作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2020年 39卷 第4期
2020, 39(4): 493-500.
doi: 10.13433/j.cnki.1003-8728.20190183
 摘要
摘要 HTML
HTML PDF 4580KB
PDF 4580KB
摘要:
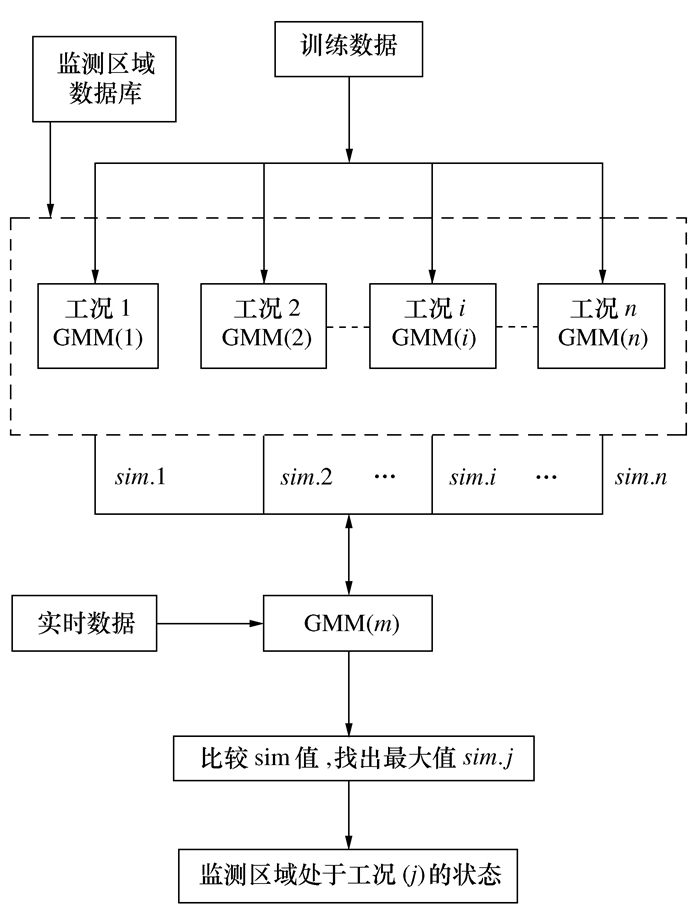
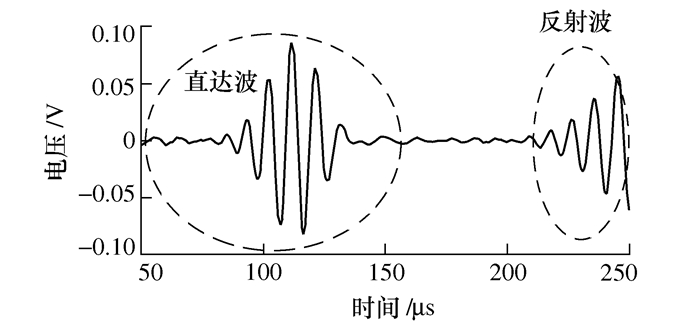
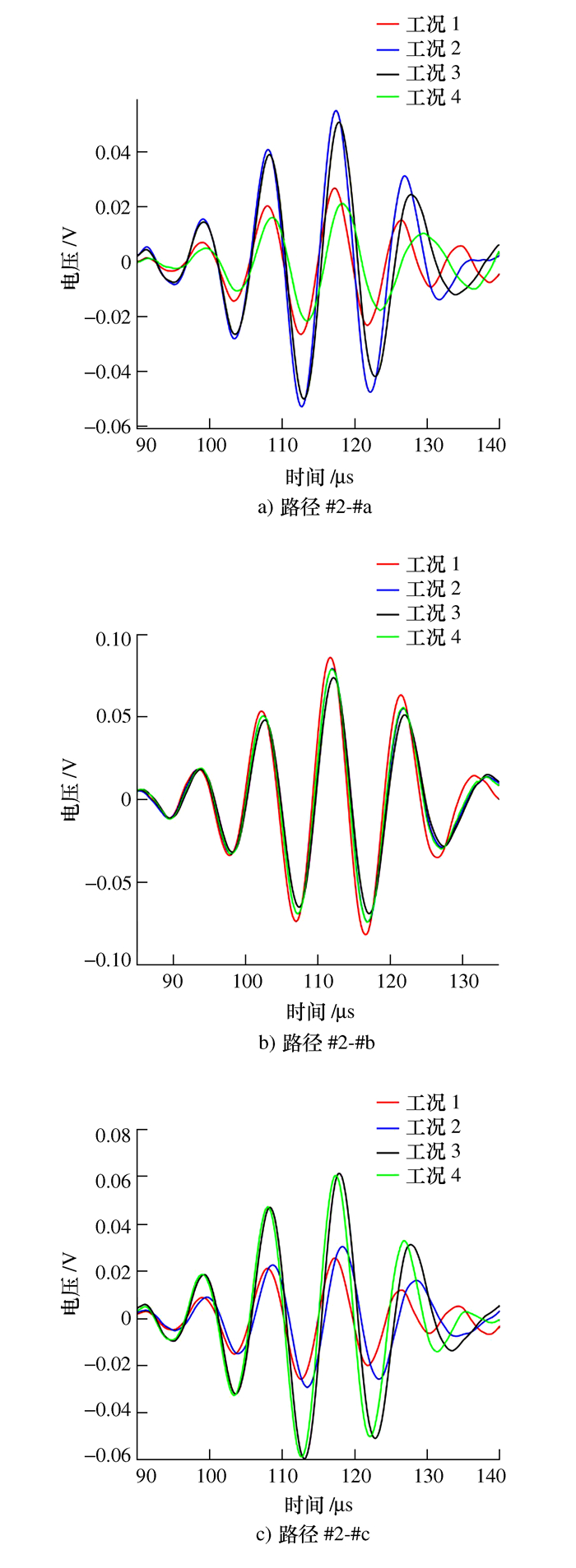
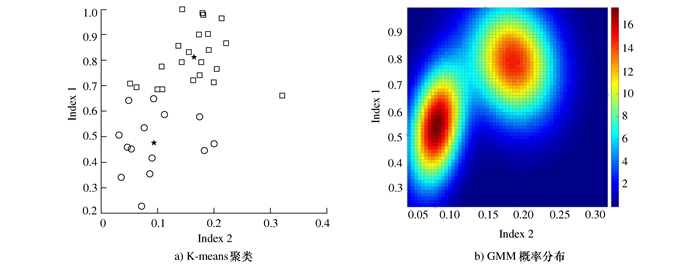
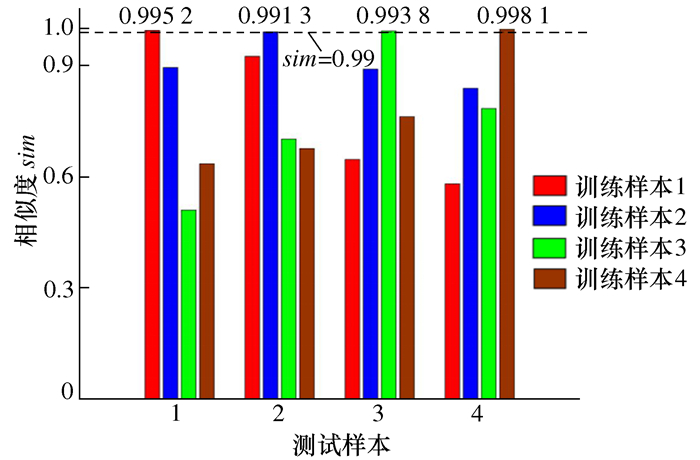
螺栓连接广泛应用于多种领域,及时发现螺栓松动的位置是结构健康监测的重要课题之一。利用粘贴在铝板上的压电阵列采集Lamb波信号,提取特征参数集建立高斯混合模型。通过采集监测区域内螺栓连接结构的各种松动工况的数据建立完备的基准数据库,更新实时数据建立动态高斯混合模型,基于高斯混合模型之间概率密度分布之间的相似度最大准则,判断监测区域的各个螺栓松动情况。实验结果表明,螺栓松紧状态一致的测试样本与训练样本之间的高斯混合模型概率分布相似度值达到0.99以上,明显高于工况不匹配的相似度,该方法可有效判断监测区域每个螺栓的松紧状态。
螺栓连接广泛应用于多种领域,及时发现螺栓松动的位置是结构健康监测的重要课题之一。利用粘贴在铝板上的压电阵列采集Lamb波信号,提取特征参数集建立高斯混合模型。通过采集监测区域内螺栓连接结构的各种松动工况的数据建立完备的基准数据库,更新实时数据建立动态高斯混合模型,基于高斯混合模型之间概率密度分布之间的相似度最大准则,判断监测区域的各个螺栓松动情况。实验结果表明,螺栓松紧状态一致的测试样本与训练样本之间的高斯混合模型概率分布相似度值达到0.99以上,明显高于工况不匹配的相似度,该方法可有效判断监测区域每个螺栓的松紧状态。






2020, 39(4): 501-507.
doi: 10.13433/j.cnki.1003-8728.20190180
摘要:
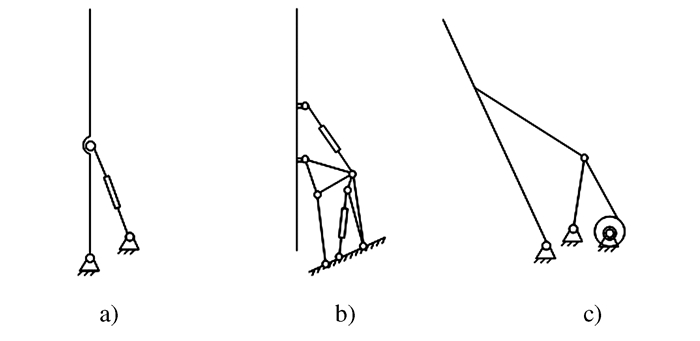
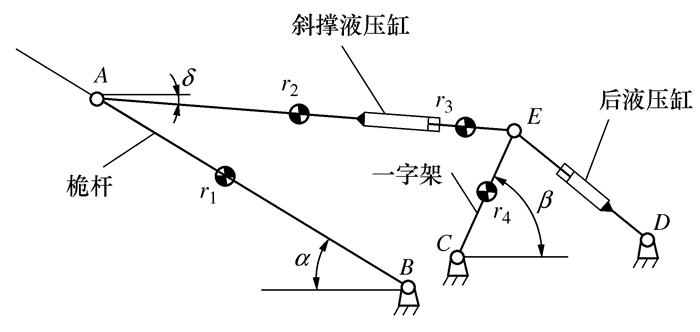
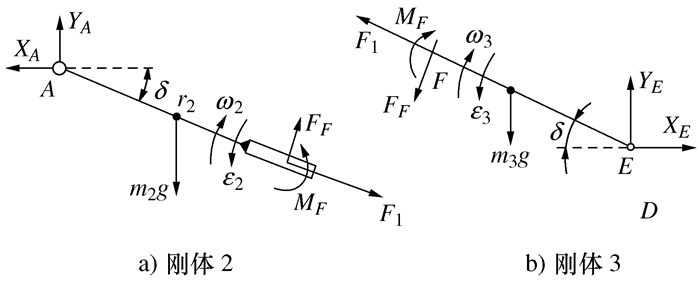
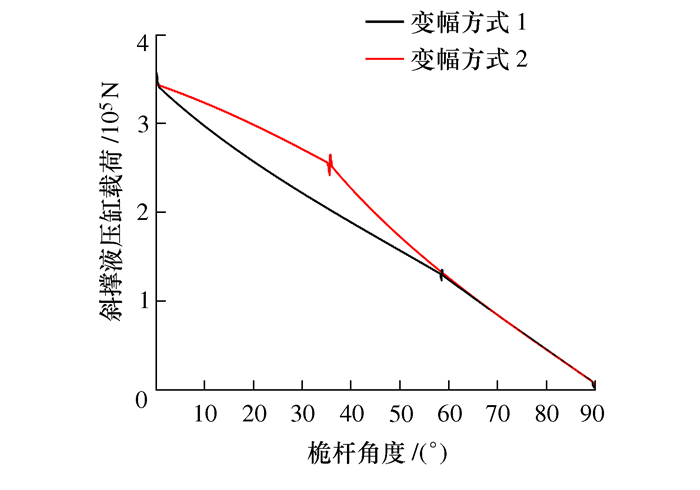
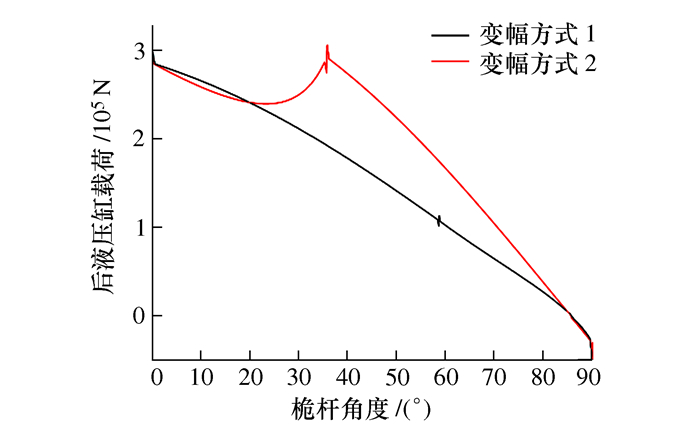
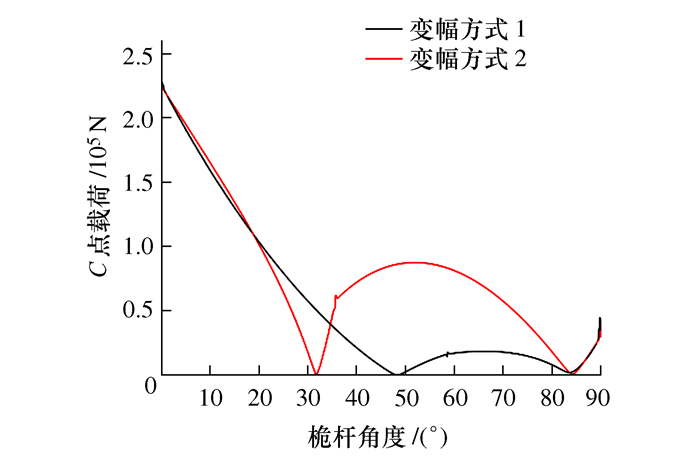
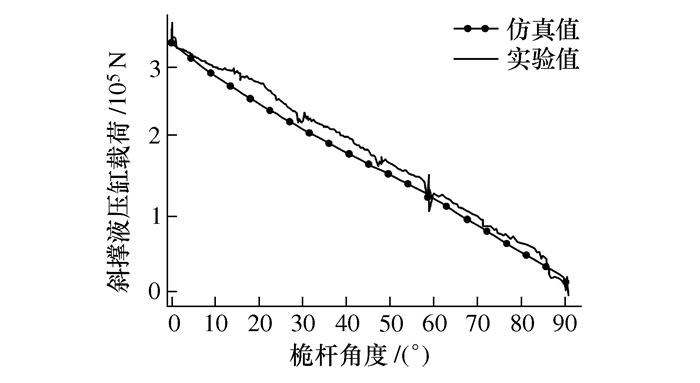
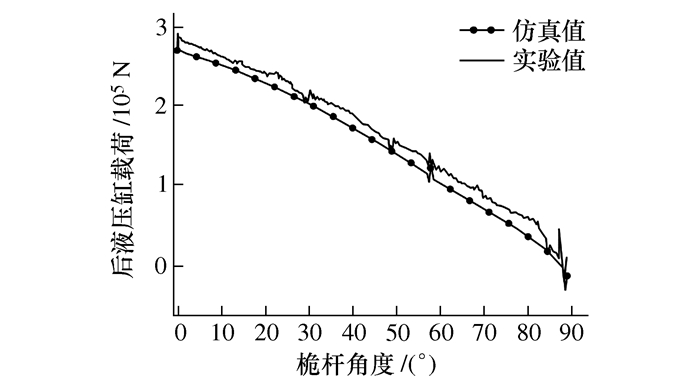
为研究桩架新型多组液压缸变幅机构的动力学特性,首先采用牛顿欧拉法建立含移动副的五杆机构的动力学模型,并使用MATLAB软件对数学模型进行仿真,然后分析两种不同变幅方式下斜撑液压缸、后液压缸、关键铰接点的载荷变化情况,最后搭建了新型变幅机构试验平台进行试验验证,对动力学仿真结果与试验结果进行对比分析。结果表明:该动力学模型能反映新型多组液压缸变幅机构的动力学特性,在变幅过程中,斜撑液压缸先收缩后液压缸再收缩的变幅方式比后液压缸先收缩斜撑液压缸再收缩的变幅方式有更好的力学性能,且关键铰接点载荷波动更小,更有利于提高整机的稳定性。
为研究桩架新型多组液压缸变幅机构的动力学特性,首先采用牛顿欧拉法建立含移动副的五杆机构的动力学模型,并使用MATLAB软件对数学模型进行仿真,然后分析两种不同变幅方式下斜撑液压缸、后液压缸、关键铰接点的载荷变化情况,最后搭建了新型变幅机构试验平台进行试验验证,对动力学仿真结果与试验结果进行对比分析。结果表明:该动力学模型能反映新型多组液压缸变幅机构的动力学特性,在变幅过程中,斜撑液压缸先收缩后液压缸再收缩的变幅方式比后液压缸先收缩斜撑液压缸再收缩的变幅方式有更好的力学性能,且关键铰接点载荷波动更小,更有利于提高整机的稳定性。



2020, 39(4): 508-515.
doi: 10.13433/j.cnki.1003-8728.20190186
摘要:
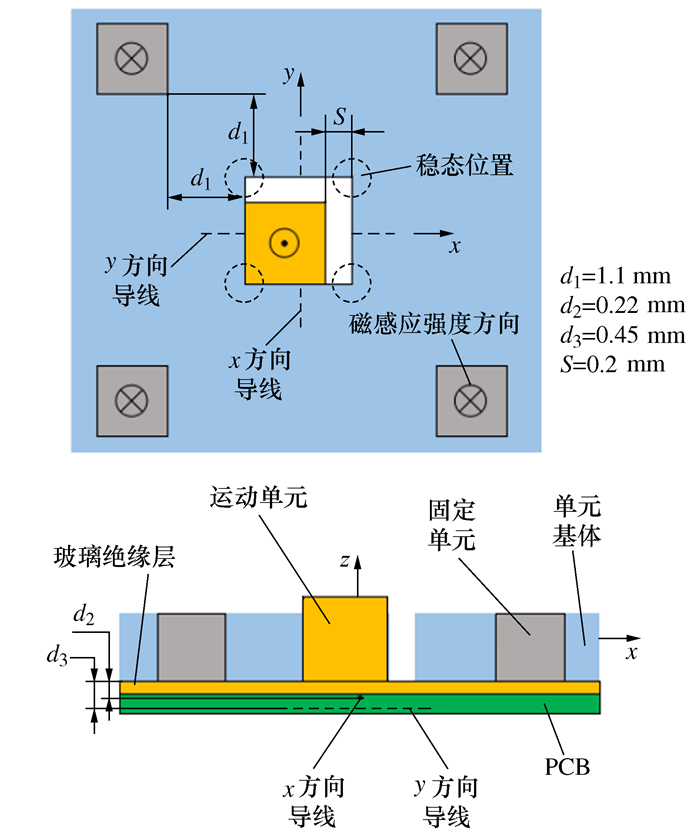
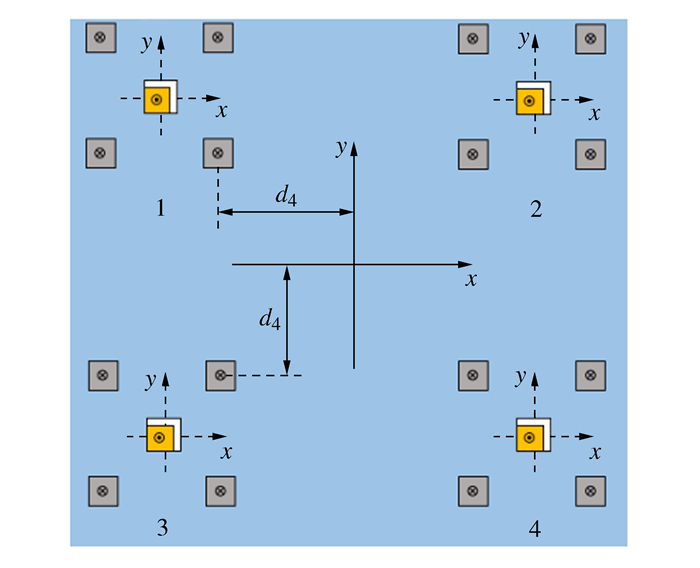
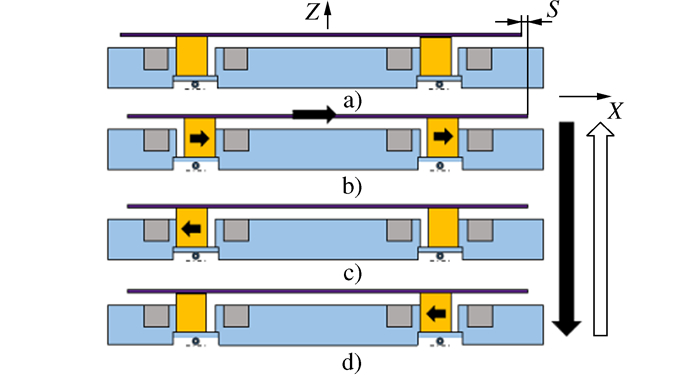
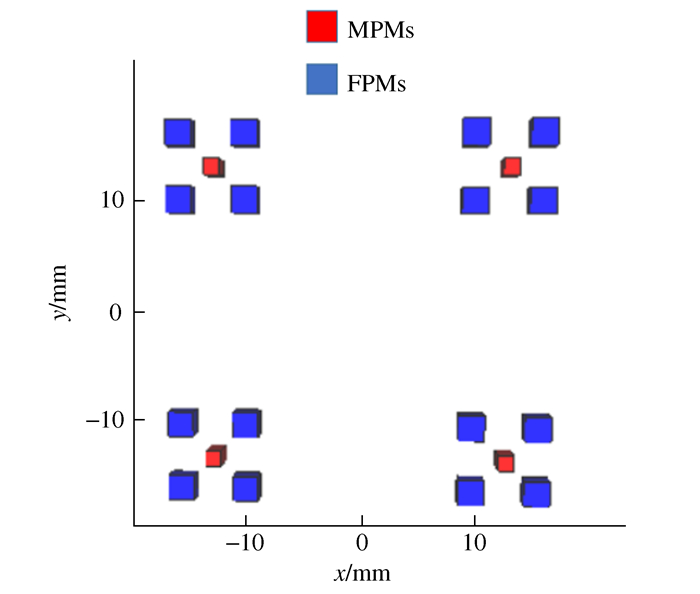
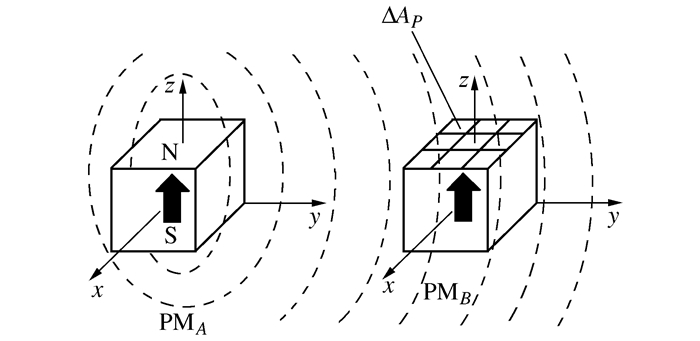
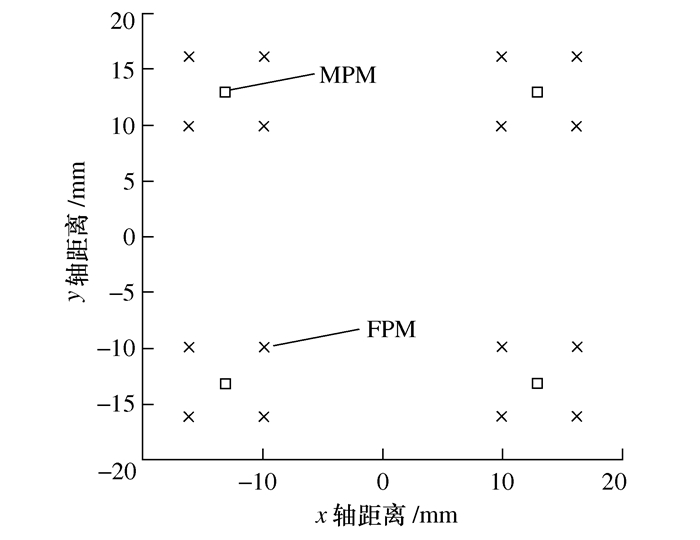
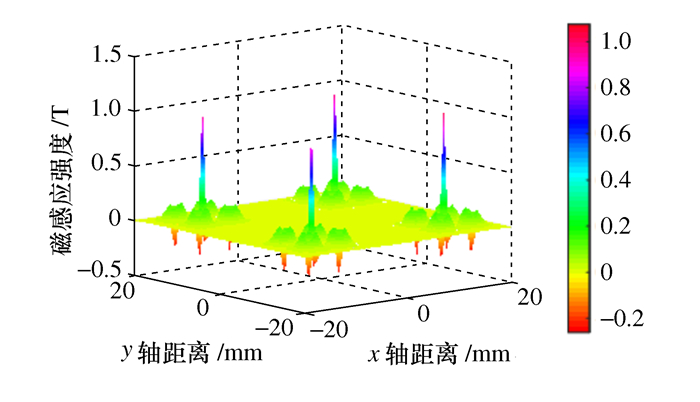
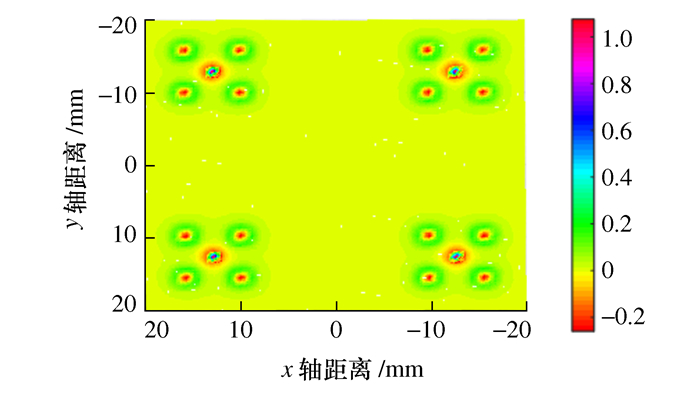
为了消除模拟执行器中安装反馈传感器造成的空间局限性对系统紧凑性设计需求带来负面影响和多磁体环境下空间静磁力耦合计算复杂等问题,应用电磁驱动原理设计并静态模拟分析了一种新型四稳态数字电磁执行器阵列,绘制阵列结构的磁通密度空间分布图,并基于Furlani空间磁感应方程进行阵列系统空间磁场建模,提出了新型多磁体间快速静磁耦合计算方法(单重叠加法)。模拟对比结果表明,单重叠加法的模型(即Matlab模型)与系统校验模型(即Radia模型)相比,单磁体所受静磁合力最大误差仅为2.94%;与传统计算方法(多重叠加法)相比,单重叠加法计算效率提高约65.82%,有较好的准确性和高效性;执行器阵列空间磁通密度分布具有均匀性、一致性和独立性。
为了消除模拟执行器中安装反馈传感器造成的空间局限性对系统紧凑性设计需求带来负面影响和多磁体环境下空间静磁力耦合计算复杂等问题,应用电磁驱动原理设计并静态模拟分析了一种新型四稳态数字电磁执行器阵列,绘制阵列结构的磁通密度空间分布图,并基于Furlani空间磁感应方程进行阵列系统空间磁场建模,提出了新型多磁体间快速静磁耦合计算方法(单重叠加法)。模拟对比结果表明,单重叠加法的模型(即Matlab模型)与系统校验模型(即Radia模型)相比,单磁体所受静磁合力最大误差仅为2.94%;与传统计算方法(多重叠加法)相比,单重叠加法计算效率提高约65.82%,有较好的准确性和高效性;执行器阵列空间磁通密度分布具有均匀性、一致性和独立性。




