作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2022年 41卷 第3期
2022, 41(3): 329-336.
doi: 10.13433/j.cnki.1003-8728.20200346
 摘要
摘要 HTML
HTML PDF 3378KB
PDF 3378KB
摘要:
当轴承出现局部故障,能够表征滚动轴承早期故障的微弱冲击特征在传感器采集的过程中往往被强背景噪声所淹没,且易受信号传输路径的影响,从而导致轴承故障难以诊断。针对上述问题,本文提出一种改进VMD与MOMEDA(Multi-point optimal minimum entropy deconvolution,多点最优最小熵解卷积)的自适应滚动轴承联合降噪方法。首先为了避免VMD方法重要参数严重依赖人工先验知识等问题,采用PSO寻优算法对VMD重要参数进行优化处理,并以峭度作为优化指标选择最优IMF分量,进一步采用MOMEDA消除信号中传输路径的影响,最后结合1.5维能谱诊断滚动轴承故障。与MED-VMD及常规包络谱方法相比较,证明了本文所提方法在轴承故障特征提取领域的优势所在。
当轴承出现局部故障,能够表征滚动轴承早期故障的微弱冲击特征在传感器采集的过程中往往被强背景噪声所淹没,且易受信号传输路径的影响,从而导致轴承故障难以诊断。针对上述问题,本文提出一种改进VMD与MOMEDA(Multi-point optimal minimum entropy deconvolution,多点最优最小熵解卷积)的自适应滚动轴承联合降噪方法。首先为了避免VMD方法重要参数严重依赖人工先验知识等问题,采用PSO寻优算法对VMD重要参数进行优化处理,并以峭度作为优化指标选择最优IMF分量,进一步采用MOMEDA消除信号中传输路径的影响,最后结合1.5维能谱诊断滚动轴承故障。与MED-VMD及常规包络谱方法相比较,证明了本文所提方法在轴承故障特征提取领域的优势所在。










2022, 41(3): 337-341.
doi: 10.13433/j.cnki.1003-8728.20200368
摘要:
硫酸纸具有较好的湿度响应特性,研究了其变形机理,设计了智能结构,并将其应用于新型软机器的设计。首先,对硫酸纸的微观结构以及力学性能进行了表征分析,表明其纸平面具有各向异性,可实现卷曲、螺旋等运动模式,给出其变形机理;设计了一款可自折叠立方体智能结构,并通过有限元分析与实验相结合验证了其可行性;其次,提出了基于智能纸张的软驱动器,并应用于水下自适应软体抓手设计,其无需外接细绳输入,依靠湿度环境就可以实现运动控制,且最大可提升比自身重45倍的物体;最后,带式蠕动机器人可在稳定的环境下实现连续性运动,速度可达到每秒0.06倍体长。该智能材料在软机器领域具有良好的应用前景。
硫酸纸具有较好的湿度响应特性,研究了其变形机理,设计了智能结构,并将其应用于新型软机器的设计。首先,对硫酸纸的微观结构以及力学性能进行了表征分析,表明其纸平面具有各向异性,可实现卷曲、螺旋等运动模式,给出其变形机理;设计了一款可自折叠立方体智能结构,并通过有限元分析与实验相结合验证了其可行性;其次,提出了基于智能纸张的软驱动器,并应用于水下自适应软体抓手设计,其无需外接细绳输入,依靠湿度环境就可以实现运动控制,且最大可提升比自身重45倍的物体;最后,带式蠕动机器人可在稳定的环境下实现连续性运动,速度可达到每秒0.06倍体长。该智能材料在软机器领域具有良好的应用前景。







2022, 41(3): 342-348.
doi: 10.13433/j.cnki.1003-8728.20200373
摘要:
针对实验室环境下容易获取大量有标签故障类型数据,而在实际工况条件下很难或无法获取大量带标签数据的问题,提出机械设备故障的深度对抗迁移诊断方法(MAAN)。该方法将实验室环境中积累的故障诊断知识迁移应用于工程实际装备,通过融合时域与频域数据获取更全面的故障信息,在特征提取层利用残差网络深度提取故障特征,对抗层采用最大化域分类损失用于对齐源域与目标域的边缘分布和条件概率分布,最小化类别预测损失用于机械设备的故障分类实现无监督迁移学习。实验结果表明,此模型在无标签的目标数据集中有较高的分类精度,在一定条件下可以有效解决数据集缺少标签的难题,即实现机械故障诊断的智能诊断。
针对实验室环境下容易获取大量有标签故障类型数据,而在实际工况条件下很难或无法获取大量带标签数据的问题,提出机械设备故障的深度对抗迁移诊断方法(MAAN)。该方法将实验室环境中积累的故障诊断知识迁移应用于工程实际装备,通过融合时域与频域数据获取更全面的故障信息,在特征提取层利用残差网络深度提取故障特征,对抗层采用最大化域分类损失用于对齐源域与目标域的边缘分布和条件概率分布,最小化类别预测损失用于机械设备的故障分类实现无监督迁移学习。实验结果表明,此模型在无标签的目标数据集中有较高的分类精度,在一定条件下可以有效解决数据集缺少标签的难题,即实现机械故障诊断的智能诊断。








2022, 41(3): 349-356.
doi: 10.13433/j.cnki.1003-8728.20200358
摘要:
针对实际运行环境下的工业水泵具有工况数据量大、运行时间长、特征类型多等特点,提出一种基于特征加权的高斯加权K近邻-支持向量机(GWKNN-SVM)的组合故障诊断分类算法。首先通过对某化工厂三台水泵5个月份的运行采集数据进行特征提取和清洗,然后分别使用高斯加权K近邻算法(GWKNN)-支持向量机算法(SVM)对数据进行快速粗分类和边界数据细分类,以提高水泵故障分类精度和识别效率。最后通过仿真实例比较了相同条件下GWKNN-SVM算法和其他分类算法的故障分类效果。试验结果表明,该组合分类方法能够有效提高水泵工况的故障分类精度,从而实现工业环境下的水泵健康监测。
针对实际运行环境下的工业水泵具有工况数据量大、运行时间长、特征类型多等特点,提出一种基于特征加权的高斯加权K近邻-支持向量机(GWKNN-SVM)的组合故障诊断分类算法。首先通过对某化工厂三台水泵5个月份的运行采集数据进行特征提取和清洗,然后分别使用高斯加权K近邻算法(GWKNN)-支持向量机算法(SVM)对数据进行快速粗分类和边界数据细分类,以提高水泵故障分类精度和识别效率。最后通过仿真实例比较了相同条件下GWKNN-SVM算法和其他分类算法的故障分类效果。试验结果表明,该组合分类方法能够有效提高水泵工况的故障分类精度,从而实现工业环境下的水泵健康监测。










2022, 41(3): 357-362.
doi: 10.13433/j.cnki.1003-8728.20200363
摘要:
针对超声塑料焊接变幅杆因加工对象不同而存在的设计难题,结合具体工程案例,综合了基于纵波传输理论的复合变幅杆的参数化建模、有限元模态与谐响应分析,阻抗分析与实验分析的一体化方法,实现了圆锥复合变幅杆的设计、建模及结构优化的高效性,准确性。结果表明:采用嵌入参数的建模可以更快的实现复合变幅杆结构设计及优化;有限元分析与阻抗分析方法在复合超声变幅杆的振型、频率特性分析上吻合度较高,试验测试满足设计要求;可以为单头超声塑料焊接复合变幅杆提供通用的设计、分析方法。
针对超声塑料焊接变幅杆因加工对象不同而存在的设计难题,结合具体工程案例,综合了基于纵波传输理论的复合变幅杆的参数化建模、有限元模态与谐响应分析,阻抗分析与实验分析的一体化方法,实现了圆锥复合变幅杆的设计、建模及结构优化的高效性,准确性。结果表明:采用嵌入参数的建模可以更快的实现复合变幅杆结构设计及优化;有限元分析与阻抗分析方法在复合超声变幅杆的振型、频率特性分析上吻合度较高,试验测试满足设计要求;可以为单头超声塑料焊接复合变幅杆提供通用的设计、分析方法。















2022, 41(3): 363-370.
doi: 10.13433/j.cnki.1003-8728.20200369
摘要:
为了在改善汽车平顺性与操纵稳定性的同时实现振动能量回收,设计了电磁直线复合作动器(Electro-magnetic linear hybrid actuator,EMLHA)。在对EMLHA悬架馈能、半主动和主动这3种工作模式分析的基础上,设计了复合悬架模式实时切换控制策略和可实现能量双向流动的可变电压源系统,仿真分析了含有可变电压源系统的复合悬架能耗特性及动态特性。结果表明,在B级路面下,与被动悬架相比,复合悬架簧载质量加速度均方根值降低22.41%,悬架动挠度均方根值降低19.83%,轮胎动载荷均方根值降低29.74%,消耗的能量减少30.7%,复合悬架在有效改善悬架动态性能的同时可实现振动能量回收。
为了在改善汽车平顺性与操纵稳定性的同时实现振动能量回收,设计了电磁直线复合作动器(Electro-magnetic linear hybrid actuator,EMLHA)。在对EMLHA悬架馈能、半主动和主动这3种工作模式分析的基础上,设计了复合悬架模式实时切换控制策略和可实现能量双向流动的可变电压源系统,仿真分析了含有可变电压源系统的复合悬架能耗特性及动态特性。结果表明,在B级路面下,与被动悬架相比,复合悬架簧载质量加速度均方根值降低22.41%,悬架动挠度均方根值降低19.83%,轮胎动载荷均方根值降低29.74%,消耗的能量减少30.7%,复合悬架在有效改善悬架动态性能的同时可实现振动能量回收。


















2022, 41(3): 371-378.
doi: 10.13433/j.cnki.1003-8728.20200347
摘要:
钢板弹簧台架疲劳载荷谱一般来源于经验估算值,不能准确反映钢板弹簧真实工况承载状态。本文提出一种新的钢板弹簧台架疲劳载荷谱编辑方法,从整车实际工况出发,综合应用道路载荷谱采集、多体动力学建模和载荷谱编辑技术,基于钢板弹簧试验场原始随机载荷谱编辑出台架疲劳载荷谱。采用仿真分析与试验验证两种技术手段,对比分析钢板弹簧试验场原始随机载荷谱与台架疲劳载荷谱对构件的影响规律,结果表明,两种谱下的钢板弹簧失效方式一致,台架谱较原始谱更为保守,证明可以通过载荷编辑技术实现钢板弹簧疲劳性能分析从昂贵的试验场验证转换到简单高效的室内台架验证。
钢板弹簧台架疲劳载荷谱一般来源于经验估算值,不能准确反映钢板弹簧真实工况承载状态。本文提出一种新的钢板弹簧台架疲劳载荷谱编辑方法,从整车实际工况出发,综合应用道路载荷谱采集、多体动力学建模和载荷谱编辑技术,基于钢板弹簧试验场原始随机载荷谱编辑出台架疲劳载荷谱。采用仿真分析与试验验证两种技术手段,对比分析钢板弹簧试验场原始随机载荷谱与台架疲劳载荷谱对构件的影响规律,结果表明,两种谱下的钢板弹簧失效方式一致,台架谱较原始谱更为保守,证明可以通过载荷编辑技术实现钢板弹簧疲劳性能分析从昂贵的试验场验证转换到简单高效的室内台架验证。


















2022, 41(3): 379-385.
doi: 10.13433/j.cnki.1003-8728.20200367
摘要:
针对多移动机器人控制系统在通讯范围约束、外界干扰存在时表现出的自适应差、控制精度低的问题,提出一种基于双曲正切型约束函数的预设性能模糊滑模编队控制算法,以实现多机器人以任意队形高精度稳定的编队,并利用MATLAB进行对比仿真试验研究。结果表明,这种预设性模糊滑模控制算法不仅可以实现多个机器人以任意队形编队,而且保证了机器人编队的暂态和稳态性能。与现有控制法相比,该预设性编队控制算法具有更高的控制精度和稳定性。
针对多移动机器人控制系统在通讯范围约束、外界干扰存在时表现出的自适应差、控制精度低的问题,提出一种基于双曲正切型约束函数的预设性能模糊滑模编队控制算法,以实现多机器人以任意队形高精度稳定的编队,并利用MATLAB进行对比仿真试验研究。结果表明,这种预设性模糊滑模控制算法不仅可以实现多个机器人以任意队形编队,而且保证了机器人编队的暂态和稳态性能。与现有控制法相比,该预设性编队控制算法具有更高的控制精度和稳定性。














