作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2022年 41卷 第8期
2022, 41(8): 1149-1153.
doi: 10.13433/j.cnki.1003-8728.20200446
 摘要
摘要 HTML
HTML PDF 1604KB
PDF 1604KB
摘要:
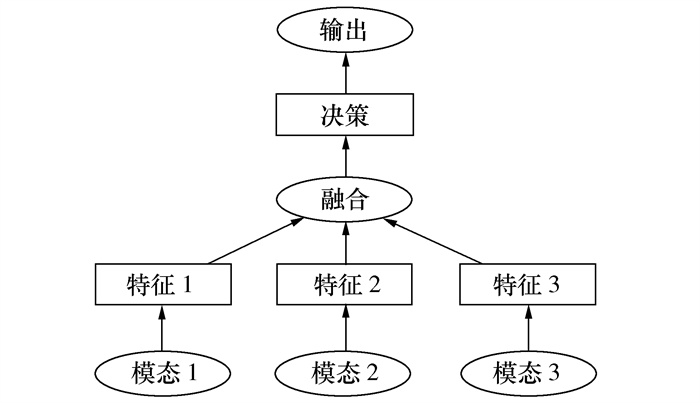
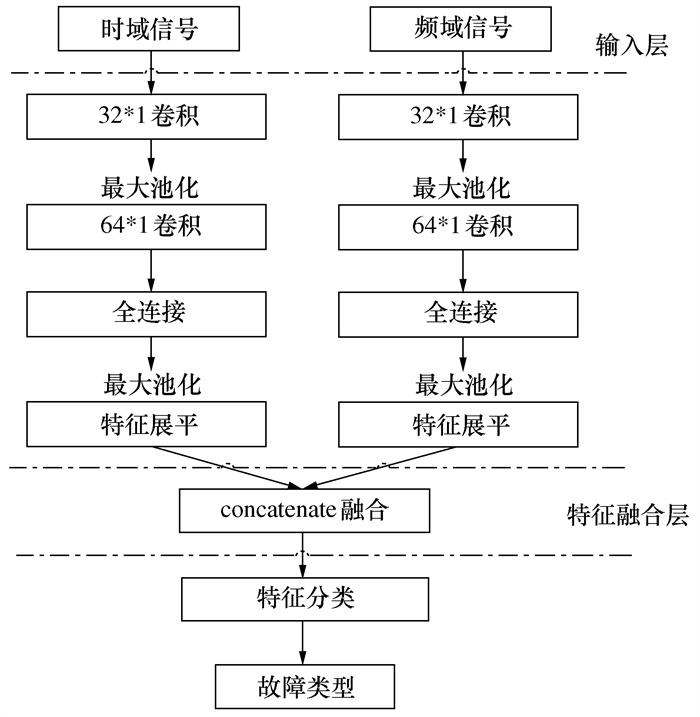
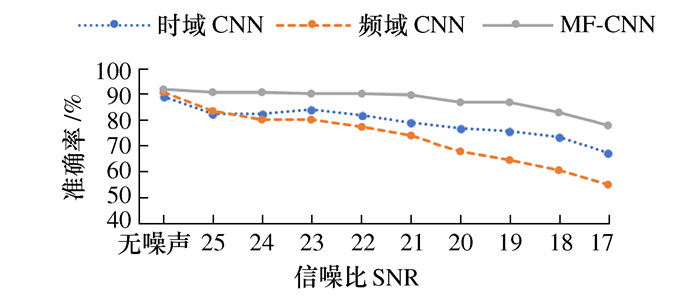
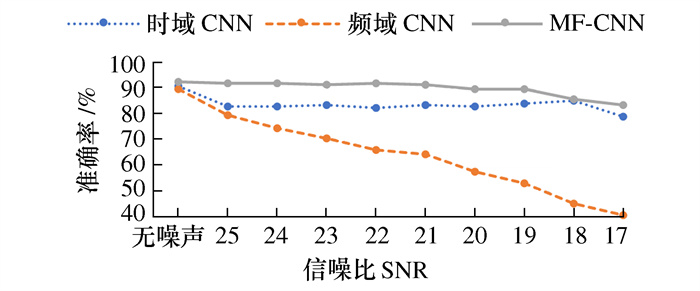
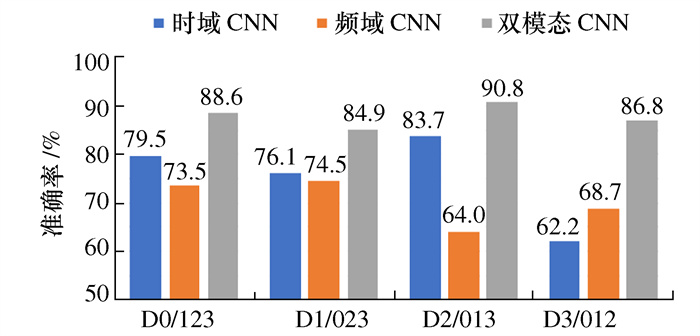
滚动轴承在实际运行中负载多变且噪声干扰较大, 导致故障特征提取及诊断困难, 针对此问题本研究提出一种用于机械设备故障诊断的深度学习方法(MF-CNN), 该方法将多模态融合技术(MFT)与卷积神经网络(CNN)结合, 用卷积神经网络对一种工况下的滚动轴承故障数据分别提取时域、频域两个模态特征并融合, 将融合后的特征作为故障分类的依据来构建整个网络, 对变工况下的未知故障类型的数据进行测试, 实现时域、频域双模态对轴承故障类型的联合诊断。大量实验结果表明, 在变载荷和噪声下, MF-CNN模型用于故障诊断的准确率相对传统单模态的时域CNN和频域CNN均有提高, 对由重载荷向轻载荷变化的工况下准确率提升更为明显。
滚动轴承在实际运行中负载多变且噪声干扰较大, 导致故障特征提取及诊断困难, 针对此问题本研究提出一种用于机械设备故障诊断的深度学习方法(MF-CNN), 该方法将多模态融合技术(MFT)与卷积神经网络(CNN)结合, 用卷积神经网络对一种工况下的滚动轴承故障数据分别提取时域、频域两个模态特征并融合, 将融合后的特征作为故障分类的依据来构建整个网络, 对变工况下的未知故障类型的数据进行测试, 实现时域、频域双模态对轴承故障类型的联合诊断。大量实验结果表明, 在变载荷和噪声下, MF-CNN模型用于故障诊断的准确率相对传统单模态的时域CNN和频域CNN均有提高, 对由重载荷向轻载荷变化的工况下准确率提升更为明显。


2022, 41(8): 1154-1162.
doi: 10.13433/j.cnki.1003-8728.20200441
摘要:
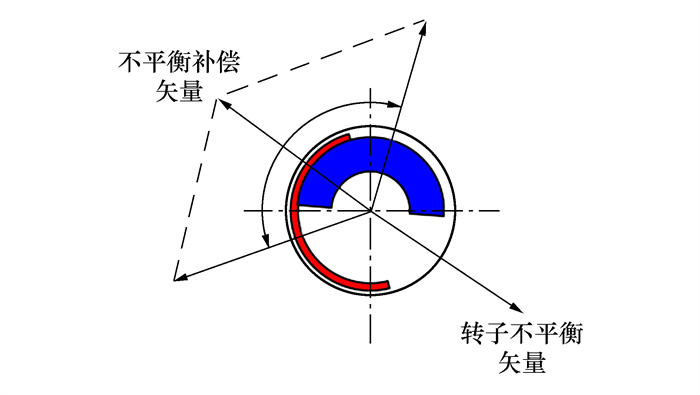
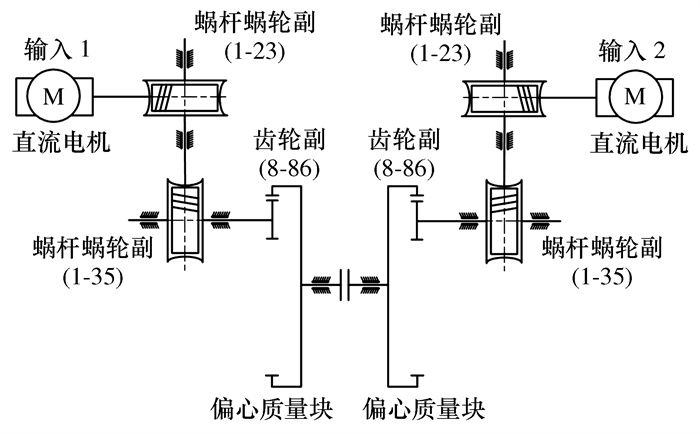
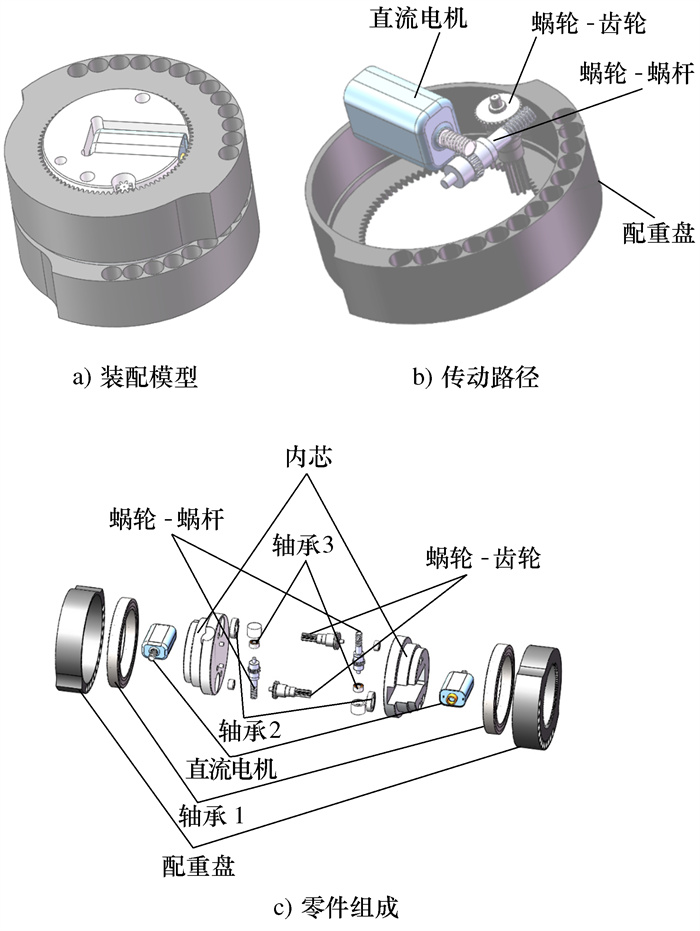
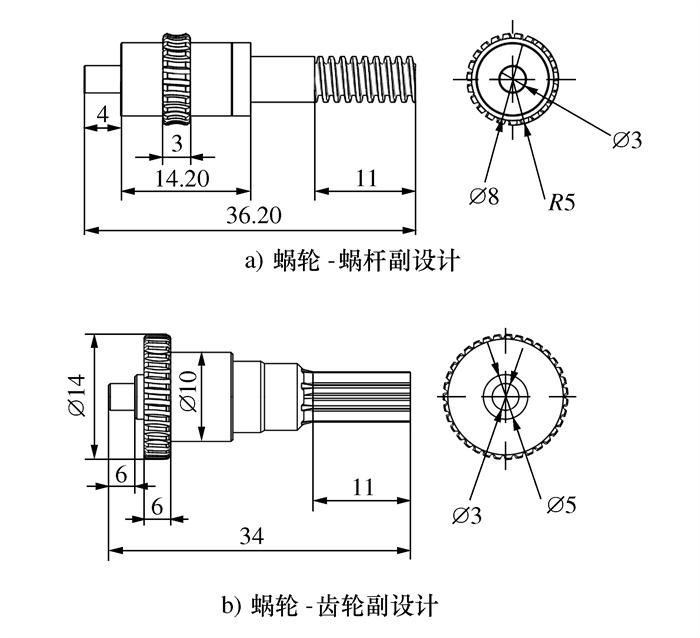
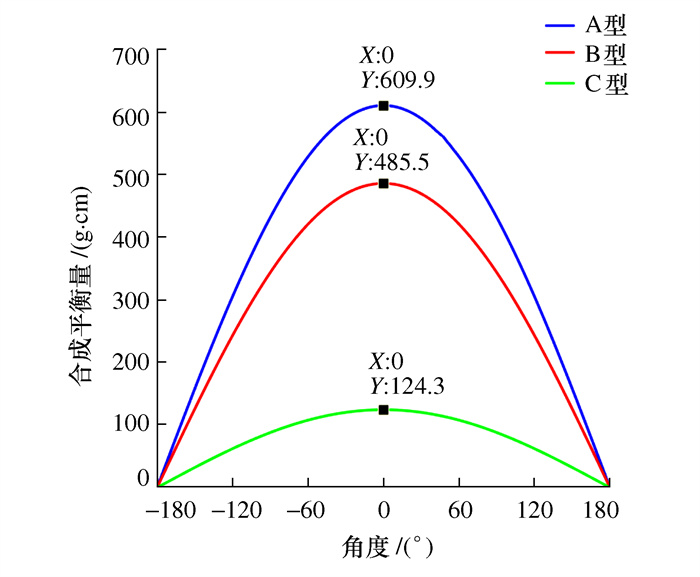
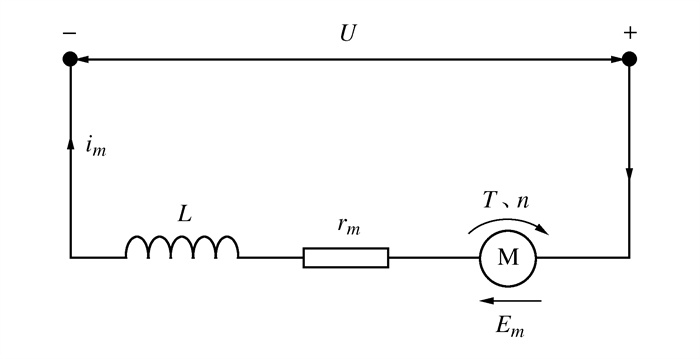
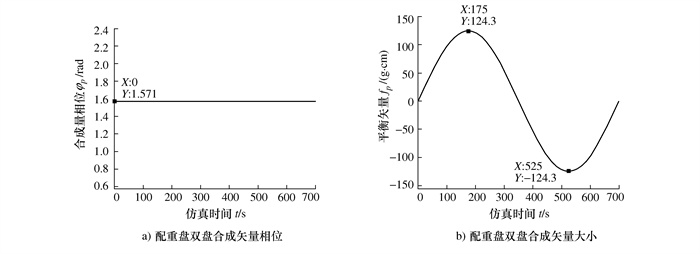
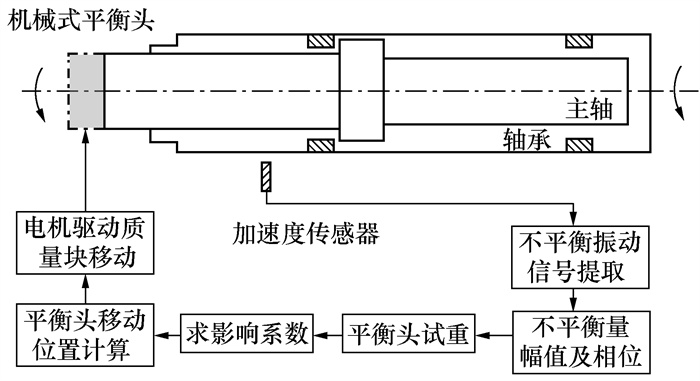
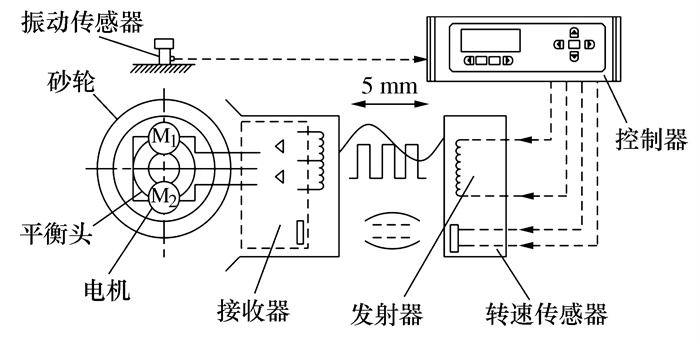
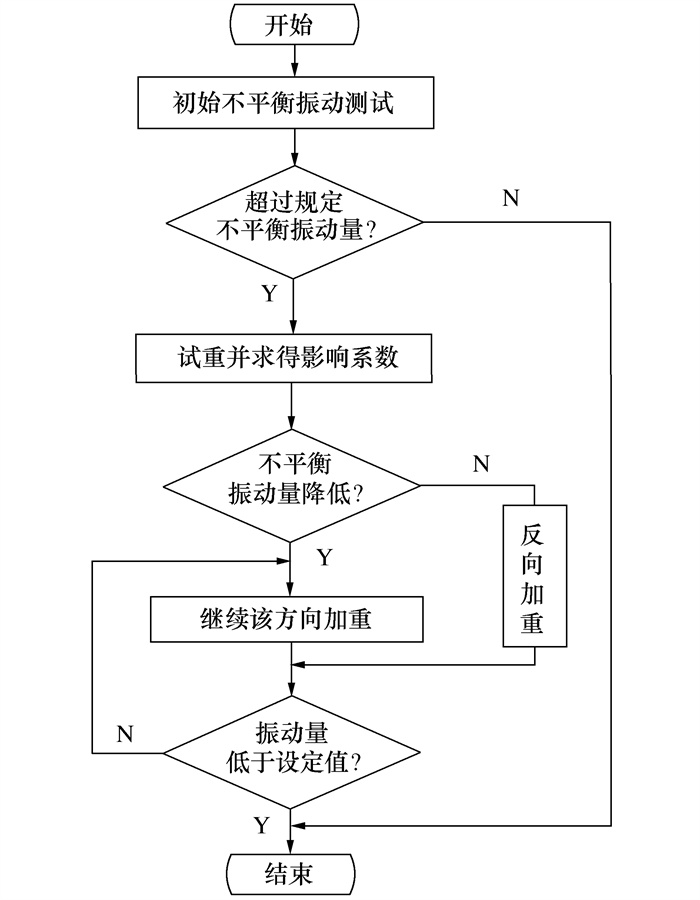
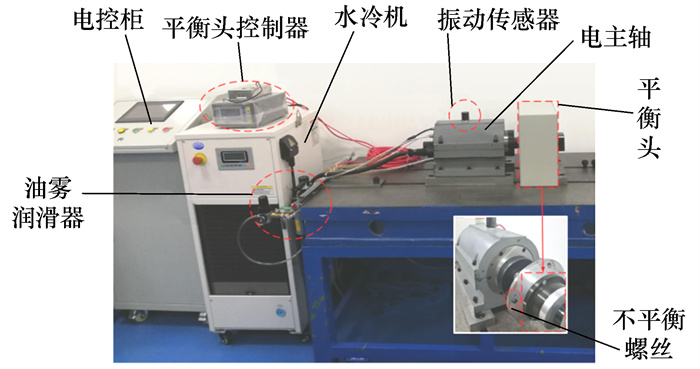
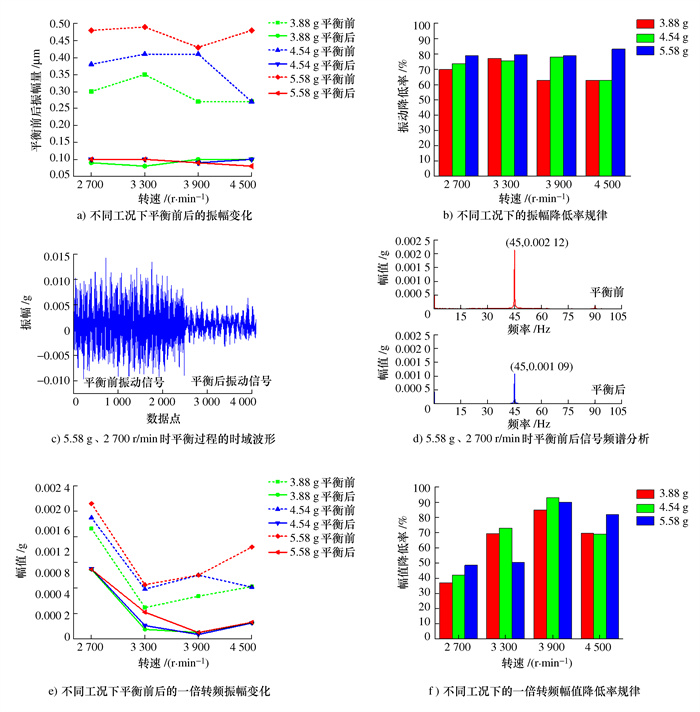
转子在线主动平衡是旋转机械高速、精密和智能化的关键技术之一, 能够不停机、无人干预地实时控制转子不平衡振动。从配重盘的极坐标运动原理出发, 研究了机械式主动平衡头结构; 研究了配重盘的平衡能力, 获得了其设计规律; 研究了平衡头作动方案, 进行了单、双盘转动平衡仿真, 证明了设计合理性。研究了转子在线影响系数平衡方法的原理, 建立了电主轴单平面主动平衡平台, 完成了不同工况下的平衡试验和振动数据分析。结果表明, 所提出的电主轴在线主动平衡策略是有效的, 在4 500 r/min下电主轴的振动位移降至0.08 μm, 降振率达83.33%;在3 900 r/min下一倍转频振动加速度降至0.7×10-4 g, 降振率达93%。
转子在线主动平衡是旋转机械高速、精密和智能化的关键技术之一, 能够不停机、无人干预地实时控制转子不平衡振动。从配重盘的极坐标运动原理出发, 研究了机械式主动平衡头结构; 研究了配重盘的平衡能力, 获得了其设计规律; 研究了平衡头作动方案, 进行了单、双盘转动平衡仿真, 证明了设计合理性。研究了转子在线影响系数平衡方法的原理, 建立了电主轴单平面主动平衡平台, 完成了不同工况下的平衡试验和振动数据分析。结果表明, 所提出的电主轴在线主动平衡策略是有效的, 在4 500 r/min下电主轴的振动位移降至0.08 μm, 降振率达83.33%;在3 900 r/min下一倍转频振动加速度降至0.7×10-4 g, 降振率达93%。



2022, 41(8): 1163-1168.
doi: 10.13433/j.cnki.1003-8728.20200516
摘要:
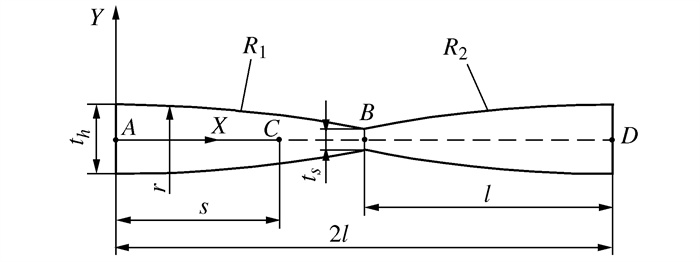
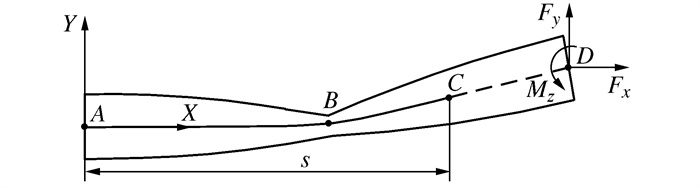
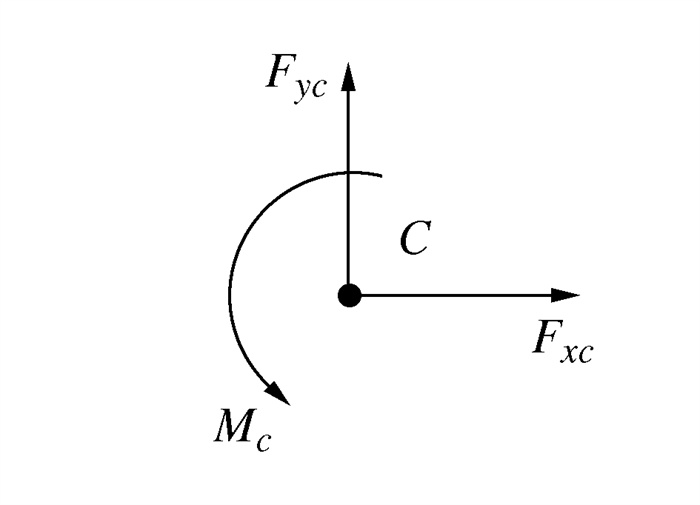
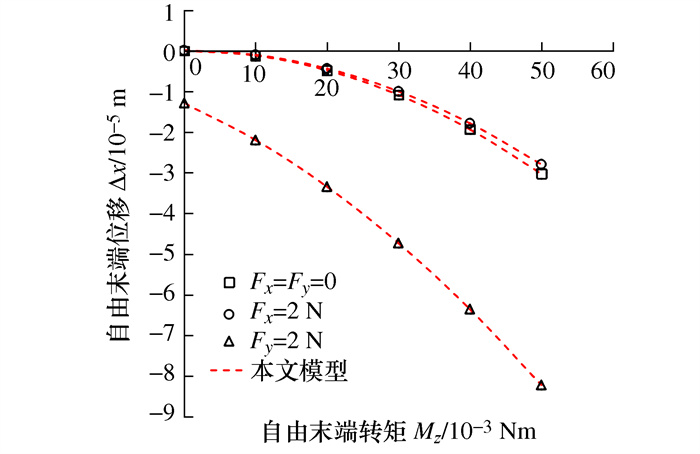
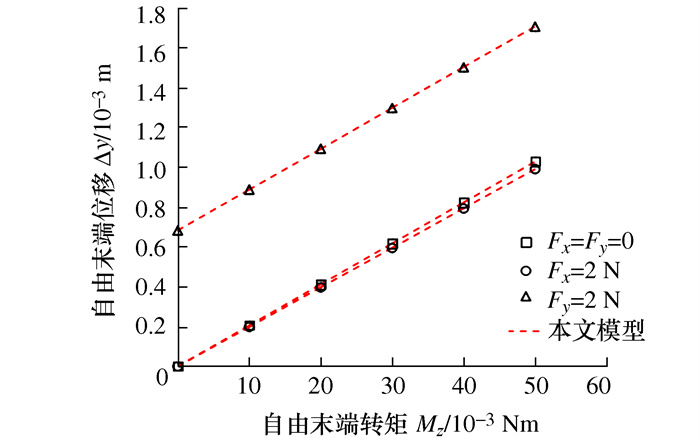
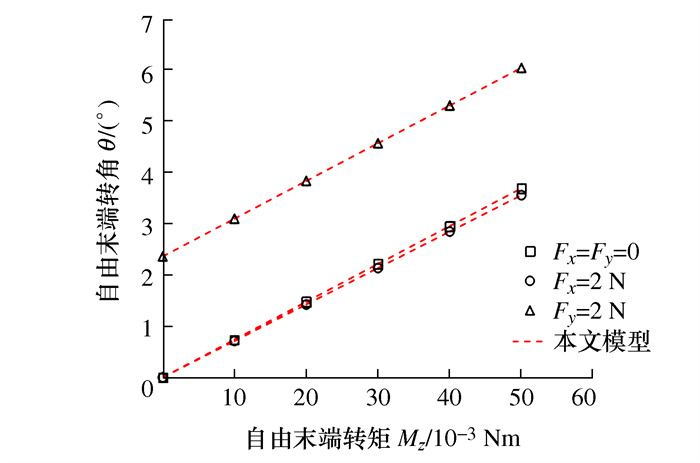
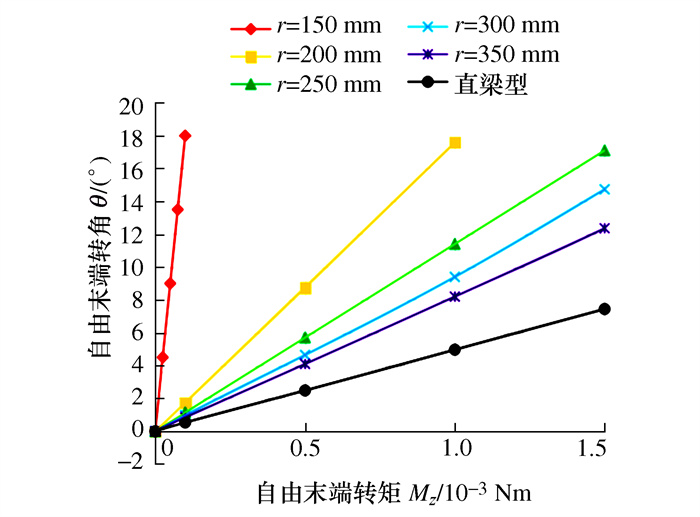
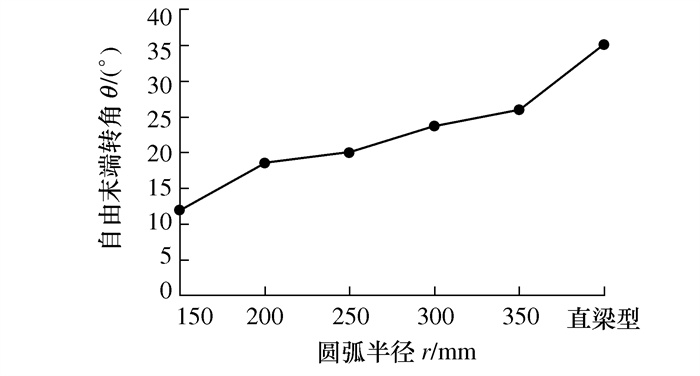
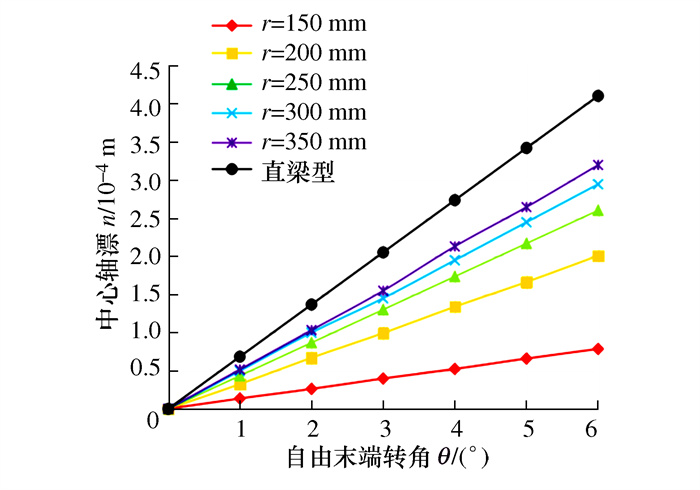
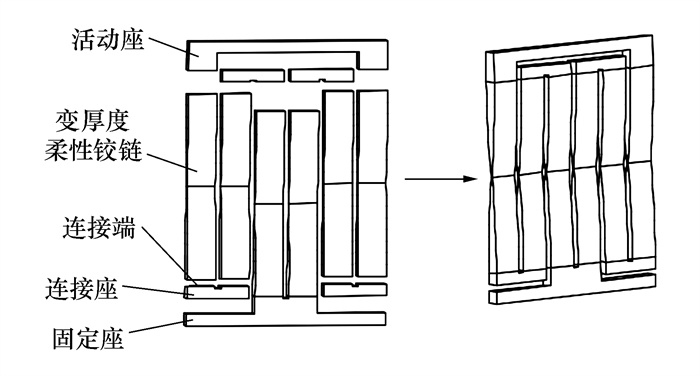
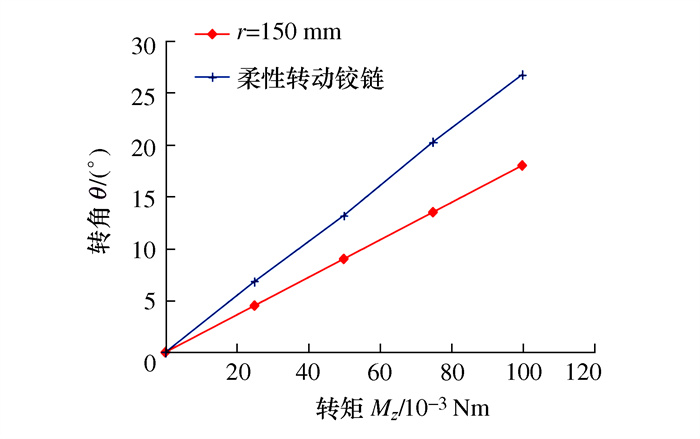
针对传统的直梁型柔性铰链转动精度低的缺点, 本文提出一种新型的变厚度柔性铰链, 使得该铰链的变形主要集中在铰链的中心位置, 以此提高柔性铰链的转动精度。为了研究变厚度柔性铰链, 首先列出变厚度柔性铰链的厚度公式, 然后以Euler-Bernoulli梁理论为基础, 搭建出变厚度柔性铰链的力学模型, 并通过牛顿迭代法进行具体数值求解, 为了验证力学模型的正确性, 将铰链模型导入有限元仿真软件ABAQUS中进行静力学仿真, 验证了力学模型的正确性; 基于力学模型与有限元仿真, 研究了变厚度柔性铰链的变形特性与圆弧半径r之间的关系, 通过分析结果表明, 变厚度柔性铰链相对传统的直梁型柔性铰链具有较大的转角范围和更小的中心轴漂n, 以本文提出的变厚度柔性铰链为基本单元, 搭建出具备大转角能力的柔性转动铰链, 为需要大转角、大承载能力的仿生关节的设计提供一定的理论参考。
针对传统的直梁型柔性铰链转动精度低的缺点, 本文提出一种新型的变厚度柔性铰链, 使得该铰链的变形主要集中在铰链的中心位置, 以此提高柔性铰链的转动精度。为了研究变厚度柔性铰链, 首先列出变厚度柔性铰链的厚度公式, 然后以Euler-Bernoulli梁理论为基础, 搭建出变厚度柔性铰链的力学模型, 并通过牛顿迭代法进行具体数值求解, 为了验证力学模型的正确性, 将铰链模型导入有限元仿真软件ABAQUS中进行静力学仿真, 验证了力学模型的正确性; 基于力学模型与有限元仿真, 研究了变厚度柔性铰链的变形特性与圆弧半径r之间的关系, 通过分析结果表明, 变厚度柔性铰链相对传统的直梁型柔性铰链具有较大的转角范围和更小的中心轴漂n, 以本文提出的变厚度柔性铰链为基本单元, 搭建出具备大转角能力的柔性转动铰链, 为需要大转角、大承载能力的仿生关节的设计提供一定的理论参考。



