作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2018年 37卷 第12期
2018, 37(12): 1805-1810.
doi: 10.13433/j.cnki.1003-8728.20180079
 摘要
摘要 HTML
HTML PDF 1059KB
PDF 1059KB
摘要:
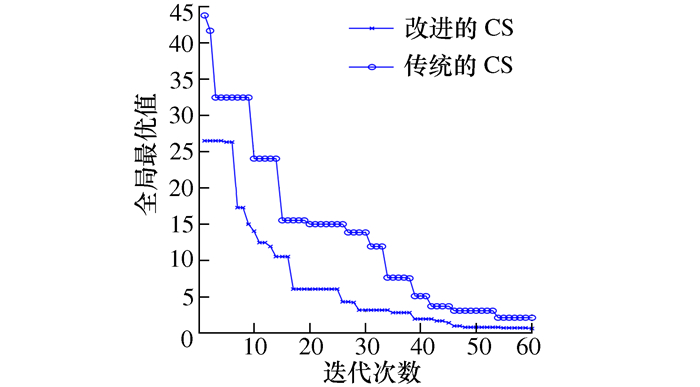
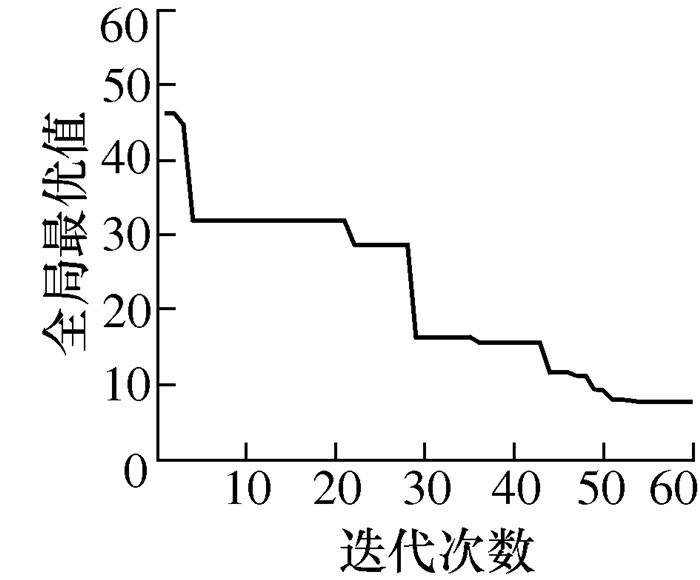
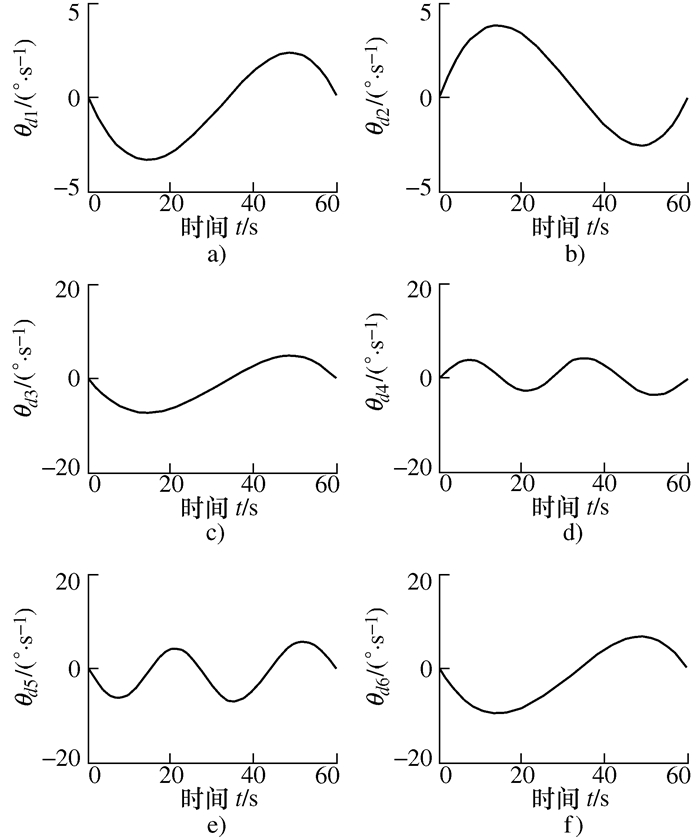
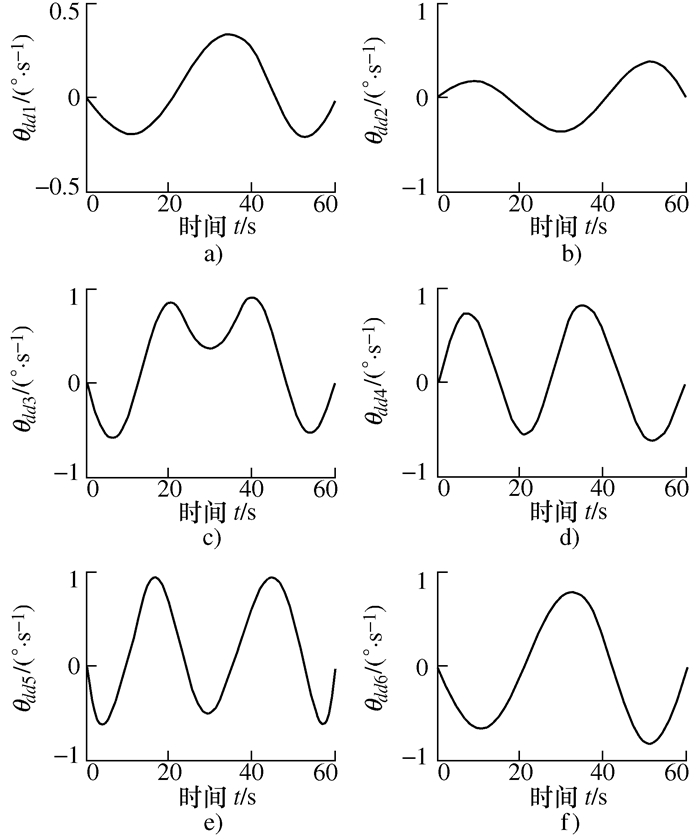
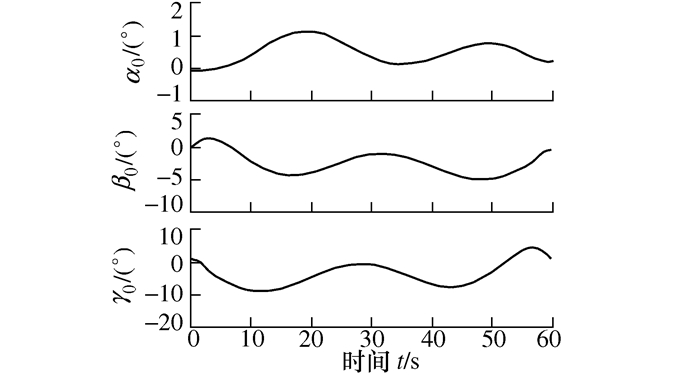
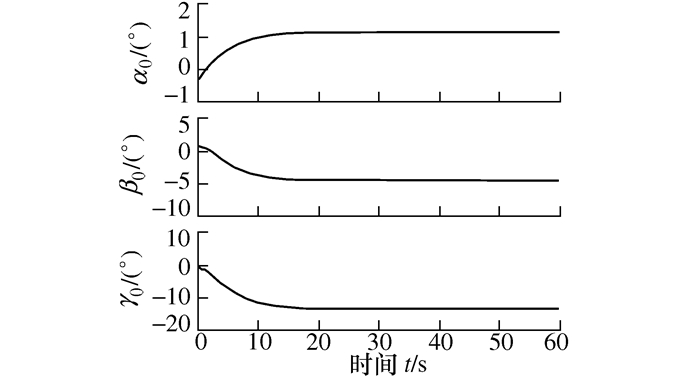
针对自由漂浮状态下的6-DOF(degree of freedom)非完整冗余的空间机械臂系统在轨迹规划时平滑性和稳定性不足的问题,设计了一种改进布谷鸟搜索算法的轨迹规划策略。在空间机械臂一般模型的基础上建立其运动方程,根据基座姿态、机械臂关节角速度以及角加速度的约束条件构建了空间机械臂轨迹规划模型,通过改进布谷鸟搜索算法进行优化,实现轨迹规划的目标。仿真结果表明,在满足机械臂系统受限范围可使得关节的最终状态达到了期望状态,关节轨迹的平滑性得到了改善;并且能较好的克服机械臂运动对基座姿态的干扰,增强了机械臂系统运动的稳定性。
针对自由漂浮状态下的6-DOF(degree of freedom)非完整冗余的空间机械臂系统在轨迹规划时平滑性和稳定性不足的问题,设计了一种改进布谷鸟搜索算法的轨迹规划策略。在空间机械臂一般模型的基础上建立其运动方程,根据基座姿态、机械臂关节角速度以及角加速度的约束条件构建了空间机械臂轨迹规划模型,通过改进布谷鸟搜索算法进行优化,实现轨迹规划的目标。仿真结果表明,在满足机械臂系统受限范围可使得关节的最终状态达到了期望状态,关节轨迹的平滑性得到了改善;并且能较好的克服机械臂运动对基座姿态的干扰,增强了机械臂系统运动的稳定性。


2018, 37(12): 1811-1816.
doi: 10.13433/j.cnki.1003-8728.20180230
摘要:
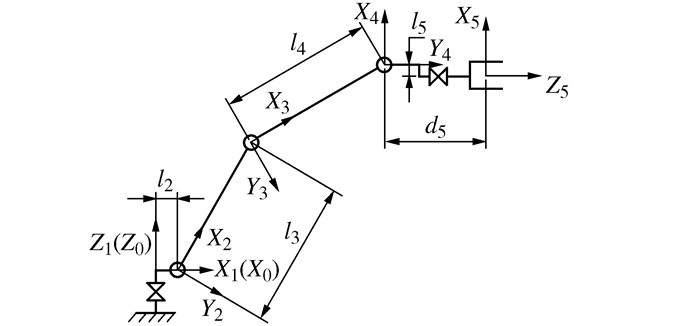
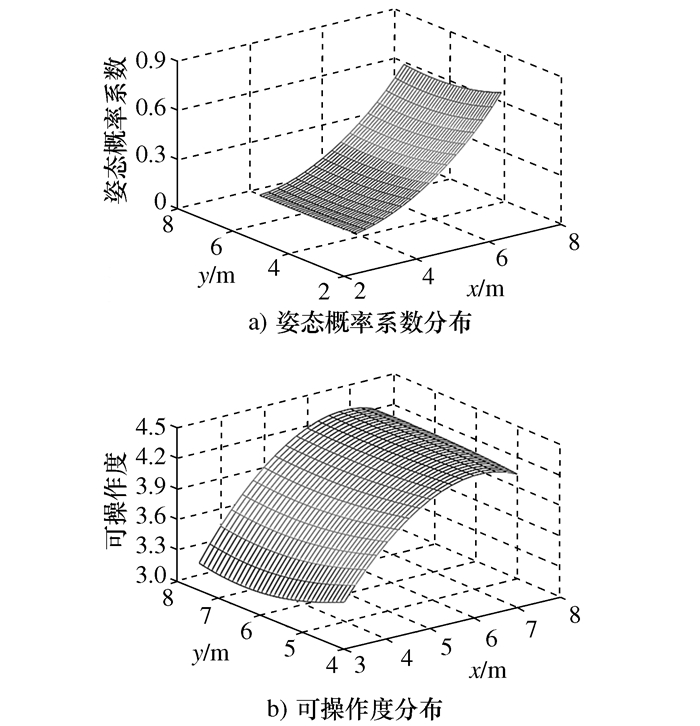
针对传统机器人操作臂灵活度优化方法忽略了获取机器人雅克比矩阵奇异值,导致操作臂灵活度过程效率降低,排爆准确度得不到明显提高。提出排爆机器人五自由度操作臂灵活度优化方法。首先对操作臂构造动力学模型,获取拉格朗日动力学方程及相关参数,对姿态概率系数和可操作度进行描述。以五自由度操作臂工作球为基础分析操作臂姿态概率系数;针对操作臂的可操作度,通过排爆机器人雅克比矩阵奇异值实现构造,建立操作臂在工作空间内的灵活度优化目标函数,通过遗传算法对目标函数进行求解,实现排爆机器人操作臂灵活度的优化。实验结果表明,所提方法优化性能佳,可有效提高操作臂灵活度。
针对传统机器人操作臂灵活度优化方法忽略了获取机器人雅克比矩阵奇异值,导致操作臂灵活度过程效率降低,排爆准确度得不到明显提高。提出排爆机器人五自由度操作臂灵活度优化方法。首先对操作臂构造动力学模型,获取拉格朗日动力学方程及相关参数,对姿态概率系数和可操作度进行描述。以五自由度操作臂工作球为基础分析操作臂姿态概率系数;针对操作臂的可操作度,通过排爆机器人雅克比矩阵奇异值实现构造,建立操作臂在工作空间内的灵活度优化目标函数,通过遗传算法对目标函数进行求解,实现排爆机器人操作臂灵活度的优化。实验结果表明,所提方法优化性能佳,可有效提高操作臂灵活度。



2018, 37(12): 1817-1822.
doi: 10.13433/j.cnki.1003-8728.20180087
摘要:
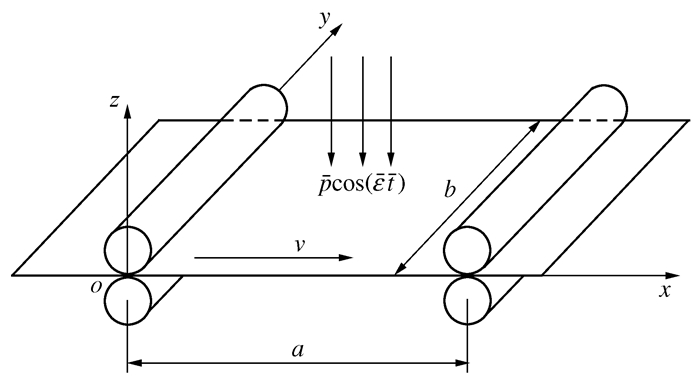
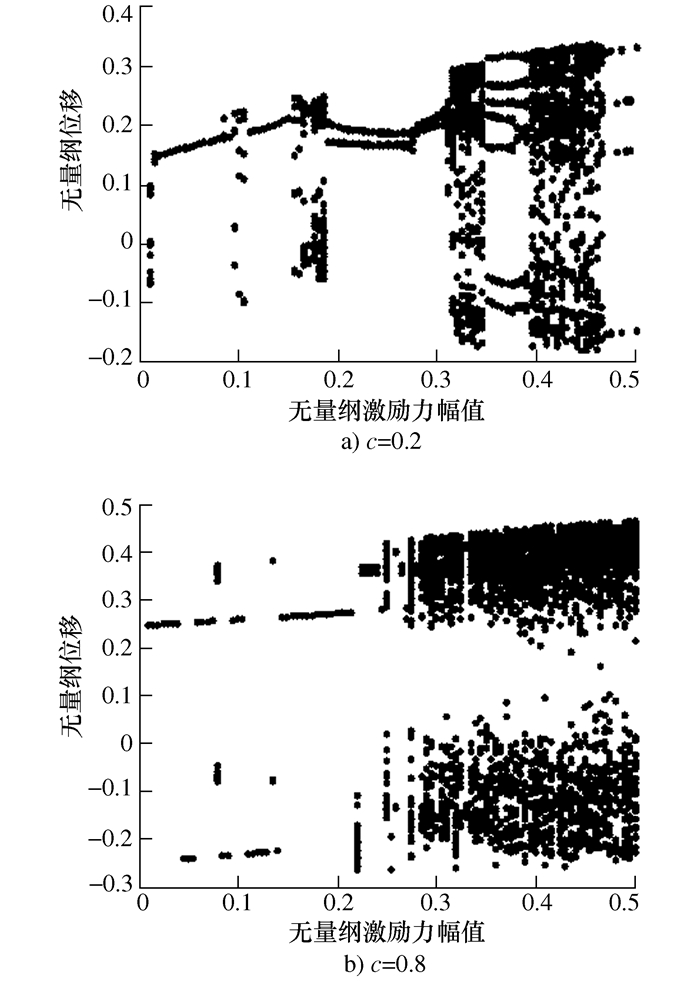
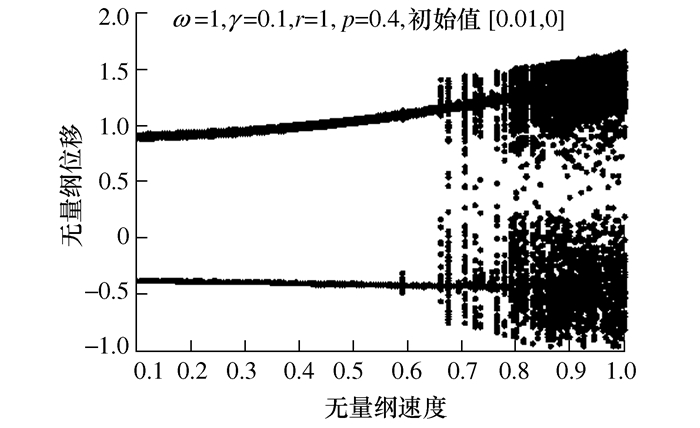
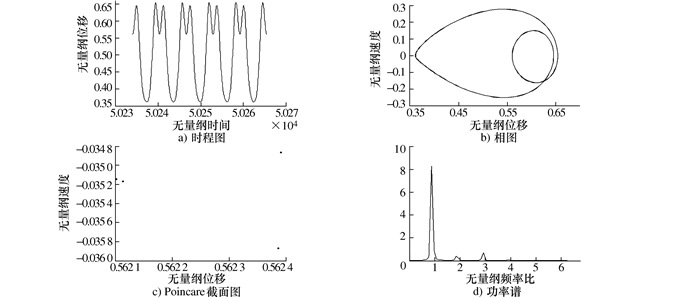
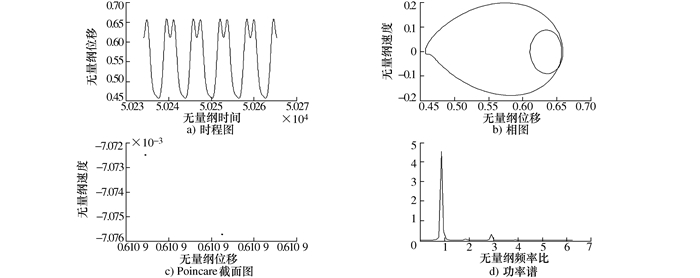
研究了运动薄膜的速度对非线性强迫振动的影响。基于Von Karman薄板理论推导出轴向运动薄膜大挠度振动方程,应用Galerkin方法对振动偏微分方程组进行离散,得到系统的状态方程,采用4阶Runge-Kutta法对系统状态方程进行数值求解,利用分岔图分析了薄膜非线性振动特性与速度的关系,得到了薄膜产生混沌的区间和稳定工作区间。通过时程图、相图、Poincare截面图和功率谱分析系统的周期运动和混沌运动。
研究了运动薄膜的速度对非线性强迫振动的影响。基于Von Karman薄板理论推导出轴向运动薄膜大挠度振动方程,应用Galerkin方法对振动偏微分方程组进行离散,得到系统的状态方程,采用4阶Runge-Kutta法对系统状态方程进行数值求解,利用分岔图分析了薄膜非线性振动特性与速度的关系,得到了薄膜产生混沌的区间和稳定工作区间。通过时程图、相图、Poincare截面图和功率谱分析系统的周期运动和混沌运动。

2018, 37(12): 1823-1827.
doi: 10.13433/j.cnki.1003-8728.20180137
摘要:
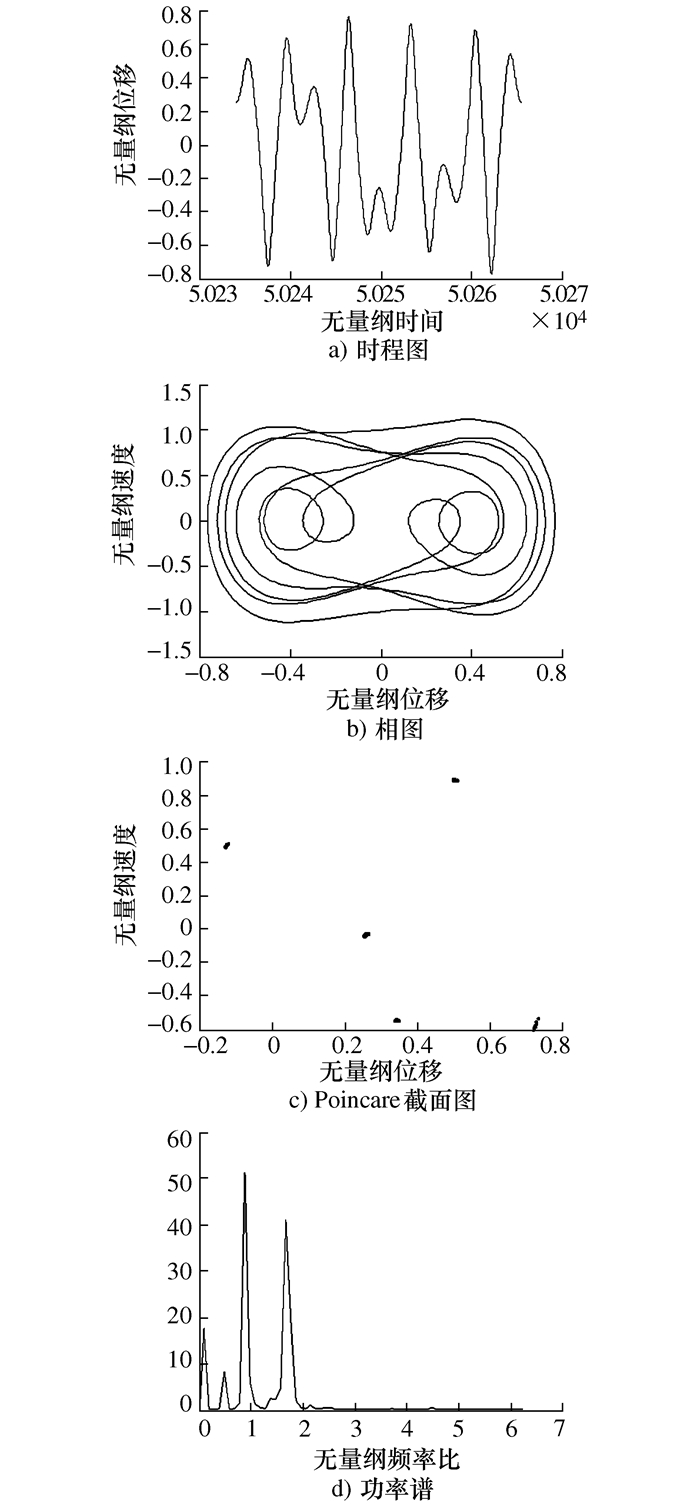
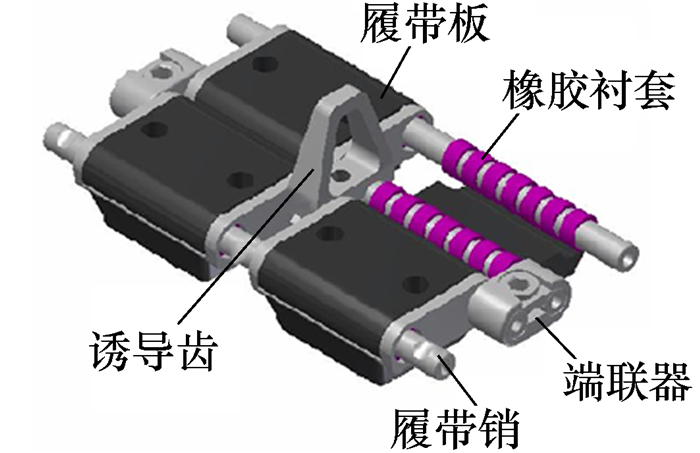
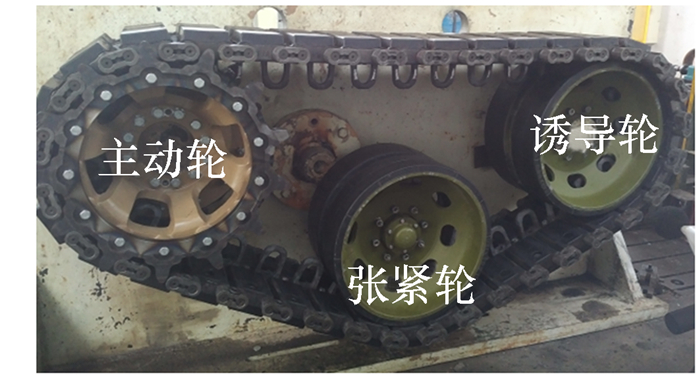
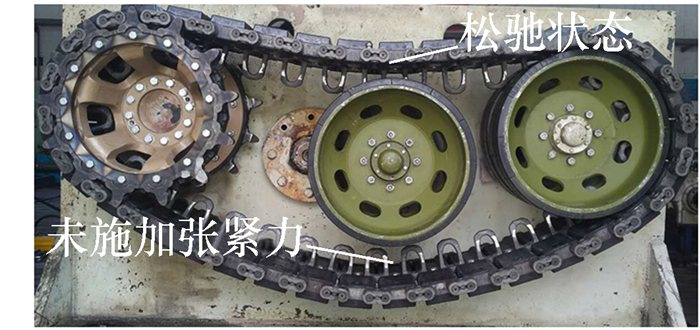
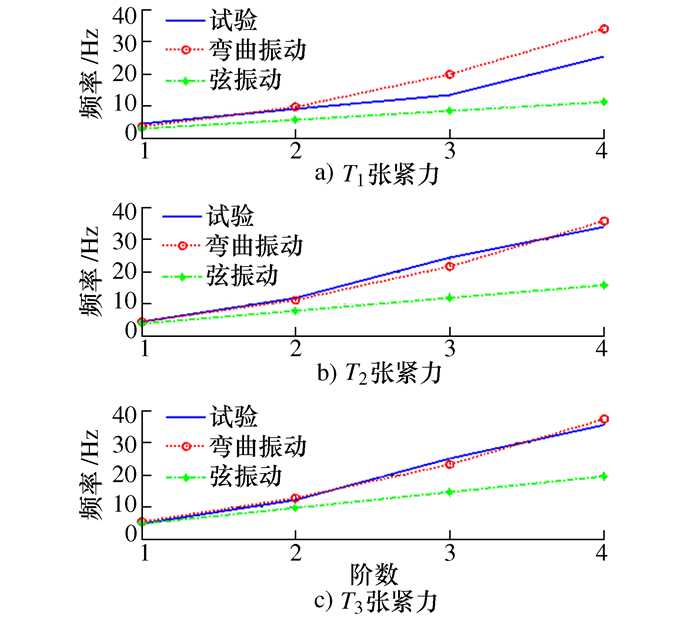
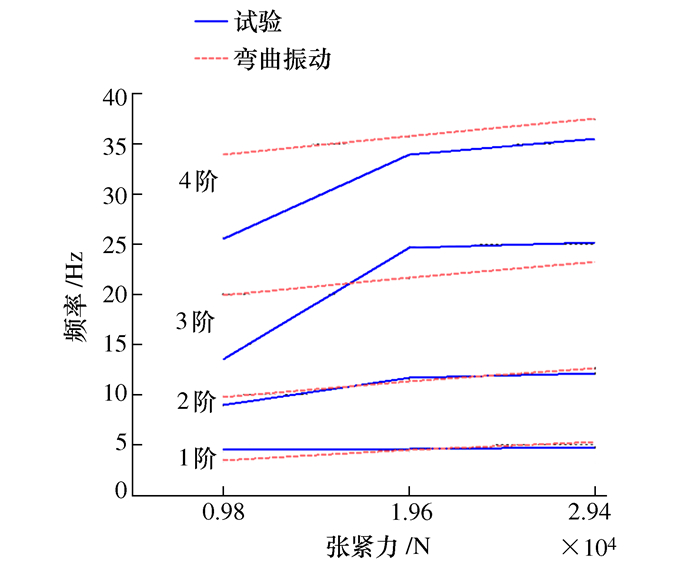
不同于原来的金属铰链履带,现代履带多采用销耳挂胶结构,履带的结构和特性均发生了变化。针对现代履带结构变化,应用梁的弯曲振动理论建立了销耳挂胶履带动力学模型。考虑到挂胶层的作用,将履带视为一段拉力下的梁模型,推导了含有履带梁弯曲刚度项的固有频率计算公式。并对一段履带进行了试验验证,对比了理论计算数据与试验数据。结果表明,与传统基于弦的横向振动模型相比,基于梁弯曲振动理论建立的模型能更准确地描述履带振动特性。
不同于原来的金属铰链履带,现代履带多采用销耳挂胶结构,履带的结构和特性均发生了变化。针对现代履带结构变化,应用梁的弯曲振动理论建立了销耳挂胶履带动力学模型。考虑到挂胶层的作用,将履带视为一段拉力下的梁模型,推导了含有履带梁弯曲刚度项的固有频率计算公式。并对一段履带进行了试验验证,对比了理论计算数据与试验数据。结果表明,与传统基于弦的横向振动模型相比,基于梁弯曲振动理论建立的模型能更准确地描述履带振动特性。



