作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2021年 40卷 第7期
2021, 40(7): 985-992.
doi: 10.13433/j.cnki.1003-8728.20200177
 摘要
摘要 HTML
HTML PDF 3241KB
PDF 3241KB
摘要:
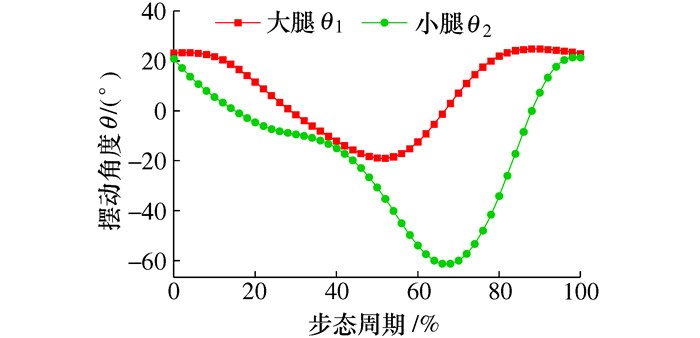
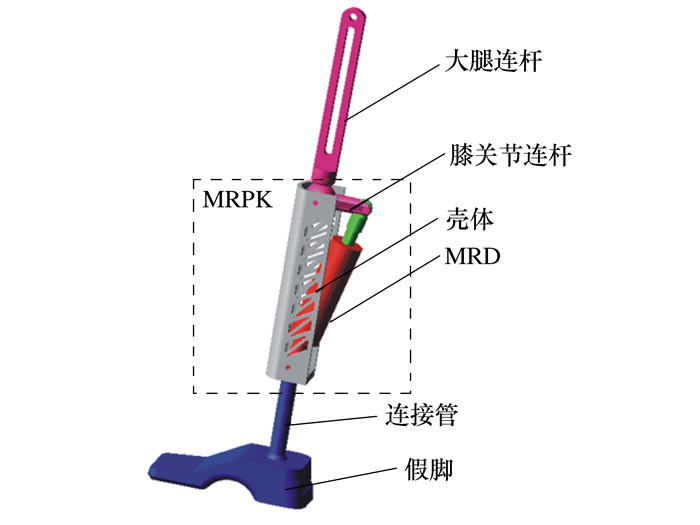
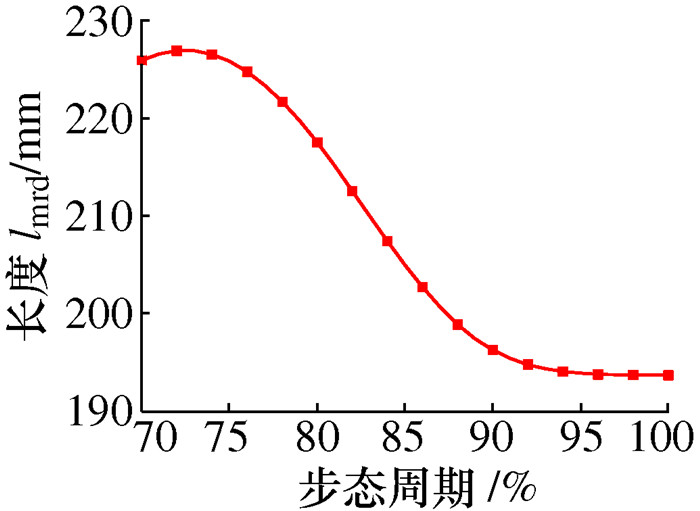
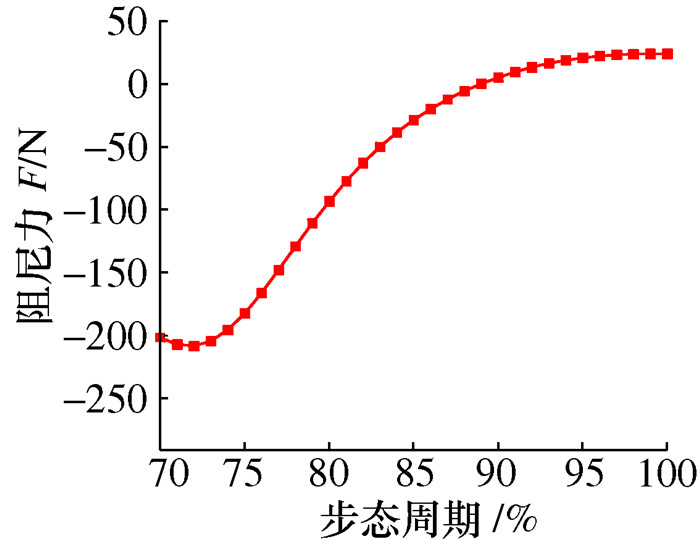
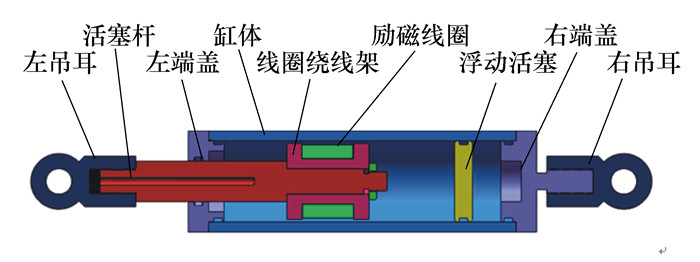
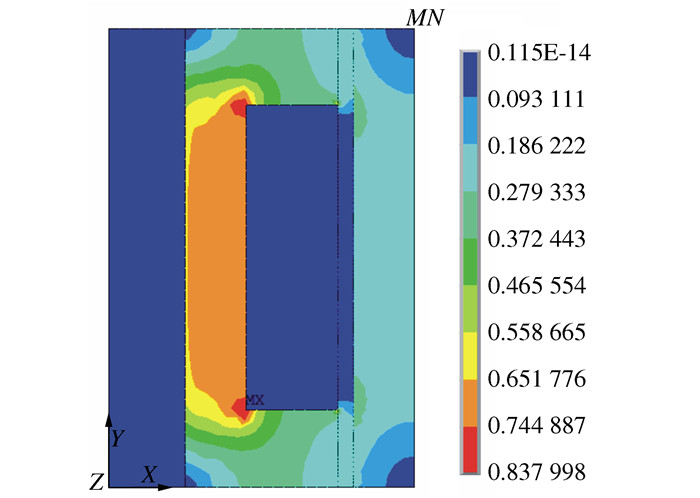
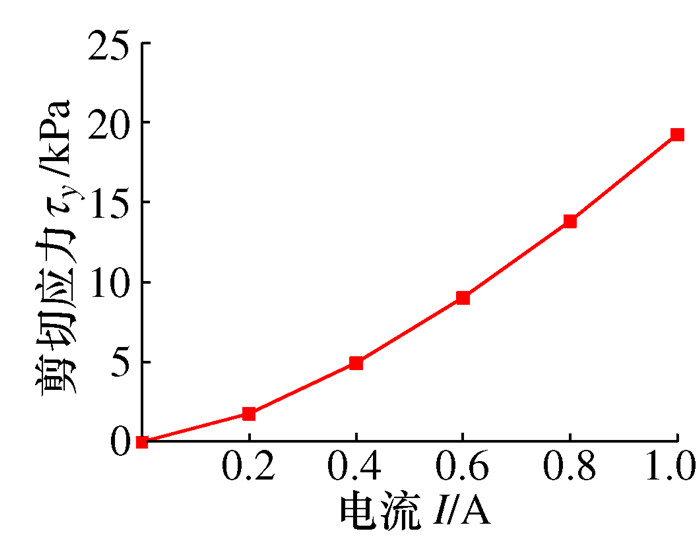
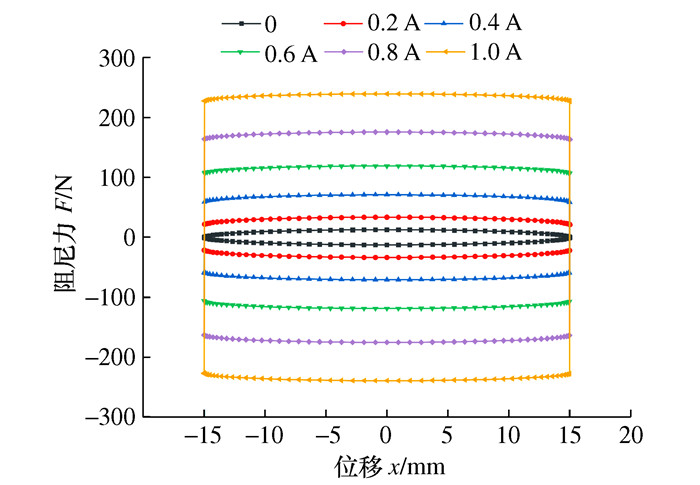
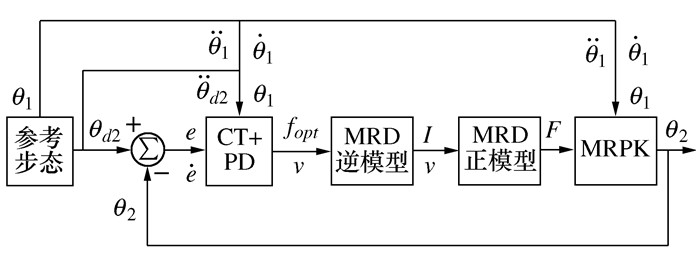
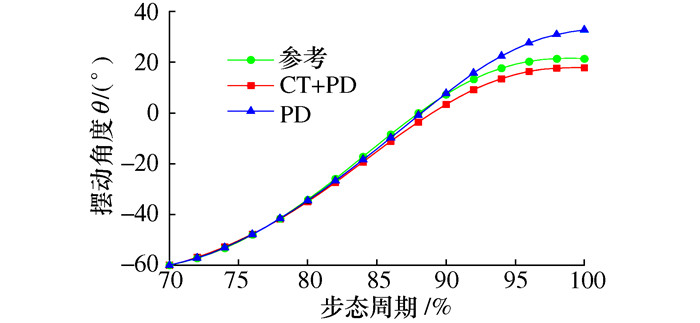
针对传统假肢膝关节存在阻尼无法连续可调、仿生性不佳及价格高昂等问题,提出一种以磁流变阻尼器(Magnetorheological damper, MRD)为控制器件的新型磁流变假肢膝关节(Magnetorheological damper-based prosthetic knee, MRPK)。基于健康人在平地行走的步态数据,对单轴式MRPK进行结构设计,并建立其处于摆动相内的动力学模型,得到MRD的阻尼力需大于208.6 N及行程需大于33.3 mm。对MRD进行结构设计并利用ANSYS对其进行电磁场仿真分析,同时建立MRD的正向、逆向力学模型并得到其性能曲线。采用联合仿真的方法建立磁流变假肢膝关节控制系统,设计CT+PD轨迹跟踪控制器并与PD控制器对比,仿真得到CT+PD控制器的最大误差为-4.6°,而PD控制器的最大误差为12.3°。初步证明了CT+PD轨迹跟踪控制对MRPK摆动控制的有效性。
针对传统假肢膝关节存在阻尼无法连续可调、仿生性不佳及价格高昂等问题,提出一种以磁流变阻尼器(Magnetorheological damper, MRD)为控制器件的新型磁流变假肢膝关节(Magnetorheological damper-based prosthetic knee, MRPK)。基于健康人在平地行走的步态数据,对单轴式MRPK进行结构设计,并建立其处于摆动相内的动力学模型,得到MRD的阻尼力需大于208.6 N及行程需大于33.3 mm。对MRD进行结构设计并利用ANSYS对其进行电磁场仿真分析,同时建立MRD的正向、逆向力学模型并得到其性能曲线。采用联合仿真的方法建立磁流变假肢膝关节控制系统,设计CT+PD轨迹跟踪控制器并与PD控制器对比,仿真得到CT+PD控制器的最大误差为-4.6°,而PD控制器的最大误差为12.3°。初步证明了CT+PD轨迹跟踪控制对MRPK摆动控制的有效性。









2021, 40(7): 993-999.
doi: 10.13433/j.cnki.1003-8728.20200168
摘要:
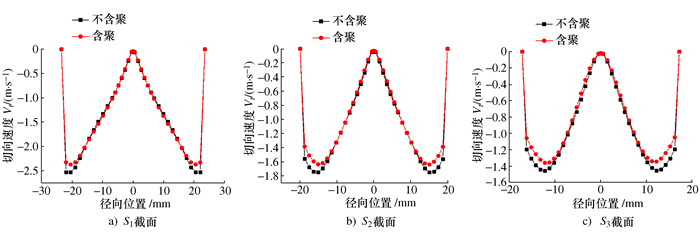
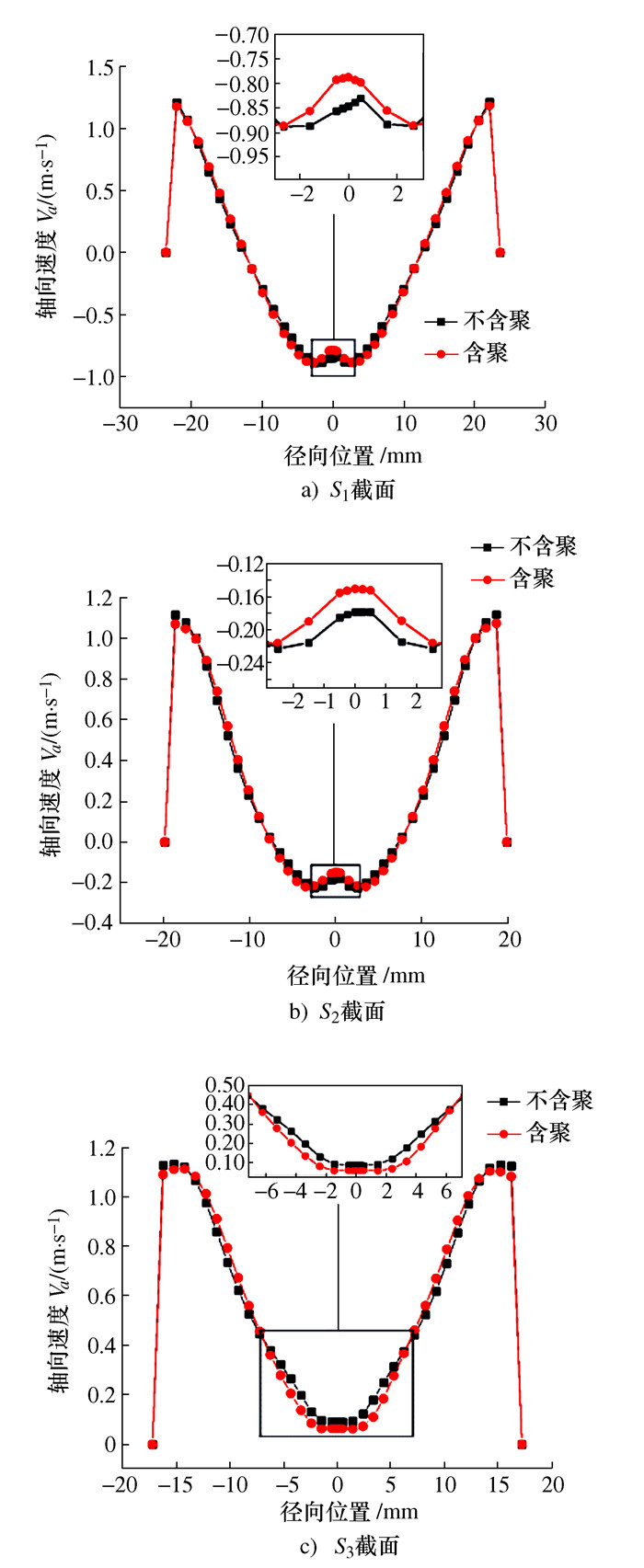
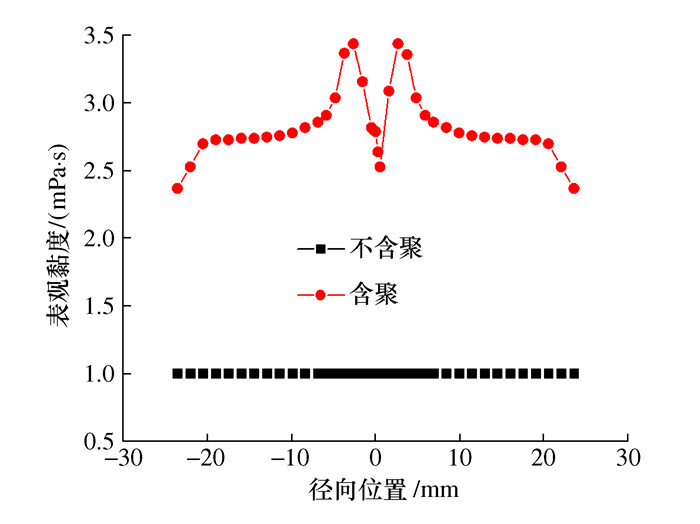
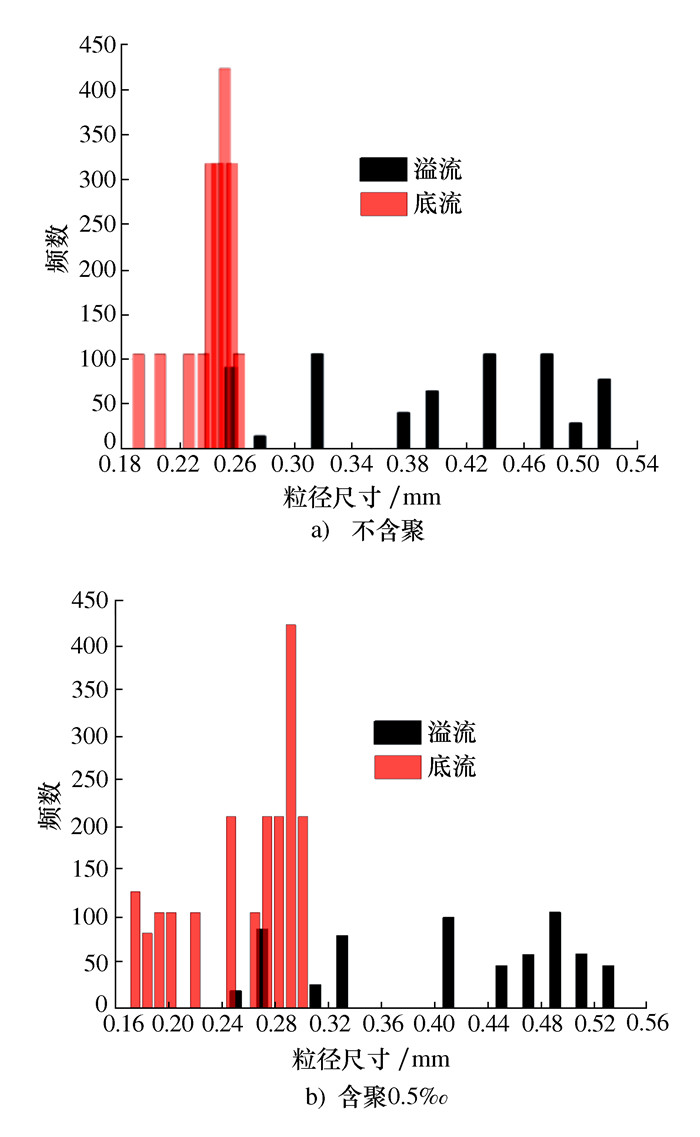
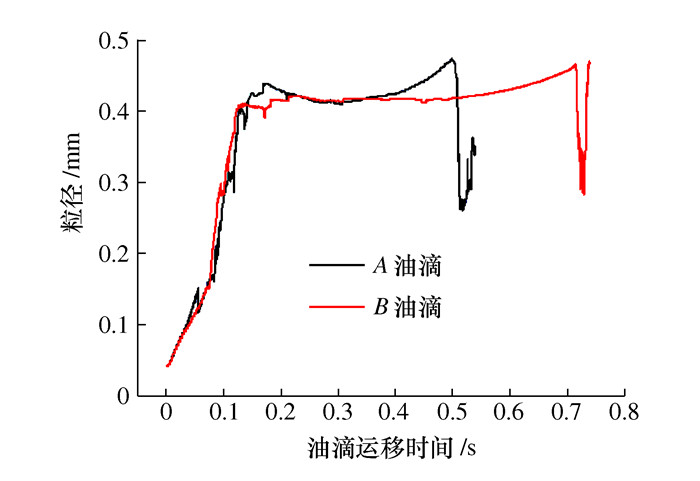
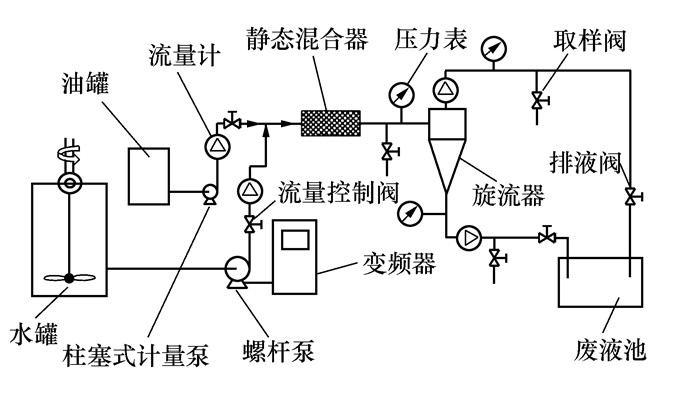
为了研究聚合物对水力旋流器内油滴聚结与分离效率的影响规律, 以螺旋导流内锥式旋流器为研究对象, 利用群体平衡模型(PBM)方法对不含聚与含聚0.5‰工况下油水两相在旋流器内的速度场、黏度场、油滴聚结、运移特性及分离效率进行数值分析, 并通过实验验证。结果表明: 聚合物的加入增大了水相黏度, 使油滴在旋流器内最大停留时间与轴向运动距离增加, 增加了油滴碰撞聚结的机会, 但降低轴心处油滴向上运动的轴向速度, 使油滴无法快速从溢流口流出, 最终从底流口流出, 增加油水分离的难度。与不含聚时相比, 含聚0.5‰工况下, 轴心处的油滴粒径与含油体积分数较高, 但简化分离效率由99.79%降低至94.72%。通过马尔文粒度仪对两种工况下入口与出口的油滴粒径进行测试, 含聚0.5‰时溢流与底流口油滴粒径高于不含聚时, 验证了模拟的准确性。
为了研究聚合物对水力旋流器内油滴聚结与分离效率的影响规律, 以螺旋导流内锥式旋流器为研究对象, 利用群体平衡模型(PBM)方法对不含聚与含聚0.5‰工况下油水两相在旋流器内的速度场、黏度场、油滴聚结、运移特性及分离效率进行数值分析, 并通过实验验证。结果表明: 聚合物的加入增大了水相黏度, 使油滴在旋流器内最大停留时间与轴向运动距离增加, 增加了油滴碰撞聚结的机会, 但降低轴心处油滴向上运动的轴向速度, 使油滴无法快速从溢流口流出, 最终从底流口流出, 增加油水分离的难度。与不含聚时相比, 含聚0.5‰工况下, 轴心处的油滴粒径与含油体积分数较高, 但简化分离效率由99.79%降低至94.72%。通过马尔文粒度仪对两种工况下入口与出口的油滴粒径进行测试, 含聚0.5‰时溢流与底流口油滴粒径高于不含聚时, 验证了模拟的准确性。





