作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2022年 41卷 第1期
2022, 41(1): 1-8.
doi: 10.13433/j.cnki.1003-8728.20200307
 摘要
摘要 HTML
HTML PDF 3426KB
PDF 3426KB
摘要:
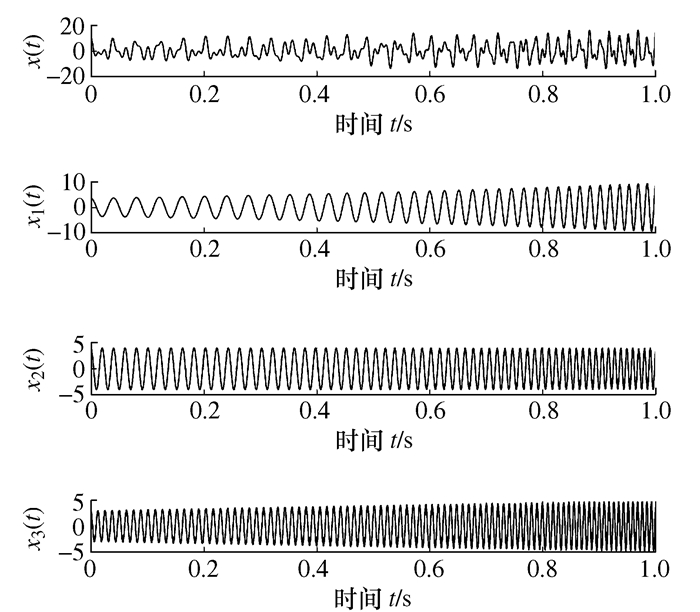
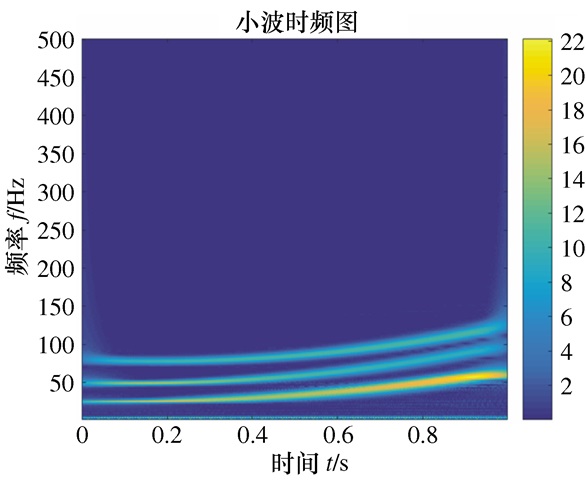
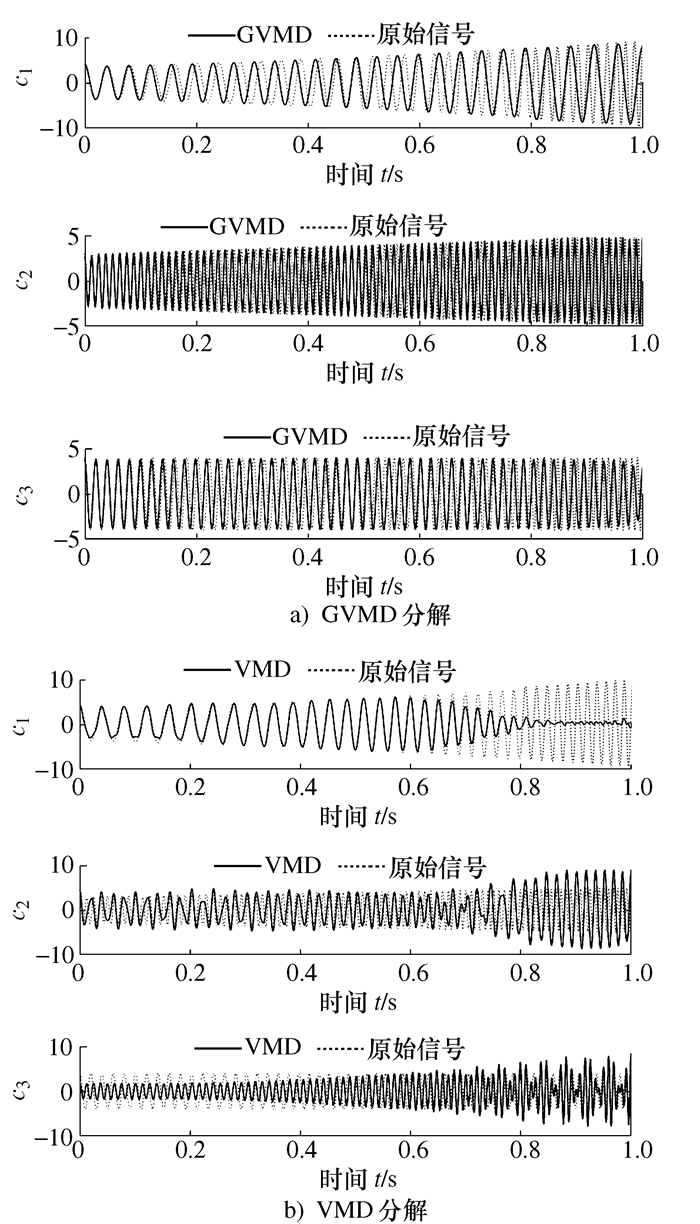
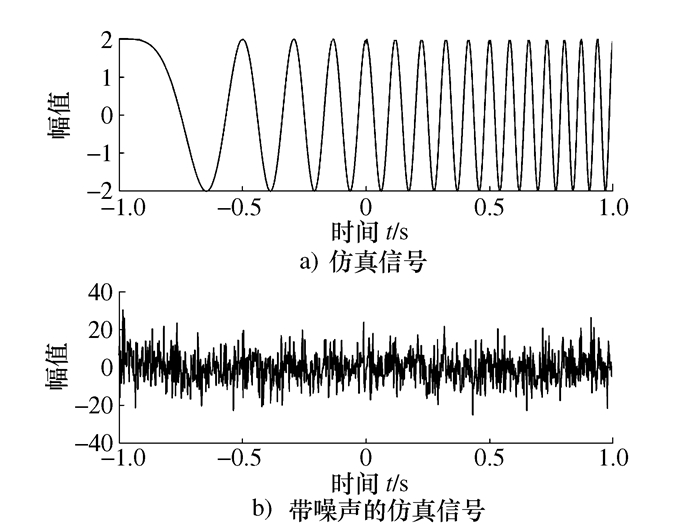
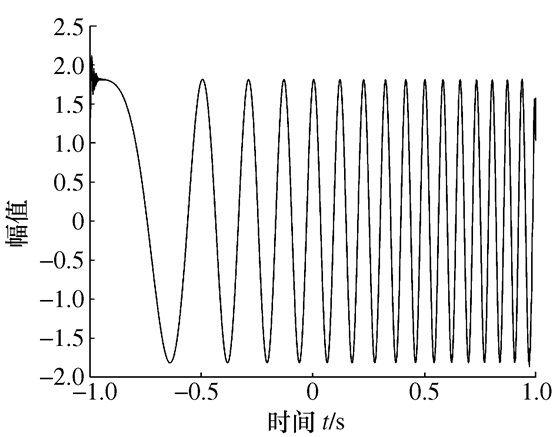
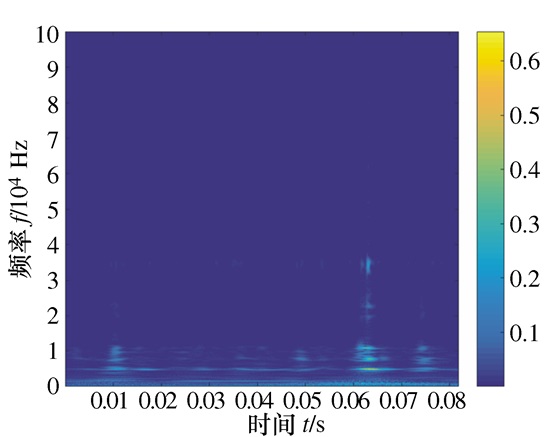
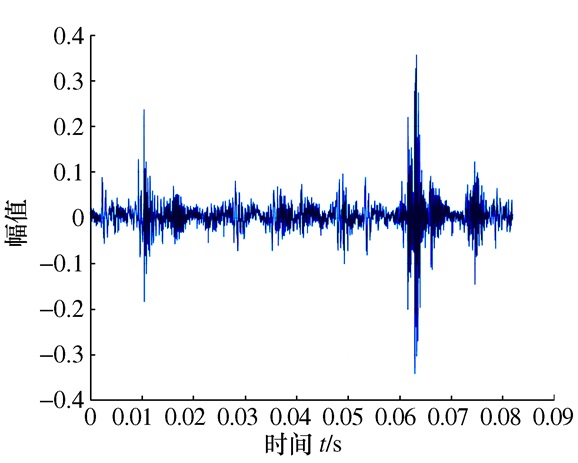
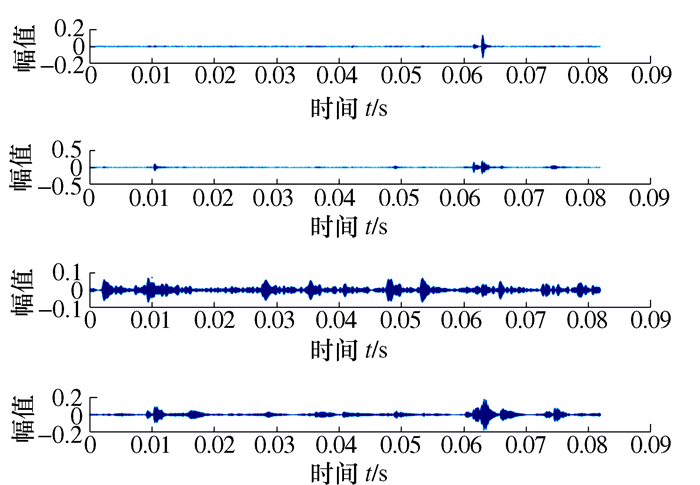
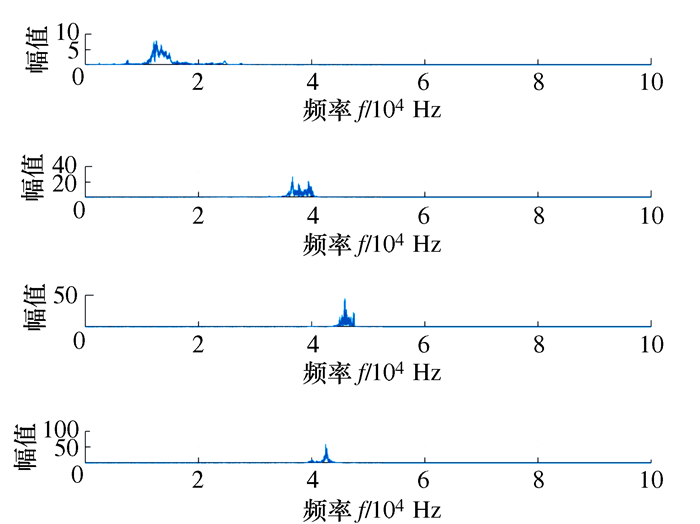
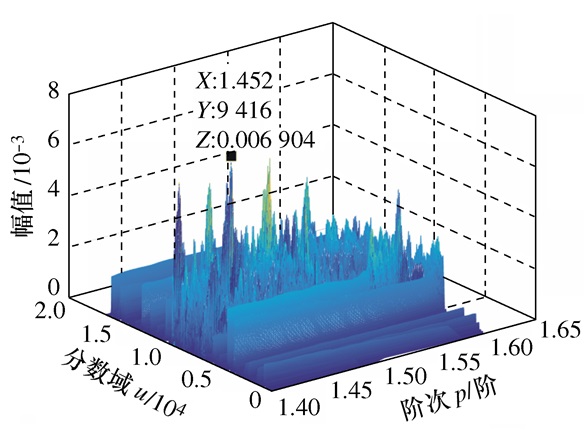
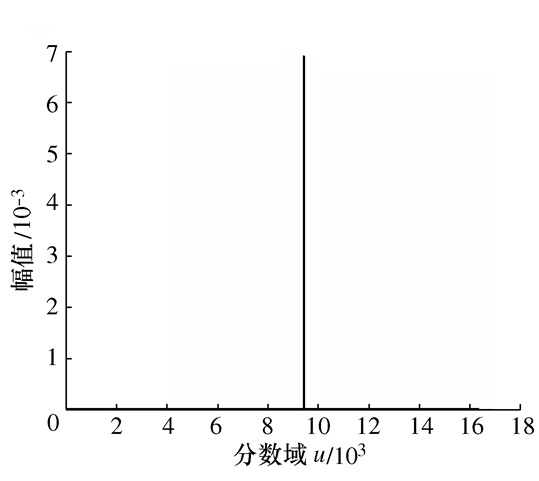
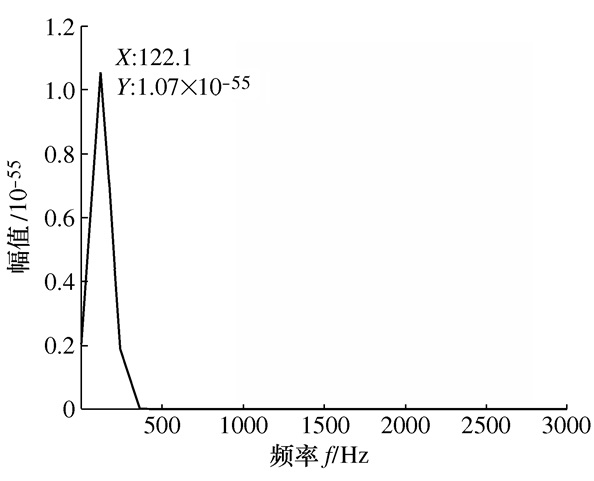
滚动轴承常被用于风力涡轮机、发动机等旋转机械中, 由于负载、电流变化等因素将导致旋转设备中的滚动轴承在变速条件下运行。在变转速的工况下, 现有时频分析、共振解调等故障诊断方法并不能有效提取故障特征, 且考虑到强大背景噪声下存在故障特征提取困难的问题, 本文提出了一种基于广义变分模态分解(Generalized variational mode decomposition, GVMD)和分数阶傅里叶变换(Fractional fourier transform, FRFT)的变工况故障特征提取方法。首先将在变工况下故障特征频率呈非线性分布的原始振动信号广义解调为近似线性分布, 其次对解调后的信号进行变分模态分解(Variational mode decomposition, VMD)得到本征模态函数分量(Intrinsic mode functions, IMF), 根据相关系数准则选取最优的分量进行分数阶域的滤波, 最后通过分析滤波后信号的1.5维包络谱提取故障特征频率。通过滚动轴承仿真数据和实验数据的验证表明本文所提方法能够有效提取变工况下滚动轴承的故障特征频率。
滚动轴承常被用于风力涡轮机、发动机等旋转机械中, 由于负载、电流变化等因素将导致旋转设备中的滚动轴承在变速条件下运行。在变转速的工况下, 现有时频分析、共振解调等故障诊断方法并不能有效提取故障特征, 且考虑到强大背景噪声下存在故障特征提取困难的问题, 本文提出了一种基于广义变分模态分解(Generalized variational mode decomposition, GVMD)和分数阶傅里叶变换(Fractional fourier transform, FRFT)的变工况故障特征提取方法。首先将在变工况下故障特征频率呈非线性分布的原始振动信号广义解调为近似线性分布, 其次对解调后的信号进行变分模态分解(Variational mode decomposition, VMD)得到本征模态函数分量(Intrinsic mode functions, IMF), 根据相关系数准则选取最优的分量进行分数阶域的滤波, 最后通过分析滤波后信号的1.5维包络谱提取故障特征频率。通过滚动轴承仿真数据和实验数据的验证表明本文所提方法能够有效提取变工况下滚动轴承的故障特征频率。





2022, 41(1): 9-15.
doi: 10.13433/j.cnki.1003-8728.20200335
摘要:
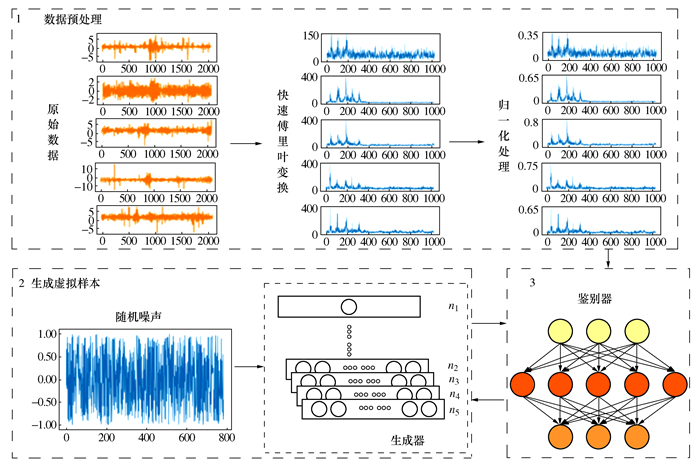
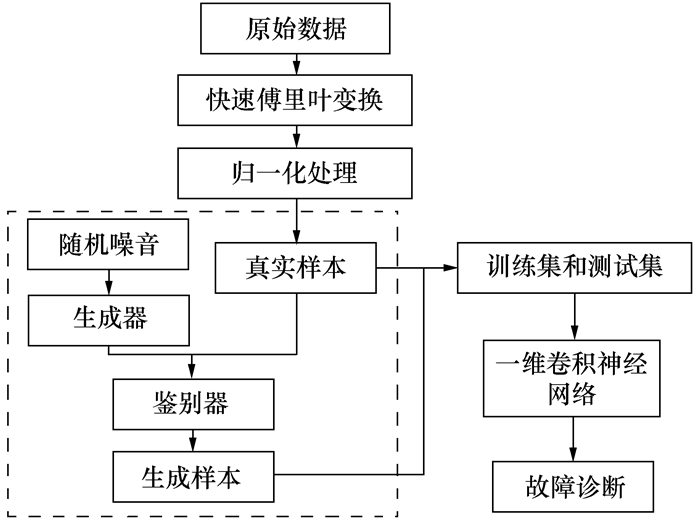
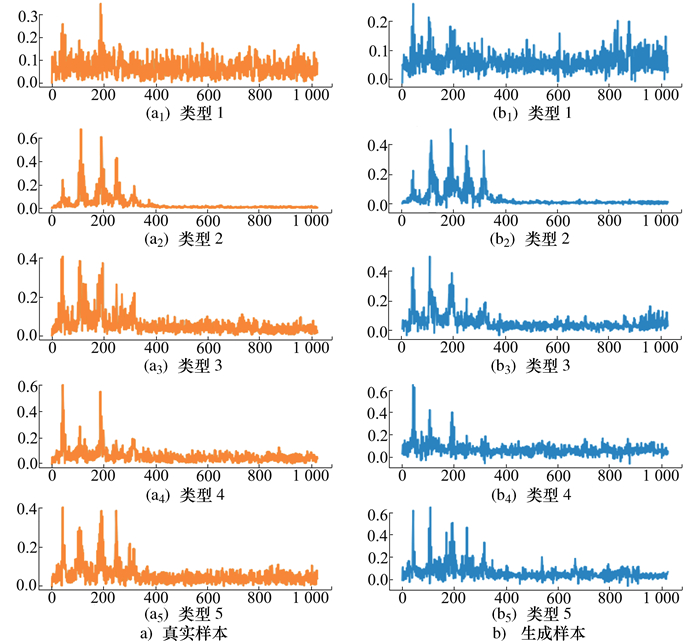
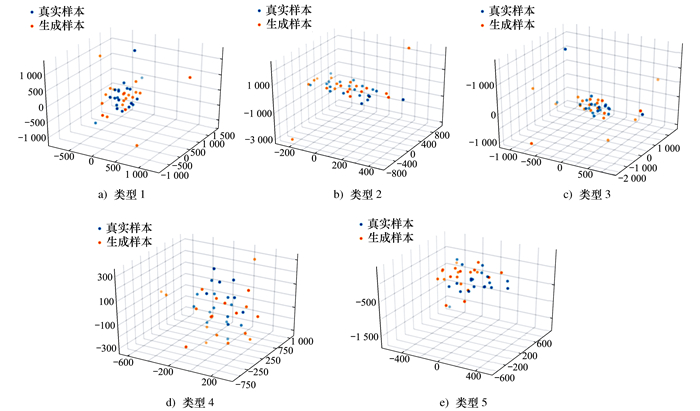
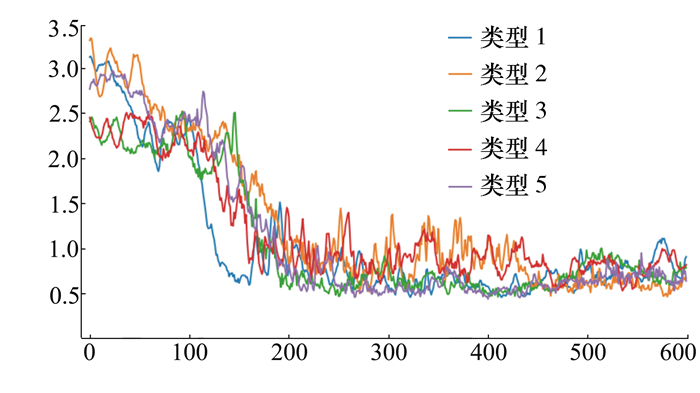
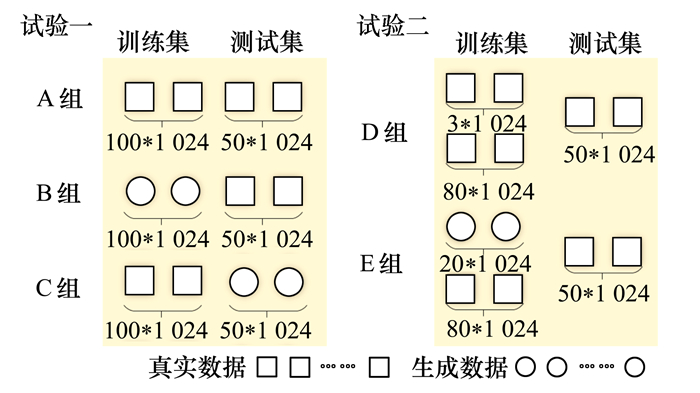
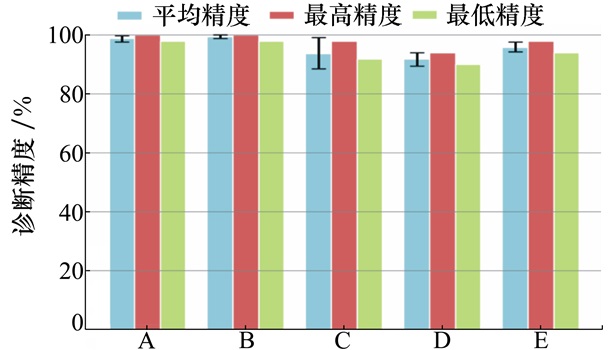
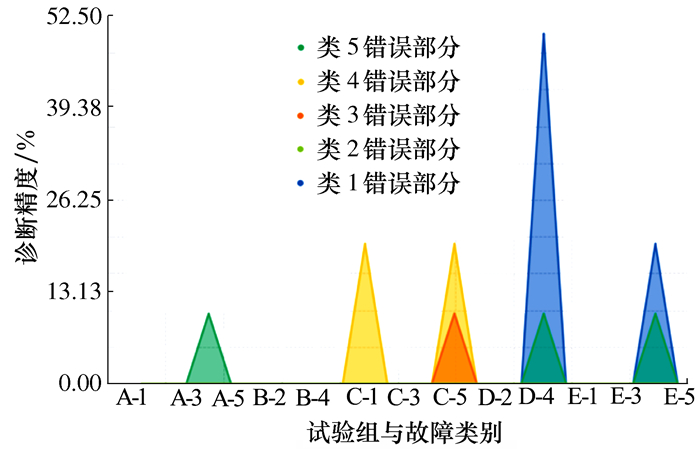
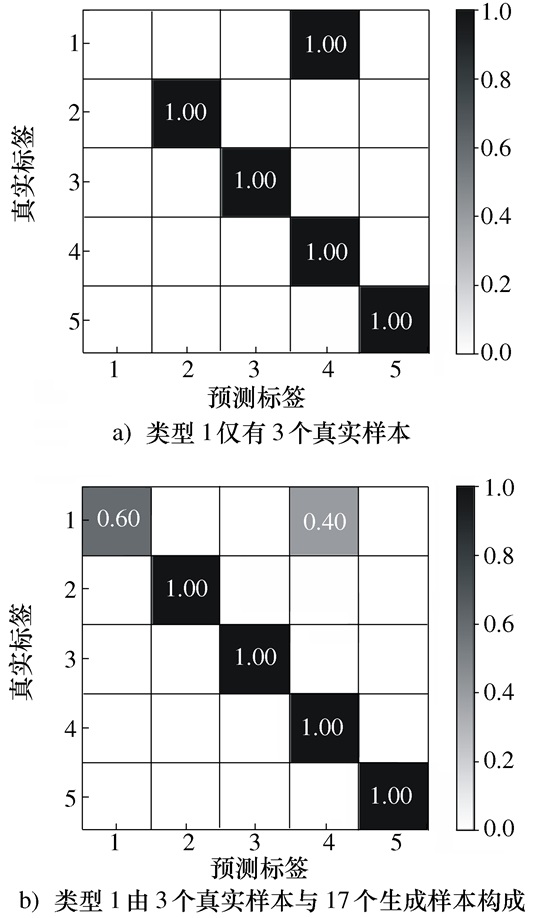
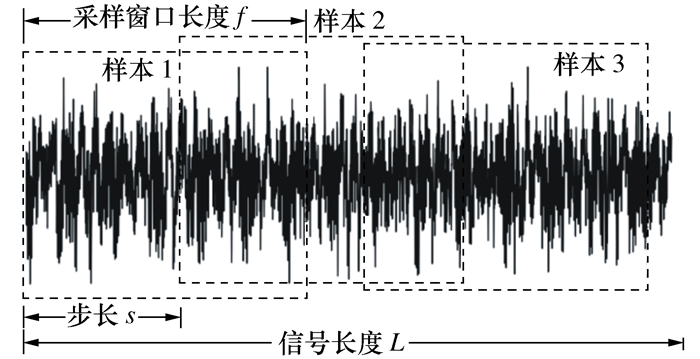
在实际工况下, 轴承可采集到的故障样本分布往往呈现极强的不均衡特性, 该特性对故障诊断精度具有不可忽略的影响。为提高样本不均衡情况下的轴承故障诊断精度, 采用样本生成扩充的思路, 提出一种基于深度卷积生成对抗网络的故障诊断方法。首先针对轴承振动数据信号的特性, 采用快速傅里叶变换使其转化为频域, 并通过归一化进行预处理; 其次利用深度卷积生成对抗网络进行对抗训练, 生成具有真实样本特征的虚拟样本。模型采用衰减学习率并增设Dropout层, 提高了模型生成的效率及真实性。最后, 构建一维卷积神经网络模型完成故障诊断。实验验证结果表明, 提出的方法能有效提高样本不均衡情况下的诊断精度以及诊断稳定性。
在实际工况下, 轴承可采集到的故障样本分布往往呈现极强的不均衡特性, 该特性对故障诊断精度具有不可忽略的影响。为提高样本不均衡情况下的轴承故障诊断精度, 采用样本生成扩充的思路, 提出一种基于深度卷积生成对抗网络的故障诊断方法。首先针对轴承振动数据信号的特性, 采用快速傅里叶变换使其转化为频域, 并通过归一化进行预处理; 其次利用深度卷积生成对抗网络进行对抗训练, 生成具有真实样本特征的虚拟样本。模型采用衰减学习率并增设Dropout层, 提高了模型生成的效率及真实性。最后, 构建一维卷积神经网络模型完成故障诊断。实验验证结果表明, 提出的方法能有效提高样本不均衡情况下的诊断精度以及诊断稳定性。


