作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2022年 41卷 第10期
2022, 41(10): 1477-1482.
doi: 10.13433/j.cnki.1003-8728.20220291
 摘要
摘要 HTML
HTML PDF 3085KB
PDF 3085KB
摘要:
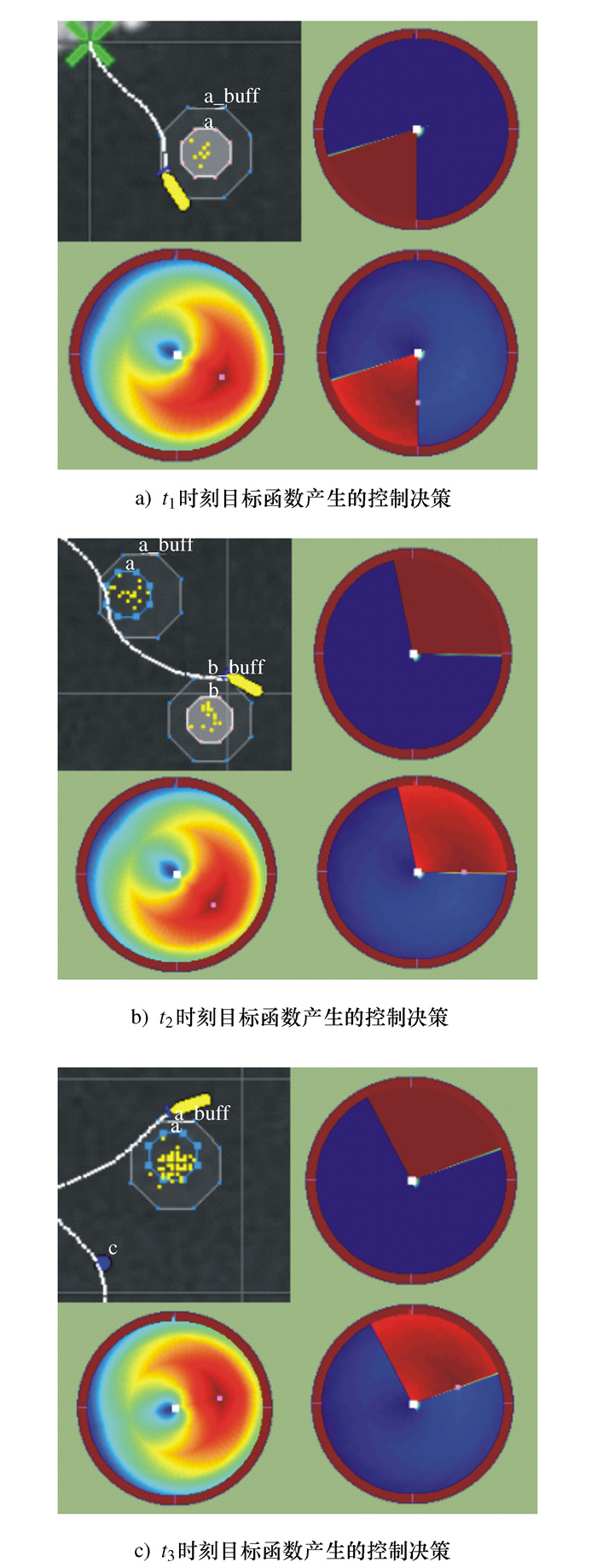
针对传统基于行为的控制体系结构在解决AUV局部路径修复问题时, AUV整体行为容易出现不可接受的缺陷等不足, 设计一种新的行为融合-区间优化(IVP)方法。首先将路径规划任务划分为路径点跟踪行为、实时避障行为等多个具体的行为, 结合环境约束, 将AUV控制决策选择视为一个多目标优化问题, 然后利用IVP模型进行行为的协调, 最后基于MOOS-IVP体系以静态目标周围的环绕式路径点跟踪进行了仿真分析, 结果表明IVP模型在解决决策空间随决策变量增加呈指数增长的同时, 能够实时避障并保证了结果的最优化。









2022, 41(10): 1483-1489.
doi: 10.13433/j.cnki.1003-8728.20200479
摘要:
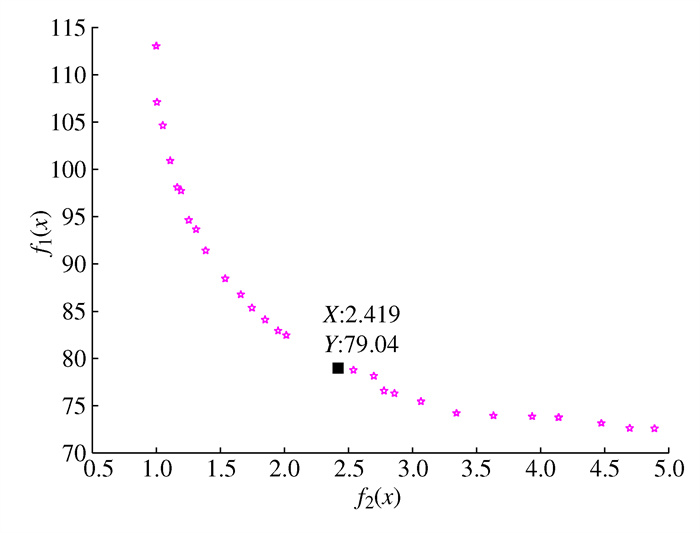
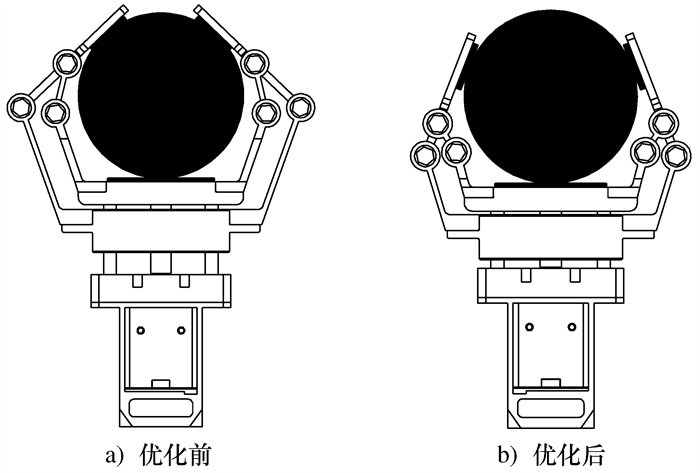
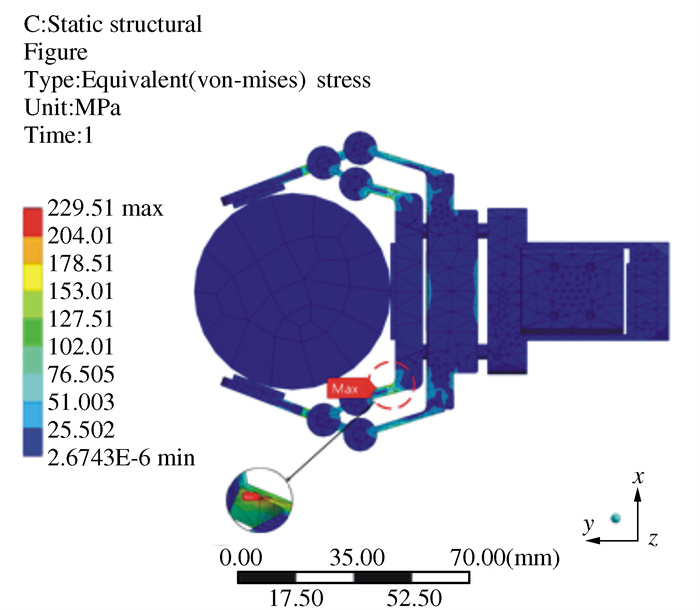
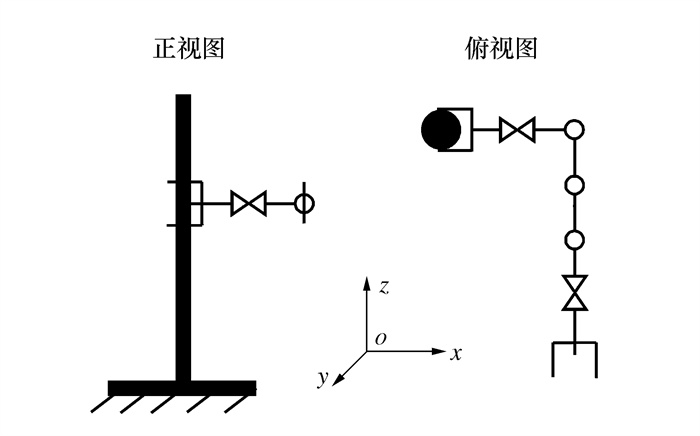
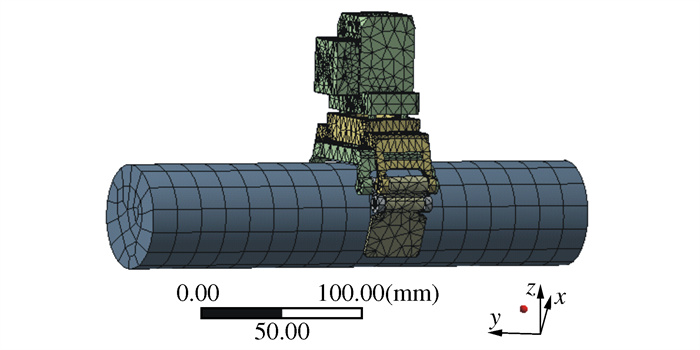
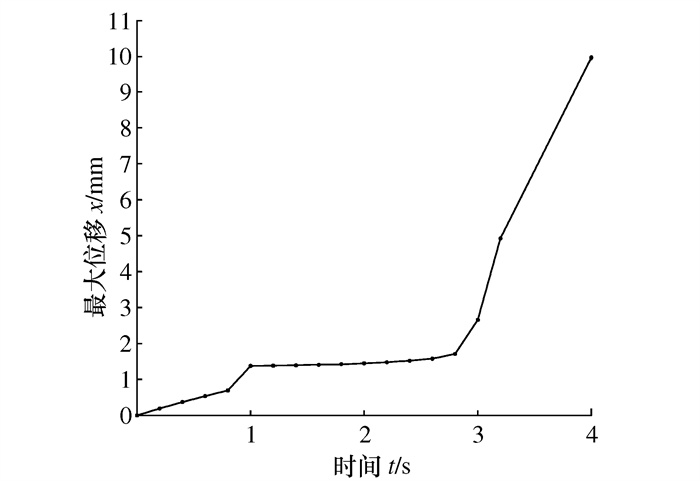
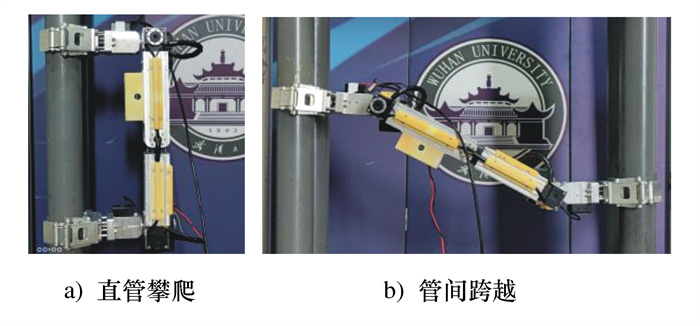
针对目前夹持式管道攀爬机器人夹持机构存在的不足, 基于三点定心法设计了四连杆夹持机构。该夹持机构由四连杆夹持部分和丝杆传动部分组成, 通过丝杠传动带动四连杆运动实现夹持机构夹持和张开。本文首先进行夹持机构设计, 并进行了力封闭性分析; 其次对夹持机构连杆进行优化, 重量减轻了11.7%;接着通过ANSYS瞬态仿真分析夹持机构理论最大负载能力, 进行机器人负载试验验证了该夹持机构的可靠性。
针对目前夹持式管道攀爬机器人夹持机构存在的不足, 基于三点定心法设计了四连杆夹持机构。该夹持机构由四连杆夹持部分和丝杆传动部分组成, 通过丝杠传动带动四连杆运动实现夹持机构夹持和张开。本文首先进行夹持机构设计, 并进行了力封闭性分析; 其次对夹持机构连杆进行优化, 重量减轻了11.7%;接着通过ANSYS瞬态仿真分析夹持机构理论最大负载能力, 进行机器人负载试验验证了该夹持机构的可靠性。





2022, 41(10): 1490-1495.
doi: 10.13433/j.cnki.1003-8728.20200480
摘要:
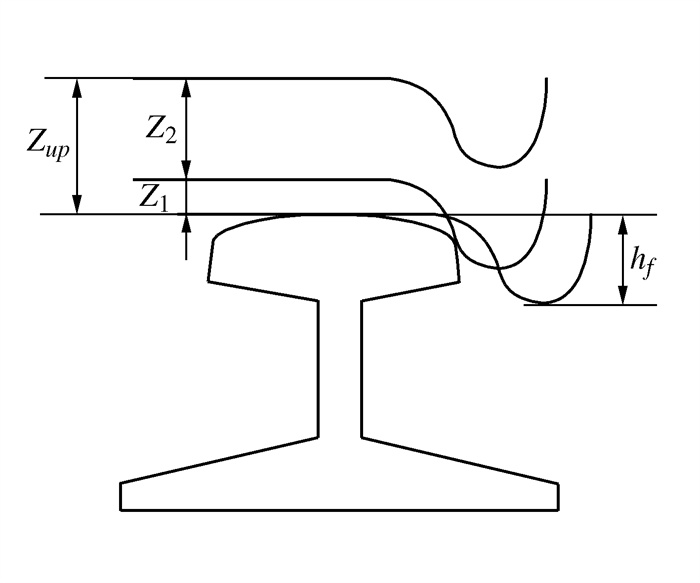
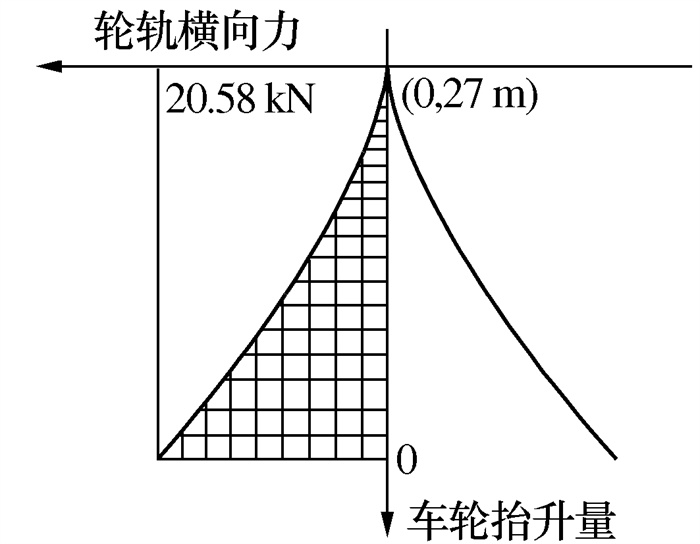
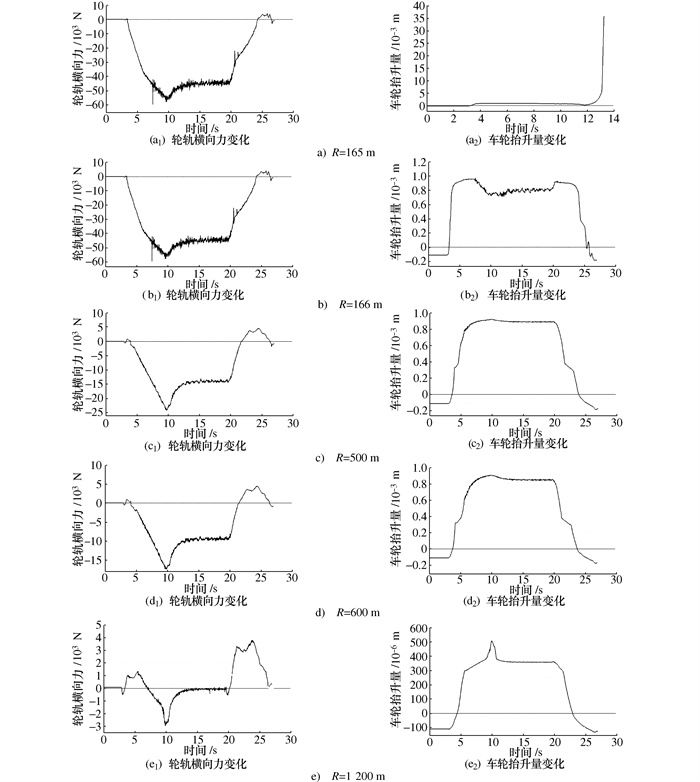
为了能更好的预测车辆的运行安全性, 现基于突变理论讨论了列车在曲线处由稳定运行到完全脱轨的状态突变过程。考虑车轮抬升量和轮轨横向力对列车运行状态的影响, 建立了尖点突变模型, 通过分叉集给出了列车在曲线处发生脱轨的危险区域。应用SIMPACK软件建立车辆系统仿真模型, 通过改变曲线半径的大小, 分析车轮抬升量和轮轨横向力随时间的变化情况。将不同工况下获得的控制变量的值与尖点突变理论的分叉集进行对比分析, 结果表明, 曲线半径过小时, 车轮抬升量和轮轨横向力均会超出极限值, 此时, 列车就会脱离轨道。由此验证了突变理论模型在列车脱轨预警上应用的有效性。
为了能更好的预测车辆的运行安全性, 现基于突变理论讨论了列车在曲线处由稳定运行到完全脱轨的状态突变过程。考虑车轮抬升量和轮轨横向力对列车运行状态的影响, 建立了尖点突变模型, 通过分叉集给出了列车在曲线处发生脱轨的危险区域。应用SIMPACK软件建立车辆系统仿真模型, 通过改变曲线半径的大小, 分析车轮抬升量和轮轨横向力随时间的变化情况。将不同工况下获得的控制变量的值与尖点突变理论的分叉集进行对比分析, 结果表明, 曲线半径过小时, 车轮抬升量和轮轨横向力均会超出极限值, 此时, 列车就会脱离轨道。由此验证了突变理论模型在列车脱轨预警上应用的有效性。