2021, 40(7): 1000-1008.
doi: 10.13433/j.cnki.1003-8728.20200166
摘要:
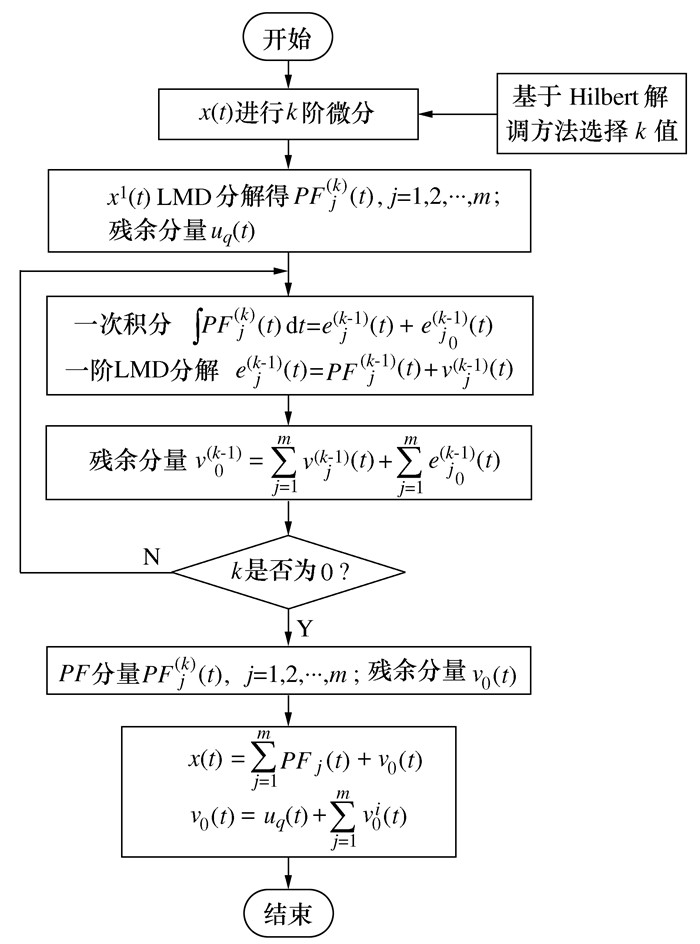
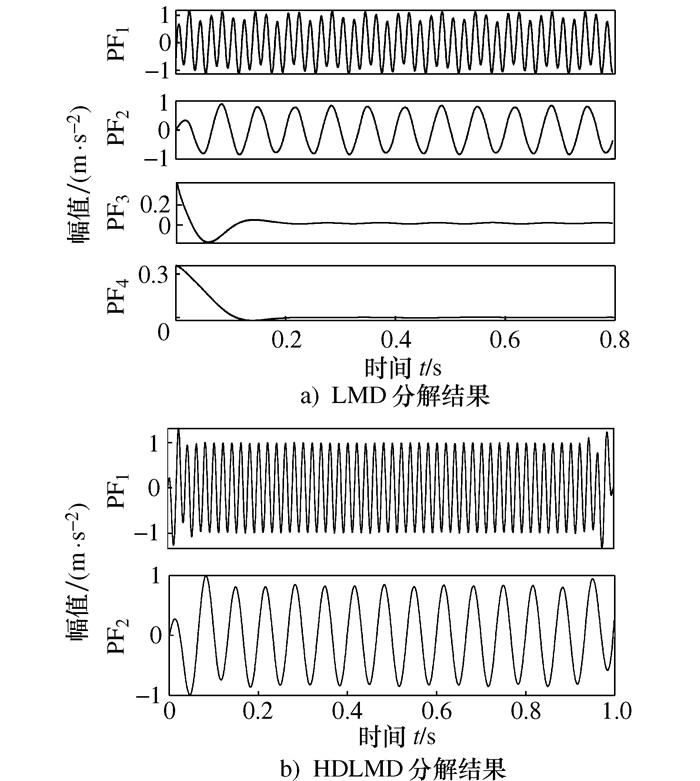
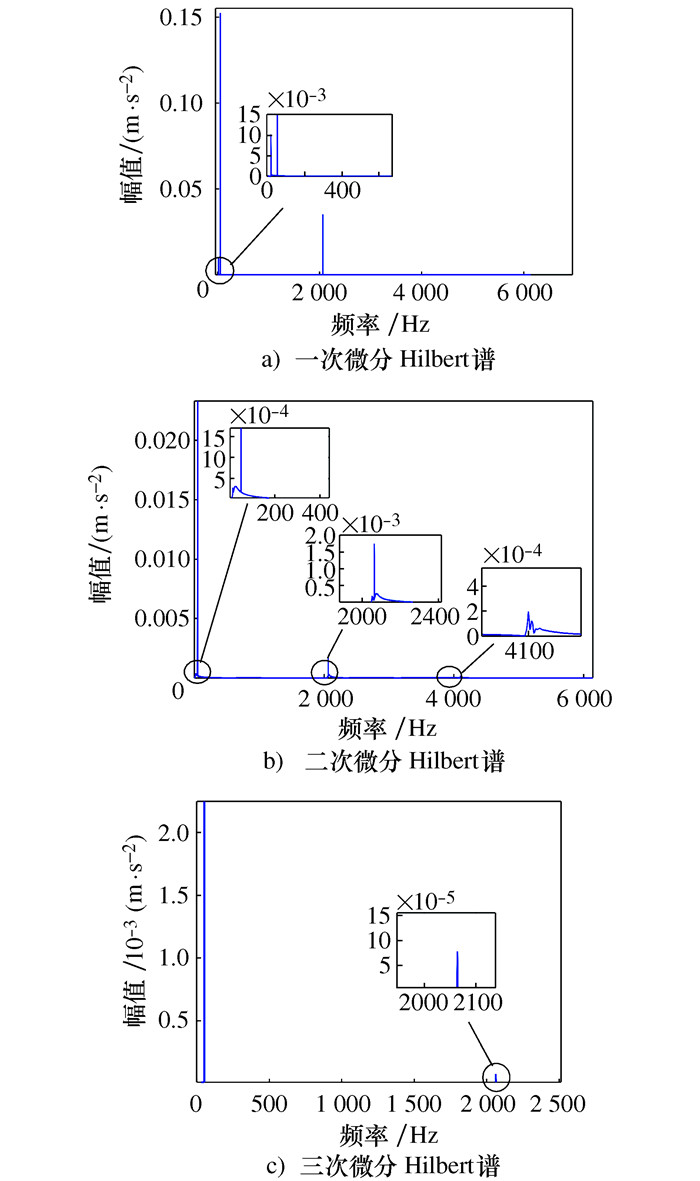
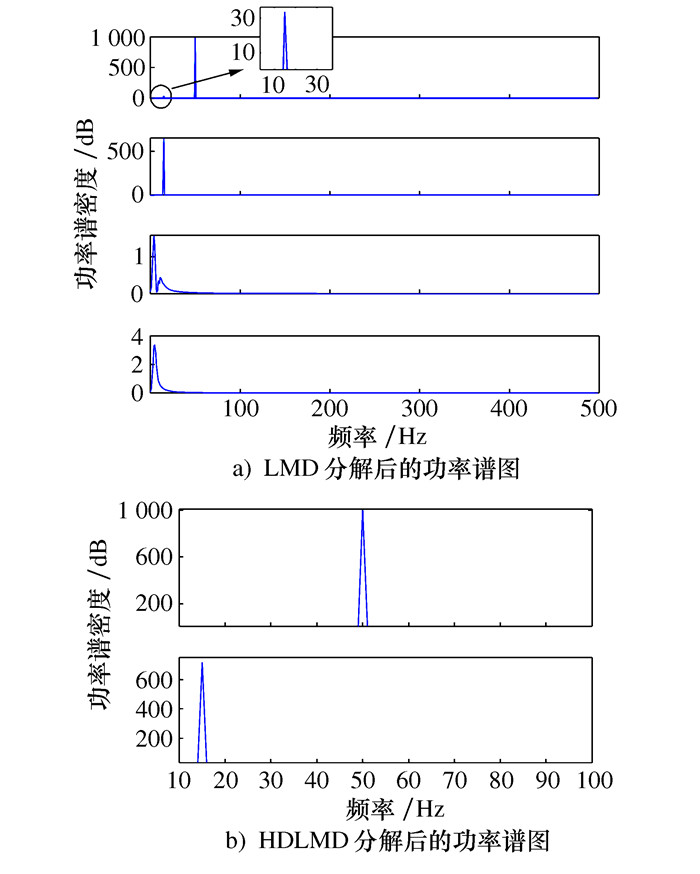
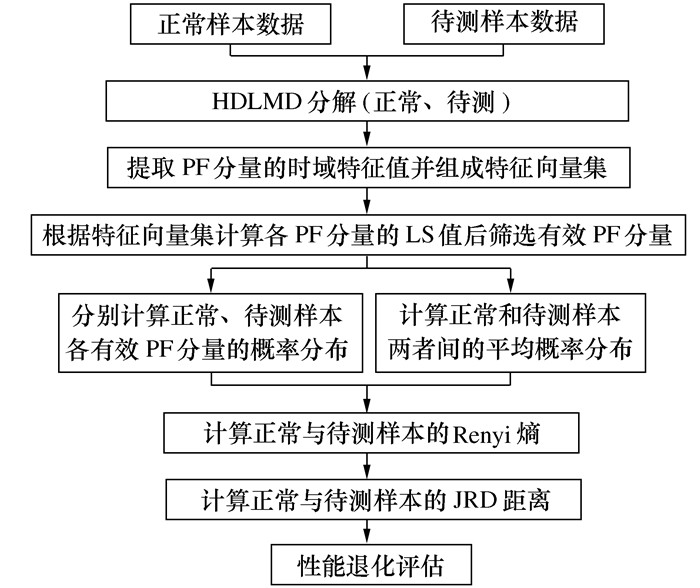
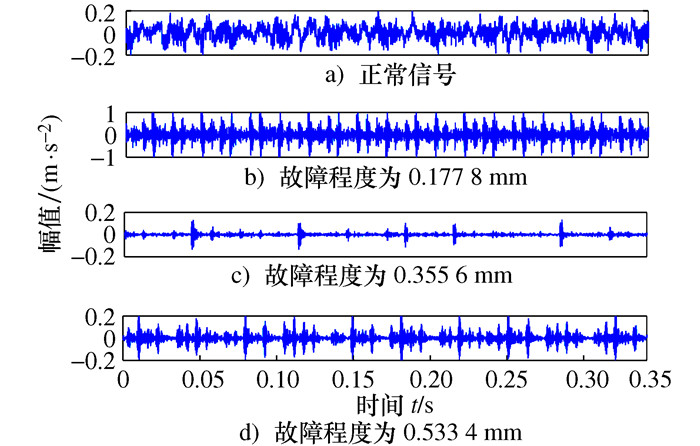
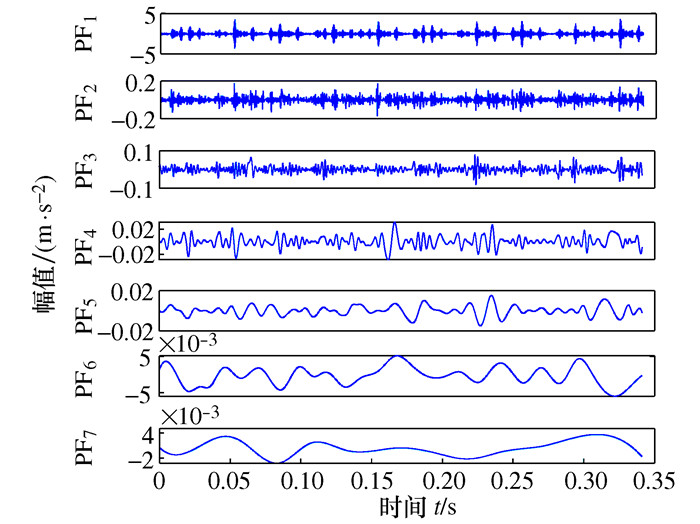
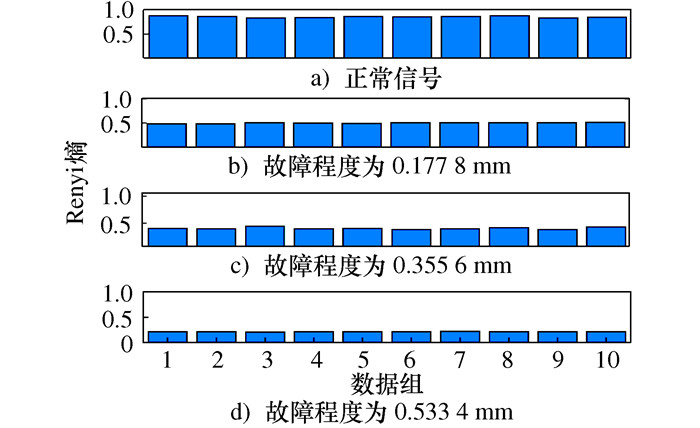
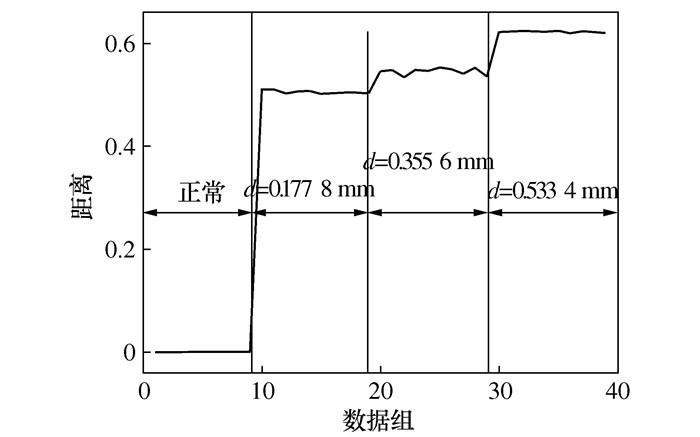
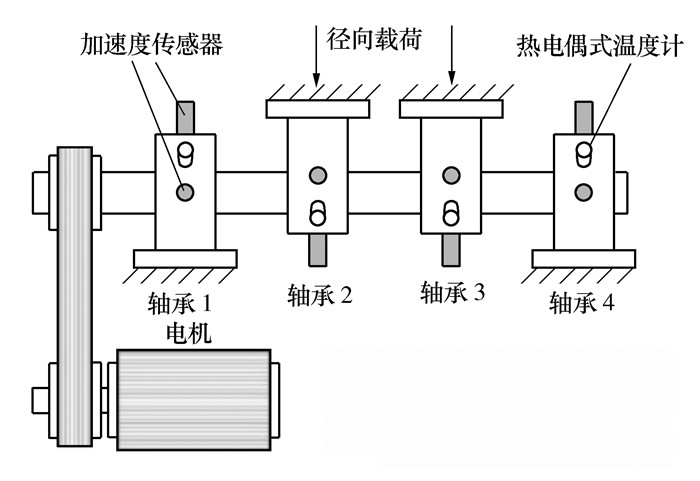
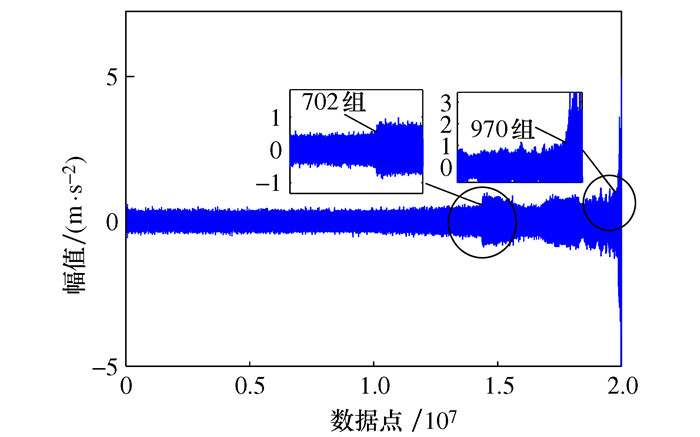
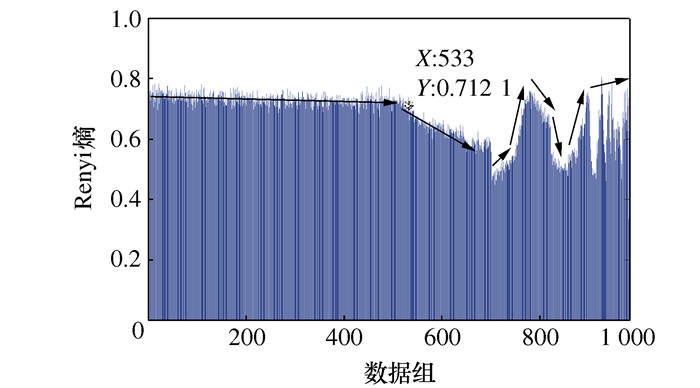
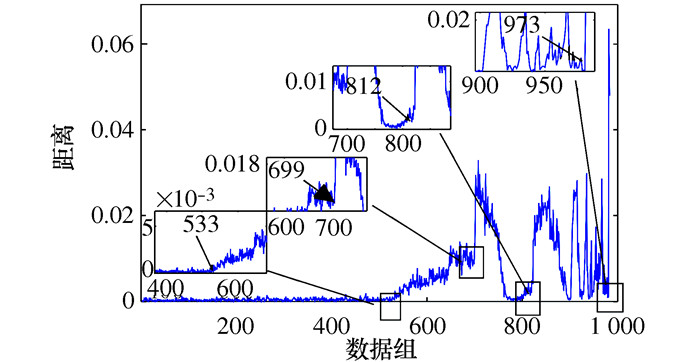
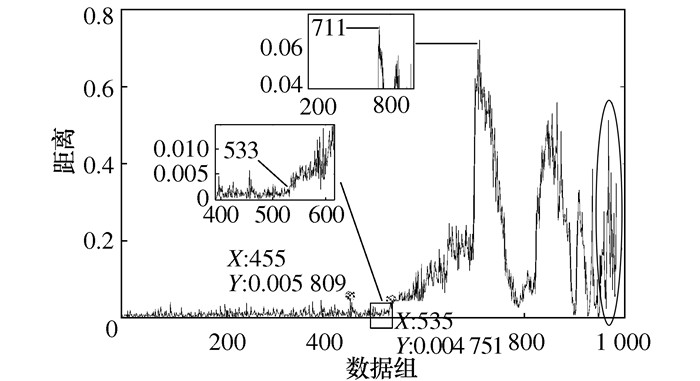
针对微分局部均值分解(Differential local mean decomposition, DLMD)方法中微分次数计算缺乏理论指导以及传统性能退化指标无法准确表示滚动轴承在全寿命阶段上当前状态的问题, 提出了一种基于HDLMD(Hilbert-differential local mean decomposition, HDLMD)和JRD(Jensen-Renyi divergence)的滚动轴承性能评估方法。该方法首先对原始振动信号进行HDLMD分解, 提取乘积函数(Product function, PF)矩阵; 然后, 基于拉普拉斯分值(Laplacian score, LS)选择包含最多故障信息的PF分量; 再计算筛选之后的有效PF分量的概率分布, 得到有效PF分量的Renyi熵值; 最后, 计算正常信号与不同故障程度信号之间的JRD距离, 并判断滚动轴承的退化状态。通过凯西斯储大学(Case western reserve university, CWRU)滚动轴承实验数据和NASA(National aeronautics and space administration)全寿命周期数据实验表明, 本文所提方法可以准确、有效地评估轴承性能的退化状态。
针对微分局部均值分解(Differential local mean decomposition, DLMD)方法中微分次数计算缺乏理论指导以及传统性能退化指标无法准确表示滚动轴承在全寿命阶段上当前状态的问题, 提出了一种基于HDLMD(Hilbert-differential local mean decomposition, HDLMD)和JRD(Jensen-Renyi divergence)的滚动轴承性能评估方法。该方法首先对原始振动信号进行HDLMD分解, 提取乘积函数(Product function, PF)矩阵; 然后, 基于拉普拉斯分值(Laplacian score, LS)选择包含最多故障信息的PF分量; 再计算筛选之后的有效PF分量的概率分布, 得到有效PF分量的Renyi熵值; 最后, 计算正常信号与不同故障程度信号之间的JRD距离, 并判断滚动轴承的退化状态。通过凯西斯储大学(Case western reserve university, CWRU)滚动轴承实验数据和NASA(National aeronautics and space administration)全寿命周期数据实验表明, 本文所提方法可以准确、有效地评估轴承性能的退化状态。



2021, 40(7): 1009-1015.
doi: 10.13433/j.cnki.1003-8728.20200457
摘要:
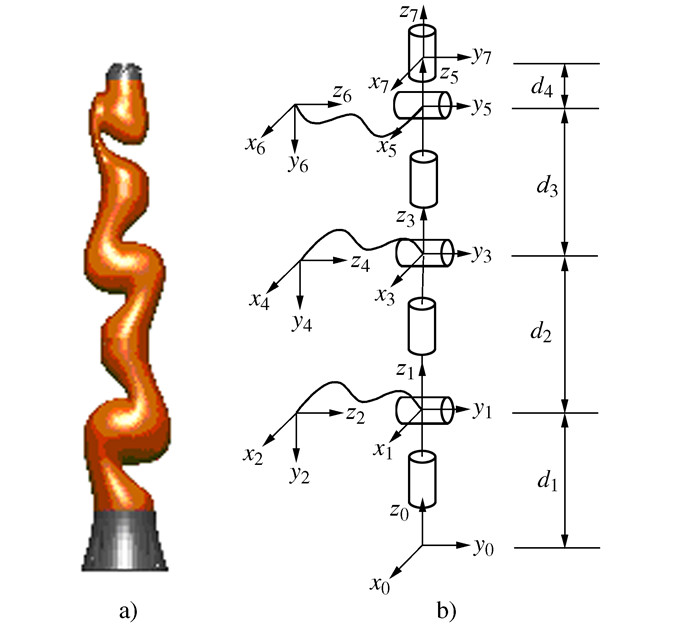
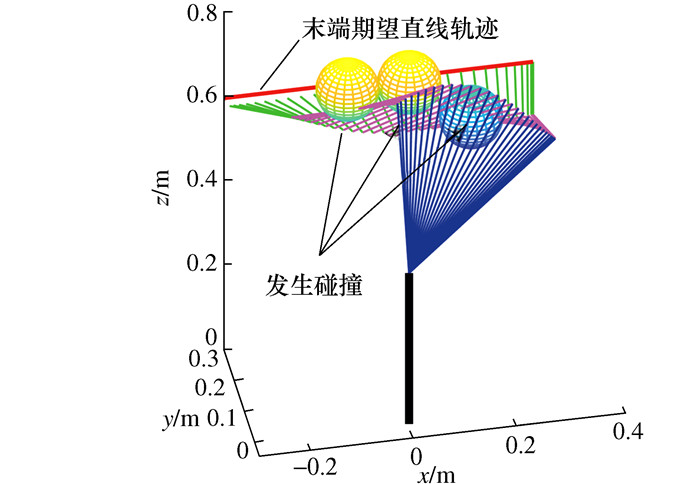
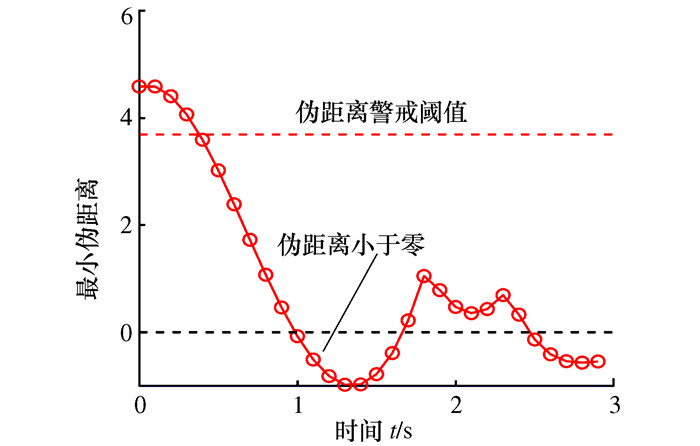
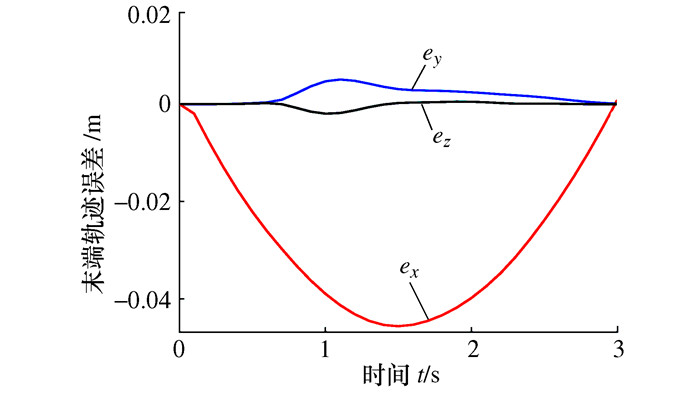
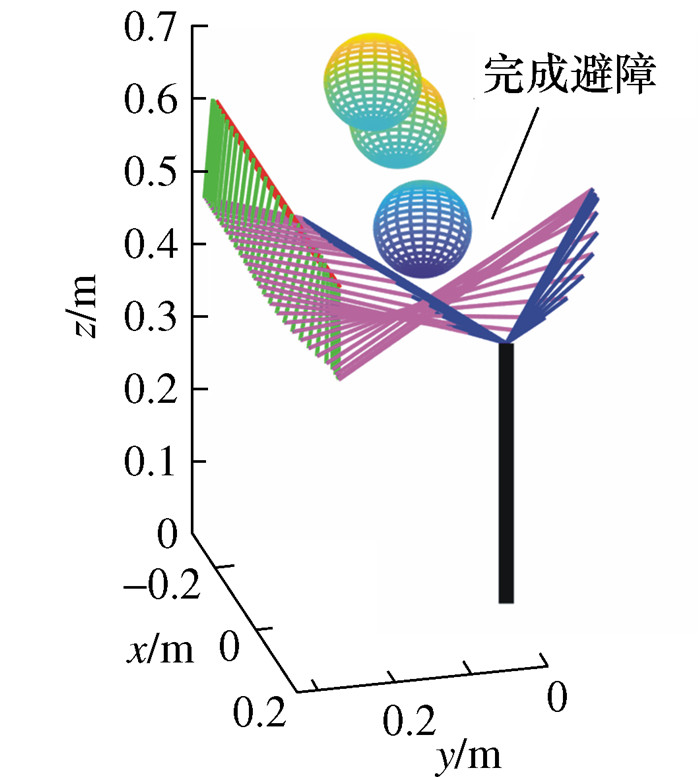
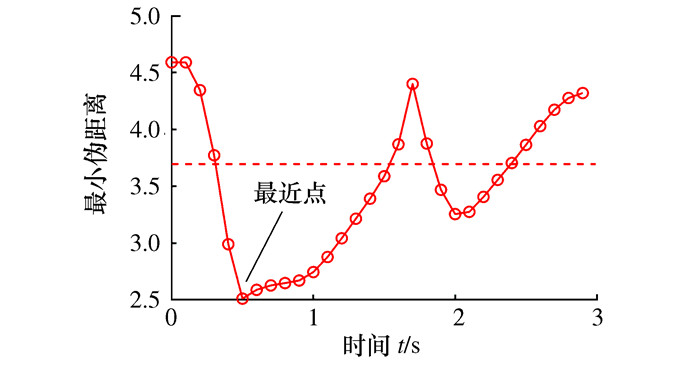
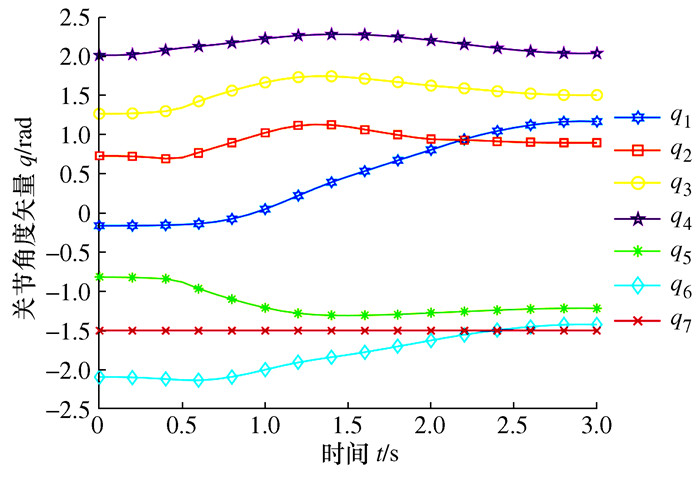
针对传统的零空间避障方法无法根据障碍物距离提前采取避障行为同时保证末端跟踪精度的问题, 提出一种零空间避障的机械臂末端轨迹跟踪算法。该方法采用伪距离代替欧氏距离作为距离接近度指标解决零空间避障问题, 同时设计一种自适应正定系数矩阵 K 和速度误差饱和函数sat( ė ), 将实时轨迹运行结果反馈给冗余机械臂运动学反解, 根据反馈结果自适应调节关节角速度以减小末端轨迹跟踪误差。采用iiwa14机械臂进行仿真实验, 仿真的结果表明, 所提出的算法能够在完成冗余机械臂零空间避障的同时保证末端轨迹跟踪误差在1 cm以下, 验证了所提算法的有效性和优越性。
针对传统的零空间避障方法无法根据障碍物距离提前采取避障行为同时保证末端跟踪精度的问题, 提出一种零空间避障的机械臂末端轨迹跟踪算法。该方法采用伪距离代替欧氏距离作为距离接近度指标解决零空间避障问题, 同时设计一种自适应正定系数矩阵 K 和速度误差饱和函数sat( ė ), 将实时轨迹运行结果反馈给冗余机械臂运动学反解, 根据反馈结果自适应调节关节角速度以减小末端轨迹跟踪误差。采用iiwa14机械臂进行仿真实验, 仿真的结果表明, 所提出的算法能够在完成冗余机械臂零空间避障的同时保证末端轨迹跟踪误差在1 cm以下, 验证了所提算法的有效性和优越性。




