作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2022年 41卷 第6期
2022, 41(6): 821-826.
doi: 10.13433/j.cnki.1003-8728.20200396
 摘要
摘要 HTML
HTML PDF 1903KB
PDF 1903KB
摘要:
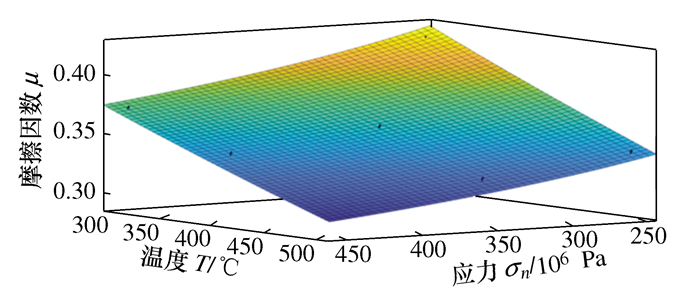
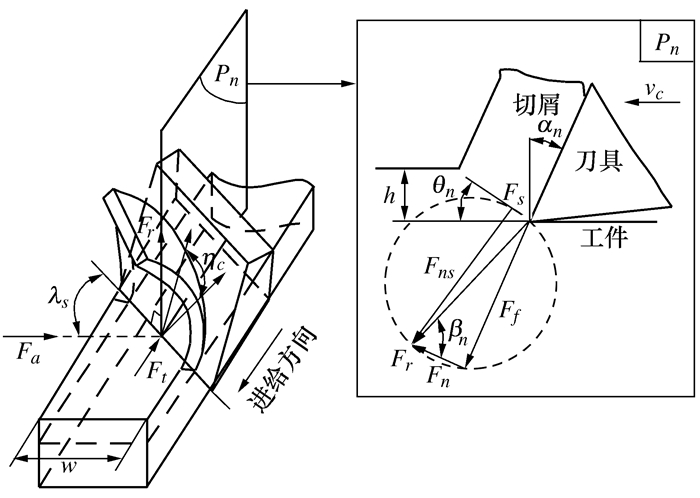
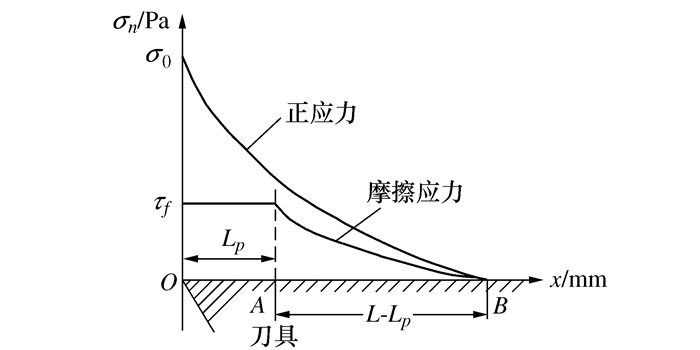
刀具-切屑接触摩擦特性对切削过程中的力、温度及刀具磨损等均会产生较大的影响。针对此, 建立刀-屑接触摩擦因数与接触面正应力和相对温度之间的经验模型。采用HT-1000多功能球-盘摩擦磨损试验机, 进行硬质合金球(模拟刀具)和Ti6Al4V(模拟工件)的摩擦试验, 通过试验数据建立并验证了考虑接触应力和切削温度的摩擦因数模型。以此为基础, 基于斜角切削理论构建变摩擦因数的立铣刀铣削力模型。通过与钛合金铣削实验测的铣削力值进行对比验证, 得出所建立的变摩擦因数的铣削力模型的准确性。
刀具-切屑接触摩擦特性对切削过程中的力、温度及刀具磨损等均会产生较大的影响。针对此, 建立刀-屑接触摩擦因数与接触面正应力和相对温度之间的经验模型。采用HT-1000多功能球-盘摩擦磨损试验机, 进行硬质合金球(模拟刀具)和Ti6Al4V(模拟工件)的摩擦试验, 通过试验数据建立并验证了考虑接触应力和切削温度的摩擦因数模型。以此为基础, 基于斜角切削理论构建变摩擦因数的立铣刀铣削力模型。通过与钛合金铣削实验测的铣削力值进行对比验证, 得出所建立的变摩擦因数的铣削力模型的准确性。



2022, 41(6): 827-832.
doi: 10.13433/j.cnki.1003-8728.20200422
摘要:
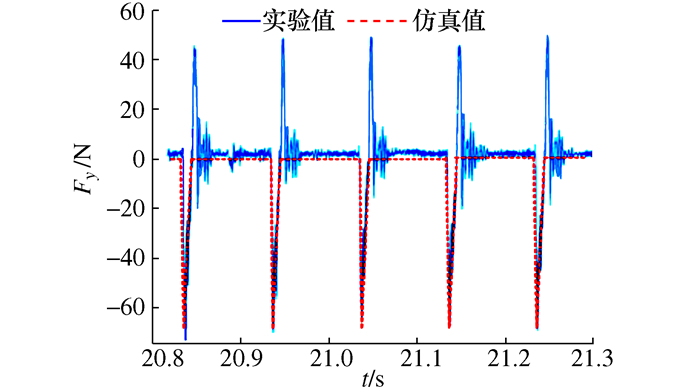
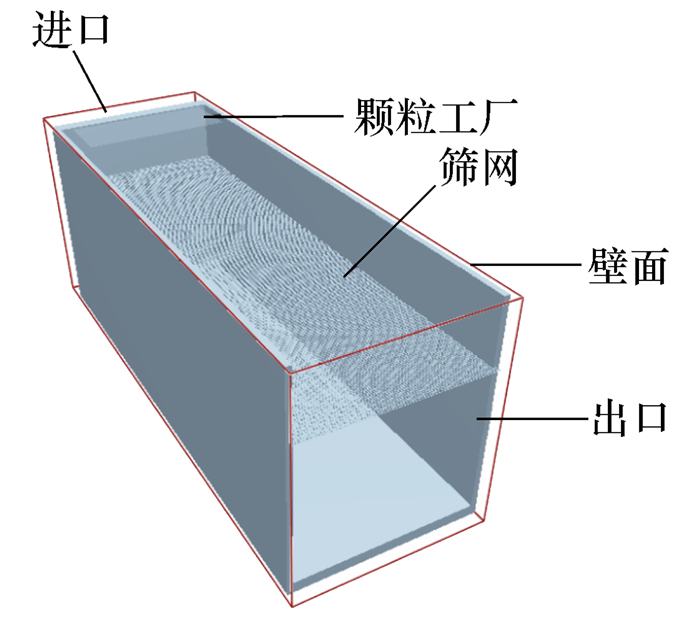
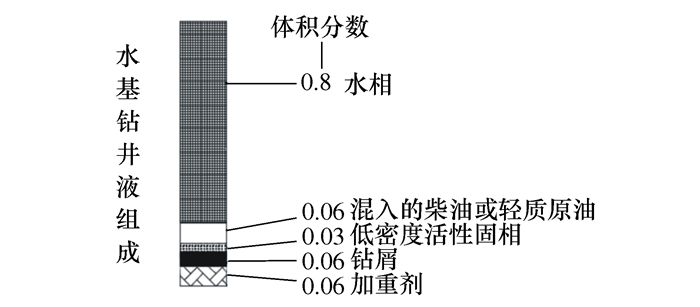
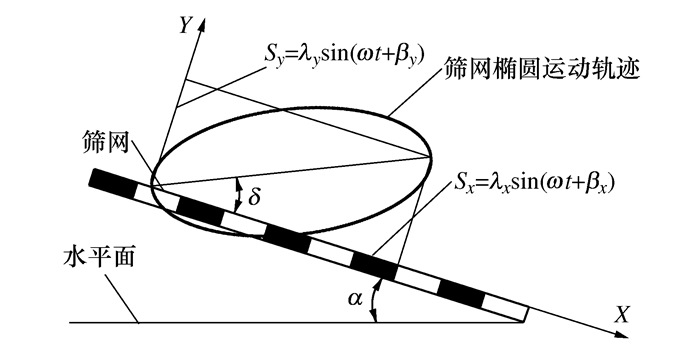
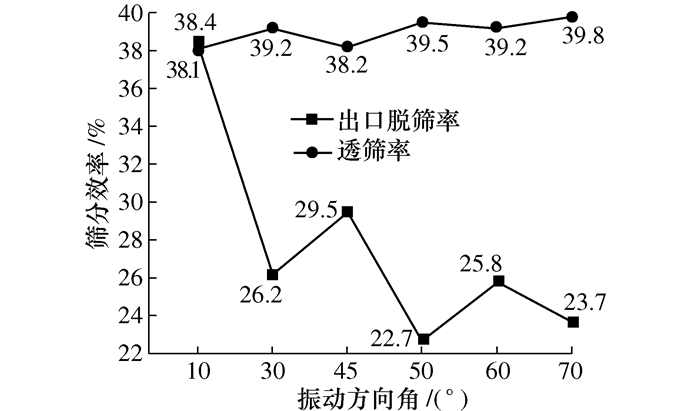
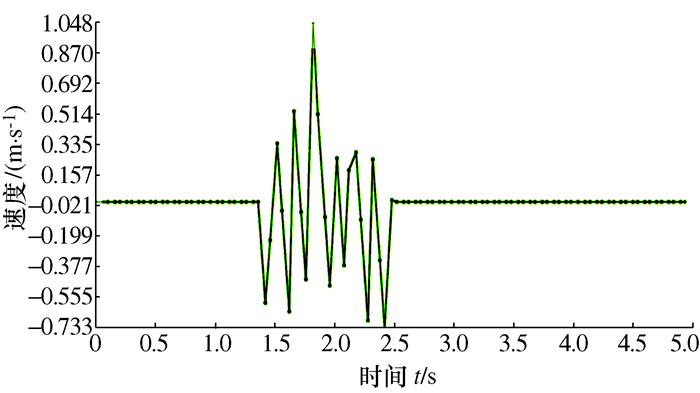
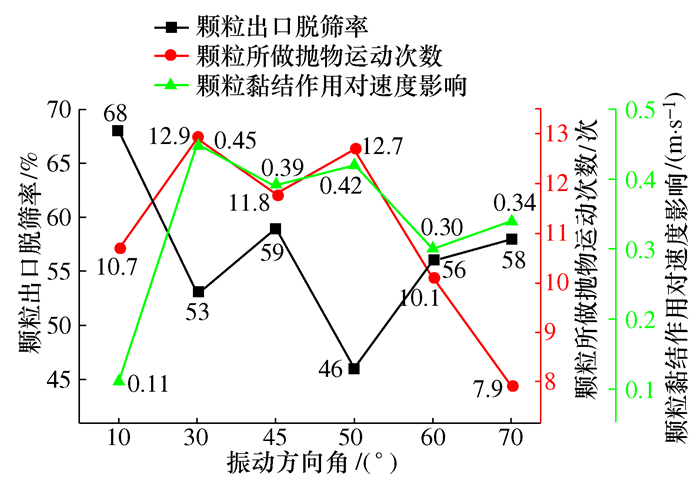
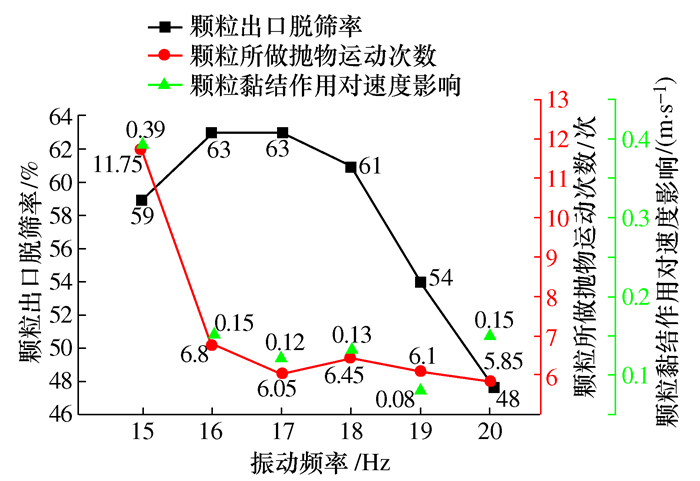
基于离散单元法与EDEM, 简化钻井液振动筛模型, 探究平动椭圆振型钻井液振动筛在不同振动参数下的颗粒黏结现象对颗粒速度及运动轨迹的影响, 并与振动筛对不同颗粒筛分效率做对比。结果表明: 颗粒黏结作用通过影响颗粒速度与运动轨迹进而影响筛网对颗粒的筛分效率。颗粒黏结作用越大, 形成颗粒团的颗粒数量越多, 颗粒所做抛物运动次数也越多, 颗粒总体速度下降越大, 筛网对颗粒的筛分效率越小。研究结果对在不同工况下充分利用颗粒黏结作用对各种颗粒的影响来增大颗粒筛分效率有借鉴意义。
基于离散单元法与EDEM, 简化钻井液振动筛模型, 探究平动椭圆振型钻井液振动筛在不同振动参数下的颗粒黏结现象对颗粒速度及运动轨迹的影响, 并与振动筛对不同颗粒筛分效率做对比。结果表明: 颗粒黏结作用通过影响颗粒速度与运动轨迹进而影响筛网对颗粒的筛分效率。颗粒黏结作用越大, 形成颗粒团的颗粒数量越多, 颗粒所做抛物运动次数也越多, 颗粒总体速度下降越大, 筛网对颗粒的筛分效率越小。研究结果对在不同工况下充分利用颗粒黏结作用对各种颗粒的影响来增大颗粒筛分效率有借鉴意义。




2022, 41(6): 833-839.
doi: 10.13433/j.cnki.1003-8728.20200390
摘要:
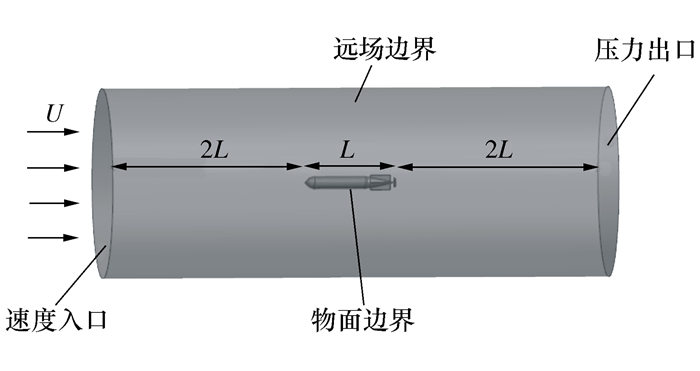
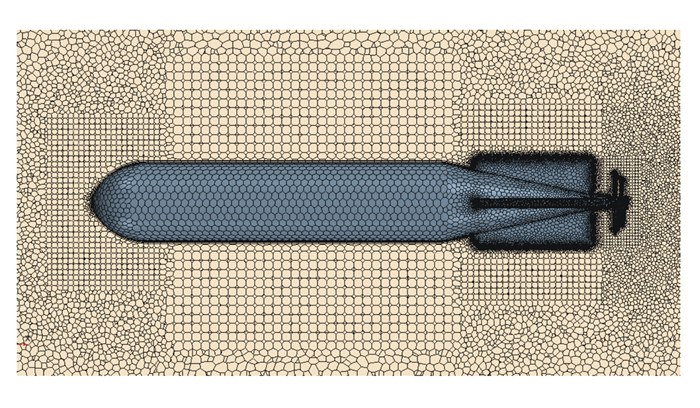
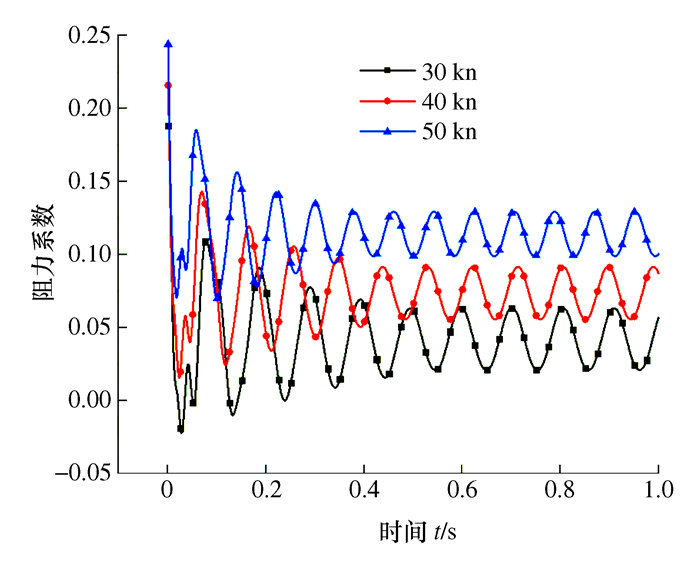
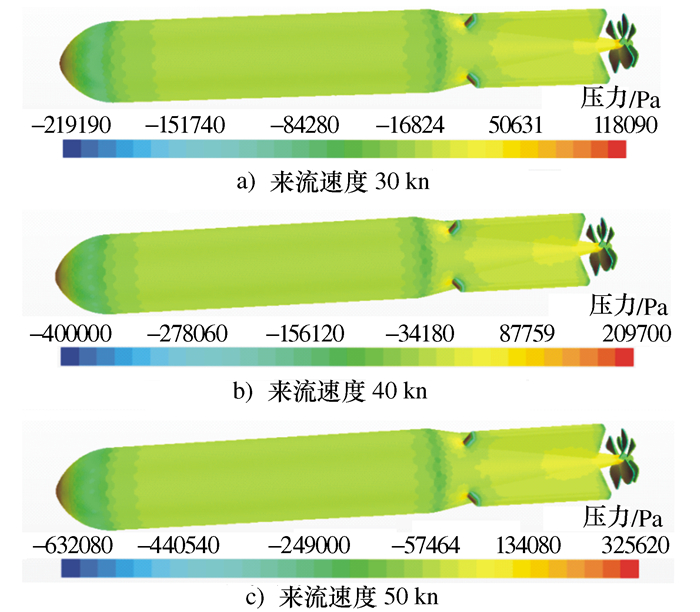
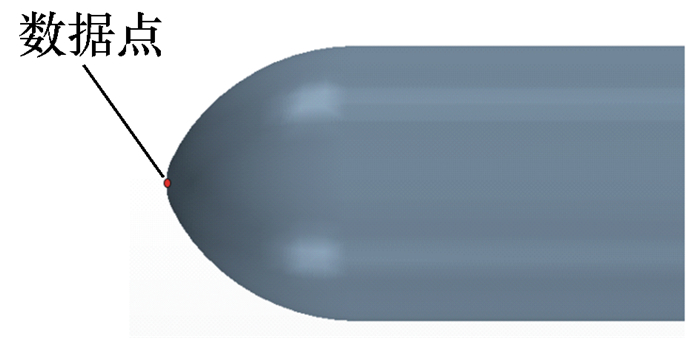
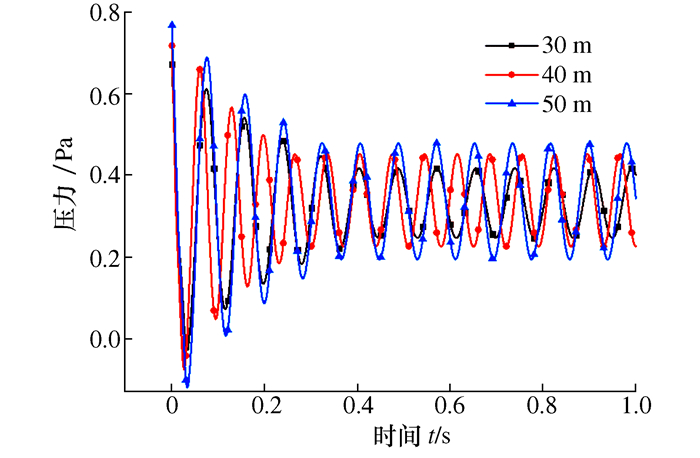
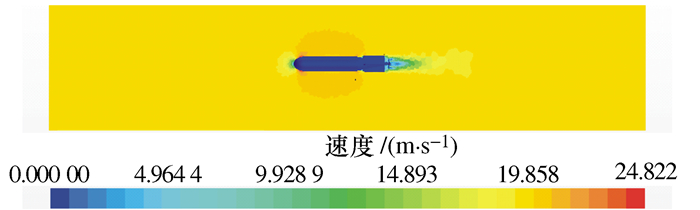
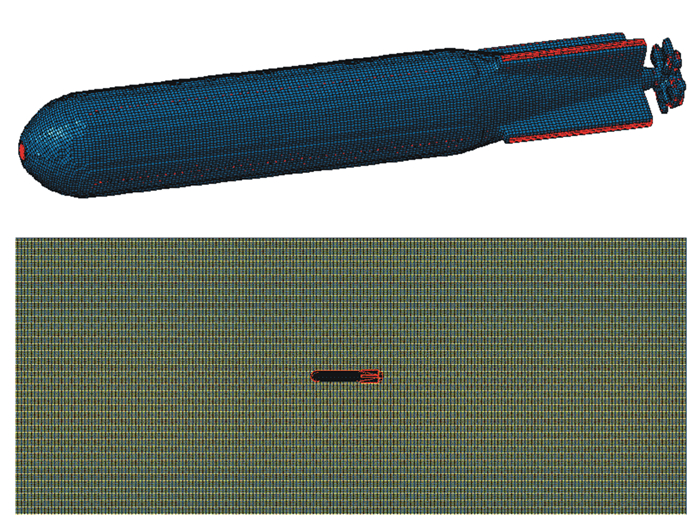
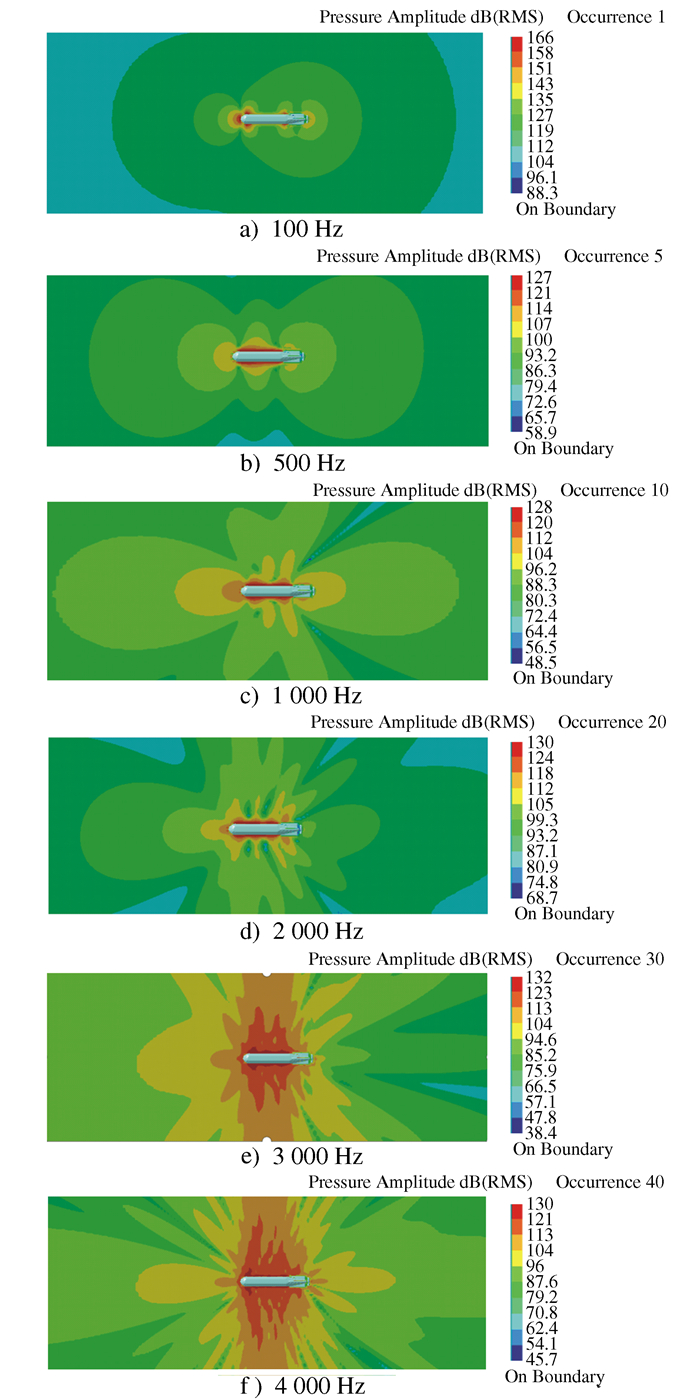
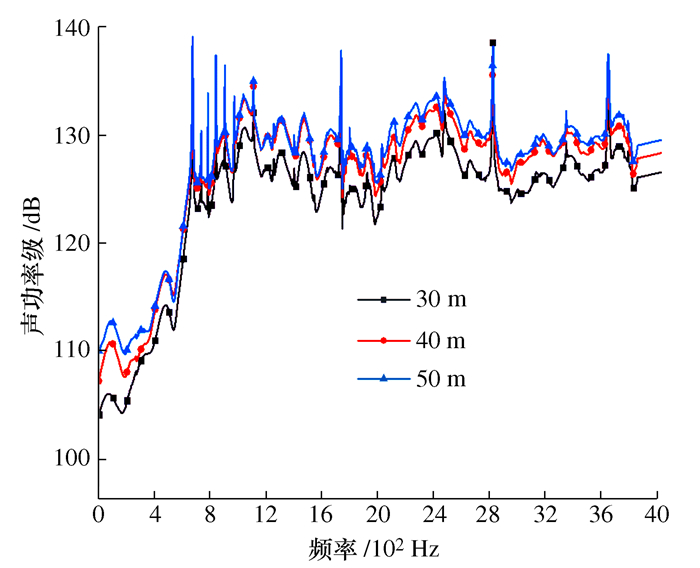
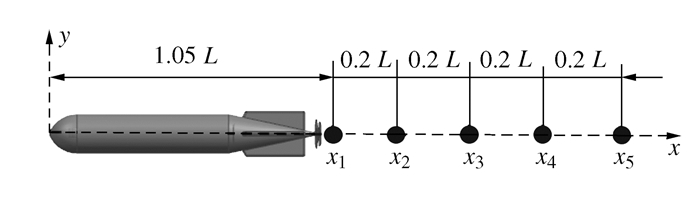
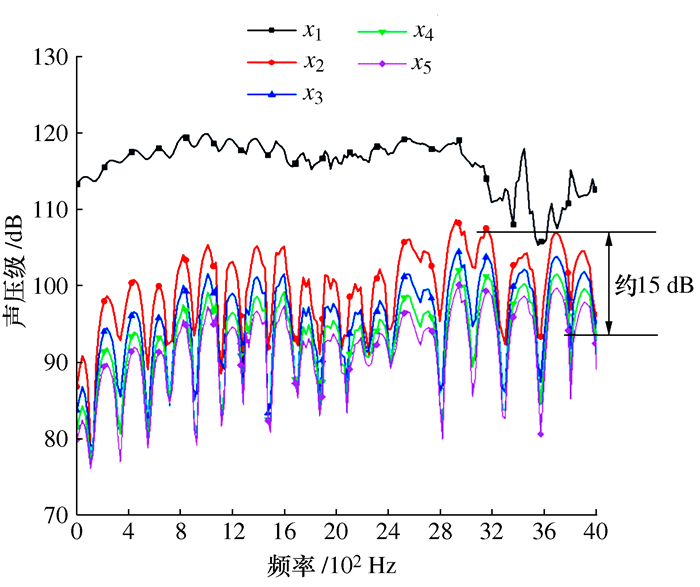
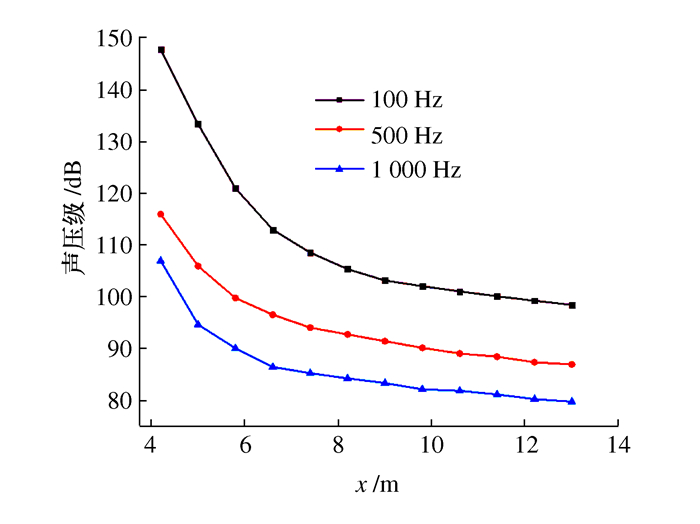
为了更好的了解水下航行器的流场特性及辐射噪声的变化规律, 采用SST k-ω模型, 运用流体仿真软件, 提取了水下航行器在3种来流速度工况下的表面压力分布, 总结了阻力系数随时间的变化规律, 推导了航行器鼻端处压力的变化, 仿真得出了航行器在对称面上的速度分布情况。把壁面压力脉动作为偶极子声源, 采用直接边界元法(BEM), 仿真计算得到声压云图和场点声功率级的分布情况。在轴向上安装探测器, 来讨论壳体辐射噪声轴向变化特性。研究结果表明: 来流速度越大, 航行器所受到的阻力和压力都随之增大, 且航行器结构辐射噪声也增大; 声场中距离航行器越近的点, 其声压越大, 且声压在近场区域衰减的速度较快, 通过仿真所得到的航行器辐射噪声的变化规律具有准确性和可行性。
为了更好的了解水下航行器的流场特性及辐射噪声的变化规律, 采用SST k-ω模型, 运用流体仿真软件, 提取了水下航行器在3种来流速度工况下的表面压力分布, 总结了阻力系数随时间的变化规律, 推导了航行器鼻端处压力的变化, 仿真得出了航行器在对称面上的速度分布情况。把壁面压力脉动作为偶极子声源, 采用直接边界元法(BEM), 仿真计算得到声压云图和场点声功率级的分布情况。在轴向上安装探测器, 来讨论壳体辐射噪声轴向变化特性。研究结果表明: 来流速度越大, 航行器所受到的阻力和压力都随之增大, 且航行器结构辐射噪声也增大; 声场中距离航行器越近的点, 其声压越大, 且声压在近场区域衰减的速度较快, 通过仿真所得到的航行器辐射噪声的变化规律具有准确性和可行性。