2018, 37(12): 1828-1833.
doi: 10.13433/j.cnki.1003-8728.20180096
摘要:
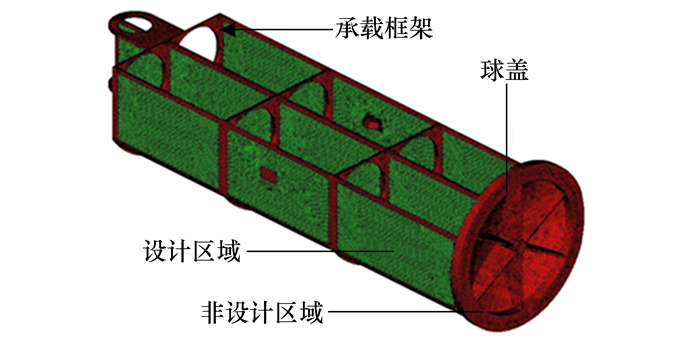
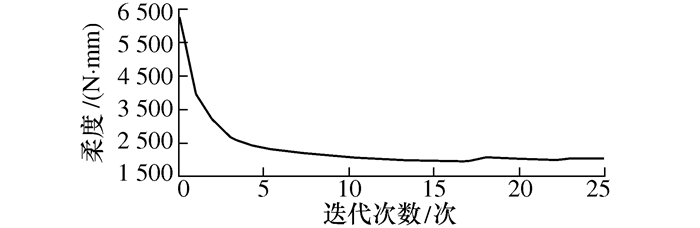
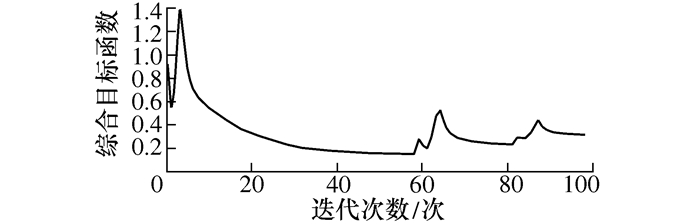
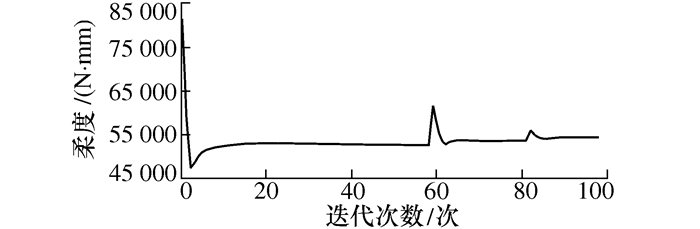
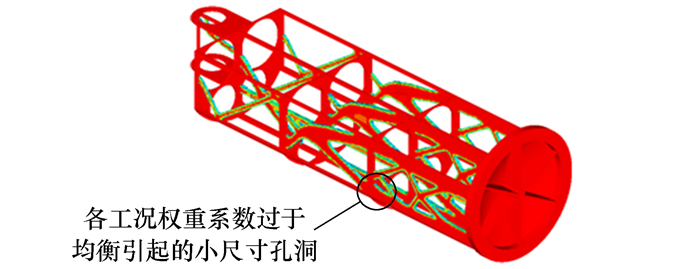
鉴于非耐压承载结构对于UUV(Unmanned underwater vehicle)的重要意义,提出一种基于折衷规划法建立综合目标函数,以灰色-层次分析确定子目标权重系数的多目标优化方法。以某型UUV的非耐压承载结构为例,首先采用灰色-层次分析法,得到各子目标(典型工况的柔度和前3阶固有频率的平均值)的权重系数;然后,采用折衷规划法进行多目标拓扑优化设计。优化结果表明:该方法适用于UUV非耐压承载结构的初始设计,可行且有效。同时,对比层次分析法和灰色关联分析法,该方法计算效率更高,优化结果更加合理。
鉴于非耐压承载结构对于UUV(Unmanned underwater vehicle)的重要意义,提出一种基于折衷规划法建立综合目标函数,以灰色-层次分析确定子目标权重系数的多目标优化方法。以某型UUV的非耐压承载结构为例,首先采用灰色-层次分析法,得到各子目标(典型工况的柔度和前3阶固有频率的平均值)的权重系数;然后,采用折衷规划法进行多目标拓扑优化设计。优化结果表明:该方法适用于UUV非耐压承载结构的初始设计,可行且有效。同时,对比层次分析法和灰色关联分析法,该方法计算效率更高,优化结果更加合理。






2018, 37(12): 1834-1840.
doi: 10.13433/j.cnki.1003-8728.20180141
摘要:
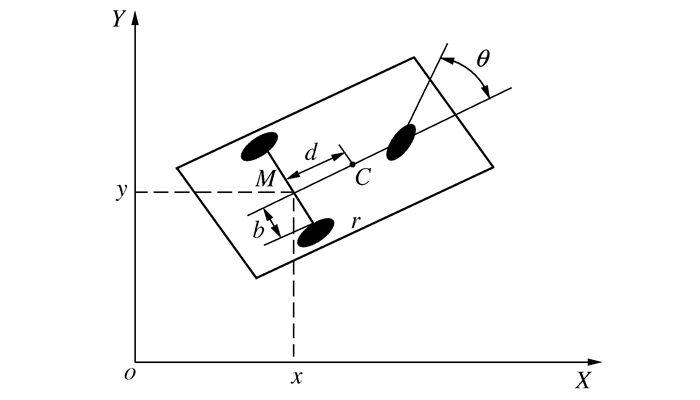
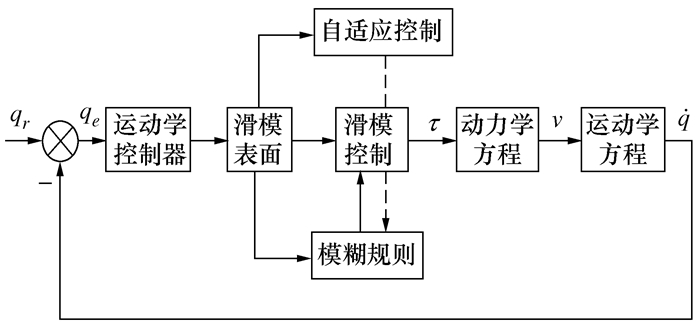
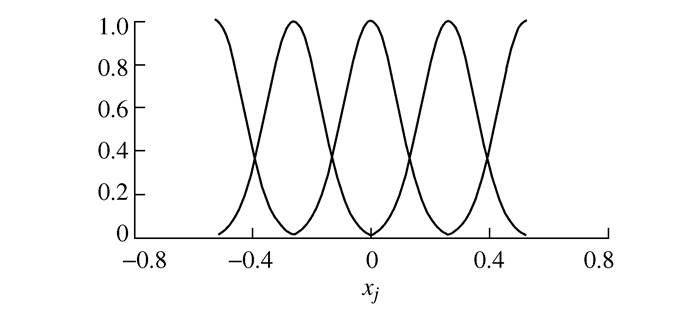
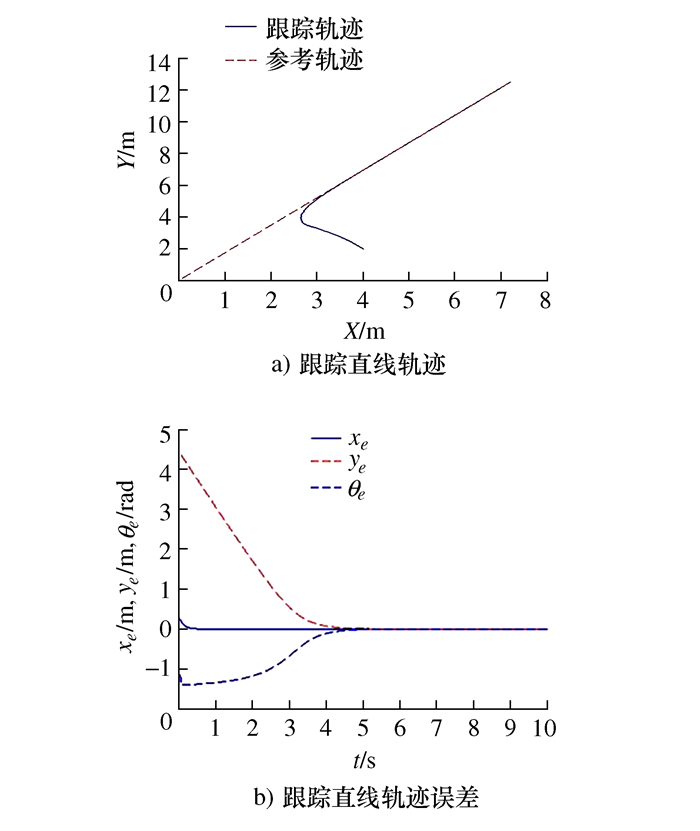
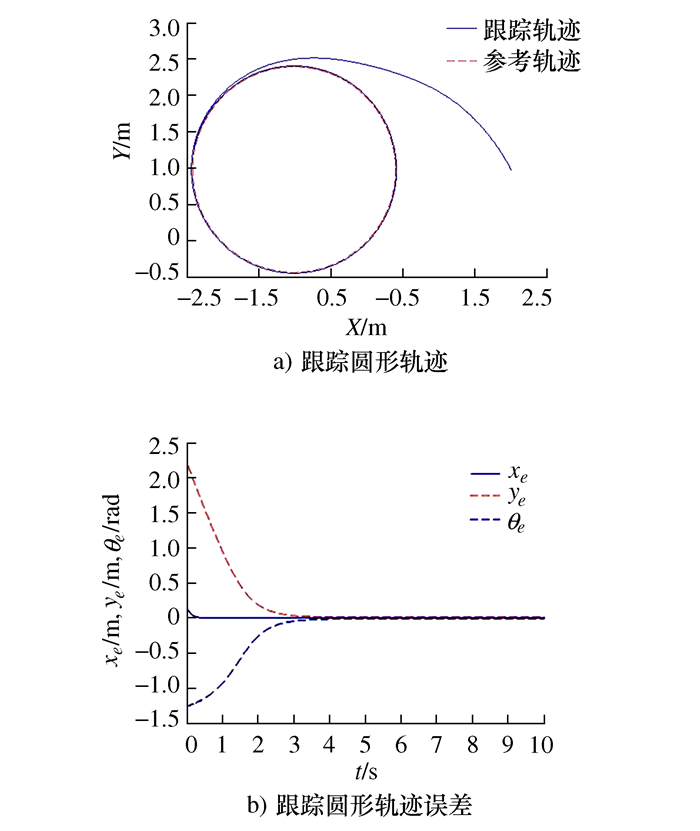
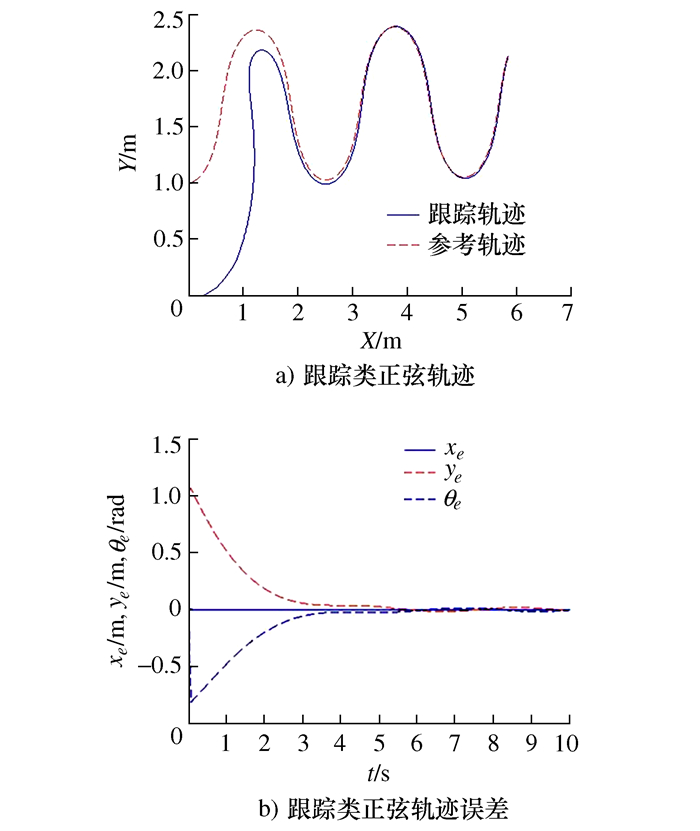
为提高两轮驱动轮式移动机器人轨迹跟踪控制的精度,依据轮式移动机器人的运动学和动力学方程,提出了一种具有全局渐进稳定性的控制方法。首先基于Back-stepping建立了轮式移动机器人的运动学控制器;其次通过滑模控制方法建立轮式移动机器人的动力学控制器;然后加入模糊控制系统调节滑模增益以削弱抖振;最后对系统的未知扰动建立自适应控制规律,并证明了其稳定性。以跟踪直线、圆、类正弦轨迹为例进行了仿真研究,验证了该控制方法的有效性。
为提高两轮驱动轮式移动机器人轨迹跟踪控制的精度,依据轮式移动机器人的运动学和动力学方程,提出了一种具有全局渐进稳定性的控制方法。首先基于Back-stepping建立了轮式移动机器人的运动学控制器;其次通过滑模控制方法建立轮式移动机器人的动力学控制器;然后加入模糊控制系统调节滑模增益以削弱抖振;最后对系统的未知扰动建立自适应控制规律,并证明了其稳定性。以跟踪直线、圆、类正弦轨迹为例进行了仿真研究,验证了该控制方法的有效性。
2018, 37(12): 1841-1846.
doi: 10.13433/j.cnki.1003-8728.20180094
摘要:
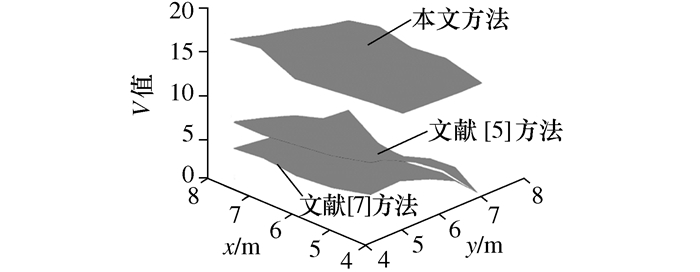
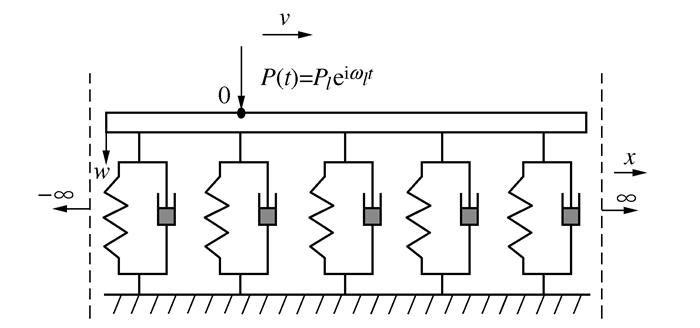
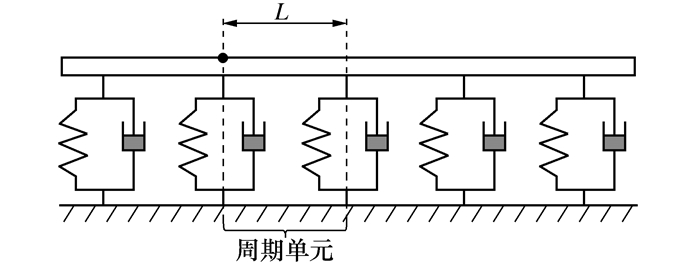
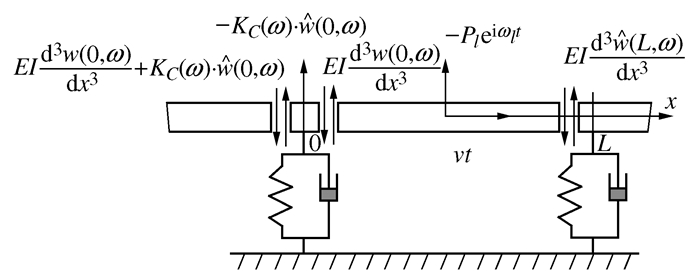
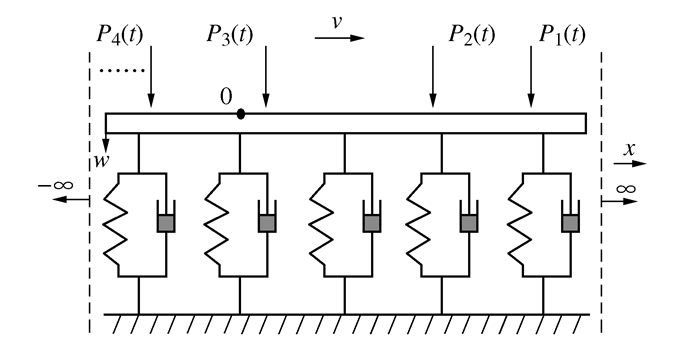
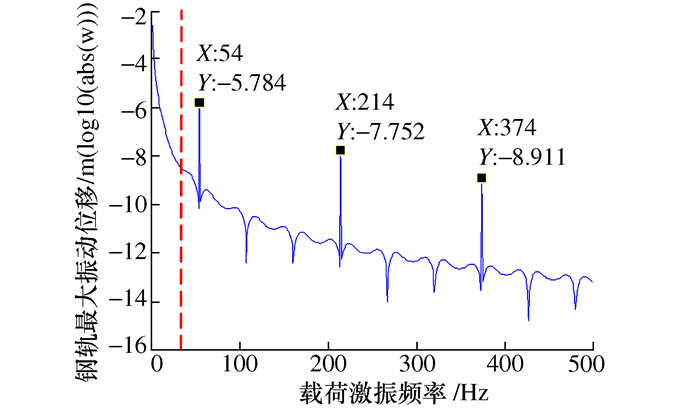
基于无限周期结构在频域内响应的性质和叠加原理,推导出移动荷载作用下轨道结构上任意点的垂向振动频率响应函数,数值分析了在单个移动荷载及6节B型鼓形车编组的系列移动荷载作用下不同移动速度对轨道结构动态响应的影响。研究结果表明:钢轨动态响应共振峰出现在荷载激励频率附近。在共振区随着移动速度的增大钢轨动态响应的频谱峰值带宽逐渐增大,但荷载激励频率附近的一个窄频段内的位移响应将减小。在非共振区随着移动速度的增大,钢轨动态响应将显著增大。相对于单个移动简谐载荷,系列移动简谐载荷使钢轨动态响应的频谱峰值及峰值带宽增大;随着移动速度的增加,钢轨动态响应的频谱峰值带宽增大。
基于无限周期结构在频域内响应的性质和叠加原理,推导出移动荷载作用下轨道结构上任意点的垂向振动频率响应函数,数值分析了在单个移动荷载及6节B型鼓形车编组的系列移动荷载作用下不同移动速度对轨道结构动态响应的影响。研究结果表明:钢轨动态响应共振峰出现在荷载激励频率附近。在共振区随着移动速度的增大钢轨动态响应的频谱峰值带宽逐渐增大,但荷载激励频率附近的一个窄频段内的位移响应将减小。在非共振区随着移动速度的增大,钢轨动态响应将显著增大。相对于单个移动简谐载荷,系列移动简谐载荷使钢轨动态响应的频谱峰值及峰值带宽增大;随着移动速度的增加,钢轨动态响应的频谱峰值带宽增大。



2018, 37(12): 1847-1853.
doi: 10.13433/j.cnki.1003-8728.20180135
摘要:
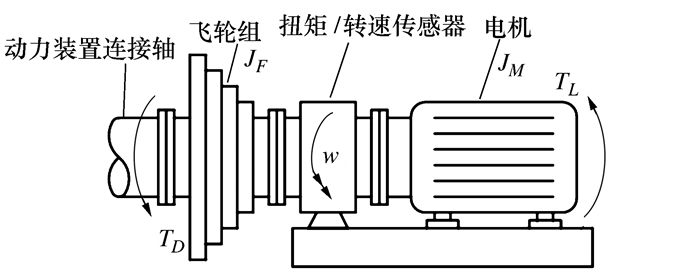
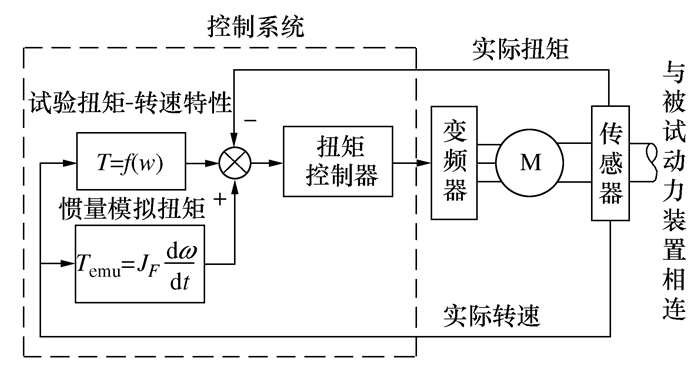
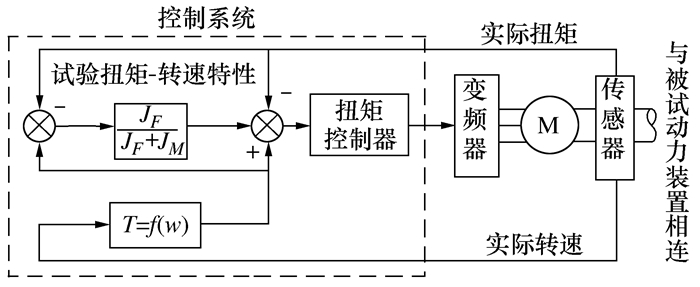
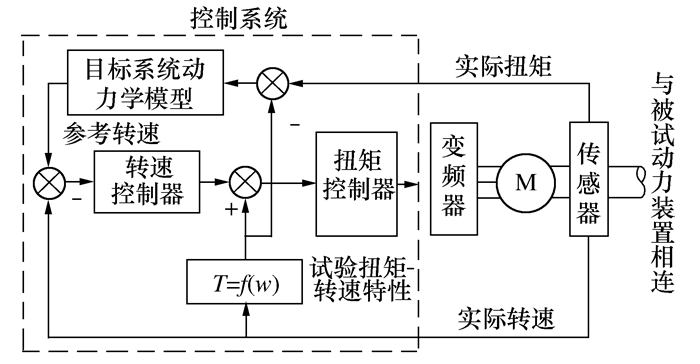
转动惯量决定了动态试验过程的客观性和有效性,电模拟在可控和可调性方面优于机械飞轮组模拟,是未来动态试验中惯量模拟的主流。为展现机械转动惯量电模拟技术的研究成果和促进技术进步,在阐述机械转动惯量电模拟原理的基础上分析了该技术在汽车传动系统试验台和风力机动态特性模拟领域中应用的技术特征,根据参与控制的信号将已研究的控制方法归纳为角加速度控制法、扭矩控制法和转速跟踪控制法,并分析了这些控制方法的特点和存在的问题,从工程应用的角度提出进一步研究需要考虑实际系统中的非线性摩擦及弹性特性、控制所需信号的实时检测、系统延迟的影响及补偿方法。
转动惯量决定了动态试验过程的客观性和有效性,电模拟在可控和可调性方面优于机械飞轮组模拟,是未来动态试验中惯量模拟的主流。为展现机械转动惯量电模拟技术的研究成果和促进技术进步,在阐述机械转动惯量电模拟原理的基础上分析了该技术在汽车传动系统试验台和风力机动态特性模拟领域中应用的技术特征,根据参与控制的信号将已研究的控制方法归纳为角加速度控制法、扭矩控制法和转速跟踪控制法,并分析了这些控制方法的特点和存在的问题,从工程应用的角度提出进一步研究需要考虑实际系统中的非线性摩擦及弹性特性、控制所需信号的实时检测、系统延迟的影响及补偿方法。
2018, 37(12): 1854-1861.
doi: 10.13433/j.cnki.1003-8728.20180132
摘要:
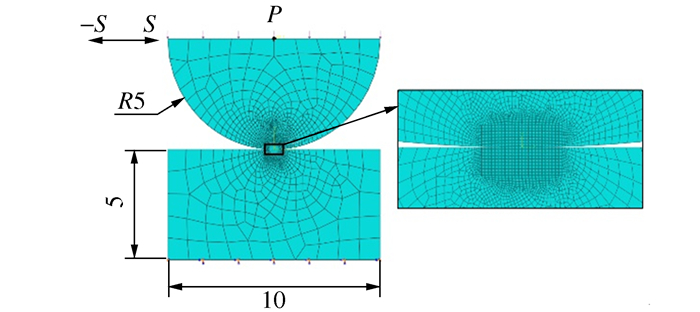
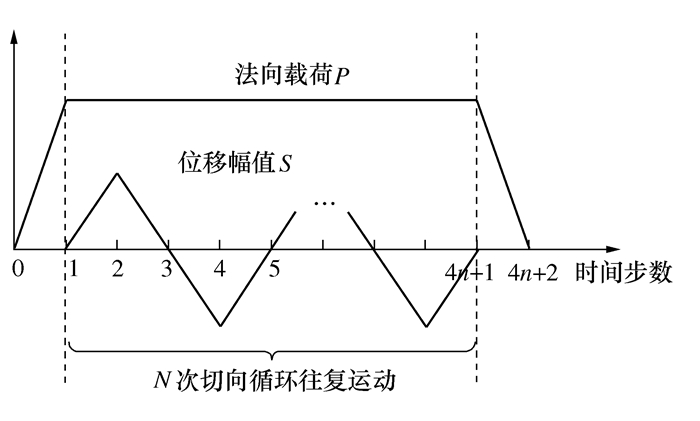
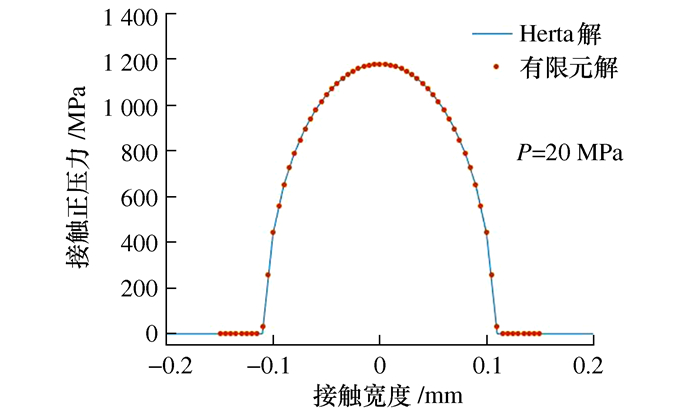
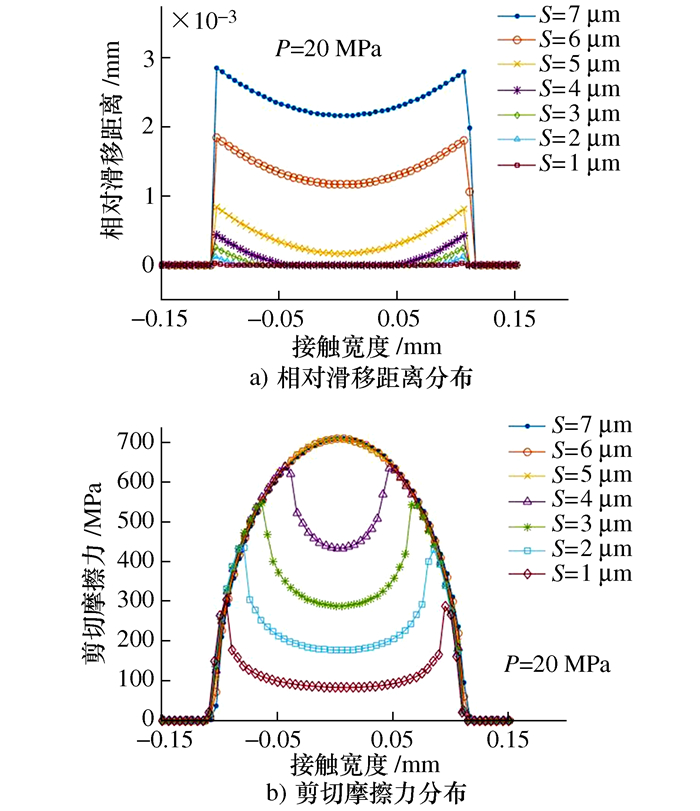
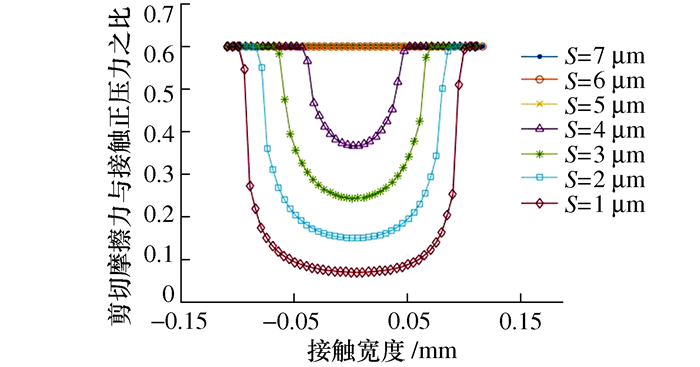
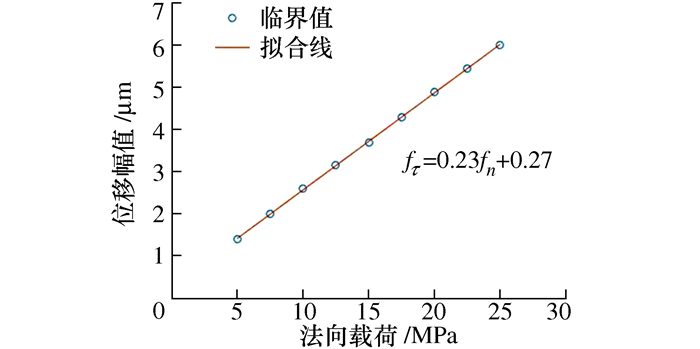
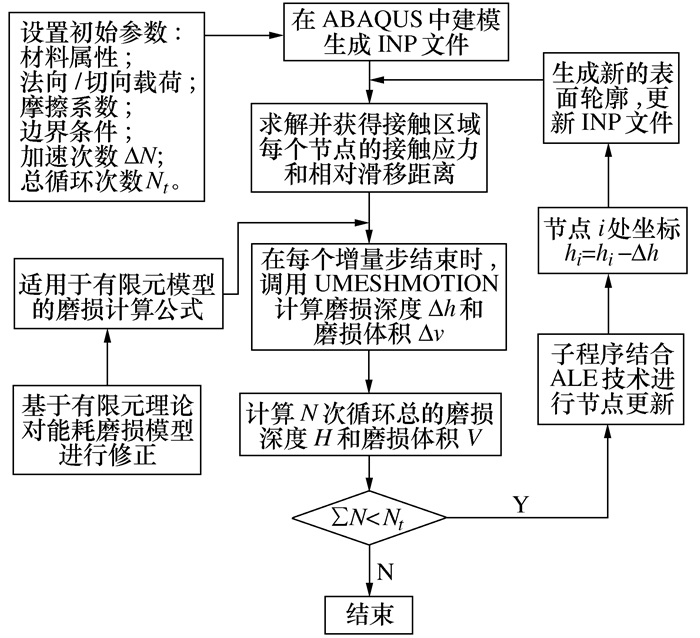
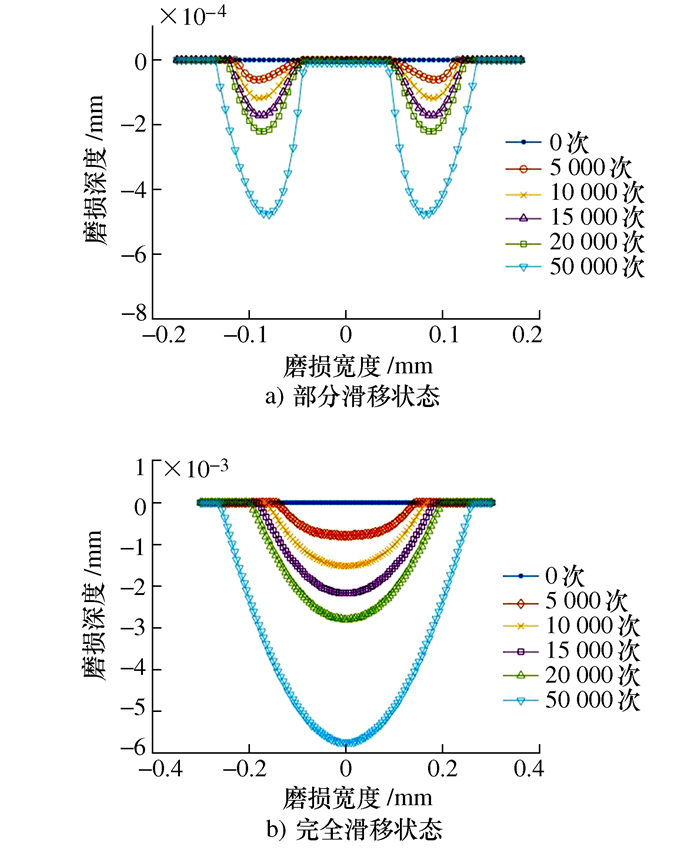
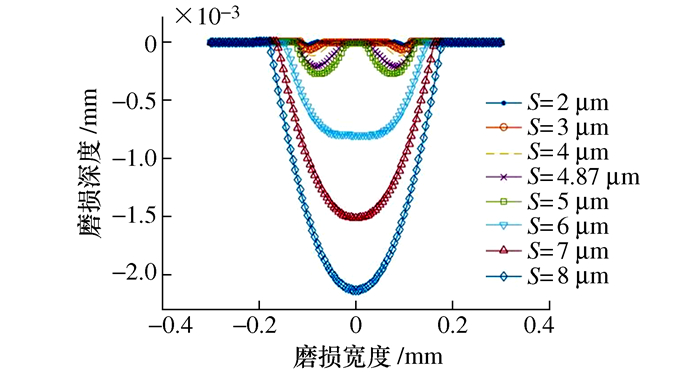
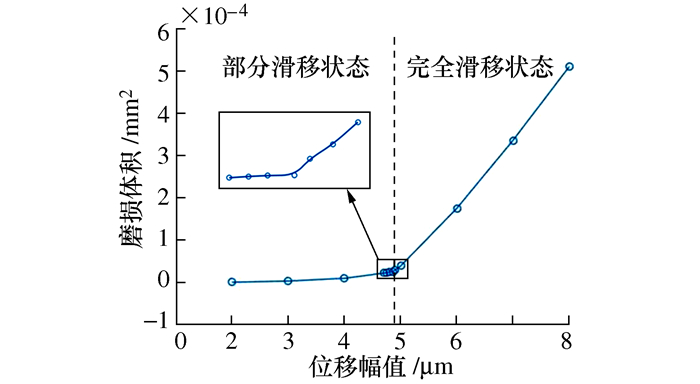
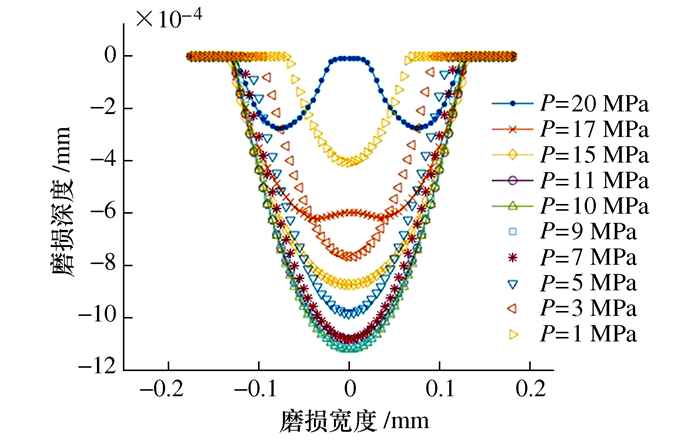
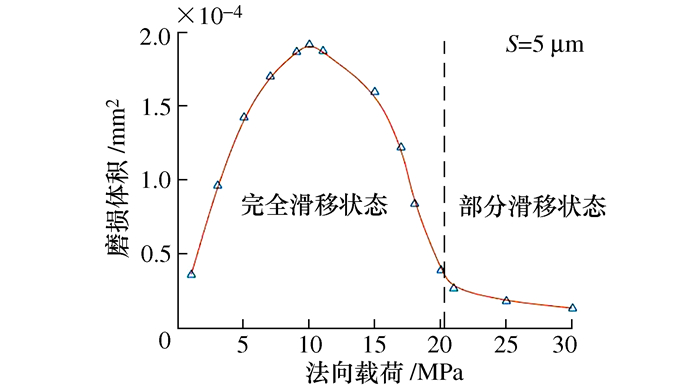
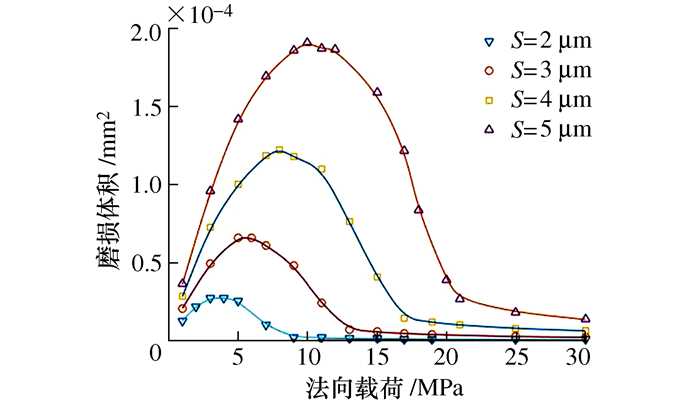
在ABAQUS中建立柱面/平面微动磨损模型,设置不同的加载条件,分析接触区域的接触应力和相对滑移距离,获得了区分两种滑移状态的临界函数。结合能量模型和FORTRAN语言编写适用于本模型的UMESHMOTION子程序,实现了磨损表面节点的动态更新,建立了动态磨损模型。通过对不同情况下磨损深度和磨损体积的仿真分析,获得结论:随循环次数的增加,磨损深度、磨损宽度和磨损体积都随着增大,部分滑移状态的磨损体积远小于完全滑移状态的磨损体积;循环次数和法向载荷为定值时,随位移幅值的增加,磨损宽度、磨损深度和磨损体积都随着增大,部分滑移状态的磨损体积很小且增长缓慢,完全滑移状态的磨损体积增长迅速;循环次数和位移幅值为定值时,在完全滑移状态,随法向载荷的增加,磨损深度和磨损体积先增大再减小;在磨损体积先增大再减小的过程中,存在一个最大值,对应的法向载荷和位移幅值称为危险加载条件,通过揭示不同位移幅值时危险加载条件的变化规律,为避免该条件的出现提供了理论依据。
在ABAQUS中建立柱面/平面微动磨损模型,设置不同的加载条件,分析接触区域的接触应力和相对滑移距离,获得了区分两种滑移状态的临界函数。结合能量模型和FORTRAN语言编写适用于本模型的UMESHMOTION子程序,实现了磨损表面节点的动态更新,建立了动态磨损模型。通过对不同情况下磨损深度和磨损体积的仿真分析,获得结论:随循环次数的增加,磨损深度、磨损宽度和磨损体积都随着增大,部分滑移状态的磨损体积远小于完全滑移状态的磨损体积;循环次数和法向载荷为定值时,随位移幅值的增加,磨损宽度、磨损深度和磨损体积都随着增大,部分滑移状态的磨损体积很小且增长缓慢,完全滑移状态的磨损体积增长迅速;循环次数和位移幅值为定值时,在完全滑移状态,随法向载荷的增加,磨损深度和磨损体积先增大再减小;在磨损体积先增大再减小的过程中,存在一个最大值,对应的法向载荷和位移幅值称为危险加载条件,通过揭示不同位移幅值时危险加载条件的变化规律,为避免该条件的出现提供了理论依据。