2020, 39(4): 516-523.
doi: 10.13433/j.cnki.1003-8728.20190184
摘要:
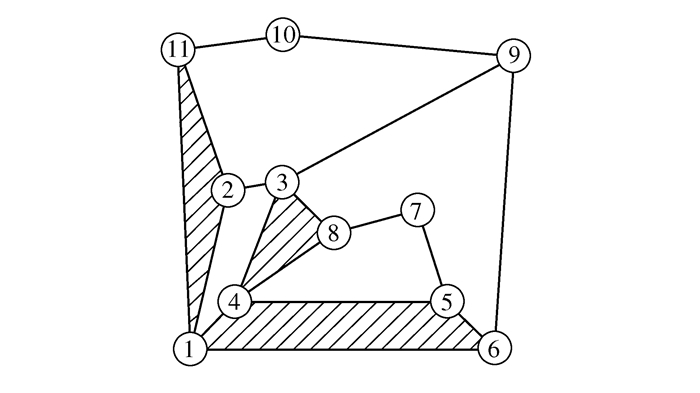
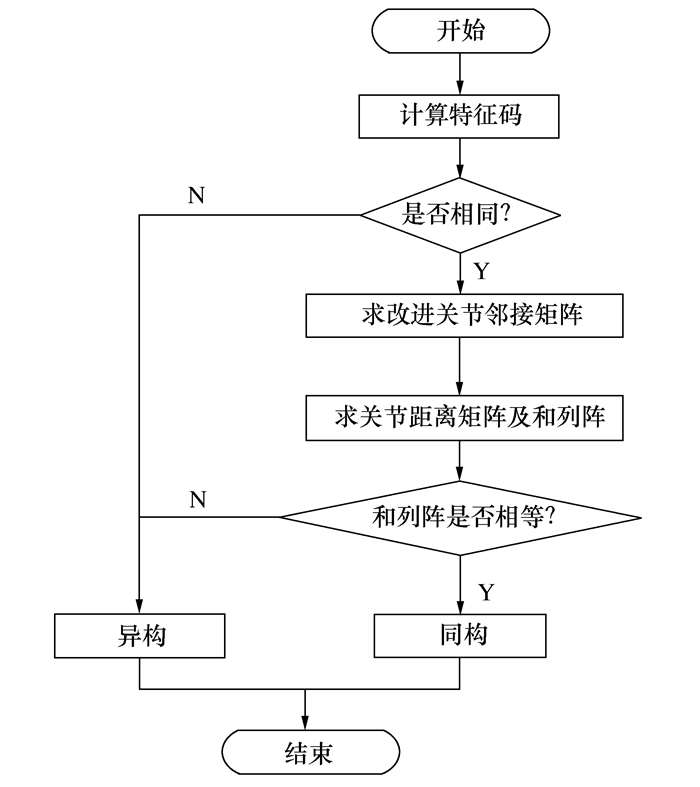
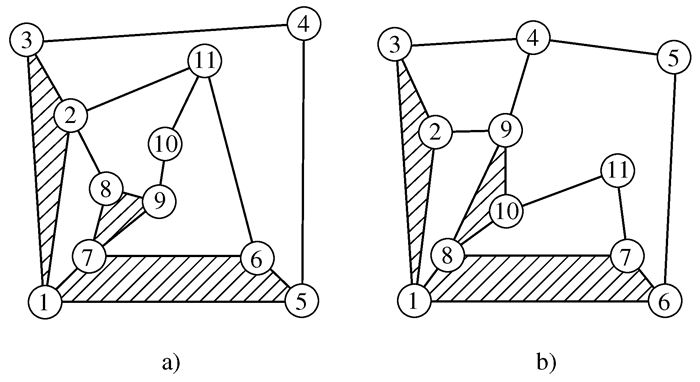
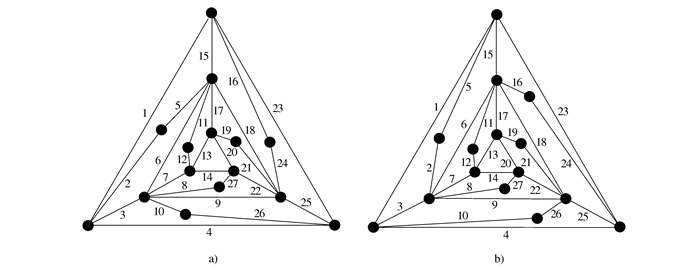
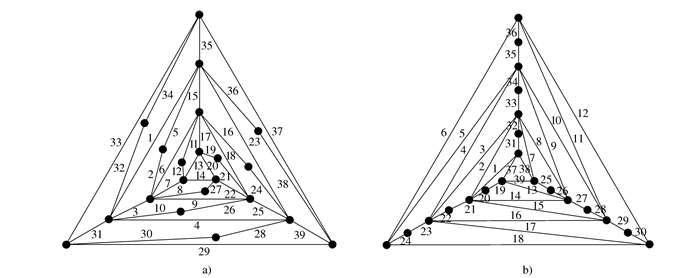
运动链的同构判定是一个较为复杂的问题,对于机构的型综合具有重大意义。本文中提出了一种含复铰运动链的描述及同构判定的新方法。首先,针对运动链中复合铰链难以分析、识别的问题,提出了一种改进关节邻接矩阵描述含复铰运动链的方法;接着,用特征码表示运动链的基本特征,作为同构的必要条件;然后,通过改进关节邻接矩阵构造了关节距离矩阵,并得到该矩阵的和列阵。通过判断特征码、和列阵两个结构恒量是否相等来判定运动链是否同构。最后,通过案例验证了该方法的有效性和可靠性。
运动链的同构判定是一个较为复杂的问题,对于机构的型综合具有重大意义。本文中提出了一种含复铰运动链的描述及同构判定的新方法。首先,针对运动链中复合铰链难以分析、识别的问题,提出了一种改进关节邻接矩阵描述含复铰运动链的方法;接着,用特征码表示运动链的基本特征,作为同构的必要条件;然后,通过改进关节邻接矩阵构造了关节距离矩阵,并得到该矩阵的和列阵。通过判断特征码、和列阵两个结构恒量是否相等来判定运动链是否同构。最后,通过案例验证了该方法的有效性和可靠性。

2020, 39(4): 524-530.
doi: 10.13433/j.cnki.1003-8728.20190179
摘要:
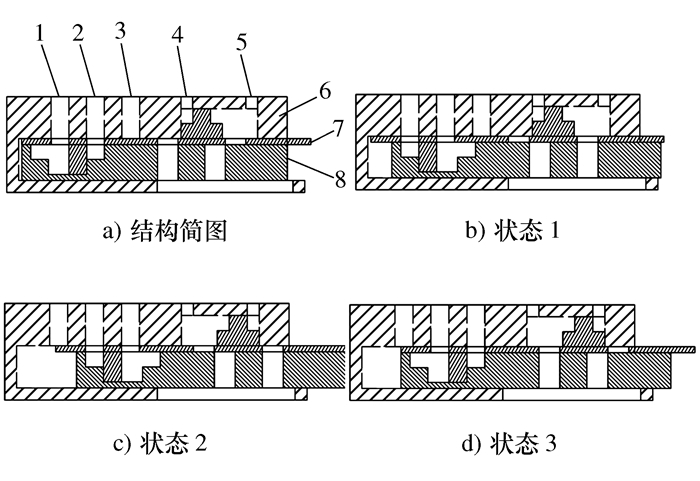
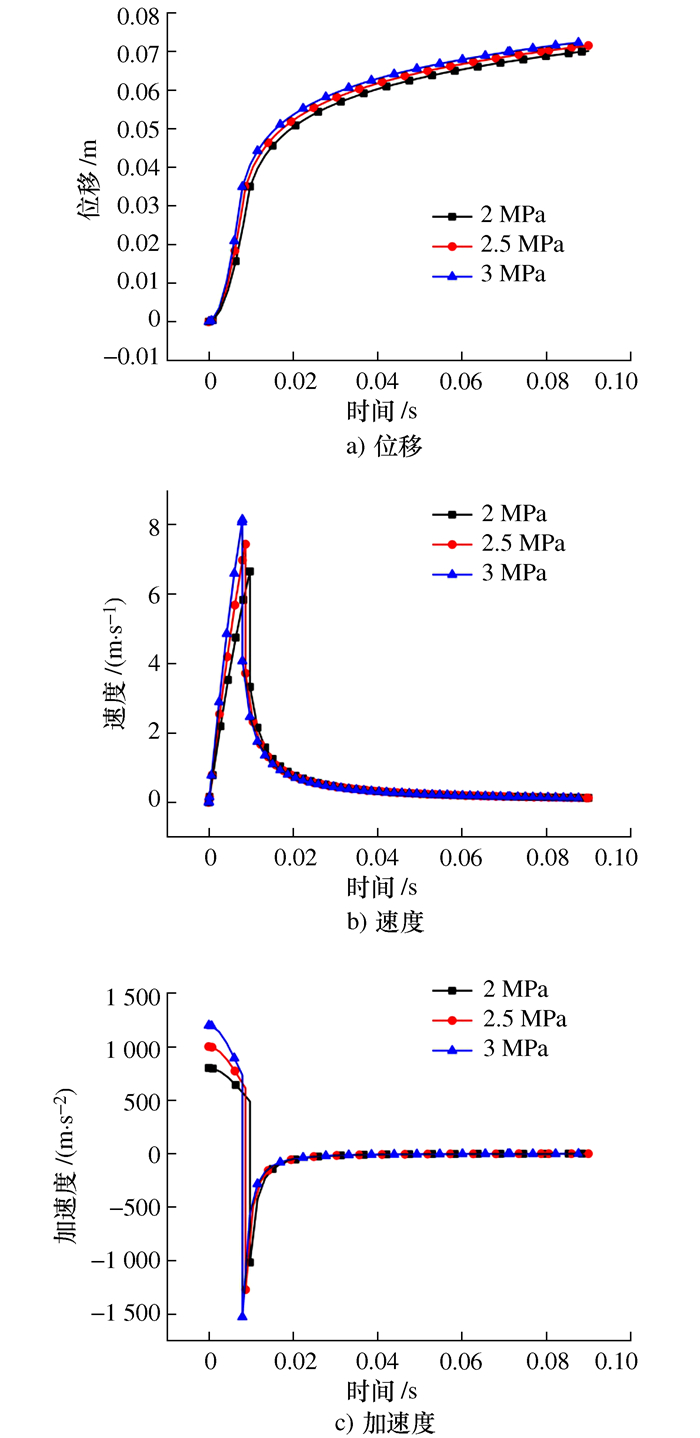
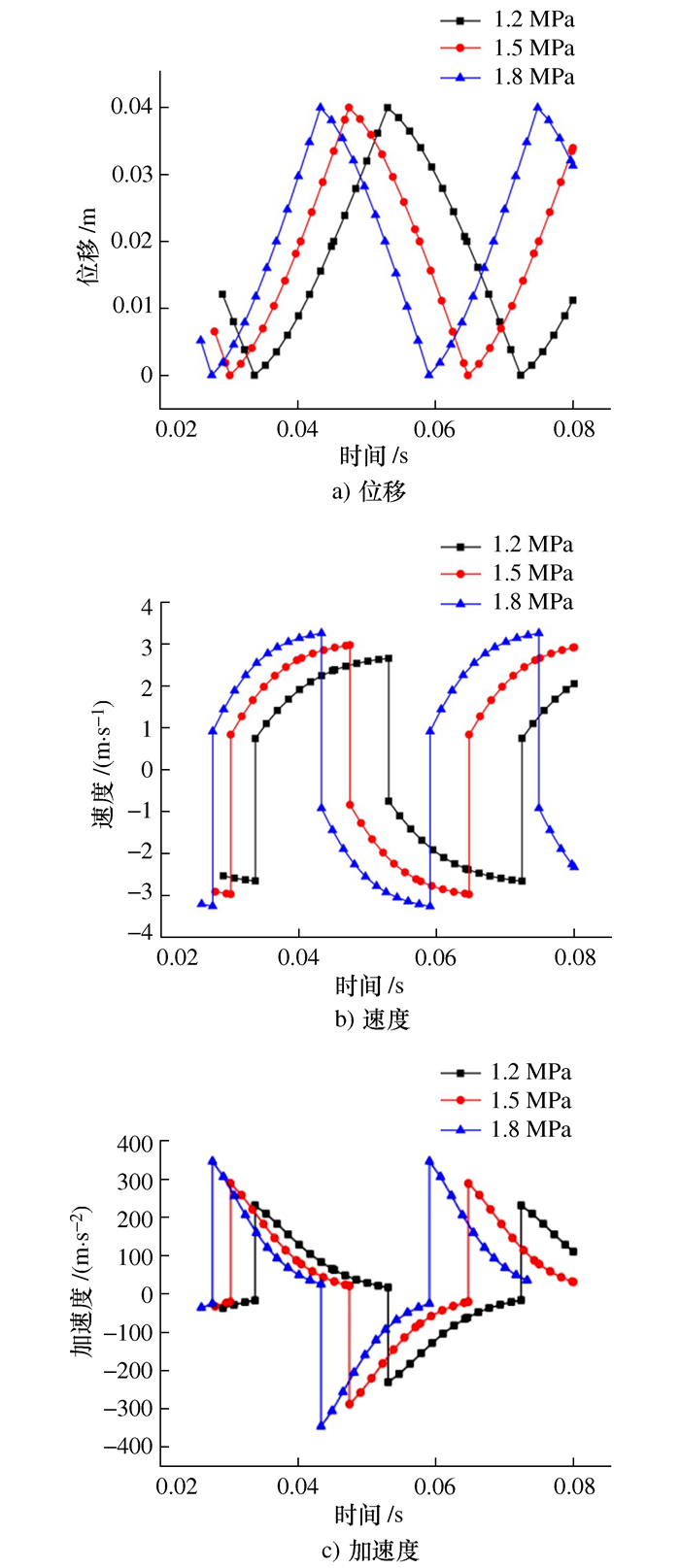
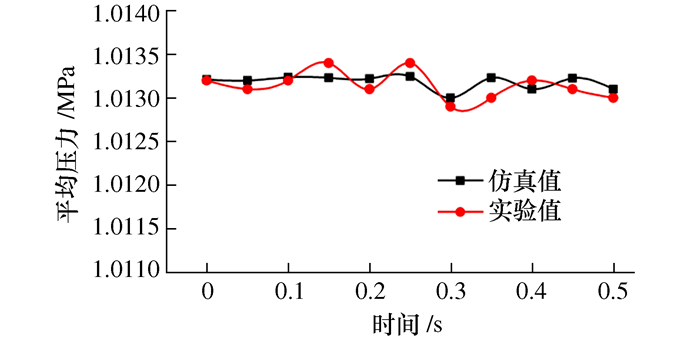
粘滑振动一直是影响深井、超深井原油开采效率及成本的关键因素之一,旋冲发生器可有效地辅助钻井工具解决粘滑振动问题。针对国内旋冲发生器运行稳定性能尚不完善,提出了一种水平旋冲运动发生器的原理,建立了动力学模型并对此结构的内部流场进行了仿真,分析了内部流场及压力特征,确定了结构特征。实验与仿真结果表明,依据理论确定结构特征可提供稳定的工作性能,证明了理论的可靠性和准确性。
粘滑振动一直是影响深井、超深井原油开采效率及成本的关键因素之一,旋冲发生器可有效地辅助钻井工具解决粘滑振动问题。针对国内旋冲发生器运行稳定性能尚不完善,提出了一种水平旋冲运动发生器的原理,建立了动力学模型并对此结构的内部流场进行了仿真,分析了内部流场及压力特征,确定了结构特征。实验与仿真结果表明,依据理论确定结构特征可提供稳定的工作性能,证明了理论的可靠性和准确性。