2022, 41(6): 840-848.
doi: 10.13433/j.cnki.1003-8728.20200419
摘要:
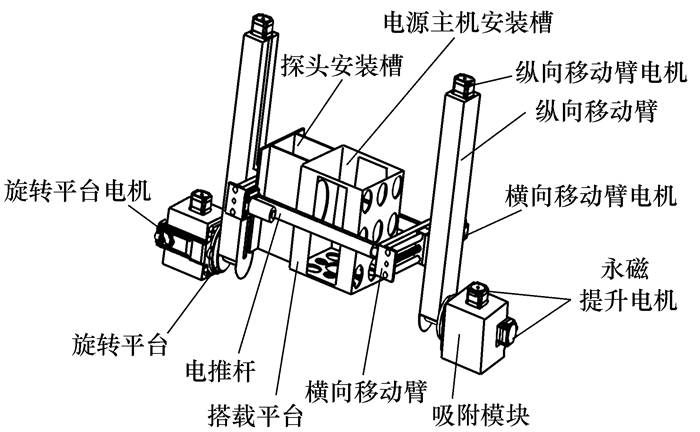
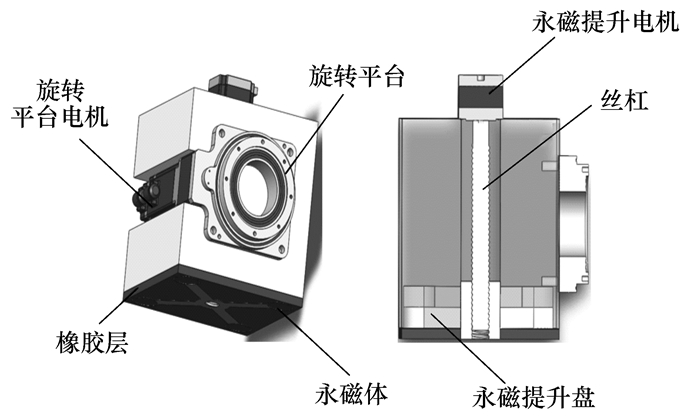
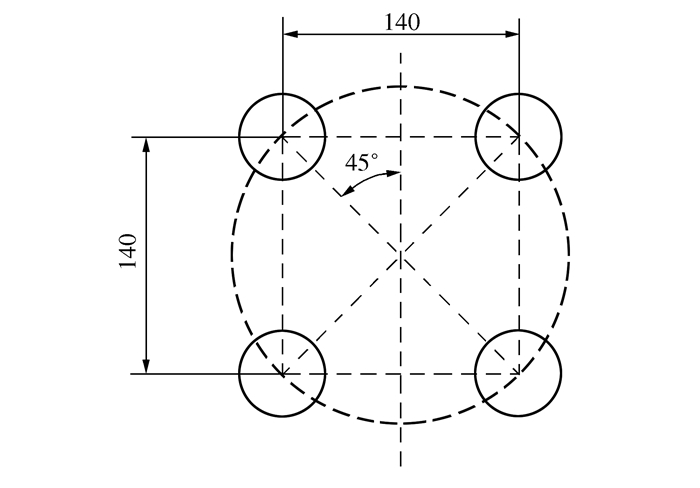
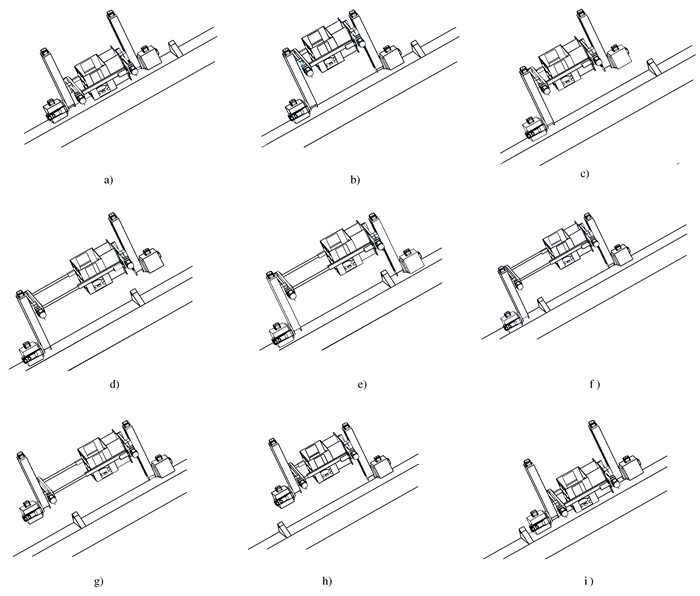
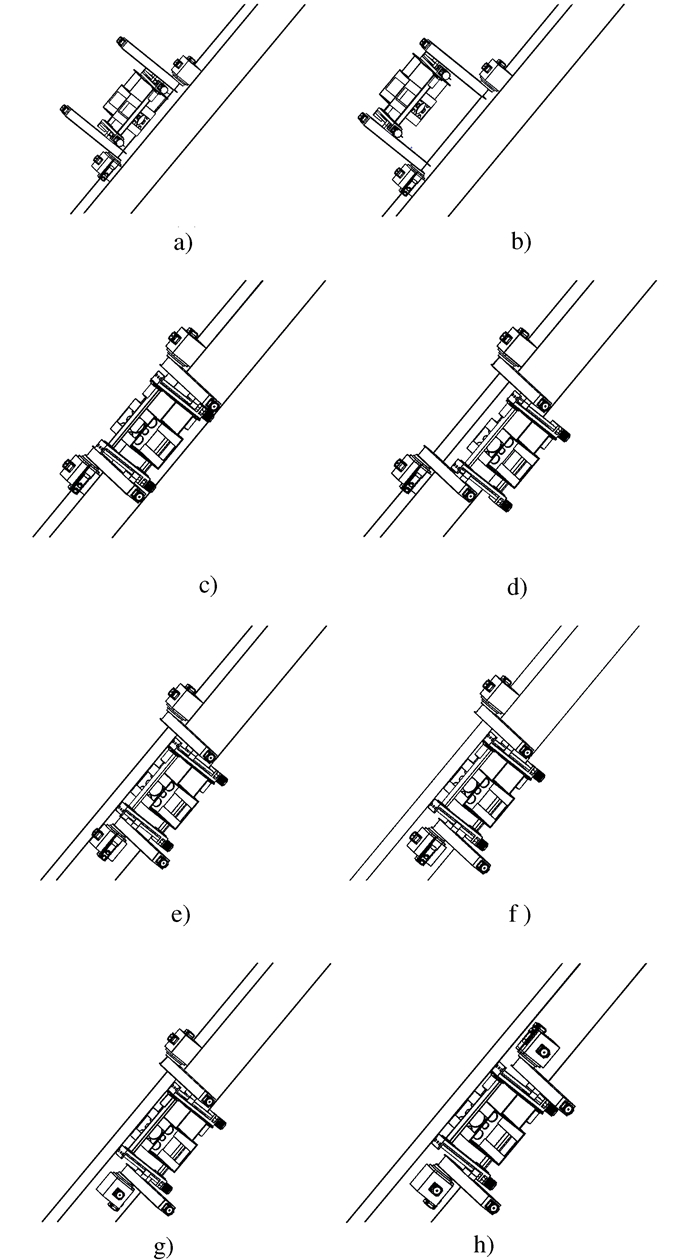
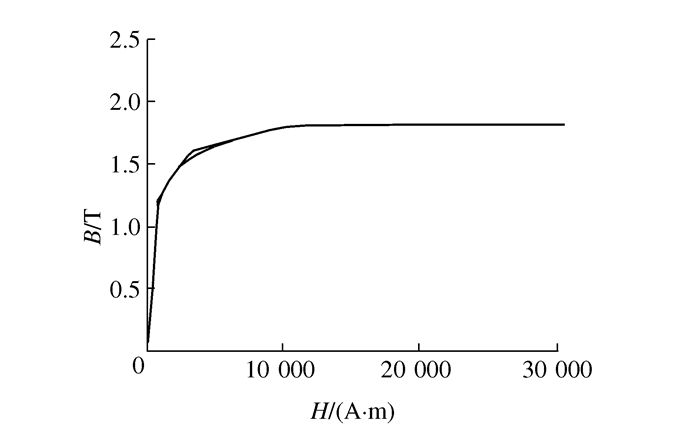
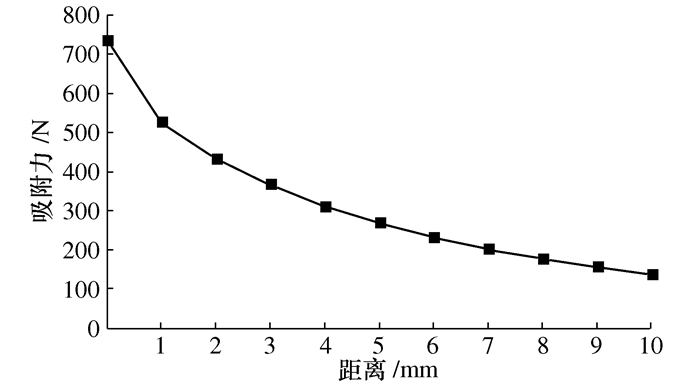
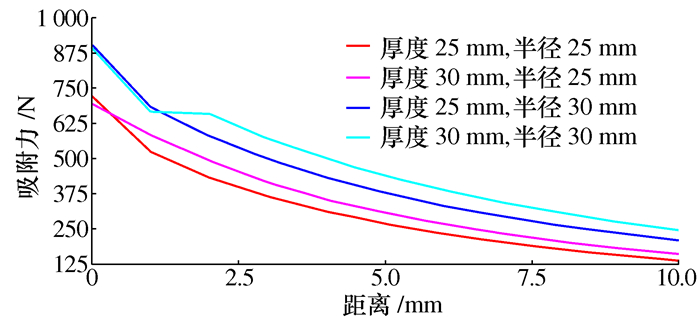
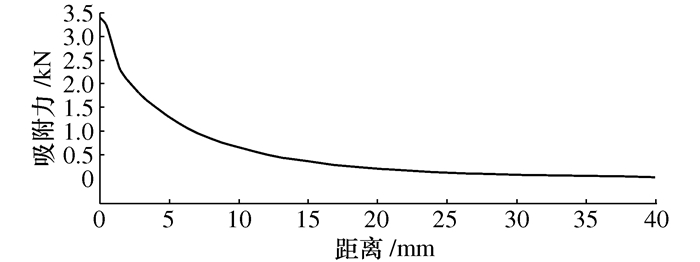
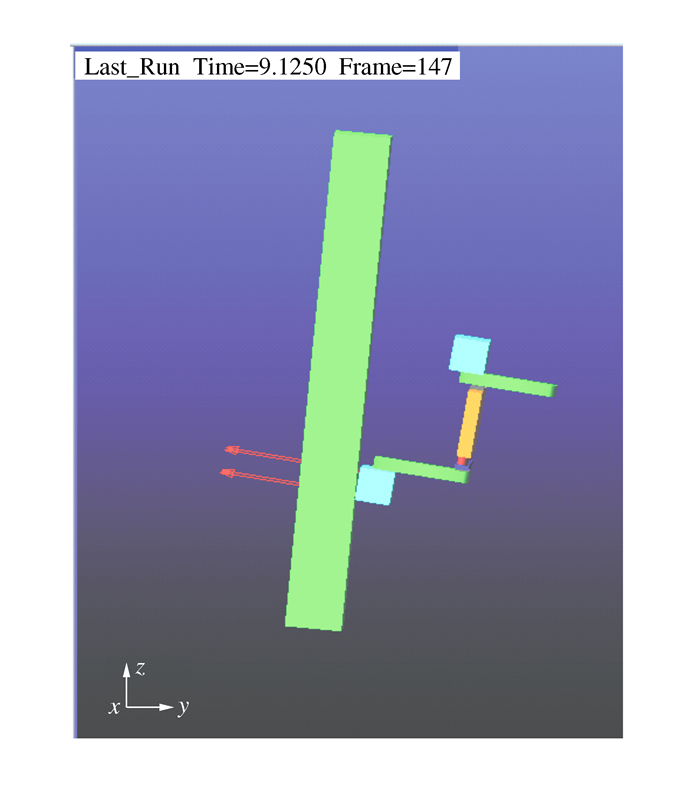
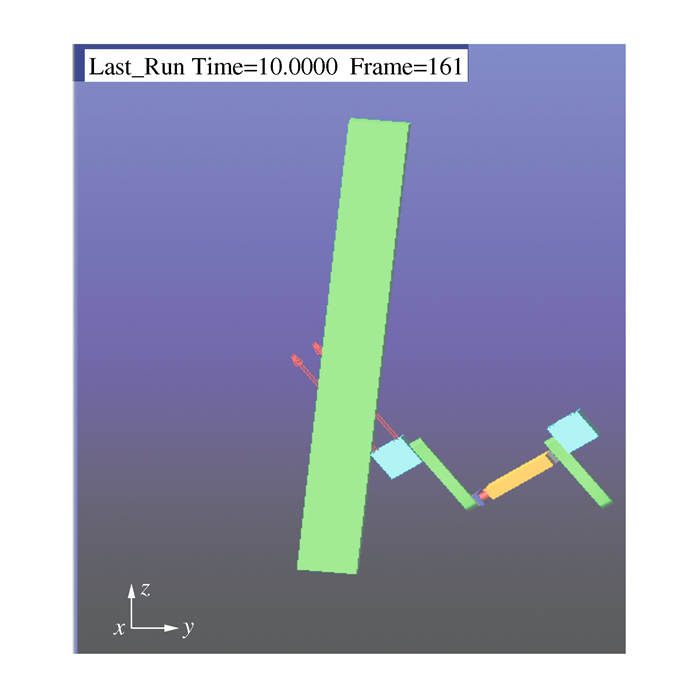
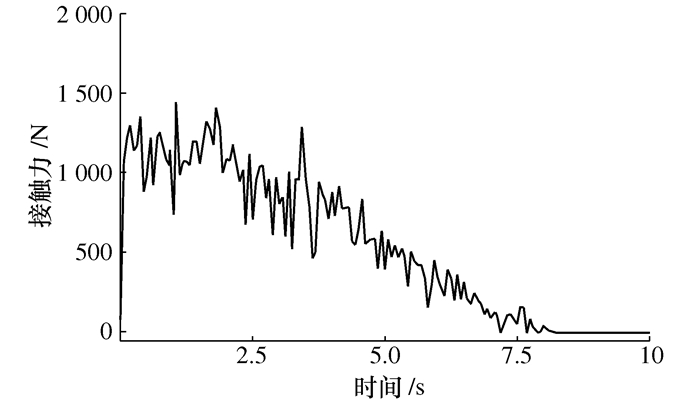
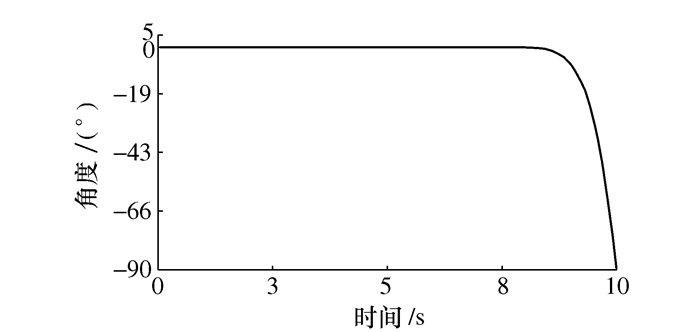
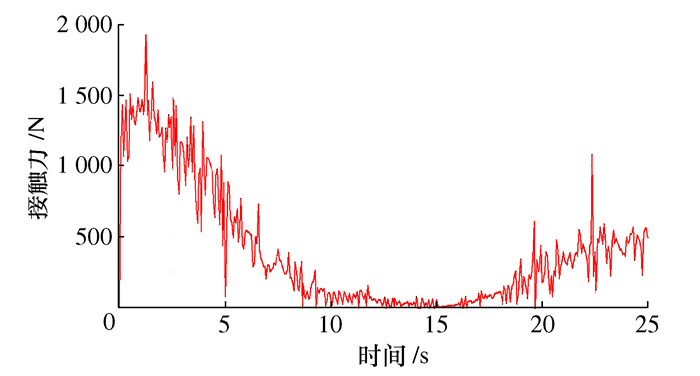
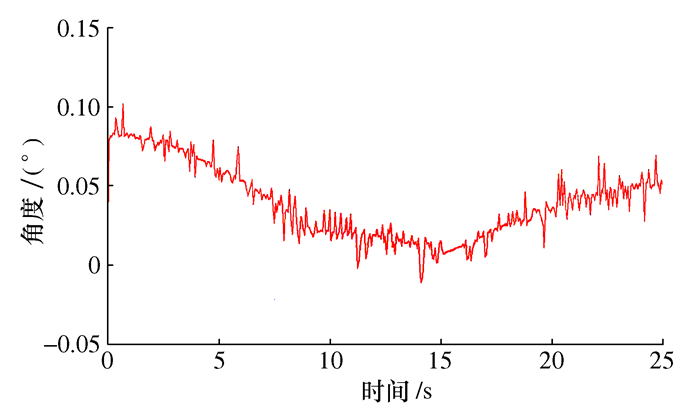
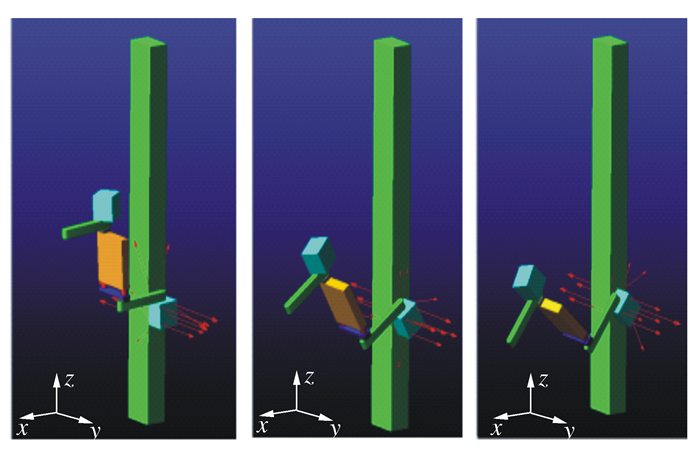
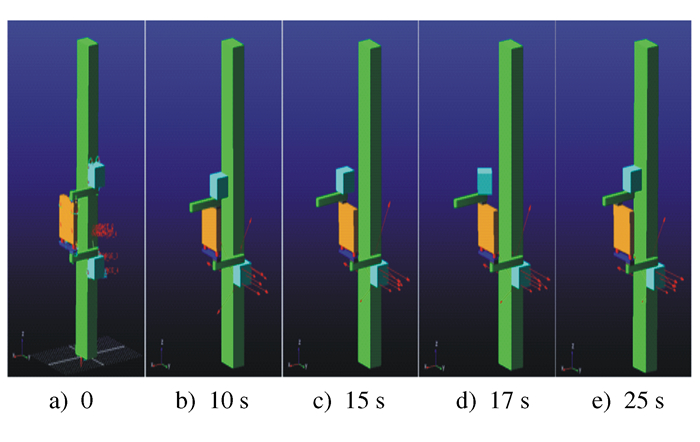
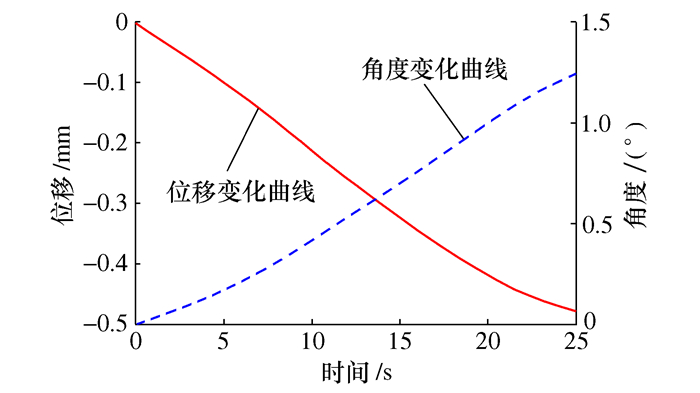
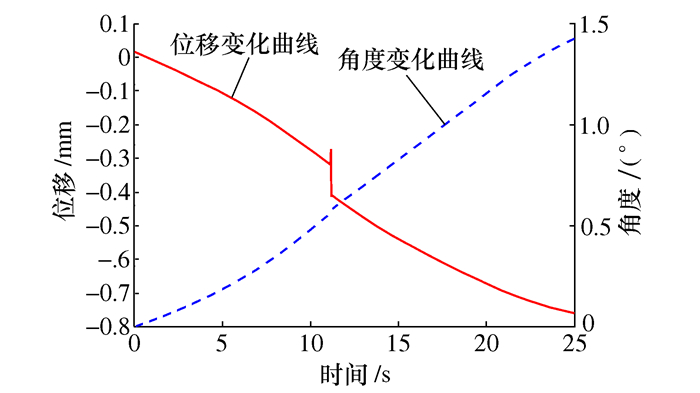
为了提前发现并解决JJ225/45-K型井架大腿上出现的损伤、腐蚀等问题, 基于永磁体与井架大腿的吸附原理, 设计了一种可以携带检测和维修装置的井架攀爬机器人结构。首先对该井架攀爬机器人结构的攀爬足、攀爬步态加以分析, 发现越障步态和空间翻转步态容易发生倾覆; 运用Ansoft Maxwell软件对机器人吸附足永磁体磁力仿真分析, 发现初选的永磁体尺寸不满足使用要求, 调整了吸附足上永磁体的尺寸; 最后通过Adams软件对攀爬机器人进行抗倾覆分析, 验证调整永磁体尺寸后的攀爬机器人工作的安全性, 验证发现调整尺寸后的永磁体吸附足可以安全的在井架上攀爬而不会发生倾覆。
为了提前发现并解决JJ225/45-K型井架大腿上出现的损伤、腐蚀等问题, 基于永磁体与井架大腿的吸附原理, 设计了一种可以携带检测和维修装置的井架攀爬机器人结构。首先对该井架攀爬机器人结构的攀爬足、攀爬步态加以分析, 发现越障步态和空间翻转步态容易发生倾覆; 运用Ansoft Maxwell软件对机器人吸附足永磁体磁力仿真分析, 发现初选的永磁体尺寸不满足使用要求, 调整了吸附足上永磁体的尺寸; 最后通过Adams软件对攀爬机器人进行抗倾覆分析, 验证调整永磁体尺寸后的攀爬机器人工作的安全性, 验证发现调整尺寸后的永磁体吸附足可以安全的在井架上攀爬而不会发生倾覆。