2018, 37(12): 1862-1869.
doi: 10.13433/j.cnki.1003-8728.20180095
摘要:
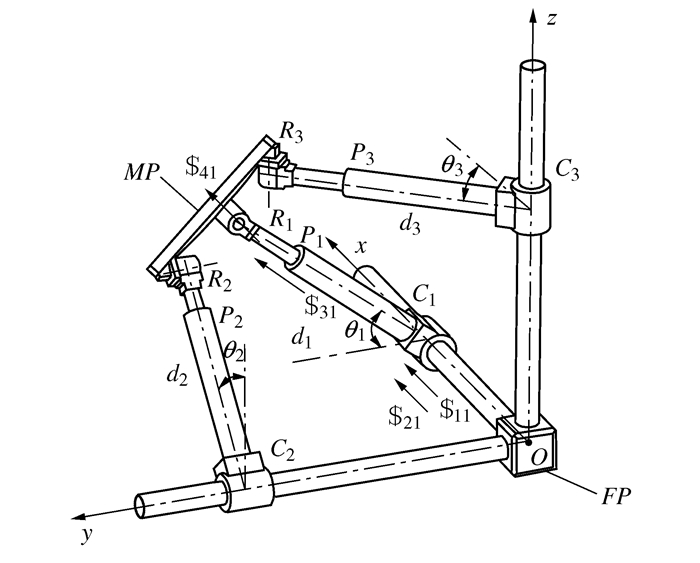
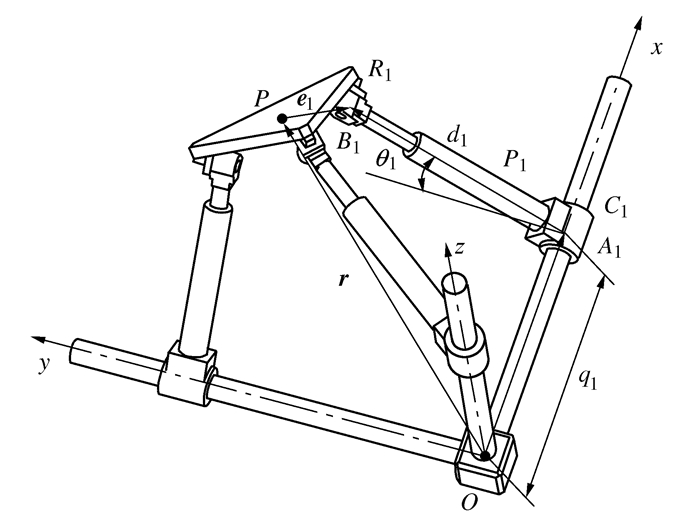
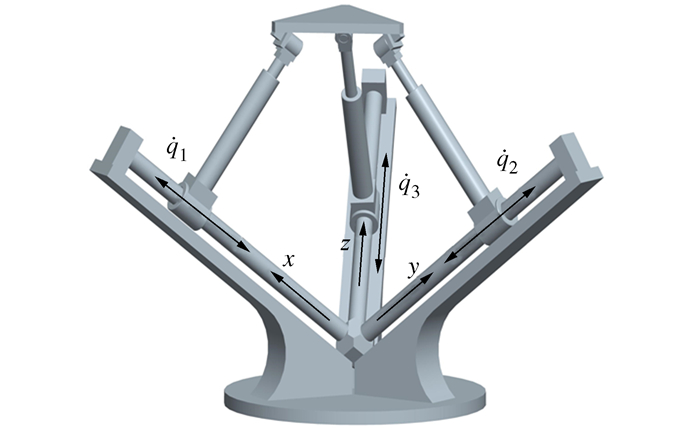
提出一种空间移动并联机器人机构,该机构由静平台、动平台和连接两平台的三条结构完全相同的CPR型分支运动链构成。基于螺旋理论对其动平台运动输出特性进行了分析,并利用全局雅可比矩阵研究了机构的主动输入选取和奇异性;根据不同的主动输入方式建立了机构的位置矢量方程,尤其是当采用圆柱副的线性位移作为主动输入时,机构动平台的输出运动与主动输入间呈一对一的线性映射控制关系,其速度雅可比矩阵为阶单位阵,因此该机构在整个工作空间内具有完全各向同性的特性;利用ADAMS和MATLAB软件对机构进行运动学仿真;最后,讨论了机构的工作空间。
提出一种空间移动并联机器人机构,该机构由静平台、动平台和连接两平台的三条结构完全相同的CPR型分支运动链构成。基于螺旋理论对其动平台运动输出特性进行了分析,并利用全局雅可比矩阵研究了机构的主动输入选取和奇异性;根据不同的主动输入方式建立了机构的位置矢量方程,尤其是当采用圆柱副的线性位移作为主动输入时,机构动平台的输出运动与主动输入间呈一对一的线性映射控制关系,其速度雅可比矩阵为阶单位阵,因此该机构在整个工作空间内具有完全各向同性的特性;利用ADAMS和MATLAB软件对机构进行运动学仿真;最后,讨论了机构的工作空间。
2018, 37(12): 1870-1874.
doi: 10.13433/j.cnki.1003-8728.20180081
摘要:
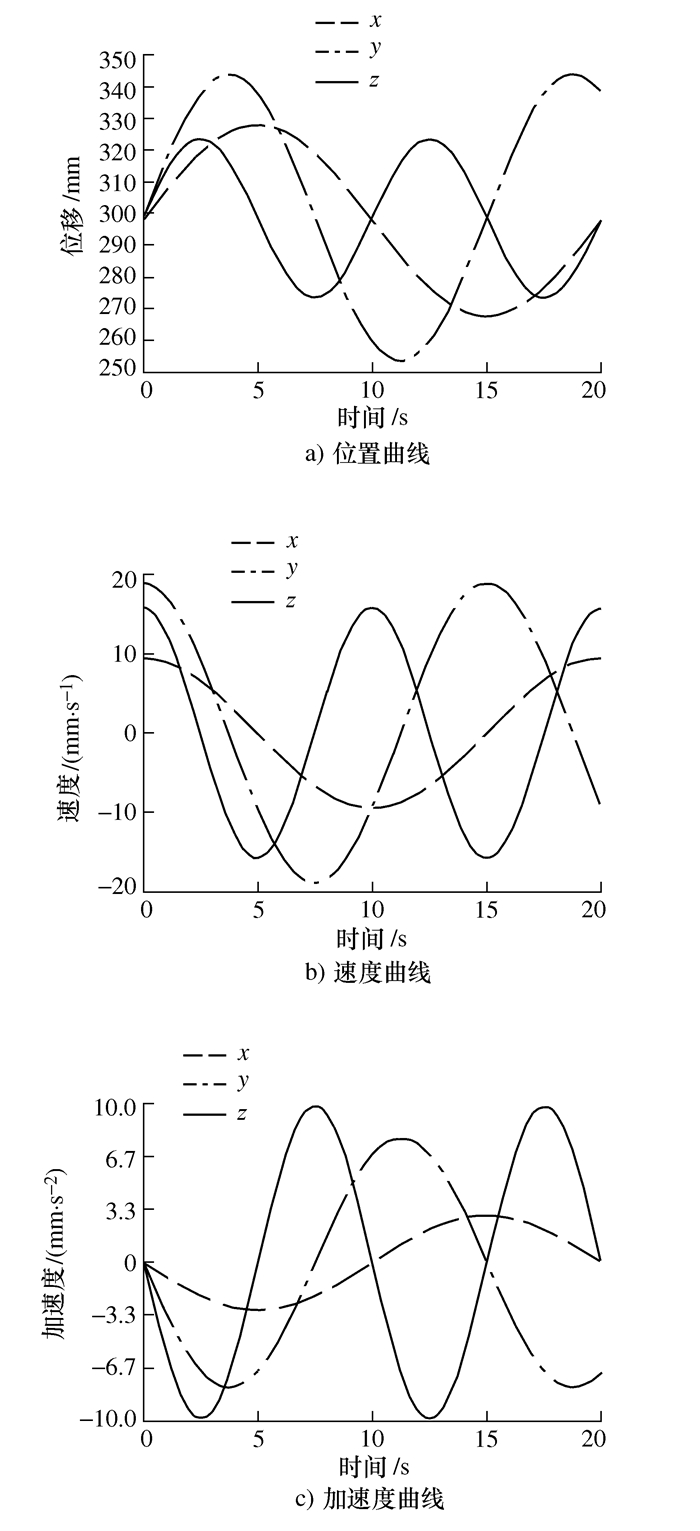
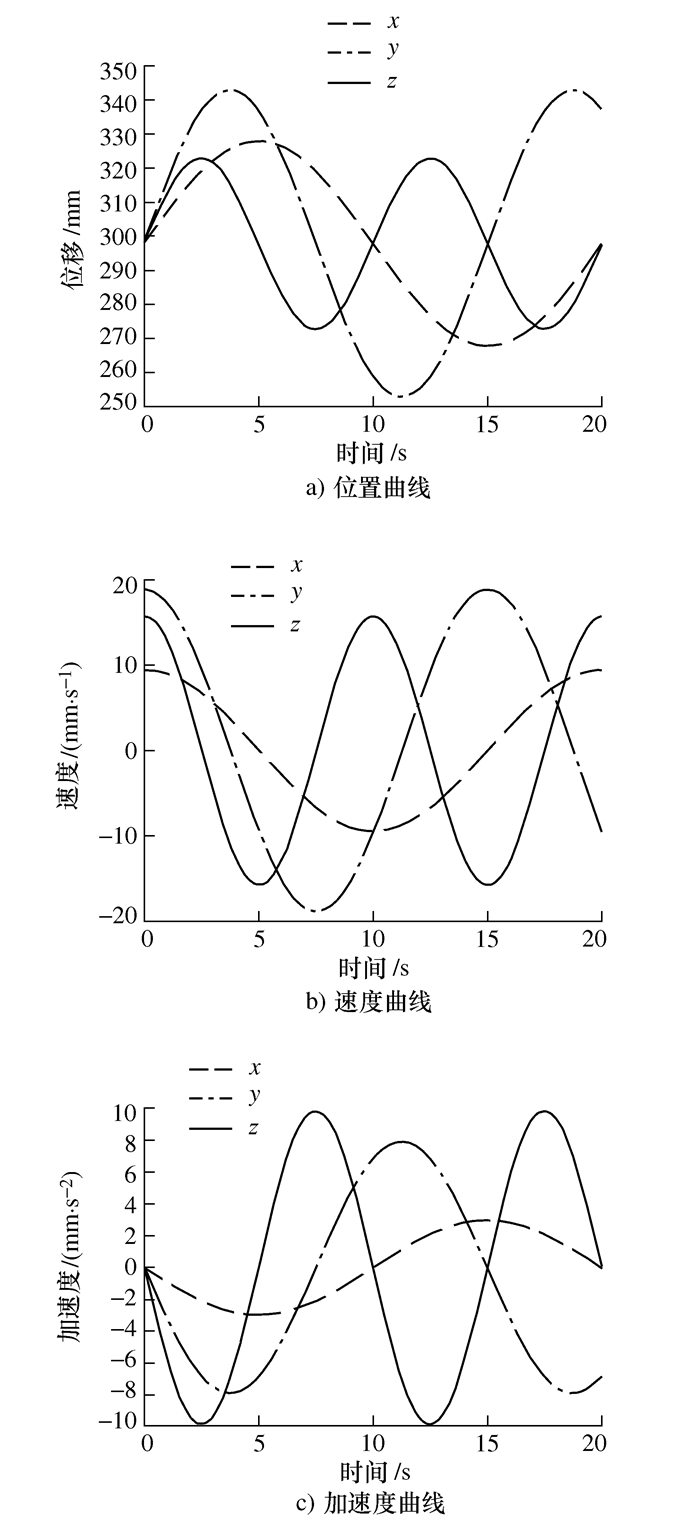
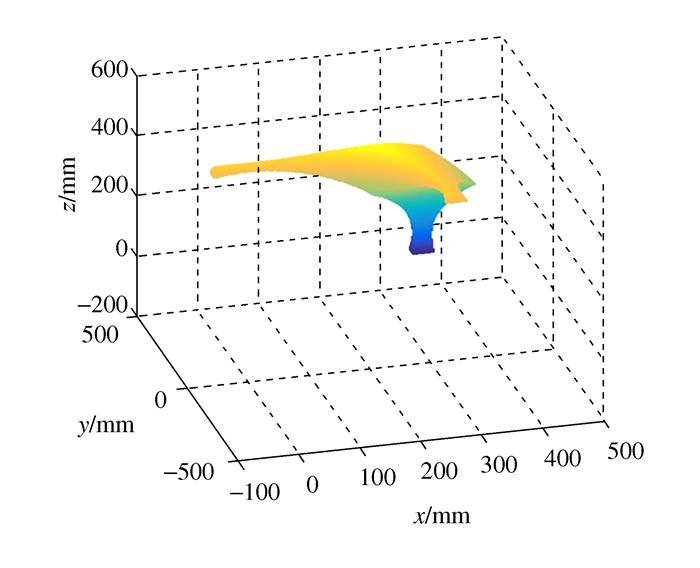
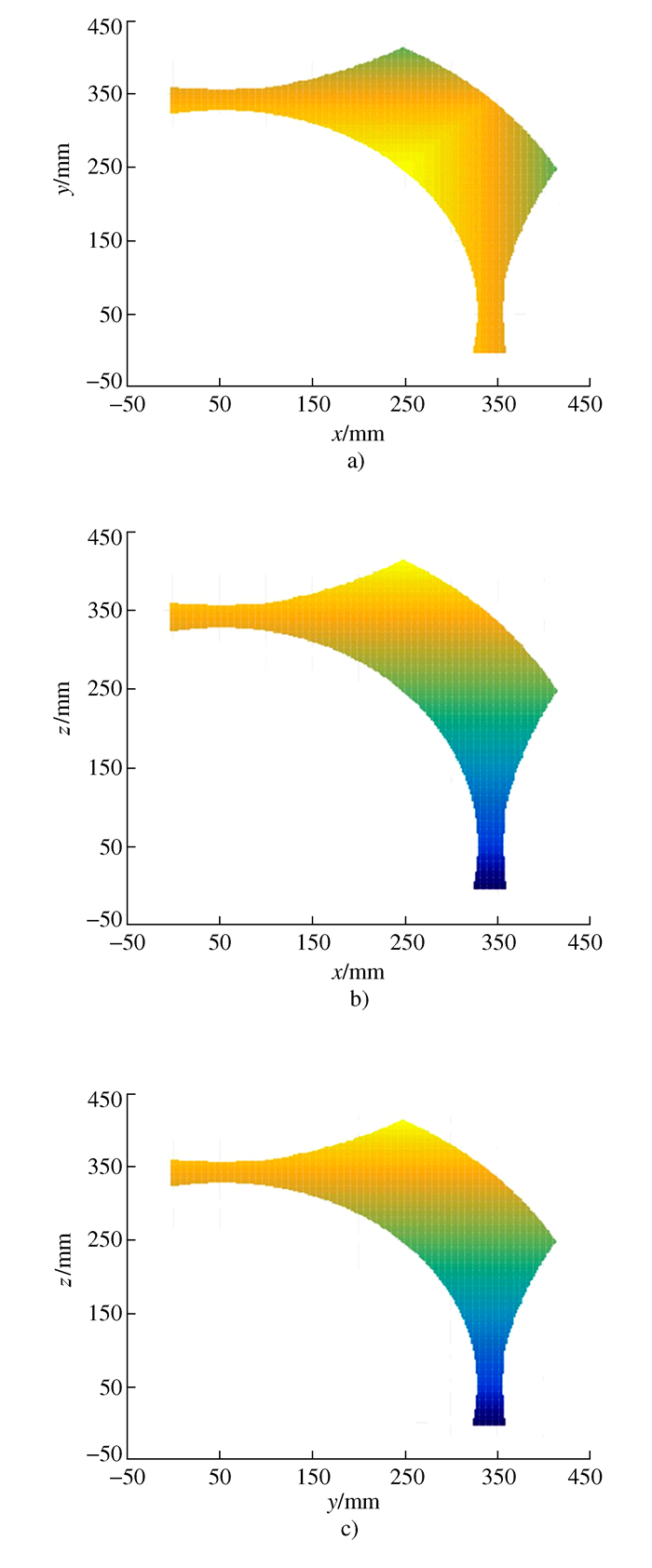
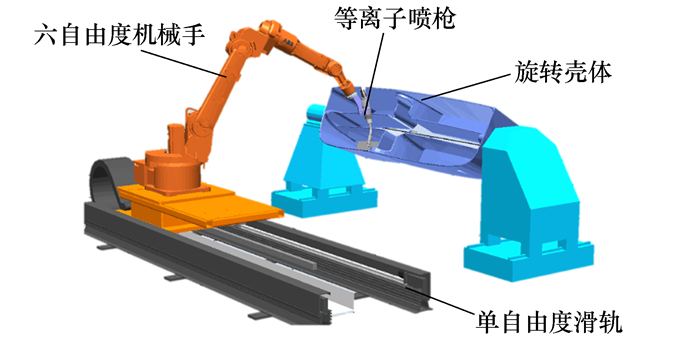
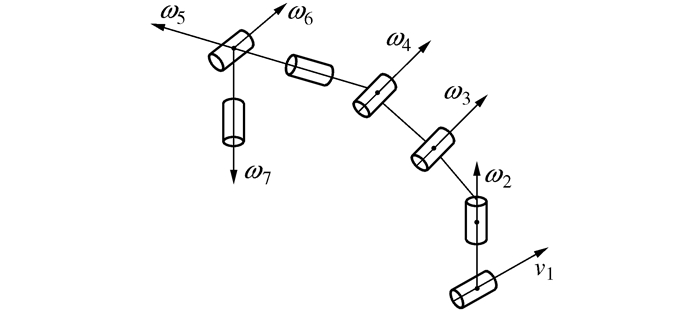
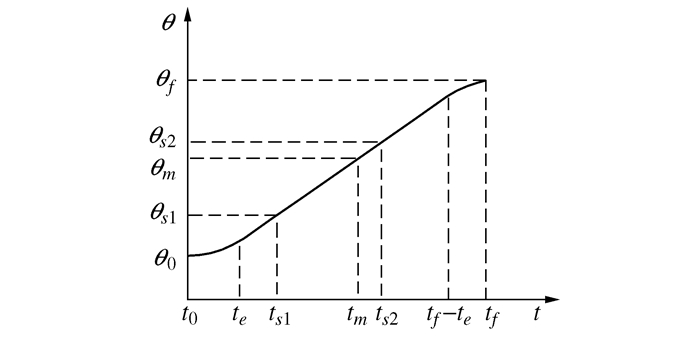
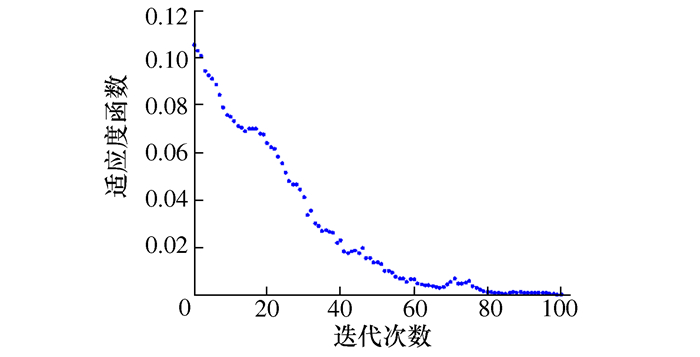
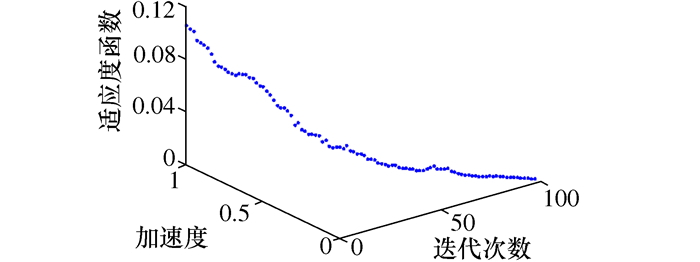
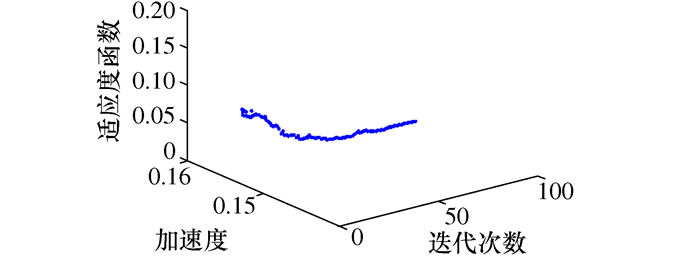
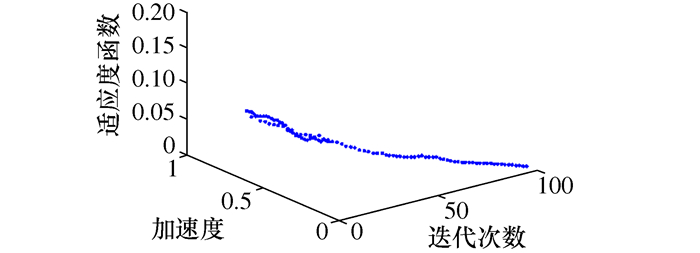
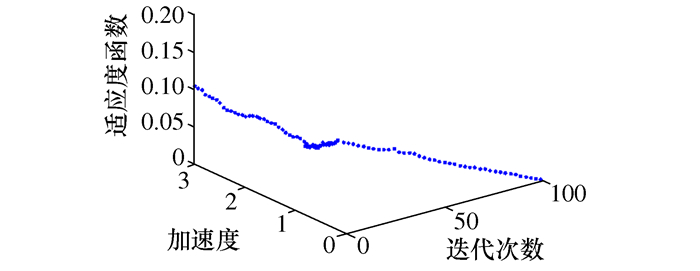
针对表面改性冗余机器人末端轨迹优化过程中关节空间运动稳定性不足的问题,提出一种以适应度函数为基础的关节空间轨迹优化算法。从表面改性冗余机器人逆解流形中选取一系列点,在机器人关节空间进行含抛物线的直线拟合,然后选取拟合曲线上的点,通过运动学正解得到末端运动轨迹,然后和表面改性曲面上的期望轨迹进行对比,以实际轨迹与期望轨迹之间的误差建立适应度函数,利用遗传算法对轨迹规划中的参数寻求最优关节逆解,从而保证关节空间的运动平稳性。最后以飞机进气道曲面为例进行仿真验证了所用方法的合理性。
针对表面改性冗余机器人末端轨迹优化过程中关节空间运动稳定性不足的问题,提出一种以适应度函数为基础的关节空间轨迹优化算法。从表面改性冗余机器人逆解流形中选取一系列点,在机器人关节空间进行含抛物线的直线拟合,然后选取拟合曲线上的点,通过运动学正解得到末端运动轨迹,然后和表面改性曲面上的期望轨迹进行对比,以实际轨迹与期望轨迹之间的误差建立适应度函数,利用遗传算法对轨迹规划中的参数寻求最优关节逆解,从而保证关节空间的运动平稳性。最后以飞机进气道曲面为例进行仿真验证了所用方法的合理性。