2022, 41(8): 1169-1175.
doi: 10.13433/j.cnki.1003-8728.20200443
摘要:
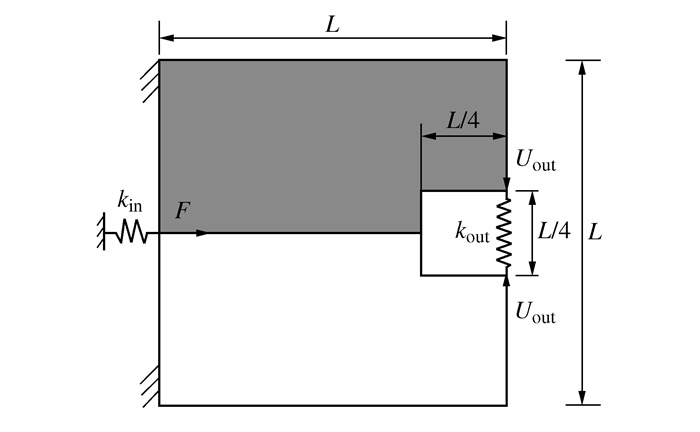
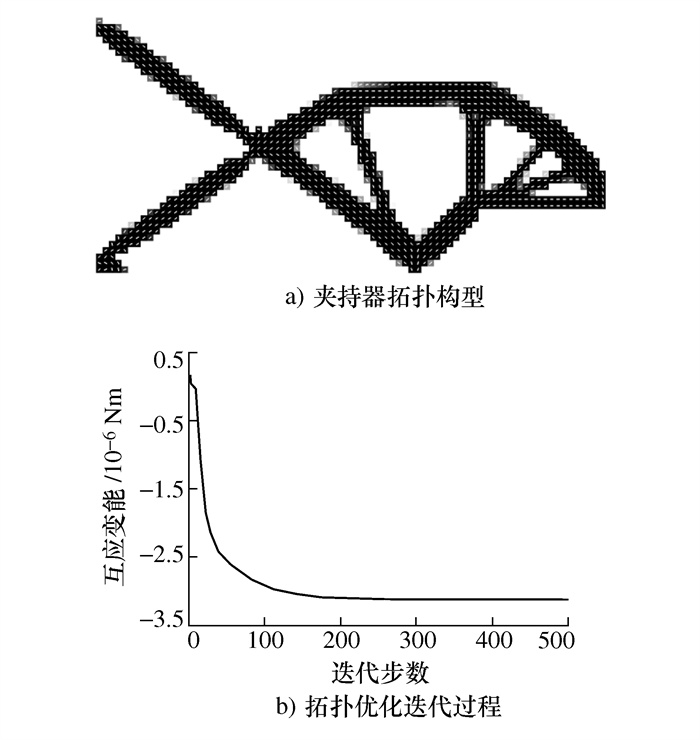
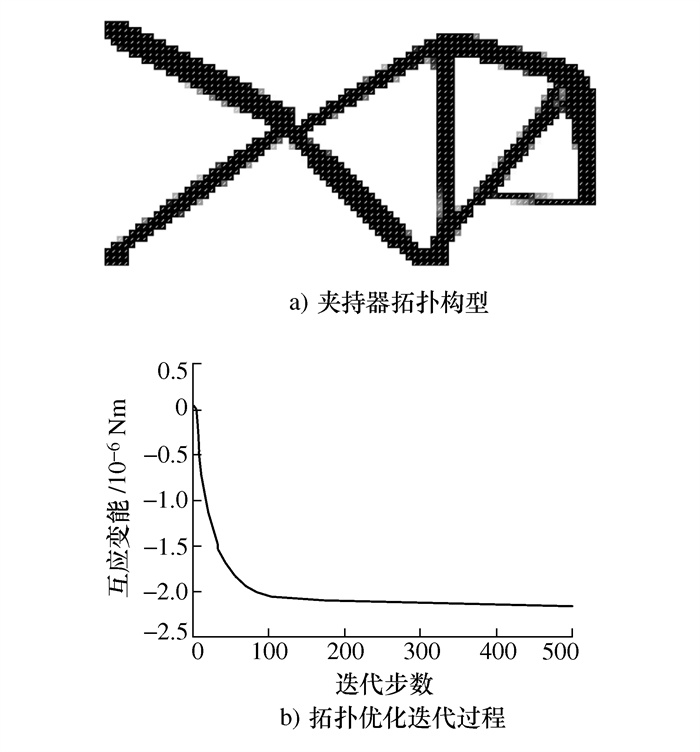
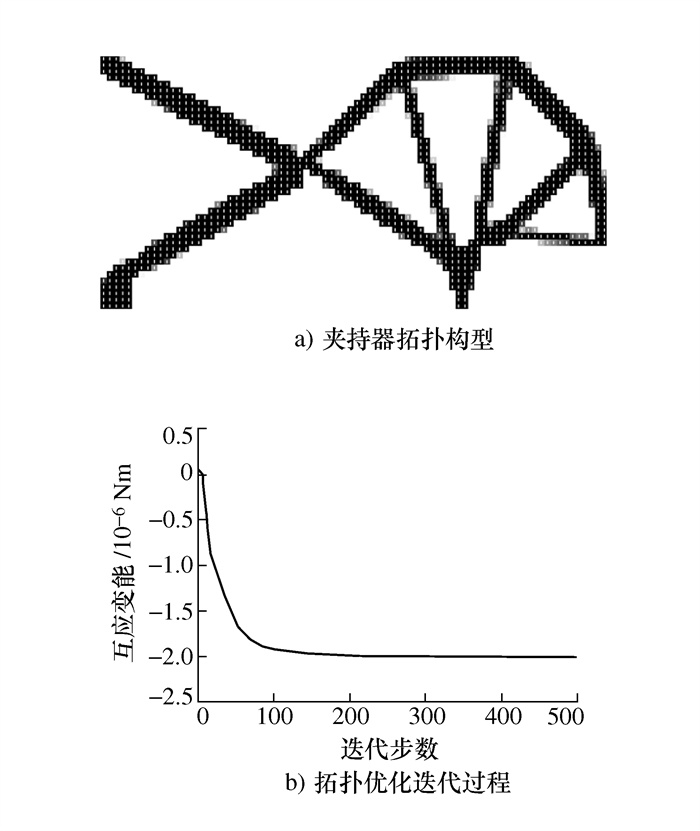
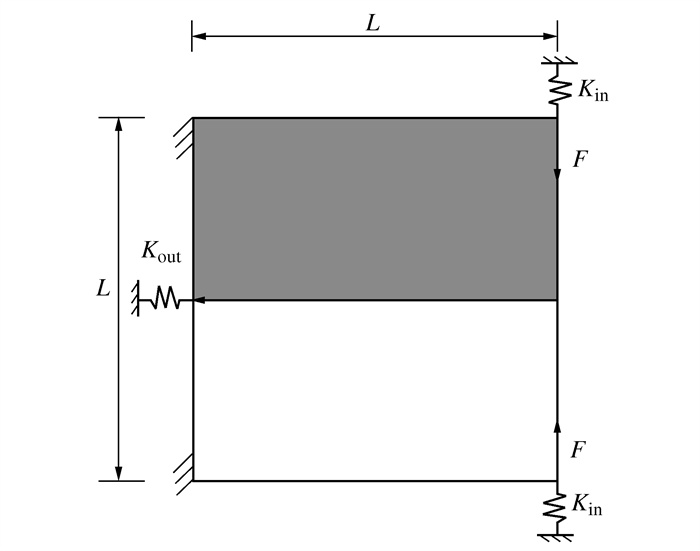
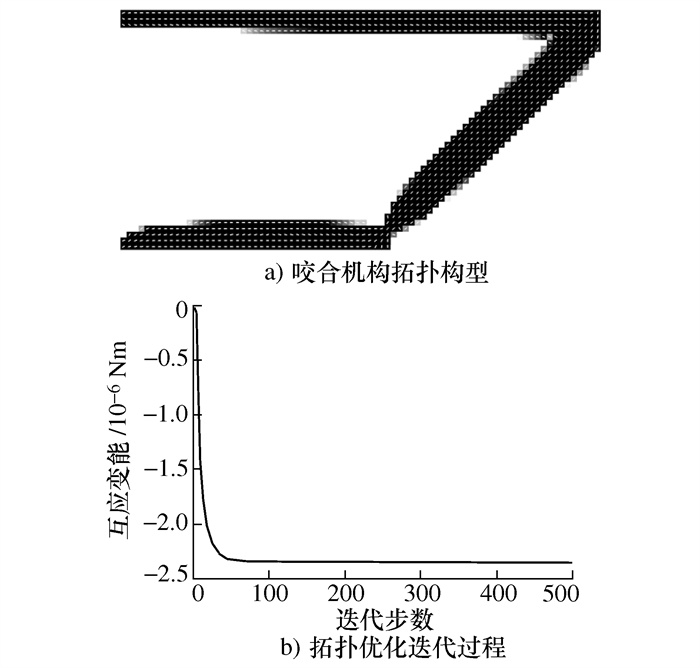
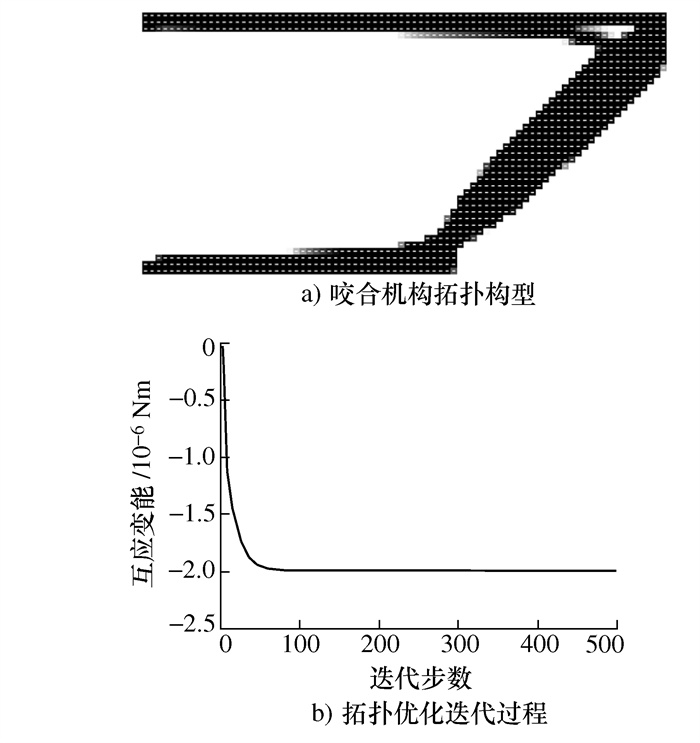
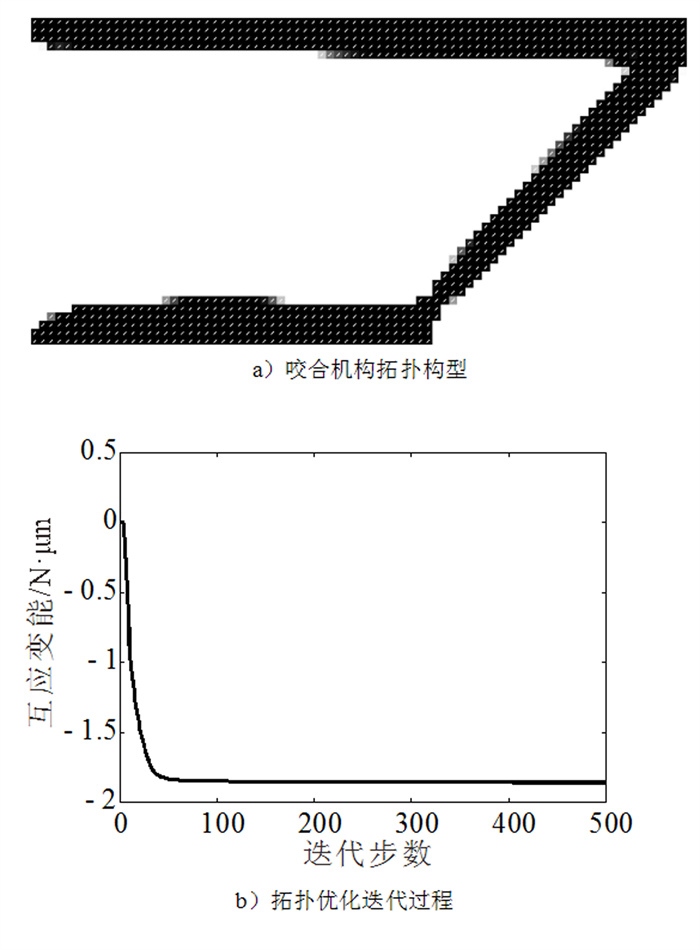
为了提高各向异性材料柔顺机构的变形性能, 提出一种考虑纤维角度变化的各向异性材料柔顺机构拓扑优化设计方法。采用改进的固体各向异性材料惩罚模型(Solid orthotropic material penalization, SOMP)引入变化的设计单元纤维角度, 以柔顺机构的互应变能最大化为目标函数, 以材料体积为约束, 建立考虑纤维角度变化的各向异性材料柔顺机构拓扑优化数学模型, 采用移动渐近算法求解各向异性材料柔顺机构拓扑优化问题。数值算例结果表明: 提出的设计方法是有效的, 与未考虑角度变化拓扑优化结果相比, 考虑纤维角度变化的各向异性材料拓扑优化获得的柔顺机构构型有所不同, 并且互应变能更大。
为了提高各向异性材料柔顺机构的变形性能, 提出一种考虑纤维角度变化的各向异性材料柔顺机构拓扑优化设计方法。采用改进的固体各向异性材料惩罚模型(Solid orthotropic material penalization, SOMP)引入变化的设计单元纤维角度, 以柔顺机构的互应变能最大化为目标函数, 以材料体积为约束, 建立考虑纤维角度变化的各向异性材料柔顺机构拓扑优化数学模型, 采用移动渐近算法求解各向异性材料柔顺机构拓扑优化问题。数值算例结果表明: 提出的设计方法是有效的, 与未考虑角度变化拓扑优化结果相比, 考虑纤维角度变化的各向异性材料拓扑优化获得的柔顺机构构型有所不同, 并且互应变能更大。


2022, 41(8): 1176-1182.
doi: 10.13433/j.cnki.1003-8728.20200458
摘要:
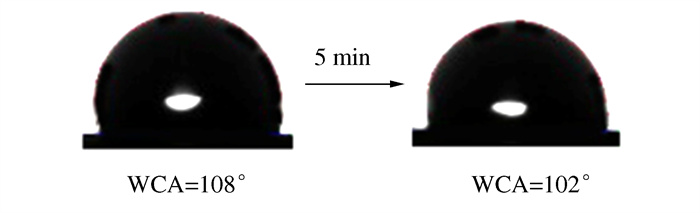
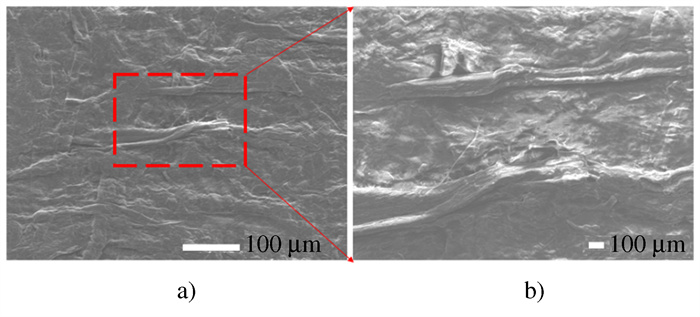
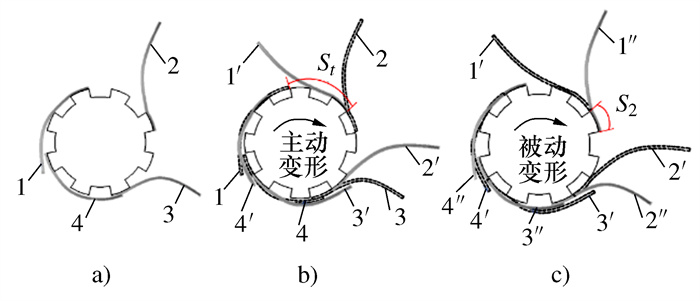
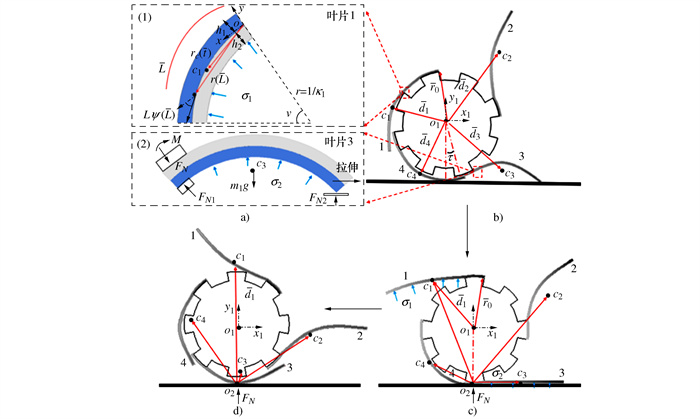
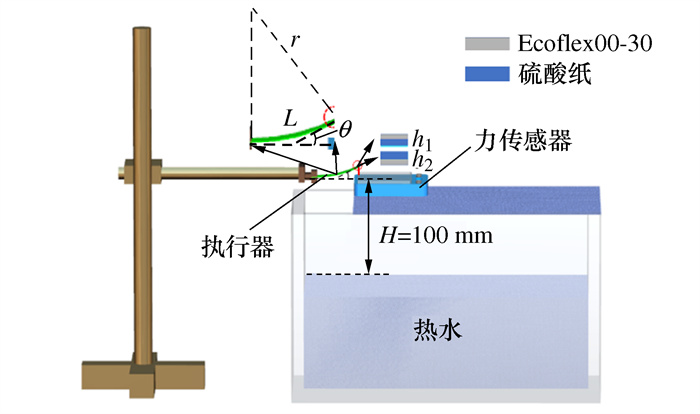
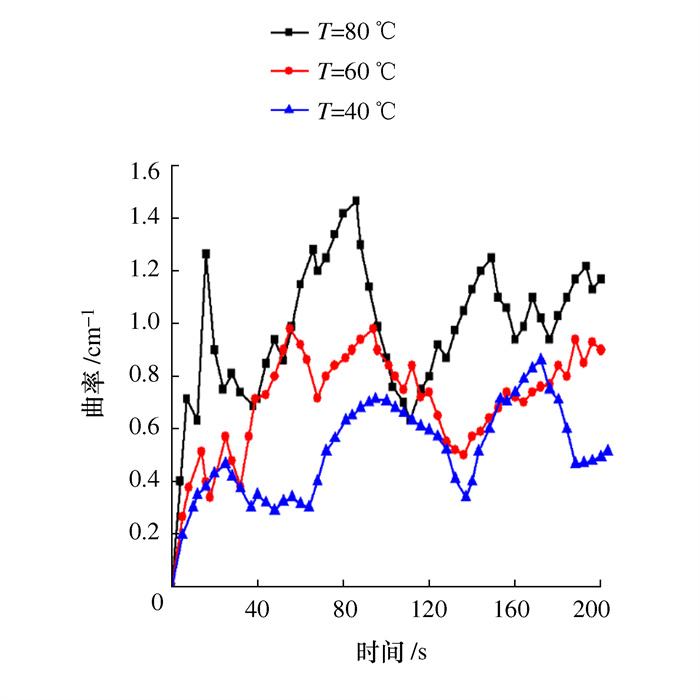
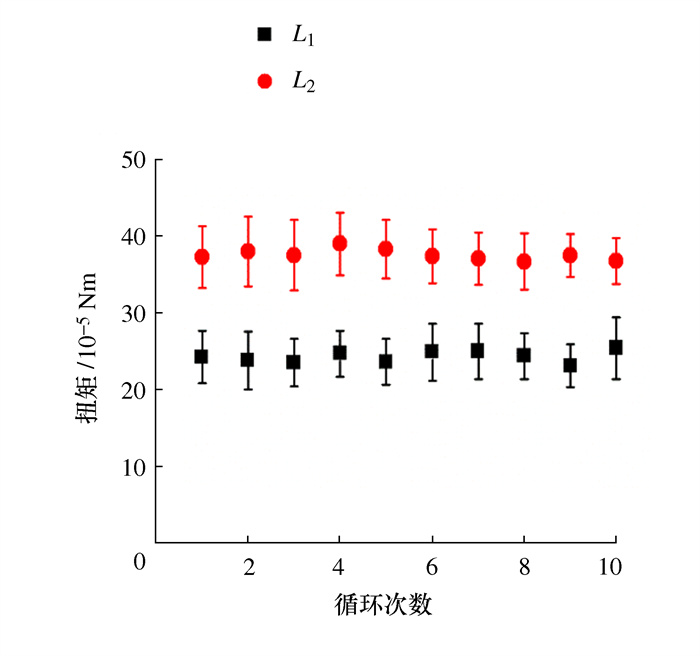
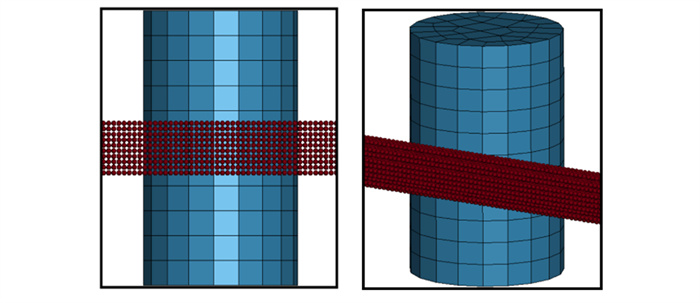
对软体机器人的无系留驱动方式探索是当前软体机器人领域一个重要的研究方向, 但当前的无系留软体机器人驱动, 大都需要交替改变环境条件来实现定向驱动, 为此, 本文提出一种能够在恒温环境下由湿度驱动的无系留软体轮式机器人, 基于硫酸纸和Ecoflex-0030的温湿度效应形变机理, 实现了对其在稳定的温度环境中定向滚动控制。将硅胶材料Ecoflex-0030涂布在硫酸纸上制成双层材料, 基于该材料剪切而成的4个软体驱动叶片粘贴在滚轮上, 通过在温、湿度环境下4个软体驱动叶片的可控形变, 实现对轮式结构主动推进的控制。研究了硫酸纸的形变机理, 给出了车轮叶片尺寸、驱动力矩的设计, 并对机器人的动力学进行了建模分析, 制作了实物样机并对其进行了滚动测试。实验表明: 从给定驱动叶片初始状态, 车轮在55 s内运动了约85 mm, 进一步, 通过将驱动叶片交错相位布置的两个驱动轮串联联接, 制作成两轮驱动小车, 验证了设计的可行性。该研究成果对设计新型温湿度控制的无系留软机器人和软机器的设计具有重要意义。
对软体机器人的无系留驱动方式探索是当前软体机器人领域一个重要的研究方向, 但当前的无系留软体机器人驱动, 大都需要交替改变环境条件来实现定向驱动, 为此, 本文提出一种能够在恒温环境下由湿度驱动的无系留软体轮式机器人, 基于硫酸纸和Ecoflex-0030的温湿度效应形变机理, 实现了对其在稳定的温度环境中定向滚动控制。将硅胶材料Ecoflex-0030涂布在硫酸纸上制成双层材料, 基于该材料剪切而成的4个软体驱动叶片粘贴在滚轮上, 通过在温、湿度环境下4个软体驱动叶片的可控形变, 实现对轮式结构主动推进的控制。研究了硫酸纸的形变机理, 给出了车轮叶片尺寸、驱动力矩的设计, 并对机器人的动力学进行了建模分析, 制作了实物样机并对其进行了滚动测试。实验表明: 从给定驱动叶片初始状态, 车轮在55 s内运动了约85 mm, 进一步, 通过将驱动叶片交错相位布置的两个驱动轮串联联接, 制作成两轮驱动小车, 验证了设计的可行性。该研究成果对设计新型温湿度控制的无系留软机器人和软机器的设计具有重要意义。