2022, 41(6): 849-856.
doi: 10.13433/j.cnki.1003-8728.20200423
摘要:
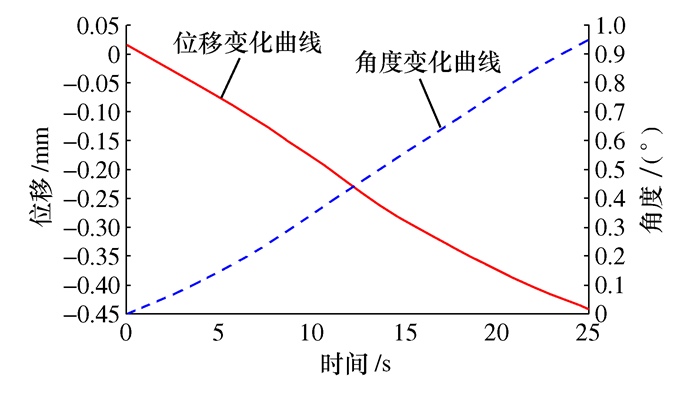
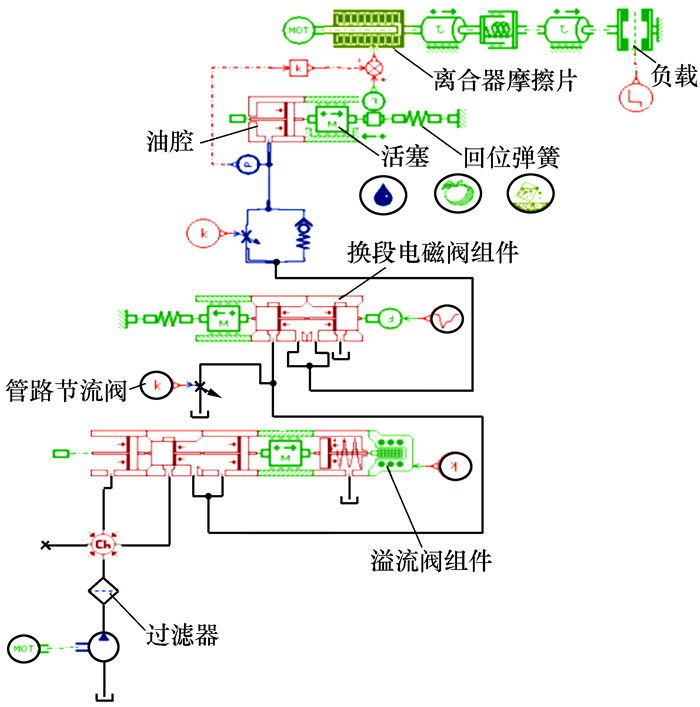
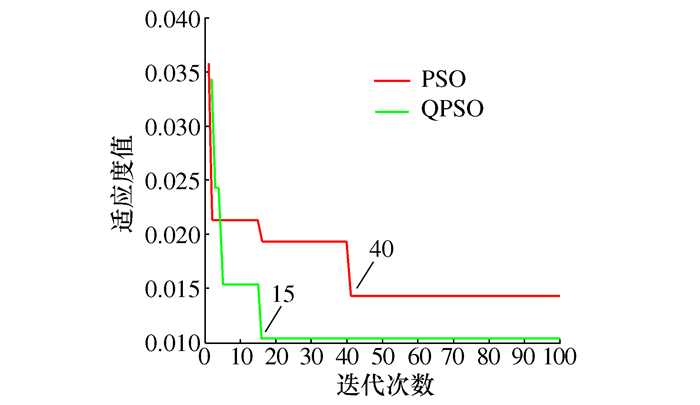
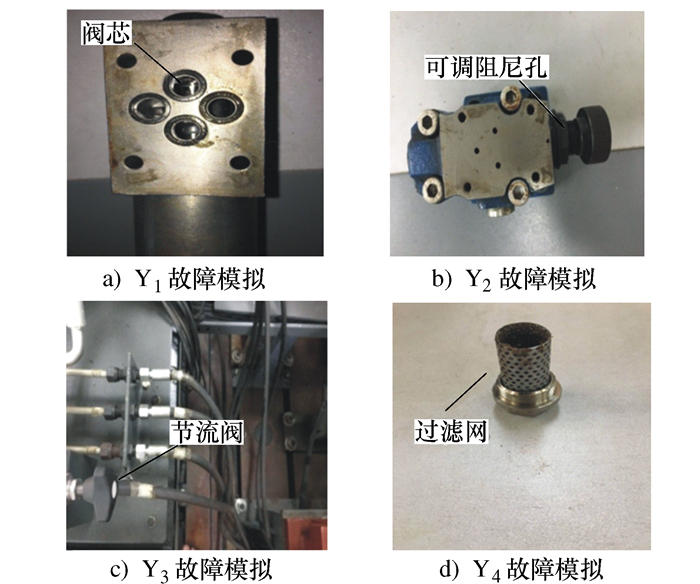
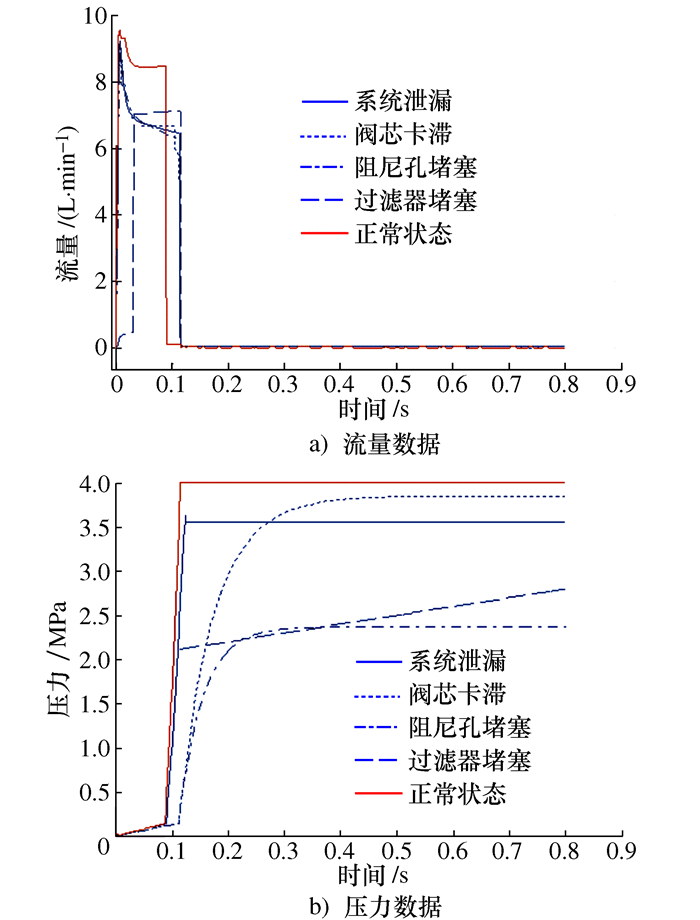
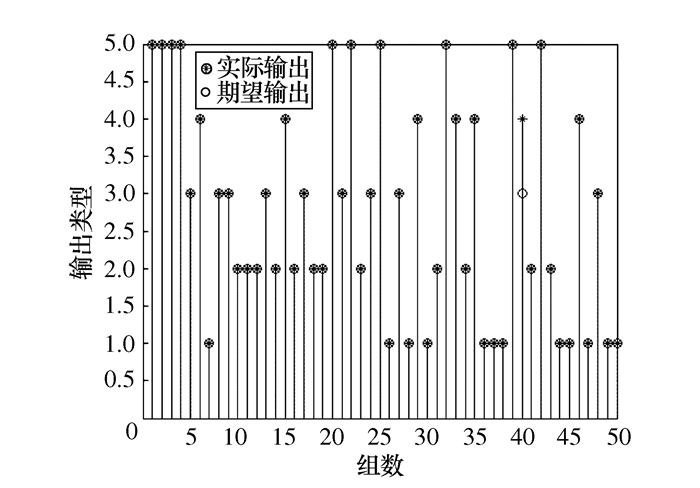
为了预测一定负载下, 液压机械无级变速器(简称HMCVT)湿式离合器由于液压系统压力、流量脉动使得主从动轴长时间产生较大转速差而一直处于滑摩状态, 导致湿式离合器换段不理想的问题。通过分析液压系统故障形成机理, 利用AMESim搭建湿式离合器液压系统, 模拟注入故障类型, 进行时域特征提取, 提出量子粒子群(QPSO)优化BP神经网络权值、阈值的算法对湿式离合器液压系统进行故障诊断, 提升该系统的诊断效率与诊断精度, 并结合台架试验验证该算法的准确性。研究结果表明: QPSO算法优化BP神经网络的故障诊断算法故障识别率高, 算法具有更高的收敛精度及收敛速度, 研究结果为设计拖拉机HMCVT的故障自诊断系统提供理论参考以及工程开发思路。
为了预测一定负载下, 液压机械无级变速器(简称HMCVT)湿式离合器由于液压系统压力、流量脉动使得主从动轴长时间产生较大转速差而一直处于滑摩状态, 导致湿式离合器换段不理想的问题。通过分析液压系统故障形成机理, 利用AMESim搭建湿式离合器液压系统, 模拟注入故障类型, 进行时域特征提取, 提出量子粒子群(QPSO)优化BP神经网络权值、阈值的算法对湿式离合器液压系统进行故障诊断, 提升该系统的诊断效率与诊断精度, 并结合台架试验验证该算法的准确性。研究结果表明: QPSO算法优化BP神经网络的故障诊断算法故障识别率高, 算法具有更高的收敛精度及收敛速度, 研究结果为设计拖拉机HMCVT的故障自诊断系统提供理论参考以及工程开发思路。



2022, 41(6): 857-861.
doi: 10.13433/j.cnki.1003-8728.20200381
摘要:
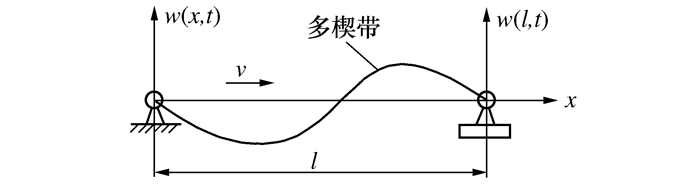
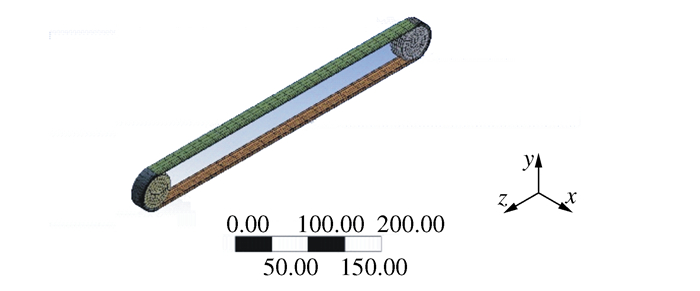
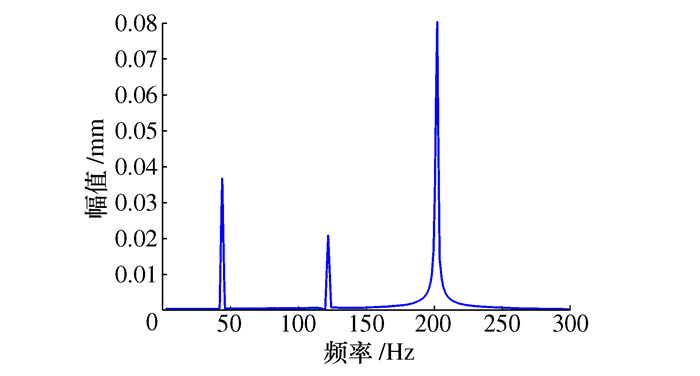
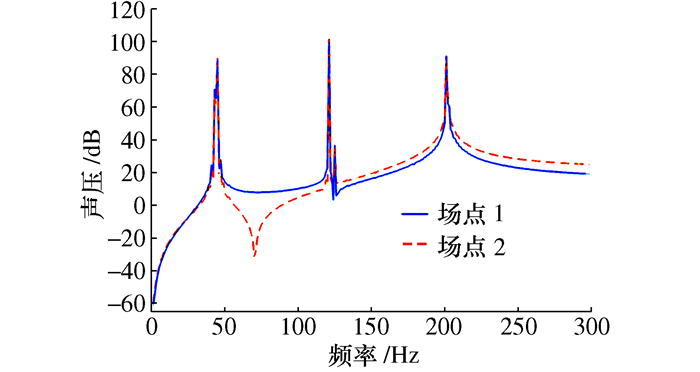
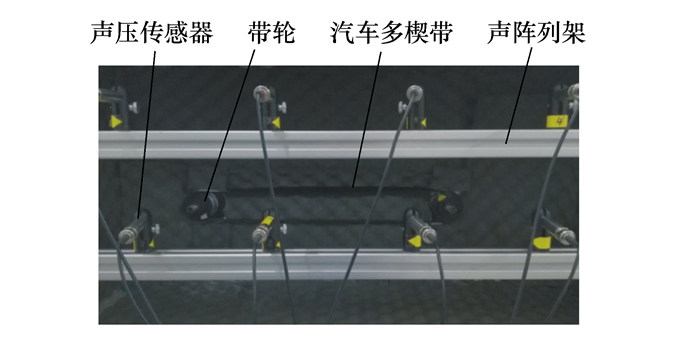
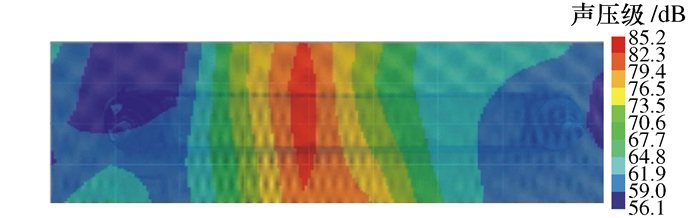
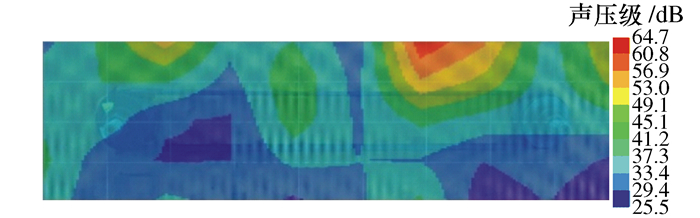
为了对多楔带的横向振动和噪声进行研究, 分析了汽车多楔带传动振动噪声的产生机理。采用弦模型建立了带横向跨度的振动微分方程, 求解了带段横向振动的固有频率。针对两轮6PK多楔带传动系统利用谐响应分析了振动边界条件, 采用声学边界元求解了关键场点的频响曲线和声压分布云图。基于声阵列测量原理进行了两轮多楔带传动系统横向振动和噪声的测试试验。仿真与试验结果表明当弹性滑动引起的激励频率与带跨度区域的固有频率耦合时会在带跨度中间位置引起尖锐的共振噪声。
为了对多楔带的横向振动和噪声进行研究, 分析了汽车多楔带传动振动噪声的产生机理。采用弦模型建立了带横向跨度的振动微分方程, 求解了带段横向振动的固有频率。针对两轮6PK多楔带传动系统利用谐响应分析了振动边界条件, 采用声学边界元求解了关键场点的频响曲线和声压分布云图。基于声阵列测量原理进行了两轮多楔带传动系统横向振动和噪声的测试试验。仿真与试验结果表明当弹性滑动引起的激励频率与带跨度区域的固有频率耦合时会在带跨度中间位置引起尖锐的共振噪声。



2022, 41(6): 862-868.
doi: 10.13433/j.cnki.1003-8728.20200549
摘要:
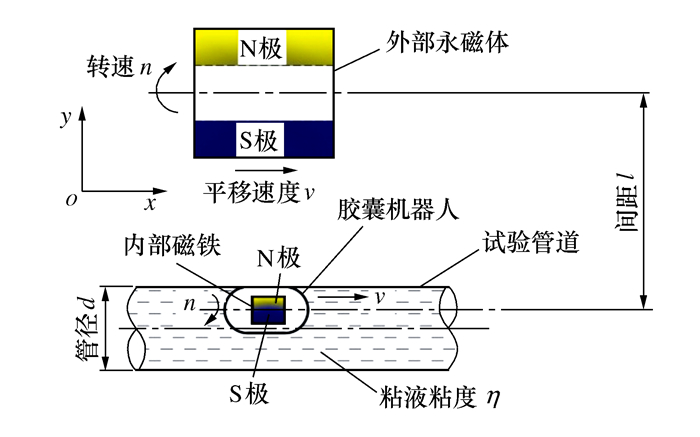
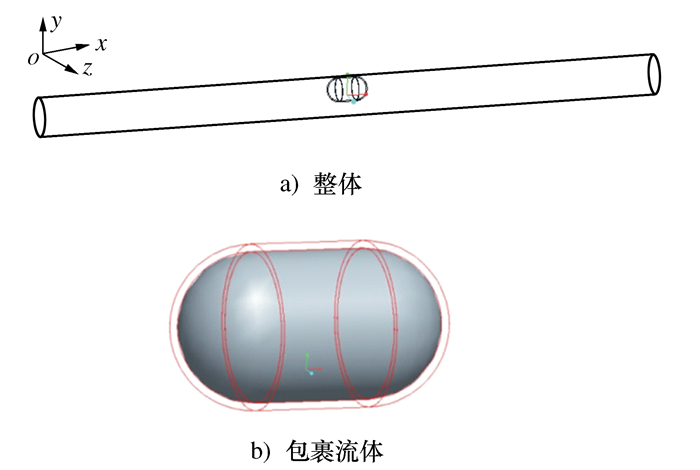
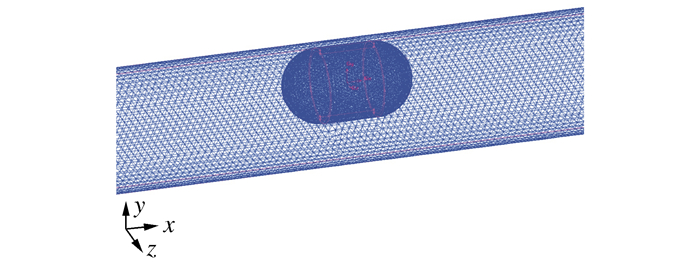
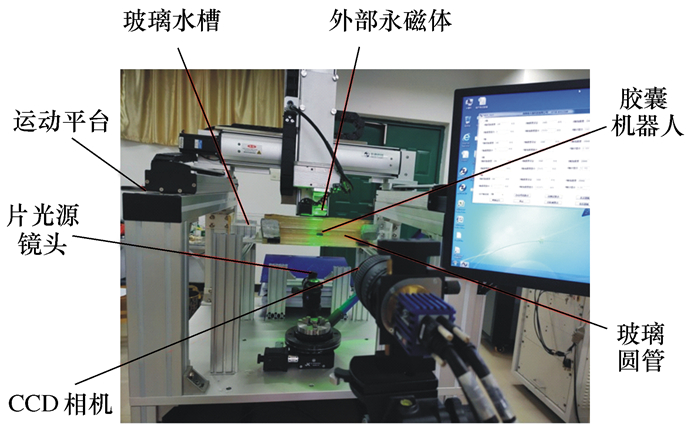
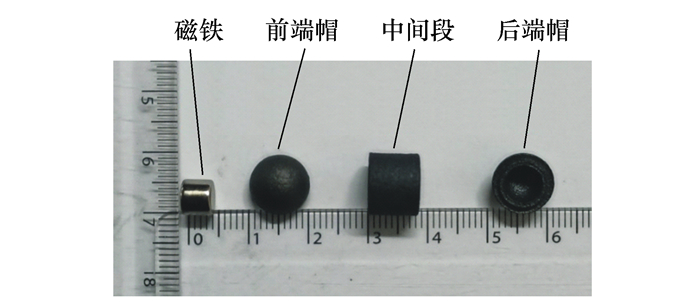
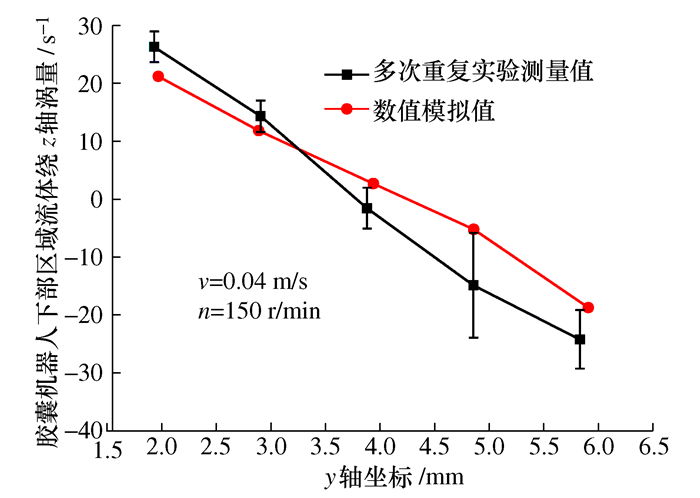
磁控胶囊机器人主要应用于人体肠道的诊断和治疗。根据永磁体法, 设计制造了一套磁控胶囊机器人旋进时管内流体流场测量系统, 采用CFD方法数值计算和PIV技术实验测量机器人周围流体涡量, 数值计算和实验测量结果的变化趋势和大小基本相同。更进一步采用均匀设计数值模拟优化方法, 数值计算管道直径、机器人平移速度、机器人转速和流体动力粘度对胶囊机器人运行平稳度(即以机器人周围流体湍流强度为指标)的影响规律, 建立了胶囊机器人周围流体湍流强度一次回归模型。结果表明: 胶囊机器人系统各类参数对机器人周围流体湍流强度的影响程度不同, 其中, 流体动力粘度>机器人平移速度≈机器人转速>管道直径的影响; 胶囊机器人运行最为平稳时的各类参数组合为: 管道直径为16 mm, 机器人平移速度为0.02 m/s, 机器人转速为90 r/min, 粘液动力粘度为0.005 Pa·s。
磁控胶囊机器人主要应用于人体肠道的诊断和治疗。根据永磁体法, 设计制造了一套磁控胶囊机器人旋进时管内流体流场测量系统, 采用CFD方法数值计算和PIV技术实验测量机器人周围流体涡量, 数值计算和实验测量结果的变化趋势和大小基本相同。更进一步采用均匀设计数值模拟优化方法, 数值计算管道直径、机器人平移速度、机器人转速和流体动力粘度对胶囊机器人运行平稳度(即以机器人周围流体湍流强度为指标)的影响规律, 建立了胶囊机器人周围流体湍流强度一次回归模型。结果表明: 胶囊机器人系统各类参数对机器人周围流体湍流强度的影响程度不同, 其中, 流体动力粘度>机器人平移速度≈机器人转速>管道直径的影响; 胶囊机器人运行最为平稳时的各类参数组合为: 管道直径为16 mm, 机器人平移速度为0.02 m/s, 机器人转速为90 r/min, 粘液动力粘度为0.005 Pa·s。



