




Research on Torque Control of Four-wheel Driving EV based on Adaptive Disturbance Rejection Algorithm
-
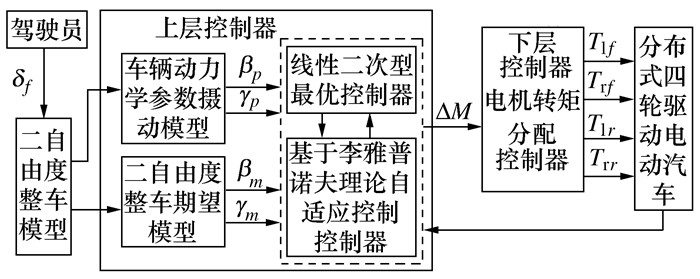
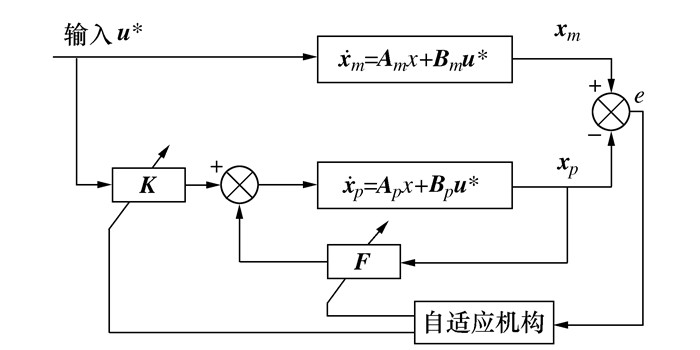
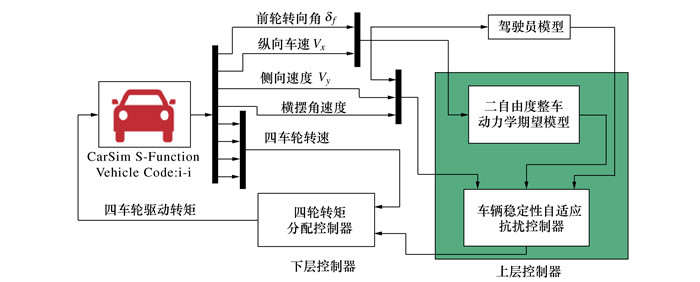
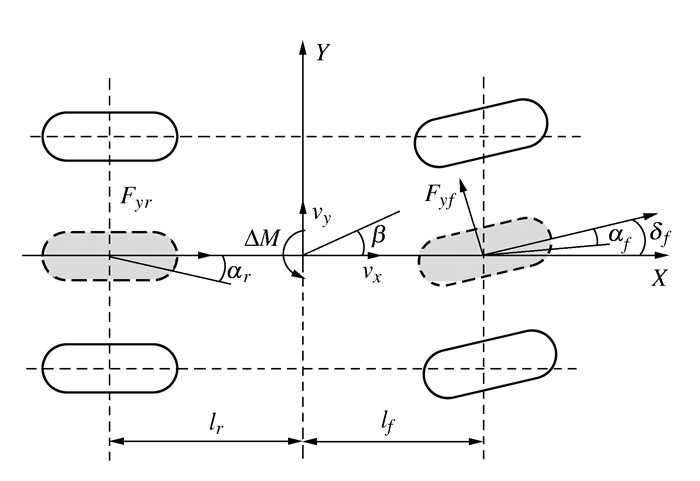
摘要: 针对分布式驱动电动汽车动力学模型参数非线性扰动影响转矩控制的问题,提出一种新的转矩自适应分层控制方法。建立四轮独立驱动电动汽车二自由度车辆动力学模型及车辆期望动力学模型,设计线性二次型最优控制器实现车辆对理想二自由度模型横摆稳定性参数的跟踪控制,计算出主动附加横摆控制力矩。针对车辆动力学模型参数扰动情况,基于李雅普诺夫稳定性理论,运用自适应控制算法提升线性二次型最优控制器的自适应能力,减小控制对象参数变动造成的控制偏差。搭建CarSim与MATLAB/ Simulink联合仿真平台验证了该方法的有效性。仿真实验表明,所设计自适应抗扰转矩控制器可有效提升四轮独立驱动电动汽车的横摆稳定性。Abstract: Aiming at the problem that nonlinear parameter disturbance of dynamic model often affects torque control stability of distributed drive electric vehicle, a new torque adaptive hierarchical control method is proposed in this paper. Firstly, the two degree of freedom vehicle dynamical model and the expected vehicle dynamical model of four-wheel independent drive electric vehicle are established. Then, the linear optimal quadratic controller is designed to realize the tracking control of the yaw stability parameters of the ideal two degree of freedom model, and the active additional yaw control moment is calculated. Aiming at the problem of vehicle dynamic model parameter disturbance, based on Lyapunov stability theory, adaptive control algorithm is used to improve the adaptive ability of linear optimal quadratic controller and reduce the control deviation caused by the change of control object parameters. Finally, the co-simulation platform of CarSim and MATLAB / Simulink is built to verify the effectiveness of the method. Simulation results show that the designed adaptive disturbance rejection torque controller can effectively improve the yaw stability of four-wheel independent drive electric vehicle.
