作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2020年 39卷 第10期
2020, 39(10): 1477-1482.
doi: 10.13433/j.cnki.1003-8728.20190304
 摘要
摘要 HTML
HTML PDF 2703KB
PDF 2703KB
摘要:
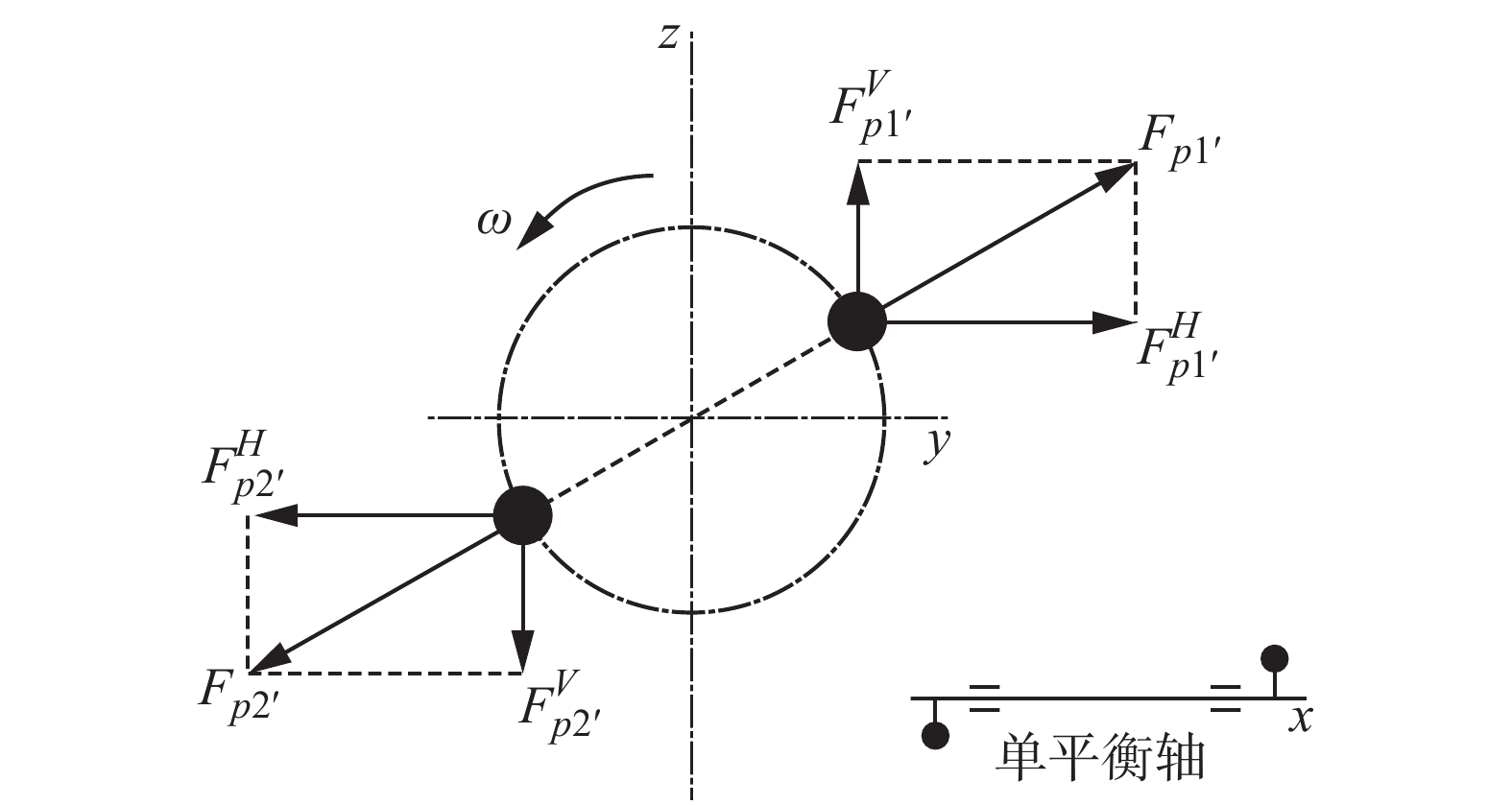
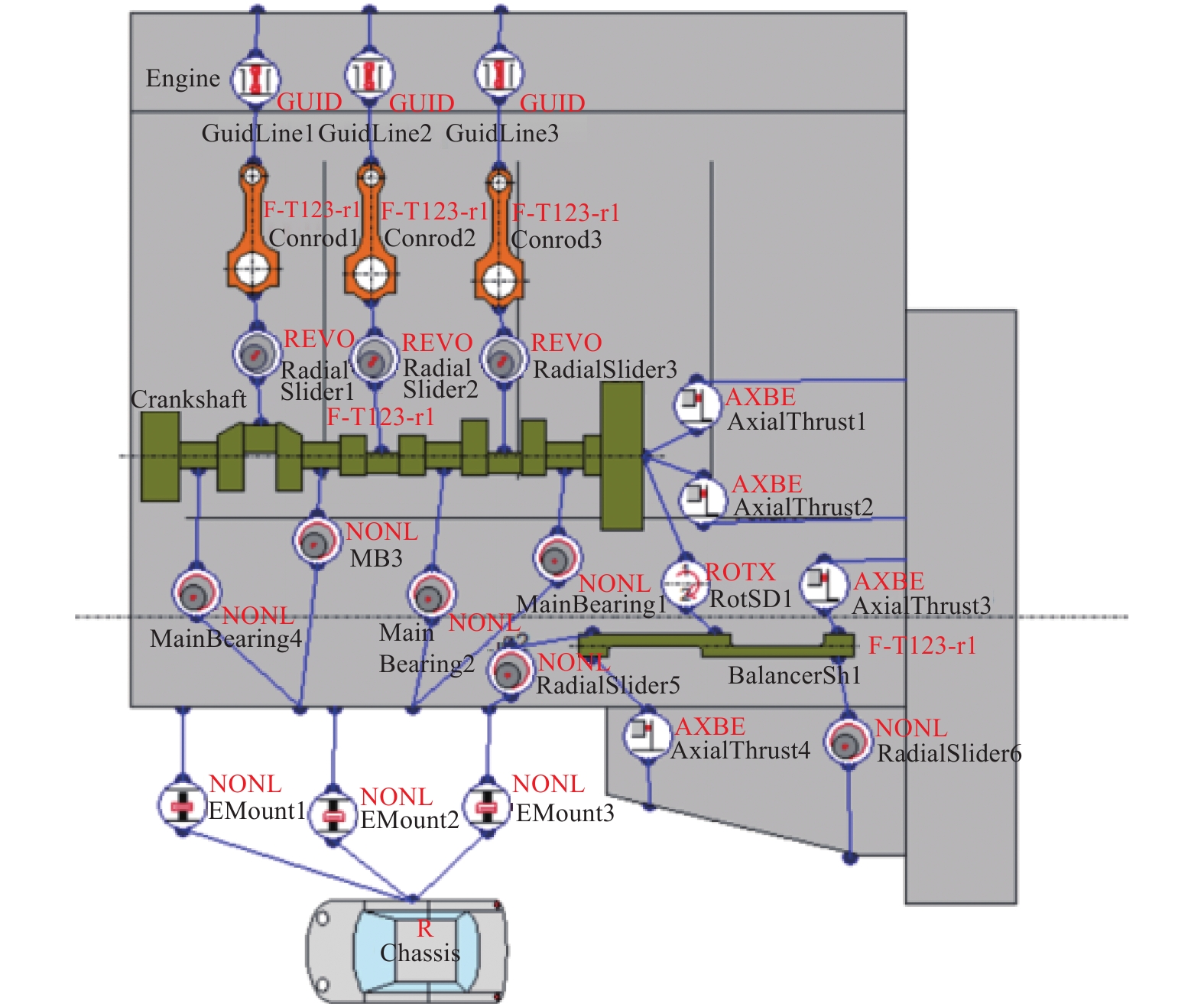
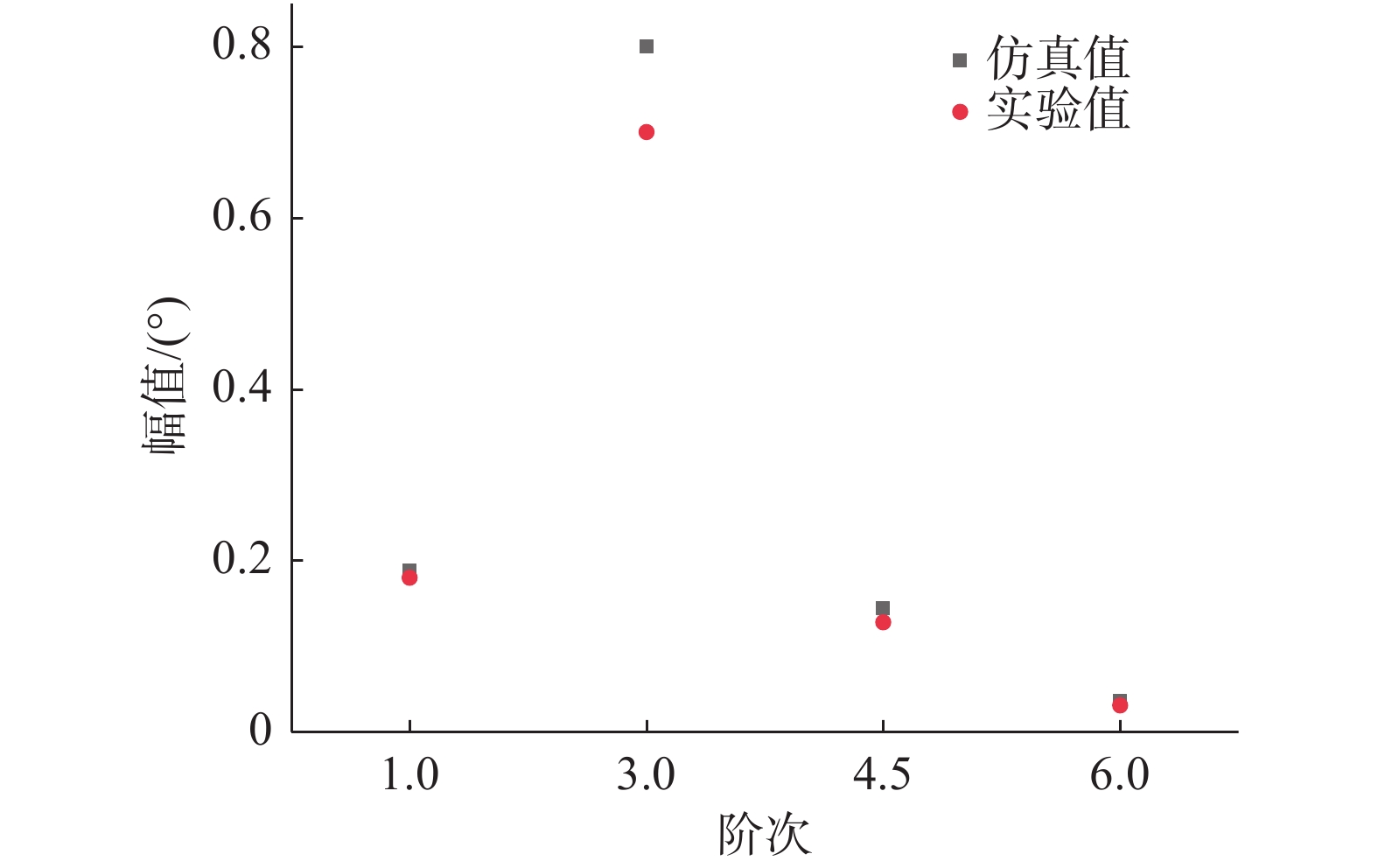
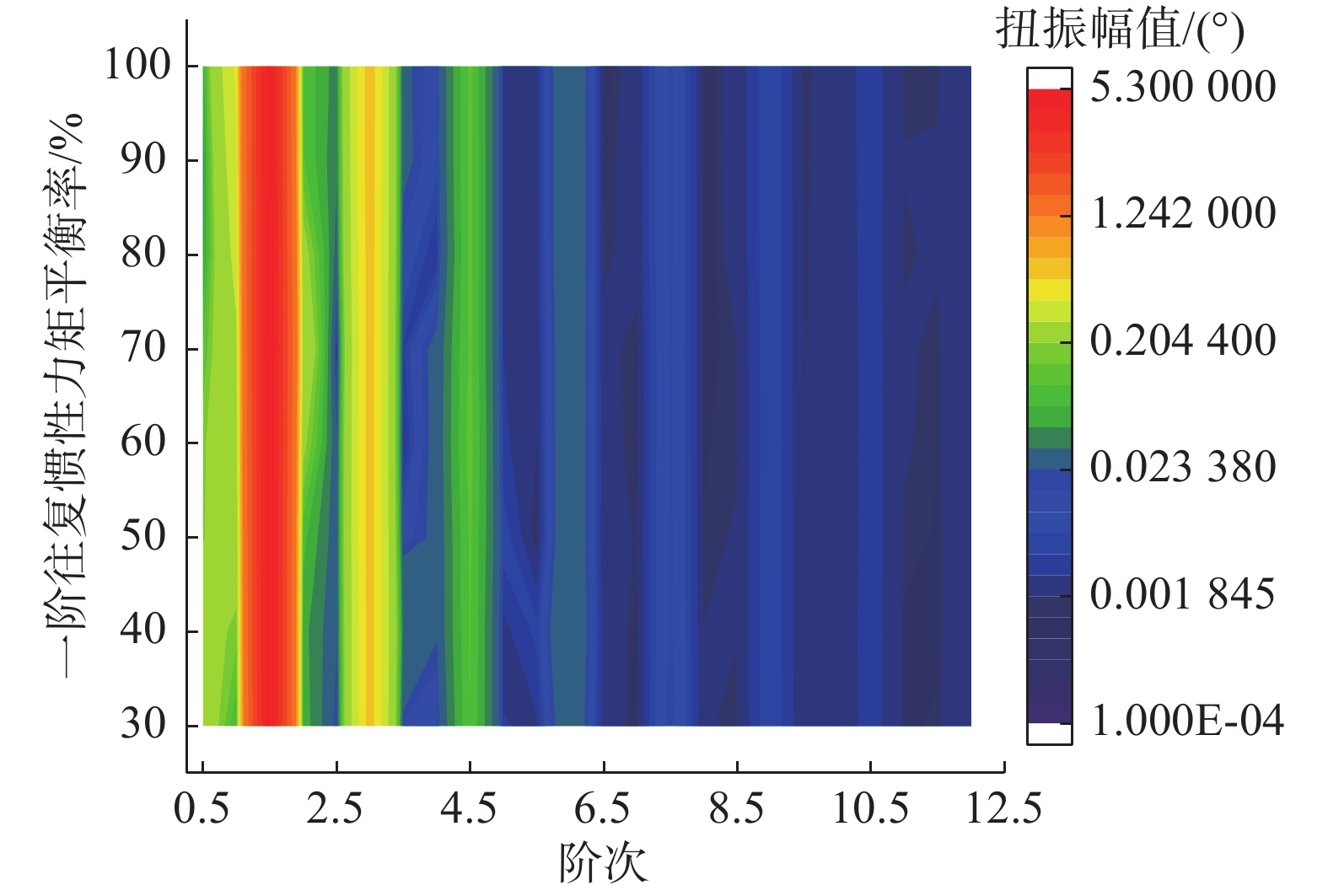
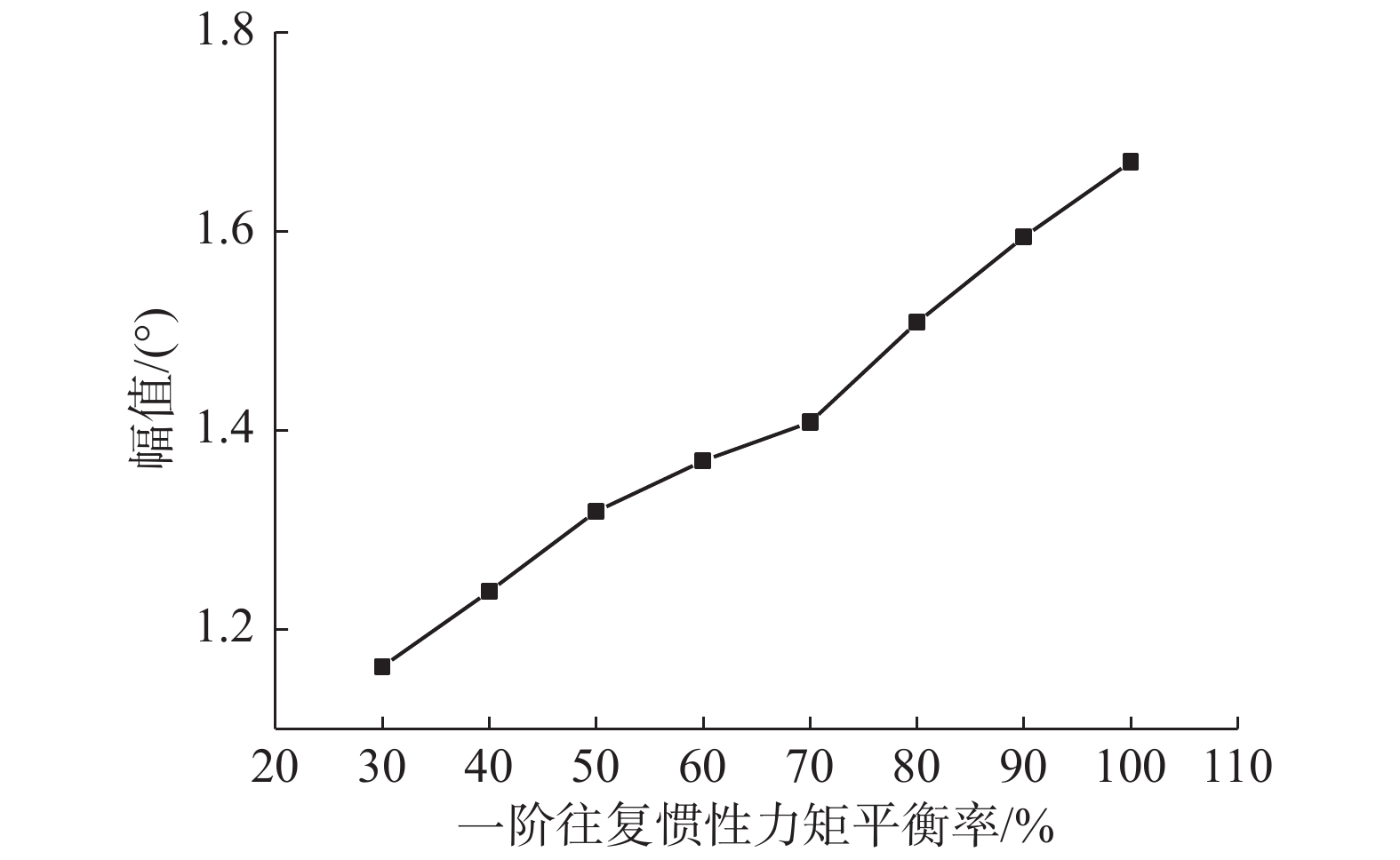
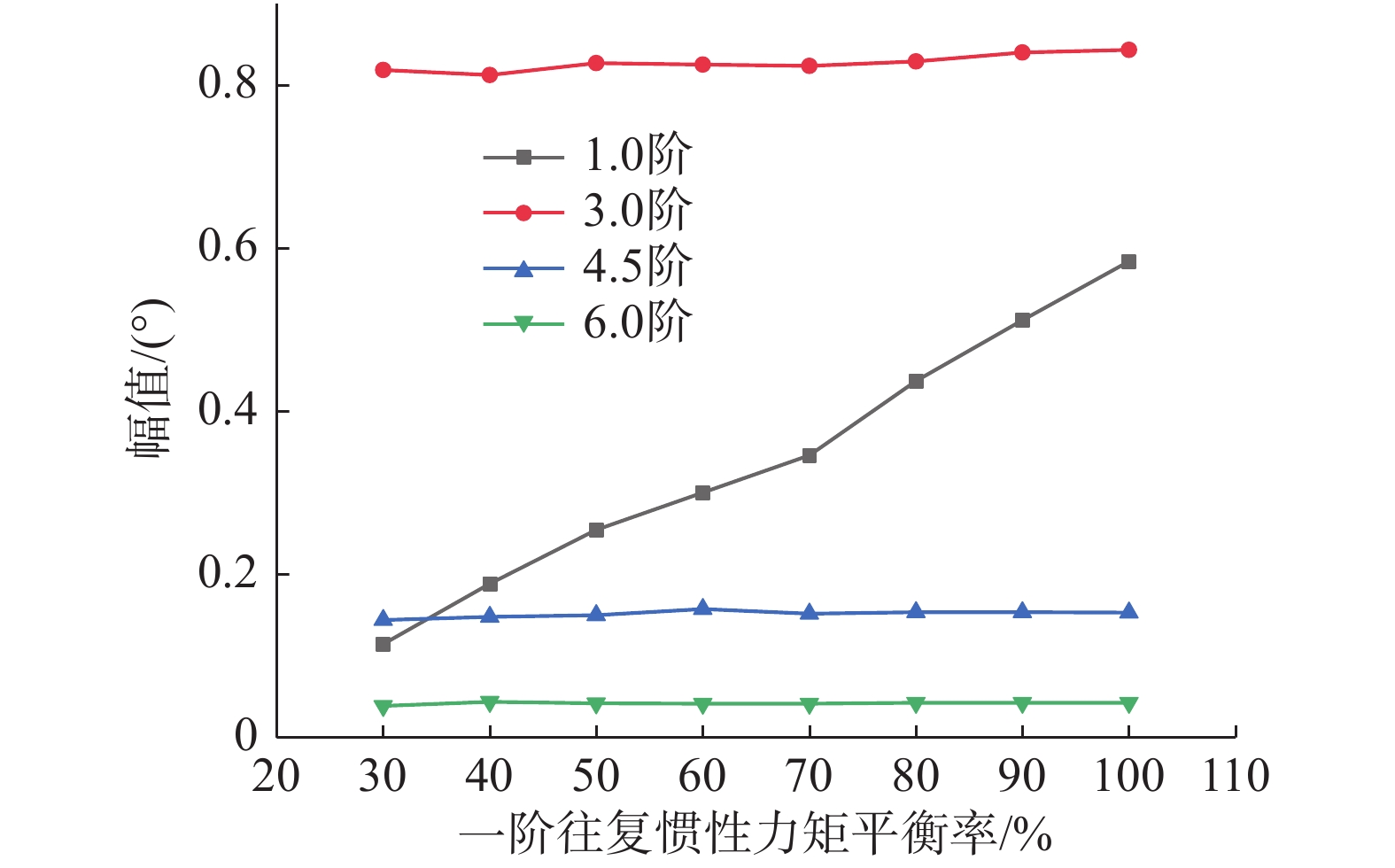
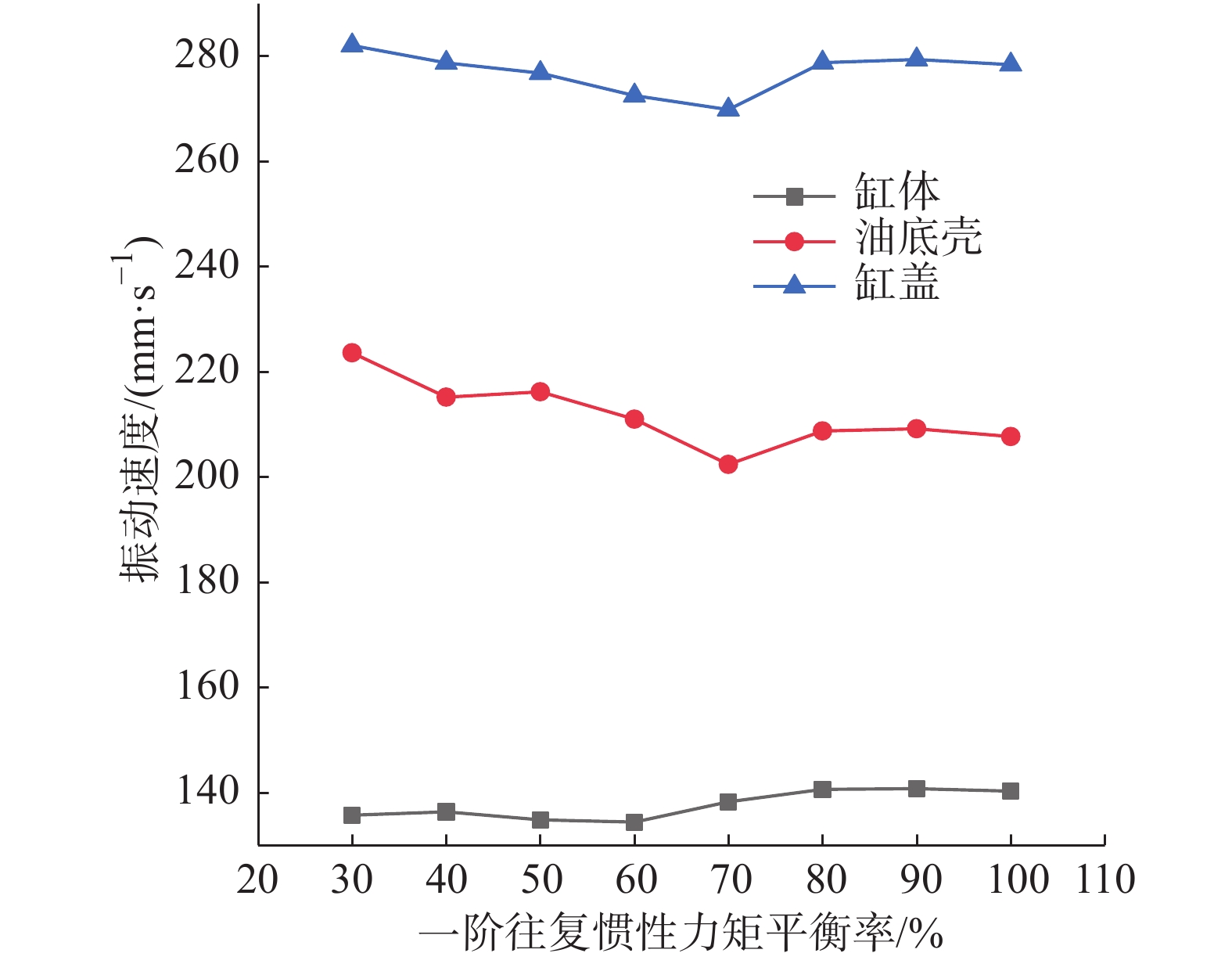
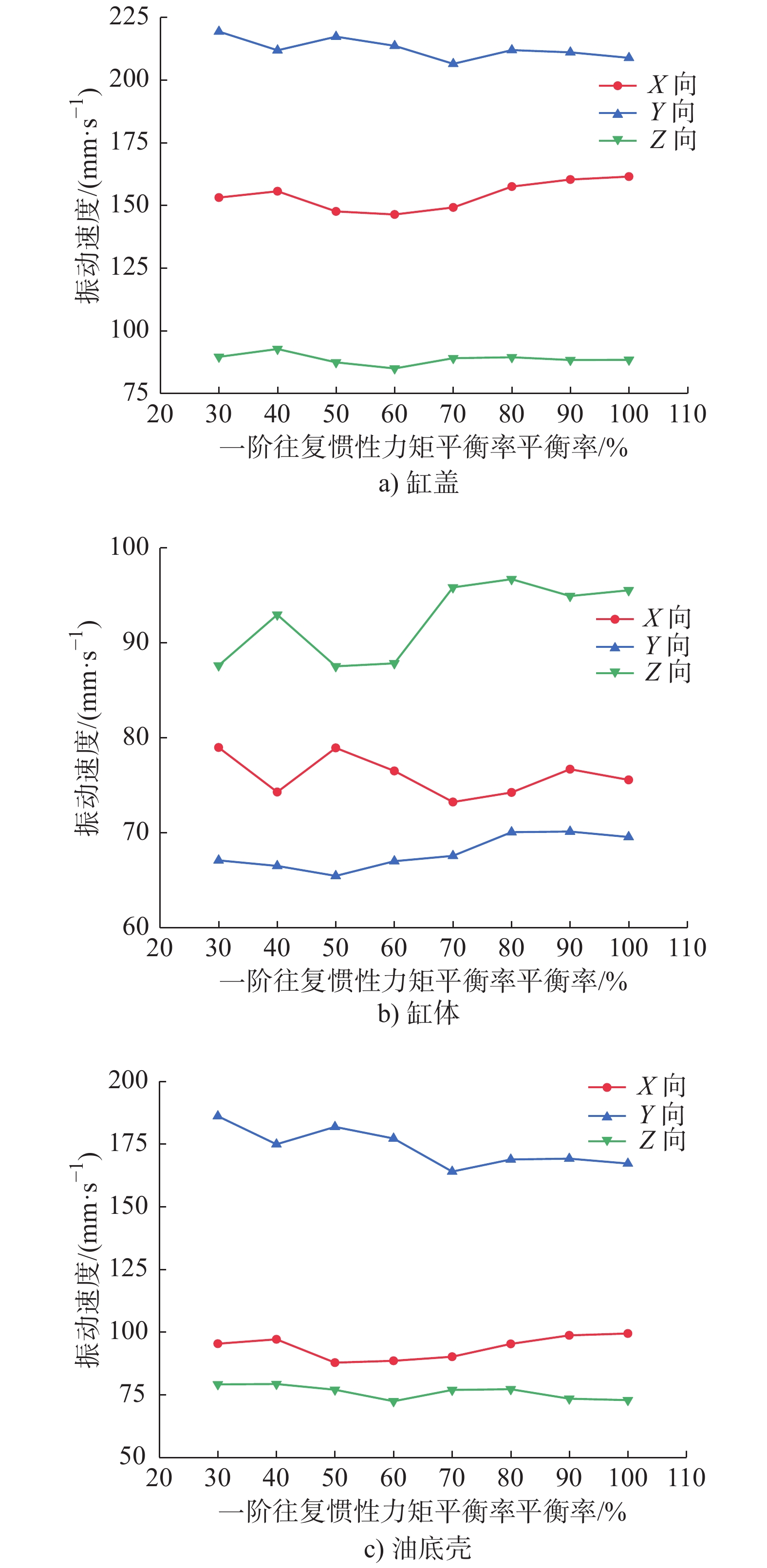
为了研究三缸汽油机采用单平衡轴时一阶往复惯性力矩平衡率对曲轴扭振和发动机表面振动的影响,采用多体动力学软件AVL-EXCITE-Power Unit建立发动机多体动力学模型。开展30% ~ 100%一阶往复惯性力矩平衡率下曲轴扭振和发动机表面振动仿真研究。结果表明:采用单轴平衡法通过选择合适的平衡率会降低发动机的表面振动,但同时也会在某种程度上增大曲轴的扭振。因此,在采用单平衡轴进行三缸机减振时也要考虑其对扭振的影响。
为了研究三缸汽油机采用单平衡轴时一阶往复惯性力矩平衡率对曲轴扭振和发动机表面振动的影响,采用多体动力学软件AVL-EXCITE-Power Unit建立发动机多体动力学模型。开展30% ~ 100%一阶往复惯性力矩平衡率下曲轴扭振和发动机表面振动仿真研究。结果表明:采用单轴平衡法通过选择合适的平衡率会降低发动机的表面振动,但同时也会在某种程度上增大曲轴的扭振。因此,在采用单平衡轴进行三缸机减振时也要考虑其对扭振的影响。


2020, 39(10): 1483-1488.
doi: 10.13433/j.cnki.1003-8728.20190299
摘要:
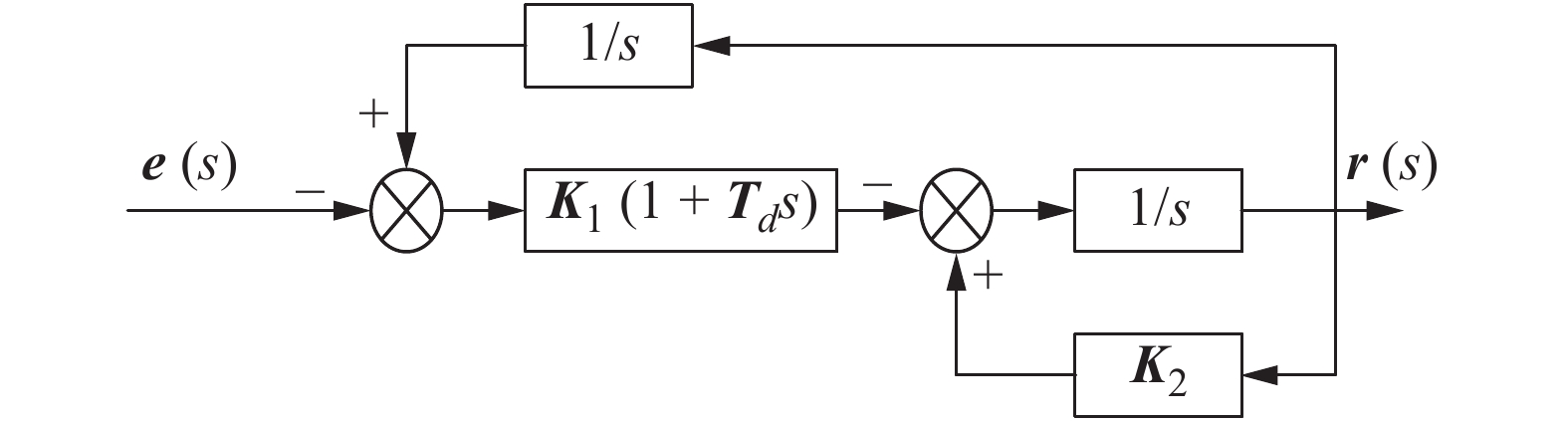
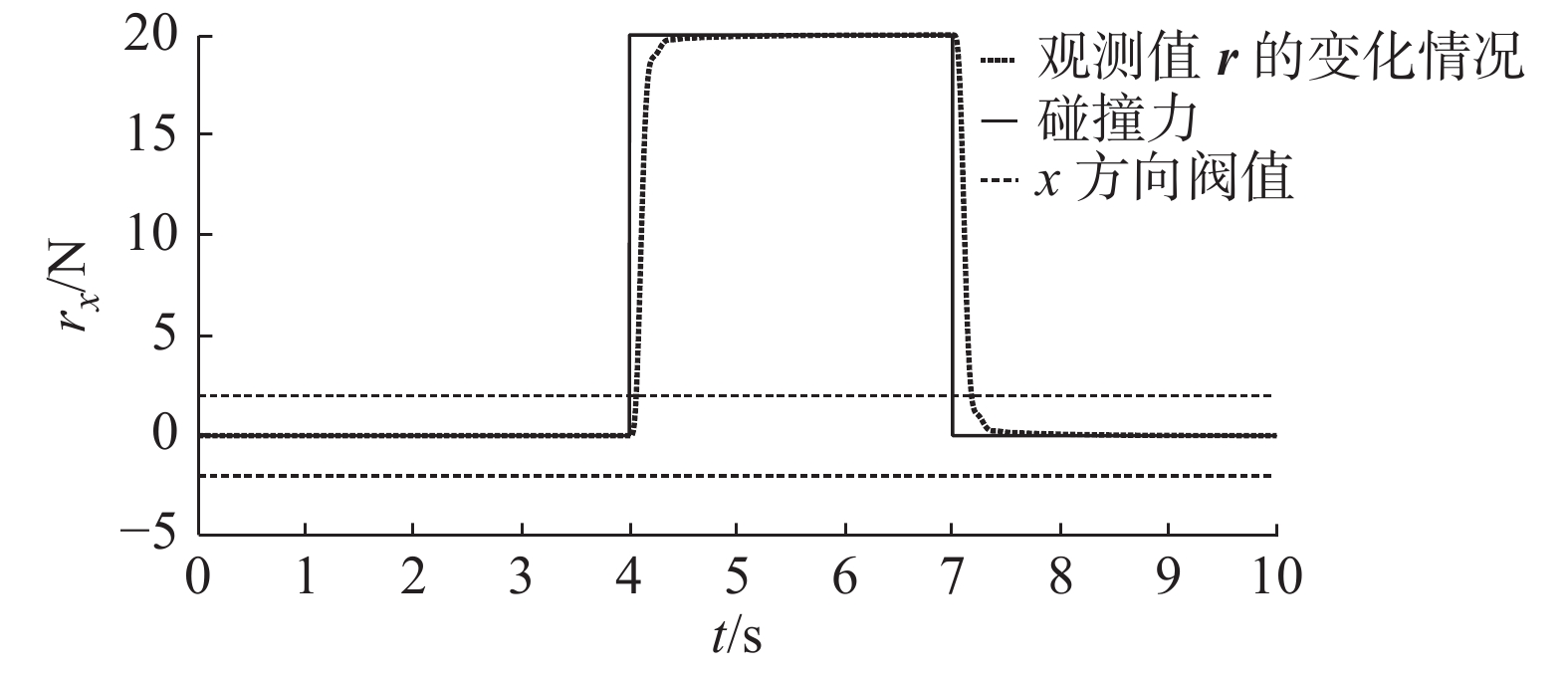
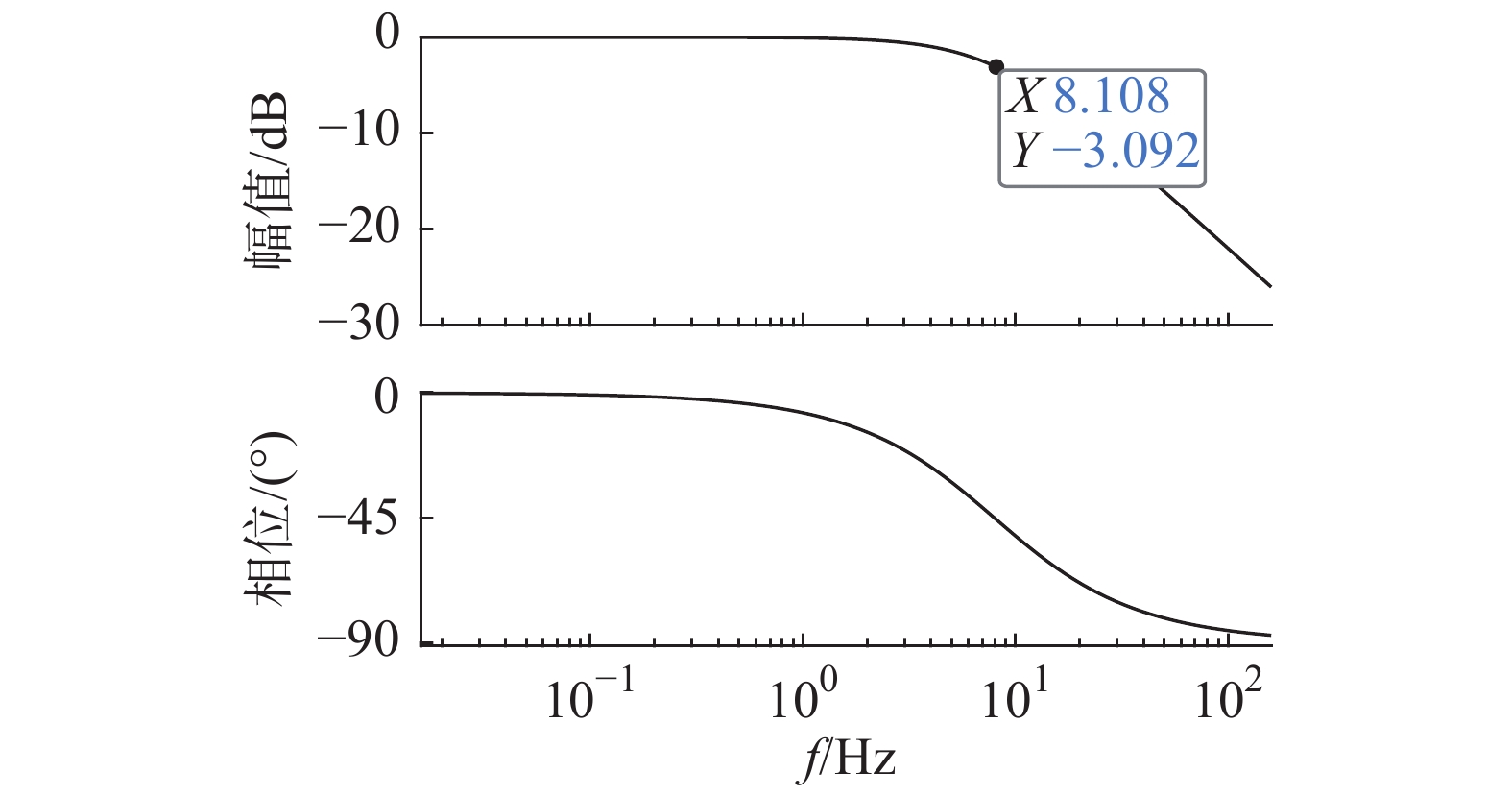
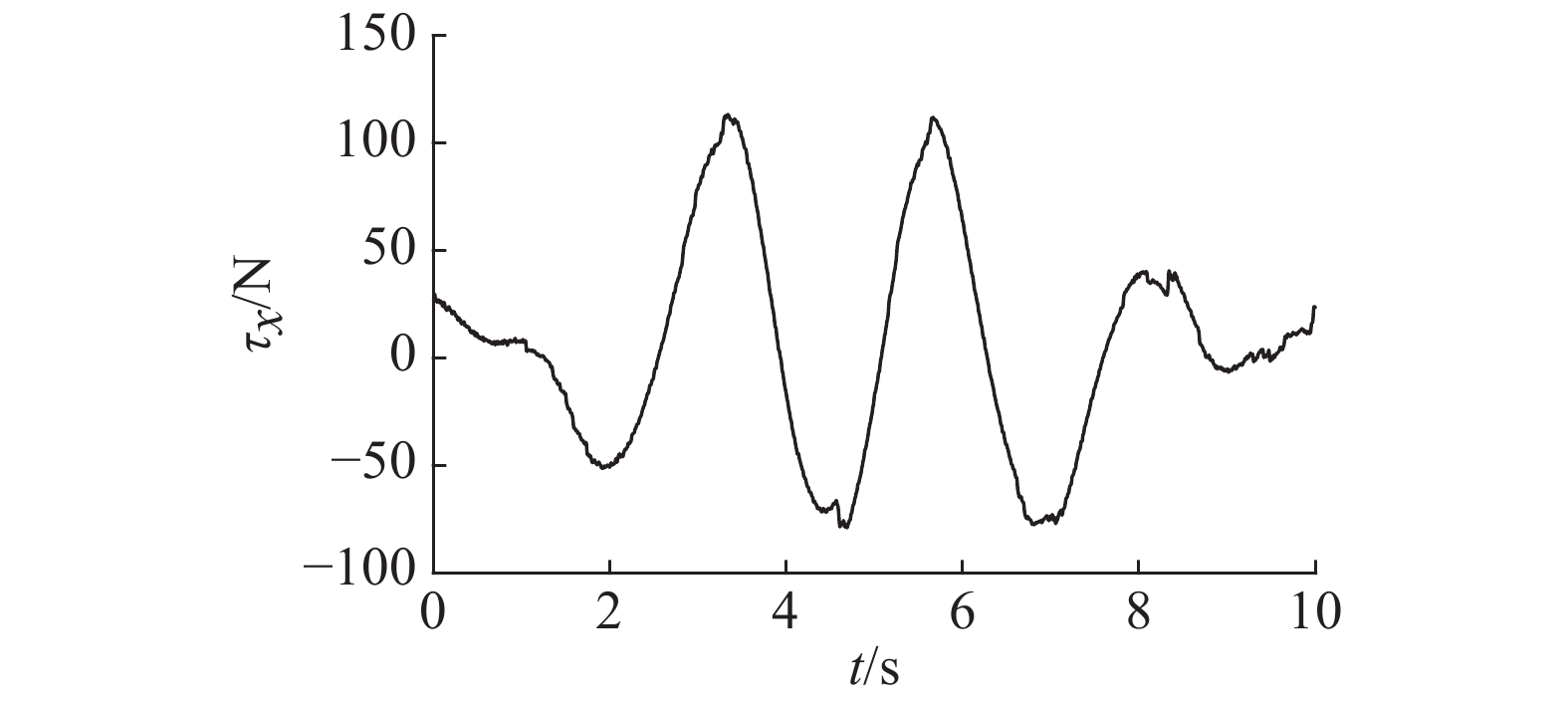
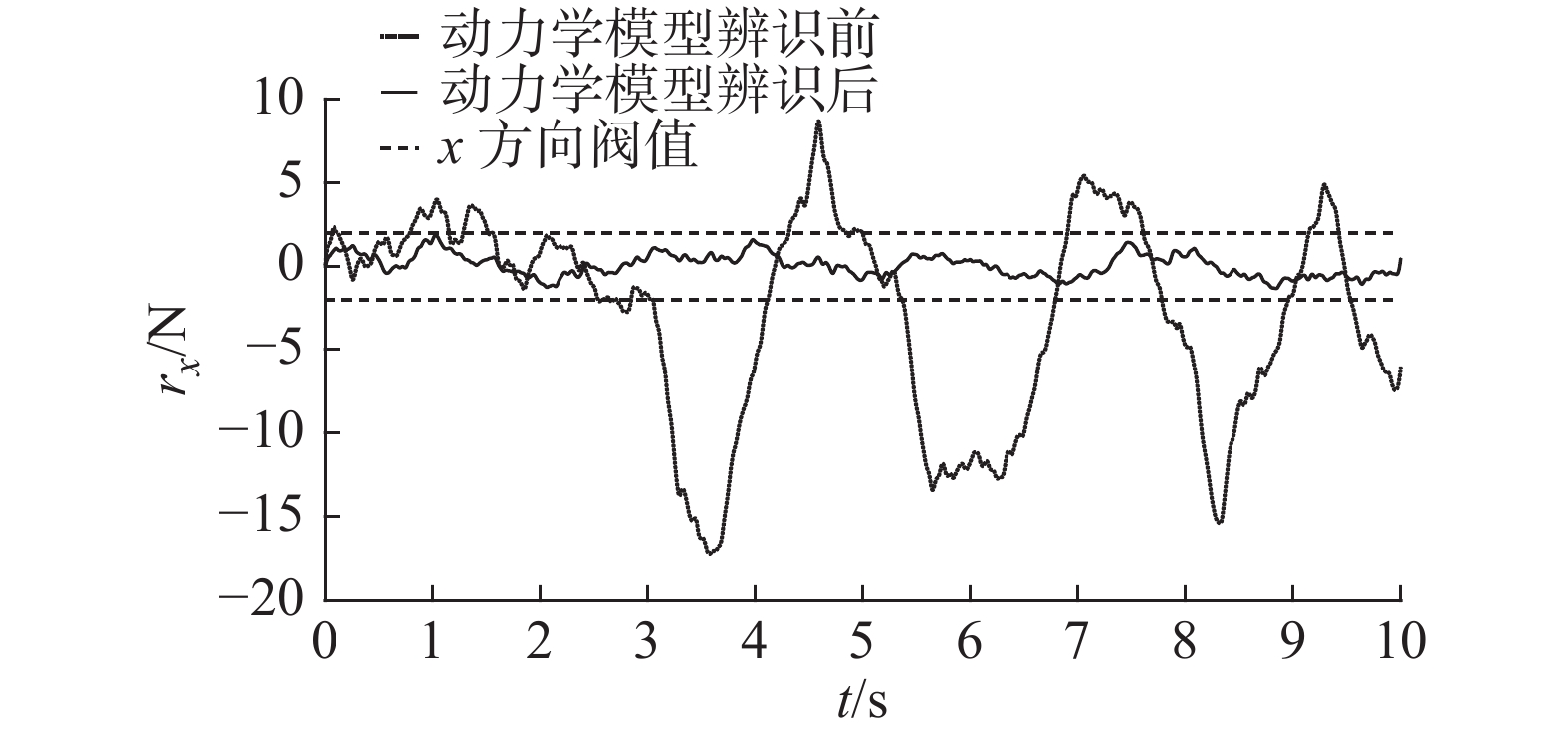
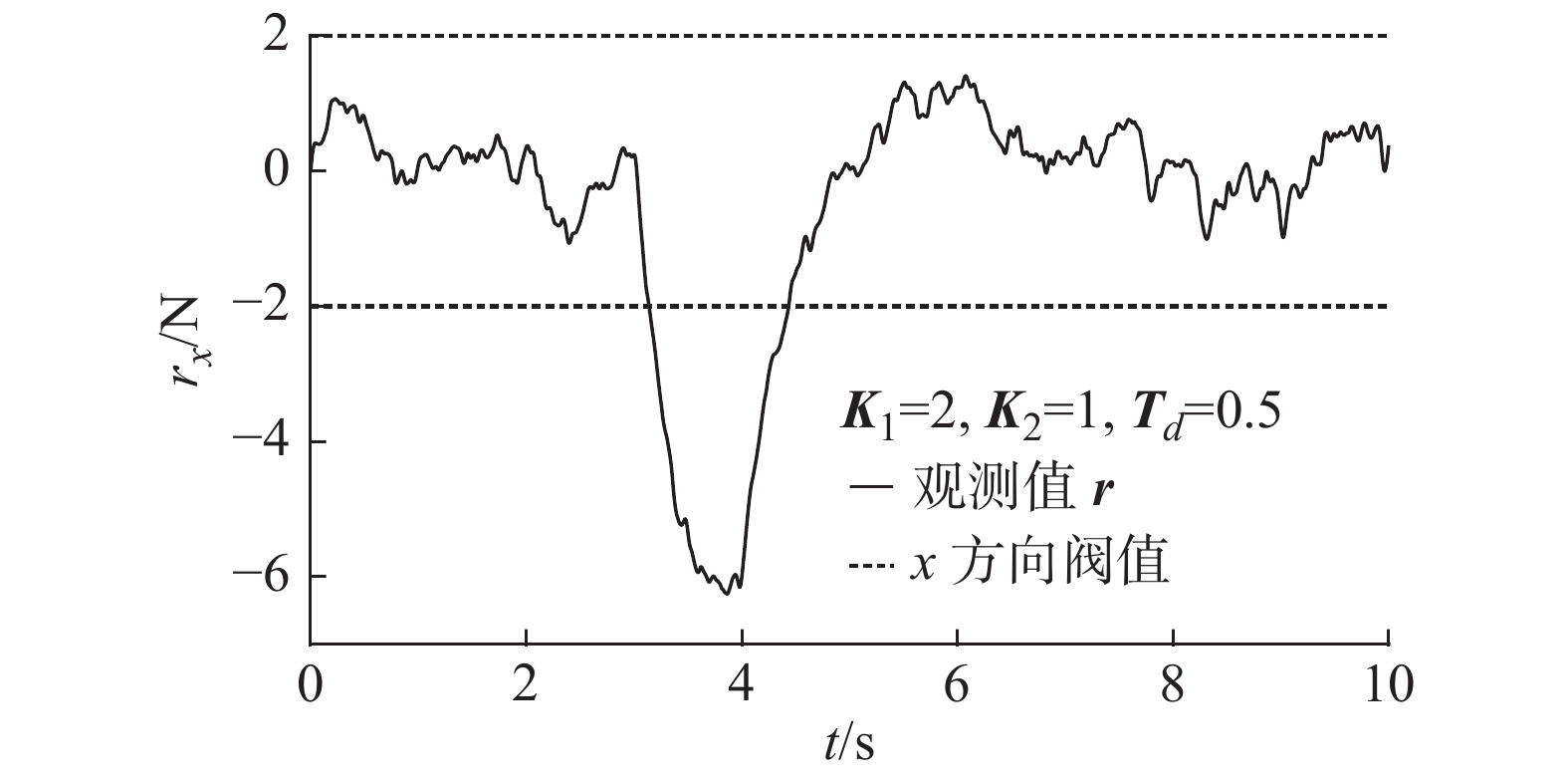
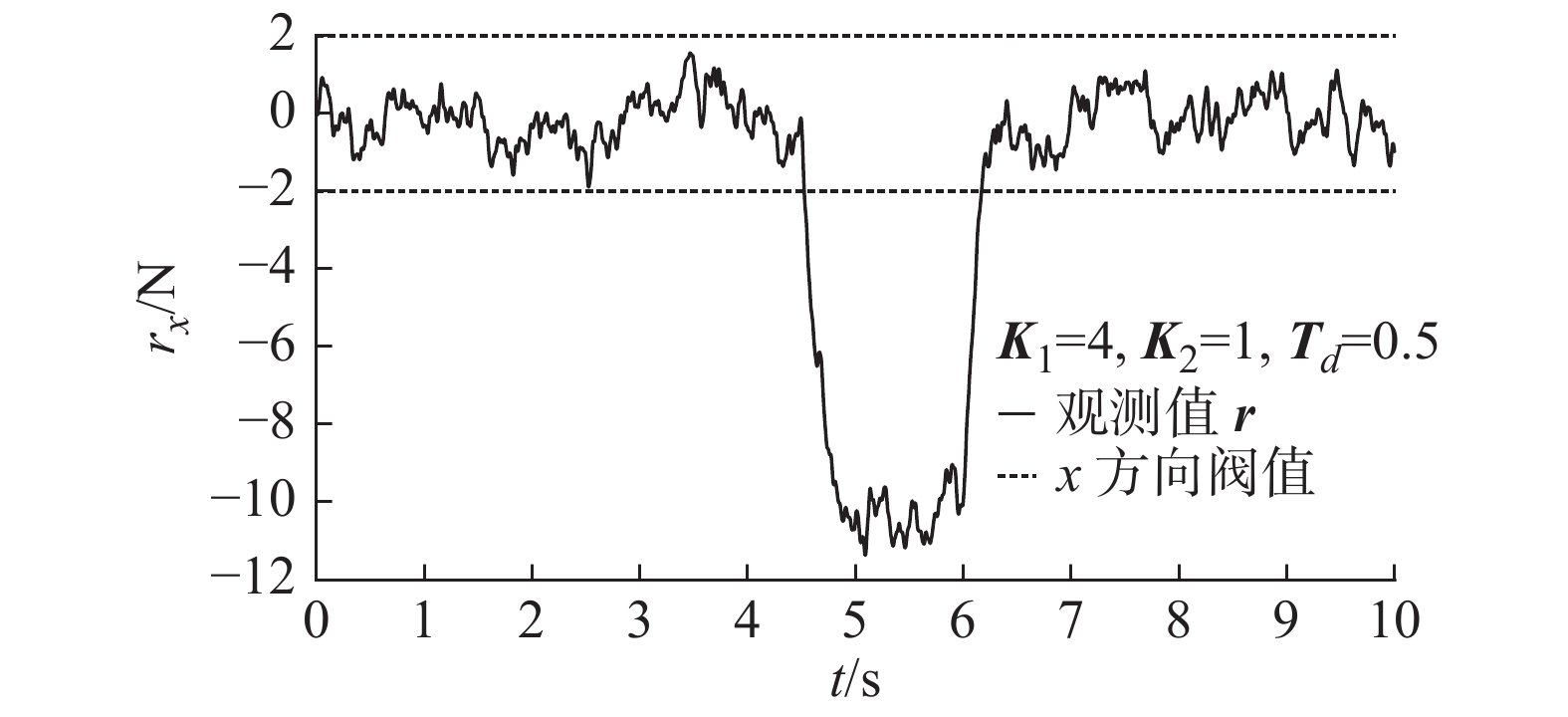
为了检测机器人与周围环境的碰撞,采用基于动力学模型的广义动量与实际动量偏差设计碰撞观测器以检测碰撞力。该观测器可在不增加额外传感器、加速度信息的情况下,仅通过机器人动力学模型、电机编码器反馈的位置、速度与驱动器反馈的驱动力矩计算机器人在当前运动状态下的理论动量与实际动量的偏差间接获取碰撞力的大小与方向,通过合理设定安全阈值就可以实现机器人的碰撞检测。仿真和实验表明,该碰撞观测器可以有效地获取碰撞力信息,并对高频噪声不敏感,参数调节方便,适用于静态与动态两种情况的碰撞检测。提高机器人动力学模型参数与关节摩擦力系数可提高观测器检测碰撞力信息的精度,减小安全阈值,提高碰撞检测的灵敏度。
为了检测机器人与周围环境的碰撞,采用基于动力学模型的广义动量与实际动量偏差设计碰撞观测器以检测碰撞力。该观测器可在不增加额外传感器、加速度信息的情况下,仅通过机器人动力学模型、电机编码器反馈的位置、速度与驱动器反馈的驱动力矩计算机器人在当前运动状态下的理论动量与实际动量的偏差间接获取碰撞力的大小与方向,通过合理设定安全阈值就可以实现机器人的碰撞检测。仿真和实验表明,该碰撞观测器可以有效地获取碰撞力信息,并对高频噪声不敏感,参数调节方便,适用于静态与动态两种情况的碰撞检测。提高机器人动力学模型参数与关节摩擦力系数可提高观测器检测碰撞力信息的精度,减小安全阈值,提高碰撞检测的灵敏度。






2020, 39(10): 1489-1496.
doi: 10.13433/j.cnki.1003-8728.20200133
摘要:
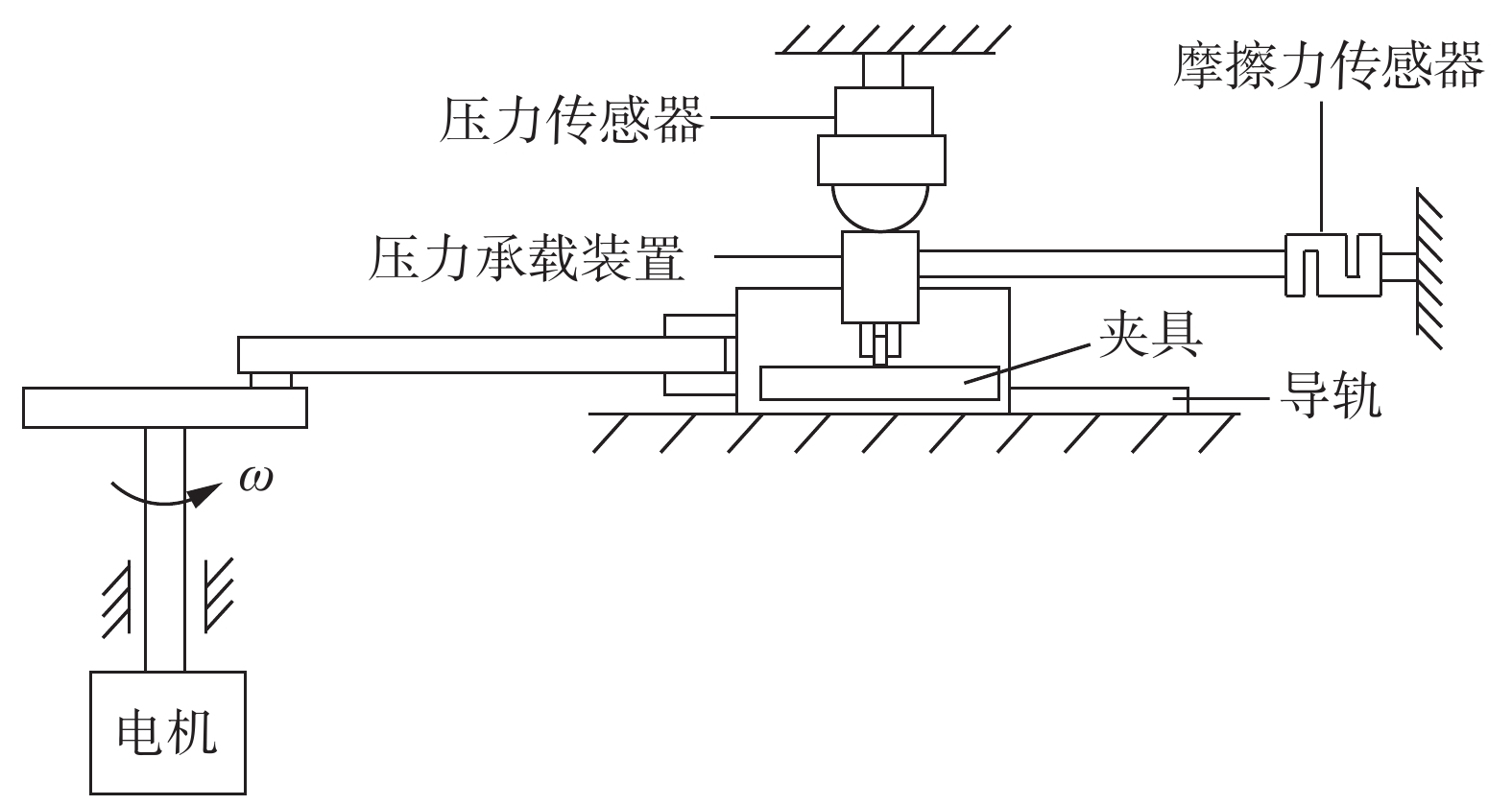
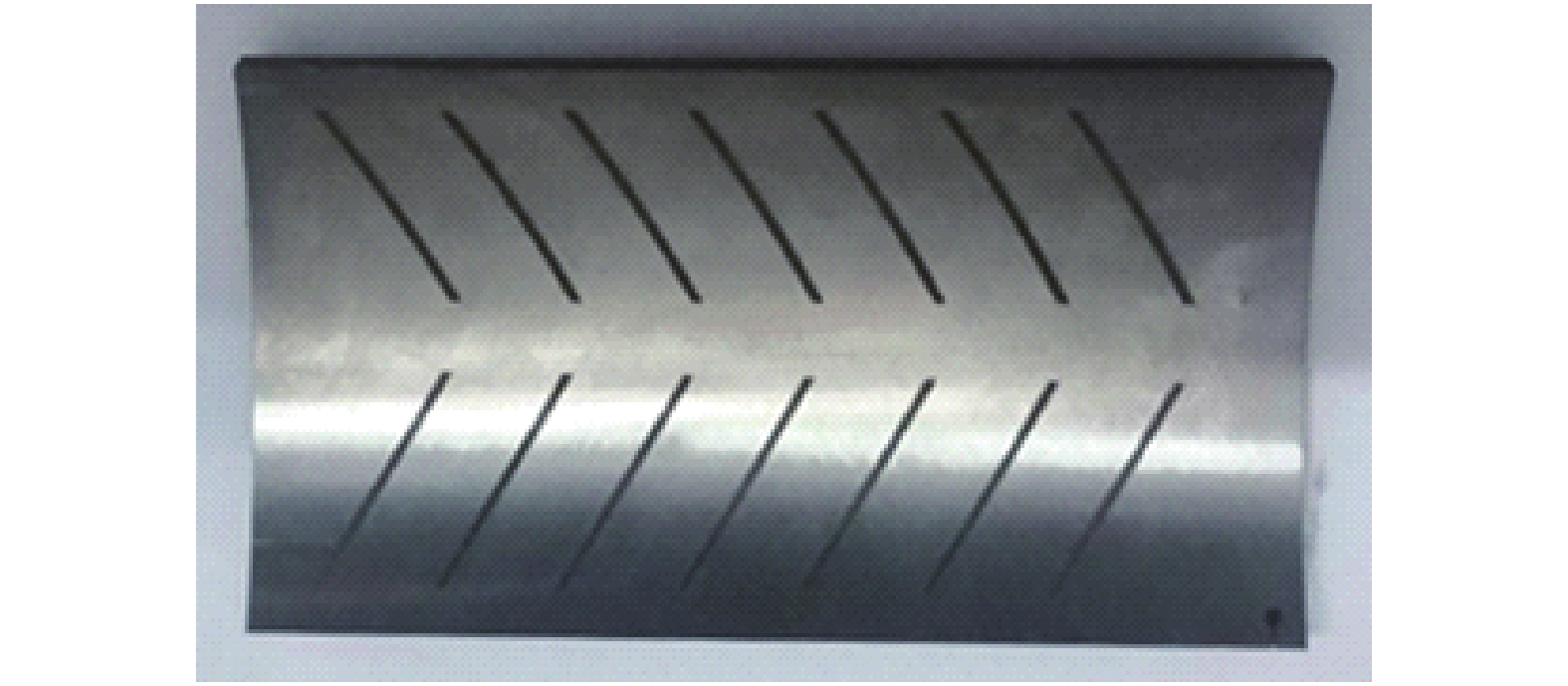
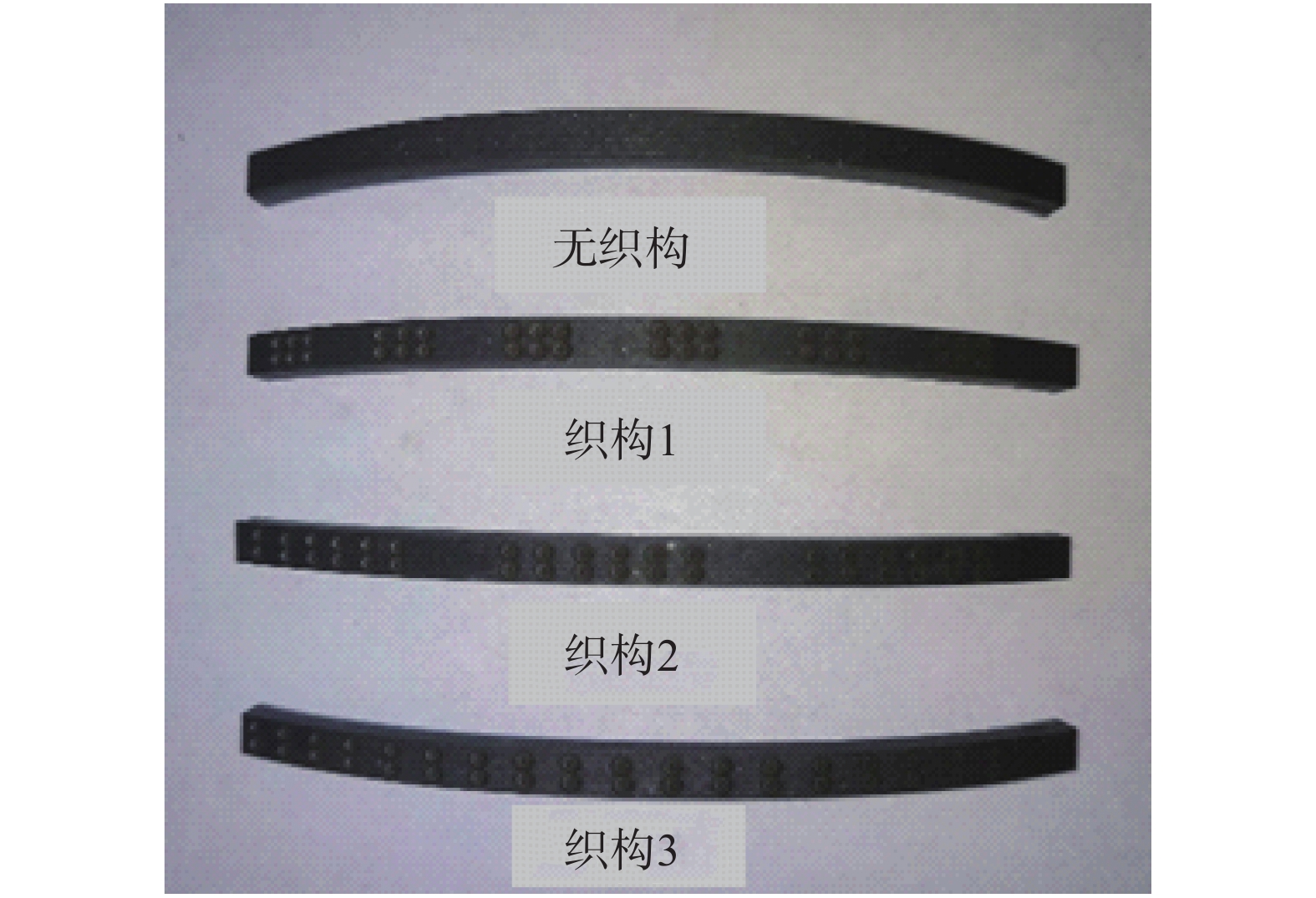
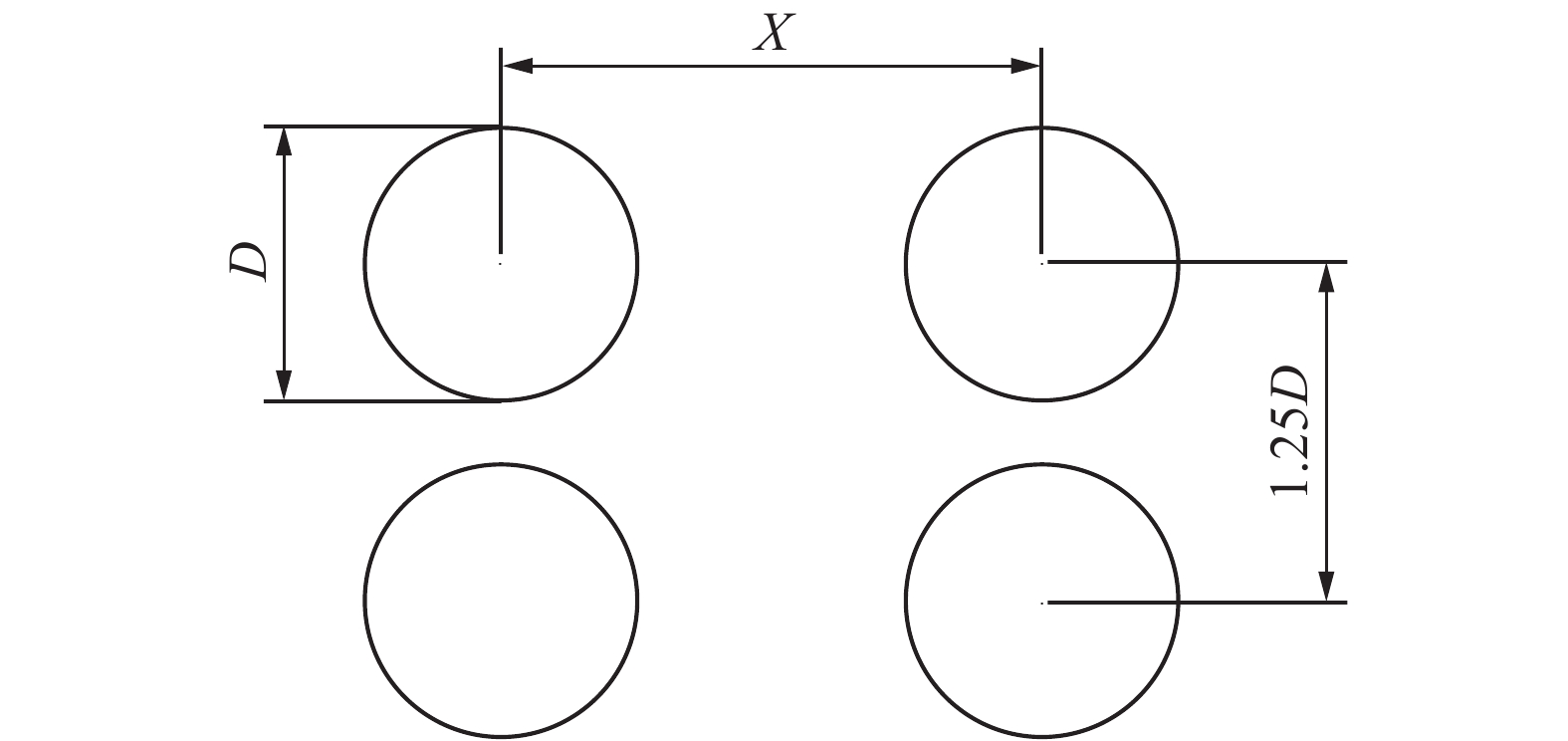
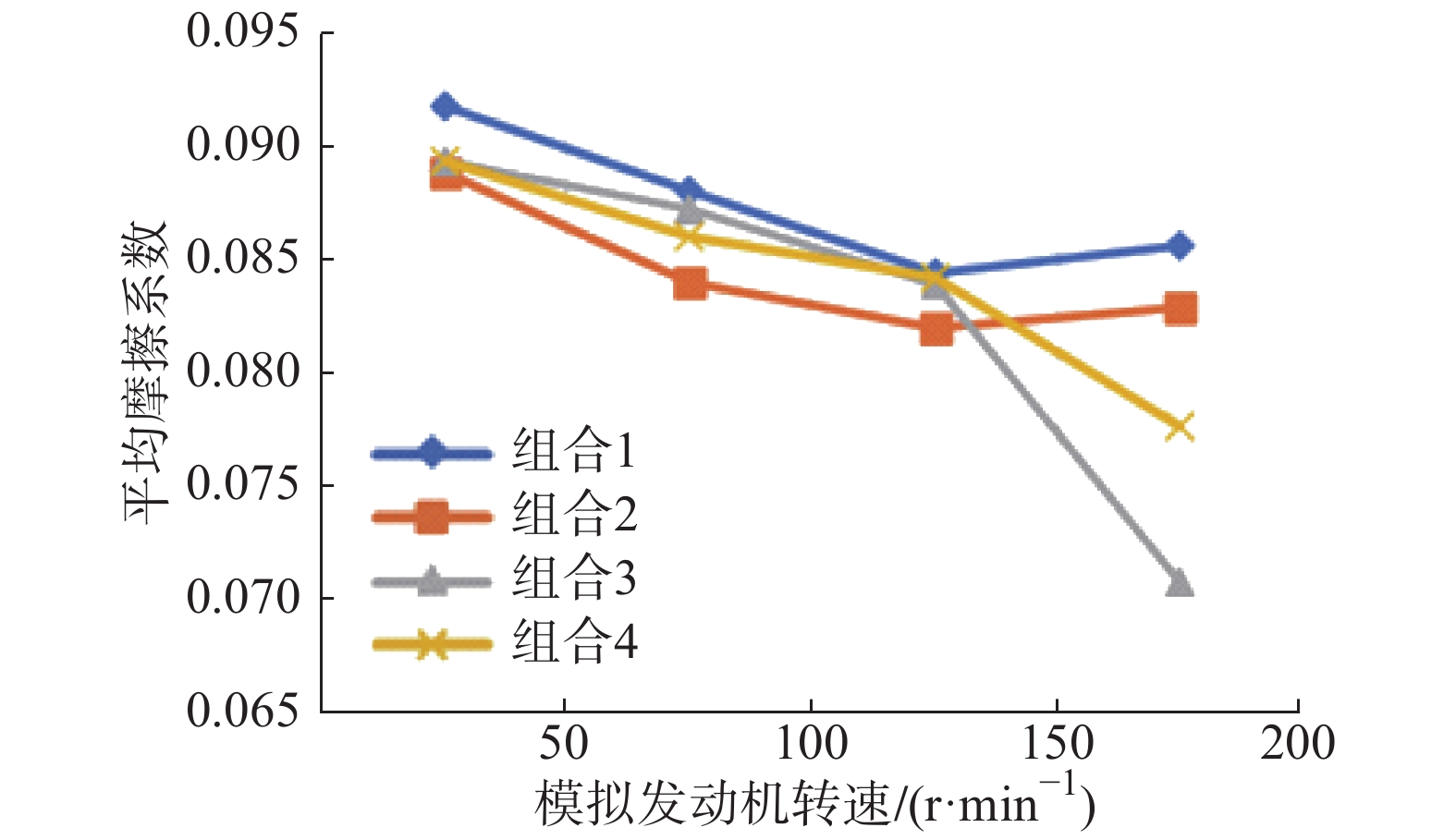
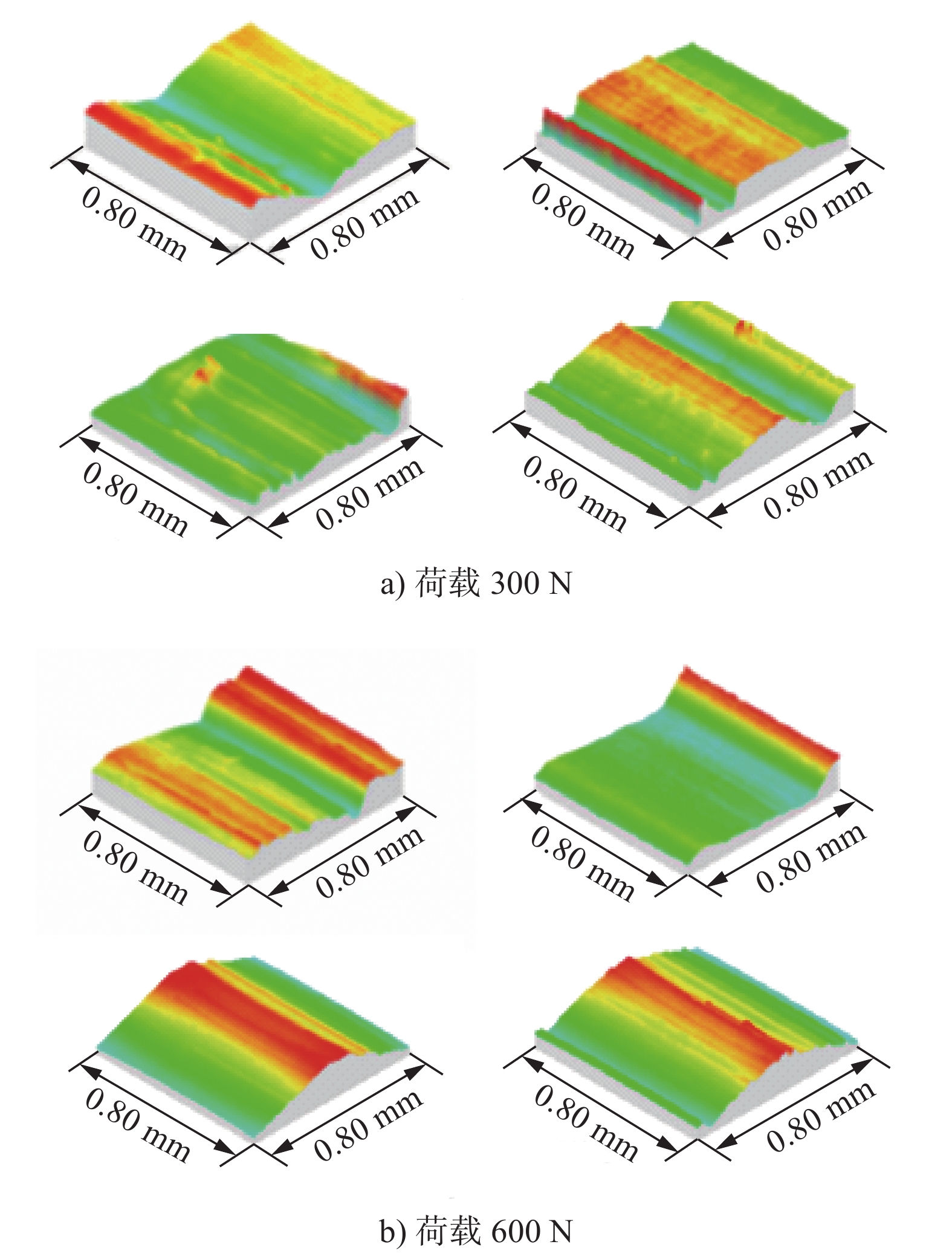
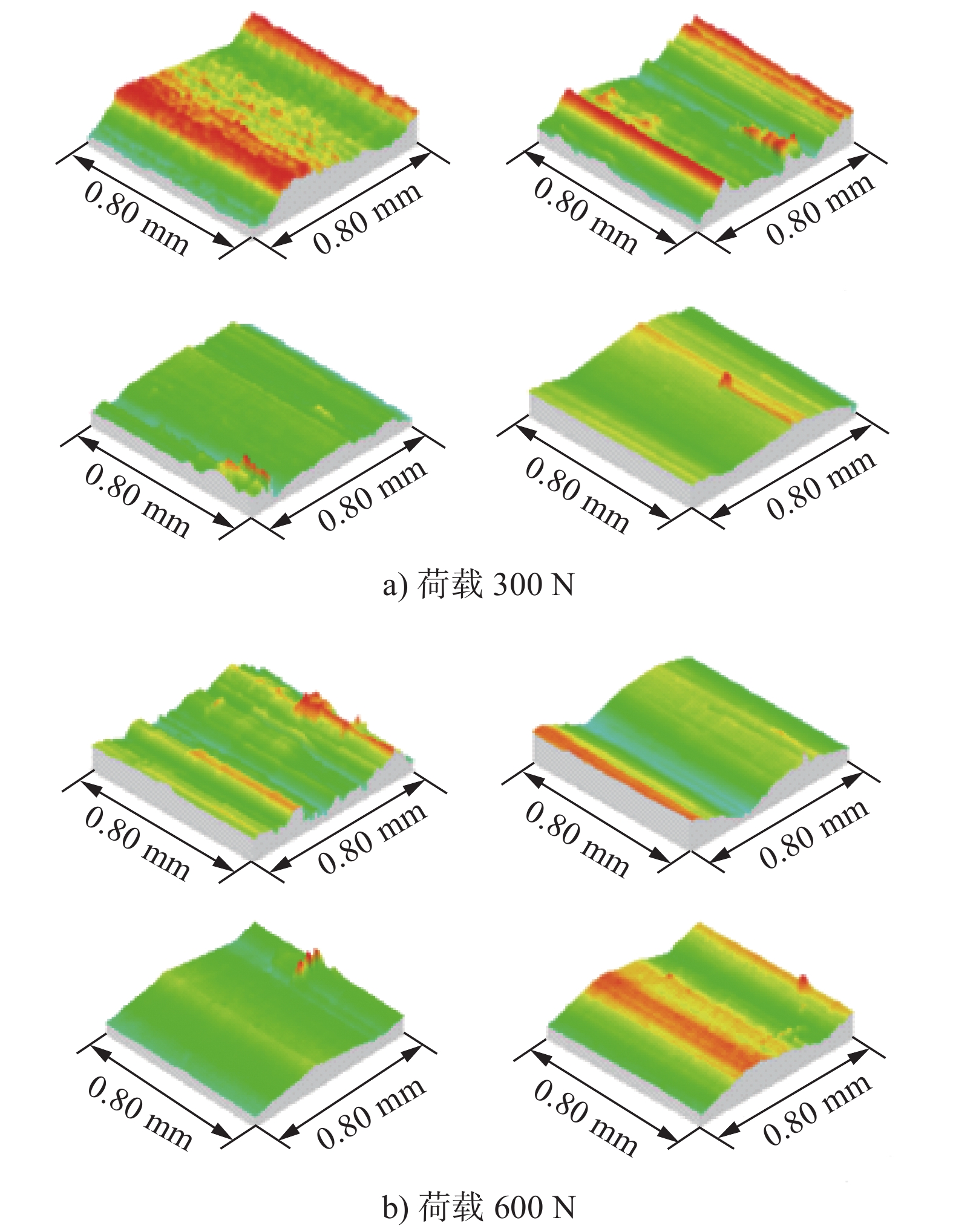
为探究活塞环表面织构密度对船舶柴油机缸套-活塞环这一主要摩擦副的摩擦性能的影响,利用具有不同织构密度圆形凹坑的活塞环在MWF-10往复式摩擦磨损试验机上进行试验。通过调整试验载荷、转速获取了不同模拟工况下的测试数据,结合对应参数分析了活塞环织构密度对缸套-活塞环摩擦副的摩擦作用影响。结果表明:带有不同表面织构密度圆形凹坑的活塞环可以在不同程度上降低摩擦副的摩擦系数,提高其摩擦学性能。综合摩擦系数、表面形貌的相关分析可知:在载荷一定时,存在合适的织构密度(\begin{document}${S\!_p}$\end{document} ![]()
![]()
为探究活塞环表面织构密度对船舶柴油机缸套-活塞环这一主要摩擦副的摩擦性能的影响,利用具有不同织构密度圆形凹坑的活塞环在MWF-10往复式摩擦磨损试验机上进行试验。通过调整试验载荷、转速获取了不同模拟工况下的测试数据,结合对应参数分析了活塞环织构密度对缸套-活塞环摩擦副的摩擦作用影响。结果表明:带有不同表面织构密度圆形凹坑的活塞环可以在不同程度上降低摩擦副的摩擦系数,提高其摩擦学性能。综合摩擦系数、表面形貌的相关分析可知:在载荷一定时,存在合适的织构密度(