2022, 41(6): 869-876.
doi: 10.13433/j.cnki.1003-8728.20220102
摘要:
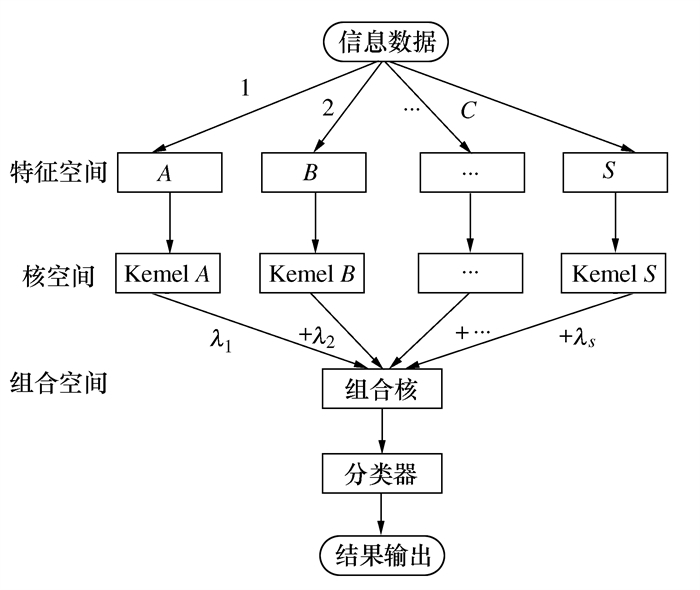
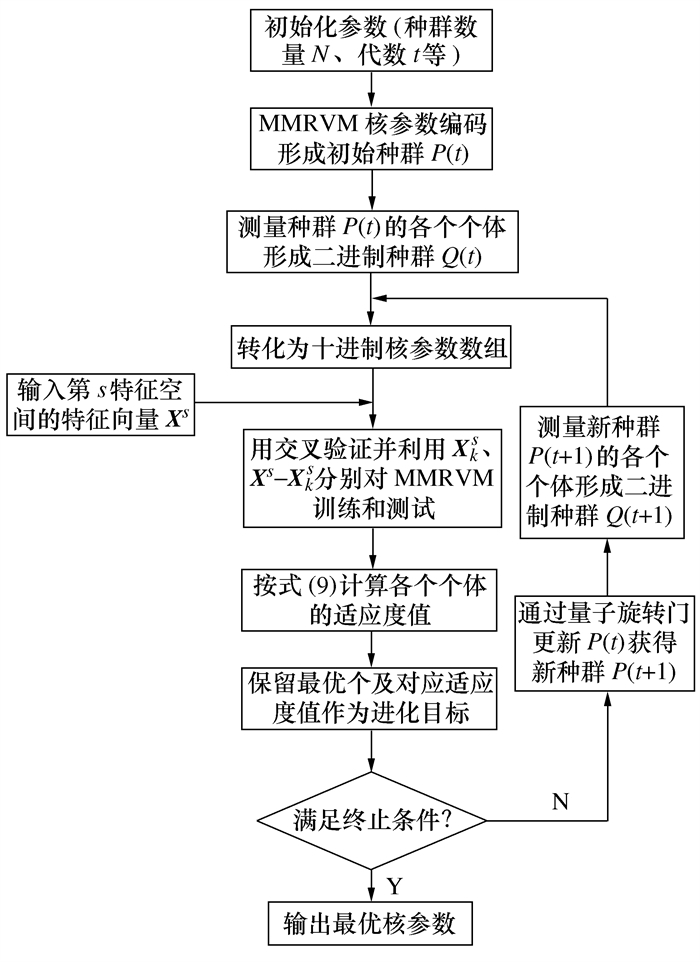
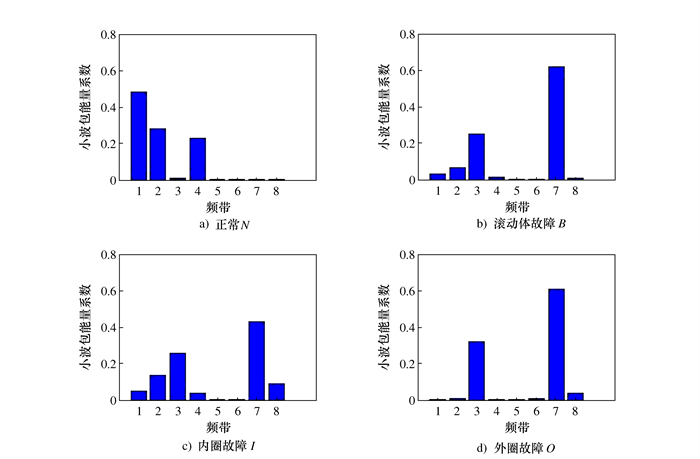
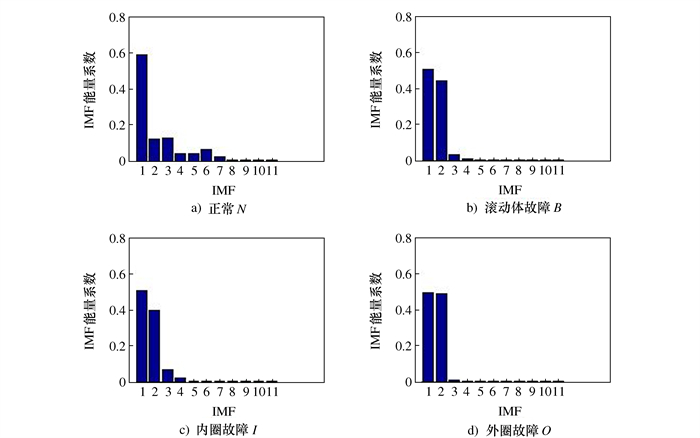
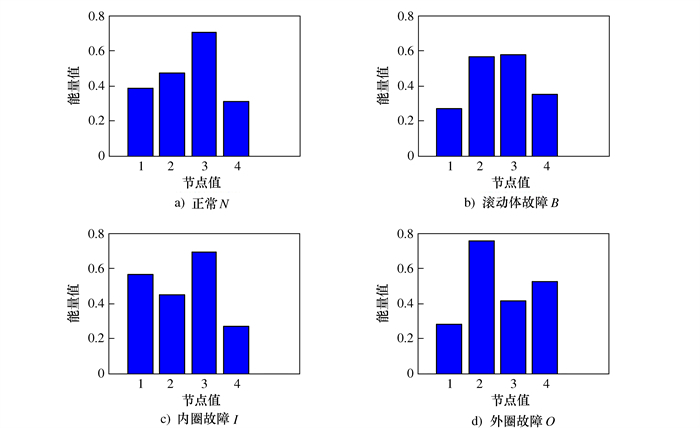
考虑到滚动轴承振动信号的复杂性, 单一故障特征难以获得较理想的故障诊断结果, 提出一种基于多核多分类相关向量机(Multi-kernel multi-class relevance vector machine, MMRVM)的多特征融合智能故障诊断方法。该方法将具有不同特性的故障特征通过核函数映射到高维特征空间, 按照特征贡献量大小进行加权求和从而融合形成多特征空间, 充分利用各特征向量的有效属性, 有效避免不同特征直接融合导致的维数增高问题。此外, 通过量子遗传算法自适应选取不同特征对应的最优核参数, 进一步提高了故障识别准确率。滚动轴承故障诊断实例表明, 与其它方法相比, 所提方法可有效融合多种滚动轴承故障特征信息, 具有更高的故障诊断准率。
考虑到滚动轴承振动信号的复杂性, 单一故障特征难以获得较理想的故障诊断结果, 提出一种基于多核多分类相关向量机(Multi-kernel multi-class relevance vector machine, MMRVM)的多特征融合智能故障诊断方法。该方法将具有不同特性的故障特征通过核函数映射到高维特征空间, 按照特征贡献量大小进行加权求和从而融合形成多特征空间, 充分利用各特征向量的有效属性, 有效避免不同特征直接融合导致的维数增高问题。此外, 通过量子遗传算法自适应选取不同特征对应的最优核参数, 进一步提高了故障识别准确率。滚动轴承故障诊断实例表明, 与其它方法相比, 所提方法可有效融合多种滚动轴承故障特征信息, 具有更高的故障诊断准率。



2022, 41(6): 877-884.
doi: 10.13433/j.cnki.1003-8728.20220150
摘要:
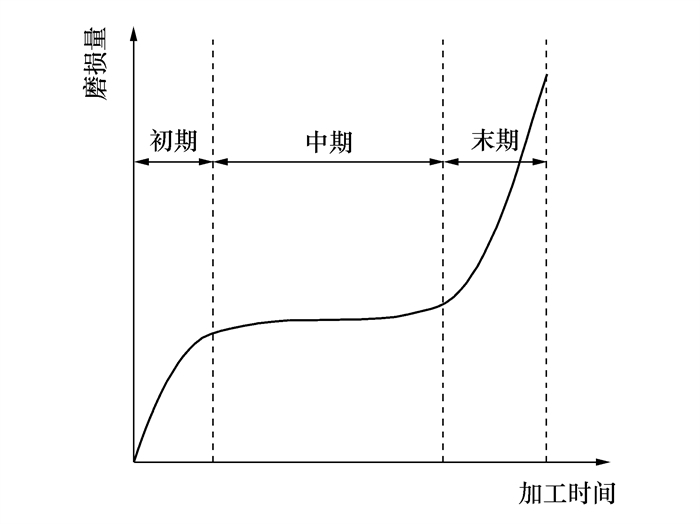
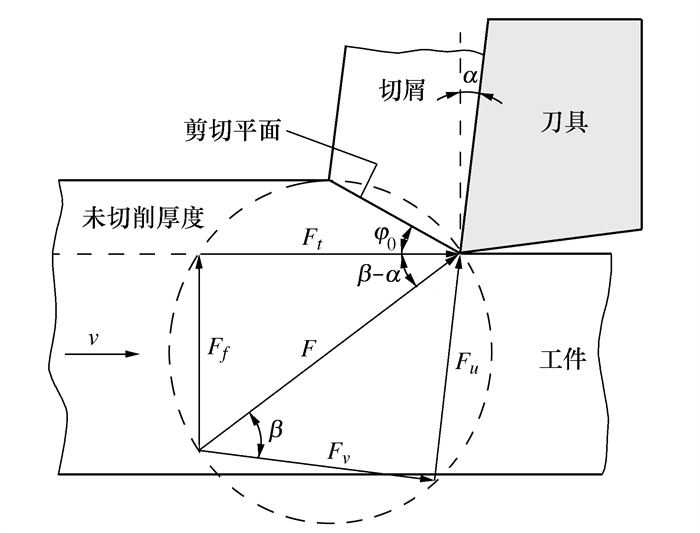
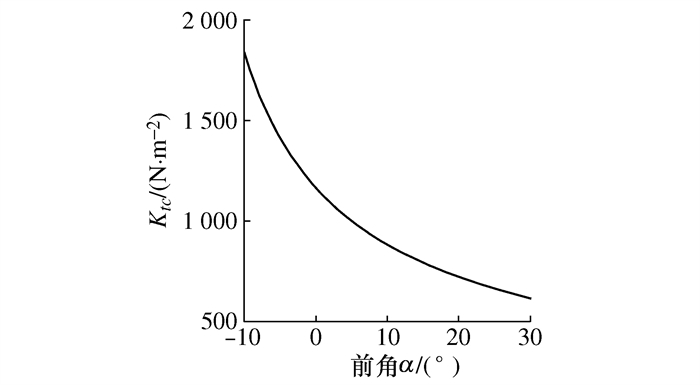
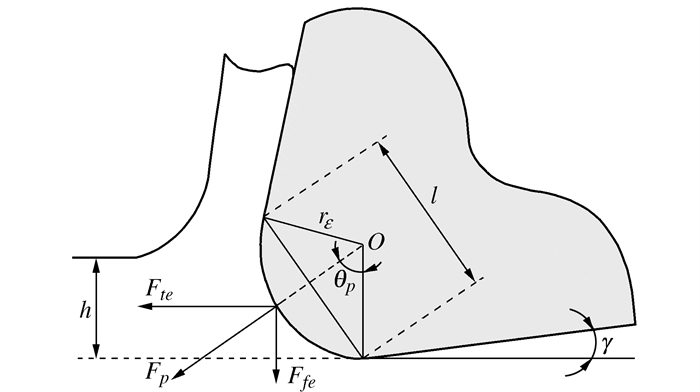
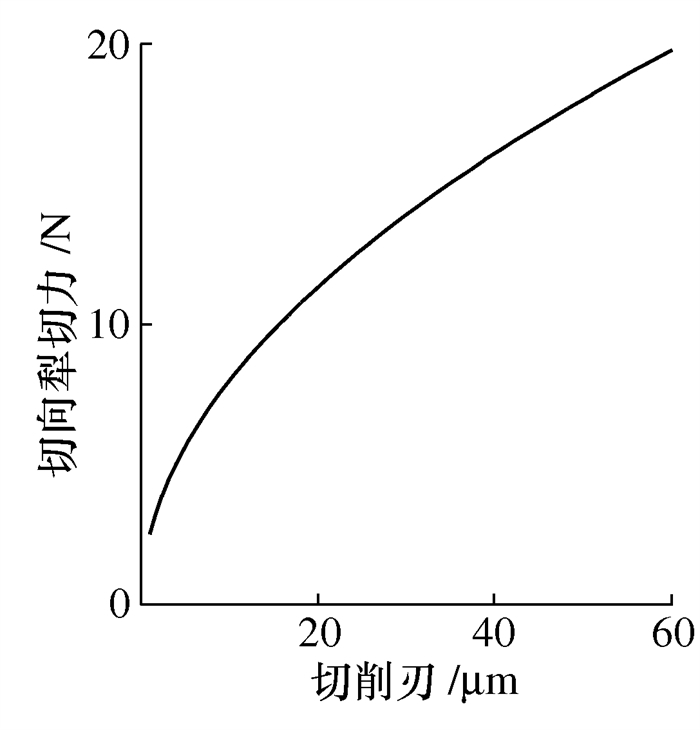
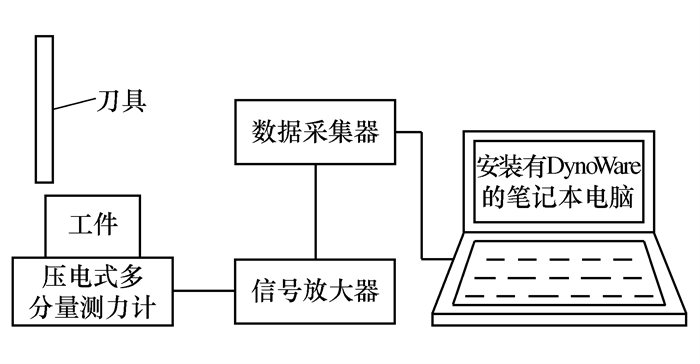
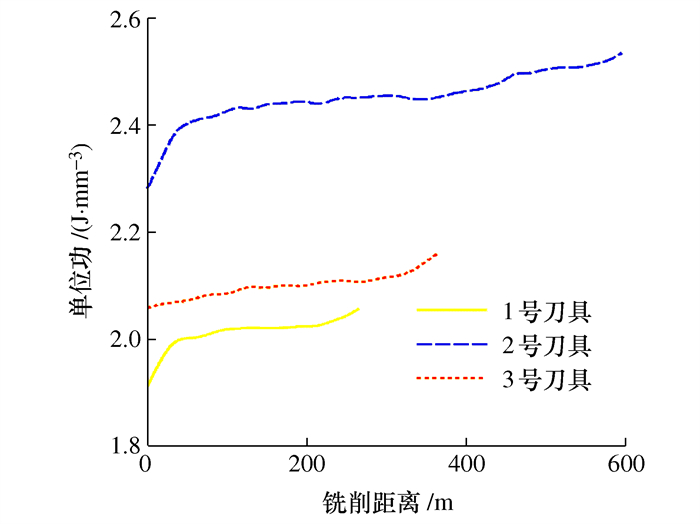
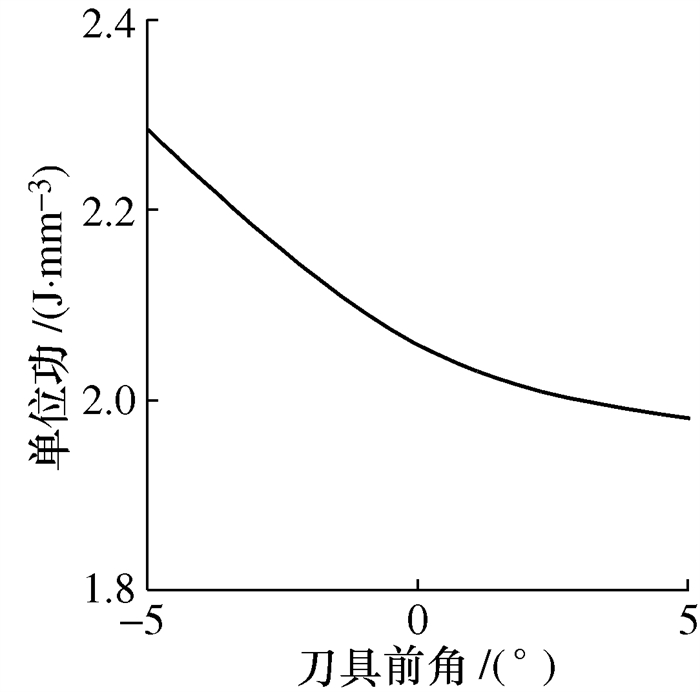
刀具磨损监测是机械加工领域关注的重点问题, 基于机床功率变化的刀具磨损监测方法是当前主流的监测方法。对于微铣削加工而言, 由于材料切削功率占机床总功率的比例极小, 运用传统方法难以监测到机床功率在加工过程中因刀具磨损产生的变化。针对微铣刀具在加工过程中的磨损问题, 本论文以切削功耗为基础提出了一种刀具磨损监测方法: 文章从切削力做功的角度出发对材料切削功耗进行了建模, 结合材料去除体积提出了单位功模型; 在切削参数固定的条件下, 从切向剪切力系数和切向犁切力系数两个方面分析了刀具磨损对单位功的影响; 以小直径硬质合金立铣刀铣削铝合金7075为例开展了多次刀具磨损实验, 并在实验过程中监测了单位功的变化趋势, 通过将单位功的变化趋势与刀具磨损进行关联, 验证了本文方法的可行性, 证明了该方法可用于微铣削过程中的刀具磨损监测。
刀具磨损监测是机械加工领域关注的重点问题, 基于机床功率变化的刀具磨损监测方法是当前主流的监测方法。对于微铣削加工而言, 由于材料切削功率占机床总功率的比例极小, 运用传统方法难以监测到机床功率在加工过程中因刀具磨损产生的变化。针对微铣刀具在加工过程中的磨损问题, 本论文以切削功耗为基础提出了一种刀具磨损监测方法: 文章从切削力做功的角度出发对材料切削功耗进行了建模, 结合材料去除体积提出了单位功模型; 在切削参数固定的条件下, 从切向剪切力系数和切向犁切力系数两个方面分析了刀具磨损对单位功的影响; 以小直径硬质合金立铣刀铣削铝合金7075为例开展了多次刀具磨损实验, 并在实验过程中监测了单位功的变化趋势, 通过将单位功的变化趋势与刀具磨损进行关联, 验证了本文方法的可行性, 证明了该方法可用于微铣削过程中的刀具磨损监测。



2022, 41(6): 885-890.
doi: 10.13433/j.cnki.1003-8728.20200389
摘要:
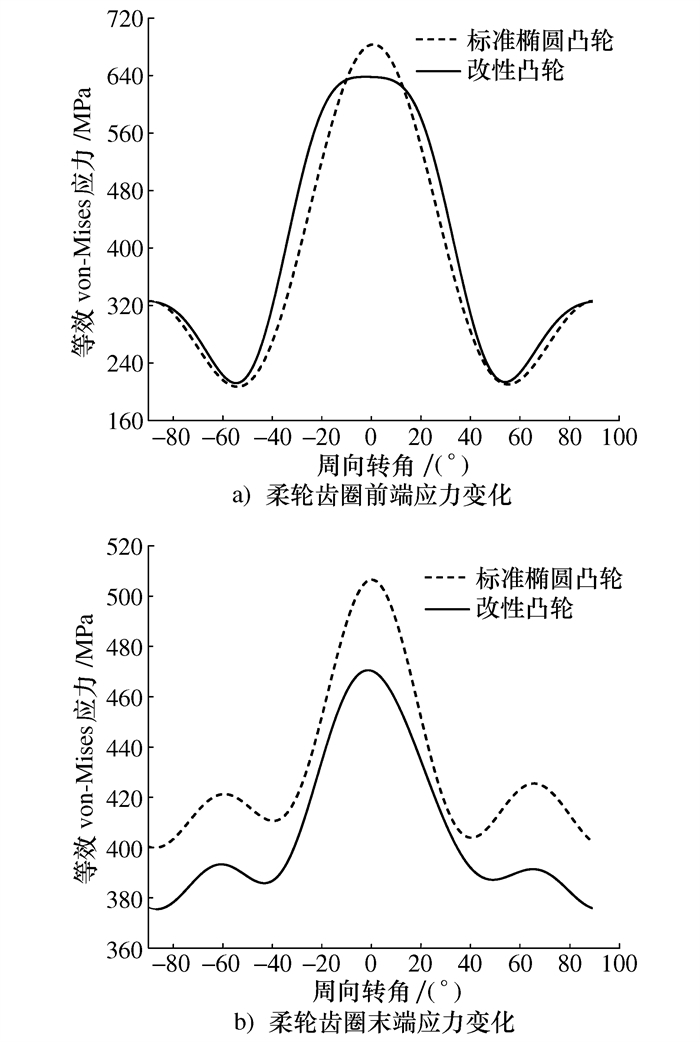
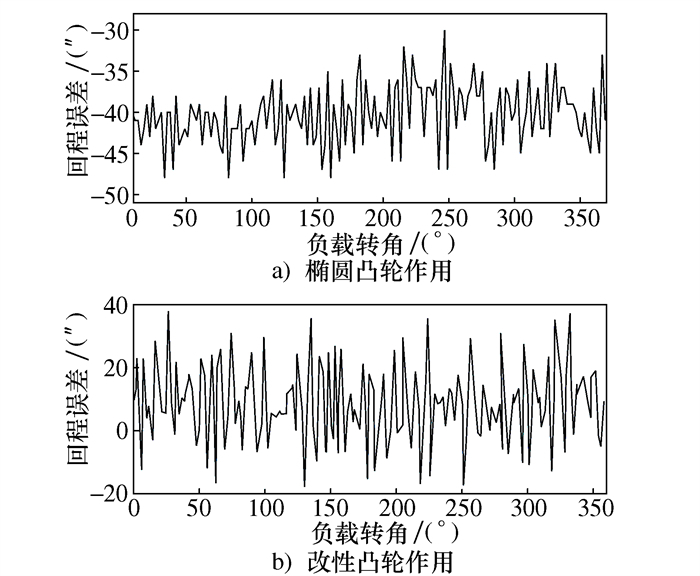
波发生器是柔轮受力特性研究的关键。为能够提高柔轮的寿命, 提出了一种新的改性凸轮波发生器作用于柔轮。改性凸轮轮廓由两段偏心圆弧和两段椭圆弧连接组成, 并将偏心圆弧与椭圆弧平滑过渡、柔轮内表面载荷分布均匀、啮合处啮合性能良好等限制条件转化为设计改性凸轮的约束条件。通过计算实例分析了不同参数的改性凸轮作用下的柔轮内周边曲线曲率变化, 并据此选取了改性凸轮波发生器。有限元仿真和试验结果表明, 与传统的椭圆凸轮波发生器作用的谐波减速器相比, 采用改性凸轮作用的谐波减速器柔轮的齿圈两端端的应力明显降低, 应力的分布也更加均匀, 传动的精度更高, 寿命更长。
波发生器是柔轮受力特性研究的关键。为能够提高柔轮的寿命, 提出了一种新的改性凸轮波发生器作用于柔轮。改性凸轮轮廓由两段偏心圆弧和两段椭圆弧连接组成, 并将偏心圆弧与椭圆弧平滑过渡、柔轮内表面载荷分布均匀、啮合处啮合性能良好等限制条件转化为设计改性凸轮的约束条件。通过计算实例分析了不同参数的改性凸轮作用下的柔轮内周边曲线曲率变化, 并据此选取了改性凸轮波发生器。有限元仿真和试验结果表明, 与传统的椭圆凸轮波发生器作用的谐波减速器相比, 采用改性凸轮作用的谐波减速器柔轮的齿圈两端端的应力明显降低, 应力的分布也更加均匀, 传动的精度更高, 寿命更长。