2022, 41(3): 386-393.
doi: 10.13433/j.cnki.1003-8728.20200569
摘要:
考虑控制系统面向应用时算法中的状态获取问题,基于UKF状态观测系统,对主动前轮转向与主动横向稳定杆进行操稳性及抗侧倾多目标集成控制以综合提高车辆的侧向稳定性及侧倾稳定性。建立了9自由度整车动力学模型,通过无迹卡尔曼滤波方法,构建了整车状态观测器;采用滑模控制算法,分别基于主动前轮转向系统设计了操稳性控制器、基于主动横向稳定杆系统设计了抗侧倾控制器以实现车身侧倾按需控制;针对轮胎垂向载荷与侧向动力学的耦合影响,采用PID控制算法动态调整前后主动横向稳定杆扭矩分配系数,实现对车辆抗侧倾与操稳性集成控制。最后,对多目标集成控制系统进行了鱼钩实验仿真,结果表明设计的集成控制器在实现车身侧倾按需控制的同时,有效改善了车辆操纵稳定性。
考虑控制系统面向应用时算法中的状态获取问题,基于UKF状态观测系统,对主动前轮转向与主动横向稳定杆进行操稳性及抗侧倾多目标集成控制以综合提高车辆的侧向稳定性及侧倾稳定性。建立了9自由度整车动力学模型,通过无迹卡尔曼滤波方法,构建了整车状态观测器;采用滑模控制算法,分别基于主动前轮转向系统设计了操稳性控制器、基于主动横向稳定杆系统设计了抗侧倾控制器以实现车身侧倾按需控制;针对轮胎垂向载荷与侧向动力学的耦合影响,采用PID控制算法动态调整前后主动横向稳定杆扭矩分配系数,实现对车辆抗侧倾与操稳性集成控制。最后,对多目标集成控制系统进行了鱼钩实验仿真,结果表明设计的集成控制器在实现车身侧倾按需控制的同时,有效改善了车辆操纵稳定性。






2022, 41(3): 394-401.
doi: 10.13433/j.cnki.1003-8728.20200374
摘要:
针对矿用提升机减速器复合故障信号存在强弱共生及噪声干扰,导致故障特征难以提取、故障类型辨识度低的问题,提出一种分段融合的减速器复合故障诊断方法。首先通过对故障信号进行组合模态函数(CMF)分解,得到低频啮合和高频共振两个模态分量,利用改进局部均值分解(CELMD)将低频分量再次分解,并结合多尺度排列熵法(MPE)选取PF分量进行重构和包络分析;利用最大相关峭度解卷积(MCKD)逆滤波器组对高频分量预处理获得不同故障频率分量后,通过平均信息图(Average infogram)法确定最佳共振频率并进行包络分析。最后,对低频和高频的包络分析结果进行融合诊断。实验研究表明:分段融合方法能够有效提取信号特征信息、对故障特征反应敏感,能够准确辨识矿用提升机减速器复合故障类型,避免了因频带信息选择不全而造成的漏诊、误诊问题。
针对矿用提升机减速器复合故障信号存在强弱共生及噪声干扰,导致故障特征难以提取、故障类型辨识度低的问题,提出一种分段融合的减速器复合故障诊断方法。首先通过对故障信号进行组合模态函数(CMF)分解,得到低频啮合和高频共振两个模态分量,利用改进局部均值分解(CELMD)将低频分量再次分解,并结合多尺度排列熵法(MPE)选取PF分量进行重构和包络分析;利用最大相关峭度解卷积(MCKD)逆滤波器组对高频分量预处理获得不同故障频率分量后,通过平均信息图(Average infogram)法确定最佳共振频率并进行包络分析。最后,对低频和高频的包络分析结果进行融合诊断。实验研究表明:分段融合方法能够有效提取信号特征信息、对故障特征反应敏感,能够准确辨识矿用提升机减速器复合故障类型,避免了因频带信息选择不全而造成的漏诊、误诊问题。













2022, 41(3): 402-408.
doi: 10.13433/j.cnki.1003-8728.20200216
摘要:
针对无标定手眼机器人视觉伺服控制问题,提出了基于图像轨迹规划与时序控制相结合的视觉伺服方法。给出了图像平面和任务空间的轨迹规划方法,设计了卡尔曼滤波器估算目标与相机相对位姿,结合相机测量实现了雅可比矩阵的自适应估算。在此基础上设计了基于图像视觉反馈的视觉伺服控制器,实现了机器人的目标视觉跟踪。通过MATLAB仿真和实验研究对该算法进行了验证,并与经典PBVS(Position-based visual servoing)、IBVS (Image-based visual servoing)方法进行了比较试验,仿真及实验结果验证了该算法的有效性。
针对无标定手眼机器人视觉伺服控制问题,提出了基于图像轨迹规划与时序控制相结合的视觉伺服方法。给出了图像平面和任务空间的轨迹规划方法,设计了卡尔曼滤波器估算目标与相机相对位姿,结合相机测量实现了雅可比矩阵的自适应估算。在此基础上设计了基于图像视觉反馈的视觉伺服控制器,实现了机器人的目标视觉跟踪。通过MATLAB仿真和实验研究对该算法进行了验证,并与经典PBVS(Position-based visual servoing)、IBVS (Image-based visual servoing)方法进行了比较试验,仿真及实验结果验证了该算法的有效性。







2022, 41(3): 409-413.
doi: 10.13433/j.cnki.1003-8728.20200365
摘要:
针对传统的齿面接触分析技术存在机床调整参数繁多、控制目标不明确和不包含传动误差优化等问题,提出以瞬时接触椭圆长半轴、接触迹线方向角及传动误差曲线交叉点纵坐标为优化目标,沿齿高方向的法曲率、沿齿长方向的法曲率以及短程挠率为控制参数,基于遗传算法的弧齿锥齿轮齿面接触区和传动误差曲线的全局优化算法具有良好的收敛性。分析了扭矩载荷对齿面接触区和传动误差的影响,用优化后的弧齿锥齿轮副有限元模型对其啮合特性进行分析,其结果验证优化方法的正确性。
针对传统的齿面接触分析技术存在机床调整参数繁多、控制目标不明确和不包含传动误差优化等问题,提出以瞬时接触椭圆长半轴、接触迹线方向角及传动误差曲线交叉点纵坐标为优化目标,沿齿高方向的法曲率、沿齿长方向的法曲率以及短程挠率为控制参数,基于遗传算法的弧齿锥齿轮齿面接触区和传动误差曲线的全局优化算法具有良好的收敛性。分析了扭矩载荷对齿面接触区和传动误差的影响,用优化后的弧齿锥齿轮副有限元模型对其啮合特性进行分析,其结果验证优化方法的正确性。







2022, 41(3): 414-420.
doi: 10.13433/j.cnki.1003-8728.20200360
摘要:
由于迭代学习前馈反馈控制方法面对具有重复运动性质系统时,既能加快收敛速度又能降低收敛误差,本研究将其引入到微纳操纵成像系统来提高扫描器的跟踪精度。首先,提出了开环比例微分(Proportional differential,PD)型迭代学习结合闭环反馈PD型学习律,并给出了学习律收敛条件,同时为了降低系统运行时间,提高学习效率,将传统的固定学习增益变为指数变增益。其次搭建了基于微纳操纵成像系统的迭代学习控制器,并进行了仿真分析。结果表明,相较于开环迭代学习控制、闭环迭代学习控制,迭代学习前馈反馈控制最大收敛误差最低,且鲁棒性强,算法易于实现,能有效地满足扫描时轨迹跟踪的精度要求。
由于迭代学习前馈反馈控制方法面对具有重复运动性质系统时,既能加快收敛速度又能降低收敛误差,本研究将其引入到微纳操纵成像系统来提高扫描器的跟踪精度。首先,提出了开环比例微分(Proportional differential,PD)型迭代学习结合闭环反馈PD型学习律,并给出了学习律收敛条件,同时为了降低系统运行时间,提高学习效率,将传统的固定学习增益变为指数变增益。其次搭建了基于微纳操纵成像系统的迭代学习控制器,并进行了仿真分析。结果表明,相较于开环迭代学习控制、闭环迭代学习控制,迭代学习前馈反馈控制最大收敛误差最低,且鲁棒性强,算法易于实现,能有效地满足扫描时轨迹跟踪的精度要求。














2022, 41(3): 421-432.
doi: 10.13433/j.cnki.1003-8728.20200618
摘要:
针对某类牌号的单晶硅材料在放电加工系统中无法实现放电的问题,本文提出一种单晶硅放电加工临界电导率σ的界定方法,系统性地揭示了单晶硅的电导率σ是影响放电通道击穿并形成火花放电的根本原因。结合半导体物理理论,系统性地分析了单晶硅放电加工系统中从极间电场的建立到极间等离子体放电通道的形成过程;引入阴极场致电子发射理论,建立了单晶硅放电加工系统极间电流密度J与单晶硅电导率σ的物理模型,仿真分析了临界电流密度J与单晶硅电导率σ之间的关系;结合实际加工过程对模型进行了验证,验证结果表明该模型可确定单晶硅放电加工的临界电导率,以此界定单晶硅的可加工性。
针对某类牌号的单晶硅材料在放电加工系统中无法实现放电的问题,本文提出一种单晶硅放电加工临界电导率σ的界定方法,系统性地揭示了单晶硅的电导率σ是影响放电通道击穿并形成火花放电的根本原因。结合半导体物理理论,系统性地分析了单晶硅放电加工系统中从极间电场的建立到极间等离子体放电通道的形成过程;引入阴极场致电子发射理论,建立了单晶硅放电加工系统极间电流密度J与单晶硅电导率σ的物理模型,仿真分析了临界电流密度J与单晶硅电导率σ之间的关系;结合实际加工过程对模型进行了验证,验证结果表明该模型可确定单晶硅放电加工的临界电导率,以此界定单晶硅的可加工性。



















2022, 41(3): 433-438.
doi: 10.13433/j.cnki.1003-8728.20200348
摘要:
为了简洁有效的解决NURBS及其偏移曲线的插补问题,本文提出了新的插补方法即参数跟踪法。首先提出了面向曲线插补的参数跟踪法并阐述其原理和计算过程;其次以NURBS曲线插补实例证明了插补方法的有效性;再次,将插补方法应用到NURBS曲线的刀具补偿计算中,包括恒定刀具补偿和线性刀具补偿;最后将插补方法与线性刀具补偿和坐标补偿相结合,提高了NURBS曲线在不同加工条件下的插补精度。参数跟踪法应用于NURBS曲线插补计算过程简洁,并易于程序化,在刀具补偿计算中可以直接应用曲线的一阶导矢,计算增量小。提出的面向插补结果的坐标消结法可用于消除NURBS曲线的自相交部分。
为了简洁有效的解决NURBS及其偏移曲线的插补问题,本文提出了新的插补方法即参数跟踪法。首先提出了面向曲线插补的参数跟踪法并阐述其原理和计算过程;其次以NURBS曲线插补实例证明了插补方法的有效性;再次,将插补方法应用到NURBS曲线的刀具补偿计算中,包括恒定刀具补偿和线性刀具补偿;最后将插补方法与线性刀具补偿和坐标补偿相结合,提高了NURBS曲线在不同加工条件下的插补精度。参数跟踪法应用于NURBS曲线插补计算过程简洁,并易于程序化,在刀具补偿计算中可以直接应用曲线的一阶导矢,计算增量小。提出的面向插补结果的坐标消结法可用于消除NURBS曲线的自相交部分。







2022, 41(3): 439-444.
doi: 10.13433/j.cnki.1003-8728.20200613
摘要:
首先阐述机床与工件相对运动的去除机理以及对去除函数的稳定性进行表征,然后对工件在平面以不同速度做平动以及绕定点转动得到的去除函数稳定性进行研究,最后通过数值实验验证。得出结论:X方向速度导致去除函数不稳定;Y方向运动速度增大导致去除函数稳定性波动;摆动弧度小于0.5 rad时去除函数越稳定,超过则不稳定。
首先阐述机床与工件相对运动的去除机理以及对去除函数的稳定性进行表征,然后对工件在平面以不同速度做平动以及绕定点转动得到的去除函数稳定性进行研究,最后通过数值实验验证。得出结论:X方向速度导致去除函数不稳定;Y方向运动速度增大导致去除函数稳定性波动;摆动弧度小于0.5 rad时去除函数越稳定,超过则不稳定。











