




Two-step Error Compensation Method for Improving Absolute Positioning Accuracy of Industrial Robots
-
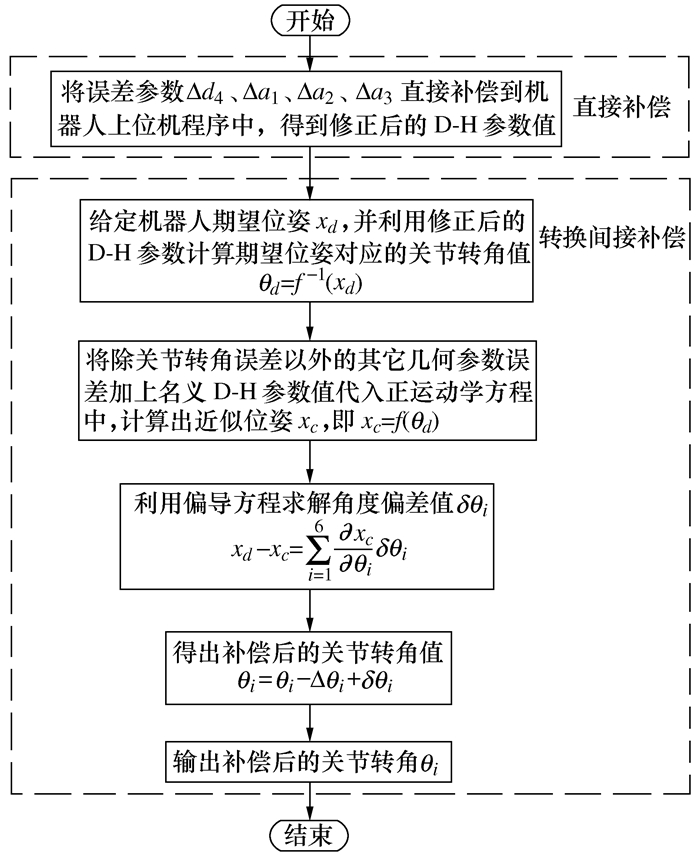
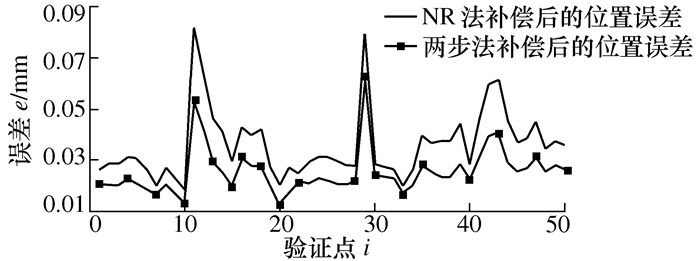
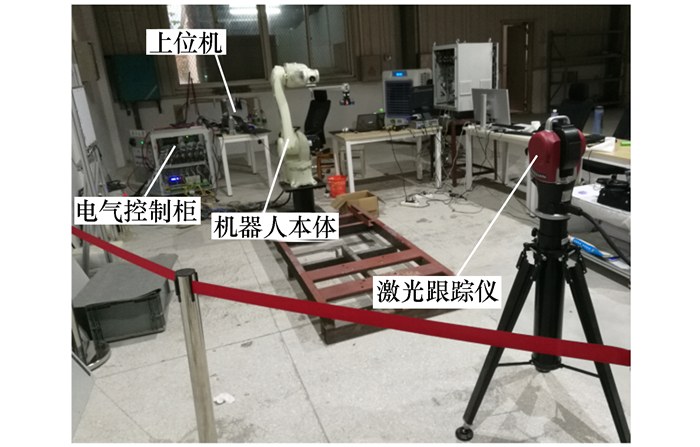
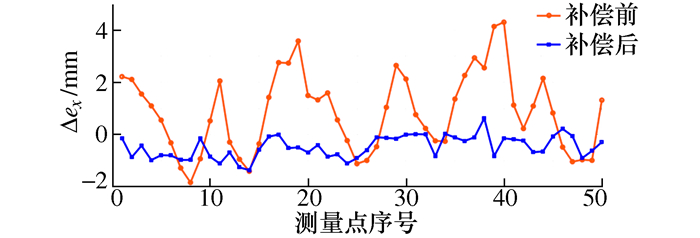
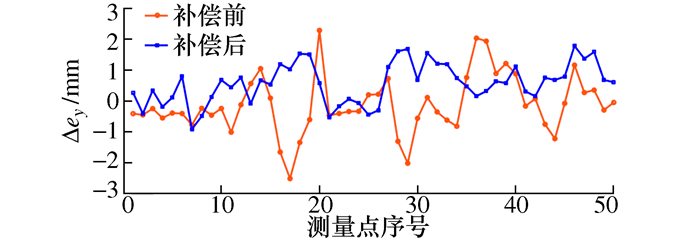
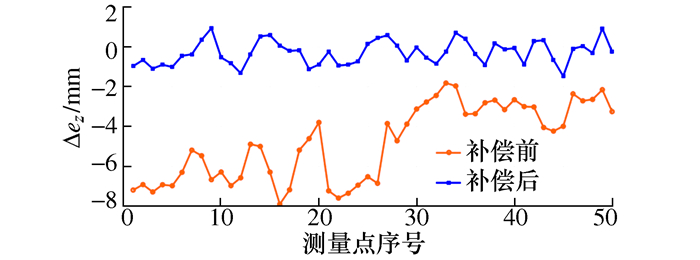
摘要: 针对大部分工业机器人结构需要满足Pieper准则无法直接补偿所有运动学参数误差的问题,提出一种两步误差补偿方法。首先,基于修正的D-H法和微分运动学建立机器人定位误差模型,建立机器人末端绝对定位误差与运动学参数误差之间的表达式;其次,利用最小二乘法迭代求解出运动学参数误差,并将可直接补偿的运动学参数误差直接补偿到机器人D-H配置参数中,将剩余的其它运动学参数误差转换为关节转角补偿值进行间接补偿;最后,搭建实验平台,在川崎RS010NA六自由度工业机器人上进行两步误差补偿实验验证。实验结果表明,通过两步误差补偿后机器人末端平均绝对定位误差由5.419 4 mm下降到1.160 5 mm,平均绝对定位精度提高约80%,该方法有效地提高了机器人的绝对定位精度。Abstract: A two-step error compensation method is proposed for the problem that most industrial robot structures need to meet the Pieper criterion and cannot directly compensate all kinematic parameter errors. Firstly, based on the modified D-H method and differential kinematics, the robot positioning error model is established, and the expression between the absolute positioning error of the robot terminal and the kinematic parameter error is obtained. Secondly, the least squares iteration method is used to calculate the kinematic parameter errors, and some kinematic parameter errors which have no influence on the inverse kinematics solution of the robot are directly compensated to the robot D-H configuration parameters, and the remaining kinematic parameter errors are converted into the offset values of joint angles for indirect compensation. Finally, the experimental platform is built and the two-step error compensation experiment is carried out on the Kawasaki RS010NA six degrees of freedom industrial robot. The experimental result indicates that the average absolute positioning error of the robot terminal is decreased from 5.4194mm to 1.1605mm, which means the average absolute positioning accuracy is improved by about 80%. The proposed method can effectively improve the robot absolute positioning accuracy.
