




Design and Stability Analysis of Flexible Joint of Rescue Robot
-
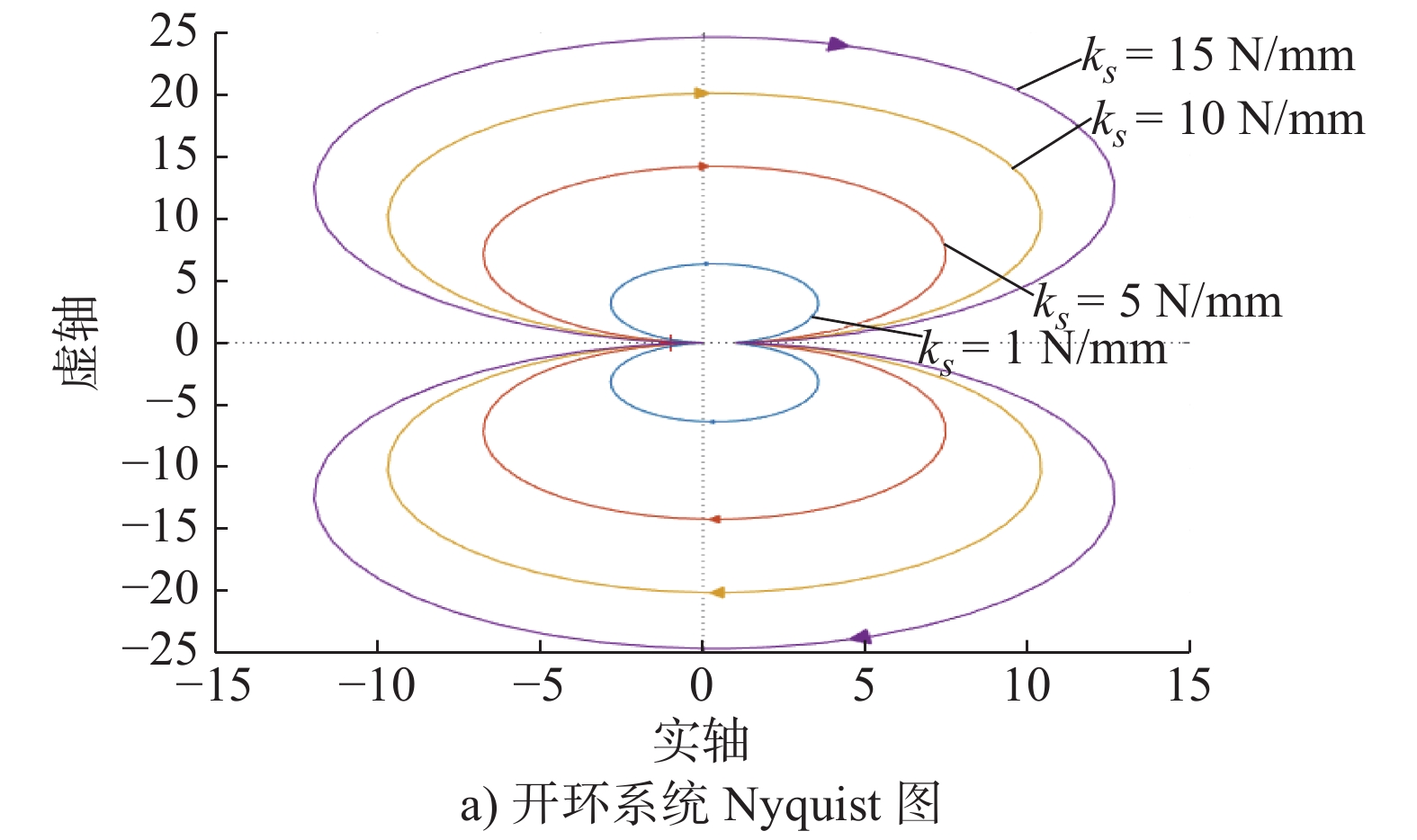
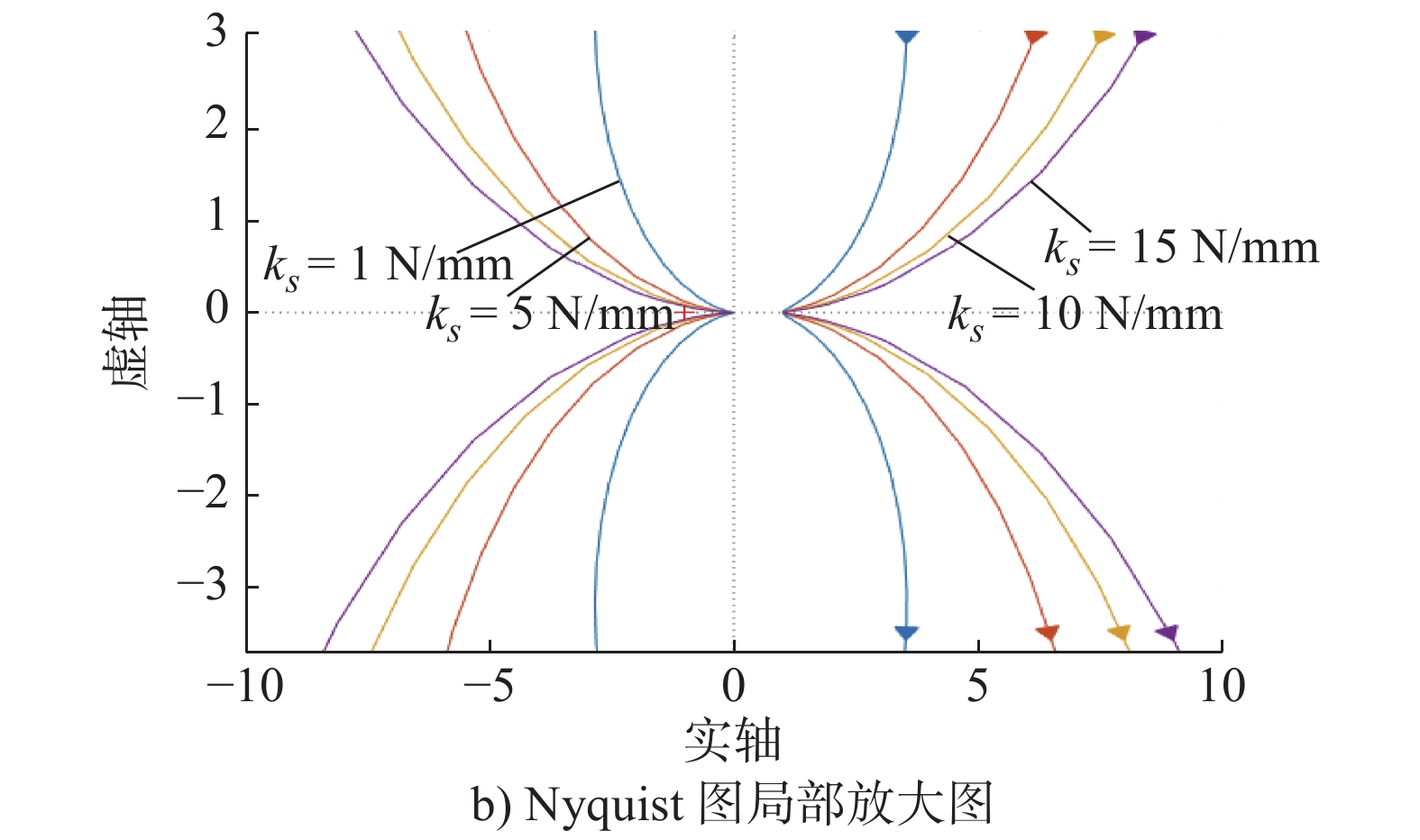
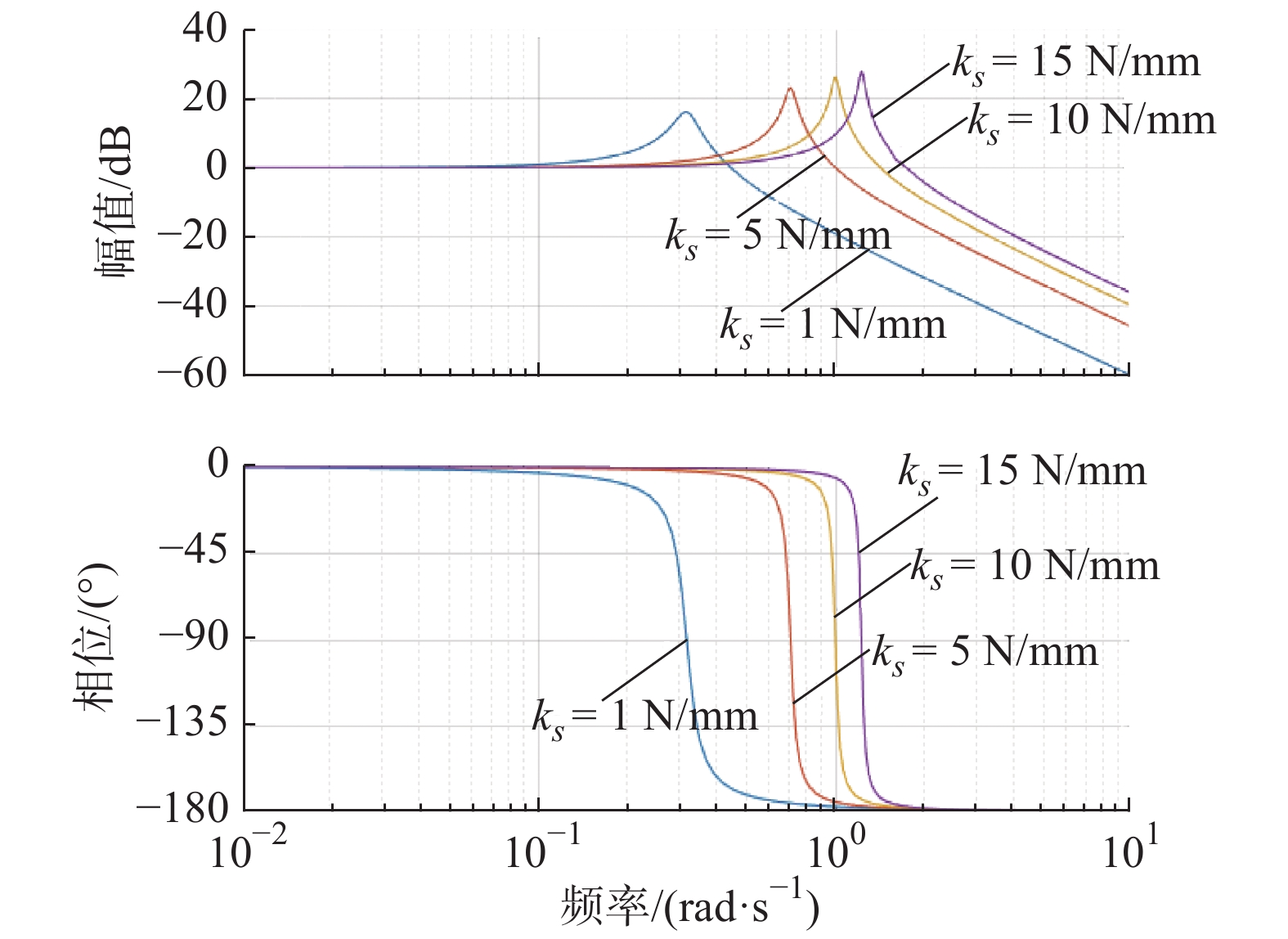
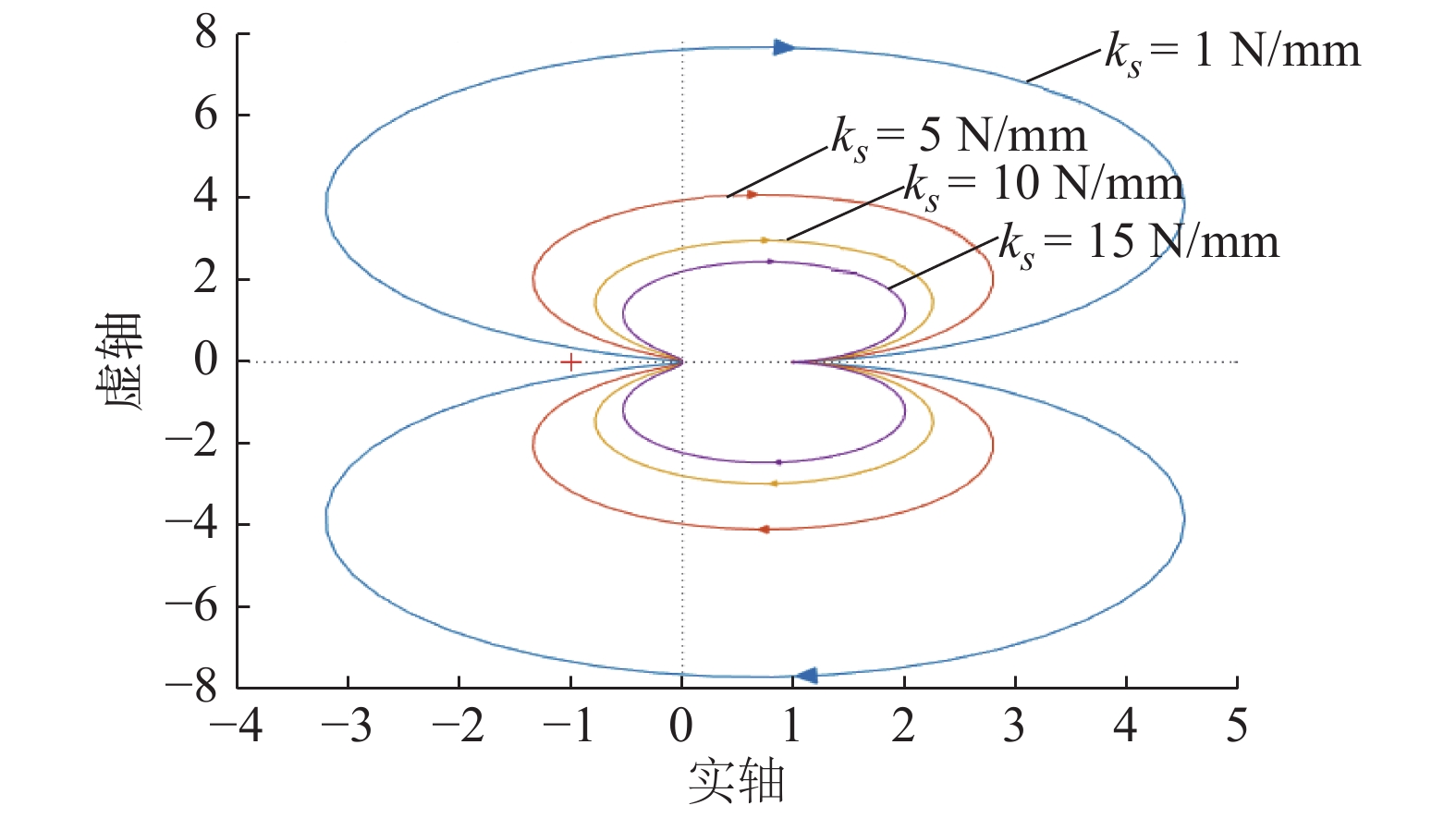
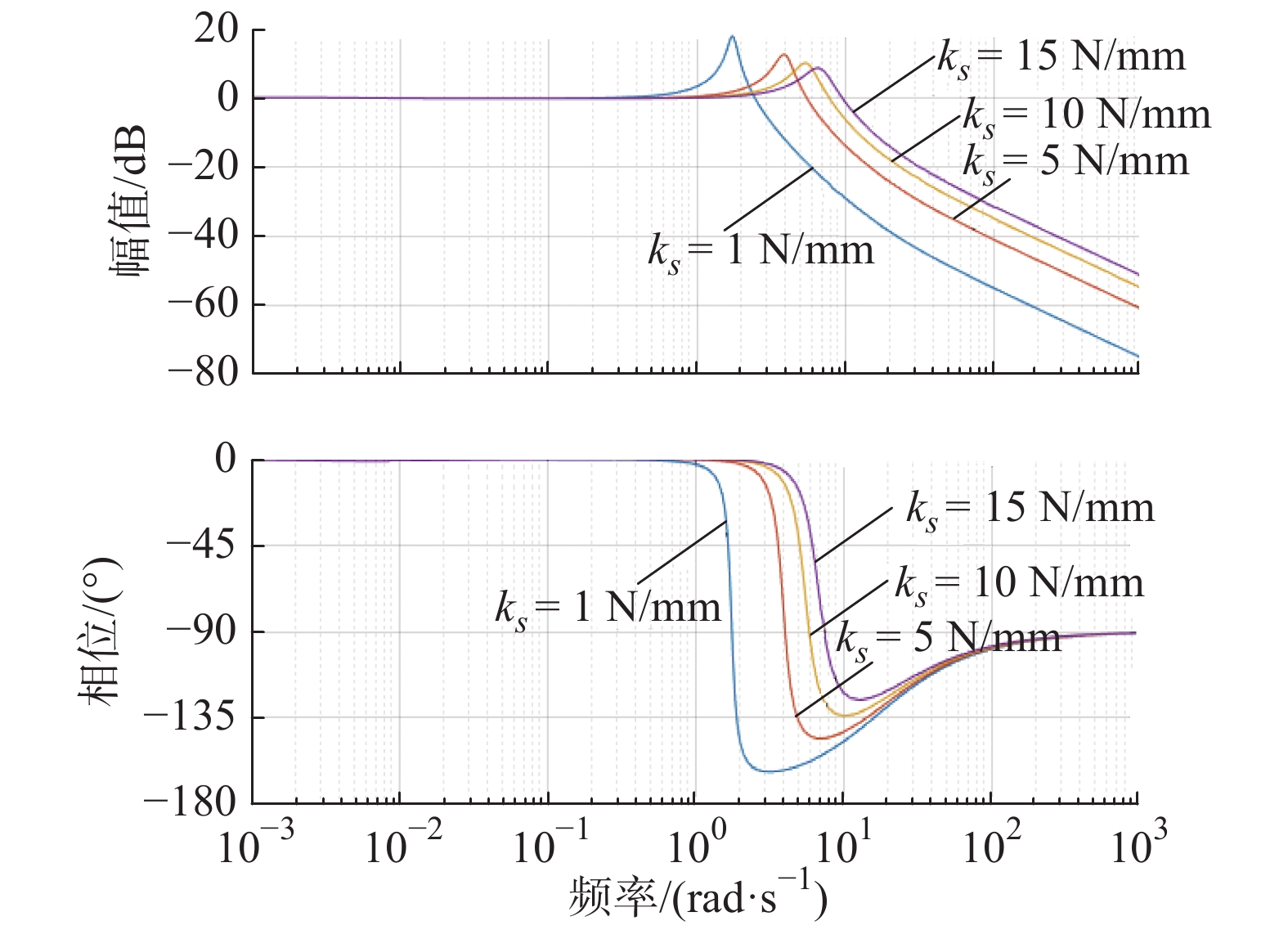
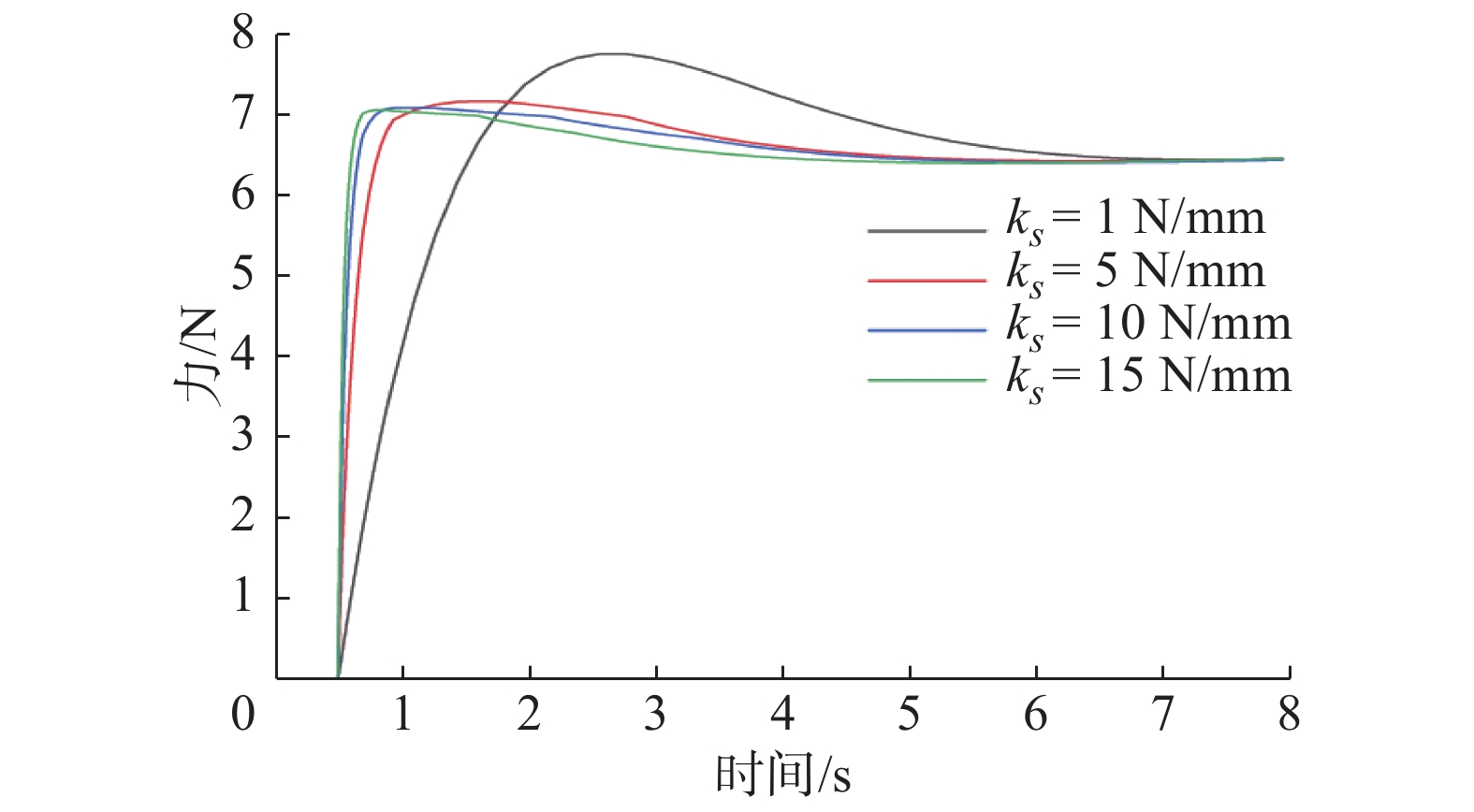
摘要: 为了提高救援机器人在非结构环境中的顺应能力,引入传动机构等效质量的概念,考虑电机内部阻尼对弹性驱动器动力学模型的影响,建立了基于力源驱动的串联弹性驱动器动力学模型。采用PID单位负反馈的控制方式,通过Laplace变换得到系统的开环传递函数与闭环传递函数,运用Nyquist判据与Bode图分析了系统的稳定性。通过仿真实验,得到了系统的阶跃信号跟踪响应。仿真结果与频域特性分析结果对比,验证了救援机器人柔性关节结构设计的合理性与稳定性。
-
关键词:
- 救援机器人 /
- 串联弹性驱动器(SEA) /
- 柔性关节 /
- 稳定性分析 /
- 动力学模型
Abstract: In order to improve the adaptability of rescue robots in unstructured environment, the concept of equivalent mass of the transmission mechanism is introduced, and the influence of the internal damping of the motor on the dynamic model of the elastic actuator is considered, and the dynamic model of the series elastic actuator based on the force source drive is established. Using PID unit