作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2021年 40卷 第11期
2021, 40(11): 1641-1648.
doi: 10.13433/j.cnki.1003-8728.20200263
 摘要
摘要 HTML
HTML PDF 2118KB
PDF 2118KB
摘要:
Ti-6Al-4V合金的高速切削加工是一个复杂的高温高应变率的热力耦合过程,为更加准确研究Ti-6Al-4V合金在高温高应变率下的真实应力-应变关系,构建了一种修正Johnson-Cook(J-C)本构模型。修正的J-C本构模型综合考虑了塑性阶段应变硬化率会随加载温度的升高而降低的现象,以及在达到高温动态结晶效应的临界温度时,Ti-6Al-4V合金的流动应力会急剧下降的现象。基于修正J-C本构模型的流动应力-应变预测结果与试验数据吻合程度良好,误差率在8%以内,准确的反映了Ti-6Al-4V合金在不同加载温度下的真实应力-应变关系。
Ti-6Al-4V合金的高速切削加工是一个复杂的高温高应变率的热力耦合过程,为更加准确研究Ti-6Al-4V合金在高温高应变率下的真实应力-应变关系,构建了一种修正Johnson-Cook(J-C)本构模型。修正的J-C本构模型综合考虑了塑性阶段应变硬化率会随加载温度的升高而降低的现象,以及在达到高温动态结晶效应的临界温度时,Ti-6Al-4V合金的流动应力会急剧下降的现象。基于修正J-C本构模型的流动应力-应变预测结果与试验数据吻合程度良好,误差率在8%以内,准确的反映了Ti-6Al-4V合金在不同加载温度下的真实应力-应变关系。






2021, 40(11): 1649-1656.
doi: 10.13433/j.cnki.1003-8728.20200256
摘要:
通过对激励点优化布置获取结构的响应信息,提出了一种以加速度信号差曲率函数作为损伤指标,直接利用输出信号快速判断结构损伤位置的方法。首先计算模态振型,以模态保证准则(MAC)矩阵非对角元素最小值作为适应度函数,采用改进粒子群算法(MPSO)优化激励点数量和位置,再运用平均加速度幅值和均方根评价准则选择较优的激励点布置方案;然后试验激励对应的位置,获取加速度信号后计算测点处损伤前后加速度差的平方的积分值,运用曲率指标函数确定损伤位置,并对加速度信号通过巴特沃斯滤波后作为改进多尺度样本熵(MMSE)的输入样本;最后根据MMSE均值的变化,判定各工况相对损伤程度变化。结果表明:利用结构响应的加速度信号差曲率函数适合作为损伤识别的判别指标,通过三维桁架振动台中螺栓连接的状态模拟损伤,可以对不同损伤工况进行损伤诊断。
通过对激励点优化布置获取结构的响应信息,提出了一种以加速度信号差曲率函数作为损伤指标,直接利用输出信号快速判断结构损伤位置的方法。首先计算模态振型,以模态保证准则(MAC)矩阵非对角元素最小值作为适应度函数,采用改进粒子群算法(MPSO)优化激励点数量和位置,再运用平均加速度幅值和均方根评价准则选择较优的激励点布置方案;然后试验激励对应的位置,获取加速度信号后计算测点处损伤前后加速度差的平方的积分值,运用曲率指标函数确定损伤位置,并对加速度信号通过巴特沃斯滤波后作为改进多尺度样本熵(MMSE)的输入样本;最后根据MMSE均值的变化,判定各工况相对损伤程度变化。结果表明:利用结构响应的加速度信号差曲率函数适合作为损伤识别的判别指标,通过三维桁架振动台中螺栓连接的状态模拟损伤,可以对不同损伤工况进行损伤诊断。






2021, 40(11): 1657-1663.
doi: 10.13433/j.cnki.1003-8728.20200274
摘要:
提出一种结合钢轨吸振器与多模态压电式俘能器的新型振动能量回收技术,在有效减轻轨道振动的条件下,回收钢轨吸振器的振动能量为各类轨道监测设备供能。通过建立车轮-轨道-吸振器系统的振动分析模型,研究了能量回收模块对吸振器减振性能的影响规律,并使用谐响应分析研究了能量回收模块的发电能力。分析结果显示,当多模态能量回收装置安装在钢轨吸振器上时,不会对钢轨吸振器的减振性能产生明显影响。并且,多模态结构能有效拓宽0~600 Hz频率范围内的振动能量回收频带,提高振动能量的回收效率。
提出一种结合钢轨吸振器与多模态压电式俘能器的新型振动能量回收技术,在有效减轻轨道振动的条件下,回收钢轨吸振器的振动能量为各类轨道监测设备供能。通过建立车轮-轨道-吸振器系统的振动分析模型,研究了能量回收模块对吸振器减振性能的影响规律,并使用谐响应分析研究了能量回收模块的发电能力。分析结果显示,当多模态能量回收装置安装在钢轨吸振器上时,不会对钢轨吸振器的减振性能产生明显影响。并且,多模态结构能有效拓宽0~600 Hz频率范围内的振动能量回收频带,提高振动能量的回收效率。













2021, 40(11): 1664-1669.
doi: 10.13433/j.cnki.1003-8728.20200541
摘要:
针对切向永磁同步电机空载感应电动势谐波含量高会增加杂散损耗的问题,提出一种优化定子槽参数和转子极面偏心设计相结合的方法,以改善空载感应电动势波形。推导出切向永磁电机空载谐波感应电动势表达式,分析并确定了影响空载感应电动势谐波的关键结构参数,以降低空载感应电动势畸变率为优化目标,采用有限元法分析定子槽口宽度、定子槽高度和转子极面偏心距三个参数对电机空载感应电动势各奇次谐波和波形畸变率的影响规律,获得了最优参数。结果表明,优化后的电机能有效削弱空载感应电动势谐波、降低波形畸变率,同时提高气隙磁密、减小齿槽转矩,提升电机整体性能。
针对切向永磁同步电机空载感应电动势谐波含量高会增加杂散损耗的问题,提出一种优化定子槽参数和转子极面偏心设计相结合的方法,以改善空载感应电动势波形。推导出切向永磁电机空载谐波感应电动势表达式,分析并确定了影响空载感应电动势谐波的关键结构参数,以降低空载感应电动势畸变率为优化目标,采用有限元法分析定子槽口宽度、定子槽高度和转子极面偏心距三个参数对电机空载感应电动势各奇次谐波和波形畸变率的影响规律,获得了最优参数。结果表明,优化后的电机能有效削弱空载感应电动势谐波、降低波形畸变率,同时提高气隙磁密、减小齿槽转矩,提升电机整体性能。















2021, 40(11): 1670-1674.
doi: 10.13433/j.cnki.1003-8728.20200329
摘要:
为了确定流体激励和轴系激励对离心泵振动的主要影响,通过对离心泵进行非定常流场计算,分析流体激励和轴系激励诱导离心泵振动特性。选择采用轴系不对中作为激励源,结果表明:轴系不对中时,离心泵在1APF(电机转动频率)处振动响应增强,并出现明显的2APF响应,1BPF(1倍叶片通过频率)处振级和中频段振级几乎无变化;当流体激励并伴有轴系不对中时,离心泵在1APF处和1BPF处出现明显的振动响应,1BPF处的振级与仅轴系激励时相差较大。
为了确定流体激励和轴系激励对离心泵振动的主要影响,通过对离心泵进行非定常流场计算,分析流体激励和轴系激励诱导离心泵振动特性。选择采用轴系不对中作为激励源,结果表明:轴系不对中时,离心泵在1APF(电机转动频率)处振动响应增强,并出现明显的2APF响应,1BPF(1倍叶片通过频率)处振级和中频段振级几乎无变化;当流体激励并伴有轴系不对中时,离心泵在1APF处和1BPF处出现明显的振动响应,1BPF处的振级与仅轴系激励时相差较大。







2021, 40(11): 1675-1680.
doi: 10.13433/j.cnki.1003-8728.20200279
摘要:
以石油套管接箍车丝机视觉机器人上下料系统为研究对象,利用UG和RobotStudio软件建立了接箍车丝机视觉机器人自动上下料系统仿真模型。利用Halcon图像处理软件对抓取工件进行中心定位,并开发了人机交互界面。设计了机器人专用上下料夹具,创建系统Smart动态组件,添加了I/O信号实现设备通讯。编写机器人离线仿真程序,完成机器人柔性上下料系统仿真和优化。仿真结果表明,设计的仿真系统实现了机器人视觉精准抓取工件柔性上下料功能。
以石油套管接箍车丝机视觉机器人上下料系统为研究对象,利用UG和RobotStudio软件建立了接箍车丝机视觉机器人自动上下料系统仿真模型。利用Halcon图像处理软件对抓取工件进行中心定位,并开发了人机交互界面。设计了机器人专用上下料夹具,创建系统Smart动态组件,添加了I/O信号实现设备通讯。编写机器人离线仿真程序,完成机器人柔性上下料系统仿真和优化。仿真结果表明,设计的仿真系统实现了机器人视觉精准抓取工件柔性上下料功能。








2021, 40(11): 1681-1687.
doi: 10.13433/j.cnki.1003-8728.20200354
摘要:
为了提高激光SLAM技术的建图精度,本文提出了一种智能重采样的IRBPF-SLAM算法,算法采用BAT启发式自适应重采样,对小颗粒进行重采样,产生新的解决方案,随机选择最佳解决方案,更新蝙蝠数量,将粒子归一化,优化的机器人状态更新,最后进行粒子重置,其迭代时间可以根据滤波器发散的程度进行自适应调整。此外,将激光传感器改进提议分布融合到算法中,以获得更好的提议分布和建图结果。仿真结果表明,所提出的IRBPF具有更好的准确性、计算效率和滤波一致性。在大型室内空间中,将IRBPF-SALM算法融合到基于ROS为框架下,在阿克曼转向移动平台进行测试,测试结果表明了新方法比原始方法更具优势。
为了提高激光SLAM技术的建图精度,本文提出了一种智能重采样的IRBPF-SLAM算法,算法采用BAT启发式自适应重采样,对小颗粒进行重采样,产生新的解决方案,随机选择最佳解决方案,更新蝙蝠数量,将粒子归一化,优化的机器人状态更新,最后进行粒子重置,其迭代时间可以根据滤波器发散的程度进行自适应调整。此外,将激光传感器改进提议分布融合到算法中,以获得更好的提议分布和建图结果。仿真结果表明,所提出的IRBPF具有更好的准确性、计算效率和滤波一致性。在大型室内空间中,将IRBPF-SALM算法融合到基于ROS为框架下,在阿克曼转向移动平台进行测试,测试结果表明了新方法比原始方法更具优势。









2021, 40(11): 1688-1694.
doi: 10.13433/j.cnki.1003-8728.20200351
摘要:
针对基于不确定性参数条件下三缸发动机悬置系统不满足稳健性设计要求问题,提出了一种基于证据理论的悬置系统优化及稳定性分析方法。在考虑了悬置系统参数不确定性的条件下,首先基于证据理论原理并结合遗传算法,对悬置系统参数进行优化设计。然后分析优化后的参数在不确定性条件下悬置系统满足稳定性设计要求的概率累计分布曲线。最后,在不确定参数区间存在波动时验证优化参数的最优性。
针对基于不确定性参数条件下三缸发动机悬置系统不满足稳健性设计要求问题,提出了一种基于证据理论的悬置系统优化及稳定性分析方法。在考虑了悬置系统参数不确定性的条件下,首先基于证据理论原理并结合遗传算法,对悬置系统参数进行优化设计。然后分析优化后的参数在不确定性条件下悬置系统满足稳定性设计要求的概率累计分布曲线。最后,在不确定参数区间存在波动时验证优化参数的最优性。











2021, 40(11): 1695-1702.
doi: 10.13433/j.cnki.1003-8728.20200277
摘要:
忽略平面柔索并联机器人的末端运动平台的姿态会造成定位误差。在考虑平台姿态的前提下,构建了机器人运动学模型并对末端平台进行静力学分析,再以各柔索张力的最小方差为优化目标,提出张力均匀化优化算法并利用罚函数、梯度法计算得到满足最优索力分布条件下的位姿,然后分析了静平台出绳点布置形状、平台形状等因素对定位精度的影响规律。MATLAB的仿真试验表明:张力均匀化优化算法定位误差小于\begin{document}${10^{ - 6}}\;{\text{mm}}$\end{document} ![]()
![]()
\begin{document}$6^\circ $\end{document} ![]()
![]()
\begin{document}$4.5^\circ $\end{document} ![]()
![]()
忽略平面柔索并联机器人的末端运动平台的姿态会造成定位误差。在考虑平台姿态的前提下,构建了机器人运动学模型并对末端平台进行静力学分析,再以各柔索张力的最小方差为优化目标,提出张力均匀化优化算法并利用罚函数、梯度法计算得到满足最优索力分布条件下的位姿,然后分析了静平台出绳点布置形状、平台形状等因素对定位精度的影响规律。MATLAB的仿真试验表明:张力均匀化优化算法定位误差小于














2021, 40(11): 1703-1709.
doi: 10.13433/j.cnki.1003-8728.20200264
摘要:
针对钢丝绳隔振器非线性系统随机响应运动方程求解困难、计算效率低的问题,提出钢丝绳隔振器-质量块非线性系统随机响应特性的统计线性化分析方法,并通过等效前后数值仿真进行了有效性验证,同时计算位移传递率评估钢丝绳隔振器的隔振效果。结果表明,统计线性化分析方法和数值仿真所得系统的随机响应曲线一致,验证了统计线性化分析钢丝绳隔振器系统随机响应特性的有效性和准确性,且分析速度远远高于数值仿真,显著提高了非线性隔振系统的设计效率。
针对钢丝绳隔振器非线性系统随机响应运动方程求解困难、计算效率低的问题,提出钢丝绳隔振器-质量块非线性系统随机响应特性的统计线性化分析方法,并通过等效前后数值仿真进行了有效性验证,同时计算位移传递率评估钢丝绳隔振器的隔振效果。结果表明,统计线性化分析方法和数值仿真所得系统的随机响应曲线一致,验证了统计线性化分析钢丝绳隔振器系统随机响应特性的有效性和准确性,且分析速度远远高于数值仿真,显著提高了非线性隔振系统的设计效率。