2022, 41(6): 891-897.
doi: 10.13433/j.cnki.1003-8728.20200382
摘要:
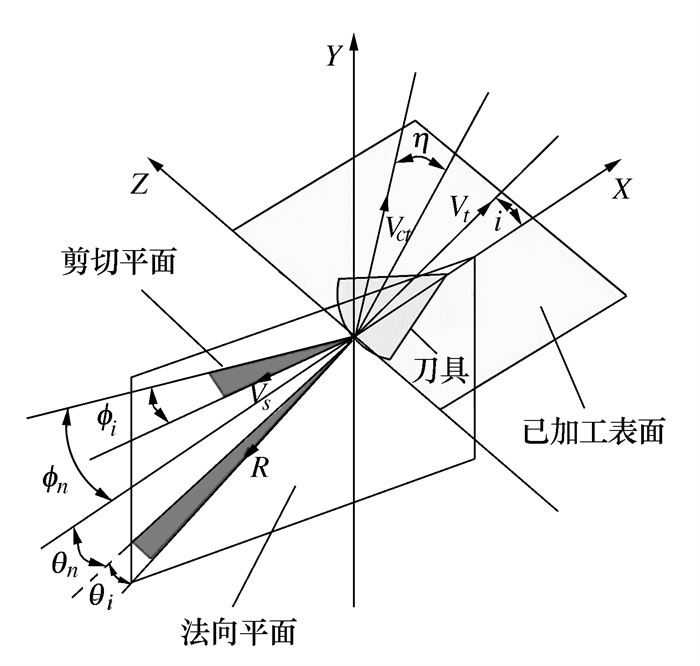
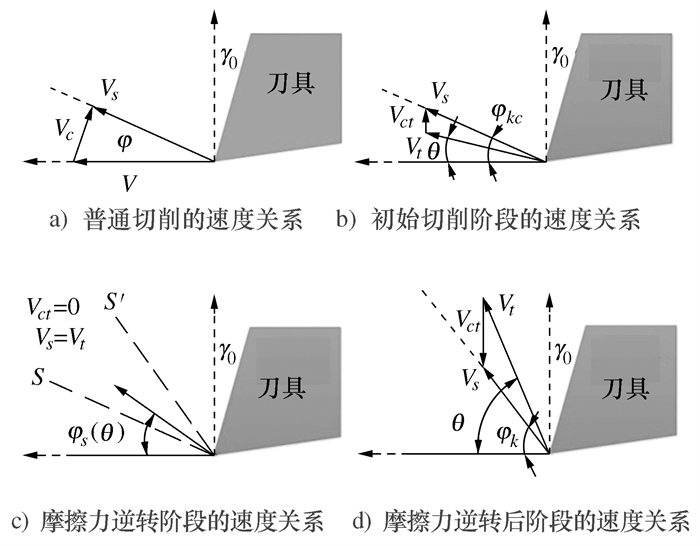
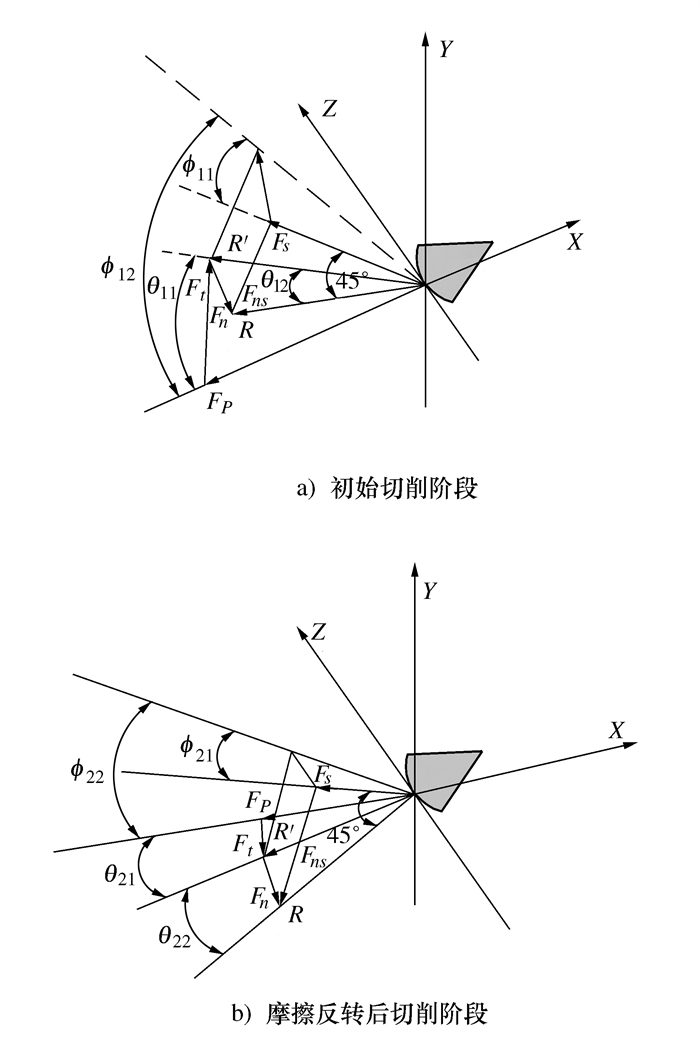
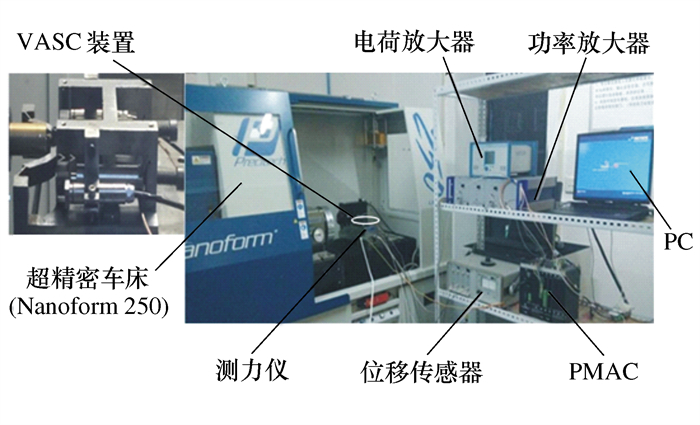
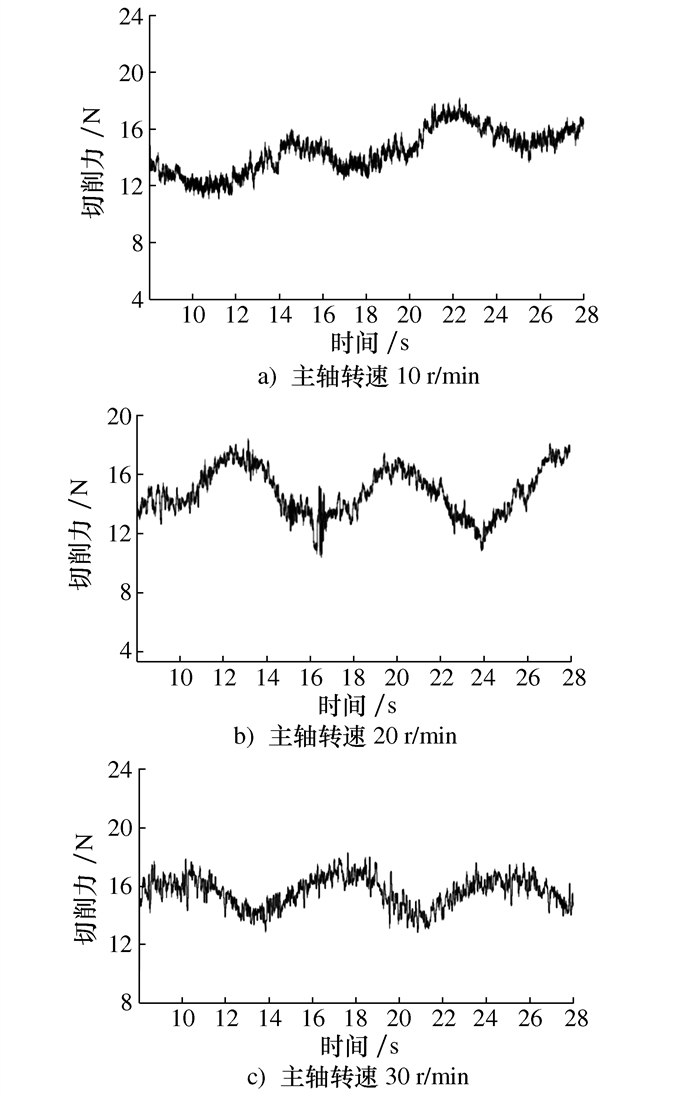
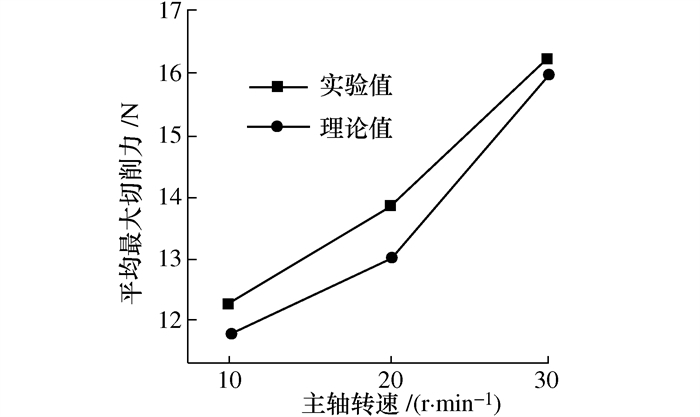
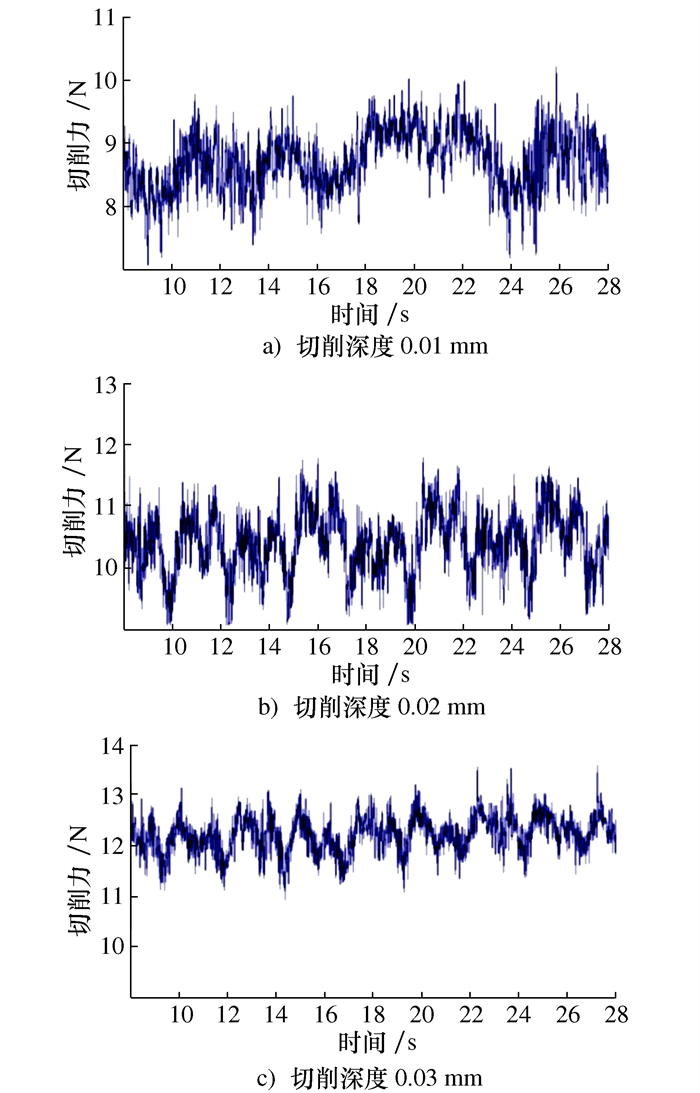
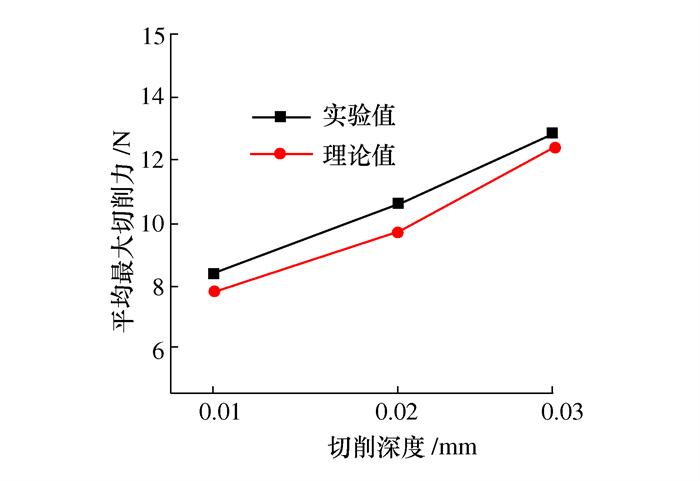
拟间歇振动辅助偏摆车削主要是为了提高难加工材料切削加工性而提出, 本文针对拟间歇振动辅助偏摆切削过程中切削力建模展开研究。首先, 根据薄剪切面理论分析振动辅助偏摆切削过程中瞬时剪切角和切削速度变化关系, 讨论切削力在法平面、前刀面及剪切面的变化情况。其次, 根据最大剪应力理论与切削过程中力的关系, 分析各相关角度与时间t的联系, 建立切削力解析模型。最后, 通过切削实验分析研究主轴转速和切削深度对切削力的影响。结果表明: 当主轴转速由10 r/min增加到30 r/min时, 实验和理论获得切削力值分别增加3.7 N和4 N; 切削深度由0.01 mm增加到0.03 mm时, 实验和理论获得的切削力值分别增加3.6 N和4.2 N。实验结果与理论模型分析结果变化趋势基本一致, 验证了所提出模型的有效性。
拟间歇振动辅助偏摆车削主要是为了提高难加工材料切削加工性而提出, 本文针对拟间歇振动辅助偏摆切削过程中切削力建模展开研究。首先, 根据薄剪切面理论分析振动辅助偏摆切削过程中瞬时剪切角和切削速度变化关系, 讨论切削力在法平面、前刀面及剪切面的变化情况。其次, 根据最大剪应力理论与切削过程中力的关系, 分析各相关角度与时间t的联系, 建立切削力解析模型。最后, 通过切削实验分析研究主轴转速和切削深度对切削力的影响。结果表明: 当主轴转速由10 r/min增加到30 r/min时, 实验和理论获得切削力值分别增加3.7 N和4 N; 切削深度由0.01 mm增加到0.03 mm时, 实验和理论获得的切削力值分别增加3.6 N和4.2 N。实验结果与理论模型分析结果变化趋势基本一致, 验证了所提出模型的有效性。


2022, 41(6): 898-904.
doi: 10.13433/j.cnki.1003-8728.20200410
摘要:
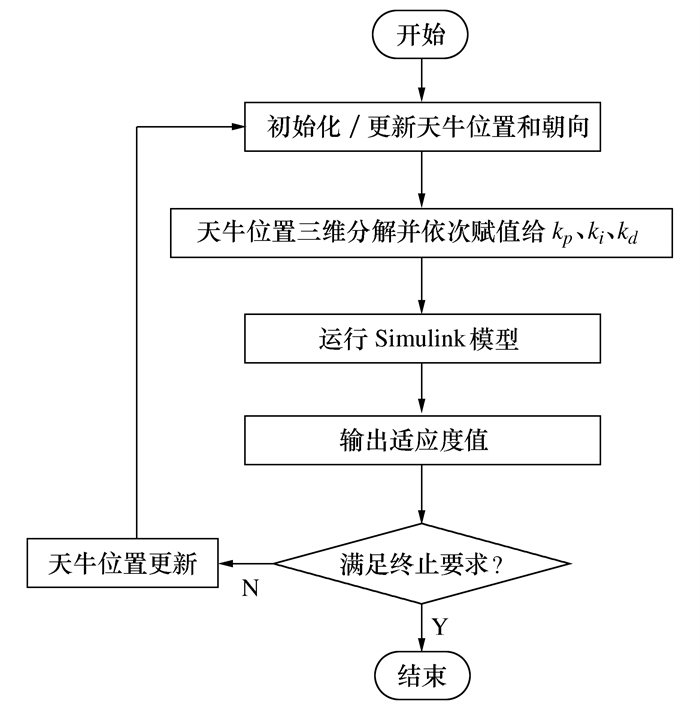
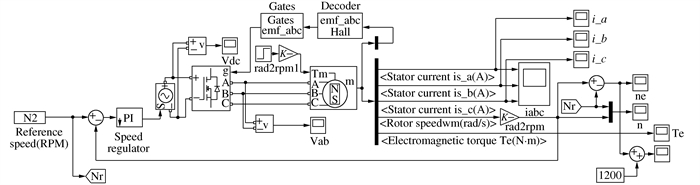
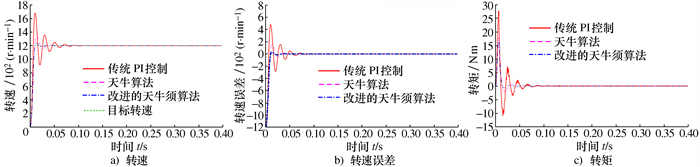
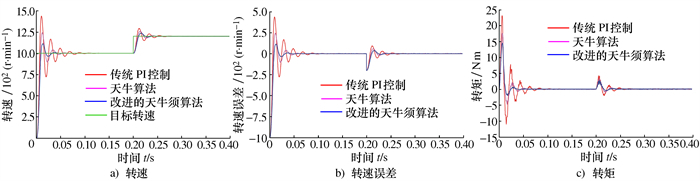
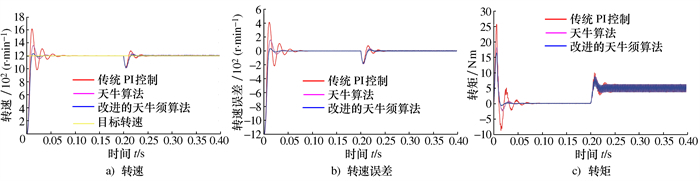
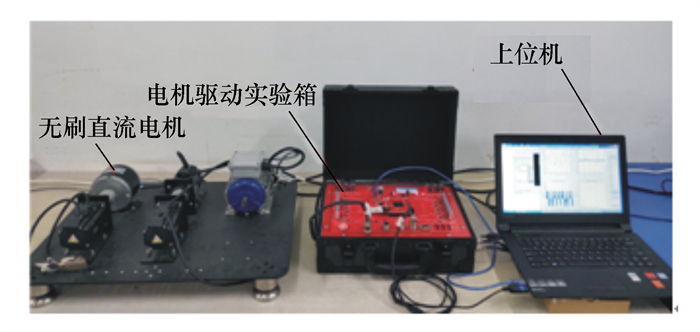
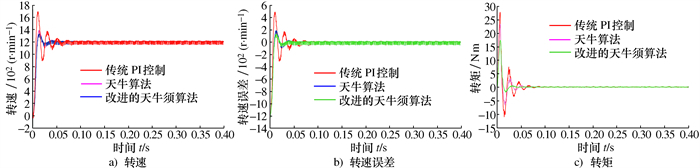
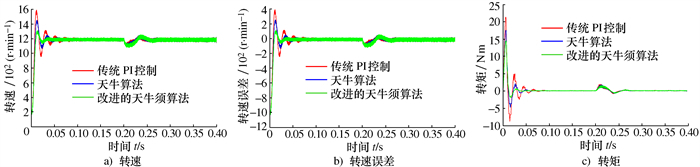
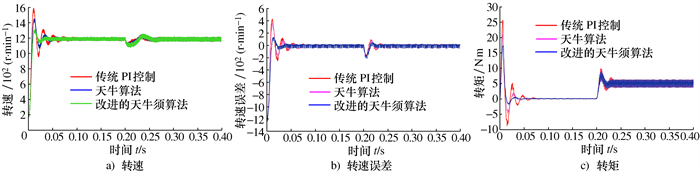
针对传统无刷直流电机(Brushless DC motor, BLDCM)速度控制系统响应慢、精度不高等缺点, 提出一种基于改进天牛须算法(Beetle antennae search, BAS)优化PID控制器参数的无刷直流电机速度控制新策略。首先, 建立BLDCM转速、电流双闭环调速系统数学模型。其次, 在MATLAB/Simulink中搭建BLDCM控制系统仿真模型, 实现双闭环控制, 电流环采用传统PID控制, 转速环采用改进天牛须算法优化PID控制, 并进行空载、转速阶跃和突加负载这3种工况的仿真验证。最后, 基于TMS320F28335芯片搭建硬件实验平台, 进行实验验证。仿真和实验结果均证明, 采用改进天牛须算法PID调速控制系统具有良好的动、静态特性、转速响应快, 抗干扰性强。
针对传统无刷直流电机(Brushless DC motor, BLDCM)速度控制系统响应慢、精度不高等缺点, 提出一种基于改进天牛须算法(Beetle antennae search, BAS)优化PID控制器参数的无刷直流电机速度控制新策略。首先, 建立BLDCM转速、电流双闭环调速系统数学模型。其次, 在MATLAB/Simulink中搭建BLDCM控制系统仿真模型, 实现双闭环控制, 电流环采用传统PID控制, 转速环采用改进天牛须算法优化PID控制, 并进行空载、转速阶跃和突加负载这3种工况的仿真验证。最后, 基于TMS320F28335芯片搭建硬件实验平台, 进行实验验证。仿真和实验结果均证明, 采用改进天牛须算法PID调速控制系统具有良好的动、静态特性、转速响应快, 抗干扰性强。


2022, 41(6): 905-911.
doi: 10.13433/j.cnki.1003-8728.20200414
摘要:
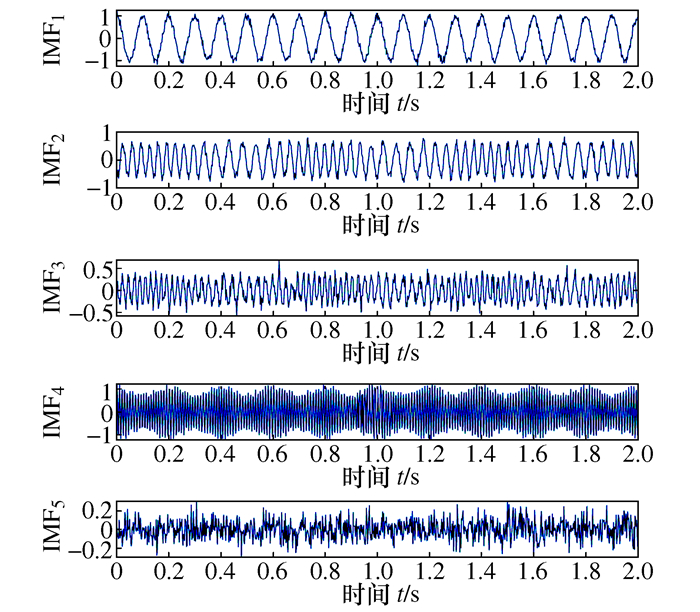
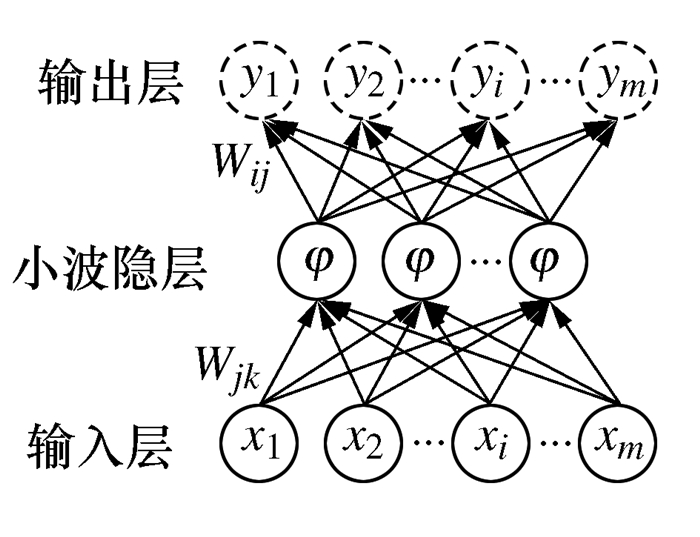
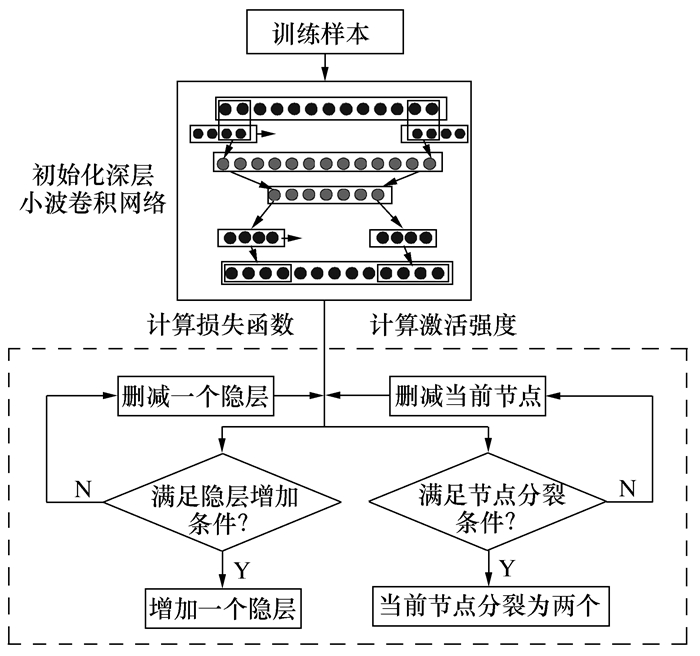
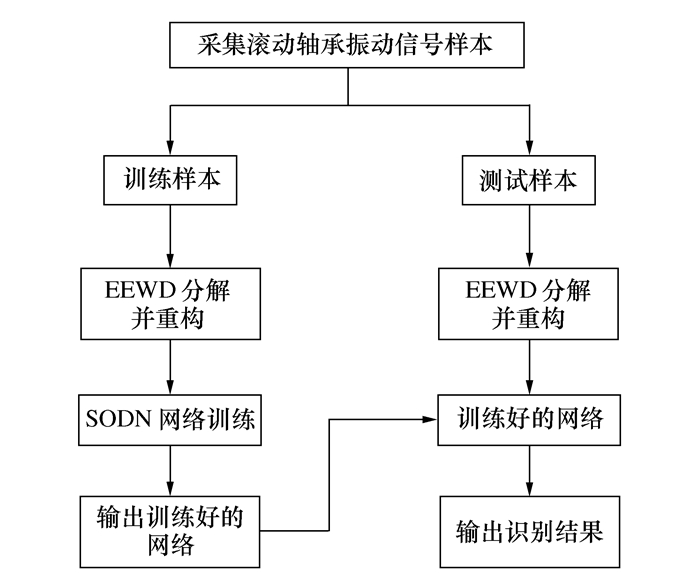
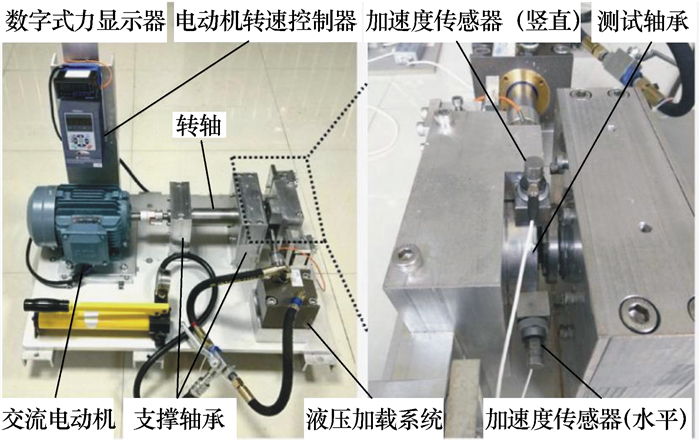
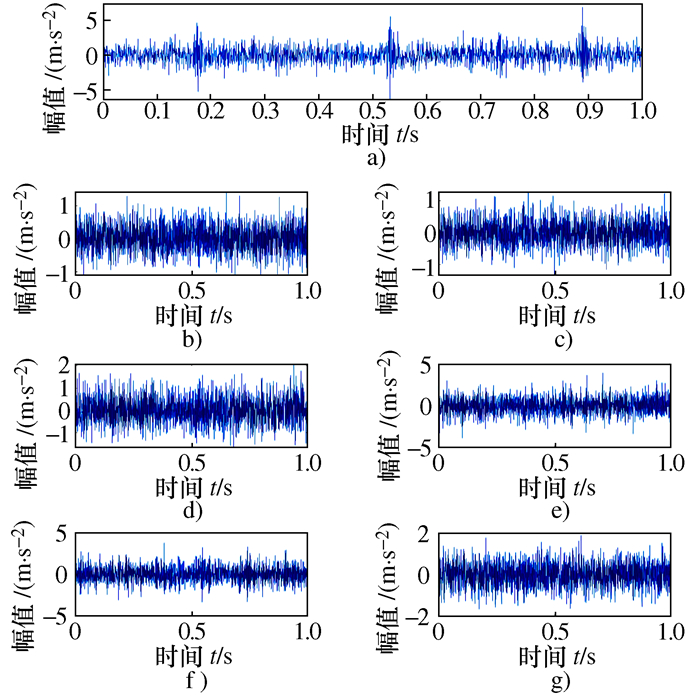
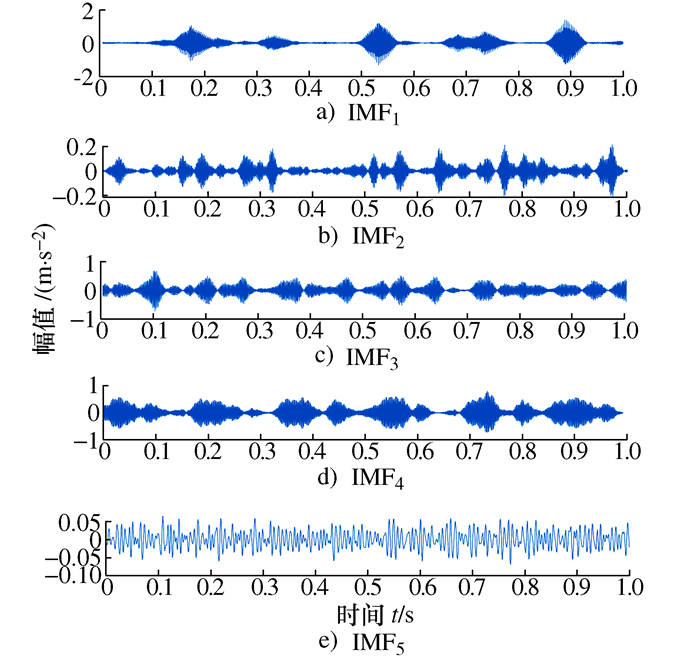
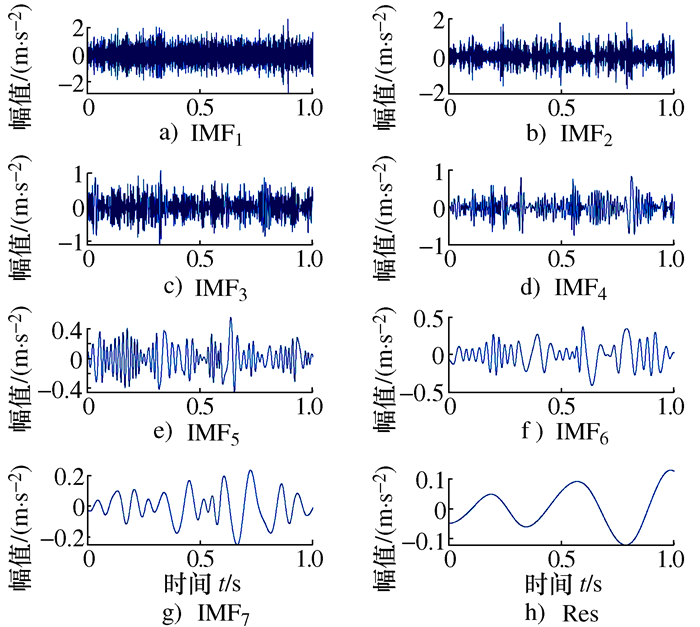
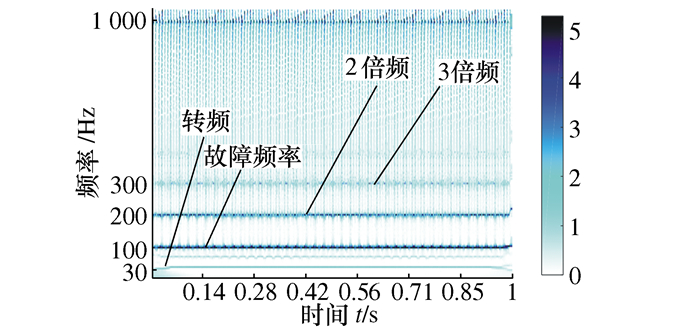
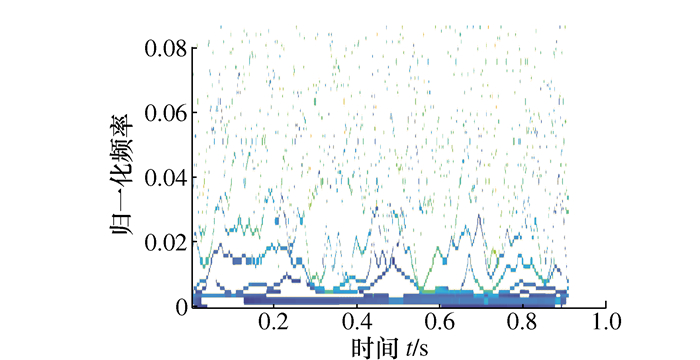
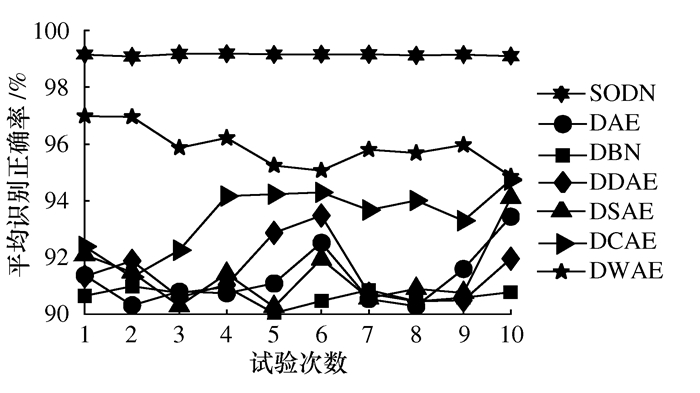
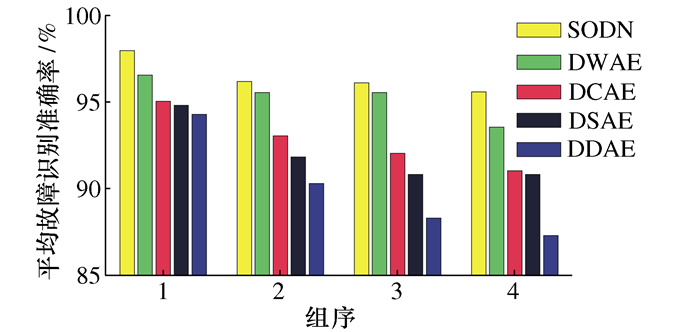
传统滚动轴承工况识别方法存在轴承振动信号人工特征提取困难的问题, 提出一种基于增强经验小波分解(Enhanced empirical wavelet decomposition, EEWD)和自组织深层网络(Self-organizing deep network, SODN)的工况识别方法。首先改进经验小波分解的频谱分割方式, 将滚动轴承振动信号自适应分解为若干本征模态分量; 然后利用综合评价指标筛选出最能反映信号工况特征的本征模态分量并重构信号; 最后构造自组织深层网络, 将重构后的滚动轴承振动信号输入SODN进行自动特征学习与工况识别。实验结果表明: EEWD结合SODN方法相比于其它深度学习方法在信号特征提取和工况识别准确率方面更具优势。
传统滚动轴承工况识别方法存在轴承振动信号人工特征提取困难的问题, 提出一种基于增强经验小波分解(Enhanced empirical wavelet decomposition, EEWD)和自组织深层网络(Self-organizing deep network, SODN)的工况识别方法。首先改进经验小波分解的频谱分割方式, 将滚动轴承振动信号自适应分解为若干本征模态分量; 然后利用综合评价指标筛选出最能反映信号工况特征的本征模态分量并重构信号; 最后构造自组织深层网络, 将重构后的滚动轴承振动信号输入SODN进行自动特征学习与工况识别。实验结果表明: EEWD结合SODN方法相比于其它深度学习方法在信号特征提取和工况识别准确率方面更具优势。