2020, 39(10): 1497-1504.
doi: 10.13433/j.cnki.1003-8728.20190313
摘要:
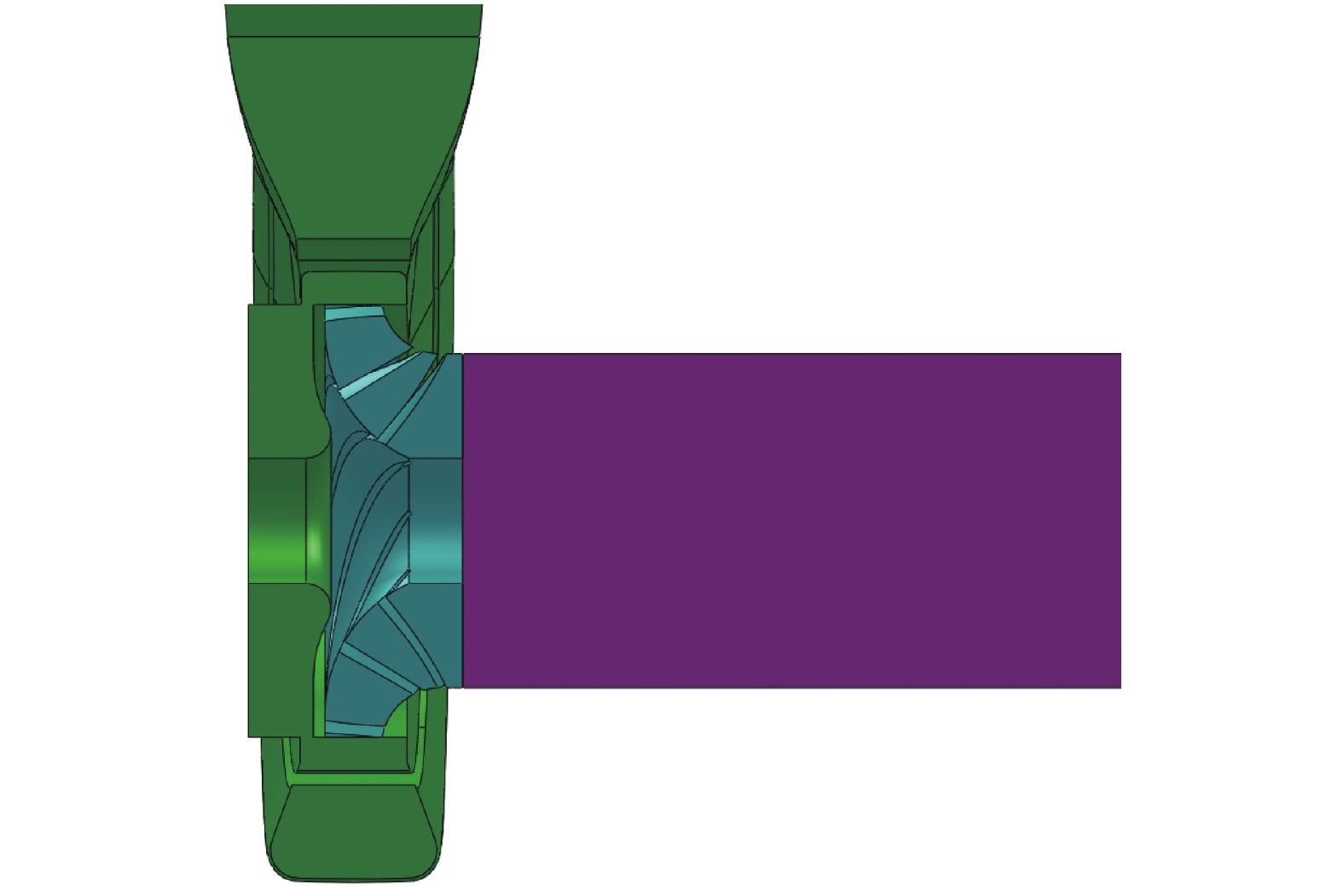
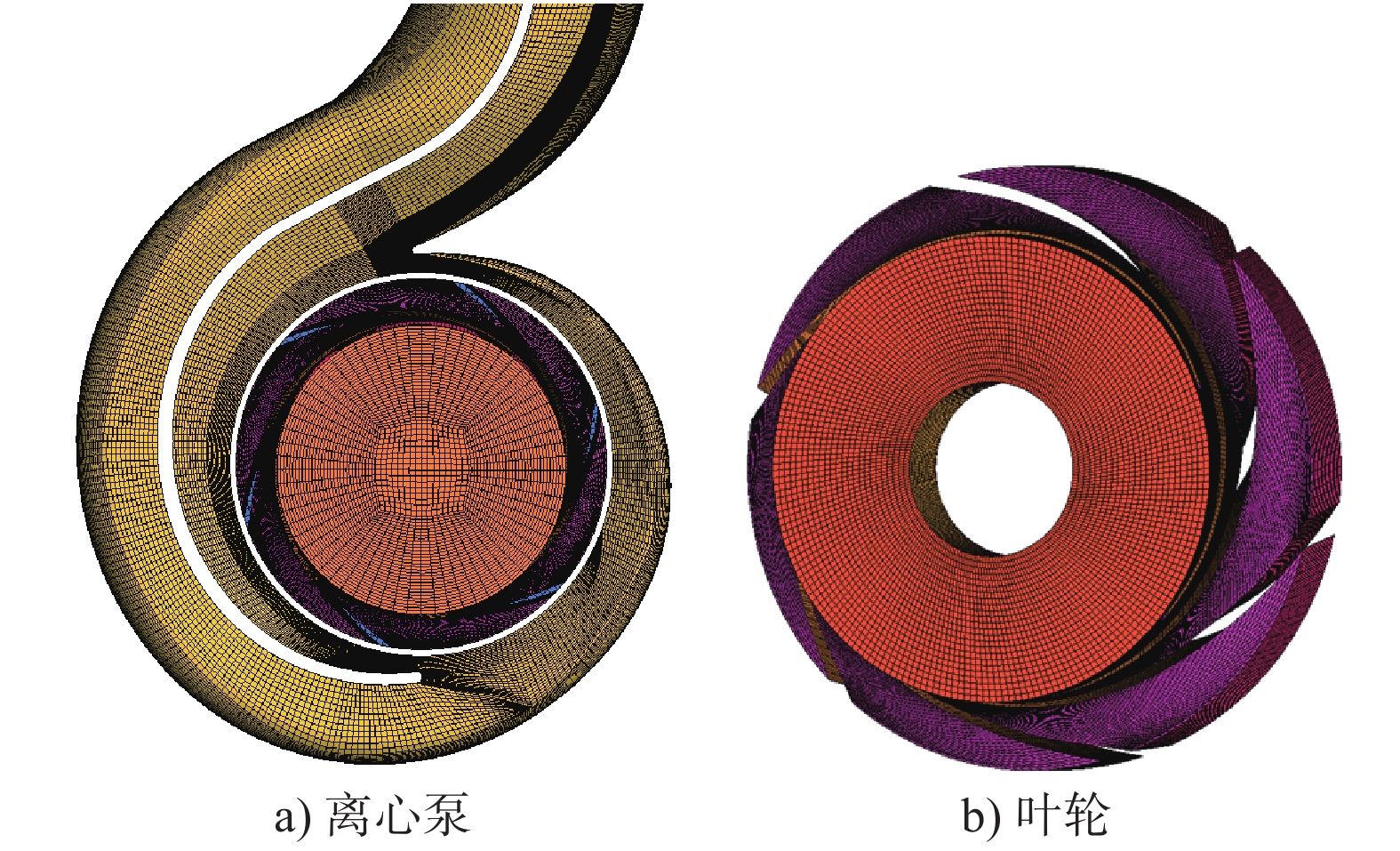
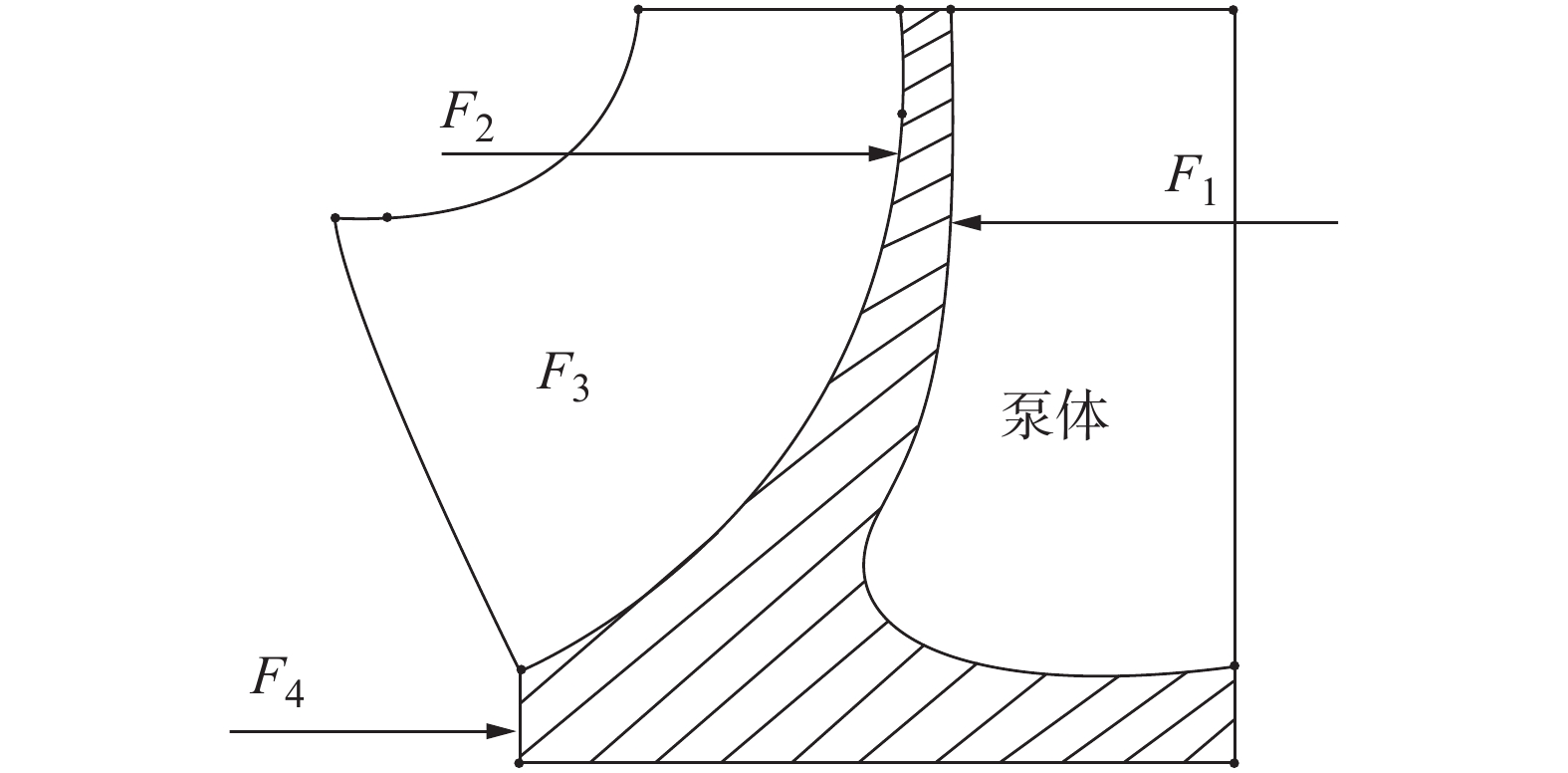
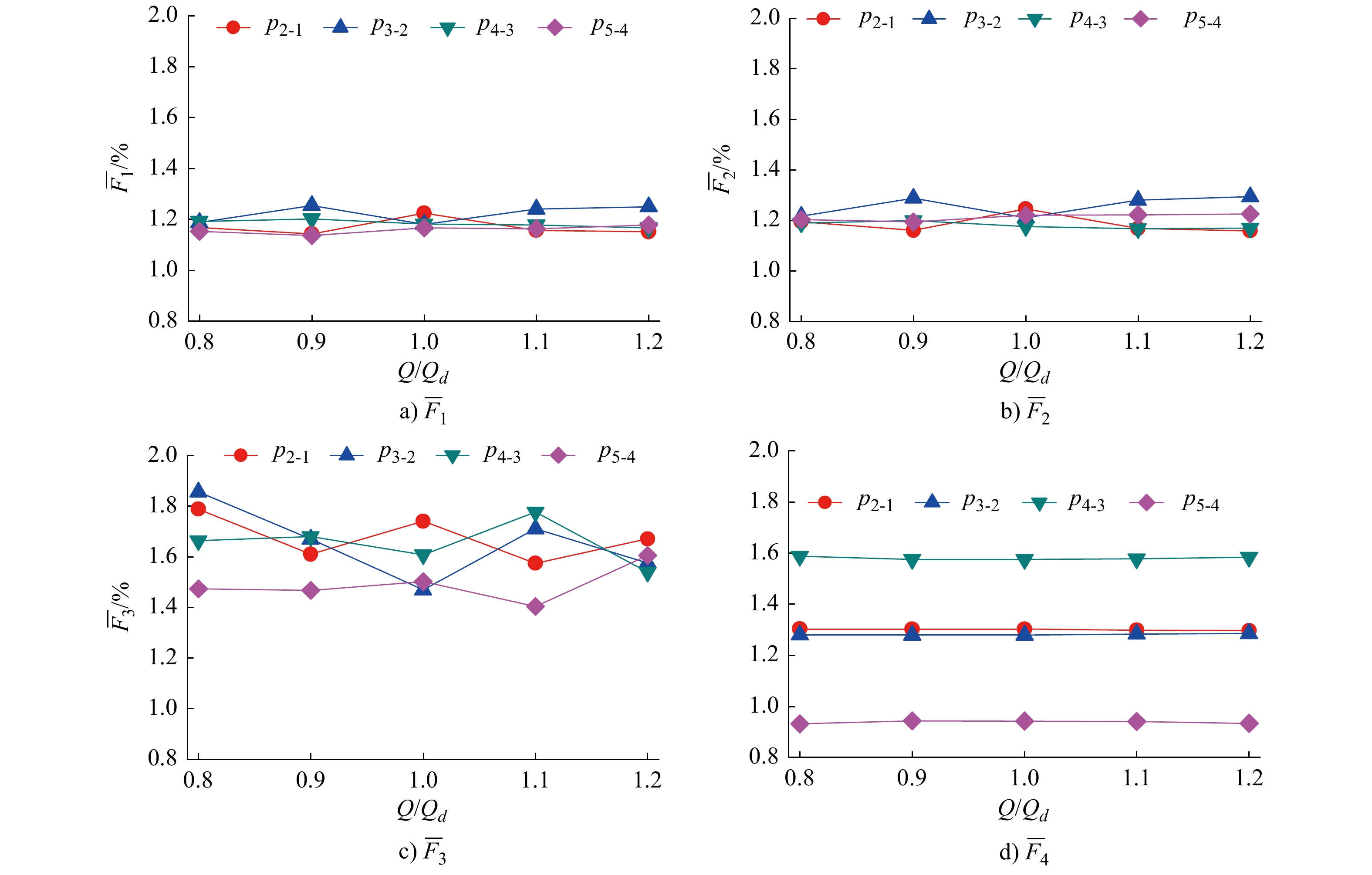
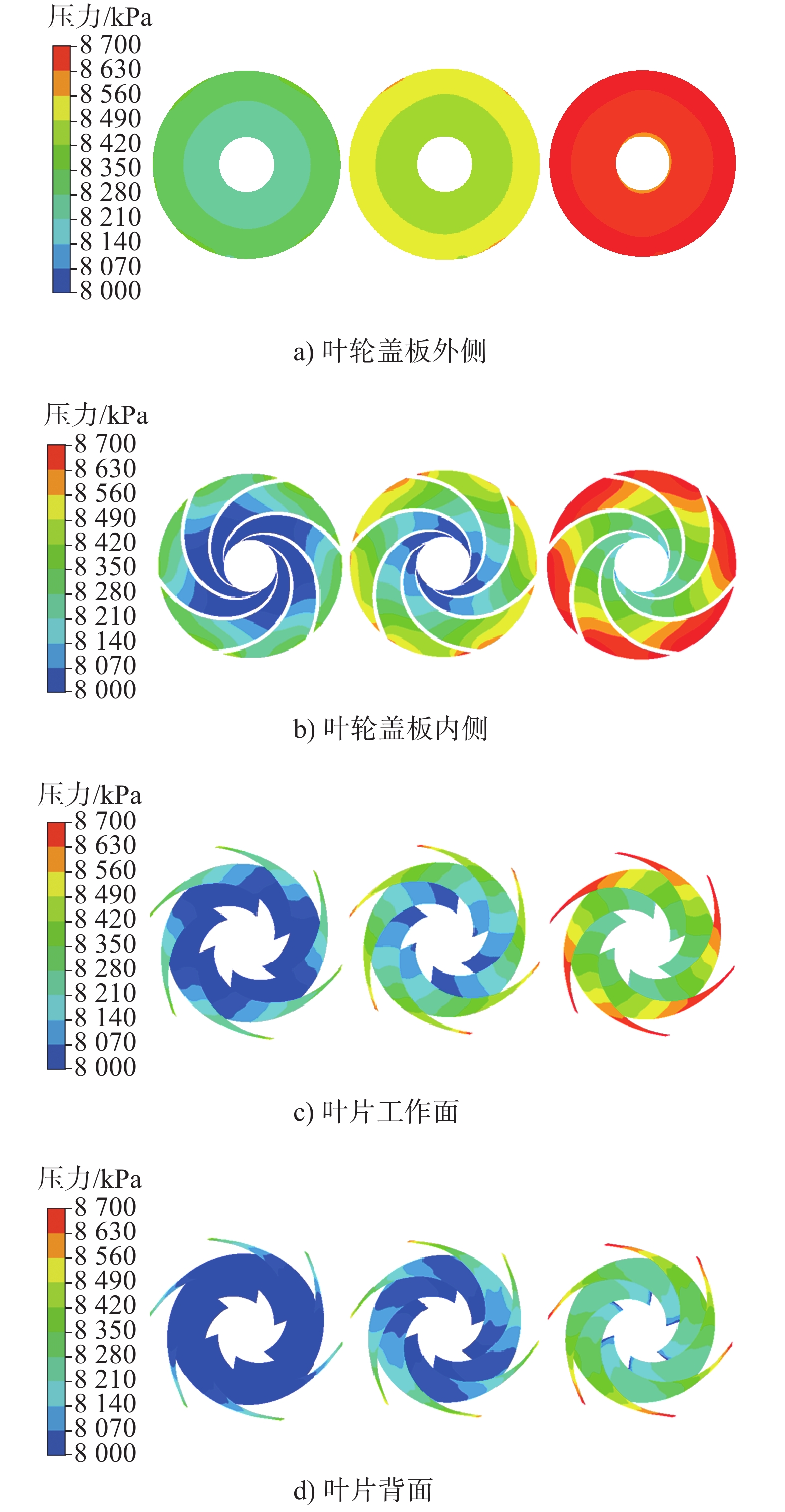
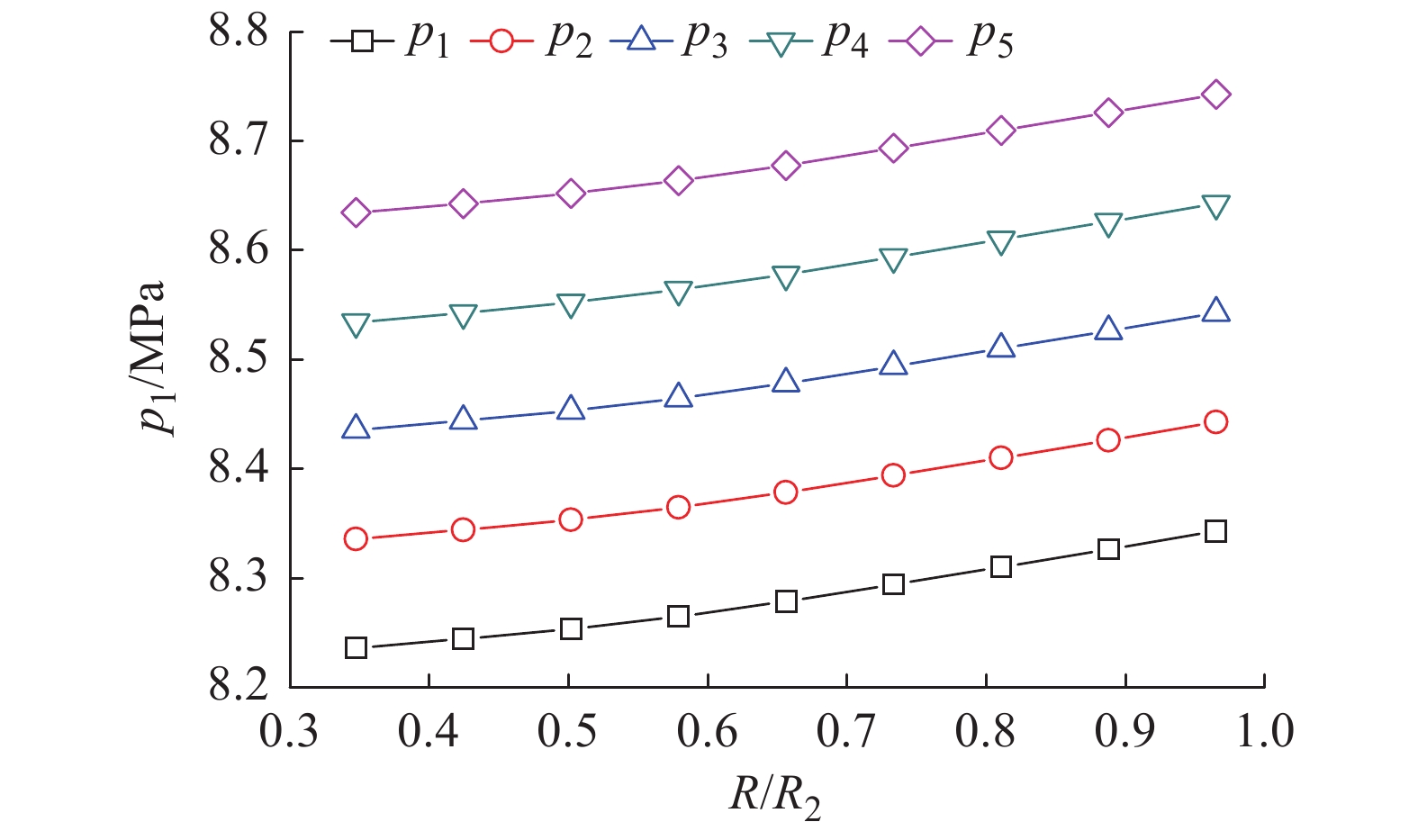
高压离心泵进口压力是影响其轴向力大小的因素之一。选取某高压半开式叶轮离心泵在0.8 ~1.2 Qd的工作区域,在对外特性计算结果进行试验验证的基础上,详细分析进口压力为7.8 ~ 8.2 MPa的5种条件下,叶轮盖板外侧轴向力F1、叶轮盖板内侧轴向力F2、叶片轴向力F3、轴端轴向力F4的分布规律,并绘制各轴向分力增加率与流量变化曲线。揭示设计流量1.0 Qd时,叶轮盖板内、外侧壁面及叶片工作面、背面压力分布特征,得出叶轮盖板外侧壁面轴向力近似计算方法。研究表明:同一流量工况时,进口压力越大,叶轮盖板外侧轴向力F1、叶轮盖板内侧轴向力F2、叶片轴向力F3、轴端轴向力F4均越大,离心泵总轴向力F越小。同一进口压力时,轴端轴向力F4不受流量变化影响,但流量越大,离心泵总轴向力F越小。因此,本研究对减小高压离心泵轴向力,提高其运行稳定性具有重要的指导意义。
高压离心泵进口压力是影响其轴向力大小的因素之一。选取某高压半开式叶轮离心泵在0.8 ~1.2 Qd的工作区域,在对外特性计算结果进行试验验证的基础上,详细分析进口压力为7.8 ~ 8.2 MPa的5种条件下,叶轮盖板外侧轴向力F1、叶轮盖板内侧轴向力F2、叶片轴向力F3、轴端轴向力F4的分布规律,并绘制各轴向分力增加率与流量变化曲线。揭示设计流量1.0 Qd时,叶轮盖板内、外侧壁面及叶片工作面、背面压力分布特征,得出叶轮盖板外侧壁面轴向力近似计算方法。研究表明:同一流量工况时,进口压力越大,叶轮盖板外侧轴向力F1、叶轮盖板内侧轴向力F2、叶片轴向力F3、轴端轴向力F4均越大,离心泵总轴向力F越小。同一进口压力时,轴端轴向力F4不受流量变化影响,但流量越大,离心泵总轴向力F越小。因此,本研究对减小高压离心泵轴向力,提高其运行稳定性具有重要的指导意义。



2020, 39(10): 1505-1510.
doi: 10.13433/j.cnki.1003-8728.20190273
摘要:
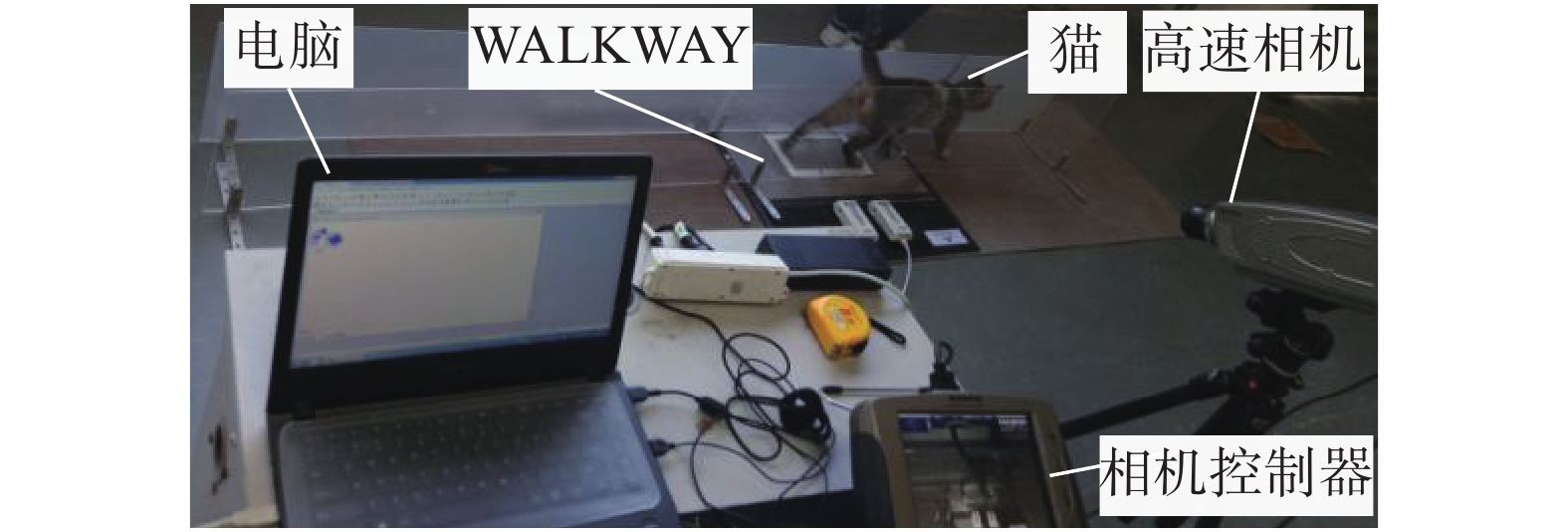
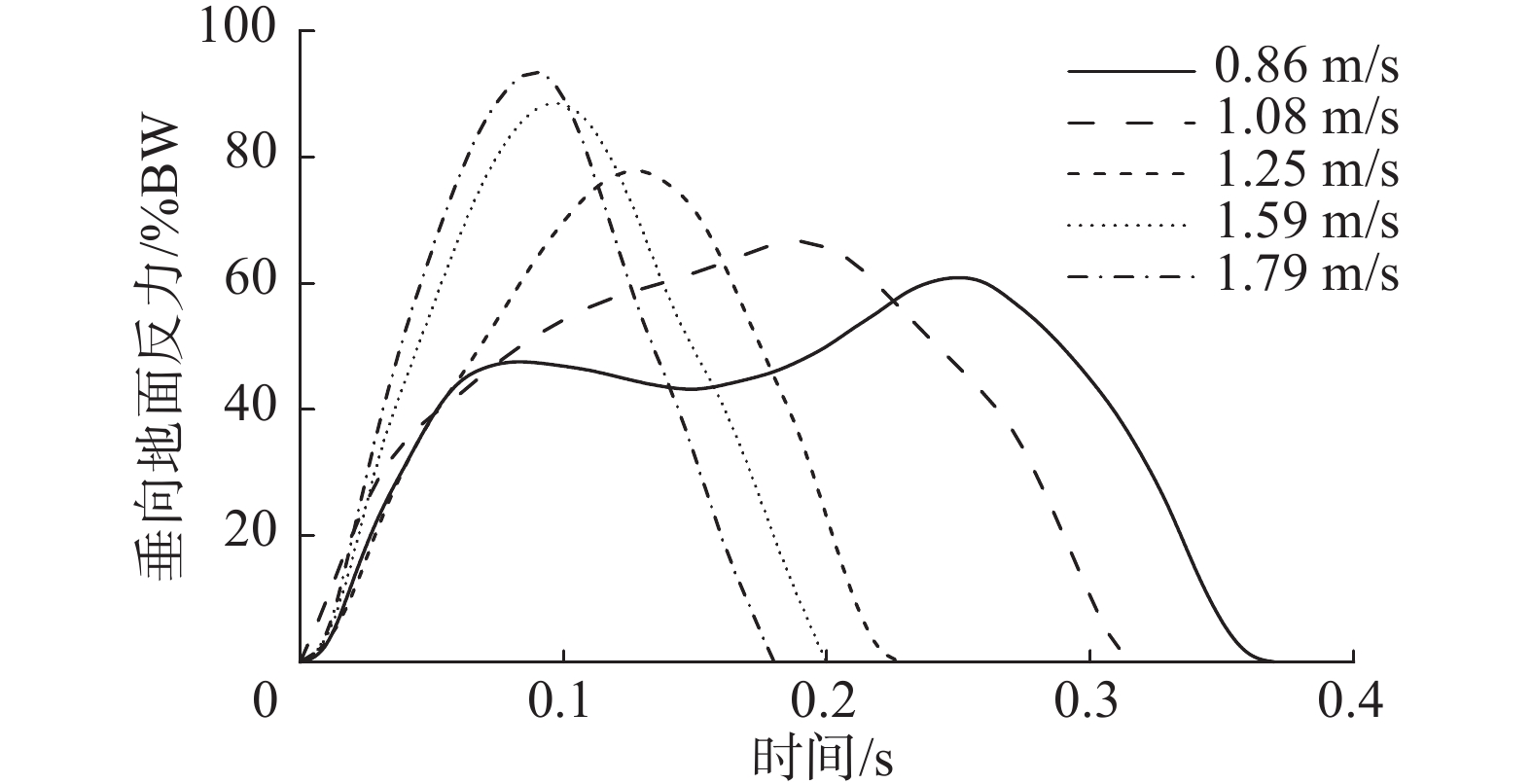
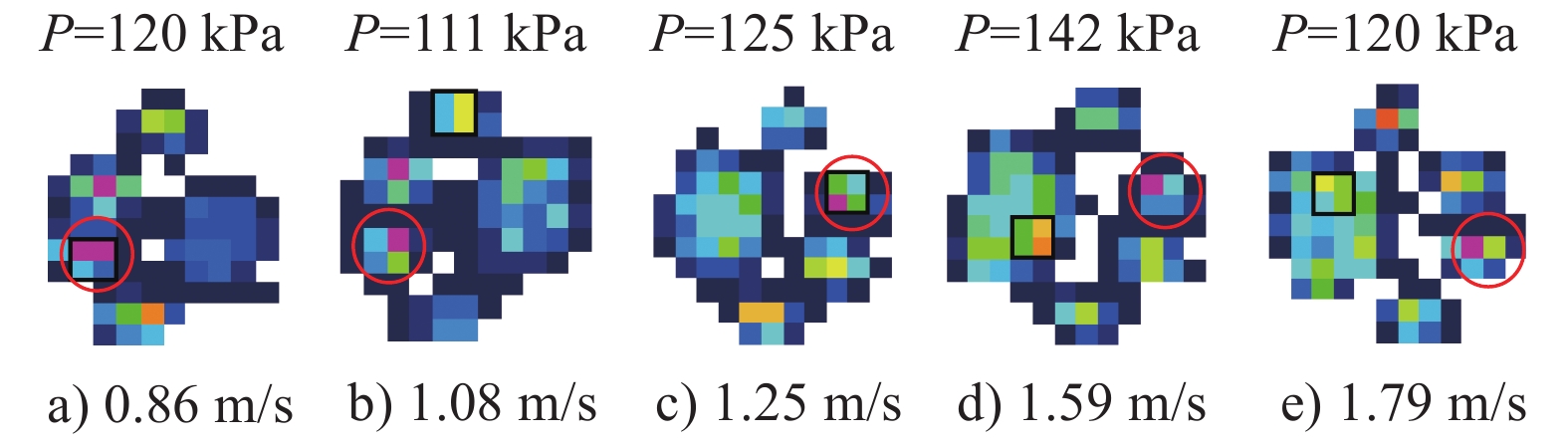
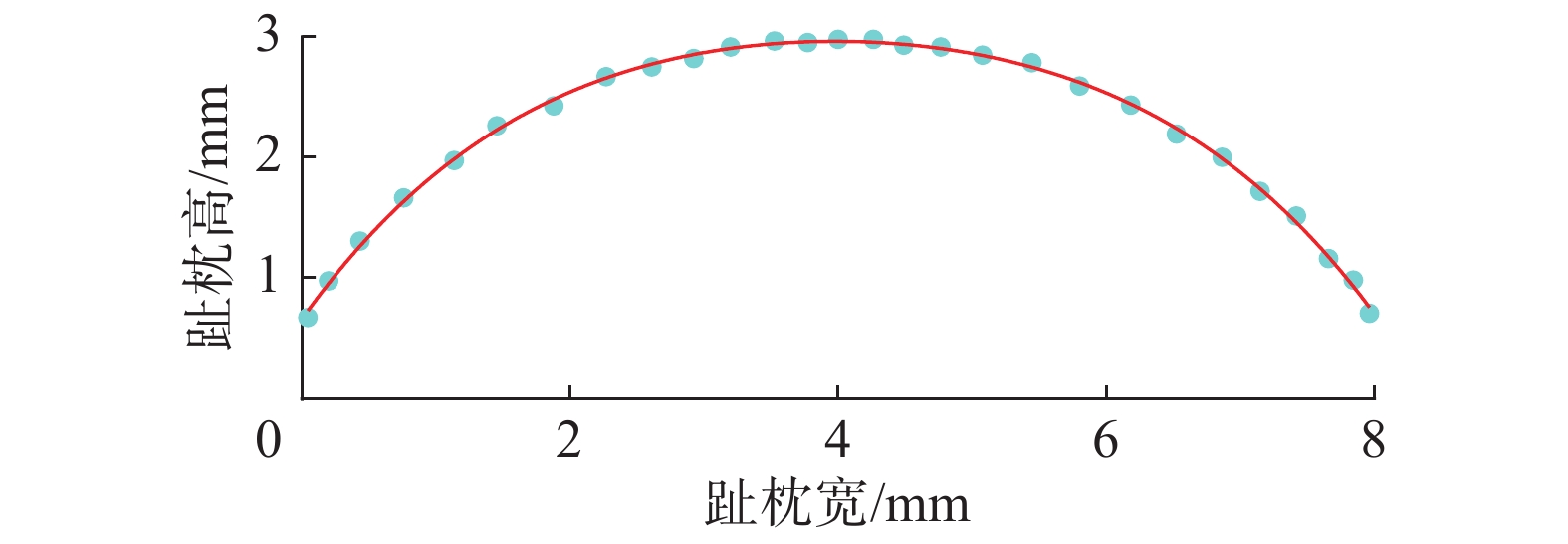
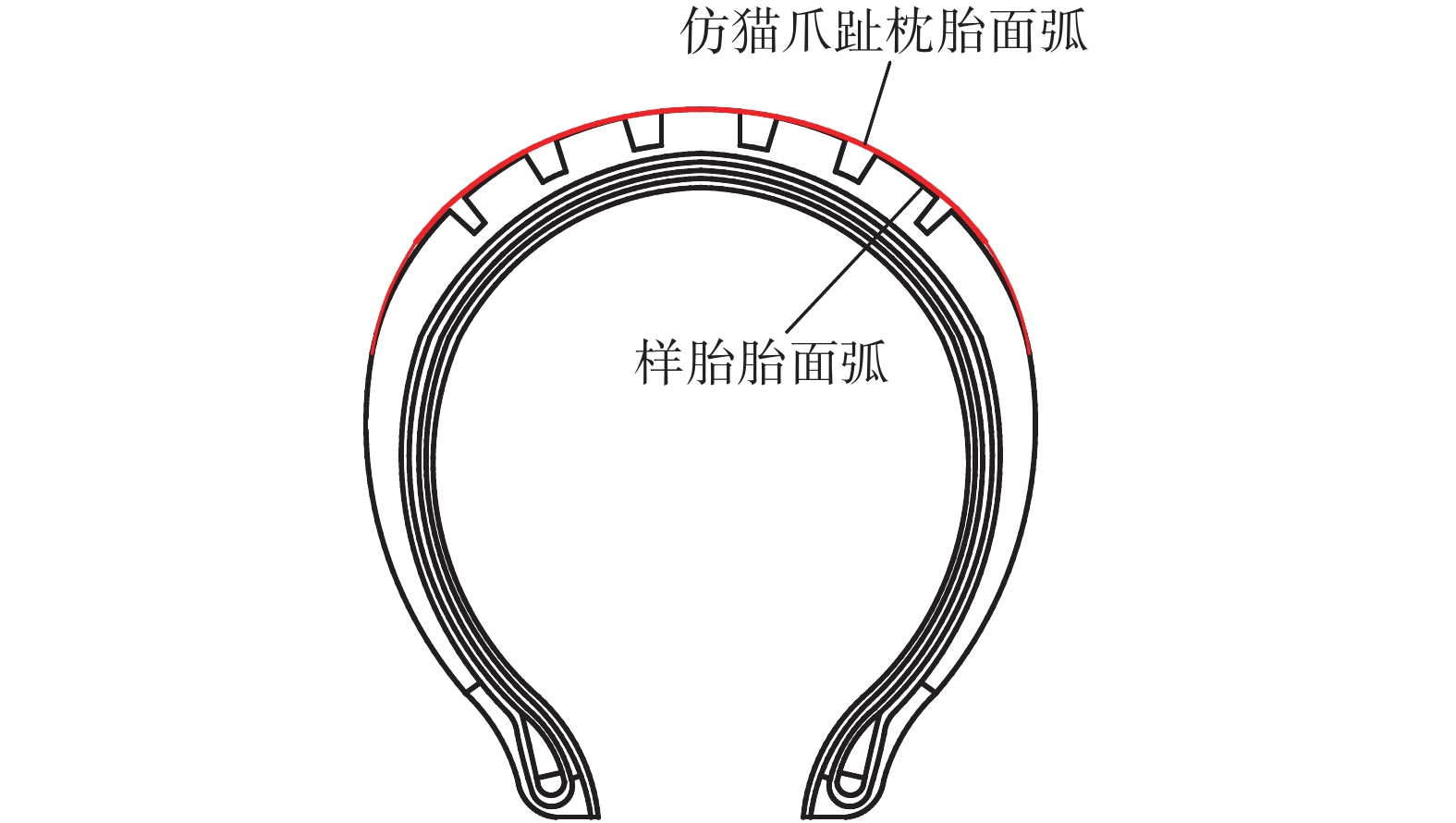
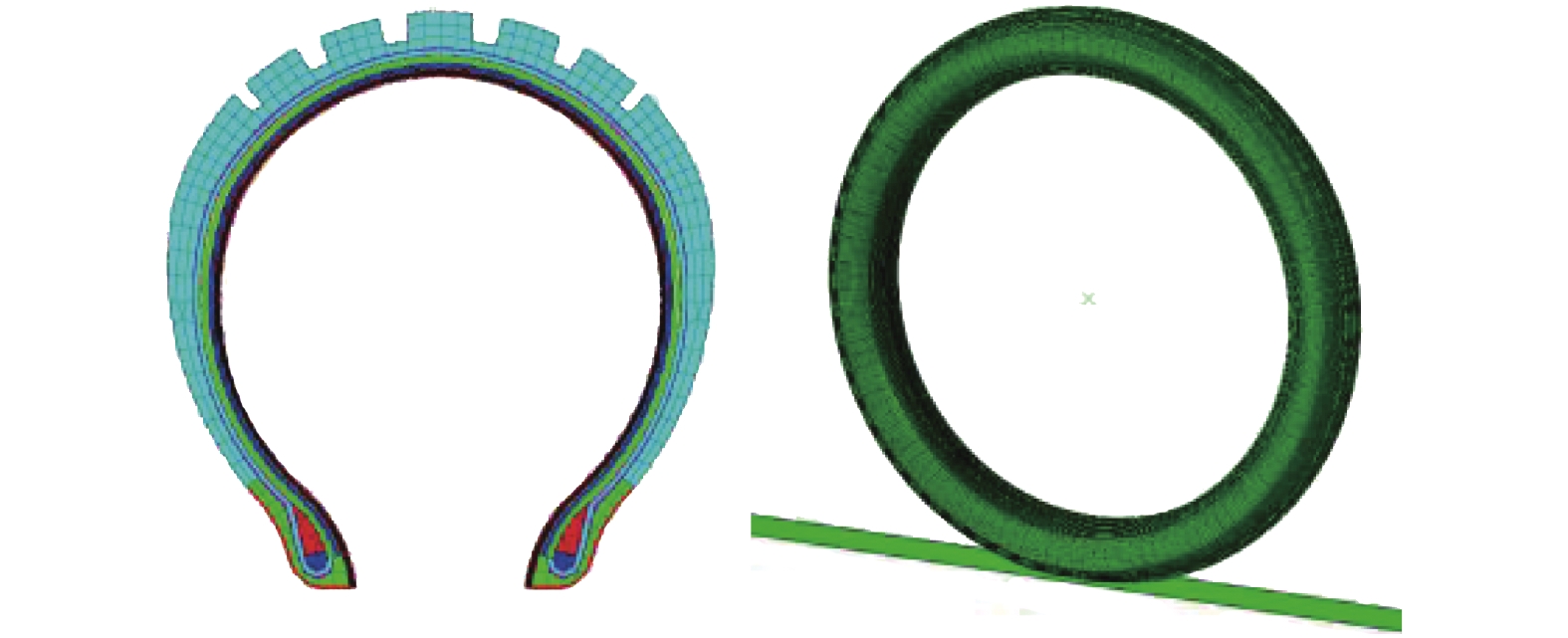
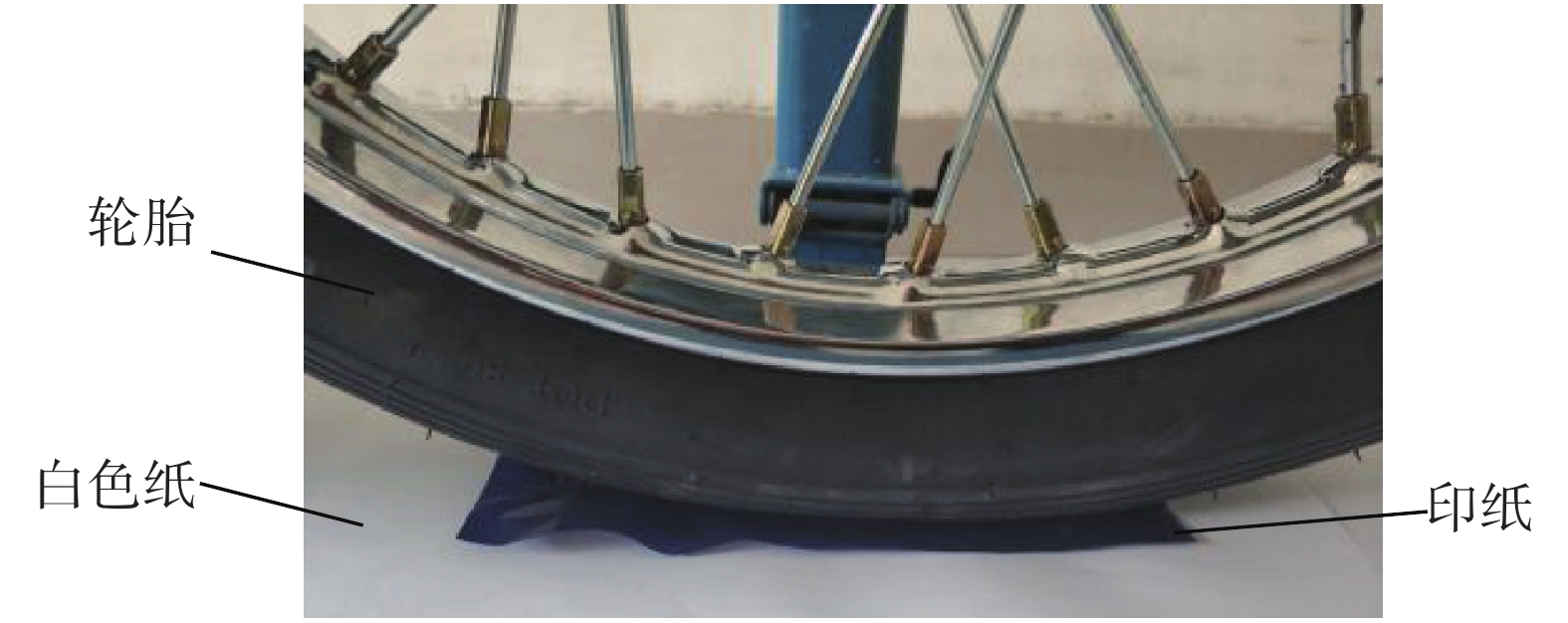
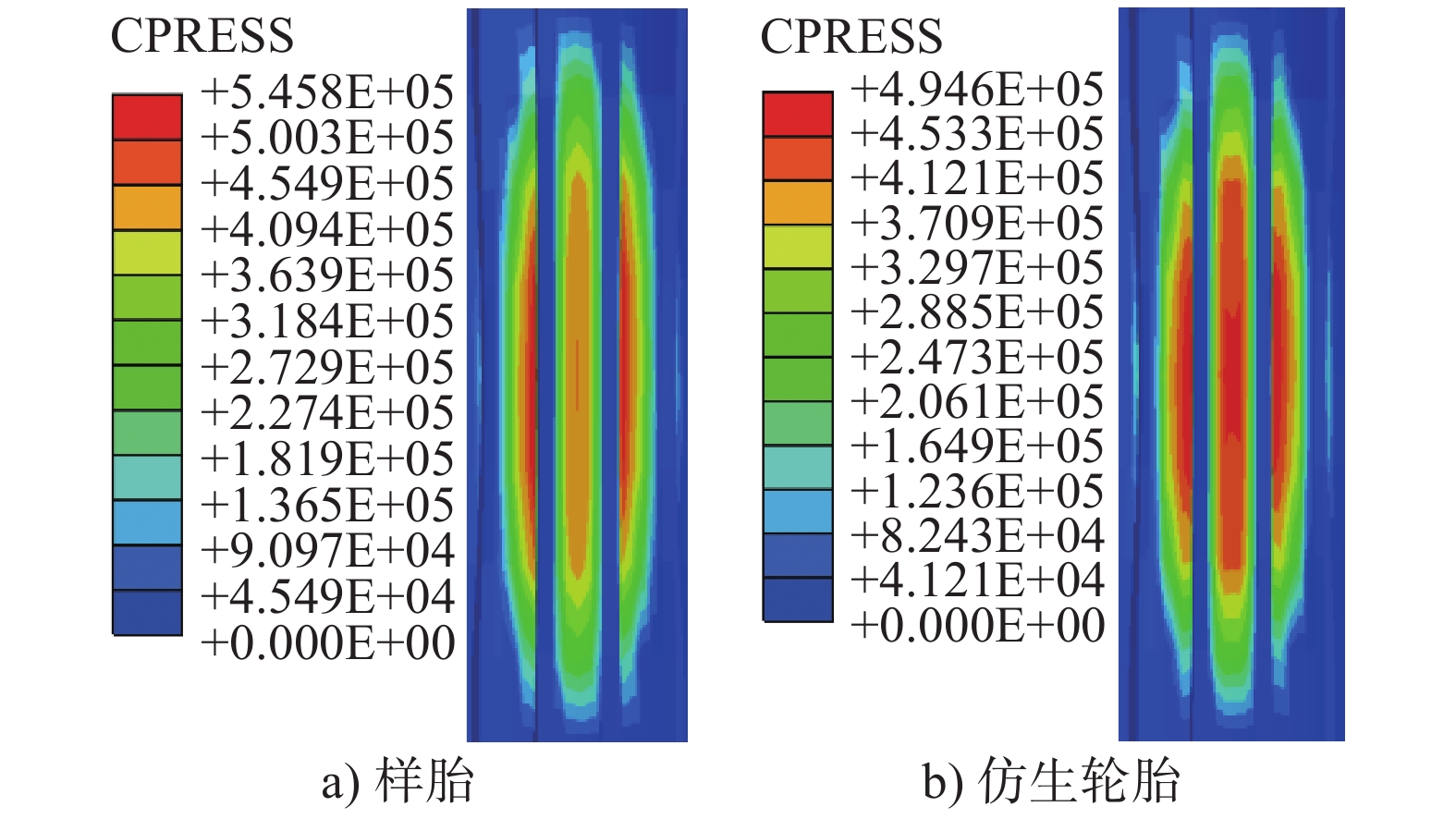
二轮摩托车轮胎接地面积很小,其接地性能直接影响车辆的动力性、制动性以及操纵稳定性。针对这一问题,对摩托车轮胎胎冠进行了仿生设计。利用WALKWAY压力分布测试系统和3D激光扫描仪对猫爪的动态接地特性及拓扑进行研究,发现猫前爪第三趾枕具有优异的抓地性能。基于第三趾枕横截面拟合曲线采用相似原理对轮胎胎冠进行了仿生设计。利用ABAQUS对轮胎进行静载、驱动、制动及转向接地状态仿真分析。结果表明:不同工况下,仿生轮胎胎冠接地面积增大,接地压力分布均匀性提高,轮胎的抓地及耐磨性能都得到提升。仿生轮胎提高了摩托车的动力性、制动性以及操纵稳定性。
二轮摩托车轮胎接地面积很小,其接地性能直接影响车辆的动力性、制动性以及操纵稳定性。针对这一问题,对摩托车轮胎胎冠进行了仿生设计。利用WALKWAY压力分布测试系统和3D激光扫描仪对猫爪的动态接地特性及拓扑进行研究,发现猫前爪第三趾枕具有优异的抓地性能。基于第三趾枕横截面拟合曲线采用相似原理对轮胎胎冠进行了仿生设计。利用ABAQUS对轮胎进行静载、驱动、制动及转向接地状态仿真分析。结果表明:不同工况下,仿生轮胎胎冠接地面积增大,接地压力分布均匀性提高,轮胎的抓地及耐磨性能都得到提升。仿生轮胎提高了摩托车的动力性、制动性以及操纵稳定性。