2022, 41(1): 16-24.
doi: 10.13433/j.cnki.1003-8728.20200327
摘要:
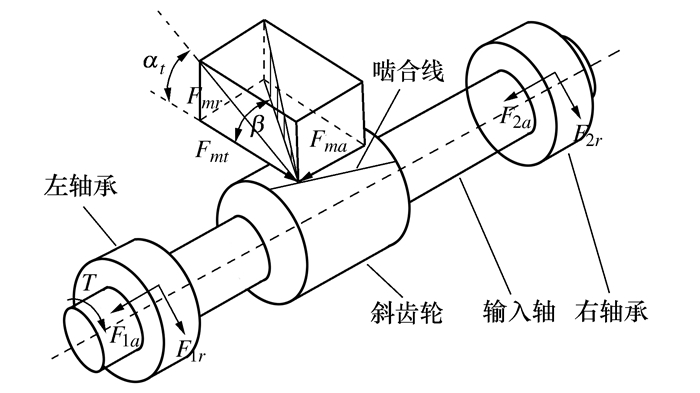
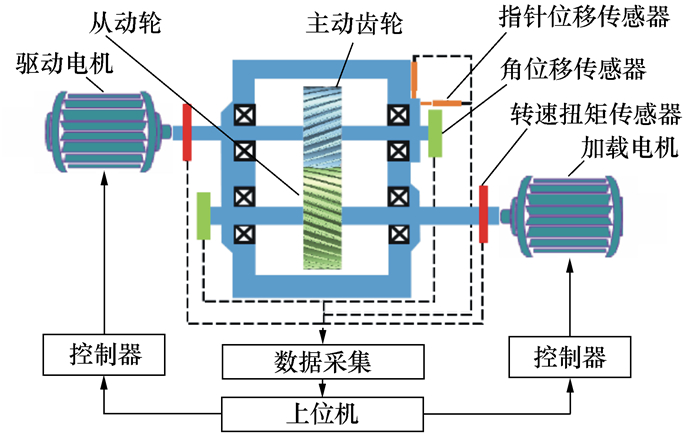
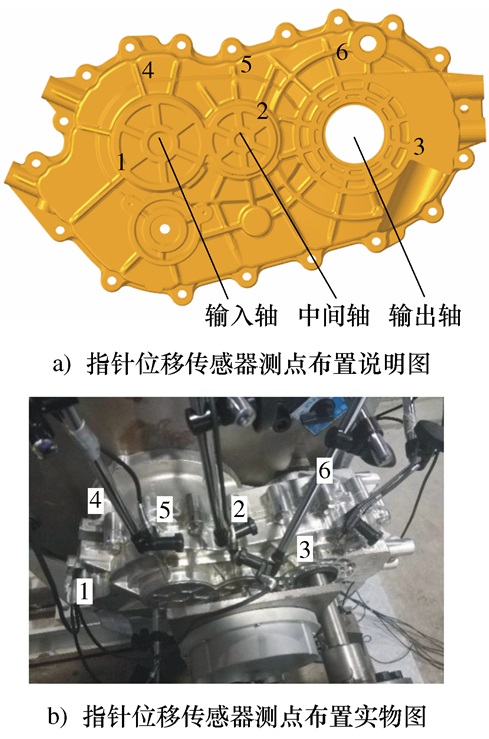
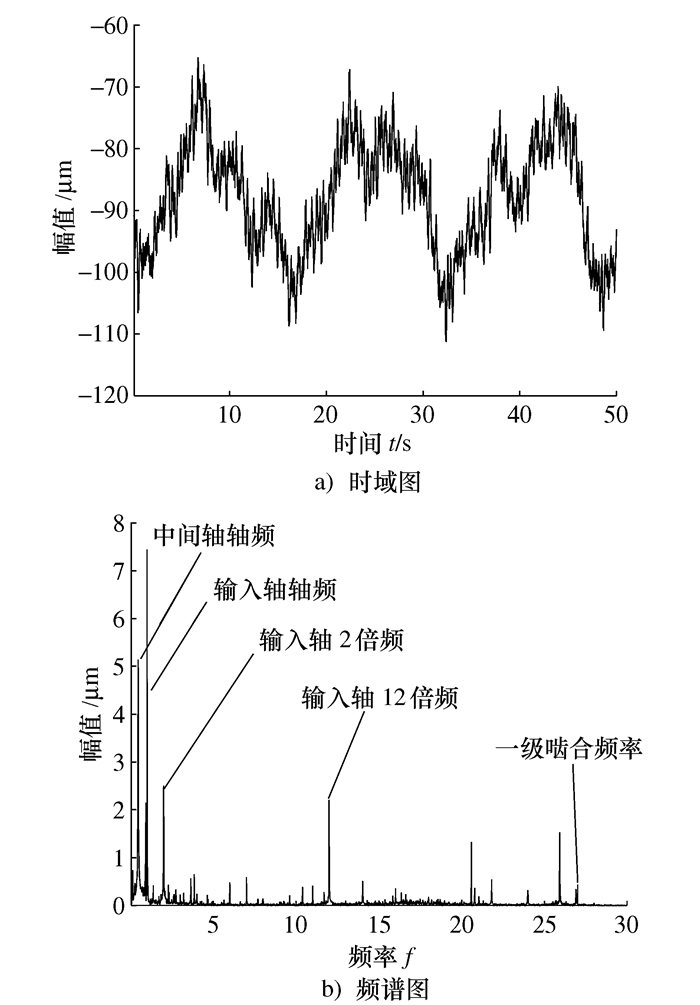
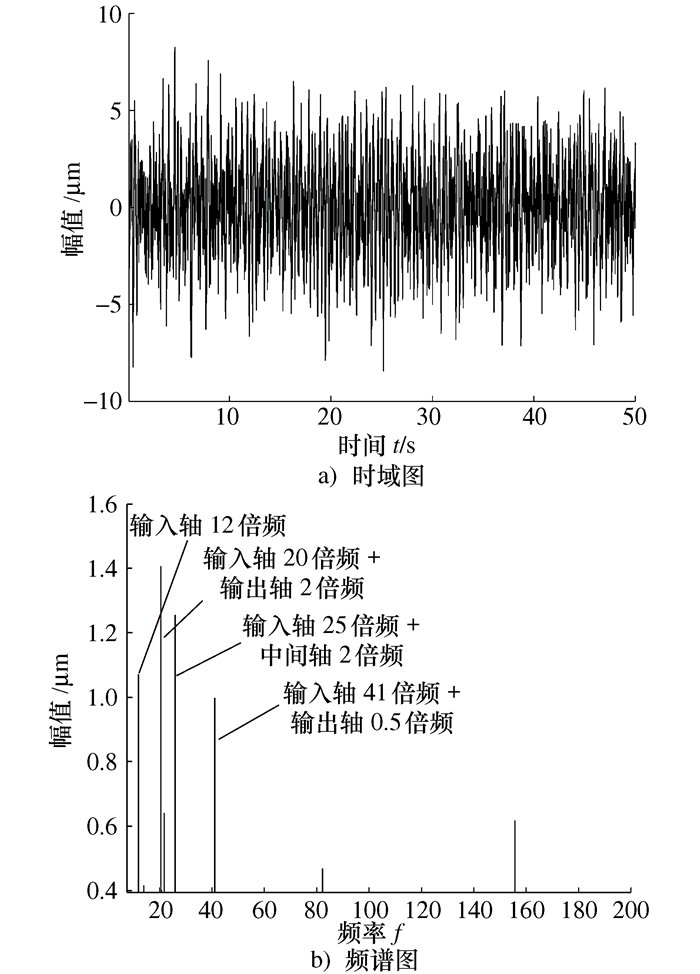
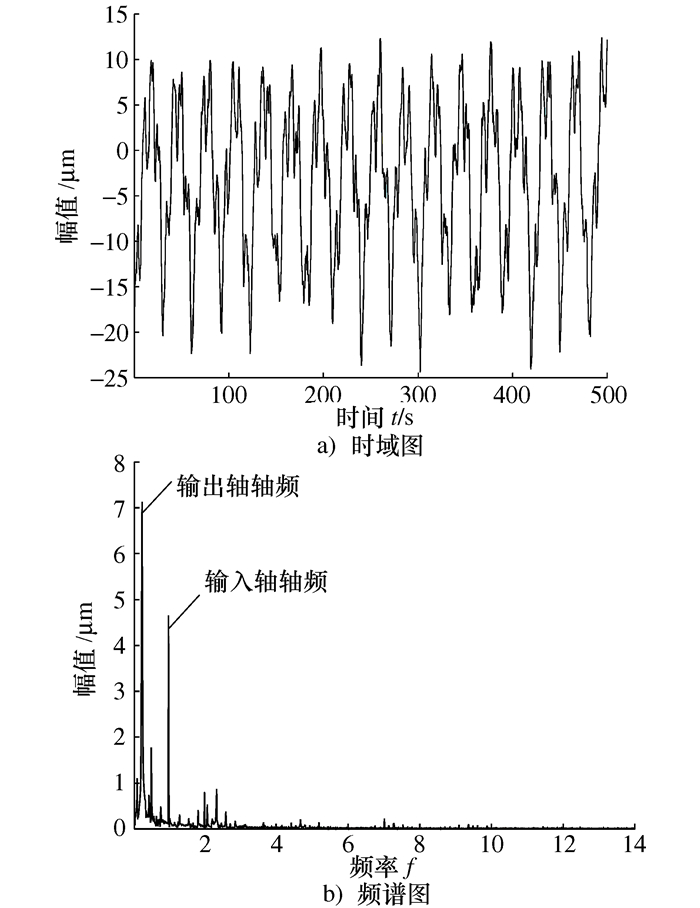
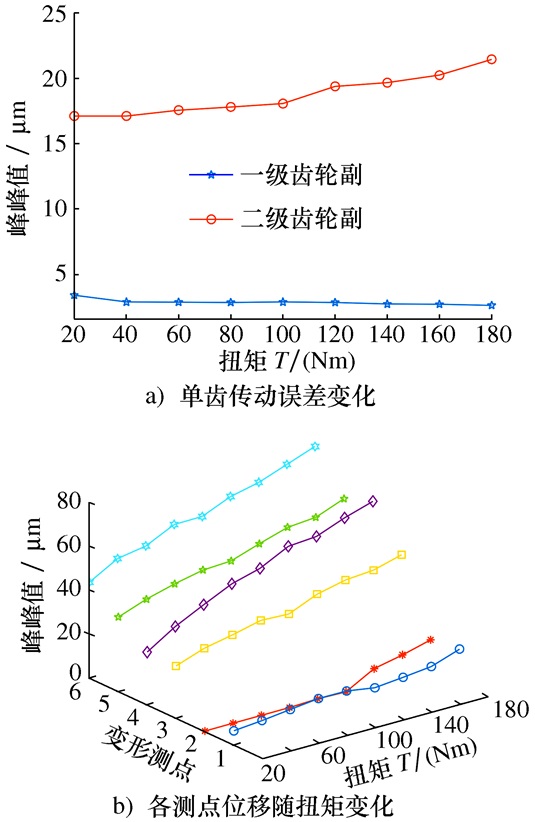
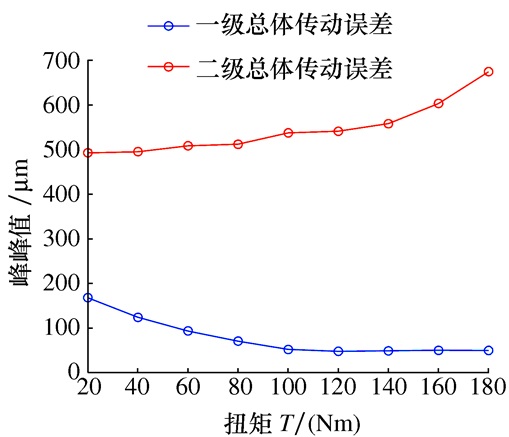
壳体变形和传动误差是电动汽车减速器NVH性能的关键影响因素, 为此进行传动误差和壳体变形联合试验, 获得不同扭矩下单齿传动误差、总体传动误差和壳体变形变化规律。对单齿传动误差、总体传动误差和壳体变形的时频特征及不同扭矩下相互作用影响进行了分析。分析结果表明: 传动误差和壳体变形相互影响, 各测点壳体变形趋势与第二级单齿传动误差变化趋势一致, 总体传动误差与壳体轴承孔处的径向相对位移频谱中输入轴或输出轴基频处的幅值密切相关。提升壳体轴承孔处的径向刚度, 能有效减小传动误差。
壳体变形和传动误差是电动汽车减速器NVH性能的关键影响因素, 为此进行传动误差和壳体变形联合试验, 获得不同扭矩下单齿传动误差、总体传动误差和壳体变形变化规律。对单齿传动误差、总体传动误差和壳体变形的时频特征及不同扭矩下相互作用影响进行了分析。分析结果表明: 传动误差和壳体变形相互影响, 各测点壳体变形趋势与第二级单齿传动误差变化趋势一致, 总体传动误差与壳体轴承孔处的径向相对位移频谱中输入轴或输出轴基频处的幅值密切相关。提升壳体轴承孔处的径向刚度, 能有效减小传动误差。




2022, 41(1): 25-30.
doi: 10.13433/j.cnki.1003-8728.20200328
摘要:
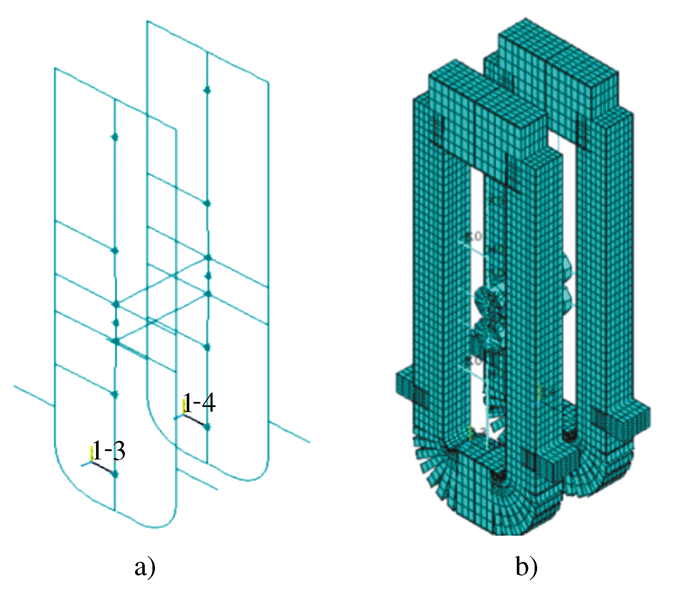
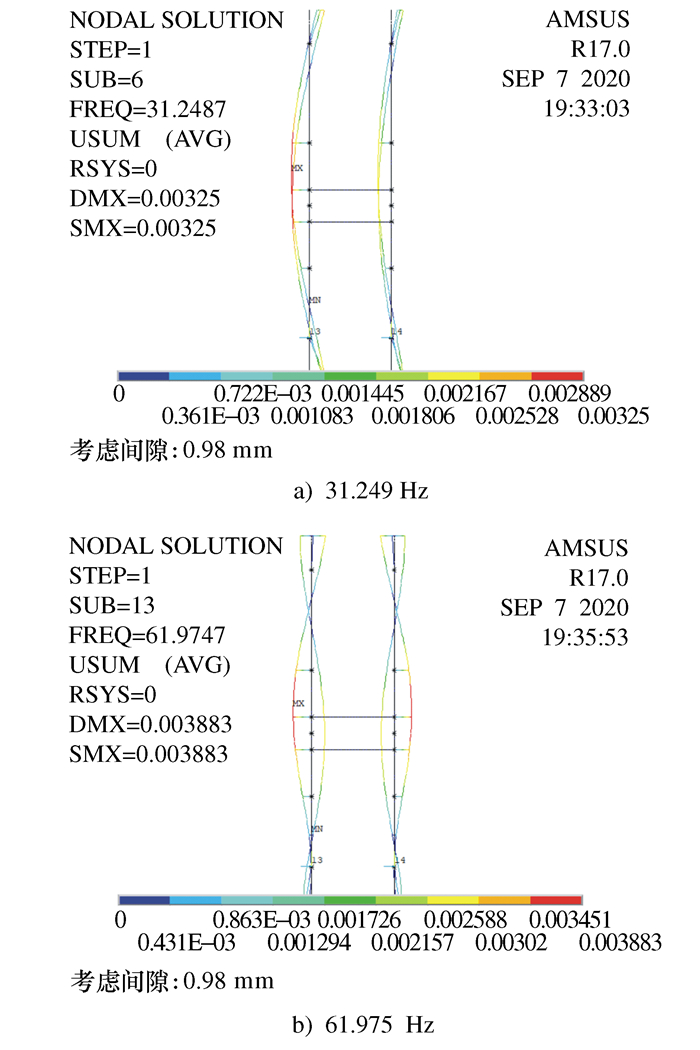
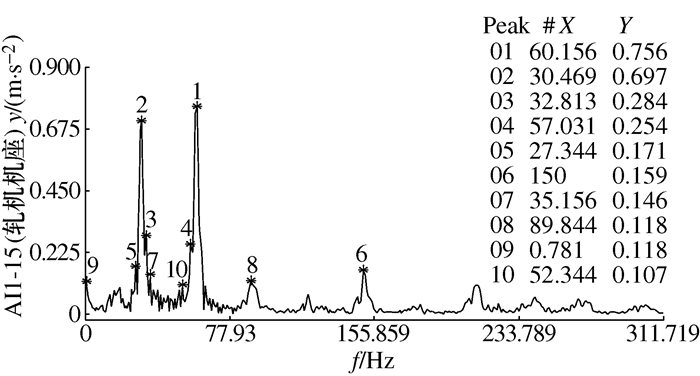
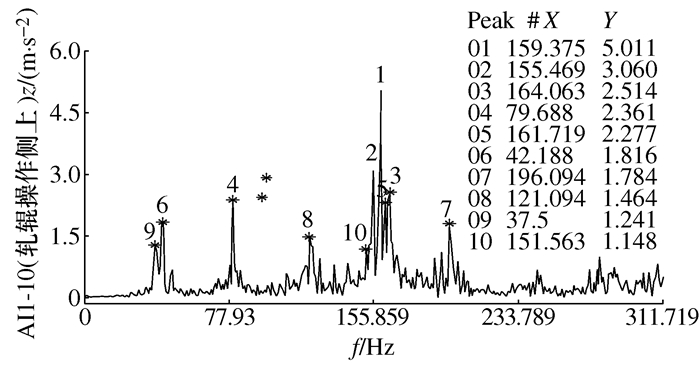
根据热连轧机实际结构, 采用集中质量法, 利用质量单元和弹簧单元表示辊系振动, 梁单元搭建机架轮廓, 建立了一种单架轧机简化模型, 可展现轧机空间振型, 在此基础上, 利用COMBIN40添加工作辊轴承座装配间隙, 考虑间隙对轧机系统固有特性的影响。通过模态分析发现, 间隙导致轧机系统低阶频率增多, 振动加剧。仿真结果与现场实测数据相对比, 验证了模型的可行性。
根据热连轧机实际结构, 采用集中质量法, 利用质量单元和弹簧单元表示辊系振动, 梁单元搭建机架轮廓, 建立了一种单架轧机简化模型, 可展现轧机空间振型, 在此基础上, 利用COMBIN40添加工作辊轴承座装配间隙, 考虑间隙对轧机系统固有特性的影响。通过模态分析发现, 间隙导致轧机系统低阶频率增多, 振动加剧。仿真结果与现场实测数据相对比, 验证了模型的可行性。