2022, 41(10): 1496-1502.
doi: 10.13433/j.cnki.1003-8728.20200484
摘要:
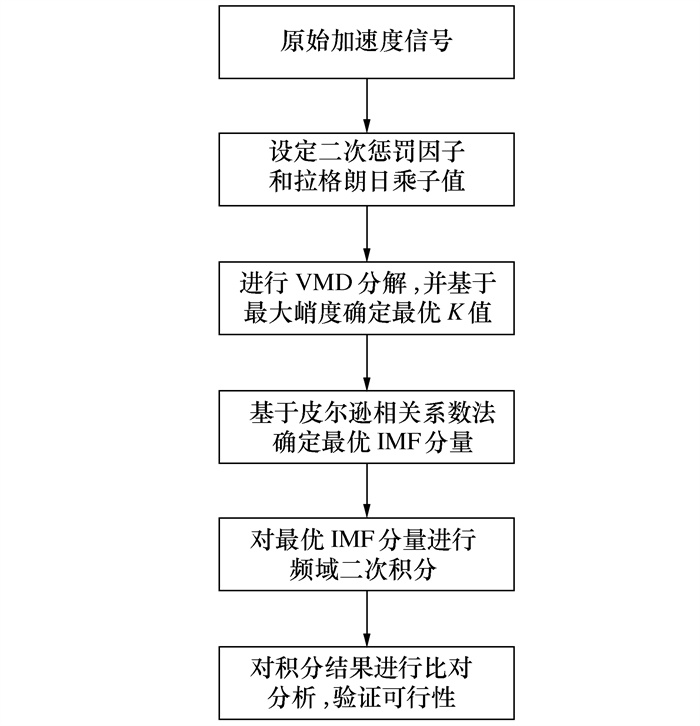
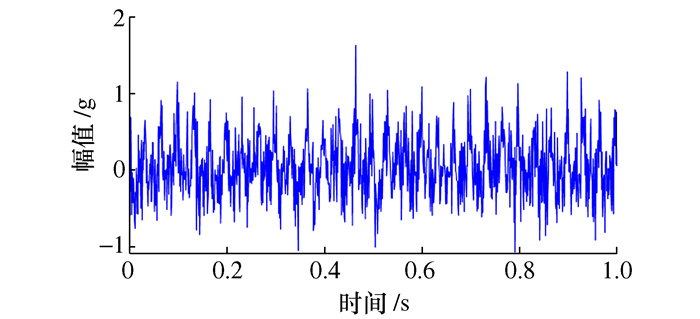
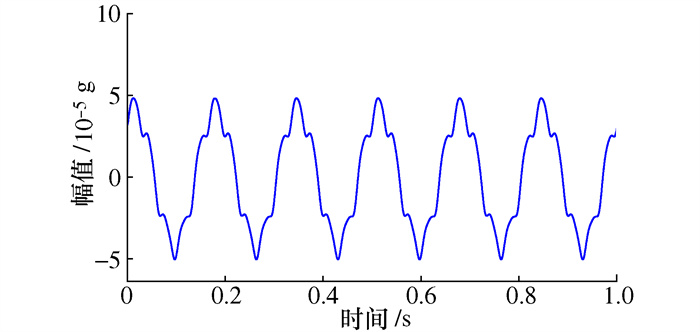
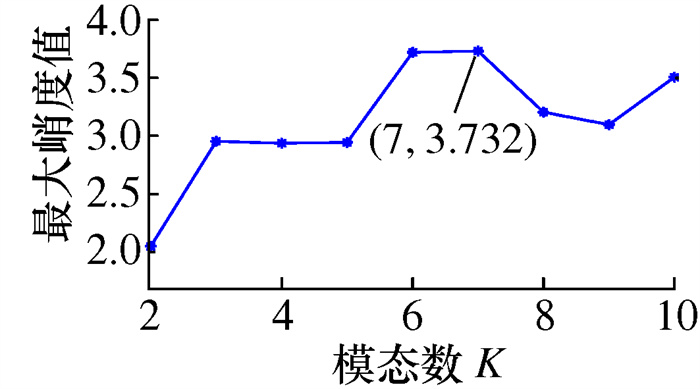
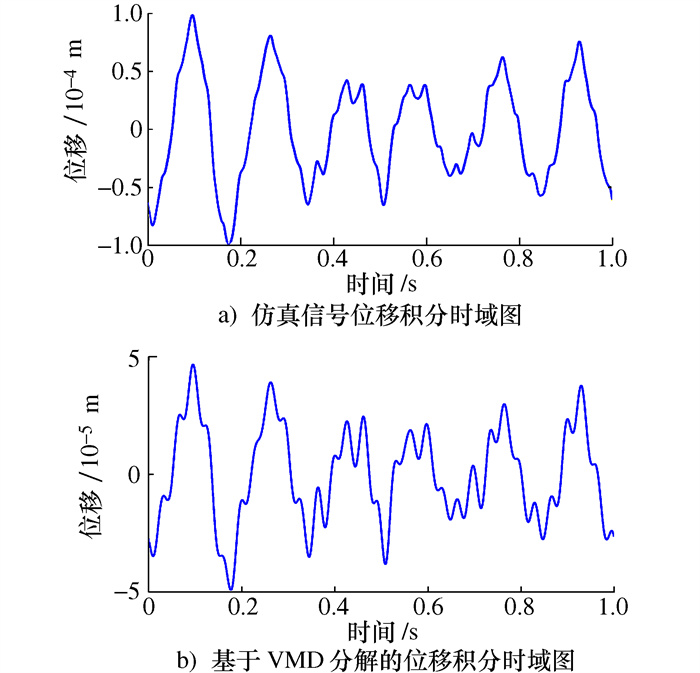
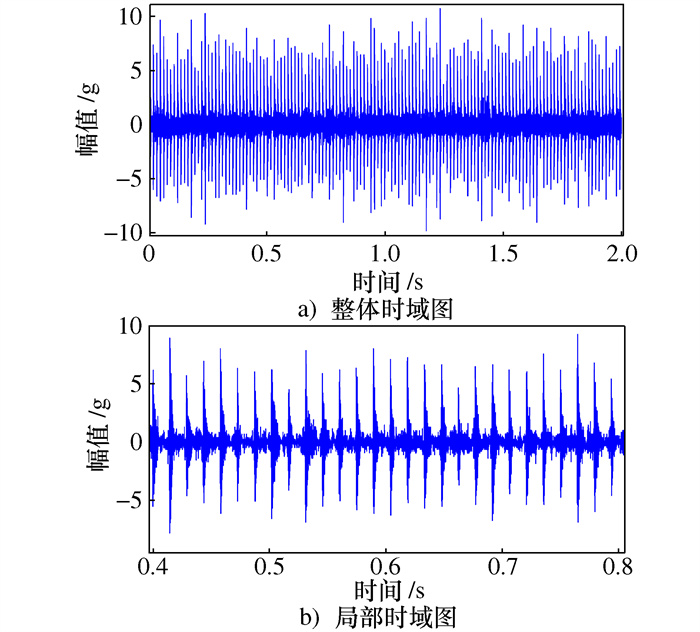
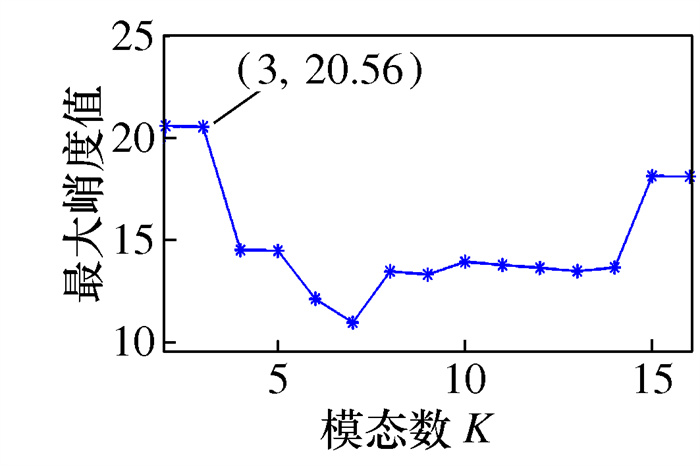
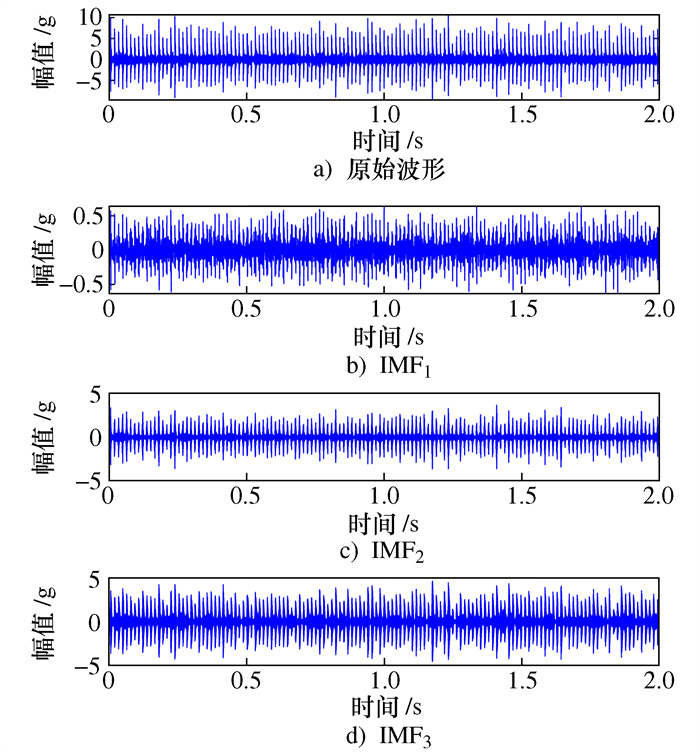
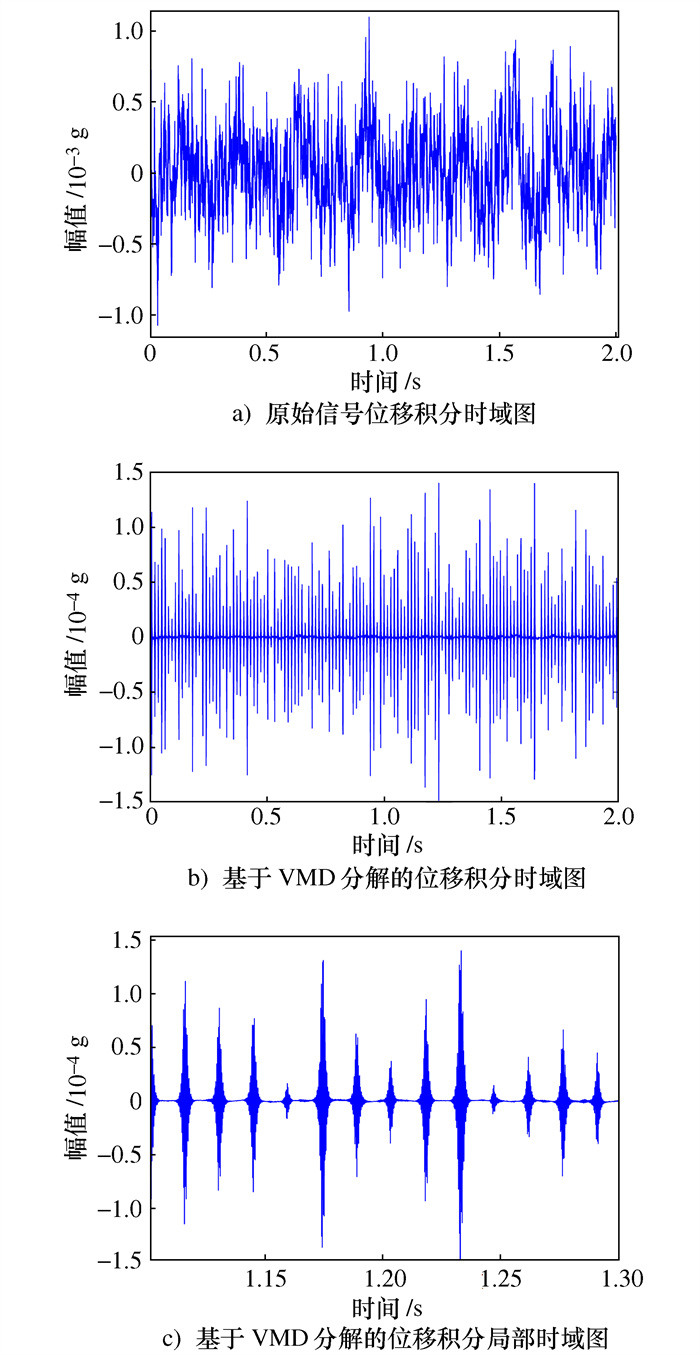
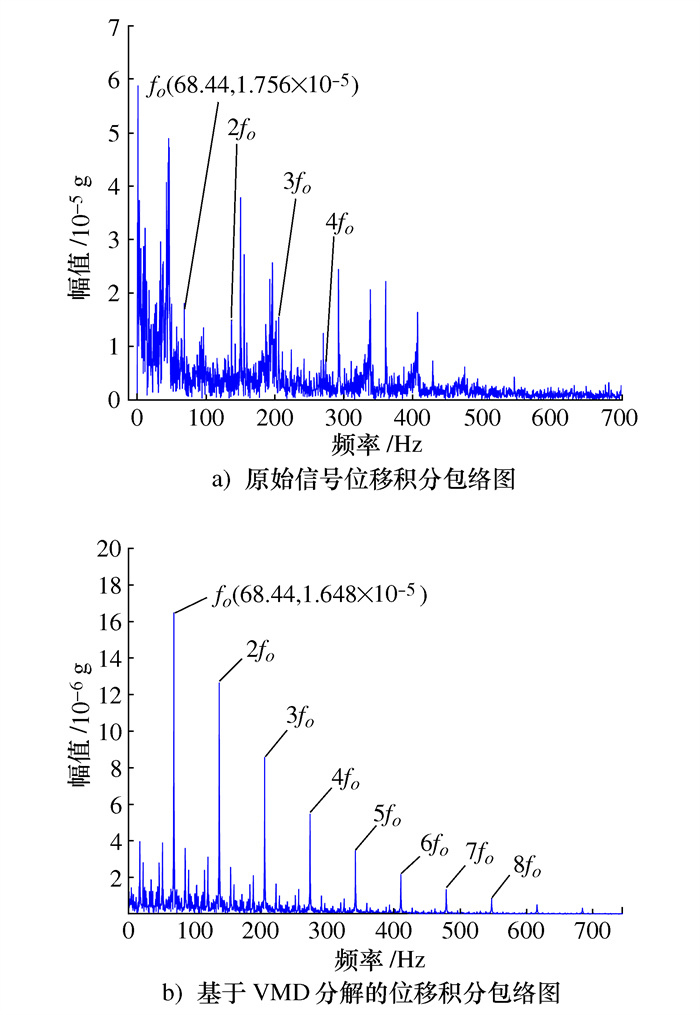
在对振动加速度信号进行积分时, 信号中存在的不可避免的直流分量以及积分过程中产生的趋势项和误差行为, 使得积分结果的精度大大降低, 尤其是二次积分后, 信号的频域特性丢失严重。针对此问题, 提出了一种基于变分模态分解(Variational mode decomposition, VMD)和频域积分相结合的故障特征提取方法。首先基于最大峭度准则对加速度信号进行变分模态分解, 根据皮尔逊相关系数法从若干分量中选取相关系数最大的分量作为最优分量, 最后对最优分量进行频域二次积分, 得到振动位移信号。仿真及实验结果表明该方法有效降低了趋势项及噪声等带来的干扰, 提高了故障信息的辨识精度, 具有较好的优越性。
在对振动加速度信号进行积分时, 信号中存在的不可避免的直流分量以及积分过程中产生的趋势项和误差行为, 使得积分结果的精度大大降低, 尤其是二次积分后, 信号的频域特性丢失严重。针对此问题, 提出了一种基于变分模态分解(Variational mode decomposition, VMD)和频域积分相结合的故障特征提取方法。首先基于最大峭度准则对加速度信号进行变分模态分解, 根据皮尔逊相关系数法从若干分量中选取相关系数最大的分量作为最优分量, 最后对最优分量进行频域二次积分, 得到振动位移信号。仿真及实验结果表明该方法有效降低了趋势项及噪声等带来的干扰, 提高了故障信息的辨识精度, 具有较好的优越性。
2022, 41(10): 1503-1508.
doi: 10.13433/j.cnki.1003-8728.20200482
摘要:
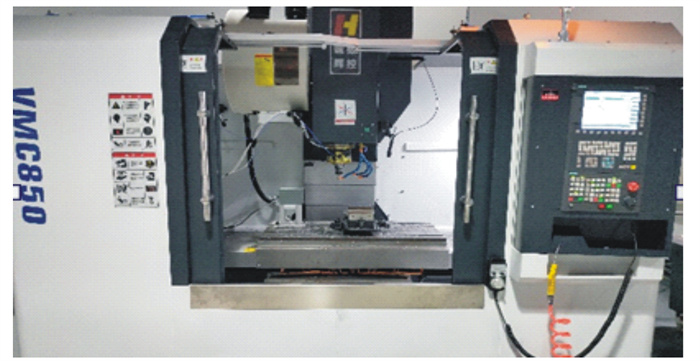
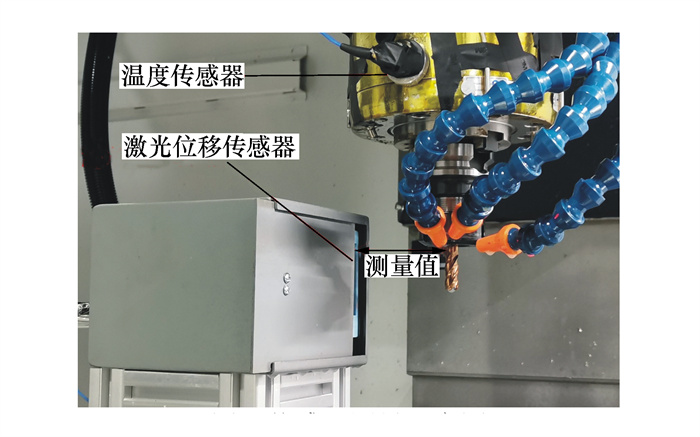
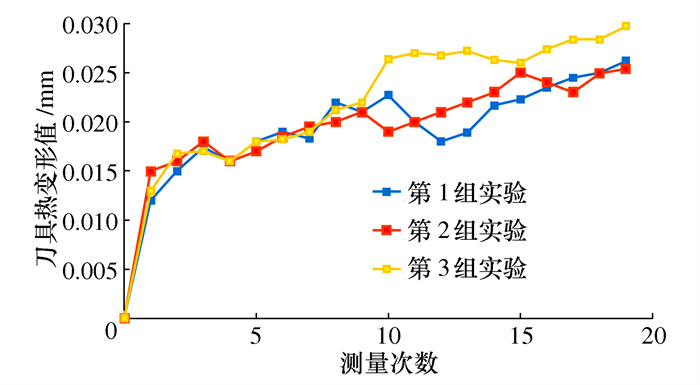
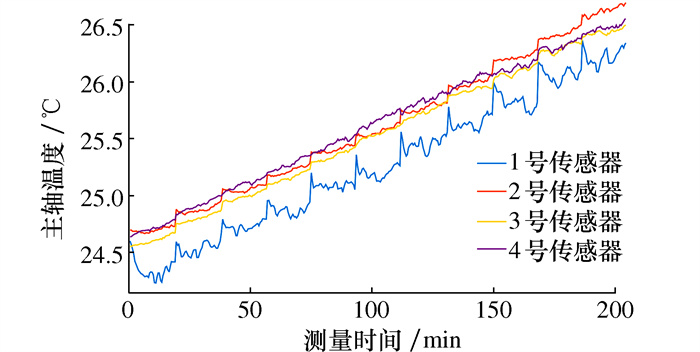
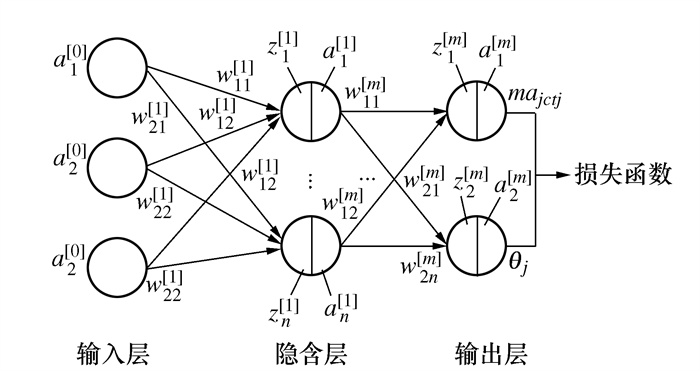
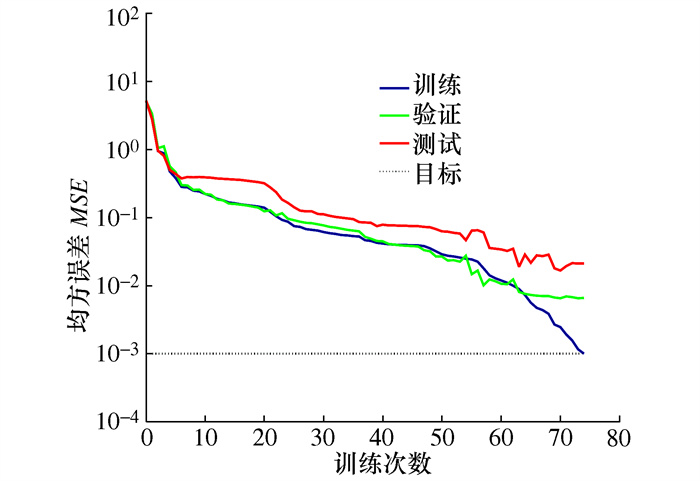
机床在铣削加工时总伴随着大量的切削热产生, 为了减少热变形对刀具加工精度的影响, 本文以硬质合金立铣刀作为研究对象, 提出一种基于BP神经网络的立铣刀在铣削过程中热变形实时状态的识别方法。搭建测试平台进行立铣刀热误差实验, 并设计了一种立铣刀热变形变形量的直接测量法。采集机床连续加工期间主轴的温度信号和立铣刀热误差变形量, 对温度信号进行特征提取。将刀具不同热变形状态及相关的特征值, 输入到8-4-2的三层BP神经网络模型进行训练。实验结果表明: 刀具热变形识别系统识别率在为87.2%左右。
机床在铣削加工时总伴随着大量的切削热产生, 为了减少热变形对刀具加工精度的影响, 本文以硬质合金立铣刀作为研究对象, 提出一种基于BP神经网络的立铣刀在铣削过程中热变形实时状态的识别方法。搭建测试平台进行立铣刀热误差实验, 并设计了一种立铣刀热变形变形量的直接测量法。采集机床连续加工期间主轴的温度信号和立铣刀热误差变形量, 对温度信号进行特征提取。将刀具不同热变形状态及相关的特征值, 输入到8-4-2的三层BP神经网络模型进行训练。实验结果表明: 刀具热变形识别系统识别率在为87.2%左右。


2022, 41(10): 1509-1514.
doi: 10.13433/j.cnki.1003-8728.20200470
摘要:
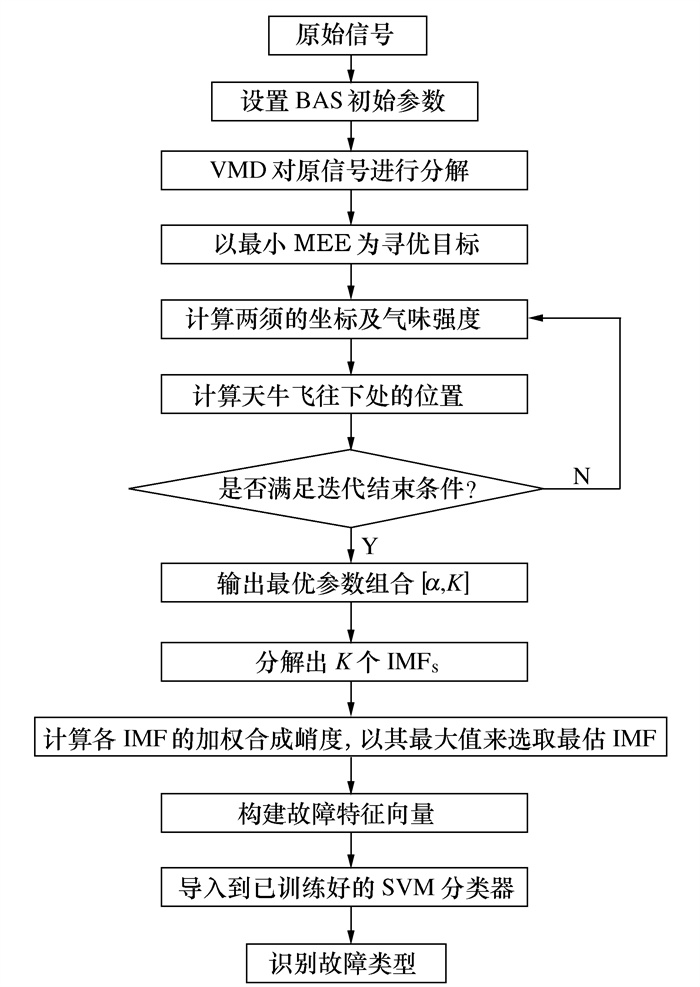
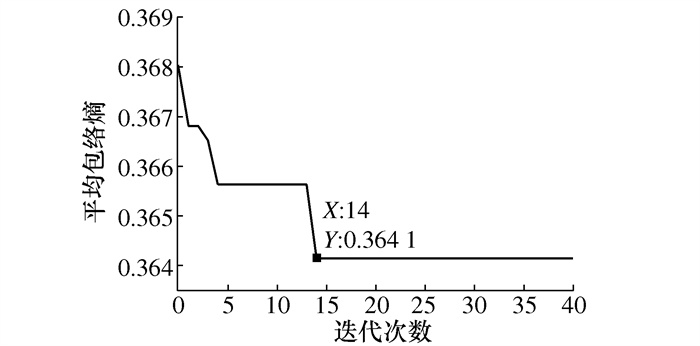
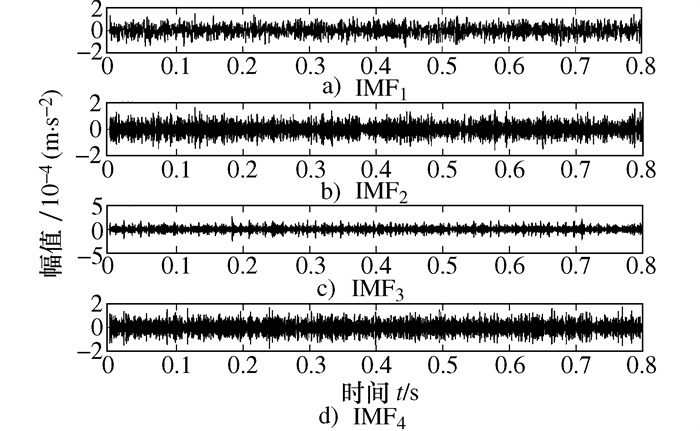
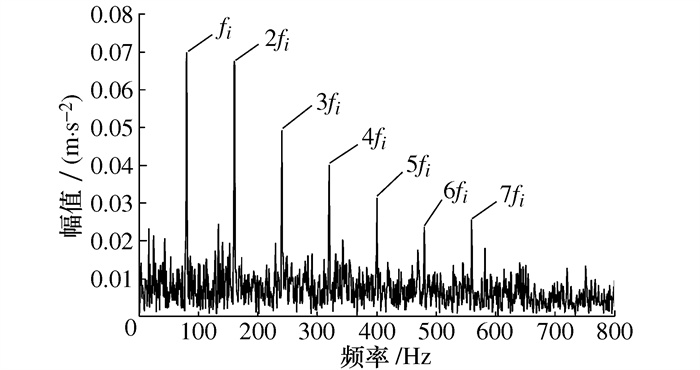
为了便于选取变分模态分解(VMD)参数、综合考虑轴承故障信号周期冲击性、循环平稳性, 各分量与原信号相关性及不同故障诊断的问题, 构建了一种天牛须搜索算法(BAS)优化VMD及加权合成峭度提取最优本征模态函数(IMF), 并结合布谷鸟算法优化支持向量机(CS-SVM)的轴承故障诊断方法。先以平均包络熵为BAS的适应度函数优化VMD参数, 接着对信号进行VMD分解。然后以加权合成峭度最大优选IMF, 对所选IMF提取故障特征并组成特征向量。最后, 将其输入CS-SVM中进行故障分类。运用仿真信号和实际轴承数据验证所提方法的可行性。
为了便于选取变分模态分解(VMD)参数、综合考虑轴承故障信号周期冲击性、循环平稳性, 各分量与原信号相关性及不同故障诊断的问题, 构建了一种天牛须搜索算法(BAS)优化VMD及加权合成峭度提取最优本征模态函数(IMF), 并结合布谷鸟算法优化支持向量机(CS-SVM)的轴承故障诊断方法。先以平均包络熵为BAS的适应度函数优化VMD参数, 接着对信号进行VMD分解。然后以加权合成峭度最大优选IMF, 对所选IMF提取故障特征并组成特征向量。最后, 将其输入CS-SVM中进行故障分类。运用仿真信号和实际轴承数据验证所提方法的可行性。