2021, 40(11): 1710-1716.
doi: 10.13433/j.cnki.1003-8728.20200266
摘要:
建立接触网-受电弓-导流罩-列车整体模型,基于分离涡模拟方法,研究了橫风作用时不同导流罩高度下受电弓非定常气动特性,分析了涡量、流线、气动荷载等的变化规律。结果表明:导流罩高度为100 mm时分离涡向橫风背风侧偏转显著,导流罩高度增加为400 mm时对受电弓下部杆件、车体连接处等作用增强;导流罩高度为200 mm时横风作用产生的绕流场偏转的效应明显得到改善,流场分布在纵向呈较好的对称性,其阻力系数的增幅远小于受电弓所受横向力的降幅,同时大幅降低了倾覆力矩和侧偏力矩,故在恶劣的风环境下采用200 mm高度的导流罩是可取的。研究结果对横风作用下导流罩高度对受电弓气动特性的影响研究具有重要意义。
建立接触网-受电弓-导流罩-列车整体模型,基于分离涡模拟方法,研究了橫风作用时不同导流罩高度下受电弓非定常气动特性,分析了涡量、流线、气动荷载等的变化规律。结果表明:导流罩高度为100 mm时分离涡向橫风背风侧偏转显著,导流罩高度增加为400 mm时对受电弓下部杆件、车体连接处等作用增强;导流罩高度为200 mm时横风作用产生的绕流场偏转的效应明显得到改善,流场分布在纵向呈较好的对称性,其阻力系数的增幅远小于受电弓所受横向力的降幅,同时大幅降低了倾覆力矩和侧偏力矩,故在恶劣的风环境下采用200 mm高度的导流罩是可取的。研究结果对横风作用下导流罩高度对受电弓气动特性的影响研究具有重要意义。
































