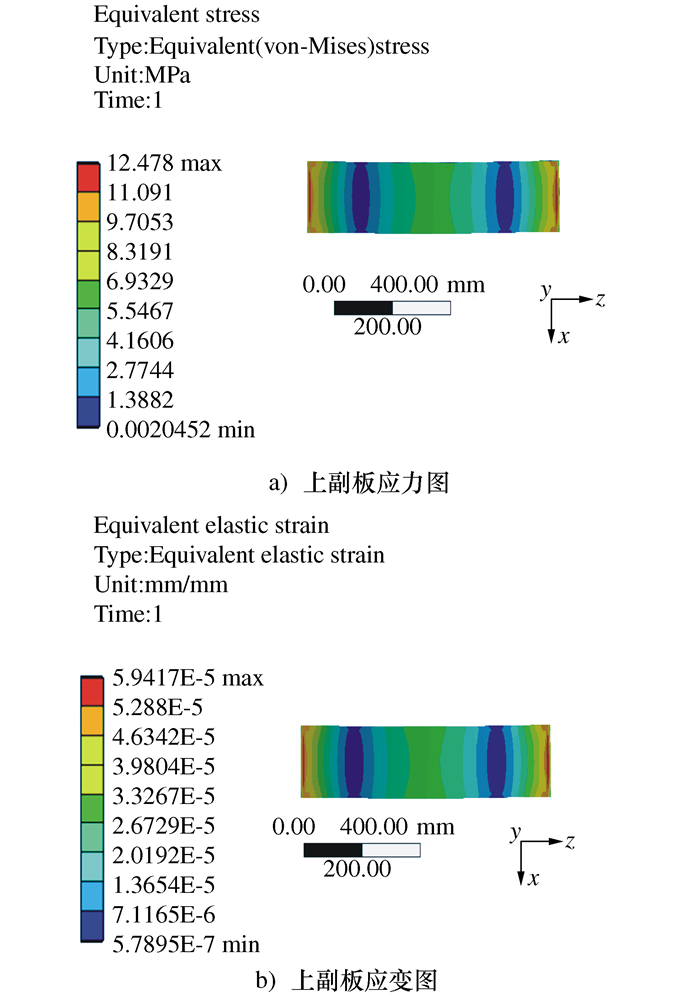
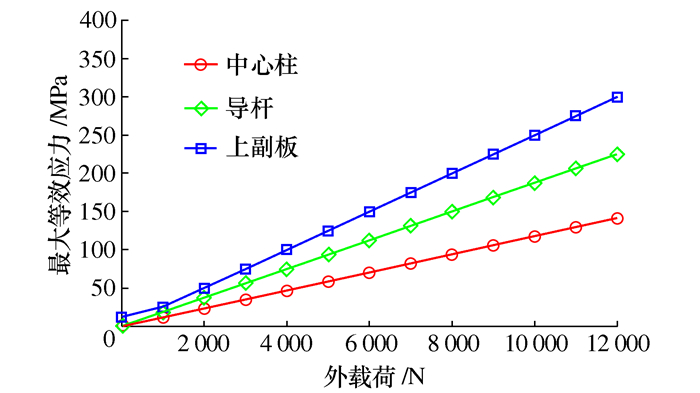
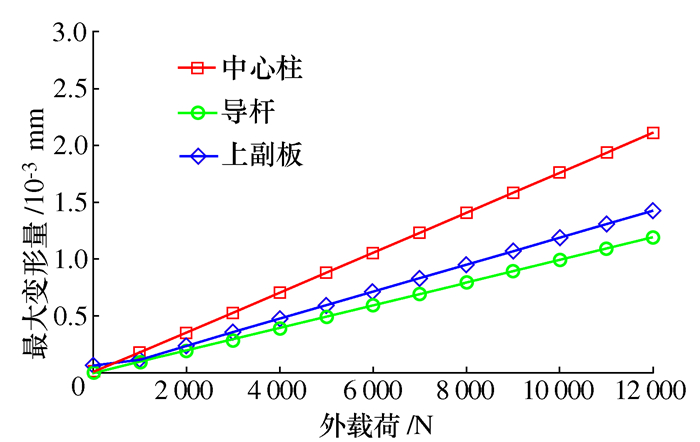
针对传统Stewart并联机器人耦合度较高导致运动学求解困难的问题,给出一种衍生拓扑构型,并详细设计了其结构模型。基于方位特征集理论,以单开链为支路单元,对机构的拓扑构型进行了剖析,计算了自由度和耦合度,结果分别为6和1;推导并验证了正向、反向运动学解析方程;为满足运动要求,发明了一种复合铰链以及一种可以转换主、从运动的移动副;加工制造了机器人的实物样机,并校核了重要零部件的强度,同时还得出实物样机可承受的最大静态载荷约为12 000 N。上述方案及结论为六自由度并联机器人的结构优化、动力学控制奠定了理论基础。
针对传统Stewart并联机器人耦合度较高导致运动学求解困难的问题,给出一种衍生拓扑构型,并详细设计了其结构模型。基于方位特征集理论,以单开链为支路单元,对机构的拓扑构型进行了剖析,计算了自由度和耦合度,结果分别为6和1;推导并验证了正向、反向运动学解析方程;为满足运动要求,发明了一种复合铰链以及一种可以转换主、从运动的移动副;加工制造了机器人的实物样机,并校核了重要零部件的强度,同时还得出实物样机可承受的最大静态载荷约为12 000 N。上述方案及结论为六自由度并联机器人的结构优化、动力学控制奠定了理论基础。







2021, 40(5): 690-693.
doi: 10.13433/j.cnki.1003-8728.20200295
摘要:
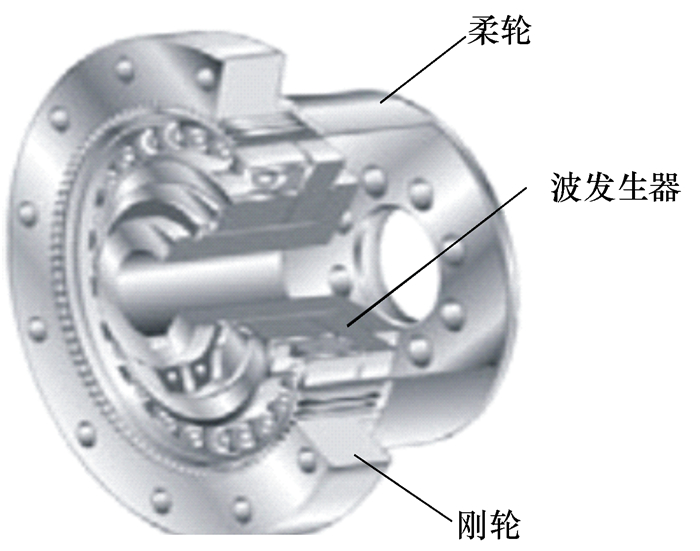
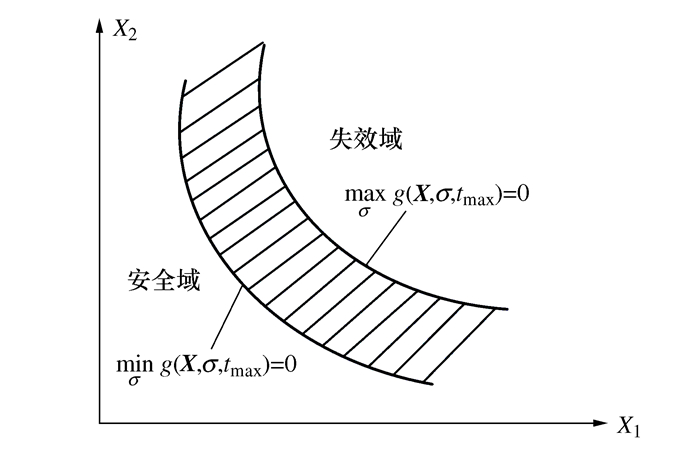
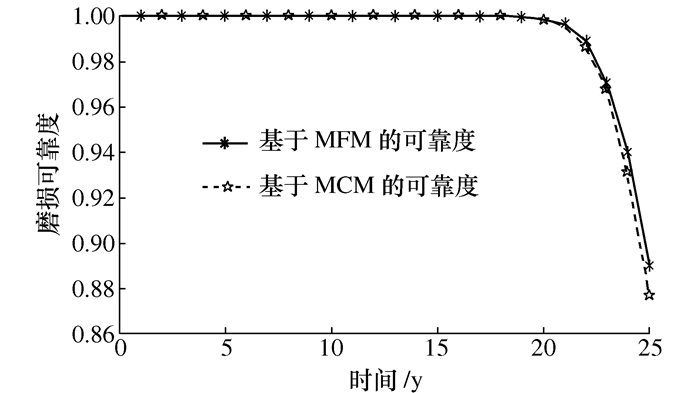
由于数据匮乏与性能退化,谐波减速器的可靠性呈现出显著的概率-区间不确定性混合与时变特征。针对这一问题,提出一种混合时变可靠性分析的单调函数法。首先,基于应力-强度干涉理论构建谐波减速器的混合时变可靠性模型;其次,通过分析可靠性模型动态响应关于时间变量的单调性,以消去时间变量的影响;进一步结合偏导数判断可靠性模型响应关于区间变量的单调性,将概率-区间混合可靠性转换为概率静态可靠性,然后利用蒙特卡罗法求解谐波减速器的可靠度。结果表明:所提方法有效降低了计算复杂性,并准确反映出谐波减速器可靠性的动态变化过程。
由于数据匮乏与性能退化,谐波减速器的可靠性呈现出显著的概率-区间不确定性混合与时变特征。针对这一问题,提出一种混合时变可靠性分析的单调函数法。首先,基于应力-强度干涉理论构建谐波减速器的混合时变可靠性模型;其次,通过分析可靠性模型动态响应关于时间变量的单调性,以消去时间变量的影响;进一步结合偏导数判断可靠性模型响应关于区间变量的单调性,将概率-区间混合可靠性转换为概率静态可靠性,然后利用蒙特卡罗法求解谐波减速器的可靠度。结果表明:所提方法有效降低了计算复杂性,并准确反映出谐波减速器可靠性的动态变化过程。
2021, 40(5): 694-700.
doi: 10.13433/j.cnki.1003-8728.20200125
摘要:
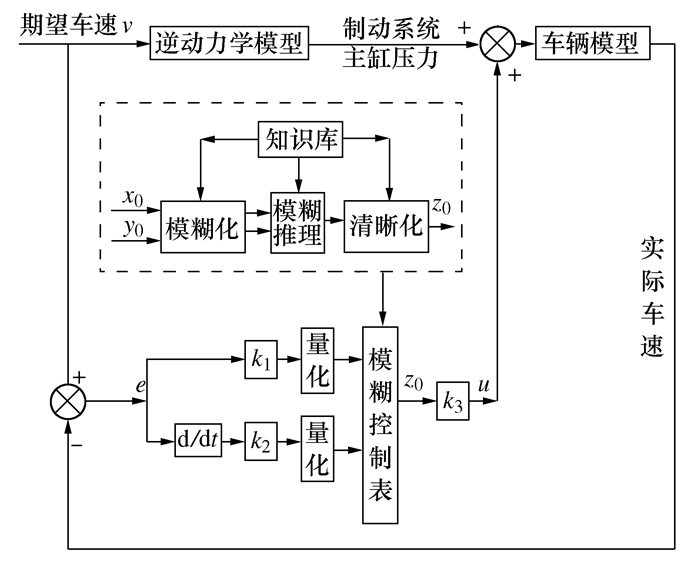
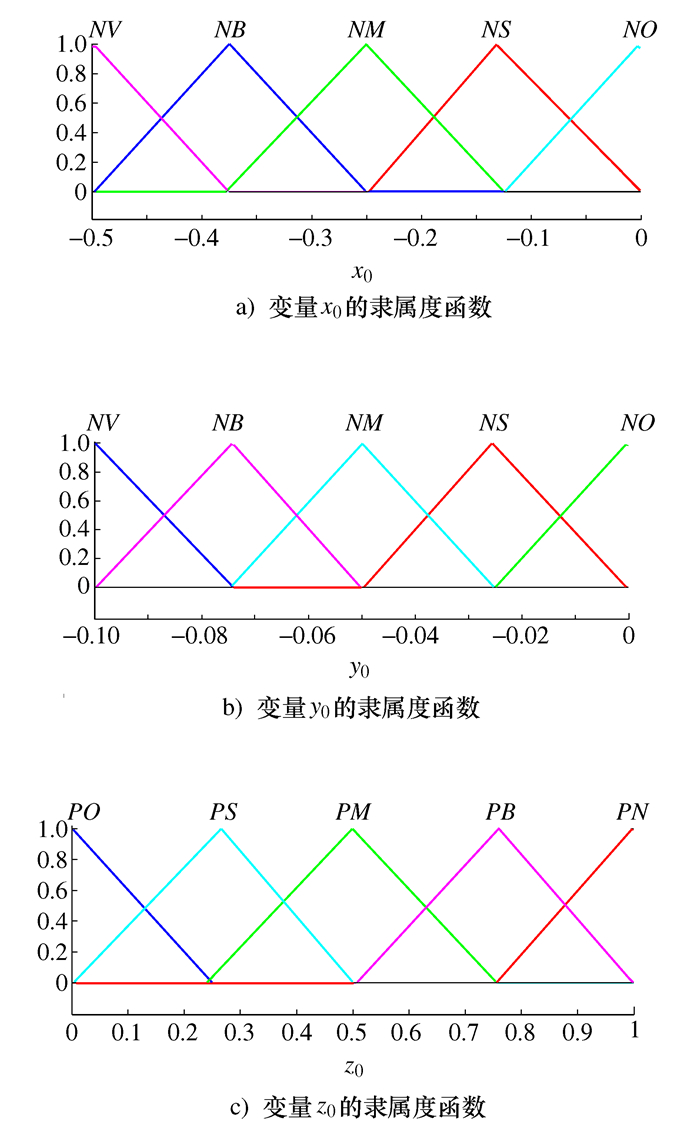
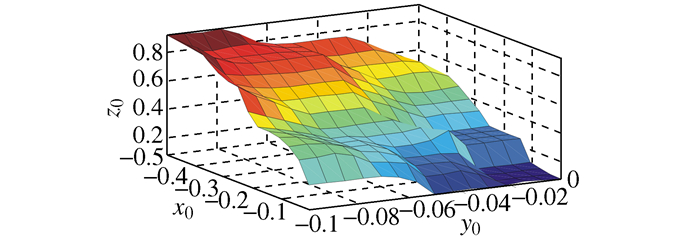
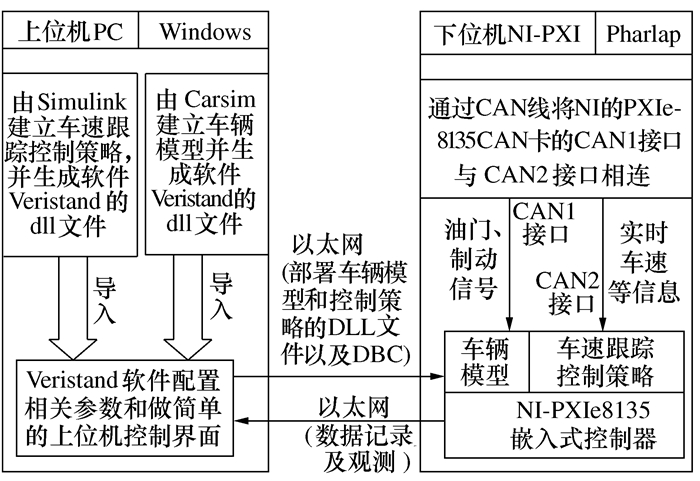
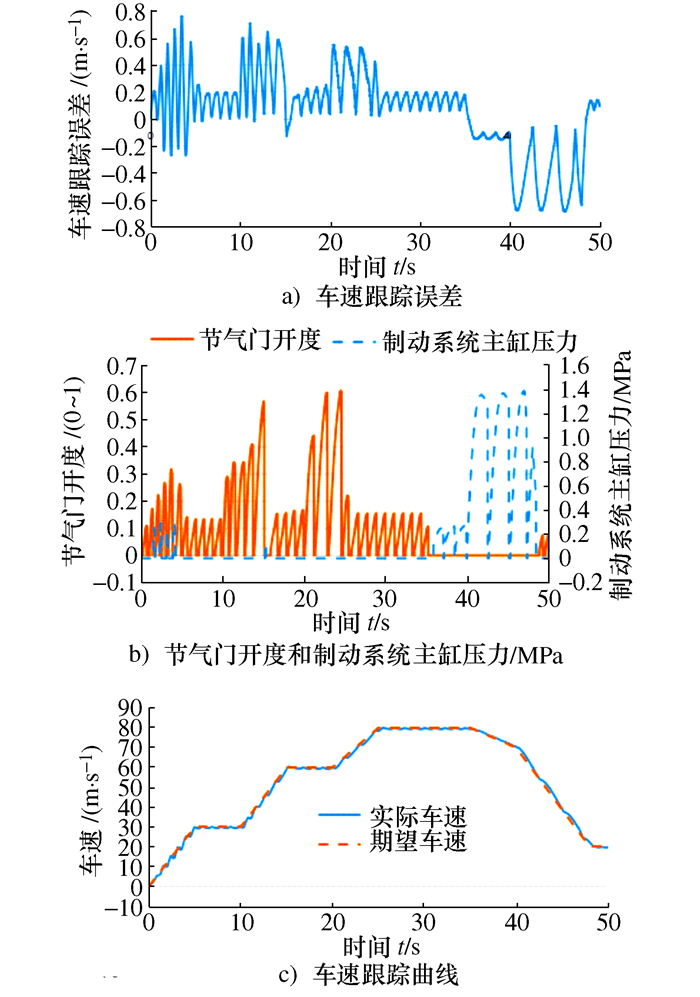
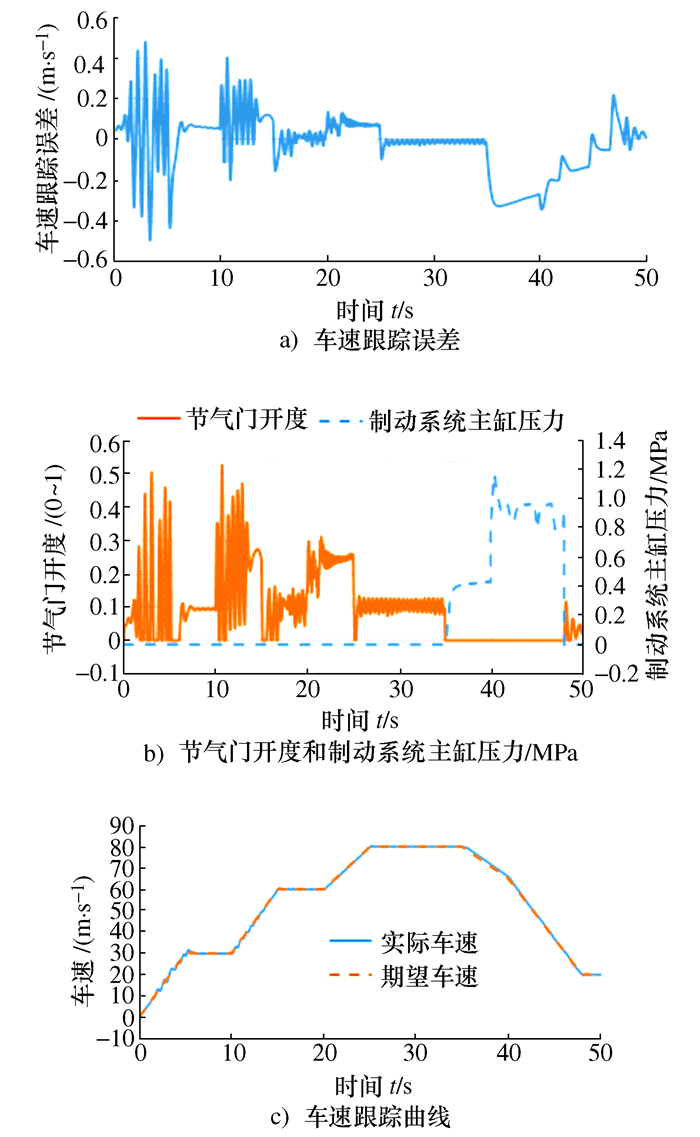
为了在满足乘坐舒适性的前提下提高智能车辆纵向车速跟随控制的精度,提出了一种具有自适应控制系统特性符合驾驶意图以及驾驶员行为特性的纵向控制策略。首先,设计油门和制动切换策略,依据期望车速计算期望加/减速度,并以此获得驾驶意图完成油门和制动的切换控制;其次,提出了一种基于模糊控制的制动控制策略;除此之外,设计了一种比例增益可调的PI油门控制策略。最后,将本文所设计的控制策略与目前普遍研究的PID车速跟踪控制策略分别进行NI实时系统仿真测试。结果表明:本文提出的基于驾驶员特性的车速跟踪控制器有效提高了对参考车速的跟踪精度以及乘坐舒适性。
为了在满足乘坐舒适性的前提下提高智能车辆纵向车速跟随控制的精度,提出了一种具有自适应控制系统特性符合驾驶意图以及驾驶员行为特性的纵向控制策略。首先,设计油门和制动切换策略,依据期望车速计算期望加/减速度,并以此获得驾驶意图完成油门和制动的切换控制;其次,提出了一种基于模糊控制的制动控制策略;除此之外,设计了一种比例增益可调的PI油门控制策略。最后,将本文所设计的控制策略与目前普遍研究的PID车速跟踪控制策略分别进行NI实时系统仿真测试。结果表明:本文提出的基于驾驶员特性的车速跟踪控制器有效提高了对参考车速的跟踪精度以及乘坐舒适性。
2021, 40(5): 701-709.
doi: 10.13433/j.cnki.1003-8728.20200313
摘要:
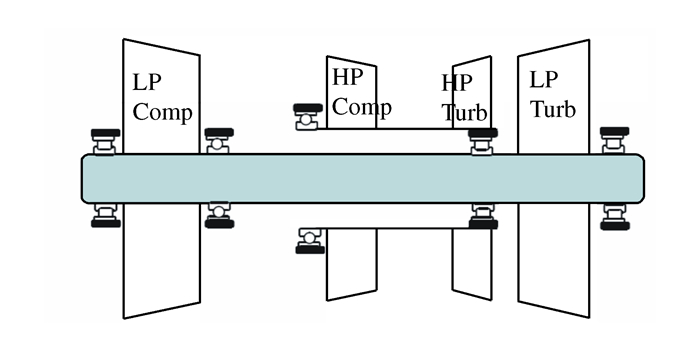
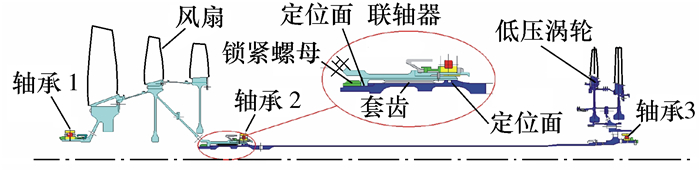
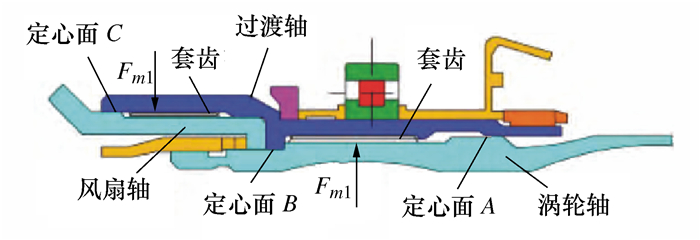
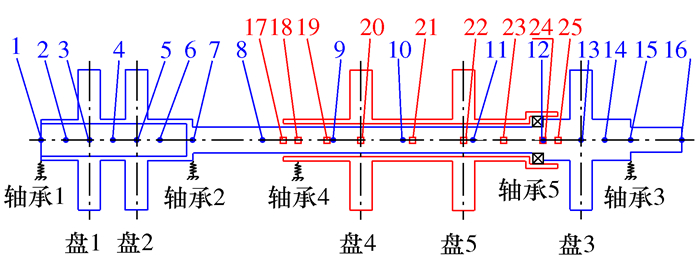
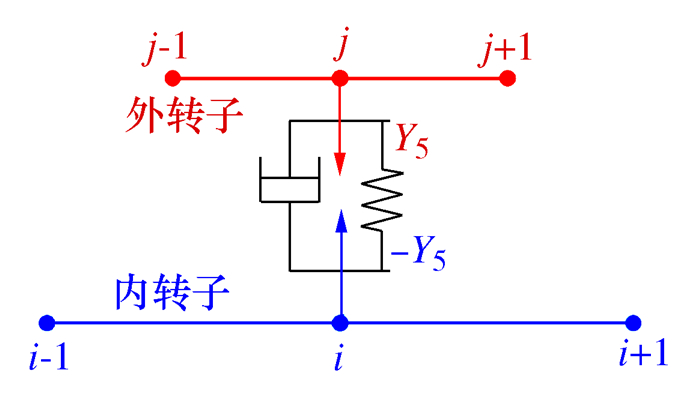
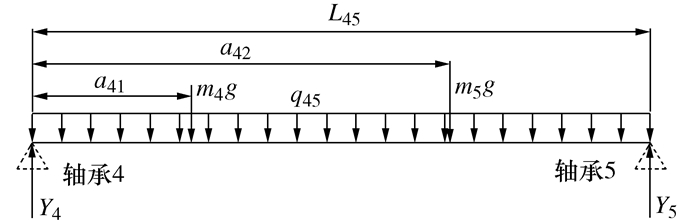
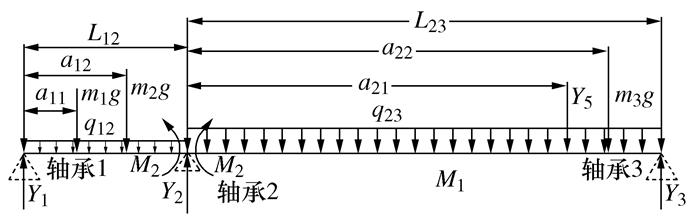
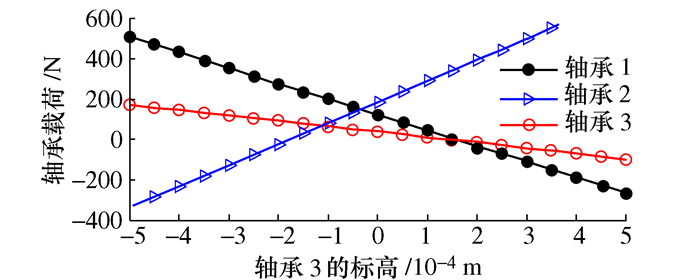
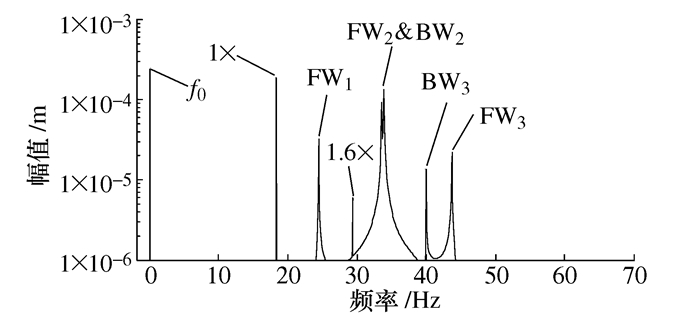
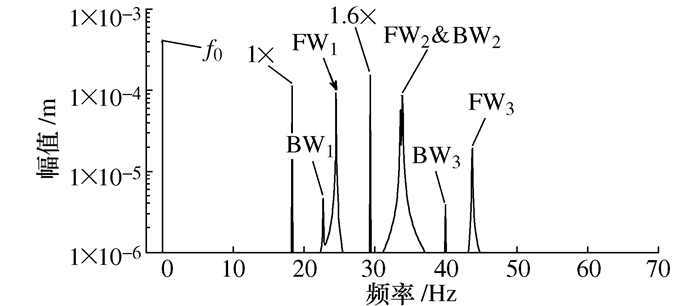
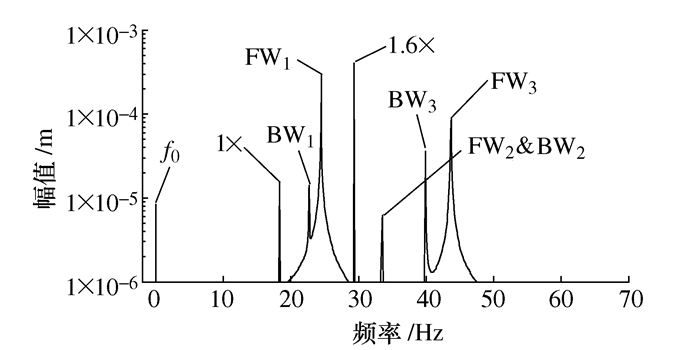
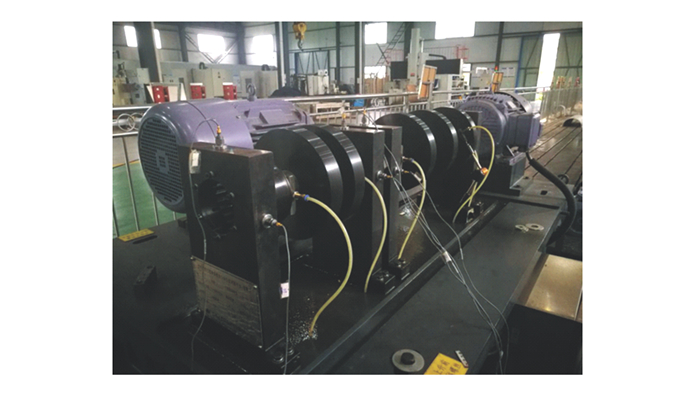
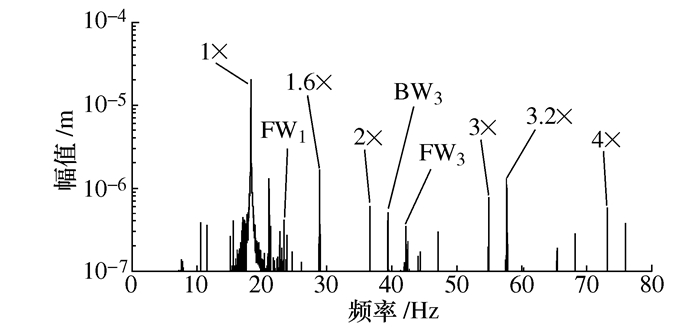
采用Timoshenko梁建立双转子系统的有限元模型,再根据三弯矩方程计算内转子不同心引起的附加轴承载荷,将轴承载荷引入双转子动力学方程,最终建立内转子不同心的双转子系统动力学模型。采用Newmark-β法求解系统动力学方程,分析不同心对转子系统振动频谱的影响。搭建了双转子试验台对仿真结果进行验证。研究表明:内转子轴承的不同心将导致轴承载荷随标高量线性变化,轴承载荷会使内转子产生静态变形。不同心状态下的不平衡响应除引起内、外转子倍频振动外,还激起了多阶正向进动和反向进动的固有频率,导致双转子系统振动频谱更加复杂。
采用Timoshenko梁建立双转子系统的有限元模型,再根据三弯矩方程计算内转子不同心引起的附加轴承载荷,将轴承载荷引入双转子动力学方程,最终建立内转子不同心的双转子系统动力学模型。采用Newmark-β法求解系统动力学方程,分析不同心对转子系统振动频谱的影响。搭建了双转子试验台对仿真结果进行验证。研究表明:内转子轴承的不同心将导致轴承载荷随标高量线性变化,轴承载荷会使内转子产生静态变形。不同心状态下的不平衡响应除引起内、外转子倍频振动外,还激起了多阶正向进动和反向进动的固有频率,导致双转子系统振动频谱更加复杂。








