




Application Research of IVP Model in AUV Path Planning and Real-time Obstacle Avoidance
-
摘要:
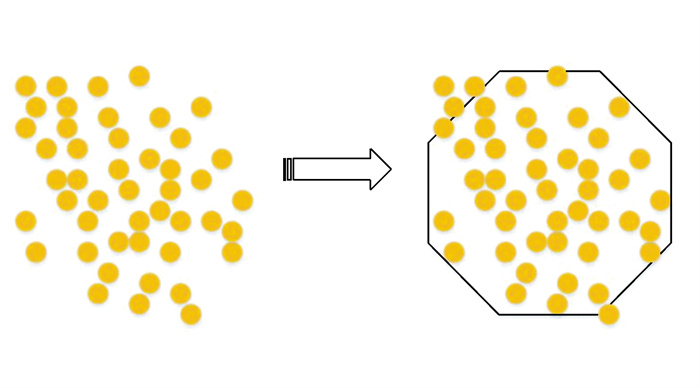
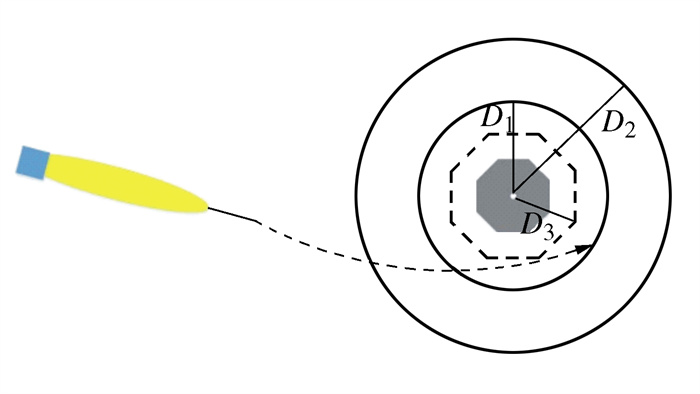
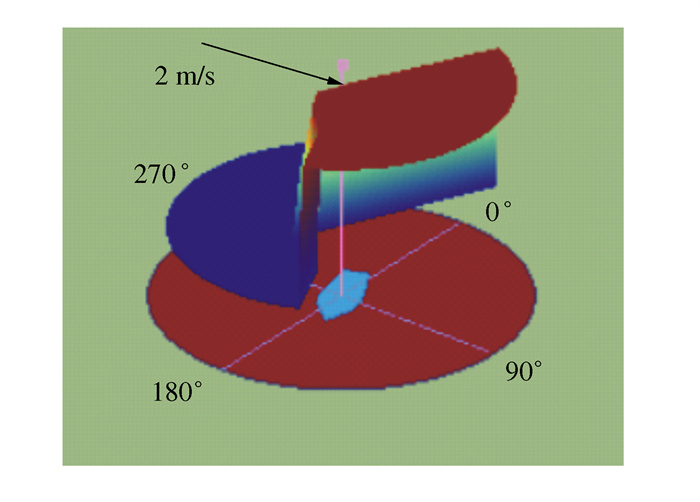
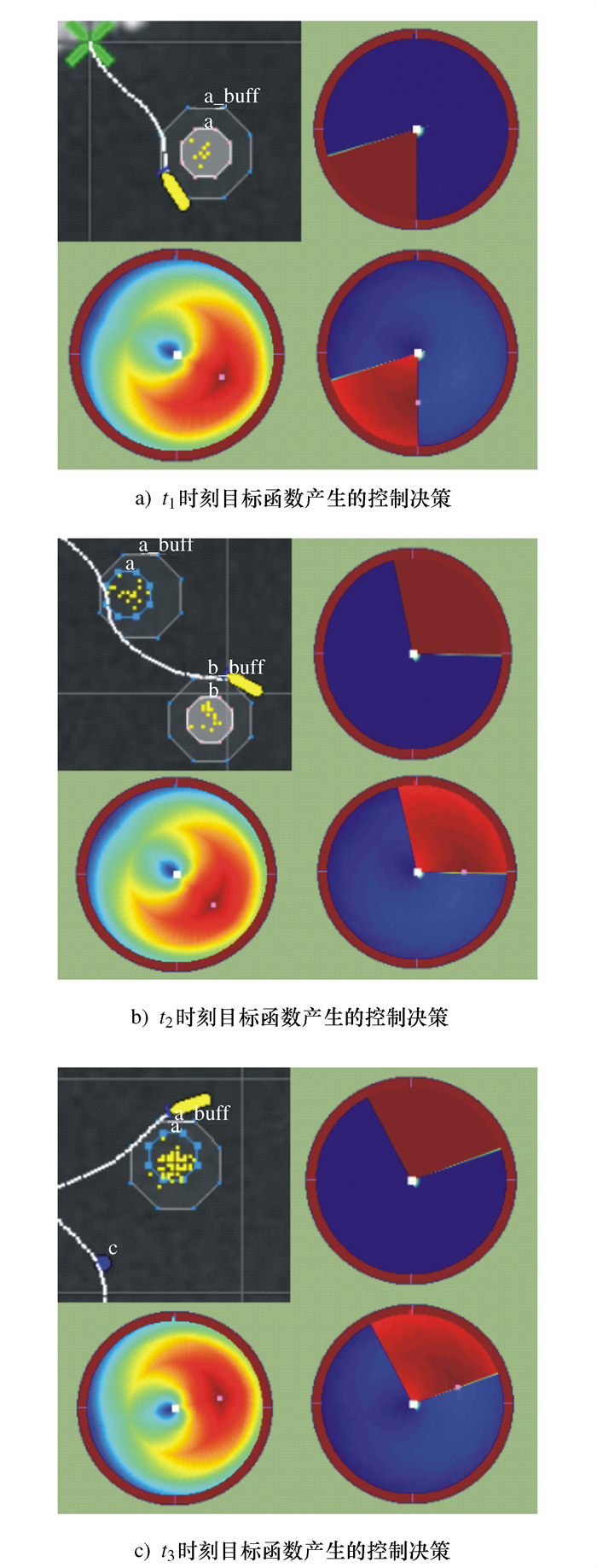
针对传统基于行为的控制体系结构在解决AUV局部路径修复问题时, AUV整体行为容易出现不可接受的缺陷等不足, 设计一种新的行为融合-区间优化(IVP)方法。首先将路径规划任务划分为路径点跟踪行为、实时避障行为等多个具体的行为, 结合环境约束, 将AUV控制决策选择视为一个多目标优化问题, 然后利用IVP模型进行行为的协调, 最后基于MOOS-IVP体系以静态目标周围的环绕式路径点跟踪进行了仿真分析, 结果表明IVP模型在解决决策空间随决策变量增加呈指数增长的同时, 能够实时避障并保证了结果的最优化。
Abstract:Aiming at the shortcomings of traditional behavior-based control architecture in solving the problem of local path repair of autonomous underwater vehicle (AUV), such as unacceptable defects of AUV′s overall behavior, a new behavior fusion -Interval Programming (IVP) method was designed in this paper. Firstly, the path planning task is divided into multiple specific behaviors such as path point tracking behavior, real-time obstacle avoidance behavior; and combined with environmental constraints, the AUV control decision selection is considered as a multi-objective optimization problem. Then the IVP model is used to coordinate these behaviors above. Finally, the simulation analysis is carried out based on MOOS(Mission oriented operating suite)-IVP system with the surrounding path point tracking around the static target. The results show that the IVP model in proposed method can avoid obstacles in real time and ensure the optimization of results while solving the decision space grows exponentially with the increase of decision variables.