2021, 40(11): 1717-1722.
doi: 10.13433/j.cnki.1003-8728.20200371
摘要:
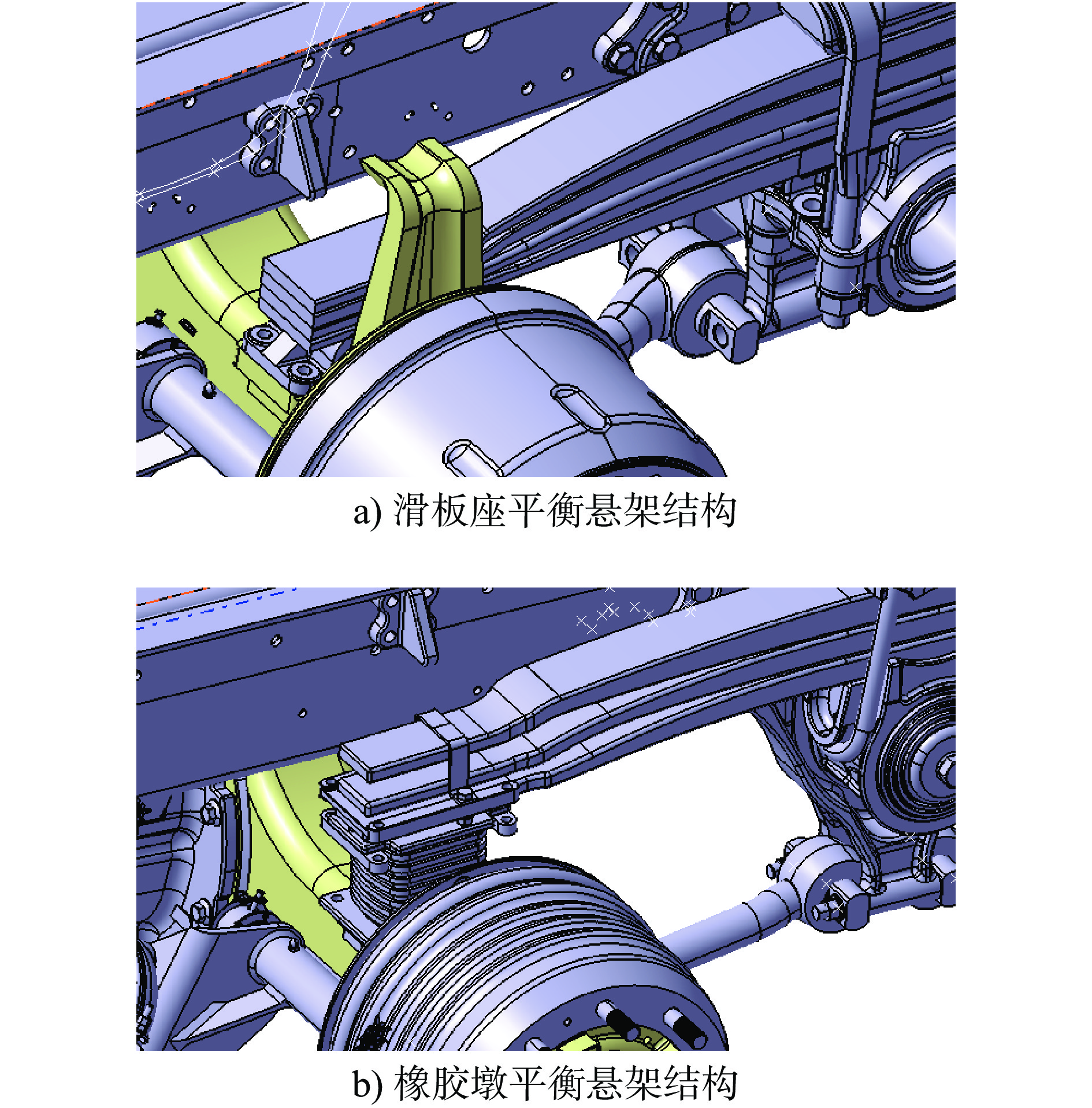
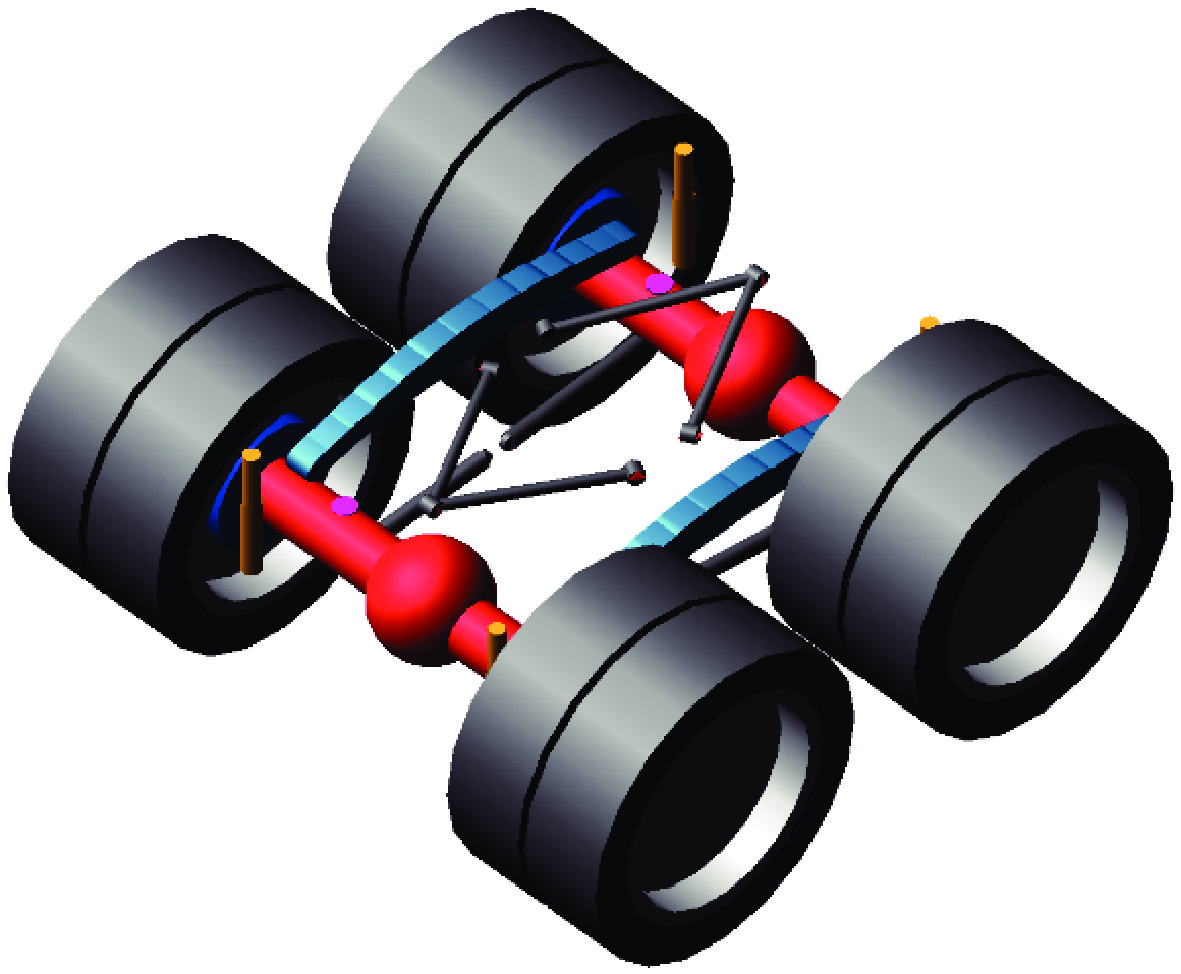
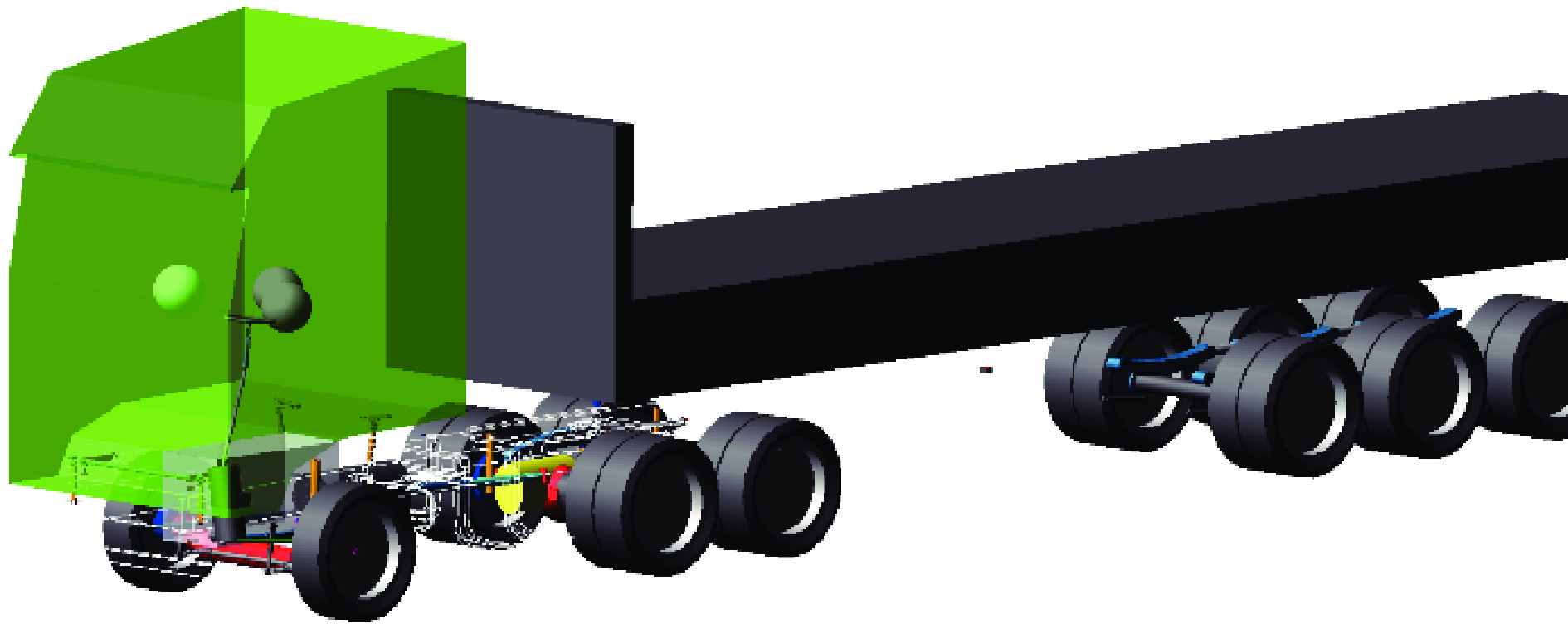
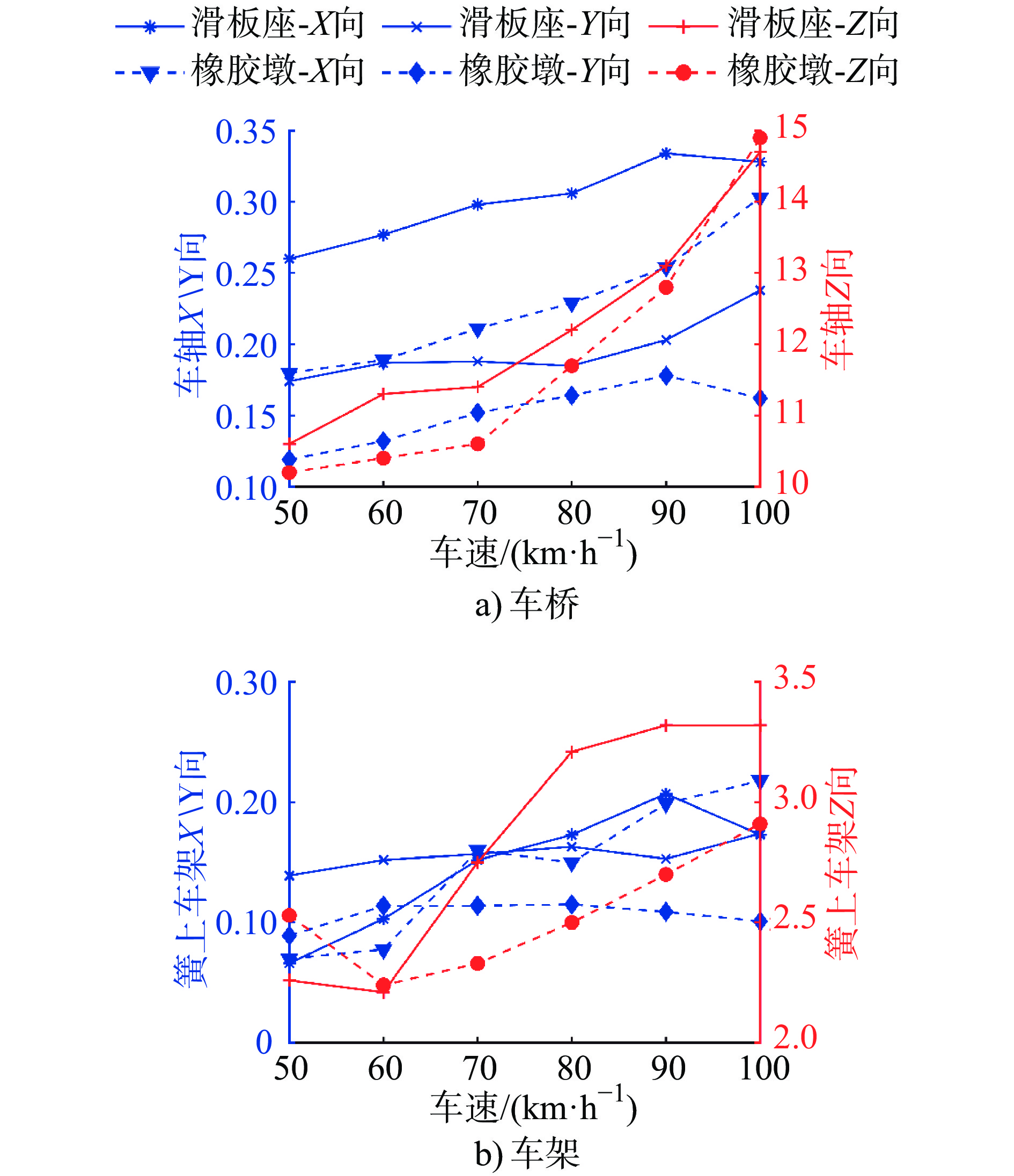
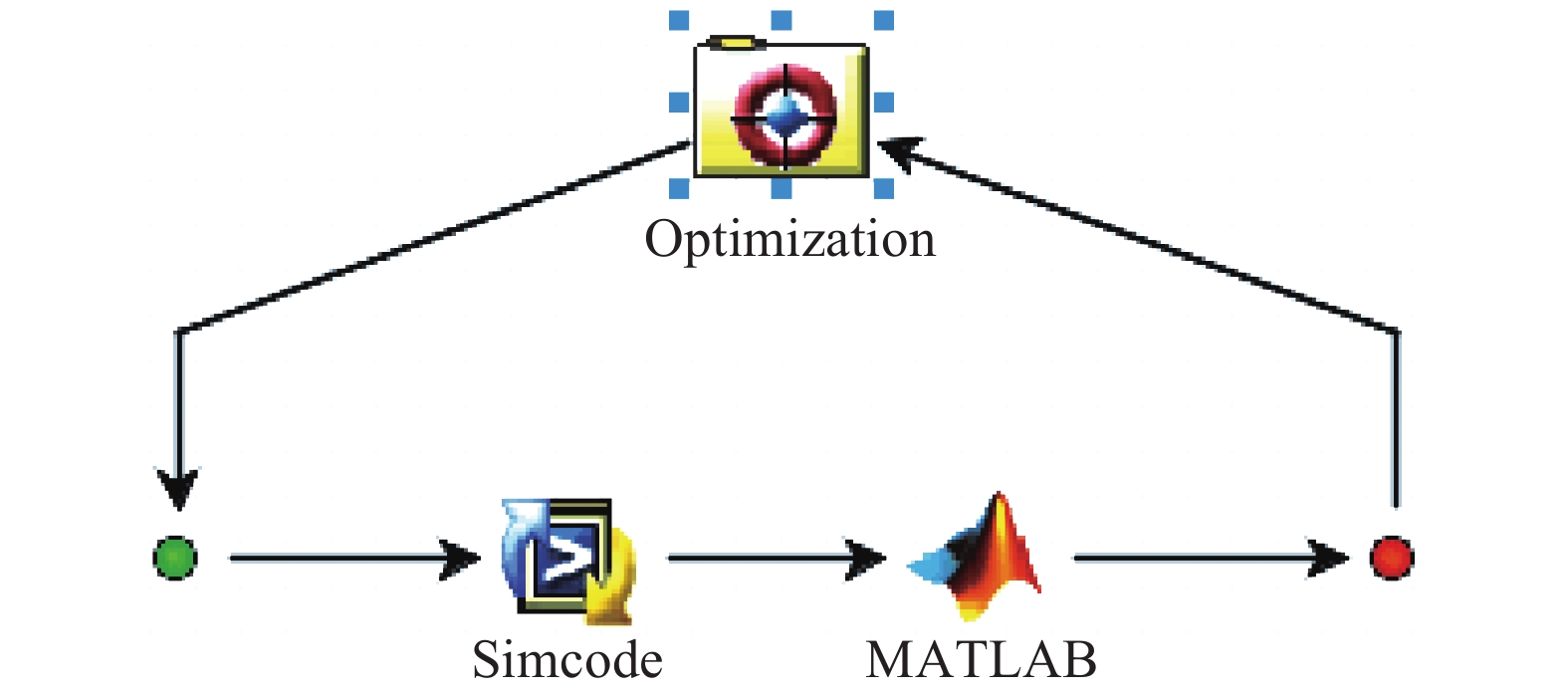
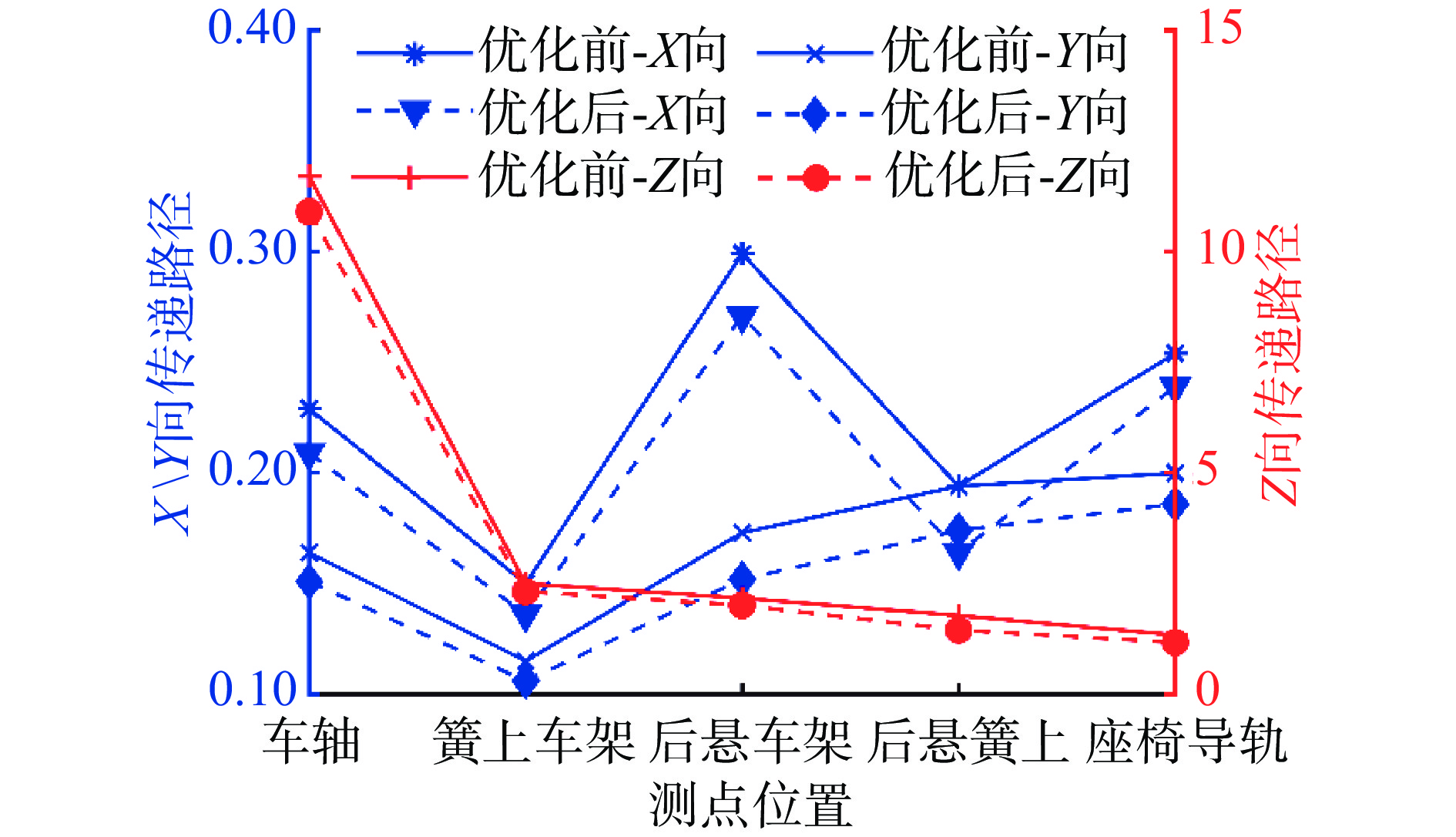
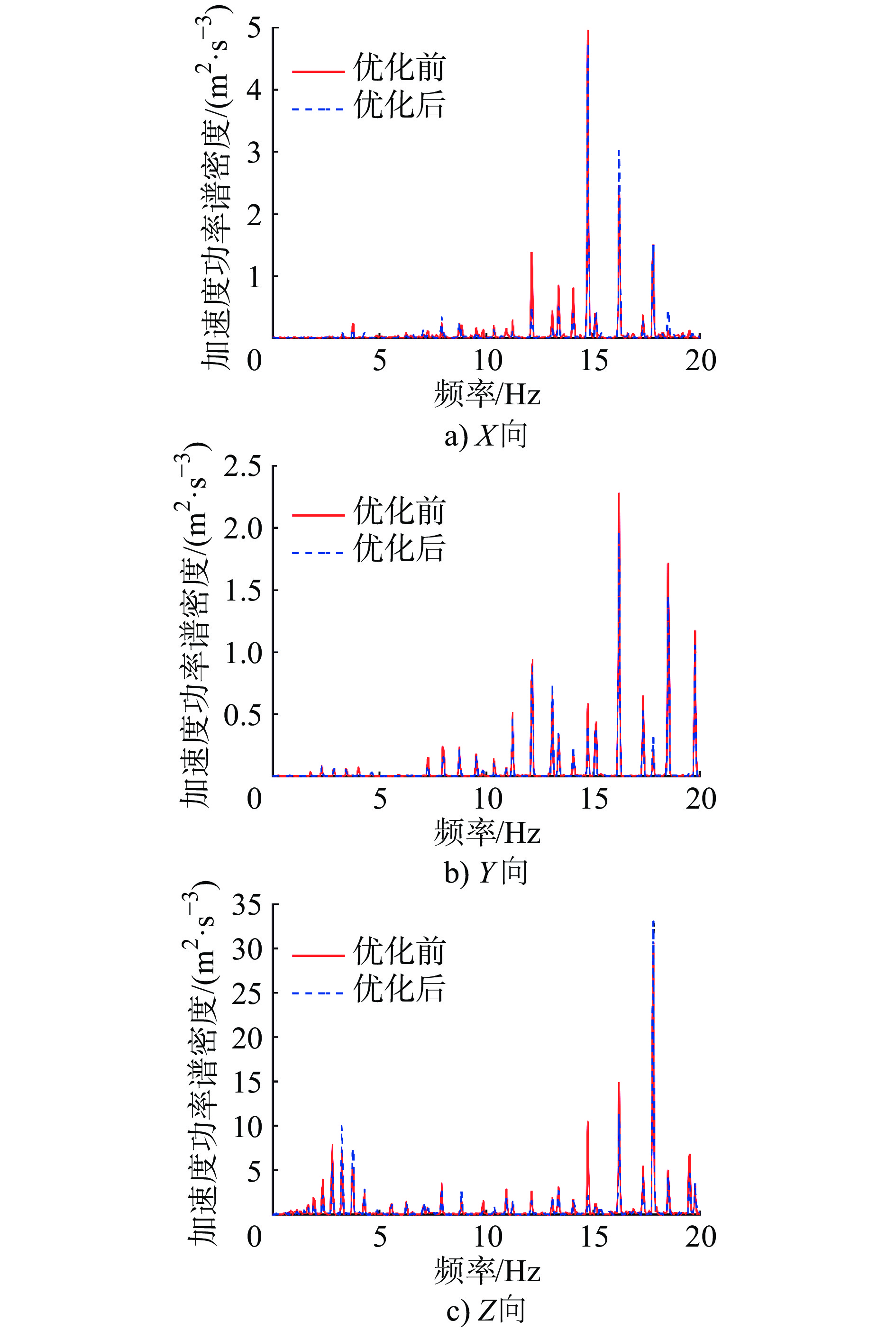
为研究平衡悬架板簧与车桥连接方式对整车平顺性的影响,以国产某重型商用车为研究对象,分别建立滑板座及橡胶墩连接方式下整车刚柔耦合动力学模型并进行平顺性仿真对比,数据揭示橡胶墩连接方式下整车平顺性优于滑板座状态但仍有改善空间。建立以中桥振动传递路径下多测点三向平顺性为目标函数、橡胶墩平动及旋转刚度系数为优化变量及平衡悬架动行程为约束条件的数学模型。应用多软件耦合计算方法将动力学模型、多岛遗传算法、优化变量、目标函数及约束条件集成于多学科优化平台以开展橡胶墩刚度优化。对比优化前后橡胶墩刚度参数下整车平顺性响应,结果表明:橡胶墩刚度参数优化后整车平顺性较优化前提升约9%且主要源于中高频振动降低。
为研究平衡悬架板簧与车桥连接方式对整车平顺性的影响,以国产某重型商用车为研究对象,分别建立滑板座及橡胶墩连接方式下整车刚柔耦合动力学模型并进行平顺性仿真对比,数据揭示橡胶墩连接方式下整车平顺性优于滑板座状态但仍有改善空间。建立以中桥振动传递路径下多测点三向平顺性为目标函数、橡胶墩平动及旋转刚度系数为优化变量及平衡悬架动行程为约束条件的数学模型。应用多软件耦合计算方法将动力学模型、多岛遗传算法、优化变量、目标函数及约束条件集成于多学科优化平台以开展橡胶墩刚度优化。对比优化前后橡胶墩刚度参数下整车平顺性响应,结果表明:橡胶墩刚度参数优化后整车平顺性较优化前提升约9%且主要源于中高频振动降低。