negative feedback control method, the open-loop transfer function and closed-loop transfer function of the flexible joint system are obtained by Laplace transform, and the stability of the system is analyzed using Nyquist criterion and Bode diagram. Through simulation experiments, the system′s step signal tracking response is obtained. By comparing the simulation results with the analysis results of the frequency domain characteristics, the rationality and stability of the flexible joint structure design of the rescue robot are further verified.-
Key words:
- rescue robot /
- series elastic actuator (SEA) /
- flexible joint /
- stability analysis /
- dynamic model
-
表 1 不同弹簧刚度下开环传递函数特征方程的根
弹簧刚度ks/(N·mm−1) 特征方程的根 1 −0.0250+0.315 2i;−0.0250−0.315 2i 5 −0.0250+0.706 7i;−0.0250−0.706 7i 10 −0.0250+0.999 7i;−0.0250−0.999 7i 15 −0.0250+1.224 5i;−0.0250−1.224 5i  下载: 导出CSV
下载: 导出CSV
表 2 不同弹簧刚度下闭环传递函数特征方程的根
弹簧刚度ks/
(N·mm−1)特征方程的根 1 −0.1118+1.756 7i;−0.111 8−1.756 7i;−0.0065 5 −0.4718+3.907 9i;−0.471 8−3.907 9i;−0.0065 10 −0.9218+5.489 8i;−0.9218−5.489 8i;−0.0065 15 −1.3718+6.678 4i;−1.3718−6.678 4i;−0.0065
下载: 导出CSV
-
[1] Saputra R P, Kormushev P. ResQbot: a mobile rescue robot for casualty extraction[C]//Proceedings of 2018 ACM/IEEE International Conference on Human-Robot Interaction. Chicago: HRI' 18 Companion, 2018: 239-240. [2] Ning M, Ma Z F, Chen H L, et al. Design and analysis for a multifunctional rescue robot with four-bar wheel-legged structure[J]. Advances in Mechanical Engineering, 2018, 10(2) doi: 10.1177/1687814017747399 [3] 葛世荣, 朱华. 危险环境下救援机器人技术发展现状与趋势[J]. 煤炭科学技术, 2017, 45(5): 1-8, 21Ge S R, Zhu H. Technical development status and tendency of rescue robot in dangerous environment[J]. Coal Science and Technology, 2017, 45(5): 1-8, 21 (in Chinese) [4] Mehrjooee O, Dehkordi S F, Korayem M H. Dynamic modeling and extended bifurcation analysis of flexible-link manipulator[J]. Mechanics Based Design of Structures and Machines, 2020, 48(1): 87-100 doi: 10.1080/15397734.2019.1665542 [5] Ozakyol H, Karaman C, Bingul Z. Advanced robotics analysis toolbox for kinematic and dynamic design and analysis of high‐DOF redundant serial manipulators[J]. Computer Applications in Engineering Education, 2019, 27(6): 1429-1452 doi: 10.1002/cae.22160 [6] 刘彦伟, 黄响, 王李梦, 等. 仿生爪刺式双足爬壁机器人设计与分析[J]. 机械科学与技术, 2019, 38(8): 1185-1190Liu Y W, Huang X, Wang L M, et al. Design and analysis of a bio-inspired biped wall-climbing robot with spines[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(8): 1185-1190 (in Chinese) [7] Werner A, Henze B, Loeffl F, et al. Optimal and robust walking using intrinsic properties of a series-elastic robot[C]//Proceedings of 2017 IEEE-RAS 17th International Conference on Humanoid Robotics. Birmingham: IEEE, 2017: 143-150. [8] 梁明轩, 李正刚, 唐任仲, 等. 基于柔性多体动力学的机械臂结构优化设计[J]. 中国机械工程, 2017, 28(21): 2562-2566 doi: 10.3969/j.issn.1004-132X.2017.21.008Liang M X, Li Z G, Tang R Z, et al. Structure optimization design of robot arm based on flexible multi-body dynamics[J]. China Mechanical Engineering, 2017, 28(21): 2562-2566 (in Chinese) doi: 10.3969/j.issn.1004-132X.2017.21.008 [9] 梁涛, 梁延德, 何福本. 