2022, 41(8): 1183-1190.
doi: 10.13433/j.cnki.1003-8728.20200454
摘要:
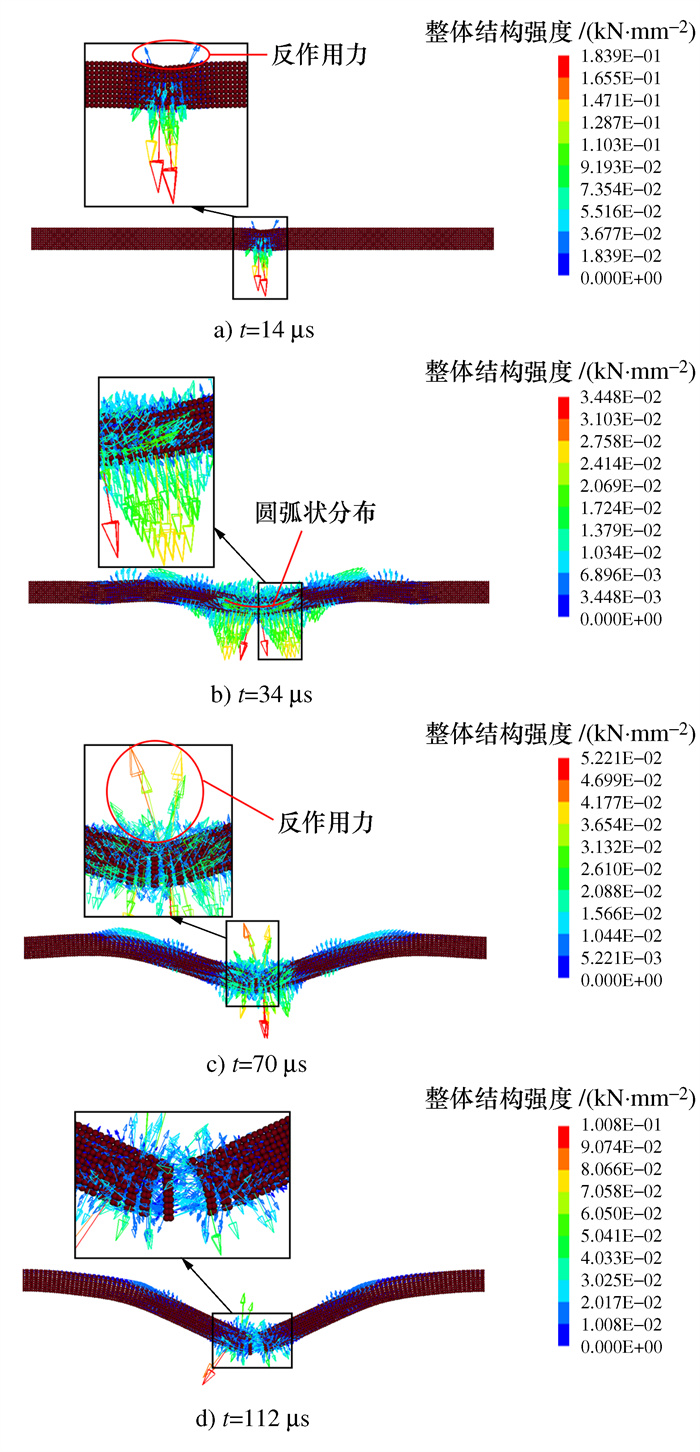
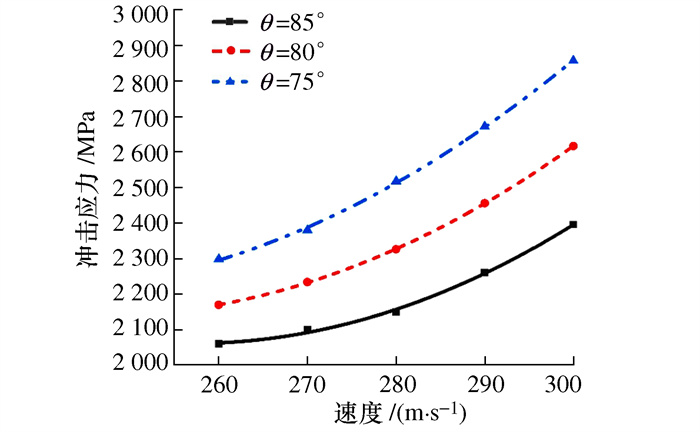
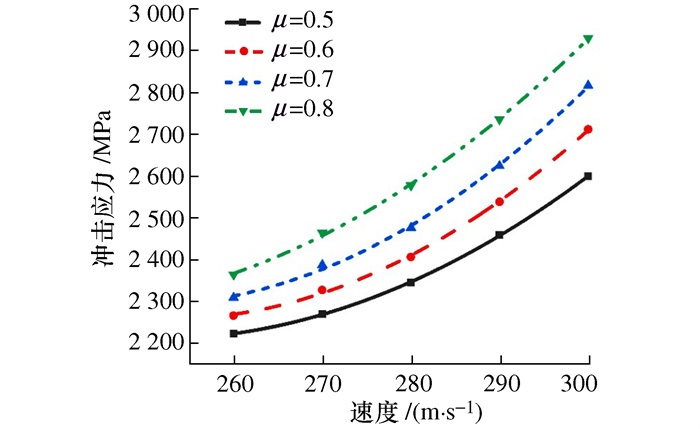
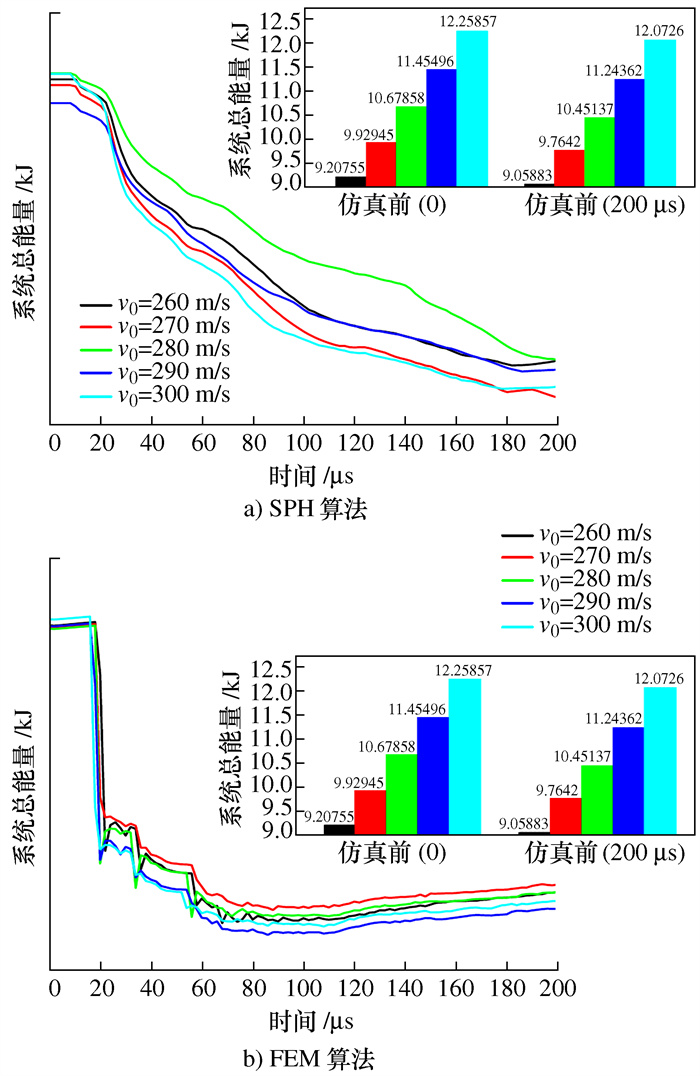
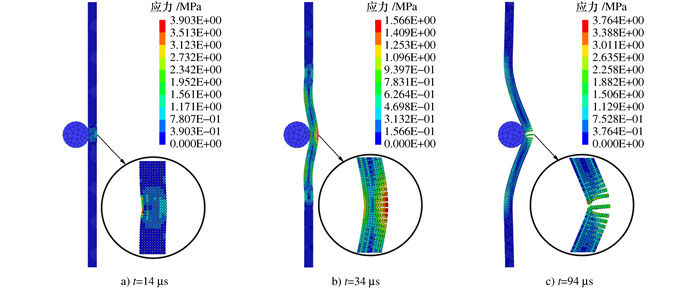
针对高速冲击下钢索波动行为问题, 分别采用人工黏性与镜像粒子法相结合的SPH算法和FEM对冲击过程进行数值模拟, 得到了高速冲击下钢索应力波的传播规律。结果对比可知: 钢索中心处产生形变时粒子相互挤压, 内外两侧部分粒子产生反应力; 外侧产生断裂时, 波峰处粒子产生相切于应力传递方向较大主应力, 且中心带粒子呈圆弧状分布; 内侧未断裂时, 部分粒子产生绝对值较大的反应力; 完全断裂后, 中心处粒子主应力方向指向冲击方向; 冲击应力随着冲击角度的增大而减小, 随着摩擦因数的增大而增大。通过理论验证了仿真模型的准确性, 具有重要的工程借鉴价值。两种算法的系统总能量损耗相似, 但采用SPH算法对进行数值模拟计算的精度更高, 效率更高, 表明了SPH算法的优越性。
针对高速冲击下钢索波动行为问题, 分别采用人工黏性与镜像粒子法相结合的SPH算法和FEM对冲击过程进行数值模拟, 得到了高速冲击下钢索应力波的传播规律。结果对比可知: 钢索中心处产生形变时粒子相互挤压, 内外两侧部分粒子产生反应力; 外侧产生断裂时, 波峰处粒子产生相切于应力传递方向较大主应力, 且中心带粒子呈圆弧状分布; 内侧未断裂时, 部分粒子产生绝对值较大的反应力; 完全断裂后, 中心处粒子主应力方向指向冲击方向; 冲击应力随着冲击角度的增大而减小, 随着摩擦因数的增大而增大。通过理论验证了仿真模型的准确性, 具有重要的工程借鉴价值。两种算法的系统总能量损耗相似, 但采用SPH算法对进行数值模拟计算的精度更高, 效率更高, 表明了SPH算法的优越性。



2022, 41(8): 1191-1196.
doi: 10.13433/j.cnki.1003-8728.20200436
摘要:
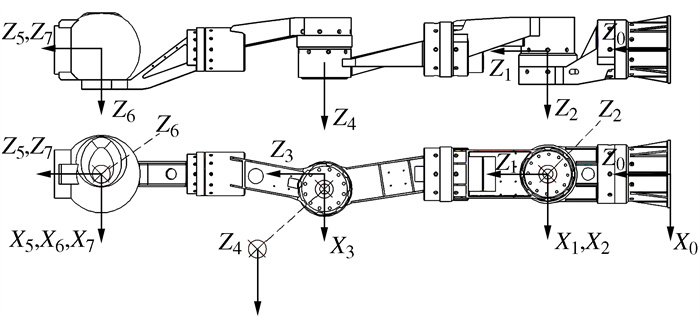
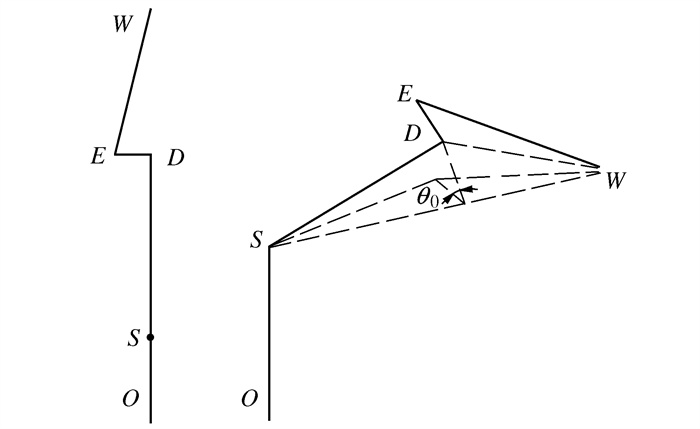
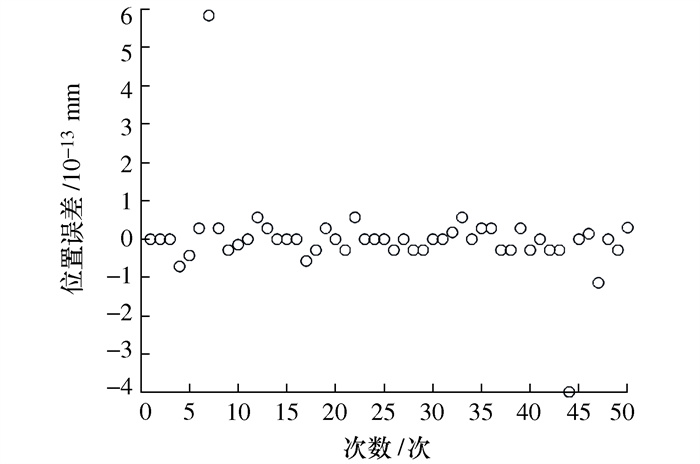
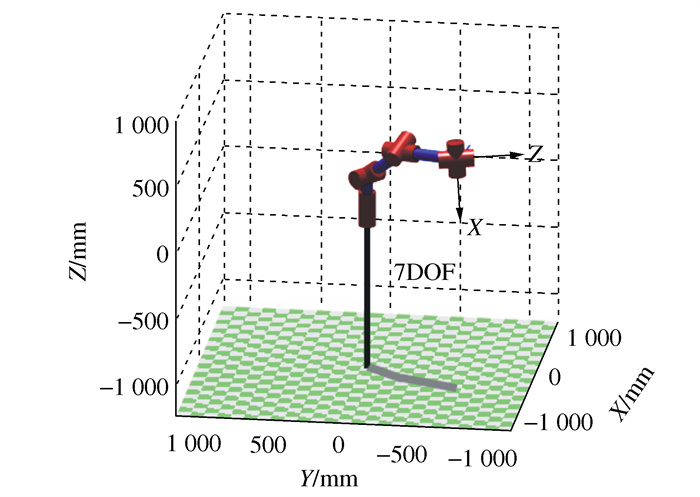
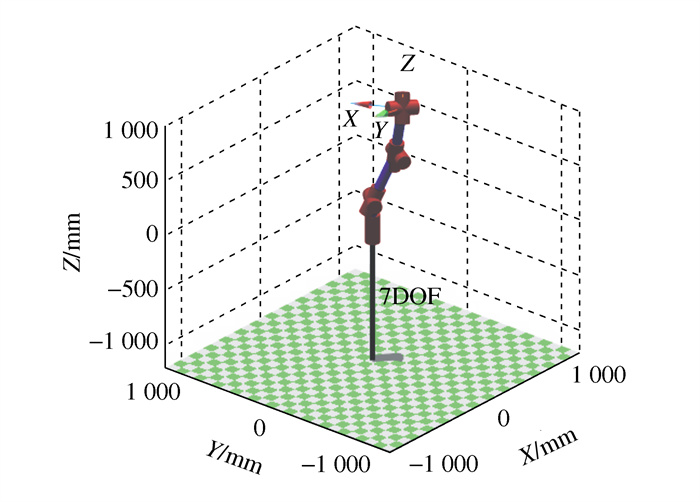
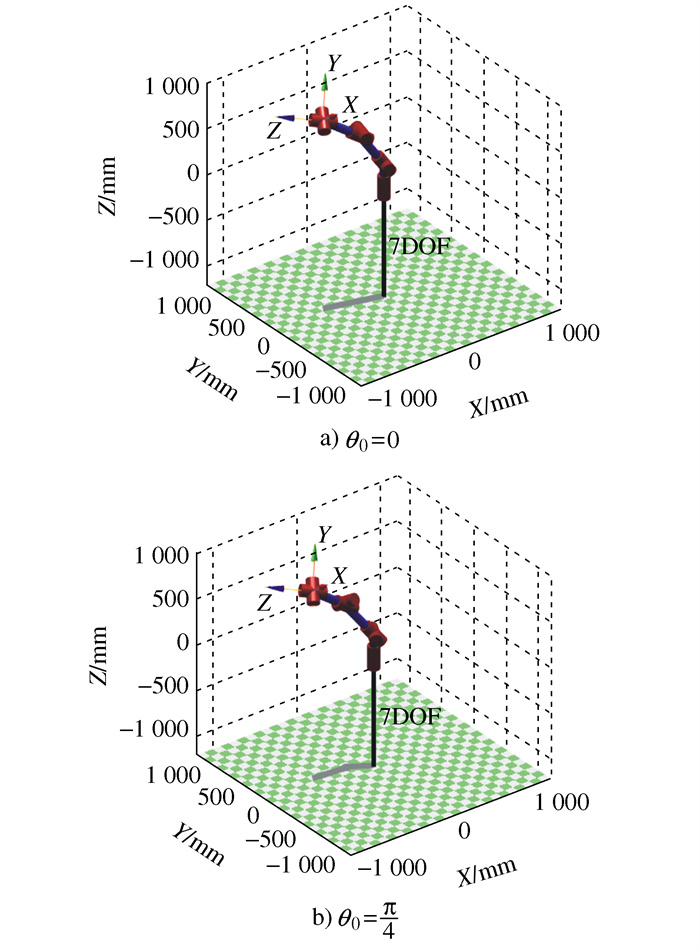
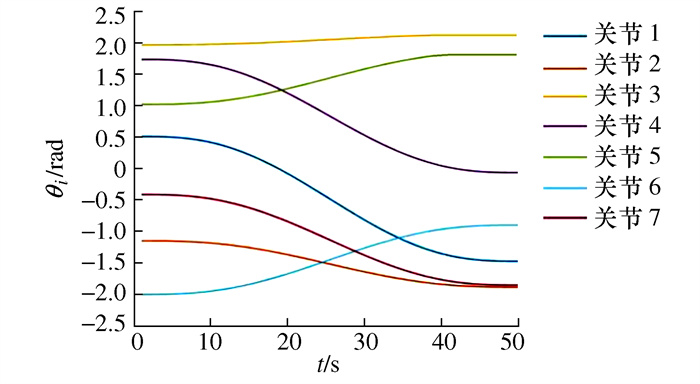
七自由度机械臂从结构上冗余一个自由度, 是为躲避障碍物和奇异点而设置。但因其冗余自由度导致运动学求解难度增加, 计算耗时长, 直接影响后续运动及控制效率。本文基于一款轻型仿人七自由度机械臂, 提出了一种求逆解的简化方法, 基于机械臂的自运动特性, 将几何方法与解析方法结合, 此方法在传统的利用罗德里格斯变换的方法基础上简化了求解臂型角为零时求解θ1、θ2、θ3的过程, 有效的对此机械臂进行运动学求解。并通过MATLAB中的Robotics Toolbox工具箱对所求结果进行验证, 所得结果正确快速, 为之后的机械臂运动控制奠定了基础。
七自由度机械臂从结构上冗余一个自由度, 是为躲避障碍物和奇异点而设置。但因其冗余自由度导致运动学求解难度增加, 计算耗时长, 直接影响后续运动及控制效率。本文基于一款轻型仿人七自由度机械臂, 提出了一种求逆解的简化方法, 基于机械臂的自运动特性, 将几何方法与解析方法结合, 此方法在传统的利用罗德里格斯变换的方法基础上简化了求解臂型角为零时求解θ1、θ2、θ3的过程, 有效的对此机械臂进行运动学求解。并通过MATLAB中的Robotics Toolbox工具箱对所求结果进行验证, 所得结果正确快速, 为之后的机械臂运动控制奠定了基础。

2022, 41(8): 1197-1204.
doi: 10.13433/j.cnki.1003-8728.20200438
摘要:
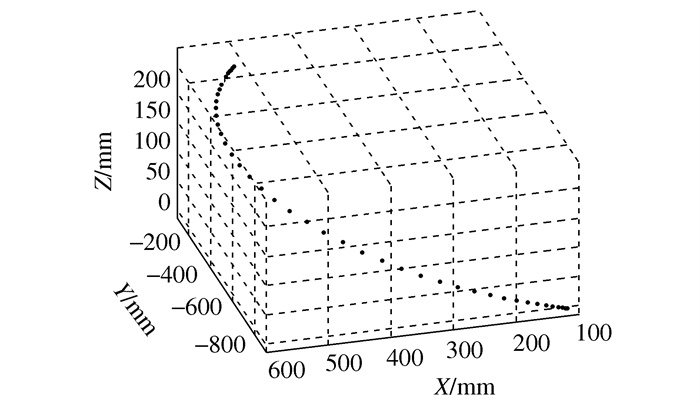
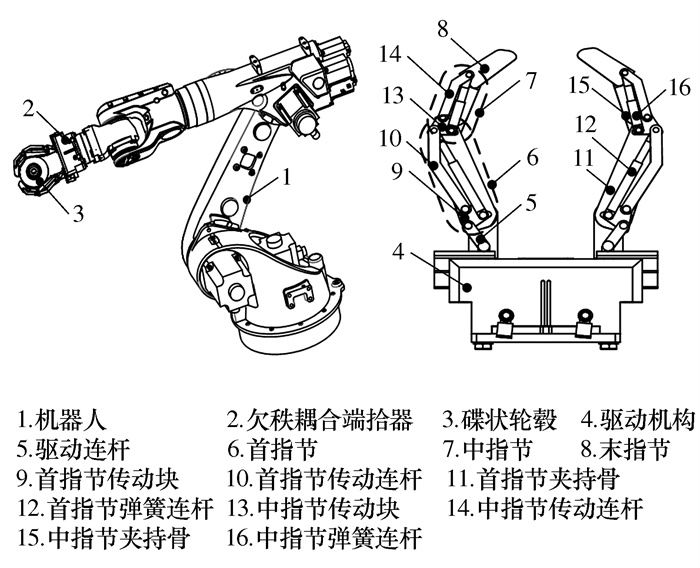
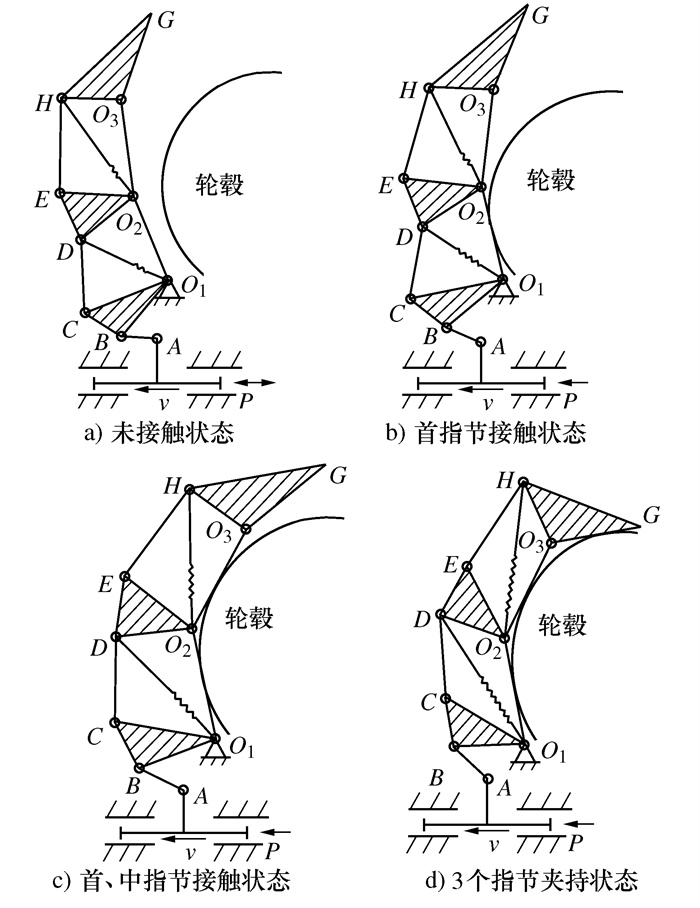
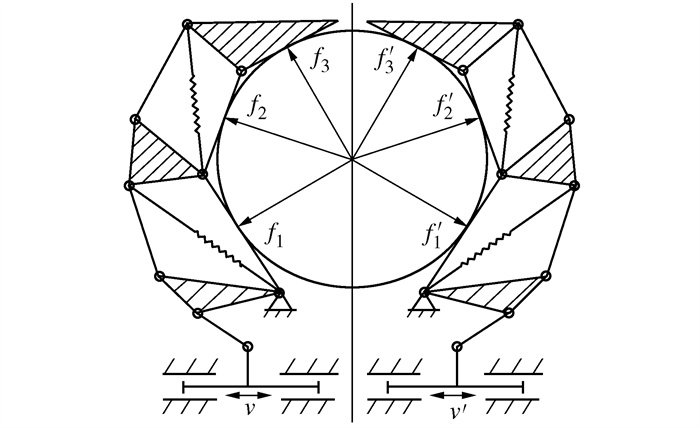
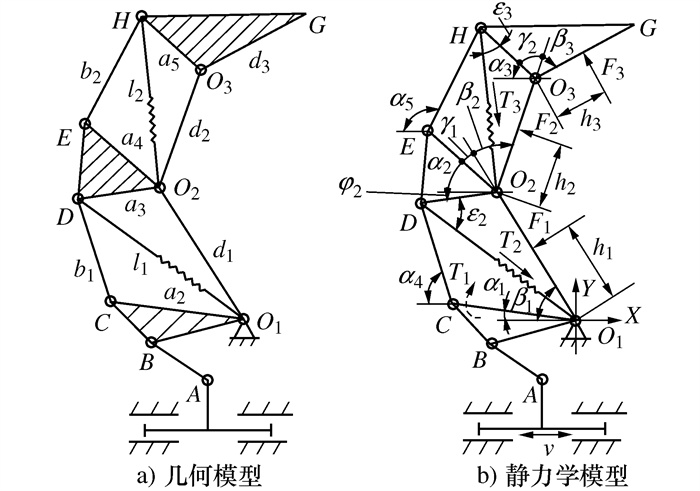
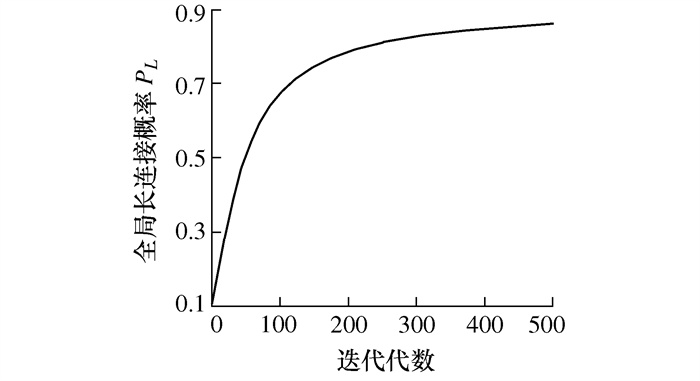
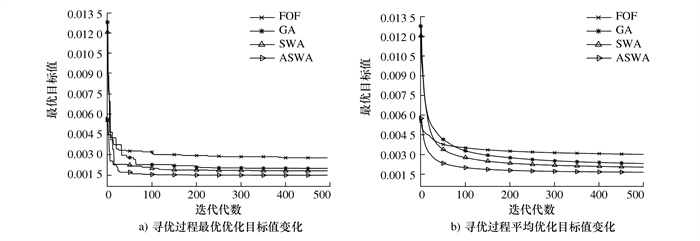
为了提高高温和振动环境中轮毂锻造机器人的夹持稳定性和安全性, 设计了一种轮毂锻造机器人欠秩耦合端拾器, 并进行了结构优化。首先, 将欠秩端拾器与弹簧杆件耦合, 进行了欠秩耦合端拾器的设计及其自适应抓取过程分析; 然后基于虚功原理, 建立了端拾器执行机构在自适应夹持状态下的接触力模型; 随后以接触力大小均衡性为要求建立结构参数优化模型, 并提出新自适应小世界算法及其优化流程; 最后利用自适应小世界优化算法完成了端拾器优化, 并将优化结果与经验法、Fmincon优化函数、遗传算法和基本小世界算法进行了比较。数值测试表明, 与其他4种算法相比, 自适应小世界算法的优化目标值最小, 且分别减少了97.4%、62.9%、52.3%和42.2%, 显示出小世界算法在欠秩耦合端拾器优化中的可行性和优越性; 而将所优化结构参数分别代入端拾器的接触力模型比较, 文中所优化端拾器不同接触点处接触力偏差最大值也最小, 且最大偏差分别减少了87.2%、82.6%、69.5%和42.1%, 满足了锻造机器人端拾器夹持时的接触力均衡性要求。
为了提高高温和振动环境中轮毂锻造机器人的夹持稳定性和安全性, 设计了一种轮毂锻造机器人欠秩耦合端拾器, 并进行了结构优化。首先, 将欠秩端拾器与弹簧杆件耦合, 进行了欠秩耦合端拾器的设计及其自适应抓取过程分析; 然后基于虚功原理, 建立了端拾器执行机构在自适应夹持状态下的接触力模型; 随后以接触力大小均衡性为要求建立结构参数优化模型, 并提出新自适应小世界算法及其优化流程; 最后利用自适应小世界优化算法完成了端拾器优化, 并将优化结果与经验法、Fmincon优化函数、遗传算法和基本小世界算法进行了比较。数值测试表明, 与其他4种算法相比, 自适应小世界算法的优化目标值最小, 且分别减少了97.4%、62.9%、52.3%和42.2%, 显示出小世界算法在欠秩耦合端拾器优化中的可行性和优越性; 而将所优化结构参数分别代入端拾器的接触力模型比较, 文中所优化端拾器不同接触点处接触力偏差最大值也最小, 且最大偏差分别减少了87.2%、82.6%、69.5%和42.1%, 满足了锻造机器人端拾器夹持时的接触力均衡性要求。
2022, 41(8): 1205-1210.
doi: 10.13433/j.cnki.1003-8728.20200444
摘要:
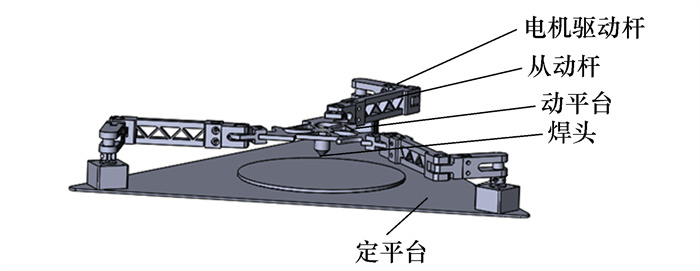
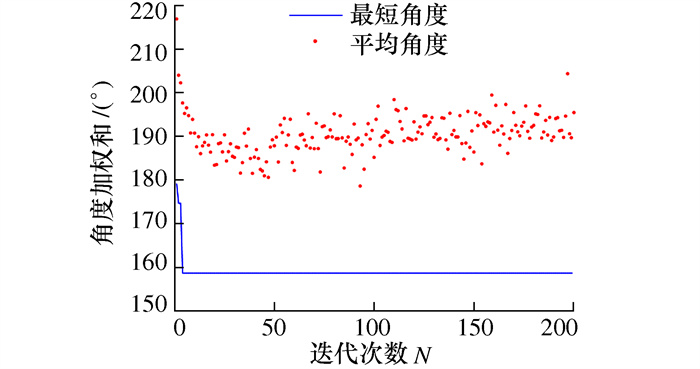
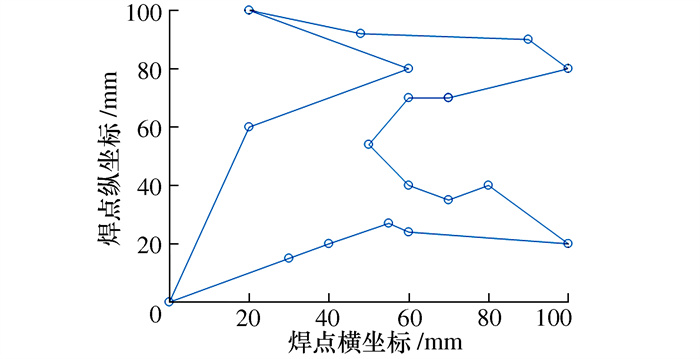
为减少焊接机器人点焊工况中的耗时、耗能, 提出一种基于关节空间的最优路径规划方法。首先, 对3-RRR并联焊锡机模型进行分析, 通过几何法建立该并联焊锡机的运动学模型。其次, 建立基于关节空间角度加权和的路径规划数学模型, 并设计一种带有精英策略和信息挥发因子自适应调节函数的改进蚁群算法对该模型进行优化。最后, 针对3-RRR并联焊锡机的焊锡工况, 使用所改进蚁群算法对该焊锡机的关节空间角度加权和最优路径进行规划。仿真数据表明, 与传统的笛卡尔空间下的最优路径规划相比, 基于关节空间角度加权和数学模型的最优路径规划缩短了关节总的角度变化值, 能实现焊锡机器人的快速焊锡作业, 对提高传统焊接机器人的加工效率和减少机器人能量损耗具有一定的参考价值。
为减少焊接机器人点焊工况中的耗时、耗能, 提出一种基于关节空间的最优路径规划方法。首先, 对3-RRR并联焊锡机模型进行分析, 通过几何法建立该并联焊锡机的运动学模型。其次, 建立基于关节空间角度加权和的路径规划数学模型, 并设计一种带有精英策略和信息挥发因子自适应调节函数的改进蚁群算法对该模型进行优化。最后, 针对3-RRR并联焊锡机的焊锡工况, 使用所改进蚁群算法对该焊锡机的关节空间角度加权和最优路径进行规划。仿真数据表明, 与传统的笛卡尔空间下的最优路径规划相比, 基于关节空间角度加权和数学模型的最优路径规划缩短了关节总的角度变化值, 能实现焊锡机器人的快速焊锡作业, 对提高传统焊接机器人的加工效率和减少机器人能量损耗具有一定的参考价值。