2021, 40(5): 710-715.
doi: 10.13433/j.cnki.1003-8728.20200128
摘要:
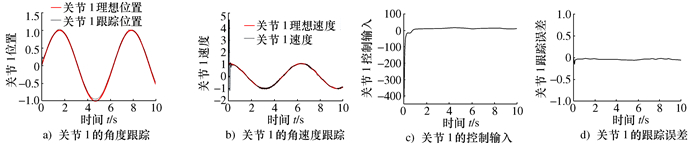
本文针对多关节机械臂提出了一种高阶滑模神经网络自适应控制策略。在机械臂的动力学方程的基础之上,设置了滑模面,并对该滑模面求二阶导数,利用高阶滑模控制理论设计了机械臂的控制方案;高阶滑模控制分两步实施,针对标称系统采用了齐次连续控制项,对系统中存在外部干扰的情况添加了补偿项,并对系统中存在的不确定性采用RBF神经网络进行逼近。最后,应用李雅普诺夫稳定性理论证明了系统的稳定性,并通过MATLAB/Simulink仿真与传统滑模控制比较,表明了该控制算法有效地提高了轨迹的跟踪速度和精度,降低了系统中存在的抖颤。
本文针对多关节机械臂提出了一种高阶滑模神经网络自适应控制策略。在机械臂的动力学方程的基础之上,设置了滑模面,并对该滑模面求二阶导数,利用高阶滑模控制理论设计了机械臂的控制方案;高阶滑模控制分两步实施,针对标称系统采用了齐次连续控制项,对系统中存在外部干扰的情况添加了补偿项,并对系统中存在的不确定性采用RBF神经网络进行逼近。最后,应用李雅普诺夫稳定性理论证明了系统的稳定性,并通过MATLAB/Simulink仿真与传统滑模控制比较,表明了该控制算法有效地提高了轨迹的跟踪速度和精度,降低了系统中存在的抖颤。



2021, 40(5): 716-720.
doi: 10.13433/j.cnki.1003-8728.20200117
摘要:
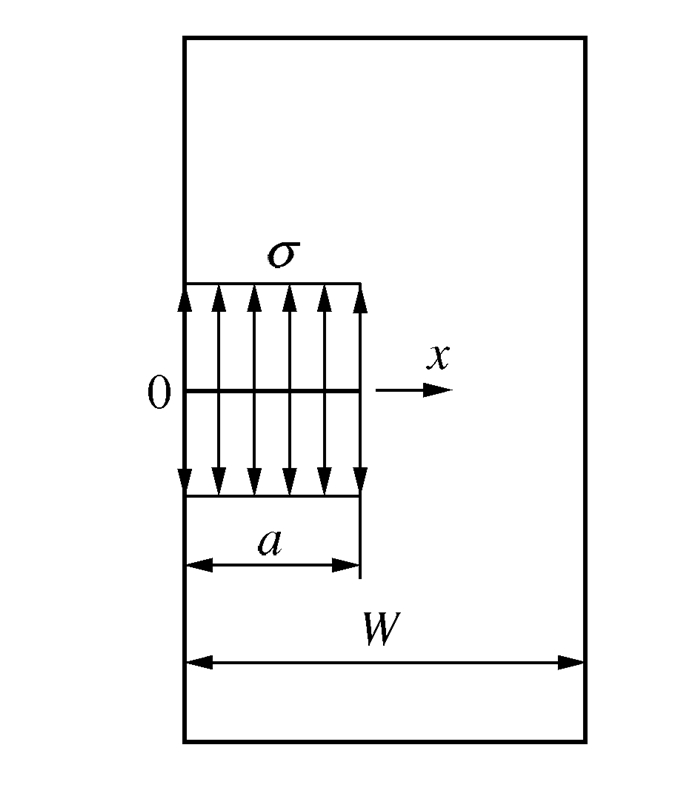
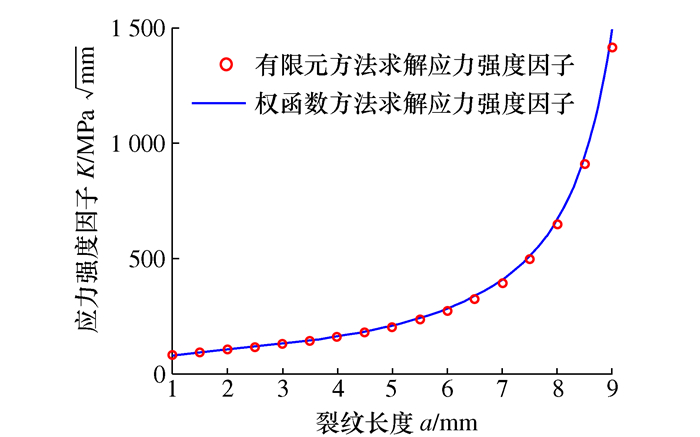
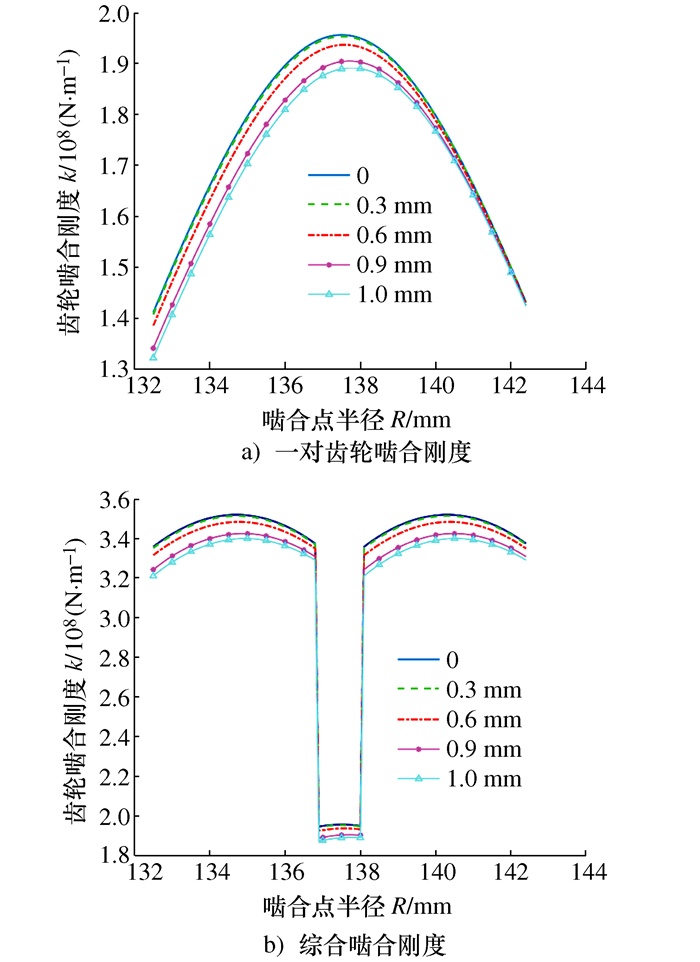
计算齿根具有裂纹的齿轮啮合刚度是求解含裂纹的齿轮传动系统动力学问题的基础。提出一种计及齿根裂纹表面自由能的计算齿轮啮合刚度的能量方法,该法将法向力作用下裂纹齿轮的弹性势能视为无裂纹齿轮的弹性势能与裂纹产生过程中释放的裂纹表面自由能之和。裂纹表面自由能通过裂纹应力强度因子与能量释放率之间的关系获得,齿根裂纹应力强度因子用权函数法求解。计算结果表明:齿根裂纹对齿轮啮合刚度影响很大;随着裂纹长度增加,裂纹齿轮啮合刚度减小,其求解结果与ANSYS软件计算结果一致。
计算齿根具有裂纹的齿轮啮合刚度是求解含裂纹的齿轮传动系统动力学问题的基础。提出一种计及齿根裂纹表面自由能的计算齿轮啮合刚度的能量方法,该法将法向力作用下裂纹齿轮的弹性势能视为无裂纹齿轮的弹性势能与裂纹产生过程中释放的裂纹表面自由能之和。裂纹表面自由能通过裂纹应力强度因子与能量释放率之间的关系获得,齿根裂纹应力强度因子用权函数法求解。计算结果表明:齿根裂纹对齿轮啮合刚度影响很大;随着裂纹长度增加,裂纹齿轮啮合刚度减小,其求解结果与ANSYS软件计算结果一致。