2022, 41(6): 912-921.
doi: 10.13433/j.cnki.1003-8728.20220152
摘要:
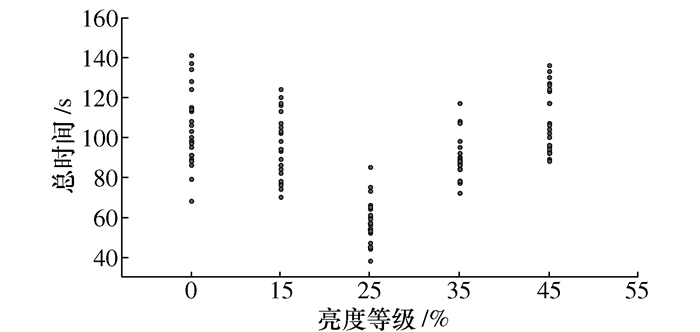
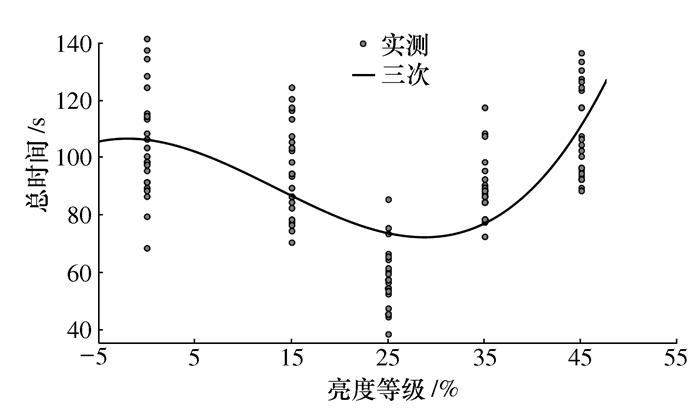
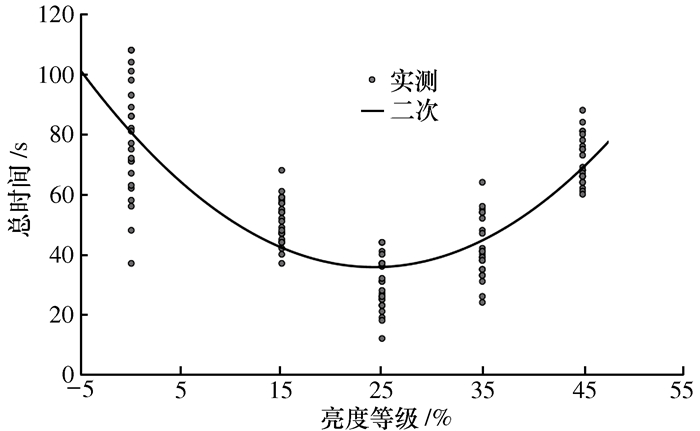
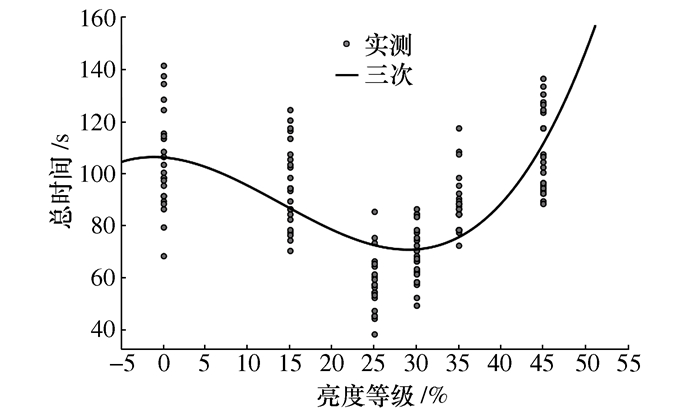
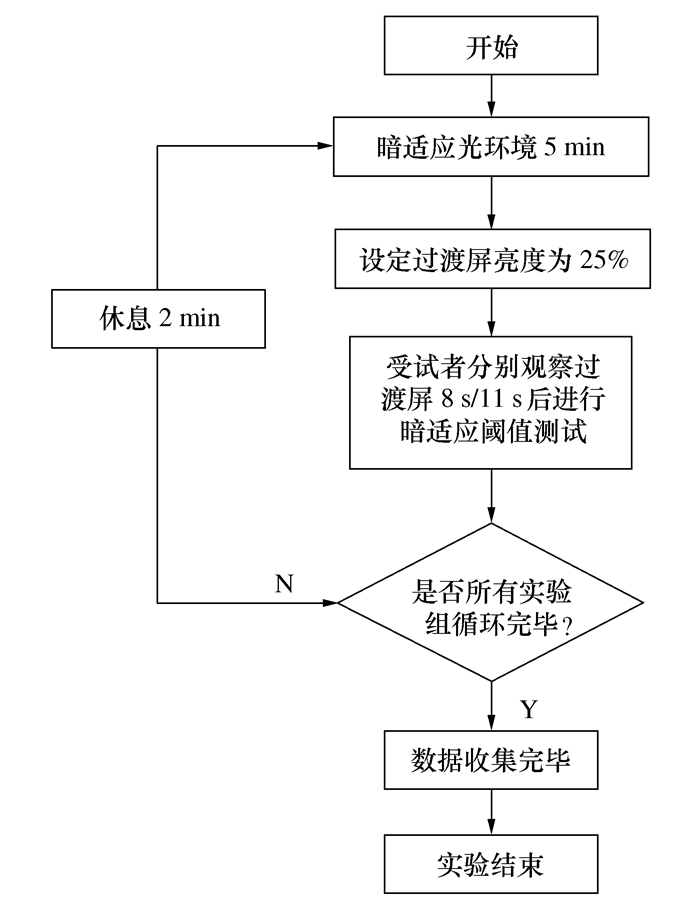
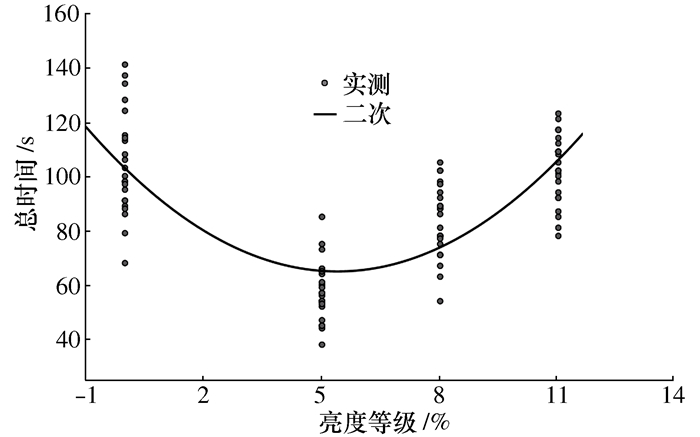
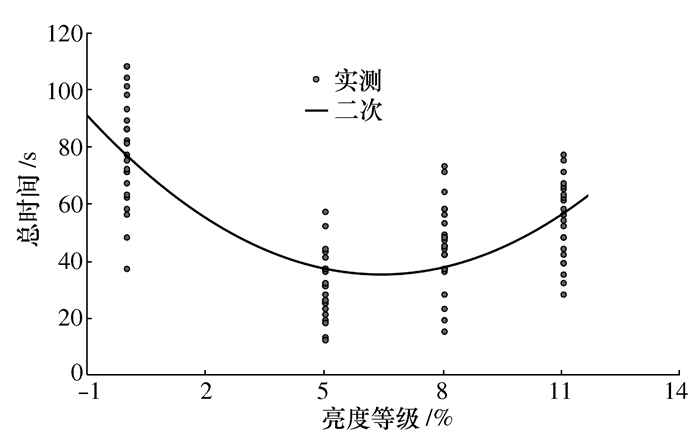
安全性作为载人潜水器潜航员下潜工作基础, 减少作业过程中视觉障碍给安全带来的潜在威胁, 缩短潜航员暗适应反应时间显得尤为重要。暗适应作为影响潜航员作业的重要视觉影响因素, 反复切换和适应高反差亮度环境导致人眼暗适应时间延长, 从而影响潜器作业安全性和准确度。本文针对潜航作业照明环境, 依据过渡照明方法, 利用过渡屏照明来补偿人眼在恶劣光照条件下的暗适应反应时间。实验中通过改变过渡屏亮度等级和观察时间以评估过渡照明的最优亮度及时间范围, 达到视觉优化作用, 保障潜航员操作安全。
安全性作为载人潜水器潜航员下潜工作基础, 减少作业过程中视觉障碍给安全带来的潜在威胁, 缩短潜航员暗适应反应时间显得尤为重要。暗适应作为影响潜航员作业的重要视觉影响因素, 反复切换和适应高反差亮度环境导致人眼暗适应时间延长, 从而影响潜器作业安全性和准确度。本文针对潜航作业照明环境, 依据过渡照明方法, 利用过渡屏照明来补偿人眼在恶劣光照条件下的暗适应反应时间。实验中通过改变过渡屏亮度等级和观察时间以评估过渡照明的最优亮度及时间范围, 达到视觉优化作用, 保障潜航员操作安全。








2022, 41(6): 922-928.
doi: 10.13433/j.cnki.1003-8728.20200409
摘要:
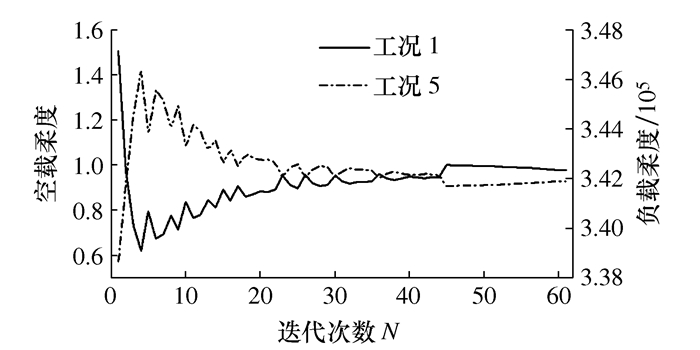
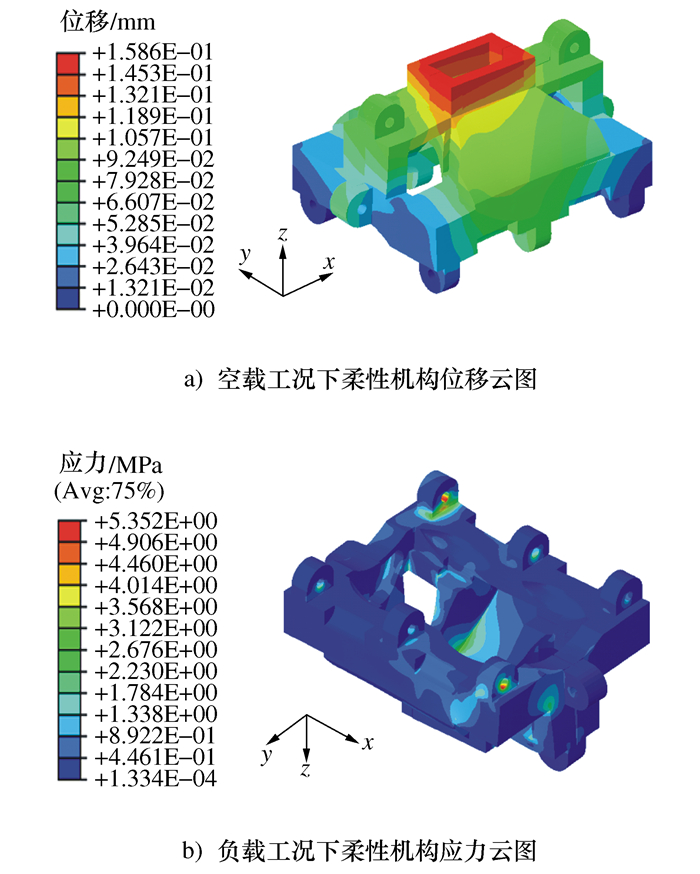
采用多目标拓扑优化方法研究了满足野战火箭炮装填系统工作要求的柔性机构材料分布。以实体各向正交材料惩罚函数为拓扑优化方法(SIMP方法), 采用加权系数法定义固有频率目标函数, 并应用折衷规划法定义静态刚度和动态振动频率多目标拓扑优化函数。以等效力载荷模拟空载工况, 以位移载荷模拟负载工况。通过HyperWorks进行优化, 得到了同时满足柔性机构空载刚度、负载柔度和低阶振动频率要求的拓扑结构。对优化后的柔性机构进行仿真分析, 验证了优化结果的有效性。
采用多目标拓扑优化方法研究了满足野战火箭炮装填系统工作要求的柔性机构材料分布。以实体各向正交材料惩罚函数为拓扑优化方法(SIMP方法), 采用加权系数法定义固有频率目标函数, 并应用折衷规划法定义静态刚度和动态振动频率多目标拓扑优化函数。以等效力载荷模拟空载工况, 以位移载荷模拟负载工况。通过HyperWorks进行优化, 得到了同时满足柔性机构空载刚度、负载柔度和低阶振动频率要求的拓扑结构。对优化后的柔性机构进行仿真分析, 验证了优化结果的有效性。




2022, 41(6): 929-935.
doi: 10.13433/j.cnki.1003-8728.20200415
摘要:
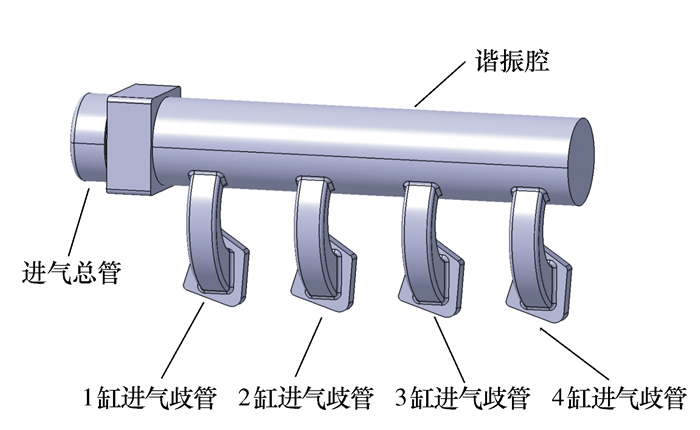
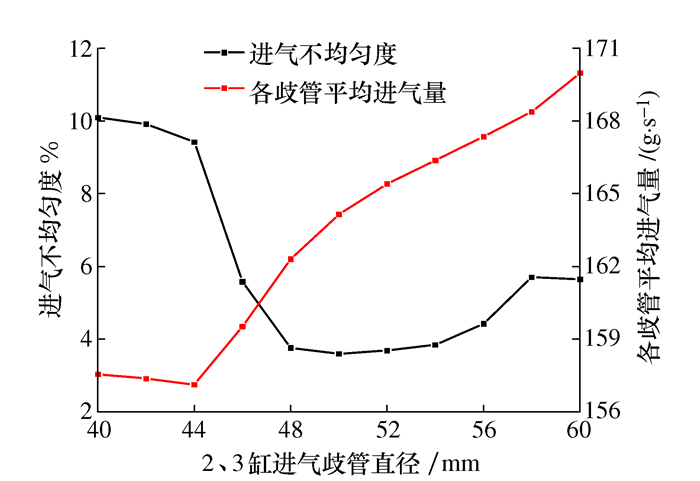
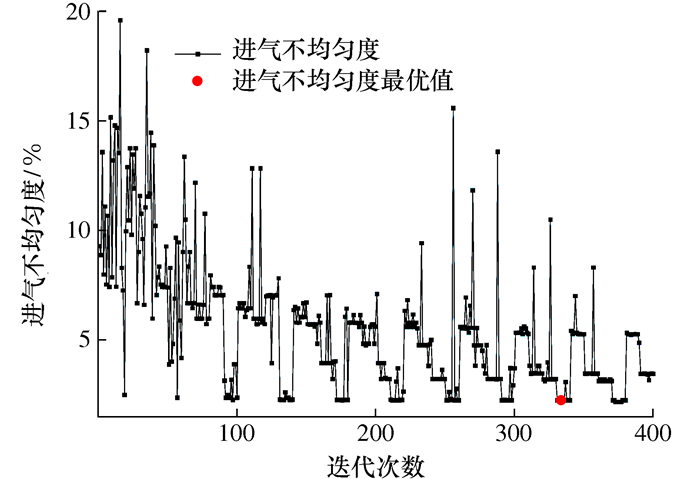
针对某四缸柴油甲醇双燃料发动机进气均匀性较差的问题, 采用GT-power软件构建了柴油甲醇双燃料发动机仿真模型, 分析进气总管、进气歧管的结构参数以及进气正时对进气均匀性的影响程度。以进气总管直径、进气歧管长度、2、3缸的进气歧管直径以及进气正时为优化变量, 以降低进气不均匀度为设计目标建立响应面模型, 并结合多岛遗传算法进行优化。优化结果表明: 减小进气总管直径和进气歧管长度以及进气正时, 增加2、3缸的进气歧管直径几何参数, 改善了进气歧管内空气和甲醇的流动质量, 使发动机的进气不均匀度由原机的10.35%降低到2.19%。
针对某四缸柴油甲醇双燃料发动机进气均匀性较差的问题, 采用GT-power软件构建了柴油甲醇双燃料发动机仿真模型, 分析进气总管、进气歧管的结构参数以及进气正时对进气均匀性的影响程度。以进气总管直径、进气歧管长度、2、3缸的进气歧管直径以及进气正时为优化变量, 以降低进气不均匀度为设计目标建立响应面模型, 并结合多岛遗传算法进行优化。优化结果表明: 减小进气总管直径和进气歧管长度以及进气正时, 增加2、3缸的进气歧管直径几何参数, 改善了进气歧管内空气和甲醇的流动质量, 使发动机的进气不均匀度由原机的10.35%降低到2.19%。