2020, 39(10): 1511-1519.
doi: 10.13433/j.cnki.1003-8728.20190309
摘要:
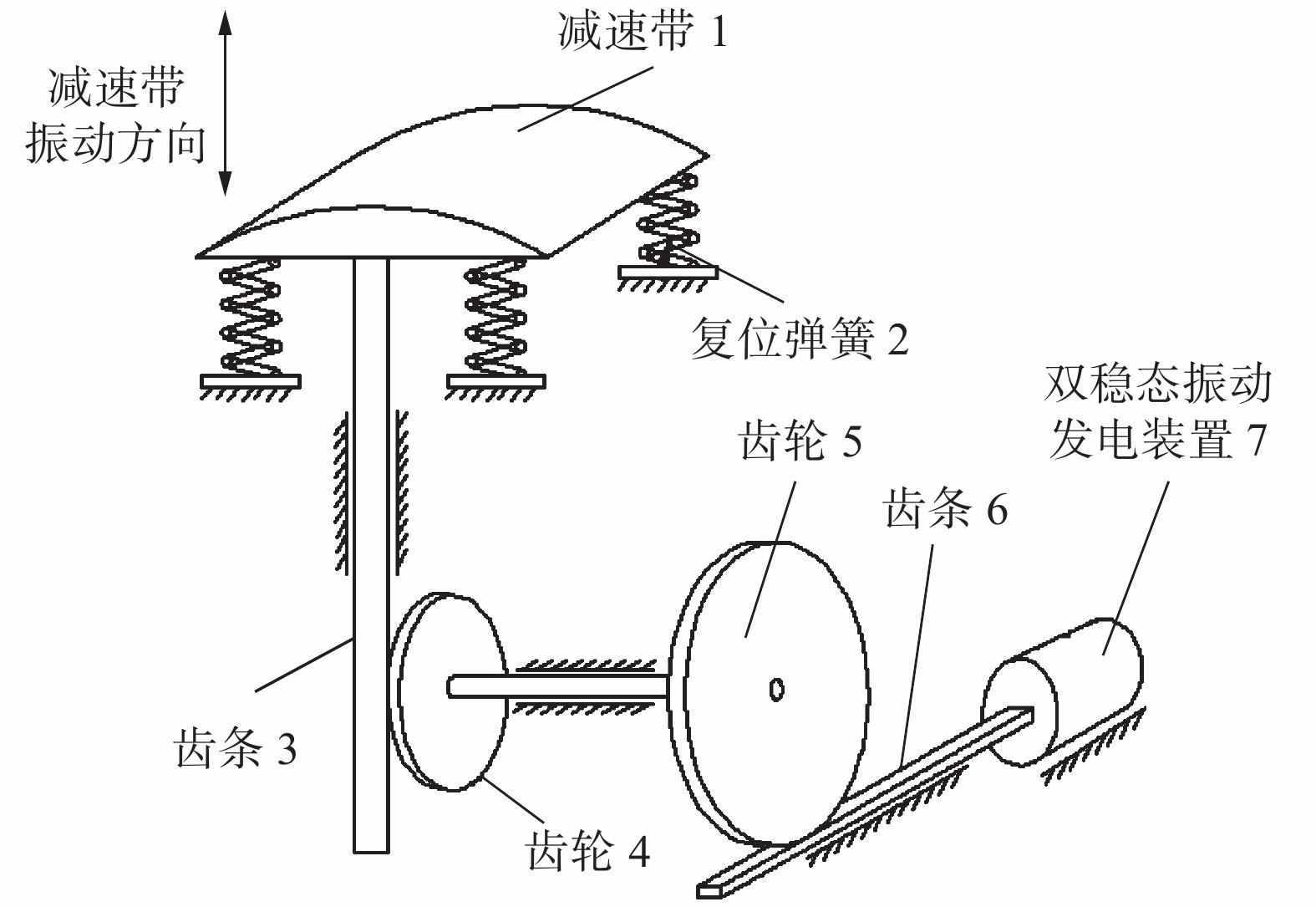
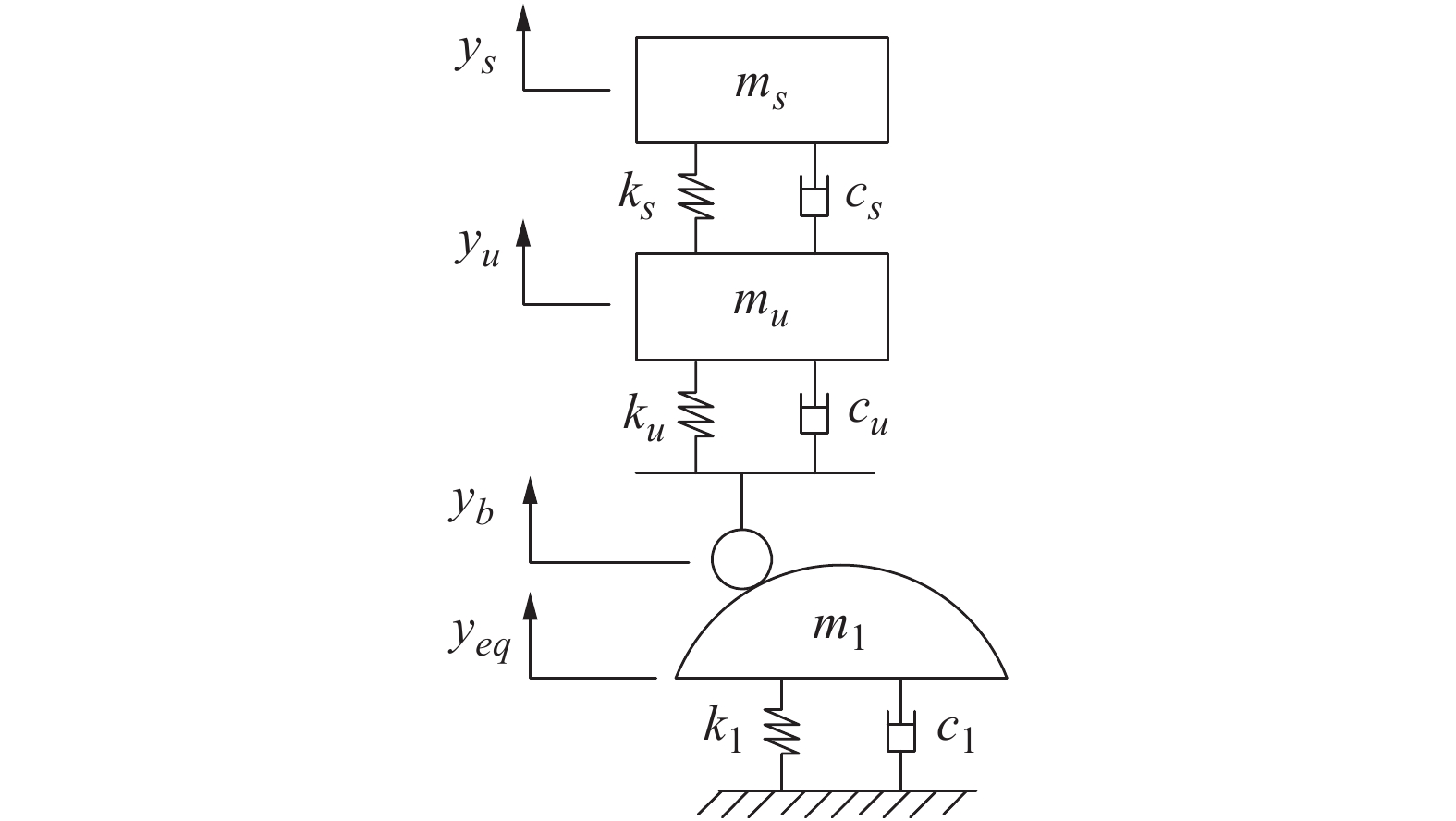
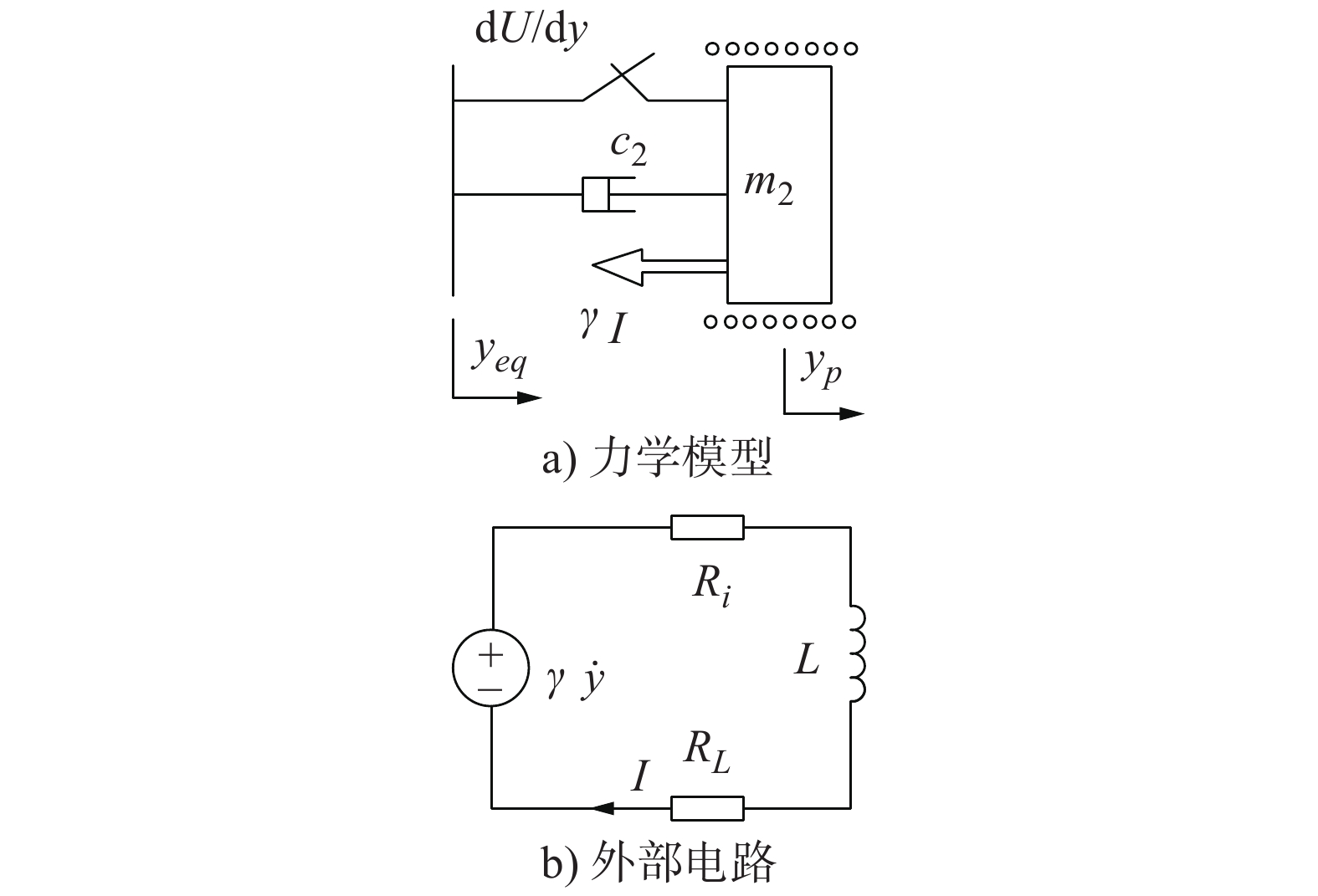
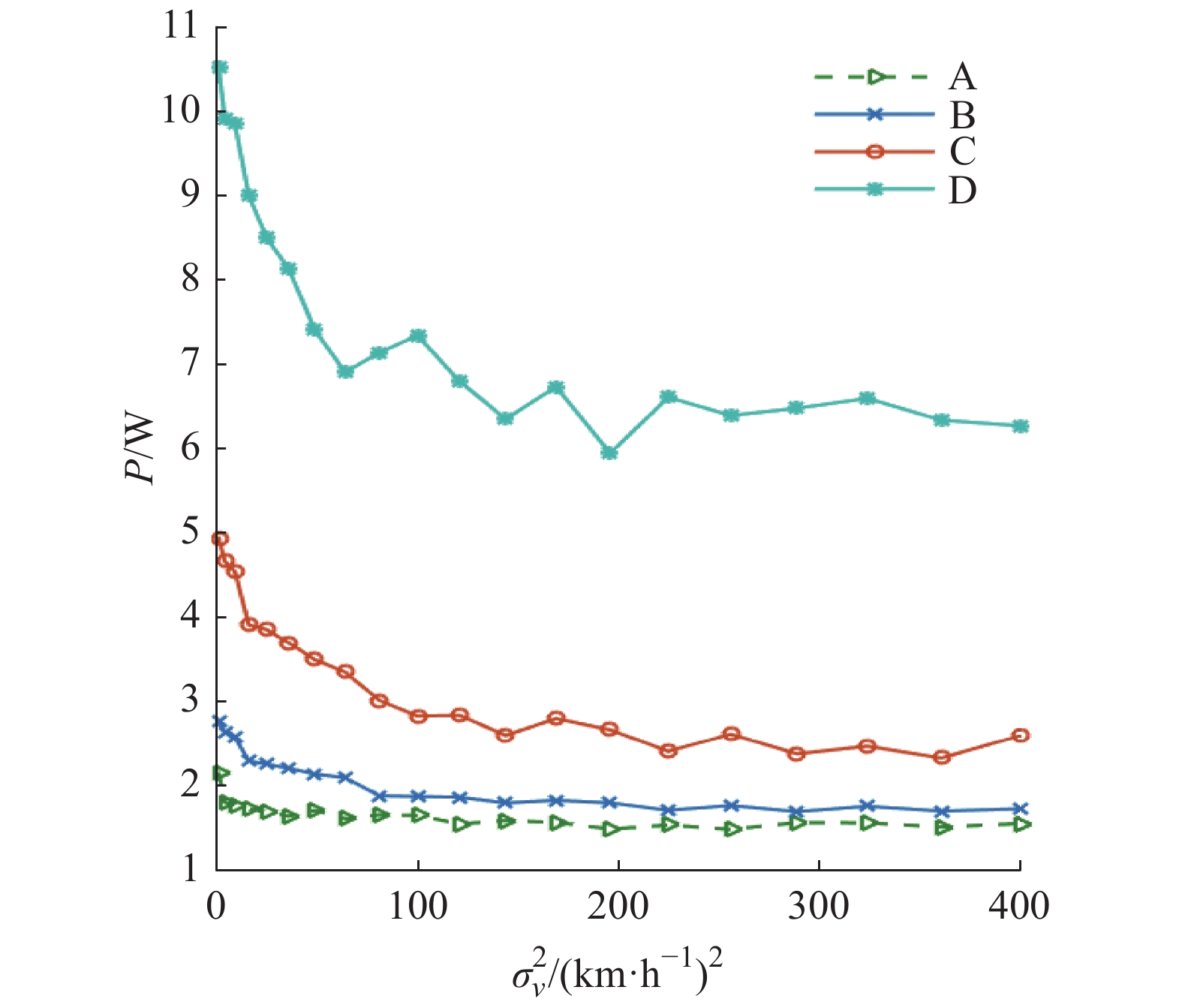
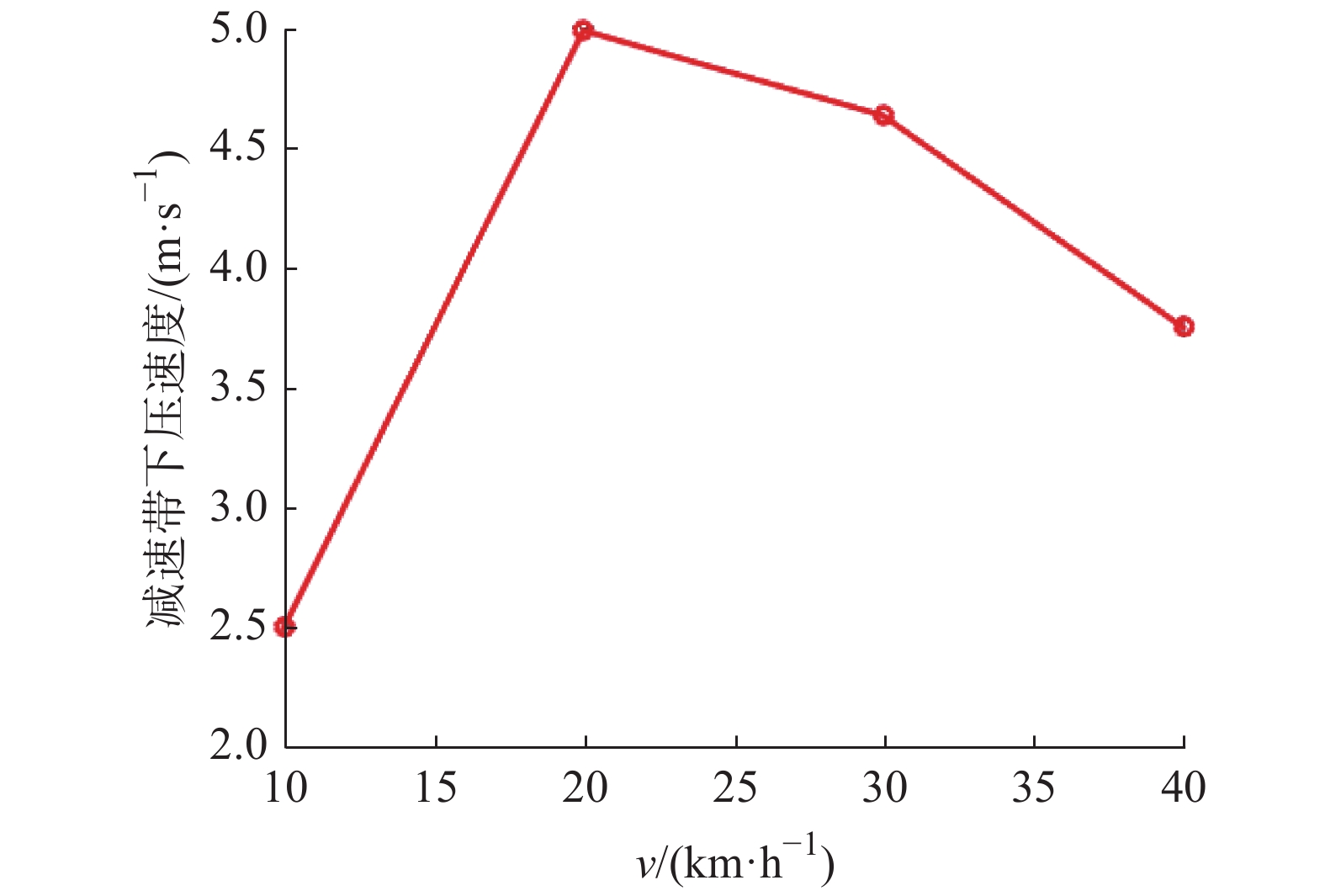
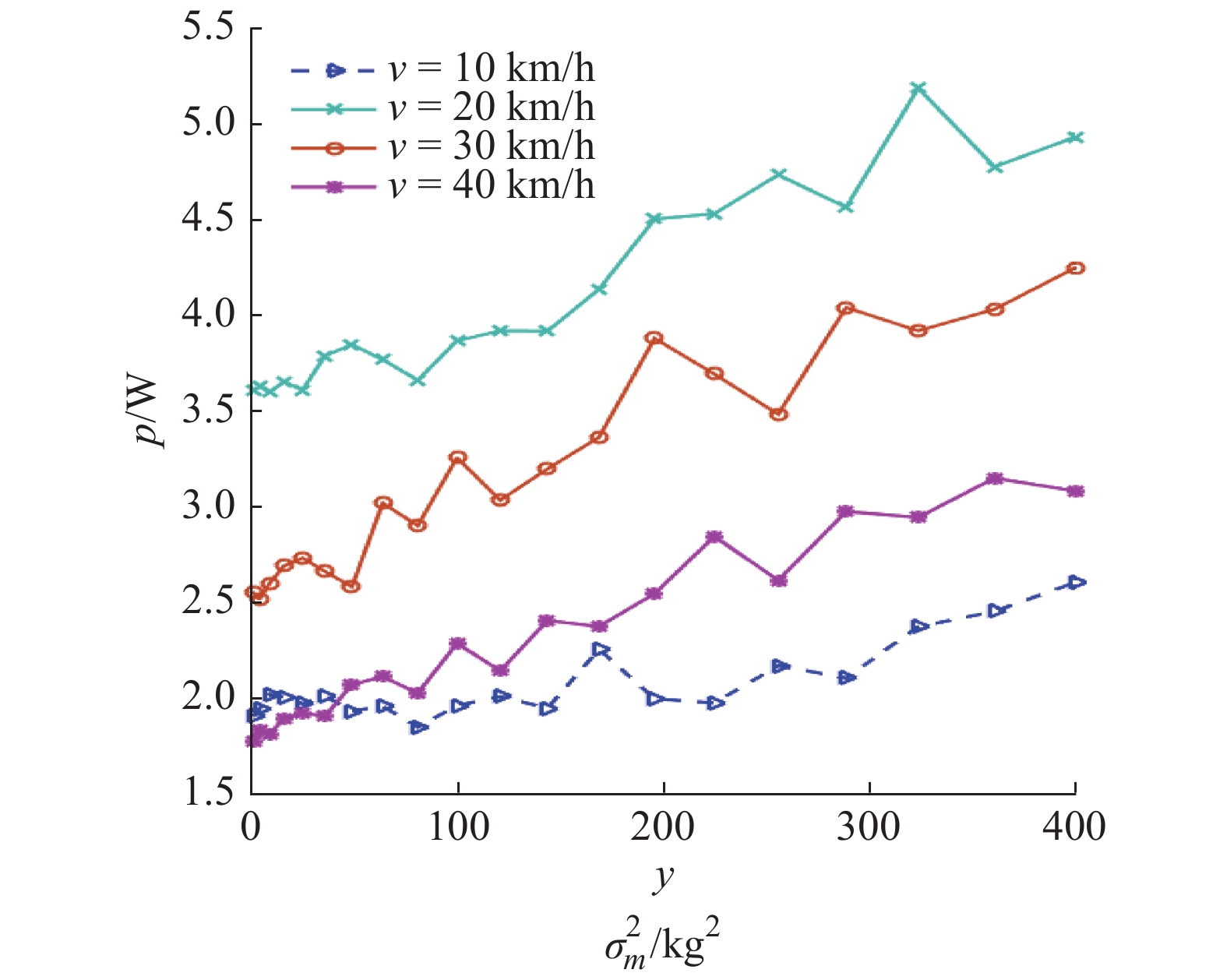
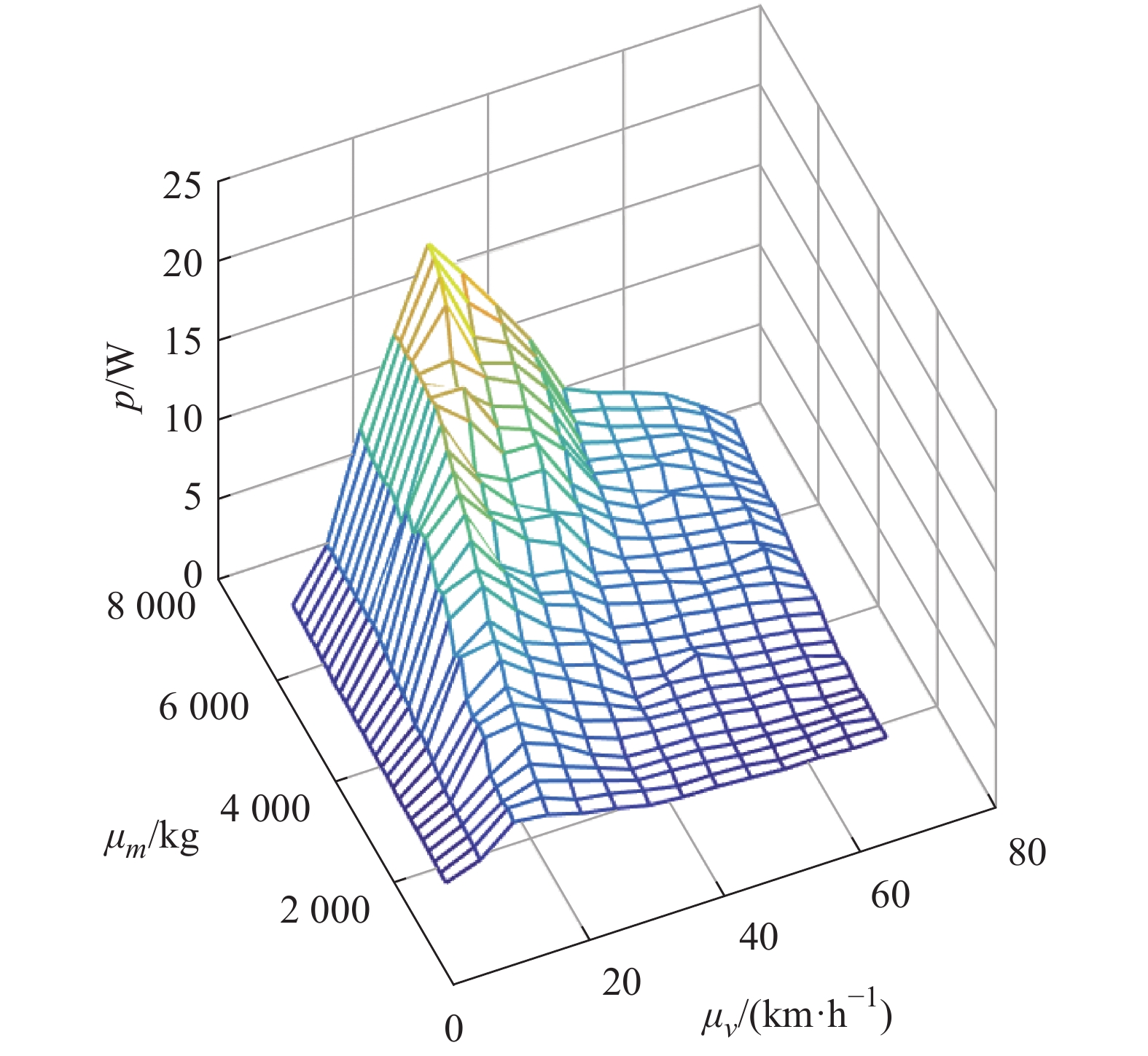
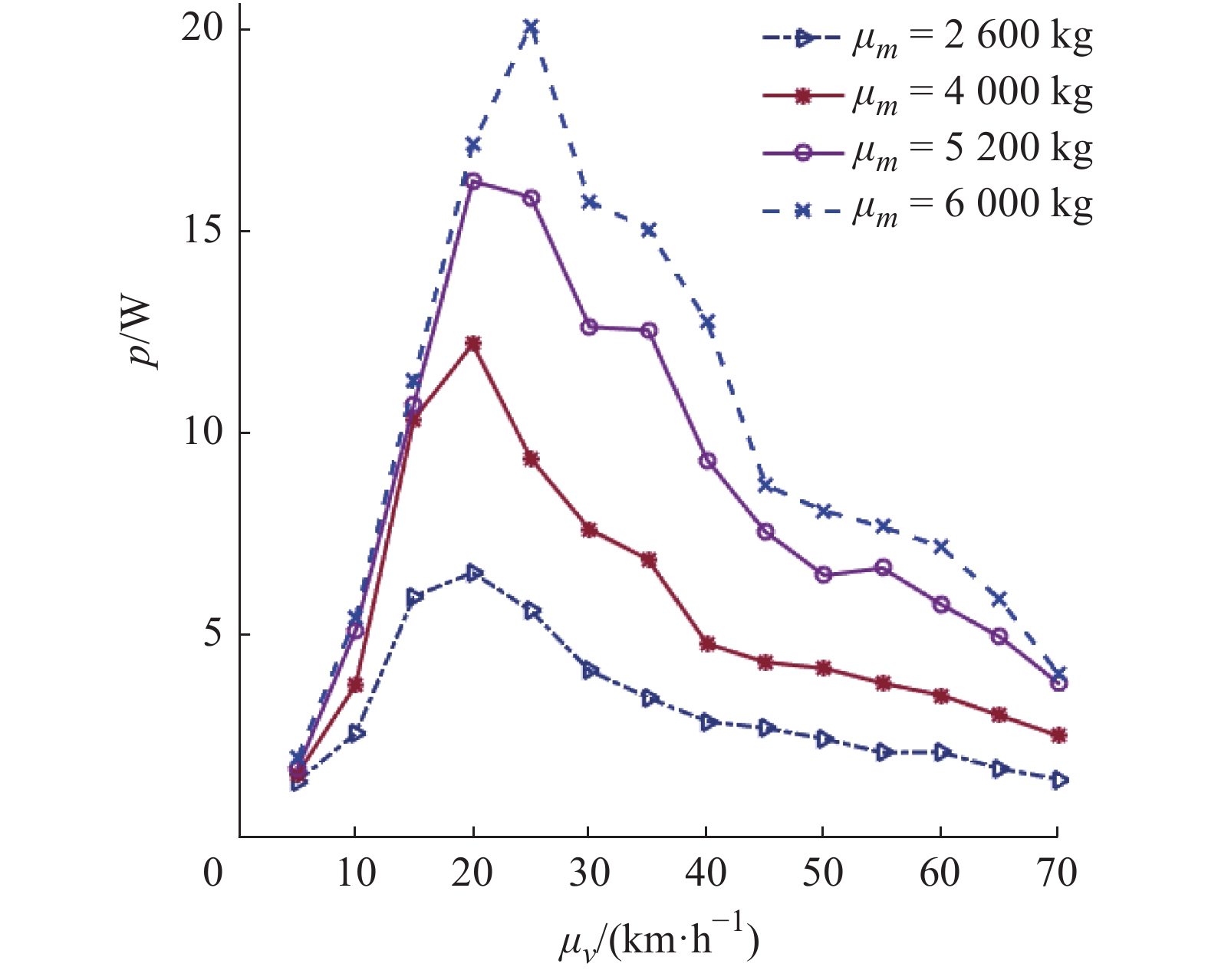
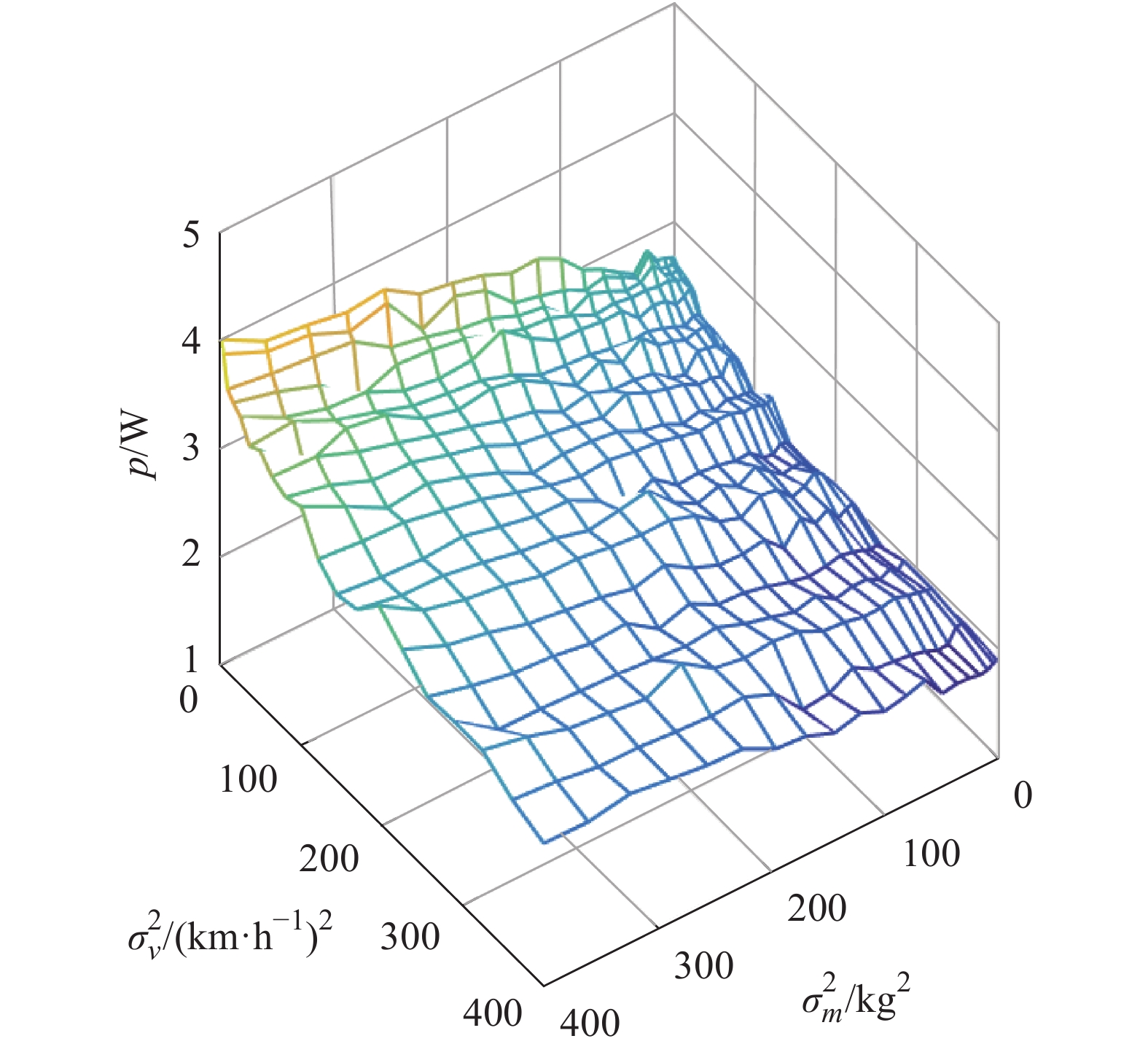
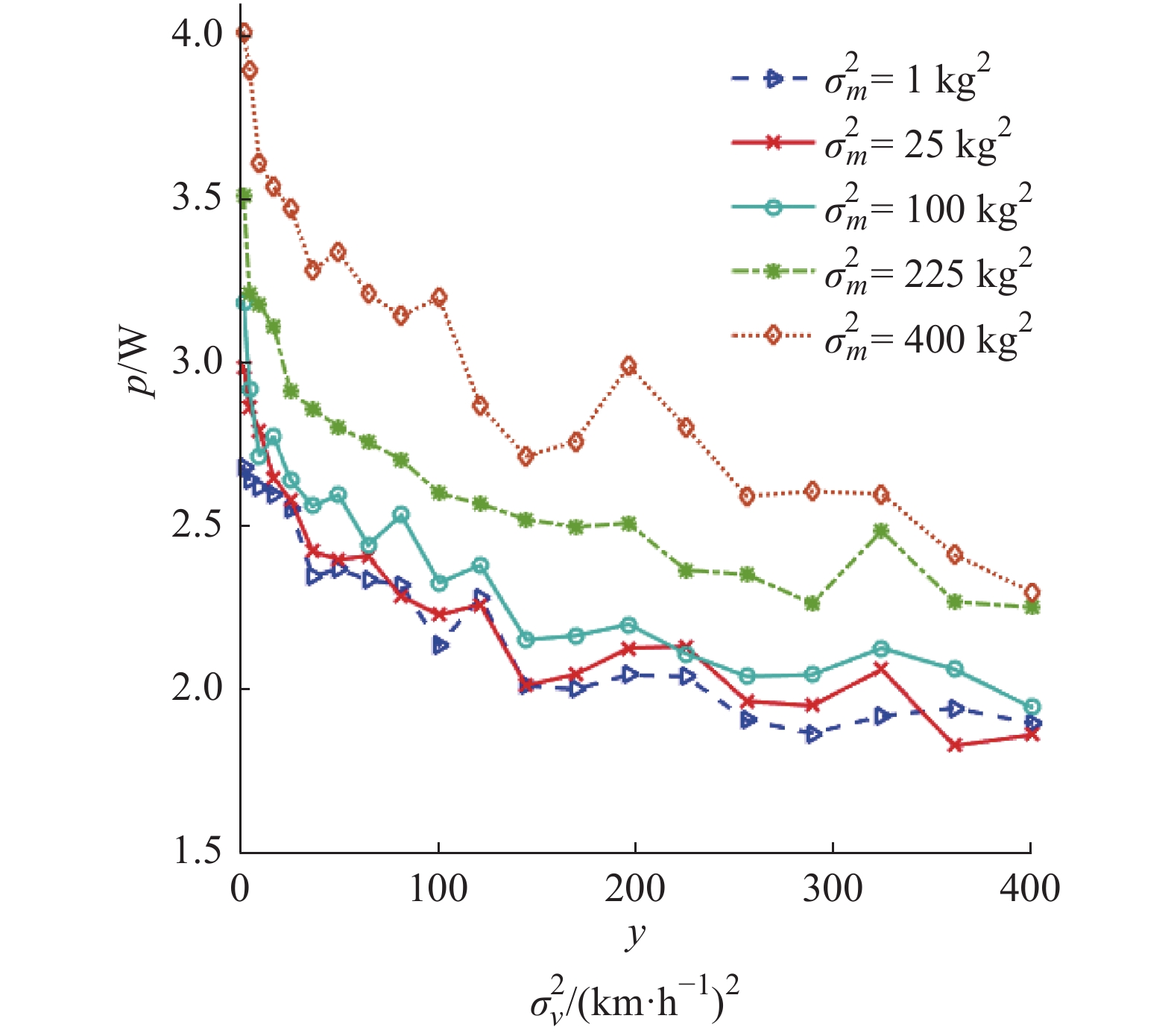
本文将双稳态振动能量发电装置引入到减速带结构中,提出了一种双稳态减速带振动能量捕获装置,建立了其力学模型和控制方程。假定车重和车速符合正态分布,利用数值仿真方法,分别针对车重和车速其中一个参数随机变化及车重和车速两个参数同时随机变化这两种情况,研究并分析了车重和车速均值和方差对减速带发电功率的影响规律,研究结果表明,减速带发电系统输出功率随着车重均值和方差的增加而增大。不同车重均值的车辆通过减速带时,减速带发电功率最大值所对应的车速均值不同,最佳车速均值约在20 ~ 25 km/h之间,减速带发电功率随着速度方差的增大而逐渐减小,在较大发电功率下,双稳态发电振子在两个平衡点间产生大幅混沌运动,处于有利于发电的状态.
本文将双稳态振动能量发电装置引入到减速带结构中,提出了一种双稳态减速带振动能量捕获装置,建立了其力学模型和控制方程。假定车重和车速符合正态分布,利用数值仿真方法,分别针对车重和车速其中一个参数随机变化及车重和车速两个参数同时随机变化这两种情况,研究并分析了车重和车速均值和方差对减速带发电功率的影响规律,研究结果表明,减速带发电系统输出功率随着车重均值和方差的增加而增大。不同车重均值的车辆通过减速带时,减速带发电功率最大值所对应的车速均值不同,最佳车速均值约在20 ~ 25 km/h之间,减速带发电功率随着速度方差的增大而逐渐减小,在较大发电功率下,双稳态发电振子在两个平衡点间产生大幅混沌运动,处于有利于发电的状态.








2020, 39(10): 1520-1525.
doi: 10.13433/j.cnki.1003-8728.20190266
摘要:
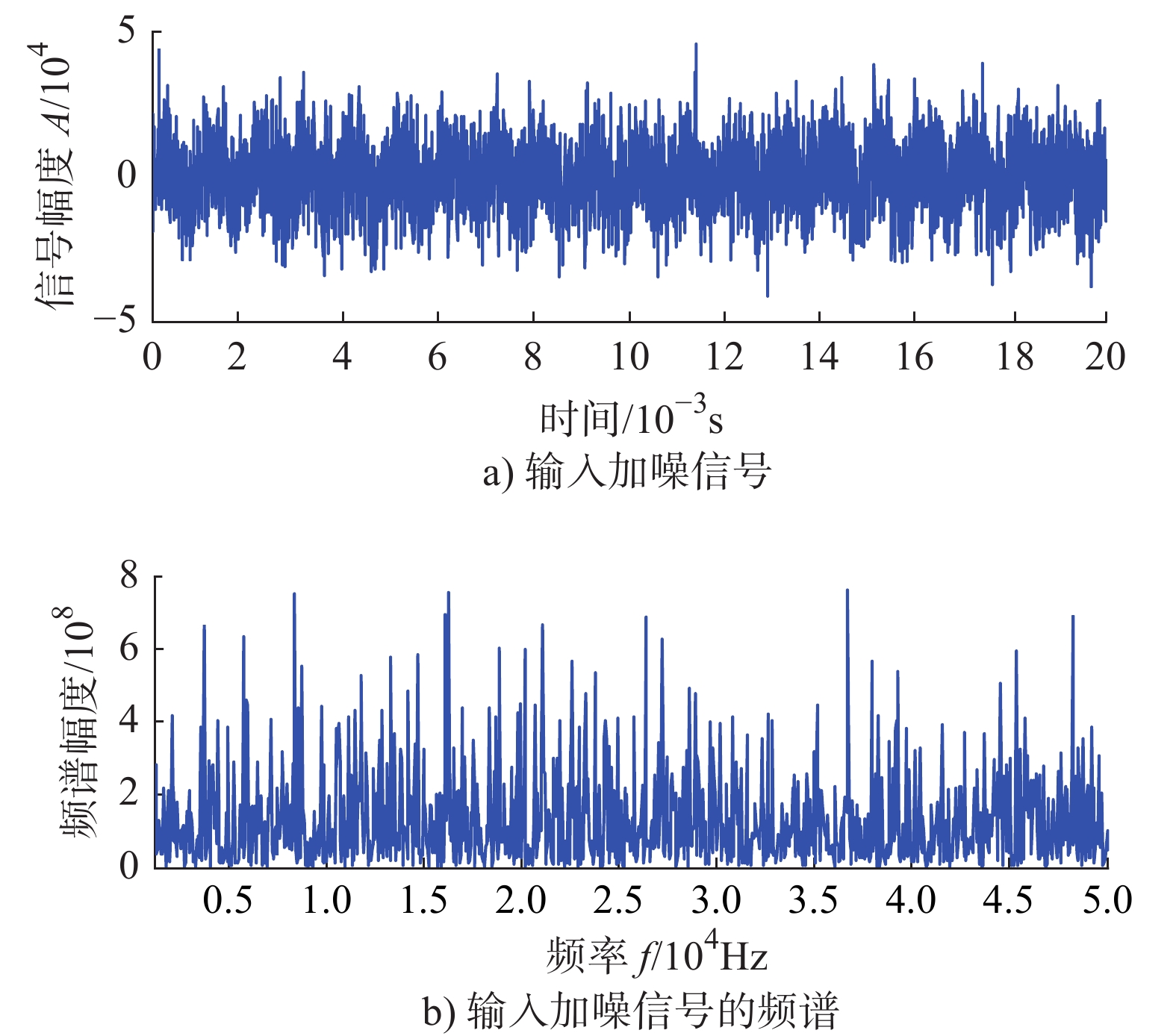
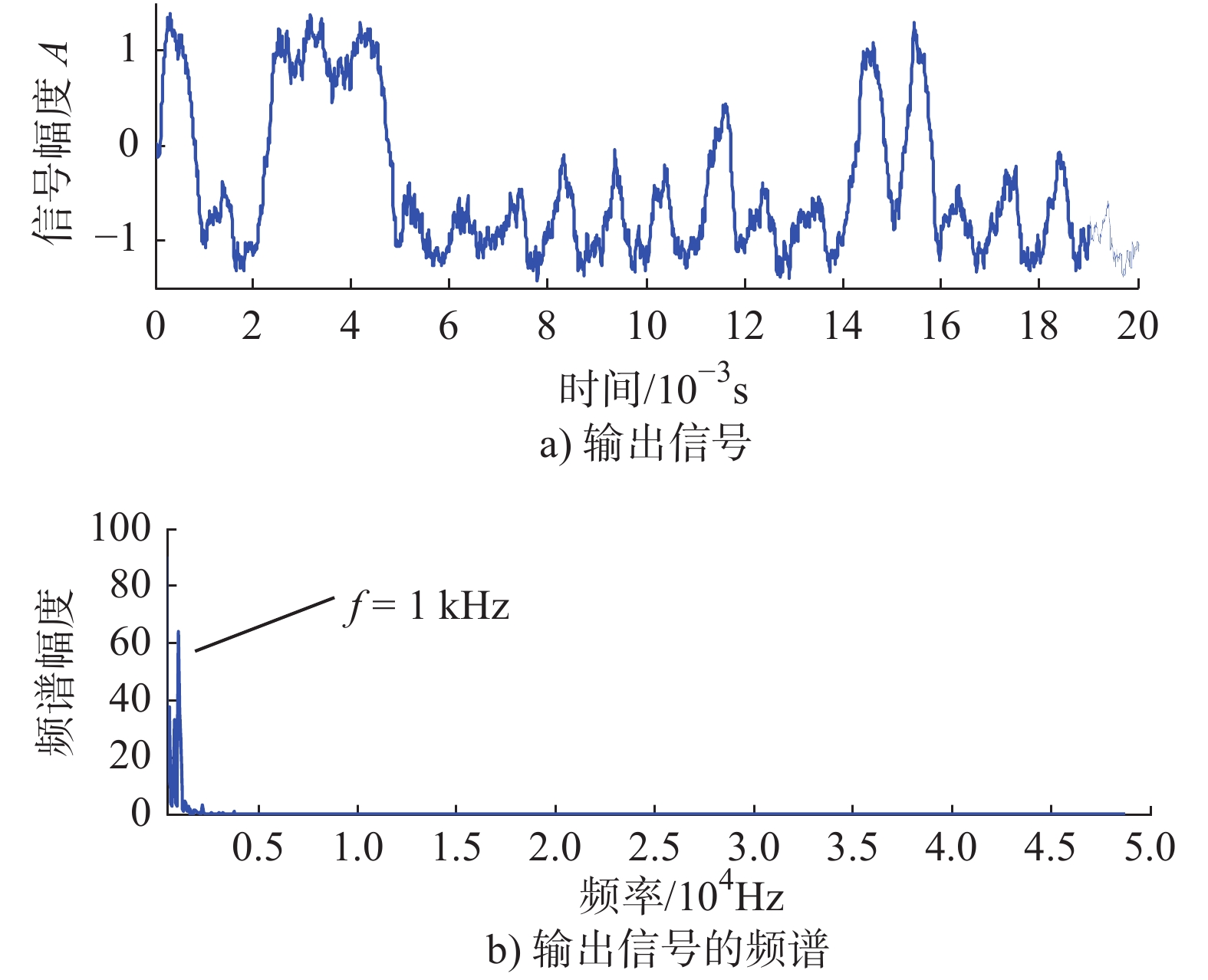
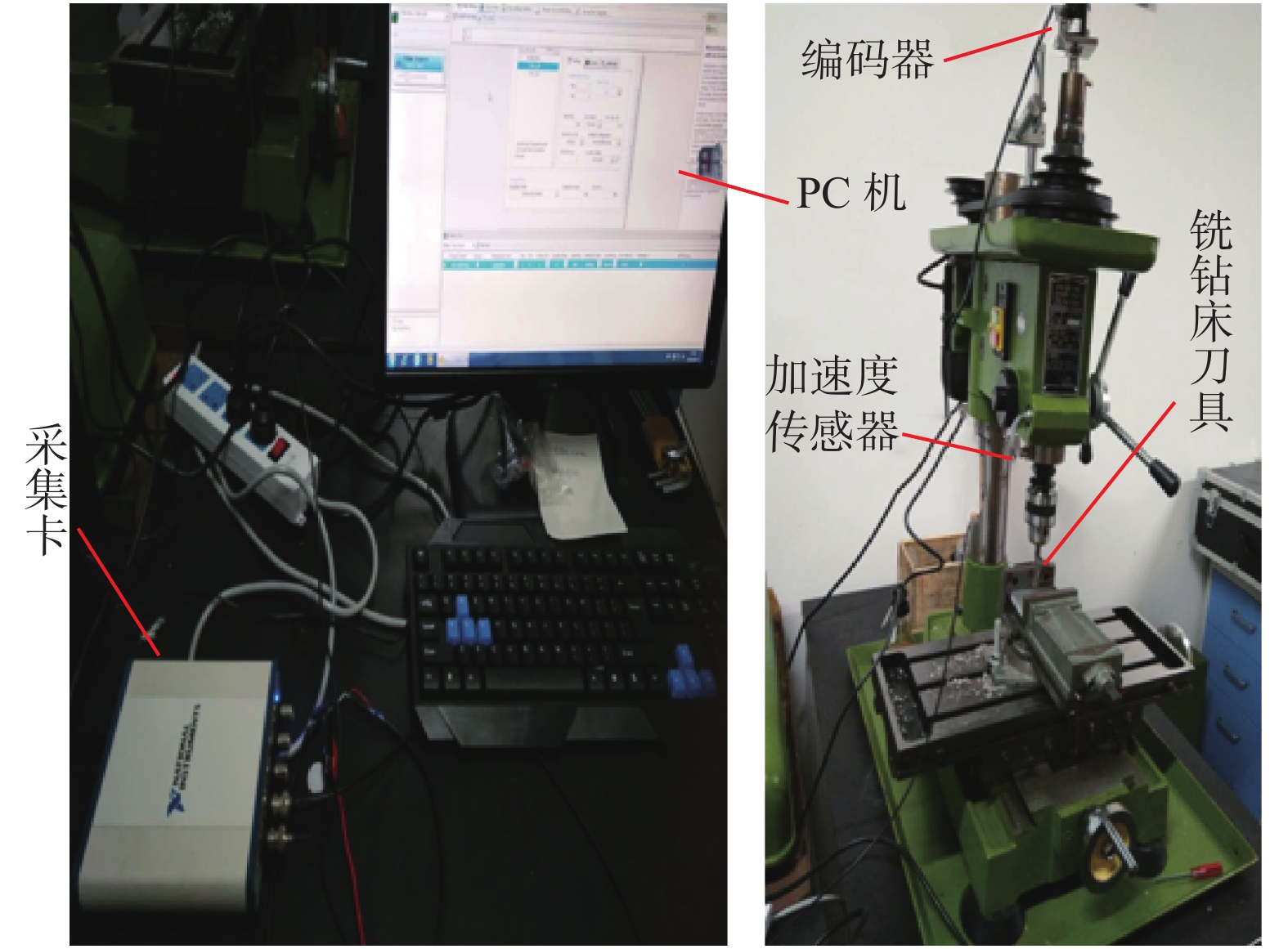
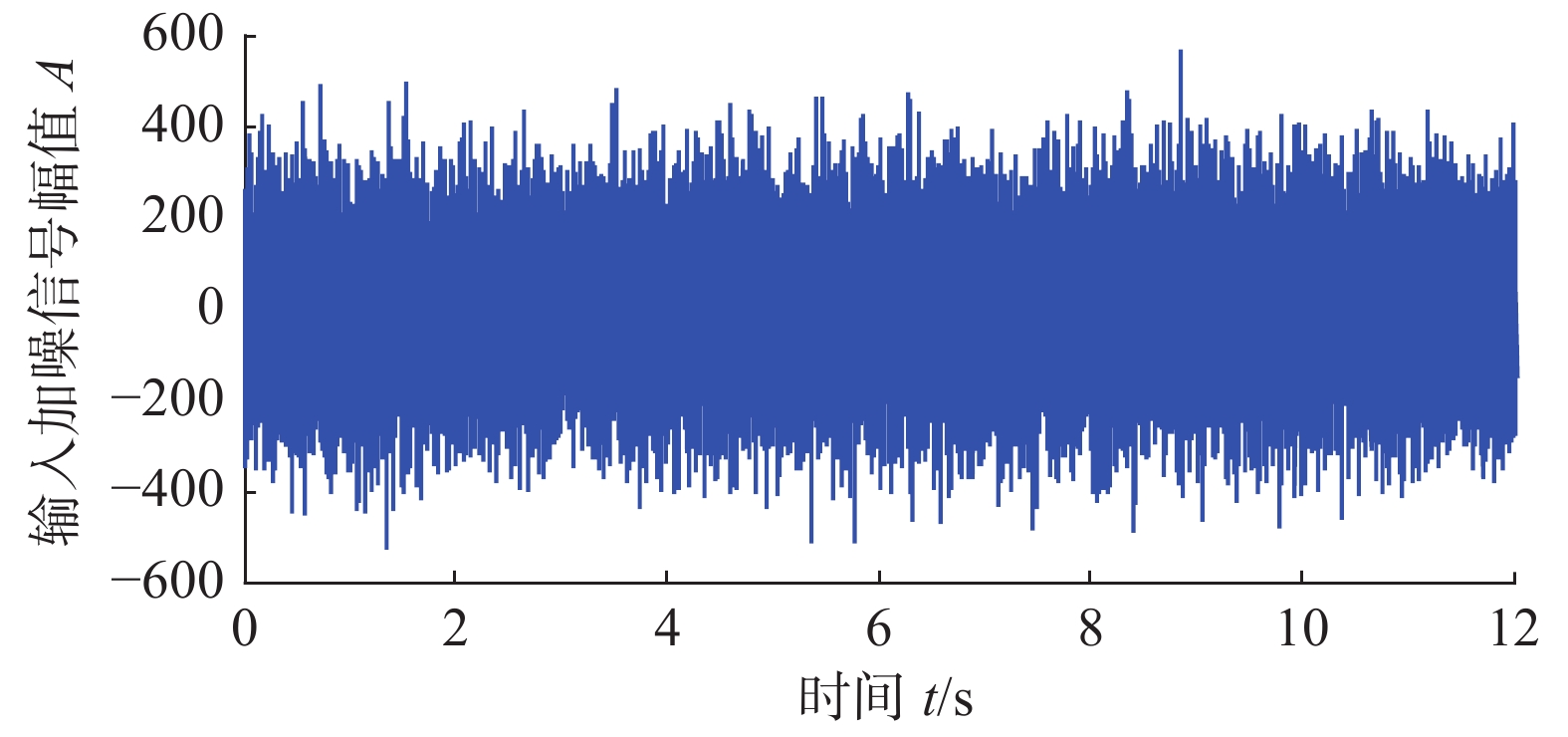
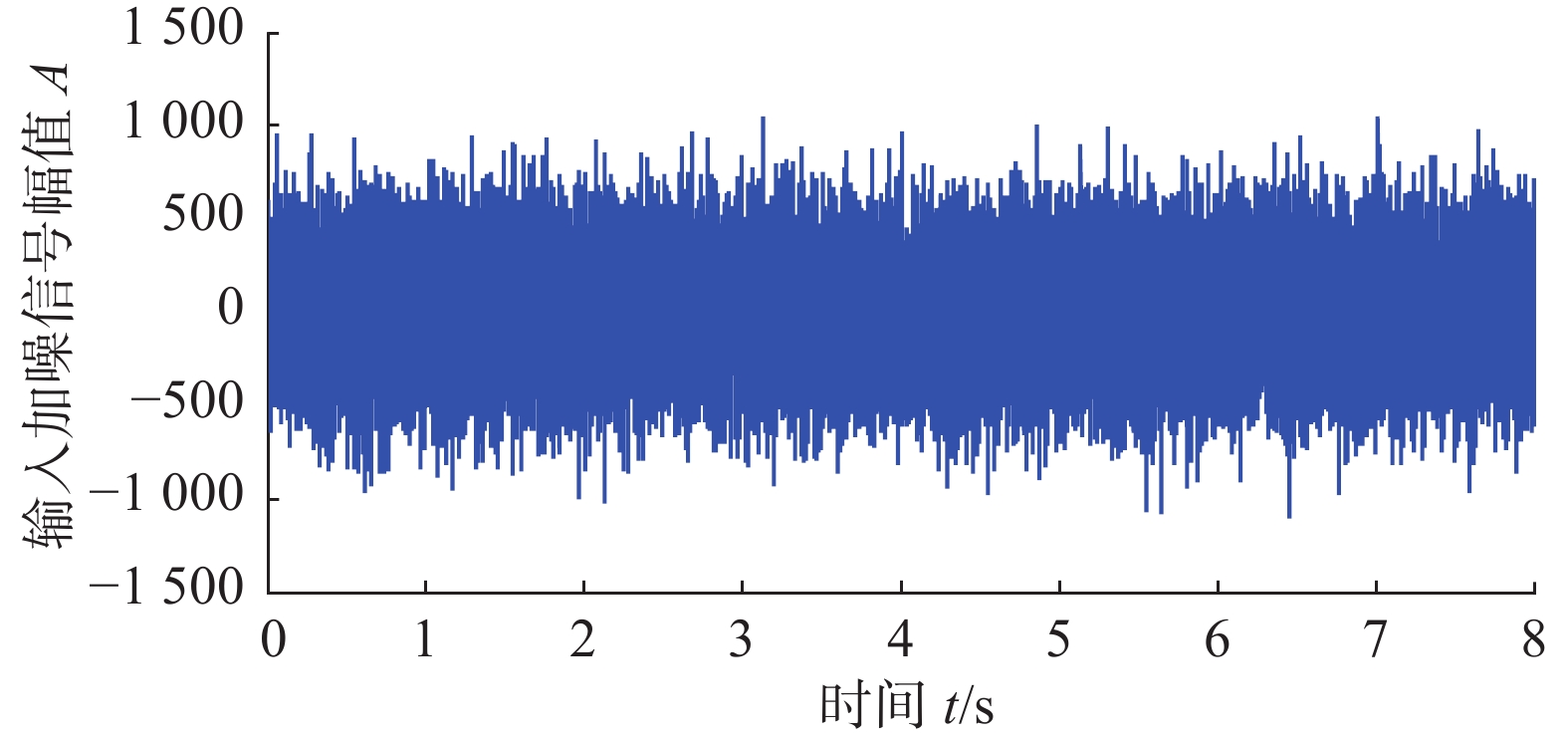
针对传统时频域检测方法不能有效检测出刀具急剧磨损初期微弱特征信息的问题,提出一种归一化变尺度随机共振监测刀具状态的新方法。该方法通过换元将经典双稳态随机共振系统模型变化为归一化形式,变化之后的随机共振(Stochastic resonance,SR)方法把混合信号进行放大,使得SR方法适用于大参数系统,通过仿真验证了该方法的可行性。并使用该方法对刀具进行实时监测,成功检测出了以主轴基频和立铣刀转频为特征的刀具磨损信息,表明了归一化变尺度随机共振在刀具状态监测中的实用性和有效性。
针对传统时频域检测方法不能有效检测出刀具急剧磨损初期微弱特征信息的问题,提出一种归一化变尺度随机共振监测刀具状态的新方法。该方法通过换元将经典双稳态随机共振系统模型变化为归一化形式,变化之后的随机共振(Stochastic resonance,SR)方法把混合信号进行放大,使得SR方法适用于大参数系统,通过仿真验证了该方法的可行性。并使用该方法对刀具进行实时监测,成功检测出了以主轴基频和立铣刀转频为特征的刀具磨损信息,表明了归一化变尺度随机共振在刀具状态监测中的实用性和有效性。



2020, 39(10): 1526-1533.
doi: 10.13433/j.cnki.1003-8728.20200179
摘要:
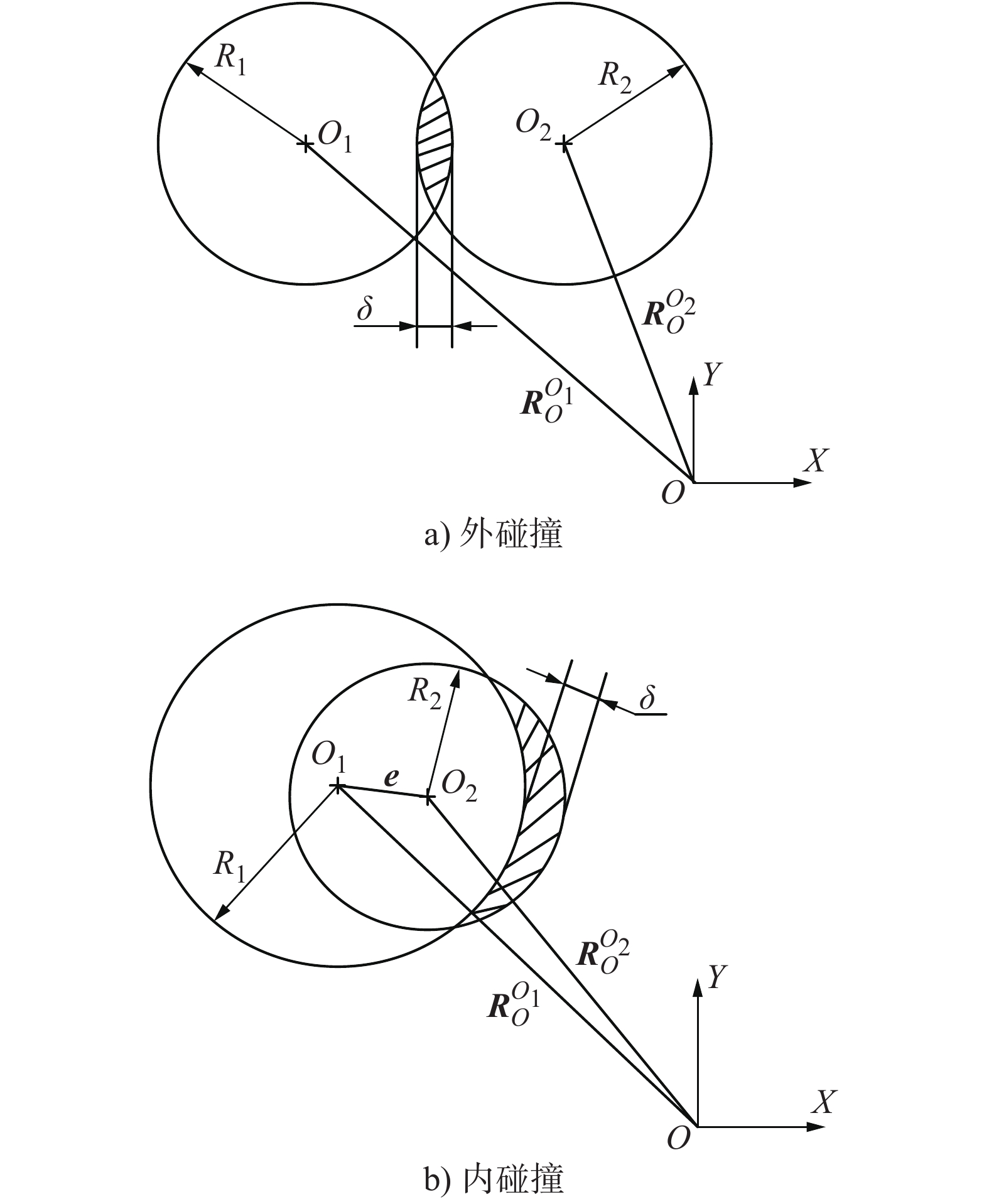
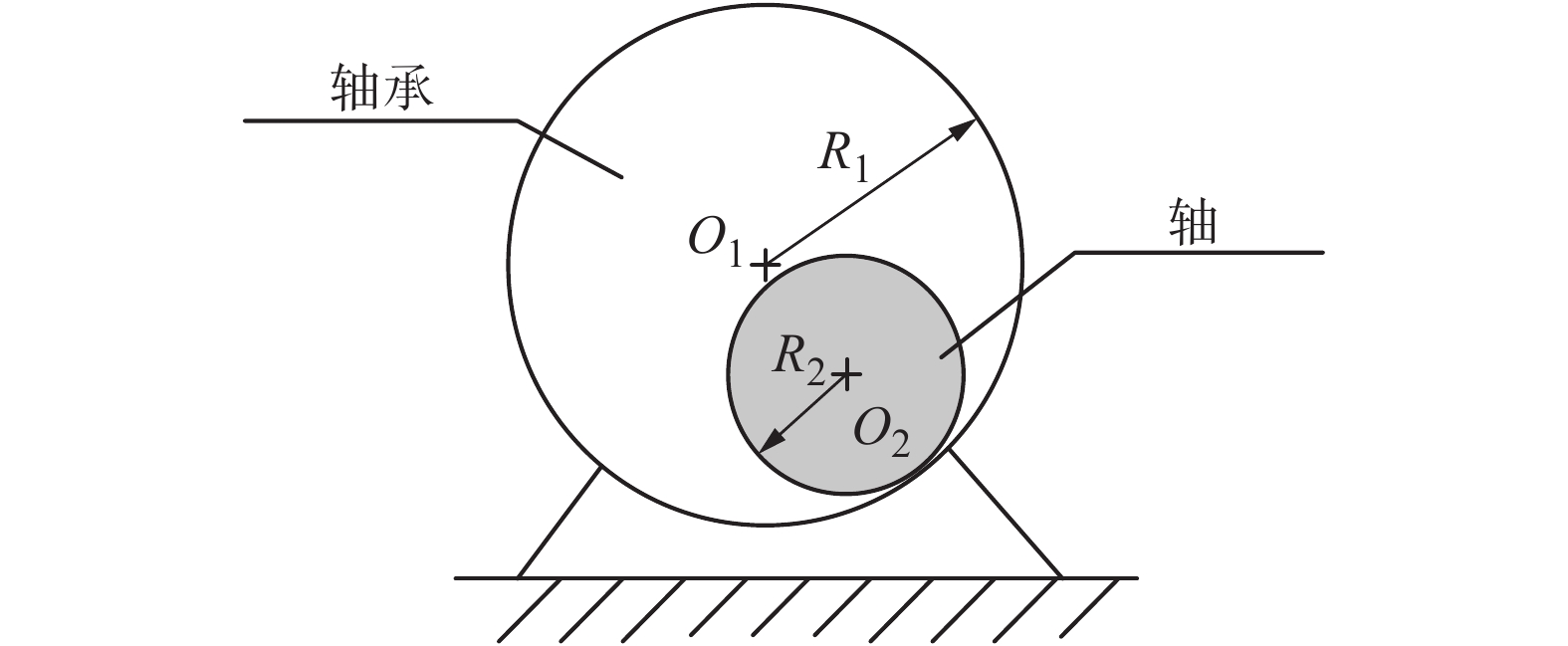
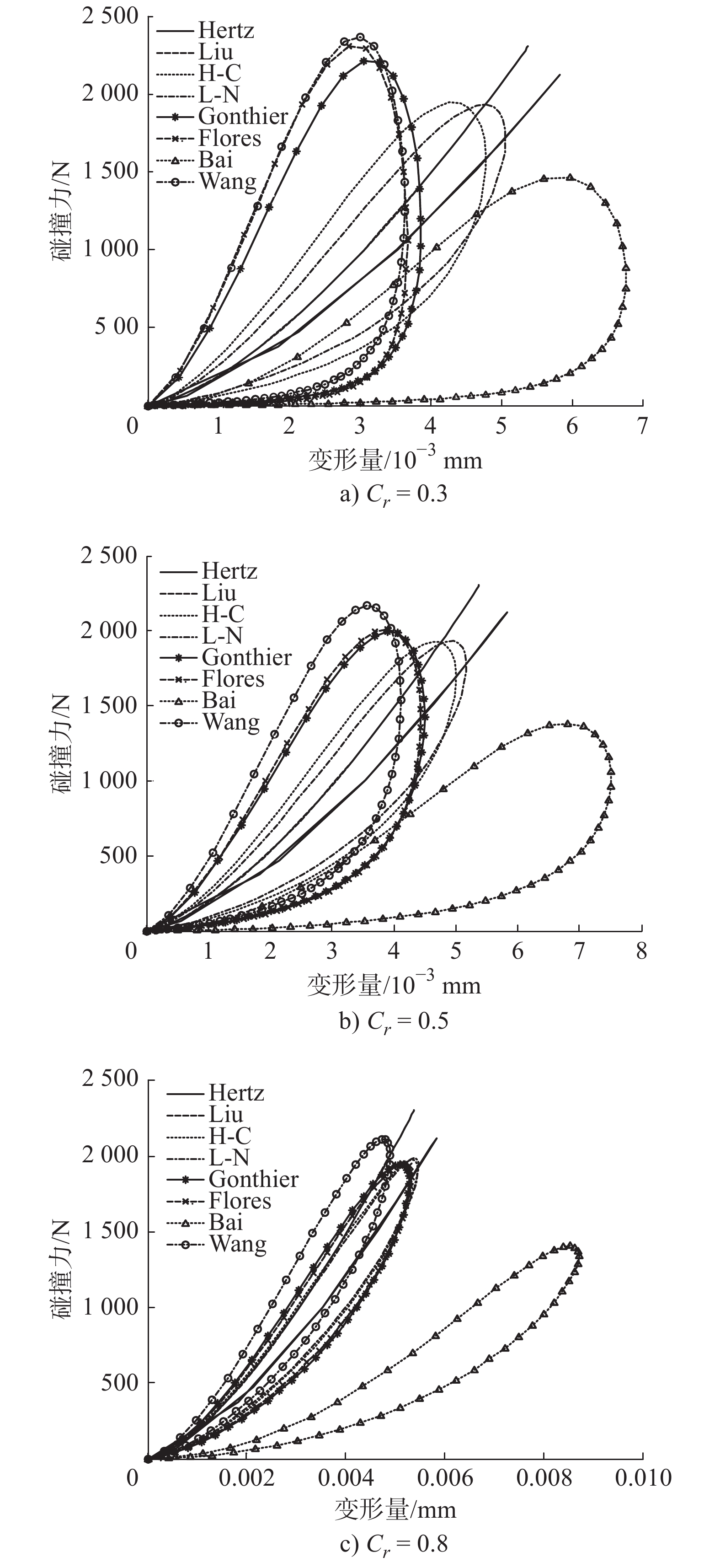
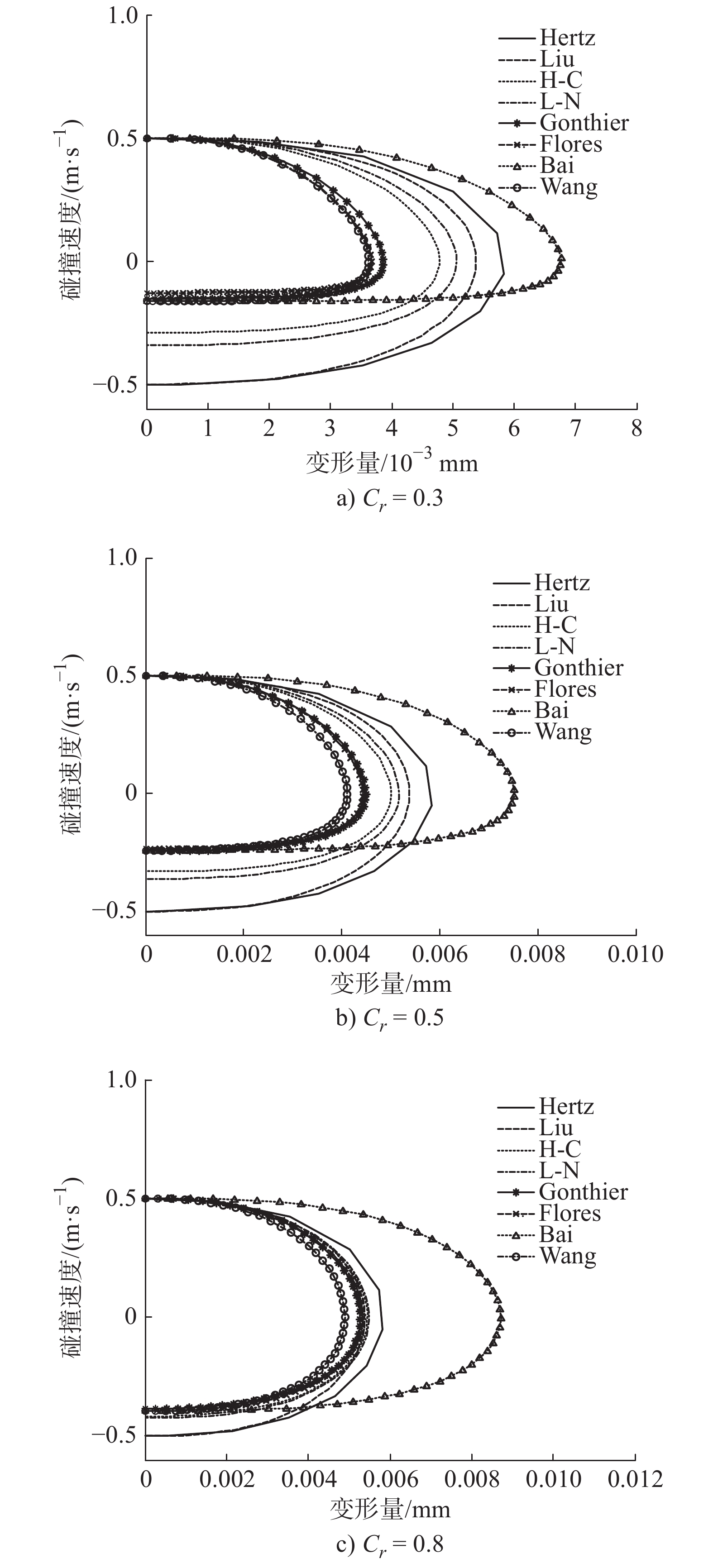
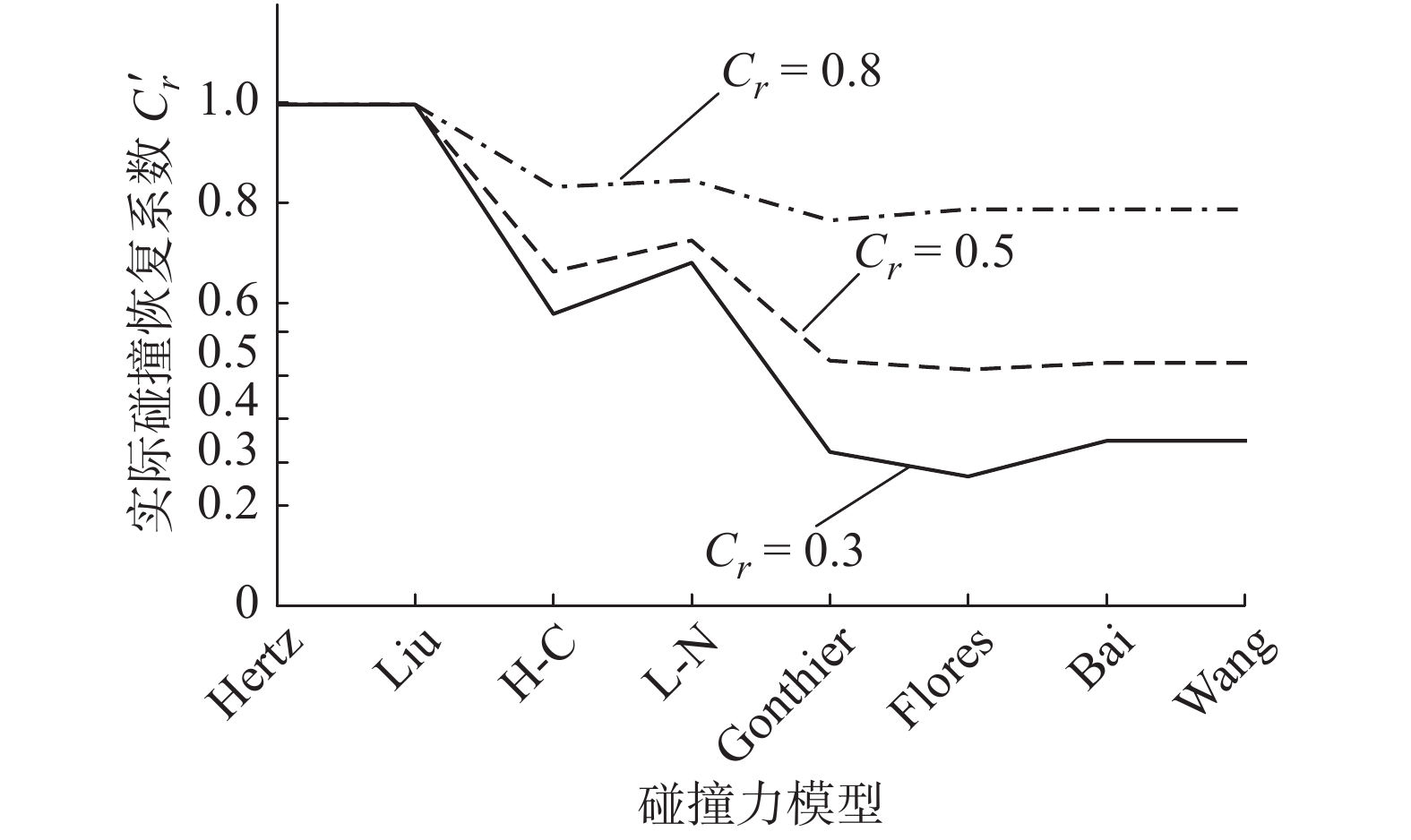
为了辨识间隙铰链处碰撞力的适用范围,更加准确地描述机械系统中普遍存在的碰撞现象及其对机械系统动态特性的影响规律,以牛顿碰撞恢复系数作为评价指标,以间隙铰链处轴、轴承间的碰撞和恢复过程为例,在不同恢复系数下和碰撞力模型下进行数值模拟及对比分析。研究发现,不同碰撞恢复系数下各模型碰撞过程的最大碰撞力、最大变形量及实际碰撞恢复系数差异较大。因此,实际选择碰撞力模型时应依据碰撞初始条件和材料特性等进行综合考虑。
为了辨识间隙铰链处碰撞力的适用范围,更加准确地描述机械系统中普遍存在的碰撞现象及其对机械系统动态特性的影响规律,以牛顿碰撞恢复系数作为评价指标,以间隙铰链处轴、轴承间的碰撞和恢复过程为例,在不同恢复系数下和碰撞力模型下进行数值模拟及对比分析。研究发现,不同碰撞恢复系数下各模型碰撞过程的最大碰撞力、最大变形量及实际碰撞恢复系数差异较大。因此,实际选择碰撞力模型时应依据碰撞初始条件和材料特性等进行综合考虑。

2020, 39(10): 1534-1538.
doi: 10.13433/j.cnki.1003-8728.20190315
摘要:
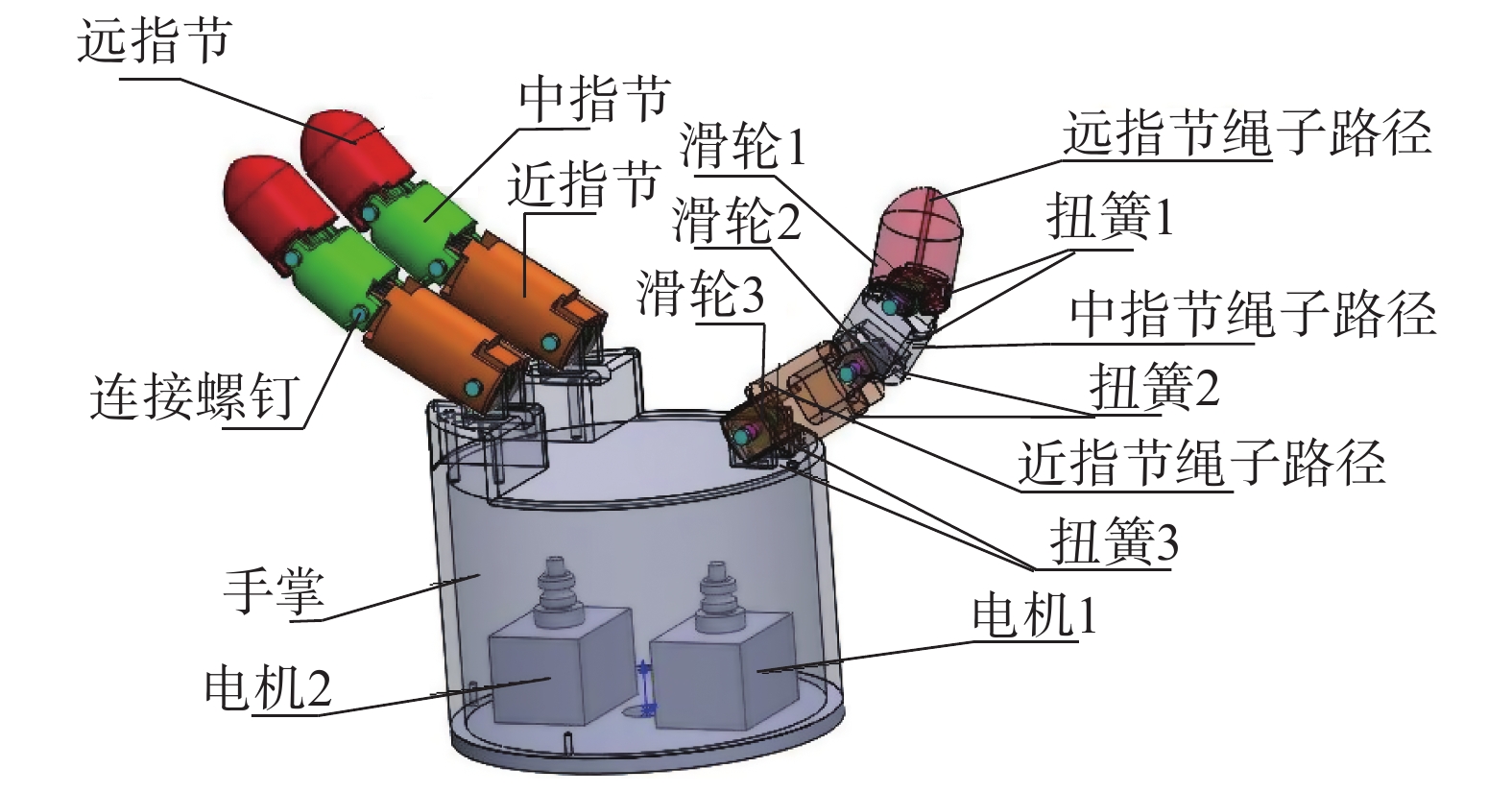
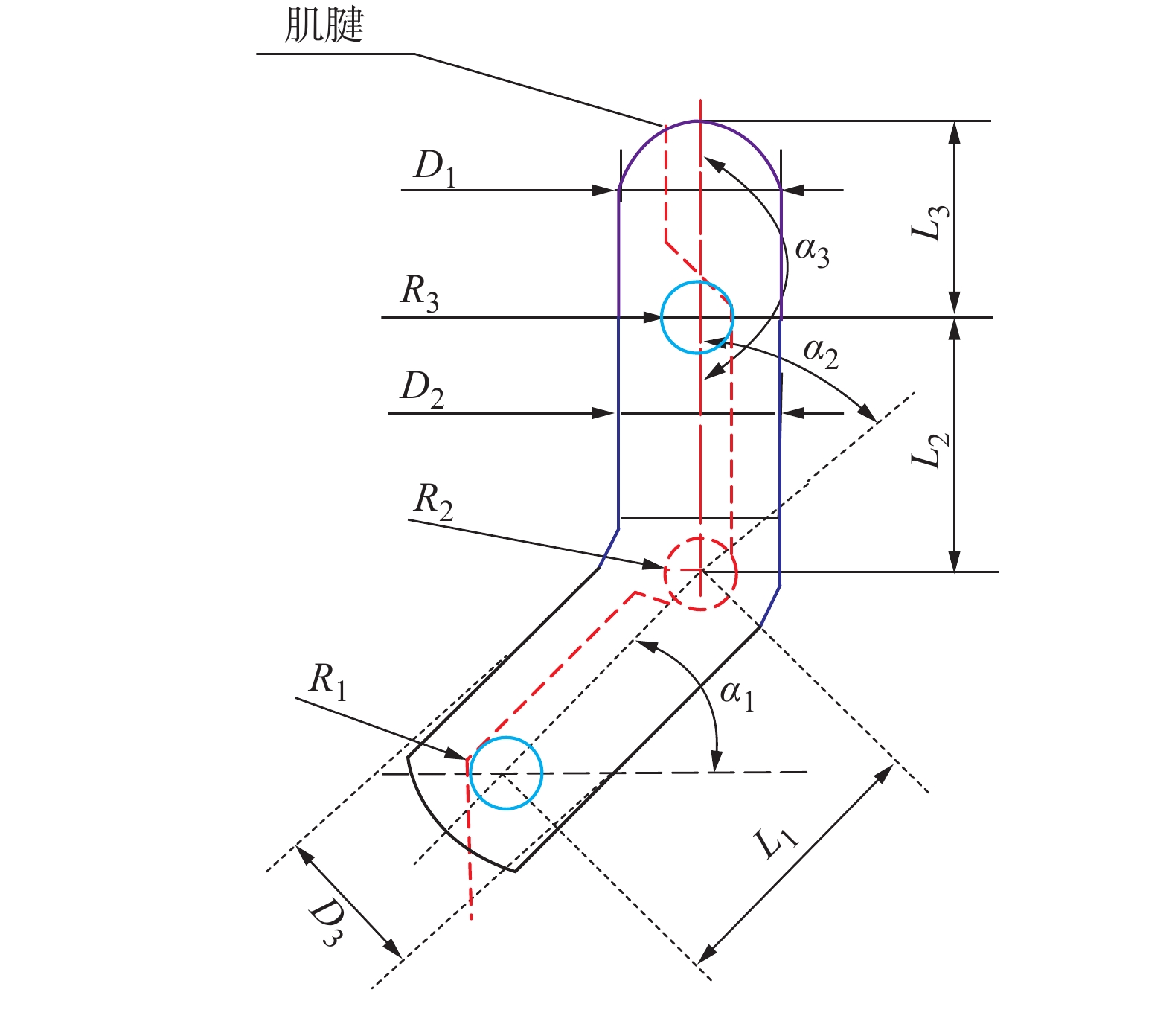
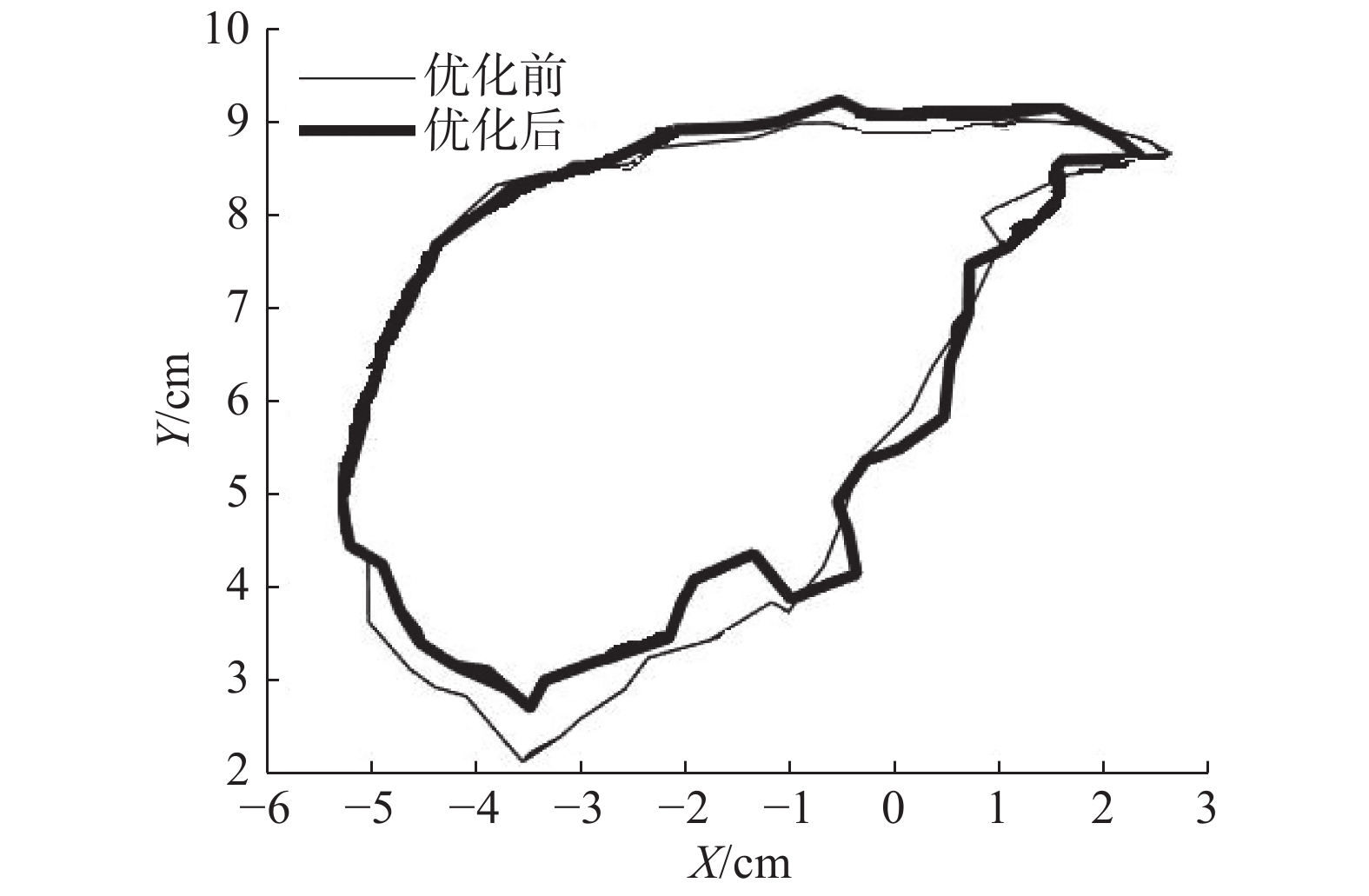
为使仿生机械手指在达到约束条件的情况下满足设计的尺寸范围,让仿生机械手实现稳定、精确的抓取目标物体。首先,通过力平衡、力矩平衡原理建立仿生机械手指关节的接触力模型;然后,根据抓取要求建立目标函数进而构建合理的的适应度函数;在此基础上,结合约束条件,利用遗传算法得到优化后的仿生机械手指的尺寸参数;最后通过MATLAB软件对仿生机械手指仿真。仿真结果表明优化后的仿生机械手的抓取效果比优化前的抓取效果显著
为使仿生机械手指在达到约束条件的情况下满足设计的尺寸范围,让仿生机械手实现稳定、精确的抓取目标物体。首先,通过力平衡、力矩平衡原理建立仿生机械手指关节的接触力模型;然后,根据抓取要求建立目标函数进而构建合理的的适应度函数;在此基础上,结合约束条件,利用遗传算法得到优化后的仿生机械手指的尺寸参数;最后通过MATLAB软件对仿生机械手指仿真。仿真结果表明优化后的仿生机械手的抓取效果比优化前的抓取效果显著

