




An Intelligent Vehicle Longitudinal Speed Following Control Strategy with Driver Characteristics Considered
-
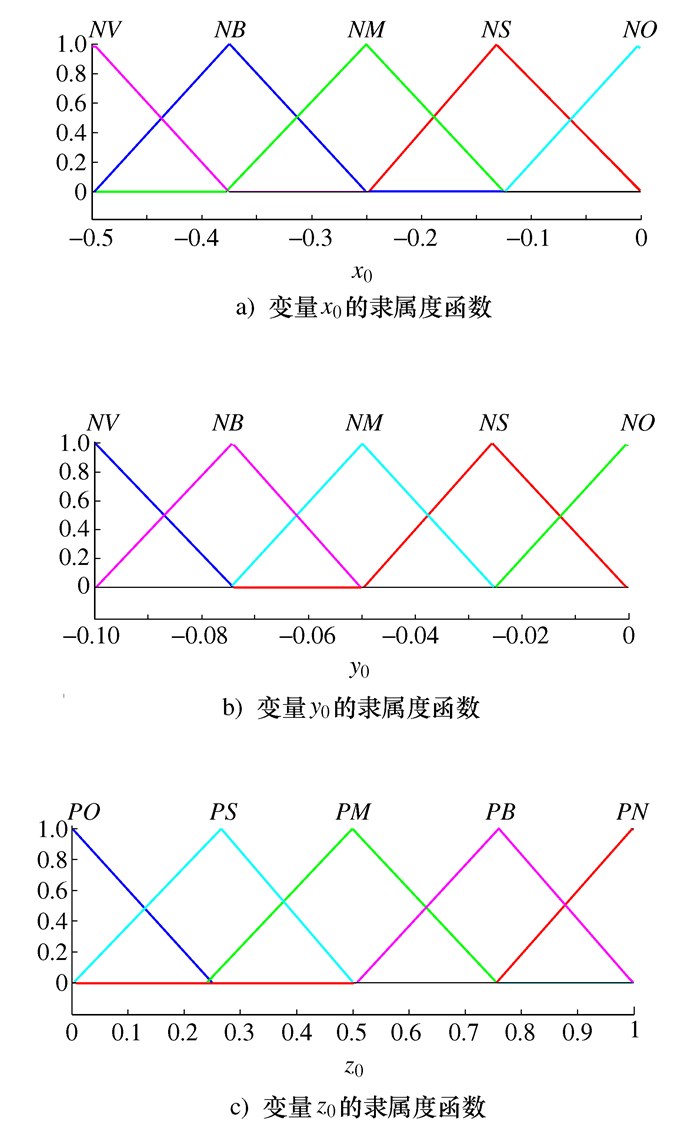
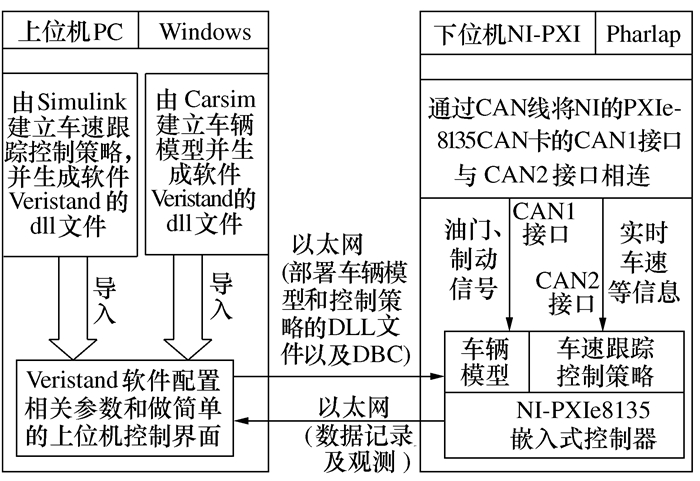
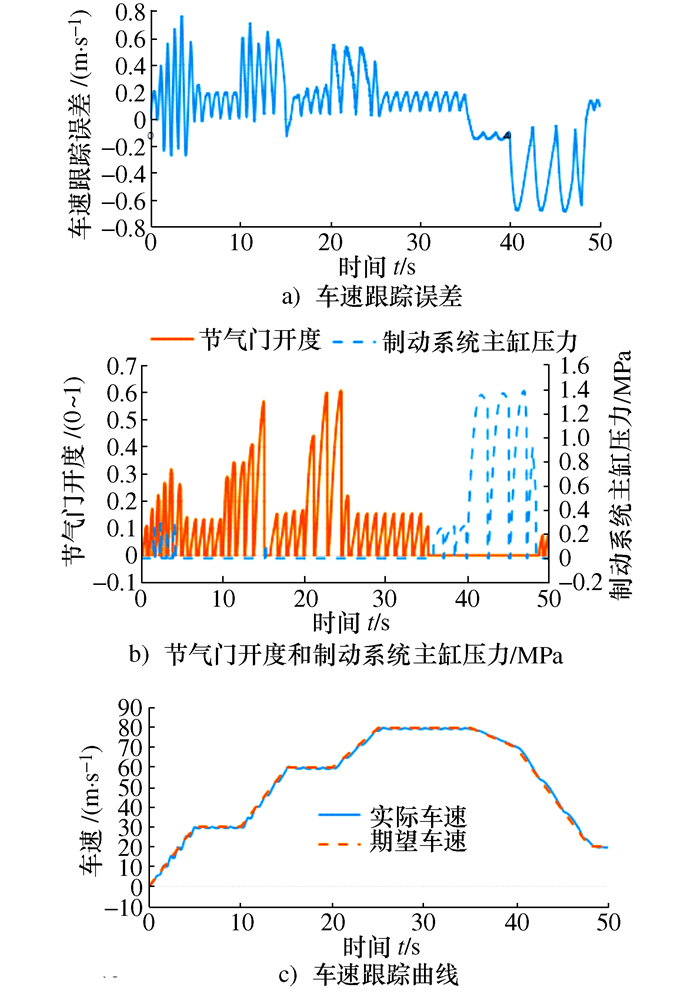
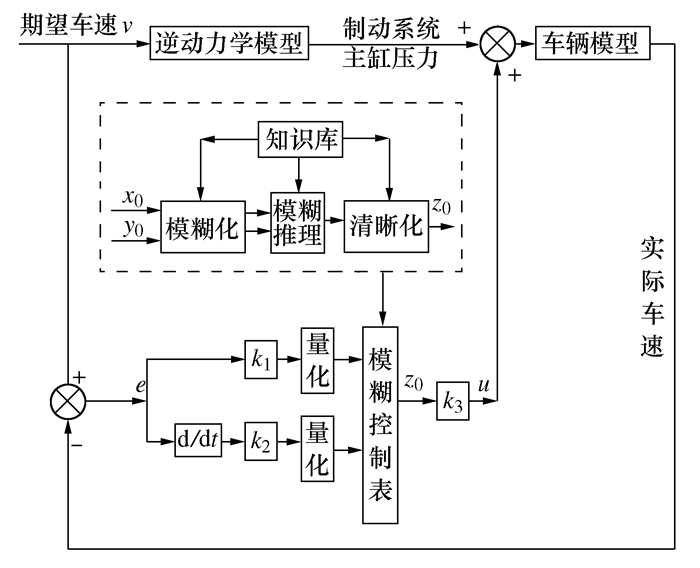
摘要: 为了在满足乘坐舒适性的前提下提高智能车辆纵向车速跟随控制的精度,提出了一种具有自适应控制系统特性符合驾驶意图以及驾驶员行为特性的纵向控制策略。首先,设计油门和制动切换策略,依据期望车速计算期望加/减速度,并以此获得驾驶意图完成油门和制动的切换控制;其次,提出了一种基于模糊控制的制动控制策略;除此之外,设计了一种比例增益可调的PI油门控制策略。最后,将本文所设计的控制策略与目前普遍研究的PID车速跟踪控制策略分别进行NI实时系统仿真测试。结果表明:本文提出的基于驾驶员特性的车速跟踪控制器有效提高了对参考车速的跟踪精度以及乘坐舒适性。Abstract: In order to improve the accuracy of a smart vehicle′s longitudinal speed following control on the premise of satisfying the ride comfort, we propose a longitudinal control strategy that is consistent with driving intention and driver behavior characteristics. First, we design the throttle and brake switching strategy, calculate the expected acceleration / deceleration according to the expected speed of the vehicle so as to obtain the driving intention, complete the throttle and brake switching control. Second, we propose a braking control strategy based on fuzzy control. In addition, a PI throttle control strategy with adjustable proportional gain is designed. In the end, the control strategy and the PID vehicle speed tracking control strategy designed in this paper are used to simulate the NI real-time system. The simulation results show that the driver speed-based tracking controller proposed in this paper effectively improves the reference vehicle speed following precision and ride comfort.