2021, 40(7): 1016-1024.
doi: 10.13433/j.cnki.1003-8728.20200182
摘要:
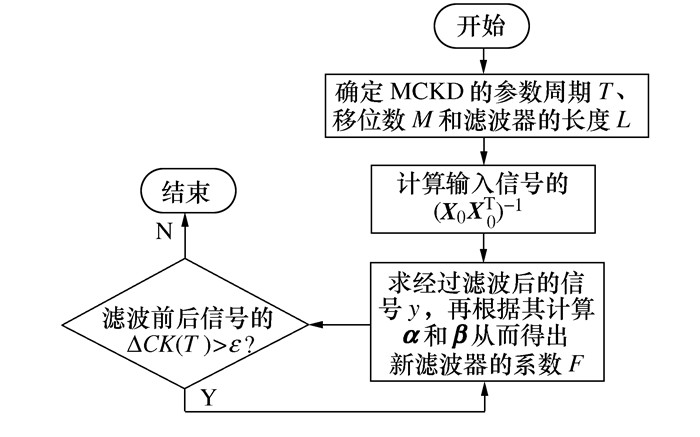
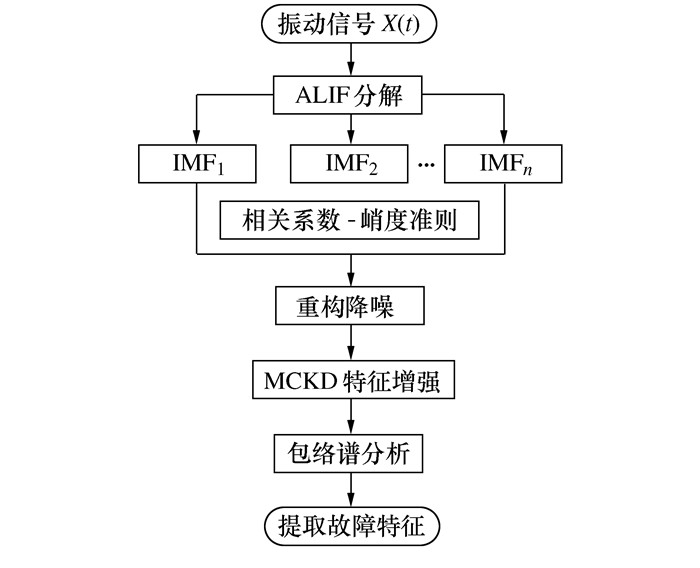
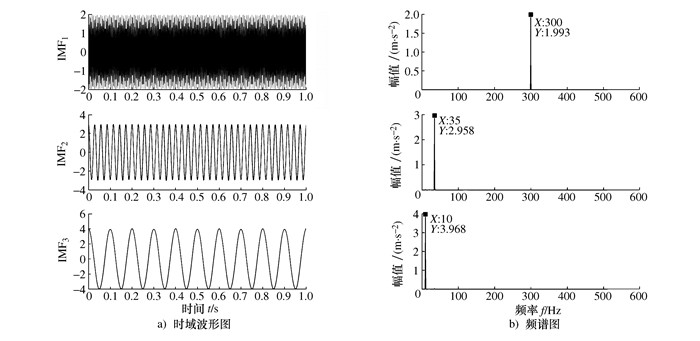
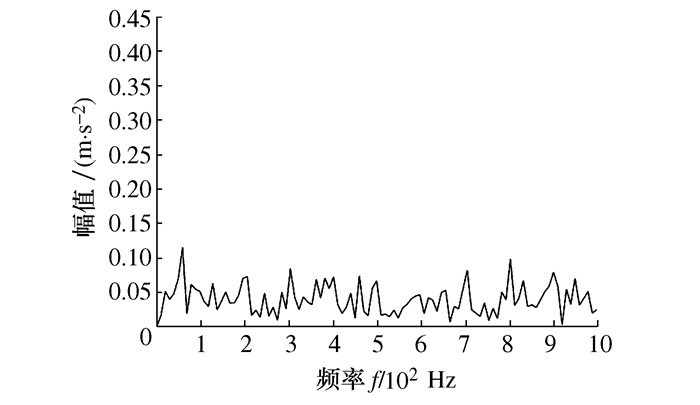
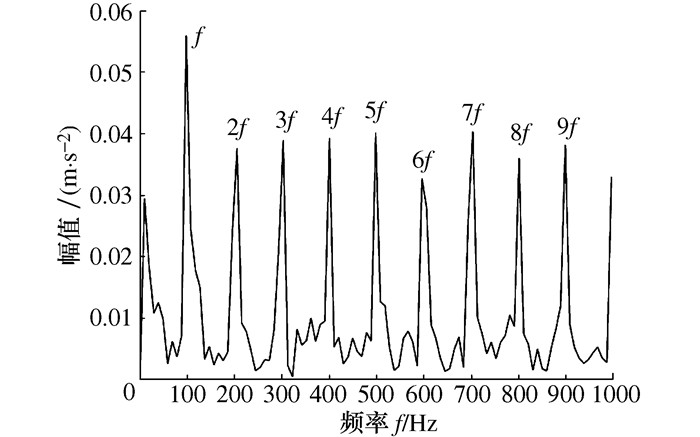
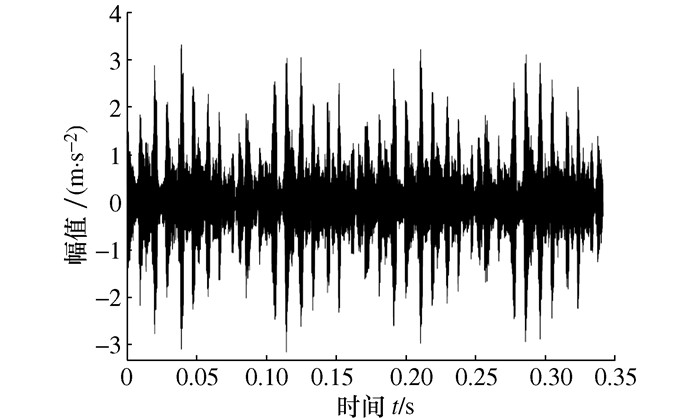
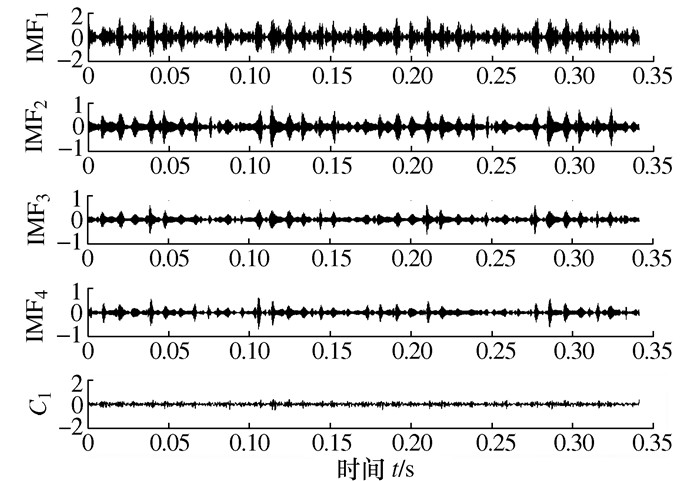
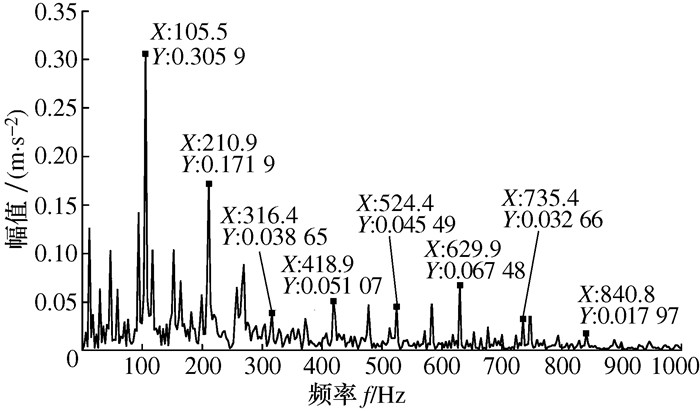
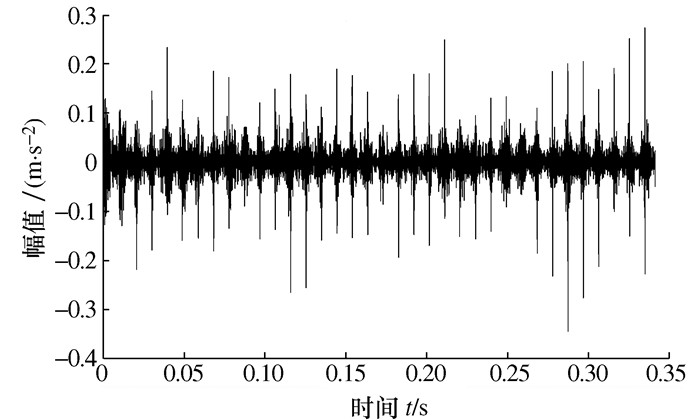
滚动轴承早期故障特征信息十分微弱并夹杂着环境噪声的干扰, 使其信噪比极低, 造成微弱故障难以提取。针对这一问题, 提出了一种基于自适应局部迭代滤波(Adaptive local iterative filter, ALIF)和最大相关峭度解卷积(Maximum correlated kurtosis deconvolution, MCKD)两者相结合的滚动轴承早期故障诊断方法。首先对采集到的振动信号应用ALIF进行分解得到若干个窄带本征模态函数(Intrinsic mode functions, IMFs), 根据相关系数-峭度准则筛选出两个较为敏感的IMF分量进行重构降噪; 然后对重构降噪后的信号采用MCKD算法增强故障特征中的冲击成分; 最后对应用ALIF-MCKD增强后的信号进行包络谱解调分析, 提取出故障特征从而判断轴承故障发生位置。
滚动轴承早期故障特征信息十分微弱并夹杂着环境噪声的干扰, 使其信噪比极低, 造成微弱故障难以提取。针对这一问题, 提出了一种基于自适应局部迭代滤波(Adaptive local iterative filter, ALIF)和最大相关峭度解卷积(Maximum correlated kurtosis deconvolution, MCKD)两者相结合的滚动轴承早期故障诊断方法。首先对采集到的振动信号应用ALIF进行分解得到若干个窄带本征模态函数(Intrinsic mode functions, IMFs), 根据相关系数-峭度准则筛选出两个较为敏感的IMF分量进行重构降噪; 然后对重构降噪后的信号采用MCKD算法增强故障特征中的冲击成分; 最后对应用ALIF-MCKD增强后的信号进行包络谱解调分析, 提取出故障特征从而判断轴承故障发生位置。








2021, 40(7): 1025-1030.
doi: 10.13433/j.cnki.1003-8728.20200190
摘要:
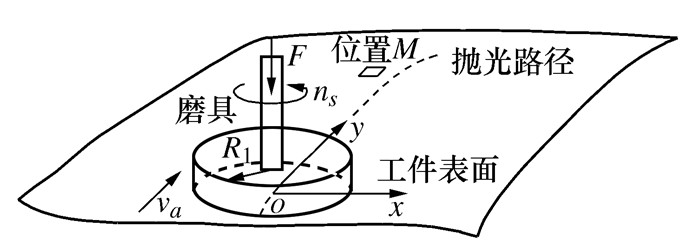
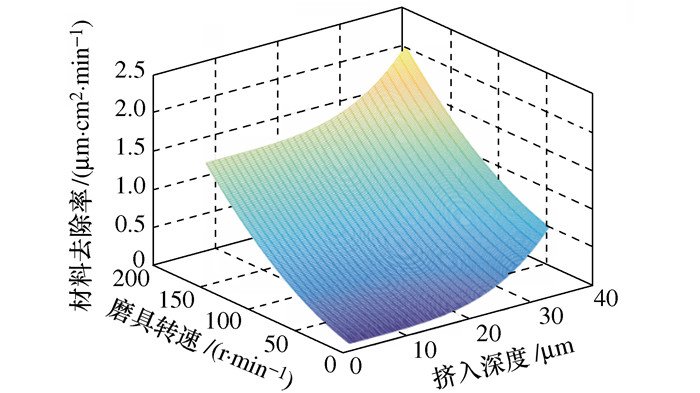
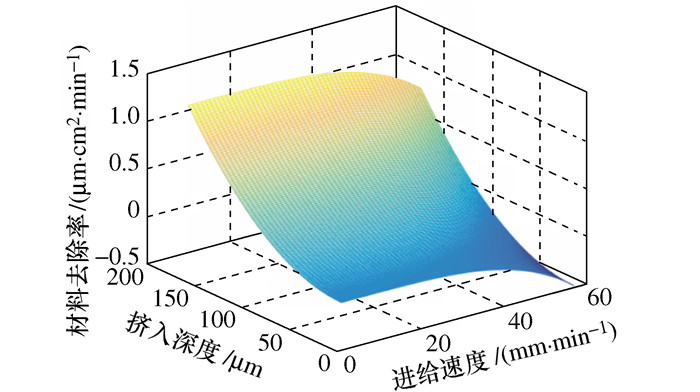
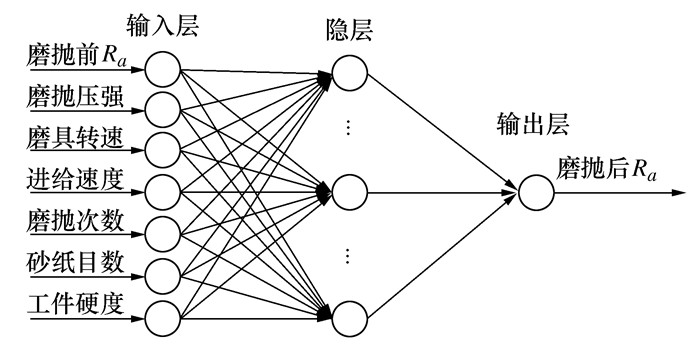
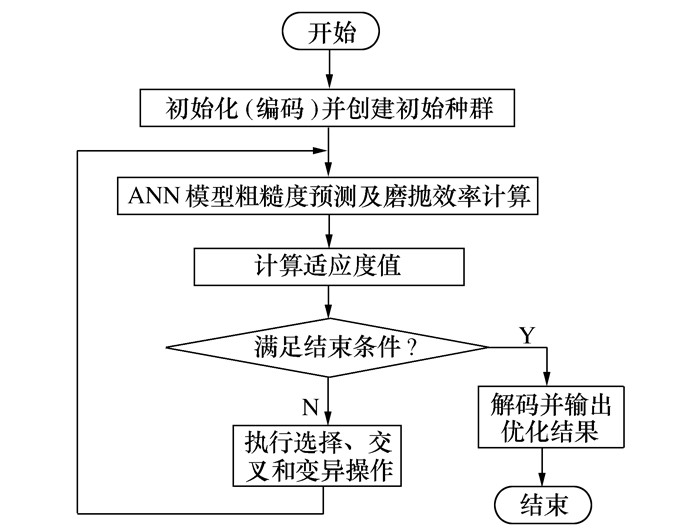
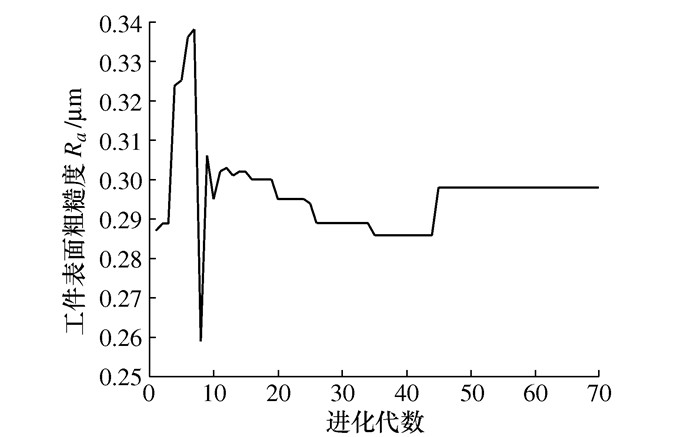
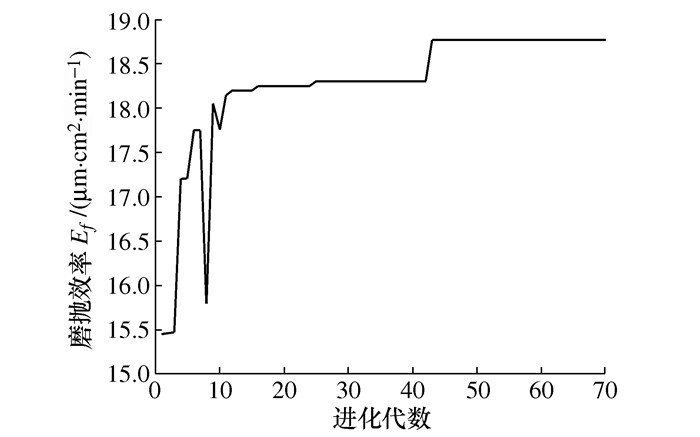
针对机器人磨抛系统工艺参数的自主选择与优化问题, 提出一种基于神经网络与遗传算法的磨抛工艺参数优化方法, 采用基于人工神经网络的工件表面粗糙度预测模型解决各工艺参数间复杂的非线性问题, 结合粗糙度预测模型与磨抛效率公式, 通过遗传算法对各工艺参数进行全局寻优解决加工质量和效率的双目标优化问题并得到最优工艺参数组合。在满足加工质量要求的前提下, 加工效率提高了近三分之一, 证明此工艺参数优化方法是可行有效的。
针对机器人磨抛系统工艺参数的自主选择与优化问题, 提出一种基于神经网络与遗传算法的磨抛工艺参数优化方法, 采用基于人工神经网络的工件表面粗糙度预测模型解决各工艺参数间复杂的非线性问题, 结合粗糙度预测模型与磨抛效率公式, 通过遗传算法对各工艺参数进行全局寻优解决加工质量和效率的双目标优化问题并得到最优工艺参数组合。在满足加工质量要求的前提下, 加工效率提高了近三分之一, 证明此工艺参数优化方法是可行有效的。

2021, 40(7): 1031-1036.
doi: 10.13433/j.cnki.1003-8728.20200173
摘要:
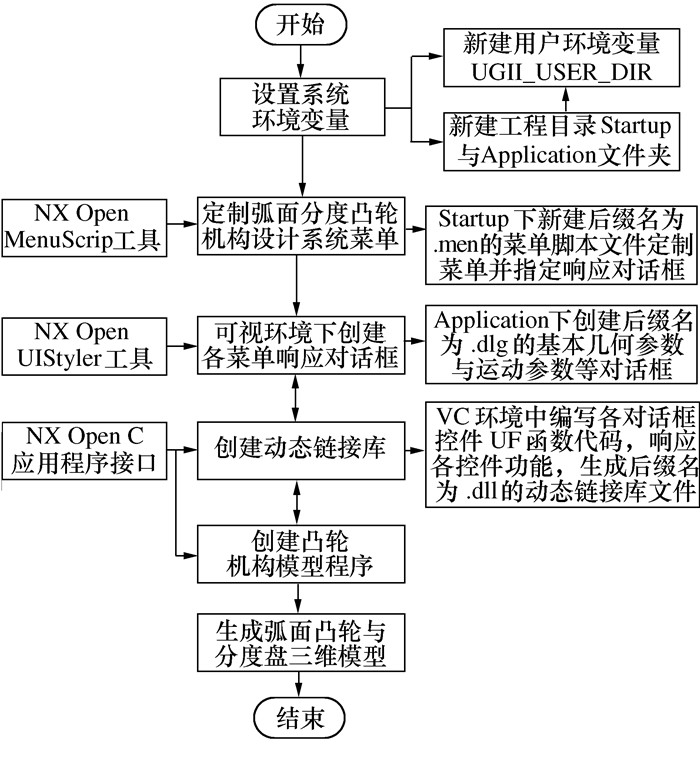
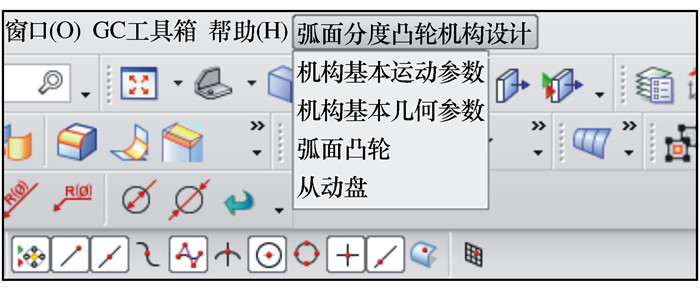
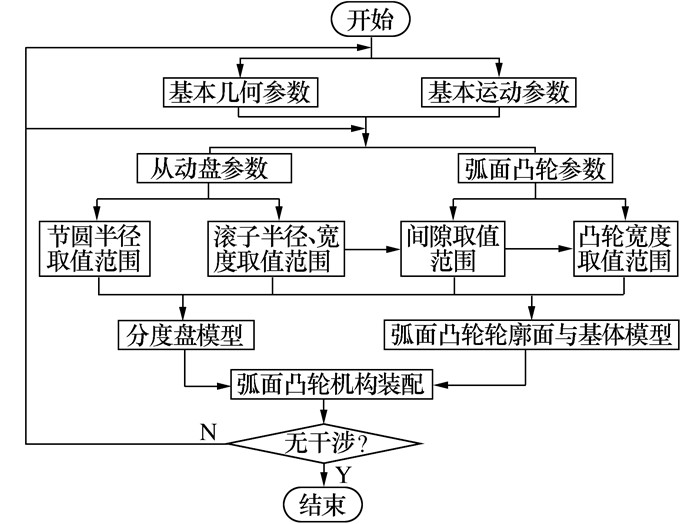
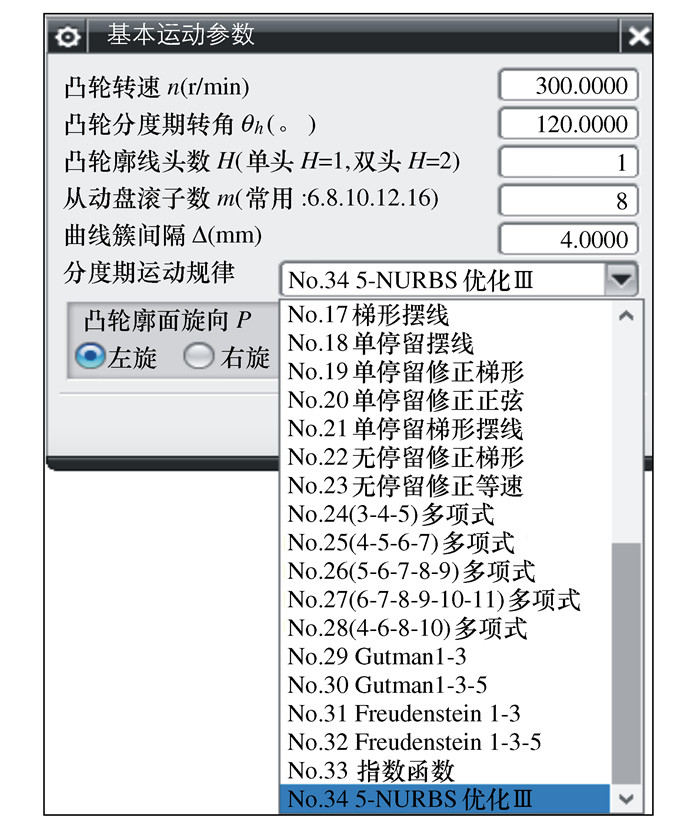
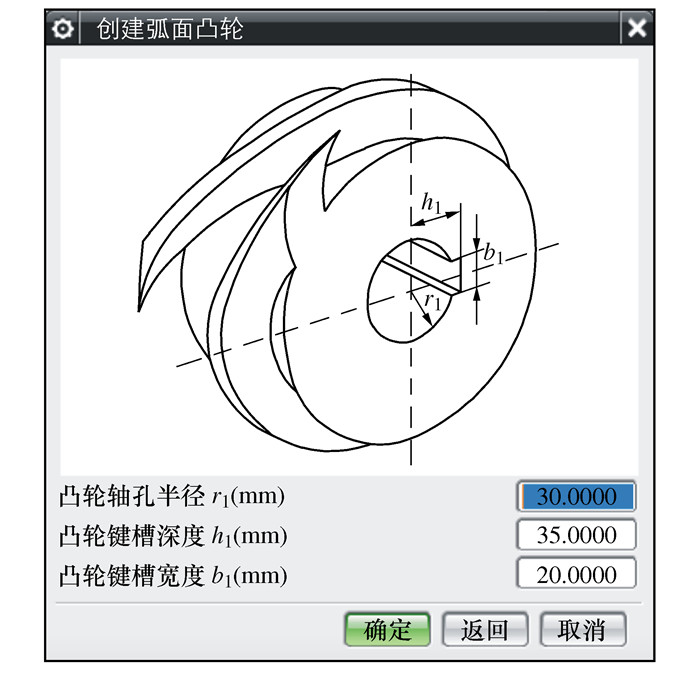
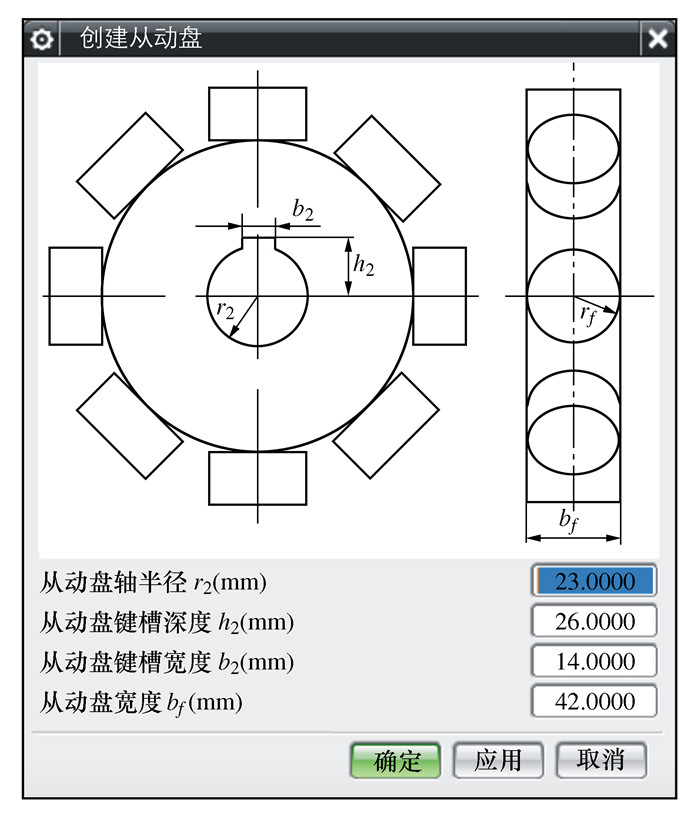
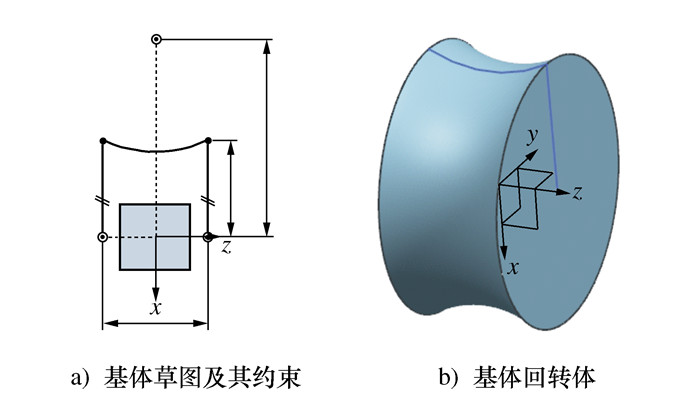
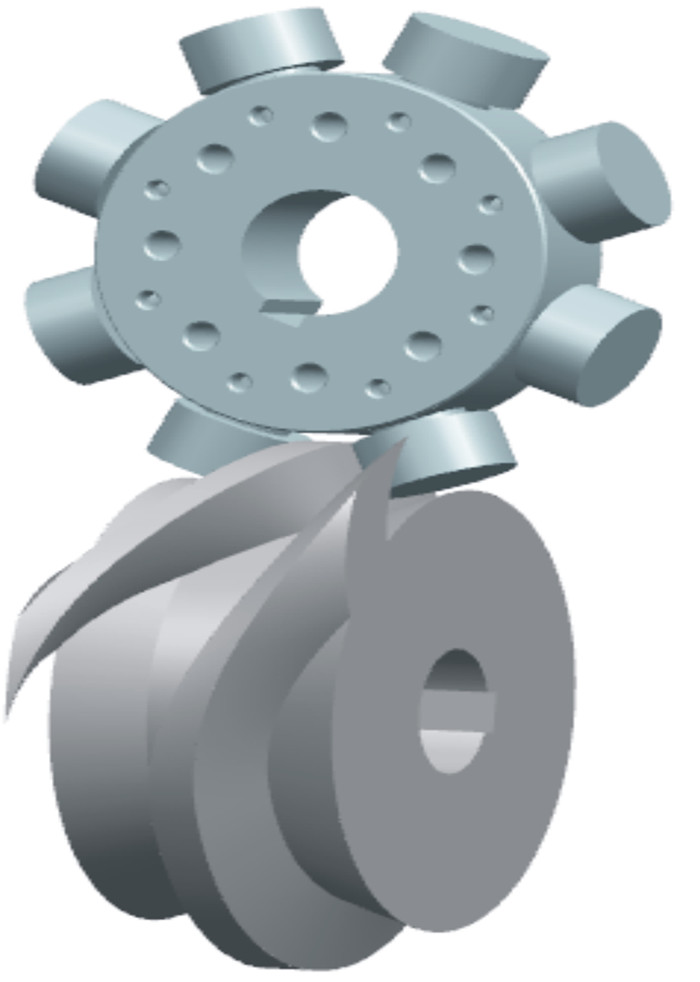
为使弧面凸轮机构在设计过程中具有修改柔性, 设计周期短和高效等优点, 利用NX Open C经典应用编程接口与Microsoft visual studio(VS)实现连接, 用户可通过NX Open应用程序开发菜单、工具条、对话框等工具实现交互设计, 对话框通过调用回调函数激活相应控件, 应用程序(回调函数)通过相应的编程语言与NX Open API进行编码。基于NX软件二次开发功能, 结合VS开发一款适用于弧面分度凸轮机构快速建模的参数化设计系统, 可实现可视化交互设计。结果表明, 参数化设计后的系统极大地缩短了设计时间和减少了繁琐的重复劳动。
为使弧面凸轮机构在设计过程中具有修改柔性, 设计周期短和高效等优点, 利用NX Open C经典应用编程接口与Microsoft visual studio(VS)实现连接, 用户可通过NX Open应用程序开发菜单、工具条、对话框等工具实现交互设计, 对话框通过调用回调函数激活相应控件, 应用程序(回调函数)通过相应的编程语言与NX Open API进行编码。基于NX软件二次开发功能, 结合VS开发一款适用于弧面分度凸轮机构快速建模的参数化设计系统, 可实现可视化交互设计。结果表明, 参数化设计后的系统极大地缩短了设计时间和减少了繁琐的重复劳动。