2020, 39(10): 1539-1546.
doi: 10.13433/j.cnki.1003-8728.20190294
摘要:
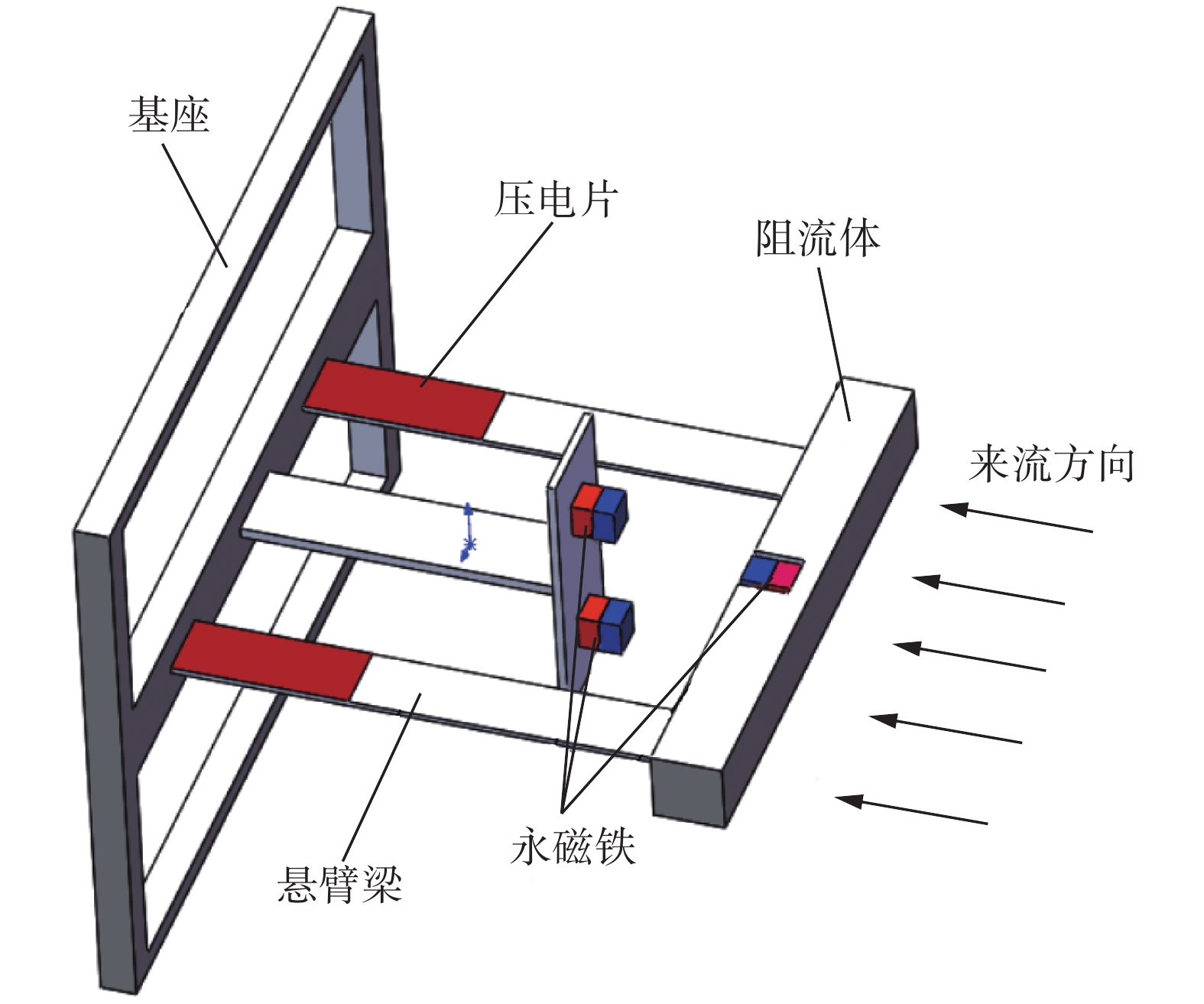
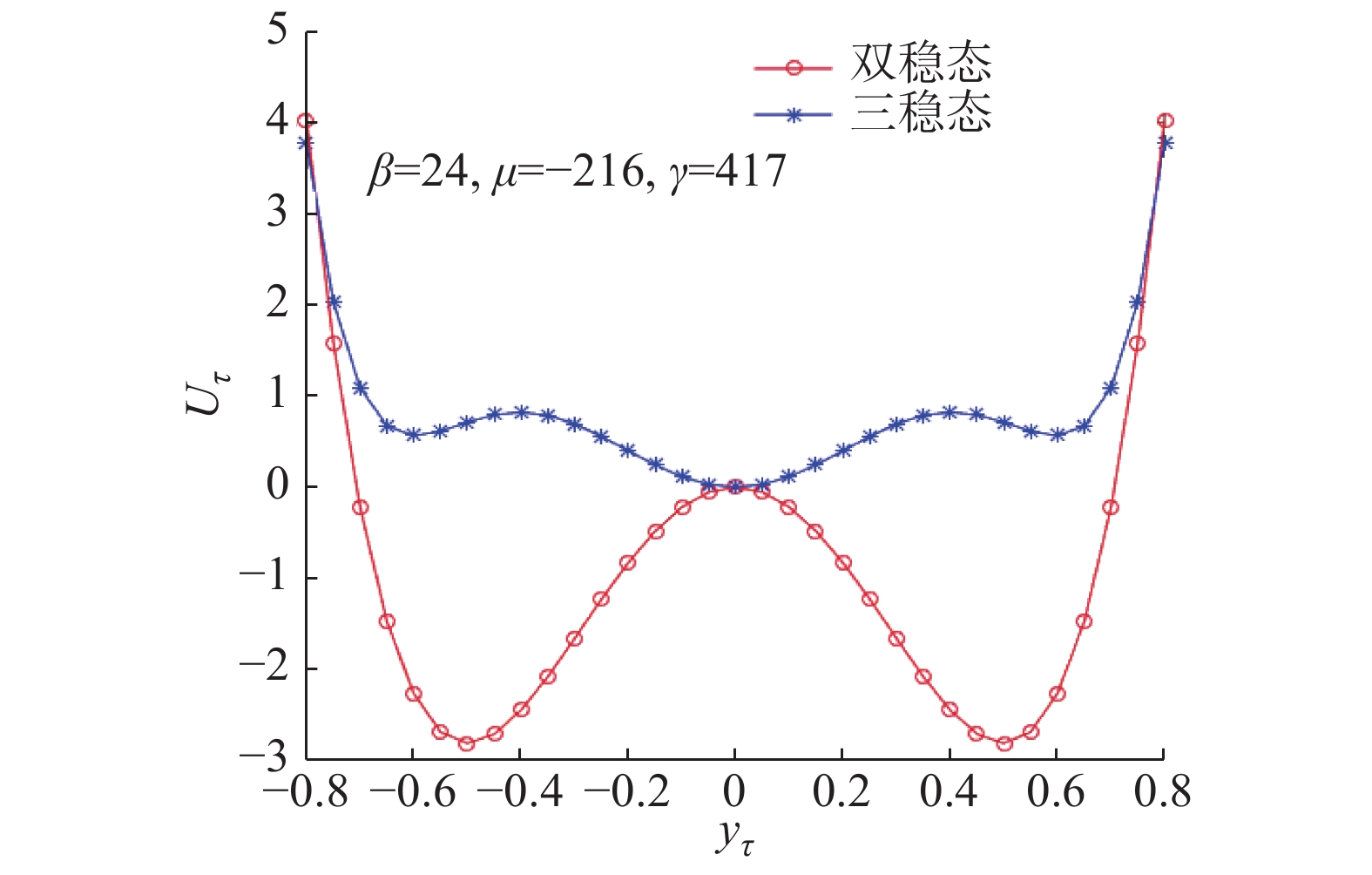
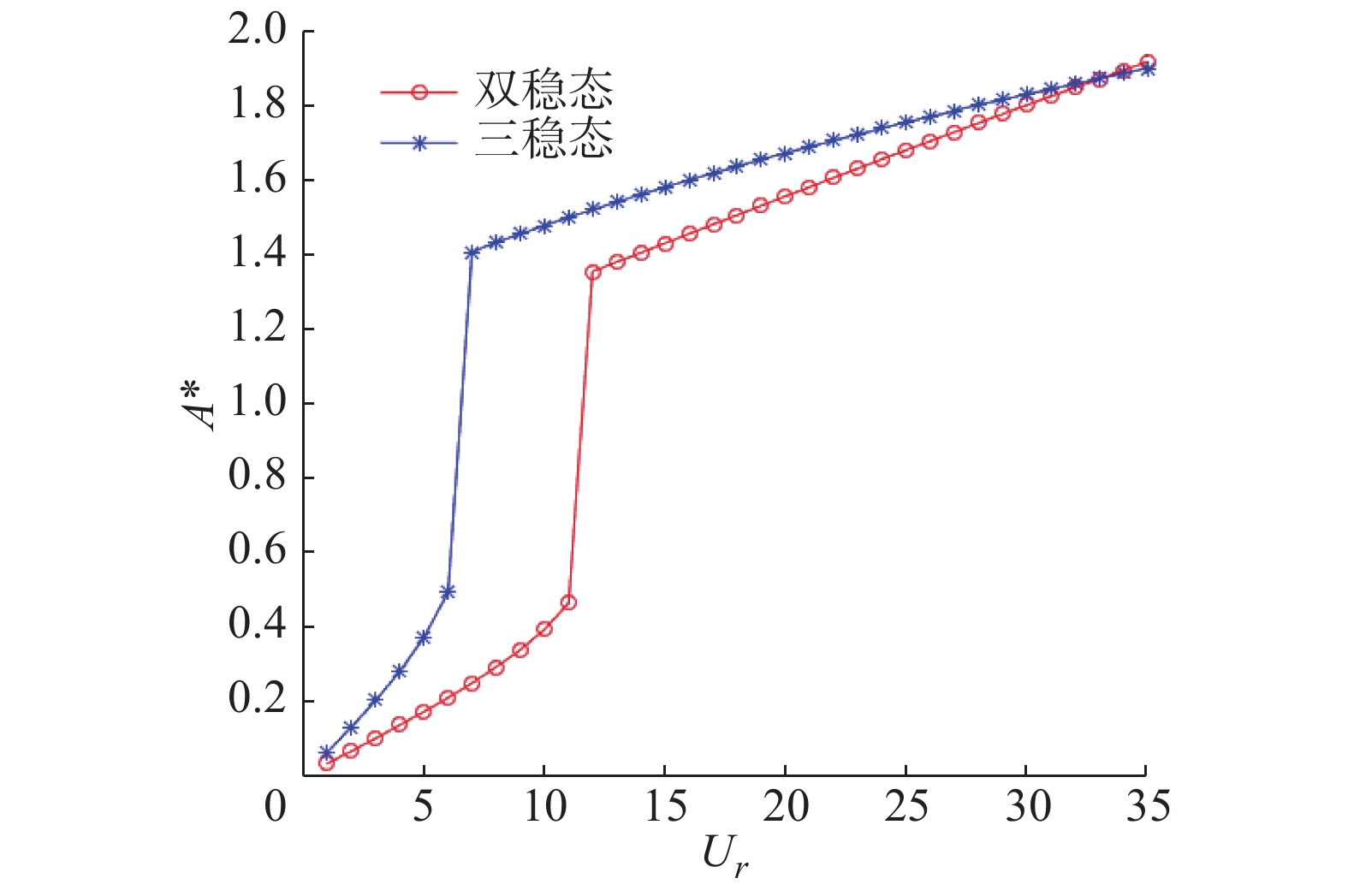
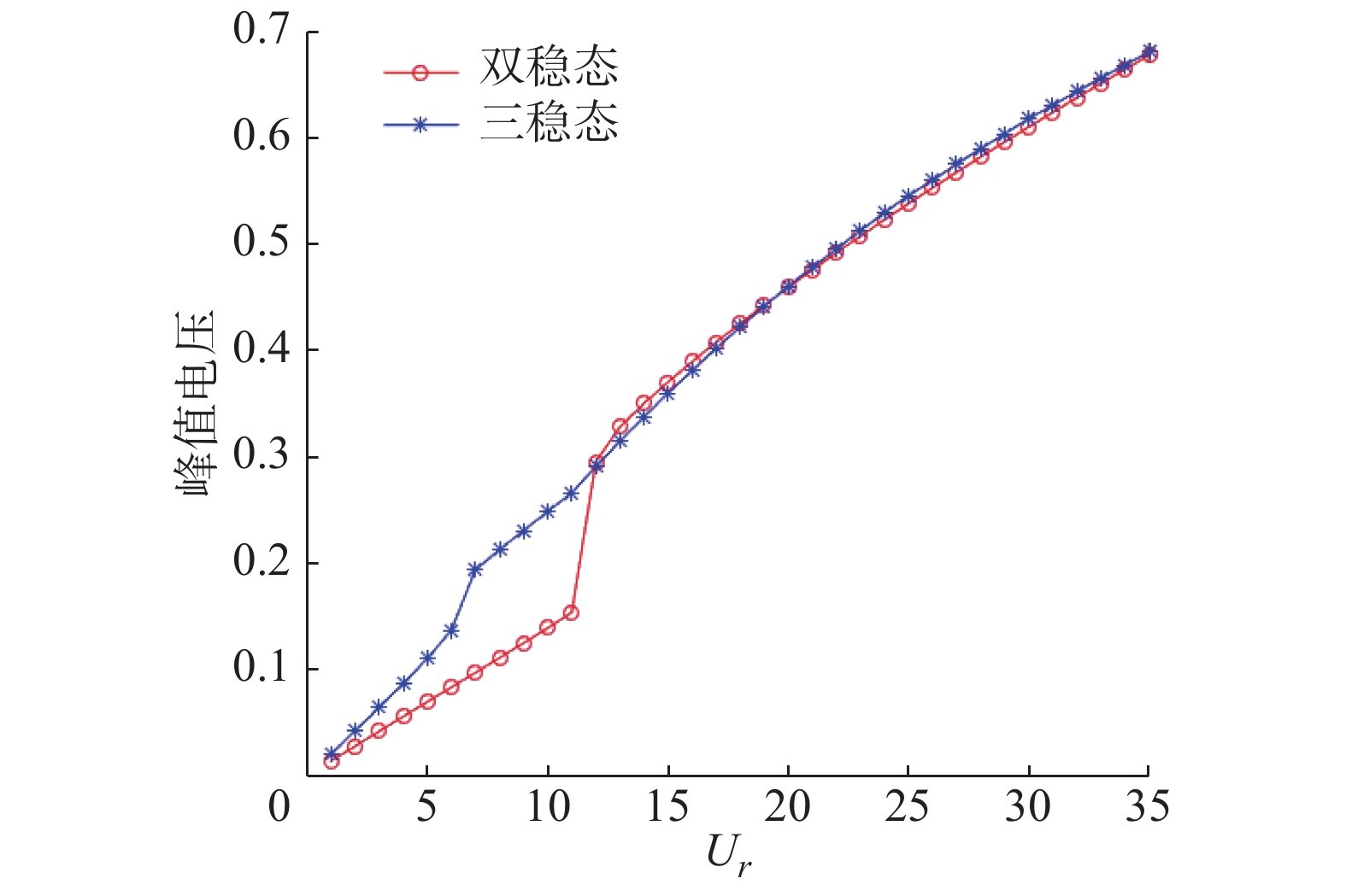
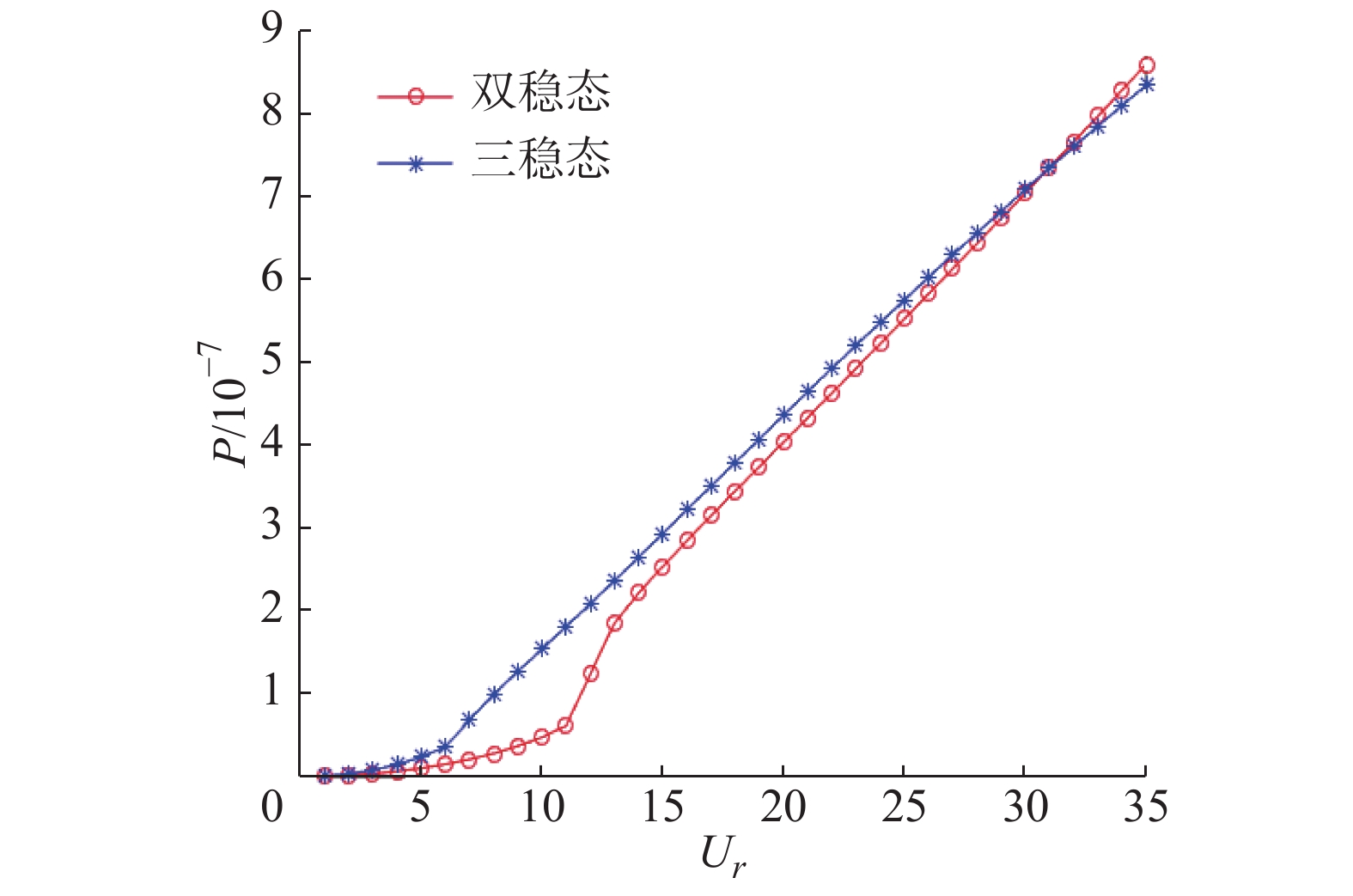
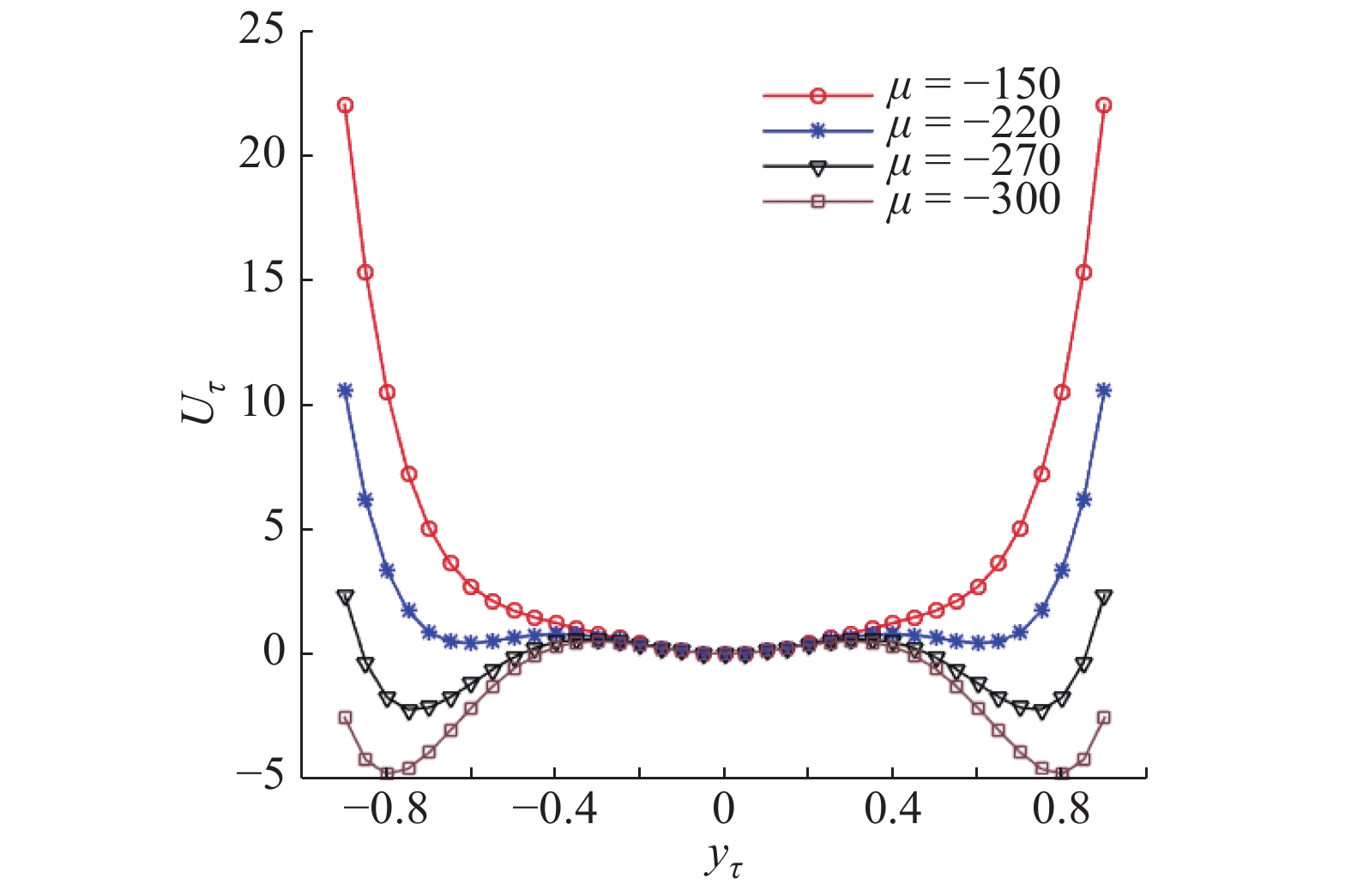
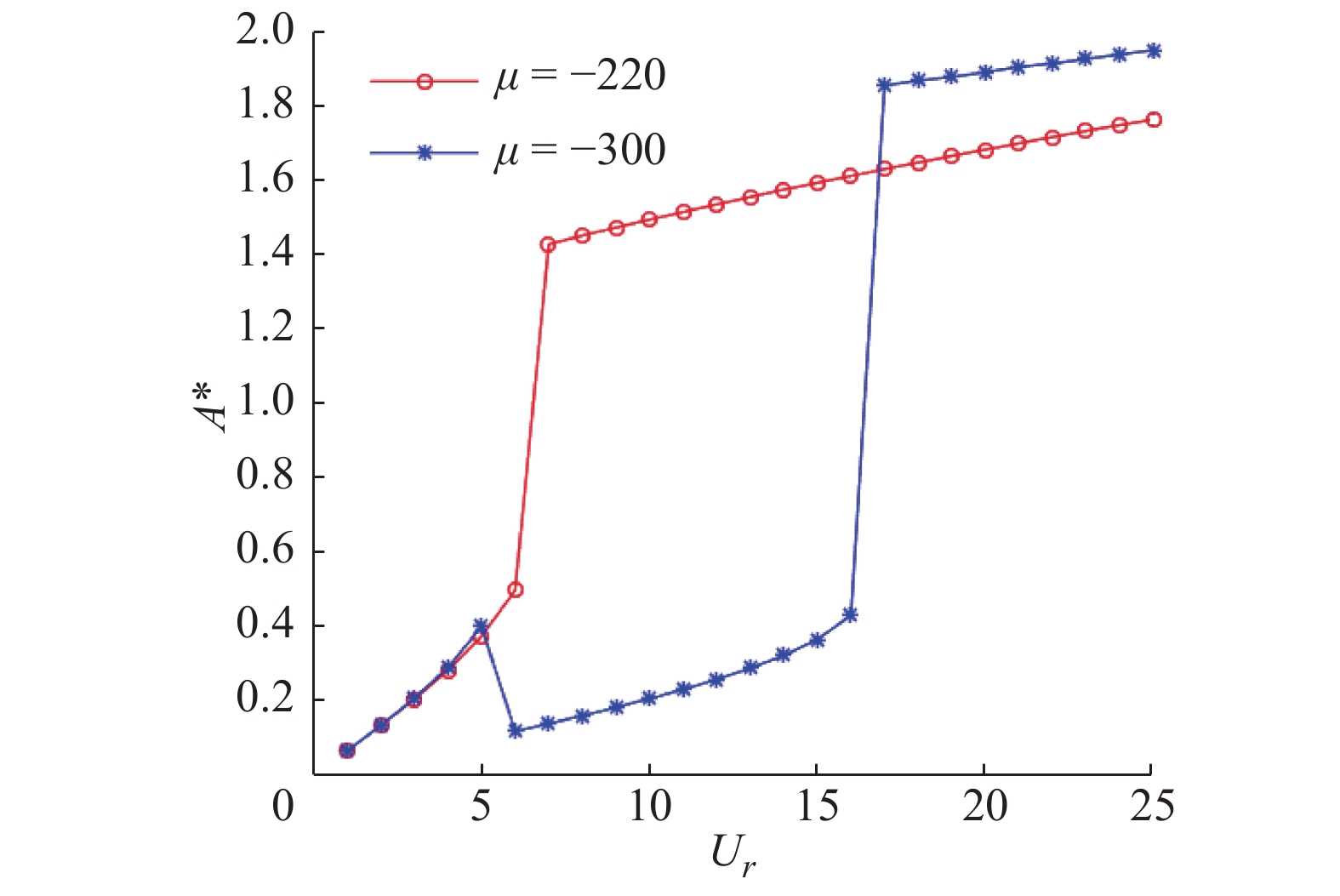
将三稳态振动模式引入到流体驰振能量捕获器中,提出了一种用于流致振动环境下的三稳态压电悬臂梁驰振能量捕获器,建立了其力学模型及动力学方程。利用数值仿真比较了双稳态和三稳态驰振系统的动力学特性和发电性能,证明了在较低流速下三稳态系统更容易发生大幅运动,发电性能更好。进一步研究了三稳态系统参数对驰振能量捕获器发电性能的影响。
将三稳态振动模式引入到流体驰振能量捕获器中,提出了一种用于流致振动环境下的三稳态压电悬臂梁驰振能量捕获器,建立了其力学模型及动力学方程。利用数值仿真比较了双稳态和三稳态驰振系统的动力学特性和发电性能,证明了在较低流速下三稳态系统更容易发生大幅运动,发电性能更好。进一步研究了三稳态系统参数对驰振能量捕获器发电性能的影响。





2020, 39(10): 1547-1554.
doi: 10.13433/j.cnki.1003-8728.20190340
摘要:
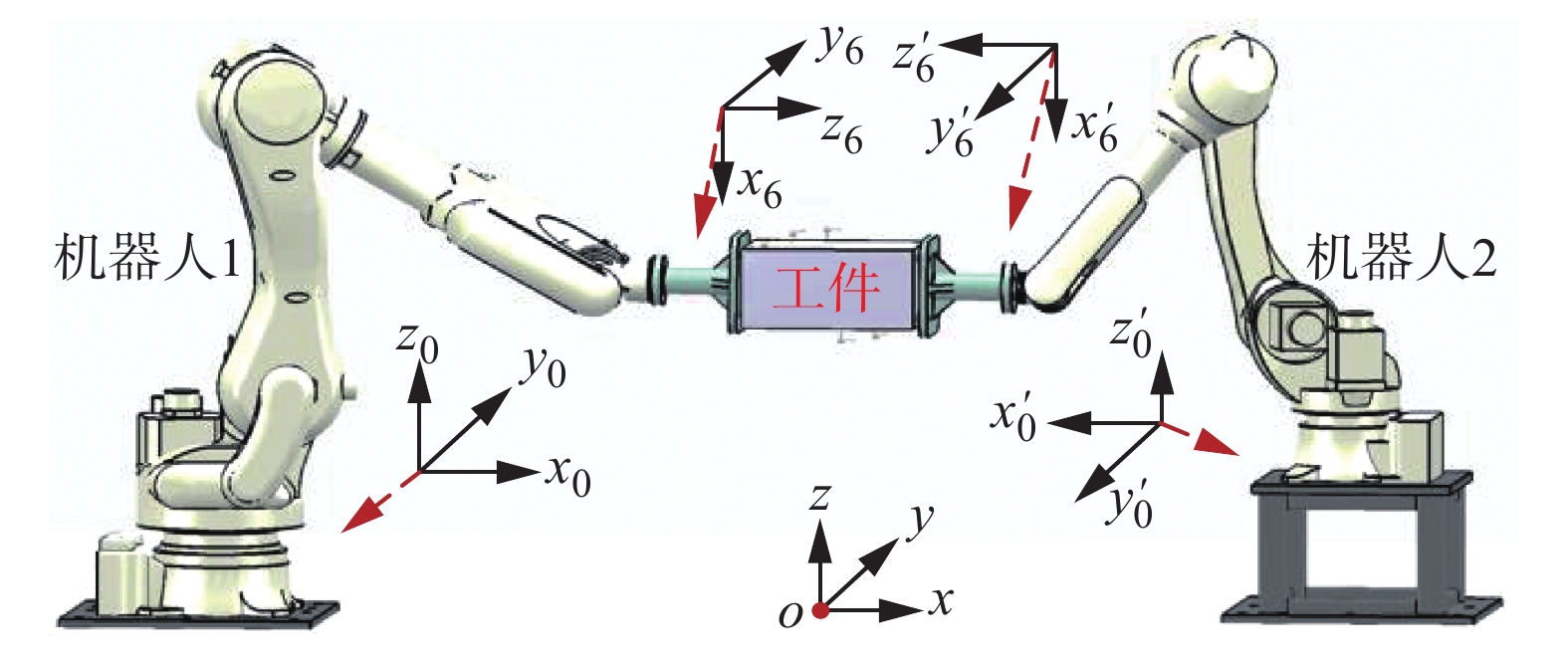
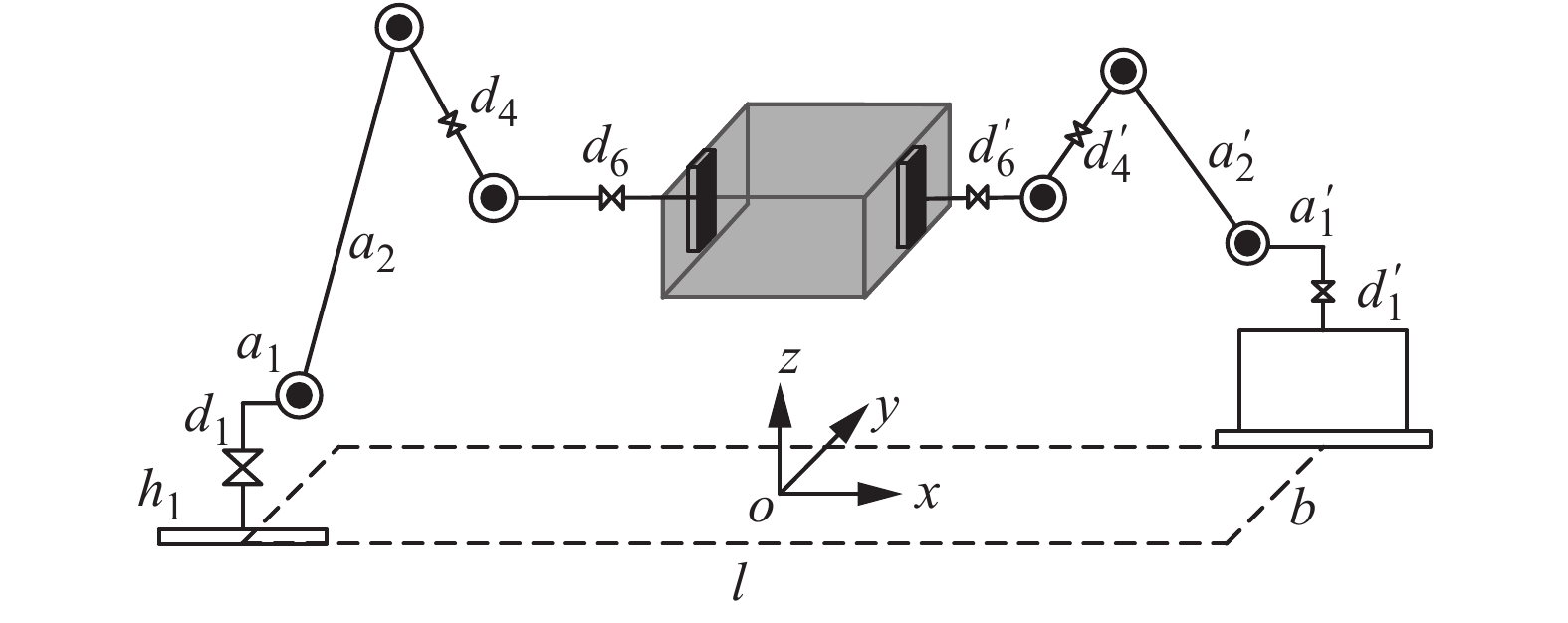
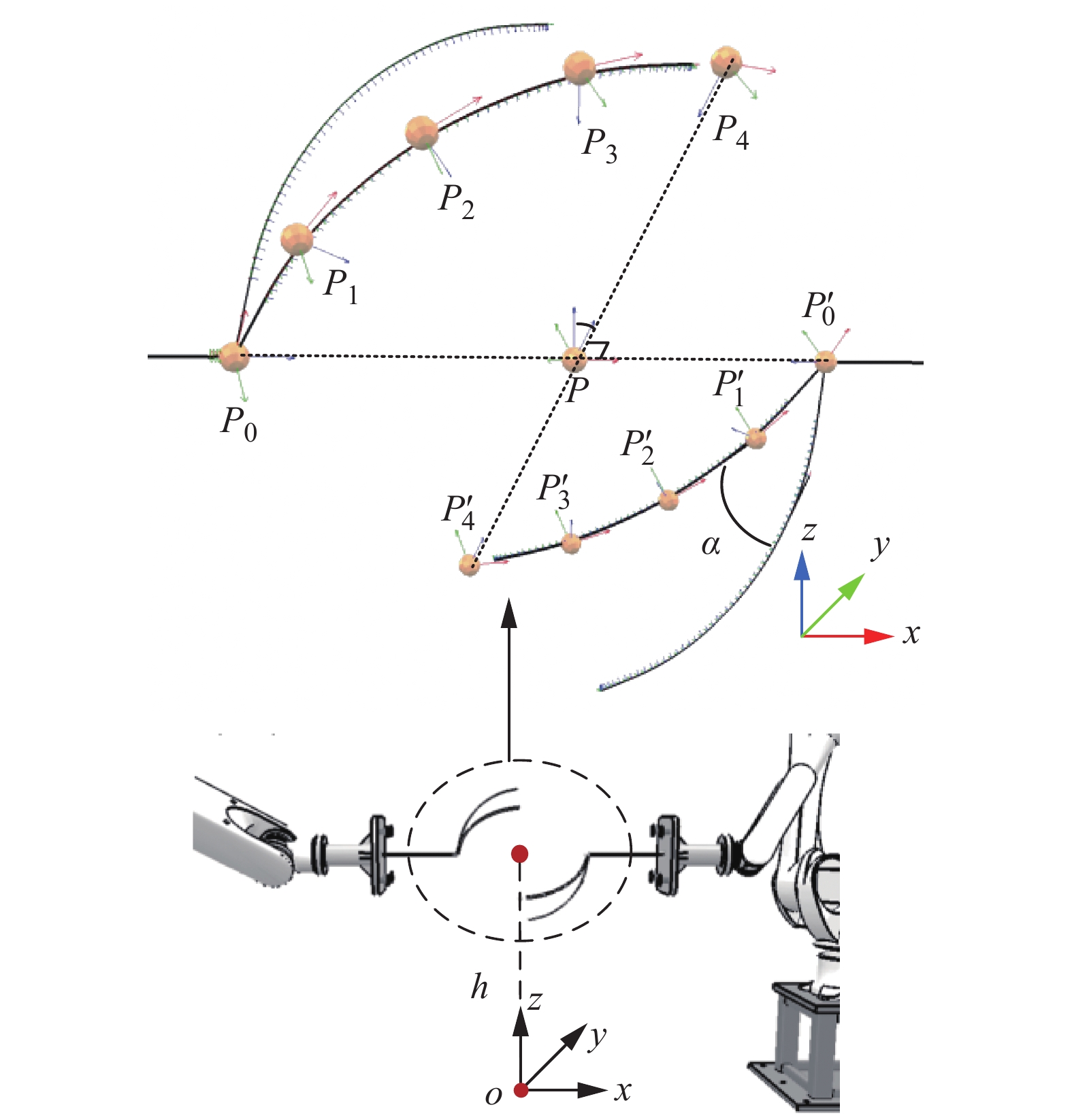
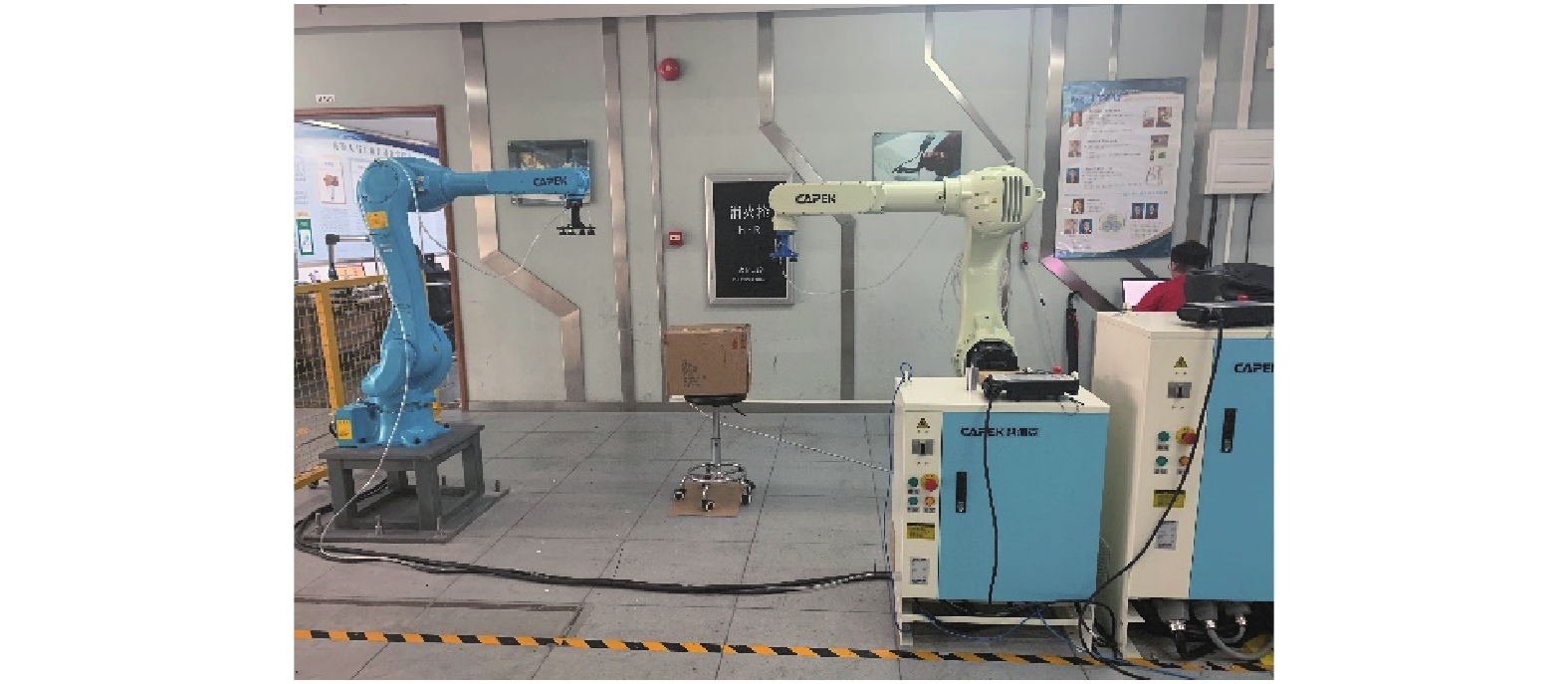
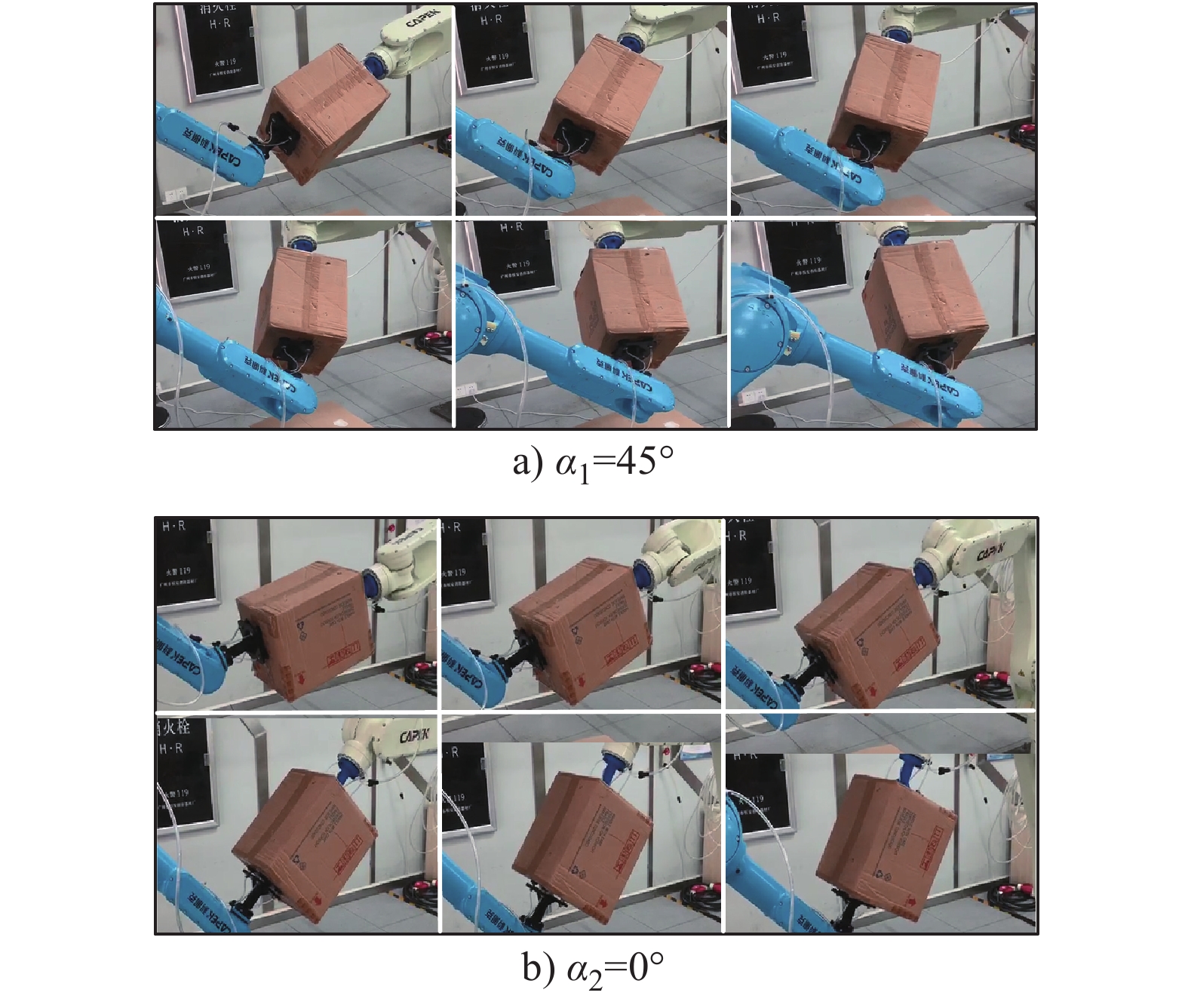
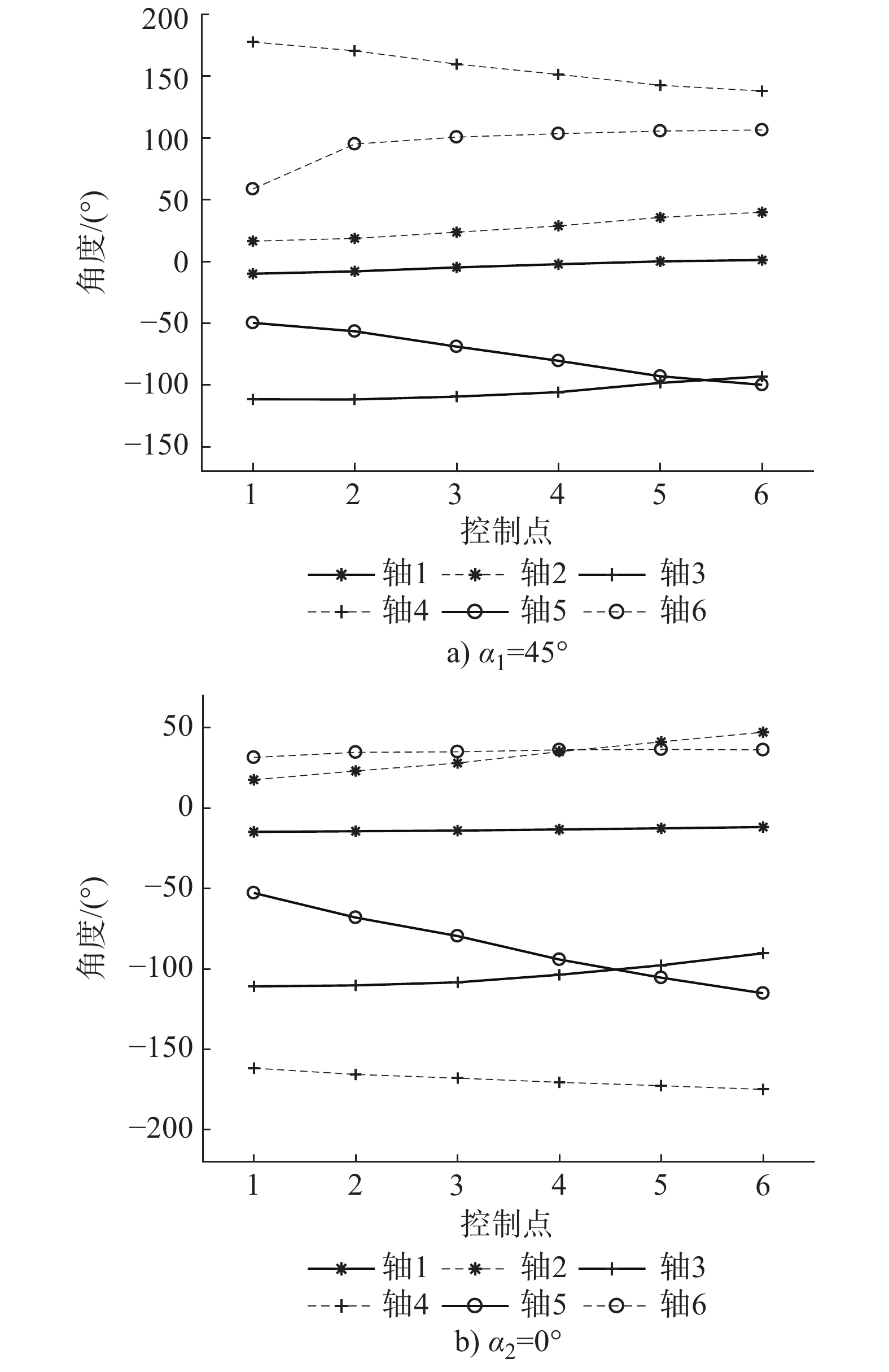
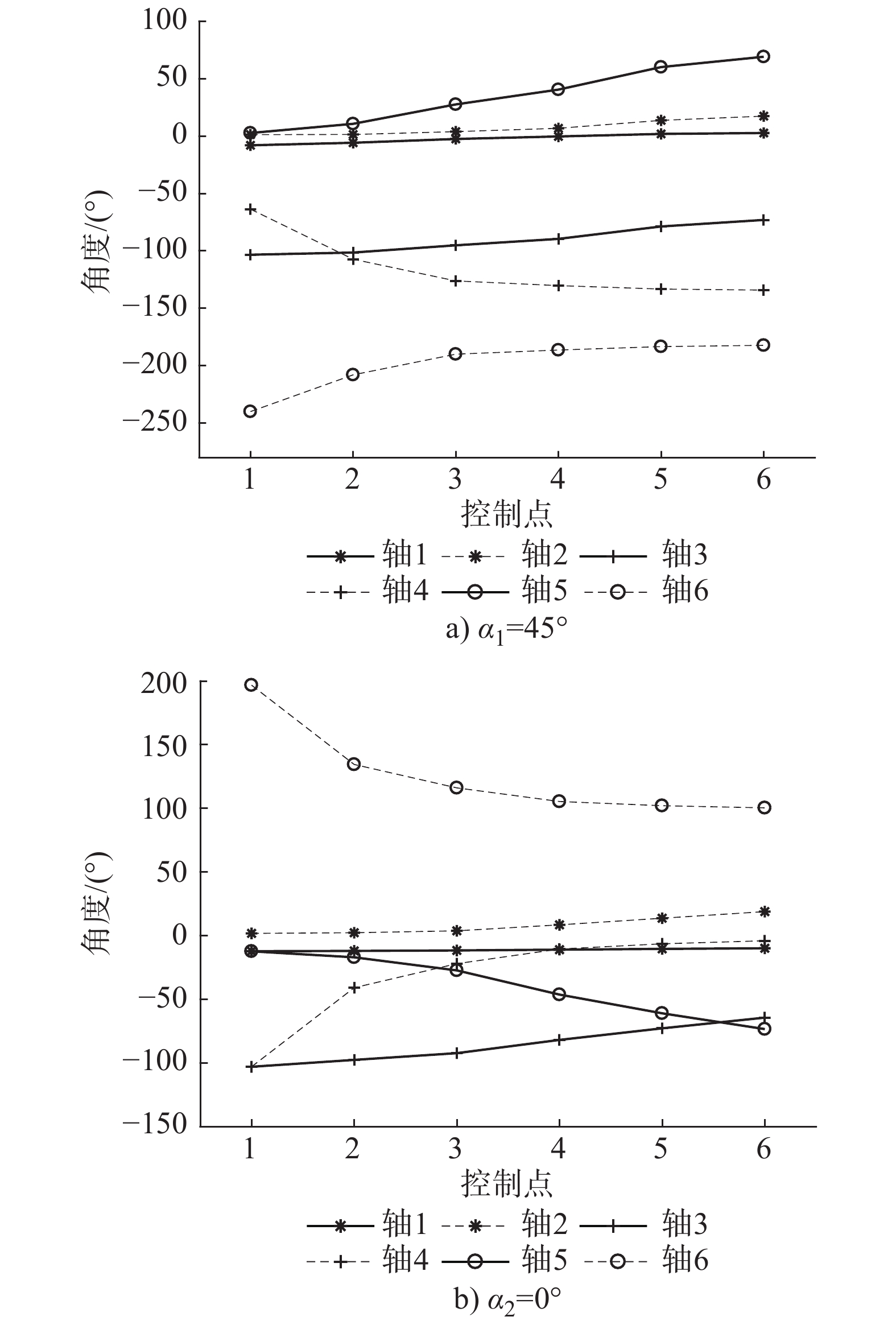
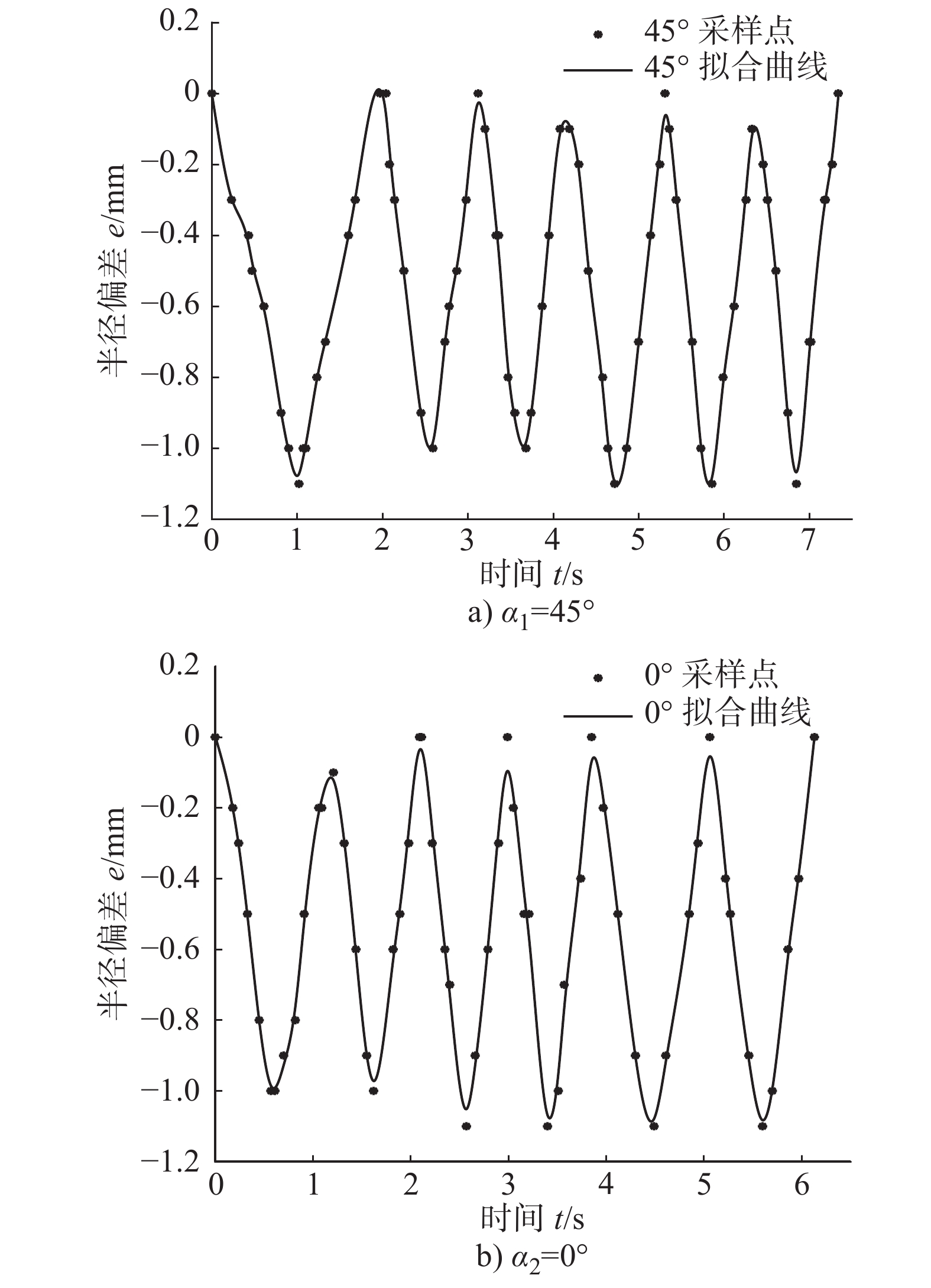
双机器人绕中心点协同旋转可实现工件在空间中的灵巧姿态变换,本文提出一种基于四元数路径圆弧插补方法,应用于路径控制点的坐标旋转与坐标位置插补。首先,将路径圆弧初始控制点表示为四维齐次变换矩阵,提取三维旋转矩阵与坐标向量两个部分。然后,把旋转矩阵转换为四元数进行坐标旋转插补,对控制点坐标向量进行位置插补,以求解该方法的齐次变换矩阵通解;最后,由逆运动学得出插补控制点的关节坐标系,导入机器人示教器,以对双机器人协同旋转进行实验验证。实验结果表明:该方法能计算出路径圆弧轨迹的插补控制点,插补路径平滑,符合关节角限制,圆度误差控制在1.1 mm以内。可实现双机器人协调搬运工件在空间中的多角度对中心旋转,具有普遍适用性。
双机器人绕中心点协同旋转可实现工件在空间中的灵巧姿态变换,本文提出一种基于四元数路径圆弧插补方法,应用于路径控制点的坐标旋转与坐标位置插补。首先,将路径圆弧初始控制点表示为四维齐次变换矩阵,提取三维旋转矩阵与坐标向量两个部分。然后,把旋转矩阵转换为四元数进行坐标旋转插补,对控制点坐标向量进行位置插补,以求解该方法的齐次变换矩阵通解;最后,由逆运动学得出插补控制点的关节坐标系,导入机器人示教器,以对双机器人协同旋转进行实验验证。实验结果表明:该方法能计算出路径圆弧轨迹的插补控制点,插补路径平滑,符合关节角限制,圆度误差控制在1.1 mm以内。可实现双机器人协调搬运工件在空间中的多角度对中心旋转,具有普遍适用性。




2020, 39(10): 1555-1562.
doi: 10.13433/j.cnki.1003-8728.20190274
摘要:
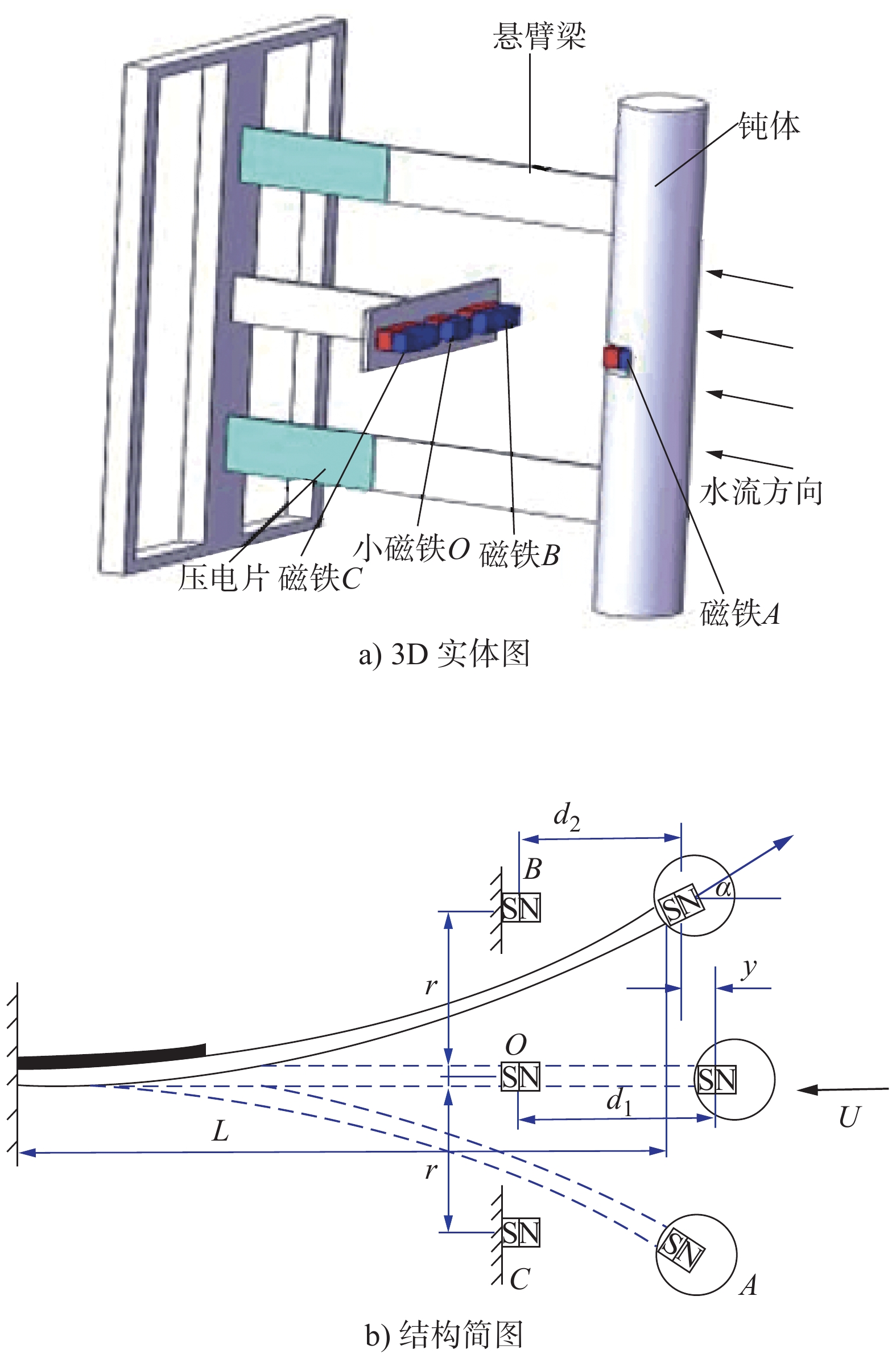
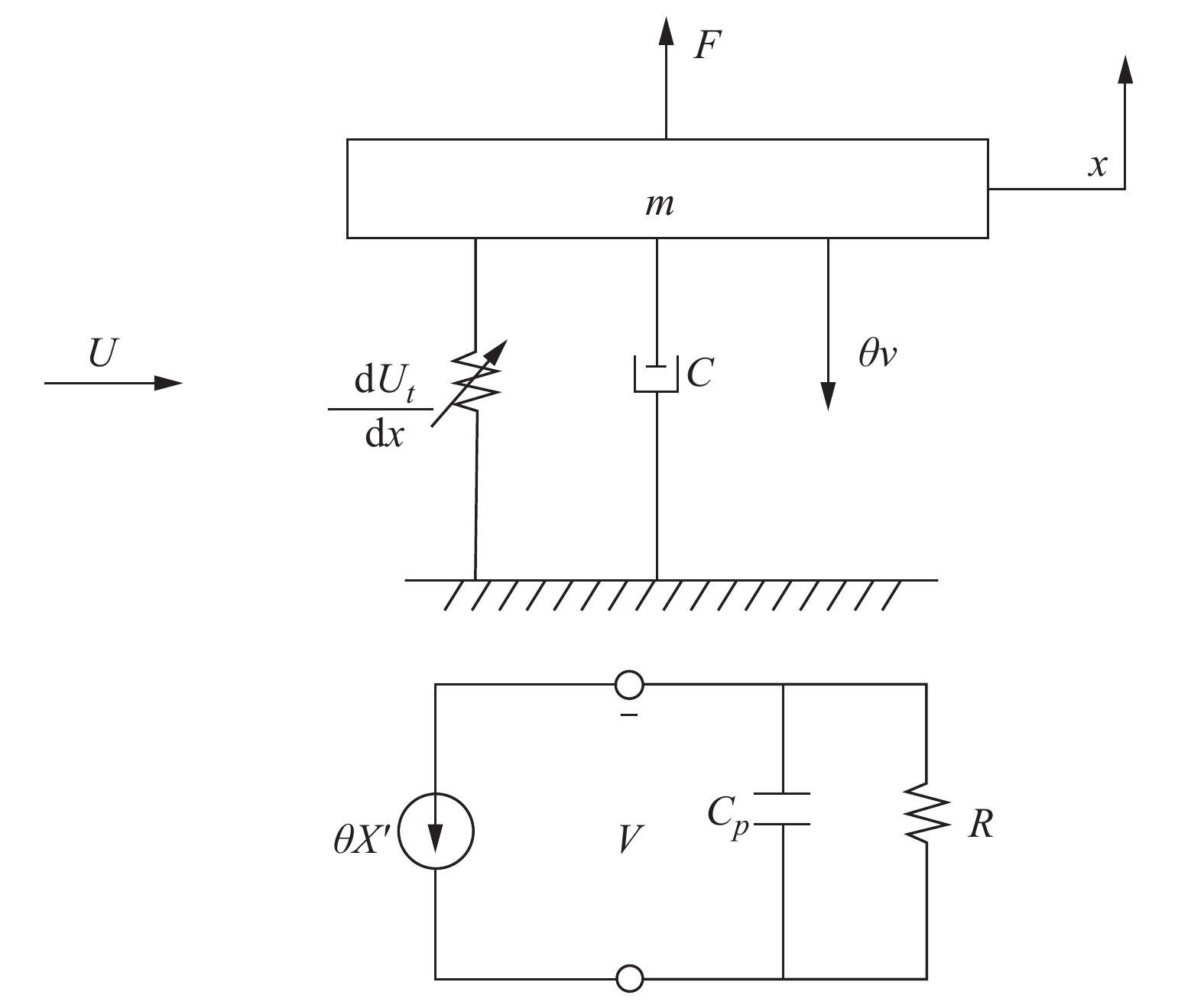
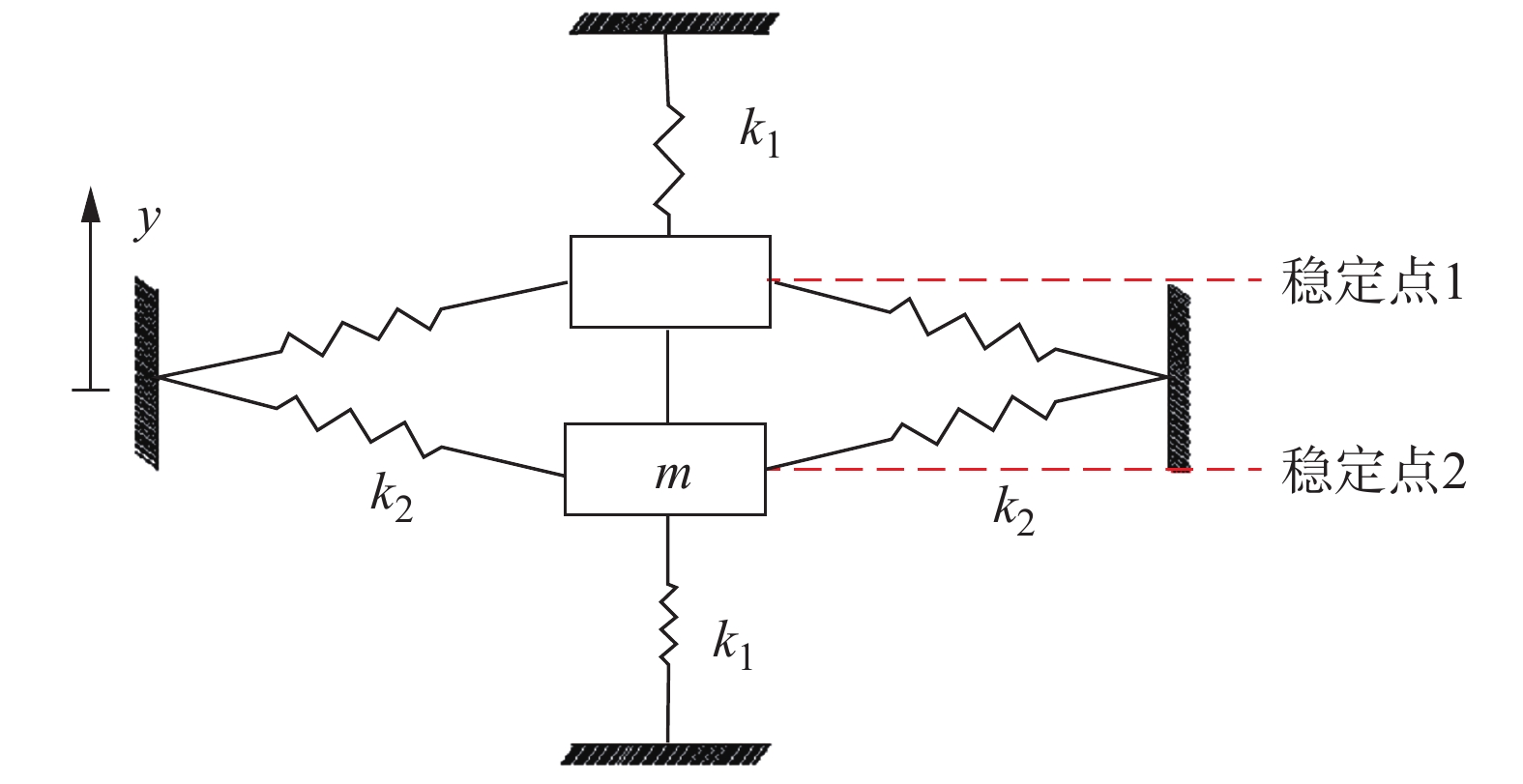
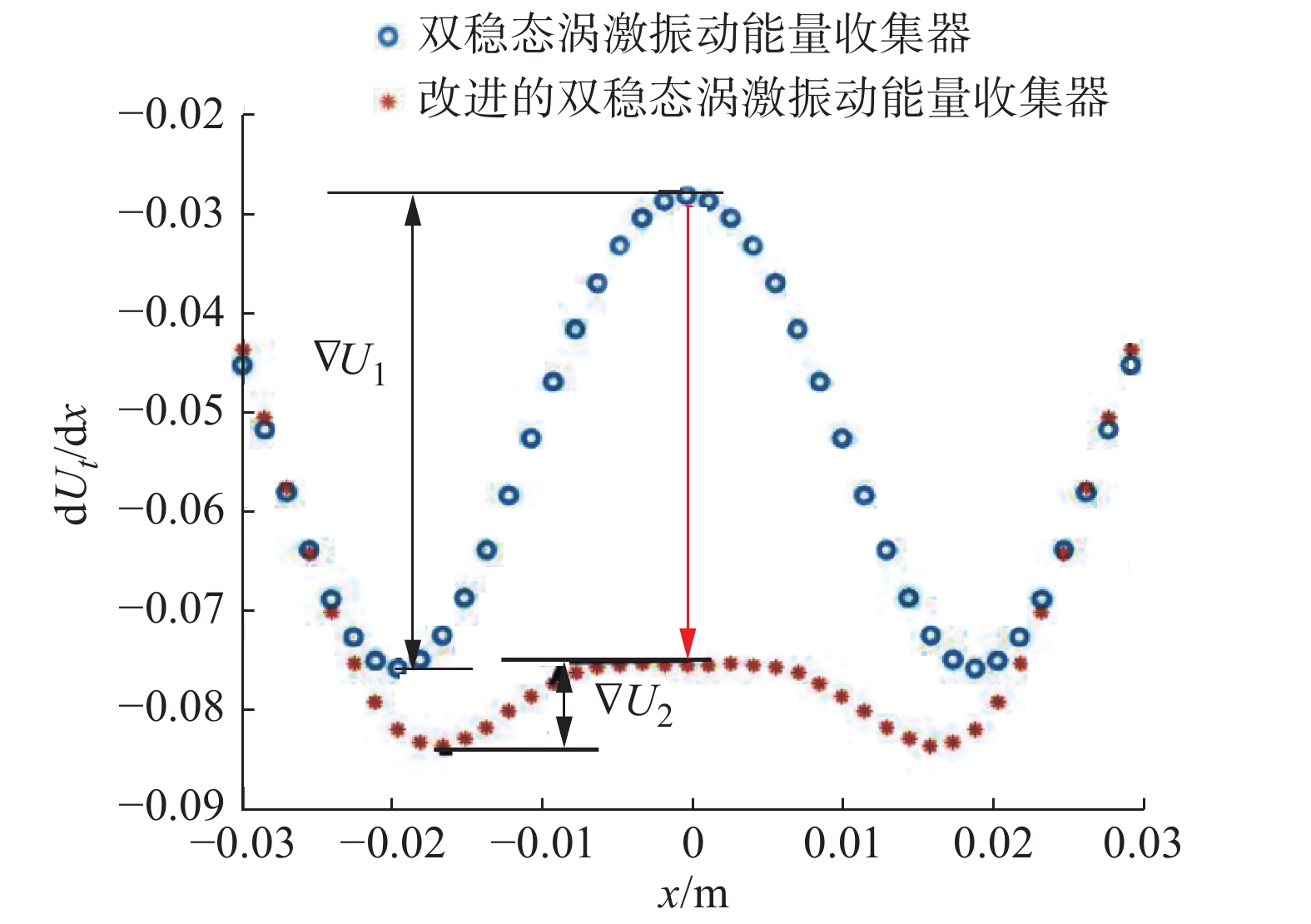
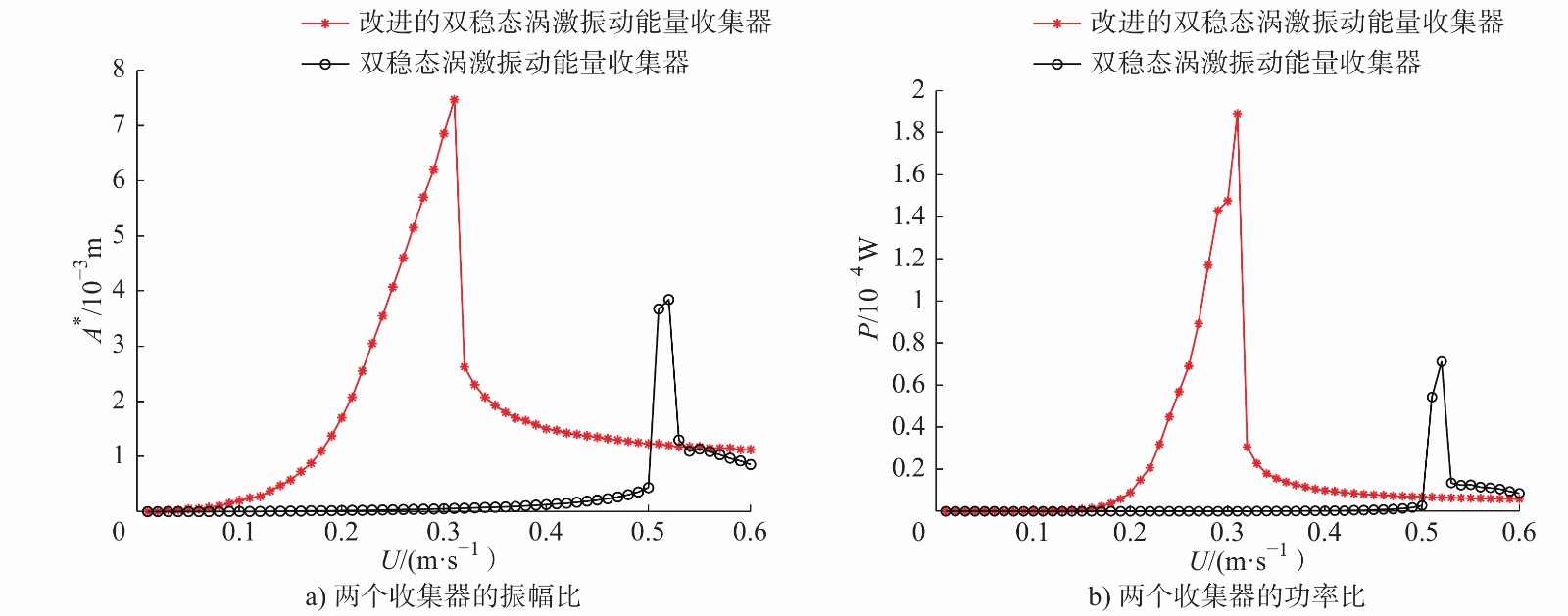
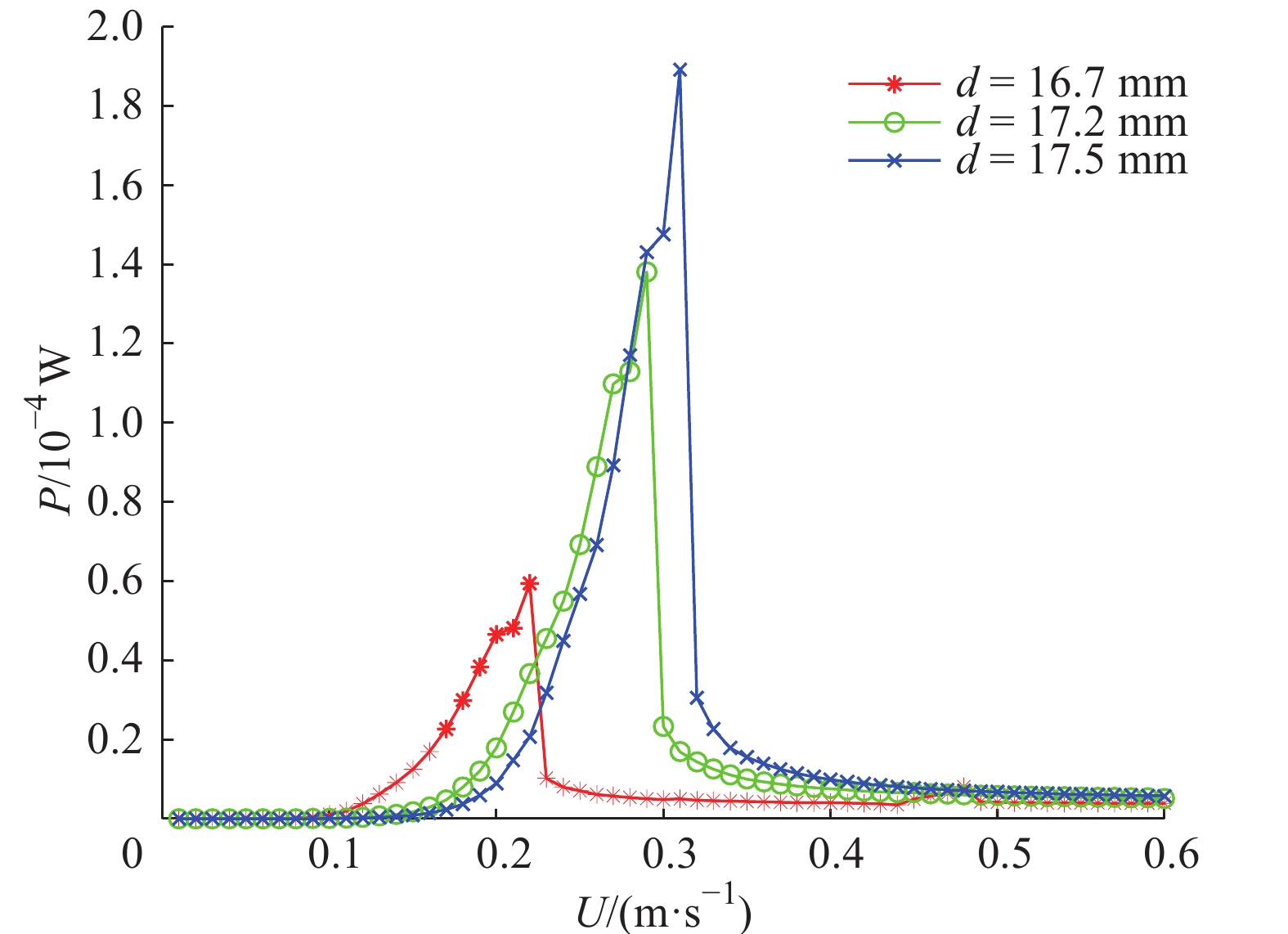
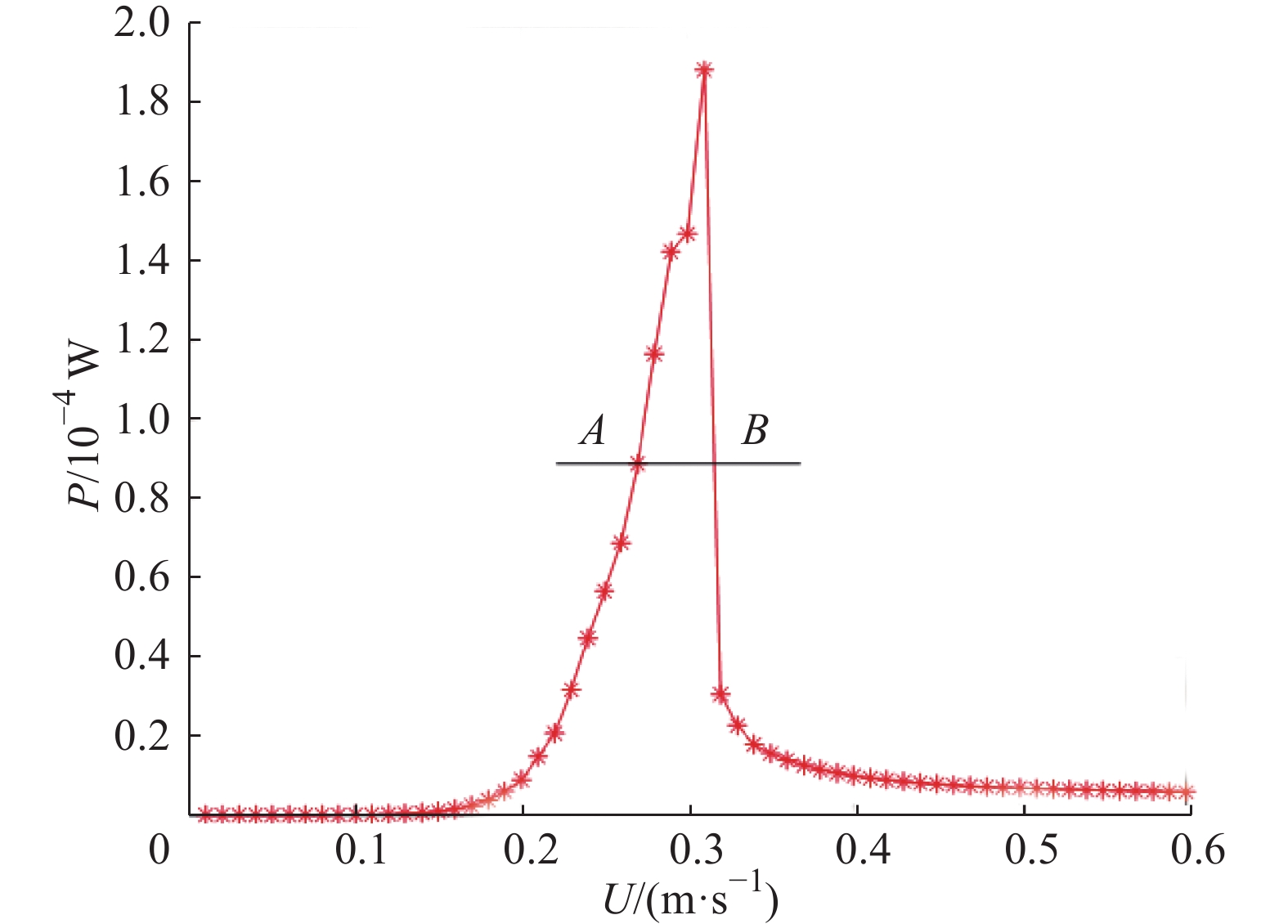
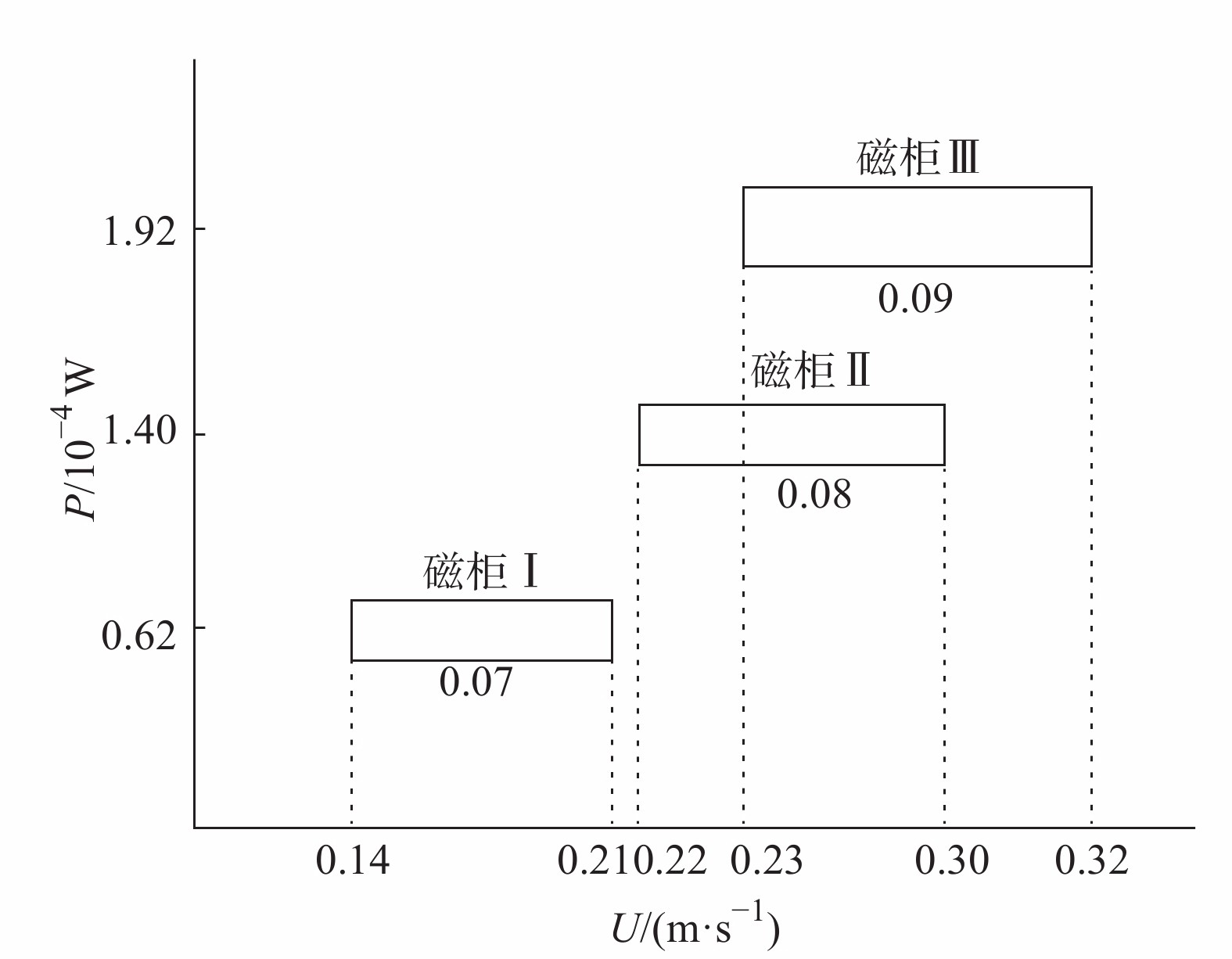
随着低功耗传感器的出现,利用流致振动为传感器提供自供电是研究环境监测中的热点。本文将改进的非线性恢复力与涡激振动相结合,提出改进的双稳态涡激振动能量收集器,建立力学模型及控制方程,借助数值仿真得出改进的双稳态涡激振动能量收集器在能量收集方面优于双稳态涡激振动能量收集器,研究并分析了磁距对能量收集系统势能函数及发电功率的影响,借助半功率带宽法,确定了系统在不同磁距下的工作带宽,分析了磁距对发电功率及工作带宽的影响。
随着低功耗传感器的出现,利用流致振动为传感器提供自供电是研究环境监测中的热点。本文将改进的非线性恢复力与涡激振动相结合,提出改进的双稳态涡激振动能量收集器,建立力学模型及控制方程,借助数值仿真得出改进的双稳态涡激振动能量收集器在能量收集方面优于双稳态涡激振动能量收集器,研究并分析了磁距对能量收集系统势能函数及发电功率的影响,借助半功率带宽法,确定了系统在不同磁距下的工作带宽,分析了磁距对发电功率及工作带宽的影响。



