




Global Dynamic Path Planning Method for Hadal Lander
-
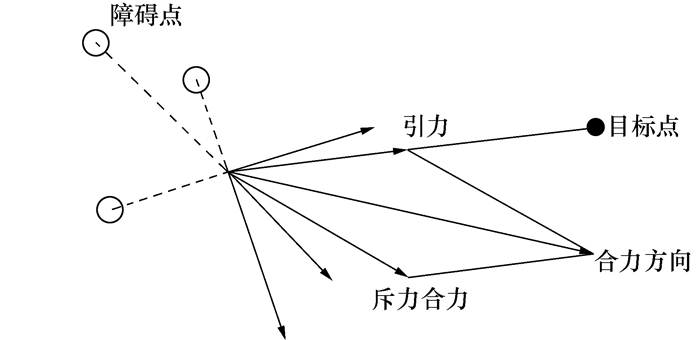
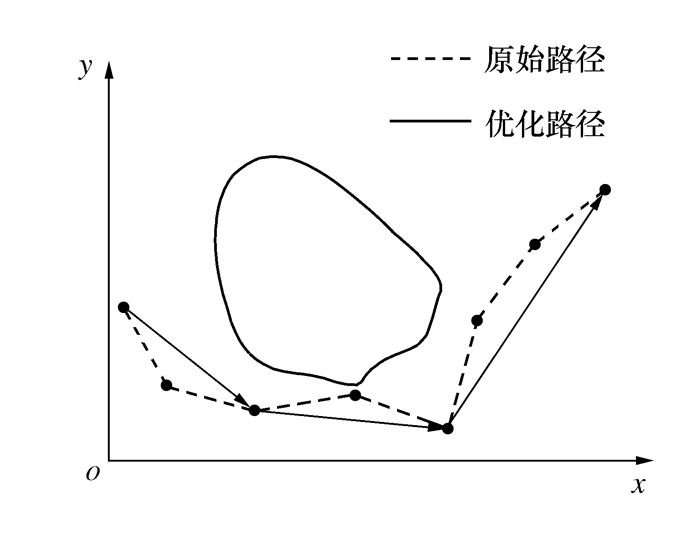
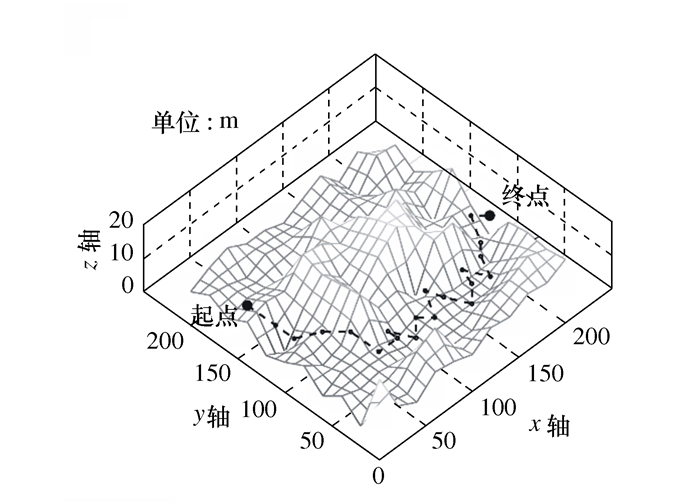
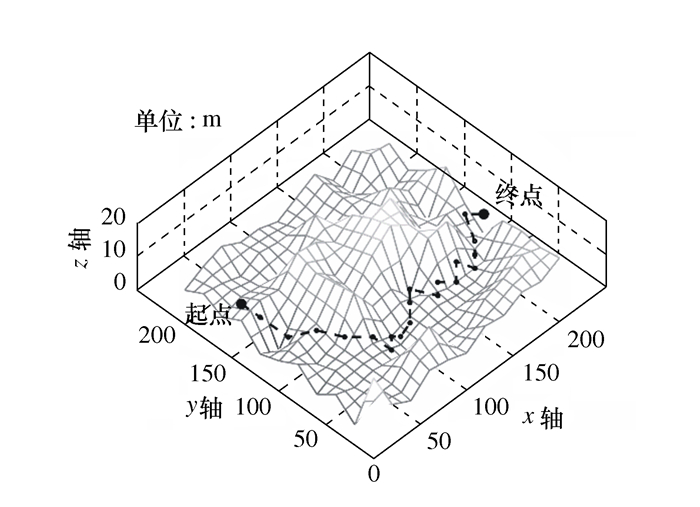
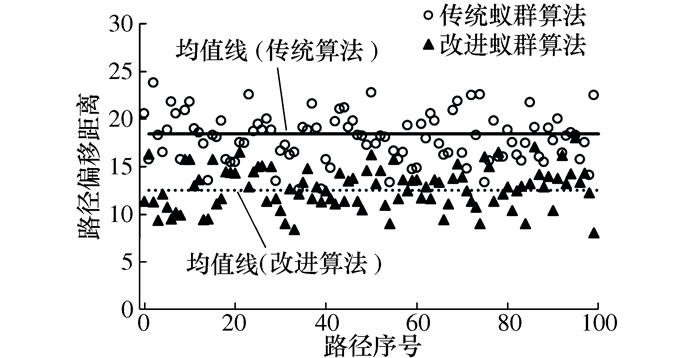
摘要: 为提升深海着陆器三维路径规划全局最优性与动态避障能力,提出了一种融合改进蚁群算法和人工势场法的全局动态路径规划方法。基于传统蚁群算法,引入路径偏移程度,优化构建启发函数,简化栅格地图并优化搜索空间,提升了蚁群算法在三维路径规划中的收敛响应速度。在此基础上,选取改进蚁群算法产生的全局路径中有效关键点作为连续子目标点,融合人工势场法,构建全局路径规划势场模型函数,在保证全局路径规划较优的基础上,提高了路径的平滑性和局部避障能力。利用实验算例验证了方法的有效性,方法能够为水下仪器、水下机器人、水下设备自主导航的规划与优化提供帮助与参考。Abstract: In order to improve the global optimality and dynamic obstacle avoidance ability of hadal lander 3D path planning, a global dynamic path planning method based on the fusion of improved ant colony optimization and artificial potential field algorithm is proposed. Based on the traditional ant colony algorithm, this paper improves the convergence response speed of the ant colony algorithm in 3D path planning by introducing the degree of path offset, optimizing the construction of heuristic functions, simplifying the grid map and optimizing the search space. On this basis, the key points in the global path generated by the improved ant colony algorithm were selected as continuous suborder punctuation points, and the potential field model function of global path planning by the artificial potential field was constructed. On the basis of ensuring the global optimal path, the smoothness of the path and local obstacle avoidance ability are improved. The effectiveness and superiority of this method were verified by an experimental example, which can provide help and reference for the planning and optimization of autonomous navigation of underwater robots and underwater equipment.
-
[1] PFANNKUCHE O, LINKE P. GEOMAR landers as long-term deep-sea observatories[J]. Sea Technology, 2003, 44(9): 50-55 [2] 陈俊, 张奇峰, 李俊, 等. 深渊着陆器技术研究及马里亚纳海沟科考应用[J]. 海洋技术学报, 2017, 36(1): 63-69 https://www.cnki.com.cn/Article/CJFDTOTAL-HYJS201701012.htmCHEN J, ZHANG Q F, LI J, et al. Research on the application of the hadal lander technology in the Mariana trench[J]. Journal of Ocean Technology, 2017, 36(1): 63-69 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HYJS201701012.htm [3] JAMIESON A J, FUJII T, SOLAN M, et al. HADEEP: free-falling landers to the deepest places on earth[J]. Marine Technology Society Journal, 2009, 43(5): 151-160 doi: 10.4031/MTSJ.43.5.17 [4] 赵羿羽. 