作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2020年 39卷 第8期
2020, 39(8): 1149-1155.
doi: 10.13433/j.cnki.1003-8728.20190269
 摘要
摘要 HTML
HTML PDF 1284KB
PDF 1284KB
摘要:
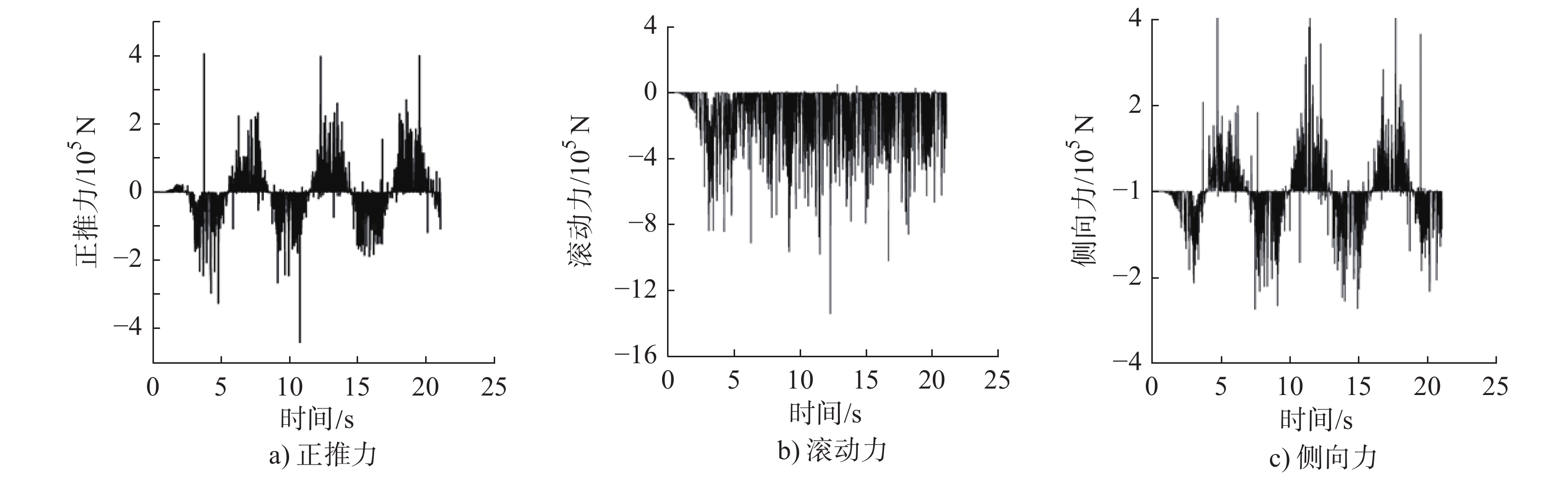
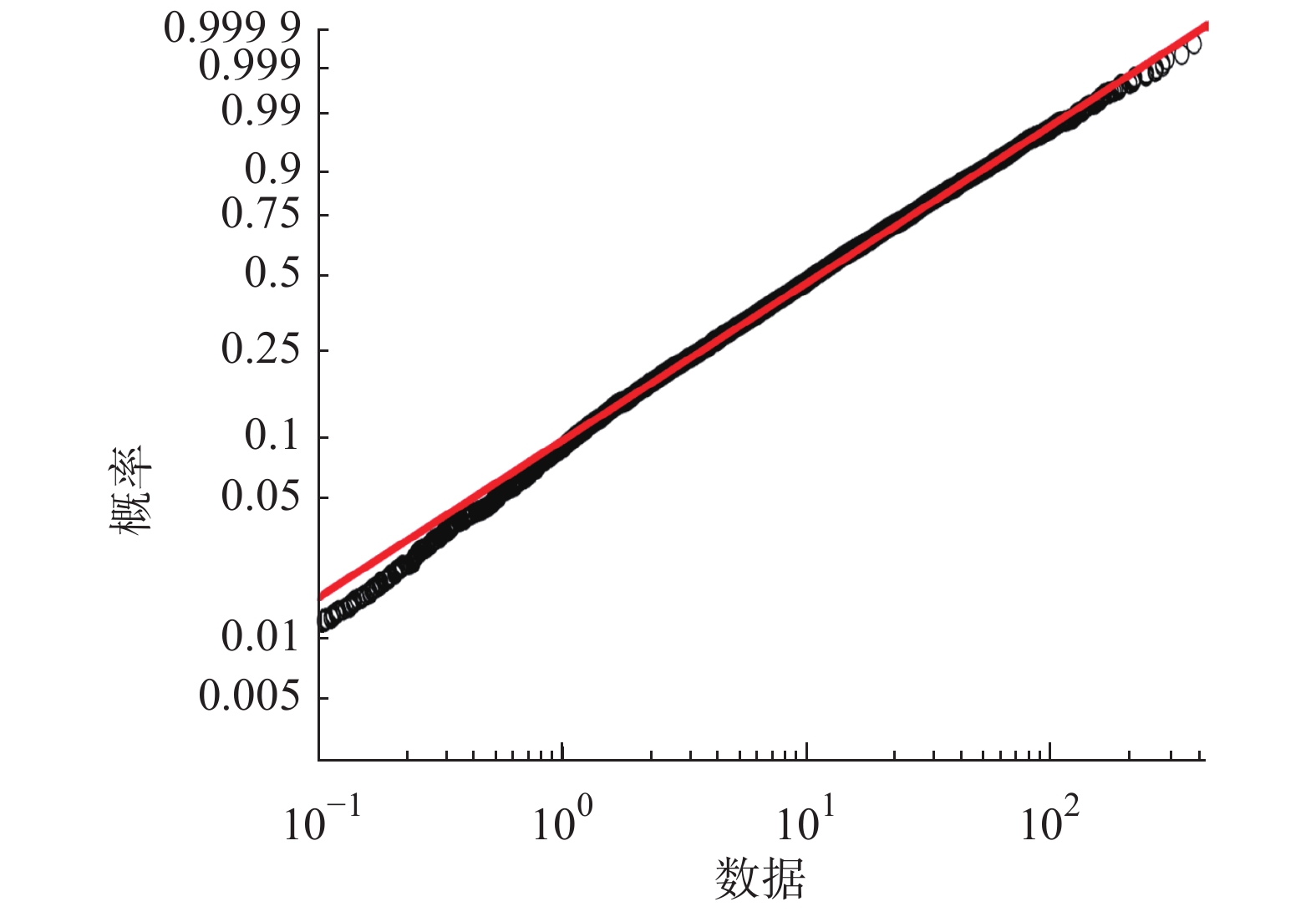
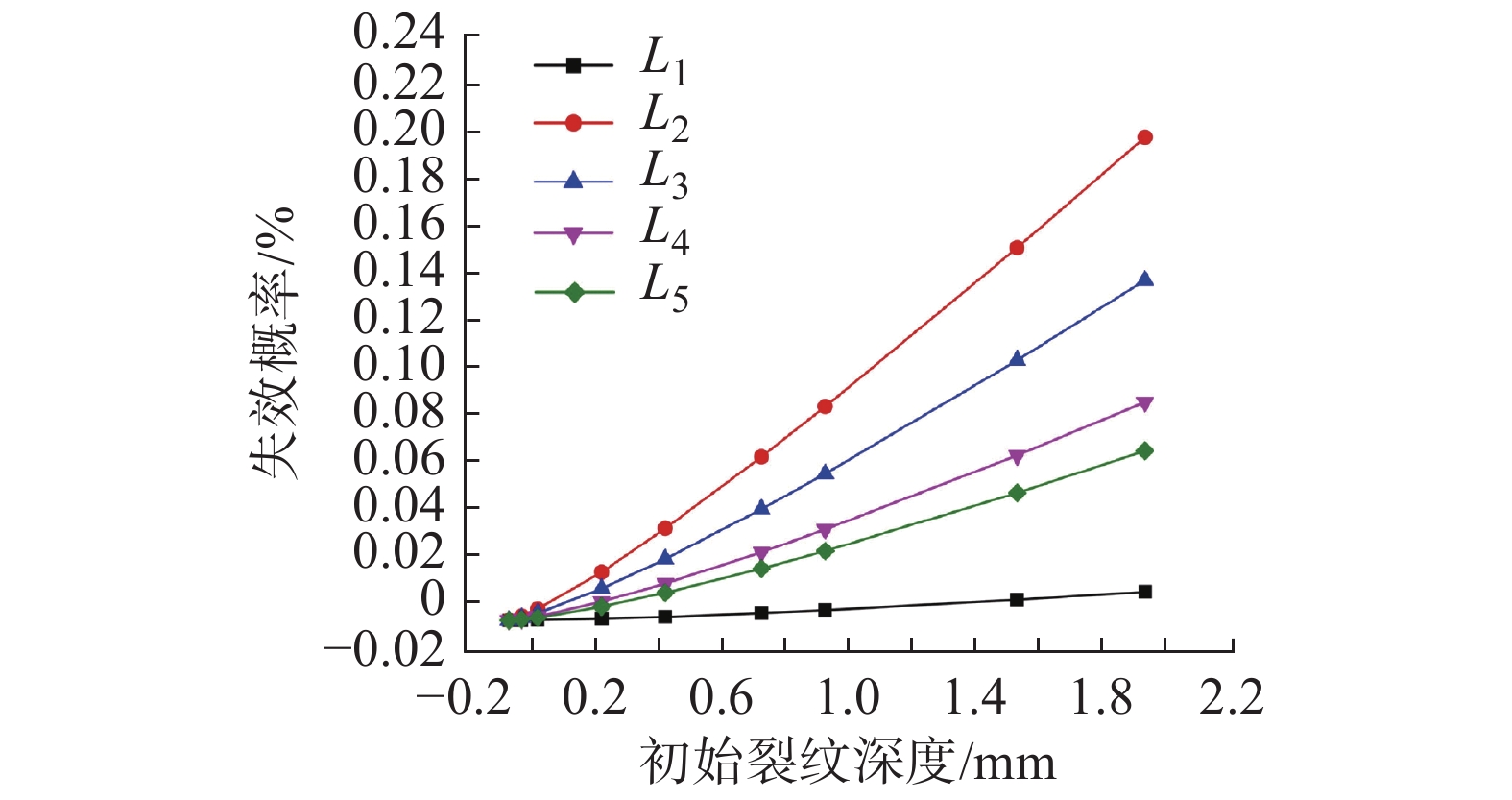
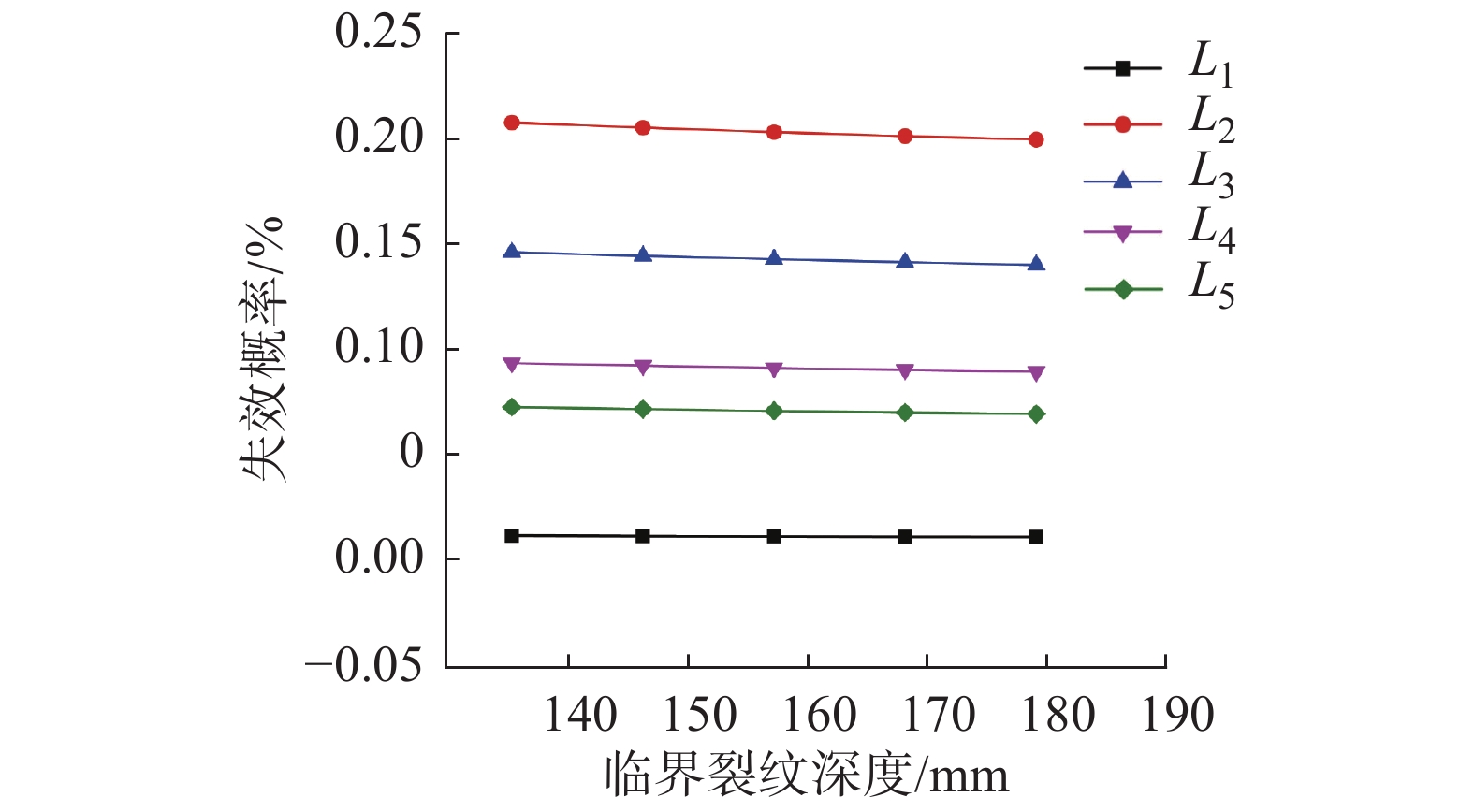
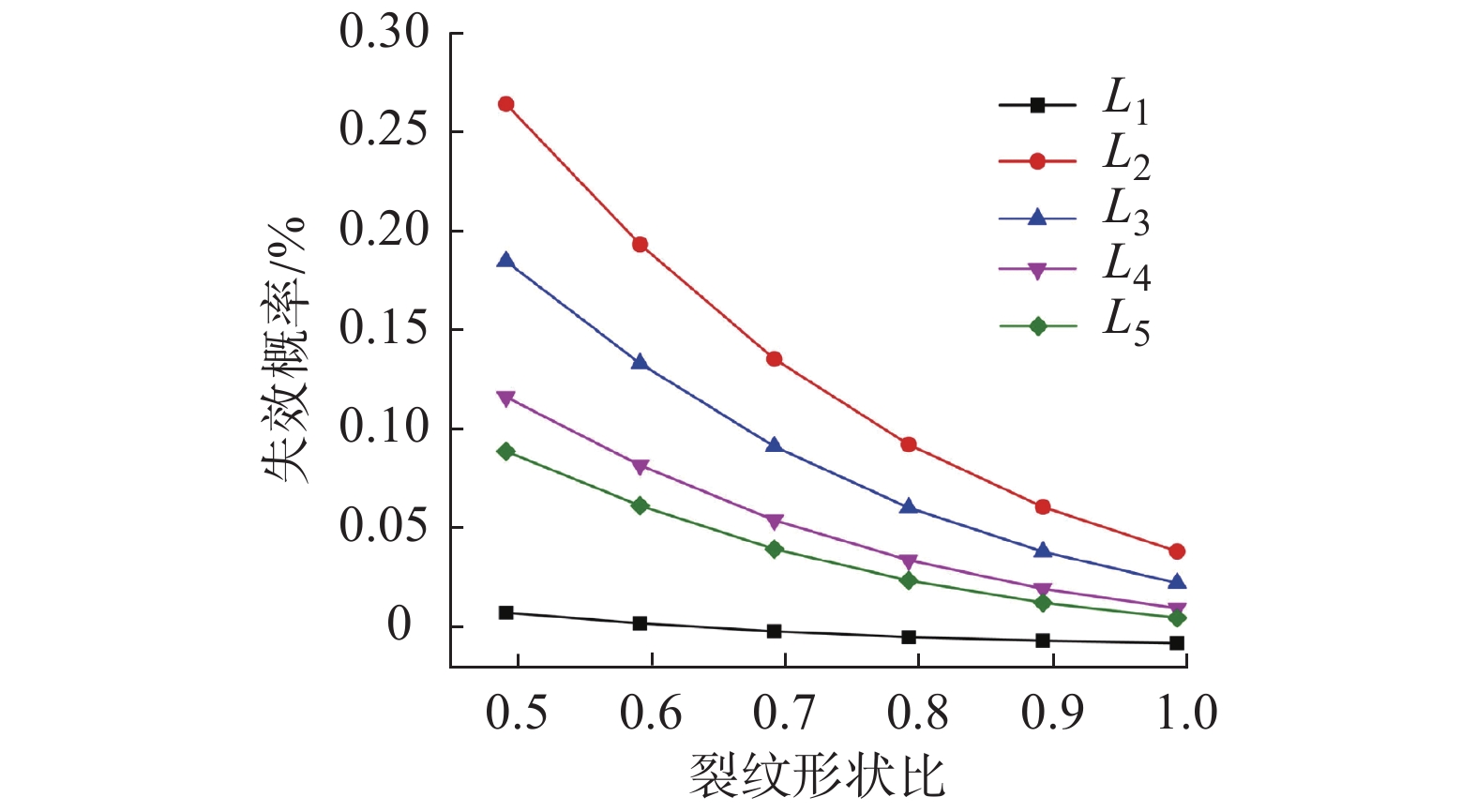
刀座焊接处是全断面岩石隧道掘进机(Full face rock tunnel boring machine,TBM)刀盘上最易发生疲劳破坏的部分。基于线弹性断裂力学,以裂纹疲劳寿命为基本变量,建立裂纹扩展可靠性模型,通过JC法计算刀座正面焊缝在不同滚刀实验载荷下的疲劳可靠性,并分析了不同因素对失效概率的影响。结果显示:中心滚刀刀座焊缝的失效概率比正滚刀小,正滚刀的失效概率随着安装半径的增大而减小;刀座焊缝失效概率随着初始裂纹深度的增大而显著增大,而临界裂纹深度的变化对失效概率的影响不大;裂纹形状比越大,刀座焊缝的失效概率越小。
刀座焊接处是全断面岩石隧道掘进机(Full face rock tunnel boring machine,TBM)刀盘上最易发生疲劳破坏的部分。基于线弹性断裂力学,以裂纹疲劳寿命为基本变量,建立裂纹扩展可靠性模型,通过JC法计算刀座正面焊缝在不同滚刀实验载荷下的疲劳可靠性,并分析了不同因素对失效概率的影响。结果显示:中心滚刀刀座焊缝的失效概率比正滚刀小,正滚刀的失效概率随着安装半径的增大而减小;刀座焊缝失效概率随着初始裂纹深度的增大而显著增大,而临界裂纹深度的变化对失效概率的影响不大;裂纹形状比越大,刀座焊缝的失效概率越小。



2020, 39(8): 1156-1162.
doi: 10.13433/j.cnki.1003-8728.20190264
摘要:
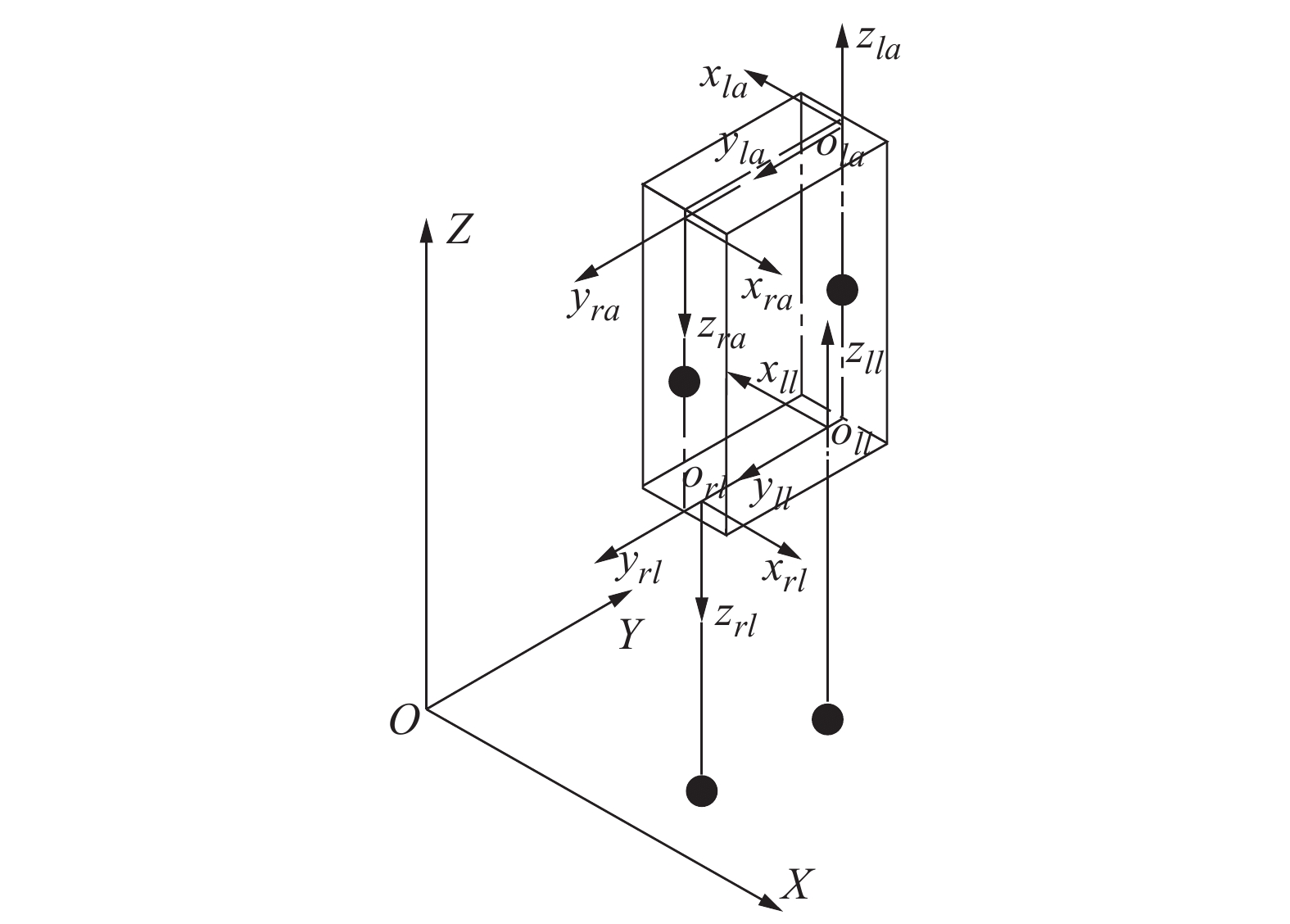
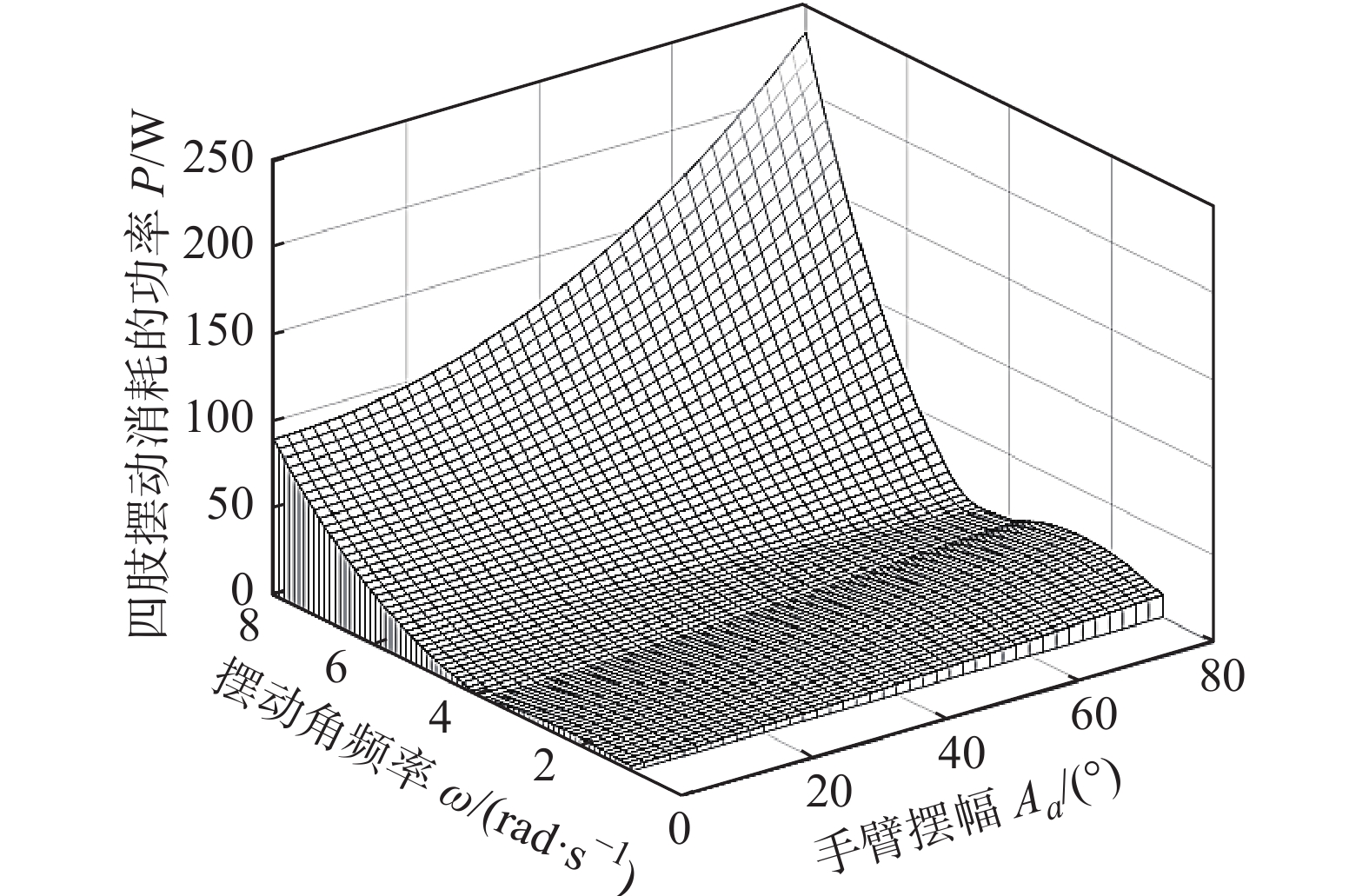
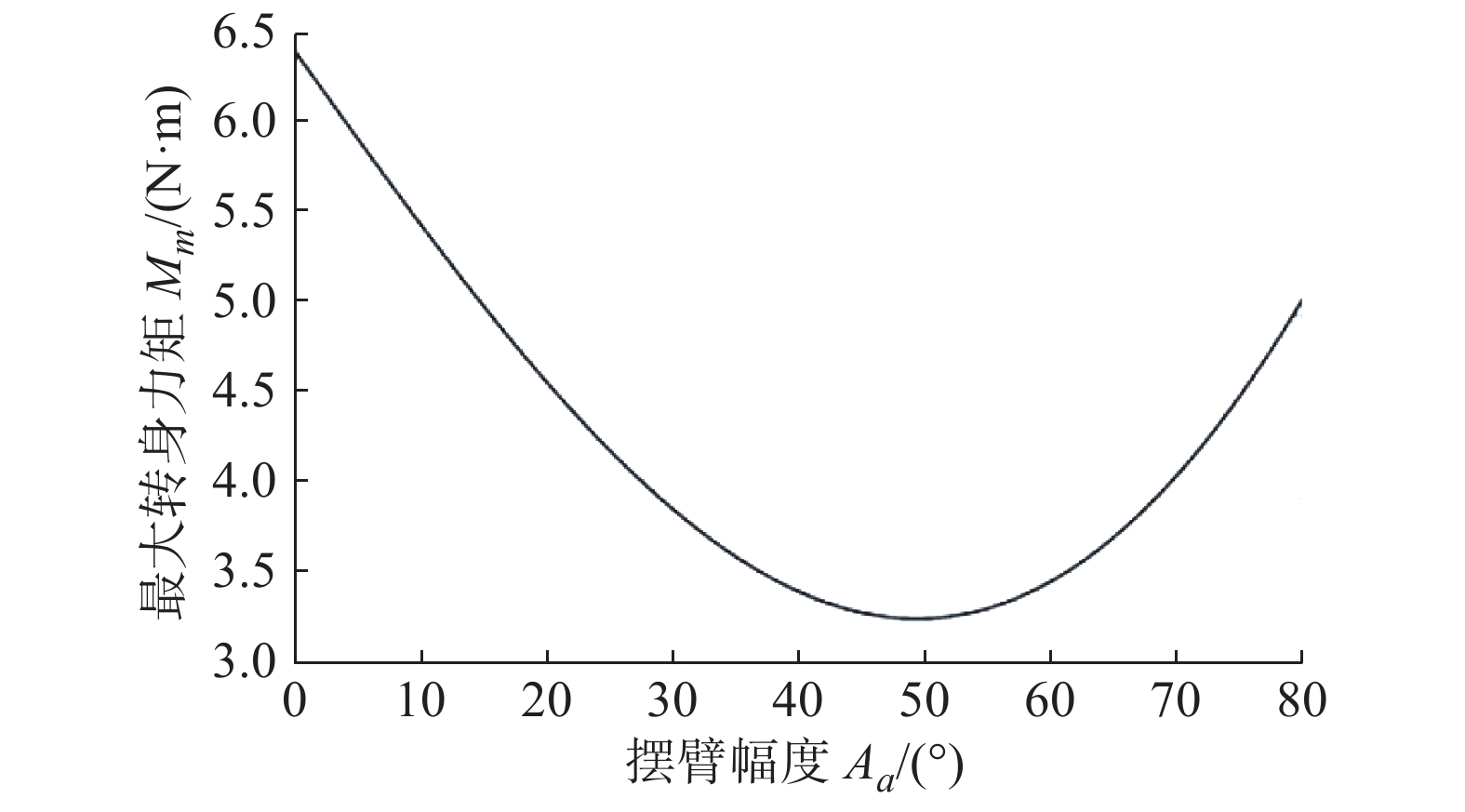
研究了仿人机器人上下肢摆动参数对步行能耗的影响,进而提出了实现仿人机器人低能耗行走的肢体摆动策略。通过将四肢抽象成单摆,建立了机器人的简化模型,据此求解机器人行走时所受的转身力矩;用非小角度假设情况下单摆摆角的近似解来描述四肢摆动角的变化规律,并分析了步行运动时的能耗机理,给出了简化模型下计算功耗的方法。以某仿人机器人模型为算例,研究了肢体摆动频率对机器人行走功耗的影响;提出了在给定行走速度时,保证机器人转身力矩在一定范围内变化的前提下,省能量的上下肢摆动幅度/频率的规划策略。仿真计算表明,采用文中提出的肢体摆动规律有利于降低仿人机器人的行走功耗。
研究了仿人机器人上下肢摆动参数对步行能耗的影响,进而提出了实现仿人机器人低能耗行走的肢体摆动策略。通过将四肢抽象成单摆,建立了机器人的简化模型,据此求解机器人行走时所受的转身力矩;用非小角度假设情况下单摆摆角的近似解来描述四肢摆动角的变化规律,并分析了步行运动时的能耗机理,给出了简化模型下计算功耗的方法。以某仿人机器人模型为算例,研究了肢体摆动频率对机器人行走功耗的影响;提出了在给定行走速度时,保证机器人转身力矩在一定范围内变化的前提下,省能量的上下肢摆动幅度/频率的规划策略。仿真计算表明,采用文中提出的肢体摆动规律有利于降低仿人机器人的行走功耗。