2020, 39(10): 1563-1567.
doi: 10.13433/j.cnki.1003-8728.20190308
摘要:
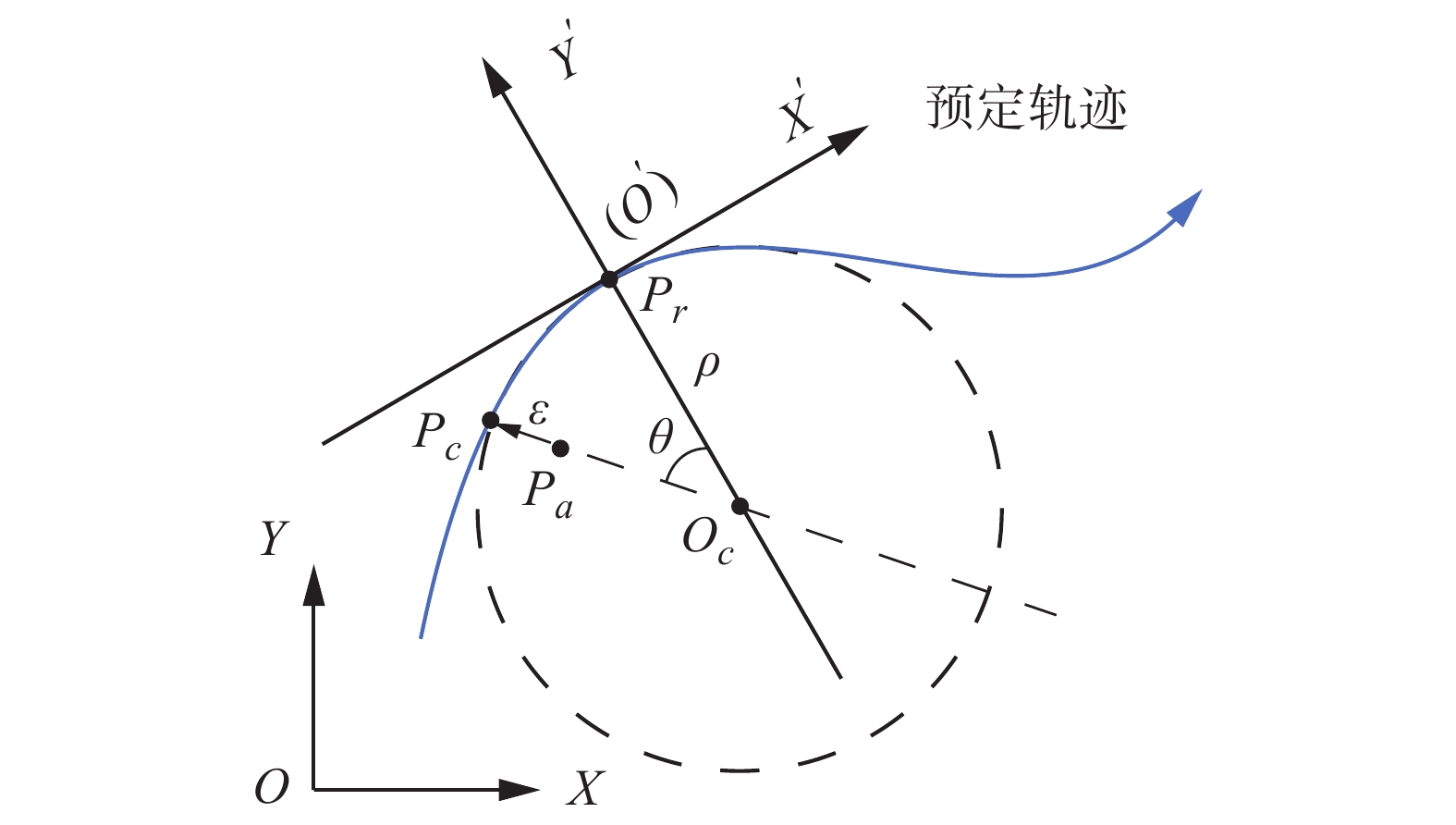
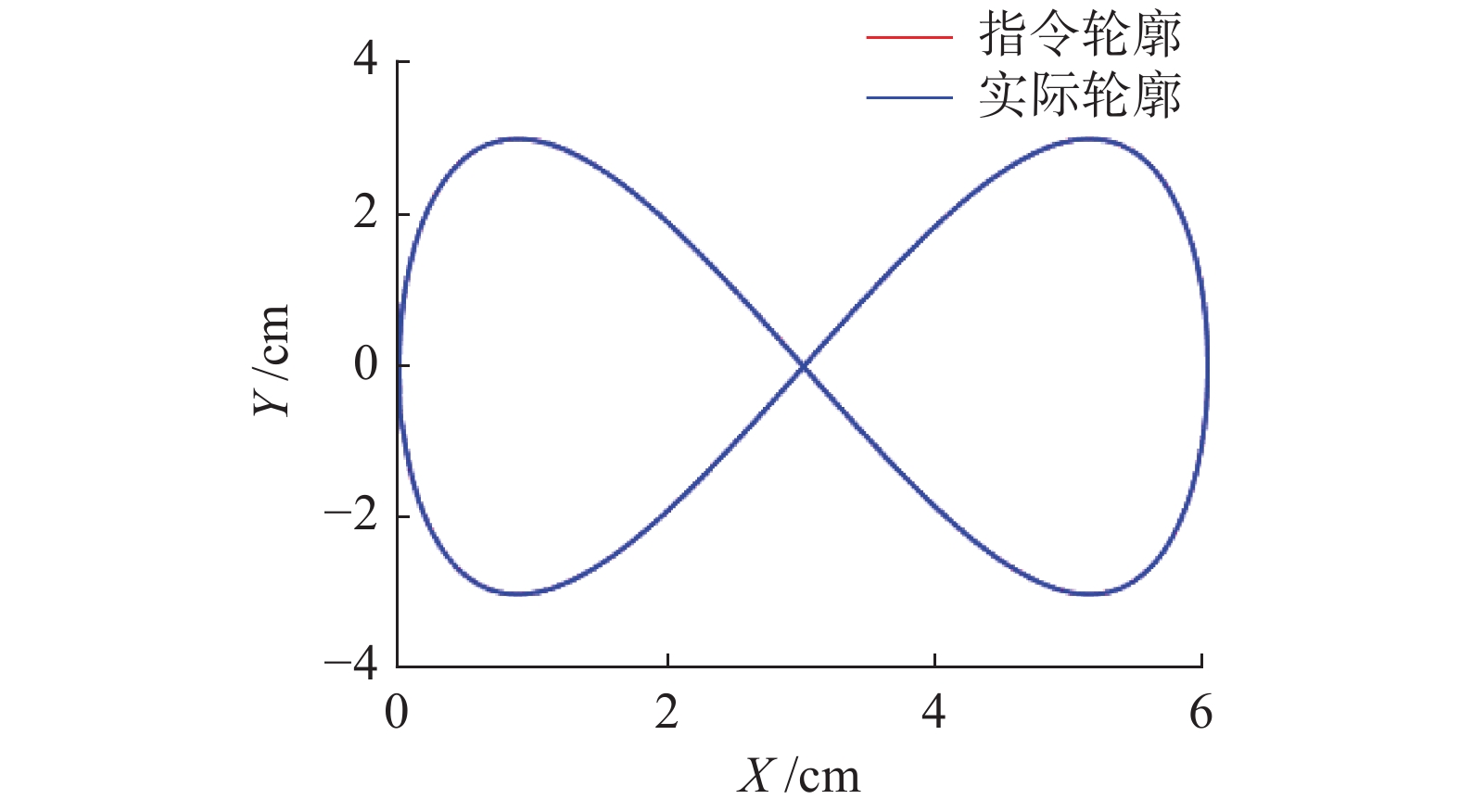
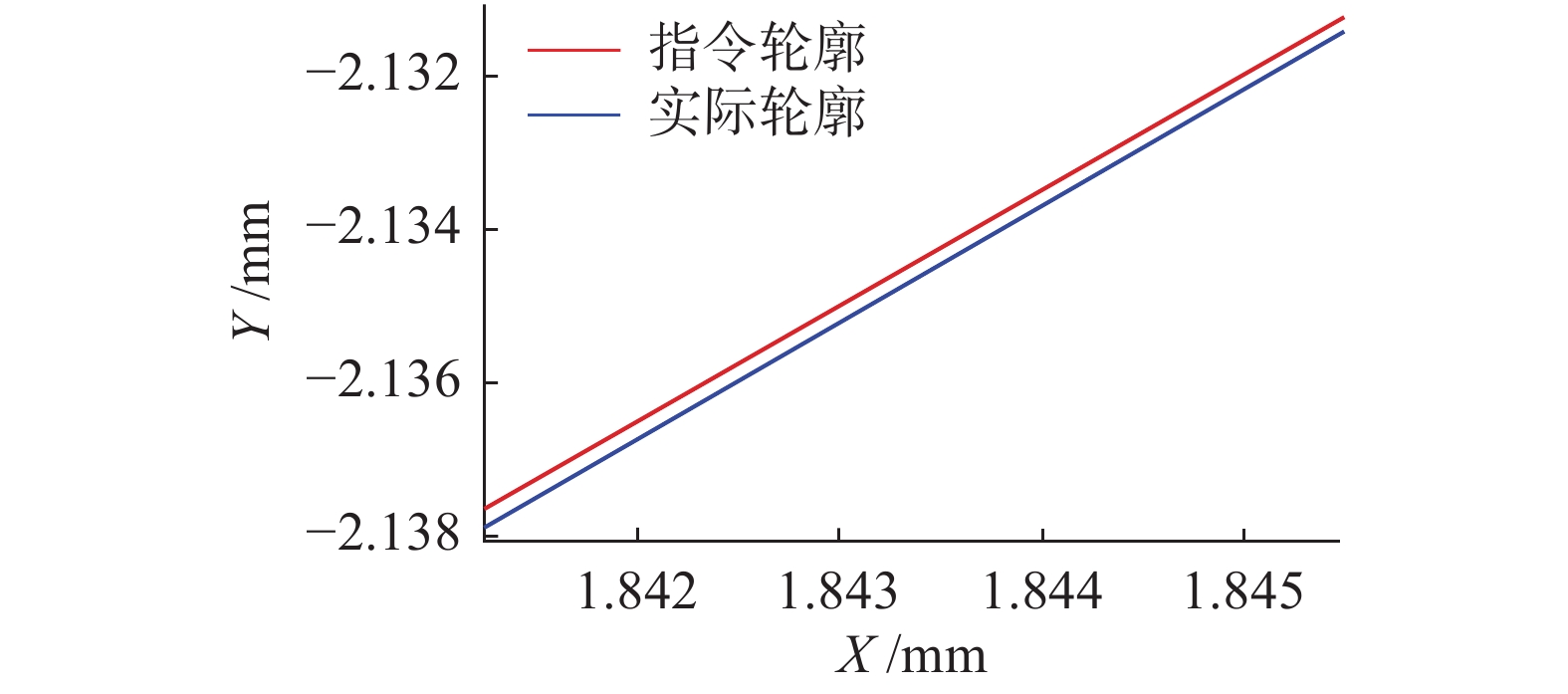
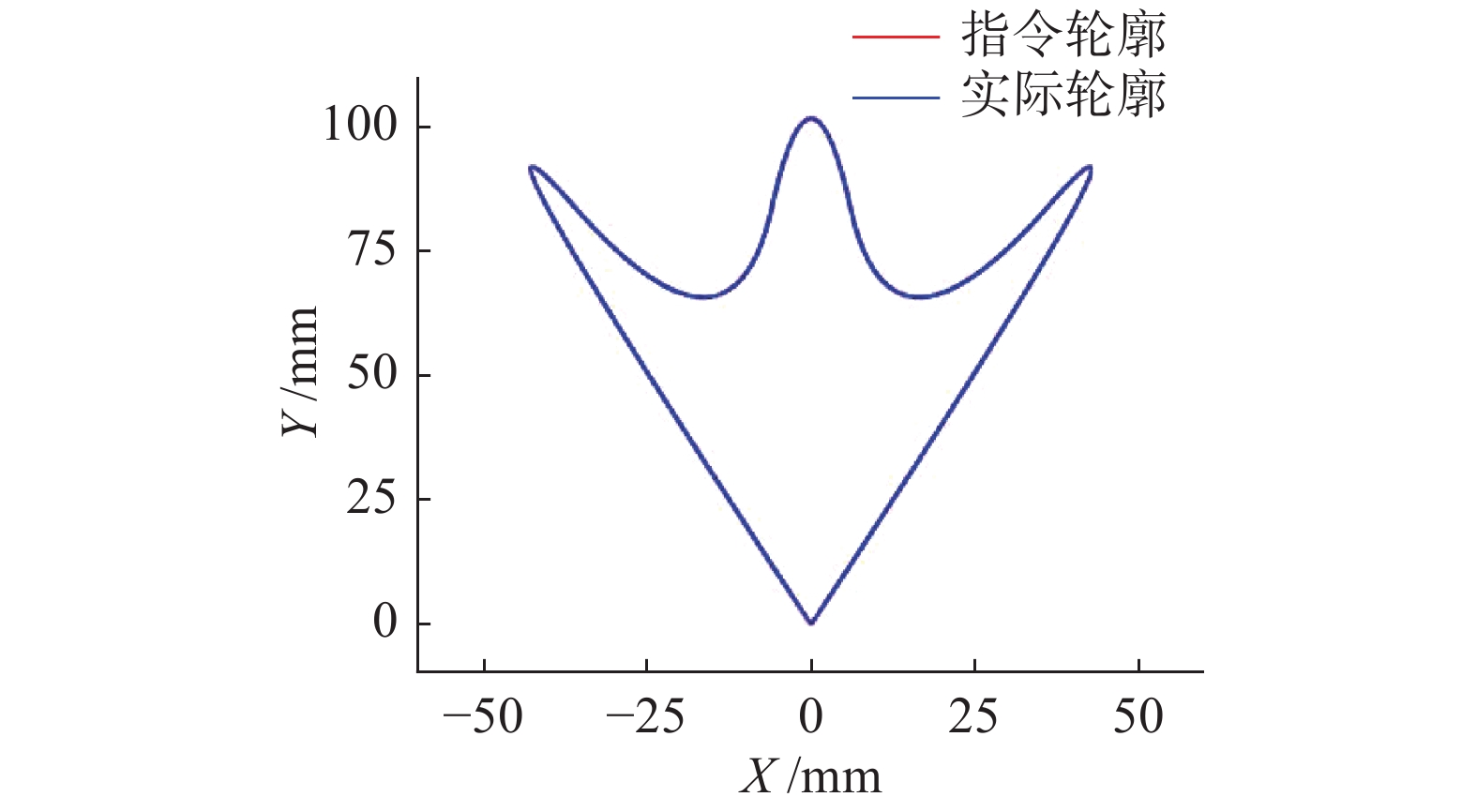
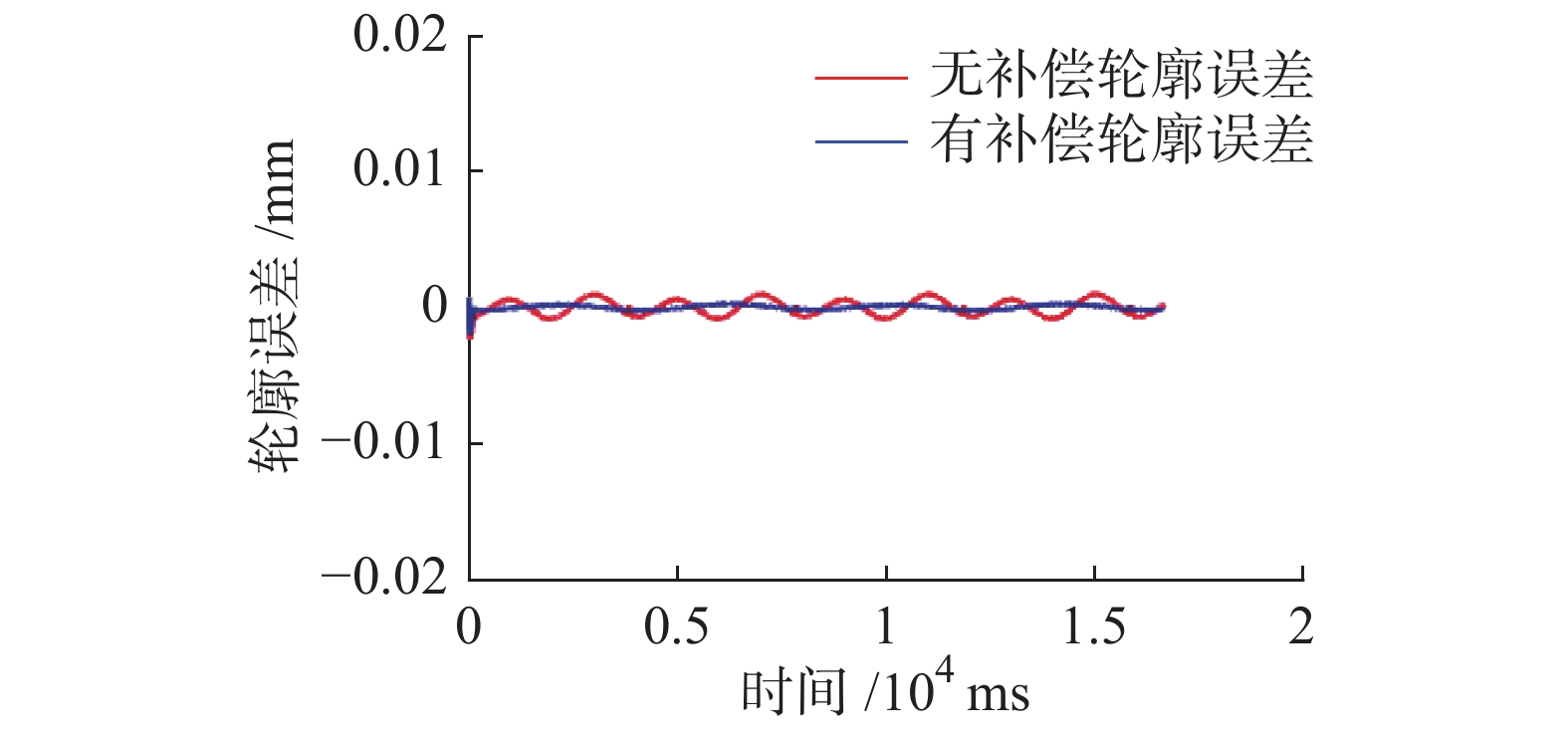
针对诸多已有的轮廓误差估算方法模型复杂,计算量大,难以进行实时估算并补偿的缺点,提出了一种基于圆形近似和坐标变换的轮廓误差估算方法。主要是通过两次目标坐标系的变换来简化计算过程,减小计算量,能够应用于实时估算轮廓误差的环境。为验证此算法的有效性,在Simulink环境下进行轮廓误差的预补偿仿真。仿真结果显示,此算法可以实时估算并补偿轮廓误差,并且其估算精度高,补偿过程平稳,能够很大程度上提高数控机床的加工精度。
针对诸多已有的轮廓误差估算方法模型复杂,计算量大,难以进行实时估算并补偿的缺点,提出了一种基于圆形近似和坐标变换的轮廓误差估算方法。主要是通过两次目标坐标系的变换来简化计算过程,减小计算量,能够应用于实时估算轮廓误差的环境。为验证此算法的有效性,在Simulink环境下进行轮廓误差的预补偿仿真。仿真结果显示,此算法可以实时估算并补偿轮廓误差,并且其估算精度高,补偿过程平稳,能够很大程度上提高数控机床的加工精度。


2020, 39(10): 1568-1574.
doi: 10.13433/j.cnki.1003-8728.20190305
摘要:
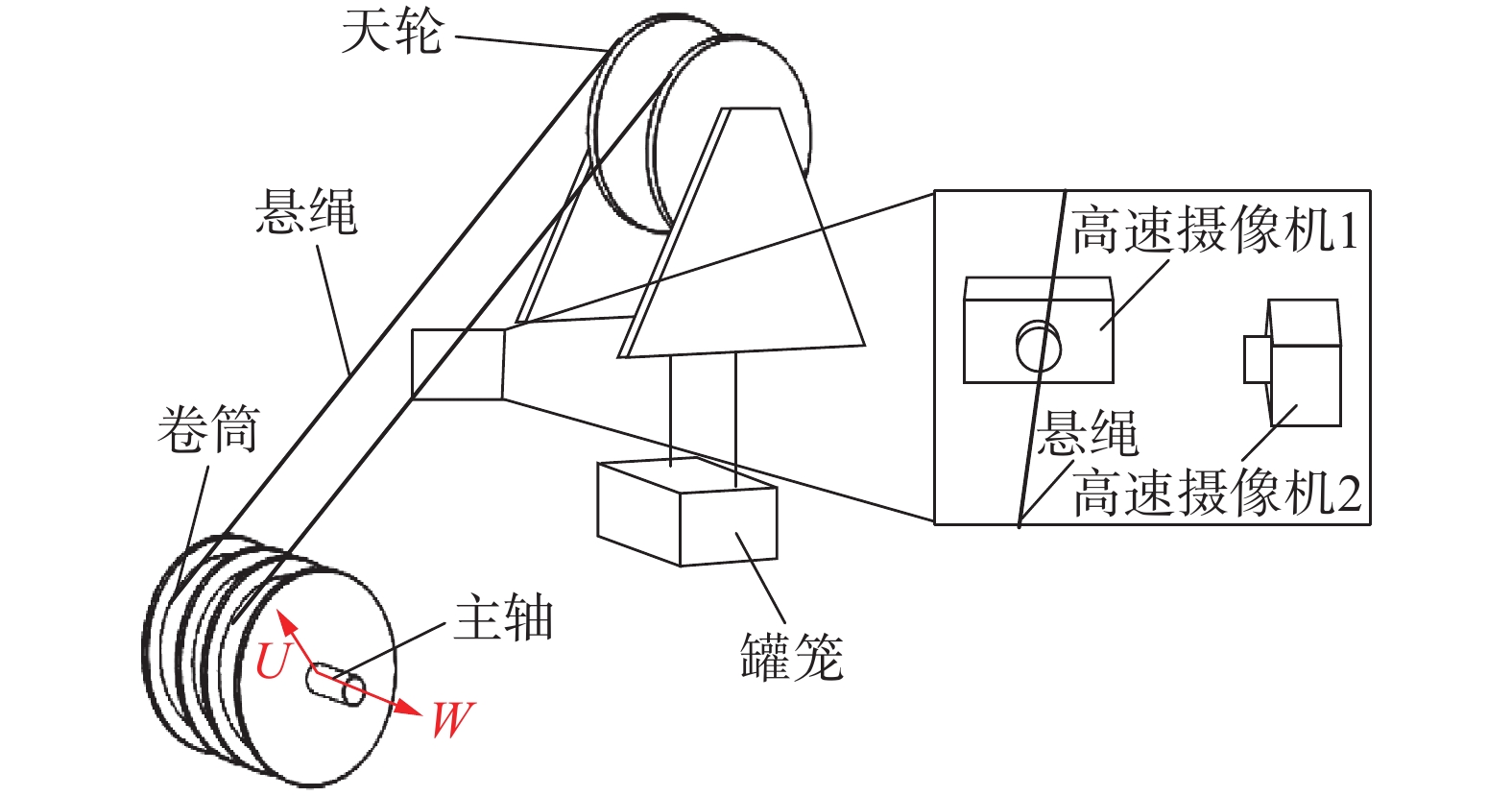
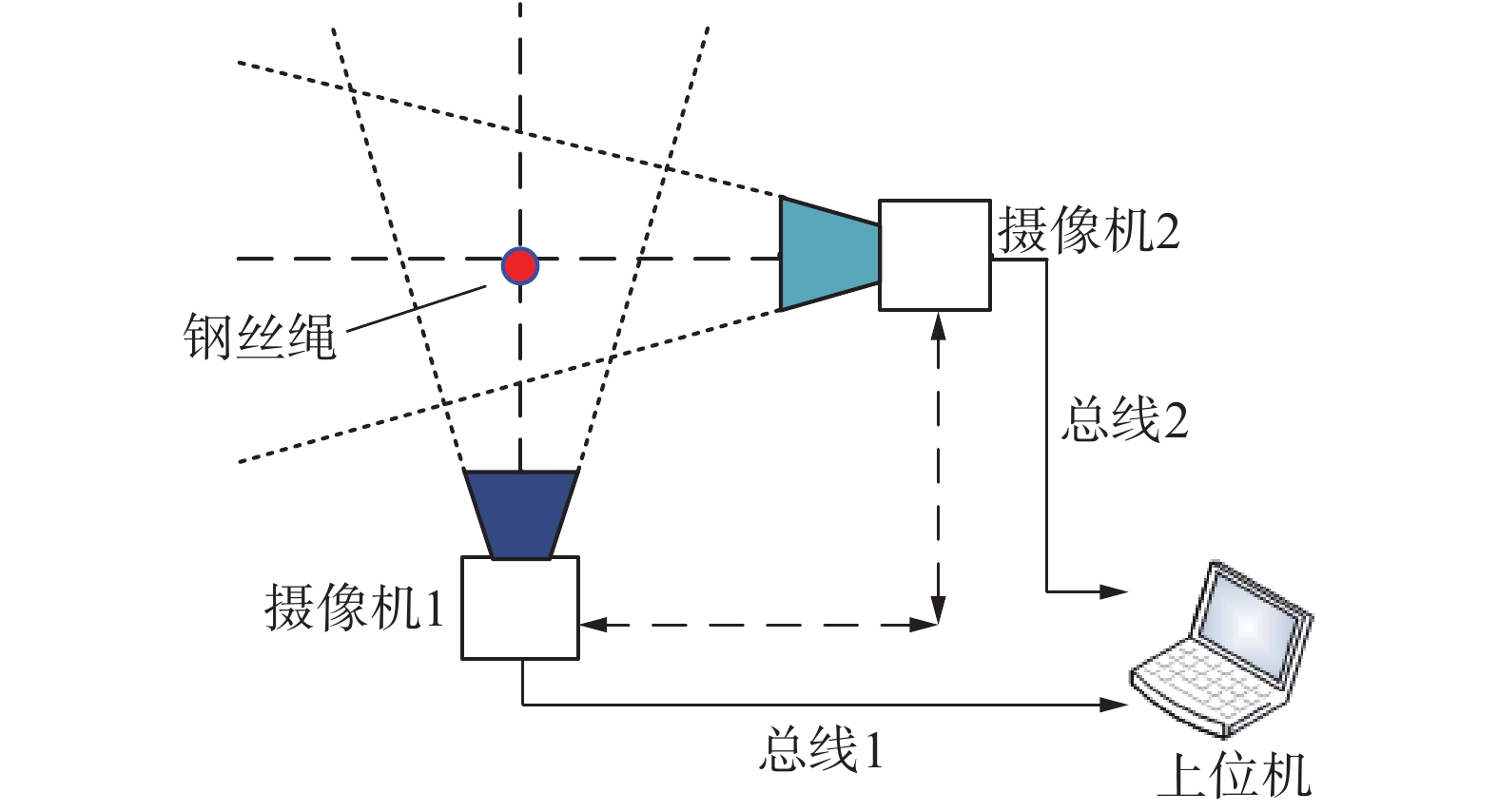
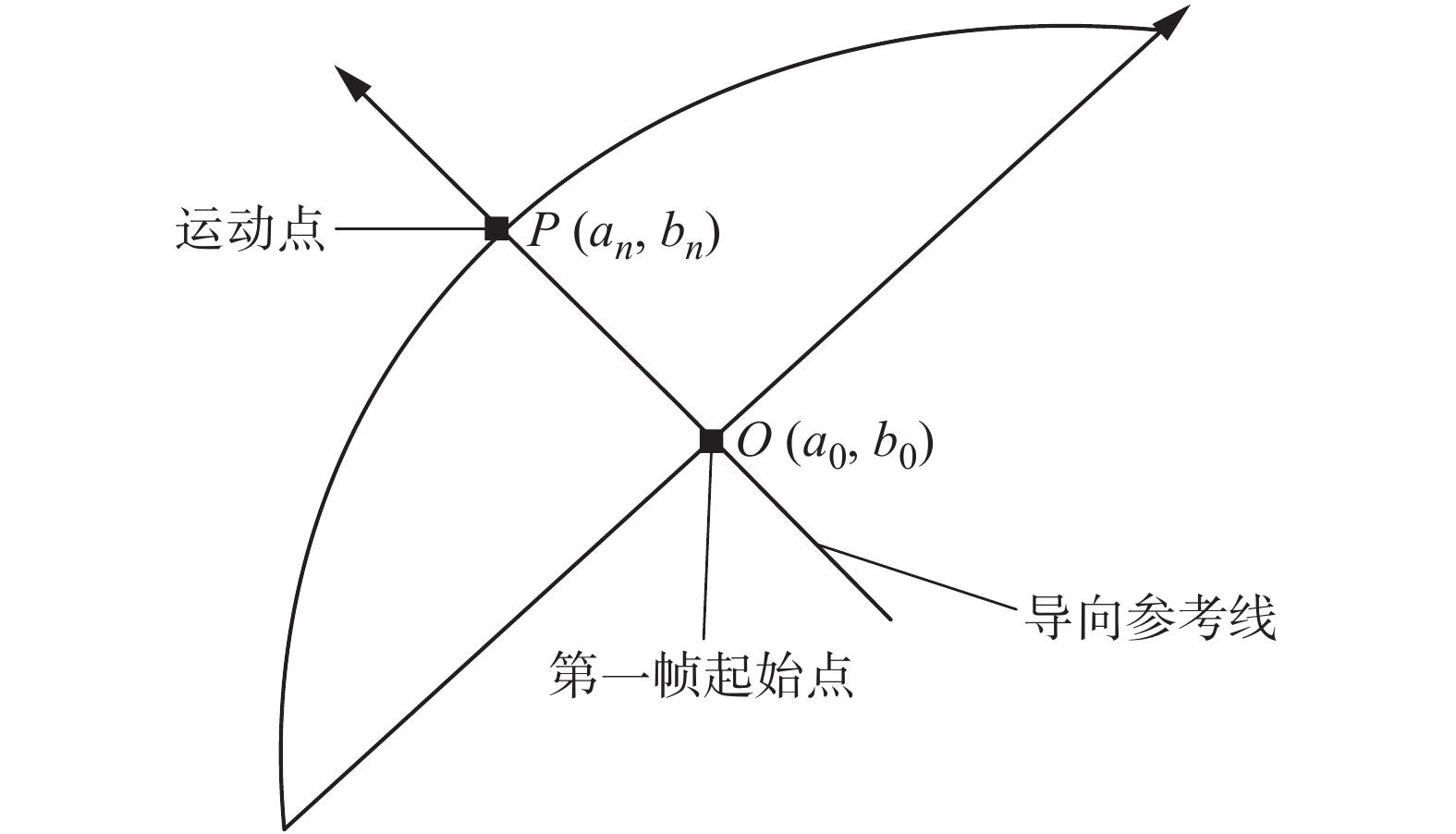
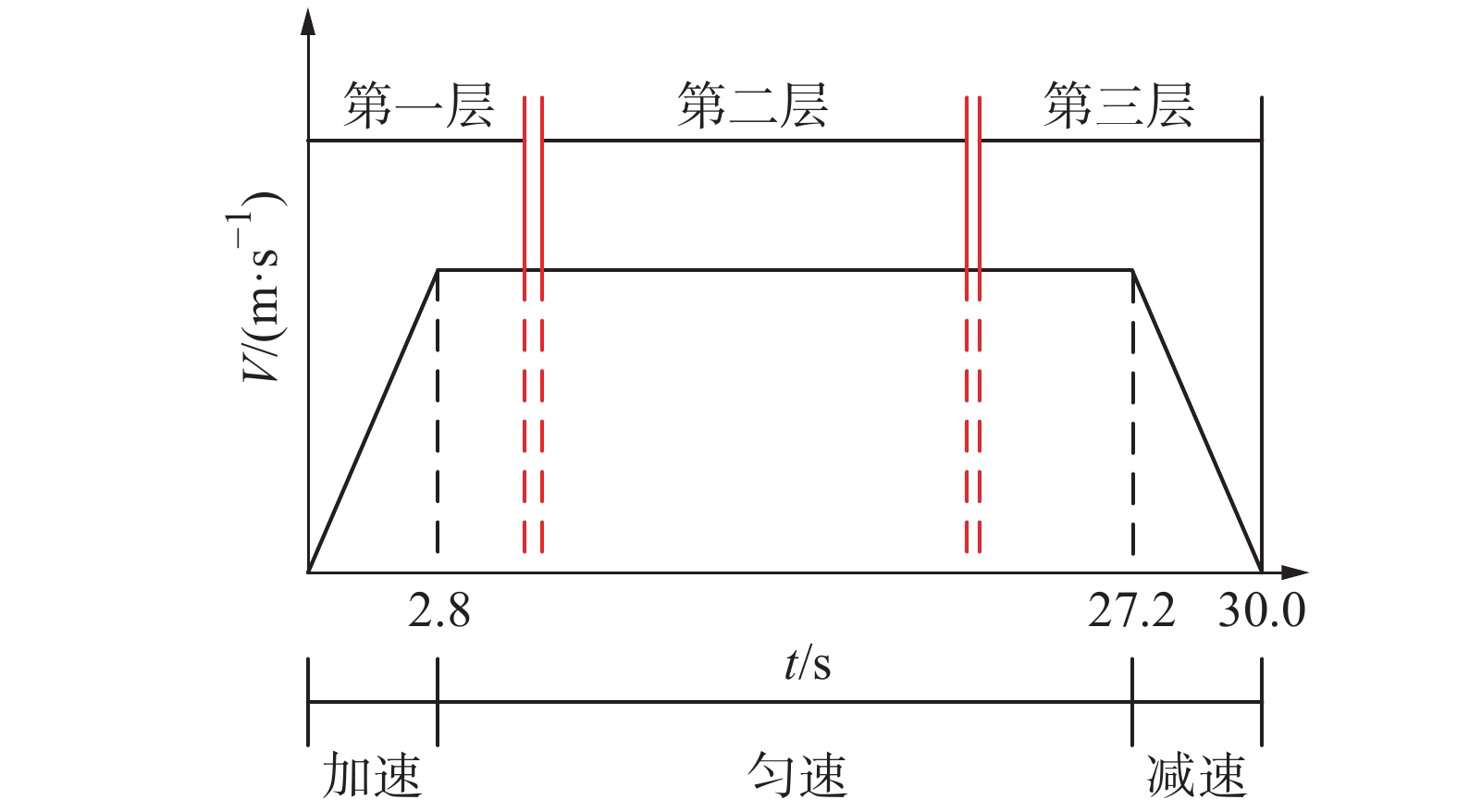
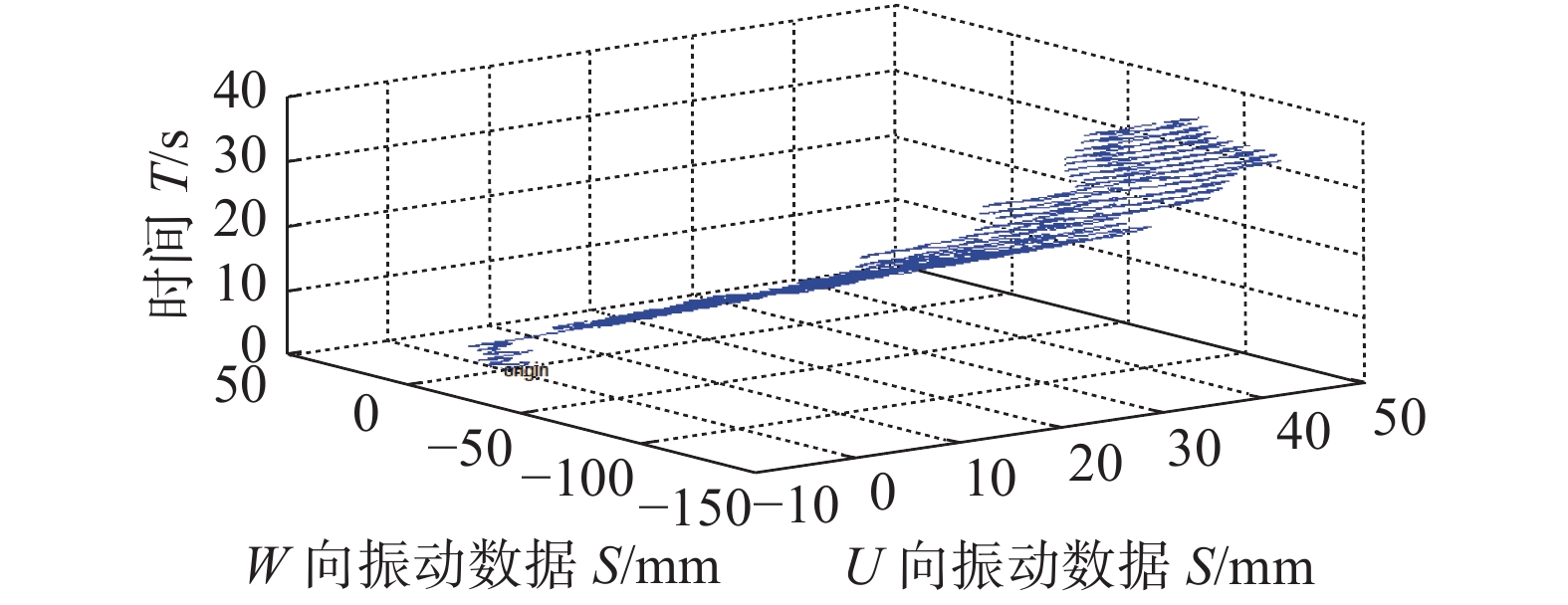
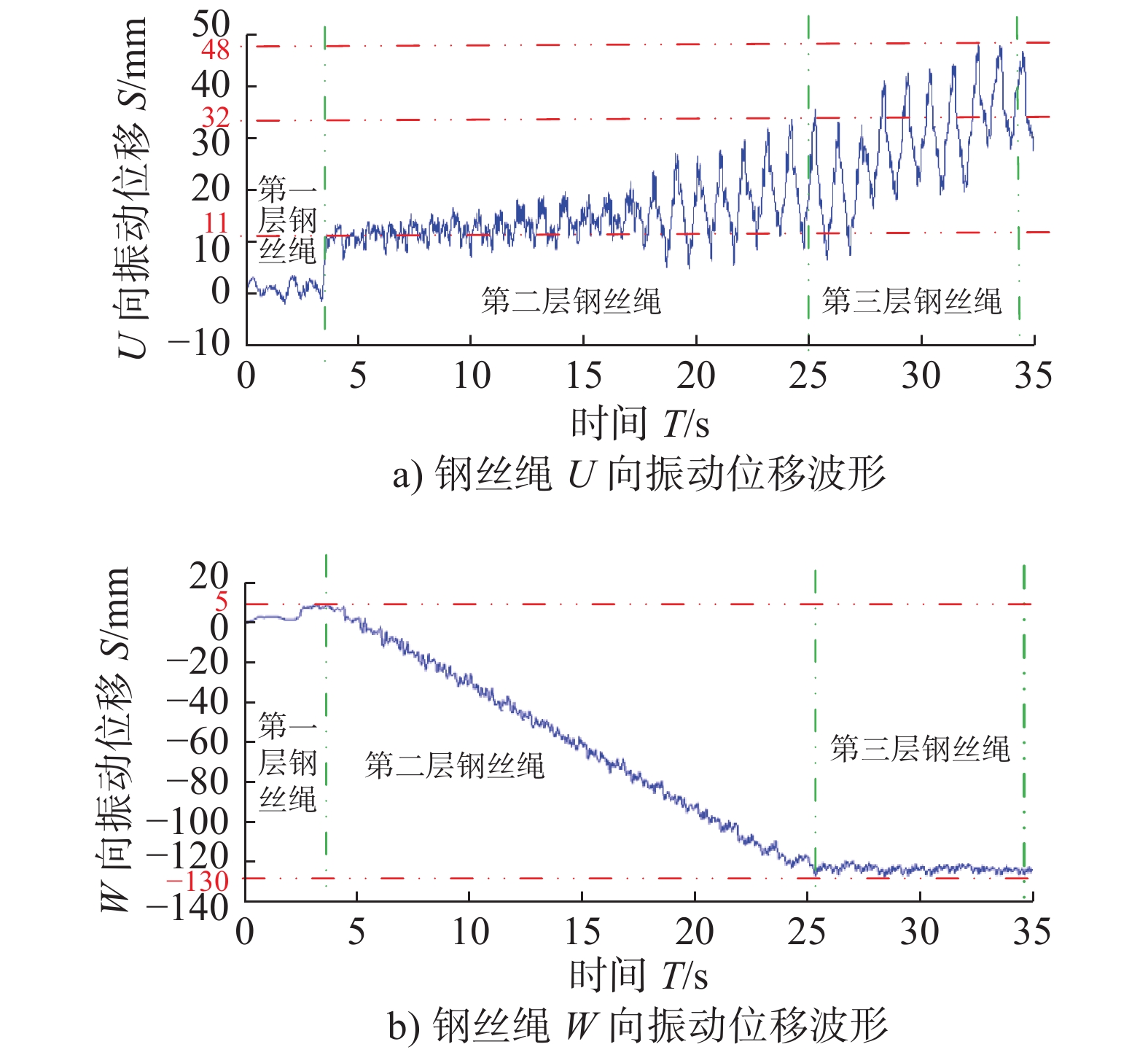
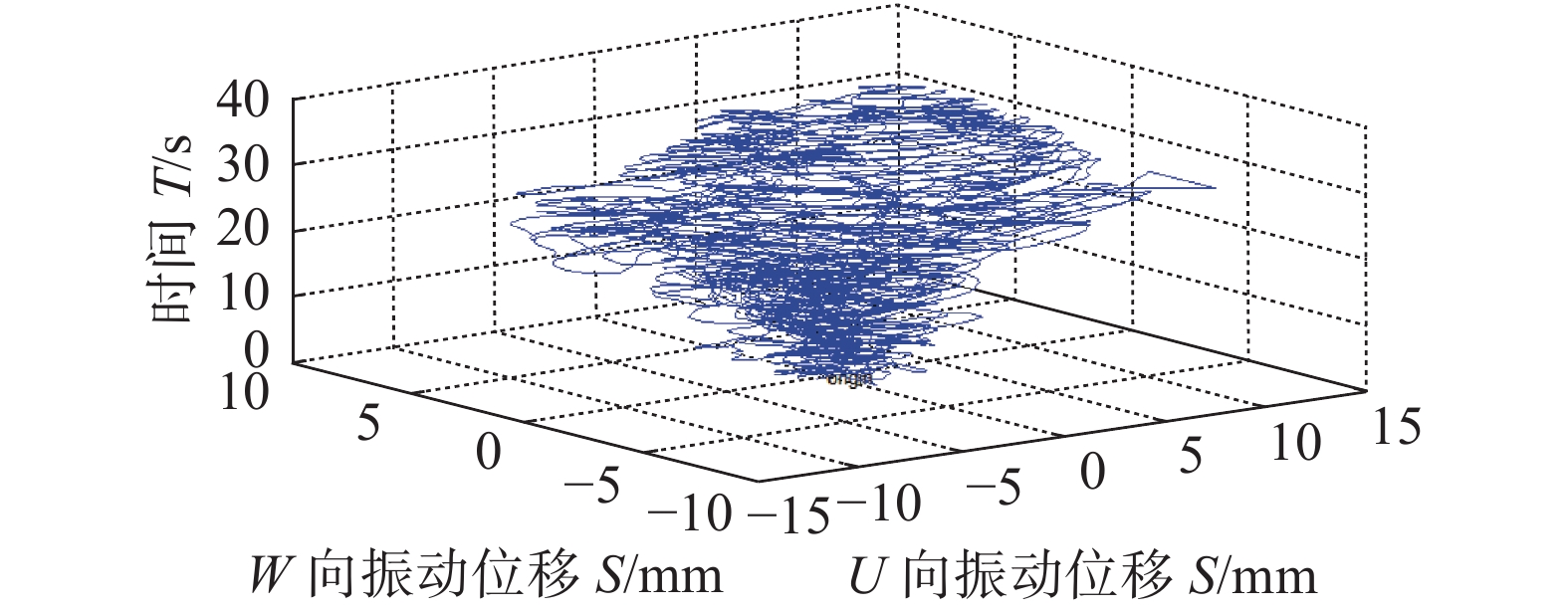
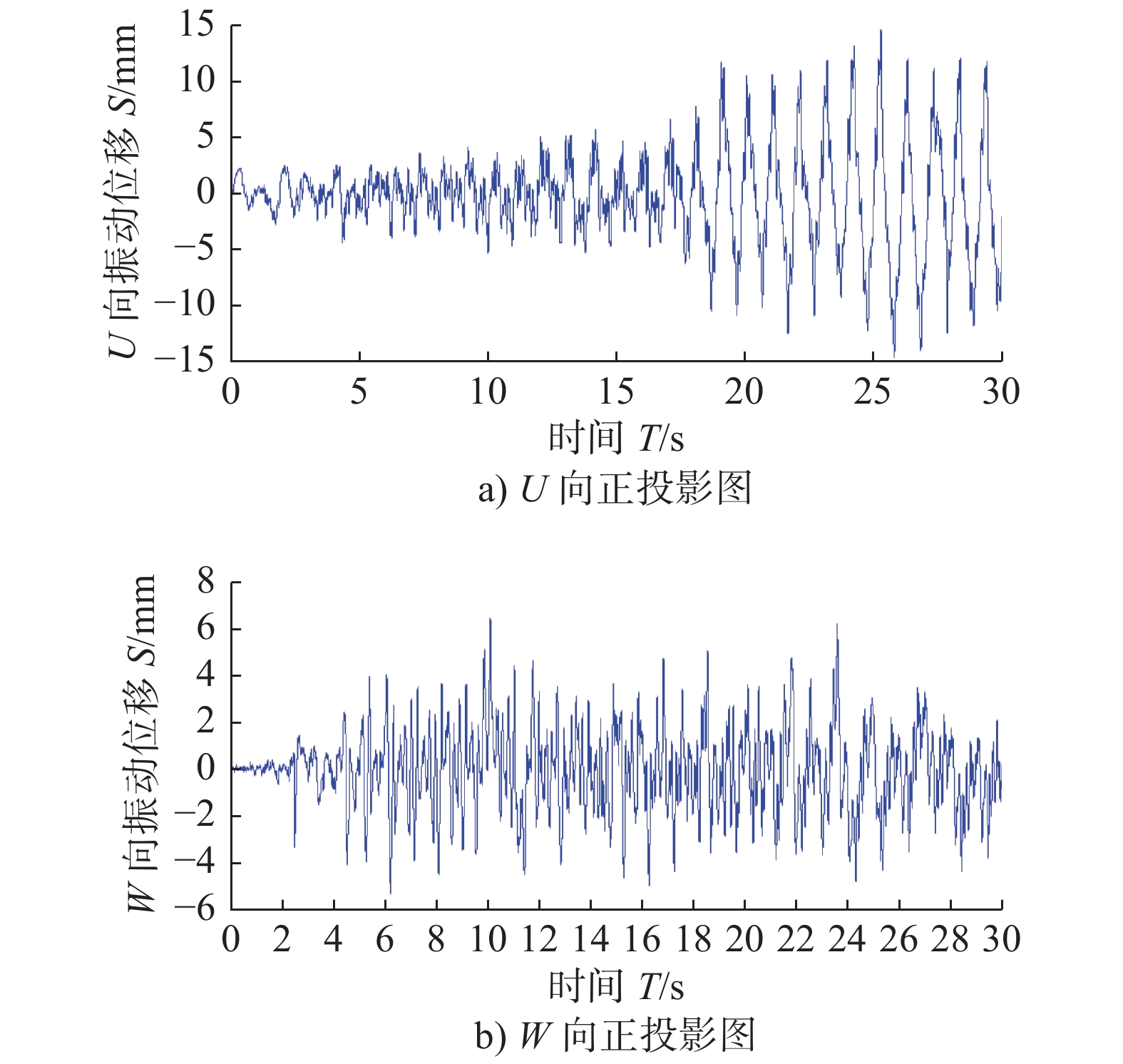
针对缠绕式提升机悬绳段钢丝绳横向空间振动开展测量方法研究,采用双高速摄像机采集悬绳空间横振的灰度图像,在设置感兴趣区域的基础上,采用自适应阈值设定的小波边缘提取算法,提高钢丝绳轮廓的检测精度,并进行二值化处理,通过矩阵求形心法得到区域内钢丝绳形心位置,并采用经验模态分解法去除钢丝绳排绳位移引起的周期性激励,从而得到了钢丝绳横向空间振动信号。为验证测量方法的正确性,在多绳缠绕式提升系统试验平台上开展试验研究,试验结果表明,研究的视觉检测方法能够快速、准确地实现钢丝绳横向空间振动信号的非接触检测。
针对缠绕式提升机悬绳段钢丝绳横向空间振动开展测量方法研究,采用双高速摄像机采集悬绳空间横振的灰度图像,在设置感兴趣区域的基础上,采用自适应阈值设定的小波边缘提取算法,提高钢丝绳轮廓的检测精度,并进行二值化处理,通过矩阵求形心法得到区域内钢丝绳形心位置,并采用经验模态分解法去除钢丝绳排绳位移引起的周期性激励,从而得到了钢丝绳横向空间振动信号。为验证测量方法的正确性,在多绳缠绕式提升系统试验平台上开展试验研究,试验结果表明,研究的视觉检测方法能够快速、准确地实现钢丝绳横向空间振动信号的非接触检测。


2020, 39(10): 1575-1579.
doi: 10.13433/j.cnki.1003-8728.20190300
摘要:
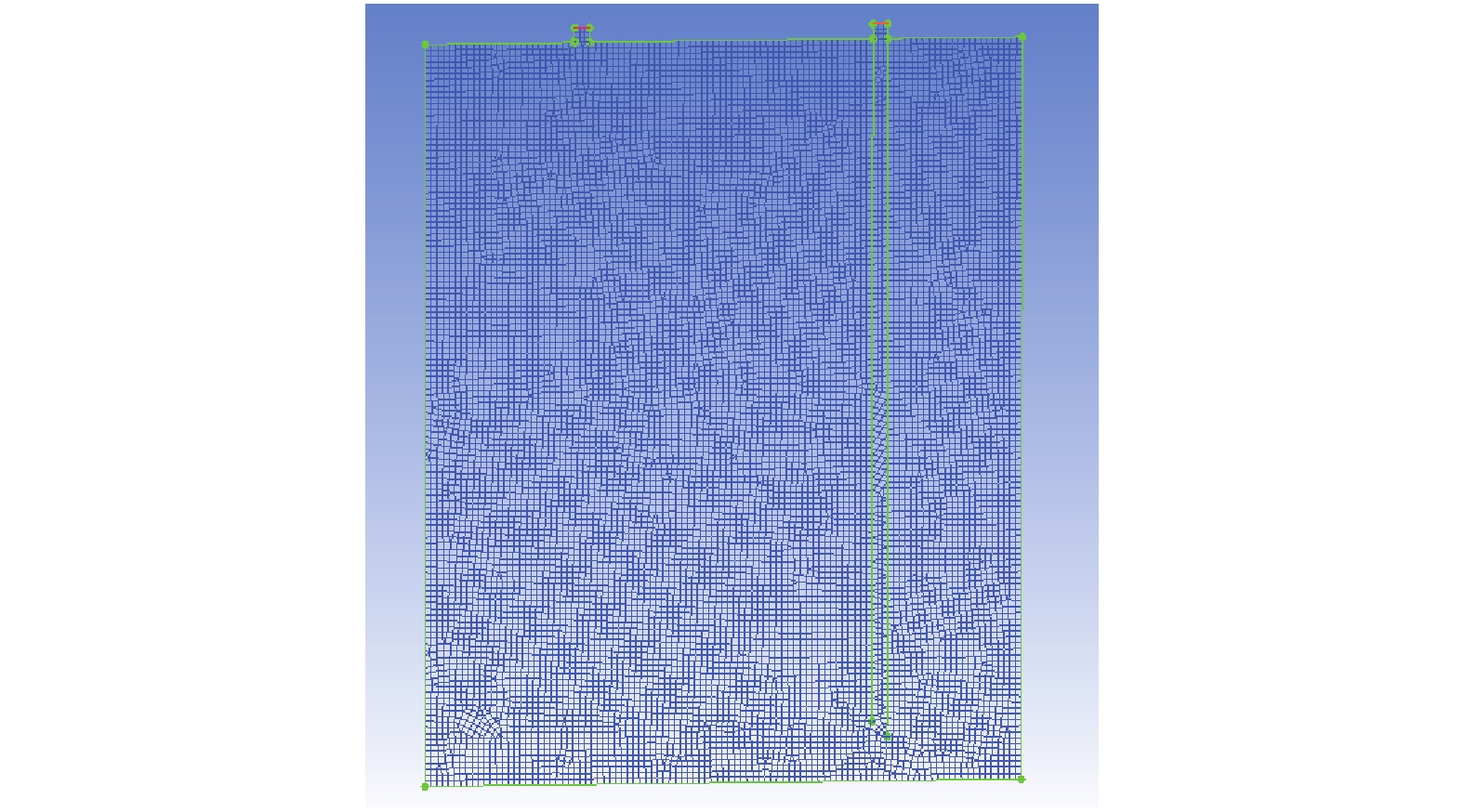
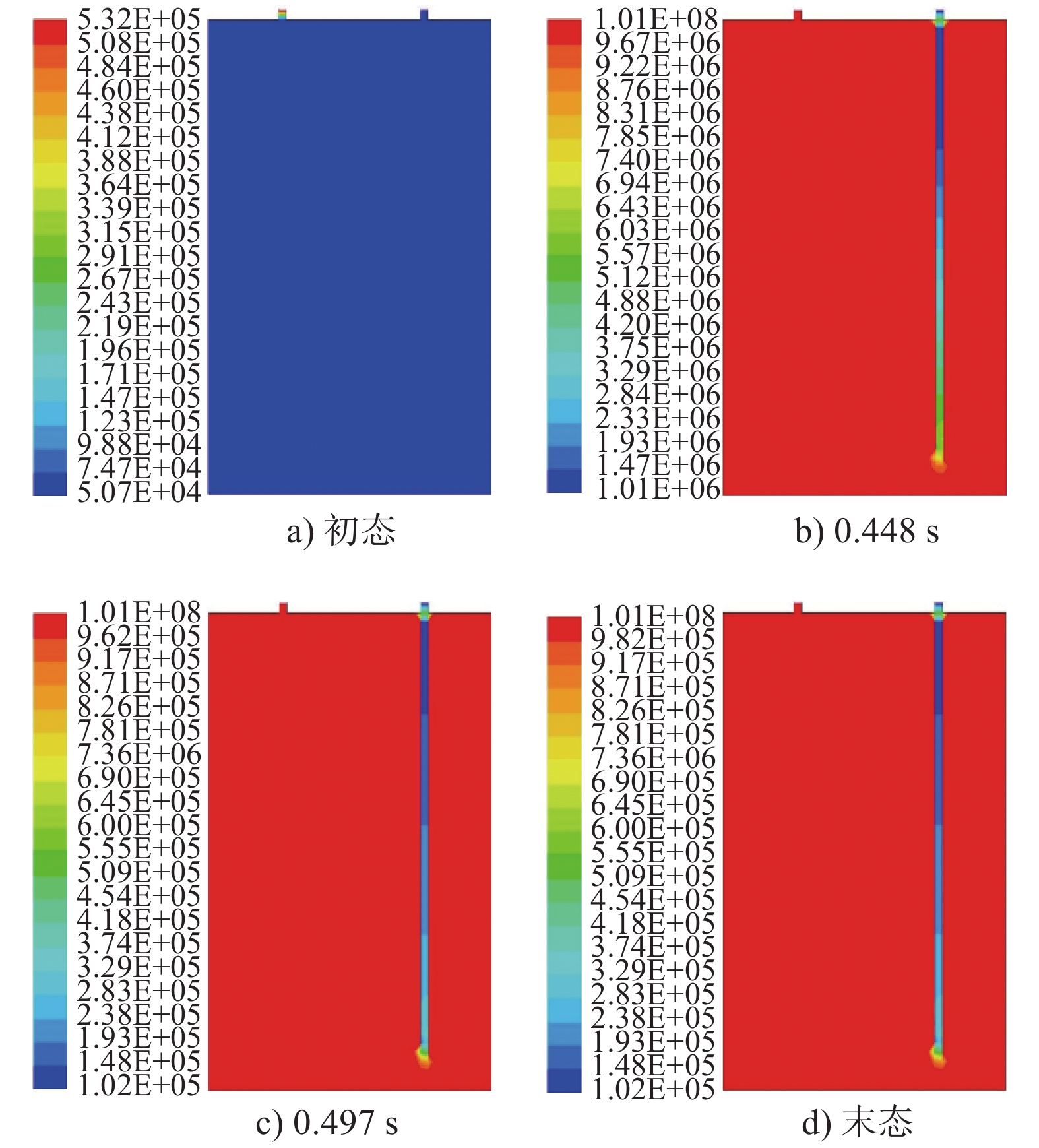
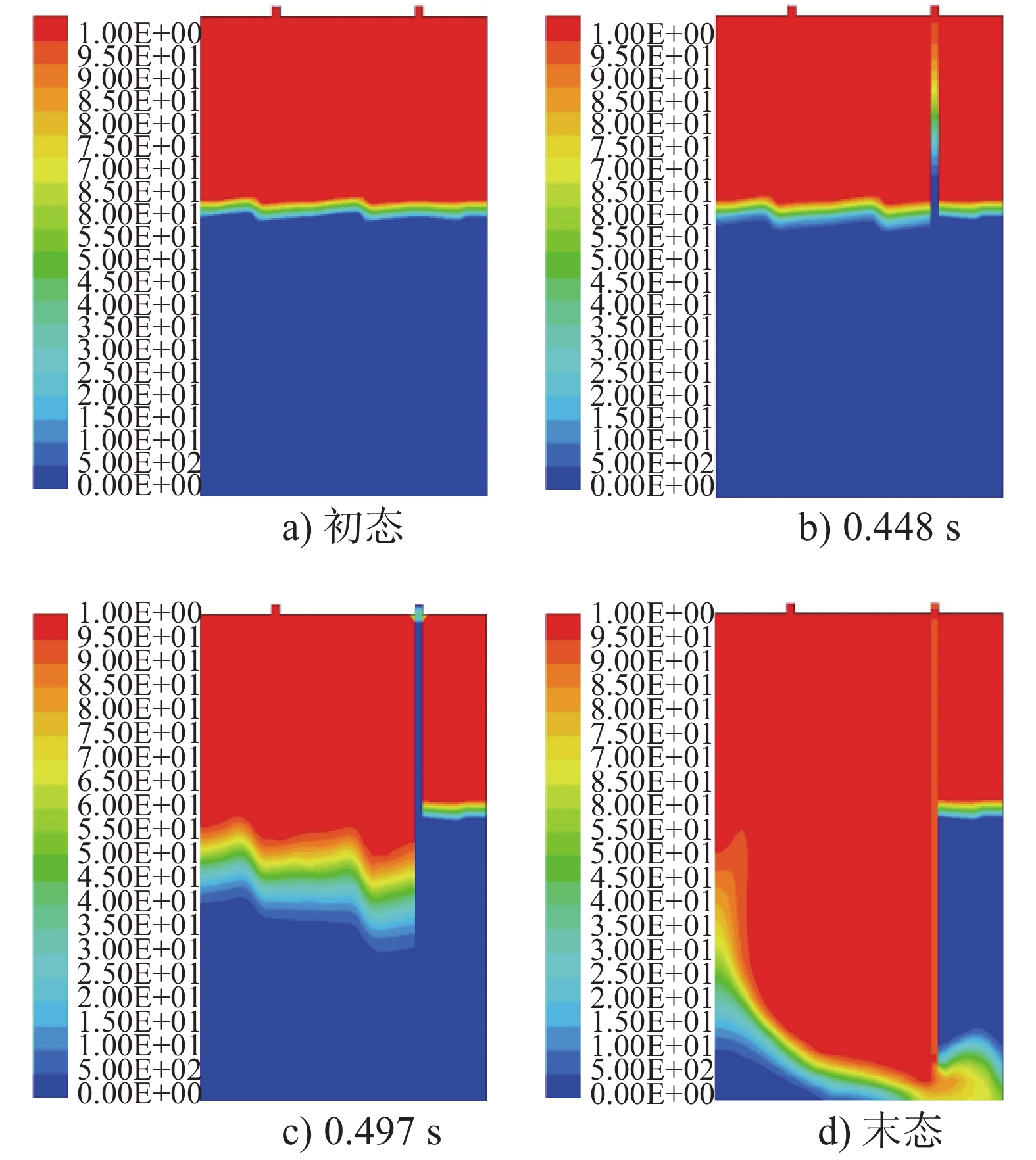
针对目前火箭发动机精清洗的常用方法,提出了一种60 L清洗容器的设计方法,通过容积计算、外形尺寸计算、强度计算、开孔补强计算、支腿校核计算等,完成图纸的绘制。基于Fluent数值模拟方法,对该清洗容器内流场特性进行仿真,得到全过程可视化压力场云图和速度场云图气液相图。同时,使用多项流模型中的VOF模型,捕捉整个容器内气-液相界面。模拟结果表明,数值模拟的预测与设计要求的预期结果比较一致,说明该设计可行性较高。
针对目前火箭发动机精清洗的常用方法,提出了一种60 L清洗容器的设计方法,通过容积计算、外形尺寸计算、强度计算、开孔补强计算、支腿校核计算等,完成图纸的绘制。基于Fluent数值模拟方法,对该清洗容器内流场特性进行仿真,得到全过程可视化压力场云图和速度场云图气液相图。同时,使用多项流模型中的VOF模型,捕捉整个容器内气-液相界面。模拟结果表明,数值模拟的预测与设计要求的预期结果比较一致,说明该设计可行性较高。