2021, 40(5): 721-726.
doi: 10.13433/j.cnki.1003-8728.20200120
摘要:
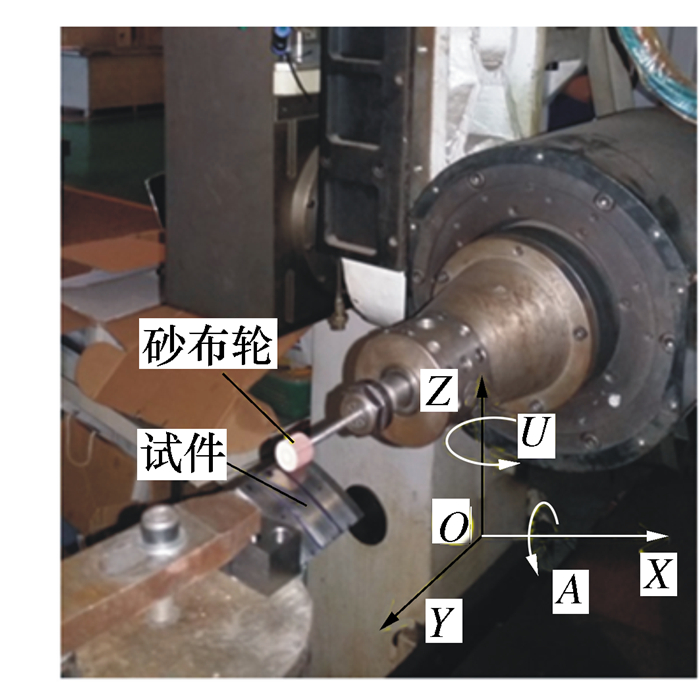
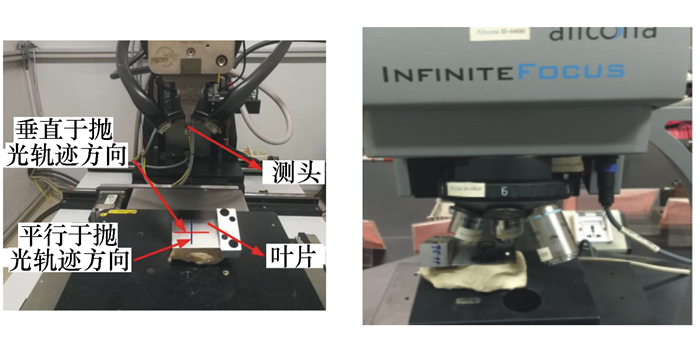
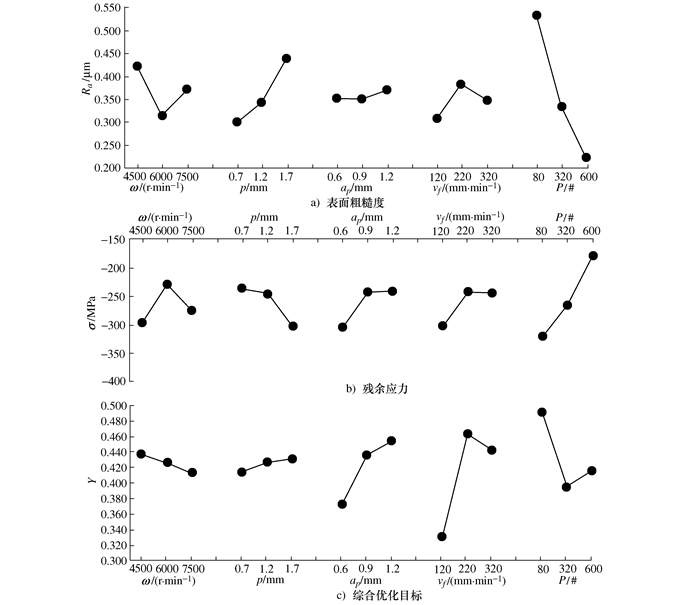
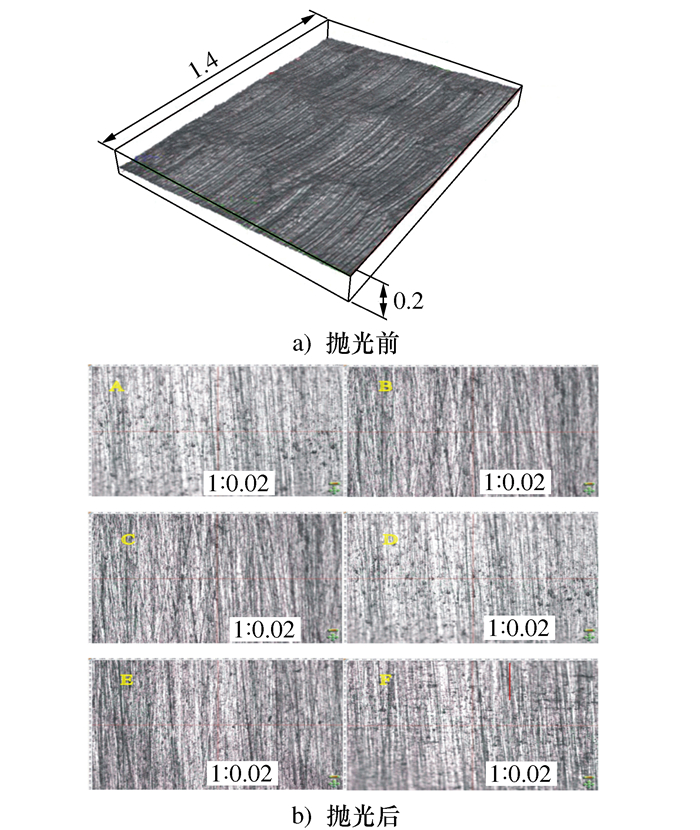
为获得理想的GH4169抛光表面粗糙度和表面残余应力,提出了面向多目标的抛光工艺参数优选区间划分方法,设计了五因素三水平抛光正交试验;根据试验结果标准差计算了工艺参数对各优化目标影响的权重系数,并将多优化目标变换为综合优化目标;通过趋势图分析了各个优化目标随工艺参数增大的变化机理及趋势;按照所提方法确定了工艺参数优选区间,并通过实验进一步验证了优选区间的可靠性。
为获得理想的GH4169抛光表面粗糙度和表面残余应力,提出了面向多目标的抛光工艺参数优选区间划分方法,设计了五因素三水平抛光正交试验;根据试验结果标准差计算了工艺参数对各优化目标影响的权重系数,并将多优化目标变换为综合优化目标;通过趋势图分析了各个优化目标随工艺参数增大的变化机理及趋势;按照所提方法确定了工艺参数优选区间,并通过实验进一步验证了优选区间的可靠性。

2021, 40(5): 727-733.
doi: 10.13433/j.cnki.1003-8728.20200312
摘要:
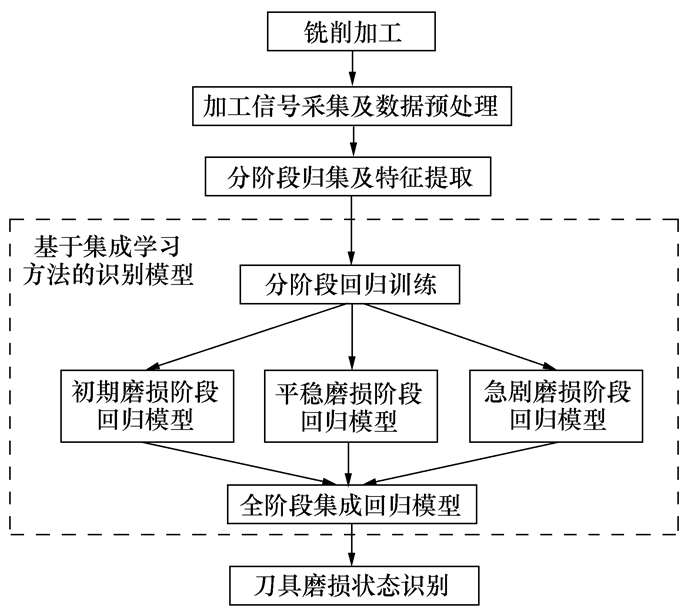
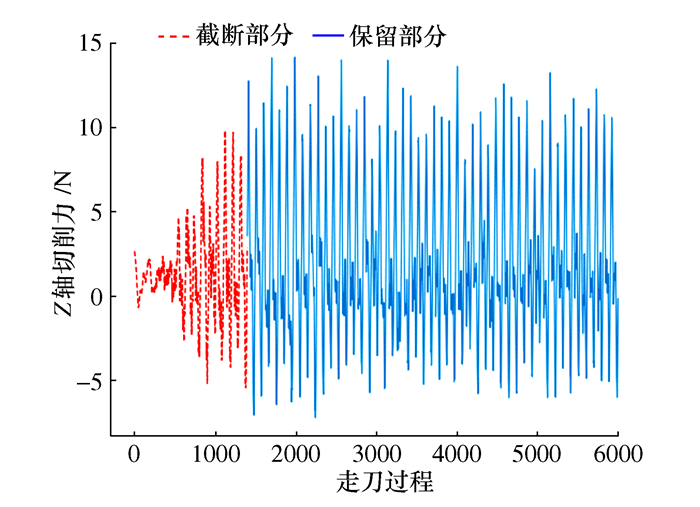
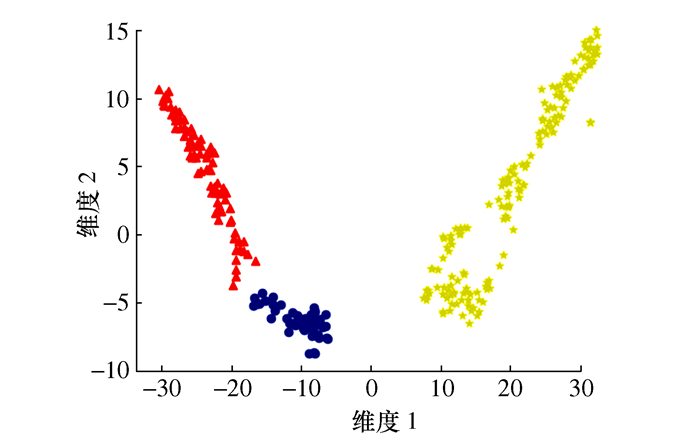
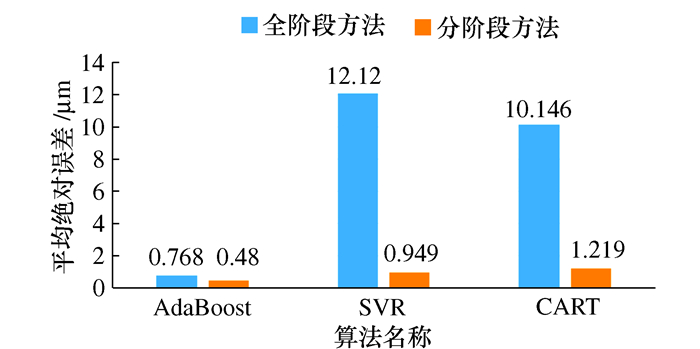
提出了一种基于AdaBoost(Adaptive boosting)集成算法的刀具磨损全阶段回归模型建模方法。首先,利用获取到的加工过程信号和刀具磨损值,建立刀具磨损拟合曲线,以实现对初期磨损、平稳磨损和急剧磨损3个阶段的准确划分;其次,对加工过程信号进行特征提取,并与相应的刀具磨损值形成3个阶段的数据样本,利用支持向量机分别建立3个磨损阶段的回归模型;再次,利用AdaBoost在全阶段上确定3个磨损阶段回归模型的权重,最终建立刀具磨损状态识别的回归模型;最后,以某铣刀切削过程采集的刀具磨损数据集验证所提出的模型和方法的有效性。
提出了一种基于AdaBoost(Adaptive boosting)集成算法的刀具磨损全阶段回归模型建模方法。首先,利用获取到的加工过程信号和刀具磨损值,建立刀具磨损拟合曲线,以实现对初期磨损、平稳磨损和急剧磨损3个阶段的准确划分;其次,对加工过程信号进行特征提取,并与相应的刀具磨损值形成3个阶段的数据样本,利用支持向量机分别建立3个磨损阶段的回归模型;再次,利用AdaBoost在全阶段上确定3个磨损阶段回归模型的权重,最终建立刀具磨损状态识别的回归模型;最后,以某铣刀切削过程采集的刀具磨损数据集验证所提出的模型和方法的有效性。



2021, 40(5): 734-740.
doi: 10.13433/j.cnki.1003-8728.20200113
摘要:
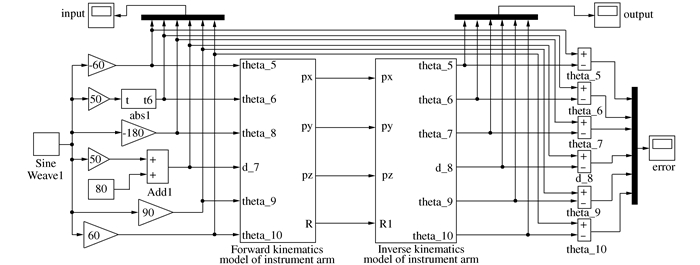
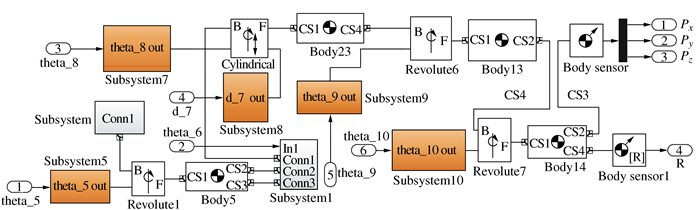
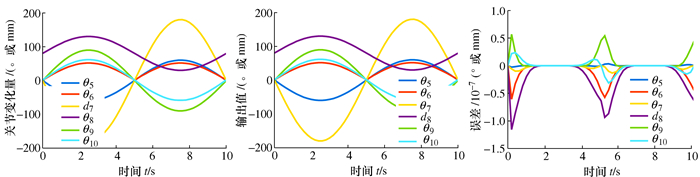
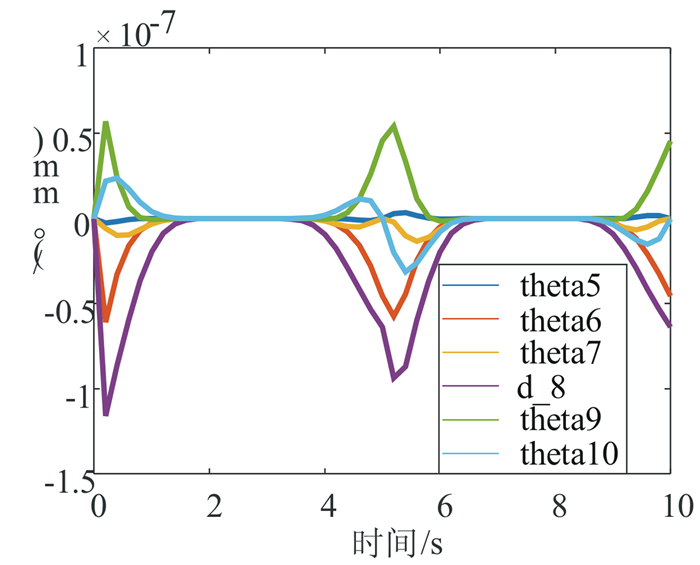
由于达芬奇手术机器人构型特殊,不满足逆运动学解析解的存在条件,传统的运动学建模方法无法求出机器人逆运动学解析解。针对一种类达芬奇手术机器人构型,提出了一种结合旋量理论和消元法相结合的全新运动学建模方法,运用该方法成功求解出类达芬奇手术机器人的逆运动学解析解,解决了类达芬奇手术机器人精确解析解的求解问题。并通过MATLAB/Simulink仿真验证了该方法的正确性,从而丰富了机器人运动学建模和逆运动学解析解的求解理论,为类达芬奇手术机器人提供了一种快速通用的精确解析解求解方法。
由于达芬奇手术机器人构型特殊,不满足逆运动学解析解的存在条件,传统的运动学建模方法无法求出机器人逆运动学解析解。针对一种类达芬奇手术机器人构型,提出了一种结合旋量理论和消元法相结合的全新运动学建模方法,运用该方法成功求解出类达芬奇手术机器人的逆运动学解析解,解决了类达芬奇手术机器人精确解析解的求解问题。并通过MATLAB/Simulink仿真验证了该方法的正确性,从而丰富了机器人运动学建模和逆运动学解析解的求解理论,为类达芬奇手术机器人提供了一种快速通用的精确解析解求解方法。