基于串联弹性驱动器的柔顺机械臂设计与仿真[J]. 组合机床与自动化加工技术, 2020,(2): 145-148, 153Liang T, Liang Y D, He F B. Design and simulation analysis of a compliant robotic arm based on series elastic actuator[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2020,(2): 145-148, 153 (in Chinese) [10] 李蕊, 张明路, 孙凌宇, 等. 柔性机械手动力学研究进展[J]. 机械设计, 2013, 30(1): 1-5 doi: 10.3969/j.issn.1001-2354.2013.01.001Li R, Zhang M L, Sun L Y, et al. Dynamics research of flexible manipulators[J]. Journal of Machine Design, 2013, 30(1): 1-5 (in Chinese) doi: 10.3969/j.issn.1001-2354.2013.01.001 [11] 陈凯旋. 基于SEA的柔性关节结构设计及控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2019.Chen K X. Research on structure design and control method of flexible joint based on SEA[D]. Harbin: Harbin Engineering University, 2019 (in Chinese). [12] 马洪文, 王立权, 赵朋, 等. 串联弹性驱动器力驱动力学模型和稳定性分析[J]. 哈尔滨工程大学学报, 2012, 33(11): 1410-1416Ma H W, Wang L Q, Zhao P, et al. Research of dynamic dodel and stability of a series elastic actuator[J]. Journal of Harbin Engineering University, 2012, 33(11): 1410-1416 (in Chinese) [13] Cappello L, Xiloyannis M, Dinh B K, et al. Multistable series elastic actuators: design and control[J]. Robotics and Autonomous Systems, 2019, 118: 167-178 doi: 10.1016/j.robot.2019.04.014 [14] Yano H, Chang J, Takano R, et al. Simultaneous optimization of trajectory and parameter for biped robot with series elastic actuators[J]. IFAC-PapersOnLine, 2019, 52(22): 7-12 doi: 10.1016/j.ifacol.2019.11.039 [15] Ghidini S, Beschi M, Pedrocchi N, et al. Robust tuning rules for series elastic actuator PID cascade controllers[J]. IFAC-PapersOnLine, 2018, 51(4): 220-225 doi: 10.1016/j.ifacol.2018.06.069 [16] Irmscher C, Woschke E, May E, et al. Design, optimisation and testing of a compact, inexpensive elastic element for series elastic actuators[J]. Medical Engineering & Physics, 2018, 52: 84-89 [17] Verstraten T, Beckerle