2022, 41(1): 31-39.
doi: 10.13433/j.cnki.1003-8728.20200310
摘要:
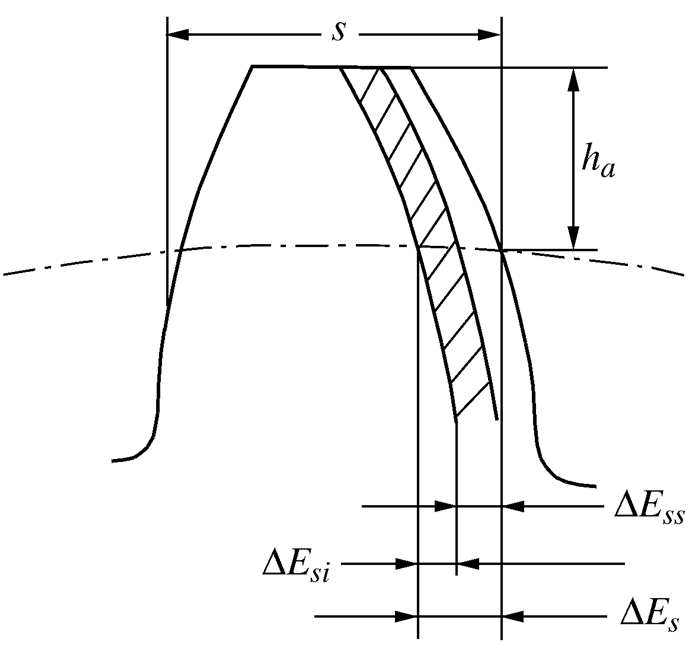
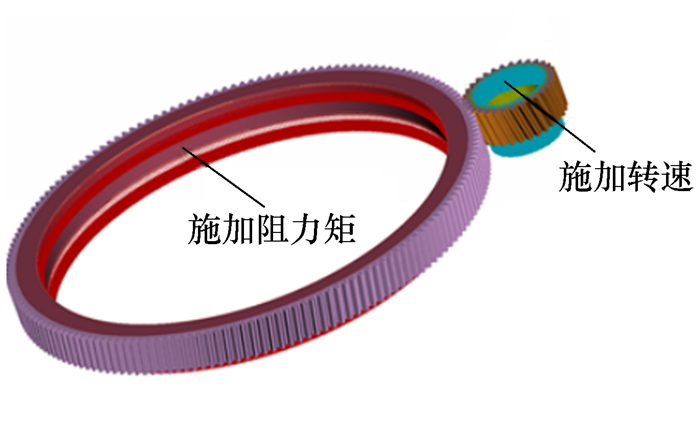
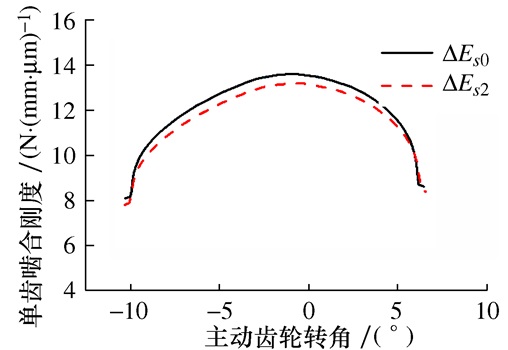
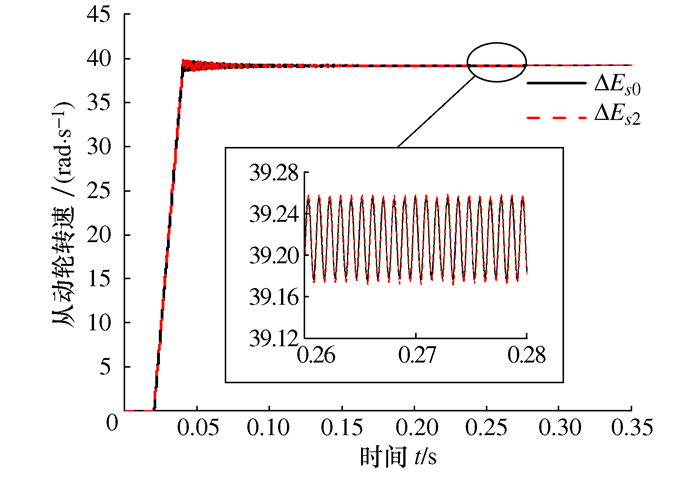
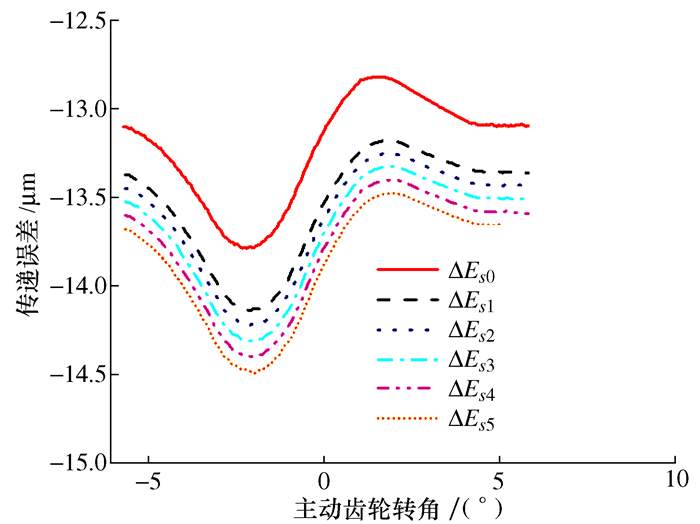
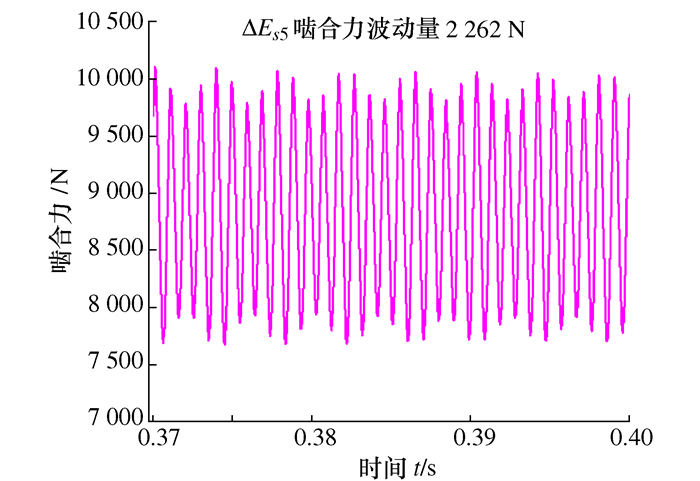
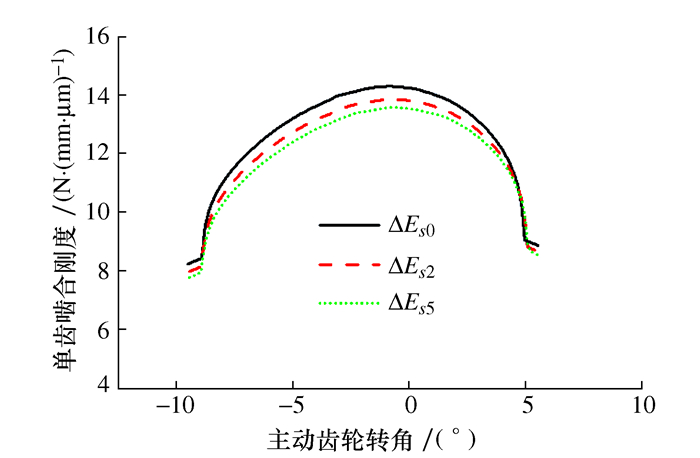
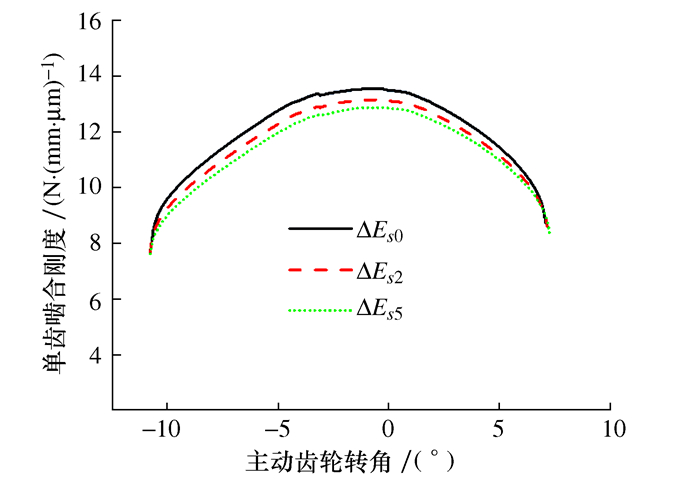
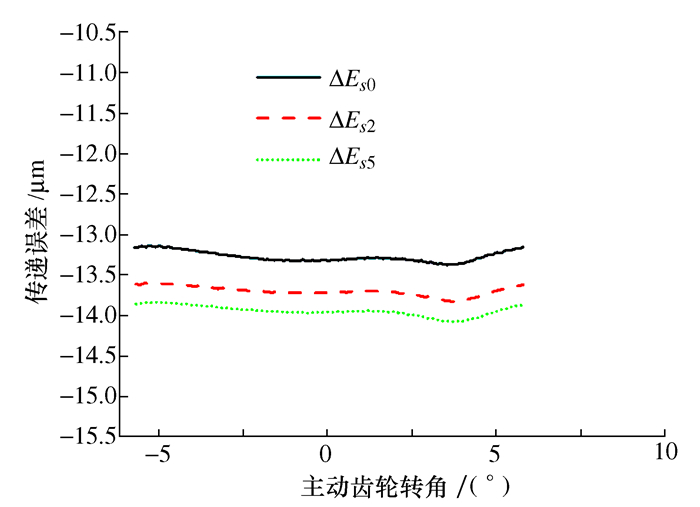
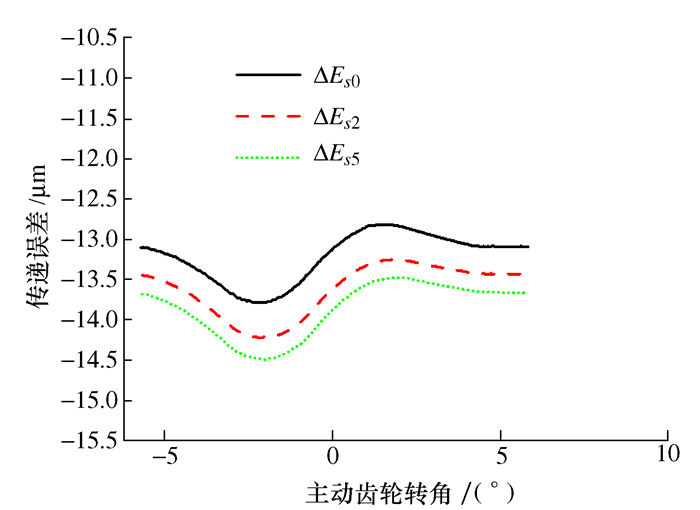
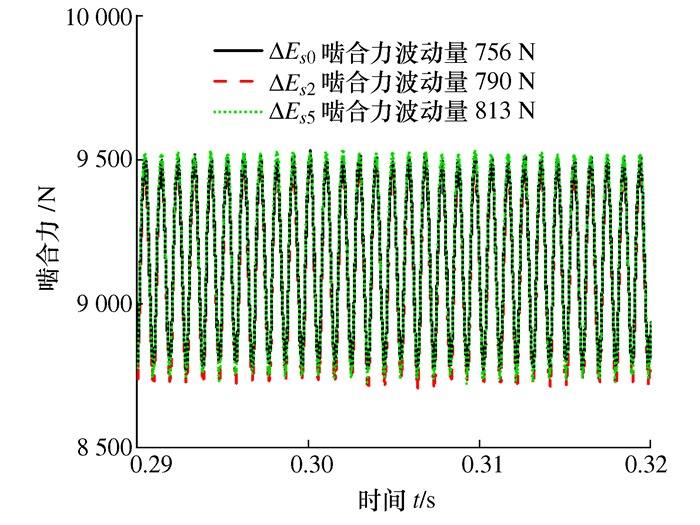
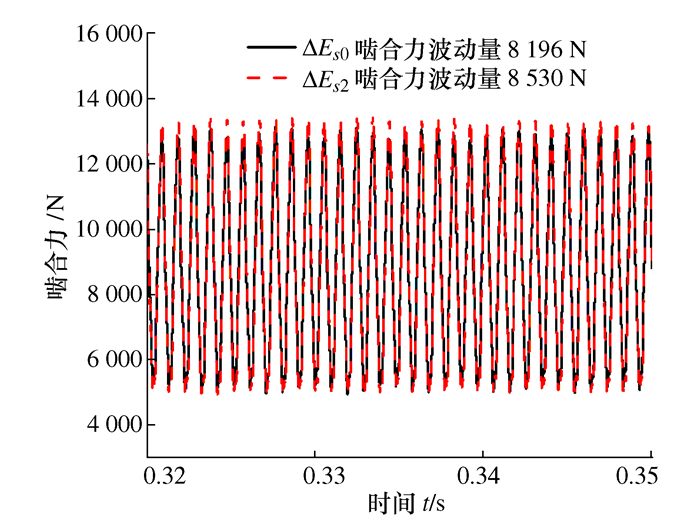
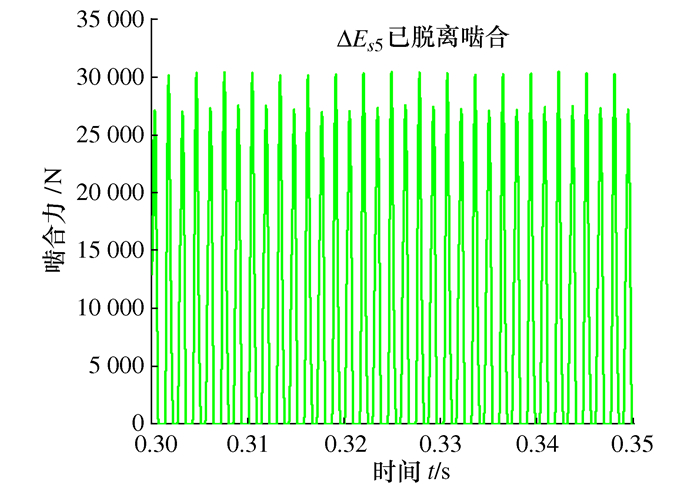
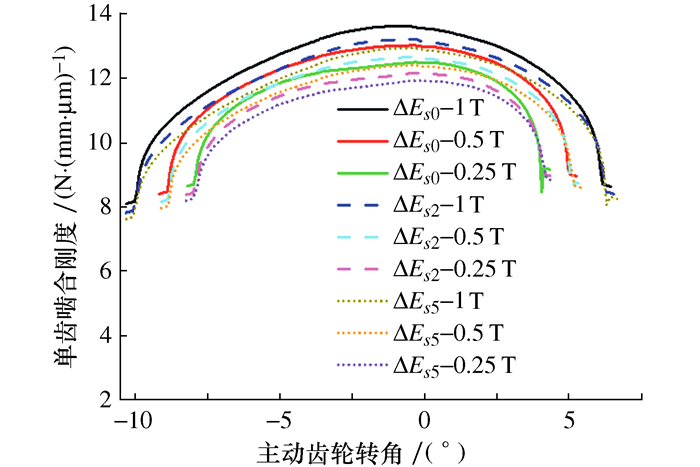
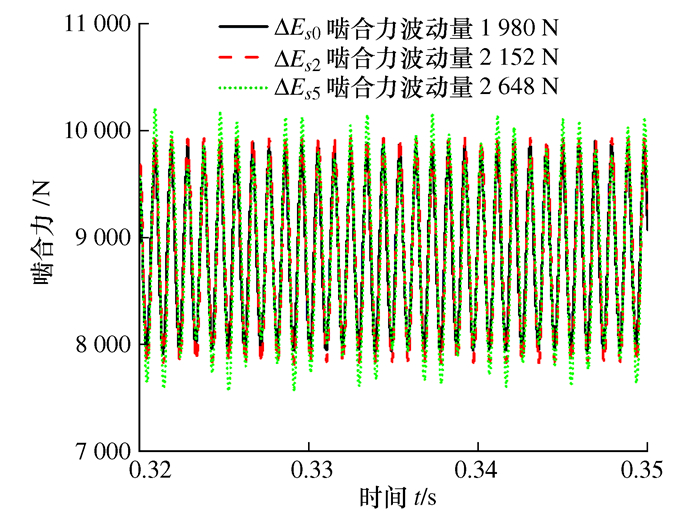
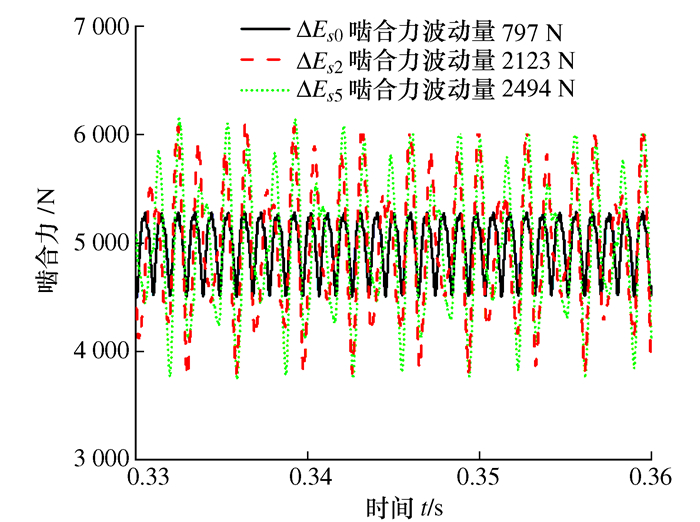
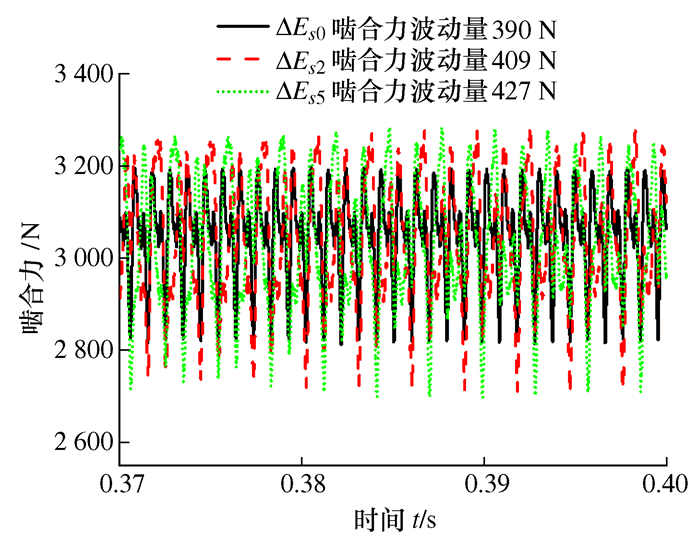
为了研究齿厚偏差对圆柱齿轮副振动特性的影响规律, 建立了考虑齿厚偏差的圆柱齿轮副啮合刚度和传递误差计算模型, 分析了齿厚偏差对圆柱齿轮副啮合刚度和传递误差激励的影响; 然后建立了考虑齿厚偏差的圆柱齿轮啮合副有限元模型, 分析了齿厚偏差对圆柱齿轮副振动特性的影响。结果表明: 随着齿厚偏差增大, 齿轮副单齿啮合刚度降低, 传递误差和啮合振动增大; 随着螺旋角减小, 齿轮副单齿啮合刚度逐渐降低, 传递误差波动和啮合振动增大, 同时齿轮副振动特性对齿厚偏差更加敏感; 随着作用扭矩减小, 齿轮副单齿啮合刚度降低, 传递误差激励减小, 啮合振动减小, 同时齿轮副振动特性对齿厚偏差敏感性降低。
为了研究齿厚偏差对圆柱齿轮副振动特性的影响规律, 建立了考虑齿厚偏差的圆柱齿轮副啮合刚度和传递误差计算模型, 分析了齿厚偏差对圆柱齿轮副啮合刚度和传递误差激励的影响; 然后建立了考虑齿厚偏差的圆柱齿轮啮合副有限元模型, 分析了齿厚偏差对圆柱齿轮副振动特性的影响。结果表明: 随着齿厚偏差增大, 齿轮副单齿啮合刚度降低, 传递误差和啮合振动增大; 随着螺旋角减小, 齿轮副单齿啮合刚度逐渐降低, 传递误差波动和啮合振动增大, 同时齿轮副振动特性对齿厚偏差更加敏感; 随着作用扭矩减小, 齿轮副单齿啮合刚度降低, 传递误差激励减小, 啮合振动减小, 同时齿轮副振动特性对齿厚偏差敏感性降低。









2022, 41(1): 40-46.
doi: 10.13433/j.cnki.1003-8728.20200337
摘要:
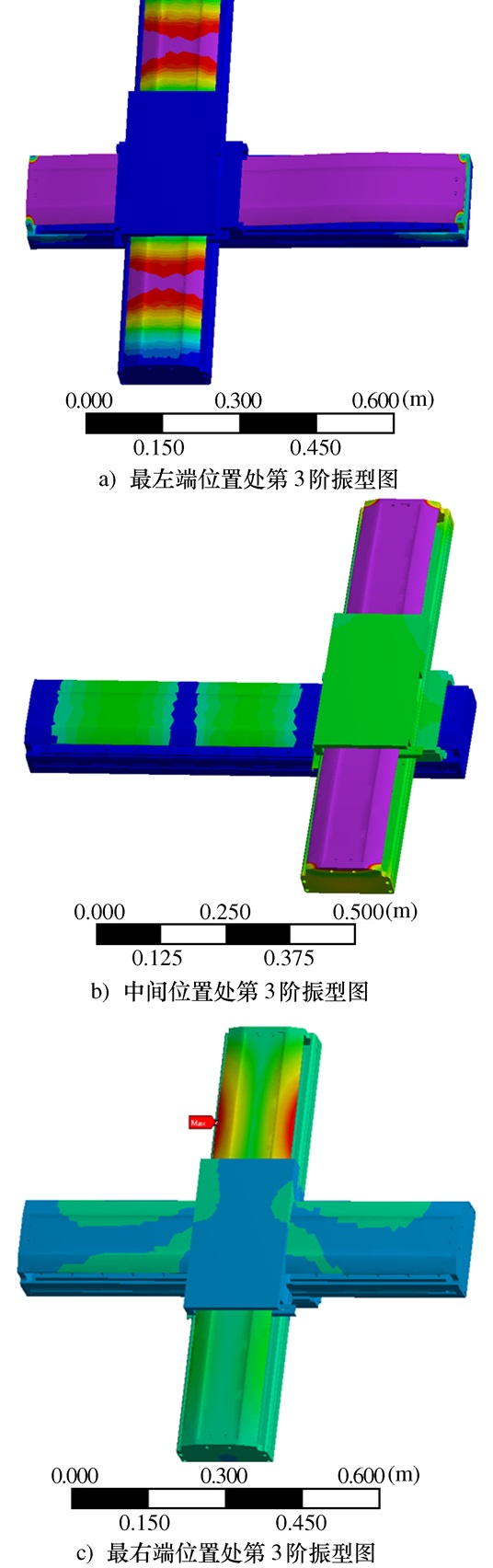
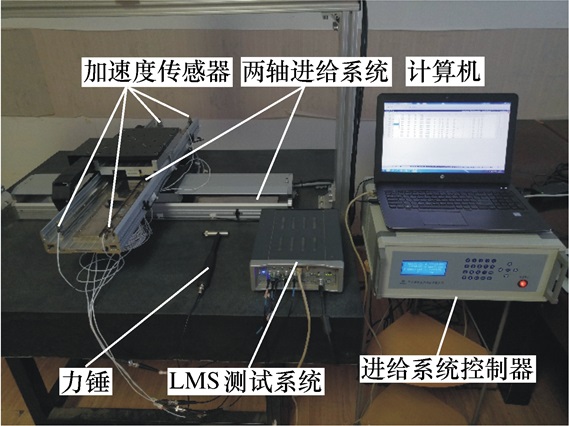
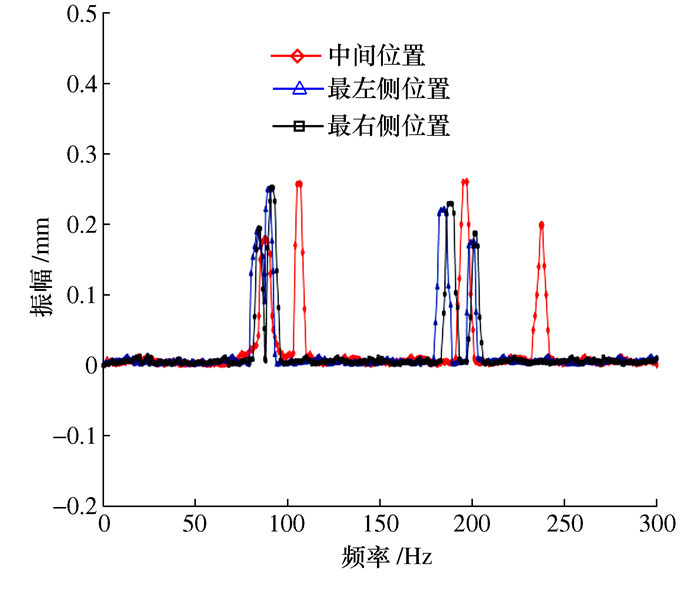
为确定随工作台移动进给系统动态响应演变规律, 利用达朗贝尔原理建立了工作台处于不同位置的直线电机进给系统动力学模型, 基于ANSYS Workbench平台数值模拟分析了工作台处于最左端、中间、最右端位置处的直线电机进给系统模态响应, 得到其前4阶固有频率和振型。采用锤击法单点激励多点拾振对两轴联动直线电机进给系统进行模态测试试验, 利用LMS测试分析系统得到三种不同位置处的固有频率和振型, 试验验证了直线电机进给系统工作台在不同位置移动过程中动态响应数值模拟的正确性和合理性, 同时发现随工作台位置变化直线电机进给系统动态特性也随之改变, 当工作台处于中间位置时系统模态低阶固有频率大于左右两端位置处, 且随着工作台位置的变化系统质量分布出现偏移, 为合理确定复杂工况下直线电机进给系统动态时变特性提供依据。
为确定随工作台移动进给系统动态响应演变规律, 利用达朗贝尔原理建立了工作台处于不同位置的直线电机进给系统动力学模型, 基于ANSYS Workbench平台数值模拟分析了工作台处于最左端、中间、最右端位置处的直线电机进给系统模态响应, 得到其前4阶固有频率和振型。采用锤击法单点激励多点拾振对两轴联动直线电机进给系统进行模态测试试验, 利用LMS测试分析系统得到三种不同位置处的固有频率和振型, 试验验证了直线电机进给系统工作台在不同位置移动过程中动态响应数值模拟的正确性和合理性, 同时发现随工作台位置变化直线电机进给系统动态特性也随之改变, 当工作台处于中间位置时系统模态低阶固有频率大于左右两端位置处, 且随着工作台位置的变化系统质量分布出现偏移, 为合理确定复杂工况下直线电机进给系统动态时变特性提供依据。