-
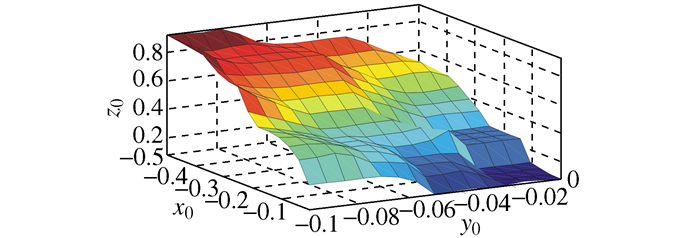
表 1 模糊控制规则
x0 y0 NV NB NM NS NO NV PV PV PB PB PM NB PV PB PB PM PM NM PB PM PM PS PS NS PB PM PS PS PO NO PS PS PO PO PO  下载: 导出CSV
下载: 导出CSV
-
[1] GUO J H, HU P, LI L H, et al. Design of automatic steering controller for trajectory tracking of unmanned vehicles using genetic algorithms[J]. IEEE Transactions on Vehicular Technology, 2012, 61(7): 2913-2924 doi: 10.1109/TVT.2012.2201513 [2] DIAS J E A, PEREIRA G A S, PALHARES R M. Longitudinal model identification and velocity control of an autonomous car[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 776-786 http://ieeexplore.ieee.org/document/6882826 [3] RESCHKA A, BÖHMER J R, SAUST F, et al. Safe, dynamic and comfortable longitudinal control for an autonomous vehicle[C]//Proceedings of 2012 IEEE Intelligent Vehicles Symposium (Ⅳ). Alcala de Henares: IEEE, 2012 [4] BOULKROUNE B, VAN AALST S, LEHAEN K, et al. Observer-based controller with integral action for longitudinal vehicle speed control[C]//Proceedings of 2017 IEEE Intelligent Vehicles Symposium (Ⅳ). Los Angeles, CA: IEEE, 2017 [5] NIE L, GUAN J Y, LU C H, et al. Longitudinal speed control of autonomous vehicle based on a self-adaptive PID of radial basis function neural network[J]. IET Intelligent Transport Systems, 2018, 12(6): 485-494 doi: 10.1049/iet-its.2016.0293 [6] 朱敏, 陈慧岩. 无人驾驶越野车辆纵向速度跟踪控制试验[J]. 机械工程学报, 2018, 54(24): 111-117 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201824013.htmZHU M, CHEN H Y. Experiment on longitudinal speed tracking control for unmanned off-road vehicles[J]. Journal of Mechanical Engineering, 2018, 54(24): 125-131 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201824013.htm [7] 刁勤晴, 张雅妮, 朱凌云. 双预瞄点智能车大曲率路径的横纵向模糊控制[J]. 中国机械工程, 2019, 30(12): 1445-1452 doi: 10.3969/j.issn.1004-132X.2019.12.010DIAO Q Q, ZHANG Y N, ZHU L Y. A lateral and longitudinal fuzzy control of intelligent vehicles with double preview points for large curvature roads[J]. China Mechanical Engineering, 2019, 30(12): 1445-1452 (in Chinese) doi: 10.3969/j.issn.1004-132X.2019.12.010 [8] 李文昌, 郭景华, 王进. 分层架构下智能电动汽车纵向运动自适应模糊滑模控制[J]. 厦门大学学报, 2019, 58(3): 422-428 https://www.cnki.com.cn/Article/CJFDTOTAL-XDZK201903022.htmLI W C, GUO J H, WANG J. Adaptive fuzzy sliding mode control for longitudinal motion of intelligent electric vehicles under layered architecture[J]. Journal of Xiamen University, 2019, 58(3): 422-428 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XDZK201903022.htm [9] 沈沛鸿, 赵治国, 郭秋伊. 基于ANFIS的工况跟踪用纵向驾驶员模型开发[J]. 汽车工程, 2019, 41(7): 815-822, 791 https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201907013.htmSHEN P H, ZHAO Z G, GUO Q Y. Development of longitudinal driver model for driving cycle tracking based on ANFIS[J]. Automotive Engineering, 2019, 41(7): 815-822, 791 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201907013.htm [10] 杨志. 考虑驾驶员制动特性的四轮独驱电动汽车制动控制策略研究[D]. 锦州: 辽宁工业大学, 2019YANG Z. Research on brake control strategy of four-wheel independent drive electric vehicle considering driver's braking characteristics[D]. Jinzhou: Liaoning University of Technology, 2019 (in Chinese) [11] 王超, 郭孔辉, 刘洋, 等. 基于滑模控制和三阶预瞄决策的转向驾驶员模型[J]. 吉林大学学报, 2020, 50(6): 2238-2246 https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY202006038.htmWANG C, GUO K H, LIU Y, et al. Behavioral characteristics of steering driver based on sliding mode control and third-order preview decision[J]. Journal of Jilin University, 2020, 50(6): 2238-2246 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY202006038.htm [12] 余志生. 汽车理论[M]. 4版. 北京: 机械工业出版社, 2009YU Z S. Automotive theory[M]. 4th ed. Beijing: Machinery Industry Press, 2009 (in Chinese) [13] 田涛涛. 无模型自适应控制在无人驾驶汽车中的应用[D]. 北京: 北京交通大学, 2017TIAN T T. Model-free adaptive control based on self-driving car[D]. Beijing: Beijing Jiaotong University, 2017 (in Chinese) [14] 王振. 无人车运动控制系统设计与实现[D]. 西安: 长安大学, 2016WANG Z. Design and realization of the autonomous vehicle motion control system[D]. Xi'an: Chang'an University, 2016 (in Chinese) [15] 陈慧岩, 熊光明, 龚建伟, 等. 无人驾驶汽车概论[M]. 北京: 北京理工大学出版社, 2014CHEN H Y, XIONG G M, GONG J W, et al. Introduction to self-driving car[M]. Beijing: Beijing Institute of Technology Press, 2014 (in Chinese) [16] 李国勇, 杨丽娟. 神经·模糊·预测控制及其MATLAB实现[M]. 3版. 北京: 电子工业出版社, 2013LI G Y, YANG L J. Neuro-fuzzy predictive control and its MATLAB implementation[M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2013 (in Chinese) -


 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 210
- HTML全文浏览量: 72
- PDF下载量: 37
- 被引次数: 0