2020, 39(4): 531-538.
doi: 10.13433/j.cnki.1003-8728.20190181
摘要:
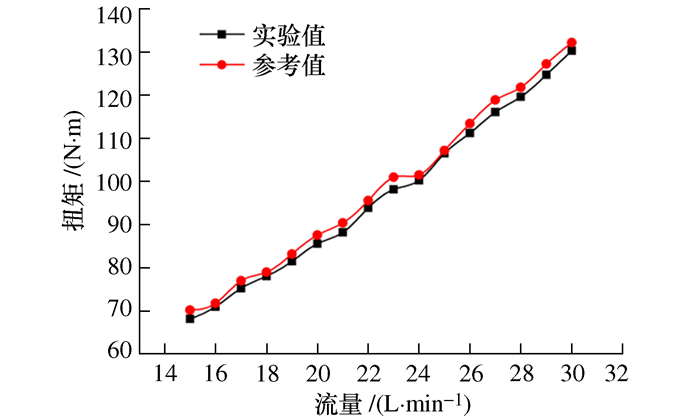
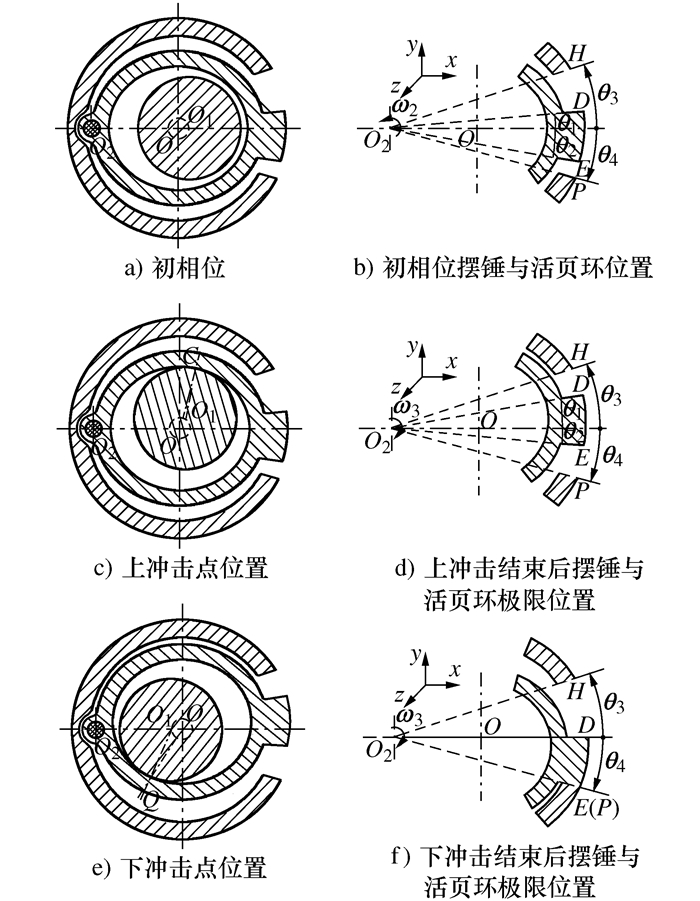
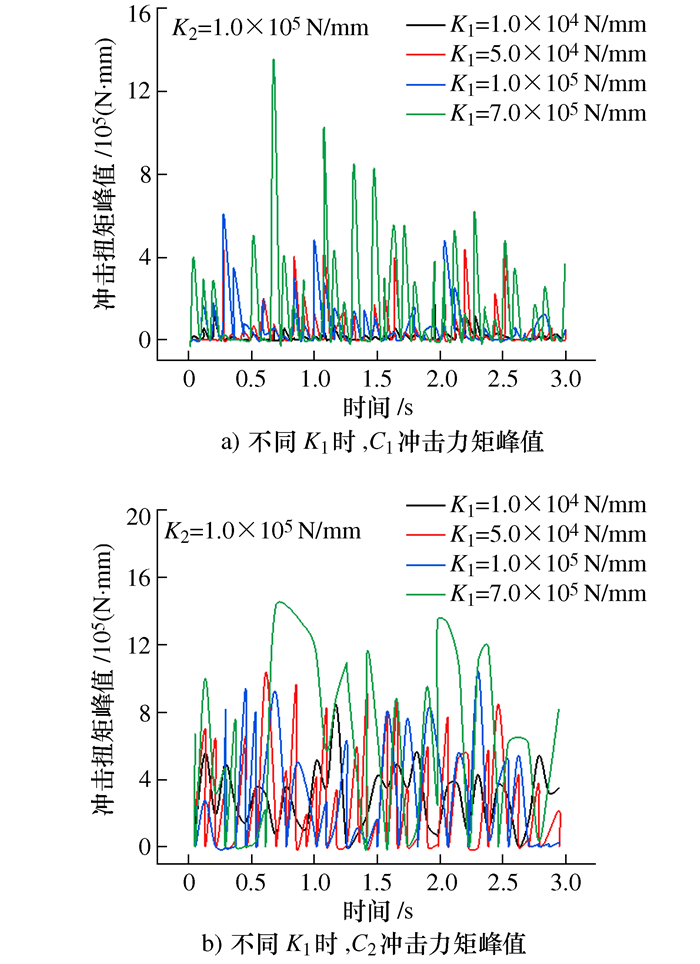
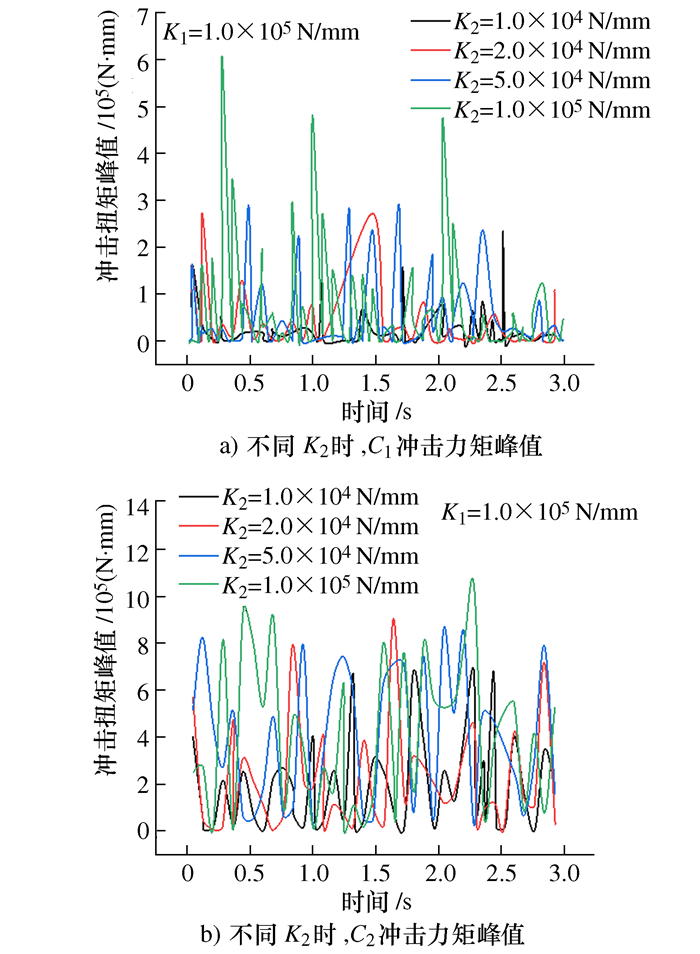
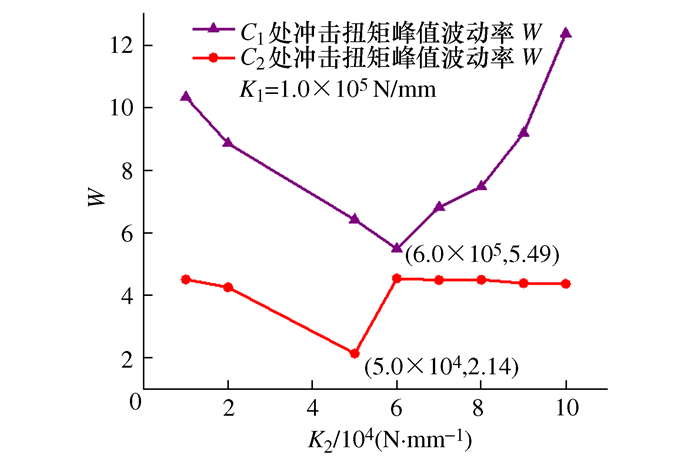
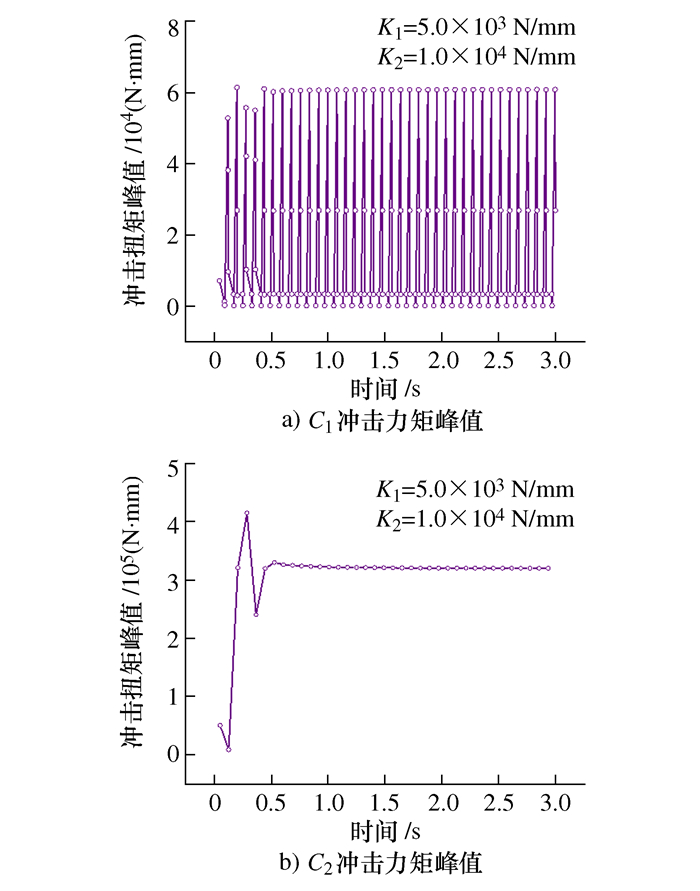
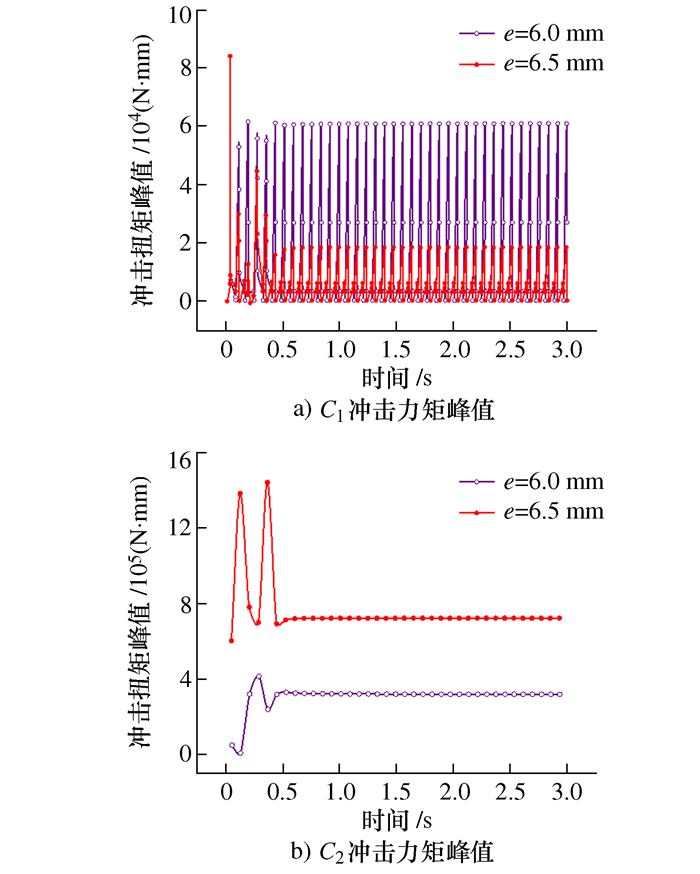
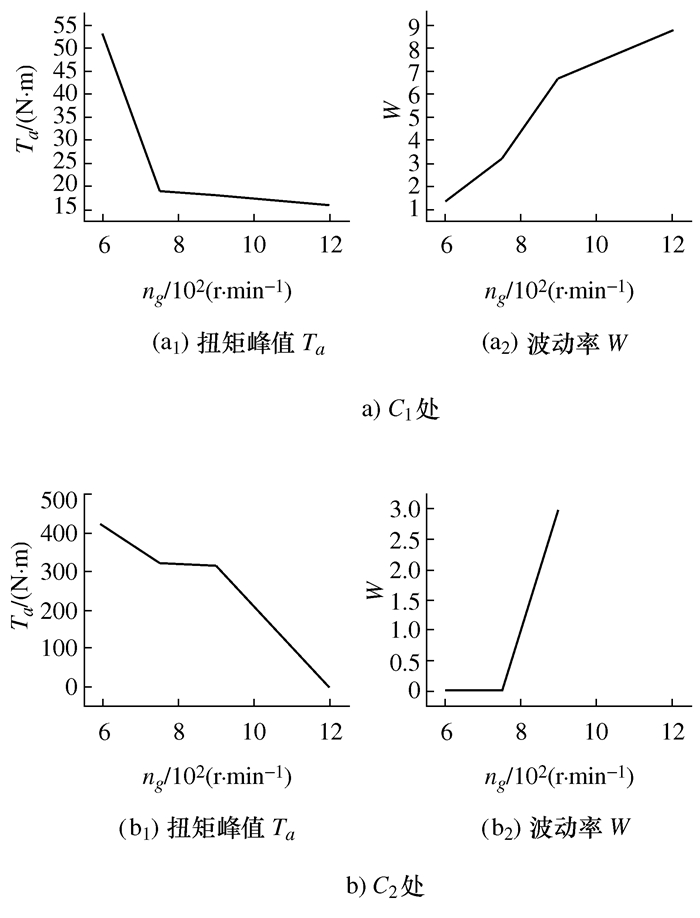
针对现有液动式、回转式扭冲工具存在的不足,提出一种集成于螺杆马达的摆动扭冲工具,利用转子公转驱动摆锤实现周期性扭转冲击。对冲击模块进行运动分析与冲击特性仿真,得到了接触刚度、偏心距、转子转速、头数对转子反扭矩与冲击模块输出扭矩峰值的影响规律。引入冲击扭矩峰值波动率和平均冲击扭矩峰值来评价转子所受反扭矩大小与冲击模块输出扭矩峰值平稳性。结果表明:影响参数取优解时,作用在转子上的反扭矩小;冲击模块输出扭矩峰值平稳,有效辅助破岩冲击力矩大。
针对现有液动式、回转式扭冲工具存在的不足,提出一种集成于螺杆马达的摆动扭冲工具,利用转子公转驱动摆锤实现周期性扭转冲击。对冲击模块进行运动分析与冲击特性仿真,得到了接触刚度、偏心距、转子转速、头数对转子反扭矩与冲击模块输出扭矩峰值的影响规律。引入冲击扭矩峰值波动率和平均冲击扭矩峰值来评价转子所受反扭矩大小与冲击模块输出扭矩峰值平稳性。结果表明:影响参数取优解时,作用在转子上的反扭矩小;冲击模块输出扭矩峰值平稳,有效辅助破岩冲击力矩大。



2020, 39(4): 539-546.
doi: 10.13433/j.cnki.1003-8728.20200003
摘要:
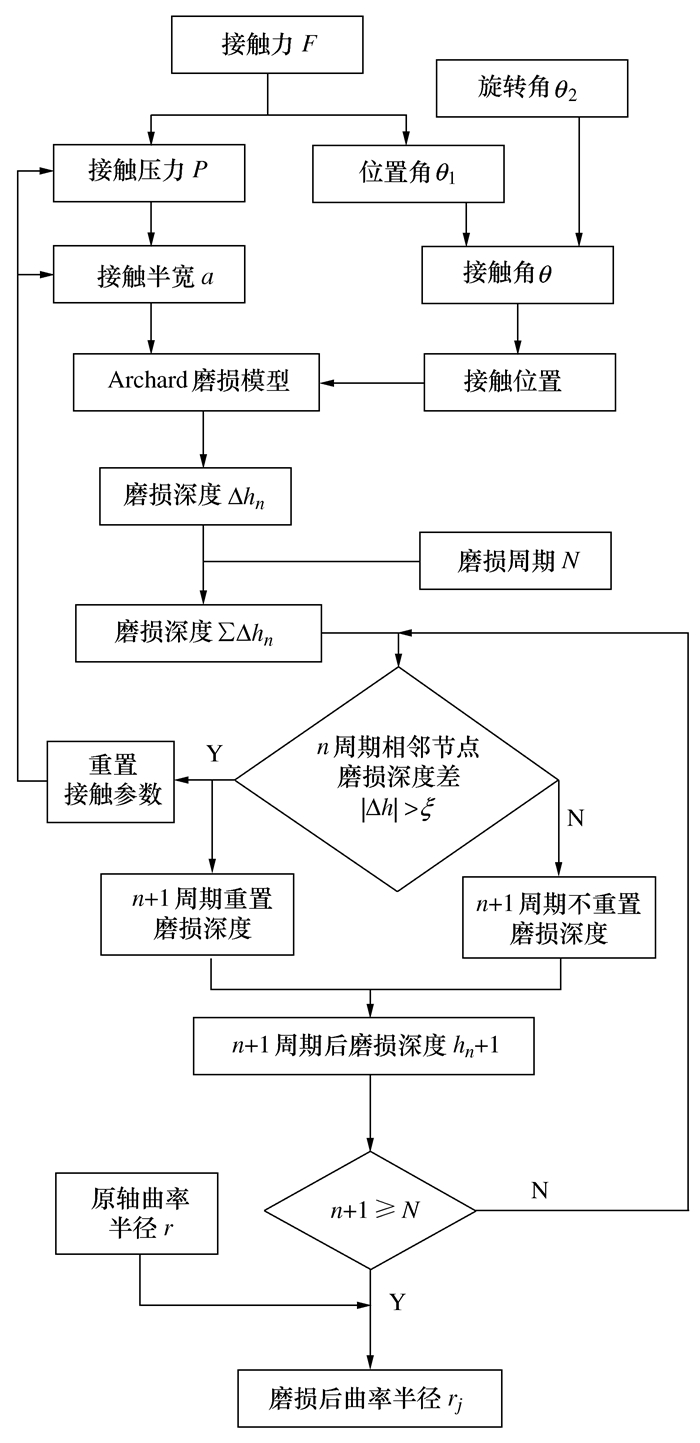
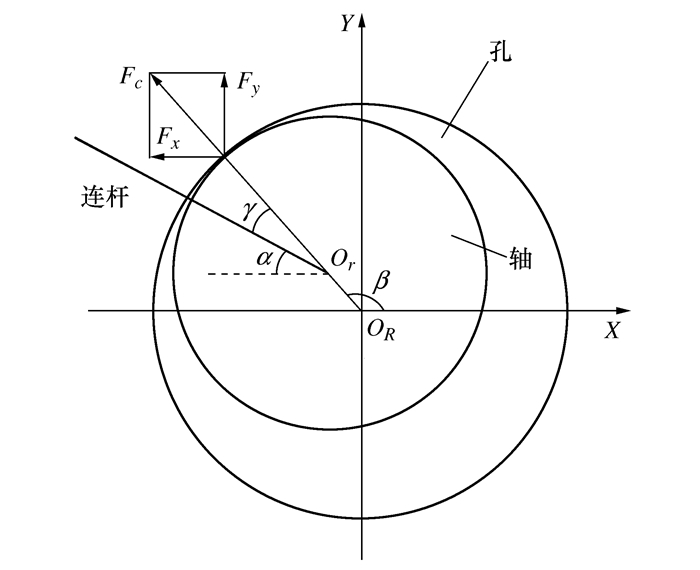
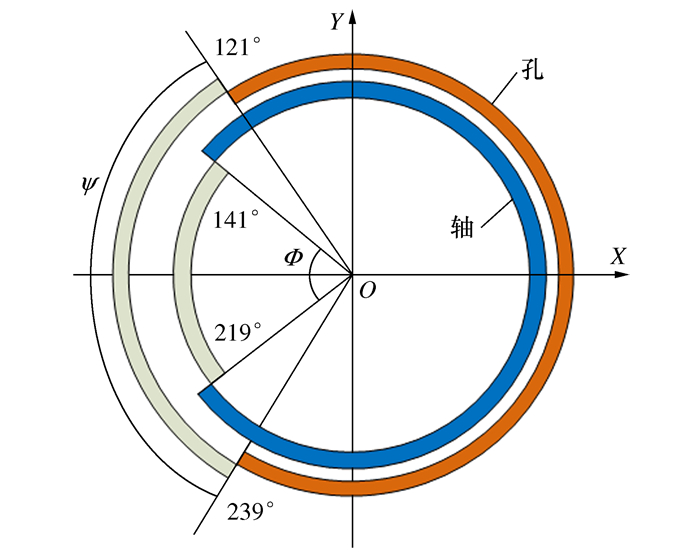
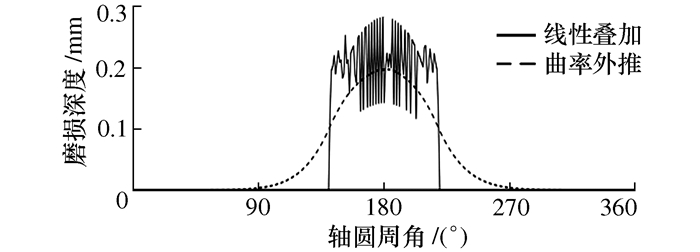
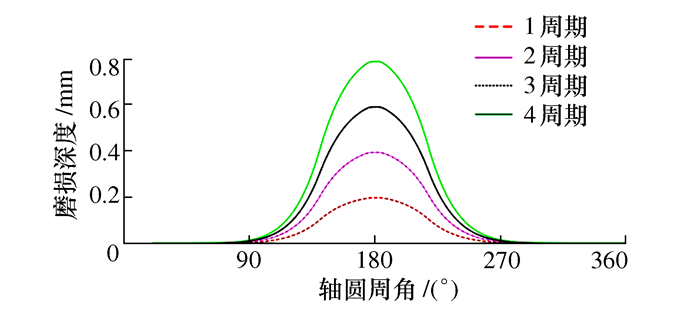
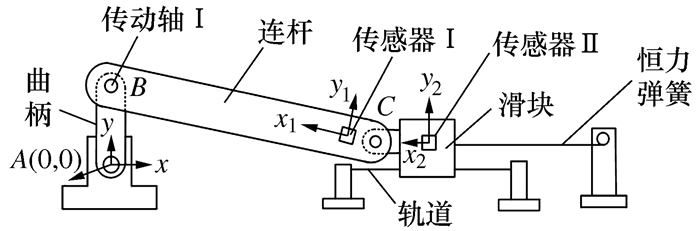
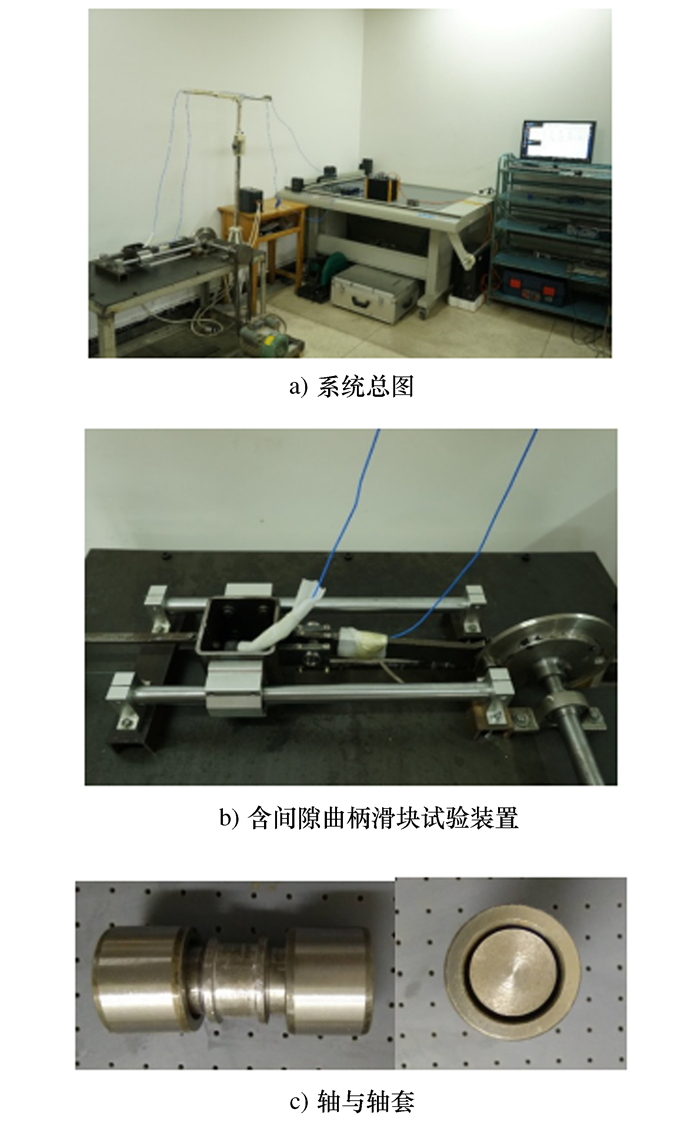
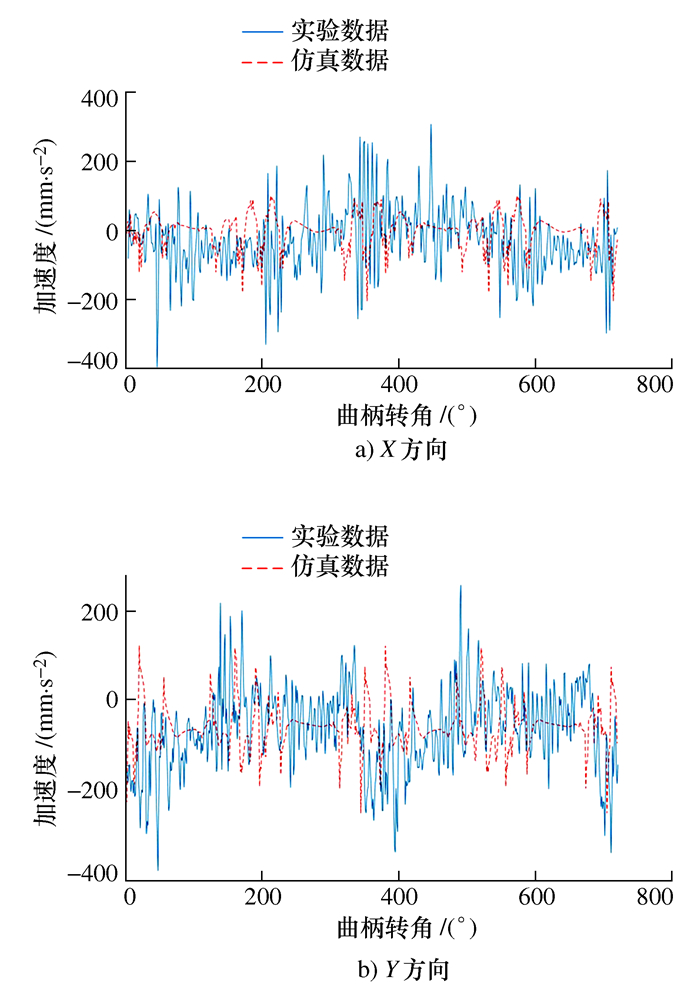
利用Archard磨损模型计算含间隙机构中的轴磨损,并获得磨损轮廓。利用ADAMS软件建模仿真,研究了磨损间隙对系统动力学特征的影响。随着磨损间隙的变化,轴孔中心之间的加速度响应幅值呈逐渐增加趋势,高幅振动位置随磨损间隙的增加发生一定规律性的变化,即磨损程度与系统振动的振幅和振动时间密切相关。最后通过自制的含间隙曲柄滑块试验装置验证了以上结论。
利用Archard磨损模型计算含间隙机构中的轴磨损,并获得磨损轮廓。利用ADAMS软件建模仿真,研究了磨损间隙对系统动力学特征的影响。随着磨损间隙的变化,轴孔中心之间的加速度响应幅值呈逐渐增加趋势,高幅振动位置随磨损间隙的增加发生一定规律性的变化,即磨损程度与系统振动的振幅和振动时间密切相关。最后通过自制的含间隙曲柄滑块试验装置验证了以上结论。





2020, 39(4): 547-553.
doi: 10.13433/j.cnki.1003-8728.20190178
摘要:
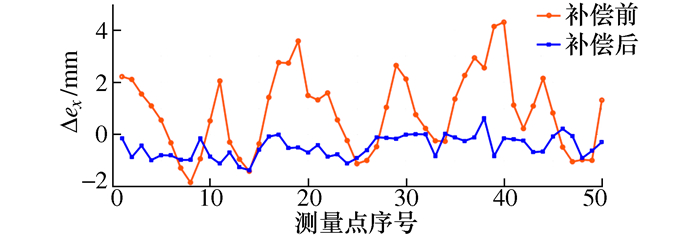
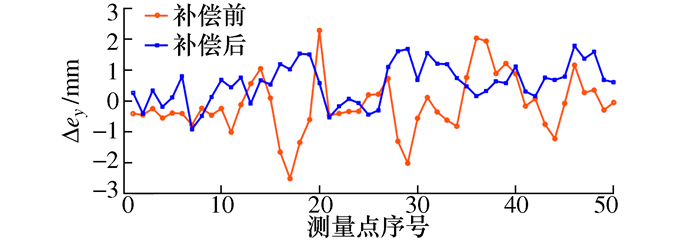
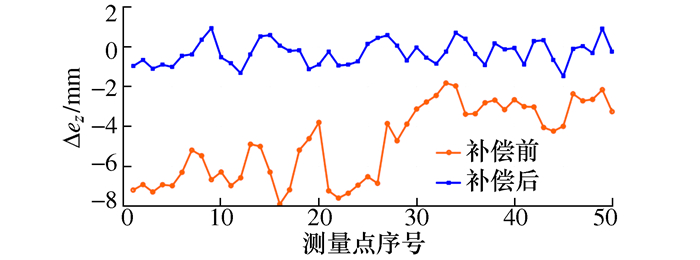
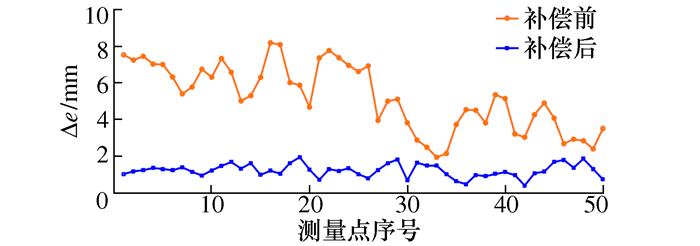
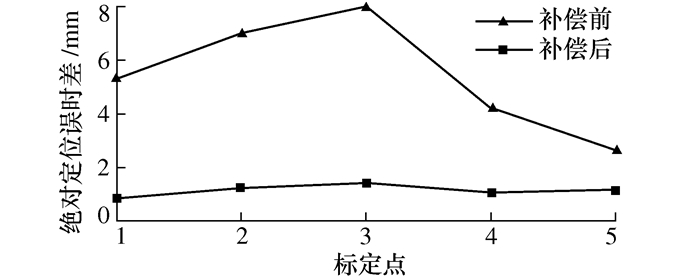
针对大部分工业机器人结构需要满足Pieper准则无法直接补偿所有运动学参数误差的问题,提出一种两步误差补偿方法。首先,基于修正的D-H法和微分运动学建立机器人定位误差模型,建立机器人末端绝对定位误差与运动学参数误差之间的表达式;其次,利用最小二乘法迭代求解出运动学参数误差,并将可直接补偿的运动学参数误差直接补偿到机器人D-H配置参数中,将剩余的其它运动学参数误差转换为关节转角补偿值进行间接补偿;最后,搭建实验平台,在川崎RS010NA六自由度工业机器人上进行两步误差补偿实验验证。实验结果表明,通过两步误差补偿后机器人末端平均绝对定位误差由5.419 4 mm下降到1.160 5 mm,平均绝对定位精度提高约80%,该方法有效地提高了机器人的绝对定位精度。
针对大部分工业机器人结构需要满足Pieper准则无法直接补偿所有运动学参数误差的问题,提出一种两步误差补偿方法。首先,基于修正的D-H法和微分运动学建立机器人定位误差模型,建立机器人末端绝对定位误差与运动学参数误差之间的表达式;其次,利用最小二乘法迭代求解出运动学参数误差,并将可直接补偿的运动学参数误差直接补偿到机器人D-H配置参数中,将剩余的其它运动学参数误差转换为关节转角补偿值进行间接补偿;最后,搭建实验平台,在川崎RS010NA六自由度工业机器人上进行两步误差补偿实验验证。实验结果表明,通过两步误差补偿后机器人末端平均绝对定位误差由5.419 4 mm下降到1.160 5 mm,平均绝对定位精度提高约80%,该方法有效地提高了机器人的绝对定位精度。