2022, 41(1): 47-52.
doi: 10.13433/j.cnki.1003-8728.20200306
摘要:
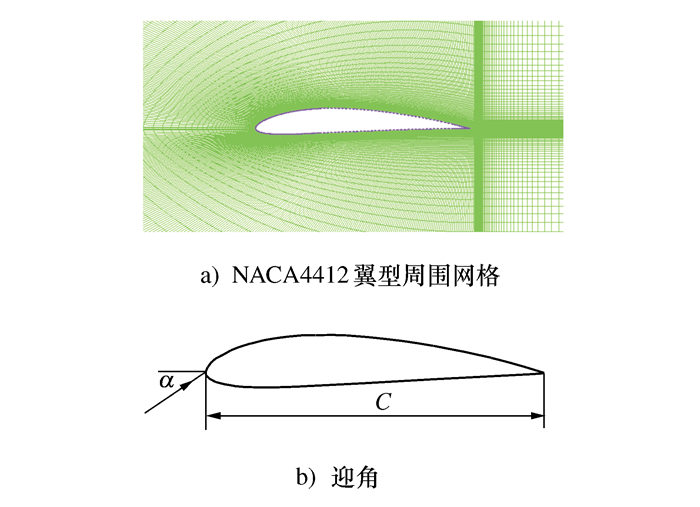
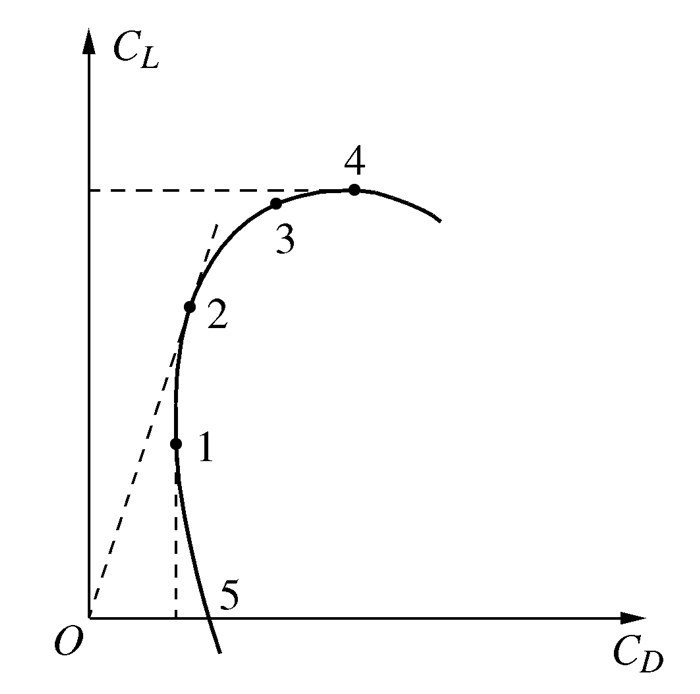
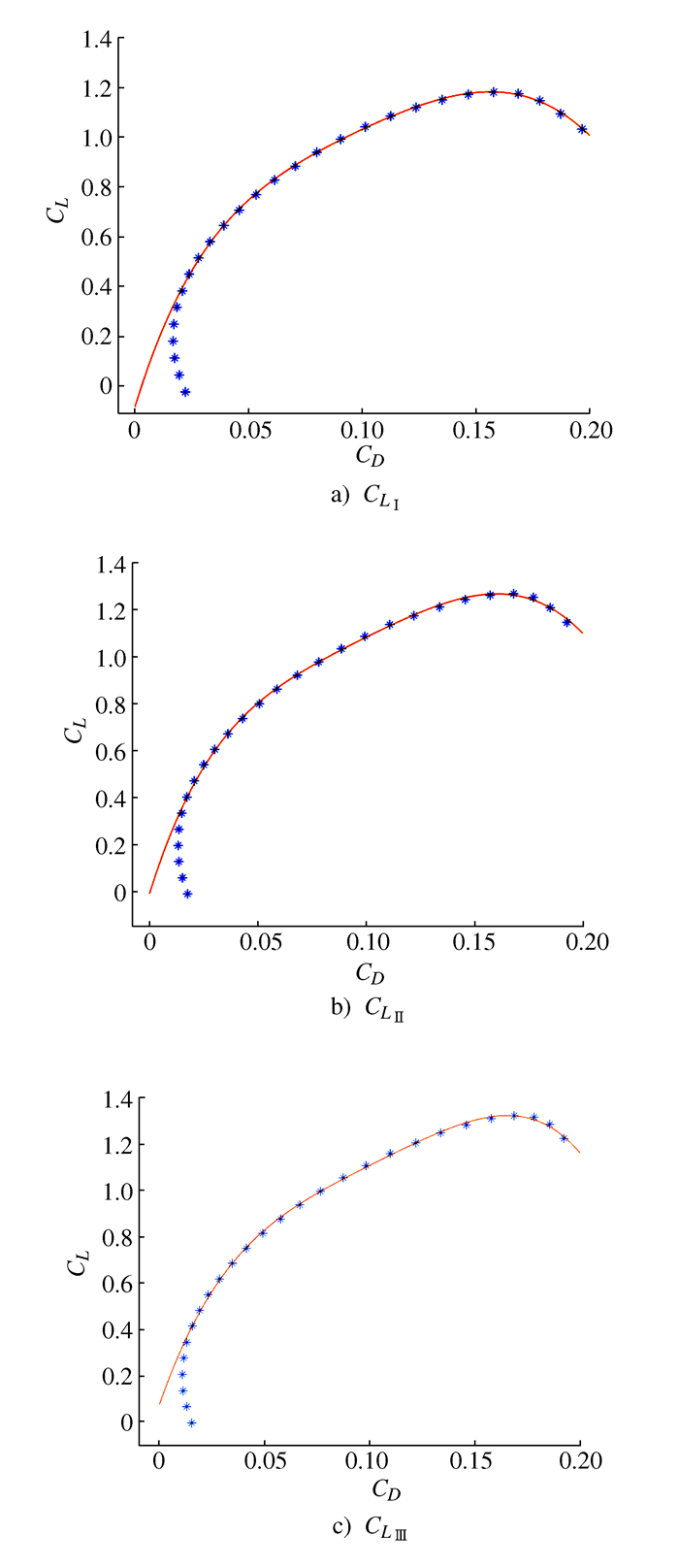
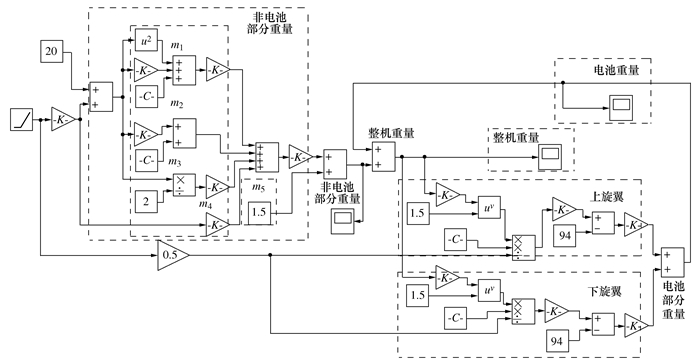
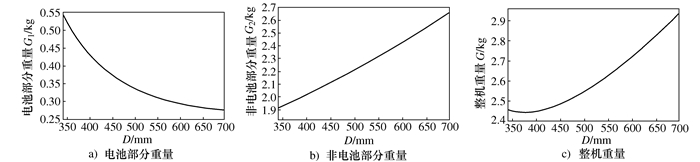
本文把空气动力学结合到机械结构设计之中, 设计了一款能在壁面灵活移动、能在简单的相邻壁面间翻越、具备一定量的负载能力、履带式行走方式、共轴双旋翼提供推力的机器人平台。先对选定翼型进行2维的外流场计算, 求得"最经济状态点", 以确定上、下旋翼的安装角分别为6°和5°。在此基础上, 再求解出旋翼直径、旋翼机构推力与电机功率三者之间的关系。然后以旋翼直径为基础, 对机器人平台的各个部分重量进行关联。最后把旋翼直径、电机功率和整机重量三者串联起来, 建立Simulink模型, 当旋翼直径等于376.4 mm时, 求得最小重量的机器人平台。对旋翼安装角、直径和整机重量的探讨和计算, 为下一步的三维仿真和实物搭建奠定基础。
本文把空气动力学结合到机械结构设计之中, 设计了一款能在壁面灵活移动、能在简单的相邻壁面间翻越、具备一定量的负载能力、履带式行走方式、共轴双旋翼提供推力的机器人平台。先对选定翼型进行2维的外流场计算, 求得"最经济状态点", 以确定上、下旋翼的安装角分别为6°和5°。在此基础上, 再求解出旋翼直径、旋翼机构推力与电机功率三者之间的关系。然后以旋翼直径为基础, 对机器人平台的各个部分重量进行关联。最后把旋翼直径、电机功率和整机重量三者串联起来, 建立Simulink模型, 当旋翼直径等于376.4 mm时, 求得最小重量的机器人平台。对旋翼安装角、直径和整机重量的探讨和计算, 为下一步的三维仿真和实物搭建奠定基础。


2022, 41(1): 53-59.
doi: 10.13433/j.cnki.1003-8728.20200332
摘要:
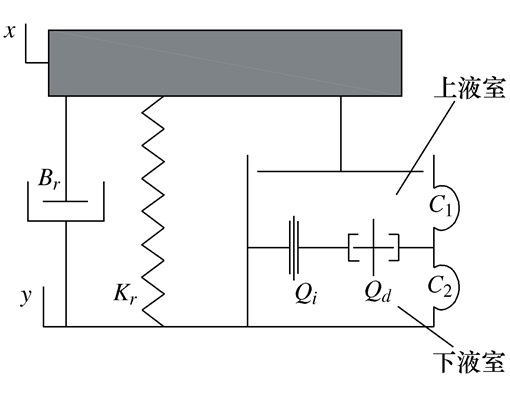
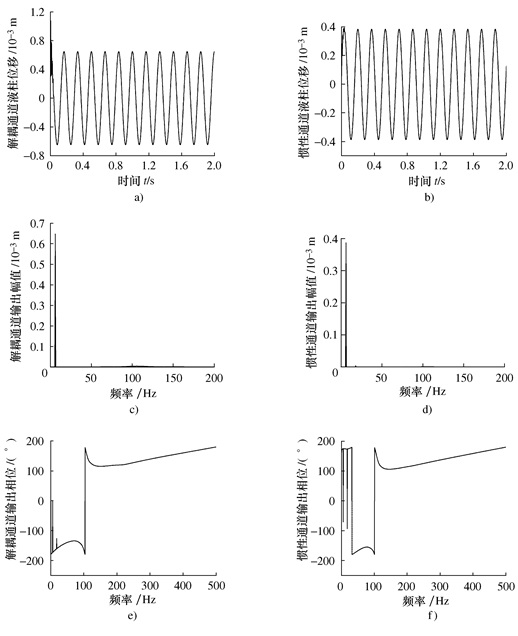
液阻悬置作为一种典型的非线性系统, 其在不同激励下有着良好的动特性, 而动特性又与悬置参数有着密切联系, 所以本文基于Volterra级数理论, 以惯性通道-浮动解耦盘式液阻悬置为研究对象, 提出了该液阻悬置非线性阻尼滞后角和其液体阻尼机构非线性阻尼参数的识别方法, 可在知道输出和部分结构参数的情况下来较为简单的获得液体阻尼机构的阻尼参数, 且在一定范围的激励频率下得到的该阻尼参数识别值与实验得到的参数值之间的误差能保持在3%以内。另外由Volterra级数理论识别得到的液阻悬置阻尼滞后角已由平均法对比验证, 同样表现出了较好的一致性。
液阻悬置作为一种典型的非线性系统, 其在不同激励下有着良好的动特性, 而动特性又与悬置参数有着密切联系, 所以本文基于Volterra级数理论, 以惯性通道-浮动解耦盘式液阻悬置为研究对象, 提出了该液阻悬置非线性阻尼滞后角和其液体阻尼机构非线性阻尼参数的识别方法, 可在知道输出和部分结构参数的情况下来较为简单的获得液体阻尼机构的阻尼参数, 且在一定范围的激励频率下得到的该阻尼参数识别值与实验得到的参数值之间的误差能保持在3%以内。另外由Volterra级数理论识别得到的液阻悬置阻尼滞后角已由平均法对比验证, 同样表现出了较好的一致性。



2022, 41(1): 60-66.
doi: 10.13433/j.cnki.1003-8728.20200331
摘要:
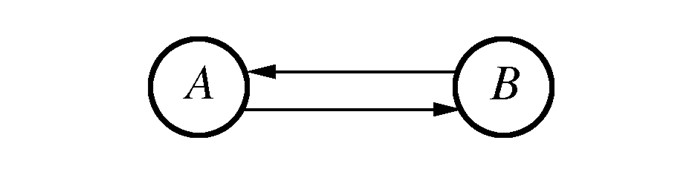
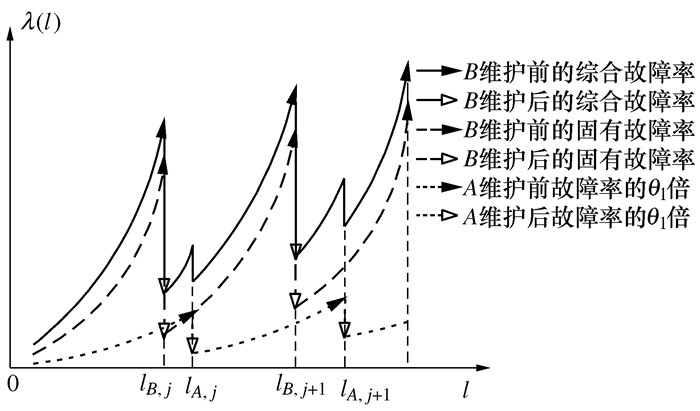
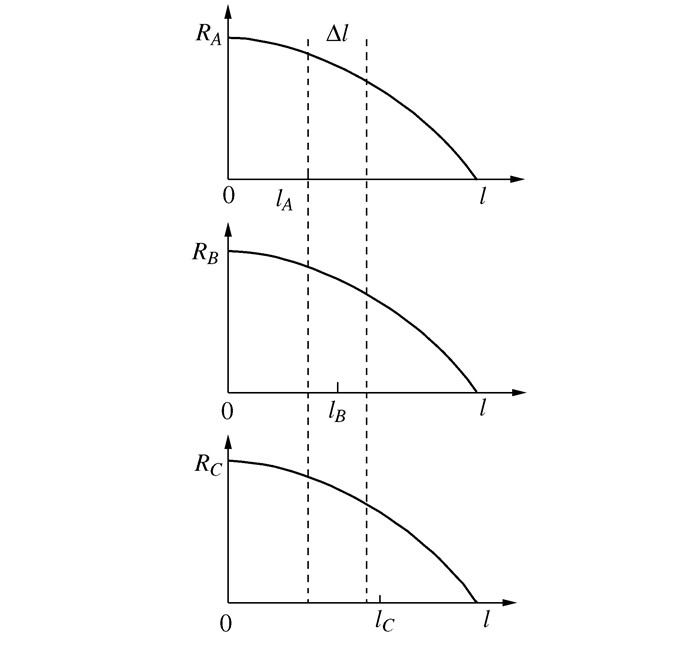
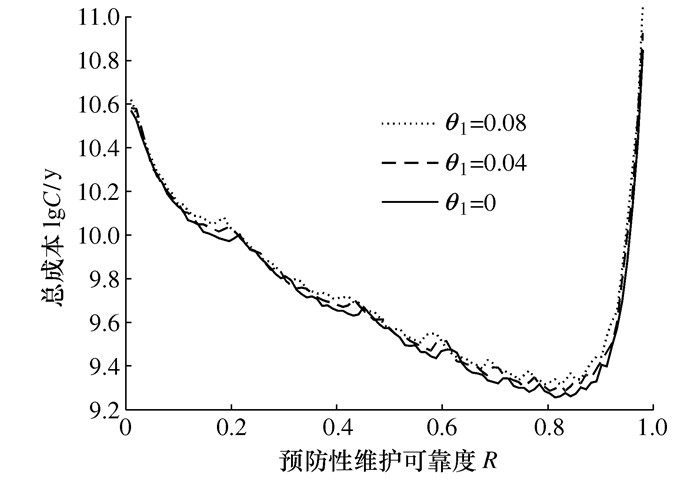
为探究故障相关作用对动车组部件维护作业的影响,利用故障链理论描述部件之间的故障相关性,在修复非新条件下分析部件故障率的演化规律。以可靠度为中心,一个更换周期内的成本最小为目标,优化单部件的维护周期。并考虑经济相关性,引入机会维护策略,进而从系统层优化部件的维护周期。算例表明,当部件之间存在故障相关关系时,要保证被影响部件的可靠度需要花费更多的维护成本,同时被影响部件的维护计划受到对它产生故障相关作用部件的维护计划的影响。机会维护策略可有效降低设备维护成本,对设备维护决策具有一定的参考意义。
为探究故障相关作用对动车组部件维护作业的影响,利用故障链理论描述部件之间的故障相关性,在修复非新条件下分析部件故障率的演化规律。以可靠度为中心,一个更换周期内的成本最小为目标,优化单部件的维护周期。并考虑经济相关性,引入机会维护策略,进而从系统层优化部件的维护周期。算例表明,当部件之间存在故障相关关系时,要保证被影响部件的可靠度需要花费更多的维护成本,同时被影响部件的维护计划受到对它产生故障相关作用部件的维护计划的影响。机会维护策略可有效降低设备维护成本,对设备维护决策具有一定的参考意义。



2022, 41(1): 67-74.
doi: 10.13433/j.cnki.1003-8728.20200305
摘要:
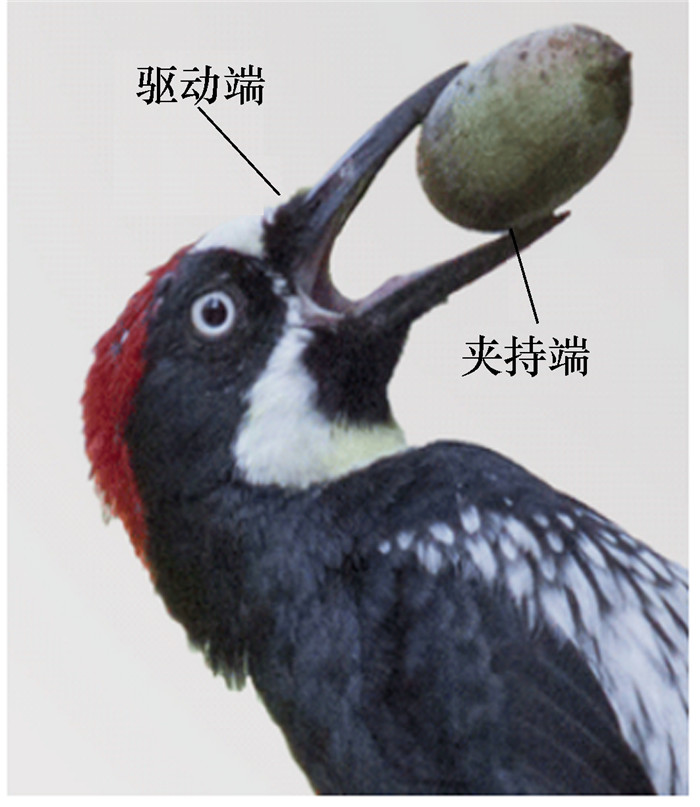
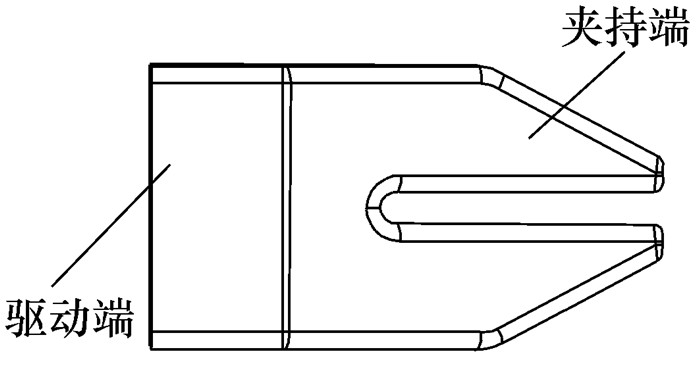
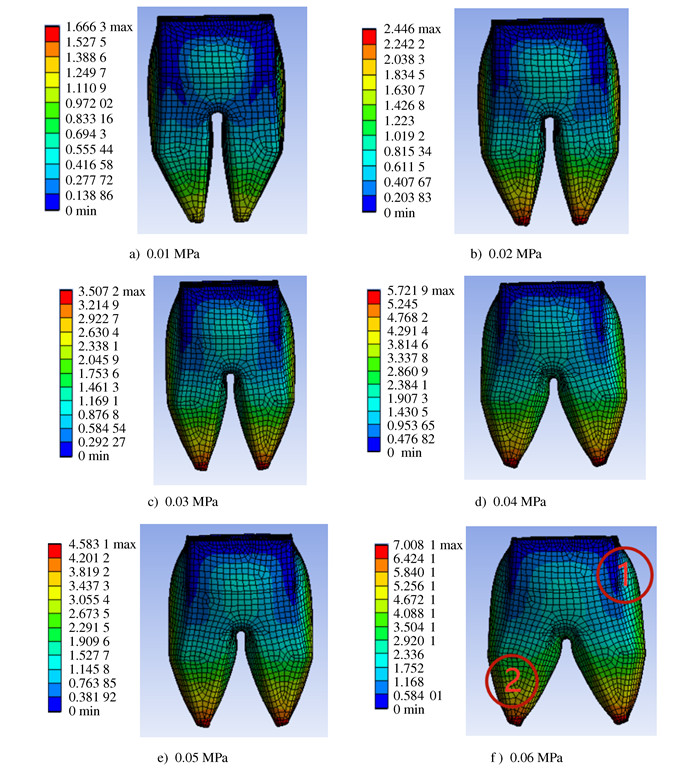
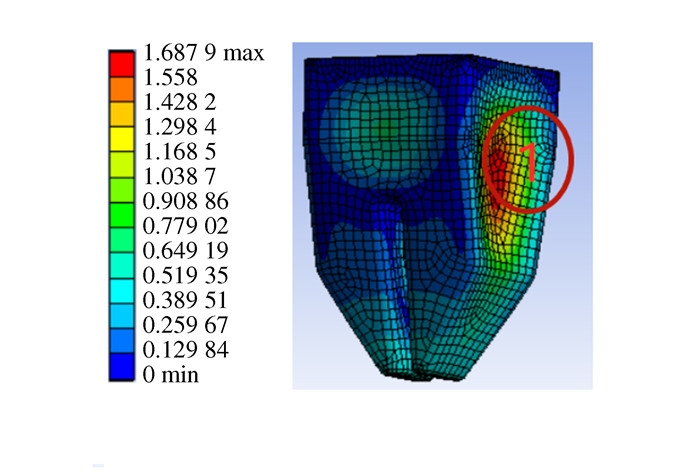
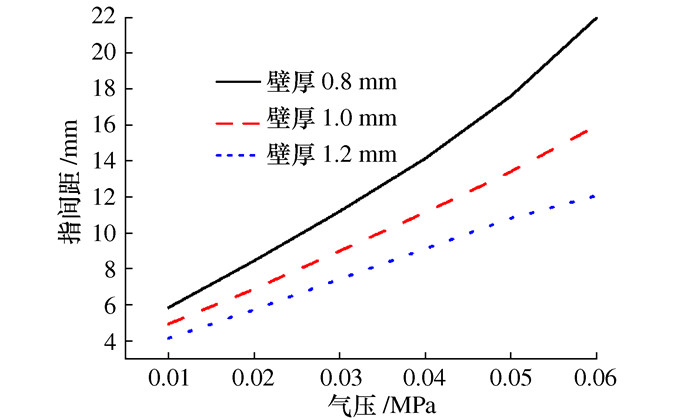
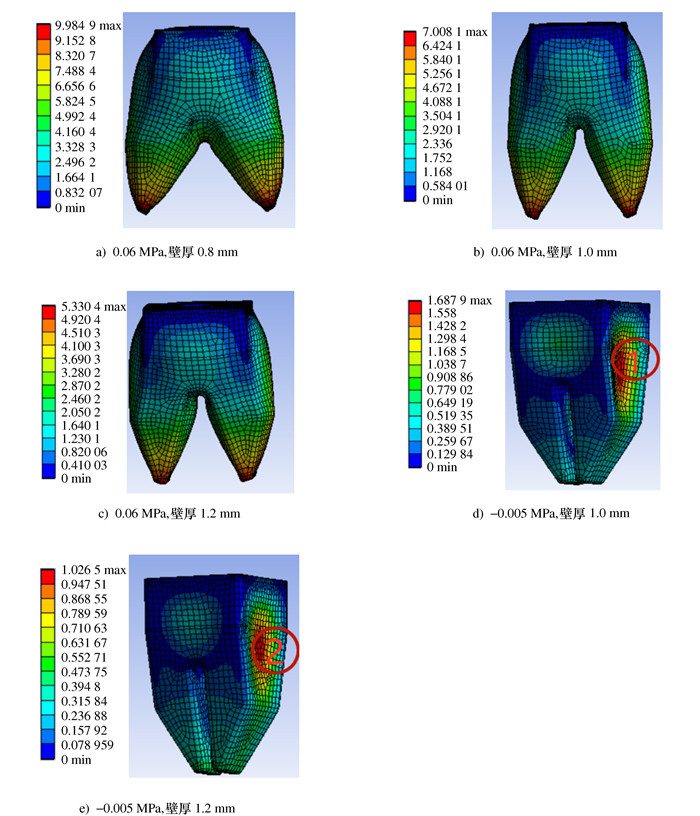
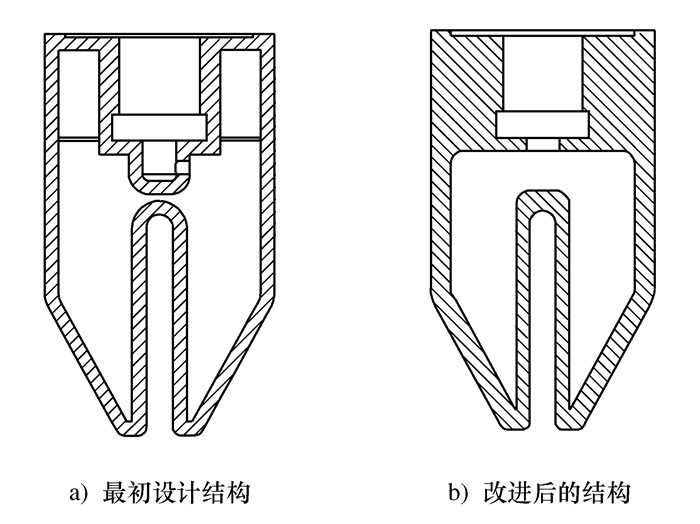
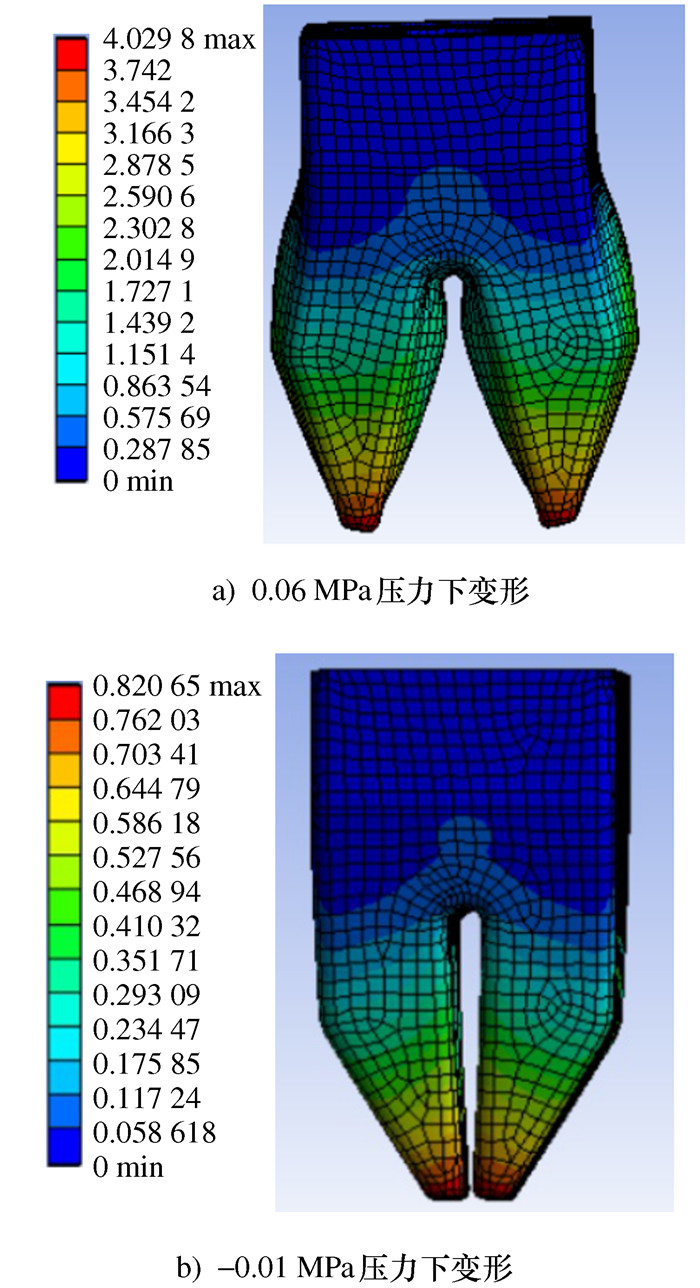
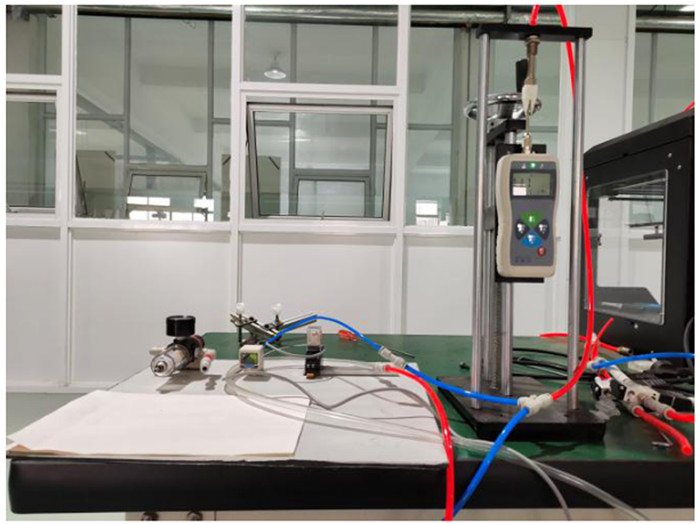
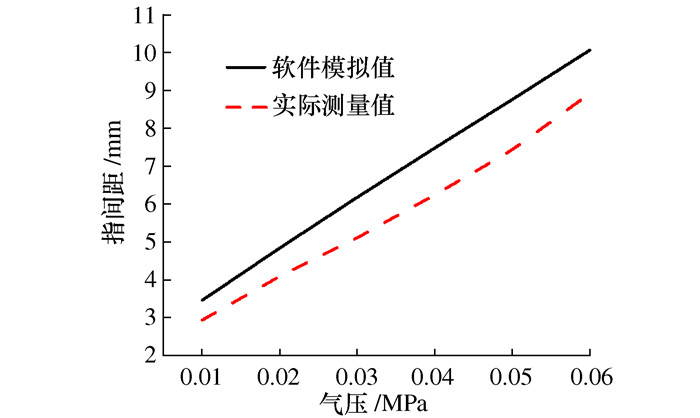
为实现微型易碎、不规则物体的稳定抓取,结合软体材料的柔顺性和鸟喙结构抓取的准确性,提出一种仿鸟喙微型气动软体机械手爪,该机械手爪不仅具有一般软体手爪良好的环境适应性,而且结构更加简洁,对微型物体尤其适用。利用Yeoh本构模型和Ansys软件,对手爪的弯曲特性做了有限元仿真,并根据仿真结果进行变壁厚和局部填充的优化。对优化后的手爪进行了弯曲特性、抓取力测试试验和适应性试验,验证了仿鸟喙微型气动软体机械手爪的可行性。
为实现微型易碎、不规则物体的稳定抓取,结合软体材料的柔顺性和鸟喙结构抓取的准确性,提出一种仿鸟喙微型气动软体机械手爪,该机械手爪不仅具有一般软体手爪良好的环境适应性,而且结构更加简洁,对微型物体尤其适用。利用Yeoh本构模型和Ansys软件,对手爪的弯曲特性做了有限元仿真,并根据仿真结果进行变壁厚和局部填充的优化。对优化后的手爪进行了弯曲特性、抓取力测试试验和适应性试验,验证了仿鸟喙微型气动软体机械手爪的可行性。