-
表 1 整车动力学模型关键参数
δf ΔM 两左车轮 两右车轮 δf>0,左转 顺时针 Tlf增大;Tlt增大 Trf减小;Trr减小 δf>0,左转 逆时针 Tlf减小;Tlt减小 Trf增大;Trr增大 δf<0,右转 顺时针 Tlf增大;Tlt增大 Trf减小;Trr减小 δf<0,右转 逆时针 Tlf减小;Tlt减小 Trf增大;Trr增大  下载: 导出CSV
下载: 导出CSV
表 2 整车动力学模型关键参数
参数 数值 整车质量 1110 kg 整车质心高度 0.54 m 质心至前轴距离 1.04 m 质心至前轴距离 1.56 m 整车绕z轴的转动惯量 1 343.1 kg·m2 前后轴距 2.6 m 前轮轮距 1.695 m 后轮轮距 1.695 m 车轮有效滚动半径 0.298 m 车轮转动惯量 1.2 kg·m2
下载: 导出CSV
-
[1] 殷国栋, 金贤建, 张云. 分布式驱动电动汽车底盘动力学控制研究综述[J]. 重庆理工大学学报(自然科学版), 2016, 30(8): 13-19, 26 doi: 10.3969/j.issn.1674-8425(z).2016.08.002YIN G D, JIN X J, ZHANG Y. Overview for chassis vehicle dynamics control of distributed drive electric vehicle[J]. Journal of Chongqing Institute of Technology(Natural Science), 2016, 30(8): 13-19, 26 (in Chinese) doi: 10.3969/j.issn.1674-8425(z).2016.08.002 [2] 张多, 刘国海, 赵文祥, 等. 电动汽车多电机独立驱动技术研究综述[J]. 汽车技术, 2015(10): 1-6 doi: 10.3969/j.issn.1000-3703.2015.10.001ZHANG D, LIU G H, ZHAO W X, et al. Overview of multi-motor independent drive of electric vehicles[J]. Automobile Technology, 2015(10): 1-6 (in Chinese) doi: 10.3969/j.issn.1000-3703.2015.10.001 [3] 王震坡, 丁晓林, 张雷. 四轮轮毂电机驱动电动汽车驱动防滑控制关键技术综述[J]. 机械工程学报, 2019, 55(12): 99-120 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201912013.htmWANG Z P, DING X L, ZHANG L. Overview on key technologies of acceleration slip regulation for four-wheel-independently-actuated electric vehicles[J]. Journal of Mechanical Engineering, 2019, 55(12): 99-120 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201912013.htm [4] 付翔, 唐秋云, 黄斌, 等. 四轮独立驱动电动车转向助力模糊控制方法研究[J]. 汽车技术, 2017(10): 6-11 doi: 10.3969/j.issn.1000-3703.2017.10.002FU X, TANG Q Y, HUANG B, et al. Research on fuzzy control method of 4WID electric vehicle power-assisted steering[J]. Automobile Technology, 2017(10): 6-11 (in Chinese) doi: 10.3969/j.issn.1000-3703.2017.10.002 [5] WU L F, GOU J F, WANG L F, et al. Acceleration slip regulation strategy for distributed drive electric vehicles with independent front axle drive motors[J]. Energies, 2015, 8(5): 4043-4072 doi: 10.3390/en8054043 [6] 李刚, 李高超, 韩海兰, 等. 考虑驾驶员特性的四轮独立驱动电动汽车转向控制研究[J]. 科学技术与工程, 2016, 16(28): 288-293 doi: 10.3969/j.issn.1671-1815.2016.28.053LI G, LI G C, HAN H L, et al. Study on steering control for four wheel independent drive electrical vehicle considering driver characteristic[J]. Science Technology and Engineering, 2016, 16(28): 288-293 (in Chinese) doi: 10.3969/j.issn.1671-1815.2016.28.053 [7] 王悦, 李春明, 肖磊. 基于模糊控制的分布式电动车辆横摆力矩研究[J]. 计算机仿真, 2020, 37(3): 128-133 doi: 10.3969/j.issn.1006-9348.2020.03.027WANG Y, LI C M, XIAO L. Direct yaw moment control of distributed electric drive vehicle based on fuzzy control[J]. Computer Simulation, 2020, 37(3): 128-133 (in Chinese) doi: 10.3969/j.issn.1006-9348.2020.03.027 [8] 李刚, 李高超, 雷永强, 等. 