2021, 40(5): 741-748.
doi: 10.13433/j.cnki.1003-8728.20200126
摘要:
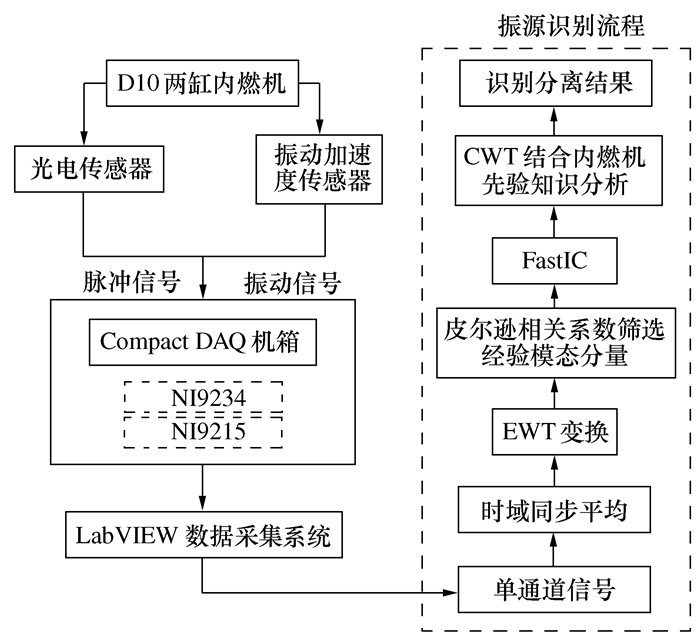
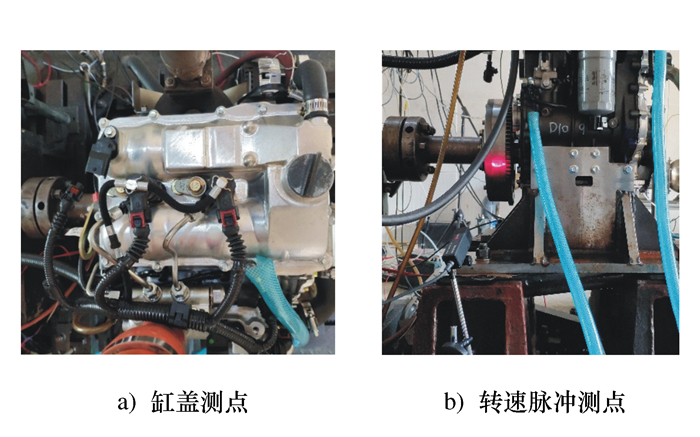
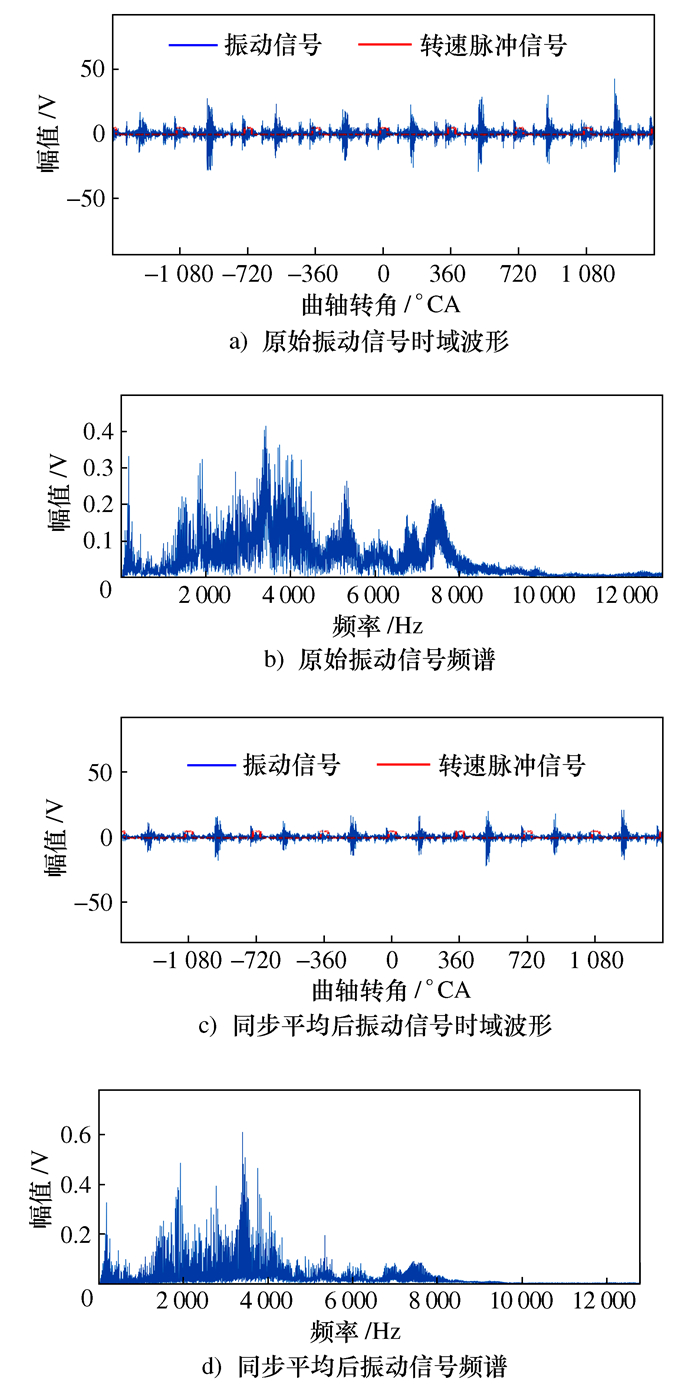
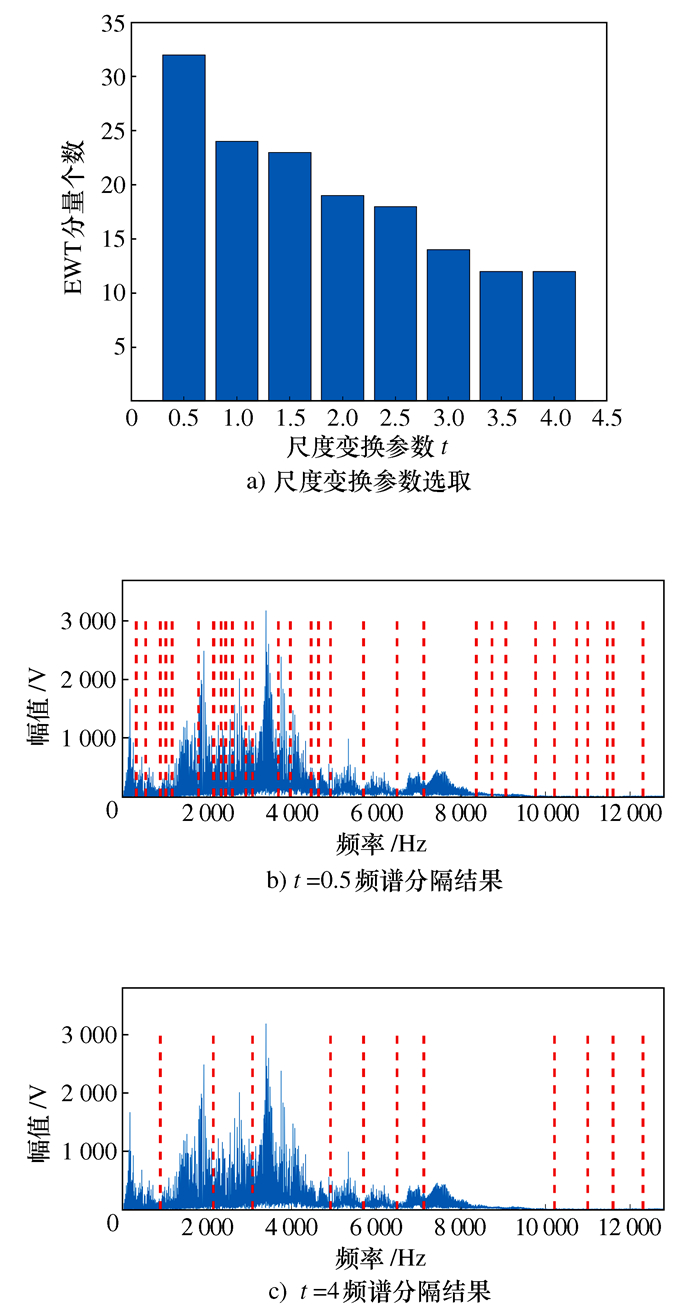
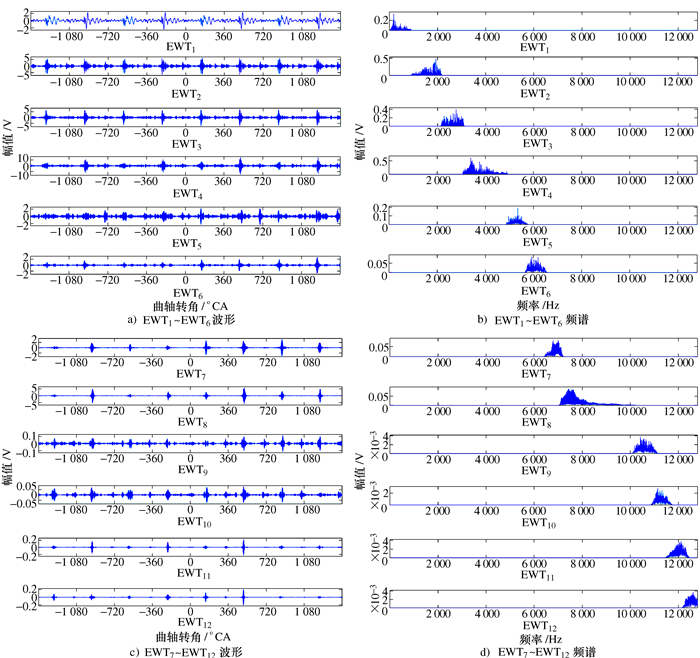
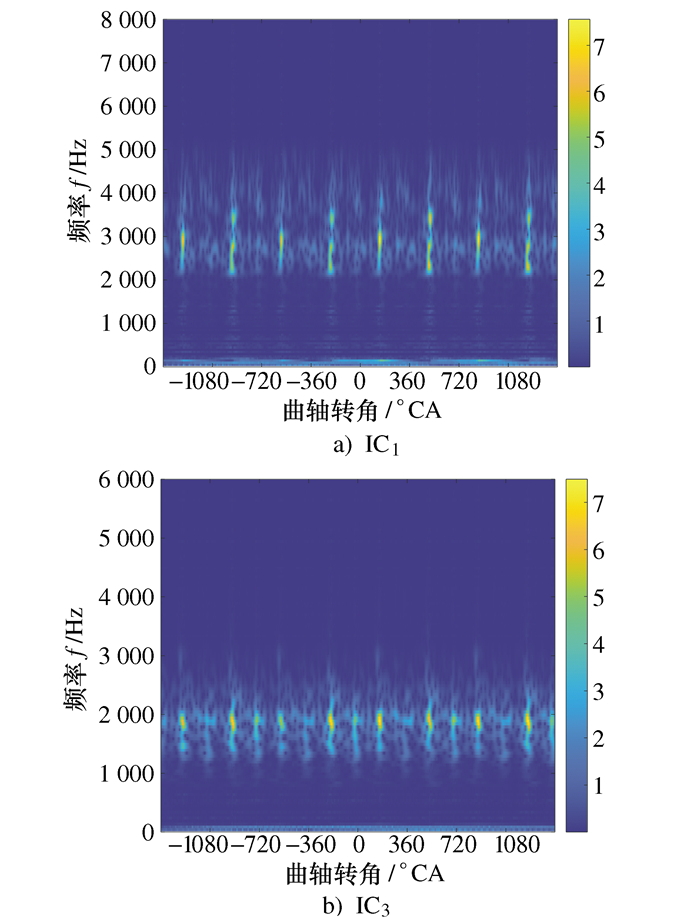
内燃机广泛应用于工程、动力等领域,然而内燃机因燃烧和机械运动引起的冲击与振动导致其减振降噪一直是研究的热点,而如何准确识别振源则是减振的前提。本文针对振源盲分离时观测信号不少于源信号数目要求不易满足的问题,利用经验小波变换(Empirical wavelet transform, EWT)结合快速独立成分分析(Fast independent component analysis, FastICA)实现对内燃机振源信号的识别。首先使用时域同步平均法对内燃机缸盖的振动信号进行预处理,然后进行经验小波变换,之后再利用皮尔逊相关系数选择有效经验模态分量作为快速独立成分分析(FastICA)的输入,最终分离结果表明:该方法可以有效地从内燃机缸盖振动信号中识别出燃烧信号和气阀机构开启时的气体冲击信号。
内燃机广泛应用于工程、动力等领域,然而内燃机因燃烧和机械运动引起的冲击与振动导致其减振降噪一直是研究的热点,而如何准确识别振源则是减振的前提。本文针对振源盲分离时观测信号不少于源信号数目要求不易满足的问题,利用经验小波变换(Empirical wavelet transform, EWT)结合快速独立成分分析(Fast independent component analysis, FastICA)实现对内燃机振源信号的识别。首先使用时域同步平均法对内燃机缸盖的振动信号进行预处理,然后进行经验小波变换,之后再利用皮尔逊相关系数选择有效经验模态分量作为快速独立成分分析(FastICA)的输入,最终分离结果表明:该方法可以有效地从内燃机缸盖振动信号中识别出燃烧信号和气阀机构开启时的气体冲击信号。



2021, 40(5): 749-754.
doi: 10.13433/j.cnki.1003-8728.20200069
摘要:
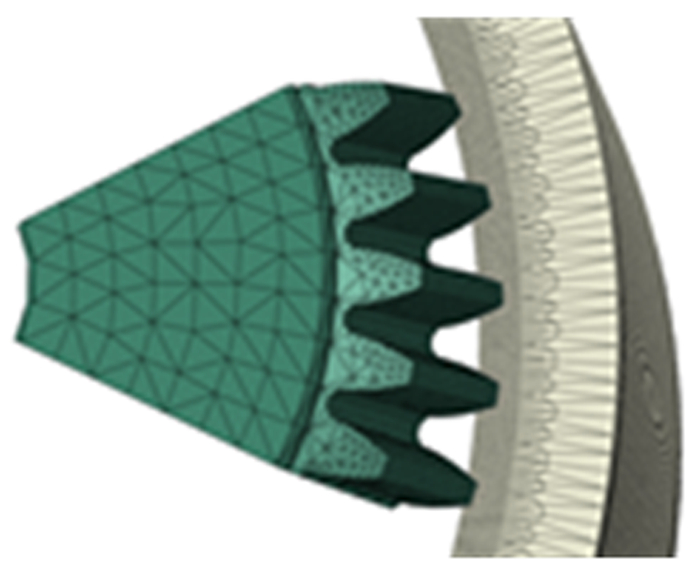
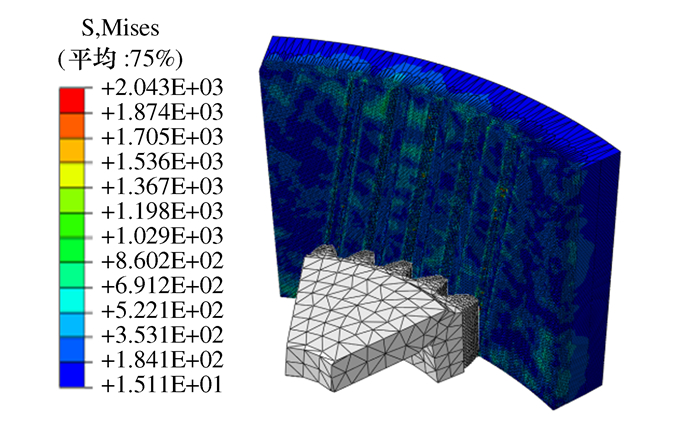
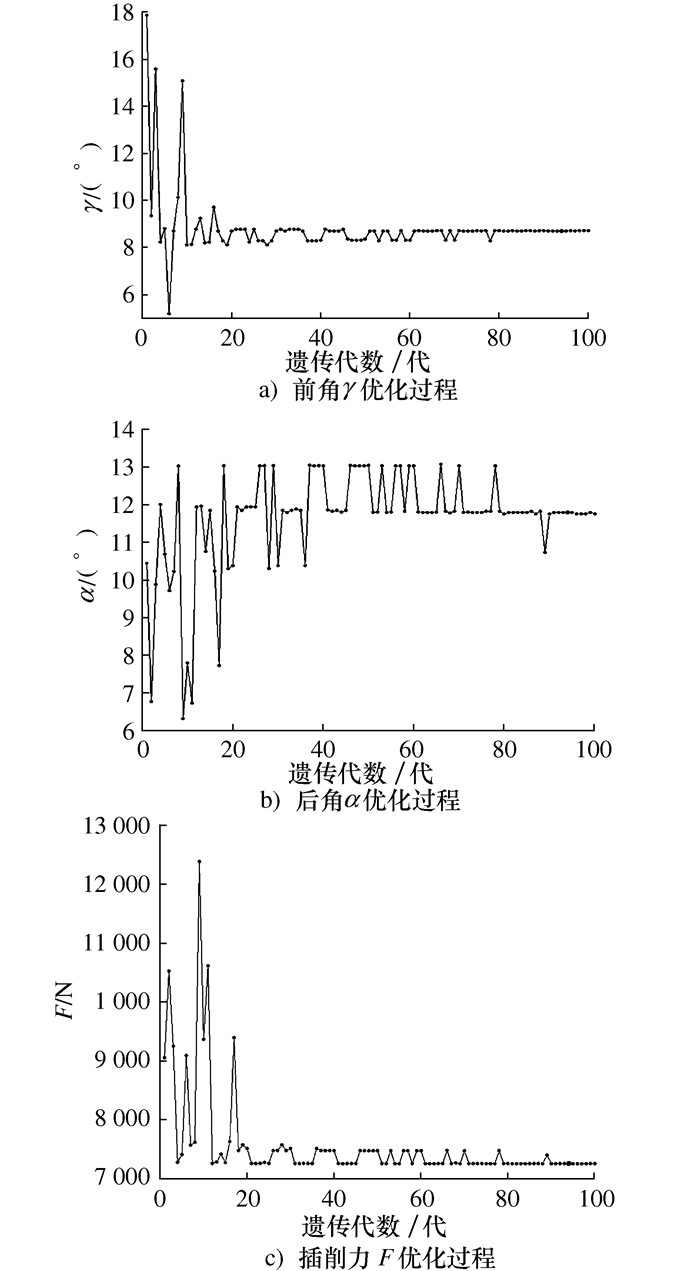
针对薄壁齿圈插齿加工过程中插削力过大引起齿形精度不高的问题,而插齿刀几何参数作为影响插削力大小的因素之一,提出了通过对插齿刀的几何参数进行优化来减小插削力提升齿形精度。采用UG对齿圈和刀具进行建模,将模型导入ABAQUS中对插齿加工过程进行仿真分析,得出插齿过程中的插削力。插齿刀的几何参数作为输入变量,插齿过程的插削力作为输出响应,通过优化拉丁超立方实验设计方法设计样本点,采用响应面近似模型建立数学模型,并结合多岛遗传算法对不同插齿刀的几何参数进行优化。研究结果表明,响应面模型能够有效的拟合插齿刀几何参数和插削力之间的函数关系,并通过多岛遗传算法的优化,插削力减小了34.87%,优化效果显著,对于插削力过大引起齿圈齿形精度不高的问题研究具有重要意义。
针对薄壁齿圈插齿加工过程中插削力过大引起齿形精度不高的问题,而插齿刀几何参数作为影响插削力大小的因素之一,提出了通过对插齿刀的几何参数进行优化来减小插削力提升齿形精度。采用UG对齿圈和刀具进行建模,将模型导入ABAQUS中对插齿加工过程进行仿真分析,得出插齿过程中的插削力。插齿刀的几何参数作为输入变量,插齿过程的插削力作为输出响应,通过优化拉丁超立方实验设计方法设计样本点,采用响应面近似模型建立数学模型,并结合多岛遗传算法对不同插齿刀的几何参数进行优化。研究结果表明,响应面模型能够有效的拟合插齿刀几何参数和插削力之间的函数关系,并通过多岛遗传算法的优化,插削力减小了34.87%,优化效果显著,对于插削力过大引起齿圈齿形精度不高的问题研究具有重要意义。


2021, 40(5): 755-761.
doi: 10.13433/j.cnki.1003-8728.20200129
摘要:
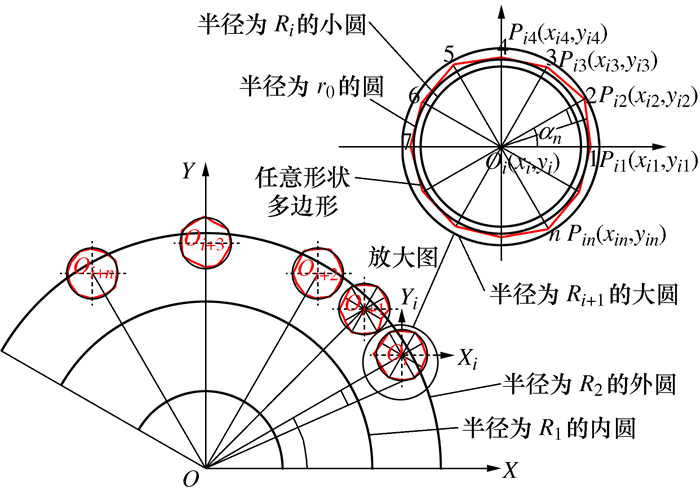
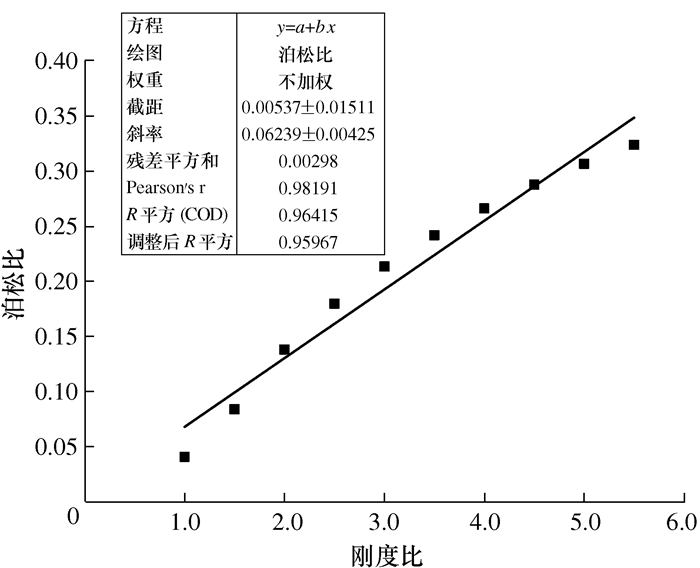
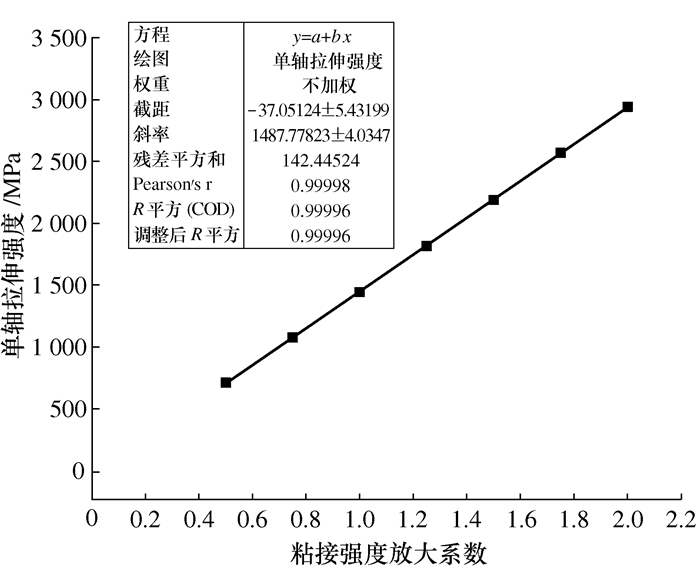
为探究镍基合金在磨削加工中的材料去除机理,采用圆弧角度随机切分法,对砂轮表层磨粒进行了轮廓、分布的几何建模;采用平行键粘结线性标定法,对镍基合金材料进行了离散元模型校准;建立了砂轮磨粒磨削镍基合金加工的动态仿真。仿真结果表明:磨削过程中,磨削力存在动态波动;磨削切向力、法向力随着砂轮表面磨粒轮廓边数增加而减小;磨削切向力、法向力随着砂轮旋转速度增加而减小,数值模拟方法和结果对镍基合金磨削加工过程材料去除机理研究具有一定参考价值。
为探究镍基合金在磨削加工中的材料去除机理,采用圆弧角度随机切分法,对砂轮表层磨粒进行了轮廓、分布的几何建模;采用平行键粘结线性标定法,对镍基合金材料进行了离散元模型校准;建立了砂轮磨粒磨削镍基合金加工的动态仿真。仿真结果表明:磨削过程中,磨削力存在动态波动;磨削切向力、法向力随着砂轮表面磨粒轮廓边数增加而减小;磨削切向力、法向力随着砂轮旋转速度增加而减小,数值模拟方法和结果对镍基合金磨削加工过程材料去除机理研究具有一定参考价值。