2022, 41(1): 75-81.
doi: 10.13433/j.cnki.1003-8728.20200625
摘要:
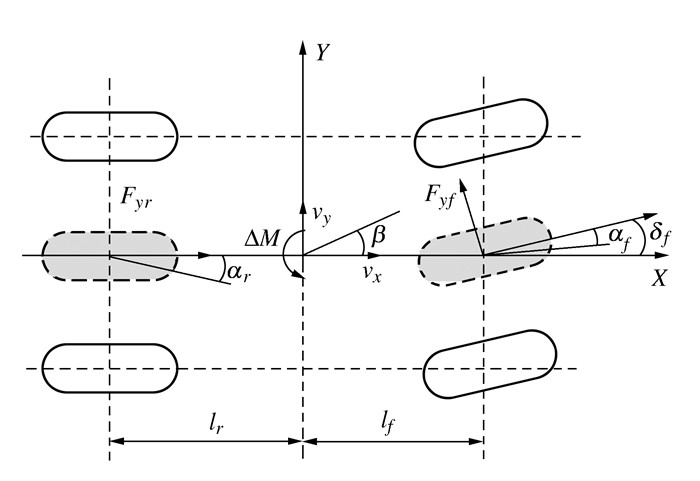
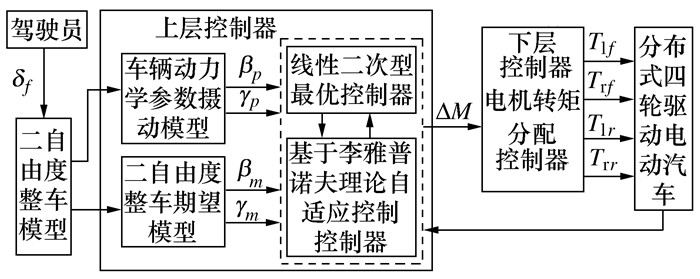
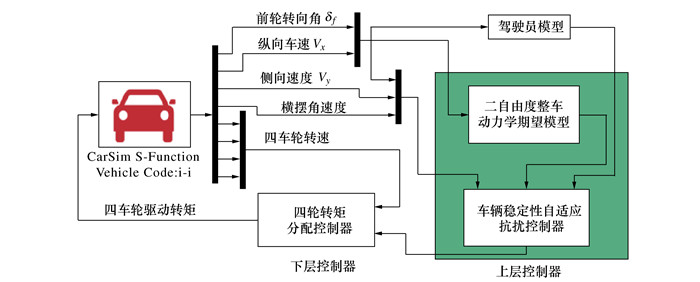
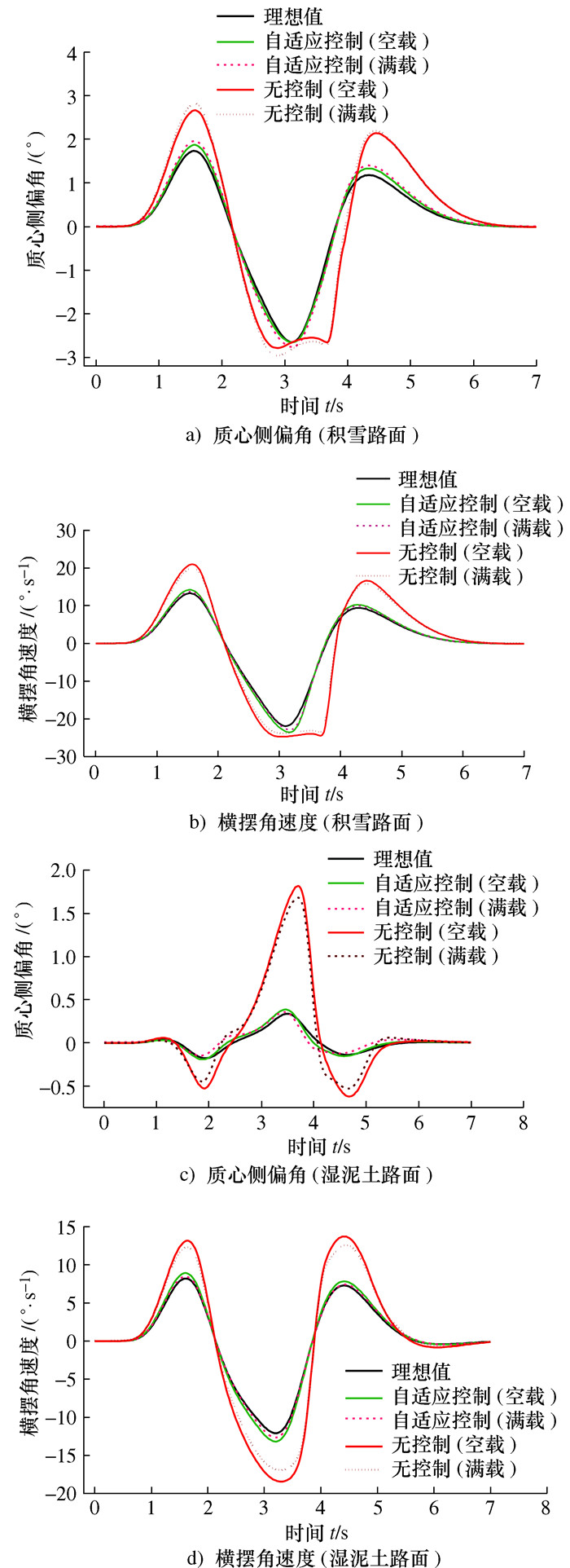
针对分布式驱动电动汽车动力学模型参数非线性扰动影响转矩控制的问题,提出一种新的转矩自适应分层控制方法。建立四轮独立驱动电动汽车二自由度车辆动力学模型及车辆期望动力学模型,设计线性二次型最优控制器实现车辆对理想二自由度模型横摆稳定性参数的跟踪控制,计算出主动附加横摆控制力矩。针对车辆动力学模型参数扰动情况,基于李雅普诺夫稳定性理论,运用自适应控制算法提升线性二次型最优控制器的自适应能力,减小控制对象参数变动造成的控制偏差。搭建CarSim与MATLAB/ Simulink联合仿真平台验证了该方法的有效性。仿真实验表明,所设计自适应抗扰转矩控制器可有效提升四轮独立驱动电动汽车的横摆稳定性。
针对分布式驱动电动汽车动力学模型参数非线性扰动影响转矩控制的问题,提出一种新的转矩自适应分层控制方法。建立四轮独立驱动电动汽车二自由度车辆动力学模型及车辆期望动力学模型,设计线性二次型最优控制器实现车辆对理想二自由度模型横摆稳定性参数的跟踪控制,计算出主动附加横摆控制力矩。针对车辆动力学模型参数扰动情况,基于李雅普诺夫稳定性理论,运用自适应控制算法提升线性二次型最优控制器的自适应能力,减小控制对象参数变动造成的控制偏差。搭建CarSim与MATLAB/ Simulink联合仿真平台验证了该方法的有效性。仿真实验表明,所设计自适应抗扰转矩控制器可有效提升四轮独立驱动电动汽车的横摆稳定性。

2022, 41(1): 82-87.
doi: 10.13433/j.cnki.1003-8728.20200334
摘要:
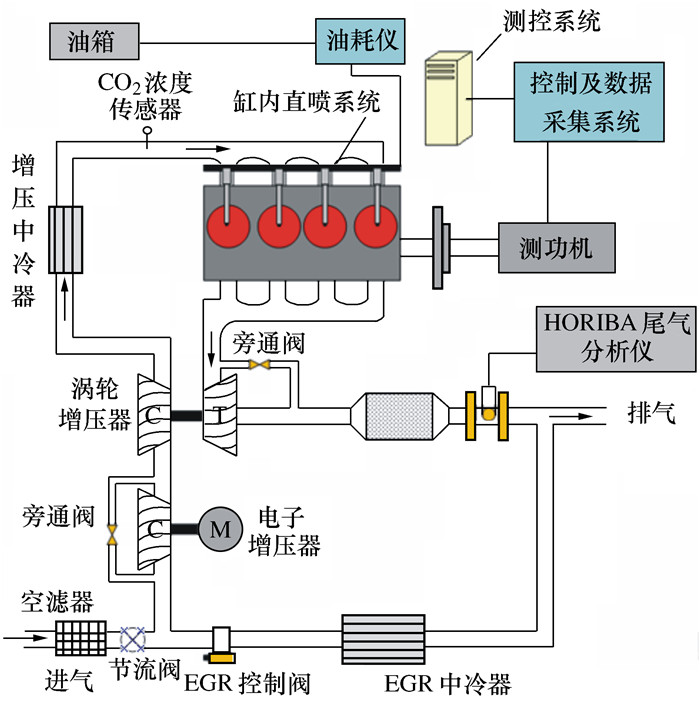
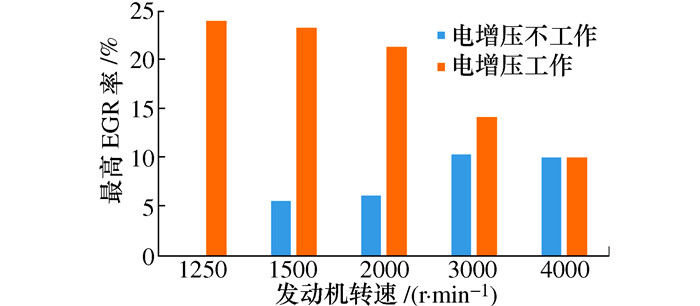
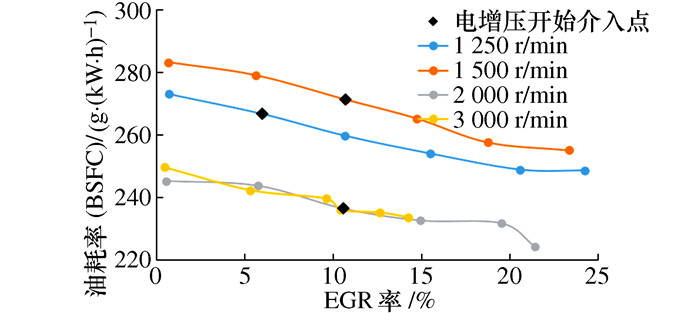
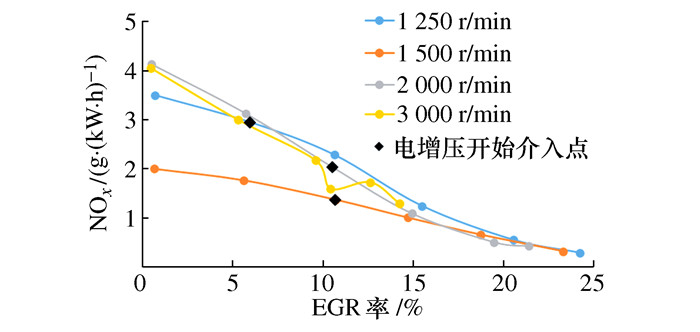
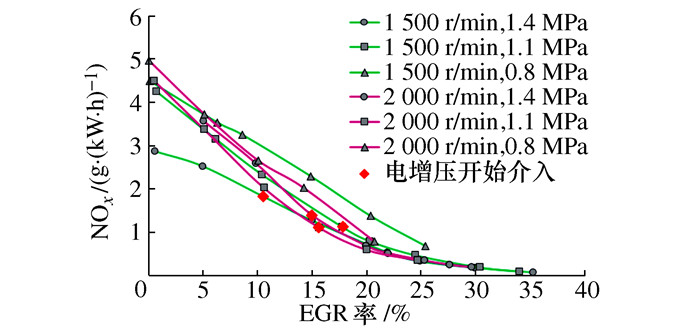
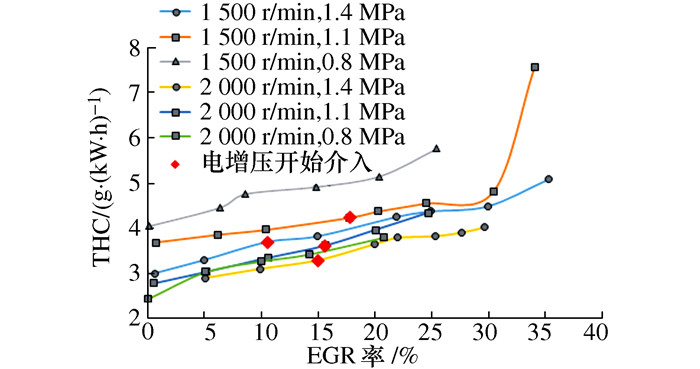
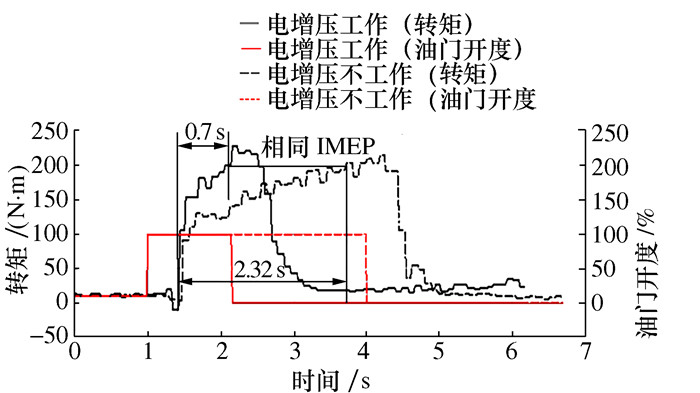
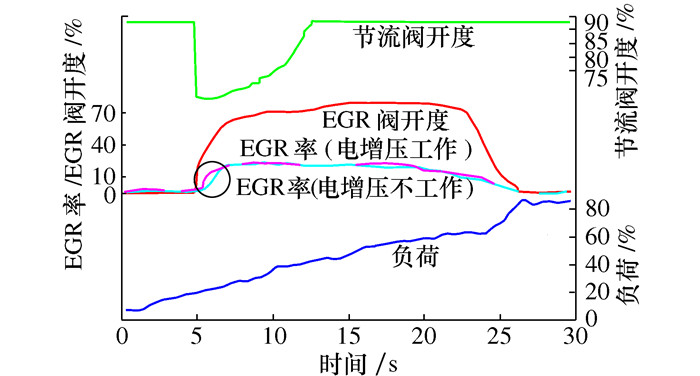
在一款采用废气涡轮增压的直喷汽油机上,进行了电动增压器和低压废气再循环(Low pressure exhaust gas recirculation,LP-EGR)技术组合对发动机经济性、NOx排放特性以及动力性、EGR率瞬态响应特性影响的试验研究。结果表明:电增压工作时,低速外特性EGR率可达到25%,使得1 250~2 000 r/min外特性的燃烧相位提前,油耗相对于电增压不工作时下降8.5%~10%,同时NOx排放显著降低;而在部分负荷工况下,电增压的泵吸作用使得最大EGR率大于30%,取得了油耗和NOx排放同时改善的综合效果,且最高油耗下降率可达10.8%;此外电增压工作时,1 500 r/min下负荷从0.2 MPa增大到1.5 MPa的瞬态响应时间缩短2/3;当发动机定转速加大负荷运行时,电增压工作时进气歧管目标EGR率的建立时间可缩短1.3 s,有效优化了发动机加速过程的运转控制参数。
在一款采用废气涡轮增压的直喷汽油机上,进行了电动增压器和低压废气再循环(Low pressure exhaust gas recirculation,LP-EGR)技术组合对发动机经济性、NOx排放特性以及动力性、EGR率瞬态响应特性影响的试验研究。结果表明:电增压工作时,低速外特性EGR率可达到25%,使得1 250~2 000 r/min外特性的燃烧相位提前,油耗相对于电增压不工作时下降8.5%~10%,同时NOx排放显著降低;而在部分负荷工况下,电增压的泵吸作用使得最大EGR率大于30%,取得了油耗和NOx排放同时改善的综合效果,且最高油耗下降率可达10.8%;此外电增压工作时,1 500 r/min下负荷从0.2 MPa增大到1.5 MPa的瞬态响应时间缩短2/3;当发动机定转速加大负荷运行时,电增压工作时进气歧管目标EGR率的建立时间可缩短1.3 s,有效优化了发动机加速过程的运转控制参数。






2022, 41(1): 88-97.
doi: 10.13433/j.cnki.1003-8728.20200626
摘要:
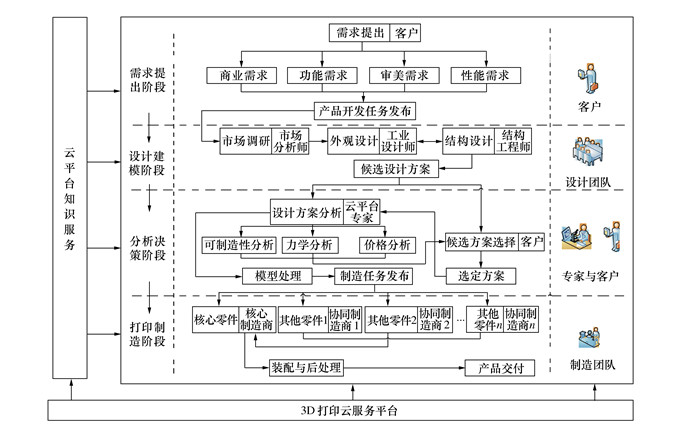
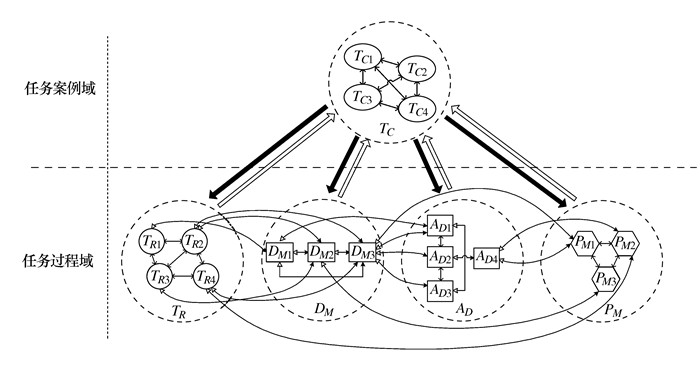
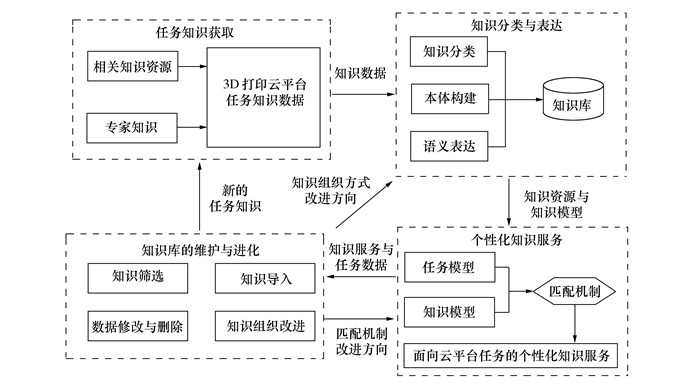
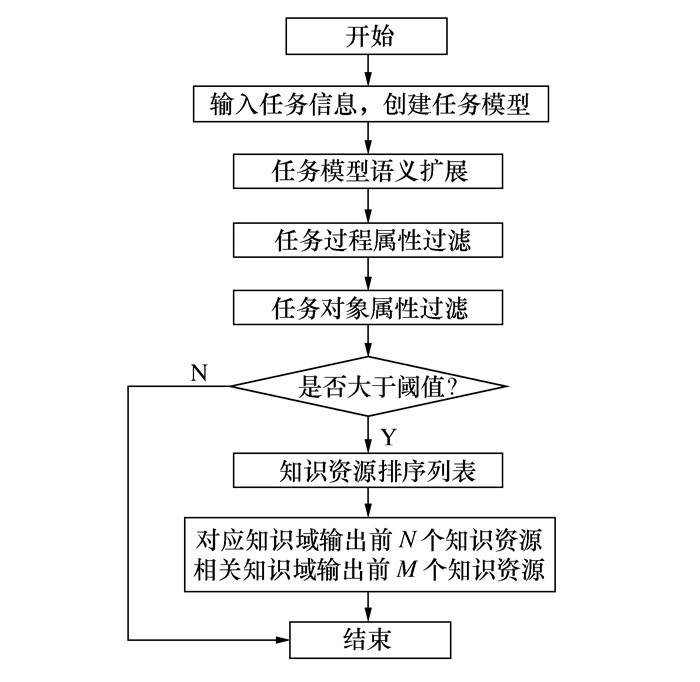
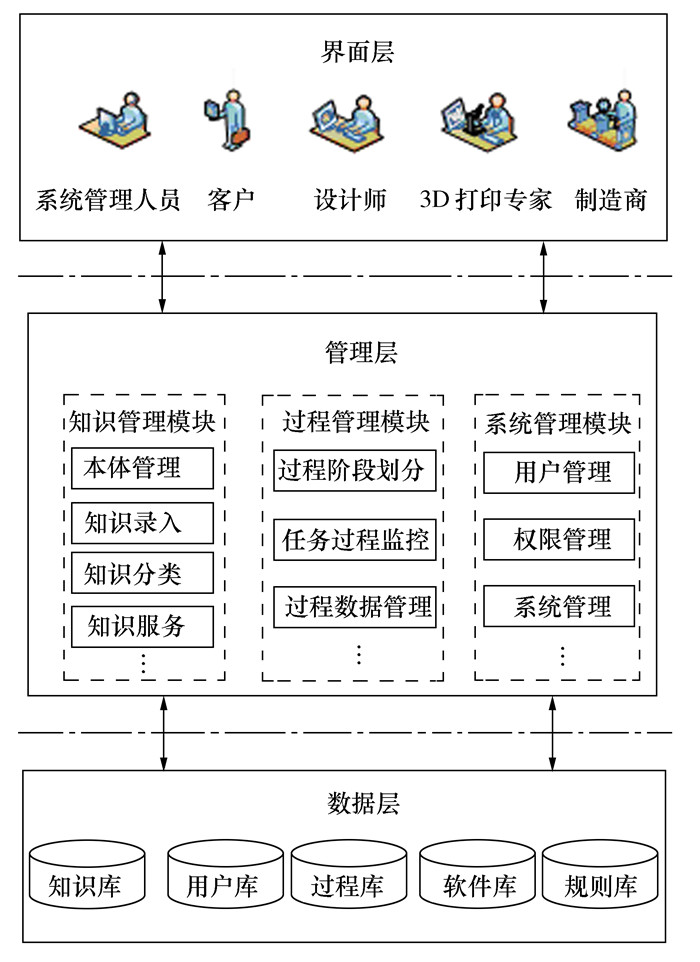
为了有效辅助用户在3D打印云服务平台上完成产品开发任务,针对3D打印云平台任务流程复杂、任务主体类型多样的特点,提出一种面向任务信息的3D打印云服务平台知识管理模型。梳理了3D打印云平台知识类型,分析了平台典型任务过程并建立了任务阶段间的信息交互映射模型。构建了3D打印云平台知识管理模式,基于本体对知识和任务进行了语义化表示,针对特定任务阶段,提出了综合任务过程属性和任务对象属性的知识双重过滤模型,通过任务对象属性语义扩展保证了知识方案的完整性,实现了个性化的知识服务。开发了3D打印云平台环境下的知识管理系统,通过案例验证了本文提出的管理模型的可行性和合理性。
为了有效辅助用户在3D打印云服务平台上完成产品开发任务,针对3D打印云平台任务流程复杂、任务主体类型多样的特点,提出一种面向任务信息的3D打印云服务平台知识管理模型。梳理了3D打印云平台知识类型,分析了平台典型任务过程并建立了任务阶段间的信息交互映射模型。构建了3D打印云平台知识管理模式,基于本体对知识和任务进行了语义化表示,针对特定任务阶段,提出了综合任务过程属性和任务对象属性的知识双重过滤模型,通过任务对象属性语义扩展保证了知识方案的完整性,实现了个性化的知识服务。开发了3D打印云平台环境下的知识管理系统,通过案例验证了本文提出的管理模型的可行性和合理性。