2020, 39(4): 554-560.
doi: 10.13433/j.cnki.1003-8728.20190157
摘要:
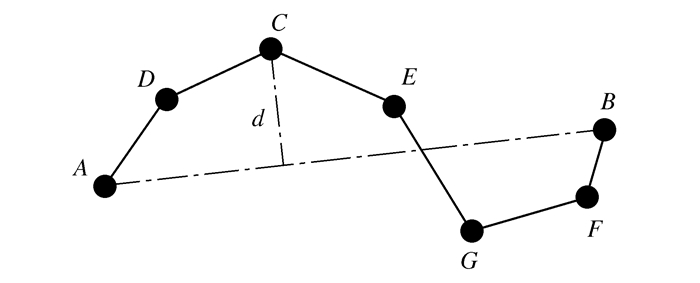
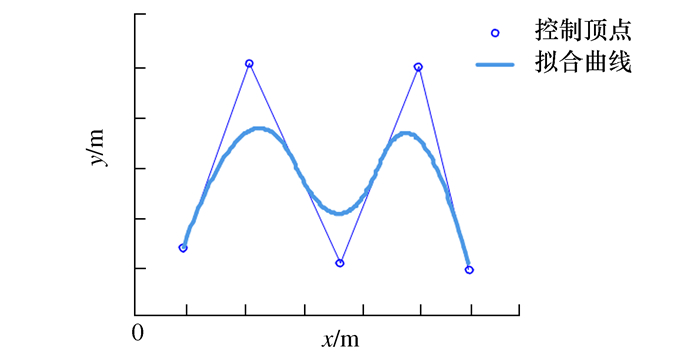
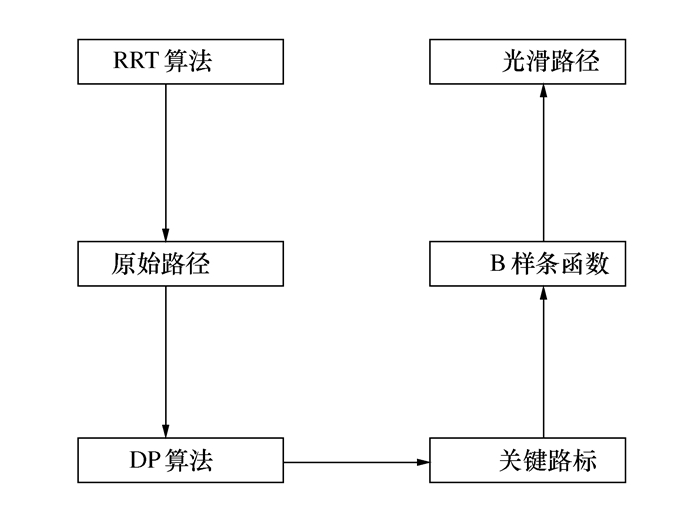
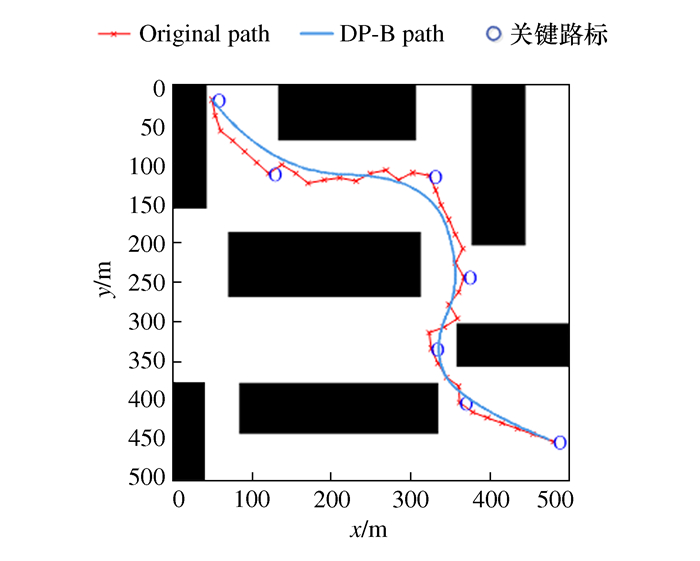
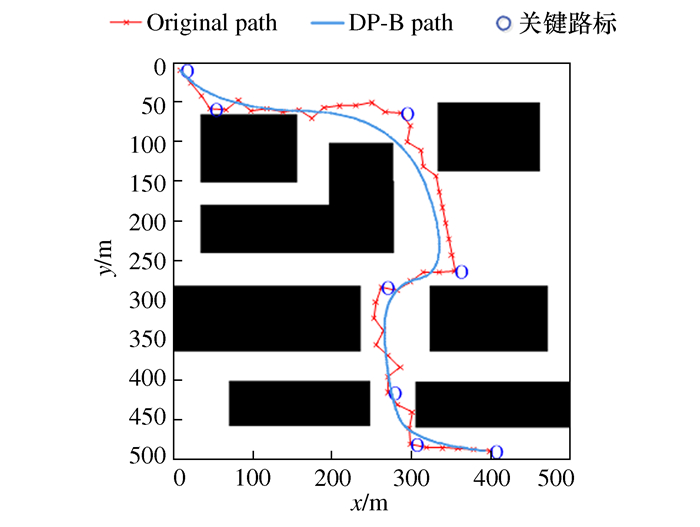
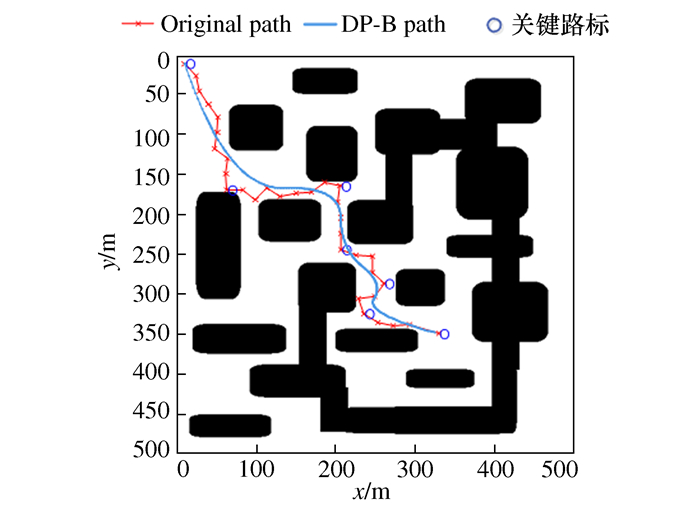
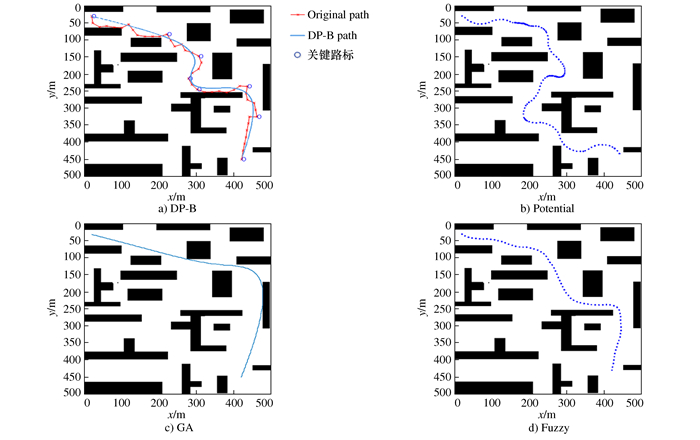
针对快速扩展随机树算法(RRT)产生的路径冗余点过多与路径转折点较多的问题,提出了一种基于Douglas-Peucker算法及B样条函数的路径光滑算法。首先,利用Douglas-Peucker(DP)算法从RRT算法产生的路径节点中提取出若干节点作为关键路标;然后,采用B样条函数拟合关键路标,得到一条曲率连续的光滑路径,实现规划路径的光滑化。通过在不同环境中进行实验和与其他路径光滑算法实验进行对比,结果表明,该算法能够明显缩短优化路径的路径长度,明显减少优化路径转折次数,大幅度提升优化路径的光滑度,有利于减少机器人在单次航程中的能量消耗,完成更多任务,有效提升机器人的工作效率。
针对快速扩展随机树算法(RRT)产生的路径冗余点过多与路径转折点较多的问题,提出了一种基于Douglas-Peucker算法及B样条函数的路径光滑算法。首先,利用Douglas-Peucker(DP)算法从RRT算法产生的路径节点中提取出若干节点作为关键路标;然后,采用B样条函数拟合关键路标,得到一条曲率连续的光滑路径,实现规划路径的光滑化。通过在不同环境中进行实验和与其他路径光滑算法实验进行对比,结果表明,该算法能够明显缩短优化路径的路径长度,明显减少优化路径转折次数,大幅度提升优化路径的光滑度,有利于减少机器人在单次航程中的能量消耗,完成更多任务,有效提升机器人的工作效率。
2020, 39(4): 561-566.
doi: 10.13433/j.cnki.1003-8728.20190160
摘要:
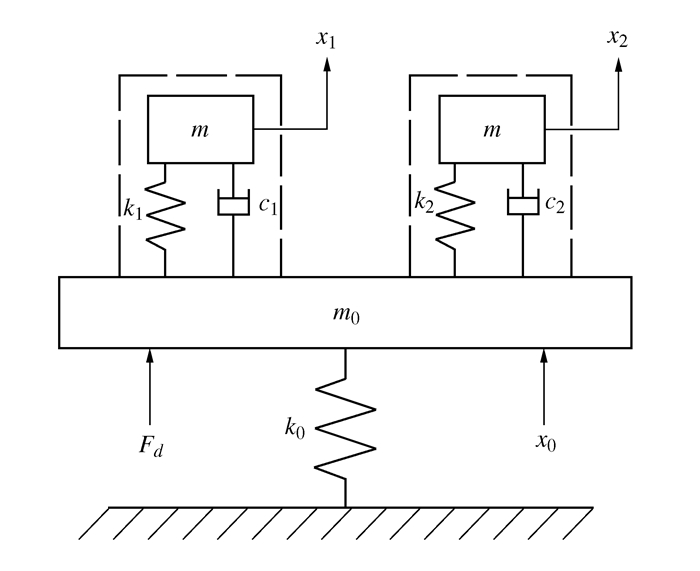
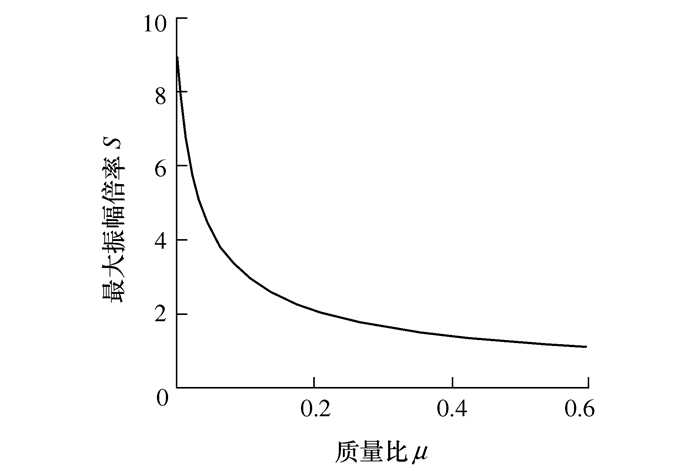
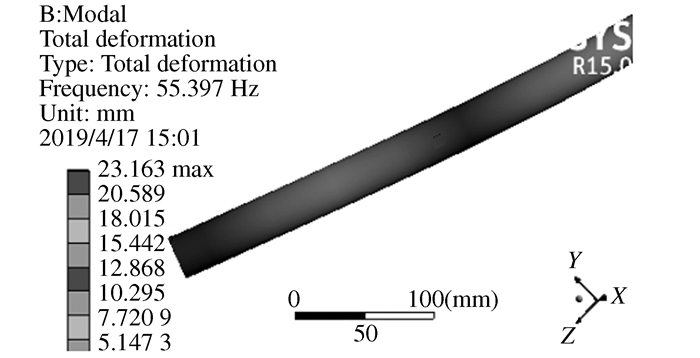
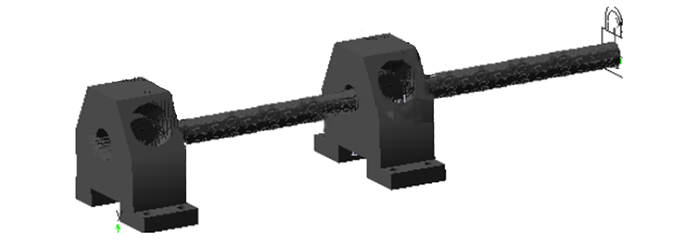
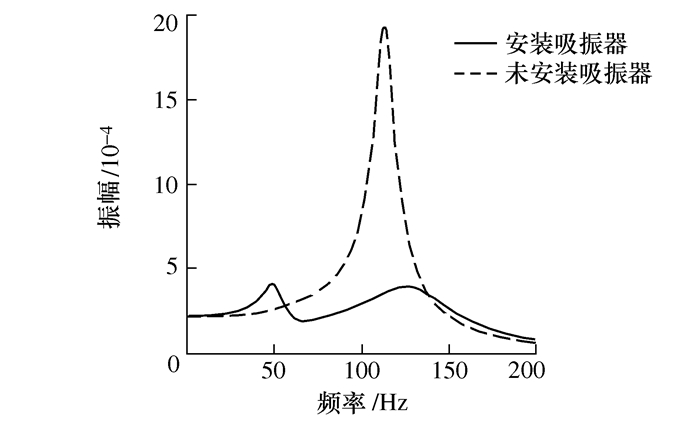
针对内蒙古某特大型机加企业结构件中大长径比镗杆的刚性差,达不到图纸加工精度要求,设计了二重动力吸振镗削系统,建立了二重动力吸振的动力学模型,基于优化准则分析了吸振器质量比对最优频率比和最佳阻尼比以及对减振性能的影响。进行了普通数控车床改造,设计了二重动力吸振的镗削减振结构,通过最优减振参数的确定,设计加工出镗削减振装置。通过ADAMS仿真实验验证其减振效果,结果表明,安装有二重动力吸振器减振装置的减振效果明显,是未安装吸振器的4倍以上。切削实验表明镗削吸振装置能显著提高零件加工表面质量。
针对内蒙古某特大型机加企业结构件中大长径比镗杆的刚性差,达不到图纸加工精度要求,设计了二重动力吸振镗削系统,建立了二重动力吸振的动力学模型,基于优化准则分析了吸振器质量比对最优频率比和最佳阻尼比以及对减振性能的影响。进行了普通数控车床改造,设计了二重动力吸振的镗削减振结构,通过最优减振参数的确定,设计加工出镗削减振装置。通过ADAMS仿真实验验证其减振效果,结果表明,安装有二重动力吸振器减振装置的减振效果明显,是未安装吸振器的4倍以上。切削实验表明镗削吸振装置能显著提高零件加工表面质量。




2020, 39(4): 567-573.
doi: 10.13433/j.cnki.1003-8728.20190185
摘要:
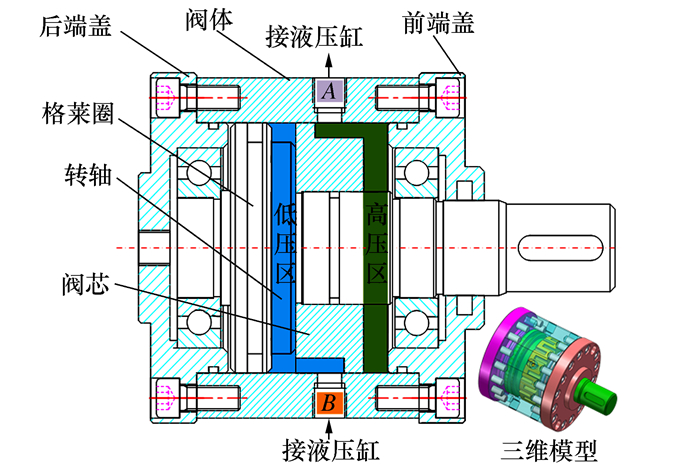
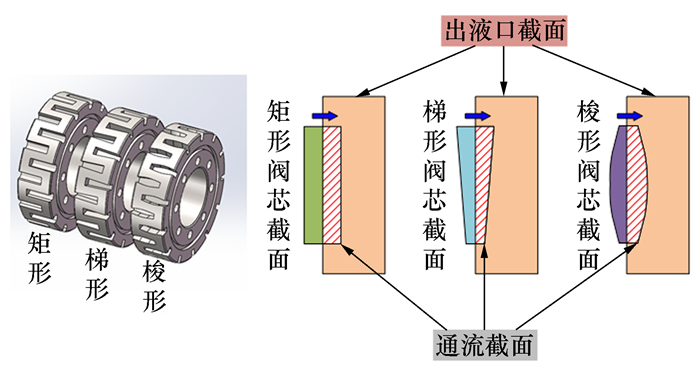
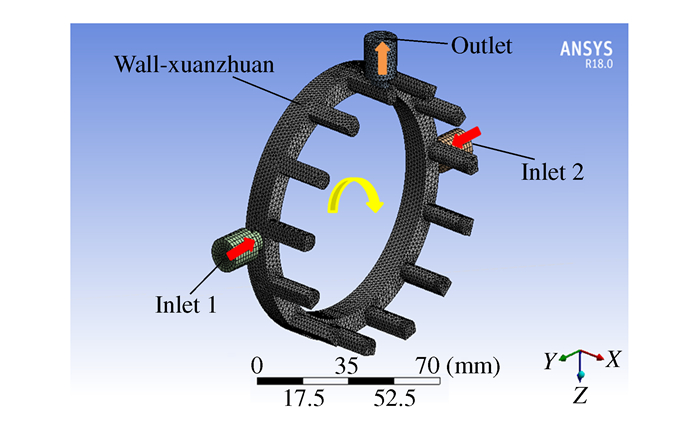
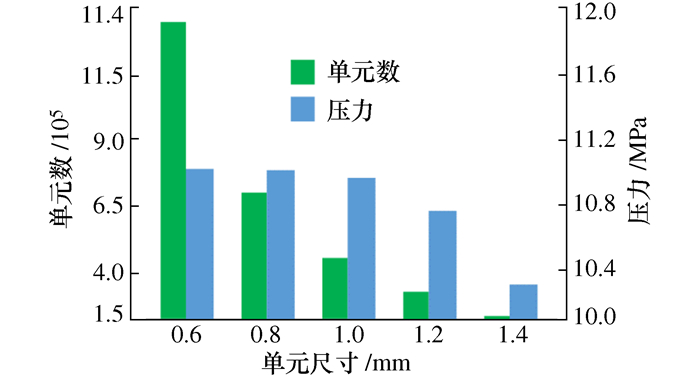
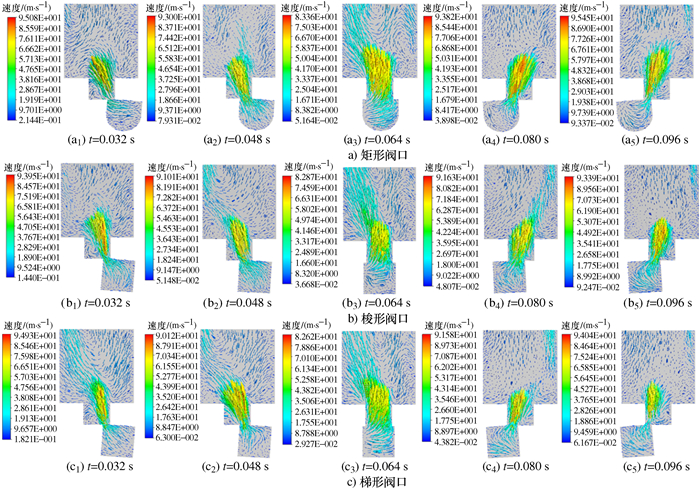
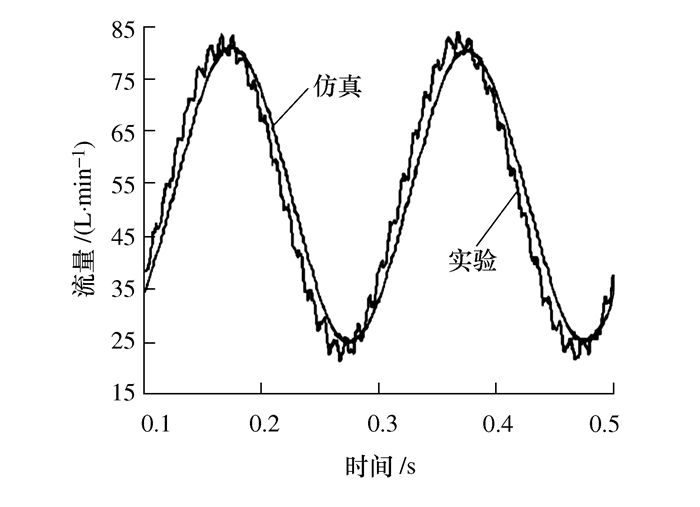
提出一种旋转式激振阀,为分析激振阀旋转过程中阀口流场的分布特性,设计三种不同几何形状的阀口。基于半隐式连接压力方程计算模型,通过多参考系模型(MRF)网格滑移运动的方法对激振阀进行流场动态模拟,获得激振阀阀口的压力、速度、射流角及流量特性曲线。研究结果表明:随阀芯的旋转,激振阀的压力和流量呈先升高后降低的趋势,速度呈先下降后上升的趋势,射流角在60~120°的区间内逐渐上升;阀口形状对激振阀的压力、速度、流量有较大的影响,矩形阀口的压力、流量动态特性最佳。实验证明,激振阀流量曲线近似为正弦波,仿真方法与实验误差小于5%。
提出一种旋转式激振阀,为分析激振阀旋转过程中阀口流场的分布特性,设计三种不同几何形状的阀口。基于半隐式连接压力方程计算模型,通过多参考系模型(MRF)网格滑移运动的方法对激振阀进行流场动态模拟,获得激振阀阀口的压力、速度、射流角及流量特性曲线。研究结果表明:随阀芯的旋转,激振阀的压力和流量呈先升高后降低的趋势,速度呈先下降后上升的趋势,射流角在60~120°的区间内逐渐上升;阀口形状对激振阀的压力、速度、流量有较大的影响,矩形阀口的压力、流量动态特性最佳。实验证明,激振阀流量曲线近似为正弦波,仿真方法与实验误差小于5%。