2021, 40(7): 1037-1042.
doi: 10.13433/j.cnki.1003-8728.20200191
摘要:
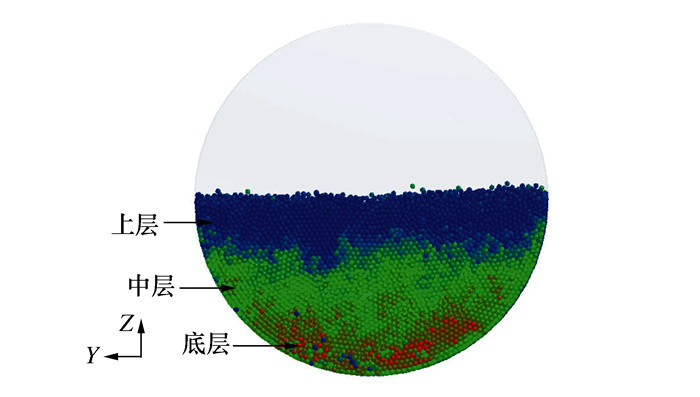
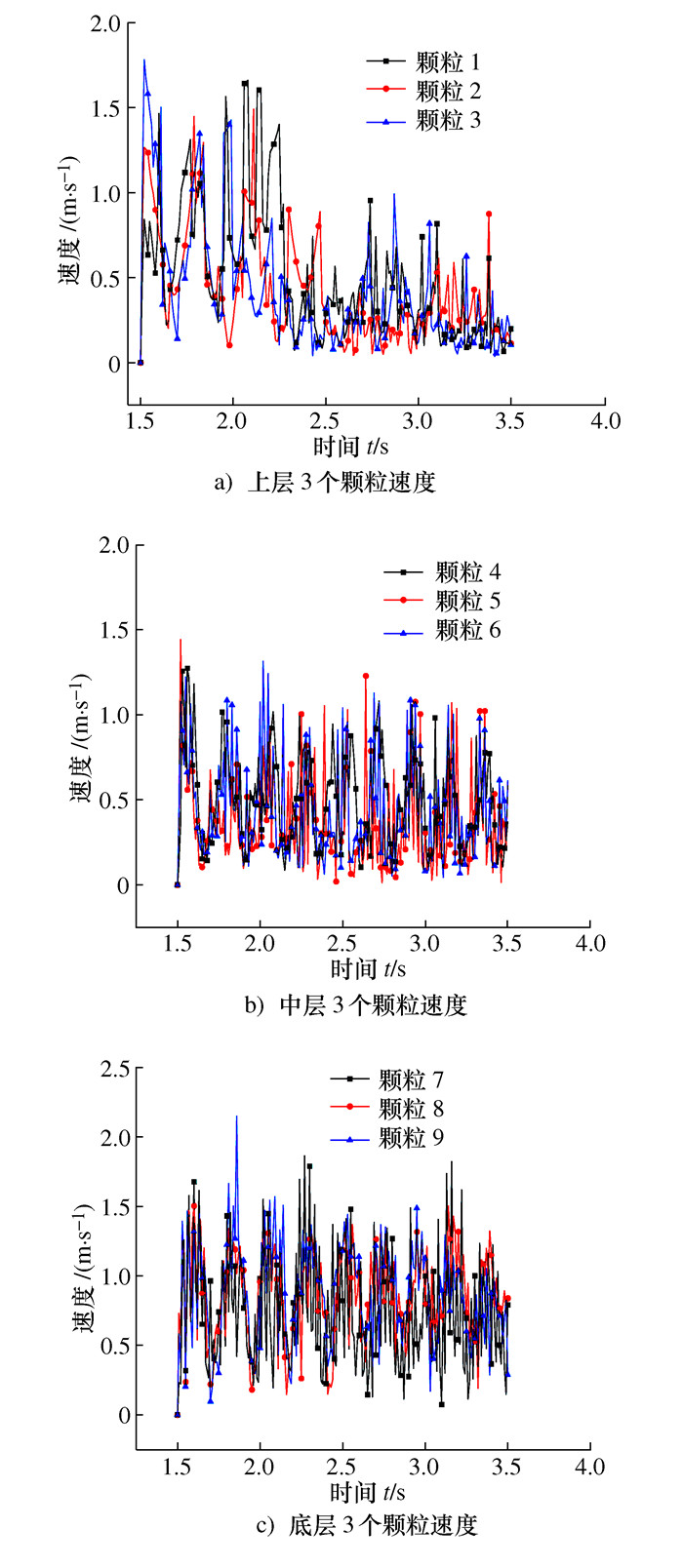
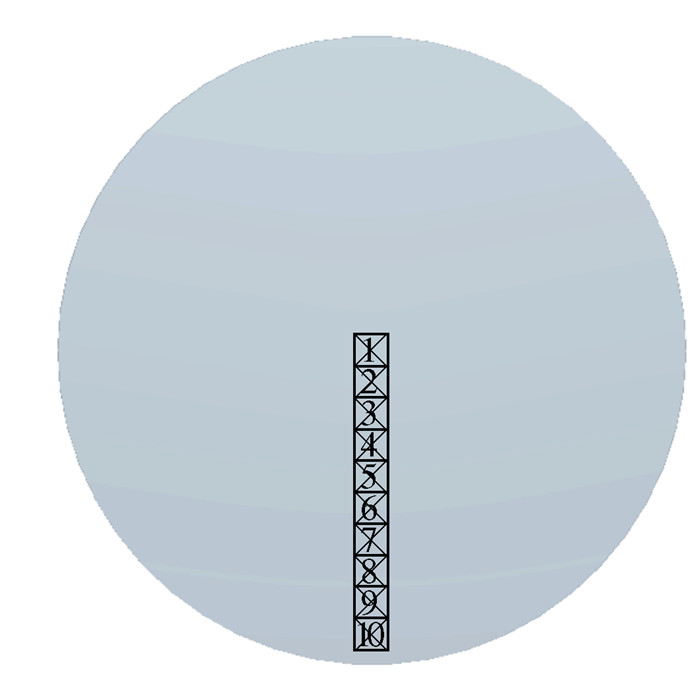
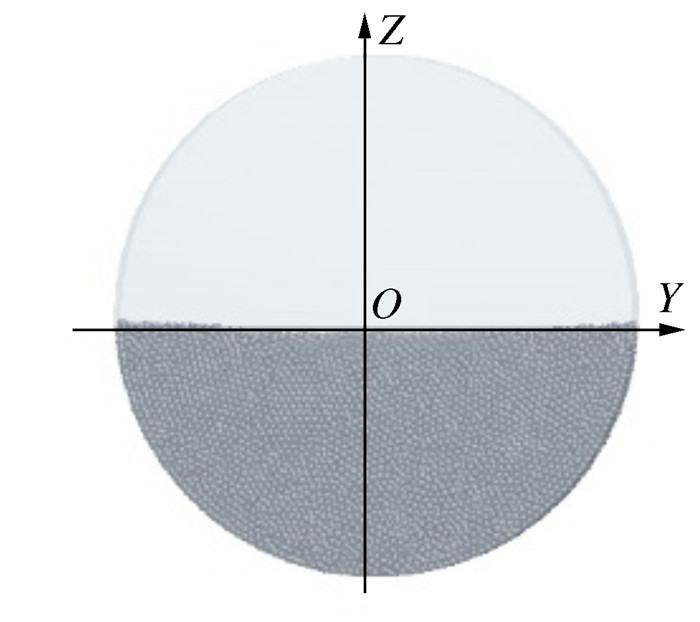
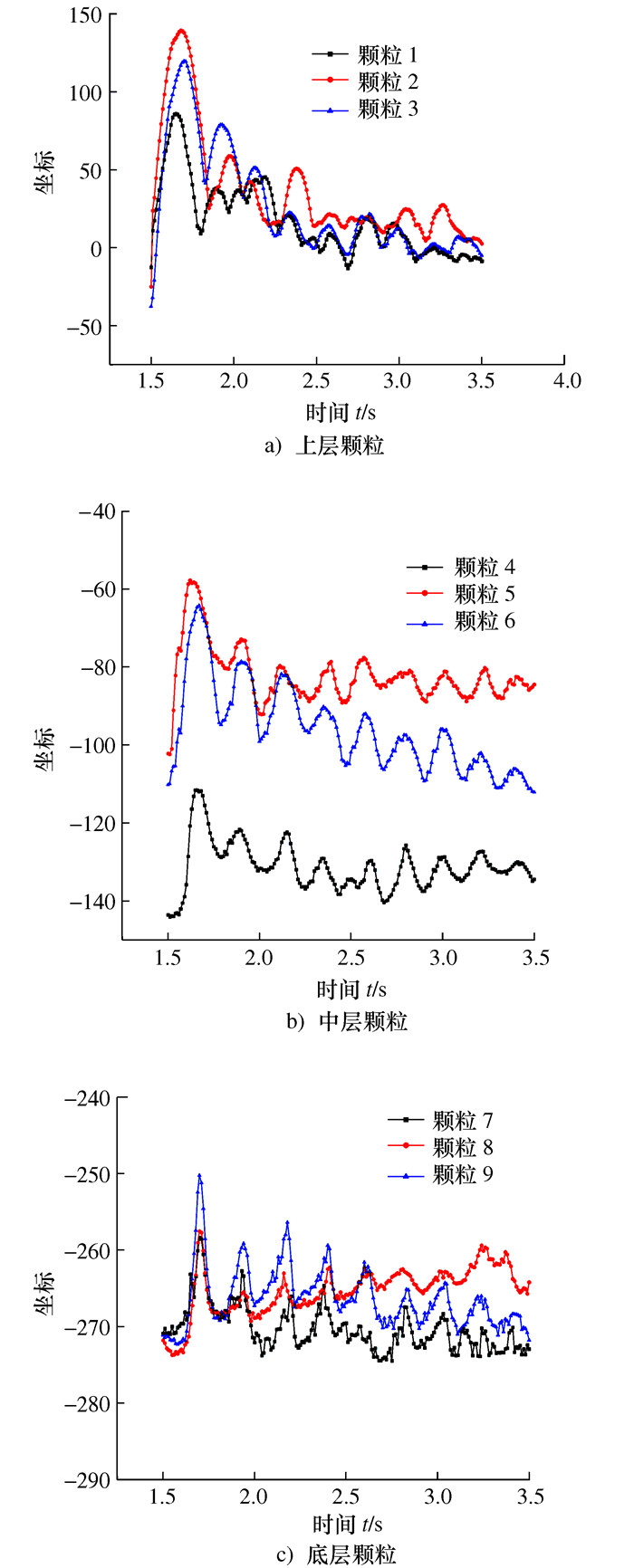
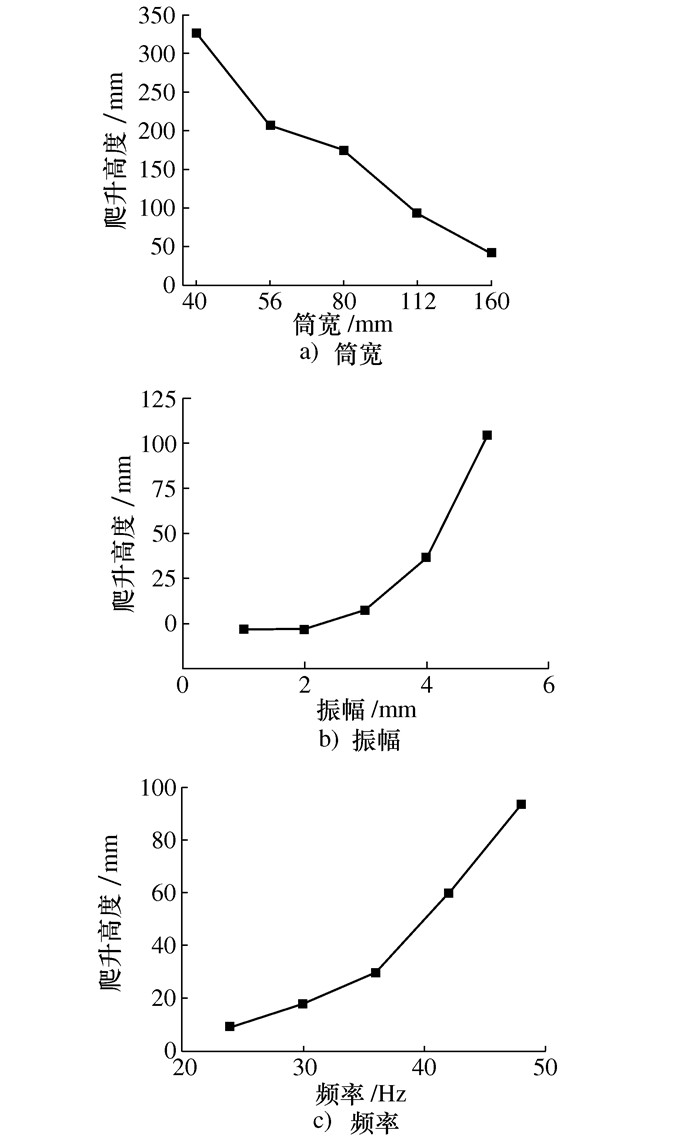
为研究一维振动式滚磨光整加工中不同振幅、频率、筒宽下的颗粒流场分布及运动特征, 基于离散元法对滚磨光整加工过程进行数值模拟与分析。研究发现: 加工过程中, 颗粒群可根据颗粒位置分为上中下三层, 上层颗粒速度波动较大, 且在一段时间后, 颗粒速度会处于动态平衡状态; 中层和底层颗粒速度始终在一定范围内波动, 且具有周期性; 不同层域的颗粒开始运动后都会有爬升, 一段时间后处于动态平衡, 上层颗粒的爬升值最大, 底层颗粒的爬升值最小; 随着频率和振幅增加, 颗粒的爬升高度增加; 筒宽越宽, 爬升高度越小。
为研究一维振动式滚磨光整加工中不同振幅、频率、筒宽下的颗粒流场分布及运动特征, 基于离散元法对滚磨光整加工过程进行数值模拟与分析。研究发现: 加工过程中, 颗粒群可根据颗粒位置分为上中下三层, 上层颗粒速度波动较大, 且在一段时间后, 颗粒速度会处于动态平衡状态; 中层和底层颗粒速度始终在一定范围内波动, 且具有周期性; 不同层域的颗粒开始运动后都会有爬升, 一段时间后处于动态平衡, 上层颗粒的爬升值最大, 底层颗粒的爬升值最小; 随着频率和振幅增加, 颗粒的爬升高度增加; 筒宽越宽, 爬升高度越小。


2021, 40(7): 1043-1050.
doi: 10.13433/j.cnki.1003-8728.20200178
摘要:
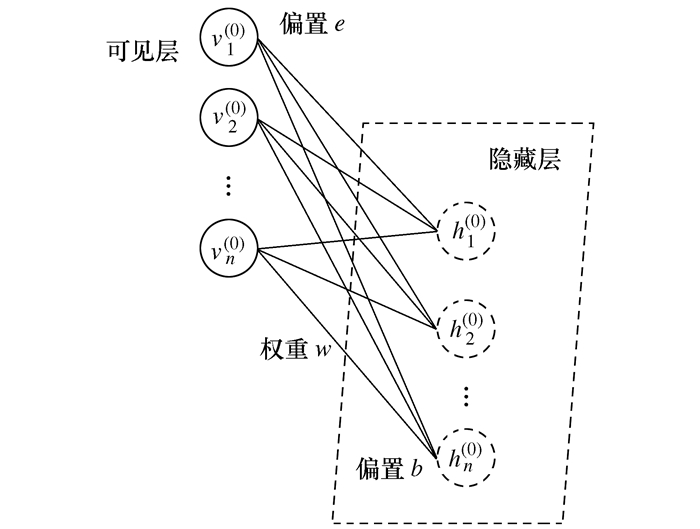
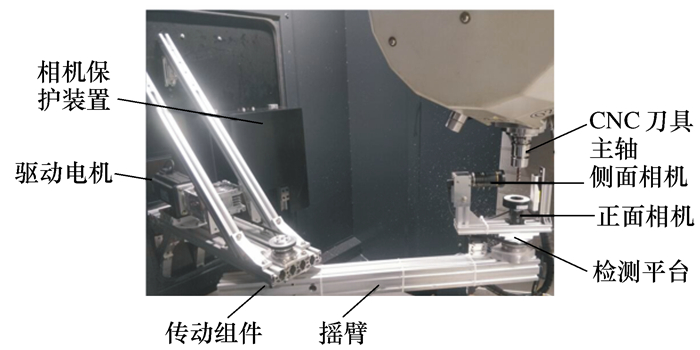
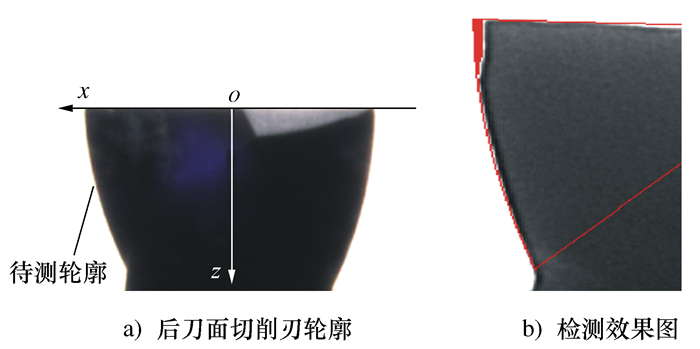
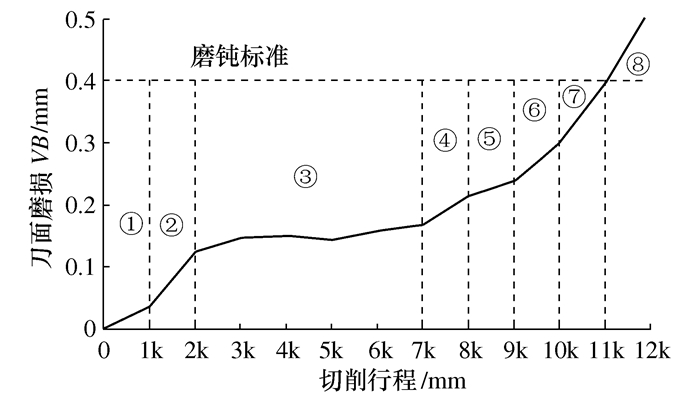
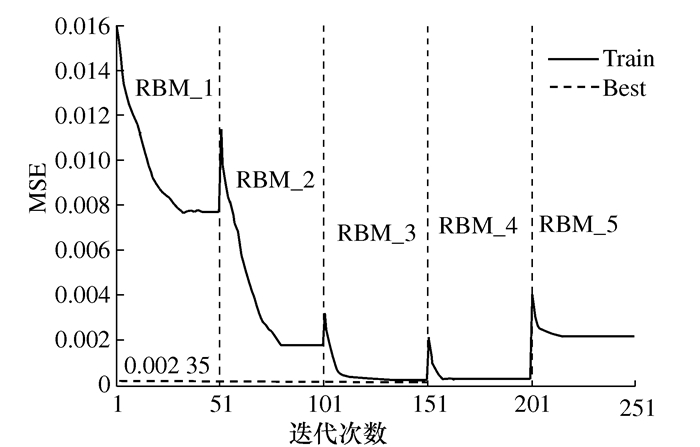
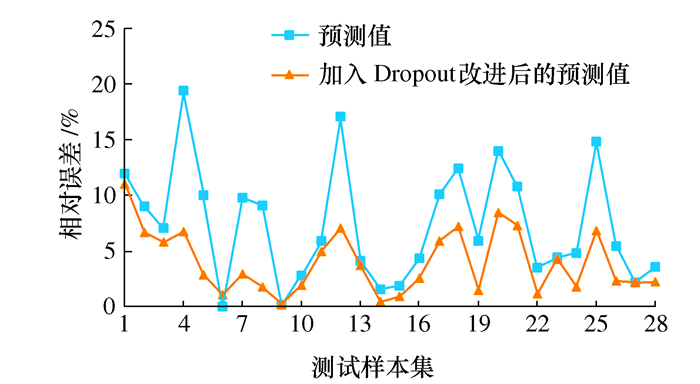
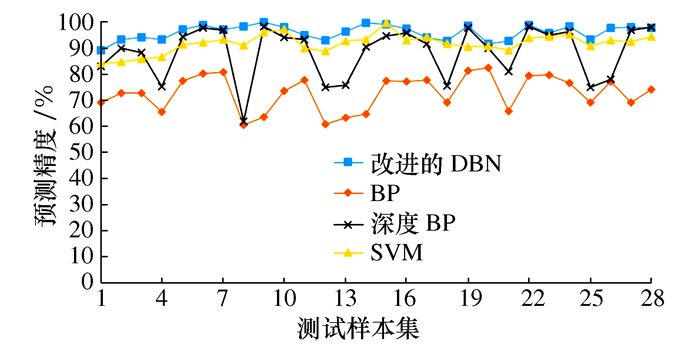
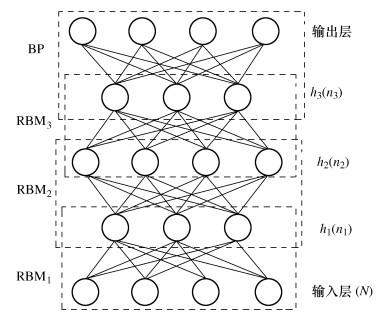
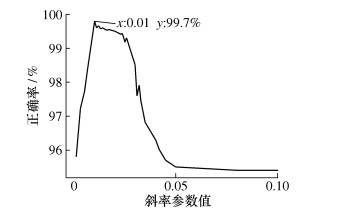
针对制造车间数控刀具在连续作业过程中易出现过度使用或提前置换的现状, 对刀具磨损感知数据获取方法和磨损预测模型构建进行研究。为避免传感器噪声影响, 采用OPC技术直接与机床协同完成数控通信, 并设计一套双镜头垂直分布的感知数据获取系统; 为增强预测模型泛化能力, 采用Dropout优化后深度信念网络(DBN)作为预测模型, 先在特征提取阶段重构出优化权值, 再引入标签量训练特征匹配阶段。结果显示, 改进的DBN算法平均预测准确度约96.0%, 在预测精度和稳定性方面较传统模型显著改善。
针对制造车间数控刀具在连续作业过程中易出现过度使用或提前置换的现状, 对刀具磨损感知数据获取方法和磨损预测模型构建进行研究。为避免传感器噪声影响, 采用OPC技术直接与机床协同完成数控通信, 并设计一套双镜头垂直分布的感知数据获取系统; 为增强预测模型泛化能力, 采用Dropout优化后深度信念网络(DBN)作为预测模型, 先在特征提取阶段重构出优化权值, 再引入标签量训练特征匹配阶段。结果显示, 改进的DBN算法平均预测准确度约96.0%, 在预测精度和稳定性方面较传统模型显著改善。