2022, 41(6): 936-947.
doi: 10.13433/j.cnki.1003-8728.20200416
摘要:
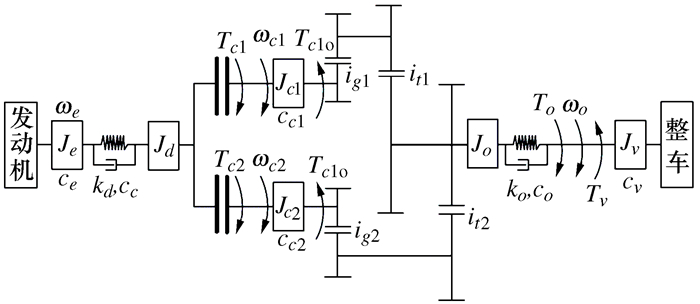
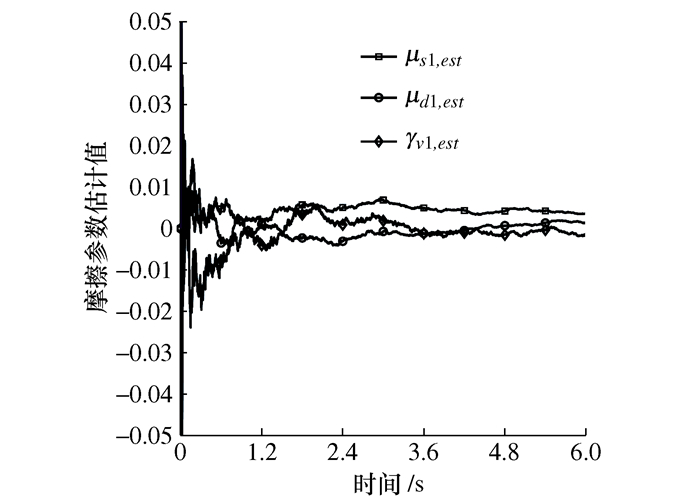
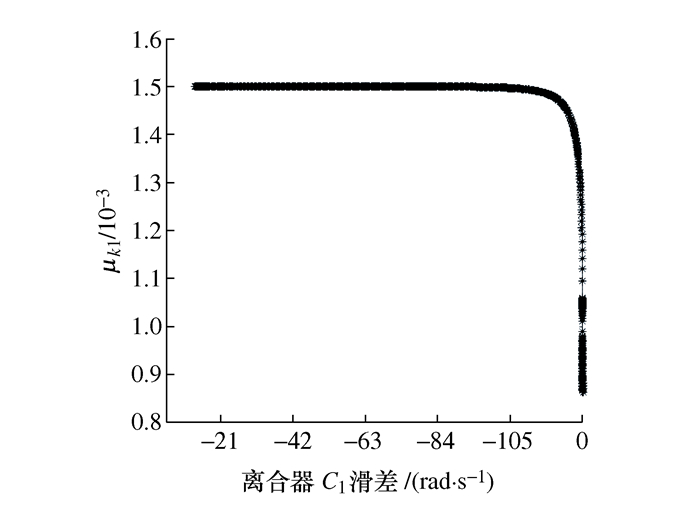
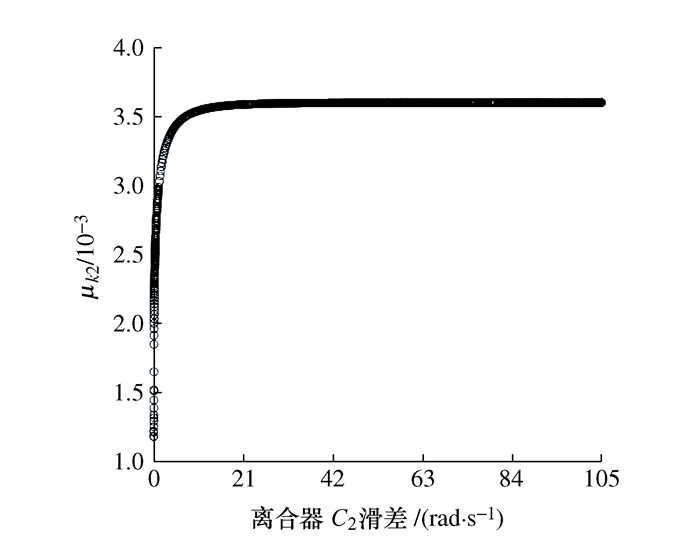
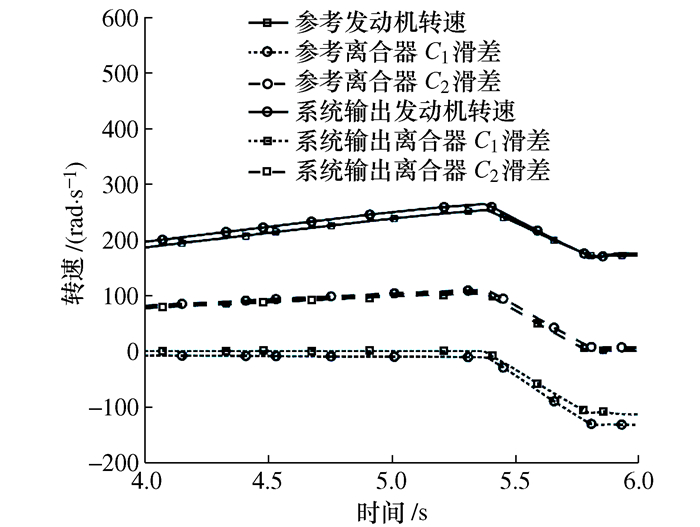
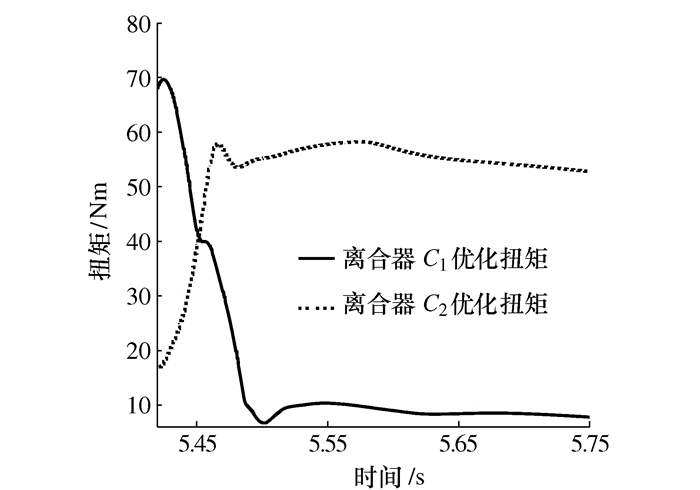
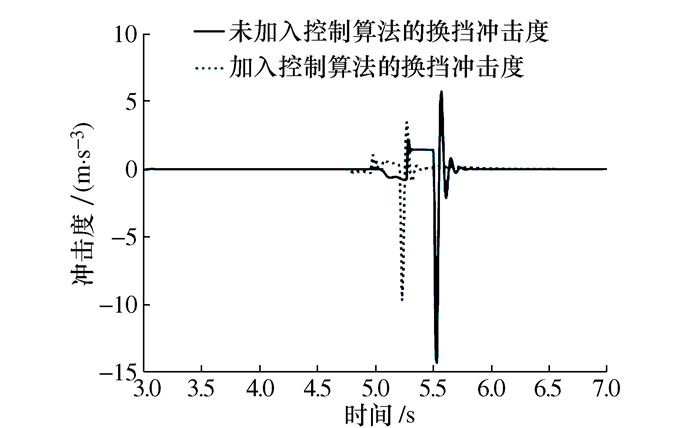
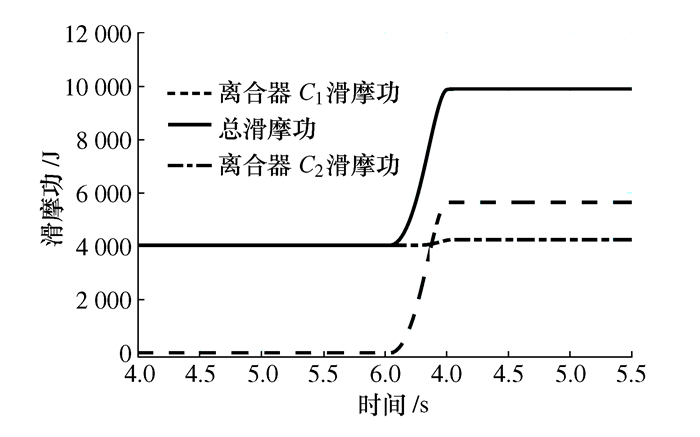
双离合变速器的换挡过程控制是其品质提升的关键, 提出了一种基于摩擦参数估计的换挡控制方法。首先, 基于扩展卡尔曼滤波设计出了估计湿式双离合器换挡过程中两个离合器传递扭矩的方法; 其次基于Stribeck摩擦模型建立了湿式离合器摩擦因数模型, 利用递推最小二乘法估计出了换挡过程中相应的系数并计算得到离合器接合过程中的实时动态摩擦因数; 最后使用模型预测控制优化出换挡过程中两个离合器的需求扭矩, 结合估计获得的动态摩擦因数逆推出液压执行机构的需求油压, 进而达到改善车辆换挡品质的目的。基于MATLAB/Simulink平台搭建了装备湿式双离合变速器的车辆模型并对提出算法进行了仿真验证, 仿真实验结果表明使用该控制方法后离合器换挡过程的冲击度和滑摩功都有所降低, 验证了该方法对改善湿式双离合变速器换挡品质的有效性。
双离合变速器的换挡过程控制是其品质提升的关键, 提出了一种基于摩擦参数估计的换挡控制方法。首先, 基于扩展卡尔曼滤波设计出了估计湿式双离合器换挡过程中两个离合器传递扭矩的方法; 其次基于Stribeck摩擦模型建立了湿式离合器摩擦因数模型, 利用递推最小二乘法估计出了换挡过程中相应的系数并计算得到离合器接合过程中的实时动态摩擦因数; 最后使用模型预测控制优化出换挡过程中两个离合器的需求扭矩, 结合估计获得的动态摩擦因数逆推出液压执行机构的需求油压, 进而达到改善车辆换挡品质的目的。基于MATLAB/Simulink平台搭建了装备湿式双离合变速器的车辆模型并对提出算法进行了仿真验证, 仿真实验结果表明使用该控制方法后离合器换挡过程的冲击度和滑摩功都有所降低, 验证了该方法对改善湿式双离合变速器换挡品质的有效性。




2022, 41(6): 948-953.
doi: 10.13433/j.cnki.1003-8728.20200466
摘要:
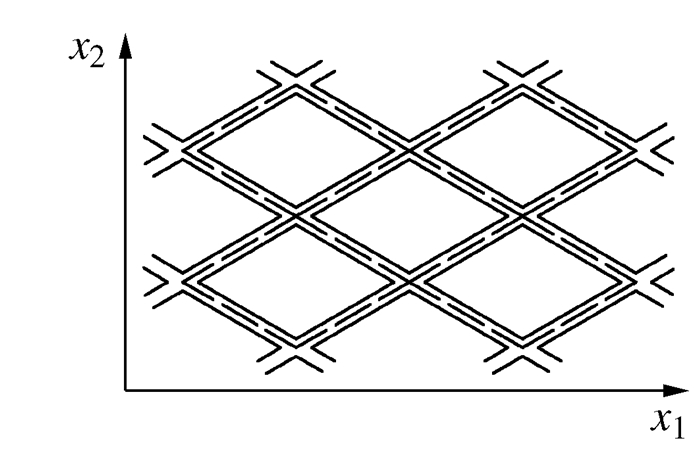
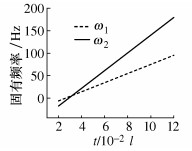
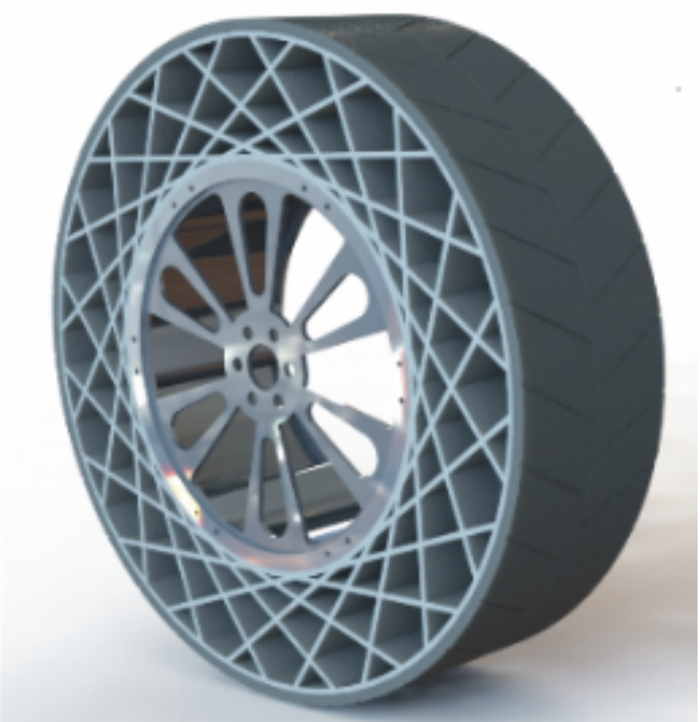
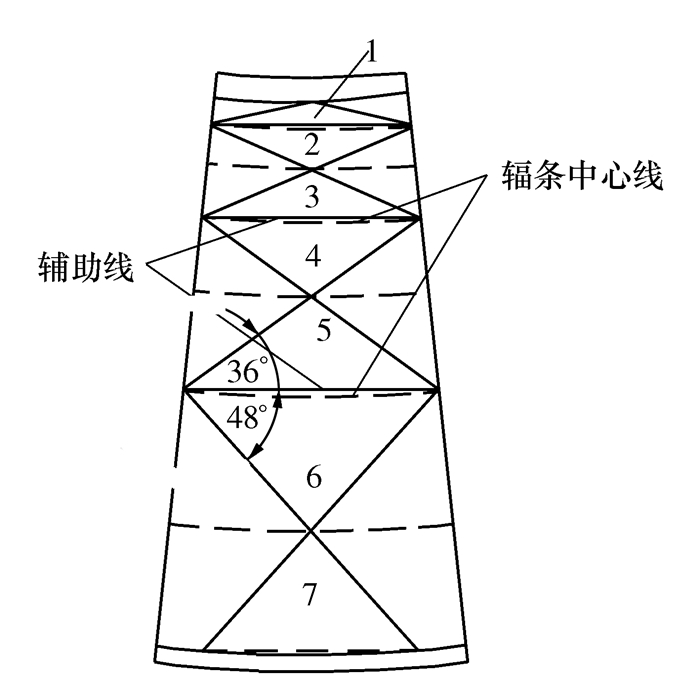
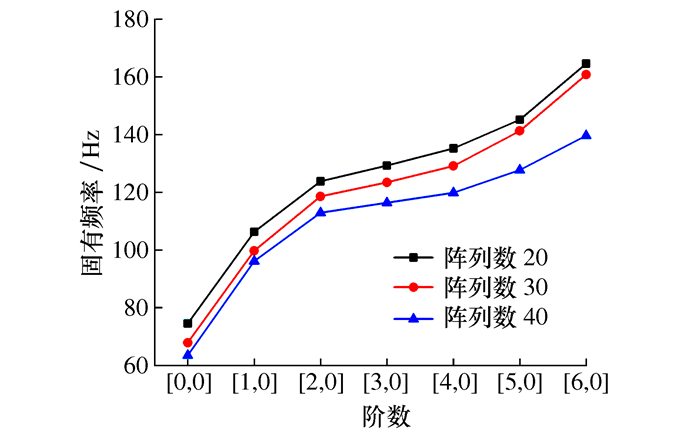
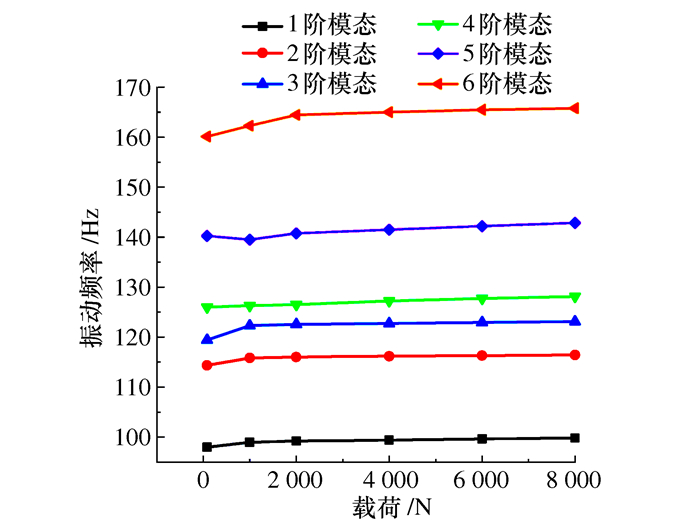
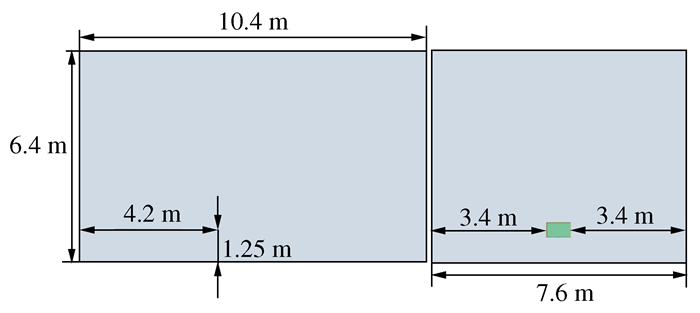
基于新型蜂窝结构式免充气轮胎固有频率的计算方法, 研究并推导出鸟巢结构式免充气轮胎鸟巢结构的固有频率计算公式。分析了各结构参数对鸟巢结构固有频率的影响规律, 研究了鸟巢结构式免充气轮胎的固有频率影响因素, 利用ABAQUS有限元仿真分析验证了理论的正确性。利用模态分析方法研究了辐条阵列数对鸟巢结构式免充气轮胎固有频率的影响, 并进行了免充气轮胎受载时的振动频率分析, 对比了充气轮胎受载时的振动频率变化规律。结果表明, 鸟巢结构式免充气轮胎刚度更大, 受载时更具有优势。
基于新型蜂窝结构式免充气轮胎固有频率的计算方法, 研究并推导出鸟巢结构式免充气轮胎鸟巢结构的固有频率计算公式。分析了各结构参数对鸟巢结构固有频率的影响规律, 研究了鸟巢结构式免充气轮胎的固有频率影响因素, 利用ABAQUS有限元仿真分析验证了理论的正确性。利用模态分析方法研究了辐条阵列数对鸟巢结构式免充气轮胎固有频率的影响, 并进行了免充气轮胎受载时的振动频率分析, 对比了充气轮胎受载时的振动频率变化规律。结果表明, 鸟巢结构式免充气轮胎刚度更大, 受载时更具有优势。




2022, 41(6): 954-960.
doi: 10.13433/j.cnki.1003-8728.20200418
摘要:
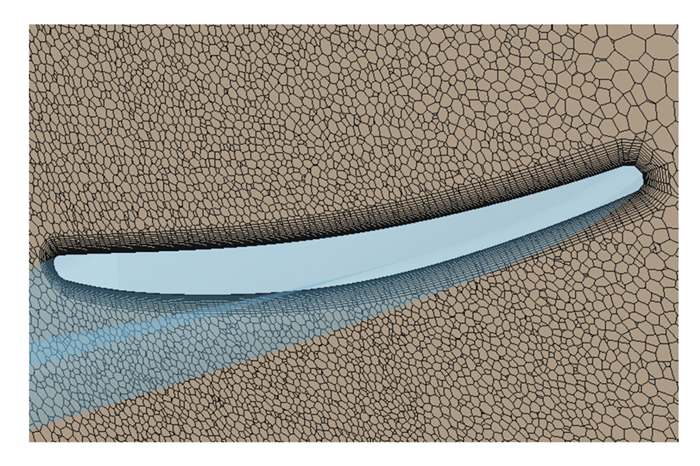
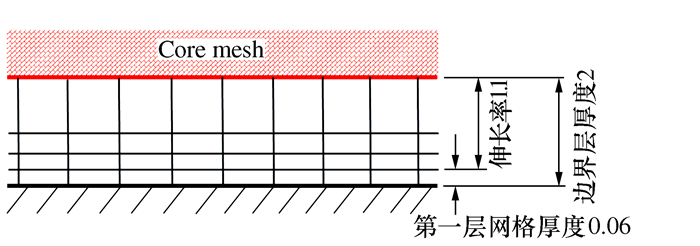
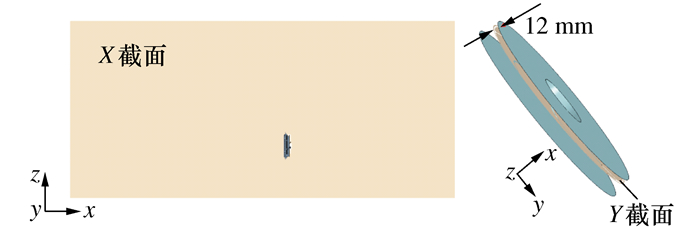
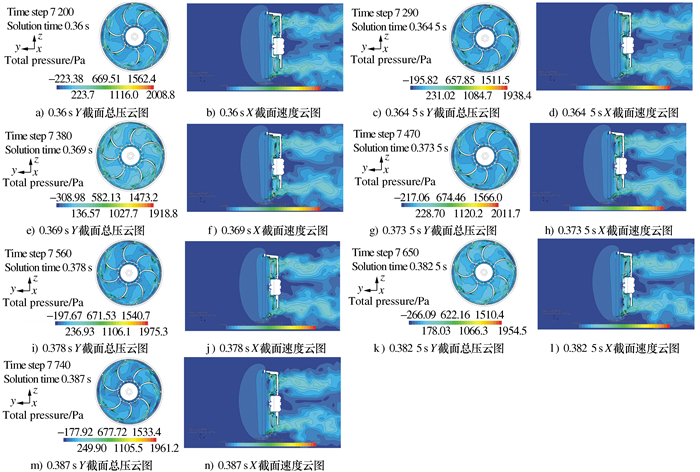
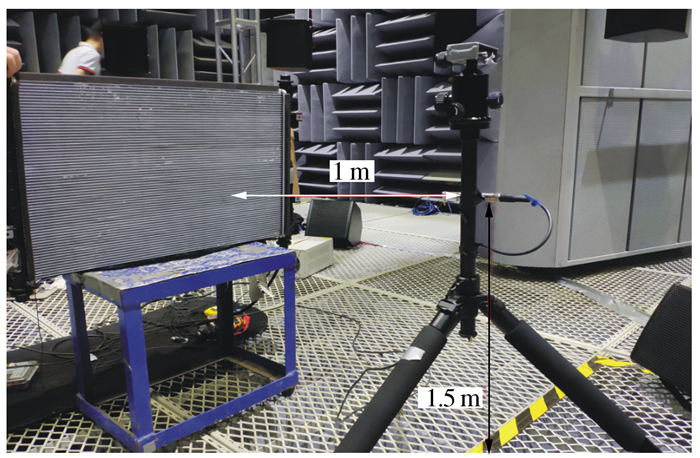
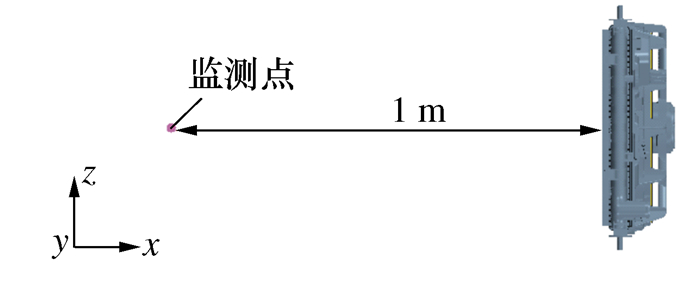
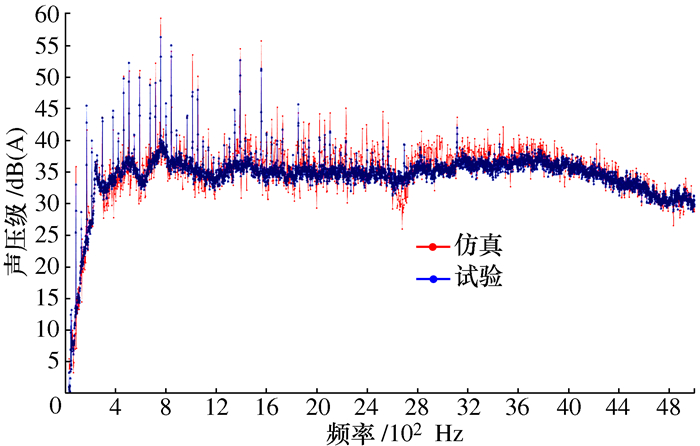
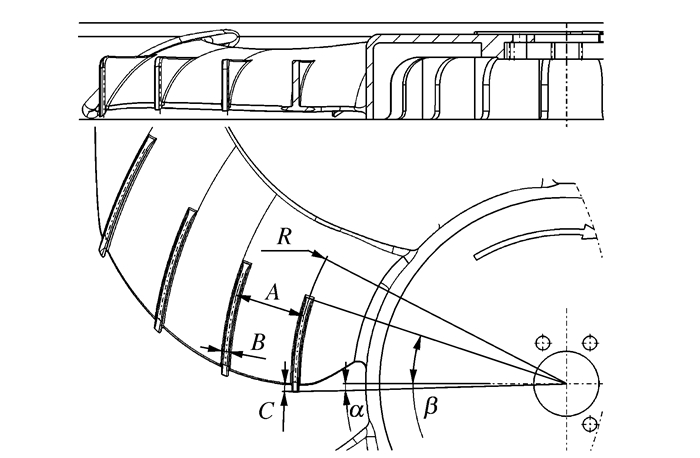
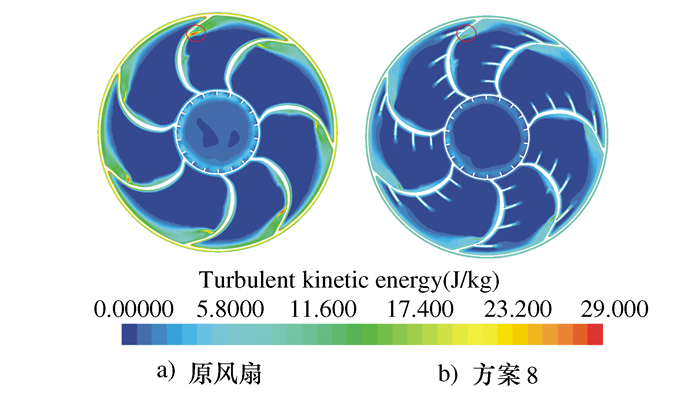
基于SST k-ω分离涡模型的数值模拟, 以及鲨鱼背鳍的仿生学研究, 设计了一种风扇叶片, 以期减少风扇的气动噪声。在风扇噪声试验验证数值模拟准确性的基础上, 应用CATIA和STRA CCM+, 通过参数化设计, 同时采用正交试验法进行优化方案的选择。结果表明: 基于仿生鲨鱼背鳍结构的方案设计, 能够减小风扇后缘的气流分离, 抑制尾缘区域湍流涡的形成, 改善了尾缘区域的流场, 有效的降低了气动噪声, 优化后的单品风扇叶片的气动噪声比原始方案减小了3.64 dB。
基于SST k-ω分离涡模型的数值模拟, 以及鲨鱼背鳍的仿生学研究, 设计了一种风扇叶片, 以期减少风扇的气动噪声。在风扇噪声试验验证数值模拟准确性的基础上, 应用CATIA和STRA CCM+, 通过参数化设计, 同时采用正交试验法进行优化方案的选择。结果表明: 基于仿生鲨鱼背鳍结构的方案设计, 能够减小风扇后缘的气流分离, 抑制尾缘区域湍流涡的形成, 改善了尾缘区域的流场, 有效的降低了气动噪声, 优化后的单品风扇叶片的气动噪声比原始方案减小了3.64 dB。