2020, 39(4): 574-580.
doi: 10.13433/j.cnki.1003-8728.20190177
摘要:
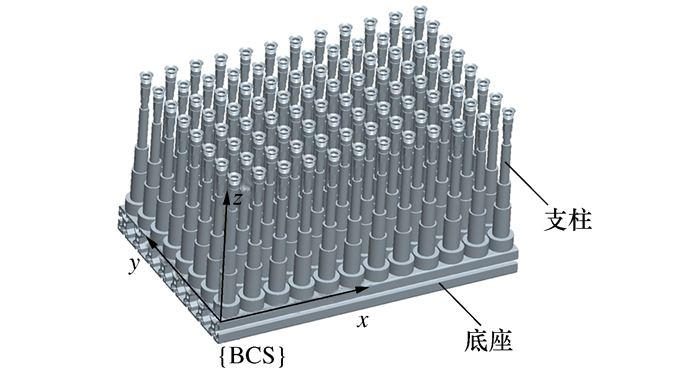
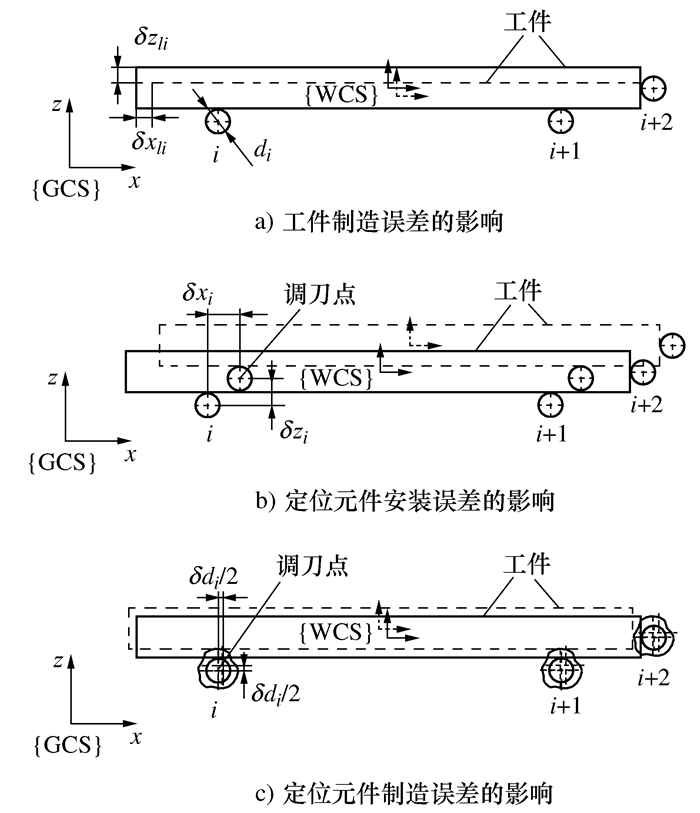
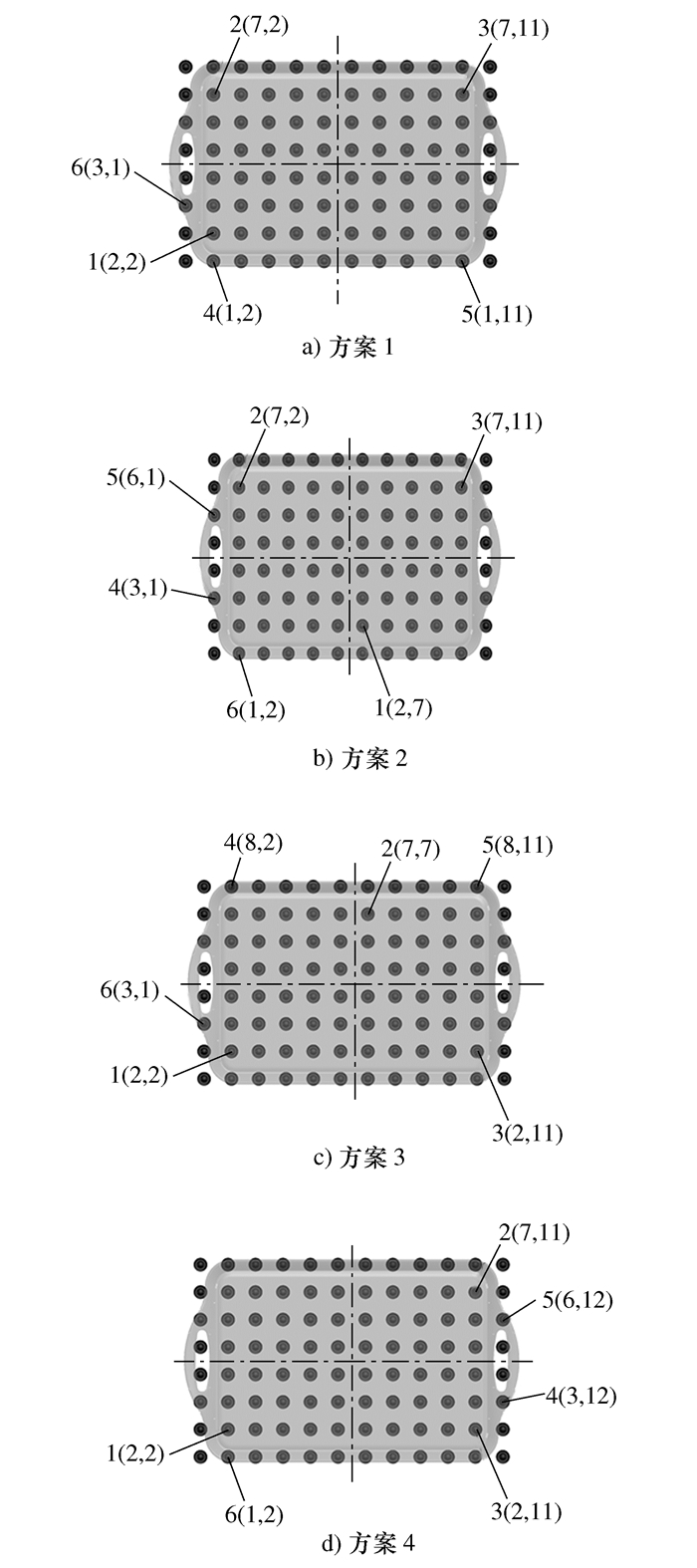
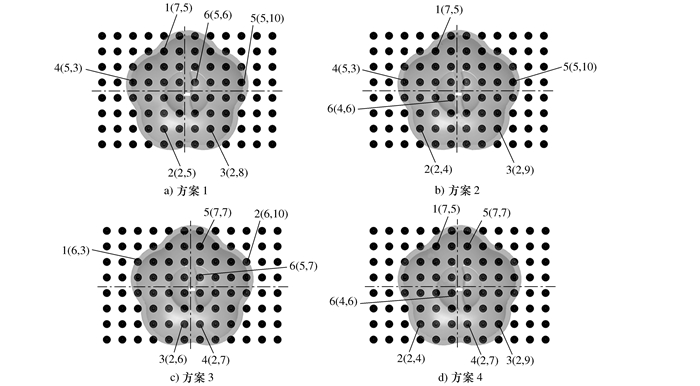
提出了一种阵列式柔性夹具的工件定位方法。该方法首先采用投影法将工件和柔性夹具之间的定位问题转化为平面图形之间的定位问题,并基于平面区域和点的包含关系生成多组定位方案。然后通过计算定位雅可比矩阵的秩,确定了定位方案的可靠性。最后建立了工件制造误差、定位元件的安装和制造误差到工件定位误差的传递模型,并根据对工件定位的误差要求来计算定位方案的准确性,按照最大偏差最小化的准则来选择最准确的定位方案。工件在阵列式柔性夹具上定位的实例表明所提出的方法能获得满足定位可靠性和准确性要求的定位方案。
提出了一种阵列式柔性夹具的工件定位方法。该方法首先采用投影法将工件和柔性夹具之间的定位问题转化为平面图形之间的定位问题,并基于平面区域和点的包含关系生成多组定位方案。然后通过计算定位雅可比矩阵的秩,确定了定位方案的可靠性。最后建立了工件制造误差、定位元件的安装和制造误差到工件定位误差的传递模型,并根据对工件定位的误差要求来计算定位方案的准确性,按照最大偏差最小化的准则来选择最准确的定位方案。工件在阵列式柔性夹具上定位的实例表明所提出的方法能获得满足定位可靠性和准确性要求的定位方案。

2020, 39(4): 581-589.
doi: 10.13433/j.cnki.1003-8728.20190190
摘要:
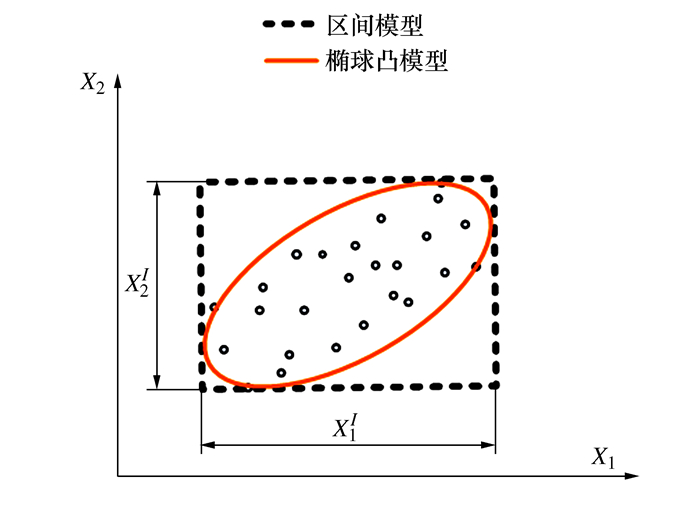
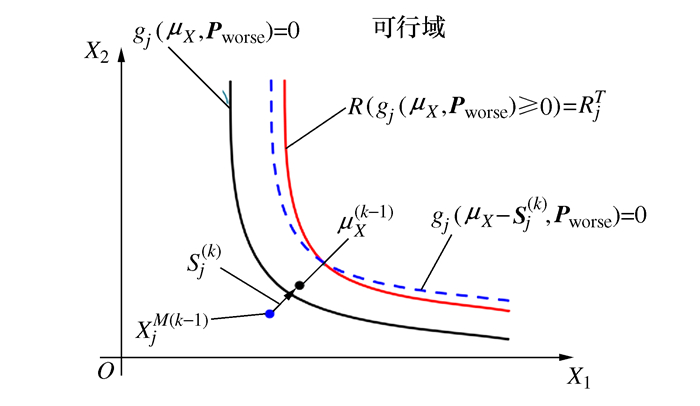
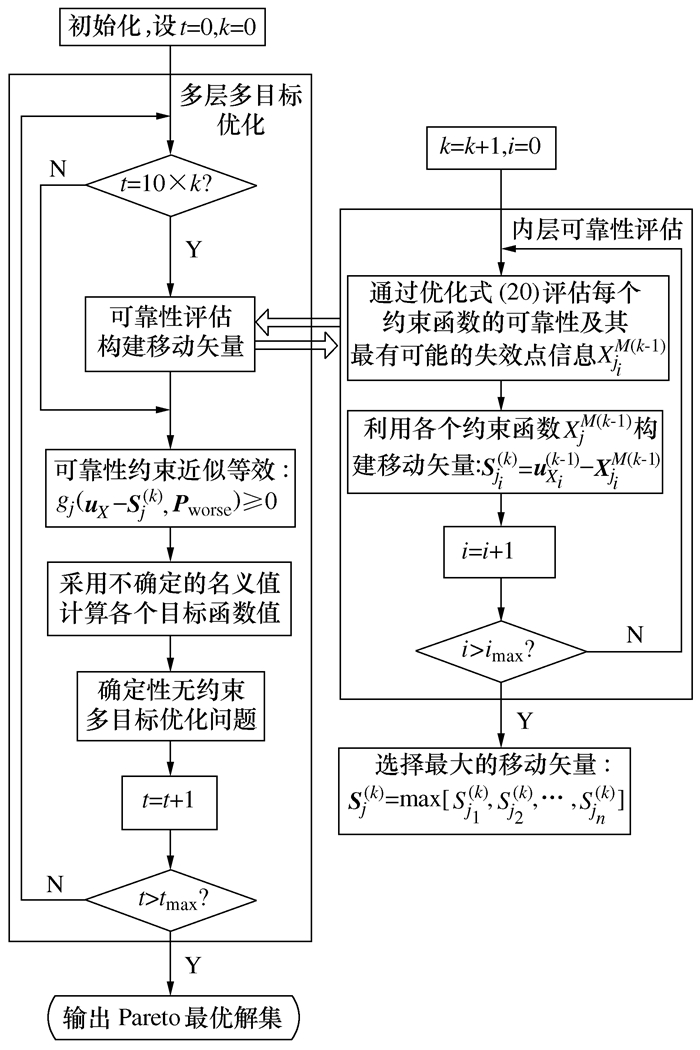
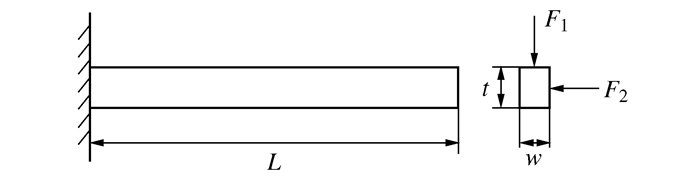
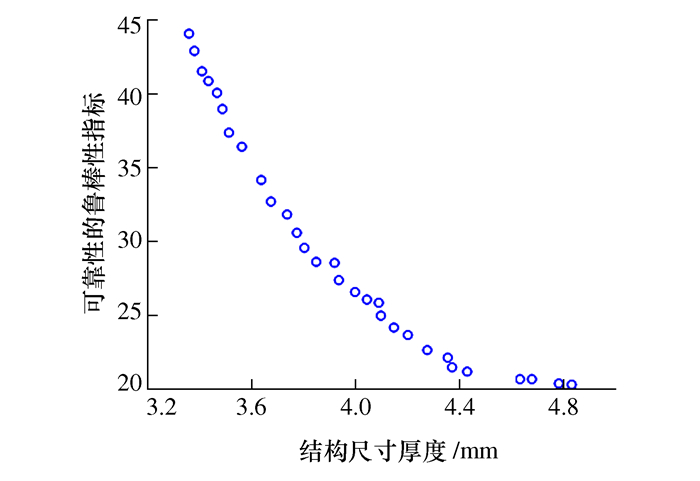
传统基于概率模型可靠性设计优化(Reliability-based design optimization,RBDO)通过制定结构性能的概率约束,使得设计结果符合可靠性要求。然而,在参数信息缺乏时,准确的参数概率密度函数难以获取,且在不确定性因素影响下可靠性的稳健性并未被考虑。在参数信息缺乏的情况下,本文中利用非概率凸模型去有效地度量参数的不确定性。根据非概率可靠性分析理论,将极限状态函数进行泰勒展开,利用非概率可靠性指标的灵敏度分析,建立非概率可靠性的鲁棒性指标。将非概率可靠性设计优化与非概率鲁棒性设计集成到统一的设计模型中,结合SORA(Sequential optimization and reliability assessment)方法和微型多目标遗传算法进行求解。最后,通过两个工程算例分析结果,表明所提优化模型的可行性。
传统基于概率模型可靠性设计优化(Reliability-based design optimization,RBDO)通过制定结构性能的概率约束,使得设计结果符合可靠性要求。然而,在参数信息缺乏时,准确的参数概率密度函数难以获取,且在不确定性因素影响下可靠性的稳健性并未被考虑。在参数信息缺乏的情况下,本文中利用非概率凸模型去有效地度量参数的不确定性。根据非概率可靠性分析理论,将极限状态函数进行泰勒展开,利用非概率可靠性指标的灵敏度分析,建立非概率可靠性的鲁棒性指标。将非概率可靠性设计优化与非概率鲁棒性设计集成到统一的设计模型中,结合SORA(Sequential optimization and reliability assessment)方法和微型多目标遗传算法进行求解。最后,通过两个工程算例分析结果,表明所提优化模型的可行性。





2020, 39(4): 590-598.
doi: 10.13433/j.cnki.1003-8728.20190156
摘要:
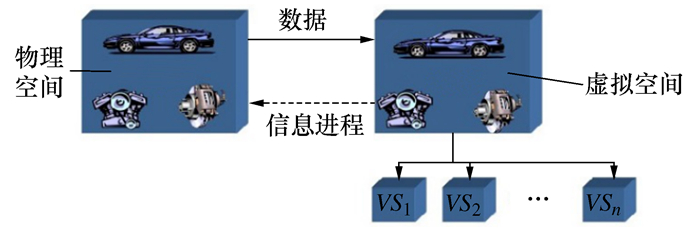
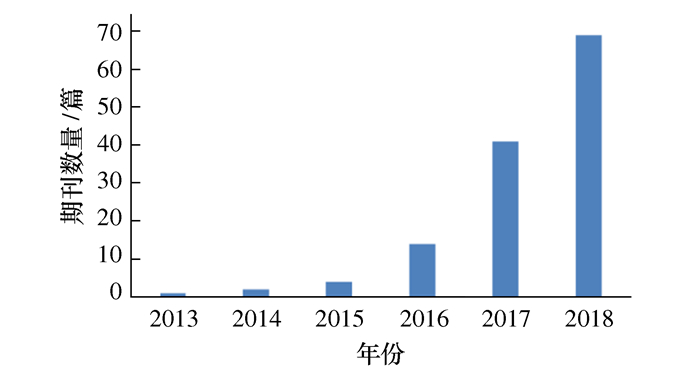
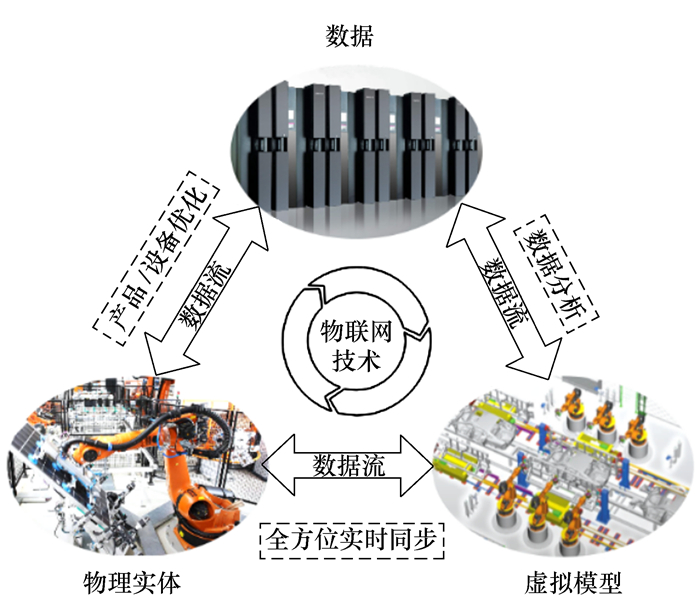
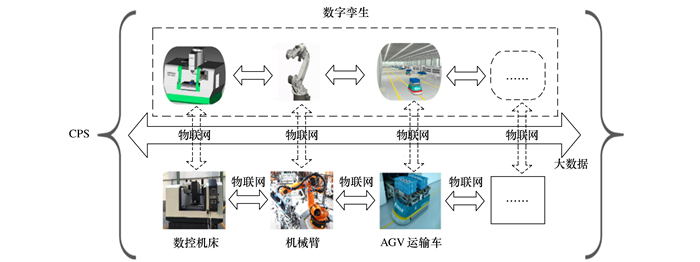
随着工业4.0、CPS、智能制造等研究的深入,如何解决制造中物理世界与信息世界之间的交互共融成为进一步推进制造业变革的核心问题。在此背景下,学术界和工业界提出了数字孪生的概念及技术体系,用于解决上述难题。为了全面了解数字孪生研究进展,首先梳理了数字孪生的基本概念,综述了其在航空航天、产品、制造设备及制造车间等阶段的应用进展,重点分析了数字孪生与物联网、大数据、CPS之间的联系与区别,最后指出了数字孪生在制造领域的发展趋势。
随着工业4.0、CPS、智能制造等研究的深入,如何解决制造中物理世界与信息世界之间的交互共融成为进一步推进制造业变革的核心问题。在此背景下,学术界和工业界提出了数字孪生的概念及技术体系,用于解决上述难题。为了全面了解数字孪生研究进展,首先梳理了数字孪生的基本概念,综述了其在航空航天、产品、制造设备及制造车间等阶段的应用进展,重点分析了数字孪生与物联网、大数据、CPS之间的联系与区别,最后指出了数字孪生在制造领域的发展趋势。


2020, 39(4): 599-607.
doi: 10.13433/j.cnki.1003-8728.20190174
摘要:
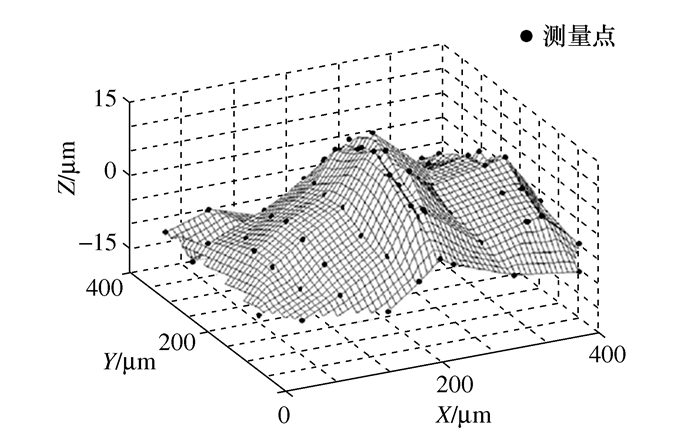
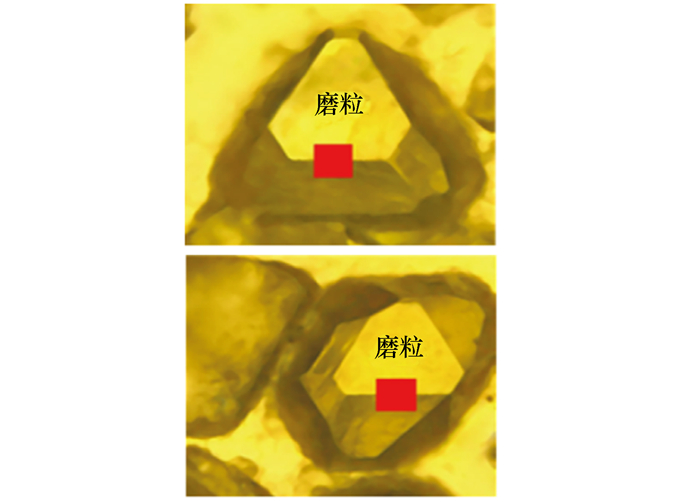
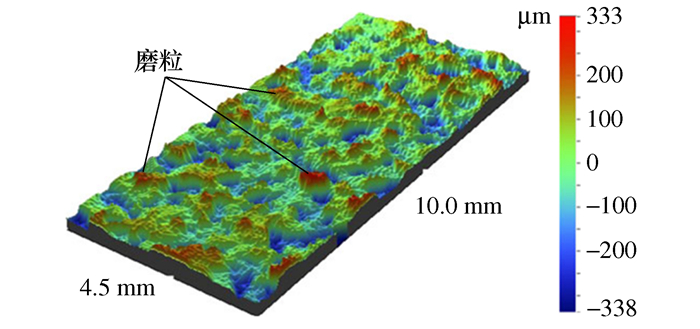
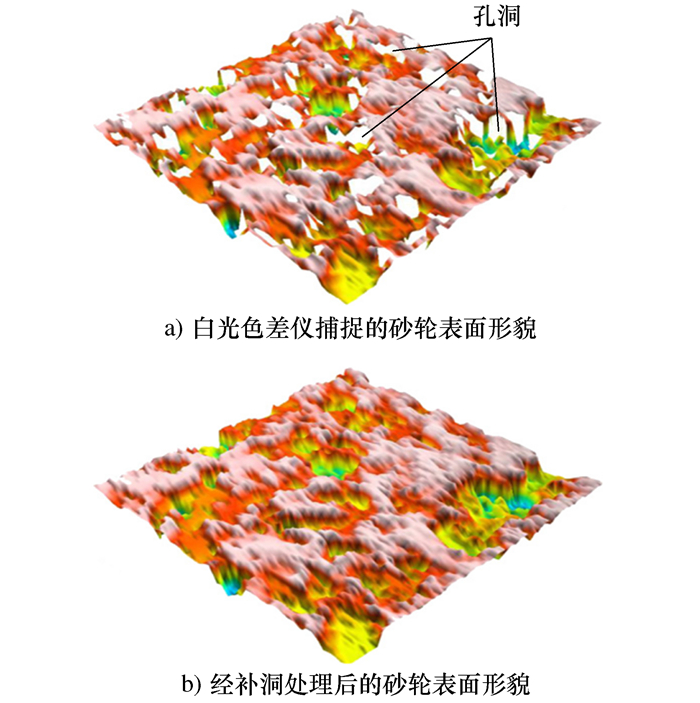
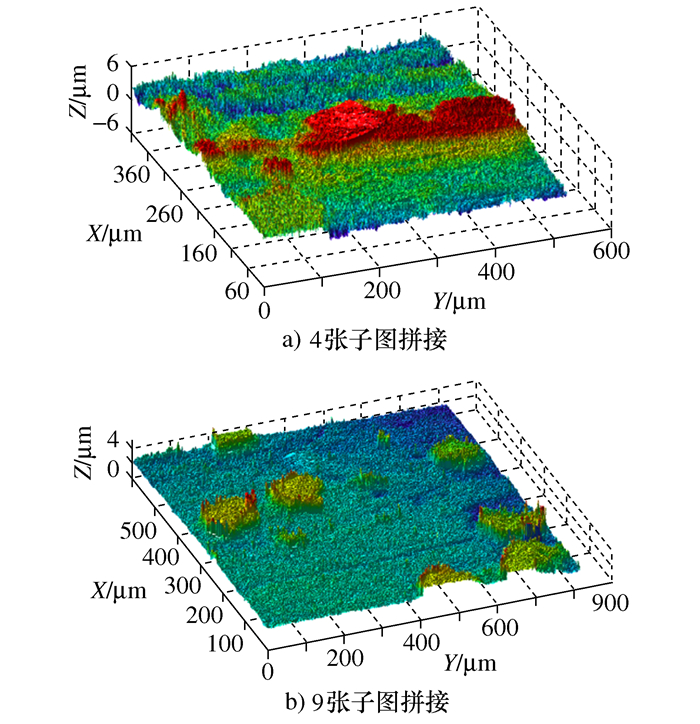
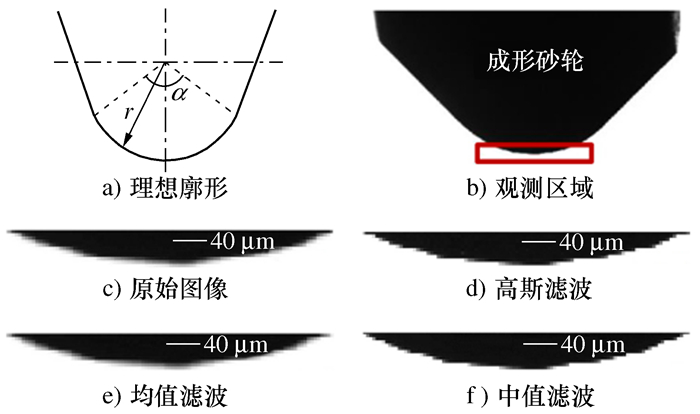
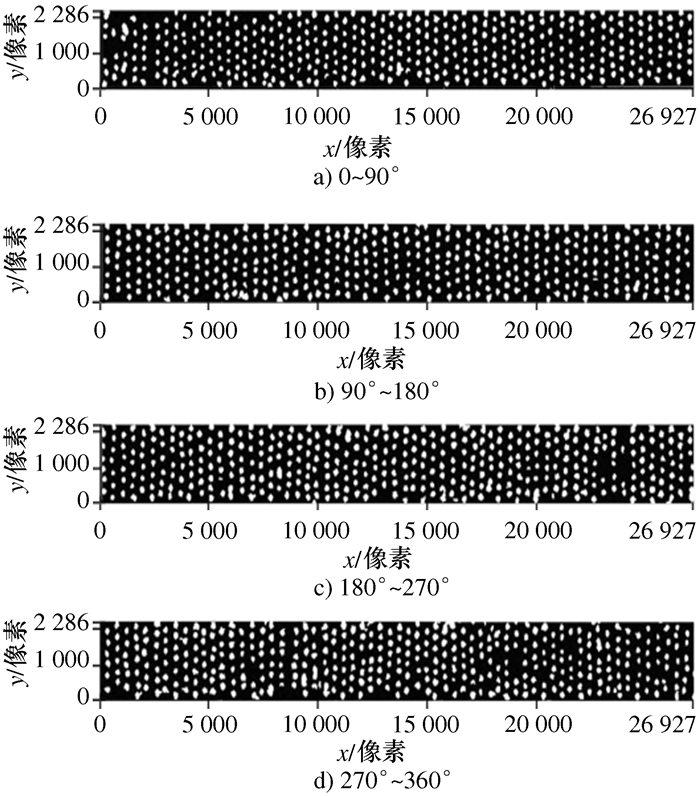
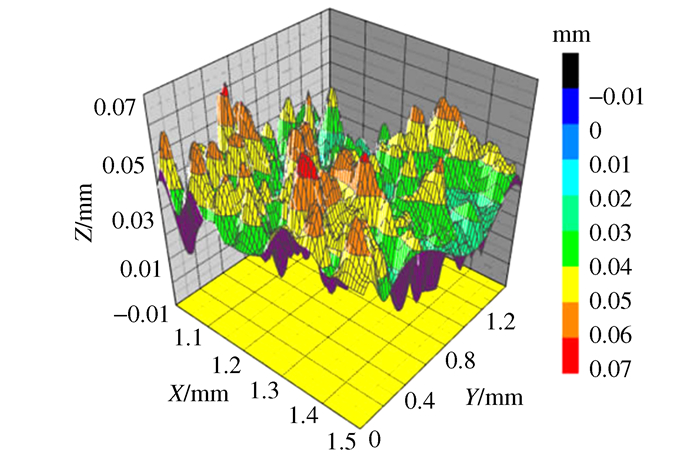
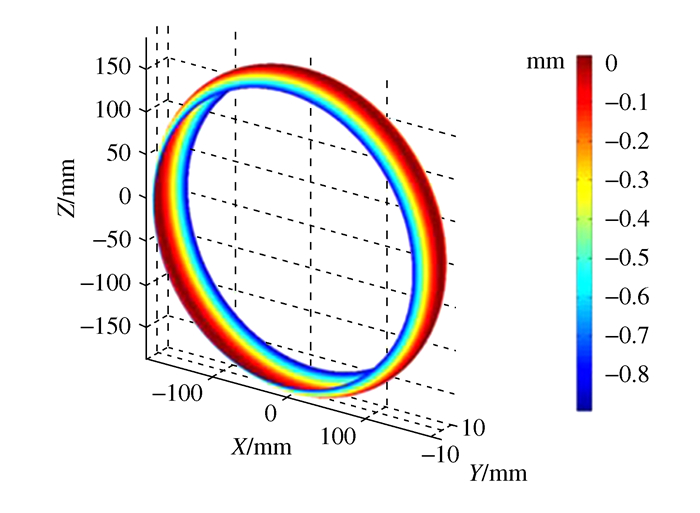
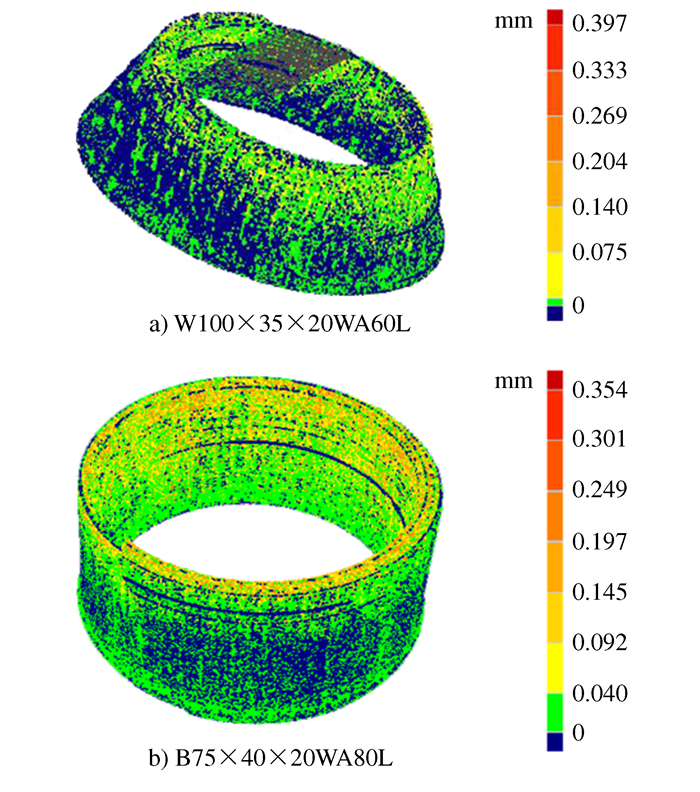
砂轮被誉为"工业的牙齿",其表面特征参数(包括微观形貌特征参数与宏观轮廓特征参数)是磨削过程的重要输入参数,它是决定砂轮磨削性能与服役寿命、进而影响工件表面完整性与面形精度的关键因素。砂轮表面在磨削过程中瞬息万变,因此开展砂轮表面测量研究对于评估砂轮性能、优化磨削过程、揭示磨削机理具有重要意义,它一直是磨削领域的重要研究课题。概述了砂轮表面直接测量方法的基本原理、研究进展及发展瓶颈,并对各测量方法的未来研究方向进行了预测。
砂轮被誉为"工业的牙齿",其表面特征参数(包括微观形貌特征参数与宏观轮廓特征参数)是磨削过程的重要输入参数,它是决定砂轮磨削性能与服役寿命、进而影响工件表面完整性与面形精度的关键因素。砂轮表面在磨削过程中瞬息万变,因此开展砂轮表面测量研究对于评估砂轮性能、优化磨削过程、揭示磨削机理具有重要意义,它一直是磨削领域的重要研究课题。概述了砂轮表面直接测量方法的基本原理、研究进展及发展瓶颈,并对各测量方法的未来研究方向进行了预测。