P, Furnémont R, et al. Series and parallel elastic actuation: impact of natural dynamics on power and energy consumption[J]. Mechanism and Machine Theory, 2016, 102: 232-246 doi: 10.1016/j.mechmachtheory.2016.04.004 [18] Kong K, Bae J, Tomizuka M. A compact rotary series elastic actuator for human assistive systems[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(2): 288-297 doi: 10.1109/TMECH.2010.2100046 [19] 朱秋国, 熊蓉, 吕铖杰, 等. 新型串联弹性驱动器设计与速度控制[J]. 电机与控制学报, 2015, 19(6): 83-88Zhu Q G, Xiong R, Lü C J, et al. Novel series elastic actuator design and velocity control[J]. Electric Machines and Control, 2015, 19(6): 83-88 (in Chinese) [20] 李扬, 崔士鹏, 刘伊威. 一种抗冲击柔性关节的设计及仿真分析[J]. 机械传动, 2017, 41(11): 163-167Li Y, Cui S P, Liu Y W. Design and simulation analysis of an impact-resistant flexible joint[J]. Journal of Mechanical Transmission, 2017, 41(11): 163-167 (in Chinese) [21] 张秀丽, 谷小旭, 赵洪福, 等. 一种基于串联弹性驱动器的柔顺机械臂设计[J]. 