2022, 41(3): 445-450.
doi: 10.13433/j.cnki.1003-8728.20200361
摘要:
对三坐标测量机(CMM)的测量路径及测量路径的构成进行了分析,将测量路径规划问题转换为旅行商问题(TSP),并确定了目标函数。结合齿面测量路径规划的特点对基本遗传算法进行改进。将模拟退火算法的新解产生和接受规则应用到遗传算法中,提高了种群的多样性,避免了算法的局部收敛问题;采用了更加简单高效的编码方式,提高了算法的收敛速度。以非均匀分布的齿面测量点为例,进行了仿真实验。结果表明:该算法对于曲面测量路径优化的结果优于基本蚁群算法、模拟退火算法和遗传算法,取得了良好的路径优化效果。
对三坐标测量机(CMM)的测量路径及测量路径的构成进行了分析,将测量路径规划问题转换为旅行商问题(TSP),并确定了目标函数。结合齿面测量路径规划的特点对基本遗传算法进行改进。将模拟退火算法的新解产生和接受规则应用到遗传算法中,提高了种群的多样性,避免了算法的局部收敛问题;采用了更加简单高效的编码方式,提高了算法的收敛速度。以非均匀分布的齿面测量点为例,进行了仿真实验。结果表明:该算法对于曲面测量路径优化的结果优于基本蚁群算法、模拟退火算法和遗传算法,取得了良好的路径优化效果。











2022, 41(3): 451-456.
doi: 10.13433/j.cnki.1003-8728.20200568
摘要:
针对自相关谱峭度(Autogram)诊断效果易受最大重叠离散小波包变换(MODWPT)预设分解层数影响的不足,本文提出一种参数自适应Autogram诊断方法。该方法将平均包络熵(MEE)最小值作为优化目标对MODWPT最佳分解层数进行搜寻,并以分解后节点平方包络自相关峭度的最大值来确定最优频带的中心频率及带宽,最后通过包络解调提取故障特征信息。研究结果表明,自适应的分解层数确定方法较好地改善了Autogram方法的故障诊断效果,该方法可以快速、准确地识别出滚动轴承的故障特征。
针对自相关谱峭度(Autogram)诊断效果易受最大重叠离散小波包变换(MODWPT)预设分解层数影响的不足,本文提出一种参数自适应Autogram诊断方法。该方法将平均包络熵(MEE)最小值作为优化目标对MODWPT最佳分解层数进行搜寻,并以分解后节点平方包络自相关峭度的最大值来确定最优频带的中心频率及带宽,最后通过包络解调提取故障特征信息。研究结果表明,自适应的分解层数确定方法较好地改善了Autogram方法的故障诊断效果,该方法可以快速、准确地识别出滚动轴承的故障特征。












2022, 41(3): 457-465.
doi: 10.13433/j.cnki.1003-8728.20200349
摘要:
为建立准确的磁流变悬架系统动力学仿真模型,通过采集试验数据对仿真模型进行参数辨识与模型修正。结果表明通过参数辨识与模型修正建立的磁流变悬架系统动力学仿真模型能模拟实际模型在不同激励信号下的振动响应。通过修正后的模型分析磁流变阻尼器各结构参数对磁流变悬架减振性能的影响,结果表明无论是在何种类型的激励下阻尼间隙与活塞直径这两种结构参数对磁流变悬架的减振性能影响较大,在正弦激励下活塞直径对悬架的加速度与动载荷影响因子最大,分别为1.287 5、1.072 7。在道路谱激励下活塞直径对悬架的动载荷影响因子最大,其值为0.810 4;而阻尼间隙对车身加速度影响因子最大,其值为0.635 5。
为建立准确的磁流变悬架系统动力学仿真模型,通过采集试验数据对仿真模型进行参数辨识与模型修正。结果表明通过参数辨识与模型修正建立的磁流变悬架系统动力学仿真模型能模拟实际模型在不同激励信号下的振动响应。通过修正后的模型分析磁流变阻尼器各结构参数对磁流变悬架减振性能的影响,结果表明无论是在何种类型的激励下阻尼间隙与活塞直径这两种结构参数对磁流变悬架的减振性能影响较大,在正弦激励下活塞直径对悬架的加速度与动载荷影响因子最大,分别为1.287 5、1.072 7。在道路谱激励下活塞直径对悬架的动载荷影响因子最大,其值为0.810 4;而阻尼间隙对车身加速度影响因子最大,其值为0.635 5。





















2022, 41(3): 466-472.
doi: 10.13433/j.cnki.1003-8728.20200366
摘要:
为提升高速磁浮列车动力学性能,提出一套高效的多目标优化设计方法,对磁浮列车悬挂参数、系统控制参数和轨道梁参数进行多目标优化设计。为保证仿真模型有效逼近高速磁浮列车实际运行状况以获得准确的输出响应,构建出磁浮系统分布式协同仿真模型,实现磁浮列车动力学模型、轨道梁有限元模型及控制系统的实时耦合,并选取5个关键设计参数作为优化设计变量;采用最优拉丁超立方试验设计方法均匀抽取20组样本,基于分布式协同仿真模型获得各样本点对应的7项动力学性能值;针对20组小样本、5输入7输出的高非线性问题,分析不同代理模型预测精度,建立优化设计变量和性能指标之间的代理模型;采用NSGA-Ⅱ(非支配排序遗传算法-Ⅱ)优化算法对设计变量进行多目标优化。计算表明7项性能指标经优化后均得到显著提升。
为提升高速磁浮列车动力学性能,提出一套高效的多目标优化设计方法,对磁浮列车悬挂参数、系统控制参数和轨道梁参数进行多目标优化设计。为保证仿真模型有效逼近高速磁浮列车实际运行状况以获得准确的输出响应,构建出磁浮系统分布式协同仿真模型,实现磁浮列车动力学模型、轨道梁有限元模型及控制系统的实时耦合,并选取5个关键设计参数作为优化设计变量;采用最优拉丁超立方试验设计方法均匀抽取20组样本,基于分布式协同仿真模型获得各样本点对应的7项动力学性能值;针对20组小样本、5输入7输出的高非线性问题,分析不同代理模型预测精度,建立优化设计变量和性能指标之间的代理模型;采用NSGA-Ⅱ(非支配排序遗传算法-Ⅱ)优化算法对设计变量进行多目标优化。计算表明7项性能指标经优化后均得到显著提升。