2018, 37(12): 1875-1882.
doi: 10.13433/j.cnki.1003-8728.20180091
摘要:
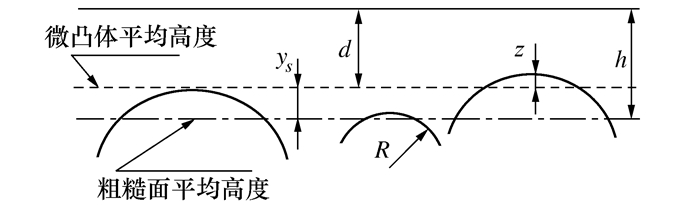
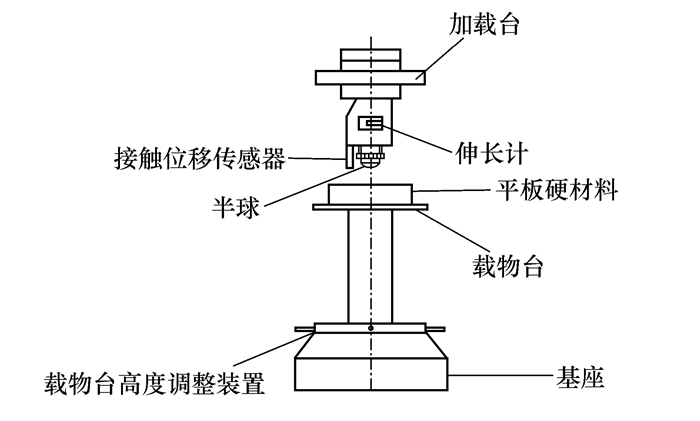
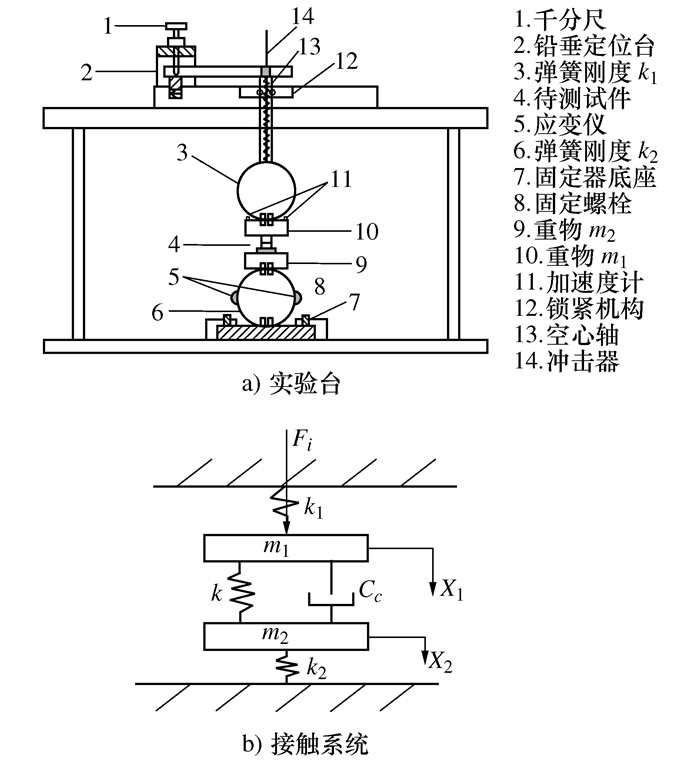
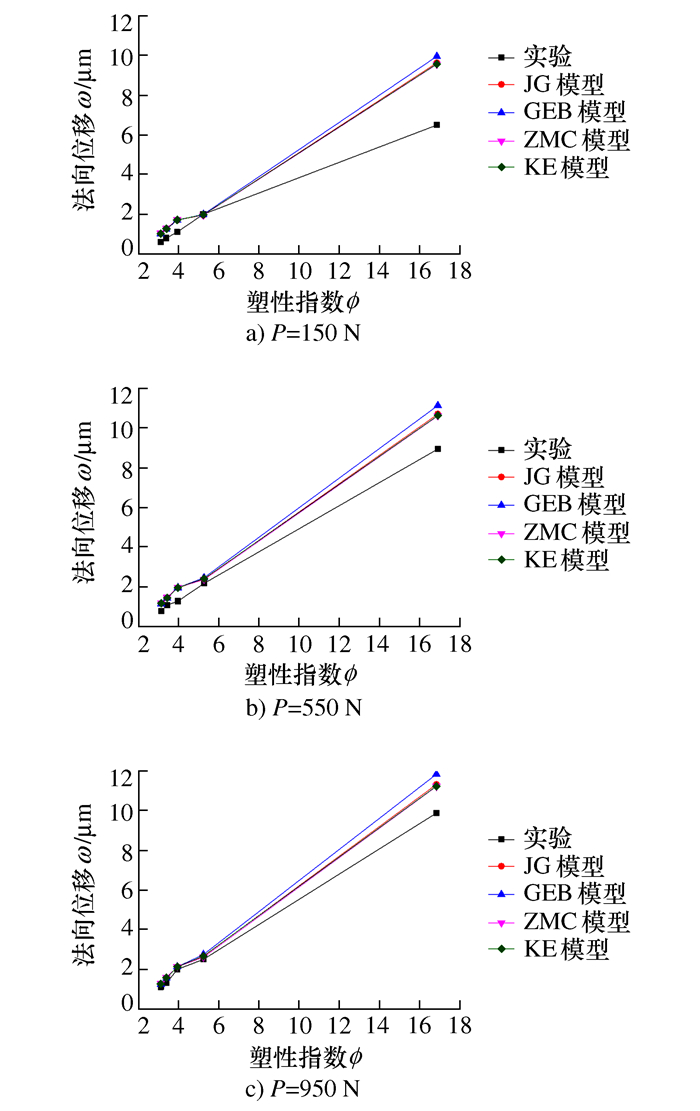
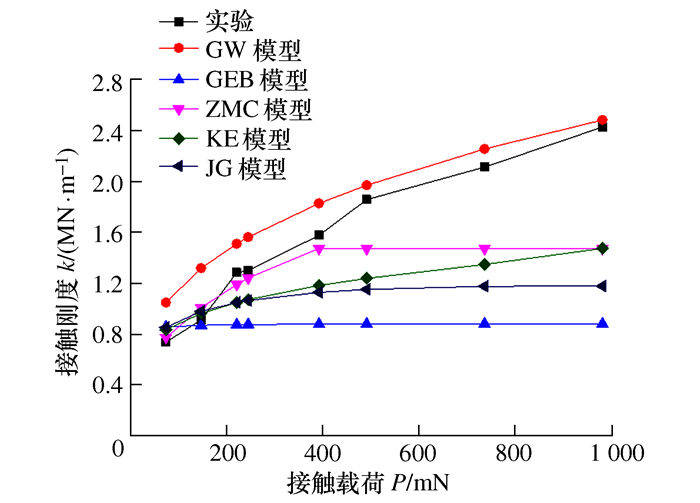
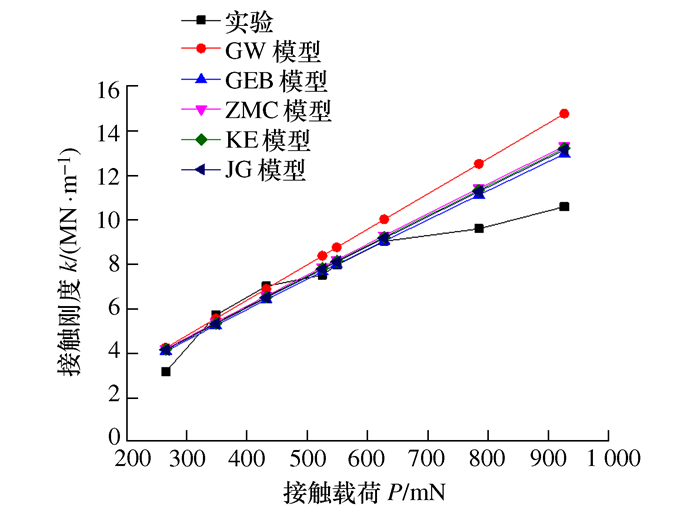
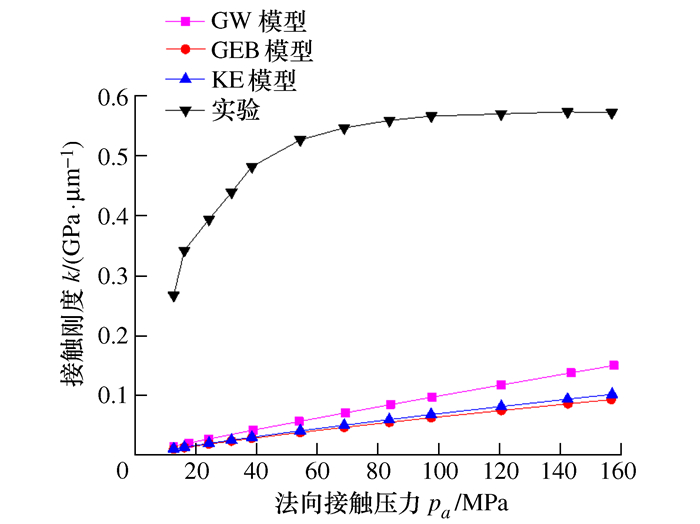
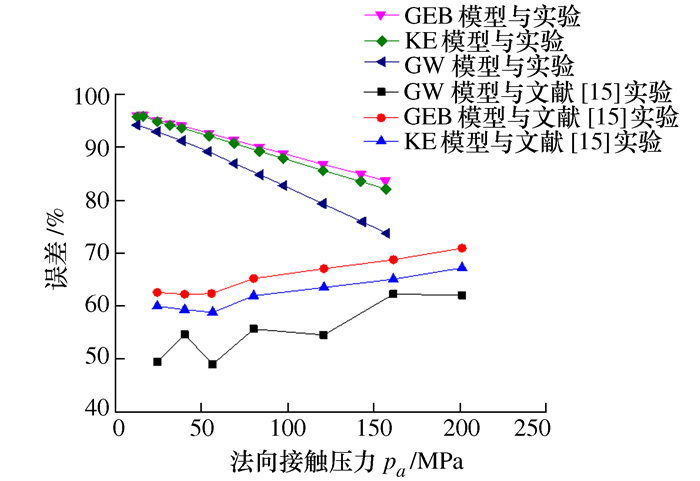
目前粗糙界面接触问题的理论模型和实验研究基本是相互独立的,为此将典型粗糙面的法向接触理论模型与接触力学实验结果进行了系统的对比研究。理论模型考虑了经典的GW模型、CEB模型和ZMC模型及基于非线性有限元的KE模型和JG模型。实验方法考虑了准静态实验、接触共振实验和超声测量实验。结果表明:法向接触过程中,随载荷的增大,界面微凸体塑性变形贡献增大,考虑微凸体塑性变形的模型预测值与实验结果差别较小;相同法向载荷时,随着塑性指数增大,不同模型预测的位移差别增大;同时存在某一塑性指数区间,该区间内理论模型与实验误差最小;超声测量结果准确性依赖于所选择的接触刚度反演模型,改进的反演模型可缩小与理论模型的误差。
目前粗糙界面接触问题的理论模型和实验研究基本是相互独立的,为此将典型粗糙面的法向接触理论模型与接触力学实验结果进行了系统的对比研究。理论模型考虑了经典的GW模型、CEB模型和ZMC模型及基于非线性有限元的KE模型和JG模型。实验方法考虑了准静态实验、接触共振实验和超声测量实验。结果表明:法向接触过程中,随载荷的增大,界面微凸体塑性变形贡献增大,考虑微凸体塑性变形的模型预测值与实验结果差别较小;相同法向载荷时,随着塑性指数增大,不同模型预测的位移差别增大;同时存在某一塑性指数区间,该区间内理论模型与实验误差最小;超声测量结果准确性依赖于所选择的接触刚度反演模型,改进的反演模型可缩小与理论模型的误差。




2018, 37(12): 1883-1889.
doi: 10.13433/j.cnki.1003-8728.20180090
摘要:
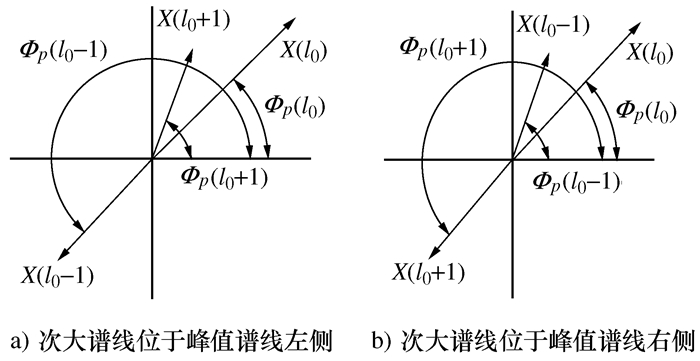
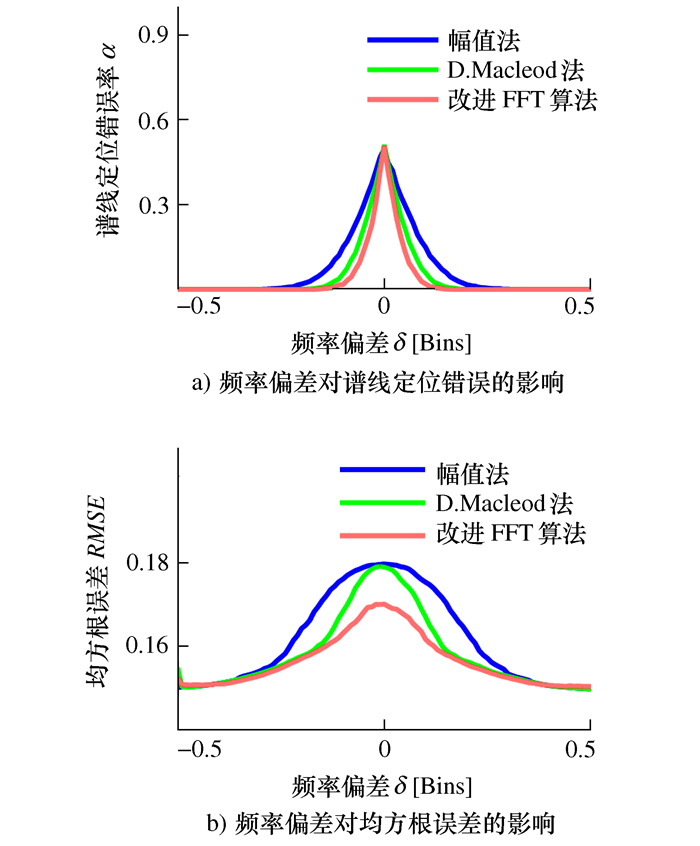
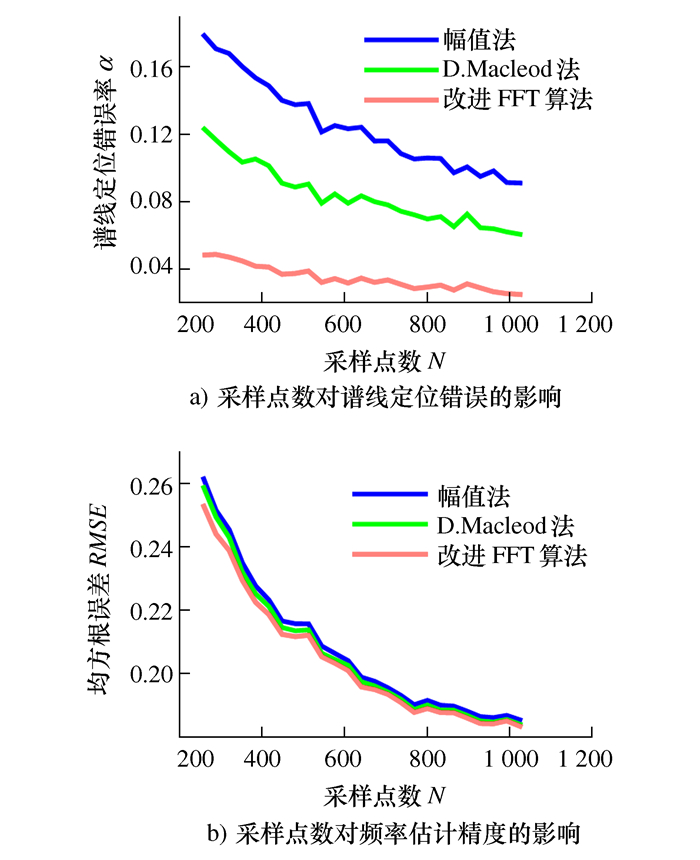
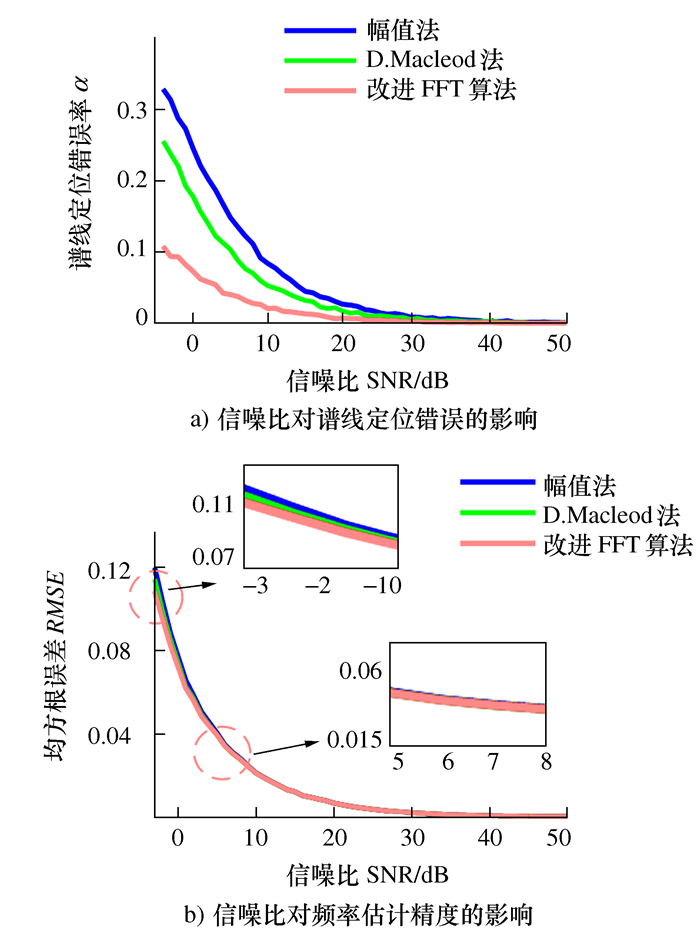
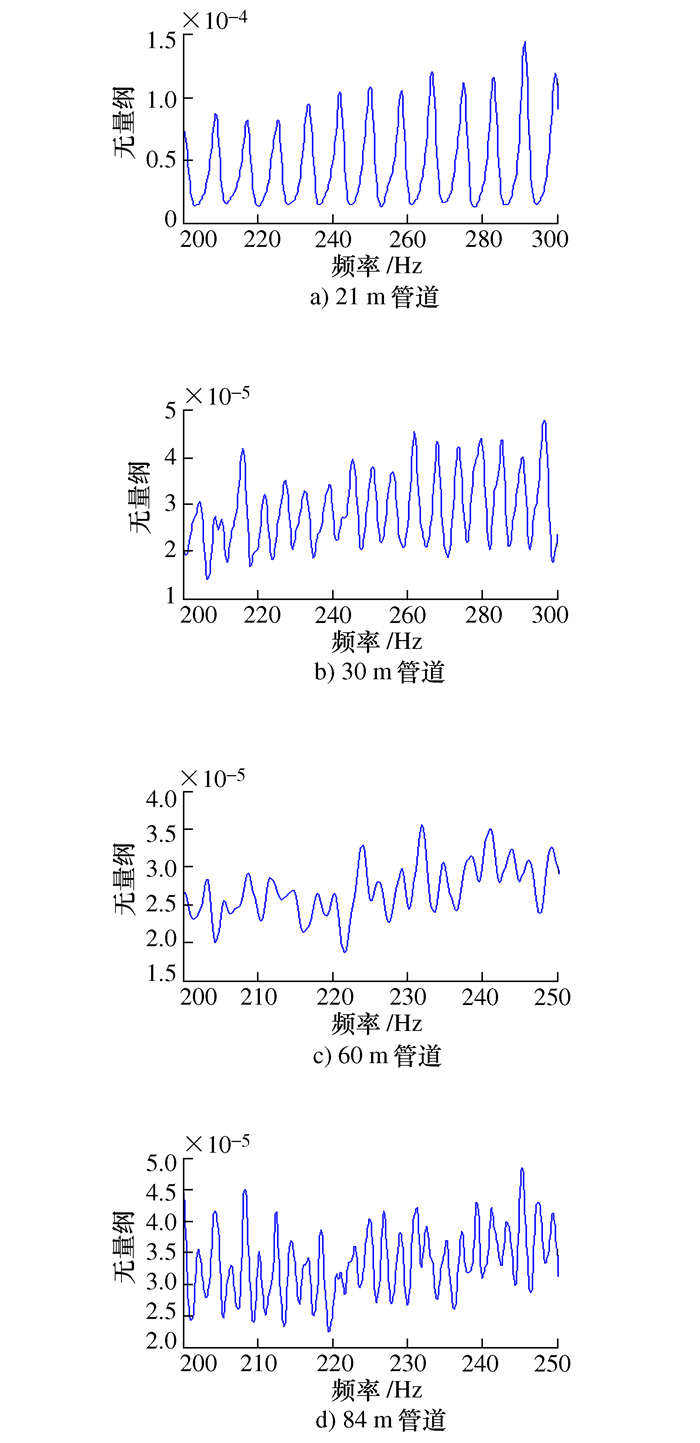
研究噪声引起的谱线定位错误对能量重心法校正精度的影响。为了提高频率校正精度,在分析能量重心法理论和现有谱线选择方法的基础上,提出了一种减少谱线定位错误率的改进FFT校正算法。该算法在D.Macleod法基础上,利用谱线间的相位差确定谱线,减少了谱线定位错误。最后给出了通用的频率校正公式。仿真结果表明,改进算法谱线定位错误率低,抗噪性强,高斯白噪声条件下进行频率估计时较其他方法具有更小的均方根误差。在模拟井下套管的管道长度检测应用中进一步表明,改进方法具有更高的校正精度,有效地减少了长度测量误差。
研究噪声引起的谱线定位错误对能量重心法校正精度的影响。为了提高频率校正精度,在分析能量重心法理论和现有谱线选择方法的基础上,提出了一种减少谱线定位错误率的改进FFT校正算法。该算法在D.Macleod法基础上,利用谱线间的相位差确定谱线,减少了谱线定位错误。最后给出了通用的频率校正公式。仿真结果表明,改进算法谱线定位错误率低,抗噪性强,高斯白噪声条件下进行频率估计时较其他方法具有更小的均方根误差。在模拟井下套管的管道长度检测应用中进一步表明,改进方法具有更高的校正精度,有效地减少了长度测量误差。