2022, 41(8): 1211-1215.
doi: 10.13433/j.cnki.1003-8728.20220030
摘要:
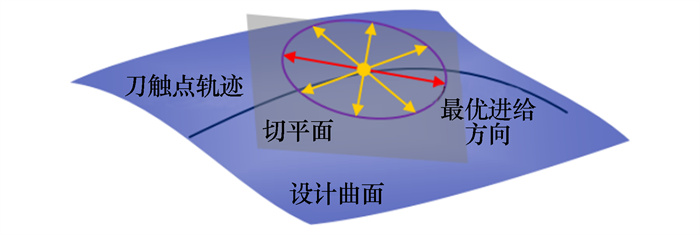
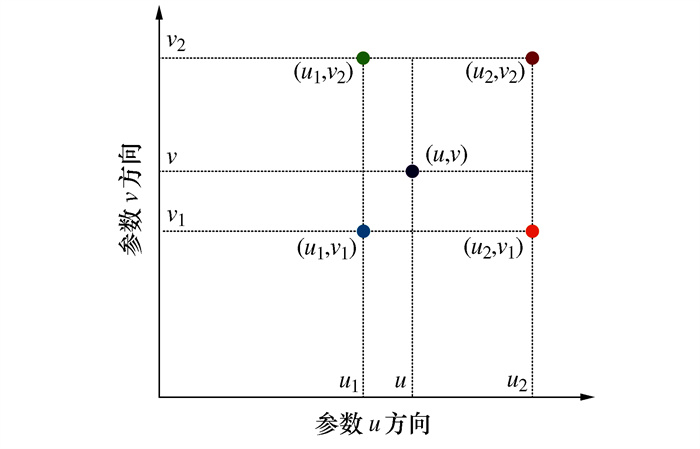
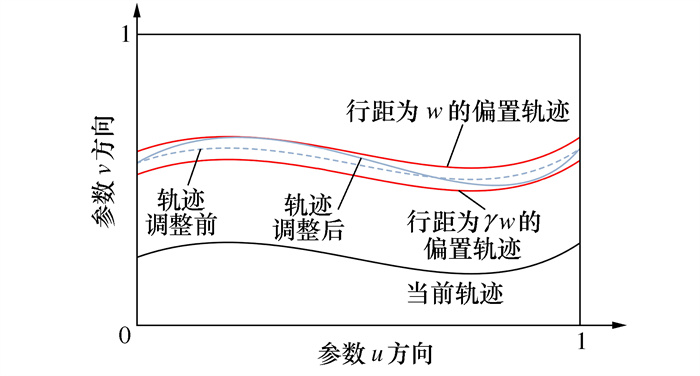
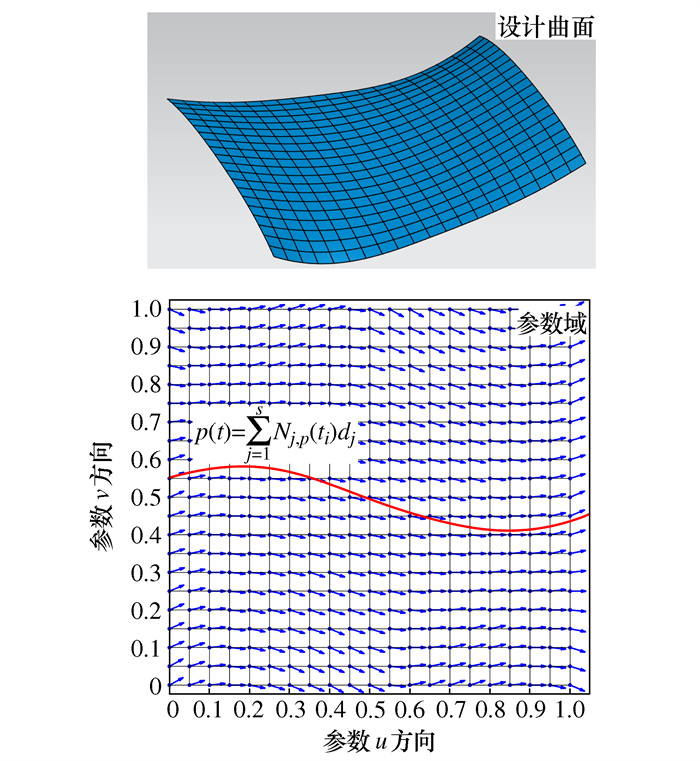
针对轨迹规划中依据等残留高度规则排列的轨迹往往偏离最优走刀方向的难题, 提出一种兼顾方向匹配与走刀行距的高效走刀轨迹生成方法。基于空间曲面与其参数域的对应关系, 采样得到不同节点处的最优走刀方向, 并结合双线性插值, 实现曲面上任意位置处最优走刀方向的快速计算。从最优方向匹配的需求出发, 以轨迹单位切向表征其实际方向, 建立与理想方向偏离最小的优化函数, 通过设定不同加工行距, 偏置得到目标轨迹的限制区间, 利用遗传算法, 搜寻得到目标轨迹的最优表达。算例仿真表明, 所提方法可在轨迹高效排布的基础上, 显著提高与最优方向的匹配度, 继而提升机床的切削性能。
针对轨迹规划中依据等残留高度规则排列的轨迹往往偏离最优走刀方向的难题, 提出一种兼顾方向匹配与走刀行距的高效走刀轨迹生成方法。基于空间曲面与其参数域的对应关系, 采样得到不同节点处的最优走刀方向, 并结合双线性插值, 实现曲面上任意位置处最优走刀方向的快速计算。从最优方向匹配的需求出发, 以轨迹单位切向表征其实际方向, 建立与理想方向偏离最小的优化函数, 通过设定不同加工行距, 偏置得到目标轨迹的限制区间, 利用遗传算法, 搜寻得到目标轨迹的最优表达。算例仿真表明, 所提方法可在轨迹高效排布的基础上, 显著提高与最优方向的匹配度, 继而提升机床的切削性能。




2022, 41(8): 1216-1223.
doi: 10.13433/j.cnki.1003-8728.20200453
摘要:
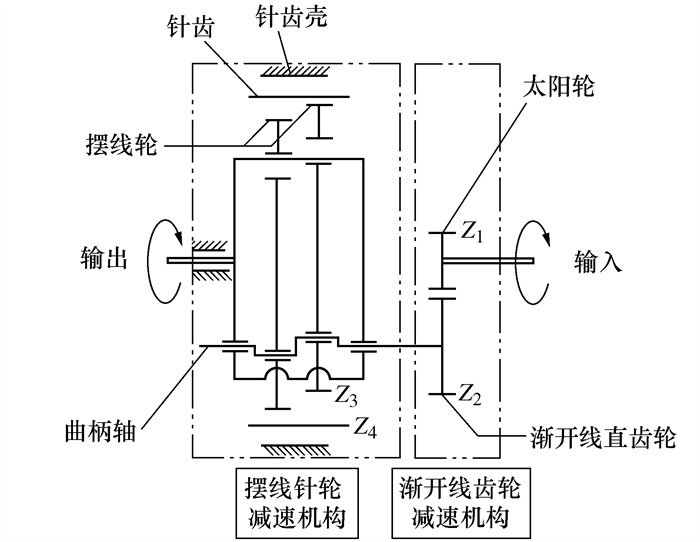
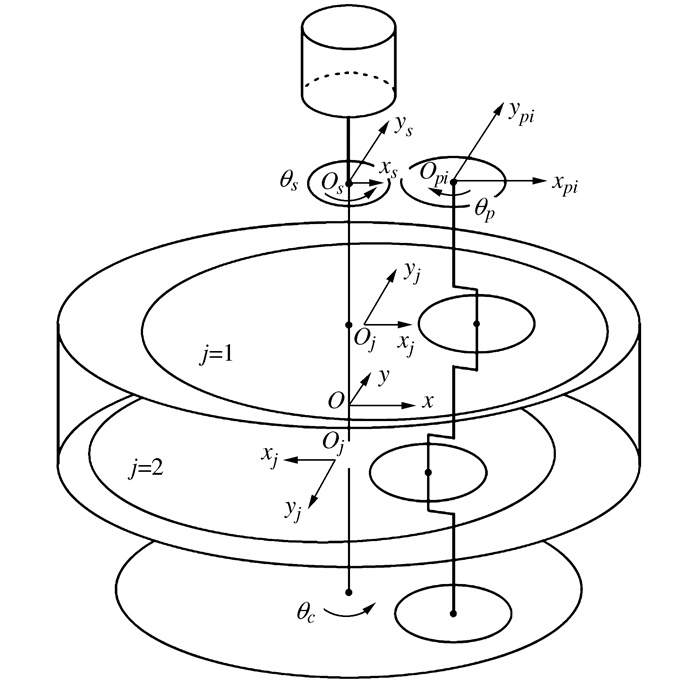
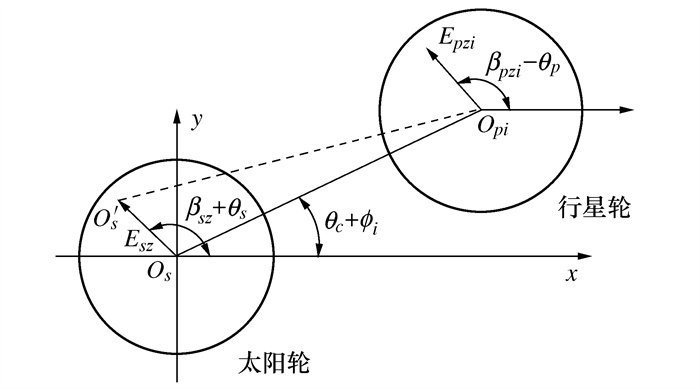
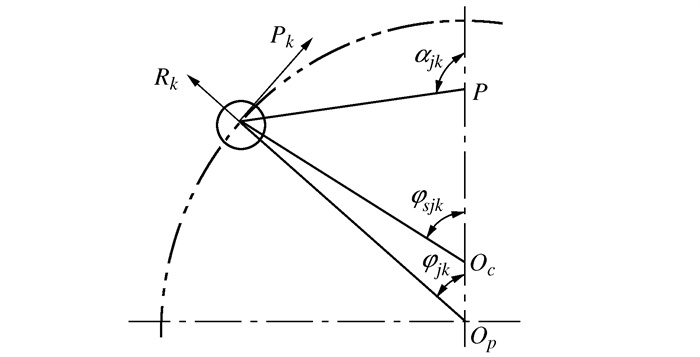
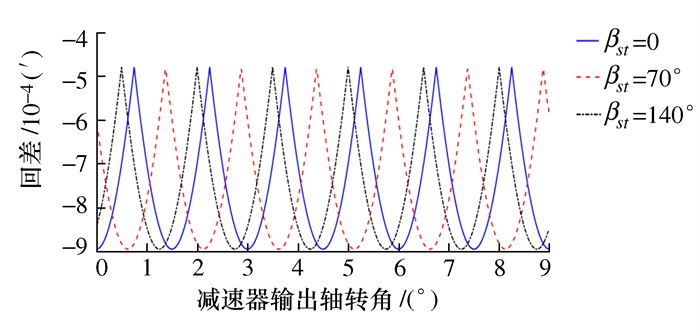
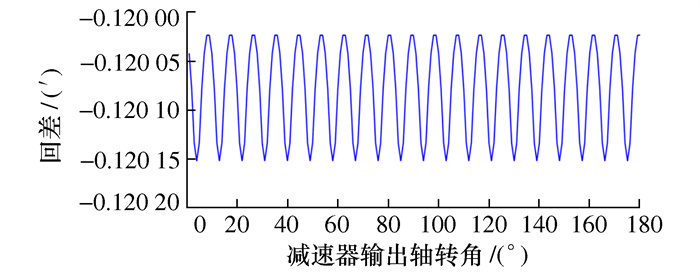
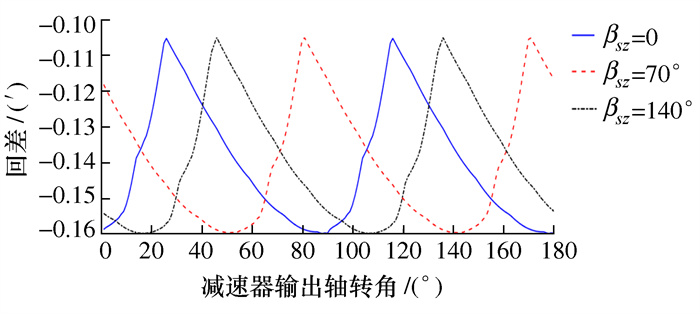
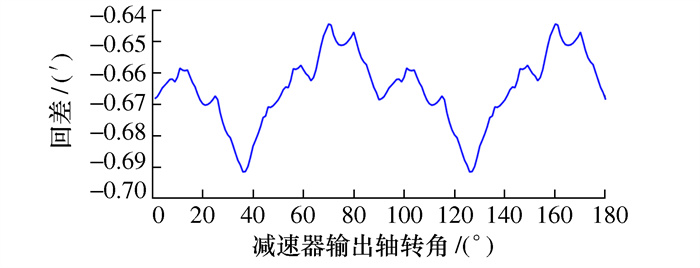
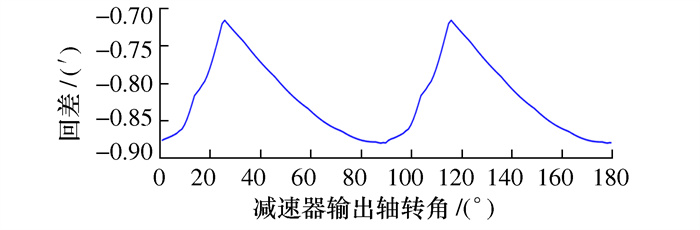
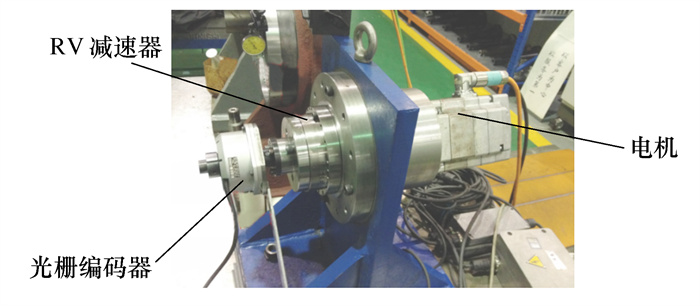
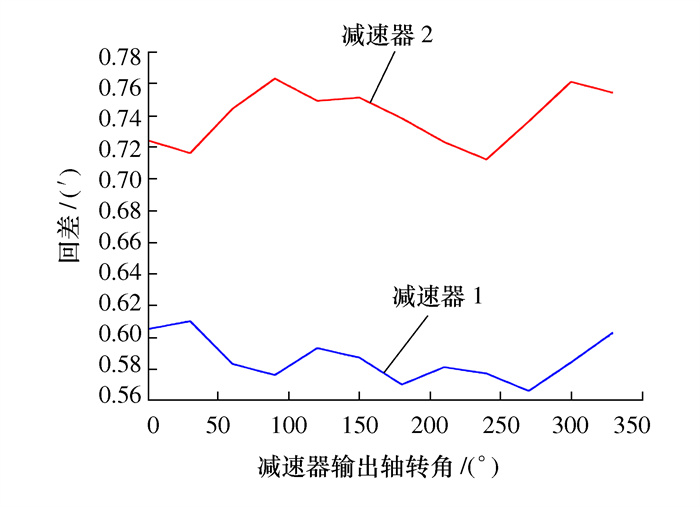
RV减速器几何回差指单纯由于传动元件的几何尺寸、形状与位置参数原因造成减速器输入轴反向转动时, 输出轴在转角上的滞后量。目前国内外学者研究了各种制造安装误差对几何回差的影响, 设计试验台并进行了试验。但目前对几何回差的研究中没有考虑摆线轮齿廓的修形方法及制造安装误差的方向对几何回差造成的影响, 当计入齿廓修形方法及制造安装误差的方向时, RV减速器的输出轴在不同相位时的几何回差并不相同。本文综合考虑了各零件制造及安装误差的大小及方向, 建立了RV减速器精确的几何回差模型及数学模型, 并对回差进行了仿真及试验。研究结果可用于提高减速器的传动精度, 并为传动系统各零件的公差设计提供依据。
RV减速器几何回差指单纯由于传动元件的几何尺寸、形状与位置参数原因造成减速器输入轴反向转动时, 输出轴在转角上的滞后量。目前国内外学者研究了各种制造安装误差对几何回差的影响, 设计试验台并进行了试验。但目前对几何回差的研究中没有考虑摆线轮齿廓的修形方法及制造安装误差的方向对几何回差造成的影响, 当计入齿廓修形方法及制造安装误差的方向时, RV减速器的输出轴在不同相位时的几何回差并不相同。本文综合考虑了各零件制造及安装误差的大小及方向, 建立了RV减速器精确的几何回差模型及数学模型, 并对回差进行了仿真及试验。研究结果可用于提高减速器的传动精度, 并为传动系统各零件的公差设计提供依据。


2022, 41(8): 1224-1230.
doi: 10.13433/j.cnki.1003-8728.20220151
摘要:
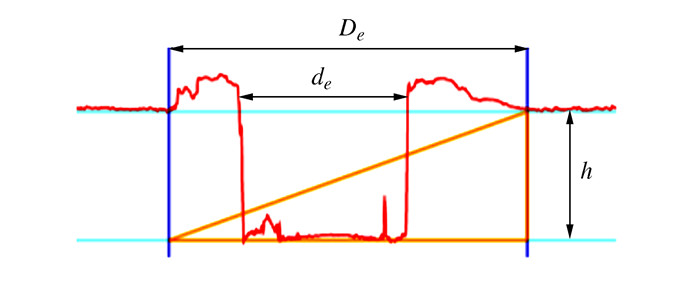
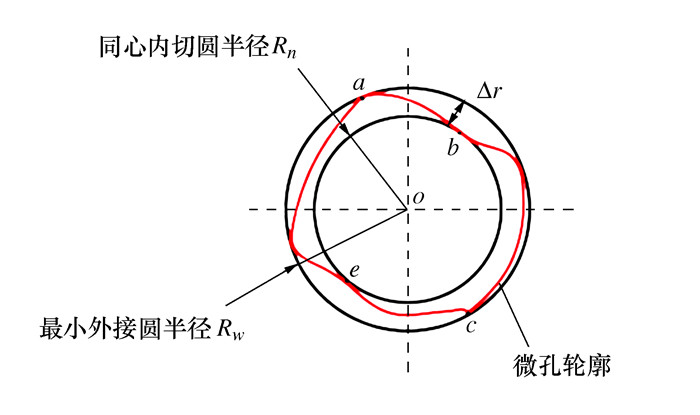
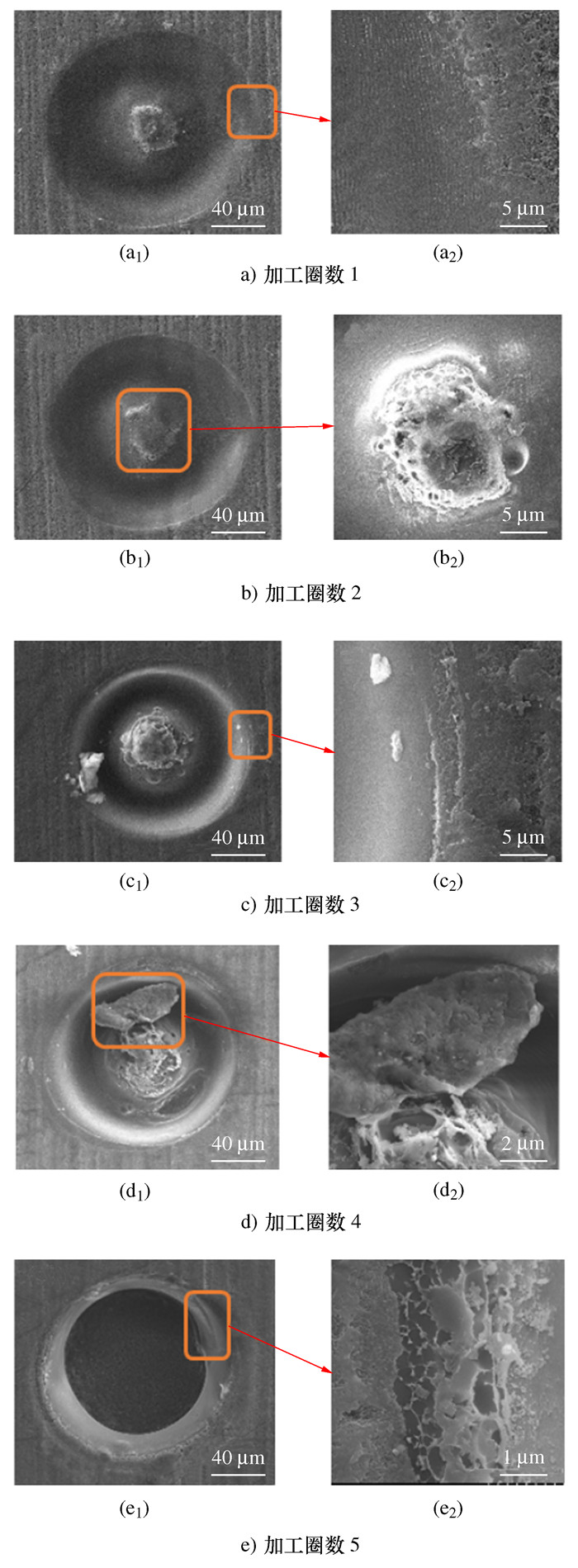
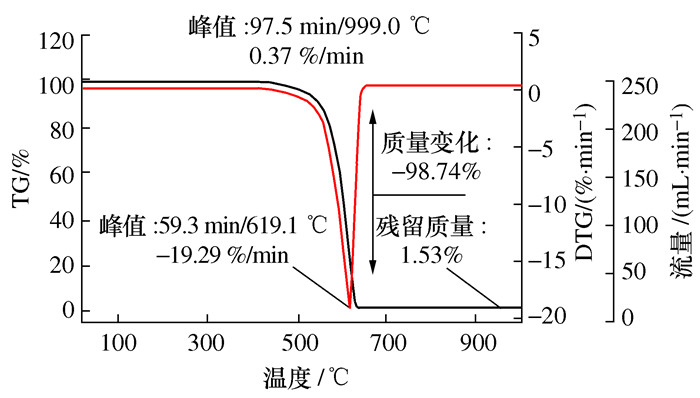
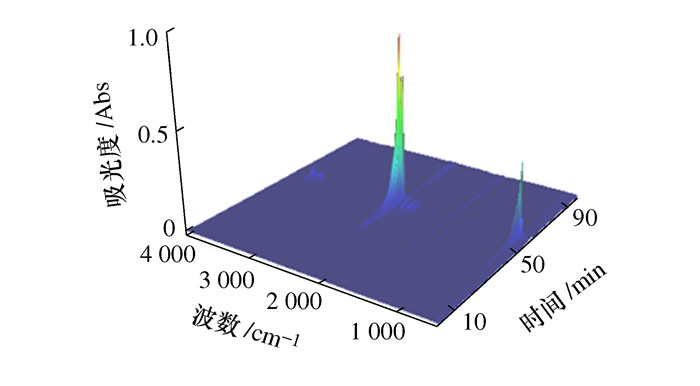
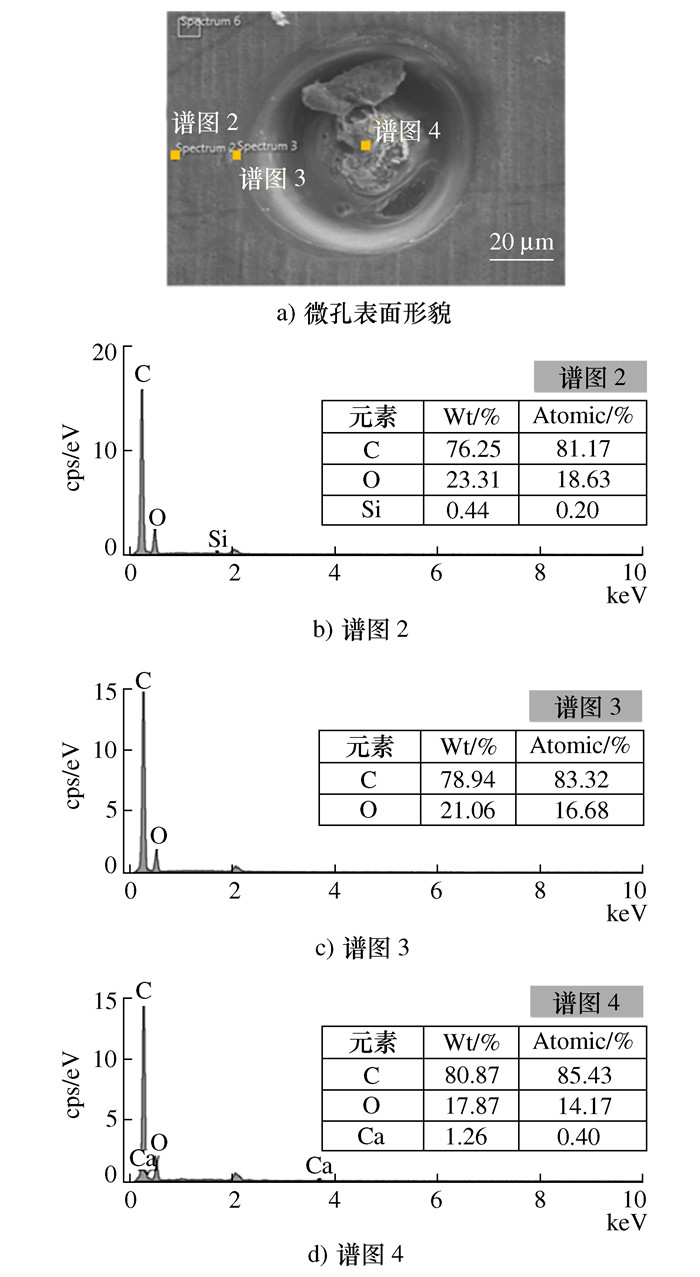
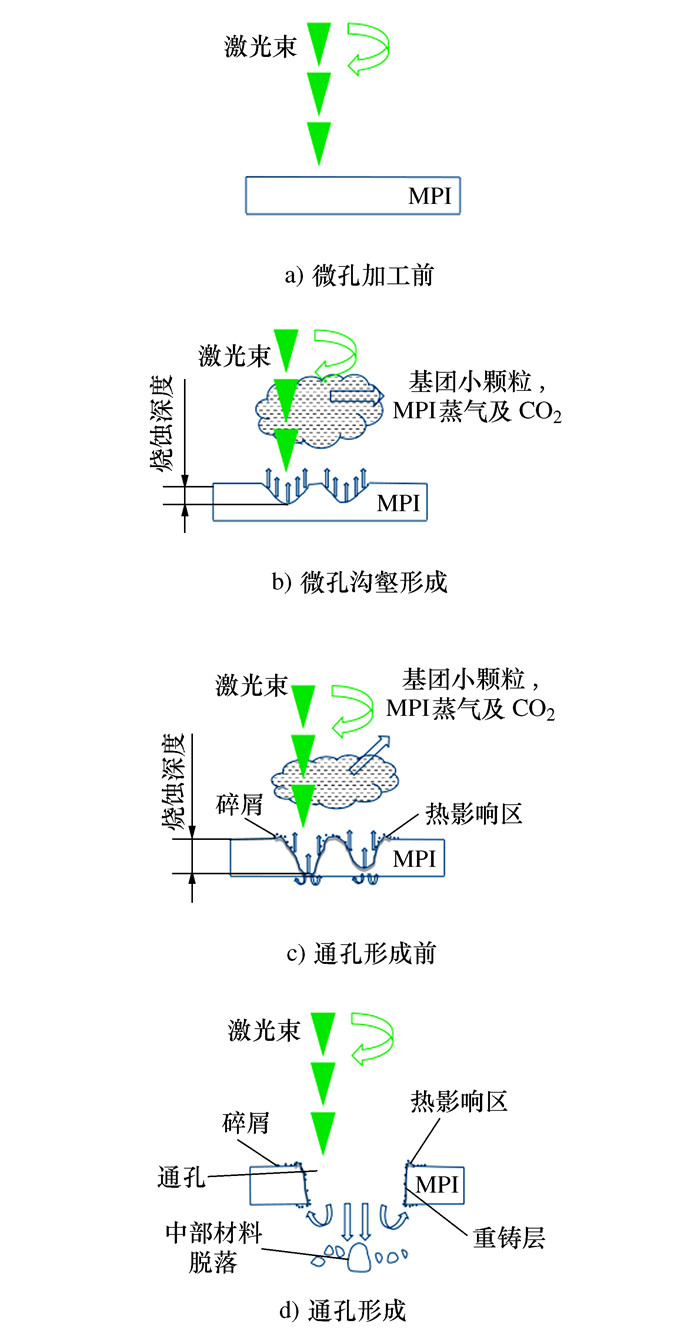
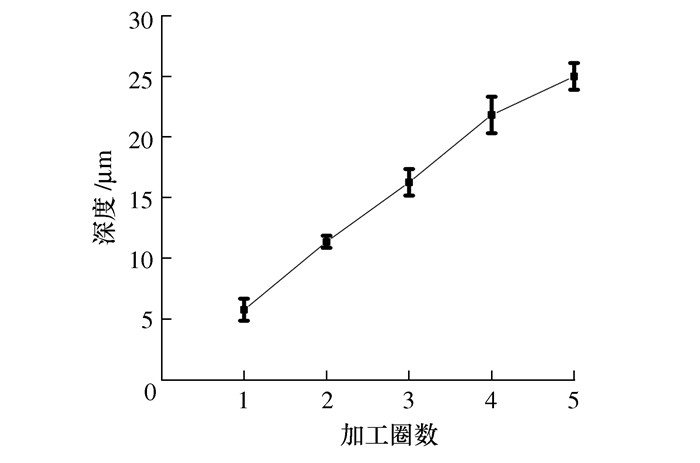
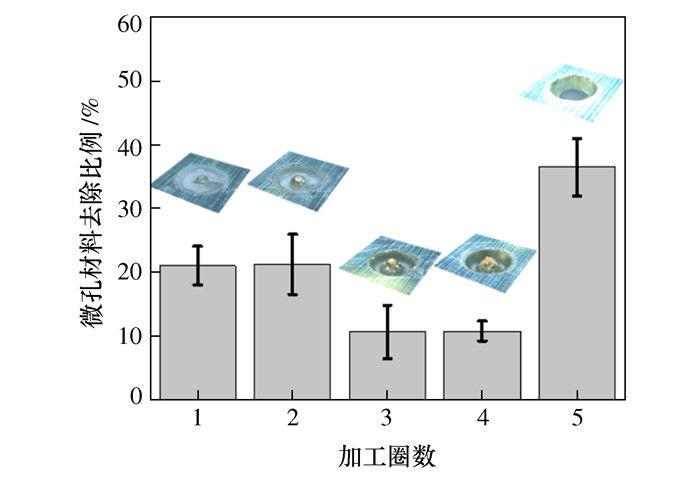
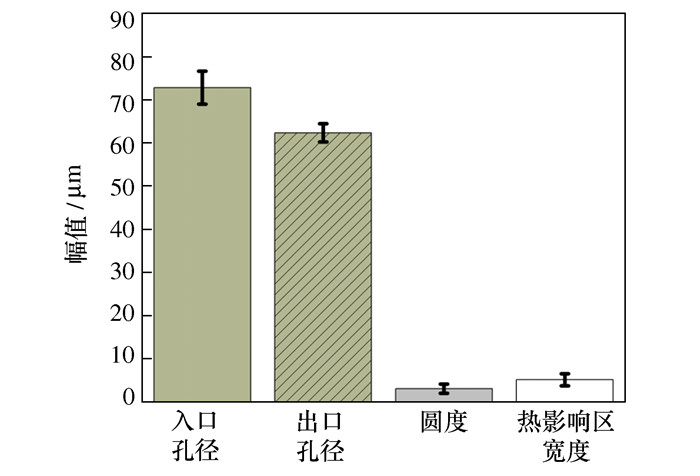
为解决目前激光加工挠性覆铜板(简称挠性板)微孔存在的加工精度差、孔型差及热损伤大等问题,探索了飞秒激光加工高频挠性板基材-改性聚酰亚胺(MPI)微孔的材料去除过程及其加工质量。采用飞秒激光进行了改性聚酰亚胺微孔加工实验,使用热重-红外联用系统分析了改性聚酰亚胺材料热解机理,并利用激光共聚焦显微镜、场发射扫描电镜对改性聚酰亚胺微孔形貌进行了三维测量、显微观察及物性分析。结果表明:改性聚酰亚胺在飞秒激光作用下发生光化学和光热反应,材料以宽而圆滑的弧形沟壑形式逐层被去除,并形成了波纹阶梯、颗粒物堆积等烧蚀显微结构;加工过程中材料烧蚀反应随加工圈数的增加而减弱;微孔深度的变化速率基本保持不变,材料去除量随加工圈数的增加而减小并在最后剧增;飞秒激光可实现改性聚酰亚胺基材表面高质量微孔加工。
为解决目前激光加工挠性覆铜板(简称挠性板)微孔存在的加工精度差、孔型差及热损伤大等问题,探索了飞秒激光加工高频挠性板基材-改性聚酰亚胺(MPI)微孔的材料去除过程及其加工质量。采用飞秒激光进行了改性聚酰亚胺微孔加工实验,使用热重-红外联用系统分析了改性聚酰亚胺材料热解机理,并利用激光共聚焦显微镜、场发射扫描电镜对改性聚酰亚胺微孔形貌进行了三维测量、显微观察及物性分析。结果表明:改性聚酰亚胺在飞秒激光作用下发生光化学和光热反应,材料以宽而圆滑的弧形沟壑形式逐层被去除,并形成了波纹阶梯、颗粒物堆积等烧蚀显微结构;加工过程中材料烧蚀反应随加工圈数的增加而减弱;微孔深度的变化速率基本保持不变,材料去除量随加工圈数的增加而减小并在最后剧增;飞秒激光可实现改性聚酰亚胺基材表面高质量微孔加工。