机器人, 2016, 38(4): 385-394Zhang X L, Gu X X, Zhao H F, et al. Design of a compliant robotic arm based on series elastic actuator[J]. Robot, 2016, 38(4): 385-394 (in Chinese) [22] 史延雷, 张明路, 张小俊, 等. 一种旋转型机器人柔性关节设计与分析[J]. 中国机械工程, 2016, 27(18): 2494-2499, 2500 doi: 10.3969/j.issn.1004-132X.2016.18.014Shi Y L, Zhang M L, Zhang X J, et al. Design and analysis of a rotary-type robot flexible joint[J]. China Mechanical Engineering, 2016, 27(18): 2494-2499, 2500 (in Chinese) doi: 10.3969/j.issn.1004-132X.2016.18.014 [23] 尹鹏, 李满天, 郭伟, 等. 面向足式机器人的新型可调刚度柔性关节的设计及性能测试[J]. 机器人, 2014, 36(3): 322-329Yin P, Li M T, Guo W, et al. Design and testing of a novel joint with adjustable stiffness for legged robot[J]. Robot, 2014, 36(3): 322-329 (in Chinese) [24] 陈兵, 骆敏舟, 孙少明, 等. 基于仿生原理的节能减振类人机器人膝关节的设计[J]. 机器人, 2014, 36(2): 218-223Chen B, Luo M Z, Sun S M, et al. Design of energy-saving and vibration damping knee joint of humanoid robot based on bionic principles[J]. Robot, 2014, 36(2): 218-223 (in Chinese) -



 点击查看大图
点击查看大图

图(9) / 表(2)
计量
- 文章访问数: 337
- HTML全文浏览量: 89
- PDF下载量: 39
- 被引次数: 0