2018, 37(12): 1890-1894.
doi: 10.13433/j.cnki.1003-8728.20180083
摘要:
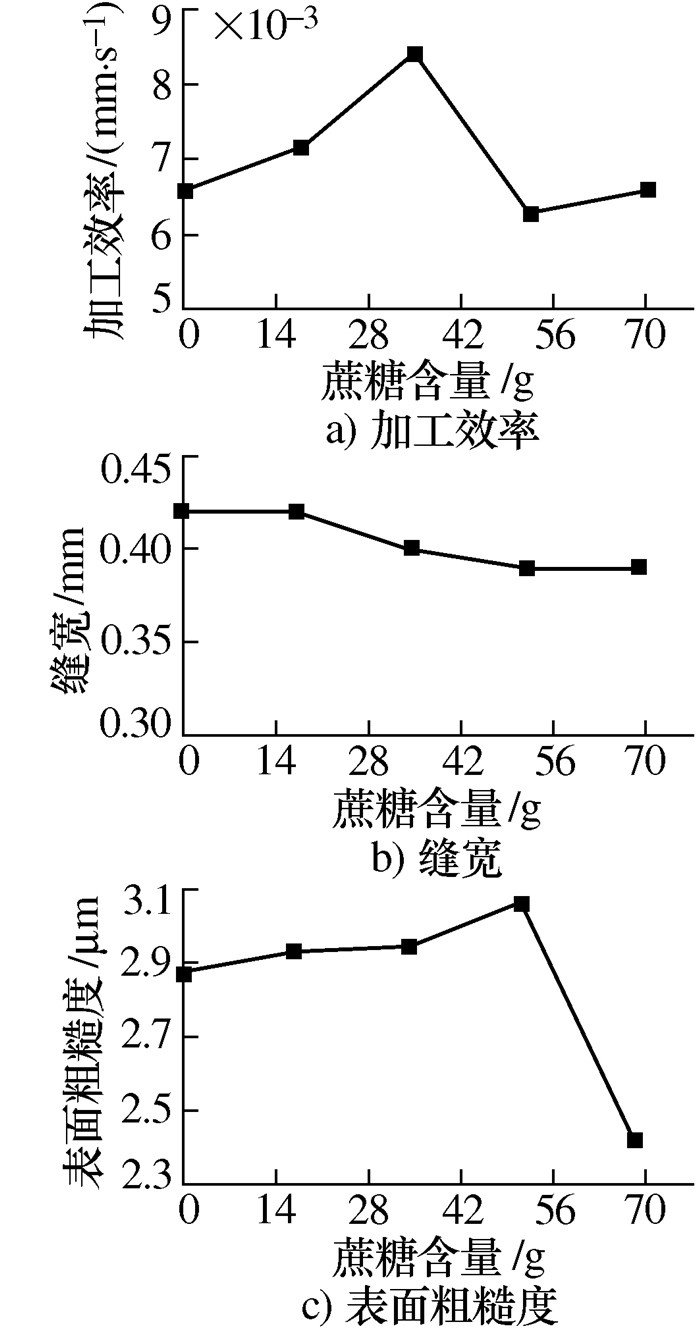
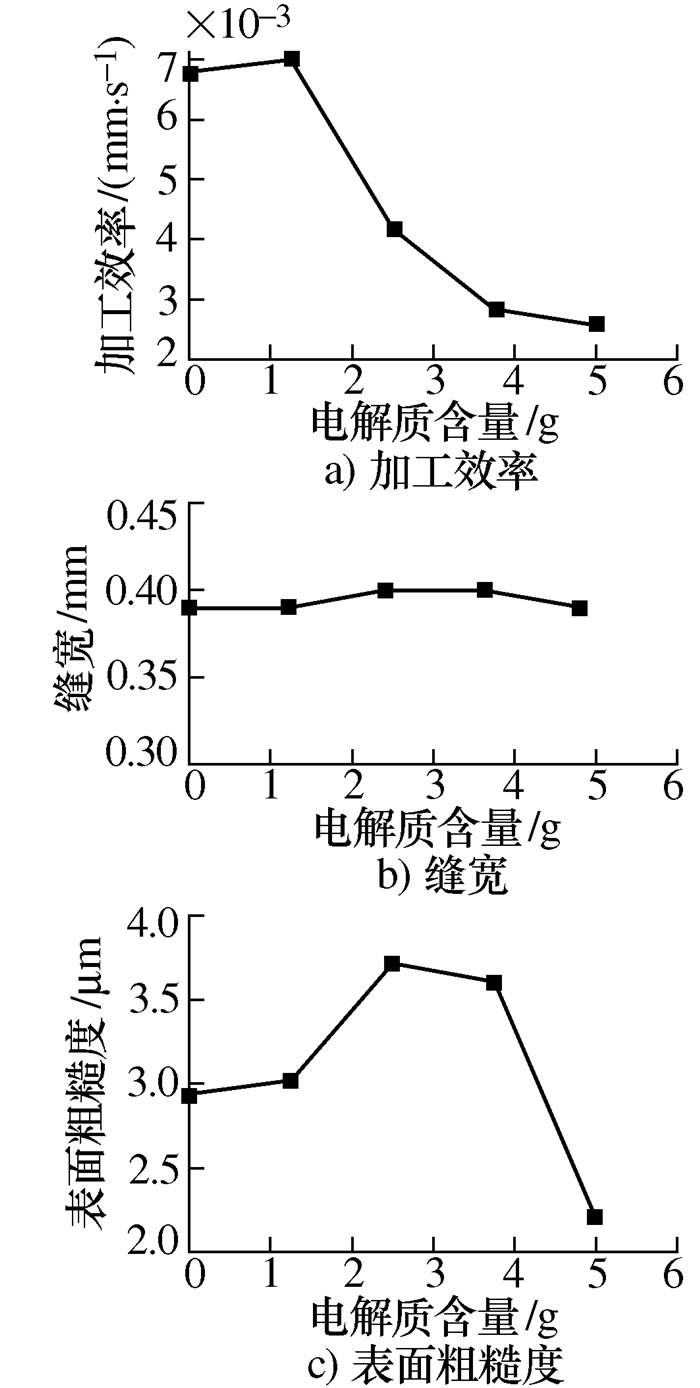
割缝筛管是机械防砂的重要设备,试验采用电火花电解复合加工的新方法对割缝筛管进行加工。针对传统的水基工作液加工效率低,而常用的煤油闪点低,安全性差等缺点,试验研制了一种新型电火花电解复合加工水溶性工作液。采用正交试验确定最佳基础工作液,并添加爆破剂蔗糖、电解质等,研究对复合加工的影响规律,并与机油加工的效果进行对比。结果表明,在温度为30℃的条件下,纯水、聚乙二醇400及三乙醇胺的比例为m(水):m(聚):m(三)=11:11:3时,基础工作液10%(质量分数)稀释液性能最优。在其基础上加入35g蔗糖,1g NaNO3和0.25gNaCl可以得到最佳的加工效果。与机油加工工作液相比表面粗糙度减小,加工效率降低且缝宽有所增加,清洁性与安全性提高。
割缝筛管是机械防砂的重要设备,试验采用电火花电解复合加工的新方法对割缝筛管进行加工。针对传统的水基工作液加工效率低,而常用的煤油闪点低,安全性差等缺点,试验研制了一种新型电火花电解复合加工水溶性工作液。采用正交试验确定最佳基础工作液,并添加爆破剂蔗糖、电解质等,研究对复合加工的影响规律,并与机油加工的效果进行对比。结果表明,在温度为30℃的条件下,纯水、聚乙二醇400及三乙醇胺的比例为m(水):m(聚):m(三)=11:11:3时,基础工作液10%(质量分数)稀释液性能最优。在其基础上加入35g蔗糖,1g NaNO3和0.25gNaCl可以得到最佳的加工效果。与机油加工工作液相比表面粗糙度减小,加工效率降低且缝宽有所增加,清洁性与安全性提高。
2018, 37(12): 1895-1901.
doi: 10.13433/j.cnki.1003-8728.20180089
摘要:
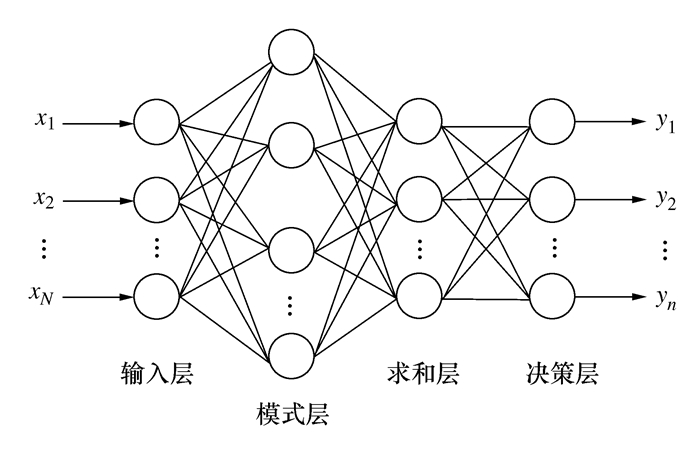
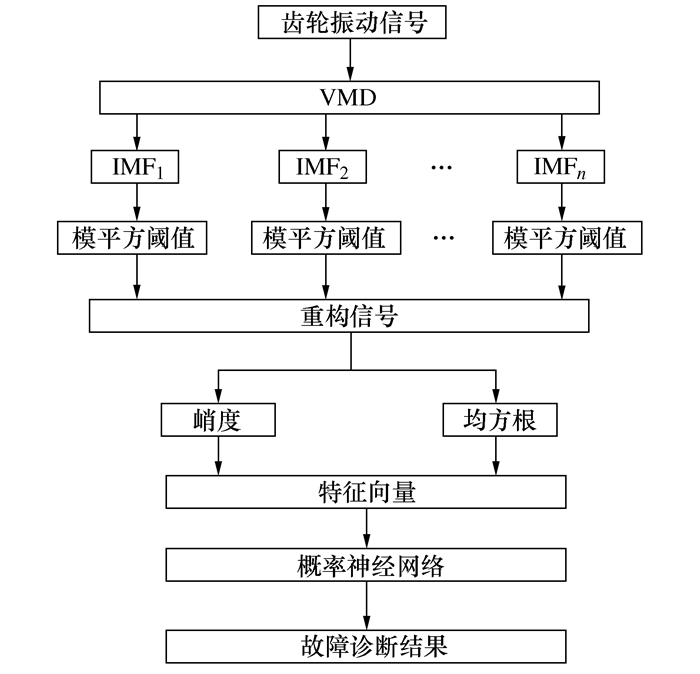
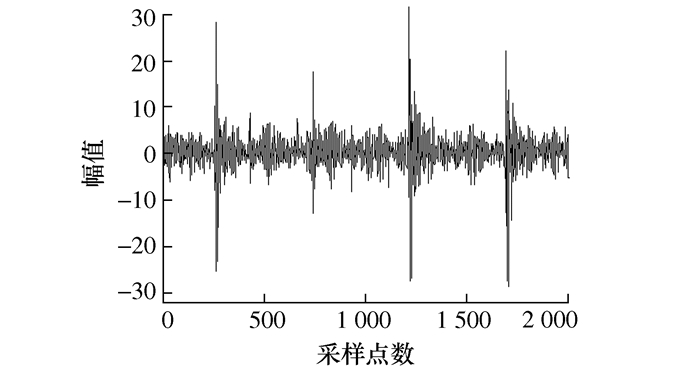
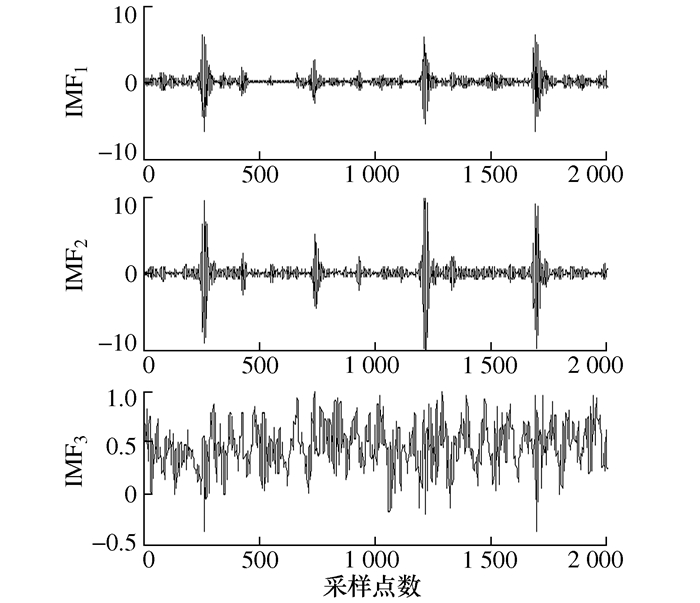
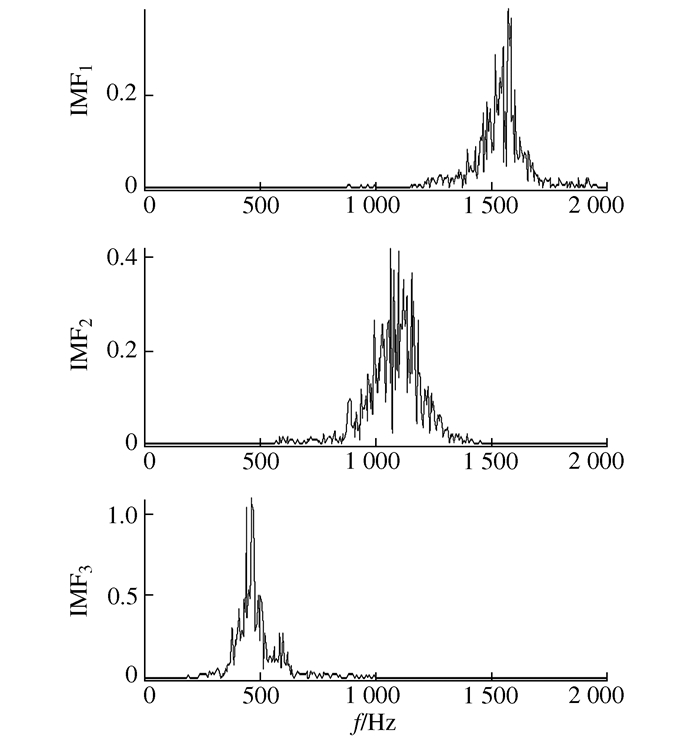
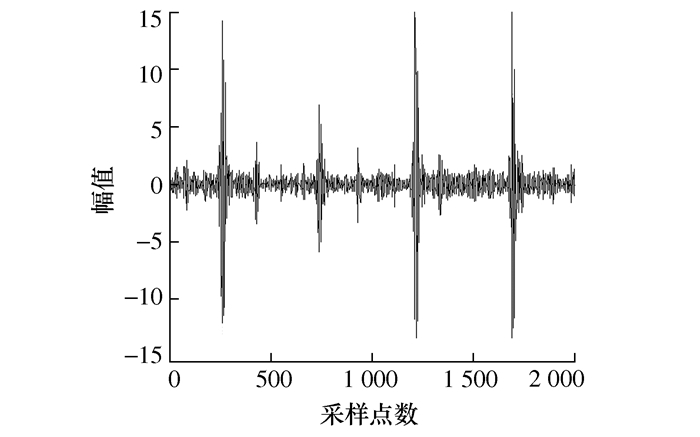
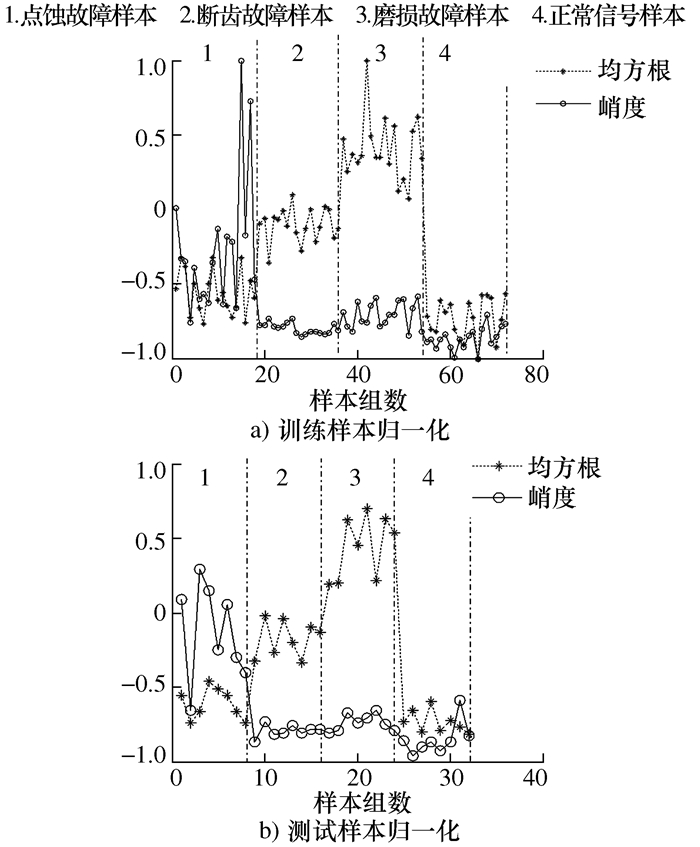
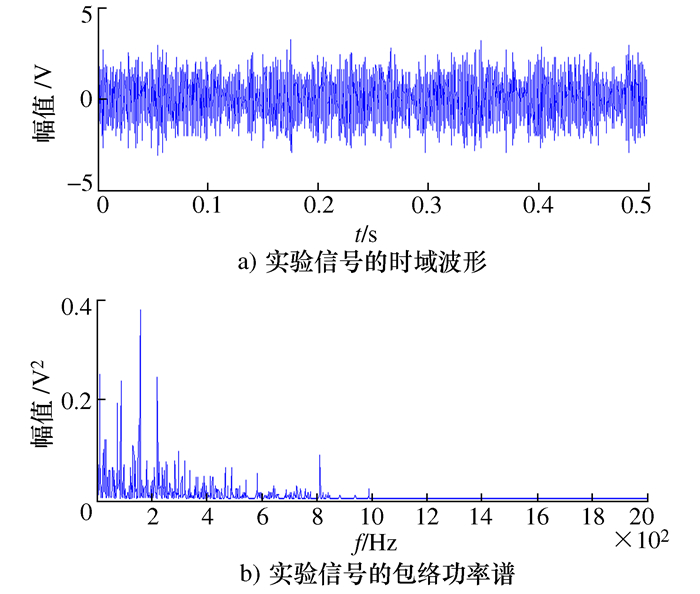
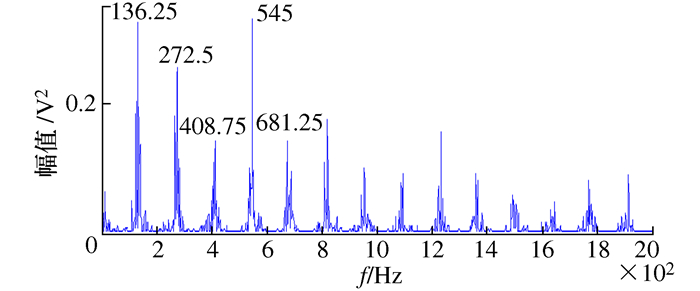
针对故障齿轮振动信号的非平稳和调制特性,提出了在变分模态分解(VMD)-模平方阈值降噪的基础上利用概率神经网络(PNN)进行齿轮故障诊断的方法。首先,利用VMD将原始振动信号分解为若干个本征模态函数分量,采用模平方阈值方法对各分量处理后并重构;然后,提取重构信号的峭度和均方根作为特征值组成特征向量;最后,将特征向量输入PNN实现故障类型识别。通过齿轮故障试验分析,将其与基于EMD-模平方阈值、LMD-模平方阈值和EEMD-模平方阈值的BP神经网络故障诊断方法相比较。结果表明,该方法能有效的提取特征信息,故障诊断准确率高达96.875%,证明了所提方法的可行性和有效性。
针对故障齿轮振动信号的非平稳和调制特性,提出了在变分模态分解(VMD)-模平方阈值降噪的基础上利用概率神经网络(PNN)进行齿轮故障诊断的方法。首先,利用VMD将原始振动信号分解为若干个本征模态函数分量,采用模平方阈值方法对各分量处理后并重构;然后,提取重构信号的峭度和均方根作为特征值组成特征向量;最后,将特征向量输入PNN实现故障类型识别。通过齿轮故障试验分析,将其与基于EMD-模平方阈值、LMD-模平方阈值和EEMD-模平方阈值的BP神经网络故障诊断方法相比较。结果表明,该方法能有效的提取特征信息,故障诊断准确率高达96.875%,证明了所提方法的可行性和有效性。





2018, 37(12): 1902-1907.
doi: 10.13433/j.cnki.1003-8728.20180138
摘要:
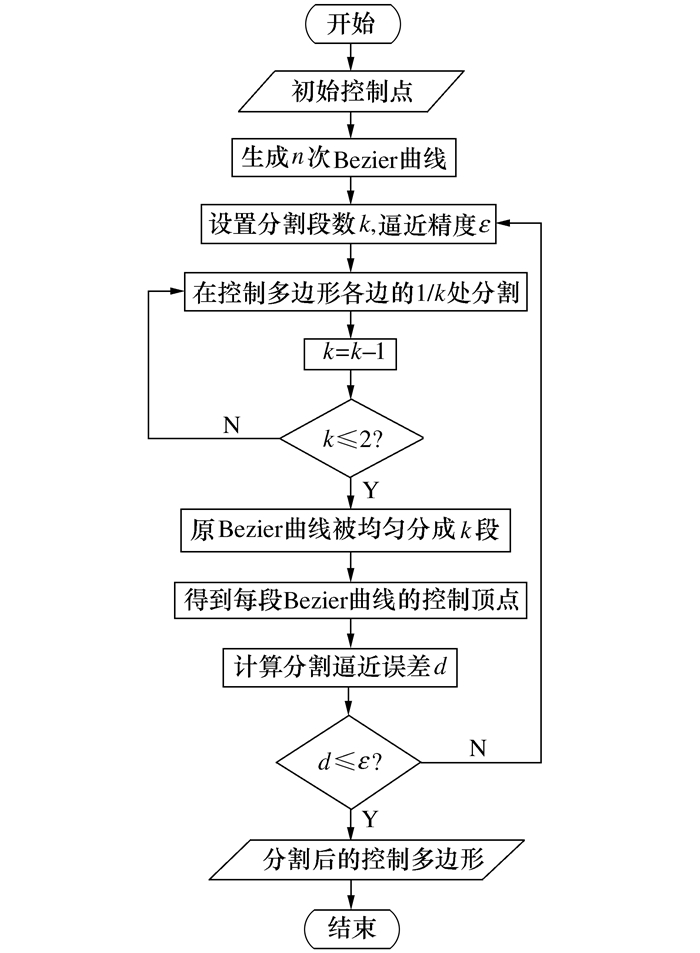
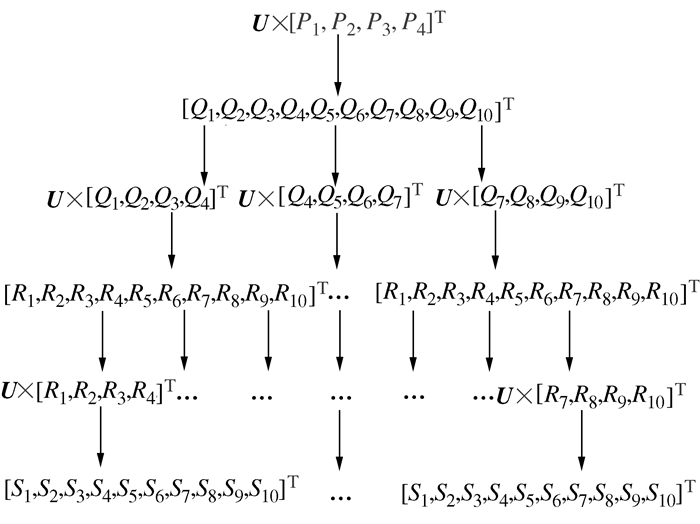
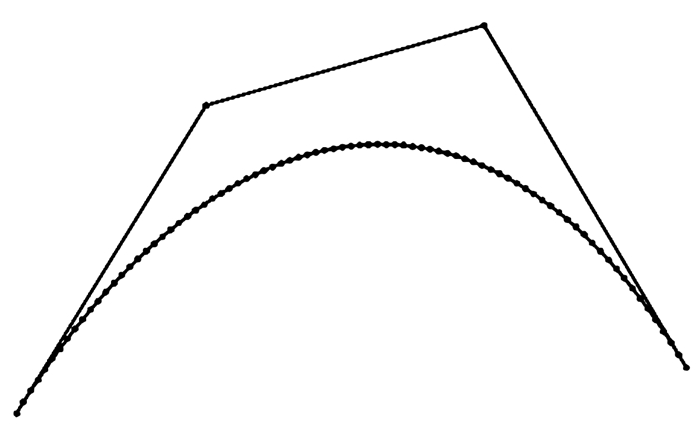
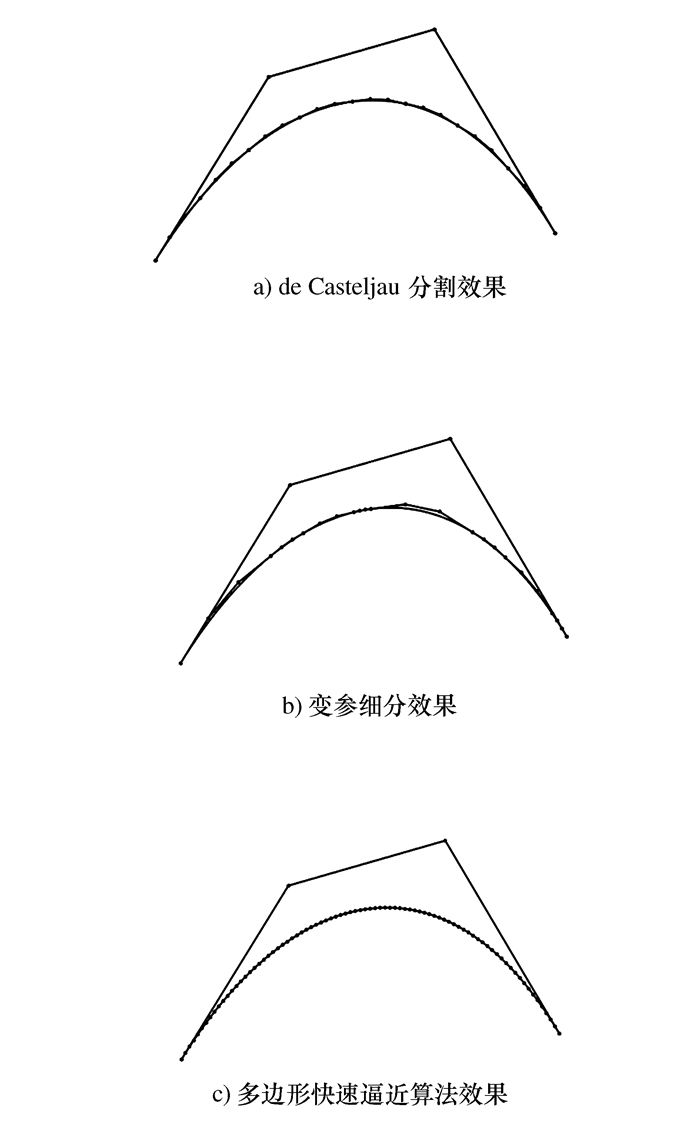
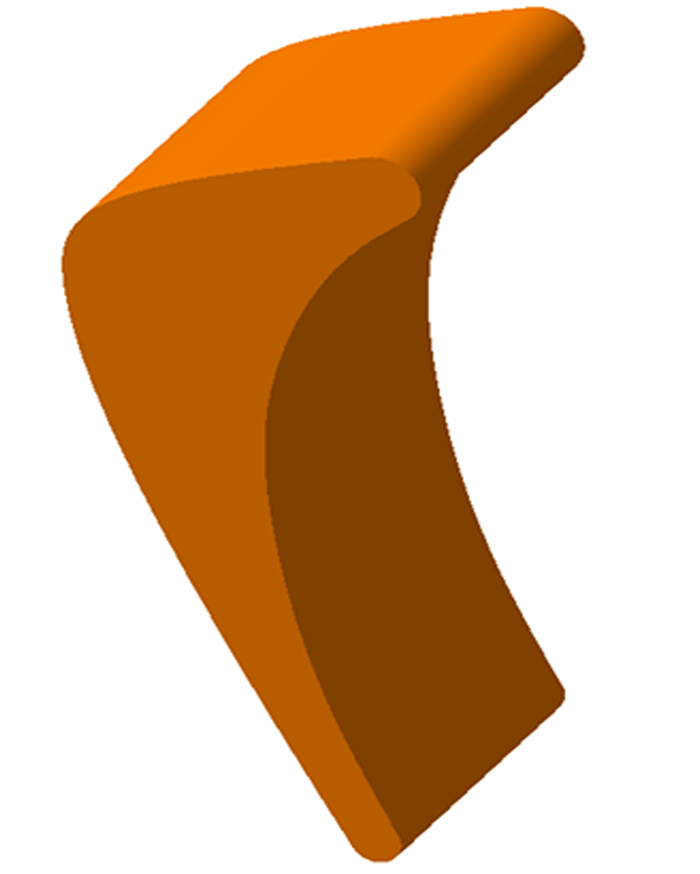
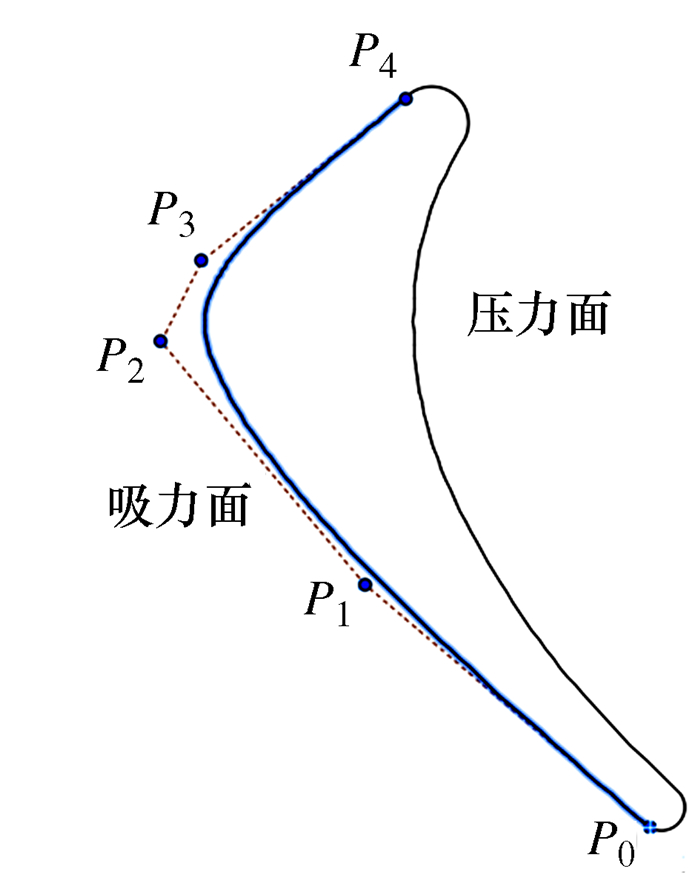
作为一种重要的形状表示的数学方法,Bezier曲线在各种CAD/CAM(计算机辅助设计和计算机辅助制造)软件中广泛应用。在复杂曲面的数控加工操作中,CAD/CAM系统最终以直线段代替曲线段进行加工。为了提高以微小直线段逼近Bezier曲线的效率和精度,提出了一种对于N次Bezier曲线较为实用的快速逼近算法。该方法通过对Bezier曲线反复进行定比分割,使其控制多边形逐步收敛于原Bezier曲线,直至逼近误差满足要求。通过MATLAB软件将该算法与已有分割算法进行对比,结果表明与已有分割算法相比,多边形快速逼近算法极大地降低了逼近误差,较好的提高分割效率。最后,通过给出工程实例验证了该算法在工程应用上的实用性。
作为一种重要的形状表示的数学方法,Bezier曲线在各种CAD/CAM(计算机辅助设计和计算机辅助制造)软件中广泛应用。在复杂曲面的数控加工操作中,CAD/CAM系统最终以直线段代替曲线段进行加工。为了提高以微小直线段逼近Bezier曲线的效率和精度,提出了一种对于N次Bezier曲线较为实用的快速逼近算法。该方法通过对Bezier曲线反复进行定比分割,使其控制多边形逐步收敛于原Bezier曲线,直至逼近误差满足要求。通过MATLAB软件将该算法与已有分割算法进行对比,结果表明与已有分割算法相比,多边形快速逼近算法极大地降低了逼近误差,较好的提高分割效率。最后,通过给出工程实例验证了该算法在工程应用上的实用性。


