




Interval Type-2 Fuzzy PID Semi-active Control of Contact Force between Pantograph and Catenary
-
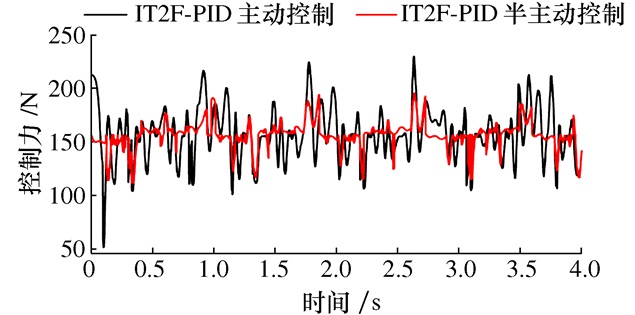
摘要: 针对不确定性条件下轨道交通列车弓网接触力改善的问题,首次提出了一种基于区间二型模糊PID(IT2F-PID)的受电弓半主动控制方法。首先,建立了三元弓网半主动控制模型。其次,设计了IT2F-PID半主动控制器,并且与一型模糊PID(T1F-PID)和PID半主动控制器对弓网接触力的控制效果进行对比分析。进一步考虑受电弓存在模型不确定性和外部扰动的问题。最后,以DSA380型受电弓为对象进行仿真实验验证。实验结果表明:当列车运行速度为200 km/h和300 km/h时,相较于被动控制,IT2F-PID半主动控制算法作用下的弓网接触力标准差分别降低了18.21%和24.91%,能有效改善弓网受流质量。另外,与主动控制相比,设计的半主动控制器具有所需能量更少的优点,而且拥有更好的处理模型不确定性以及抗扰动能力。Abstract: Aiming at the problem of improving pantograph-catenary contact force of rail transit trains under uncertain conditions, a pantograph semi-active control method based on the interval type-2 fuzzy PID (IT2F-PID) was proposed for the first time. Firstly, a three-degree-of-freedom pantograph-catenary semi-active control model is established. Secondly, the IT2F-PID semi-active controller is designed, and the control effect of the pantograph-catenary contact force is compared with the type-1 fuzzy PID (T1F-PID) and PID semi-active controllers. The problems of model uncertainty and external disturbance of the pantograph are further considered. Finally, the DSA380 pantograph was used as the object for simulation experiment verification. The results show that: when the trains run at 200 km/h and 300 km/h, compared with the passive control methods, the standard deviations of the pantograph-catenary contact force under the IT2F-PID semi-active control algorithm are reduced by 18.21% and 24.91%, respectively, and the quality of pantograph-catenary current can be effectively improved. In addition, compared with active control methods, the designed semi-active controller has the advantages of less energy required for the outside world, and has stronger ability to deal with model uncertainty and anti-disturbance.
-
Key words:
- pantograph /
- contact force /
- active control /
- semi-active control /
- interval type-2 fuzzy PID
-
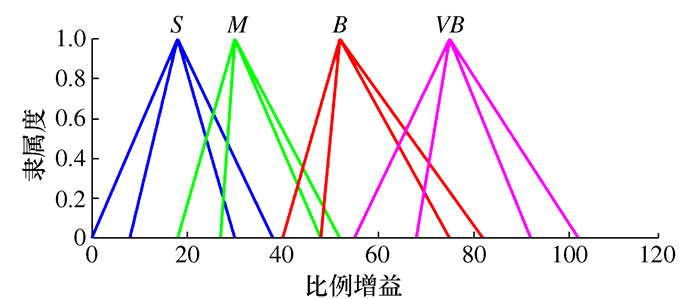
表 1 比例增益的规则库
误差变化率 误差 NL NS Z PS PL NL M S S S M NS B M S M B Z VB B M B VB PS B M S M B PL M S S S M  下载: 导出CSV
下载: 导出CSV
表 2 积分增益的规则库
误差变化率 误差 NL NS Z PS PL NL NL NL NL NS Z NS NL NL NS Z PS Z NL NS Z PS PL PS NS Z PS PL PL PL Z PS PL PL PL
下载: 导出CSV
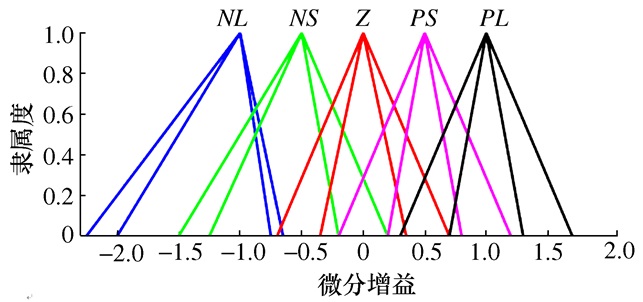
表 3 微分增益的规则库
误差变化率 误差 NL NS Z PS PL NL PL PL PL PS Z NS PL PL PS Z NS Z PL PS Z NS NL PS PS Z NS NL NL PL Z NS NL NL NL
下载: 导出CSV
表 4 弓网系统参数
参数 数值 参数 数值 参数 数值 m1/kg 7.12 c1/(N·s·m-1) 0 α1 0.466 m2/kg 6 c2/(N·s·m-1) 0 α2 0.083 m3/kg 5.8 c3/(N·s·m-1) 70 α3 0.26 k1/(N·m-1) 9 430 L 63 α4 -0.28 k2/(N·m-1) 14 100 L1 9 α5 -0.336 k3/(N·m-1) 0.1 k0/(N·m-1) 3 694