2022, 41(3): 473-480.
doi: 10.13433/j.cnki.1003-8728.20200370
摘要:
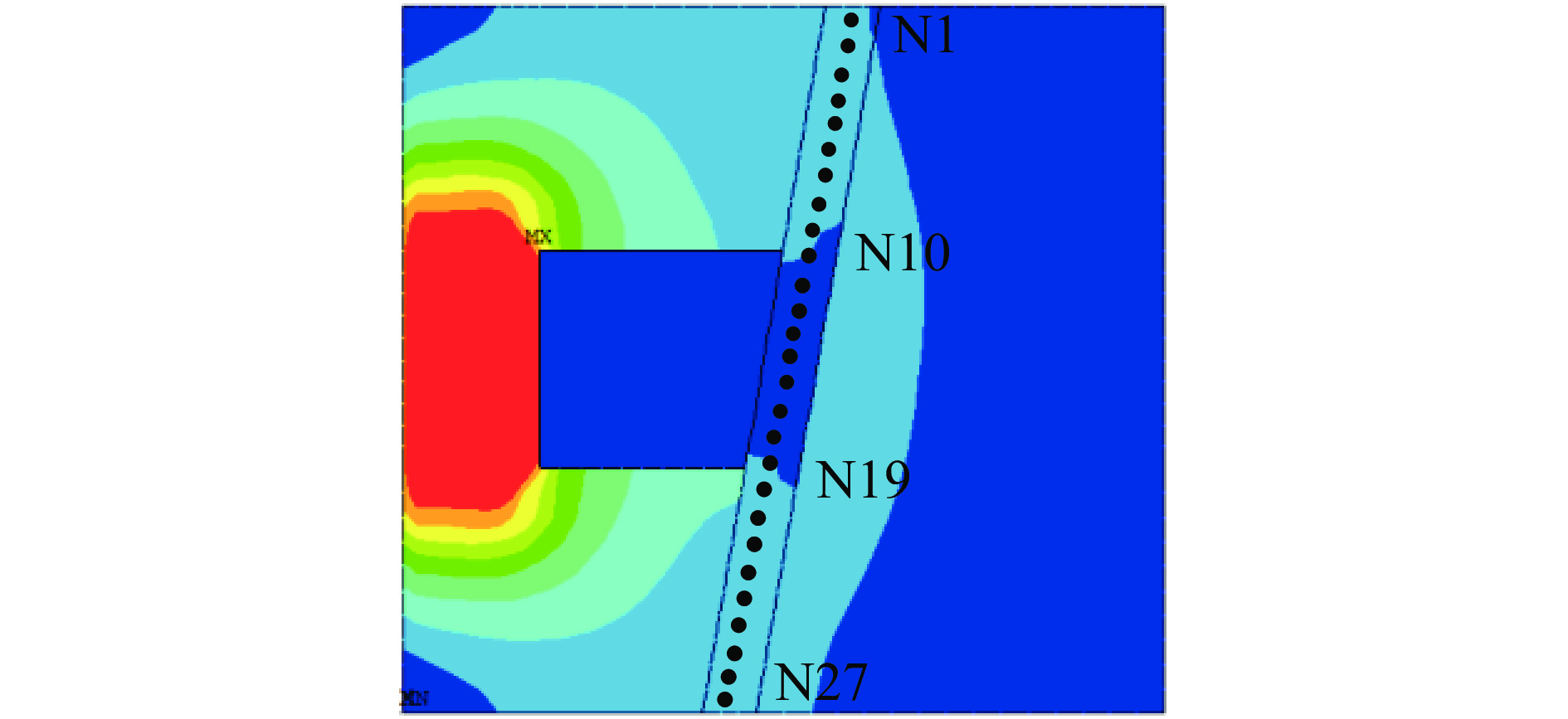
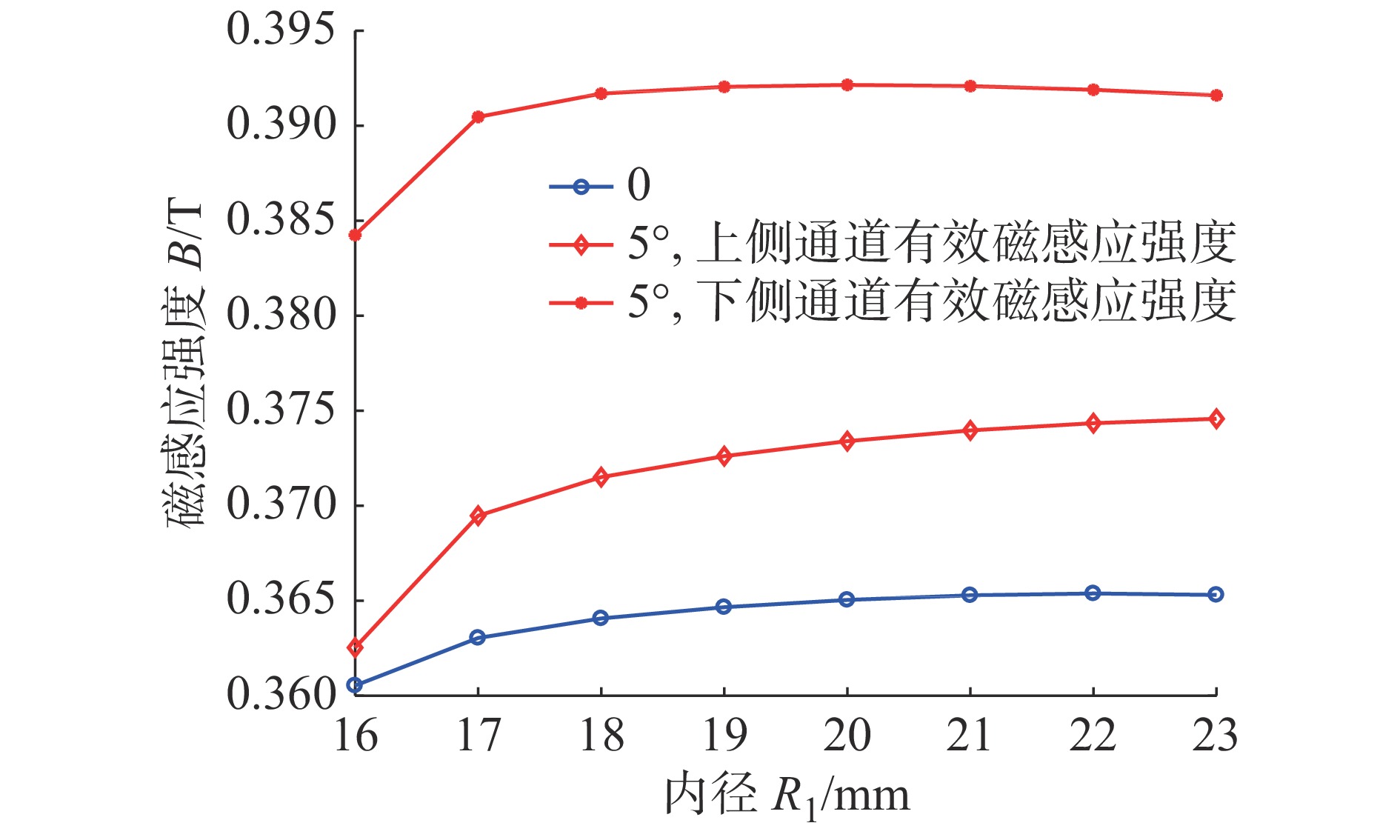
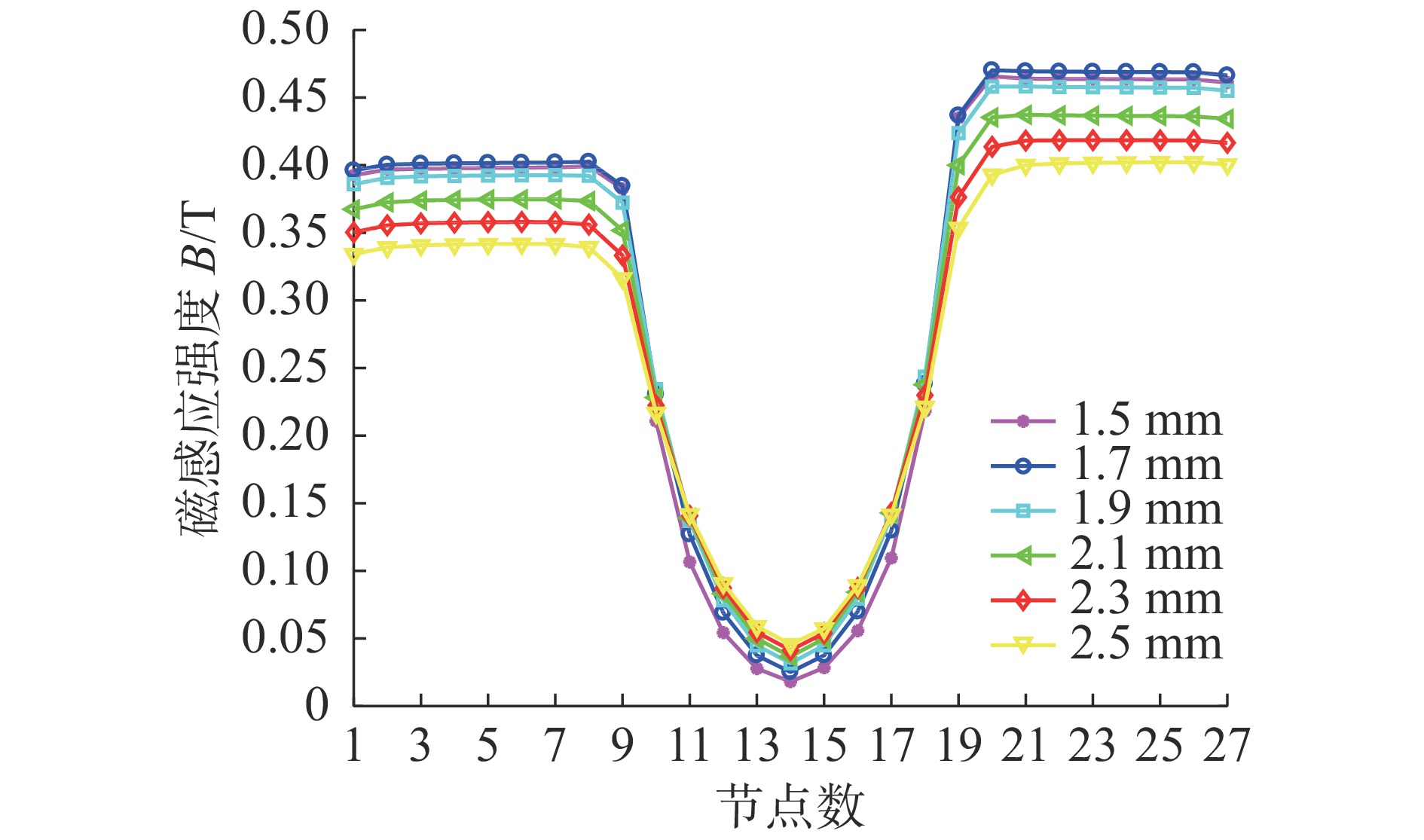
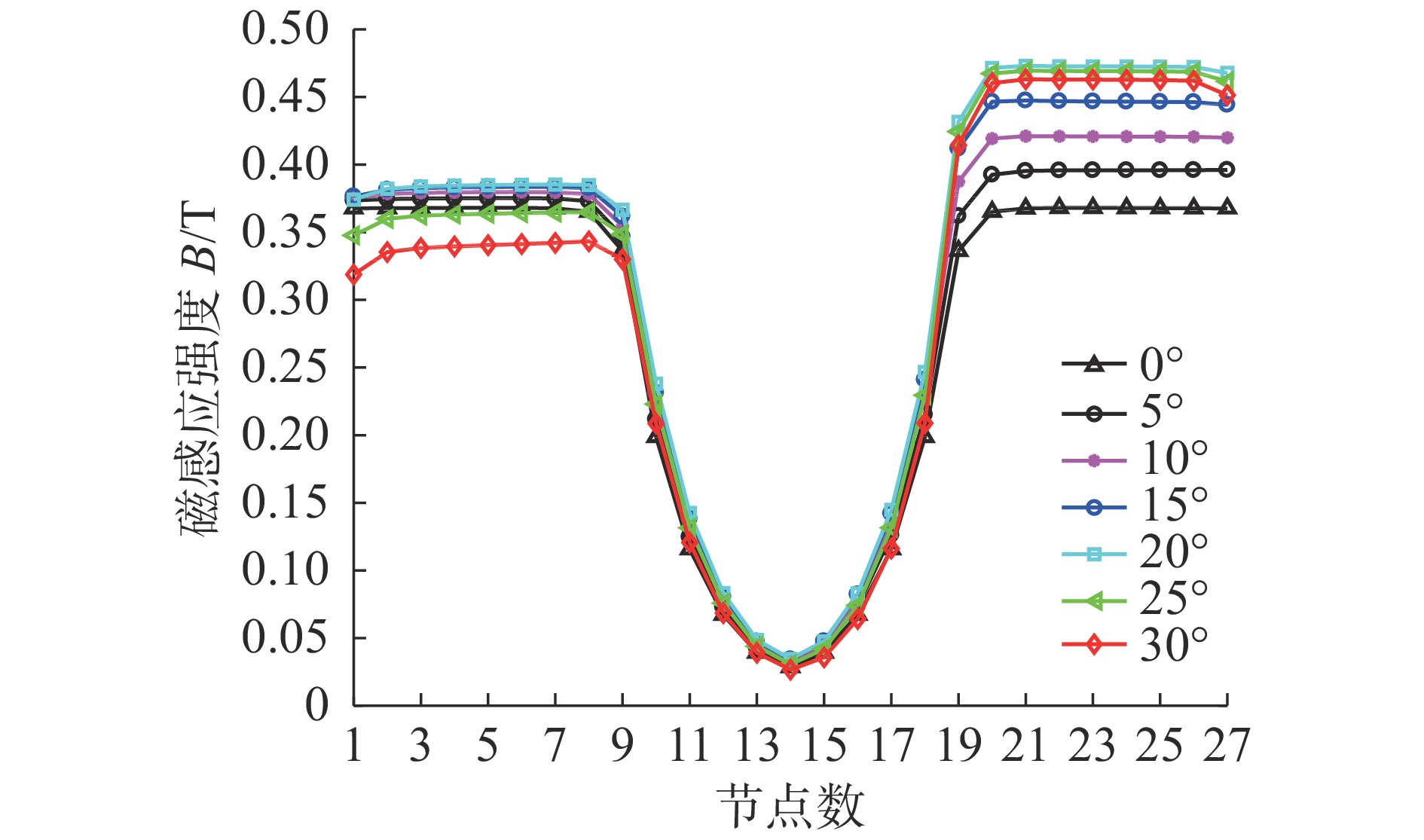
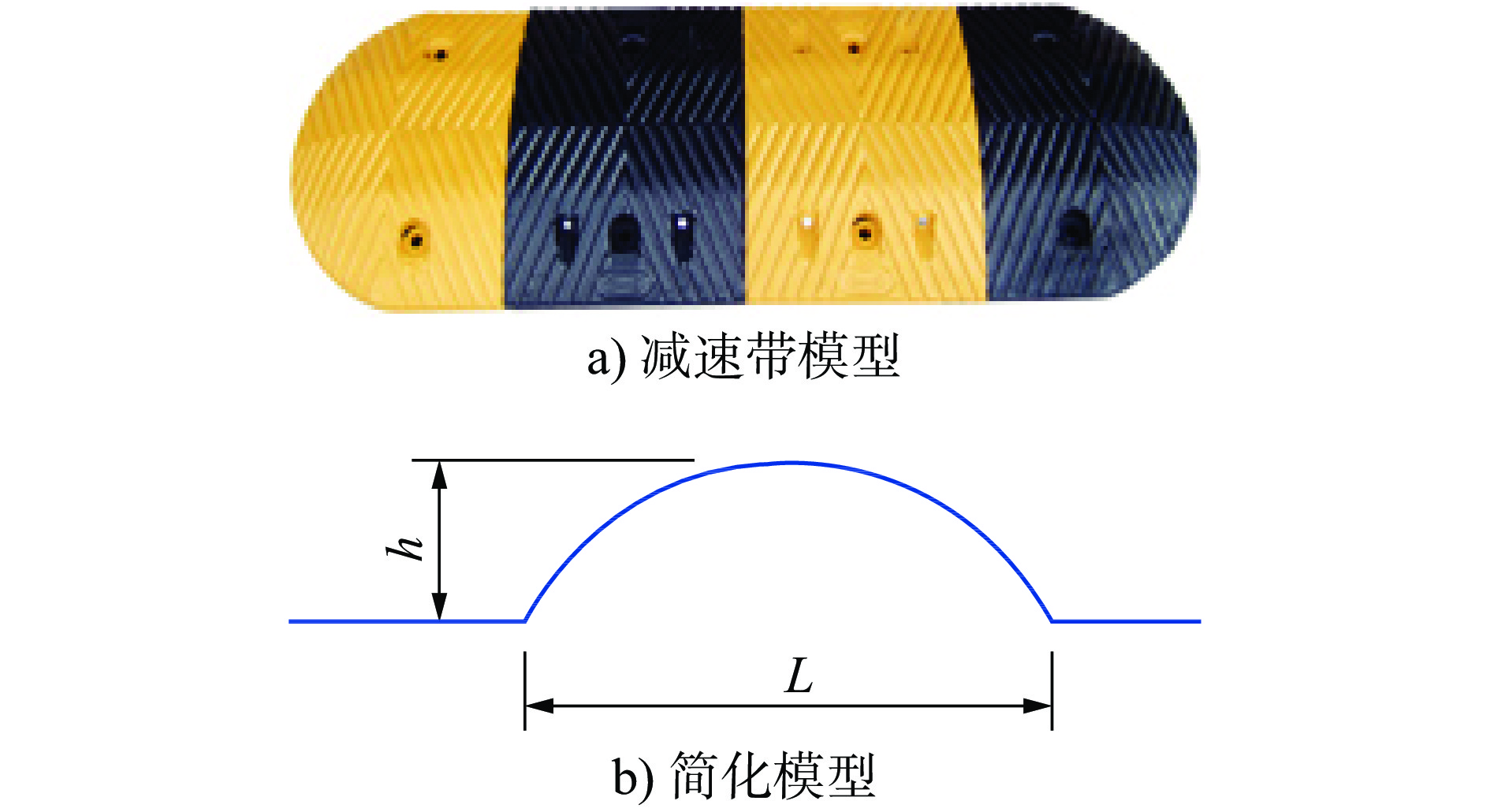
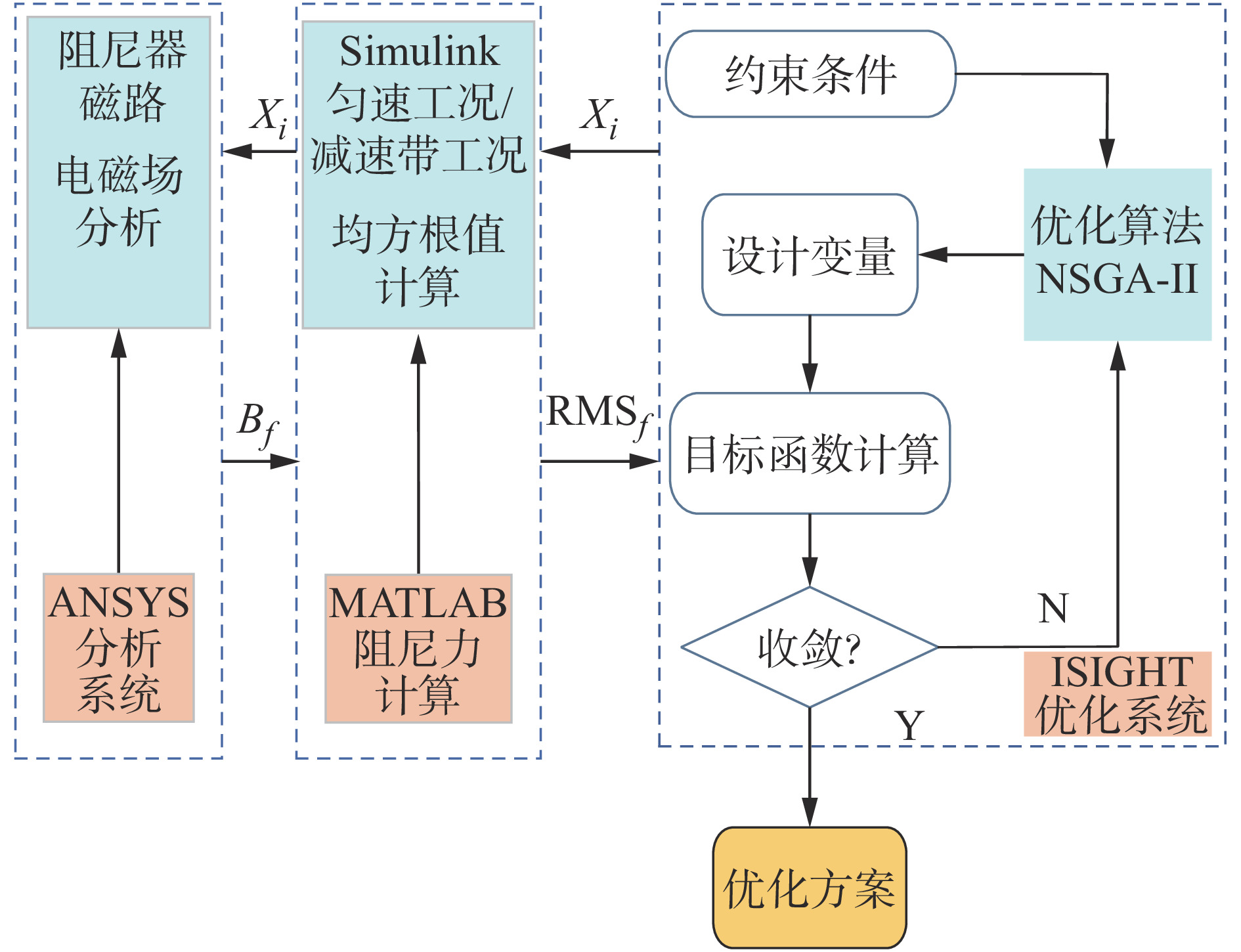
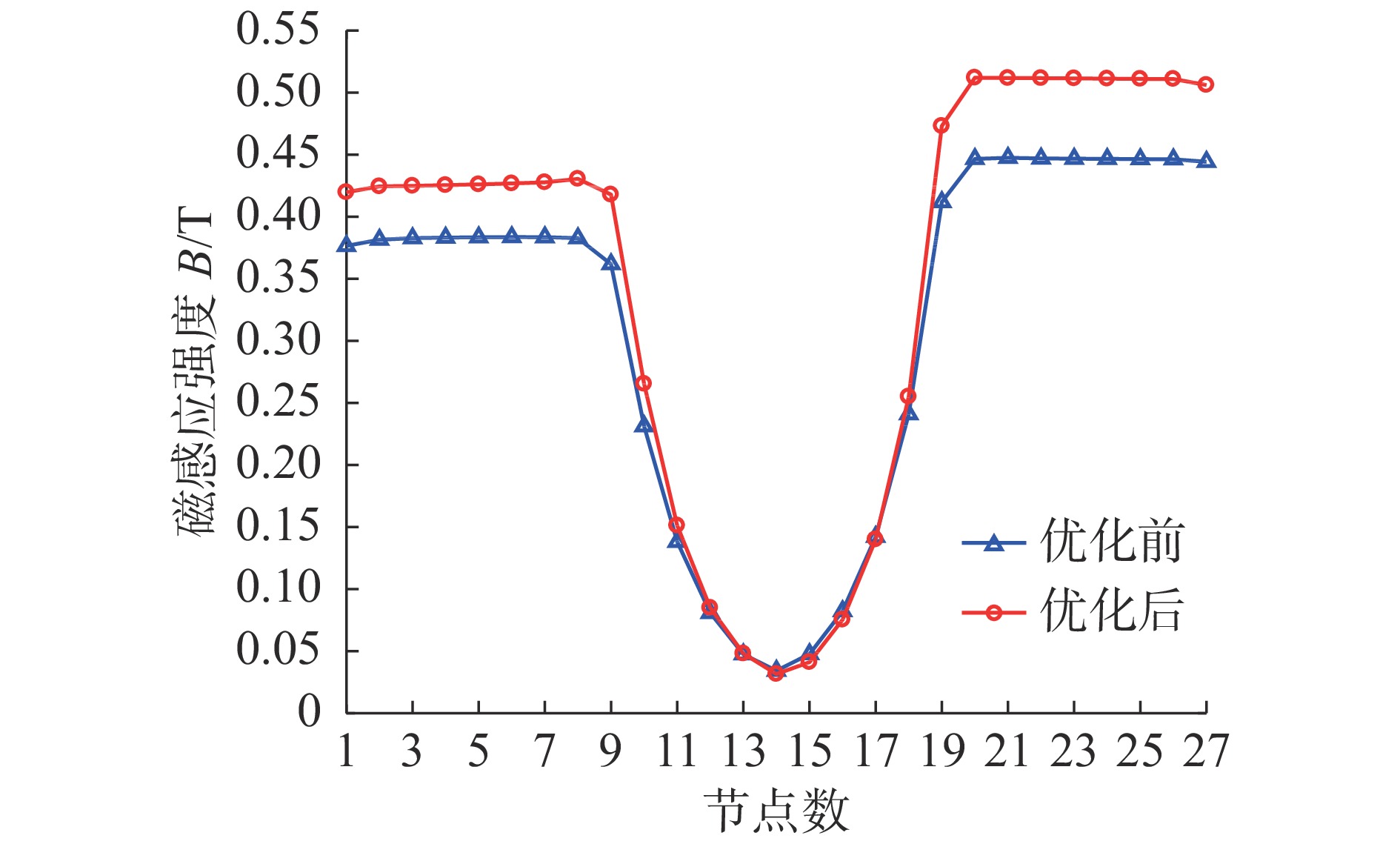
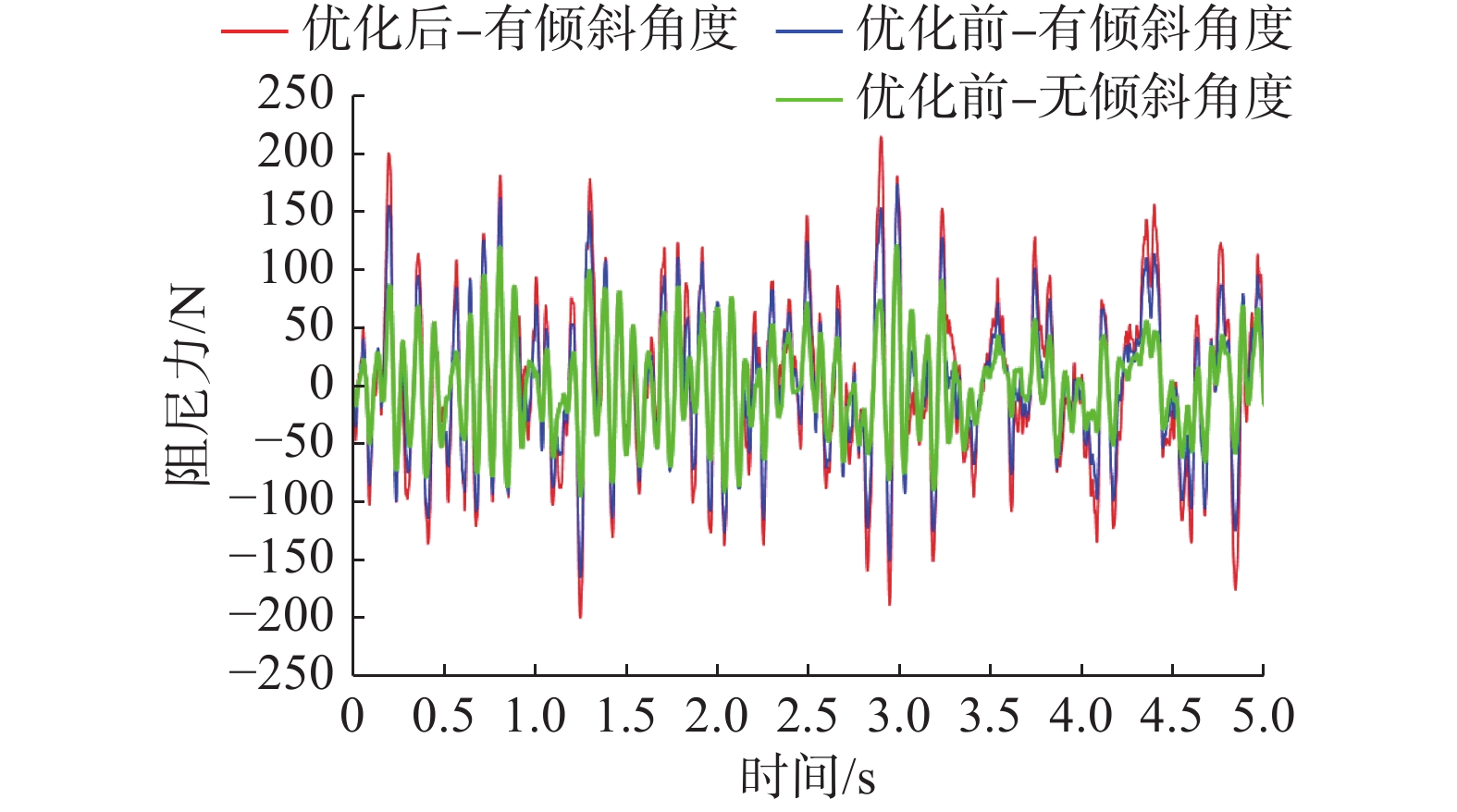