2018, 37(12): 1908-1913.
doi: 10.13433/j.cnki.1003-8728.20180080
摘要:
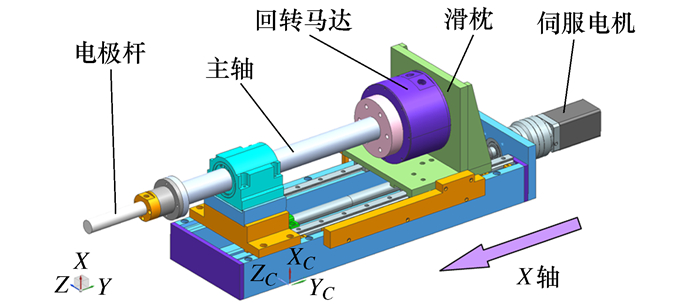
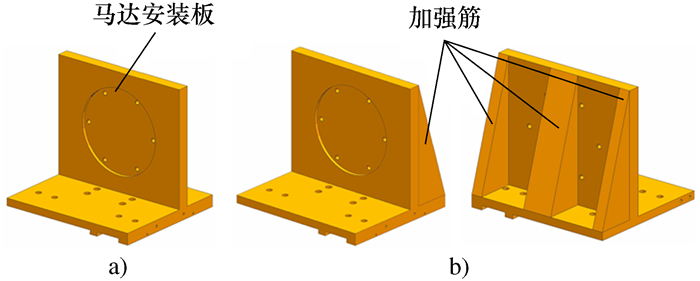
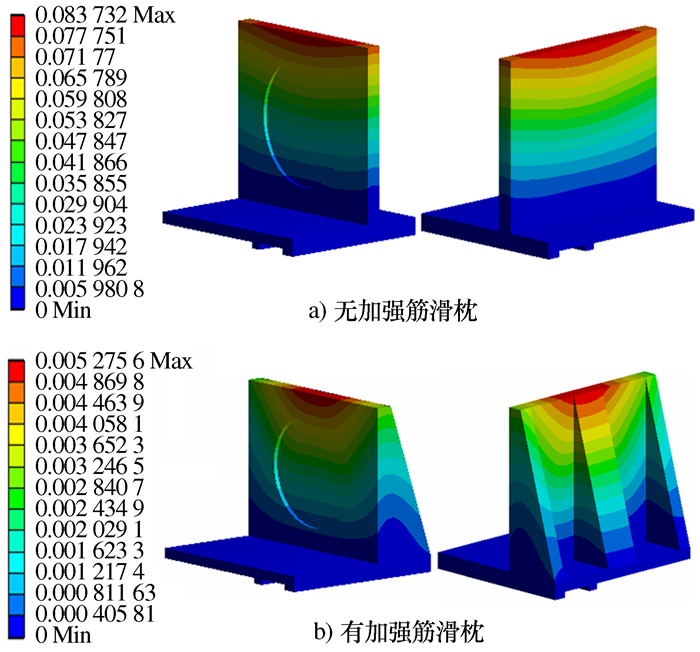
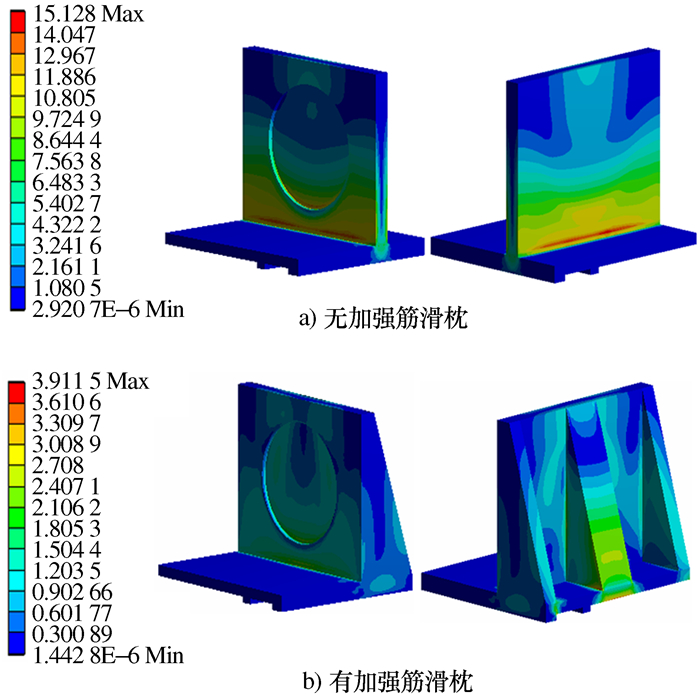
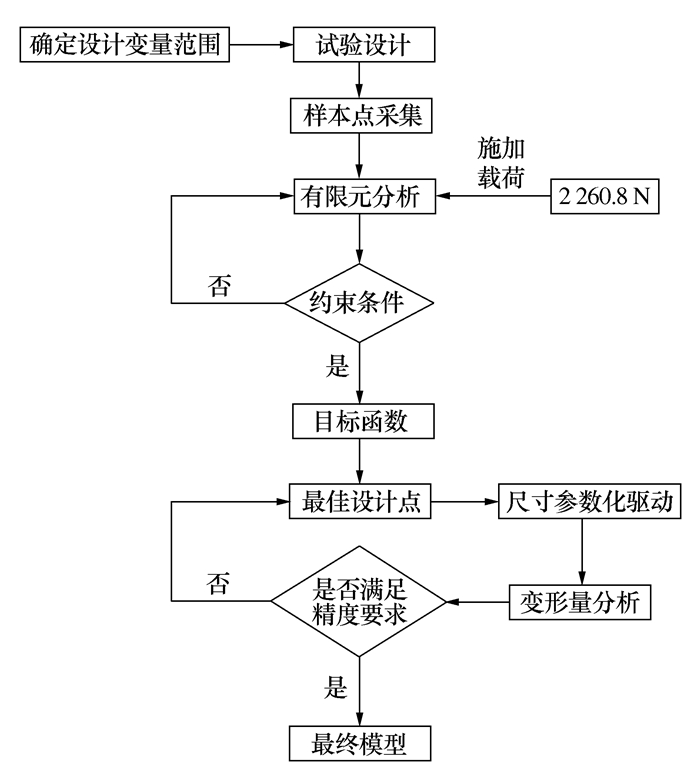
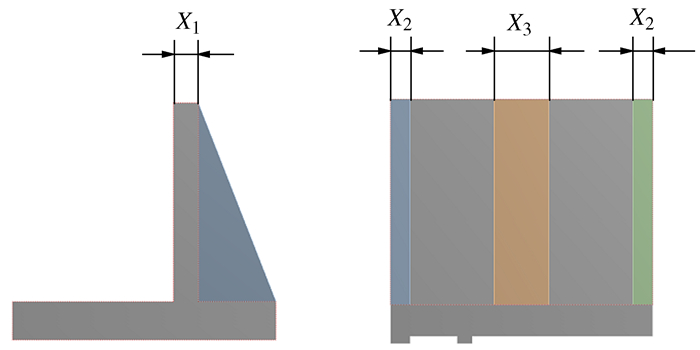
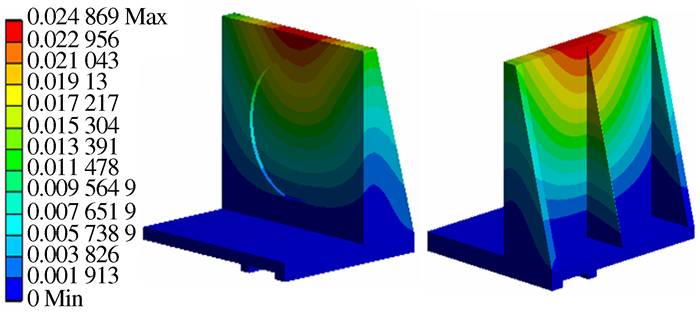
滑枕是电解加工机床中的关键承载件,对机床的加工性能有至关重要的影响。针对滑枕部件的结构特点及受载情况,采用了设置加强筋提高滑枕结构刚度的技术方案,并对受力变形情况进行了有限元仿真分析。在此基础上,基于拓扑优化方法,建立多约束优化数学模型,利用评价函数将多目标问题转化为单目标问题求解,以最小质量作为优化目标函数,最大变形量作为约束条件,开展了优化设计并进行了灵敏度分析,以此获得了合理的加强筋布局和结构尺寸,在有效提高了滑枕部件刚度和承载稳定性的同时,实现了轻量化设计。该滑枕部件已实际应用于自行研制的电解加工机床中。
滑枕是电解加工机床中的关键承载件,对机床的加工性能有至关重要的影响。针对滑枕部件的结构特点及受载情况,采用了设置加强筋提高滑枕结构刚度的技术方案,并对受力变形情况进行了有限元仿真分析。在此基础上,基于拓扑优化方法,建立多约束优化数学模型,利用评价函数将多目标问题转化为单目标问题求解,以最小质量作为优化目标函数,最大变形量作为约束条件,开展了优化设计并进行了灵敏度分析,以此获得了合理的加强筋布局和结构尺寸,在有效提高了滑枕部件刚度和承载稳定性的同时,实现了轻量化设计。该滑枕部件已实际应用于自行研制的电解加工机床中。
2018, 37(12): 1914-1919.
doi: 10.13433/j.cnki.1003-8728.20180093
摘要:
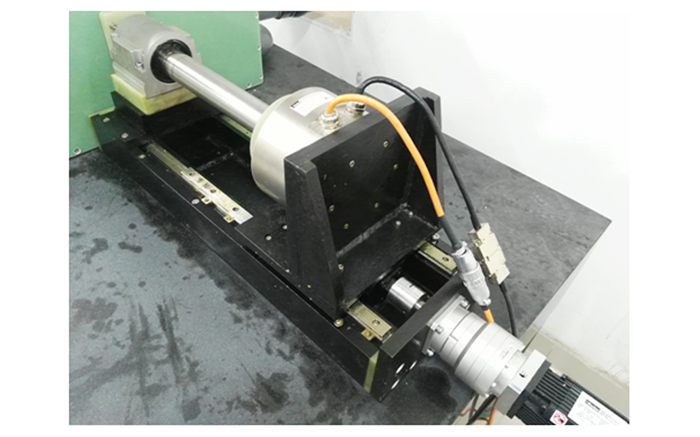
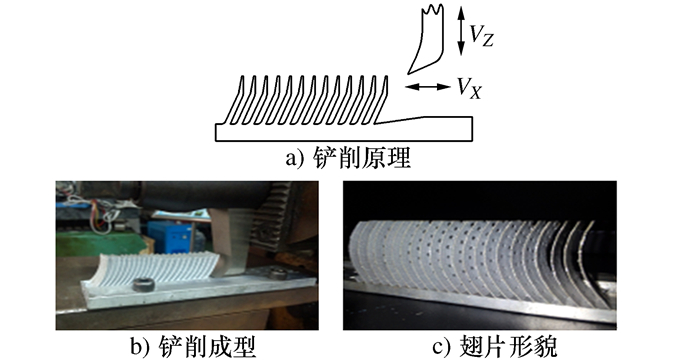
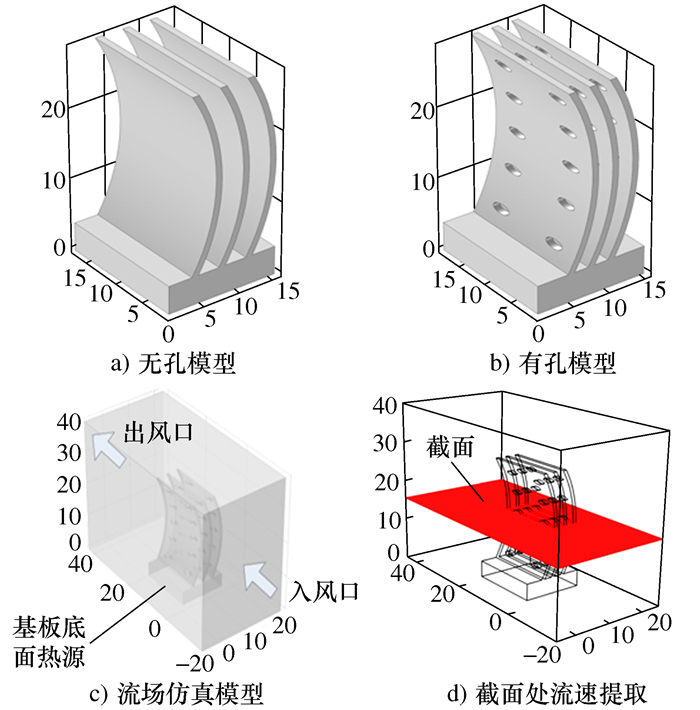
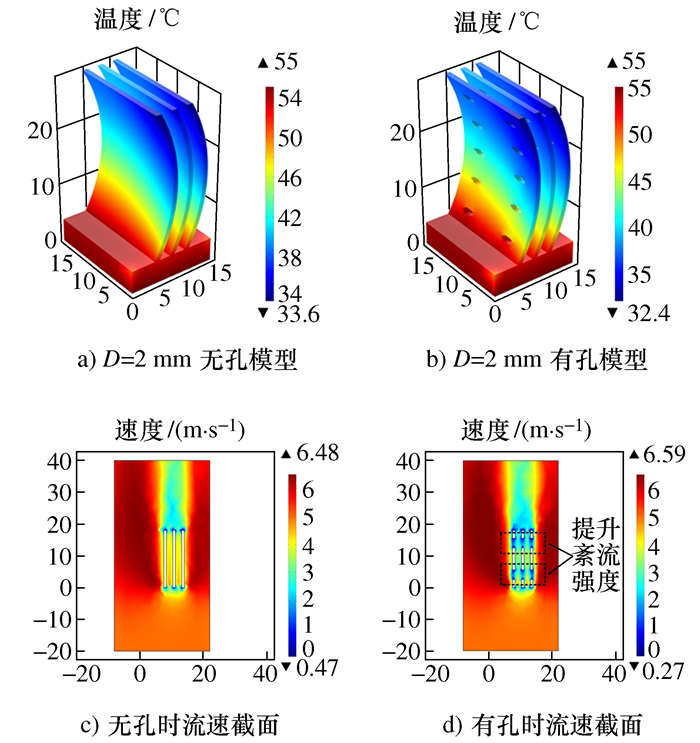
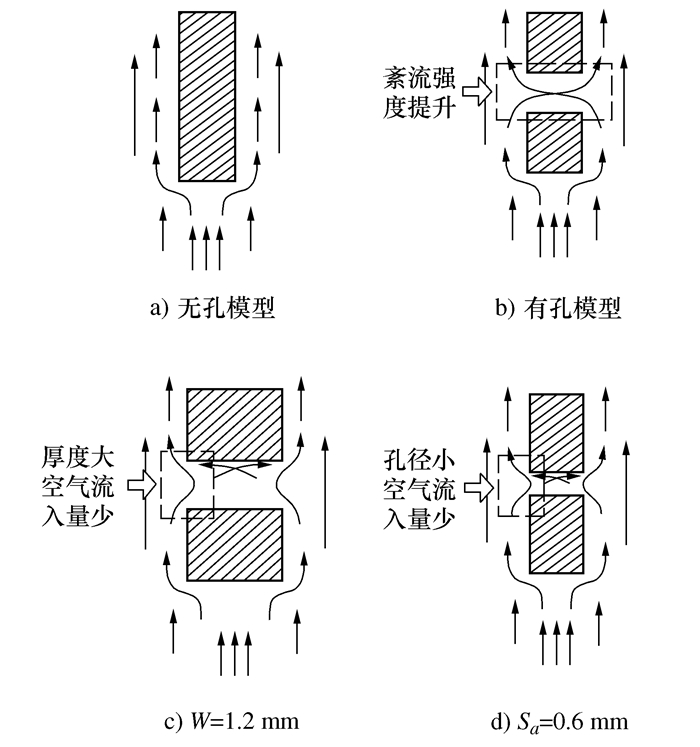
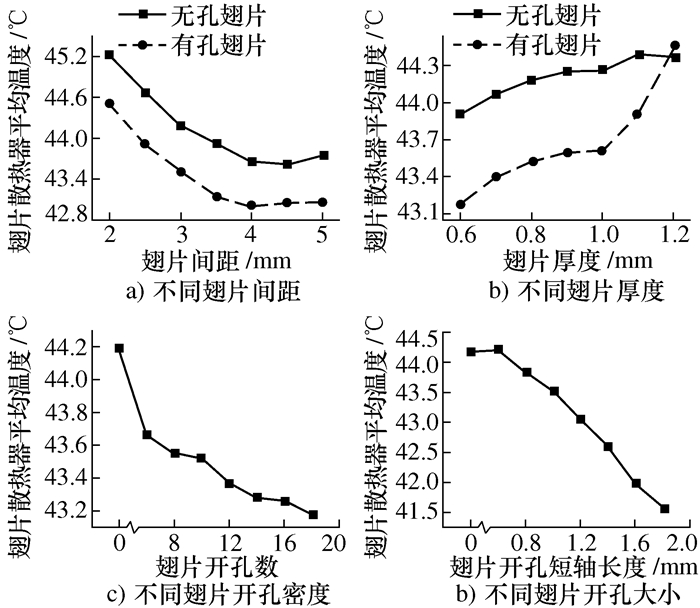
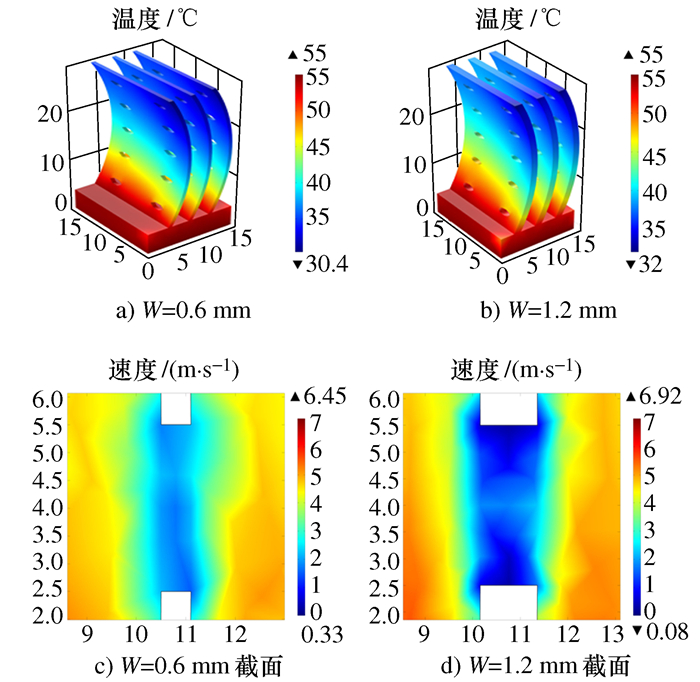
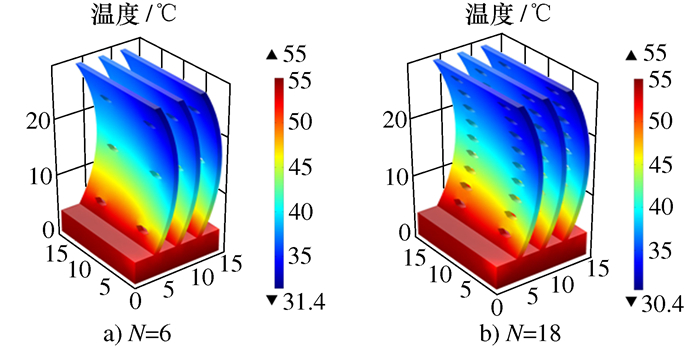
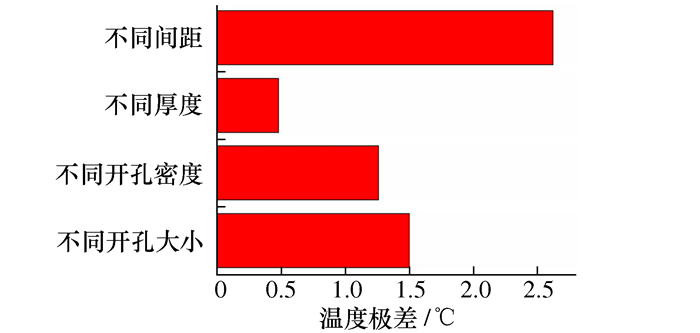
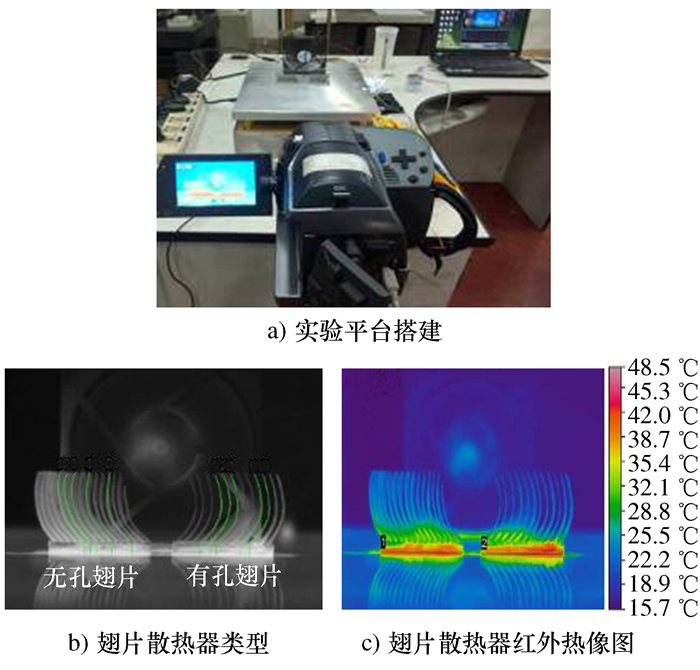
对铲削成形多孔翅片散热器结构进行了湍流和固体传热耦合分析。从铲削工艺的特性出发,研究了翅片间距、厚度、开孔密度、孔径等参数对其散热效果的影响。利用自主研发的铲削工艺加工出铝基材料多孔翅片,进行了实际散热效果测试,验证了分析结果的正确性。
对铲削成形多孔翅片散热器结构进行了湍流和固体传热耦合分析。从铲削工艺的特性出发,研究了翅片间距、厚度、开孔密度、孔径等参数对其散热效果的影响。利用自主研发的铲削工艺加工出铝基材料多孔翅片,进行了实际散热效果测试,验证了分析结果的正确性。

2018, 37(12): 1920-1927.
doi: 10.13433/j.cnki.1003-8728.20180229
摘要:
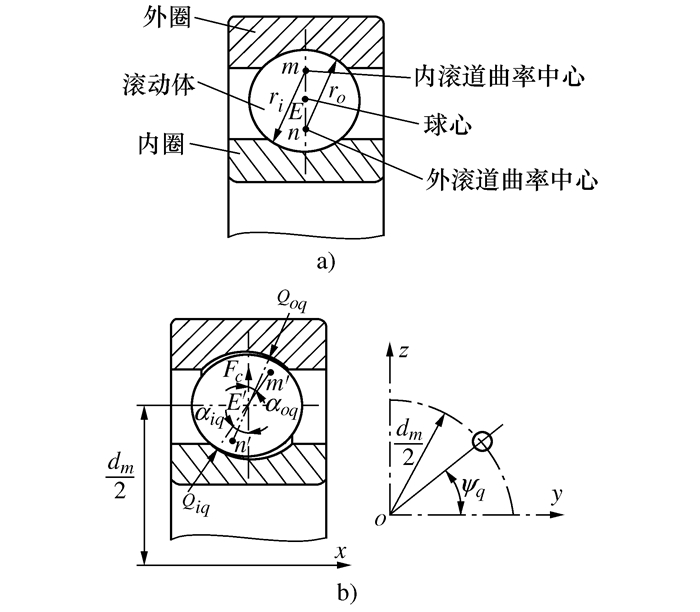
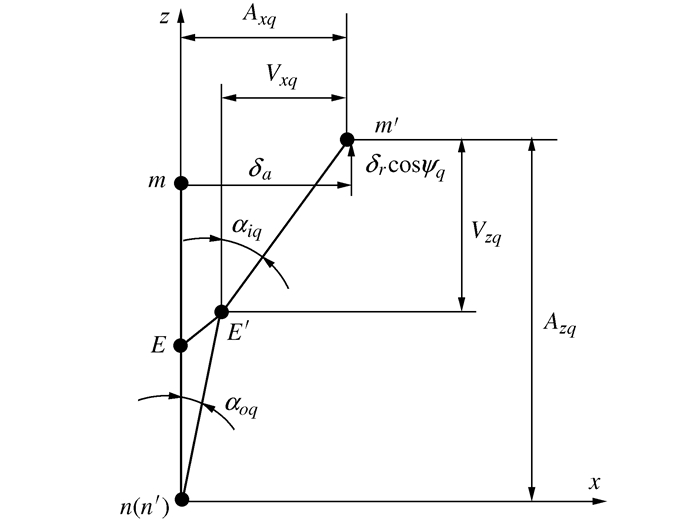
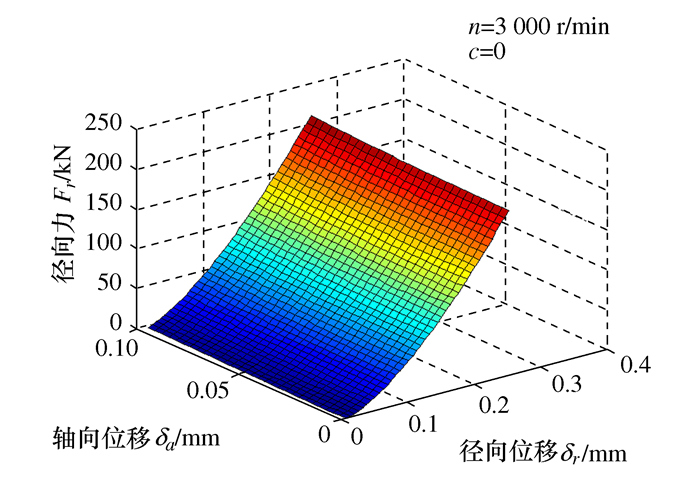
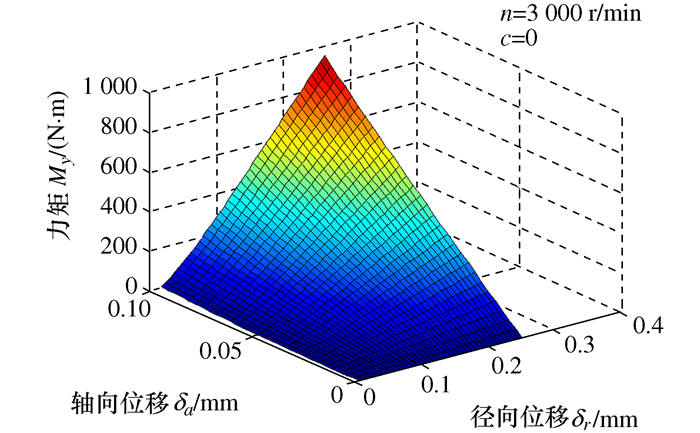
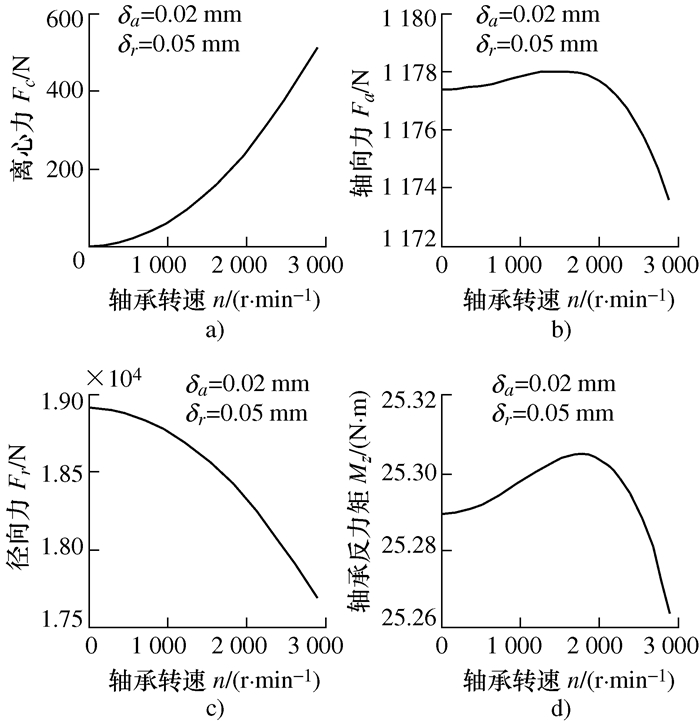
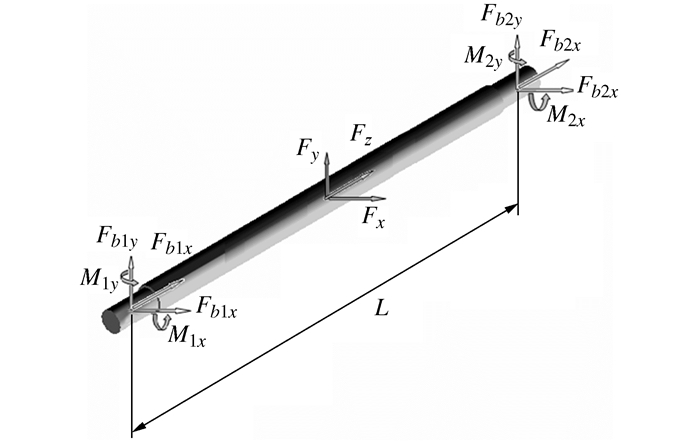
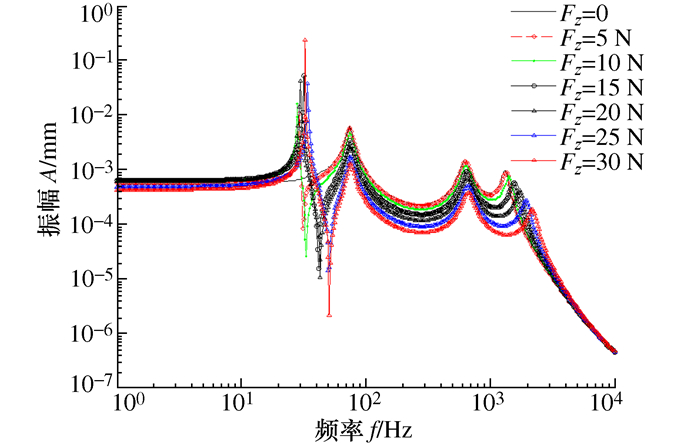
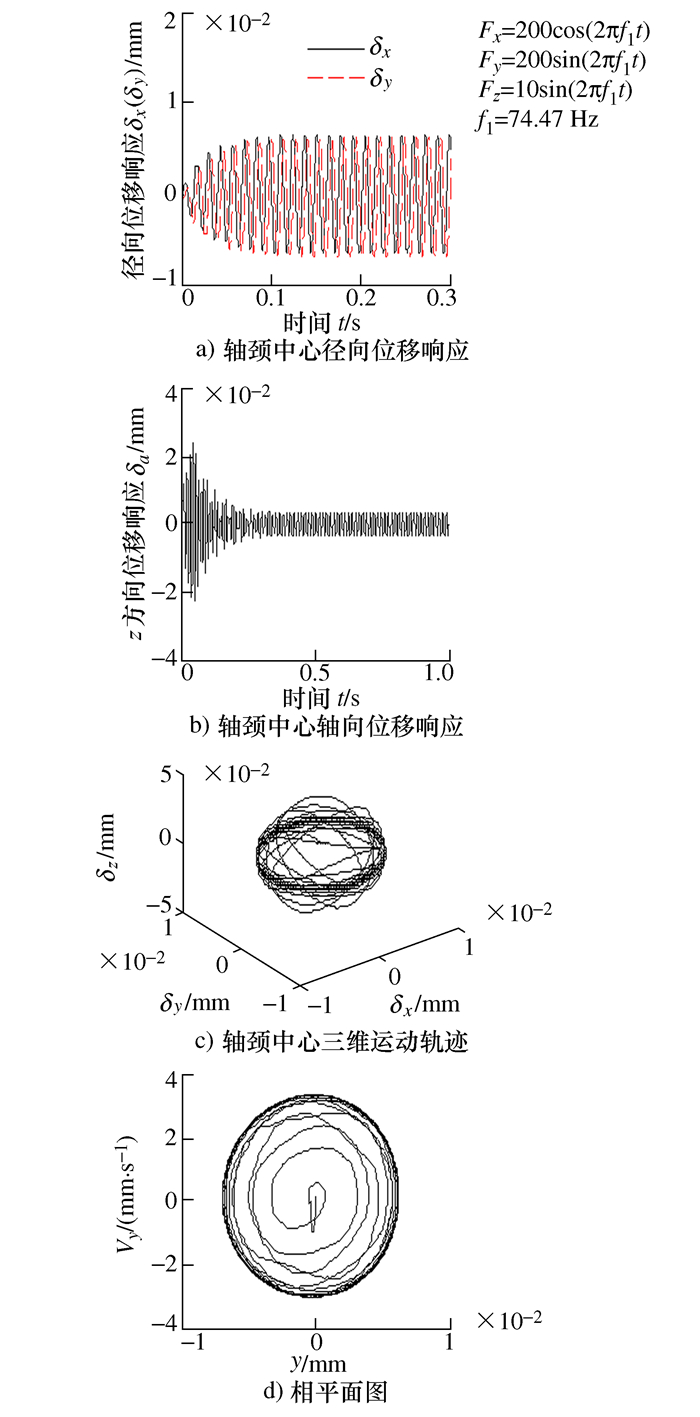
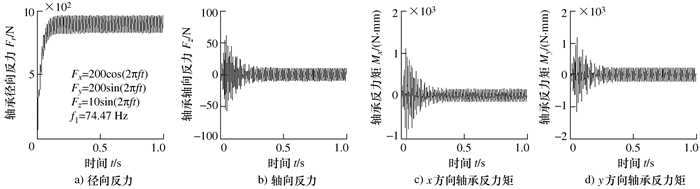
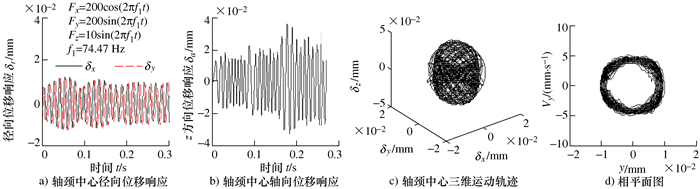
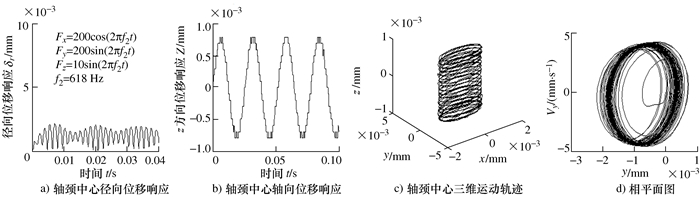
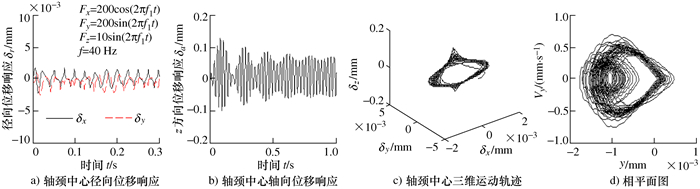
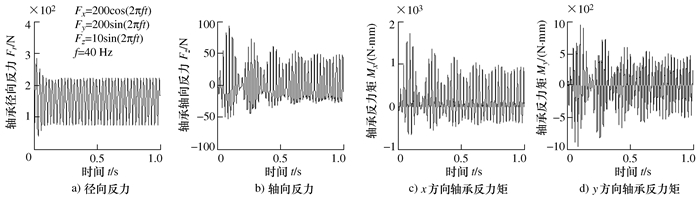
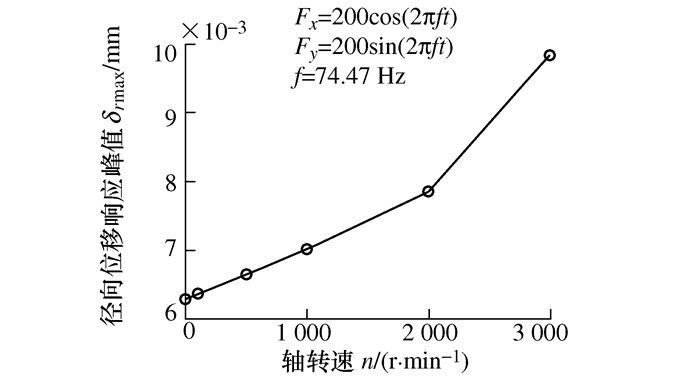
以轴-深沟球轴承系统为研究对象,在揭示深沟球轴承反力与轴颈中心位移之间关系的基础上,采用ADAMS动力学仿真软件研究轴-轴承系统的动力学行为,着重讨论了深沟球轴承轴向力、滚动体离心力以及轴承径向间隙等因素对轴-轴承系统动力学行为的影响。结果表明:轴向力作用对轴承起预紧作用,改变了轴-轴承系统的幅频特性,轴承轴颈中心径向位移与轴向力关系为非线性减函数关系;轴承转速增加,滚动体离心力增加,轴承支承刚度下降,轴承轴颈中心径向位移响应峰值增加;轴承间隙与轴承轴颈中心径向位移响应峰值为近似线性关系。
以轴-深沟球轴承系统为研究对象,在揭示深沟球轴承反力与轴颈中心位移之间关系的基础上,采用ADAMS动力学仿真软件研究轴-轴承系统的动力学行为,着重讨论了深沟球轴承轴向力、滚动体离心力以及轴承径向间隙等因素对轴-轴承系统动力学行为的影响。结果表明:轴向力作用对轴承起预紧作用,改变了轴-轴承系统的幅频特性,轴承轴颈中心径向位移与轴向力关系为非线性减函数关系;轴承转速增加,滚动体离心力增加,轴承支承刚度下降,轴承轴颈中心径向位移响应峰值增加;轴承间隙与轴承轴颈中心径向位移响应峰值为近似线性关系。





