




A Simplified Kinematics Solution Method for Redundant Manipulator
-
摘要: 七自由度机械臂从结构上冗余一个自由度, 是为躲避障碍物和奇异点而设置。但因其冗余自由度导致运动学求解难度增加, 计算耗时长, 直接影响后续运动及控制效率。本文基于一款轻型仿人七自由度机械臂, 提出了一种求逆解的简化方法, 基于机械臂的自运动特性, 将几何方法与解析方法结合, 此方法在传统的利用罗德里格斯变换的方法基础上简化了求解臂型角为零时求解θ1、θ2、θ3的过程, 有效的对此机械臂进行运动学求解。并通过MATLAB中的Robotics Toolbox工具箱对所求结果进行验证, 所得结果正确快速, 为之后的机械臂运动控制奠定了基础。Abstract: Due to its structural characteristics, the redundant one degree of freedom is often used to avoid obstacles and singular points. However, due to its redundant degrees of freedom, the kinematics solution of the robotic arm of these degrees is more complicated and usually takes more time, directly affecting its follow-up movement and control efficiency. Based on a light-weight human-like seven-degree-of-freedom manipulator, this paper proposes a simplified method to find the inverse solution. Based on the self-motion characteristics of the manipulator, the self-motion geometric method based on the fixed arm angle is combined with the analytical method. This method simplifies the solution of θ1, θ2 and θ3, when the arm angle is zero and is based on the traditional method using the Rodrigues transformation. The method effectively solves the kinematics of this manipulator. The robotics toolbox in MATLAB is used to verify the obtained results, which are correct and fast, thereby laying the foundation for the subsequent motion control of a robotic arm.
-
Key words:
- seven-degree-of-freedom manipulator /
- kinematics /
- self-motion /
- geometric method
-
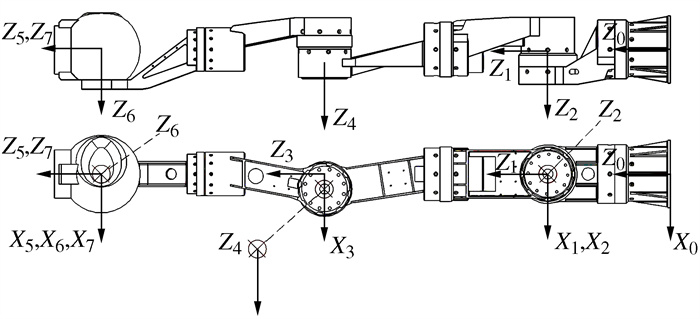
表 1 机械臂D-H参数表
i αi/(°) ai/mm di/mm θi/rad 1 90 0 247 θ1 2 -90 0 0 θ2 3 90 30 449.5 θ3 4 -90 -30 0 θ4 5 90 0 449.5 θ5 6 -90 0 0 θ6 7 0 0 0 θ7  下载: 导出CSV
下载: 导出CSV
-
[1] 高涵, 张明路, 张小俊, 等. 冗余机器人的任务优先级轨迹规划方法[J]. 机械科学与技术, 2018, 37(1): 24-29 doi: 10.13433/j.cnki.1003-8728.2018.0105GAO H, ZHANG M L, ZHANG X J, et al. An approach for task priority trajectory planning of redundant robots[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(1): 24-29 (in Chinese) doi: 10.13433/j.cnki.1003-8728.2018.0105 [2] 杨德志. 冗余双臂机器人协调控制方法的研究[D]. 天津: 河北工业大学, 2016YANG D Z. Research on the coordination control methods of redundant dual-arm robots[D]. Tianjin: Hebei University of Technology, 2016 (in Chinese) [3] DULEBA I, OPAŁKA M. A comparison of Jacobian- based methods of inverse kinematics for serial robot manipulators[J]. International Journal of Applied Mathematics and Computer Science, 2013, 23(2): 373-382 doi: 10.2478/amcs-2013-0028 [4] BEESON P, AMES B. TRAC-IK: an open-source library for improved solving of generic inverse kinematics[C]//2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids). Seoul: IEEE, 2015: 928-935 [5] 欧群文, 贠超, 杨学兵, 等. 基于神经网络的冗余机械臂运动学逆解研究[J]. 机电工程, 2016, 33(6): 663-667 https://www.cnki.com.cn/Article/CJFDTOTAL-JDGC201606004.htmOU Q W, YUN C, YANG X B, et al. Algorithm based on neural network for inverse kinematics of redundant manipulator[J]. Journal of Mechanical & Electrical Engineering, 2016, 33(6): 663-667 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JDGC201606004.htm [6] SRISUK P, SENTO A, KITJAIDURE Y. Inverse kinematics solution using neural networks from forward kinematics equations[C]//2017 9th International Conference on Knowledge and Smart Technology (KST). Chonburi: IEEE, 2017: 61-65 [7] 杨惠珍, 刘西洋. 