-
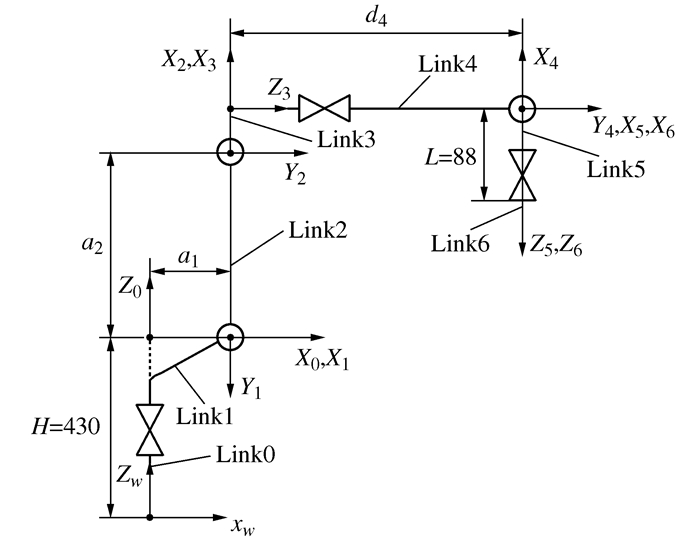
表 1 机器人D-H参数
序号 θi/(°) αi/(°) ai/mm di/mm 1 0 -90 100 0 2 -90 0 650 0 3 0 -90 0 0 4 0 90 0 700 5 90 -90 0 0 6 0 0 0 0  下载: 导出CSV
下载: 导出CSV
表 2 预设的几何参数误差值
序号 Δθi/(°) Δdi/mm Δai/mm Δαi/(°) Δβi/(°) 1 -0.05 0.25 0.56 0.01 2 0.02 0.43 0.74 0.03 0.11 3 0.14 0.11 0.89 0.015 4 0.28 0.64 0.60 0.11 5 0.30 0.16 0.52 0.32 6 0.12 0.14 0.27 0.13
下载: 导出CSV
表 3 机器人运动学参数误差辨识结果
序号 θ/(°) d/mm a/mm α/(°) β/(°) 1 -0.014 6 -0.056 7 -0.433 6 -0.045 0 2 0.043 5 - 0.493 8 -0.029 7 -0.011 1 3 0.381 8 0.055 5 0.592 9 0.076 6 4 -0.136 7 -0.239 6 -0.414 6 -0.012 3 5 -0.933 4 -0.033 0 0.155 0 -0.049 6 6 0.194 1 -0.509 6 - -0.032 3
下载: 导出CSV
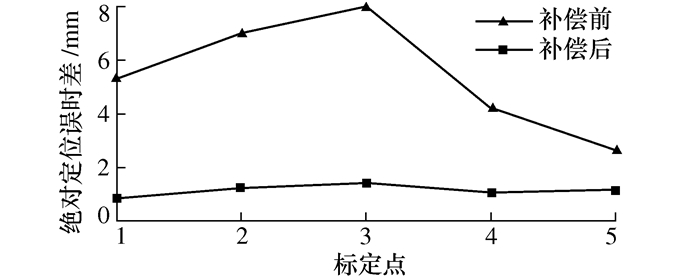
表 4 标定点补偿前后的绝对定位误差
序号 补偿前平均实际位置误差/mm 补偿后平均实际位置误差/mm APx APy APz APp APx APy APz APp P1 0.427 8 -0.254 1 -5.283 1 5.306 5 -0.454 2 0.516 8 0.505 6 0.853 8 P2 3.773 7 0.556 2 -5.843 4 6.978 2 -0.791 9 -0.926 1 0.237 0 1.241 4 P3 4.019 1 -0.441 0 -6.868 8 7.970 4 -1.162 7 0.275 3 -0.783 8 1.429 0 P4 -0.875 7 0.118 5 -4.108 0 4.202 0 -0.764 5 0.783 8 -0.124 4 1.101 9 P5 -0.996 9 -0.883 0 -2.279 6 2.640 1 -0.690 4 -0.557 5 0.772 6 1.176 6
下载: 导出CSV
-
[1] Cai Y, Yuan P J, Chen D D, et al. A calibration method of industrial robots based on ELM[C]//Proceedings of 2017 International Conference on Advanced Robotics and Mechatronics. Hefei: IEEE, 2017 [2] 熊杰.六关节机器人误差补偿技术研究与实现[D].沈阳: 中国科学院研究生院(沈阳计算技术研究所), 2015Xiong J. Research and implementation of error compensation technology on six-joint robot[D]. Shenyang: Shenyang Institute of Computing Technology, Chinese Academy of Sciences Technology, 2015(in Chinese) [3] Veitschegger W K, Wu C H. A method for calibrating and compensating robot kinematic errors[C]//Proceedings of 1987 IEEE International Conference on Robotics and Automation. Raleigh: IEEE, 1987 [4] Zeng Y F, Tian W, Liao W H. Positional error similarity analysis for error compensation of industrial robots[J]. Robotics and Computer-Integrated Manufacturing, 2016, 42:113-120 doi: 10.1016/j.rcim.2016.05.011 [5] 夏凯, 陈崇端, 洪涛, 等.补偿机器人定位误差的神经网络[J].机器人, 1995, 17(3):171-176 http://d.old.wanfangdata.com.cn/Periodical/gxjmgc200805019Xia K, Chen C D, Hong T, et al. A neural network model for compensating robot kinematics error[J]. Robot, 1995, 17(3):171-176(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc200805019 [6] Zhong X L, Lewis J M. A new method for autonomous robot calibration[C]//Proceedings of 1995 IEEE International Conference on Robotics and Automation. Nagoya: IEEE, 1995 [7] Hadge H, Bidaud P, Jardin N. Practical consideration on the identification of the kinematic parameters of the Stäubli TX90 robot[C]//Proceedings of 13th World Congress in Mechanism and Machine Science. Guanajuato, 2011 [8] 邾继贵, 邹剑, 林嘉睿, 等.