2018, 37(12): 1928-1935.
doi: 10.13433/j.cnki.1003-8728.20180133
摘要:
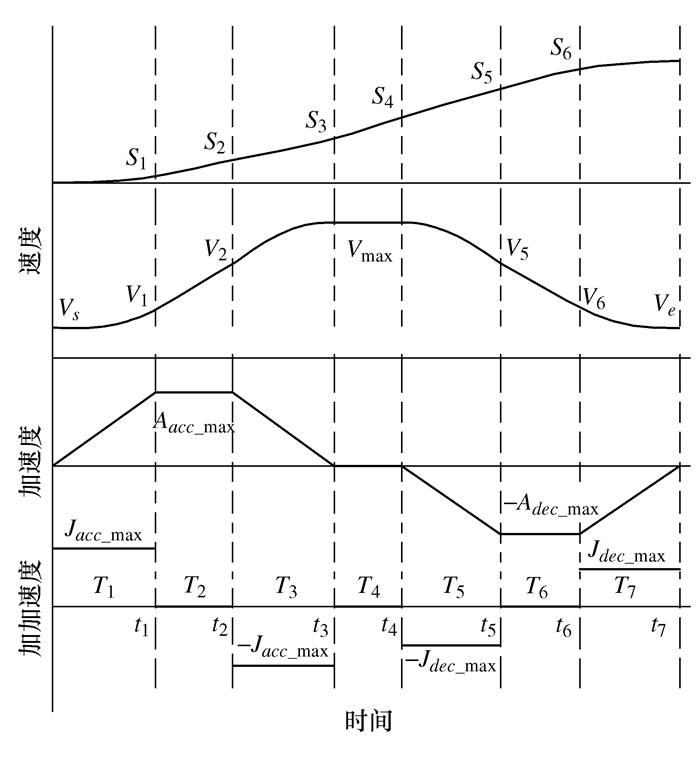
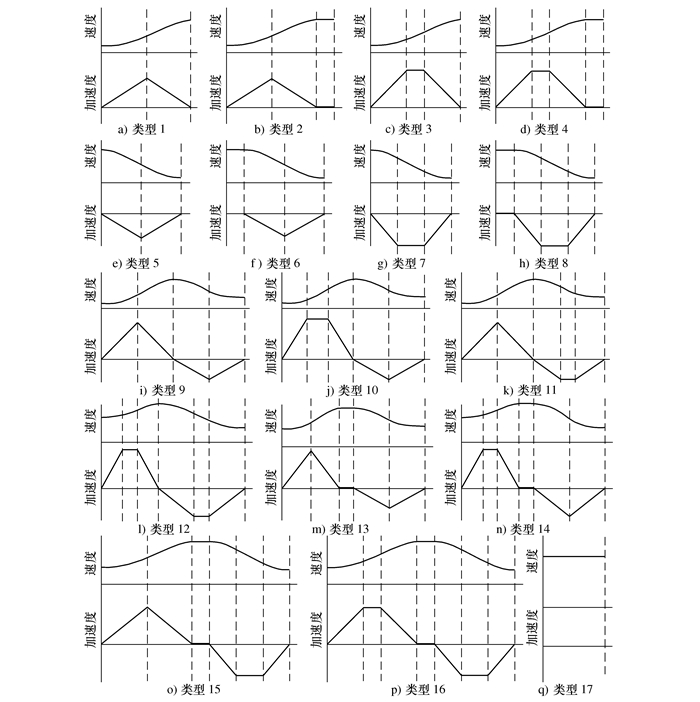
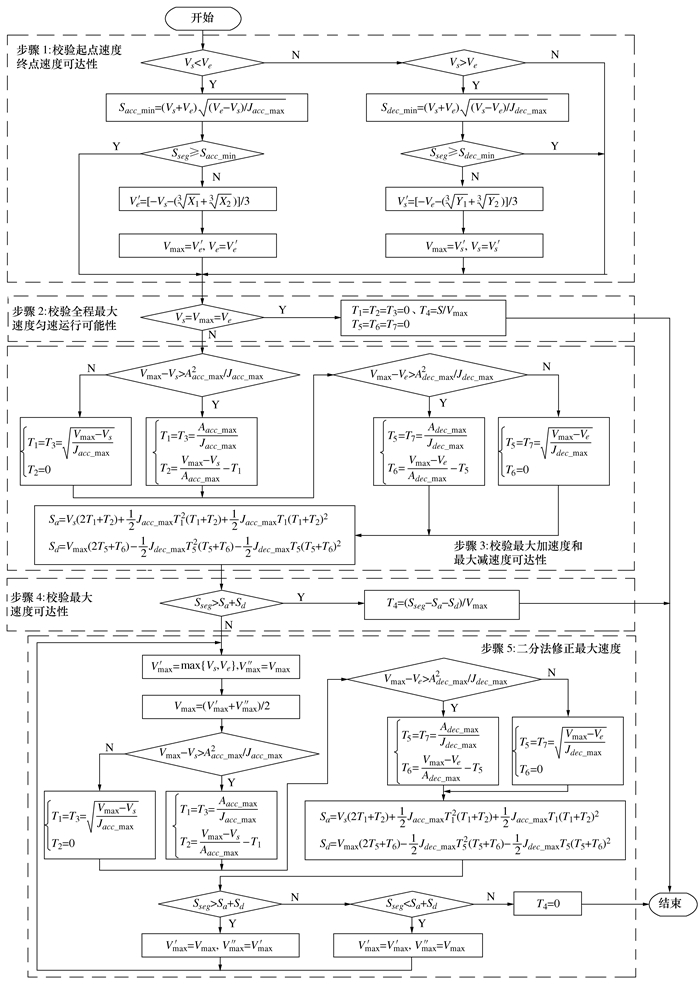
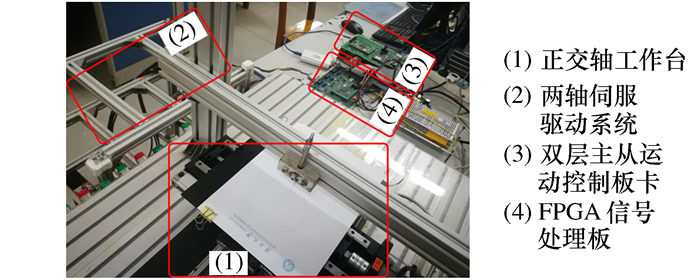
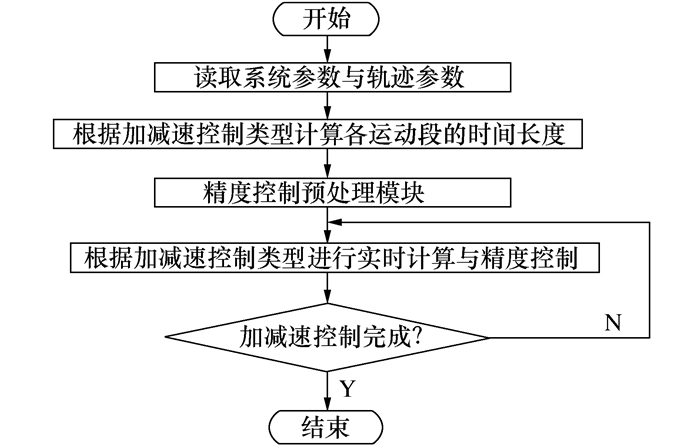
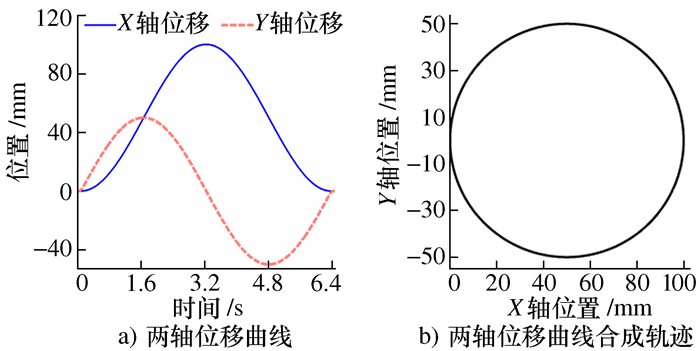
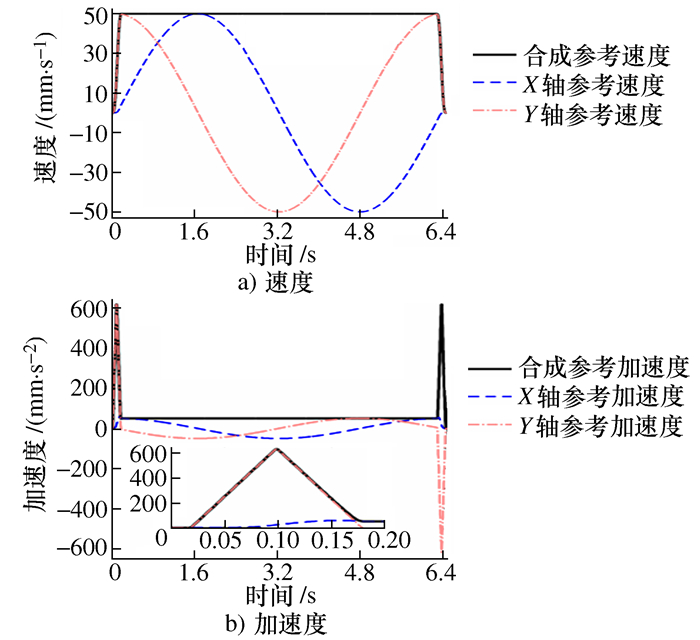
为减小运动控制系统在启动、停止、加速和减速运动阶段的振动和冲击,提出全类型非对称七段式S型曲线加减速控制算法。通过分析最大加速度、最大减速度和最大速度的可达性,规划出17种速度曲线类型;考虑在给定轨迹段长约束下,保证系统能够从起点速度运动到终点速度,提出基于给定轨迹段长约束的起点速度和终点速度可达性校验;在给定轨迹段长度小于系统从起点速度运动到终点速度所需最短轨迹段长的情况下,采用盛金公式修正起点速度和终点速度,推导并优化S型曲线加减速控制算法流程。在自主开发多轴运动控制器卡上,验证所提出的全类型非对称七段式S型曲线加减速控制算法。实验结果表明:在保证最大加速度、最大减速度和最大速度不超限情况下,该算法可规划出17种速度曲线类型;在给定轨迹段长度较短系统无法从起点速度运动到终点速度的情形下,该算法解决了起点速度和终点速度的可达性校验及修正问题。
为减小运动控制系统在启动、停止、加速和减速运动阶段的振动和冲击,提出全类型非对称七段式S型曲线加减速控制算法。通过分析最大加速度、最大减速度和最大速度的可达性,规划出17种速度曲线类型;考虑在给定轨迹段长约束下,保证系统能够从起点速度运动到终点速度,提出基于给定轨迹段长约束的起点速度和终点速度可达性校验;在给定轨迹段长度小于系统从起点速度运动到终点速度所需最短轨迹段长的情况下,采用盛金公式修正起点速度和终点速度,推导并优化S型曲线加减速控制算法流程。在自主开发多轴运动控制器卡上,验证所提出的全类型非对称七段式S型曲线加减速控制算法。实验结果表明:在保证最大加速度、最大减速度和最大速度不超限情况下,该算法可规划出17种速度曲线类型;在给定轨迹段长度较短系统无法从起点速度运动到终点速度的情形下,该算法解决了起点速度和终点速度的可达性校验及修正问题。
2018, 37(12): 1936-1943.
doi: 10.13433/j.cnki.1003-8728.20180086
摘要:
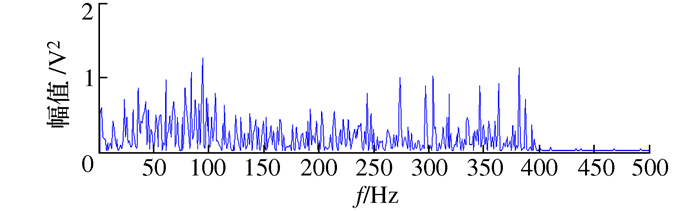
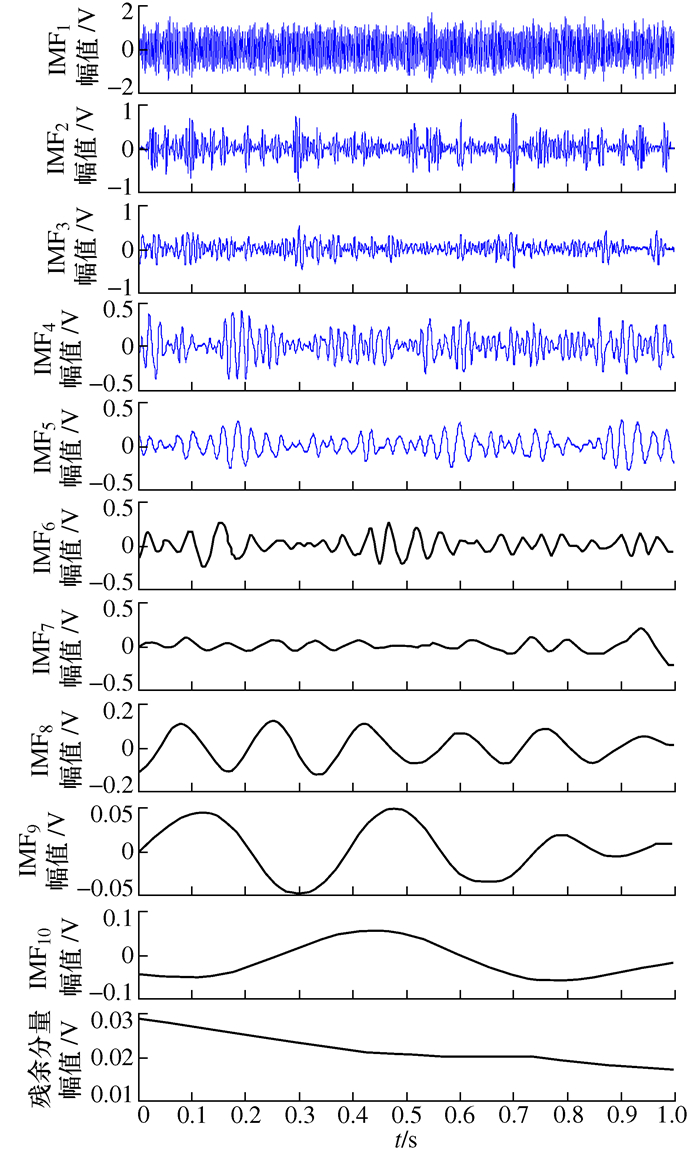
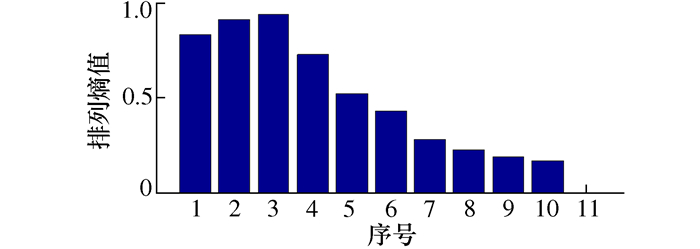
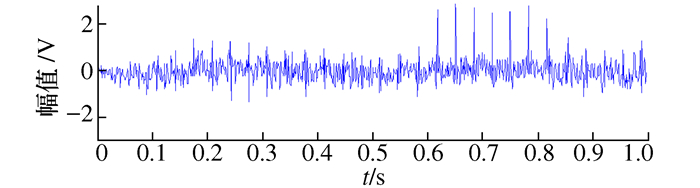
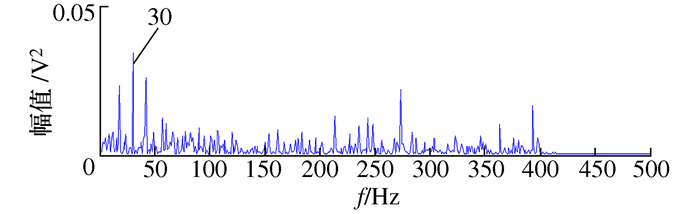
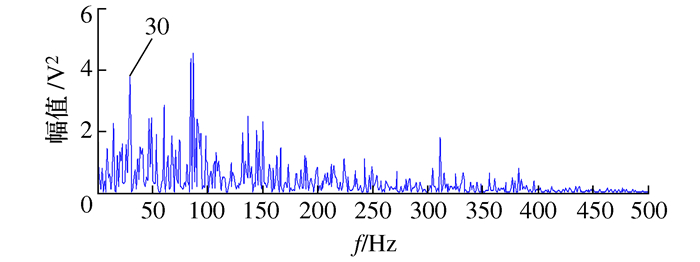
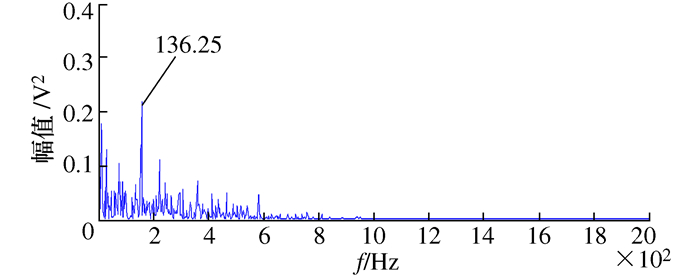
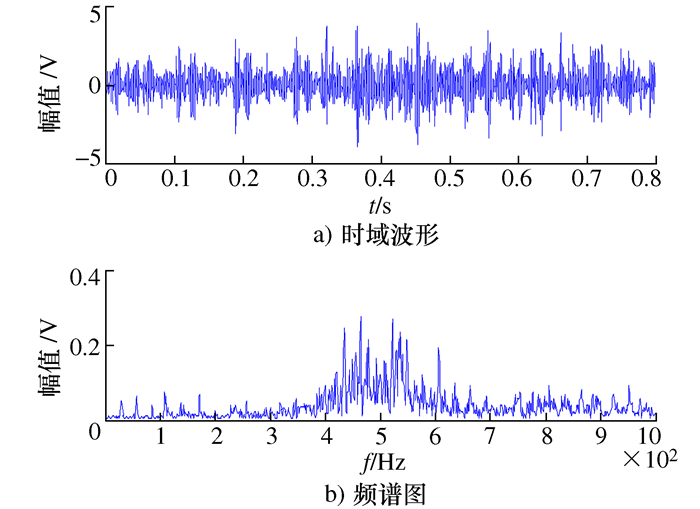
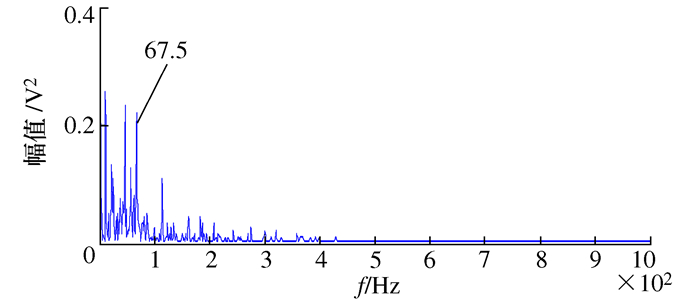
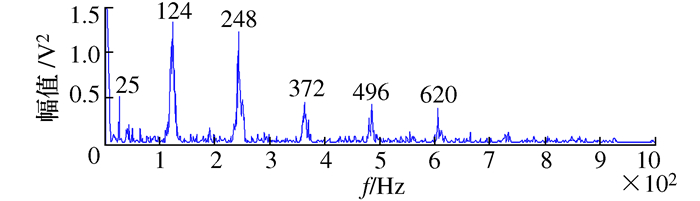
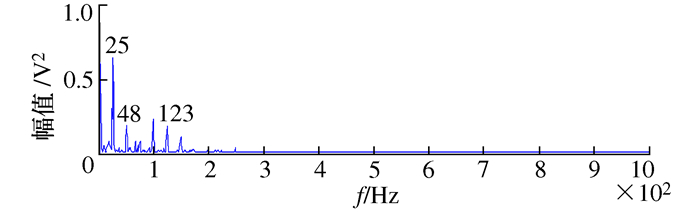
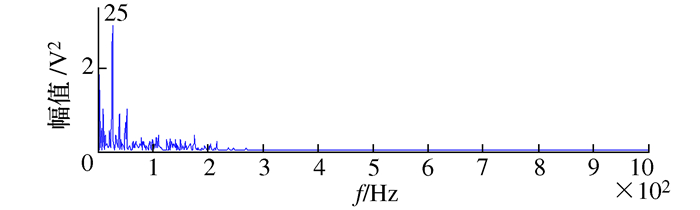
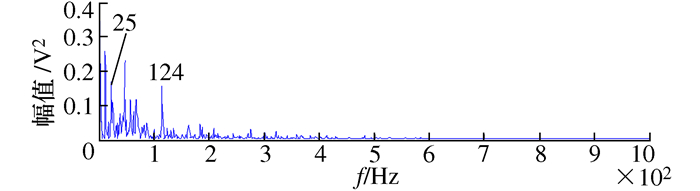
当滚动轴承处于早期故障阶段的时候,受环境噪声和信号衰减的影响,滚动轴承振动信号特征频率成分难以精确提取,并且在信噪比较低时CEEMD不能很好提取微弱故障。针对上述问题,提出了基于互补集合经验模态分解(Complementary ensemble empirical mode decomposition,CEEMD)和最大相关峭度解卷积(Maxim correlated kurtosis deconvolution,MCKD)相结合的故障特征提取方法(CEEMD-MCKD)。两种方法的结合有效解决了CEEMD分解后无法提取出淹没在背景噪声中微弱信号特征的问题,又保持了信号的完备性,避免了有用信息的损失。通过仿真和试验验证了该方法的有效性及优点。
当滚动轴承处于早期故障阶段的时候,受环境噪声和信号衰减的影响,滚动轴承振动信号特征频率成分难以精确提取,并且在信噪比较低时CEEMD不能很好提取微弱故障。针对上述问题,提出了基于互补集合经验模态分解(Complementary ensemble empirical mode decomposition,CEEMD)和最大相关峭度解卷积(Maxim correlated kurtosis deconvolution,MCKD)相结合的故障特征提取方法(CEEMD-MCKD)。两种方法的结合有效解决了CEEMD分解后无法提取出淹没在背景噪声中微弱信号特征的问题,又保持了信号的完备性,避免了有用信息的损失。通过仿真和试验验证了该方法的有效性及优点。









2018, 37(12): 1944-1947.
doi: 10.13433/j.cnki.1003-8728.20180231
摘要:
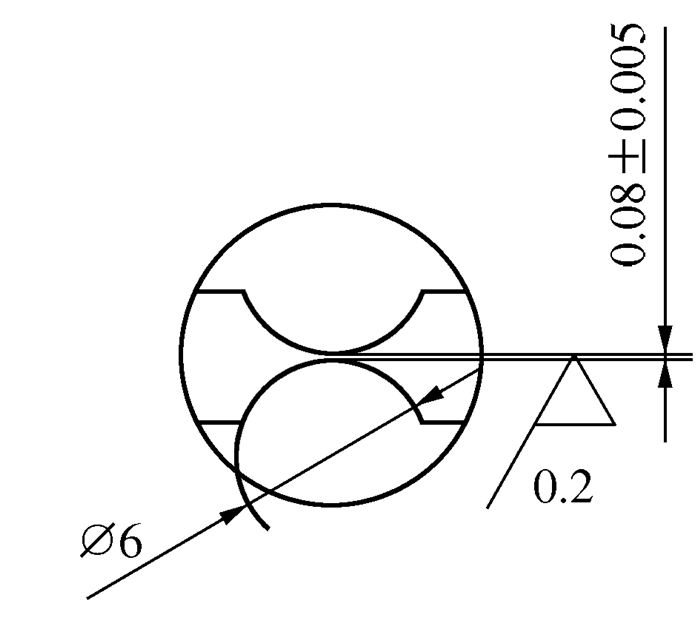
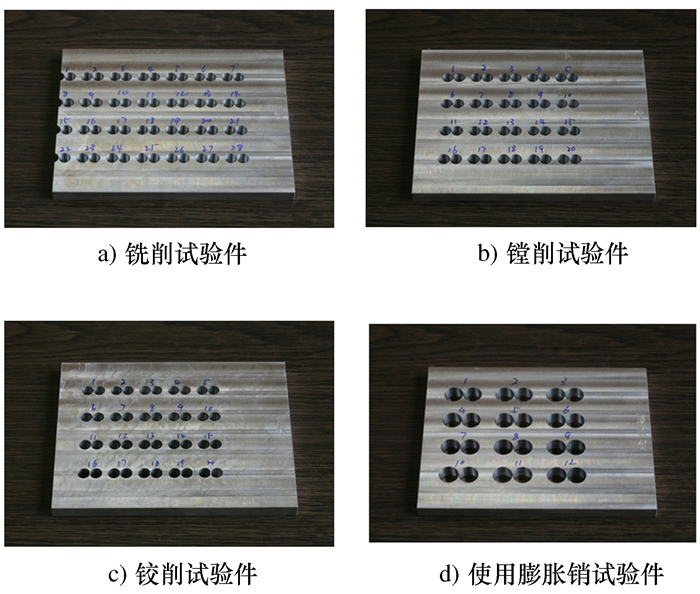
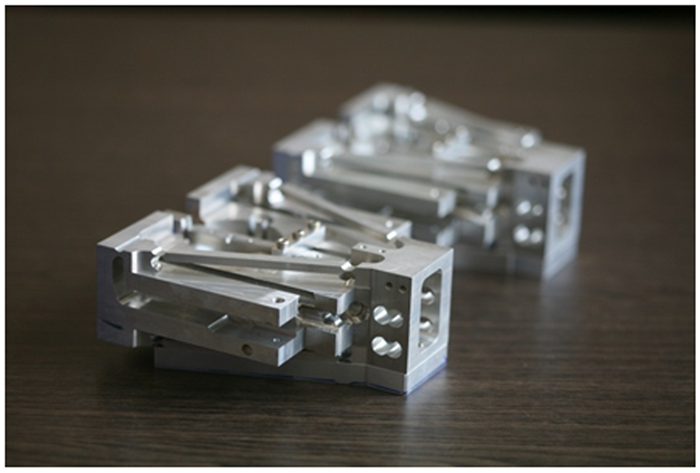
精密电子天平对其传感器模块的机械性能要求极高,柔性铰链是影响传感器机械性能的关键因素,其加工难点在于完整、薄壁(最小壁厚小于0.1 mm)的金属连接,且多个铰链厚度一致性需控制在5 μm以内。目前,受制于传感器模块的制造技术,我国0.01 mg级电子天平仍然依赖进口,因此迫切需要开发柔性铰链精密加工技术,提升传感器模块制造技术。通过对比工艺试验研究,分析了铣削、铰削、镗削等多种工艺方法,优化了工艺参数,并实现了柔性铰链的稳定加工。
精密电子天平对其传感器模块的机械性能要求极高,柔性铰链是影响传感器机械性能的关键因素,其加工难点在于完整、薄壁(最小壁厚小于0.1 mm)的金属连接,且多个铰链厚度一致性需控制在5 μm以内。目前,受制于传感器模块的制造技术,我国0.01 mg级电子天平仍然依赖进口,因此迫切需要开发柔性铰链精密加工技术,提升传感器模块制造技术。通过对比工艺试验研究,分析了铣削、铰削、镗削等多种工艺方法,优化了工艺参数,并实现了柔性铰链的稳定加工。