2021, 40(7): 1051-1057.
doi: 10.13433/j.cnki.1003-8728.20200172
摘要:
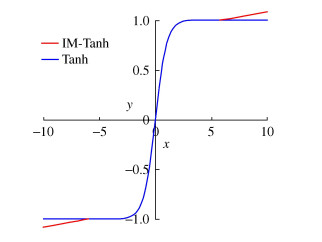
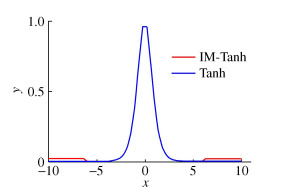
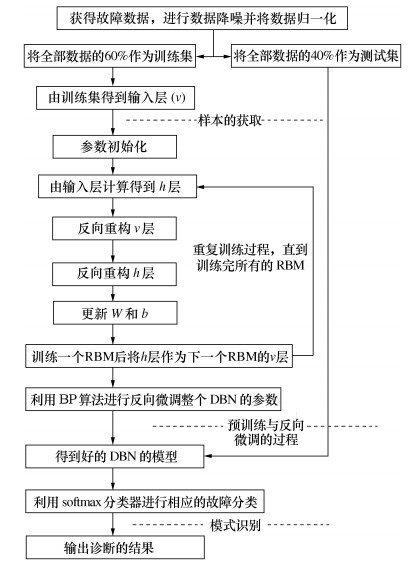
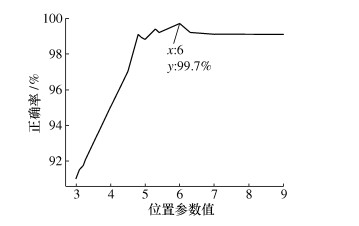
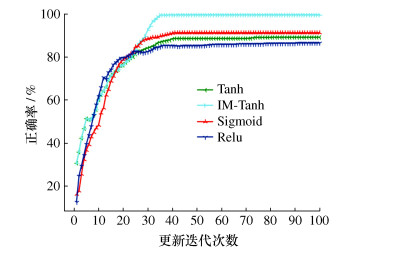
针对加工中心电主轴中滚动轴承等零部件容易出现故障或者失效等问题, 即提出一种改进的DBN(深度置信网络)电主轴故障诊断方法。该方法对电主轴中滚动轴承运行故障状态下的振动信号进行特征提取, 然后通过DBN映射出信号与故障特征的复杂关系来进行故障诊断。其中为提高训练DBN的效率以及解决在反向传播过程中梯度消失的问题, 提出一种新型激活函数。研究结果表明, 采用新型激活函数的DBN不仅降低了时间成本, 同时也具有较高的故障识别的能力。
针对加工中心电主轴中滚动轴承等零部件容易出现故障或者失效等问题, 即提出一种改进的DBN(深度置信网络)电主轴故障诊断方法。该方法对电主轴中滚动轴承运行故障状态下的振动信号进行特征提取, 然后通过DBN映射出信号与故障特征的复杂关系来进行故障诊断。其中为提高训练DBN的效率以及解决在反向传播过程中梯度消失的问题, 提出一种新型激活函数。研究结果表明, 采用新型激活函数的DBN不仅降低了时间成本, 同时也具有较高的故障识别的能力。
2021, 40(7): 1058-1064.
摘要:
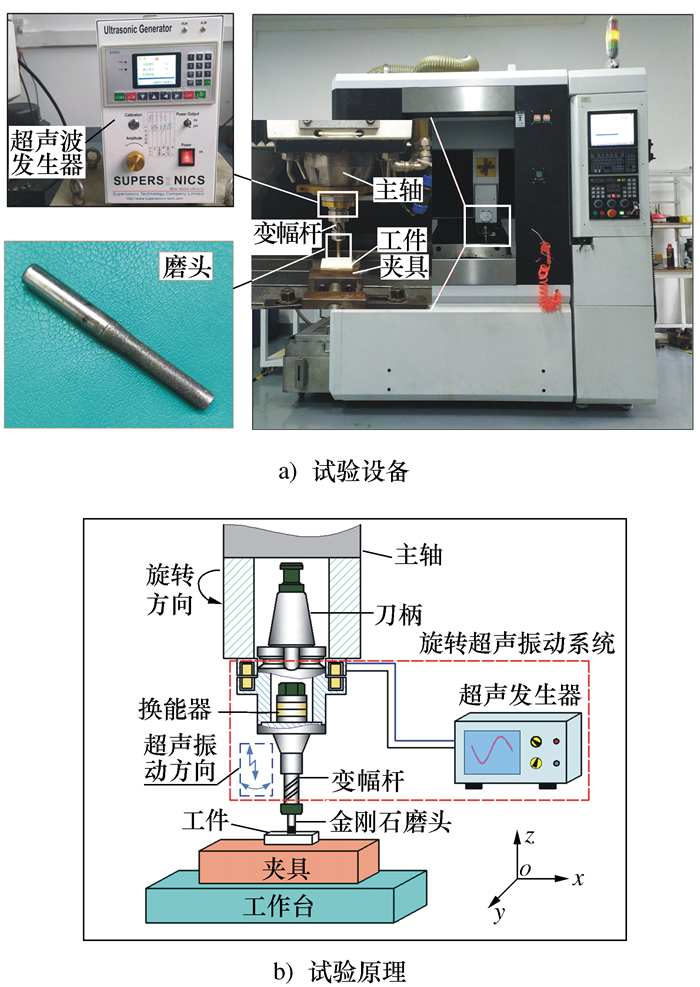
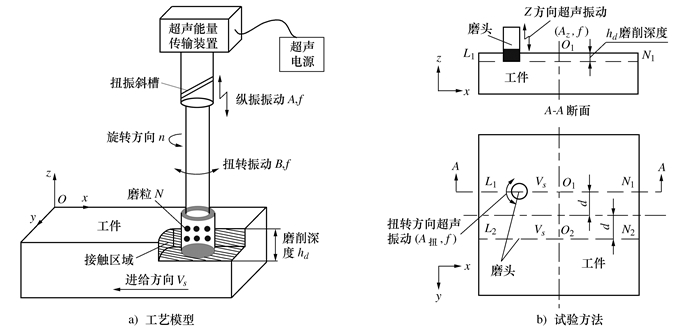
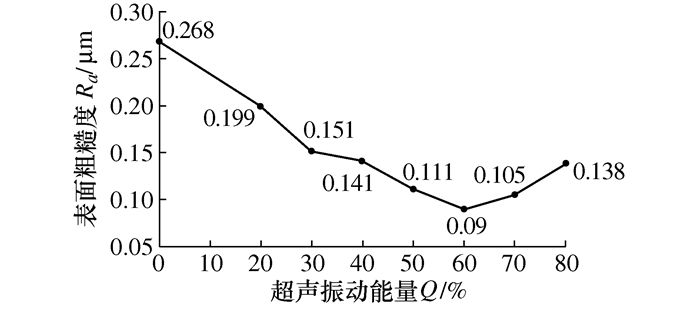
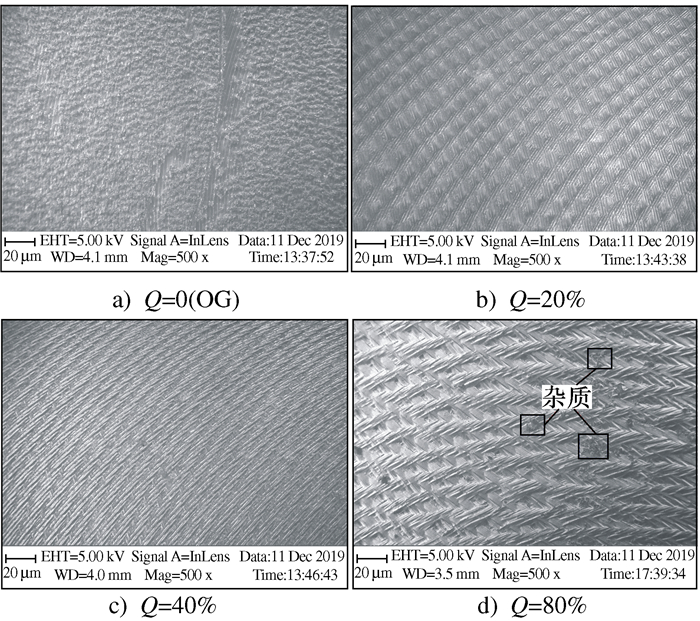
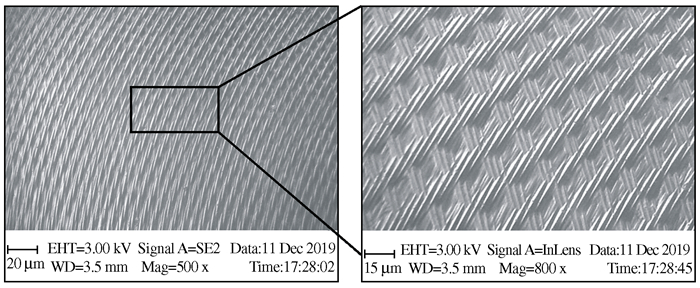
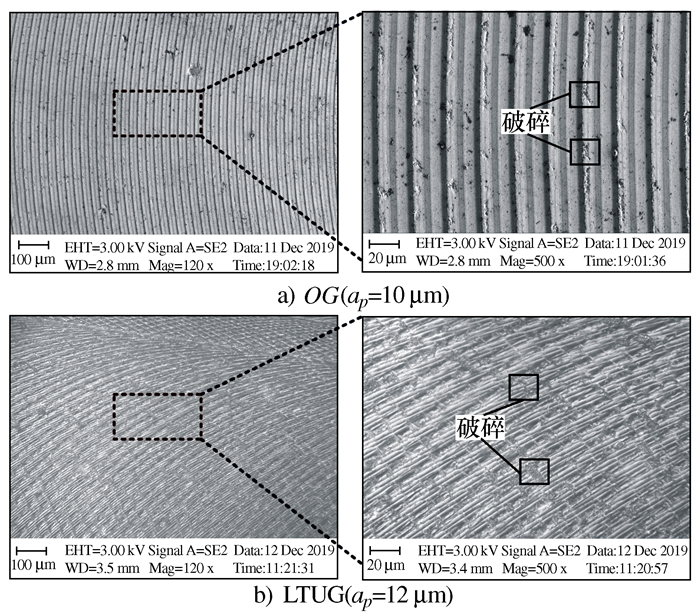
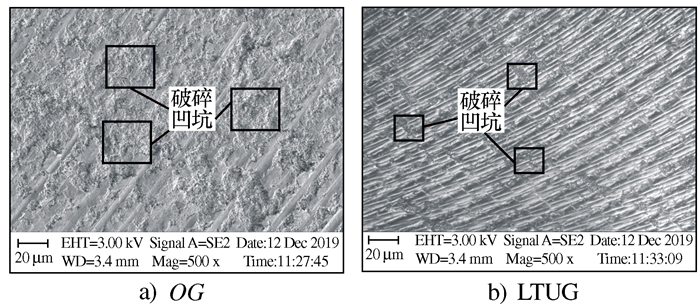
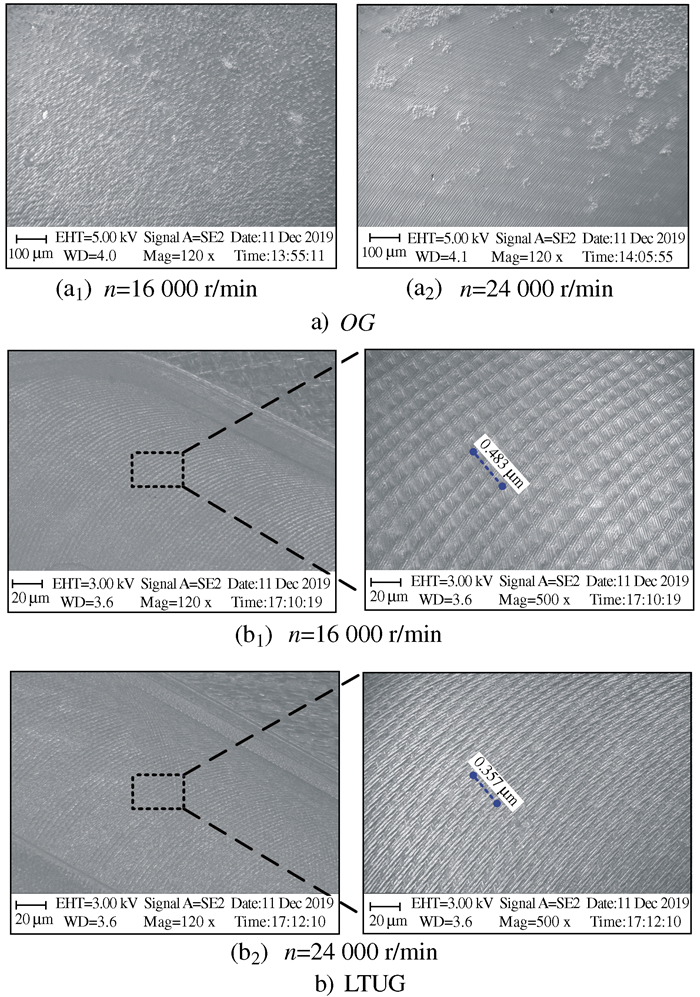
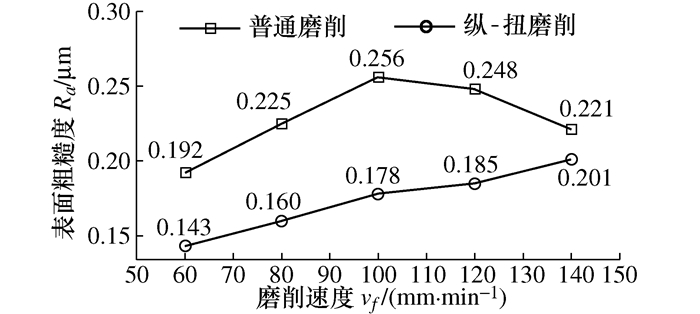
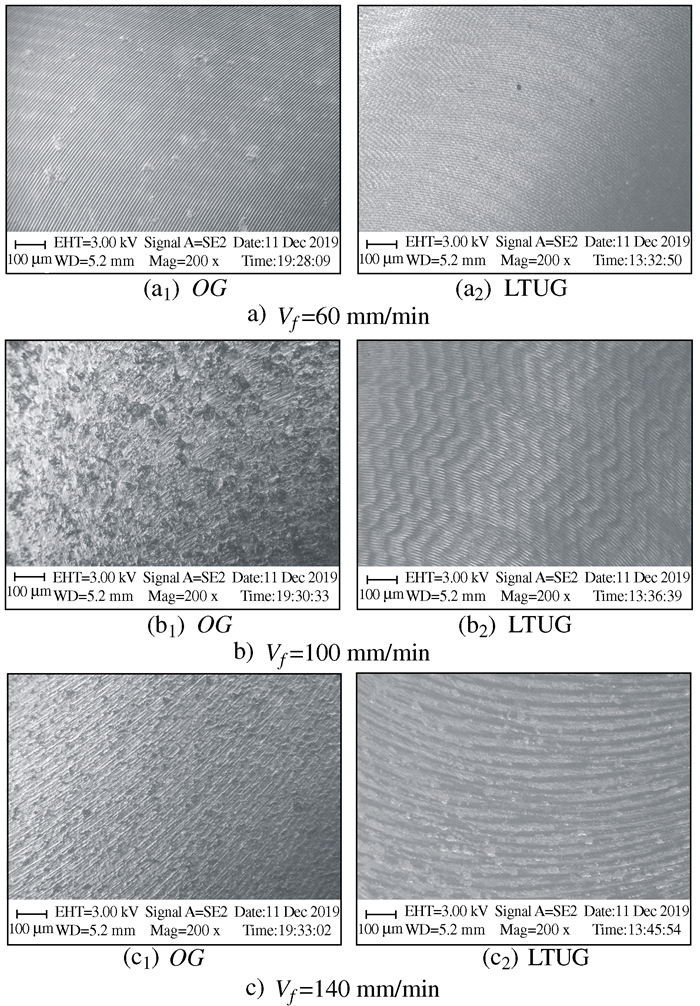
ZrO2陶瓷作为典型硬脆材料, 采用普通的磨削方法难以获得良好表面质量, 而超声振动磨削可显著改善其加工效果。本文将纵扭超声振动应用于磨削加工, 运用单因素法, 设计普通磨削(OG)及纵扭超声磨削(LTUG)对比试验, 以加工后材料表面粗糙度Ra值和微观形貌作为评价指标, 分析并得到各工艺参数对表面质量的影响规律。结果表明: 整体上LTUG表面Ra值始终低于OG, 且磨削表面平整, 磨痕形貌更加均匀、顺畅; 相比于OG, 随超声能量增大, LTUG表面Ra值呈先减小后增大趋势, 同时均随磨削深度加深先减小后增大, 随主轴转速提高均逐渐降低; 另外, OG表面Ra值随进给速度提升先增大后减小, 而LTUG为持续增大并逐渐趋向OG。
ZrO2陶瓷作为典型硬脆材料, 采用普通的磨削方法难以获得良好表面质量, 而超声振动磨削可显著改善其加工效果。本文将纵扭超声振动应用于磨削加工, 运用单因素法, 设计普通磨削(OG)及纵扭超声磨削(LTUG)对比试验, 以加工后材料表面粗糙度Ra值和微观形貌作为评价指标, 分析并得到各工艺参数对表面质量的影响规律。结果表明: 整体上LTUG表面Ra值始终低于OG, 且磨削表面平整, 磨痕形貌更加均匀、顺畅; 相比于OG, 随超声能量增大, LTUG表面Ra值呈先减小后增大趋势, 同时均随磨削深度加深先减小后增大, 随主轴转速提高均逐渐降低; 另外, OG表面Ra值随进给速度提升先增大后减小, 而LTUG为持续增大并逐渐趋向OG。