2022, 41(10): 1515-1523.
doi: 10.13433/j.cnki.1003-8728.20220227
摘要:
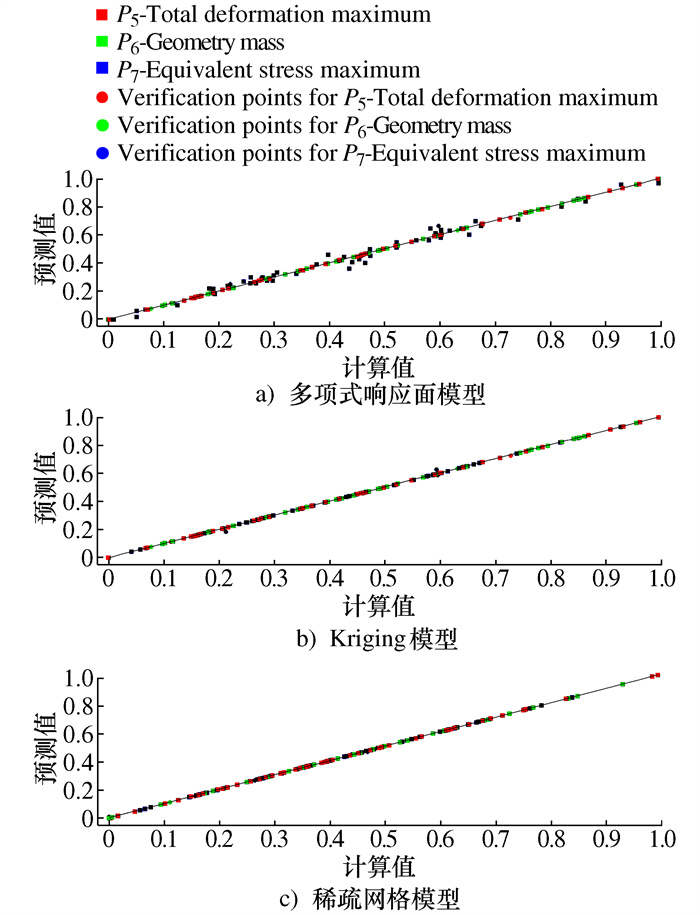
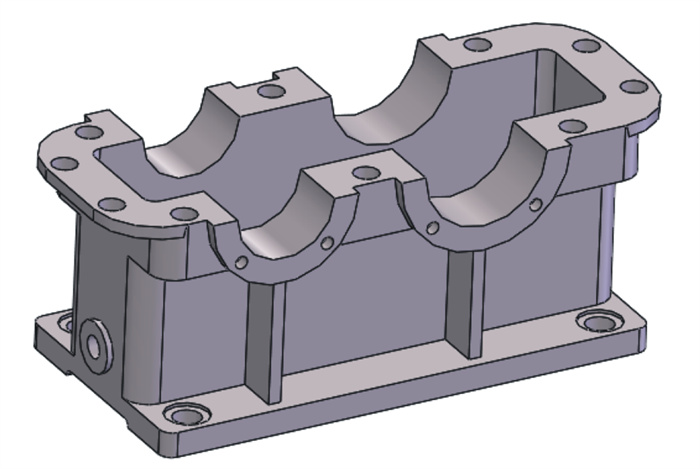
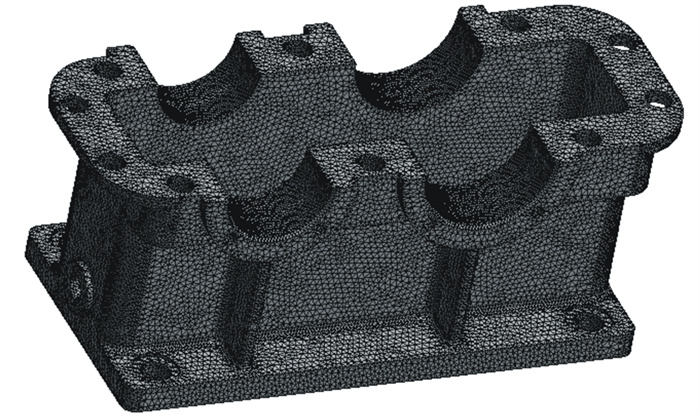
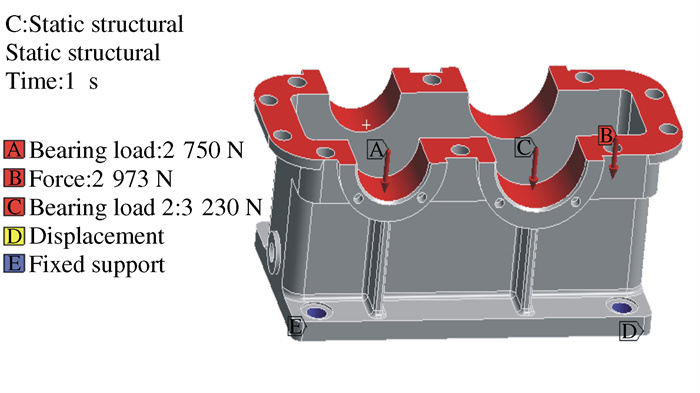
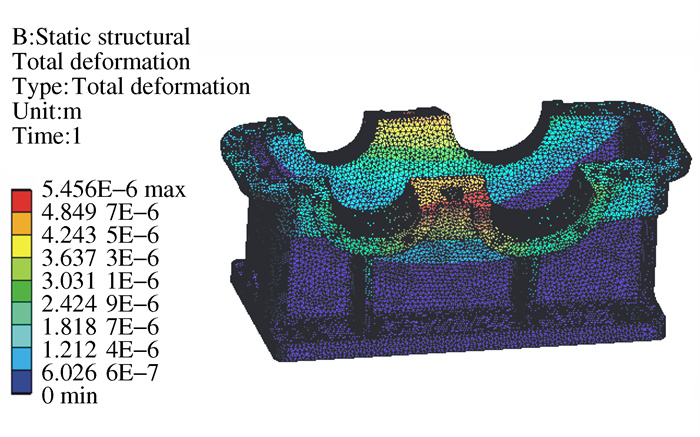
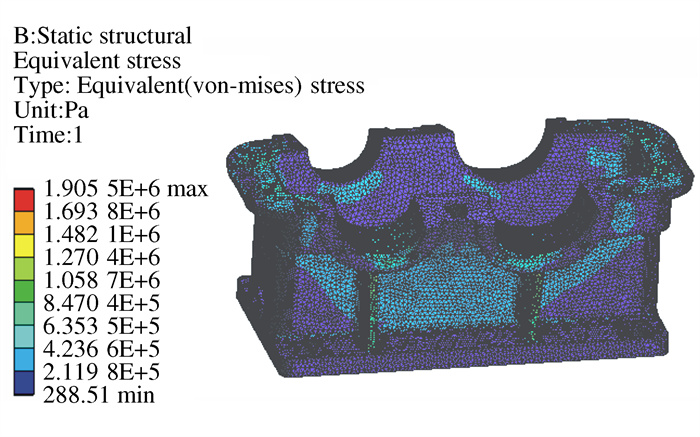
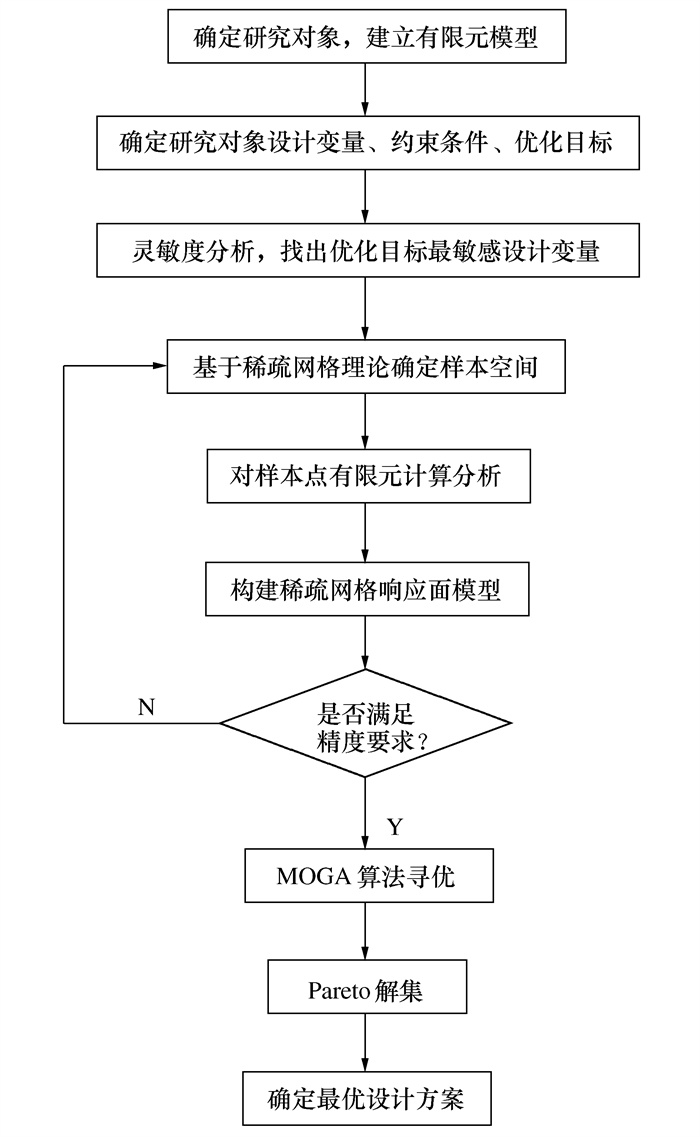
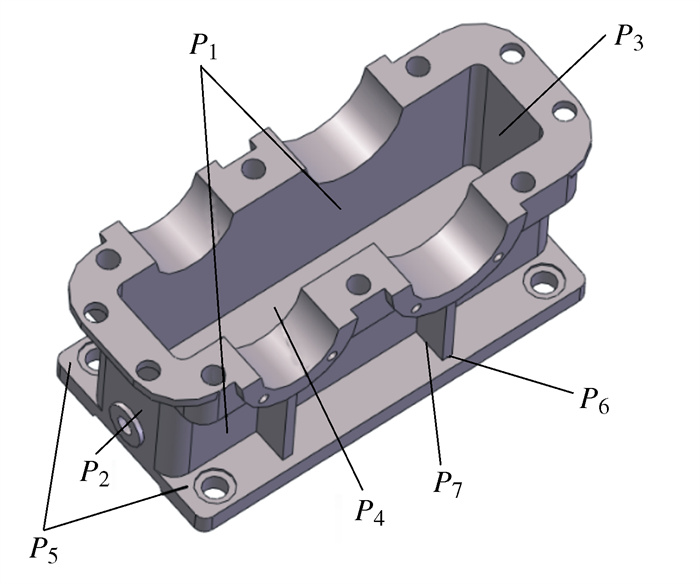
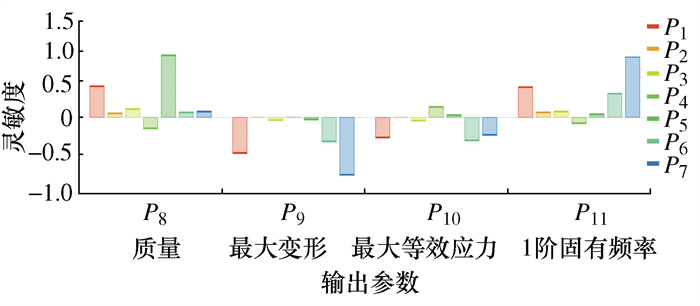
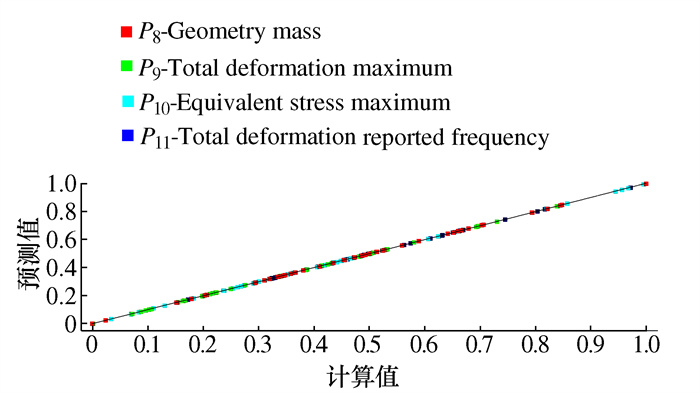
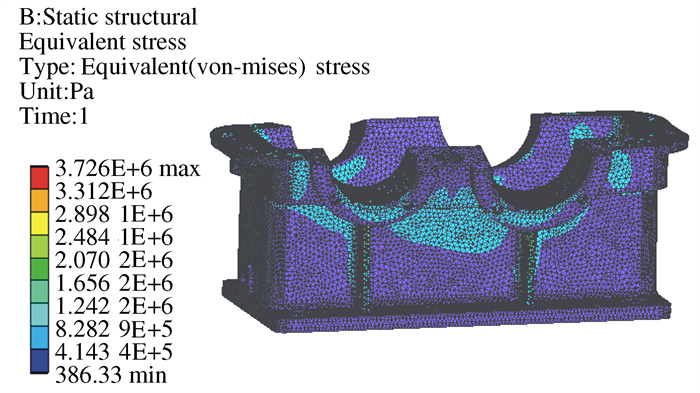
为解决某压裂泵用变速箱壳体壁厚设计不合理的问题, 提出了一种稀疏网格近似模型与MOGA遗传算法集成的优化方法。对比分析传统近似模型与稀疏网格模型的预测精度, 得出稀疏网格模型的预测精度更高。利用稀疏网格初始化法构建样本数据, 搭建出响应面模型, 采用MOGA遗传算法搜索最优设计方案。结果表明: 在结构性能满足使用要求的基础上变速箱壳体重量减轻了18.1%, 为变速箱壳体轻量化设计提供了一种新途径。
为解决某压裂泵用变速箱壳体壁厚设计不合理的问题, 提出了一种稀疏网格近似模型与MOGA遗传算法集成的优化方法。对比分析传统近似模型与稀疏网格模型的预测精度, 得出稀疏网格模型的预测精度更高。利用稀疏网格初始化法构建样本数据, 搭建出响应面模型, 采用MOGA遗传算法搜索最优设计方案。结果表明: 在结构性能满足使用要求的基础上变速箱壳体重量减轻了18.1%, 为变速箱壳体轻量化设计提供了一种新途径。



2022, 41(10): 1524-1529.
doi: 10.13433/j.cnki.1003-8728.20200493
摘要:
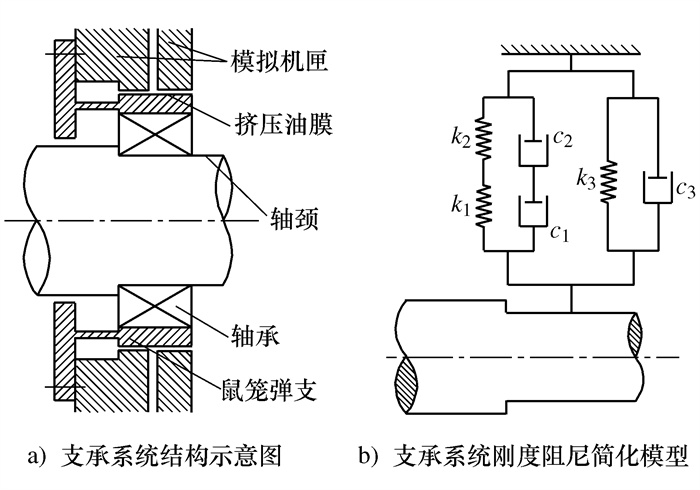
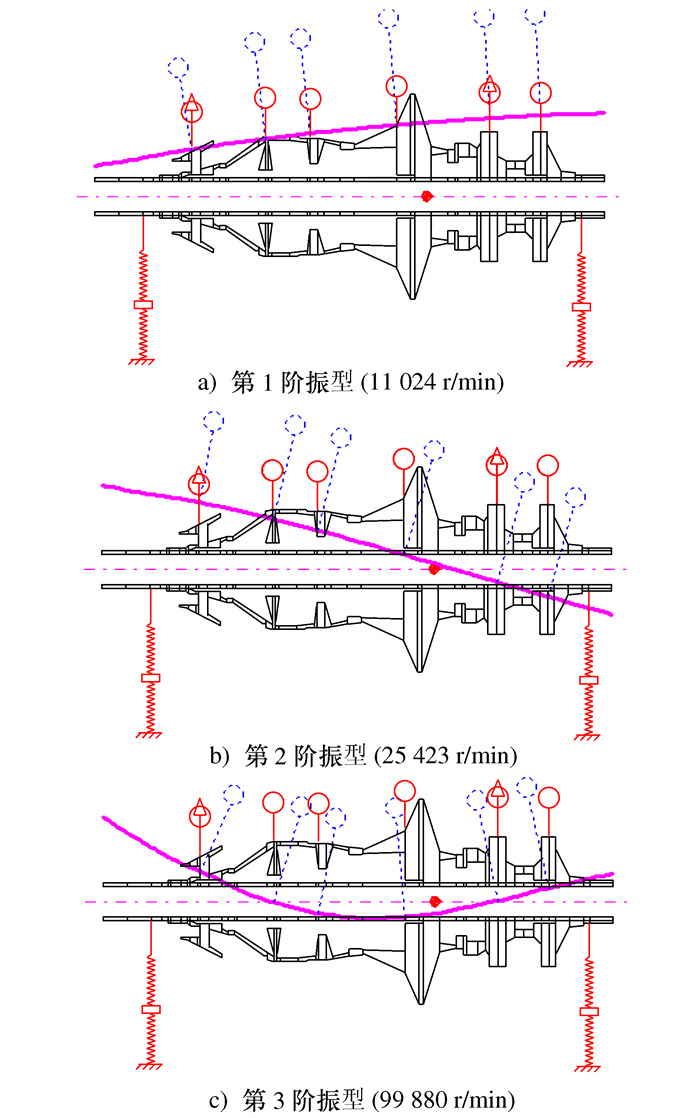
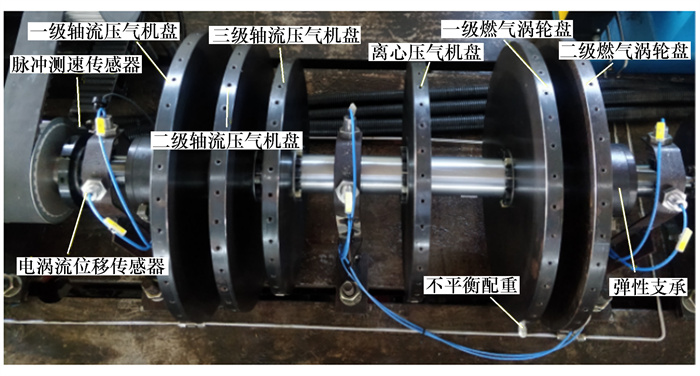
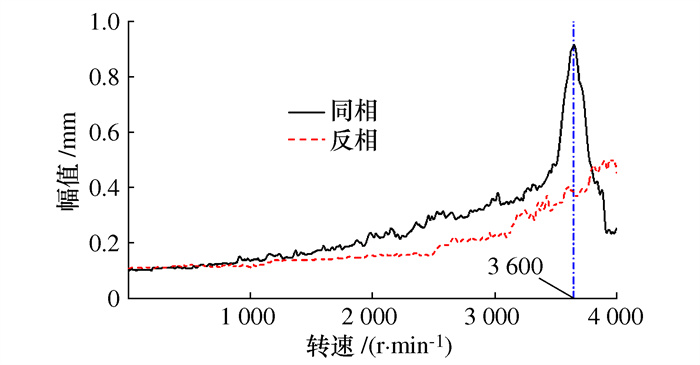
针对弹支作用下涡轴发动机燃发转子多位置不平衡组合振动响应特性复杂问题, 提出从转子不平衡相位差组合的角度来研究燃发转子振动响应规律。首先构建鼠笼和挤压油膜阻尼器组成的弹支系统动力学模型, 探究弹支动力学特性与转子系统固有属性间的关系, 揭示不平衡相位差组合对燃发转子振动响应的影响规律, 设计涡轴发动机燃发转子动力学模拟实验台, 开展相应的实验验证。结果表明: 弹支刚度小于3×104 N/mm时可使转子系统尽早出现刚体模态, 避免发动机宽的工作转速范围内出现跨临界转速点现象; 在1阶临界转速内, 同相组合不平衡引起的振动响应大于反相组合, 反相组合不平衡将1阶临界振动峰值削弱至同相组合的50%;过1阶临界转速后, 反相组合不平衡引起的振动幅值明显大于同相组合。
针对弹支作用下涡轴发动机燃发转子多位置不平衡组合振动响应特性复杂问题, 提出从转子不平衡相位差组合的角度来研究燃发转子振动响应规律。首先构建鼠笼和挤压油膜阻尼器组成的弹支系统动力学模型, 探究弹支动力学特性与转子系统固有属性间的关系, 揭示不平衡相位差组合对燃发转子振动响应的影响规律, 设计涡轴发动机燃发转子动力学模拟实验台, 开展相应的实验验证。结果表明: 弹支刚度小于3×104 N/mm时可使转子系统尽早出现刚体模态, 避免发动机宽的工作转速范围内出现跨临界转速点现象; 在1阶临界转速内, 同相组合不平衡引起的振动响应大于反相组合, 反相组合不平衡将1阶临界振动峰值削弱至同相组合的50%;过1阶临界转速后, 反相组合不平衡引起的振动幅值明显大于同相组合。