本文提出一种面向整车振动抑制的磁流变阻尼器协同优化方法。设计一种具有锥形倾斜角度阻尼通道的磁流变阻尼器,推导了其阻尼力数学模型,采用有限元法对磁路结构参数进行分析。搭建了整车七自由度模型,通过ISIGHT软件搭建协同优化仿真平台,以悬架动挠度、轮胎动载荷、车身垂向加速度均方根值为优化目标,利用遗传算法对磁流变阻尼器结构进行了优化。结果表明:悬架动挠度、轮胎动载荷和车身垂向加速度都得到了相应的改善,优化后的阻尼器能更好的提高了车辆平顺性和操稳性。
本文提出一种面向整车振动抑制的磁流变阻尼器协同优化方法。设计一种具有锥形倾斜角度阻尼通道的磁流变阻尼器,推导了其阻尼力数学模型,采用有限元法对磁路结构参数进行分析。搭建了整车七自由度模型,通过ISIGHT软件搭建协同优化仿真平台,以悬架动挠度、轮胎动载荷、车身垂向加速度均方根值为优化目标,利用遗传算法对磁流变阻尼器结构进行了优化。结果表明:悬架动挠度、轮胎动载荷和车身垂向加速度都得到了相应的改善,优化后的阻尼器能更好的提高了车辆平顺性和操稳性。