2022, 41(8): 1231-1239.
doi: 10.13433/j.cnki.1003-8728.20200455
摘要:
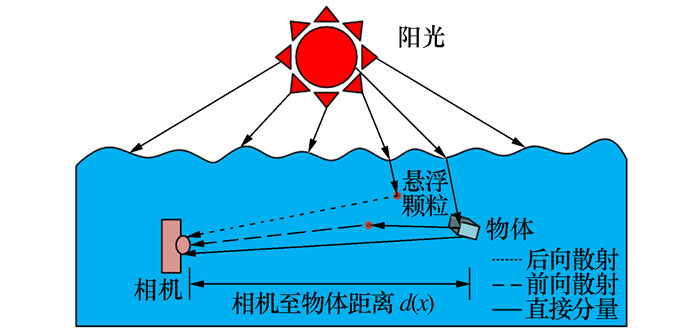
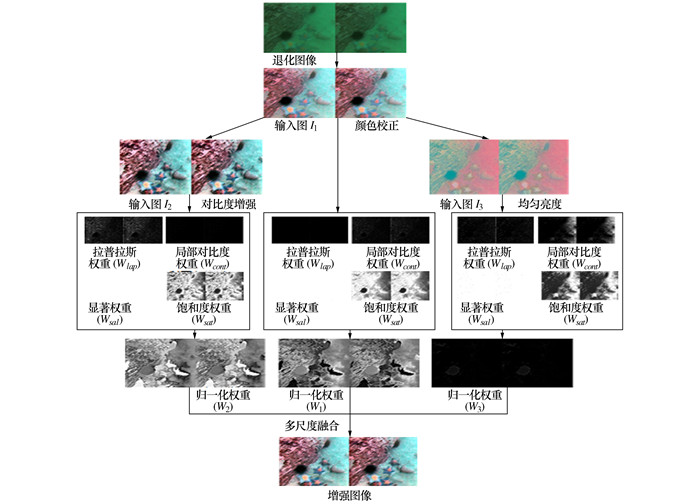
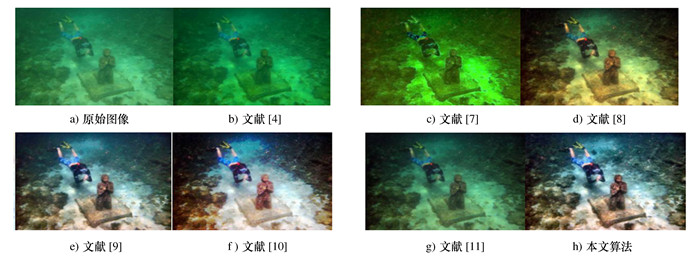
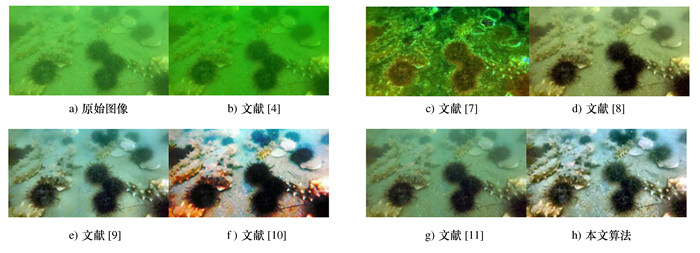
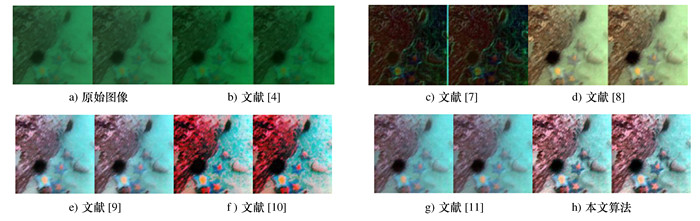
由于水体环境中光的吸收和散射,导致采集的水下图像存在色偏、对比度差、细节模糊以及光照不均的缺陷。针对以上缺陷,提出改进的同态滤波与多尺度融合的水下图像增强方法。首先,对采集的水下图像使用色彩平衡算法得到颜色校正的图像;然后,对颜色校正的图像分别采用CLAHE算法和改进的同态滤波算法得到对比度增强的图像和亮度均匀的图像;最后,对上文处理后具有优势特征的3张图像使用拉普拉斯对比度、局部对比度、显著性和饱和度这4个权重进行多尺度融合。为验证本文算法的有效性,采用主观视觉效果和3种客观指标进行验证。结果表明,本文算法不但可以解决颜色失真问题,而且能有效改善图像对比度、清晰度和亮度。
由于水体环境中光的吸收和散射,导致采集的水下图像存在色偏、对比度差、细节模糊以及光照不均的缺陷。针对以上缺陷,提出改进的同态滤波与多尺度融合的水下图像增强方法。首先,对采集的水下图像使用色彩平衡算法得到颜色校正的图像;然后,对颜色校正的图像分别采用CLAHE算法和改进的同态滤波算法得到对比度增强的图像和亮度均匀的图像;最后,对上文处理后具有优势特征的3张图像使用拉普拉斯对比度、局部对比度、显著性和饱和度这4个权重进行多尺度融合。为验证本文算法的有效性,采用主观视觉效果和3种客观指标进行验证。结果表明,本文算法不但可以解决颜色失真问题,而且能有效改善图像对比度、清晰度和亮度。






2022, 41(8): 1240-1246.
doi: 10.13433/j.cnki.1003-8728.20200451
摘要:
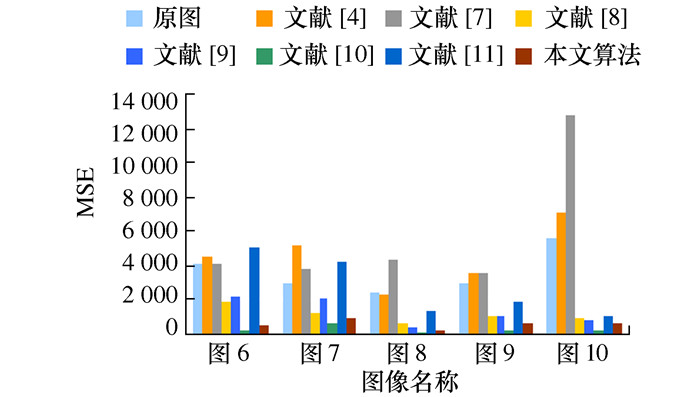
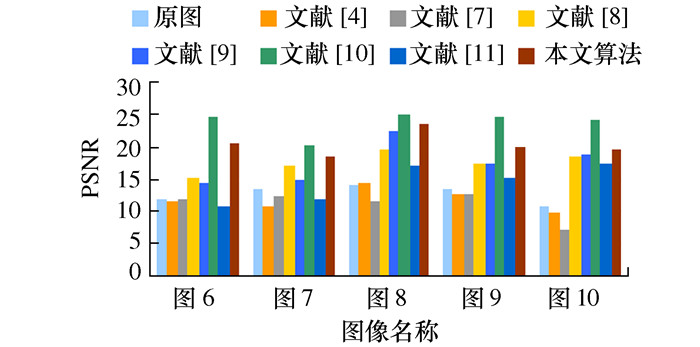
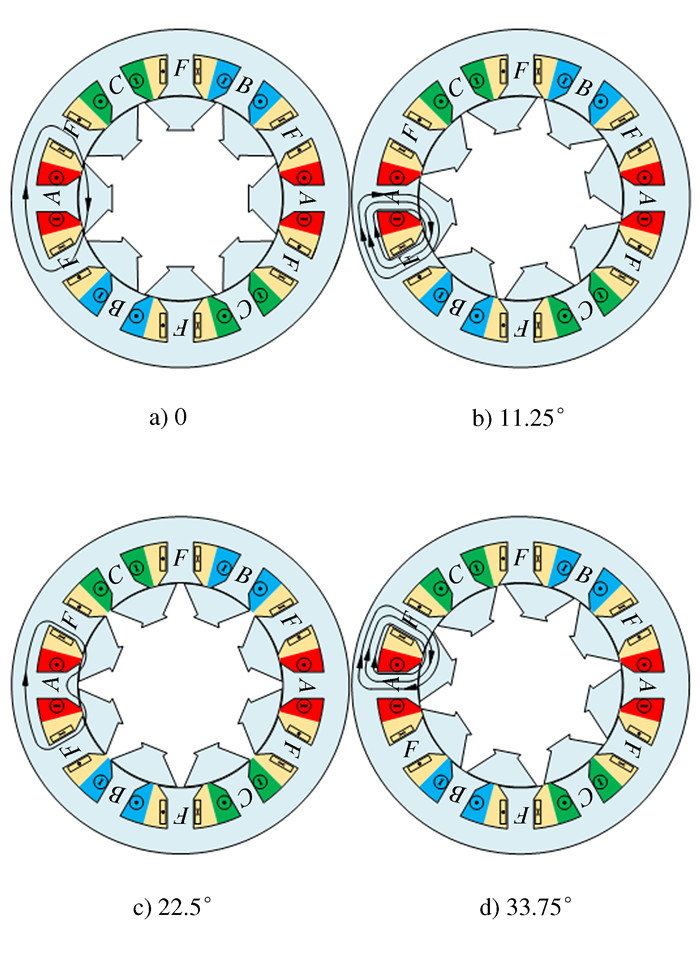
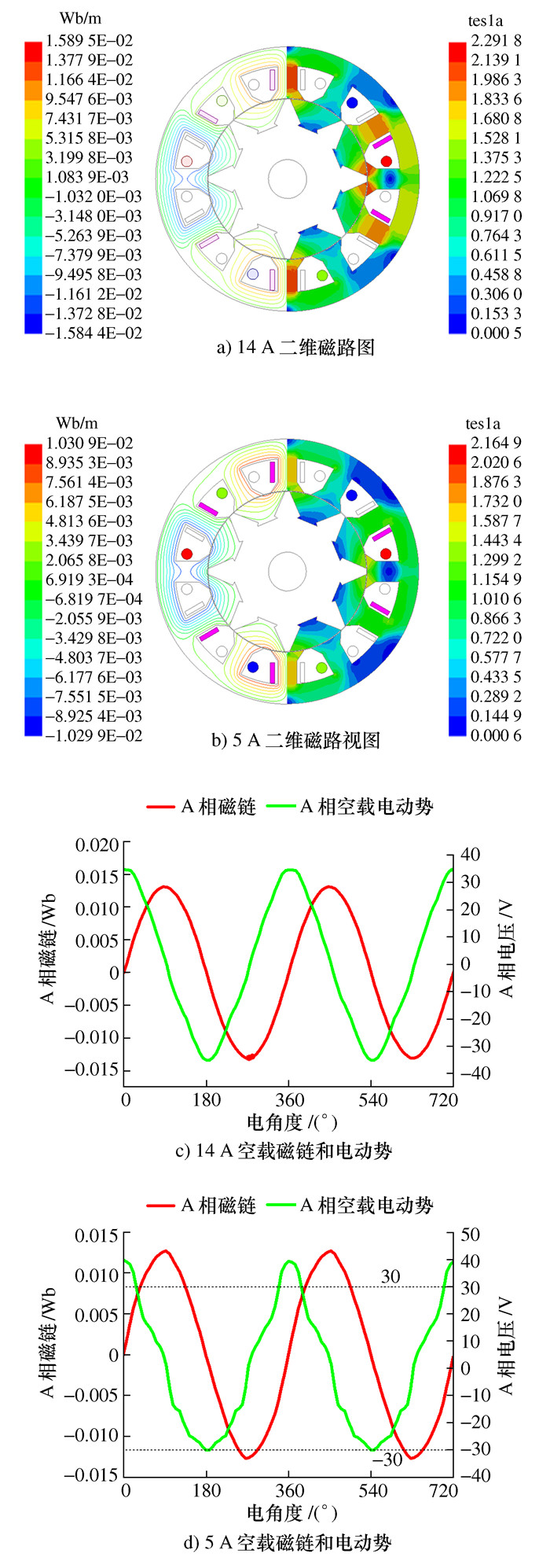
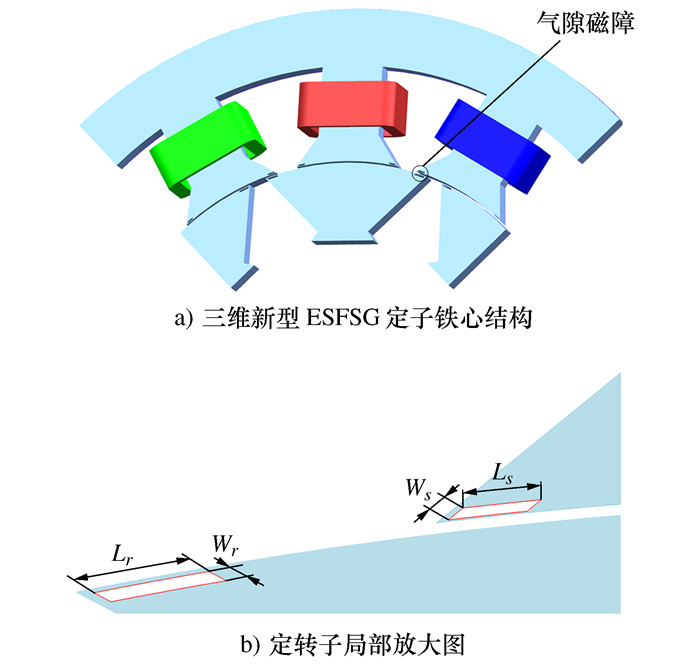
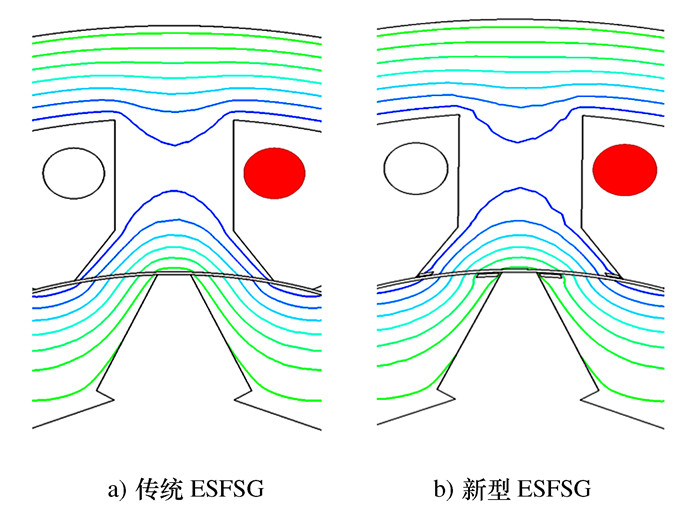
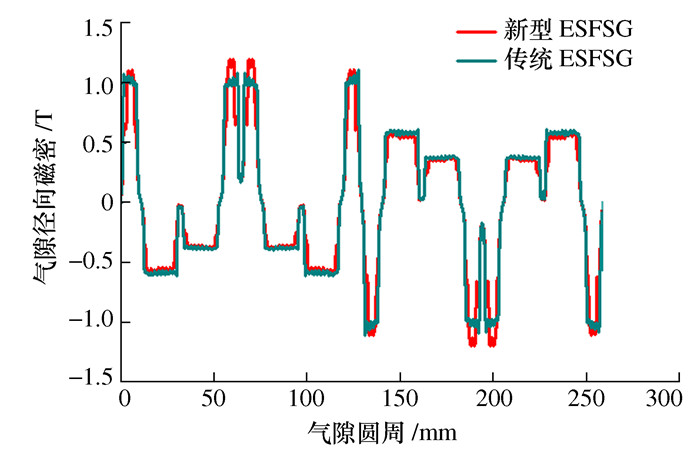
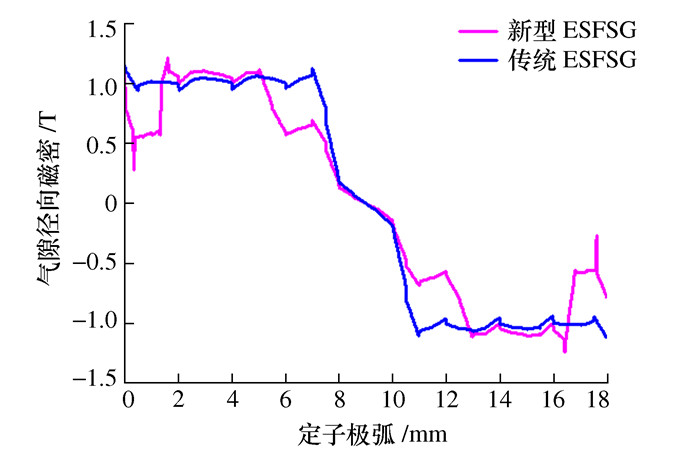
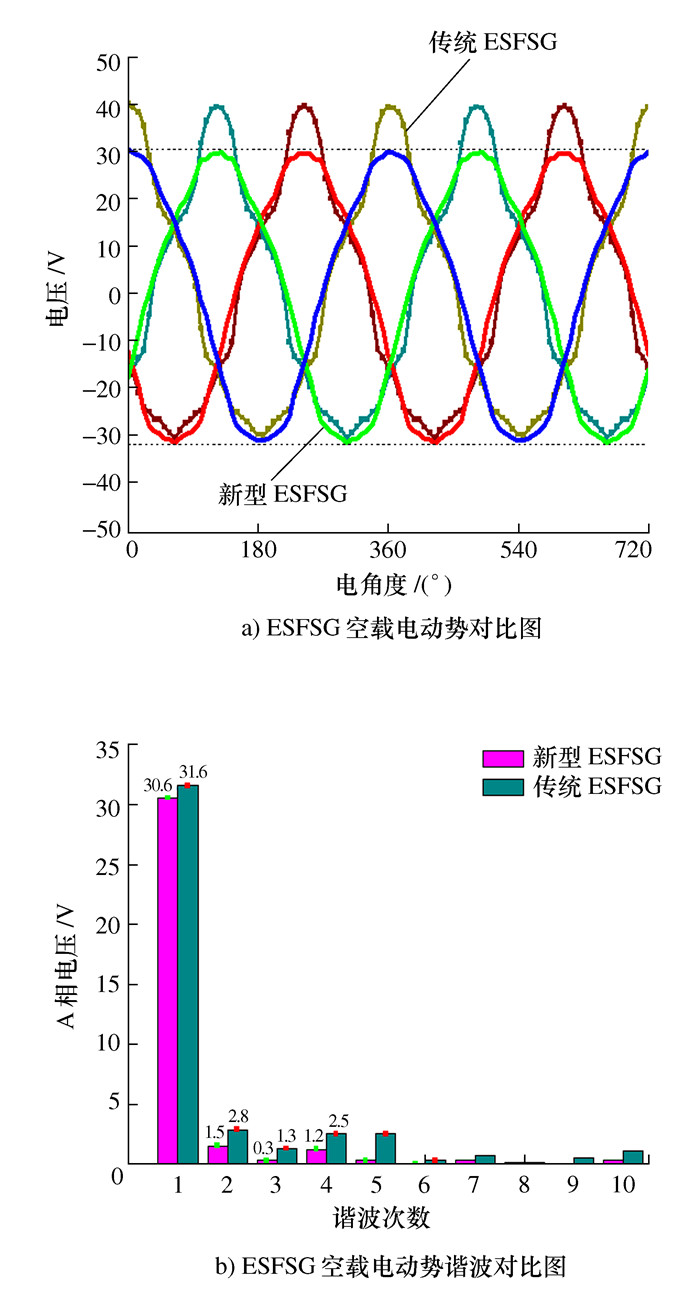
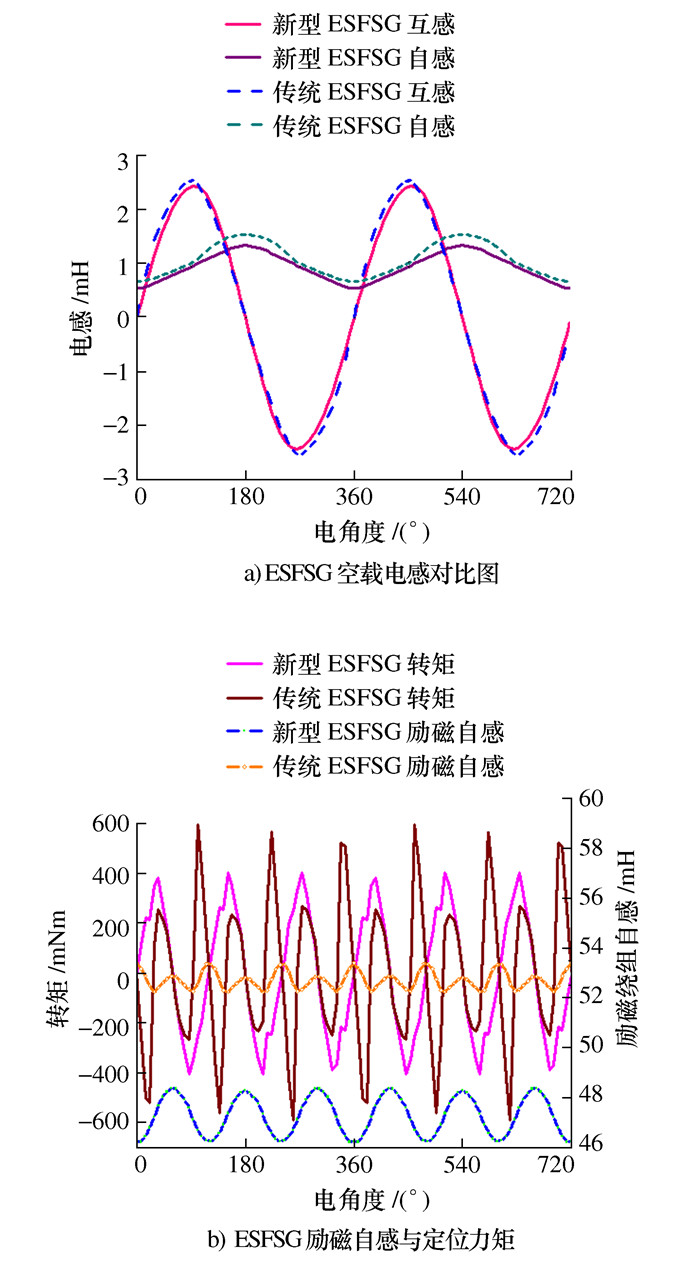
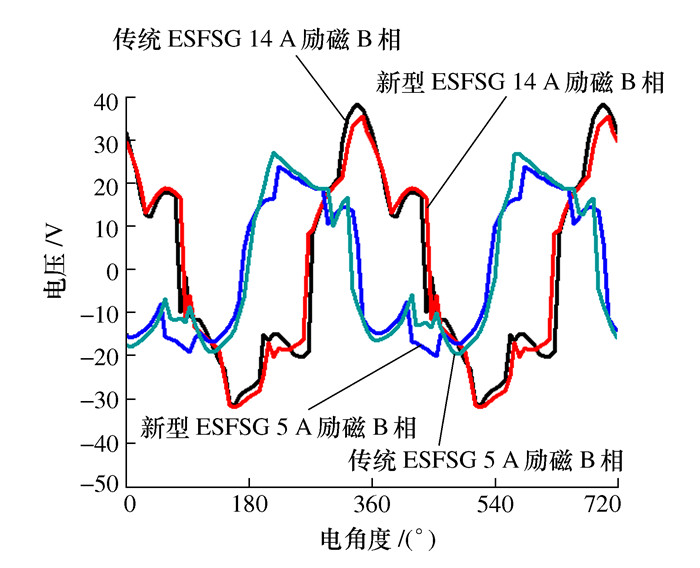
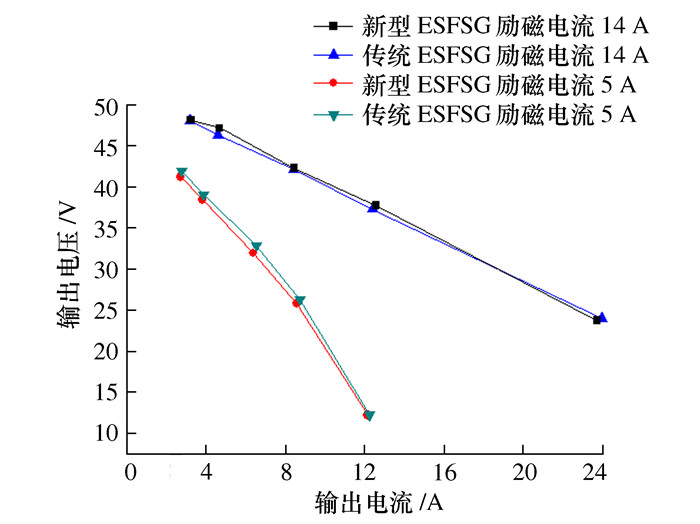
针对传统分块转子磁通切换发电机在低励磁电流时,空载电动势过轴线对称且正负半周期幅值不相等的问题。提出了一种在定转子上增加气隙磁障的方法以削弱空载电动势中的谐波,改善电动势波形的方法,并且利用电机学公式从理论上分析了其谐波削弱的原理。通过有限元仿真软件对新型分块转子磁通切换发电机静态特性进行了分析,包括磁场分布、空载电动势、磁链等。仿真结果表明,优化后电机空载电动势的电压波形正弦性畸变率降低了83.1%。
针对传统分块转子磁通切换发电机在低励磁电流时,空载电动势过轴线对称且正负半周期幅值不相等的问题。提出了一种在定转子上增加气隙磁障的方法以削弱空载电动势中的谐波,改善电动势波形的方法,并且利用电机学公式从理论上分析了其谐波削弱的原理。通过有限元仿真软件对新型分块转子磁通切换发电机静态特性进行了分析,包括磁场分布、空载电动势、磁链等。仿真结果表明,优化后电机空载电动势的电压波形正弦性畸变率降低了83.1%。