2022, 41(10): 1530-1535.
doi: 10.13433/j.cnki.1003-8728.20200508
摘要:
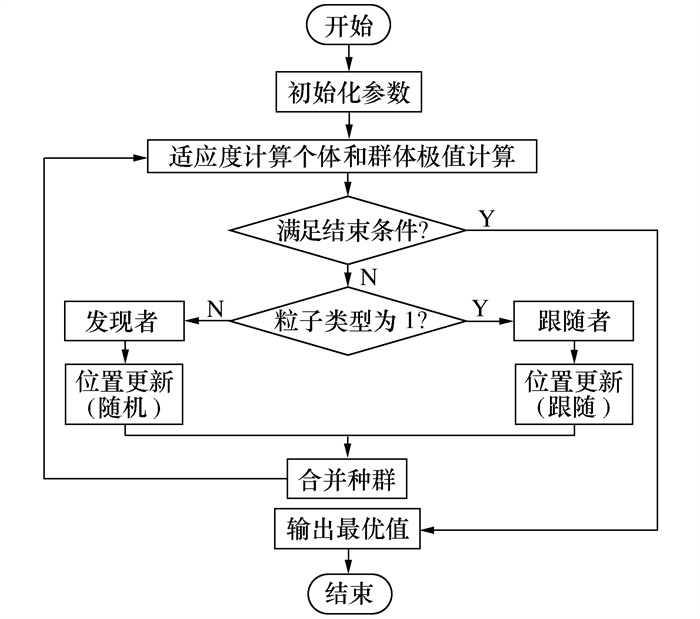
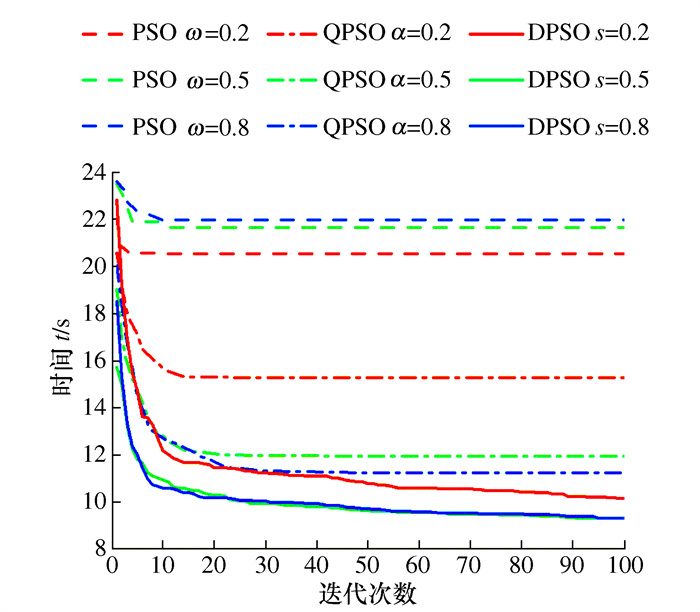
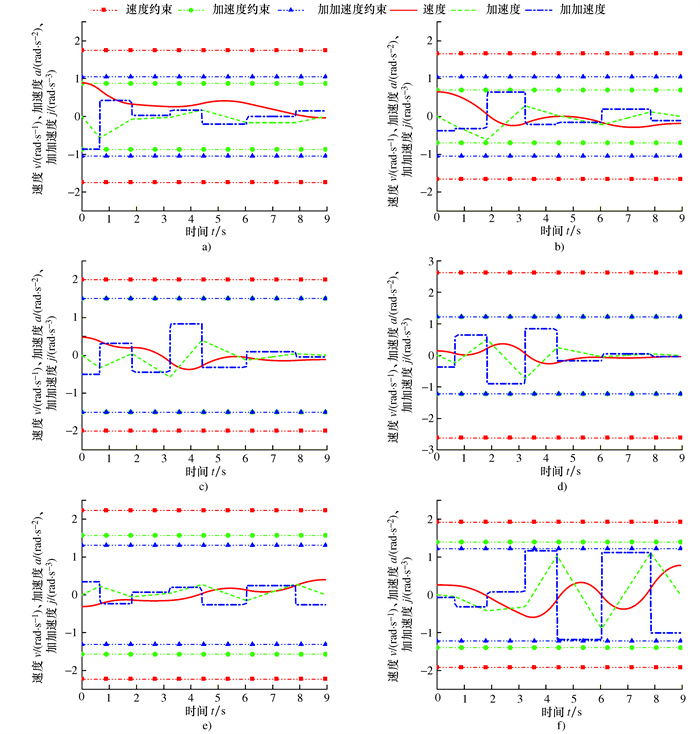
针对以时间为目标的轨迹规划问题, 提出一种工业机器人时间最优轨迹规划方法。将路径规划生成的关键点, 两两之间通过3次多项式连接; 以时间为优化目标, 以运动学特征为约束, 通过罚函数法构建适应度函数; 提出双种群粒子群算法进行优化。以6自由度机械臂为例, 仿真发现所提算法解的质量优于粒子群算法和量子粒子群算法, 最优值分别减少43.83%和1.75%、平均值分别减少54.62%和17.05%、标准差分别减少91.38%和83.80%;结果表明所提方法能使机械臂各关节轨迹平滑, 速度、加速度和加加速度最大值77.78%处于50%最大约束左右。所提方法在机器人最优时间轨迹规划中具有较强实用性, 能够延长机器人使用寿命。
针对以时间为目标的轨迹规划问题, 提出一种工业机器人时间最优轨迹规划方法。将路径规划生成的关键点, 两两之间通过3次多项式连接; 以时间为优化目标, 以运动学特征为约束, 通过罚函数法构建适应度函数; 提出双种群粒子群算法进行优化。以6自由度机械臂为例, 仿真发现所提算法解的质量优于粒子群算法和量子粒子群算法, 最优值分别减少43.83%和1.75%、平均值分别减少54.62%和17.05%、标准差分别减少91.38%和83.80%;结果表明所提方法能使机械臂各关节轨迹平滑, 速度、加速度和加加速度最大值77.78%处于50%最大约束左右。所提方法在机器人最优时间轨迹规划中具有较强实用性, 能够延长机器人使用寿命。
2022, 41(10): 1536-1542.
doi: 10.13433/j.cnki.1003-8728.20200499
摘要:
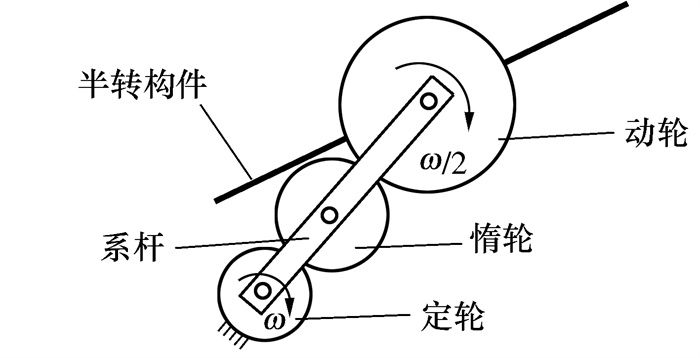
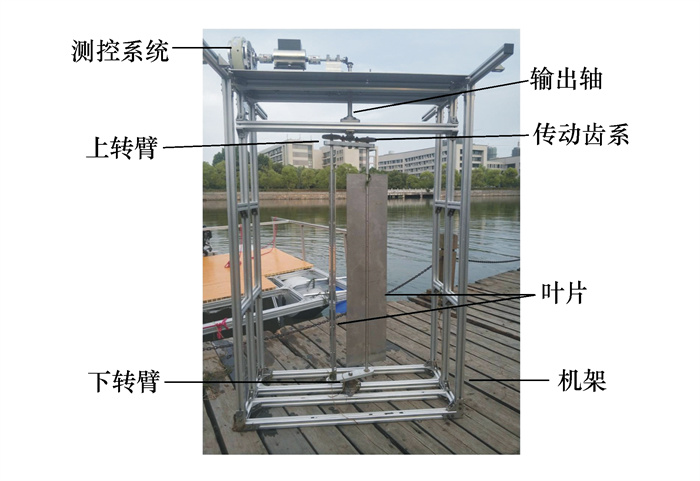
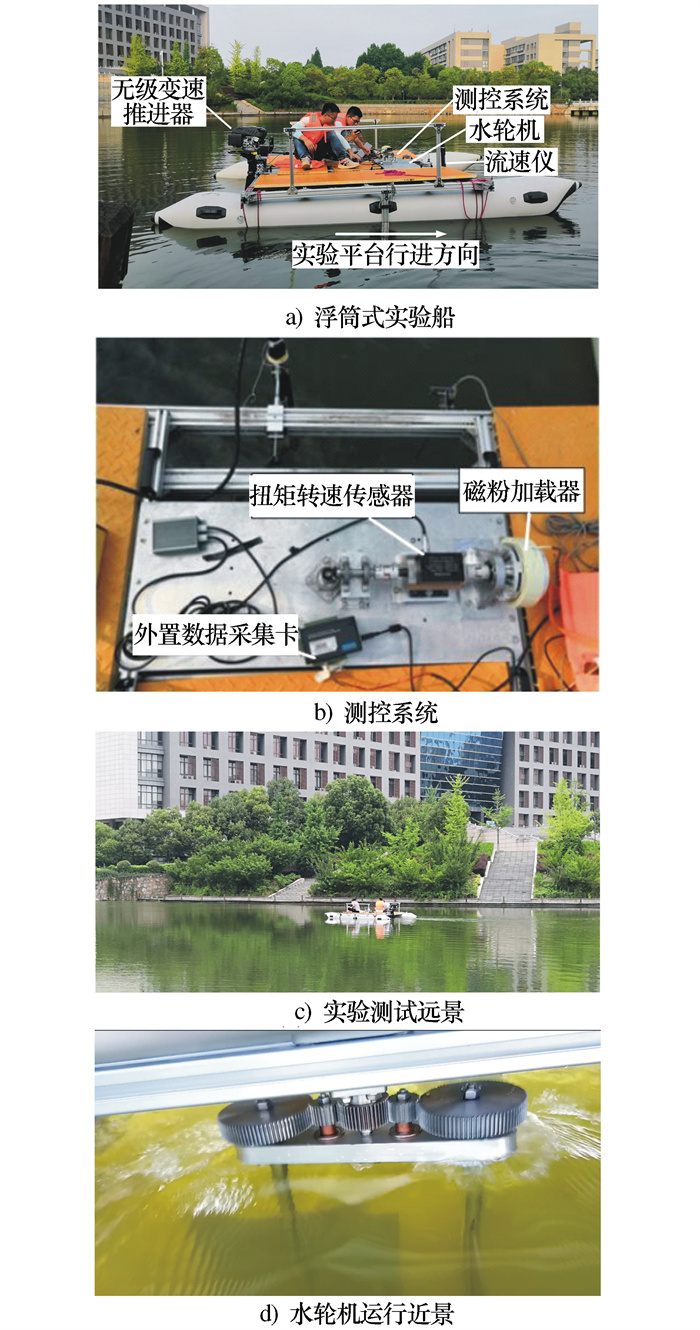
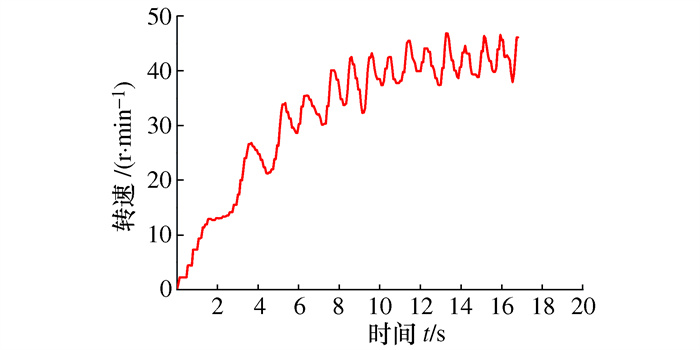
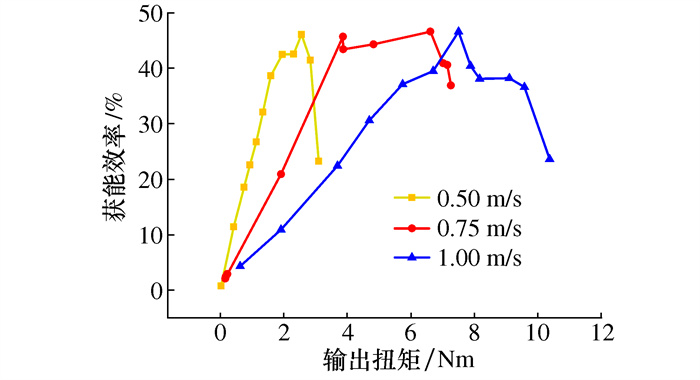
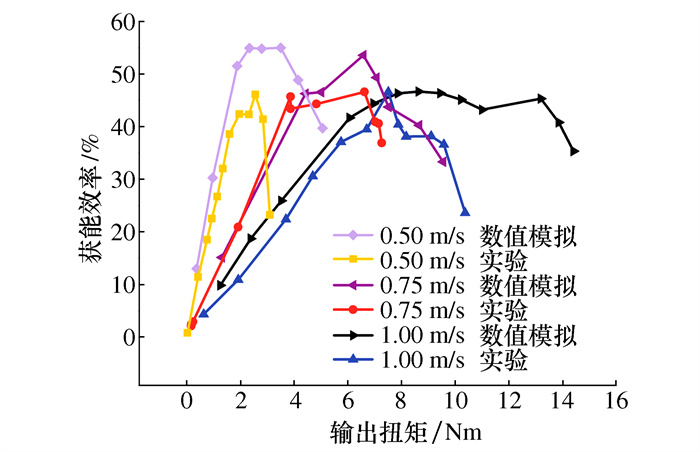
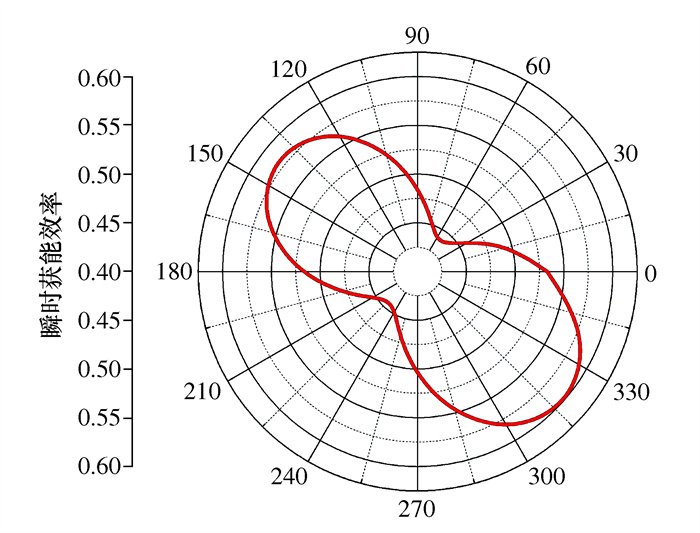
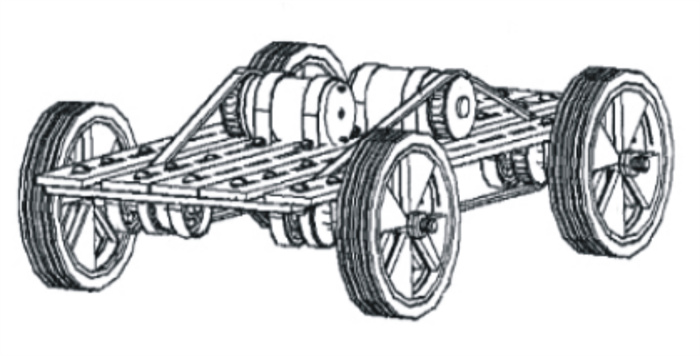
双叶片半转叶轮水轮机是一种升阻复合新型垂直轴水轮机, 水动力性能优劣直接影响着其工程应用价值。本文首先介绍了双叶片半转叶轮水轮机工作原理, 分析了主要性能参数与实验参数的关系; 在水轮机样机制造和水下实验平台设计的基础上, 开展了水轮机低速启动性能测试、不同流速下获能效率测试以及获能效率稳定性测试等水下实验项目, 并将水下实验与数值模拟进行结果对比分析。实验结果表明: 双叶片半转叶轮水轮机在低流速(0.5 m/s)下依然保持良好的启动特性, 来流速度对水轮机获能效率影响较小, 最佳负载下水轮机平均获能效率可达46%, 明显高于传统垂直轴水轮机获能效率; 提高能量输出稳定性是该水轮机设计研究下一步需要努力的方向。
双叶片半转叶轮水轮机是一种升阻复合新型垂直轴水轮机, 水动力性能优劣直接影响着其工程应用价值。本文首先介绍了双叶片半转叶轮水轮机工作原理, 分析了主要性能参数与实验参数的关系; 在水轮机样机制造和水下实验平台设计的基础上, 开展了水轮机低速启动性能测试、不同流速下获能效率测试以及获能效率稳定性测试等水下实验项目, 并将水下实验与数值模拟进行结果对比分析。实验结果表明: 双叶片半转叶轮水轮机在低流速(0.5 m/s)下依然保持良好的启动特性, 来流速度对水轮机获能效率影响较小, 最佳负载下水轮机平均获能效率可达46%, 明显高于传统垂直轴水轮机获能效率; 提高能量输出稳定性是该水轮机设计研究下一步需要努力的方向。



2022, 41(10): 1543-1549.
doi: 10.13433/j.cnki.1003-8728.20220083
摘要:
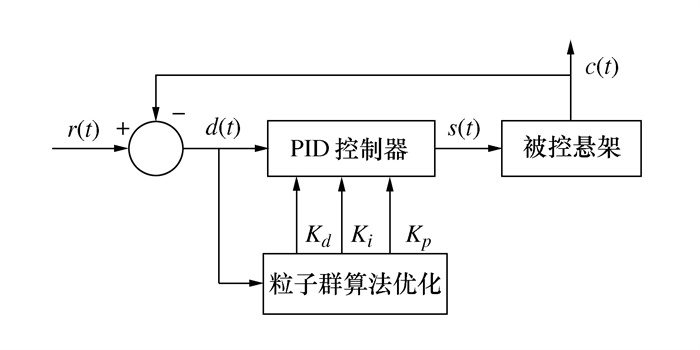
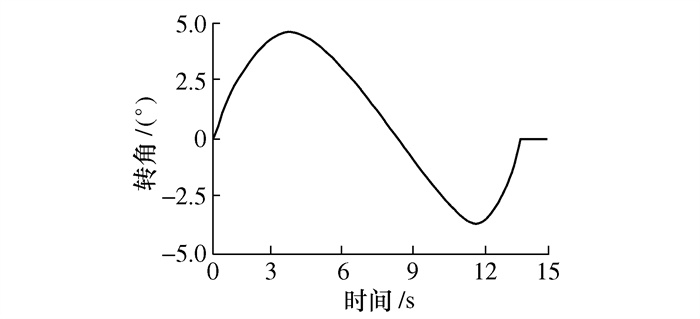
本文对轮毂电机驱动式电动汽车驱动悬挂系统集成控制方法进行研究, 构建包含扭转振动模型、纵向振动模型及垂向振动模型的轮毂电机驱动式电动汽车耦合动力学模型及路面模型, 在此基础上, 设计模糊控制器、滑模控制器及PID控制器, 集成各控制器协调互补控制电动汽车的主动前轮转向、目标横摆力矩以及主动悬架, 实现对电动汽车驱动悬挂系统的集成控制。结果表明: 在该方法的集成协调控制下, 可以显著降低峰值处的车体侧向加速度与横摆角速度, 并实现质心垂向加速度与侧偏角的有效抑制, 提升电动汽车的综合性能, 显著改善汽车行驶中的悬架动行程与轮毂电机定转子位移, 提升汽车的操纵平稳性与乘坐舒适性, 并且可以降低汽车行驶时撞击限位的几率, 保障轮毂电机驱动式电动汽车的稳定行驶。
本文对轮毂电机驱动式电动汽车驱动悬挂系统集成控制方法进行研究, 构建包含扭转振动模型、纵向振动模型及垂向振动模型的轮毂电机驱动式电动汽车耦合动力学模型及路面模型, 在此基础上, 设计模糊控制器、滑模控制器及PID控制器, 集成各控制器协调互补控制电动汽车的主动前轮转向、目标横摆力矩以及主动悬架, 实现对电动汽车驱动悬挂系统的集成控制。结果表明: 在该方法的集成协调控制下, 可以显著降低峰值处的车体侧向加速度与横摆角速度, 并实现质心垂向加速度与侧偏角的有效抑制, 提升电动汽车的综合性能, 显著改善汽车行驶中的悬架动行程与轮毂电机定转子位移, 提升汽车的操纵平稳性与乘坐舒适性, 并且可以降低汽车行驶时撞击限位的几率, 保障轮毂电机驱动式电动汽车的稳定行驶。


2022, 41(10): 1550-1556.
doi: 10.13433/j.cnki.1003-8728.20200467
摘要:
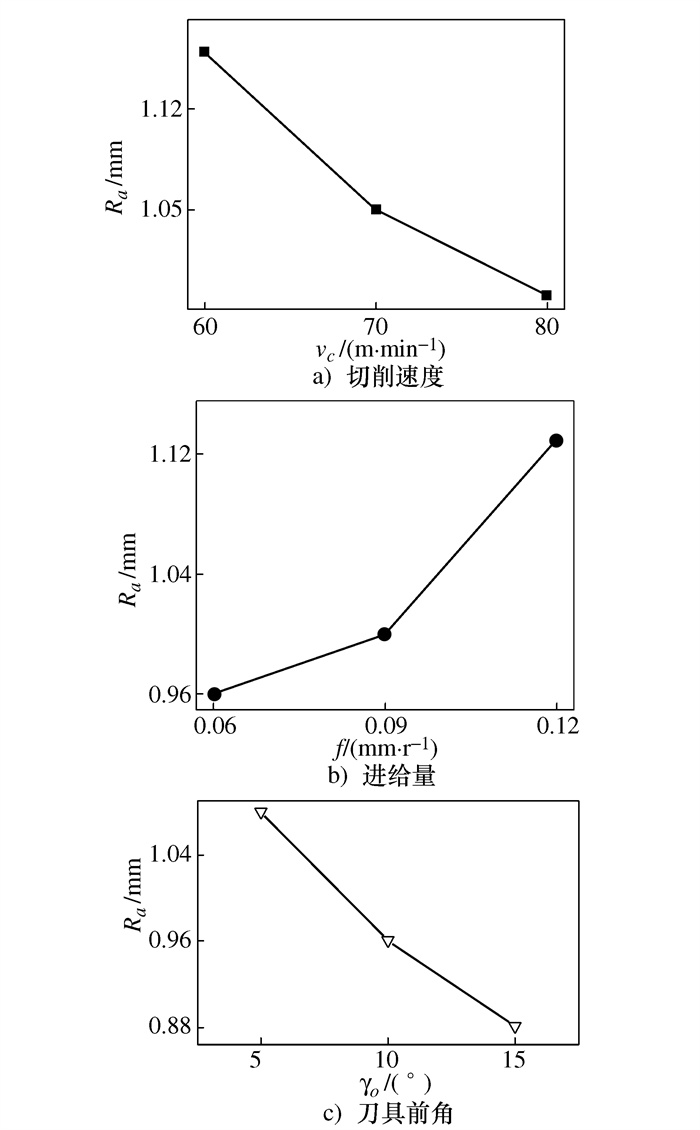
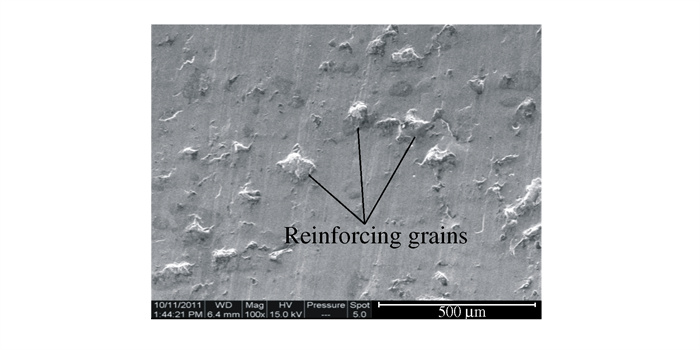
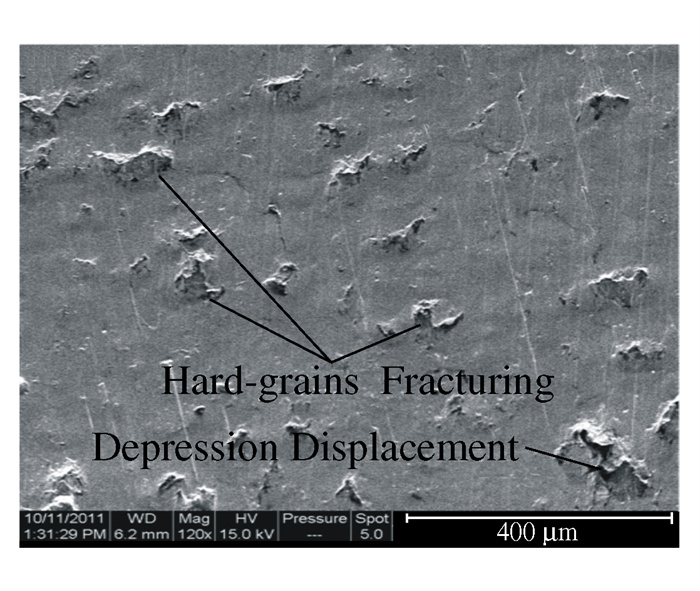
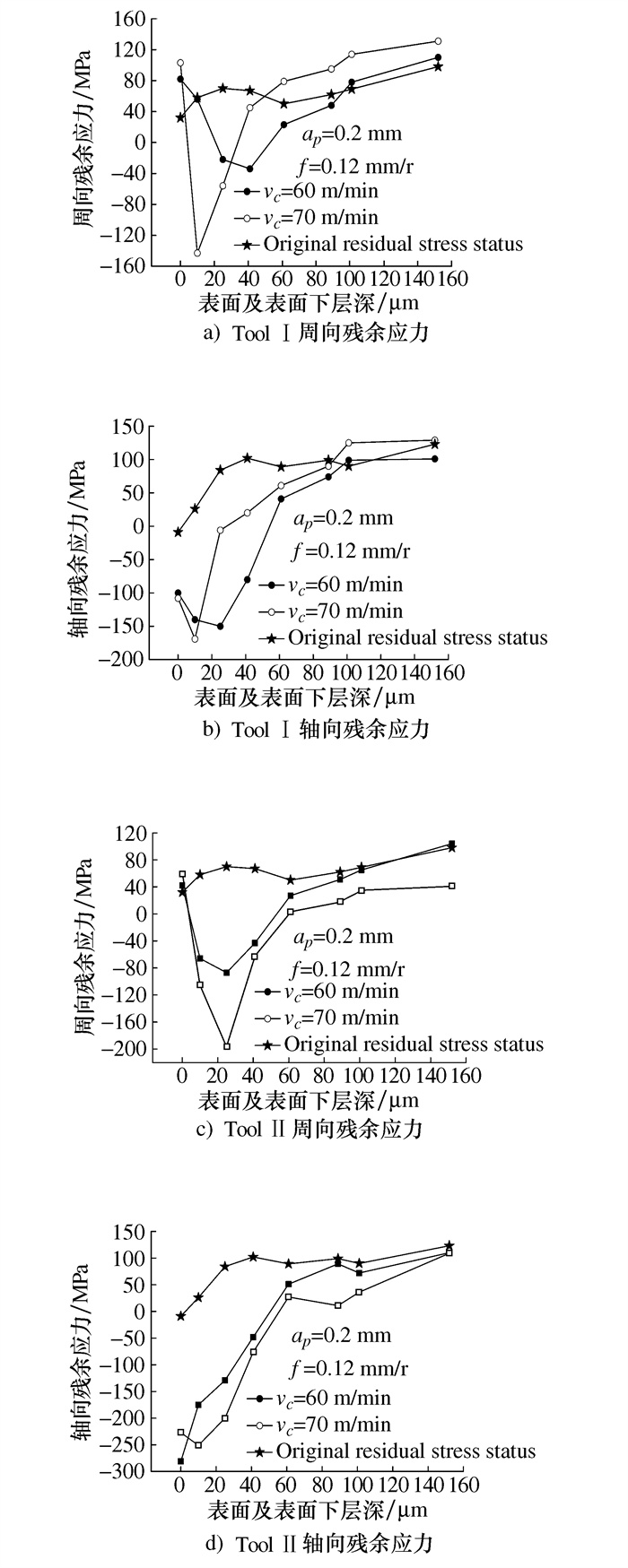
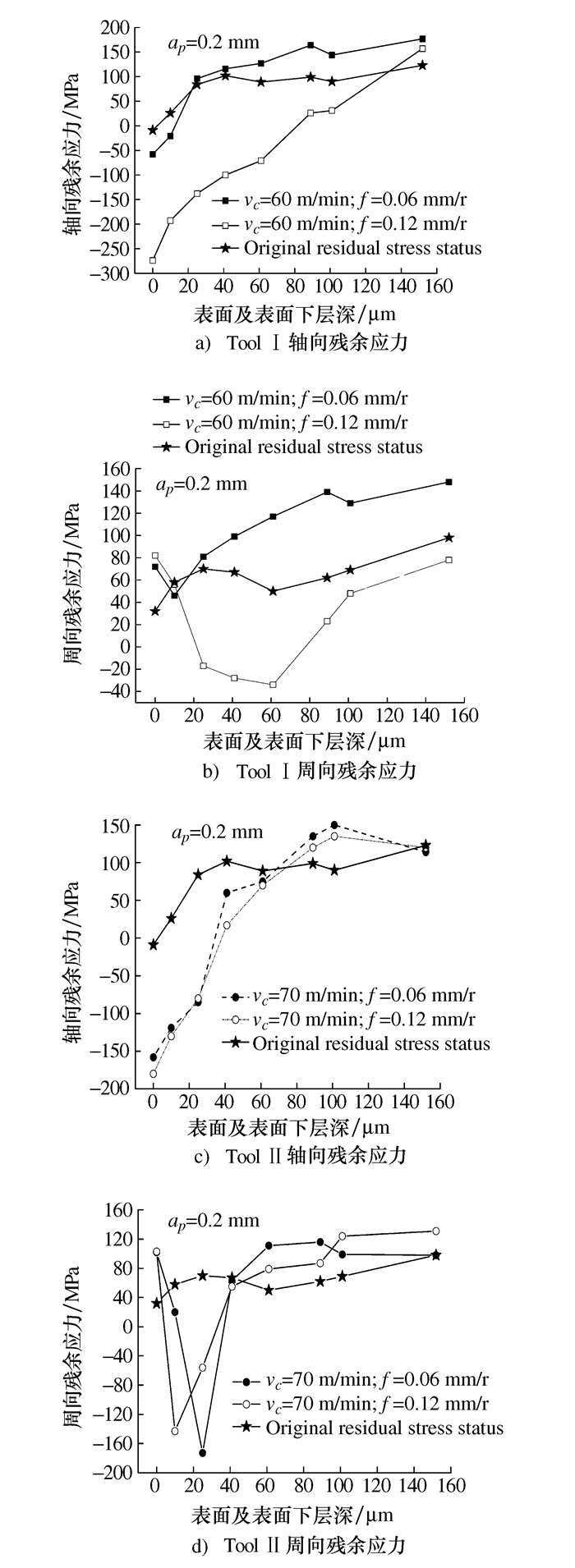
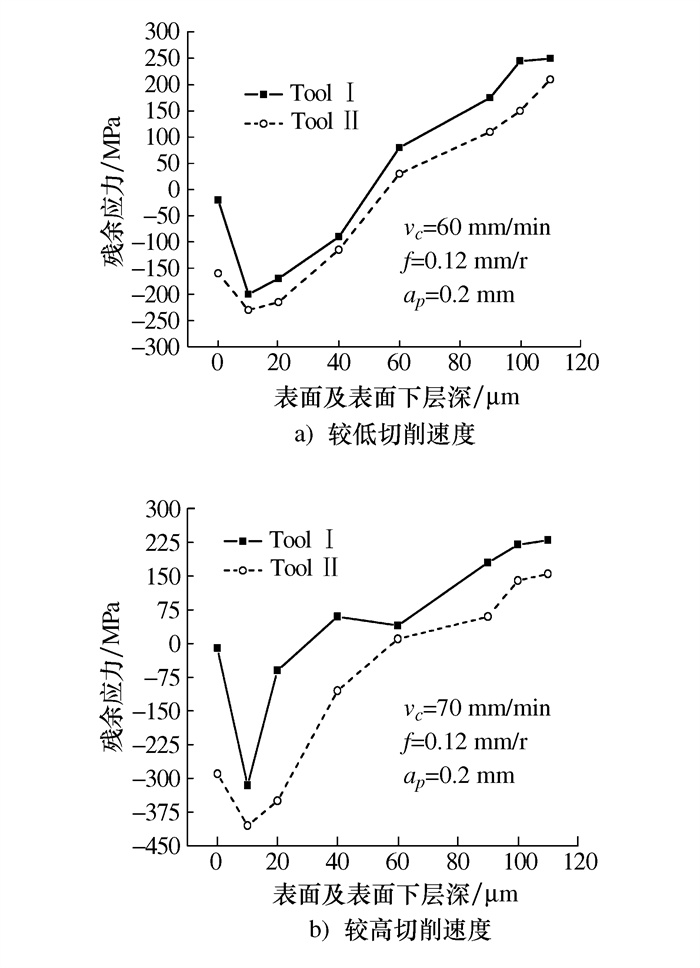
研究切削速度vc、进给量f和刀具前角γ0这3个因素的变化对FeCrBSi再制造涂层已加工表面质量(包括对表面粗糙度、表面形貌和残余应力再分布量)的影响规律。结果表明: FeCrBSi涂层表面粗糙度随着切削速度的增大和进给量的降低而改善。切削后已加工涂层表面出现明显的犁沟, 且沿进给方向的波峰和波谷呈明显的规律性。切削速度为60 m/min, 进给量从0.06 mm/r增加至0.12 mm/r, 涂层表层残余应力发生了由"线性分布"的残余拉应力向"勺形分布"的残余压应力转变。切削速度提高到70 m/min, 进给量的变化对涂层残余应力再分布的影响不明显。研究发现刀具前角的增大显著影响着涂层表面残余应力值, 而切削速度的增加显著影响着涂层表层最大残余压应力值。切削参数vc=70 m/min, f=0.12 mm/r, ap=0.2 mm, γ0=(10°~ 15°)是FeCrBSi合金涂层已加工表面质量状态改变的临界参数。
研究切削速度vc、进给量f和刀具前角γ0这3个因素的变化对FeCrBSi再制造涂层已加工表面质量(包括对表面粗糙度、表面形貌和残余应力再分布量)的影响规律。结果表明: FeCrBSi涂层表面粗糙度随着切削速度的增大和进给量的降低而改善。切削后已加工涂层表面出现明显的犁沟, 且沿进给方向的波峰和波谷呈明显的规律性。切削速度为60 m/min, 进给量从0.06 mm/r增加至0.12 mm/r, 涂层表层残余应力发生了由"线性分布"的残余拉应力向"勺形分布"的残余压应力转变。切削速度提高到70 m/min, 进给量的变化对涂层残余应力再分布的影响不明显。研究发现刀具前角的增大显著影响着涂层表面残余应力值, 而切削速度的增加显著影响着涂层表层最大残余压应力值。切削参数vc=70 m/min, f=0.12 mm/r, ap=0.2 mm, γ0=(10°~ 15°)是FeCrBSi合金涂层已加工表面质量状态改变的临界参数。