2022, 41(1): 98-103.
doi: 10.13433/j.cnki.1003-8728.20200303
摘要:
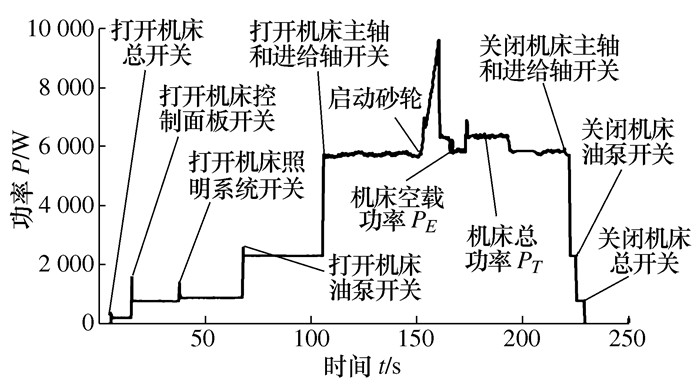
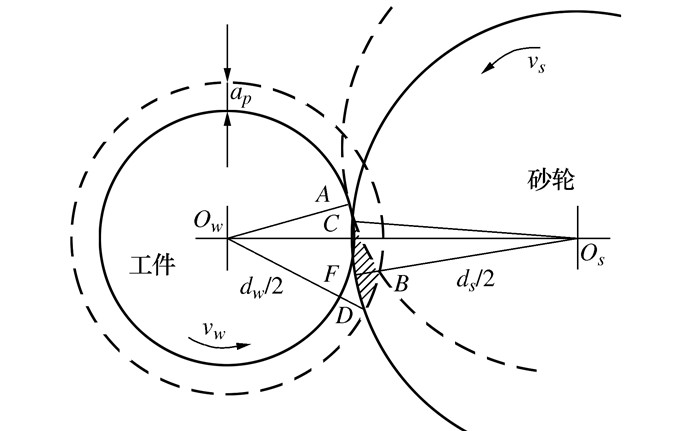
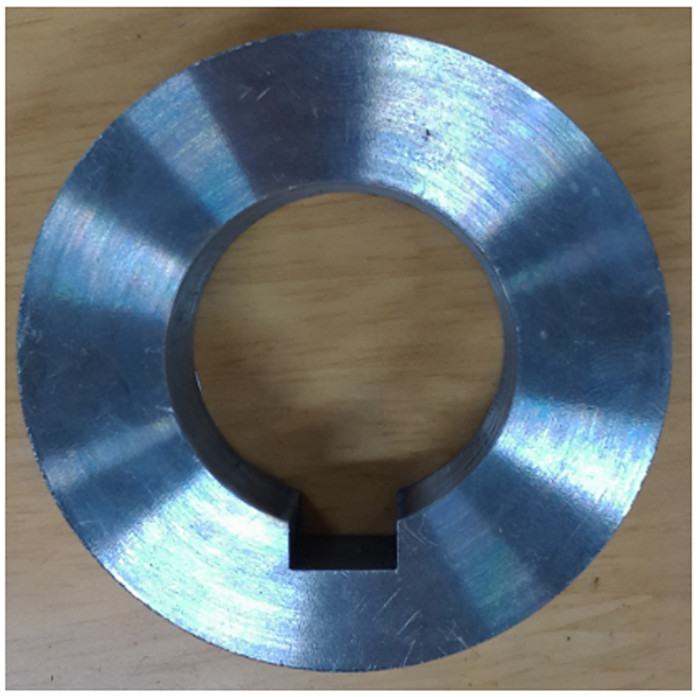
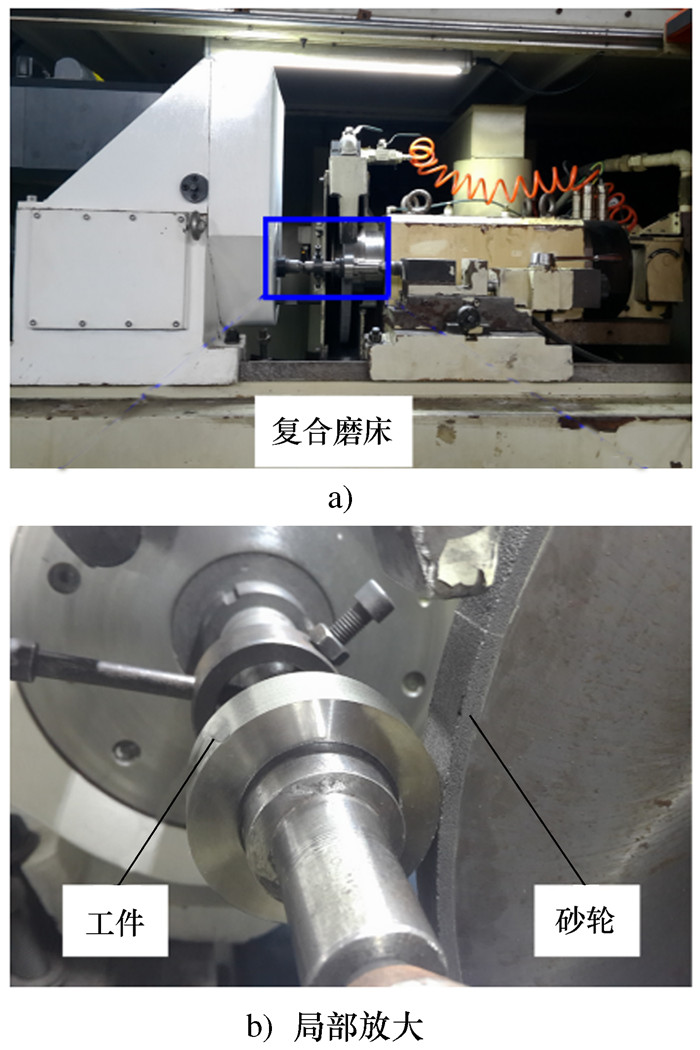
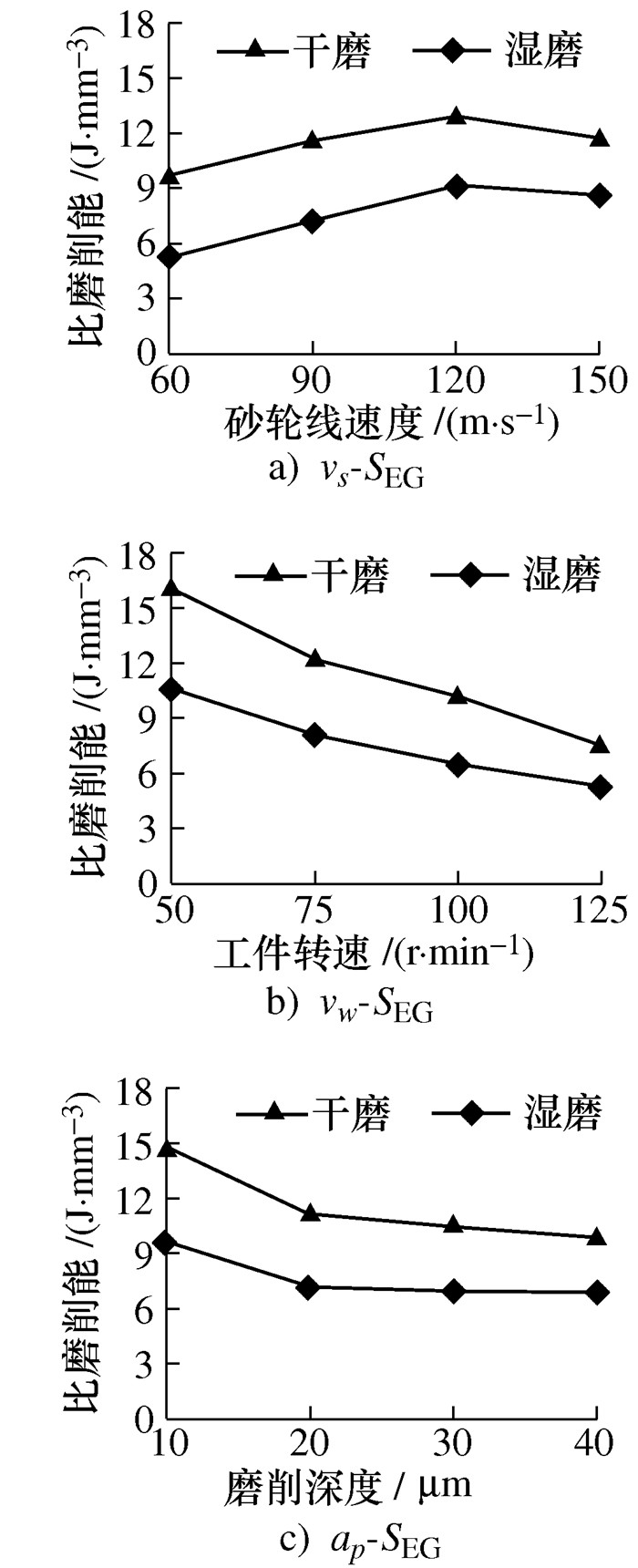
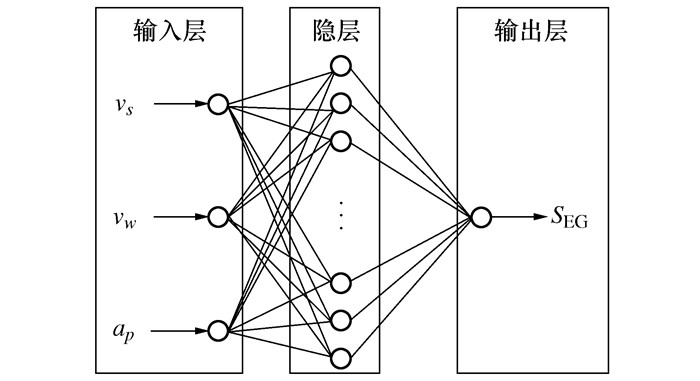
采用正交试验法研究干磨和湿磨方式下砂轮线速度、工件转速、磨削深度对合金钢40CrNiMoA高速外圆磨削比能的影响,并建立基于BP神经网络的磨削比能预测模型,最后对预测结果进行验证。结果表明:合金钢40CrNiMoA高速外圆磨削比能随砂轮线速度增大呈现先增加后减小的趋势,随工件转速、磨削深度的增大而减小,工件转速对磨削比能的影响程度最大;湿磨方式的磨削比能比干磨方式的小。在试验工艺参数范围内,当砂轮线速度为60 m/s、工件转速为125 r/min、磨削深度为40 μm时,磨削比能最小;预测模型的预测值与试验结果的绝对误差小于10%,表明BP神经网络预测模型是有效的。
采用正交试验法研究干磨和湿磨方式下砂轮线速度、工件转速、磨削深度对合金钢40CrNiMoA高速外圆磨削比能的影响,并建立基于BP神经网络的磨削比能预测模型,最后对预测结果进行验证。结果表明:合金钢40CrNiMoA高速外圆磨削比能随砂轮线速度增大呈现先增加后减小的趋势,随工件转速、磨削深度的增大而减小,工件转速对磨削比能的影响程度最大;湿磨方式的磨削比能比干磨方式的小。在试验工艺参数范围内,当砂轮线速度为60 m/s、工件转速为125 r/min、磨削深度为40 μm时,磨削比能最小;预测模型的预测值与试验结果的绝对误差小于10%,表明BP神经网络预测模型是有效的。
2022, 41(1): 111-119.
doi: 10.13433/j.cnki.1003-8728.20200333
摘要:
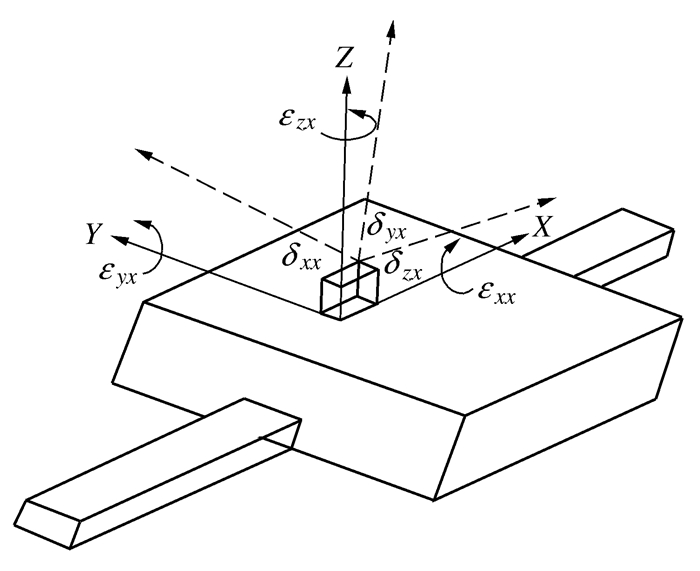
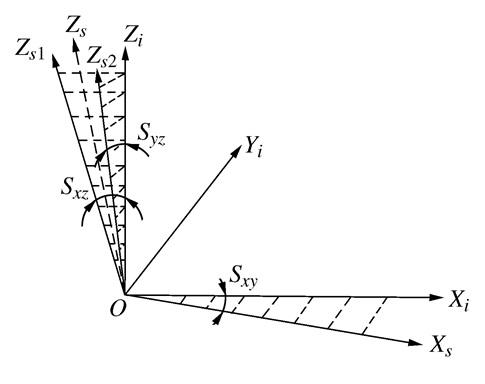
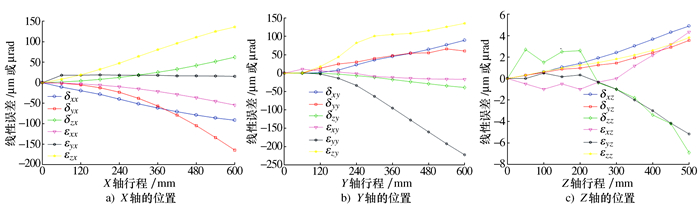
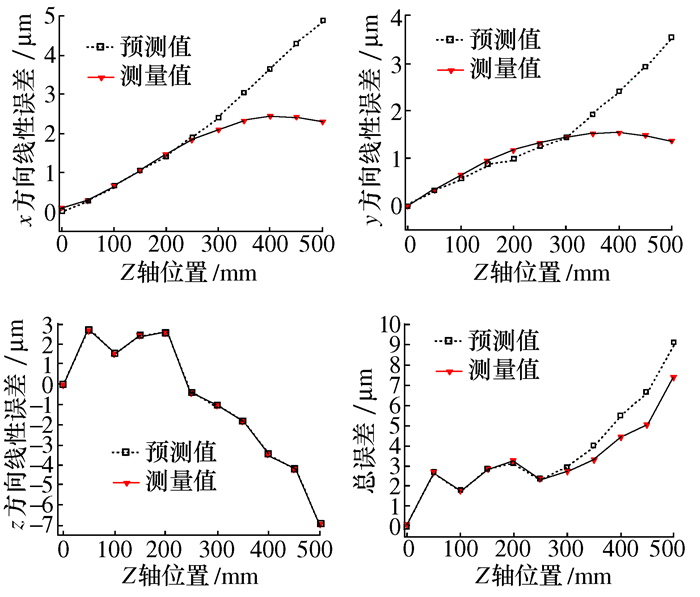
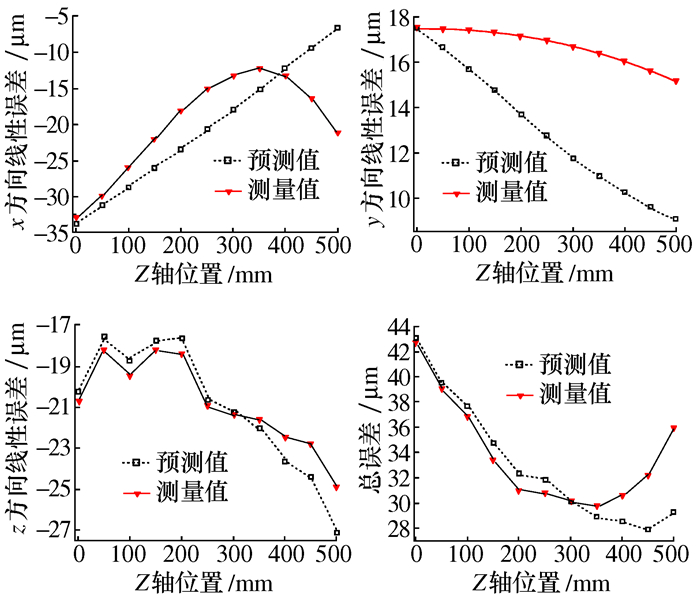
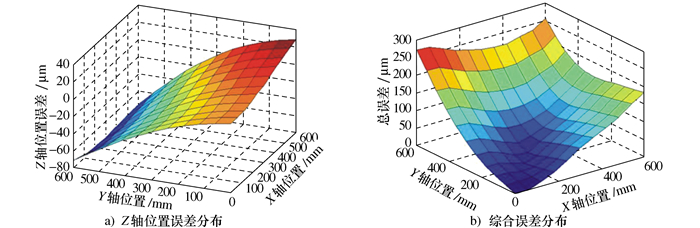
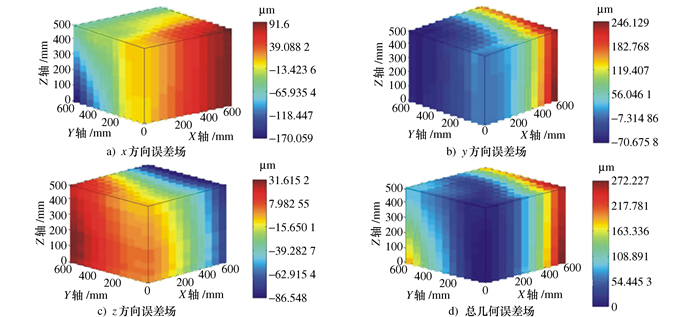
以三轴立式加工中心为研究对象, 提出一种基于指数积(Product of exponential, POE)旋量理论的几何误差综合建模方法。首先根据误差和旋量的几何定义建立3个旋量来表示各个轴的6项基本几何误差元素, 综合3个旋量建立各个轴的误差POE模型; 其次在POE建模时考虑垂直度误差, 根据垂直度误差的几何属性提出获得垂直度误差POE模型的两种方法; 此外根据机床拓扑结构确定旋量和相应指数矩阵的相乘次序, 建立综合几何误差POE模型。最后在某三轴立式加工中心上进行建模实验, 结果表明本文方法足够有效和精确, 根据综合误差模型得到数控机床的误差场。
以三轴立式加工中心为研究对象, 提出一种基于指数积(Product of exponential, POE)旋量理论的几何误差综合建模方法。首先根据误差和旋量的几何定义建立3个旋量来表示各个轴的6项基本几何误差元素, 综合3个旋量建立各个轴的误差POE模型; 其次在POE建模时考虑垂直度误差, 根据垂直度误差的几何属性提出获得垂直度误差POE模型的两种方法; 此外根据机床拓扑结构确定旋量和相应指数矩阵的相乘次序, 建立综合几何误差POE模型。最后在某三轴立式加工中心上进行建模实验, 结果表明本文方法足够有效和精确, 根据综合误差模型得到数控机床的误差场。




2022, 41(1): 120-126.
doi: 10.13433/j.cnki.1003-8728.20200309
摘要:
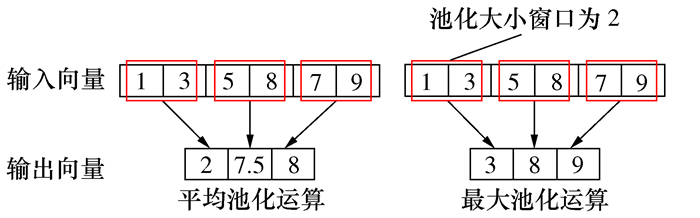
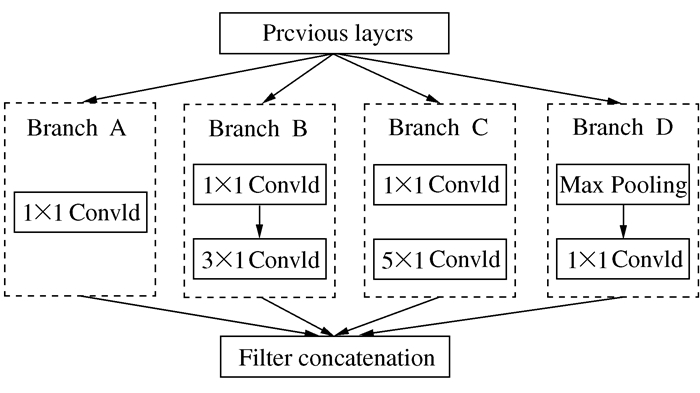
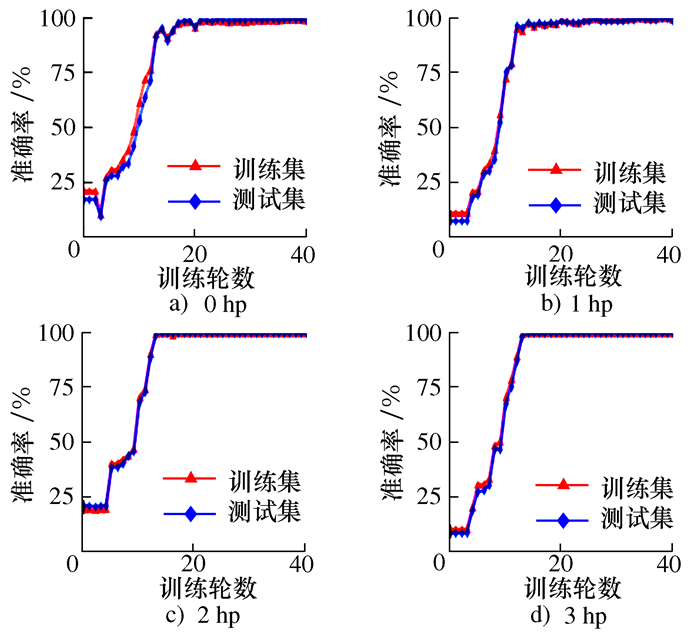
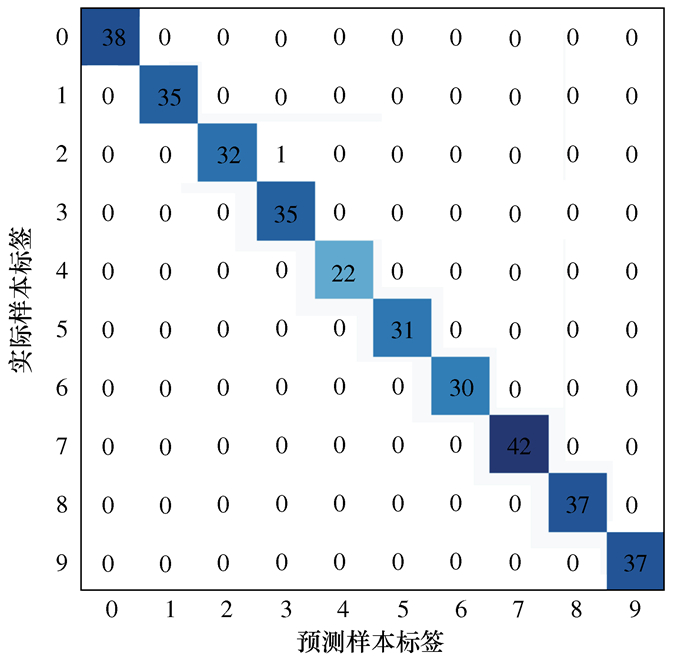
为了有效利用来自实际生产中监测系统的海量数据, 并结合一维卷积网络在处理一维数据的优势, 提出一种端到端的一维多尺度卷积神经网络滚动轴承故障诊断方法。首先使用两个一维卷积层和池化层将输入振动信号的长度缩减并增加通道数, 然后利用多尺度并行一维卷积核对上层输出特征进行不同尺度上的反复提取和重构, 最后将提取到的特征输入到一个全连接层进行故障分类。为验证算法的有效性, 通过对滚动轴承不同工况、不同训练样本以及与支持向量机、BP神经网络和循环神经网络等算法对比分析。结果表明提出的模型及方法具有较好的识别效果, 滚动轴承故障诊断正确率达到99.78%。
为了有效利用来自实际生产中监测系统的海量数据, 并结合一维卷积网络在处理一维数据的优势, 提出一种端到端的一维多尺度卷积神经网络滚动轴承故障诊断方法。首先使用两个一维卷积层和池化层将输入振动信号的长度缩减并增加通道数, 然后利用多尺度并行一维卷积核对上层输出特征进行不同尺度上的反复提取和重构, 最后将提取到的特征输入到一个全连接层进行故障分类。为验证算法的有效性, 通过对滚动轴承不同工况、不同训练样本以及与支持向量机、BP神经网络和循环神经网络等算法对比分析。结果表明提出的模型及方法具有较好的识别效果, 滚动轴承故障诊断正确率达到99.78%。