四轮独立转向/独立电驱动汽车四轮转向与横摆力矩集成控制研究[J]. 机械设计与制造, 2019(5): 147-150, 154 doi: 10.3969/j.issn.1001-3997.2019.05.038LI G, LI G C, LEI Y Q, et al. Research on integrated control of four wheel steering and yaw moment for four wheel independent steering/independent electric vehicle[J]. Machinery Design & Manufacture, 2019(5): 147-150, 154 (in Chinese) doi: 10.3969/j.issn.1001-3997.2019.05.038 [9] 廖自力, 蔡立春, 张新喜. 轮毂电机驱动电动车稳定性横摆力矩控制研究[J]. 计算机仿真, 2020, 37(8): 73-76, 86 doi: 10.3969/j.issn.1006-9348.2020.08.016LIAO Z L, CAI L C, ZHANG X X. Research on stability of yaw torque control of electric vehicle driven by hub motors[J]. Computer Simulation, 2020, 37(8): 73-76, 86 (in Chinese) doi: 10.3969/j.issn.1006-9348.2020.08.016 [10] 田燃, 肖本贤. 四轮转向车辆的直接横摆力矩控制研究[J]. 机械设计与制造, 2020(5): 175-179, 184 doi: 10.3969/j.issn.1001-3997.2020.05.043TIAN R, XIAO B X. Research on direct yaw moment control of four wheel steering vehicle[J]. Machinery Design & Manufacture, 2020(5): 175-179, 184 (in Chinese) doi: 10.3969/j.issn.1001-3997.2020.05.043 [11] 蔡立春, 廖自力, 刘春光, 等. 分布式驱动电动车行驶稳定性控制建模与仿真[J]. 计算机应用与软件, 2019, 36(10): 42-46, 65 doi: 10.3969/j.issn.1000-386x.2019.10.008CAI L C, LIAO Z L, LIU C G, et al. Modeling and simulation of distributed drive electric vehicles driving stability control[J]. Computer Applications and Software, 2019, 36(10): 42-46, 65 (in Chinese) doi: 10.3969/j.issn.1000-386x.2019.10.008 [12] 张新锋, 朱明, 王奥特. 分布式驱动电动汽车横摆稳定性控制研究[J]. 重庆理工大学学报(自然科学版), 2020, 34(2): 24-31 https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL202002005.htmZHANG X F, ZHU M, WANG A T. Research on yaw stability control of distributed drive electric vehicles[J]. Journal of Chongqing University of Technology (Natural Science), 2020, 34(2): 24-31 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL202002005.htm [13] 高琪, 王春燕. 四轮驱动汽车转向状态下的横向稳定性控制研究[J]. 重庆理工大学学报(自然科学版), 2019, 33(8): 16-21, 37 https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL201908003.htmGAO Q, WANG C Y. Research on lateral stability control of four-wheel drive vehicle under steering condition[J]. Journal of Chongqing University of Technology (Natural Science), 2019, 33(8): 16-21, 37 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL201908003.htm [14] 陈建兵, 向青青. 分布式驱动电动汽车Simulink/Carsim联合仿真平台的建立[J]. 机械科学与技术, 2018, 37(10): 1496-1500 doi: 10.13433/j.cnki.1003-8728.20180064CHEN J B, XIANG Q Q. Establishing Simulink/Carsim co-simulation platform for distributed drive electric vehicle[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(10): 1496-1500 (in Chinese) doi: 10.13433/j.cnki.1003-8728.20180064 -


 点击查看大图
点击查看大图
图(5) / 表(4)
计量
- 文章访问数: 101
- HTML全文浏览量: 29
- PDF下载量: 15
- 被引次数: 0