2022, 41(8): 1247-1253.
doi: 10.13433/j.cnki.1003-8728.20200449
摘要:
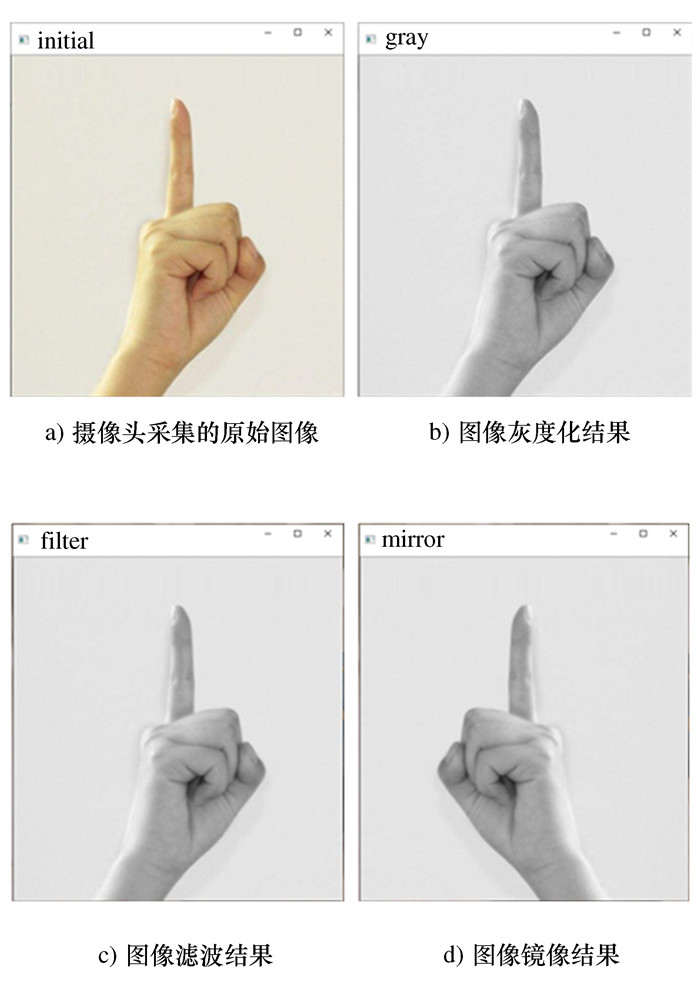
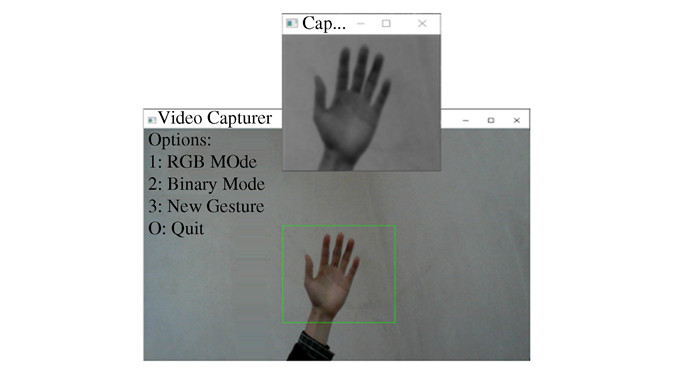
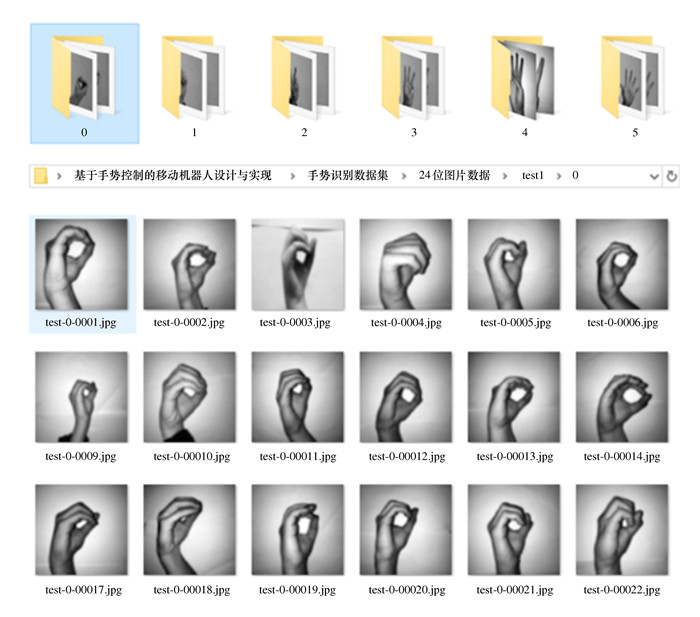
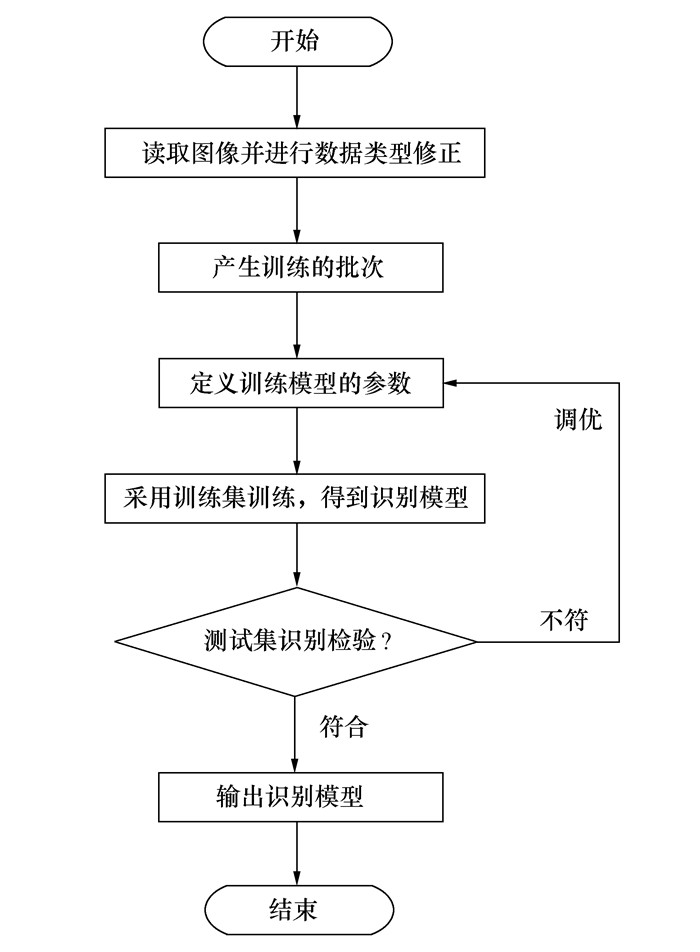
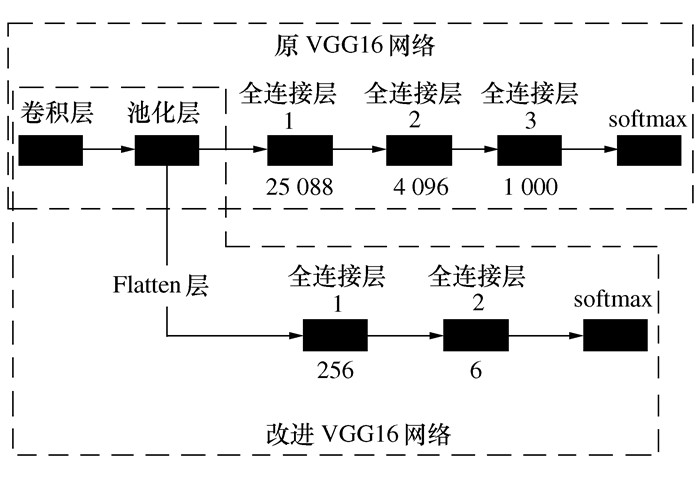
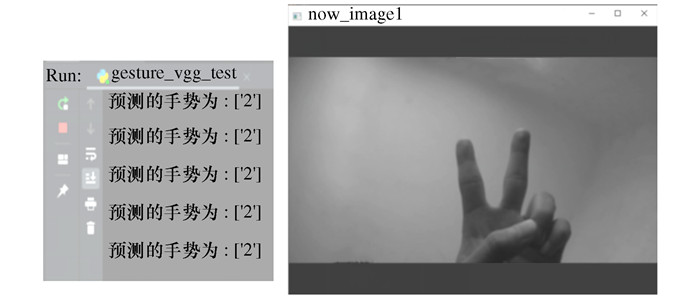
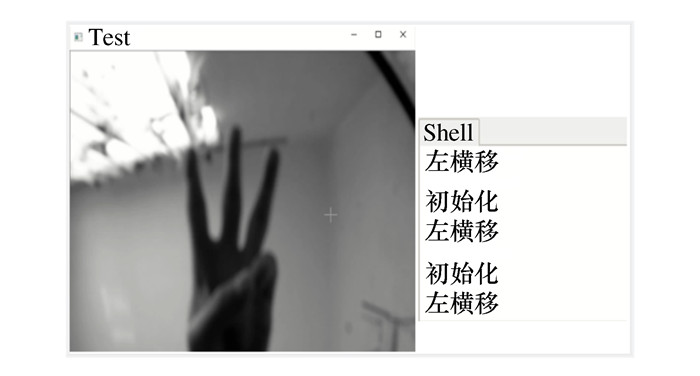
为了实现机器人控制人机交互的智能化与多功能化,提出了基于视觉手势识别的移动机器人手势控制系统。采用麦克纳姆轮搭建了全向四轮移动机器人平台,以主从控制作为机器人整体控制构架,采用PC机搭建了上位机视觉手势识别系统,采用树莓派设计了下位机机器人运动控制系统,并利用较高可靠性的TCP协议实现了上、下位机WIFI无线通信。采用改进的VGG16网络模型设计了手势识别算法,利用建立的手势图像数据库对网络模型进行训练和测试,通过对改进结构VGG16网络的应用,实现了高准确度的手势图像识别。通过实验验证了视觉识别手势控制移动机器人方案的可行性,为手势控制的应用提供了理论参考。
为了实现机器人控制人机交互的智能化与多功能化,提出了基于视觉手势识别的移动机器人手势控制系统。采用麦克纳姆轮搭建了全向四轮移动机器人平台,以主从控制作为机器人整体控制构架,采用PC机搭建了上位机视觉手势识别系统,采用树莓派设计了下位机机器人运动控制系统,并利用较高可靠性的TCP协议实现了上、下位机WIFI无线通信。采用改进的VGG16网络模型设计了手势识别算法,利用建立的手势图像数据库对网络模型进行训练和测试,通过对改进结构VGG16网络的应用,实现了高准确度的手势图像识别。通过实验验证了视觉识别手势控制移动机器人方案的可行性,为手势控制的应用提供了理论参考。



2022, 41(8): 1254-1260.
doi: 10.13433/j.cnki.1003-8728.20220147
摘要:
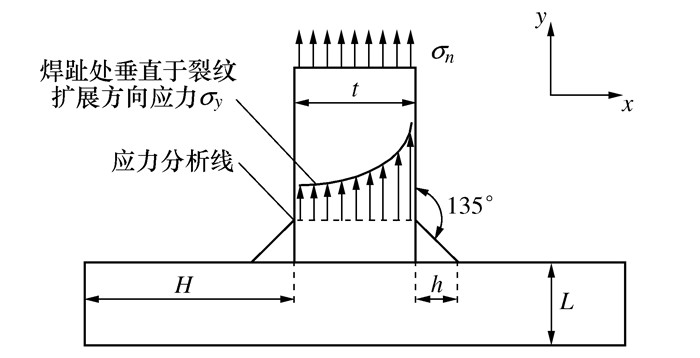
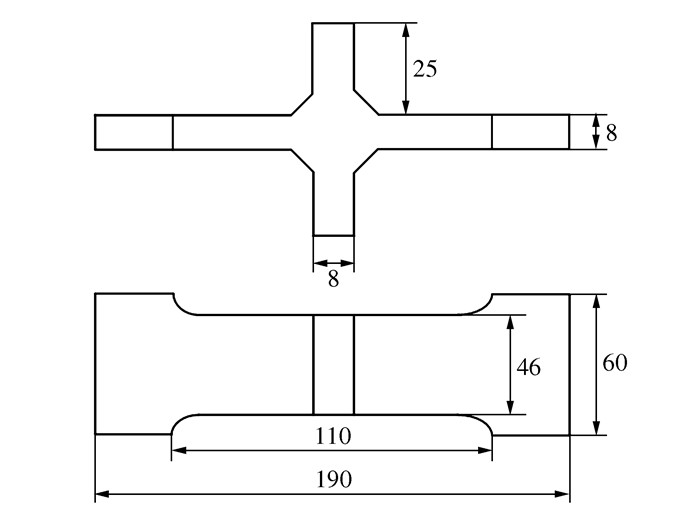
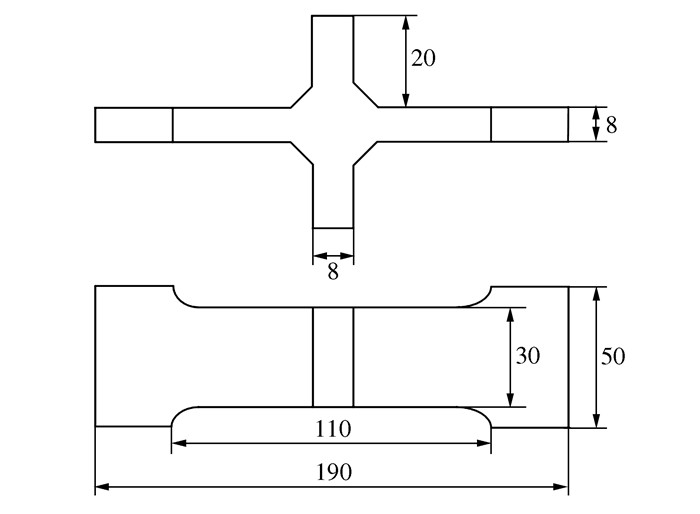
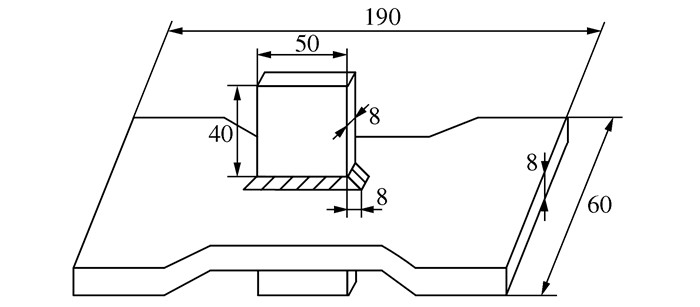
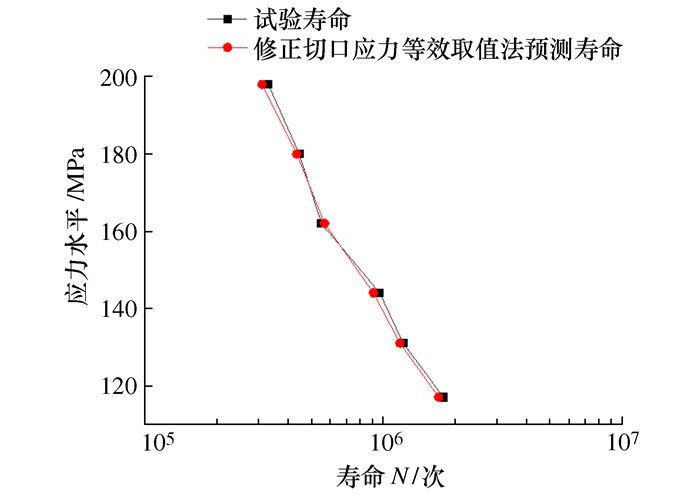
为了提高16Mn钢焊接接头疲劳寿命预测的准确程度,首先应用3种不同方法对十字焊接接头的疲劳寿命进行预测,验证了切口应力等效取值法考虑了应力集中对16Mn钢疲劳寿命的影响。其次,采用基于切口应力强度因子理论的切口应力等效取值法对焊接接头的疲劳寿命进行预测。与试验结果对比表明:应用切口应力等效取值法对16Mn钢焊接接头寿命的评估结果存在误差。结合16Mn钢十字焊接接头试验结果,引入切口等效应力修正系数,得到适用于16Mn钢常用焊接接头的修正切口等效应力公式。
为了提高16Mn钢焊接接头疲劳寿命预测的准确程度,首先应用3种不同方法对十字焊接接头的疲劳寿命进行预测,验证了切口应力等效取值法考虑了应力集中对16Mn钢疲劳寿命的影响。其次,采用基于切口应力强度因子理论的切口应力等效取值法对焊接接头的疲劳寿命进行预测。与试验结果对比表明:应用切口应力等效取值法对16Mn钢焊接接头寿命的评估结果存在误差。结合16Mn钢十字焊接接头试验结果,引入切口等效应力修正系数,得到适用于16Mn钢常用焊接接头的修正切口等效应力公式。



2022, 41(8): 1261-1269.
doi: 10.13433/j.cnki.1003-8728.20200452
摘要:
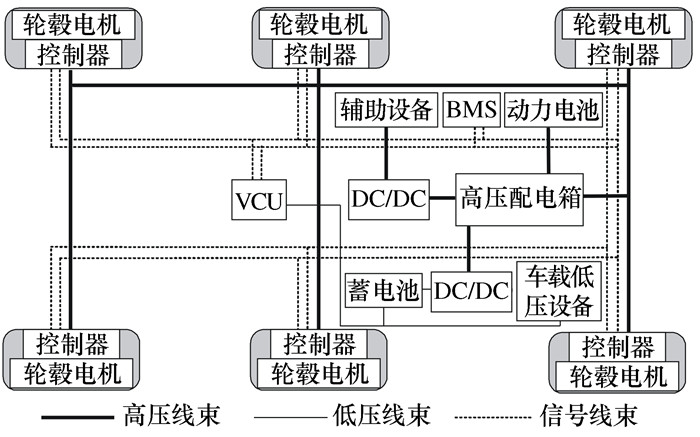
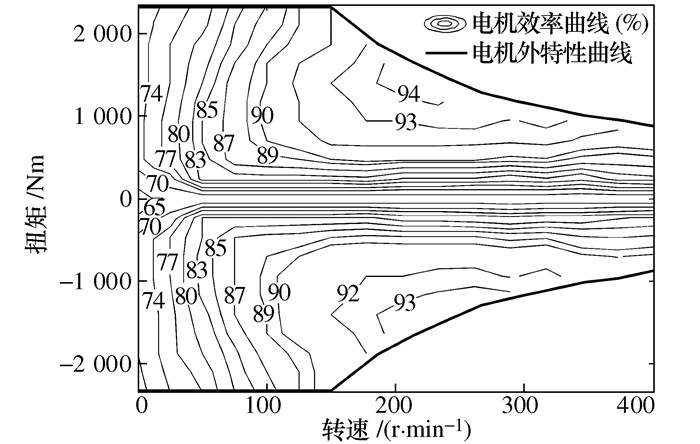
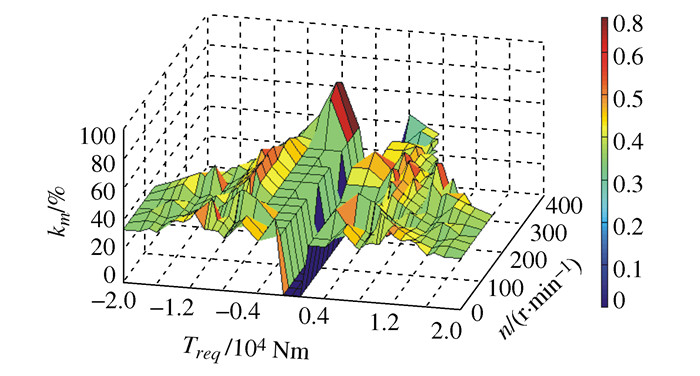
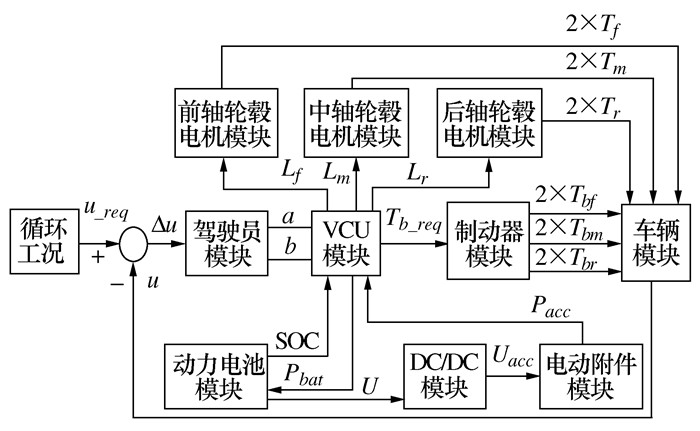
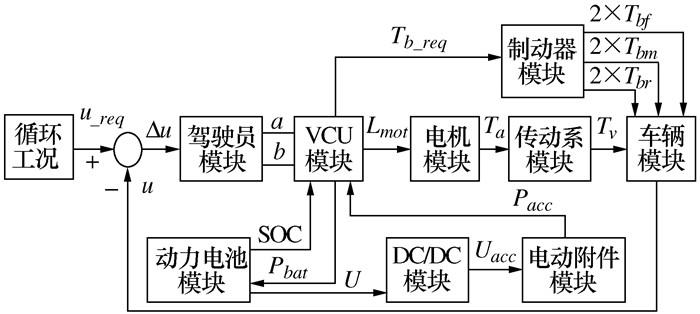
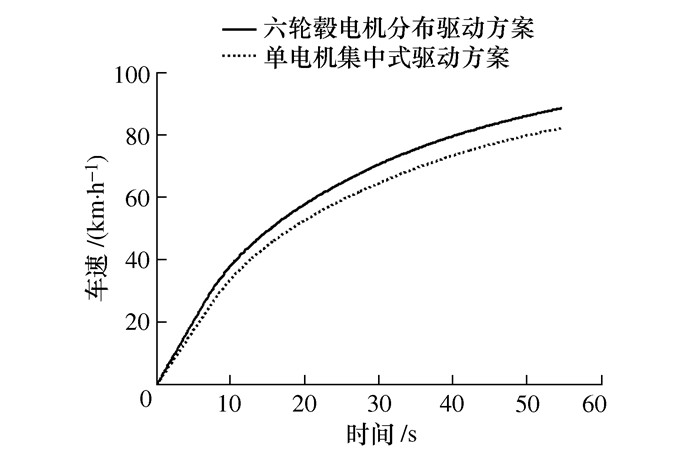
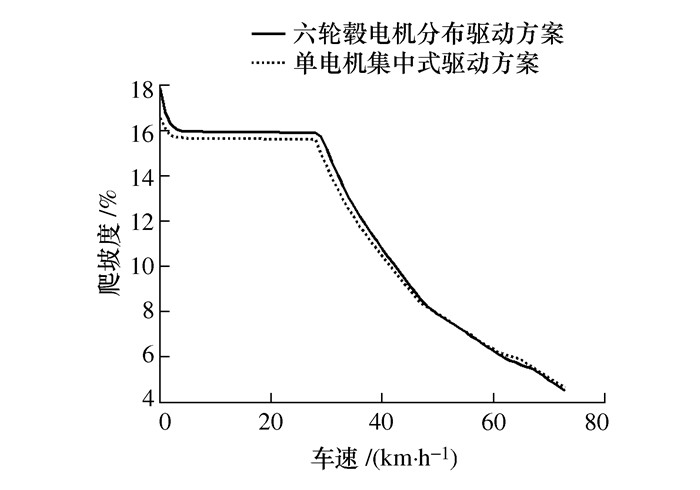
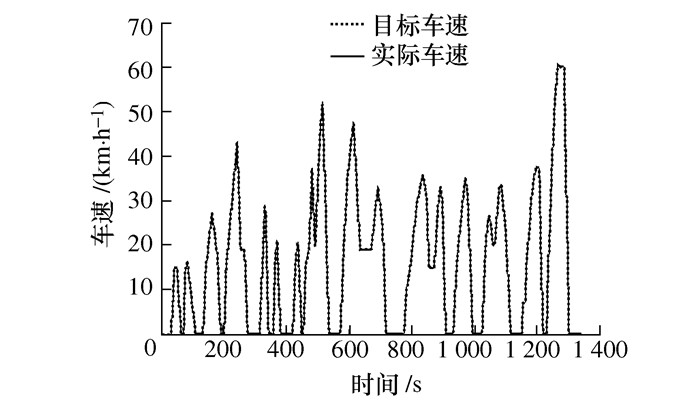
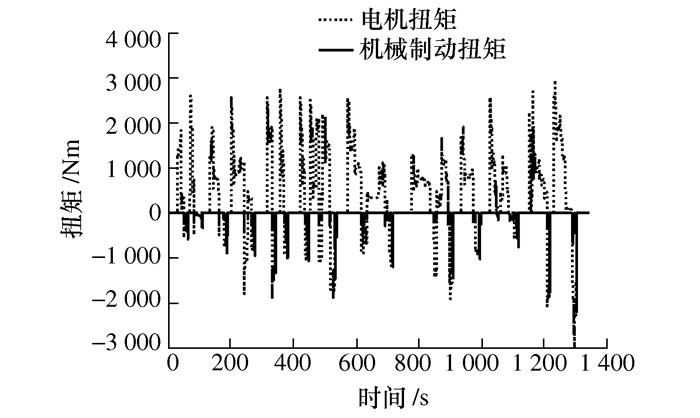
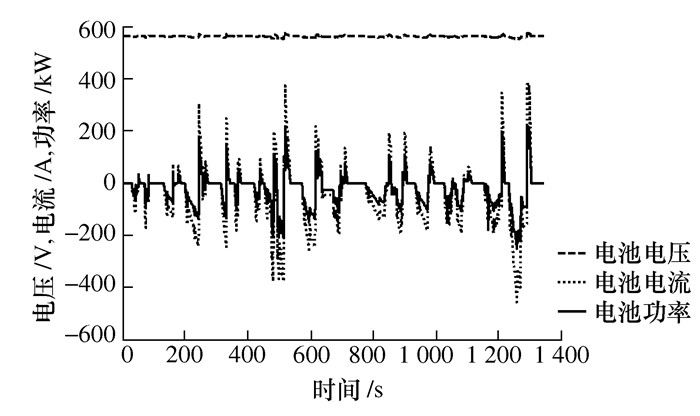
以三轴纯电动铰接客车为研究对象,针对单电机集中式驱动构型存在的动力系统布置困难、传动链长等问题,构建基于六轮毂电机分布式驱动的三轴纯电动铰接客车构型,完成关键总成参数匹配;针对前、中、后轴电机扭矩分配问题,提出以系统效率最佳为目标的扭矩优化分配策略,并基于MATLAB/Simulink搭建了扭矩优化分配模型;基于AVL Cruise和MATLAB/Simulink搭建了整车联合仿真模型,在满足整车动力性和经济性指标的前提下,通过与单电机集中式驱动构型的对比可知:整车0~50 km/h的加速时间减少3.1 s,最高车速提升5 km/h,最大爬坡度提高1.3%;满载CCBC工况下,百公里能耗降低11.51%,续驶里程增加27 km;提出的扭矩优化分配策略能将整车需求扭矩合理分配给各电机,并可优化电机工作区间,有效降低整车能耗。
以三轴纯电动铰接客车为研究对象,针对单电机集中式驱动构型存在的动力系统布置困难、传动链长等问题,构建基于六轮毂电机分布式驱动的三轴纯电动铰接客车构型,完成关键总成参数匹配;针对前、中、后轴电机扭矩分配问题,提出以系统效率最佳为目标的扭矩优化分配策略,并基于MATLAB/Simulink搭建了扭矩优化分配模型;基于AVL Cruise和MATLAB/Simulink搭建了整车联合仿真模型,在满足整车动力性和经济性指标的前提下,通过与单电机集中式驱动构型的对比可知:整车0~50 km/h的加速时间减少3.1 s,最高车速提升5 km/h,最大爬坡度提高1.3%;满载CCBC工况下,百公里能耗降低11.51%,续驶里程增加27 km;提出的扭矩优化分配策略能将整车需求扭矩合理分配给各电机,并可优化电机工作区间,有效降低整车能耗。