2020, 39(10): 1580-1586.
doi: 10.13433/j.cnki.1003-8728.20190306
摘要:
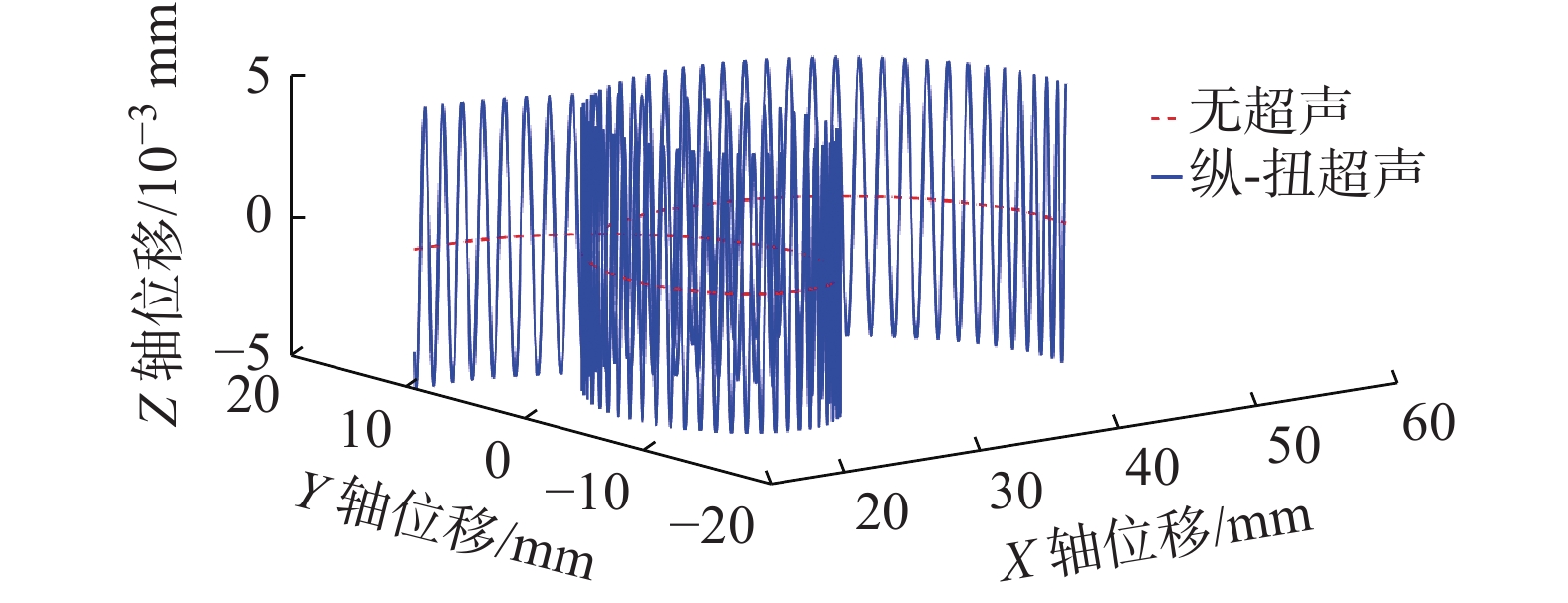
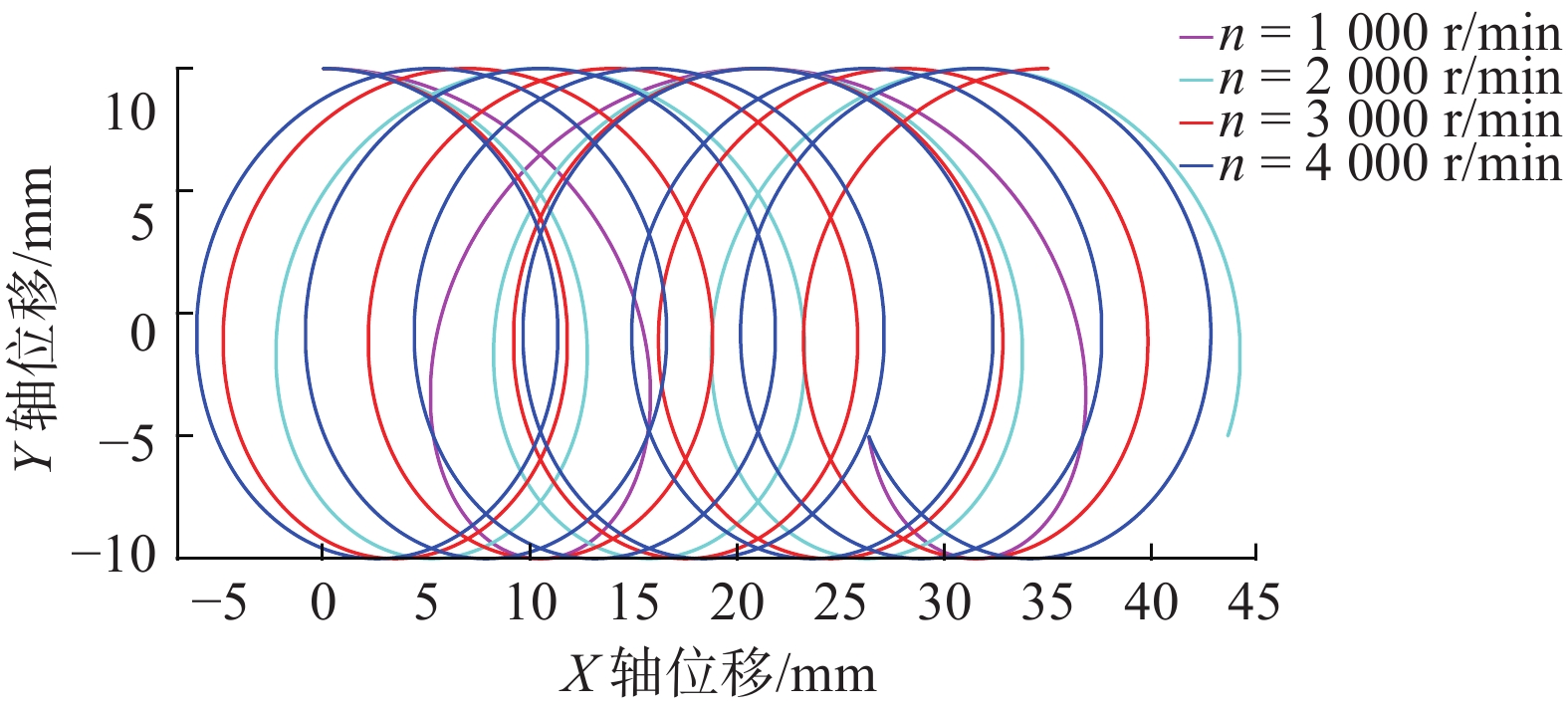
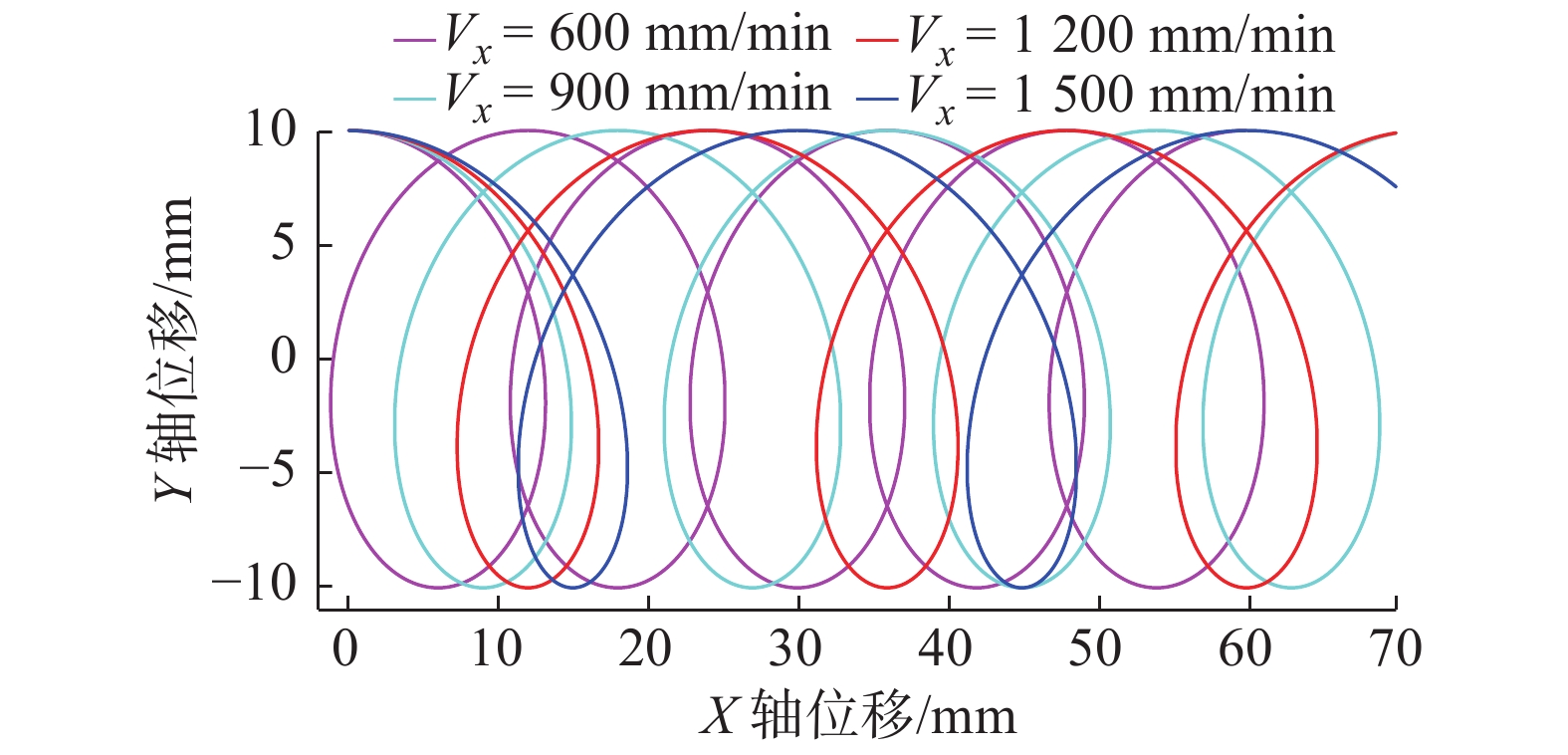
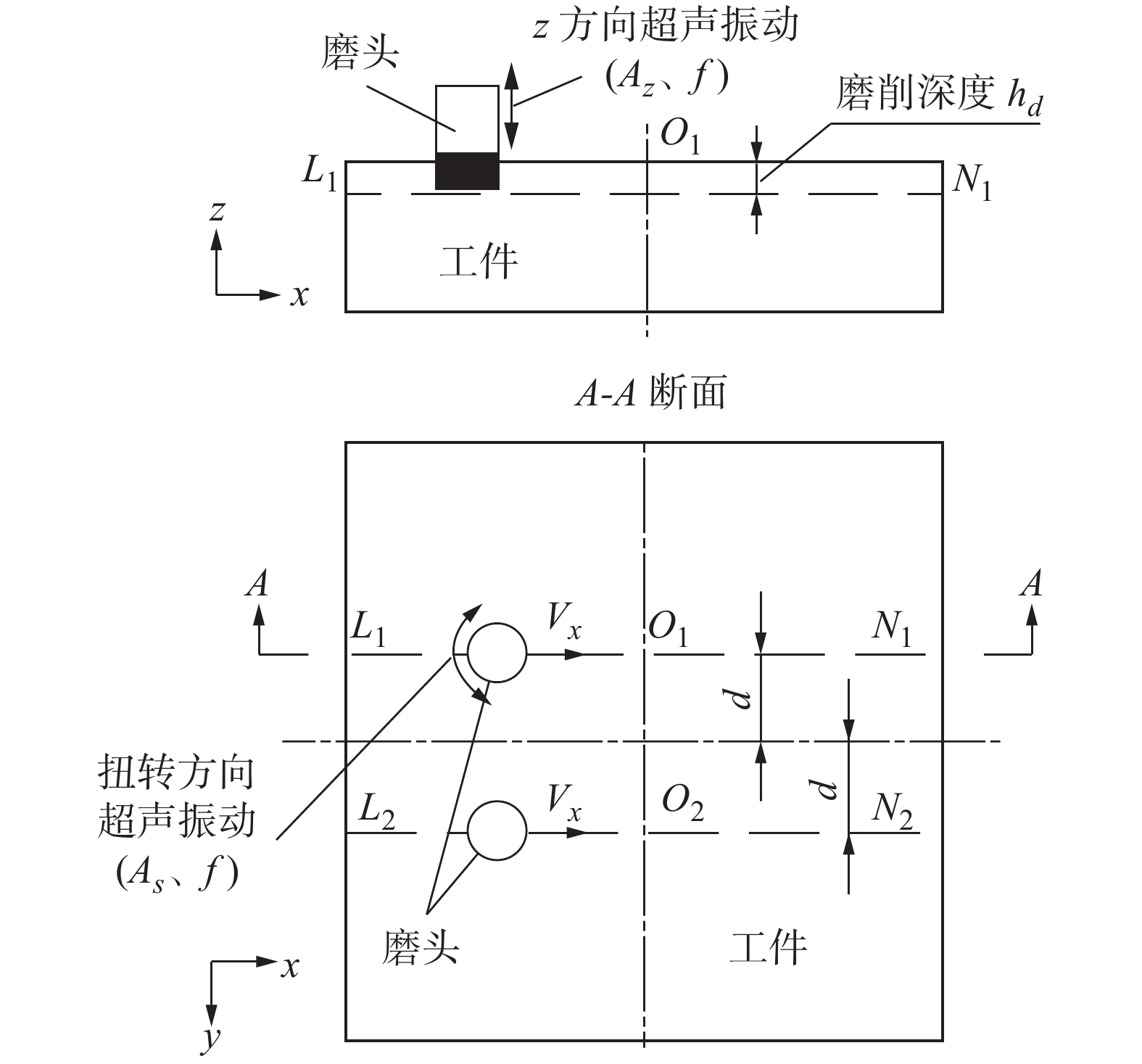
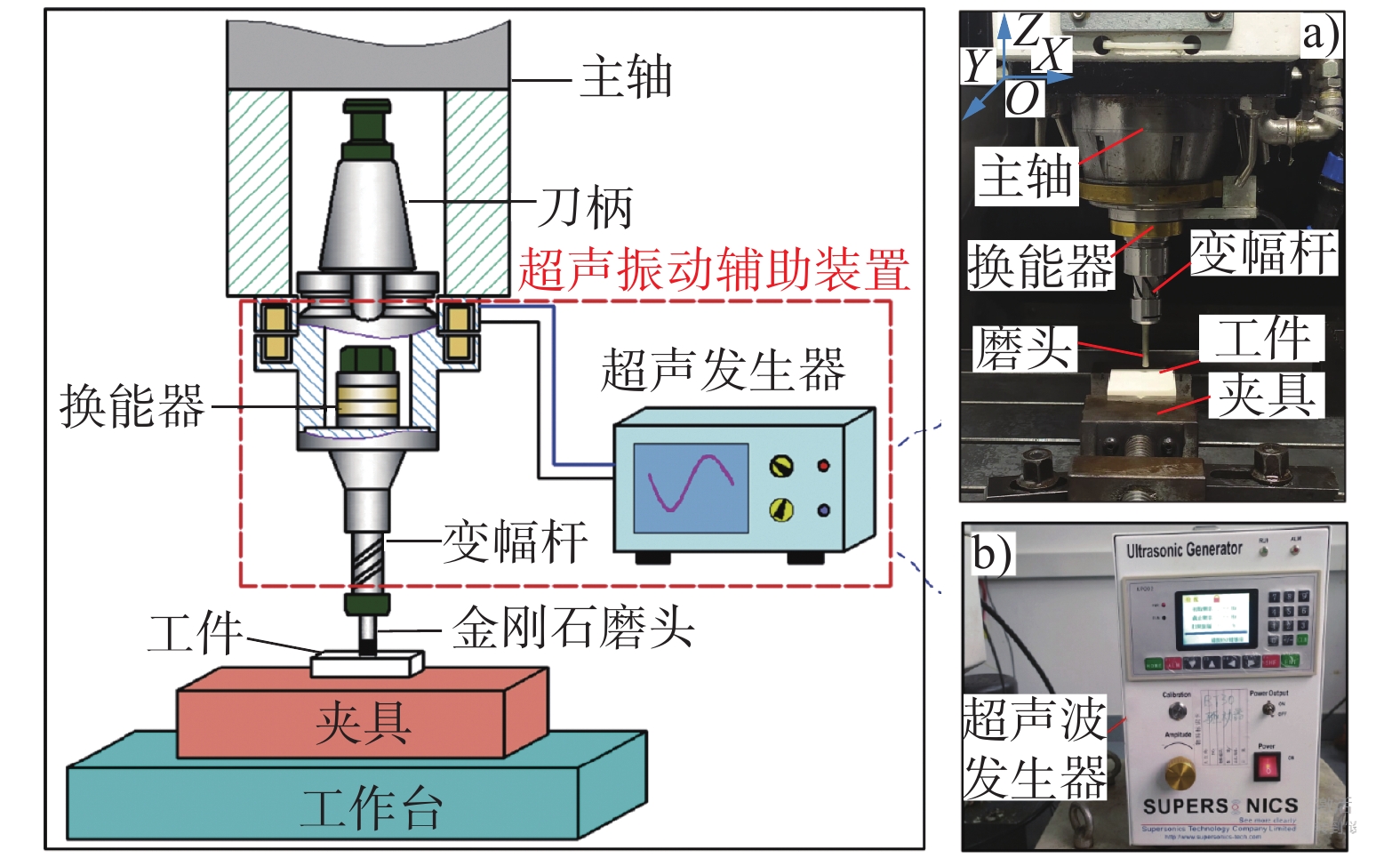
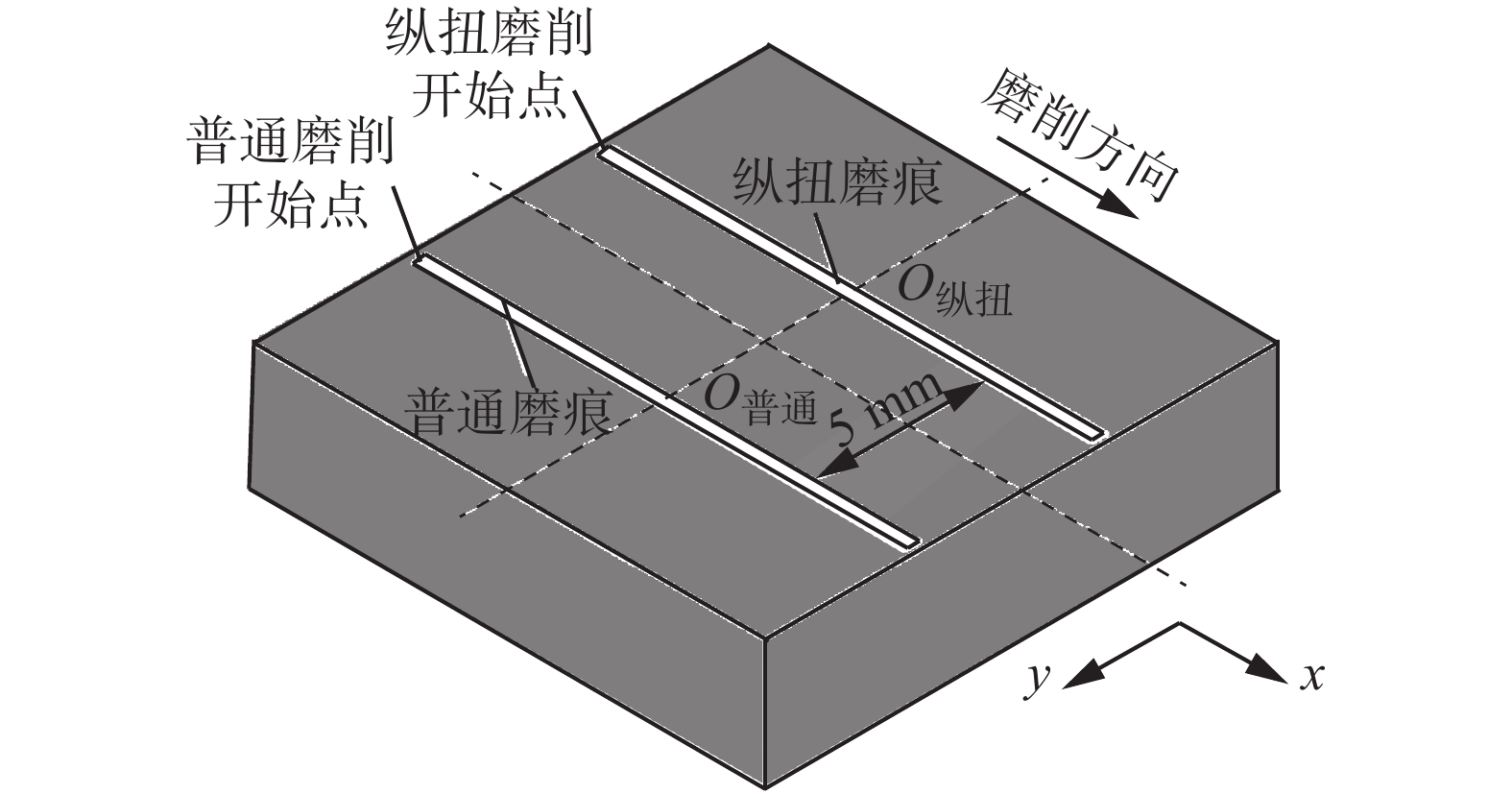
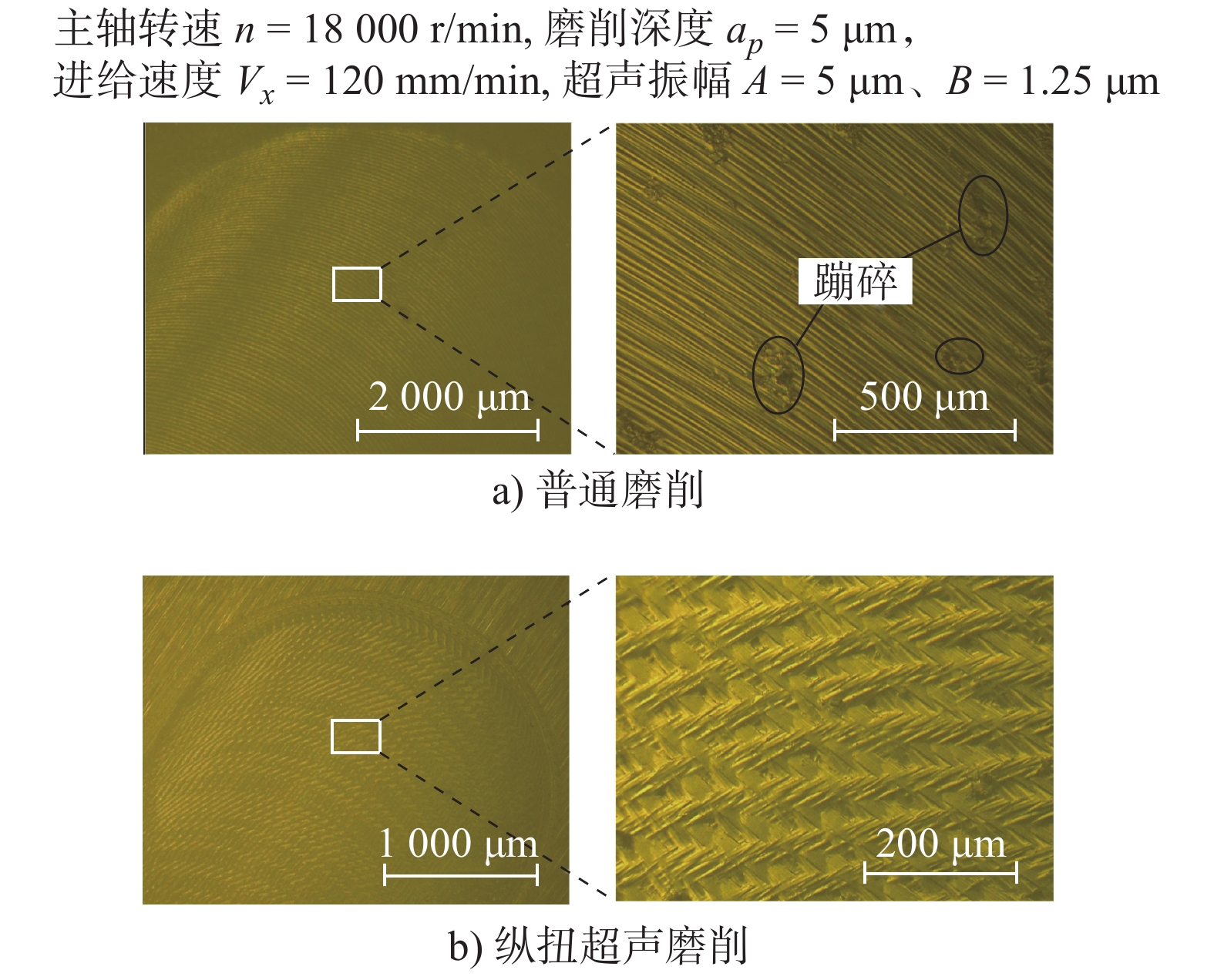
以氧化锆陶瓷为研究对象,基于纵扭超声矢量分解原理,建立了单颗磨粒运动轨迹数学模型。借助MATLAB仿真软件,对比分析了普通磨削与纵扭超声磨削的运动轨迹,探讨了工艺参数对纵扭超声磨削运动轨迹的影响规律;同时通过普通磨削和纵扭超声磨削试验,研究了工艺参数对氧化锆陶瓷表面形貌的影响。结果表明:普通磨削与纵扭超声磨削运动轨迹仿真结果均与试验结果相吻合,验证了该运动轨迹数学模型的正确性;与普通磨削相比,纵扭超声磨削磨痕均匀、沟槽光滑,工件加工表面形貌得到明显改善。
以氧化锆陶瓷为研究对象,基于纵扭超声矢量分解原理,建立了单颗磨粒运动轨迹数学模型。借助MATLAB仿真软件,对比分析了普通磨削与纵扭超声磨削的运动轨迹,探讨了工艺参数对纵扭超声磨削运动轨迹的影响规律;同时通过普通磨削和纵扭超声磨削试验,研究了工艺参数对氧化锆陶瓷表面形貌的影响。结果表明:普通磨削与纵扭超声磨削运动轨迹仿真结果均与试验结果相吻合,验证了该运动轨迹数学模型的正确性;与普通磨削相比,纵扭超声磨削磨痕均匀、沟槽光滑,工件加工表面形貌得到明显改善。




2020, 39(10): 1587-1592.
doi: 10.13433/j.cnki.1003-8728.20190307
摘要:
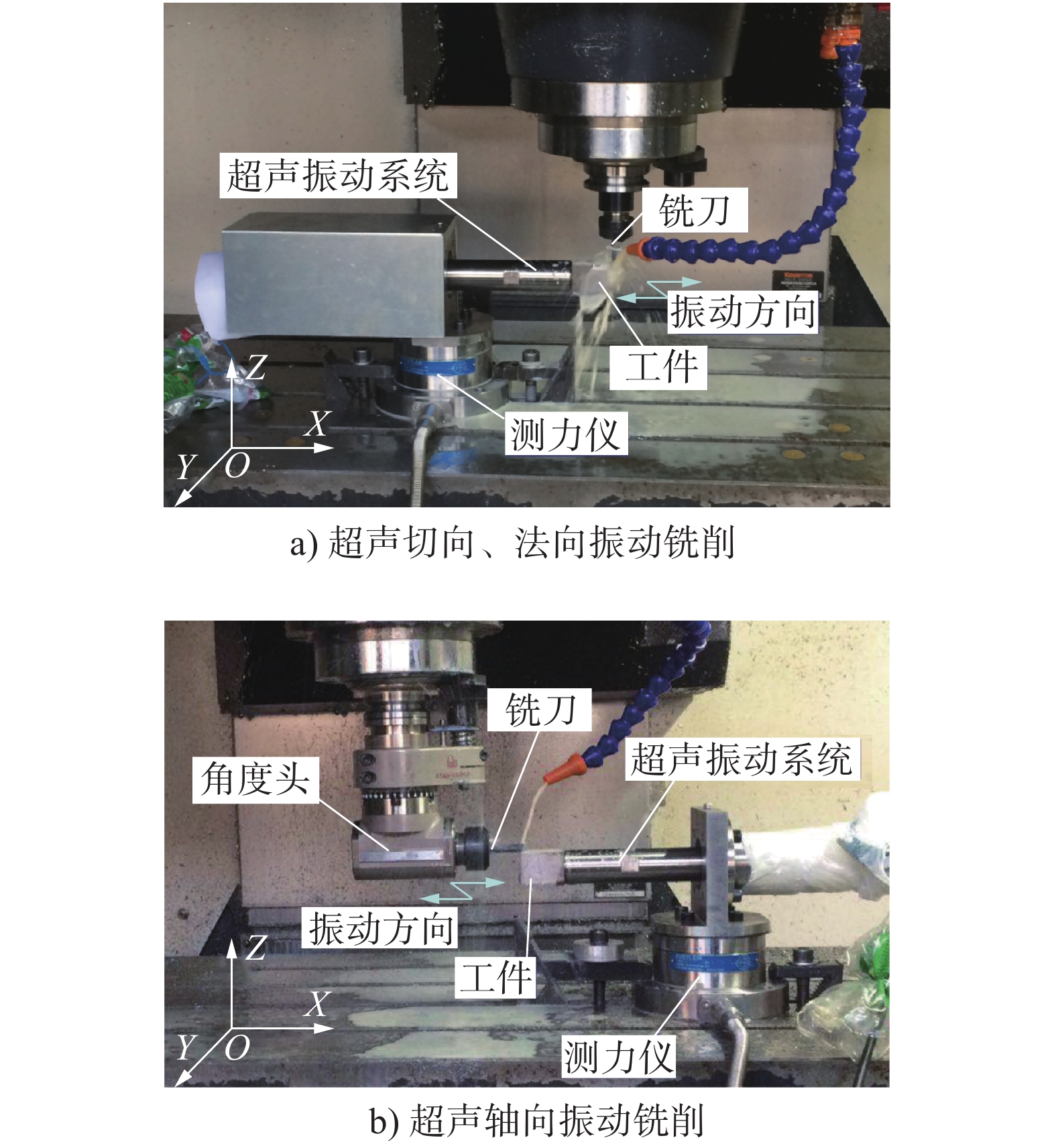
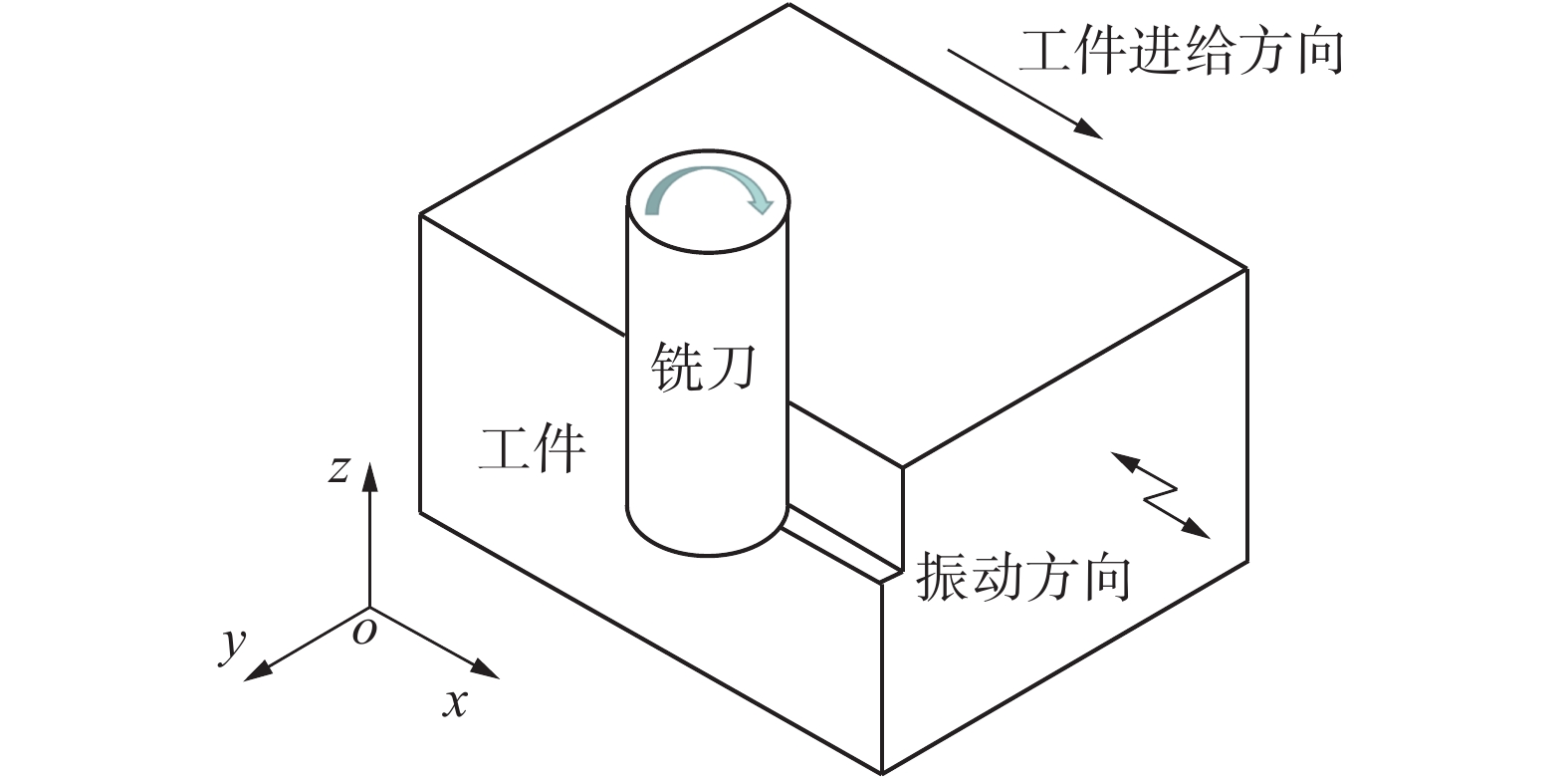
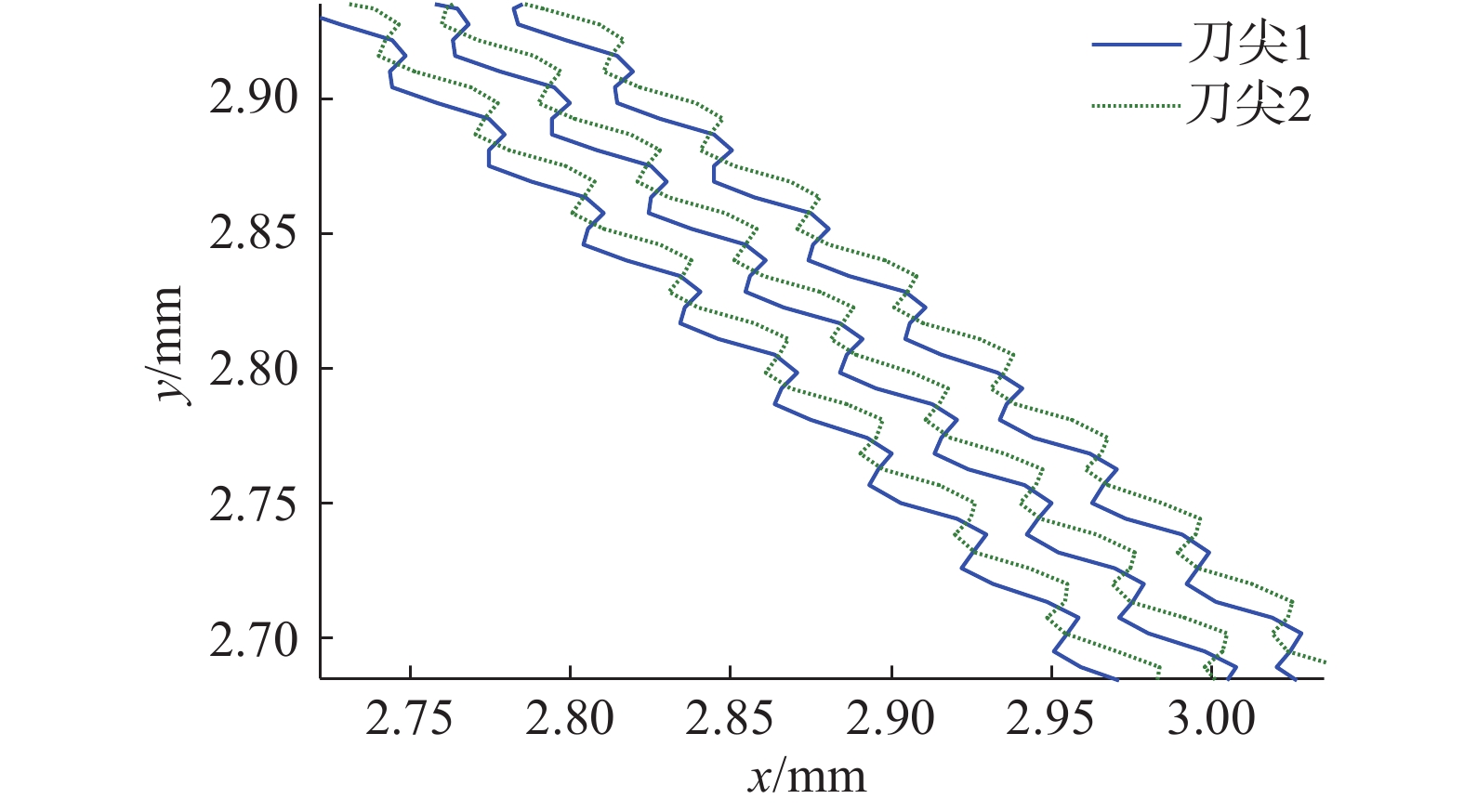
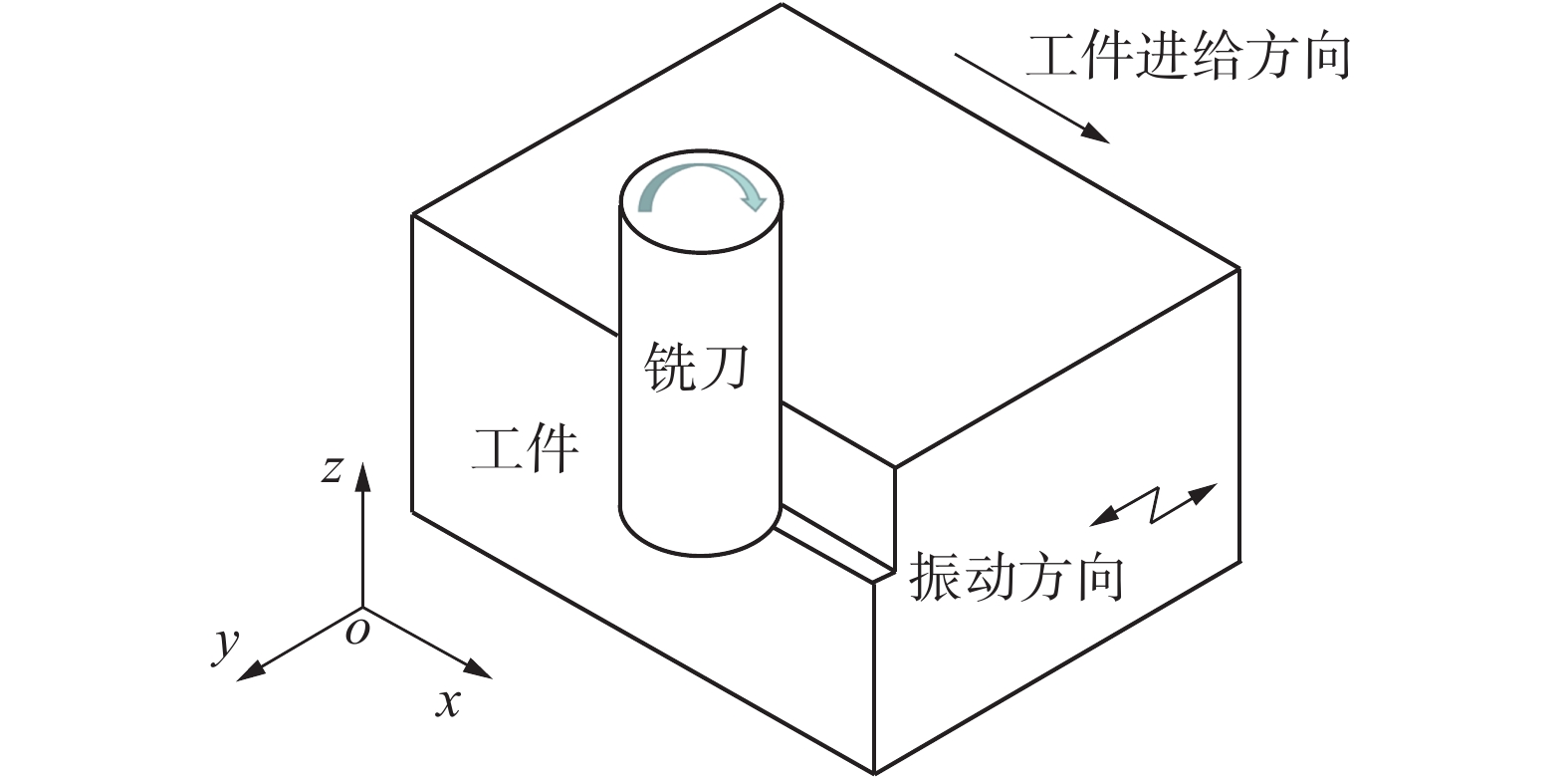
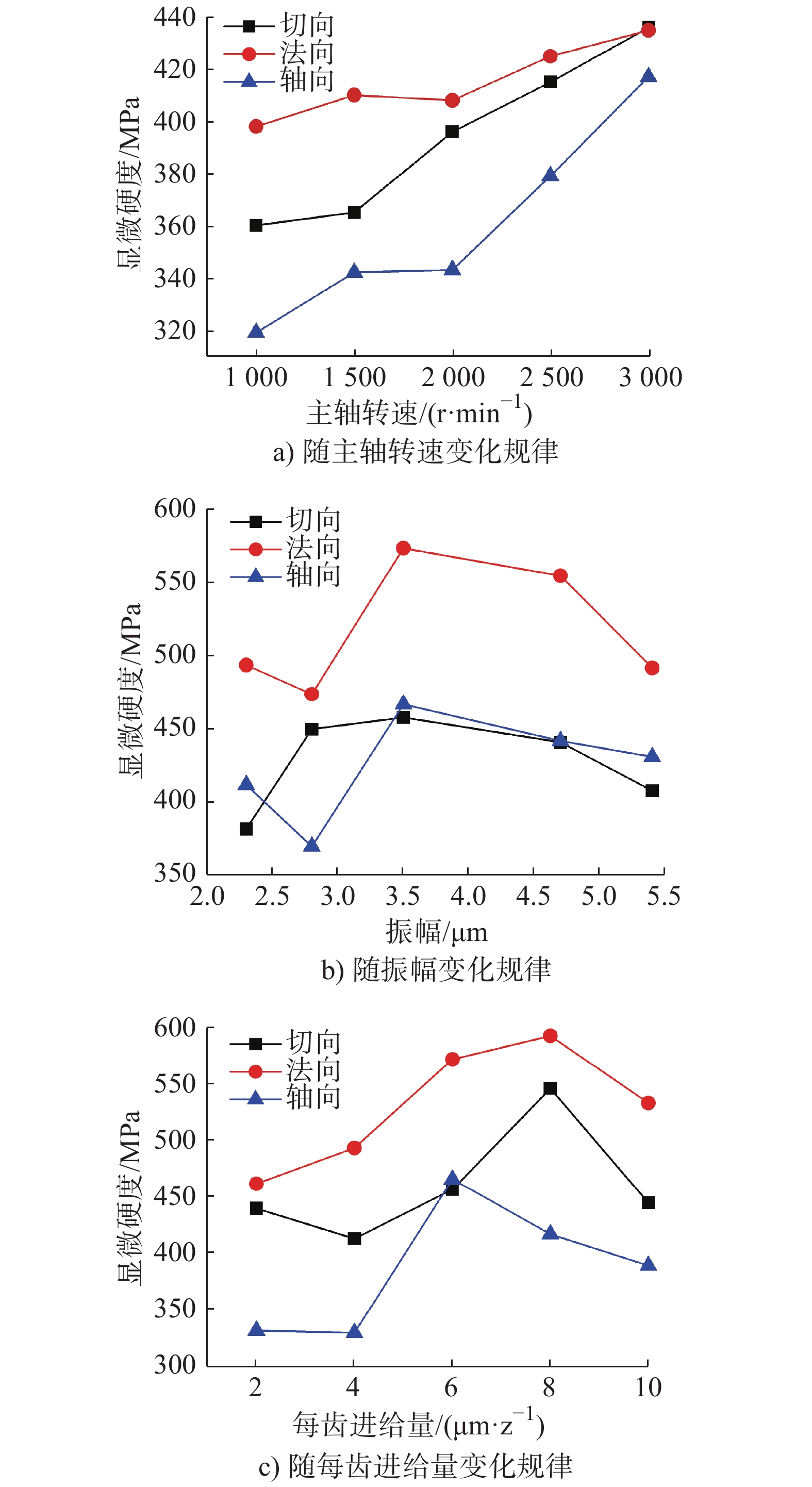
超声振动铣削是一种公认的先进切削技术,在难加工材料铣削方面具有独特的优势。然而超声振动铣削优势的发挥程度与工艺参数的选择密切相关。表面显微硬度是零件表面质量的重要衡量指标,直接影响到零件的耐磨性和使用性能。为了充分揭示超声振动铣削的工艺参数对表面显微硬度的影响规律,本文通过给工件施加超声振动的方式,开展了不同振动方向下的TC4钛合金超声振动侧铣平面试验,分析了振动方向、振幅、铣削参数对加工表面显微硬度的影响规律。结果表明:法向振动铣削得到的工件表面显微硬度大于切向和轴向振动;随着主轴转速的增加3个振动方向铣削后的表面显微硬度都呈现出上升的趋势。
超声振动铣削是一种公认的先进切削技术,在难加工材料铣削方面具有独特的优势。然而超声振动铣削优势的发挥程度与工艺参数的选择密切相关。表面显微硬度是零件表面质量的重要衡量指标,直接影响到零件的耐磨性和使用性能。为了充分揭示超声振动铣削的工艺参数对表面显微硬度的影响规律,本文通过给工件施加超声振动的方式,开展了不同振动方向下的TC4钛合金超声振动侧铣平面试验,分析了振动方向、振幅、铣削参数对加工表面显微硬度的影响规律。结果表明:法向振动铣削得到的工件表面显微硬度大于切向和轴向振动;随着主轴转速的增加3个振动方向铣削后的表面显微硬度都呈现出上升的趋势。





2020, 39(10): 1593-1599.
doi: 10.13433/j.cnki.1003-8728.20190301
摘要:
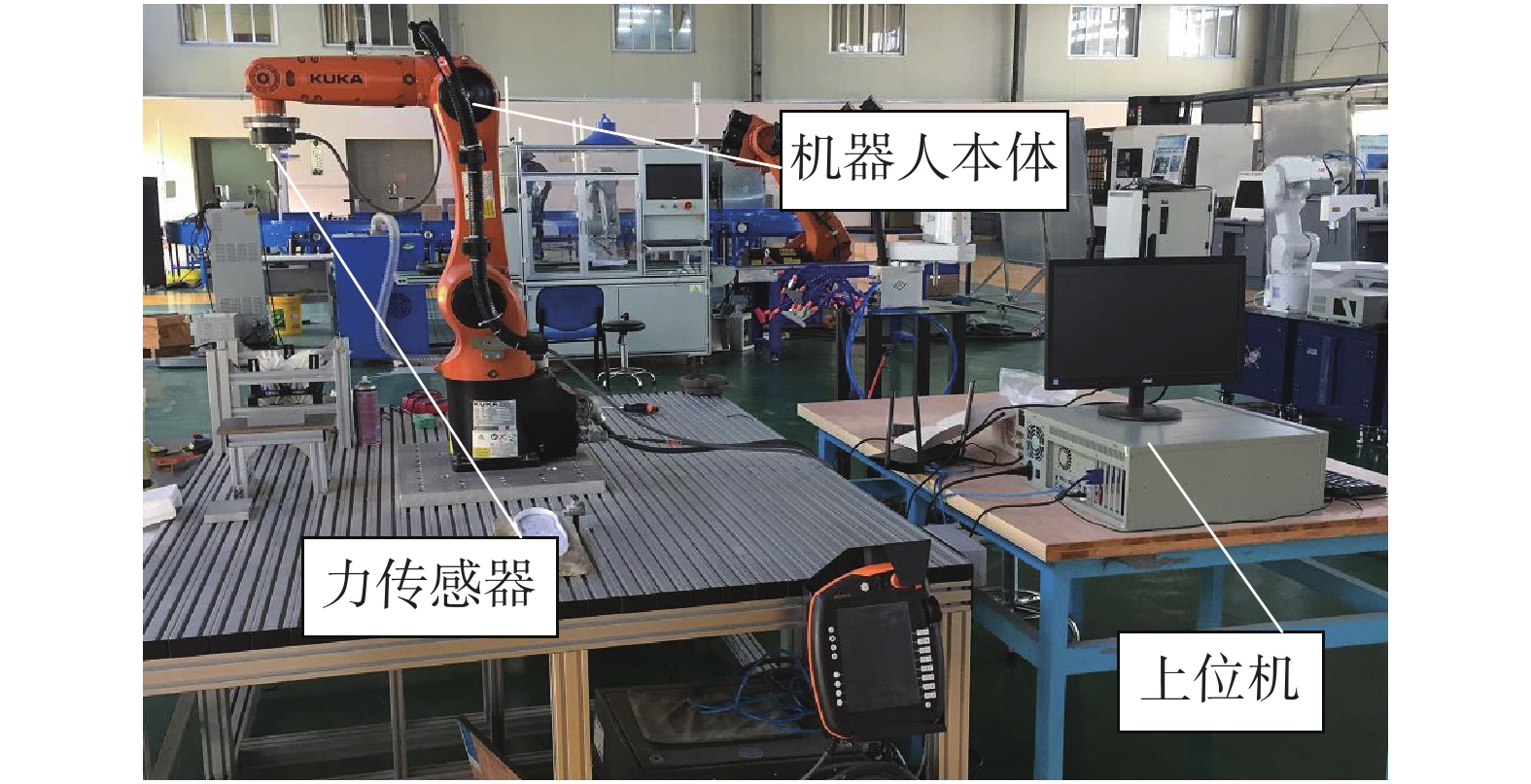
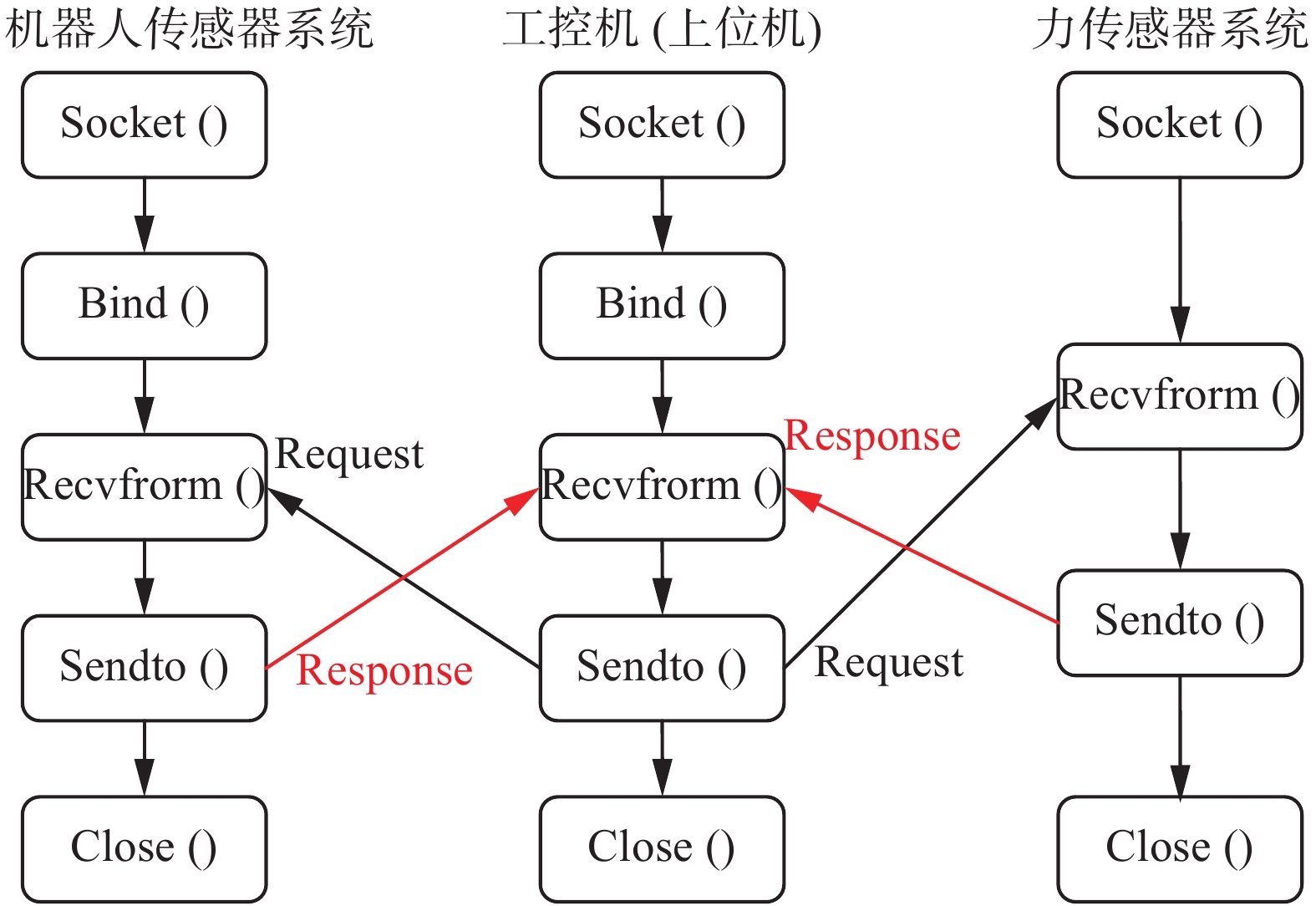
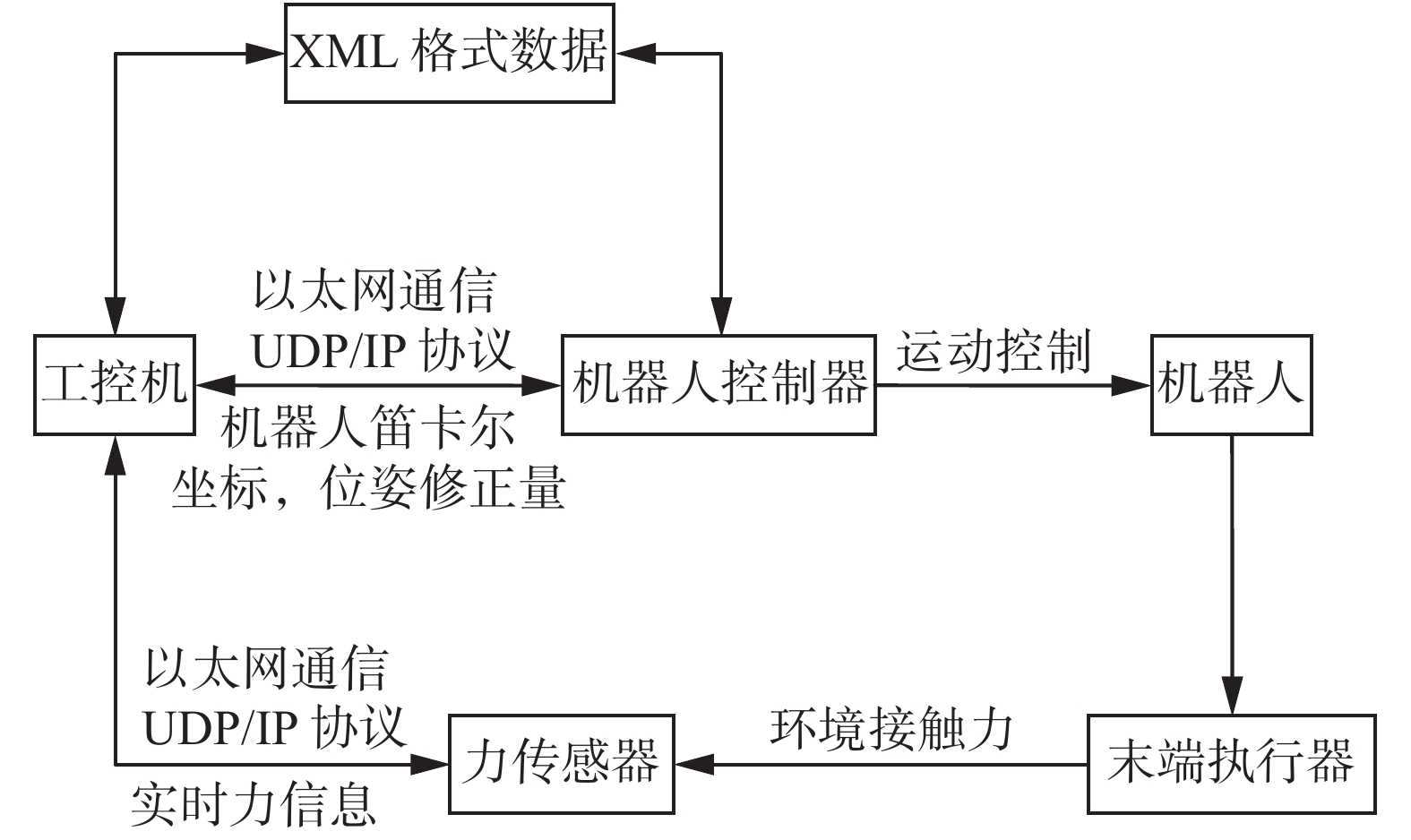
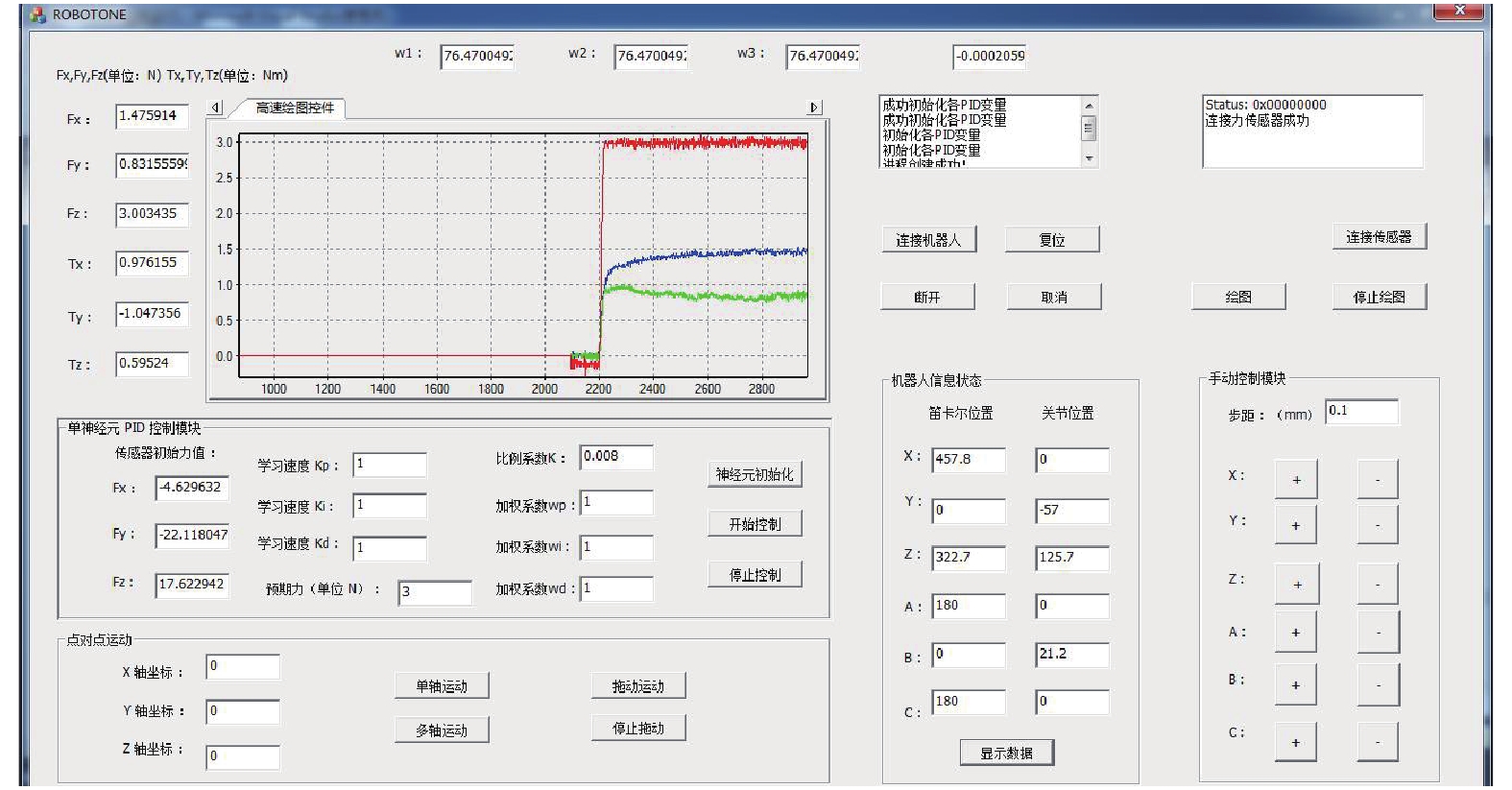
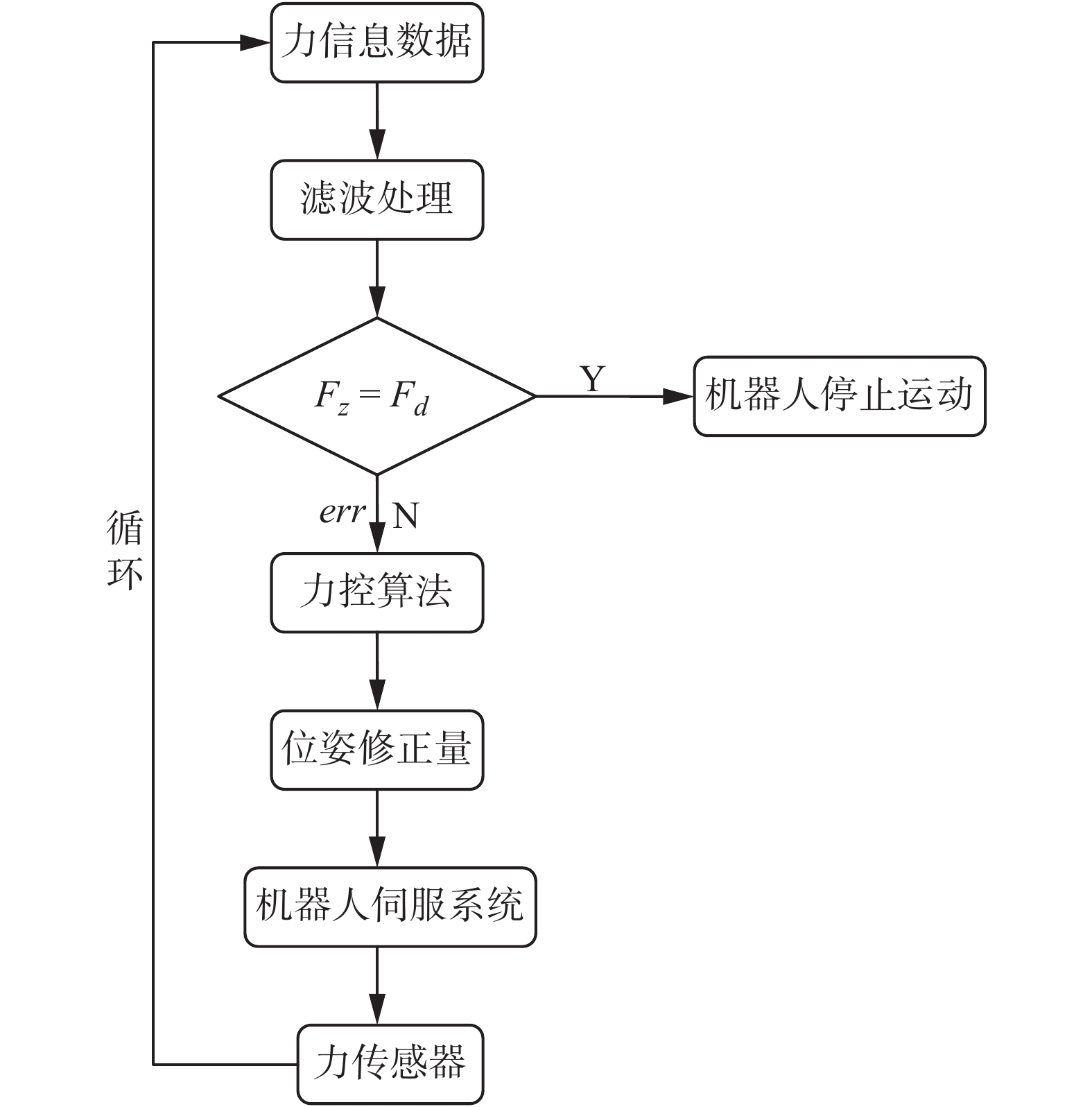
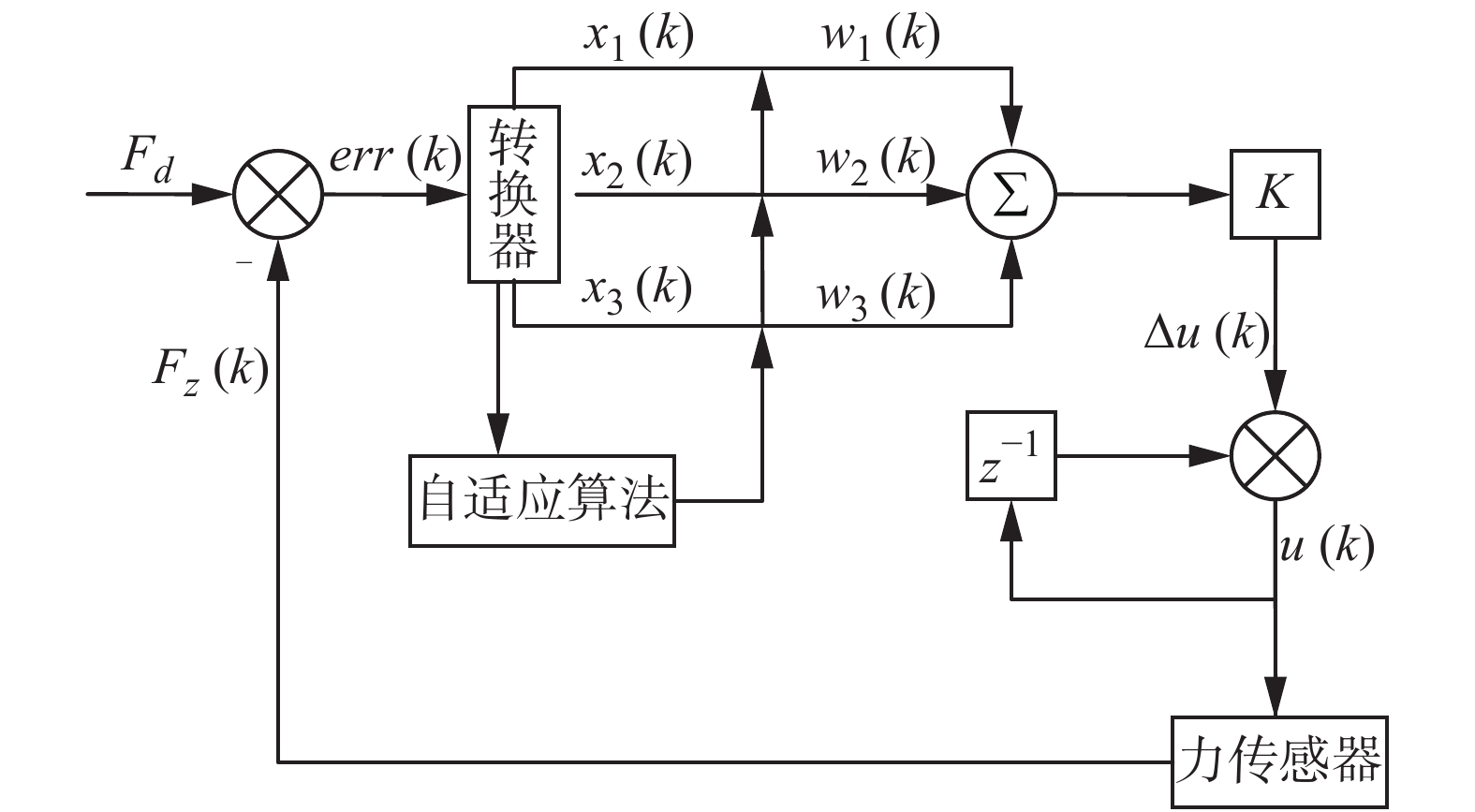
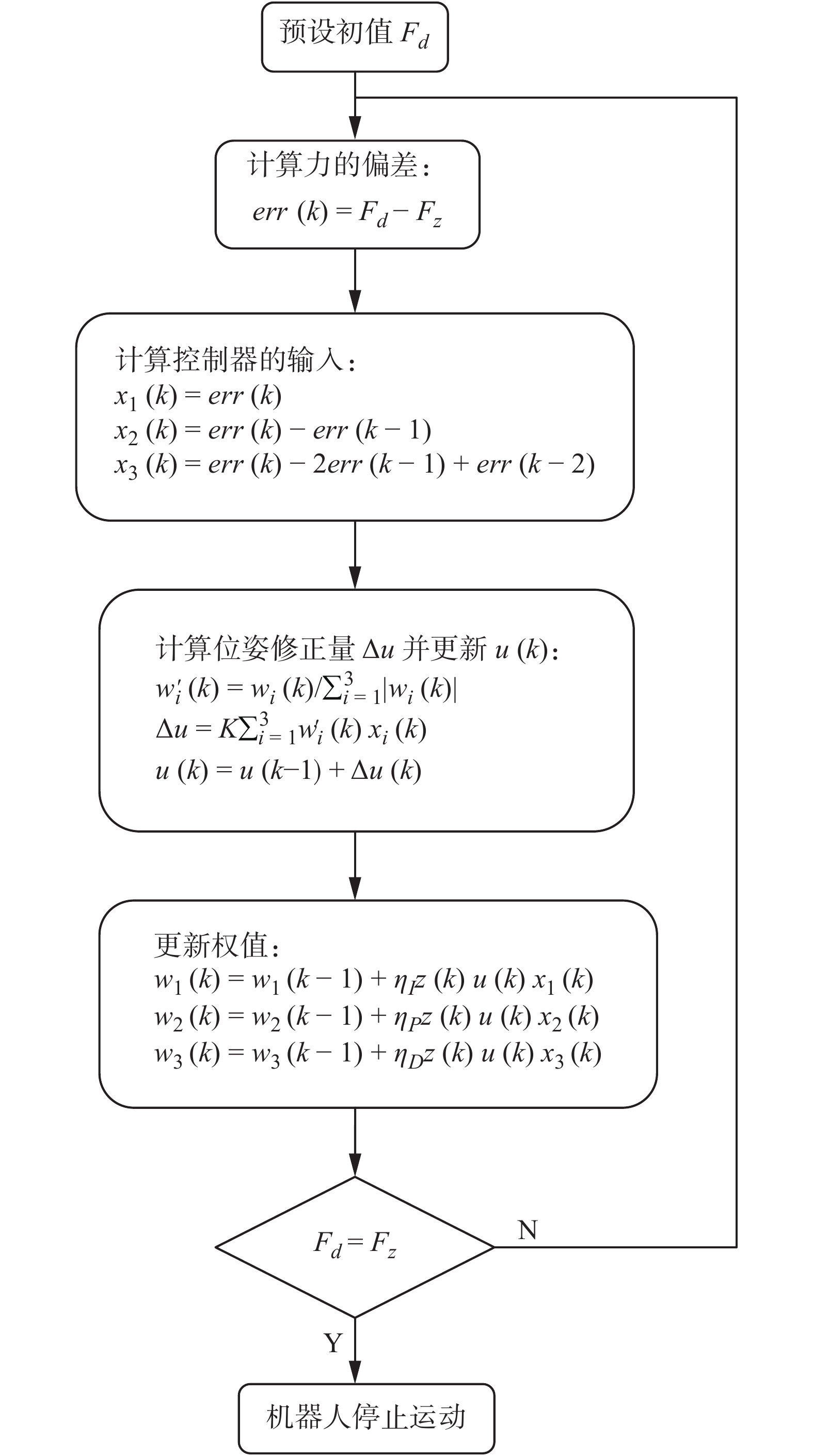
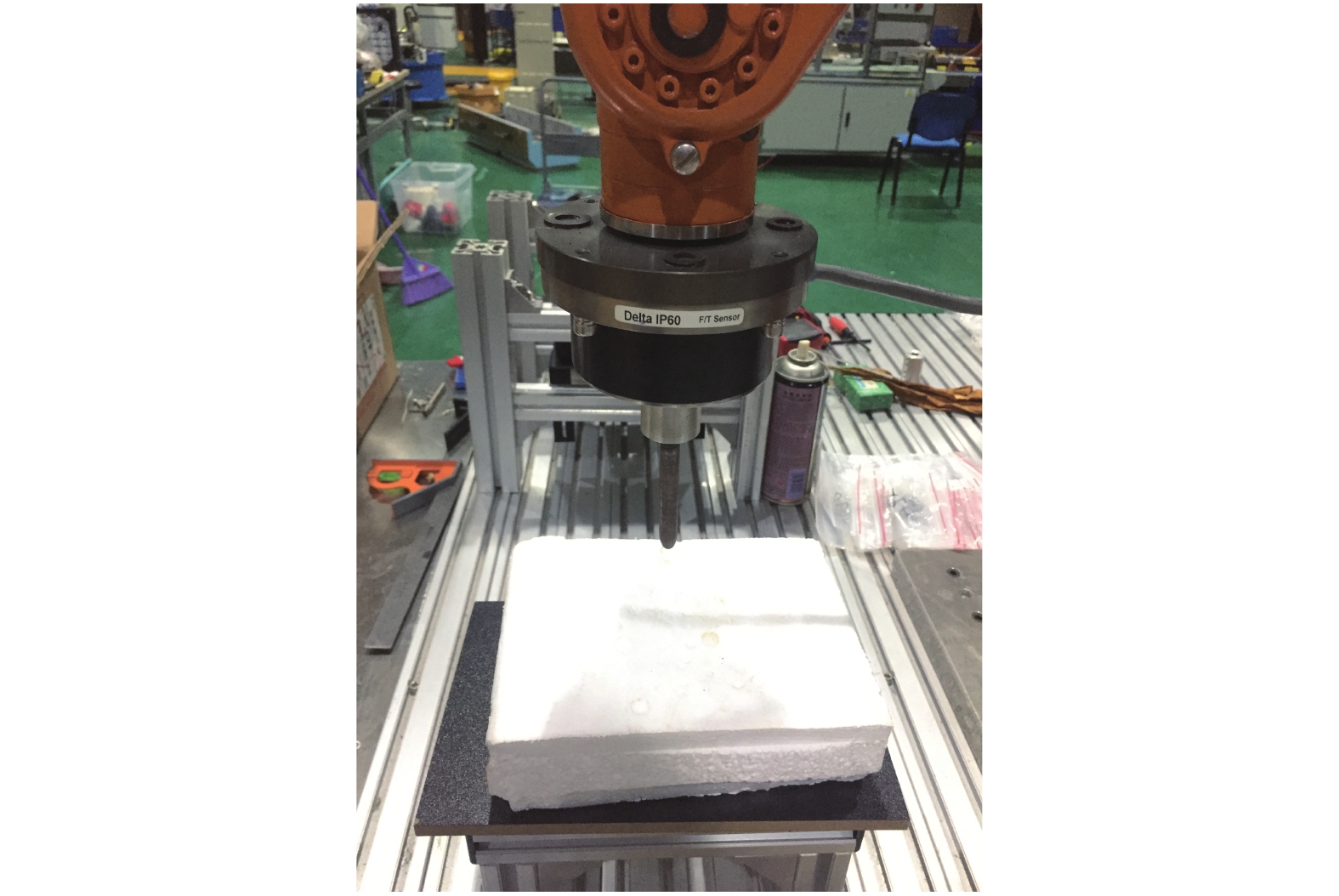
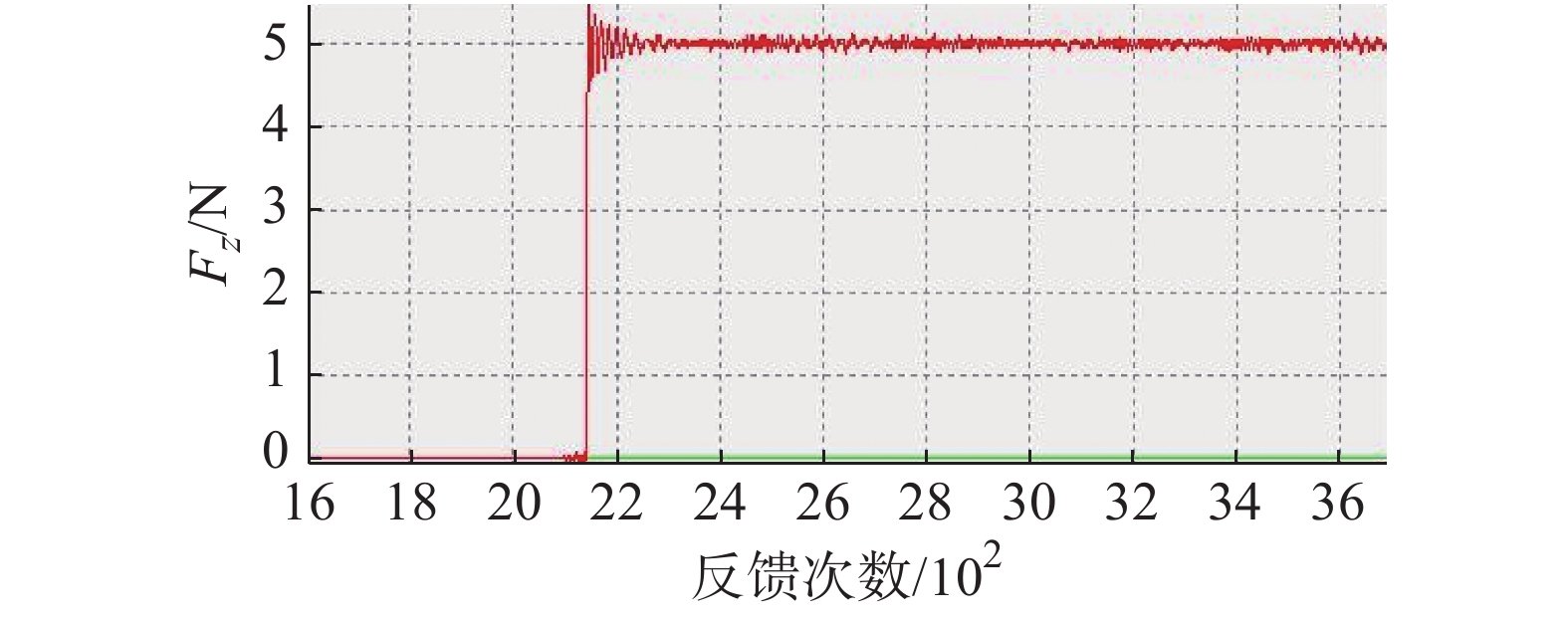
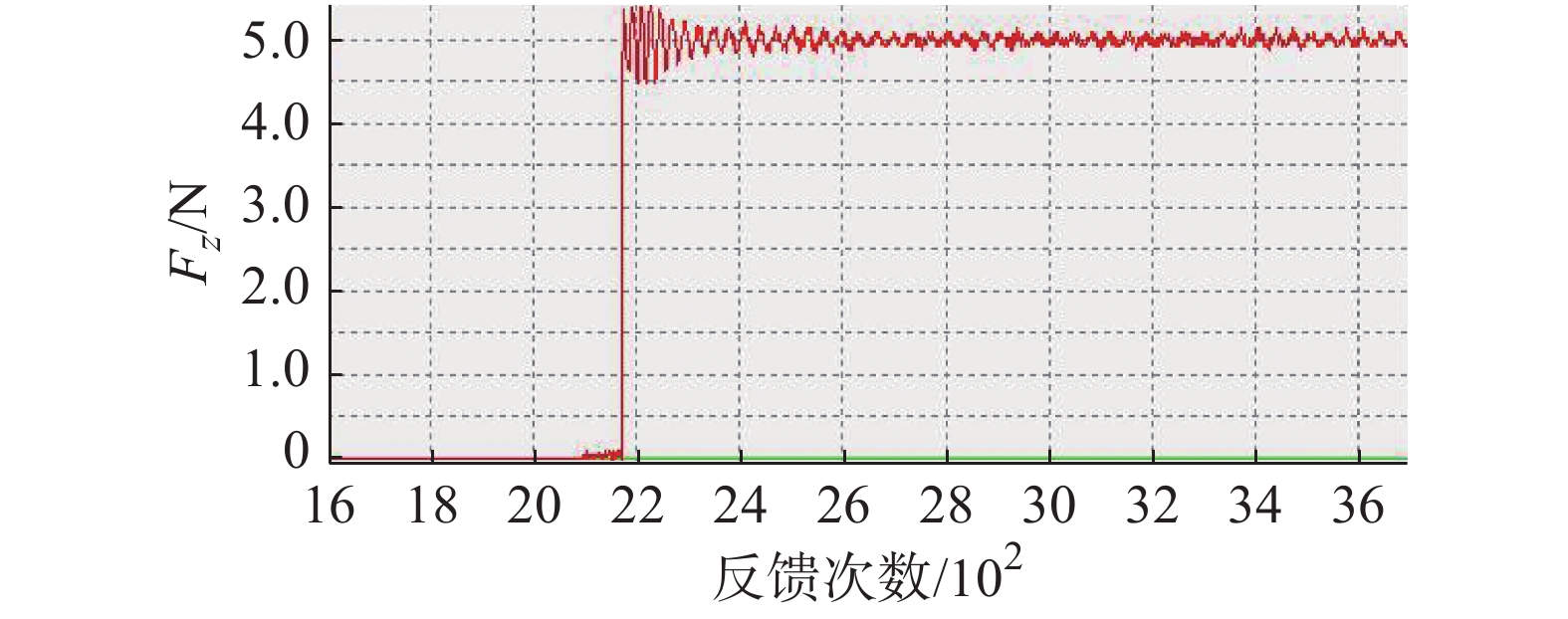
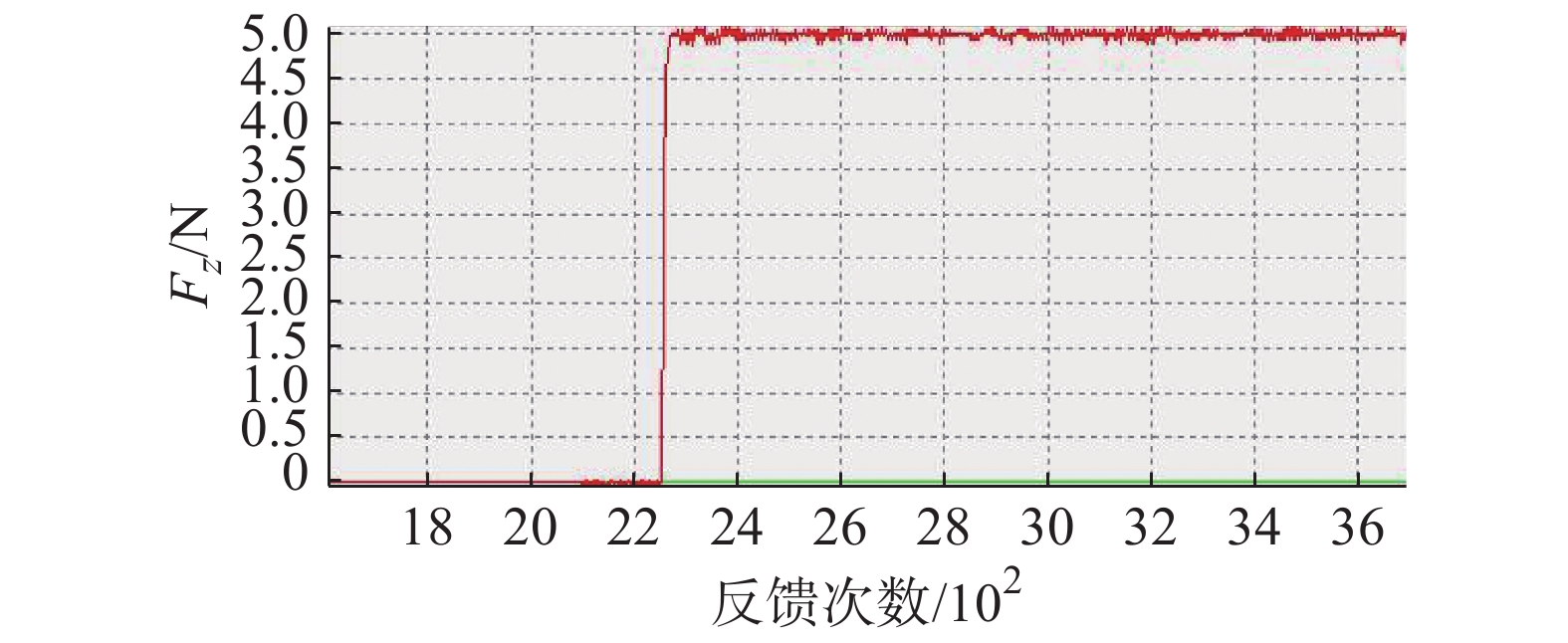
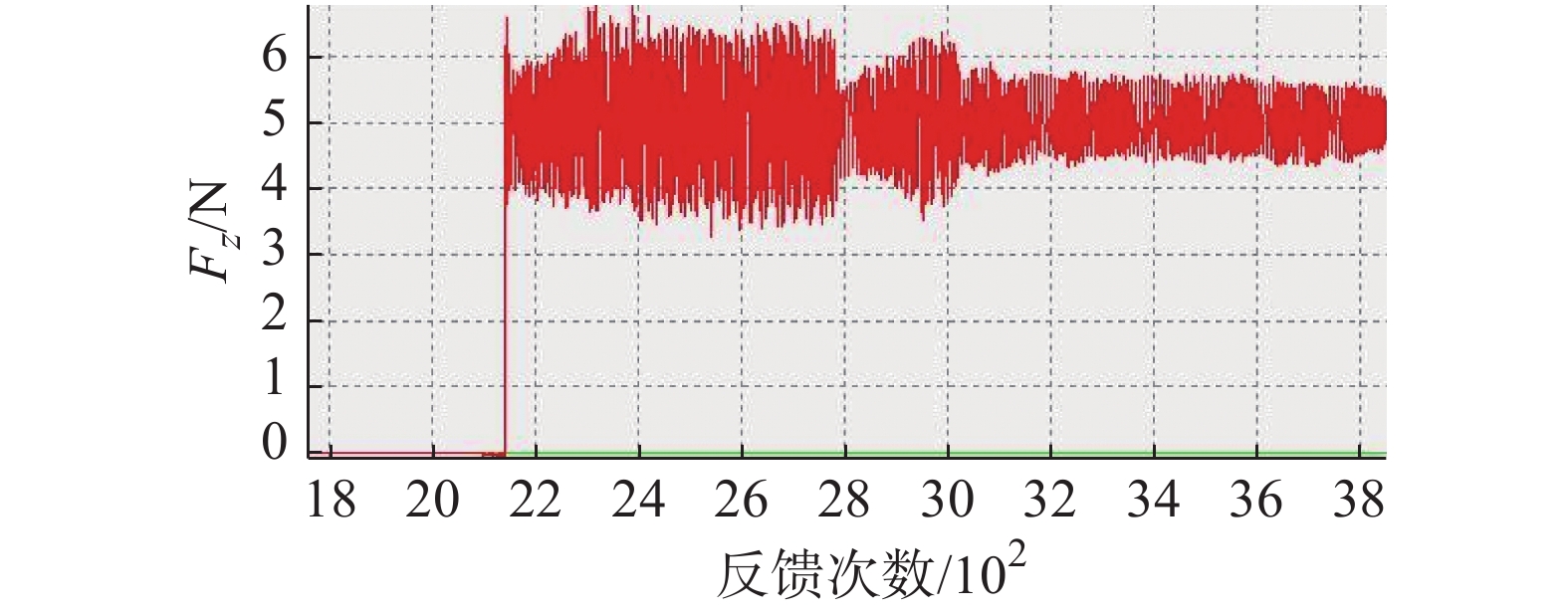
针对传统基于位置控制的机器人因末端执行器缺少力负反馈环节,难以实现对接触力精确控制问题,建立了一种基于Windows 平台和RSI(Robot sensor interface)应用程序包的工业机器人开放式控制系统,在此基础上提出单神经元自适应PID的机器人恒力控制自适应算法。通过在KUKA工业机器人平台实验验证,该力控算法可在未知环境参数情况下实现机器人末端执行器与工件之间恒力接触,并且易于实现;最后通过实验提出了基于所搭建实验平台的单神经元系数K自调整的单神经元自适应PID的机器人恒力控制算法,进一步提高了控制器的自适应性和鲁棒性。
针对传统基于位置控制的机器人因末端执行器缺少力负反馈环节,难以实现对接触力精确控制问题,建立了一种基于Windows 平台和RSI(Robot sensor interface)应用程序包的工业机器人开放式控制系统,在此基础上提出单神经元自适应PID的机器人恒力控制自适应算法。通过在KUKA工业机器人平台实验验证,该力控算法可在未知环境参数情况下实现机器人末端执行器与工件之间恒力接触,并且易于实现;最后通过实验提出了基于所搭建实验平台的单神经元系数K自调整的单神经元自适应PID的机器人恒力控制算法,进一步提高了控制器的自适应性和鲁棒性。