2021, 40(7): 1065-1071.
doi: 10.13433/j.cnki.1003-8728.20200176
摘要:
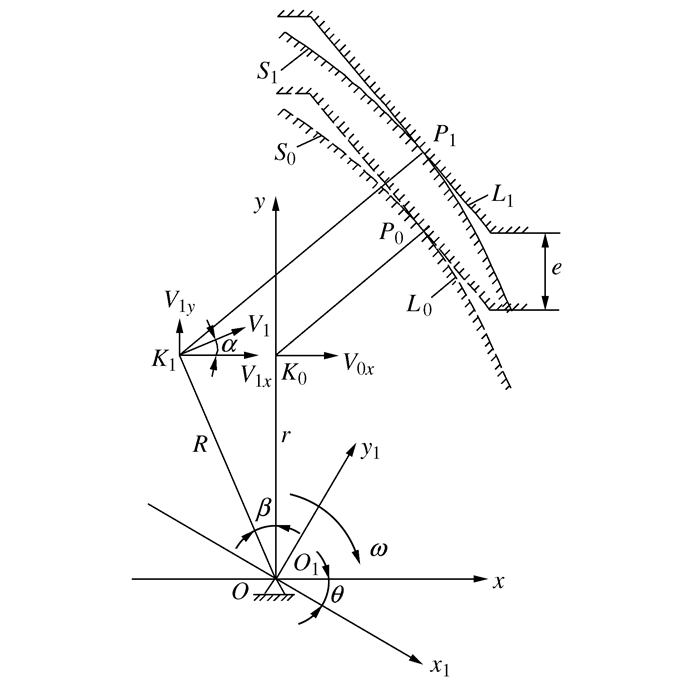
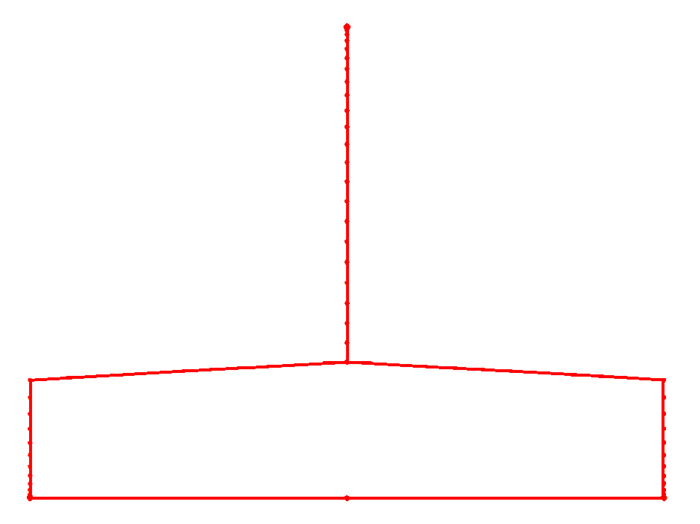
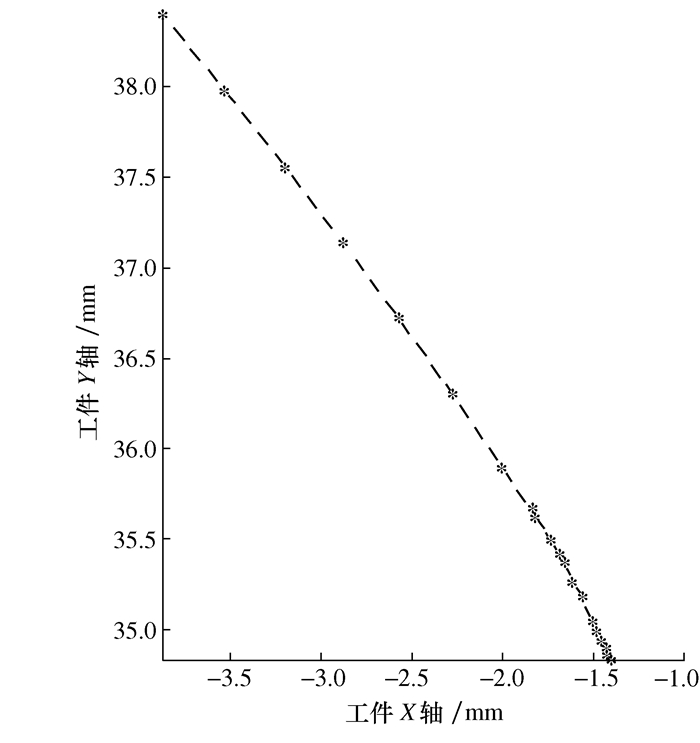
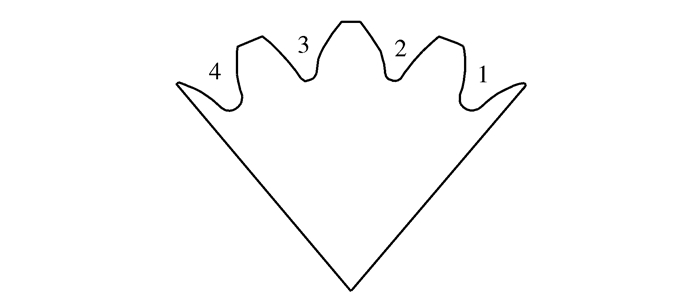
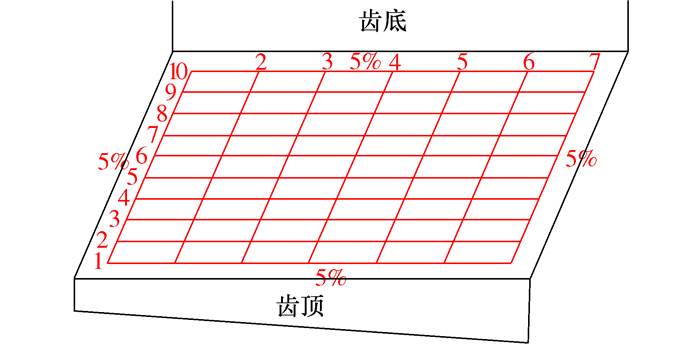
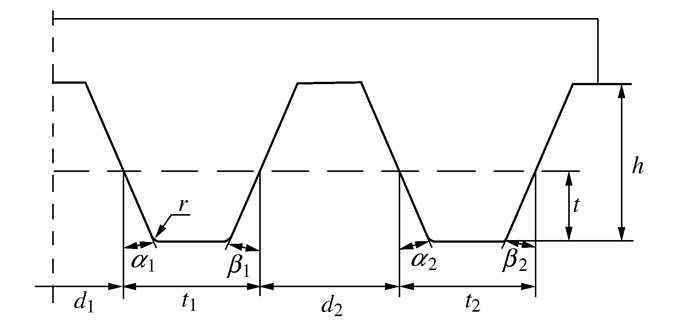
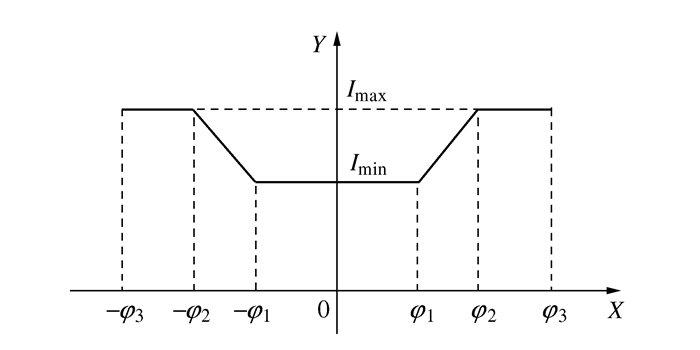
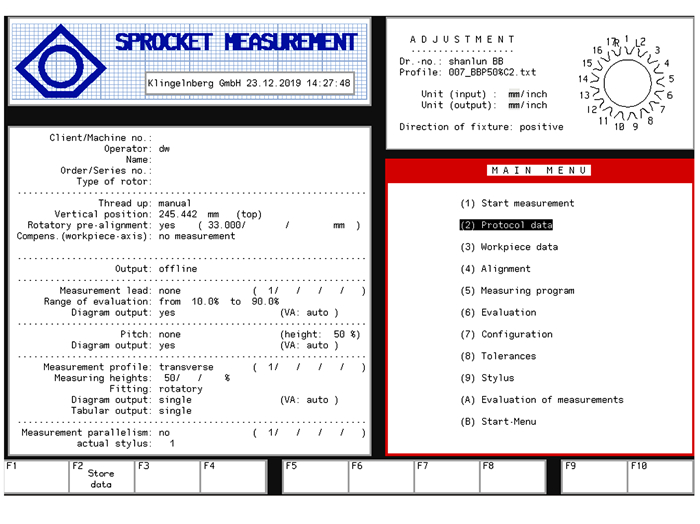
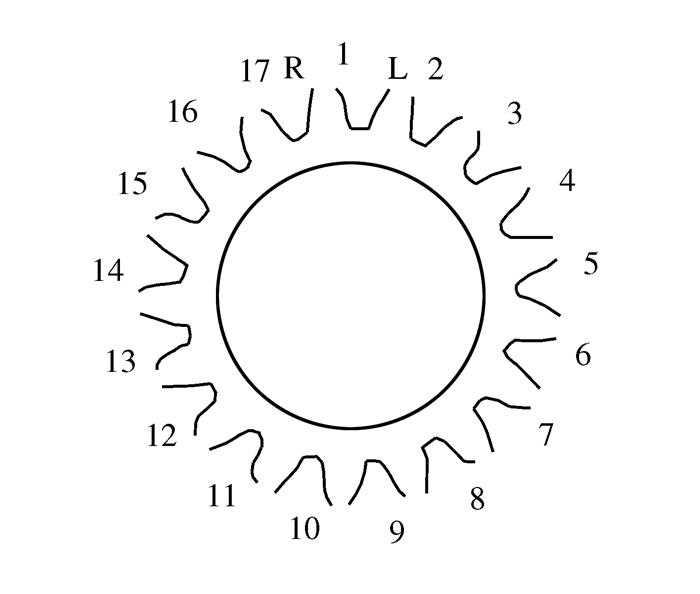
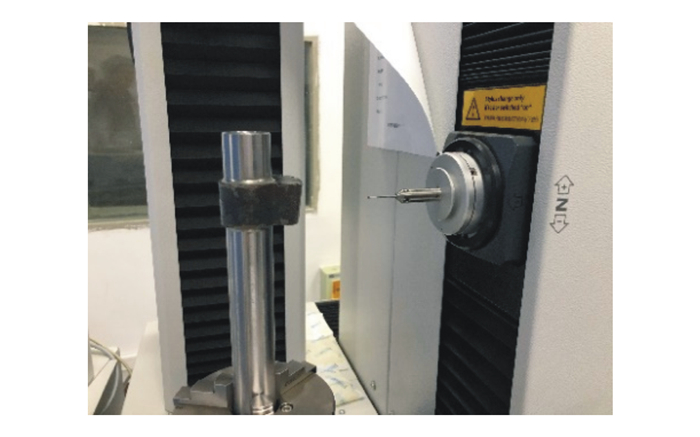
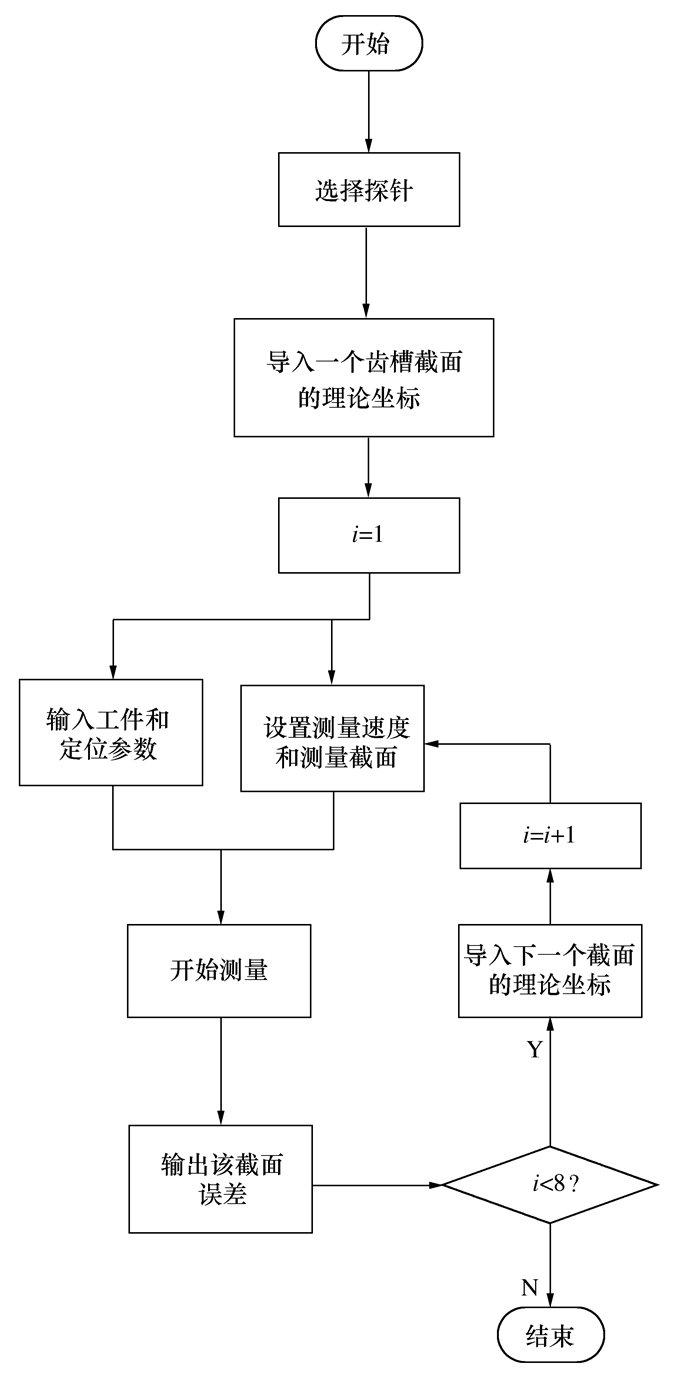
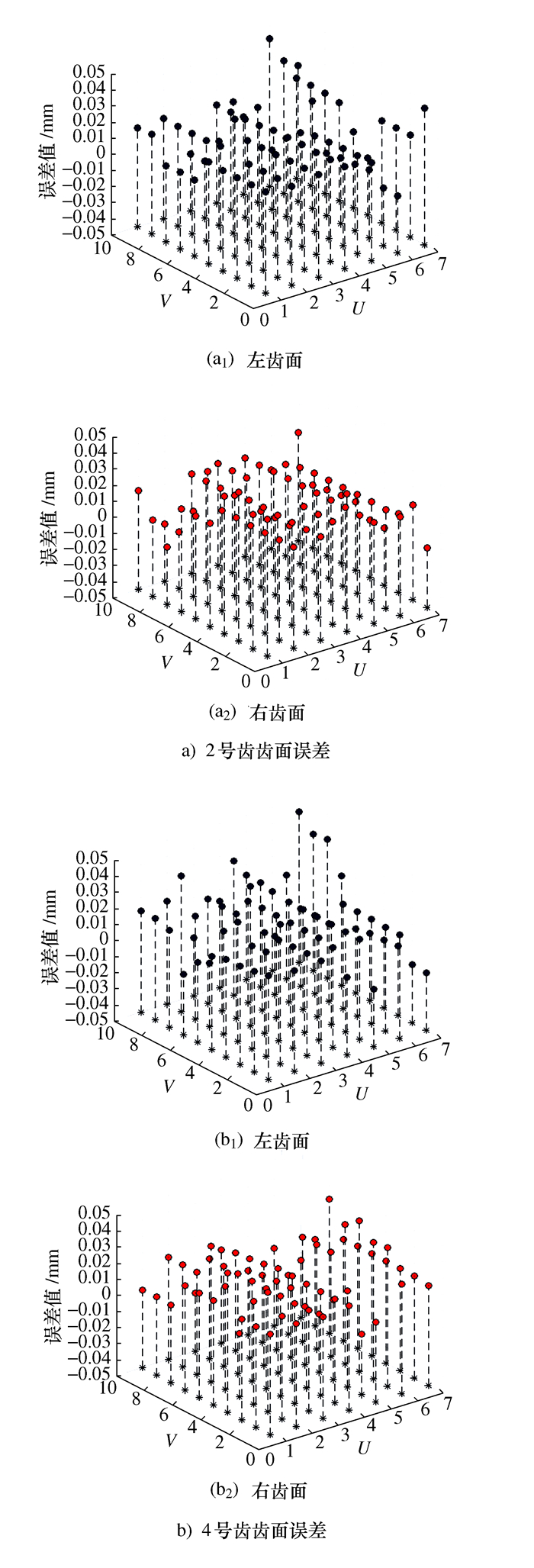
汽车转向器摇臂轴非圆齿扇是一种锥面上端截面的变位系数随端截面位置不同而变化的结构复杂的齿轮, 目前还没有专用的测量软件。本文提出了一种汽车转向器摇臂轴非圆齿扇齿廓误差测量方法, 将用齿廓法线法计算得到的理论齿廓坐标导入Kligenberg P26中的Sprocket profile模块对已知理论齿廓坐标的非圆齿扇进行测量。根据非圆齿扇齿条副的啮合特性, 计算并绘制出非圆齿扇齿条副的啮合瞬心点; 根据willis定理计算非圆齿扇的齿廓, 并用仿真软件绘制齿廓; 为了更直观的显示非圆齿扇齿齿面的误差, 将齿面网格划分, 并将同一齿槽的若干截面整合为一个完整的齿面误差模型。
汽车转向器摇臂轴非圆齿扇是一种锥面上端截面的变位系数随端截面位置不同而变化的结构复杂的齿轮, 目前还没有专用的测量软件。本文提出了一种汽车转向器摇臂轴非圆齿扇齿廓误差测量方法, 将用齿廓法线法计算得到的理论齿廓坐标导入Kligenberg P26中的Sprocket profile模块对已知理论齿廓坐标的非圆齿扇进行测量。根据非圆齿扇齿条副的啮合特性, 计算并绘制出非圆齿扇齿条副的啮合瞬心点; 根据willis定理计算非圆齿扇的齿廓, 并用仿真软件绘制齿廓; 为了更直观的显示非圆齿扇齿齿面的误差, 将齿面网格划分, 并将同一齿槽的若干截面整合为一个完整的齿面误差模型。

2021, 40(7): 1072-1078.
doi: 10.13433/j.cnki.1003-8728.20200169
摘要:
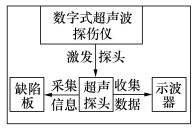
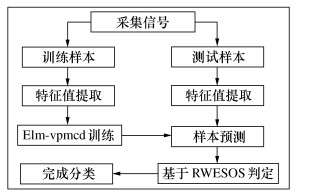
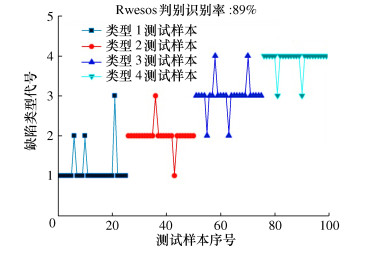
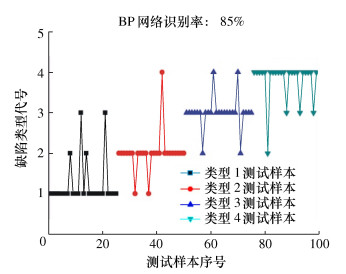
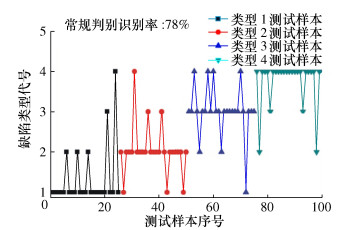
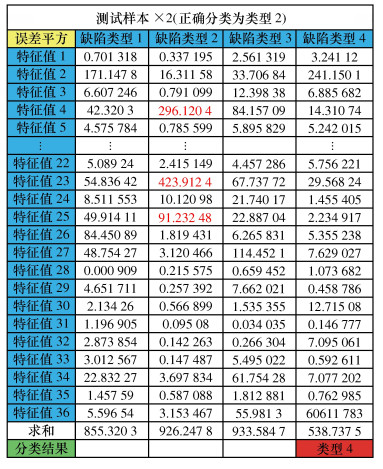
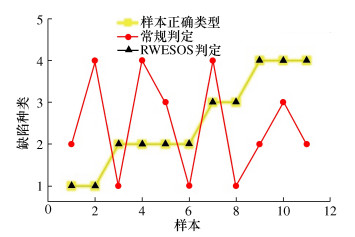
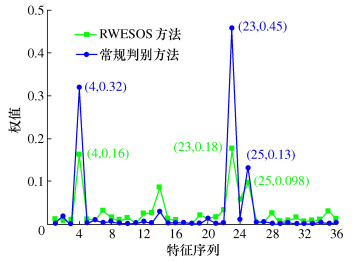
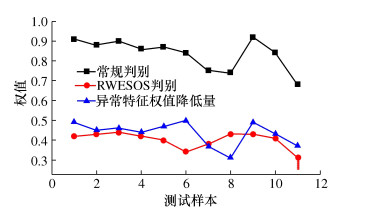
在通过特征值间的内在关系建立预测模型的变量预测模式识别方法(VPMCD)中, 传统判别方法受特征向量中的个别特征预测异常值影响大, 易导致分类错误。提出基于比值加权的最小误差平方和的判别函数(RWESOS), 可将异常预测的特征权重大幅降低, 提升正确预测特征的权重, 从而提高分类准确率。实验表明, 在对不同缺陷大小的超声检测信号的识别中, 使用RWESOS判别函数的RWESOS-VPMCD方法的识别率比BP神经网络和普通判别函数的VPMCD方法的识别率分别提高了4%和11%。
在通过特征值间的内在关系建立预测模型的变量预测模式识别方法(VPMCD)中, 传统判别方法受特征向量中的个别特征预测异常值影响大, 易导致分类错误。提出基于比值加权的最小误差平方和的判别函数(RWESOS), 可将异常预测的特征权重大幅降低, 提升正确预测特征的权重, 从而提高分类准确率。实验表明, 在对不同缺陷大小的超声检测信号的识别中, 使用RWESOS判别函数的RWESOS-VPMCD方法的识别率比BP神经网络和普通判别函数的VPMCD方法的识别率分别提高了4%和11%。


2021, 40(7): 1079-1084.
doi: 10.13433/j.cnki.1003-8728.20200181
摘要:
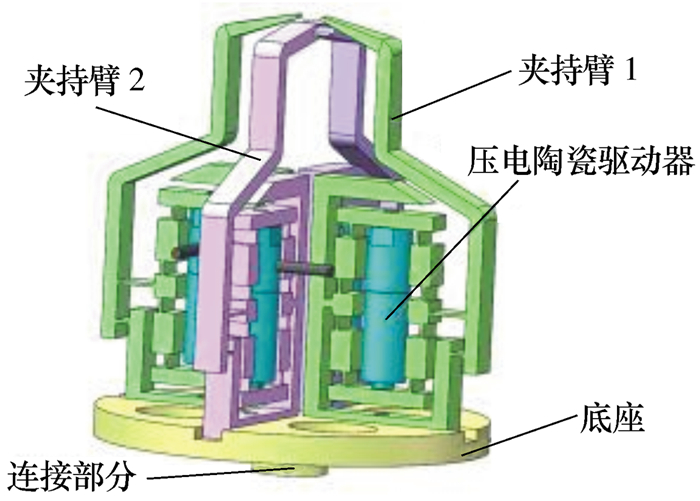
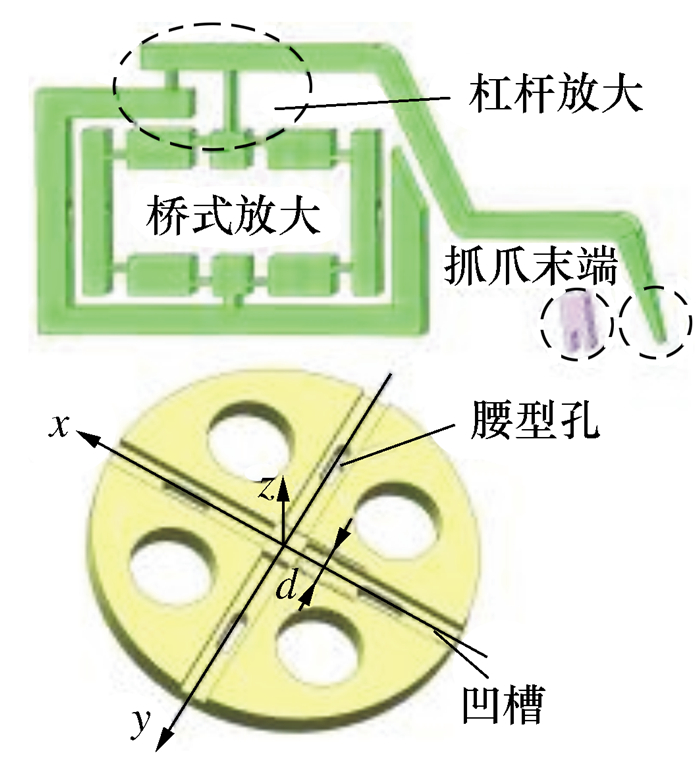
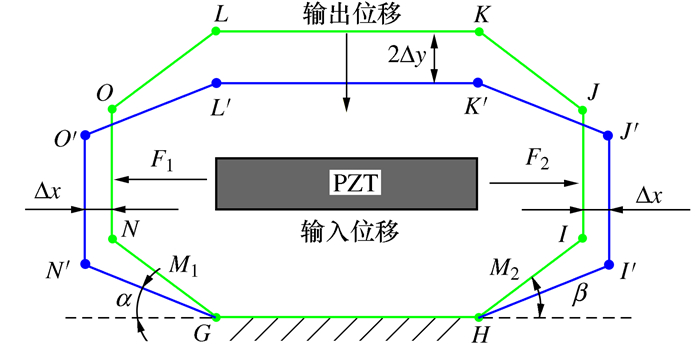
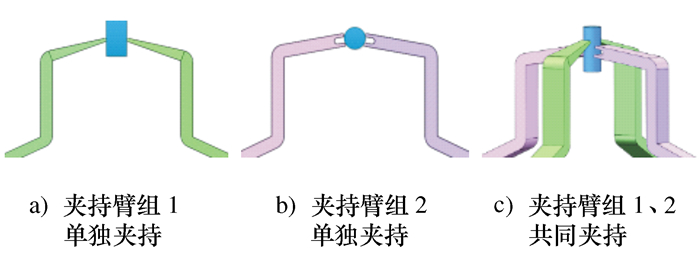
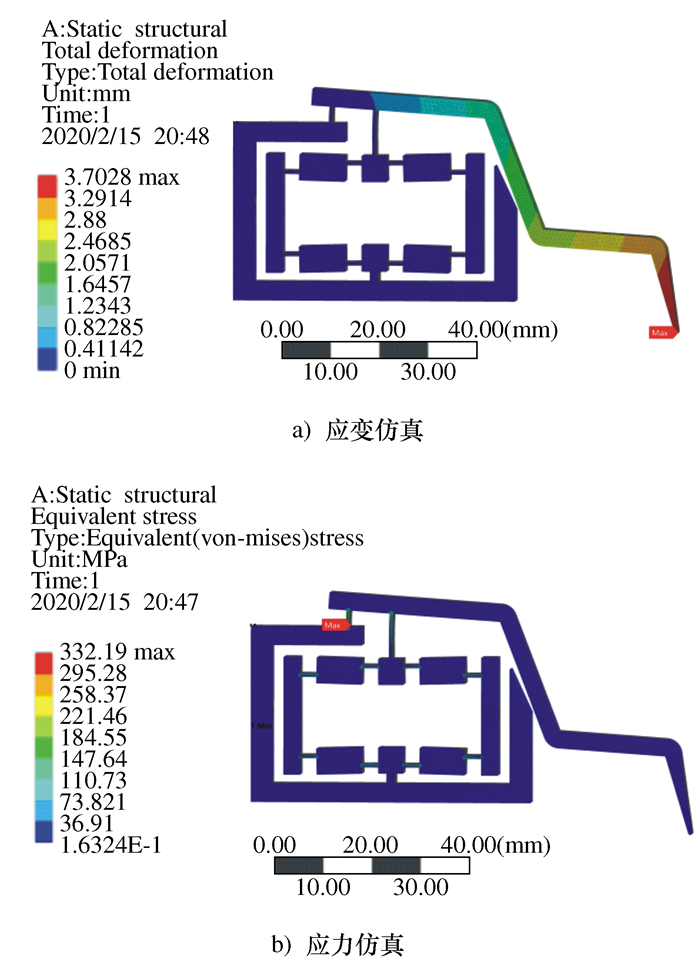
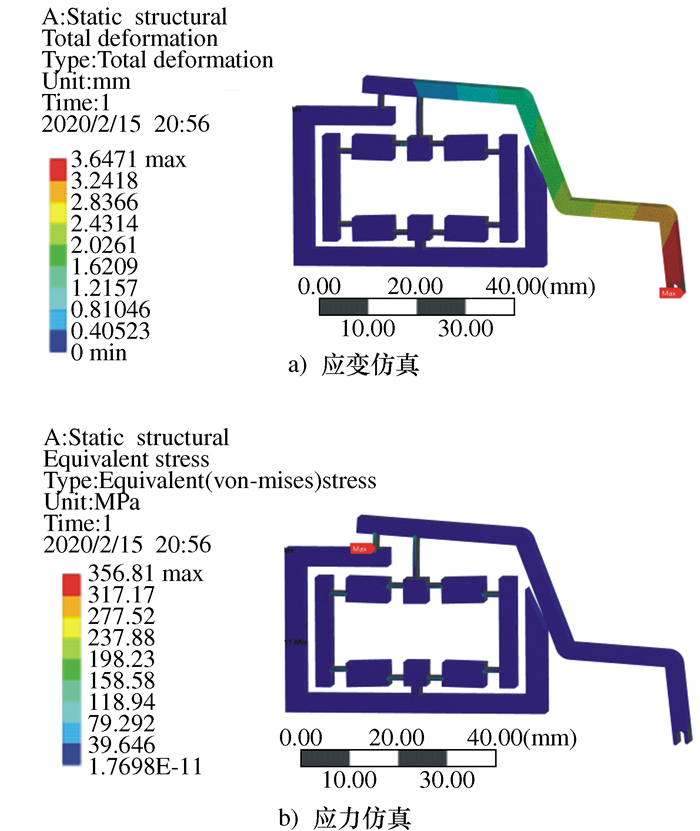
针对传统微夹持器夹持范围小、易对物体造成损伤等不足, 基于桥式放大机构和杠杆原理设计了一种新型微夹持器。该微夹持器不仅能完成对不同尺寸大小微物体的微夹持操作, 还能避免在微夹持操作过程中对微小物体造成损伤或脱落, 以及适应不规则微小物体的夹持操作。阐明了夹持器的结构设计原理, 根据微夹持臂的工作原理建立了数学模型, 计算了微夹持臂的位移放大率。此外, 使用有限元分析软件ANSYS Workbench进行了静力学和动力学仿真, 并验证其夹持的有效范围。结果表明微夹持臂有较大的位移输出, 且其放大率的理论计算值与仿真分析值吻合良好。
针对传统微夹持器夹持范围小、易对物体造成损伤等不足, 基于桥式放大机构和杠杆原理设计了一种新型微夹持器。该微夹持器不仅能完成对不同尺寸大小微物体的微夹持操作, 还能避免在微夹持操作过程中对微小物体造成损伤或脱落, 以及适应不规则微小物体的夹持操作。阐明了夹持器的结构设计原理, 根据微夹持臂的工作原理建立了数学模型, 计算了微夹持臂的位移放大率。此外, 使用有限元分析软件ANSYS Workbench进行了静力学和动力学仿真, 并验证其夹持的有效范围。结果表明微夹持臂有较大的位移输出, 且其放大率的理论计算值与仿真分析值吻合良好。