2022, 41(10): 1557-1566.
doi: 10.13433/j.cnki.1003-8728.20200507
摘要:
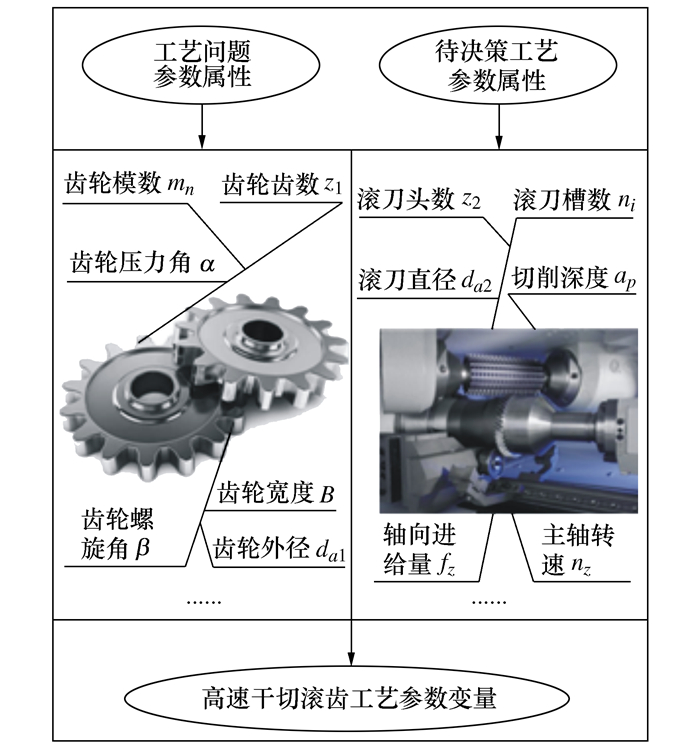
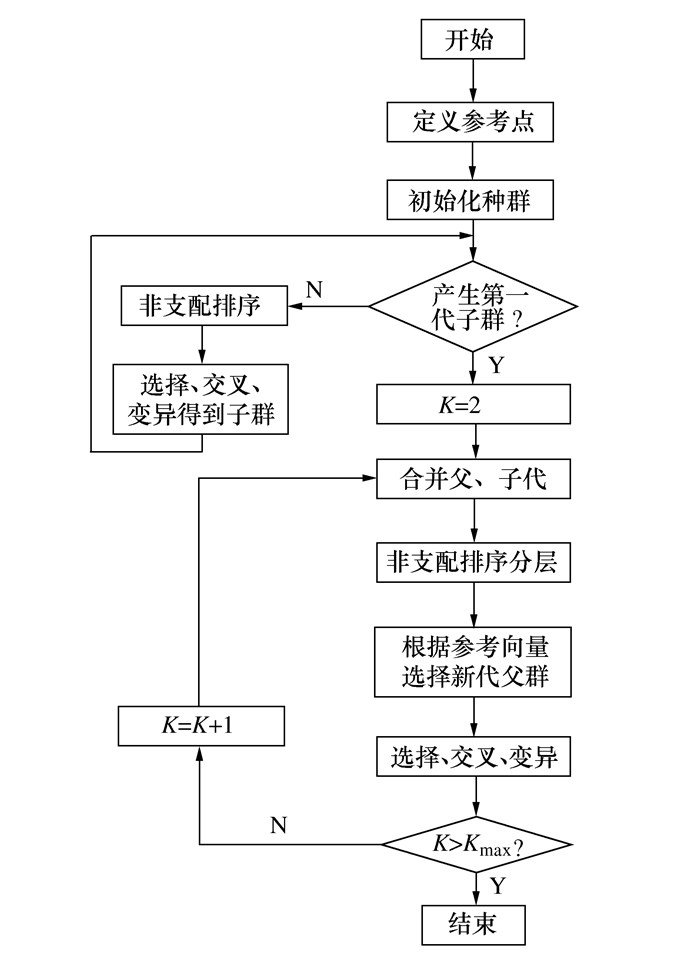
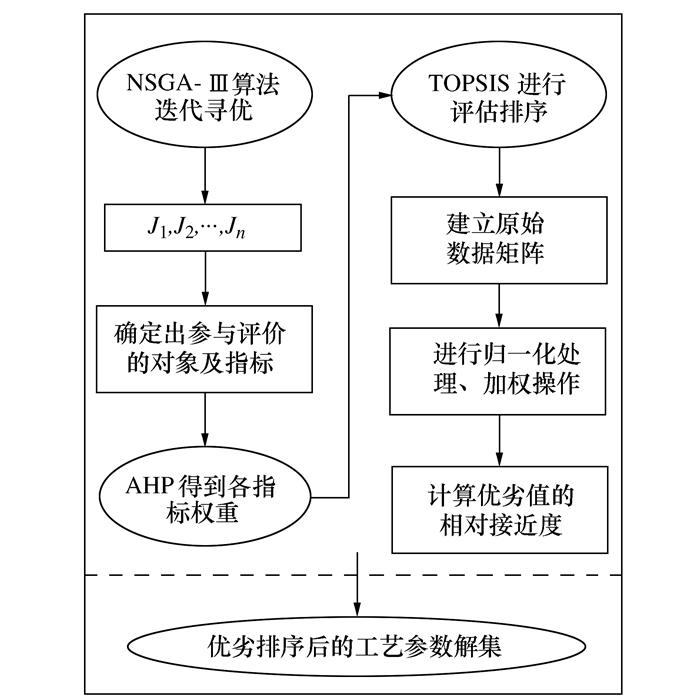
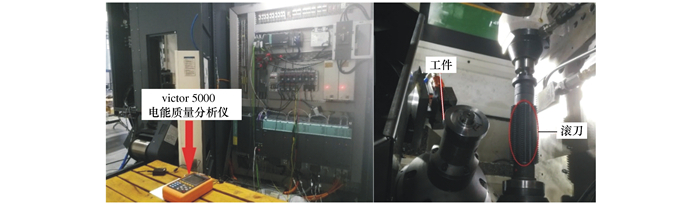
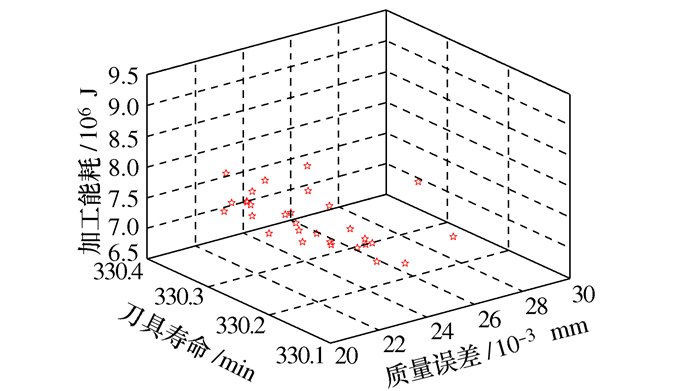
高速干切滚齿过程无切削液且切削速度高,不合适的工艺参数将严重影响加工能耗、质量以及刀具寿命等。针对多目标滚齿工艺参数优化问题,构建了以最低能耗、最小质量误差以及最大刀具寿命为目标的多目标优化模型,提出了一种基于多目标遗传算法(NSGA-Ⅲ)以及层次分析法与优劣解距离排序法相结合(AHP-TOPSIS)的优化决策方法。该方法采用基于参考点的NSGA-Ⅲ算法寻优,利用AHP-TOPSIS组合方法进行各评价指标权重的动态计算,完成工艺参数解集优劣性能排序,便于更加高效合理的进行优化决策。
高速干切滚齿过程无切削液且切削速度高,不合适的工艺参数将严重影响加工能耗、质量以及刀具寿命等。针对多目标滚齿工艺参数优化问题,构建了以最低能耗、最小质量误差以及最大刀具寿命为目标的多目标优化模型,提出了一种基于多目标遗传算法(NSGA-Ⅲ)以及层次分析法与优劣解距离排序法相结合(AHP-TOPSIS)的优化决策方法。该方法采用基于参考点的NSGA-Ⅲ算法寻优,利用AHP-TOPSIS组合方法进行各评价指标权重的动态计算,完成工艺参数解集优劣性能排序,便于更加高效合理的进行优化决策。




2022, 41(10): 1567-1576.
doi: 10.13433/j.cnki.1003-8728.20200471
摘要:
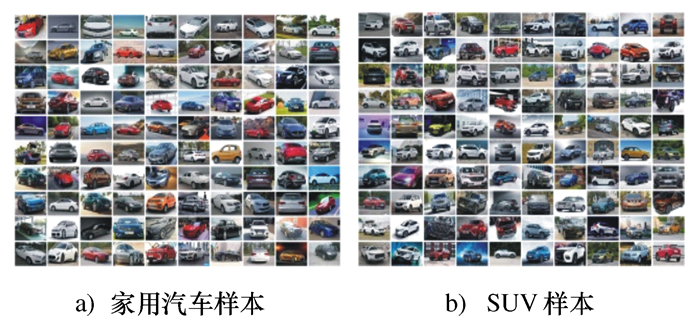
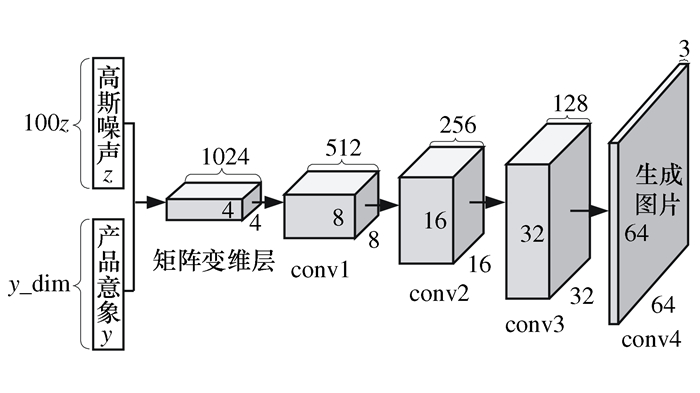
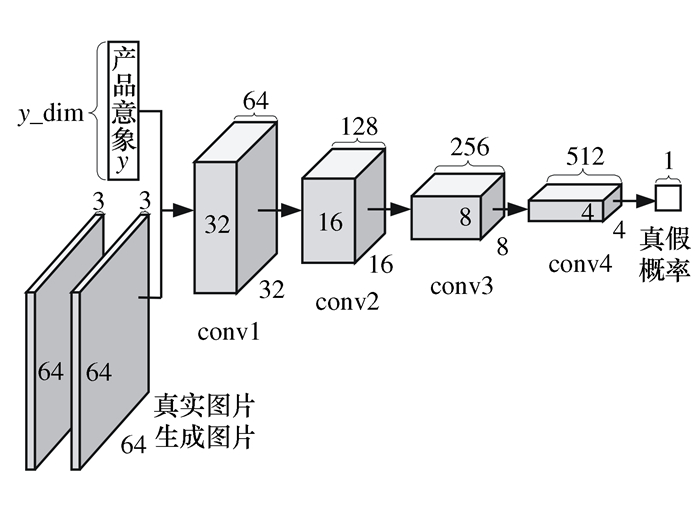
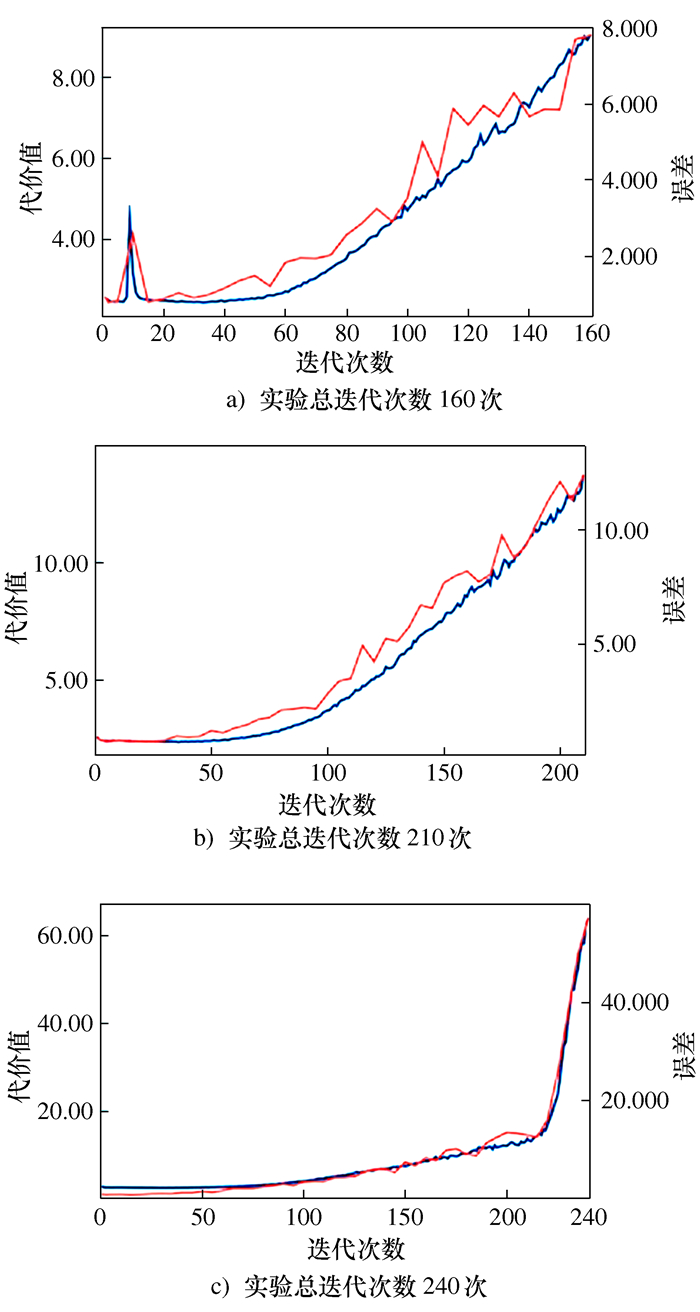
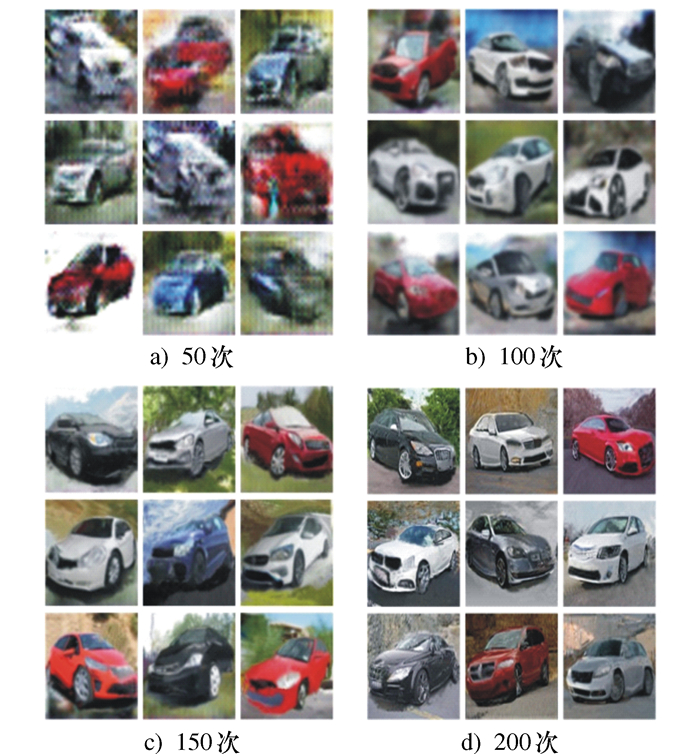
为了进一步提升设计方案的效率,缓解人工劳动的强度和压力,通过计算机自动设计达到快速生成创新造型设计方案的目的,提出一种基于深度卷积生成对抗网络(Deep convolution generative adversarial networks,DCGAN)的汽车造型设计模型。该模型通过构建基础产品造型模块的设计方案数据集,利用深度学习的DCGAN对数据集进行训练以提高设计方案图像质量。最后,将生成的两种不同种类汽车造型方案与专家方案进行满意度对比,结果显示模型生成的方案能够得到与专家设计方案相近的评分,证明了所提模型的有效性和合理性。
为了进一步提升设计方案的效率,缓解人工劳动的强度和压力,通过计算机自动设计达到快速生成创新造型设计方案的目的,提出一种基于深度卷积生成对抗网络(Deep convolution generative adversarial networks,DCGAN)的汽车造型设计模型。该模型通过构建基础产品造型模块的设计方案数据集,利用深度学习的DCGAN对数据集进行训练以提高设计方案图像质量。最后,将生成的两种不同种类汽车造型方案与专家方案进行满意度对比,结果显示模型生成的方案能够得到与专家设计方案相近的评分,证明了所提模型的有效性和合理性。