2022, 41(3): 481-486.
doi: 10.13433/j.cnki.1003-8728.20200372
摘要:
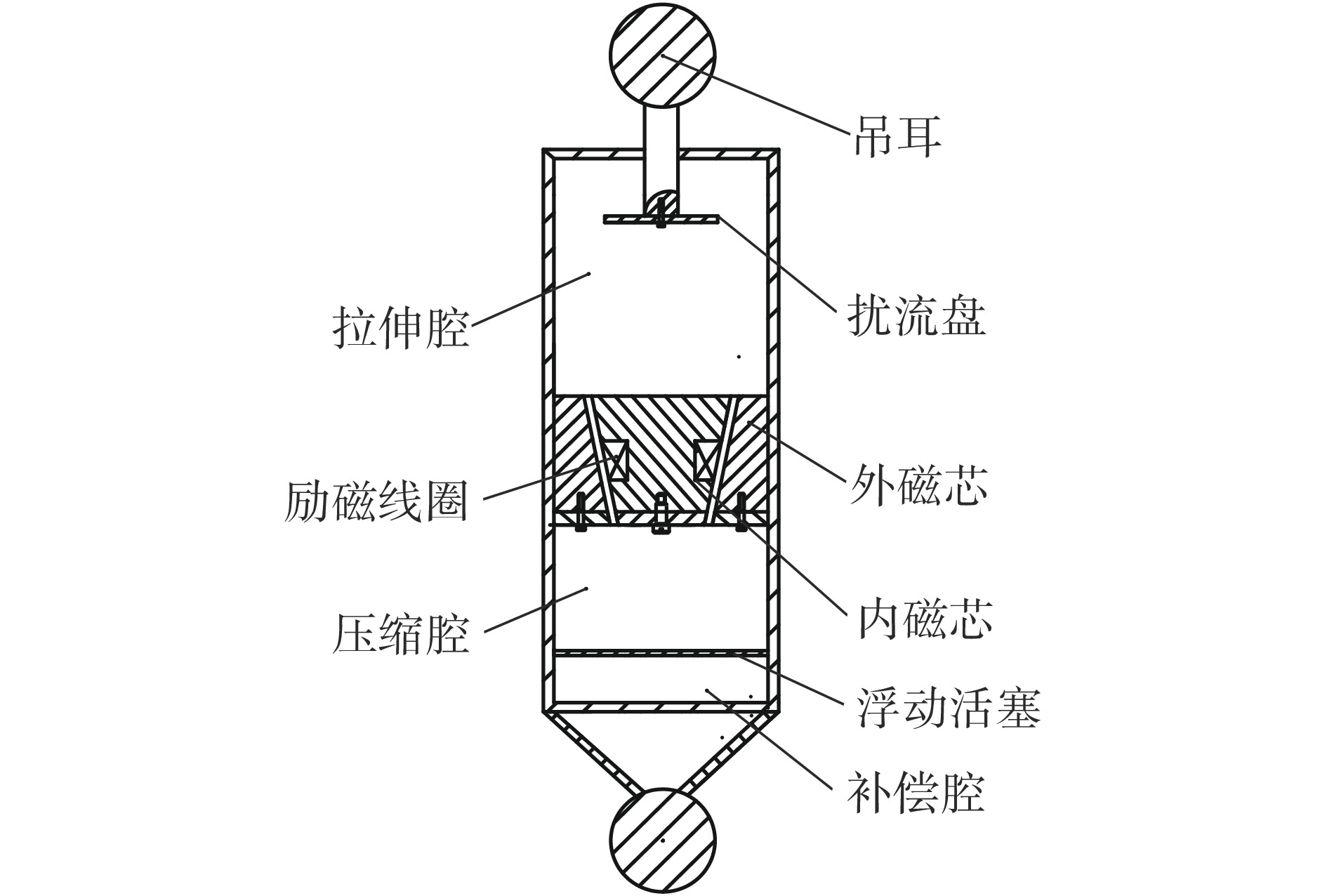
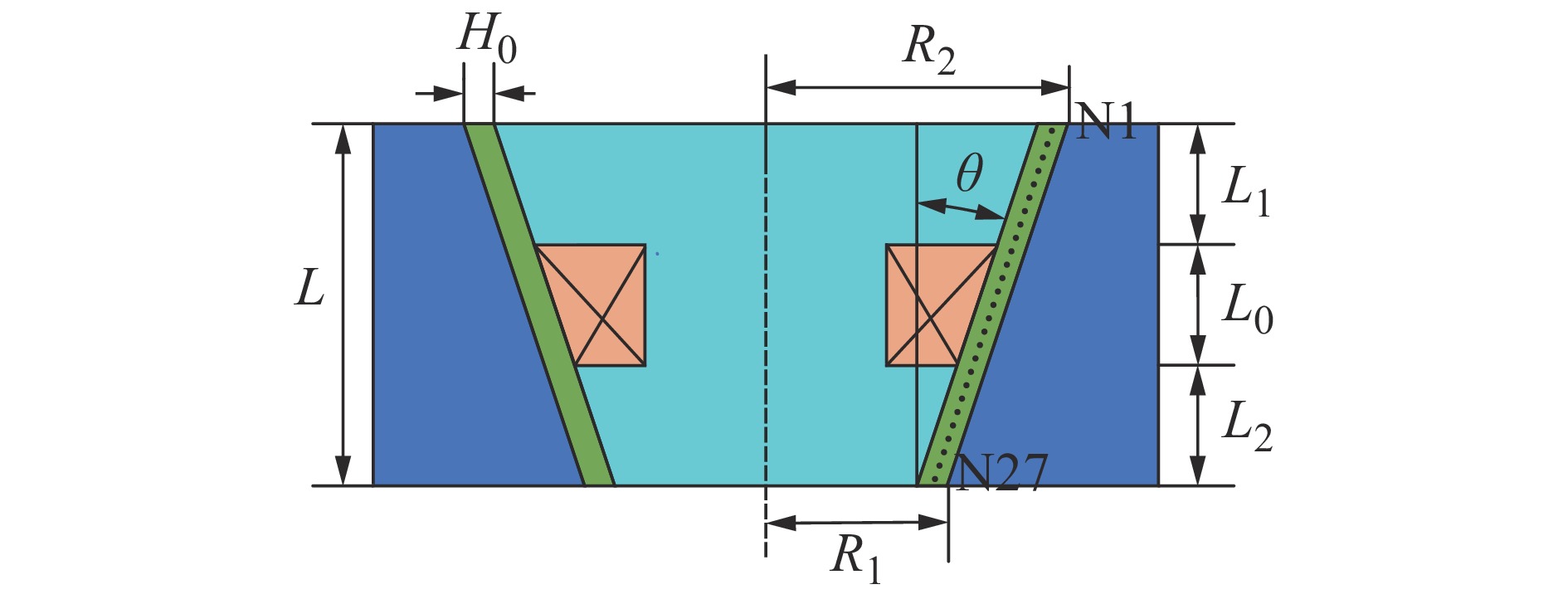
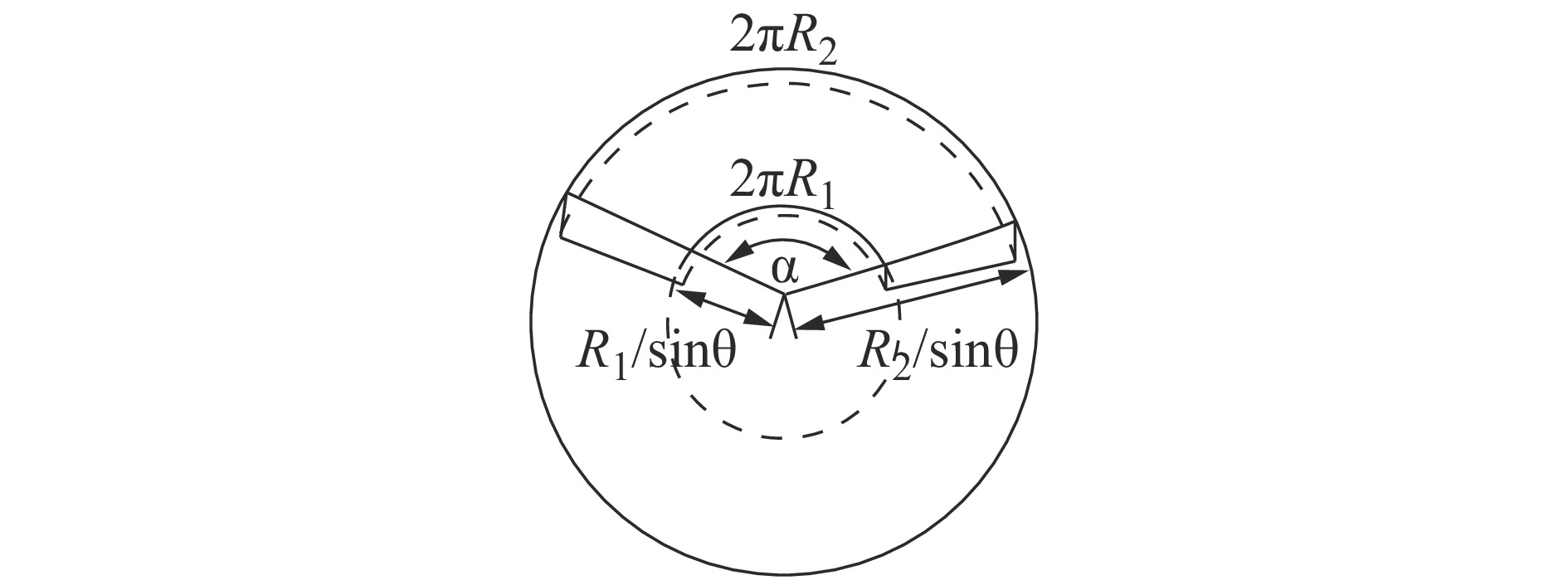
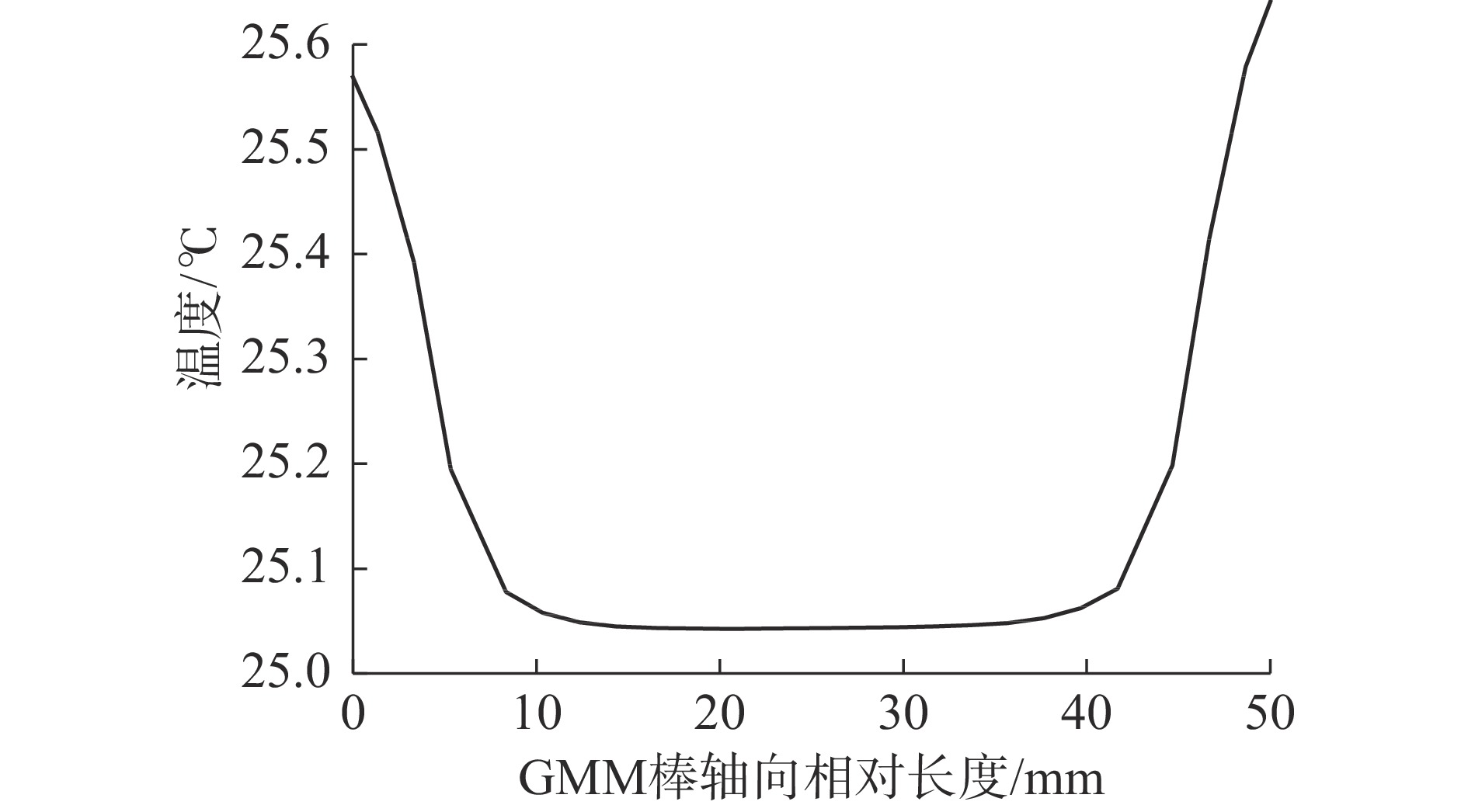
为了降低温升对超磁致伸缩致动器工作性能的影响,提出了一种采用内管外腔式的超磁致伸缩致动器水冷结构。基于热阻定律建立其传热模型,分析了影响超磁致伸缩材料棒温度的因素,对超磁致伸缩致动器稳态时的温度进行了仿真分析。结果表明,虽然超磁致伸缩致动器的温度随着电流强度的增大而升高,但是采用强制水冷可以有效地控制温升,且温升随着冷却水入口流速的增大而减小,当冷却水入口流速为3 m/s时,超磁致伸缩材料棒的热变形量不大于0.09 μm。
为了降低温升对超磁致伸缩致动器工作性能的影响,提出了一种采用内管外腔式的超磁致伸缩致动器水冷结构。基于热阻定律建立其传热模型,分析了影响超磁致伸缩材料棒温度的因素,对超磁致伸缩致动器稳态时的温度进行了仿真分析。结果表明,虽然超磁致伸缩致动器的温度随着电流强度的增大而升高,但是采用强制水冷可以有效地控制温升,且温升随着冷却水入口流速的增大而减小,当冷却水入口流速为3 m/s时,超磁致伸缩材料棒的热变形量不大于0.09 μm。