2021, 40(7): 1085-1090.
doi: 10.13433/j.cnki.1003-8728.20200184
摘要:
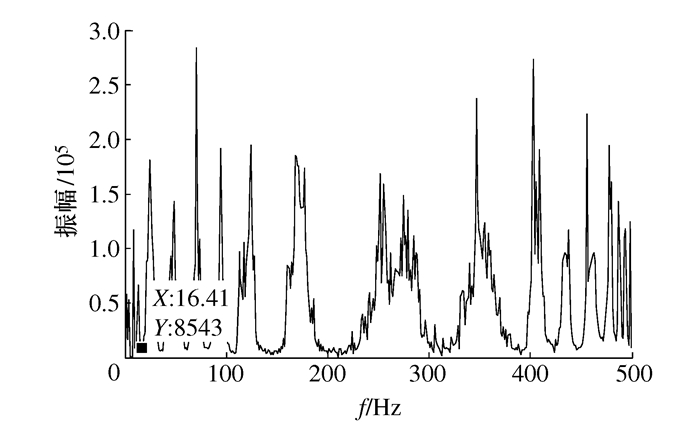
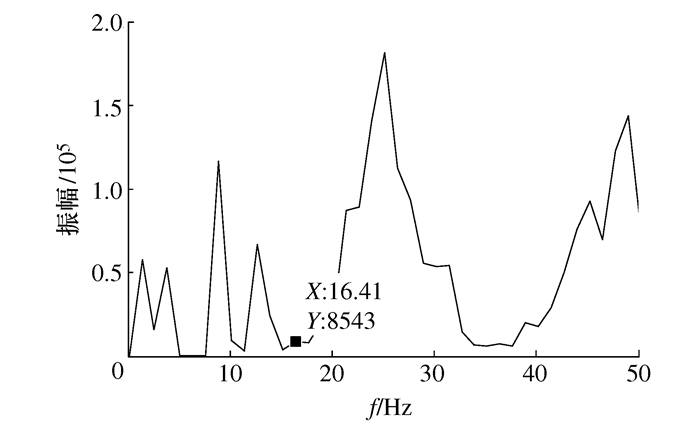
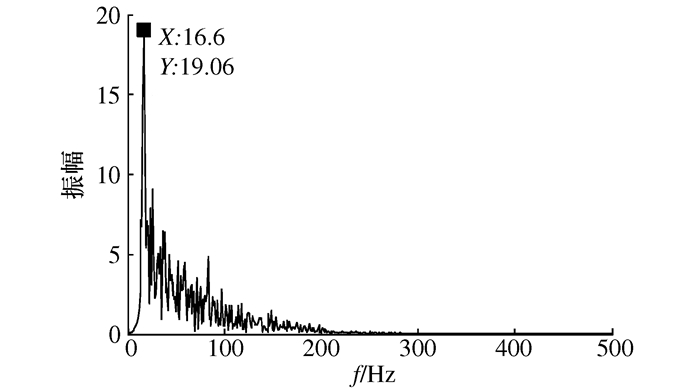
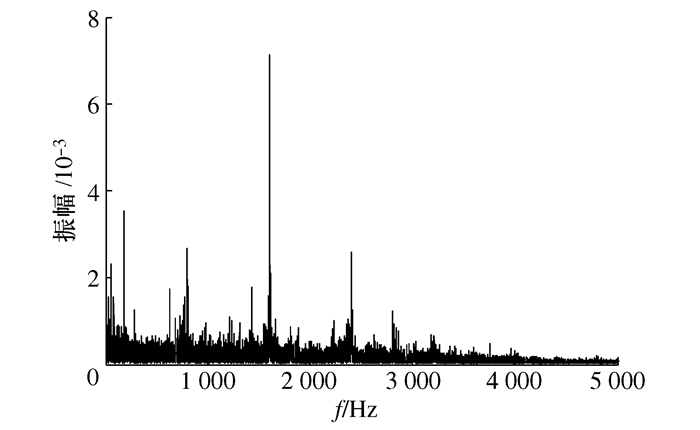
轴承作为风力发电机设备中重要部件, 其健康状态直接影响风力发电机运行的稳定性和现场的安全可靠性。由于风力发电机特殊的工作环境, 导致采集到的振动信号中包含大量的噪声干扰, 难以准确提取轴承振动信号包含的信息成分, 给评估主轴承健康状态带来困难。因此本文采用将傅立叶分解(Fourier decomposition method, FDM)和随机共振(Stochastic resonance, SR)相结合的方式提取信号中微弱的轴承振动信息。首先用FDM将原始信号自适应地分解为一系列包含轴承振动特征的傅立叶频带函数, 然后找出相关性大的频带函数进行重构, 最后采用SR对重构信号进行分析获得特征频率, 判断轴承的健康状态。结果显示, 将两种方法相结合能有效提高输出信噪比, 提升特征频率检测的精度, 为实现风机轴承早期微弱故障诊断提供帮助。
轴承作为风力发电机设备中重要部件, 其健康状态直接影响风力发电机运行的稳定性和现场的安全可靠性。由于风力发电机特殊的工作环境, 导致采集到的振动信号中包含大量的噪声干扰, 难以准确提取轴承振动信号包含的信息成分, 给评估主轴承健康状态带来困难。因此本文采用将傅立叶分解(Fourier decomposition method, FDM)和随机共振(Stochastic resonance, SR)相结合的方式提取信号中微弱的轴承振动信息。首先用FDM将原始信号自适应地分解为一系列包含轴承振动特征的傅立叶频带函数, 然后找出相关性大的频带函数进行重构, 最后采用SR对重构信号进行分析获得特征频率, 判断轴承的健康状态。结果显示, 将两种方法相结合能有效提高输出信噪比, 提升特征频率检测的精度, 为实现风机轴承早期微弱故障诊断提供帮助。








2021, 40(7): 1091-1099.
doi: 10.13433/j.cnki.1003-8728.20200170
摘要:
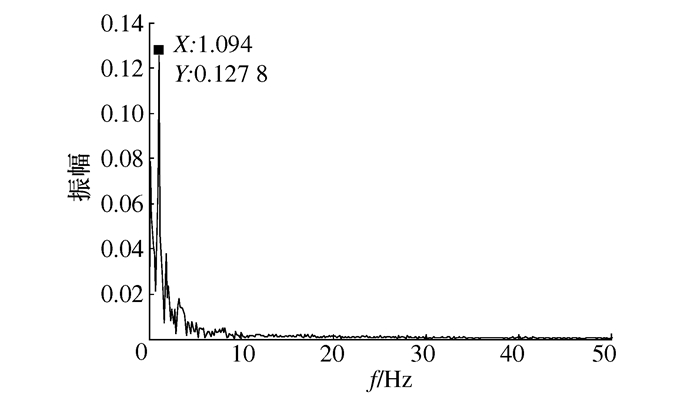
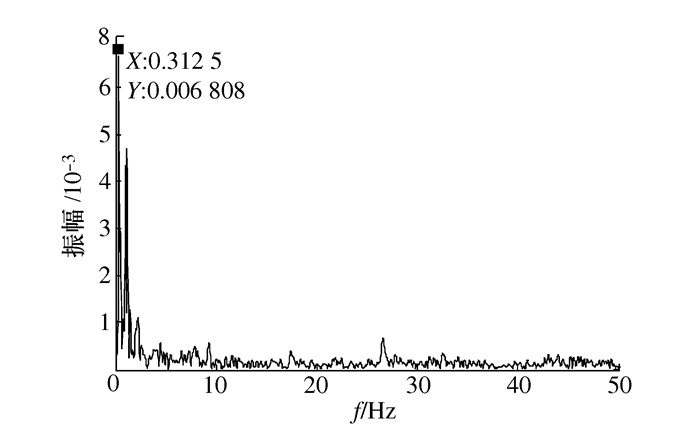
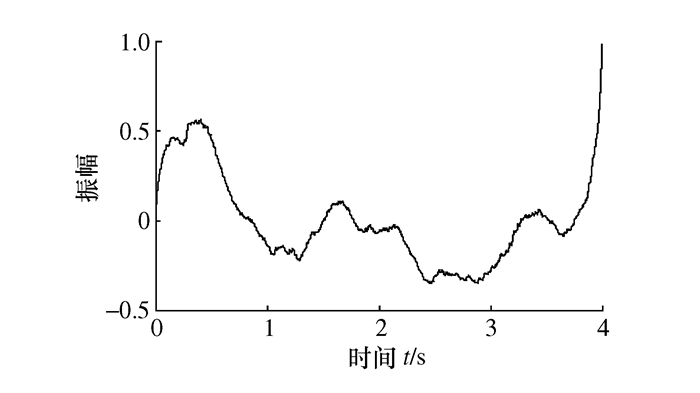
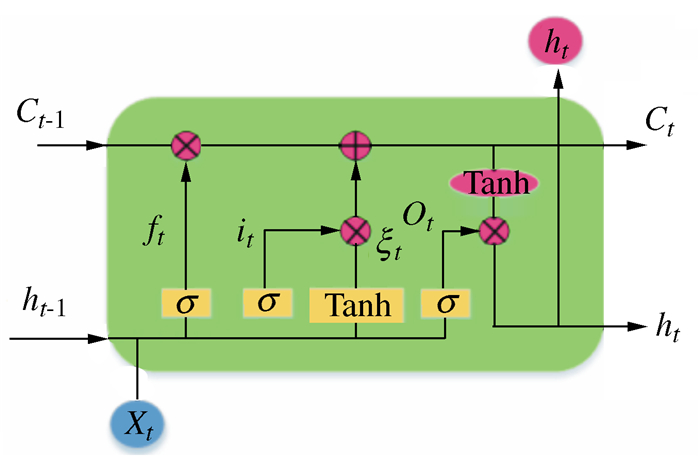
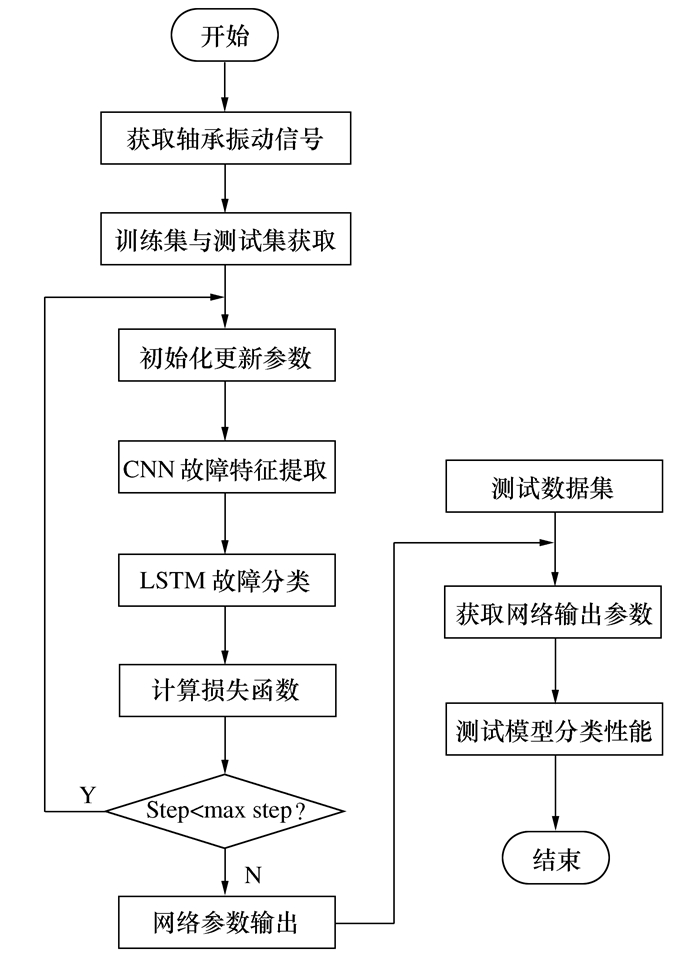
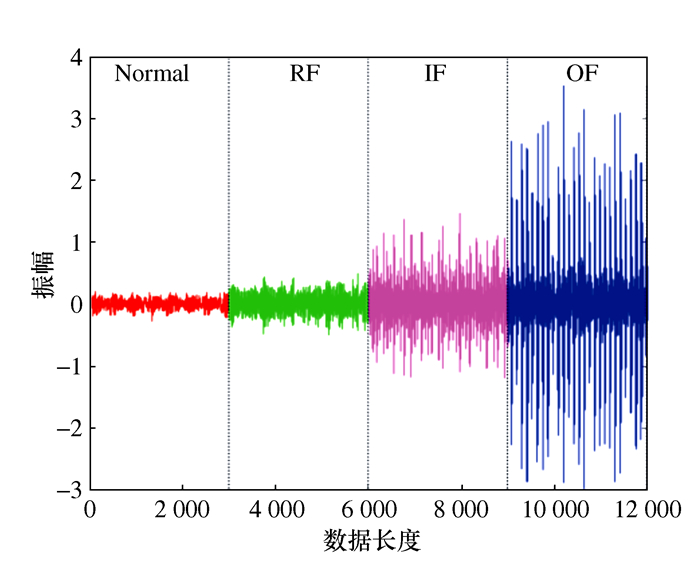
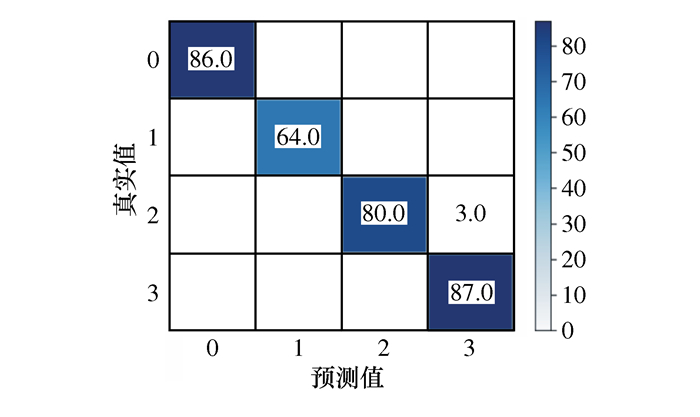
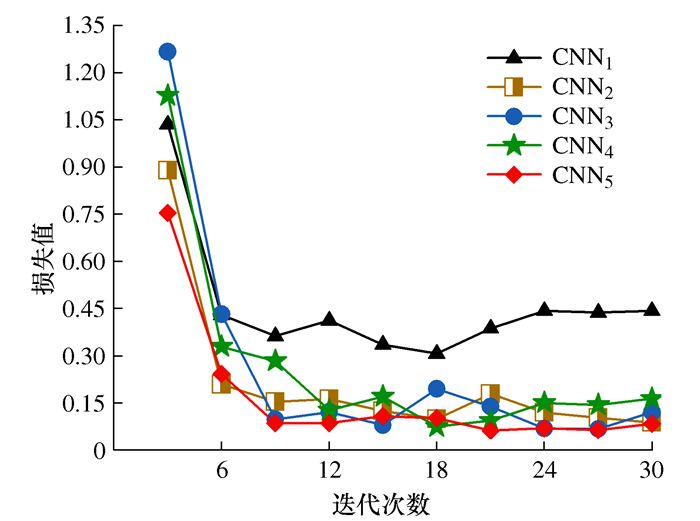
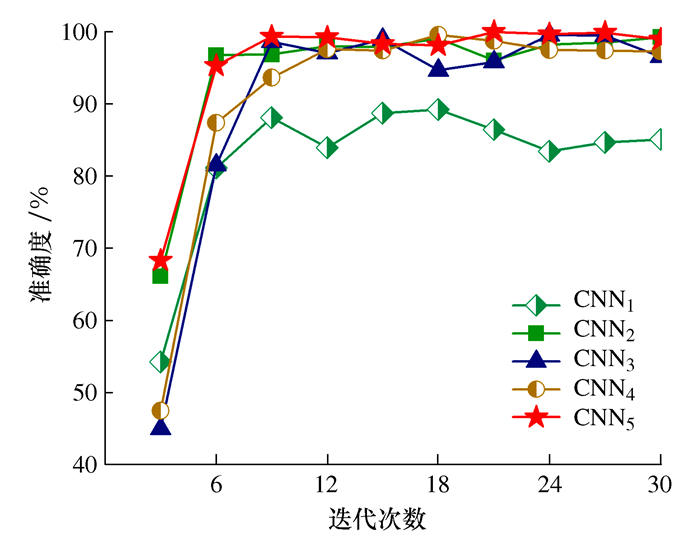
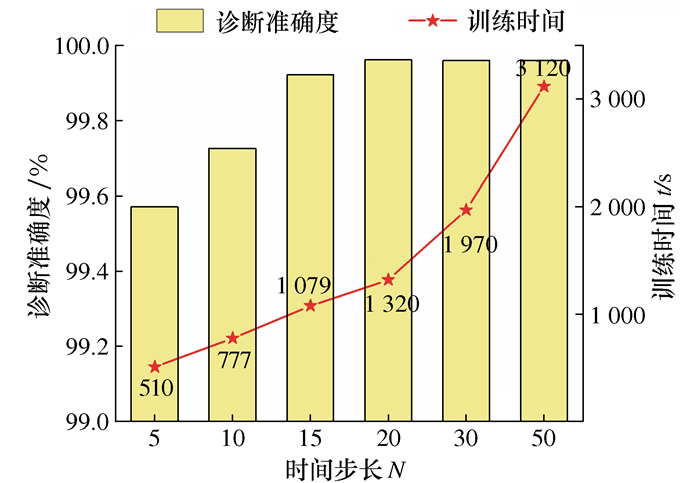
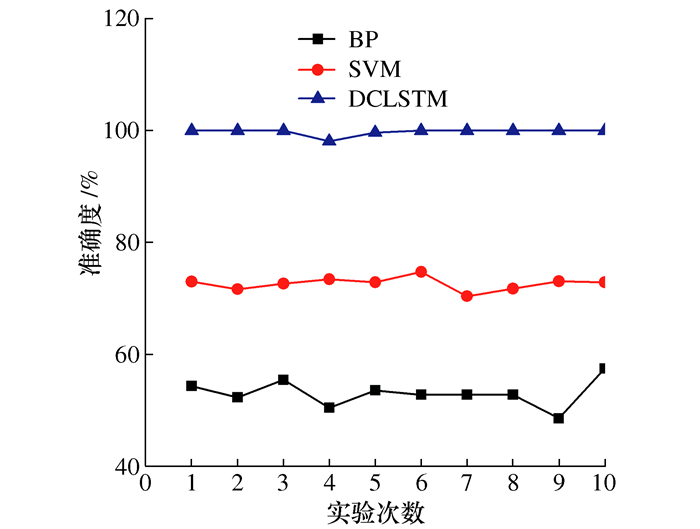
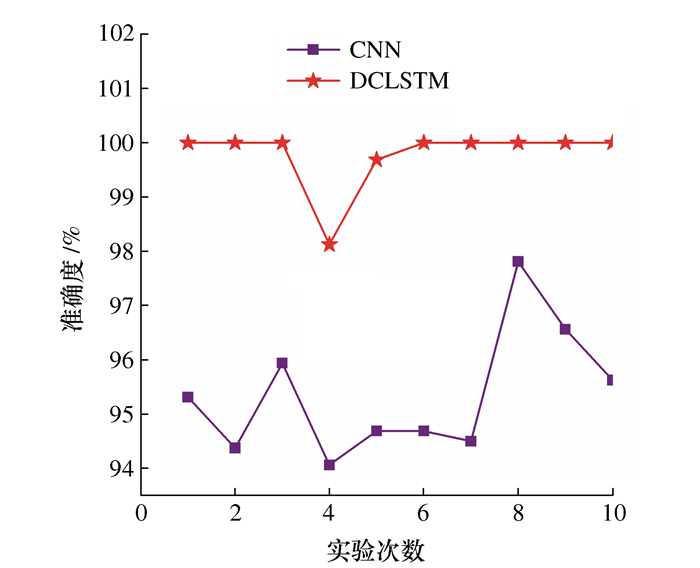
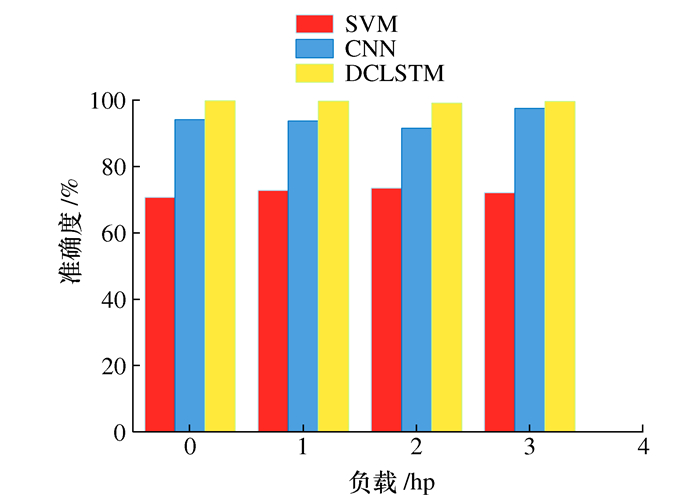
针对传统数据驱动故障诊断方法难以从轴承信号中自适应提取有效特征、没有充分利用故障数据的时序特点以及缺乏自适应处理动态信息能力的问题, 提出了一种深度卷积神经网络与长短期记忆网络相结合的智能故障诊断方法。本文方法构建的深度模型能够从轴承原始信号中自适应地提取鲁棒性特征, 然后利用长短期记忆网络学习特征中的时间依赖关系实现了高准确度的轴承故障诊断。该方法克服了传统特征提取方法依赖专家经验和信息利用不完全等问题, 实现了故障的智能、准确诊断。实验结果表明, 该方法可以提取更准确的特征而且由于利用了故障演变过程中的时序信息, 使得故障诊断更加智能、可靠。
针对传统数据驱动故障诊断方法难以从轴承信号中自适应提取有效特征、没有充分利用故障数据的时序特点以及缺乏自适应处理动态信息能力的问题, 提出了一种深度卷积神经网络与长短期记忆网络相结合的智能故障诊断方法。本文方法构建的深度模型能够从轴承原始信号中自适应地提取鲁棒性特征, 然后利用长短期记忆网络学习特征中的时间依赖关系实现了高准确度的轴承故障诊断。该方法克服了传统特征提取方法依赖专家经验和信息利用不完全等问题, 实现了故障的智能、准确诊断。实验结果表明, 该方法可以提取更准确的特征而且由于利用了故障演变过程中的时序信息, 使得故障诊断更加智能、可靠。

2021, 40(7): 1100-1105.
doi: 10.13433/j.cnki.1003-8728.20200185
摘要:
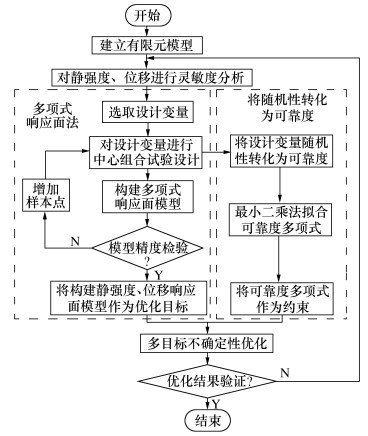
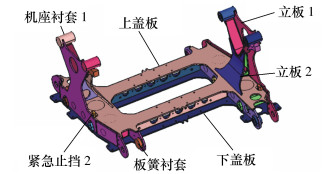
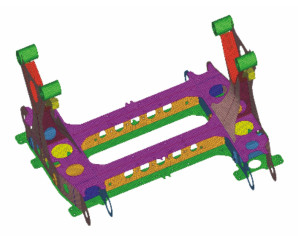
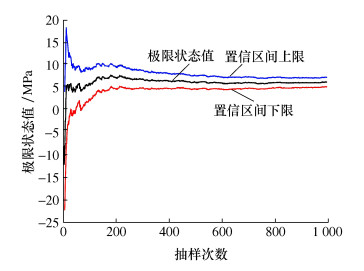
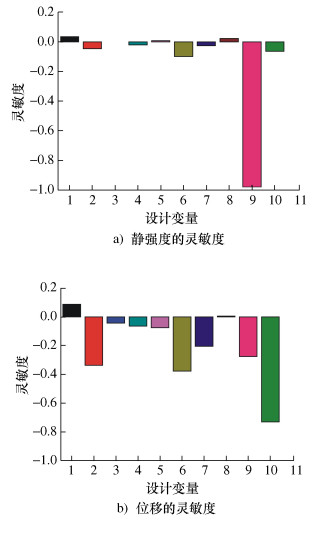
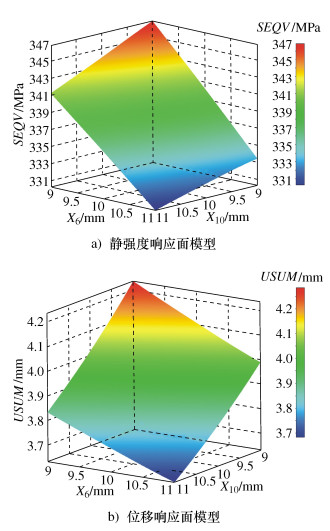
为提高高速动车组电机吊架的承载能力,考虑几何参数的随机性,将响应面法和多目标遗传算法相结合对其进行可靠性优化设计。首先,对电机吊架进行静强度和位移灵敏度分析,找出设计变量;其次,对设计变量进行中心组合试验设计,根据试验设计点来拟合静强度和位移的多项式响应面模型;然后,将几何参数的随机性转化为可靠度,运用最小二乘法拟合可靠度函数方程作为约束条件;最后,运用多目标遗传算法对电机吊架进行可靠性优化设计。研究结果表明:响应面法与结构可靠性优化方法相结合,可以简化求解过程,提高优化结果的可靠度。
为提高高速动车组电机吊架的承载能力,考虑几何参数的随机性,将响应面法和多目标遗传算法相结合对其进行可靠性优化设计。首先,对电机吊架进行静强度和位移灵敏度分析,找出设计变量;其次,对设计变量进行中心组合试验设计,根据试验设计点来拟合静强度和位移的多项式响应面模型;然后,将几何参数的随机性转化为可靠度,运用最小二乘法拟合可靠度函数方程作为约束条件;最后,运用多目标遗传算法对电机吊架进行可靠性优化设计。研究结果表明:响应面法与结构可靠性优化方法相结合,可以简化求解过程,提高优化结果的可靠度。
2021, 40(7): 1106-1113.
doi: 10.13433/j.cnki.1003-8728.20200171
摘要:
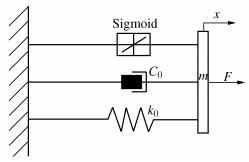
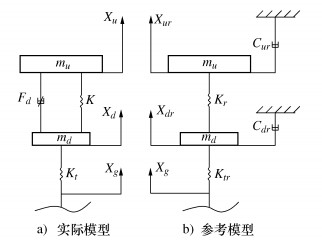
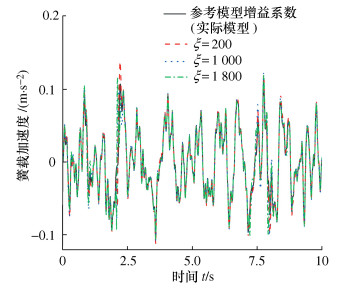
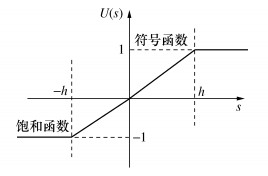
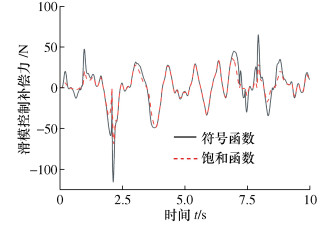
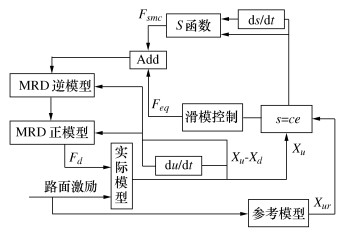
对悬架系统所用磁流变阻尼器进行阻尼特性试验,利用Levenberg-Marquardt优化算法对磁流变可调Sigmoid模型进行参数辨识,运用最小二乘法对辨识的参数进行拟合; 基于天棚阻尼系统,设计了四分之一车辆悬架系统滑模控制器;采用极点配置法确定切换面参数, 使用饱和函数代替符号函数,缓解滑模控制系统抖振问题, 运用模糊控制、RBF神经网络对半主动悬架滑模控制器进行优化; 以随机路面激励作为输入, 分别对模糊控制、RBF神经网络优化的滑模控制器半主动悬架进行仿真分析。仿真结果表明:该优化算法辨识的可调Sigmoid模型具有良好的控制性能,利用该模型可实现对阻尼力的准确控制, 所设计的RBF优化滑模控制器具有比模糊滑模控制器更优异的性能。
对悬架系统所用磁流变阻尼器进行阻尼特性试验,利用Levenberg-Marquardt优化算法对磁流变可调Sigmoid模型进行参数辨识,运用最小二乘法对辨识的参数进行拟合; 基于天棚阻尼系统,设计了四分之一车辆悬架系统滑模控制器;采用极点配置法确定切换面参数, 使用饱和函数代替符号函数,缓解滑模控制系统抖振问题, 运用模糊控制、RBF神经网络对半主动悬架滑模控制器进行优化; 以随机路面激励作为输入, 分别对模糊控制、RBF神经网络优化的滑模控制器半主动悬架进行仿真分析。仿真结果表明:该优化算法辨识的可调Sigmoid模型具有良好的控制性能,利用该模型可实现对阻尼力的准确控制, 所设计的RBF优化滑模控制器具有比模糊滑模控制器更优异的性能。