2020, 39(4): 608-614.
doi: 10.13433/j.cnki.1003-8728.20190155
摘要:
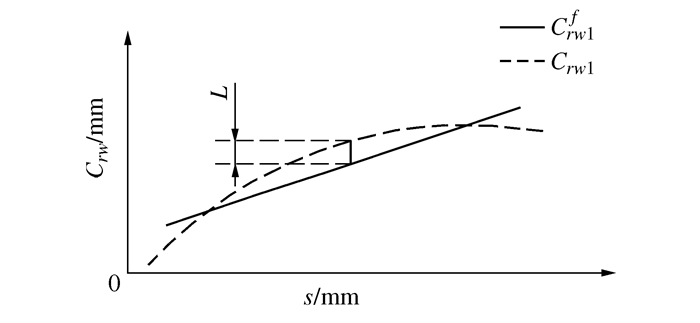
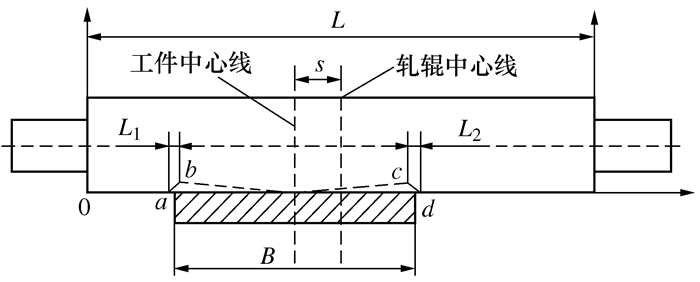
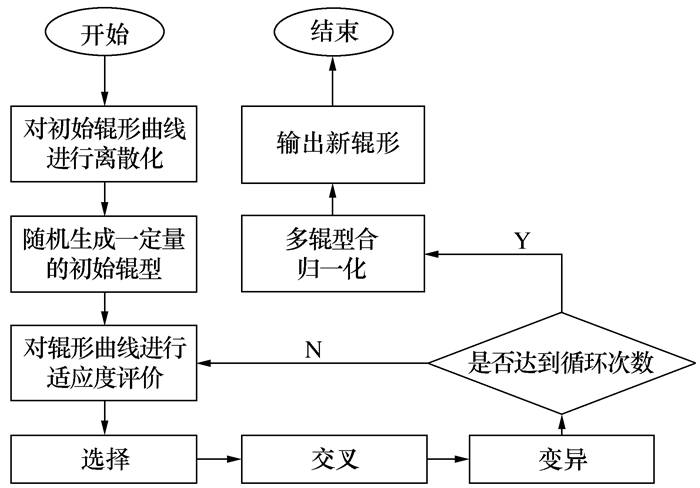
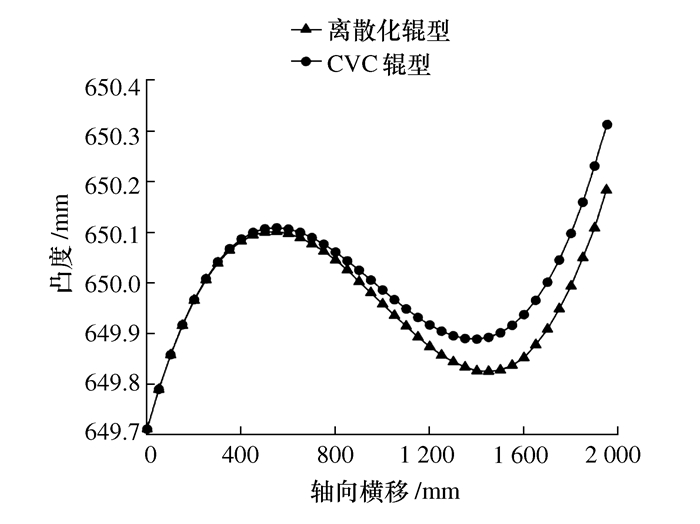
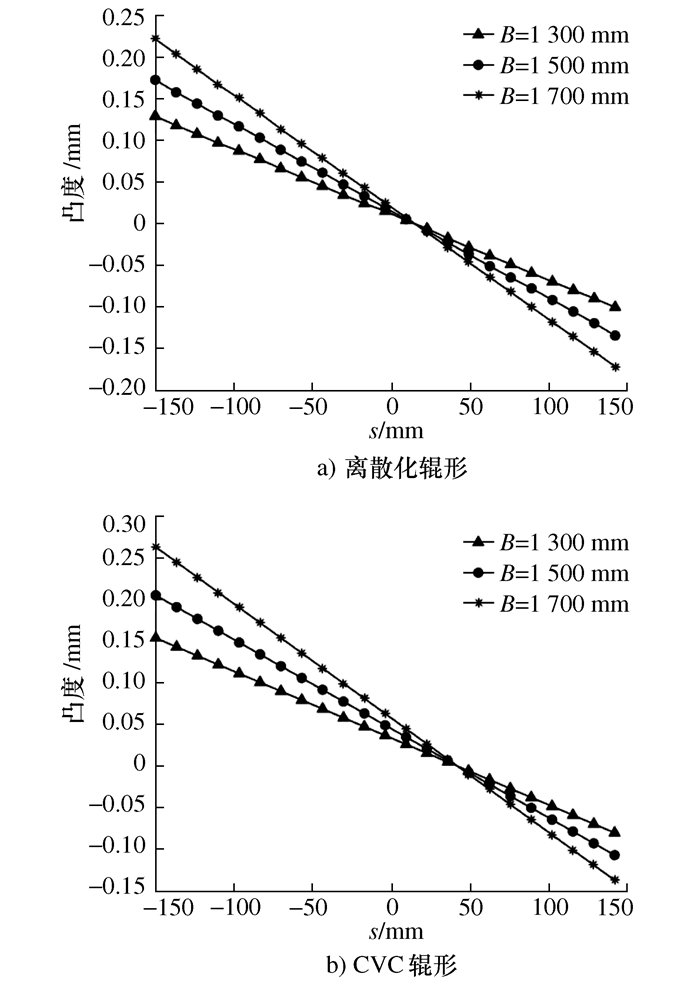
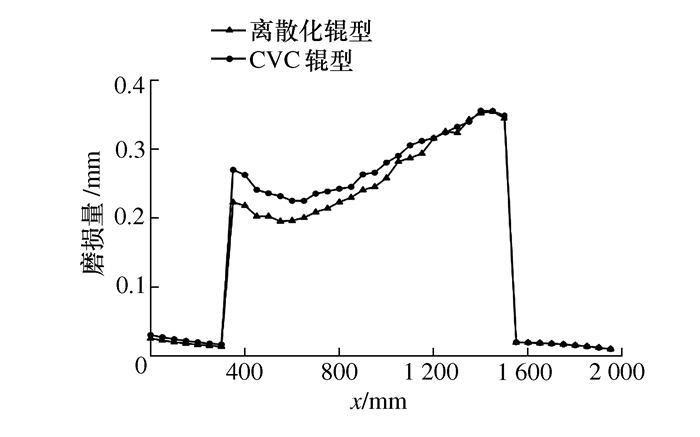
变凸度辊形因其优异的凸度控制能力而在板型控制方面应用广泛,但变凸度辊形由于自身的结构特点导致其相对普通辊形而言有着非对称磨损的情况,且大部分的变凸度辊形的设计过程中考虑的主要因素都是辊形的凸度控制能力。针对上述情况,提出了一种离散化变凸度辊形曲线的自适应设计方法,采用遗传算法对辊形数据进行优化。该设计方法以凸度控制能力和轧辊磨损量为辊形评价指标,以该指标建立遗传算法的适应度函数,优化设计辊形曲线。对比CVC(Continuously variable crown)辊形,发现通过遗传算法优化设计后的离散化辊形在保证凸度控制能力的前提下提高了轧辊的抗磨损能力。相较常规设计方法,该设计方法也具有更好的拓展性和灵活度。
变凸度辊形因其优异的凸度控制能力而在板型控制方面应用广泛,但变凸度辊形由于自身的结构特点导致其相对普通辊形而言有着非对称磨损的情况,且大部分的变凸度辊形的设计过程中考虑的主要因素都是辊形的凸度控制能力。针对上述情况,提出了一种离散化变凸度辊形曲线的自适应设计方法,采用遗传算法对辊形数据进行优化。该设计方法以凸度控制能力和轧辊磨损量为辊形评价指标,以该指标建立遗传算法的适应度函数,优化设计辊形曲线。对比CVC(Continuously variable crown)辊形,发现通过遗传算法优化设计后的离散化辊形在保证凸度控制能力的前提下提高了轧辊的抗磨损能力。相较常规设计方法,该设计方法也具有更好的拓展性和灵活度。

2020, 39(4): 615-622.
doi: 10.13433/j.cnki.1003-8728.20190182
摘要:
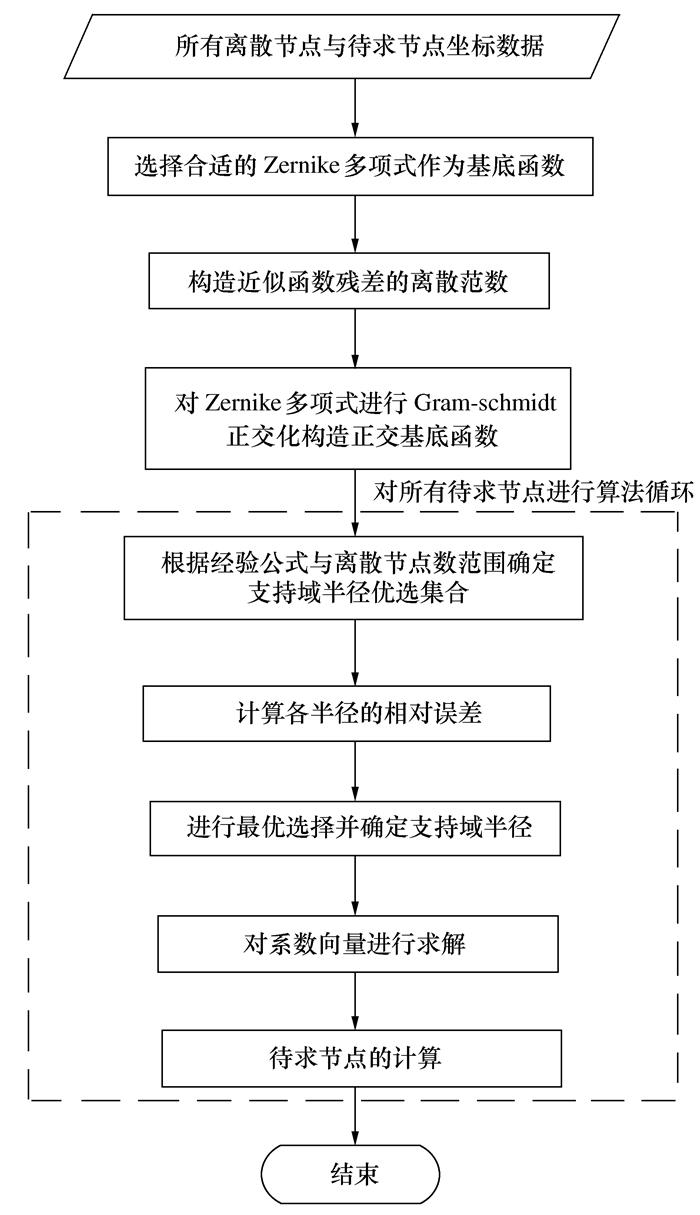
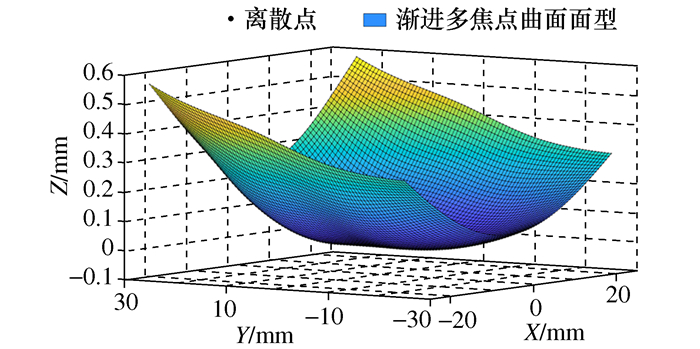
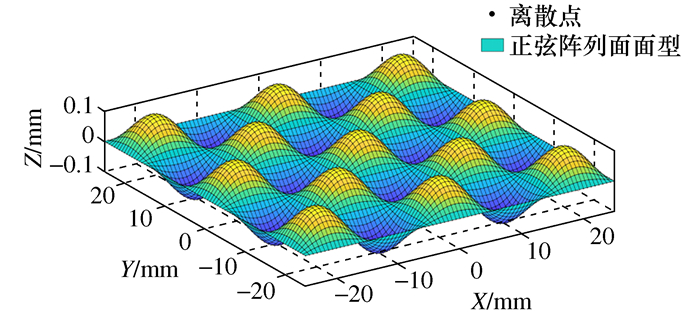
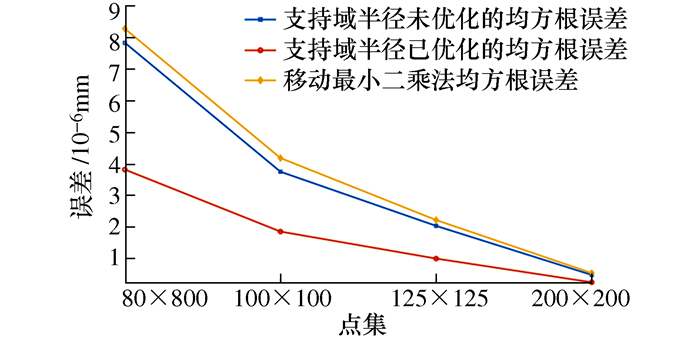
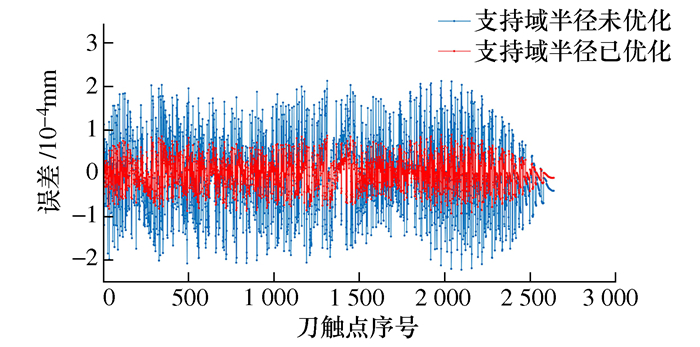
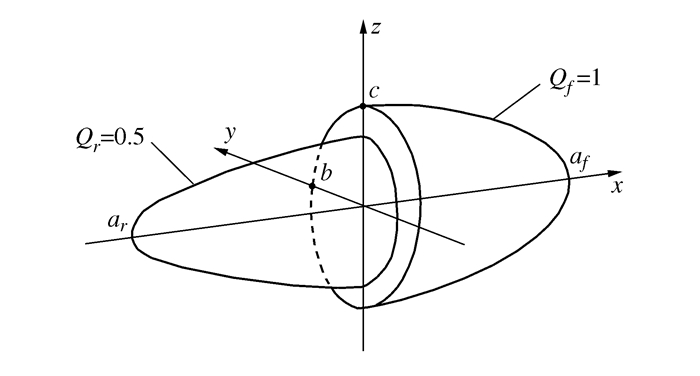
针对慢刀伺服加工前后的曲面拟合问题,将Zernike多项式与移动最小二乘法结合,提出Zernike多项式局部拟合算法。使用Gram-Schmidt正交化构造正交基底函数,解决了拟合计算中出现的病态矩阵及矩阵求逆运算量大等问题。局部拟合中支持域半径对拟合精度影响显著,基于此提出了支持域半径优化算法。以渐进多焦点曲面、环曲面、正弦阵列面为例,采用与慢刀伺服加工关系密切的刀触点精度及拟合优度R-square作为评价标准,在MATLAB软件中进行了数值仿真。结果表明,Zernike多项式局部拟合算法各项标准均优于移动最小二乘法,并且算法在经过半径优化后,不仅进一步提高了精度、改善了拟合优度,还改善了刀触点误差的离散程度。
针对慢刀伺服加工前后的曲面拟合问题,将Zernike多项式与移动最小二乘法结合,提出Zernike多项式局部拟合算法。使用Gram-Schmidt正交化构造正交基底函数,解决了拟合计算中出现的病态矩阵及矩阵求逆运算量大等问题。局部拟合中支持域半径对拟合精度影响显著,基于此提出了支持域半径优化算法。以渐进多焦点曲面、环曲面、正弦阵列面为例,采用与慢刀伺服加工关系密切的刀触点精度及拟合优度R-square作为评价标准,在MATLAB软件中进行了数值仿真。结果表明,Zernike多项式局部拟合算法各项标准均优于移动最小二乘法,并且算法在经过半径优化后,不仅进一步提高了精度、改善了拟合优度,还改善了刀触点误差的离散程度。



2020, 39(4): 623-628.
doi: 10.13433/j.cnki.1003-8728.20190176
摘要:
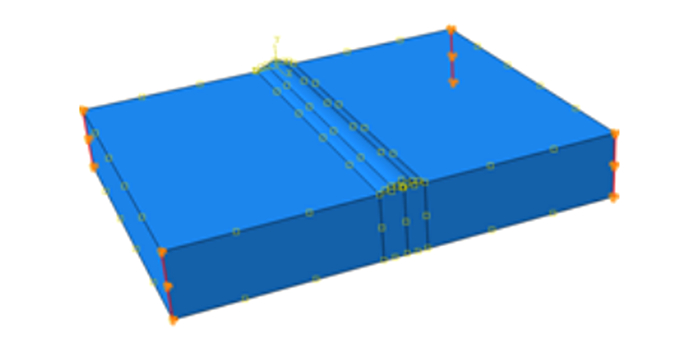
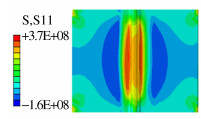
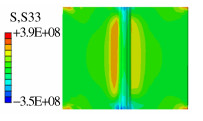
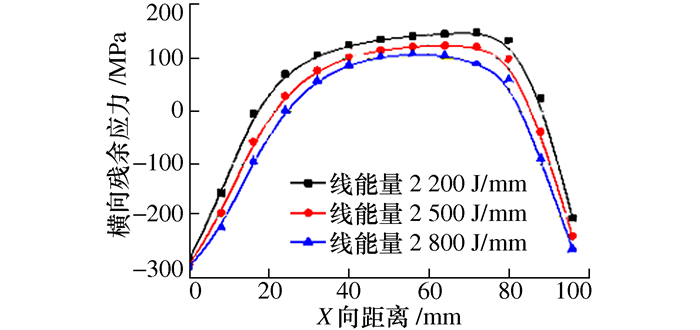
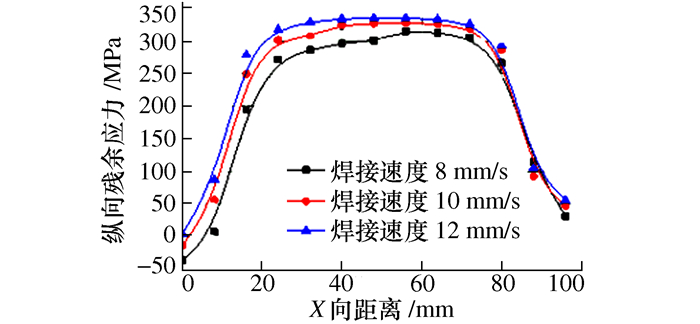
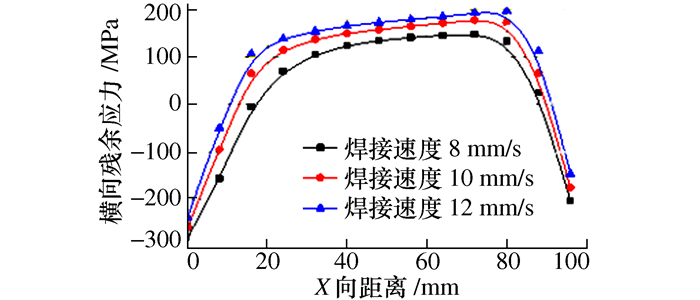
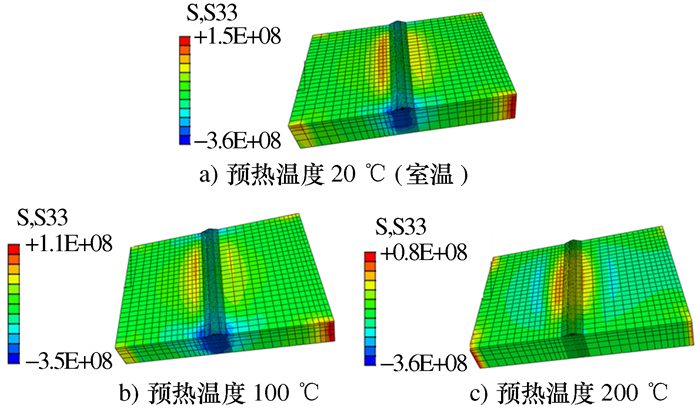
在多层熔丝增材过程中,高度集中的瞬时热输入将引发相当大的残余应力和变形,因此,研究其残余应力演变规律将对增材工艺设计意义重大。通过植入可控移动焊接热源程序于ABAQUS中,建立了多层熔丝增材有限元模型,分析了熔丝过程中的温度场和残余应力的演变规律,并研究了各工艺参数对多层熔丝增材残余应力的影响规律。结果表明,在一定范围内,在较高的熔丝线能量、较低的熔丝速度和高的预热温度下,残余应力水平较低。
在多层熔丝增材过程中,高度集中的瞬时热输入将引发相当大的残余应力和变形,因此,研究其残余应力演变规律将对增材工艺设计意义重大。通过植入可控移动焊接热源程序于ABAQUS中,建立了多层熔丝增材有限元模型,分析了熔丝过程中的温度场和残余应力的演变规律,并研究了各工艺参数对多层熔丝增材残余应力的影响规律。结果表明,在一定范围内,在较高的熔丝线能量、较低的熔丝速度和高的预热温度下,残余应力水平较低。