2020, 39(8): 1163-1170.
doi: 10.13433/j.cnki.1003-8728.20190253
摘要:
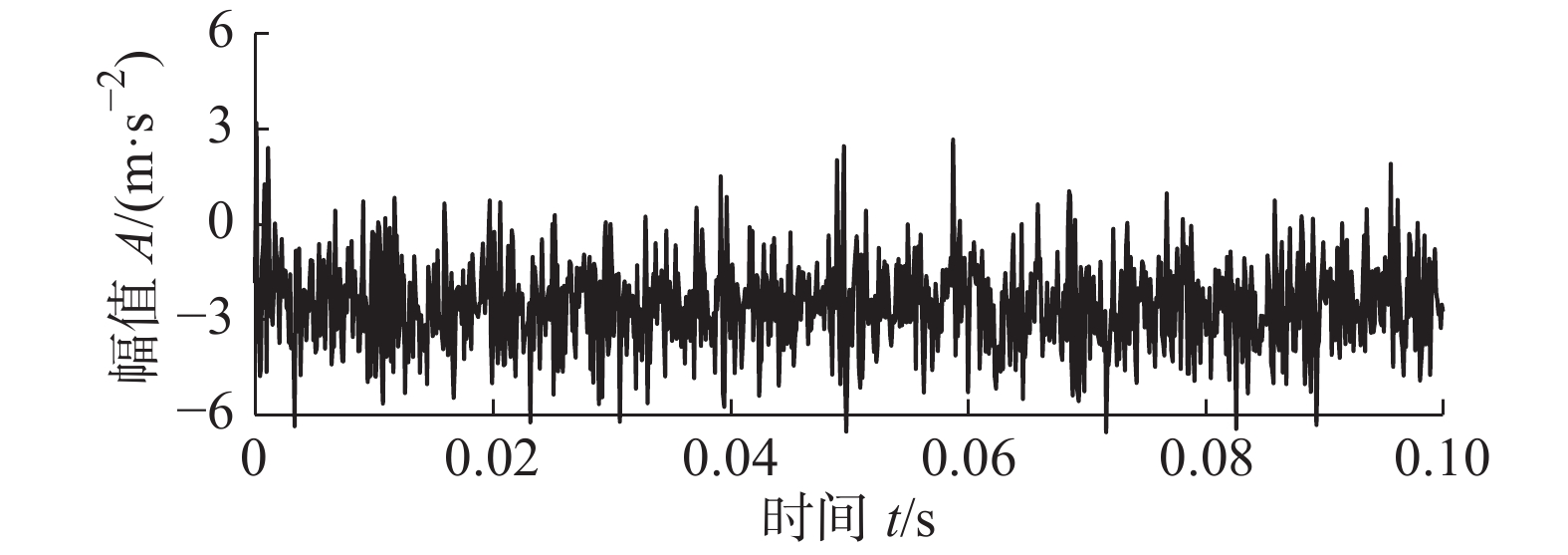
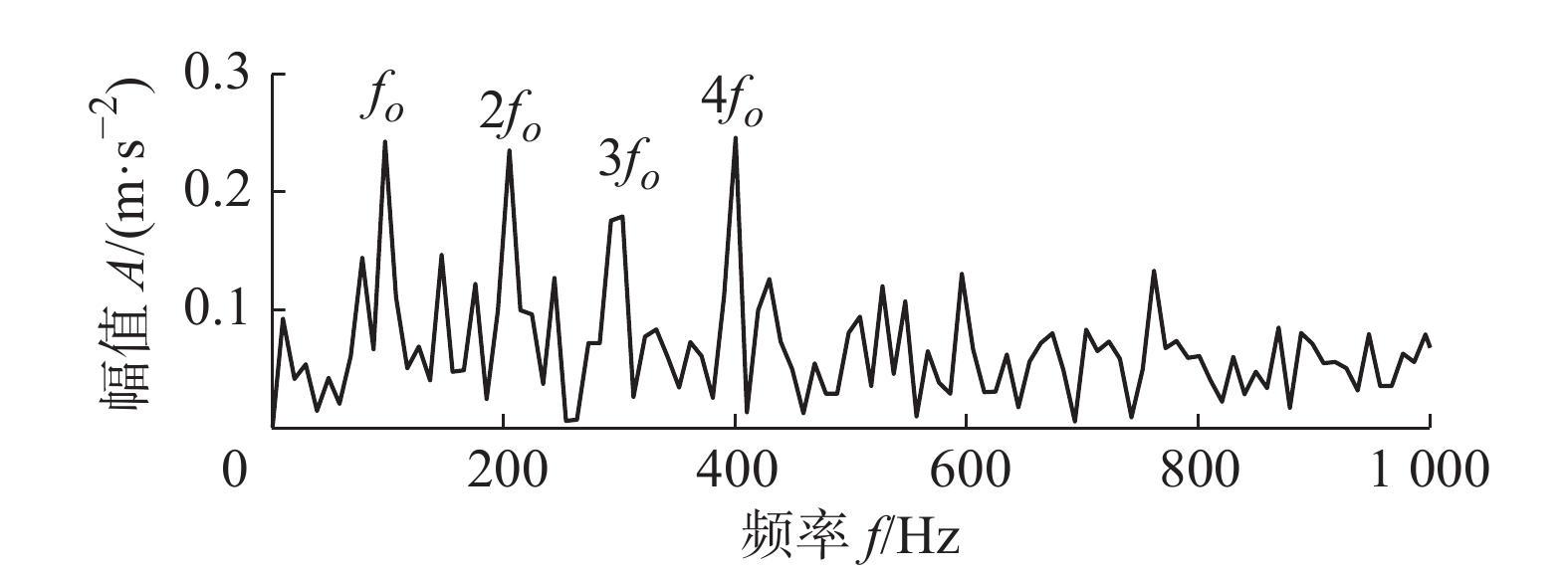
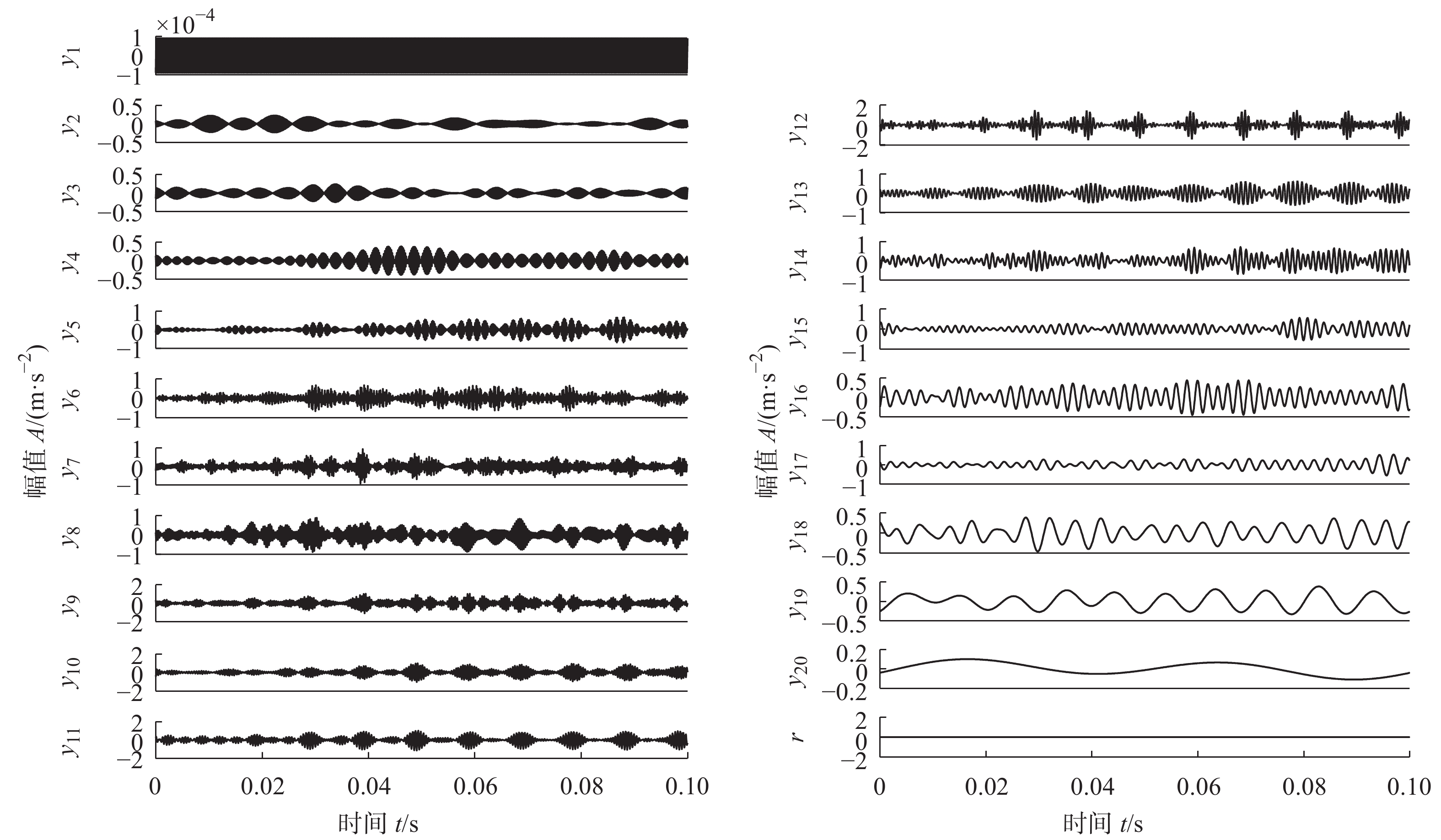
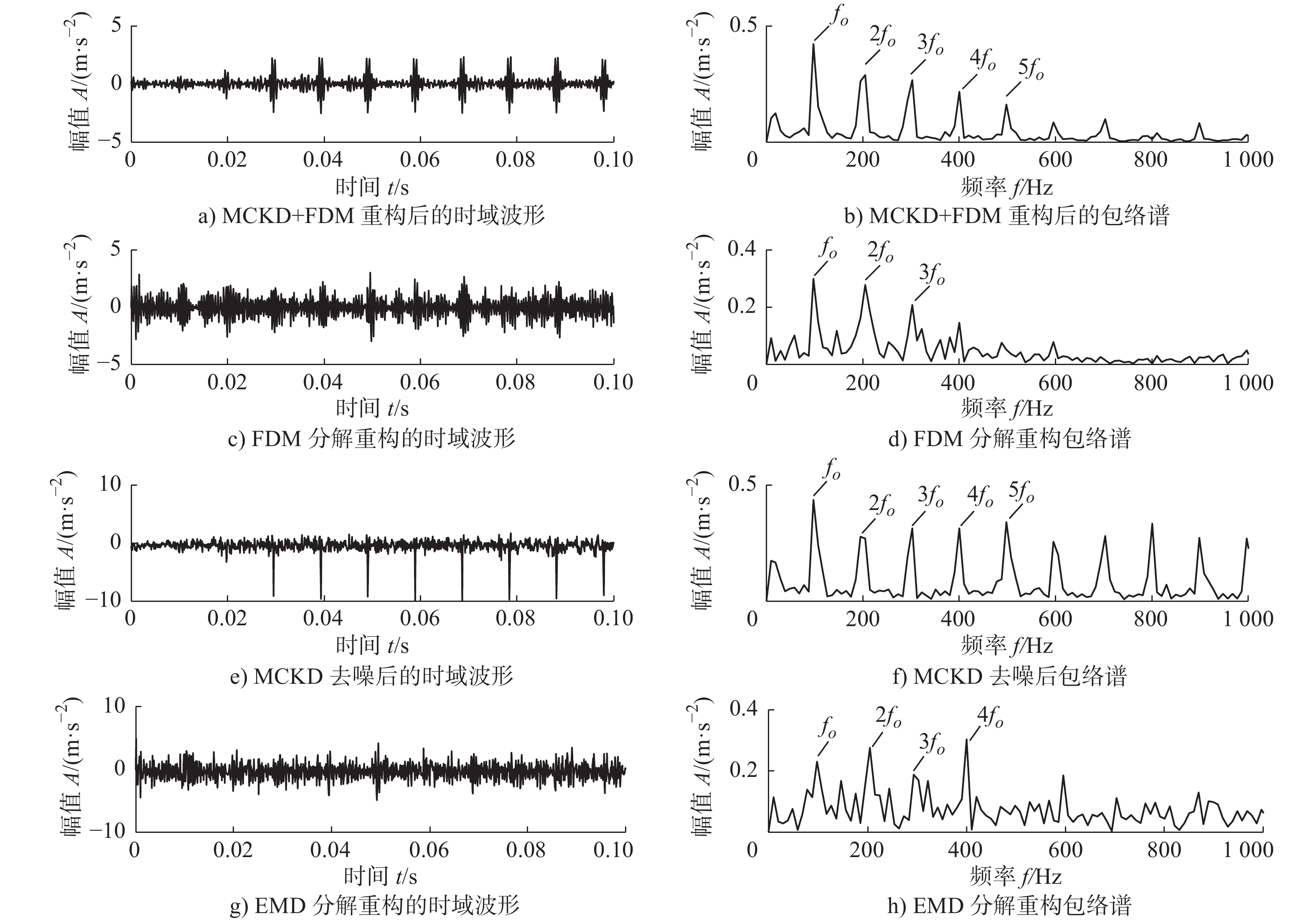
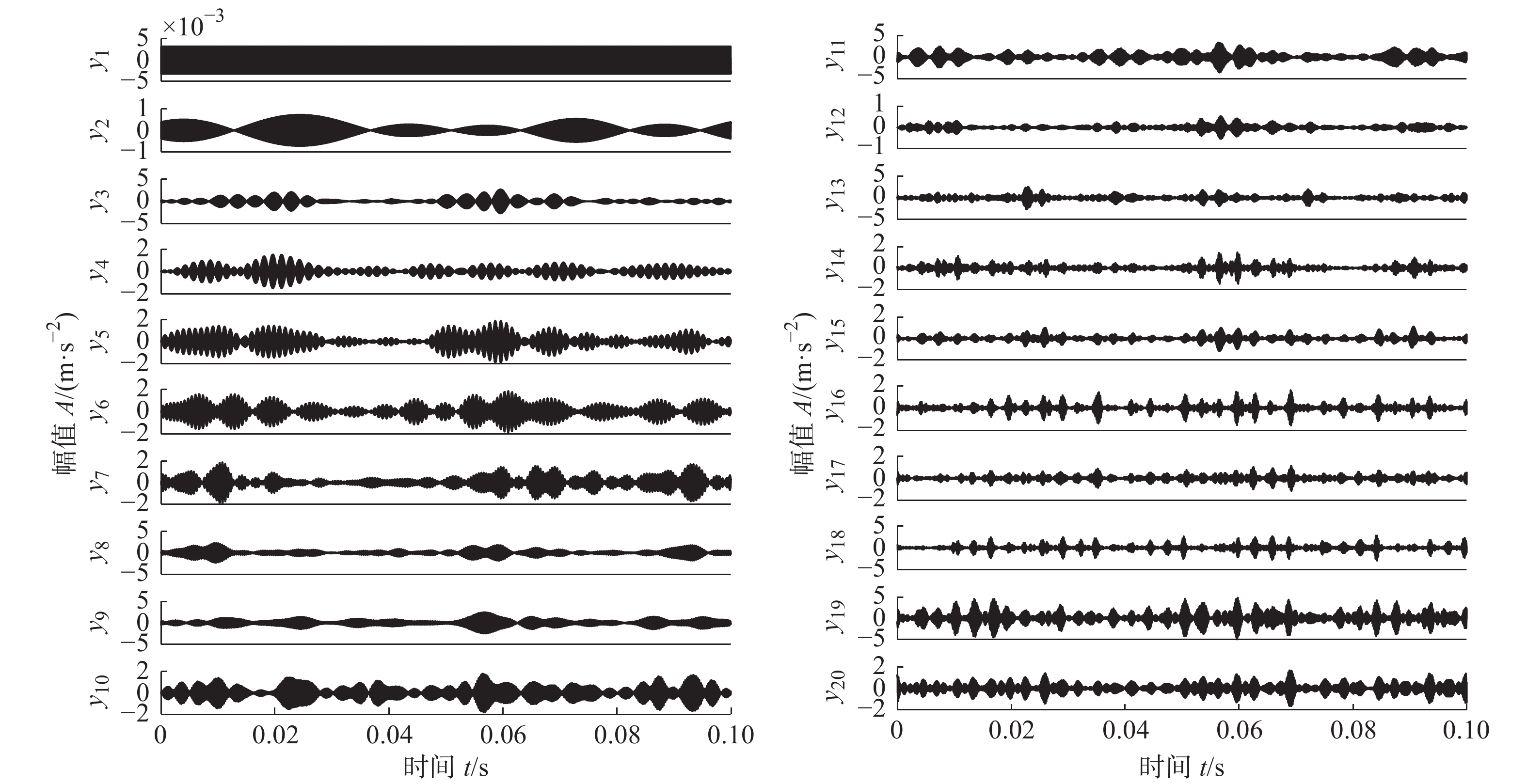
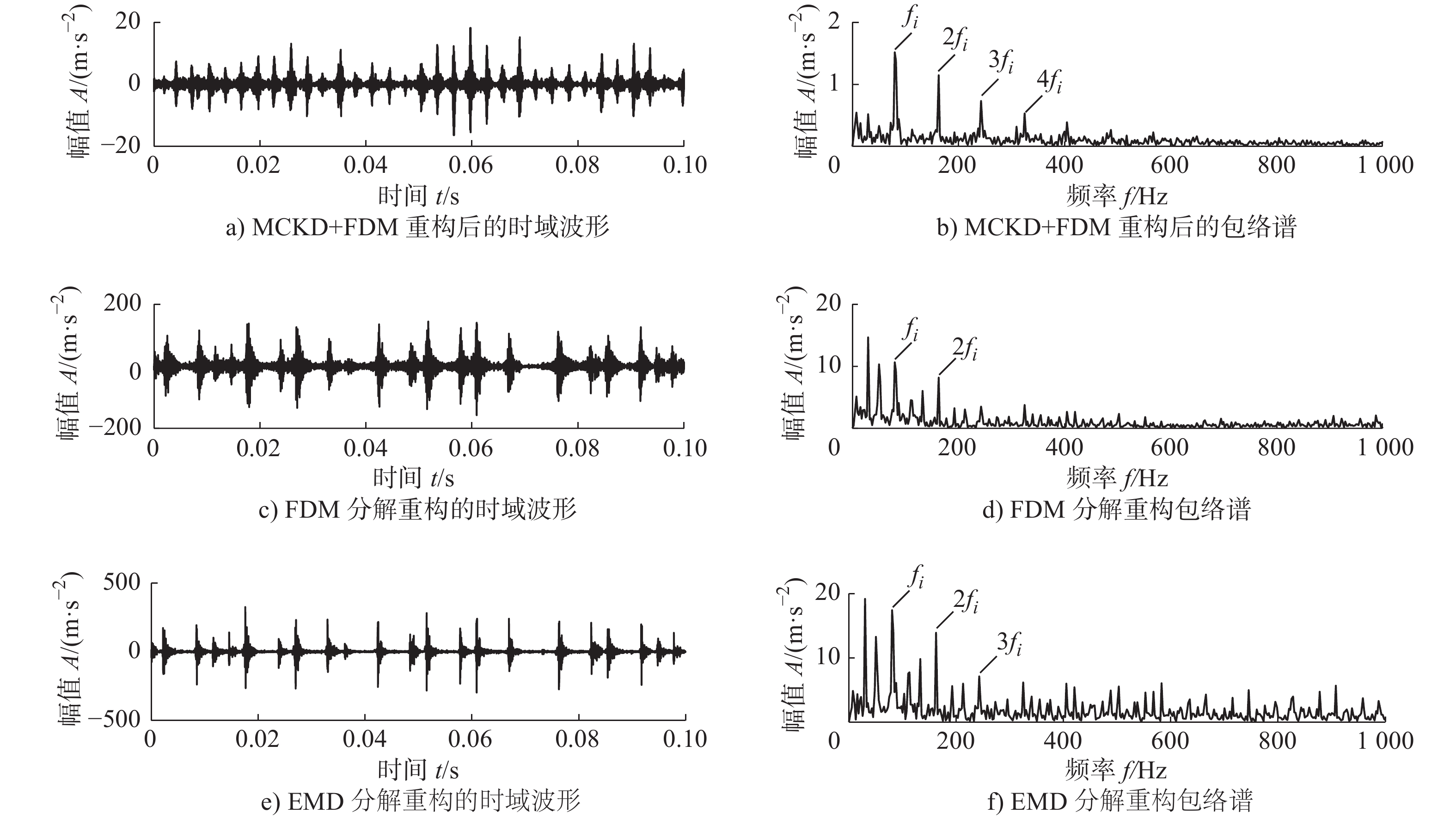
针对强背景噪声环境下滚动轴承故障特征难以提取的问题,提出一种基于最大相关峭度反褶积(MCKD)与傅里叶分解方法(FDM)相结合的滚动轴承故障诊断方法。首先采用MCKD对振动信号去噪、提取与故障相关的冲击成分;其次,采用FDM对去噪信号进行分解,得到若干个瞬时频率具有物理意义的傅里叶固有频带函数和一个残余分量之和;第三,依据各个模态与去噪信号的相关性提取包含故障信息的最优模态分量,并对它们进行重构;最后,计算重构信号的包络谱,从谱图中读取故障信息。将所提故障诊断方法应用于滚动轴承故障仿真和实验数据分析,并通过与现有方法进行对比,结果表明,该方法优于所对比的方法。
针对强背景噪声环境下滚动轴承故障特征难以提取的问题,提出一种基于最大相关峭度反褶积(MCKD)与傅里叶分解方法(FDM)相结合的滚动轴承故障诊断方法。首先采用MCKD对振动信号去噪、提取与故障相关的冲击成分;其次,采用FDM对去噪信号进行分解,得到若干个瞬时频率具有物理意义的傅里叶固有频带函数和一个残余分量之和;第三,依据各个模态与去噪信号的相关性提取包含故障信息的最优模态分量,并对它们进行重构;最后,计算重构信号的包络谱,从谱图中读取故障信息。将所提故障诊断方法应用于滚动轴承故障仿真和实验数据分析,并通过与现有方法进行对比,结果表明,该方法优于所对比的方法。




2020, 39(8): 1184-1190.
doi: 10.13433/j.cnki.1003-8728.20190256
摘要:
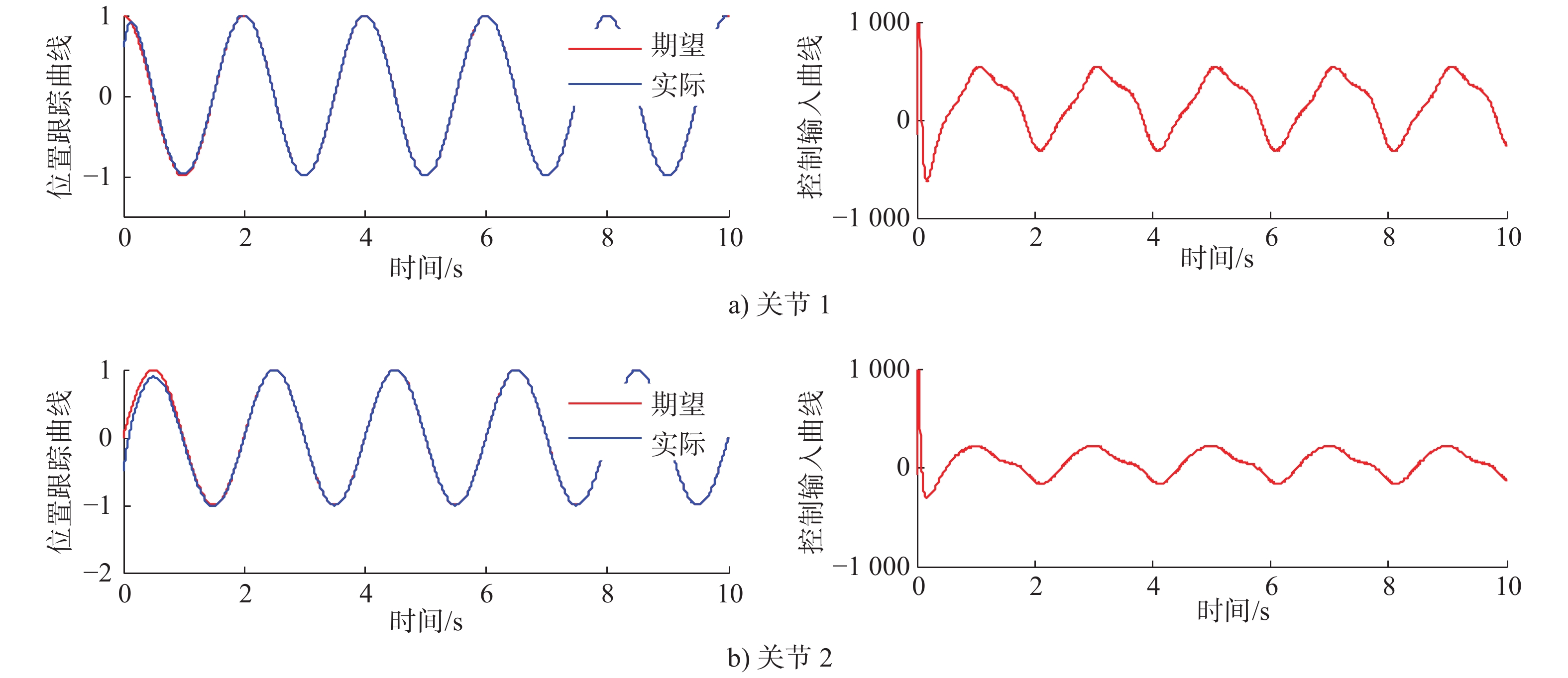
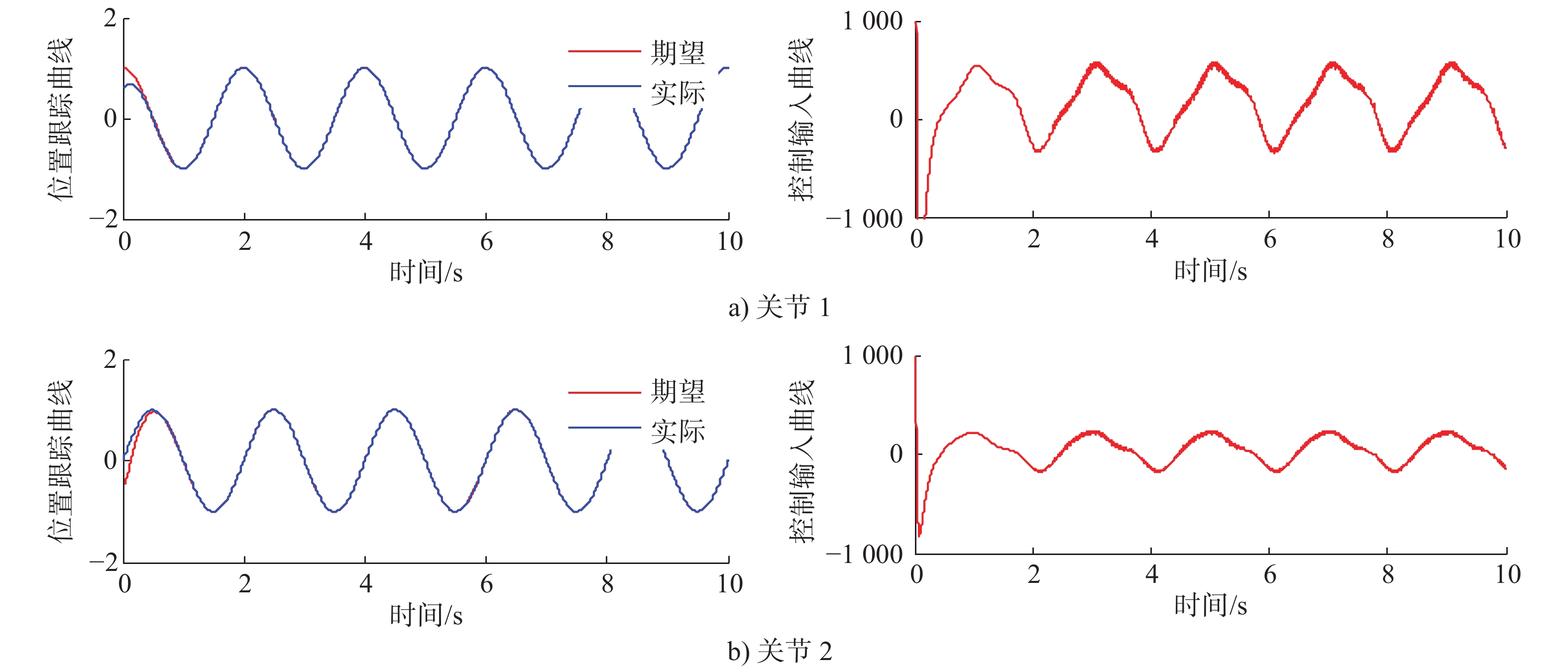
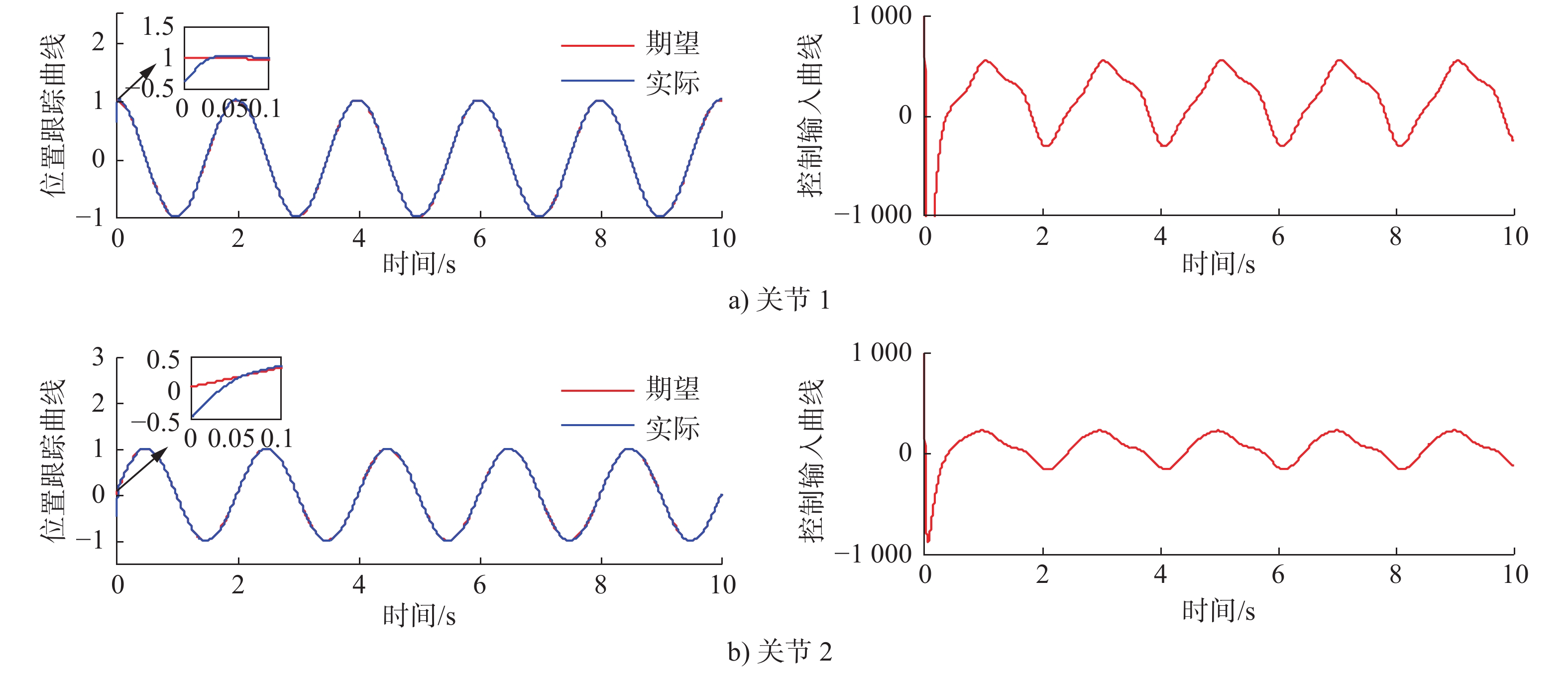
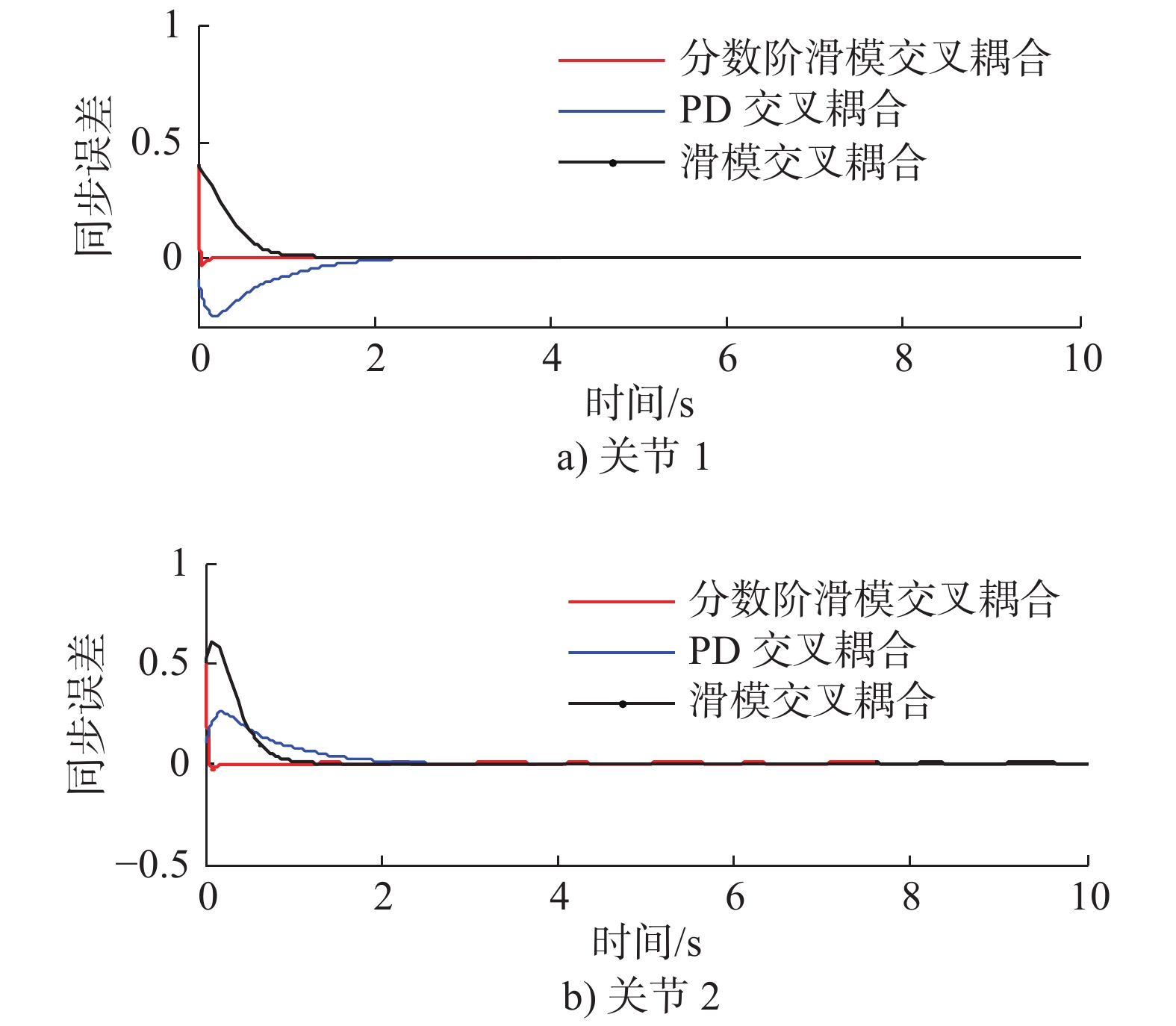
为了对机械臂各关节间进行高精度同步控制,以提高运动轨迹跟踪精度,针对机械臂单关节,提出了分数阶微积分与滑模控制相结合的位置跟踪控制策略,考虑机械臂各关节之间存在的耦合关系,提出了分数阶滑模交叉耦合控制策略。并对所提的控制策略的渐进稳定性进行了理论证明。以二关节机械臂为研究对象进行了实验验证,结果表明:利用本文提出的位置跟踪控制策略使二关节机械臂角位移调整时间分别为0.53 s、0.58 s,优于传统滑模控制策略的1.31 s、1.24 s,其位置误差的均方根误差相比传统滑模控制策略分别减小了1.6×10−4、6.51×10−4。本文所设计的分数阶滑模交叉耦合控制器使机械臂得到的输出响应的上升时间和稳定时间优于PD交叉耦合控制策略和滑模交叉耦合控制策略,且同步误差的均方根误差分别为0.022 5、0.031 6,优于PD交叉耦合的0.133、0.926和滑模交叉耦合的0.057 3、0.052 3。实验结果说明了本文所提出控制方法的有效性。
为了对机械臂各关节间进行高精度同步控制,以提高运动轨迹跟踪精度,针对机械臂单关节,提出了分数阶微积分与滑模控制相结合的位置跟踪控制策略,考虑机械臂各关节之间存在的耦合关系,提出了分数阶滑模交叉耦合控制策略。并对所提的控制策略的渐进稳定性进行了理论证明。以二关节机械臂为研究对象进行了实验验证,结果表明:利用本文提出的位置跟踪控制策略使二关节机械臂角位移调整时间分别为0.53 s、0.58 s,优于传统滑模控制策略的1.31 s、1.24 s,其位置误差的均方根误差相比传统滑模控制策略分别减小了1.6×10−4、6.51×10−4。本文所设计的分数阶滑模交叉耦合控制器使机械臂得到的输出响应的上升时间和稳定时间优于PD交叉耦合控制策略和滑模交叉耦合控制策略,且同步误差的均方根误差分别为0.022 5、0.031 6,优于PD交叉耦合的0.133、0.926和滑模交叉耦合的0.057 3、0.052 3。实验结果说明了本文所提出控制方法的有效性。