面向测量的工业机器人定位误差补偿[J].光电子·激光, 2013, 24(4):746-750 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdzjg201304020Zhu J G, Zou J, Lin J R, et al. Measurement-oriented positioning error compensation for industrial robot[J]. Journal of Optoelectronics·Laser, 2013, 24(4):746-750(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdzjg201304020 [9] 杜亮, 张铁, 戴孝亮.激光跟踪仪测量距离误差的机器人运动学参数补偿[J].红外与激光工程, 2015, 44(8):2351-2357 doi: 10.3969/j.issn.1007-2276.2015.08.020Du L, Zhang T, Dai X L. Robot kinematic parameters compensation by measuring distance error using laser tracker system[J]. Infrared and Laser Engineering, 2015, 44(8):2351-2357(in Chinese) doi: 10.3969/j.issn.1007-2276.2015.08.020 [10] 史晓佳, 张福民, 曲兴华, 等.KUKA工业机器人位姿测量与在线误差补偿[J].机械工程学报, 2017, 53(8):1-7 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201708001Shi X J, Zhang F M, Qu X H, et al. Position and attitude measurement and online errors compensation for KUKA industrial robots[J]. Journal of Mechanical Engineering, 2017, 53(8):1-7(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201708001 [11] Denavit J, Hartenberg R S. A kinematic notation for lower-pair mechanisms based on metrics[J]. Journal of Applied Mechanics, 1955, 22(2):215-221 https://www.bibsonomy.org/bibtex/21b2871f9a8a923429851042a47890258/wolftype [12] Park I W, Lee B J, Cho S H, et al. Laser-based kinematic calibration of robot manipulator using differential kinematics[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(6):1059-1067 doi: 10.1109/TMECH.2011.2158234 [13] 陈钢, 贾庆轩, 李彤, 等.基于误差模型的机器人运动学参数标定方法与实验[J].机器人, 2012, 34(6):680-688 http://d.old.wanfangdata.com.cn/Periodical/jqr201206006Chen G, Jia Q X, Li T, et al. Calibration method and experiments of robot kinematics parameters based on error model[J]. Robot, 2012, 34(6):680-688(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201206006 [14] 齐飞, 平雪良, 刘洁, 等.工业机器人误差补偿及冗余参数研究[J].机械设计, 2017, 34(2):17-22 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsj201702004Qi F, Ping X L, Liu J, et al. Error compensation and parameters redundancy research of industrial robot[J]. Journal of Machine Design, 2017, 34(2):17-22(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsj201702004 [15] 中华人民共和国国家质量监督检验检疫总局.GB/T 12642-2013工业机器人性能规范及其试验方法[S].北京: 中国标准出版社, 2013General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China. GB/T 12642-2013 Industrial robots-performance criteria and related test methods[S]. Beijing: Standards Press of China, 2013(in Chinese) -


 点击查看大图
点击查看大图
图(10) / 表(4)
计量
- 文章访问数: 365
- HTML全文浏览量: 165
- PDF下载量: 41
- 被引次数: 0