2020, 39(4): 629-634.
doi: 10.13433/j.cnki.1003-8728.20200005
摘要:
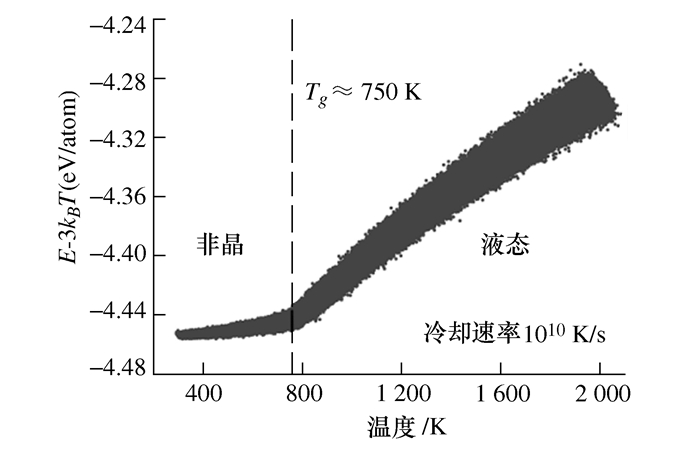
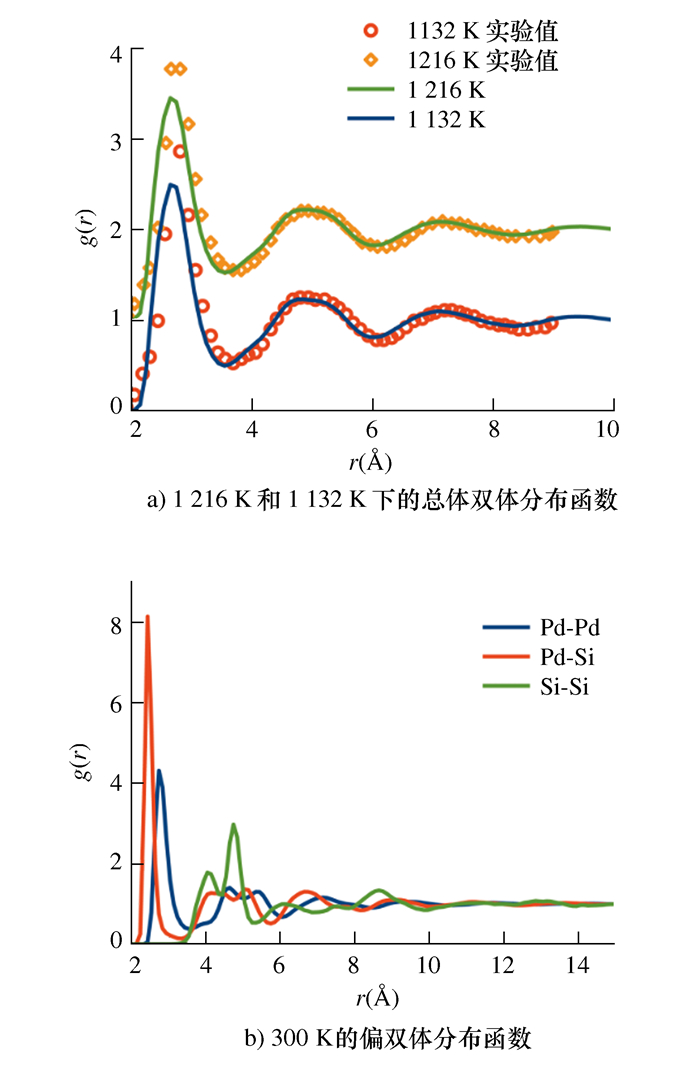
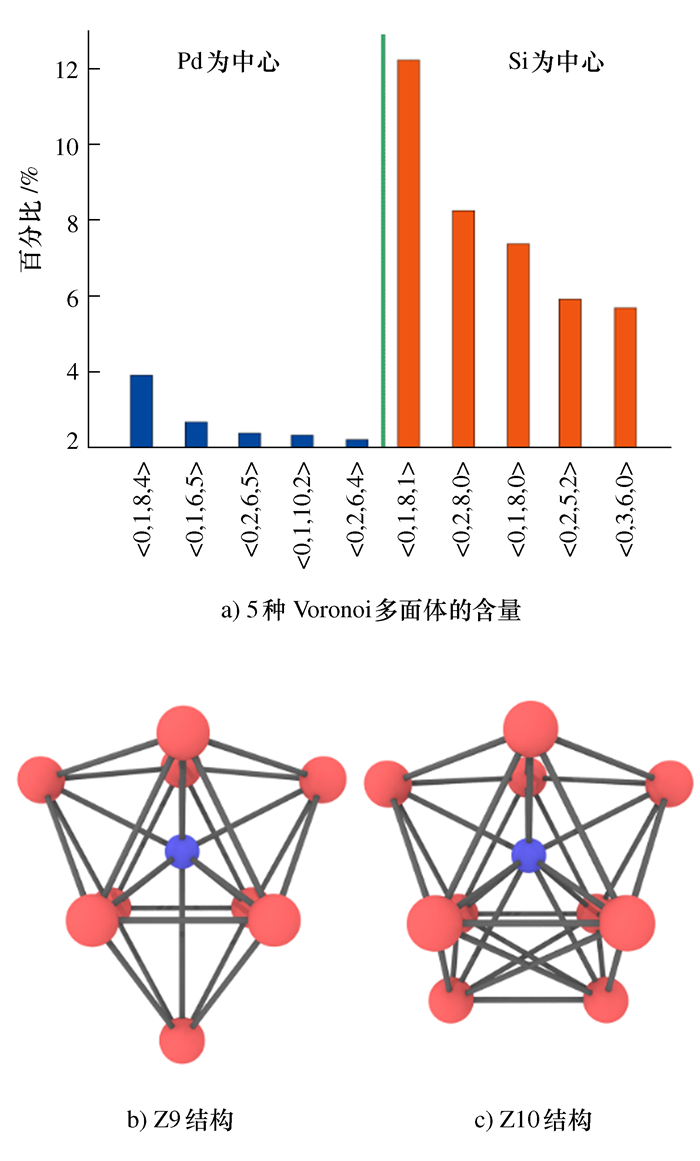
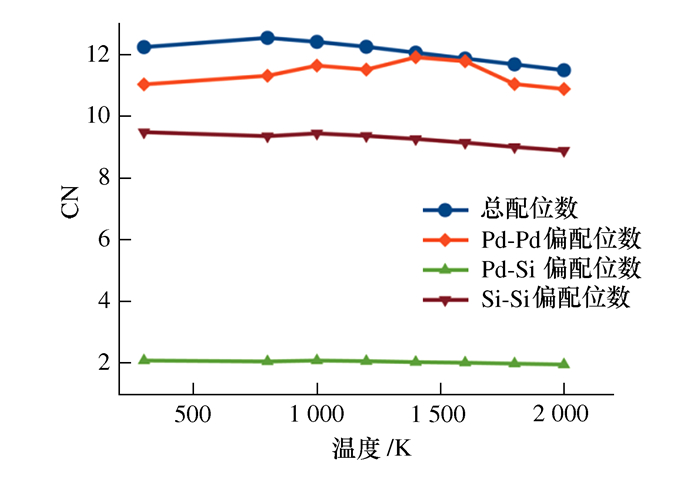
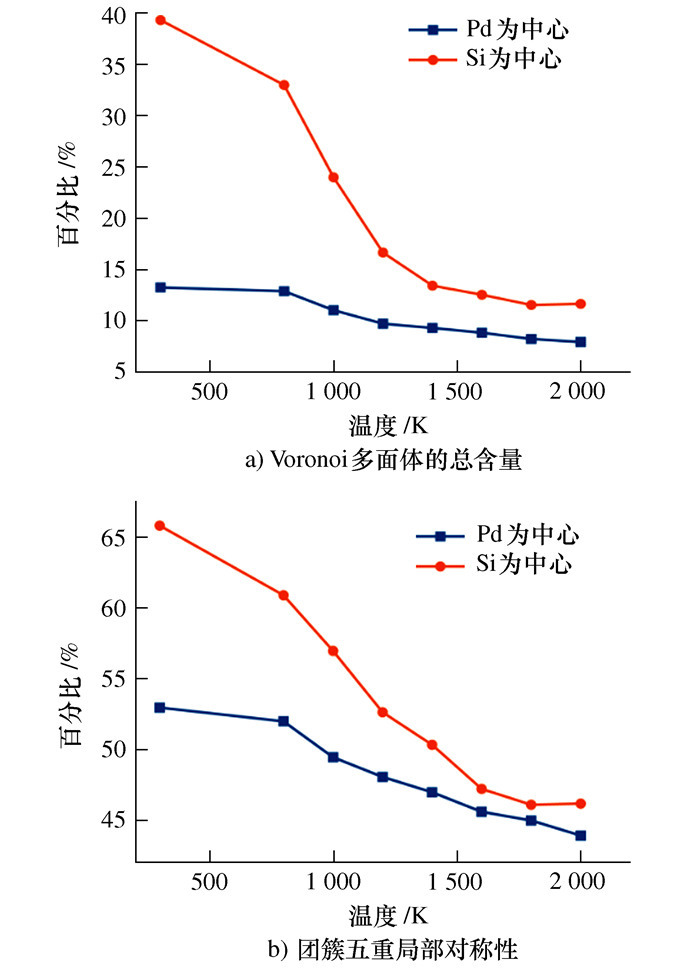
为了研究Pd-Si非晶合金的结构和非晶转变过程中结构的演化规律,通过分子动力学(MD)方法模拟了Pd-Si体系从液态到非晶态的非晶转变过程,并利用双体分布函数、Voronoi多面体等方法表征了原子尺度结构。结果表明,通过MD模拟得到的非晶转变温度和合金液体的双体分布函数均与实验结果相一致。在非晶合金结构中,Pd与Si原子相互吸引并排列在第一近邻的位置上,而Si与Si原子之间的相互排斥作用使得它们之间的距离较大。在短程序结构(SRO)方面,在Pd原子周围并无占据主导地位的SRO,而在Si原子周围Z9和Z10为占据主导地位的SRO。此外,随着温度的降低,配位数缓慢增加,而SRO的含量和五重局部对称性的程度迅速增加,并且SRO连接得更加紧密。
为了研究Pd-Si非晶合金的结构和非晶转变过程中结构的演化规律,通过分子动力学(MD)方法模拟了Pd-Si体系从液态到非晶态的非晶转变过程,并利用双体分布函数、Voronoi多面体等方法表征了原子尺度结构。结果表明,通过MD模拟得到的非晶转变温度和合金液体的双体分布函数均与实验结果相一致。在非晶合金结构中,Pd与Si原子相互吸引并排列在第一近邻的位置上,而Si与Si原子之间的相互排斥作用使得它们之间的距离较大。在短程序结构(SRO)方面,在Pd原子周围并无占据主导地位的SRO,而在Si原子周围Z9和Z10为占据主导地位的SRO。此外,随着温度的降低,配位数缓慢增加,而SRO的含量和五重局部对称性的程度迅速增加,并且SRO连接得更加紧密。

2020, 39(4): 635-640.
doi: 10.13433/j.cnki.1003-8728.20200004
摘要:
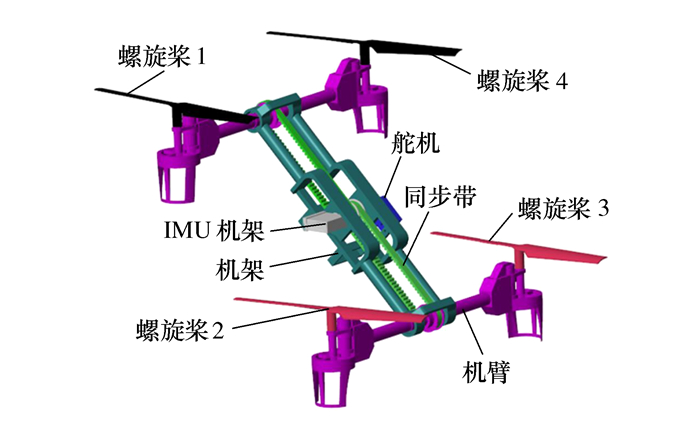
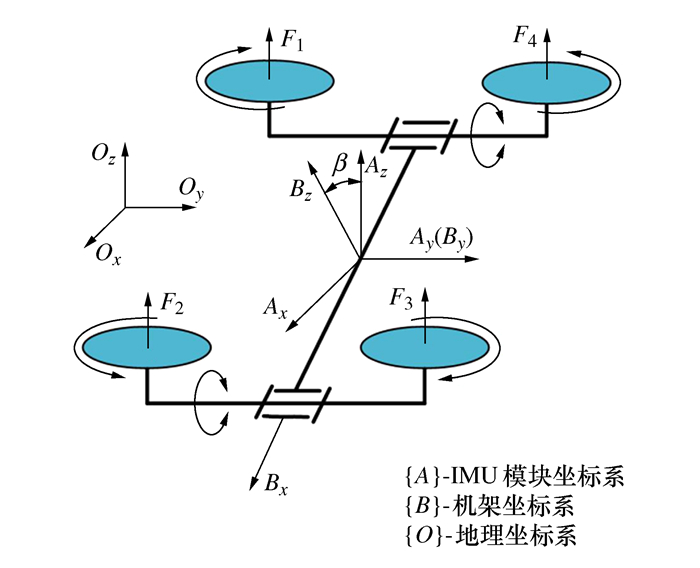
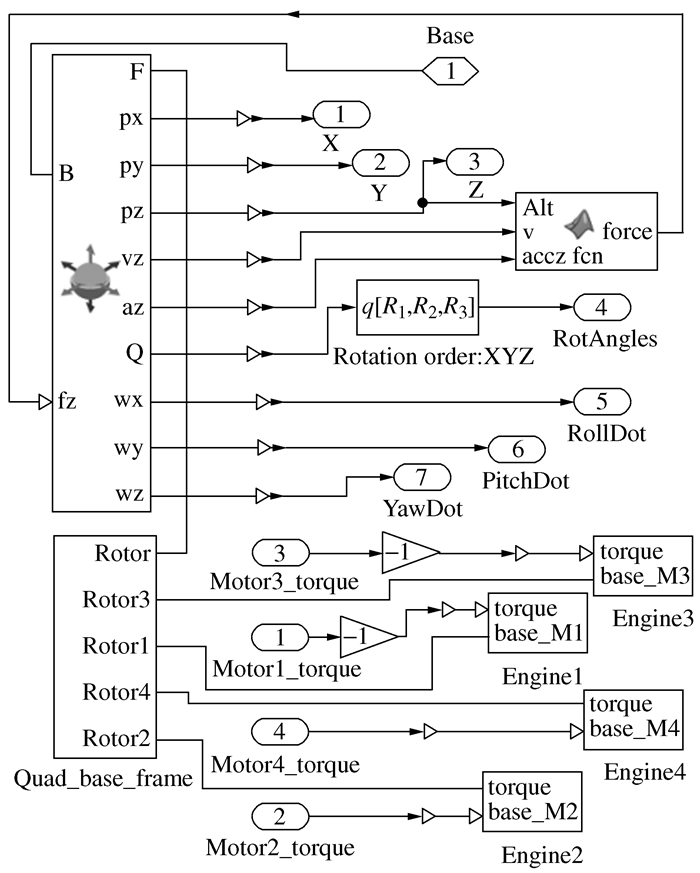
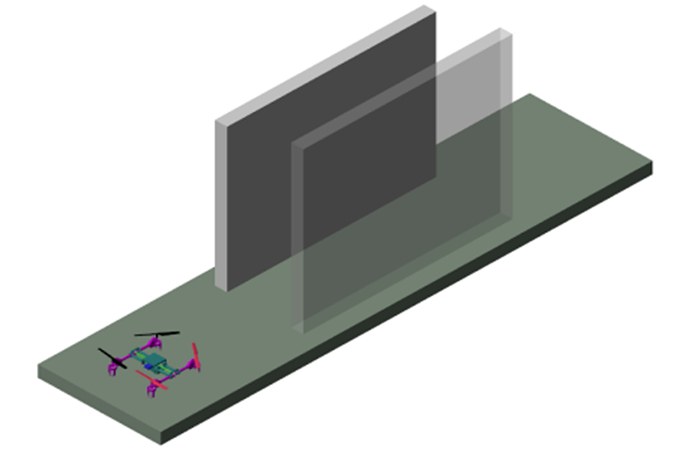
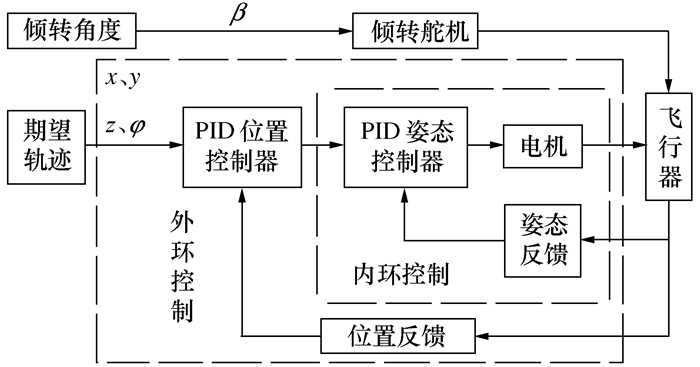
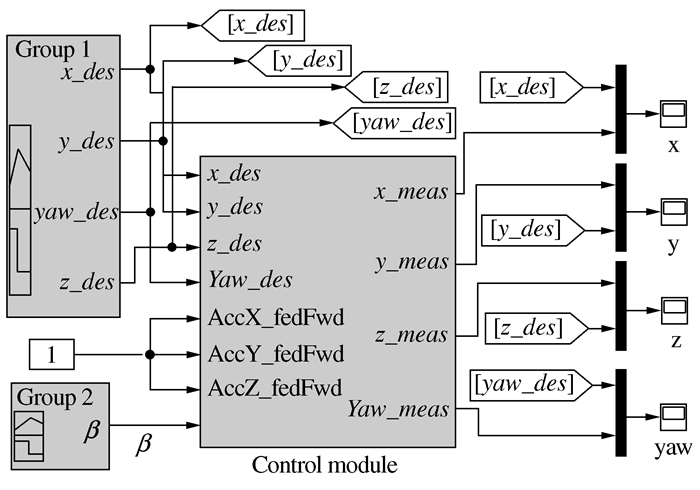
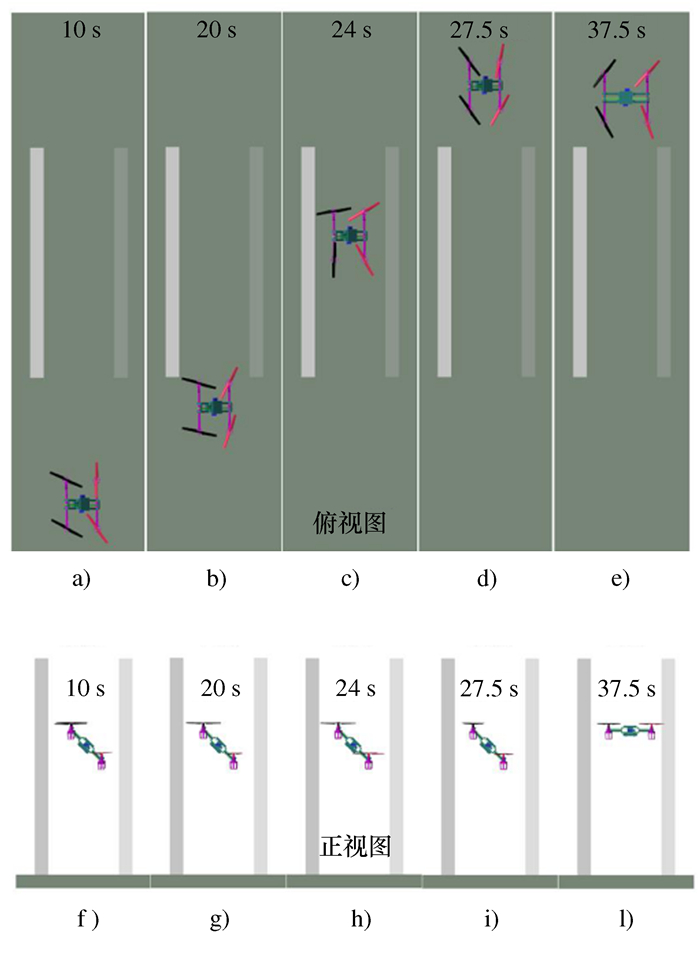
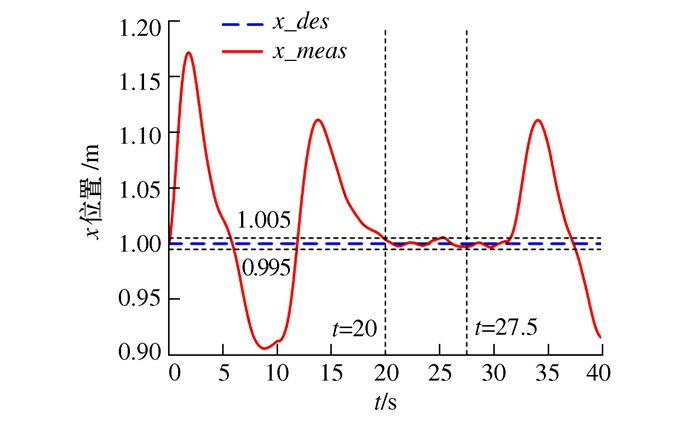
为了提高四旋翼飞行器在地震灾难现场等内部狭窄空间中的通过性,提出了一种新型的螺旋桨可倾转的四旋翼飞行器。该四旋翼飞行器在传统四旋翼飞行器基础上增加了一个倾转自由度,实现四个螺旋桨同步、同向倾转,进而可以改变飞行器构型来适应狭窄飞行空间。建立了倾转变形四旋翼飞行器动力学数学模型,在Simulink/SimMechanics仿真环境中搭建了四旋翼飞行器动力学模型,设计了串级PID控制器,实现了四旋翼飞行器在倾转状态下稳定飞行,分析了飞行器穿越狭窄空间的飞行动作及轨迹跟踪情况。仿真结果表明倾转变形四旋翼飞行器构型设计和仿真系统是可行的。
为了提高四旋翼飞行器在地震灾难现场等内部狭窄空间中的通过性,提出了一种新型的螺旋桨可倾转的四旋翼飞行器。该四旋翼飞行器在传统四旋翼飞行器基础上增加了一个倾转自由度,实现四个螺旋桨同步、同向倾转,进而可以改变飞行器构型来适应狭窄飞行空间。建立了倾转变形四旋翼飞行器动力学数学模型,在Simulink/SimMechanics仿真环境中搭建了四旋翼飞行器动力学模型,设计了串级PID控制器,实现了四旋翼飞行器在倾转状态下稳定飞行,分析了飞行器穿越狭窄空间的飞行动作及轨迹跟踪情况。仿真结果表明倾转变形四旋翼飞行器构型设计和仿真系统是可行的。