2021, 40(7): 1114-1119.
doi: 10.13433/j.cnki.1003-8728.20200188
摘要:
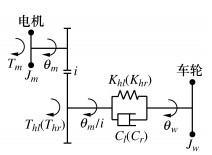
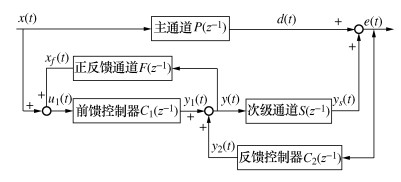
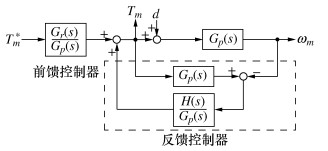
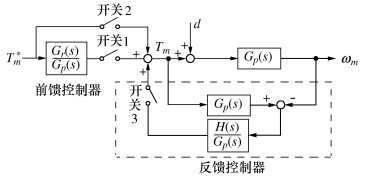
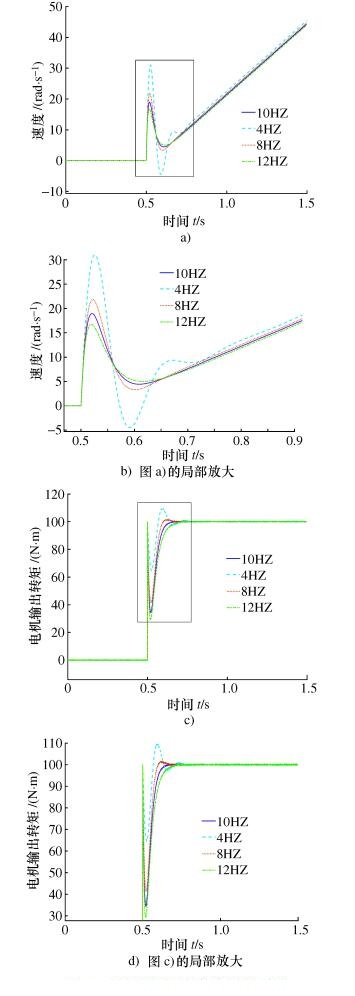
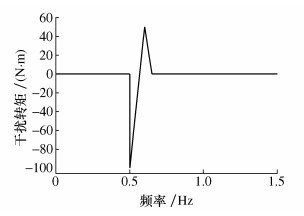
混合动力汽车传动系统受发动机、电机、传动构件、路面激励等多源激励以及模式切换时产生很大的动载荷,从而诱发复杂的扭转振动问题, 直接影响传动系统的平顺性、可靠性与安全性。为了抑制传动系统的扭转振动,本文针对传动系统纯电动模式提出了一种基于混合自适应控制算法的主动控制策略。采用状态空间法建立了传动系统双质量运动学平衡方程,结合前馈控制器和反馈控制器,构建了传动电动模式的主动减振控制模型。通过分析理想模型阻尼比对控制效果的影响,获取了传动系统的最优阻尼比。通过仿真分析,对比了有无干扰情况下的控制效果,结果表明本文提出的混合自适应控制算法可降低传动系80%~90%的扭转振动并使系统稳定时间提前83%~87%,能够有效抑制HEV在纯电动模式下启动时的扭转振动,并且可以消除特定频率的外界干扰。
混合动力汽车传动系统受发动机、电机、传动构件、路面激励等多源激励以及模式切换时产生很大的动载荷,从而诱发复杂的扭转振动问题, 直接影响传动系统的平顺性、可靠性与安全性。为了抑制传动系统的扭转振动,本文针对传动系统纯电动模式提出了一种基于混合自适应控制算法的主动控制策略。采用状态空间法建立了传动系统双质量运动学平衡方程,结合前馈控制器和反馈控制器,构建了传动电动模式的主动减振控制模型。通过分析理想模型阻尼比对控制效果的影响,获取了传动系统的最优阻尼比。通过仿真分析,对比了有无干扰情况下的控制效果,结果表明本文提出的混合自适应控制算法可降低传动系80%~90%的扭转振动并使系统稳定时间提前83%~87%,能够有效抑制HEV在纯电动模式下启动时的扭转振动,并且可以消除特定频率的外界干扰。


2021, 40(7): 1120-1127.
doi: 10.13433/j.cnki.1003-8728.20200167
摘要:
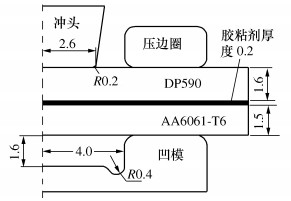
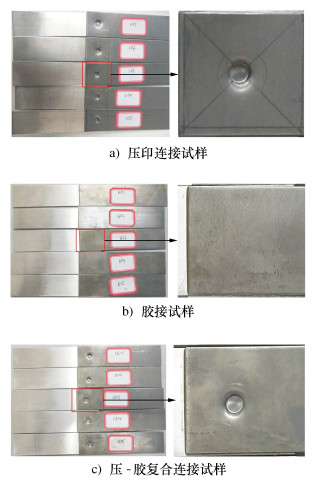
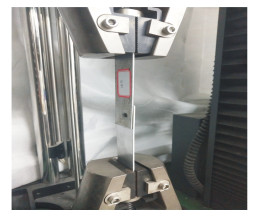
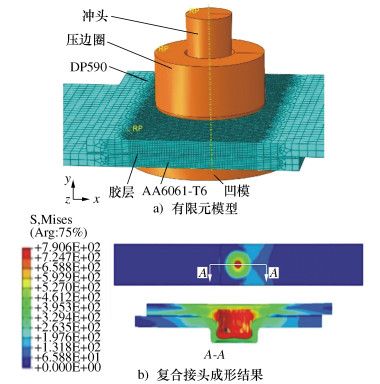
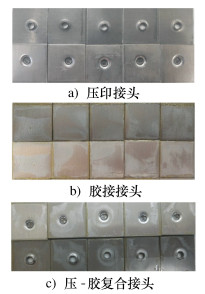
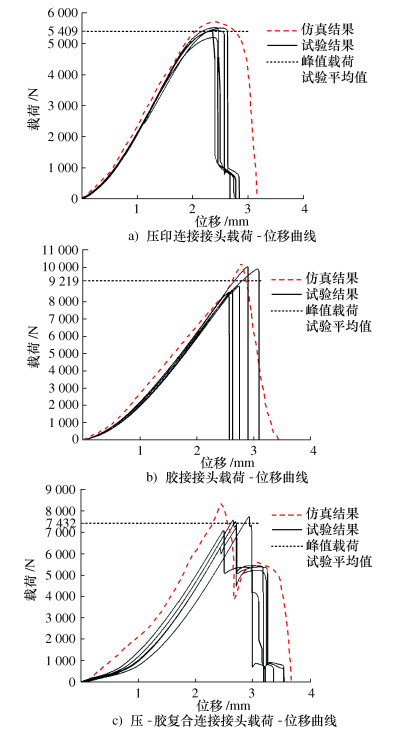
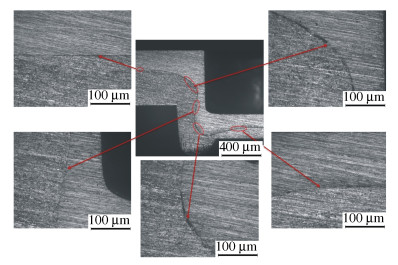
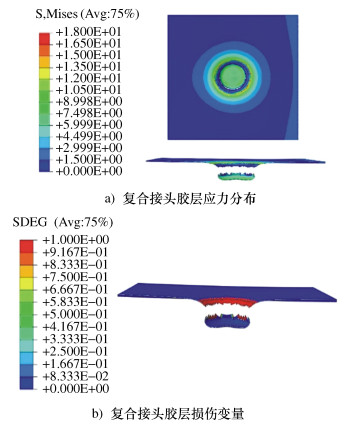
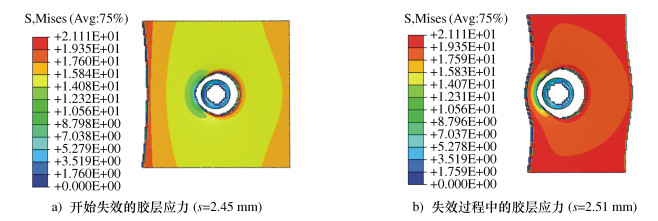
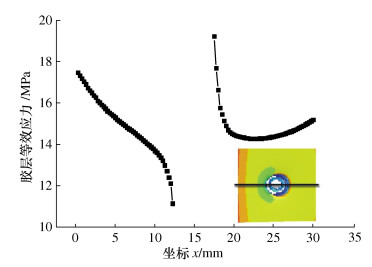
在钢铝压印连接界面之间加入胶粘剂,能有效提高接头性能,但接头的力学行为与失效机理非常复杂。以双相高强钢板DP590和铝合金板6061-T6为连接材料,对钢铝压-胶复合连接接头的力学行为和失效机理进行了有限元模拟和试验研究。基于ABAQUS有限元分析软件,采用GTN(Gurson tvergaard needleman)模型+内聚力(Cohesive zone)模型的混合失效模型,模拟了压-胶复合连接接头的成形和失效行为。通过压印连接、胶接以及压-胶复合连接接头的搭接剪切试验,对比分析了以上3种接头的失效模式和力学行为。结合压-胶复合连接接头的胶粘剂分布规律和胶层失效过程,揭示了压-胶复合连接接头的失效机理。
在钢铝压印连接界面之间加入胶粘剂,能有效提高接头性能,但接头的力学行为与失效机理非常复杂。以双相高强钢板DP590和铝合金板6061-T6为连接材料,对钢铝压-胶复合连接接头的力学行为和失效机理进行了有限元模拟和试验研究。基于ABAQUS有限元分析软件,采用GTN(Gurson tvergaard needleman)模型+内聚力(Cohesive zone)模型的混合失效模型,模拟了压-胶复合连接接头的成形和失效行为。通过压印连接、胶接以及压-胶复合连接接头的搭接剪切试验,对比分析了以上3种接头的失效模式和力学行为。结合压-胶复合连接接头的胶粘剂分布规律和胶层失效过程,揭示了压-胶复合连接接头的失效机理。


2021, 40(7): 1128-1136.
doi: 10.13433/j.cnki.1003-8728.20200174
摘要:
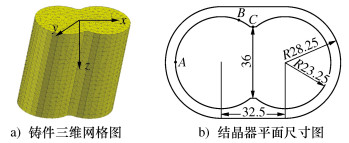
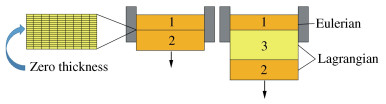
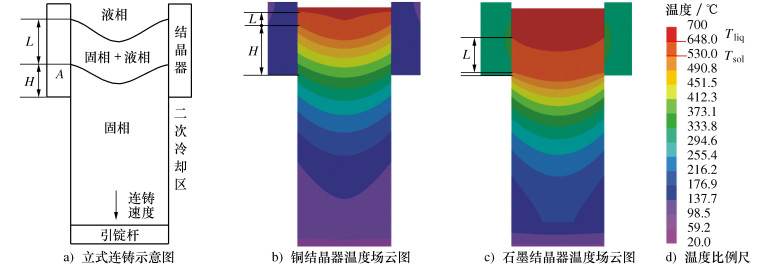
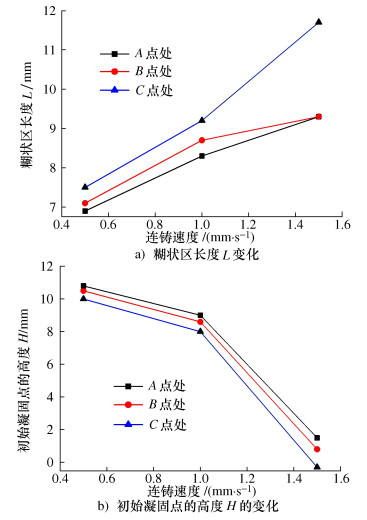
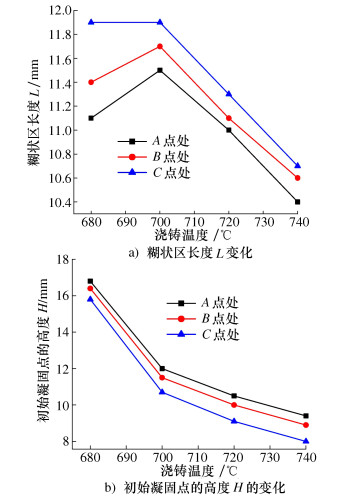
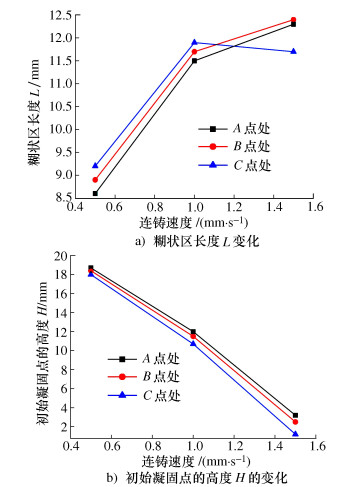
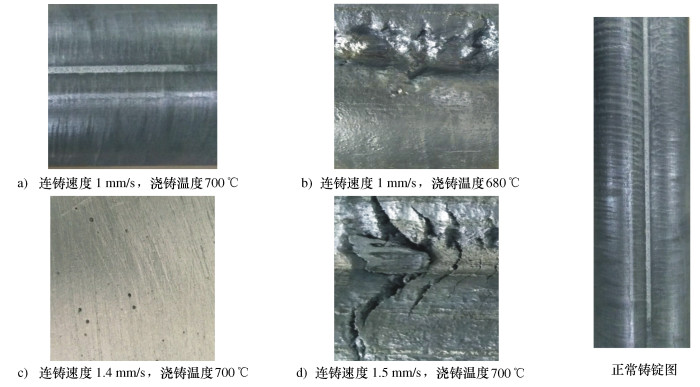
结晶器是连续铸造的核心部件,被称为连续铸造的“心脏”,它决定着连铸生产的成败;而糊状区的长度以及初始凝固点的位置是评价结晶器能否成功拉出铸锭的关键因素。利用有限元分析软件ProCAST中的MILE算法对高度分别为20 mm、30 mm以及40 mm的结晶器,在相同的工艺条件下,进行温度场的数值模拟,分别研究其糊状区长度和初始凝固点位置随工艺参数的变化规律。数值模拟分析发现,30 mm结晶器要优于20 mm和40 mm结晶器,具有较大的可调节的工艺参数范围,更能安全稳定的生产出铸锭。30 mm结晶器的实验验证表明,实验结果与模拟分析的规律吻合度较好,证明了用模拟分析进行结晶器设计的合理性和优越性。
结晶器是连续铸造的核心部件,被称为连续铸造的“心脏”,它决定着连铸生产的成败;而糊状区的长度以及初始凝固点的位置是评价结晶器能否成功拉出铸锭的关键因素。利用有限元分析软件ProCAST中的MILE算法对高度分别为20 mm、30 mm以及40 mm的结晶器,在相同的工艺条件下,进行温度场的数值模拟,分别研究其糊状区长度和初始凝固点位置随工艺参数的变化规律。数值模拟分析发现,30 mm结晶器要优于20 mm和40 mm结晶器,具有较大的可调节的工艺参数范围,更能安全稳定的生产出铸锭。30 mm结晶器的实验验证表明,实验结果与模拟分析的规律吻合度较好,证明了用模拟分析进行结晶器设计的合理性和优越性。




2021, 40(7): 1137-1142.
doi: 10.13433/j.cnki.1003-8728.20200461
摘要:
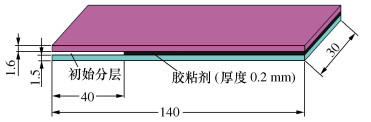
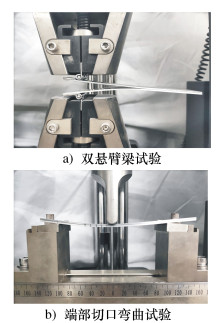
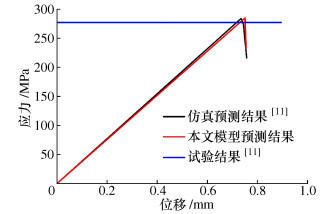
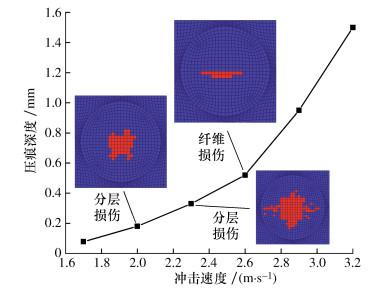
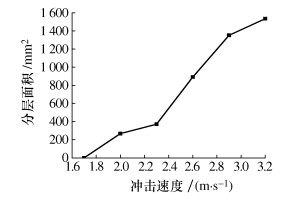
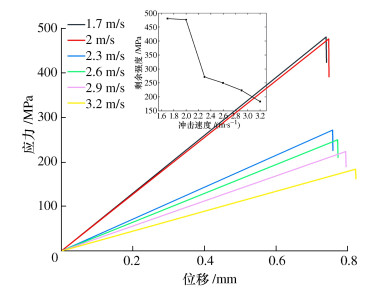
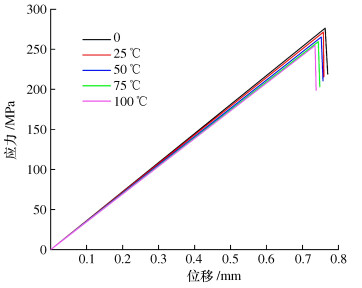
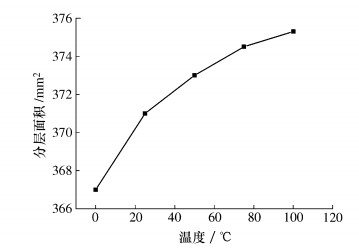
为研究冲击速度和温度对层合板冲后压的影响,建立考虑温度影响的渐进损伤模型预测材料的损伤模式,并分析层合板在低速冲击下的损伤机理。首先将模型预测的冲后压位移应力曲线与实验进行对照,进一步分析不同冲击速度对压痕深度、分层区域面积和剩余强度的影响,最后在2.3 m/s冲击速度下分析了不同温度对剩余强度和分层区域面积的影响。
为研究冲击速度和温度对层合板冲后压的影响,建立考虑温度影响的渐进损伤模型预测材料的损伤模式,并分析层合板在低速冲击下的损伤机理。首先将模型预测的冲后压位移应力曲线与实验进行对照,进一步分析不同冲击速度对压痕深度、分层区域面积和剩余强度的影响,最后在2.3 m/s冲击速度下分析了不同温度对剩余强度和分层区域面积的影响。

2021, 40(7): 1143-1148.
doi: 10.13433/j.cnki.1003-8728.20200442
摘要:
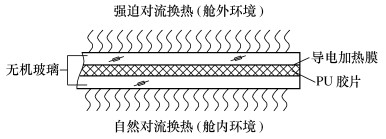
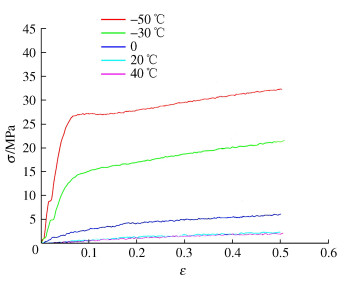
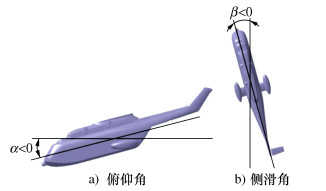
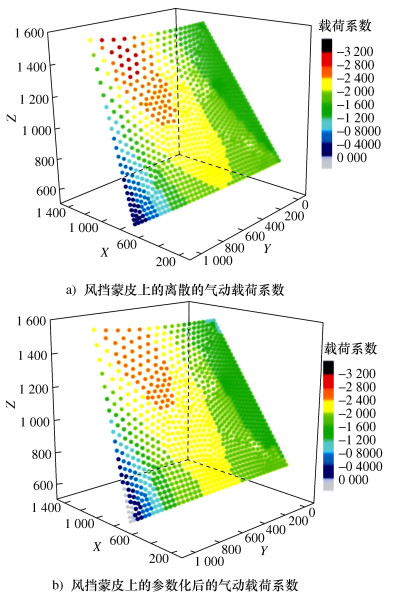
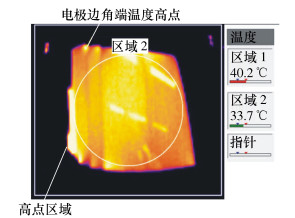
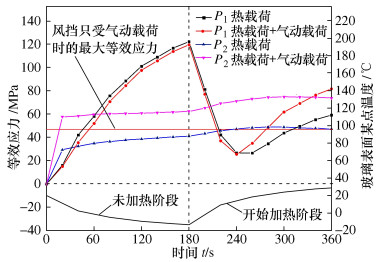
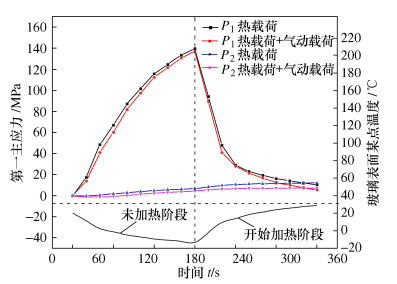
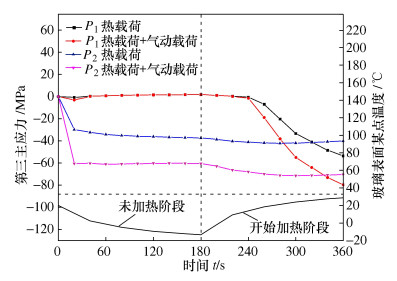
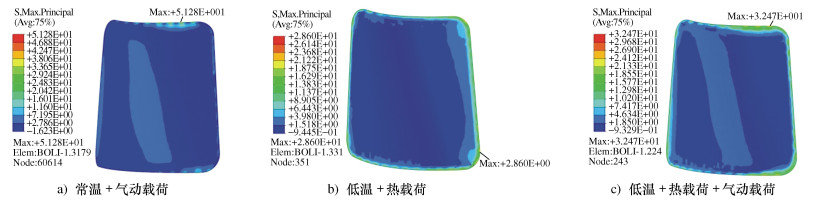
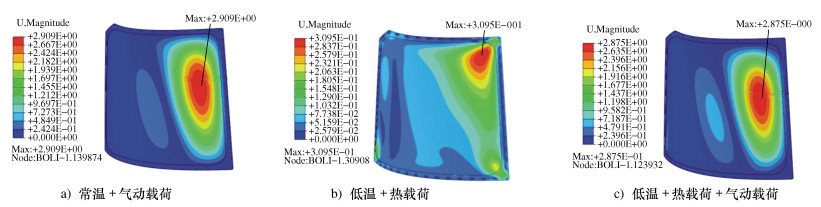
研究了电加温直升机风挡在极限飞行工况条件下受电加温热载荷的影响。通过对离散气动载荷进行参数化处理,建立一种可以在风挡表面施加非均匀气动载荷的方法。基于ABAQUS软件分析直升机风挡在各个飞行姿态下的受力状态,找出较为危险的飞行工况;基于ANSYS建立风挡的电热耦合模型, 计算出低温环境下风挡玻璃电加温过程中的风挡厚度方向的温度分布。建立电加温风挡的热力耦合模型,对直升机风挡飞行工况条件下的热应力和变形进行分析。结果表明,在低温环境中电加温对降低风挡玻璃边缘的拉应力有积极的作用,而对风挡的变形影响不明显。
研究了电加温直升机风挡在极限飞行工况条件下受电加温热载荷的影响。通过对离散气动载荷进行参数化处理,建立一种可以在风挡表面施加非均匀气动载荷的方法。基于ABAQUS软件分析直升机风挡在各个飞行姿态下的受力状态,找出较为危险的飞行工况;基于ANSYS建立风挡的电热耦合模型, 计算出低温环境下风挡玻璃电加温过程中的风挡厚度方向的温度分布。建立电加温风挡的热力耦合模型,对直升机风挡飞行工况条件下的热应力和变形进行分析。结果表明,在低温环境中电加温对降低风挡玻璃边缘的拉应力有积极的作用,而对风挡的变形影响不明显。