2021, 40(5): 762-768.
doi: 10.13433/j.cnki.1003-8728.20200105
摘要:
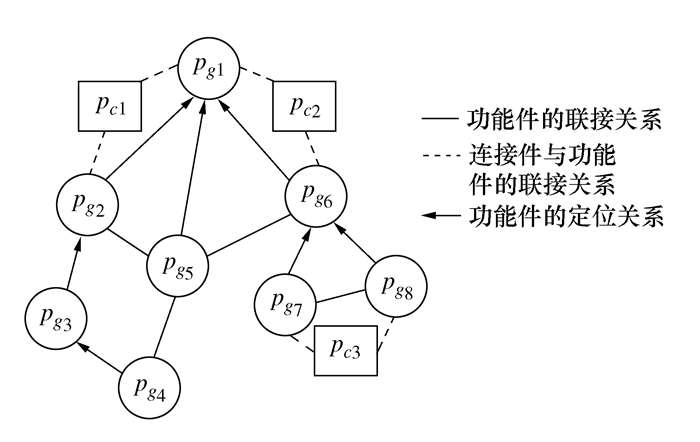
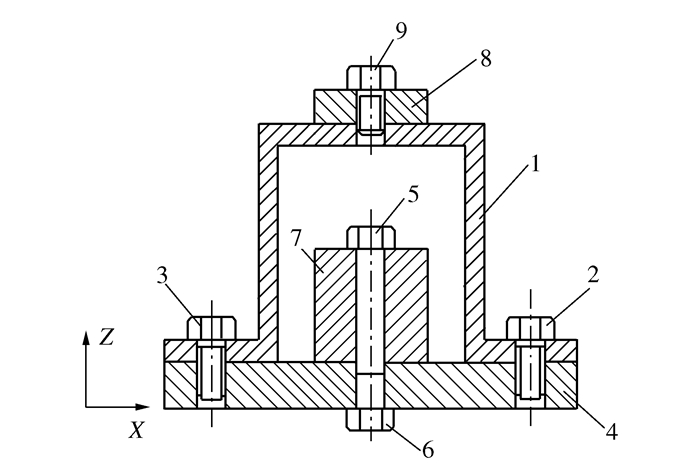
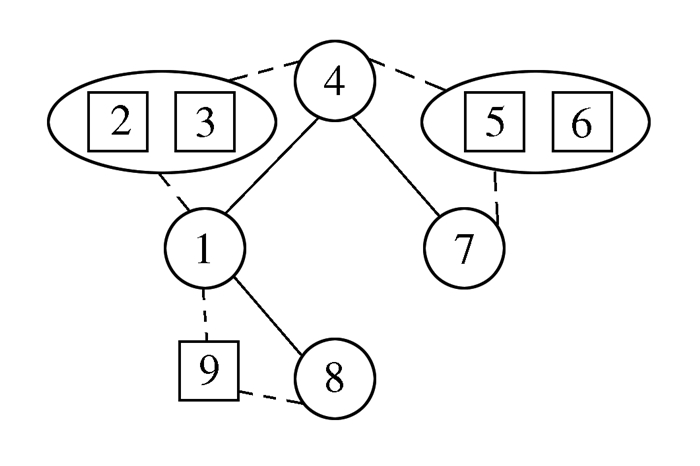
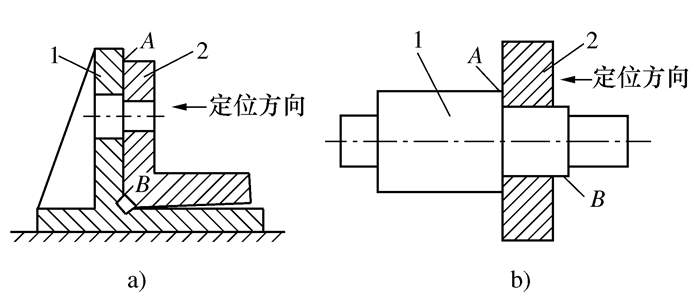
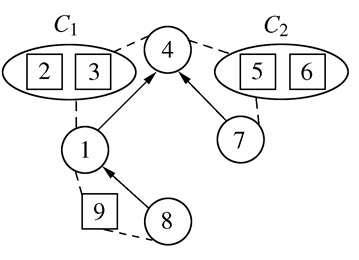
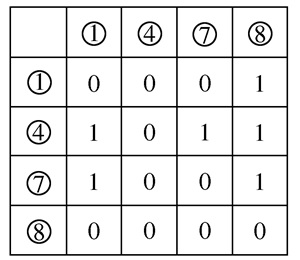
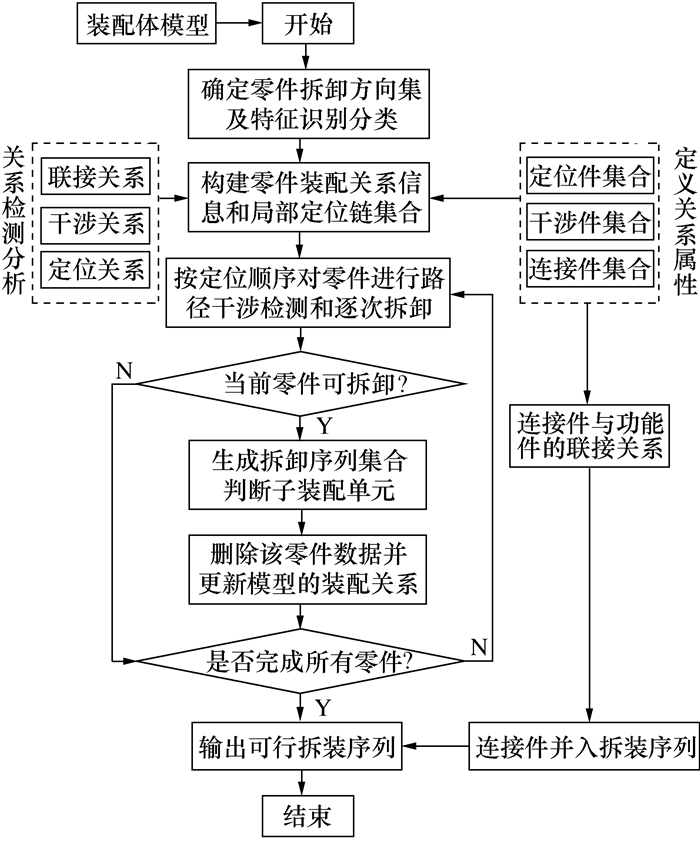
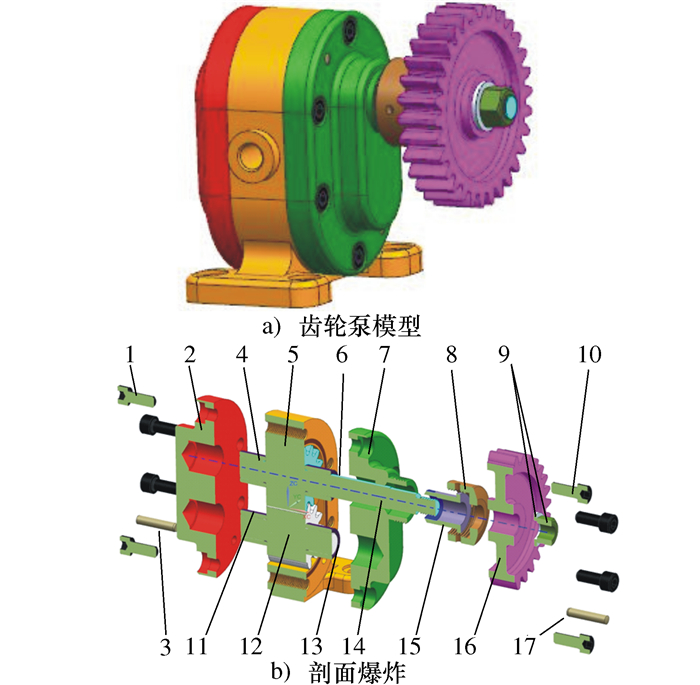
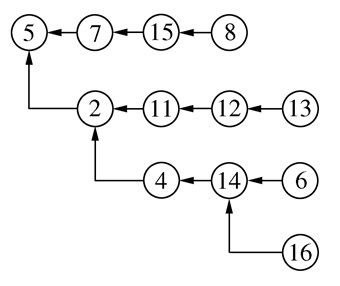
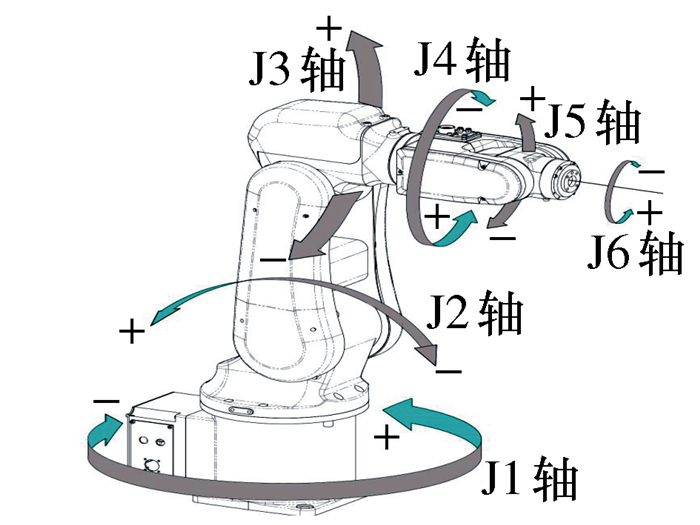
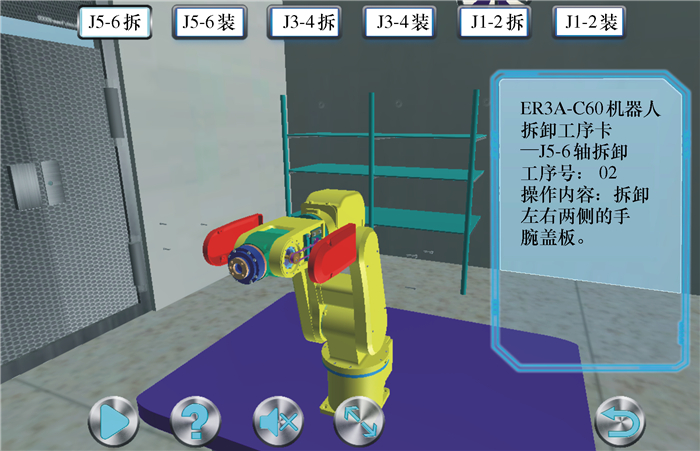
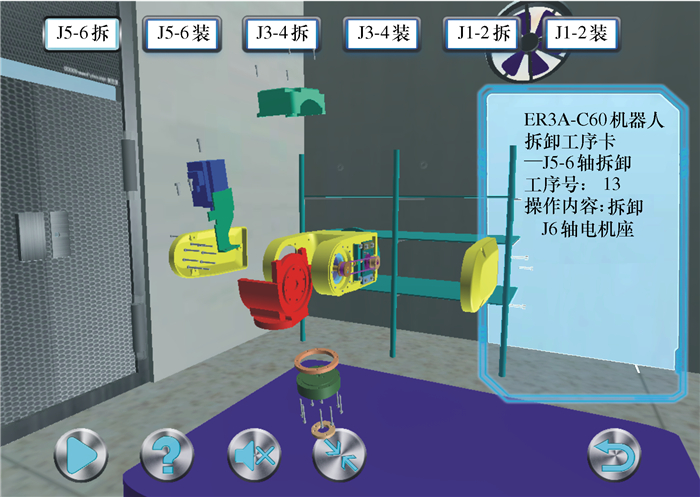
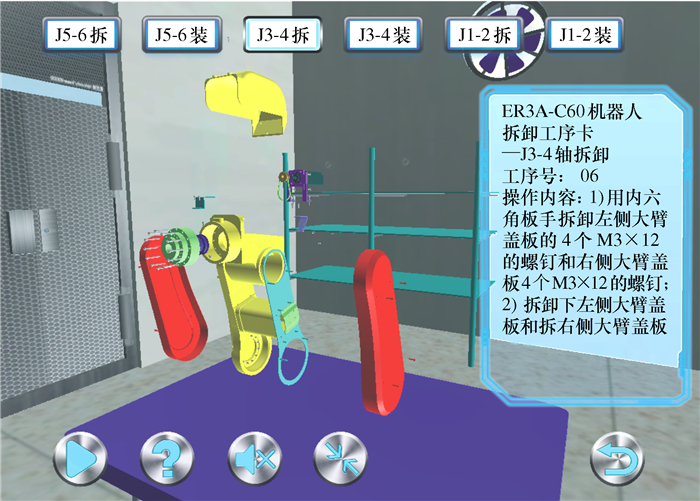
为提高产品仿真装配效率和满足装配工艺要求,提出一种基于定位关系分析的分类装配序列规划方法。首先对零件的装配特征属性进行预定义和分类,然后根据装配零件的联接关系,在可行拆装方向上建立所有邻接零件的定位关系链有向图;按照定位链顺序依次对零件进行干涉检测并更新其定位关系,最终获得可行装配序列。实例表明,该方法简化了模型的装配关系并有效缩小其装配序列解空间,在一定程度上提高了装配规划效率,并通过虚拟拆装仿真过程验证其生成序列的正确性和可行性。
为提高产品仿真装配效率和满足装配工艺要求,提出一种基于定位关系分析的分类装配序列规划方法。首先对零件的装配特征属性进行预定义和分类,然后根据装配零件的联接关系,在可行拆装方向上建立所有邻接零件的定位关系链有向图;按照定位链顺序依次对零件进行干涉检测并更新其定位关系,最终获得可行装配序列。实例表明,该方法简化了模型的装配关系并有效缩小其装配序列解空间,在一定程度上提高了装配规划效率,并通过虚拟拆装仿真过程验证其生成序列的正确性和可行性。