下载: 导出CSV
表 5 V=200 km/h, 控制前后接触力统计对比
控制类型 最大值 最小值 平均值 标准差 被动控制 160.808 8 57.087 1 109.904 9 22.984 7 PID 158.179 7 57.009 5 109.766 3 20.964 5 T1F-PID 153.266 5 68.223 2 109.592 7 19.667 6 IT2F-PID 153.100 3 70.271 8 109.350 7 18.799 3
下载: 导出CSV
表 6 V=300 km/h, 控制前后接触力统计对比
控制类型 最大值 最小值 平均值 标准差 被动控制 250.874 3 59.431 3 160.175 0 43.324 5 PID 241.389 6 77.460 9 159.770 3 40.670 8 T1F-PID 233.590 9 85.613 6 159.349 0 37.889 4 IT2F-PID 229.727 9 94.402 9 159.245 5 32.530 9
下载: 导出CSV
表 7 同时考虑模型不确定性和外部扰动条件下, 控制前后接触力统计对比
控制类型 最大值 最小值 平均值 标准差 PID 251.587 0 82.428 9 168.284 7 46.836 5 T1F-PID 243.964 3 91.924 7 165.635 9 42.131 9 IT2F-PID 234.187 2 101.371 6 165.078 5 35.550 0
下载: 导出CSV
-
[1] ZHU B, REN Z L, XIE W J, et al. Active nonlinear partial-state feedback control of contacting force for a pantograph-catenary system[J]. ISA Transactions, 2019, 91: 78-89 doi: 10.1016/j.isatra.2019.01.033 [2] ZHANG W H, ZHOU N, LI R P, et al. Pantograph and catenary system with double pantographs for high-speed trains at 350 km/h or higher[J]. Journal of Modern Transportation, 2011, 19(1): 7-11 doi: 10.1007/BF03325734 [3] POMBO J, AMBRóSIO J. Influence of pantograph suspension characteristics on the contact quality with the catenary for high speed trains[J]. Computers & Structures, 2012, 110-111: 32-42 http://www.sciencedirect.com/science/article/pii/S0045794912001563 [4] 杨岗, 李芾. 基于LQR的高速受电弓最优半主动控制研究[J]. 铁道学报, 2011, 33(11): 34-40 doi: 10.3969/j.issn.1001-8360.2011.11.006YANG G, LI F. Semi-active control for high-speed pantograph based on the optimal LQR regulator[J]. Journal of the China Railway Society, 2011, 33(11): 34-40 (in Chinese) doi: 10.3969/j.issn.1001-8360.2011.11.006 [5] SONG Y, LIU Z G, OUYANG H J, et al. Sliding mode control with PD sliding surface for high-speed railway pantograph-catenary contact force under strong stochastic wind field[J]. Shock and Vibration, 2017, 2017: 4895321 http://downloads.hindawi.com/journals/sv/aip/4895321.pdf [6] LIN Y C, SHIEH N C, LIU V T. Optimal control for rail vehicle pantograph systems with actuator delays[J]. IET Control Theory & Applications, 2015, 9(13): 1917-1926 http://ieeexplore.ieee.org/document/7208750 [7] 鲁小兵, 刘志刚, 宋洋. 基于磁流变阻尼器的受电弓主动控制分析与验证[J]. 仪器仪表学报, 2015, 36(1): 103-109 https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201501015.htmLU X B, LIU Z G, SONG Y. Analysis and verification of pantograph active control based on MR damper[J]. Chinese Journal of Scientific Instrument, 2015, 36(1): 103-109 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201501015.htm [8] 庄哲, 施莹, 彭飞, 等. 