基于改进自适应小生境遗传算法的机械臂逆运动学求解[J]. 西北工业大学学报, 2019, 37(3): 488-495 doi: 10.3969/j.issn.1000-2758.2019.03.008YANG H Z, LIU X Y. Solving approach of inverse kinematics for manipulators based on improved adaptive niche genetic algorithm[J]. Journal of Northwestern Polytechnical University, 2019, 37(3): 488-495 (in Chinese) doi: 10.3969/j.issn.1000-2758.2019.03.008 [8] DONG H, WU W T, YAO L G, et al. A novel algorithm combined with single mapping workspace and Genetic Algorithm for solving inverse kinematic problem of redundant manipulators[M]//UHL T. Advances in Mechanism and Machine Science. Cham: Springer, 2019: 299-308 [9] 许杉, 李高峰, 刘景泰, 等. 基于点触任务的可变形臂逆运动学求解[J]. 机器人, 2017, 39(4): 405-414 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201704004.htmXU S, LI G F, LIU J T, et al. Inverse kinematics solution of deformable manipulator for point touching task[J]. Robot, 2017, 39(4): 405-414 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201704004.htm [10] RAM R V, PATHAK P M, JUNCO S J. Inverse kinematics of mobile manipulator using bidirectional particle swarm optimization by manipulator decoupling[J]. Mechanism and Machine Theory, 2019, 131: 385-405 doi: 10.1016/j.mechmachtheory.2018.09.022 [11] 魏延辉, 韩寒, 于园园, 等. 构形平面方法求解冗余机械臂逆运动学[J]. 哈尔滨工程大学学报, 2016, 37(8): 1096-1102 https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201608016.htmWEI Y H, HAN H, YU Y Y, et al. Solving inverse kinematics for redundant manipulator using configuration plane method[J]. Journal of Harbin Engineering University, 2016, 37(8): 1096-1102 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201608016.htm [12] 徐呈艺, 刘英, 贾民平, 等. 木板抓取冗余机械臂逆运动学求解[J]. 计算机集成制造系统, 2020, 26(12): 3368-3374 https://www.cnki.com.cn/Article/CJFDTOTAL-JSJJ202012021.htmXU C Y, LIU Y, JIA M P, et al. Inverse kinematics solution of redundant robot arm in picking board[J]. Computer Integrated Manufacturing Systems, 2020, 26(12): 3368-3374 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJJ202012021.htm [13] 王鹏程, 沈惠平, 孟庆梅, 等. 一种冗余自由度机械臂逆运动学解析算法[J]. 机械科学与技术, 2016, 35(5): 706-710 doi: 10.13433/j.cnki.1003-8728.2016.0509WANG P C, SHEN H P, MENG Q M, et al. An analytical algorithm of inverse kinematics for manipulator with redundancy[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(5): 706-710 (in Chinese) doi: 10.13433/j.cnki.1003-8728.2016.0509 [14] 刘世平, 曹俊峰, 孙涛, 等. 基于BP神经网络的冗余机械臂逆运动学分析[J]. 中国机械工程, 2019, 30(24): 2974-2977+2985 doi: 10.3969/j.issn.1004-132X.2019.24.011LIU S P, CAO J F, SUN T, et al. Inverse kinematics analysis of redundant manipulators based on BP neural network[J]. China Mechanical Engineering, 2019, 30(24): 2974-2977+2985 (in Chinese) doi: 10.3969/j.issn.1004-132X.2019.24.011 [15] 胡奎, 张继文, 董云飞, 等. 针对关节限位优化的7自由度机械臂逆运动学解法[J]. 清华大学学报(自然科学版), 2020, 60(12): 1007-1015 https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB202012006.htmHU K, ZHANG J W, DONG Y F, et al. Inverse kinematic optimization for 7-DoF serial manipulators with joint limits[J]. Journal of Tsinghua University (Science and Technology), 2020, 60(12): 1007-1015 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB202012006.htm -





 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 127
- HTML全文浏览量: 48
- PDF下载量: 30
- 被引次数: 0