2021, 40(5): 769-774.
doi: 10.13433/j.cnki.1003-8728.20200068
摘要:
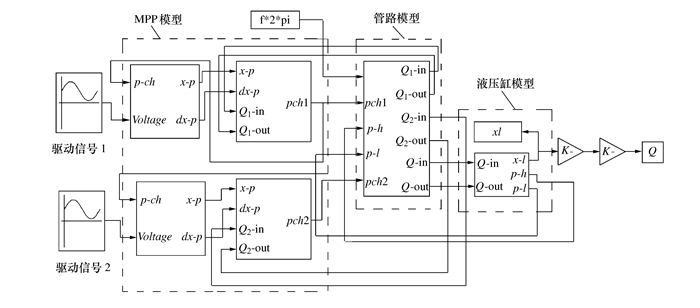
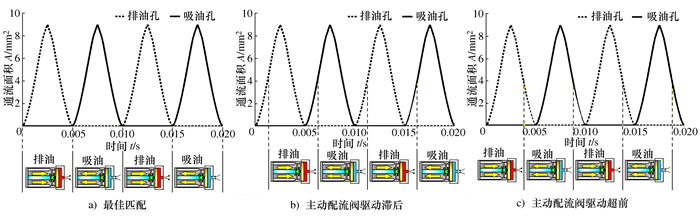
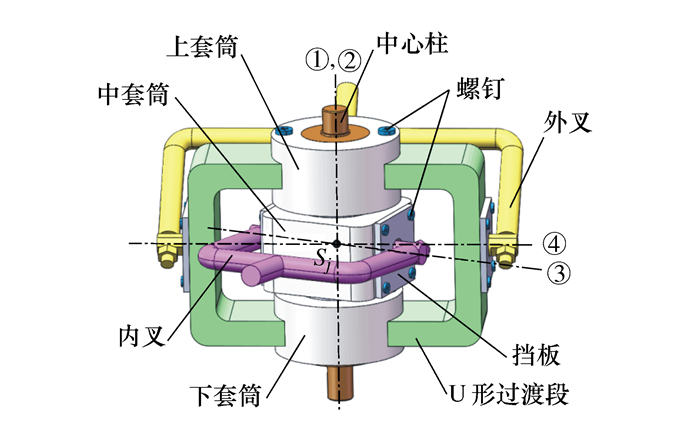
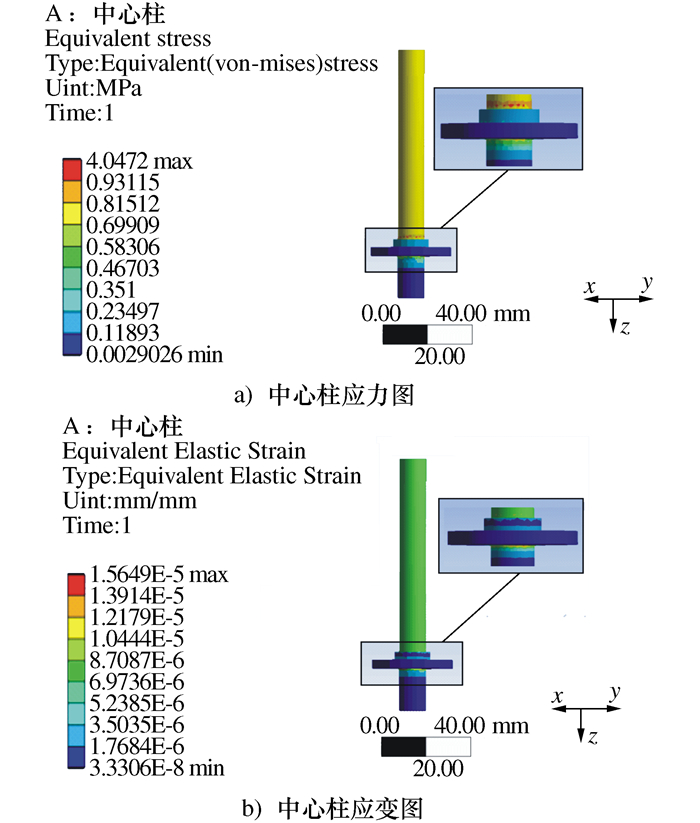
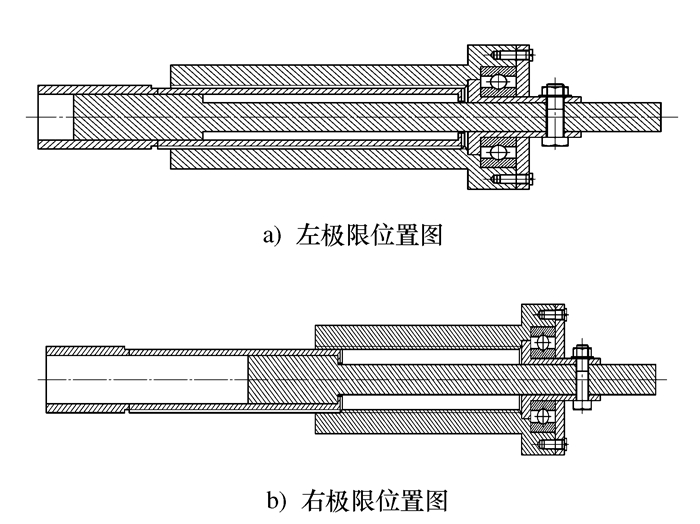
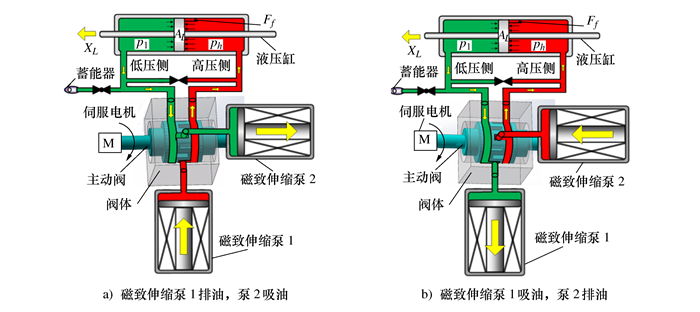
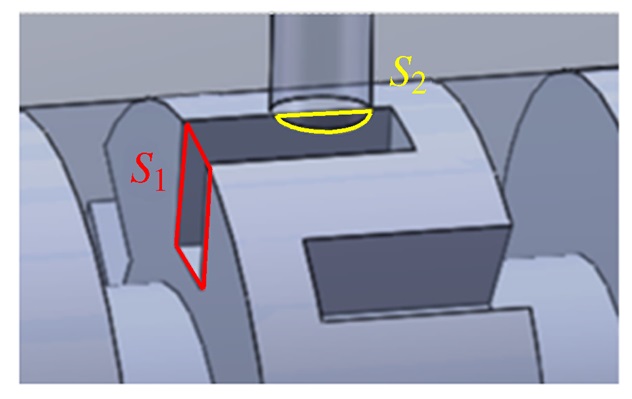
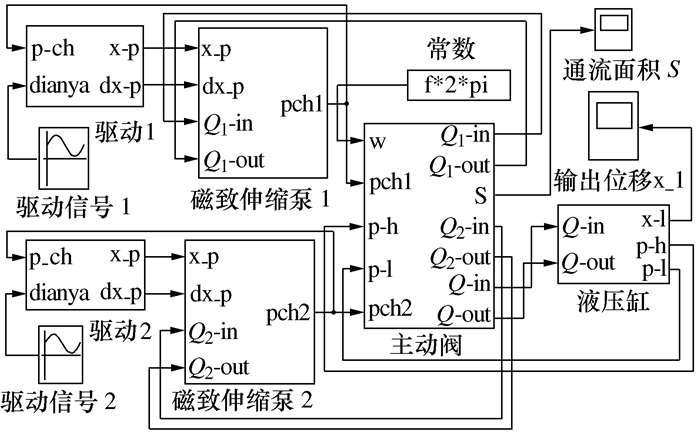
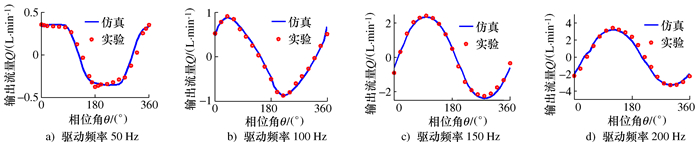
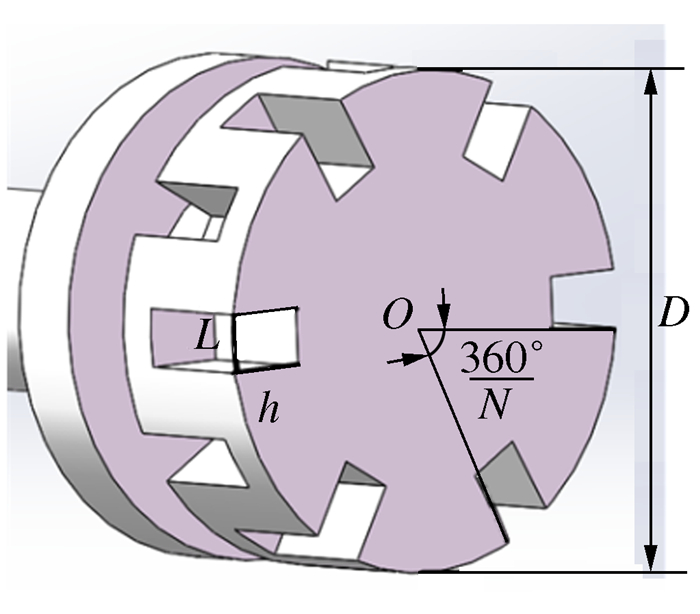
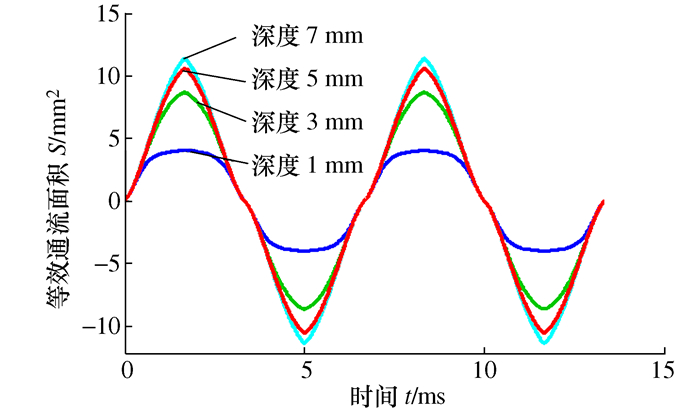
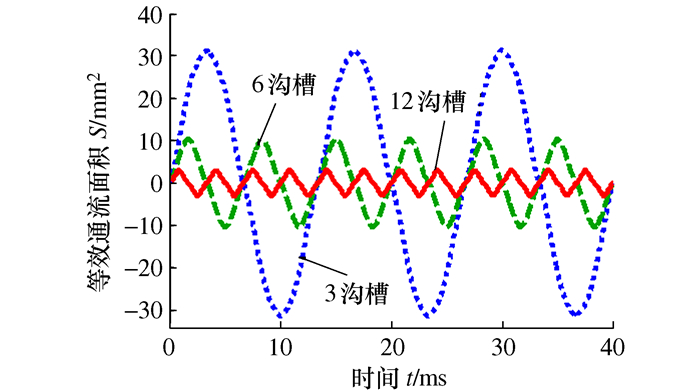
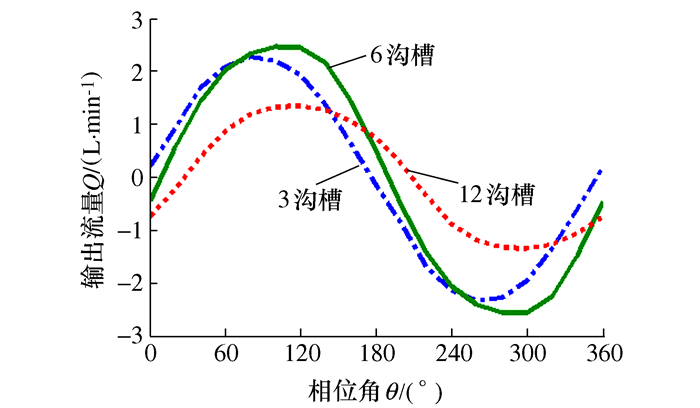
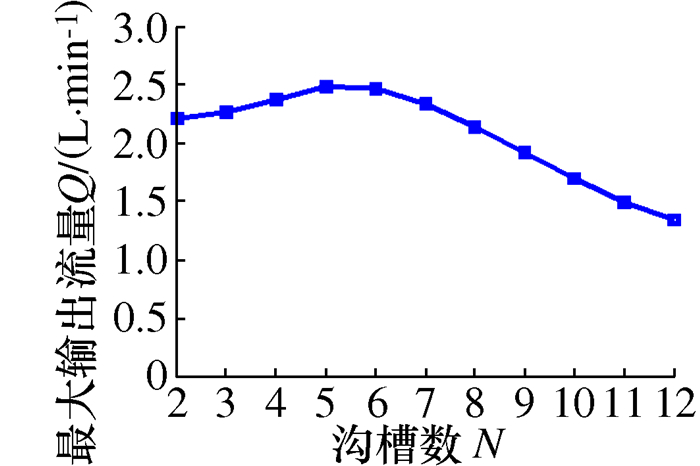
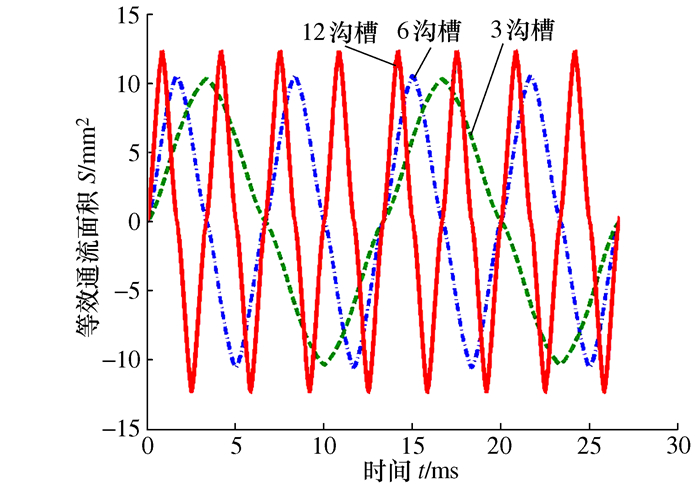
研究了主动阀结构及尺寸等对作动器流量特性的影响: 对作动器的结构及工作原理进行了介绍与分析;在MATLAB/Simulink中建立了作动器整体数学模型,通过仿真得到了不同驱动频率下作动器输出流量与驱动信号相位角间的关系,并与相应的实验结果相对比,验证了模型的准确性;仿真模拟了主动阀阀芯不同的沟槽深度以及沟槽数(包括相同阀芯直径以及不同阀芯直径)等情况下作动器对应的输出流量,基于仿真结果进行了分析与总结。
研究了主动阀结构及尺寸等对作动器流量特性的影响: 对作动器的结构及工作原理进行了介绍与分析;在MATLAB/Simulink中建立了作动器整体数学模型,通过仿真得到了不同驱动频率下作动器输出流量与驱动信号相位角间的关系,并与相应的实验结果相对比,验证了模型的准确性;仿真模拟了主动阀阀芯不同的沟槽深度以及沟槽数(包括相同阀芯直径以及不同阀芯直径)等情况下作动器对应的输出流量,基于仿真结果进行了分析与总结。

2021, 40(5): 775-779.
doi: 10.13433/j.cnki.1003-8728.20200098
摘要:
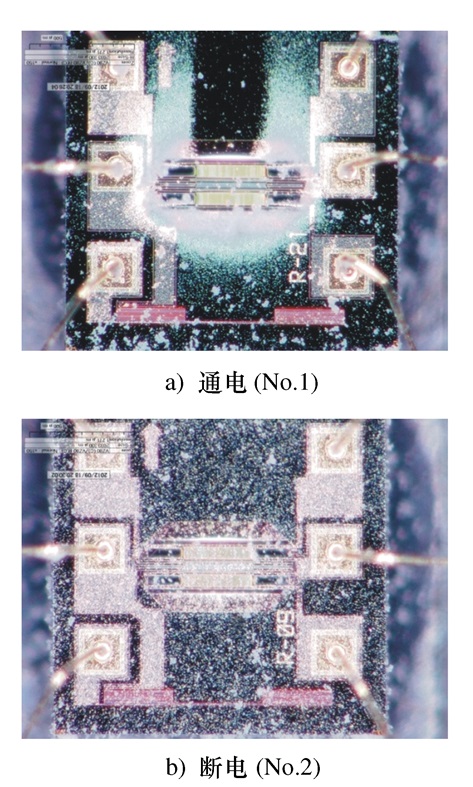
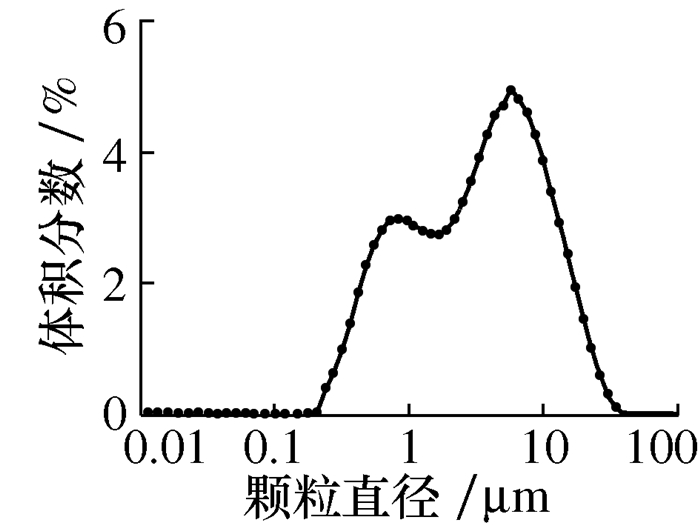
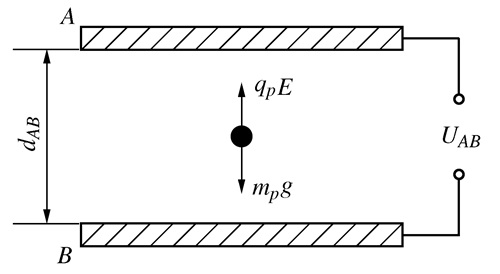
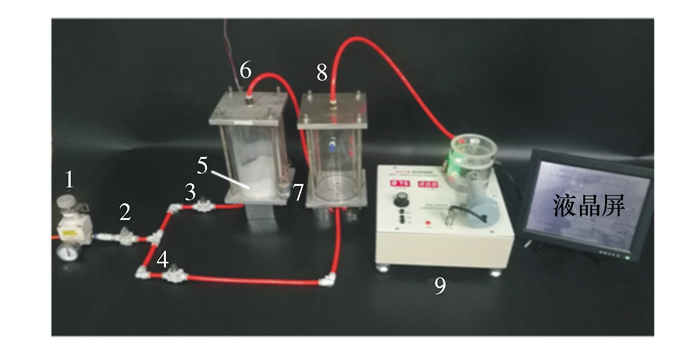
热膜式气体流量传感器在实际使用过程中,其芯片表面很容易被微小颗粒污染,使精度达不到工作要求。试验研究发现,传感器通电工作时,芯片表面电场力是造成污染物颗粒吸附堆积的主要因素。因此,污染物颗粒带电量的大小对芯片表面颗粒的堆积有着直接影响。文中采用Mastersizer 2000激光粒度分析仪和密立根油滴仪联合测量了颗粒群的平均粒径和平均带电量。激光粒度分析仪所测污染物颗粒的平均粒径为3.311 μm,根据此平均粒径值,密立根油滴仪所测3.2~3.4 μm范围内的颗粒所带平均带电量为6.4×10-17 C,此带电量即为整个颗粒群的平均带电量。
热膜式气体流量传感器在实际使用过程中,其芯片表面很容易被微小颗粒污染,使精度达不到工作要求。试验研究发现,传感器通电工作时,芯片表面电场力是造成污染物颗粒吸附堆积的主要因素。因此,污染物颗粒带电量的大小对芯片表面颗粒的堆积有着直接影响。文中采用Mastersizer 2000激光粒度分析仪和密立根油滴仪联合测量了颗粒群的平均粒径和平均带电量。激光粒度分析仪所测污染物颗粒的平均粒径为3.311 μm,根据此平均粒径值,密立根油滴仪所测3.2~3.4 μm范围内的颗粒所带平均带电量为6.4×10-17 C,此带电量即为整个颗粒群的平均带电量。




2021, 40(5): 780-786.
doi: 10.13433/j.cnki.1003-8728.20200115
摘要:
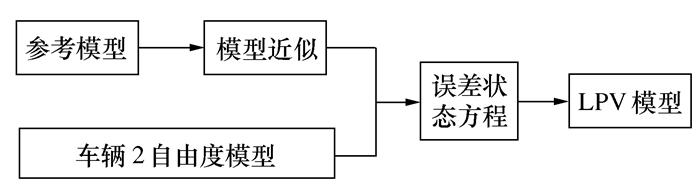
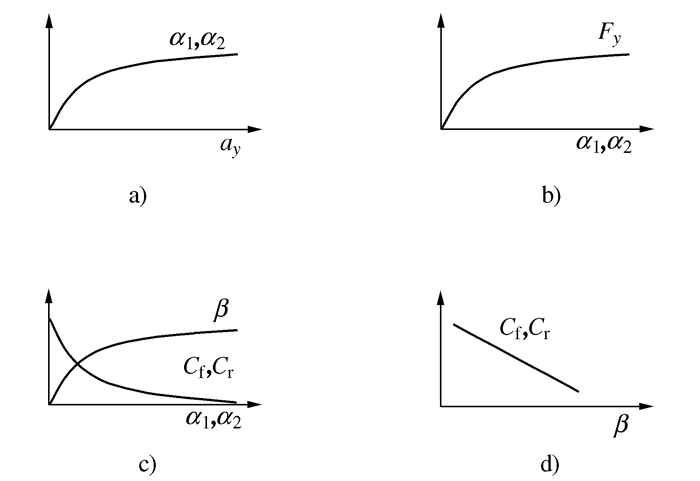
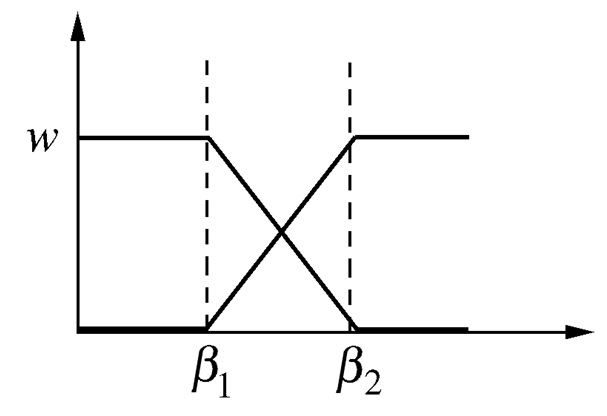
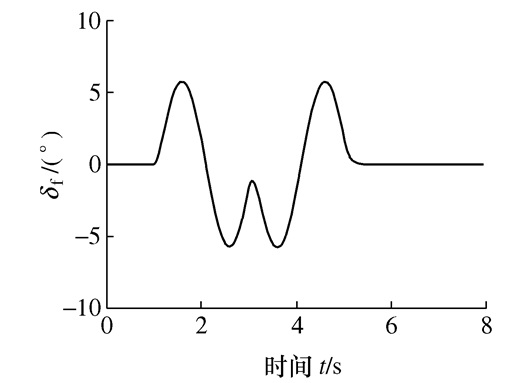
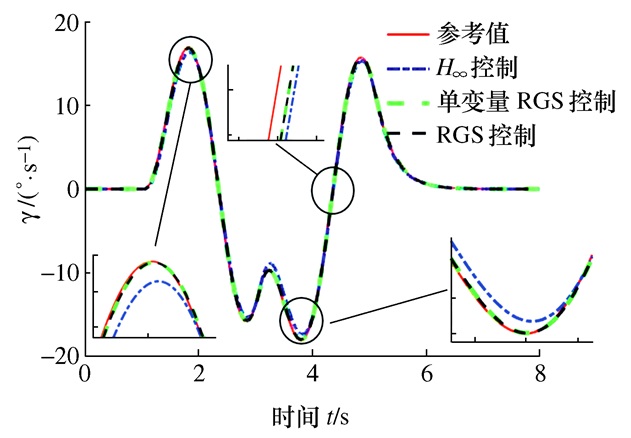
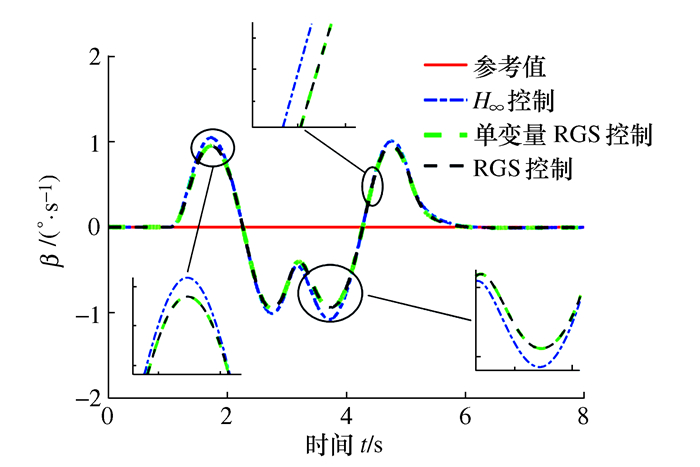
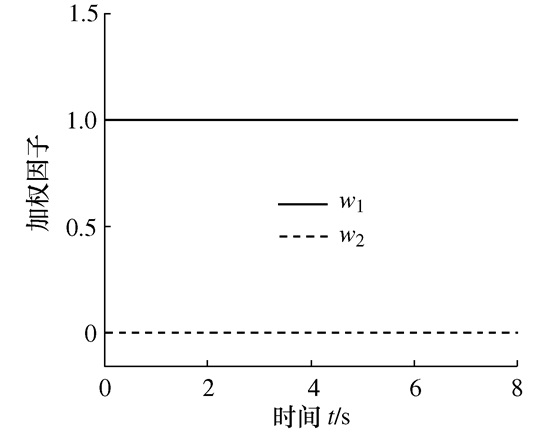
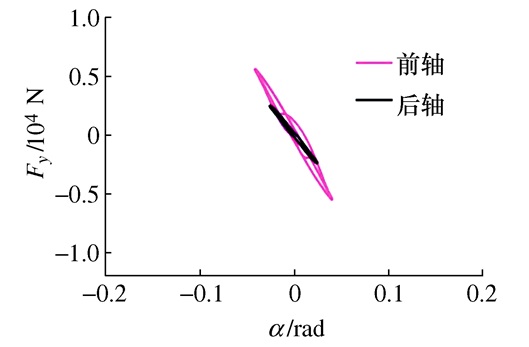
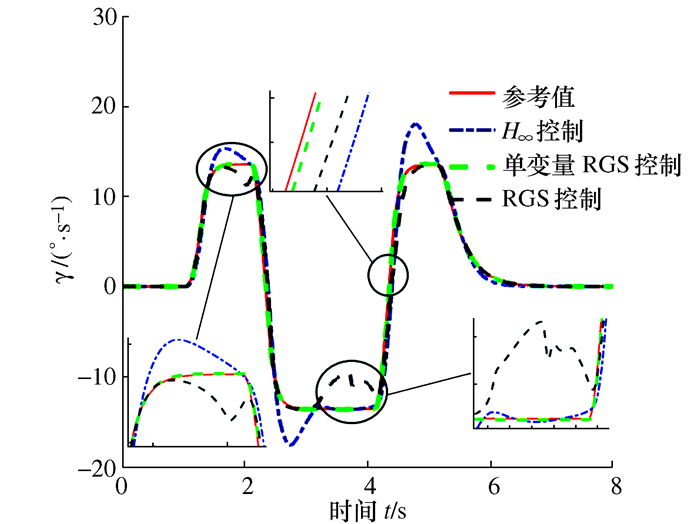
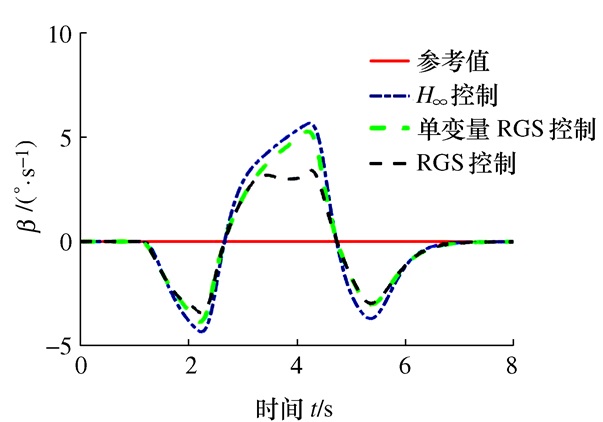
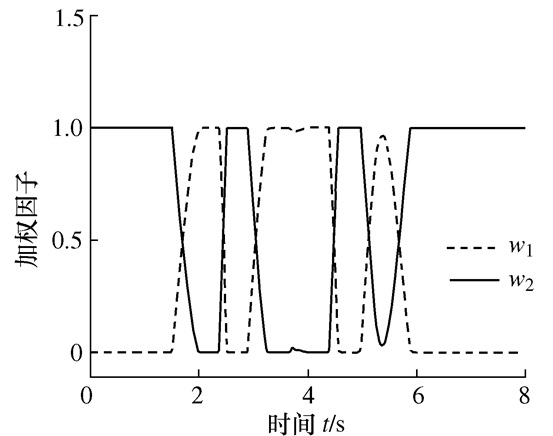
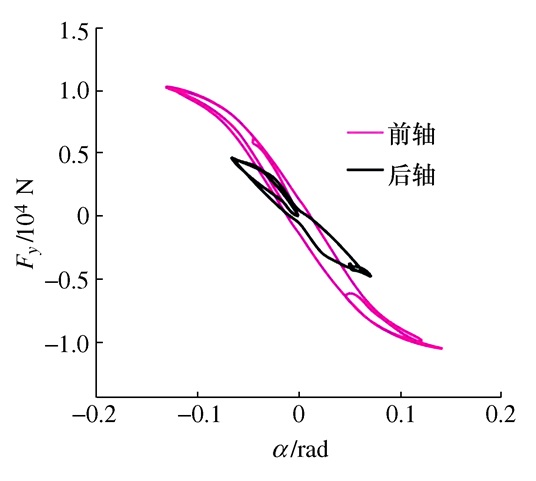
研究了当车速以及轮胎刚度变化时的分布式驱动电动汽车的操控稳定性问题。针对时变的纵向速度,建立了以车速为调度变量的线性变参数(LPV)模型并设计了鲁棒增益调度控制器以保证车辆的性能。考虑到轮胎的非线性,提出了一种模糊融合策略,利用估计的车辆滑移角对控制器的输出进行加权,以使其更好地适应轮胎的变化并能够实时调整其控制变量权重。仿真结果表明,该策略可以在车速变化和轮胎侧偏刚度非线性的情况下有效地改善车辆性能。
研究了当车速以及轮胎刚度变化时的分布式驱动电动汽车的操控稳定性问题。针对时变的纵向速度,建立了以车速为调度变量的线性变参数(LPV)模型并设计了鲁棒增益调度控制器以保证车辆的性能。考虑到轮胎的非线性,提出了一种模糊融合策略,利用估计的车辆滑移角对控制器的输出进行加权,以使其更好地适应轮胎的变化并能够实时调整其控制变量权重。仿真结果表明,该策略可以在车速变化和轮胎侧偏刚度非线性的情况下有效地改善车辆性能。