2018, 37(12): 1948-1955.
doi: 10.13433/j.cnki.1003-8728.20180085
摘要:
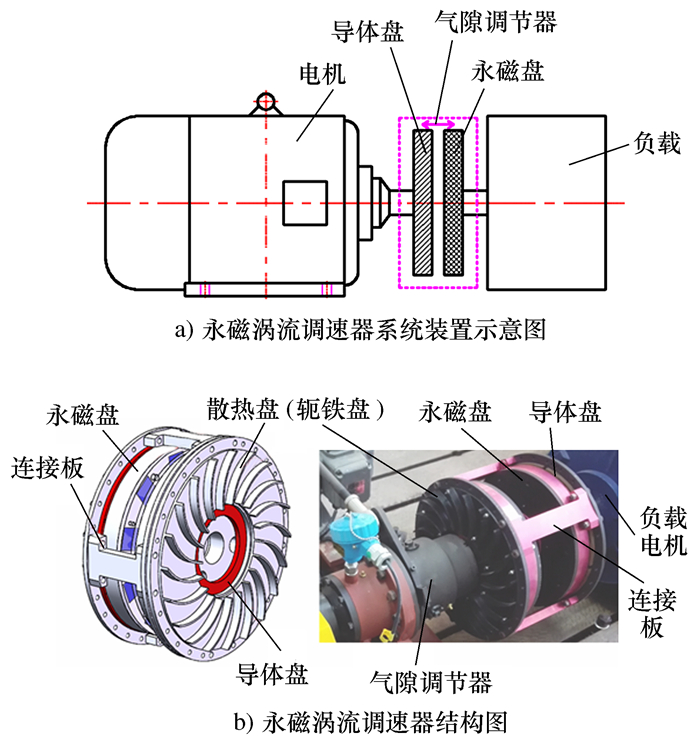
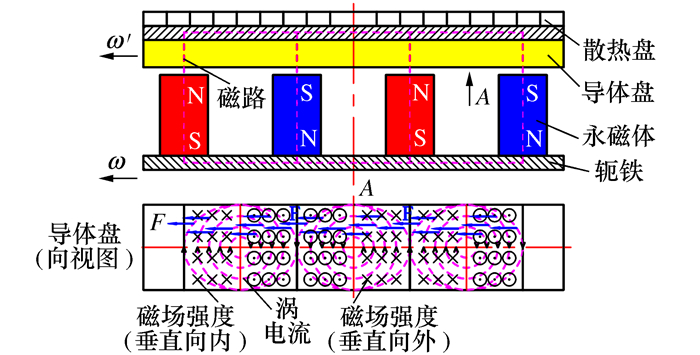
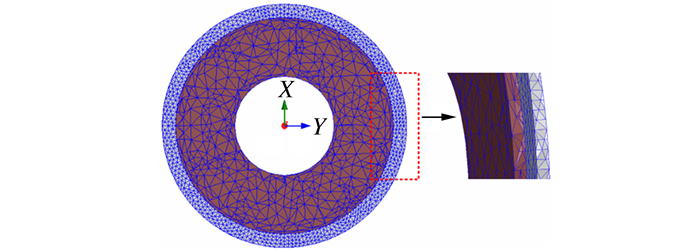
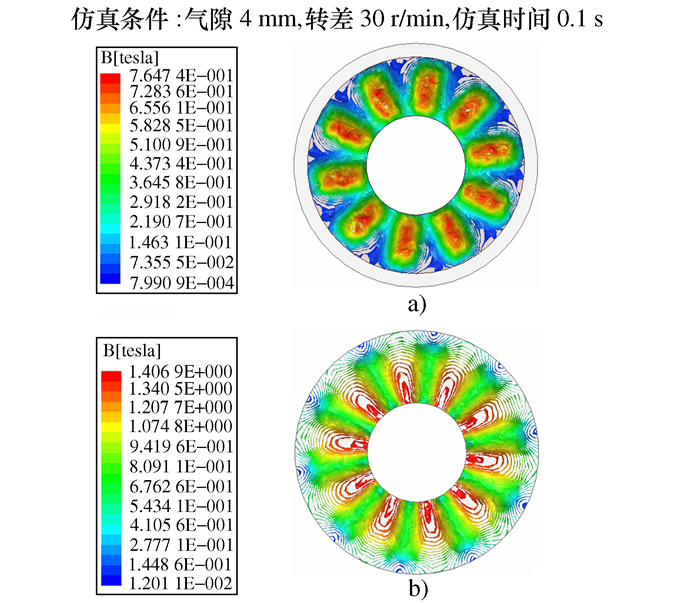
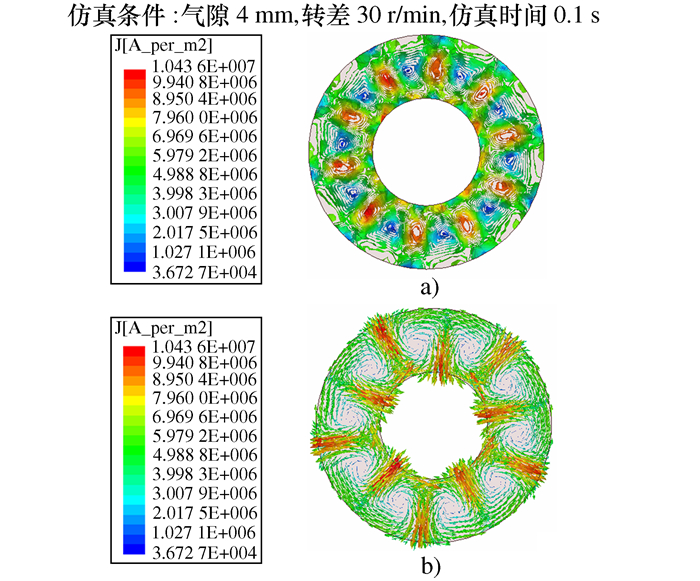
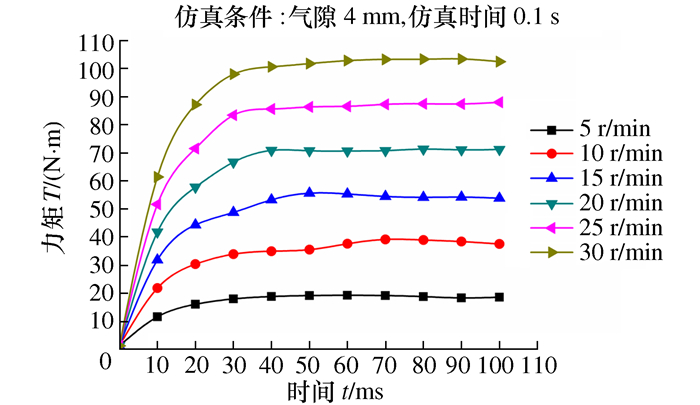
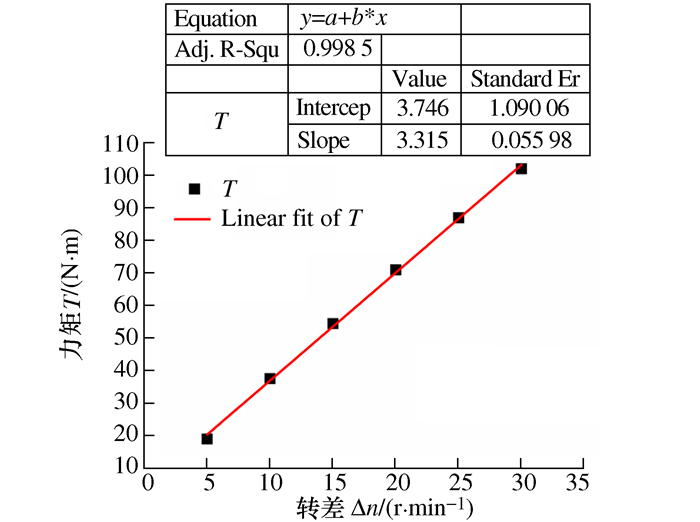
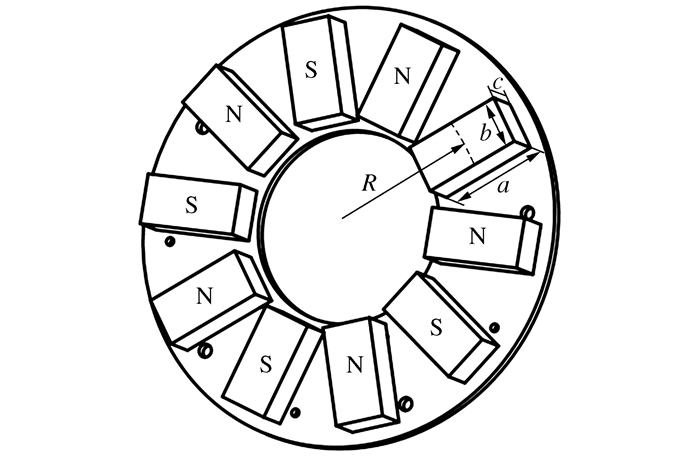
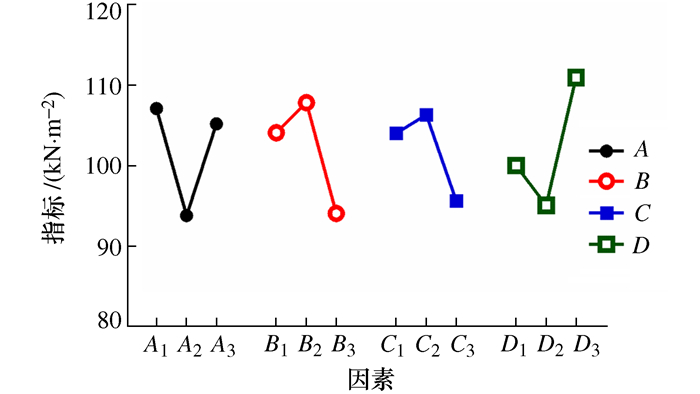
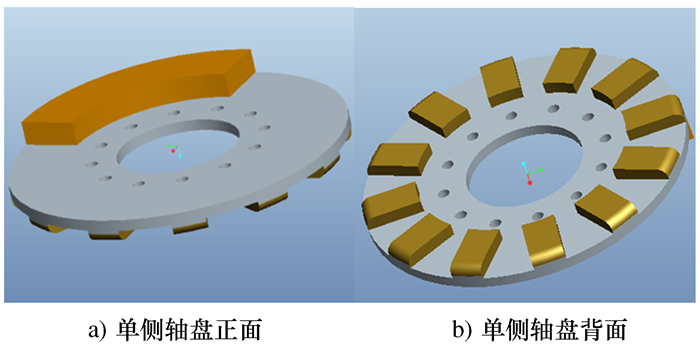
以一台双盘式永磁涡流调速器为研究对象,理解了永磁涡流驱动机理,建立了三维瞬态磁场有限元模型。仿真结果表明:导体盘上三维磁密集中区域形状与永磁盘中永磁体形状几乎相同,磁密集中区域数目与永磁体极数相同;轭铁区域内的三维磁场分布为辐射带形状,磁密值高低区域相邻布局,导体盘上产生了与永磁体数目相等的涡流回路,相邻涡流区域涡流方向相反,中间部分涡流密度较低,相邻涡流回路交界处即正对应于永磁体处的涡流密度最高,平均转矩与转差呈现递增规律,两者之间线性数学关系非常显著。运用正交实验方法研究表明:在实验约束条件下因素主次顺序依次为磁极数、永磁体宽、永磁体长、永磁体厚,确定了永磁涡流调速器关于永磁体的最佳参数方案。结果表明:较原结构平均转矩提高了14.2%,转矩密度提高了18.0%,永磁体材料减少了3.2%。
以一台双盘式永磁涡流调速器为研究对象,理解了永磁涡流驱动机理,建立了三维瞬态磁场有限元模型。仿真结果表明:导体盘上三维磁密集中区域形状与永磁盘中永磁体形状几乎相同,磁密集中区域数目与永磁体极数相同;轭铁区域内的三维磁场分布为辐射带形状,磁密值高低区域相邻布局,导体盘上产生了与永磁体数目相等的涡流回路,相邻涡流区域涡流方向相反,中间部分涡流密度较低,相邻涡流回路交界处即正对应于永磁体处的涡流密度最高,平均转矩与转差呈现递增规律,两者之间线性数学关系非常显著。运用正交实验方法研究表明:在实验约束条件下因素主次顺序依次为磁极数、永磁体宽、永磁体长、永磁体厚,确定了永磁涡流调速器关于永磁体的最佳参数方案。结果表明:较原结构平均转矩提高了14.2%,转矩密度提高了18.0%,永磁体材料减少了3.2%。


2018, 37(12): 1956-1962.
doi: 10.13433/j.cnki.1003-8728.20180228
摘要:
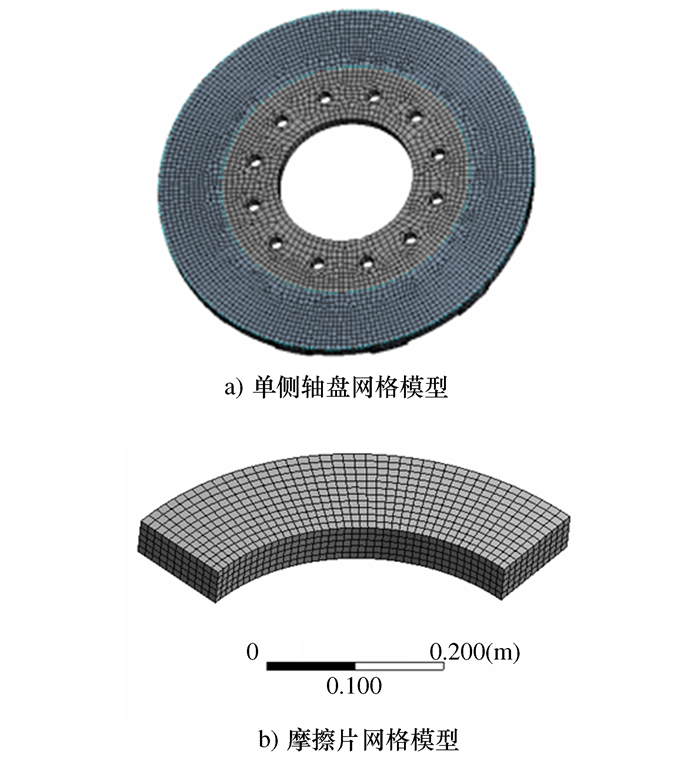
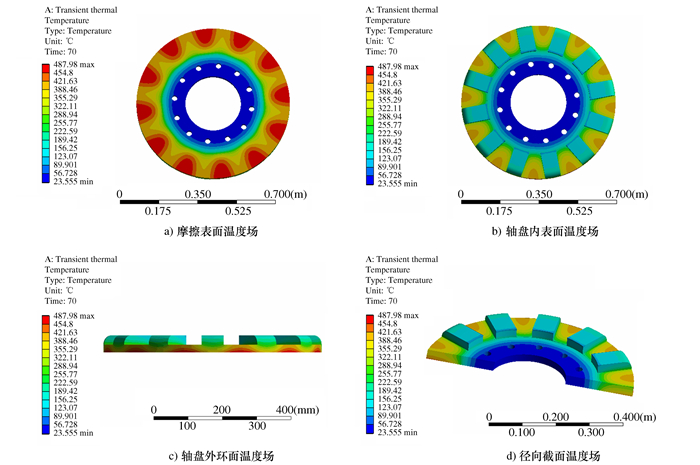
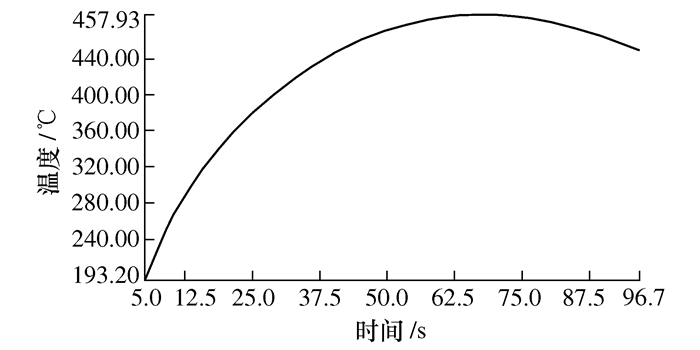
以CRH380BL型高速动车组的动车转向架上轴盘制动为研究对象,基于摩擦功率方法,对轴盘进行热负荷仿真研究及边界条件的确定。利用ANSYS软件,对动车组在350 km/h紧急制动过程中,制动盘的三维瞬态温度场在径向、轴向以及深度方向上的分布情况进行仿真,并从制动盘所能承受的最高温度方面分析其制动能力。结果表明:轴盘摩擦表面在制动初期温度呈环状分布,由于散热筋具有良好的散热功能,随后在散热筋之间的摩擦环面上产生不断地向周围扩散的团状高温区;制动后期,制动盘的温度呈层状分布,温度从制动盘的上表面自上而下递减,同时温度随着靠近轴盘轴心孔位置而渐渐降低,这表明轴盘制动过程中轴盘的温度分布受轴盘结构的影响。
以CRH380BL型高速动车组的动车转向架上轴盘制动为研究对象,基于摩擦功率方法,对轴盘进行热负荷仿真研究及边界条件的确定。利用ANSYS软件,对动车组在350 km/h紧急制动过程中,制动盘的三维瞬态温度场在径向、轴向以及深度方向上的分布情况进行仿真,并从制动盘所能承受的最高温度方面分析其制动能力。结果表明:轴盘摩擦表面在制动初期温度呈环状分布,由于散热筋具有良好的散热功能,随后在散热筋之间的摩擦环面上产生不断地向周围扩散的团状高温区;制动后期,制动盘的温度呈层状分布,温度从制动盘的上表面自上而下递减,同时温度随着靠近轴盘轴心孔位置而渐渐降低,这表明轴盘制动过程中轴盘的温度分布受轴盘结构的影响。


2018, 37(12): 1963-1968.
doi: 10.13433/j.cnki.1003-8728.20180088
摘要:
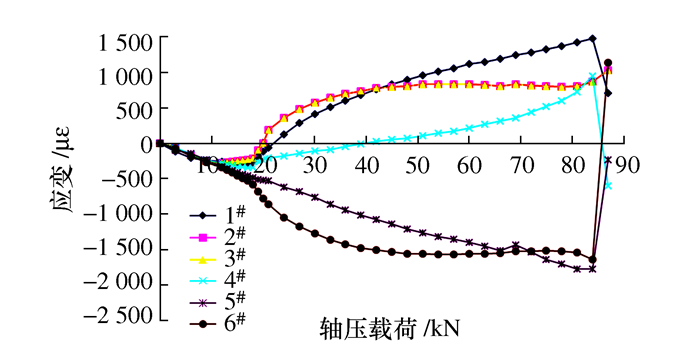
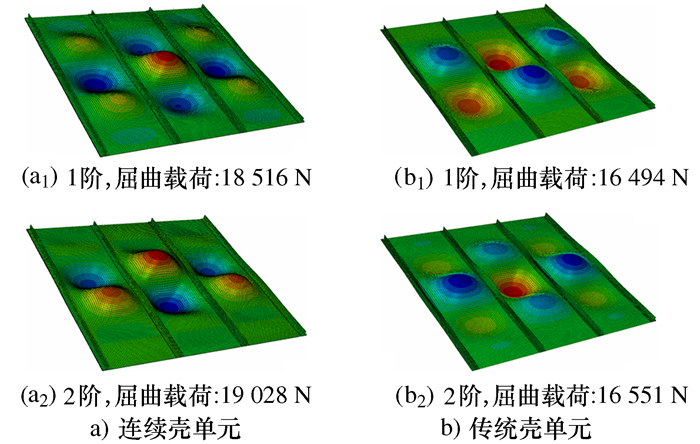
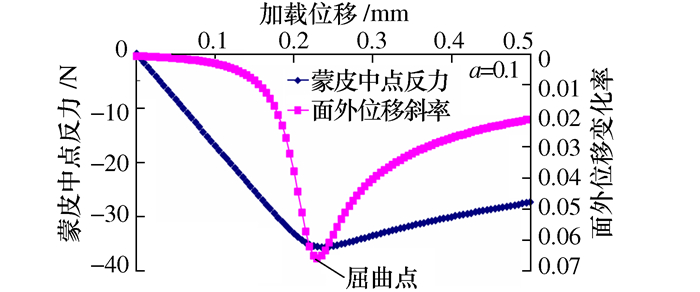
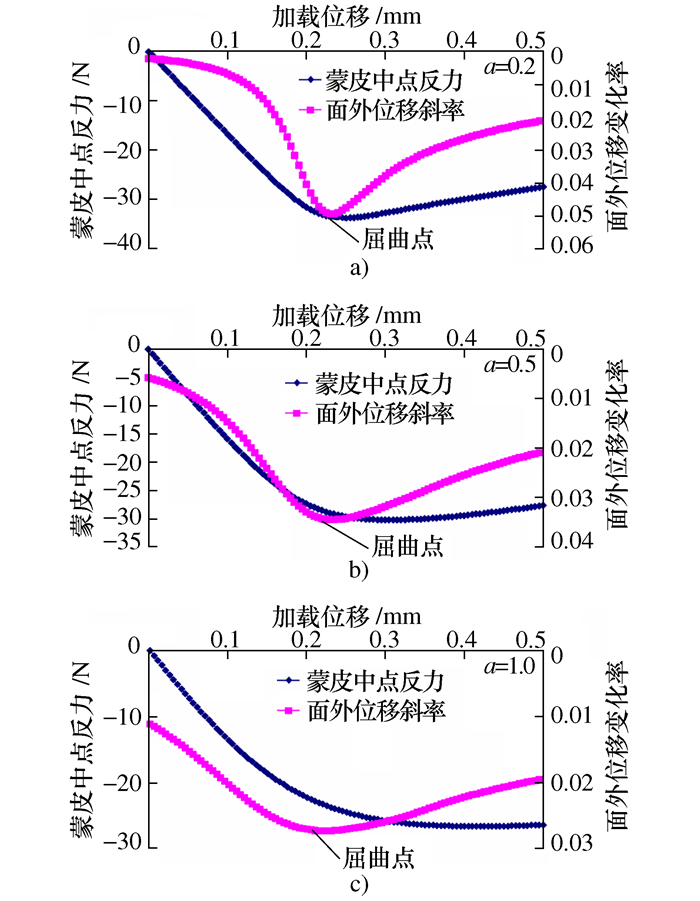
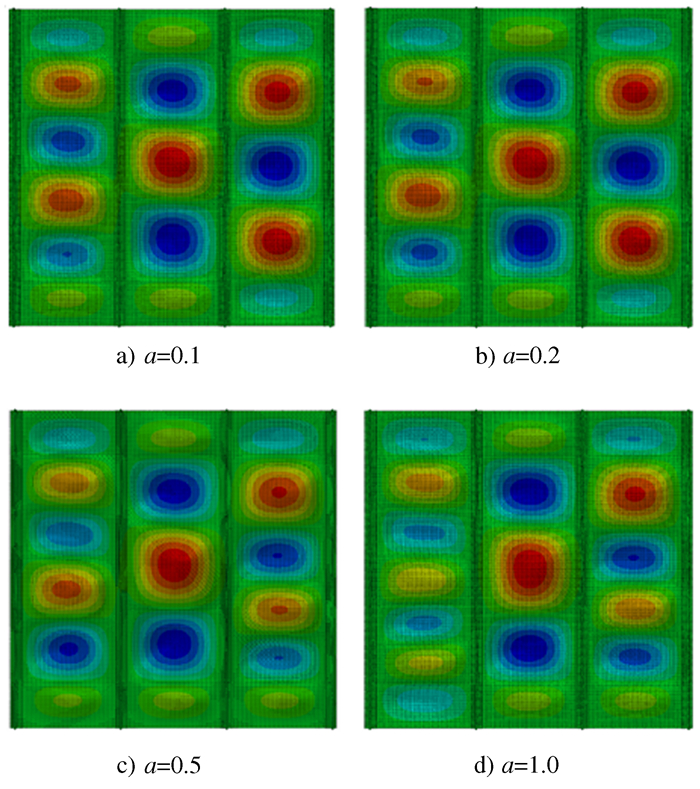
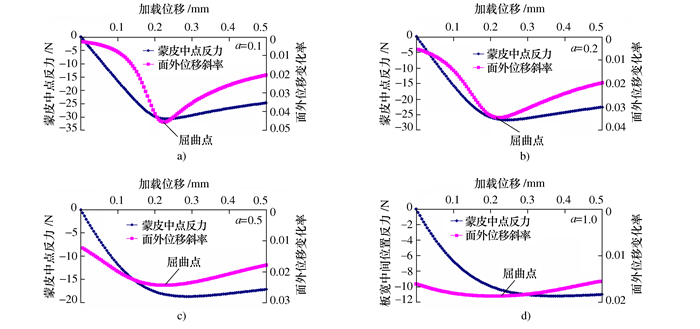
当前的设计准则要求复合材料结构在限制载荷下蒙皮不发生局部屈曲,因此对蒙皮屈曲载荷的准确预测至关重要。设计了三种构型复合材料加筋平板轴压试验件,研究蒙皮在轴压载荷下的屈曲和后屈曲;采用线性特征值有限元方法计算了蒙皮的轴压屈曲载荷;采用多阶屈曲模态线性组合的方式引入初始缺陷,应用非线性方法计算了蒙皮轴压屈曲载荷并进行了缺陷灵敏度分析。计算结果和试验结果对比表明:当前计算蒙皮屈曲的工程方法过于保守,有限元方法可以更准确的计算蒙皮的屈曲载荷;初始缺陷对复合材料平板屈曲载荷有一定影响,其影响大小与缺陷幅值息息相关,不考虑该缺陷,会得到非保守的计算结果。
当前的设计准则要求复合材料结构在限制载荷下蒙皮不发生局部屈曲,因此对蒙皮屈曲载荷的准确预测至关重要。设计了三种构型复合材料加筋平板轴压试验件,研究蒙皮在轴压载荷下的屈曲和后屈曲;采用线性特征值有限元方法计算了蒙皮的轴压屈曲载荷;采用多阶屈曲模态线性组合的方式引入初始缺陷,应用非线性方法计算了蒙皮轴压屈曲载荷并进行了缺陷灵敏度分析。计算结果和试验结果对比表明:当前计算蒙皮屈曲的工程方法过于保守,有限元方法可以更准确的计算蒙皮的屈曲载荷;初始缺陷对复合材料平板屈曲载荷有一定影响,其影响大小与缺陷幅值息息相关,不考虑该缺陷,会得到非保守的计算结果。



2018, 37(12): 1969-1974.
doi: 10.13433/j.cnki.1003-8728.20180097
摘要:
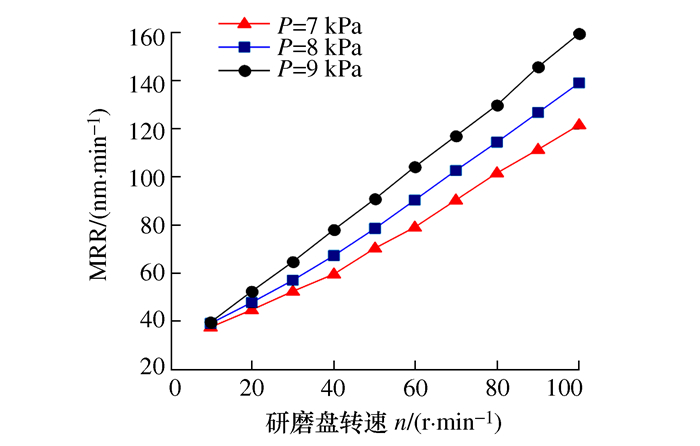
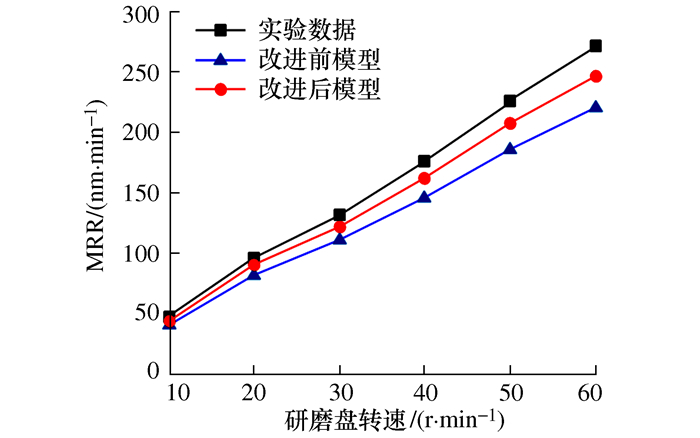
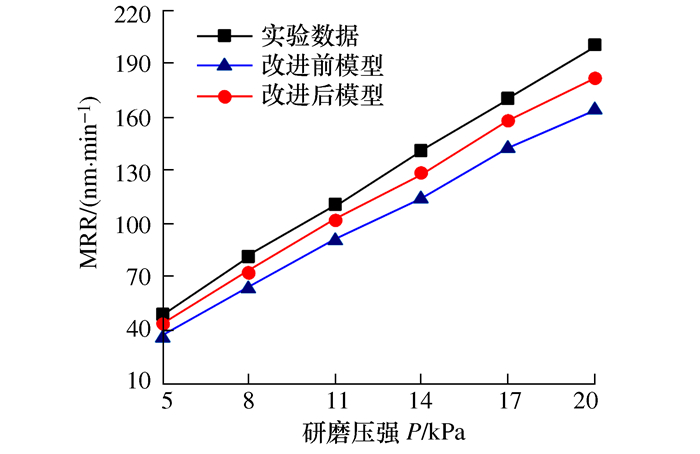
碳化硅(SiC)单晶片属于难加工材料,在使用之前必须要进行研磨与抛光。材料去除率(Material removal rate,MRR)是衡量SiC单晶片研磨与抛光效率的重要因素。针对传统研磨与抛光过程中考虑磨粒摩擦磨损时建立的材料去除率公式对材料去除的不足,考虑SiC单晶片研磨时磨粒挤压嵌入阶段的材料去除,建立了新型的材料去除率公式。根据SiC单晶片、磨粒与研磨盘之间的接触状态,推导出了包含嵌入阶段和摩擦磨损阶段材料去除的新型MRR数学模型;结合材料的物理特性(如硬度与弹性模量等),进行研磨实验。实验结果与模型预测结果表明,新型材料去除率公式的预测结果更接近实际情况。
碳化硅(SiC)单晶片属于难加工材料,在使用之前必须要进行研磨与抛光。材料去除率(Material removal rate,MRR)是衡量SiC单晶片研磨与抛光效率的重要因素。针对传统研磨与抛光过程中考虑磨粒摩擦磨损时建立的材料去除率公式对材料去除的不足,考虑SiC单晶片研磨时磨粒挤压嵌入阶段的材料去除,建立了新型的材料去除率公式。根据SiC单晶片、磨粒与研磨盘之间的接触状态,推导出了包含嵌入阶段和摩擦磨损阶段材料去除的新型MRR数学模型;结合材料的物理特性(如硬度与弹性模量等),进行研磨实验。实验结果与模型预测结果表明,新型材料去除率公式的预测结果更接近实际情况。