2020, 39(4): 641-647.
doi: 10.13433/j.cnki.1003-8728.20190154
摘要:
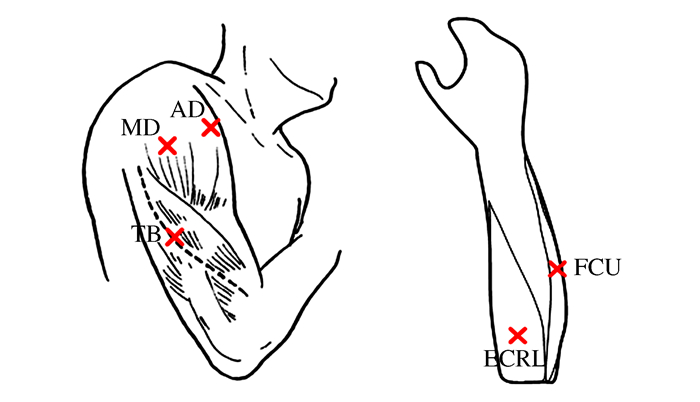
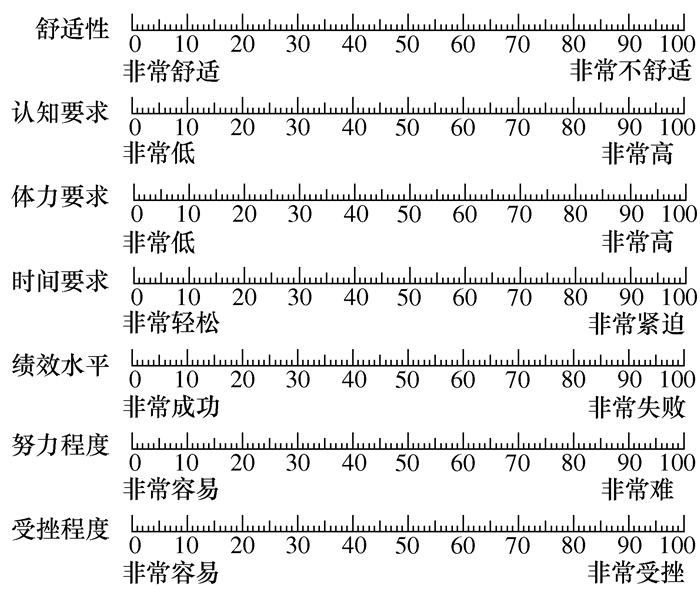
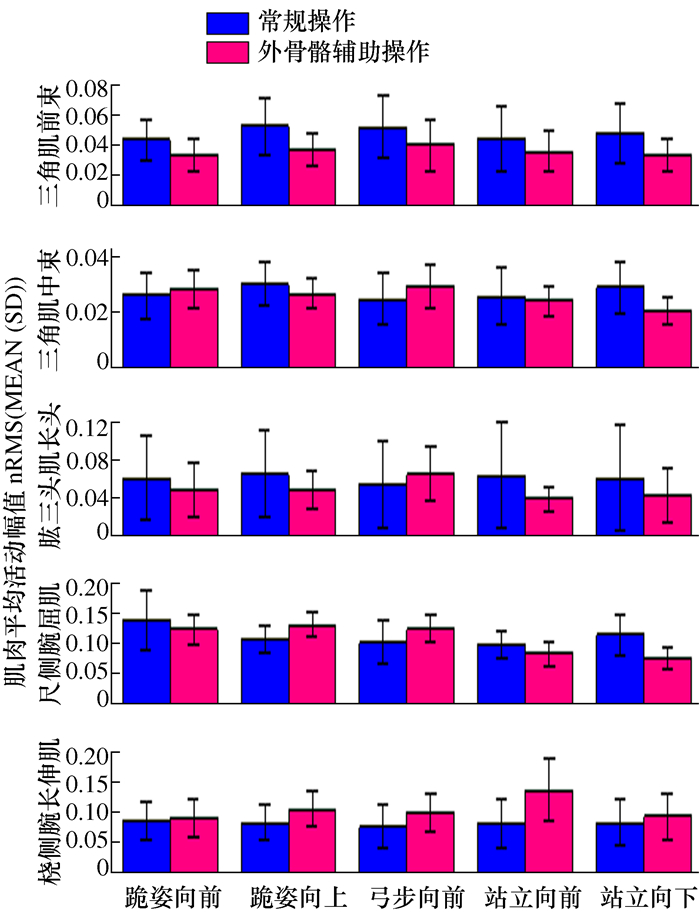
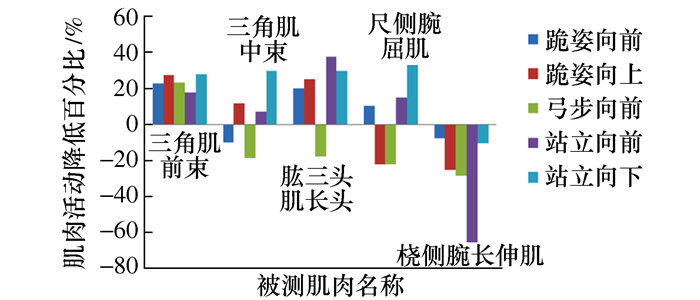
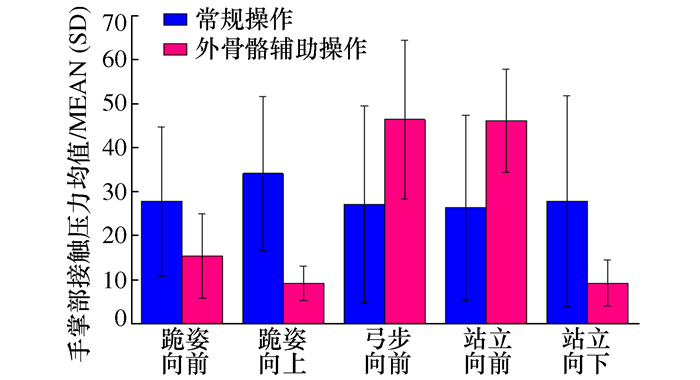
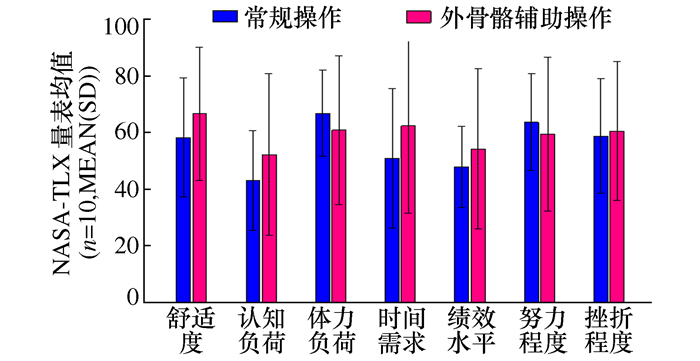
为了测试辅助装配外骨骼的人机交互性能,10名工人在穿戴和不穿戴辅助外骨骼下,进行了实验室设计主客观实验测试,测量了手臂的肌肉活动、人机在手部接触压力,填写了扩展的NASA-TLX主观性能矩阵量表。结果显示辅助外骨骼装置整体上降低了手臂肌肉活动8.6%,降低了手部接触压力20%,其中外骨骼装置对于上臂肌肉活动降低具有更好的效果,达到20%,而对于前臂则造成了肌肉活动增加和操作灵活性的限制;主观性能矩阵量表结果表明,辅助外骨骼对于工人体力和绩效水平的帮助较大,然而增加了工人的认知负荷和受挫程度。因此,辅助外骨骼的使用降低了对工人的体力要求,但是其灵活性设计需要进一步改善。
为了测试辅助装配外骨骼的人机交互性能,10名工人在穿戴和不穿戴辅助外骨骼下,进行了实验室设计主客观实验测试,测量了手臂的肌肉活动、人机在手部接触压力,填写了扩展的NASA-TLX主观性能矩阵量表。结果显示辅助外骨骼装置整体上降低了手臂肌肉活动8.6%,降低了手部接触压力20%,其中外骨骼装置对于上臂肌肉活动降低具有更好的效果,达到20%,而对于前臂则造成了肌肉活动增加和操作灵活性的限制;主观性能矩阵量表结果表明,辅助外骨骼对于工人体力和绩效水平的帮助较大,然而增加了工人的认知负荷和受挫程度。因此,辅助外骨骼的使用降低了对工人的体力要求,但是其灵活性设计需要进一步改善。


2020, 39(4): 648-656.
doi: 10.13433/j.cnki.1003-8728.20190158
摘要:
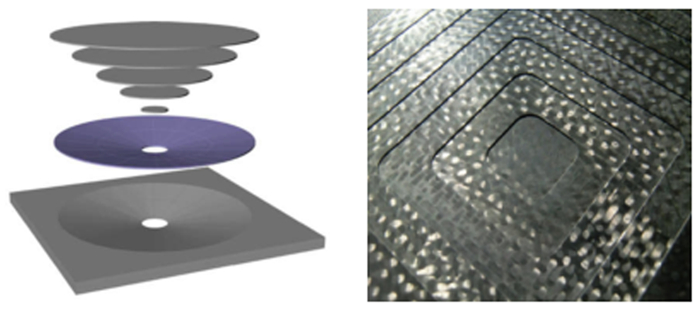
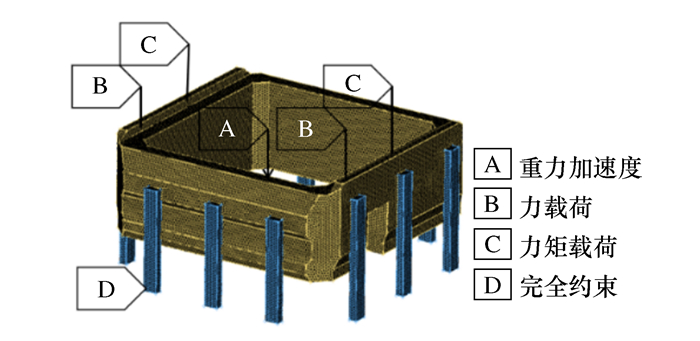
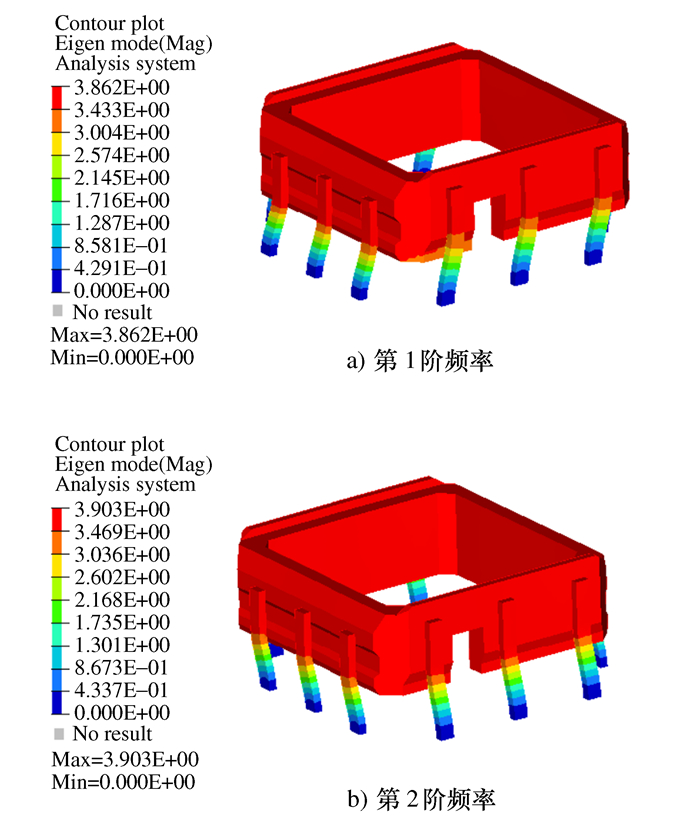
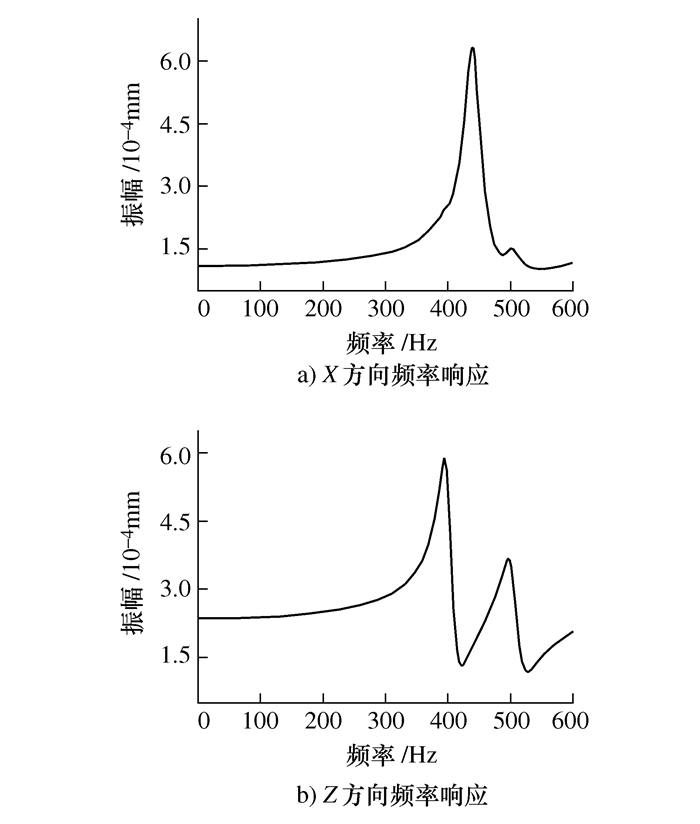
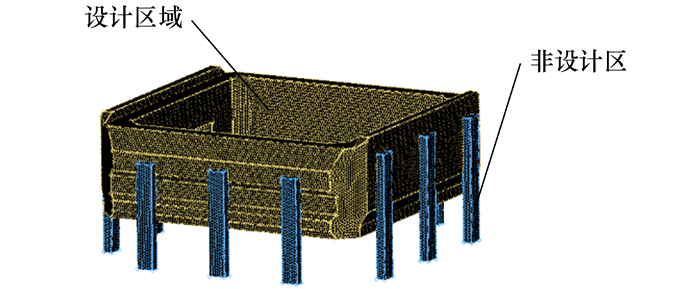
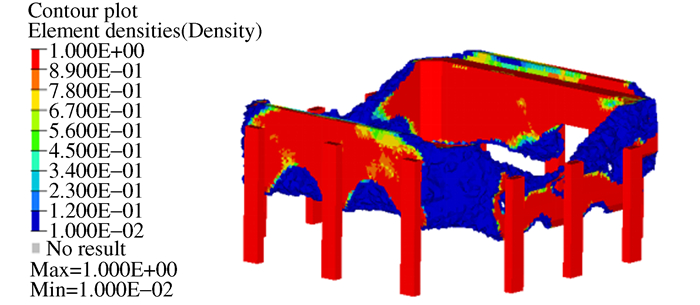
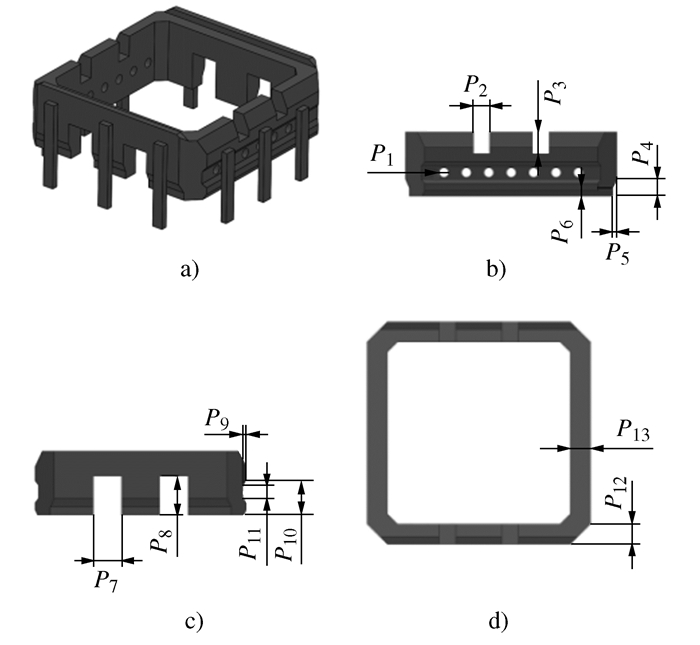
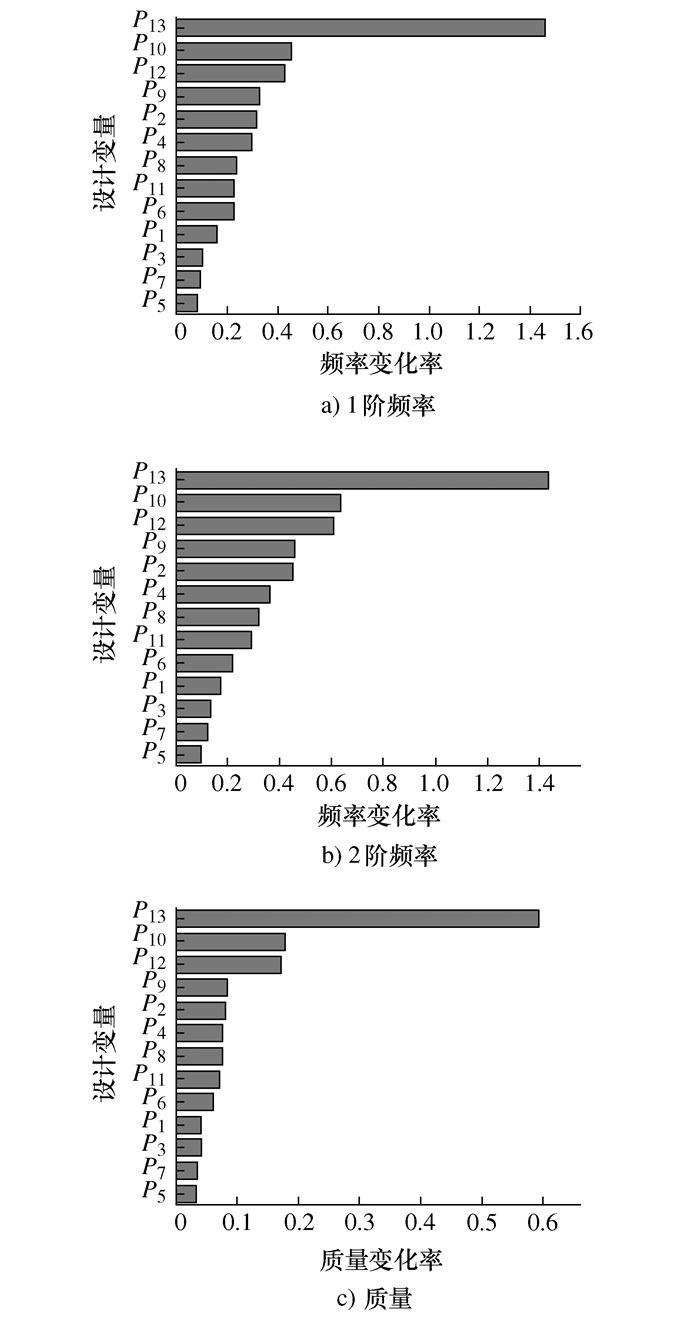
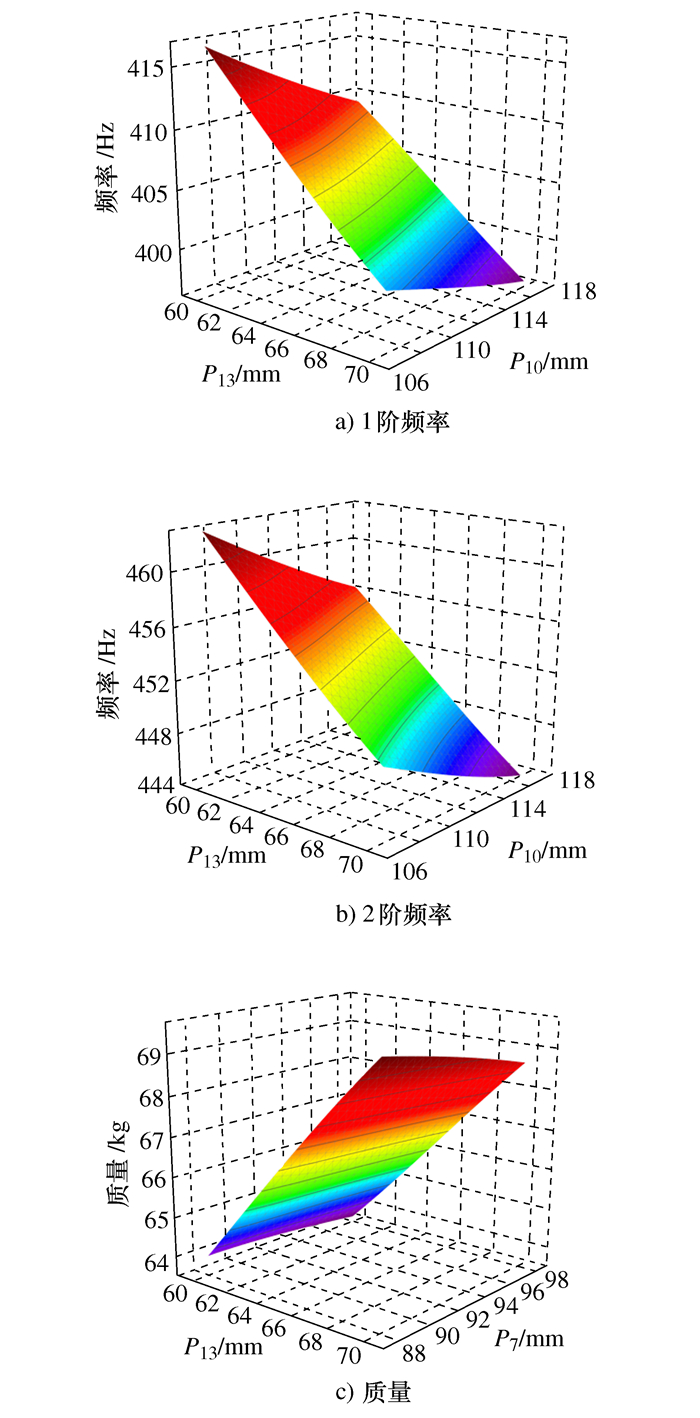
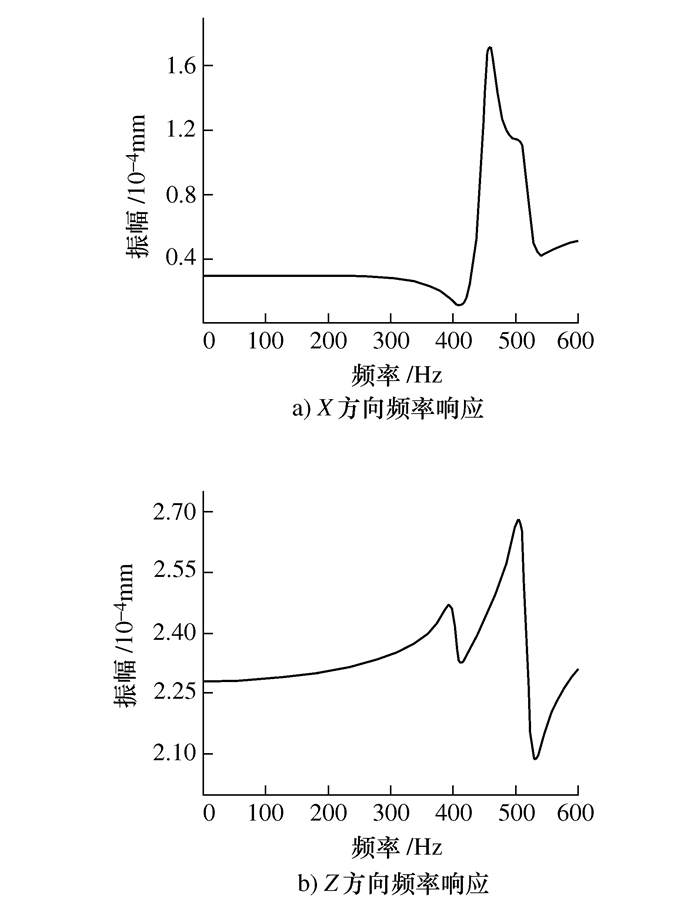
内补片胶接技术是一种修复FRP制件缺陷、损伤的常用方法。工程中急需一种该方法中内凹阶梯结构的在位加工机床。此类薄壁弱刚性制件受压易变形。因此,对该机床床身进行轻量化设计,以减小受压变形对加工质量的影响。以某型在位加工机床原型机环形BFPC床身为研究对象,首先基于原型机工况分析,明确了床身的综合性能指标;采用拓扑优化技术,获得了最优拓扑的床身结构;进而,通过规则化结构参数,并设计正交实验,辨识了机床质量及综合性能的主要影响因素;最后,建立了以规则化结构参数为变量,床身质量及振幅最小为目标的多目标优化函数,获得了最优拓扑和最优性能的床身。
内补片胶接技术是一种修复FRP制件缺陷、损伤的常用方法。工程中急需一种该方法中内凹阶梯结构的在位加工机床。此类薄壁弱刚性制件受压易变形。因此,对该机床床身进行轻量化设计,以减小受压变形对加工质量的影响。以某型在位加工机床原型机环形BFPC床身为研究对象,首先基于原型机工况分析,明确了床身的综合性能指标;采用拓扑优化技术,获得了最优拓扑的床身结构;进而,通过规则化结构参数,并设计正交实验,辨识了机床质量及综合性能的主要影响因素;最后,建立了以规则化结构参数为变量,床身质量及振幅最小为目标的多目标优化函数,获得了最优拓扑和最优性能的床身。