2021, 40(11): 1723-1729.
doi: 10.13433/j.cnki.1003-8728.20200359
摘要:
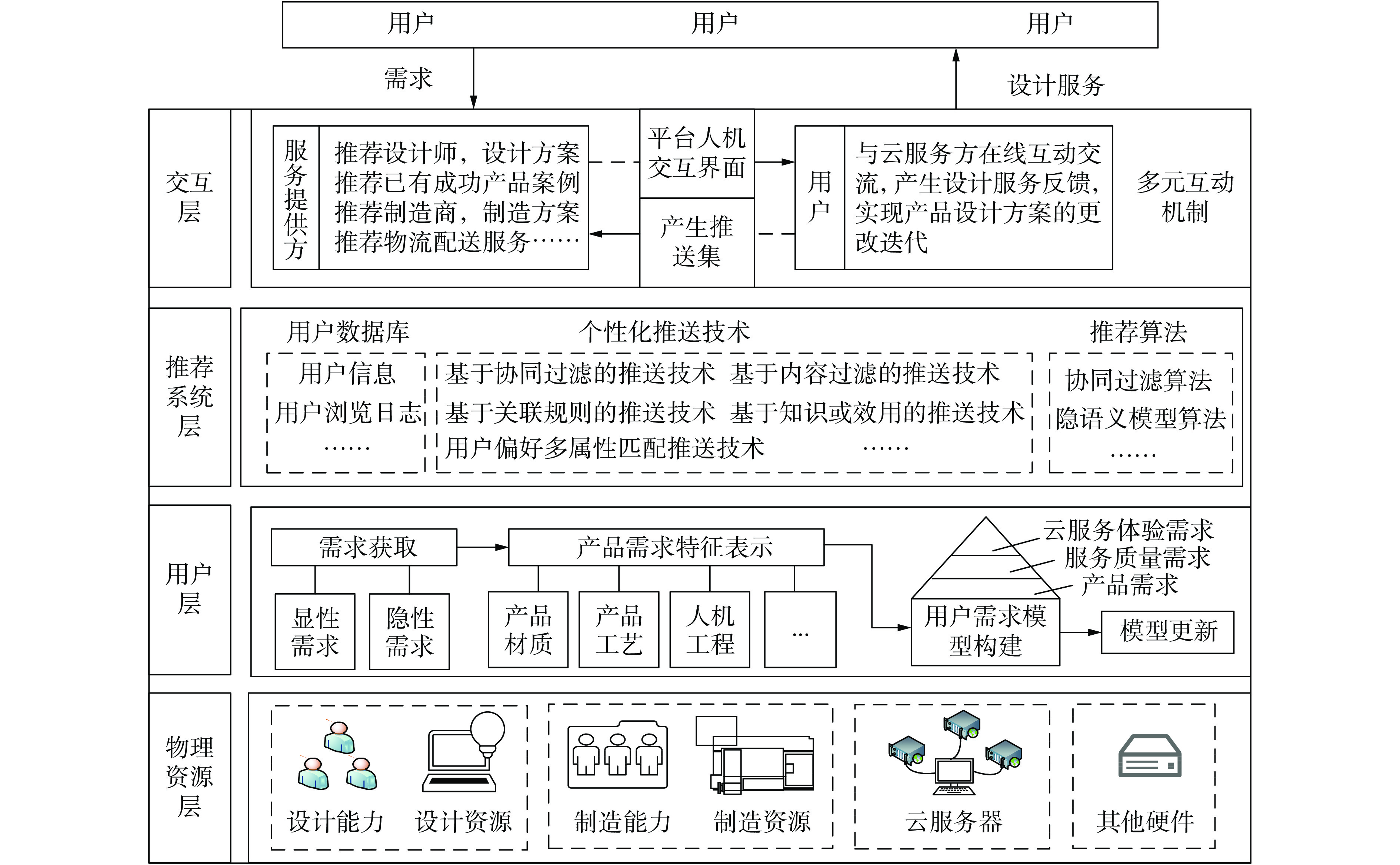
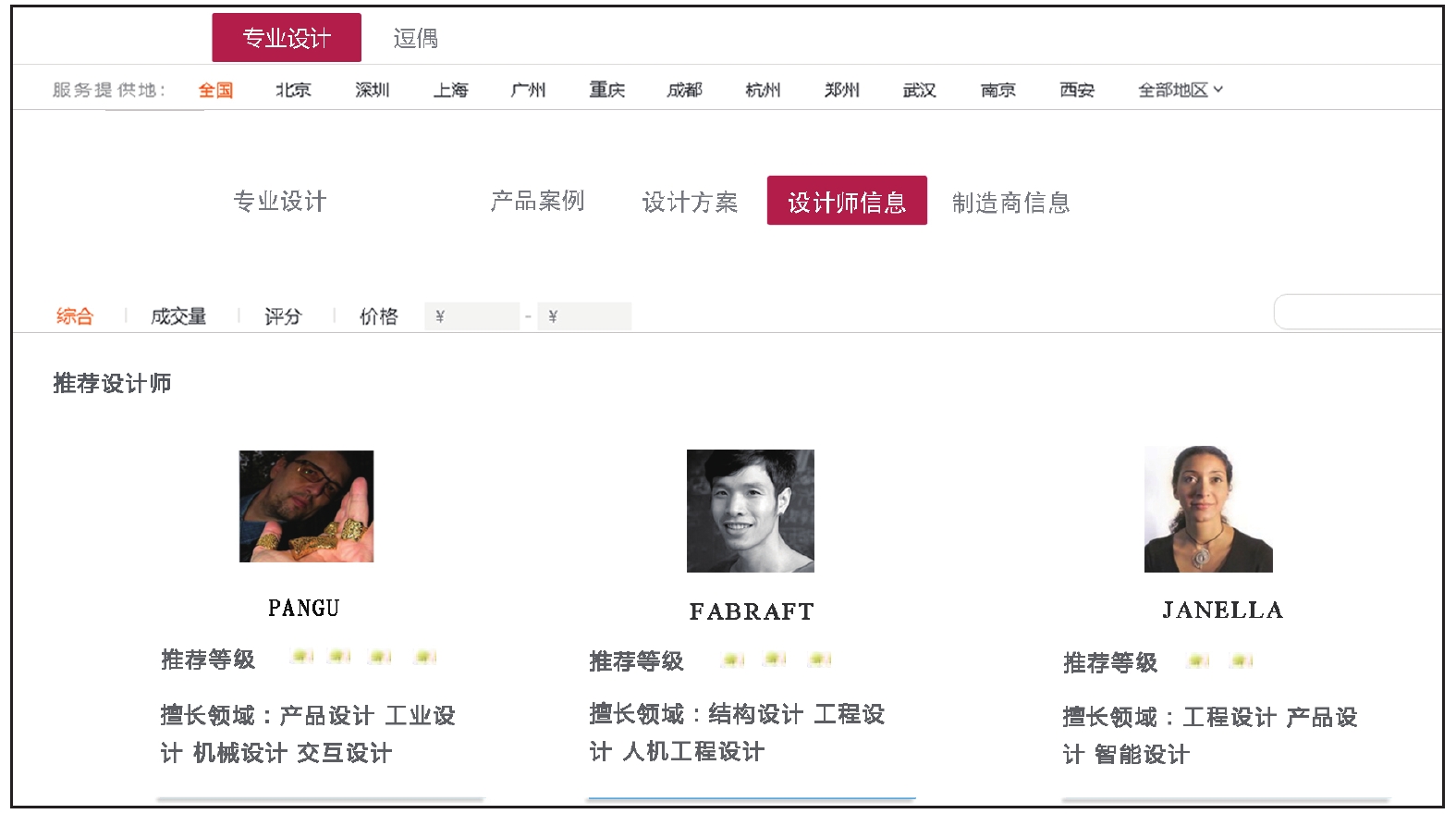
为提高云服务平台下产品设计服务推荐的质量,增强协同产品设计过程中用户与服务提供方之间的交互,构建了个性化产品设计服务推荐框架,并提出考虑用户需求偏好的设计服务推荐方法。采用模糊C均值聚类算法实现用户初步聚类;利用改进的基于用户的协同过滤方法优化用户相似度函数及评分预测函数,以提高目标用户对设计服务推荐项目预测评分的准确性;通过用户对设计服务推荐结果的交互反馈,完成产品设计服务的更新迭代。以设计云服务平台上用户对壁挂式智能空调设计的需求为例,验证了所提方法的有效性。
为提高云服务平台下产品设计服务推荐的质量,增强协同产品设计过程中用户与服务提供方之间的交互,构建了个性化产品设计服务推荐框架,并提出考虑用户需求偏好的设计服务推荐方法。采用模糊C均值聚类算法实现用户初步聚类;利用改进的基于用户的协同过滤方法优化用户相似度函数及评分预测函数,以提高目标用户对设计服务推荐项目预测评分的准确性;通过用户对设计服务推荐结果的交互反馈,完成产品设计服务的更新迭代。以设计云服务平台上用户对壁挂式智能空调设计的需求为例,验证了所提方法的有效性。

