




Application of Screw Theory and Elimination Method in Inverse Kinematics of Da Vinci-like Surgical Robot
-
摘要: 由于达芬奇手术机器人构型特殊,不满足逆运动学解析解的存在条件,传统的运动学建模方法无法求出机器人逆运动学解析解。针对一种类达芬奇手术机器人构型,提出了一种结合旋量理论和消元法相结合的全新运动学建模方法,运用该方法成功求解出类达芬奇手术机器人的逆运动学解析解,解决了类达芬奇手术机器人精确解析解的求解问题。并通过MATLAB/Simulink仿真验证了该方法的正确性,从而丰富了机器人运动学建模和逆运动学解析解的求解理论,为类达芬奇手术机器人提供了一种快速通用的精确解析解求解方法。Abstract: Because of the Da Vinci surgical robot has a special joint configuration, the existence condition of its inverse kinematics analytic solution is not satisfied, that means the inverse kinematics analytical solution of Da Vinci surgical robot can′t be obtained by traditional kinematics modeling method. In this paper, a new kinematics modeling method which combining screw theory with elimination method is first proposed for a kind of robot similar to Da Vinci surgical robot configuration. The inverse kinematics analytical solution of Da Vinci surgical robot is solved successfully by using the proposed method, and the correctness of the method is verified by MATLAB/Simulink simulation. This study enriches the theory of robot kinematics modeling and inverse kinematics analytic solution and provides a fast and general method for accurate analytical solution of Da Vinci surgical robot.
-
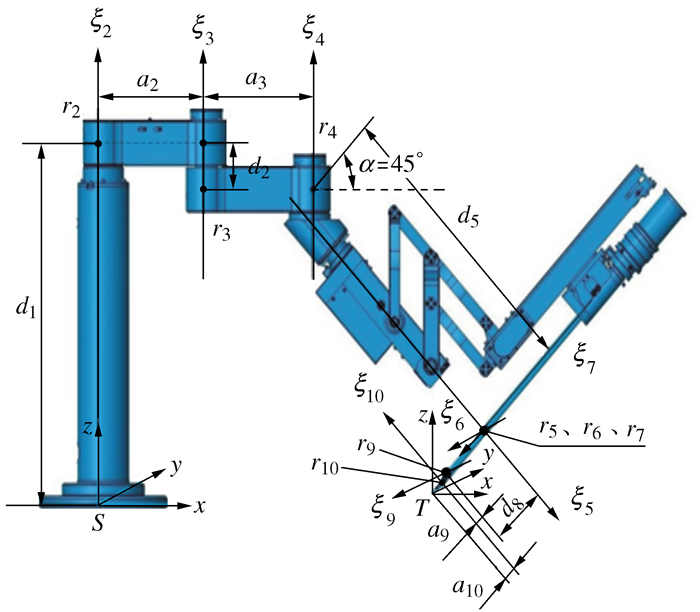
表 1 关节轴线上点rn坐标相对于基坐标系位置关系
r X/mm Y/mm Z/mm 1 0 0 800 2 200 0 800 3 200 0 714 4 400 0 714 5 751.998 8 0 348.002 2 6 751.997 8 0 348.002 2 7 751.997 8 0 348.002 2 8 701.997 8 0 348.002 2 9 701.997 8 0 348.002 2 10 693.497 8 0 348.002 2  下载: 导出CSV
下载: 导出CSV
-
[1] FARAH E, LIU S G. Kinematics modeling and simulating of a new surgical robot[J]. International Journal of Control and Automation, 2015, 8(8): 363-372 doi: 10.14257/ijca.2015.8.8.34 [2] ÖZGVR E, MEZOUAR Y. Kinematic modeling and control of a robot arm using unit dual quaternions[J]. Robotics and Autonomous Systems, 2016, 77: 66-73 doi: 10.1016/j.robot.2015.12.005 [3] LIU Y, WANG D Q, SUN J, et al. Geometric approach for inverse kinematics analysis of 6-Dof serial robot[C]//2015 IEEE International Conference on Information and Automation. Lijiang, Yunnan, China: IEEE, 2015: 852-855 [4] 黄昔光, 刘冰, 李启才. 一种6自由度关节机器人逆运动学共形几何代数法[J]. 上海交通大学学报, 2016, 50(S1): 86-89 https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT2016S1022.htmHUANG X G, LIU B, LI Q C. Inverse kinematics analysis of a degree-of-freedom articulated robot using conformal geometric algebra[J]. Journal of Shanghai Jiao Tong University, 2016, 50(S1): 86-89 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SHJT2016S1022.htm [5] 马如奇, 王伟东, 董为, 等. 一种新型机器人微创手术微器械的机构设计及运动学分析[J]. 机器人, 2013, 35(4): 402-409 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201304003.htmMA R Q, WANG W D, DONG W, et al. Mechanism design and kinematics analysis of a micro instrument for robotic minimally invasive surgery[J]. Robot, 2013, 35(4): 402-409 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201304003.htm [6] 唐奥林. 面向主从式微创外科手术机器人的遥操作运动控制策略研究[D]. 上海: 上海交通大学, 2014TANG A L. Research on the teleoperation motion control strategy for a master-slave minimally invasive surgical robot[D]. Shanghai: Shanghai Jiao Tong University, 2014 (in Chinese) [7] 于凌涛, 王文杰, 王正雨, 等. 一类不满足Pieper准则的机器人逆运动学解析解获取方法[J]. 