万米级潜水器现状及发展重点[J]. 中国船检, 2018(9): 76-81 doi: 10.3969/j.issn.1009-2005.2018.09.018ZHAO Y Y. Current status and development focus of 10, 000-meter submersible[J]. China Ship Survey, 2018(9): 76-81 (in Chinese) doi: 10.3969/j.issn.1009-2005.2018.09.018 [5] 张丹红, 陈文文, 张华军, 等. A*算法与蚁群算法相结合的无人艇巡逻路径规划[J]. 华中科技大学学报(自然科学版), 2020, 48(6): 13-18 https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG202006003.htmZHANG D H, CHEN W W, ZHANG H J, et al. Patrol path planning of unmanned surface vehicle based on A* algorithm and ant colony algorithm[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2020, 48(6): 13-18 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG202006003.htm [6] 张岳星, 王轶群, 李硕, 等. 基于海图和改进粒子群优化算法的AUV全局路径规划[J]. 机器人, 2020, 42(1): 120-128 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202001013.htmZHANG Y X, WANG Y Q, LI S, et al. Global path planning for AUV based on charts and the improved particle swarm optimization algorithm[J]. Robot, 2020, 42(1): 120-128 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202001013.htm [7] 王珂, 卜祥津, 李瑞峰, 等. 景深约束下的深度强化学习机器人路径规划[J]. 华中科技大学学报(自然科学版), 2018, 46(12): 77-82 https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG201812014.htmWANG K, BU X J, LI R F, et al. Path planning for robots based on deep reinforcement learning by depth constraint[J]. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2018, 46(12): 77-82 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG201812014.htm [8] 刘贵杰, 刘鹏, 穆为磊, 等. 采用能耗最优改进蚁群算法的自治水下机器人路径优化[J]. 西安交通大学学报, 2016, 50(10): 93-98 https://www.cnki.com.cn/Article/CJFDTOTAL-XAJT201610014.htmLIU G J, LIU P, MU W L, et al. A path optimization algorithm for AUV using an improved ant colony algorithm with optimal energy consumption[J]. Journal of Xi'an Jiaotong University, 2016, 50(10): 93-98 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAJT201610014.htm [9] 刘利强, 于飞, 戴运桃. 基于蚁群算法的水下潜器三维空间路径规划[J]. 系统仿真学报, 2008, 20(14): 3712-3716 https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200814023.htmLIU L Q, YU F, DAI Y T. Path planning of underwater vehicle in 3D space based on ant colony algorithm[J]. Journal of System Simulation, 2008, 20(14): 3712-3716 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200814023.htm [10] 李宪强, 马戎, 张伸, 等. 