2021, 40(5): 787-793.
doi: 10.13433/j.cnki.1003-8728.20200071
摘要:
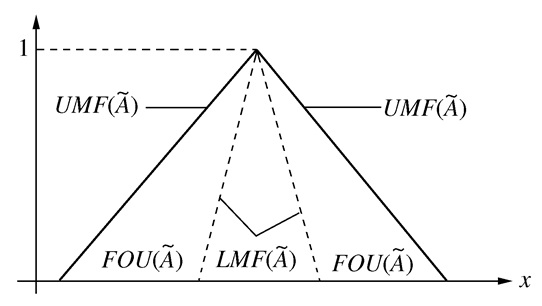
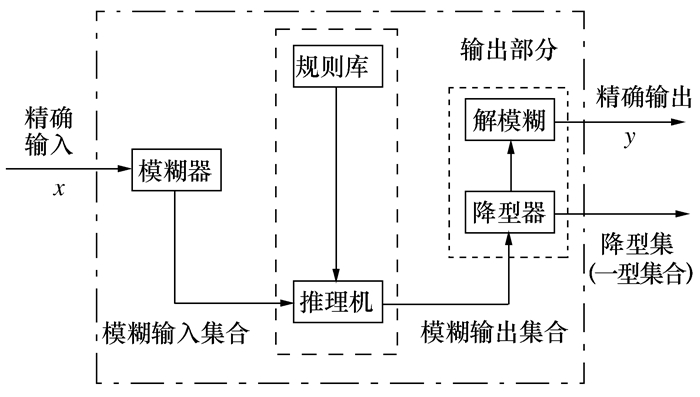
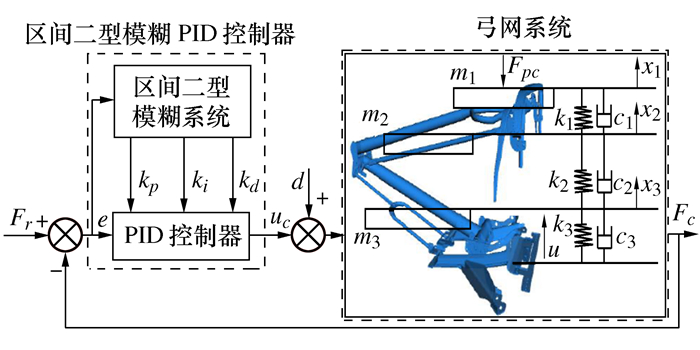
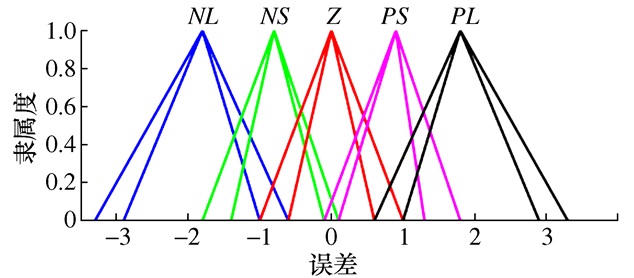
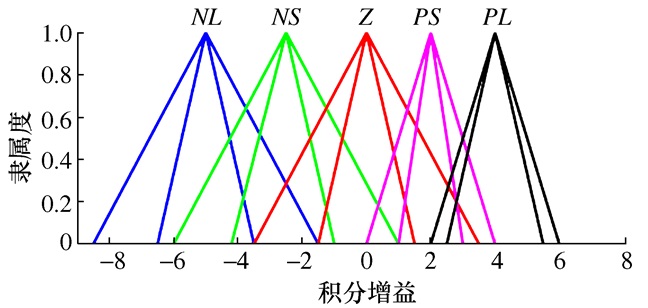
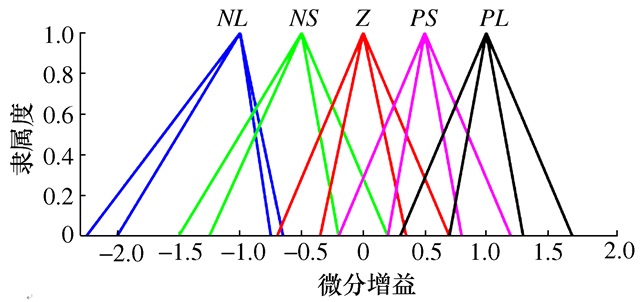
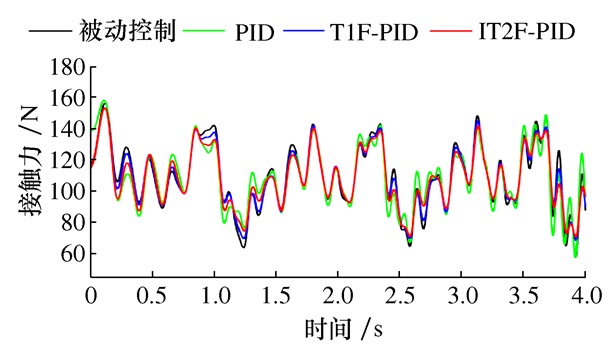
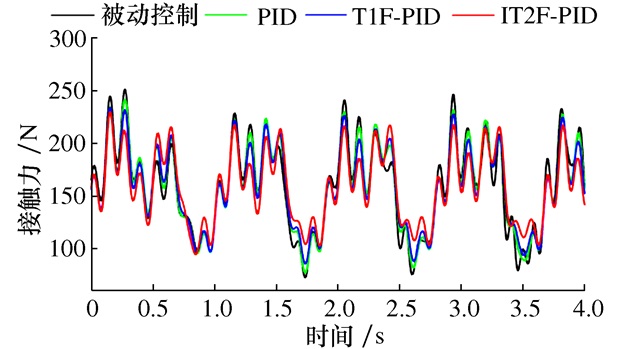
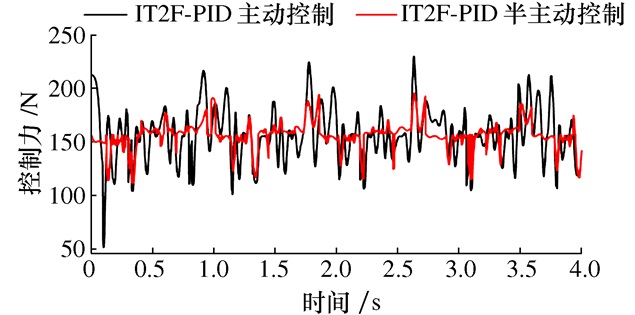
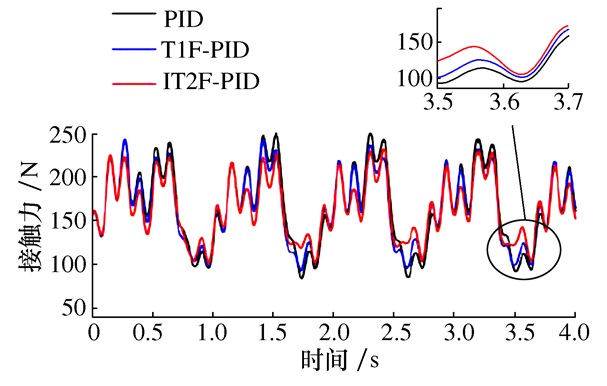
针对不确定性条件下轨道交通列车弓网接触力改善的问题,首次提出了一种基于区间二型模糊PID(IT2F-PID)的受电弓半主动控制方法。首先,建立了三元弓网半主动控制模型。其次,设计了IT2F-PID半主动控制器,并且与一型模糊PID(T1F-PID)和PID半主动控制器对弓网接触力的控制效果进行对比分析。进一步考虑受电弓存在模型不确定性和外部扰动的问题。最后,以DSA380型受电弓为对象进行仿真实验验证。实验结果表明:当列车运行速度为200 km/h和300 km/h时,相较于被动控制,IT2F-PID半主动控制算法作用下的弓网接触力标准差分别降低了18.21%和24.91%,能有效改善弓网受流质量。另外,与主动控制相比,设计的半主动控制器具有所需能量更少的优点,而且拥有更好的处理模型不确定性以及抗扰动能力。
针对不确定性条件下轨道交通列车弓网接触力改善的问题,首次提出了一种基于区间二型模糊PID(IT2F-PID)的受电弓半主动控制方法。首先,建立了三元弓网半主动控制模型。其次,设计了IT2F-PID半主动控制器,并且与一型模糊PID(T1F-PID)和PID半主动控制器对弓网接触力的控制效果进行对比分析。进一步考虑受电弓存在模型不确定性和外部扰动的问题。最后,以DSA380型受电弓为对象进行仿真实验验证。实验结果表明:当列车运行速度为200 km/h和300 km/h时,相较于被动控制,IT2F-PID半主动控制算法作用下的弓网接触力标准差分别降低了18.21%和24.91%,能有效改善弓网受流质量。另外,与主动控制相比,设计的半主动控制器具有所需能量更少的优点,而且拥有更好的处理模型不确定性以及抗扰动能力。




2021, 40(5): 794-800.
doi: 10.13433/j.cnki.1003-8728.20200119
摘要:
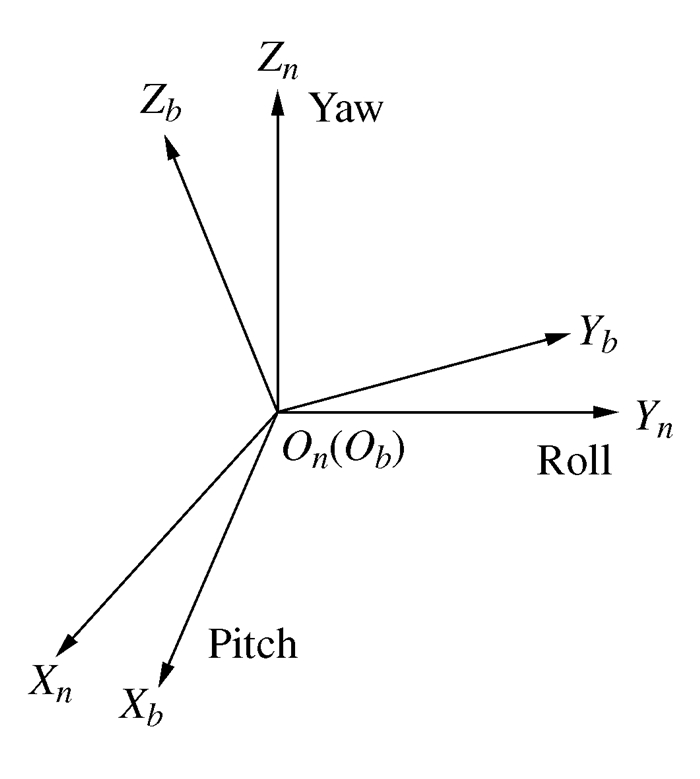
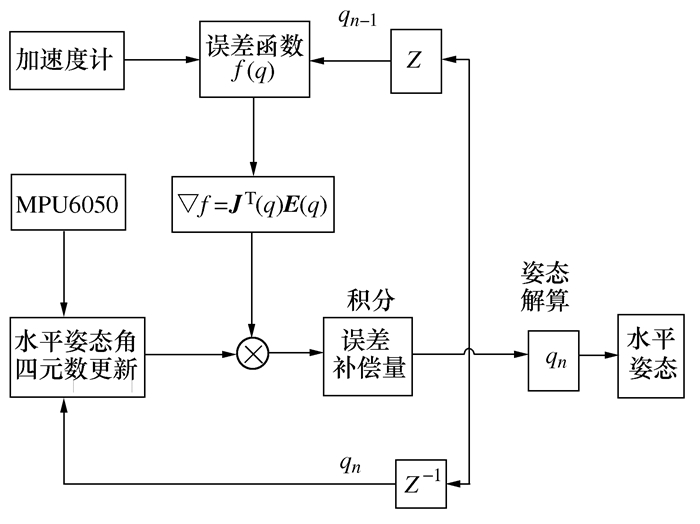
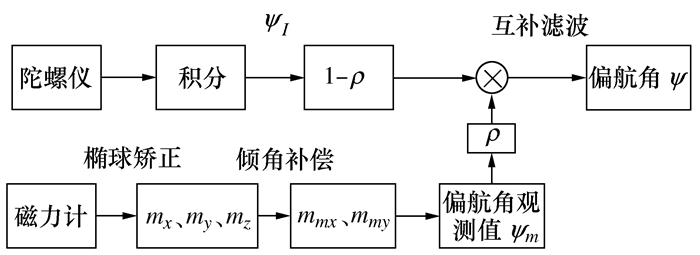
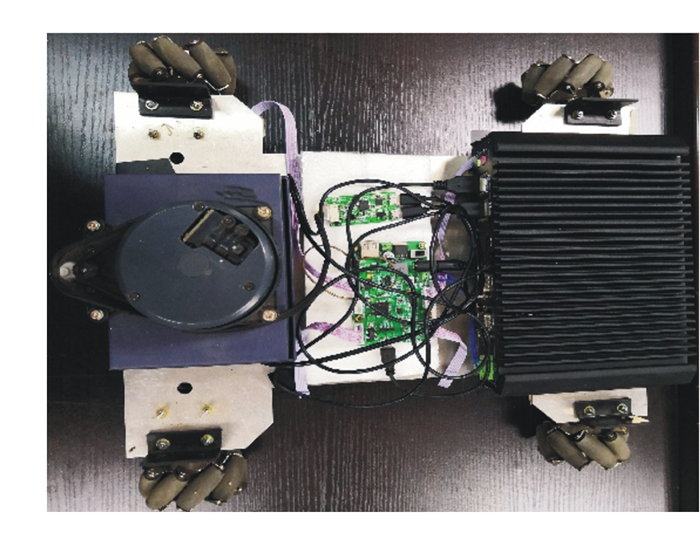
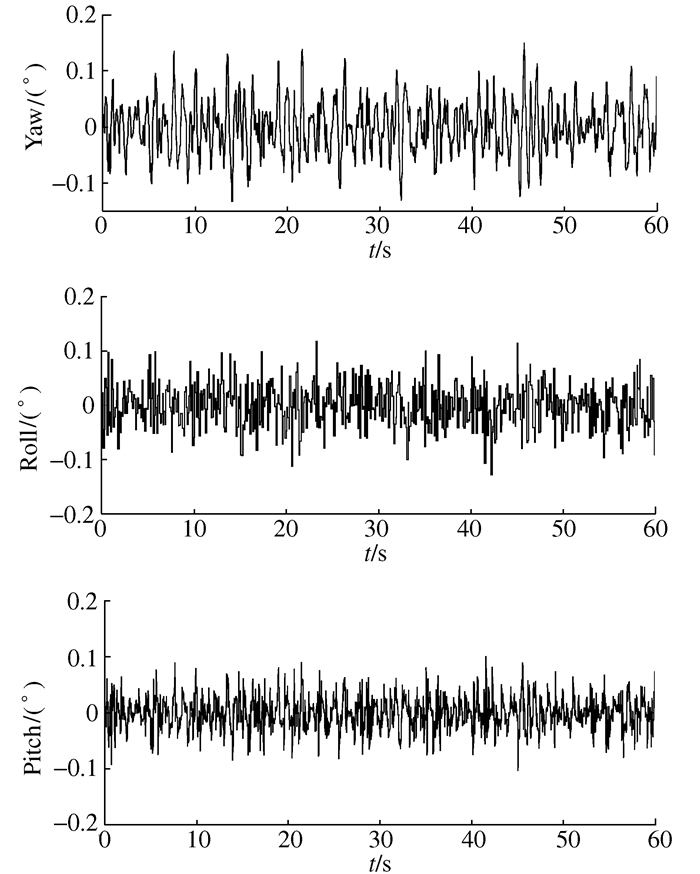
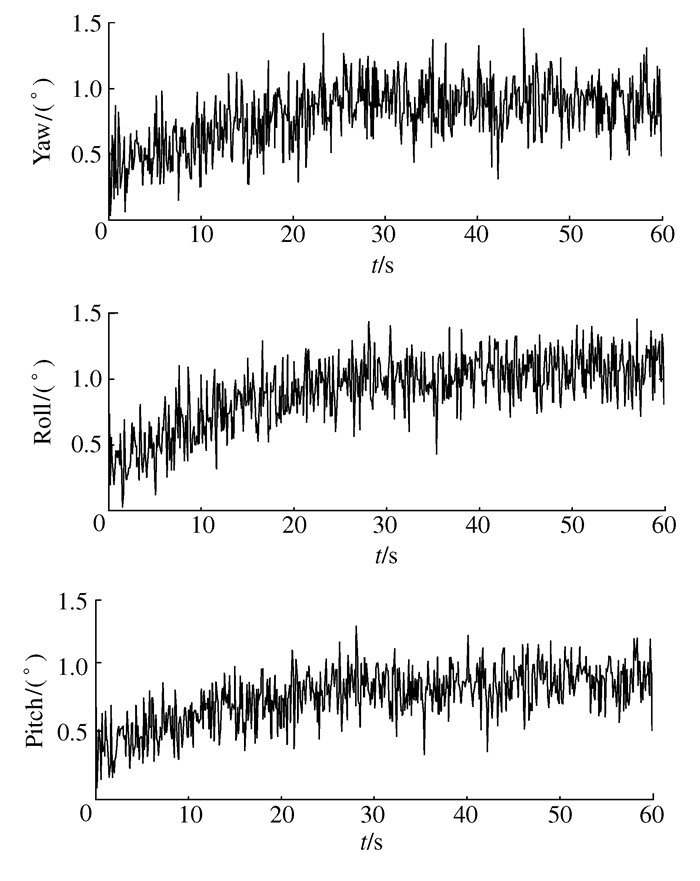
针对单一的MEMS陀螺仪无法解决本身的易发散和磁力计易受磁场干扰导致引入新的噪声,而带来的姿态估计不精确的问题,提出了一种基于全向AGV的优化互补滤波的姿态解算方法。偏航角不参与四元数解算,在水平姿态角四元数解算的基础上,利用共轭梯度法减小陀螺仪的漂移误差。再引进经过椭球修正后的磁力计数据作为观测量,与偏航角进行一阶互补滤波融合, 并确定加权因子。搭建了基于STM32和MEMS传感器为核心的全向AGV实验平台,实验结果表明,该方法能有效抑制陀螺仪易发散和磁力计易受干扰的问题,提高姿态解算的精确性,使姿态解算具有良好的动态和静态性能,同时保证了系统的稳定性。
针对单一的MEMS陀螺仪无法解决本身的易发散和磁力计易受磁场干扰导致引入新的噪声,而带来的姿态估计不精确的问题,提出了一种基于全向AGV的优化互补滤波的姿态解算方法。偏航角不参与四元数解算,在水平姿态角四元数解算的基础上,利用共轭梯度法减小陀螺仪的漂移误差。再引进经过椭球修正后的磁力计数据作为观测量,与偏航角进行一阶互补滤波融合, 并确定加权因子。搭建了基于STM32和MEMS传感器为核心的全向AGV实验平台,实验结果表明,该方法能有效抑制陀螺仪易发散和磁力计易受干扰的问题,提高姿态解算的精确性,使姿态解算具有良好的动态和静态性能,同时保证了系统的稳定性。