2020, 39(10): 1600-1605.
doi: 10.13433/j.cnki.1003-8728.20190265
摘要:
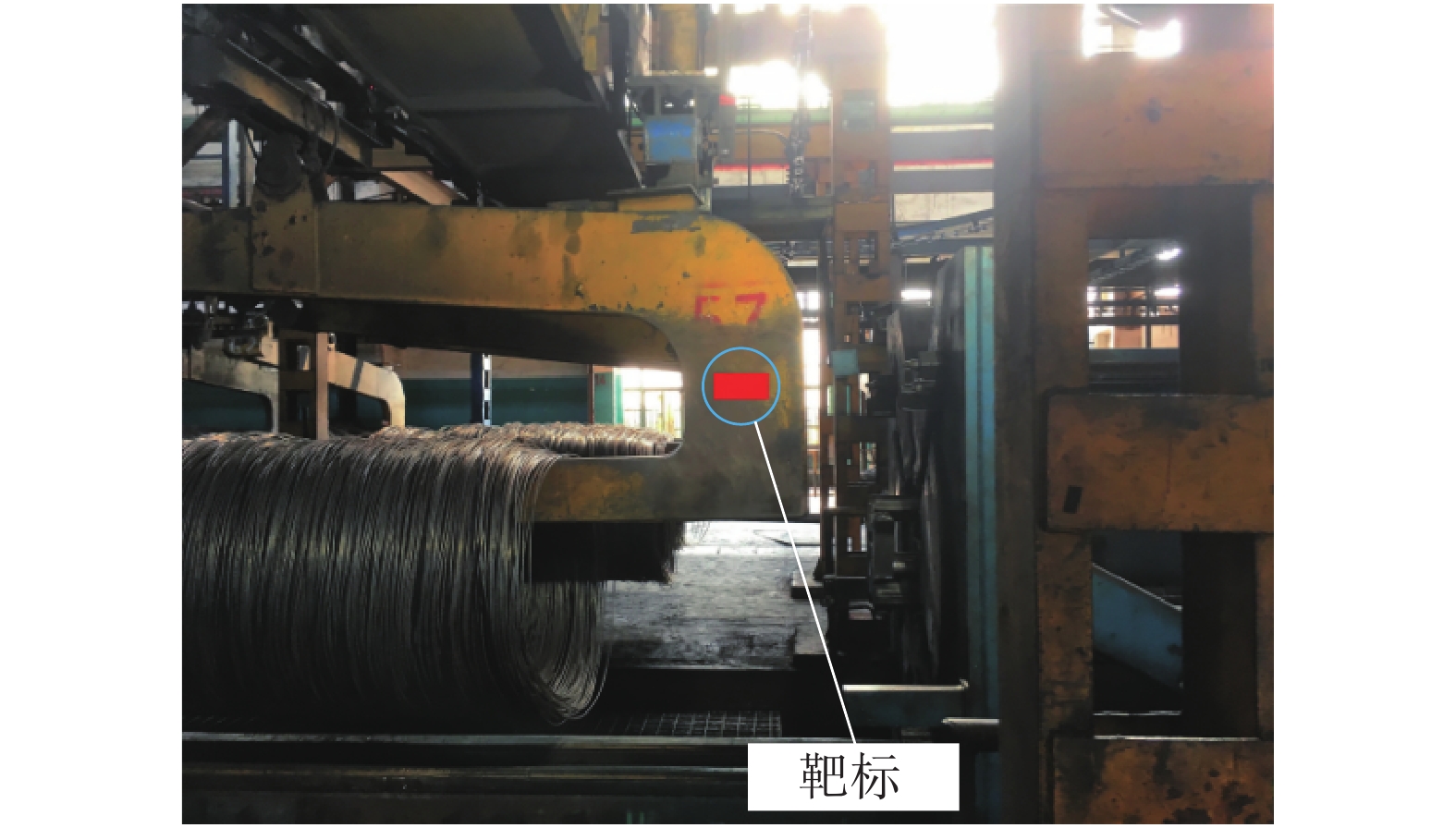
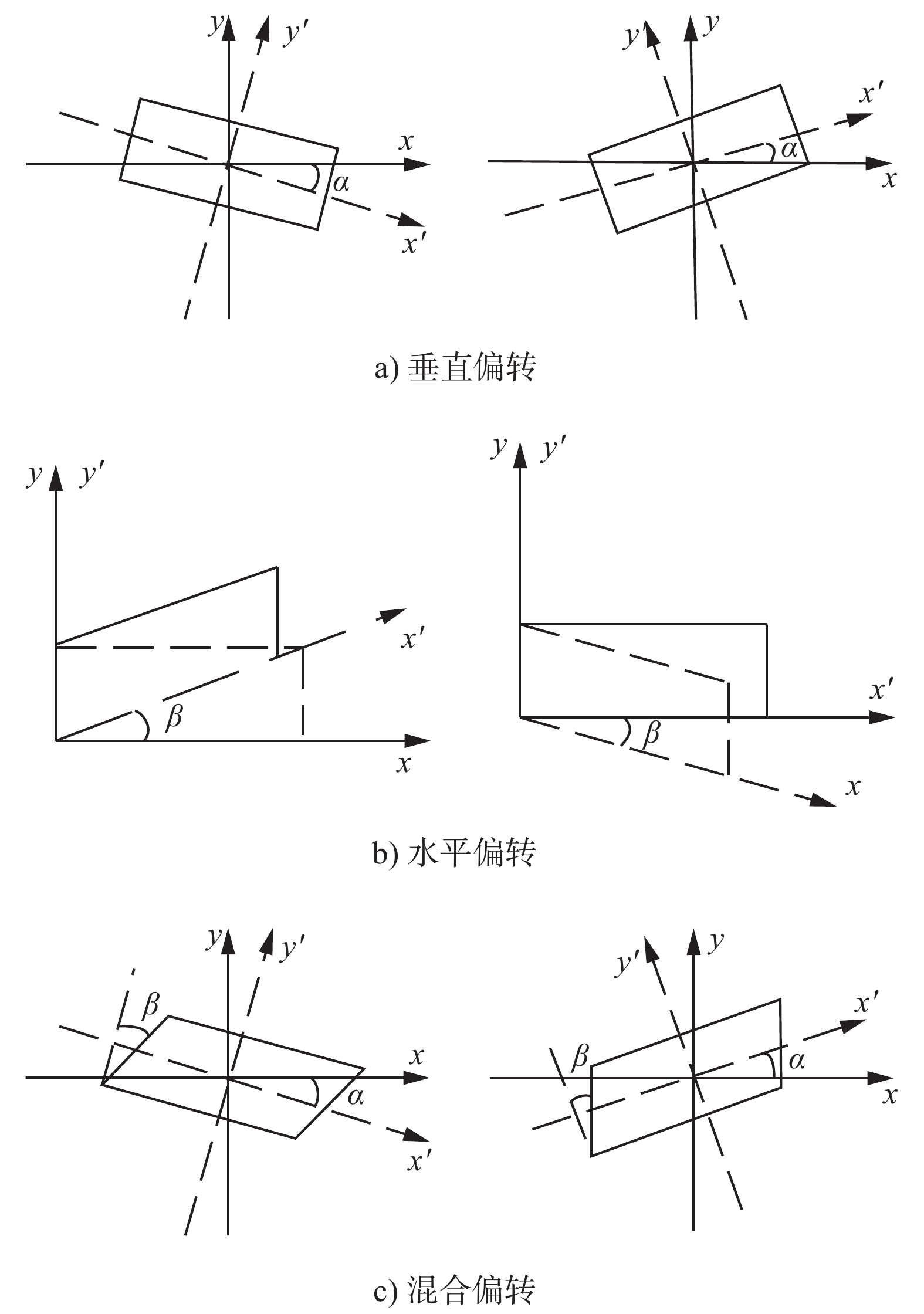
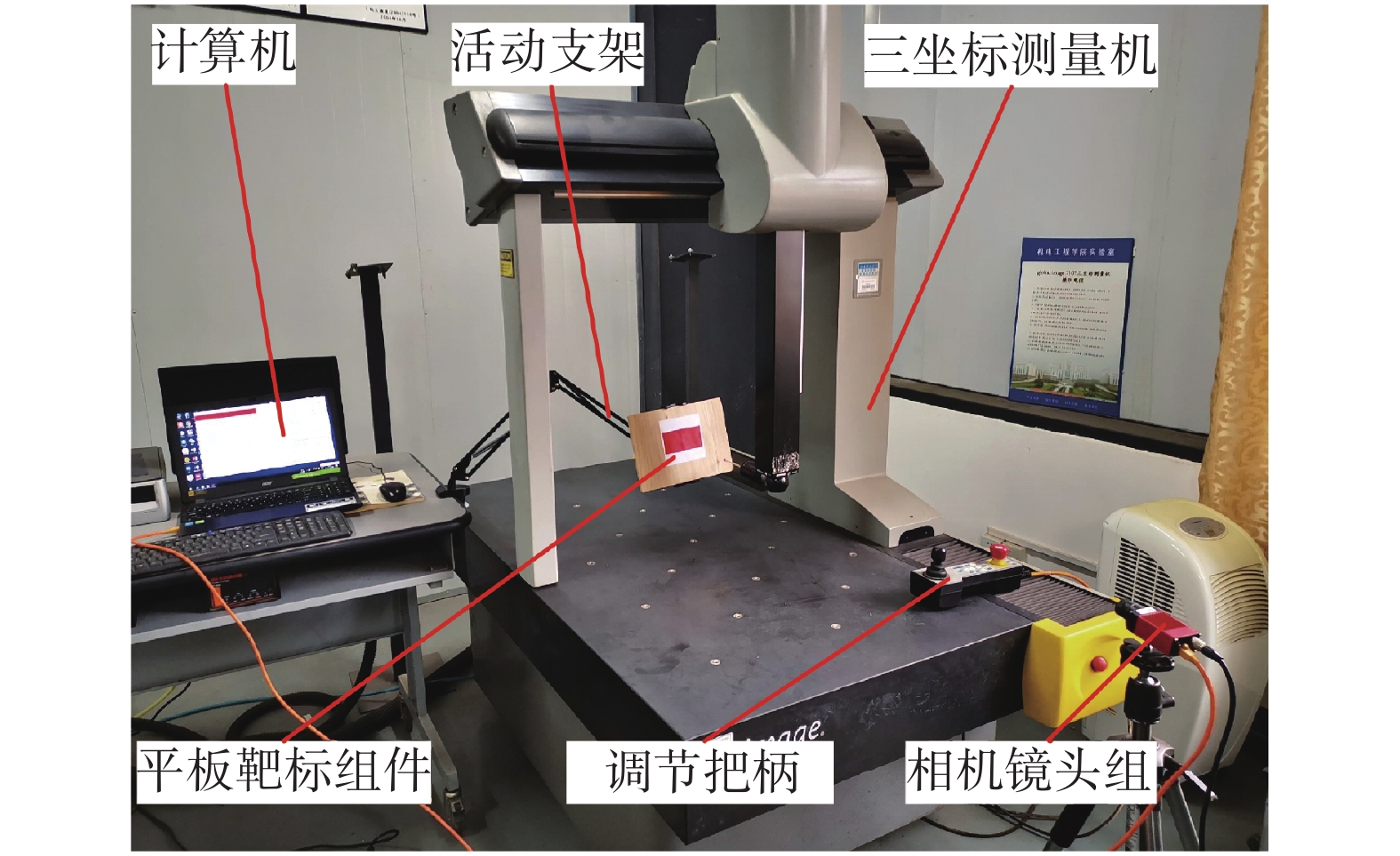
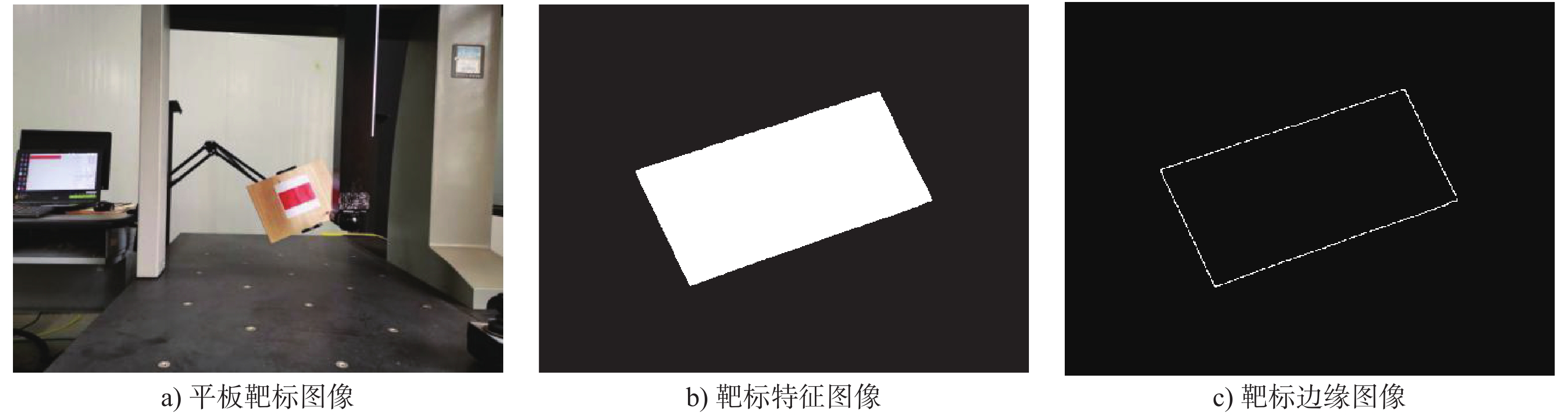
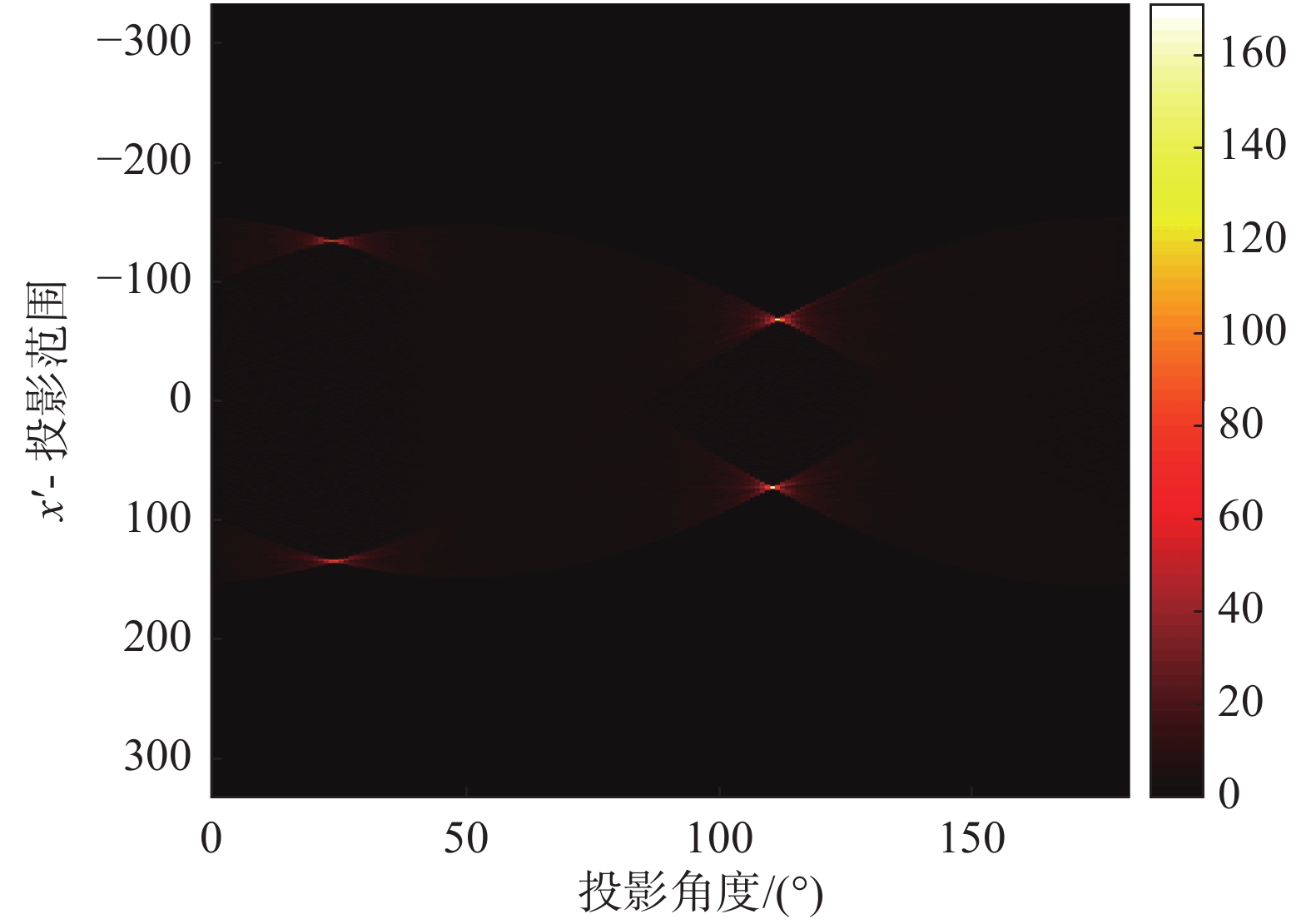
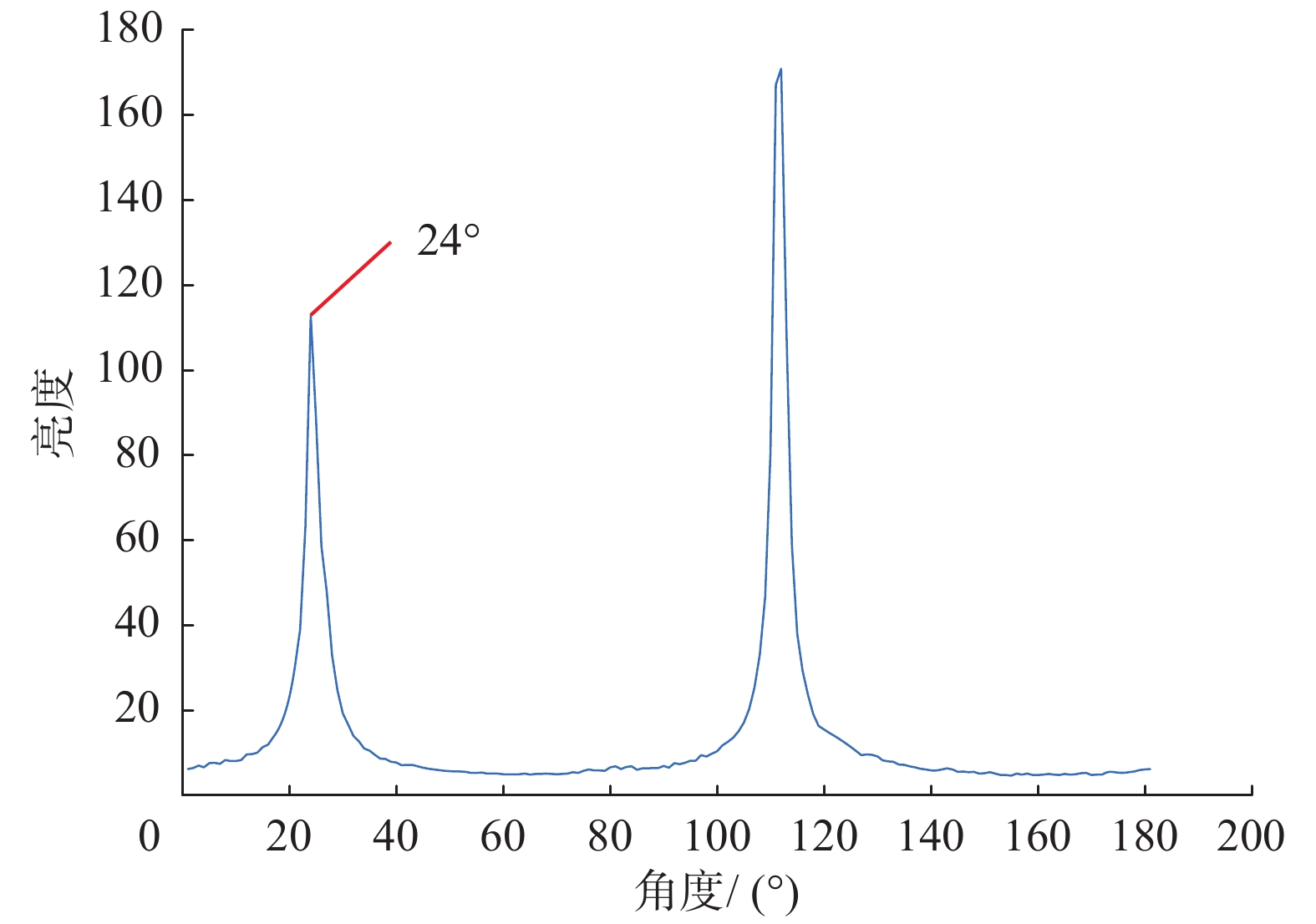
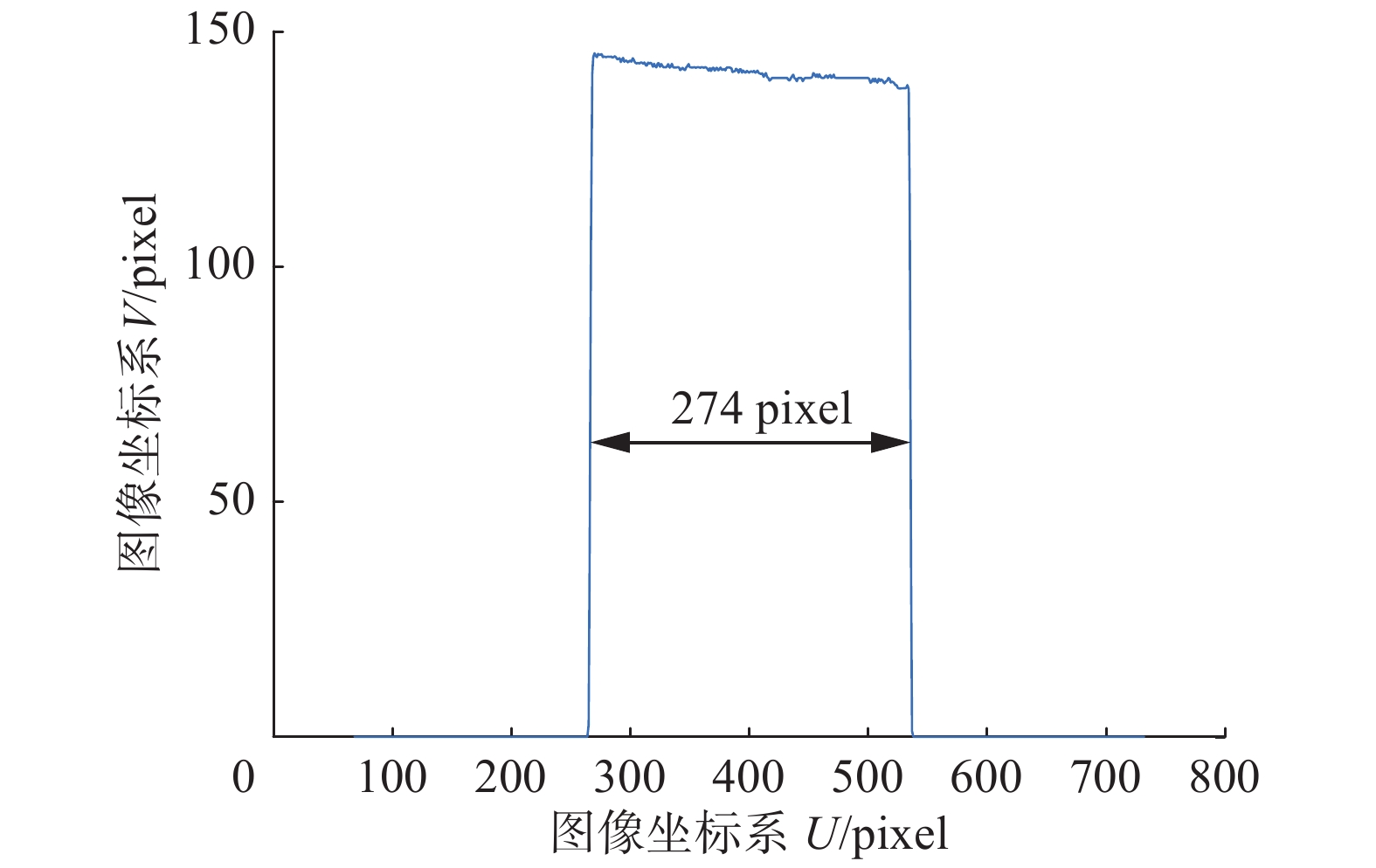
本文提出基于单目视觉的钢丝捆扎机C形钩偏转角度检测方法,通过在C形钩表面适当部位粘贴红色矩形标志,利用单目相机检测获得图像并通过图像处理技术获取红色矩形图轮廓形状作为靶标,最后将靶标偏转模式进行分类并建立相应偏转模式的数学模型,从而实现对靶标垂直倾角和靶标水平倾角的检测。检测方法具有较高的计算效率和准确度且容易编程实现,以高精度三坐标测量机为参考基准的实验表明该检测方法的测量精度在0.6°以内,满足车间现场C形钩偏转角度检测精度低于2°的技术要求。
本文提出基于单目视觉的钢丝捆扎机C形钩偏转角度检测方法,通过在C形钩表面适当部位粘贴红色矩形标志,利用单目相机检测获得图像并通过图像处理技术获取红色矩形图轮廓形状作为靶标,最后将靶标偏转模式进行分类并建立相应偏转模式的数学模型,从而实现对靶标垂直倾角和靶标水平倾角的检测。检测方法具有较高的计算效率和准确度且容易编程实现,以高精度三坐标测量机为参考基准的实验表明该检测方法的测量精度在0.6°以内,满足车间现场C形钩偏转角度检测精度低于2°的技术要求。



2020, 39(10): 1606-1614.
doi: 10.13433/j.cnki.1003-8728.20190303
摘要:
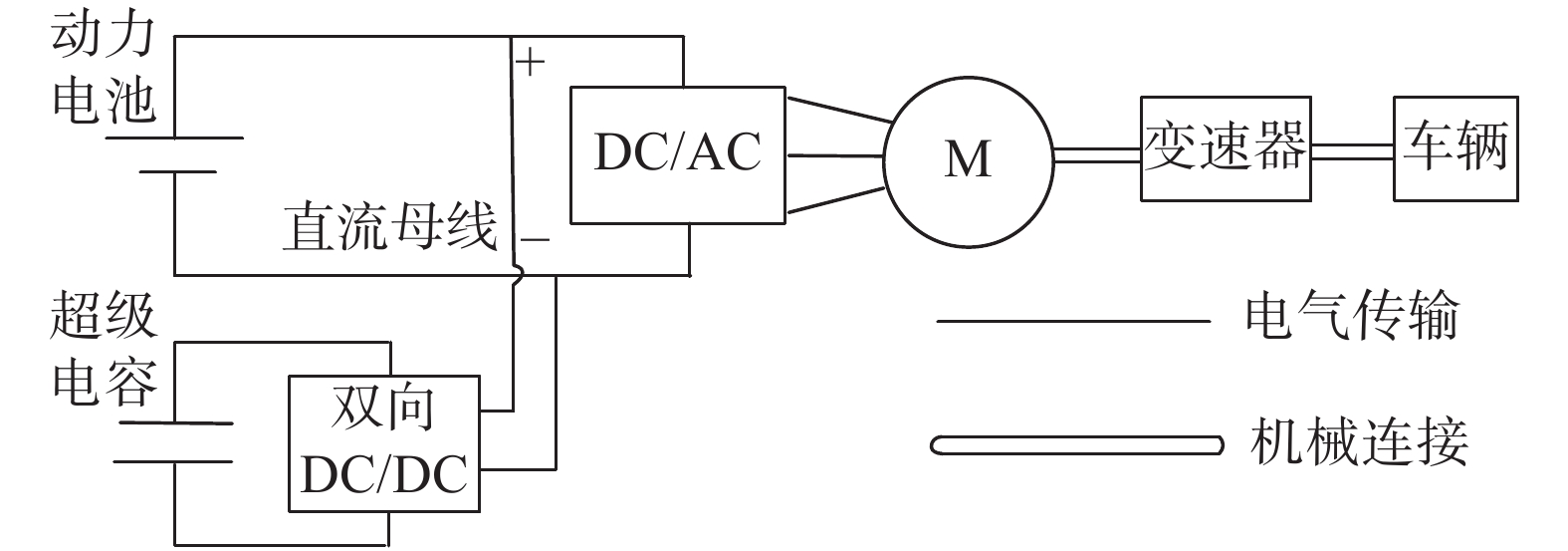
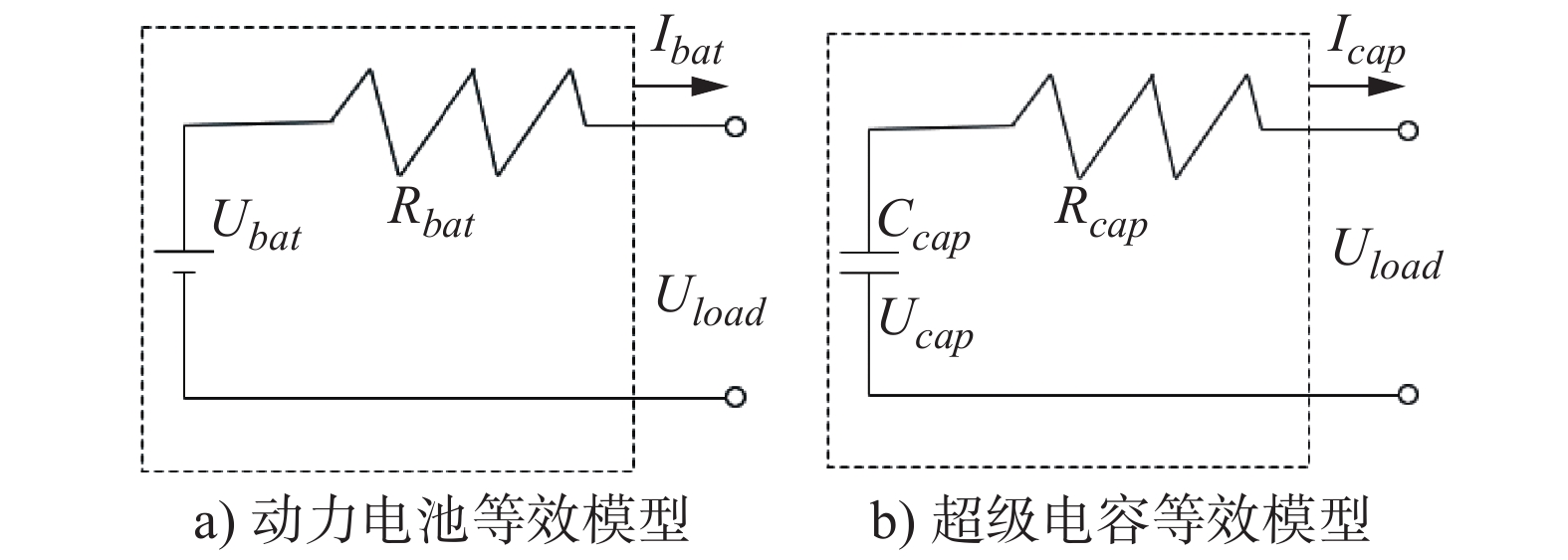
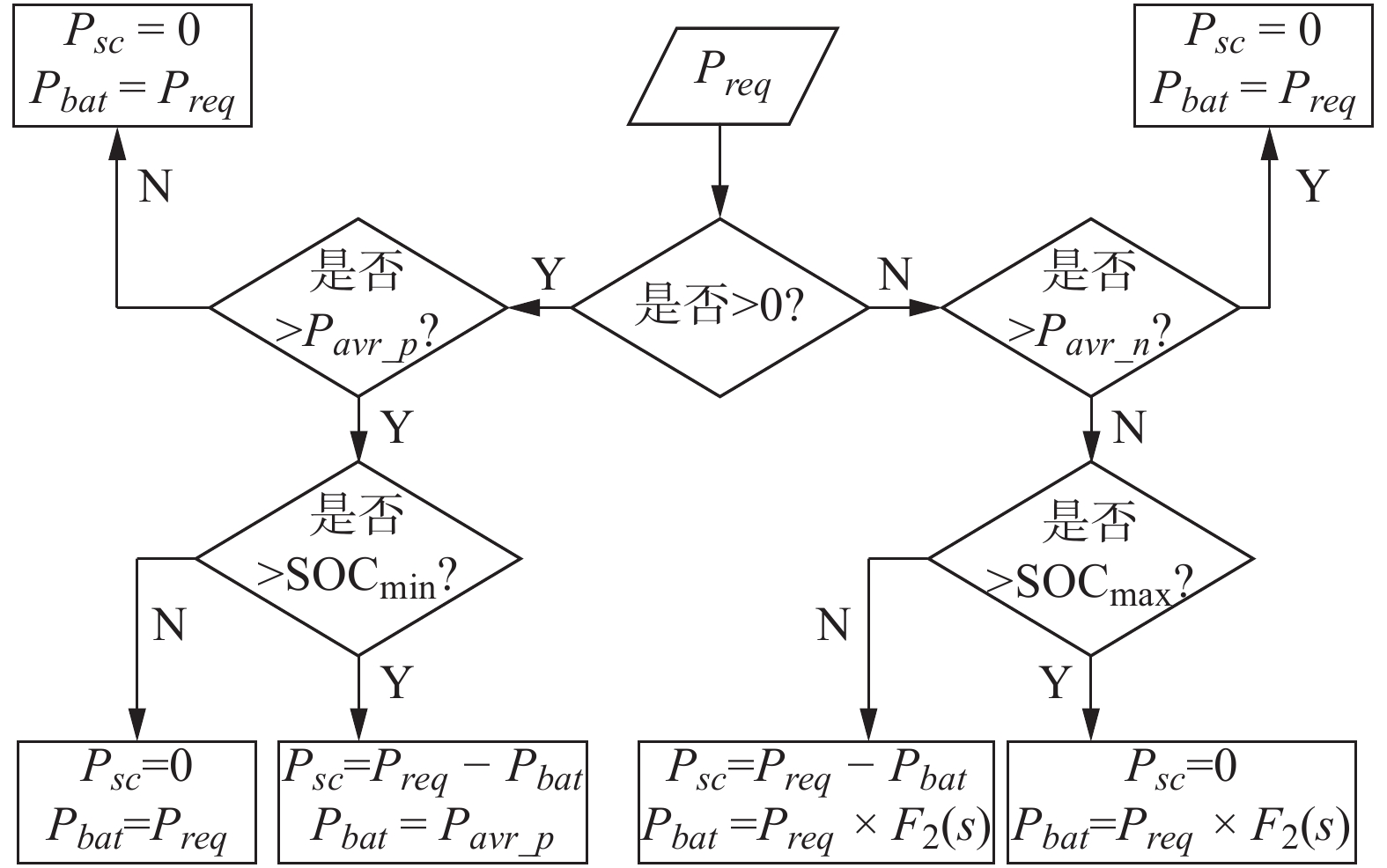
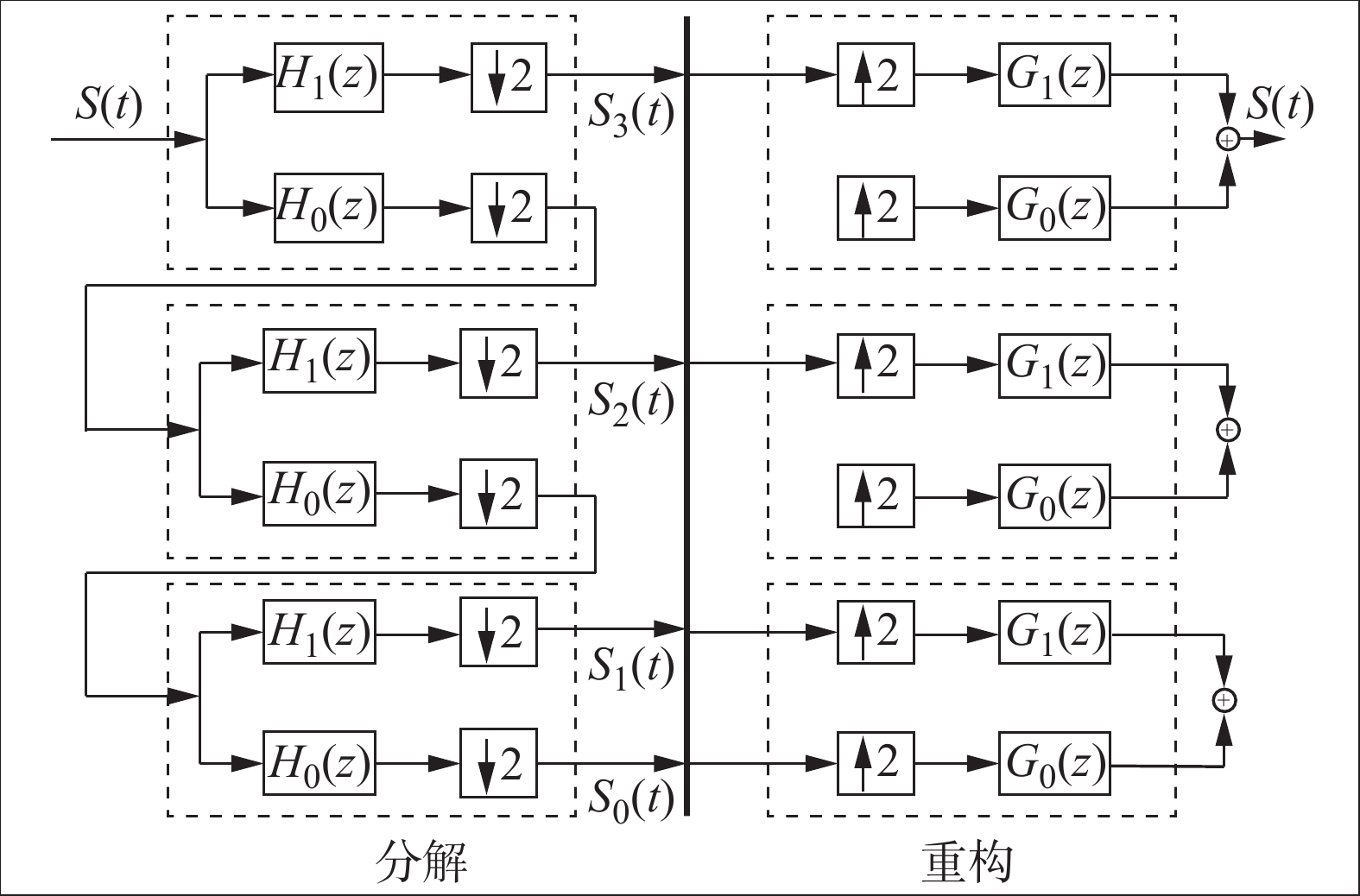
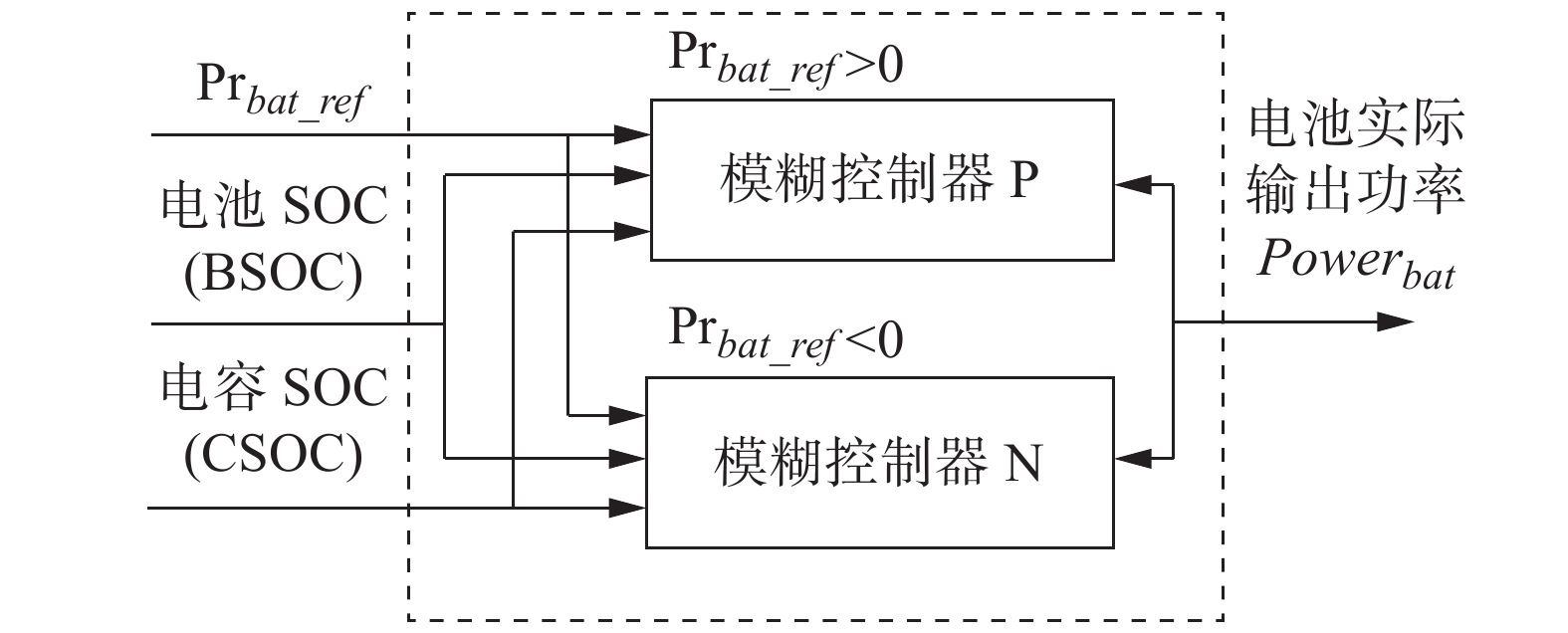
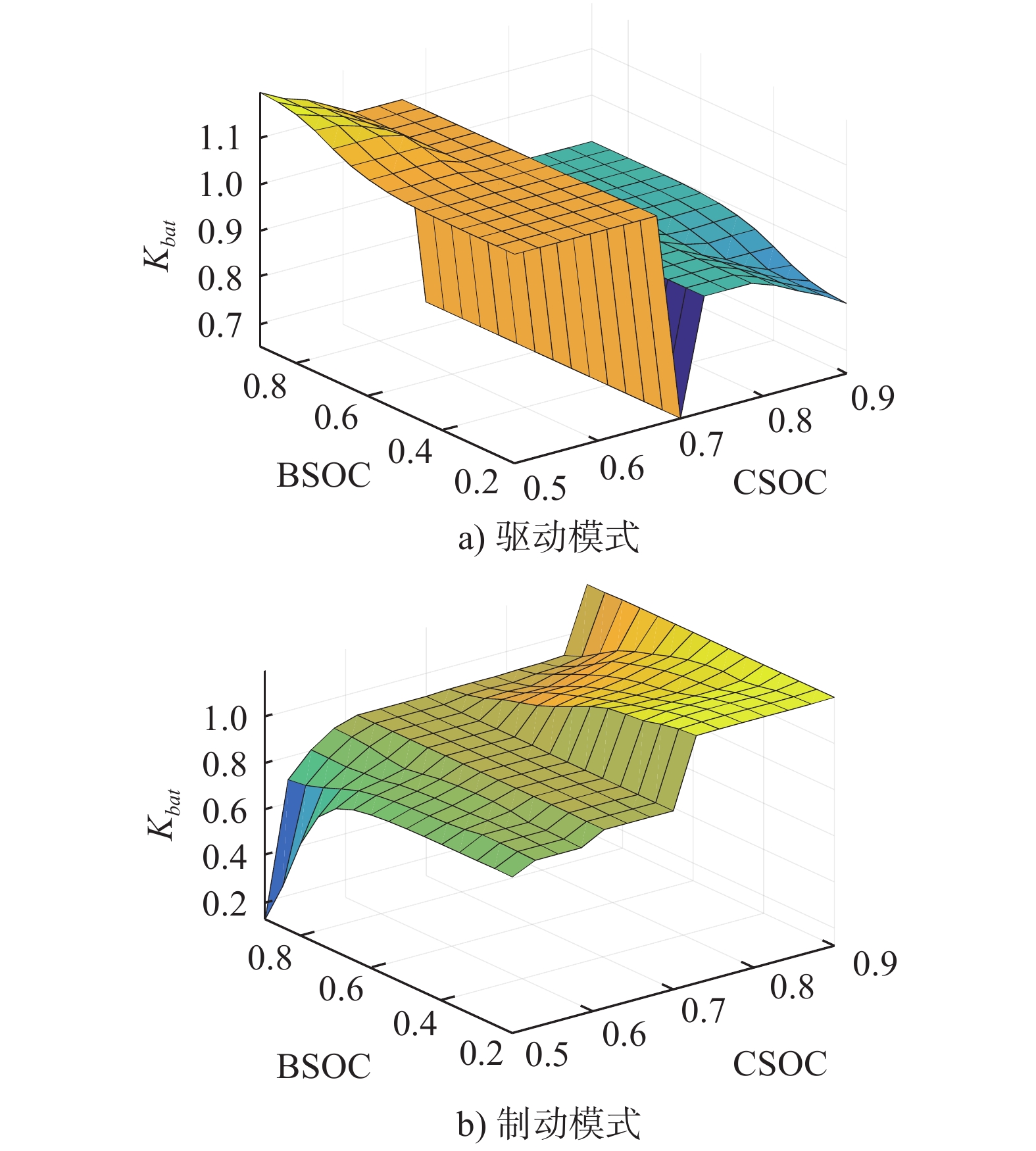
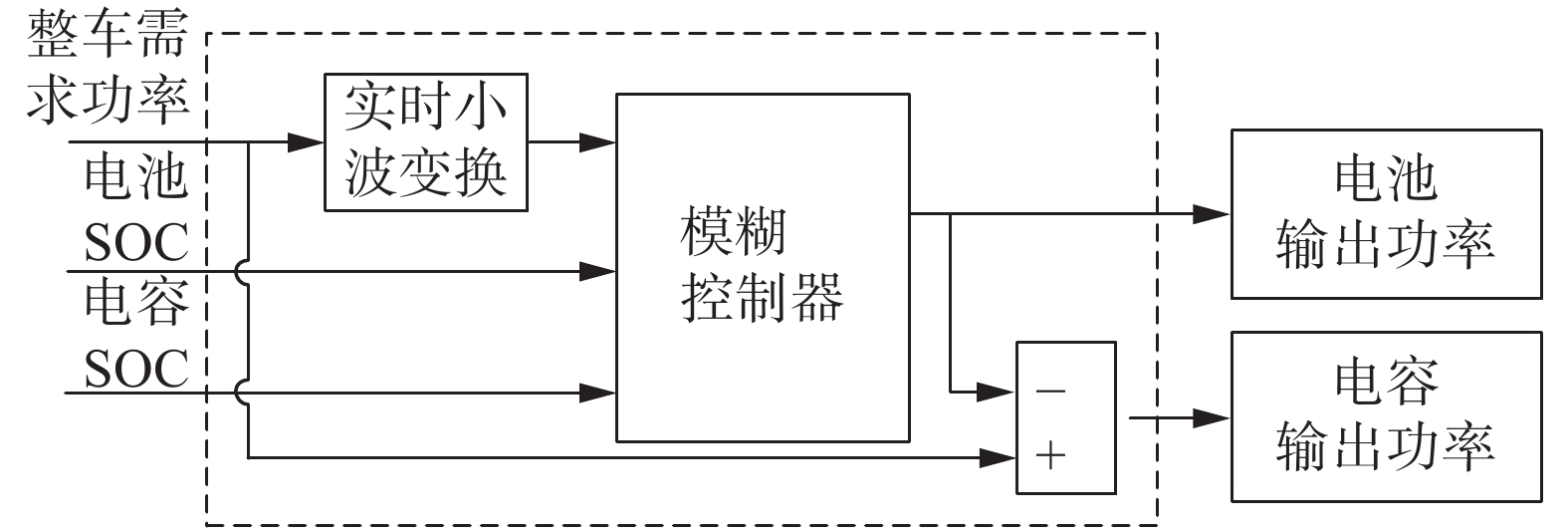
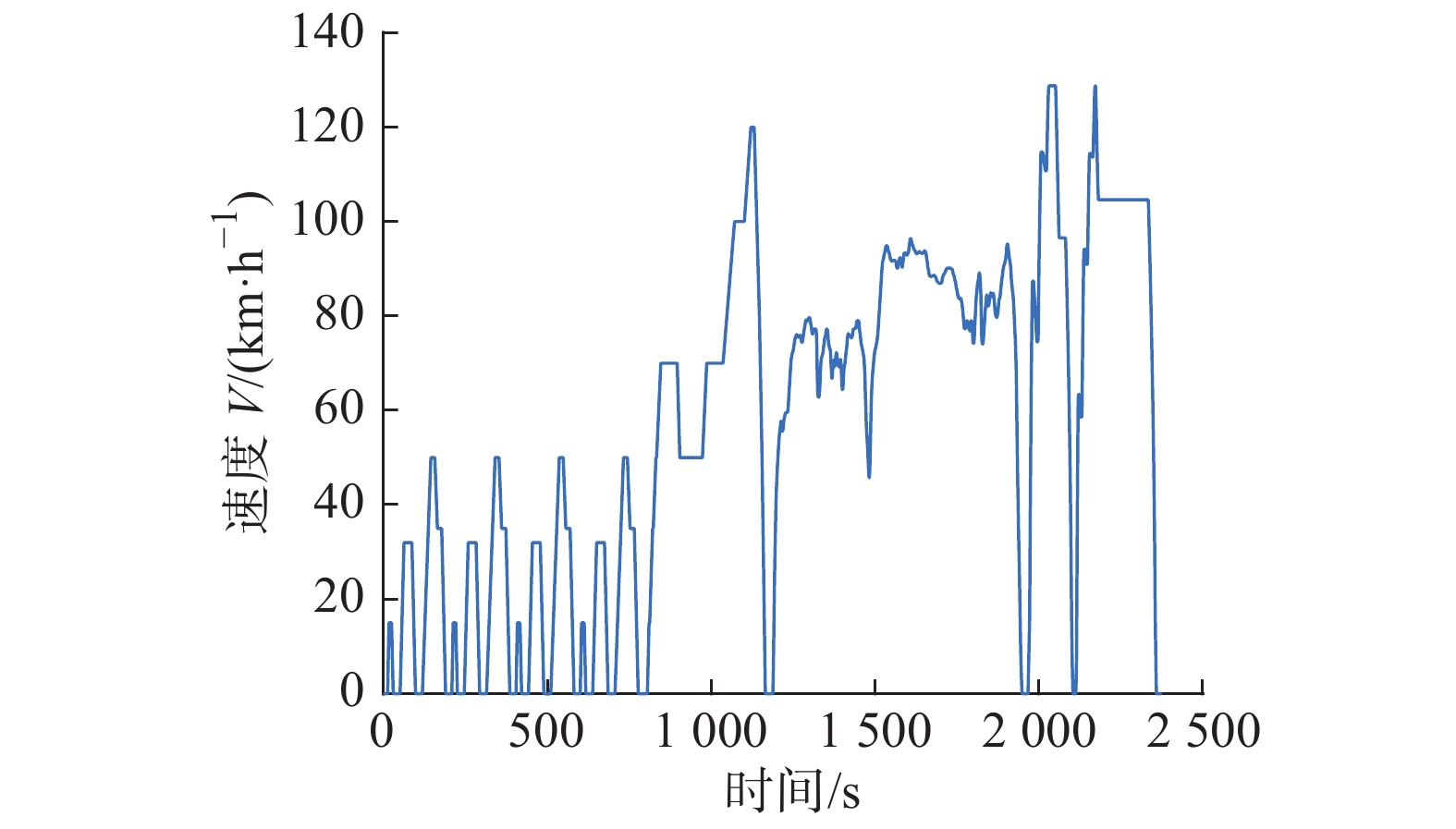
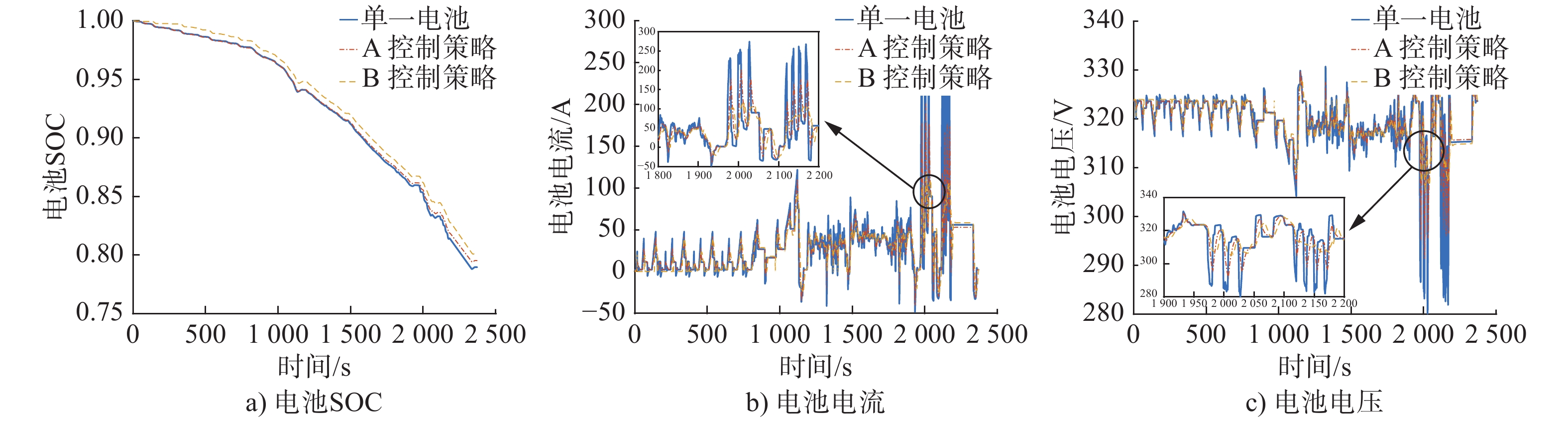
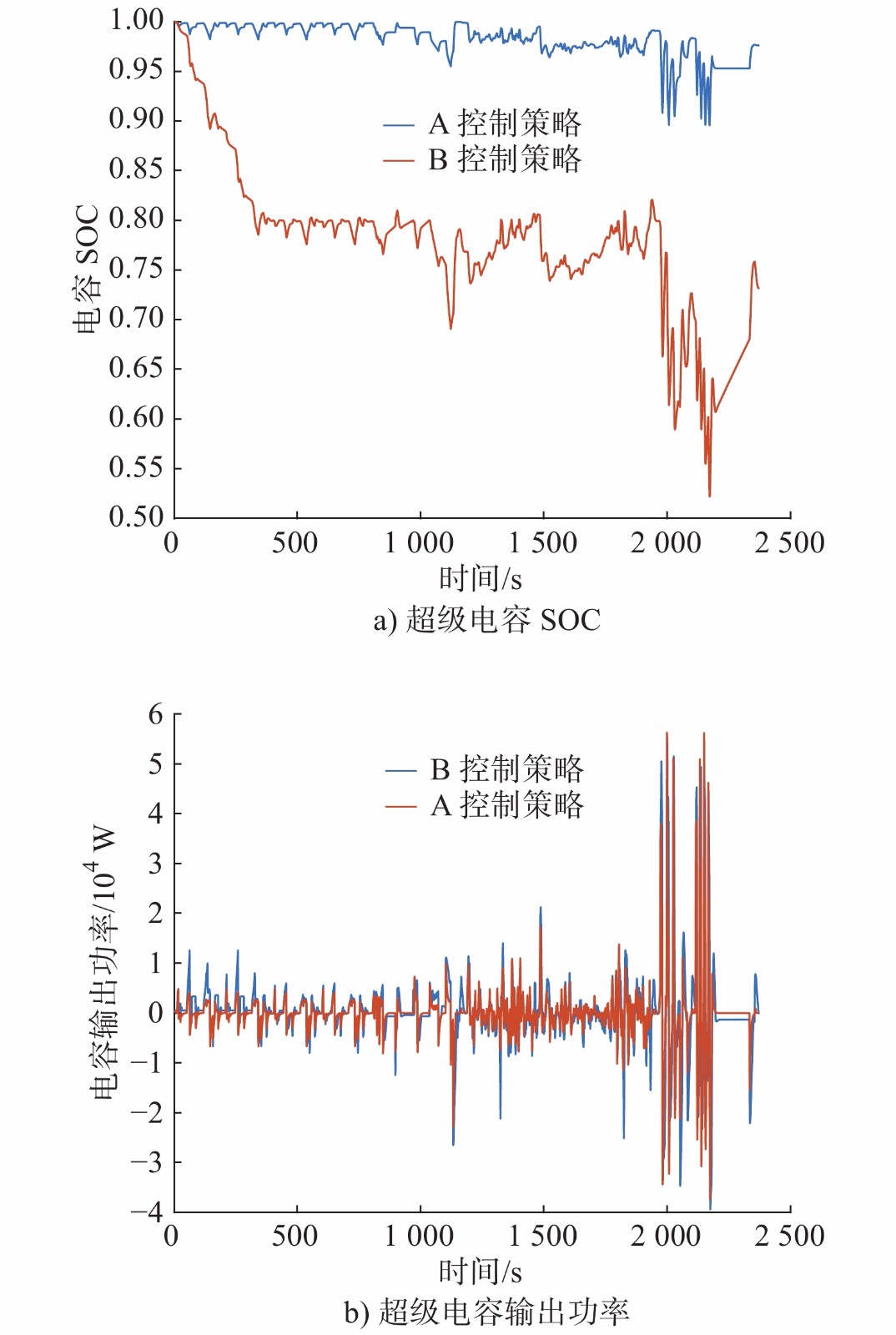
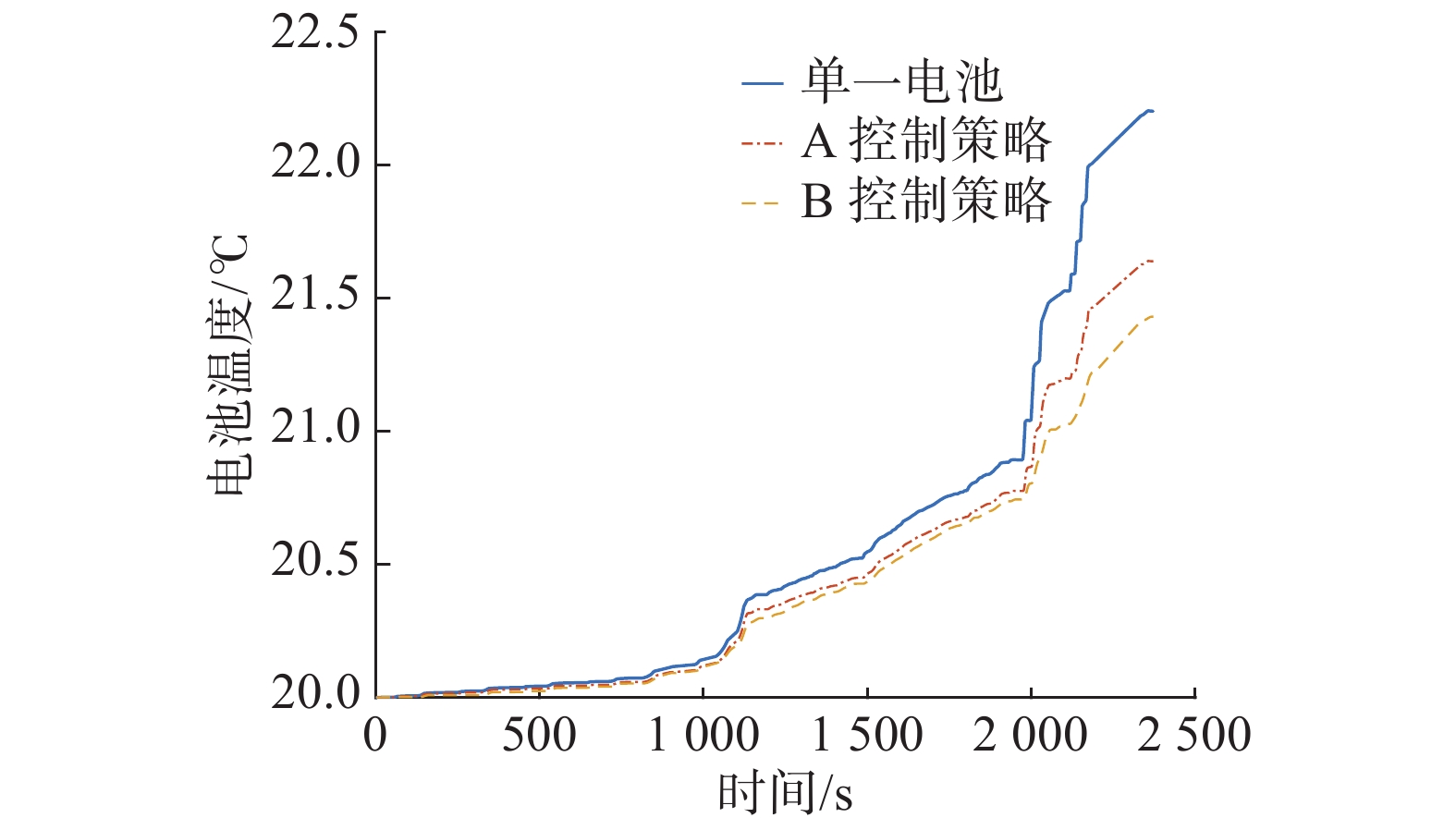
针对电动汽车单一动力电池功率密度低、循环寿命短、接收暂态功率等问题,设计了由动力电池和超级电容组成的复合能源系统,提出了基于小波变换-模糊控制的能量管理策略,并对不同分解层数的小波变换进行评价和选择。该控制策略利用小波变换将需求功率分解成低频成分和高频成分,并根据能量源的动态响应特性进行分配,避免动力电池接收暂态功率;为了充分利用超级电容“削峰填谷”的作用来提高电池的性能和循环寿命,采用模糊控制将超级电容的荷电状态(State of charge, SOC)维持在合适的范围内。建立MATLAB/Simulink仿真模型基于随机组合的循环工况验证所提策略的有效性,并与传统的控制策略进行比较。仿真结果表明:采用所提出的能量管理策略可以有效地减少峰值电流对动力电池的冲击,并且相比于单一电源的电动汽车还可以将能量利用率提高5.96%,电池的最大输出电流降低了57.1%,电池的温升降低了35.3%。
针对电动汽车单一动力电池功率密度低、循环寿命短、接收暂态功率等问题,设计了由动力电池和超级电容组成的复合能源系统,提出了基于小波变换-模糊控制的能量管理策略,并对不同分解层数的小波变换进行评价和选择。该控制策略利用小波变换将需求功率分解成低频成分和高频成分,并根据能量源的动态响应特性进行分配,避免动力电池接收暂态功率;为了充分利用超级电容“削峰填谷”的作用来提高电池的性能和循环寿命,采用模糊控制将超级电容的荷电状态(State of charge, SOC)维持在合适的范围内。建立MATLAB/Simulink仿真模型基于随机组合的循环工况验证所提策略的有效性,并与传统的控制策略进行比较。仿真结果表明:采用所提出的能量管理策略可以有效地减少峰值电流对动力电池的冲击,并且相比于单一电源的电动汽车还可以将能量利用率提高5.96%,电池的最大输出电流降低了57.1%,电池的温升降低了35.3%。