2021, 40(11): 1730-1734.
doi: 10.13433/j.cnki.1003-8728.20200278
摘要:
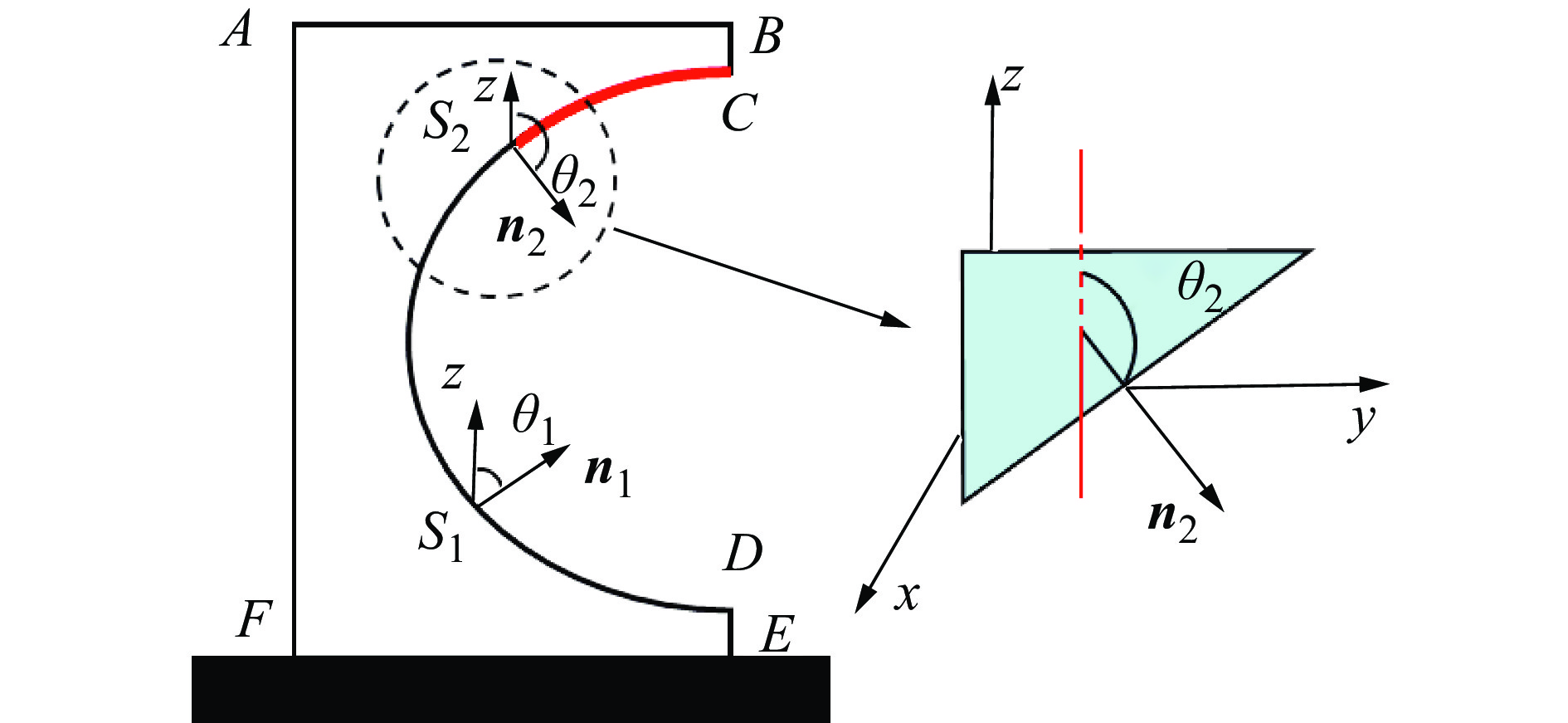
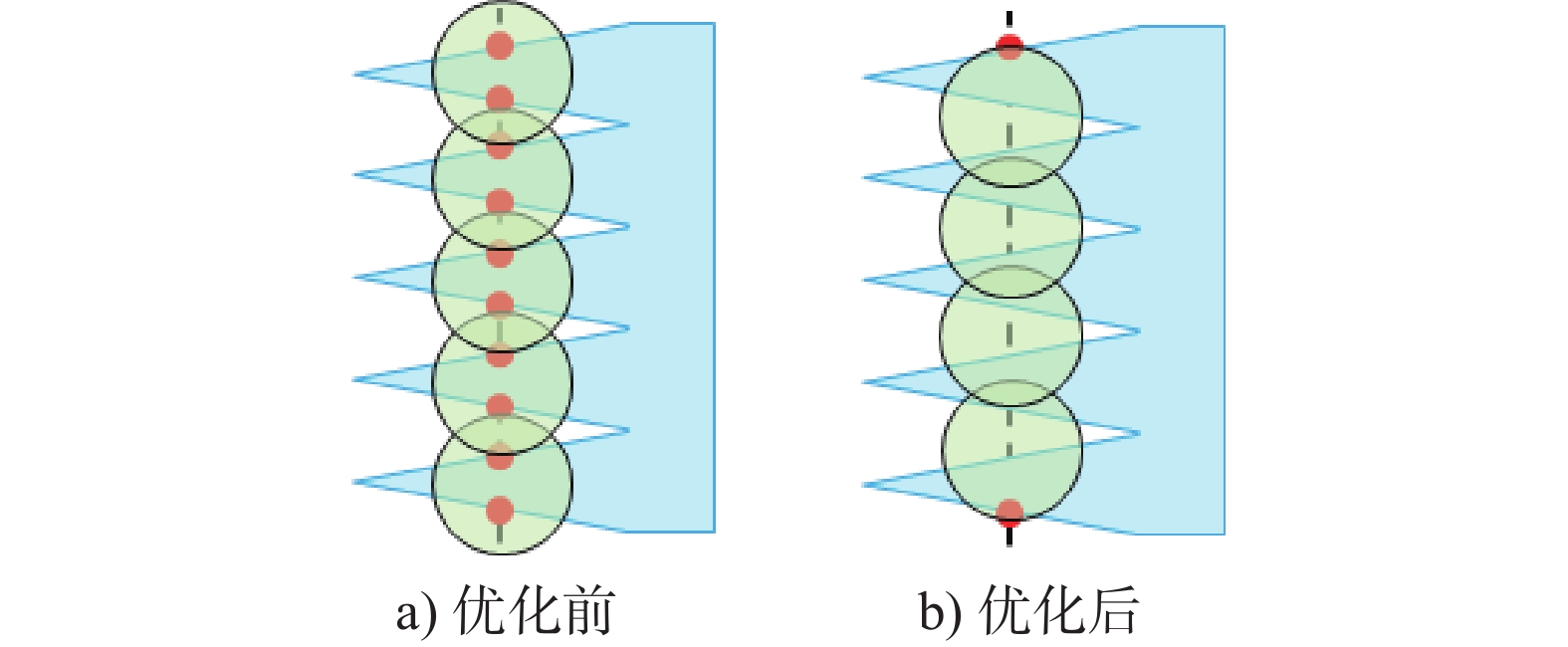
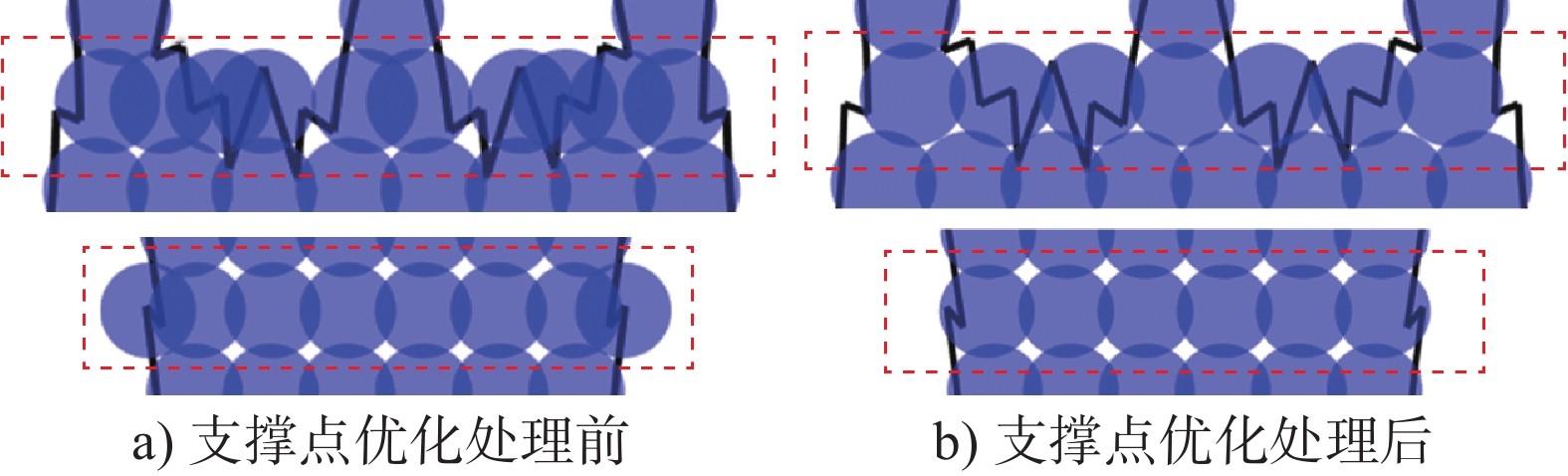
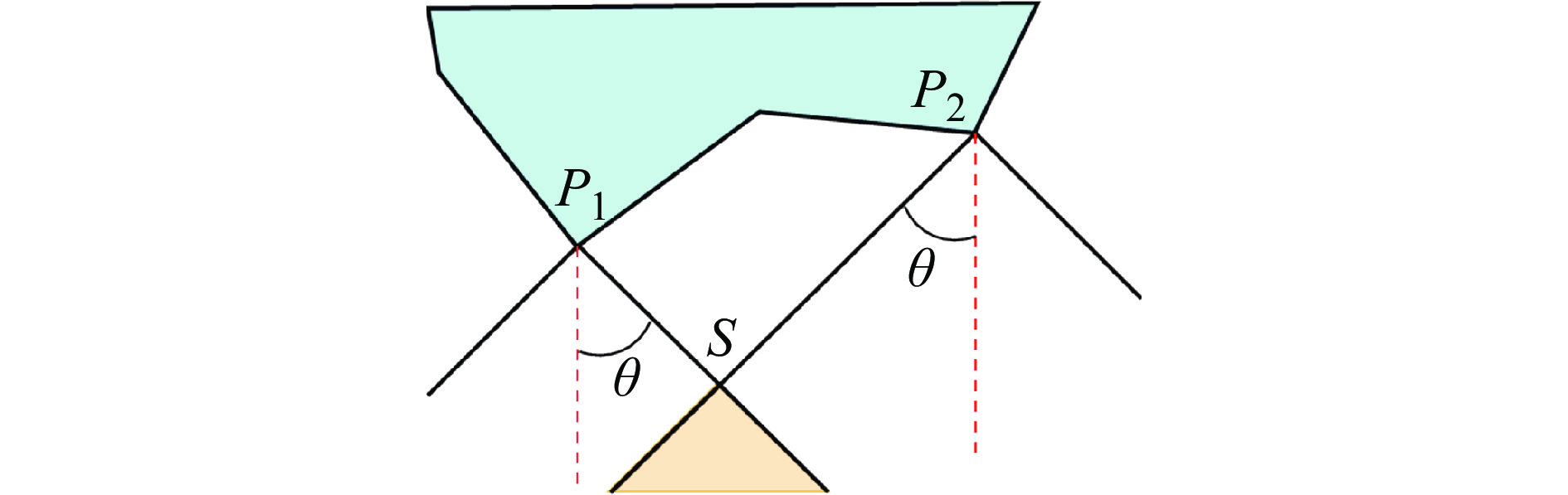
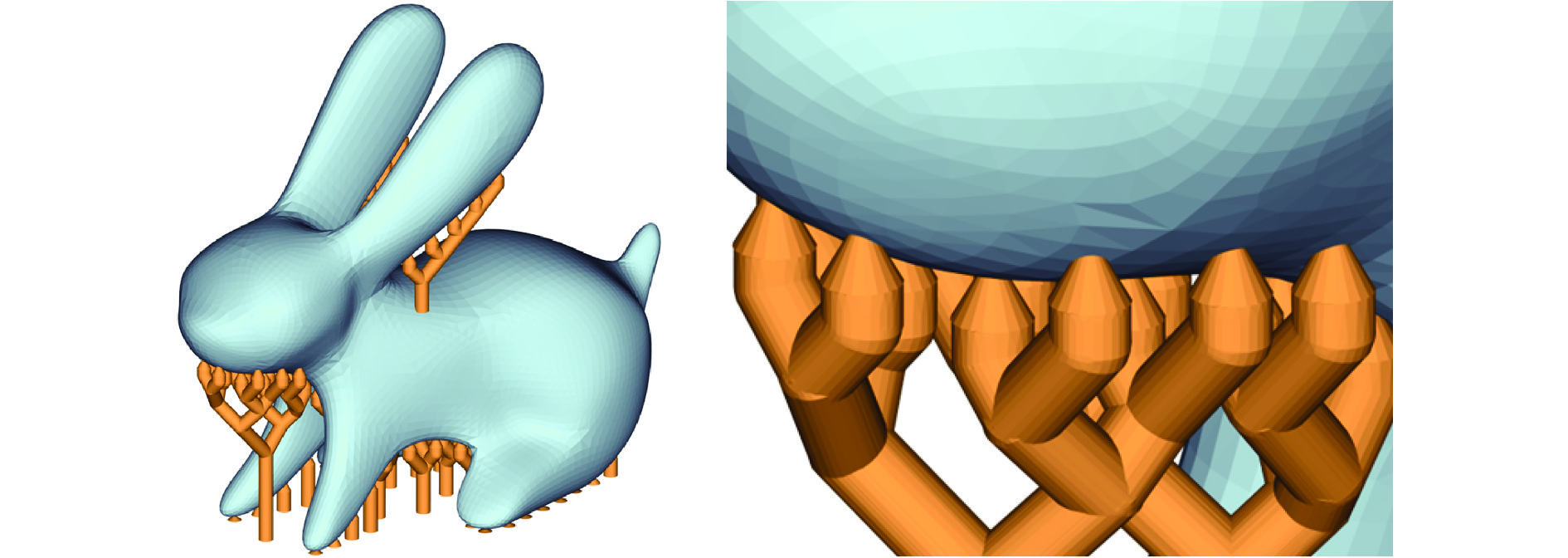
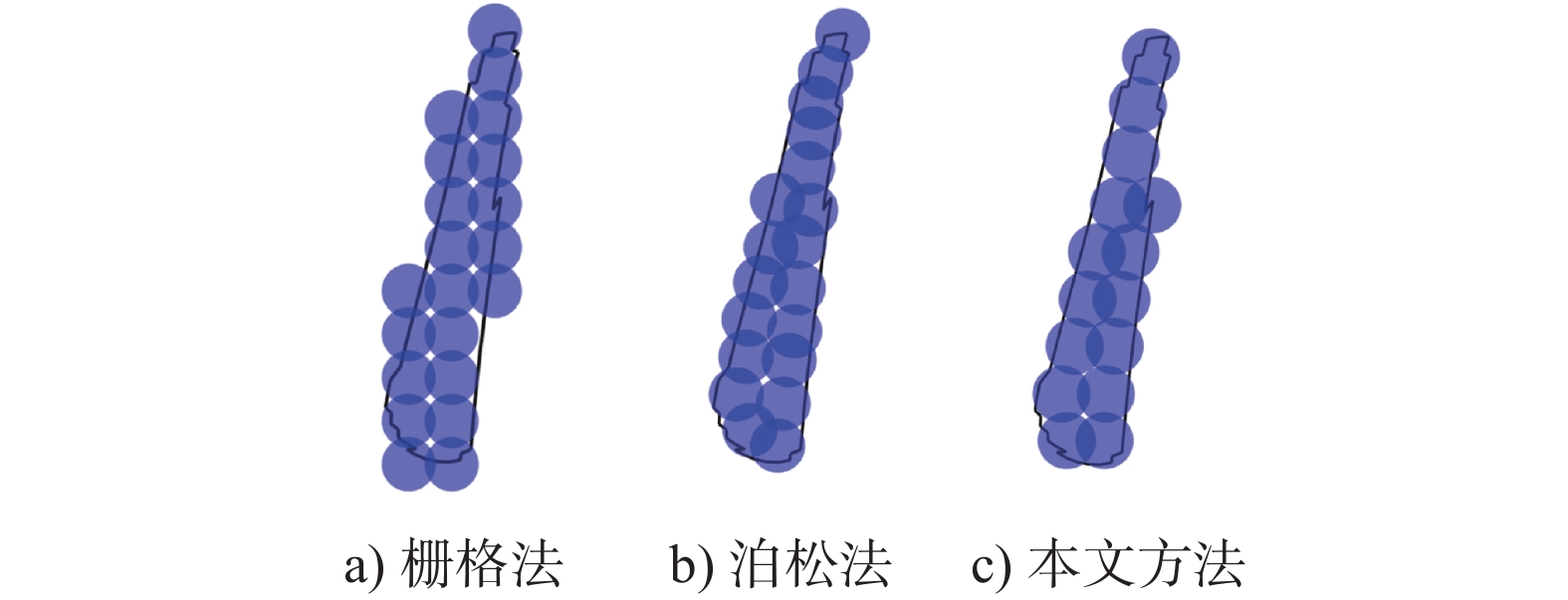
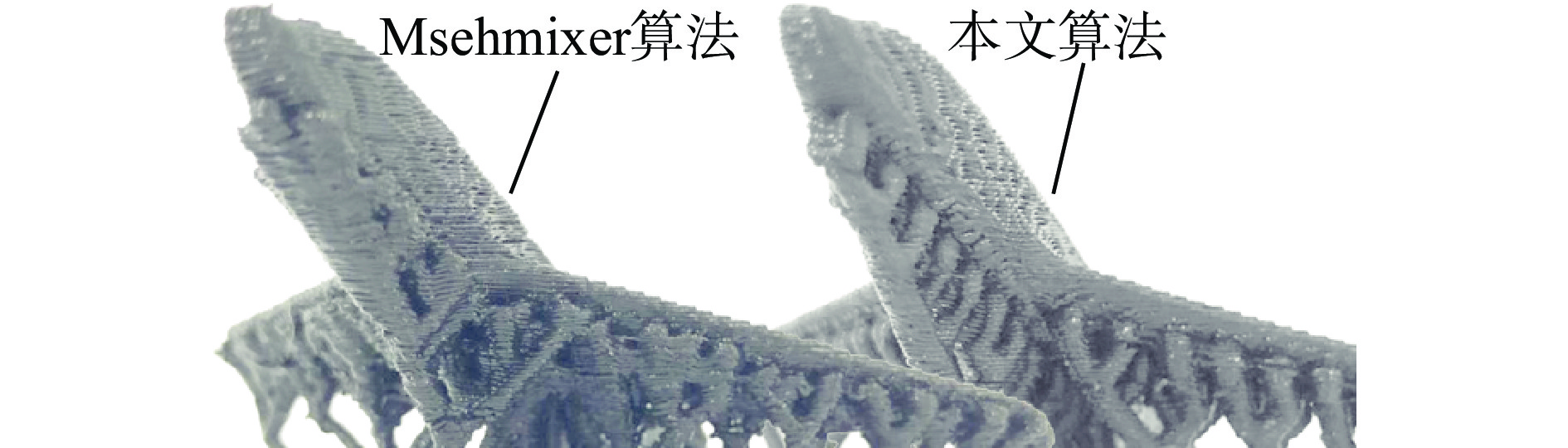
提出一种自适应树状支撑生成算法。首先识别待支撑三角面片并进行区域划分,利用基于区域轮廓的自适应采样算法获得待支撑点;然后根据临界倾角约束条件,采用最近合并原则自上而下计算树状支撑结构的中间节点;最后采用扫掠法对支撑路径实体化,同时对与模型连接部分的支撑结构进行削尖处理,使其易于剥离。实验结果表明,该算法能够在保证支撑稳定性的同时减少待支撑点的数量,降低支撑材料的消耗量,减少打印时间。
提出一种自适应树状支撑生成算法。首先识别待支撑三角面片并进行区域划分,利用基于区域轮廓的自适应采样算法获得待支撑点;然后根据临界倾角约束条件,采用最近合并原则自上而下计算树状支撑结构的中间节点;最后采用扫掠法对支撑路径实体化,同时对与模型连接部分的支撑结构进行削尖处理,使其易于剥离。实验结果表明,该算法能够在保证支撑稳定性的同时减少待支撑点的数量,降低支撑材料的消耗量,减少打印时间。