2020, 39(8): 1191-1195.
doi: 10.13433/j.cnki.1003-8728.20200109
摘要:
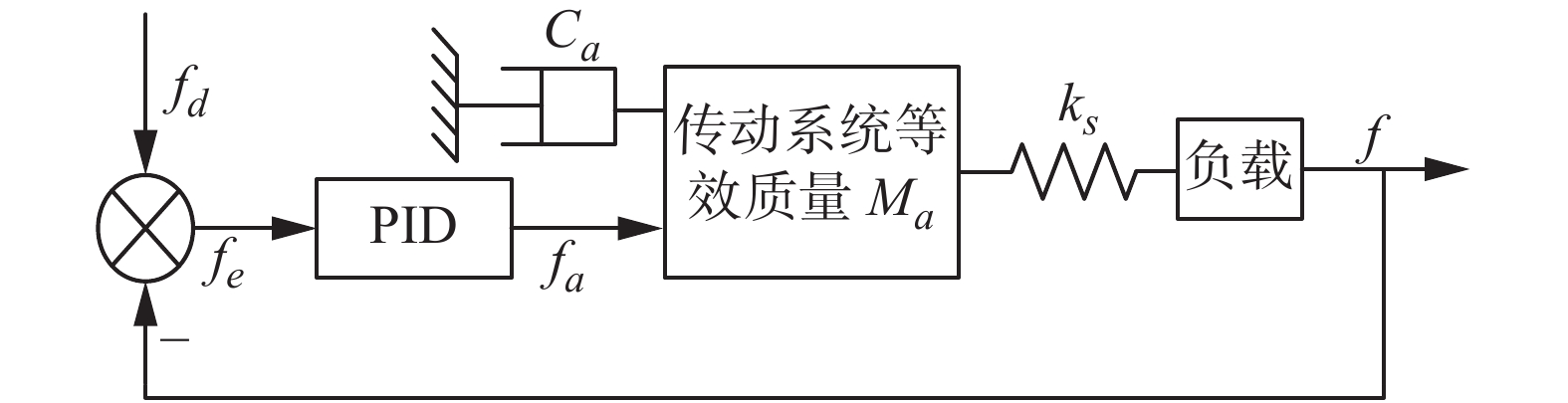
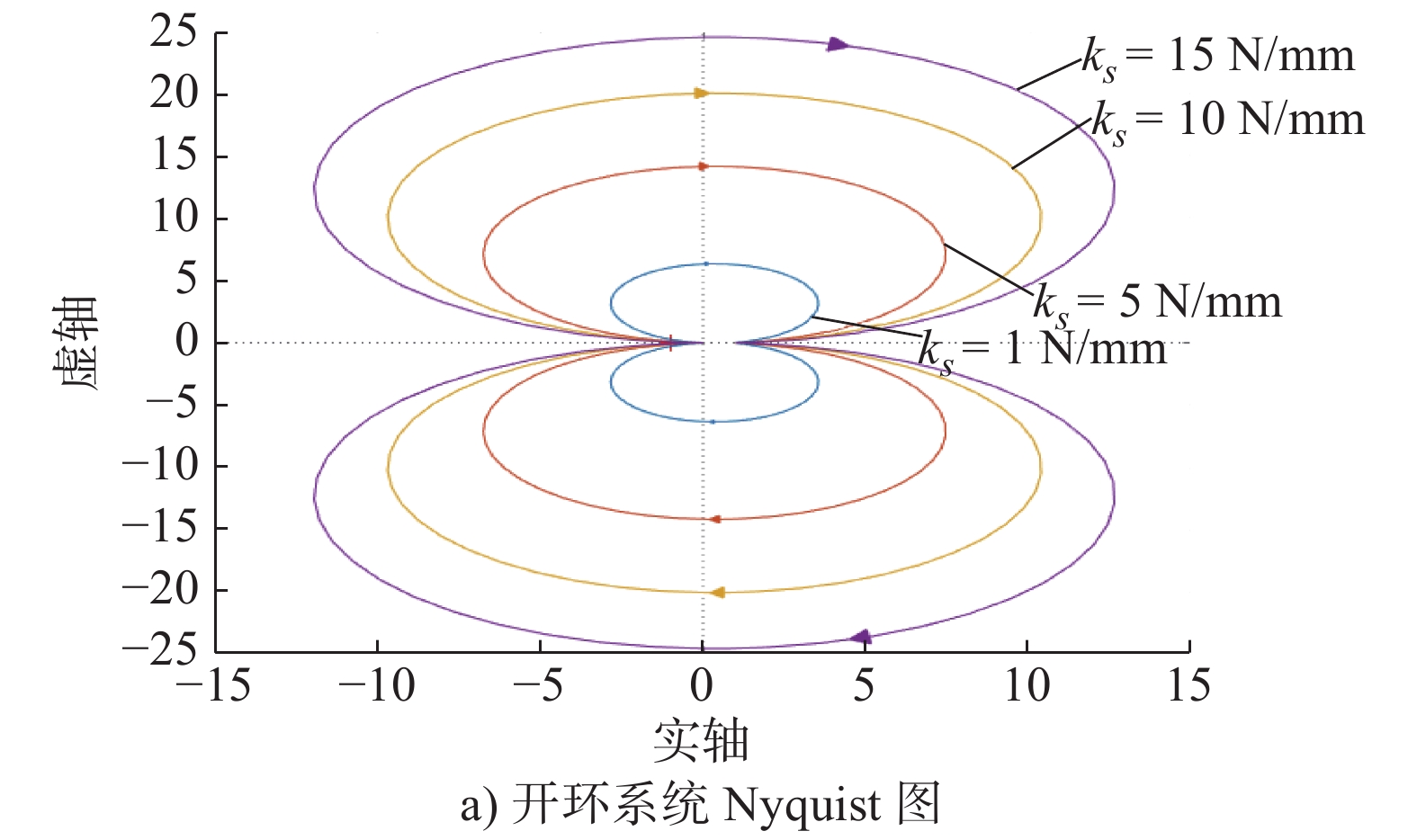
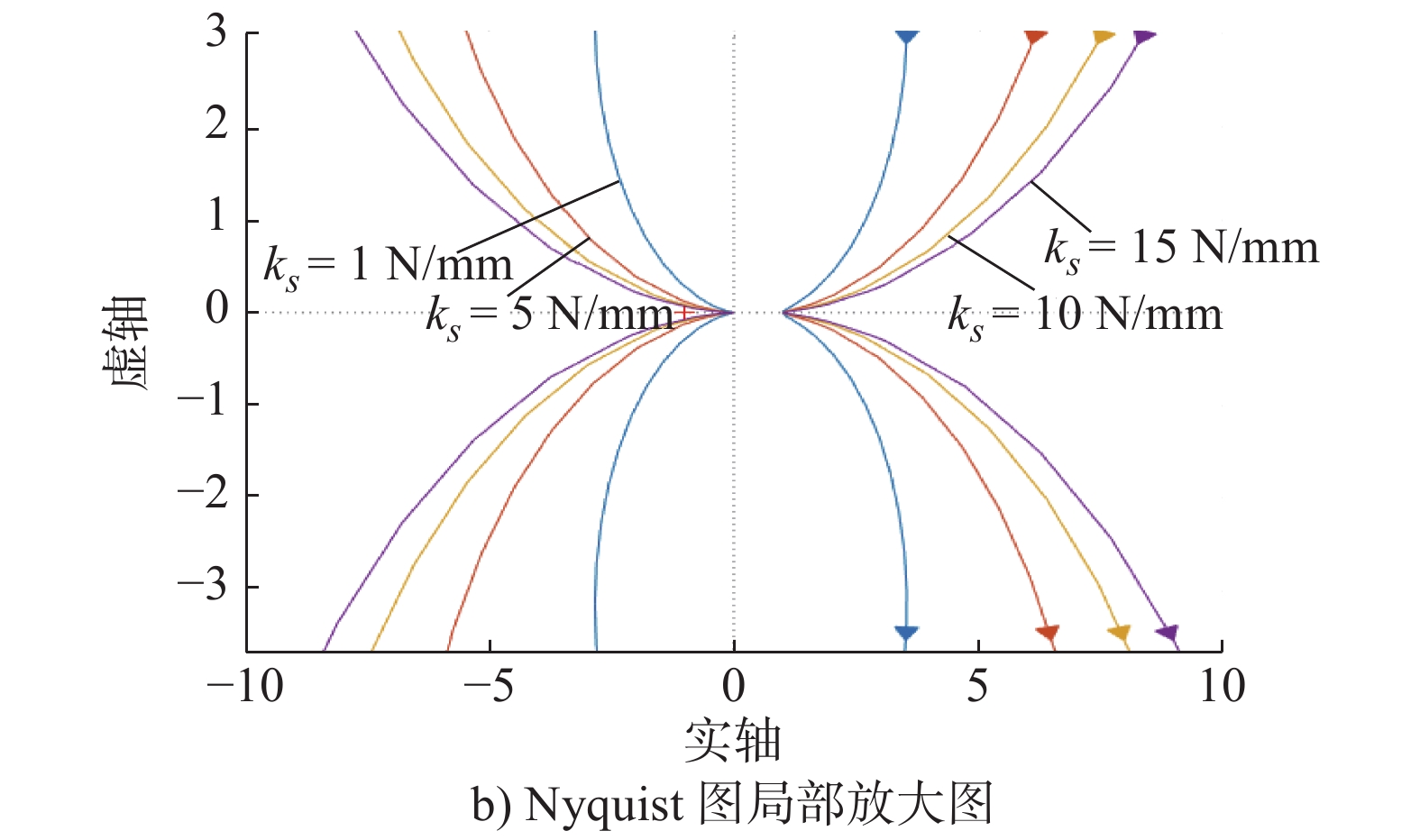
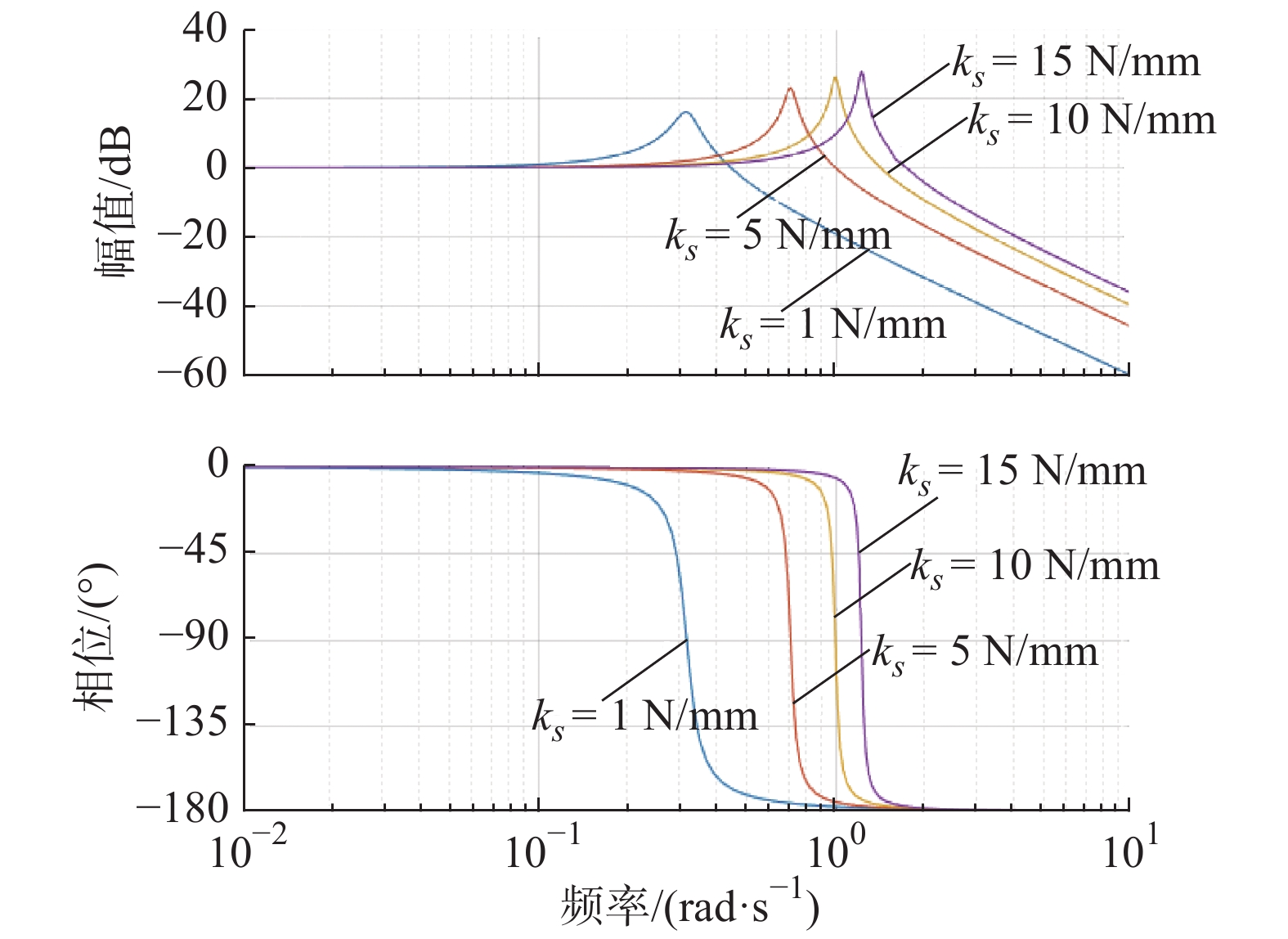
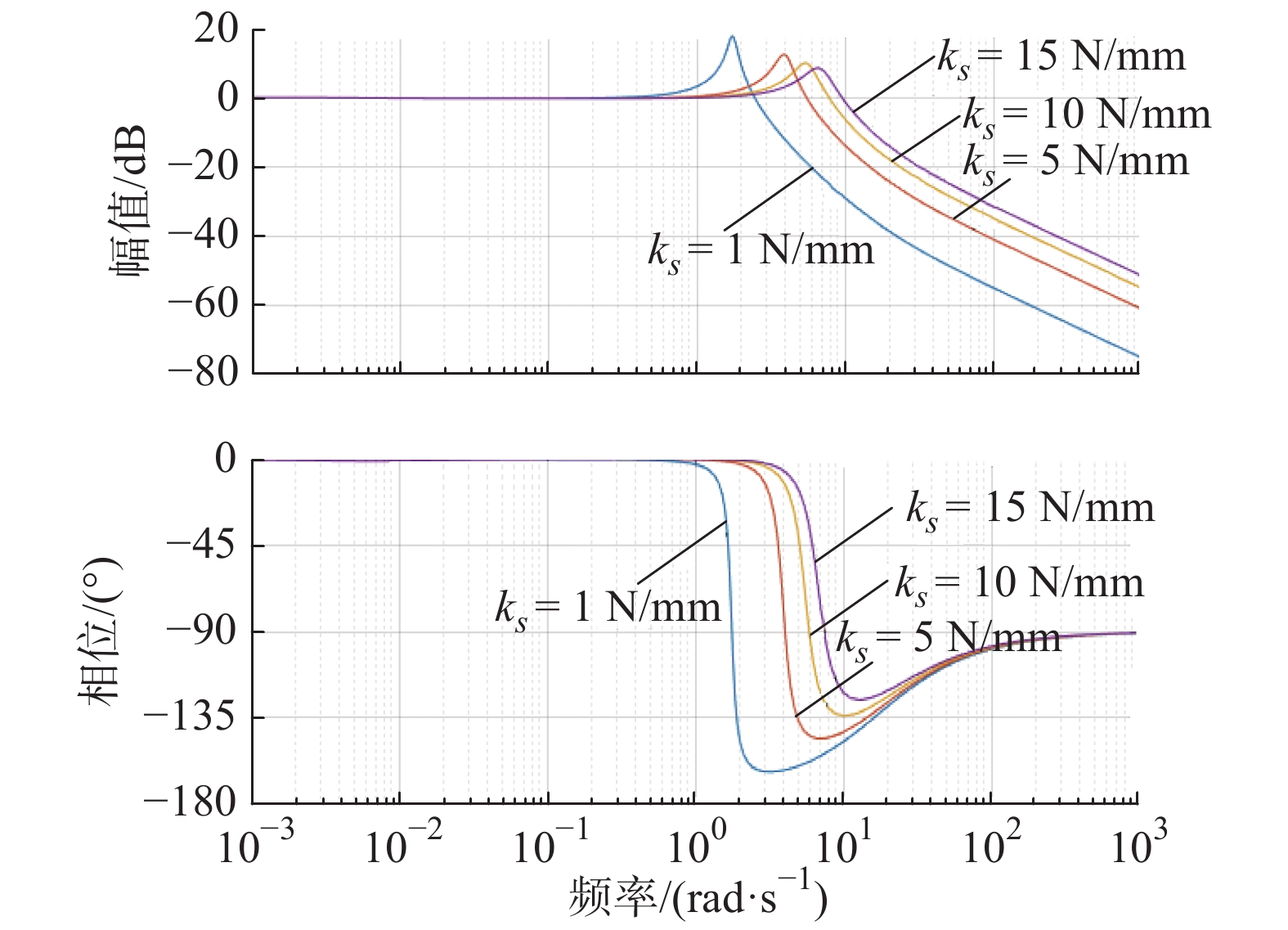
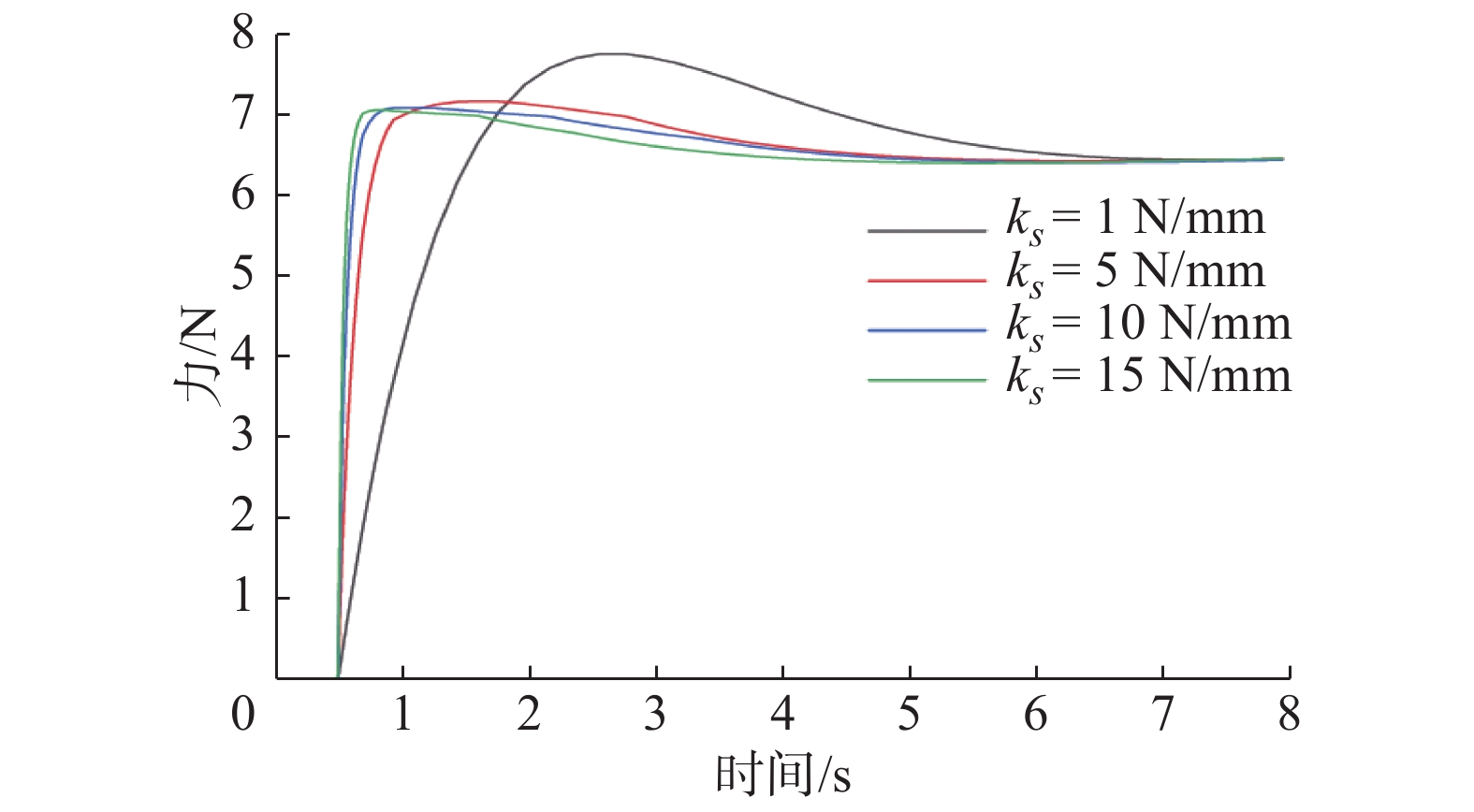
为了提高救援机器人在非结构环境中的顺应能力,引入传动机构等效质量的概念,考虑电机内部阻尼对弹性驱动器动力学模型的影响,建立了基于力源驱动的串联弹性驱动器动力学模型。采用PID单位负反馈的控制方式,通过Laplace变换得到系统的开环传递函数与闭环传递函数,运用Nyquist判据与Bode图分析了系统的稳定性。通过仿真实验,得到了系统的阶跃信号跟踪响应。仿真结果与频域特性分析结果对比,验证了救援机器人柔性关节结构设计的合理性与稳定性。
为了提高救援机器人在非结构环境中的顺应能力,引入传动机构等效质量的概念,考虑电机内部阻尼对弹性驱动器动力学模型的影响,建立了基于力源驱动的串联弹性驱动器动力学模型。采用PID单位负反馈的控制方式,通过Laplace变换得到系统的开环传递函数与闭环传递函数,运用Nyquist判据与Bode图分析了系统的稳定性。通过仿真实验,得到了系统的阶跃信号跟踪响应。仿真结果与频域特性分析结果对比,验证了救援机器人柔性关节结构设计的合理性与稳定性。



2020, 39(8): 1196-1201.
doi: 10.13433/j.cnki.1003-8728.20190208
摘要:
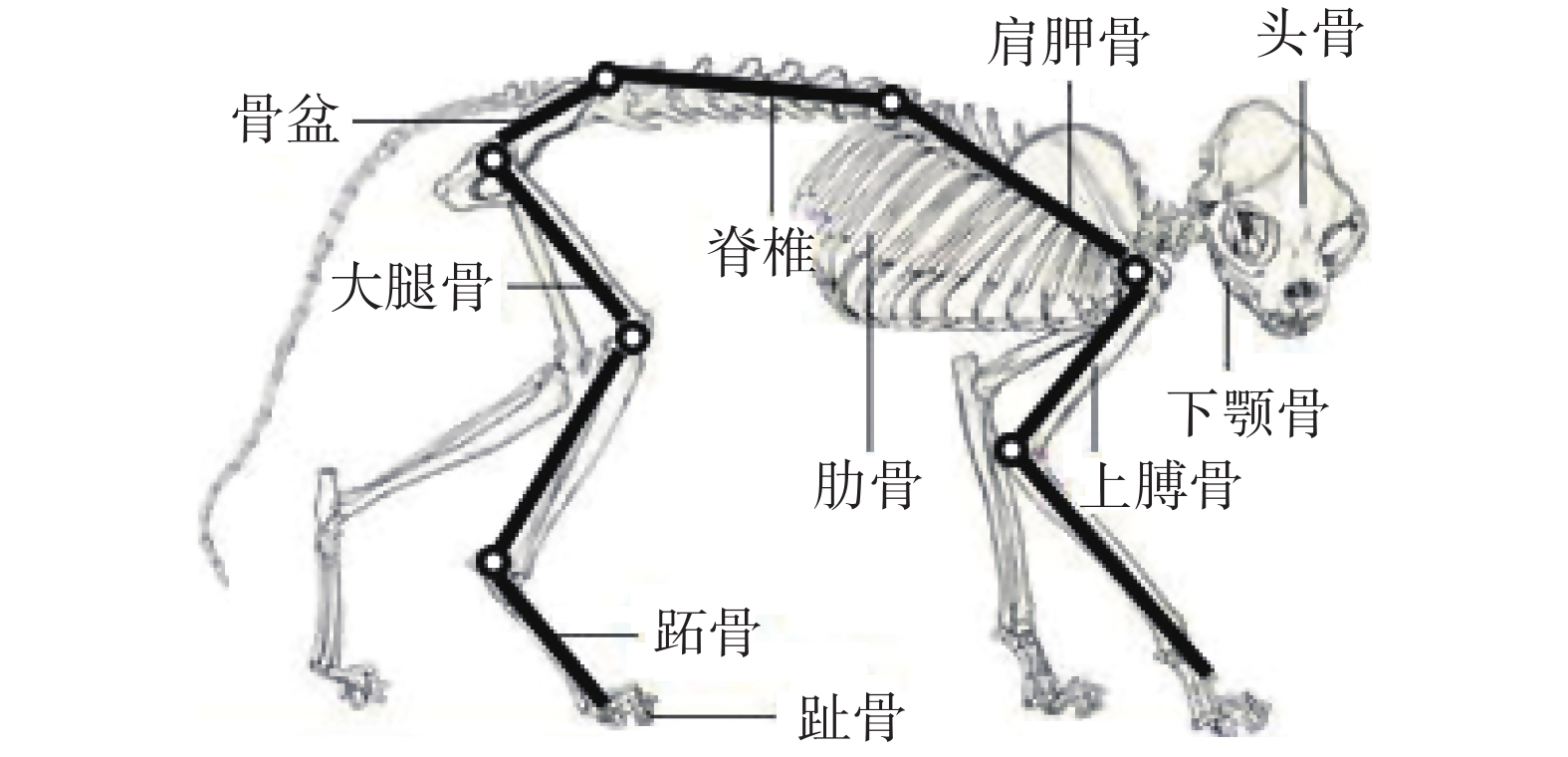
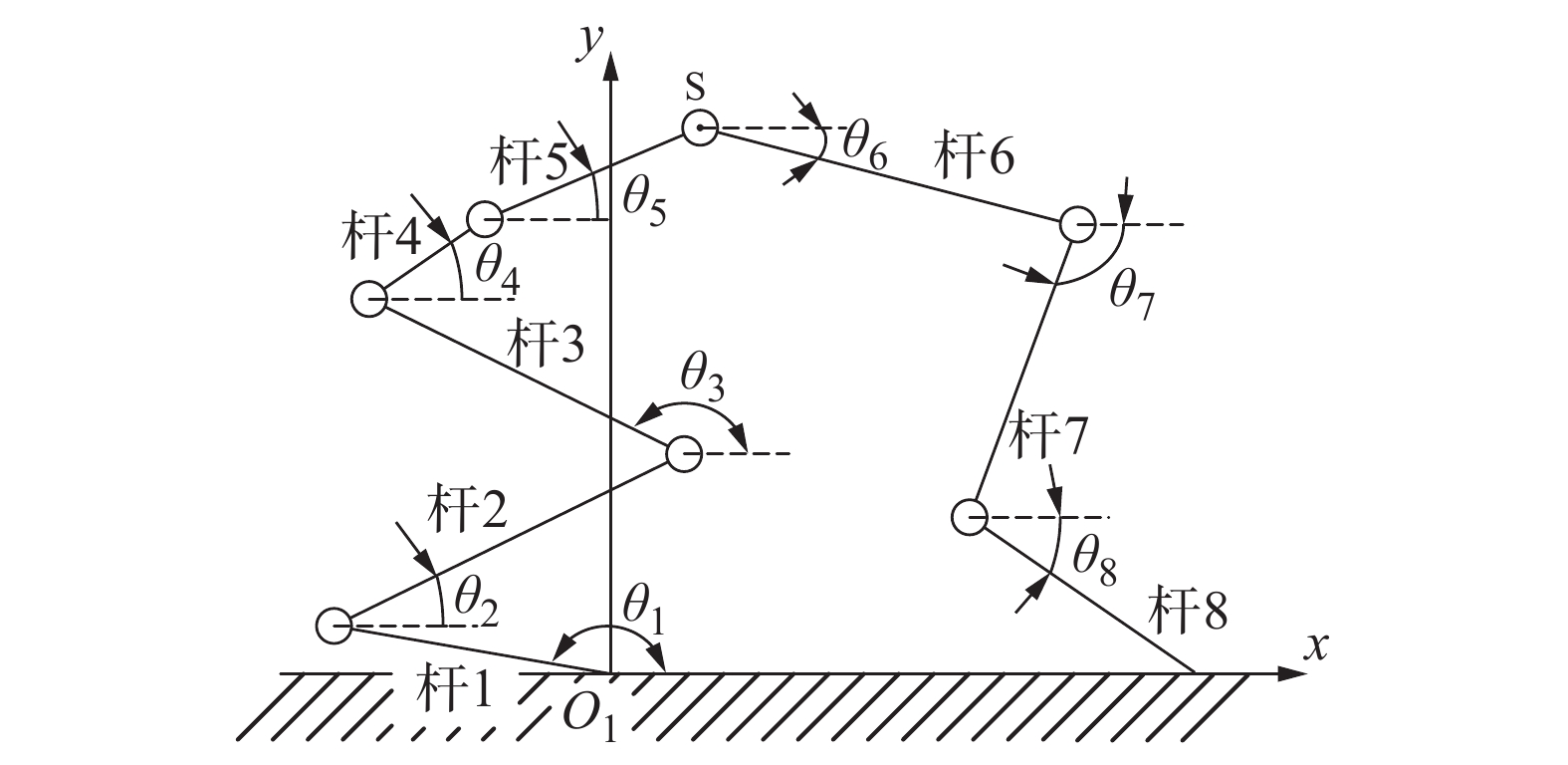
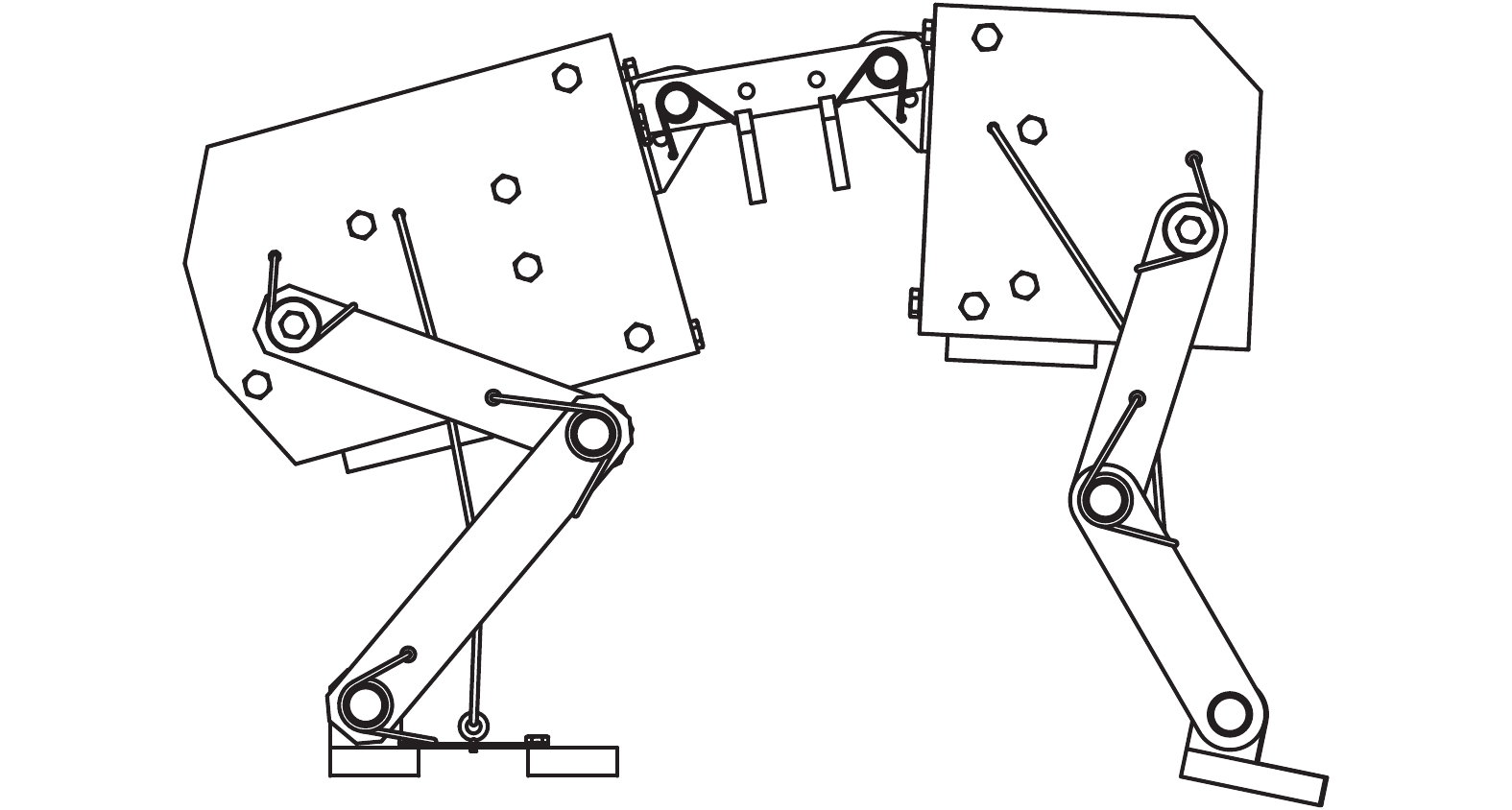
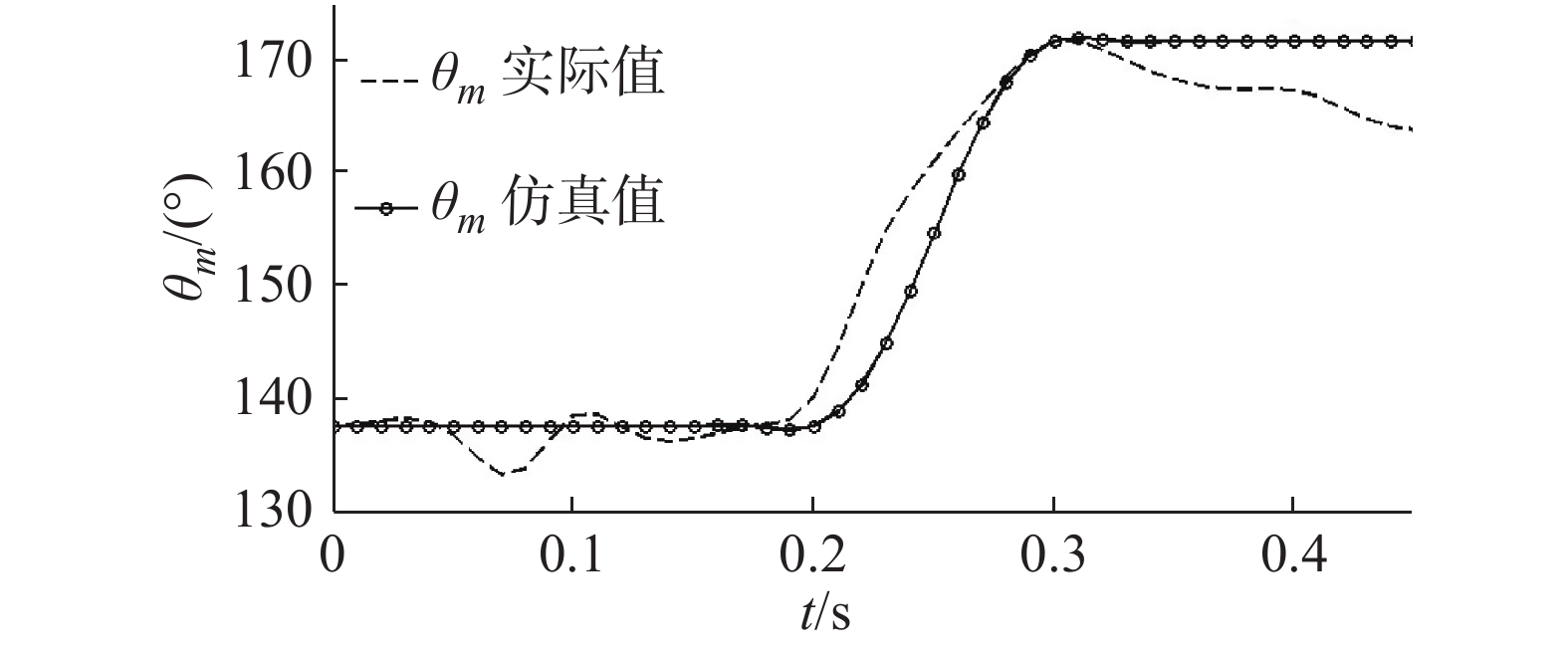
猫是一种灵巧擅长跳跃的动物,分析猫的跳跃,有助于启发改善跳跃机器人的机构,提高机器人跳跃灵活性。以家猫作为模本,提出了有腰部结构的仿猫机构模型,研制出仿猫机器人,利用动量守恒和拉格朗日方程,建立了机器人空中动力学模型。最后令机器人模仿一家猫跳跃过程中的腰部运动,观察机器人在空中不同情况下后脚尖的运动轨迹,得出结论机器人在空中的利用腰部进行姿态调整可以增加机器人越障高度,为机器人应对突发状况提供参考。
猫是一种灵巧擅长跳跃的动物,分析猫的跳跃,有助于启发改善跳跃机器人的机构,提高机器人跳跃灵活性。以家猫作为模本,提出了有腰部结构的仿猫机构模型,研制出仿猫机器人,利用动量守恒和拉格朗日方程,建立了机器人空中动力学模型。最后令机器人模仿一家猫跳跃过程中的腰部运动,观察机器人在空中不同情况下后脚尖的运动轨迹,得出结论机器人在空中的利用腰部进行姿态调整可以增加机器人越障高度,为机器人应对突发状况提供参考。