2022, 41(1): 127-133.
doi: 10.13433/j.cnki.1003-8728.20200640
摘要:
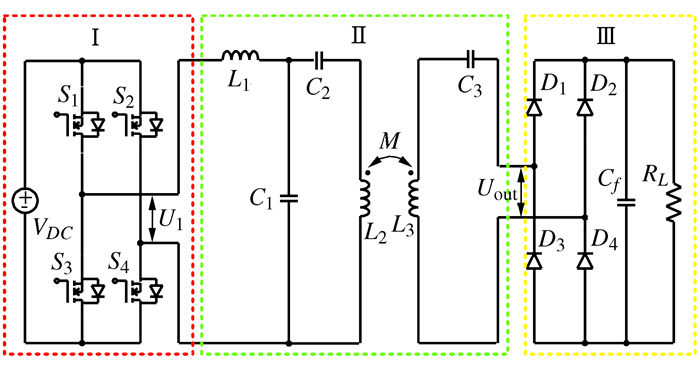
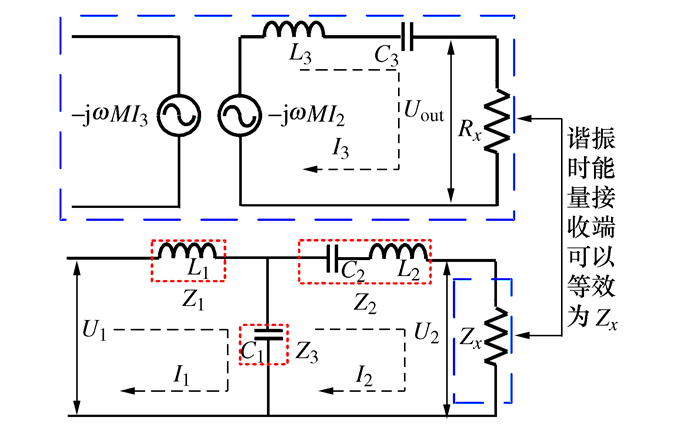
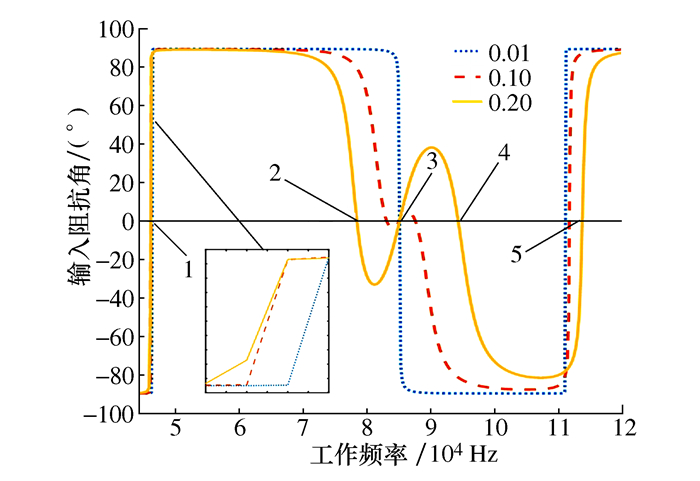
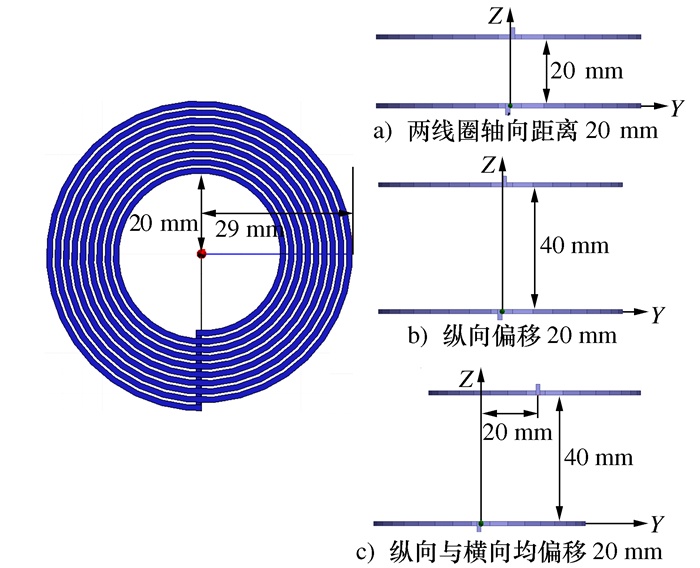
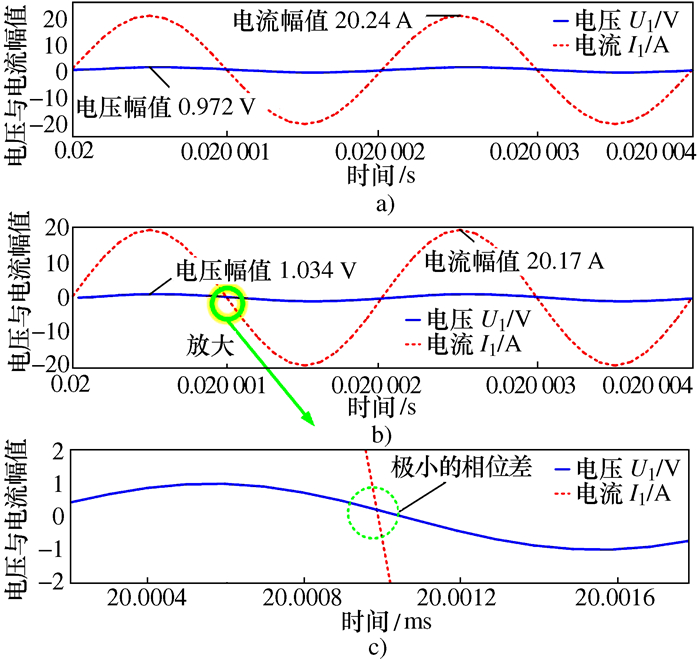
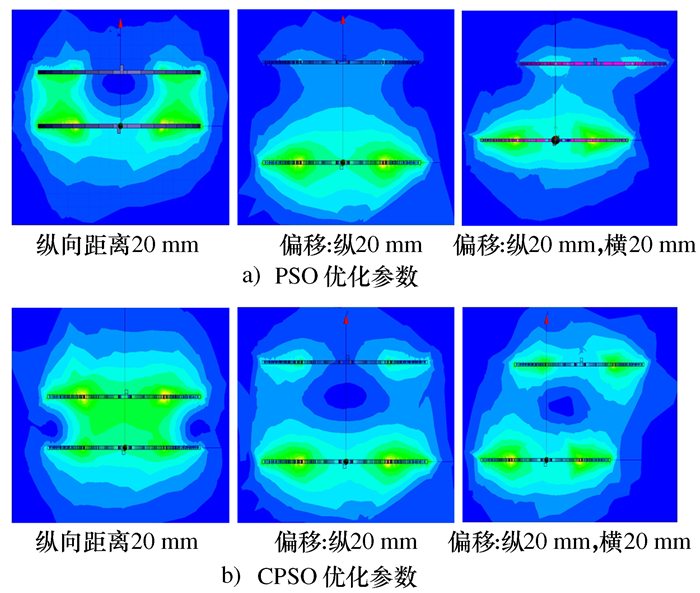
针对移动监测型传感器种类不同且位置可变的特性, 确定LCC/S磁谐振耦合机构工作模式。由于该型无线电能传输系统谐振补偿拓扑参数配置困难, 使得系统难以同时兼顾输出效率与输出功率, 提出一种以系统传输效率为目标函数, 以传感器移动范围内所需功率为限制条件的约束模型; 然后引入罚函数将约束模型转化为无约束模型, 通过粒子群算法进行参数优化, 使得系统在满足传感器所需功率的同时传输效率最大化。最后通过仿真验证了所提优化方法的有效性。
针对移动监测型传感器种类不同且位置可变的特性, 确定LCC/S磁谐振耦合机构工作模式。由于该型无线电能传输系统谐振补偿拓扑参数配置困难, 使得系统难以同时兼顾输出效率与输出功率, 提出一种以系统传输效率为目标函数, 以传感器移动范围内所需功率为限制条件的约束模型; 然后引入罚函数将约束模型转化为无约束模型, 通过粒子群算法进行参数优化, 使得系统在满足传感器所需功率的同时传输效率最大化。最后通过仿真验证了所提优化方法的有效性。







2022, 41(1): 134-142.
doi: 10.13433/j.cnki.1003-8728.20200304
摘要:
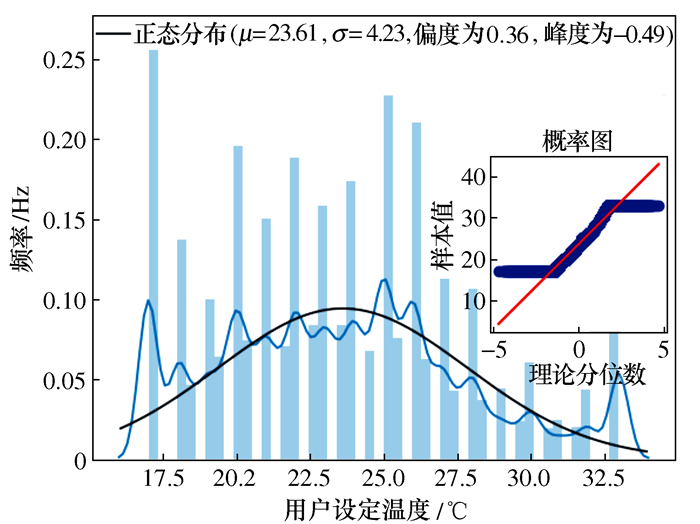
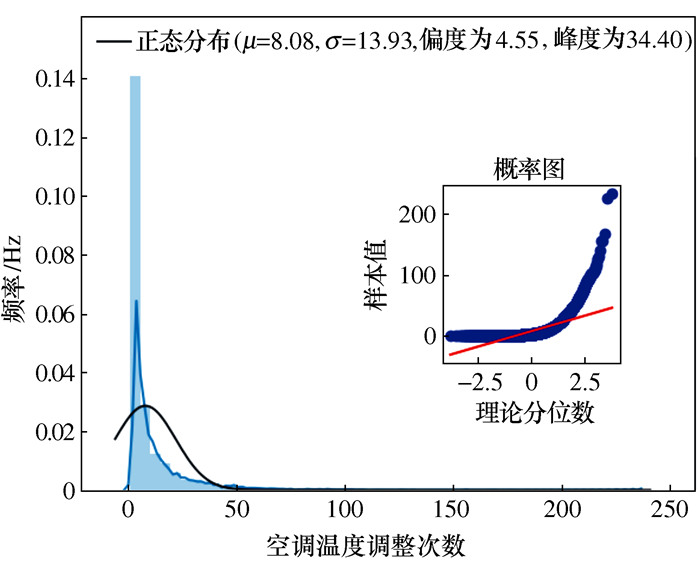
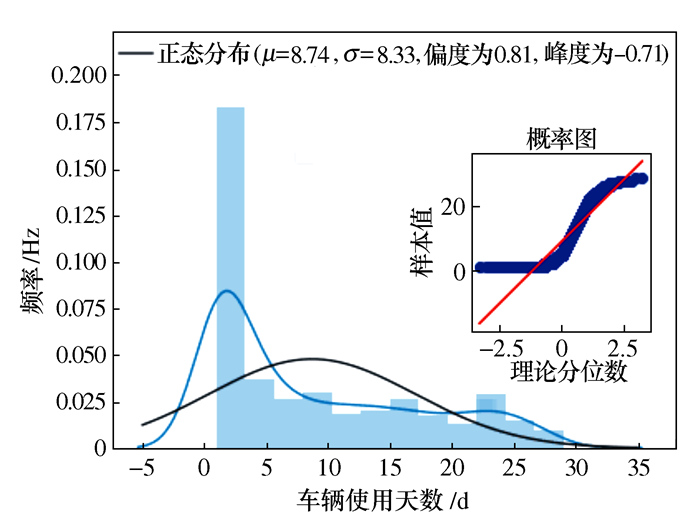
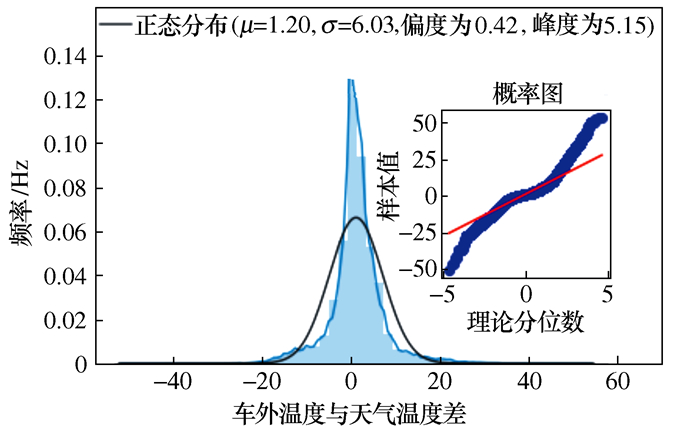
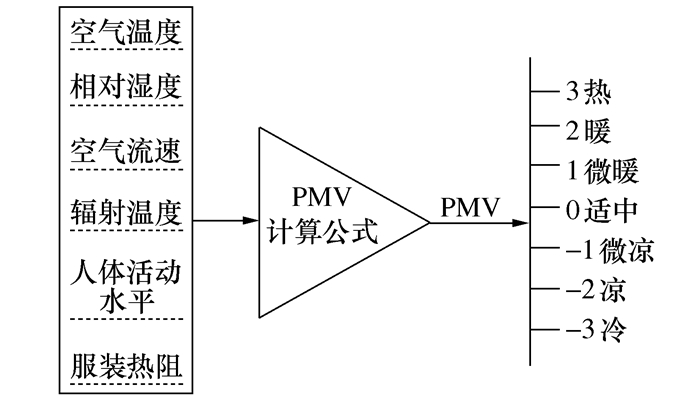
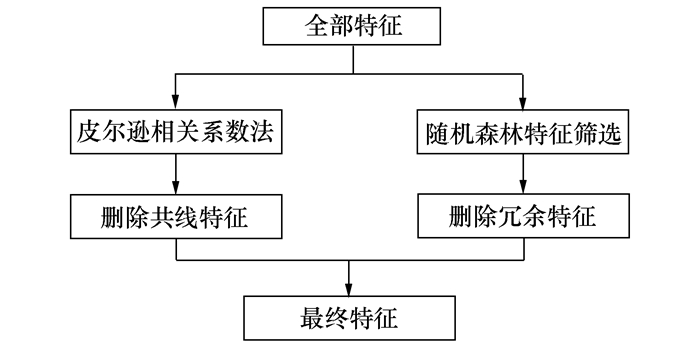
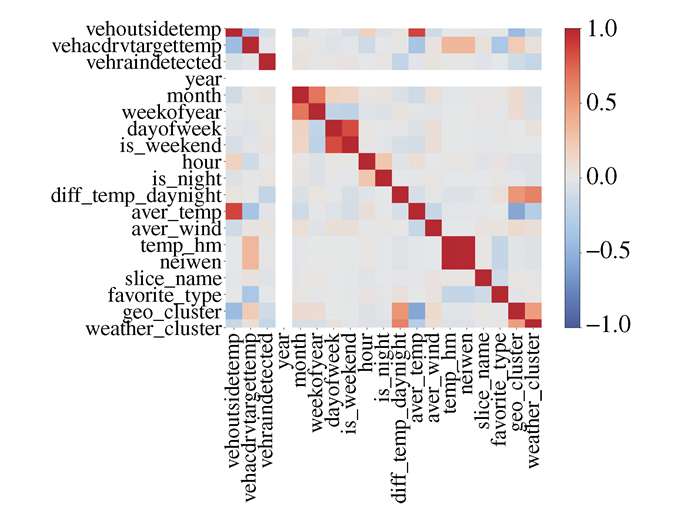
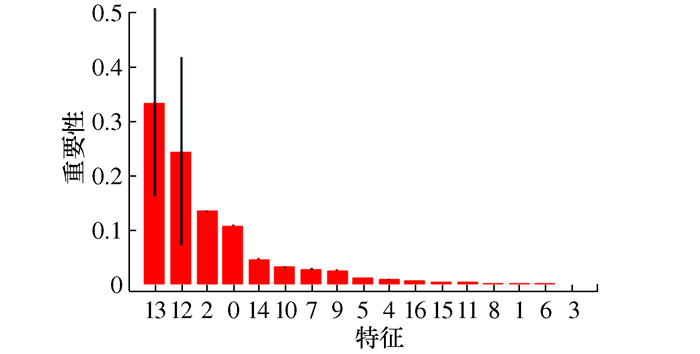
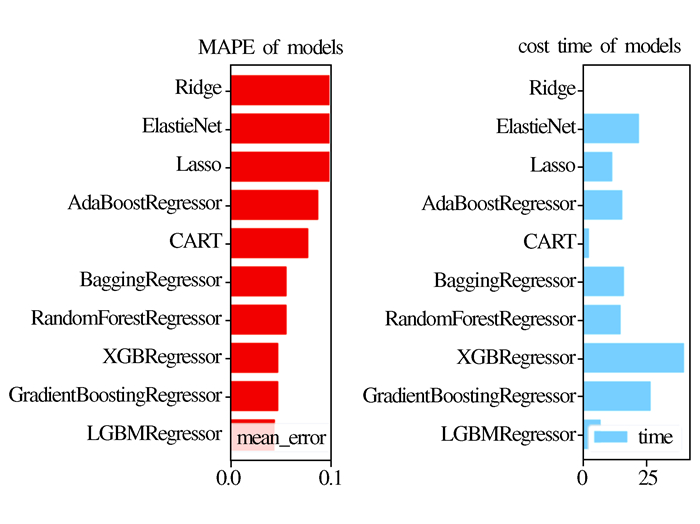
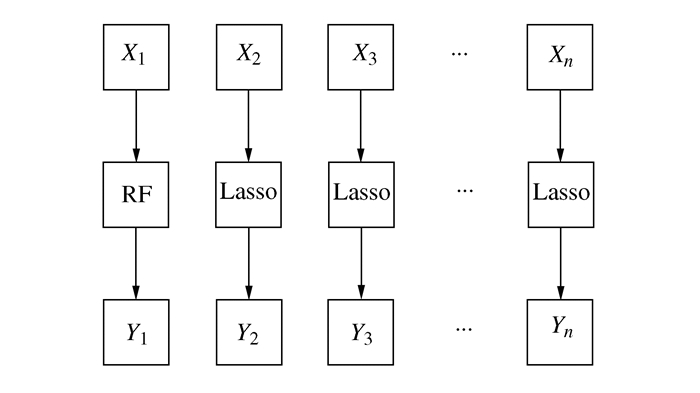
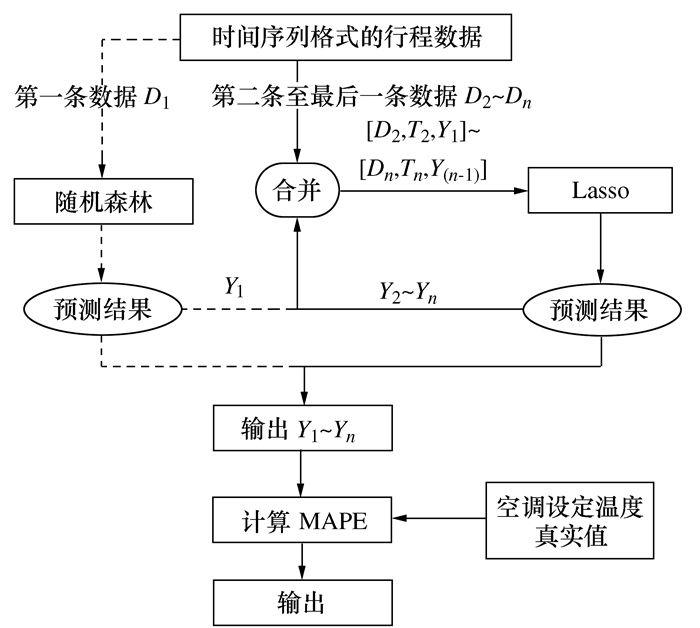
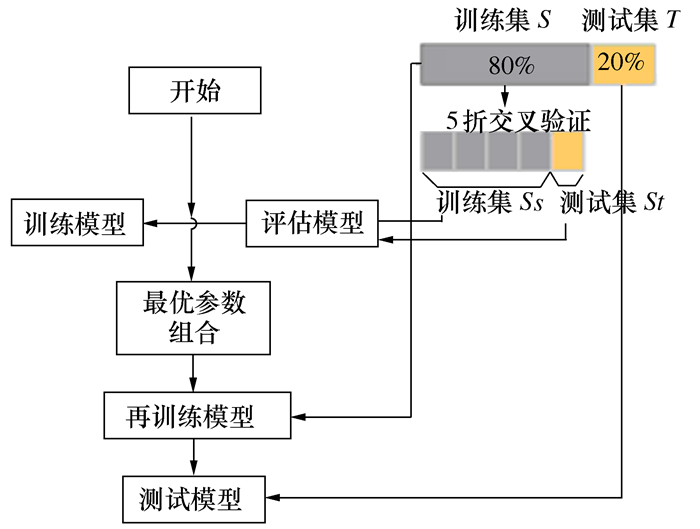
为了对用户期望的车载空调温度进行实时预测, 本文提出了一种习惯温度预测模型和时间序列温度预测模型双模型耦合的方法对车载空调设定温度进行实时预测。该方法以车内和外界的多维度信息作为输入, 通过过滤式和随机森林对特征进行筛选, 并根据实际应用场景集成模型来对用户期望的空调设定温度进行预测。最后使用该模型对测试数据进行验证。结果表明本文提出的双模型耦合的方法对用户空调设定温度的预测结果平均绝对百分比误差(MAPE)为0.049, 能够精确地对车载空调温度进行预测, 从而为智能化、个性化调控空调提供辅助决策。
为了对用户期望的车载空调温度进行实时预测, 本文提出了一种习惯温度预测模型和时间序列温度预测模型双模型耦合的方法对车载空调设定温度进行实时预测。该方法以车内和外界的多维度信息作为输入, 通过过滤式和随机森林对特征进行筛选, 并根据实际应用场景集成模型来对用户期望的空调设定温度进行预测。最后使用该模型对测试数据进行验证。结果表明本文提出的双模型耦合的方法对用户空调设定温度的预测结果平均绝对百分比误差(MAPE)为0.049, 能够精确地对车载空调温度进行预测, 从而为智能化、个性化调控空调提供辅助决策。