2021, 40(11): 1735-1740.
doi: 10.13433/j.cnki.1003-8728.20200260
摘要:
航空发动机叶片表面完整性严重影响叶片疲劳强度和服役寿命。为掌握砂布轮柔性抛光叶片表面完整性关键表征参数,基于“数控机床+柔性磨头+弹性磨具(砂布轮)”的抛光工艺装备开展了TC4叶片抛光试验和表面完整性检测,对比了抛光前后表面完整性各项表征参数变化,分析了变化机理,结果表明:砂布轮柔性抛光对叶片表面粗糙度、表面微观形貌、表面残余应力、表面显微硬度有明显改善,对深度方向残余应力、深度方向显微硬度、微观组织没有影响。研究结果为砂布轮抛光表面完整性控制提供了依据。
航空发动机叶片表面完整性严重影响叶片疲劳强度和服役寿命。为掌握砂布轮柔性抛光叶片表面完整性关键表征参数,基于“数控机床+柔性磨头+弹性磨具(砂布轮)”的抛光工艺装备开展了TC4叶片抛光试验和表面完整性检测,对比了抛光前后表面完整性各项表征参数变化,分析了变化机理,结果表明:砂布轮柔性抛光对叶片表面粗糙度、表面微观形貌、表面残余应力、表面显微硬度有明显改善,对深度方向残余应力、深度方向显微硬度、微观组织没有影响。研究结果为砂布轮抛光表面完整性控制提供了依据。









2021, 40(11): 1741-1746.
doi: 10.13433/j.cnki.1003-8728.20200268
摘要:
以风力发电机叶片为研究对象,提出风力机叶片表面应变的光纤光栅(Fiber Bragg Grating,FBG)检测方法。通过数值模拟得到叶片表面应变分布规律,以此设计光纤光栅检测方法,并开展叶片表面应变检测实验。通过对实验结果和仿真数据进行对比、分析,验证所提检测方法的可行性与有效性。结果表明:光纤光栅传感器结构轻简、信噪比高;该检测方法能够实现快速准确地检测风力机叶片表面应变变化。
以风力发电机叶片为研究对象,提出风力机叶片表面应变的光纤光栅(Fiber Bragg Grating,FBG)检测方法。通过数值模拟得到叶片表面应变分布规律,以此设计光纤光栅检测方法,并开展叶片表面应变检测实验。通过对实验结果和仿真数据进行对比、分析,验证所提检测方法的可行性与有效性。结果表明:光纤光栅传感器结构轻简、信噪比高;该检测方法能够实现快速准确地检测风力机叶片表面应变变化。










2021, 40(11): 1747-1753.
doi: 10.13433/j.cnki.1003-8728.20200280
摘要:
为改进优化压缩感知理论中以凸优化方式的重构算法在滚动轴承故障信号的应用中存在重构误差较大、重构迭代次数多及重构误差信噪比低等问题。本文提出采用反正弦函数取代双曲函数近似逼近l0范数,使得函数曲线与l0范数的逼近程度更高且更为光滑,同时加入衰减因子,加快迭代速度。实验结果表明该算法加入衰减因子后在一定程度上减少了迭代次数,却损失了部分重构精度,但整体重构效果相对已有算法具有重构精度高、迭代次数少及重构信噪比高的优势。
为改进优化压缩感知理论中以凸优化方式的重构算法在滚动轴承故障信号的应用中存在重构误差较大、重构迭代次数多及重构误差信噪比低等问题。本文提出采用反正弦函数取代双曲函数近似逼近l0范数,使得函数曲线与l0范数的逼近程度更高且更为光滑,同时加入衰减因子,加快迭代速度。实验结果表明该算法加入衰减因子后在一定程度上减少了迭代次数,却损失了部分重构精度,但整体重构效果相对已有算法具有重构精度高、迭代次数少及重构信噪比高的优势。










2021, 40(11): 1754-1759.
doi: 10.13433/j.cnki.1003-8728.20200557
摘要:
将线性压缩机的机械和电磁两部分分别构建了物理模型。在物理模型基础上以驱动电压为输入、活塞位移为输出构建了线性压缩机状态方程;采用变速趋近律滑模控制算法设计线性压缩机控制器,并在Simulink中搭建线性压缩机控制系统;通过数值仿真方法与传统指数趋近律控制器进行对比,结果表明:变速趋近律滑模控制器在到达稳态时间、抖振程度上均优于传统指数趋近律控制器,并且在控制精度上提升了约20%,同时α =1.346、k = 13.499时变速趋近律滑模控制器取得最优控制效果,通过试验测试得到控制误差在4% ~7.8%之间,验证了控制器的控制精度及有效性。
将线性压缩机的机械和电磁两部分分别构建了物理模型。在物理模型基础上以驱动电压为输入、活塞位移为输出构建了线性压缩机状态方程;采用变速趋近律滑模控制算法设计线性压缩机控制器,并在Simulink中搭建线性压缩机控制系统;通过数值仿真方法与传统指数趋近律控制器进行对比,结果表明:变速趋近律滑模控制器在到达稳态时间、抖振程度上均优于传统指数趋近律控制器,并且在控制精度上提升了约20%,同时α =1.346、k = 13.499时变速趋近律滑模控制器取得最优控制效果,通过试验测试得到控制误差在4% ~7.8%之间,验证了控制器的控制精度及有效性。












2021, 40(11): 1760-1766.
doi: 10.13433/j.cnki.1003-8728.20200267
摘要:
非道路车辆由于经常行驶在非铺装路面上,在行驶过程中会因路面不平、加速减速和转弯变向等情况受到多个方向的冲击振动,且这类车辆的座椅悬架不能有效地衰减此类冲击振动,而目前对于座椅悬架减振的研究多集中在被动减振与垂直方向减振,多维协同主动减振的研究相对较少。为此选用可衰减多维振动的3-RCC并联机构为座椅悬架系统,在ADAMS搭建3-RCC悬架模型的虚拟样机,并且结合主动控制原理,在MATLAB/Simulink搭建控制器,进行ADAMS与MATLAB联合仿真。仿真结果表明,3-RCC座椅悬架可实现多维协同减振,并且通过结合主动控制原理,进一步提升了驾驶员的乘坐舒适性。
非道路车辆由于经常行驶在非铺装路面上,在行驶过程中会因路面不平、加速减速和转弯变向等情况受到多个方向的冲击振动,且这类车辆的座椅悬架不能有效地衰减此类冲击振动,而目前对于座椅悬架减振的研究多集中在被动减振与垂直方向减振,多维协同主动减振的研究相对较少。为此选用可衰减多维振动的3-RCC并联机构为座椅悬架系统,在ADAMS搭建3-RCC悬架模型的虚拟样机,并且结合主动控制原理,在MATLAB/Simulink搭建控制器,进行ADAMS与MATLAB联合仿真。仿真结果表明,3-RCC座椅悬架可实现多维协同减振,并且通过结合主动控制原理,进一步提升了驾驶员的乘坐舒适性。














2021, 40(11): 1767-1772.
doi: 10.13433/j.cnki.1003-8728.20200282
摘要:
为降低因驾驶人疲劳驾驶导致的交通事故,需要开展驾驶人疲劳检测研究。为满足在线实时检测的要求,本文提出了融合面部特征的机动车驾驶人疲劳检测方法,首先通过背景差分缩小检测区域、减少图像金字塔层数等方法对MTCNN人脸检测网络进行优化加速,加速后的速度与之前相比提升了258%。其次通过多级级联的残差回归树对人脸进行特征点检测,得到了人脸的特征点,最后通过融合面部嘴、眼开合度特征的方式建立驾驶人疲劳检测模型并进行训练。实验表明,该检测方法的准确率可达95.4%,每帧检测平均速度64 ms,检测速度快,能满足实时性的要求。
为降低因驾驶人疲劳驾驶导致的交通事故,需要开展驾驶人疲劳检测研究。为满足在线实时检测的要求,本文提出了融合面部特征的机动车驾驶人疲劳检测方法,首先通过背景差分缩小检测区域、减少图像金字塔层数等方法对MTCNN人脸检测网络进行优化加速,加速后的速度与之前相比提升了258%。其次通过多级级联的残差回归树对人脸进行特征点检测,得到了人脸的特征点,最后通过融合面部嘴、眼开合度特征的方式建立驾驶人疲劳检测模型并进行训练。实验表明,该检测方法的准确率可达95.4%,每帧检测平均速度64 ms,检测速度快,能满足实时性的要求。










2021, 40(11): 1773-1778.
doi: 10.13433/j.cnki.1003-8728.20200269
摘要:
为了研究侧向压缩载荷下单侧面板含穿孔的平纹编织面板蜂窝夹芯板的损伤行为,建立考虑湿热效应的渐进损伤模型。编写UMAT子程序将考虑湿热效应的本构关系、温度变化对材料属性的影响、选用的失效准则和刚度退化模型加入到考虑湿热效应的渐进损伤分析中。将模型在25 ℃、0吸湿量条件下预测的位移-载荷曲线及失效形式与实验进行对照,以验证建立模型的正确性。进一步在5个温度和5个湿度下研究湿热效应对受侧向压缩载荷的蜂窝夹芯板承载强度的影响。结果表明,建立的模型可有效预测损伤的扩展过程和湿热环境对蜂窝板性能的影响,随着温度和湿度的增加,蜂窝板的承载强度逐渐下降。
为了研究侧向压缩载荷下单侧面板含穿孔的平纹编织面板蜂窝夹芯板的损伤行为,建立考虑湿热效应的渐进损伤模型。编写UMAT子程序将考虑湿热效应的本构关系、温度变化对材料属性的影响、选用的失效准则和刚度退化模型加入到考虑湿热效应的渐进损伤分析中。将模型在25 ℃、0吸湿量条件下预测的位移-载荷曲线及失效形式与实验进行对照,以验证建立模型的正确性。进一步在5个温度和5个湿度下研究湿热效应对受侧向压缩载荷的蜂窝夹芯板承载强度的影响。结果表明,建立的模型可有效预测损伤的扩展过程和湿热环境对蜂窝板性能的影响,随着温度和湿度的增加,蜂窝板的承载强度逐渐下降。





2021, 40(11): 1779-1786.
doi: 10.13433/j.cnki.1003-8728.20200265
摘要:
非正交航空弧齿锥齿轮由于其高速重载服役特性,齿面磨削精度要求高,很难实现实际齿面与理论齿面的匹配。为了满足高效率高精度要求,本文提出了一种齿面精度自适应加工参数驱动控制方法。首先,基于先进的全工序法磨削仿真,进行加工参数驱动的齿面精确数学建模。然后,以磨削精度为控制目标,建立齿面误差测量、齿面设计,齿面误差反调集成的加工精度自适应控制模型。最后,通过齿面误差敏感性分析策略和改进Levenberg-Marquardt算法,实现预设目标齿面的自适应逼近,求解最终精确机床加工参数。本文提供的算例证明了该方法有效性。
非正交航空弧齿锥齿轮由于其高速重载服役特性,齿面磨削精度要求高,很难实现实际齿面与理论齿面的匹配。为了满足高效率高精度要求,本文提出了一种齿面精度自适应加工参数驱动控制方法。首先,基于先进的全工序法磨削仿真,进行加工参数驱动的齿面精确数学建模。然后,以磨削精度为控制目标,建立齿面误差测量、齿面设计,齿面误差反调集成的加工精度自适应控制模型。最后,通过齿面误差敏感性分析策略和改进Levenberg-Marquardt算法,实现预设目标齿面的自适应逼近,求解最终精确机床加工参数。本文提供的算例证明了该方法有效性。