2022, 41(8): 1270-1277.
doi: 10.13433/j.cnki.1003-8728.20200491
摘要:
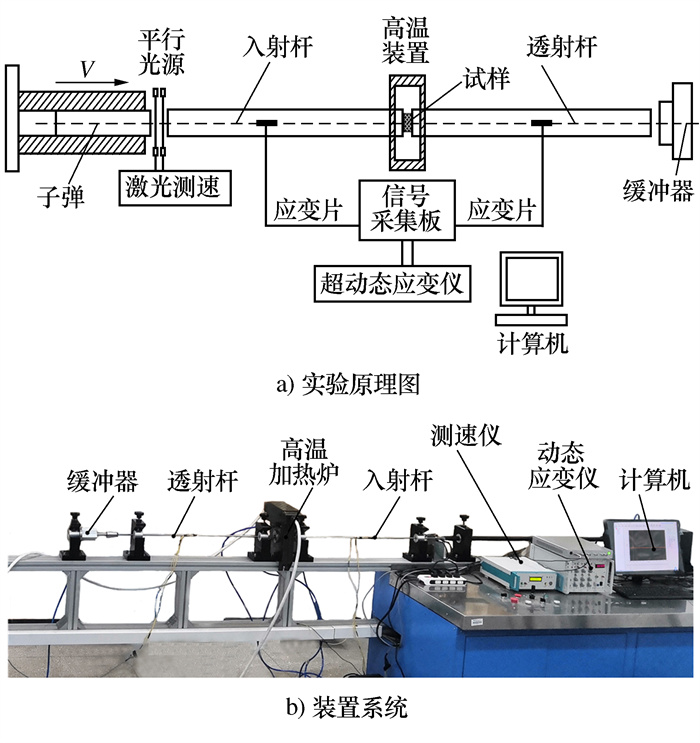
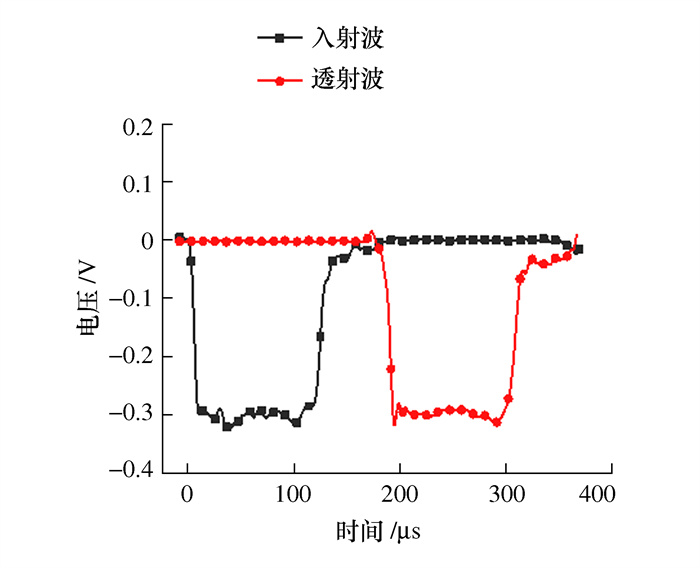
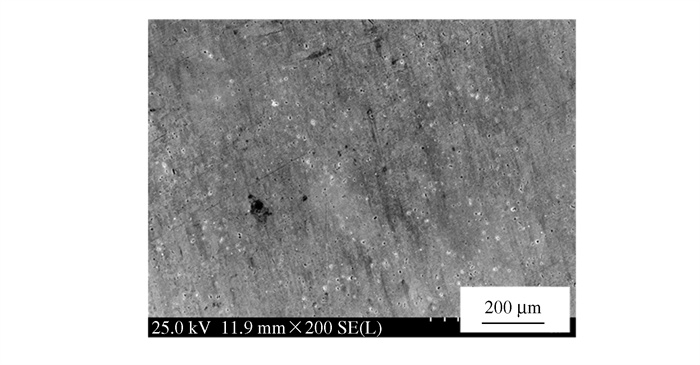
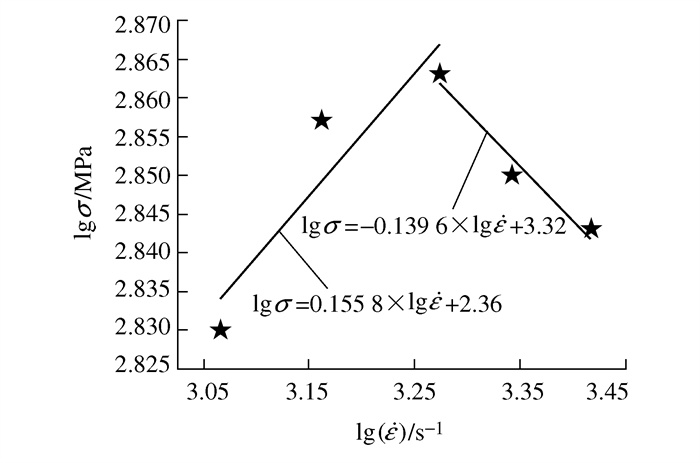
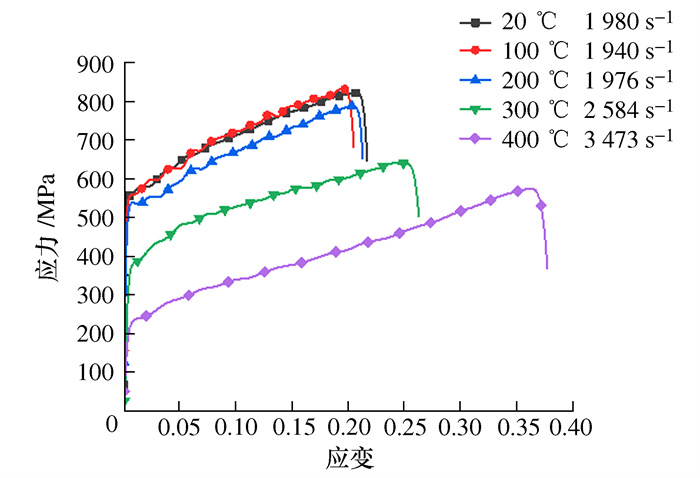
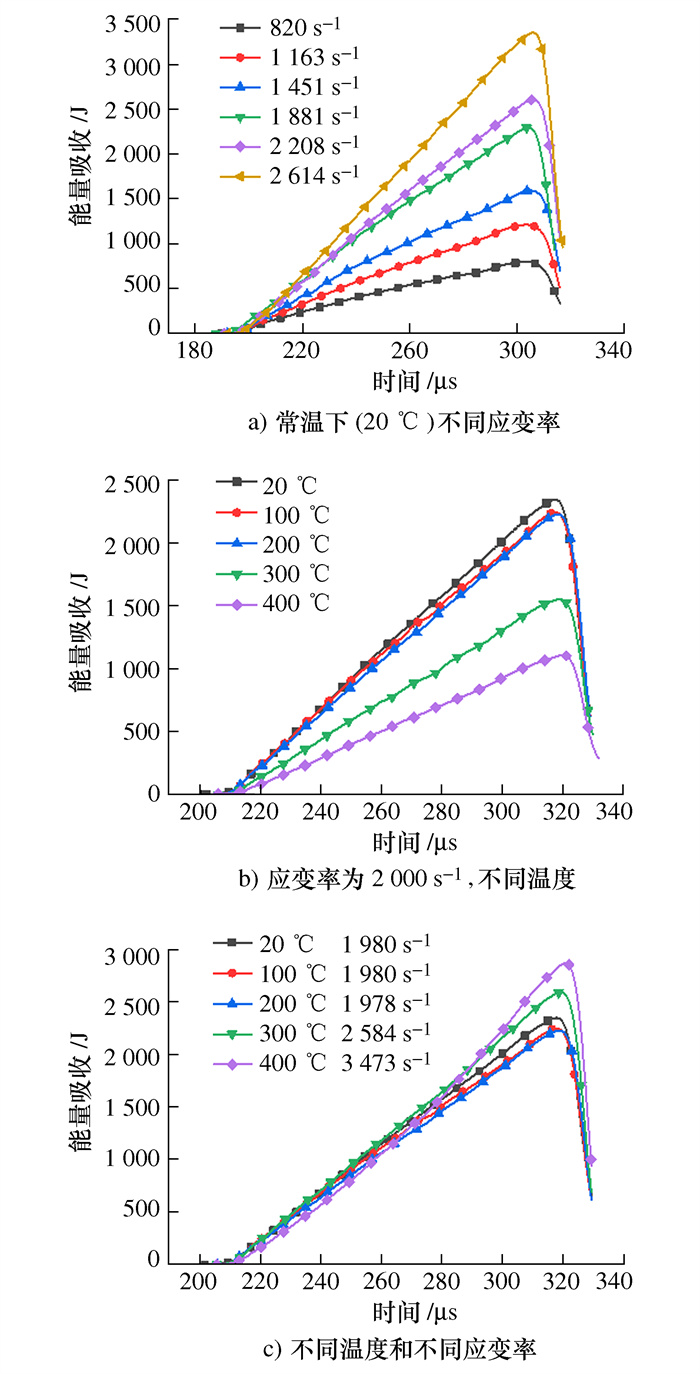
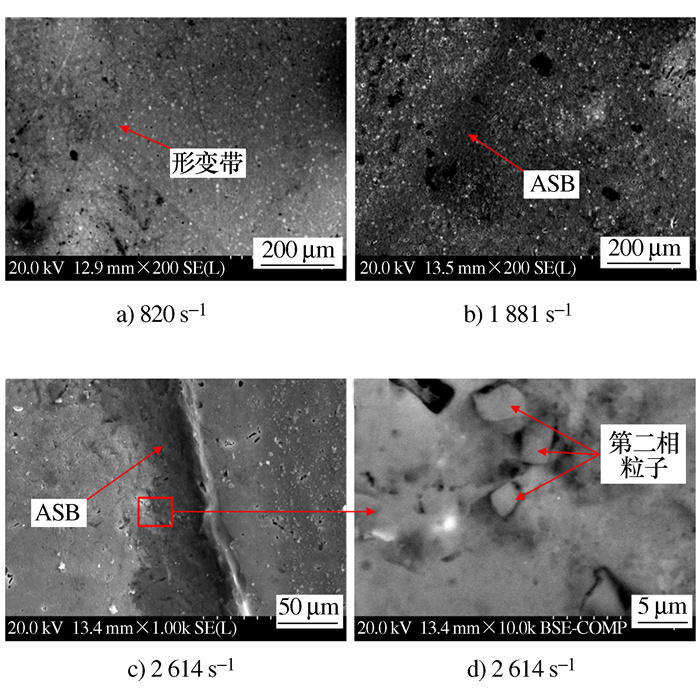
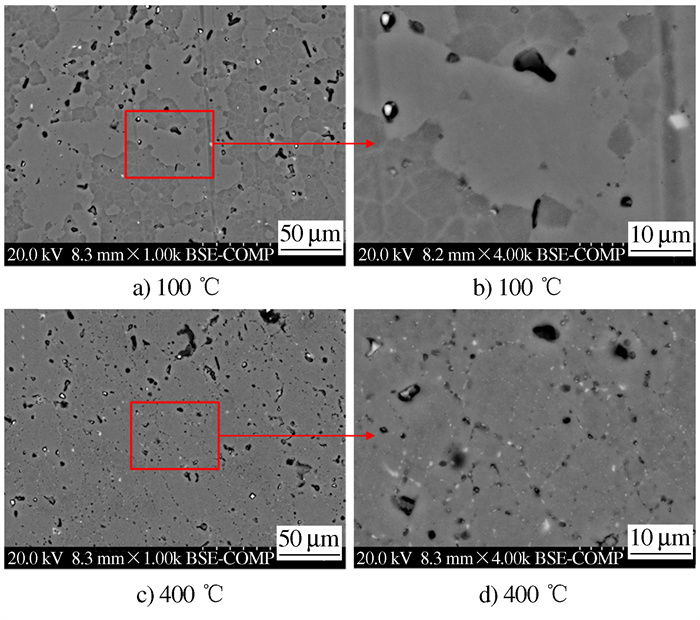
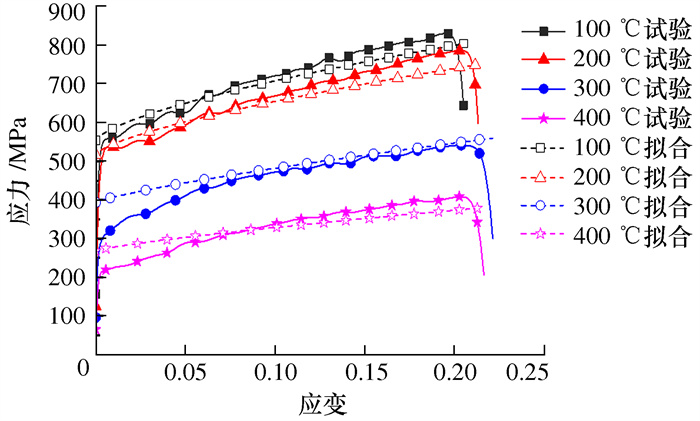
为研究高温与高应变率对7150-T6铝合金动态力学性能的影响,利用分离式霍普金森压杆装置进行动态冲击试验,并对冲击后试样进行了SEM显微组织分析。结果表明:7150-T6铝合金在常温、高应变率下呈现局部热软化现象和较弱的应变率敏感性。材料的流动应力随着温度的升高而不断减小,尤其当温度高于200 ℃时,流动应力显著降低。在高应变率冲击下,应变率增大使绝热剪切带的形成更加明显,而高温下未发生明显绝热剪切现象。通过最小二乘法拟合出的Johnson-Cook本构方程能够有效预测不同加载条件下的流动应力,其预测结果与试验结果基本吻合。本研究可为7150-T6铝合金在汽车等运载器结构的轻量化与安全性设计提供指导。
为研究高温与高应变率对7150-T6铝合金动态力学性能的影响,利用分离式霍普金森压杆装置进行动态冲击试验,并对冲击后试样进行了SEM显微组织分析。结果表明:7150-T6铝合金在常温、高应变率下呈现局部热软化现象和较弱的应变率敏感性。材料的流动应力随着温度的升高而不断减小,尤其当温度高于200 ℃时,流动应力显著降低。在高应变率冲击下,应变率增大使绝热剪切带的形成更加明显,而高温下未发生明显绝热剪切现象。通过最小二乘法拟合出的Johnson-Cook本构方程能够有效预测不同加载条件下的流动应力,其预测结果与试验结果基本吻合。本研究可为7150-T6铝合金在汽车等运载器结构的轻量化与安全性设计提供指导。





2022, 41(8): 1278-1288.
doi: 10.13433/j.cnki.1003-8728.20220153
摘要:
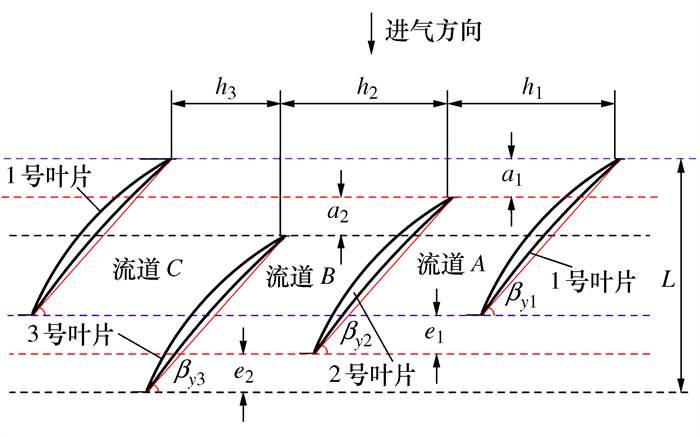
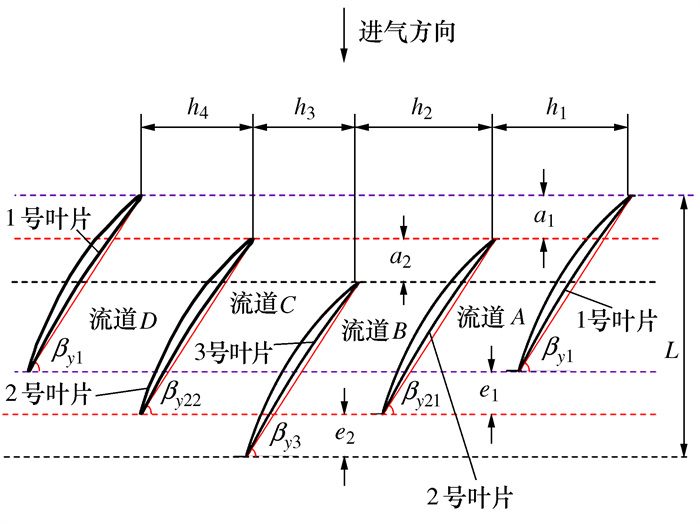
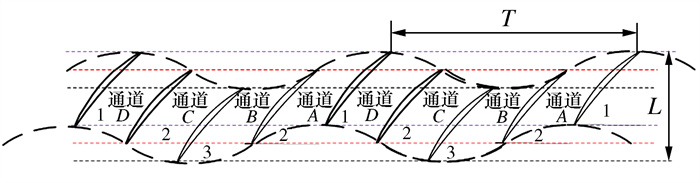
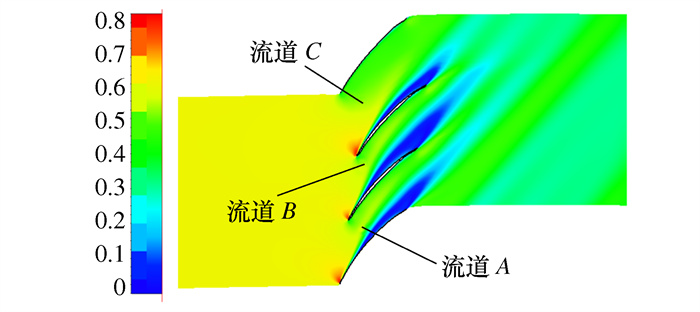
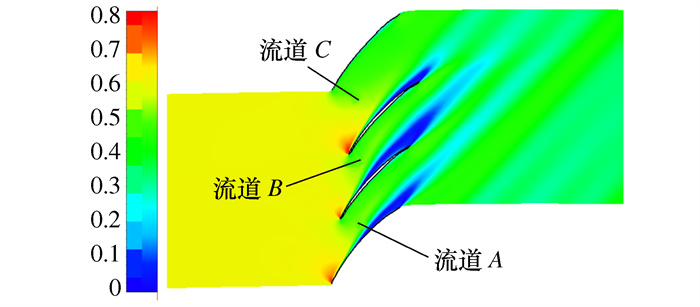
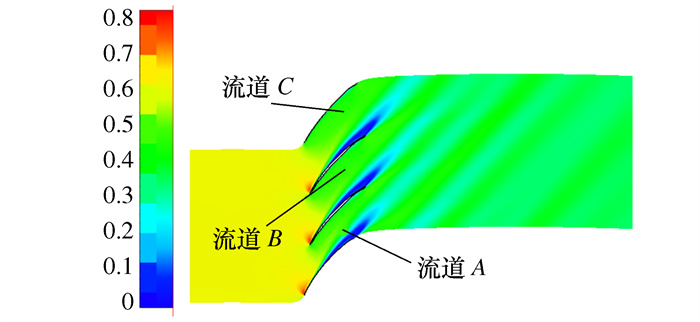
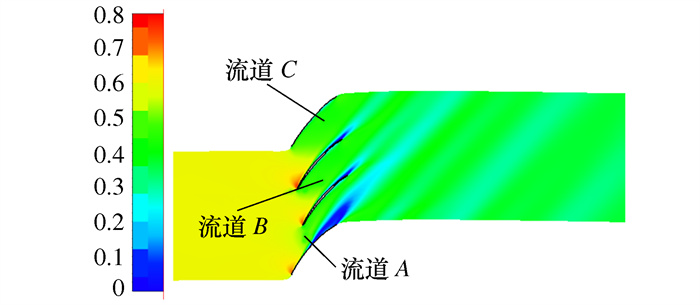
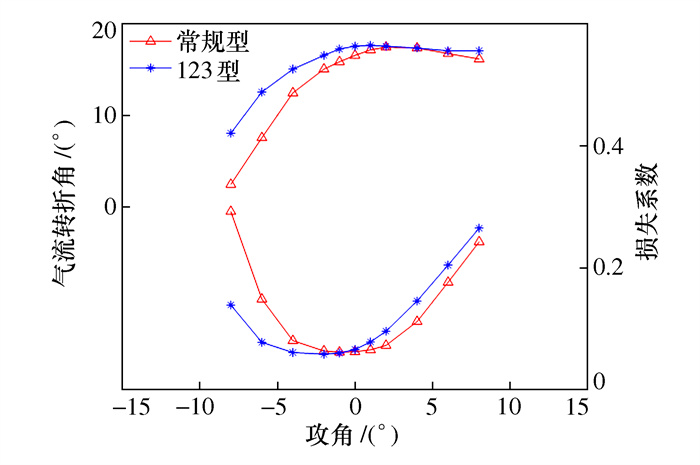
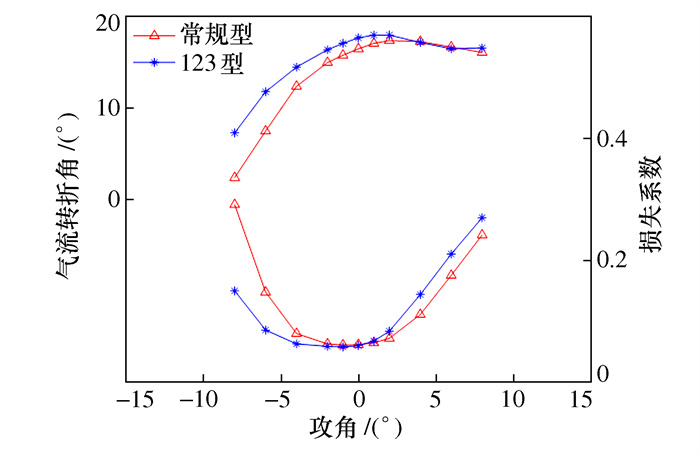
为提高轴流压气机气动负荷和稳定性,本文将若干个叶片的前缘和后缘在不同轴向位置上沿圆周方向彼此交错排列,构成压气机的一个非均匀叶片排。提出了4种压气机叶片新型排布构型——NPU-刘-廖叶片系列构型,简称LL叶片系列构型, 分析了NPU-LL叶片系列构型的结构特征和参数,探索了其流动特性,初步揭示了NPU-LL叶片系列构型在流动控制方面的突出优势,计算了4种NPU-LL叶片叶栅布局的气动特性,并与常规叶栅进行了对比。研究结果表明,NPU-LL叶片系列构型打破了传统叶片均匀布局局限,可有效地提升压气机的气动性能,为压气机性能的优化设计提供了一种新思路。
为提高轴流压气机气动负荷和稳定性,本文将若干个叶片的前缘和后缘在不同轴向位置上沿圆周方向彼此交错排列,构成压气机的一个非均匀叶片排。提出了4种压气机叶片新型排布构型——NPU-刘-廖叶片系列构型,简称LL叶片系列构型, 分析了NPU-LL叶片系列构型的结构特征和参数,探索了其流动特性,初步揭示了NPU-LL叶片系列构型在流动控制方面的突出优势,计算了4种NPU-LL叶片叶栅布局的气动特性,并与常规叶栅进行了对比。研究结果表明,NPU-LL叶片系列构型打破了传统叶片均匀布局局限,可有效地提升压气机的气动性能,为压气机性能的优化设计提供了一种新思路。