2021, 40(5): 801-807.
doi: 10.13433/j.cnki.1003-8728.20200311
摘要:
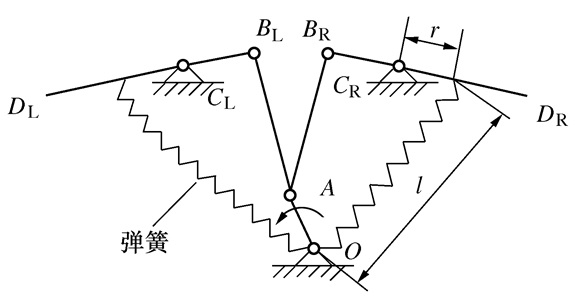
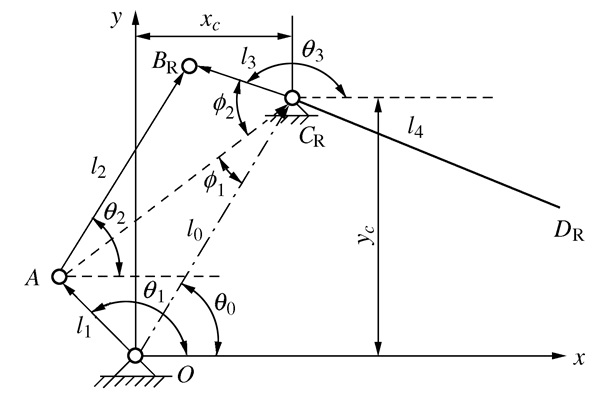
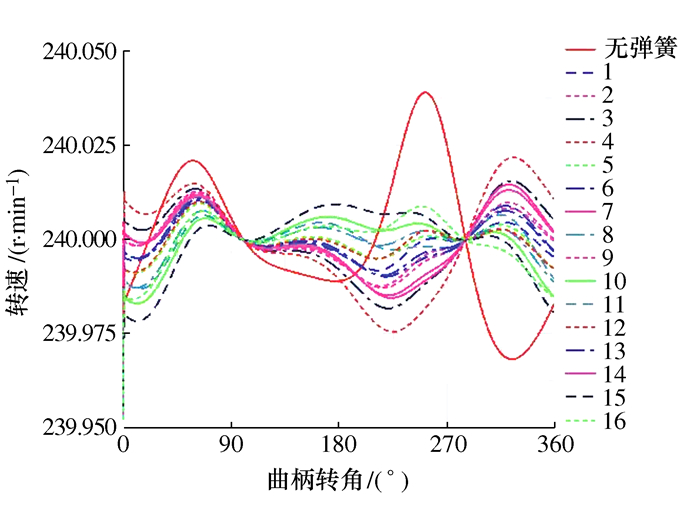
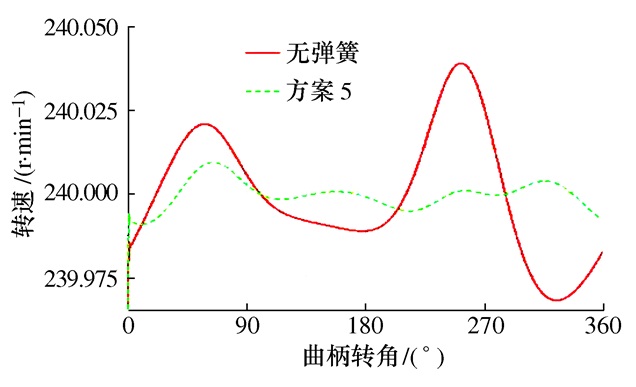
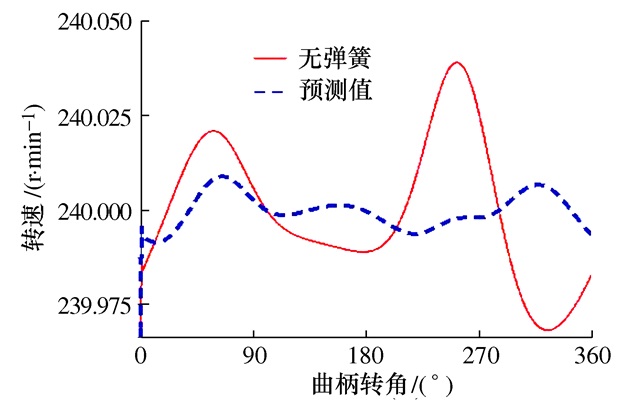
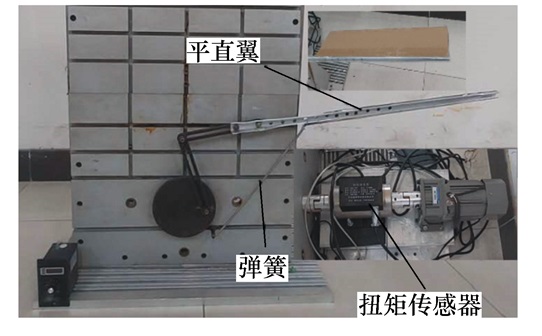
以特拉华大学机械系统实验室所研制的样机模型进行建模,该模型传动机构采用曲柄摇杆机构。传动机构在运转的过程中,翅翼会在气动力和惯性力作用下产生周期性波动,导致电机转速波动增大,影响机构的平稳运行,产生振动和噪声。在仿真试验中引入弹簧元件,可有效降低电机转速波动,利用正交试验设计方法对影响电机转速波动的影响因素进行极差分析,得出弹簧的连接点位置是主要因素,弹簧的刚度系数是次要因素,弹簧原长影响最小。搭建了物理实验平台,验证了仿真结果和正交试验设计方法的正确性。
以特拉华大学机械系统实验室所研制的样机模型进行建模,该模型传动机构采用曲柄摇杆机构。传动机构在运转的过程中,翅翼会在气动力和惯性力作用下产生周期性波动,导致电机转速波动增大,影响机构的平稳运行,产生振动和噪声。在仿真试验中引入弹簧元件,可有效降低电机转速波动,利用正交试验设计方法对影响电机转速波动的影响因素进行极差分析,得出弹簧的连接点位置是主要因素,弹簧的刚度系数是次要因素,弹簧原长影响最小。搭建了物理实验平台,验证了仿真结果和正交试验设计方法的正确性。

2021, 40(5): 808-815.
doi: 10.13433/j.cnki.1003-8728.20200116
摘要:
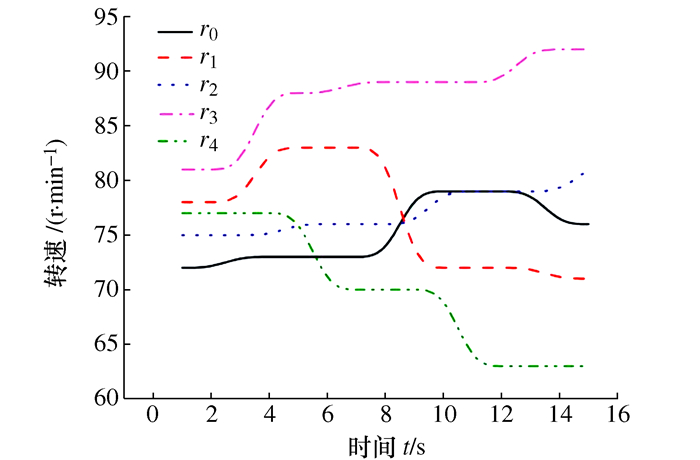
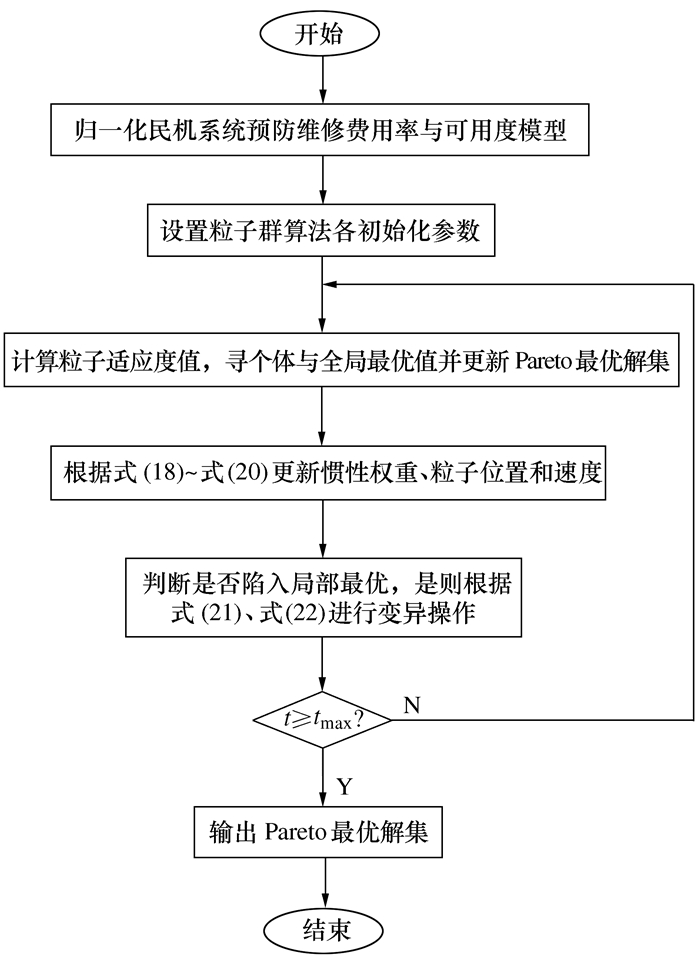
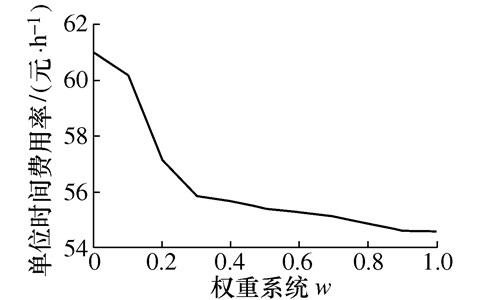
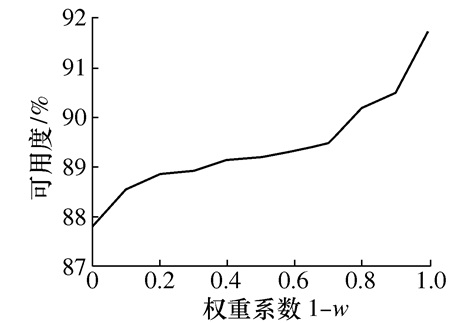
以系统单位时间费用率和可用度为目标,构建了民机多部件系统不完全预防性维修多目标优化模型。引入机会维修思想,以部件机会维修可靠度阈值作为模型优化变量,将各部件维修方式按照时间相关性和结构相关性进行优化组合。模型采用改进后的自适应变异粒子群算法(Adaptive mutation particle swarm optimization,AM-PSO)求解Pareto最优解集。利用民机某型发动机反推控制和指示系统实际维修数据进行模型验证与分析,结果表明:在有限运行周期内运用本文的多目标优化模型与方法进行预防性维修活动,能有效降低系统维修成本的同时提高其可用度。
以系统单位时间费用率和可用度为目标,构建了民机多部件系统不完全预防性维修多目标优化模型。引入机会维修思想,以部件机会维修可靠度阈值作为模型优化变量,将各部件维修方式按照时间相关性和结构相关性进行优化组合。模型采用改进后的自适应变异粒子群算法(Adaptive mutation particle swarm optimization,AM-PSO)求解Pareto最优解集。利用民机某型发动机反推控制和指示系统实际维修数据进行模型验证与分析,结果表明:在有限运行周期内运用本文的多目标优化模型与方法进行预防性维修活动,能有效降低系统维修成本的同时提高其可用度。




2021, 40(5): 816-820.
doi: 10.13433/j.cnki.1003-8728.20200112
摘要:
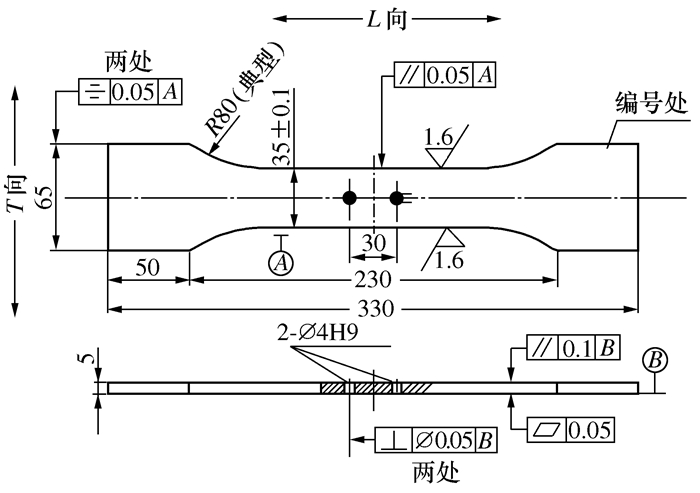
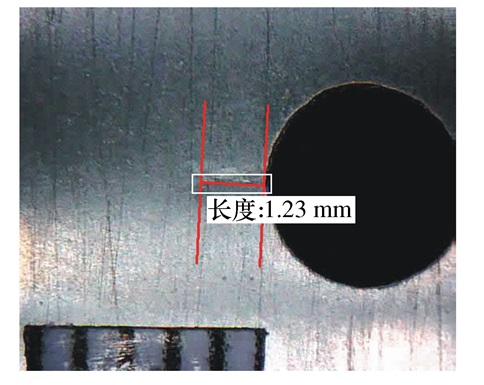
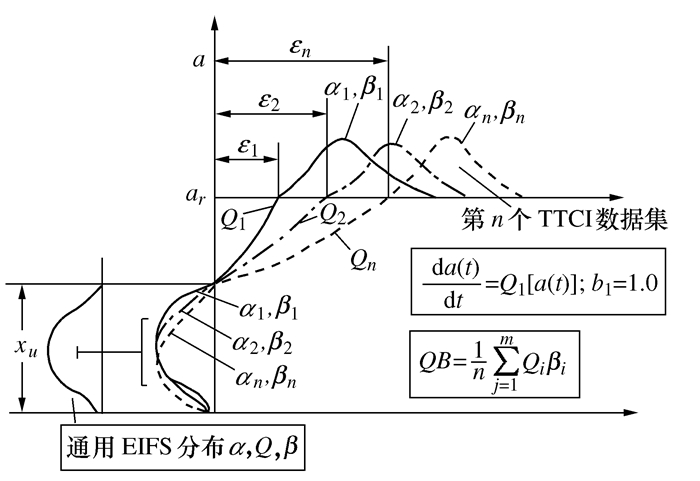
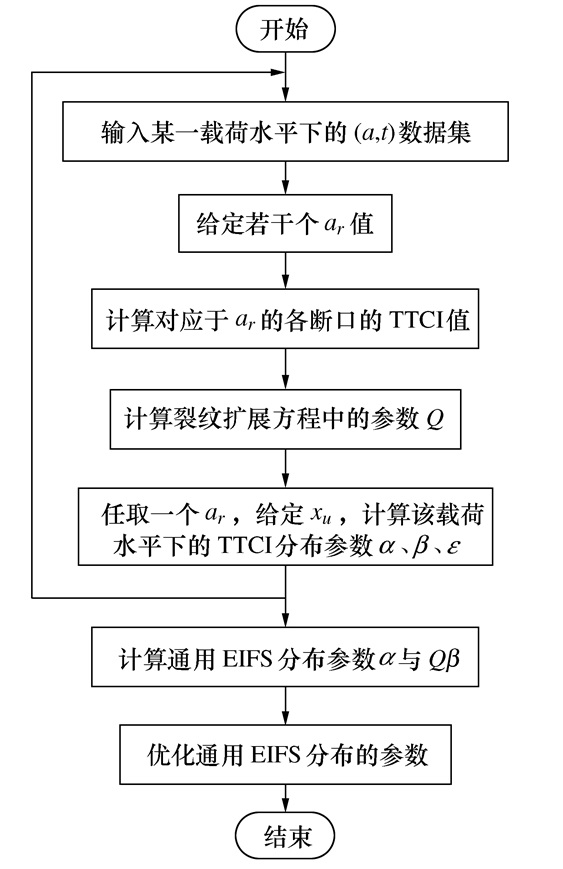
针对飞机结构中常用的钛合金典型结构细节,采用原始疲劳质量方法对其耐久性进行了分析。首先完成了钛合金典型结构细节在3个应力水平下的耐久性试验,通过疲劳断口判读补充了小裂纹扩展数据集,统计获得了各应力水平下的裂纹形成时间TTCI及通用当量初始缺陷尺寸EIFS的概率分布及特征参数。在此基础上,预测了典型结构细节95%可靠度疲劳寿命,并基于EIFS分布预测了95%可靠度的当量初始裂纹尺寸,结果表明该钛合金典型结构细节满足设计要求。
针对飞机结构中常用的钛合金典型结构细节,采用原始疲劳质量方法对其耐久性进行了分析。首先完成了钛合金典型结构细节在3个应力水平下的耐久性试验,通过疲劳断口判读补充了小裂纹扩展数据集,统计获得了各应力水平下的裂纹形成时间TTCI及通用当量初始缺陷尺寸EIFS的概率分布及特征参数。在此基础上,预测了典型结构细节95%可靠度疲劳寿命,并基于EIFS分布预测了95%可靠度的当量初始裂纹尺寸,结果表明该钛合金典型结构细节满足设计要求。