2021, 40(11): 1787-1792.
doi: 10.13433/j.cnki.1003-8728.20200275
摘要:
滚柱挤压强化是重要的表面处理方法,能够在材料内部形成稳定的残余应力,进而有效提高结构的疲劳性能。针对TA15钛合金开孔结构,滚柱挤压强化参数对残余应力及疲劳寿命的影响规律有待进一步研究。基于Johnson-Cook方程建立了TA15滚柱挤压过程仿真模型,揭示了不同挤压量和摩擦因数下,残余应力的产生、扩展及影响范围,探讨了挤压后孔壁材料在周向及轴向的变形规律;开展了TA15开孔结构疲劳寿命试验,对比研究了挤压强化后疲劳寿命的增益效果。
滚柱挤压强化是重要的表面处理方法,能够在材料内部形成稳定的残余应力,进而有效提高结构的疲劳性能。针对TA15钛合金开孔结构,滚柱挤压强化参数对残余应力及疲劳寿命的影响规律有待进一步研究。基于Johnson-Cook方程建立了TA15滚柱挤压过程仿真模型,揭示了不同挤压量和摩擦因数下,残余应力的产生、扩展及影响范围,探讨了挤压后孔壁材料在周向及轴向的变形规律;开展了TA15开孔结构疲劳寿命试验,对比研究了挤压强化后疲劳寿命的增益效果。










2021, 40(11): 1793-1797.
doi: 10.13433/j.cnki.1003-8728.20200281
摘要:
在某缩比验证机推力矢量系统研制中,首先采用两套电动舵机驱动的连杆机构的设计方案,实现了矢量喷管的轴对称偏转。通过分析矢量喷管偏转过程中作动机构受力关系和运动关系,得到舵机需提供的最大扭矩与最大铰链力矩的关系。分别采用工程估算和CFD数值模拟两种方法对矢量喷管偏转产生的铰链力矩进行了计算。通过地面试验和飞行试验验证了所研制的轴对称推力矢量系统满足工程应用要求。
在某缩比验证机推力矢量系统研制中,首先采用两套电动舵机驱动的连杆机构的设计方案,实现了矢量喷管的轴对称偏转。通过分析矢量喷管偏转过程中作动机构受力关系和运动关系,得到舵机需提供的最大扭矩与最大铰链力矩的关系。分别采用工程估算和CFD数值模拟两种方法对矢量喷管偏转产生的铰链力矩进行了计算。通过地面试验和飞行试验验证了所研制的轴对称推力矢量系统满足工程应用要求。