2022, 41(1): 143-150.
doi: 10.13433/j.cnki.1003-8728.20200330
摘要:
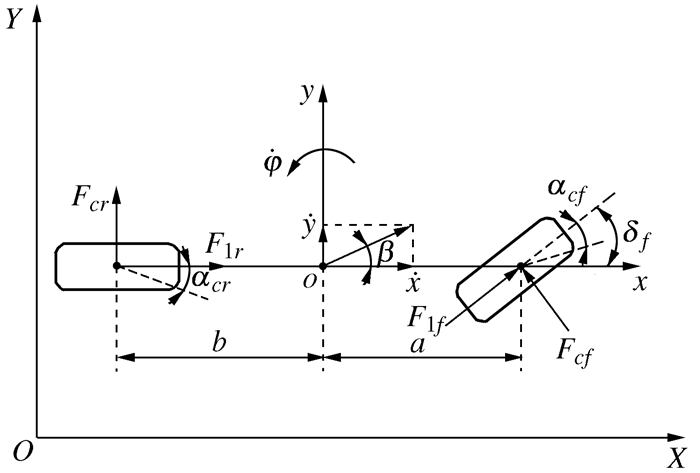
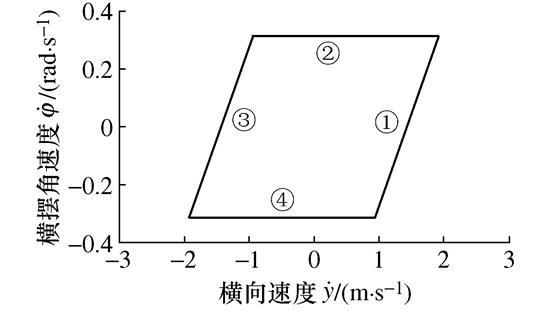
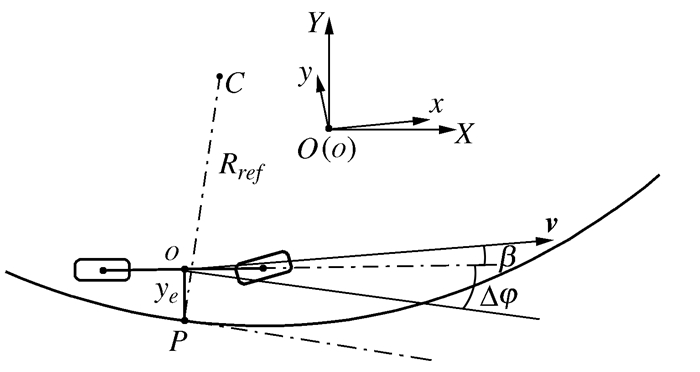
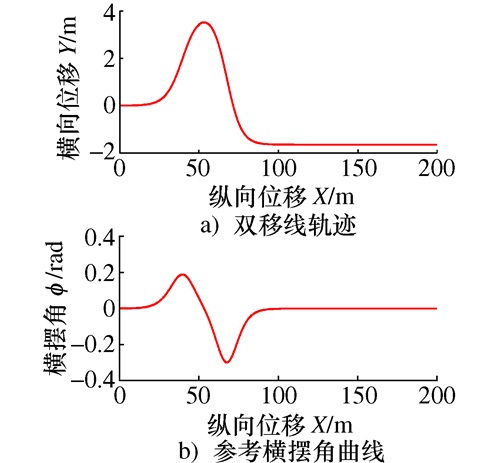
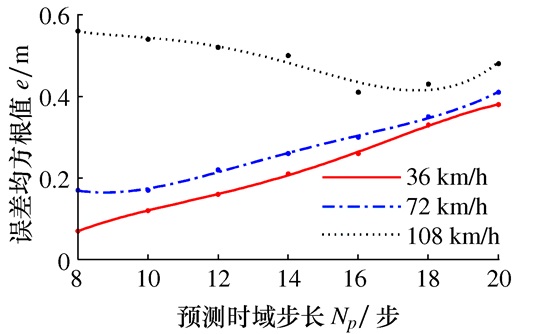
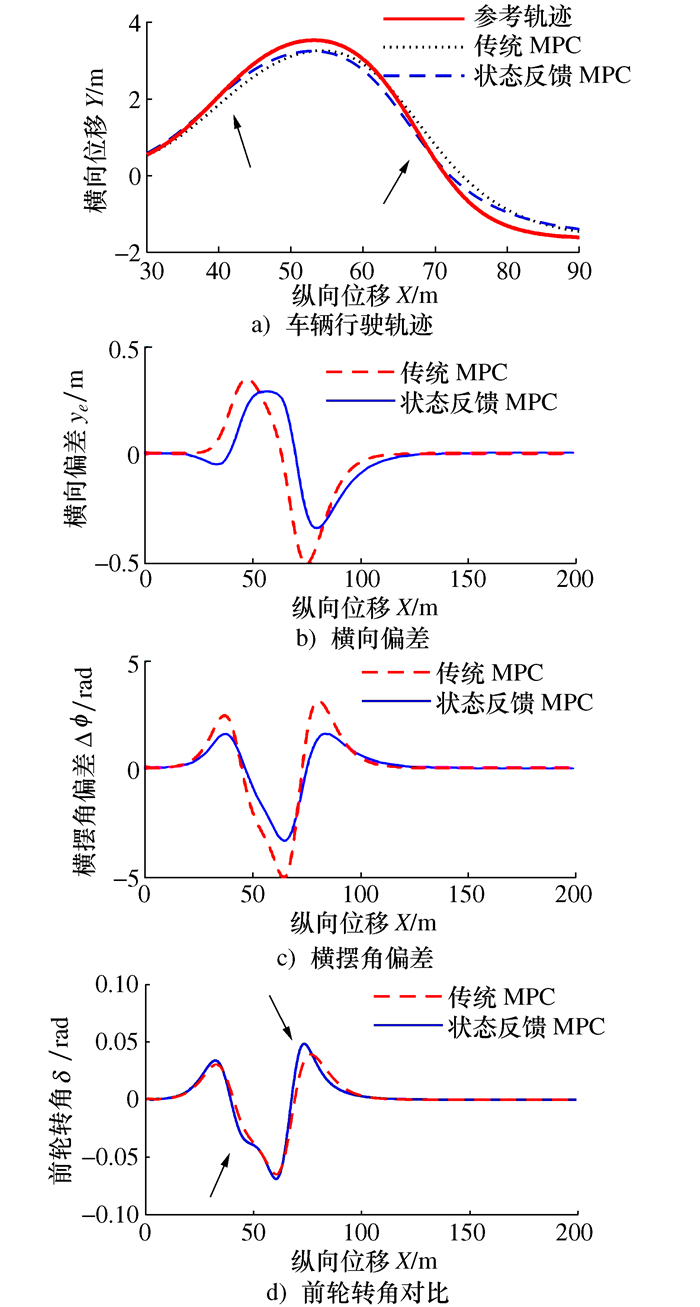
针对采用传统模型预测控制器的车辆在弯道内跟踪精度难以保证的问题, 本文提出了一种基于状态反馈的路径跟踪横向控制策略。基于车辆动力学模型, 建立考虑轮胎滑移包络线约束条件的路径跟踪模型预测控制器, 并根据车速选择合适的控制器时域参数; 以车辆质心位置为控制点建立车辆跟踪误差模型, 结合车辆当前位置横摆角偏差建立状态反馈调节器, 通过LQR最优控制方法对无人车姿态进行校正。利用MATLAB/Simulink和Carsim软件对改进的状态反馈控制策略进行了仿真验证, 典型双移线道路仿真试验表明: 中低车速下车辆路径跟踪横向偏差降低了16 %以上, 横摆角偏差降低了33 %以上, 所设计控制器能够有效提高车辆路径跟踪精度, 可保证车辆对变曲率弯道具有适应性和行驶稳定性。
针对采用传统模型预测控制器的车辆在弯道内跟踪精度难以保证的问题, 本文提出了一种基于状态反馈的路径跟踪横向控制策略。基于车辆动力学模型, 建立考虑轮胎滑移包络线约束条件的路径跟踪模型预测控制器, 并根据车速选择合适的控制器时域参数; 以车辆质心位置为控制点建立车辆跟踪误差模型, 结合车辆当前位置横摆角偏差建立状态反馈调节器, 通过LQR最优控制方法对无人车姿态进行校正。利用MATLAB/Simulink和Carsim软件对改进的状态反馈控制策略进行了仿真验证, 典型双移线道路仿真试验表明: 中低车速下车辆路径跟踪横向偏差降低了16 %以上, 横摆角偏差降低了33 %以上, 所设计控制器能够有效提高车辆路径跟踪精度, 可保证车辆对变曲率弯道具有适应性和行驶稳定性。



2022, 41(1): 151-158.
doi: 10.13433/j.cnki.1003-8728.20200301
摘要:
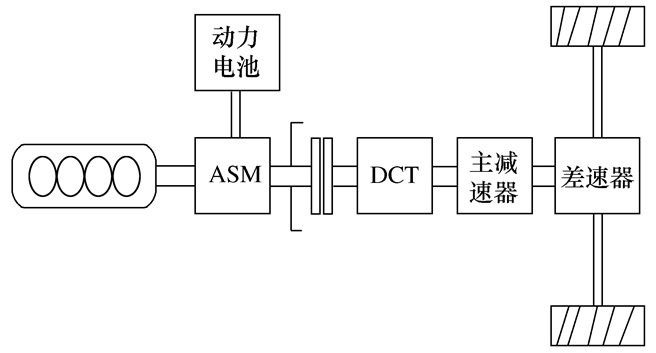
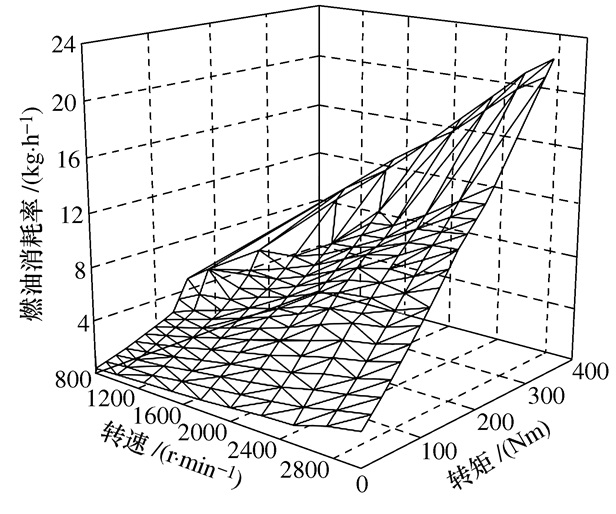
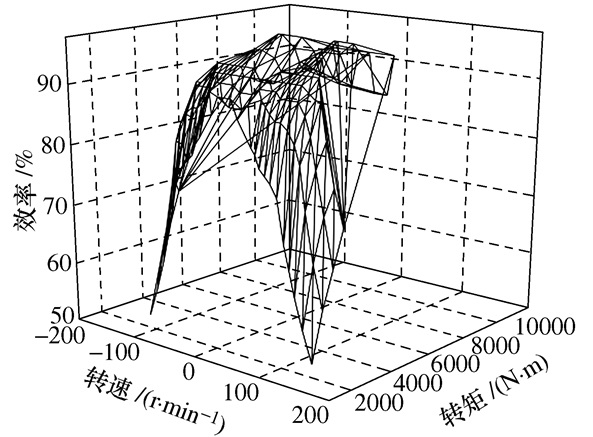
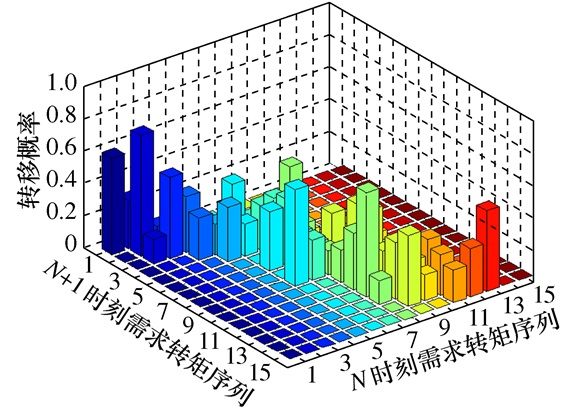
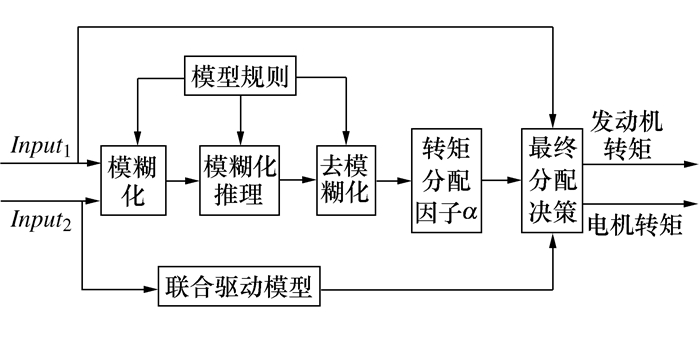
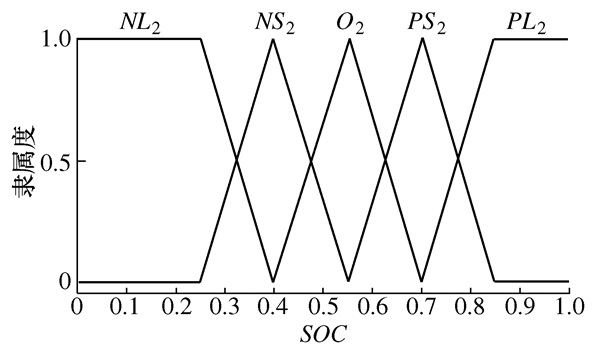
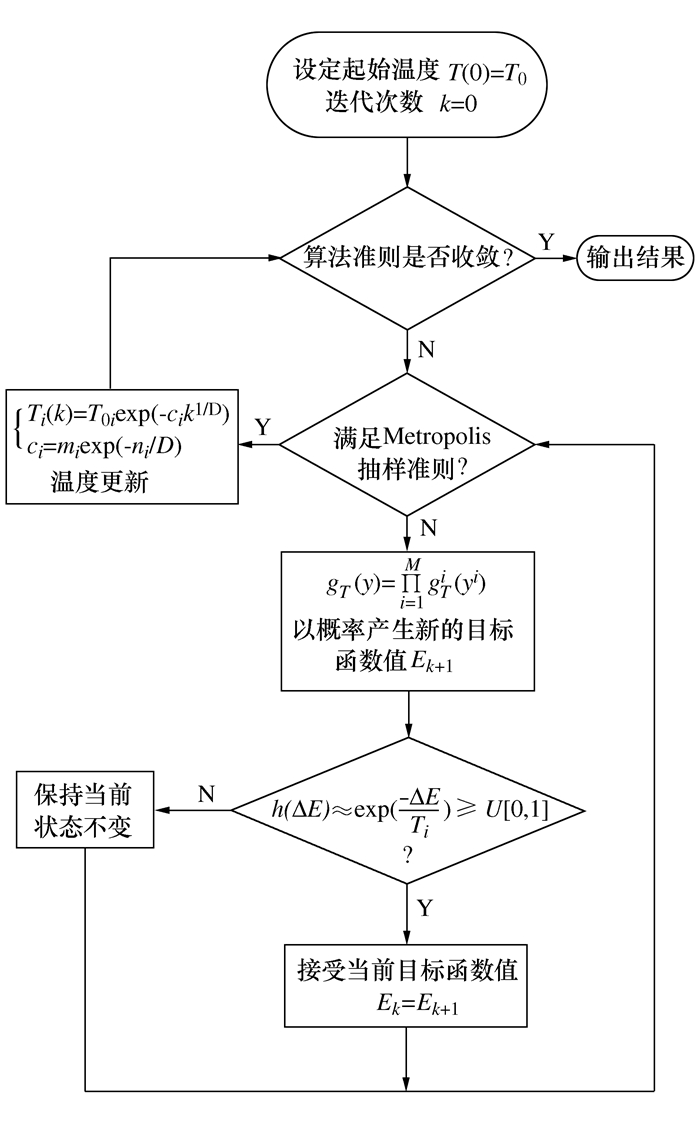
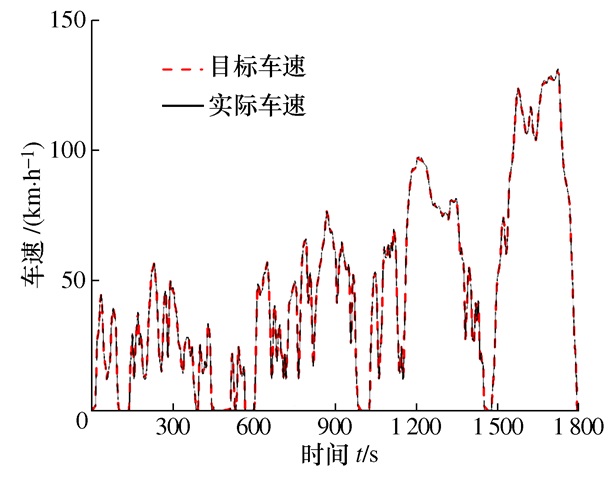
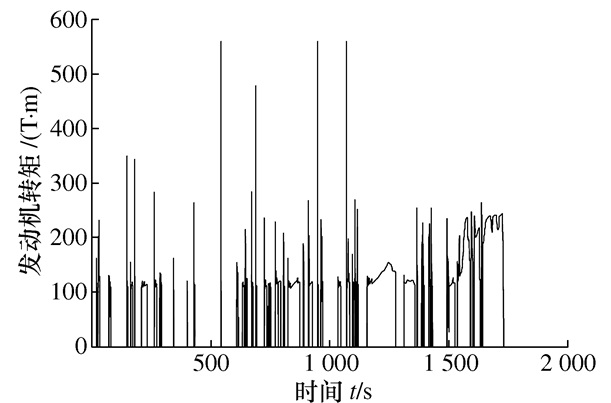
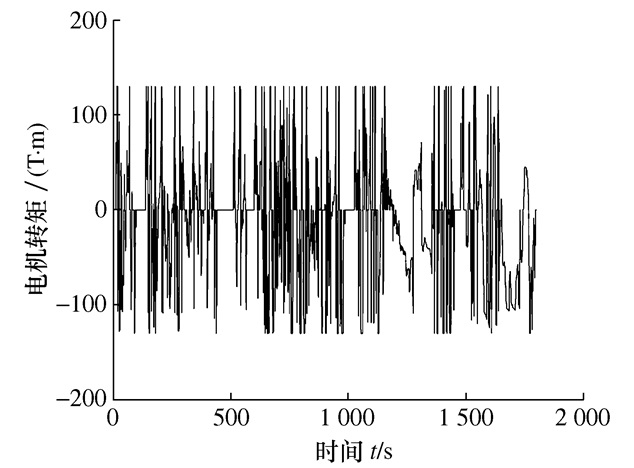
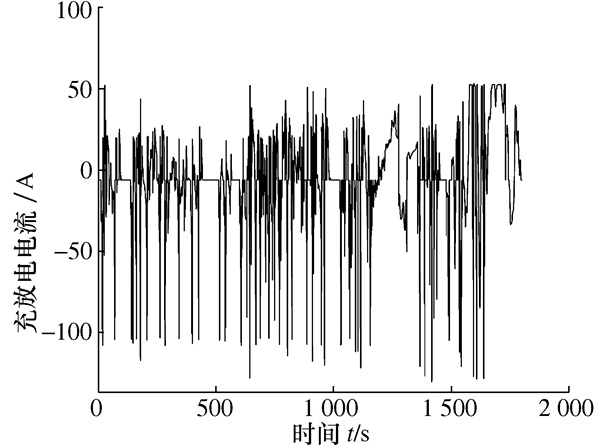
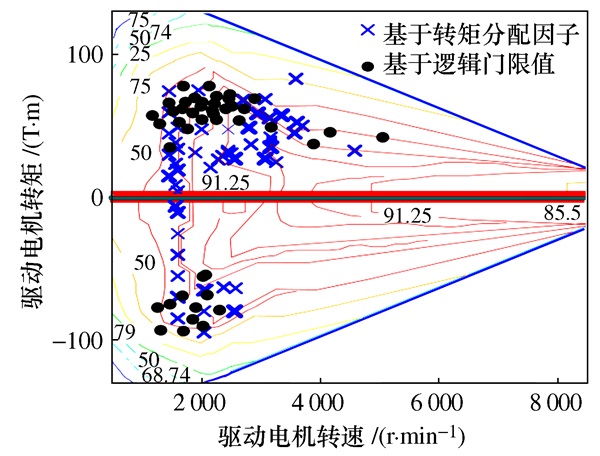
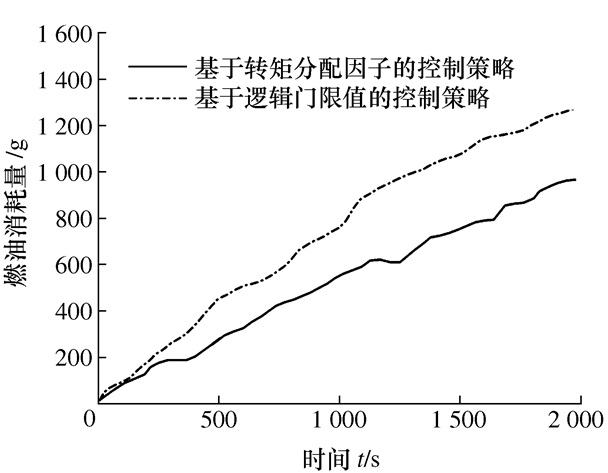
为提高并联式混合动力汽车的整体效率, 确保发动机工作在高效区的同时, 动力电池不会因过度放电对使用寿命造成损害, 对并联式混合动力汽车转矩实时分配控制策略展开研究。以全球轻型车测试规程(WLTP)为循环工况, 采用马尔科夫链模型预测车辆在未来时域内的需求转矩, 以未来时域内电机目标转矩占总需求转矩的百分比和电池SOC值作为输入, 以转矩分配因子作为输出, 建立模糊控制器, 利用自适应模拟退火算法对模糊控制器的输出值进行离线优化, 通过动态调节优化后的转矩分配因子实现需求转矩的合理分配, 确保电池SOC值波动在设定的上下限内。在MATLAB和Cruise仿真平台中, 对本文提出的控制策略进行联合仿真, 并与逻辑门限值控制策略进行对比分析, 结果表明: 相比于逻辑门限值控制策略, 转矩实时分配控制策略不仅保证发动机在高效区工作, 而且电池SOC值的波动范围也保持在与初始值上下的3%以内, 有效的改善了动力电池的使用寿命。
为提高并联式混合动力汽车的整体效率, 确保发动机工作在高效区的同时, 动力电池不会因过度放电对使用寿命造成损害, 对并联式混合动力汽车转矩实时分配控制策略展开研究。以全球轻型车测试规程(WLTP)为循环工况, 采用马尔科夫链模型预测车辆在未来时域内的需求转矩, 以未来时域内电机目标转矩占总需求转矩的百分比和电池SOC值作为输入, 以转矩分配因子作为输出, 建立模糊控制器, 利用自适应模拟退火算法对模糊控制器的输出值进行离线优化, 通过动态调节优化后的转矩分配因子实现需求转矩的合理分配, 确保电池SOC值波动在设定的上下限内。在MATLAB和Cruise仿真平台中, 对本文提出的控制策略进行联合仿真, 并与逻辑门限值控制策略进行对比分析, 结果表明: 相比于逻辑门限值控制策略, 转矩实时分配控制策略不仅保证发动机在高效区工作, 而且电池SOC值的波动范围也保持在与初始值上下的3%以内, 有效的改善了动力电池的使用寿命。





2022, 41(1): 159-164.
doi: 10.13433/j.cnki.1003-8728.20200519
摘要:
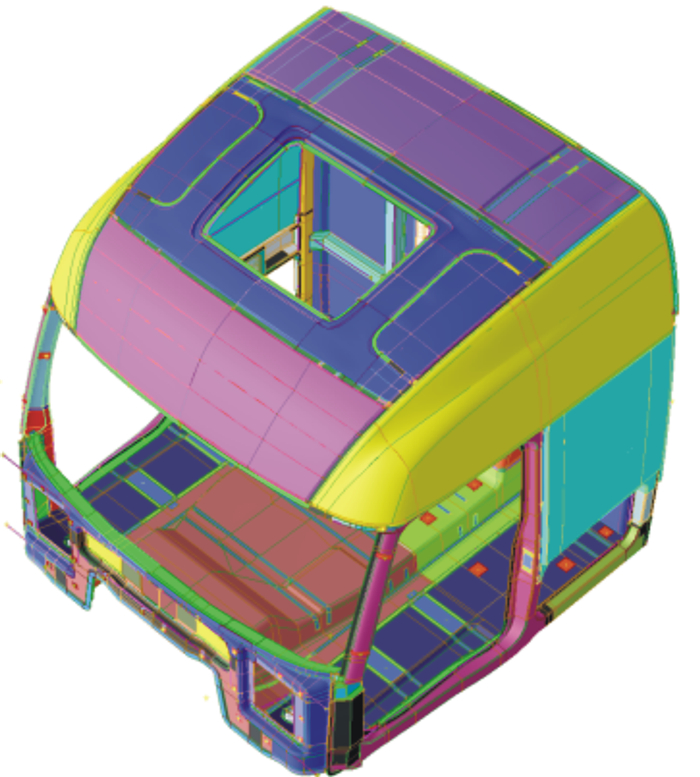
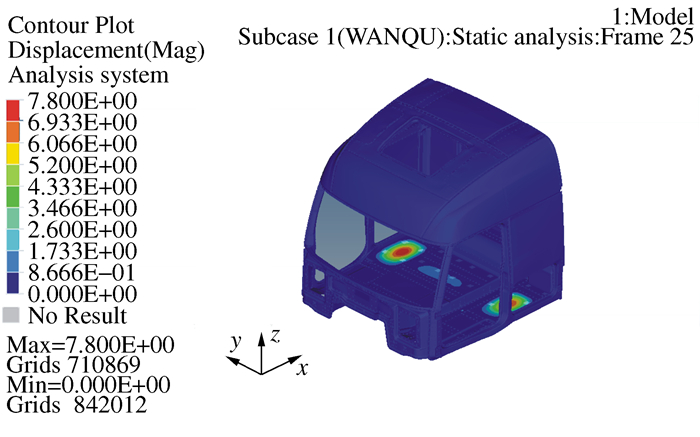
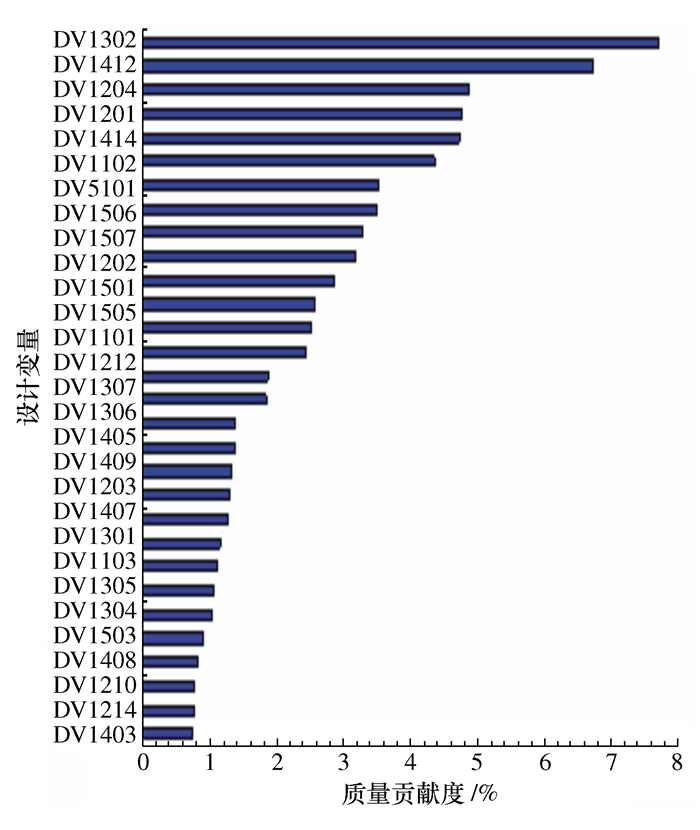
采用SFE-concept建立驾驶室白车身隐式参数化模型, 并对弯曲刚度和扭转刚度进行求解分析。通过灵敏度分析筛选出14个车身零部件的厚度、形状和位置作为设计变量; 采用最优超拉丁方试验设计方法构建样本数据; 对比分析响应面与逐次替换响应面近似模型的拟合精度, 得出逐次替换响应面的拟合精度更高; 采用粒子群算法, 以质车身量最小为目标, 约束静态弯扭刚度, 进行优化设计, 并对优化后结果进行验证, 结果表明: 在车身静态刚度性能基本保持不变的基础上, 白车身质量下降17 kg, 轻量化率为5.49%。
采用SFE-concept建立驾驶室白车身隐式参数化模型, 并对弯曲刚度和扭转刚度进行求解分析。通过灵敏度分析筛选出14个车身零部件的厚度、形状和位置作为设计变量; 采用最优超拉丁方试验设计方法构建样本数据; 对比分析响应面与逐次替换响应面近似模型的拟合精度, 得出逐次替换响应面的拟合精度更高; 采用粒子群算法, 以质车身量最小为目标, 约束静态弯扭刚度, 进行优化设计, 并对优化后结果进行验证, 结果表明: 在车身静态刚度性能基本保持不变的基础上, 白车身质量下降17 kg, 轻量化率为5.49%。