2020, 39(8): 1211-1216.
doi: 10.13433/j.cnki.1003-8728.20190268
摘要:
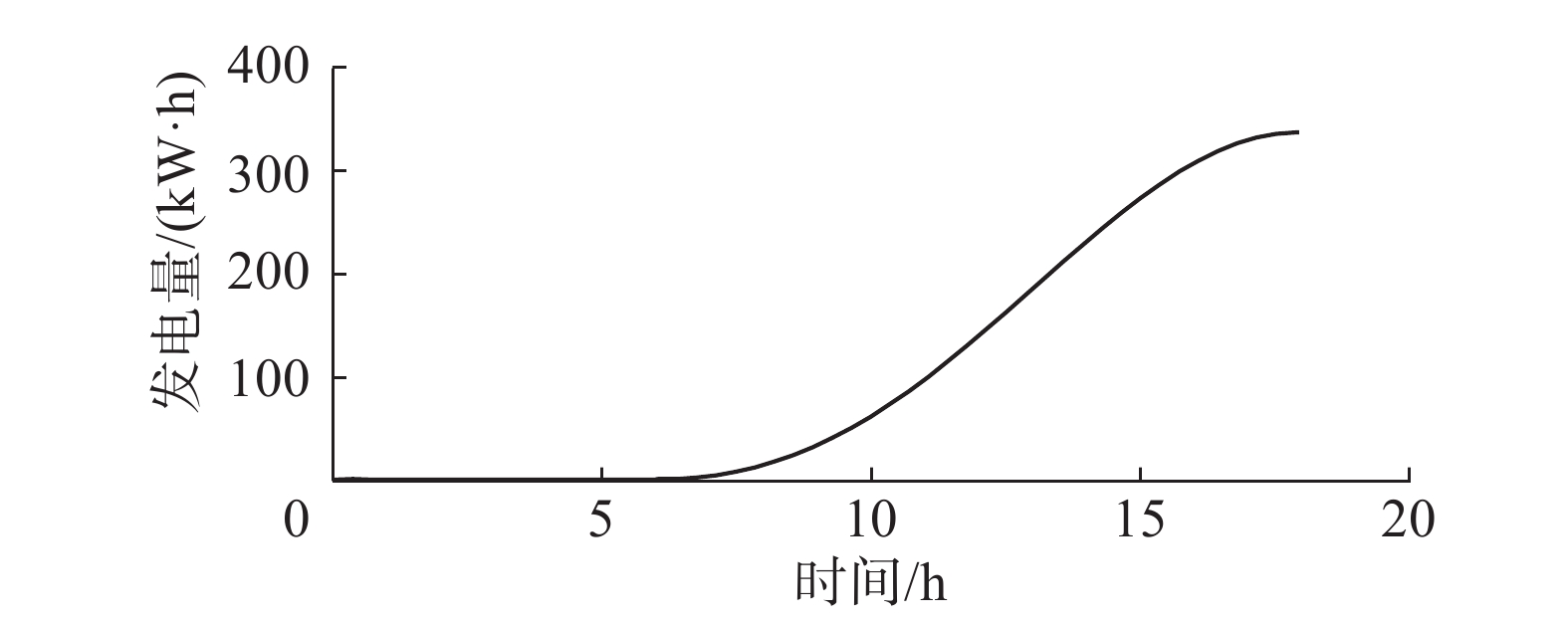
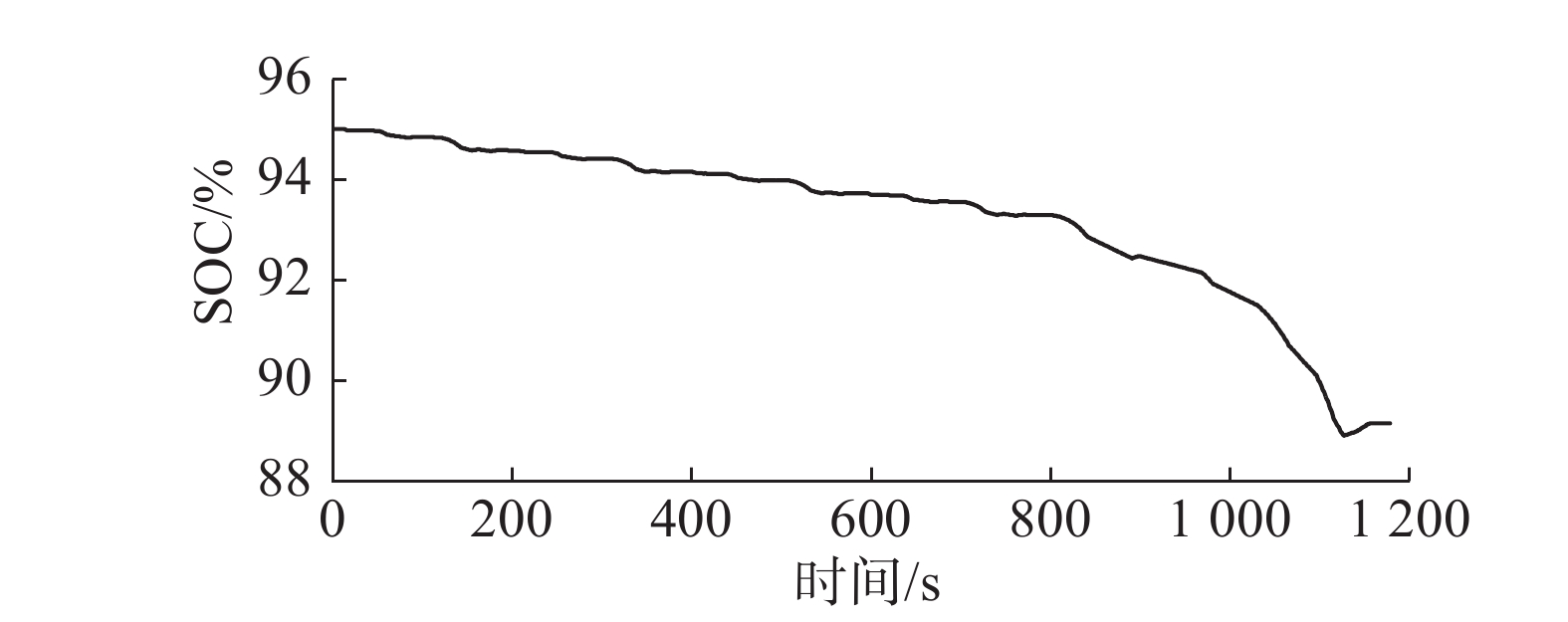
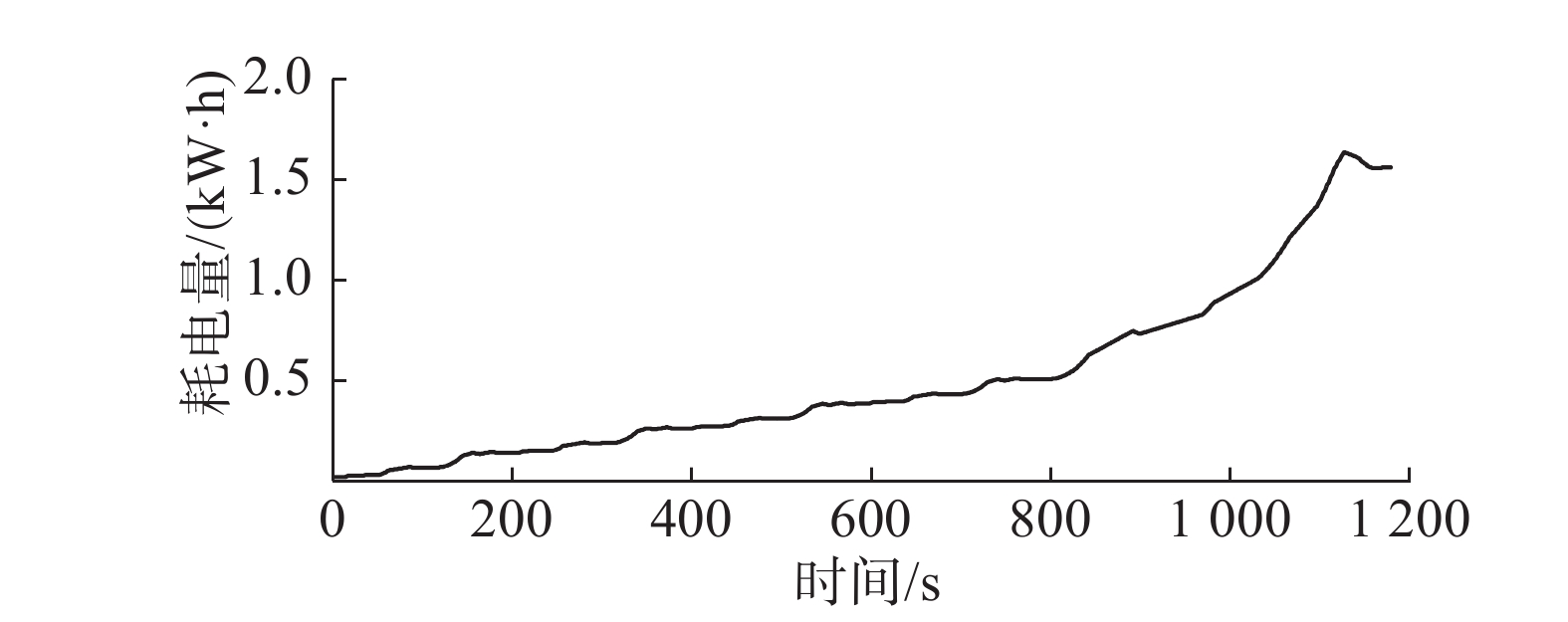
提出了一种基于轮毂电机的太阳能电动车构型,基于某B级车完成了太阳能电池、动力电池、电机等关键总成参数的选型与匹配。基于MATLAB/Simulink搭建了太阳能电池仿真模型,对太阳能电池的光照特性进行了仿真分析。为了验证所提出构型的经济性,基于AVL Cruise搭建了经济性验证模型,基于NEDC工况对整车经济性进行了验证分析,仿真结果表明:当一天平均行驶50 km时,非太阳能电动车耗电量为7.174 kW·h,太阳能电池会生成1.688 kW·h,即太阳能电池消耗电网电5.486 kW·h,节能比例为23.5%;当动力电池容量相同时,非太阳能纯电动车续驶里程为200 km,太阳能电动车续驶里程为240 km,续驶里程增加了20%,节能效果显著,相关研究可为我国太阳能电动车的开发提供参考。
提出了一种基于轮毂电机的太阳能电动车构型,基于某B级车完成了太阳能电池、动力电池、电机等关键总成参数的选型与匹配。基于MATLAB/Simulink搭建了太阳能电池仿真模型,对太阳能电池的光照特性进行了仿真分析。为了验证所提出构型的经济性,基于AVL Cruise搭建了经济性验证模型,基于NEDC工况对整车经济性进行了验证分析,仿真结果表明:当一天平均行驶50 km时,非太阳能电动车耗电量为7.174 kW·h,太阳能电池会生成1.688 kW·h,即太阳能电池消耗电网电5.486 kW·h,节能比例为23.5%;当动力电池容量相同时,非太阳能纯电动车续驶里程为200 km,太阳能电动车续驶里程为240 km,续驶里程增加了20%,节能效果显著,相关研究可为我国太阳能电动车的开发提供参考。



2020, 39(8): 1222-1229.
doi: 10.13433/j.cnki.1003-8728.20190262
摘要:
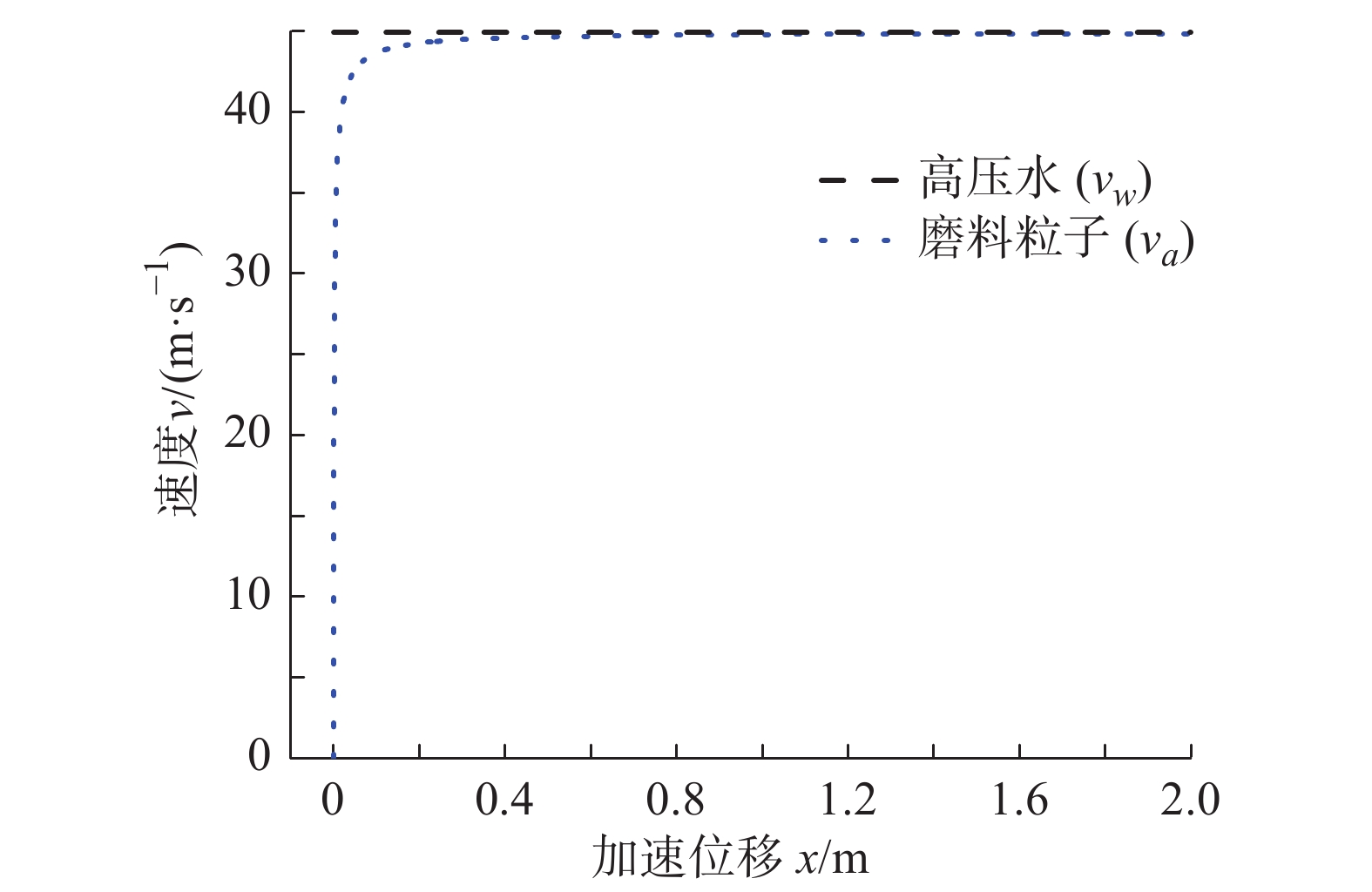
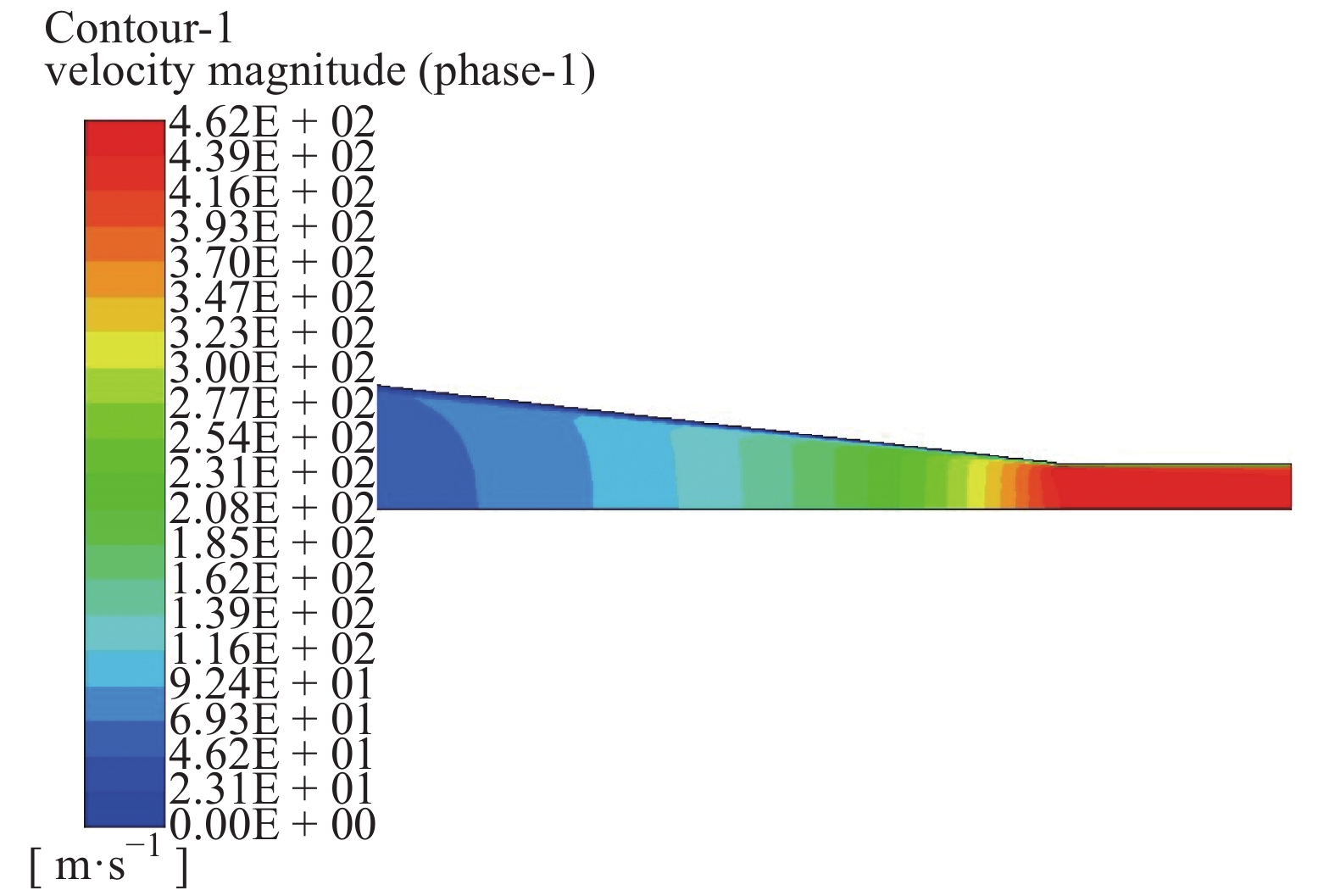
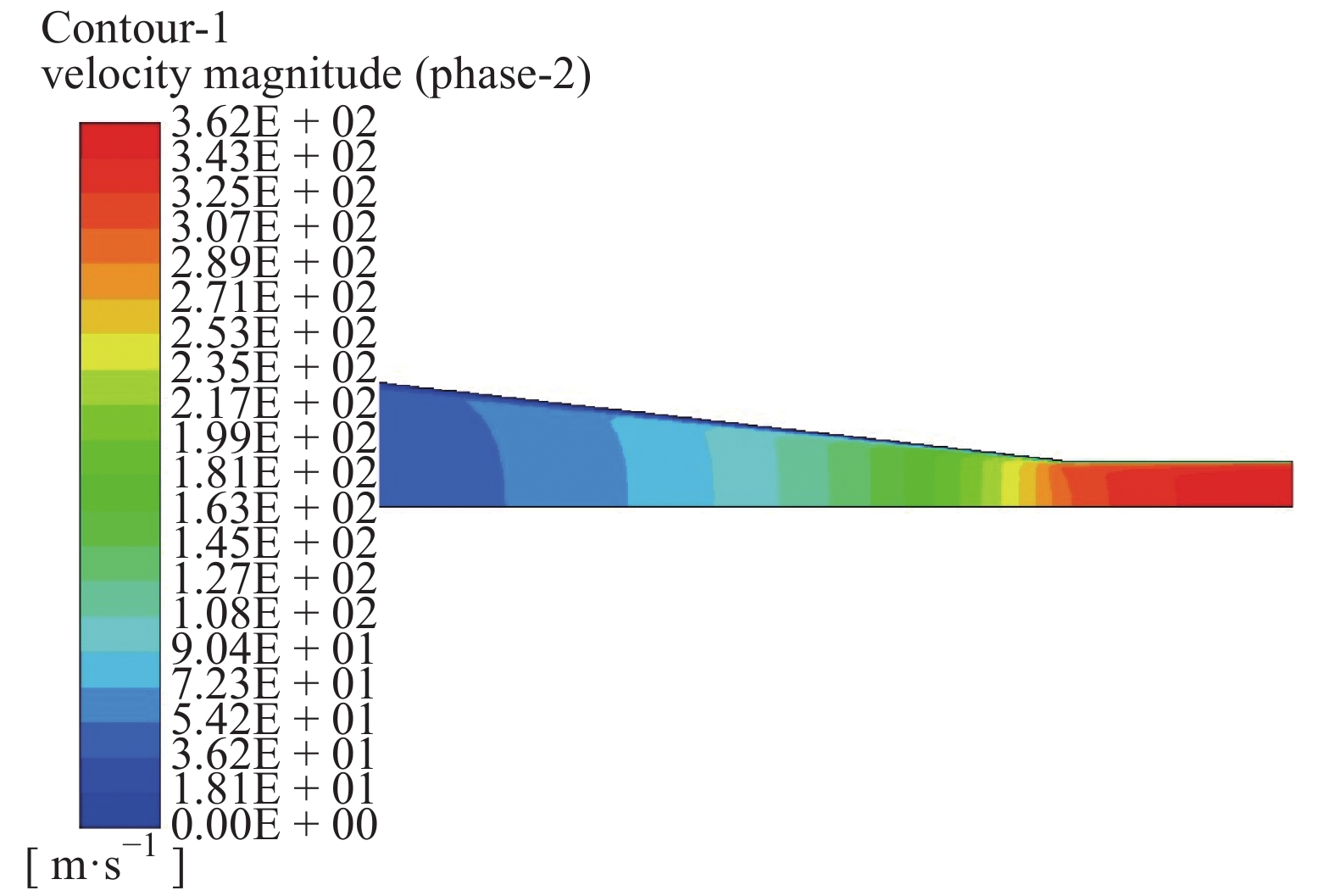
针对超高压前混合磨料粒子在喷嘴内加速过程中受力不明确的问题,对外力采用先分后和的处理方法,通过不动点迭代法和实时积分的方式建立非线性方程组,利用MATLAB软件建立数学模型求解方程,结合ANSYS仿真结果验证理论分析。喷嘴内固液两相流的仿真结果表明:理论分析及建立的数学模型能准确的阐述粒子的受力情况。磨料粒子在喷嘴收缩段内的加速过程中主要受粘性阻力、附加质量力和压强力的作用;在圆柱段内的加速过程中主要受粘性阻力和附加质量力的作用。
针对超高压前混合磨料粒子在喷嘴内加速过程中受力不明确的问题,对外力采用先分后和的处理方法,通过不动点迭代法和实时积分的方式建立非线性方程组,利用MATLAB软件建立数学模型求解方程,结合ANSYS仿真结果验证理论分析。喷嘴内固液两相流的仿真结果表明:理论分析及建立的数学模型能准确的阐述粒子的受力情况。磨料粒子在喷嘴收缩段内的加速过程中主要受粘性阻力、附加质量力和压强力的作用;在圆柱段内的加速过程中主要受粘性阻力和附加质量力的作用。



2020, 39(8): 1230-1236.
doi: 10.13433/j.cnki.1003-8728.20190213
摘要:
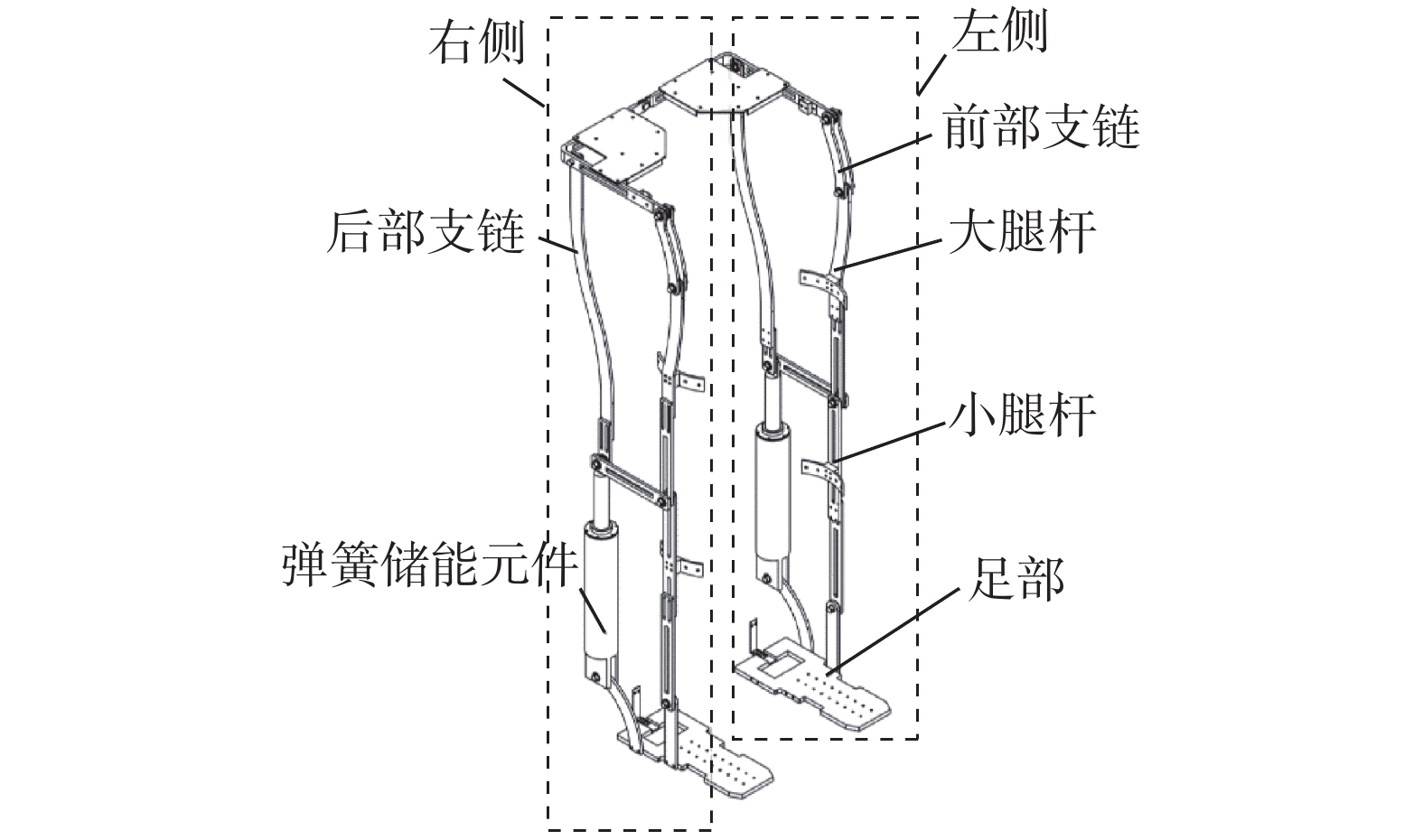
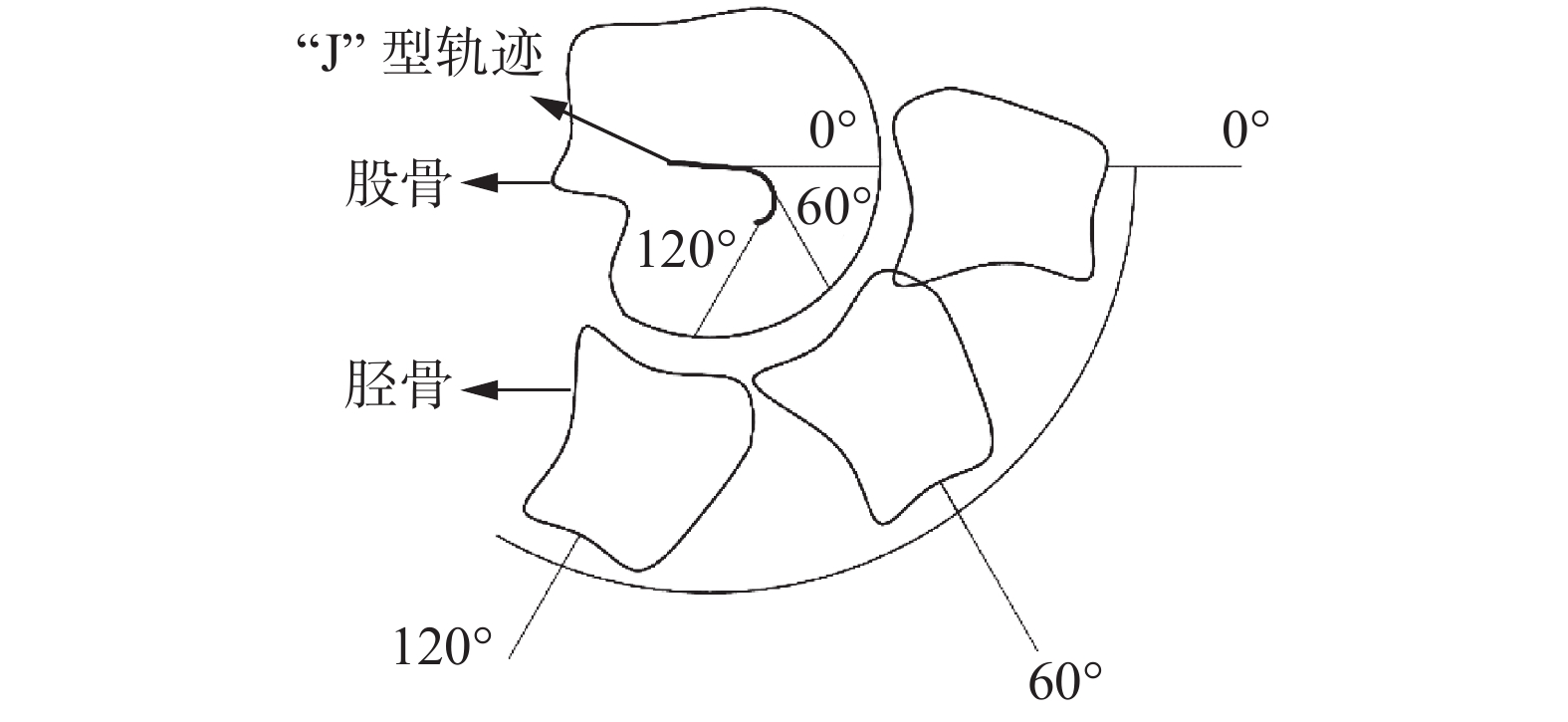
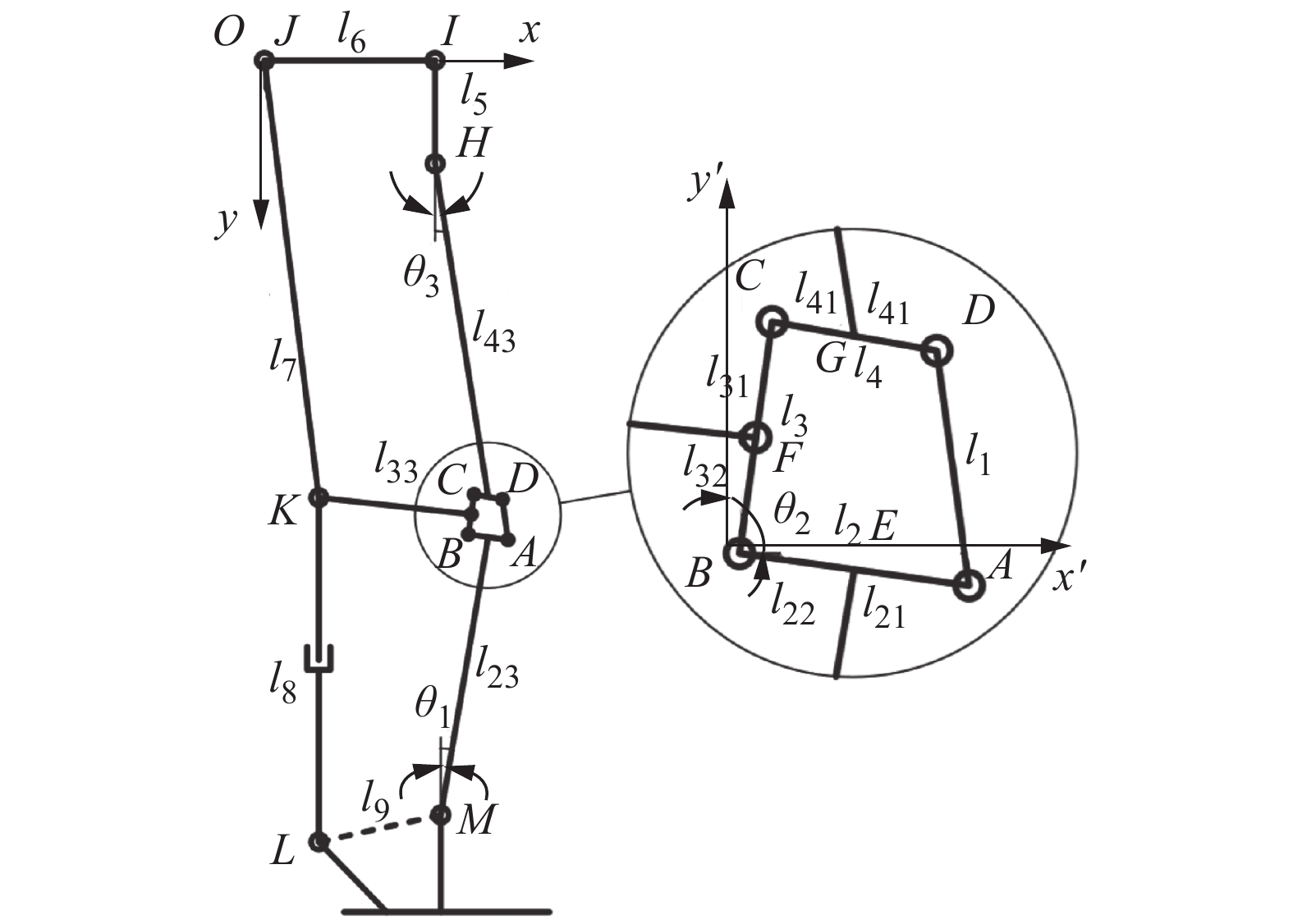
针对人体膝关节轴线具有可变性,定轴线膝关节机构必然使外骨骼与人腿协调性较差的问题,在一种无驱动含耦合双支闭链的下肢外骨骼的基础上,采用一种变轴线膝关节机构。首先,根据人体膝关节“J”型瞬心轨迹特点,确定合适的变轴线膝关节机构,并且建立含变轴线膝关节的外骨骼整体模型;其次,通过遗传算法计算出符合人体膝关节瞬心轨迹的变轴线膝关节的参数;最后,通过MATLAB计算验证变轴线膝关节的瞬心轨迹符合人体膝关节瞬心轨迹。结果表明:变轴线膝关节瞬心轨迹更加贴合人体膝关节的瞬心轨迹,含变轴线膝关节机构的外骨骼步态更加符合人体步态。
针对人体膝关节轴线具有可变性,定轴线膝关节机构必然使外骨骼与人腿协调性较差的问题,在一种无驱动含耦合双支闭链的下肢外骨骼的基础上,采用一种变轴线膝关节机构。首先,根据人体膝关节“J”型瞬心轨迹特点,确定合适的变轴线膝关节机构,并且建立含变轴线膝关节的外骨骼整体模型;其次,通过遗传算法计算出符合人体膝关节瞬心轨迹的变轴线膝关节的参数;最后,通过MATLAB计算验证变轴线膝关节的瞬心轨迹符合人体膝关节瞬心轨迹。结果表明:变轴线膝关节瞬心轨迹更加贴合人体膝关节的瞬心轨迹,含变轴线膝关节机构的外骨骼步态更加符合人体步态。






2020, 39(8): 1237-1241.
doi: 10.13433/j.cnki.1003-8728.20190252
摘要:
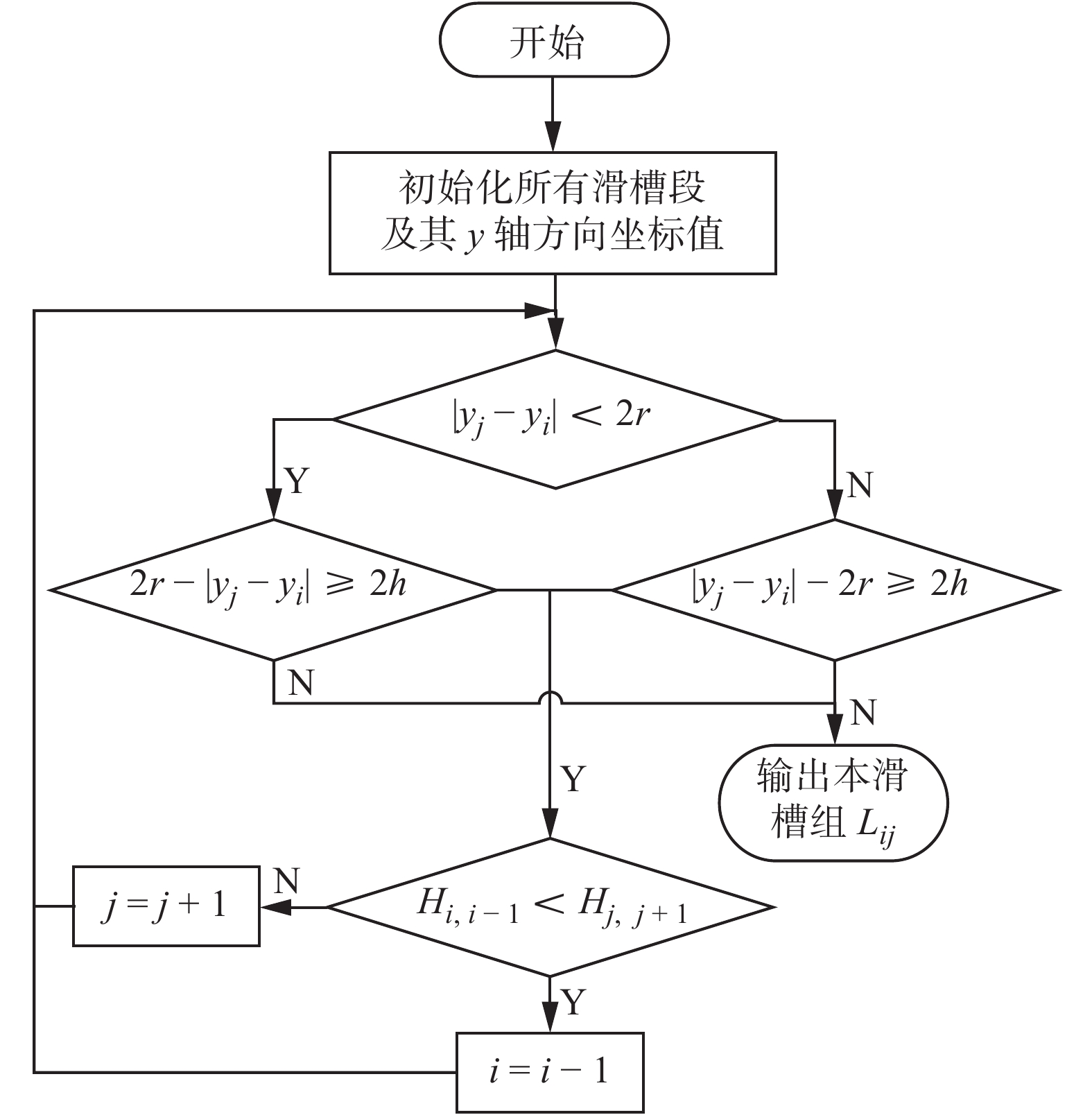
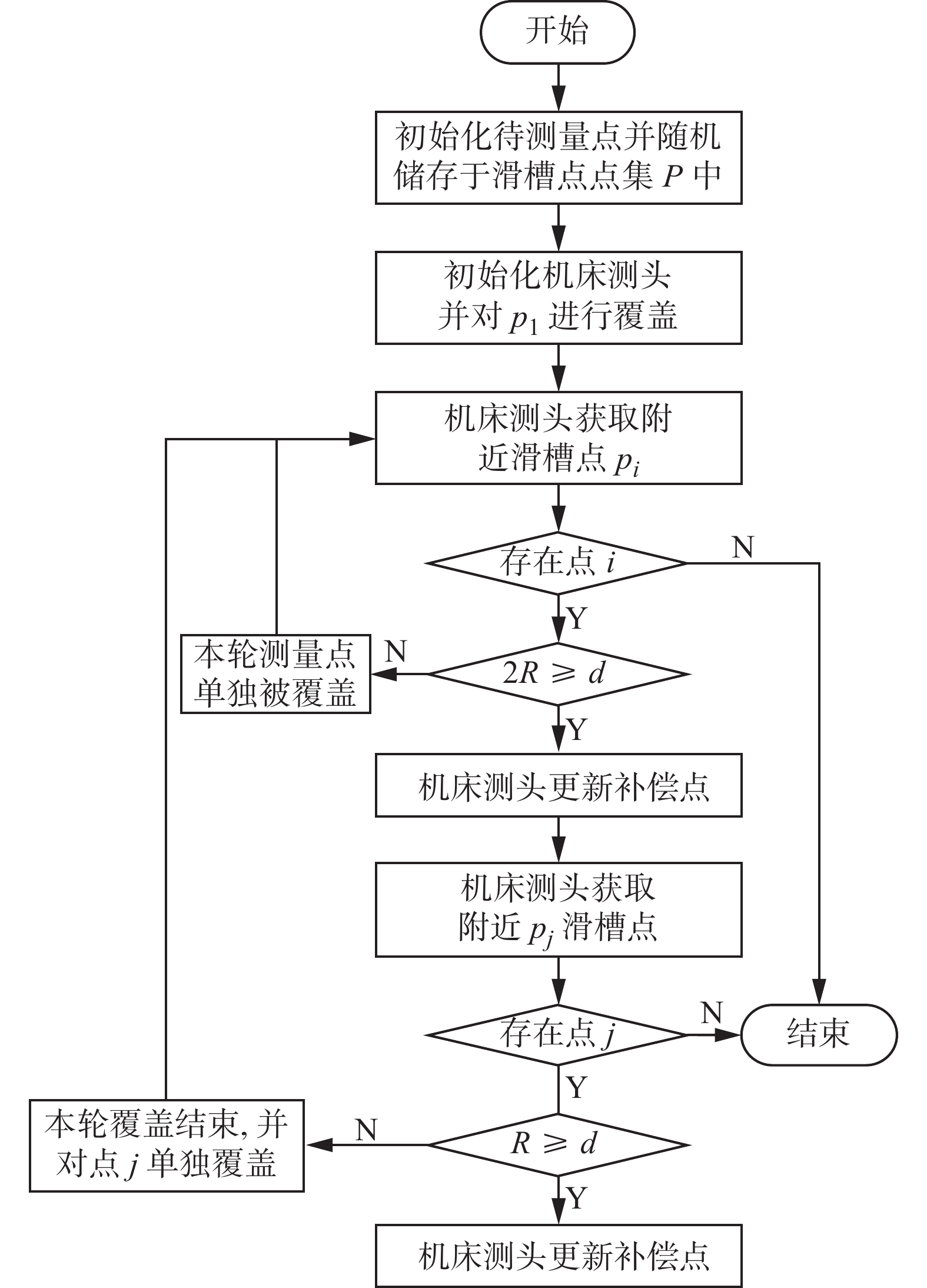
为进一步提高当前数控机床对城轨车体底架装夹误差的测量效率及精度,利用英国雷尼绍公司研发的高精度RMP60机床测头,以最小化机床测头的补偿点数量为目标,分别提出了基于分组规划法与动态规划法的城轨车体底架覆盖测量方法,给出了覆盖测量方法的步骤,实现了底架上滑槽点的全覆盖。仿真结果表明,在相同条件下,机床测头利用动态规划法完成对滑槽点全覆盖时所获得的补偿点数量比分组规划法缩减12.9%,且重叠率降低4.47%,所以本文所提方法能够有效提升机床对城轨车体底架滑槽的测量效率及精度。
为进一步提高当前数控机床对城轨车体底架装夹误差的测量效率及精度,利用英国雷尼绍公司研发的高精度RMP60机床测头,以最小化机床测头的补偿点数量为目标,分别提出了基于分组规划法与动态规划法的城轨车体底架覆盖测量方法,给出了覆盖测量方法的步骤,实现了底架上滑槽点的全覆盖。仿真结果表明,在相同条件下,机床测头利用动态规划法完成对滑槽点全覆盖时所获得的补偿点数量比分组规划法缩减12.9%,且重叠率降低4.47%,所以本文所提方法能够有效提升机床对城轨车体底架滑槽的测量效率及精度。