2022, 41(6): 961-970.
doi: 10.13433/j.cnki.1003-8728.20200514
摘要:
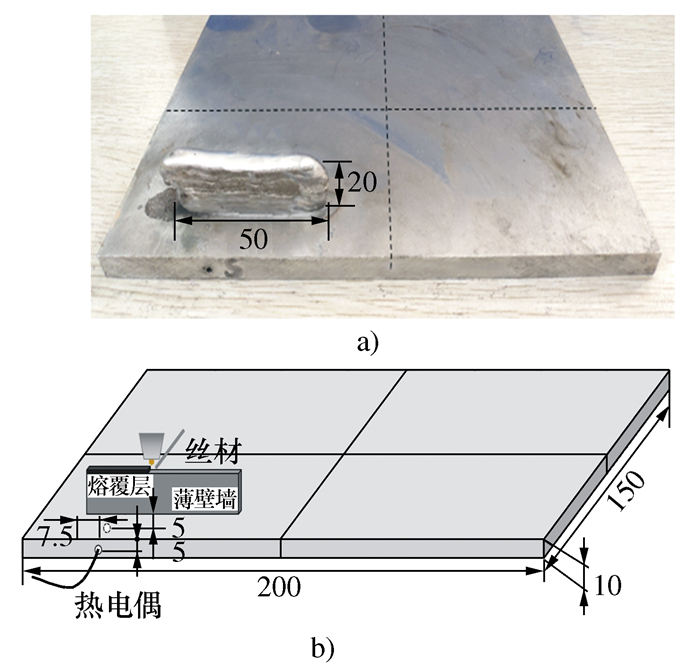
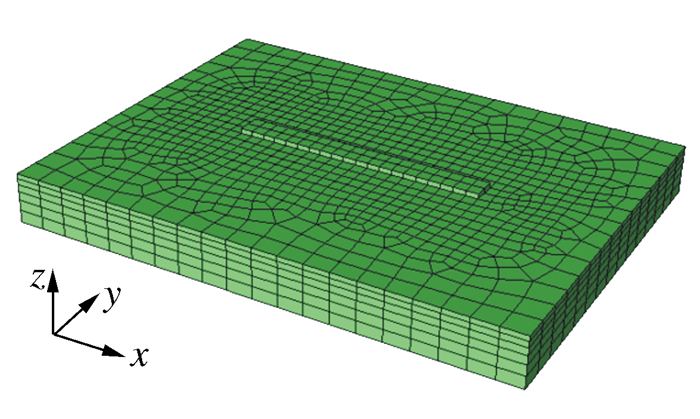
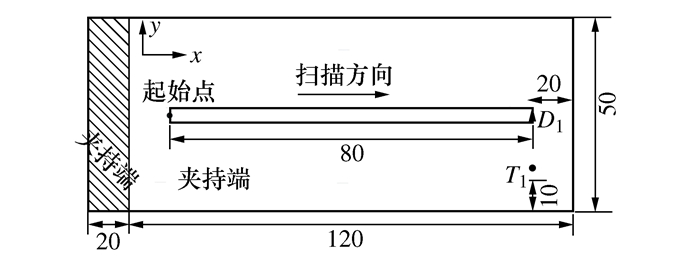
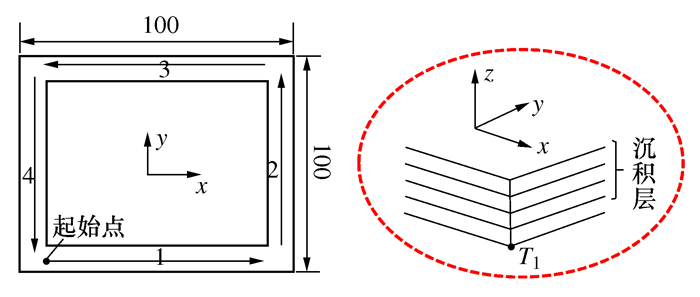
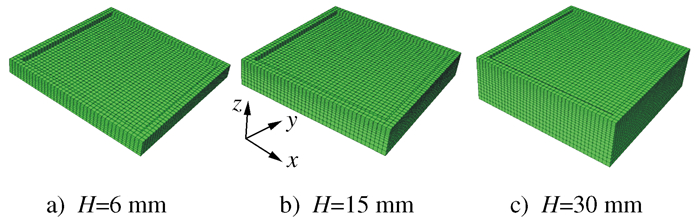
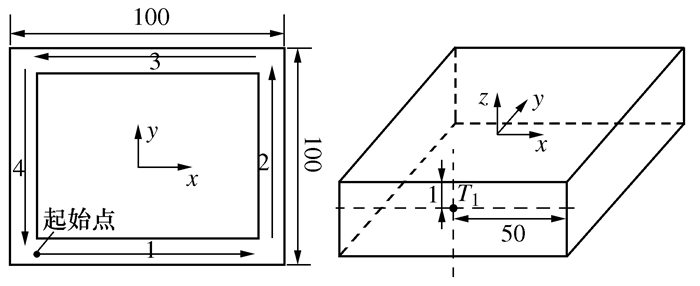
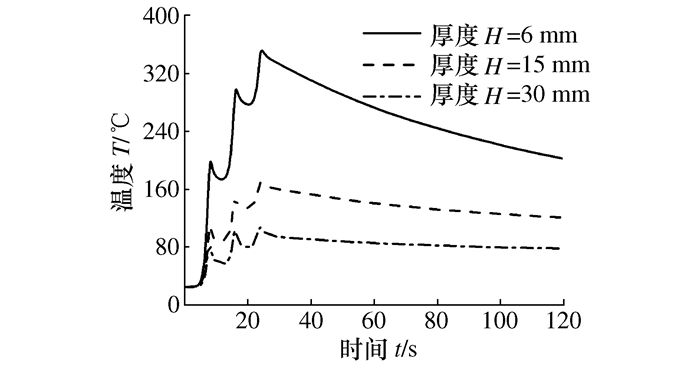
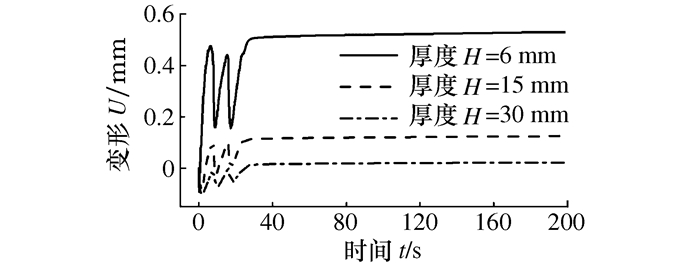
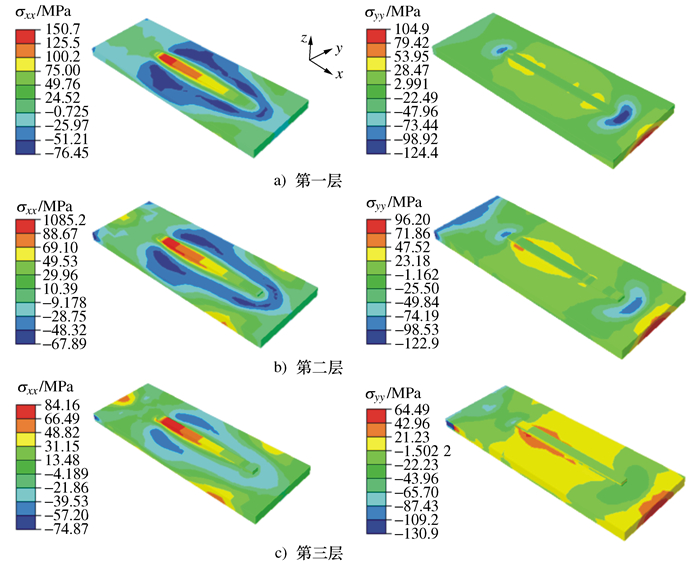
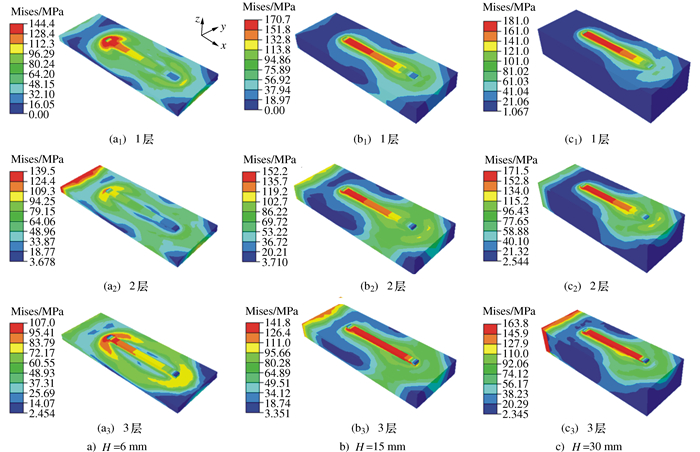
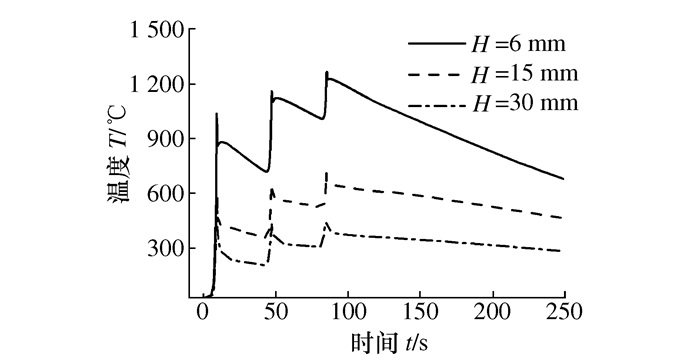
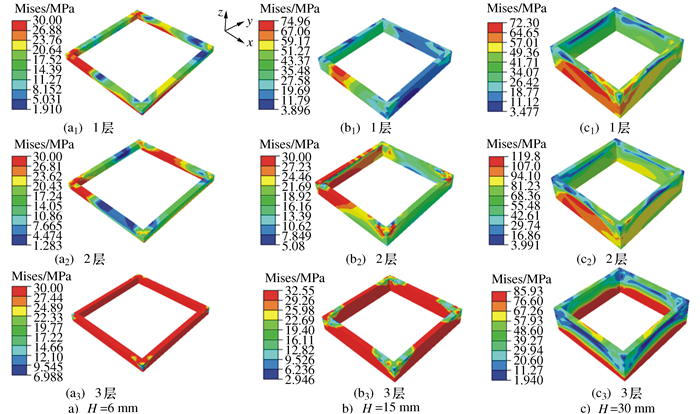
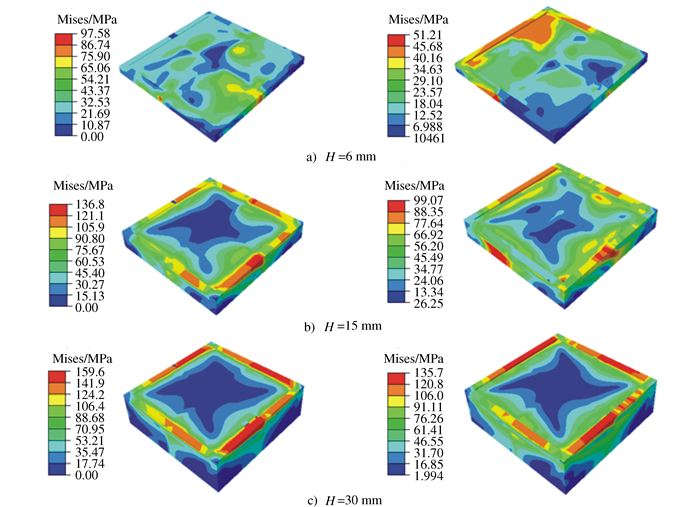
电弧增材制造(Wire and arc additive manufacturing, WAAM)具有材料利用率高、成形效率高、设备成本低的特点, 已经成为一种重要的金属增材制造技术。但是, WAAM熔池大、热输入高、制造的金属零件几何精度低已经严重制约了该技术的进一步应用。以有限元分析为手段, 建立了WAAM的热应力仿真模型, 并对3种典型结构的WAAM热应力演化规律进行了研究, 重点分析了基板厚度对热变形的影响规律, 发现: 与后续沉积层相比, 第一层对构件整体热变形的影响最大; 增加基板厚度不仅可以提高刚度, 增加约束, 而且能强化散热, 降低热累积, 对减小成形件最终变形和残余应力非常有利; 对于矩形框构件来说, 基板结构和约束方式对成形件热应力变形演化行为有较大影响。
电弧增材制造(Wire and arc additive manufacturing, WAAM)具有材料利用率高、成形效率高、设备成本低的特点, 已经成为一种重要的金属增材制造技术。但是, WAAM熔池大、热输入高、制造的金属零件几何精度低已经严重制约了该技术的进一步应用。以有限元分析为手段, 建立了WAAM的热应力仿真模型, 并对3种典型结构的WAAM热应力演化规律进行了研究, 重点分析了基板厚度对热变形的影响规律, 发现: 与后续沉积层相比, 第一层对构件整体热变形的影响最大; 增加基板厚度不仅可以提高刚度, 增加约束, 而且能强化散热, 降低热累积, 对减小成形件最终变形和残余应力非常有利; 对于矩形框构件来说, 基板结构和约束方式对成形件热应力变形演化行为有较大影响。












2022, 41(6): 971-976.
doi: 10.13433/j.cnki.1003-8728.20200469
摘要:
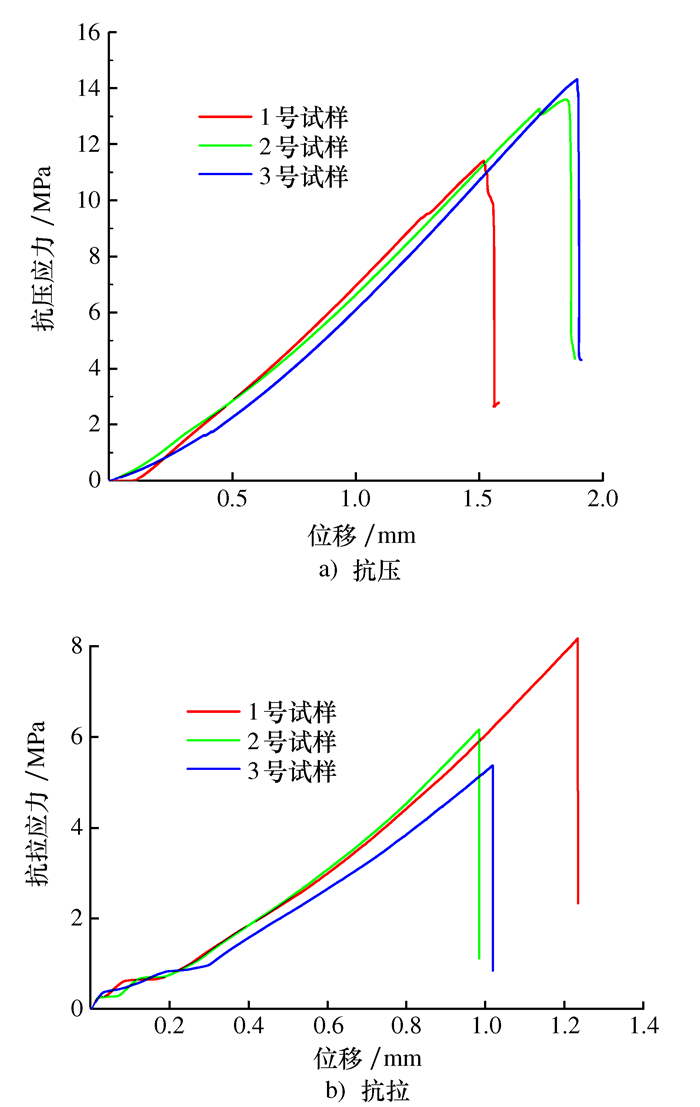
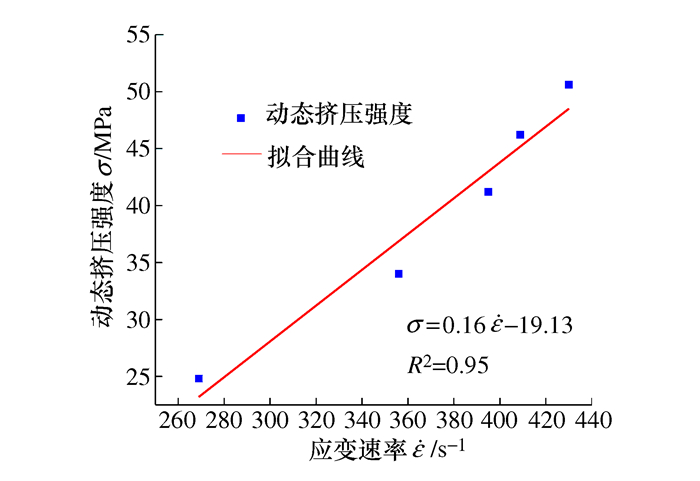
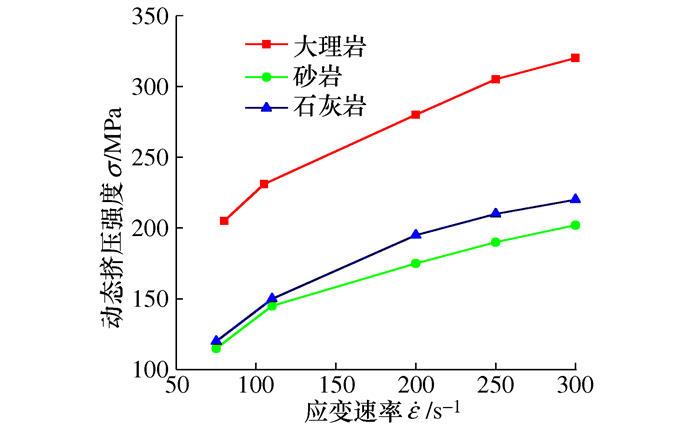
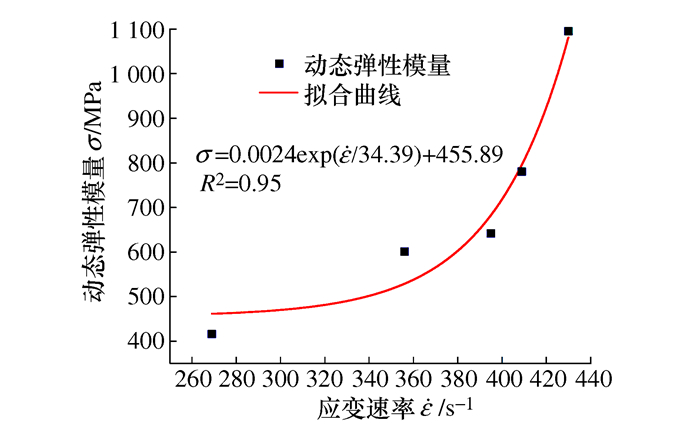
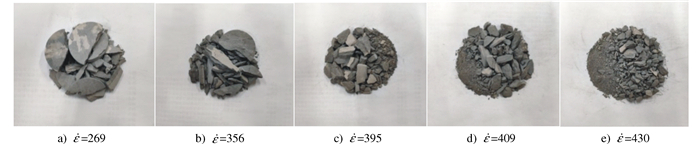
海泡石矿粉常采用机械冲击破碎方法制备, 粗矿石受到的应变速率不同会导致破碎程度不一致。为了研究应变速率对海泡石动态力学性能影响, 采用分离式霍普金森压杆(SHPB)对海泡石在五种不同应变速率下进行动态压缩试验。结果表明: 海泡石的动态抗压强度、弹性模量以及破碎特性均表现出明显的应变速率效应。动态抗压强度随应变速率的增加呈线性增长; 动态弹性模量随应变速率的增加呈指数增长; 随着应变速率的增加, 破碎形态由劈裂转为压碎, 应变速率越高压碎后的海泡石碎块尺寸越小且粉末增多。
海泡石矿粉常采用机械冲击破碎方法制备, 粗矿石受到的应变速率不同会导致破碎程度不一致。为了研究应变速率对海泡石动态力学性能影响, 采用分离式霍普金森压杆(SHPB)对海泡石在五种不同应变速率下进行动态压缩试验。结果表明: 海泡石的动态抗压强度、弹性模量以及破碎特性均表现出明显的应变速率效应。动态抗压强度随应变速率的增加呈线性增长; 动态弹性模量随应变速率的增加呈指数增长; 随着应变速率的增加, 破碎形态由劈裂转为压碎, 应变速率越高压碎后的海泡石碎块尺寸越小且粉末增多。


2022, 41(6): 977-984.
doi: 10.13433/j.cnki.1003-8728.20200397
摘要:
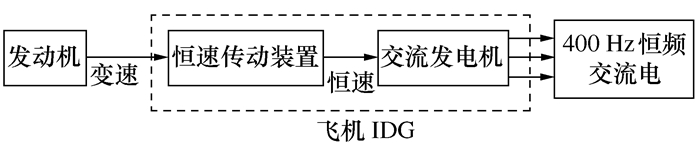
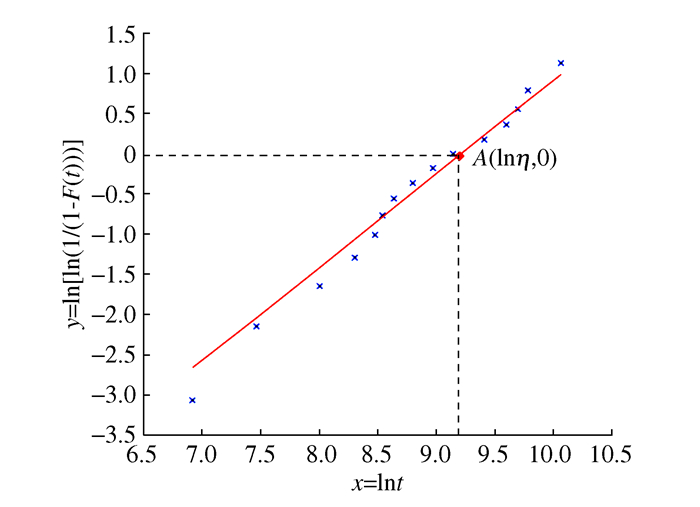
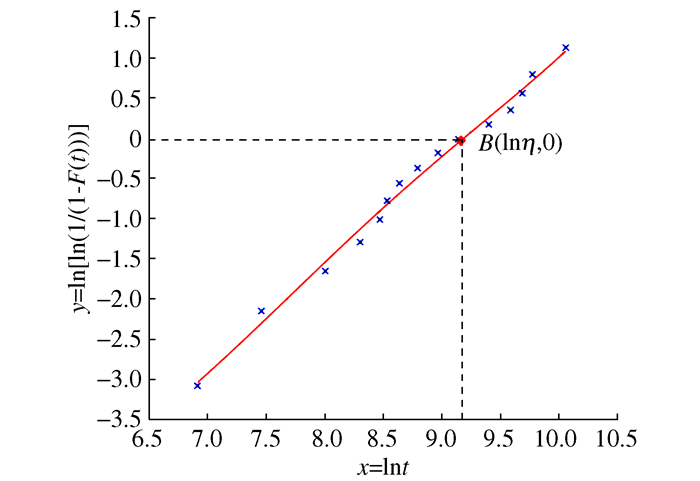
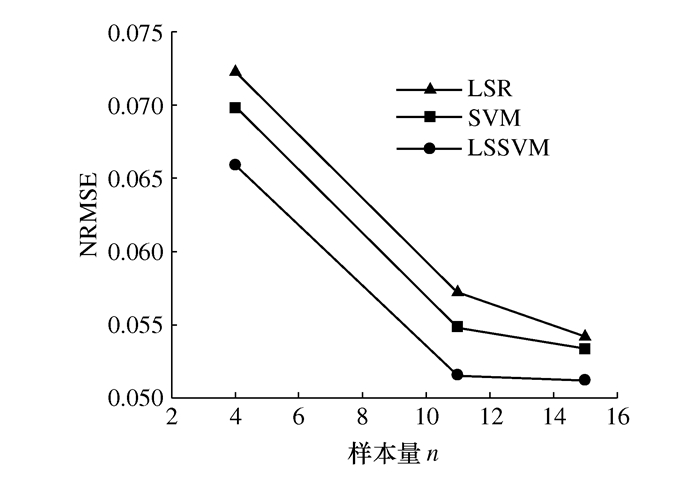
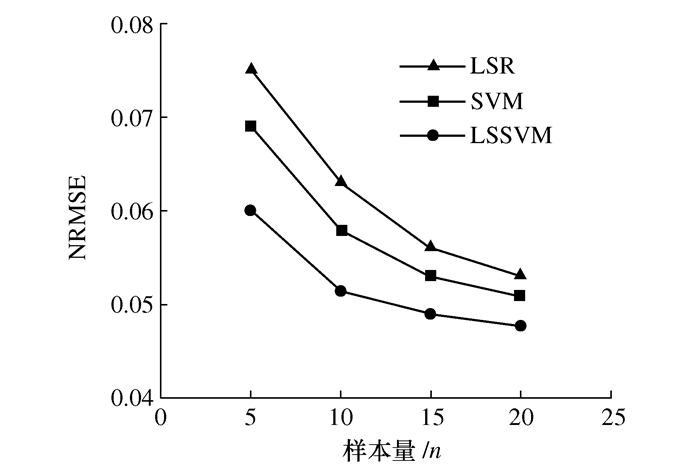
准确估计飞机整体驱动发电机(Integrated drive generator, IDG)的可靠性分布参数, 对掌握该部件的故障变化规律和制定维修策略起到关键性作用。针对飞机IDG故障数据为小样本的特点, 以威布尔分布为例, 采用最小二乘支持向量回归机(LSSVR)、支持向量回归机(SVR)和最小二乘法(LSR)对飞机IDG进行可靠性参数估计。结合实例与蒙特卡罗仿真, 对比分析3种参数估计方法的精度、运行时间以及样本量变化时的稳定性。结果表明, 在小样本情况下, LSSVR的参数估计精度最高, LSR的运行时间最短; 随着样本量的减小, 3种参数估计方法的精度均有所减小, 但LSSVR的稳定性最好。
准确估计飞机整体驱动发电机(Integrated drive generator, IDG)的可靠性分布参数, 对掌握该部件的故障变化规律和制定维修策略起到关键性作用。针对飞机IDG故障数据为小样本的特点, 以威布尔分布为例, 采用最小二乘支持向量回归机(LSSVR)、支持向量回归机(SVR)和最小二乘法(LSR)对飞机IDG进行可靠性参数估计。结合实例与蒙特卡罗仿真, 对比分析3种参数估计方法的精度、运行时间以及样本量变化时的稳定性。结果表明, 在小样本情况下, LSSVR的参数估计精度最高, LSR的运行时间最短; 随着样本量的减小, 3种参数估计方法的精度均有所减小, 但LSSVR的稳定性最好。