机器人, 2016, 38(4): 486-494 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201604013.htmYU L T, WANG W J, WANG Z Y, et al. Acquisition method of inverse kinematics analytical solutions for a class of robots dissatisfying the pieper criterion[J]. Robot, 2016, 38(4): 486-494 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201604013.htm [8] ALEBOOYEH M, URBANIC J. Neural network model for identifying workspace, forward and inverse kinematics of the 7-DOF YuMi 14000 ABB collaborative robot[J]. IFAC-PapersOnLine, 2019, 52(10): 176-181 doi: 10.1016/j.ifacol.2019.10.019 [9] 董云, 杨涛, 李文. 基于解析法和遗传算法的机械手运动学逆解[J]. 计算机仿真, 2012, 29(3): 239-243 doi: 10.3969/j.issn.1006-9348.2012.03.059DONG Y, YANG T, LI W. Algorithm based on analytical method and genetic algorithm for inverse kinematics of redundant manipulator[J]. Computer Simulation, 2012, 29(3): 239-243 (in Chinese) doi: 10.3969/j.issn.1006-9348.2012.03.059 [10] 尹一伊, 朱其新, 张国平, 等. 基于GAN网络的机器人逆运动学求解[J]. 苏州科技大学学报, 2019, 36(3): 74-78 https://www.cnki.com.cn/Article/CJFDTOTAL-TDSY201903013.htmYIN Y Y, ZHU Q X, ZHANG G P, et al. Robot inverse kinematics solution based on generative adversarial networks[J]. Journal of Suzhou University of Science and Technology, 2019, 36(3): 74-78 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDSY201903013.htm [11] WU L, YANG X D, CHEN K, et al. A minimal POE-based model for robotic kinematic calibration with only position measurements[J]. IEEE Transactions on Automation Science and Engineering, 2015, 12(2): 758-763 doi: 10.1109/TASE.2014.2328652 [12] 牛国君, 曲翠翠, 潘博, 等. 腹腔微创手术机器人的主从控制[J]. 机器人, 2019, 41(4): 551-560 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201904016.htmNIU G J, QU C C, PAN B, et al. Master-slave control of the Celiac minimally invasive surgical robot[J]. Robot, 2019, 41(4): 551-560 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201904016.htm [13] 敖天翔, 刘满禄, 张华, 等. 结合旋量和代数方法的工业机械臂逆运动学解法[J]. 机械科学与技术, 2017, 36(8): 1224-1229 doi: 10.13433/j.cnki.1003-8728.2017.0813AO T X, LIU M L, ZHANG H, et al. Inverse kinematic solution of industrial robot arm with combination of screw theory and algebraic methods[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(8): 1224-1229 (in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.0813 [14] 张立栋, 李亮玉, 王天琪. 工业机器人逆解问题的旋量解法[J]. 机械科学与技术, 2016, 35(4): 539-544 doi: 10.13433/j.cnki.1003-8728.2017.0813ZHANG L D, LI L Y, WANG T Q. A screw solution of industrial robot's inverse kinematics problem[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(4): 539-544 (in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.0813 [15] 孙恒辉, 赵爱武, 李达, 等. 基于新旋量子问题改进一类6R串联机器人逆解算法[J]. 机械工程学报, 2016, 52(1): 79-86 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201601010.htmSUN H H, ZHAO A W, LI D, et al. Improvement of the algorithm of the inverse kinematics calculation for 6R series robots based on one novel Paden-Kahan sub-problem[J]. Journal of Mechanical Engineering, 2016, 52(1): 79-86 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201601010.htm [16] 理查德·摩雷, 李泽湘, 夏恩卡·萨里特里. 机器人操作的数学导论[M]. 徐卫良, 钱瑞明, 译. 北京: 机械工业出版社, 1998MURRAY R M, LI Z X, SASTRY S S. A mathematical introduction to robotic manipulation[M]. XU W L, QIAN R M, trans. Beijing: China Machine Press, 1998 (in Chinese) -






 点击查看大图
点击查看大图
图(10) / 表(1)
计量
- 文章访问数: 269
- HTML全文浏览量: 68
- PDF下载量: 34
- 被引次数: 0