2020, 39(8): 1242-1247.
doi: 10.13433/j.cnki.1003-8728.20190207
摘要:
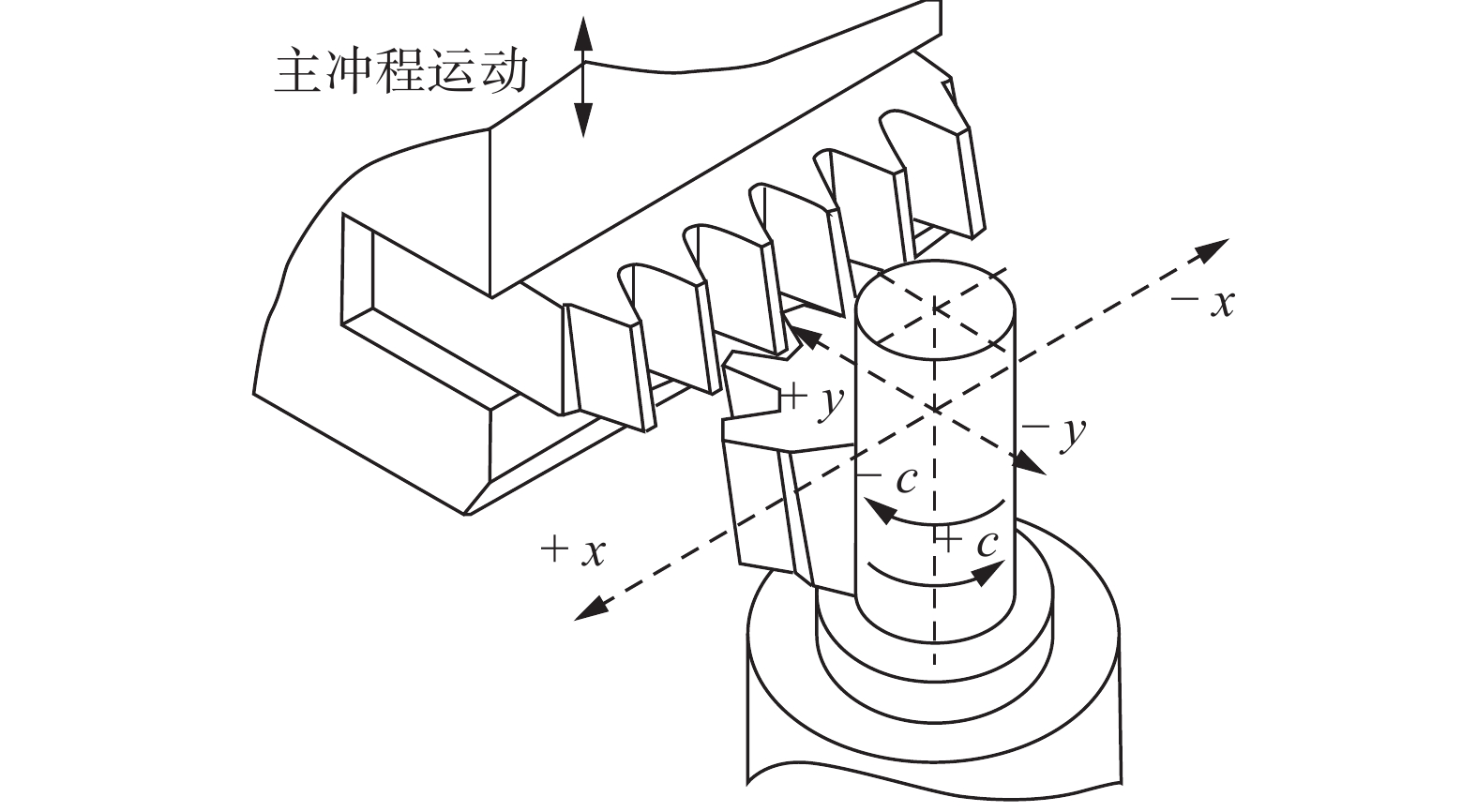
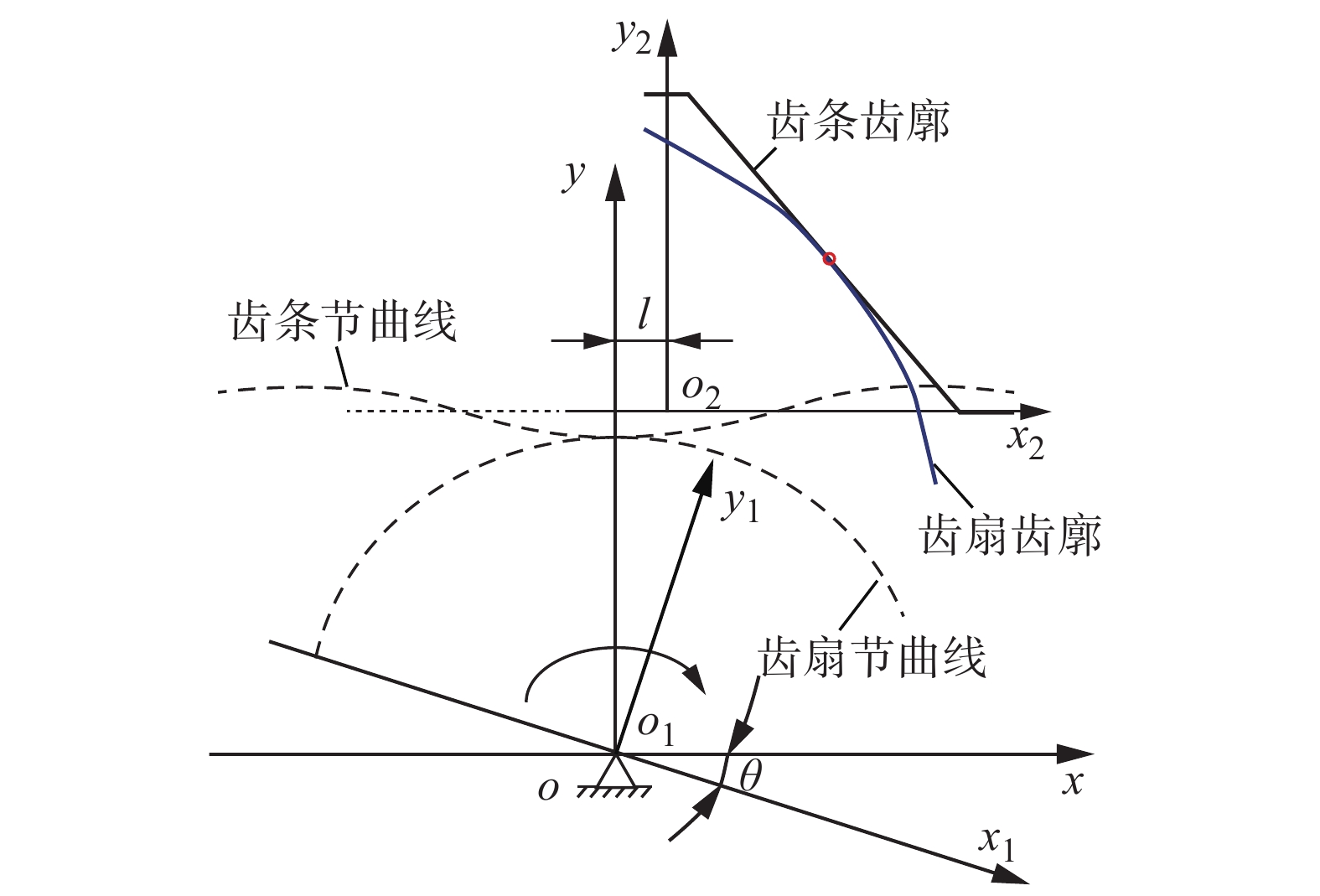
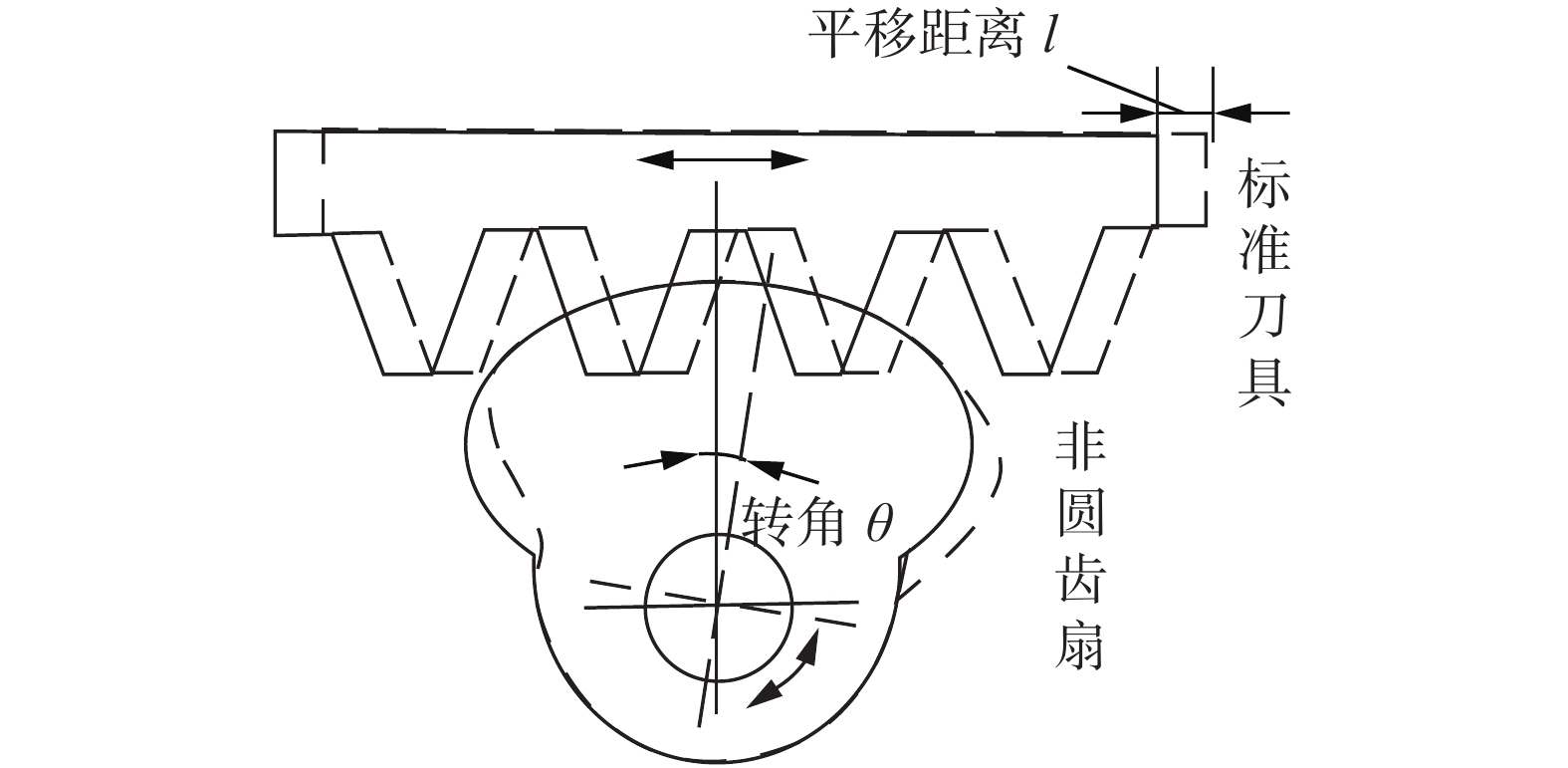
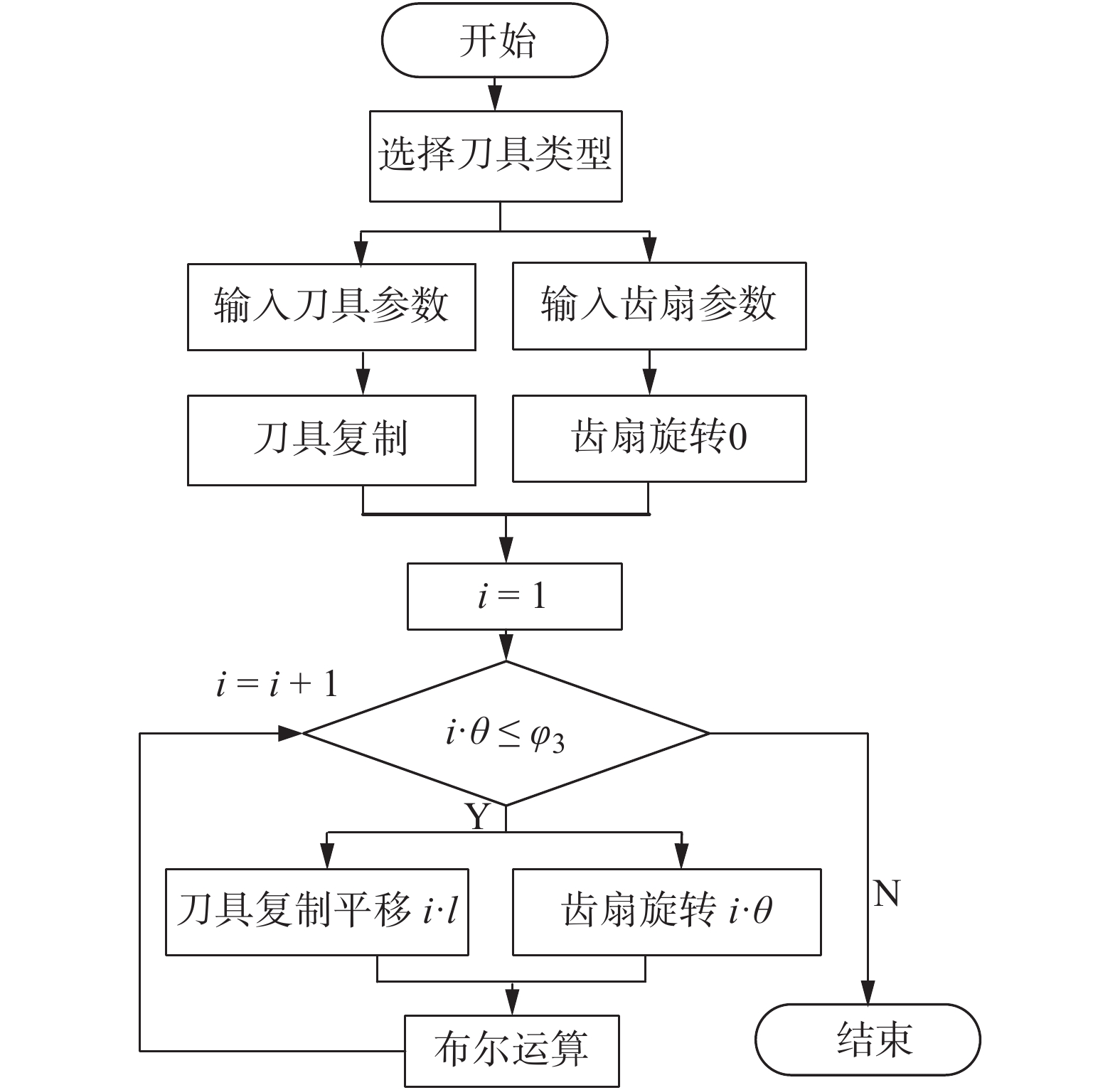
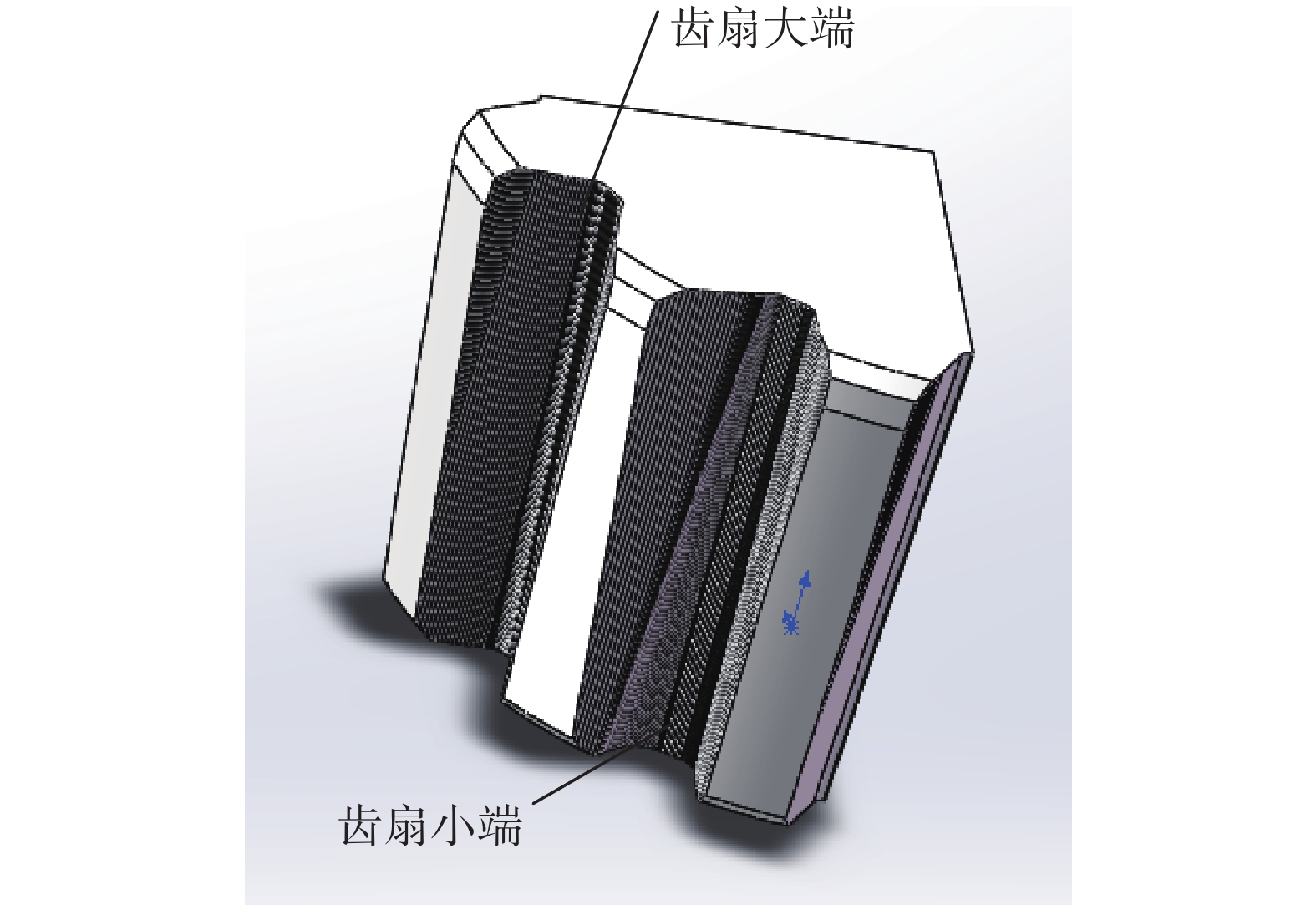
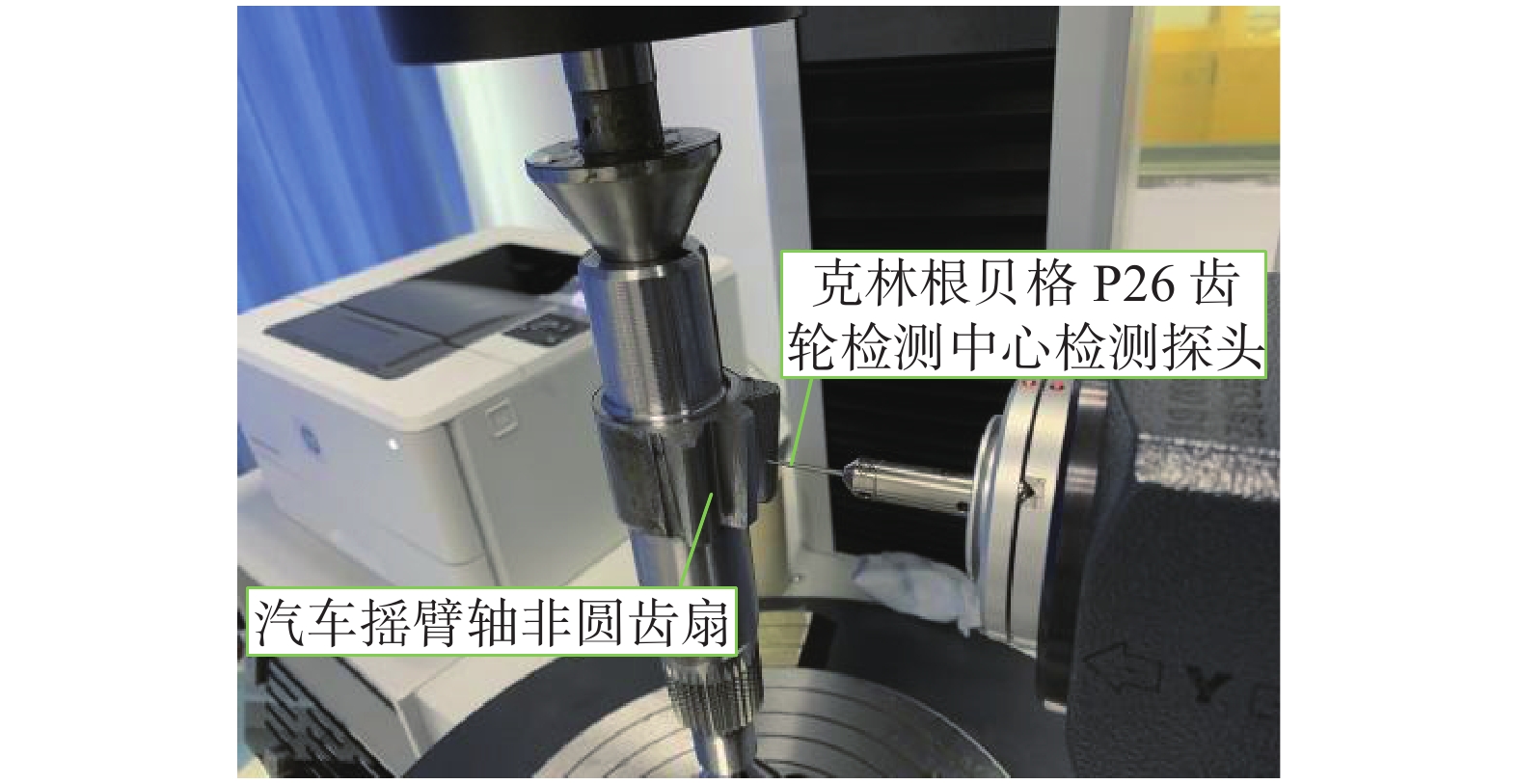
提出一种基于SolidWorks二次开发实现非圆齿扇三维参数化建模的方法。利用展成法加工原理,在SolidWorks/VBA中编写程序代码对加工刀具及齿扇毛坯进行参数化建模,根据传动比曲线模拟齿扇插齿加工过程,生成非圆齿扇三维模型。将齿扇、齿条三维模型装配,进行动态干涉检测,并使用克林根贝格齿轮检测中心进行检测对比,以验证模型的正确性。结果表明使用这种建模方法得到的非圆齿扇三维模型是可行的,极大地方便了产品设计工作。
提出一种基于SolidWorks二次开发实现非圆齿扇三维参数化建模的方法。利用展成法加工原理,在SolidWorks/VBA中编写程序代码对加工刀具及齿扇毛坯进行参数化建模,根据传动比曲线模拟齿扇插齿加工过程,生成非圆齿扇三维模型。将齿扇、齿条三维模型装配,进行动态干涉检测,并使用克林根贝格齿轮检测中心进行检测对比,以验证模型的正确性。结果表明使用这种建模方法得到的非圆齿扇三维模型是可行的,极大地方便了产品设计工作。