受电弓状态反馈线性化主动控制方法研究[J]. 机械科学与技术, 2017, 36(10): 1604-1610 doi: 10.13433/j.cnki.1003-8728.2017.1020ZHUANG Z, SHI Y, PENG F, et al. Research on active control method of pantograph state feedback linearization[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(10): 1604-1610 (in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.1020 [9] ZDZIEBKO P, MARTOWICZ A, UHL T. An investigation on the active control strategy for a high-speed pantograph using co-simulations[J]. Proceedings of the Institution of Mechanical Engineers, Part Ⅰ: Journal of Systems and Control Engineering, 2019, 233(4): 370-383 http://www.zhangqiaokeyan.com/academic-journal-foreign_other_thesis/0204112887572.html [10] 佃松宜, 梁伟博, 赵涛. 基于改进QPSO的两轮移动机器人区间二型模糊逻辑控制[J]. 控制与决策, 2019, 34(2): 261-268 https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201902005.htmDIAN S Y, LIANG W B, ZHAO T. Interval type-2 fuzzy logic control for a two-wheeled mobile robot based on improved QPSO[J]. Control and Decision, 2019, 34(2): 261-268 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201902005.htm [11] EL-BARDINI M, EL-NAGAR A M. Interval type-2 fuzzy PID controller for uncertain nonlinear inverted pendulum system[J]. ISA Transactions, 2014, 53(3): 732-743 doi: 10.1016/j.isatra.2014.02.007 [12] WANG B, XUE J Y, WU F J, et al. Stabilization conditions for fuzzy control of uncertain fractional order non-linear systems with random disturbances[J]. IET Control Theory & Applications, 2016, 10(6): 637-647 http://ieeexplore.ieee.org/document/7440954/references [13] 肖建, 赵涛. T-S模糊控制综述与展望[J]. 西南交通大学学报, 2016, 51(3): 462-474 doi: 10.3969/j.issn.0258-2724.2016.03.006XIAO J, ZHAO T. Overview and prospect of T-S fuzzy control[J]. Journal of Southwest Jiaotong University, 2016, 51(3): 462-474 (in Chinese) doi: 10.3969/j.issn.0258-2724.2016.03.006 [14] ZHAO T, LIU J H, DIAN S Y. Finite-time control for interval type-2 fuzzy time-delay systems with norm-bounded uncertainties and limited communication capacity[J]. Information Sciences, 2019, 483: 153-173 doi: 10.1016/j.ins.2019.01.044 [15] 郭京波, 杨绍普, 高国生. 高速机车主动控制受电弓研究[J]. 铁道学报, 2004, 26(4): 41-45 https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200404009.htmGUO J B, YANG S P, GAO G S. Study on active control of high-speed-train pantographs[J]. Journal of the China Railway Society, 2004, 26(4): 41-45 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB200404009.htm -









 点击查看大图
点击查看大图

图(14) / 表(7)
计量
- 文章访问数: 135
- HTML全文浏览量: 159
- PDF下载量: 21
- 被引次数: 0