2022, 41(10): 1577-1584.
doi: 10.13433/j.cnki.1003-8728.20200488
摘要:
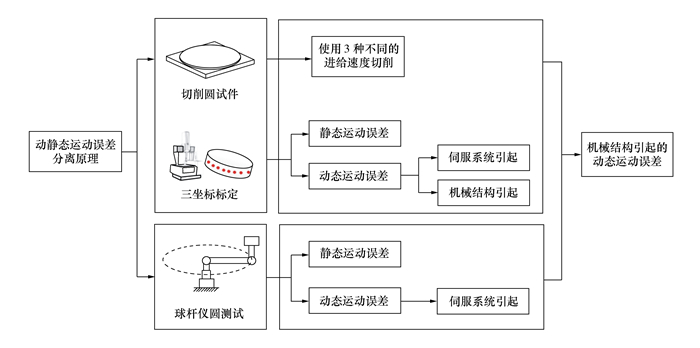
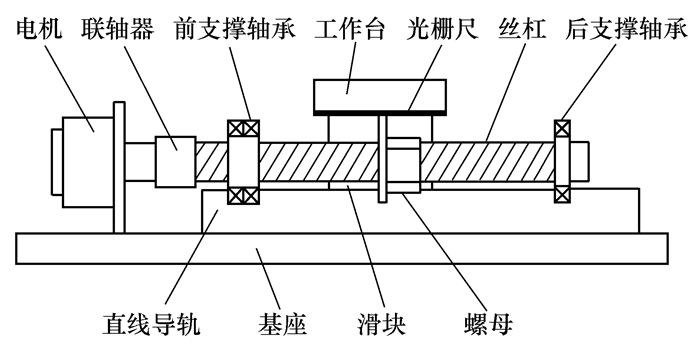
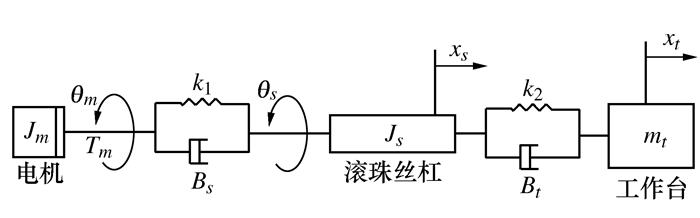
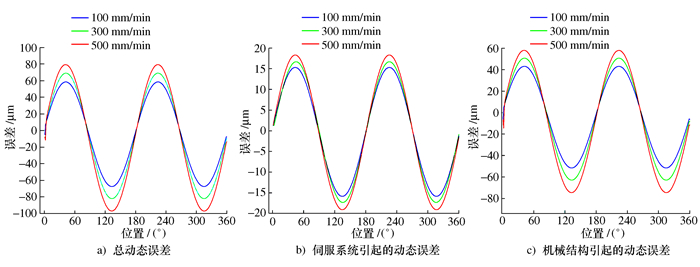
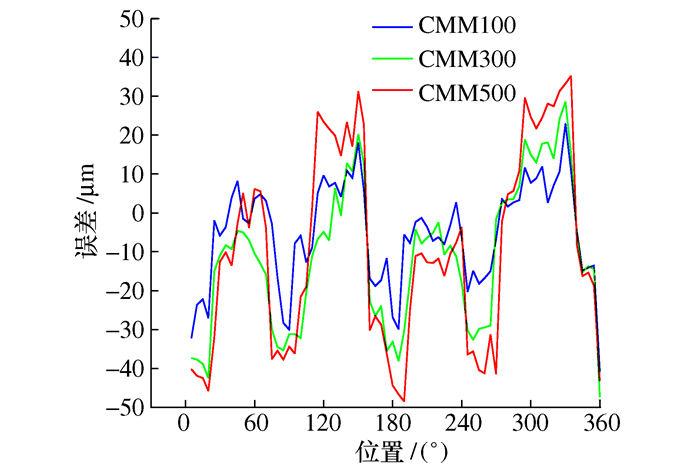
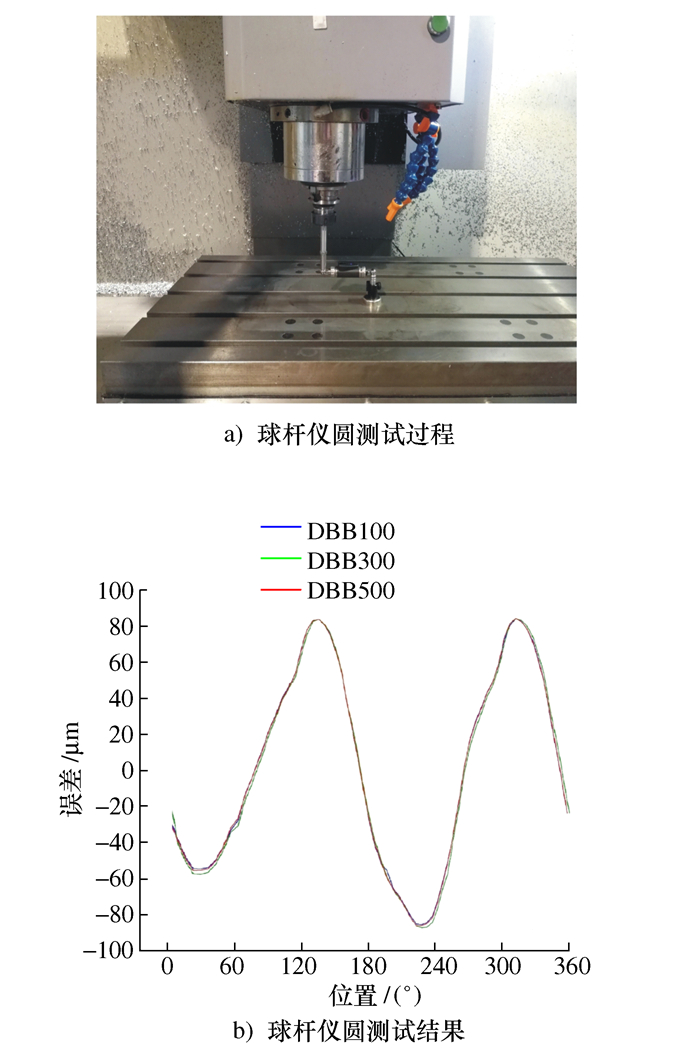
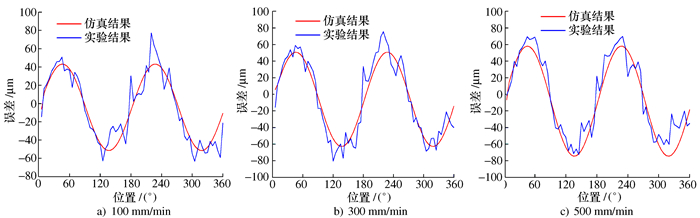
动态运动误差是影响数控机床加工精度的关键因素,但因其具有时变性、随机性与动态性,研究难度大,其产生机理尚不明确,严重阻碍了机床加工精度的提升。本文旨在溯源进给系统的动态运动误差,提出了基于机电-刚柔耦合特性分析的数控机床进给系统动态运动误差溯源方法。通过不同进给速度下切削圆试件,基于三坐标标定与球杆仪圆测试分离出由机械结构引起的动态运动误差。同时,基于机电刚柔耦合动力学模型进行仿真分析,其仿真结果与实验分离结果吻合度达70%以上,从而验证了该方法的可行性与动力学模型的准确性。
动态运动误差是影响数控机床加工精度的关键因素,但因其具有时变性、随机性与动态性,研究难度大,其产生机理尚不明确,严重阻碍了机床加工精度的提升。本文旨在溯源进给系统的动态运动误差,提出了基于机电-刚柔耦合特性分析的数控机床进给系统动态运动误差溯源方法。通过不同进给速度下切削圆试件,基于三坐标标定与球杆仪圆测试分离出由机械结构引起的动态运动误差。同时,基于机电刚柔耦合动力学模型进行仿真分析,其仿真结果与实验分离结果吻合度达70%以上,从而验证了该方法的可行性与动力学模型的准确性。





2022, 41(10): 1585-1589.
doi: 10.13433/j.cnki.1003-8728.20200468
摘要:
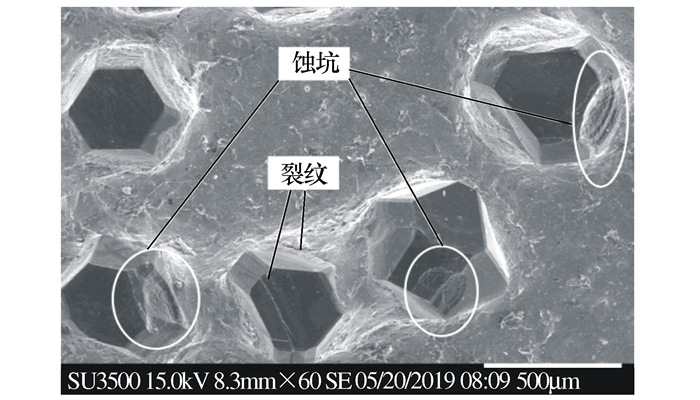
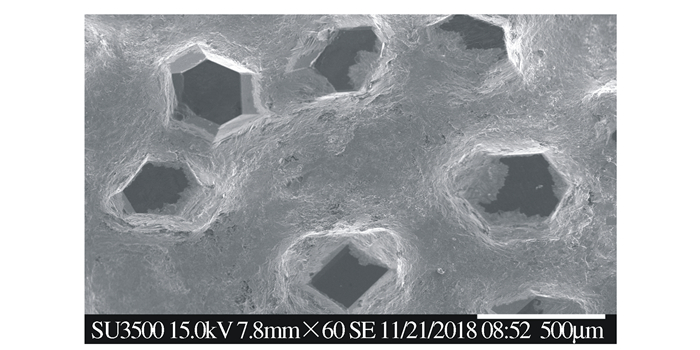
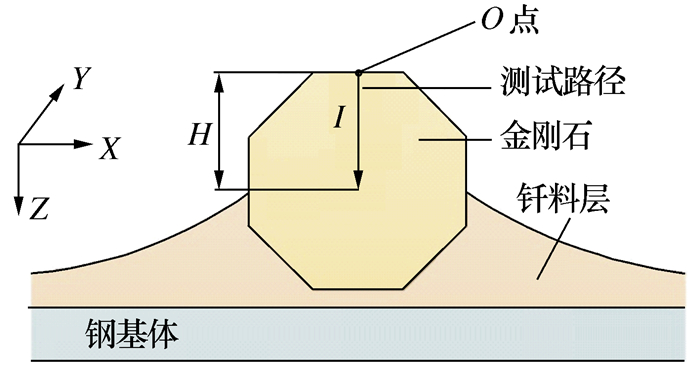
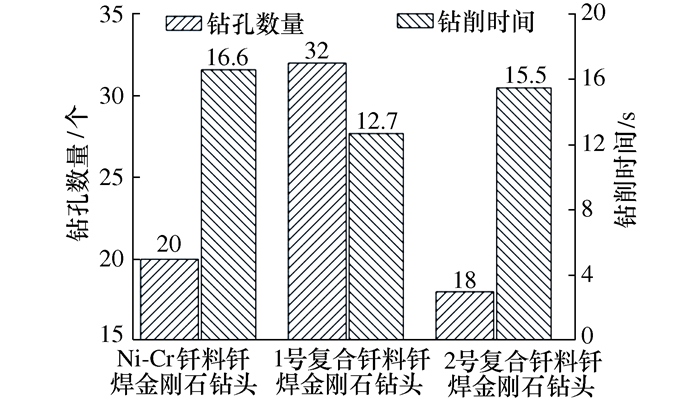
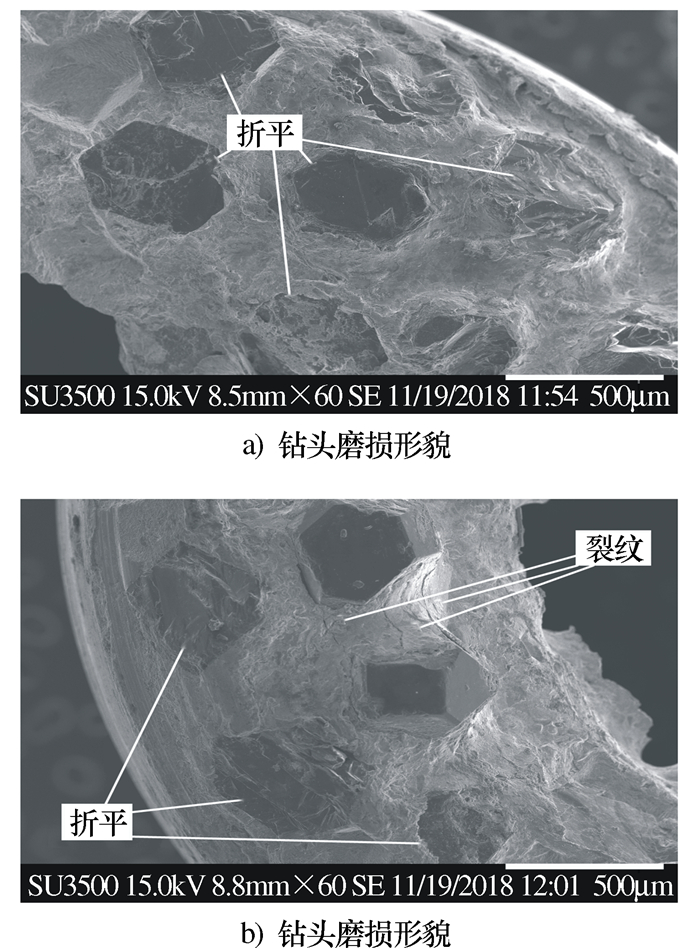
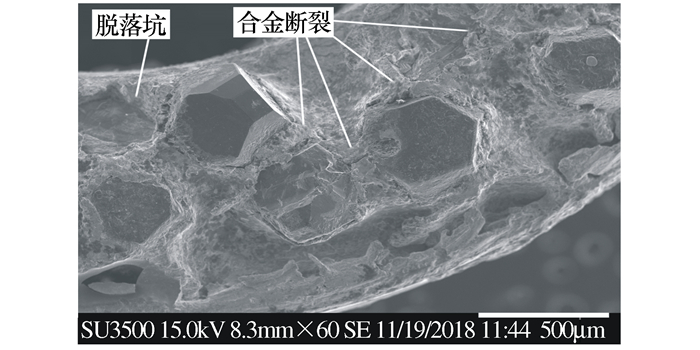
Ni-Cr合金钎料对金刚石磨料会造成热损伤,影响了钎焊金刚石钻头加工性能的进一步提高。提出了Ni-Cr合金和富Ce合金复合钎料制备新型钎焊金刚石钻头和试样,开展了3种钎焊钻头钻削玻化砖的加工性能实验研究,利用扫描电镜分析了3种钎焊金刚石试样表面微观形貌和钎焊钻头的磨损形貌。结果表明:采用复合钎料制备的钎焊金刚石试样,金刚石磨料表面蚀坑较少,金刚石磨料表面或附近微裂纹较少,表面形貌优于Ni-Cr合金钎料钎焊金刚石试样;与Ni-Cr合金钎焊金刚石相比,富Ce合金添加量为5%和10%的复合钎料钎焊金刚石残余应力分别减少9.7%和16.1%;与Ni-Cr合金钎料钎焊金刚石钻头相比,采用富Ce合金添加量为5%的复合钎料制备的钎焊金刚石钻头其使用寿命增加60%,加工效率提高30.7%,磨损形式主要为微观破碎和宏观破碎,具有最优的加工性能和磨损形貌;富Ce合金能降低Ni-Cr合金对金刚石造成的热损伤。
Ni-Cr合金钎料对金刚石磨料会造成热损伤,影响了钎焊金刚石钻头加工性能的进一步提高。提出了Ni-Cr合金和富Ce合金复合钎料制备新型钎焊金刚石钻头和试样,开展了3种钎焊钻头钻削玻化砖的加工性能实验研究,利用扫描电镜分析了3种钎焊金刚石试样表面微观形貌和钎焊钻头的磨损形貌。结果表明:采用复合钎料制备的钎焊金刚石试样,金刚石磨料表面蚀坑较少,金刚石磨料表面或附近微裂纹较少,表面形貌优于Ni-Cr合金钎料钎焊金刚石试样;与Ni-Cr合金钎焊金刚石相比,富Ce合金添加量为5%和10%的复合钎料钎焊金刚石残余应力分别减少9.7%和16.1%;与Ni-Cr合金钎料钎焊金刚石钻头相比,采用富Ce合金添加量为5%的复合钎料制备的钎焊金刚石钻头其使用寿命增加60%,加工效率提高30.7%,磨损形式主要为微观破碎和宏观破碎,具有最优的加工性能和磨损形貌;富Ce合金能降低Ni-Cr合金对金刚石造成的热损伤。




2022, 41(10): 1590-1597.
doi: 10.13433/j.cnki.1003-8728.20200477
摘要:
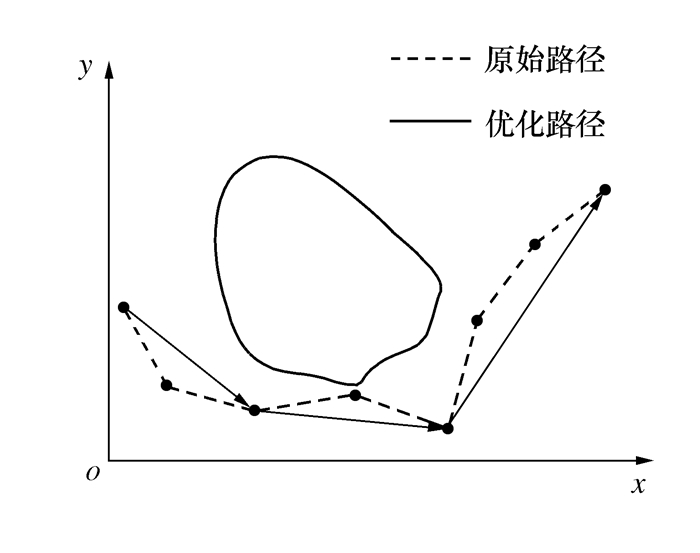
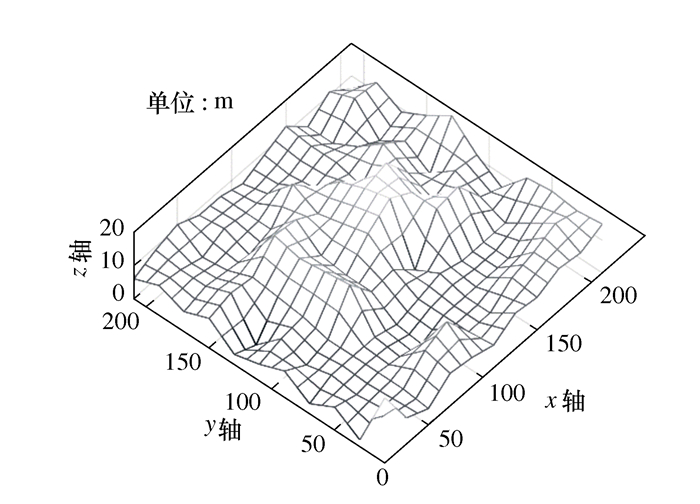
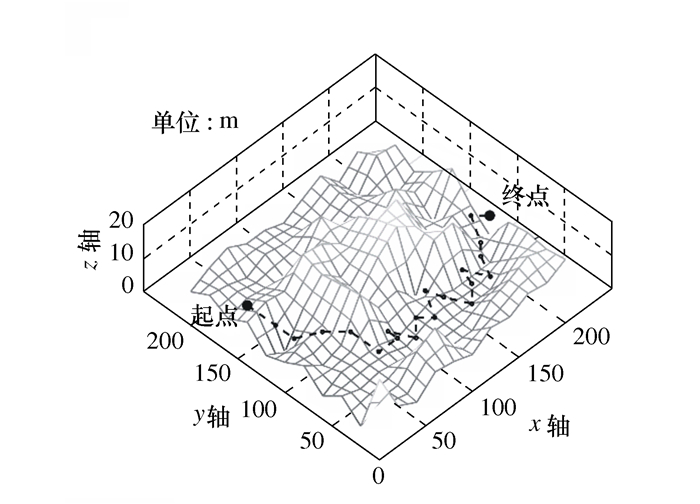
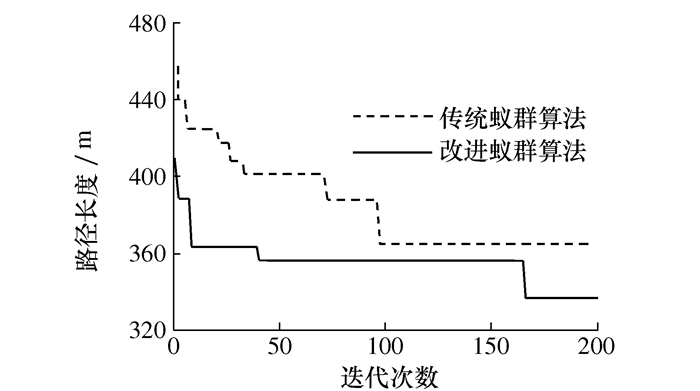
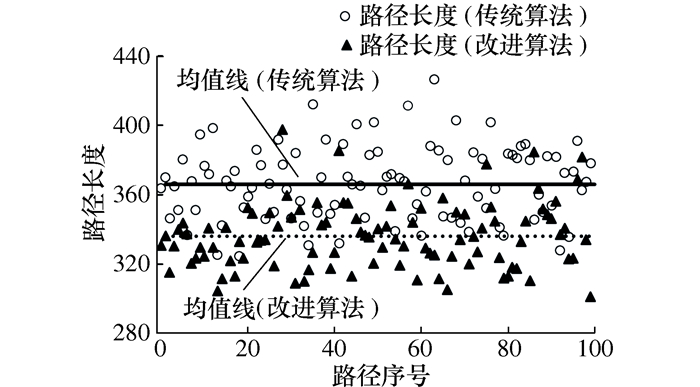
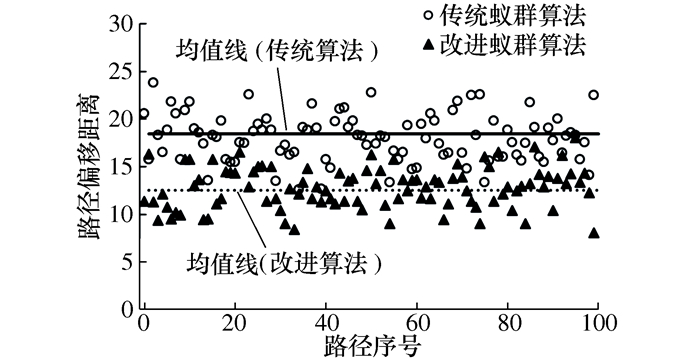
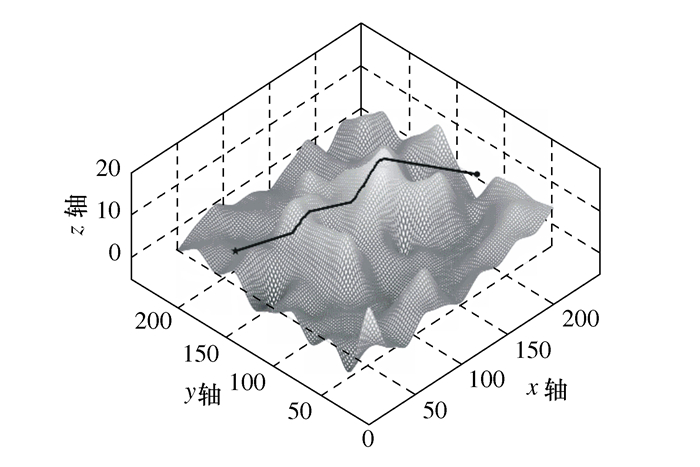
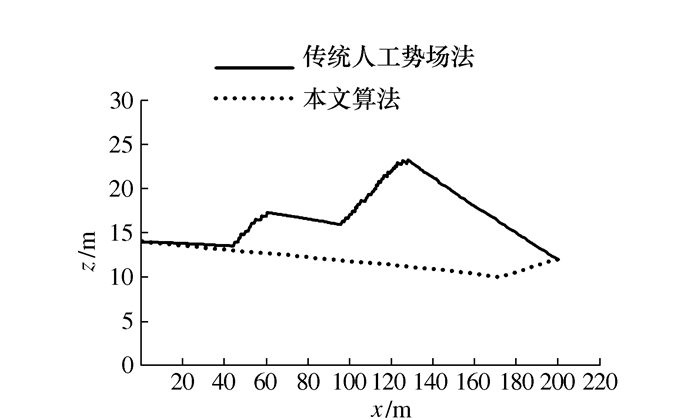
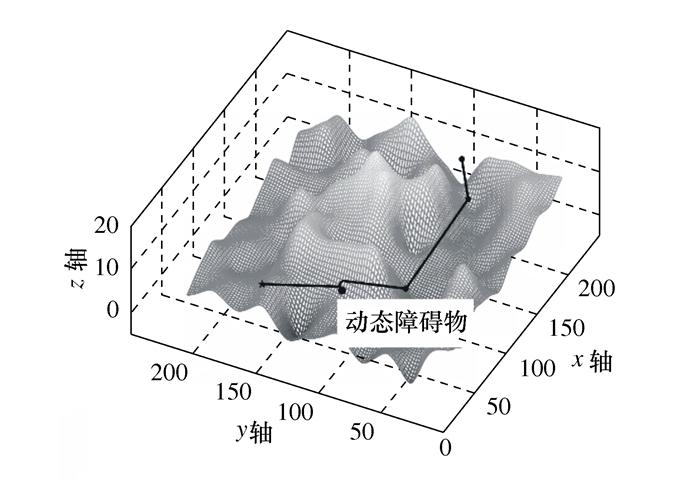
为提升深海着陆器三维路径规划全局最优性与动态避障能力,提出了一种融合改进蚁群算法和人工势场法的全局动态路径规划方法。基于传统蚁群算法,引入路径偏移程度,优化构建启发函数,简化栅格地图并优化搜索空间,提升了蚁群算法在三维路径规划中的收敛响应速度。在此基础上,选取改进蚁群算法产生的全局路径中有效关键点作为连续子目标点,融合人工势场法,构建全局路径规划势场模型函数,在保证全局路径规划较优的基础上,提高了路径的平滑性和局部避障能力。利用实验算例验证了方法的有效性,方法能够为水下仪器、水下机器人、水下设备自主导航的规划与优化提供帮助与参考。
为提升深海着陆器三维路径规划全局最优性与动态避障能力,提出了一种融合改进蚁群算法和人工势场法的全局动态路径规划方法。基于传统蚁群算法,引入路径偏移程度,优化构建启发函数,简化栅格地图并优化搜索空间,提升了蚁群算法在三维路径规划中的收敛响应速度。在此基础上,选取改进蚁群算法产生的全局路径中有效关键点作为连续子目标点,融合人工势场法,构建全局路径规划势场模型函数,在保证全局路径规划较优的基础上,提高了路径的平滑性和局部避障能力。利用实验算例验证了方法的有效性,方法能够为水下仪器、水下机器人、水下设备自主导航的规划与优化提供帮助与参考。