2020, 39(8): 1256-1262.
doi: 10.13433/j.cnki.1003-8728.20190251
摘要:
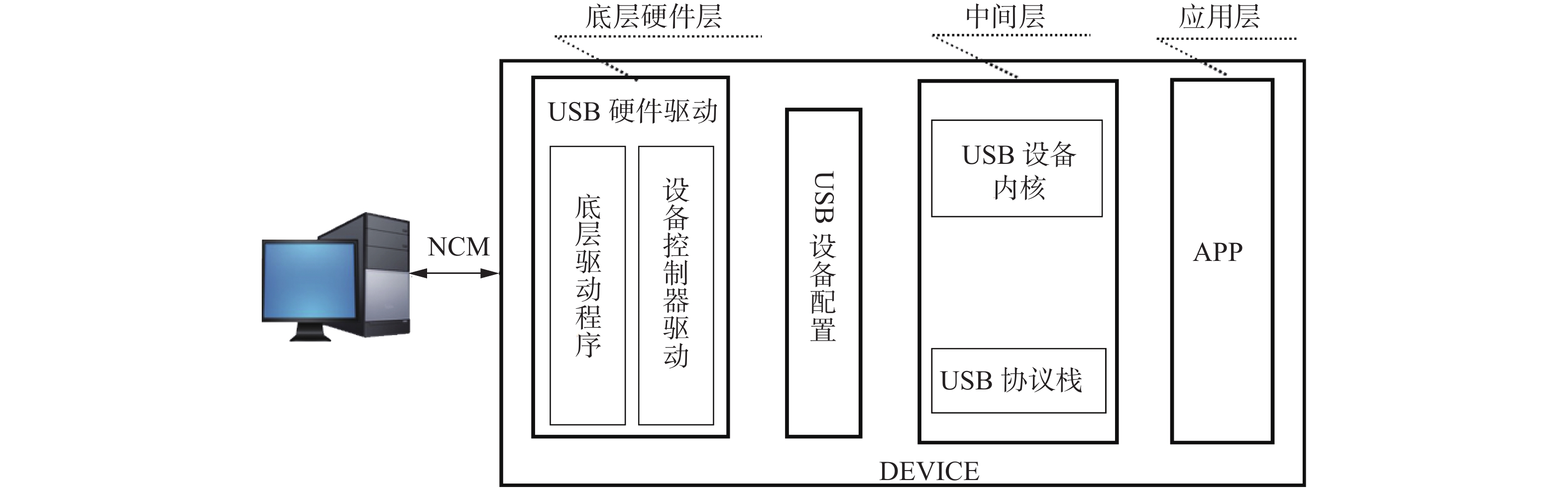
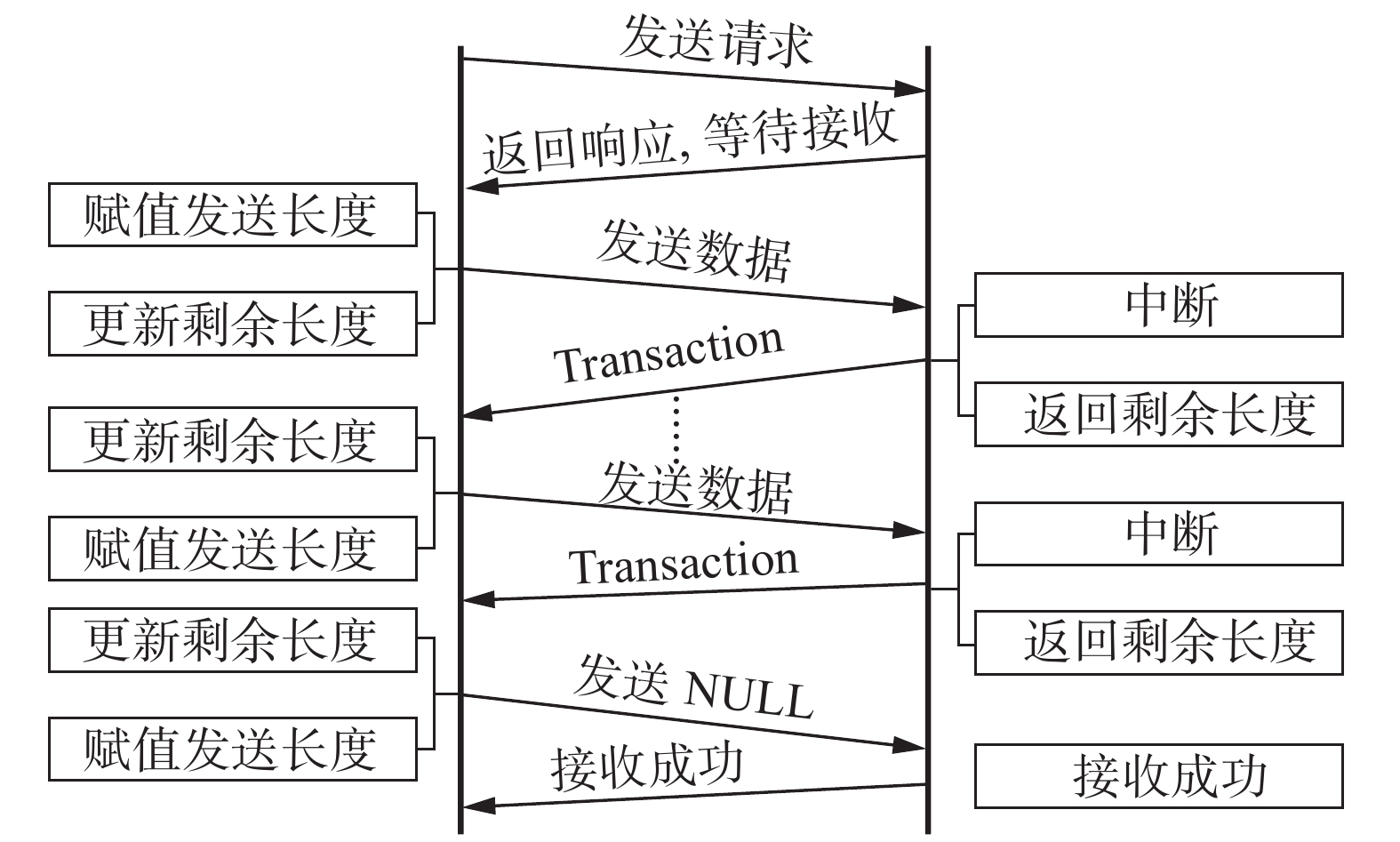
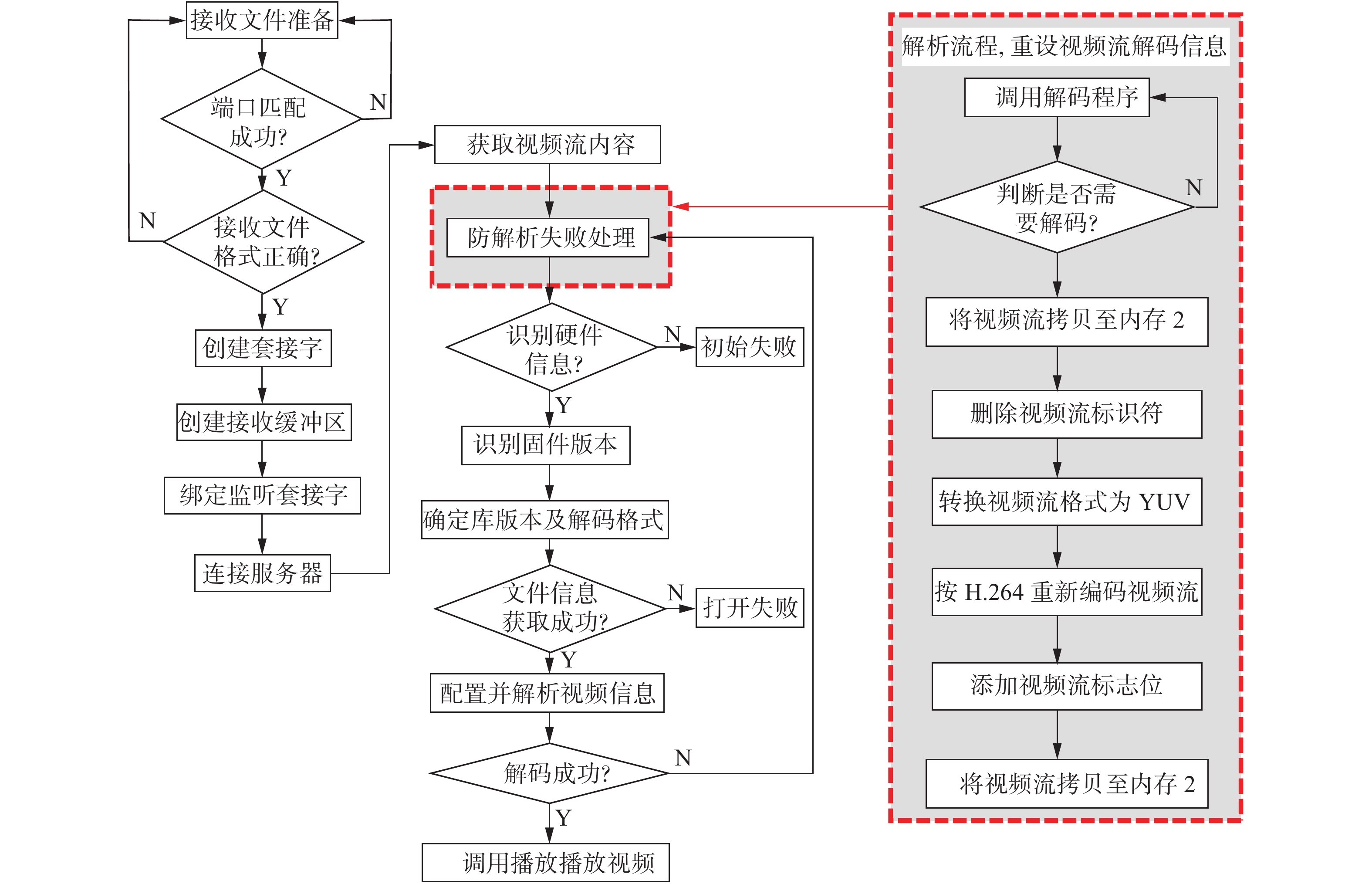
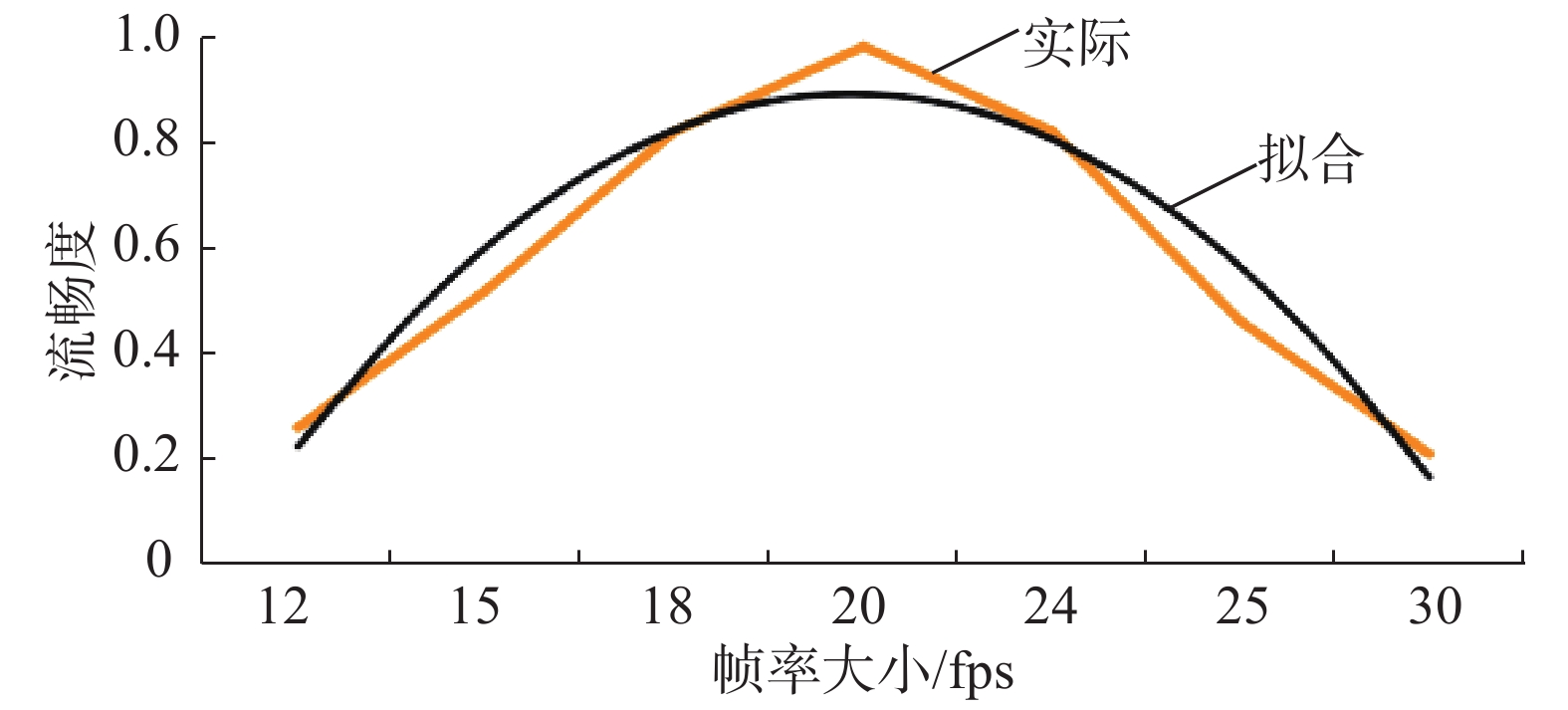
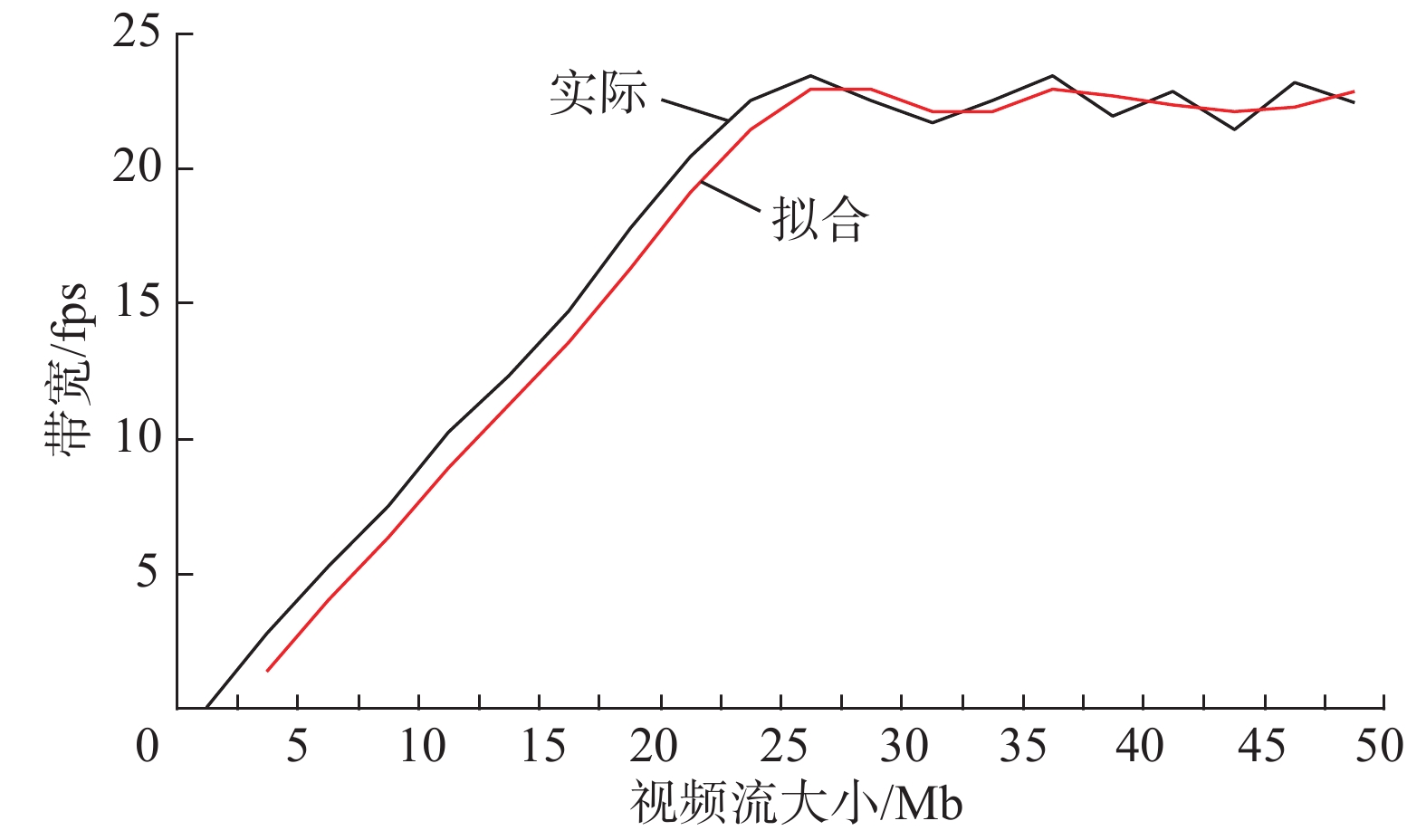
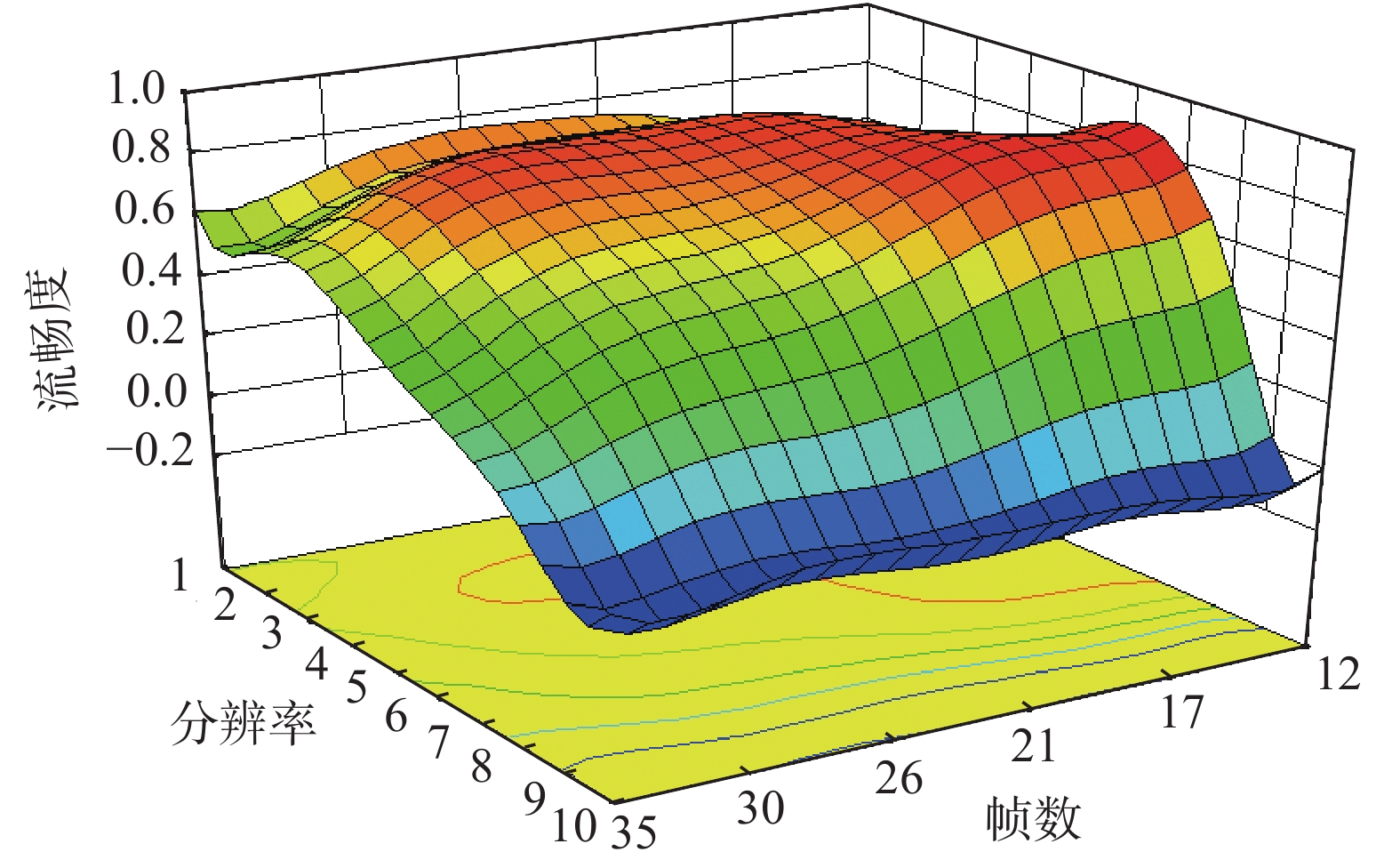
为探索NCM技术实际应用的可行性,解决当前汽车液晶仪表传输带宽不足及车载以太网应用成本过高的问题,本文对NCM工作环境进行了分析。通过设计NCM USB兼容接口和网络解码器,优化NCM系统传输过程,设计了NCM传输系统。数据处理发现,该系统单一条件下最优工作帧为20帧,极限传输速率达到22.5 M/s,可用于汽车的高带宽数据传输。为确定NCM传输的最优工作区间,分析多因素对NCM传输的综合影响,引入了数学模型对系统进行评估。结果表明,NCM技术可用于特定条件下汽车的高带宽数据传输。当分辨率为600×240、工作帧18帧时,流畅度为0.85,视频流的传输效果最好。该研究在提供低成本高带宽的NCM传输方案的同时,提供了NCM传输工作环境的数学评价模型,为NCM技术的应用提供了理论支持。
为探索NCM技术实际应用的可行性,解决当前汽车液晶仪表传输带宽不足及车载以太网应用成本过高的问题,本文对NCM工作环境进行了分析。通过设计NCM USB兼容接口和网络解码器,优化NCM系统传输过程,设计了NCM传输系统。数据处理发现,该系统单一条件下最优工作帧为20帧,极限传输速率达到22.5 M/s,可用于汽车的高带宽数据传输。为确定NCM传输的最优工作区间,分析多因素对NCM传输的综合影响,引入了数学模型对系统进行评估。结果表明,NCM技术可用于特定条件下汽车的高带宽数据传输。当分辨率为600×240、工作帧18帧时,流畅度为0.85,视频流的传输效果最好。该研究在提供低成本高带宽的NCM传输方案的同时,提供了NCM传输工作环境的数学评价模型,为NCM技术的应用提供了理论支持。



2020, 39(8): 1263-1270.
doi: 10.13433/j.cnki.1003-8728.20190267
摘要:
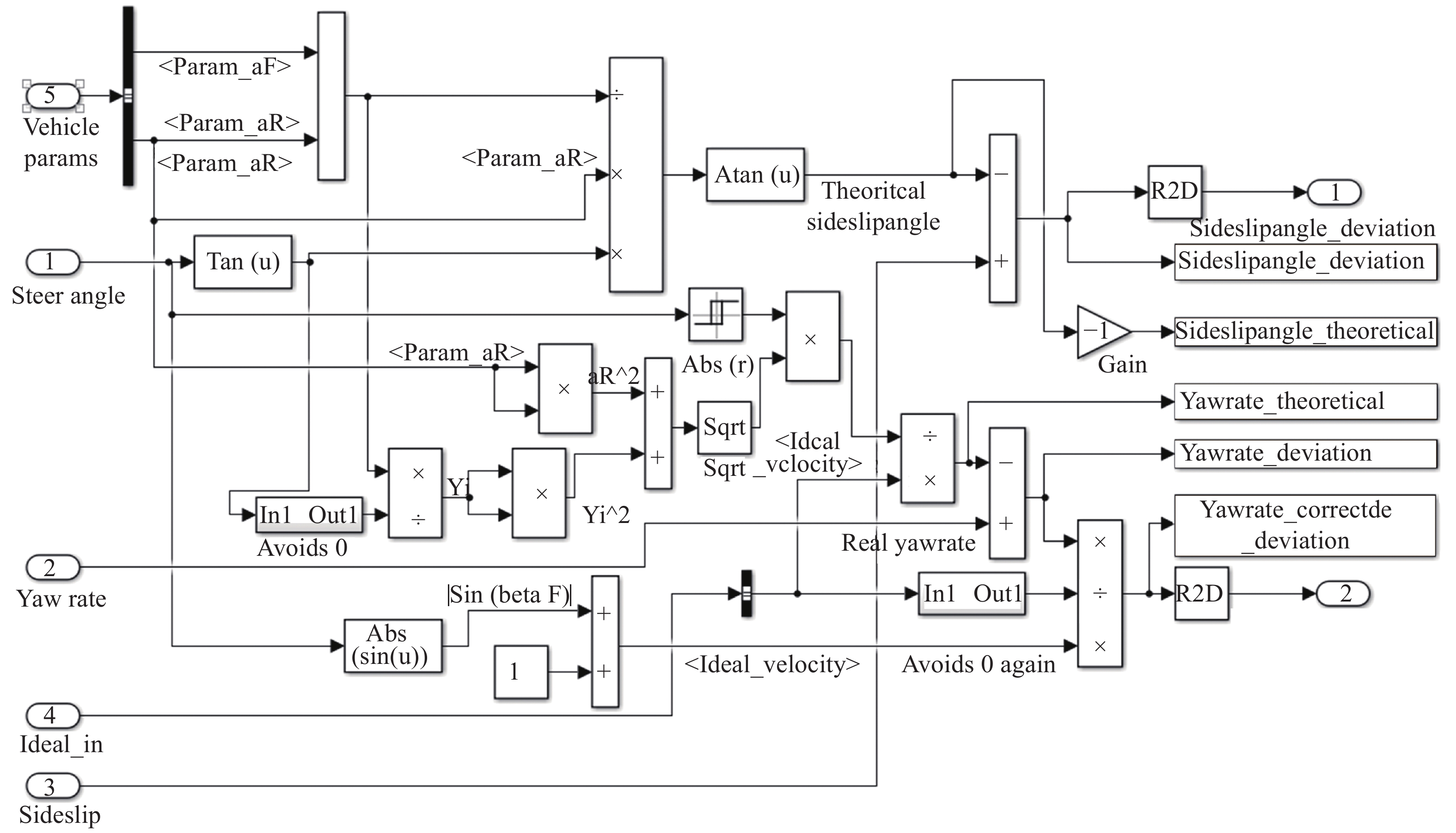
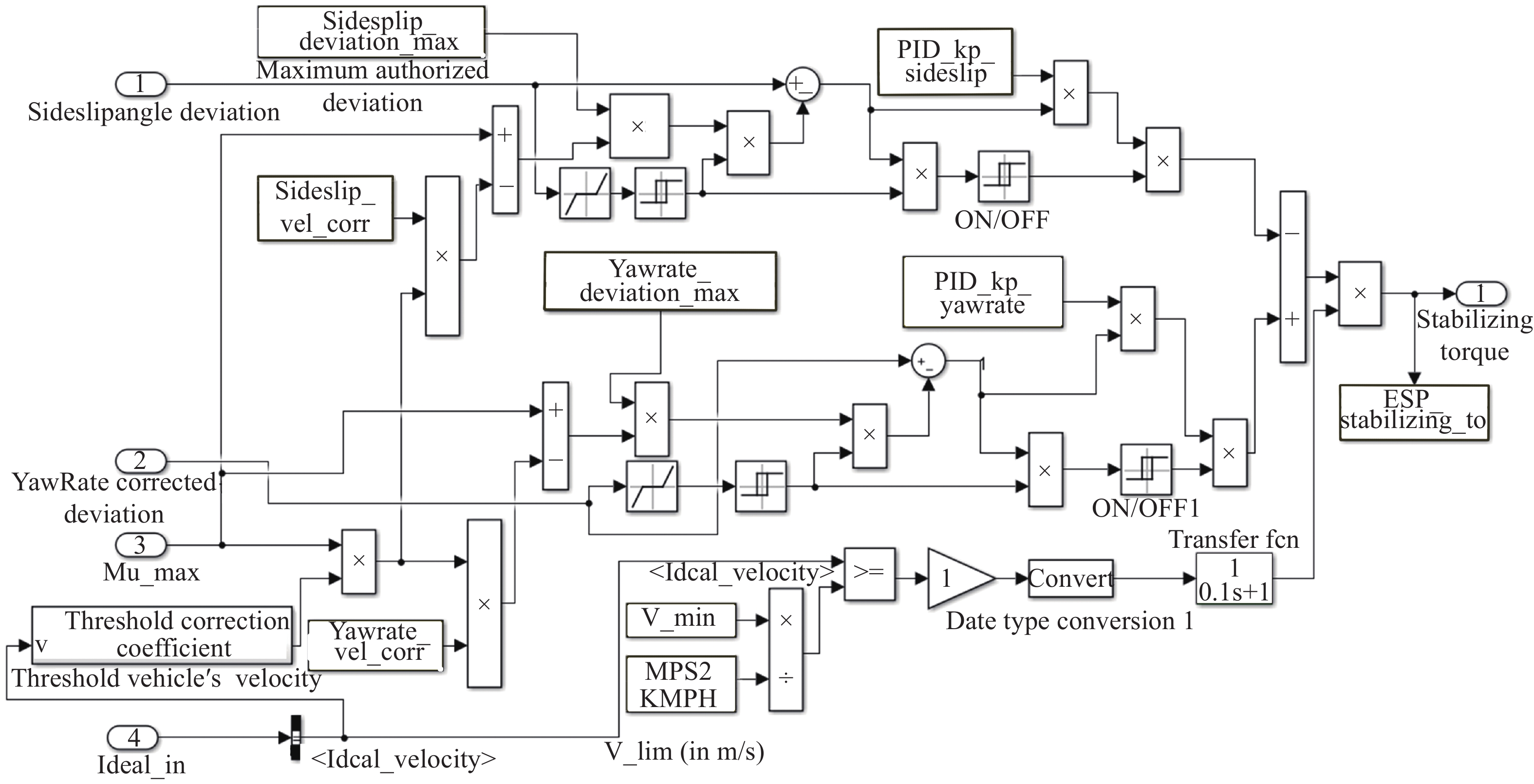
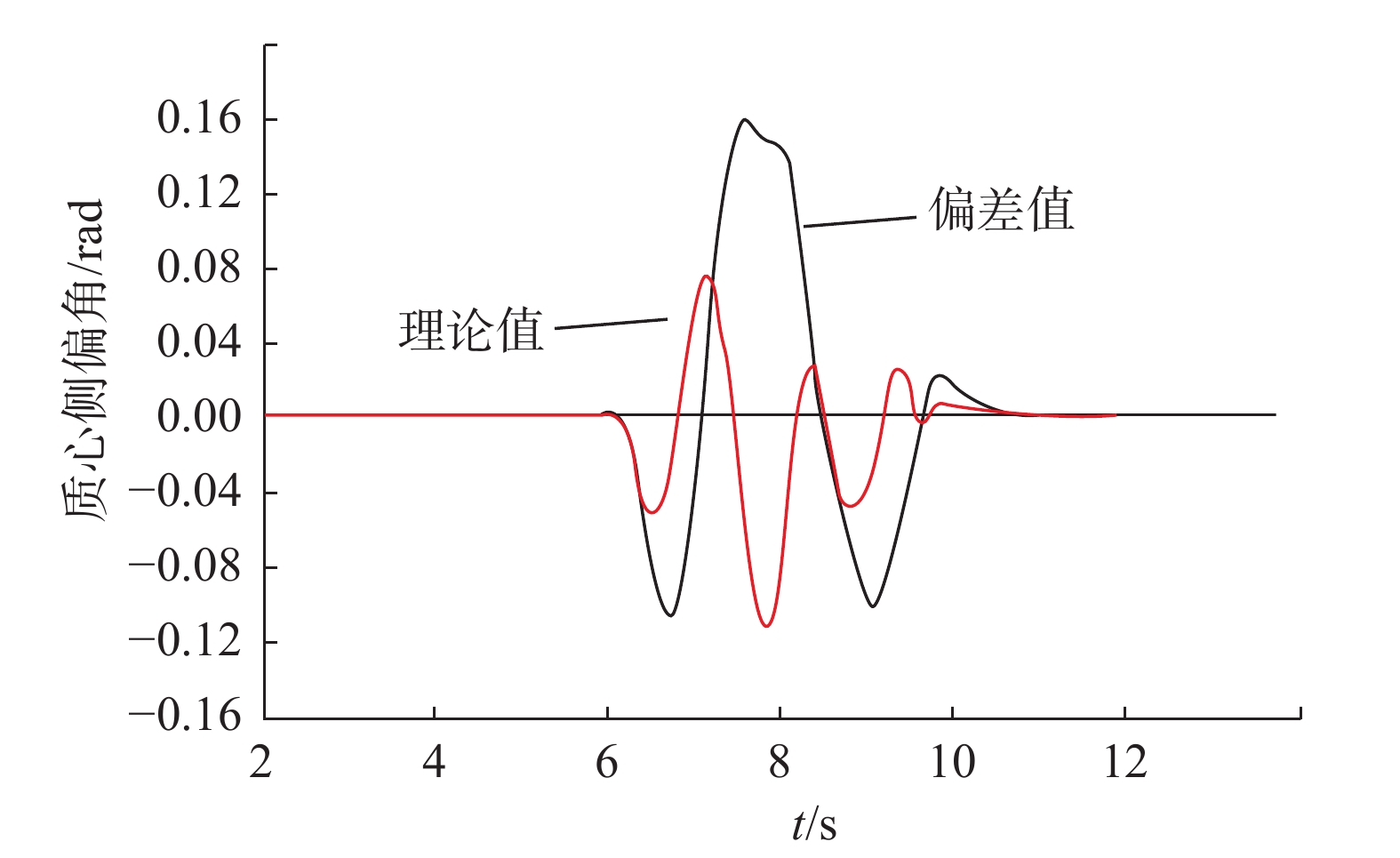
为提高车辆电子稳定程序的控制精度,通过分层模块化思想,提出以横摆角速度和质心侧偏角为输入量的ESP控制系统算法,最终输出稳定制动力矩提高车辆的操纵稳定性。为保证控制系统的准确性,采用CarMaker和Simulink联合建立虚拟仿真环境,并在ISO3888-2(2002)急促双移线试验工况下进行验证。结果表明:试验较好地验证了ESP系统算法的有效性;当横摆角速度和质心侧偏角的偏差值超过规定范围时,控制系统能准确实施制动干预,保证了车辆能准确跟踪驾驶员的期望路线。
为提高车辆电子稳定程序的控制精度,通过分层模块化思想,提出以横摆角速度和质心侧偏角为输入量的ESP控制系统算法,最终输出稳定制动力矩提高车辆的操纵稳定性。为保证控制系统的准确性,采用CarMaker和Simulink联合建立虚拟仿真环境,并在ISO3888-2(2002)急促双移线试验工况下进行验证。结果表明:试验较好地验证了ESP系统算法的有效性;当横摆角速度和质心侧偏角的偏差值超过规定范围时,控制系统能准确实施制动干预,保证了车辆能准确跟踪驾驶员的期望路线。