2021, 40(11): 1798-1804.
doi: 10.13433/j.cnki.1003-8728.20200565
摘要:
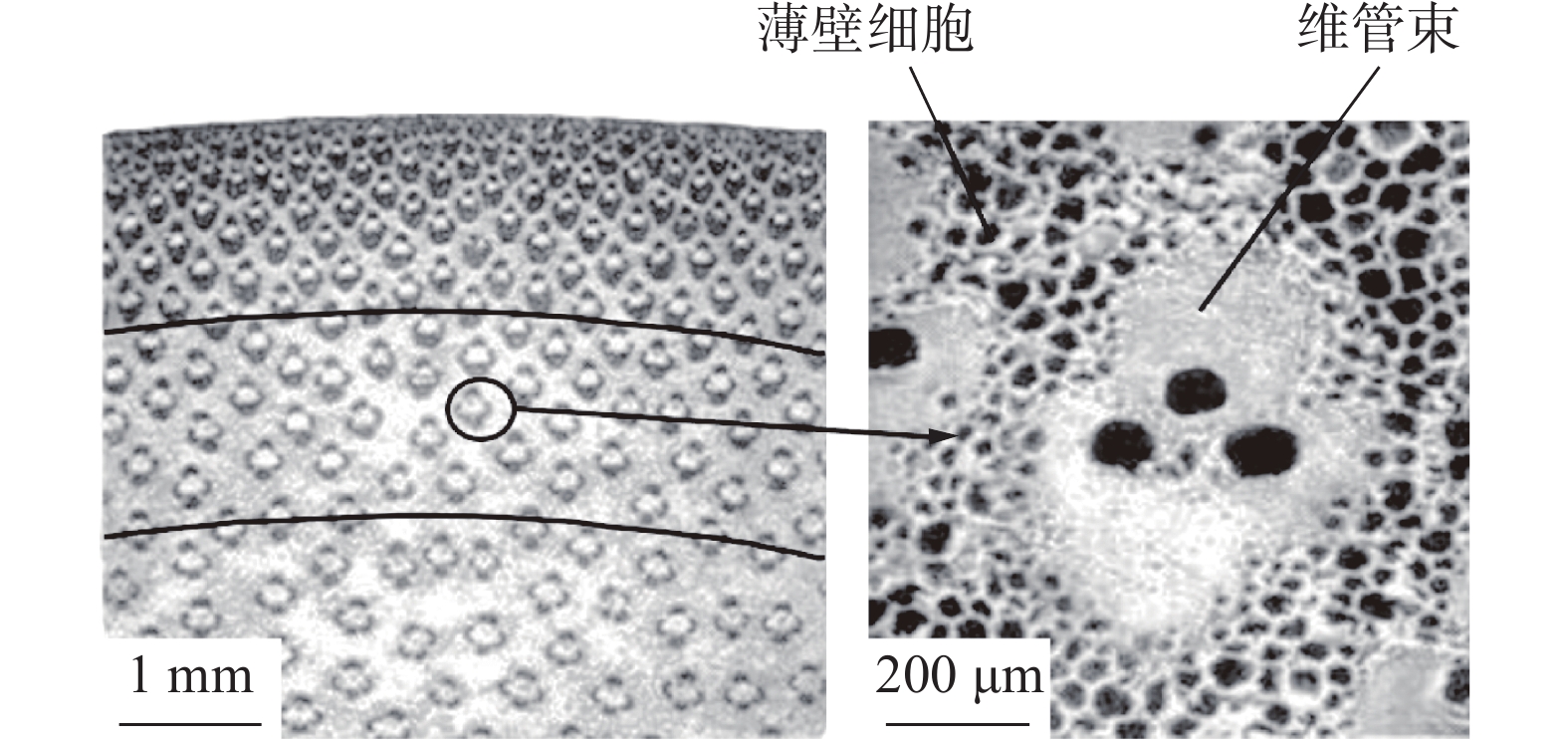
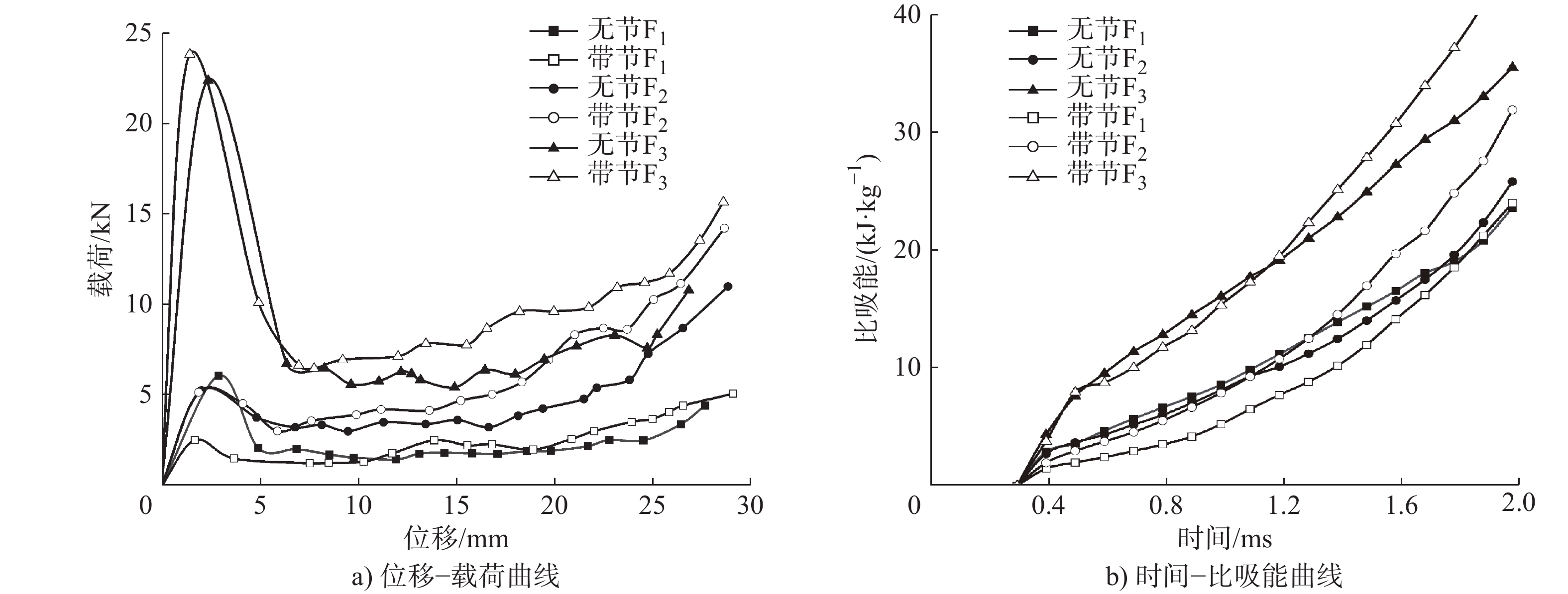
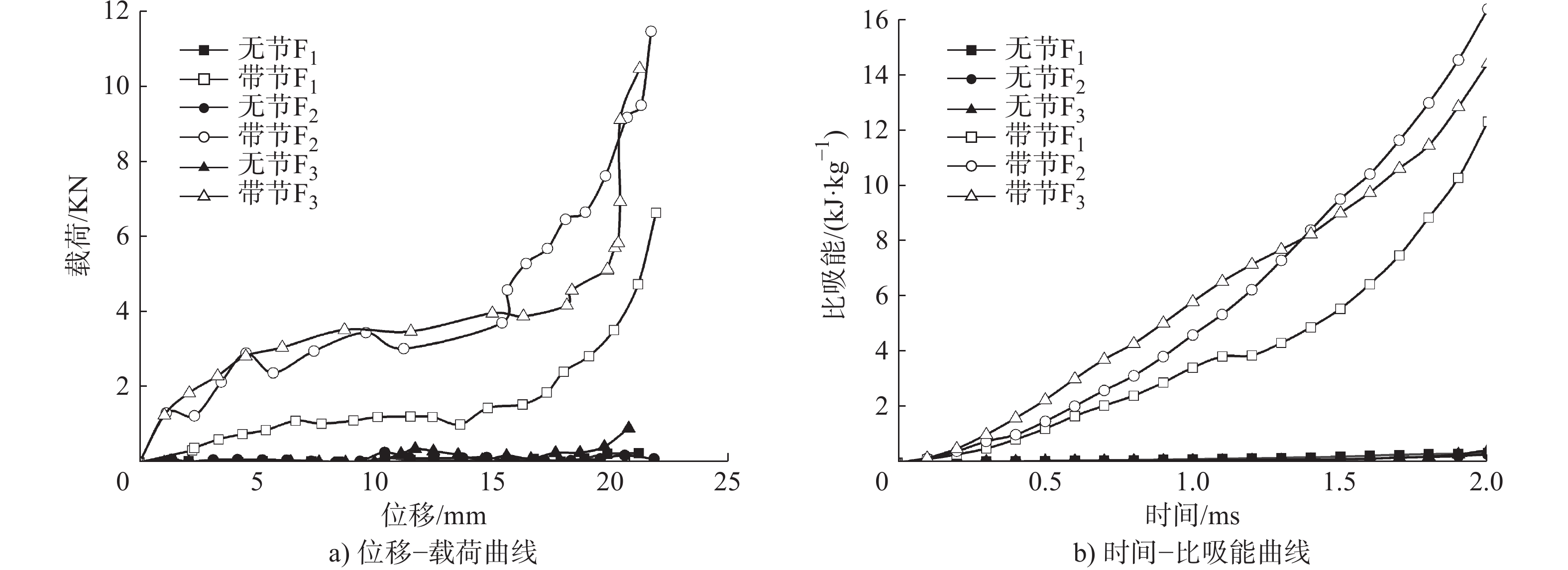
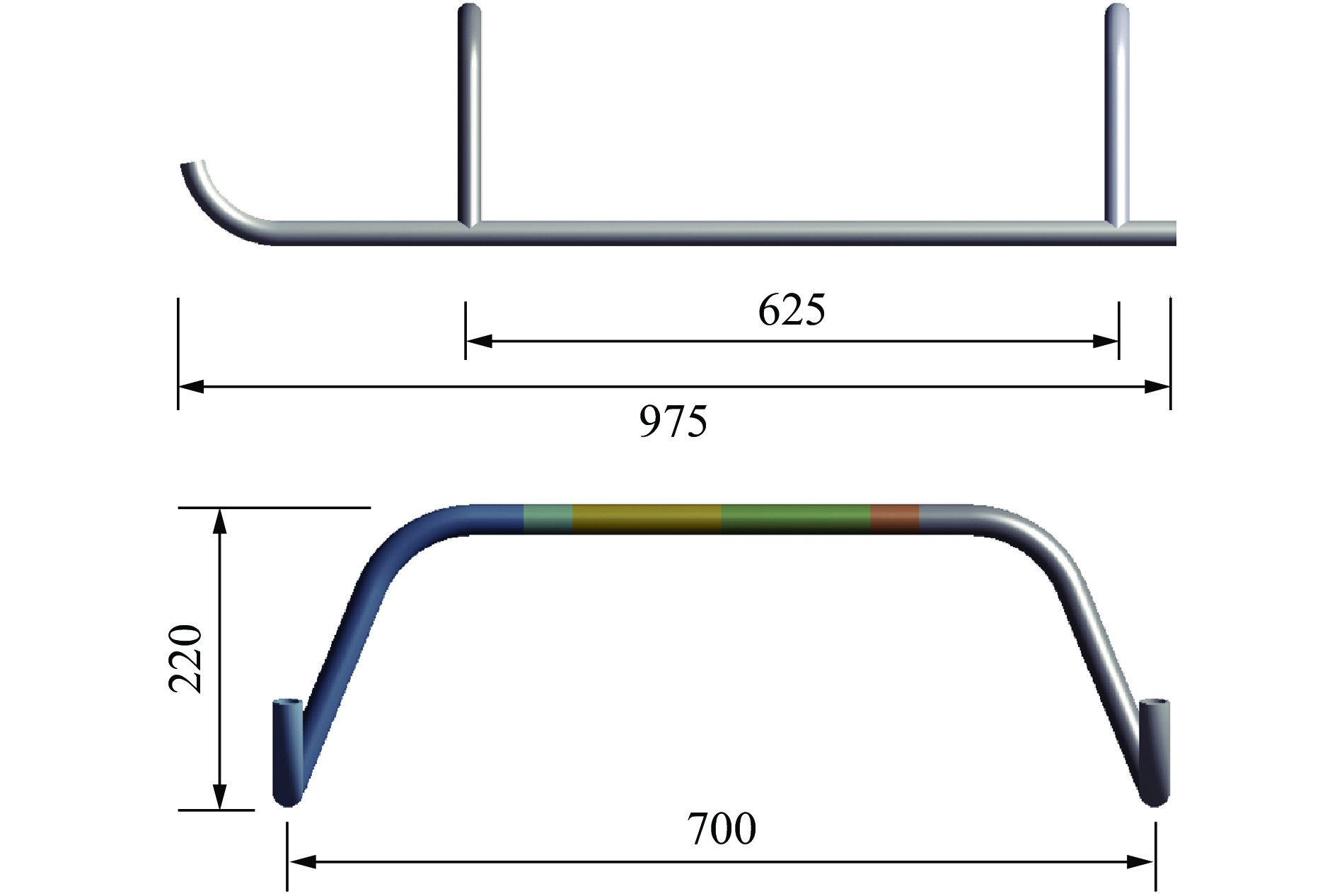
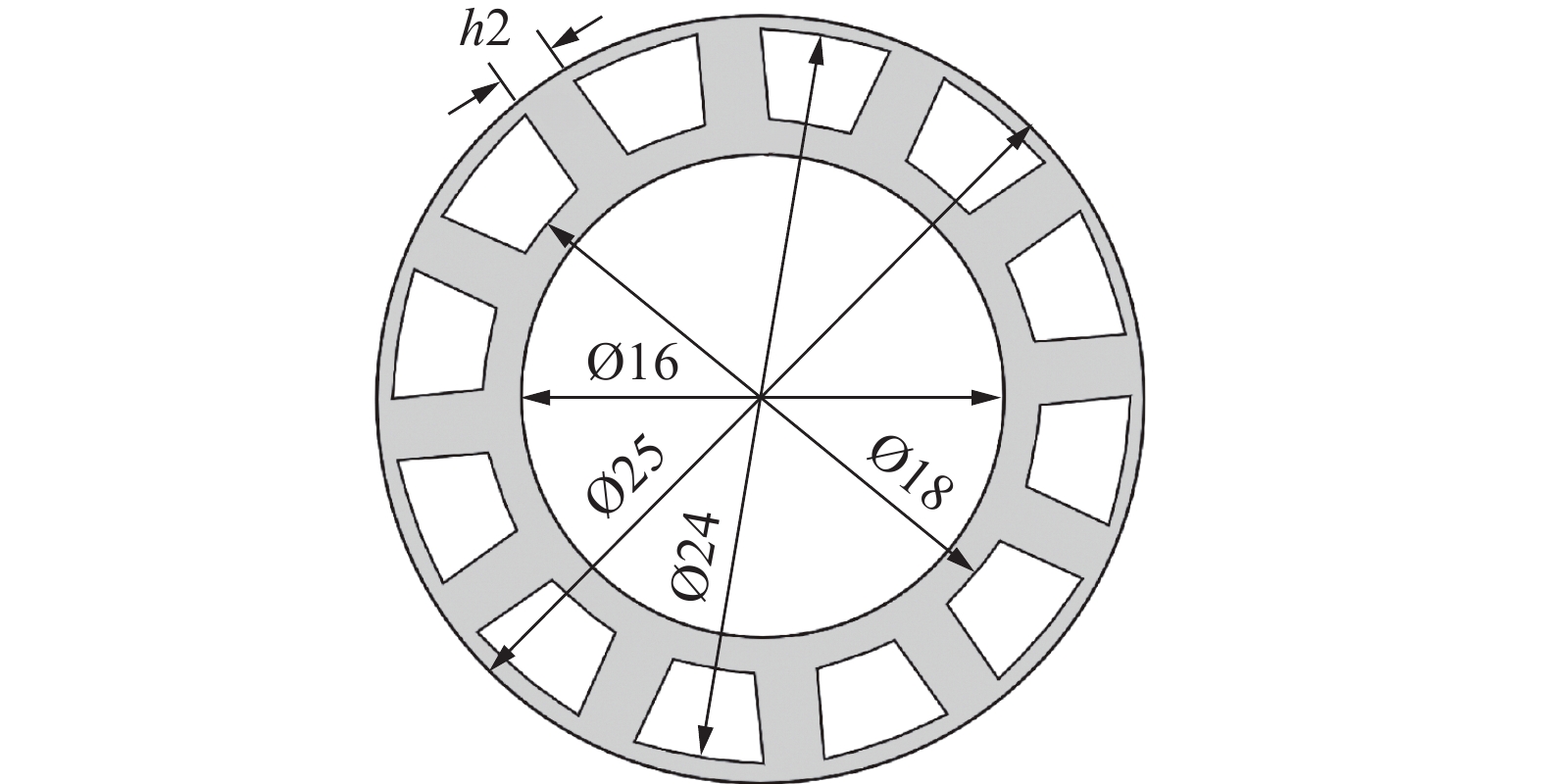
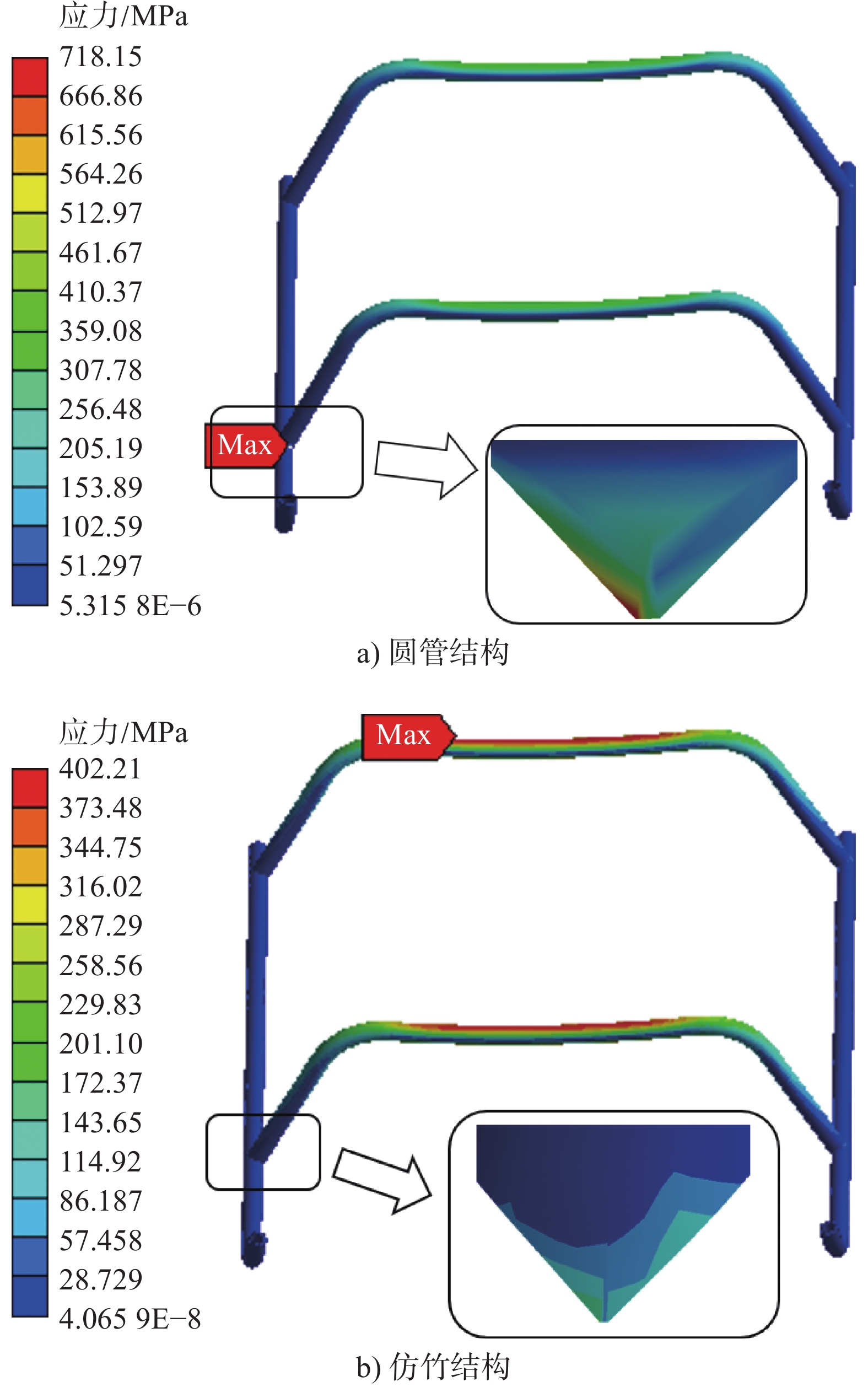
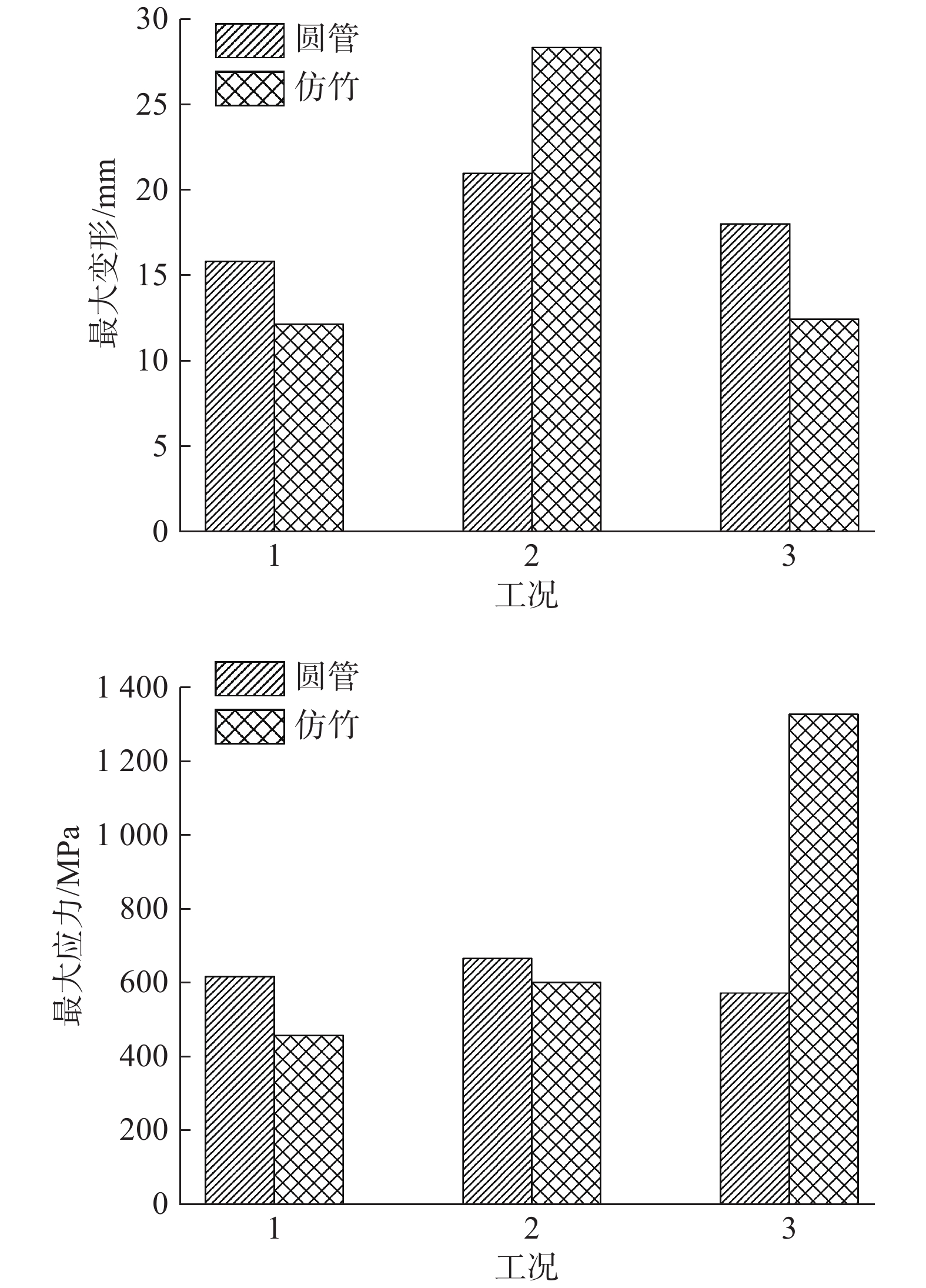
应用于无人机的滑撬式起落架多使用弓形梁结构,几何特征上梁是一种细长弹性体,与竹子结构(具有较大细长比)相似。为了提高滑撬式起落架的结构性能,首先参考竹子的微观结构,设计了三种类维管束的仿生圆管,采用有限元法对仿生管轴向与径向碰撞吸能进行了仿真与计算;其次通过有限元静力学与动力学分析,对比了原结构与仿竹结构在相同载荷下的力学性能。仿真结果表明:静力学分析中,仿竹结构的最大应力相较于原结构降低约44%,并改善了弓形梁与滑筒连接处应力集中现象;动力学分析通过多工况模拟了起落架可能出现的平稳着陆与非平稳着陆,采用仿竹结构多工况的最大应力平均降低约22%,有效地提升了着陆性能。
应用于无人机的滑撬式起落架多使用弓形梁结构,几何特征上梁是一种细长弹性体,与竹子结构(具有较大细长比)相似。为了提高滑撬式起落架的结构性能,首先参考竹子的微观结构,设计了三种类维管束的仿生圆管,采用有限元法对仿生管轴向与径向碰撞吸能进行了仿真与计算;其次通过有限元静力学与动力学分析,对比了原结构与仿竹结构在相同载荷下的力学性能。仿真结果表明:静力学分析中,仿竹结构的最大应力相较于原结构降低约44%,并改善了弓形梁与滑筒连接处应力集中现象;动力学分析通过多工况模拟了起落架可能出现的平稳着陆与非平稳着陆,采用仿竹结构多工况的最大应力平均降低约22%,有效地提升了着陆性能。