2022, 41(10): 1598-1607.
doi: 10.13433/j.cnki.1003-8728.20220223
摘要:
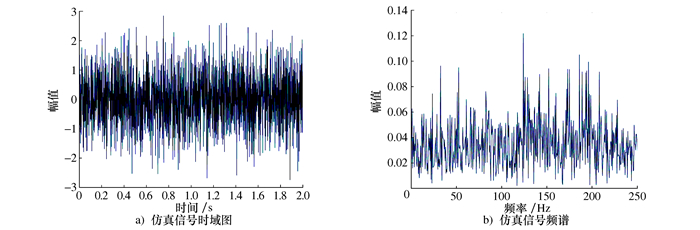
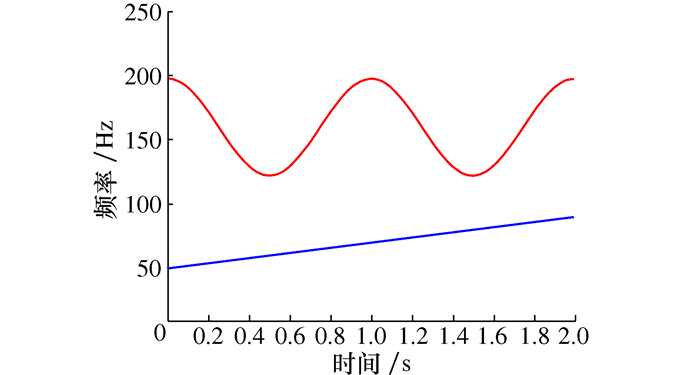
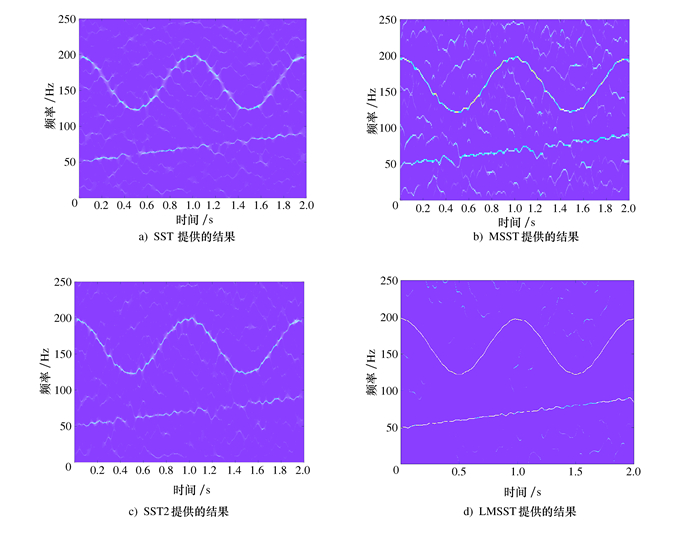
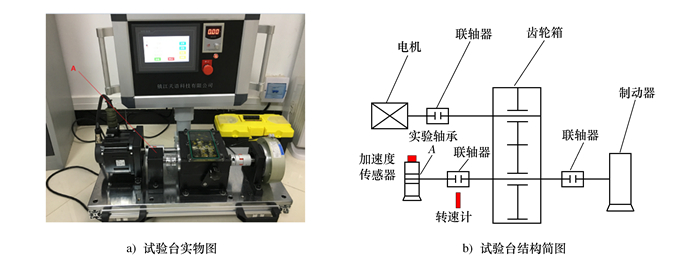
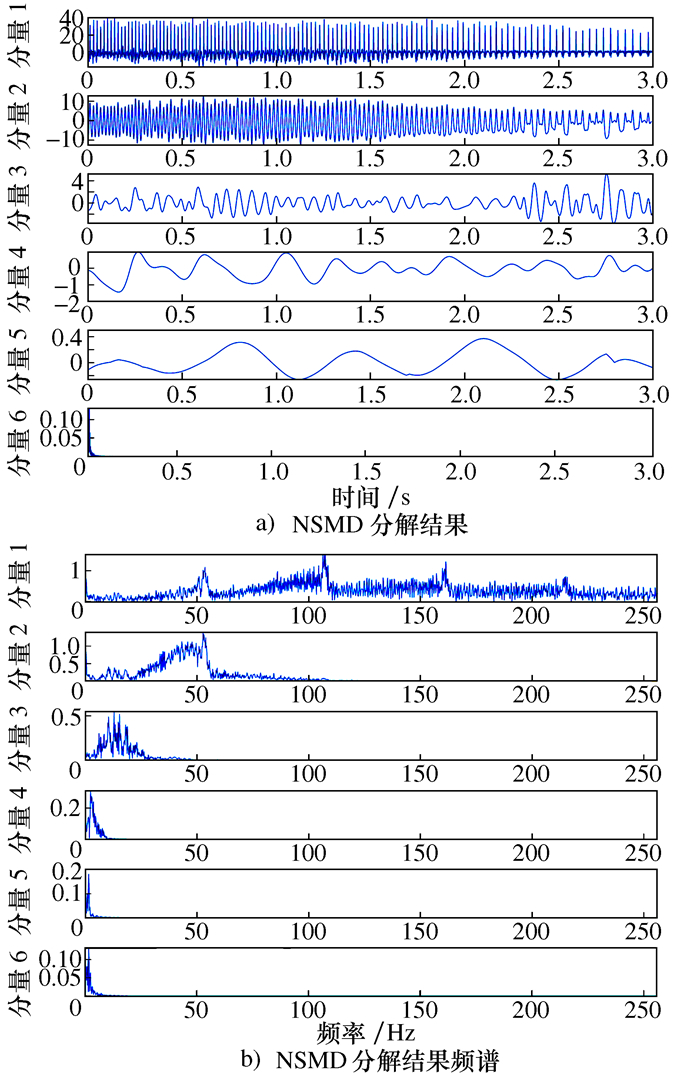
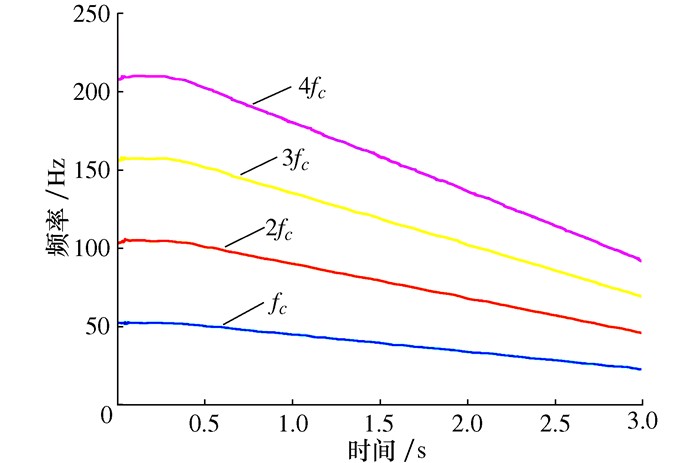
为了能够准确反映变转速工况下滚动轴承的时变故障特征,本文提出了一种基于非线性稀疏模态分解(NSMD)和局部最大值同步压缩变换(LMSST)的故障诊断方法。首先利用NSMD对含噪振动信号进行分解,基于各分量的频谱最大相关性进行有用分量的选择;然后对其进行LMSST分析,从时频平面中提取时变故障特征,从而实现变转速下轴承故障诊断。
为了能够准确反映变转速工况下滚动轴承的时变故障特征,本文提出了一种基于非线性稀疏模态分解(NSMD)和局部最大值同步压缩变换(LMSST)的故障诊断方法。首先利用NSMD对含噪振动信号进行分解,基于各分量的频谱最大相关性进行有用分量的选择;然后对其进行LMSST分析,从时频平面中提取时变故障特征,从而实现变转速下轴承故障诊断。




2022, 41(10): 1608-1614.
doi: 10.13433/j.cnki.1003-8728.20200486
摘要:
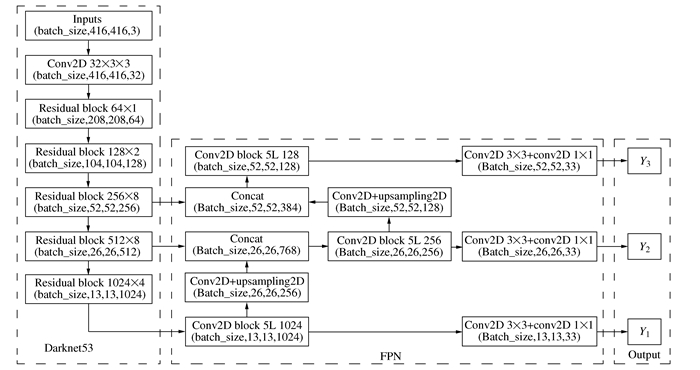
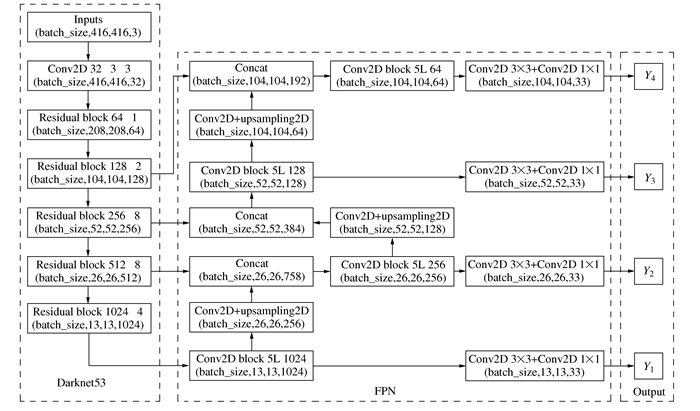
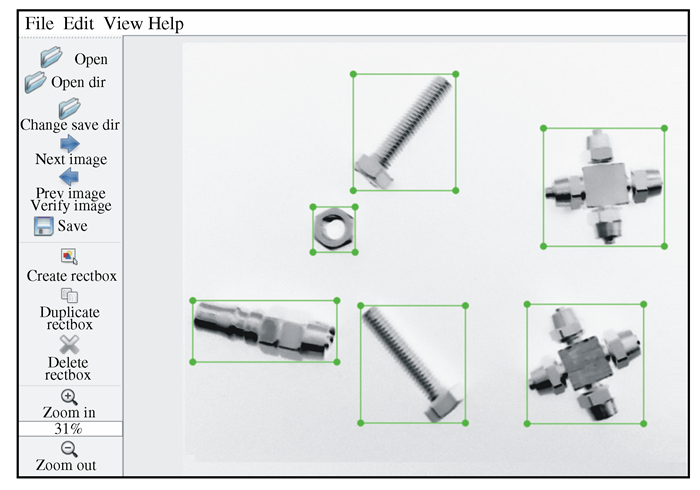
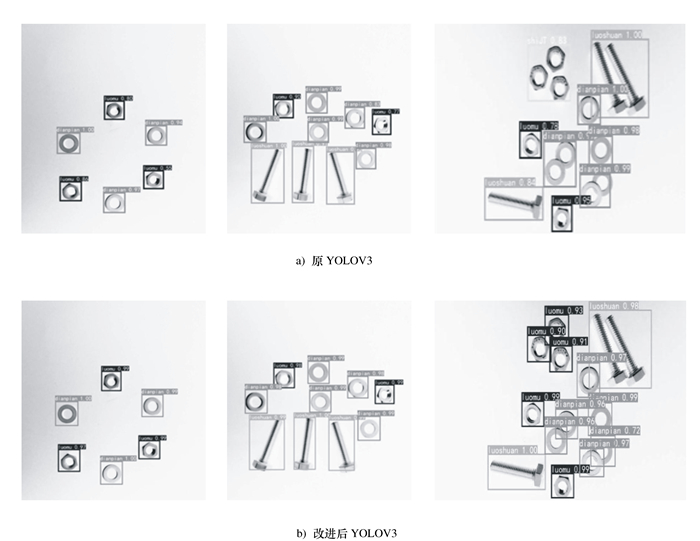
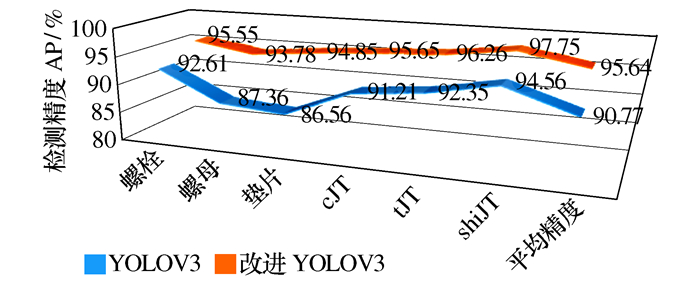
针对工业生产中小型零件存在漏检及识别率不高等问题,结合深度学习基本理论,提出一种改进YOLOV3网络的零件目标识别算法。该算法首先在零件特征融合结构信息中增加了一个特征尺度,进一步融合深层网络与浅层网络的特征信息,以便更好融合零件的位置信息和语义信息。为克服YOLOV3算法中使用K-means聚类对初值不稳定的缺点,根据不同零件类别宽高比,采用K-means++算法对Anchor框重新进行了聚类。最后,在自制常见的六种零件的数据集上,通过实验对该算法进行了验证。结果表明,所提出的改进算法识别效果优于YOLOV3识别效果,在目标识别检测中具有准确率高的优势。
针对工业生产中小型零件存在漏检及识别率不高等问题,结合深度学习基本理论,提出一种改进YOLOV3网络的零件目标识别算法。该算法首先在零件特征融合结构信息中增加了一个特征尺度,进一步融合深层网络与浅层网络的特征信息,以便更好融合零件的位置信息和语义信息。为克服YOLOV3算法中使用K-means聚类对初值不稳定的缺点,根据不同零件类别宽高比,采用K-means++算法对Anchor框重新进行了聚类。最后,在自制常见的六种零件的数据集上,通过实验对该算法进行了验证。结果表明,所提出的改进算法识别效果优于YOLOV3识别效果,在目标识别检测中具有准确率高的优势。


2022, 41(10): 1615-1622.
doi: 10.13433/j.cnki.1003-8728.20200474
摘要:
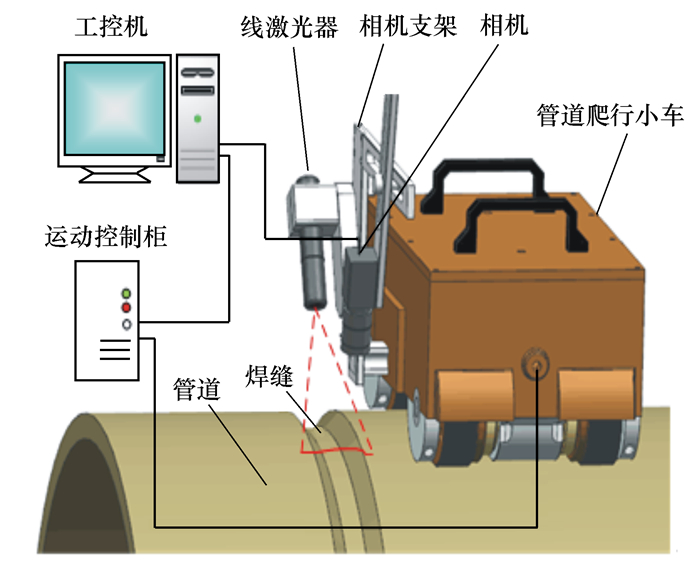
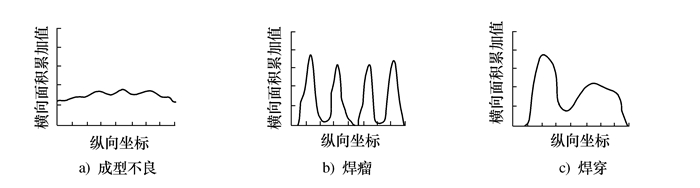
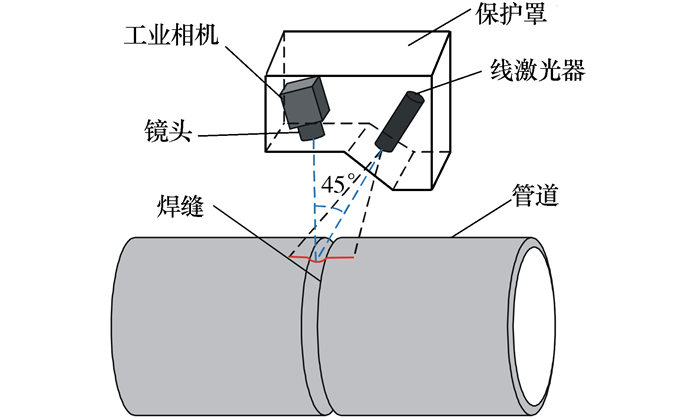
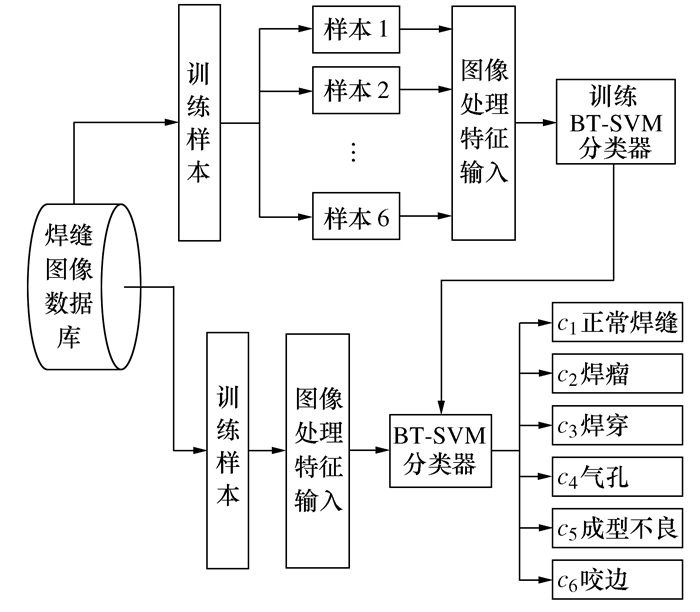
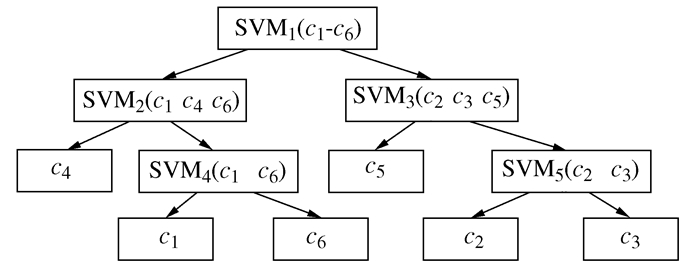
为实现化工管道焊缝表面缺陷的自动检测分类,提出一种基于多特征提取和二叉树支持向量机(BT-SVM)分类的机器视觉检测方法。针对正常焊缝、气孔、咬边、成型不良、焊穿、焊瘤6种分类目标,采用被动视觉传感技术和激光视觉传感技术两种模式提取焊缝图像特征,并将得到的焊缝几何形状特征、焊缝面积波形图特征、激光条纹特征等参数作为二叉树支持向量机的特征输入,设计合理结构的分类器对6种焊缝目标进行识别分类。测试结果表明,设计的BT-SVM分类器能较精准地检测出焊缝缺陷类型,识别率为96.94%。
为实现化工管道焊缝表面缺陷的自动检测分类,提出一种基于多特征提取和二叉树支持向量机(BT-SVM)分类的机器视觉检测方法。针对正常焊缝、气孔、咬边、成型不良、焊穿、焊瘤6种分类目标,采用被动视觉传感技术和激光视觉传感技术两种模式提取焊缝图像特征,并将得到的焊缝几何形状特征、焊缝面积波形图特征、激光条纹特征等参数作为二叉树支持向量机的特征输入,设计合理结构的分类器对6种焊缝目标进行识别分类。测试结果表明,设计的BT-SVM分类器能较精准地检测出焊缝缺陷类型,识别率为96.94%。










2022, 41(10): 1623-1628.
doi: 10.13433/j.cnki.1003-8728.20200483
摘要:
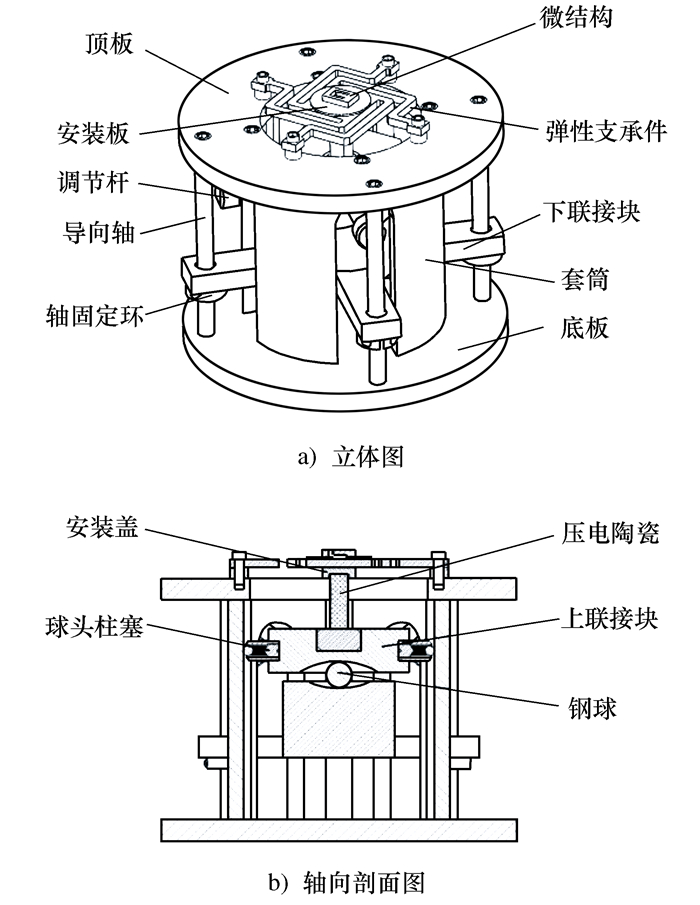
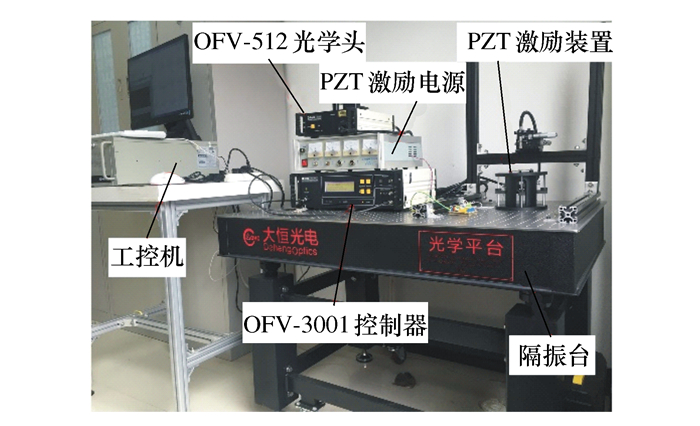
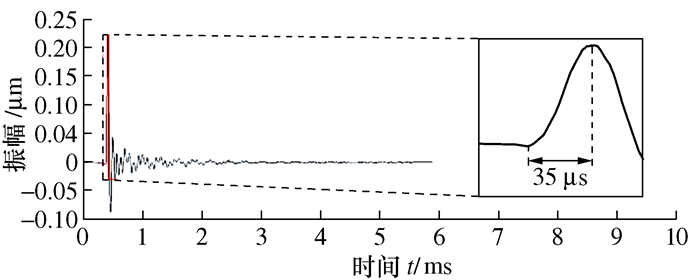
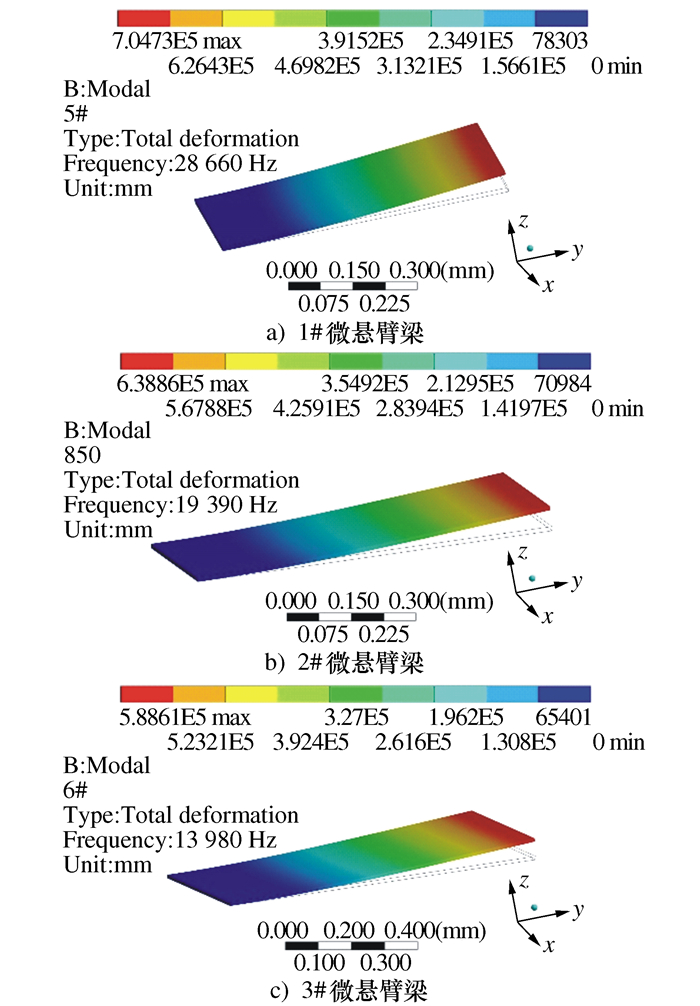
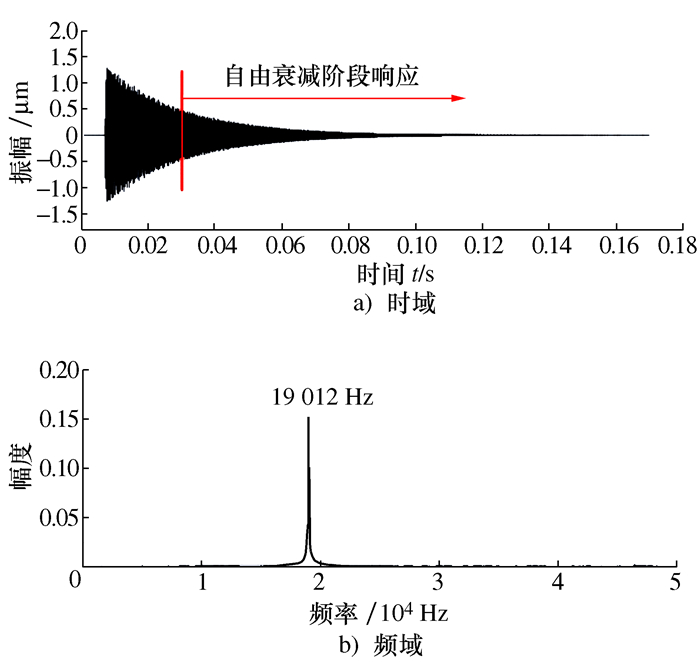
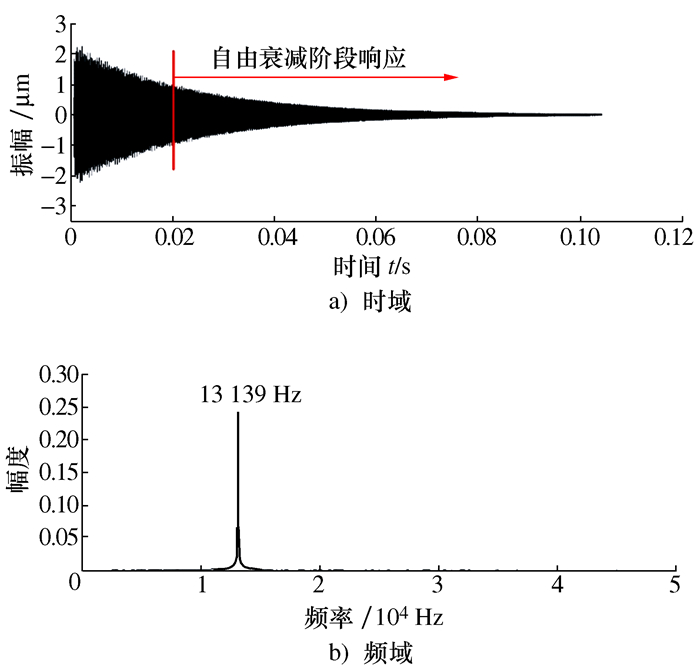
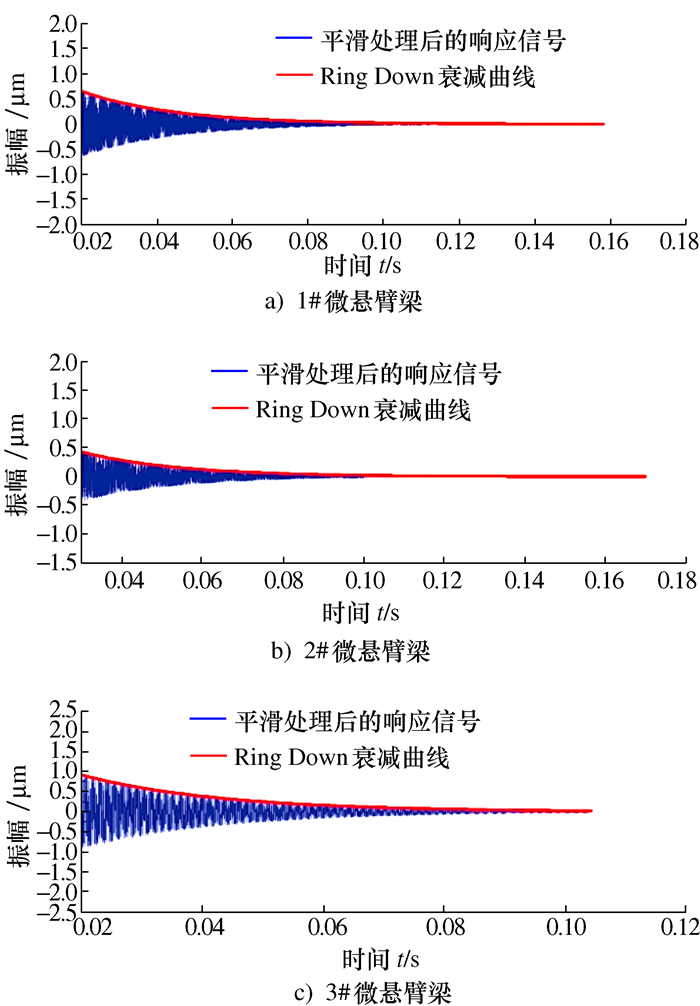
针对压电陶瓷底座激励装置中可动底座结构的实现方式和微结构的安装可靠性问题进行了研究,设计了一种由上联接块、钢球和下联接块组成的点接触式可动底座结构,以及一种带有L型支撑臂的弹性支承件,制作了基于压电陶瓷的底座激励装置,搭建了MEMS微结构动态特性测试系统,对激励装置的激振性能进行了测试实验,也对3种典型微悬臂梁的动态特性进行了测试实验。研究结果表明:所设计的激励装置能够使底座结构进行自适应调节,微结构安装区域的变形量也被大幅降低了,激励带宽可达到90 kHz,具备良好的激振性能。
针对压电陶瓷底座激励装置中可动底座结构的实现方式和微结构的安装可靠性问题进行了研究,设计了一种由上联接块、钢球和下联接块组成的点接触式可动底座结构,以及一种带有L型支撑臂的弹性支承件,制作了基于压电陶瓷的底座激励装置,搭建了MEMS微结构动态特性测试系统,对激励装置的激振性能进行了测试实验,也对3种典型微悬臂梁的动态特性进行了测试实验。研究结果表明:所设计的激励装置能够使底座结构进行自适应调节,微结构安装区域的变形量也被大幅降低了,激励带宽可达到90 kHz,具备良好的激振性能。