2020, 39(8): 1271-1276.
doi: 10.13433/j.cnki.1003-8728.20190229
摘要:
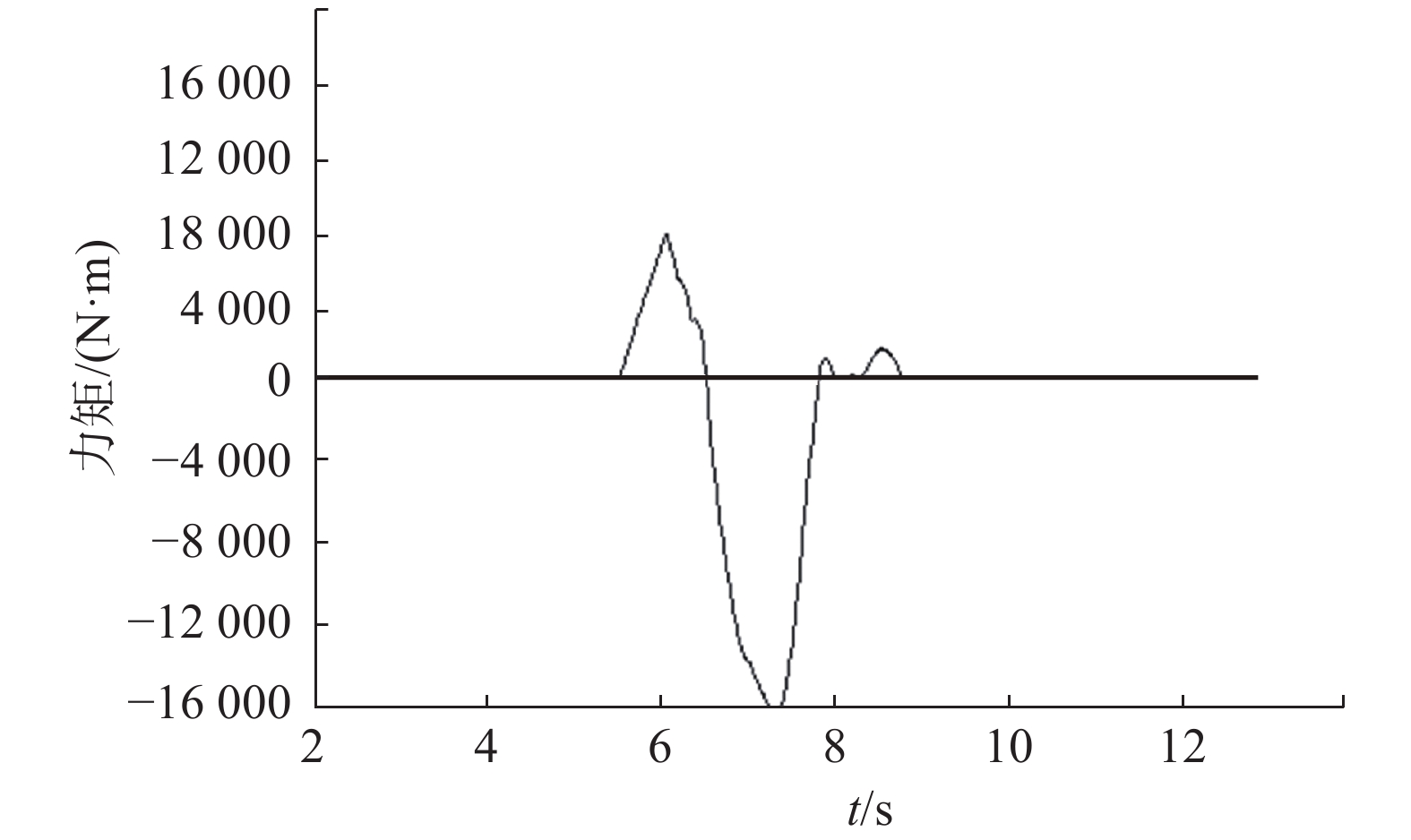
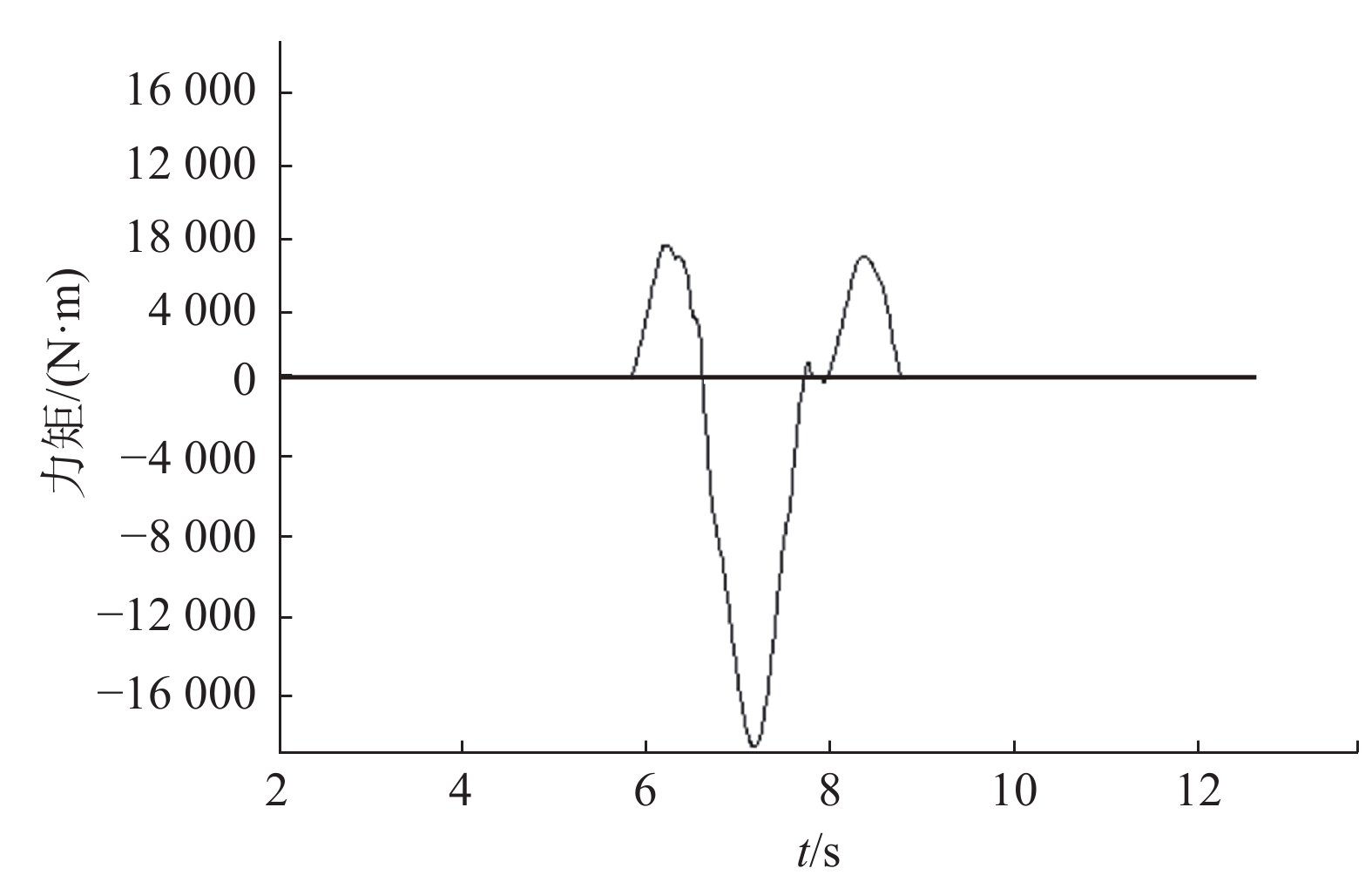
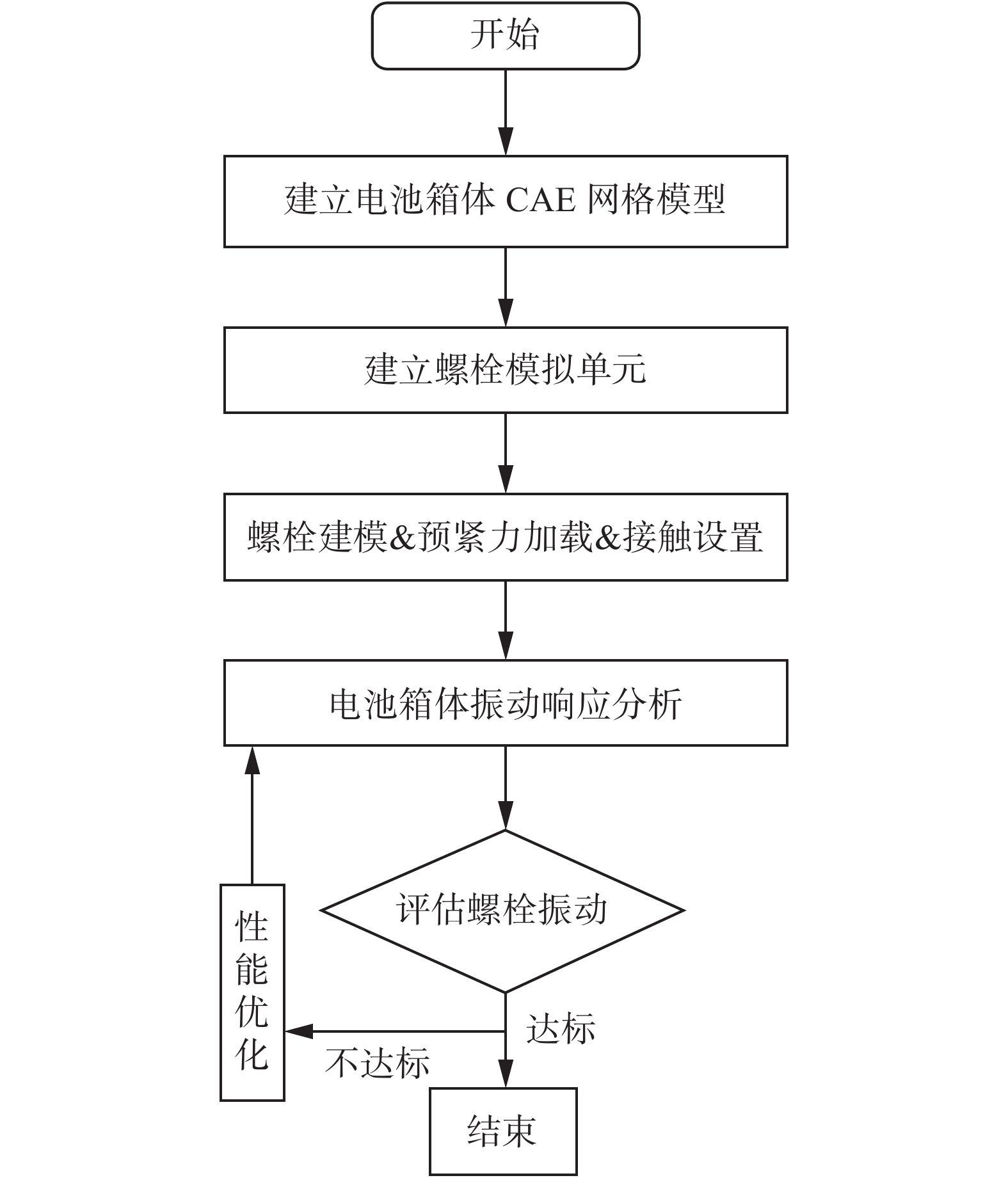
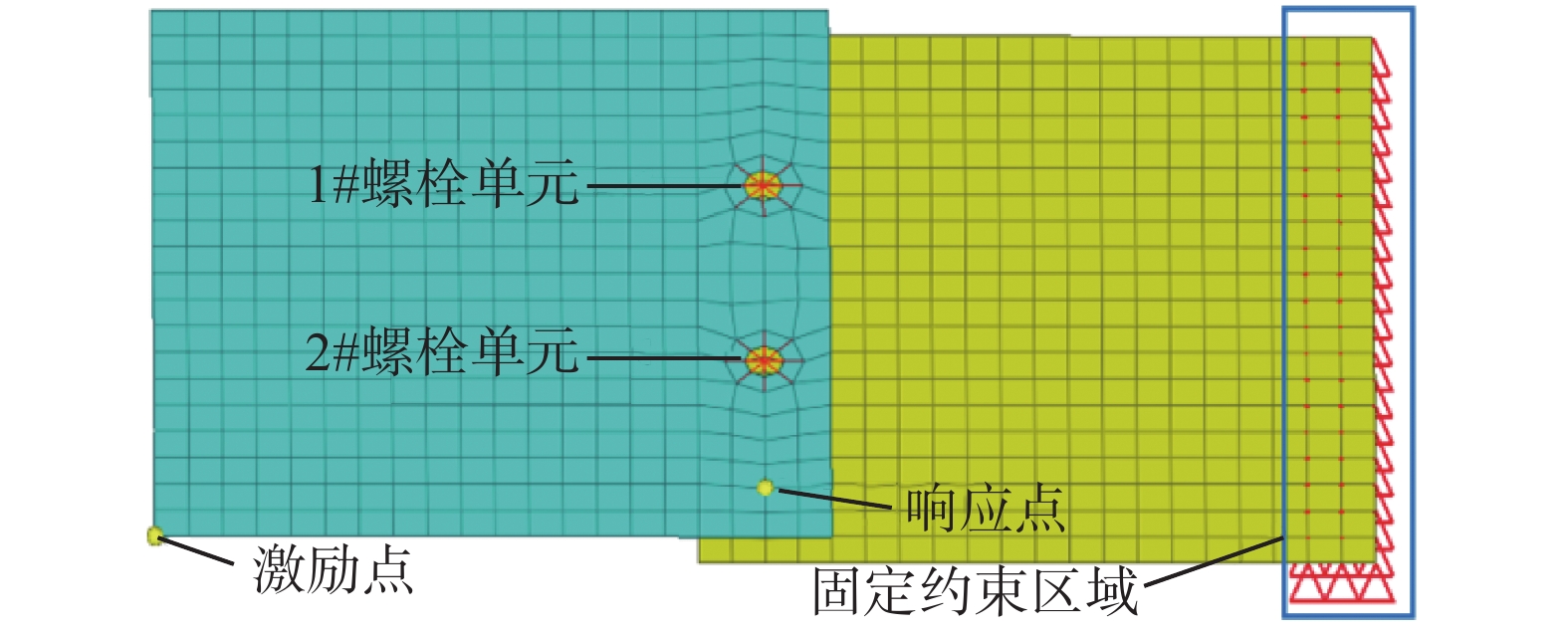
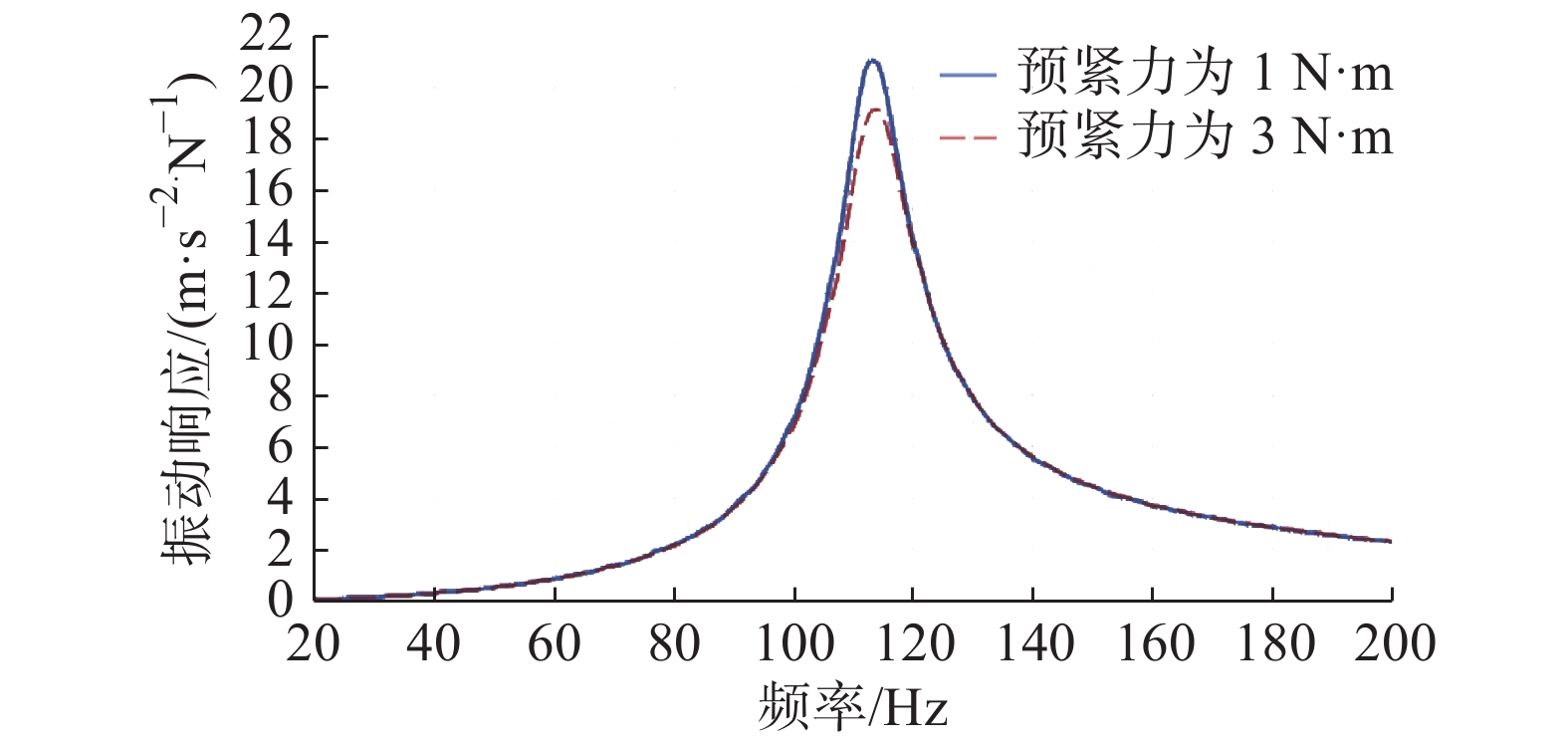
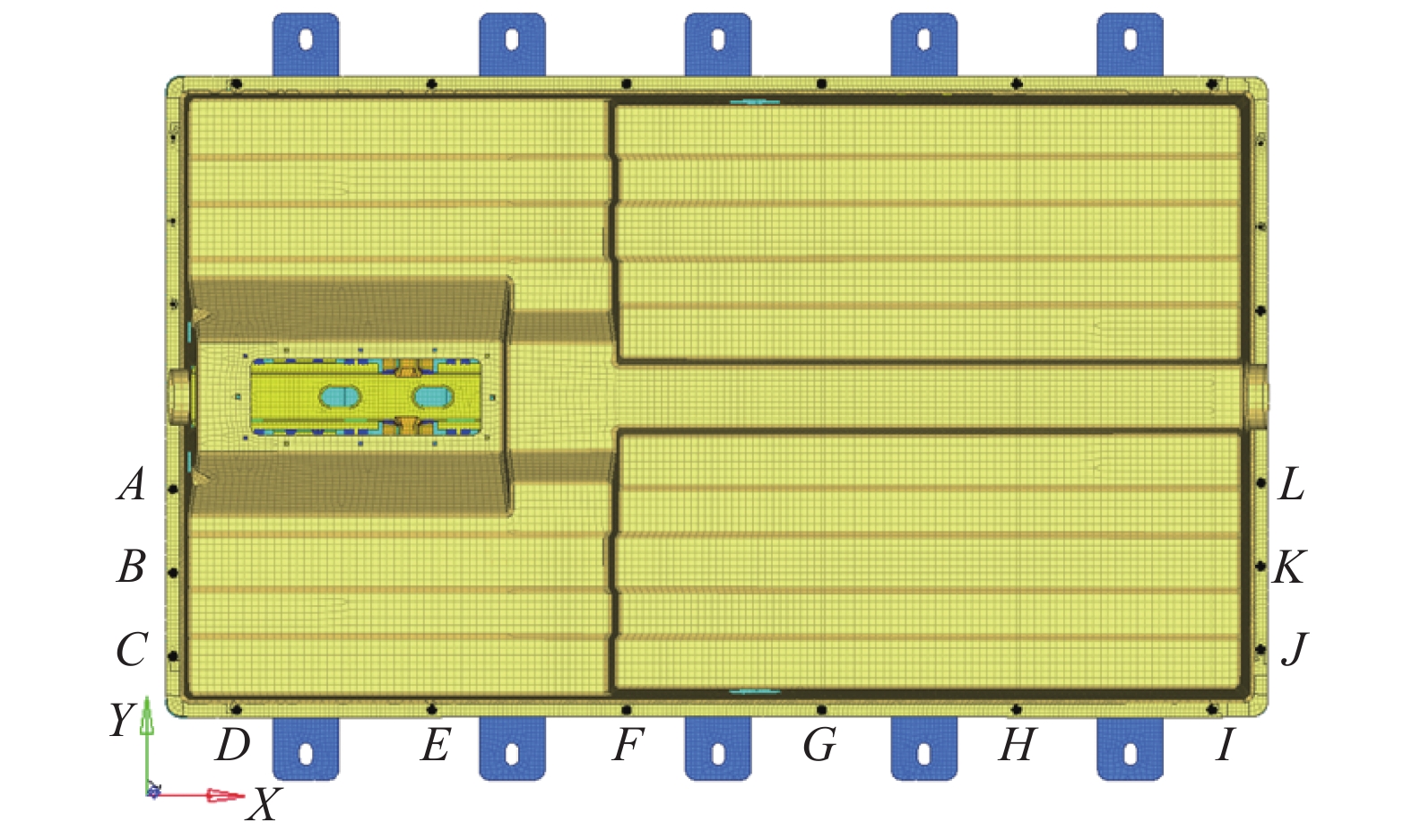
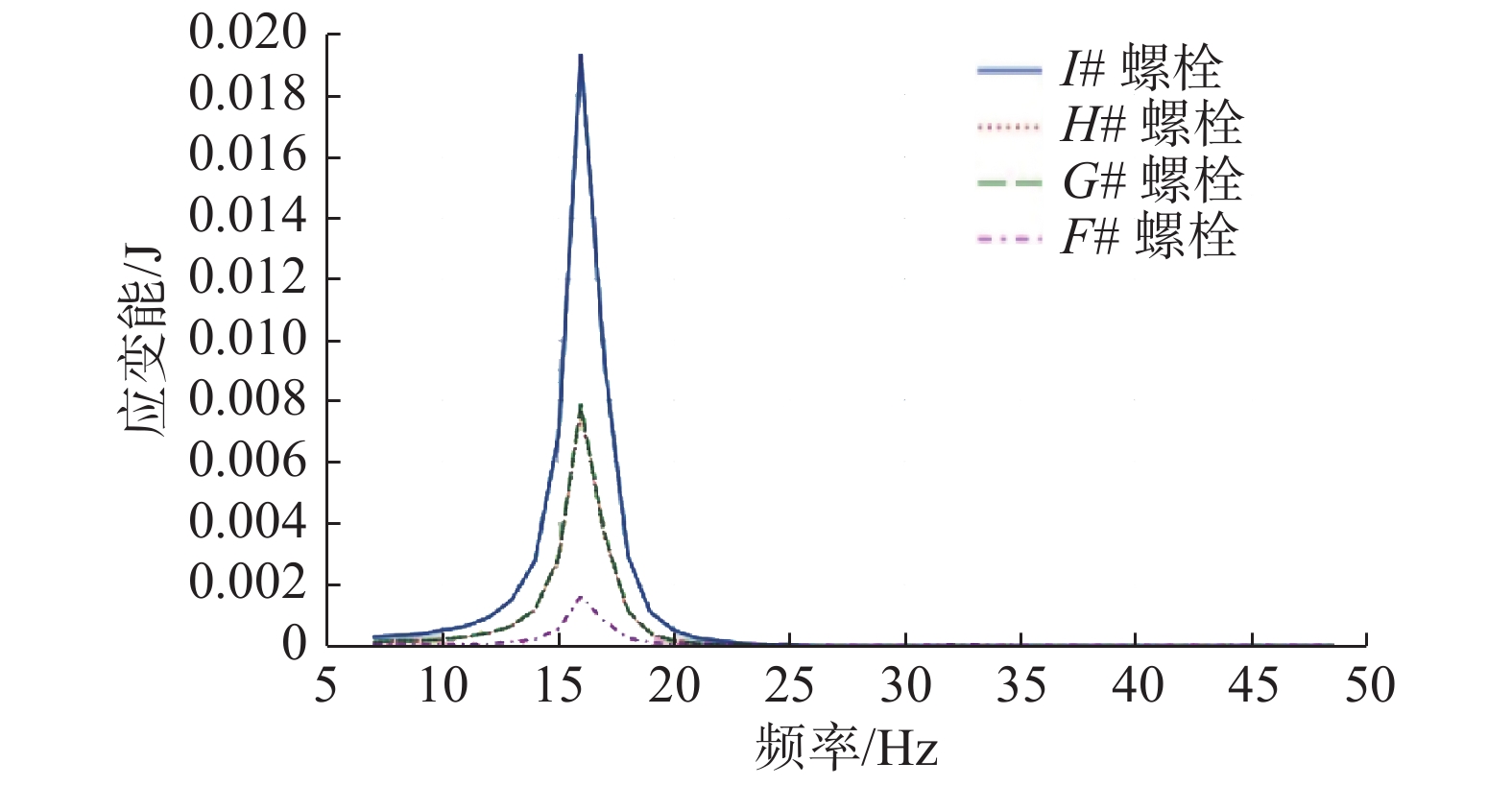
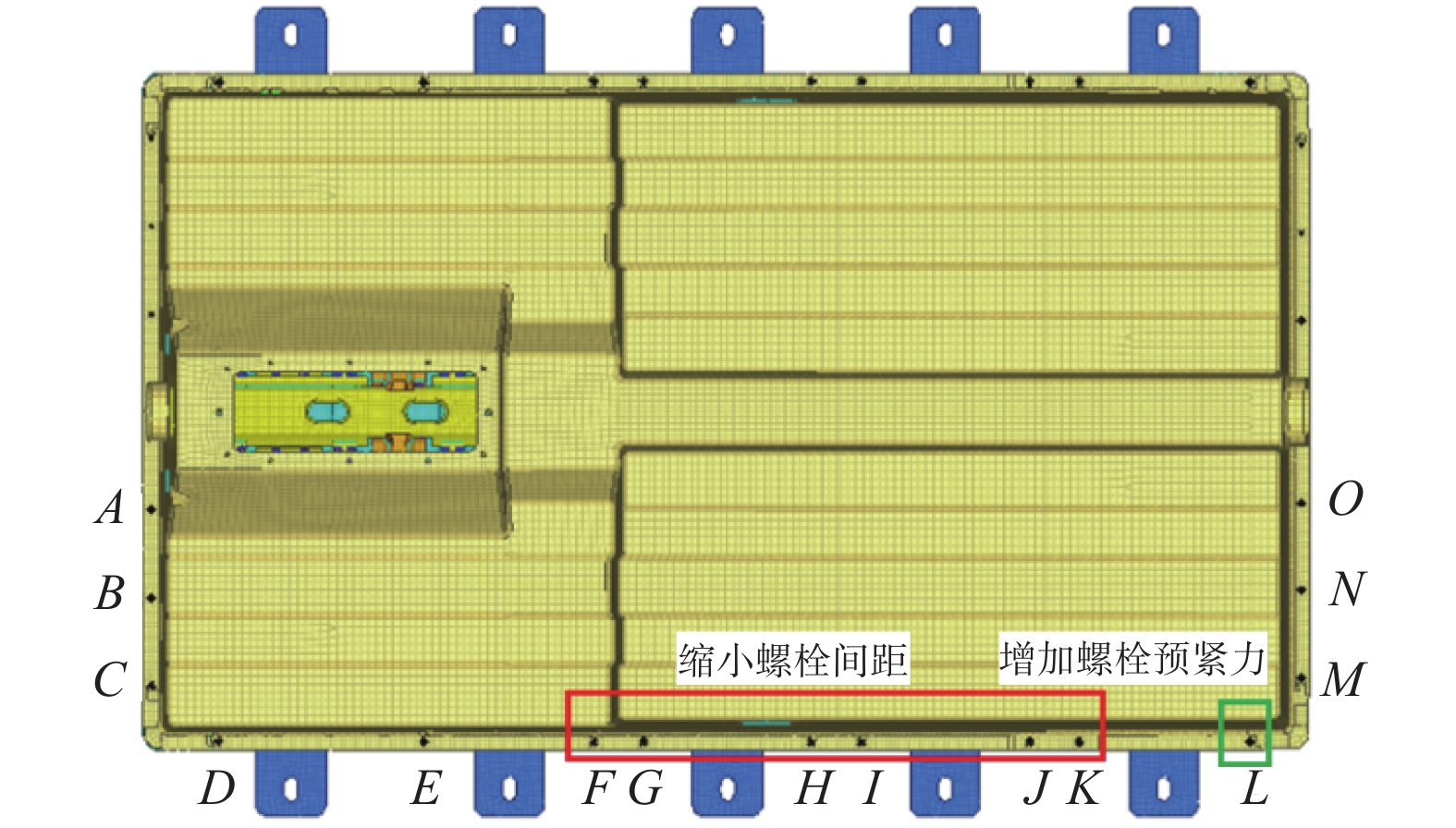
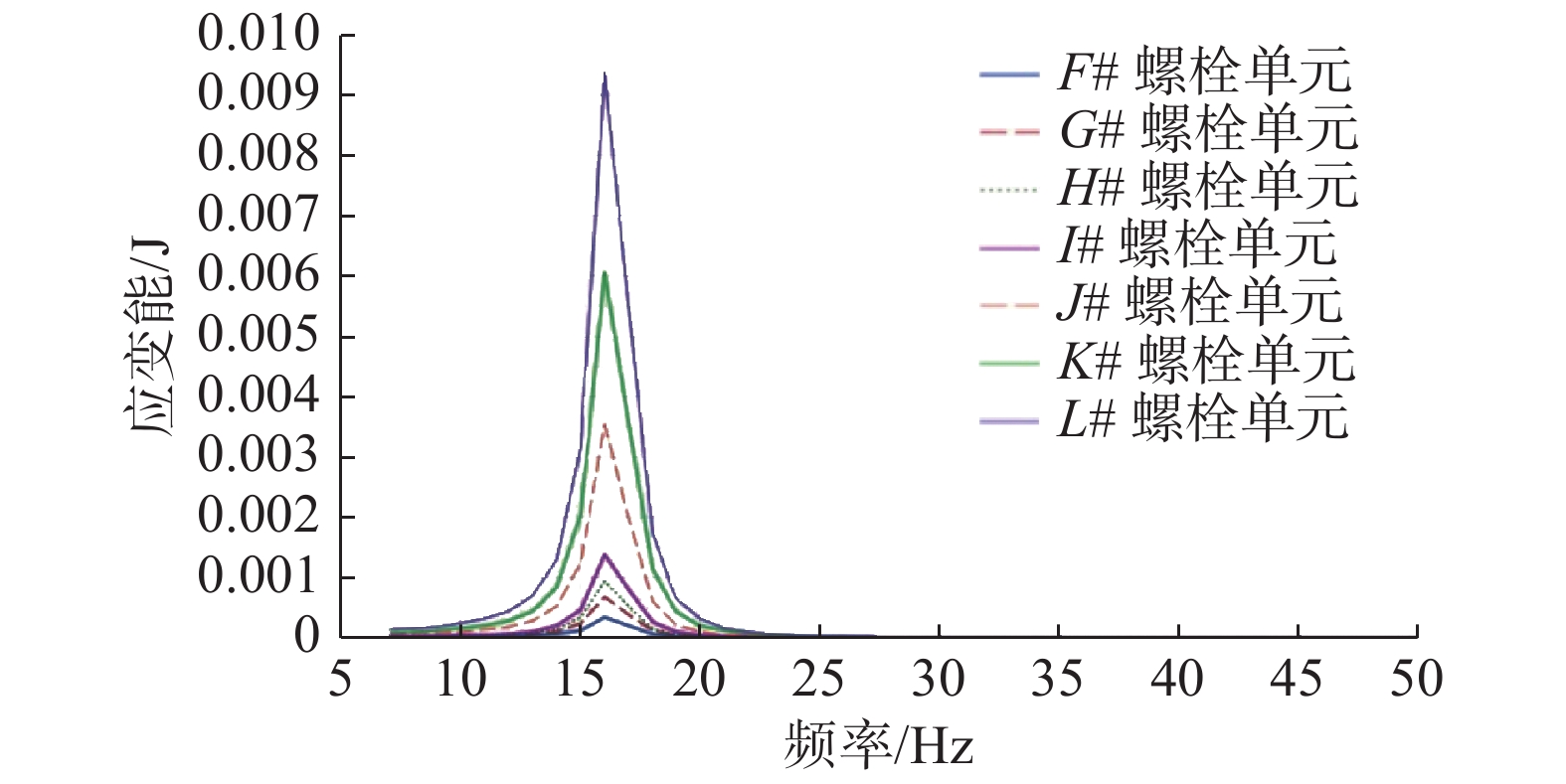
为提高电动汽车动力电池箱体振动环境下结构连接可靠性和完好性,建立了一套完整的螺栓振动松弛仿真评价及控制流程。首先采用试验测试与仿真模拟结合的方法,建立了螺栓动态响应仿真分析高精度计算模型。然后以谐波失真度评价结果作为参照,提出将螺杆单元的应变能响应均方根值作为螺栓振动松弛评估参数。最后参照国标要求,对某电池箱体螺栓振动松弛性能进行了评价,并通过优化螺栓间距和预紧力提高了电池箱体螺栓连接可靠性。上述研究成果可作为电池箱体开发前期一种有效的安全性能预测评估手段。
为提高电动汽车动力电池箱体振动环境下结构连接可靠性和完好性,建立了一套完整的螺栓振动松弛仿真评价及控制流程。首先采用试验测试与仿真模拟结合的方法,建立了螺栓动态响应仿真分析高精度计算模型。然后以谐波失真度评价结果作为参照,提出将螺杆单元的应变能响应均方根值作为螺栓振动松弛评估参数。最后参照国标要求,对某电池箱体螺栓振动松弛性能进行了评价,并通过优化螺栓间距和预紧力提高了电池箱体螺栓连接可靠性。上述研究成果可作为电池箱体开发前期一种有效的安全性能预测评估手段。




2020, 39(8): 1277-1282.
doi: 10.13433/j.cnki.1003-8728.20190263
摘要:
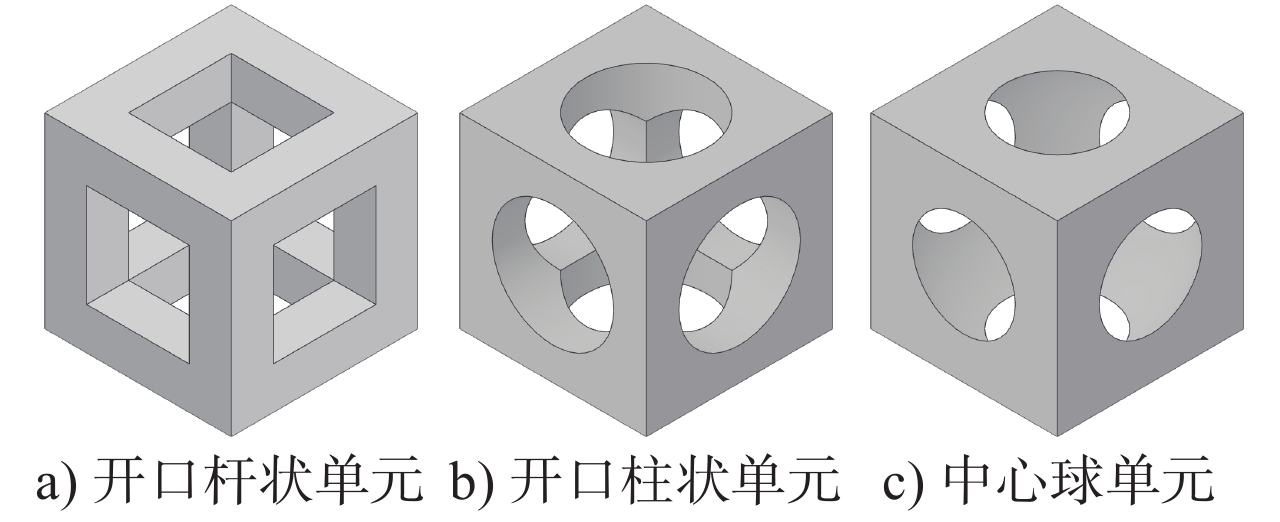
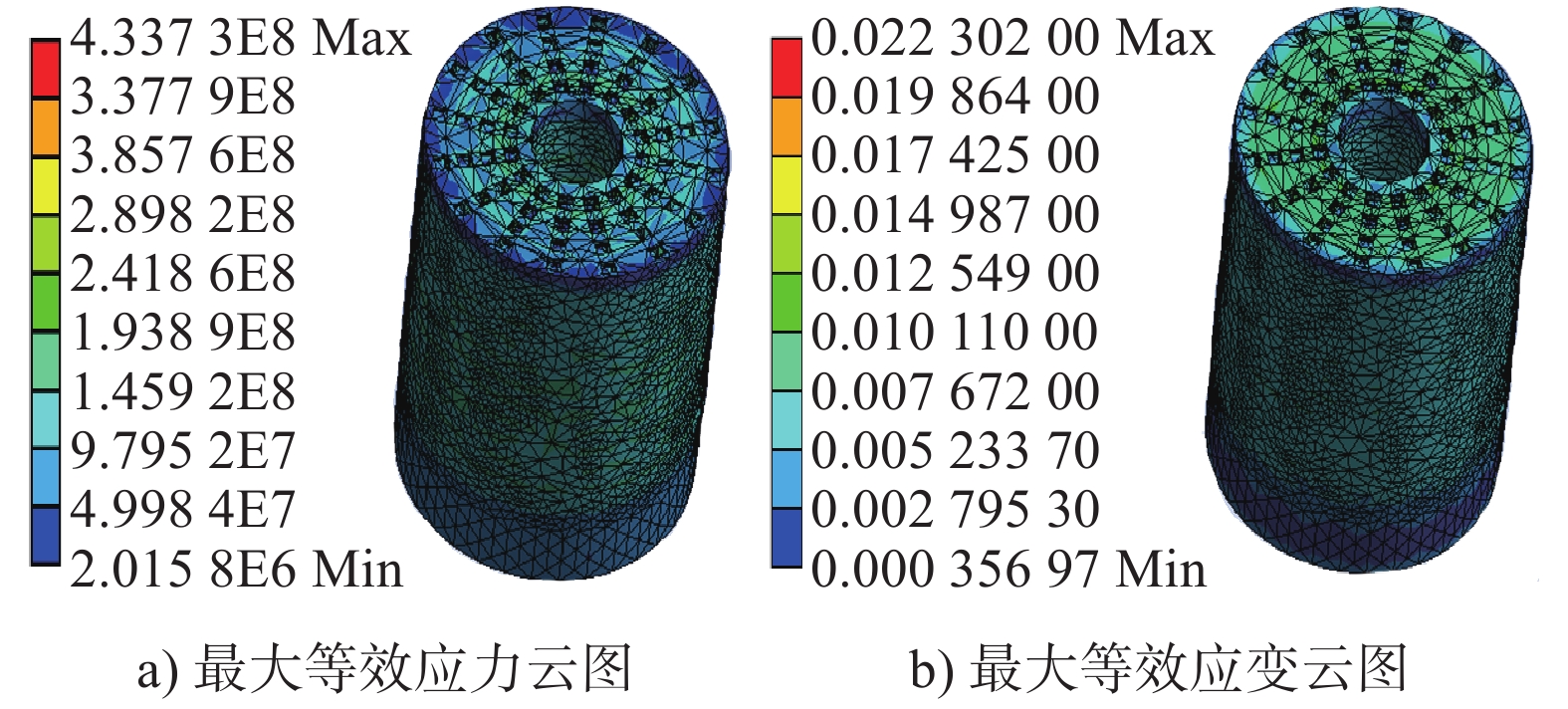
为解决钛合金骨仿生骨植入体弹性模量与人骨弹性模量不匹配的问题,采用多孔结构的钛合金骨植入体使其与自体骨的力学性能相适应。根据骨骼部位密度不同力学参数不同的特点,设计了开口杆状单元、开口柱状单元、中心球单元的微孔单元结构,并在不同的结构尺寸下得到11种模型。对这11种模型进行静力学仿真,得到受轴向压缩载荷时骨植入体结构的最大等效应力和应变分布,以及弹性模量数据;采用SLM技术将TC4钛合金粉末加工成试样,做压缩和三点弯曲试验。结果表明,开口杆状单元适用于具有较高的弹性模量抗弯强度的骨骼重建,开口柱状单元适用于弹性模量范围较大的骨骼重建,而中心球单元适合弹性模量较低且变化范围较小的骨骼重建。
为解决钛合金骨仿生骨植入体弹性模量与人骨弹性模量不匹配的问题,采用多孔结构的钛合金骨植入体使其与自体骨的力学性能相适应。根据骨骼部位密度不同力学参数不同的特点,设计了开口杆状单元、开口柱状单元、中心球单元的微孔单元结构,并在不同的结构尺寸下得到11种模型。对这11种模型进行静力学仿真,得到受轴向压缩载荷时骨植入体结构的最大等效应力和应变分布,以及弹性模量数据;采用SLM技术将TC4钛合金粉末加工成试样,做压缩和三点弯曲试验。结果表明,开口杆状单元适用于具有较高的弹性模量抗弯强度的骨骼重建,开口柱状单元适用于弹性模量范围较大的骨骼重建,而中心球单元适合弹性模量较低且变化范围较小的骨骼重建。




2020, 39(8): 1283-1287.
doi: 10.13433/j.cnki.1003-8728.20190259
摘要:
在两种不同海域的海洋环境下对7B04铝合金铆接结构试验件进行自然曝晒,通过对试验件一年后腐蚀情况的对比分析,研究了这两种海洋服役环境对7B04铝合金的腐蚀影响。结果表明:两种海域的海洋环境对7B04铝合金铆接结构试验件都产生了明显的腐蚀行为,疲劳性能均有不同程度的下降,涂层对海洋环境能够起到较好的防护作用;同时两种海洋环境对7B04铝合金腐蚀行为的影响也表现出明显的差异性,必须对更严酷的服役环境做好针对性的腐蚀防护工作。
在两种不同海域的海洋环境下对7B04铝合金铆接结构试验件进行自然曝晒,通过对试验件一年后腐蚀情况的对比分析,研究了这两种海洋服役环境对7B04铝合金的腐蚀影响。结果表明:两种海域的海洋环境对7B04铝合金铆接结构试验件都产生了明显的腐蚀行为,疲劳性能均有不同程度的下降,涂层对海洋环境能够起到较好的防护作用;同时两种海洋环境对7B04铝合金腐蚀行为的影响也表现出明显的差异性,必须对更严酷的服役环境做好针对性的腐蚀防护工作。


2020, 39(8): 1295-1298.
doi: 10.13433/j.cnki.1003-8728.20200025
摘要:
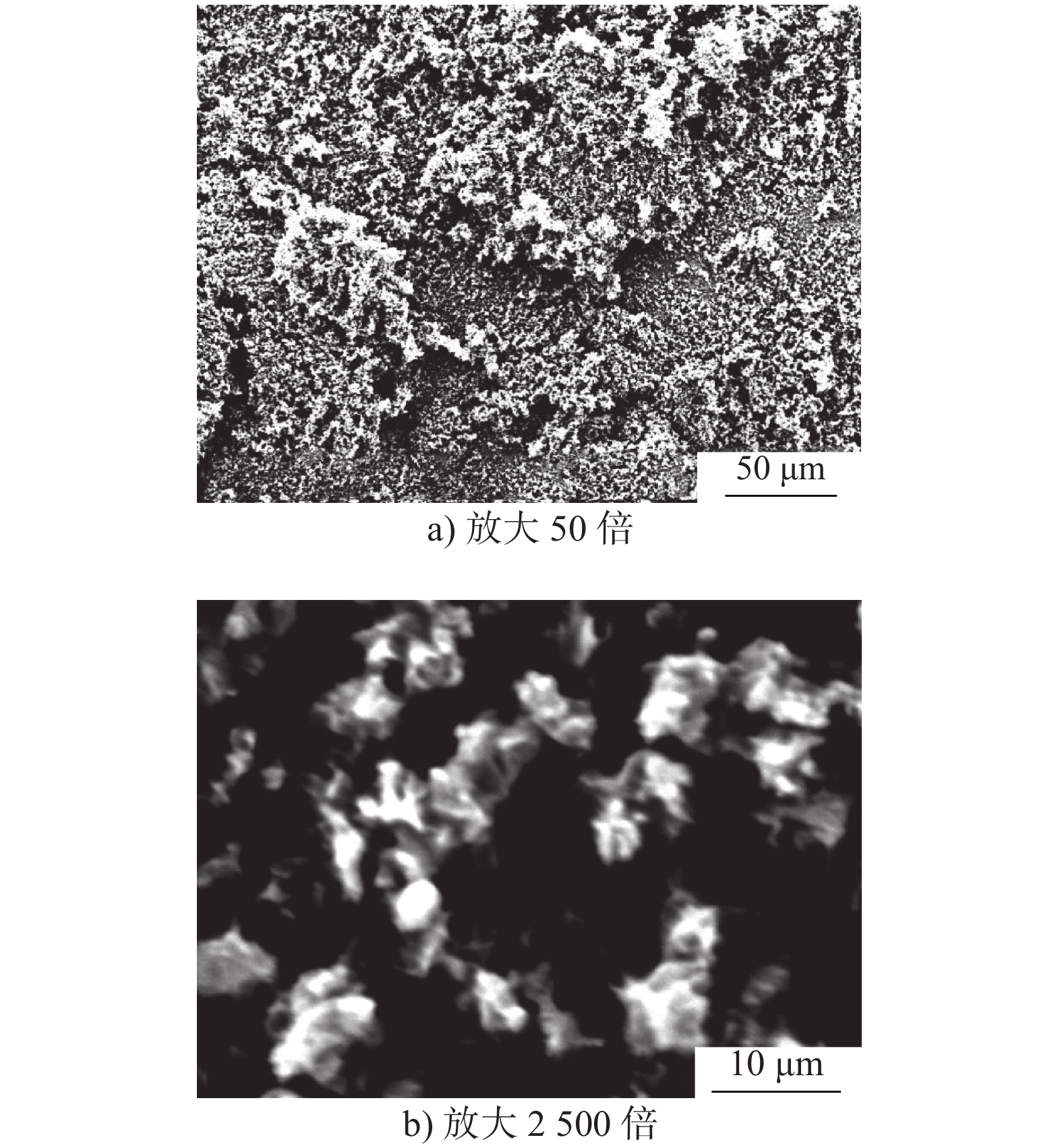
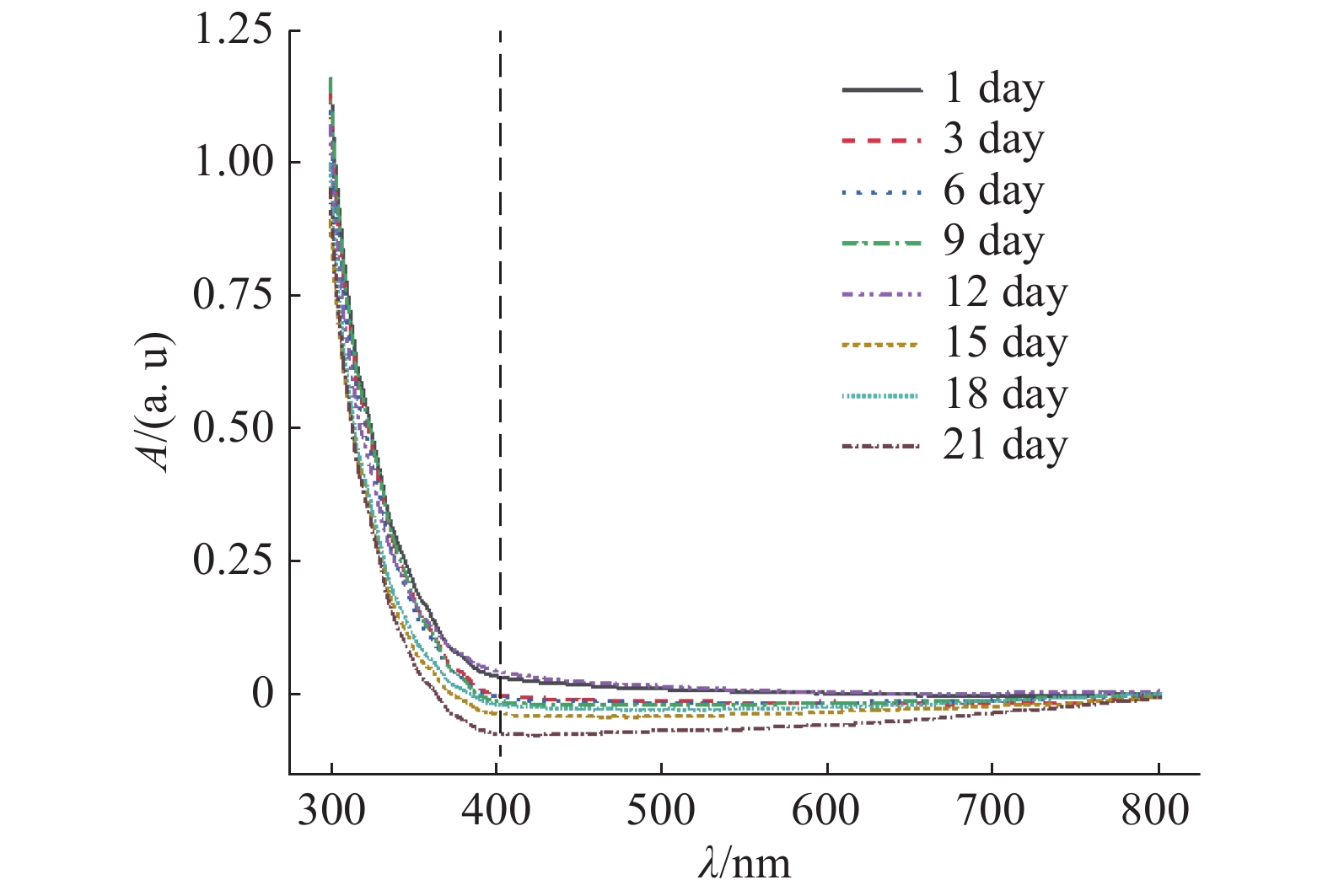
采用化学氧化还原法,得到的石墨烯薄片,用油酸、硬脂酸对其进行改性,通过分光光度法考察石墨烯作为润滑油添加剂的分散稳定性。使用四球摩擦磨损试验机考察了石墨烯分散液的摩擦学性能,利用扫描电镜和能谱仪对摩擦表面的微观形貌和组成结构进行了表征分析。结果表明:对石墨烯改性处理是将其均匀分散到润滑油中的必要条件,改性后的石墨烯分散液表现出良好的抗磨减摩性能,平均摩擦系数为0.078,降低约12%,磨斑直径也有明显下降,且实验验证了磨损表面有石墨烯颗粒堆积现象。
采用化学氧化还原法,得到的石墨烯薄片,用油酸、硬脂酸对其进行改性,通过分光光度法考察石墨烯作为润滑油添加剂的分散稳定性。使用四球摩擦磨损试验机考察了石墨烯分散液的摩擦学性能,利用扫描电镜和能谱仪对摩擦表面的微观形貌和组成结构进行了表征分析。结果表明:对石墨烯改性处理是将其均匀分散到润滑油中的必要条件,改性后的石墨烯分散液表现出良好的抗磨减摩性能,平均摩擦系数为0.078,降低约12%,磨斑直径也有明显下降,且实验验证了磨损表面有石墨烯颗粒堆积现象。