-
Key words:
- AUV /
- path point tracking /
- interval programming /
- real-time obstacle avoidance
-
[1] 张楠楠, 姜文刚, 窦刚. 改进蚁群算法在AUV三维路径规划中的研究[J]. 计算机工程与应用, 2019, 55(11): 265-270 https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG201911041.htmZHANG N N, JIANG W G, DOU G. Research on autonomous underwater vehicle 3D path planning based on improved ant colony algorithm[J]. Computer Engineering and Applications, 2019, 55(11): 265-270 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG201911041.htm [2] 王雷, 李明, 蔡劲草, 等. 改进遗传算法在移动机器人路径规划中的应用研究[J]. 机械科学与技术, 2017, 36(5): 711-716 doi: 10.13433/j.cnki.1003-8728.2017.0509WANG L, LI M, CAI J C, et al. Research on mobile robot path planning by using improved genetic algorithm[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(5): 711-716 (in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.0509 [3] 冷静, 刘健, 徐红丽. 实时避碰的无人水面机器人在线路径规划方法[J]. 智能系统学报, 2015, 10(3): 343-348 https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT201503002.htmLENG J, LIU J, XU H L. Online path planning of an unmanned surface vehicle for real-time collision avoidance[J]. CAAI Transactions on Intelligent Systems, 2015, 10(3): 343-348 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT201503002.htm [4] 姚淑香. 基于海流预测模型的AUV路径规划方法[D]. 哈尔滨: 哈尔滨工程大学, 2019YAO S X. AUV path planning method based on ocean current prediction model[D]. Harbin: Harbin Engineering University, 2019 (in Chinese) [5] KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[C]//Proceedings. 1985 IEEE International Conference on Robotics and Automation. St. Louis: IEEE, 1985: 500-505 [6] ROSENBLATT J K. DAMN: a distributed architecture for mobile navigation[J]. Journal of Experimental & Theoretical Artificial Intelligence, 1997, 9(2-3): 339-360 [7] PIRJANIAN P. Multiple objective action selection & behavior fusion using voting[D]. Aalborg: Aalborg University, 1998 [8] PIRJANIAN P, HUNTSBERGER T L, SCHENKER P S. Development of CAMPOUT and its further applications to planetary rover operations: a multirobot control architecture[C]//Proceedings of SPIE 4571, Sensor Fusion and Decentralized Control in Robotic Systems IV. Boston: SPIE, 2001: 108-119 [9] BENJAMIN M R. The interval programming model for multi-objective decision making[R]. Cambridge: Computer Science and Artificial intelligence Laboratory, 2004: 35-50 [10] GUPTA A, NOVITZKY M, BENJAMIN M. Learning autonomous marine behaviors in MOOS-IVP[C]//OCEANS 2018 MTS/IEEE Charleston. Charleston: IEEE, 2018: 1-10 [11] BENJAMIN M R, SCHMIDT H, NEWMAN P M, et al. Nested autonomy for unmanned marine vehicles with MOOS-vP[J]. Journal of Field Robotics, 2010, 27(6): 834-875 doi: 10.1002/rob.20370 [12] DONG L Y, XU H L. Design of heading control system for USV based on MOOS-IVP[C]//2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC). Chengdu: IEEE, 2017: 68-71 [13] JIANG D P, PANG Y J, QIN Z B. Application of MOOS-IVP architecture in multiple autonomous underwater vehicle cooperation[C]//2010 Chinese Control and Decision Conference. Xuzhou: IEEE, 2010: 1802-1807 [14] BENJAMIN M R. Multi-objective navigation and control using interval programming[C]//Multi-Robot Systems Workshop, NRL. Washington DC, 2003: 1-12 [15] BENJAMIN M R, DEFILIPPO M, ROBINETTE P, et al. Obstacle avoidance using multiobjective optimization and a dynamic obstacle manager[J]. IEEE Journal of Oceanic Engineering, 2019, 44(2): 331-342 doi: 10.1109/JOE.2019.2896504 -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 303
- HTML全文浏览量: 75
- PDF下载量: 59
- 被引次数: 0