2022, 41(10): 1629-1635.
doi: 10.13433/j.cnki.1003-8728.20200462
摘要:
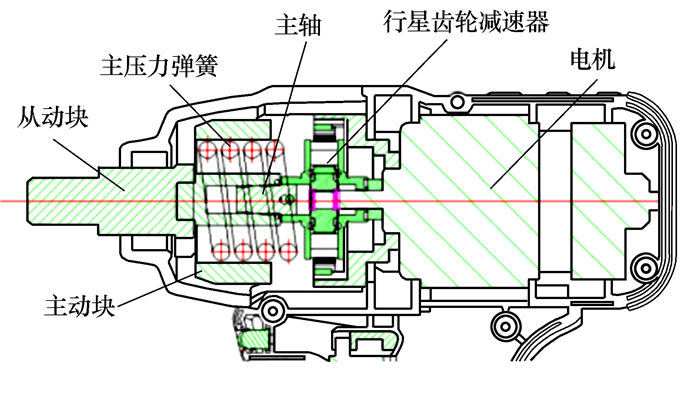
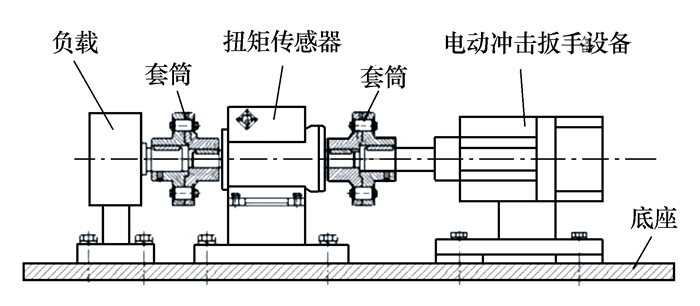
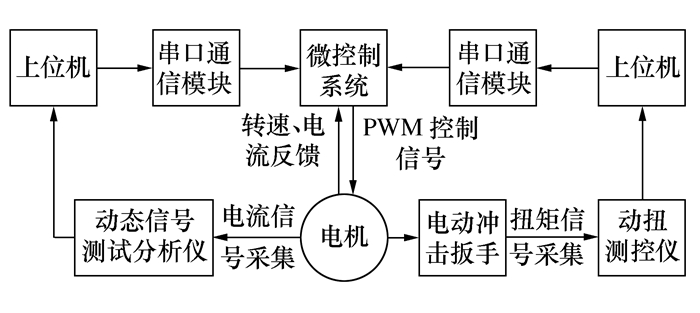
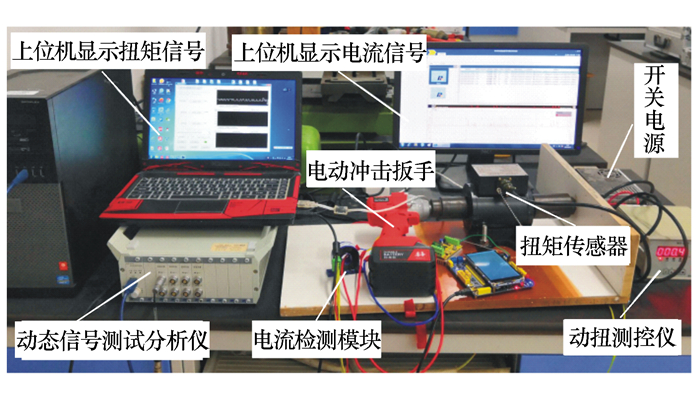
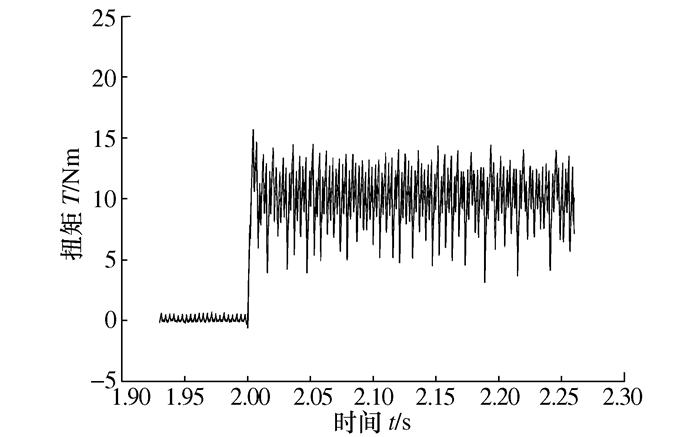
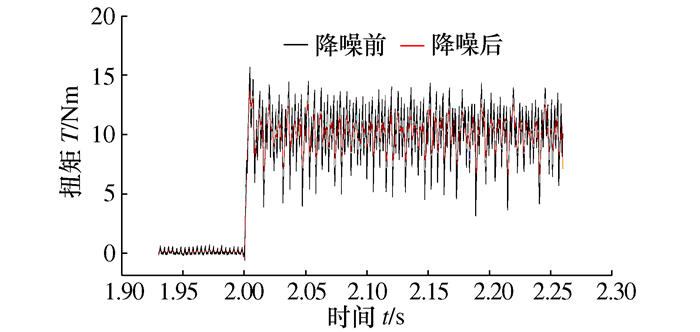
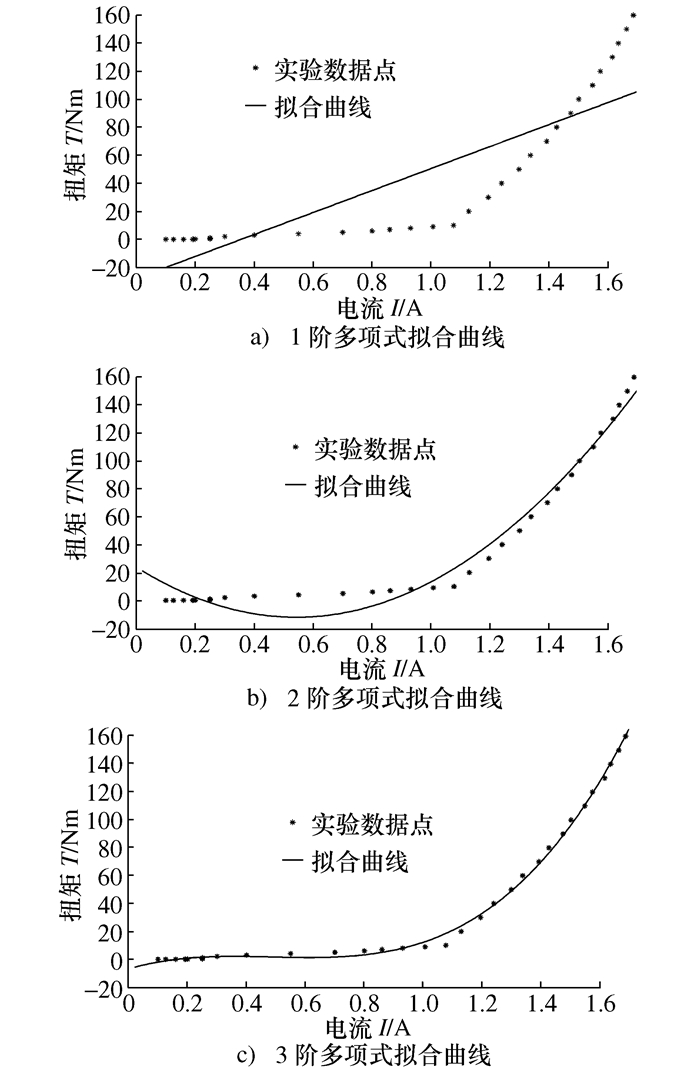
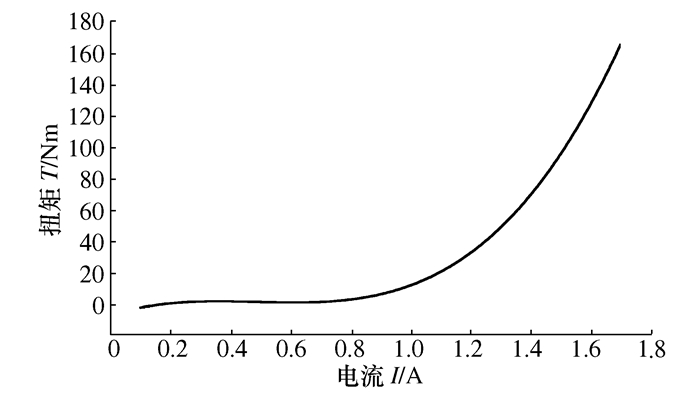
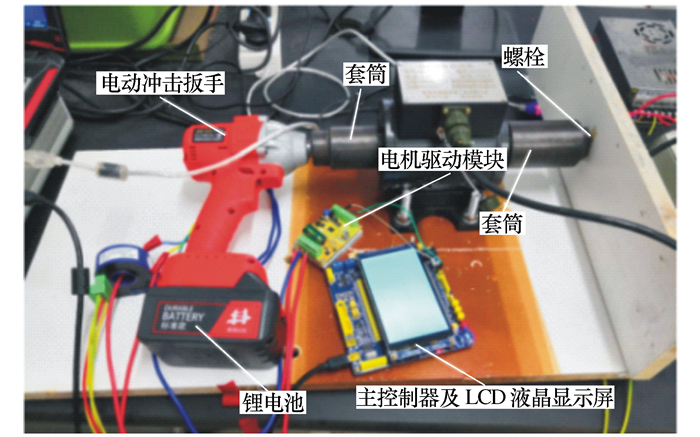
针对电动冲击扳手在紧固螺栓时存在输出转矩波动较大的问题,提出了基于电流参数的电动冲击扳手定扭矩控制策略。首先,通过信号采集系统同步采集扳手在紧固螺栓过程中的输出扭矩信号和电机电流信号,并利用SG(Savitzky-Golay)滤波器对信号中的噪声进行降噪处理。然后结合多项式曲线拟合建立了扳手输出扭矩与电机电流的多项式模型关系,结果表明扳手输出扭矩与电机电流之间为3阶多项式关系。最后通过实验平台进行验证分析。实验结果表明,在该控制策略下,可实现通过控制电机电流来对扳手进行定扭矩控制,并且控制误差小于4%,提高了电动冲击扳手定扭矩控制系统的控制精度和鲁棒性。
针对电动冲击扳手在紧固螺栓时存在输出转矩波动较大的问题,提出了基于电流参数的电动冲击扳手定扭矩控制策略。首先,通过信号采集系统同步采集扳手在紧固螺栓过程中的输出扭矩信号和电机电流信号,并利用SG(Savitzky-Golay)滤波器对信号中的噪声进行降噪处理。然后结合多项式曲线拟合建立了扳手输出扭矩与电机电流的多项式模型关系,结果表明扳手输出扭矩与电机电流之间为3阶多项式关系。最后通过实验平台进行验证分析。实验结果表明,在该控制策略下,可实现通过控制电机电流来对扳手进行定扭矩控制,并且控制误差小于4%,提高了电动冲击扳手定扭矩控制系统的控制精度和鲁棒性。

2022, 41(10): 1636-1640.
doi: 10.13433/j.cnki.1003-8728.20220239
摘要:
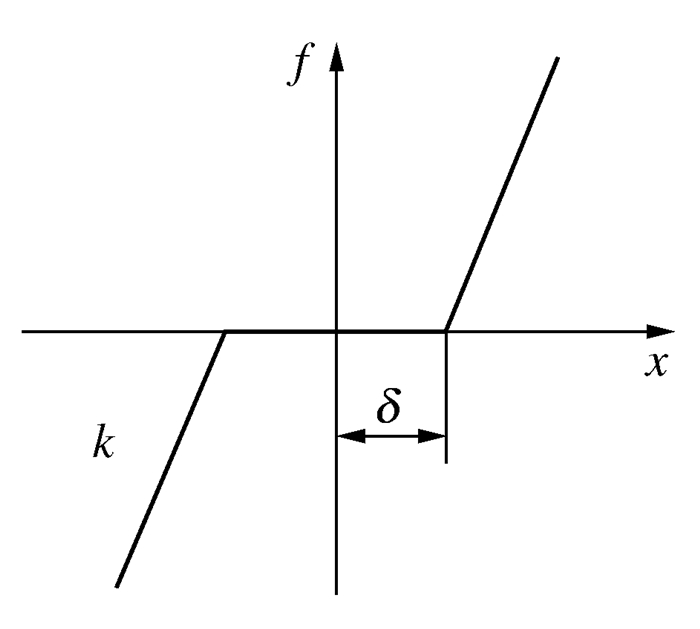
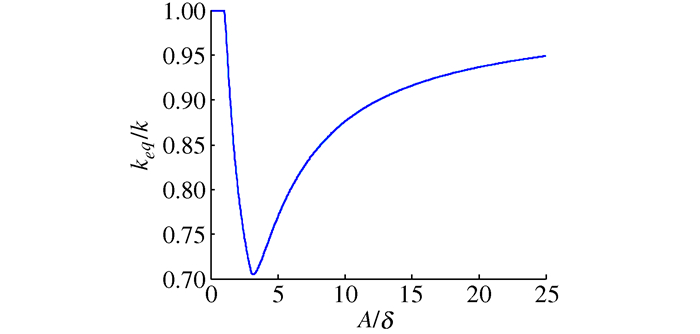
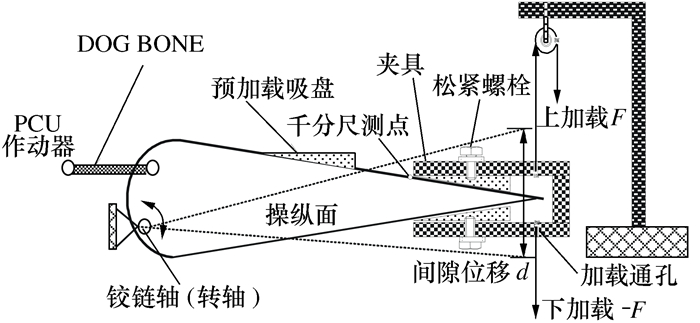
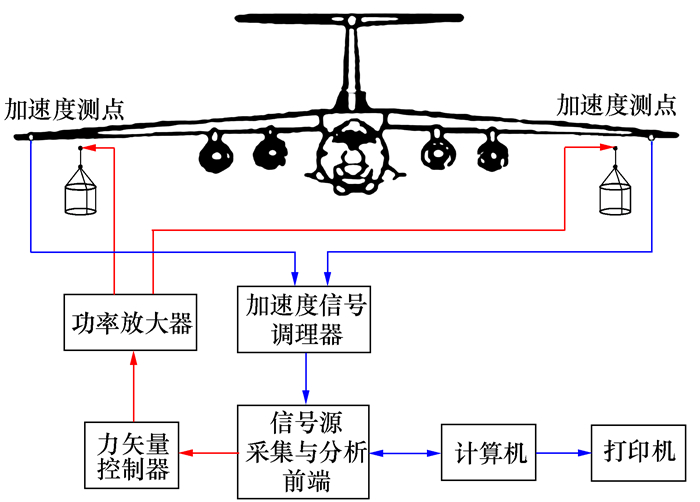
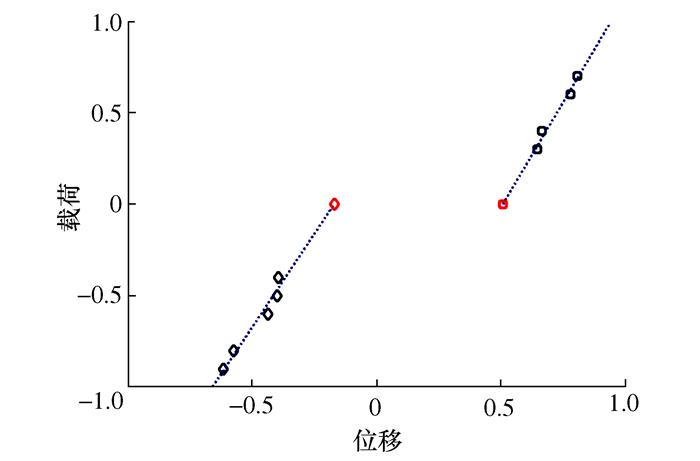
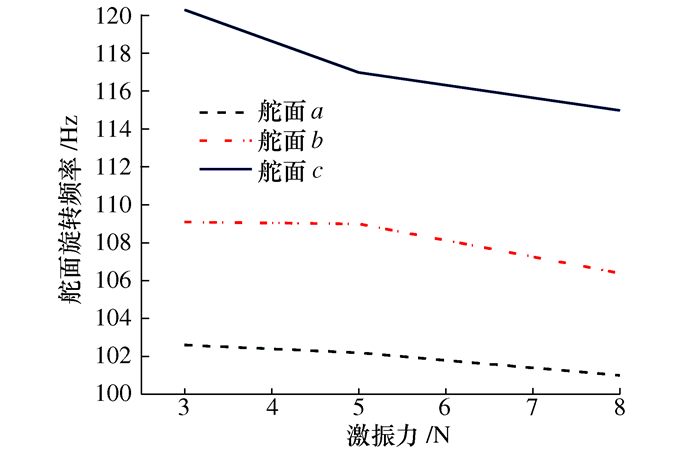
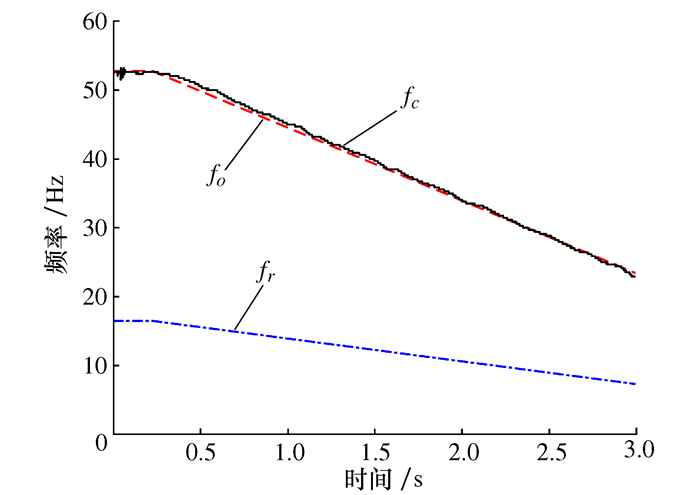
间隙的存在给航空结构带来了很大的安全隐患。间隙会影响舵面的旋转频率,此时对舵面施加预载可以有效地克服间隙非线性的影响,从而获取舵面的旋转频率。本文根据静力学原理,设计加工了克服舵面间隙的预加载系统,并以此建立了带预载间隙舵面旋转频率测试方法。针对某飞机舵面旋转频率的试验结果表明,本文所提方法可以有效实现对舵面旋转频率的测试。
间隙的存在给航空结构带来了很大的安全隐患。间隙会影响舵面的旋转频率,此时对舵面施加预载可以有效地克服间隙非线性的影响,从而获取舵面的旋转频率。本文根据静力学原理,设计加工了克服舵面间隙的预加载系统,并以此建立了带预载间隙舵面旋转频率测试方法。针对某飞机舵面旋转频率的试验结果表明,本文所提方法可以有效实现对舵面旋转频率的测试。