2022, 41(8): 1289-1297.
doi: 10.13433/j.cnki.1003-8728.20200459
摘要:
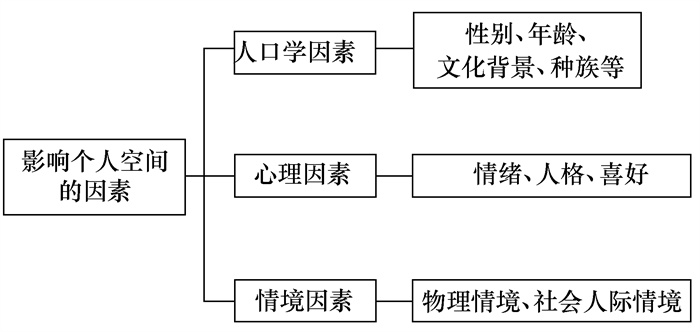
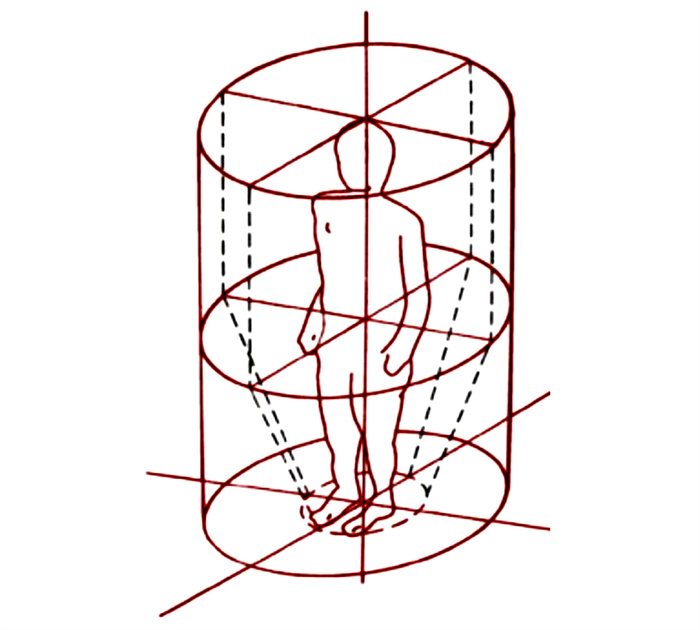
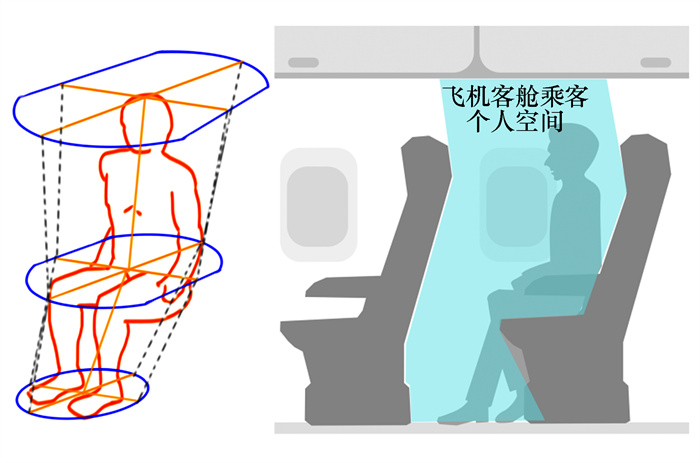
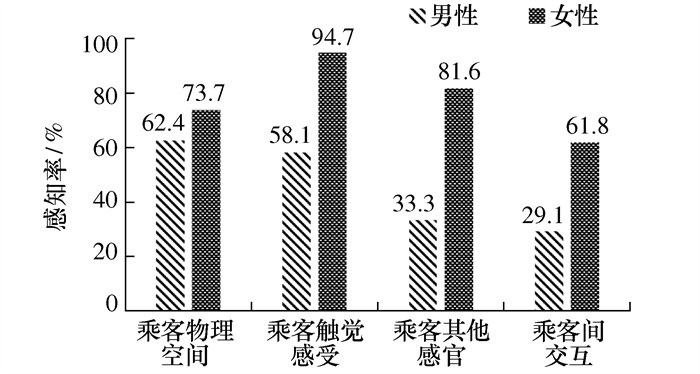
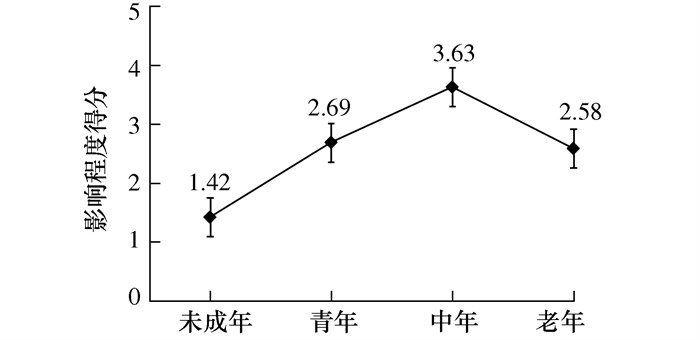
为提高飞机经济舱舒适性,引入环境心理学个人空间理论,研究乘客个人空间入侵对舒适性设计的影响。调查得到乘客个人空间入侵的具体形式、感受和对舒适性的影响程度,对影响程度进行混合方差分析,发现影响程度因乘客性别、年龄及受教育程度不同存在显著差异。DEMATEL方法分析影响因素发现,触觉感受与其它感官分别是值最大的结果和原因维度,物理空间与触觉感受的中心度远大于另外两个维度,优化相应的客舱设计指标可提高经济舱舒适性。
为提高飞机经济舱舒适性,引入环境心理学个人空间理论,研究乘客个人空间入侵对舒适性设计的影响。调查得到乘客个人空间入侵的具体形式、感受和对舒适性的影响程度,对影响程度进行混合方差分析,发现影响程度因乘客性别、年龄及受教育程度不同存在显著差异。DEMATEL方法分析影响因素发现,触觉感受与其它感官分别是值最大的结果和原因维度,物理空间与触觉感受的中心度远大于另外两个维度,优化相应的客舱设计指标可提高经济舱舒适性。




2022, 41(8): 1298-1305.
doi: 10.13433/j.cnki.1003-8728.20200447
摘要:
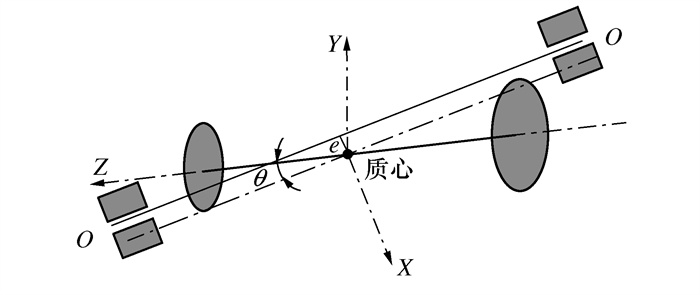
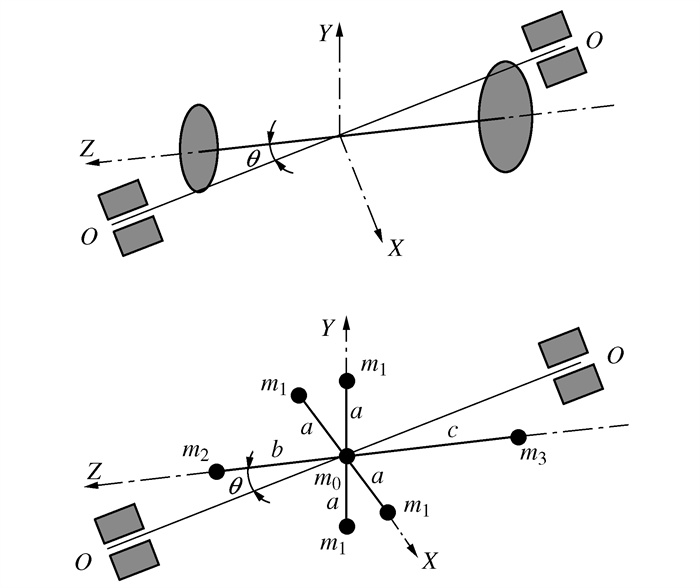
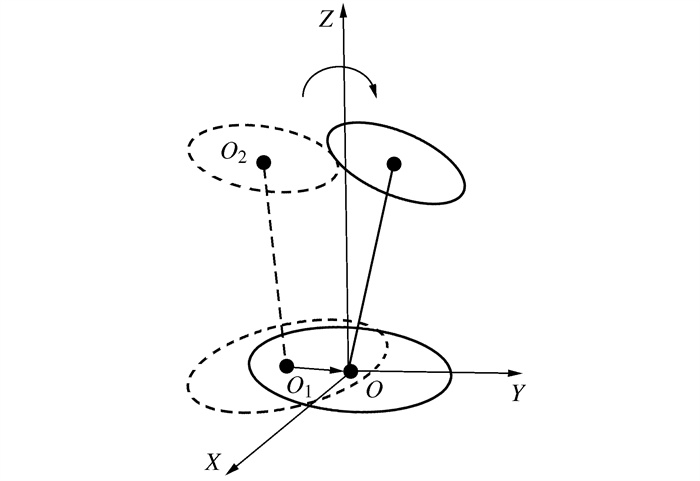
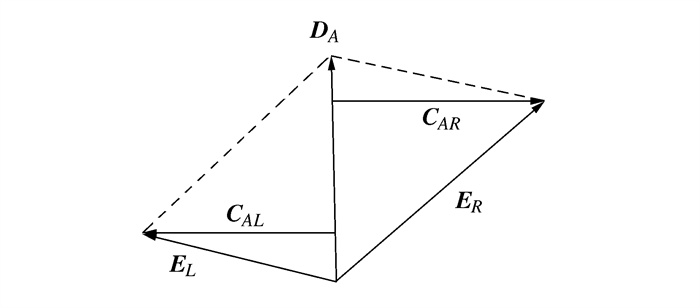
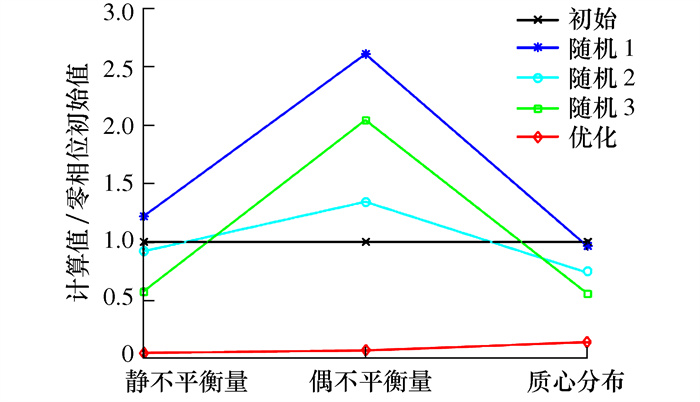
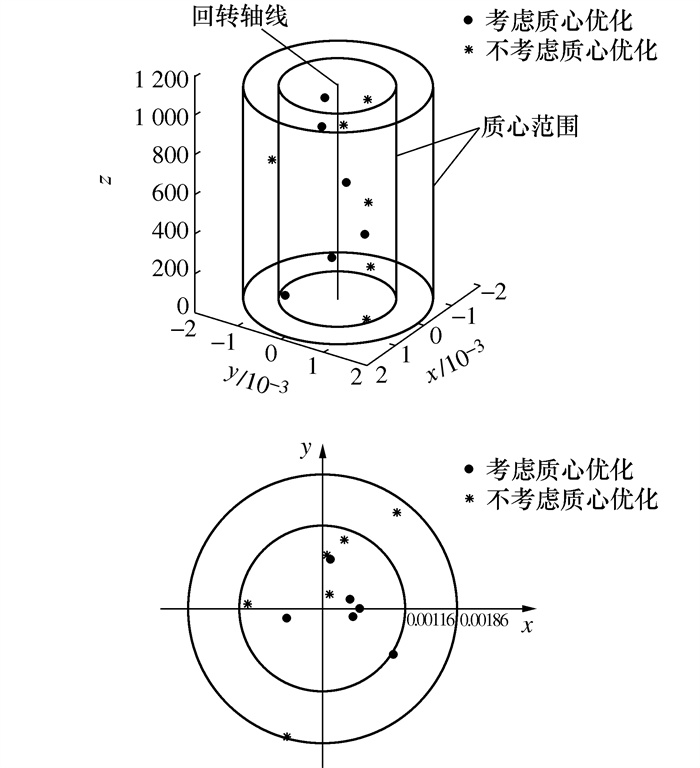
多级盘转子装配是航空发动机转子制造过程中十分重要的一环,其中装配不平衡量的大小直接影响整机振动水平。为了对多级盘转子进行初始不平衡量的预测与优化,通过端面跳动及径向跳动等参数计算获得各单件的表示矩阵,经过堆叠计算获得在以回转轴线为轴的坐标系内的装配体空间位姿,进而获得各单件及整体的静、偶不平衡量,同时获得相对回转轴线位置的各单件质心分布情况,建立装配不平衡量预测模型; 基于预测模型以静、偶不平衡量及质心分布为目标,以装配相位为设计变量利用遗传算法进行多目标优化。结果表明:与原始装配方案相比,根据预测模型进行遗传算法优化之后的初始静不平衡量降低至5.11%,偶不平衡量降低至7.09%,质心分布范围降低至14.29%,优化效果显著,装配质量提升明显,并且与不考虑质心分布的优化相比证明能有效控制质心范围,与穷举法优化相比证明能有效的节约时间,对航空发动机的装配工艺的进步有一定的工程指导意义。
多级盘转子装配是航空发动机转子制造过程中十分重要的一环,其中装配不平衡量的大小直接影响整机振动水平。为了对多级盘转子进行初始不平衡量的预测与优化,通过端面跳动及径向跳动等参数计算获得各单件的表示矩阵,经过堆叠计算获得在以回转轴线为轴的坐标系内的装配体空间位姿,进而获得各单件及整体的静、偶不平衡量,同时获得相对回转轴线位置的各单件质心分布情况,建立装配不平衡量预测模型; 基于预测模型以静、偶不平衡量及质心分布为目标,以装配相位为设计变量利用遗传算法进行多目标优化。结果表明:与原始装配方案相比,根据预测模型进行遗传算法优化之后的初始静不平衡量降低至5.11%,偶不平衡量降低至7.09%,质心分布范围降低至14.29%,优化效果显著,装配质量提升明显,并且与不考虑质心分布的优化相比证明能有效控制质心范围,与穷举法优化相比证明能有效的节约时间,对航空发动机的装配工艺的进步有一定的工程指导意义。



2022, 41(8): 1306-1312.
doi: 10.13433/j.cnki.1003-8728.20200450
摘要:
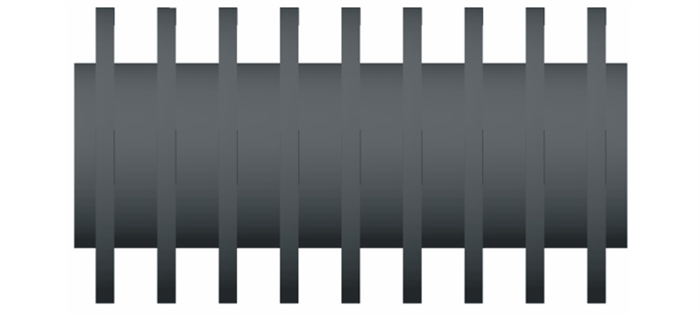
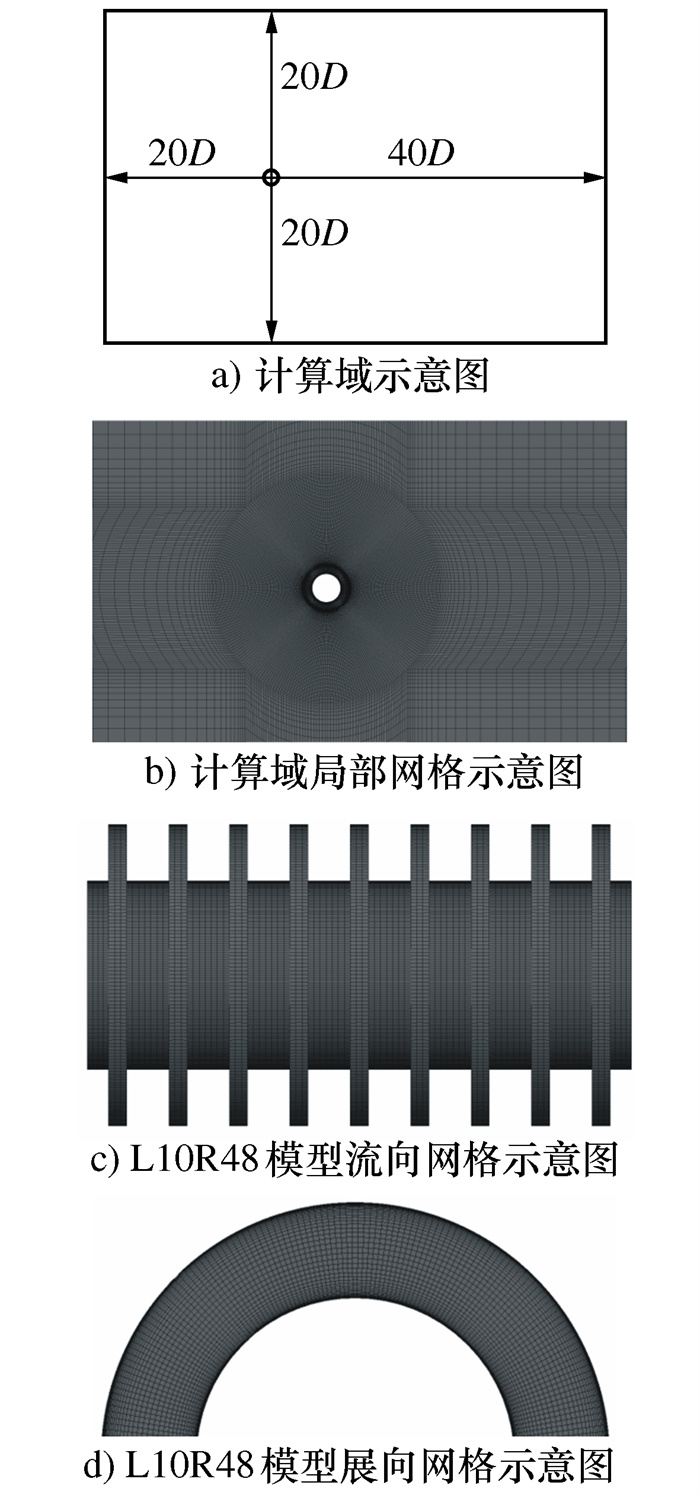
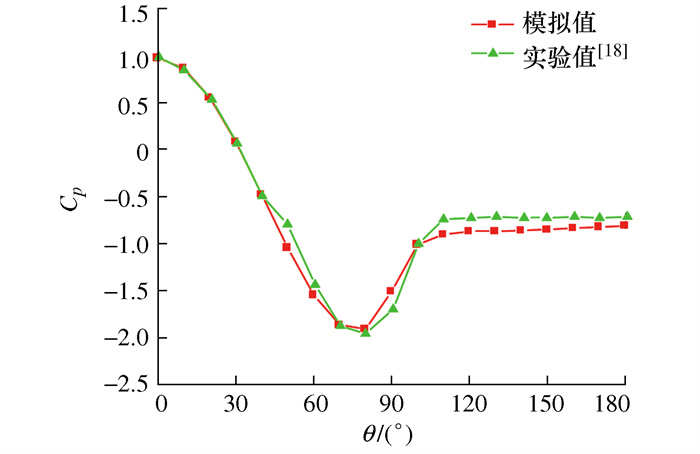
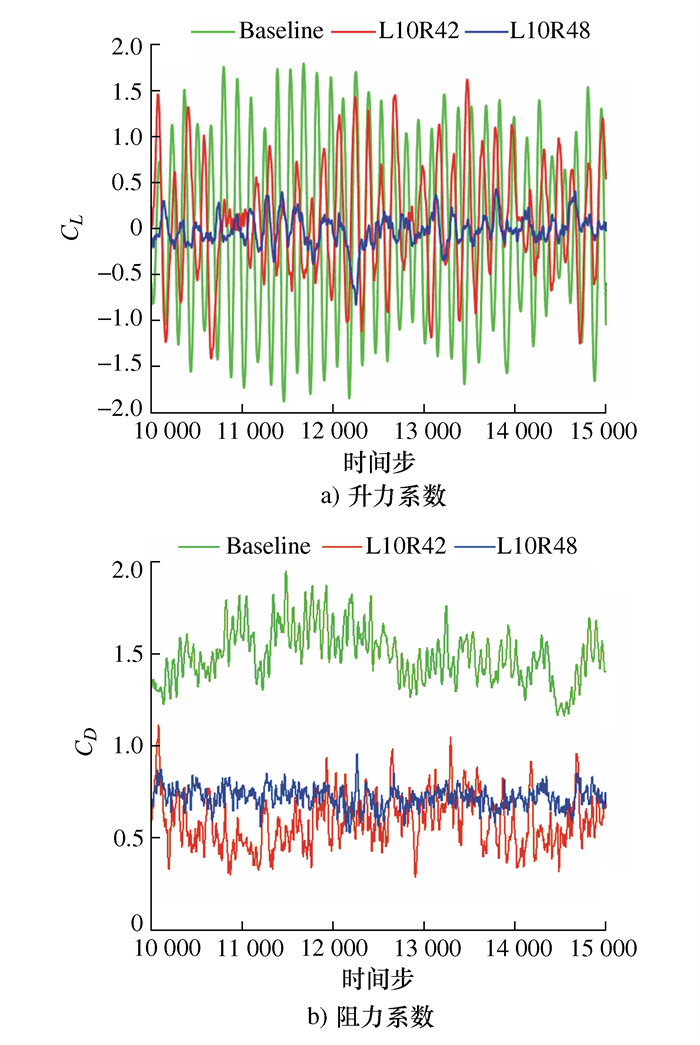
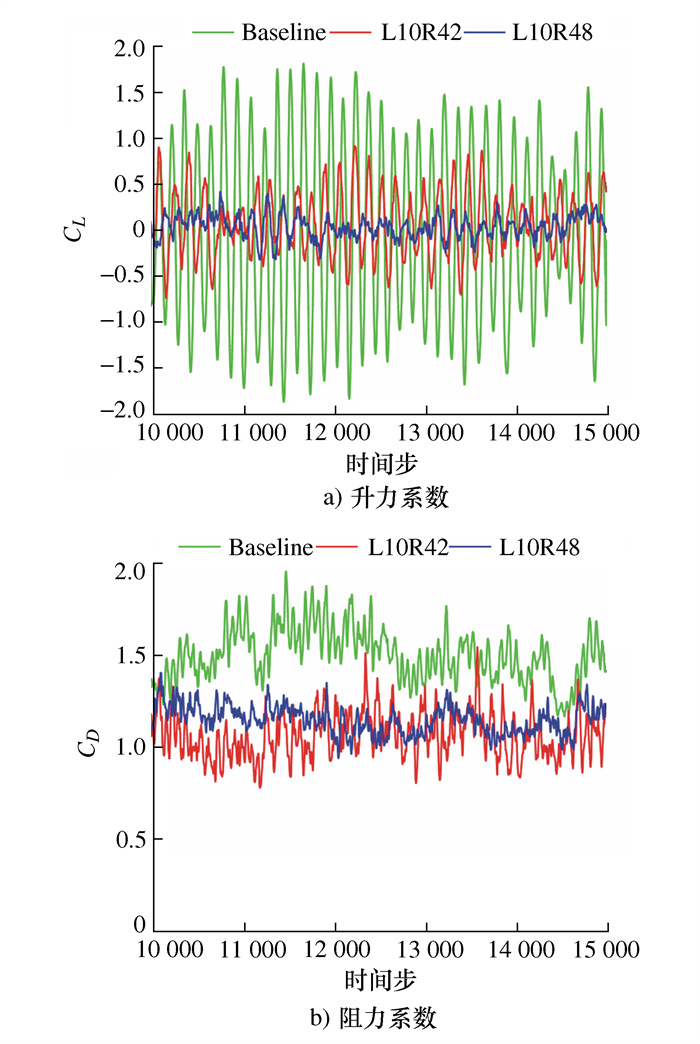
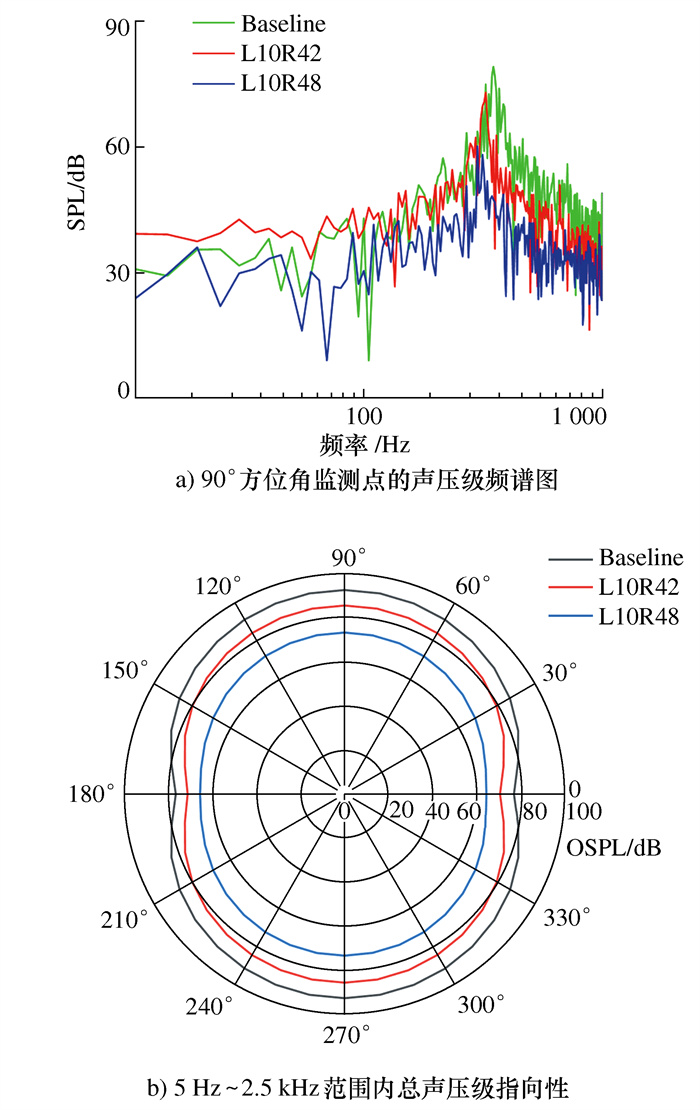
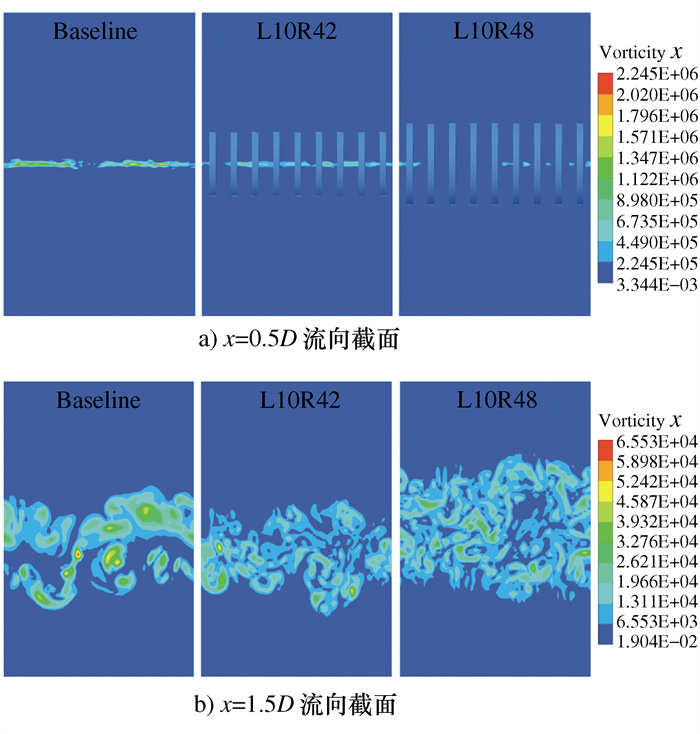
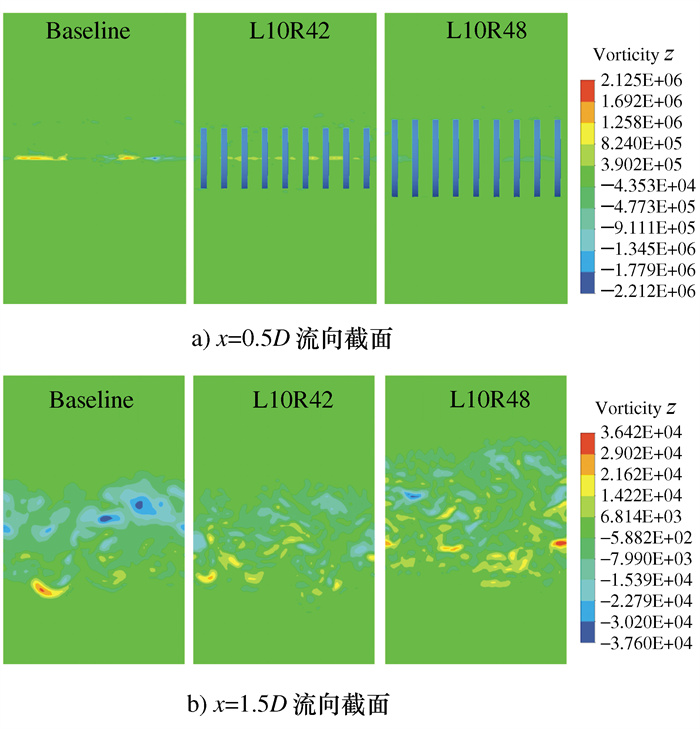
采用大涡模拟与声类比的方法研究了周期性凸起结构对圆柱绕流流场及声场的影响。以30 mm直径的圆柱为研究对象,设计的凸起结构周期为1/3直径,凸起结构展向厚度为1/10直径,同时设计了42 mm与48 mm两种不同直径的凸起结构。模拟雷诺数123 100下基准圆柱与两种带周期性凸起结构圆柱的流场与声场,详细分析了凸起结构对气动力系数的影响,同时分析了凸起结构对圆柱绕流涡脱落噪声的影响。研究发现,直径更大的凸起结构降低噪声的效果更显著,25 000 Hz以下的总声压级降低高达19 dB; 同时凸起结构也能够降低升力系数波动及阻力系数的均值。进一步研究表明,周期性凸起结构的降噪机理在于,周期性凸起结构破坏了圆柱绕流在展向上脱落涡的连续性。
采用大涡模拟与声类比的方法研究了周期性凸起结构对圆柱绕流流场及声场的影响。以30 mm直径的圆柱为研究对象,设计的凸起结构周期为1/3直径,凸起结构展向厚度为1/10直径,同时设计了42 mm与48 mm两种不同直径的凸起结构。模拟雷诺数123 100下基准圆柱与两种带周期性凸起结构圆柱的流场与声场,详细分析了凸起结构对气动力系数的影响,同时分析了凸起结构对圆柱绕流涡脱落噪声的影响。研究发现,直径更大的凸起结构降低噪声的效果更显著,25 000 Hz以下的总声压级降低高达19 dB; 同时凸起结构也能够降低升力系数波动及阻力系数的均值。进一步研究表明,周期性凸起结构的降噪机理在于,周期性凸起结构破坏了圆柱绕流在展向上脱落涡的连续性。