2020, 39(8): 1299-1306.
doi: 10.13433/j.cnki.1003-8728.20200160
摘要:
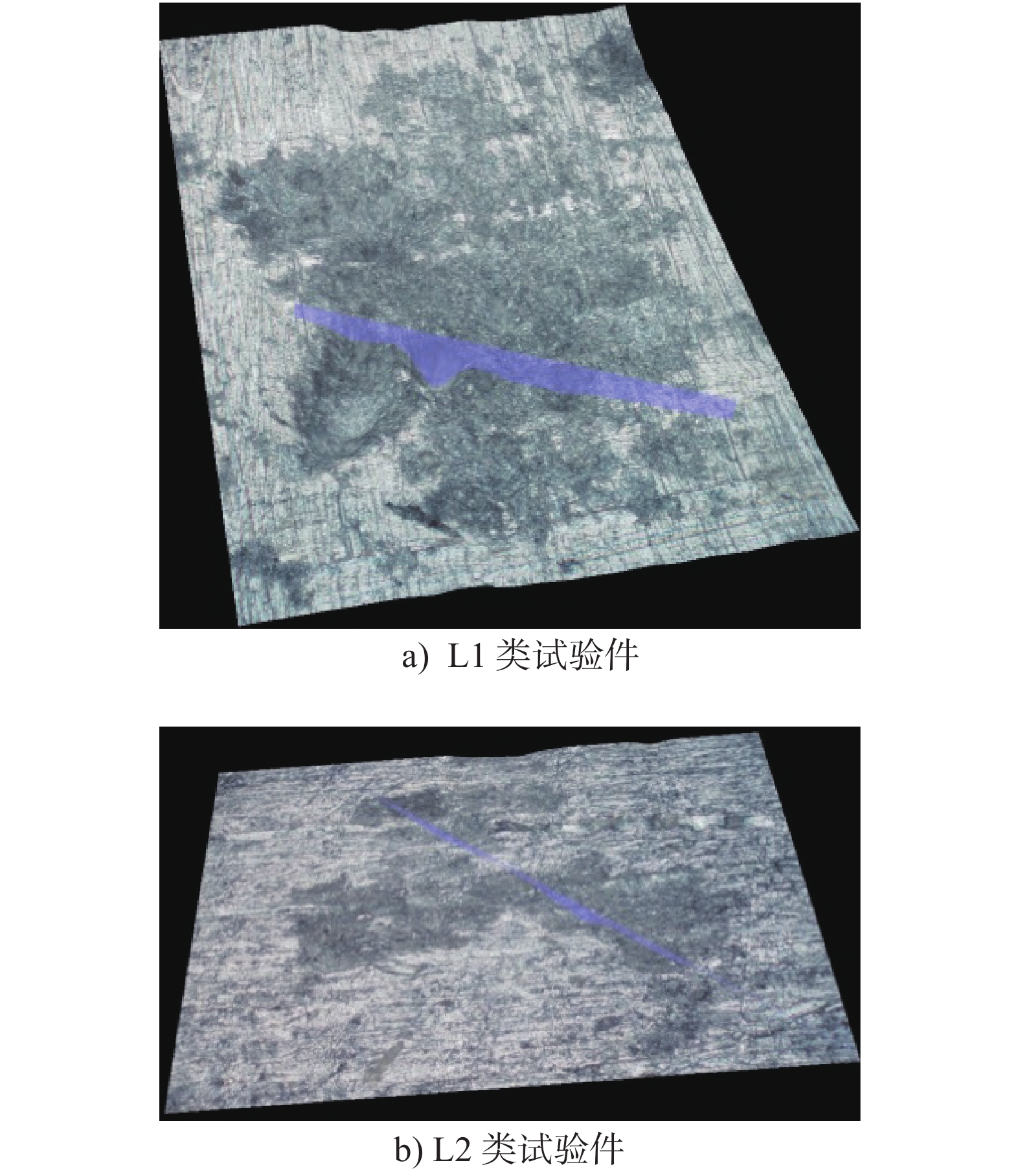
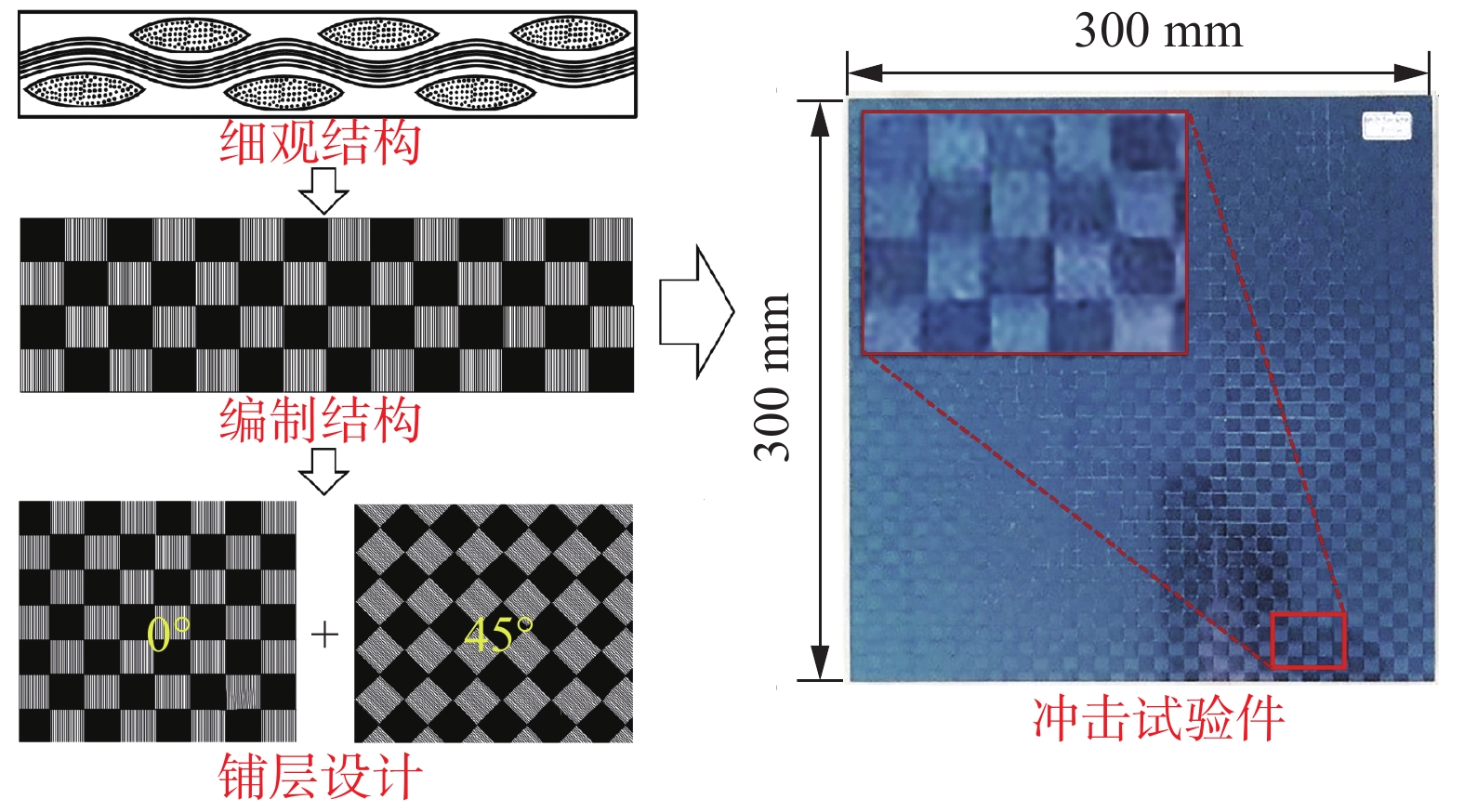
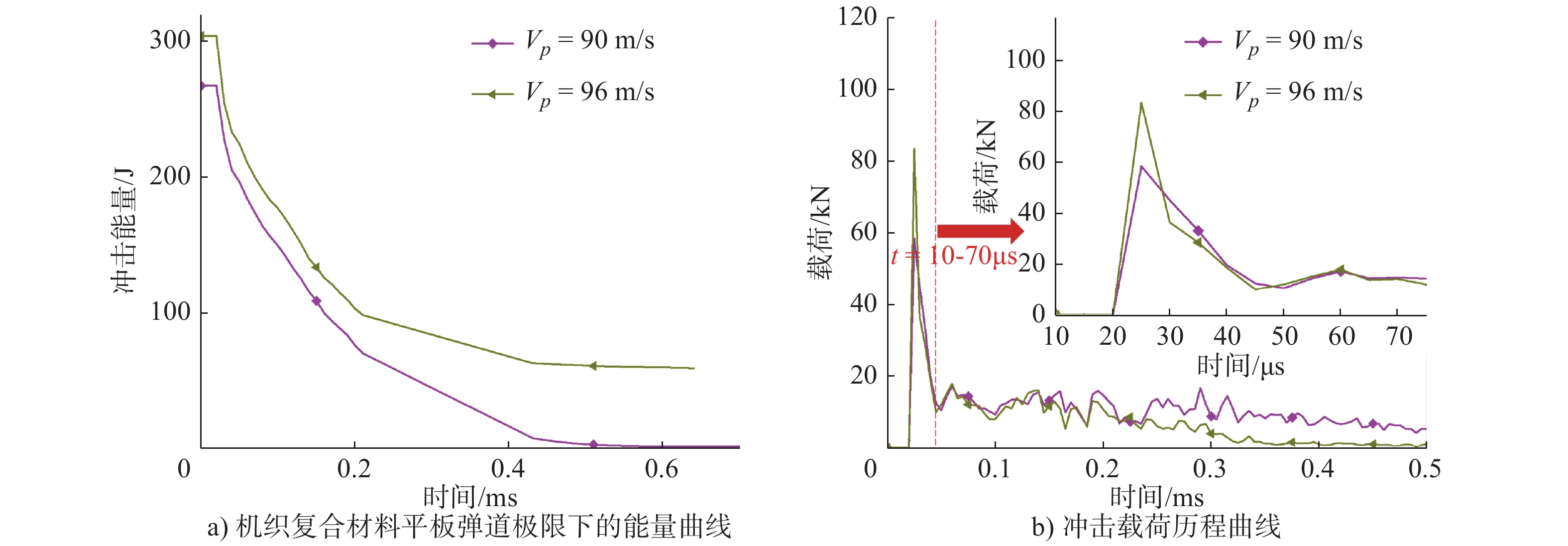
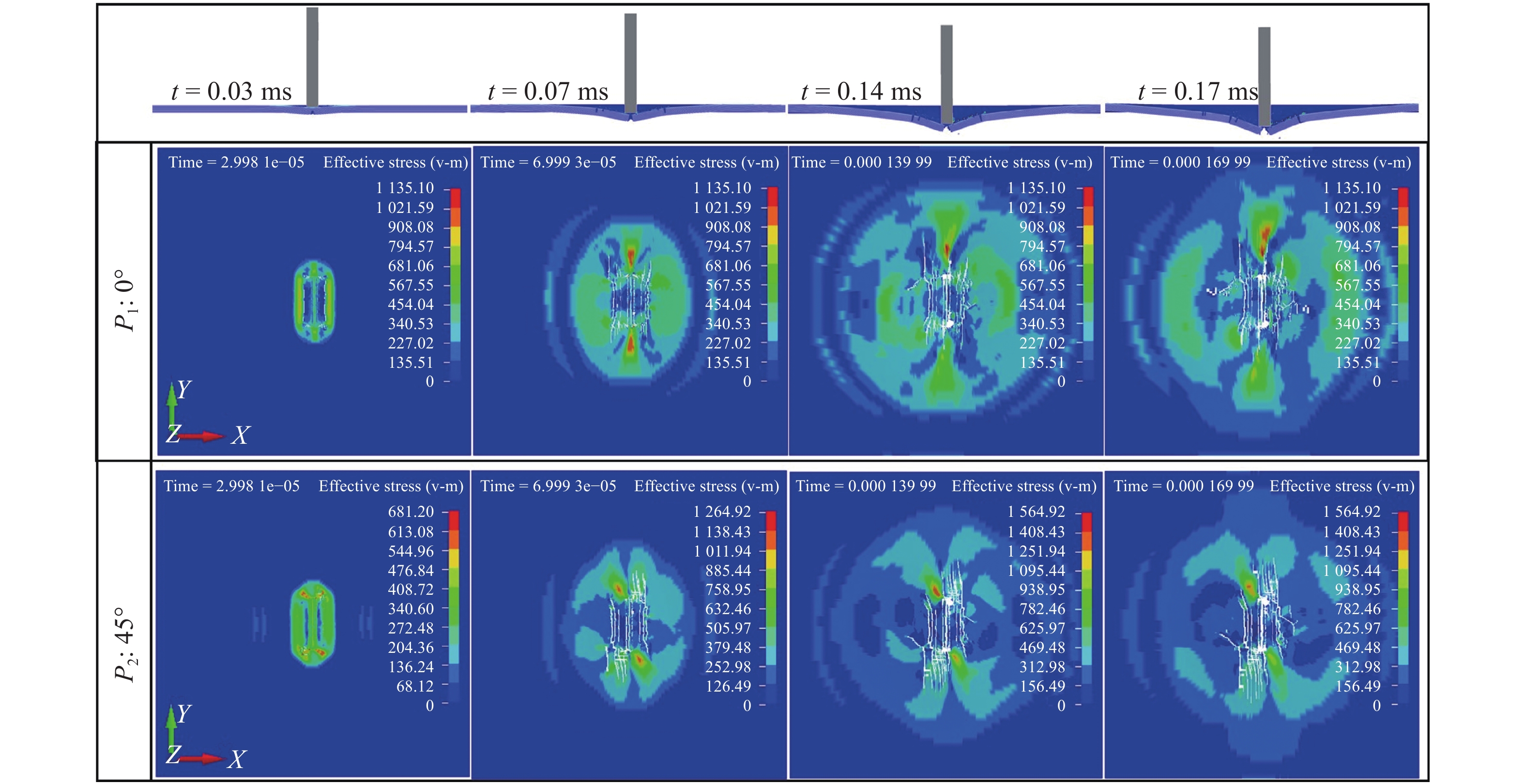
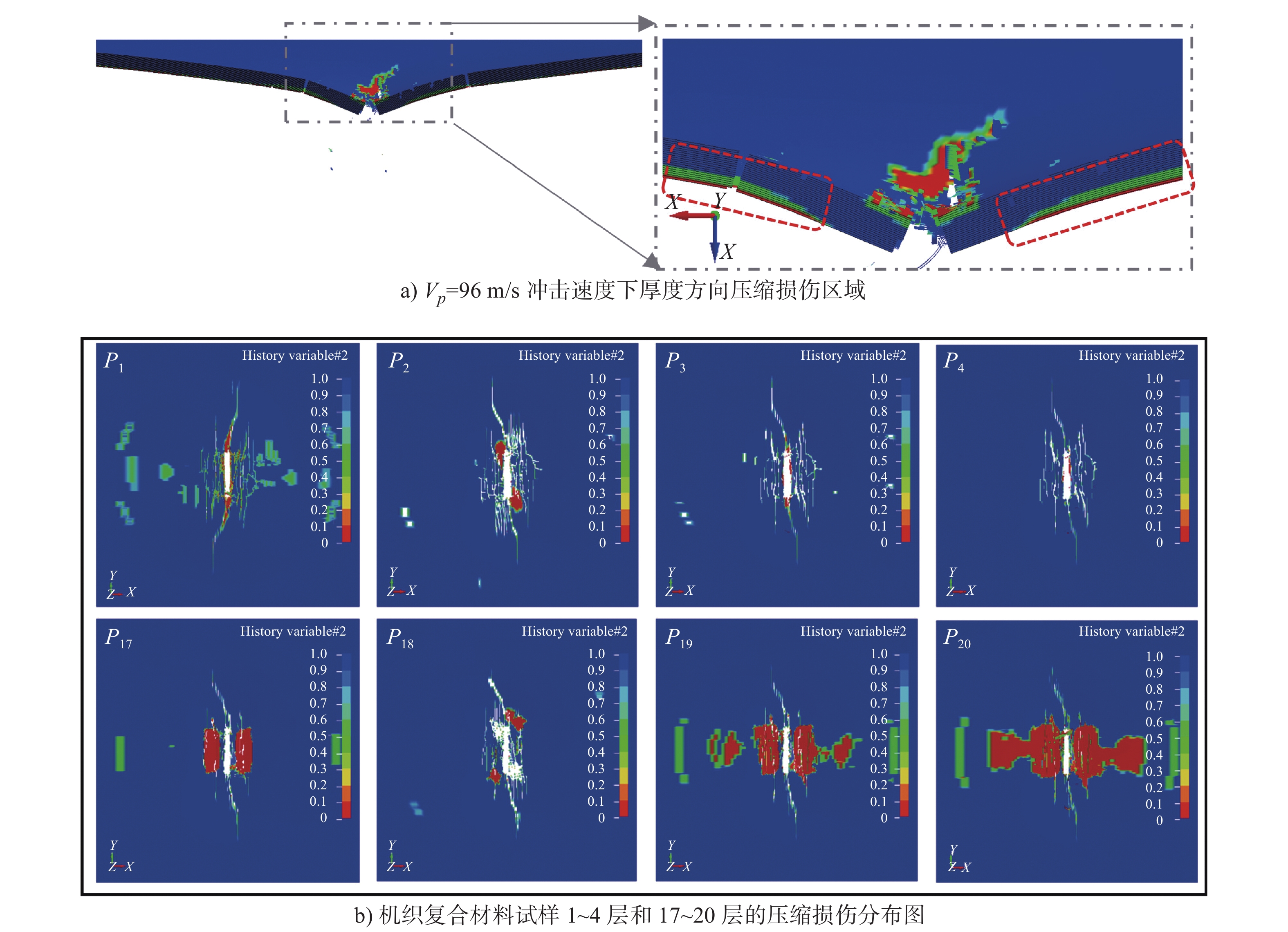
本文基于数值仿真方法研究了展宽平纹机织复合材料平板在金属破片高速冲击载荷作用下的失效行为。在显示动力学求解软件LS-DYNA®中建立了平纹机织复合材料的宏观精细化有限元模型,通过多尺度分析计算得到单层机织复合材料的等效力学性能,采用经典的Chang-Chang失效准则评估复合材料靶板的冲击损伤和失效行为。通过平板高速冲击试验确定了材料在特定冲击条件下的临界穿透速度范围和典型破坏模式,并与数值仿真结果对比,验证了数值模型的准确性。在此基础上,采用所构建的冲击仿真模型研究了平纹机织复合材料在不同冲击速度(0.1 ~ 0.8 km/s)载荷下的侵彻失效特性。研究结果表明:展宽机织复合材料平板在承受高速冲击载荷过程中,中间层受压缩损伤区域较小,靠近边界层损伤区域较大;随着冲击速度的增加,机织复合材料平板受压缩损伤区域减小;在冲击速度为0.2 ~ 0.8 km/s下,平板吸收能量与破片冲击速度呈近线性关系。
本文基于数值仿真方法研究了展宽平纹机织复合材料平板在金属破片高速冲击载荷作用下的失效行为。在显示动力学求解软件LS-DYNA®中建立了平纹机织复合材料的宏观精细化有限元模型,通过多尺度分析计算得到单层机织复合材料的等效力学性能,采用经典的Chang-Chang失效准则评估复合材料靶板的冲击损伤和失效行为。通过平板高速冲击试验确定了材料在特定冲击条件下的临界穿透速度范围和典型破坏模式,并与数值仿真结果对比,验证了数值模型的准确性。在此基础上,采用所构建的冲击仿真模型研究了平纹机织复合材料在不同冲击速度(0.1 ~ 0.8 km/s)载荷下的侵彻失效特性。研究结果表明:展宽机织复合材料平板在承受高速冲击载荷过程中,中间层受压缩损伤区域较小,靠近边界层损伤区域较大;随着冲击速度的增加,机织复合材料平板受压缩损伤区域减小;在冲击速度为0.2 ~ 0.8 km/s下,平板吸收能量与破片冲击速度呈近线性关系。



2020, 39(8): 1307-1312.
doi: 10.13433/j.cnki.1003-8728.20190210
摘要:
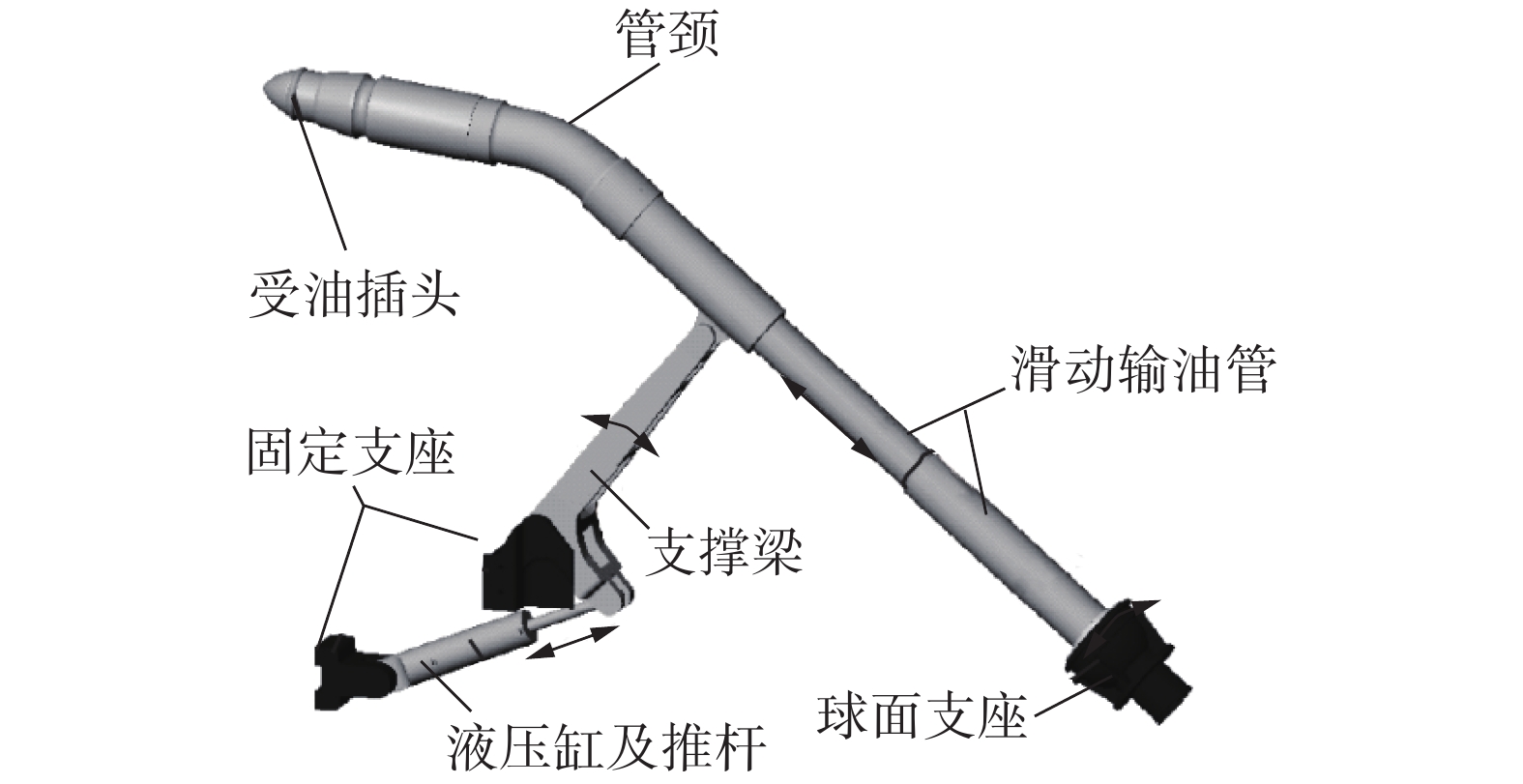
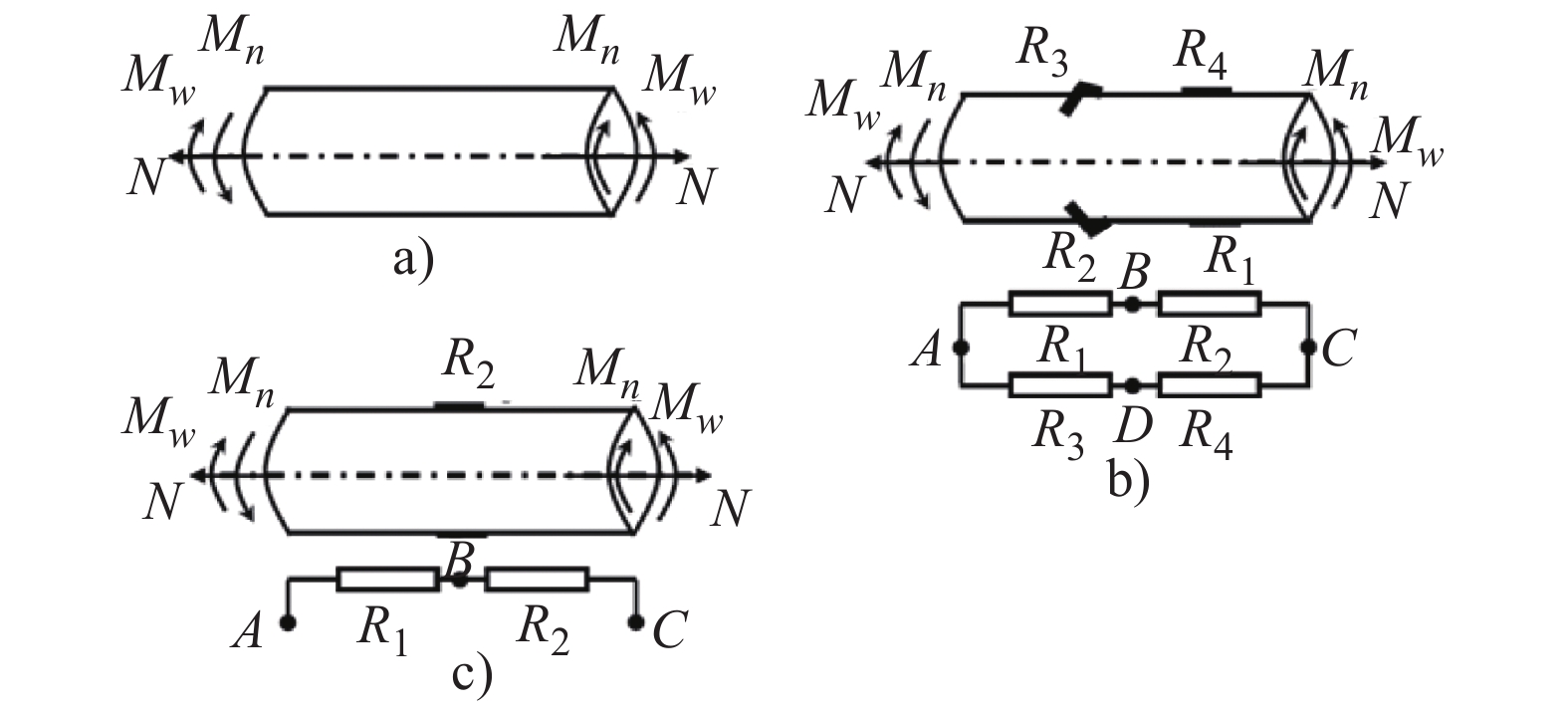
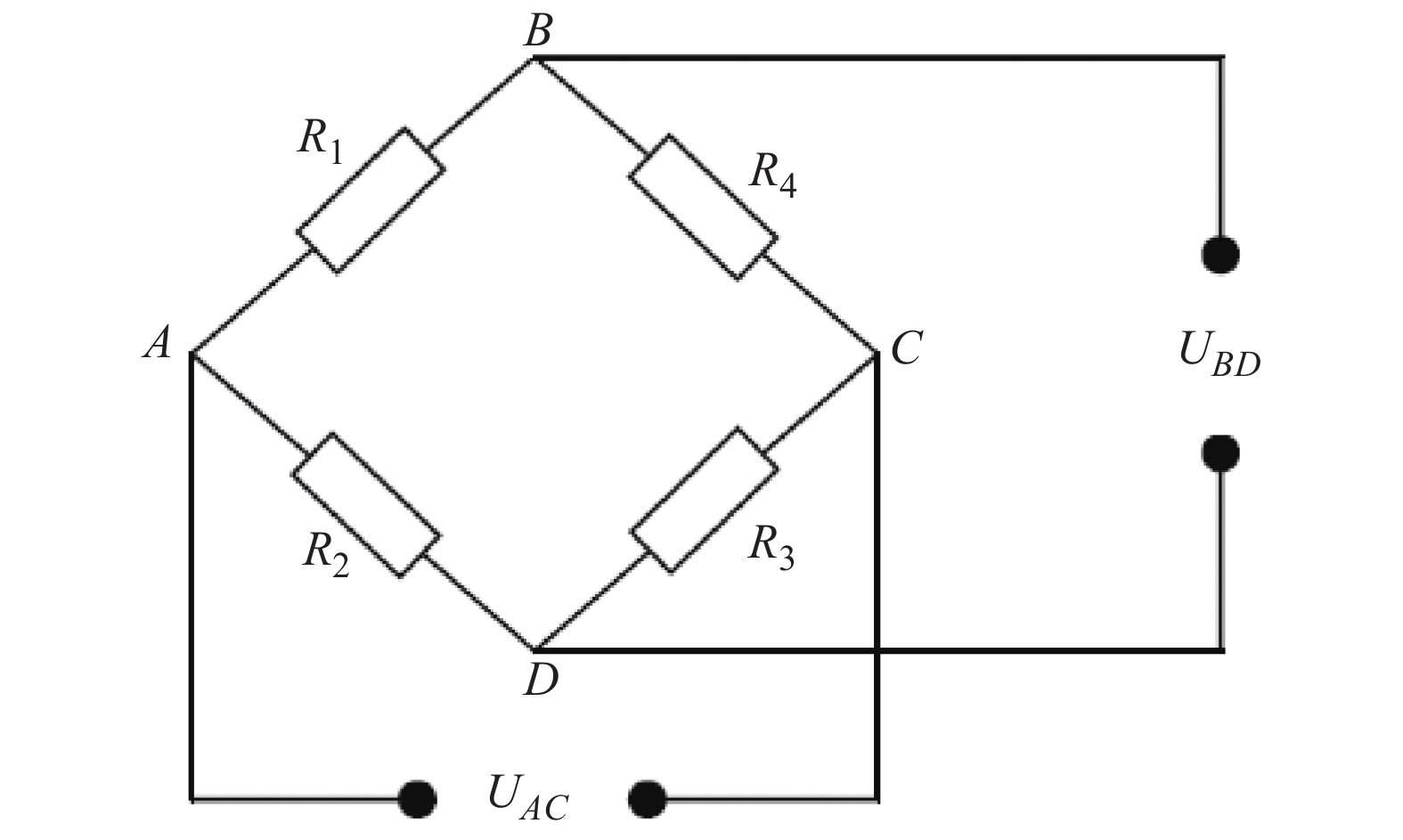
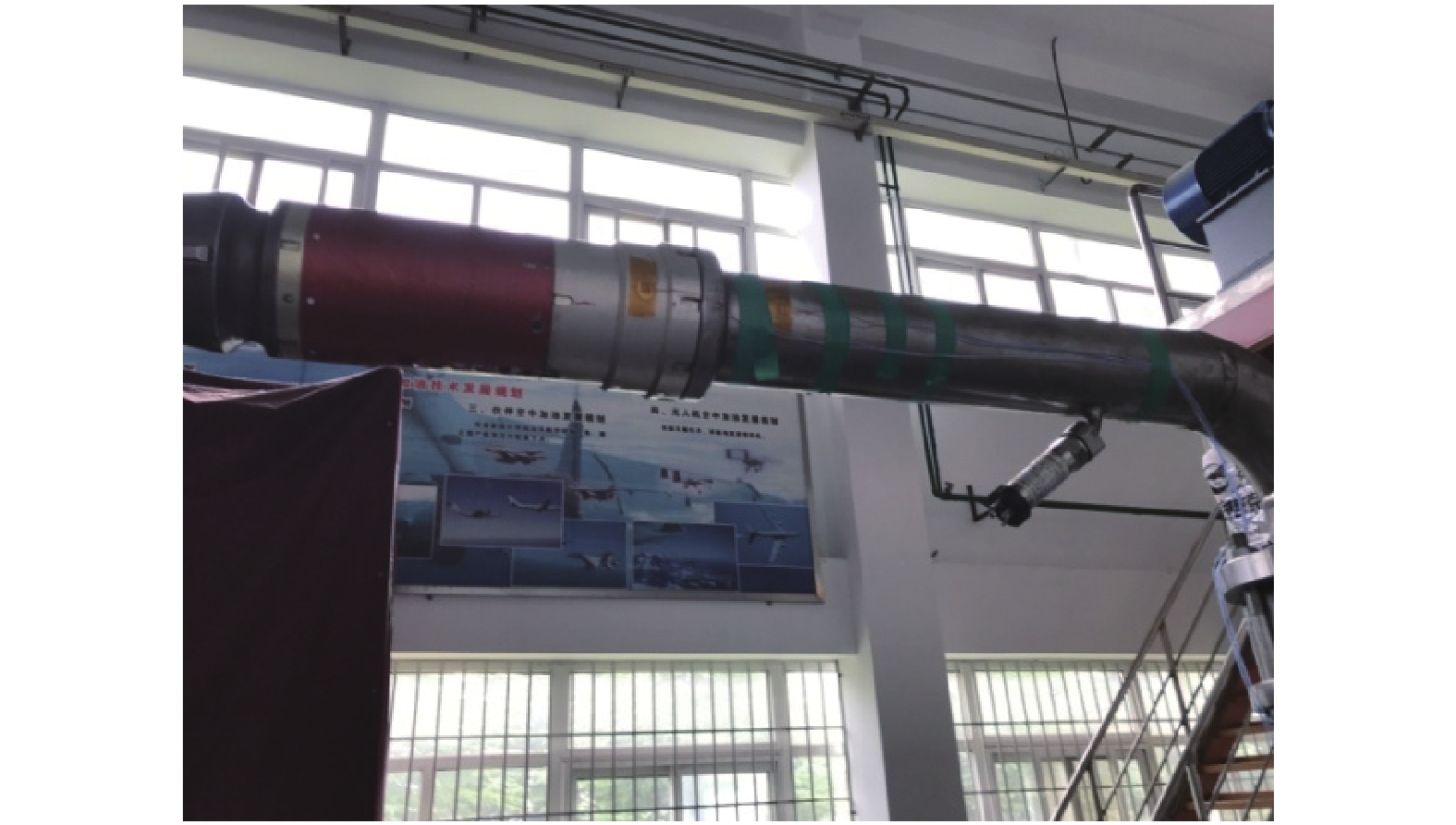
受油装置作为受油机的重要机构与加油设备建立输油通道,与加油设备对接过程中的载荷大小对于受油装置结构强度设计具有重要意义。本文根据受油装置结构形式,提出基于应变电测原理的受油装置对接载荷测量方法。在空中加油吊舱地面调试试验期间搭建可移动式测试系统,验证对接载荷测量思路及方法,获取了锥套与受油插头对接过程中受油管上的应变数据,分析了对接过程中的载荷变化规律,并结合受油管几何模型估算给出了对接过程中的轴向载荷大小,为后续空中加油过程对接载荷测量进行了原理及可行性验证。
受油装置作为受油机的重要机构与加油设备建立输油通道,与加油设备对接过程中的载荷大小对于受油装置结构强度设计具有重要意义。本文根据受油装置结构形式,提出基于应变电测原理的受油装置对接载荷测量方法。在空中加油吊舱地面调试试验期间搭建可移动式测试系统,验证对接载荷测量思路及方法,获取了锥套与受油插头对接过程中受油管上的应变数据,分析了对接过程中的载荷变化规律,并结合受油管几何模型估算给出了对接过程中的轴向载荷大小,为后续空中加油过程对接载荷测量进行了原理及可行性验证。