2022, 41(3): 487-492.
doi: 10.13433/j.cnki.1003-8728.20200352
摘要:
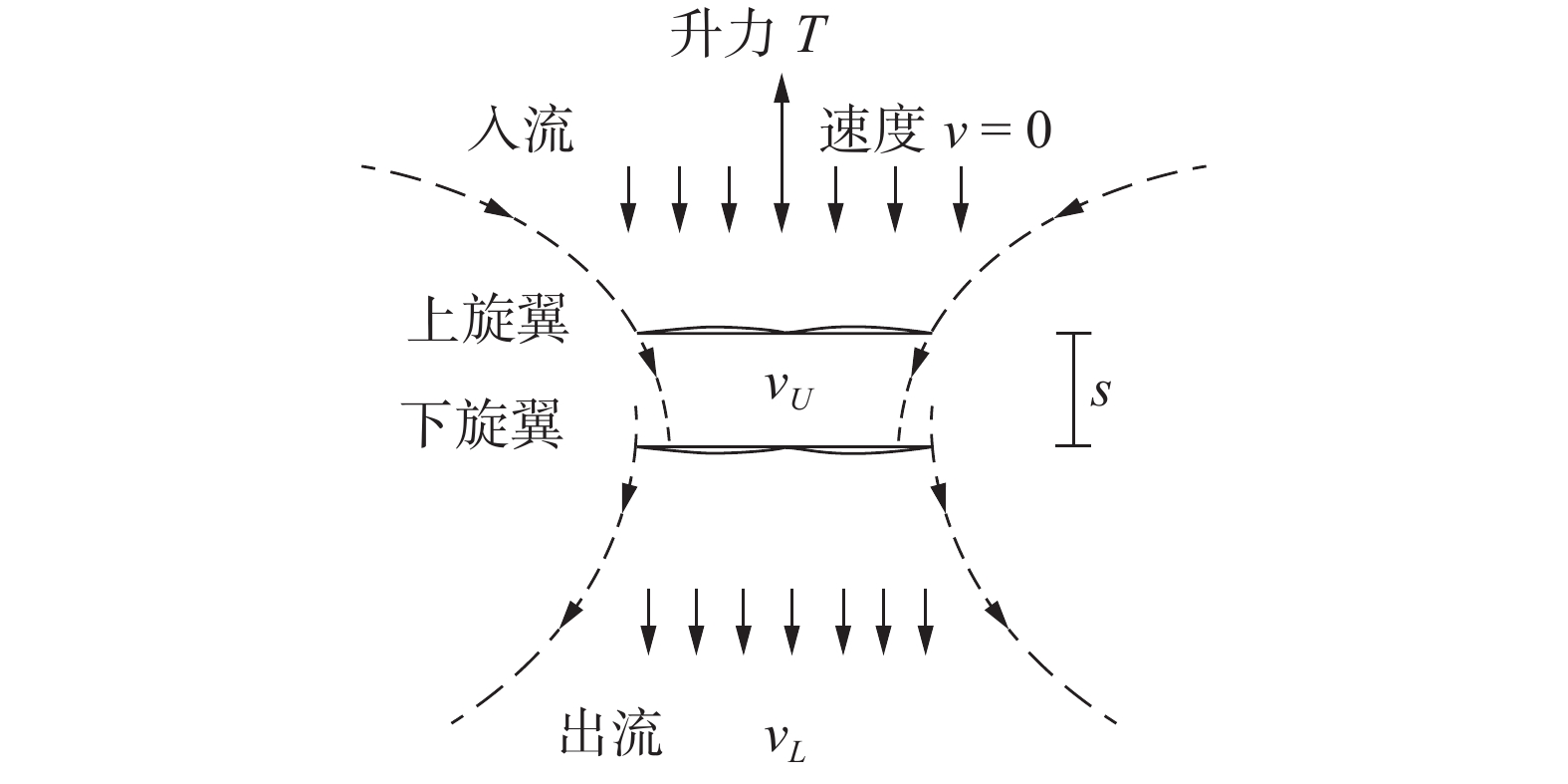
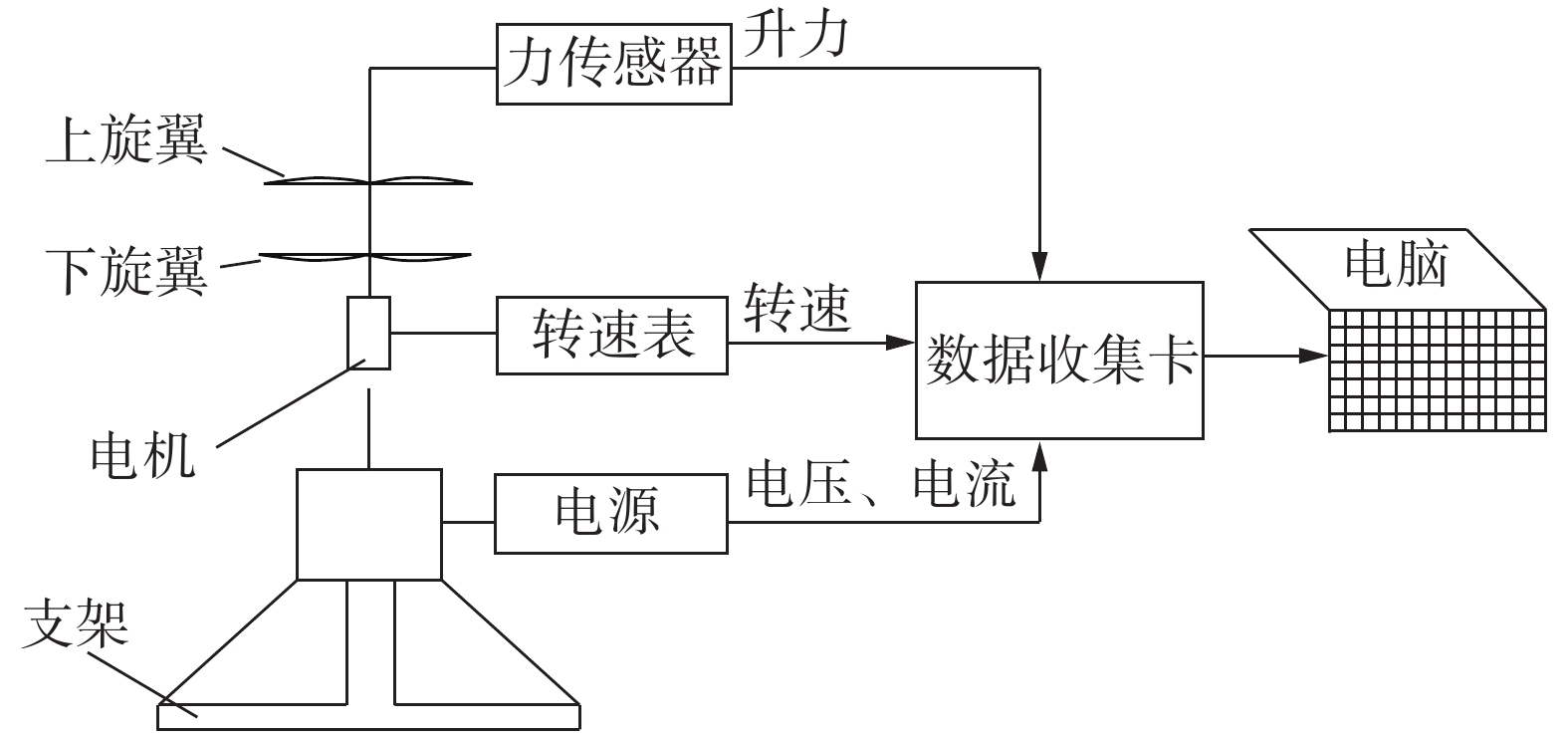
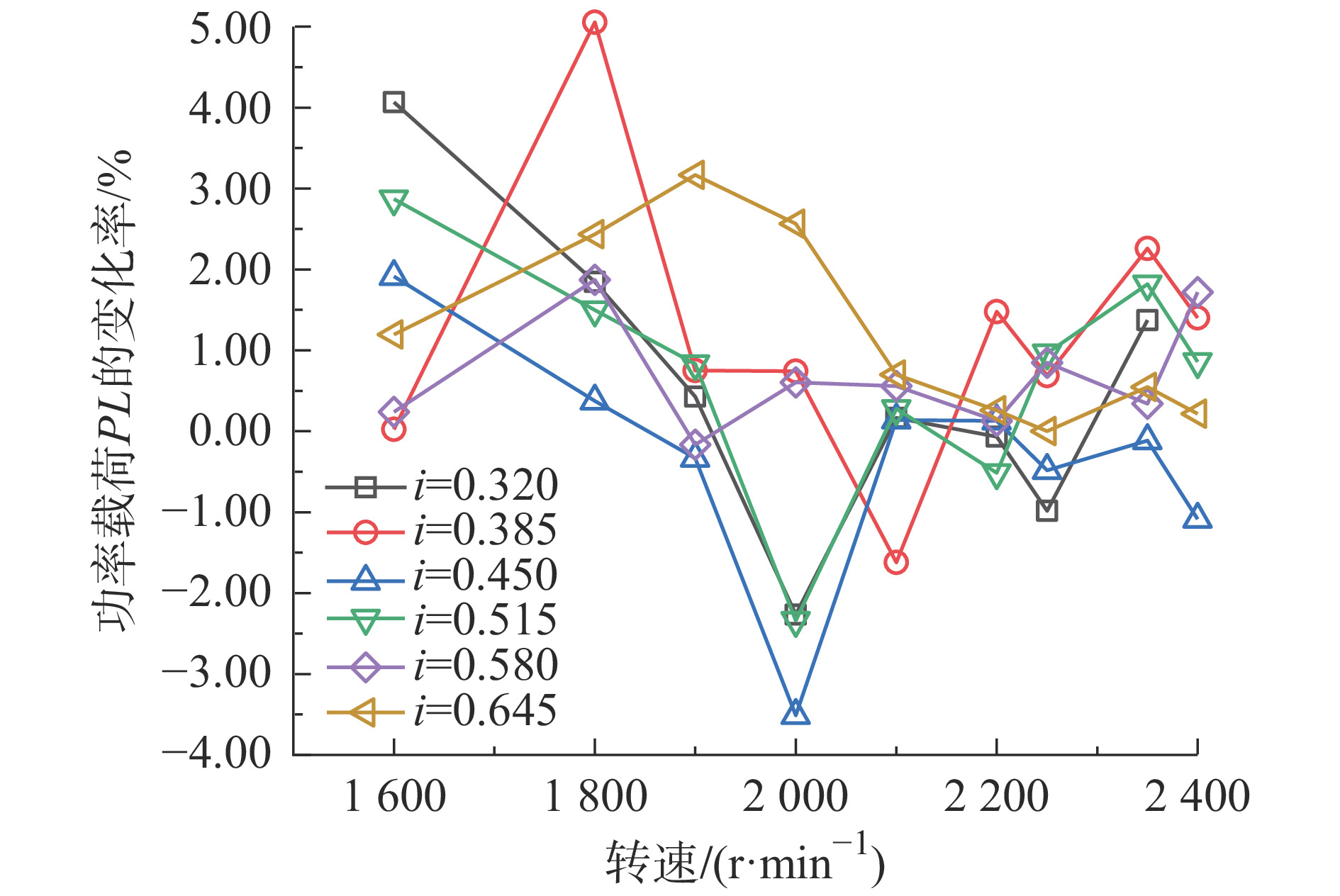
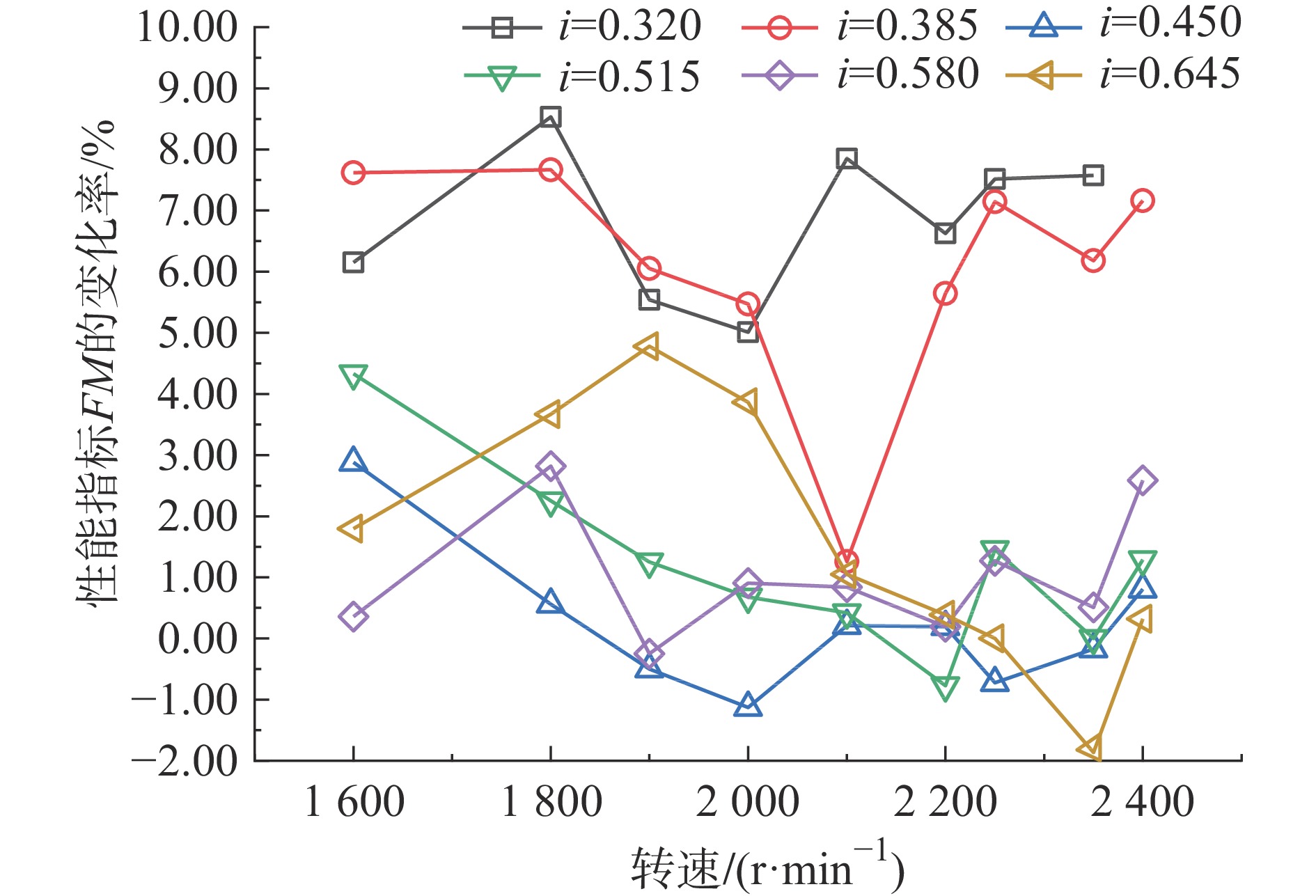
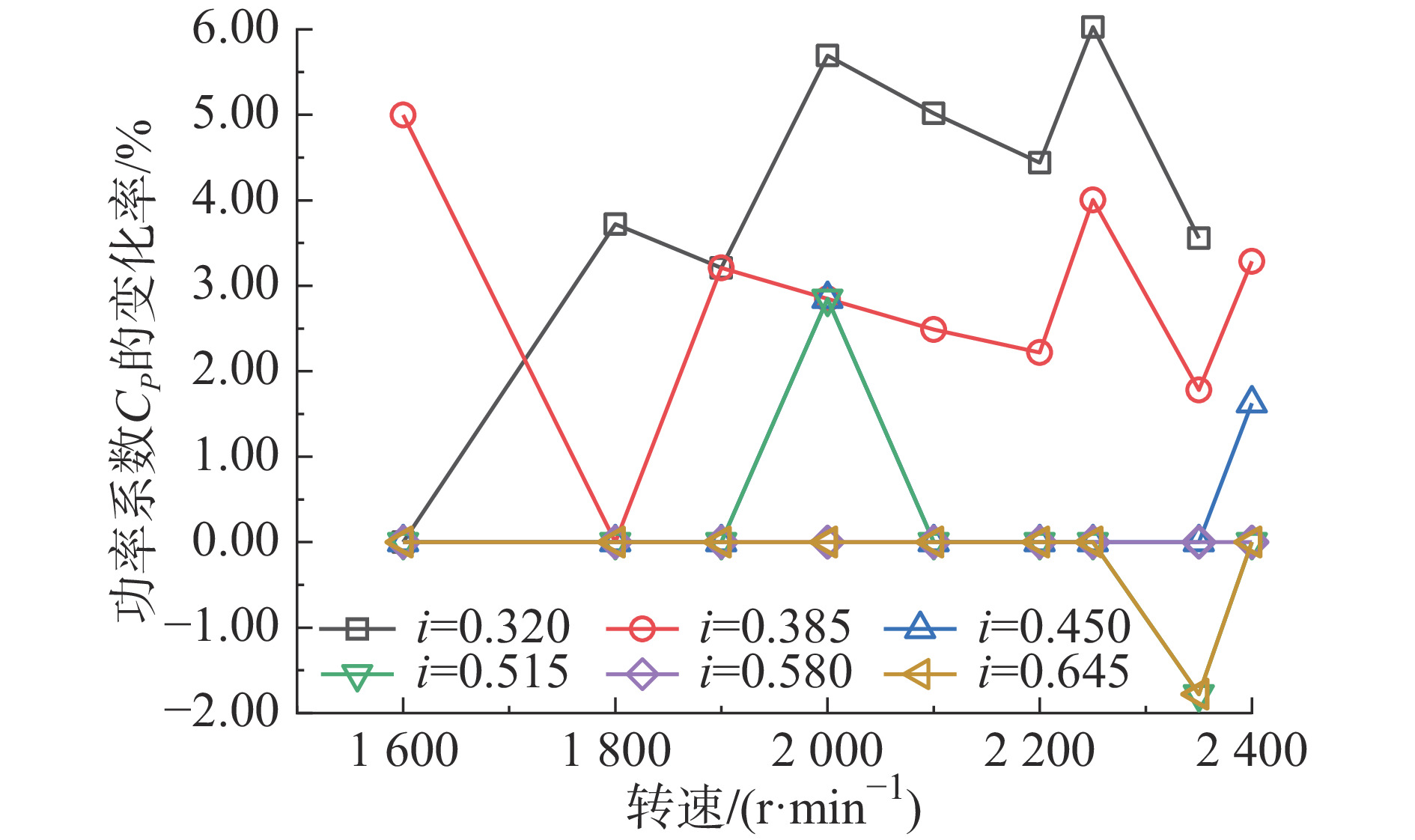
为了获得共轴双旋翼的最佳气动性能,对不同旋翼间距比的共轴双旋翼无人机进行了试验和数值模拟。首先,对共轴双旋翼的气动性能参数进行了理论分析。然后,构造共轴双旋翼模型进行数值模拟,并通过自行设计的试验获得了升力和功率。同时,将试验获得的升力和功耗转化为功率载荷和悬停效率进行气动分析。最后,结合试验和仿真结果表明,工作转速2 200 r/min下,与i = 0.75在相比,当间距比i = 0.385时,功率载荷提高了1.5%,总效率提高了大约5.64%。该间距比下的气动性能较好,可以作为共轴旋翼无人机的最佳气动布局。
为了获得共轴双旋翼的最佳气动性能,对不同旋翼间距比的共轴双旋翼无人机进行了试验和数值模拟。首先,对共轴双旋翼的气动性能参数进行了理论分析。然后,构造共轴双旋翼模型进行数值模拟,并通过自行设计的试验获得了升力和功率。同时,将试验获得的升力和功耗转化为功率载荷和悬停效率进行气动分析。最后,结合试验和仿真结果表明,工作转速2 200 r/min下,与i = 0.75在相比,当间距比i = 0.385时,功率载荷提高了1.5%,总效率提高了大约5.64%。该间距比下的气动性能较好,可以作为共轴旋翼无人机的最佳气动布局。