蚁群算法的改进设计及在航迹规划中的应用[J]. 航空学报, 2020, 41(S2): 210-216 https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB2020S2024.htmLI X Q, MA R, ZHANG S, et al. Improved design of ant colony algorithm and its application in path planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 210-216 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB2020S2024.htm [11] 陈劲峰, 黄卫华, 王肖, 等. 基于改进蚁群算法的移动机器人路径规划[J]. 高技术通讯, 2020, 30(3): 291-297CHEN J F, HUANG W H, WANG X, et al. Research on path planning based on an improved ant colony algorithm for mobile robot[J]. Chinese High Technology Letters, 2020, 30(3): 291-297 (in Chinese) [12] 张培艳, 吕恬生. 基于模拟退火-人工势场法的足球机器人路径规划研究[J]. 机械科学与技术, 2003, 22(4): 547-548+555 https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200304009.htmZHANG P Y, LYU T S. Soccer robot path planning based on artificial potential field approach with simulated annealing[J]. Mechanical Science and Technology for Aerospace Engineering, 2003, 22(4): 547-548+555 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200304009.htm [13] LI F L. An optimization path planning method based on evolutionary artificial potential field[J]. Applied Mechanics and Materials, 2013, 380-384: 1414-1417 [14] 罗乾又, 张华, 王姮, 等. 改进人工势场法在机器人路径规划中的应用[J]. 计算机工程与设计, 2011, 32(4): 1411-1413+1418 https://www.cnki.com.cn/Article/CJFDTOTAL-SJSJ201104067.htmLUO Q Y, ZHANG H, WANG H, et al. Application of improved artificial potential field approach in local path planning for mobile robot[J]. Computer Engineering and Design, 2011, 32(4): 1411-1413+1418 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SJSJ201104067.htm [15] 罗强, 王海宝, 崔小劲, 等. 改进人工势场法自主移动机器人路径规划[J]. 控制工程, 2019, 26(6): 1091-1098 https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201906014.htmLUO Q, WANG H B, CUI X J, et al. Autonomous mobile robot path planning based on improved artificial potential method[J]. Control Engineering of China, 2019, 26(6): 1091-1098 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201906014.htm -

 下载:
下载:







 点击查看大图
点击查看大图

图(16) / 表(1)
计量
- 文章访问数: 120
- HTML全文浏览量: 79
- PDF下载量: 18
- 被引次数: 0