2020, 39(10): 1615-1623.
doi: 10.13433/j.cnki.1003-8728.20190314
摘要:
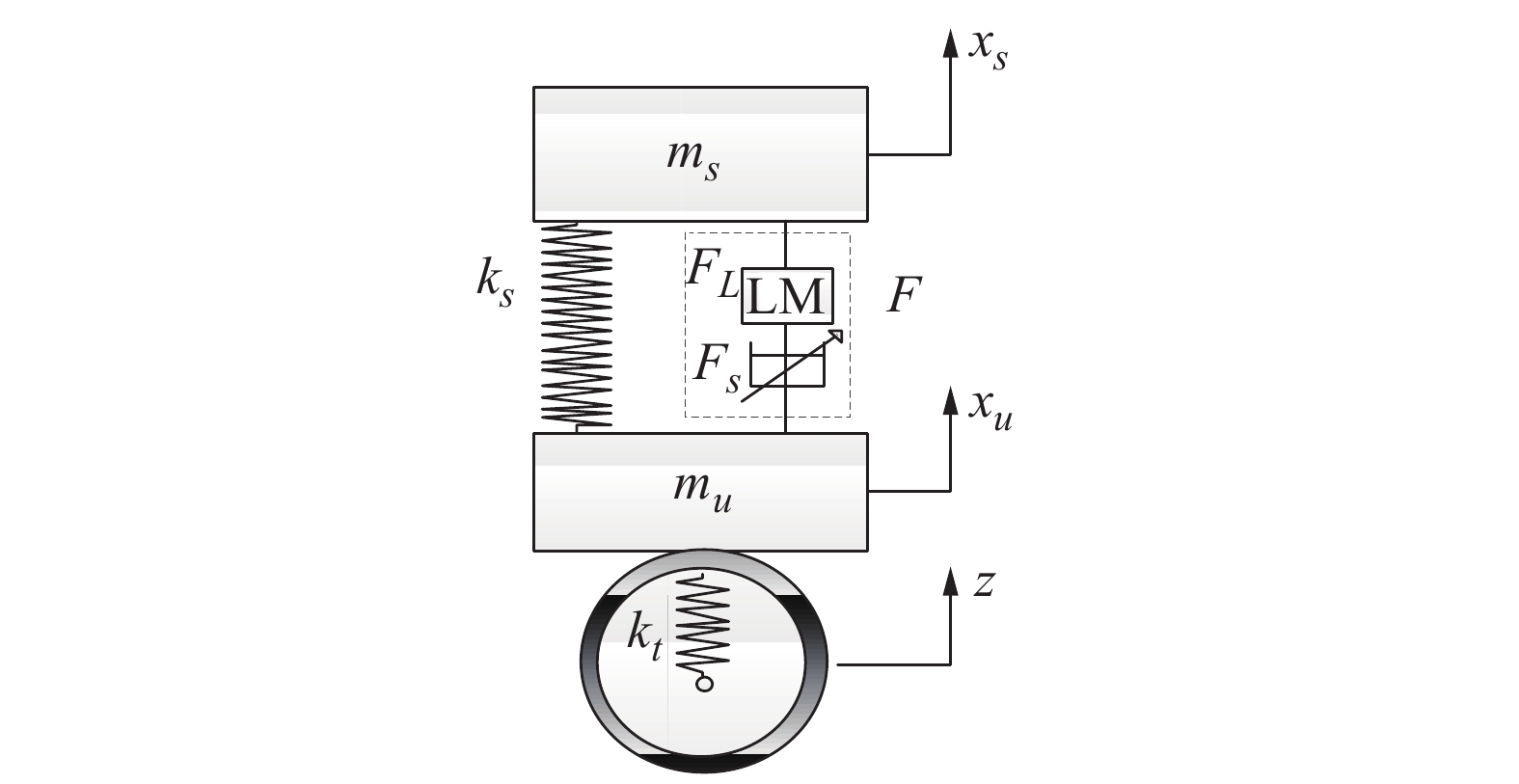
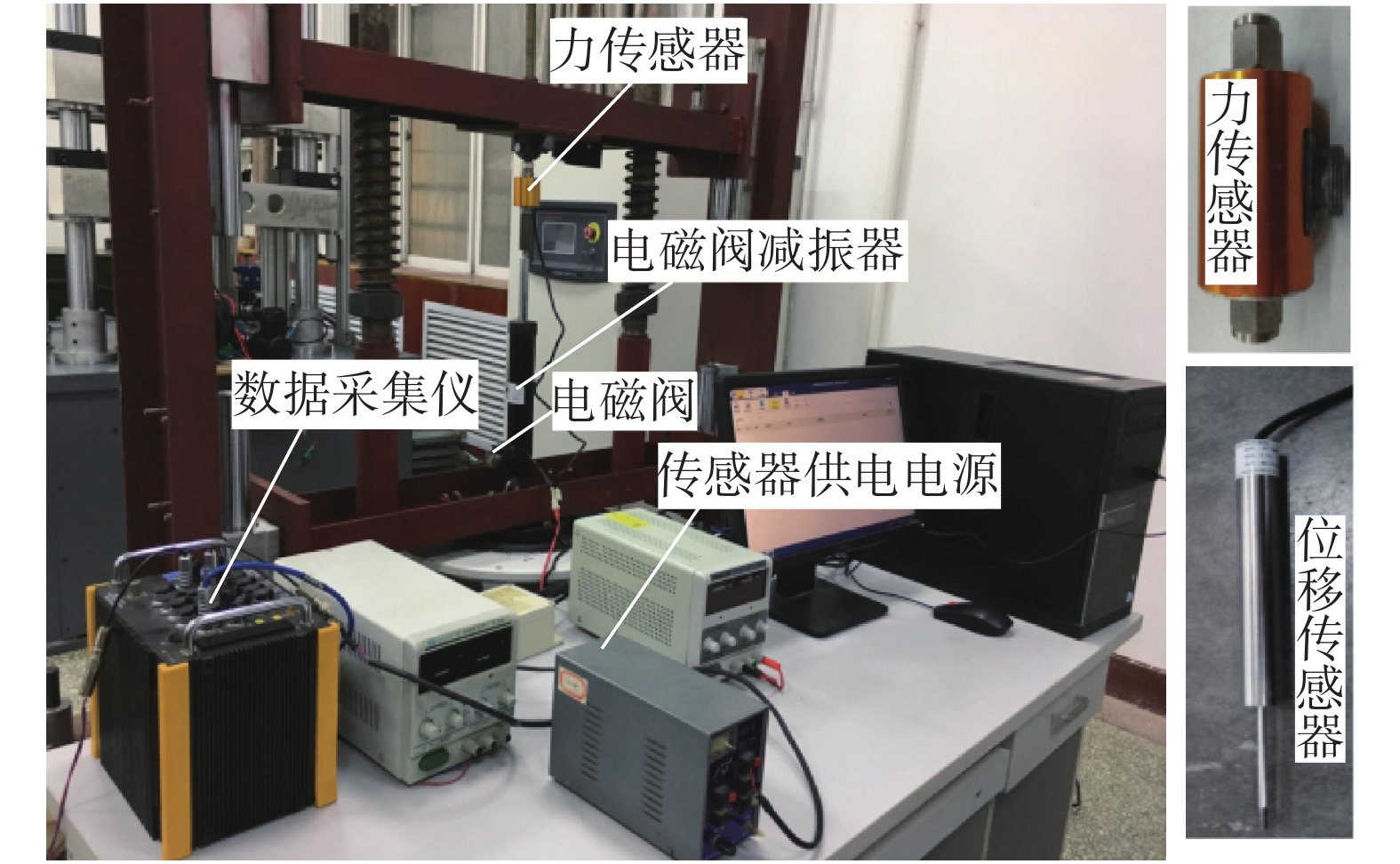
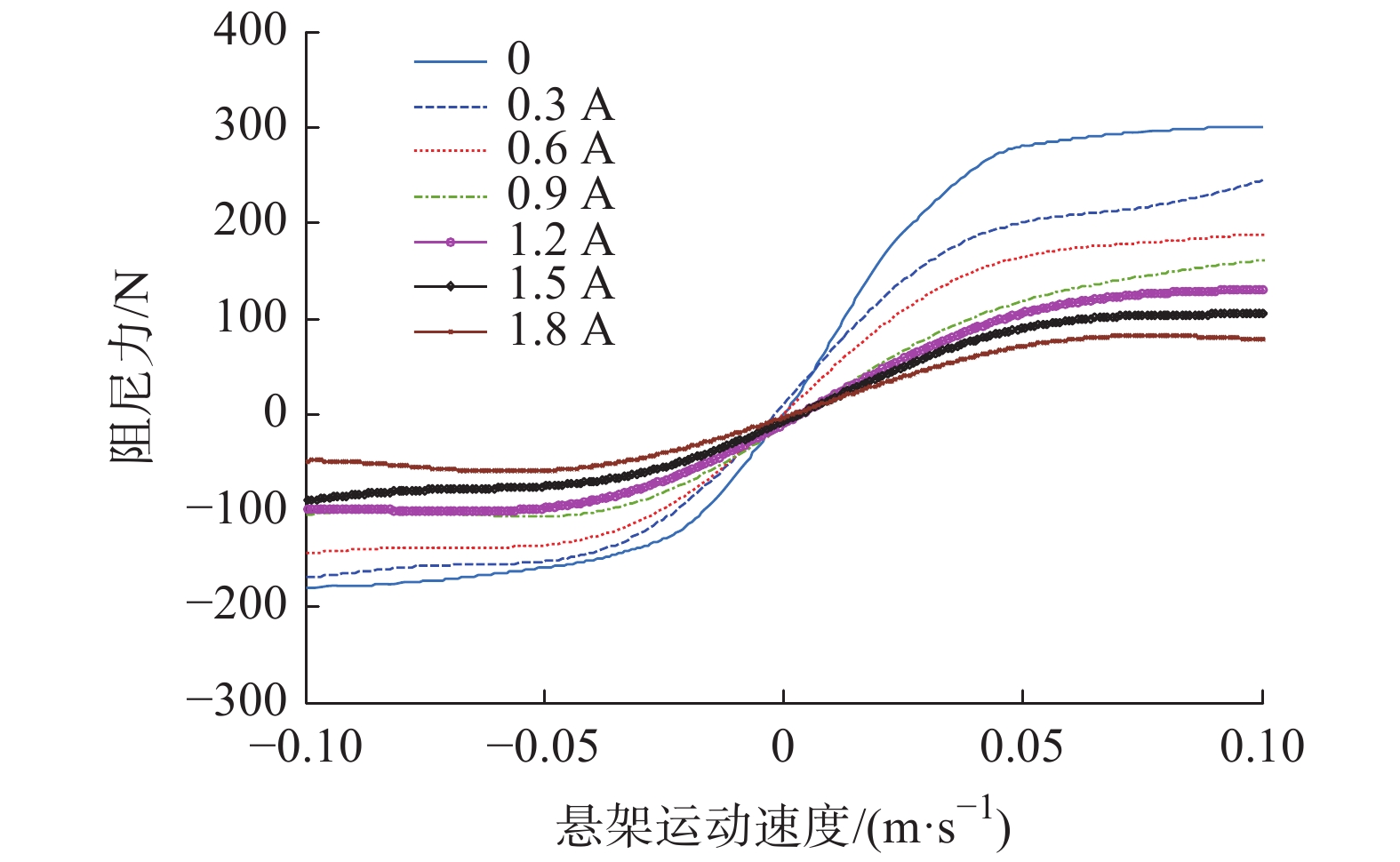
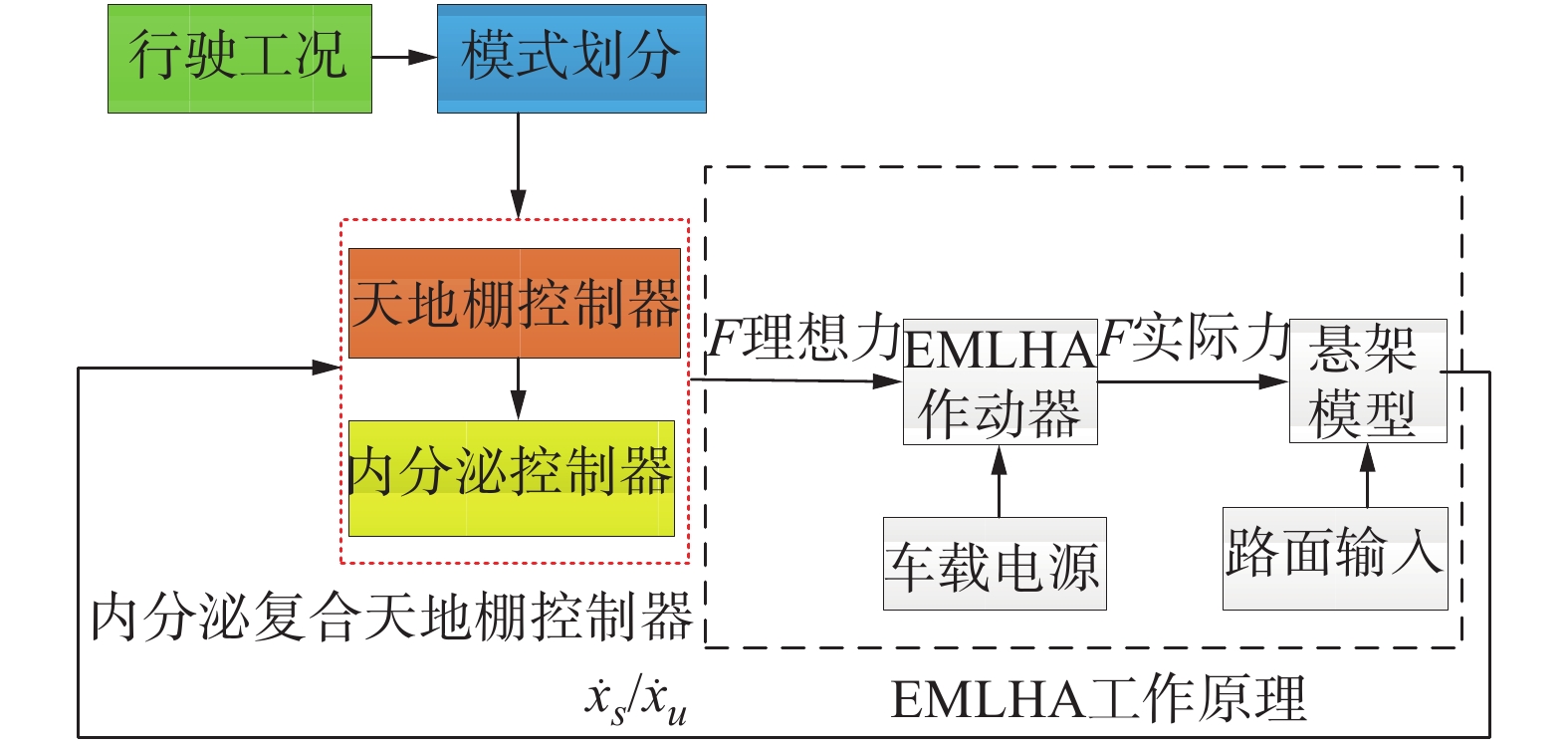
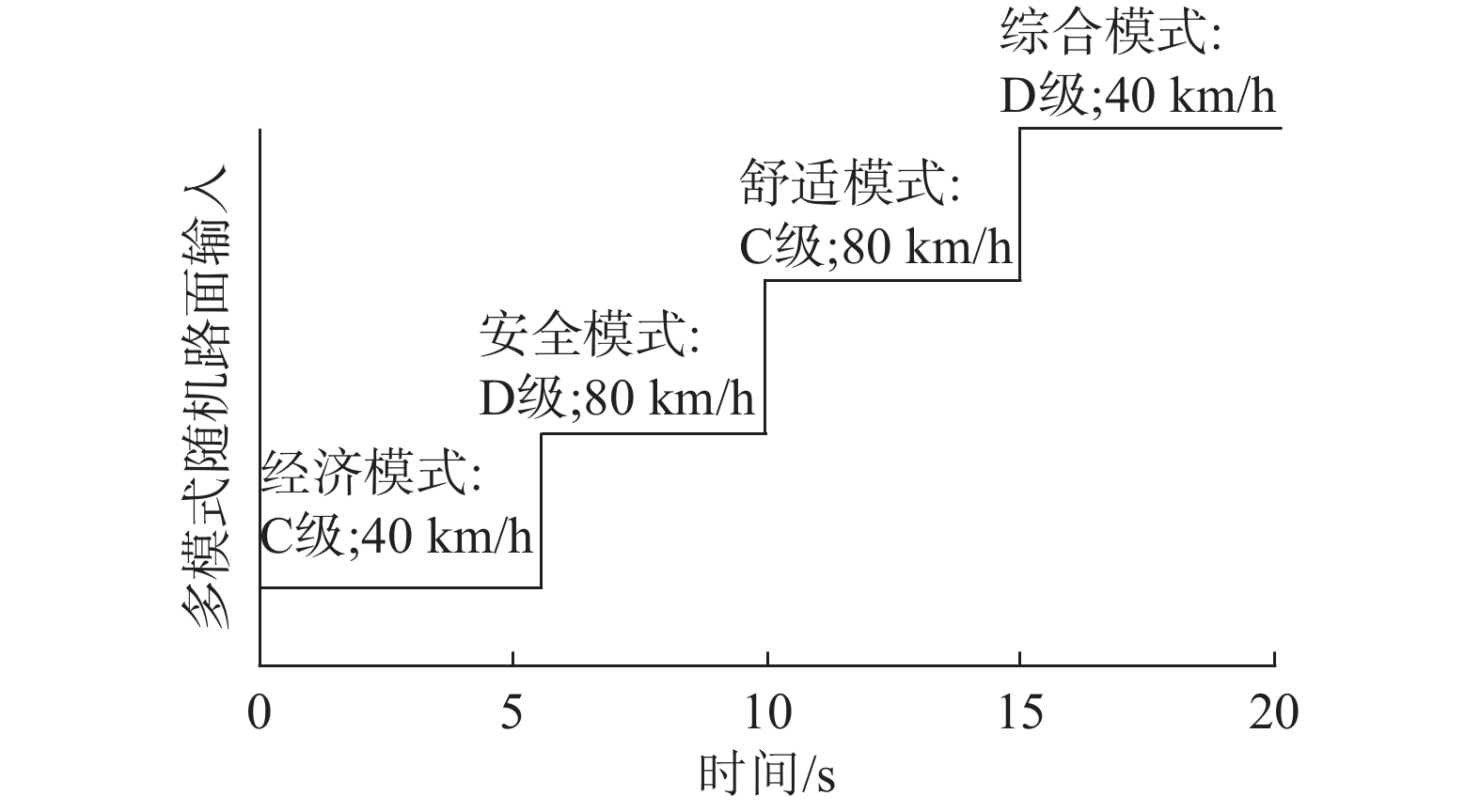
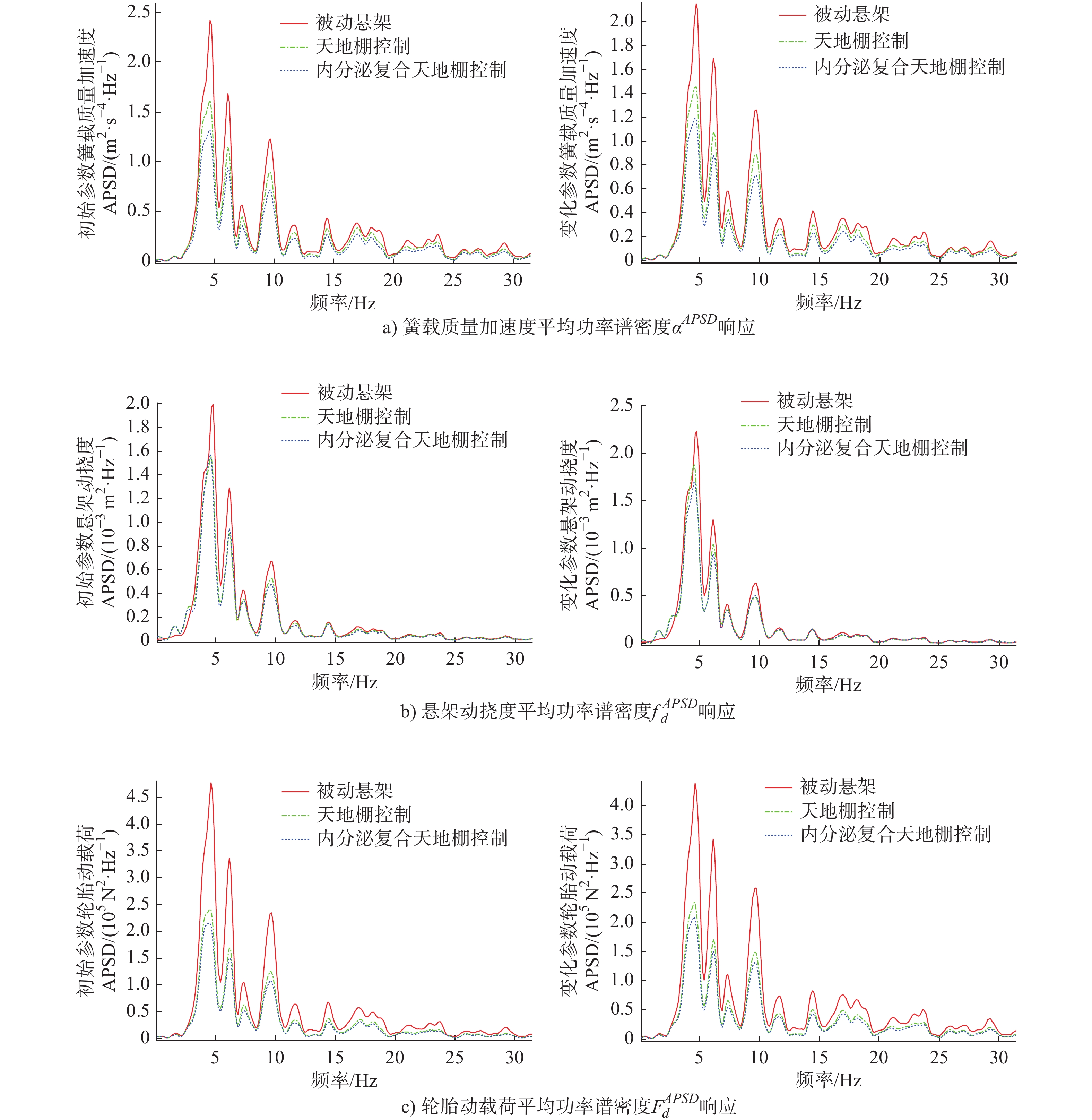
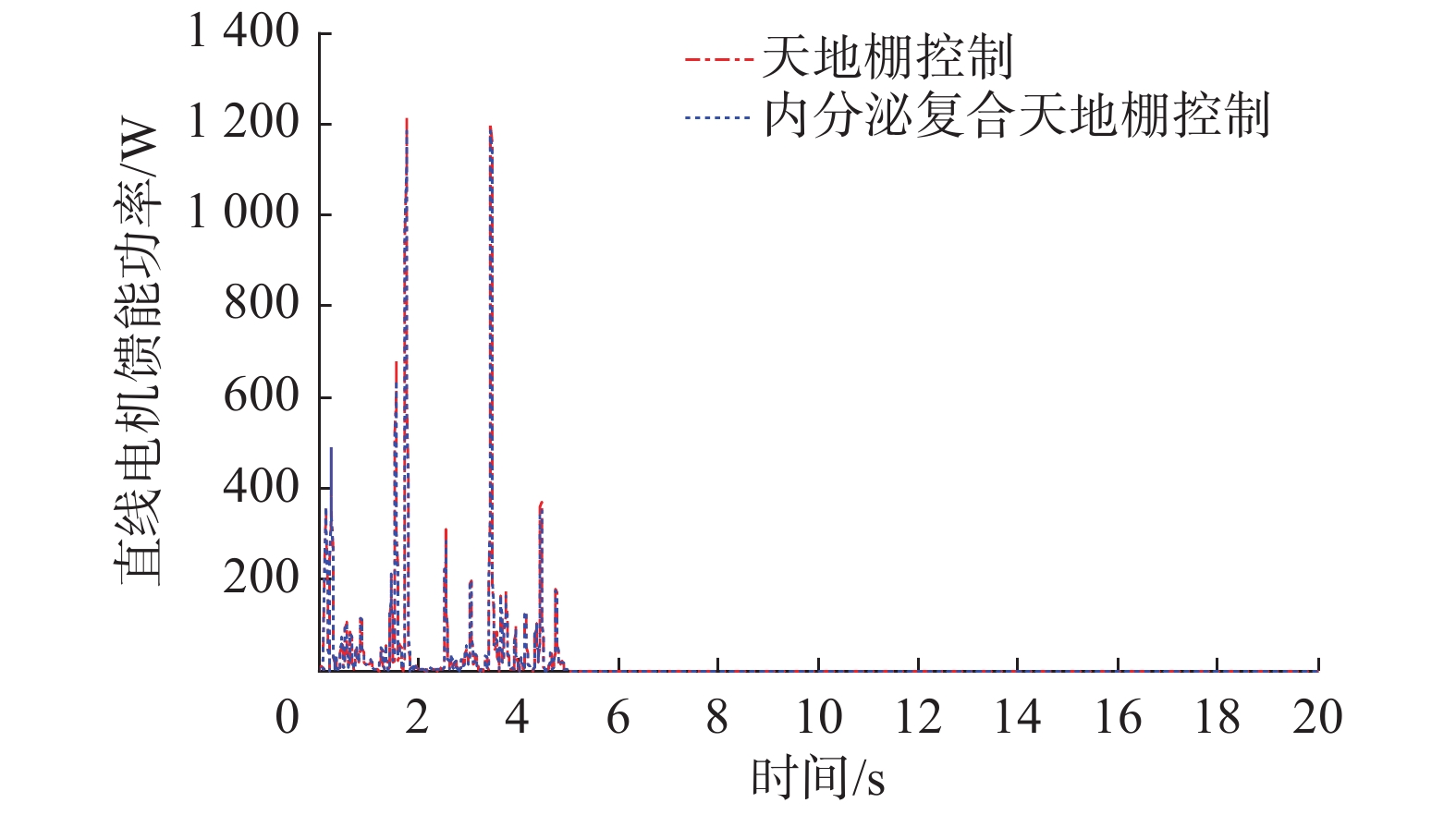
为了改善汽车平顺性与操纵稳定性,且实现振动能量回收,设计了一种基于电磁直线混合作动器(EMLHA)的主动悬架系统。根据汽车行驶工况将悬架运动划分为经济、安全、舒适和综合这4种模式;将包含长反馈与短反馈的内分泌控制与天地棚控制相结合,提出了一种内分泌复合天地棚控制策略;采用加权优化函数与能耗最低优化函数确定了悬架不同模式下最优天地棚阻尼系数,并设计了内分泌控制规律,在随机路面进行时频域仿真分析。结果表明:相比天地棚控制,内分泌复合天地棚控制减振效果更优,对变化参数仿真具有较好的适应性,改善了汽车平顺性与操纵稳定性,且回收了部分振动能量。
为了改善汽车平顺性与操纵稳定性,且实现振动能量回收,设计了一种基于电磁直线混合作动器(EMLHA)的主动悬架系统。根据汽车行驶工况将悬架运动划分为经济、安全、舒适和综合这4种模式;将包含长反馈与短反馈的内分泌控制与天地棚控制相结合,提出了一种内分泌复合天地棚控制策略;采用加权优化函数与能耗最低优化函数确定了悬架不同模式下最优天地棚阻尼系数,并设计了内分泌控制规律,在随机路面进行时频域仿真分析。结果表明:相比天地棚控制,内分泌复合天地棚控制减振效果更优,对变化参数仿真具有较好的适应性,改善了汽车平顺性与操纵稳定性,且回收了部分振动能量。





2020, 39(10): 1624-1631.
doi: 10.13433/j.cnki.1003-8728.20190342
摘要:
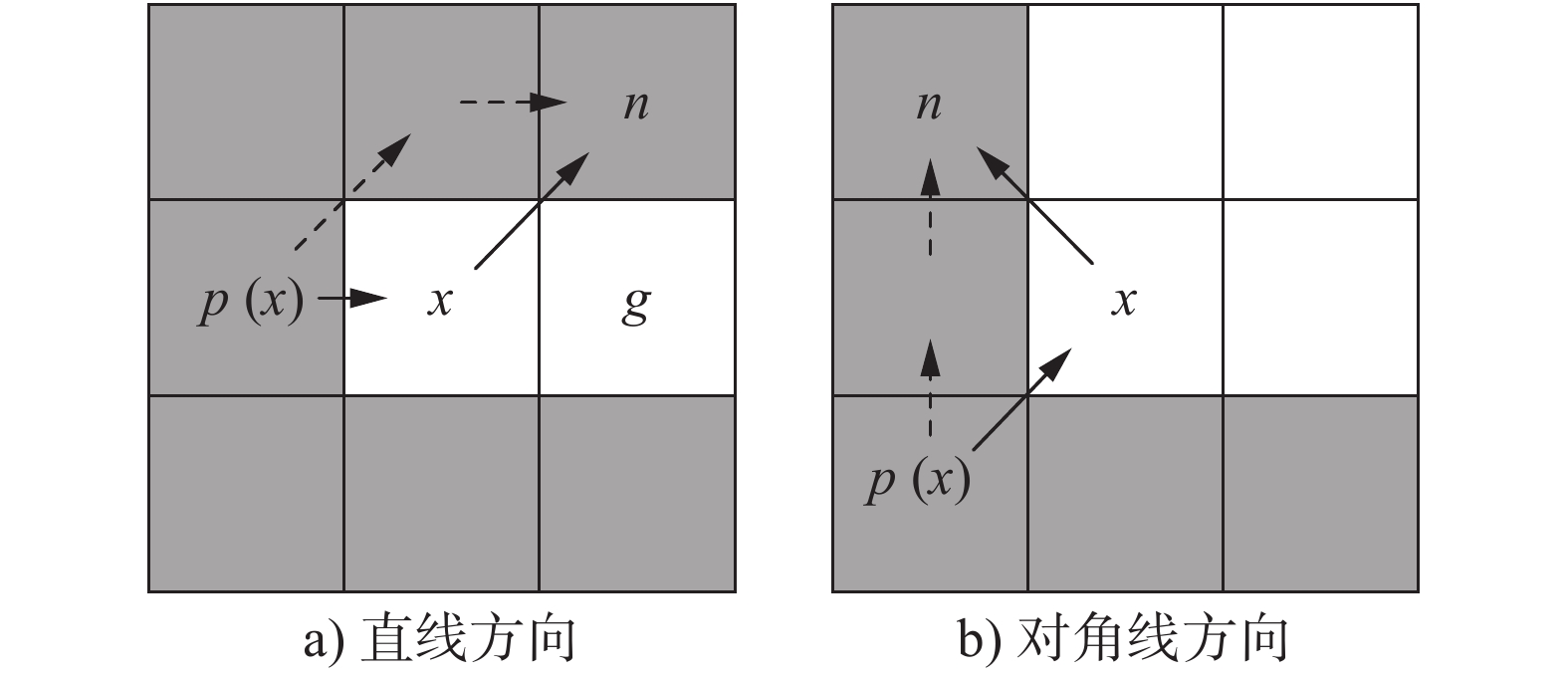
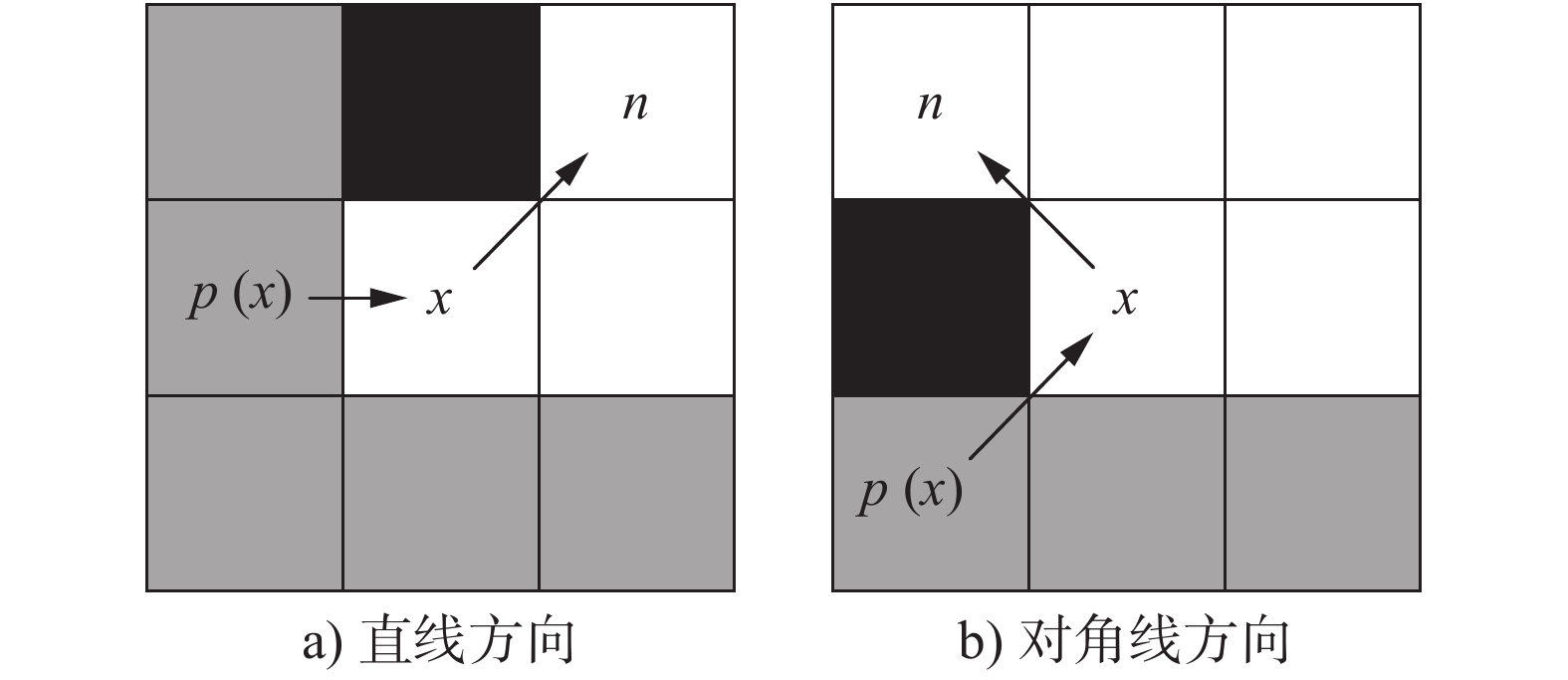
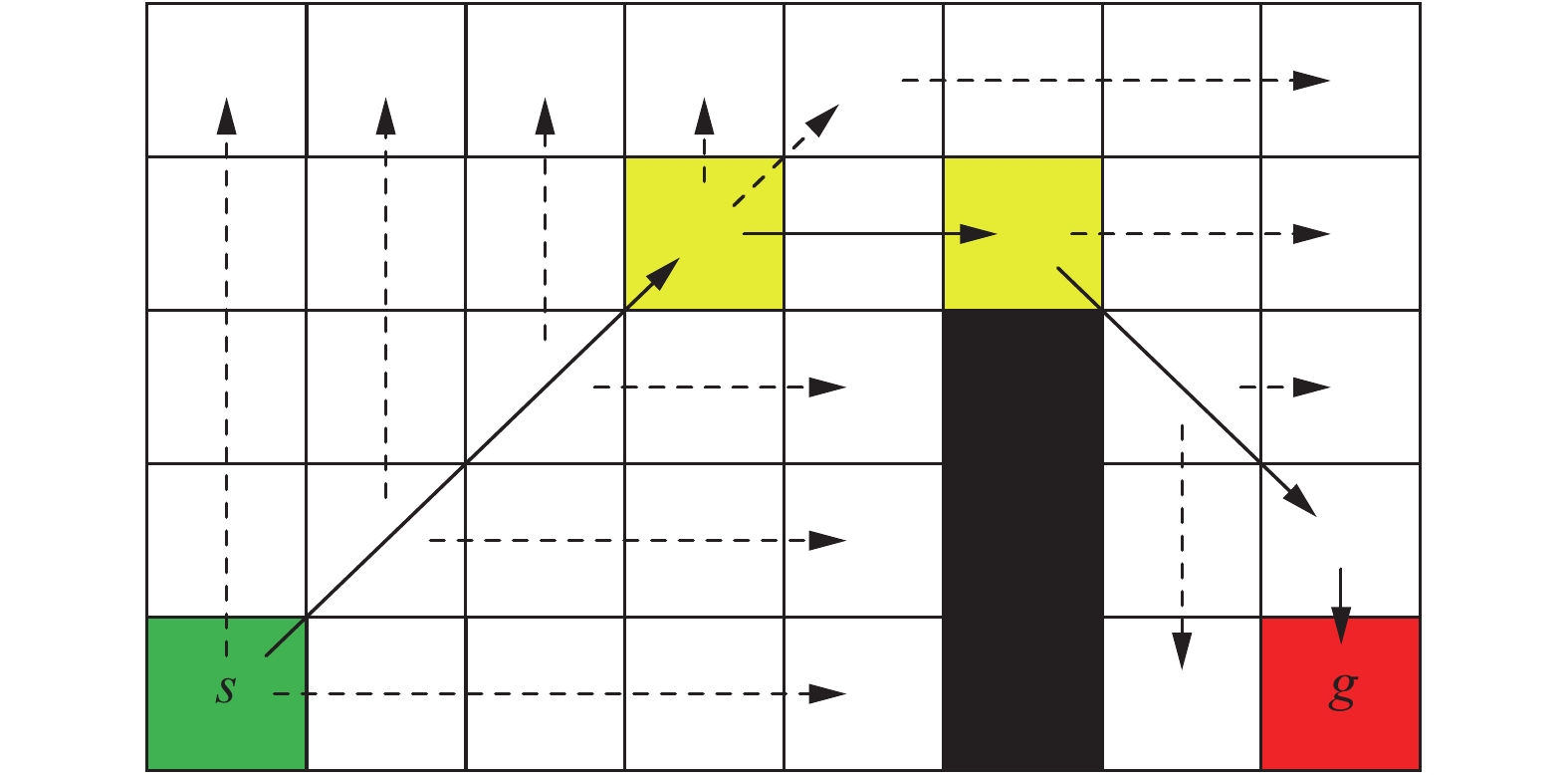
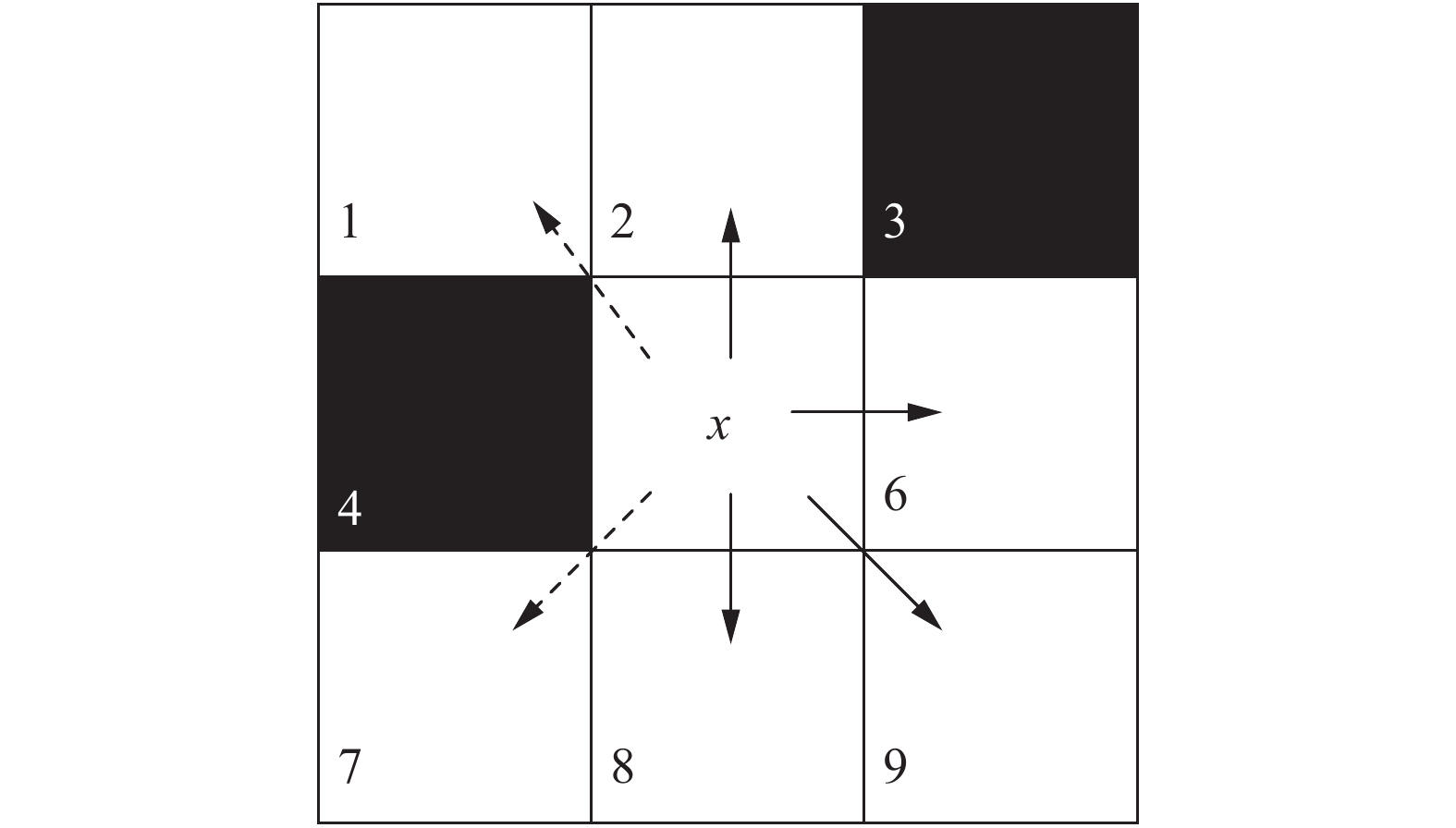
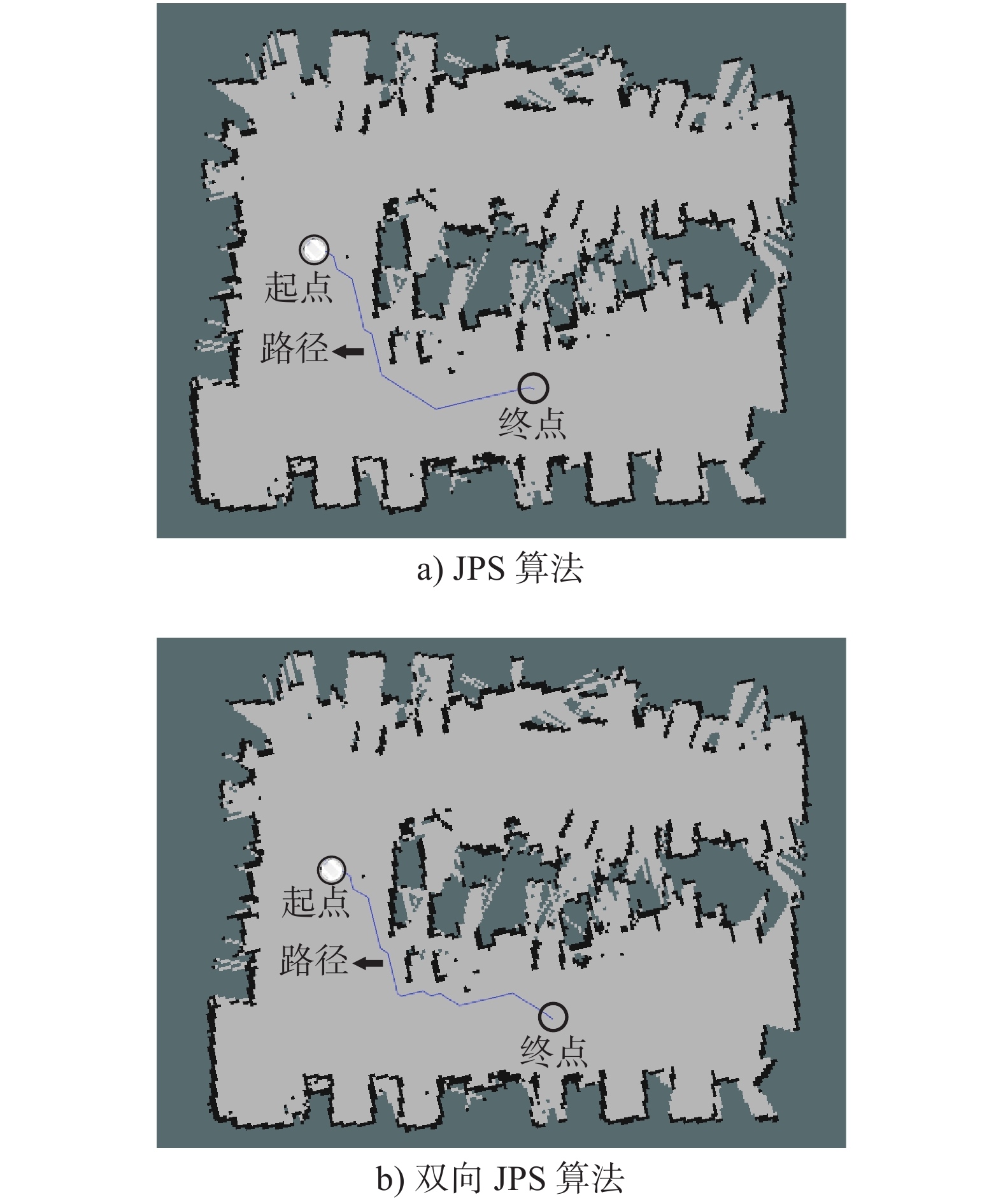
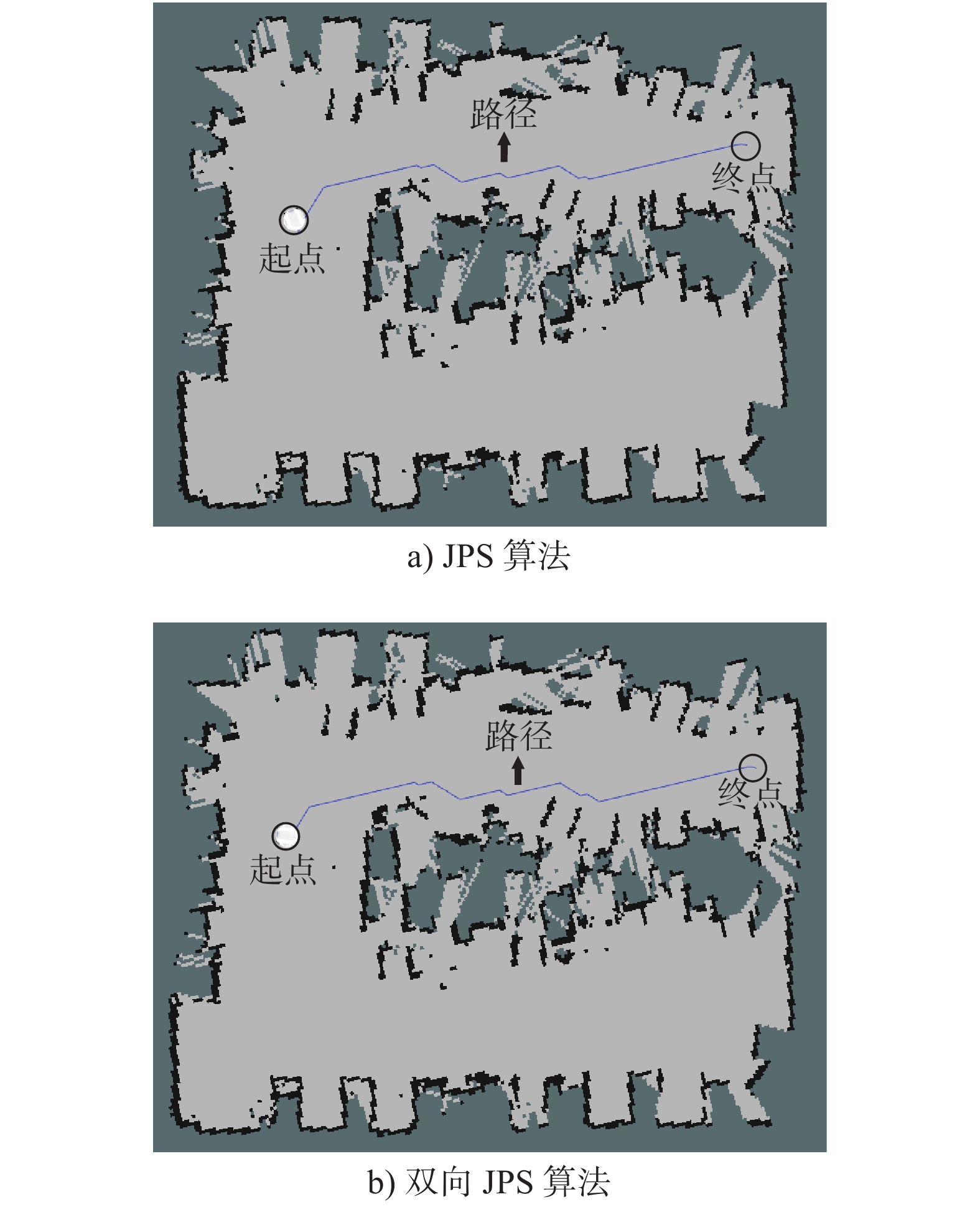
针对跳点搜索算法在移动机器人全局路径规划中预处理规则存在不安全、路径搜索时间长和内存消耗大等问题,提出了一种双向跳点搜索算法的全局路径规划方法。该方法改进了跳点筛选规则,且从两个方向交替进行路径搜索,使得路径搜索时间和扩展节点大大减少,同时也提高了机器人的安全。为验证该算法的有效性,使用不同规格的栅格地图进行了仿真实验,仿真结果表明,双向跳点搜索算法的路径搜索时间比跳点搜索算法短,且栅格地图越大,效果越明显。最后在实际的移动服务机器人中进行了导航实验,实验结果证明双向跳点搜索算法比跳点搜索算法的路径搜索时间减少约30%,且安全性高。
针对跳点搜索算法在移动机器人全局路径规划中预处理规则存在不安全、路径搜索时间长和内存消耗大等问题,提出了一种双向跳点搜索算法的全局路径规划方法。该方法改进了跳点筛选规则,且从两个方向交替进行路径搜索,使得路径搜索时间和扩展节点大大减少,同时也提高了机器人的安全。为验证该算法的有效性,使用不同规格的栅格地图进行了仿真实验,仿真结果表明,双向跳点搜索算法的路径搜索时间比跳点搜索算法短,且栅格地图越大,效果越明显。最后在实际的移动服务机器人中进行了导航实验,实验结果证明双向跳点搜索算法比跳点搜索算法的路径搜索时间减少约30%,且安全性高。








2020, 39(10): 1632-1635.
doi: 10.13433/j.cnki.1003-8728.20190302
摘要:
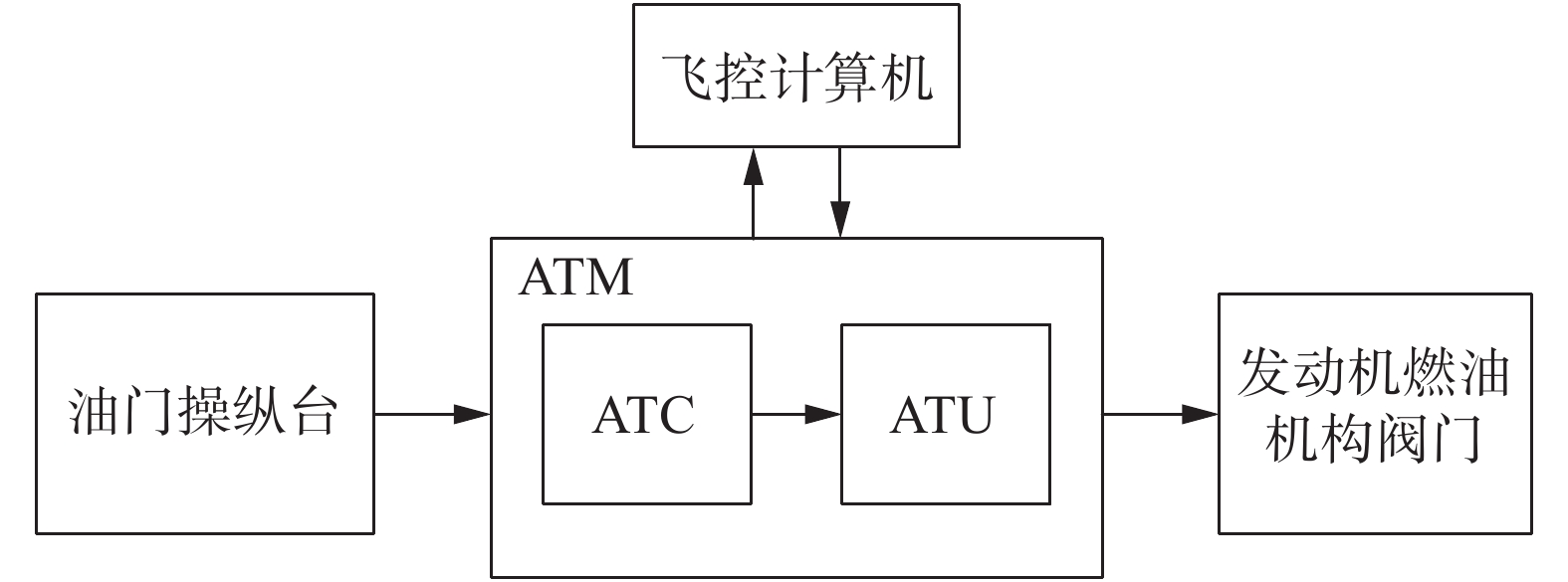
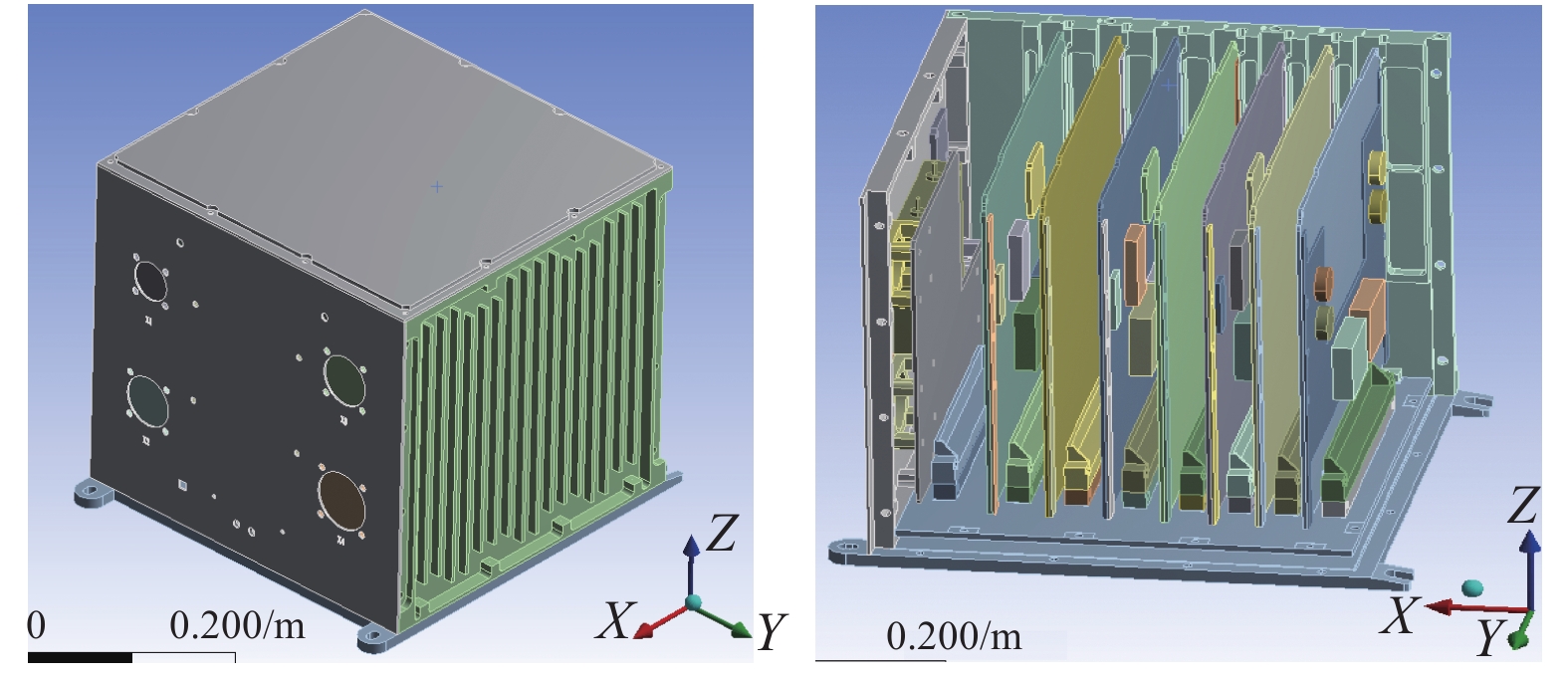
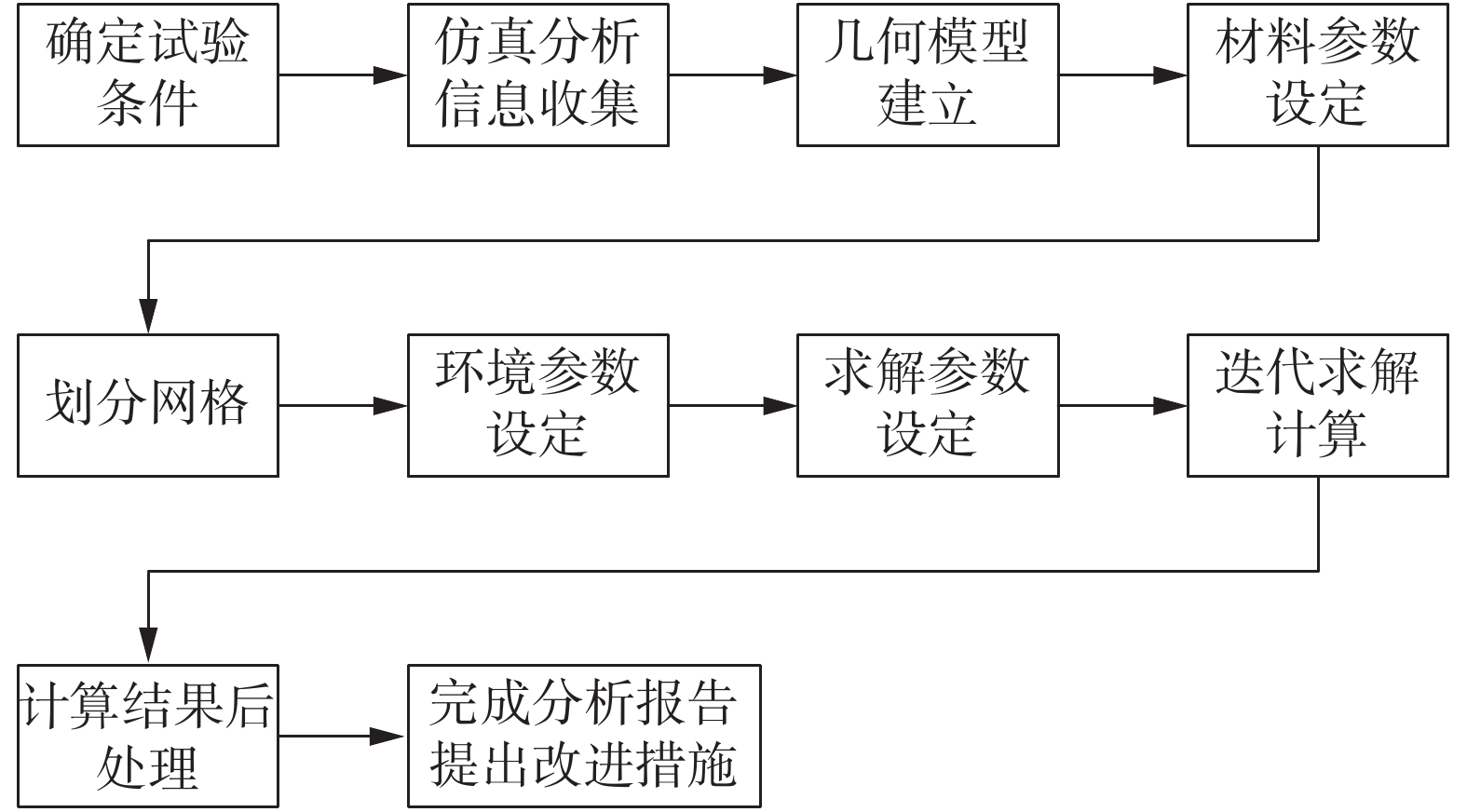
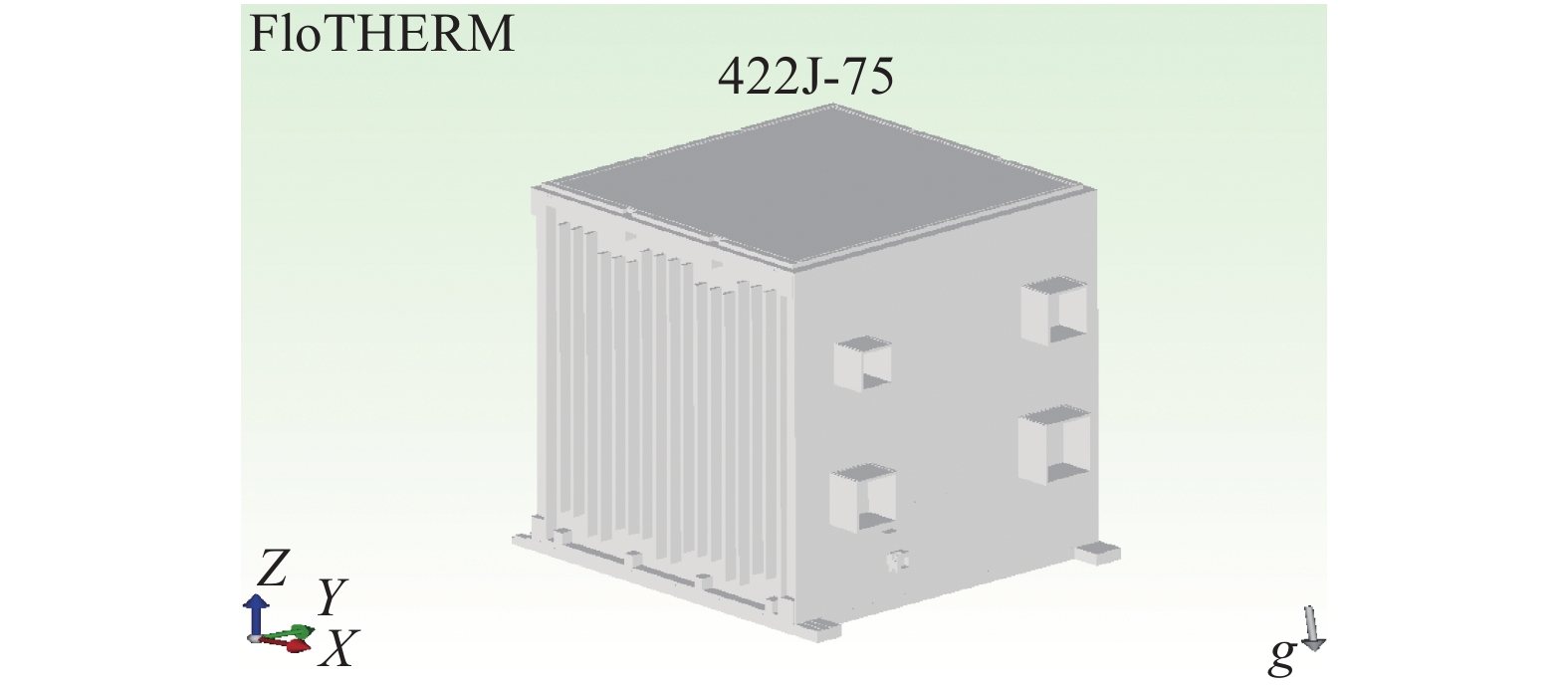
为了发现飞机油门控制器热设计的薄弱环节,保证热设计的合理性和产品的安全性,因而对航空用油门控制器进行了热设计仿真分析研究。介绍了油门控制器的工作原理以及内部结构,采用FloTHERM软件对飞机油门控制器建立热模型,分析其在70 ℃环境温度条件下,位于地面高度与高空飞行高度时的模型内部温度分布规律,找到热设计的薄弱环节。通过热仿真分析结果,指出产品热设计的不足,提出改进意见,避免由于温度过高而造成失效。
为了发现飞机油门控制器热设计的薄弱环节,保证热设计的合理性和产品的安全性,因而对航空用油门控制器进行了热设计仿真分析研究。介绍了油门控制器的工作原理以及内部结构,采用FloTHERM软件对飞机油门控制器建立热模型,分析其在70 ℃环境温度条件下,位于地面高度与高空飞行高度时的模型内部温度分布规律,找到热设计的薄弱环节。通过热仿真分析结果,指出产品热设计的不足,提出改进意见,避免由于温度过高而造成失效。




2020, 39(10): 1636-1640.
doi: 10.13433/j.cnki.1003-8728.20190261
摘要:
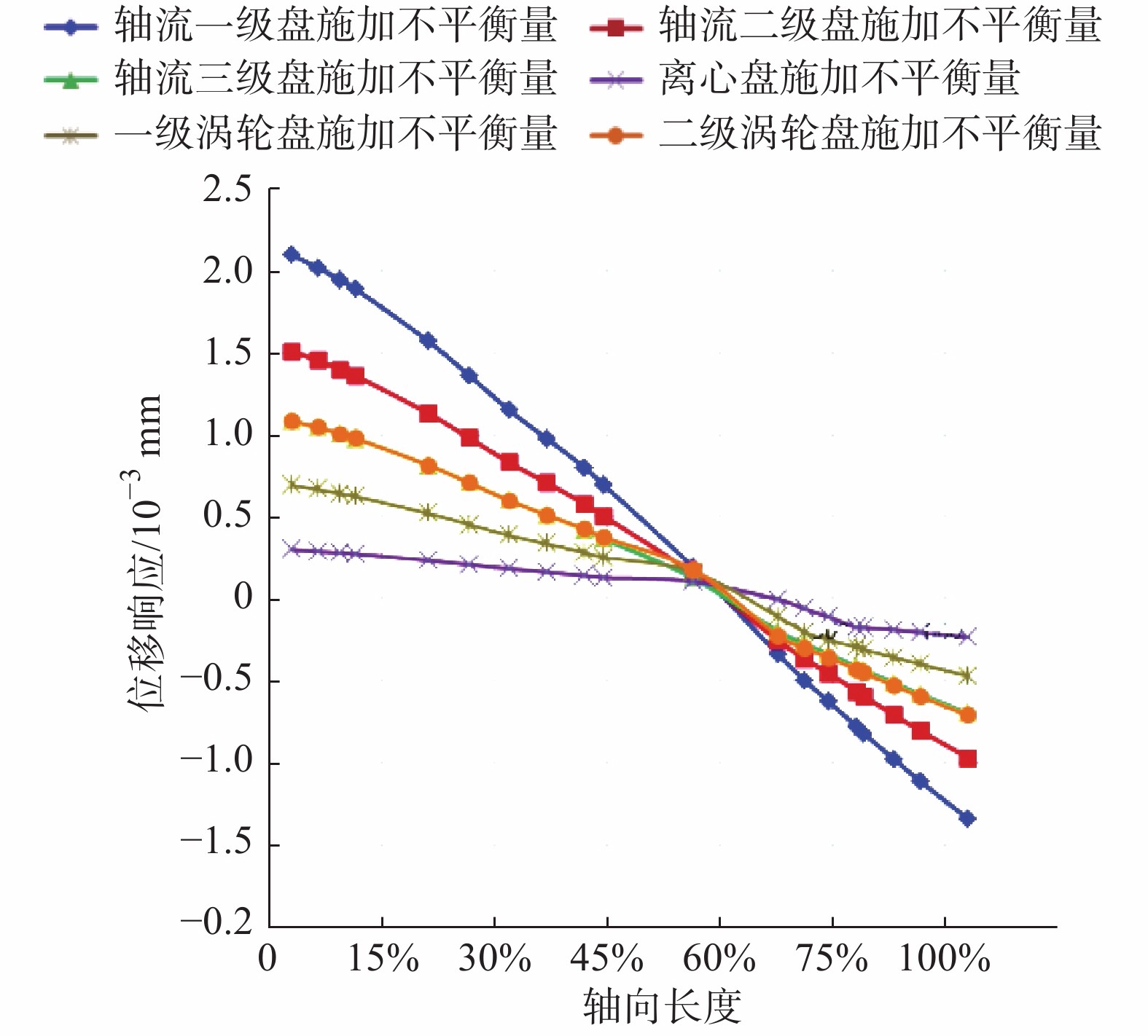
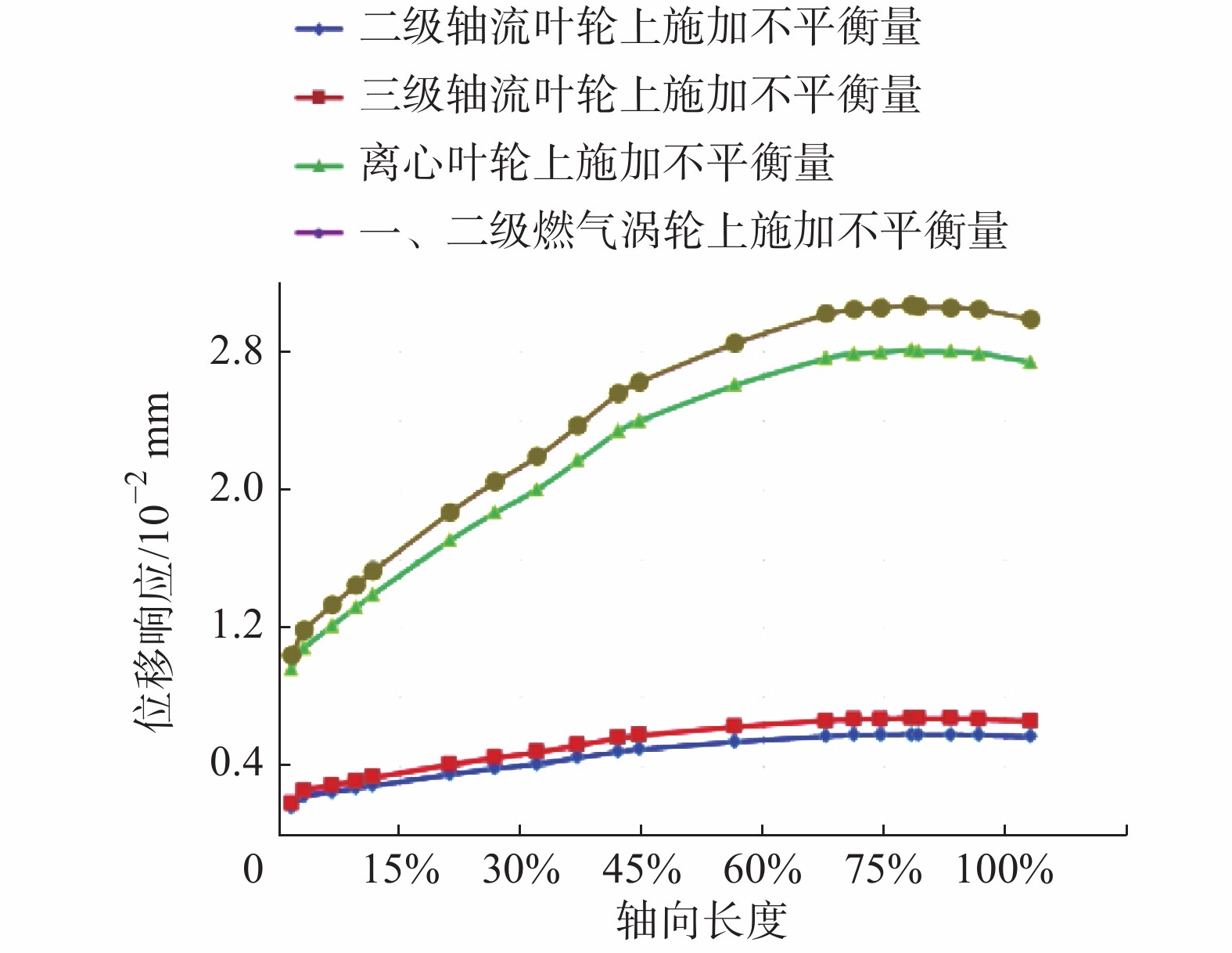
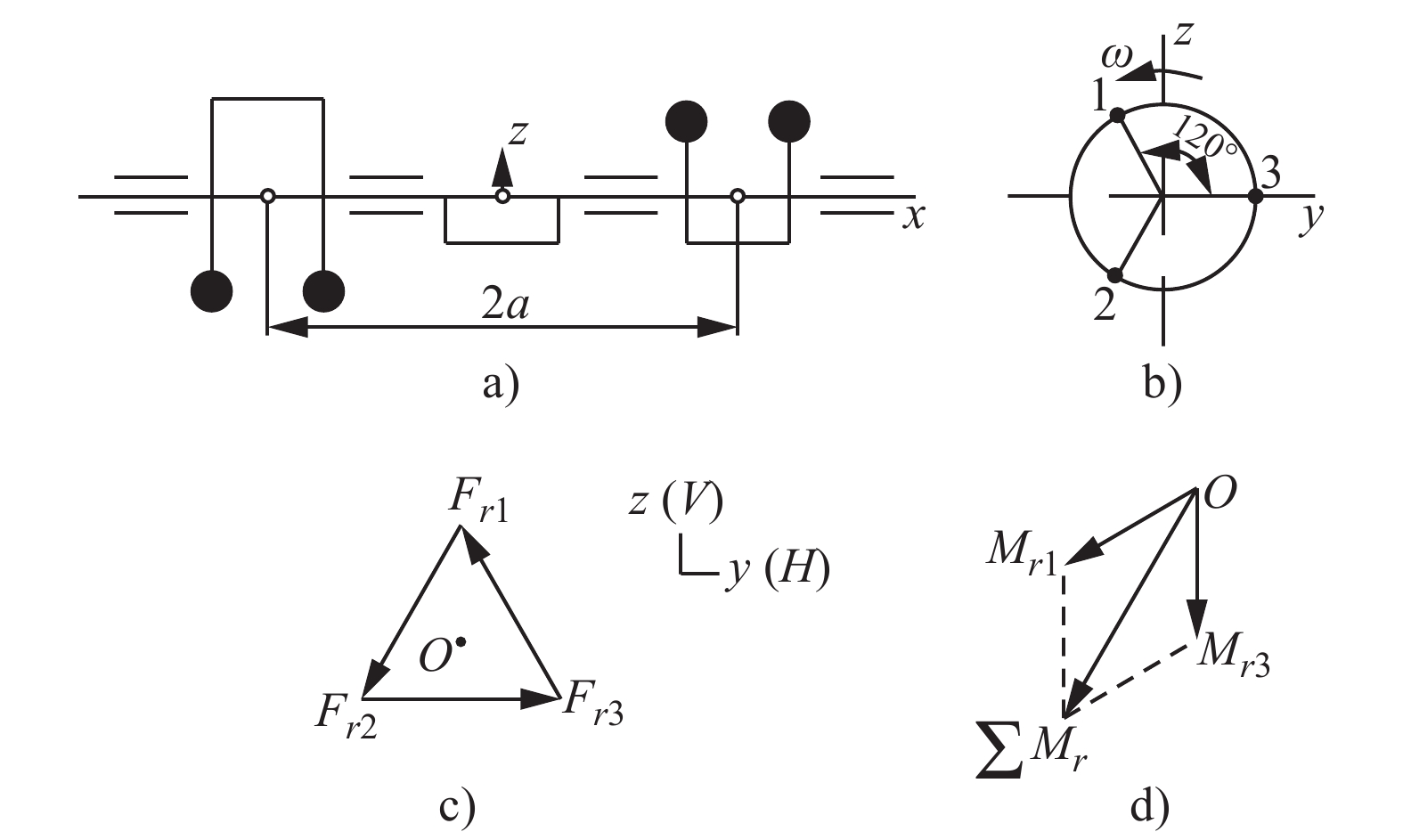
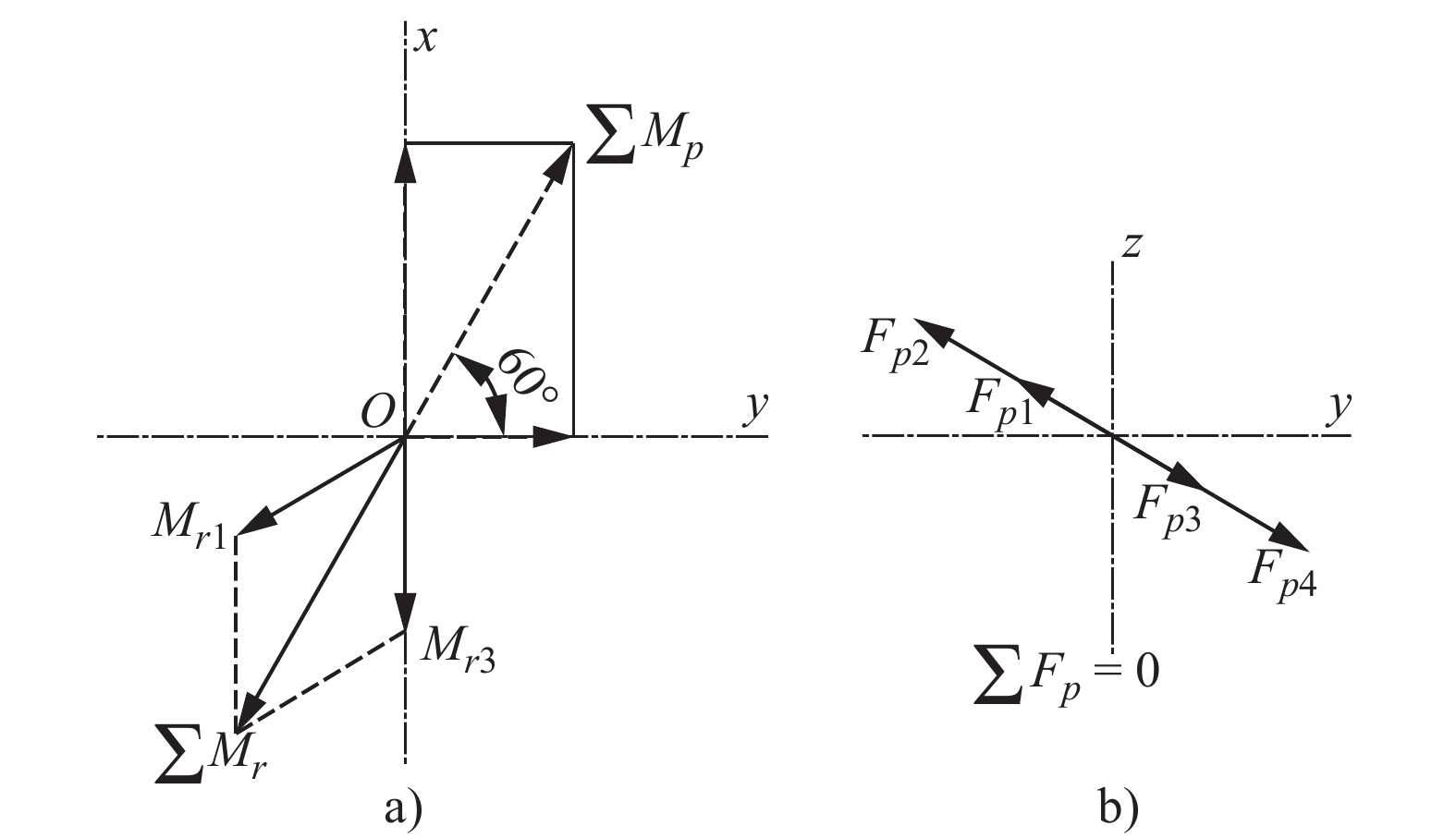
本文介绍了一种典型涡轴发动机燃气发生器转子结构,针对该转子存在的初始不平衡量分散度大的问题,分析了初始不平衡量的影响因素,计算了装配引起或单件初始不平衡量对转子振动的影响,发现压气机一级轴流盘和燃气涡轮二级盘的单件不平衡量对转子振动影响最大,必须降低这两个零件的初始不平衡量,但燃气发生器转子的平衡位置也在这两个零件上,这与降低单件不平衡量是相冲突的。为此,进一步分析了转子初始不平衡量的装配因素,给出了采用通过调整中心拉杆的角向位置来严格控制离心叶轮跳动的装配工艺。该装配工艺简单有效,能快速的控制转子的初始不平衡量, 适用于使用中心拉杆紧固的转子组件,已在不同型号和不同承制厂家实施验证,具有实际应用推广价值。
本文介绍了一种典型涡轴发动机燃气发生器转子结构,针对该转子存在的初始不平衡量分散度大的问题,分析了初始不平衡量的影响因素,计算了装配引起或单件初始不平衡量对转子振动的影响,发现压气机一级轴流盘和燃气涡轮二级盘的单件不平衡量对转子振动影响最大,必须降低这两个零件的初始不平衡量,但燃气发生器转子的平衡位置也在这两个零件上,这与降低单件不平衡量是相冲突的。为此,进一步分析了转子初始不平衡量的装配因素,给出了采用通过调整中心拉杆的角向位置来严格控制离心叶轮跳动的装配工艺。该装配工艺简单有效,能快速的控制转子的初始不平衡量, 适用于使用中心拉杆紧固的转子组件,已在不同型号和不同承制厂家实施验证,具有实际应用推广价值。